Raport stiințific si tehnic al etapei 1 dec 2014 PROGRAM: Proiecte Colaborative de Cercetare Aplicativa PN-II-PT-PCCA-2013-4 PROIECT: DEMONSTRATOR ANTIFLUTTER CU ACTUATOR PIEZO (AFDPA) Raport stiințific si tehnic in extenso privind implementarea proiectului in perioada – septembrie – decembrie 2014 Rezumatul etapei Proiectul propune un sistem avansat de control activ al flutterului si, in general, al vibratiilor, si, implicit, de atenuare a efectului sarcinilor dinamice aeroelastice asupra unei structuri aerospatiale. Flutterul este un fenomen critic de vibratie structurala care apare brusc, cand viteza de zbor creste la o valoare critica, si poate duce la catastrofe, cu pierderi de vieti. Sarcinile dinamice provocate de acceleratii verticale, de exemplu sub influenta rafalelor de vant, pot determina oboseala excesiva a structurii si vibratii, scurtand durata de viata a avionului si conducand la defectiuni impredictibile. Sistemul propus in proiect, “Demonstrator Antiflutter cu Actuator Piezoelectric”, acronim AFDPA, va preveni aceste fenomene critice, prin aplicarea unei legi de control si a unui algoritm avansat, avand la baza o metoda noua din analiza si sinteza neliniare, aceea a exponentului Liapunov maxim (MLE). Implementarea acestei metodologii prevede un actuator piezoelectric special, cu o banda de trecere ridicata, incorporat intr-o aripa “inteligenta”, capabil sa reactioneze rapid si precis la semnalele unui controller, prevenind astfel accidentele de zbor. Produsele finale ale proiectului vor fi noua metodologie si “Demonstratorul antiflutter cu actuator piezolectric”, care va oferi o confirmare experimentala a unei solutii de aripa inteligenta, cu control activ al flutterului, al vibratiilor si atenuarea efectului sarcinilor dinamice aeroelastice. In etapa de fata, ca urmare a suplimentarii de ultima ora a bugetului, Etapa 1 este definita astfel: Concepte de baza, modelare, optimizare si sinteza control, cu actuator piezo, pentru aripa cu alingire mare (AM). Etapa contine Activitatile Activitatea 1.1. Metodologii de predictie a dinamicii neliniare a aripei. Metoda de control robust antiflutter Activitata 1.2. Dezvoltarea unui concept inovator pentru acționarea inteligentă de tip servotab piezo: analiza, sinteza, control, simulare și proiectare. Partea I. La realizarea acestor Activitati a contribuit INCAS, UPB-CCAS si STRAERO. Contributiile fiecarui partener si realizarea obiectivelor din Activitati sunt marcate astfel in cadrul Cuprinsului lucrarii (lucrarea in extenso face obiectul Raportului de etapa, avizat in INCAS) 1. Introducere (INCAS) 2. Un concept nou in acționarea antiflutter cu actuator piezo si servotab (INCAS), A1.2 3. Sinteza unei legi de control robust (INCAS), A1.2, A1.1 4. Metodologii de predictie a dinamicii neliniare a aripii (STRAERO), A1.1 5. Aspecte generale privind calculul forțelor aerodinamice nestaționare (UPB-CCAS), A1.1 6. Argumente aerodinamice pentru proiectarea modelului fizic al aripii (INCAS), A1.1, A1.2
Transcript
Raport stiințific si tehnic al etapei 1 dec 2014
PROGRAM: Proiecte Colaborative de Cercetare Aplicativa
PN-II-PT-PCCA-2013-4
PROIECT: DEMONSTRATOR ANTIFLUTTER CU ACTUATOR PIEZO (AFDPA)
Raport stiințific si tehnic in extenso privind implementarea proiectului in perioada – septembrie – decembrie 2014
Rezumatul etapei Proiectul propune un sistem avansat de control activ al flutterului si, in general, al vibratiilor,
si, implicit, de atenuare a efectului sarcinilor dinamice aeroelastice asupra unei structuri
aerospatiale. Flutterul este un fenomen critic de vibratie structurala care apare brusc, cand viteza de
zbor creste la o valoare critica, si poate duce la catastrofe, cu pierderi de vieti. Sarcinile dinamice
provocate de acceleratii verticale, de exemplu sub influenta rafalelor de vant, pot determina
oboseala excesiva a structurii si vibratii, scurtand durata de viata a avionului si conducand la
defectiuni impredictibile. Sistemul propus in proiect, “Demonstrator Antiflutter cu Actuator
Piezoelectric”, acronim AFDPA, va preveni aceste fenomene critice, prin aplicarea unei legi de
control si a unui algoritm avansat, avand la baza o metoda noua din analiza si sinteza neliniare,
aceea a exponentului Liapunov maxim (MLE). Implementarea acestei metodologii prevede un
actuator piezoelectric special, cu o banda de trecere ridicata, incorporat intr-o aripa “inteligenta”,
capabil sa reactioneze rapid si precis la semnalele unui controller, prevenind astfel accidentele de
zbor.
