49

3.1. COEFICIENŢI DE SIGURANŢĂ
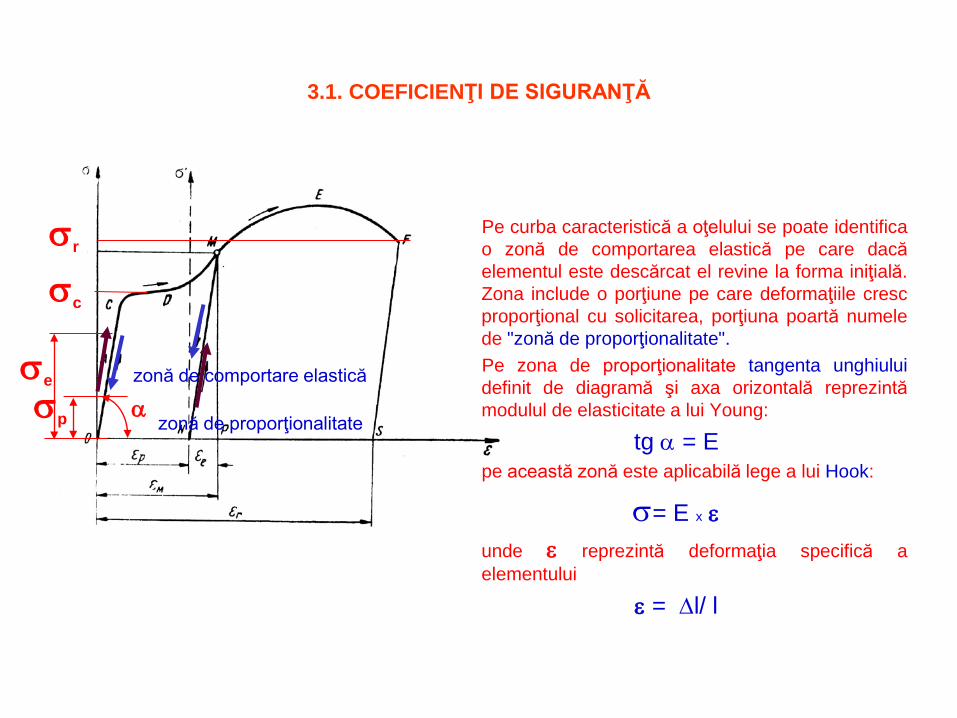
Pe curba caracteristică a oţelului se poate identifica o zonă de comportarea elastică pe care dacă elementul este descărcat el revine la forma iniţială. Zona include o porţiune pe care deformaţiile cresc proporţional cu solicitarea, porţiuna poartă numele de "zonă de proporţionalitate".
Pe zona de proporţionalitate tangenta unghiului definit de diagramă şi axa orizontală reprezintă modulul de elasticitate a lui Young:
tg α = E pe această zonă este aplicabilă lege a lui Hook:
σ= E x ε
unde ε reprezintă deformaţia specifică a elementului
ε = ∆l/ l
zonă de proporţionalitate
zonă de comportare elastică
σc
σp
σe
σr
α

Pentru calcul elementelor de rezistenţă inginerii utilizează două
metode şi anume: - metoda rezistenţelor admisibile;
- metoda stărilor limită. Mai uşor de intuit pentru începători este metoda rezistenţelor admisibile ce constă în păstrarea materialelor în domeniul elastic prin admiterea producerii în interiorul acestora a unor eforturi sub valorea eforturilor apărute în momentul curgerii (moment în care deformaţiile nu mai pot fi
controlate). Valoarea admisibilă a eforturilor în elementele solicitate (σa) se obţine prin
reducerea valorii efortului corespunzator momentului curgerii (σcurgere) cu un coeficient supraunitar, coeficient ce poartă numele de coeficient de siguranţă
σa = σcurgere / c siguranţă
3.1. COEFICIENŢI DE SIGURANŢĂ

3.2. COMPONENTELE STRUCTURALE ŞI ROLUL LOR

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE REAZEMUL IZOLAT
Principiu rudimentar al echilibrului îl constituie principiul forţă-contraforţă, forţele acţionînd pe aceiaşi direcţie
Este clar că un astfel de principiu transferat la structuri trebuie să releveze egalitatea dintre o "acţiune" şi o "reacţiune".
În lumea antică a staticii "acţiunea" era văzută ca o forţă-greutate, echilibrul ce rezulta din principiul fortă-contraforţă fiind asigurat de elemente structurale verticale de susţinere, fire sau coloane.
FORŢĂ
CONTRA FORŢĂ

COLOANELE TEMPLULUI LUI CHEFREN 2735 - 2563 î.Hr

COLOANELE TEMPLULUI REGINEI HASEPSOWE DE LA DEYR EL-BAHRI (1461-1468 î.Hr)

