63
U.T.C.N. 2008 Curs TRACTOARE, AUTOMOBILE ŞI SISTEME DE PROPULSIE Prof. dr. ing. N. Burnete Drd. ing. D. Băldean
| Date post: | 11-Feb-2018 |
| Category: |
Documents |
| Upload: | sabo-grigore-adrian |
| View: | 242 times |
| Download: | 0 times |
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 1/63
U.T.C.N.
2008
Curs
TRACTOARE, AUTOMOBILE
ŞI SISTEME DE PROPULSIE
Prof. dr. ing. N. Burnete Drd. ing. D. Băldean
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 2/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
2 T. A. S. P.
Cuprins:
Curs tractoare, automobile şi sisteme de propulsie .............................................................................. 4 1. Noţiuni generale. Definiţii ........................................................................................................................ 4 2. Dezvoltarea construcţiei de autovehicule şi tractoare - istoric .................................. ................................ 4
3. Dezvoltarea industriei de autovehicule şi tractoare în România ............................................................... 4 4. Clasificarea tractoarelor şi automobilelor ................................................................................................. 4
4.1. Tractoarele ............................................................................................ ............................................................ 4 4.2. Automobilul ..................................................................................................................................................... 5 4.3. Autoturismul .................................................................................................................................................... 6 4.4. Remorca ........................................................................................................................................................... 7
5. Construcţia generală a automobilelor, tractoarelor şi remorcilor ...................................... ........................ 8 1. Păr ţile componente ale tractoarelor şi automobilelor ............................................................................ 8 2. Condiţii generale impuse ansamblurilor şi mecanismelor tractoarelor şi autovehiculelor .................... 8 6. Parametrii principali ai tractoarelor şi automobilelor ................................................................................ 8
3. Parametrii constructivi ........................................................................................................................... 8 4. Parametrii dinamici ............................................................................................................................... 9
5. Parametrii economici ............................................................................................................................10 7. Caracteristica motoarelor utilizate la tractoare şi automobile ..................................................................10 8. Transformarea momentului motor în for ţă motoare a automobilului şi tractorului .................................12 9. Raportul de transmitere şi randamentul transmisiei .................................................................................14
10. Generalităţi asupra drumurilor ...............................................................................................................14 11. Rularea roţilor. Elemente de cinematică ................................................................................................16
12. Rularea pur ă ...........................................................................................................................................18
13. Dinamica roţilor conduse .......................................................................................................................20 14. Dinamica roţii motoare ..........................................................................................................................21 15. Presiunea specifică pe sol, patinarea şi aderenţa roţilor motoare ........................................... ................22
16. Rularea roţilor în lipsa for ţelor transversale ....................................... ........................................... .........24
16.1. Rularea roţilor cu obadă rigidă pe suprafaţă rigidă. ................................................................................. 25 16.2. Rularea roţilor cu obadă rigidă pe suprafaţă deformabilă. ....................................................................... 26 16.3. Rularea roţilor deformabile pe suprafaţă rigidă. ....................................................................................... 27 16.4. Rularea roţilor deformabile pe suprafaţă deformabilă. ............................................................................. 29
17. Rularea roţilor în prezenţa for ţelor transversale ........................................... ..........................................29
18. Cinematica şenilelor. Determinarea coeficientului de neuniformitate în mers la autovehiculele peşenile. ...........................................................................................................................................................31 19. Dinamica generală a mecanismului şenilelor .........................................................................................31 20. For ţele care acţionează asupra tractorului în plan longitudinal ..............................................................31
20.1. For ţa de rezistenţă la rulare, Ff .................................................................................................................. 32 20.2. For ţa de iner ţie, F j...................................................................................................................................... 32 20.3. For ţa de rezistenţă a maşinii agricole. For ţa de tracţiune la cârlig Ft ....................................................... 33 20.4. For ţa tangenţială de tracţiune. Fm.............................................................................................................. 33 20.5. Reacţiunile normale la roţile faţă şi spate Zd şi Zm ................................................................................... 33 20.6. Bilanţul de tracţiune al tractorului ............................................................................. ................................ 34
21. Reacţiunile normale ale drumului în planul transversal al tractorului ...................................................35
22. Dinamica generală a tractorului pe şenile (determinarea centrului de pres.) .........................................37
23. Stabilitatea longitudinală a automobilelor pe roţi ..................................................................................38 23.1. Stabilitatea longitudinală statică ............................................................................................................... 39 23.2. Stabilitatea dinamică când există sarcină la cârlig.................................................................................... 39 23.3. Stabilitatea dinamică cu maşini purtate .................................................................................................... 40
24. Stabilitatea transversală a automobilelor pe roţi ....................................................................................40 25. Stabilitatea la r ăsturnare laterală ............................................................................................................41
25.1. Caz 1 .......................................................................................................................................................... 41
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 3/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
3 T. A. S. P.
25.2. Caz 2 .......................................................................................................................................................... 42 25.3. Caz 3 .......................................................................................................................................................... 42
26. Stabilitatea la derapare ...........................................................................................................................43 27. Virarea automobilelor pe roţi. Posibilităţi de virare ....................................... ........................................44
28. Cinematica vir ării automobilelor pe roţi ................................................................................................45 28.1. Caz 1 .......................................................................................................................................................... 45 28.2. Caz 2 .......................................................................................................................................................... 45 28.3. Caz 3 .......................................................................................................................................................... 46
29. Virarea autovehiculelor pe şenile. Cinematica vir ării autovehiculelor pe şenile ...................................46 30. Momentul de rezistenţă la virare ............................................................................................................47 31. Stabilitatea în curbă ................................................................................................................................48
32. Stabilitatea la mers în linie dreaptă ........................................................................................................51 32.1. Caz 1. Metacentrul Ca se află în Cλ ........................................................................................................... 52 32.2. Caz 2. Metacentrul Ca se află în spatele Cλ............................................................................................... 53 32.3. Caz 3. Metacentrul Ca se află în faţa Cλ.................................................................................................... 53
33. Frânarea. Parametrii capacităţii de frânare ......................................... ........................................... .........54 34. Influenţa conducătorului şi a unor caracteristici constructive asupra procesului de frânare ..................56
35. For ţa specifică de frânare .......................................................................................................................57 36. Stabilitatea la frânare ..............................................................................................................................57
36.1. Caz 1. Blocarea roţilor spate ................................................................................................................ ..... 57 36.2. Caz 2. Blocarea roţilor faţă ....................................................................................................................... 58
37. Studiul mecanismelor şi servomecanismelor de direcţie .......................................................................58 37.1. Rolul sistemelor de direcţie ....................................................................................... ................................ 58 37.2. Cerinţe impuse sistemelor de direcţie ....................................................................................................... 58 37.3. Metode de virare ........................................................................................................................................ 59 37.4. Construcţia sistemelor de direcţie ............................................................................................................. 59 37.5. Condiţii impuse mecanismului de direcţie ................................................................................................ 60 37.6. Clasificarea mecanismelor de direcţie ...................................................................................................... 60 37.7. Servomecanisme de direcţie ...................................................................................... ................................ 60
37.8. Penele sistemului de direcţie ..................................................................................................................... 61 Index.............................................................................................................................................................62
Bibliografie ........................................................................................................................................ 63
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 4/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
4 T. A. S. P.
Curs tractoare, automobile şi sisteme de propulsie
1. Noţiuni generale. Definiţii
2. Dezvoltarea construcţiei de autovehicule şi tractoare - istoric
3. Dezvoltarea industriei de autovehicule şi tractoare în România
4. Clasificarea tractoarelor şi automobilelor
4.1. Tractoarele
a) după destinaţie:i. agricole:
1. de utilizare generală: pot fi pe roţi sau pe şenile şi se utilizează laexecutarea principalelor lucr ări agricole (arat, semănat, gr ă patetc.) (E=ct.),
2. universale: sunt numai pe roţi şi se utilizează în plus (faţă de celede uz general) la întreţinerea culturilor şi la transportul înagricultur ă (E≠ct., iar garda la sol între 350÷700 mm),
3. specializate: pot fi pe roţi sau pe şenile, realizate în construcţiespecială pentru executarea diferitelor lucr ări în condiţiile specialede lucru sau pentru anumite culturi,
a. viticole (lăţime 800...1100 mm), uneori cu gardă mare lasol 1300...1800 mm, (Ex. V445, SV-445, U-445 HC)
b. pomicole (H redusă şi centrul de greutate jos): U-445 DT,SM-445,
c. legumicole numai pe roţi, având garda la sol mare (640-750 sau chiar 1200 mm), ecartament reglabil şi balonajredus al roţilor,
d. pentru pante: SM-445, SM-800,e. pentru mlaştini,f. pentru încărcat,g. pentru culturi de bumbac, ceai, hamei etc.
4. şasiuri autopropulsate: tractoare pe roţi la care zona dintre punteafaţă şi cea din spate este liber ă, şi permite montarea maşiniiagricole purtate sau semipurtate şi a echipamentelor de lucru sau a
platformei pentru transport de unde rezultă supravegherea maiuşoar ă a lucr ărilor executate,
ii. pentru industrie:1. de utilizare generală: pentru executarea unor lucr ări grele de
terasament, defrişări, irigaţii, îmbunătăţiri funciare,
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 5/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
5 T. A. S. P.
2. speciale: pentru efectuarea lucr ărilor de să pat, încărcat, stivuit,
corhănit (tragerea copacilor din pădure la marginea acesteia),iii. rutiere: au ca destinaţie specială lucr ările de transport, putând asiguraviteze sporite de deplasare (25-45 km/h, iar unele chiar 60 km/h) şisuspensie îmbunătăţită,
b) după tipul sistemului de rulare:i. tractoare pe roţi:
1. cu o punte (motocultoare) cu putere mică (5-20 CP) şi gabaritredus,
2. cu două punţi:a. 4x2 sau 4x4,
b. cu roţi motoare egale,c. cu roţi motoare neegale,
d. cu o roată de direcţie,e. cu E normal sau cu roţi apropiate,ii. tractoare pe semişenile: au roţi în faţă şi şenile în spate, şi se obţin din
tractoarele obişnuite prin montarea pe nişte roţi intermediare şi pe celedin spate a unor şenile uşoare,
iii. tractoare pe şenile,c) după tipul motorului:
i. cu motor termic,ii. cu motor electric, cu acumulator sau cu alimentare prin cablu de la
distanţă,d) după for ţa nominală de tracţiune, pe care o dezvoltă tractorul (există 10 clase: 0,2; 0,6;
0,9; 1,4; 2; 3; 4; 5; 6; 8 tf (103 daN),
e) după tipul transmisiei:i. cu transmisie mecanică:
1. în trepte,2. continuă,
ii. cu transmisie hidrostatică,iii. cu transmisie hidrodinamică,iv. cu transmisie electrică,v. cu transmisie combinată.
4.2. Automobilul
a) după destinaţie:i. pentru transport de persoane:
1. autoturisme: pentru transport rapid de persoane (cel mult 8 persoane),
2. microbuze (până la 17 pasageri),3. autobuze (peste 17 pasageri),
a. urbane, b. suburbane,c. interurbane,d. autocare.
ii. pentru transport de bunuri:
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 6/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
6 T. A. S. P.
1. cu caroserie închisă:
a.
furgon, b. autodubă,c. autofrigorifică,d. autoizotermă,
2. cu caroserie deschisă:a. autocamion,
b. autocamionetă,c. pentru containere,d. pick-up.
3. cu caroserie specială:a. autobasculante,
b. autobetonier ă,
c. autocisterne,d. pentru animale,iii. pentru prestări de servicii:
1. pentru pompieri,2. sanitare,3. autoateliere,4. autostropitori,5. automătur ători,6. automacarale,
b) după tipul transmisiei:i. cu transmisie mecanică:
1. în trepte,
2. continuă,ii. cu transmisie hidrostatică,
iii. cu transmisie hidrodinamică,iv. cu transmisie electrică,v. cu transmisie combinată.
c) după numărul de punţi:i. cu două punţi:
1. 4x2,2. 4x4,
ii. cu trei punţi:1. 6x2,2. 6x4,3. 6x6,
d) după tipul motorului.
4.3. Autoturismul
a) după forma caroseriei:i. cu caroserie închisă:
1. berlină,2. coach,
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 7/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
7 T. A. S. P.
3. cupeu,
4.
limuzină,5. sedan, etc.ii. cu caroserie deschisă:
1. roadster,2. spider,3. cabriolet,
iii. cu caroserie decapotabilă iv. cu caroserie specială:
1. combi,2. spider,3. cabriolet,
b) după capacitatea cilindrică a motorului:
i. foarte mici (microturisme) < 600 cm3
,ii. mici: 600-1299 cm3,iii. mijloci: 1300-2499 cm3,iv. mari: 2500-3500 cm3,v. foarte mari: > 3500 cm3.
4.4. Remorca
Remorcile sunt vehicule rutiere destinate prin construcţie a fi ataşate unui autovehicul.a) semiremorcă: este o remorcă dependentă, f ăr ă puntea faţă, cuplată în aşa fel încât o parte
apreciabilă a greutăţii proprii se sprijină pe puntea (punţile) motoare a autotractorului; secuplează cu autotractoare cu şa; partea posterioar ă a autobuzelor articulate intr ă încategoria semiremorcilor.
b) remorcile cu o osie: pot fi folosite şi la autoturisme,c) remorcile cu două osii:
i. cu platformă deschisă,ii. cu benă basculantă,
iii. pentru scopuri speciale (ex. ateliere, laboratoare etc.),d) remorcile cu mai multe osii: pentru transporturi grele > 40 t (pentru transport maşini).
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 8/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
8 T. A. S. P.
5. Construcţia generală a automobilelor, tractoarelor şi remorcilor
1. P ăr ţ ile componente ale tractoarelor şi automobilelor
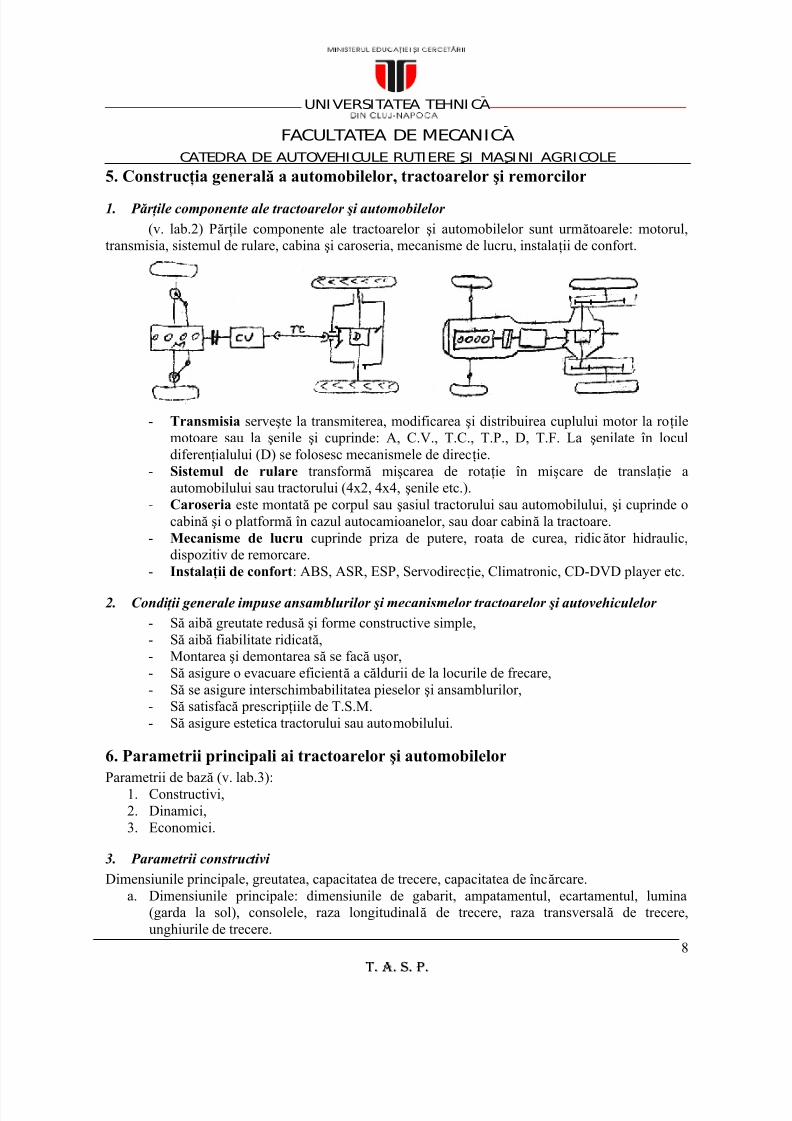
(v. lab.2) Păr ţile componente ale tractoarelor şi automobilelor sunt următoarele: motorul,transmisia, sistemul de rulare, cabina şi caroseria, mecanisme de lucru, instalaţii de confort.
- Transmisia serveşte la transmiterea, modificarea şi distribuirea cuplului motor la roţilemotoare sau la şenile şi cuprinde: A, C.V., T.C., T.P., D, T.F. La şenilate în loculdiferenţialului (D) se folosesc mecanismele de direcţie.
- Sistemul de rulare transformă mişcarea de rotaţie în mişcare de translaţie aautomobilului sau tractorului (4x2, 4x4, şenile etc.).
- Caroseria este montată pe corpul sau şasiul tractorului sau automobilului, şi cuprinde ocabină şi o platformă în cazul autocamioanelor, sau doar cabină la tractoare.
- Mecanisme de lucru cuprinde priza de putere, roata de curea, ridicător hidraulic,dispozitiv de remorcare.
- Instalaţii de confort: ABS, ASR, ESP, Servodirecţie, Climatronic, CD-DVD player etc.
2. Condi ţ ii generale impuse ansamblurilor şi mecanismelor tractoarelor şi autovehiculelor
- Să aibă greutate redusă şi forme constructive simple,- Să aibă fiabilitate ridicată,- Montarea şi demontarea să se facă uşor,- Să asigure o evacuare eficientă a căldurii de la locurile de frecare,- Să se asigure interschimbabilitatea pieselor şi ansamblurilor,- Să satisfacă prescripţiile de T.S.M.- Să asigure estetica tractorului sau automobilului.
6. Parametrii principali ai tractoarelor şi automobilelor
Parametrii de bază (v. lab.3):1. Constructivi,2. Dinamici,3. Economici.
3. Parametrii constructivi
Dimensiunile principale, greutatea, capacitatea de trecere, capacitatea de încărcare.a. Dimensiunile principale: dimensiunile de gabarit, ampatamentul, ecartamentul, lumina
(garda la sol), consolele, raza longitudinală de trecere, raza transversală de trecere,unghiurile de trecere.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 9/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
9 T. A. S. P.
b. Greutatea tractorului: constructivă, de exploatare.
-
greutatea automobilului:o în stare nealimentată (constructivă),o proprie (alimentat, cu roata de rezervă, cu ladă de scule),o totală: greutatea proprie a automobilului la care se adaugă sarcina maximă utilă şi
greutatea conducătorului.c. Capacitatea de trecere: calitatea autovehicolului de a se deplasa pe drumuri şi terenuri
accidentate şi de a trece peste obstacole, şi există astfel:i. Autovehicule obişnuite
ii. Autovehicule cu capacitate mare de trecere: pe roţi (toate roţile motoare), peşenile, este caracterizată de următorii parametrii: lumina, ρ, ρ1, raza minimă de viraj (distanţa de la polul virajului până la jumătatea punţii spate), razaroţilor (la automobile cu o singur ă punte motoare înălţimea unui obstacol
vertical peste care se poate trece este r 32h = , iar la automobile cu mai multe
punţi motoare r h ≅ ; lăţimea canalului peste care poate trece un automobil cuo punte motoare r h ≅ ; lăţimea canalului peste care poate trece un automobilcu o punte motoare este r b ≅ , iar la automobile cu mai multe punţi motoare
r 2,1 b ≅ ), nr. de roţi motoare, presiunea specifică pe sol
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ =
solul.cu.contact.de.raf sup
G p t
s
( ) 5s 104,1...6,0 p ⋅= Pa – la tractoarele pe roţi cu pneuri,
( ) 5107,0...4,0 ⋅= Pa – şenilate,
( ) 5105,5...0,3 ⋅= Pa – autocamioane.
25
2 cm
daN10
m
N1Pa ==
4. Parametrii dinamici
a) Caracteristica externă a motorului (caracteristica de turaţie) b) Factorul dinamic
1
am
G
FFD
−=
Fm – for ţa tangenţială de tracţiune la roata motoare,Fa – for ţa de rezistenţă a arcului (numai la automobile).
Variaţia factorului dinamic în funcţie de viteză se numeşte caracteristica dinamică aautovehiculului.c) For ţa maximă de tracţiuned) Viteza maximă a autovehiculului: viteza reală în km/h, cu care se poate deplasa autovehiculul peun drum orizontal, în condiţii normale, la treapta superioar ă din cutia de viteză şi cu sarcina maximă utilă.
- viteza teoretică: [ ]h/kmi
r n377,0r v
t
mmt
⋅⋅=⋅ω= ;
e) Panta maximă:
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 10/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
10 T. A. S. P.
f) Stabilitatea: capacitatea autovehiculului de a se deplasa pe pante, drumuri înclinate, curbe, etc.
f ăr ă a se r ăsturna sau derapa.5. Parametrii economici
Costul iniţial, amortismentul, cheltuielile de exploatare (consumul de combustibil,durabilitatea).
L4Se determină ps la tractoarele şi automobilele din dotare pentru diferite presiuni în pneuri!Se determină L, E, E1, ρ, ρ1, h, b!În general, la tractoare, ps < 1,0 daN/cm2 – la roţile motoare,
> 1,0 daN/cm2 – la roţile de direcţie.Pt. U650 E=1320-1920
E=1400-2050
L=2500 (ampatamentul)H=480 (lumina)G=3380 kg
Dacia Gf =540 kg;Gs=390 kg. (gol)
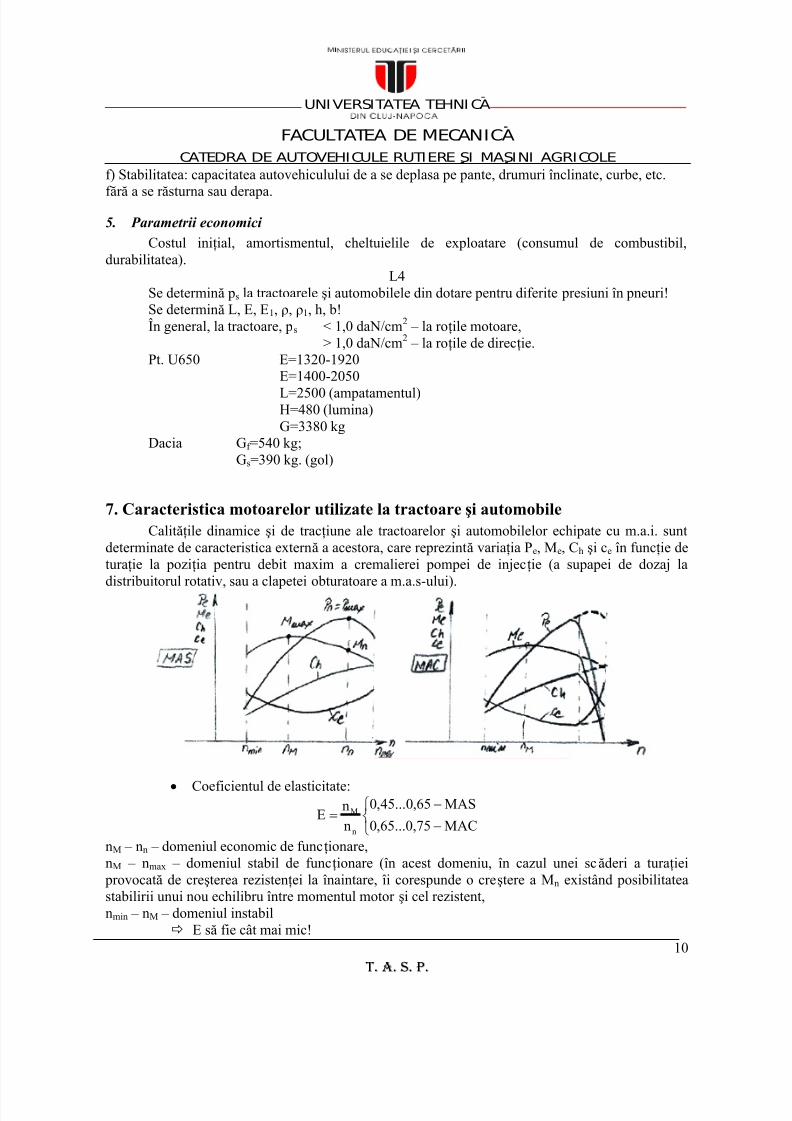
7. Caracteristica motoarelor utilizate la tractoare şi automobile
Calităţile dinamice şi de tracţiune ale tractoarelor şi automobilelor echipate cu m.a.i. suntdeterminate de caracteristica externă a acestora, care reprezintă variaţia Pe, Me, Ch şi ce în funcţie deturaţie la poziţia pentru debit maxim a cremalierei pompei de injecţie (a supapei de dozaj ladistribuitorul rotativ, sau a clapetei obturatoare a m.a.s-ului).