Produsele finale ale proiectului vor fi noua metodologie si “Demonstratorul antiflutter cu
actuator piezolectric”, care va oferi o confirmare experimentala a unei solutii de aripa inteligenta, cu
control activ al flutterului, al vibratiilor si atenuarea efectului sarcinilor dinamice aeroelastice.
In etapa de fata, ca urmare a suplimentarii de ultima ora a bugetului, Etapa 1 este definita
astfel: Concepte de baza, modelare, optimizare si sinteza control, cu actuator piezo, pentru
aripa cu alingire mare (AM).
Etapa contine Activitatile
Activitatea 1.1. Metodologii de predictie a dinamicii neliniare a aripei. Metoda de
control robust antiflutter
Activitata 1.2. Dezvoltarea unui concept inovator pentru acționarea inteligentă de tip
servotab piezo: analiza, sinteza, control, simulare și proiectare. Partea I.
La realizarea acestor Activitati a contribuit INCAS, UPB-CCAS si STRAERO. Contributiile
fiecarui partener si realizarea obiectivelor din Activitati sunt marcate astfel in cadrul Cuprinsului
lucrarii (lucrarea in extenso face obiectul Raportului de etapa, avizat in INCAS)
1. Introducere (INCAS)
2. Un concept nou in acționarea antiflutter cu actuator piezo si servotab (INCAS), A1.2
3. Sinteza unei legi de control robust (INCAS), A1.2, A1.1
4. Metodologii de predictie a dinamicii neliniare a aripii (STRAERO), A1.1
5. Aspecte generale privind calculul forțelor aerodinamice nestaționare (UPB-CCAS), A1.1 6. Argumente aerodinamice pentru proiectarea modelului fizic al aripii (INCAS), A1.1, A1.2
Rezultatele numerice ale celor trei metode de calcul în frecvenţă al flutter-ului sunt
apropiate ca valori.
Programele de calcul dezvoltate vor fi folosite pentru determinarea vitezei si frecventei de
flutter pentru aripa elastica cu caracteristici constante pe anvergura ce se va realiza in cadrul
proiectului.
5. Aspecte generale privind calculul fortelor aerodinamice nestationare
Determinarea fortelor aerodinamice reprezinta activitatea cea mai complicata intr-o
problema de aeroelasticitate. Dupa cum s-a vazut in capitolul precedent, una dintre abordari poate fi
reprezentata de modelul Theodorsen pentru curgeri incompresibile nestationare armonice. In acest
capitol se prezinta o metodă cu panouri cunoscută în literatură ca Doublet Lattice Method (DLM),
foarte utilă pentru predicția forțelor aerodinamice nestaționare în regim subsonic, pe aripi care
oscilează armonic.
Pentru aripa de anvergură finită s-au dezvoltat multe metode pentru calculul distribuţiei de
presiuni în regim nestaţionar subsonic, pornind de la ecuaţia integrală dedusă de Küsner. C.E.
Watkins şi colectivul său au dezvoltat o formă a ecuaţiei integrale foarte convenabilă din punct de
vedere aplicativ. Dintre dezvoltările ulterioare ale acestei metode s-au impus prin accesibilitate şi
aplicabilitate două: metoda reţelei de dublete (DLM) şi metoda dubletelor punctiforme (DPM).
Studiul curgerilor nestaţionare în regim compresibil subsonic are o aplicabilitate imediată în
calculul fenomenelor aeroelastice dinamice şi în calculul derivatelor de stabilitate ale aeronavei.