COLOANELE TEMPLULUI REGINEI HASEPSOWE DE LA DEYR EL-BAHRI (1461-1468 î.Hr)

COLOANELE TEMPLULUI LUI AMUN DE LA KARNAK 1320-1224 î.Hr

Dorinţa de a asigura o rezistenţă egală în toate secţiunile pornind din vîrf către bază, a dus la apariţia coloanelor cu secţiune variabilă pe verticală, coloane de formă tronconică numite coloane de "egală rezistenţă"
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE REAZEMUL DE SPRIJIN IZOLAT

COLOANA DIN TEMPLULUI LUI AMUN DE LA KARNAK

COLOANELE TEMPLULUI LUI AMUN (1436-1224 î.Hr)

COLOANELE TEMPLULUI LUI HOROSSEC DE LA EDFU (sec.III-II î.Hr)

COLOANELE TEMPLULUI HEREI DE LA PAESTUM (SEC.VI.î.Hr)

COLOANELE PARTHENONULUI (447-438 î.Hr)

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE REAZEMUL IZOLAT

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE REAZEMUL CONTINUU
Fenomenologia statică şi structurală a "peretelui" dezvoltă un concept static de dirijare directă a încărcărilor aplicate şi a greutăţii propri prin "împănarea" pe verticală a materialelor rezistente compuse din blocuri, zidul se prezintă ca expresia cea mai elementară a structurii ce transmite un flux continuu vertical de compresiune pură.

ZIDARIE CICLOPIANA LA CRIPTA LUI MANTEION DIN EFIRA (SEC.III î.Hr)

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.
Pentru omul antic era evident că, în cazul unic al configurării simetrice a geometriei arhitravei şi a dispunerii forţei-greutate, antiforţele şi deplasările pe verticală datorate deformării elementelor verticale de susţinere să fie şi ele simetrice

În cazul unei disimetrii datorate geometriei arhitravei sau a dispunerii forţei (încărcării), era greu de aflat ce contraforţe apar în elementele de sprijin şi cît se vor deforma acestea pe verticală. Într-o astfel de situaţie era evidentă disponibilitatea de rotire a arhitravei între reazeme.
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

Problema echilibrului rotaţional ridica o mare întrebare: de ce natură este solicitarea care provoacă structurii o disponibilitate de rotire şi deci de ce natură trebuie să fie contrasolicitarea capabilă să o contracareze ?
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

Au trebuit să treacă mai mult de douăzeci de secole, pentru ca pornind de la studiul pîrghiilor şi al balanţei (care au constituit primele modele pentru care a fost pusă problema echilibrului rotaţional), să apară conceptul de moment al unei forţe şi principiul echilibrului dintre momente .
Pentru a ajunge la aceast concept era indispensbilă ca ideea de forţă să se elibereze de ideea de forţă-greutate şi să devină idee de forţă mărime vectorială.
O primă idee în evoluţa conceptului de forţă este realizată în perioada aristotelică, ideea încă confuză era că forţă este ceva mult mai general decît simpla forţă-greutate, ideea că forţa acţionează cu o anumită "putere" pentru a opri sau a pune în mişcare corpurile.
Apare deci ideea de "putere a forţei" sau alte cuvinte de "mărime" a ei.
În "Probleme de Mecanică", Aristotel (384-322 î.Hr) pune la baza Mecanicii următorul principiul:
"doua puteri (forţe) sunt echivalente dacă mutînd două greutăţi diferite cu viteze diferite determină acelaşi produs între greutăţi si viteze"
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

Aplicînd principiul enunţat mai sus la echilibrul pîrghiilor, Aristotel (384-322 î.Hr) ajunge la următoarea concluzie: “greutatea care s-a mişcat / greutatea ce produce mişcarea este invers proporţională cu lungimea celor două brate ale pîrghiei pentru că greutatea determină mai uşor miscarea cînd se găseşte cît mai departe de reazem. Cauza este totdeauna aceeaşi, traiectoria cea mai departată de reazem comportă un arc mai mare"
PA/PB = lb/la
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

Conceptul de forţă este formulat de catre Leonardo da Vinci (1452-1519) în lucrarea sa "Libri di Meccanica": "Forţa nu este altceva decît o virtute spirituală, o potenţă invizibilă, care este, creată şi indusă prin violenţă accidentală, de la corpurile sensibile în cele insensibile, dînd acestor corpuri aparenţa de viaţă; care viaţă implică o acţiune miraculoasă, obligînd şi mutînd din loc şi din formă toate lucrurile create".
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

Astăzi manualele de fizică definesc astfel forţa:
" vom numi forţă orice acţiune capabilă să deformeze corpurile sau să le modifice mişcarea, cît şi orice rezistenţă la aceste schimbări“
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE EVOLUŢIA CONCEPTUL DE FORŢĂ.

