C apitolul II. Reglarea automat a frecven ţ ei i puterii active RAF-P) în sistemele energetice II.1. Probleme generale privind reglarea automat a frecven ţ ei i puterii active Prin reglarea automatăa frecvenţei şi puterii active (RAF-P) în sistemele energetice se înţelege ansamblul de operaţii prin care frecvenţa este menţinutăconstantăîn SE şi este asiguratăo repartiţie convenabilăa puterii active între sursele din sistem. Conform normativelor în vigoare [39], reglajul automat frecvenţă-putere activăare următoarele funcţiuni: a.Reglarea frecven ţ ei în cadrul sistemului energetic propriu , funcţionând izolat sau interconectat cu sistemele vecine, în sensul men ţinerii valorii nominale de 50Hz. b.Reglarea puterilor de schimb pe liniile de interconexiune cu re ţ elele vecine,în sensul menţinerii puterilor de schimb la valorile stabilite contractual. c.Reparti ţ ia puterilor active între centralele reglante care particip ăla reglarea frecven ţ ei şi puterii de schimb, în sensul respectării criteriilor economice de funcţionare optimăa SE. Sistemul de reglare automat ăfrecvenţă-putere activăpoate fi exploatat cumulând toate funcţiile de mai sus, sau reglând separat numai frecvenţa sau numai puterile de schimb. Reglajul automat frecvenţă-putere activărealizeazăfuncţiile prin reglarea încărcării cu putere activăa centralelor reglante, încadrate în sistemul de reglaj. Încărcarea centralelor se face în scopul anulării erorii de reglare, formatădin suma abaterilor de frecvenţăşi putere de schimb. Acţiunea reglajului va fi proporţional-integrală(regulator PI). Instalaţia de reglare automatăfrecvenţă-putere activăva cuprinde: a.Telemă surarea puterilor active de schimb pe liniile de interconexiune cu reţelele vecine.
II.1. Probleme generale privind reglarea automată a
frecvenţei şi puterii active
Prin reglarea automată a frecvenţei şi puterii active (RAF-P) în sistemele energetice seînţelege ansamblul de operaţii prin care frecvenţa este menţinută constantă în SE şi este asigurată orepartiţie convenabilă a puterii active între sursele din sistem.
Conform normativelor în vigoare [39], reglajul automat frecvenţă-putere activă areurmătoarele funcţiuni:
a. Reglarea frecven ţ ei în cadrul sistemului energetic propriu, funcţionând izolat sauinterconectat cu sistemele vecine, în sensul menţinerii valorii nominale de 50Hz.
b. Reglarea puterilor de schimb pe liniile de interconexiune cu re ţ elele vecine, în sensulmenţinerii puterilor de schimb la valorile stabilite contractual.
c. Reparti ţ ia puterilor active între centralele reglante care participă la reglarea frecven ţ ei şi puterii de schimb, în sensul respectării criteriilor economice defuncţionare optimă a SE.
Sistemul de reglare automată frecvenţă-putere activă poate fi exploatat cumulând toatefuncţiile de mai sus, sau reglând separat numai frecvenţa sau numai puterile de schimb.
Reglajul automat frecvenţă-putere activă realizează funcţiile prin reglarea încărcării cu putere activă a centralelor reglante, încadrate în sistemul de reglaj. Încărcarea centralelor se face în
scopul anulării erorii de reglare, formată din suma abaterilor de frecvenţă şi putere de schimb.Acţiunea reglajului va fi propor ţional-integrală (regulator PI).Instalaţia de reglare automată frecvenţă-putere activă va cuprinde:a. Telemă surarea puterilor active de schimb pe liniile de interconexiune cu reţelele
b. Regulatorul central de sistem care, prin măsurarea frecvenţei şi a puterii totale deschimb reale şi compararea acestora cu valorile de referinţă, formează eroarea şiordinul de reglaj.
c. Teletransmiterea ordinului de reglaj către centralele reglante. d. Instala ţ iile de recep ţ ie şi distribu ţ ie a ordinului de reglaj la grupurile generatoare din
centralele reglante.
La regulatorul central de sistem vor exista dispozitive de repartiţie a ordinului de reglaj pecentralele reglante, conform unor caracteristici reglabile.
La instala ţ iile din centrale vor exista, de asemenea, dispozitive de repartiţie a ordinului dereglaj pe grupurile reglante, conform unor caracteristici reglabile.
Instalaţiile de reglaj ale regulatorului central şi cele din centralele reglante vor fi prevăzutecu dispozitive de supraveghere a funcţionării corecte a proceselor de reglaj. În funcţie de naturadefecţiunii, dispozitivele de supraveghere blochează reglajul total sau par ţial, definitiv sautemporar, asigurând corectitudinea desf ăşur ării proceselor şi avertizând optic şi acustic stărileanormale.
II.1.1. Necesitatea şi avantajele introducerii reglării
automate a frecvenţei şi puterii active în SE.Frecvenţa este unul din indicii de calitate de bază ai energiei electrice. Abaterile admise ale
frecvenţei sunt sensibil mai reduse decât cele admise pentru tensiune. În sistemele europene seacceptă variaţii ale frecvenţei de cel mult ±0,2 Hz faţă de frecvenţa nominală f n = 50 Hz, respectivo abatere admisibilă de frecvenţă:
%.4,0100f
f [%]*f
n
maxadm ≤⋅
Δ=Δ (II.1)
Pentru a putea evalua calitativ şi cantitativ influenţa abaterii frecvenţei asupra puterilor active şi reactive consumate, precum şi asupra pierderilor de putere activă în SE, se impune o
analiză a dependenţei de frecvenţă a acestora.1. Din punctul de vedere al dependen ţ ei puterii active de frecven ţă, consumatorii de energie
electrică se clasifică în patru categorii. Dacă reprezintă puterile active consumate la
frecvenţa nominală f
CnC P,P
n, respectiv la o altă frecvenţă f, se poate stabili dependenţa:
,7...2,1,0q,f
f PP
q
nnCC =⎟⎟
⎠
⎞⎜⎜⎝
⎛ = (II.2)
de unde rezultă:- Categoria I de consumatori: q = 0, .ctPP
nCC == În această categorie sunt încadraţi
consumatorii de tipul instalaţiilor de iluminat, aparaturii electrocasnice, cuptoarelor electrice curezistenţă sau arc etc., la care puterea consumată nu variază cu frecvenţa tensiunii de alimentare.