Primele studii în domeniul aerodinamicii nestaţionare, cu aplicaţii practice directe, aparţin lui T.
Theodorsen, care tratează problema curgerilor incompresibile în jurul profilelor. Deoarece în
regimul nestaţionar trecerea de la domeniul compresibil la cel incompresibil nu se mai poate face
prin intermediul transformării de tip Prandtl-Glauert, problema bidimensională a fost reluată pe căi
diferite de diverşi autori, prin introducerea potenţialului de acceleraţie şi formularea ecuaţiei
integrale corespunzătoare sau printr-o transformare a ecuaţiilor diferenţiale ale curgerii în
coordonate eliptice şi construirea unor soluţii sub forma unor dezvoltări în serie de funcţii Mathieu.
9
0 0.25 0.5 0.75 1 1.25 1.5 1.75 20
1.875
3.75
5.625
7.5
9.375
11.25
13.125
15
p
rad
1 Rezultate Ueda si
Dowell
Metoda propusa
x
Distribuţia presiunii pe coardă în secţiunea 2y/b=0.2
0 0.25 0.5 0.75 1 1.25 1.5 1.75 20
0.5
1
1.5
2
2.5
3
3.5
4
Rezultate Ueda si Dowell
Metoda propusa
y
Cz
Distribuţia de portanţă în anvergură
Pentru cazul 3D, cu includerea completă a efectelor de portanţă, distribuţia vârtejurilor se
face atât pe extradosul, cât şi pe intradosul suprafeţei portante, cele două familii de vârtejuri unindu-
se în bordul de fugă şi continuând la infinit sub forma unei pânze de vârtejuri libere. În cazul
general, rezolvarea problemei pentru o suprafaţă portantă cu o distribuţie dată de grosime şi de
curbură şi pentru o anume incidenţă se face în următoarele trei etape: 1) decuplarea efectelor de
grosime de cele de incidenţă (curbură); 2) liniarizarea condiţiilor la limită ( condiţiile la limită se
pun nu pe conturul aripii, ci pe o suprafaţă de referinţă (suprafaţa corzilor), folosind însă pantele
grosimii şi scheletului corespunzătoare ale suprafeţei şi 3) distribuţia de singularităţi în planul de
referinţă al suprafeţei portante.
Metoda de calcul cu panouri este pe larg prezentata in cadrul capitolului 5, atat din punct de
vedere teoretic cat si al rezultatelor numerice. Au fost abordate patru cazuri de studiu (cazuri de
referinta din literatura de specialitate) iar rezultatele numerice arata o concordanţă foarte bună, atât
pentru distribuţia presiunilor în coardă cât şi pentru distribuţia de portanţă în anvergură, cu studiile
de referinta.
Rezultatele pentru o aripă dreptunghiulară de alungire =2, fără diedru, în regim
incompresibil şi incidenţa unitară, in regim de curgere fiind staţionar sunt prezentate mai jos.
Comparaţia este făcută cu rezultatele prezente în lucrarea lui Ueda şi Dowell. Discretizarea aripii a
fost făcută în 50 de panouri (10 în coardă şi 5 în anvergură). După cum se observă există o
concordanţă foarte bună atât pentru distribuţia presiunilor în coardă, cât şi pentru distribuţia de
portanţă în anvergură.
Aceasta metoda cu panouri poate fi folosita in urmatoarea etapa a proiectului la predictia
vitezei si frecventei de flutter și respectiv la sinteza unor regulatoare anti-flutter.
10
6. Argumente aerodinamice pentru proiectarea modelului fizic al aripii
Incercarile experimentale pentru studiul fenomenului de flutter se fac cu ajutorul unor
machete ce se introduc in suflerie. Aceste machete trebuie sa respecte legi de similitudine in ceea ce
priveste Aerodinamica, Mecanica solidului, Teoria elasticitatii. Aceste machete pot fi incluse in
categoria mai larga numita modele.
O definitie a modelului ar putea fi: “Un system material sau abstract care, fiind pus in
corespondenta cu alt system dat anterior, va putea servi indirect studiului proprietatilor acestui
system mai complex (originalul) si cu care modelul prezinta o anumita analogie”.
Modelarea se clasifica in:
Modelare prin similitudine, de care trateaza aceasta lucrare.
