Page 1
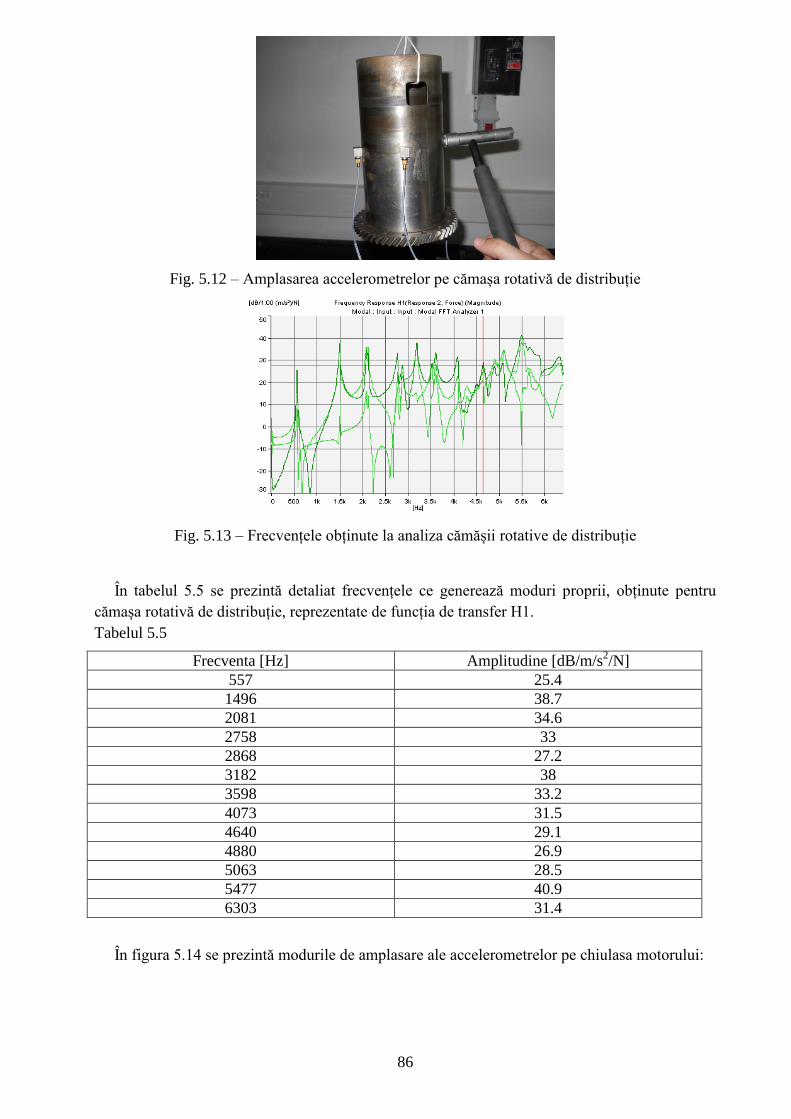
1
Investeşte în oameni!
FONDUL SOCIAL EUROPEAN
Programul Operaţional Sectorial Dezvoltarea Resurselor Umane 2007 – 2013
Axa prioritară 1 „Educaţie şi formare profesională în sprijinul creşterii economice şi dezvoltării societăţii bazate pe cunoaştere” Domeniul major de intervenţie 1.5 „Programe doctorale şi post-doctorale în sprijinul cercetării”
Titlul proiectului: „Investiţie în dezvoltare durabilă prin burse doctorale (INED)”
Numărul de identificare al contractului: POSDRU/88/1.5/S/59321
Beneficiar: Universitatea Transilvania din Braşov
Universitatea Transilvania din Brasov
Scoala Doctorala Interdisciplinara
Centrul de cercetare: Sisteme electrice avansate
Ing. Adrian GABOR
Contribuții la determinarea răspunsului dinamic al
motoarelor cu raport de comprimare variabil
Contributions in determining the dynamic response of
the variable compression ratio engines
Conducător ştiinţific
Prof.dr.ing.mat. Sorin Vlase
BRASOV, 2012
Page 2
2
MINISTERUL EDUCAŢIEI, CERCETARII, TINERETULUI ŞI SPORTULUI
UNIVERSITATEA “TRANSILVANIA” DIN BRAŞOV
BRAŞOV, B-DUL EROILOR NR. 29, 500036, TEL. 0040-268-413000, FAX 0040-268-410525
RECTORAT
D-lui (D-nei) ..............................................................................................................
COMPONENŢA
Comisiei de doctorat
Numită prin ordinul Rectorului Universităţii „Transilvania” din Braşov
Nr. 5354 din 31.07.2012
PREŞEDINTE: Prof. dr.ing. Anghel CHIRU
Universitatea Transilvania din Brașov
CONDUCĂTOR ŞTIINŢIFIC: Prof. dr. ing. mat. Sorin VLASE
Universitatea Transilvania din Brașov
REFERENŢI: Prof. dr. ing. Polidor BRATU
Universitatea ”Dunărea de Jos” din Galați
Cercet. șt. pr. I, Dr. mat. Veturia CHIROIU
Institutul de Mecanica Solidelor al Acadamiei Române
Prof. dr. ing. Gheorghe N. RADU
Universitatea Transilvania din Brașov
Data, ora şi locul susţinerii publice a tezei de doctorat: 11. 12. 2012, ora
13.00
, sala UII3, Aula Universității Transilvania Brașov.
Eventualele aprecieri sau observaţii asupra conţinutului lucrării vă rugăm să
le transmiteţi în timp util, pe adresa: [email protected] .
Totodată vă invităm să luaţi parte la şedinţa publică de susţinere a tezei de
doctorat.
Vă mulţumim.
Page 3
3
CUVÂNT ÎNAINTE
La finalul unui important capitol din viață mea profesională, doresc să aduc mulțumiri celor
care mi-au fost alături, m-au îndrumat și ajutat să duc la bun sfârșit lucrarea de față.
În primul rând doresc să îi mulțumesc domnului Prof. Dr. Ing. Mat. Sorin Vlase,
coordonatorul științific al lucrării, care m-a îndrumat și m-a sprijinit pe parcursul celor trei ani să
aduc teza de doctorat în forma ei finală.
Doresc pe această cale sa-i mulțumesc și domnului Prof. Dr. Ing. Călin Roșca și colegului
meu Dr. Ing. Cosmin Boricean, care prin experiența și îndrumările oferite, m-au ajutat la
realizarea cercetărilor experimentale privind determinarea frecvențelor proprii ale componentelor
studiate din motor.
Totodată doresc sa-i mulțumesc și domnului Prof. Dr. Ing. Vladimir Mărdărescu, alături de
care mi-am însușit numeroase cunoștințe în domeniul motoarelor cu ardere internă, reușind astfel
să duc la bun sfârșit experimentele efectuate pe motorul MDR-2, din cadrul laboratorului de
motoare al Universității ”Transilvania” din Brașov.
Mulțumesc de asemenea colectivului din cadrul Departamentului de Mecanică, care m-a
sprijinit în realizarea tezei de doctorat și care mi-a acordat de fiecare dată ajutorul necesar.
Nu în ultimul rând, aș dori să mulțumesc familiei mele și prietenilor pentru sprijinul, răbdarea
și încrederea acordată pe întreaga perioadă de pregătire a acestei lucrări.
Cu stimă, Adrian Gabor.
Decembrie 2012.
Page 4
4
CUPRINS (lb. română)
Pg.
teza
Pg.
rezumat
LISTA DE FIGURI I -
LISTA DE TABELE II -
LISTA DE NOTAȚII III -
INTRODUCERE 1 8
Capitolul 1 Stadiul actual 2 9
1.1. Soluții actuale de motoare cu raport de comprimare variabil 2 9
1.2. Avantajele utilizării unui motor cu raport de comprimare variabil 12 17
1.2.1. Influența raportului de comprimare asupra randamentului termic 12 17
1.2.2. Influența raportului geometric de comprimare asupra schimbului de gaze 14 18
1.2.3. Influența εv asupra proceselor de ardere și destindere. 15 19
1.2.4. Influența raportului geometric de comprimare asupra procesului de ardere 16 20
1.3. Descrierea motorului MDR-2 18 22
1.4. Stabilirea estimativă a performanțelor motorului cu distribuția gazelor prin
cămasă rotativă față de motorul cu distribuție prin supape 23 25
1.5 Concluzii 26 27
Capitolul 2 Oportunitatea și obiectivele cercetărilor conținute în teză 29 29
2.1. Necesitatea cercetărilor 29 29
2.2. Structura tezei de doctorat 30 30
2.3. Obiectivele tezei de doctorat 31 31
Capitolul 3 Contribuții la analiza dinamică a motoarelor cu raport de comprimare
variabil 32
32
3.1. Introducere 32 32
3.2. Modelul mecanic al unui monocilindru 32 32
3.3. Dinamica monocilindrului MDR-2 41 36
3.3.1 Calculul forțelor ce solicită biela 41 36
3.3.2 Torsorul de reducere al sistemului de forțe în A0 45 40
3.3.3 Calculul coeficienților de siguranță la oboseală 47 41
3.4 Vibrațiile arborilor cotiți 48 42
3.4.1 Vibrațiile torsionale ale arborilor cotiți 48 43
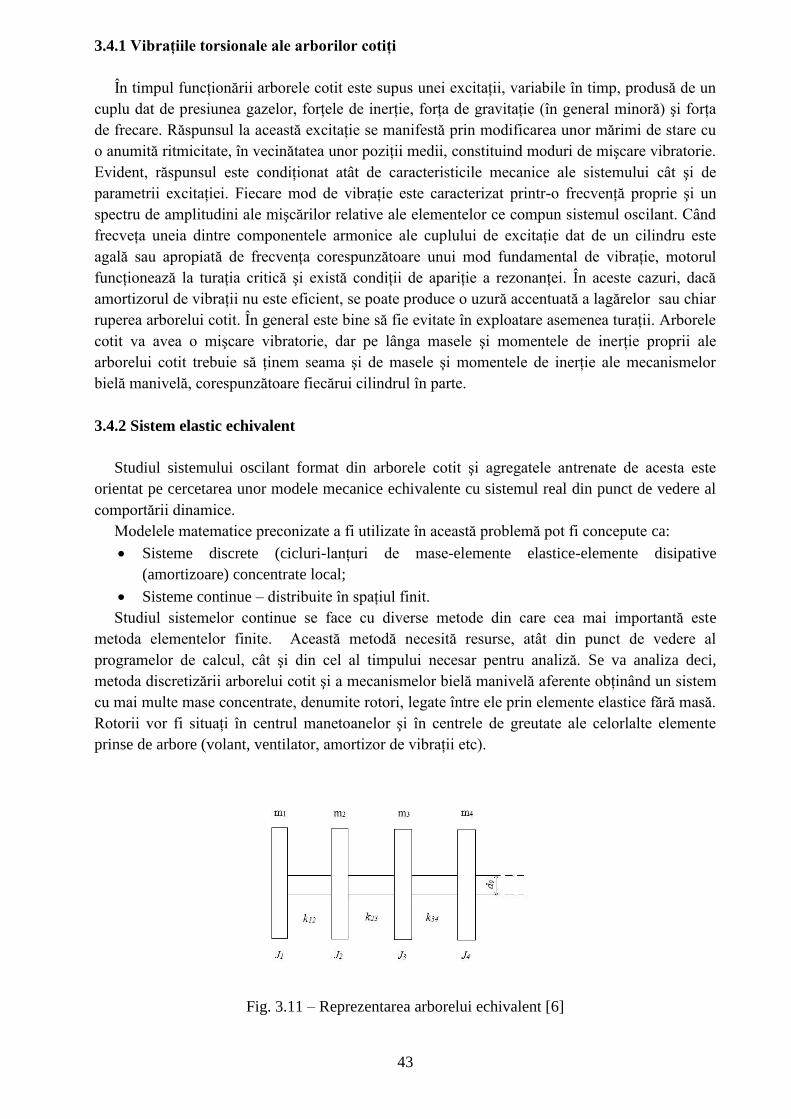
3.4.2 Sistem elastic echivalent 49 43
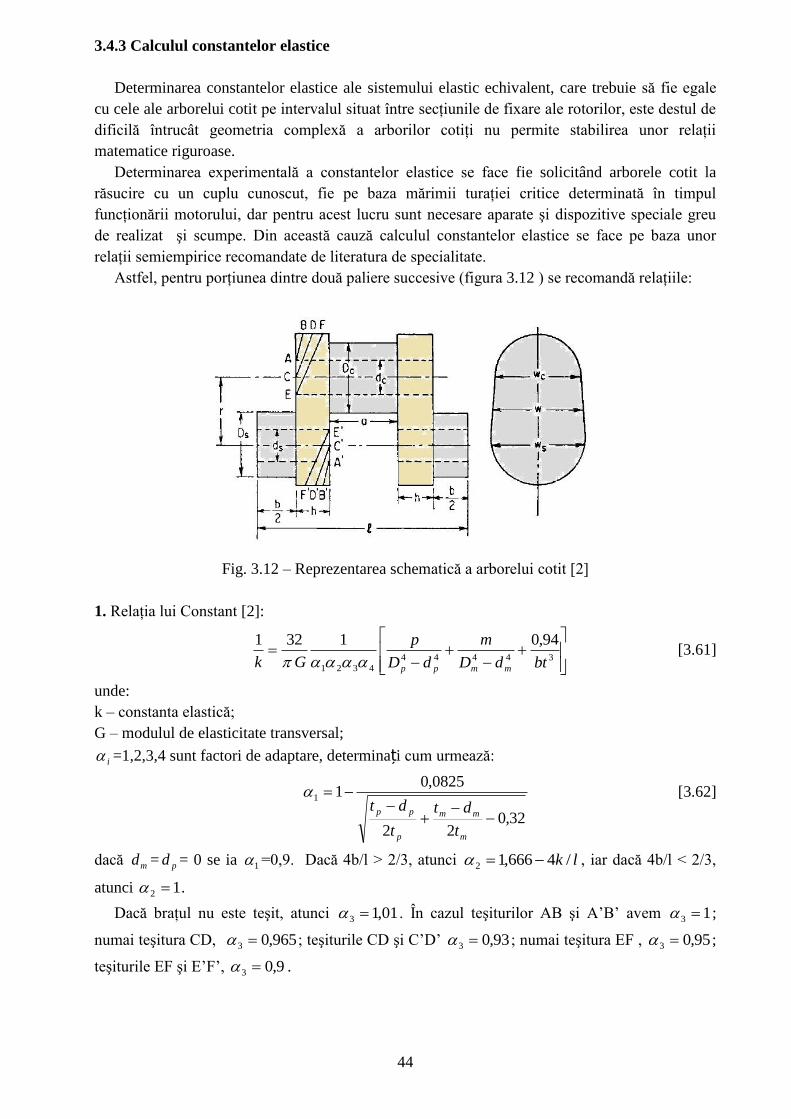
3.4.3 Calculul constantelor elastice 50 44
3.4.4 Determinarea momentelor de inerție axiale 52 45
3.4.5 Ecuații de mișcare 54 48
Page 5
5
3.5 Concluzii 56 49
Capitolul 4 Determinarea frecvențelor proprii pentru componentele motorului
MDR-2 folosind metoda elementelor finite 60 52
4.1 Concepte de bază 60 52
4.2 Analiza modală 61 53
4.2.1 Pulsații proprii 61 53
4.2.2 Proprietăți ale valorilor proprii 63 55
4.2.3 Analiza problemei vibrațiilor motorului MDR-2 69 59
4.3 Metoda elementelor finite 70 60
4.3.1 Etapele de rezolvare a unei probleme cu ajutorul metodei elementelor finite 71 60
4.3.2 Elemente finite tridimensionale utilizate la discretizarea pieselor 72 62
4.4 Calculul frecvențelor proprii pentru componentele motorului MDR-2 78 67
4.5 Concluzii 100 77
Capitolul 5 Verificări experimentale 102 78
5.1 Aspecte teoretice 102 78
5.2 Achiziția datelor 103 79
5.3 Metodica utilizată și aparatura folosită la analiza modală 104 79
5.4 Rezultatele obținute în urma analizei modale 108 81
5.5 Concluzii 120 87
Capitolul 6 Contribuții originale, diseminare, direcții viitoare de cercetare 121 88
6.1 Concluzii finale 121 88
6.2 Contribuții personale 122 89
6.3 Diseminarea rezultatelor 125 90
6.4 Direcții viitoare de cercetare 127 90
BIBLIOGRAFIE 130 91
ANEXE 135 -
Scurt Rezumat (română/engleză).............................................................................. - 95
CV................................................................................................................................. 145 96
Page 6
6
CUPRINS (lb. engleză) Pg.
teza
Pg.
rezumat
LIST OF FIGURES I -
LIST OF TABELS II -
LIST OF ABREVIATIONS III -
INTRODUCTION 1 8
Chapter 1 Actual study 2 9
1.1. Present solutions of variable compression ratio engines 2 9
1.2. The advantages of using a variable compression ratio engines 12 17
1.2.1. The influence of compression ratio on thermal efficiency 12 17
1.2.2. The influence of geometric compression ratio on gas exchange 14 18
1.2.3. The εv influence on combustion and release processes 15 19
1.2.4. The influence of geometric compression ratio on combustion process 16 20
1.3. Description of MDR-2 engine 18 22
1.4. Estimation of the performances of the slide-valve distribution with rotating
cylinder jacket engine 23 25
1.5 Conclusions 26 27
Chapter 2 Opportunity and research goals included in the thesis 29 29
2.1. Necessity of the research 29 29
2.2. Thesis structure 30 30
2.3. Thesis goals 31 31
Chapter 3 Contributions in determining the dynamic respone of variable
compression ratio engines
32
32
3.1. Introduction 32 32
3.2. Mechanical model of a monocylinder 32 32
3.3. The dynamics of the MDR-2monocylinder 41 36
3.3.1 Calculation of stress forces of the piston rod 41 36
3.3.2 Torsor of power reduction system in A0 45 40
3.3.3 Stress safety coefficient calculation 47 41
3.4 Cranck shaft vibrations 48 42
3.4.1 Cranck shaft torsional vibrations 48 43
3.4.2 Equivalent elastic system 49 43
3.4.3 Elastic constants calculation 50 44
3.4.4 Determination of axial inertia moments 52 45
3.4.5 Equations of motion 54 48
3.5 Conclusions 56 49
Page 7
7
Chapter 4 Determining the self frequencies of the MDR-2 engine components using
finite element method 60 52
4.1 Base concepts 60 52
4.2 Modal analysis 61 53
4.2.1 Self pulsations 61 53
4.2.2 Properties of the self values 63 55
4.2.3 MDR-2 engine vibration analysis 69 59
4.3 Finite element method 70 60
4.3.1 Steps to solve a problem using finite element method 71 60
4.3.2 Tridimensional finite elements used to obtain the mesh of the components 72 62
4.4 Natural frequency calculation of the MDR-2 engine components 78 67
4.5 Conclusions 100 77
Chapter 5 Experimental verification 102 78
5.1 Theoretical aspects 102 78
5.2 Data acquisition 103 79
5.3 Methodology and devices used in modal analysis 104 79
5.4 The results obtained from modal analysis 108 81
5.5 Conclusions 120 87
Chapter 6 Original contributions, dissemination, future research directions 121 88
6.1 Final conclusions 121 88
6.2 Personal contributions 122 89
6.3 Results disseminations 125 90
6.4 Future research directions 127 90
REFERENCES 130 91
ANNEXES 135 -
Short Abstract (română/engleză).............................................................................. - 95
Resumee................................................................................................................................. 145 96
Page 8
8
Introducere
Motorul cu ardere internă reprezintă în prezent, cea mai convenabilă soluție de sursă
energetică pentru propulsarea autovehiculelor. Având în vedere rezervele limitate de
combustibili și reglementările internaționale legate de normele de poluare tot mai severe, se
impune îmbunătățirea economicității și reducerea poluării pentru aceste categorii de motoare.
În contextul prezentat anterior, optimizarea performanțelor viitoarelor motoare cu tehnologii
avansate destinate propulsiei rutiere, vor avea ca „țintă” conceptul „totul variabil”. Cercetările
realizate, în ultimul timp, pentru atingerea unui raport de comprimare variabil sau amestec
stratificat, au drept rezultat tendința generală de a proiecta și creea motoare ce funcționează în
condiții variabile cu diminuarea consumului de combustibil.
Oportunitatea abordării temei are la bază o analiză succintă a funcţionării motoarelor, cu
raport de comprimare variabil, ce evidenţiază faptul că performanţele unui motor pot fi
îmbunătăţite prin creșterea randamentului termic la regimurile cu frecvență mare în funcționare.
Cum motoarele folosite la automobile trebuie să funcționeze la regimuri variate de sarcină și
viteză, soluția inflexibilă de funcționare a motorului, constrânge proiectanții la realizarea unor
soluții de compromis între configurația motorului și condițiile de funcționare, ajungându-se la o
economie scăzută de combustibil. Prin realizarea parametrilor motorului la valori variabile, se
obține o construcție ce permite folosirea aceluiași motor pentru o gamă largă de condiții de
funcționare, la un regim ce oferă performanțe semnificative cu scopul diminuării consumul de
combustibil și îmbunătățirii proceselor termodinamice.
În cazul autoturismelor cu propulsie clasică, întreaga cantitate de energie consumată pentru
propulsie și pentru instalațiile anexe este furnizată de un motor cu ardere internă ce oferă o
putere utilizabilă sub forma mecanică, Pe. Conversia energiei combustibilului în enegie mecanică
de deplasare este influențată de randamentul termic. În consecinţă, se va urmări, în cazul unui
proces de proiectare ca soluţia tehnică adoptată să ducă la o folosire cât mai eficientă a energiei
combustibililor și în final la un randament termic ridicat.
Randamentele maxime ale soluțiilor actuale de motoare cu ardere internă se situează în jurul
valorii de 30% pentru m.a.s. şi respectiv 40% pentru m.a.c.. Acest lucru se petrece în condițiile
cele mai favorabile funcționării motorului, însă la utilizarea lor în regim urban, randamentul nu
depăşeşte uneori 10-15%, la valori ale consumului de combustibil și ale emisiilor poluante foarte
mari.
În momentul de față cercetările sunt îndreptate înspre găsirea unor soluţii constructive care să
conducă la funcționarea motorului în zona regimurilor de sarcini parţiale, sub 20%, mers în gol şi
în regim de frână de motor, aceste regimuri reprezentând 80-90% din timpul de funcţionare al
unui autoturism aflat în trafic urban, la ora de vârf. În această direcție, motorul cu raport de
comprimare variabil ar putea constitui o alternativă foarte bună, iar realizarea lui este perfect
valabilă, dacă se ține seama de tehnologiile actuale existente.
Page 9
9
Capitolul 1
Stadiul actual
1.1 Soluții constructive actuale de motoare cu raport de comprimare variabil.
Primul motor cu aprindere prin scânteie construit de Nicolaus Otto, funcţiona în anul 1876 cu
un raport de comprimare de 2,5:1. Întrucât raportul de comprimare este un factor care determină
în final randamentul motorului, constructorii de motoare, în soluțiile lor constructive, nu au
încetat să mărească acest raport. Astfel, în primele decenii din secolul trecut, raportul de
comprimare era cuprins între 3-4:1 şi era, în general, determinat de materialele folosite și de
rezistența lor la solicitări mecanice. Încercarea de a mări acest raport a dus la o problemă tehnică
majoră și anume apariţia fenomenului de detonaţie, care reprezintă principala limitare fizică în
calea creşterii raportului de comprimare. Dezvoltarea tehnologică continuă a permis, între anii
1960-1970, creşterea valorii raportului de comprimare până la 8-9:1, iar în momentul de față,
datorită progreselor realizate în cunoaşterea şi controlul detonaţiei, motoarele cu aprindere prin
scânteie funcţionează cu raport de comprimare cuprins între 10, 11:1 şi chiar 13, 14:1.
Teoretic gradul de comprimare este caracterizat de o mărime geometrică , invariabilă în
timpul funcţionării - raportul geometric de comprimare, definit prin raportul dintre valoarea
maximă, respectiv minimă, a volumului care poate fi ocupat de către gaze în cilindrul motorului - εv.
Dar, în realitate în cazul m.a.s.-ului, raportul de comprimare depinde de sarcina motorului, de
turaţie și de legea de distribuţie. Astfel raportul real de comprimare, εp, se defineşte ca fiind
raportul dintre presiunile măsurate la sfârşitul, respectiv începutul procesului de comprimare.
Dacă la deschiderea completă a obturatorului, pentru m.a.s.-uri cu raport de comprimare
εv=7,5:1...10:1, presiunea maximă atinge 40...60 bar, în condiţiile de deplasare urbană ale unui
autoturism, când obturatorul este parţial deschis, presiunea atinge 18...24 bar, iar la regim de
mers în gol aceasta scade şi mai mult, atingând doar 10...13 bar. Astfel, la sarcini parţiale joase,
la motorul clasic, normal comprimat (εv=8,5:1), raportul real de comprimare este situat între
3,5:1 şi 5:1, aceasta constituind cauza eficienţei scăzute în acest interval de funcţionare.
Acest dezavantaj poate fi eliminat prin variaţia raportului geometric de comprimare odată cu
modificarea nivelului de sarcină, astfel raportul creşte pe măsură ce sarcina se reduce. Prin
reducerea sarcinii se diminuează pericolul apariţiei detonaţiei, astfel valoarea minimă pentru
raportul de comprimare este stabilită la sarcina plină, la limita detonaţiei, iar valoarea maximă se
stabileşte pentru mersul în gol.
Posibilitatea variației raportului de comprimare la m.a.s. are o influență directă asupra
performanțelor motorului privitor la consumul specific de combustibil. Randamentul teoretic este
dat de formula:
1
11
(1.1)
Din relația 1.1 se observă că principala variabilă care controlează eficiența motorului cu
aprindere prin scânteie este raportul de comprimare, caracteristica gazelor γ, fiind practic
constantă. Totuși modificarea acestui parametru este limitată de apariția detonației, combustibilul
utilizat impunând limita superioară pentru raportul de comprimare.
Modificarea raportului de comprimare a motoarelor cu ardere internă cu mecanism bielă-
manivelă se poate realiza prin reproiectarea unor elemente ale motorului, principalele metode
fiind ilustrate în figura 1.1.
Page 10
10
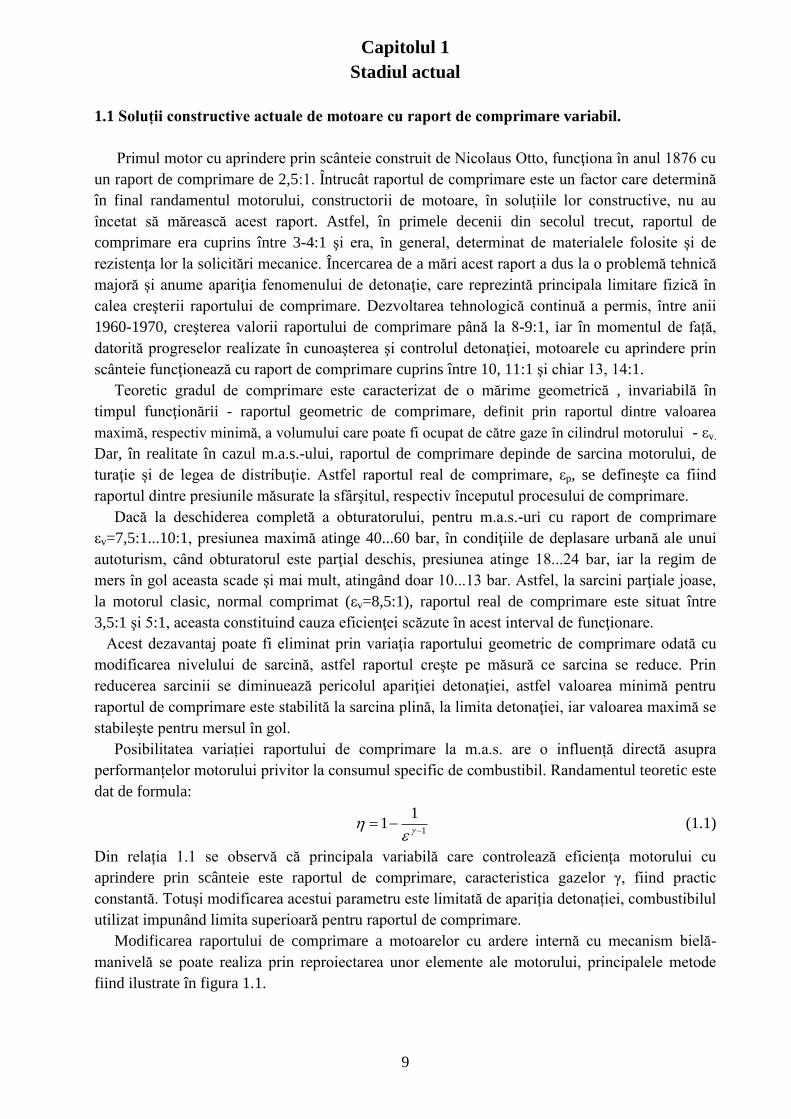
Figura 1.1-Metode de obținere a raportului de comprimare variabil [21]
În figura 1.1 au fost menționate principalele metode de obținere a raportului de comprimare
variabil, astfel:
1 bloc motor articulat;
2 modificarea volumului camerei de ardere prin adăugarea de volum suplimentar;
3 schimbarea geometriei unui piston compus din două părți;
4 bielă prinsă excentric faţă de arborele cotit sau bielă cu lungime variabilă;
5 arbore cotit montat excentric;
6 combinarea mecanismului bielă-manivelă cu angrenaje cu roți dințate;
7-9 articulaţii ale mecanismul bielă-manievelă, cu rol cinematic.
În continuare se vor prezenta exemple pentru soluțiile tehnice de obținere a raportului de
comprimare variabil enumerate mai sus.
1. Bloc motor mobil/articulat
Un motor de aest tip este capabil să își modifice raportul de comprimare prin mișcarea părții
superioare a blocului cilindrilor. Astfel, la motorul Saab (SVC) [10, 11, 14] rapotul de
comprimare este continuu ajustat către valoarea optimă pentru condițiile de funcționare ale
motorului.
Partea superioară a blocului cilindrilor poate oscila pâna la patru grade față de planul
orizontal, realizându-se astfel variația raportului de comprimare în intervalul 8:1-14:1, în funcție
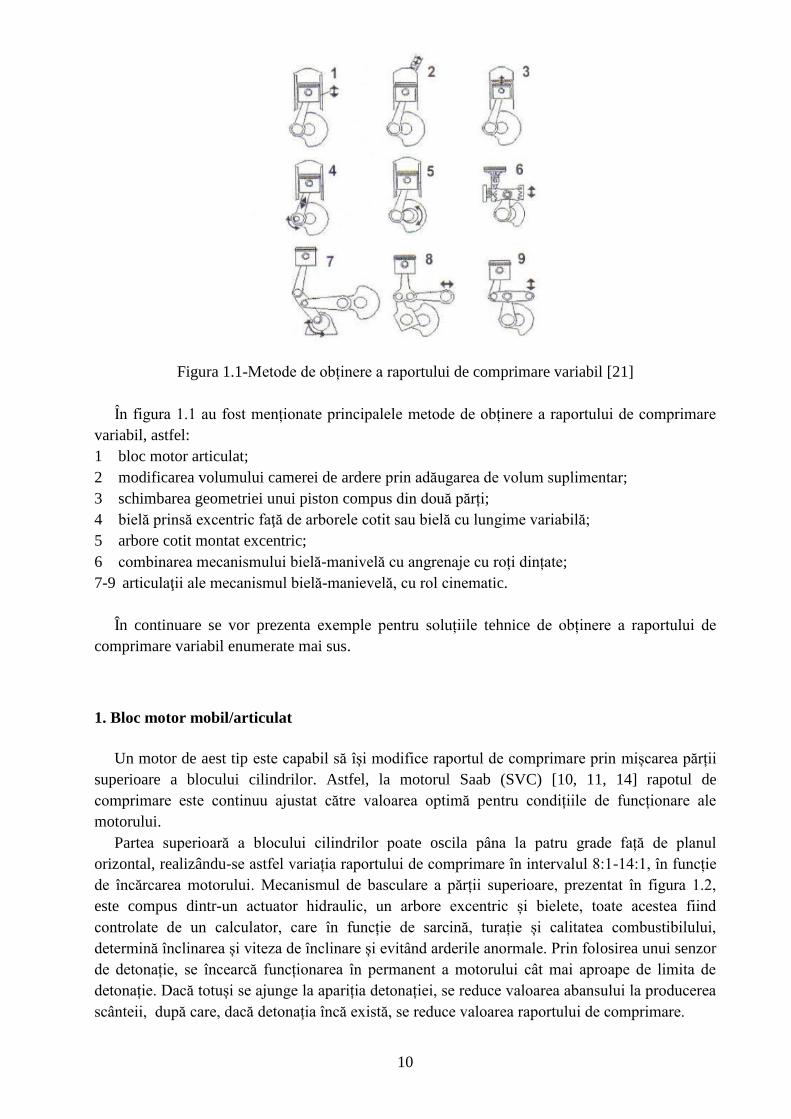
de încărcarea motorului. Mecanismul de basculare a părții superioare, prezentat în figura 1.2,
este compus dintr-un actuator hidraulic, un arbore excentric și bielete, toate acestea fiind
controlate de un calculator, care în funcție de sarcină, turație și calitatea combustibilului,
determină înclinarea și viteza de înclinare și evitând arderile anormale. Prin folosirea unui senzor
de detonație, se încearcă funcționarea în permanent a motorului cât mai aproape de limita de
detonație. Dacă totuși se ajunge la apariția detonației, se reduce valoarea abansului la producerea
scânteii, după care, dacă detonația încă există, se reduce valoarea raportului de comprimare.