- Categoria II de consumatori: q = 1, .f f PPn
nCC = Puterea activă consumată variază cu
puterea întâi a frecvenţei. În această categorie într ă instalaţiile acţionate electric la care cuplulrezistent este constant (MR = ct.), iar puterea electrică activă consumată este:
PC = MR ⋅ω = K ⋅f. (II.3)Dintre aceşti consumatori menţionăm maşinile unelte, maşinile de ridicat etc.
instalaţiile de tip centrifugal, la care cuplul rezistent MR are un termen constant ( ) şi un
termen propor ţional cu pătratul turaţiei:0R M
.n
nK MM
2
n0R R ⎟⎟
⎠
⎞⎜⎜⎝
⎛ += (II.4)
Cuplul determină o putere consumată dependentă de puterea întâi a frecvenţei
(categoria II de consumatori), iar cuplul propor ţional cu pătratul turaţiei determină putereaconsumată
0R M
.f
f P
n
nPP
3
nnC
3
nnCC ⎟⎟
⎠
⎞⎜⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ = (II.5)
- Categoria IV de consumatori: q > 3, deci
,f
f PP
q
nnCC ⎟⎟
⎠
⎞⎜⎜⎝
⎛ = (II.6)
iar dependenţa puterii active de frecvenţă este mult mai accentuată. În această categorie intr ă instalaţiile care au de învins presiuni statice, cum sunt: ventilatoare, pompe, compresoare etc. Deexemplu, în cazul electropompelor de alimentare a cazanelor, q ≈ 7, ceea ce reflectă o strânsă dependenţă a randamentului de variaţia frecvenţei.
Pentru o mare parte din consumatorii industriali, scăderea frecvenţei conduce la reducerea productivităţii, datorită micşor ării turaţiei motoarelor de antrenare a diverselor mecanisme.Menţinerea constantă a frecvenţei elimină dezavantajele variaţiei productivităţii consumatorilor deenergie electrică.
În SE, exponentul q se apropie, în medie, de valoarea 2. Rezultă că pentru SE se poateexprima dependenţa globală
,f
f PP
2
nn ⎟⎟
⎠
⎞⎜⎜⎝
⎛ = (II.7)
sau în unităţi relativeP* = f*2. (II.8)2. Din punctul de vedere al dependen ţ ei puterii reactive de frecven ţă, sistemul energetic
este caracterizat printr-o reactanţă transversală echivalentă XSE = Lω şi consumă o putere reactivă globală
,L
U
X
UQ
2
SE
2
ω== sau .
f
f QQ n
n= (II.9)
În unităţi relative, rezultă o dependenţă invers propor ţională de frecvenţă, de forma:
.*f *f
1Q 1* −== (II.10)
Dependenţa puterilor active şi reactive consumate în SE, conform relaţiilor (II.8) şi (II.10)sunt reprezentate în fig.II.1a şi b.
Fig.II.1. Dependenţa puterii active (a) şi a puterii reactive (b) de frecvenţă
3. Pierderile globale de putere activă în SE , aproximativ egale cu pierderile prin efectcaloric (pierderi în cupru ΔPCu) şi care pot fi exprimate în funcţie de frecvenţă prin:
( ) ,U3
Q
U3
PR IIR RIPP
2
n
2
n
2r
2a
2CuSE
⎥
⎥⎥
⎦
⎤
⎢
⎢⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ +
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ =+==Δ≈Δ (II.11)
sau, înlocuind P şi Q din relaţiile (II.7) şi (II.9), rezultă:
.U3
f
f Q
U3
f
f P
R P
2
n
nn
2
n
2
nn
SE
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
=Δ (II.12)
Pentru cosϕ≥ 0,8, componenta reactivă a curentului poate fi neglijată, deciΔPSE ≈ K SEf 4. (II.13)Se constată o dependenţă a pierderilor de putere din SE de puterea a patra a frecvenţei; la
scăderea frecvenţei pierderile în SE se reduc simţitor, dar se reduce şi productivitatea
consumatorilor. Rezultă că menţinerea constantă a frecvenţei în SE prezintă avantajul eliminăriifluctuaţiilor pierderilor de putere în sistem.
Menţinerea constantă a frecvenţei în sistemele energetice determină şi alte avantaje, dintrecare menţionăm:
- creşterea randamentului global al centralelor electrice, deoarece variaţiile de frecvenţă faţă de frecvenţa nominală conduc la puncte de funcţionare pe curba randamentuluiinferioare punctului optim;
- evitarea ieşirii din funcţiune a electropompelor din centrale, deoarece la scădereafrecvenţei sub 48 Hz, productivitatea electropompelor de circulaţie scade cu 30 ÷ 40%iar la 47,5 Hz, electropompele de alimentare a cazanelor din centrale ies din funcţiune;
- diminuarea erorii aparatelor de măsurare, înregistrare, protecţie şi automatizare, înspecial a celor de inducţie.
Efectele globale ale menţinerii constante a frecvenţei la valoarea nominală suntîmbunătăţirea indicatorilor tehnico-economici în exploatarea SE, creşterea calităţii energieielectrice şi a gradului de fiabilitate a SE. Menţinerea constantă a frecvenţei este o condiţieesenţială şi din punctul de vedere al dezvoltării şi interconectării sistemelor energetice.
de antrenare a GSSpre deosebire de tensiune, care poate fi diferită în diferite puncte ale unui sistem energetic,
frecvenţa are aceeaşi valoare în orice punct al sistemului şi este legată de turaţia agregatelor generatoare în funcţionare sincronă prin relaţia:
,60
pnf = (II.14)
unde: f este frecvenţa energiei generate;n – turaţia agregatului;
p – numărul de perechi de poli ai GS.Dacă se notează cu P M puterea mecanică dezvoltată la arborele maşinii primare (de
antrenare) a GS, cu C M cuplul dezvoltat la arbore, cu η randamentul şi cu Z admisia de agent motor (abur, apă etc.) la maşina primar ă (turbină cu abur, hidraulică etc.), dependenţa acestor mărimi de turaţia turbinei, respectiv frecvenţa GS sunt cele reprezentate în fig.II.2. Se observă că,
la creşterea admisiei Z de agent motor în turbină, curba PM(Z) se deplasează spre dreapta-sus,astfel încât pentru Z2 > Z1, puterile maxime disponibile ale turbinelor sunt în relaţia
iar valorile turaţiilor corespunzătoare funcţionării în gol sunt n,PP1maxM2maxM > 02 > n01.
Rezultă că principala mărime asupra căreia se poate interveni în sensul modificării puteriimecanice produse şi a turaţiei turbinei este debitul de agent motor, prin mărimea de admisie Z.
Caracteristicile mecanice n = f(PM) ale turbinelor (por ţiunile utile) corespund ramuriicuprinse între punctele A şi B pentru şi sunt caracterizate printr-o puternică dependenţă în
sensul că turaţia scade într-o măsur ă importantă la creşterea puterii mecanice datorată creşterii puterii active a GS antrenat.
)n(P1M
Prin reglarea automată a vitezei turbinelor, se poate obţine o caracteristică a turaţiei multmai puţin dependentă de puterea mecanică (cu statism mic) sau chiar independentă (astatică) şi cuo comportare dinamică corespunzătoare.
A
n,f
n02
n01
η(n) CM(n)B
11M Z),n(P
122M ZZ),n(P >
1maxMP 2maxMP
PM,CM,η
Fig.II.2 Dependenţa PM(n), CM(n), η(n)
Reglarea automată a vitezei turbinelor permite menţinerea între limite acceptabile sau chiar constantă a turaţiei turbinelor, respectiv a frecvenţei GS antrenate, dar lucrurile se complică atuncicând se pune problema funcţionării în paralel a generatoarelor dintr-o centrală şi a centralelor dintr-un sistem. În acest sens, pentru menţinerea constantă a frecvenţei şi pentru o repartiţie optimă
a puterilor active între centralele reglante din sistem şi între generatoarele fiecărei centrale reglantesunt necesare şi sisteme de reglare frecvenţă-putere activă, dispuse la un nivel ierarhic superior faţă de sistemele de reglare a vitezei turbinelor şi a căror funcţionare o coordonează.