Modelarea prin analogie, in care natura modelului este deosebita de cea a originalului (ex:
analogii electromecanice, modele pe care se bazeaza calculul analogic).
Modelari stiintifice complexe teoretice si conceptuale, de tipul modelului atomic planetar
(Rutherford), “trenul lui Einstein”, etc.
Modelarea prin similitudine
In experimente, similitudinea se referă la următoarele aspecte:
- similitudinea geometrică;
- similitudinea statică, inclusiv cea elastică;
- similitudinea cinematică;
- similitudinea dinamică;
- similitudinea elastică etc.
Analiza dimensionala. Teorema Π (Buckingham)
Prima conditie pe care trebuie sa o indeplineasca ecuatiile utilizate in in fizica este
omogeneitatea dimensionala. Deci o ecuatie fizica este alcatuita din insumarea unor termeni cu
aceleasi dimensiuni.
Considerand o dimensiune de un acelasi tip, (de ex. lungime, L) se pot forma dimensiuni noi
numai prin operatiile de inmultire si ridicare la o putere rationala: L0. L
-1, L
2, L
3/2,L
-2/3. Deci, nu
exista L π.
O marime fizica LmT
nM
p poate fi aumata unui vector (m,n,p) de numere rationale in spatiul L,
T, M.
Nu este obligatoriu sa folosim ca dimensiuni de baza doar dimensiunile L, T, M. Spre
exemplu, utilizand a doua lege a Mecanicii F=ma, cu dimensiunile [F]= LT-2
M, putem redefini M=
L-1
T2[F]. Astfel era definit sistemul tehnic MKfS utilizat pana nu demult. Printr-o astfel de
operatiune, se trece la un alt spatiu vectorial, L, T, [F]. Tot astfel, in locul masei se putea defini si
timpul T=M1/2
L1/2
[F]-1/2
intr-un system L[F]M.
Exista ecuatii care descriu correct fenomene fizice si care totusi nu sunt dimensional corecte.
De exemplu cele legate prin corelatii statistice, sau ecuatiile partial prelucrate, in care, spre exemplu
timpul se va introduce obligatoriu in ore, masa in tone, rezultatul fiind puterea in kW. Nu tratam
aceste cazuri.
Teorema Π (Buckingham )
Daca o ecuatie ce descrie un fenomen fizic este omogena dimensional si implica un numar
de k variabile independente intre ele, ea poate fi redusa la o relatie intre k-r produse fara
dimensiuni, unde r este numarul minim de dimensiuni de referinta necesar pentru a descrie
variabilele.
Aceste produse se noteaza de obicei 𝛱𝑖 i=1,…k-r.
Vom aplica aceasta teorema la cele doua cazuri de interes: repartitia aeroelastica a portantei
pe o aripa de avion (caz stationar) si fenomenul de flutter.
11
Repartitia aeroelastica a portantei (fenomen stationar)
Vom considera o aripa dreapta si sufficient de alungita pentru a putea aplica teoriile cunscute
din Aerodinamica si Teoria elasticitatii:
Portanta poate fi considerate ca este repartizata pe linia de ¼ din coarda.
Structura aripii poate fi redusa la axa sa elastica.
In plus, aripa studiata in cadrul lucrarii are profil simetric, deci nu avem nici coefficient de
portanta si nici coefficient de moment la incidenta nula.