Page 11
11
Fig. 1.2 – Mecanismul de basculare compus din actuator hidraulic, arbore
excentric și bielete [25]
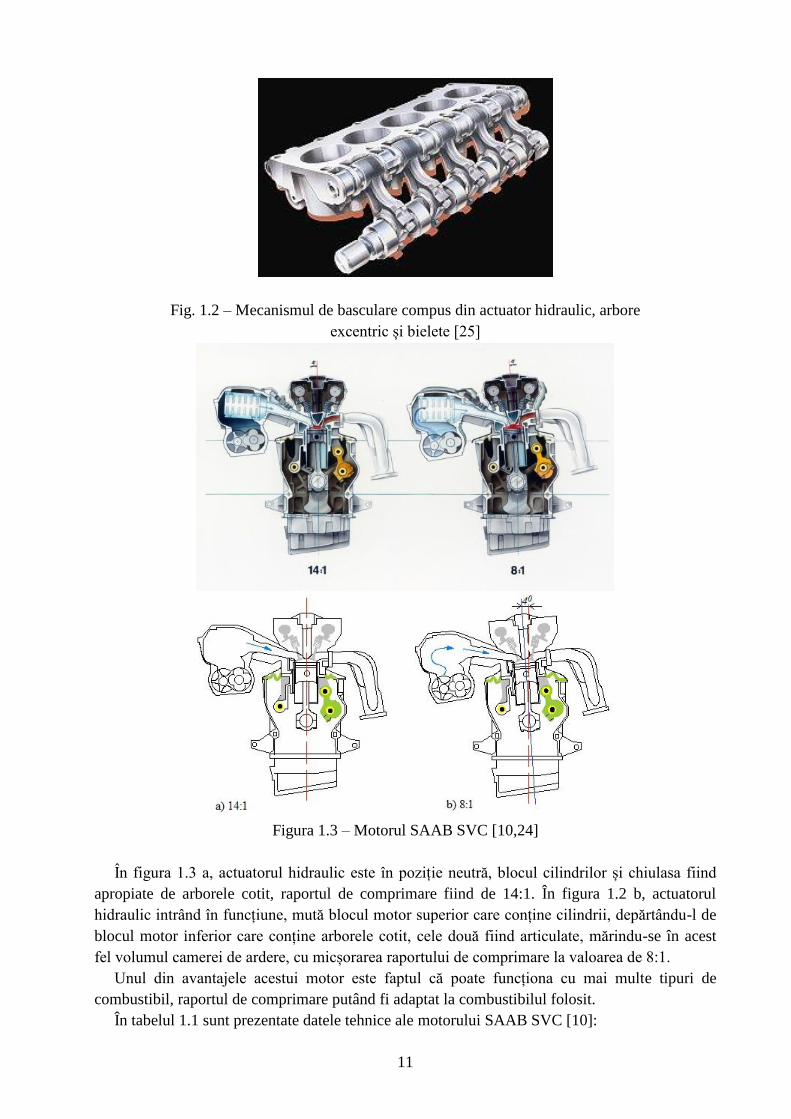
Figura 1.3 – Motorul SAAB SVC [10,24]
În figura 1.3 a, actuatorul hidraulic este în poziție neutră, blocul cilindrilor și chiulasa fiind
apropiate de arborele cotit, raportul de comprimare fiind de 14:1. În figura 1.2 b, actuatorul
hidraulic intrând în funcțiune, mută blocul motor superior care conține cilindrii, depărtându-l de
blocul motor inferior care conține arborele cotit, cele două fiind articulate, mărindu-se în acest
fel volumul camerei de ardere, cu micșorarea raportului de comprimare la valoarea de 8:1.
Unul din avantajele acestui motor este faptul că poate funcționa cu mai multe tipuri de
combustibil, raportul de comprimare putând fi adaptat la combustibilul folosit.
În tabelul 1.1 sunt prezentate datele tehnice ale motorului SAAB SVC [10]:
Page 12
12
Tabelul 1.1
Capacitate cilindrică 1598 cc
Numărul de cilindrii 5
Putere maximă 225 CP (168 Kw)
Cuplul maxim 305 Nm
Alezaj 68mm
Cursa pistonului 88mm
Raport de comprimare De la 8:1 la 14:1, în funcție de sarcină
Unghiul maxim de înclinare 40
Sistem de control Saab Trionic
2. Modificarea volumului camerei de ardere
Sistemul patentat de Ford [17] poate fi folosit atât la motoarele cu aprindere prin scânteie, cât
și la cele cu aprindere prin comprimare și permite variația raportului de comprimare între
anumite valori.
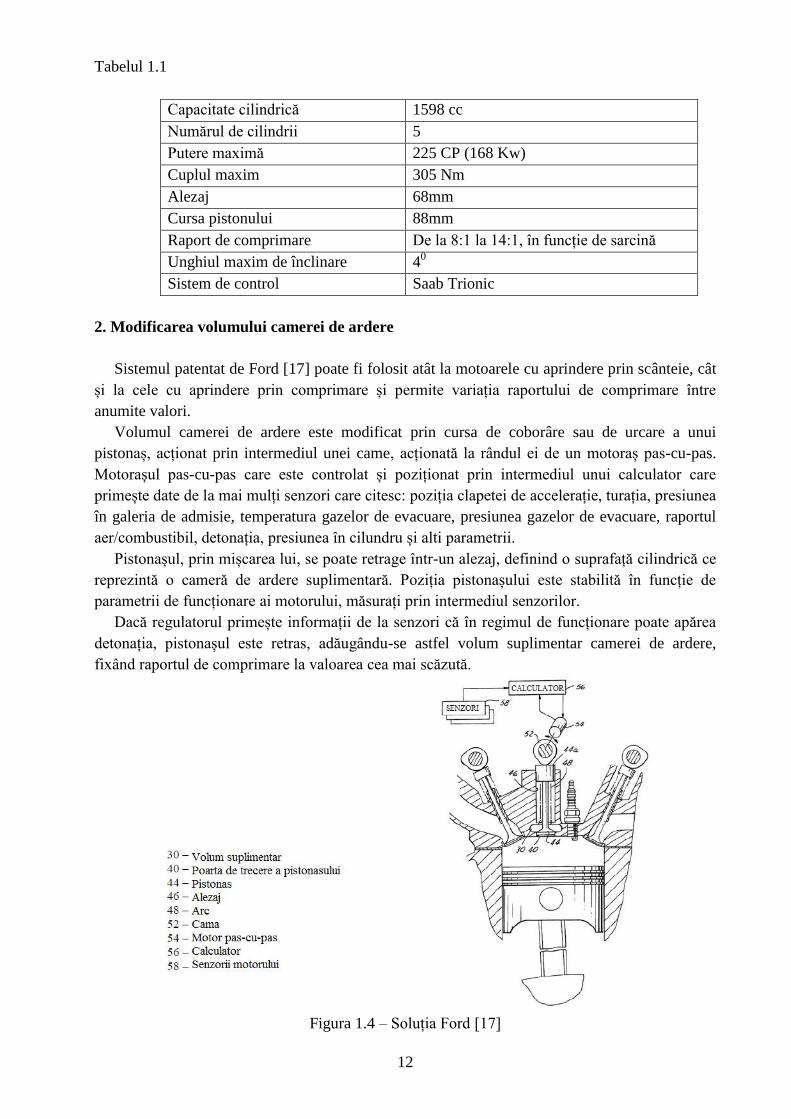
Volumul camerei de ardere este modificat prin cursa de coborâre sau de urcare a unui
pistonaș, acționat prin intermediul unei came, acționată la rândul ei de un motoraș pas-cu-pas.
Motorașul pas-cu-pas care este controlat și poziționat prin intermediul unui calculator care
primește date de la mai mulți senzori care citesc: poziția clapetei de accelerație, turația, presiunea
în galeria de admisie, temperatura gazelor de evacuare, presiunea gazelor de evacuare, raportul
aer/combustibil, detonația, presiunea în cilundru și alti parametrii.
Pistonașul, prin mișcarea lui, se poate retrage într-un alezaj, definind o suprafață cilindrică ce
reprezintă o cameră de ardere suplimentară. Poziția pistonașului este stabilită în funcție de
parametrii de funcționare ai motorului, măsurați prin intermediul senzorilor.
Dacă regulatorul primește informații de la senzori că în regimul de funcționare poate apărea
detonația, pistonașul este retras, adăugându-se astfel volum suplimentar camerei de ardere,
fixând raportul de comprimare la valoarea cea mai scăzută.
Figura 1.4 – Soluția Ford [17]
Page 13
13
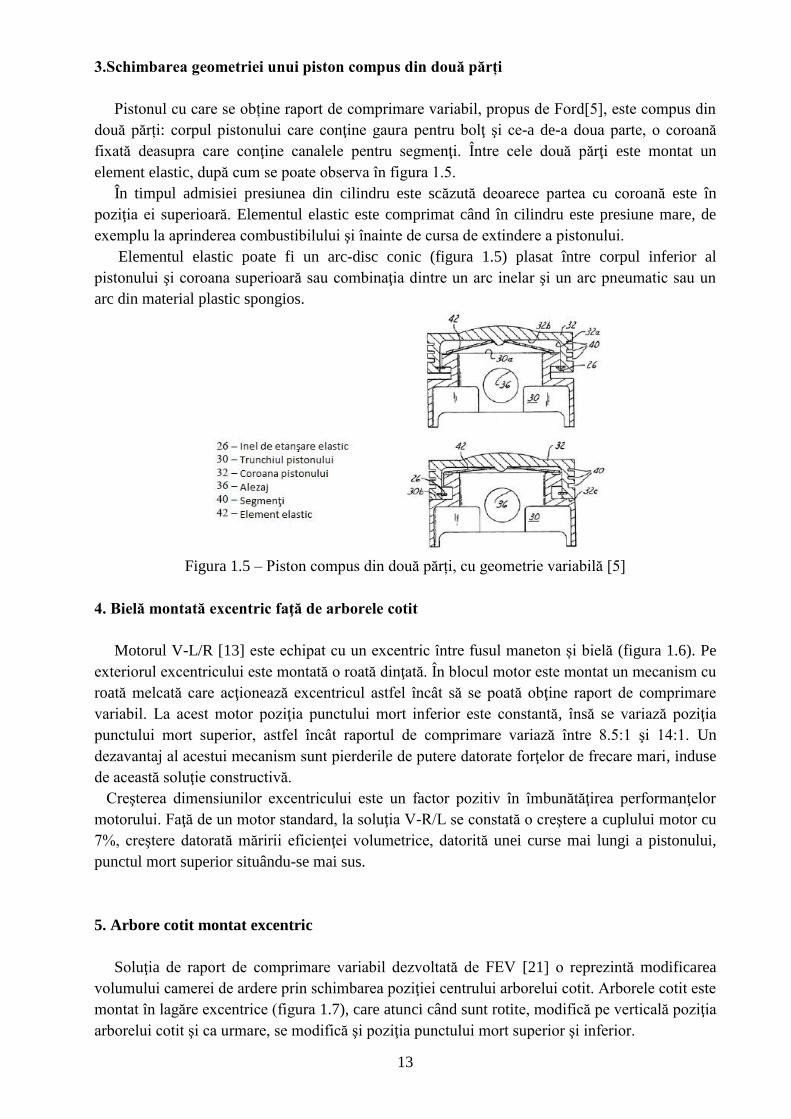
3.Schimbarea geometriei unui piston compus din două părți
Pistonul cu care se obține raport de comprimare variabil, propus de Ford[5], este compus din
două părți: corpul pistonului care conţine gaura pentru bolţ şi ce-a de-a doua parte, o coroană
fixată deasupra care conţine canalele pentru segmenţi. Între cele două părţi este montat un
element elastic, după cum se poate observa în figura 1.5.
În timpul admisiei presiunea din cilindru este scăzută deoarece partea cu coroană este în
poziţia ei superioară. Elementul elastic este comprimat când în cilindru este presiune mare, de
exemplu la aprinderea combustibilului şi înainte de cursa de extindere a pistonului.
Elementul elastic poate fi un arc-disc conic (figura 1.5) plasat între corpul inferior al
pistonului şi coroana superioară sau combinaţia dintre un arc inelar şi un arc pneumatic sau un
arc din material plastic spongios.
Figura 1.5 – Piston compus din două părți, cu geometrie variabilă [5]
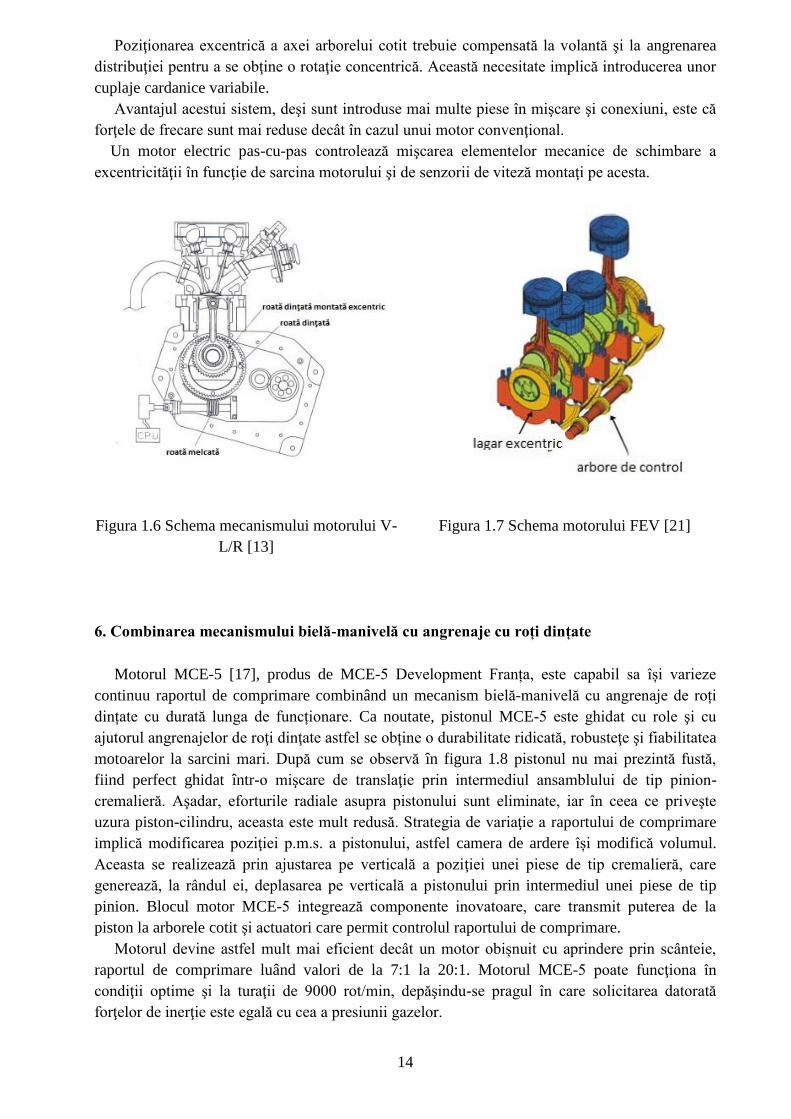
4. Bielă montată excentric faţă de arborele cotit
Motorul V-L/R [13] este echipat cu un excentric între fusul maneton și bielă (figura 1.6). Pe
exteriorul excentricului este montată o roată dinţată. În blocul motor este montat un mecanism cu
roată melcată care acţionează excentricul astfel încât să se poată obţine raport de comprimare
variabil. La acest motor poziţia punctului mort inferior este constantă, însă se variază poziţia
punctului mort superior, astfel încât raportul de comprimare variază între 8.5:1 şi 14:1. Un
dezavantaj al acestui mecanism sunt pierderile de putere datorate forţelor de frecare mari, induse
de această soluţie constructivă.
Creşterea dimensiunilor excentricului este un factor pozitiv în îmbunătăţirea performanţelor
motorului. Faţă de un motor standard, la soluţia V-R/L se constată o creştere a cuplului motor cu
7%, creştere datorată măririi eficienţei volumetrice, datorită unei curse mai lungi a pistonului,
punctul mort superior situându-se mai sus.
5. Arbore cotit montat excentric
Soluţia de raport de comprimare variabil dezvoltată de FEV [21] o reprezintă modificarea
volumului camerei de ardere prin schimbarea poziţiei centrului arborelui cotit. Arborele cotit este
montat în lagăre excentrice (figura 1.7), care atunci când sunt rotite, modifică pe verticală poziţia
arborelui cotit şi ca urmare, se modifică şi poziţia punctului mort superior şi inferior.
Page 14
14
Poziţionarea excentrică a axei arborelui cotit trebuie compensată la volantă şi la angrenarea
distribuţiei pentru a se obţine o rotaţie concentrică. Această necesitate implică introducerea unor
cuplaje cardanice variabile.
Avantajul acestui sistem, deşi sunt introduse mai multe piese în mişcare şi conexiuni, este că
forţele de frecare sunt mai reduse decât în cazul unui motor convenţional.
Un motor electric pas-cu-pas controlează mişcarea elementelor mecanice de schimbare a
excentricităţii în funcţie de sarcina motorului şi de senzorii de viteză montaţi pe acesta.
Figura 1.6 Schema mecanismului motorului V-
L/R [13]
Figura 1.7 Schema motorului FEV [21]
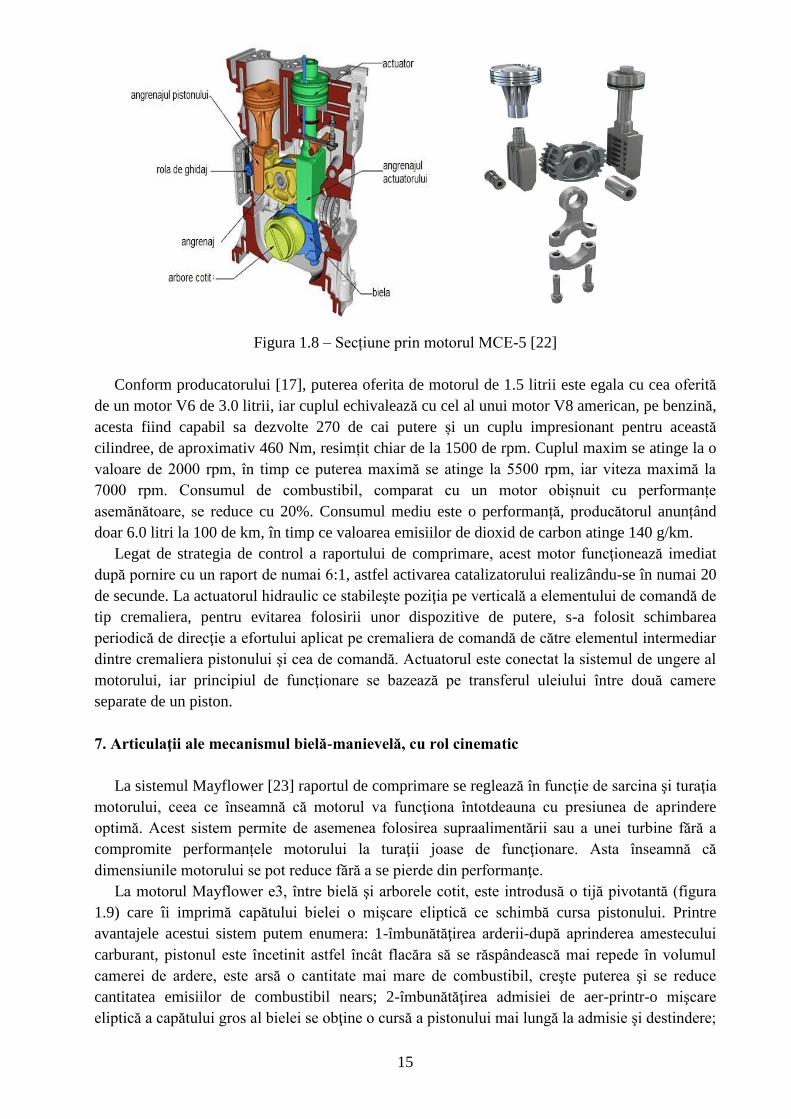
6. Combinarea mecanismului bielă-manivelă cu angrenaje cu roți dințate
Motorul MCE-5 [17], produs de MCE-5 Development Franța, este capabil sa își varieze
continuu raportul de comprimare combinând un mecanism bielă-manivelă cu angrenaje de roți
dințate cu durată lunga de funcționare. Ca noutate, pistonul MCE-5 este ghidat cu role şi cu
ajutorul angrenajelor de roţi dinţate astfel se obține o durabilitate ridicată, robusteţe şi fiabilitatea
motoarelor la sarcini mari. După cum se observă în figura 1.8 pistonul nu mai prezintă fustă,
fiind perfect ghidat într-o mişcare de translaţie prin intermediul ansamblului de tip pinion-
cremalieră. Aşadar, eforturile radiale asupra pistonului sunt eliminate, iar în ceea ce priveşte
uzura piston-cilindru, aceasta este mult redusă. Strategia de variaţie a raportului de comprimare
implică modificarea poziţiei p.m.s. a pistonului, astfel camera de ardere își modifică volumul.
Aceasta se realizează prin ajustarea pe verticală a poziţiei unei piese de tip cremalieră, care
generează, la rândul ei, deplasarea pe verticală a pistonului prin intermediul unei piese de tip
pinion. Blocul motor MCE-5 integrează componente inovatoare, care transmit puterea de la
piston la arborele cotit şi actuatori care permit controlul raportului de comprimare.
Motorul devine astfel mult mai eficient decât un motor obișnuit cu aprindere prin scânteie,
raportul de comprimare luând valori de la 7:1 la 20:1. Motorul MCE-5 poate funcţiona în
condiţii optime şi la turaţii de 9000 rot/min, depăşindu-se pragul în care solicitarea datorată
forţelor de inerţie este egală cu cea a presiunii gazelor.
Page 15
15
Figura 1.8 – Secțiune prin motorul MCE-5 [22]
Conform producatorului [17], puterea oferita de motorul de 1.5 litrii este egala cu cea oferită
de un motor V6 de 3.0 litrii, iar cuplul echivalează cu cel al unui motor V8 american, pe benzină,
acesta fiind capabil sa dezvolte 270 de cai putere și un cuplu impresionant pentru această
cilindree, de aproximativ 460 Nm, resimțit chiar de la 1500 de rpm. Cuplul maxim se atinge la o
valoare de 2000 rpm, în timp ce puterea maximă se atinge la 5500 rpm, iar viteza maximă la
7000 rpm. Consumul de combustibil, comparat cu un motor obișnuit cu performanțe
asemănătoare, se reduce cu 20%. Consumul mediu este o performanță, producătorul anunțând
doar 6.0 litri la 100 de km, în timp ce valoarea emisiilor de dioxid de carbon atinge 140 g/km.
Legat de strategia de control a raportului de comprimare, acest motor funcţionează imediat
după pornire cu un raport de numai 6:1, astfel activarea catalizatorului realizându-se în numai 20
de secunde. La actuatorul hidraulic ce stabileşte poziţia pe verticală a elementului de comandă de
tip cremaliera, pentru evitarea folosirii unor dispozitive de putere, s-a folosit schimbarea
periodică de direcţie a efortului aplicat pe cremaliera de comandă de către elementul intermediar
dintre cremaliera pistonului şi cea de comandă. Actuatorul este conectat la sistemul de ungere al
motorului, iar principiul de funcţionare se bazează pe transferul uleiului între două camere
separate de un piston.
7. Articulaţii ale mecanismul bielă-manievelă, cu rol cinematic
La sistemul Mayflower [23] raportul de comprimare se reglează în funcţie de sarcina şi turaţia
motorului, ceea ce înseamnă că motorul va funcţiona întotdeauna cu presiunea de aprindere
optimă. Acest sistem permite de asemenea folosirea supraalimentării sau a unei turbine fără a
compromite performanțele motorului la turaţii joase de funcţionare. Asta înseamnă că
dimensiunile motorului se pot reduce fără a se pierde din performanţe.
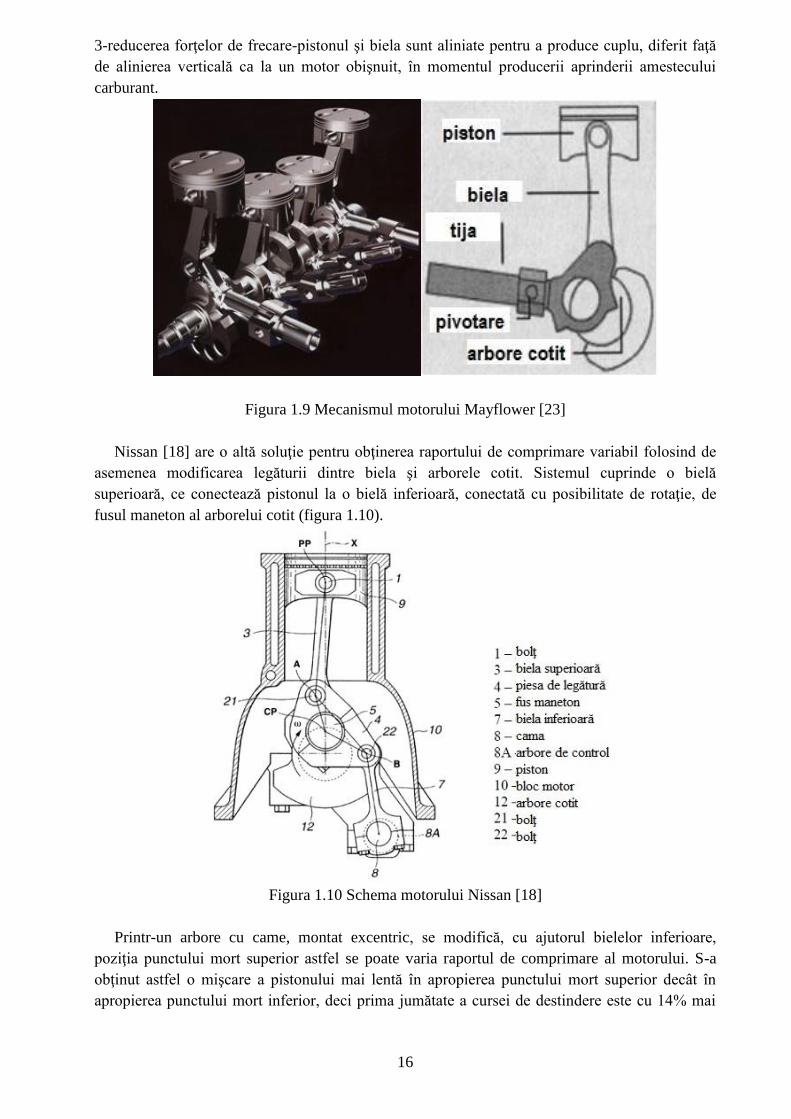
La motorul Mayflower e3, între bielă şi arborele cotit, este introdusă o tijă pivotantă (figura
1.9) care îi imprimă capătului bielei o mişcare eliptică ce schimbă cursa pistonului. Printre
avantajele acestui sistem putem enumera: 1-îmbunătăţirea arderii-după aprinderea amestecului
carburant, pistonul este încetinit astfel încât flacăra să se răspândească mai repede în volumul
camerei de ardere, este arsă o cantitate mai mare de combustibil, creşte puterea şi se reduce
cantitatea emisiilor de combustibil nears; 2-îmbunătăţirea admisiei de aer-printr-o mişcare
eliptică a capătului gros al bielei se obţine o cursă a pistonului mai lungă la admisie şi destindere;
Page 16
16
3-reducerea forţelor de frecare-pistonul şi biela sunt aliniate pentru a produce cuplu, diferit faţă
de alinierea verticală ca la un motor obişnuit, în momentul producerii aprinderii amestecului
carburant.
Figura 1.9 Mecanismul motorului Mayflower [23]
Nissan [18] are o altă soluţie pentru obţinerea raportului de comprimare variabil folosind de
asemenea modificarea legăturii dintre biela şi arborele cotit. Sistemul cuprinde o bielă
superioară, ce conectează pistonul la o bielă inferioară, conectată cu posibilitate de rotaţie, de
fusul maneton al arborelui cotit (figura 1.10).
Figura 1.10 Schema motorului Nissan [18]
Printr-un arbore cu came, montat excentric, se modifică, cu ajutorul bielelor inferioare,
poziţia punctului mort superior astfel se poate varia raportul de comprimare al motorului. S-a
obţinut astfel o mişcare a pistonului mai lentă în apropierea punctului mort superior decât în
apropierea punctului mort inferior, deci prima jumătate a cursei de destindere este cu 14% mai
Page 17
17
lungă raportat la unghiului de rotaţie a arborelui cotit. Se obţine o îmbunătăţire a stabilităţii
arderii, o reducere a consumului de combustibil cu 13% la un raport de comprimare de 14,3:1.
1.2 Avantajele utilizării unui motor cu raport de comprimare variabil
1.2.1 Influența raportului de comprimare asupra randamentului termic.
La un motor cu ardere internă, amestecul aer-combustibil din interiorul cilindrului este supus
în timpul proceselor de comprimare și ardere, unor transformări din care rezultă variații mari ale
presiunii, volumului și temperaturii. Analiza termodinamică a procesului arată că maximul
randamentului termic se obține când amestecul are loc în cel mai mic volum posibil și la cea mai
mare temperatură posibilă:
1
11
k
v
Otto
(1.2)
unde:
ηOtto[%] – randamentul ciclului teoretic Otto (m.a.s.);
εv - raportul geometric de comprimare;
k - coeficientul adiabatic;
Aceasta înseamnă că amestecul trebuie sa fie comprimat înainte de aprindere, de gradul de
comprimare fiind legată valoarea randamentului termic, după cum indică relația (1.2), rezultând
ca randamentul crește continuu cu creșterea εv.
Într-un motor real, însă, datorită imperfecțiunii fluidului de lucru și a transferului de căldură
inevitabil, există o creștere a randamentului termic până la valori ale lui εv de 13-14. [1, 3, 4].
Mai mult decât atât, în cazul unui motor real, comprimarea este limitată de apariția detonației.
În plus, temperaturile înalte duc la apariția emisiilor de NOx (amestec de oxizi de azot NO, NO2,
...) în gazele de evacuare, ducând astfel la depașirea limitelor impuse prin regulamentele
internaționale privind emisiile poluante. Ținând cont de aceste constrângeri, volumul, dar și
forma camerei de ardere sunt alese cu grijă pentru a furniza condiții optime de ardere [15].
