1 RAPORT ŞTIINŢIFIC ŞI TEHNIC Etapa III (ianuarie-decembrie 2014) Titlu proiect: Sistem pentru palpare virtuală şi training avansat, diagnostic medical şi tratament (VIPsystem) Contractul de finanțare nr: 2011‐3.2‐0503 Director: Ș.L. Univ. Dr. Dan Gheonea REZUMAT ETAPĂ: A treia etapă a proiectului s-a întins pe 12 luni (ianuarie‐decembrie 2014) şi a inclus mai multe activități: Utilizarea unui dispozitiv haptic intermediar in timp real (activitatea 3.1), Implementarea in context real a simulatorului haptic in cadrul diagnosticului (activitatea 3.2), Stabilirea capabilitatii si limitarilor platformei de telemedicina folosita impreuna cu dispozitivul haptic si interfata creata (activitatea 2.3) și participarea la congrese şi diseminarea rezultatelor. În cadrul primei activităţi am folosit volumele tumorale reconstruite de la un număr total de 25 pacienți, cărora le-au fost efectuate cele două investigații care furnizează date despre volumul tumoral, respectiv caracteristicile de duritate în cadrul etapei anterioare. Am folosit astfel în timp real un dispozitiv haptic intermediar (interfata haptica Omni Phantom) în timp real împreună cu modelul computerizat. Reconstrucția volumetrică în trei dimensiuni, pornind de la informațiile DICOM furnizate de investigarea CT și completate cu informațiile despre elasticitate au fost transmise la distanță prin intermediul aplicațiilor specifice de telemedicină, dispozitivul haptic interacționând de la distanță cu acesta. Rezultatele obținute au fost valorificate prin intermediul a două articole în reviste cotate ISI cu factor de impact, prin elaborarea a două rezumate, publicat de asemenea într-o revistă cotată ISI și a altor trei rezumate prezentate în cadrul unei conferințe internaționale. Rezumatele ISI au fost prezentat în cadrul celui mai prestigios congres mondial de gastroenterologie (Digestive Disease Week 2014, 3–6 Mai, Chicago, Statele Unite ale Americii). Cele trei rezumate au fost prezentate în cadrul United European Gastroenterology Week 2014, 18-22 Octombrie, Viena, Austria și au fost câștigate două premii I în cadrul secțiunilor de prezentări orale respectiv postere. Astfel am asigurat diseminarea rezultatelor la un nivel comparabil cu cel de la nivelul centrelor de prestigiu de la nivelul UE.
Transcript
1
RAPORT ŞTIINŢIFIC ŞI TEHNIC
Etapa III (ianuarie-decembrie 2014)
Titlu proiect: Sistem pentru palpare virtuală şi training avansat, diagnostic medical şi
tratament (VIPsystem)
Contractul de finanțare nr: 2011‐3.2‐0503
Director: Ș.L. Univ. Dr. Dan Gheonea
REZUMAT ETAPĂ:
A treia etapă a proiectului s-a întins pe 12 luni (ianuarie‐decembrie 2014) şi a inclus
mai multe activități: Utilizarea unui dispozitiv haptic intermediar in timp real (activitatea 3.1),
Implementarea in context real a simulatorului haptic in cadrul diagnosticului (activitatea 3.2),
Stabilirea capabilitatii si limitarilor platformei de telemedicina folosita impreuna cu
dispozitivul haptic si interfata creata (activitatea 2.3) și participarea la congrese şi diseminarea
rezultatelor.
În cadrul primei activităţi am folosit volumele tumorale reconstruite de la un număr total
de 25 pacienți, cărora le-au fost efectuate cele două investigații care furnizează date despre
volumul tumoral, respectiv caracteristicile de duritate în cadrul etapei anterioare. Am folosit
astfel în timp real un dispozitiv haptic intermediar (interfata haptica Omni Phantom) în timp
real împreună cu modelul computerizat. Reconstrucția volumetrică în trei dimensiuni, pornind
de la informațiile DICOM furnizate de investigarea CT și completate cu informațiile despre
elasticitate au fost transmise la distanță prin intermediul aplicațiilor specifice de telemedicină,
dispozitivul haptic interacționând de la distanță cu acesta.