• Coeficientul de elasticitate:
⎩⎨⎧
−
−=
MAC75,0...65,0
MAS65,0...45,0
n
nE
n
M
nM – nn – domeniul economic de funcţionare,nM – nmax – domeniul stabil de funcţionare (în acest domeniu, în cazul unei scăderi a turaţiei
provocată de creşterea rezistenţei la înaintare, îi corespunde o creştere a Mn existând posibilitateastabilirii unui nou echilibru între momentul motor şi cel rezistent,nmin – nM – domeniul instabil
Ö E să fie cât mai mic!

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 11/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
11 T. A. S. P.
• Coeficientul de adaptabilitate:
maxeP
max
MMA =
Coeficientul de adaptabilitate caracterizează posibilitatea învingerii suprasarcinilor temporare f ăr ă trecerea la o treaptă inferioar ă:
MAC20,1...05,1
MAS35,1...20,1A
−
−=
La tractoare şi automobile momentul rezistent la înaintare variază în limite foarte largi, întimp ce variaţia Me este relativ redusă faţă de variaţia în limite largi a turaţiei motorului.
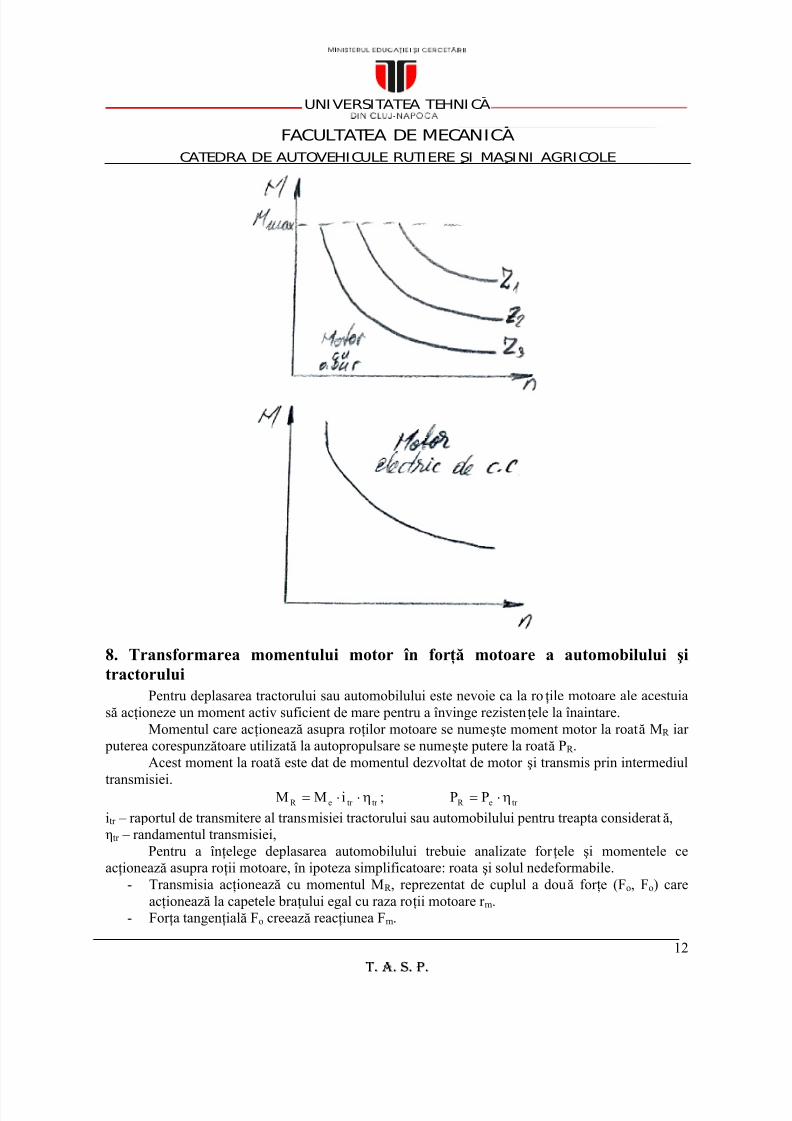
O caracteristică corespunzătoare de tracţiune ar avea motoarele care dezvoltă o putereconstantă la toate regimurile de funcţionare:
.ctnMP =⋅=
O astfel de caracteristică este o hiperbolă şi reprezintă caracteristica ideală a motorului detractor sau automobil.
În acest caz funcţionarea motorului este întotdeauna stabilă, deoarece la micşorarea turaţieicreşte cuplul motor, iar transmisia autovehiculului nu necesită cutie de viteze.
Turbinele cu gaze sunt avantajoase din punctul de vedere al caracteristicii, dar audezavantajul unui randament termic redus şi în plus necesită timpi mari pentru demarare.
Motorul cu abur are randament η scăzut şi greutate mare (Z – debitul de abur).
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 12/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
12 T. A. S. P.
8. Transformarea momentului motor în forţă motoare a automobilului şitractorului
Pentru deplasarea tractorului sau automobilului este nevoie ca la roţile motoare ale acestuiasă acţioneze un moment activ suficient de mare pentru a învinge rezistenţele la înaintare.
Momentul care acţionează asupra roţilor motoare se numeşte moment motor la roată MR iar puterea corespunzătoare utilizată la autopropulsare se numeşte putere la roată PR .
Acest moment la roată este dat de momentul dezvoltat de motor şi transmis prin intermediul
transmisiei.tr tr eR iMM η⋅⋅= ; tr eR PP η⋅=
itr – raportul de transmitere al transmisiei tractorului sau automobilului pentru treapta considerată,ηtr – randamentul transmisiei,
Pentru a înţelege deplasarea automobilului trebuie analizate for ţele şi momentele ceacţionează asupra roţii motoare, în ipoteza simplificatoare: roata şi solul nedeformabile.
- Transmisia acţionează cu momentul MR , reprezentat de cuplul a două for ţe (Fo, Fo) careacţionează la capetele braţului egal cu raza roţii motoare r m.
- For ţa tangenţială Fo creează reacţiunea Fm.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 13/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
13 T. A. S. P.
o Fm – for ţa de tracţiune (for ţa motoare la roată), care este limitată la valoarea maximă
(Fm max) de aderenţa cu solul.- Corpul tractorului creează reacţiunea R echilibrată de for ţa de împingere Fo,- For ţa maximă de împingere Fo max corespunde cuplului maxim al m.a.i.,- Asupra roţii motoare mai acţionează sarcina radială Qm care include şi greutatea proprie a
roţii şi care este echilibrată de reacţiunea normală a solului (Zm).
m
tr tr e
m
R om r
iM
r
MFF
η⋅⋅=== .
Cazurile de mişcare a roţii
CazulSituaţia punctelor
ConcluziiO A
R>Fo max; Fm max>Fo max imobil imobil Mişcarea este imposibilă, motorul se opreşte.
R ≥Fo max; Fm max<Fo max imobil mobil Patinare totală (100%).R<Fo max; Fm max≥Fo max mobil imobil Rostogolire ideală.R<Fo max; Fm max<Fo max mobil mobil Deplasare cu patinare par ţială.
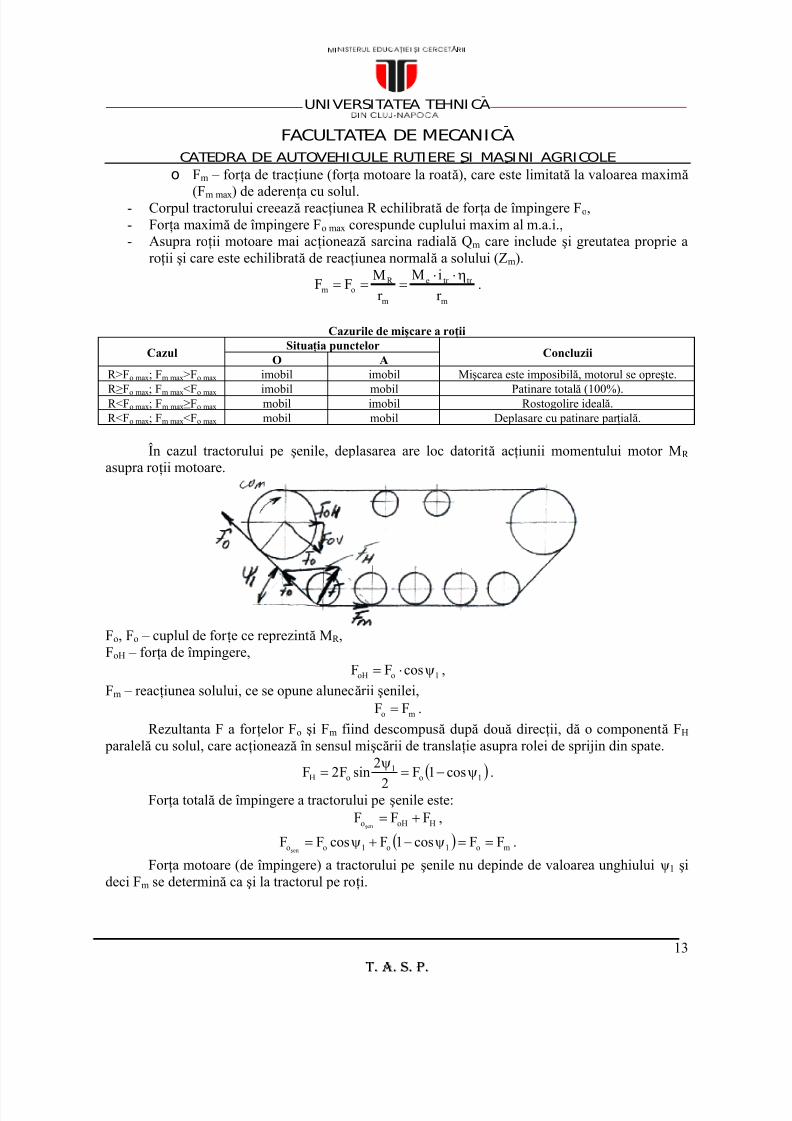
În cazul tractorului pe şenile, deplasarea are loc datorită acţiunii momentului motor MR asupra roţii motoare.
Fo, Fo – cuplul de for ţe ce reprezintă MR ,FoH – for ţa de împingere,
1ooH cosFF ψ⋅= ,
Fm – reacţiunea solului, ce se opune alunecării şenilei,
mo FF = .
Rezultanta F a for ţelor Fo şi Fm fiind descompusă după două direcţii, dă o componentă FH paralelă cu solul, care acţionează în sensul mişcării de translaţie asupra rolei de sprijin din spate.
( )1o1
oH cos1F
2
2sinF2F ψ−=ψ
= .
For ţa totală de împingere a tractorului pe şenile este:
HoHo FFFşen
+= ,
( ) mo1o1oo FFcos1FcosFFşen
==ψ−+ψ= .
For ţa motoare (de împingere) a tractorului pe şenile nu depinde de valoarea unghiului ψ1 şideci Fm se determină ca şi la tractorul pe roţi.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 14/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
14 T. A. S. P.
9. Raportul de transmitere şi randamentul transmisiei
Raportul de transmitere itr al transmisiei autovehiculului este dat de raportul dintre turaţia n(a motorului) şi turaţia nr (a roţii motoare).
r r tr n
ni
ωω
==
itr – depinde de treapta cuplată în cutia de viteză şi de construcţia transmisiei,
tf tccvtr iiii ⋅⋅=
itc – raportul transmisiei centrale,itf – raportul transmisiei finale.
tr e
R
e
R tr iM
M
P
P
⋅==η
tf tccvtr η⋅η⋅η=η ¾ pentru şenilate: s ptf tccvtr η⋅η⋅η⋅η⋅η=η
η p – randamentul mecanismului planetar de direcţie,ηs – randamentul şenilei.
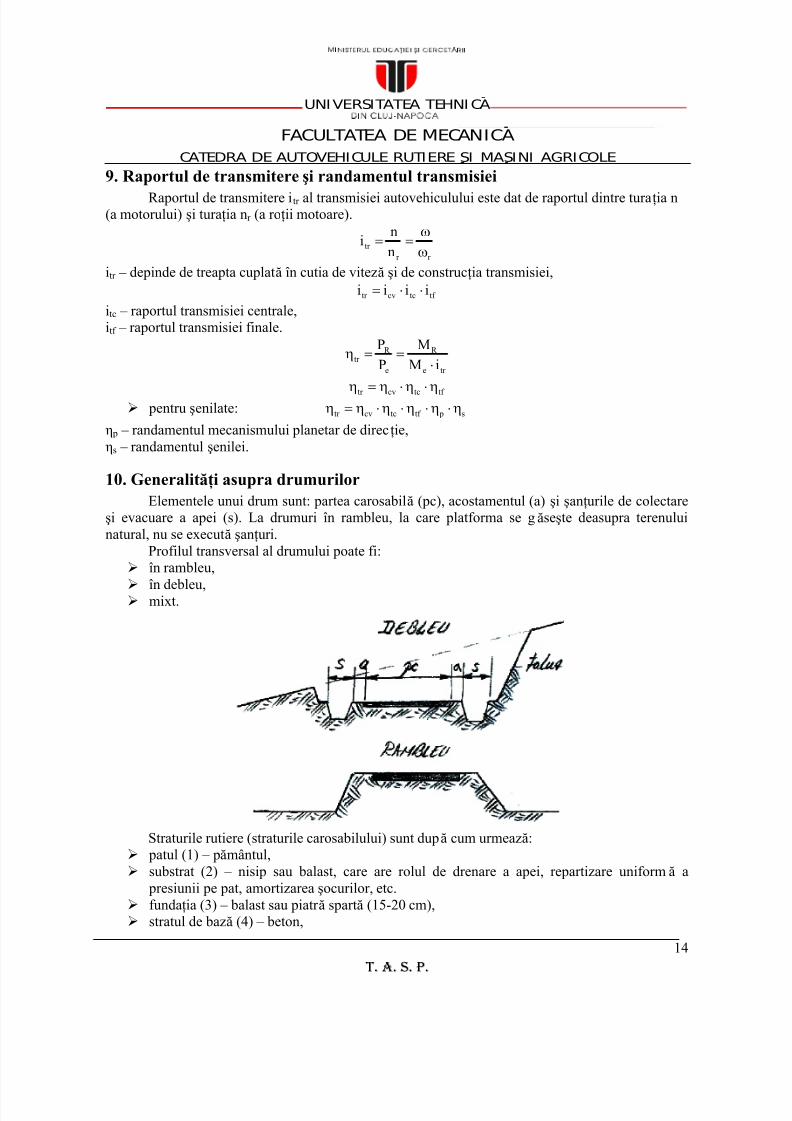
10. Generalităţi asupra drumurilor
Elementele unui drum sunt: partea carosabilă (pc), acostamentul (a) şi şanţurile de colectareşi evacuare a apei (s). La drumuri în rambleu, la care platforma se găseşte deasupra terenuluinatural, nu se execută şanţuri.
Profilul transversal al drumului poate fi:¾ în rambleu,¾
în debleu,¾ mixt.
Straturile rutiere (straturile carosabilului) sunt după cum urmează:¾ patul (1) – pământul,¾ substrat (2) – nisip sau balast, care are rolul de drenare a apei, repartizare uniformă a
presiunii pe pat, amortizarea şocurilor, etc.¾ fundaţia (3) – balast sau piatr ă spartă (15-20 cm),¾ stratul de bază (4) – beton,
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 15/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
15 T. A. S. P.
¾ stratul de legătur ă (5),¾
stratul de uzur ă (6).
Drumurile difer ă prin alcătuirea şi dimensionarea straturilor corespunzătoare unor traficuride diferite intensităţi:
¾ trafic foarte redus – sub 750 t/zi,¾ trafic redus – 750÷4500 t/zi,¾ trafic mijlociu – 4500÷11000 t/zi,¾ trafic intens – 11000÷15000 t/zi,¾ trafic foarte intens – peste 15000 t/zi.
În funcţie de gradul de perfecţionare există:¾ drumuri de tip inferior: drumurile de pământ naturale sau amenajate,
o drumurile naturale sunt drumuri agricole şi de ţărână,o drumurile amenajate sunt drumuri de interes local care au infrastructur ă (şanţuri,
poduri etc.) şi sunt din pământ, pietriş, zgur ă.¾ drumuri de tip intermediar: au partea carosabilă consolidată prin împietruire (compactarea
cu material dur – pietriş, piatr ă concasată (macadam) – cu ajutorul cilindrului compresor).
Pot fi stropite cu emulsii de bitum pentru combaterea prafului.¾ drumuri de tip superior.Dimensiuni: lăţimea benzii de circulaţie este minim 3 m iar pentru şosele cu trafic intens
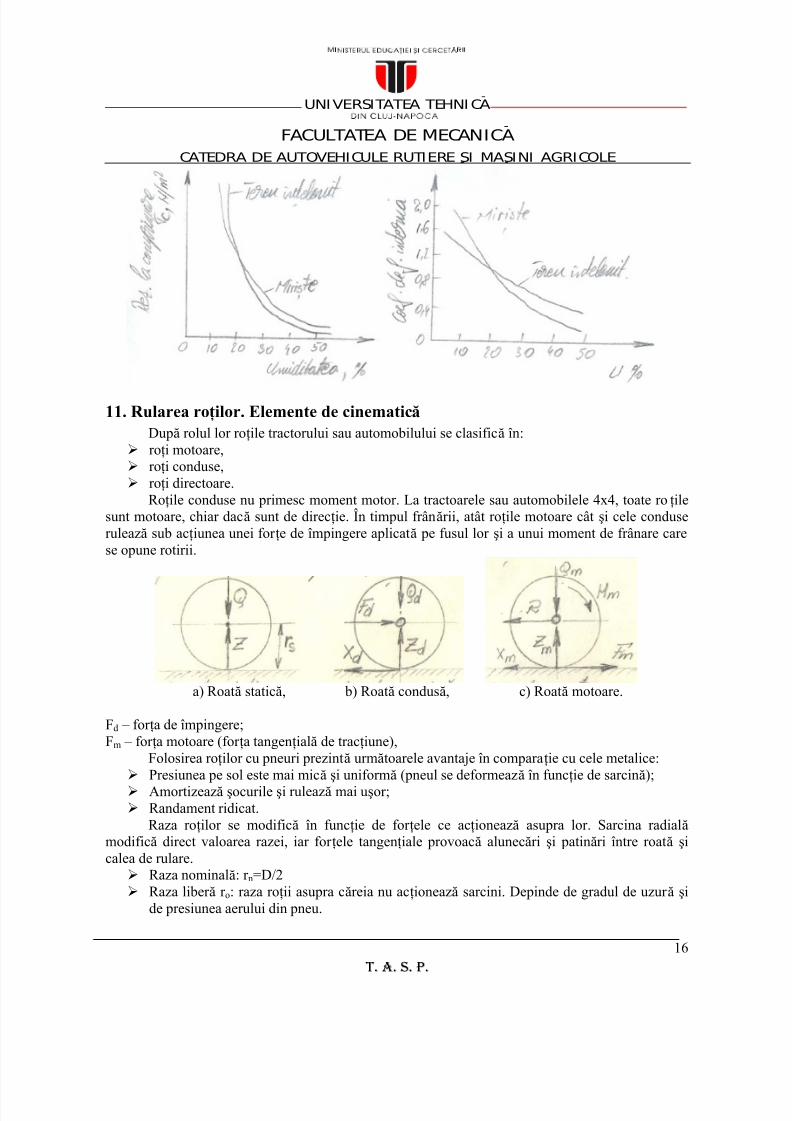
3,5...3,75; lăţimea acostamentului 1 ... 2,5 m.Tractoarele agricole, în timpul deplasării, datorită interacţiunii roţilor sau şenilelor cu solul,
provoacă următoarele fenomene:¾ deteriorarea locală a structurii solului,¾ presarea şi ruperea unor complexe separate de pământ,¾ apariţia for ţelor de frecare în complexele de pământ dislocate,¾ formarea câmpurilor de tensiune în jurul fiecărui element al mecanismului de rulare, prin
presarea şi deformarea solului.Rezistenţa la forfecare şi rupere a solurilor naturale este foarte redusă, iar rezistenţa la
compensare scade brusc cu creşterea umidităţii solului. Coeficientul de frecare dintre sistemulderulare şi sol este 0,25...0,30. Coeficientul de frecare internă a solului variază în limite largi înfuncţie de umiditate.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 16/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
16 T. A. S. P.
11. Rularea roţilor. Elemente de cinematică
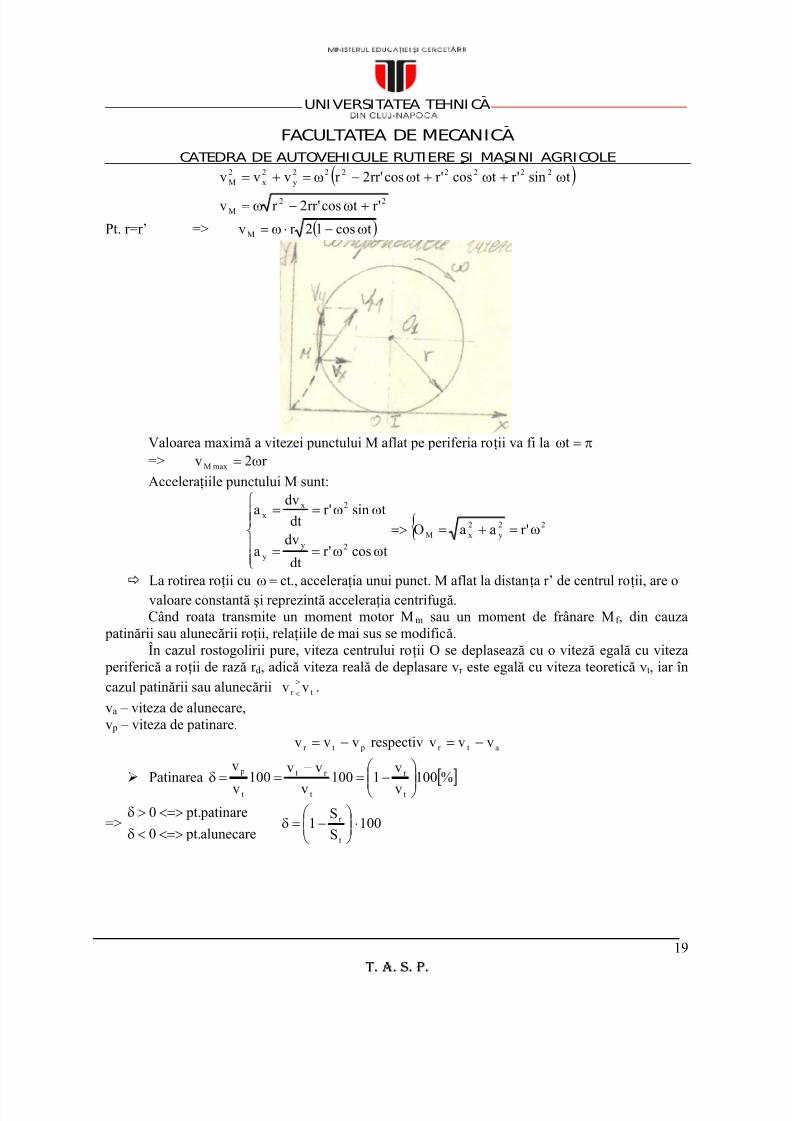
După rolul lor roţile tractorului sau automobilului se clasifică în:¾ roţi motoare,¾ roţi conduse,¾ roţi directoare.
Roţile conduse nu primesc moment motor. La tractoarele sau automobilele 4x4, toate roţilesunt motoare, chiar dacă sunt de direcţie. În timpul frânării, atât roţile motoare cât şi cele conduserulează sub acţiunea unei for ţe de împingere aplicată pe fusul lor şi a unui moment de frânare carese opune rotirii.
a) Roată statică, b) Roată condusă, c) Roată motoare.