Creșterea raportului de comprimare de la 8,5 la 12 unități se reflectă prin creșterea
performanțelor astfel [7]:
- pentru λ=0.9, puterea înregistrează o creștere de 19%, iar consumul specific efectiv o
reducere de 15%;
- pentru λ=1,3, se inregistrează o creștere a puterii cu 17%, iar a economicitații cu 15,4 %.
Se poate spune astfel, că pentru fiecare unitate de creștere a raportului geometric de
comprimare, economicitatea se îmbunătățește cu aproximativ 4%, iar puterea motorului cu
aproximativ 5%, aproape independent de dozaj.
Principalul avantaj al motoarelor cu amestecuri sărace este consumul redus de combustibil,
ceea ce determină și o reducere a emisiilor poluante. În privința performanțelor de putere scăzute
ale acestui motor (se obține la εv =12 puterea care se obține la un motor ce funcționează cu
amestec bogat la εv=8,5), o soluție logică o constituie combinarea celor două moduri de
funcționare: a) la sarcini parțiale, în trafic urban, necesarul de putere maximă este redus, deci se
Page 18
18
pot arde amestecuri sărace, cu consecințe favorabile asupra consumului; b) la sarcini mari se
trece la funcționarea cu amestecuri bogate, necesare obținerii puterii maxime.
Printre primii care au demonstrat valabilitatea acestei ideei, este May [15, 16], în anul 1978,
cu camera de ardere Fireball, unde prin combinarea mișcărilor organizate, cu amestecuri sărace
și cu supracomprimarea, a obținut ofuncționare normală cu un εv=14,3 și un λ=1,36.
Organizarea mișcării încărcăturii proaspete este benefică pentru controlul propagării flăcării, deci
pentru o ardere completă și rapidă a amestecurilor mai sărace. În plus, prin supracomprimare se
potențează avantajele organizării mișcării încărcăturii proaspete.
Organizarea încărcăturii proaspete în cazul camerei de ardere May-Fireball se face prin
utilizarea unui canal de ghidare, ce face legătura între supapa de admisie și partea principală a
camerei de ardere unde va fi concentrată încărcătura proaspătă la sfârșitul cursei de comprimare,
sub supapa de evacuare. Prin aceasta se reduce cantitatea de amestec în zona de sub supapa de
evacuare unde înclinația la detonație este mai mare. În acest caz, cantitatea inevitabilă de
amestec din zona finală este localizată sub supapa de admisie, mai rece, ceea ce determină
reducerea tendinței de autoaprindere necontrolată. În plus, prin aranjamentul excentric sau
tangențial al canalului de ghidare, se induce o mișcare turbionară a încărcăturii proaspete, ceea
ce determină o stratificare a amestecului în camera de ardere propriu-zisă, amestec mai bogat
spre circumferință, unde este plasată bujia și mai sărac spre centrul camerei de ardere.
Viteza de ardere mărită, raportul mare de comprimare și sărăcirea amestecului au determinat
creșterea randamentului termic (ηt=35,8% [15, 16]) și apropierea de valorile obținute de
motoarele cu aprindere prin comprimare (35...36%).
1.2.2 Influența raportului geometric de comprimare asupra schimbului de gaze
În momentul închiderii supapei de evacuare, în cilindru mai ramâne o cantitate de gaze de
ardere, numite convențional gaze arse reziduale, care participă la efectuarea ciclului următor. Se
numește coeficientul gazelor reziduale γr, raportul:
110
0
vvg
g
fp
gar
rT
T
p
p
(1.3)
unde:
υgar[kmol] – cantitatea de gaze arse reziduale de la finele evacuării;
υfp[kmol] – cantitatea totală de fluid proaspăt reținută în cilindru;
p0[MPa], T0[K] – presiunea și temperatura mediului ambiant;
pg[MPa], Tg[K] – presiunea și temperatura gazelor de evacuare p.m.s.;
εv – raportul geometric de comprimare;
ηv – randamentul umplerii;
Gazele arse reziduale nu micșorează numai volumul disponibil pentru fluidul proaspăt, ci au
și o consecință de natură cinetică, deoarece fiind substanțe inerte chimic, micșorează viteza de
ardere a combustibilului. Acțiunea de inhibitor intervine la m.a.s. mai ales la regimurile de
sarcini parțiale, unde, prin obturare, gradul de umplere scade la 0,3...0,4, iar γr crește până la
0,3...0,35. Astfel arderea se dezvoltă lent, funcționarea devine instabilă, iar randamentul indicat
scade.
Ținând cont de cele menționate, pentru optimizarea proceselor ce au loc în motor, se poate
impune drept criteriu de optimizare, minimizarea coeficientului gazelor reziduale. Acesta are un
Page 19
19
efect imediat asupra gradului de perfecțiune a procesului de evacuare, care variază invers
proporțional cu γr:
r
ev
1
1 (1.4)
Valoarea raportului geometric de comprimare poate fi modificată fie prin intermediul
volumului camerei de ardere, Vk, fie prin cel al volumului total al cilindrului, Vtot, deci al
cilindreei unitare (Vs=Vtot-Vk). În ambele cazuri se modifică corespunzător cantitatea gazelor
reziduale păstrate în cilindru, astfel relația 1.3 indică faptul că γr este invers proporțional cu εv.
Dar cu cât εv este mai mare, cu atât mai mult se destind în cilindru gazele de ardere, iar
temperatura gazelor de evacuare scade. Totuși la mărirea εv, produsul Tg(εv-1) crește, iar γr
scade. Așadar la creșterea raportului geometric de comprimare, scade cantitatea de gaze arse
reziduale, ceea ce determină și scăderea temperaturii fluidului proaspăt la finele admisiei,
umplerea fiind influențată pozitiv.
Din relația:
rpuv
v
a
av
T
T
p
p
1
1
1
0
0
(1.5)
se poate evidenția influența raportului geometric de comprimare asupra randamentului umplerii,
ηv. În regim de sarcină plină, la creșterea lui εv de la 9 la 23 de unități, raportul εv/( εv-1) scade de
la 1,13 la 1,05, dar γr scade de la 0,09 la 0,03, astfel că gradul de umplere este influențat.
La sarcini parțiale un raport geometric de comprimare mărit determină și restabilirea vitezei
optime de ardere și prin faptul că masa de gaze arse reziduale se micșorează.
Tendinței de îmbunătățire a umplerii prin creșterea raportului geometric de comprimare i se
opune creșterea pierderilor termice, ca urmare a uni regim termic mai ridicat al motorului, regim
care depinde însă de particularitățile constructive ale motorului. Astfel, la unele tipuri
constructive de motoare, creșterea raportului geometric de comprimare determină o înrăutățire a
umplerii, deoarece tendința introdusă de creșterea regimului termic o depășește pe aceea a
reducerii cantității relative de gaze arse reziduale.
Prin urmare, în funcție de influența factorilor interdependenți, cu creșterea εv, coeficientul de
umplere poate să scadă, dar să și crească. Cercetările experimentale au arătat că influența directă
a raportului geometric de comprimare asupra randamentului umplerii este mică. Însă, prin faptul
ca εv mărit determină o cantitate de gaze arse reziduale mică, care pe lângă îmbunătățirea
umplerii duce și la îmbunătățirea procesului de ardere, se consideră că un raport geometric de
comprimare mărit este de dorit, în special la sarcini parțiale.
1.2.3 Influența lui εv asupra proceselor de ardere și destindere
Influența raportului de comprimare asupra comprimării se exprimă prin faptul că odată cu
creșterea sa, crește atat presiunea pc, cât și temperatura, Tc, la finele cursei de comprimare, lucru
favorabil pentru majorarea forței dezvoltate de gazele arse în procesul de destindere. Reies astfel
relațiile:
cn
vac pp și 1
cn
vac TT (1.6)
Cum în cazul ciclului Otto, raportul geometric de comprimare este identic cu cel de
destindere [12], rămâne ca mărirea raportului geometric de comprimare să fie percepută ca o
măsură de creștere a raportului de destindere, după cum este demonstrat de următoarele relații:
Page 20
20
dd
d
dd
n
v
y
n
v
y
n
d
y
yd
n
dd
n
yy
pp
V
VppVpVp
(1.7)
11
dd n
v
y
n
v
y
d
TTT
(1.8)
unde py, Vy și pd, Vd reprezintă presiunea, respectiv volumul în punctele de pe ciclul teoretic Otto
corespunzătoare maximului de presiune, respectiv sfârșitului destinderii, iar nd și δv reprezintă
exponentul politropic de destindere, respectiv raportul geometric de destindere.
După cum se observă din relațiile (1.7, 1.8), destinderea este cu atât mai completă cu cât raportul
geometric de comprimare este mai mare [9].
În privința influenței raportului geometric de comprimare asupra exponentului politropic, se
remarcă influența oarecum nefastă asupra mc. Astfel prin mărirea εv cresc temperaturile
amestecului inițial, mai ales către sfârșitul procesului de comprimare, ceea ce duce la creșterea
temperaturii cedate Qc și la micșorarea mc (doza de combustibil). Pe de altă parte creșterea
raportului geometric de comprimare determină și creșterea regimului termic al motorului, deci
creșterea temperaturii pereților, ducând la creșterea căldurii primite de catre fluid de la pereți, Qp
și deci creșterea lui mc.
Așadar, ținând cont de acestea, se consideră că exponentul politropic este invariabil cu
raportul geometric de comprimare.
În concluzie, creșterea randamentului termic și a lucrului mecanic specific cu creșterea
gradului de comprimare explică tendința de mărire a raportului geometric de comprimare la
motoarele cu aprindere prin scânteie.
1.2.4 Influența raportului geometric de comprimare asupra procesului de ardere
Îmbunătațirea calităților generale ale motorului, a indicilor săi caracteristici, a puterii și a
randamentului se poate obține dacă durata arderii este redusă la minimum. Acest deziderat se
realizează acționând în două direcții [3]: reducerea duratei propagării prin mărirea vitezei de
propagare a frontului de flacără sau prin reducerea parcursului pe care-l străbate, ceea ce
determină intrarea în reacție într-un timp scurt a unei importante cantităși de combustibil;
reducerea adâncimii zonei de ardere sau a grosimii flăcării turbulente, ceea ce are drept efect
degajarea unei cantități mai mari de căldură în faza principală a arderii și reducerea duratei fazei
de ardere întârziată. Rezultă, astfel, că pentru reducerea duratei de ardere treuie făcute anumite
modificări ale unor parametrii constructivi ca: raportul geometric de comprimare, camera de
ardere etc.
Trebuie menționat că odată cu marirea raportului geometric de comprimare, din cauza creșterii
temperaturii maxime a ciclului, cresc pierderile de căldură prin pereți și se amplifică reacțiile de
dislocare . Aceste fenomene duc la diminuarea eficienței proceselor termodinamice cu creșterea
raportului de comprimare. De aici apare necesitatea ca la mărirea εv să se acorde o atenție
deosebită îmbunătățirii formei camerei de ardere în formă optimizată.
Mărirea raportului geometric de comprimare influențează valorile presiunii și temperaturii
amestecului inițial în momentul declanșării scânteii electrice.
Prin creștrea εv [12] se intensifică transformările chimice din zona de ardere, ceea ce
determină micșorarea arderii rapide, reducerea în intensitate a arderii moderate. Astfel întreaga
durată a arderii se micșorează, ceea ce constituie principala cauză a sporirii puterii și
economicității cu creșterea raportului geometric de comprimare.
Page 21
21
Experimentele efectuate arată că raportul geometric de comprimare are o influență însemnată
asupra fenomenelor de ardere anormală. La creșterea acestuia, crește si regimul de presiuni și
temperaturi, ceea ce determină întârzieri la autoaprindere, fiind astfel favorizată detonația.
Începutul apariției pe ciclu a flăcărilor reci în amestecul din zona finală, avansează pe măsura
creșterii εv, ceea ce explică intensificarea detonației.
Prevenirea detonației prin reducerea avansului la producerea scânteii electrice afectează
câștigul de putere și economicitatea motorului, obținute prin creșterea εv. Pentru contracararea
acestor fenomene negative, se recomandă utilizarea unor combustibili mai rezistenți la detonație.
Rezistența la detonație este proporțională cu cifra octanică, calea cea mai eficientă de prevenire a
detonației fiind utilizarea unor benzine cu cifra octanică mărită.
Creșterea εv, prin mărirea șipresiunii și temperaturii amestecului intensifică transferul de
căldură de la fluid la perete, astfel că principala barieră în calea majorării raportului geometric de
comprimare la valori peste 11, 12 unități, o constituie arderea cu aprinderi secundare.
În concluzie, arderile anormale limitează creșterea economicității prin marirea raportului de
comprimare, însă modificarea raportului geometric de comprimare cu sarcina, permite obținerea
unei economicități ridicate la toate regimurile fără riscul apariției arderilor anormale [19].
Un alt aspect care contribuie la creșterea economicității la utilizarea rapoartelor mari de
comprimare este sărăcirea amestecului. De exemplu, motoarele de tracțiune funcționează în
exploatarea curentă la sarcini parțiale, unde economicitatea este redusă. La aceste regimuri
pericolul de detonație fiind redus, pentru reducerea consumului de combustibil, se poate adopta
un raport geometric de comprimare mai mare decât cel corespunzător sarcinii totale, prin
supracomprimare, iar la sarcini mari detonația este evitată prin modificarea avansului la
producerea scânteii electrice sau prin aplicarea unei răciri diferențiate.
Raportul geometric de comprimare are influență și asupra fenomenului de dispersie ciclică
care constă în ireproductibilitatea fazelor de ardere din ciclurile succesive ale uni motor cu
ardere internă. Dacă fenomenul de dispersie ciclică ar fi eleiminat și toate ciclurile ar atinge
aceeași presiune maximă, atunci s-ar putea obține un spor de putere și de economicitate de
aproximativ 25% [12].
Astfel prin mărirea raportului geometric de comprimare de la 7:1 la 10:1 se reduce gradul de
dispersie ciclică, δ deoarece prin sporirea regimului de presiuni și temperaturi se accelerează
reacția chimică, suplinind în mare parte efectul pulsațiilor turbulente [3].
Raportul geometric de comprimare influențează și nivelul emisiilor poluante: hidrocarburi
neoxidate - HC, oxizi de azot - NOx, monoxid de carbon – CO și dioxid de carbon CO2. Prezența
hidrocarburilor în gazele de evacuare arată că benzina nu reușește să ardă complet în cilindrul
motorului [2].
Conținutul relativ de hidrocarburi este proporțional cu rapotul dintre aria suprafeței
corespunzătoare volumului camerei de ardere. Există trei metode de reducerea a acestui raport și
anume: mărirea alezajului, mărirea raportului cursă/alezaj sau micșorarea raportului geometric de
comprimare. Orice acțiune în acest sens impune abandonarea a ceea ce s-a obținut: εv mare,
alezaj și raport cursă/alezaj mici. Aceste tendințe satisfac dezideratul general de realizare a unor
motoare economice, adică cu raport de comprimare mare, durabile, adică raport cursă/alezaj mic
sau cu dimensiuni mici, adică un alezaj mai mic.
Cei trei parametrii, εv, alezajul și rapotul cursă/alezaj, influențează durata arderii prin
intermediul drumului parcurs de frontul de flacără, când se consideră bujia amplasată la o
extremitate a camerei de ardere, și a vitezei de propagare, când prin modificarea alezajului se
modifică și dimensiunile supapei de admisie, influențându-se astfel viteza de curgere a
Page 22
22
încărcăturii proaspete și turbulența. Prin mărirea alezajului, crește pericolul apariției detonației,
din acest considerent este necesară corelarea acestuia cu raportul geometric de comprimare.
În concluzie, cu toate dezavantajele pe care le implică mărirea εv - forțe de presiune mai mari
deci, randament mecanic mai mic, folosirea unor benzine cu cifra octanică mai mare pentru
evitarea detonației sau mărirea concentrației de NOx din gazele de evacuare – mărirea este încă
interesantă, mai ales dacă se combină și cu sărăcirea amestecului și este din ce în ce mai utilizată
ca o metodă sigură de creștere a performanțelor motoarelor actuale folosite la propulsia
autovehiculelor rutiere și nu numai.
1.3 Descrierea motorului MDR-2
Un domeniu de perfecționare a construcției și de creștere a performanțelor motoarelor cu
ardere internă cu piston îl constituie îmbunătățirea, în ansamblu, a mecanismului de distribuție a
gazelor, ce influențează în mod direct schimbul de gaze și umplerea cu încărcătură proaspătă,
forma camerei de ardere, mișcarea gazelor în cilindru. Chiar dacă pe majoritatea motoarelor
actuale se utilizează mecanismul de distribuție cu supape, acesta nu satisface pe deplin
necesitățile de creștere a puterilor specifice și turațiilor de funcționare și asigurarea unei
anduranțe corespunzătoare. Astfel s-au căutat și încercat noi soluții de îmbunătățire constructiv-
funcțională a motorului cu ardere internă, prin înlocuirea mecanismului de distribuție și
perfecționarea procesului de umplere.
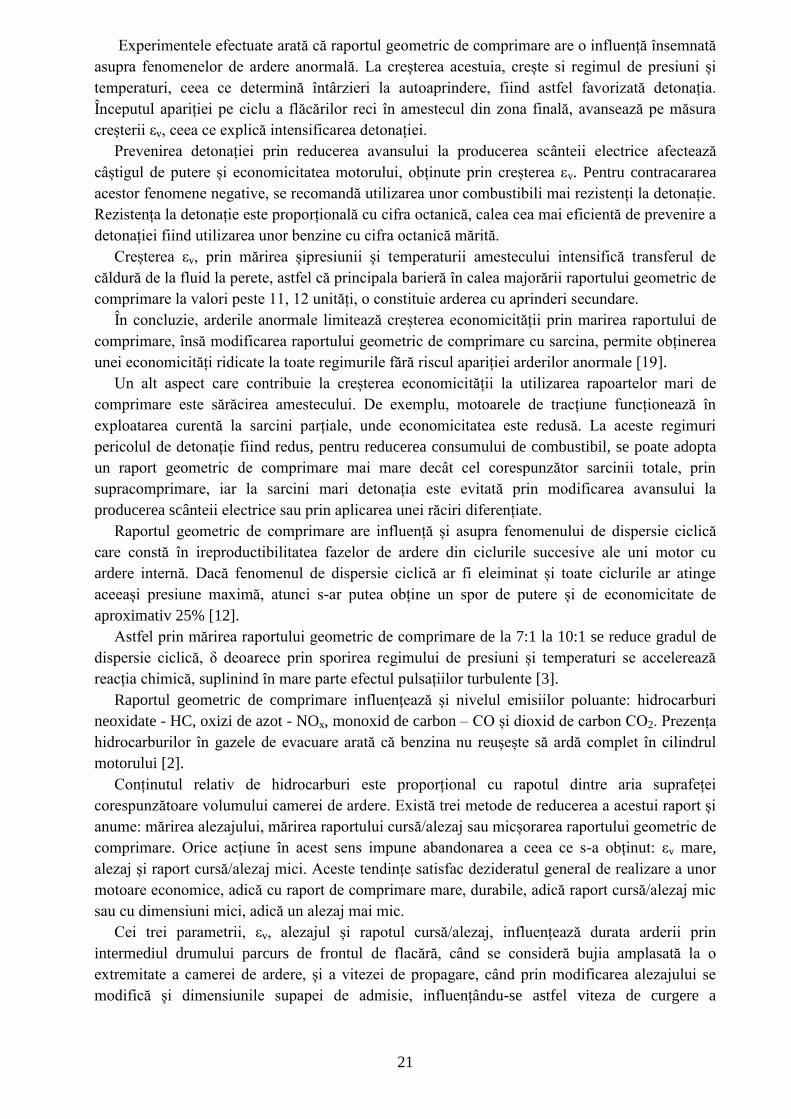
Figura 1.11 – Mecanismul motorului MDR-2
Soluția aleasă pentru realizarea părții experimentale este un motor de cercetare, monocilindric
cu distribuție prin ferestre și cămașă rotativă. Astfel, de la motorul cu supape s-au păstrat unele
piese precum: carterul inferior care ține locul băii de ulei, arborele cotit cu lagărele sale și volant,
biela cu bolțul de piston și segmenții. Pentru realizarea amestecului carburant, se utilizează un
carburator, iar pentru pornire, un demaror. Cămașa de distribuție este plasată în cilindrul
motorului, iar pistonul se deplasează în interiorul acestuia. Umplerea cilindrului cu încărcătură
proaspătă și evacuarea gazelor arse se relizează prin intermediul a două ferestre practicate la
partea superioară a cămășii de distribuție și prin patru canale, două pentru admisie și două pentru
evacuare, plasate la partea superioară a cilindrului.
La proiectarea elementelor motorului s-a ținut cont de cerințele impuse în general motoarelor
actuale și de condițiile specifice introduse de distribuția cu ferestre, condiții rezultate, de cele
Page 23
23
mai multe ori, din procesul de proiectare. Considerentele care au decis alegerea soluției de motor
cu distribuție prin ferestre și cămașă rotativă se prezintă în continuare.
Acționarea cămășii de distribuție se realizează prin dantura acesteia cu ajutorul unor roți
dințate conice și cilindrice, executate corp comun cu arbori, după cum se poate observa în figura
1.11. Cu ajutorul roților conice se reduce zgomotul din angrenaj și totodată se poate realiza un
reglaj fin al distribuției. Prin roțile dințate conice se reduce 1:2 turația de la arborele cotit, iar cu
cele cilindrice și cămașa se reduce turația cu încă 1:2, în final cămașa de distribuție se învârte cu
1:4 din turația arborelui cotit. Totodată cu ajutorul roților dințate sunt angrenate pompa de
benzină și distribuitorul de ulei care asigură ungerea angrenajelor motorului. Pompa de ulei,
amplasată în carter, este acționată de arborele cotit, tot printr-o roată dințată amplasată pe acesta.
Carterul motorului este realizat ca o construcție rigidă, nervurată, pe care este montat
cilindrul, conține de asemenea inelul inferior de sprijin al cămășii de distribuție precum și găurile
de fixare și ghidare a mai multor elemente ale motorului. Carterul este prevăzut cu bosaje în care
sunt practicate găurile pentru ungerea lagărelor și a altor elemente. Tot de carter este fixat și
demarorul necesar la pornirea motorului.
Cilindrul are prevăzute la partea superioară canalele de admisie și evacuare, iar pe fețele
laterale sunt prevăzute bosaje-flanșe pentru fixarea galeriilor de admisie și evacuare. Totodată
cilindru prezintă canalele necesare pentru asigurarea circuitului de răcire și a celui de ungere.
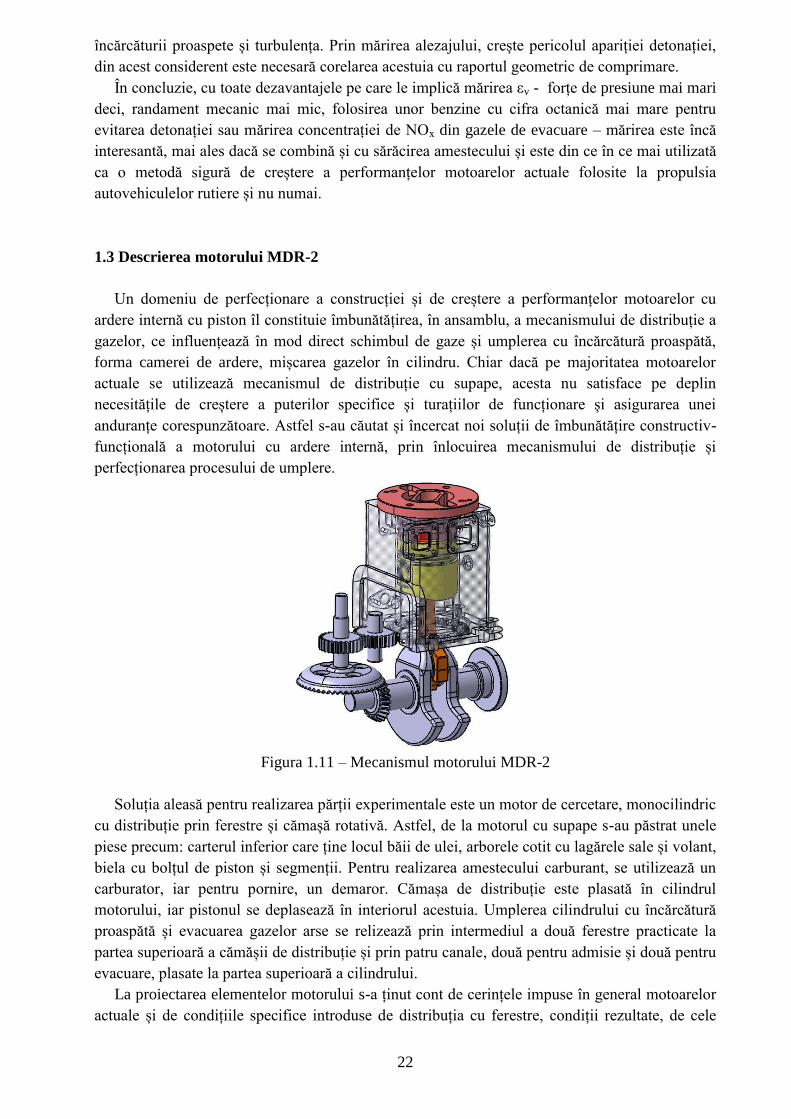
Motorul fiind un monocilindru, canalele de admisie au fost orientate astfel încat alimentarea
sa se facă de la un singur carburator, printr-un distribuitor cu două ramificații, după cum se poate
observa în figura 1.12.
În plan orizontal, canalele de admisie au porțile de intrare în cilindru amplasate tangențial una
față de cealaltă, pentru a se evita pe cât posibil deranjarea reciprocă a curenților de încărcătură
proaspătă. În plan vertical, canalele sunt orientate în jos pentru reducerea rezistențelor
gazodinamice în procesul de umplere. Canalele au secțiunea transversală dreptunghiulară,
rotunjită la colțuri pentru o trecere continuă de la exterior spre interior.
Canalele de evacure au de asemenea secțiunea dreptunghiulară, sunt foarte scurte și dirijate
pentru colectarea gazelor într-un colector comun.
Cilindrul are practicate în partea superioară găurile de fixare ale capului de cilindru
(chiulasei) și ale ghidajelor acestuia. La partea inferioara prezintă găurile de fixare pe carter,
două dintre acestea fiind prevăzute cu bucșe de ghidare pentru centrarea corespunzătoare impusă
de antrenarea cămășii de distribuție.
Figura 1.12 – Galeria de admisie prevăzută cu carburator
Page 24
24
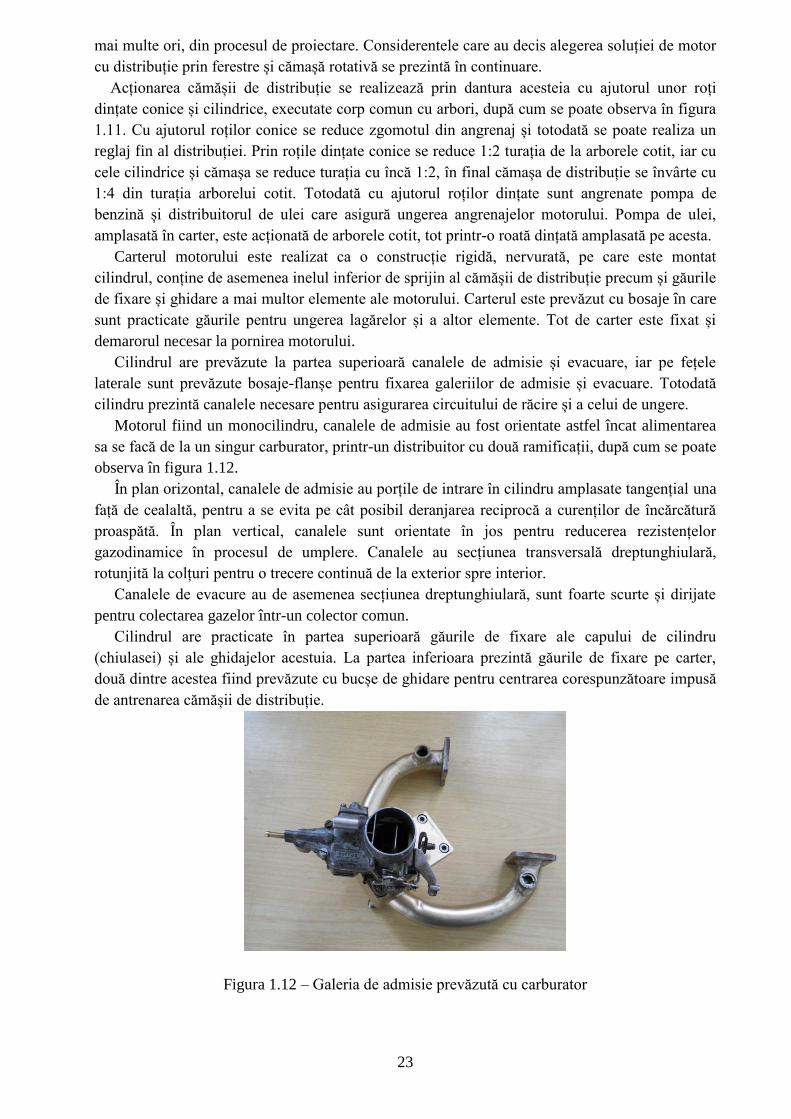
Distribuția prin cămasă rotativă în cilindru oferă posibilitatea realizării unei camere de ardere
compacte, cu bujia cât mai aproape de centru. Ținând cont de această posibilitate, s-au construit
mai multe tipuri de cilindru și de capete de cilindru, pentru a se obține diferite arhitecturi de camere
de ardere, deci raporturi de comprimare diferite. S-au efectuat montaje pentru a se obține diferite
raporturi de comprimare în funcționare motorului cu distribuție prin fereste și cămașă rotativă
MDR-2. Pentru aceasta s-au folosit două tipuri de pistoane, unul cu capul plat și celălalt cu cameră
de ardere de tip Heron. Pentru încercări a fost folosită o chiulasă cu patru degajări, două pentru
dirijarea încărcăturii proaspete din canalele de admisie spre interiorul cilindrului și două pentru
dirijarea gazelor arse spre canalele de evacuare. Acest tip a fost testat cu piston cu cap profilat,
obținându-se o cameră de ardere de tip Heron și un raport de comprimare geometric de 9. La
folosirea aceleași chiulase, dar cu un piston cu cap plat, raportul de comprimare geometric ia valori
între 11.5 și 12.
Figura 1.13 – Diverse tipuri de pistoane și de capete de cilindru folosite la motor
Capătul de cilindru (chiulasa) este prevăzut cu o cavitate ovală, în scopul plasării bujiei cu
electrozii cât mai central. Totodată el conține și canalele necesare pentru circularea apei de
racire. În scopul cercetării etanșării, unele capete au fost prevăzute și cu canale pentru segmenți
asemănători cu cei folosiți la piston.
În scopul practicării unor camere de ardere în pistoane, acestea au fost înălțate cu 10 mm față
de cele de serie și pentru a păstra neschimbate celelalte piese, cămașa de distribuție, cilindul, s-a
menținut aceeași înălțime și pentru pistoanele cu fundul plat.
Cămașa de distribuție s-a realizat din materiale diferite, fontă și oțel, pentru a se obține atât
rezistență cât și jocul minim necesar pentru asigurarea etanșeității. La partea inferioară este
prevăzută cu o coroană dințată necesară la antrenarea ei, coroană ce este fixată pe corp prin
știfturi. La partea superioară sunt practicate două ferestre de distribuție de formă dreptunghiulară
dirijate spre interior cu o înclinație de 15 grade. În vederea ușurării, coroana dințată este
prevăzută cu găuri, care servesc în același timp pentru trecerea uleiului de ungere.
Etanșarea cilindrului se realizează prin potrivirea corespunzătoare a cămășii de distribuție,
având o gorsime de 2,5 mm cu jocuri diametrale cuprinse între 0,1 și 0,25 mm.