Rezultatele obținute au fost valorificate prin intermediul a două articole în reviste cotate
ISI cu factor de impact, prin elaborarea a două rezumate, publicat de asemenea într-o revistă
cotată ISI și a altor trei rezumate prezentate în cadrul unei conferințe internaționale. Rezumatele
ISI au fost prezentat în cadrul celui mai prestigios congres mondial de gastroenterologie
(Digestive Disease Week 2014, 3–6 Mai, Chicago, Statele Unite ale Americii). Cele trei
rezumate au fost prezentate în cadrul United European Gastroenterology Week 2014, 18-22
Octombrie, Viena, Austria și au fost câștigate două premii I în cadrul secțiunilor de prezentări
orale respectiv postere.
Astfel am asigurat diseminarea rezultatelor la un nivel comparabil cu cel de la nivelul centrelor
de prestigiu de la nivelul UE.
2
A3.1. Utilizarea unui dispozitiv haptic intermediar in timp real.
Arhitectura sistemelor haptice
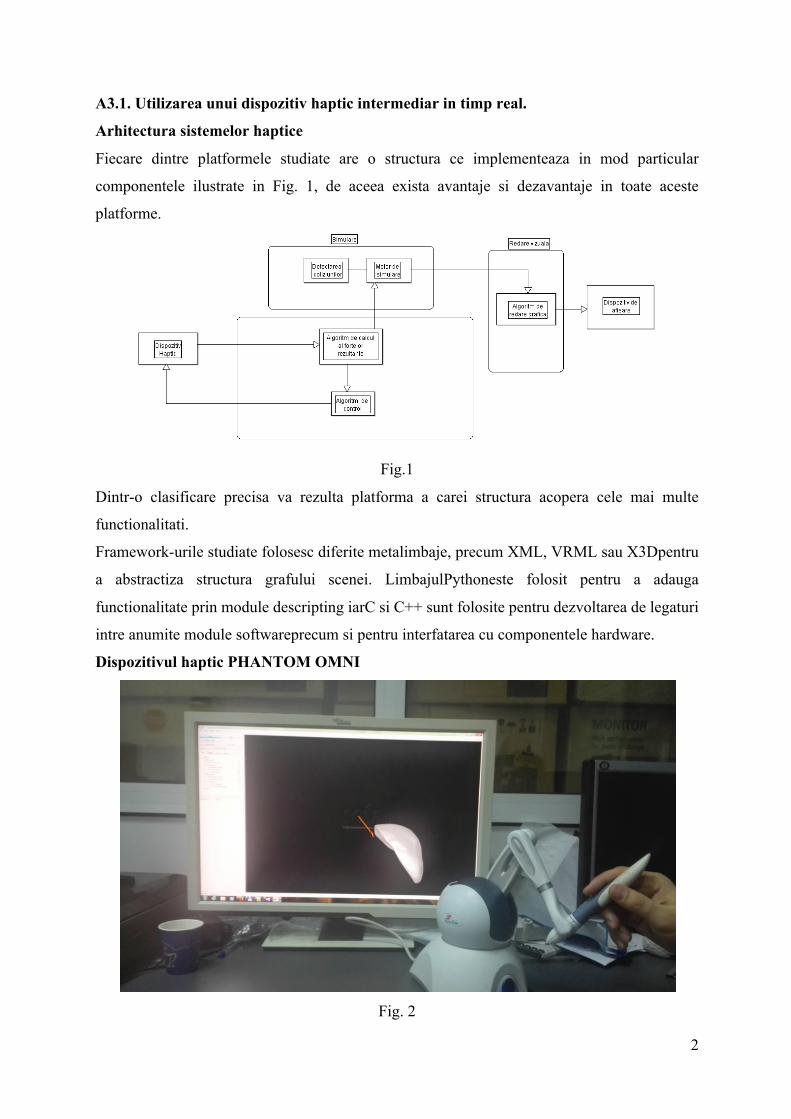
Fiecare dintre platformele studiate are o structura ce implementeaza in mod particular
componentele ilustrate in Fig. 1, de aceea exista avantaje si dezavantaje in toate aceste
platforme.
Fig.1
Dintr-o clasificare precisa va rezulta platforma a carei structura acopera cele mai multe
functionalitati.