Fd – for ţa de împingere;Fm – for ţa motoare (for ţa tangenţială de tracţiune),
Folosirea roţilor cu pneuri prezintă următoarele avantaje în comparaţie cu cele metalice:¾ Presiunea pe sol este mai mică şi uniformă (pneul se deformează în funcţie de sarcină);¾ Amortizează şocurile şi rulează mai uşor;¾ Randament ridicat.
Raza roţilor se modifică în funcţie de for ţele ce acţionează asupra lor. Sarcina radială modifică direct valoarea razei, iar for ţele tangenţiale provoacă alunecări şi patinări între roată şicalea de rulare.
¾ Raza nominală: r n=D/2¾ Raza liber ă r o: raza roţii asupra căreia nu acţionează sarcini. Depinde de gradul de uzur ă şi
de presiunea aerului din pneu.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 17/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
17 T. A. S. P.
¾ Raza statică r s: distanţa de la axa geometrică a roţii până la suprafaţa de sprijin pe care stă
roata încărcată cu sarcina Q. Depinde de Q, de presiunea aerului şi de elesticitateaanvelopei.¾ Raza dinamică r d: raza roţii în mişcare asupra căreia acţionează o sarcină radială şi un
anumit moment.¾ Raza de rulare r r (raza cinematică): distanţa de la axa geometrică a roţii până la axa
instantanee de rotaţie Se determină experimental.
n2
Sr r ⋅π⋅=
s – spaţiul parcurs de roată,n – numărul de rotaţii ale roţii.
p – presiunea din pneu;Mm – momentul transmis de roată.
Deformaţia pneului sub influenţa momentului transmis de roată.
Roata care transmite un moment motor, va avea raza de rulare mai mică, iar dacă transmiteun moment de frânare va avea raza de rulare mai mare. Ro ţile care se rostogolesc f ăr ă să transmită moment, au raza de rulare apropiată de raza dinamică.
Deformaţia pneului sub influenţa momentului transmis de roată se datoreşte mai aleselasticităţii tangenţiale a pneului.
Modificarea r r faţă de r d, se explică şi prin alunecarea şi patinarea roţii pe calea de rulare,
acestea modificând poziţia axei instantanee de rotaţie a roţii.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 18/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
18 T. A. S. P.
a) Rulare ideală, b) Rulare cu patinare, c) Rulare cu alunecare.
12. Rularea pură
Se consider ă schema rulării pure a unei roţi de rază r din poziţia 1 în poziţia 2, atât roata câtşi calea de rulare fiind rigide. În timpul rostogolirii cu unghiul ψ, centrul roţii se deplasează din O1 în O2, iar un punct de pe roată aflat la distanţa r’ de axa roţii, se deplasează din M1 în M2. Însistemul XOY, coordonatele acestui punct sunt:
Ecuaţiile cicloidei:⎩⎨⎧
⋅ω−=ψ−=
⋅ω−⋅ω⋅=ψ−ψ=
tcos'r r cos'r r y
tsin'r tr sin'r r x
Dacă M se află pe periferia roţii:
( )( )⎩
⎨⎧
⋅ω−=
⋅ω−⋅ω=
=
tcos1r y
tsintr x
'r r
Componentele vitezei şi acceleraţiei unui punct M de pe roată se determină prin derivare(ω=ct.):
( )
⎪⎪⎩
⎪⎪⎨
⎧
ωω==
⋅ω−ω=ωω−ω==
tsin'r dt
dyv
tcos'r r tcos'r r dt
dxv
x
x
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 19/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
19 T. A. S. P.
( )22
M
2222222y
2x
2M
'r tcos'rr 2r v
tsin'r tcos'r tcos'rr 2r vvv
+ω−ω=
ω+ω+ω−ω=+=
Pt. r=r’ => ( )tcos12r v M ω−⋅ω=
Valoarea maximă a vitezei punctului M aflat pe periferia roţii va fi la π=ωt => r 2v maxM ω=
Acceleraţiile punctului M sunt:
{ 22y
2xM
2yy
2xx
'r aaO
tcos'r dt
dva
tsin'r dt
dva
ω=+==>
⎪⎪⎩
⎪⎪⎨
⎧
ωω==
ωω==
Ö La rotirea roţii cu .,ct=ω acceleraţia unui punct. M aflat la distanţa r’ de centrul roţii, are ovaloare constantă şi reprezintă acceleraţia centrifugă.Când roata transmite un moment motor Mm sau un moment de frânare Mf , din cauza
patinării sau alunecării roţii, relaţiile de mai sus se modifică.În cazul rostogolirii pure, viteza centrului roţii O se deplasează cu o viteză egală cu viteza
periferică a roţii de rază r d, adică viteza reală de deplasare vr este egală cu viteza teoretică vt, iar în
cazul patinării sau alunecării tr vv >< .
va – viteza de alunecare,v p – viteza de patinare.
ptr vvv −= respectiv atr vvv −=
¾ Patinarea[ ]%100
v
v1100
v
vv100
v
v
t
r
t
r t
t
p
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ −=
−==δ
=>alunecare. pt0
patinare. pt0
<=><δ
<=>>δ100
S
S1
t
r ⋅⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=δ
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 20/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
20 T. A. S. P.
Rostogolire pur ă (cicloidă)Patinare (cicloidă alungită)
Alunecare (cicloidă scurtată)
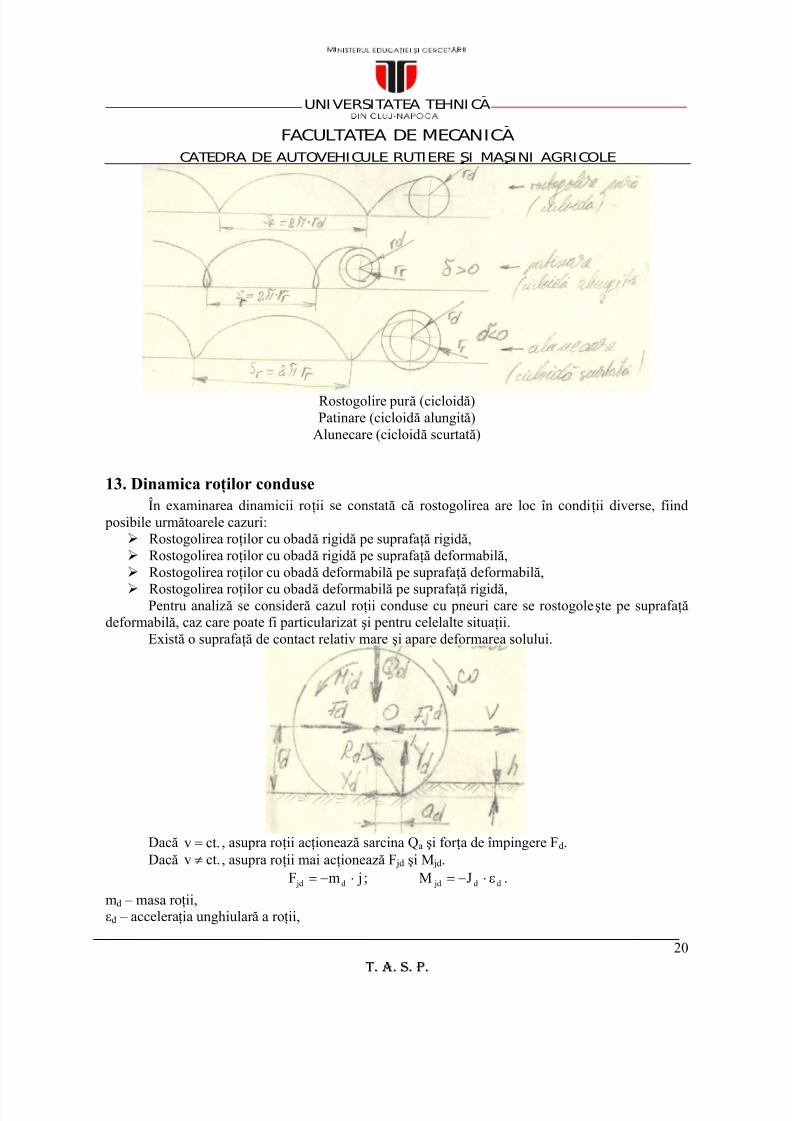
13. Dinamica roţilor conduse
În examinarea dinamicii roţii se constată că rostogolirea are loc în condiţii diverse, fiind posibile următoarele cazuri:
¾ Rostogolirea roţilor cu obadă rigidă pe suprafaţă rigidă,¾ Rostogolirea roţilor cu obadă rigidă pe suprafaţă deformabilă,¾ Rostogolirea roţilor cu obadă deformabilă pe suprafaţă deformabilă,
¾ Rostogolirea roţilor cu obadă deformabilă pe suprafaţă rigidă,Pentru analiză se consider ă cazul roţii conduse cu pneuri care se rostogoleşte pe suprafaţă
deformabilă, caz care poate fi particularizat şi pentru celelalte situaţii.Există o suprafaţă de contact relativ mare şi apare deformarea solului.
Dacă .ctv = , asupra roţii acţionează sarcina Qa şi for ţa de împingere Fd.Dacă .ctv ≠ , asupra roţii mai acţionează F jd şi M jd.
jmF d jd ⋅−= ; dd jd JM ε⋅−= .
md – masa roţii,εd – acceleraţia unghiular ă a roţii,

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 21/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
21 T. A. S. P.
Jd – momentul de iner ţie al roţii,
M jd – momentul for ţelor tangenţiale de iner ţie.Ö Rezultanta reacţiunilor solului R d trece prin centrul roţii O, când v=ct., deoarece Fd şi Qd sunt concurente în O şi nu dau moment în raport cu acest centru al roţii.
Ö În mişcare accelerată, reacţiunea R d trebuie să dea un moment egal cu M jd şi de sens contrar,şi deci R d va trece pe sub axa O.
Ö În mişcare încetinită, R d va trece pe deasupra axei O.Ö Xd – rezistenţa la rulare a roţii conduse.
⎪⎩
⎪⎨
⎧
=⋅−−⋅
=−
=−−
0aYMr X
0YQ
0FXF
dd jddd
dd
jddd
unde: rddddd MaQaY =⋅=⋅ - momentul de rezistenţă la rulare,
ad – coeficientul de frecare la rulare, în unităţi de lungime.Pt. .ctv = şi drum orizontal:
dd XF = ; dd QY = dddd aYr X ⋅=⋅
Ö rddddddd MaYr Fr X =⋅=⋅=⋅
Ö dd
d
d
d
d
d f r
Q
Q
X
Y
F=== - coeficientul de rezistenţă la rulare a roţii conduse (de direcţie).
În cazul când reacţiunea Xd (necesar ă rotirii roţii) depăşeşte for ţa de aderenţă a roţii cu solul( )dQ⋅ϕ , roata nu se mai roteşte şi se deplasează prin alunecare.
14. Dinamica roţii motoare
În cazul deplasării pe drum orizontal, asupra roţii (motoare) acţionează Qm (sarcina), Fm’(reacţiunea for ţei de împingere) şi momentul motor Mm.
Acţiunea drumului este reprezentată prin reacţiunea totală R m şi for ţa tangenţială detracţiune Fm (for ţa motoare la roată).
Dacă .ctv ≠ => mai apar F jm şi M jm.
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−=⇒=−⋅−
=−
=−−−
m
jmmm jmmmm
mm
jm'mmm
r
MMF0Mr FM
0QY
0FFXF
R m – va trece totdeauna prin axa geometrică.Pentru v=ct. bilanţul de putere al roţii motoare este următorul:
( ) ( ) vFvXvvFvFvvFvFM 'mmtmmtmtm
'mm +⋅+−=⋅+−=⋅=ω⋅
vt – viteza teoretică, şi este dată de relaţia:
mmt r v ω⋅=
v – viteza reală.Xm
.v – puterea pierdută la rularea roţii,Fm(vt-v) – puterea pierdută prin patinarea roţii,
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 22/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
22 T. A. S. P.
Fm’.v – puterea utilă, transmisă corpului tractorului.
Randamentul roţii motoare:
mR
m
e
um M
vF
P
P
ω⋅
⋅==η
Coeficientul de rezistenţă la rulare:
m
mm Q
Xf = ;
G
Ff f = .
15. Presiunea specifică pe sol, patinarea şi aderenţa roţilor motoare
Presiunea pe sol (drum). Calităţile de tracţiune ale tractoarelor şi automobilelor depind înmare măsur ă de valoarea şi distribuţia presiunii pe suprafaţa de contact a pneului cu solul, care larândul lor sunt influenţate de următorii factori:
¾ Construcţia, dimensiunile, elasticitatea şi desenul acestuia,¾ Proprietăţile mecanice ale solului,¾ Presiunea aerului din pneu,¾ Încărcarea pe roată.
Pentru un anumit tip de pneu, presiunea pe sol creşte odată cu creşterea presiunii din pneu,cu creşterea sarcinii şi cu creşterea rigidităţii.
Dacă ps este prea mare, atunci roţile se vor afunda în teren iar rulajul va deveni imposibil:
.A
Q p
contacts =
Distribuţia presiunii dintre roată şi sol nu este uniformă. Astfel la o roată cu nervuri pronunţate, ps sub nervuri este mai mare ca între nervuri.
Suprafaţa de contact dintre roată şi sol este o elipsă, ps fiind mai mare în zona centrală şi maimică spre conturul elipsei de contact.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 23/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
23 T. A. S. P.
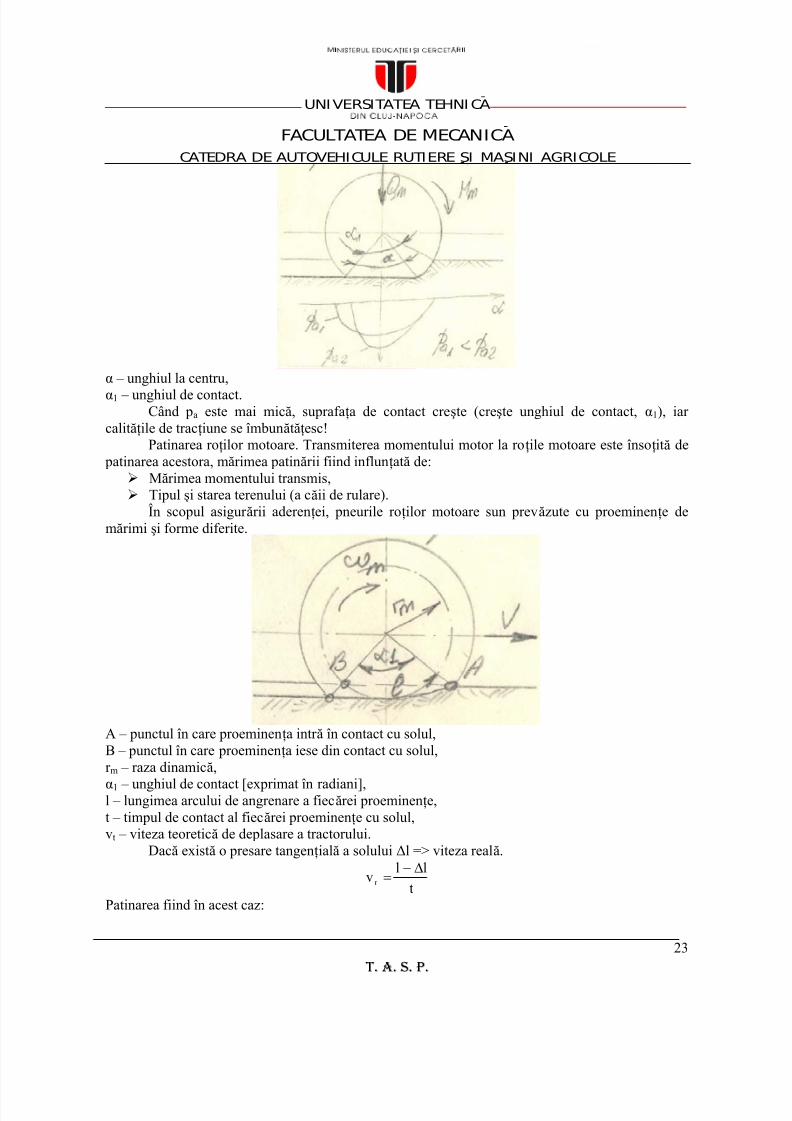
α – unghiul la centru,
α1 – unghiul de contact.Când pa este mai mică, suprafaţa de contact creşte (creşte unghiul de contact, α1), iar
calităţile de tracţiune se îmbunătăţesc!Patinarea roţilor motoare. Transmiterea momentului motor la roţile motoare este însoţită de
patinarea acestora, mărimea patinării fiind influnţată de:¾ Mărimea momentului transmis,¾ Tipul şi starea terenului (a căii de rulare).
În scopul asigur ării aderenţei, pneurile roţilor motoare sun prevăzute cu proeminenţe demărimi şi forme diferite.
A – punctul în care proeminenţa intr ă în contact cu solul,B – punctul în care proeminenţa iese din contact cu solul,r m – raza dinamică,
α1 – unghiul de contact [exprimat în radiani],l – lungimea arcului de angrenare a fiecărei proeminenţe,t – timpul de contact al fiecărei proeminenţe cu solul,vt – viteza teoretică de deplasare a tractorului.
Dacă există o presare tangenţială a solului Δl => viteza reală.
t
llv r
Δ−=
Patinarea fiind în acest caz:
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 24/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
24 T. A. S. P.
l
l
v
vv1
t
r t Δ=
−=η−=δ δ
mmt QFF μ−= – for ţa de tracţiune utilă.
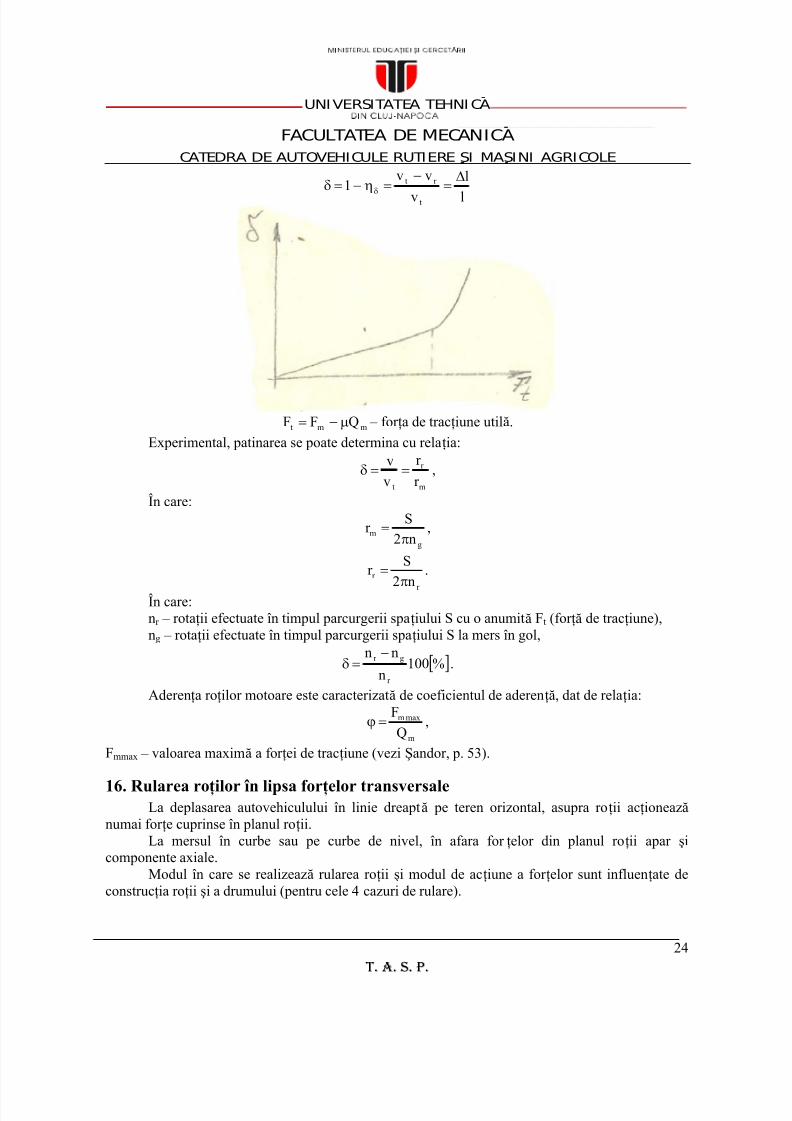
Experimental, patinarea se poate determina cu relaţia:
m
r
t r
r
v
v==δ ,
În care:
gm n2
Sr
π= ,
r
r n2
Sr
π= .
În care:nr – rotaţii efectuate în timpul parcurgerii spaţiului S cu o anumită Ft (for ţă de tracţiune),ng – rotaţii efectuate în timpul parcurgerii spaţiului S la mers în gol,
[ ]%100n
nn
r
gr −=δ .
Aderenţa roţilor motoare este caracterizată de coeficientul de aderenţă, dat de relaţia:
m
maxm
Q
F=ϕ ,
Fmmax – valoarea maximă a for ţei de tracţiune (vezi Şandor, p. 53).
16. Rularea roţilor în lipsa forţelor transversaleLa deplasarea autovehiculului în linie dreaptă pe teren orizontal, asupra roţii acţionează
numai for ţe cuprinse în planul roţii.La mersul în curbe sau pe curbe de nivel, în afara for ţelor din planul roţii apar şi
componente axiale.Modul în care se realizează rularea roţii şi modul de acţiune a for ţelor sunt influenţate de
construcţia roţii şi a drumului (pentru cele 4 cazuri de rulare).

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 25/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
25 T. A. S. P.
16.1. Rularea roţilor cu obadă rigidă pe suprafaţă rigidă.
Când roata este în repaus for ţa normală N, care este rezultanta presiunilor, este aşezată peaceeaşi axă cu sarcina Q, repartizarea presiunilor fiind simetrică faţă de axa verticală a roţii.
La începutul rulării, presiunile se modifică, iar rezultanta N va fi decalată în sensul mişcăriicu cota „e”. La rularea roţii trebuie să se învingă momentul:
eQM ⋅= ,care în cazul roţilor motoare este învins de momentul motor, iar în cazul roţilor conduse de cătrefor ţa de împingere Fd.
Pentru ω=ct şi neglijabil frecarea din lagăre:
⎪⎩
⎪⎨⎧
=⋅−⋅
=−=−
=>
0e Nr F
0HF0 NQ
x
T

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 26/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
26 T. A. S. P.
Pentru deformaţii foarte mici r=r x =>QFr e = , iar coeficientul de rezistenţă la rulare se
determină cu relaţia:
f Q
F
r
e==
De asemenea:
f Q
F
N
Htg T ===β
Rezistenţa la rulare este influenţată de sarcina pe roată şi de asemenea de dimensiunile roţii.La creşterea diametrului roţii scade „f” şi concomitent scade deformaţia drumului.
Dacă se consider ă şi frecările din lagărele roţii, momentul rezistent din lagăre este dat derelaţia:
Qr M ee ⋅⋅μ=
μ – coeficientul de alunecare în lagărul roţii,r e – raza fusului lagărului.
0Mr He N exT =+⋅−⋅=>
0HF T =− 0 NQ =−
r
r ef e⋅μ+==>
Rezultanta R nu mai trece prin centrul roţii ci la distanţa „a” de centru.