Ungerea motorului se realizează sub presiune, cu ajutorul pompei de ulei amplasată în
carterul motorului. Între pompă și filtrul de ulei, amplasat separat lângă motor, s-a intercalat o
supapă specială cu care se poate regla presiunea uleiului. Pentru a se asigura ungerea suprafețelor
de frecare între cilindru și cămașa de distribuție, pe suprafața interioară, cilindrul este prevăzut
cu o bucșă acoperită cu molibden, cu rolul de a reduce fricțiunea. Totodată, pe suprafața
interioară a cilindrului, exista niște canale elicoidale, în care uleiul este adus în cantități dozate
de la distribuitorul de ulei.
Page 25
25
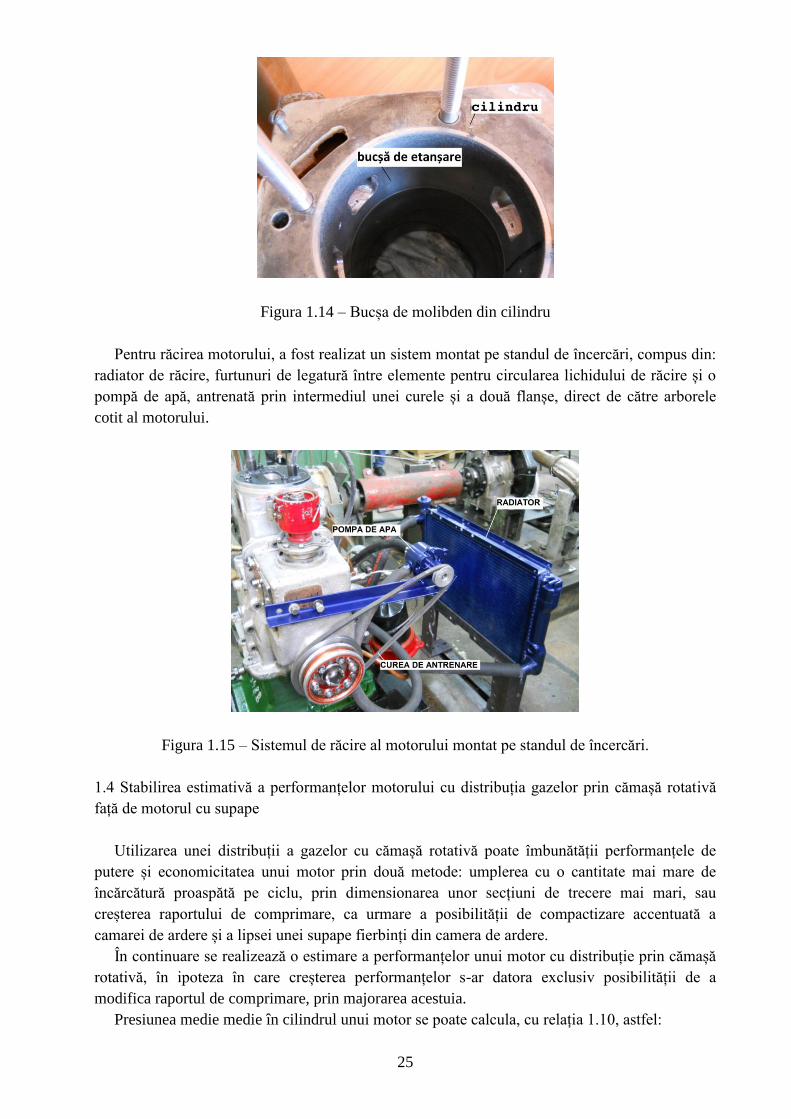
Figura 1.14 – Bucșa de molibden din cilindru
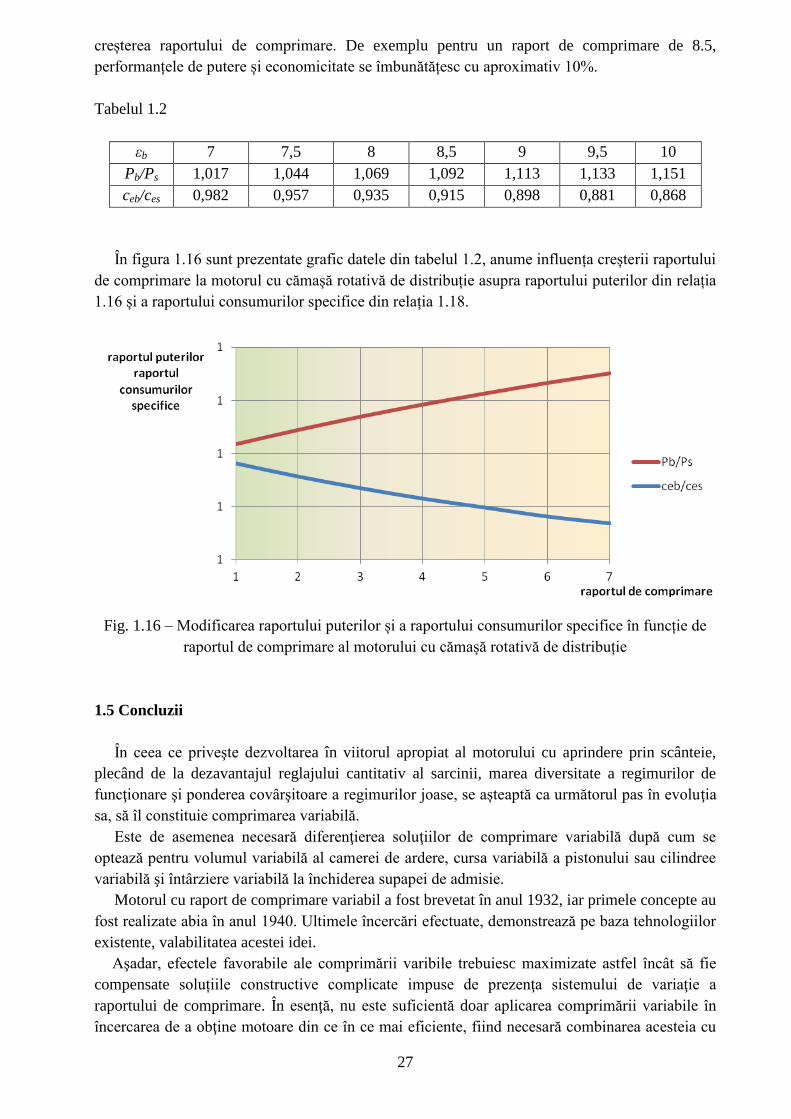
Pentru răcirea motorului, a fost realizat un sistem montat pe standul de încercări, compus din:
radiator de răcire, furtunuri de legatură între elemente pentru circularea lichidului de răcire și o
pompă de apă, antrenată prin intermediul unei curele și a două flanșe, direct de către arborele
cotit al motorului.
Figura 1.15 – Sistemul de răcire al motorului montat pe standul de încercări.
1.4 Stabilirea estimativă a performanțelor motorului cu distribuția gazelor prin cămașă rotativă
față de motorul cu supape
Utilizarea unei distribuții a gazelor cu cămașă rotativă poate îmbunătății performanțele de
putere și economicitatea unui motor prin două metode: umplerea cu o cantitate mai mare de
încărcătură proaspătă pe ciclu, prin dimensionarea unor secțiuni de trecere mai mari, sau
creșterea raportului de comprimare, ca urmare a posibilității de compactizare accentuată a
camarei de ardere și a lipsei unei supape fierbinți din camera de ardere.
În continuare se realizează o estimare a performanțelor unui motor cu distribuție prin cămașă
rotativă, în ipoteza în care creșterea performanțelor s-ar datora exclusiv posibilității de a
modifica raportul de comprimare, prin majorarea acestuia.
Presiunea medie medie în cilindrul unui motor se poate calcula, cu relația 1.10, astfel:
Page 26
26
410A
Qp v
em (1.10)
iar puterea calorică, după cum se poate observa în relația 1.11:
a
aci
vT
T
p
p
n
PQ 0
04,22 (1.11)
unde: ηe – randamentul efectiv al motorului;
Qv- puterea calorică a unui metru cub de gaze în condițiile de la admisie;
Pci- puterea calorică inferioară a unui kilogram de gaze în condițiile de la admisie;
Σn- suma participațiilor molare ale amestecului carburant;
p0, T0- presiunea și temperatura mediului ambiant;
pa, Ta- presiunea și temperatura încărcăturii proaspete la admisie.
Pentru efectuarea calculelor, la mărimile ce caracterizează funcționarea motorului cu cămașă
rotativă de distribuție se atașează indicele ”b”, iar pentru un motor cu supape indicele ”s”. Pentru
aceeași turație și cilindree, raportul puterilor se poate scrie astfel:
as
asci
ab
abci
es
eb
vs
es
vb
eb
s
b
T
T
p
p
n
P
T
T
p
p
n
P
A
QA
Q
P
P
0
0
0
0
4
4
4.22
4.22
10
10
[1.12]
Dacă se ține cont de faptul că ηe=ηmηgηT , ecuația 1.12 ia următoarea formă:
ab
as
as
ab
Tsgsms
Tbgbmb
s
b
T
T
p
p
P
P
[1.13]
Dacă se consideră că randamentul mecanic ηm, gradul de acoperire ηg, presiunea și
temperatura de admisie pa, Ta, sunt egale atât la motorul cu supape cât și la cel cu cămașă
rotativă de distribuție, din ecuația 1.13 rezultă că:
Ts
Tb
s
b
P
P
[1.14]
Pentru valori ale raportului de comprimare cuprinse între 5:1 și 11:1, randamentul termic se
poate calcula cu suficientă precizie cu relația 1.15, după cum urmează [3]:
276.0
11
T [1.15]
relația 1.14 luând următoarea formă: 276.0
276.0
276.0
1
1
b
s
s
b
s
b
P
P
[1.16]
Folosind formula consumului specific de combustibil (1.17):
310632
eci
eP
c
[1.17]
și folosind relația 1.16, se ajunge la o expresie cu următoarea formă: 276.0
276.0
276.0
1
1
s
b
b
s
Tb
Ts
es
eb
c
c
[1.18]
Plecând de la valoarea raportului de comprimare, ε=6,7, a motorului cu cămașă rotativă de
distribuție, în tabelul 1.2 se prezintă valorile pe care le pot atinge rapoartele din relațiile 1.16 și
1.18, în cazul creșterii raportului de comprimare la motorul cu cămașă rotativă de distribuție.
După cum se poate observa, performanțele acestui motor se pot îmbunătăți considerabil prin
Page 27
27
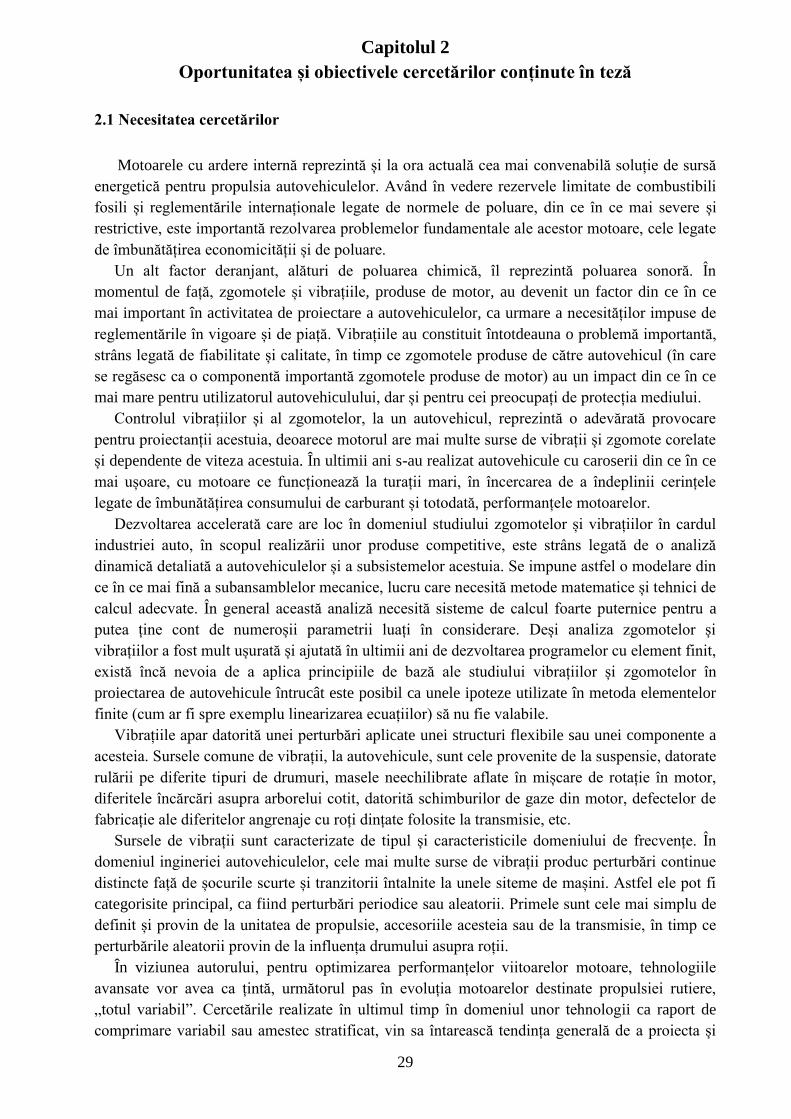
creșterea raportului de comprimare. De exemplu pentru un raport de comprimare de 8.5,
performanțele de putere și economicitate se îmbunătățesc cu aproximativ 10%.
Tabelul 1.2
εb 7 7,5 8 8,5 9 9,5 10
Pb/Ps 1,017 1,044 1,069 1,092 1,113 1,133 1,151
ceb/ces 0,982 0,957 0,935 0,915 0,898 0,881 0,868
În figura 1.16 sunt prezentate grafic datele din tabelul 1.2, anume influența creșterii raportului
de comprimare la motorul cu cămașă rotativă de distribuție asupra raportului puterilor din relația
1.16 și a raportului consumurilor specifice din relația 1.18.
Fig. 1.16 – Modificarea raportului puterilor și a raportului consumurilor specifice în funcție de
raportul de comprimare al motorului cu cămașă rotativă de distribuție
1.5 Concluzii
În ceea ce priveşte dezvoltarea în viitorul apropiat al motorului cu aprindere prin scânteie,
plecând de la dezavantajul reglajului cantitativ al sarcinii, marea diversitate a regimurilor de
funcţionare şi ponderea covârşitoare a regimurilor joase, se așteaptă ca următorul pas în evoluţia
sa, să îl constituie comprimarea variabilă.
Este de asemenea necesară diferenţierea soluţiilor de comprimare variabilă după cum se
optează pentru volumul variabilă al camerei de ardere, cursa variabilă a pistonului sau cilindree
variabilă şi întârziere variabilă la închiderea supapei de admisie.
Motorul cu raport de comprimare variabil a fost brevetat în anul 1932, iar primele concepte au
fost realizate abia în anul 1940. Ultimele încercări efectuate, demonstrează pe baza tehnologiilor
existente, valabilitatea acestei idei.
Aşadar, efectele favorabile ale comprimării varibile trebuiesc maximizate astfel încât să fie
compensate soluțiile constructive complicate impuse de prezenţa sistemului de variaţie a
raportului de comprimare. În esenţă, nu este suficientă doar aplicarea comprimării variabile în
încercarea de a obţine motoare din ce în ce mai eficiente, fiind necesară combinarea acesteia cu
Page 28
28
alte concepte (turbosupraalimentarea, obţinându-se astfel valori ridicate ale factorului de
downsizing, distribuţia variabilă etc).
Analiză soluţiilor prezentate semnalează, ca un criteriu de apreciere, atenţia deosebită a
constructorilor de a păstra nealterată configuraţia camerei de ardere şi cinematica mecanismului
motor. Totodată se observă şi dorinţa de a păstra cât mai multe componente convenţionale în
construcţia motoarelor cu raport de comprimare variabil.
În plus, analizând soluţiile prezentate se observă că acestea au un numitor comun, combinarea
comprimării variabile cu supraalimentarea, cele două sisteme fiind complementare. De asemenea
se observă tendinţa de a combina comprimarea variabilă cu o destindere de intensitate variabilă.
În esenţă nu se consideră suficientă aplicarea numai a comprimării variabile în încercarea de a
obţine motoare din ce în ce mai eficiente, fiind aşadar necesară combinarea cu alte concepte.
Page 29
29
Capitolul 2
Oportunitatea și obiectivele cercetărilor conținute în teză
2.1 Necesitatea cercetărilor
Motoarele cu ardere internă reprezintă și la ora actuală cea mai convenabilă soluție de sursă
energetică pentru propulsia autovehiculelor. Având în vedere rezervele limitate de combustibili
fosili și reglementările internaționale legate de normele de poluare, din ce în ce mai severe și
restrictive, este importantă rezolvarea problemelor fundamentale ale acestor motoare, cele legate
de îmbunătățirea economicității și de poluare.
Un alt factor deranjant, alături de poluarea chimică, îl reprezintă poluarea sonoră. În
momentul de față, zgomotele și vibrațiile, produse de motor, au devenit un factor din ce în ce
mai important în activitatea de proiectare a autovehiculelor, ca urmare a necesităților impuse de
reglementările în vigoare și de piață. Vibrațiile au constituit întotdeauna o problemă importantă,
strâns legată de fiabilitate și calitate, în timp ce zgomotele produse de către autovehicul (în care
se regăsesc ca o componentă importantă zgomotele produse de motor) au un impact din ce în ce
mai mare pentru utilizatorul autovehiculului, dar și pentru cei preocupați de protecția mediului.
Controlul vibrațiilor și al zgomotelor, la un autovehicul, reprezintă o adevărată provocare
pentru proiectanții acestuia, deoarece motorul are mai multe surse de vibrații și zgomote corelate
și dependente de viteza acestuia. În ultimii ani s-au realizat autovehicule cu caroserii din ce în ce
mai ușoare, cu motoare ce funcționează la turații mari, în încercarea de a îndeplinii cerințele
legate de îmbunătățirea consumului de carburant și totodată, performanțele motoarelor.
Dezvoltarea accelerată care are loc în domeniul studiului zgomotelor și vibrațiilor în cardul
industriei auto, în scopul realizării unor produse competitive, este strâns legată de o analiză
dinamică detaliată a autovehiculelor și a subsistemelor acestuia. Se impune astfel o modelare din
ce în ce mai fină a subansamblelor mecanice, lucru care necesită metode matematice și tehnici de
calcul adecvate. În general această analiză necesită sisteme de calcul foarte puternice pentru a
putea ține cont de numeroșii parametrii luați în considerare. Deși analiza zgomotelor și
vibrațiilor a fost mult ușurată și ajutată în ultimii ani de dezvoltarea programelor cu element finit,
există încă nevoia de a aplica principiile de bază ale studiului vibrațiilor și zgomotelor în
proiectarea de autovehicule întrucât este posibil ca unele ipoteze utilizate în metoda elementelor
finite (cum ar fi spre exemplu linearizarea ecuațiilor) să nu fie valabile.
Vibrațiile apar datorită unei perturbări aplicate unei structuri flexibile sau unei componente a
acesteia. Sursele comune de vibrații, la autovehicule, sunt cele provenite de la suspensie, datorate
rulării pe diferite tipuri de drumuri, masele neechilibrate aflate în mișcare de rotație în motor,
diferitele încărcări asupra arborelui cotit, datorită schimburilor de gaze din motor, defectelor de
fabricație ale diferitelor angrenaje cu roți dințate folosite la transmisie, etc.
Sursele de vibrații sunt caracterizate de tipul și caracteristicile domeniului de frecvențe. În
domeniul ingineriei autovehiculelor, cele mai multe surse de vibrații produc perturbări continue
distincte față de șocurile scurte și tranzitorii întalnite la unele siteme de mașini. Astfel ele pot fi
categorisite principal, ca fiind perturbări periodice sau aleatorii. Primele sunt cele mai simplu de
definit și provin de la unitatea de propulsie, accesoriile acesteia sau de la transmisie, în timp ce
perturbările aleatorii provin de la influența drumului asupra roții.
În viziunea autorului, pentru optimizarea performanțelor viitoarelor motoare, tehnologiile
avansate vor avea ca țintă, următorul pas în evoluția motoarelor destinate propulsiei rutiere,
„totul variabil”. Cercetările realizate în ultimul timp în domeniul unor tehnologii ca raport de
comprimare variabil sau amestec stratificat, vin sa întarească tendința generală de a proiecta și
Page 30
30
crea motoare ce funcționează diferit, în funcție de condițiile de exploatare, cu îmbunătățirea
constantă a consumului de combustibil.
Pentru oportunitatea abordării temei s-a efectuat o analiză succintă a tipurilor și a funcţionării
motoarelor cu raport de comprimare variabil, analiză ce evidenţiază faptul că performanţele unui
motor pot fi îmbunătăţite prin maximizarea randamentului termic la regimurile cu frecvență mare
în funcționare. Cum motoarele folosite la automobile trebuie să funcționeze la regimuri variate
de sarcină și viteză, o configurație constantă a motorului constrânge proiectanții la realizarea
unor soluții de compromis între configurația motorului și condițiile de funcționare, ajungându-se
la o economie redusă de combustibil. Prin realizarea variației unor parametrii ai motorului, se
obține o construcție ce permite folosirea aceluiași motor pentru o gamă largă de condiții de
funcționare, la regimul ce oferă cele mai bune performanțe, obiectivul fiind de a scădea
consumul de combustibil și de a îmbunătății procesele termodinamice.
Randamentele maxime ale soluțiilor actuale de motoare cu ardere internă se învârt în jurul
valorii de 30% pentru m.a.s., dar pentru utilizarea lor în regim urban acesta nu depăşeşte 10-
15%, cu valori ale consumului de combustibil și a emisiilor poluante foarte mari.
Sunt căutate soluţii constructive care să acţioneze în zona regimurilor de sarcini parţiale sub
20%, mers în gol şi regim de frână de motor, aceste regimuri totalizând 80-90% din timpul de
funcţionare al unui autoturism aflat în trafic urban la ora de vârf. Una din cele mai abordabile
soluții la ora actuală, din punct de vedere al tehnologiilor existente, o reprezintă motorul cu
raport de comprimare variabil.
2.2 Structura tezei de doctorat
Teza este strucuturată în șase capitole, după cum urmează:
1. Stadiul actual – capitol ce cuprinde o scurtă descriere a soluțiilor actuale de motoare cu
raport de comprimare variabil, noțiuni teoretice legate de raportul de comprimare, și
prezentarea motorului MDR-2. Acest motor s-a considerat că va corespunde cel mai bine
cercetărilor în domeniu, întrucât permite o modificare ușoară pentru a fi adaptat scopului
tezei. S-au facut modificări constructive pe acest motor, iar rezultatele experimentale s-au
obținut pentru motor și componentele sale;
2. Oportunitatea și obiectivele cercetărilor conținute în teză – în acest capitol se
motivează alegerea temei care a dus la realizarea acestei teze, în contextul actual al
cercetărilor în domeniul motoarelor cu raport de comprimare variabil și se prezintă, de
asemenea, obiectivele principale ale tezei;
3. Contribuții la analiza dinamică a motoarelor cu raport de comprimare variabil – în
acest capitol se utilizează modele mecanice pentru determinarea solicitărilor care apar la
motoarele cu raport de comprimare variabil;
4. Determinarea frecvențelor proprii cu metoda elementelor finite – capitolul cuprinde
aspecte teoretice legate de analiza modală, metoda elementelor finite și analiza cu
element finit a principalelor elemente ale motorului;
5. Măsurători experimentale – în acest capitol se descriu măsurătorile efectuate în
laborator pe motorul MDR-2, pentru determinarea frecvențelor proprii ale pieselor
analizate. Măsurătorile au ca scop compararea rezultatelor obținute la analiza cu element
finit cu cele obținute din măsurătorile experimentale.
6. Contribuții originale, diseminare, direcții viitoare de cercetare viitoare – capitolul
prezintă contribuțiile originale ale autorului, modul cum aceste contribuții au fost
Page 31
31
diseminate în mediul academic și industrial cât și posibilitățile viitoare de dezvoltare ale
problemei cercetate.
Bibliografia este prezentată la sfârșitul fiecărui capitol și la finalul tezei este prezentată o
bibliografie generală, cu lucrările indicate în bibliografia capitolelor, dar și alte lucrări care
au fost consultate sau utilizate de către autorul tezei, fără a fi însă menționate expres în text.
2.3 Obiectivele tezei de doctorat
Obiectivele tezei sunt enumerate mai jos:
1. Cercetarea bibliografică și stabilirea stadiului actual, în domeniul motoarelor cu raport de
comprimare variabil;
2. Justificarea necesității și a oportunității temei alese pentru realizarea tezei de doctorat;
3. Încadrarea cercetărilor preliminate în fluxul principal al cercetărilor în domeniu;
4. Realizarea unui model dinamic pentru analiza răspunsului mecanic al unor soluții de motor cu
raport de comprimare variabil;
5. Calculul frecvențelor proprii pe un model de motor;
6. Măsurători experimentale ale frecvențelor proprii;
7. Propuneri de inserție a rezultatelor în industrie și de transfer tehnologic;
8. Propuneri de brevet și propuneri de valorificare a rezultatelor.
Page 32
32
Capitolul 3
Contribuții la analiza dinamică a motoarelor
cu raport de comprimare variabil
3.1 Introducere
Arborele cotit al mașinilor cu mecanism bielă-manivelă și toate elementele mobile antrenate
de acesta formează un sistem elastic, la care apar vibrații (de torsiune). Un astfel de sistem are
mai multe moduri de oscilații libere de torsiune. Fiecare mod este caracterizat printr-o frecvență
proprie și un spectru de amplitudini ale mișcărilor relative ale elementelor ce compun sistemul.
Componentele armonice ale cuplului motor excită modurile fundamentale de vibrație ale acestui
sistem. Dacă frecvența uneia dintre componentele armonice ale cuplului dat de un singur cilindru
este egală sau apropiata de frecvența oricărui mod fundamental de vibrație, există condiții de
apariție a rezonanței, iar despre motor se spune că funcționează la turația critică. Funcționarea la
acest regim de turație critică este periculoasă, putând produce ruperea arborelui, uzura rapidă a
lagărelor, a roților dințate și a altor elemente, având ca rezultat vibrația motorului și a agregatelor
cu care este cuplat.
3.2. Modelul mecanic al unui monocilindru
Studiul cinematic și dinamic al mecanismului bielă-manivelă permite determinarea mărimilor
caracteristice necesare proiectării unui motor cu ardere internă, rezolvarea problemelor de natură
dinamică stând la baza determinării acestor marimi și legi care le definesc.
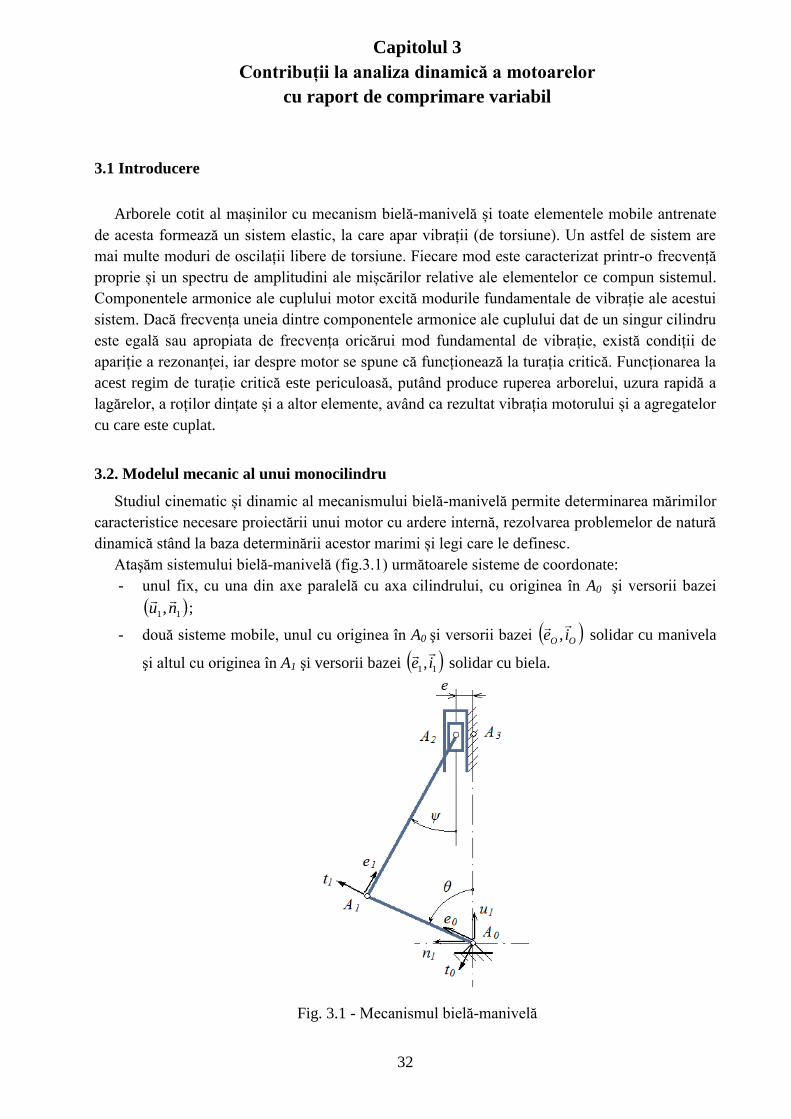
Ataşăm sistemului bielă-manivelă (fig.3.1) următoarele sisteme de coordonate:
- unul fix, cu una din axe paralelă cu axa cilindrului, cu originea în A0 şi versorii bazei
11,nu
;
- două sisteme mobile, unul cu originea în A0 şi versorii bazei OO ie
, solidar cu manivela
şi altul cu originea în A1 şi versorii bazei 11,ie
solidar cu biela.
Fig. 3.1 - Mecanismul bielă-manivelă
Page 33
33
Lungimea manivelei este r = AOA1, lungimea bielei l = A1A2, iar excentricitatea este e = A3A2.
Vom nota: .;l
e
l
r
Avem deci: 1321211 ;; neAAelAAerAA OO
.