Aripa este supusa unei solicitari de incovoiere si a uneia de torsiune ambele statice. Se arata
ca ecuatiile de incovoiere si rasucire pot fi puse sub formele adimensionale:
𝑑2
𝑑𝜂2 𝐸𝐼𝑎 𝜂,𝛼
𝑑2𝜒 𝜂,𝛼
𝑑𝜂2 = 𝛱𝑖 𝑝 𝜂
𝑑
𝑑𝜂 𝐺𝐽𝑎 𝜂
𝑑𝜃 𝜂,𝛼
𝑑𝜂 = 𝛱𝑡𝑝 𝜂 𝛥𝑥𝑒 𝜂
unde coeficientii 𝛱 pentru incovoiere si torsiune sunt:
𝛱𝑖 = 1
8
𝜌𝑈2𝑆𝑏2
𝐸𝐼𝑟𝑒𝑓𝐶𝐿 𝛼 ; 𝛱𝑡 =
1
2
𝜌𝑈2𝑆𝑏2
𝐺𝐽𝑟𝑒𝑓𝐶𝐿 𝛼
In ecuatiile de Aerodinamica si Rezistenta materialelor s-au introdus urmatoarele notatii si
adimensionalizari:
𝑝 𝜂 ; coeficient de pondere pentru distributia portantei in anvergura; 𝑥𝑒 𝑦 ; ecuatia axei
elastice
𝑥1/4 𝑦 ecuatia liniei focarelor (de ¼ c), iar 𝛥𝑥𝑒 𝜂 =𝑥𝑒 𝑦 −𝑥1/4 𝑦
𝑏
𝑦 =𝑏
2 𝜂; 𝐸𝐼 = 𝐸𝐼𝑟𝑒𝑓𝐸𝐼𝑎 ; ℎ 𝑦,𝛼 =
𝑏
2𝜒 𝜂,𝛼 ; 𝐺𝐽 = 𝐺𝐽𝑟𝑒𝑓𝐺𝐽𝑎 , unde 𝐸𝐼𝑟𝑒𝑓 si 𝐺𝐽𝑟𝑒𝑓 sunt
rigiditati dimensionale, iar 𝐸𝐼𝑎 𝜂 si 𝐺𝐽𝑎 𝜂 sunt adimensionale; 0 ≤ 𝜂 ≤ 1 tot adimensional.
De aici rezulta pentru incovoiere considerand aripa reala si modelul (indice m):
𝛱𝑖 = 1
8
𝜌𝑈2𝑆𝑏2
𝐸𝐼𝑟𝑒𝑓𝐶𝐿 𝛼 =
1
8
𝜌𝑈𝑚2 𝑆𝑚𝑏𝑚
2
𝐸𝐼𝑟𝑒𝑓 𝑚
𝐶𝐿 𝛼
Tragem concluzia ca rigiditatile trebuie sa se afle in raportul:
𝐸𝐼𝑟𝑒𝑓 𝑚𝐸𝐼𝑟𝑒𝑓
=𝑈𝑚
2
𝑈2𝑘𝐿
4
Pentru rasucire se procedeaza la fel.
Ecuatiile de flutter ale unei aripi incastrate
Vom face o analiza dimensionala a ecuatiilor de flutter ale unei aripi incastrate. Ecuatiile
utilizate mai sunt extrase din lucrarea lui Fung, paragraful 6.3, ca si din fig. 6.3 insotitoare.
Se procedeaza la fel ca in cazul stationar. Se fac mai intai adimensionalizarile variabilelor si
functiilor:
𝑦 =𝑏
2 𝜂; 𝐸𝐼 = 𝐸𝐼𝑟𝑒𝑓𝐸𝐼𝑎 ; 𝐺𝐽 = 𝐺𝐽𝑟𝑒𝑓𝐺𝐽𝑎 ; ℎ =
𝑏
2𝜒; 𝑚 = 𝑚𝑟𝑒𝑓
2
𝑏𝜇; 𝑥∝ =
𝑏
2𝜉𝛼 ; 𝑡 =
𝑏
2𝑈𝜏;
𝐼∝ = 𝐼𝑚2
𝑏𝐼𝛼𝑎 𝐿 =
𝜌𝑈2
2
𝑏
2
2𝑐
𝑏𝐶𝐿 ; 𝑀 =
𝜌𝑈2
2
𝑏2
4
4𝑐2
𝑏2𝐶𝑀
Apoi, separand coeficientii se obtin ecuatiile adimensionale cu coeficientii PI:
12
𝜕2
𝜕𝜂2 𝐸𝐼𝑎 𝜂
𝜕2𝜒 𝜂, 𝜏
𝜕𝜂2 + 𝛱1𝜇 𝜂
𝜕2𝜒 𝜂, 𝜏
𝜕𝜏2+ 𝛱1𝜇 𝜂 𝜉𝛼 𝜂
𝜕2 ∝ 𝜂, 𝜏
𝜕𝜏2+ 𝛱2
2𝑐
𝑏𝐶𝐿 = 0
𝜕
𝜕𝜂 𝐺𝐽𝑎 𝜂
𝜕 ∝ 𝜂, 𝜏
𝜕𝜂 − 𝛱3𝐼𝛼𝑎 𝜂
𝜕2 ∝ 𝜂, 𝜏
𝜕𝜏2− 𝛱4𝜇 𝜂 𝜉𝛼 𝜂
𝜕2𝜒 𝜂, 𝜏
𝜕𝜏2+ 𝛱5
4𝑐2
𝑏2𝐶𝑀 = 0
unde avem:
𝛱1 = 1
2
𝑚𝑟𝑒𝑓𝑈2𝑏
𝐸𝐼𝑟𝑒𝑓; 𝛱2 =
1
32
𝜌𝑈2𝑏4
𝐸𝐼𝑟𝑒𝑓; 𝛱3 =
2𝐼𝑚𝑈2
𝑏𝐺𝐽𝑟𝑒𝑓; 𝛱4 =
1
2
𝑚𝑟𝑒𝑓𝑈2𝑏
𝐺𝐽𝑟𝑒𝑓; 𝛱5 =
1
32
𝜌𝑈2𝑏4
𝐺𝐽𝑟𝑒𝑓.