II.2. Reglarea automată a vitezei (turaţiei)
turbinelor de antrenare
II.2.1. Principiul reglării automate a vitezei turbinelorPentru a evidenţia acest principiu, se consider ă în fig.II.3 atât dependenţa puterii mecanice
de turaţie PM(n), cât şi dependenţa puterii electrice active PE(n) consumate de la GS antrenat deturbină (PE(n) reprezentată în fig.II.1.a dar de coordonate inversate, iar între f şi n există relaţia
(II.14)). Mărimile PM şi PE sunt legate între ele prin randamentul GS, ,P
P
M
E=η dar în cele ce
urmează se consider ă atingerea unor puncte de echilibru pentru PE = PM.Dacă se presupune că la un moment dat caracteristica pe care funcţionează GS este
(caracteristica 1 din fig. II.3), iar caracteristica turbinei pentru o admisie Z
)n(P1E
1 = ct. este
(caracteristica 2 din fig.II.3), echilibrul se realizează în punctul a, la turaţia n
)n(P1M
1a pentru care.P)n(P)n(P 1a11Ma11E == (II.15)
La o creştere a puterii electrice consumate cu ΔP, caracteristica puterii electrice trece dinîn (caracterisrica 1’). La aceeaşi valoare a turaţiei, n)n(P
1E )n(P2E 1a, punctul de funcţionare ar
trebui să fie c. Datorită iner ţiei maselor în mişcare de rotaţie, punctul de funcţionare evoluează dina spre c, care însă nu este un punct stabil întrucât puterea mecanică disponibilă este mai mică decâtcea electrică necesar ă. Din c funcţionarea trece în b, corespunzător turaţiei n1b < n1a, pentru care
Rezultă că, deşi consumatorii au solicitat creşterea puterii electrice cu ΔP la o frecvenţă corespunzătoare turaţiei n1a, aceştia primesc numai ΔP’ < ΔP la o turaţie n1b < n1a. În acest intervalde timp, admisia Z1 a r ămas constantă, iar punctul stabil de funcţionare b a fost atins datorită caracteristicii autoreglante a maşinii primare de antrenare a generatorului. Eliminând etapele
intermediare, la modificarea caracteristicii PE(n) (prin trecerea de pe pe ), punctul
de funcţionare evoluează pe caracteristica statică a turbinei, din a în b.
)n(P1E )n(P
2E
Pentru a fi posibilă asigurarea unei puteri P2 = P1 + ΔP la aceeaşi valoare n1a a turaţiei,trebuie să se modifice admisia Z a agentului motor, de la Z1 la Z2, astfel încât, noua caracteristică mecanică, obţinută prin translaţie, , să treacă prin punctul c, corespunzător turaţiei n)n(P
2M 1a şi
în care(II.16).P)n(P)n(P 2a12Ma12E ==
În acest mod, a fost asigurat consumul ΔP suplimentar la aceeaşi valoare a turaţiei respectivfrecvenţei. Restabilirea valorii turaţiei n1a ca în fig.II.3, conduce la o reglare astatică. Acestecaracteristici nu permit însă repartizarea puterilor active între generatoarele unei centrale; din acestmotiv în multe situaţii sunt utilizate caracteristici statice (puţin înclinate, cu o mică dependenţă aturaţiei de puterea electrică). Dacă reglarea din fig.II.3 ar apar ţine unui sistem static, punctul finalde funcţionare ar fi c’, căruia îi corespunde o turaţie n1c’ < n1c, dar totodată n1c’ > n1b. Prinintroducerea reglajului automat al vitezei (RAV), statismul Sn al sistemului este mult mai mic
decât statismul natural S0 al turbinei.În fig.II.4 sunt prezentate caracteristica mecanică reală a turbinei, 1, prin a cărei liniarizare
se obţine caracteristica 2 de statism S0 = tgα1 (statismul natural al turbinei) şi caracteristica statică a sistemului de reglare automată a vitezei turbinei (SRAV), 3, care prin liniarizare conduce lacaracteristica 4, de statism SRV = Sn = tgα2, cu Sn << S0.