Luând ca origine pentru măsurarea deplasării pistonului, distanţa D = AOA3 va indica legea de
mişcare a pistonului, iar .13 uDAAO
Ecuaţia de contur pentru sistemul bielă-manivelă va fi:
0332211 OO AAAAAAAA [3.1]
sau:
0111 uDneeler O
relaţie care înmulţită scalar cu 1n
dă:
0111 enelner O
[3.2]
Dacă este mărimea unghiului de rotaţie al arborelui cotit, unghiul făcut de versorul
bielei 1e
cu 1u
, (3.2) devine:
Componentele lui Oe
şi Ot
sunt respectiv:
cos,sin;sin,cos OO te
[3.3]
iar la efectuarea produselor scalare ţinem seama de faptul că: .1,0;0,1 11 nu
Rezultă:
sinsin
sinl
er [3.4]
Prin geometria mecanismului bielă-manivelă pentru motoare cos este întodeana pozitiv,
deci:
2sin1cos [3.5]
şi componentele versorului 1e
faţă de sistemul 11 ,nu
vor fi:
sin,cos e
, şi cos,sin1 t
[3.6]
Înmulţind (3.1) cu 1u
rezultă:
0111 Dueluer O
de unde:
coscos111 lrueluerD O
[3.7]
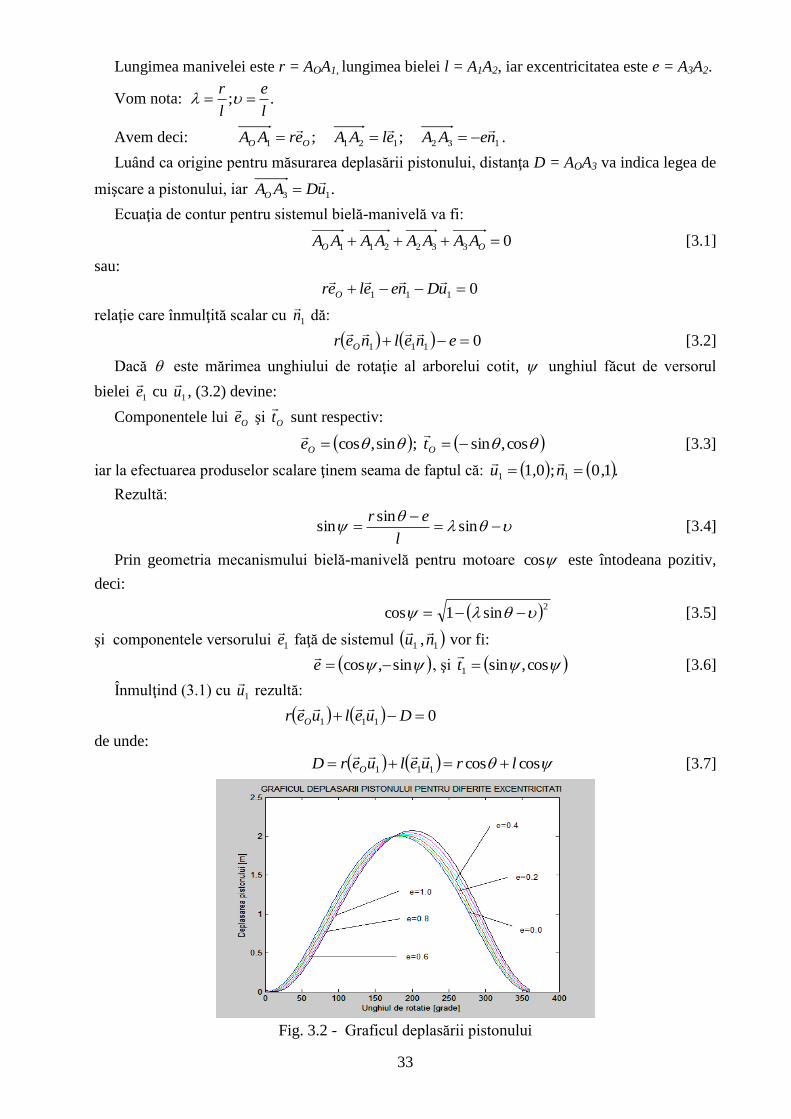
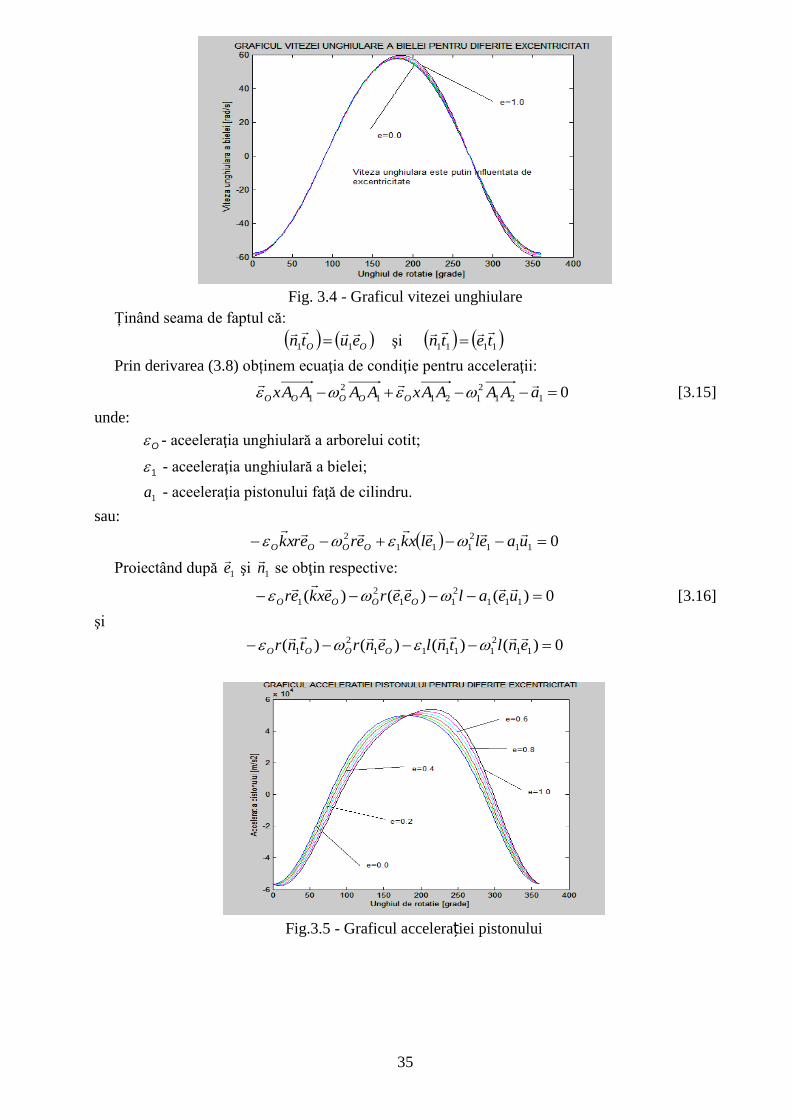
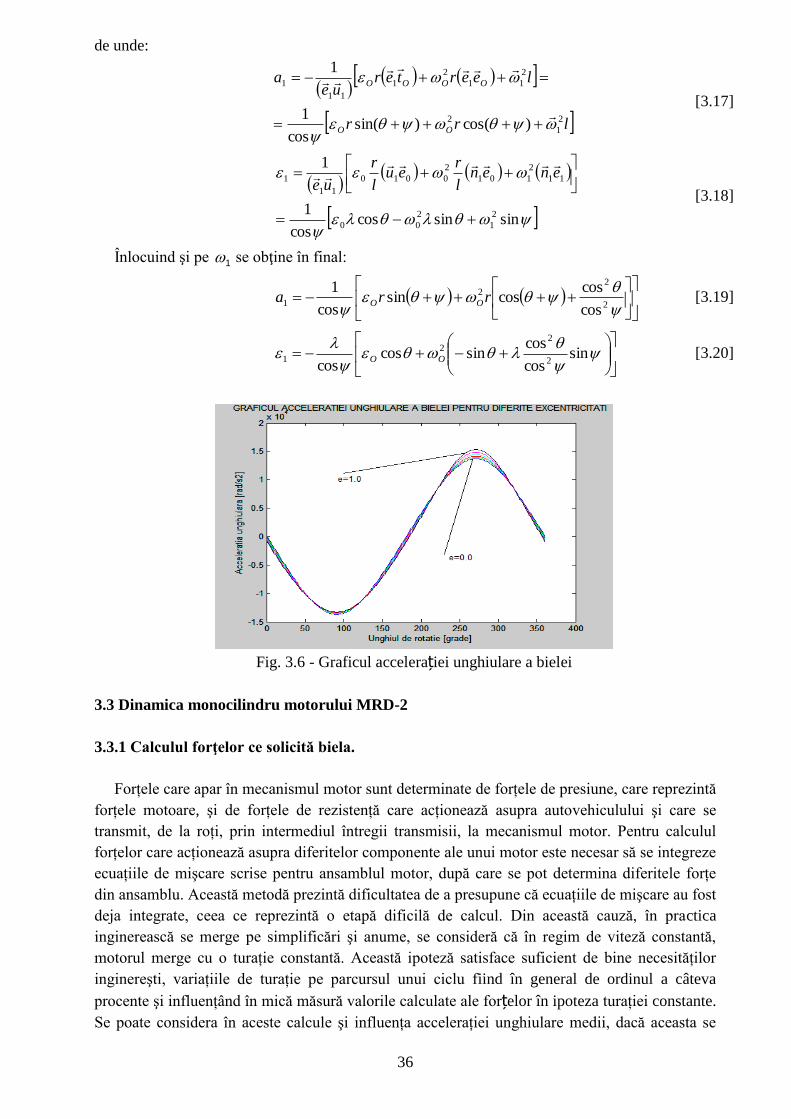
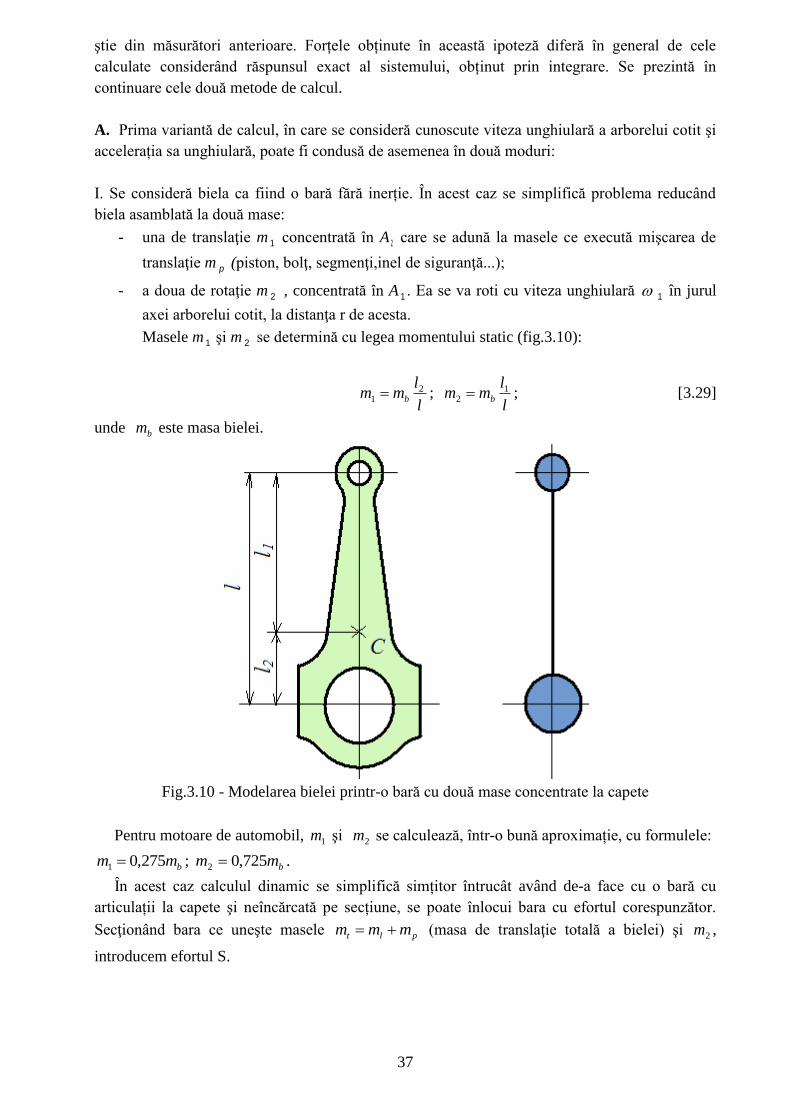
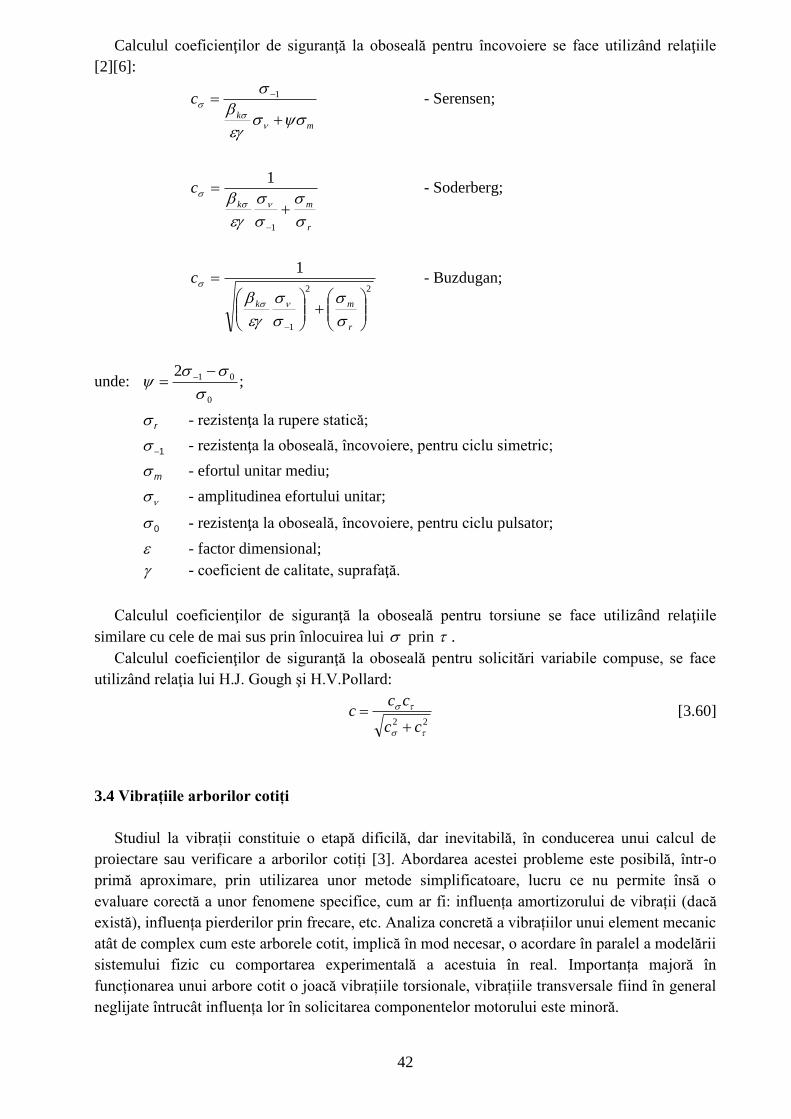
Fig. 3.2 - Graficul deplasării pistonului
Page 34
34
Derivând (3.1) rezultă ecuaţia de condiţie pentru viteze:
012111 vAAxAAx OO
[3.8]
unde:
O - viteza unghiulară a arborelui cotit;
sradn
O /30
[3.9]
dacă se ia turaţia motorului n în min/rot ;
1 - viteza unghiulară a bielei;
v1 - viteze pistonului faţă de cilindru.
k
- fiind vesor perpendicular pe 1u
şi 1n
astfel ca sistemul knu
,, 11 să fie drept.
Proiectând respective după direcţiile 1e
şi 1n
ecuaţia scrisă, se obţine:
01111 uevexker OO
şi [3.10]
0nl 1111 exKexKnr OO
Întrucât
0;0 1111 unexke
. [3.11]
Deoarece: ;OO texk
11 texk
relaţiile (3.10) și (3.11) devin:
0
0
1111
1111
tnlrtn
uevrte
OO
OO
[3.12]
de unde:
rr
ue
tev OO
O
cos
sin
11
11
[3.13]
OO
O
l
r
ue
eu
cos
cos
11
11
[3.14]
Fig. 3.3 - Graficul vitezei pistonului
Page 35
35
Fig. 3.4 - Graficul vitezei unghiulare
Ținând seama de faptul că:
OO eutn
11 şi 1111 tetn
Prin derivarea (3.8) obținem ecuaţia de condiţie pentru acceleraţii:
0121
2
1211
2
1 aAAAAxAAAAx OOOOO
[3.15]
unde:
O - aceeleraţia unghiulară a arborelui cotit;
1 - aceeleraţia unghiulară a bielei;
1a - aceeleraţia pistonului faţă de cilindru.
sau:
0111
2
111
2 uaelelxkerexrk OOOO
Proiectând după 1e
şi 1n
se obţin respective:
0)()()( 111
2
11
2
1 uealeerexker OOOO
[3.16]
şi
0)()()()( 11
2
11111
2
1 enltnlenrtnr OOOO
Fig.3.5 - Graficul accelerației pistonului
Page 36
36
de unde:
lrr
leerterue
a
OO
OOOO
2
1
2
2
11
2
1
11
1
)cos()sin(cos
1
1
[3.17]
sinsincoscos
1
1
2
1
2
00
11
2
101
2
0010
11
1
enen
l
reu
l
r
ue
[3.18]
Înlocuind şi pe 1 se obţine în final:
2
22
1cos
coscossin
cos
1rra OO [3.19]
sin
cos
cossincos
cos 2
22
1 OO [3.20]
Fig. 3.6 - Graficul accelerației unghiulare a bielei
3.3 Dinamica monocilindru motorului MRD-2
3.3.1 Calculul forţelor ce solicită biela.
Forțele care apar în mecanismul motor sunt determinate de forțele de presiune, care reprezintă
forțele motoare, şi de forțele de rezistență care acționează asupra autovehiculului şi care se
transmit, de la roți, prin intermediul întregii transmisii, la mecanismul motor. Pentru calculul
forțelor care acționează asupra diferitelor componente ale unui motor este necesar să se integreze
ecuațiile de mişcare scrise pentru ansamblul motor, după care se pot determina diferitele forțe
din ansamblu. Această metodă prezintă dificultatea de a presupune că ecuațiile de mişcare au fost
deja integrate, ceea ce reprezintă o etapă dificilă de calcul. Din această cauză, în practica
inginerească se merge pe simplificări şi anume, se consideră că în regim de viteză constantă,
motorul merge cu o turație constantă. Această ipoteză satisface suficient de bine necesităților
inginereşti, variațiile de turație pe parcursul unui ciclu fiind în general de ordinul a câteva
procente şi influențând în mică măsură valorile calculate ale forțelor în ipoteza turației constante.
Se poate considera în aceste calcule şi influența accelerației unghiulare medii, dacă aceasta se
Page 37
37
ştie din măsurători anterioare. Forțele obținute în această ipoteză diferă în general de cele
calculate considerând răspunsul exact al sistemului, obținut prin integrare. Se prezintă în
continuare cele două metode de calcul.
A. Prima variantă de calcul, în care se consideră cunoscute viteza unghiulară a arborelui cotit şi
accelerația sa unghiulară, poate fi condusă de asemenea în două moduri:
I. Se consideră biela ca fiind o bară fără inerție. În acest caz se simplifică problema reducând
biela asamblată la două mase:
- una de translaţie m 1 concentrată în A 2 care se adună la masele ce execută mişcarea de
translaţie m p (piston, bolţ, segmenţi,inel de siguranţă...);
- a doua de rotaţie m 2 , concentrată în A 1 . Ea se va roti cu viteza unghiulară 1 în jurul
axei arborelui cotit, la distanţa r de acesta.
Masele m 1 şi m 2 se determină cu legea momentului static (fig.3.10):
l
lmm b
21 ;
l
lmm b
12 ; [3.29]
unde bm este masa bielei.
Fig.3.10 - Modelarea bielei printr-o bară cu două mase concentrate la capete
Pentru motoare de automobil, 1m şi 2m se calculează, într-o bună aproximație, cu formulele:
bmm 275,01 ; bmm 725,02 .
În acest caz calculul dinamic se simplifică simțitor întrucât având de-a face cu o bară cu
articulații la capete şi neîncărcată pe secțiune, se poate înlocui bara cu efortul corespunzător.
Secţionând bara ce uneşte masele plt mmm (masa de translaţie totală a bielei) şi 2m ,
introducem efortul S.
Page 38
38
Dacă 00 ,nu
este un sistem de referinţă global la care se raportează motorul, vectorul 0u
fiind orientat după verticală şi dacă este unghiul făcut de vectorii 01,nu
, ecuaţia de echilibru
pentru masa tm va fi:
01110111 eSuFuGuFnN i
g
[3.30]
unde: N - este forţa care apare la contactul dintre piston şi cămaşa cilindrului;
Fg- este forţa data de presiunea gazelor;
1amF t
i
t - este forţa de inerţie a masei de translaţie;
gmmgmG pt )( 11 .
Prin înmulţirea scalară succesiv cu 1t
şi 1u
rezultă respectiv N, S:
0111111111 tuFtuGtuFtnN i
og
;0111
2
11101
2
1 ueSuFuuGuF i
g
cos
1sinsin
1
1
11
101111
GFF
tntuGtuFFN
i
l
i
g
i
g
[3.31]
întrucât:
2sin,
2cos1t
faţă de sistemul 00 ,nu
.
cos
cos
11111011
11
GFFuuGFFue
S i
g
i
g
[3.32]
sin,cos1 u
faţă de sistemul 00 ,nu
.
Rezultă imediat forţele T' şi R
':
cos
cos
sinsin 1101
' GFFSteST i
g
cos
cos
coscos 1101
' GFFSeeST i
g
[3.33]
Forţele T şi R care încarcă fusul maneton adăugând la T' şi R
' forţele de inerţie:
'
21
'
1
'
2 coscos
sin' ngn FGFFFTT
[3.34]
unde:
122 rmF i
n
şi
i
t
i
g
i
t FGFFFRR 2112
' coscos
cos
[3.35]
unde:
rmF i
t
2
122
Dacă se neglijează G1 se obţin expresii mai simple pentru N, S, T', R
', T, R:
Page 39
39
tan1
i
g FFN [3.36]
cos
11
i
g FFS [3.37]
cos
sin1
' i
g FFT [3.38]
cos
sin1
' i
g FFR [3.39]
g
rGFFT i
g1
21cos
sin
[3.40]
g
rGFFR i
g
2
121
cos
cos
[3.41]
II. În cel de-al doilea caz se scriu ecuaţiile de echilibru dinamic pentru biela considerată ca
un corp rigid. Dacă notăm cu i
bF forţa de inerţie datorată masei bielei asamblate, i
bM momentul
de inerţie al bielei, i
bF forţa de inerţie a pistonului asamblat pm , putem scrie ecuaţia de ecuaţia
de momente faţă de punctul 1A :
00110121 i
b
i
bbp
i
pg MFuGxCAnNuGuFFxAA
[3.42]
şi ecuaţia vectorială de echilibru:
0000101 RetTFuGnNuGuFF i
bbp
i
pg
[3.43]
unde:
gmG gb
1111
2
111212
2
11 )( tleluamCAxCAamamF bbcb
i
b
KJM b
I
B
1 , Jb - fiind momentul de inerţie al bielei faţă de centrul de masă C.
a1 – acceleraţia pistonului faţă de cilindru
1 - viteza unghiulară a bielei
1 - acceleraţia unghiulară a bielei.
Ecuaţia (3.42) devine:
xelnNuGuFFxel p
i
pg 121011
0111111
2
1110 KJtleluamuG bbb
[3.44]
sau
01111121
0121112
KJtxemllnxelN
uxeGllGuxeamlFFl
bb
bpb
i
pg
[3.45]
Proiectând după axa K
obţinem:
011121
0121112
bb
bpb
i
pg
JmlluelN
neGllGneamlFFl
[3.47]
Page 40
40
1112
21
21
11
112
012
1112
11
cos
1sin
cos
1sin
cos
1
l
Jm
l
ll
Gl
lGam
l
lFF
l
J
ue
l
ml
llneG
l
lGneam
l
lFF
ue
lN
bb
bpb
i
pgb
bbpb
i
pg
[3.46]
Proiectând (3.43) pe 0t
şi 0e
se obţin respectiv:
00111011
2
1
01100010001
Tttlmtelm
tuamtuGtnNtuGtuFF
bb
bbp
i
pg
[3.47]
şi
00111011
2
1
01100010001
Retlmeelm
euameuGenNeuGeuFF
bb
bbp
i
pg
[3.48]
Rezultă:
cossin
cossinsin
111
2
1
10111
011
2
10100011
lmlm
NGGamFFeelm
telmtnNtuGGtuamFFT
bb
bpb
i
pgb
bbpb
i
pg
[3.49]
sincos
sincoscos
111
2
1
10111
011
2
10100011
lmlm
NGGamFFtelm
eelmenNnuGGeuamFFR
bb
bpb
i
pgb
bbpb
i
pg
[3.50]
3.3.2 Torsorul de reducere al sistemului de forţe în A0.
Ecuaţia de momente faţă de A0 dă momentul motor furnizat:
kJGxCATxAAkM mm
001010 [3.51]
unde: Gm – greutatea manetonului şi a cotului maneton;
J0 – momentul de inerţie al masei Gm faţă de A0.
Se obţine:
00sin JGrTM mm [3.52]
cu CA0 .
În ipoteza rigidității arborelui se poate considera că solicitările la care este supus manetonul,
împreună cu forțele de inerție, se împart în mod egal pe cele două paliere alăturate. Dacă se
consideră rigiditatea arborelui sau a capacelor paliere această ipoteză nu corespunde, dar ca o
primă aproximație dă rezultate suficient de bune.
Ecuaţia de echilibru:
Page 41
41
000 uGRTFR m
t
m
[3.53]
unde: 000 ,ZYR
- este reacţiunea ce apare în articulaţia A0, iar
01001
2
0 lmemF mm
t
m
- este forţa de inerţie datorată manetonului şi cotului maneton,
prin proiectarea pe 0u
şi 0n
dă respectiv:
0, 00000010001
2
00 ueRutTGutmuemY mmm
[3.54]
cu:
cos
sinsincos
,
0
2
0
00000010001
2
00
R
Tmm
ueRutTGutmuemY
mm
mmm
[3.55]
sin
coscossin 0
2
00
R
TmmZ mm [3.56]
Centrul de masă al cotului se determină cu formulele:
m
CfC
Cm
mrmmy
2211 coscos21
m
CfC
Cm
mrmmz
2211 sinsin21
[3.57]
unde: 21
, CC mm - masa cotului maneton 1 respectiv 2;
1211,mm - masa poţiunii din fusul palier aferent cotului 1 respectiv 2;
fm - masa fusului maneton;
fCCm mmmmmm 121121
Rezultă: 2
122
cc zy şi C
C
y
ztan [3.58]
Pentru 0J avem:
21
2
12110 CCff JJrmJJJJ [3.59]
unde:
1211 , JJ - momentul de inerţie faţă de axa arborelui cotit a porţiunii din fusul palier
aferentă cotului 1 respectiv 2
21
, CC JJ - momentul de inerţie al cotului 1 respectiv 2 faţă de axa arborelui cotit;
fJ - momentul de inerţie al fusului maneton faţă de axa fusului.
3.3.3 Calculul coeficienţilor de siguranţă la oboseală.
Pentru calculul la oboseală a unui arbore cotit este necesar să se facă mai întâi o discretizare a
acestuia, iar în fiecare secţiune să se determine caracteristicile geometrice: Wy, Wn, Wp şi aria. De
exemplu, pentru arborele cotit al unui motor cu şase cilindri în linie, se obţin în urma
discretizării, 60 secţiuni.
Page 42
42
Calculul coeficienţilor de siguranţă la oboseală pentru încovoiere se face utilizând relaţiile
[2][6]:
mk
c
1 - Serensen;
r
mk
c
1
1 - Soderberg;
22
1
1
r
mk
c
- Buzdugan;
unde: ;2
0
01
r - rezistenţa la rupere statică;
1 - rezistenţa la oboseală, încovoiere, pentru ciclu simetric;
m - efortul unitar mediu;
- amplitudinea efortului unitar;
0 - rezistenţa la oboseală, încovoiere, pentru ciclu pulsator;
- factor dimensional;
- coeficient de calitate, suprafaţă.
Calculul coeficienţilor de siguranţă la oboseală pentru torsiune se face utilizând relaţiile
similare cu cele de mai sus prin înlocuirea lui prin .
Calculul coeficienţilor de siguranţă la oboseală pentru solicitări variabile compuse, se face
utilizând relaţia lui H.J. Gough şi H.V.Pollard:
22
cc
ccc
[3.60]
3.4 Vibrațiile arborilor cotiți
Studiul la vibrații constituie o etapă dificilă, dar inevitabilă, în conducerea unui calcul de
proiectare sau verificare a arborilor cotiți [3]. Abordarea acestei probleme este posibilă, într-o
primă aproximare, prin utilizarea unor metode simplificatoare, lucru ce nu permite însă o
evaluare corectă a unor fenomene specifice, cum ar fi: influența amortizorului de vibrații (dacă
există), influența pierderilor prin frecare, etc. Analiza concretă a vibrațiilor unui element mecanic
atât de complex cum este arborele cotit, implică în mod necesar, o acordare în paralel a modelării
sistemului fizic cu comportarea experimentală a acestuia în real. Importanța majoră în
funcționarea unui arbore cotit o joacă vibrațiile torsionale, vibrațiile transversale fiind în general
neglijate întrucât influența lor în solicitarea componentelor motorului este minoră.
Page 43
43
3.4.1 Vibrațiile torsionale ale arborilor cotiți
În timpul funcționării arborele cotit este supus unei excitații, variabile în timp, produsă de un
cuplu dat de presiunea gazelor, forțele de inerție, forța de gravitație (în general minoră) şi forța
de frecare. Răspunsul la această excitație se manifestă prin modificarea unor mărimi de stare cu
o anumită ritmicitate, în vecinătatea unor poziții medii, constituind moduri de mişcare vibratorie.
Evident, răspunsul este condiționat atât de caracteristicile mecanice ale sistemului cât şi de
parametrii excitației. Fiecare mod de vibrație este caracterizat printr-o frecvență proprie şi un
spectru de amplitudini ale mişcărilor relative ale elementelor ce compun sistemul oscilant. Când
frecveța uneia dintre componentele armonice ale cuplului de excitație dat de un cilindru este
agală sau apropiată de frecvența corespunzătoare unui mod fundamental de vibrație, motorul
funcționează la turația critică şi există condiții de apariție a rezonanței. În aceste cazuri, dacă
amortizorul de vibrații nu este eficient, se poate produce o uzură accentuată a lagărelor sau chiar
ruperea arborelui cotit. În general este bine să fie evitate în exploatare asemenea turații. Arborele
cotit va avea o mişcare vibratorie, dar pe lânga masele şi momentele de inerție proprii ale
arborelui cotit trebuie să ținem seama şi de masele şi momentele de inerție ale mecanismelor
bielă manivelă, corespunzătoare fiecărui cilindrul în parte.
3.4.2 Sistem elastic echivalent
Studiul sistemului oscilant format din arborele cotit şi agregatele antrenate de acesta este
orientat pe cercetarea unor modele mecanice echivalente cu sistemul real din punct de vedere al
comportării dinamice.
Modelele matematice preconizate a fi utilizate în această problemă pot fi concepute ca:
Sisteme discrete (cicluri-lanțuri de mase-elemente elastice-elemente disipative
(amortizoare) concentrate local;
Sisteme continue – distribuite în spațiul finit.
Studiul sistemelor continue se face cu diverse metode din care cea mai importantă este
metoda elementelor finite. Această metodă necesită resurse, atât din punct de vedere al
programelor de calcul, cât şi din cel al timpului necesar pentru analiză. Se va analiza deci,
metoda discretizării arborelui cotit şi a mecanismelor bielă manivelă aferente obținând un sistem
cu mai multe mase concentrate, denumite rotori, legate între ele prin elemente elastice fără masă.
Rotorii vor fi situați în centrul manetoanelor şi în centrele de greutate ale celorlalte elemente
prinse de arbore (volant, ventilator, amortizor de vibrații etc).
Fig. 3.11 – Reprezentarea arborelui echivalent [6]
Page 44
44
3.4.3 Calculul constantelor elastice
Determinarea constantelor elastice ale sistemului elastic echivalent, care trebuie să fie egale
cu cele ale arborelui cotit pe intervalul situat între secțiunile de fixare ale rotorilor, este destul de
dificilă întrucât geometria complexă a arborilor cotiți nu permite stabilirea unor relații
matematice riguroase.
Determinarea experimentală a constantelor elastice se face fie solicitând arborele cotit la
răsucire cu un cuplu cunoscut, fie pe baza mărimii turației critice determinată în timpul
funcționării motorului, dar pentru acest lucru sunt necesare aparate şi dispozitive speciale greu
de realizat şi scumpe. Din această cauză calculul constantelor elastice se face pe baza unor
relații semiempirice recomandate de literatura de specialitate.
Astfel, pentru porțiunea dintre două paliere succesive (figura 3.12 ) se recomandă relațiile:
Fig. 3.12 – Reprezentarea schematică a arborelui cotit [2]
1. Relația lui Constant [2]:
34444
4321
94,01321
btdD
m
dD
p
Gkmmpp
[3.61]
unde:
k – constanta elastică;
G – modulul de elasticitate transversal;
i =1,2,3,4 sunt factori de adaptare, determinați cum urmează:
32,022
0825,011
m
mm
p
pp
t
dt
t
dt [3.62]
dacă md = pd = 0 se ia 1 =0,9. Dacă 4b/l > 2/3, atunci lk /4666,12 , iar dacă 4b/l < 2/3,
atunci 12 .