Framework-urile studiate folosesc diferite metalimbaje, precum XML, VRML sau X3Dpentru
a abstractiza structura grafului scenei. LimbajulPythoneste folosit pentru a adauga
functionalitate prin module descripting iarC si C++ sunt folosite pentru dezvoltarea de legaturi
intre anumite module softwareprecum si pentru interfatarea cu componentele hardware.
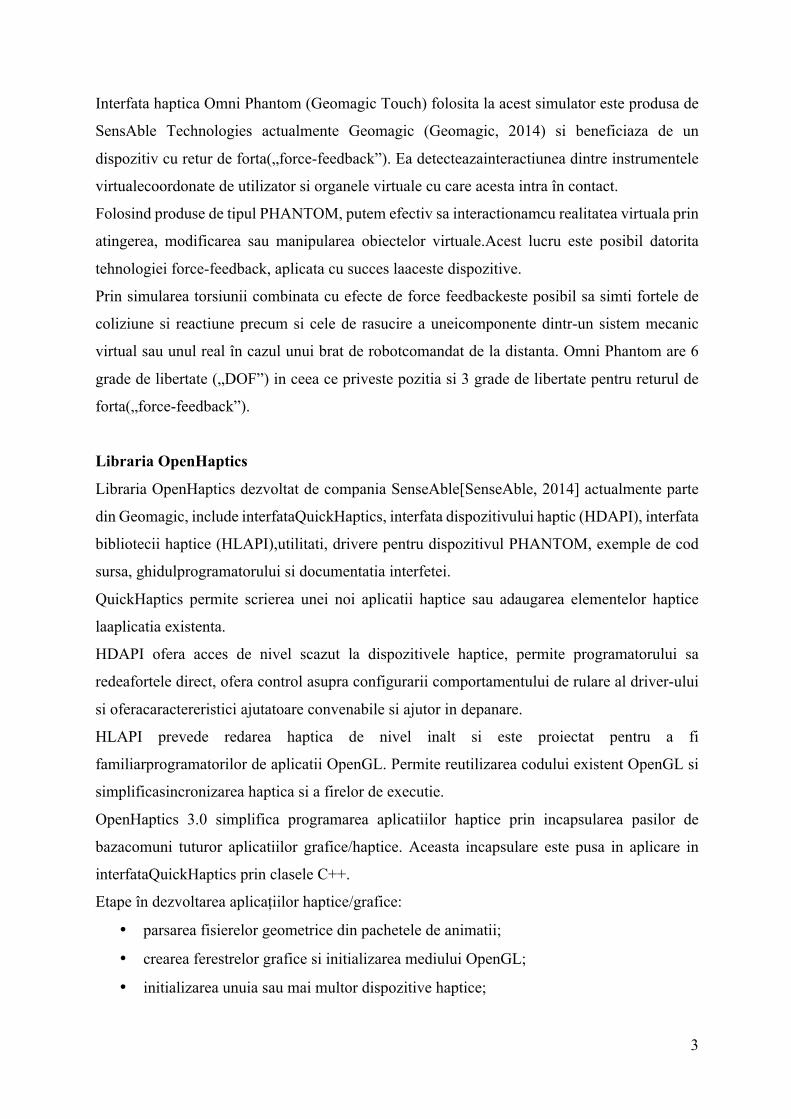
Dispozitivul haptic PHANTOM OMNI
Fig. 2
3
Interfata haptica Omni Phantom (Geomagic Touch) folosita la acest simulator este produsa de
SensAble Technologies actualmente Geomagic (Geomagic, 2014) si beneficiaza de un
dispozitiv cu retur de forta(„force-feedback”). Ea detecteazainteractiunea dintre instrumentele
virtualecoordonate de utilizator si organele virtuale cu care acesta intra în contact.
Folosind produse de tipul PHANTOM, putem efectiv sa interactionamcu realitatea virtuala prin
atingerea, modificarea sau manipularea obiectelor virtuale.Acest lucru este posibil datorita
tehnologiei force-feedback, aplicata cu succes laaceste dispozitive.
Prin simularea torsiunii combinata cu efecte de force feedbackeste posibil sa simti fortele de
coliziune si reactiune precum si cele de rasucire a uneicomponente dintr-un sistem mecanic
virtual sau unul real în cazul unui brat de robotcomandat de la distanta. Omni Phantom are 6
grade de libertate („DOF”) in ceea ce priveste pozitia si 3 grade de libertate pentru returul de
forta(„force-feedback”).