Fig.II.4 Caracteristicile statice ale turbinei, 1, 2şi caracteristicile statice ale SRAV, 3, 4
Fig.II.5. Zona de insensibilitate a SRAV
0 Pn P
n
n0
nmin
α1 α2
1
3
2
4
0 P
n
n0
n0max
n0min1
Expresia caracteristicii statice a SRAV (caracteristica 4, fig.II.4) este de forma:
,PP
nnnn
n
min00
−−= (II.17)
unde: P=PE=PM în punctele de echilibru din fig.II.3;
n0 – turaţia de mers în gol (referinţa de turaţie);nmin – turaţia minimă la funcţionarea în regim de sarcină nominală Pn,iar
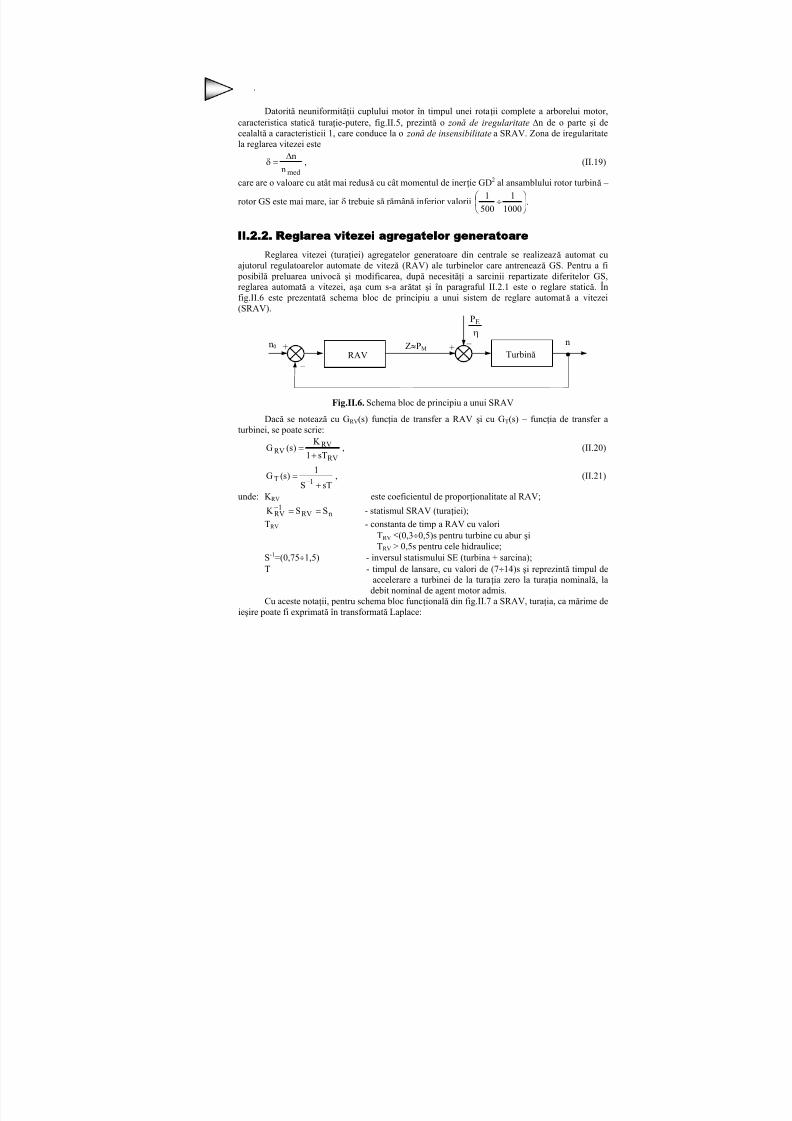
Datorită neuniformităţii cuplului motor în timpul unei rotaţii complete a arborelui motor,caracteristica statică turaţie-putere, fig.II.5, prezintă o zonă de iregularitate Δn de o parte şi de
cealaltă a caracteristicii 1, care conduce la o zonă de insensibilitate a SRAV. Zona de iregularitatela reglarea vitezei este
medn
nΔ=δ , (II.19)
care are o valoare cu atât mai redusă cu cât momentul de iner ţie GD2 al ansamblului rotor turbină –
rotor GS este mai mare, iar δ trebuie să r ămână inferior valorii .1000
1
500
1⎟ ⎠
⎞⎜⎝
⎛ ÷
II.2.2. Reglarea vitezei agregatelor generatoare
Reglarea vitezei (turaţiei) agregatelor generatoare din centrale se realizează automat cuajutorul regulatoarelor automate de viteză (RAV) ale turbinelor care antrenează GS. Pentru a fi
posibilă preluarea univocă şi modificarea, după necesităţi a sarcinii repartizate diferitelor GS,reglarea automată a vitezei, aşa cum s-a ar ătat şi în paragraful II.2.1 este o reglare statică. Înfig.II.6 este prezentată schema bloc de principiu a unui sistem de reglare automată a vitezei(SRAV).
ηEP
Fig.II.6. Schema bloc de principiu a unui SRAV
Dacă se notează cu GRV(s) funcţia de transfer a RAV şi cu GT(s) – funcţia de transfer aturbinei, se poate scrie:
RV
RVRV sT1
K )s(G
+= , (II.20)
sTS
1)s(G
1T+
=−
, (II.21)
unde: K RV este coeficientul de propor ţionalitate al RAV;
- statismul SRAV (turaţiei);nRV1
RV SSK ==−
TRV - constanta de timp a RAV cu valoriTRV ≤(0,3÷0,5)s pentru turbine cu abur şiTRV > 0,5s pentru cele hidraulice;
S-1=(0,75÷1,5) - inversul statismului SE (turbina + sarcina);T - timpul de lansare, cu valori de (7÷14)s şi reprezintă timpul de
accelerare a turbinei de la turaţia zero la turaţia nominală, ladebit nominal de agent motor admis.
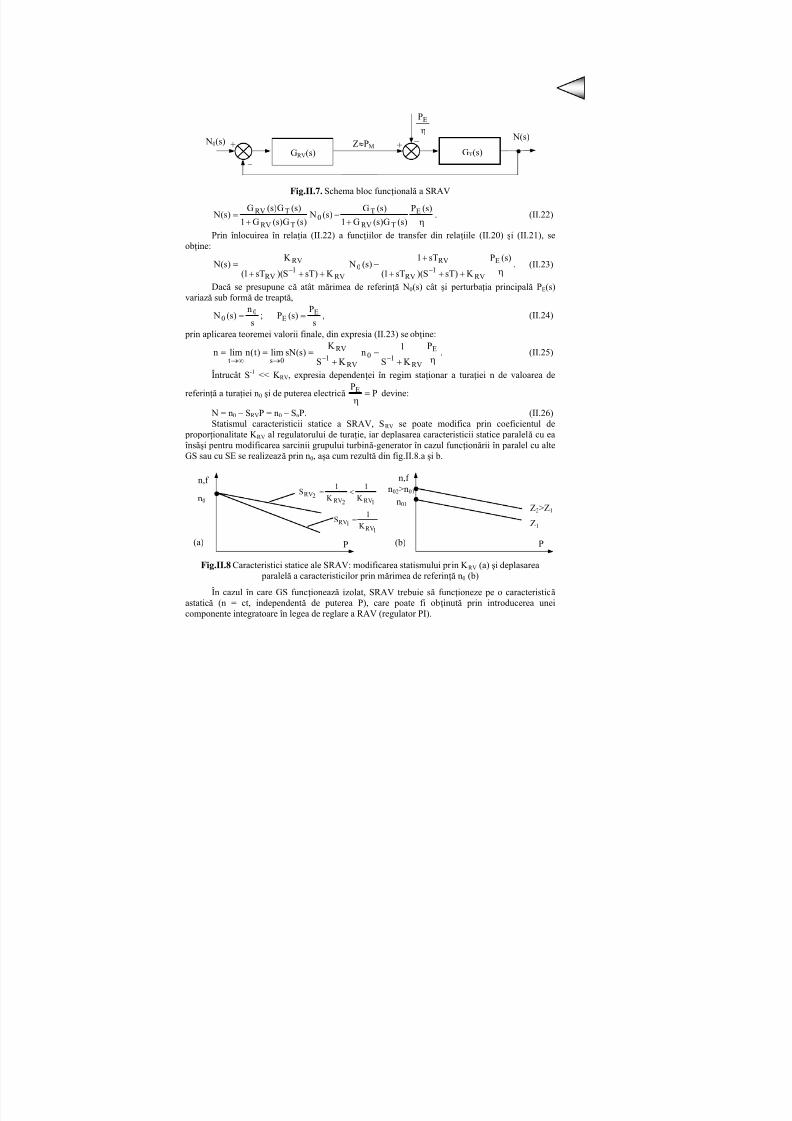
Cu aceste notaţii, pentru schema bloc funcţională din fig.II.7 a SRAV, turaţia, ca mărime deieşire poate fi exprimată în transformată Laplace:
Prin înlocuirea în relaţia (II.22) a funcţiilor de transfer din relaţiile (II.20) şi (II.21), seobţine:
.)s(P
K )sTS)(sT1(
sT1)s( N
K )sTS)(sT1(
K )s( N E
RV
1
RV
RV0
RV
1
RV
RV
η+++
+−
+++
=−−
(II.23)
Dacă se presupune că atât mărimea de referinţă N0(s) cât şi perturbaţia principală PE(s)variază sub formă de treaptă,
,s
P)s(P;
s
n)s( N E
E0
0 == (II.24)
prin aplicarea teoremei valorii finale, din expresia (II.23) se obţine:
.P
K S
1n
K S
K )s(sNlim)t(nlimn E
RV10
RV1
RV
0st η+−
+===
−−→∞→(II.25)
Întrucât S-1 << K RV, expresia dependenţei în regim staţionar a turaţiei n de valoarea de
referinţă a turaţiei n0 şi de puterea electrică PPE =η
devine:
N = n0 – SRVP = n0 – SnP. (II.26)Statismul caracteristicii statice a SRAV, SRV se poate modifica prin coeficientul de propor ţionalitate K RV al regulatorului de turaţie, iar deplasarea caracteristicii statice paralelă cu eaînsăşi pentru modificarea sarcinii grupului turbină-generator în cazul funcţionării în paralel cu alteGS sau cu SE se realizează prin n0, aşa cum rezultă din fig.II.8.a şi b.