Ecuatiile de mai sus sunt adimensionale si caracterizeaza toate aripile ce prezinta similitudine
aeroelastica. Distributiile de masa 𝜇 𝜂 si curbele 𝜉 = 𝜉𝛼 𝜂 pentru cazul real si model sunt
identice.
Se vor scrie apoi coeficientii 𝛱𝑖 pentru avion si model:
𝛱𝑖 𝑎𝑣𝑖𝑜𝑛 = 𝛱𝑖 𝑚𝑜𝑑𝑒𝑙 Din egalitatea lor vom deduce legi de similitudine (cum am procedat in exemplul de la
incovoiere)..
Concluzii
S-au pus in evidenta criteriile de similitudine pe care trebuie sa le indeplineasca un model
static de deformare aeroelastica si unul dinamic al aripii intrate in fenomenul de flutter.
Pe baza analizei dimensionale si a teoremei 𝛱s-a aratat faptul ca ecuatiile de flutter pot fi
aduse la o forma in care sa contina termeni afectati doar de coeficienti adimensionali. Acesti
coeficienti trebuie sa fie folositi pentru definirea caracteristicilor elastice, masice si de inertie
masica ai modelului. Astfel, va exista o corespondenta biunivoca intre domeniul de valori
caracteristice utilizate in experimente cu domeniul acelorasi valori caracteristice intalnite la aripile
reale de aviatie.
7. Proiectul structurii aripii
Modelul fizic care pune in evidenta fenomenul de flutter prin experimente in tunelul
aerodinamic este o aripa de tip alcatuita dintr-un cheson (lonjeron), acoperit de un invelis cu forma
aerodinamica (profil NACA 0012). Aripa are si o suprafata de control al zborului (eleron) la una
dintre extremitati. La cealalta extremitate a lonjeronului este o flansa care fixeaza intreaga aripa in
tunelul aerodinamic. Chesonul este o teava rectangulara (120x25x1200), cu grosimea de 1mm,
prevazuta cu crestaturi pentru a-i micsora (controla) rigiditatea. Elementele care definesc suprafata
aerodinamica sunt executate din lemn sau rasina ROHACELL 71S.
Conceptul structurii aripii este prezentat in figurile alaturate.