22
ee
FQQr aQr MeaR +⋅⋅μ==>⋅⋅μ==⋅
16.2. Rularea roţilor cu obadă rigidă pe suprafaţă deformabilă.
În această situaţie deformaţia roţii este foarte redusă, dar în schimb creşte deformaţia solului.Adâncimea de deformare „h” ca urmare a trecerii roţilor, se poate determina dacă se cunosc
proprietăţile mecanice ale solului.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 27/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
27 T. A. S. P.
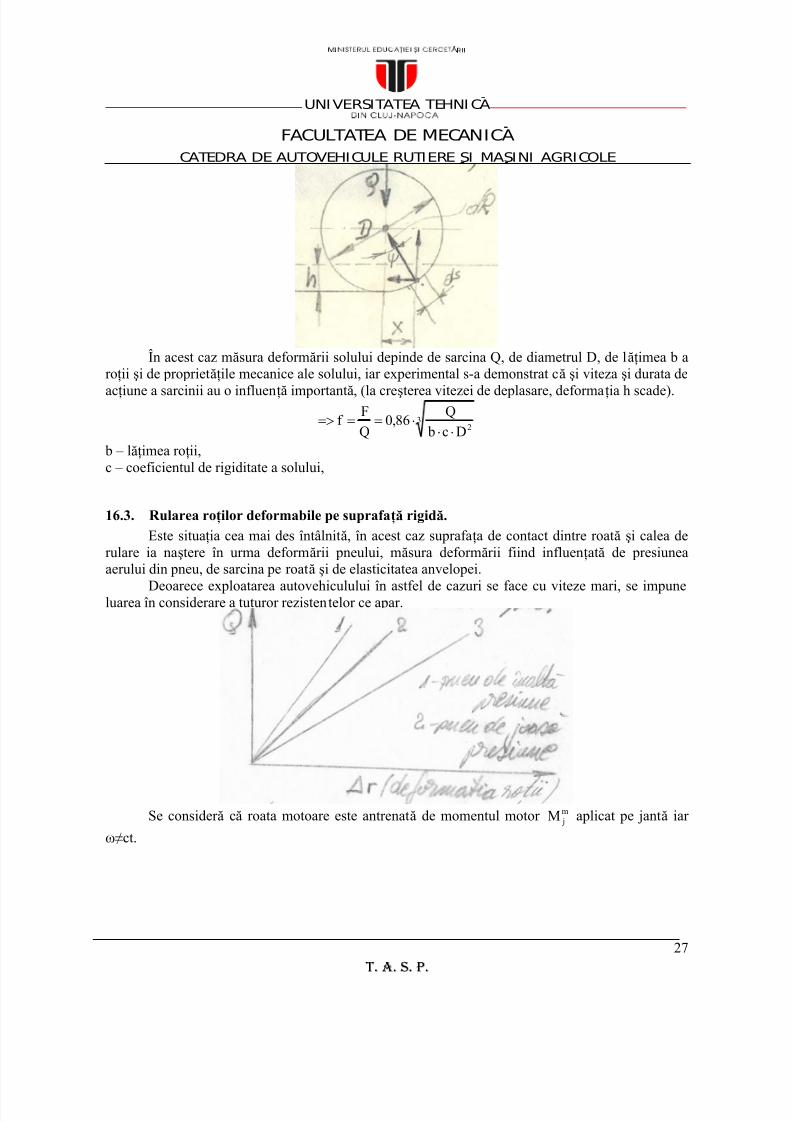
În acest caz măsura deformării solului depinde de sarcina Q, de diametrul D, de lăţimea b aroţii şi de proprietăţile mecanice ale solului, iar experimental s-a demonstrat că şi viteza şi durata de
acţiune a sarcinii au o influenţă importantă, (la creşterea vitezei de deplasare, deformaţia h scade).3
2Dc b
Q86,0
Q
Ff
⋅⋅⋅===>
b – lăţimea roţii,c – coeficientul de rigiditate a solului,
16.3. Rularea roţilor deformabile pe suprafaţă rigidă.
Este situaţia cea mai des întâlnită, în acest caz suprafaţa de contact dintre roată şi calea derulare ia naştere în urma deformării pneului, măsura deformării fiind influenţată de presiuneaaerului din pneu, de sarcina pe roată şi de elasticitatea anvelopei.
Deoarece exploatarea autovehiculului în astfel de cazuri se face cu viteze mari, se impuneluarea în considerare a tuturor rezistenţelor ce apar.
Se consider ă că roata motoare este antrenată de momentul motor m jM aplicat pe jantă iar
ω≠ct.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 28/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
28 T. A. S. P.
Mi, Fi – moment, for ţă de iner ţie,Fa – rezistenţa aerului => Ma,Fr – for ţa de remorcare din lagăr,Me – momentul datorat frecării din lagăr.
⎪⎩
⎪⎨⎧
⋅+⋅+++=
++==
d peaim j
r ai p
r Fe NMMMM
FFFF; NQ
( ) dr aieaim j r FFFeQMMMM ⋅+++⋅+++==> , dar
r
ef = .
( )r aideaim j FFFQf r MMMM +++⋅+++==> .
Pentru viteze mici:0M ,0F ,0M ,0F iiaa ==== .
( )r dem j FQf r MM +⋅+==> fQ
r
MMF
d
em j
r −−
==>
Pentru roata frânată se înlocuieşte m jM cu f
jM− :
( )r def j FQf r MM +⋅+=−=> fQ
r
MMF
d
ef j
r ++
==>
32da
1 r p QCf ⋅=
C1=0,11 – pentru pneuri de înaltă presiune,C1=0,045 – pentru pneuri de joasă presiune.
Pe calea de reulare rigidă rezistenţa la rulare este cu atât mai mică cu cât presiunea din pneueste mai mare, în timp ce pe teren deformabil rezisten ţa la rulare creşte cu creşeterea presiunii din
pneu.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 29/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
29 T. A. S. P.
16.4. Rularea roţilor deformabile pe suprafaţă deformabilă.
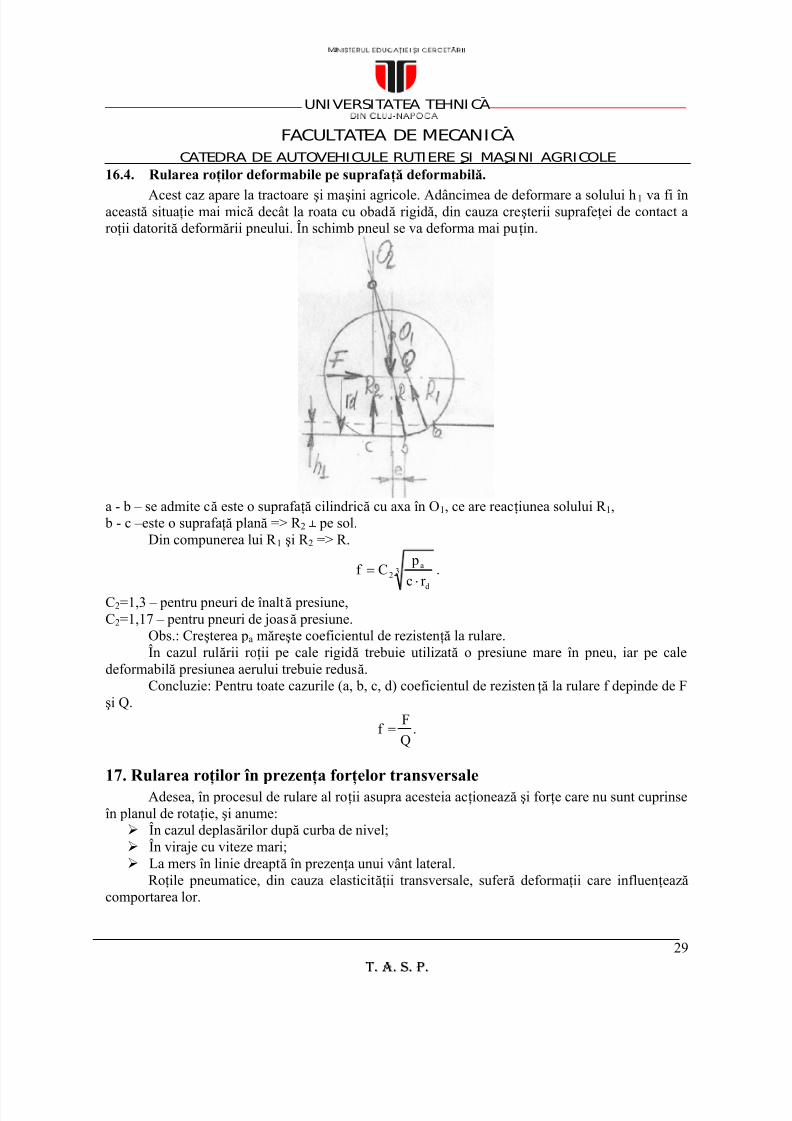
Acest caz apare la tractoare şi maşini agricole. Adâncimea de deformare a solului h1 va fi înaceastă situaţie mai mică decât la roata cu obadă rigidă, din cauza creşterii suprafeţei de contact aroţii datorită deformării pneului. În schimb pneul se va deforma mai puţin.
a - b – se admite că este o suprafaţă cilindrică cu axa în O1, ce are reacţiunea solului R 1, b - c –este o suprafaţă plană => R 2 ┴ pe sol.
Din compunerea lui R 1 şi R 2 => R.
3
d
a2 r c
pCf
⋅= .
C2=1,3 – pentru pneuri de înaltă presiune,C2=1,17 – pentru pneuri de joasă presiune.
Obs.: Creşterea pa măreşte coeficientul de rezistenţă la rulare.În cazul rulării roţii pe cale rigidă trebuie utilizată o presiune mare în pneu, iar pe cale
deformabilă presiunea aerului trebuie redusă.Concluzie: Pentru toate cazurile (a, b, c, d) coeficientul de rezistenţă la rulare f depinde de F
şi Q.
.Q
Ff =
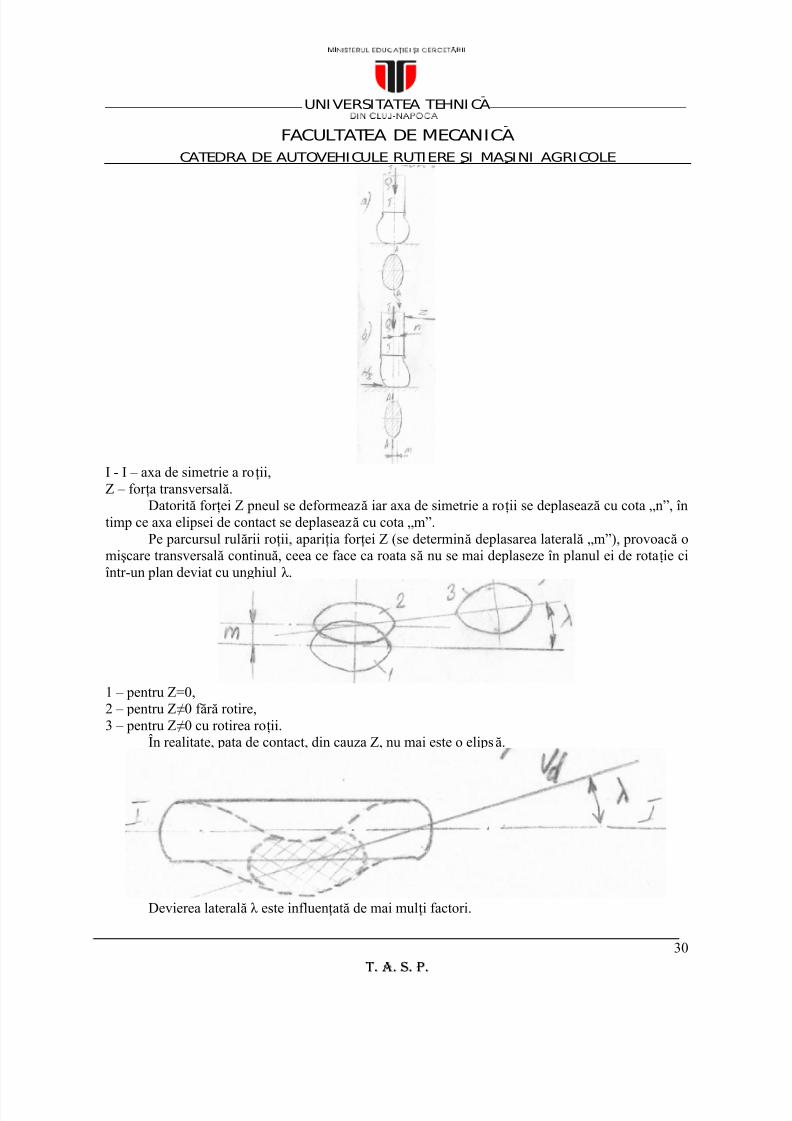
17. Rularea roţilor în prezenţa forţelor transversale
Adesea, în procesul de rulare al roţii asupra acesteia acţionează şi for ţe care nu sunt cuprinseîn planul de rotaţie, şi anume:
¾ În cazul deplasărilor după curba de nivel;¾ În viraje cu viteze mari;¾ La mers în linie dreaptă în prezenţa unui vânt lateral.
Roţile pneumatice, din cauza elasticităţii transversale, sufer ă deformaţii care influenţează comportarea lor.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 30/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
30 T. A. S. P.
I - I – axa de simetrie a roţii,Z – for ţa transversală.
Datorită for ţei Z pneul se deformează iar axa de simetrie a roţii se deplasează cu cota „n”, întimp ce axa elipsei de contact se deplasează cu cota „m”.
Pe parcursul rulării roţii, apariţia for ţei Z (se determină deplasarea laterală „m”), provoacă omişcare transversală continuă, ceea ce face ca roata să nu se mai deplaseze în planul ei de rotaţie ciîntr-un plan deviat cu unghiul λ.
1 – pentru Z=0,2 – pentru Z≠0 f ăr ă rotire,3 – pentru Z≠0 cu rotirea roţii.
În realitate, pata de contact, din cauza Z, nu mai este o elipsă.
Devierea laterală λ este influenţată de mai mulţi factori.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 31/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
31 T. A. S. P.
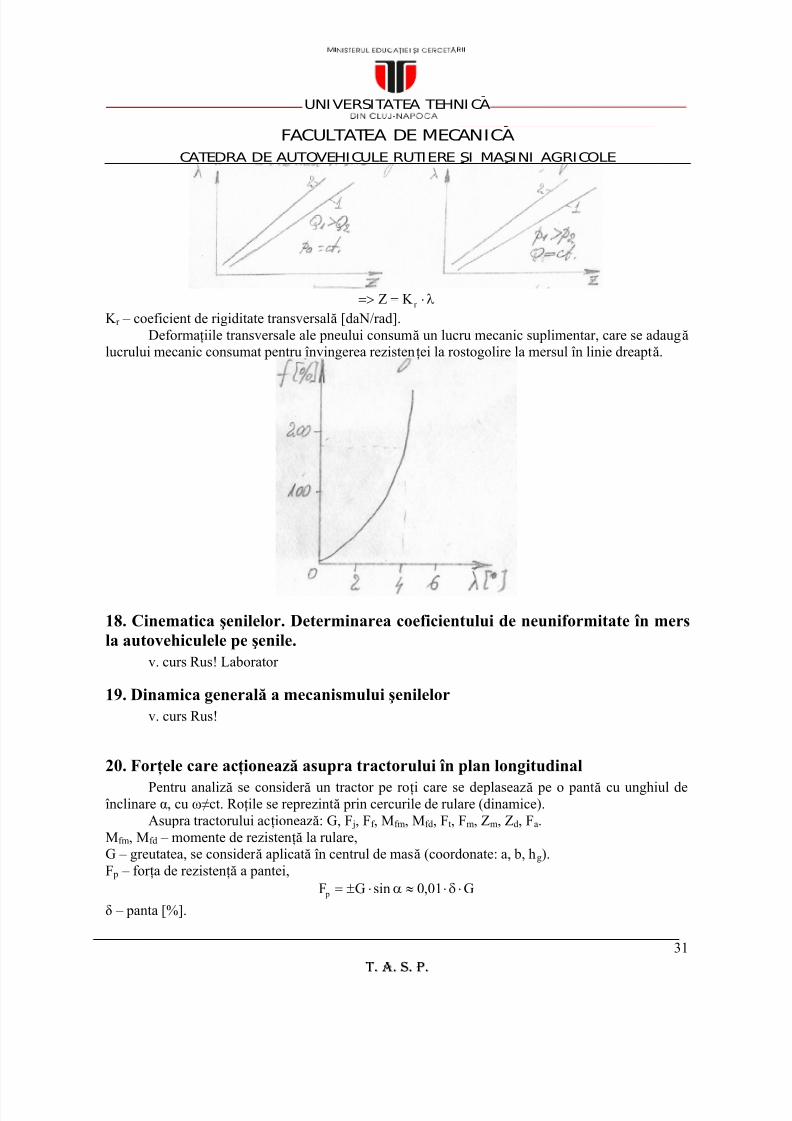
λ⋅==> r K Z K r – coeficient de rigiditate transversală [daN/rad].
Deformaţiile transversale ale pneului consumă un lucru mecanic suplimentar, care se adaugă lucrului mecanic consumat pentru învingerea rezistenţei la rostogolire la mersul în linie dreaptă.
18. Cinematica şenilelor. Determinarea coeficientului de neuniformitate în mers
la autovehiculele pe şenile.
v. curs Rus! Laborator
19. Dinamica generală a mecanismului şenilelor
v. curs Rus!
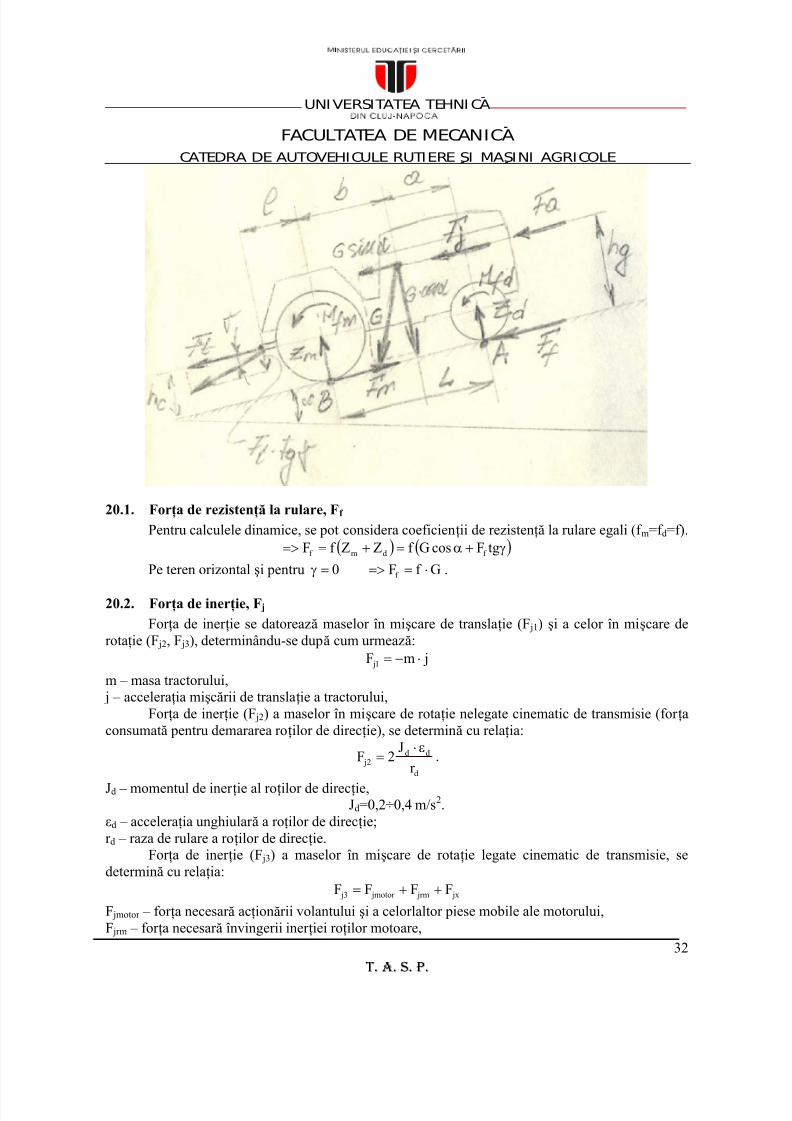
20. Forţele care acţionează asupra tractorului în plan longitudinal
Pentru analiză se consider ă un tractor pe roţi care se deplasează pe o pantă cu unghiul deînclinare α, cu ω≠ct. Roţile se reprezintă prin cercurile de rulare (dinamice).
Asupra tractorului acţionează: G, F j, Ff , Mfm, Mfd, Ft, Fm, Zm, Zd, Fa.Mfm, Mfd – momente de rezistenţă la rulare,G – greutatea, se consider ă aplicată în centrul de masă (coordonate: a, b, hg).F p – for ţa de rezistenţă a pantei,
G01,0sinGF p ⋅δ⋅≈α⋅±=
δ – panta [%].
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 32/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
32 T. A. S. P.
20.1. Forţa de rezistenţă la rulare, Ff
Pentru calculele dinamice, se pot considera coeficienţii de rezistenţă la rulare egali (f m=f d=f).( ) ( )γ+α=+==> tgFcosGf ZZf F f dmf
Pe teren orizontal şi pentru 0=γ Gf Ff ⋅==> .
20.2. Forţa de inerţie, F j
For ţa de iner ţie se datorează maselor în mişcare de translaţie (F j1) şi a celor în mişcare derotaţie (F j2, F j3), determinându-se după cum urmează:
jmF1 j ⋅−=
m – masa tractorului, j – acceleraţia mişcării de translaţie a tractorului,
For ţa de iner ţie (F j2) a maselor în mişcare de rotaţie nelegate cinematic de transmisie (for ţaconsumată pentru demararea roţilor de direcţie), se determină cu relaţia:
d
dd2 j r
J2F
ε⋅= .
Jd – momentul de iner ţie al roţilor de direcţie,Jd=0,2÷0,4 m/s2.
εd – acceleraţia unghiular ă a roţilor de direcţie;r d – raza de rulare a roţilor de direcţie.
For ţa de iner ţie (F j3) a maselor în mişcare de rotaţie legate cinematic de transmisie, sedetermină cu relaţia:
jx jrm jmotor 3 j FFFF ++=
F jmotor – for ţa necesar ă acţionării volantului şi a celorlaltor piese mobile ale motorului,F jrm – for ţa necesar ă învingerii iner ţiei roţilor motoare,

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 33/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
33 T. A. S. P.
F jrx – for ţa necesar ă învingerii iner ţiei unui anumit organ al transmisiei.
motor m
tr tr m jmotor r iJF ε⋅η⋅⋅= ,
mmm jrm r
1J2F ⋅ε⋅⋅= ,
xm
xxx jx r
iJF ε⋅
η⋅⋅= .
Sumând cele trei for ţe de iner ţie vom avea: jmFFFF rot3 j2 j1 j j ⋅δ⋅−=++= .
δrot – coeficientul maselor de rotaţie,2tr rot i001,01 ⋅+=δ .
20.3. Forţa de rezistenţă a maşinii agricole. Forţa de tracţiune la cârlig Ft
¾ For ţa de rezistenţă a plugului se determină cu relaţia: baK R F aat ⋅⋅== ,
unde: K a – rezistenţa specifică la arat, K a=(20...80).103 N/m2,a,b – adâncimea brazdei, şi lăţimea de lucru a plugului [m].
¾ For ţa de rezistenţă a maşinii agricole de semănat, întreţinere, recoltat se determină cu relaţia: bK R Ft ⋅== ,
unde: K – rezistenţa specifică, b –lăţimea de lucru [m].
20.4. Forţa tangenţială de tracţiune. Fm Fm este for ţa motoare şi se datorează momentului motor aplicat la roată, determinându-se cu
relaţia:
m
tr tr em r
iMF
η⋅⋅= .
Valoarea maximă a acestei for ţe este limitată de aderenţa roţilor cu solul, astfel că avem:α⋅⋅λ⋅ϕ=⋅ϕ=ϕ cosGZF mmm pentru tractoare 4x2,
( ) ( )γ⋅+α⋅⋅ϕ=+⋅ϕ=ϕ tgFcosGZZF tdmm pentru tractoare 4x4,
unde: λm – coeficientul de încărcare dinamică a roţilor motoare.
20.5. Reacţiunile normale la roţile faţă şi spate Zd şi Zm
Reacţiunile normale la roţile faţă şi spate Zd şi Zm se determină din ecuaţia de moment faţă de punctele A şi B.
( )⎪⎩
⎪⎨⎧
=⋅−+++⋅γ⋅+⋅+⋅+⋅+⋅α⋅+⋅α⋅
=⋅−−−⋅γ⋅−⋅−⋅−⋅−⋅α⋅−⋅α⋅
0LZMMLtgFhFhFhFhsinGacosG
0LZMMtgFhFhFhFhsinG bcosG
mfdfmtctgag jg
dfdfmtctgag jg
l
l

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 34/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
34 T. A. S. P.
( )
L
MMLtgFhFhFhFhsinGacosGZ
L
MMtgFhFhFhFhsinG bcosGZ
fdfmtctgag jgm
fdfmtctgag jgd
+++⋅γ⋅+⋅+⋅+⋅+⋅α⋅+⋅α⋅=
−−⋅γ⋅−⋅−⋅−⋅−⋅α⋅−⋅α⋅=
l
l
Dacă v=ct., α=0, γ=0, Fa=0:( )
( )L
MMhFaGZ
L
MMhF bGZ
fdfmctm
fdfmctd
++⋅+⋅=
++⋅−⋅=
Dacă tractorul staţionează, reacţiunile Zm şi Zd se numesc statice:
L
aGZ
L
bGZ
st
st
m
d
⋅=
⋅=
Coeficienţii de încărcare se determină cu relaţiile:
dd
G
Zλ= - coeficient de încărcare a roţilor de direcţie,
mm
G
Zλ= - coeficient de încărcare a roţilor de direcţie.