n,f
n0 1RV2RV2RV K
1
K
1S <=
1RV1RV K
1S =
n,f n02>n01
n01 Z2>Z1
Z1
P P(a) (b)
Fig.II.8 Caracteristici statice ale SRAV: modificarea statismului prin K RV (a) şi deplasarea paralelă a caracteristicilor prin mărimea de referinţă n0 (b)
În cazul în care GS funcţionează izolat, SRAV trebuie să funcţioneze pe o caracteristică astatică (n = ct, independentă de puterea P), care poate fi obţinută prin introducerea uneicomponente integratoare în legea de reglare a RAV (regulator PI).
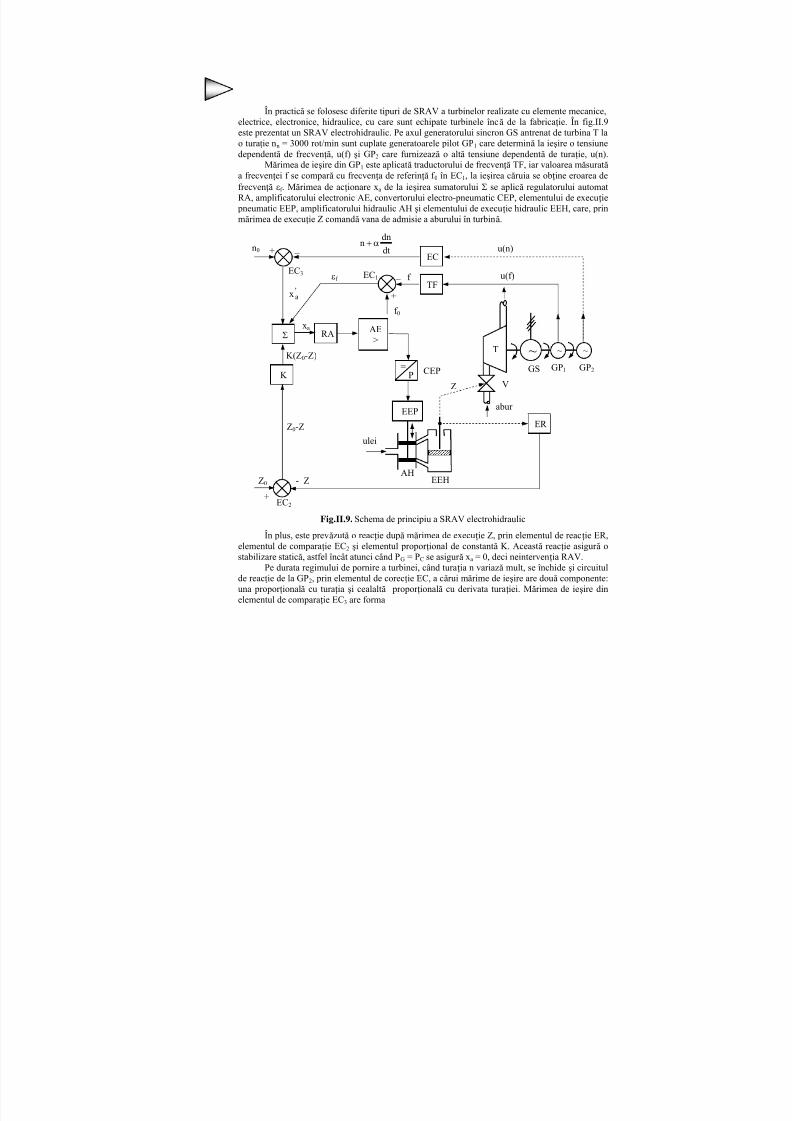
În practică se folosesc diferite tipuri de SRAV a turbinelor realizate cu elemente mecanice,electrice, electronice, hidraulice, cu care sunt echipate turbinele încă de la fabricaţie. În fig.II.9este prezentat un SRAV electrohidraulic. Pe axul generatorului sincron GS antrenat de turbina T lao turaţie nn = 3000 rot/min sunt cuplate generatoarele pilot GP1 care determină la ieşire o tensiunedependentă de frecvenţă, u(f) şi GP2 care furnizează o altă tensiune dependentă de turaţie, u(n).
Mărimea de ieşire din GP1 este aplicată traductorului de frecvenţă TF, iar valoarea măsurată a frecvenţei f se compar ă cu frecvenţa de referinţă f 0 în EC1, la ieşirea căruia se obţine eroarea defrecvenţă εf . Mărimea de acţionare xa de la ieşirea sumatorului Σ se aplică regulatorului automatRA, amplificatorului electronic AE, convertorului electro-pneumatic CEP, elementului de execuţie
pneumatic EEP, amplificatorului hidraulic AH şi elementului de execuţie hidraulic EEH, care, prinmărimea de execuţie Z comandă vana de admisie a aburului în turbină.
n0 dt
dnn α+
EC
TF
f 0
f
+
_
+
EC1
Σ
EC3 εf
AE>
RA
P= CEPK
K(Z0-Z)
Z0-ZEEP
ulei
AHEEH
Z V
T
abur
ER
~ ~~
GS GP1 GP2
xa
Z0 - Z
EC2
_ u(n)
u(f)'ax
+
Fig.II.9. Schema de principiu a SRAV electrohidraulic
În plus, este prevăzută o reacţie după mărimea de execuţie Z, prin elementul de reacţie ER,elementul de comparaţie EC2 şi elementul propor ţional de constantă K. Această reacţie asigur ă ostabilizare statică, astfel încât atunci când PG = PC se asigur ă xa = 0, deci neintervenţia RAV.
Pe durata regimului de pornire a turbinei, când turaţia n variază mult, se închide şi circuitulde reacţie de la GP2, prin elementul de corecţie EC, a cărui mărime de ieşire are două componente:una propor ţională cu turaţia şi cealaltă propor ţională cu derivata turaţiei. Mărimea de ieşire dinelementul de comparaţie EC3 are forma
şi se aplică aceluiaşi sumator Σ. Rolul acestui circuit de reacţie este de a limita viteza de creştere aturaţiei în regimul de pornire a turbinei.