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE PRINCIPIUL PÎRGHIEI ŞI NOŢIUNEA DE MOMENT.
Continuator al operei lui Euclid, Arhimede (287-212 î.Hr) poate fi considerat pe drept cuvînt fondatorul tradiţiilor fizico-matematice care vor permite mai tîrziu dezvoltarea mecanicii teoretice şi a celei practice. În lucrarea sa "De planorum equilibris" Aristotel abordează problematica determinării centrelor de greutate pentru numeroase figuri plane precum şi cea a echilibrului pîrghiilor ce conduce către echilibrul rotaţional. Raţionamentul porneşte de la cazul particular al echilibrului unei pîrghii simetrice din punctul de vedere al geometriei şi al încărcării.

Pornind de la acest experiment Arhimede ajunge la următorul enunţ general:
" două greutăţi îşi fac echilibrul cînd greutăţile lor sunt invers proporţionale cu lungimea braţului de care sunt suspendate"
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE PRINCIPIUL PÎRGHIEI ŞI NOŢIUNEA DE MOMENT.
a b
RA RB
RA/RB = b/a
(RA x a = RB x b)
Rc = RA + RB
A B C

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.
Este interesant de observat cum conceptul de forţă şi de moment se concretizează în acţiunile pe care acestea le produc, forţa avînd tendinţa de a imprima corpului o miscare de translaţie în timp ce momentul tinde să îl rotească.
În fapt forţa şi momentul constituiesc elementele esenţiale în teoria sistemelor de forţe după cum translaţia şi rotaţia sunt elementele constitutive ale cinematicii solidului rigid.
Pe baza acestui concept despre moment şi avînd prezent conceptul de forţă- contrafortă (acţiune-reacţiune) se poate afirma că:
pentru echilibrul unui corp rigid liber trebuiesc să fie nule: forţa rezultantă a tuturor forţelor aplicate pe sistem (acţiuni şi reacţiuni) şi momentul rezultant al momentelor tuturor forţelor fată de un punct fix.

Rezultă:
RA + RB = P RA x a = RB x b
RA + RB – P = 0
- RA x a + RB x b = 0
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.
pentru echilibrul unui corp rigid liber trebuiesc să fie nule: forţa rezultantă a tuturor forţelor aplicate pe sistem (acţiuni şi reacţiuni) şi momentul rezultant al momentelor tuturor forţelor fată de un punct fix
a b

RA / RB = b / a (RA + RB) / RB = (a+b) / a
rezultă
P / Rb = l / a sau echilibrul rotaţional
P x a = RB x l
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.
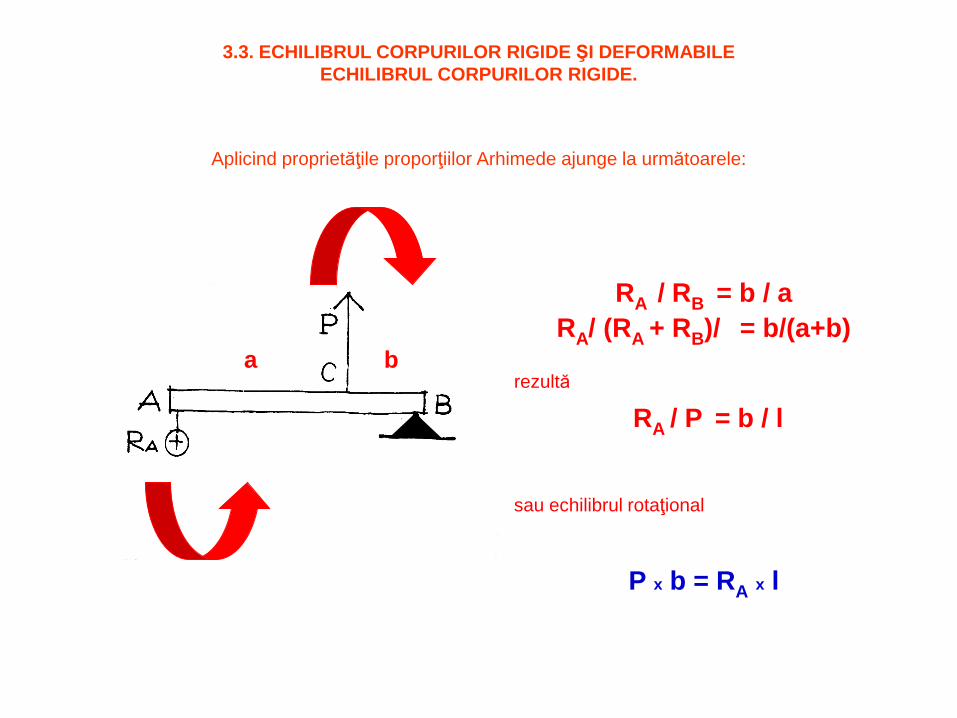
Aplicind proprietăţile proporţiilor Arhimede ajunge la următoarele:
a b
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.
Aplicind proprietăţile proporţiilor Arhimede ajunge la următoarele:
a b
RA / RB = b / a RA/ (RA + RB)/ = b/(a+b)
rezultă
RA / P = b / l
sau echilibrul rotaţional
P x b = RA x l