Reducerea sarcinii pe puntea faţă înr ăutăţeşte maniabilitatea, iar reducerea sarcinii pe punteaspate (motoare), la autovehiculele 4x2, reduce calităţile de tracţiune după aderenţă.
20.6. Bilanţul de tracţiune al tractorului
Bilanţul de tracţiune al tractorului este definit de relaţia:
δ±±++= FFFFFF jaf tm
( )( )
α⋅±⋅δ⋅±±⋅
+γ⋅+α⋅+⋅⋅=η⋅⋅
sinGam13
vvACtgFcosGf baK
r
iMrot
2vf x
tam
tr tr e (*)
=> în orice moment al mişcării tractorului, for ţa motoare la roată este egală cu suma tuturor rezistenţelor.f – r ămâne constant pentru vitezele normale ale tractorului =>
( ) .ctvFf =
( ) .ctvF =δ
( ) .ctvFt = În punctul A curba Fm intersectează curba rezistenţelor totale, iar F j=0. În acest puncttractorul poate trece de la mişcarea accelerată la mişcarea uniformă. Acest punct reprezintă vitezamaximă cu care se poate deplasa tractorul în treapta respectivă.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 35/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
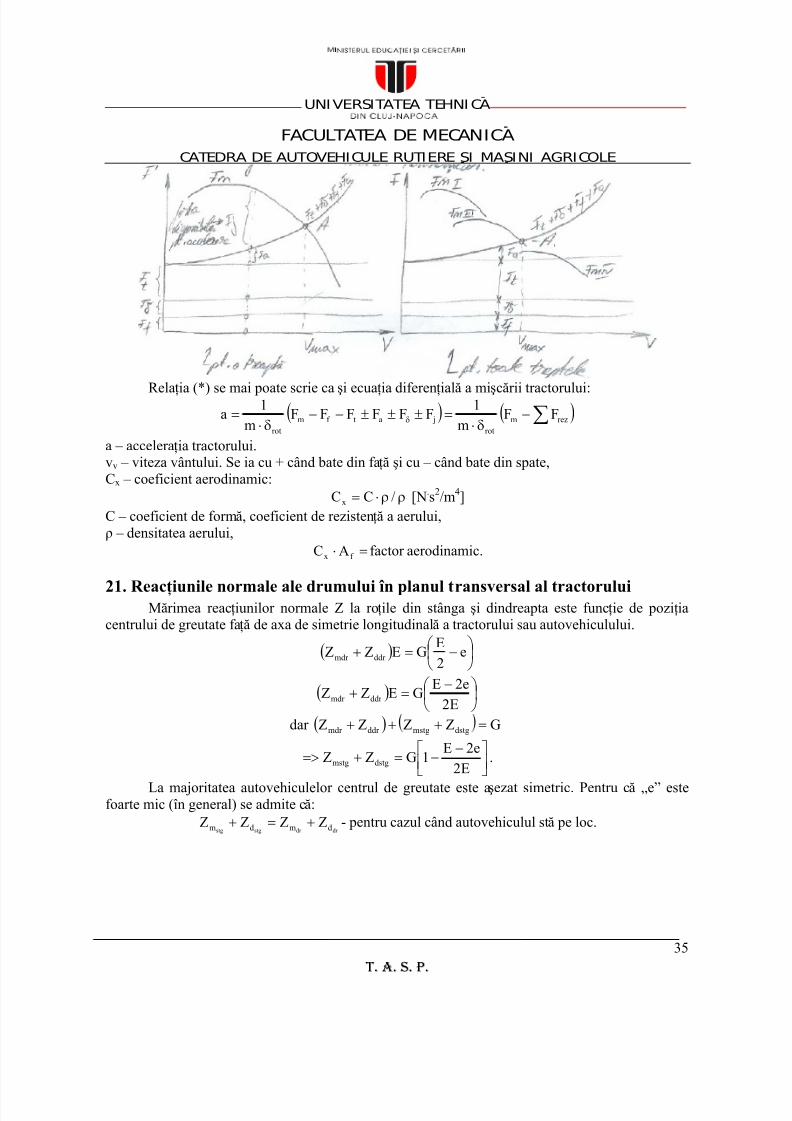
35 T. A. S. P.
Relaţia (*) se mai poate scrie ca şi ecuaţia diferenţială a mişcării tractorului:( ) ( )∑−δ⋅
=±±±−−δ⋅
= δ rezmrot
jatf mrot
FFm
1FFFFFF
m
1a
a – acceleraţia tractorului.vv – viteza vântului. Se ia cu + când bate din faţă şi cu – când bate din spate,Cx – coeficient aerodinamic:
ρρ⋅= /CCx [N.s2/m4]C – coeficient de formă, coeficient de rezistenţă a aerului,ρ – densitatea aerului,
=⋅ f x AC factor aerodinamic.
21. Reacţiunile normale ale drumului în planul transversal al tractoruluiMărimea reacţiunilor normale Z la roţile din stânga şi dindreapta este funcţie de poziţia
centrului de greutate faţă de axa de simetrie longitudinală a tractorului sau autovehiculului.
( ) ⎟ ⎠
⎞⎜⎝
⎛ −=+ e2
EGEZZ ddr mdr
( ) ⎟ ⎠
⎞⎜⎝
⎛ −=+E2
e2EGEZZ ddr mdr
dar ( ) GZZZZ dstgmstgddr mdr =+++
⎥⎦
⎤⎢⎣
⎡ −−=+=>
E2
e2E1GZZ dstgmstg .
La majoritatea autovehiculelor centrul de greutate este aşezat simetric. Pentru că „e” estefoarte mic (în general) se admite că:
dr dr stgstg dmdm ZZZZ +=+ - pentru cazul când autovehiculul stă pe loc.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 36/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
36 T. A. S. P.
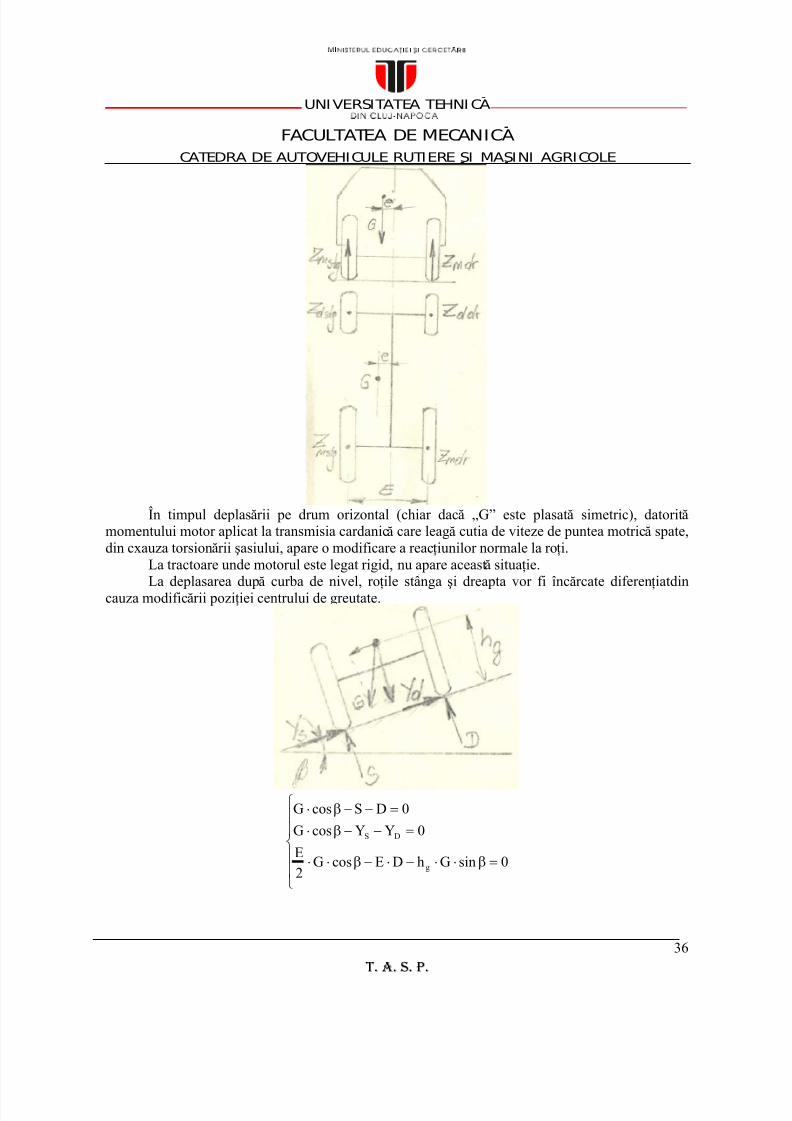
În timpul deplasării pe drum orizontal (chiar dacă „G” este plasată simetric), datorită momentului motor aplicat la transmisia cardanică care leagă cutia de viteze de puntea motrică spate,din cxauza torsionării şasiului, apare o modificare a reacţiunilor normale la roţi.
La tractoare unde motorul este legat rigid, nu apare această situaţie.La deplasarea după curba de nivel, roţile stânga şi dreapta vor fi încărcate diferenţiatdin
cauza modificării poziţiei centrului de greutate.
⎪⎪
⎩
⎪⎪
⎨
⎧
=β⋅⋅−⋅−β⋅⋅
=−−β⋅
=−−β⋅
0sinGhDEcosG2
E
0YYcosG
0DScosG
g
DS

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 37/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
37 T. A. S. P.
DS
sinE
hcos
2
1GS
sinE
hcos
2
1GD
g
g
>=
⎪⎪
⎭
⎪⎪⎬
⎫
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ β+β=
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
β−β=
1
sinE
hcos
2
1
sinE
hcos
2
1
D
S
g
g
>β−β⋅
β+β⋅=
Când β=0 => 1D
S= => DS = , 0YY DS ==
22. Dinamica generală a tractorului pe şenile (determinarea centrului de pres.)
For ţa maximă de tracţiune la tractorul pe şenile nu este influenţată de modul de repartizare a presiunii, căci întreaga greutate a tractorului formează sarcina de aderenţă.
Momentul şi puterea necesar ă vir ării este influenţată de felul repartizării presiunii dintreşenilă şi sol.
La deplasare după curba de nivel, repartizarea sarcinilor se face ca în cazul tractorului peroţi. Deci:
1
sin
E
hcos
2
1
sinE
hcos
2
1
D
S
g
g
>β−β⋅
β+β⋅=
La deplasarea în rampă (v≠ct.) cu o maşină tractată, asupra tractorului cu şenile acţionează aceleaşi for ţe ca la tractorul pe roţi şi anume:
¾ Greutatea G (aplicată în centrul de greutate – a, hg),¾ Rezistenţa la rulare, dată de relaţia:
α⋅⋅= cosGf Ff .¾ For ţa de tracţiune Ft (egală cu for ţa de rezistenţă a maşinii agricole).

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 38/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
38 T. A. S. P.
For ţa de tracţiune Fm, aplicată la o anumită distanţă de vârful pintenilor afundaţi în sol şi
limitată de aderenţă la valoarea: α⋅⋅ϕ=ϕ cosGFm .
Reacţiunea normală a solului, se determină cu relaţia:α+α⋅= tgFcosGZ t
În mod normal rezistenţa aerului şi for ţele de iner ţie nu se consider ă din cauza vitezei redusela aceste tractoare.
α⋅+α⋅=
+α⋅+=
tgFcosGZ
FsinGFF
t
tf m => ( )α+α⋅+= sincosf GFF tm .
Centrul de presiune – este punctul de aplicaţie al reacţiunii Z.Dacă centrul de presiune P coincide cu centrul geometric al suprafeţei de sprijin al şenilei pe
sol ⎟ ⎠
⎞⎜⎝
⎛ = 2
Lc
1P => o repartizare uniformă a presiunii pe sol.
Din cauza for ţelor exterioare şi a unghiului α, ⎟ ⎠
⎞⎜⎝
⎛ ≠2
Lc 1
P .
Din ecuaţia de moment în jurul punctului O (punctul de contact dintre ultima rolă de sprijinşi sol).
( ) ( ) 0cZtgFhFhFhsinGacosG P1tctsf g1 =⋅−γ⋅+−⋅−⋅−⋅α−−α lll
( ) ( )
γ⋅+α⋅
γ⋅+−⋅−⋅−α⋅⋅−α⋅−=
tgFcosG
tgFhFhFsinhGcosaGc
t
1tctsf g1P
lll.
Înlocuim ⎟
⎠
⎞⎜
⎝
⎛ =
2
Lc 1
P şi rezolvăm ecuaţia în raport cu cota „a”, astfel încât va rezulta relaţia:
G
...L5,0a 11 ++= l
unde: 11 L5,0+l - distanţa de la mijlocul suprafeţei de sprijin la axa roţii motoare. Al treilea termenreprezintă mărimea cu care trebuie deplasat în faţă centrul de masă al tractorului, în raport cucentrul geometric al suprafeţei de sprijin şenilelor, astfel încât presiunea să aibă o repartizareuniformă pe sol în timpul deplasării tractorului.
23. Stabilitatea longitudinală a automobilelor pe roţi
¾ Reprezintă capacitatea acestuia de a nu se r ăsturna sau derapa în plan longitudinal şi se ia înconsiderare pentru tractoare şi autovehicule care urcă sau coboar ă pe un drum înclinat.
¾ Dacă reacţiunea normală a solului la roţile aflate mai sus are o valoare pozitivă, înseamnă că aceste roţi apasă solul şi deci nu se pune problema pierderii stabilităţii.¾ Astfel, criteriul de stabilitate longitudinală este dat de mărimea reacţiunii Z (de pe roţile de
la nivelul superior) şi anume:9 Dacă Z>0 => stabilitatea este asigurată,9 Dacă Z=0 => stabilitatea este la limită,9 Dacă Z<0 => tractorul (automobilul) se r ăstoarnă.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 39/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
39 T. A. S. P.
23.1. Stabilitatea longitudinală statică
Automobilul este oprit în rampă (pantă) şi deci asupra lui vor acţiona numai G şi reacţiunilenormale ale căii Z.
,0F =γ ,0Fa = ,0Ff = ,0Fm = .0Ft =
L
sinhGcos bGZ g
d
α⋅⋅−α⋅⋅= .
La limită:0Zd =
α⋅⋅=α⋅⋅ sinhGcos bG g
gmax h
btg =α .
Stabilitatea statică este asigurată cândgh
btg <α .
La coborâre r ăsturnarea poate avea loc în jurul punctului A deci condiţia de stabilitate esteurmătoarea:
=>≥ 0Zmg
max h
bL'tg
−=α .
Întrucât pentru mărirea aderenţei, centrul de masă se plasează mai aproape de puntea spate:
maxmax 'α<α=> ,
deci autovehiculul se r ăstoarnă mai repede la urcare decât la coborâre.o
maxo
max 55',4535 ≅α÷=α .
23.2. Stabilitatea dinamică când există sarcină la cârlig
Se presupune că: 0F,0F a j == .
Dacă γ=0,( )
cg
c
hh
hf btg
−⋅−ϕ−
=α=> .
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 40/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
40 T. A. S. P.
23.3. Stabilitatea dinamică cu maşini purtate
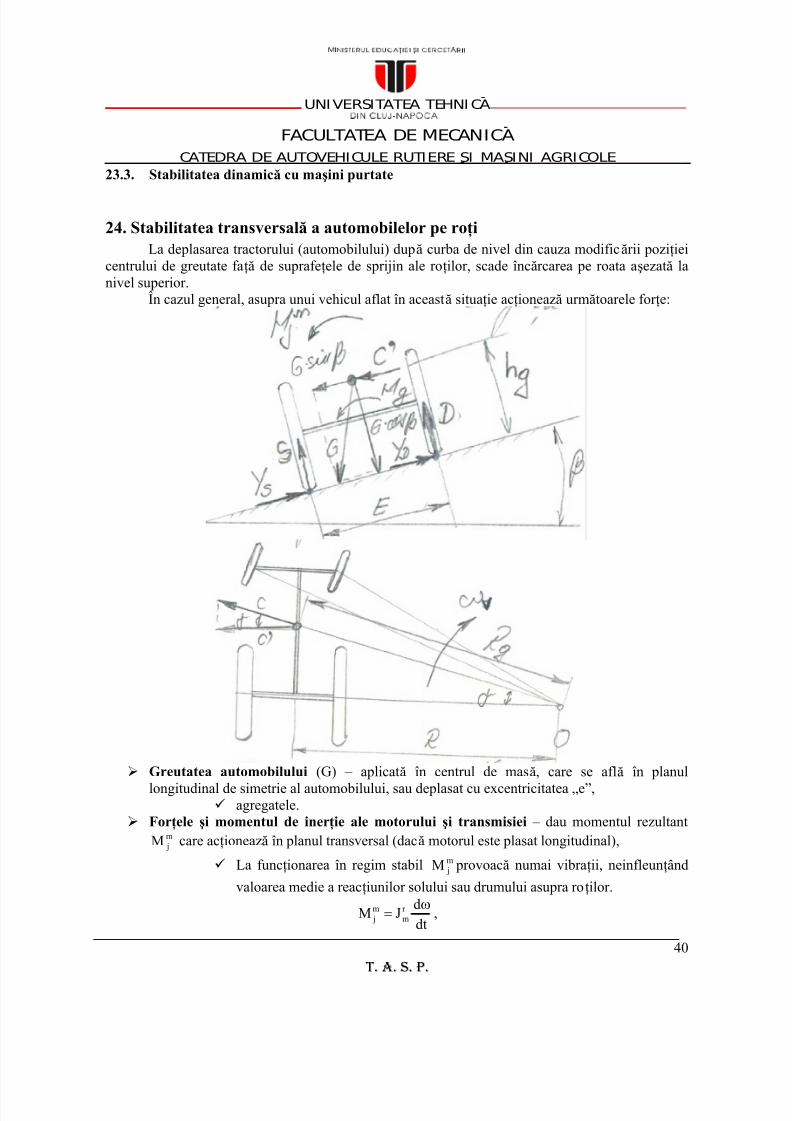
24. Stabilitatea transversală a automobilelor pe roţi
La deplasarea tractorului (automobilului) după curba de nivel din cauza modificării poziţieicentrului de greutate faţă de suprafeţele de sprijin ale roţilor, scade încărcarea pe roata aşezată lanivel superior.
În cazul general, asupra unui vehicul aflat în această situaţie acţionează următoarele for ţe:
¾ Greutatea automobilului (G) – aplicată în centrul de masă, care se află în planul
longitudinal de simetrie al automobilului, sau deplasat cu excentricitatea „e”,9 agregatele.
¾ Forţele şi momentul de inerţie ale motorului şi transmisiei – dau momentul rezultantm jM care acţionează în planul transversal (dacă motorul este plasat longitudinal),
9 La funcţionarea în regim stabil m jM provoacă numai vibraţii, neinfleunţând
valoarea medie a reacţiunilor solului sau drumului asupra roţilor.
dt
dJM r
mm j
ω= ,

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 41/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
41 T. A. S. P.
r mJ - momentul de iner ţie al maselor în mişcare de rotaţie reduse la arborele motor,
dtdω - acceleraţia unghiular ă a motorului.
¾ Forţa centrifugă (C) – apare în timpul virajului, fiind aplicată în centrul de masă alautomobilului, în plan orizontal, în prelungirea razei duse din CIV≡O, prin centrul de masă.
γ⋅= cosC'C - componenta în plan transversal.
gR
R cos =γ
R
VmR m
R
R R m
R
R C'C
22
gg
2
g
⋅=⋅ω⋅=⋅ω⋅=⋅==> ,
¾ Momentul giroscopic (Mg) – rezultă din acţiunea maselor aflate în mişcare de rotaţie (roţi,
etc.):r r vg JM ⋅ω⋅ω= ,
ωv – viteza unghiular ă de rotaţie în jurul C.I.V.ωr – viteza unghiular ă a roţii în jurul axei proprii,Jr – momentul de iner ţie al roţii.
În cazul în care C.I.V., este spre deal, acest moment provoacă descărcarea roţii din dreapta.¾ Forţa de tracţiune la cârlig (Ft),
9 În viraj => 'tF - paralelă cu solul şi ''
tF perpendicular ă pe sol.
¾ Reacţiunile căii de rulare (S, D) şi (YS, YD).9 Se consider ă Ef =Es=E.
Pierderea stabilităţii transversale se poate realiza prin:
9 r ăsturnare,9 derapare.
25. Stabilitatea la răsturnare laterală
¾ se analizează în cazul cel mai nefavorabil: virajul tractorului (automobilului) în jurul axei Z-Z (prin O), cu viteză maximă,
¾ condiţia de stabilitate: D>0,
25.1. Caz 1
¾ Considerând b=0 (lăţimea roţii) =>
0
2
EcosGMMhsinGh'CED g
m jgg =⋅β⋅−++⋅β⋅++⋅
¾ La limită D=0
0MMh'Csinhcos2
EG g
m jgg =−−⋅−⎟
⎠
⎞⎜⎝
⎛ β⋅−β=>
¾ Dacă v=ct. 0Mm j ==> .
¾ La deplasarea în linie dreaptă C’=0 şi Mg=0.
β⋅=β⋅=> sinhcos2
Eg ,
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 42/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
42 T. A. S. P.
gh2
Etg
⋅
=β .
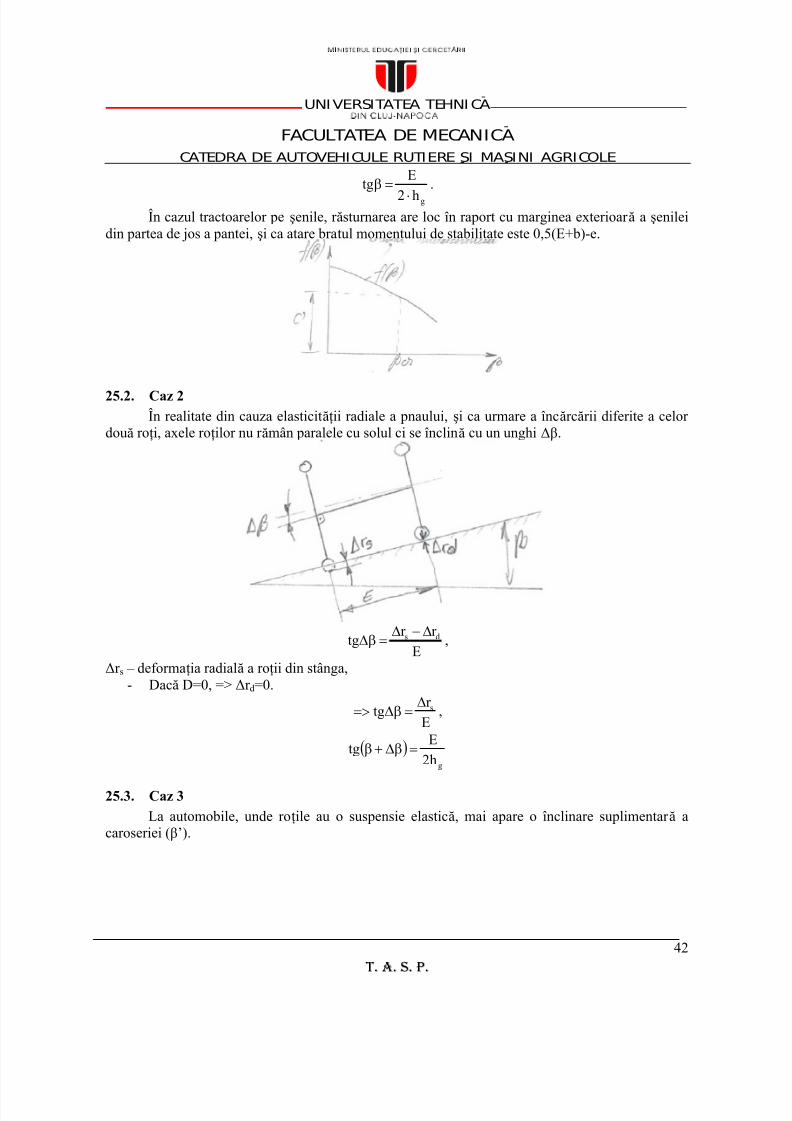
În cazul tractoarelor pe şenile, r ăsturnarea are loc în raport cu marginea exterioar ă a şenileidin partea de jos a pantei, şi ca atare braţul momentului de stabilitate este 0,5(E+b)-e.