Libraria OpenHaptics
Libraria OpenHaptics dezvoltat de compania SenseAble[SenseAble, 2014] actualmente parte
din Geomagic, include interfataQuickHaptics, interfata dispozitivului haptic (HDAPI), interfata
bibliotecii haptice (HLAPI),utilitati, drivere pentru dispozitivul PHANTOM, exemple de cod
sursa, ghidulprogramatorului si documentatia interfetei.
QuickHaptics permite scrierea unei noi aplicatii haptice sau adaugarea elementelor haptice
laaplicatia existenta.
HDAPI ofera acces de nivel scazut la dispozitivele haptice, permite programatorului sa
redeafortele direct, ofera control asupra configurarii comportamentului de rulare al driver-ului
si oferacaractereristici ajutatoare convenabile si ajutor in depanare.
HLAPI prevede redarea haptica de nivel inalt si este proiectat pentru a fi
familiarprogramatorilor de aplicatii OpenGL. Permite reutilizarea codului existent OpenGL si
simplificasincronizarea haptica si a firelor de executie.
OpenHaptics 3.0 simplifica programarea aplicatiilor haptice prin incapsularea pasilor de
bazacomuni tuturor aplicatiilor grafice/haptice. Aceasta incapsulare este pusa in aplicare in
interfataQuickHaptics prin clasele C++.
Etape în dezvoltarea aplicațiilor haptice/grafice:
• parsarea fisierelor geometrice din pachetele de animatii;
• crearea ferestrelor grafice si initializarea mediului OpenGL;
• initializarea unuia sau mai multor dispozitive haptice;
4
• proiectarea scenei si a camerei;
• maparea fortei si a parametrilor de rigiditate pentru obiectele din scena;
• redarea raspunsului la interactiuni.
Libraria OpenGL
OpenGL (Open Graphics Library) (OpenGL, 2014)(este un standard deschis utilizat pe toate
platformele foarte utilizat pentru programarea componentelor grafice 2D si 3D ale programelor
de calculator. API-ul OpenGL ( application programming interface) constă in peste 250 de
apeluri diferite care pot fi folosite pentru a desena scene 3D complexe din primitive simple
(linii, puncte si poligoane). OpenGL este o interfata software foarte utilizata în realitate virtuală,
visualizare științifică, grafică asistată de calculator sau jocuri pe calculator.
Design
OpenGL servește două scopuri principale:
-ascunde complexitatea interfațării cu diferite acceleratoare 3D, prin prezentarea
programatorului cu un singur API uniform.
-ascunde capabilitățile diferitelor platforme hardware, prin solicitarea ca toate
implementarile să accepte caracteristica OpenGL ca un set complet –poate fi folosita si o
emulare software daca este necesar.
Funcționarea OpenGL de bază este de a accepta primitive, cum ar fi puncte, linii și poligoane,
și de a le converti în pixeli. Acest lucru se face printr-o conducta grafică - (graphics pipeline),
cunoscută sub numele de mașină de stare OpenGL. OpenGL oferă mai multe etape, care sunt
pe deplin programabile folosind GLSL(Graphics Library Shading Language).Un shader este o
funcționalitate executată pe procesorul grafic, care redă o parte din scena 3D în aplicații grafice.
OpenGL este un API procedural, care necesită ca un programator să impună restrictiile necesare
pentru constructia unei scene. OpenGL impune programatorilor să cunoasca limitarile si
cerintele impuse de API dar, de asemenea, oferă o anumită libertatea de a pune în aplicare
algoritmi noi de redare. OpenGL evolueaza permanent noi versiuni imbunatatite fiind lansate
permanent.
5
GLUT
Este o librarie utilitara a OpenGL(„OpenGL Utility Toolkit”)(GLUT, 2014) al carei scop este
interactiunea cu interfata sistemului de operare –functii de intrare/iesire la nivelul sistemului
(mouse, tastatura) cat si lucrul cu interfata grafica.