13
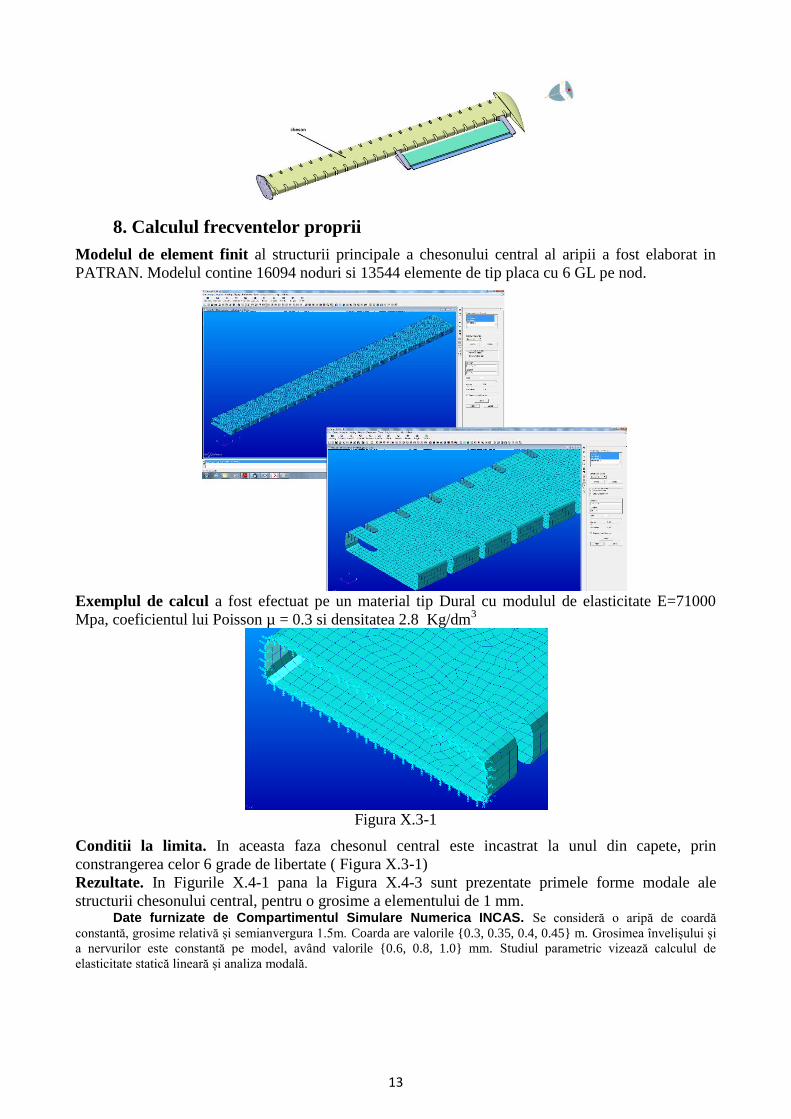
8. Calculul frecventelor proprii
Modelul de element finit al structurii principale a chesonului central al aripii a fost elaborat in
PATRAN. Modelul contine 16094 noduri si 13544 elemente de tip placa cu 6 GL pe nod.
Exemplul de calcul a fost efectuat pe un material tip Dural cu modulul de elasticitate E=71000
Mpa, coeficientul lui Poisson µ = 0.3 si densitatea 2.8 Kg/dm3
Figura X.3-1
Conditii la limita. In aceasta faza chesonul central este incastrat la unul din capete, prin
constrangerea celor 6 grade de libertate ( Figura X.3-1)
Rezultate. In Figurile X.4-1 pana la Figura X.4-3 sunt prezentate primele forme modale ale
structurii chesonului central, pentru o grosime a elementului de 1 mm. Date furnizate de Compartimentul Simulare Numerica INCAS. Se consideră o aripă de coardă
constantă, grosime relativă și semianvergura 1.5m. Coarda are valorile {0.3, 0.35, 0.4, 0.45} m. Grosimea învelișului și
a nervurilor este constantă pe model, având valorile {0.6, 0.8, 1.0} mm. Studiul parametric vizează calculul de
elasticitate statică lineară și analiza modală.
Figura X.4-1: Modul 1 Frecventa 10.2 Hz
(Primul mod de incovoiere)
Figura X.4-2 Modul 2 Frecventa 32.2 Hz
(mod de incovoiere superior)
15
Figura X.4-3 Modul 3 Frecventa 35.2 Hz (Primul mod de incovoiere in plan) Pentru fiecare din cele trei grosimi de material, se prezintă:
-valoarea maximă a tensiunii echivalente din analiza de elastostatică, precum și graficul corespunzator.
-primele trei frecvențe și moduri proprii din analiza modală.
Densitatea nervurilor s-a facut dupa analize modale preliminarii care au relevat incepand cu modul III
“umflaturi” ale invelisului in celulele dintre nervuri si lonjeron. Lonjeronul posterior a fost adaugat exact din
motivul prezentat si dupa insertia lui aceste moduri proprii de invelis au fost deplasate cu cel putin un mod catre
frecventele superioare. Lonjeroanele nu sunt materializate printr-un ansamblu talpi si inima, dar exista cele doua
inimi corespunzatoare lonjeroanelor anterior si posterior. Geometria prezinta imperfectiuni din punct de vedere
aerodinamic, dar este vorba de un calcul preliminar. Pentru analiza statică, încarcarea s-a considerat constantă pe
lungimea aripii, la un coeficient de portanta CL=0.6, pentru densitate fluid 1.225Kg/mc si Viteza 30m/s.