25.2. Caz 2
În realitate din cauza elasticităţii radiale a pnaului, şi ca urmare a încărcării diferite a celor două roţi, axele roţilor nu r ămân paralele cu solul ci se înclină cu un unghi Δβ.
E
r r tg ds Δ−Δ=βΔ ,
Δr s – deformaţia radială a roţii din stânga,- Dacă D=0, => Δr d=0.
E
r tg sΔ=βΔ=> ,
( )gh2
Etg =βΔ+β
25.3. Caz 3
La automobile, unde roţile au o suspensie elastică, mai apare o înclinare suplimentar ă acaroseriei (β’).
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 43/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
43 T. A. S. P.
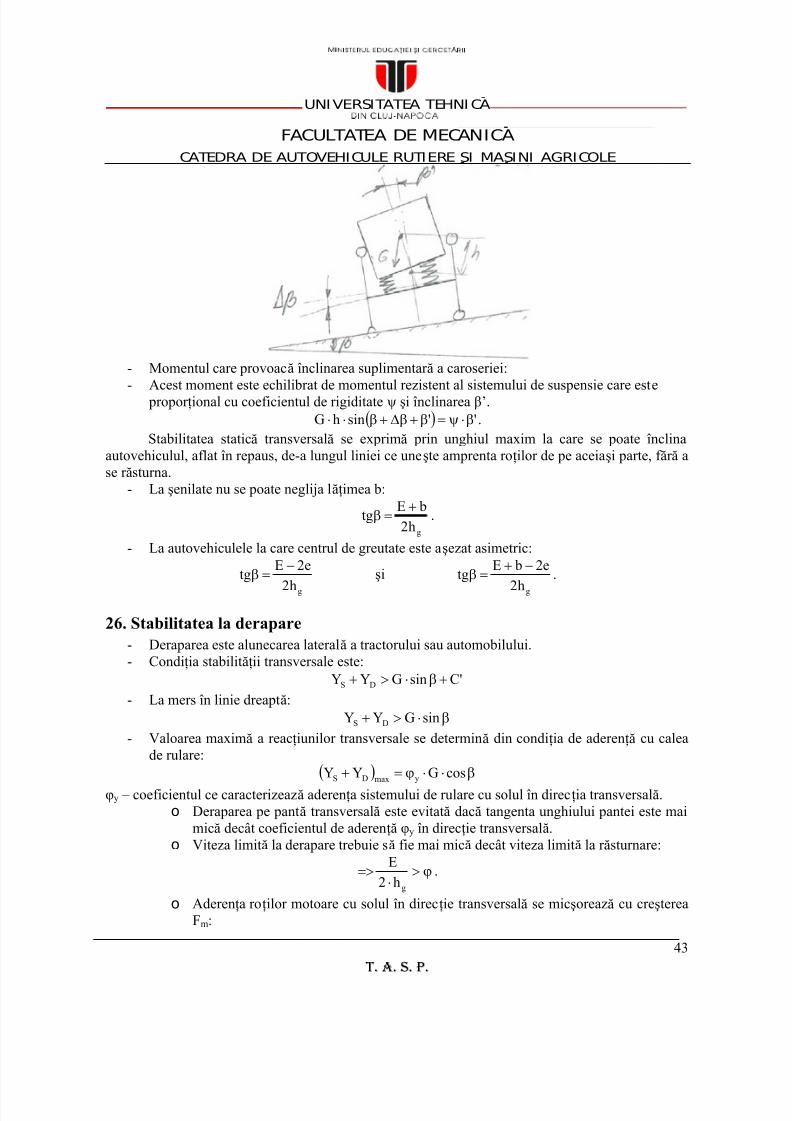
- Momentul care provoacă înclinarea suplimentar ă a caroseriei:- Acest moment este echilibrat de momentul rezistent al sistemului de suspensie care este
propor ţional cu coeficientul de rigiditate ψ şi înclinarea β’.( ) ''sinhG β⋅ψ=β+βΔ+β⋅⋅ .
Stabilitatea statică transversală se exprimă prin unghiul maxim la care se poate înclinaautovehiculul, aflat în repaus, de-a lungul liniei ce uneşte amprenta roţilor de pe aceiaşi parte, f ăr ă ase r ăsturna.
- La şenilate nu se poate neglija lăţimea b:
gh2
bEtg
+=β .
- La autovehiculele la care centrul de greutate este aşezat asimetric:
gh2
e2Etg
−=β şi
gh2
e2 bEtg
−+=β .
26. Stabilitatea la derapare
- Deraparea este alunecarea laterală a tractorului sau automobilului.- Condiţia stabilităţii transversale este:
'CsinGYY DS +β⋅>+
- La mers în linie dreaptă:β⋅>+ sinGYY DS
- Valoarea maximă a reacţiunilor transversale se determină din condiţia de aderenţă cu caleade rulare:
( ) β⋅⋅ϕ=+ cosGYY ymaxDS
φy – coeficientul ce caracterizează aderenţa sistemului de rulare cu solul în direcţia transversală.o Deraparea pe pantă transversală este evitată dacă tangenta unghiului pantei este mai
mică decât coeficientul de aderenţă φy în direcţie transversală.o Viteza limită la derapare trebuie să fie mai mică decât viteza limită la r ăsturnare:
ϕ>⋅
=>gh2
E.
o Aderenţa roţilor motoare cu solul în direcţie transversală se micşorează cu creştereaFm:
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 44/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
44 T. A. S. P.
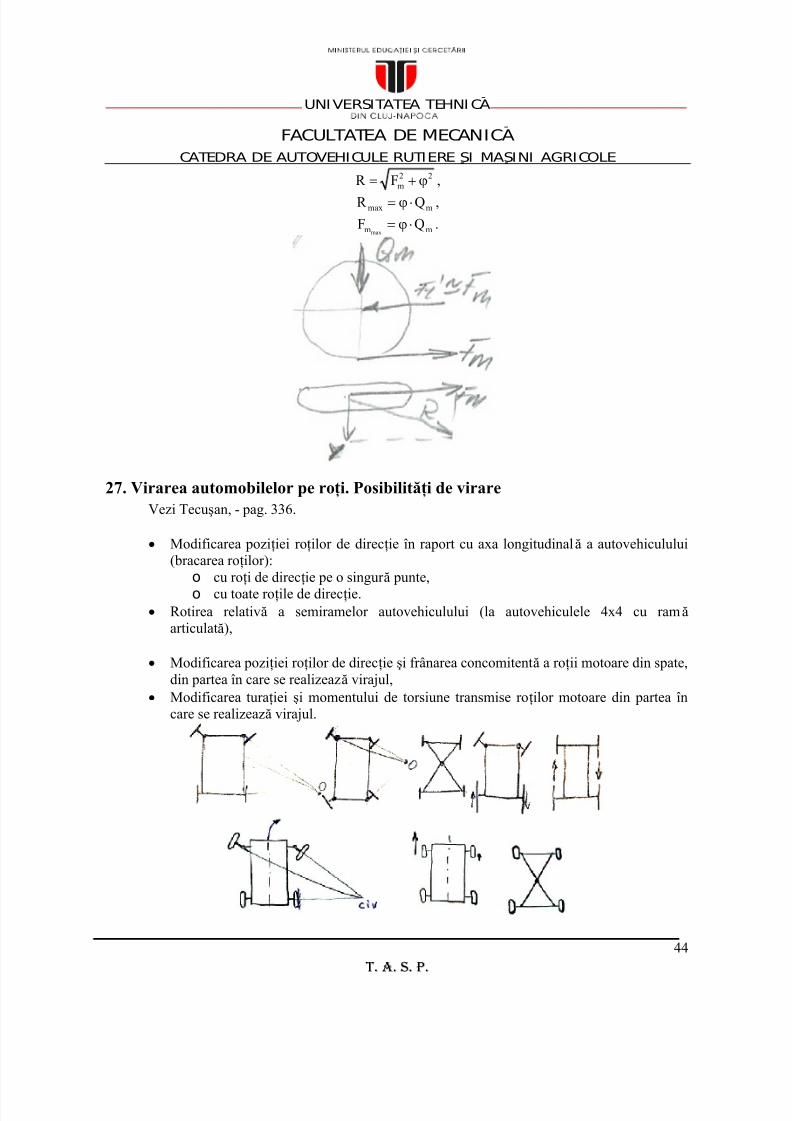
22mFR ϕ+= ,
mmax QR ⋅ϕ= ,
mm QFmax
⋅ϕ= .
27. Virarea automobilelor pe roţi. Posibilităţi de virare
Vezi Tecuşan, - pag. 336.
• Modificarea poziţiei roţilor de direcţie în raport cu axa longitudinală a autovehiculului(bracarea roţilor):
o cu roţi de direcţie pe o singur ă punte,o cu toate roţile de direcţie.
• Rotirea relativă a semiramelor autovehiculului (la autovehiculele 4x4 cu ramă articulată),
• Modificarea poziţiei roţilor de direcţie şi frânarea concomitentă a roţii motoare din spate,din partea în care se realizează virajul,
• Modificarea turaţiei şi momentului de torsiune transmise roţilor motoare din partea încare se realizează virajul.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 45/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
45 T. A. S. P.
28. Cinematica virării automobilelor pe roţi
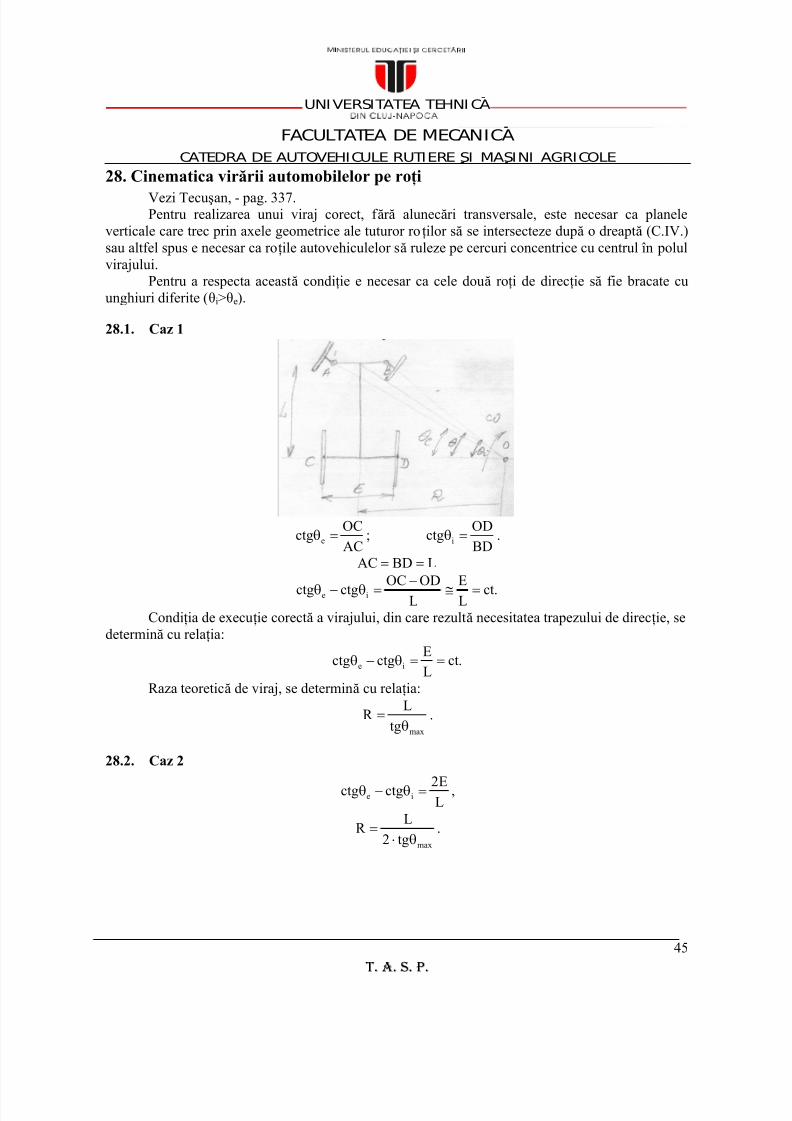
Vezi Tecuşan, - pag. 337.Pentru realizarea unui viraj corect, f ăr ă alunecări transversale, este necesar ca planele
verticale care trec prin axele geometrice ale tuturor roţilor să se intersecteze după o dreaptă (C.IV.)sau altfel spus e necesar ca roţile autovehiculelor să ruleze pe cercuri concentrice cu centrul în polulvirajului.
Pentru a respecta această condiţie e necesar ca cele două roţi de direcţie să fie bracate cuunghiuri diferite (θi>θe).
28.1. Caz 1
AC
OCctg e =θ ;
BD
ODctg i =θ .
LBDAC ==
.ctL
E
L
ODOCctgctg ie =≅
−=θ−θ
Condiţia de execuţie corectă a virajului, din care rezultă necesitatea trapezului de direcţie, sedetermină cu relaţia:
.ctL
Ectgctg ie ==θ−θ
Raza teoretică de viraj, se determină cu relaţia:
maxtg
LR
θ= .
28.2. Caz 2
LE2ctgctg ie =θ−θ ,
maxtg2
LR
θ⋅= .
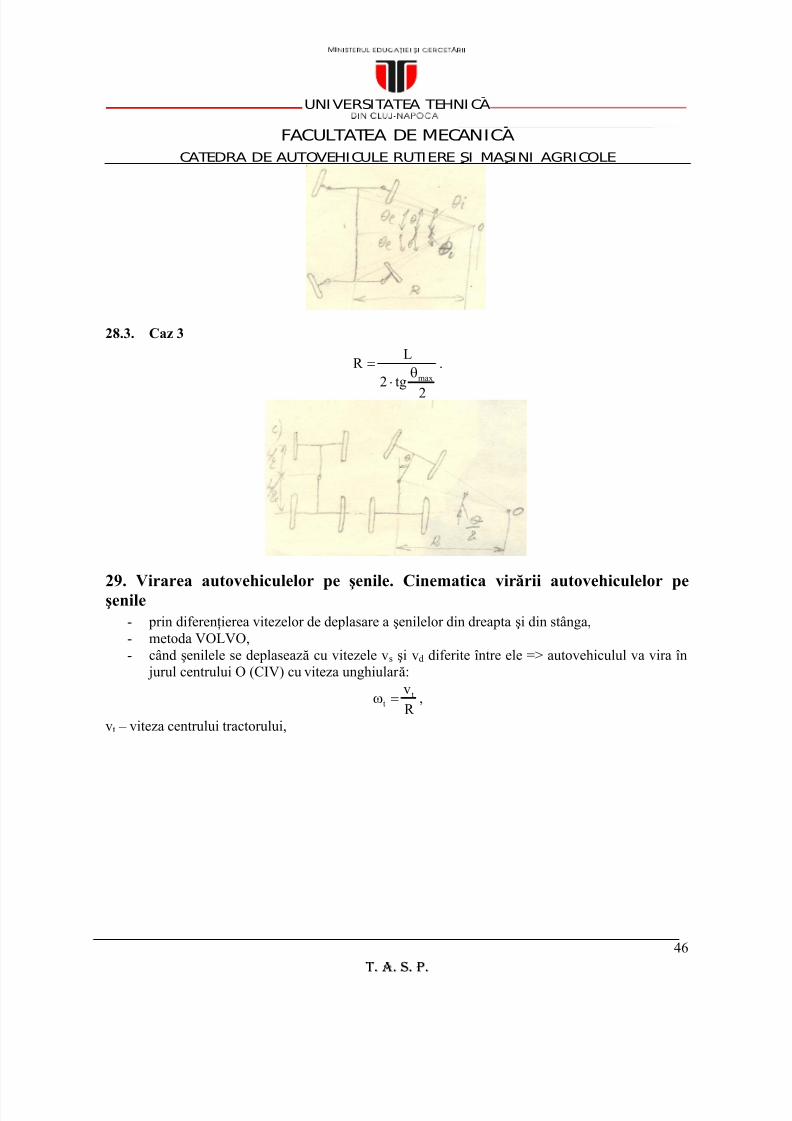
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 46/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
46 T. A. S. P.
28.3. Caz 3
2tg2
LR
maxθ⋅= .
29. Virarea autovehiculelor pe şenile. Cinematica virării autovehiculelor peşenile
- prin diferenţierea vitezelor de deplasare a şenilelor din dreapta şi din stânga,- metoda VOLVO,- când şenilele se deplasează cu vitezele vs şi vd diferite între ele => autovehiculul va vira în
jurul centrului O (CIV) cu viteza unghiular ă:
R
v tt =ω ,
vt – viteza centrului tractorului,
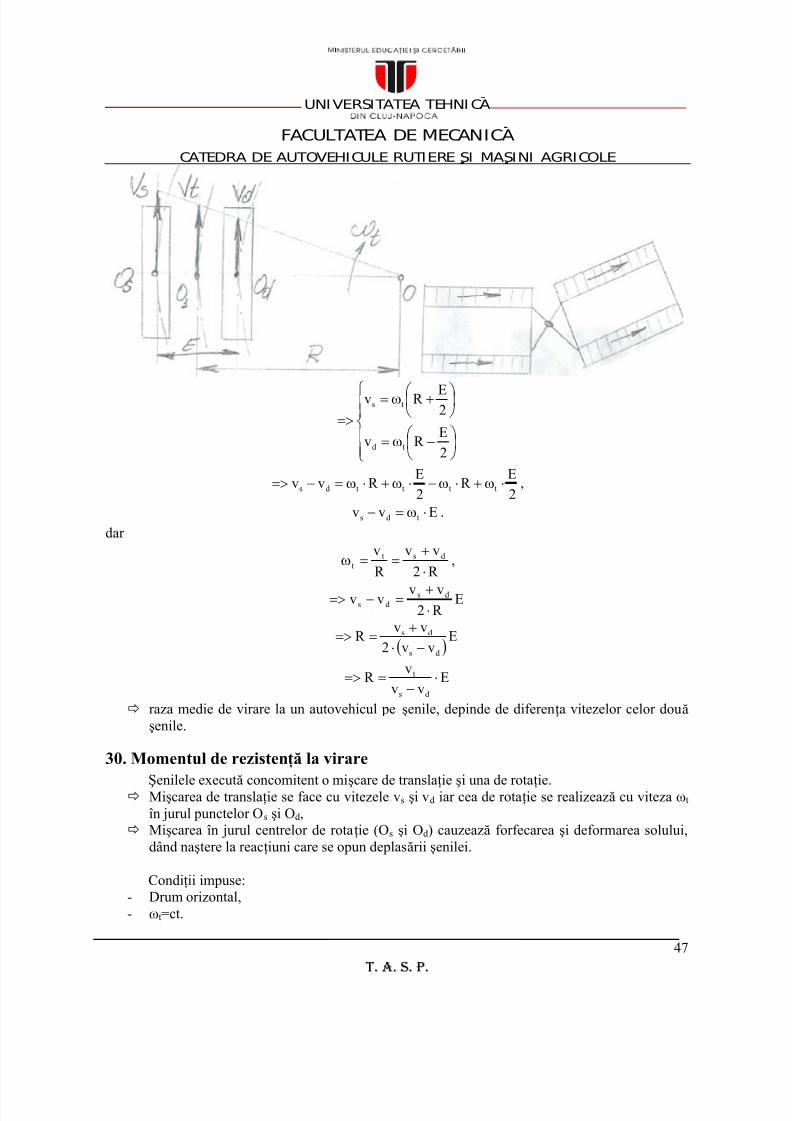
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 47/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
47 T. A. S. P.
⎪⎪⎩
⎪⎪⎨
⎧
⎟ ⎠
⎞⎜⎝
⎛ −ω=
⎟ ⎠ ⎞⎜
⎝ ⎛ +ω=
=>
2
ER v
2ER v
td
ts
2
ER
2
ER vv ttttds ⋅ω+⋅ω−⋅ω+⋅ω=−=> ,
Evv tds ⋅ω=− .
dar
R 2
vv
R
v dstt ⋅
+==ω ,
ER 2vvvv ds
ds ⋅+=−=>
( )E
vv2
vvR
ds
ds
−⋅+
==>
Evv
vR
ds
t ⋅−
==>
Ö raza medie de virare la un autovehicul pe şenile, depinde de diferenţa vitezelor celor două şenile.
30. Momentul de rezistenţă la virare
Şenilele execută concomitent o mişcare de translaţie şi una de rotaţie.Ö Mişcarea de translaţie se face cu vitezele vs şi vd iar cea de rotaţie se realizează cu viteza ωt în jurul punctelor Os şi Od,
Ö Mişcarea în jurul centrelor de rotaţie (Os şi Od) cauzează forfecarea şi deformarea solului,dând naştere la reacţiuni care se opun deplasării şenilei.
Condiţii impuse:- Drum orizontal,- ωt=ct.
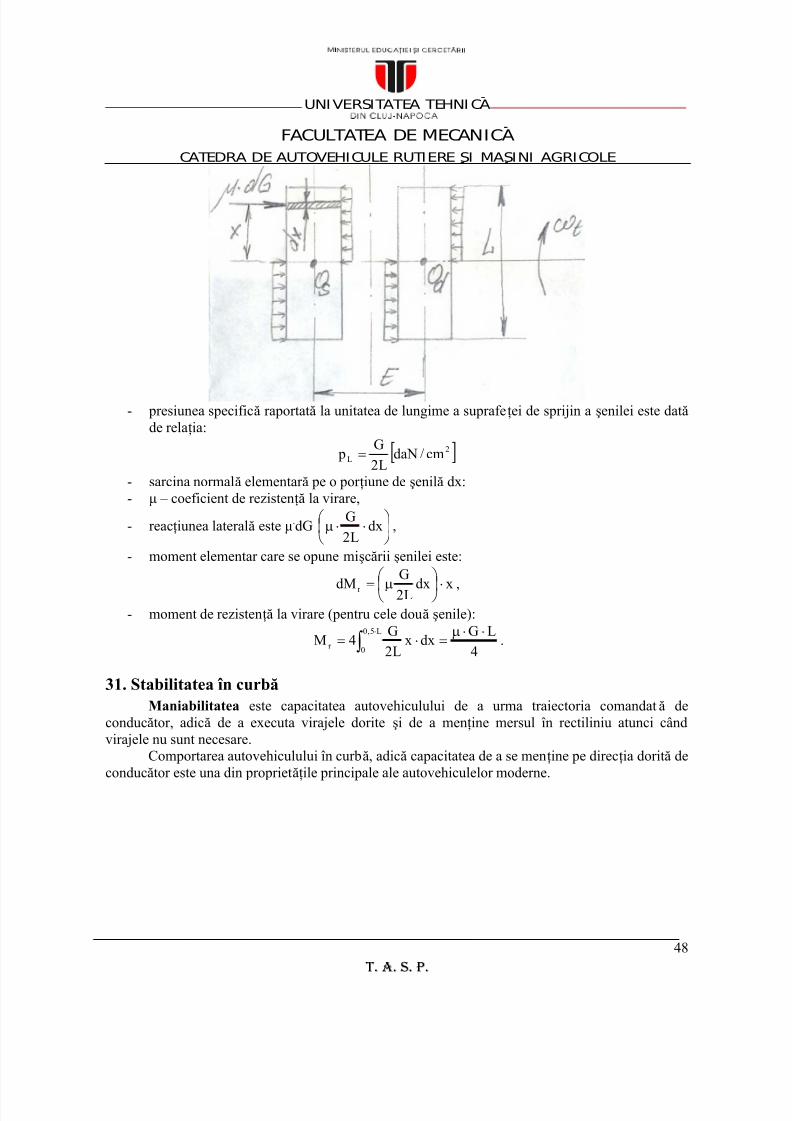
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 48/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
48 T. A. S. P.
- presiunea specifică raportată la unitatea de lungime a suprafeţei de sprijin a şenilei este dată de relaţia:
[ ]2L cm/daN
L2
G p =
- sarcina normală elementar ă pe o por ţiune de şenilă dx:- μ – coeficient de rezistenţă la virare,
- reacţiunea laterală este μ.dG ⎟ ⎠
⎞⎜⎝
⎛ ⋅⋅μ dxL2
G,
- moment elementar care se opune mişcării şenilei este:
xdxL2
G
dM r ⋅⎟ ⎠
⎞
⎜⎝
⎛
μ= ,- moment de rezistenţă la virare (pentru cele două şenile):
4
LGdxx
L2
G4M
L5,0
0r
⋅⋅μ=⋅= ∫
⋅.