Diagnosticare prin palpare - simulare
Procedura de palpare reprezintă o aplicație importantă în stabilirea diagnosticului. Un exemplu
de implementare a procedurii de palpareeste simulatorul haptic Virtual Haptic Back[Holland,
2004]și care a fost folosit pentruinițierea studenților în domeniul diagnosticării prin palpare în
medicina osteopaticăîn terapie fizica și în cadrulterapiei prin masaj.Evaluarea rezultatelor
folosirii simulatorului a demonstrat o creștere semnificativă a vitezei de execuție a procedurilor
de diagnosticare si a preciziei acesteia.
Simulatorul generează modelul 3D vizual și haptic pentru spatele uman și două puncte haptice
ce sunt folosite pentru palpare; pentru testare sunt folosite mai multe exemple de disfuncții
somatice. În cadrul interfațeigrafice, sistemul haptic prezintăforțele aplicate. Simulatorul
integrează și un modul de evaluare cantitativă a performanței utilizatorilor și folosește interfeța
haptică PHANTOM 3.0 [Burdea, 1999].Aspectele vizuale și haptice pot fi adăugate foarte
ușor,iar unavantaj îl reprezintă evaluarea expertizei dobândite de către utilizator și vizualizarea
comparativă a evoluției asistateîn raport cu cea neasistată de către sistem a celui care învață
gestul medical.
În [Ullrich, 2012] este prezentat un algoritm nou de palpare și interacțiunea referitoare la