cazul a,b
RA + RB = P
RA x a = RB x b
cazul c
RA / RB = b / a
(RA + RB) / RB = (a+b) / a
Rezultă P / RB = l / a sau echilibrul rotaţional
P x a = RB x l cazul d
RA/ (RA + RB) = b/(a+b)
Rezultå RA / P = b / l sau echilibrul rotaţional
P x b = RA x l
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.
Arhimede care era pasionat şi de matematică, aplicînd proprietăţile proporţiilor ajunge la echilibrul pîrghiilor, astfel în:

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE ECHILIBRUL CORPURILOR RIGIDE.

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE
Pornind de la o greutate susţinută de două bucaţi de funie legate de două puncte fixe Leonardo da Vinci (1452-1519) ajunge la noţiunea de forţă direcţională precum şi la soluţia de descompunere a forţei după două directii.
P
S2 S1

Stevin în căutarea perpetului mobile porneşte de la planul inclinat pe care consideră aşezat un lanţ perfect flexibil şi inextensibil, lanţ aşezat pe cele două pante diferite ale planului, însă lăsat liber sub acestea. După ce lanţul ramîne nemişcat, Stevin observă că forţele de tracţiune exercitate de porţiunea de lanţ liberă asupra lanţul aşezat pe feţele înclinate sunt egale pe raţiuni de simetrie.
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE
Simon Stevin (1548-1620) în tratatul sau "Mathematicorum Hypomnemata de Statica" defineşte paralelogramul forţelor

Dacă unul din plane este vertical mişcarea unei greutăti P pe acest plan poate fi impiedicată printr-o greutate Q, care reprezintă de fapt proiecţia forţei P pe faţa inclinată a planului. Daca unghiul de înclinare al planului este α rezultă:
Q = P x (h/l) = P x sin α
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE
Pentru obţinerea componentei perpendiculare pe plan (R), Stevin leagă greutatea cu un fir în punctul M, firul fiind perpendicular pe faţa planului înclinat. In această situaţie acţiunea R produsă de forţa P în fir poate fi determinată grafic facînd proiecţia forţei P pe normala la planul înclinat, rezultă:
R = P x cos α

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE
Roberval (1602-1675), furnizeaza prima tratare sistematică şi generalizată a paralelogramului forţelor

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE

Concluzionînd referindu-ne la forţă, aceasta este caracterizată de trei parametrii şi anume:
-intensitatea sau mărime;
-direcţie de acţiune;
-sens de acţiune.
O astfel de mărime este numită astăzi mărime vectorială. Operaţiile cu forţe vor fi deci operaţii cu vectori.
Pentru descompunerea unei forţe pe două direcţii, precum şi pentru determinarea rezultantei unui sistem de două forţe se aplică regula paralelogramului. Pentru determinarea intensităţilor sau a mărimilor se pot aplica relaţiile lui Stevin, sau teorema lui Pitagora generalizată.
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE

3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE
COMPUNEREA FORŢELOR PARALELE
determinarea mărimii şi a sensului rezultantei
PARALELOGRAMUL FORŢELOR
determinarea mărimii rezultantei utilizînd teorema lui Pitagora generalizată

PARALELOGRAMUL FORŢELOR
determinarea mărimii rezultantei utilizînd teorema sinusurilor a lui Stevin
F1 / sin θ2 = F2 / sin θ1 = R / sin θ
CAZUL PARTICULAR AL FORŢELOR ORTOGONALE
3.3. ECHILIBRUL CORPURILOR RIGIDE ŞI DEFORMABILE FORŢA DIRECŢIONALĂ. COMPUNERI DE FORŢE ŞI MOMENTE

APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE

APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE

DESCOMPUNEREA UNEI FORŢE DUPĂ DOUĂ DIRECŢII
APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE

APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE
DESCOMPUNEREA UNEI FORŢE DUPĂ DOUĂ DIRECŢII

APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE
DESCOMPUNEREA UNEI FORŢE DUPĂ DOUĂ DIRECŢII

APLICAŢII COMPUNERI DE FORŢE ŞI MOMENTE
DESCOMPUNEREA UNEI FORŢE DUPĂ DOUĂ DIRECŢII

