Doua metode s-au folosit pentru analiza modala: Lanczos si QR. Rezultatele sunt identice.
Geometria modelului in linii
Geometria modelului in suprafete
16
In dreapta, avem coloristica pentru tensiunile in aripa.
c=0,3 m
f1
f2
f3
Deplasarea maxima
rosime=0,6 mm
17
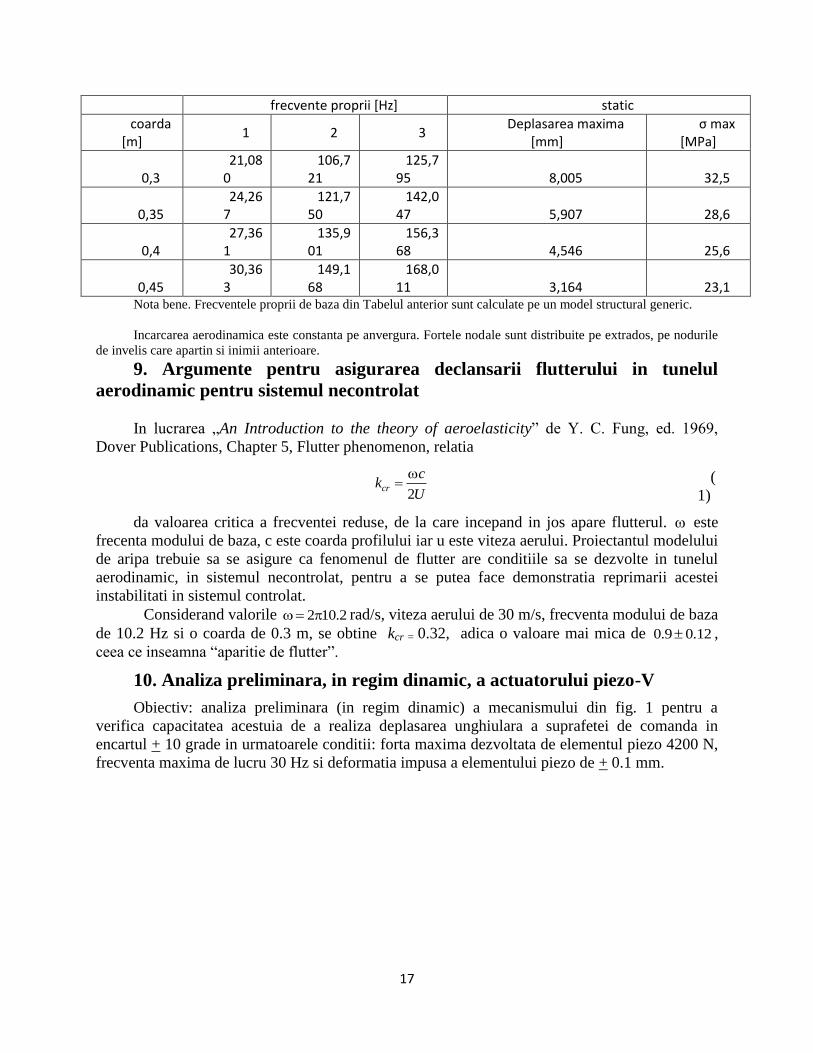
frecvente proprii [Hz] static
coarda [m]
1 2 3 Deplasarea maxima
[mm] σ max
[MPa]
0,3 21,08
0 106,7
21 125,7
95 8,005 32,5
0,35 24,26
7 121,7
50 142,0
47 5,907 28,6
0,4 27,36
1 135,9
01 156,3
68 4,546 25,6
0,45 30,36
3 149,1
68 168,0
11 3,164 23,1 Nota bene. Frecventele proprii de baza din Tabelul anterior sunt calculate pe un model structural generic.
Incarcarea aerodinamica este constanta pe anvergura. Fortele nodale sunt distribuite pe extrados, pe nodurile
de invelis care apartin si inimii anterioare. 9. Argumente pentru asigurarea declansarii flutterului in tunelul
aerodinamic pentru sistemul necontrolat
In lucrarea „An Introduction to the theory of aeroelasticity” de Y. C. Fung, ed. 1969,