palparea cu glisarea țesutului, care utilizează un algoritm de tip forță multi-obiect pentru a
sprijini mai multe straturi de anatomie și un algoritm forță puls de simulare a pulsului arterial.
Prototipul dezvoltat utilizează o abordare finit element de co-rotație pentru simulare țesuturilor
moi și oferă interacțiune bimanuală prin combinarea mai multor tehnici. Rezultatele studiului
validează algoritmul propus de interacțiune prin palpare.
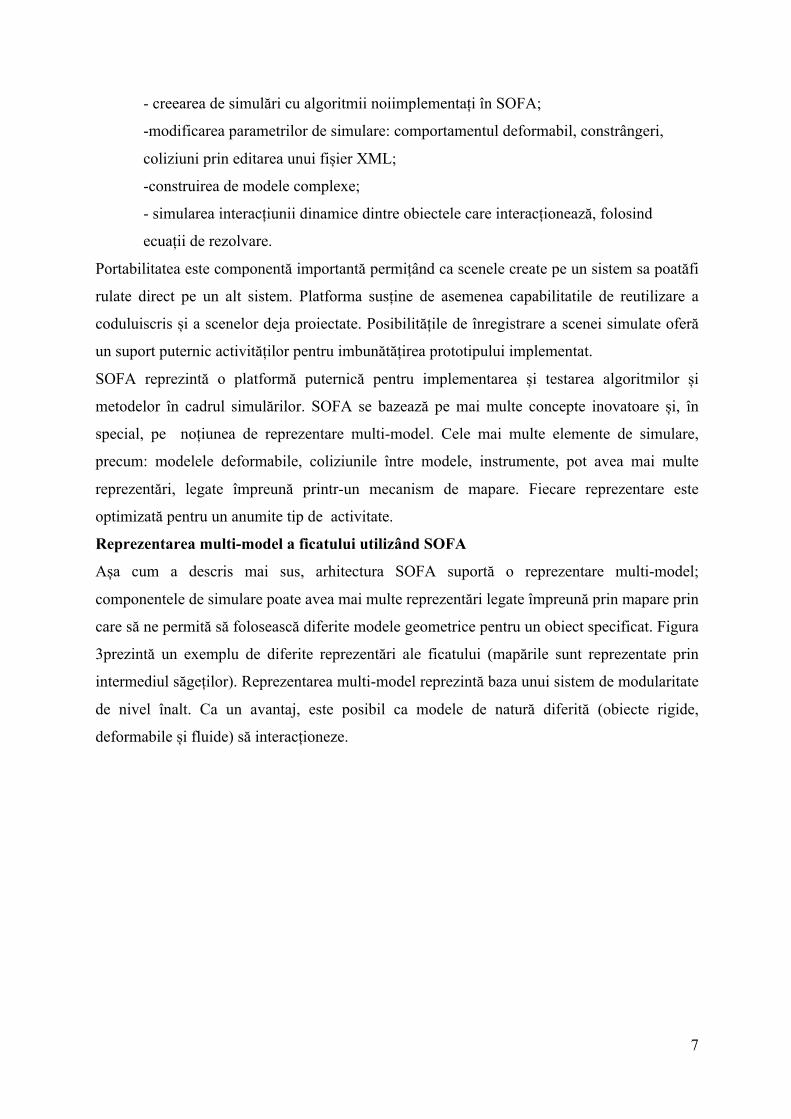
În cadrul proiectului, s-a realizat folosind framework-ul SOFA [SOFA, 2014](care va fi descris
în capitolul următor) un simulator pentrupalparea ficatului.În cadrul palpării fizice a ficatului
sunt utilizate doua tehnici: cu o singura mână pentru persoane fizice slabe, în timp ce tehnica
bimanuală este folosită pentru persoanele obeze și pentru o palpare profundă. Prin palparea se
determină forma ficatului și consistența acestuia. Dezavantajul major al palpării fizice se referă
la imposibilitatea stocării automate a rezultatelor: dimensiune, zone afectate, tipurile de forță
folosite și reacția acestora. Toate aceste valori permit analiza comparativă pentru mai mulți
În figura 4 este modelul vizual importat in SOFA al unui ficat.
10
Fig. 4
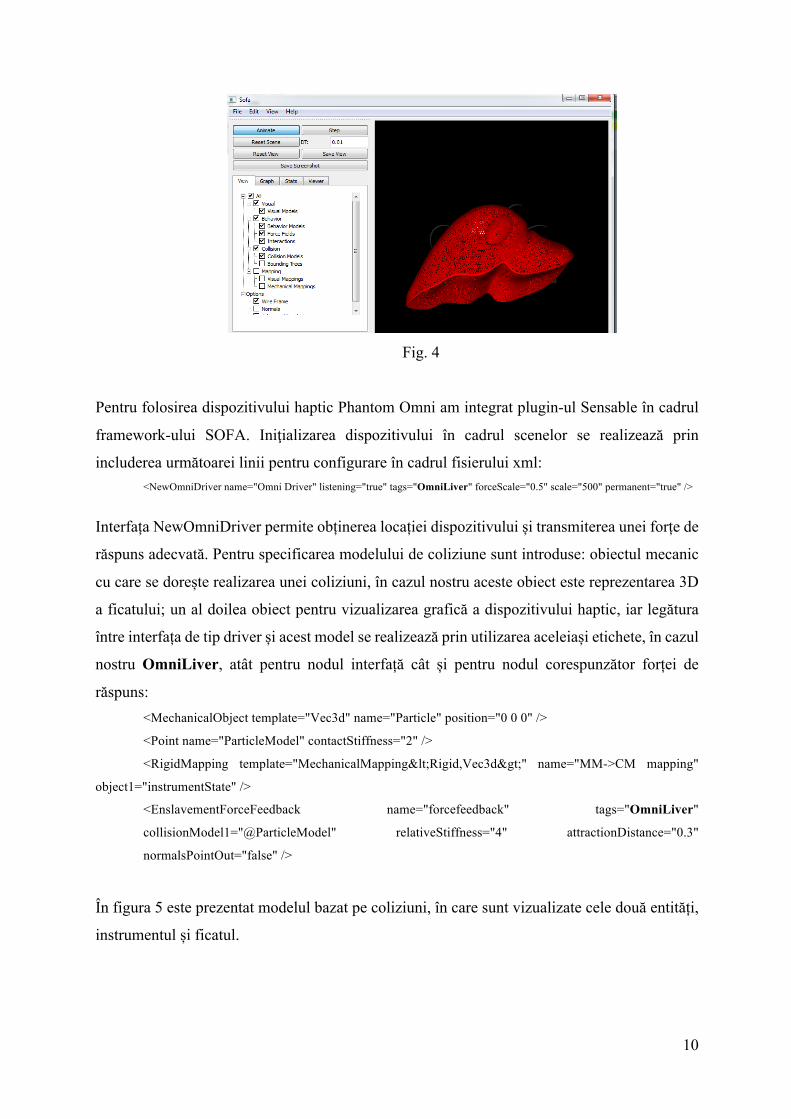