II.3. Reglarea automată a frecvenţei şi puterii
active în sisteme energetice
II.3.1. Principiul metodelor de reglare automată a frecvenţei
şi puterii active (RAF-P)
Pentru explicarea principiului metodelor de RAF-P a GS conectate în paralel, consider ămdouă agregate turbină-generator funcţionând în paralel la ieşire, cu turbinele prevăzute cu RAV, cu
caracteristici statice de statisme diferite (S1 > S2) şi turaţii de funcţionare în gol, deci mărimi dereferinţă diferite (n01 > n02), fig.II.10.
n’01n01
n02
n,f
n’02
nn
n’A A’
A” B
B”
B’2’
2
1’1
P11 P12 P21 P22
ΔP1 ΔP2
Fig.II.10. Principiul metodelor de reglare automată frecven ţă-putere activă
Datorită cuplării în paralel a GS, mărimile de ieşire ale celor două SRAV, turaţiile, trebuiesă fie identice; valoarea comună este considerată turaţia nominală nn.
În conformitate cu statismele S1 şi S2 şi cu valorile turaţiilor corespunzătoare funcţionării îngol n01 şi n02, grupul 1 se încarcă cu puterea activă P11 (punctul A), iar grupul 2 – cu puterea P21 (punctul B). În acest regim cele două grupuri asigur ă puterea totală P1 = P11 + P21.
La creşterea puterii active consumate cu ΔP, cele două generatoare trebuie să producă P2 = P1 + ΔP. Pentru a fi posibil acest lucru, SRAV corespunzătoare celor două grupuri asigur ă evoluţia punctului de funcţionare al grupului 1 din A în A’, determinând încărcarea suplimentar ă aacestuia cu ΔP1, respectiv evoluţia punctului de funcţionare al grupului 2 din B în B’, determinândîncărcarea sa suplimentar ă cu ΔP2; evident ΔP1 + ΔP2 = ΔP. În această fază, cele două generatoareau preluat cererea de putere activă suplimentar ă; SRAV au comandat, prin creşterea admisiei Z încele două turbine mărirea corespunzătoare a debitelor de fluid motor admise în turbine. Datorită faptului că SRAV funcţionează pe caracteristici statice (înclinate), asigurarea puterii consumatemajorate cu ΔP a fost posibilă numai la o valoare comună a turaţiei (deci şi a frecvenţei) n’ mai
redusă decât cea iniţială: n’ < nn. Rezultă că SRAV, funcţionând cu caracteristici statice, au posibilitatea să asigure repartiţia univocă a sarcinilor între GS conectate în paralel dar f ăr ă să poată menţine turaţia (frecvenţa) constantă la valoarea nominală; SRAV se mai numesc şi sisteme dereglare primare.
Pentru funcţionarea celor două agregate la noul regim de puteri debitate dar la o valoare aturaţiei egală cu cea iniţială, nn, este necesar să se deplaseze, prin translaţie caracteristicile statice 1şi 2 în poziţiile 1’ şi 2’, astfel încât:
(II.28).n'n"B'B
n'n"A'A
0202
0101
−=
−=
Noile poziţii ale caracteristicilor statice ale SRAV corespund unei noi major ări a admisieide fluid motor Z la turbine, comandate prin noile valori ale mărimilor de referinţă n’01 > n01 şin’02>n02. Deplasarea dreptelor 1 şi 2 s-a f ăcut numai prin translaţie, f ăr ă modificarea înclinărilor,respectiv a statismelor S1 şi S2 ale celor două sisteme.
Principiul metodelor de reglare automat ă a frecven ţ ei şi puterii active în SE poate fienunţat astfel:
Pentru restabilirea valorii frecven ţ ei (tura ţ iei) care s-a modificat (pe caracteristicile staticeale SRAV) ca urmare a varia ţ iei puterii active consumate, este necesar ă deplasarea simultană atuturor caracteristicilor statice ale SRAV paralel cu ele inse şi şi în aceea şi mă sur ă.
Această deplasare trebuie efectuată în aceeaşi măsur ă pentru a se menţine repartiţia puterilor active între generatoare şi simultan pentru a se evita circulaţiile de puteri, nedorite în SE.Dacă este deplasată numai caracteristica statică a unui grup, atunci întregul surplus de putere este
preluat de acel grup care poate atinge un regim de supraîncărcare.Reglarea frecvenţei numai de către SRAV nu este suficientă întrucât aceste funcţionează cu
statisme de câteva procente şi nu se poate obţine o eroare staţionar ă a frecvenţei εf st = 0. Reglareaautomată a frecvenţei trebuie să fie astatică în raport cu perturbaţia (puterea activă) dar totodată să asigure o repartiţie univocă a acesteia între grupurile generatoare. Procesul mixt de reglare frecven ţă-tura ţ ie se desf ăşoar ă astfel: când variază puterea activă consumată (deci şi cea generată),variază turaţiile turbinelor din centrale; intr ă în funcţiune SRAV care au caracteristici statice dereglare, deci pot redistribui variaţiile de putere între agregatele în paralel, acţionând asupraadmisiei agentului motor în turbine. Se restabileşte echilibrul între puterile active generate şi celeconsumate dar la o turaţie comună apropiată de cea nominală dar diferită de aceasta (Sn = SRV ≠0);în această fază s-a încheiat reglarea primar ă. În continuare intervine regulatorul automat defrecvenţă, care deplasează simultan, prin translaţie, caracteristicile statice ale SRAV aferenteturbinelor care participă la reglare. Restabilind valoarea turaţiei, deci a frecvenţei, la cea nominală,este corectată funcţionarea intenţionat “defectuoasă” a SRAV, obţinându-se eroarea staţionar ă εf st = 0 deci şi un statism al sistemului de reglare automată a frecvenţei SRAF, Sf = 0. Faza a doua,de reglare automată a frecvenţei, este numită reglare secundar ă. În cadrul procesului de reglareautomată a frecvenţei nu se modifică distribuţia sarcinilor active pe agregatele în paralel, impusă
prin statismele SRAV.Reglarea automată a vitezei este o reglare statică (Sn ≠ 0), iar reglarea automată a frecvenţei
este o reglare astatică (Sf = 0). Realizând concomitent cu menţinerea constantă a frecvenţei în SEşi o redistribuire a sarcinilor active, reglarea se numeşte reglare automat ă a frecven ţ ei şi puterii
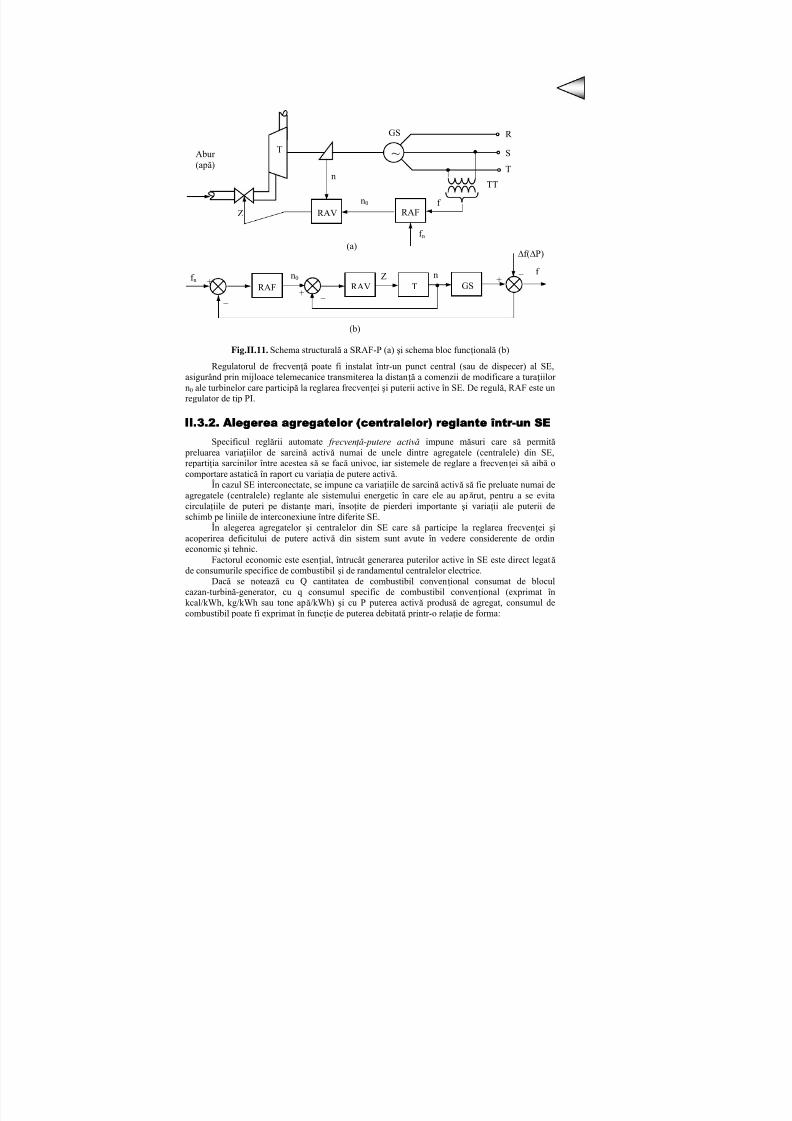
active (RAF-P) în SE.În fig.II.11a şi b sunt prezentate schema structurală şi schema bloc funcţională a SRAF-P.