Dacă brațul nu este teşit, atunci 01,13 . În cazul teşiturilor AB şi A’B’ avem 13 ;
numai teşitura CD, 965,03 ; teşiturile CD şi C’D’ 93,03 ; numai teşitura EF , 95,03 ;
teşiturile EF şi E’F’, 9,03 .
Page 45
45
Factorul 4 se determină din relația:
BdD
tAl
mm
44
3
4 [3.63]
unde pentru arborii motoarelor marine sau ai motoarelor staționare mari se ia A=0,0029 şi
B=0,91 iar pentru arborii motoarelor de automobile şi avioane A=0,01 şi B=0,84.
Constanta elastică a celorlalte elemente ale arborelui cotit precum variațiile de secțiune,
flanșe, piese fretate, locașurile de pană, etc. necesită atenție în vederea aprecierii influenței pe
care o au asupra constantei elastice a arborelui. Pentru o variație de secțiune având raza de
racordare egală cu 0,1 din diametrul minim, constanta elastică se poate determina presupunând
că porțiunea de arbore cu diametrul minim este lungită și porțiunea cu diametrul maxim este
scurtată cu o lungime λ.
Rigiditatea elementelor fretate sau fixate cu pană este dificil de apreciat, deoarece efectul de
rigiditate depinde în mare măsură de modul cum s-a făcut fretarea sau fixarea penei. Valorile
cele mai corecte ale constantei elastice se obțin neglijând efectul de rigidizare al piesei montate
și presupunând că aceasta acționează ca o masă concentrată, plasată în centrul porțiunii fretate
sau a îmbinării cu pană.
2. Relația lui Wilson [2]:
34444
(2,04,04,0321
bt
DDR
dD
Dm
dD
Dp
Gk
mp
mm
m
pp
p
[3.64]
3. Relația lui Zimanenko [2]:
2/13
2/3
4444
)/(2,08,0/6,0321
mmm
p
pp
p
Dht
R
dD
DRtm
dD
pbDp
Gk [3.65]
4. Relația lui Timoshenko [2]:
34444
93,09,09,0321
bt
R
dD
bm
dD
bp
Gkmmpp
[3.66]
5. Relația lui Geiger [2]:
34444
)(912,04,04,0321
bt
aDR
dD
bm
dD
bp
Gk
p
mmpp
[3.67]
unde: a = 0 pentru t/Dp=1,6 …….1,63 şi R/Dp=1,2 ……0,92 ,
a = 0,4 pentru t/Dp=1,49 şi R/Dp=0,84,
a = 0 pentru t/Dp=1,33 şi R/Dp=1,07,
6. Relația lui Carter [2]:
34444
5,175,08,0321
bt
R
dD
bm
dD
bp
Gkmmpp
[3.68]
Pentru porțiuni tronconice ale arborelui cotit, constanta elastică se determină cu relația:
33
1132
)(3
dDl
dDGk
[3.69]
Pentru porțiuni cilindrice, constanta elastică se calculează cu relația:
Page 46
46
l
GDk
32
3 [3.70]
Determinarea constantelor elastice pentru elemente cu o geometrie complexă se face utilizând
o discretizare în elemente simple şi apoi se însumează ținând cont că pentru elemente legate în
paralel, constanta elastică totală este egală cu suma constantelor elastice parțiale, iar pentru
elemente legate în serie, inversul constantei elastice totale este egal cu suma inverselor
constantelor elastice parțiale.
3.4.4 Determinarea momentelor de inerţie axiale
S-a calculat anterior valoarea momentului de inerție redus pentru mecanismul bielă manivelă
considerat:
;])sinsin(
)cos(2[)(
2
3
2
22
22
2
2
21
2
1
ltrm
tJrbtmtbmrmJamJ CC
[3.71]
unde:
cos
cos
l
rt .
Momentele de inerţie ale rotorilor care înlocuiesc mecanismele bielă-manivelă sunt funcţii
periodice de poziţia manivelei:
2 JJ [3.72]
Utilizând dezvoltarea în serie Fourier, J capătă forma:
i
ii iBiAAJ sincos0 [3.73]
unde 0A reprezintă momentul de inerţie axial mediu şi este dat de relaţia:
dJAJ med
2
0
02
1 [3.74]
Deoarece studiul vibraţiilor torsionale ale arborelui cotit se face în cazul unei mişcări de
rotaţie cu viteză unghiulară constantă, iar J este variabil pe 2,0 , se reţine pentru valoarea
medie (3.74), care are forma explicită:
2
2
222 11
111
BPBC JRM
L
lRMJJ [3.75]
unde s-au utilizat notaţiile:
JC - momentul de inerţie al porţiunii din arborele cotit corespunzătoare unui cilindru (între
mijloacele a două paliere consecutive);
MB - masa bielei asamblate;
R - raza manivelei;
l - distanţa de la axa menetonului la centrul de greutate al bielei asamblate;
L - lungimea bielei;
MP - masa pistonului asamblat;
JB - momentul de inerţie al bielei asamblate în raport cu axa manetonului;
LR .
O relaţie aproximativă utilizată uneori la calculul momentului de inerţie mecanic axial al
mecanismului bielă-manivelă este şi cea a lui Frahm:
Page 47
47
22
2
41
2
1RMMRMMJ oscBprotBrc
[3.76]
unde:
Mrc - masa redusă a unui cot (între mijloacele a două paralele consecutive);
MB rot - masa bielei în mişcare de rotaţie;
MB osc - masa bielei în mişcare de translaţie;
iar R, Mp şi au aceeaşi semnificaşie ca mai sus.
Revenind la relaţia (3.75), JC este dat de:
bmmmmppC JRBdDdDadDbg
J 232
2222244
[3.78]
unde Jb este momentul de inerţie al brațului care se calculează prin metode grafo-analitice.
Determinarea lui JB şi l se face utilizând studiul micilor oscilaţii libere ale bielei suspendate în
punctele A şi A1.
Utilizând relaţia lui Steiner, se poate scrie: 2
2
m
BCA
DlMJJ [3.79]
2
21
dlLMJJ BCA [3.80]
unde MB este masa bielei asamblate.
Notând cu TA şi TA1 perioada de oscilaţie a bielei în jurul punctului A, respectiv A1, JA şi JA1
sunt daţi de:
24 2
2
m
BA
A
DlgM
TJ
[3.81]
24 2
2
1
1
dlLgM
TJ B
A
A
[3.82]
unde g este acceleraţia gravitaţională.
Din relaţiile (3.79), (3.80), (3.81) şi (3.82) rezultă:
2
22
2
22
422
222422
1
1
gTTdDL
dDL
LDDgdLT
DT
lAAm
mmmA
mA
[3.83]
2
2
2
224
m
B
m
BA
C
DlM
DlgM
TJ
[3.84]
Utilizând încă o dată relaţia lui Steiner, rezultă: 2lMJJ BCB [3.85]
Momentele de inerţie axiale ale pieselor complexe (ventilator, volant etc.), se pot determina
cel mai exact utilizând o metodă, numită a suspendării trifilare.
Notând perioada de oscilaţie cu T şi cu JP momentul de inerţie axial al plăcii suport P faţă de
o axă CC1, se poate scrie, în cazul general, expresia lui JCC, :
pCC JRRRRRR
RRR
h
TRRRgMJ
321213132
332211
2
2
321
sinsinsin
sinsinsin
41
[3.86]
Page 48
48
unde M este masa suportului împreună cu a piesei, iar g este acceleraţia gravitaţională.
Dacă RRRR 321 şi 0
321 120 , relaţia (3.87) devine:
pCC Jh
TRgMJ
2
22
41 [3.87]
3.4.5 Ecuaţii de mişcare
Considerând în cazul general un sistem vâscoelastic cu n grade de libertate n ...,,, 21 în
care masele execută o mişcare de rotaţie, energia cinetică a sistemului este dată de:
JET
C2 [3.88]
unde: EC - energia cinetică
- vectorul rotaţiilor
J - maticea diagonală a momentelor de inerţie ale celor n mase aflate în mişcare de
rotaţie.
De asemenea, energia disipată la contactul sistemului cu legăturile externe are expresia:
ede CE ,2 [3.89]
unde: deE = energia disipată de frecările externe
eC = matricea diagonală generată de momentele exterioare dec frecare care acţionează
asupra sistemului în timpul mişcării
Notând cu:
njptjj ,...,3,2.12
11
[3.90]
se poate scrie:
A [3.91]
unde A este aşa numita "matrice de influenţă".
În aceste condiţii, energia elastică a sistemului capătă forma:
e
T
e kE2 [3.92]
unde:
eE - energia elastică;
ek - diagonala (0, k2, k3,..., k11) reprezintă matricea rigidităţilor componentelor elastice
ale sistemului corespunzând deformaţiilor 1132 ,...,, .
Energia disipativă produsă de frecările interioare este dată de:
idi CE ,2 [3.93]
unde:
diE - energia disipată de frecările interne
iC - diagonala (0, C2, C3,..., Cn) este matricea coeficienţilor de frecare a componentelor
vâscoase ale sistemului corespunzând vitezelor de deformaţie n ,...,, 32
Din relaţiile (3.91), (3.92) şi (3.93) se obţine:
Page 49
49
AKAE ee ,2 [3.94]
sau
AKAE e
T
e ,2 [3.95]
şi
ACAE ddi ,2 [3.96]
sau
ACAE d
T
di ,2 [3.97]
unde: TA este transpusa matricei A .
Notând cu:
AKAK e
T [3.98]
ei
TCACAC [3.99]
dedid EEE [3.100]
energia elastică, Ee şi energia disipată, Ed, capătă formele:
KEe ,2 [3.101]
CEd ,2 [3.102]
Lucrul mecanic produs de excitaţiile externe este:
dMdL T , [3.103]
unde TM este vectorul dat de componentele forţelor externe în raport cu rotaţiile n ...,,, 21 .
Utilizând ecuaţiile de mişcare ale lui Lagrange:
LEE
d
dE
dt
d edC
[3.104]
în condiţiile relaţiilor (3.88), (3.101), (3.102) şi (3.103) sistemul de ecuaţii de mişcare devine în
final:
TMKCJ [3.105]
formă ce este utilizată pentru analiza vibraţiilor torsoniale libere şi forţate ale sistemului elastic
compus din arborele cotit şi agregatele antrenate de acesta.
3.5 Concluzii
Vibrațiile torsionale ale arborelui cotit nu se pot elimina, în schimb efectul lor poate fi
atenuat. În acest scop la proiectare se urmărește în primul rând evitarea turațiilor critice
periculoase. Dacă acest deziderat nu se poate realiza, se urmărește deplasarea turației critice
înafara domeniului turațiilor utilizabile, fie prin reducerea ei ei sub turația minimă, fie prin
deplasarea ei peste turația maximă. Se recomandă utilizarea celei de-a doua soluții doarece nu
implică trecerea arborelui cotit prin turația critică la fiecare pornire a motorului. Întrucât pulsația
armonicii fundamentale, 0,5ω, este dată, proiectantul poate modifica pulsația proprie a
vibrațiilor, ω0, prin mărirea turației critice. Acest lucru se poate realiza prin mărirea rigidității k a
arborelui cotit sau prin reducerea momentului de inerție mecanic J al maselor în mișcare. În acest
mod se explică soluțiile constructive adoptate la motoarele cu aprindere prin scânteie, ce
funcționează la turații înalte: pistoane și biele ușoare, fusuri manetoane găurite, mase de
echilibrare eliminate, distanțe reduse de la centrul de masă al masei de echilibrare la axa de
Page 50
50
rotație, fusuri paliere cu diametru mare, arbore de lungime redusă, materiale cu modul de
elasticitate transversală ridicat.
La motoarele în patru timpi, cu număr par de cilindri și arbore cu plan central de simetrie, se
pot crea domenii lipsite de rezonanță prin adoptarea unei ordini de aprindere astfel încât seria de
cifre impare să crească progresiv, iar seria de cifre pare să descrească progresiv. De exemplu,
pentru un motor cu șase cilindri, ordinea de aprindere ar trebui sa fie: 1-3-5-6-4-2.
O altă soluție folosită sunt amortizoarele de vibrații, care se împart în două mari clase: cu
frecare sau cu disipare de energie și dinamice, fără disipare de energie.
Un amortizor cu frecare este alcătuit din trei elemente: elementul primar, fixat pe arborele
cotit, elementul inerțial care are o masă importantă și este liber pe arbore și elementul de cuplare
care stabilește legătura dintre primele două elemente, prin intermediul forțelor de frecare. În
timpul funcționării elementul primar se rotește pe arborele cotit, mișcarea lui fiind transmisă prin
intermediul elementului de cuplare, elementului inerțional. Dacă arborele cotit nu vibrează,
viteza unghiulară a elementului inerțial este aceeași cu a elementului primar. Dacă arborele cotit
vibrează, între cele două elemente apare o mișcare relativă, datorită vibrațiilor, deoarece
elementul inerțial tinde să-și păstreze mișcarea uniformă de rotație. Elementul de cuplare, prin
intermediul forțelor de frecare, limitează mișcarea, energia deformațiilor de răsucire a arborelui
fiind preluată de elementul de cuplare și disipată în mediul ambiant, sub formăî de căldură.
Amortizorul se plasează pe porțiunea arborelui cotit care are amplitudine maximă a vibrațiilor.
Fig. 3.13 – Amortizor pentru vibrații de torsiune [6]
O altă soluție folosită la motoarele moderne de autovehicule sunt amortizoarele hidraulice,
figura 3.14, care reduc vibrațiile de torsiune conform principiului modificării hidrodinamice.
Vibrațiile de torsiune produc în amortizor o mișcare relativă între masa primară și masa
secundară, mișcare ce comprimă uleiul mineral din amortizor, printr-o fantă strâmtă. Scăderea de
presiune rezultată corespunde unei scăderi în performanța hidraulică, fapt ce produce efectul de
amortizare.
Page 51
51
Fig. 3.14 – Amortizor hidraulic de vibrații torsionale [6]
Page 52
52
Capitolul 4
Determinarea frecvențelor proprii pentru componentele motorului MDR-2
folosind metoda elementelor finite
4.1 Concepte de bază
Orice structură mecanică este alcătuită din materiale în care elasticitatea se poate manifesta
mai mult sau mai puţin, în funcţie de solicitările şi condiţiile în care funcţionează structura
respectivă [1]. Elasticitatea şi considerarea materialelor ca fiind solicitate în domeniul linear
elastic va duce la apariţia vibraţiilor în cadrul unei structuri. În cazul motoarelor cu ardere
internă vibraţiile sunt generate de arderea care are loc în cilindru şi care reprezintă elementul
excitator al sistemului. Explozia care se produce induce perturbaţii aplicate componentelor
motorului şi duce la apariţia unor vibraţii ale diferitelor componente direct sau indirect şi la
apariţia zgomotelor care se vor transmite de la corpul motorului, prin aer, la receptor. Prin
acţionarea sistemului bielă manivelă şi a acţionării arborelui cotit care transmite momentul la roţi
şi prin acţionarea celorlalte mecanisme ale motorului (distribuţie, sistem de răcire, sistemul
electric,...) se creează surse de vibraţii datorate, indirect, tot fenomenelor de ardere din cilindru.
Fiecare piesă a motorului, prinsă într-un sistem mecanic, are propria sa frecvenţă naturală
modificată de legăturile dintre diferitele elemente. Tot acest sistem de zgomote şi vibraţii care
apar la un motor cu ardere internă are, în general, un efect nociv asupra mediului înconjurător, o
preocupare majoră constituind-o modalităţile de reducere a acestor vibraţii. Pe de altă parte
monitorizarea vibraţiilor, identificate anterior, ne poate da informaţii importante despre buna
funcţionare a elementelor motorului, despre uzurile care pot apărea sau despre defecţiunile mai
grave, care pot pune în pericol integritatea motorului cu ardere internă.
În majoritatea problemelor de modelare a sistemelor mecanice cu elemente elastice ecuaţiile
care descriu mişcarea reprezintă o aproximare a sistemelor continue prin sisteme discrete, având
un număr finit de grade de libertate. Ele au, în general, forma clasică:
}{][][ FKM [4.1.a]
sau, dacă se consideră şi amortizările care apar în sistem , sub forma mai completă:
}{][][][ FKCM [4.1.b]
unde [M], [C] și [K] reprezintă matrici ce depind de timp.
Coeficienţii matriceali care intervin în ecuaţii sunt constanţi sau variabili, funcţie de natura
problemei care a generat ecuaţiile de mişcare. În cele ce urmează se vor presupune aceşti
coeficienţi constanţi, aşa cum se întâmplă în cazul sistemelor motorului pe care îl vom studia în
teza de faţă. Pentru alte aplicaţii trebuie să considerăm şi variabilitatea coeficienţilor matriceali
în raport cu timpul sau cu alţi parametrii. Pentru acele cazuri se poate face o analiză incrementală
a problemei, pe intervale de timp pe care se poate considera că aceşti coeficienţi matriceali sunt
constanţi. Din cele arătate rezultă că un studiu al ecuaţiilor de forma [4.1.a, b] poate satisface
nevoilor de modelare a sistemelor mecanice pentru o clasă mare de probleme. În cele ce urmează
se prezintă pe scurt, modul de analiză a unor sisteme de ecuaţii diferenţiale de această formă.
Page 53
53
4.2. Analiza modală
Analiza modală reprezintă un instrument puternic de analiză a sistemelor de ecuaţii
diferenţiale cu coeficienţi constanţi care are şi avantajul unor reprezentări intuitive, calitative a
fenomenelor care se produc, reprezentări deosebit de utile inginerului. Metoda superpoziţiei
modale oferă un suport extraordinar de puternic pentru înţelegerea fizică a fenomenelor.
În esenţă această metodă constă într-o schimbare de funcţie având ca scop aducerea
sistemului obţinut la o formă remarcabil de simplă, cu ajutorul transformării lineare:
} q ]{ { [4.2]
unde ] poartă numele de matrice modală. Pentru ecuaţiile (4.1.a), în anumite condiţii pe care
trebuie să le îndeplinească matricele de inerţie şi de rigiditate (condiţii care sunt îndeplinite
întotdeauna în sistemele mecanice reale) această transformare care să aducă sistemul la o formă
mai simplă, în care ecuaţiile sunt decuplate, există în timp ce pentru (4.1.b), pentru a putea
realiza acest lucru, matricea amortizărilor ][C trebuie să îndeplinească anumite condiţii care vor
fi menţionate. Ca rezultat a transformării menţionate sistemul dat (4.1.a) „se sparge” într-un
număr de n ecuaţii diferenţiale de ordinul doi cu coeficienţi constanţi, independente, a căror
rezolvare nu mai este o problemă.
4.2.1. Pulsaţii proprii
Noţiunea de pulsaţii proprie generalizează această noţiune de la vibraţiile cu un singur grad de
libertate. Pulsaţia proprie este o caracateristică naturală a sistemului cu un grad de libertate, nu
depinde de excitaţie şi condiţiile iniţiale şi determină cantitativ răspunsul punctului material. În
mod analog este introdusă noţiunea de pulsaţii proprii pentru un sistem cu n grade de libertate.
Dacă pentru sistemul de ecuaţii diferenţiale (4.1.a) se caută soluţii armonice, de forma:
))( { tscXt [4.4]
se obţine prin derivare succesivă, vectorul acceleraţiilor sistemului:
)sin)( { tXt [4.5]
)cos)( { 2 tXt [4.6]
Dacă punem condiţia ca soluţia să verifice sistemul (4.1.a), se obţine:
0 )sin) - ]K [ ( 2 tXM [4.7]
la orice moment de timp t. Acest lucru se întâmplă dacă şi numai dacă:
0 ) - ]K [ ( 2 XM [4.8]
condiţie care reprezintă un sistem linear, omogen.. Acest sistem linear va admite şi alte soluţii în
afară de cea banală, zero, dacă şi numai dacă:
Page 54
54
0][][ 2 MKetd [4.9]
Daca dimensiunea sistemului linear este n prin dezvoltarea determinantului se va obţine un
polinom de gradul n în 2
:
0][][)( 22 MKetdP [4.10]
care poartă numele de polinomul caracteristic al sistemului. Ecuaţia P() = 0 poartă numele de
ecuaţie caracteristică, ecuaţia frecvenţelor sau ecuaţia valorilor proprii. Valorile ii poartă
numele de pulsaţii proprii ale sistemului. Definiţia pentru frecvenţe şi perioade este aceeaşi ca la
studiul vibraţiilor cu un singur grad de libertate. Pulsaţia cea mai joasă se numeşte pulsaţia
fundamentală. La fel ca şi la sistemele cu un singur grad de libertate, pulsaţiile proprii reprezintă
o caracteristică naturală a sistemului, independente de excitaţie şi de condiţiile iniţiale.
Frecvenţele armonicelor care vor reprezenta soluţiile sistemului de ecuaţii diferenţiale vor
depinde numai de caracteristicile inerţiale şi elastice ale sistemului. Ele nu sunt influenţate în nici
un fel de valorile iniţiale ale poziţiilor şi vitezelor, nici de forţele care solicită sistemul. Numărul
valorilor proprii este egal cu numărul gradelor de libertate ale sistemului.
Se poate face o ordonare a valorile proprii, definind serii spectrale formate din:
- pulsaţiile proprii: T
n ][ 21 ,cu i ordonate crescător: 1 2 … n ;
- frecvenţele proprii:
2
iif cu: f1 f2 … fn ;
- perioadele proprii: i
iT
2 cu: T1 T2 …Tn .
Soluţia sistemului linear omogen (4.8) în care am introdus valorea proprie determinată
anterior i o notăm, respectiv, cu iX . Se obţin n sistemele lineare omogene:
0][2 ii XMK i =1,2,..,n [4.11]
Soluţia sistemului i corespunzătoare pulsaţiei proprii i , se numeşte vectorul propriu de
rangul i al sistemului. Deoarece:
0][][ 2 MKetd i [4.12]
cele n componente ale vectorului iX nu vor fi independente, deci nu vom putea obţine
mărimea vectorului ci numai direcţia lui. Din acest motiv în literatură se mai utilizează noţiunea
de direcţie proprie. Se poate obţine modul de mişcare de rangul i dacă se va stabili un mod de
scalare (normalizare) a componentelor lui iX . Se notează modurile proprii cu iii X
unde coeficienţii i vor depinde de metoda de scalare aleasă iar ansamblul lor formează
matricea modală ][ :
][][ 21 n [4.13]
Page 55
55
4.2.2. Proprietăţi ale valorilor proprii
Modurile proprii se bucură de câteva proprietăţi remarcabile care le fac apte de ajuca un rol
deosebit de important în analiza vibraţiilor sistemelor inginereşti. Mai jos se regăsesc,
principalele proprietăţi utilizate în lucrare:
P1. Dacă matricea [K] este singulară atunci: 02 este valoare proprie a ecuaţiei caracteristice.
Mai mult, dacă rang ( [K] ) = n-l atunci 2
= 0 este rădăcină a ecuaţiei P( 2
) = 0 cu ordinul l
de multiplicitate.
P2. Dacă [K] şi [M] sunt simetrice, valorile proprii sunt reale.
P3. Dacă [K] şi [M] sunt pozitiv definite, valorile proprii sunt pozitive. Pentru sistemele
mecanice aflate în studiul nostru acest lucru se întâmplă întotdeauna.
4.2.2.1 Proprietăţi de ortogonalitate
Deoarece matricea de rigiditate K este o matrice simetrică, putem scrie:
iT
jj
T
i XKXXKX [4.14]
relaţie care se demonstrează cu uşurinţă prin scrierea explicită a matricelor care apar în formulele
scrise.
În acelaşi mod, întrucât matricea M este simetrica avem şi:
iT
jj
T
i XMXXMX [4.15]
Dacă se scrie ecuaţia valorilor proprii sub forma:
02 iii XMXK [4.16]
şi premultiplicăm această ecuaţie cu T
jX se obţine:
02 i
T
jii
T
j XMXXKX [4.17]
Schimbând acum pe i cu j se obţine, la fel şi:
02 j
T
ijj
T
i XMXXKX [4.18]
Prin scăderea relaţiilor(4.17) şi (4.18) se obţine:
0)( 22 i
T
jji XMX . [4.19]
Întrucât, în general pulsaţiile proprii sunt diferite, ji rezultă:
0i
T
j XMX [4.20]
şi dacă se ţine seama de (4.17) rezultă şi:
0i
T
j XKX [4.21]
Se pot lua în locul amplitudinilor X modurile proprii definite prin iii X şi se
obţine:
0 i
T
j M [4.22]
şi:
0 i
T
j K [4.23]
Page 56
56
Exprimăm aceste lucru spunând că modurile proprii sunt ortogonale prin M respectiv prin
K .
4.2.2.2 Câtul Rayleigh
Câtul Rayleigh permite obţinerea unei estimări pentru pulsaţiile proprii. Din acest motiv este
des utilizat în diferite metode numerice, legate de calculul vectorilor şi valorilor proprii. Dacă în
relaţia:
02 iii XMXK [4.24]
înmulţim la stânga cu T
iX , obţinem:
02 i
T
iii
T
i XMXXKX [4.25]
de unde se obţine:
iT
i
i
T
ii
XMX
XKX2 [4.26]
Raportul (4.26) poartă numele de câtul lui Rayleigh. Se poate arăta că, dacă se aleg vectorii
proprii aproximativi (estimaţi) iX , se poate obţine o aproximare foarte bună pentru 2
i , motiv
pentru care acest raport este utilizat pentru calculul aproximativ al pulsaţiilor proprii. În relaţia
de mai sus se poate înlocui iX cu i .
4.2.2.3 Relaţii de ortogonalitate generalizate
Relaţiile de ortogonalitate generalizate permit o reprezentare a matricei amortizărilor astfel
încât să poată fi aplicată analiza modală şi să se obţină decuplarea ecuaţiilor de mişcare şi atunci
când matricea de amortizare nu este proporţională cu matricea de inerţie, cu matricea de
rigiditate sau cu o combinaţie lineară a celor două (amortizare Rayleigh).
Din relaţia:
0][][ 2 jjj MK [4.27]
se poate exprima vectorul modal j în două moduri distincte:
i) jj
j KM ][][1 1
2 [4.28]
ii) jjjjj KMMK 11212 ][][][][ [4.29]
Dacă vom ţine seama de aceste două relaţii, proprietăţile de ortogonalitate se pot generaliza în
două direcţii complementare.
Astfel, dacă se consideră relaţia demonstrată anterior:
0][ j
T
i M [4.30]
şi se introduce j exprimat cu relaţia i), se poate scrie:
0][][1
][ 1
2
j
j
T
i KMM
[4.31]
sau:
Page 57
57
0][][][ 1
j
T
i KMM [4.32]
Înlocuind din nou pe j din (4.28) se obţine:
0][][1
][][][ 1
2
1
j
j
T
i KMKMM
[4.33]
sau:
0][][][21
j
T
i KMM [4.34]
Dacă se repetă procedeul se obţine, printr-un proces de inducţie:
0][][][ 1
j
pT
i KMM [4.35]
relaţie valabilă pentru: p=0, 1, 2,....
Mai departe, dacă în (4.30) se introduce j exprimat cu relaţia ii), se poate scrie:
0][][][ 12
jji MKM [4.36]
sau:
0][][][11
ji KMM [4.37]
Dacă în această relaţie se introduce din nou j se obţine:
0][][][][][ 1211
jji MKKMM [4.38]
sau:
0][][][21
ji KMM [4.39]
Dacă se repetă procedeul se obţine, printr-un proces de inducţie:
0][][][ 1
j
pT
i KMM [4.40]
relaţie valabilă pentru: p=0, 1, 2, 3,....
Cele două relaţii (4.35) şi (4.40) pot fi grupate într-una singură, care reprezintă proprietăţile
de ortogonalitate generalizate:
0][][][ 1
j
pT
i KMM Zp [4.41]
4.2.2.4 Relaţiile de definiţie pentru matricea de amortizare
Dacă se ţine seama de relaţia (4.41) putem defini aşa numita matrice de amortizare Caughey
ca o combinaţie lineară a matricelor ortogonale pKMM ][][][ 1 :
rZr
r KMMC ][][][][ 1
cu: Rr . [4.42]
Pentru un sistem cu n grade de libertate această combinaţie lineară conţine numai n termeni
independenţi, deci se poate scrie:
rn
r
r
rn
r
r KMMKMMC ][][][][][][][ 11
0
11
0
[4.43]
Page 58
58
Rezultă că dacă avem de-a face cu o formă mai complicată pentru matricea de amortizare, am
putea să o scriem sub forma seriei prezentate, după care să determinăm coeficienţii r astfel
încât să avem o aproximare cât mai bună a matricei iniţiale cu seria obţinută.
Matricea de amortizare Rayleigh se obţine ca un caz particular al matricei Caughey, prin
reţinerea primilor doi termeni:
][][][][][ 11 KMCCC oo [4.44]
4.2.2.5 Normalizarea modurilor de vibraţie
Normalizarea modurilor proprii de vibrație este un procedeu necesar pentru a obţine o
imagine cât mai intuitivă a fenomenelor sau o interpretare unitară a rezultatelor. Am văzut că
modurile proprii sunt nedeterminate, adica n-1 componente pot fi exprimate în funcţie de cel de-
al n-lea element. Din acest motiv se vorbeşte şi de direcţiile proprii pentru problemele propuse,
întrucât de fapt determinăm o direcţie pentru o frecvenţă proprie şi nu un vector complet definit.
Am văzut anterior că soluţia problemei de valori proprii constă din vectorul unic determinat al
valorilor proprii şi sistemul de vectori ai amplitudinilor, determinaţi până la un factor. Procedeul
prin care se elimină nedeterminarea introdusă de factorul de scară se numeşte normalizare.
Normalizarea se poate face în mai multe moduri:
se ia amplitudinea primului grad de libertate egală cu unitatea;
se ia amplitudinea maximă a fiecărui mod de vibraţie egală cu unitatea;
se pune condiţia ca 1][ i
T
i XMX care defineşte forma normalizată prin [M] a
modului de vibraţie i. Acest tip de normare se numeşte normare inerţială. Notăm matricea
modală în acest caz cu [ ];
se pune condiţia ca 1i
T
i XX , deci ca suma pătratelor amplitudinilor să fie 1.
Prin normalizare modurile proprii (direcţiile proprii) devin univoc determinate (vectori
proprii). Oricare din procedeele enunţate poate fi aplicat iar alegerea revine celui care se ocupă
de studiul problemei, pentru a determina acel mod de scalare care oferă cel mai bun suport
intuitiv pentru sistemul mecanic studiat.
4.2.2.6 Decuplarea ecuaţiilor de mişcare
După toate aceste definiţii şi prezentări se va prezenta cea mai importantă proprietate a
sistemului de ecuaţii diferenţiale cu coeficienţi constanţi şi anume aceea de a putea decupla
sistemul în n ecuaţii diferenţiale de ordinul doi, cu coeficienţi constanţi, decuplate.