Pentru folosirea dispozitivului haptic Phantom Omni am integrat plugin-ul Sensable în cadrul
framework-ului SOFA. Iniţializarea dispozitivului în cadrul scenelor se realizează prin
includerea următoarei linii pentru configurare în cadrul fisierului xml: <NewOmniDriver name="Omni Driver" listening="true" tags="OmniLiver" forceScale="0.5" scale="500" permanent="true" />
Interfața NewOmniDriver permite obținerea locației dispozitivului și transmiterea unei forțe de
răspuns adecvată. Pentru specificarea modelului de coliziune sunt introduse: obiectul mecanic
cu care se dorește realizarea unei coliziuni, în cazul nostru aceste obiect este reprezentarea 3D
a ficatului; un al doilea obiect pentru vizualizarea grafică a dispozitivului haptic, iar legătura
între interfața de tip driver și acest model se realizează prin utilizarea aceleiași etichete, în cazul
nostru OmniLiver, atât pentru nodul interfață cât și pentru nodul corespunzător forței de
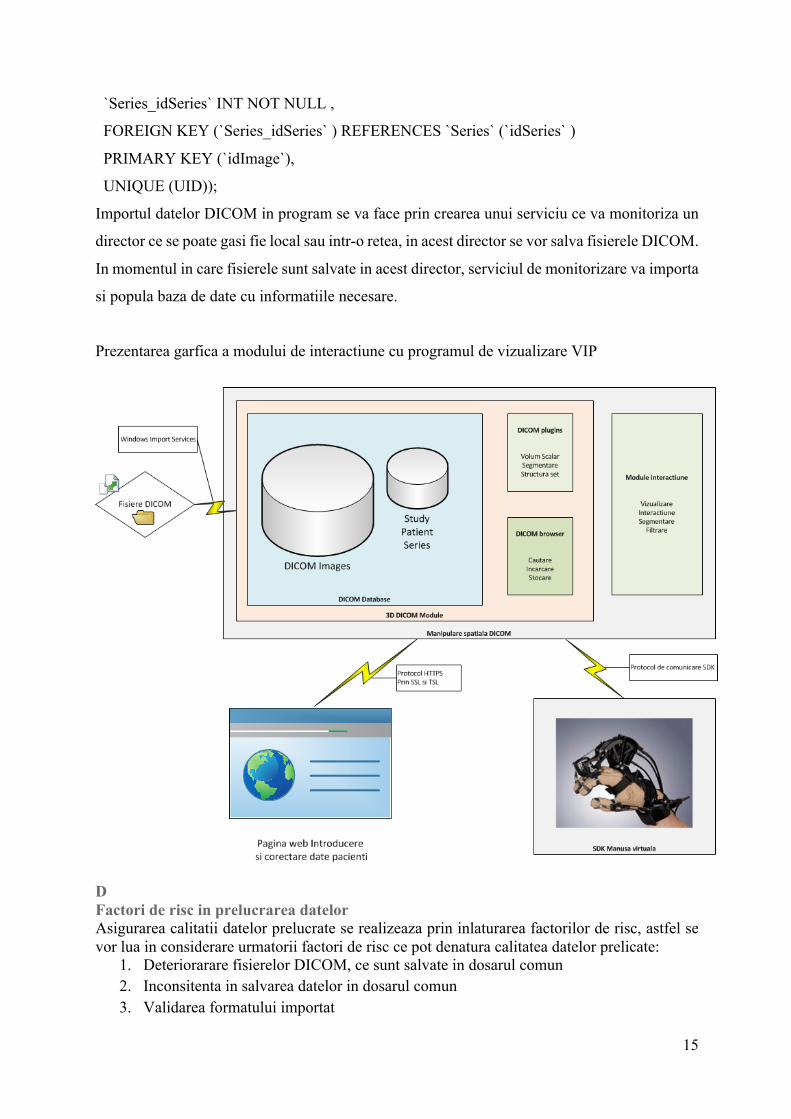
Importul datelor DICOM in program se va face prin crearea unui serviciu ce va monitoriza un
director ce se poate gasi fie local sau intr-o retea, in acest director se vor salva fisierele DICOM.
In momentul in care fisierele sunt salvate in acest director, serviciul de monitorizare va importa
si popula baza de date cu informatiile necesare.