Se remarcă structura de reglare în cascadă în care RAF asigur ă mărimea de referinţă n0 a RAV,deci deplasarea prin translaţie a caracteristicilor statice ale acestuia.
Fig.II.11. Schema structurală a SRAF-P (a) şi schema bloc funcţională (b)
Regulatorul de frecvenţă poate fi instalat într-un punct central (sau de dispecer) al SE,asigurând prin mijloace telemecanice transmiterea la distanţă a comenzii de modificare a turaţiilor n0 ale turbinelor care participă la reglarea frecvenţei şi puterii active în SE. De regulă, RAF este unregulator de tip PI.
II.3.2. Alegerea agregatelor (centralelor) reglante într-un SE
Specificul reglării automate frecven ţă-putere activă impune măsuri care să permită preluarea variaţiilor de sarcină activă numai de unele dintre agregatele (centralele) din SE,repartiţia sarcinilor între acestea să se facă univoc, iar sistemele de reglare a frecvenţei să aibă ocomportare astatică în raport cu variaţia de putere activă.
În cazul SE interconectate, se impune ca variaţiile de sarcină activă să fie preluate numai deagregatele (centralele) reglante ale sistemului energetic în care ele au apărut, pentru a se evitacirculaţiile de puteri pe distanţe mari, însoţite de pierderi importante şi variaţii ale puterii deschimb pe liniile de interconexiune între diferite SE.
În alegerea agregatelor şi centralelor din SE care să participe la reglarea frecvenţei şiacoperirea deficitului de putere activă din sistem sunt avute în vedere considerente de ordin
economic şi tehnic.Factorul economic este esenţial, întrucât generarea puterilor active în SE este direct legată de consumurile specifice de combustibil şi de randamentul centralelor electrice.
Dacă se notează cu Q cantitatea de combustibil convenţional consumat de bloculcazan-turbină-generator, cu q consumul specific de combustibil convenţional (exprimat înkcal/kWh, kg/kWh sau tone apă/kWh) şi cu P puterea activă produsă de agregat, consumul decombustibil poate fi exprimat în funcţie de puterea debitată printr-o relaţie de forma:
unde: Q0 este consumul pentru funcţionarea în gol;
K 1,K 2 constante de dependente de agregat.În fig.II.12 este reprezentată dependenţa Q = f(P).
Fig.II.12. Dependenţa consumului de combustibilde puterea activă generată
Q0
Q
0 P
Pentru n agregate cuplate în paralel la ieşire, relaţia (II.29) devine:
(II.30).PK QQ i2K i
n
1ii1
n
1ii0
n
1ii ∑∑∑
===+=
Diferenţele între consumurile specifice corespunzătoare funcţionării în gol ale diferitelor blocuri nu sunt esenţiale; în aceste condiţii, se poate considera că minimul expresiei (II.30) are loc pentru:
,dP
dQ...
dP
dQ
dP
dQ
n
n
2
2
1
1 === (II.31)
adică pentru egalitatea consumurilor specifice:(II.32).q...qq n21 ===
Modificările de sarcină activă cu ±ΔP faţă de regimul staţionar anterior, determină modificări ale acestor consumuri specifice, ;qq,....,qq nn11 Δ±Δ± pentru a fi îndeplinită relaţia
(II.32) şi în aceste condiţii, este necesar ca şi.q...qq n21 Δ==Δ=Δ (II.33)
Relaţia (II.33) exprimă condiţia egalităţii creşterilor consumurilor specifice de combustibilconvenţional ca o condiţie de funcţionare optimă şi de preluare optimă a perturbaţiilor pentru toateagregatele (centralele) care participă la RAF-P într-un SE.
În exploatarea SE, nu se recomandă, din considerente de ordin economic şi tehnic, să se păstreze o rezervă importantă de putere în fiecare dintre centralele SE, pentru a satisface cererilede putere suplimentar ă, întrucât se produc circulaţii permanente de puteri însoţite de pierderi, caurmare a redistribuirii încărcării diferitelor agregate şi centrale. În sistemele moderne, se stabilesccentrale care să funcţioneze în regim de bază, cu putere constantă pe perioade îndelungate şicentrale în regim de vârf cu rolul de a prelua cererile suplimentare de putere activă şi de a reglafrecvenţa în SE.
Din punctul de vedere al capacităţii de preluare a variaţiilor de sarcină, agregatelegeneratoare din SE prezintă utmătoarele particularităţi:- Cazanele din centralele termoelectrice: cel mai mic domeniu de reglare îl ofer ă cele care
funcţionează cu praf de cărbune (60% - 100% din capacitatea nominală); un domeniu mai mare(30% - 100%), cu o viteză mai ridicată de variaţie a sarcinii îl ofer ă cazanele cu combustibiligazoşi sau mixt (gaz + lichid).
- Turbinele cu abur : cele mai indicate pentru a participa la reglarea frecvenţei şi preluareavariaţiilor de putere activă sunt cele cu condensaţie pur ă, de înaltă presiune, la care reglareaadmisiei se face prin laminare. Turbinele cu contrapresiune nu sunt indicate pentru RAF-P,întrucât consumul specific variază mult cu sarcina activă. În unele cazuri se utilizează şi turbinelecu condensaţie şi priză, care au un consum specific variabil cu sarcina, dar nu în aceeaşi măsur ă cala turbinele cu contrapresiune.