Sistemul de ecuaţii de diferenţiale care descrie mişcarea unui sistem mecanic cu parametrii
concentraţi:
FKCM ][][][ [4.45]
devine, cu transformarea: { } = [ ]{ q }, un sistem de ecuaţii diferenţiale în q :
FqKqCqM ]][[]][[]][[ [4.46]
Dacă matricea amortizărilor ][C este o matrice ce admite o factorizare Caughey, atunci
sistemul de ecuaţii se va decupla, prin înmulţire cu transpusa matricei modale:
FqKqCqM TTTT ][]][[][]][[][]][[][ [4.47]
Matricele ]][[][ MT , ]][[][ CT şi ]][[][ KT devin în acest caz diagonale şi le
notăm:
]][[][]\\[ * MM T
]][[][]\\[ * CC T [4.48]
]][[][]\\[ * KK T
Page 59
59
Se notează cu mi , ci şi respectiv ki, componentele diagonale ale matricelor ]\\[ *M , ]\\[ *C şi
]\\[ *K . Vor exista relaţiile:
]][[][ i
T
ii Mm ;
]][[][ i
T
ii Cc ; [4.49]
]][[][ i
T
ii Kk ;
Cu aceste notaţii sistemul de ecuaţii diferenţiale se decuplează în n ecuaţii diferenţiale de
ordinul doi, cu coeficienţi constanţi, independente:
1111111 Fqkqcqm
2222222 Fqkqcqm
…. [4.50]
nnnnnnn Fqkqcqm
Cu notaţiile: iii mc /2 ; iii mk /2 ; iii mFf / se obţine:
11
2
1111 2 fqqq
22
2
2222 2 fqqq
…. [4.51]
nnnnnn fqqq 22
Problema se reduce astfel la rezolvarea a n ecuaţii diferenţiale de ordinul doi, independente.
Rezolvarea unei astfel de ecuaţii se face prin scrierea ecuaţiei omogene:
iiiiii qqq 02 2 [4.52]
care are soluţia omogenă:
)sin()exp( iiiio ttiAq [4.53]
la care se va adăuga o soluţie particulară qip. Soluţia sistemului omogen se obţine prin
suprapunere modală:
nno qqq 2211 [4.54]
4.2.3 Analiza problemei vibraţiilor motorului MRD-2
O perturbaţie de scurtă durată aplicată unui sistem, cum ar fi de exemplu un motor cu ardere
internă, tinde să excite simultan toate frecvenţele naturale ale sistemului. Majoritatea sistemelor
au un număr mare de frecvenţe naturale, dar normal doar câteva dintre acestea, cele mai scăzute,
numite fundamentale prezintă interes deoarece cele superioare sunt, în general, amortizate. La
fiecare frecvenţă naturală un sistem vibrează într-un mod particular, descris de modul propriu de
vibraţie.
Structurile slab amortizate pot produce nivele înalte de vibraţii chiar de la surse de nivel
scăzut dacă frecvenţa perturbaţiei este apropiată de una din frecvenţele naturale ale sistemului.
Pentru evitarea unor astfel de probleme, încă din stadiul de proiectare, este necesară modelarea
Page 60
60
precisă a subsistemelor şi analizarea răspunsului la perturbaţiile anticipate. Astfel, metodica de
abordare a analizei vibraţiilor presupune:
a) elaborarea unui model matematic al sistemului pe baza căruia se vor scrie ecuaţiile de
mişcare;
b) analiza caracteristicilor vibraţiilor libere (pulsaţiile proprii şi modurile proprii);
c) analiza răspunsului vibraţiilor forţate şi anticiparea perturbaţiilor ce pot apărea;
d) analiza metodelor de control a nivelurilor de vibraţii nedorite, în cazul în care acestea
apar.
Primul pas în problema analizei vibraţiei unei structuri este formularea ecuaţiilor de mişcare,
succesul analizei depinzând de corectitudinea acestora [1].
4.3 Metoda elementelor finite
Metoda elementelor finite (Finite Element Method – FEM) [3] reprezintă o metodă
modernă şi foarte eficientă de realizare a diferitelor calcule şi simulări în domeniul ingineriei.
Această metodă împreună cu programele care o încorporează au devenit componentele de bază
ale sitemelor moderne de proiectare asistată de calculator.
Metoda elementelor finite [2] reprezintă o metodǎ generală utilizată pentru rezolvarea
numerică a ecuaţiilor diferenţiale cu derivate parţiale care descriu sau nu fenomene fizice. Ca
descriere generală FEM constǎ în descompunerea domeniului iniţial în care sunt definite
ecuaţiile diferenţiale în porţiuni de o formă geometrică cât mai simplă. Problema derivatelor
parţiale este redusǎ, după o serie de operaţii de aproximare, la un sistem de ecuaţii algebrice în
cazul problemelor de statică, la o problemă de valori şi vectori proprii dacă se face o analiză
modală sau la un sistem de ecuaţii diferenţiale care trebuiesc integrate în cazul problemelor mai
complexe în care apare o excitaţie variabilă în timp. Metoda poate fi utilizată în orice situaţie în
care ne confruntăm cu ecuaţii diferenţiale cu derivate parţiale. Pânǎ în prezent
metoda s-a dezvoltat în mod deosebit în domenii ca: analiza structuralǎ, analiza termicǎ,
analiza fluidelor, analiza electricǎ, analiza magneticǎ şi altele.
4.3.1Etapele de rezolvare a unei probleme cu ajutorul metodei elementelor finite
Etapa 1. Împărțirea domeniului de analiză în elemente finite.
În această etapă se alege tipul sau tipurile de elemente finte adecvate problemei de rezolvat,
apoi se împarte structura în elemente finite. Aceasta operație, care se numeste și discretizare,
poate fi făcută cu ajutorul calculatorului. Tipul de element finit este definit de mai multe
caracteristici, cum sunt numărul de dimensiuni (uni-, bi-, tridimensional), numărul de noduri ale
elementului, funcțiile de aproximare asociate și altele. Alegerea tipului de element finit are mare
importanță pentru necesarul de memorie interna, pentru efortul de calcul impus calculatorului și
pentru calitatea rezultatelor. Punctul de plecare pentru construcția matematică a diferitelor
metode de elemente finite îl constituie respectarea următoarelor principii:
• utilizarea unei aproximări bazată pe folosirea de elemente mai simple, pentru care avem la
dispozitie o solutie;
• sporirea exactității calculului prin rafinarea discretizării.
Etapa 2. Constituirea ecuațiilor elementelor finite.
Page 61
61
Comportatea materialului sau mediului în cuprinsul unui element finit este descrisa de
ecuatiile elementelor finte denumite și ecuații elementale. Acestea alcatuiesc un sistem de ecuații
al elementului. Ecuațiile elementale pot fi deduse direct, pe cale variațională, prin metoda
reziduală sau prin metoda bilanțului energetic.
Etapa 3. Asamblarea ecuațiilor elementale în sistemul de ecuații al structurii.
Comportarea întregii structurii este modelată prin asamblarea sistemelor de ecuații ale
elementelor finte în sistemul de ecuații al structurii, ceea ce din punct de vedere fizic înseamnă
că echilibrul structurii este condiționat de echilibrul elementelor finite. Prin asamblare se impune
ca funcția sau funcțiile necunoscute să aibă aceeași valoare în nodurile comune elementelor
Etapa 4. Implementarea condițiilor la limita și rezolvarea sistemului de ecuații al structurii.
Sistemul de ecuații obținut în urma implementării condițiilor la limită corespunzătoare
problemei concrete este rezolvat printr-unul din procedeele obișnuite, de exemplu prin
eliminarea Gauss sau prin descompunerea Choleski, obținându-se valorile funcțiilor în noduri.
Acestea se numesc și necunoscute primare sau de ordinul întâi.
Etapa 5. Efectuarea de calcule suplimentare pentru determinarea necunoscutelor secundare.
În unele probleme, dupa aflarea necunoscutelor primare, analiza se încheie. În alte probleme
însă, cunoașterea numai a necunoscutelor primare nu este suficientă, analiza trebuind să
continuie cu determinarea necunoscutelor secundare sau de ordinul doi. Acestea sunt derivate de
ordin superior ale necunoscutelor primare. Astfel, de exemplu, în problemele mecanice de
elasticitate, necunoscutele primare sunt deplasările nodale. Cu ajutorul lor, în această etapă, se
determina necunoscutele secundare care sunt deformațiile specifice și tensiunile.
Sistemele complexe care vibrează [4] sunt, de obicei, alcătuite din componente care posedă
caracteristici distribuite de stocare sau de disipare a energiei. În astfel de sisteme proprietățile
inerțiale, de rigiditate și de amortizare variază continuu în funcție de locul ocupat de sistem în
spațiu. În consecință, ecuațiile diferențiale parțiale, cu coordonate în spațiu (de exemplu
coordonatele Carteziene x, y, z ) și timpul t ca variabile independente, sunt necesare pentru a
reprezenta raspunsul în vibrații al sistemelor complexe.
Un sistem continuu care vibrează poate fi modelat cu un set de mase concentrate
interconectate folosindu-se elemente discrete de arcuri și amortizoare. Un astfel de model se
numește model de parametru-concentrat sau model discret. Un avantaj imediat al reprezentării cu
ajutorul acestor modele discrete îl reprezintă faptul că sistemul de ecuații devine un sistem
obișnuit de ecuații diferențiale. La aceste modele se folosesc elemente de liniare de arcuri și
amortizoare. Ecuațiile diferențiale liniare rezultate se pot rezolva folosind metoda analizei
modale care se bazează pe faptul că aceste modele idealizate au frecvențe preferate și
configurații geometrice în care tind să execute vibrații libere. Un răspuns arbitrar al sistemului
poate fi interpretat ca o combinație liniară a acestor vibrații modale și ca rezultat, analiza
sistemului se poate realiza folosindu-se tehnici modale.
Analiza modală este o unealtă importantă în analiza vibrațiilor, diagnosticare, proiectare și
control. În unele sisteme, nefuncționarea din punct de vedere mecanic poate fi atribuită excitației
mișcării lor preferate, ca de exemplu vibrațiilor modale sau rezonanței. Prin analiza modală se
poate determina locația și extinderea vibrațiilor periculoase dintr-un sistem, din acest motiv
analiza reprezintă o metodă de diagnosticare și prevenire a eventualelor nefuncționalități ale unui
sistem. Prin folosirea unui model modal, se pot determina care grade de libertate ale unui sistem
mecanic sunt mai sensibile prin adăugarea sau eliminarea unei mase sau a unui element de
rigidizare. În această manieră, se poate stabilii o metodă convenabilă și sistematică de a realiza
modificări structurale în scopul eliminării problemei vibrațiilor sau pentru a verifica efectele unei
modificări particulare. Un sistem mare și complex poate fi divizat în mai multe subsisteme care
Page 62
62
se pot analiza independent. Prin intermediul tehnicilor analizei modale, caracteristicile dinamice
ale întregului sistem se pot determina prin informații de la subsisteme. Printre avantajele acestei
metode se enumără: 1) subsitemele pot fi dezvoltate prin diferite metode precum experimentarea,
metoda elementelor finite sau tehnici de modelare și asamblare pentru a se obține modelul întreg;
2) analiza unui sistem de ordin mai mare se poate reduce la analiza câtorva sisteme de ordin mai
mic; 3) proiectare unui sistem complex se poate realiza prin proiectarea și dezvoltarea
subsistemelor separate. Aceste capabilități ale modificărilor structurale și ale analizei
substructurilor ale metodei analizei modale fac din aceasta o unealtă foarte folositoare în
procesul de dezvoltare a proiectării sistemelor mecanice.
4.3.2 Elemente finite tridimensionale utilizate la discretizarea pieselor
Elementele finite tridimensionale reprezintă categoria elementelor finite utilizate pentru
studiul structurilor de tip masiv sau a altor structuri cu pereți groși [7]. Pentru piesele studiate din
motorul MDR-2, s-au folosit elemente finite tridimensionale de tip tetraedru și hexaedru,
elemente folosite în problemele de elasticitate spațială.
4.3.2.1 Elementul finit tetraedru
Fig. 4.1 – Element finit tip tetraedru cu patru noduri [7]
Se impun drept grade de libertate în noduri componentele deplasărilor u, v, w, după cele trei
axe ale sistemului cartezian x, y, z. Dacă se admite pentru aproximarea deplasărilor pe domeniul
elementului finit polinoame de gradul întâi de forma:
zcycxccw
zcycxccv
zcycxccu
1211109
8765
4321
[4.55]
coeficienții c1, c2, ….c12, se determină punându-se condițiile următoare:
iiii
iiii
iiii
wzyxw
vzyxv
uzyxu
,,
,,
,,
[4.56]
unde (xi,yi,zi) reprezintă coordonatele nodului i. se obține următorul sistem de ecuații:
Page 63
63
llll
jkkk
jjjj
iiii
iiii
llll
kkkk
jjjj
iiii
zcycxccw
zcycxccw
zcycxccw
zcycxccw
zcycxccv
zcycxccu
zcycxccu
zcycxccu
zcycxccu
1211109
1211109
1211109
1211109
8765
4321
4321
4321
4321
...
...
.
[4.57]
Cu notațiile:
l
l
k
j
i
e
w
u
u
u
u
U
.
.
;
12
4
3
2
1
.
.
c
c
c
c
c
c [4.58]
lll
kkk
jjj
iii
lll
kkk
jjj
iii
lll
kkk
jjj
iii
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
A
1
1
1
1
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
1
1
1
1
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
1
1
1
1
0 [4.59]
se obține ecuația matriceală:
eUAc 1
[4.60]
Rezolvarea ecuației matriceale de forma (4.60) este dificilă, în special în cazul elementelor
finite cu număr mare de noduri [7].
Conform relațiilor (4.55) pentru calculul deplasărilor pe domeniul elementului finit se
folosesc polinoame de interpolare de forma:
zcycxcczyxf 4321,, [4.61]
Presupunând cunoscute deplasările din noduri se pot scrie condiții de forma fi=f(xi,yi,zi). Se
obține următorul sistem de ecuații:
Page 64
64
llll
kkkk
jjjj
iiii
zcycxccf
zcycxccf
zcycxccf
zcycxccf
4321
4321
4321
4321
[4.62]
Din rezolvarea sistemului de ecuații (4.62) se obțin coeficienții ci unde i=1, 2, 3, 4, ai
polinomului (4.61) sub forma:
llkkjjii
llkkjjii
llkkjjii
llkkjjii
ffffV
c
ffffV
c
ffffV
c
ffffV
c
6
1
6
1
6
1
6
1
4
3
2
1
[4.63]
unde:
lll
kkk
jjj
iii
zyx
zyx
zyx
zyx
V
1
1
1
1
6
1 [4.64]
;
1
1
1
;
ll
kk
jj
i
lll
kkk
jjj
i
zx
zx
zx
zyx
zyx
zyx
1
1
1
1
1
1
ll
kk
jj
i
ll
kk
jj
i
yx
yx
yx
zy
zy
zy
[4.65]
Prin permutări circulare se obțin ceilalți coeficienți din relațiile (4.63).
Înlocuind soluțiile (4.63) în relația (4.61) se obține expresia funcției de interpolare:
llkkjjii fzyxNfzyxNfzyxNfzyxNzyxf ,,,,,,,,,, [4.66]
unde:
zyxV
N
zyxV
N
zyxV
N
zyxV
N
lllll
kkkkk
jjjjj
iiiii
6
1
6
1
6
1
6
1
[4.67]
Utilizând relația (4.66) se obțin expresiile finale ale funcțiilor de deplasare, date de relațiile
(4.55):
Page 65
65
llkkjjii
llkkjjii
llkkjjii
wNwNwNwNzyxw
vNvNvNvNzyxv
uNuNuNuNzyxu
,,
,,
,,
[4.68]
Vectorul funcțiilor de deplasare pe element, {U}, este:
eUN
zyxw
zyxv
zyxu
U
,,
,,
,,
[4.69]
l
i
l
k
j
i
lkji
lkji
lkji
w
v
u
u
u
u
NNNN
NNNN
NNNN
U
.
.
.
000
000
00
0
000
000
0
00
000
000 [4.70]
Pentru problemele de elasticitate spațială vectorul deformație specific și vectorul tensiune
sunt de forma:
;
z
u
x
w
y
w
z
v
x
v
y
u
z
w
y
v
x
u
zx
yz
xy
z
y
x
.
zx
yz
xy
z
y
x
[4.71]
Ținând cont că funcțiile Ni date de relațiile (4.67) sunt funcții de variabilele x,y,z, iar vectorul
{Ue}, nu depinde de aceste variabile, rezultă că:
eUB [4.72]
unde:
Page 66
66
x
N
x
N
x
Nx
N
x
N
x
N
x
Nx
N
z
N
z
Nx
N
x
N
z
Nz
N
z
N
x
N
x
N
y
N
z
N
z
N
z
N
y
N
y
N
y
N
z
N
z
N
z
N
z
N
y
N
y
N
y
N
y
Nx
N
x
N
x
N
x
N
B
432
432
1
143
43
4
21
214
321
321
432
1
4321
4
321
000
00
0
00
0000
000
000
00
0
000
000
0
00
000
000
[4.73]
reprezintă matricea de interpolare a deformațiilor specifice pe element.
Matricea [Ke] de rigiditate a elementului se calculează cu relația [7]:
V
TdVBDBK [4.74]
iar tensiunile vor fi:
eUBDD [4.75]
unde matricea [D], reprezintă matricea de elasticitate a materialului pentru starea de tensiune
triaxială, sau matricea de rigiditate a materialului.
4.3.2.2 Elementul finit hexaedric
Fig. 4.2 – Elementul finit paralelipipedic cu opt noduri [7]
Pentru un element finit paralelipipedic cu opt noduri, reprezentat în figura 4.xx, pentru
câmpul deplasărilor se pot folosi polinoame de interpolare de forma:
xyzczxcyzcxyczcycxccw
xyzczxcyzcxyczcycxccv
xyzczxcyzcxyczcycxccu
2423222120191817
161514131211109
87654321
[4.76]
Page 67
67
Coeficienții ci (i=1, 2, 3,….,24) din relația (4.76) se determină din condiții de forma (4.56). În
același mod se abordează și rezolvarea ecuațiilor elementale pentru elementele finite
tridimensionale cu un număr de noduri “n”. Spre exemplu, vectorul deplasărilor nodale {Ue} are
forma:
{Ue} T ={u1 v1 w1 u2 v2 w2 …..un vn wn } [4.78]
4.4 Calculul frecvențelor proprii pentru componentele motorului MDR-2
Analiza modală virtuală a pieselor încercate din motor: biela, pistonul, cămasa rotativă, chiulasa
și arborele cotit s-a realizat cu ajutorul soft-ului specializat, ANSA (Automatic net generation for
structural analysis)[5]. Analiza are ca scop determinarea modurilor proprii de vibrație ale pieselor
mai sus amintite, pentru a se realiza o comparație a rezultatelor obținute în urma analizei virtuale cu
rezultatele obținute în urma măsurătorilor experimentale realizate în condiții de laborator și
prezentate în capitolul 5.
În vederea obținerii unor frecvențe proprii apropiate de cele reale, în cazul analizei modale
există posibilitatea introducerii de valori ale densității materialelor și a modulului de elasticitate,
ambele în strânsă legătură cu rigiditatea piesei. Astfel s-au urmat etapele:
- cântărirea efectivă a pieselor și introducerea în program a valorilor de densitate astfel
încât masa rezultată în modelul cu elemente finite să fie egală cu cea reală;
- s-a modificat valoarea modulului de elasticitate astfel încât valorile frecvențelor proprii
ale pieselor analizate să fie apropiate de cele obținute experimental;
- s-au comparat frecvențele proprii obținute cu metoda elementului finit cu cele
determinate experimental.
Pentru evitarea problemelor legate de discretizarea modelului cu elemente finite, s-au
considerat următoarele în modelarea 3D:
- razele de curbură foarte mici (sub 1 mm) nu au fost luate în considerare;
- diferențele de diametre foarte mici (sub 1 mm) nu au fost luate în considerare.
Pentru realizarea analizei virtuale au fost importate în programul ANSA fișierele de tip .cad
conținând modelul virtual al pieselor de analizat, realizate în programul Catia v5, în scopul
realizării mesh-ului de volum, necesar analizei virtuale. Pentru realizarea acestui mesh se urmează
câteva etape din program: se analizează geometria piesei, eliminându-se eventualele greșeli ale
desenului, apoi în modulul special dedicat al soft-ului se pregătește mesh-ul de suprafață, se elimină
sau se corectează erorile care apar în geometria mesh-ului primar, apoi se trece la realizarea mesh-
ul de volum. Etapele descrise mai sus sunt ilustrate în figurile de mai jos pentru piston, pentru
celelalte piese fiind ilustrate doar rezultatele.
Page 68
68
Figura 4.3 – Fișierul de tip .cad ce conține modelul virtual al piesei analizate
Fig. 4.4 – Importul modelului virtual al piesei în modulul specializat al programului ANSA
Fig. 4.5 – Pregătirea mesh-ului de suprafață, curățarea geometriei de elementele dăunătoare
Page 69
69
Fig. 4.6 – Obținerea mesh-ului de volum, folosit la analiza modală
La finalul analizei modale se obțin frecvențele proprii de vibrație ale piesei analizate și un
spectru al valorilor deformațiilor.
Pistonul neconstrâns, exemple de deformații la diferite frecvențe:
Deformația la 2593 Hz
Deformația la 4905 Hz
Figura 4.7 – Exemplu de deformație în cazul pistonului analizat neconstrâns la diferite frecvențe
Page 70
70
Tabelul 4.1 Modurile proprii obținute pentru pistonul neconstrâns
Moduri Frecvența (Hz)
1 2593,4
2 3432,0
3 4905,7
4 5182,7
5 5363,3
6 6318,3
Pistonul constrâns, exemple de deformații la diferite frecvențe:
Deformația la 2228 Hz
Deformația la 6378 Hz
Fig. 4.8 - Exemplu de deformație în cazul pistonului analizat constrâns
Page 71
71
Tabelul 4.2 Modurile proprii obținute pentru pistonul constrâns
Moduri Frecvența (Hz)
1 2228,3
2 4180,8
3 4322,5
4 4956,5
5 5025,0
6 5359,6
7 5895,5
8 6378,5
În continuare sunt prezentate doar exemple de deformații pentru celelalte piese analizate, pașii
urmați pentru obținere lor fiind aceeași ca la piston. În tabele sunt prezentate modurile proprii
obținute pentru fiecare piesă, în funcție de cum a fost analizată, constrâns sau neconstrâns.
Biela constrânsă, exemple de deformații la diferite frecvențe:
Deformație la 350 Hz
Deformația la 5230 Hz
Fig. 4.9 – Deformațiile obținute în cazul bielei constrânse
Page 72
72
Tabelul 4.3 Modurile proprii obținute pentru biela constrânsă
Moduri Frecvența (Hz)
1 347,2
2 943,1
3 1894,7
4 2041,9
5 3548,5
6 4485,0
7 5226,7
8 5516,8
9 5699,3
Biela neconstrânsă, exemple de deformații la diferite frecvențe:
Deformația la 1630 Hz
Deformația la 1690 Hz
Fig. 4.10 – Deformațiile obținute în cazul bielei neconstrânse
Page 73
73
Tabelul 4.4 Modurile proprii obținute pentru biela liberă
Moduri Frecvența (Hz)
1 1628,5
2 1687,5
3 3230,1
4 5320,2
Cămașa de rotație folosită la distribuția motorului și chiulasa au fost analizate doar în modul
liber, deoarece la fel au fost testate și în condiții de laborator, prin metoda loviturii de ciocan,
pentru determinarea frecvențelor proprii. Rezultatele obținute la analiza virtuală se pot observa în
imaginile de mai jos.
Cămașa de rotație, exemple de deformație la diferite frecvențe:
Deformația la 750 Hz
Deformația la 2800 Hz
Fig. 4.11 – Exemplu de deformații obținute în cazul cămașii de rotație
Page 74
74
Tabelul 4.5 Modurile proprii obținute pentru cămașa de rotație liberă
Moduri Frecvența (Hz)
1 738,5
2 752,9
3 2045,8
4 2057,5
5 2825,4
6 3707,8
7 3894,0
8 3950,7
9 4408,8
10 4747,3
11 4828,4
12 5603,6
13 5820,3
14 6074,2
15 6296,1
16 6431,0
Chiulasa, exemple de deformație la diferite frecvențe:
Deformația la 3570 Hz
Deformația la 4750 Hz
Fig. 4.12 – Exemplu de deformații obținute în cazul chiulasei
Page 75
75
Tabelul 4.6 Modurile proprii obținute pentru chiulasa liberă
Moduri Frecvența (Hz)
1 3571,0
2 3754,5
3 4759,6
4 5435,4
5 5601,2
6 6175,1
Deoarece rezultatele obținute în urma analizei virtuale corespund cu cele obținute în urma
încercărilor de laborator, s-a considerat metoda de lucru ca fiind corectă și s-a trecut la analiza
virtuală a arborelui cotit al motorului. Pașii urmați sunt aceeași ca la pistonul motorului.
Fig. 4.13 – Mesh-ul arborelui cotit pe care s-au realizat simulările virtuale
În continuare se prezintă exemple de deformații obținute pentru diferite frecvențe:
Deformația la 1182 Hz
Page 76
76
Deformația la 4480 Hz
Deformația la 5450 Hz
Deformația la 6135 Hz
Fig. 4.14 – Exemplu de deformații obținute la arborele cotit al motorului
Page 77
77
Tabelul 4.7 Modurile proprii obținute pentru arborele cotit
Moduri Frecvența (Hz)
1 1182,5
2 1815,8
3 2075,9
4 3074,9
5 3216,3
6 3297,1
7 3868,5
8 4477,2
9 5453,4
10 6135,7
4.5 Concluzii
Prin testarea modală a structurilor permite estimarea frecvenţelor proprii (naturale), masele
modale, amortizarea modală şi modurile proprii ale acestora.
În urma măsurătorilor efectuate s-a constatat că modurile proprii de vibrație periculoase apar
în afara domeniului turațiilor la care funcționează motorul.
Page 78
78
Capitolul 5
Verificări experimentale
În capitolul 5 se prezintă determinarea frecvențele proprii ale principalelor piese din motorul
cu raport de comprimare variabil (piston, bielă, cămașa rotativă de distribuție, chiulasa și
arborele cotit) în condiții de laborator, cu scopul de a compara rezultatele obținute în urma
măsurătorilor, cu cele obținute utilizând soft-ul ANSA.
Analiza modală s-a efectuat luându-se în considerare două cazuri:
a) analiza modală a componentelor considerând piesele libere, fără constrângeri;
b) analiza modală a componentelor considerând piesele a fi supuse acelorași constrângeri ca
în cazul real, unde componentele sunt montate pe motor prin diferite tipuri de montaje
(cu șurub, prin bolț, etc.)
Compararea rezultatelor obținute utilizând ambele situații, fără constrângeri, respectiv cu
aplicarea constrângerilor permite obținerea unei imagini de ansamblu asupra modului în care
frecvențele proprii de vibrație își schimbă valoarea, frecvențele astfel obținute putând fi
comparate cu frecvențele obținute la testarea pieselor în mediu virtual.
Cercetările experimentale au avut ca scop următoarele aspecte:
- calibrarea și validarea modelelor teoretice pentru analiza vibrațiilor pieselor studiate din
motor;
- identificarea surselor ce generează nivele mari de vibrație: erori de proiectare, defecte de
fabricație (materialul folosit, montaj defectuos, neconcentricități) sau regimuri de
funcționare în vecinătatea frecvențelor de rezonanță ale diferitelor piese;
- propunerea unor noi soluții constructive ce pot duce la diminuarea nivelului de vibrații.
5.1 Aspecte teoretice
Analiza modală este un proces prin care se determină următorii parametrii modali: frecvențele
proprii, factorul de amortizare, vectori modali pentru sisteme liniare invariante în timp [9][38].
Parametrii modali se pot determina prin metoda analitică sau prin metoda experimentală,
obținându-se un rezultat sub formă matematică în care datele de ieșire sunt funcții de tip impuls-
răspuns sau răspuns în frecvență. Metodele experimentale, ca de exemplu metoda ciocanului de
impact, sunt folosite pentru validarea rezultatelor analitice.
Pașii principali parcurși în realizarea unei analize modale sunt [4]:
-teoria analizei modale care se referă la aspectele teoretice ale teoriei clasice de vibrații care
explică existența frecvențelor proprii și a modurilor proprii;
-achiziția de date se referă la aspectele efective legate de achiziția de date utilizate ca date de
intrare pentru estimarea parametrilor modali. Se acordă atenție deosebită algoritmilor matematici
utilizați pentru estimarea parametrilor modali, problemelor de liniaritate ale sistemelor și
invariației în timp a parametrilor sistemelor mecanice analizate;
-estimarea parametrilor modali bazată pe alegerea corespunzătoare a aparatului matematic
utilizat și justificat prin parametrii măsurați în cadrul experimental;
-prelucrarea datelor obținute și validarea acestora, ținându-se cont de evaluarea efectivă și
prezentarea datelor obținute în cadrul măsurătorilor experimentale. Totodată prelucrarea datelor
se referă și la modul de prezentare a datelor, sub formă de tabele care pot prezenta evaluarea
frecvențelor, estimarea amortizării și a vectorilor modali. Acești parametrii sunt asociați cu
formele geometrice ale gradelor de libertate corespunzătoare sistemului mecanic măsurat.
Page 79
79
5.2 Achiziția datelor
Achiziția datelor reprezintă o metodă care permite înregistrarea datelor necesare determinării
modelului modal, metoda implicând o serie de aspecte tehnice care trebuie luate în seamă pentru
obținerea unor rezultate cu erori cât mai mici. După obținerea datelor în formă lor digitală, o
abordare uzuală [4] o reprezintă transformarea acestor din domeniul timp, în domeniul frecvență
utilizând transformata Fourier.
Conversia semnalului din analog în digital are ca scop practic obținerea conversiei datelor
obținute prin măsurători, acordându-se atenție păstrării acurateții de conversie în termeni de
frecvență, amplitudine și fază. La dispozitivele analogice, acuratețea este îndeplinită doar prin
caracteristicile tehnice ale aparaturii utilizate, iar în cazul utilizării conversiei sub formă digitală,
performanțele aparatului digital nu sunt așa importante. Procesul de conversie a datelor din
analog în digital implică două faze:
- prelevarea probelor, referindu-se la intervalul de timp între două seturi de date;
- cunatificarea care se referă la transpunerea unei amplitudini analogice sub forma unei
valori digitale.
5.3 Metodica utilizată și aparatura folosită la analiza modală
Componentele motorului au fost analizate utilizând metoda ciocanului de impact [9][38] care
presupune suspendarea pieselor de analizat și lovirea lor cu ciocanul de impact B&K 8206-003.
Se aplică piesei o lovitură cu ciocanul, lovitură ce generează în masa acesteia o vibrație ce este
captată ulterior prin intermediul accelerometrelor fixate rigid pe suprafața piesei, semnalul fiind
transmis către o placă de achiziții, care mai apoi prin intermediul unui computer, afișează
vibrația în formă digitală. Pentru ca măsurătorile să fie precise, greutatea accelerometrelor nu
trebuie să depășească 10% din greutatea totală a piesei măsurate. Totodată, în funcție de
gabaritul dimensional al piesei analizate, se utilizează diferite variante constructive de ciocan de
impact. Se ține cont de asemenea de faptul că accelerometrele trebuie montate cât mai rigid pe
piesa de analizat, obținându-se astfel un semnal nealterat, de amplitudine corespunzătoare,
neafectat de elementele intermediare dintre accelerometru și piesă.
Analiza modală a componentelor din motor (piston, bielă, cămasă rotativă, chiulasă) s-a
efectuat în cadrul Laboratorului de Vibrații din cadrul Catedrei de Rezistența Materialelor și
Vibrații a Universității Transilvania din Brașov, utilizându-se metodica corespunzătoare și
aparatura aferentă.
Aparatura utilizată o constituie platforma de măsurări de vibrații Pulse 12 [7], produsă de
Compania Bruel&Kajer, compusă din elementele:
- ciocan de impact;
- accelerometre;
- placă de achiziții;
- interfață grafică/computer.
Ciocanul de impact tip 8026-003 Bruel&Kjaer (figura 5.2), utilizat la anliza modală, are
următoarele propietăți:
- senzitivitate 1,14 mV/N;
- eroare ±1%;
- funcționare între -55 și +1250 C;
- forța realizată 4450N;
- masă seismică 100g;
- lungime 223 mm.
Page 80
80
Fig. 5.2 – Ciocanul de impact [7]
Pentru realizarea măsurătorilor s-au folosit accelerometre de tip 4507 Bruel&Kjaer (figura
5.3) , cele de tip 4507 având următoarele date tehnice:
- senzitivitate 10,2 mV/g;
- funcționare în domeniul de temperaturi cuprins între -54 și +1200 C;
- greutate de 4,8 g;
- frecvența de rezonanță în stare montată de 18 kHz.