Prezentarea garfica a modului de interactiune cu programul de vizualizare VIP
D Factori de risc in prelucrarea datelor Asigurarea calitatii datelor prelucrate se realizeaza prin inlaturarea factorilor de risc, astfel se vor lua in considerare urmatorii factori de risc ce pot denatura calitatea datelor prelicate:
1. Deteriorarare fisierelor DICOM, ce sunt salvate in dosarul comun 2. Inconsitenta in salvarea datelor in dosarul comun 3. Validarea formatului importat
16
4. Relevanta imaginilor salvate in diagnosticarea tumori 5. Deteriorarea bazei de date
Prin inlaturarea sau minimizarea acestori factori de risc se minimizeaza foarte mult pierderea datelor Asigurarea calitatii se va realiza prin implementarea unor proceduri de lucru si prin
monitorizarea permanenta a informatiilor prelucrate. De asemenea se va efectua back-up zilnic
al bazei de date si plan de mentenenta ce include verificare, defragmentare si reindexare, astfel
datele vor fi protejate si vor avea consistenta necesara proiectului.
17
A2.5. Participarea la congrese şi diseminarea rezultatelor obţinute
PUBLICAŢII
Articole publicate în reviste cotate ISI
• Dan Ionuţ Gheonea, Costin Teodor Streba, Cristin Constantin Vere, Mircea Şerbănescu,
Daniel Pirici, Maria Comănescu, Letiţia Adela Maria Streba, Marius Eugen Ciurea, Stelian
Mogoanţă, Ion Rogoveanu. Diagnosis System for Hepatocellular Carcinoma Based on
Fractal Dimension of Morphometric Elements Integrated in an Artificial Neural Network.
BioMed Research International, Volume 2014, Article ID 239706, 10 pages.(IF = 2.706).
• Shape memory alloy-based smart module structure working under intense thermo-mechanical stress, Suzana Danoiu, P. Rotaru, Sonia Degeratu,S. Rizescu, N. G. Bizdoaca, Journal of Thermal Analysis and Calorimetry, pag.1323-1330, 118:1323–1330, DOI 10.1007/s10973-014-4069-8, (2014) – articolul are integrat Acknowledgements cu ID-ul si numele proiectului. Impact factor pentru 2013 - 2.206
Rezumate publicate în reviste cotate ISI
1. CT Streba, IA Gheonea, L Streba, L D Sandulescu, A Saftoiu, DI Gheonea. Virtual Palpation
Model -Combining Spiral CT and Elastography Data: a Proof-of-Concept Study.
Gastroenterology, Vol. 146, Issue 5, S-344–S-345
2. CT Streba, CC Vere, LD. Sandulescu, A Saftoiu, DI Gheonea, L Streba, I Rogoveanu. Focal
Liver Lesions Classification by Artificial Neural Networks and Support Vector Machines
aided diagnosis and prediction system for early hepatocellular carcinoma in cirrhotic
patients. 22nd United European Gastroenterology Week, October 18-22, 2014, Vienna,
Austria; UEG Journal, A140.
18
3. C.T. Streba, I.A. Gheonea, L. Sandulescu, S. Adrian, D. I. Gheonea. Implementing a
virtual palpation model combining spiral CT and elastography data into medical training - a
pilot study. 22nd United European Gastroenterology Week, October 18-22, 2014, Vienna,
Austria; UEG Journal, A147.
Premii internaționale
Premiul I secţiunea Poster 22nd United European Gastroenterology Week, October 18-22, 2014, Vienna, Austria – Liver, biliary and pancreatic diseases: C.T.Streba, C.C.Vere, L. Săndulescu, A. Săftoiu, D.I.Gheonea, L.Streba, I.Rogoveanu. Focal lesions classification by artificial neural networks and support machines dynamic imaging data.
Premiul I Oral Free Paper Prize 22nd United European Gastroenterology Week, October 18-22, 2014, Vienna, Austria: C.T.Streba, C.C.Vere, L.Săndulescu, D.I.Gheonea, I.Rogoveanu. Modular computer-aided diagnosis and prediction system for early hepatocellular carcinoma in cirrhotic patients.
Director proiect Șef. Lucrări. Dr. Dan Ionuț Gheonea