31. Stabilitatea în curbă
Maniabilitatea este capacitatea autovehiculului de a urma traiectoria comandată deconducător, adică de a executa virajele dorite şi de a menţine mersul în rectiliniu atunci cândvirajele nu sunt necesare.
Comportarea autovehiculului în curbă, adică capacitatea de a se menţine pe direcţia dorită deconducător este una din proprietăţile principale ale autovehiculelor moderne.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 49/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
49 T. A. S. P.
FS, FD – for ţele de împingere cu care fusurile lagărelor roţilor directoare conduse acţionează asupra butucului roţilor, ele fiind paralele cu planul longitudinal al autovehiculului, se descompunîn două componente:
⎩⎨⎧
β⋅=
β⋅=
sinFZ
cosFF
SS
SS
1 ⎩⎨⎧
β⋅=
β⋅=
sinFZ
cosFF
DD
DD
1
Ö componentele S1F şi D
1F , acţionează în planul roţilor şi împreună cu reacţiunile căii SPF şi
DPF dau naştere momentului care roteşte roata.
o =>
S
1F şi
D
1F sunt determinate de mărimea coeficientului derezistenţă la rulare.Ö ZS şi ZD acţionează perpendicular pe roată şi produc reacţiunea căii S
ZH şi DZH .
a) Menţinerea roţii pe traiectoria virajului, e condiţionată de rularea f ără alunecare, adică:2P
2Z FHQ +=⋅ϕ ,
adică:
SS FQ ≥⋅ϕ şi DD FQ ≥⋅ϕ ,
φ – coeficient de aderenţă,QS – sarcina pe roata stângă,QD – sarcina pe roata dreapa.dar:
SS
1 F/Fcos =β şi DD
1 F/Fcos =β ,iar:
SS
1 Qf F ⋅= şi DD
1 Qf F ⋅= ,
;f
cosϕ≥β⇒
ϕ≥α
f cos .
Unghiurile α şi β trebuie să satisfacă aceste condiţii pentru menţinerea roţii într-un viraj f ăr ă alunecare.
b) În cazul în care roata este frânată, for ţele periferice sunt mai mari

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 50/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
50 T. A. S. P.
d
f j
S
S
1 r
MQf F +⋅= ; şi
d
f j
D
D
1 r
MQf F +⋅= ;
Sd
f j
Qr
Mf cos
⋅⋅ϕ+ϕ≥β⇒ ;
Dd
f j
Qr
Mf cos
⋅⋅ϕ+ϕ≥β ,
Ö Prin creşterea momentului de frânare f jM unghiul maxim de bracare devine mai mic.
c) În cazul când roţile directoare sunt motrice, pe roată acţionează un moment m jM , iar
FS şi FD nu mai apar.Astfel, pentru această situaţie efectul for ţei de rezistenţă la rulare este învins de momentul
motor m jM .
Ö Nu mai apare limitarea unghiului de bracare a roţilor directoare!!
Schimbarea regimului de funcţionare al roţii motrice din situaţia cum
jM la cea cuf
jM (şi prin frână de motor), determină trecerea la cazul anterior.
La deplasarea autovehiculelor în curbă iau naştere for ţe şi momente de iner ţie. În timpulmişcării pe teren orizontal, cu un unghi constant de bracare al roţilor, centrul de greutate al
autovehiculului are o acceleraţie tangenţială dt
dR g
ω⋅ şi o acceleraţie centripetă 2
gR ω .
g2 R mc ⋅ω⋅= ,
⎪⎪⎩
⎪⎪
⎨
⎧
γ⋅ω⋅−γω⋅=
γ⋅ω⋅+γω⋅=
sinR cosdtdR a
cosR sindt
dR a
2ggy
2ggx
dar:
gR
bsin =γ ;
gR
R cos =γ ;
vr =⋅ω ,dt
dvR
dt
d=⋅
ω.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 51/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
51 T. A. S. P.
⎪⎪⎩
⎪⎪⎨
⎧
−=
+⋅==>
2
2
y
2
x
R
v b
dt
dva
R
v
dt
dv
R
ba
deci for ţele care acţionează asupra autovehiculului sunt:
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=⋅=
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +⋅=⋅=
2
2
TyTy
2
TxTx
R
v b
dt
dvmamF
R
v
dt
dv
R
bmamF
Cazuri particulare:
=>= .ctv R
vmF
2
Tx = ; 2
2
Ty R
v bmF ⋅−= .
∞=R (mers în linie dreaptă), 0Fx = ;dt
dvmF Ty ⋅= .
Dacă .ctv = 2y
2x FFc +=
222
2
T bR R
vmc +=
dar 2g
22 R bR =+ ;R
R vv y
t = ,
.R mR
vmc
g
2
Tg
2t
T⋅ω⋅==
Această for ţă centrifugă este orientată în sens invers acceleraţiei centrului de greutate, adică în prelungirea razei R g.
32. Stabilitatea la mers în linie dreaptă
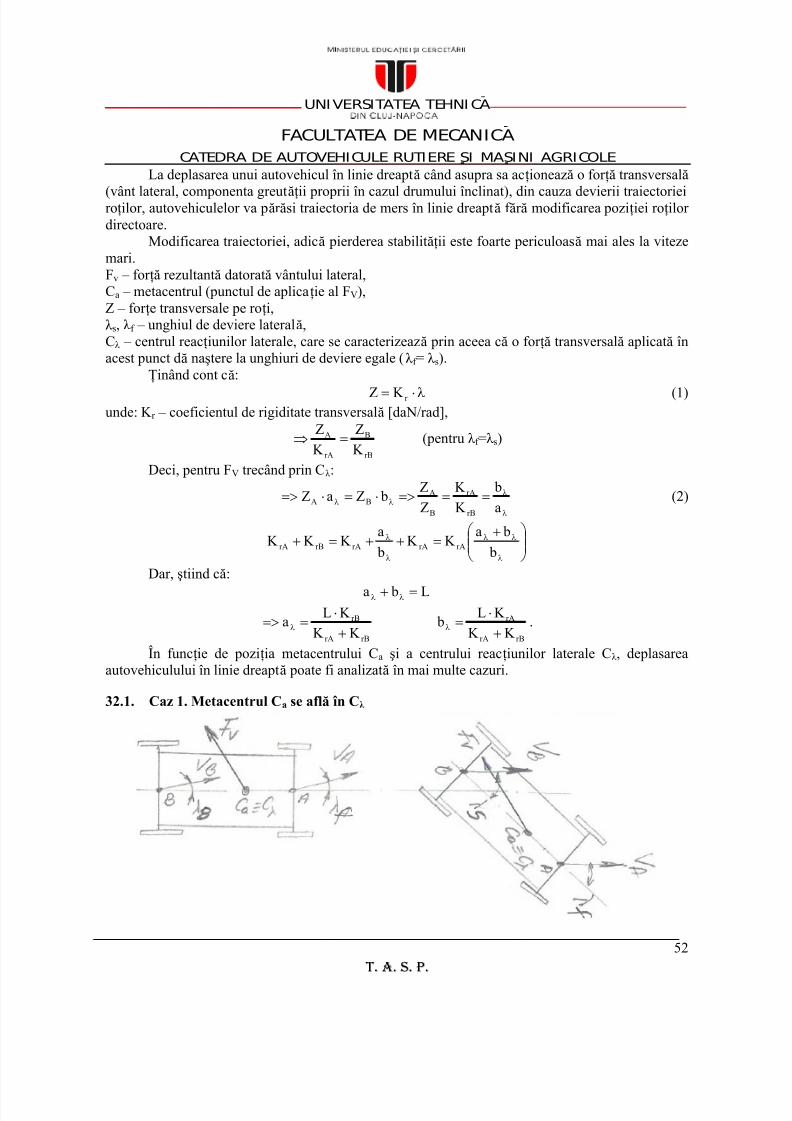
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 52/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
52 T. A. S. P.
La deplasarea unui autovehicul în linie dreaptă când asupra sa acţionează o for ţă transversală
(vânt lateral, componenta greutăţii proprii în cazul drumului înclinat), din cauza devierii traiectorieiroţilor, autovehiculelor va păr ăsi traiectoria de mers în linie dreaptă f ăr ă modificarea poziţiei roţilor directoare.
Modificarea traiectoriei, adică pierderea stabilităţii este foarte periculoasă mai ales la vitezemari.Fv – for ţă rezultantă datorată vântului lateral,Ca – metacentrul (punctul de aplicaţie al FV),Z – for ţe transversale pe roţi,λs, λf – unghiul de deviere laterală,Cλ – centrul reacţiunilor laterale, care se caracterizează prin aceea că o for ţă transversală aplicată înacest punct dă naştere la unghiuri de deviere egale (λf = λs).
Ţinând cont că:
λ⋅= r K Z (1)unde: K r – coeficientul de rigiditate transversală [daN/rad],
rB
B
rA
A
K
Z
K
Z=⇒ (pentru λf =λs)
Deci, pentru FV trecând prin Cλ:
λ
λλλ ===>⋅=⋅=>
a
b
K
K
Z
Z bZaZ
rB
rA
B
ABA (2)
⎟⎟ ⎠
⎞⎜⎜⎝
⎛ +=++=+
λ
λλ
λ
λ
b
baK K
b
aK K K rArArArBrA
Dar, ştiind că:
L ba =+ λλ
rBrA
rB
K K
K La
+⋅
==> λ rBrA
rA
K K
K L b
+⋅
=λ .
În funcţie de poziţia metacentrului Ca şi a centrului reacţiunilor laterale Cλ, deplasareaautovehiculului în linie dreaptă poate fi analizată în mai multe cazuri.
32.1. Caz 1. Metacentrul Ca se află în Cλ
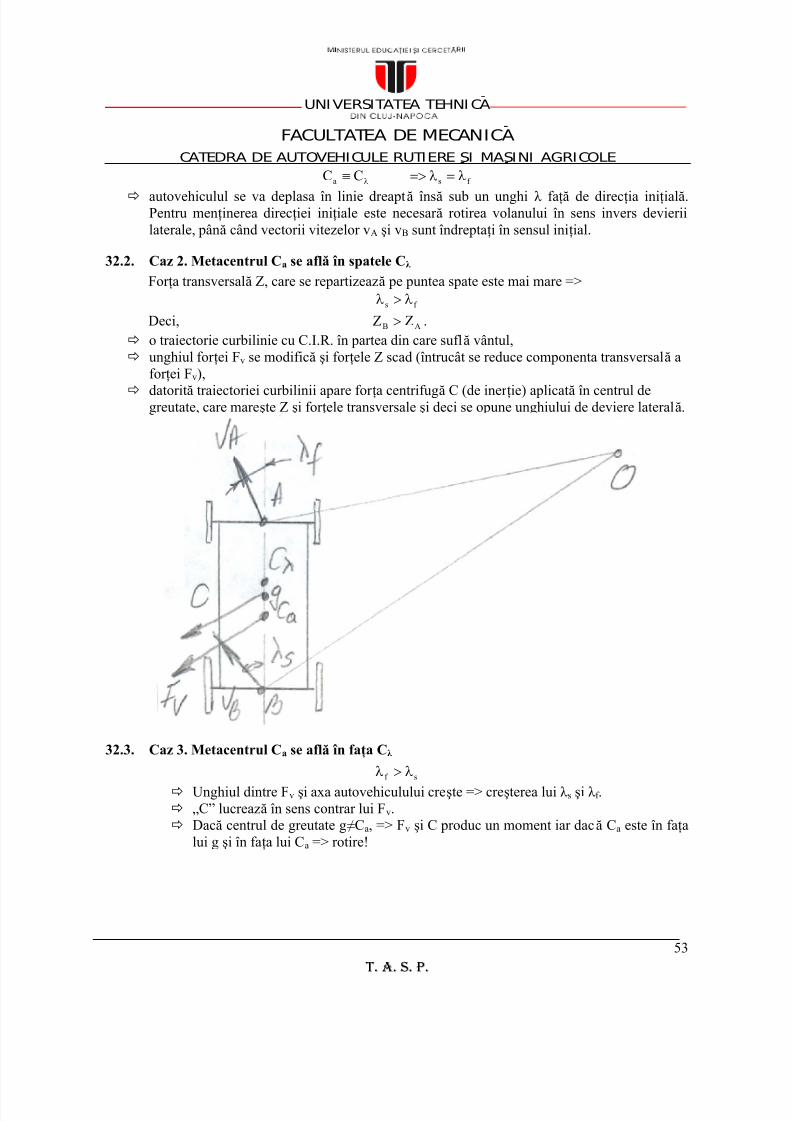
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 53/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
53 T. A. S. P.
λ≡ CCa f s λ=λ=>
Ö autovehiculul se va deplasa în linie dreaptă însă sub un unghi λ faţă de direcţia iniţială.Pentru menţinerea direcţiei iniţiale este necesar ă rotirea volanului în sens invers devieriilaterale, până când vectorii vitezelor vA şi vB sunt îndreptaţi în sensul iniţial.
32.2. Caz 2. Metacentrul Ca se află în spatele Cλ
For ţa transversală Z, care se repartizează pe puntea spate este mai mare =>
f s λ>λ
Deci, AB ZZ > .Ö o traiectorie curbilinie cu C.I.R. în partea din care suflă vântul,Ö unghiul for ţei Fv se modifică şi for ţele Z scad (întrucât se reduce componenta transversală a
for ţei Fv),
Ö datorită traiectoriei curbilinii apare for ţa centrifugă C (de iner ţie) aplicată în centrul degreutate, care mareşte Z şi for ţele transversale şi deci se opune unghiului de deviere laterală.
32.3. Caz 3. Metacentrul Ca se află în faţa Cλ
sf λ>λ
Ö Unghiul dintre Fv şi axa autovehiculului creşte => creşterea lui λs şi λf .Ö „C” lucrează în sens contrar lui Fv.Ö Dacă centrul de greutate g≠Ca, => Fv şi C produc un moment iar dacă Ca este în faţa
lui g şi în faţa lui Ca => rotire!
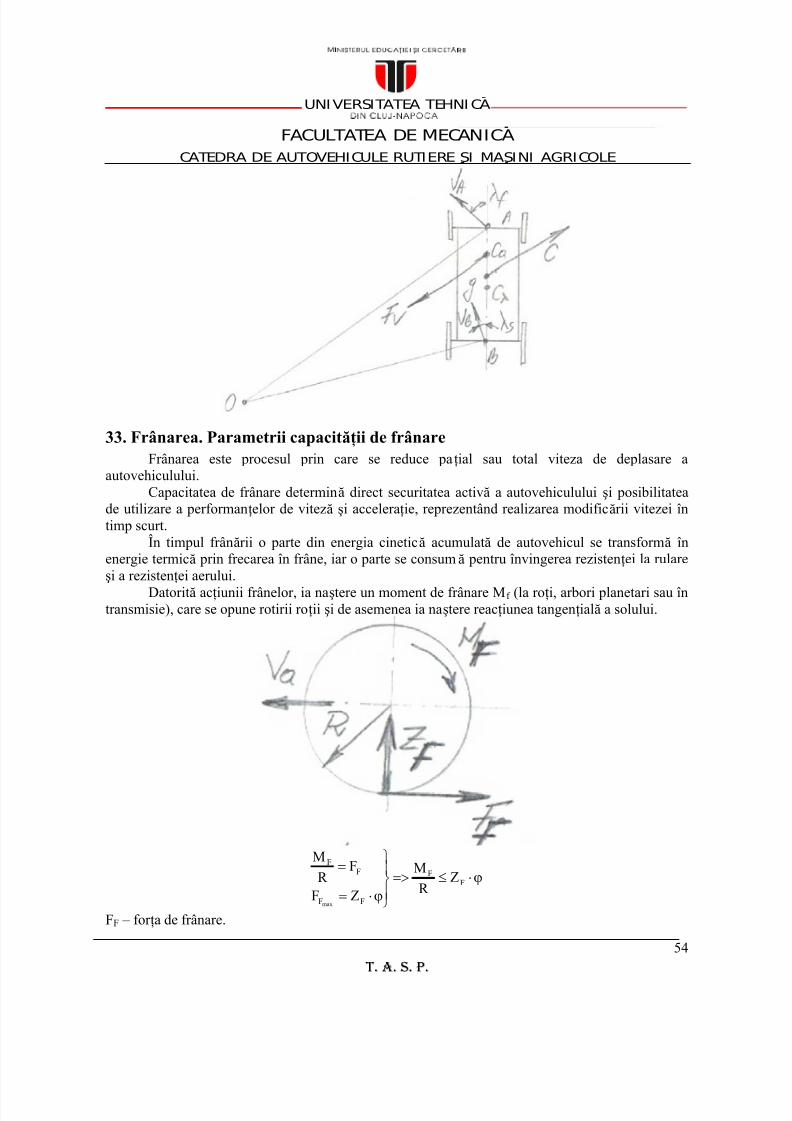
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 54/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
54 T. A. S. P.
33. Frânarea. Parametrii capacităţii de frânare
Frânarea este procesul prin care se reduce paţial sau total viteza de deplasare aautovehiculului.
Capacitatea de frânare determină direct securitatea activă a autovehiculului şi posibilitateade utilizare a performanţelor de viteză şi acceleraţie, reprezentând realizarea modificării vitezei întimp scurt.
În timpul frânării o parte din energia cinetică acumulată de autovehicul se transformă înenergie termică prin frecarea în frâne, iar o parte se consumă pentru învingerea rezistenţei la rulareşi a rezistenţei aerului.
Datorită acţiunii frânelor, ia naştere un moment de frânare Mf (la roţi, arbori planetari sau întransmisie), care se opune rotirii roţii şi de asemenea ia naştere reacţiunea tangenţială a solului.
ϕ⋅≤=>⎪⎭
⎪⎬
⎫
ϕ⋅=
=F
F
FF
FF
ZR
M
ZF
FR
M
max
FF – for ţa de frânare.

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 55/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
55 T. A. S. P.
Depăşirea acestei valori produce deraparea.
În acelaşi timp asupra autovehiculelor acţionează şi for ţele de iner ţie şi cele de rezistenţă:0FFFFF aFf j =±−−− δ .
Aprecierea şi compararea capacităţii de frânare la autovehicul se realizează cu ajutorulspaţiului de frânare minim şi a deceleraţiei maxime în funcţie de viteză. Deci parametrii capacităţiide frânare sunt:
• Spaţiul de frânare: parametrul intuitiv care reflectă corelaţia dintre calităţilede frânare şi securitatea circulaţiei.
( )f g6,32
vvS
2
22
21
f +ϕ⋅⋅⋅−
= ,
ϕ⋅⋅⋅=
g6,32
vS
2
21
f ,
ϕ⋅=
g
vt 1
f .
• Spaţiul de oprire: ţine seama şi de timpul de reacţie al conducătorului şi deconstrucţia sistemului de frânare.
( )ϕ⋅⋅⋅
+++=g6,32
vttt
6,3
vS
2
21
21r 1
opr ,
• Deceleraţia maximă:5,6...6J f = m/s2 – la autoturisme,
6J f = m/s2 – la autocamioane,
4J f = m/s
2
– la tractoare,5,3...3J f = m/s2 – pentru frânele de siguranţă.În figura este reprezentată grafic variaţia spaţiului de frânare în funcţie de viteza de
deplasare pentru diferite condiţii de aderenţă.
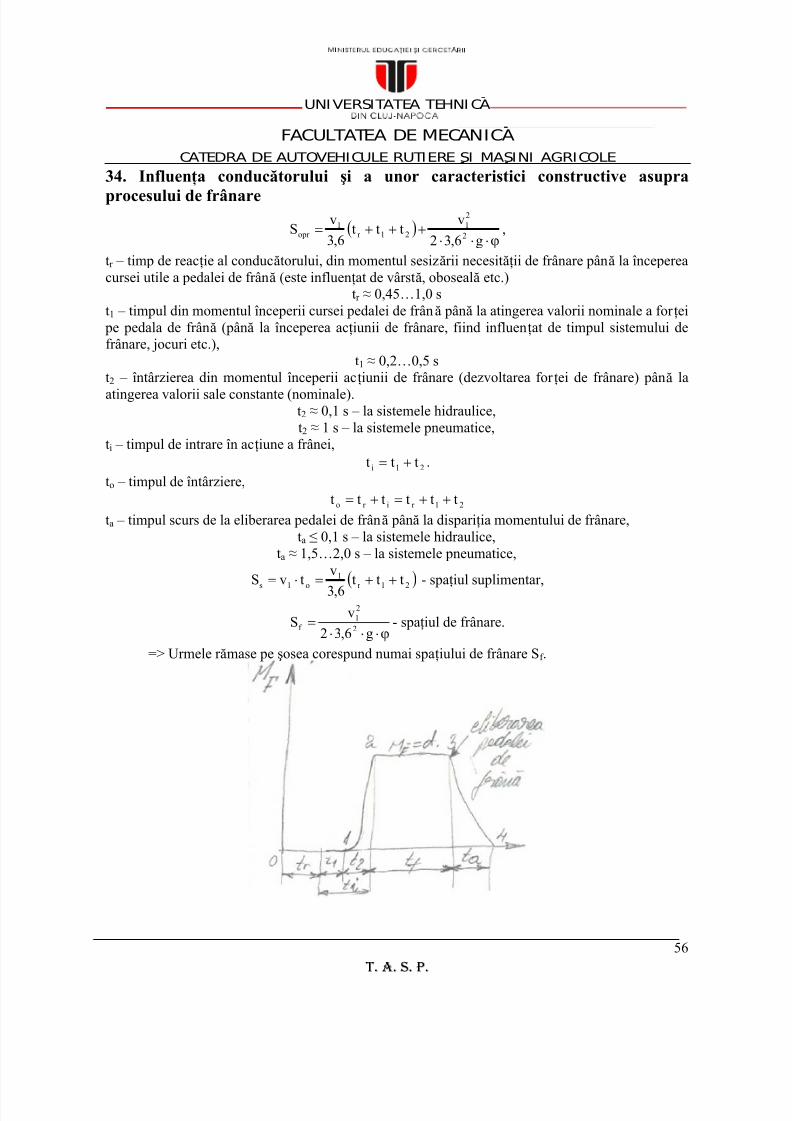
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 56/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
56 T. A. S. P.
34. Influenţa conducătorului şi a unor caracteristici constructive asupra
procesului de frânare
( )ϕ⋅⋅⋅
+++=g6,32
vttt
6,3
vS
2
21
21r 1
opr ,
tr – timp de reacţie al conducătorului, din momentul sesizării necesităţii de frânare până la începereacursei utile a pedalei de frână (este influenţat de vârstă, oboseală etc.)
tr ≈ 0,45…1,0 st1 – timpul din momentul începerii cursei pedalei de frână până la atingerea valorii nominale a for ţei
pe pedala de frână (până la începerea acţiunii de frânare, fiind influenţat de timpul sistemului defrânare, jocuri etc.),
t1 ≈ 0,2…0,5 st2 – întârzierea din momentul începerii acţiunii de frânare (dezvoltarea for ţei de frânare) până la
atingerea valorii sale constante (nominale).t2 ≈ 0,1 s – la sistemele hidraulice,t2 ≈ 1 s – la sistemele pneumatice,
ti – timpul de intrare în acţiune a frânei,
21i ttt += .to – timpul de întârziere,
21r ir o tttttt ++=+=
ta – timpul scurs de la eliberarea pedalei de frână până la dispariţia momentului de frânare,ta ≤ 0,1 s – la sistemele hidraulice,
ta ≈ 1,5…2,0 s – la sistemele pneumatice,
( )21r
1
o1s
ttt6,3
vtvS ++=⋅= - spaţiul suplimentar,
ϕ⋅⋅⋅=
g6,32
vS
2
21
f - spaţiul de frânare.
=> Urmele r ămase pe şosea corespund numai spaţiului de frânare Sf .

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 57/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
57 T. A. S. P.
35. Forţa specifică de frânare
For ţa specifică de frânare:
G
F pF =γ ,
F p – suma for ţelor de frânare la toate roţile frânate,
G
G pFmax
⋅ϕ=γ ,
G p – suma sarcinilor pe roţile frânate (sarcina dinamică pe roţile frânate),α⋅= cosGG p
α – înclinarea căii de rulare,α⋅ϕ=γ cos
maxF .