Fig. 5.3 Accelerometrele folosite la măsurători [7]
Placa de achiziție și prelucrare a semnalelor este una portabilă de tip Bruel & Kjaer 3560C
care echipează platforma Pulse 12 și este prezentată în figura 5.4:
Fig. 5.4 - Placă de achiziție a datelor B&K Pulse 3650C
Page 81
81
Amplasarea semnalelor pe canalele plăcii de achiziție s-a realizat, după cum se poate observa
și în figura 5.6, astfel:
- pe canalul 1 s-a preluat semnalul provenit de la ciocanul de impact;
- pe canalele 2, 3 și 4 s-a preluat semnalul de la accelerometrele de vibrație.
Fig. 5.6 – Conectarea cablurilor pentru achiziția semnalului
5.4 Rezultate obținute în urma analizei modale
Amplasarea accelerometrelor pe pistonul de încercat, în cazul când este analizat neconstrâns,
este prezentată în figura 5.4:
Fig. 5.4 Montarea accelerometrelor pe pistonul analizat
Pentru piston s-a folosit un număr de 3 accelerometre și au fost aplicate, în ambele cazuri,
constrâns sau neconstrâns, un număr de câte 10 lovituri în diferite puncte ale pistonului.
Semnalele înregistrate au fost analizate, în continuare, în domeniul frecvență, formele
răspunsurilor fiind prezentate în figurile de mai jos:
Page 82
82
Fig. 5.5 – Frecvențele înregistrate de accelerometre pentru pistonul neconstrâns
În tabelul 5.1 se prezintă detaliat frecvențele ce generează moduri proprii de vibrație, obținute
pentru pistonul neconstrâns, reprezentate de funcția de transfer H1.
Tabelul 5.1
Frecventa [Hz] Amplitudine [dB/m/s2/N]
2616 31.8
2871 59.2
849 7.70
1008 20.3
4742 61.2
5748 31.6
Amplasarea accelerometrelor pe pistonul constrâns se poate observa în figura 5.6. Pistonul a
fost fixat pe dispozitiv simulându-se modul lui de constrângere în montarea lui de pe motor.
Fig. 5.6 – Încercarea pistonului constrâns
Page 83
83
Fig. 5.7 – Frecvențele înregistrate pentru pistonul constrâns
În tabelul 5.2 se prezintă detaliat frecvențele ce generează moduri proprii de vibrație, obținute
pentru pistonul constrâns, reprezentate de funcția de transfer H1.
Frecventa [Hz] Amplitudine [dB/m/s2/N]
76 -18.4
165 8.47
290 -5.60
855 -9.17
1285 5.68
1430 14.5
1762 5.73
2029 12.2
2123 12.1
2435 24.4
3431 4.59
4515 24.3
5036 41.3
3607 5.70
Amplasarea accelerometrelor pe biela neconstrânsa, este prezentată în figura 5.8:
Fig. 5.8 – Biela analizată neconstrâns
Page 84
84
Fig. 5.9 – Frecvențele înregistrate pentru biela neconstrânsă
În tabelul 5.3 se prezintă detaliat frecvențele ce generează moduri proprii, obținute pentru
biela analizată neconstrâns, reprezentate de funcția de transfer H1.
Tabelul 5.3
Frecventa [Hz] Amplitudine [dB/m/s2/N]
17 -6.99
1529 -1.20
1690 -5.26
3696 3.63
Pentru biela constrânsă s-au obținut următoarele rezultate:
Fig. 5.10 – Montarea accelerometrelor pe biela constrânsă
Page 85
85
Fig. 5.11 – Frecvențele înregistrate pentru biela constrânsă
În tabelul 5.4 se prezintă detaliat frecvențele ce generează moduri proprii obținute pentru
biela analizată constrâns, reprezentate de funcția de transfer H1.
Tabelul 5.4
Frecventa [Hz] Amplitudine [dB/m/s2/N]
29 -27.4
65 -9.69
154 -19
226 -15.6
256 -8.27
331 -6.81
557 -10.3
643 -8.41
758 -8.02
889 -7.38
1218 0.19
1342 -11.2
1470 -5.81
1563 -2.59
1860 -11
2050 -10.1
2629 12.8
3129 10.1
4454 15.7
5141 6.80
5315 10
6110 26.8
În continuare se prezintă rezultatele obținute pentru cămașa rotativă de distribuție și pentru
chiulasă, analizate doar în modul neconstrâns. S-a luat această decizie deoarece frecvențele
obținute în modul constrâns nu oferă informații concludente despre modurile proprii de vibrație
ale acestor piese.
În figura 5.12 se prezintă modurile de amplasare ale accelerometrelor pe cămașa rotativă de
distribuție:
Page 86
86
Fig. 5.12 – Amplasarea accelerometrelor pe cămașa rotativă de distribuție
Fig. 5.13 – Frecvențele obținute la analiza cămășii rotative de distribuție
În tabelul 5.5 se prezintă detaliat frecvențele ce generează moduri proprii, obținute pentru
cămașa rotativă de distribuție, reprezentate de funcția de transfer H1.
Tabelul 5.5
Frecventa [Hz] Amplitudine [dB/m/s2/N]
557 25.4
1496 38.7
2081 34.6
2758 33
2868 27.2
3182 38
3598 33.2
4073 31.5
4640 29.1
4880 26.9
5063 28.5
5477 40.9
6303 31.4
În figura 5.14 se prezintă modurile de amplasare ale accelerometrelor pe chiulasa motorului:
Page 87
87
Fig. 5.14 – Amplasarea accelerometrelor pe chiulasă
Fig. 5.15 – Frecvențele obținute pentru chiulasă
În tabelul 5.6 se prezintă detaliat frecvențele ce generează moduri proprii, obținute pentru
cămașa rotativă de distribuție, reprezentate de funcția de transfer H1.
Tabelul 5.6
Frecventa [Hz] Amplitudine [dB/m/s2/N]
3599 23.5
3801 27.1
4748 32.8
5353 24.8
5590 26.9
6299 24.1
5.5 Concluzii:
Procedura de testare modală a structurilor permite estimarea frecvenţelor proprii (naturale),
masele modale, amortizarea modală şi modurile proprii ale acestora.
Sub acţiunea excitaţiei introdusă în sistem, prin intermediul ciocanului de impact, structurile,
la frecvenţele de rezonanţă, funcţionează ca amplificatoare de răspuns, evidenţiat în răspunsul în
frecvenţă. Pornind de la aceste aspecte s-a procedat la o testare modală, prin metoda ciocanului
de impact, pentru piesele componente ale motorului.
Analiza modală realizată atât virtual, cu soft-ul ANSA, cât și în laborator, prin metoda
ciocanului de impact, identifică frecvențele de bază unde o piesă ar putea să vibreze, acest lucru
fiind util dacă piesa respectivă face parte dintr-un ansamblu și ansamblul începe să vibreze se pot
identifica, cu o oarecare precizie, sursa posibilă de vibrație (biela, piston etc).
Page 88
88
Capitolul 6
Contribuții originale, diseminare, direcții viitoare de cercetare viitoare
6.1 Concluzii finale
Scopul principal al tezei a fost acela de a studia comportamentul dinamic al motoarele cu
raport de comprimare variabil. Astfel, s-a dorit optimizarea motorului cu distribuție prin ferestre
și cămașă rotativă MDR-2, studiindu-se zgomotele și vibrațiile care apar la un motor de acest tip
care s-a dorit a se reconsidera și modifica pentru a funcționa cu raport de comprimare variabil.
Prin rezultatele obținute în această lucrare, se pot formula unele concluzii referitoare la
motoarele cu raport de comprimare variabil și la posibilitatea implementării pe motorul MDR-2 a
unui sistem de obținere a raportului geometric de comprimare variabil, sistem care a fost propus
și spre brevetare. Astfel ca activități se pot enumera:
- cercetări experimentale privind reconsiderarea și îmbunătățirea funcționării motorului cu
cămasă rotativă și distribuție prin ferestre;
- cercetări experimentale privind modificarea raportului de comprimare, utilizând modele
diferite de pistoane (de exemplu cu cameră de ardere integrată sau nu), modele diferite de
chiulase (cu sau fără canale în dreptul ferestrelor pentru direcționarea încărcăturii
proaspete sau a gazelor de evacuare) și cămăși de rotație executate din materiale diferite
din componente sau dintr-o singură bucată;
- măsurători experimentale pentru studiul vibrațiilor principalelor componente ale
motorului: arbore cotit, bielă, piston, cămașă de rotație, chiulasă;
- analiza virtuală a pieselor mai sus amintite pentru identificare modurilor proprii de
vibrație și compararea rezultatelor cu rezultatele obținute în urma măsurătorilor
experimentale.
Analiza virtuală a pieselor motorului s-a realizat folosindu-se metoda elementelor finite, cu
ajutorul programului specializat ANSA. Metoda folosită este complexă și presupune parcurgera
unor etape prestabilite, rezultatele obținute fiind apropiate de realitate, deci acceptabile, totuși
influențate în mare măsură de caracteristicile de modelare și de rezolvare oferite de programul
ales de utilizator și de experiența în domeniu a acestuia.
Printre avantajele utilizării metodei elementelor finite pentru testarea pieselor, în comparație
cu cercetarea experimentală se numără:
- reducerea timpului de lucru, folosindu-se software-uri specializate și aparatură
performantă;
- se pot analiza piesele atît în ansamblu, cât și separat;
- se poate interveni asupra formei și proprietăților modelelor 3D ale pieselor,
îmbunătățindu-se compoziția materialului din care sunt executate sau reproiectându-le
geometria, fără impedimentul întârzierilor cauzate de eventualele modificări necesare a fi
aduse pieselor utilizate la cercetările experimentale efectuate în laborator;
- se reduc costurile ne mai fiind necesare aparatura de testare și accesoriile acesteia,
demontarea pieselor de pe motor sau realizarea acestora în mai multe exemplare pentru a
îndeplini diferite condiții impse de testarea lor în laborator sau deplasarea cu piesele
cercetate la diferite laboratoare sau institute de cercetare.
Analiza modală a pieselor cercetate din motorul MDR-2, efectuată în condiții de laborator,
vine să completeze rezultatele cercetărilor obținute prin metoda elementelor finite. Cele două
Page 89
89
tipuri de analiză evidențiat informații privind modurile proprii de vibrație ale pieselor, acestea
apărând la frecvențe mult mai ridicate față de cele care apar la funcționarea în condiții normale a
motorului.
Rezultatele apropiate obținute prin metoda virtuală și prin cea experimentală evidențiază o
concordanță buna între modelele experimentale și cele teoretice.
6.2 Contribuții personale
Contribuții din punct de vedere teoretic:
- realizarea și analiza unui stadiu actual al cercetărilor în domeniul motoarelor cu raport de
comprimare variabil;
- studiul motorului MDR-2 cu distribuție prin cămașă rotativă și ferstre, evidențierea
avantajelor și dezavantajelor folosirii unui astfel de motor, precum și cercetări privind
implementarea unui sistem dinamic de obținere a raportului de comprimare variabil,
precum și brevetarea unui astfel de sistem;
- contribuții la analiza dinamică a motoarelor cu raport de comprimare variabil;
- determinarea modurilor proprii de vibrație a componentelor principale motorului MDR-2
utilizând metoda elementelor finite: -realizarea modelelor 3D ale pieselor supuse analizei
în programul CatiaV5, realizarea lor cât mai corectă influențând precizia și timpul
analizei finite;
-modele 3D astfel realizate au fost importate în
programul ANSA, unde s-a generat structura de elemente finite, s-a verificat
corectitudinea acesteia, s-au introdus tipurile de material și proprietățile acestuia, s-au
setat parametrii necesari apoi s-a trecut la rularea programului;
-s-au vizualizat rezultatele sub formă de deformații
obținute la diferite frecvențe.
Contribuții din punct de vedere experimental:
- cercetări experimentale realizate în cadrul laboratoarelor de motoare ale Universității
Transilvania, cercetări care au vizat motorul MDR-2, mai exact:
1. repunerea în stare de funcționare a motorului;
2. realizarea unui model îmbunătățit, din punct de vedere al materialelor și al
procesului de fabricație, al cămășii rotative;
3. diferite montaje pentru realizarea unei etanșări îmbunătățite a cilindrului în zona
ferestrelor de distribuție, incluzând aici și o bucșă de etanșare din molibden;
4. încercări efectuate cu diferite tipuri de chiulase sau de piston, obținându-se
posibilitatea varierii raportului de comprimare prin modificarea volumului
camerei de ardere;
5. modificarea galeriei de admisie și totodată a tipului de carburator folosit la motor;
6. modificarea galeriei de evacuare pentru a se obține ”pata caldă” pentru carburator
și totodata o evacuare mai rapidă a gazelor de evacuare;
7. realizarea unui sistem de răcire a motorului cu circuit independent pentru chiulasă
și blocul motor, sistem necesar în vederea implementării pe motor a unui
mecanism de obținere a raportului de comprimare variabil.
- măsurători experimentale efectuate în cadrul Laboratorului de Vibrații din cadrul
Catedrei de Rezistența Materialelor și Vibrații a Universității Transilvania din Brașov,
utilizându-se metodica corespunzătoare și aparatura aferentă.
Page 90
90
6.3 Diseminarea rezultatelor
În urma studiilor și a cercetărilor efectuate, au fost redactate și publicate un număr de 10
lucrări științifice care au fost prezentate în cadrul unor conferințe naționale și internaționale, din
care amintesc:
- Internaţional CONgress on Automotive and Transport Engneering – CONAT 2010 /
27-29 Octombrie 2010;
sau:
- The 4th Internaţional Conference Advanced Compoșiţe Materials Engineerng –
COMAT 2012 / 18 – 20 Octombrie 2012.
Cercetările asupra realizării unor mecanisme de obținere a raportului geometric de
comprimare variabil și adaptarea acestuia pentru a funcționa pe motorul MDR-2, au avut ca
rezultat două soluții fezabile, care au fost trimise spre brevetare.
6.4 Direcții viitoare de cercetare
Prin parcurgerea lucrării de față, deci și a capitolelor legate de îmbunătățirea componentelor
și a funcționării motorului cu distribuție prin ferestre și cămașă rotativă, cât și a implementării
unui sistem de obținere a raportului de comprimare variabil, se observă necesitatea unui studiu
mai amănunțit, care presupune o perioadă mai lungă de timp pentru teste, dar și costuri legate de
procesul de fabricație sau cel de cercetare, destul de ridicate.
Alte direcții în care se poate îndrepta o viitoare cercetare ar fi cele legate de rezolvarea
problemelor de etanșeitate a cilindrului, adaptarea unui sistem de injecție la un motor cu
distribuție prin cămașă rotativă și ferestre care să înlocuiască sistemul existent cu carburație sau
chiar construcția fizică și testarea unui sistem de obținere a raportului de comprimare variabil.
Page 91
91
Bibliografie selectivă:
1. Abaitancei, D., Bobescu, Gh. – Motoare pentru automobile, Editura Didactică și Pedagogică,
București 1975.
2. Arama, C., Apostolescu, N., Grunwald, B. – Poluarea aerului de către m.a.i., Editura
Tehnică, București 1975.
3. Arama, C., Grunwald, B. – Motoare cu ardere internă – Procese și caracteristici, Editura
Tehnică, București 1966.
4. Bathe, K. J., - Finite Element Procedures, 2nd Ed., Prentice-Hall Inc., New Jersey, 1996.
5. Birch, S., - MayFlower’s variable engine technology, Automotive engineering International,
Ianuarie, 2002.
6. Blumenfeld, M., - Introducere în metoda elementelor finite, Editura Tehnică, București, 1995.
7. Bobescu, Gh., Cofaru, C., Chiru, A., – Motoare pentru autovehicule și tractoare. Vol. I:
Teorie și caracteristici, Editura Tehnică, Chișinău, 1996.
8. Bobescu, Gh., Cofaru, C., Chiru, A., – Motoare pentru autovehicule și tractoare. Vol. II:
Dinamică, calcul și construcție, Editura Tehnică, Chișinău, 1998.
9. Boricean, C.C., - Cercetari teoretice si experimentale asupra dinamicii rotorilor de
turbosuflanta si a diminuarii vibratiilor generate de acestia, Teză de doctorat, Universitatea
”Transilvania” din Brașov, Școala Doctorală Interdisciplinară, Centrul de cercetare : Produse
high-tech pentru automobile, 2012.
10. Botiș, M.F., - Metoda elementelor finite, Editura Universității Transilvania, Brașov, 2005.
11. Brevick, Variable compression ratio piston, US Patent 5,755,192, 1998.
12. Clarke, et al., Internal combustion engine with adjustable compression ratio and
knock control, US Patent 6,135,086, 2000.
13. Clenci, A., Dumitrescu, V. – Influența supracomprimării amestecurilor sărace asupra
performanțelor unui m.a.s., Conferința intrenațională ESFA, București 1998
14. Clenci, A., Ivan, Fl., Racota, R. – Studiu teoretic asupra destinderii prelungite la M.A.S.,
Conferința internațională AMMA, Cluj 2002
15. Clenci, A., Ivan, Fl., Racota, R. – Higher expansion or higher compression at S.I.E.?,
Conferința internațională ESFA București, 2003.
16. Clenci, A., - Cercetări privind îmbunătățirea funcționării unui m.a.s. la sarcini parțialeprin
intermediul comprimării variabile și supraalimentării, Teză de doctorat, Universitatea
”Transilvania” din Brașov, 2012
17. Cunha, A. & Caetano, E. - Experimental Modal Analysis of Civil Engineering Structures,
Sound and Vibration 2006, Vol. 6.
18. Drangel, H., Olofsson, E., Reinmann, R., - The Variable Compression (SVC) and the
Combustion Control (SCC) – Two Ways to Improve Fuel Economy and Still Comply with World-
Wide Emission Requirements, SAE Technical Paper, 2002-01-0996, Martie, 2002.
19. Enescu, I., Stanciu, A.E., - Elemente finite, Editura Universității Transilvania, Brașov, 2007.
20. Envera, C.M., - Variable compression ratio engine, Mai, 2009.
21. Faur, N., - Elemente finite-Fundamente, Editura Politehnica, Timișoara, 2012.
22. Frâncu, T., - Studiul distribuției gazelor prin cămașă rotativă la motorul cu aprindere prin
scânteie, Teză de doctorat, Universitatea ”Transilvania” din Brașov, 1976.
23. Gabor, A., Grigore, P., - A method to determine the self frequencies of a cranckshaft from a
single cylinder engine with variable compression ratio, The 4th International Conference ”Advanced
Composite Materials Engineering” COMAT 2012, Brașov, Octombrie 2012.
Page 92
92
24. Gabor, A., Grigore, P., Secară, E., Petric, L., Radu, I.Ș., - Kinematics of a variable compression
ratio engine, Proceedings of the 4th International Conference on Manufacturing Engineering, Quality
and production systems, Barcelona, Septembrie, 2011.
25. Gabor, A., Grigore, P., Munteanu, M.V., - Determining the architecture of intake and exhaust
collectors for a four-stroke engine with rotating jacket distribution, The 4th International Conference
„Computational Mechanics and Virtual Engineering” COMEC 2011, Brașov, Octombrie, 2011.
26. Gabor, A., Munteanu, M.V., Grigore, P., - Sizing the cross section of a gas distribution with
rotating jacket, The 4th International Conference „Computational Mechanics and Virtual
Engineering” COMEC 2011, Brașov, Octombrie, 2011.
27. Gabor, A., Grigore, P., - Variable compression ratio engines – a solution for the near
future?, 3rd International Conference COMAT 2010 Research & Innovation in Engineering –
Vol. 3, Transilvania University Press, Brașov, 2010.
28. Ghionea, I.G., - Proiectare asistată în Catia V5 – Elemente teoretice și aplicații, Editura „Bren”,
București, 2007.
29. Grigore, P., - Posibilități de realizare a unui raport de comprimare variabil pentru motoarele cu
distribuție prin ferestre, Buletinul AGIR, 2012.
30. Grigore, P., - Solicitări în motorul cu raport de comprimare variabil, Buletinul AGIR, 2011.
31. Grigore, P., Gabor, A., Munteanu, M.V., - Parameterized model of a cylinder jacket for a slide-
valve distribution, The 4th International Conference „Computational Mechanics and Virtual
Engineering” COMEC 2011, Brașov, Octombrie, 2011.
32. Grigore, P., Gabor, A., Munteanu, M.V., Todor, I. , - Influence of variable compression ratio
regarding stress study of internal combustion engines components, The 4th International Conference
„Advanced Composite Materials Engineering” COMAT 2012, Brașov, Octombrie, 2012.
33. Grunwald, B. – Teoria, calculu și construcția motoarelor pentru autovehicule rutiere,
Editura Didactică și Pedagogică, București 1980.
35. Hara, V., Clenci, A., - The Adaptive Thermal Engine with Variable Compression Ratio and
Variable Intake Valve Lift, E.U.d. Pitești, 2002.
36. Hara, V., Pandrea, N., Popa, D., Stan, M., - Motoare termice adaptive, E.U.d. Pitești 1995.
37. Harrison, K., - The new generation variable compression ratio engine, Noiembrie, 2007.
38. Harris, R., Crede, C.M., Șocuri și vibrații, Vol. 1...3, Editura tehnică, București, 1968-1969
39. Harris, M. C., Piersol, A. G. – Harris’ shock and vibration handbook - Fifth edition, Editura
McGraw-Hill, New York, 2002.
40. Kajiwara, Kenichi, - A Variable-Radius/Length Engine, SAE 920453, 1992.
41. Klein, m., Eriksson, L., Nilsson, Y., - Compression Estimation from Simulated and
Measured Cylinder Pressure, SAE 2002-01-0843, 2002.
42. Larsen, G.J., - Research Engine for Evaluating the Effects of Variable Compression Ratio
(VCR) And/Or Variable Valve Timing (VVT), SAE Technical Paper, 910053, Februarie, 1991.
43. May, M.G. – The potential of the high compression homogeneous charge spark ignited for
four stroke combustion engine, IMech C204/1979.
44. May, M.G. – The high compression lean-burn spark ignited 4-stroke engine, Imech
c97/1979.
45. Mărdărescu, R., - Motoare de automobile și tractoare : Teoria, calculul și construcția,
Litografia „Învățământului”, Brașov, 1959.
46. Mraz, S. J., - Variable-compression-ratio engine. Machine Design, 78(6), 22-22, 2006
47. Maksay, Șt., Bistrain, D., - Introducere în metoda elementelor finite, Editura Cermi, Iași,
2010.
48. Mogan, Ghe., Burnariu, S. - Analiza cu elemente finite in inginerie : aplicatii in CATIA,
Editura Universitatii 'Transilvania' din Brasov, 2007.
Page 93
93
49. Moteki, et al., - Variable compression ratio mechanism of reciprocating internal combustion
engine, US Patent 6,505,582, 2003.
50. Năstăsoiu, M., - Calculul și construcția motoarelor cu ardere internă, Suport curs-Anul III,
Editura „Universității Transilvania”, Brașov, 2008.
51. Negrescu, N., Pana, C., Popa, M. – Motoare cu ardere internă. Procese, Editura Matrix Rom
S.R.L., București 1995.
52. Pesic, R., - Automobile Otto engines with minimal fuel consumption, Monographic edition of
the magazine Mobility and Vehicle Mechanics, Kragujevac, 1994.
53. Pesic, R., Veinovic, S., - Low consumption automobile engines, Revista Inginerilor de
Automobile, nr.1/1995.
54. Petyt, M. – Introduction to finite element vibration analysis-second edition, Cambridge
University Press, New York, USA, 2010.
55. Popa, B., Arbori cotiți, Editura tehnică, București, 1974.
55. Rădoi, M., Deciu, E., Voiculescu, D., - Elemente de vibrații mecanice, Editura tehnică,
București, 1973.
56. Ripianu, A., Crăciun, I., - Osii, arbori drepți și arbori cotiți, Editura tehnică, București,
1978.
57. Roberts, M., - Benefits and Challenges of Variable Compression Ratio (VCR), SAE Journal,
Paper No: 03P-227, 2002.
58. de Silva, C.W., - Vibrations. Fundamentals and Practice, Editura Boca Raton CRC Press,
2002.
59. Schwaderlapp, M., Habermann, K., Yapici, K.I., - Variable Compression Ratio – A Design
Solution for Fuel Economy Concepts, SAE Technical Paper, 2002-01-1103, Martie, 2002.
60. Serruys, M. – O sută de ani de la descoperirea fenomenului de detonație, reflexii asupra
procesului de ardere la motoare, Ingenieurs de l’Automobile, Martie 1997.
61. Siegla, D.C., Seewert, R. M., - The variable stroke engine-problems and promises, SAE
Paper no. 780700, Februarie, 1978.
62. Sykes, R.G., - Methods to reduce the fuel consumption of gasoline engines, Engines Expo,
2000.
63. Thomson, W. T., Theory of Vibration with Applications, 3rd Ed., Prentice-Hall Inc.,
Englewood Cliffs, 1988.
64. Vlase, S. – Elastodinamica elementelor finite, Editura Lux Libris, Brașov, 1996
65. Vlase, S., „Contribuţii la analiza elastodinamică a mecanismelor cu metoda elementelor
finite. Teză de doctorat”, Universitatea din Braşov, 1988.
66. Vlase, S., - Mecanică. Statică, Editura Infomarket, Brașov, 2004.
67. Vlase, S., - Mecanică. Dinamică, Editura Infomarket, Brașov, 2005.
68. Vlase, S., - Mecanică. Cinematică, Editura Infomarket, Brașov, 2006.
69. ***US Patent: 5-755-192, Brevick, ș.a., Variable compression ratio piston, 1998.
70.***US Patent: 6-135-086, Clarke, J., Tabaczynski, R., - Internal combustion engine with
adjustable compression ratio and knock control, 2000.
71. *** RO Brevet de invenție: 111863B, C., 104027, 96876, Hara, V., - Motor termic adaptiv.
72. ***RO Brevet de invenșie: 115662B, Râpan, G., Râpan, I., - Variable compression ratio
engine, 2000.
73. ***RO Propunere brevet de invenție: Grigore, P., Gabor, A., Vlase, S., Mărdărescu, V., -
Motor cu raport de comprimare variabil, 2012.
74. ***www.lotuscars.com/engineering/case-study-omnivore-research-engine, - Lotus Omnivore
Engine – 10% Better Fuel Economy than Current Leading Gasoline Engines, Decembrie, 2010.
Page 94
94
75. ***www.mce-5.com/vcr_strategy/mpc_inertia_forces.html, - MCE-5 DEVELOPMENT SA -
VCR Advantages and drawbacks, Iunie, 2010.
76. ***www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/vcr.html, - Variable
Compression Ratio Piston-Crank System, Noiembrie, 2010.
77. ***www.saabnet.com/tsn/press/000318.html, - Saab Reveals Unique Engine Concept that Offers
High Performance and Low Fuel Consumption, Iunie, 2011.
78. ***www.knorr-bremse.ro
79. ***http://www.beta-cae.gr/ansa.htm, Iulie, 2012.
80. ***http://www.bksv.com/Products/pulse-analyzer.aspx, Iulie, 2012.
Page 95
95
REZUMAT
Lucrarea de față cuprinde o scurtă cercetare a soluțiilor de motoare cu raport de comprimare
variabil, analizându-se posibilitatea implementării unui mecanism de obținerea a raportului de
comprimare variabilă pe un motor cu distribuție prin ferestre și cămasă rotativă. Pentru ca acest
lucru sa fie posibil, s-au efectuat diferite teste în cadrul laboratorului de motoare, care au constat
în modificarea raportului de comprimare, ajungându-se la propunerea spre brevetare a două
mecanisme de control al raportului volumetric de comprimare.
S-au determinat frecvențele proprii pentru principalele componente ale motorului, folosind
metoda elementelor finite. Totodată, analiza modală efectuată în condiții de laborator, pentru
determinarea frecvențelor proprii de vibrație ale componentelor studiate, vine în completarea
rezultatelor obținute în urma analizei cu elemente finite.
Cuvinte cheie: raport de comprimare variabil, motor, distribuție prin ferestre, cămașă
rotativă, piston, bielă, chiulasă.
ABSTRACT
This paper includes a brief research of the solutions of variable compression ratio engine,
looking at the possibility of implementing a mechanism to obtain the variable compression ratio
on an engine with slide-valve distribution and rotating cylinder jacket. For this to be possible,
various tests were performed in the engines laboratory, which consisted in changing the
compression ratio, leading to the proposal of patenting two control mechanisms volumetric
compressionratio.
The self frequencies of the main engine components were determined, using the finite
element method. However, modal analysis conducted under laboratory conditions to determine
the self frequencies of vibration of the studied components, complements the results of finite
element-analysis.
Keywords: variable compression ratio, engine, slide-valve distribution, rotating cylinder
jacket, piston, connecting rod, cylinder head.
Page 96
96
Curriculum Vitae
Informaţii personale
Nume / Prenume GABOR Adrian
Adresa Cart. Stefan cel Mare, Bl. 30, Sc. B, Ap. 3 Mun. Săcele, Jud. Brașov
Mobil 0747084520
E-mail(uri) [email protected] ; [email protected]
Naţionalitate(-tăţi) român
Data naşterii 03. 06. 1984
Sex Masculin
Educaţie şi formare
Perioada 2009 - 2012
Pozitia ocupata Student doctorand
Disciplinele principale studiate Motoare cu ardere internă și raport de comprimare variabil
Numele şi tipul instituţiei de învăţământ/furnizorului de formare
Facultatea de Inginerie Mecanică, Universitatea "Transilvania"din Brașov Brașov
Perioada 01/10/2003 - 15/02/2008
Calificarea/diploma obţinută Inginer Diplomat
Disciplinele principale studiate/competenţele profesionale
dobândite
Organe de mașini, Mecanisme, Termodinamică, Electrotehnică, Dinamica Autovehiculului, Calculul și Construcția Auto., Procese și caracteristici ale motoarelor, Calculul motoarelor, Hidraulică și pneumatică, Fabricarea pieselor auto., Repararea și diagnosticarea auto.,Managementul proiectelor.
Numele şi tipul instituţiei de învăţământ/furnizorului de formare
Facultatea de Inginerie Mecanică, Universitatea "Transilvania"din Brașov Brașov
Perioada 01/10/1999 - 15/07/2003
Calificarea/diploma obţinută Operator PC
Disciplinele principale studiate/competenţele profesionale
dobândite
Informatică, matematică, fizică. Operare, programere PC.
Numele şi tipul instituţiei de învăţământ/furnizorului de formare
Colegiul Național de Informatică ”Grigore Moisil” Brașov
Activitate stiintifica
Lucrări științifice publicate: 10 lucrări (ISI, BDI, B+)
Limbi straine cunoscute: Engleză,franceză
Page 97
97
Curriculum Vitae
Personal information
First name(s) / Surname(s) Adrian GABOR
Address(es) Stefan cel Mare Street, Bl. 30-B, Ap. 3 Săcele City 505600, Brașov (Romania)
Telephone(s) Mobile: +40 747 084520
E-mail [email protected] ; [email protected]
Nationality Romanian
Date of birth 03/06/1984
Gender Male
Education and training
Dates 2009→2012
Occupation or position held PhD. Student
Principal subjects Internal combustion engines with variable compression ratio
Name and type of organisation providing education and training
“Transilvania” University of Brașov
Dates 01.10.2003→15.02.2008
Title of qualification awarded Dipl. Eng.
Principal subjects/occupational skills covered
Mechanical Engineering, Automotives Engineering
Name and type of organisation providing education and training
Faculty of Mechanical Engineering, Transilvania University of Brașov
Dates 01.10.1999 →15.07.2003
Title of qualification awarded PC Operator
Principal subjects/occupational skills covered
Computer science, mathematics, physics.
Name and type of organisation providing education and training
„Grigore Moisil” High school of Brașov, Romania
Scientific results: 10 papers (ISI, BDI, B+) were published in several International Conferences
Foreign languages: English, French;