Se defineşte coeficient de repartizare dinamică a masei pe roţile frânate ρF ca raportul dintresarcina dinamică din timpul frânării şi sarcina statică.Ö Pentru puntea faţă a unui autovehicul cu două punţi:
bG
hFhFhFMM
b
sinhcos b
A
dimA ttaagif Fg
stA ⋅
⋅−⋅−⋅+++α⋅−α⋅
==ρ
Pentru α = 0, Fa=0 şi f ăr ă for ţă la cârlig (Ft=0) =>
bG
hFMM1 gif F
A ⋅
⋅+++=ρ .
Ö Pentru puntea spate:
bG
hFMM1 gif F
B ⋅
⋅++−=ρ ,
1A >ρ=> şi 1B <ρ ,
L
bAFA
⋅ρ⋅ϕ=γ=> ;
L
bBFB
⋅ρ⋅ϕ=γ .
Ö La frânarea cu roţile din spate for ţa specifică de frânare este mult mai mică decât încazul frânării numai cu roţile din faţă.
36. Stabilitatea la frânare
La depăşirea limitei de aderenţă în timpul frânării, prin mărirea excesivă a for ţei perifericeF p, datorită MF, o for ţă transversală oricât de mică provoacă alunecarea laterală a roţii.
Stabilitatea la frânare reprezintă capacitatea unui autovehicul de a se menţine în timpulfrânării pe traiectoria iniţială de mers.
36.1. Caz 1. Blocarea roţilor spate
La blocarea roţilor spate se anulează capacitatea de ghidare laterală a acestora, r ămânând cughidare laterală numai faţa.
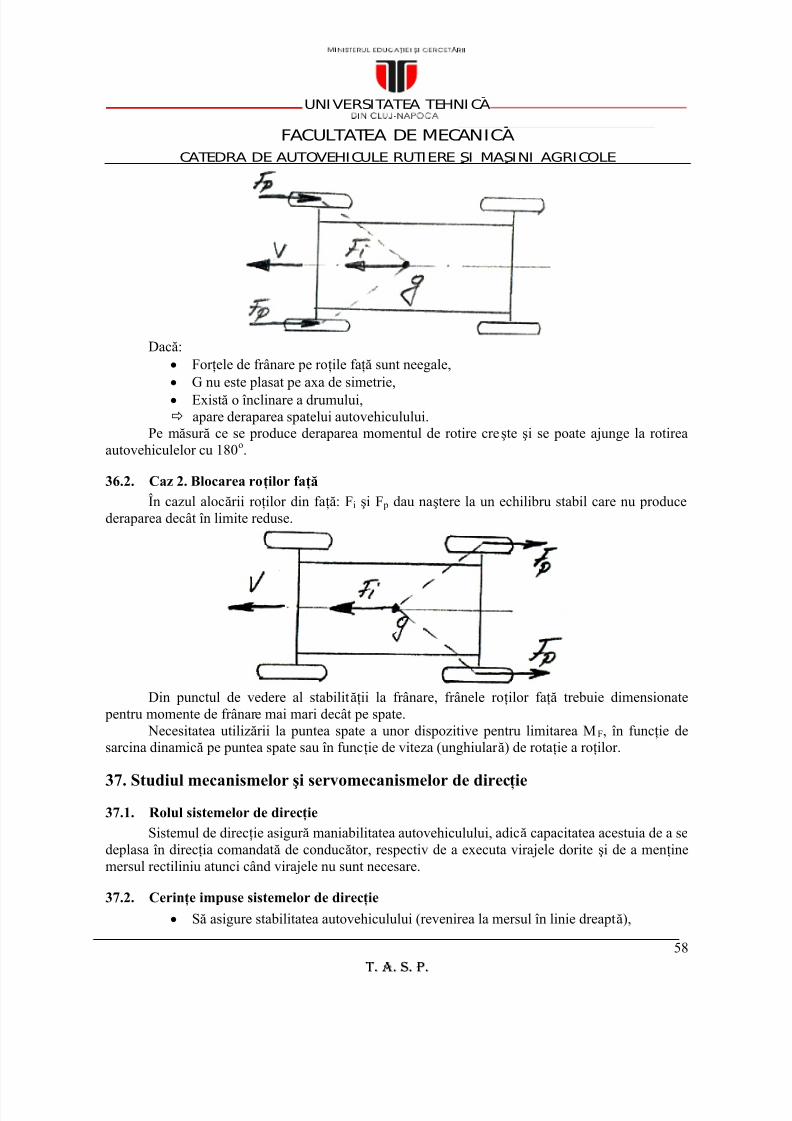
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 58/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
58 T. A. S. P.
Dacă:• For ţele de frânare pe roţile faţă sunt neegale,• G nu este plasat pe axa de simetrie,• Există o înclinare a drumului,Ö apare deraparea spatelui autovehiculului.
Pe măsur ă ce se produce deraparea momentul de rotire creşte şi se poate ajunge la rotireaautovehiculelor cu 180o.
36.2. Caz 2. Blocarea roţilor faţă
În cazul alocării roţilor din faţă: Fi şi F p dau naştere la un echilibru stabil care nu producederaparea decât în limite reduse.
Din punctul de vedere al stabilităţii la frânare, frânele roţilor faţă trebuie dimensionate pentru momente de frânare mai mari decât pe spate.
Necesitatea utilizării la puntea spate a unor dispozitive pentru limitarea MF, în funcţie desarcina dinamică pe puntea spate sau în funcţie de viteza (unghiular ă) de rotaţie a roţilor.
37. Studiul mecanismelor şi servomecanismelor de direcţie37.1. Rolul sistemelor de direcţie
Sistemul de direcţie asigur ă maniabilitatea autovehiculului, adică capacitatea acestuia de a sedeplasa în direcţia comandată de conducător, respectiv de a executa virajele dorite şi de a menţinemersul rectiliniu atunci când virajele nu sunt necesare.
37.2. Cerinţe impuse sistemelor de direcţie
• Să asigure stabilitatea autovehiculului (revenirea la mersul în linie dreaptă),
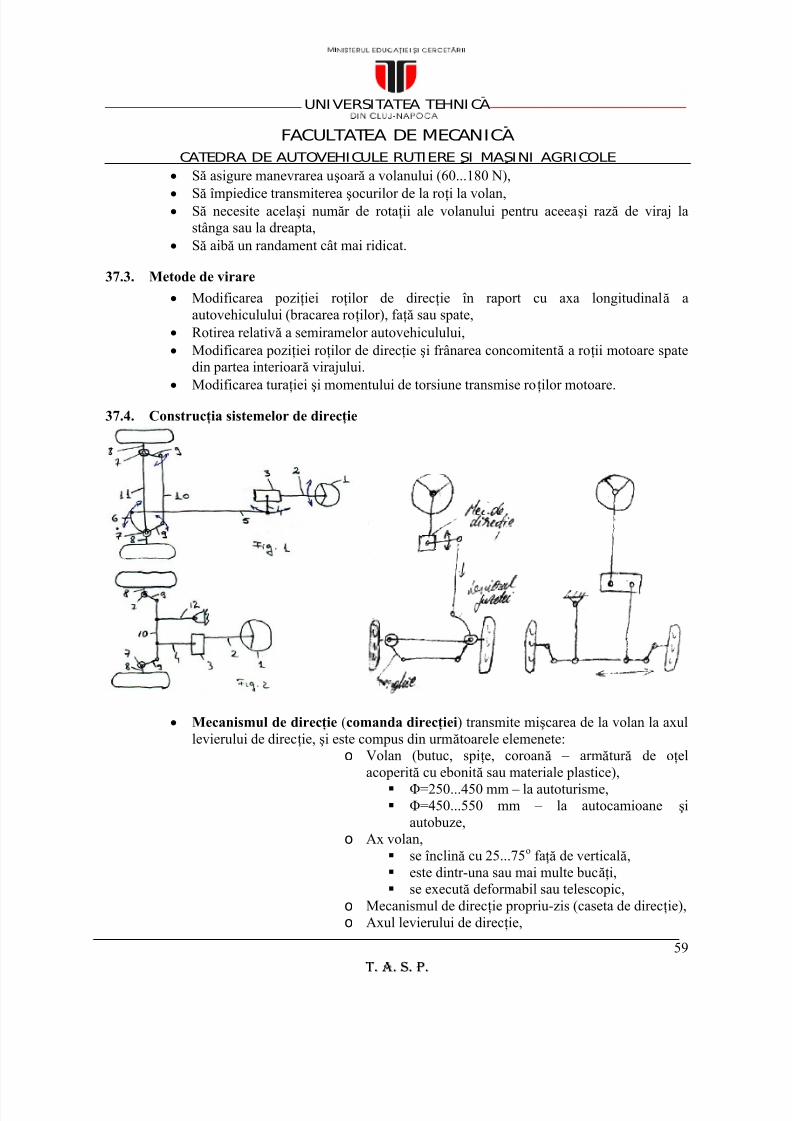
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 59/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
59 T. A. S. P.
• Să asigure manevrarea uşoar ă a volanului (60...180 N),
• Să împiedice transmiterea şocurilor de la roţi la volan,• Să necesite acelaşi număr de rotaţii ale volanului pentru aceeaşi rază de viraj lastânga sau la dreapta,
• Să aibă un randament cât mai ridicat.
37.3. Metode de virare
• Modificarea poziţiei roţilor de direcţie în raport cu axa longitudinală aautovehiculului (bracarea roţilor), faţă sau spate,
• Rotirea relativă a semiramelor autovehiculului,• Modificarea poziţiei roţilor de direcţie şi frânarea concomitentă a roţii motoare spate
din partea interioar ă virajului.• Modificarea turaţiei şi momentului de torsiune transmise roţilor motoare.
37.4. Construcţia sistemelor de direcţie
• Mecanismul de direcţie (comanda direcţiei) transmite mişcarea de la volan la axullevierului de direcţie, şi este compus din următoarele elemenete:
o Volan (butuc, spiţe, coroană – armătur ă de oţelacoperită cu ebonită sau materiale plastice),
Φ=250...450 mm – la autoturisme, Φ=450...550 mm – la autocamioane şi
autobuze,o Ax volan,
se înclină cu 25...75o faţă de verticală, este dintr-una sau mai multe bucăţi, se execută deformabil sau telescopic,
o Mecanismul de direcţie propriu-zis (caseta de direcţie),o Axul levierului de direcţie,
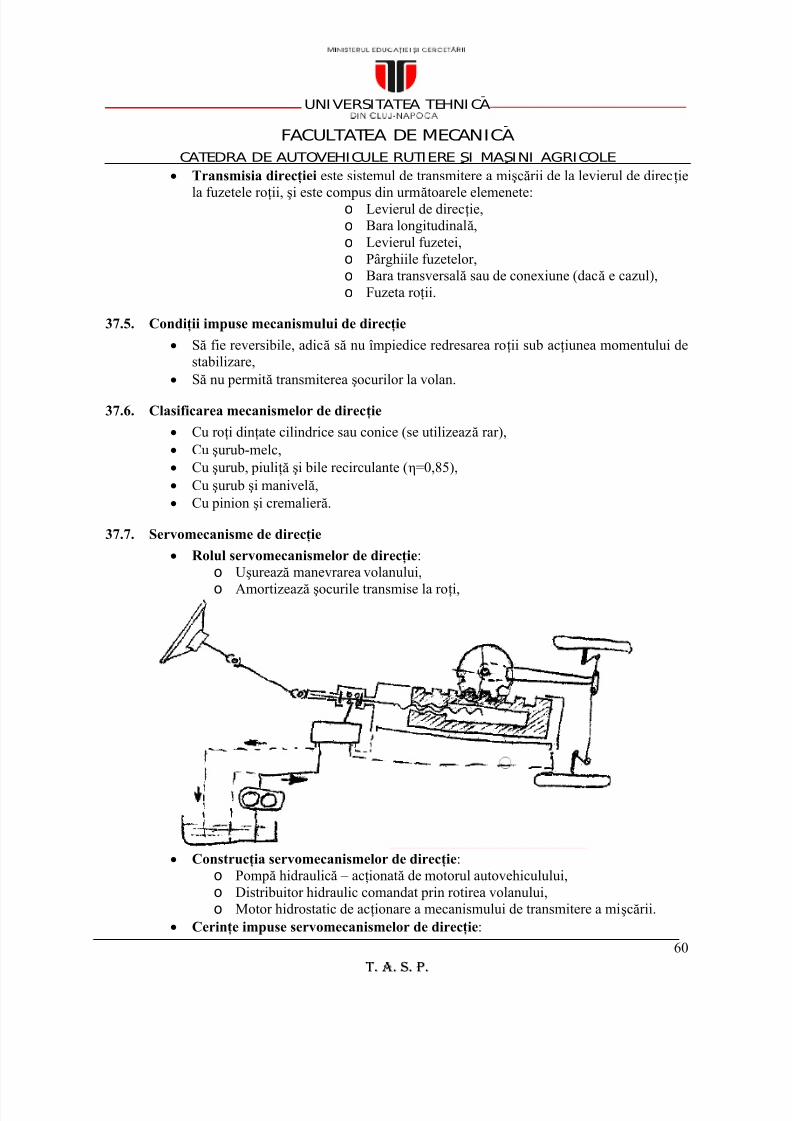
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 60/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
60 T. A. S. P.
• Transmisia direcţiei este sistemul de transmitere a mişcării de la levierul de direcţie
la fuzetele roţii, şi este compus din următoarele elemenete:o Levierul de direcţie,o Bara longitudinală,o Levierul fuzetei,o Pârghiile fuzetelor,o Bara transversală sau de conexiune (dacă e cazul),o Fuzeta roţii.
37.5. Condiţii impuse mecanismului de direcţie
• Să fie reversibile, adică să nu împiedice redresarea roţii sub acţiunea momentului destabilizare,
• Să nu permită transmiterea şocurilor la volan.
37.6. Clasificarea mecanismelor de direcţie
• Cu roţi dinţate cilindrice sau conice (se utilizează rar),• Cu şurub-melc,• Cu şurub, piuliţă şi bile recirculante (η=0,85),• Cu şurub şi manivelă,• Cu pinion şi cremalier ă.
37.7. Servomecanisme de direcţie
• Rolul servomecanismelor de direcţie:o Uşurează manevrarea volanului,
o Amortizează şocurile transmise la roţi,
• Construcţia servomecanismelor de direcţie:o Pompă hidraulică – acţionată de motorul autovehiculului,o Distribuitor hidraulic comandat prin rotirea volanului,o Motor hidrostatic de acţionare a mecanismului de transmitere a mişcării.
• Cerinţe impuse servomecanismelor de direcţie:
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 61/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
61 T. A. S. P.
o Să intre în funcţiune şi să iasă doar când e comandat,o
Iner ţia sistemului să fie mică, adică să r ăspundă prompt comenzilor,o Să asigure o corespondenţă între viteza de rotire a volanului şi cea de frecarea roţilor de direcţie,
o La defectarea servomecanismului să fie asigurată funcţionarea mecanică adirecţiei.
• Clasificarea servomecanismelor de direcţie:o După modul legăturii elementelor de reglare:o După locul de amplasare a distribuitorului hidraulic (DH) şi a motorului
hidrostatic (MH): Servodirecţii hidromecanice, la care atât DH cât şi MH sunt montate
pe bara longitudinală, Servodirecţii hidromecanice, la care DH e montat monobloc cu caseta
de direcţie, iar MH la fuzetă, Servodirecţii hidromecanice, la care DH e montat pe bara
longitudinală MH e montat pe bara transversală, Servodirecţii hidromecanice, la care atât DH cât şi MH sunt montate
monobloc cu caseta de direcţie.
37.8. Penele sistemului de direcţie
• Volanul are joc mare: Joc mare în casetă, Slă birea fixării levierelor pe fuzete, Joc mare în rulmenţi, Jocul fuzetei pe pivot, Slă birea fixării casetei de direcţie, Jocuri la articulaţiile barelor de direcţie.
Cum se determină jocul?• Manevrarea greoaie a volanului:
Griparea pivoţilor în fuzete, Strângerea puternică a casetei de direcţie, Torsionarea axului volanului, Griparea rulmenţilor.
• Ruperea articulaţiilor barei de direcţie.
7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 62/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
62 T. A. S. P.
IndexABS ............................... 8
accelerație ............ 49, 53
acumulator ................... 5
Aderența ............... 24, 43
aderență ... 21, 24, 34, 37,
38, 43, 48, 54, 56
alimentare .................... 5
alunecarea ...... 17, 43, 56
amortismentul ............ 10
animale ......................... 6
ASR ............................... 8
ateliere ......................... 7
autoateliere .................. 6
autobasculante ............. 6
autobetonieră............... 6
autobuze ................. 5, 58
autocamioane ... 9, 54, 58
autocamion................... 6
autocamionetă ............. 6
autocisterne ................. 6
autodubă ...................... 6
autofrigorifică ............... 6
autoizotermă ................ 6
automacarale ................ 6
automăturători ............. 6
automobil ............... 9, 11
automobile ................... 4
autostropitori ............... 6
Autoturism.................... 6
autoturisme ...5, 7, 54, 58
autovehicul . 7, 46, 51, 53,
54, 56
autovehicule ....... 2, 4, 38
basculantă .................... 7
benă.............................. 7
berlină .......................... 6
cablu ............................. 5
cabriolet ....................... 7
Capacitatea de frânare 53
caracteristica de turație 9
caracteristica externă . 10
Caroseria ...................... 8
caroserie ................... 6, 7
caseta de direcție . 58, 60 centrul de greutate ..... 52
Climatronic ................... 8
coach ............................ 6
coeficient .. 31, 34, 35, 47,
48, 56
Coeficientul de
adaptabilitate ........ 11
Coeficientul de
elasticitate ............. 10
combi ............................ 7
combustibil ................. 10
condiție ....................... 44
conducător ............ 47, 57
containere ..................... 6
corhănit ........................ 5
cremalieră ................... 59
cupeu ............................ 7
curbă................. 3, 47, 49
curbe ..................... 10, 24
cutie de viteze ............. 11
Decelerația maximă .... 54
defrişări ......................... 4
deraparea ............. 54, 57
Deraparea ................... 43
dinamic ......................... 9
direcție ... 3, 8, 10, 14, 16,
21, 32, 34, 43, 44, 45,
57, 58, 59, 60
dreaptă 3, 24, 29, 31, 41,
43, 44, 50, 51, 52, 57
durabilitatea ............... 10
electrică .................... 5, 6
ESP ................................ 8
forța .. 5, 9, 13, 16, 20, 21,
24, 25, 28, 30, 31, 32,
33, 34, 37, 52, 53, 56
forță centrifugă........... 50
furgon ........................... 6
Fuzeta ......................... 59
greutate . 4, 8, 11, 35, 36,
37, 40, 43, 49, 50, 52
hidrodinamică ........... 5, 6
hidrostatică ............... 5, 6
hiperbolă..................... 11
îmbunătățiri funciare .... 4
încărcat ..................... 4, 5
Instalații de confort ...... 8
irigații ............................ 4
laboratoare ................... 7 levierul de direcție ...... 59
limuzină ........................ 7
maniabilitatea ....... 34, 57
Maniabilitatea ............. 47
manivelă ..................... 59
maşinii agricole .. 2, 4, 33,
37
mecanică ............. 5, 6, 60
Mecanisme de lucru ..... 8
microbuze ..................... 5
microturisme ................. 7
motocultoare ................ 5
motor . 2, 5, 8, 10, 11, 12,
13, 16, 17, 19, 21, 23,
25, 27, 33, 36, 41, 49
motor termic ................. 5
Motorul cu abur .......... 11
motrice ....................... 49
osie ................................ 7
Panta ............................. 9
pantă ............... 31, 39, 43
pinion .......................... 59
piuliță .......................... 59
platformă .................. 7, 8
player ............................ 8
polul virajului .......... 9, 44
pompieri ........................ 6
presiunea specifică . 9, 47
randament ............ 11, 58
rază de viraj ................. 58
Remorca .................... 2, 7
remorcă......................... 7
rezistență . 2, 3, 9, 21, 22,
26, 29, 31, 32, 33, 35,
37, 46, 47, 48, 49, 54
roadster ........................ 7
roată5, 12, 13, 16, 17, 18,
21, 22, 26, 27, 33, 34,
48, 49
roată de direcție ............ 5
roți ... 2, 3, 4, 5, 9, 13, 16,
18, 31, 36, 37, 38, 40,
41, 42, 44, 51, 53, 58,
59
roți dințate .................. 59
roți motoare ........ 5, 9, 16
roțile directoare ......... 49
sanitare ......................... 6
sarcina .. 9, 13, 17, 20, 21, 25, 26, 27, 37, 47, 48,
56, 57
şasiuri ............................ 4
sedan ............................. 7
semiremorcă ................. 7
semişenile ..................... 5
şenilă ..................... 37, 47
şenile .. 2, 3, 4, 5, 8, 9, 13,
31, 37, 42, 45, 46, 47
şenile uşoare ................ 5
Servodirecție ................ 8
sistemele hidraulice ... 55
sistemele pneumatice 55
Sistemul de direcție .... 57
Sistemul de rulare ........ 8
şosea .......................... 55
spațiul .................... 17, 55
Spațiul de frânare ....... 54
Spațiul de oprire ......... 54
spider ........................... 7
stabilitatea ............ 38, 57
Stabilitatea ... 2, 3, 10, 38,
39, 40, 41, 43, 47, 50,
56
stivuit ........................... 5
şurub .......................... 59
suspensie ........... 5, 42, 43
Tecuşan ...................... 44
telescopic ................... 58
terasament ................... 4
timpul . 15, 16, 18, 23, 24,
36, 38, 41, 49, 53, 54,
55, 56
torsiune ...................... 58
tracțiune ... 2, 5, 9, 10, 11,
13, 16, 21, 22, 23, 24,
33, 34, 37, 38, 41
tractoare .... 2, 4, 5, 8, 10,
11, 29, 33, 36, 38, 54
tractor ................... 11, 31
translație ..... 8, 13, 32, 46
Transmisia ......... 8, 12, 59
transmisia
autovehiculului ..... 11
transmisie ...... 5, 6, 32, 53
transport ............... 4, 5, 7
transporturi grele ......... 7
Turbinele cu gaze ....... 11
unghiuri ................. 44, 51
viraj ....... 9, 41, 44, 45, 48 virare ..... 3, 44, 46, 47, 58
viteza .... 9, 19, 21, 23, 27,
34, 35, 41, 43, 46, 53,
54, 57, 60
volan ...................... 58, 59

7/23/2019 Curs Tractoare 2008 2009 Stud
http://slidepdf.com/reader/full/curs-tractoare-2008-2009-stud 63/63
UNIVERSITATEA TEHNICA
FACULTATEA DE MECANICA
CATEDRA DE AUTOVEHICULE RUTIERE I MA INI AGRICOLES S
Bibliografie
1. Caragiugiuc Gr., s.a., „Îndrumator practic pentru conducerea si exploatarea tractoarelor”,Editura Ceres, Bucuresti, 1985.
2. Caraciugiuc Gr., N.Patrascu, „Tractoare”, Editura Ceres, Bucuresti, 1980.3. Fr ăţilă Gh., Fr ăţilă M., Samoilă St., „Automobile”, Editura Didactică şi Pedagogică, R.A.,
Bucuresti, 1997.4. Fr ăţilă Gh., „Calculul şi construcţia autovehiculelor”, Ed. Didactică şi Pedagogică,
Bucureşti, 1977.5. Fratila Gh., „Sistemele de frânare ale autovehiculelor” , Ed. Tehnica, Bucuresti, 1982.6. Linde Cr., Neagu C., „Constructia tractoarelor U-650M”, Institutul Politehnic Iasi,1981.7. Mihaitoiu J., Caraciugiuc Gr., „Exploatarea raţională a tractoarelor”, Editura Agro-Silvica,
Bucuresti, 1965.8. Niţescu Gh., „Mecanica tractoarelor”, p. 190.9. Roşca R., „Autovehicule rutiere şi tractoare, vol.1”, Ed. Cutia Pandorei, Vaslui, 2002.10. Roşca R., ş.a., „Autovehicule rutiere şi tractoare, vol.2”, Ed. Politehnium, Iaşi, 2004.11. Untaru M., s.a., „Calculul şi construcţia automobilelor” , Ed. Didactica si Pedagogica,
Bucuresti, 1982.12. Untaru M., ş.a., „Dinamica autovehiculelor pe roţi” Ed. Tehnică, Bucureşti, 1981.13. Tecuşan N., Niţescu Gh., „Tractoare şi automobile”, E.D.P. Bucuresti 1977.14. Toma Dragoş, s.a., „Tractoare agricole”, Editura Didactică şi Pedagogică,Bucuresti,1978.

