- Turbinele hidraulice sunt cele mai indicate pentru RAF-P, întrucât au un domeniu larg dereglare (0% ÷ 100%), pot fi pornite şi cuplate la SE în cel mai scurt timp. În plus, rezerva de puterece trebuie menţinută în centralele hidroelectrice este de 2-3 ori mai mică decât rezerva turnantă dincentralele de vârf termoelectrice, datorită limitărilor tehnologice impuse la pornirea şi încărcarearapidă a agregatelor termice.
II.3.3 RAF-P în sisteme energetice neinterconectate
II.3.3.1. Repartizarea proporţională a sarcinilor pe agregate
Această metodă se bazează pe SRAF cu caracteristici statice de reglare şi pe un repartitor de sarcină activă; se mai numeşte metoda statismului virtual . În cadrul acestei metode, seurmăreşte obţinerea unei reglări astatice a frecvenţei (f = f n = ct. şi εfst = 0), dar statică din punctulde vedere al repartiţiei sarcinii active.
Fiecare din agregatele care participă la RAF-P este prevăzut cu un regulator automat defrecvenţă (RAF) local, cu o caracteristică statică de statism pozitiv, exprimată prin:
}n,...,1{i,PSf f iif i0 =−= (II.34)
unde: f este frecvenţa curentă (reglată);f 0i - frecvenţa de funcţionare în gol a grupului i;
- statismul SRAF al grupului i;if
S
Pi - puterea activă debitată de grupul i.
Presupunem că, printr-o anumită metodă, “corectăm” valoarea f 0i a frecvenţei defuncţionare în gol a grupului i cu un termen adiţional, propor ţional cu puterea totală a celor nagregate care reglează frecvenţa (evident obţinută prin măsur ări, teletransmisii şi sumare); înaceste condiţii, relaţia (II.34) devine:
(II.35),PSPf f iif
n
1iiii0 −⎟⎟
⎠
⎞⎜⎜⎝
⎛ α+= ∑
=
unde: αi = {α1...αn} sunt coeficienţii de repartiţie ai puterii totale pe agregatele reglante;
este puterea totală cerută celor n agregate care reglează frecvenţa (obţinută prin
iar prin sumarea relaţiilor (II.37) corespunzătoare celor n agregate, se obţine:
.P1PPS
f n
1i
n
1i
n
1ii
n
1ii
n
1iiii
if
i∑ ∑ ∑∑∑= = ===
⎟⎟
⎠
⎞⎜⎜⎝
⎛ β−=⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ β−=
Δ(II.38)
Dacă poate fi îndeplinită egalitatea
(II.39),1n
1ii =β∑
=
şi dacă măsurarea sarcinii celor n agregate care reglează frecvenţa se realizează cu precizie (peaceasta s-a bazat operaţia de sumare din (II.38)), din relaţia (II.38) rezultă:
,0S
f n
1i if
i∑=
=Δ respectiv .Sf
Sf n
1i if
i0n
1i if ∑∑==
= (II.40)
Din (II.40) se obţine
.,const
S
1
S
f
f n
1i if
n
1i if
i0
==
∑
∑
=
= (II.41)
deci, în regim staţionar, frecvenţa reglată f r ămâne constantă, independent de sarcina activă generată.
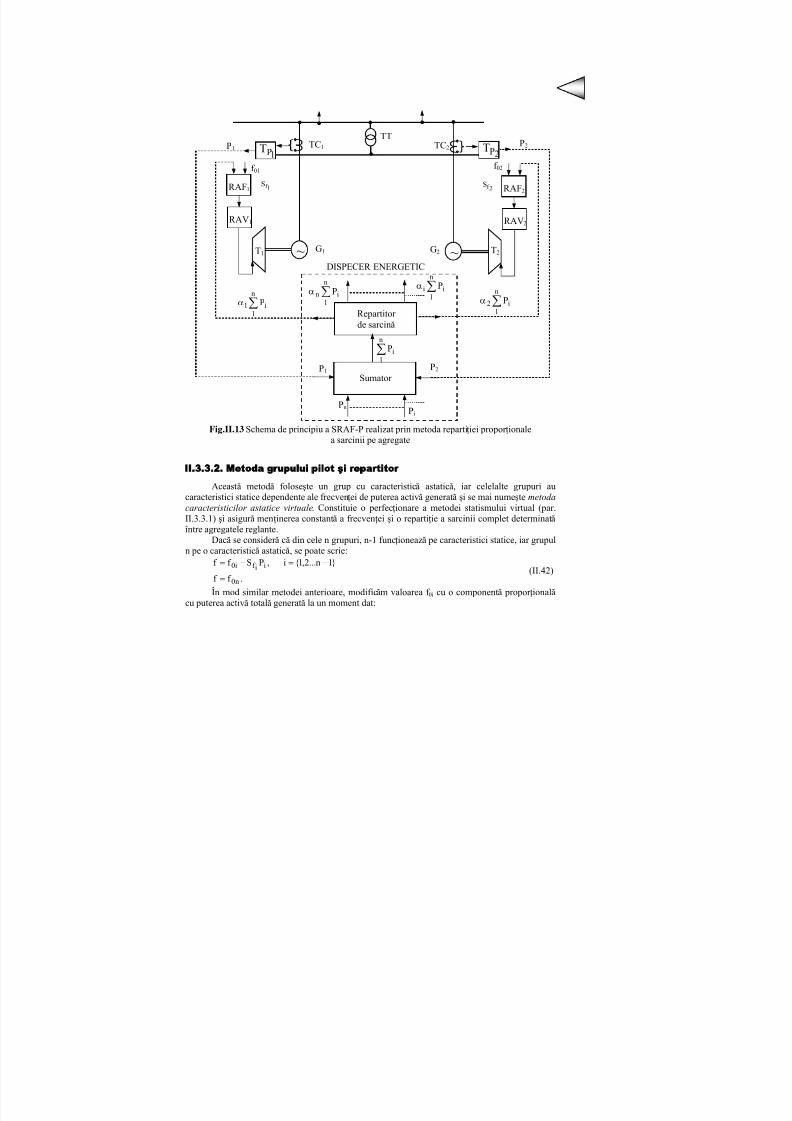
În fig.II.13 este prezentată schema de principiu a SRAF-P pentru două agregate. Puterileactive P1, P2, măsurate cu traductoarele de putere activă sunt transmise prin mijloace
telemecanice la dispecerul energetic, unde sunt sumate împreună cu puterile măsurate ale celorlalteagregate reglante. În funcţie de precizia măsur ării, transmisiei şi sumării puterilor depindeîndeplinirea condiţiei (II.39) şi deci precizia SRAF. Repartitorul de sarcină stabileşte cotele de
putere pe care le alocă fiecărui agregat şi care sunt transmise prin mijloace telemecanice
fiecărui RAF.
,T,T2P1P
∑αn
1ii P
Metoda repartiţiei propor ţionale a sarcinii pe agregate este simplă şi eficace, dar, în general,
condiţia este greu de realizat (din cauza erorilor menţionate mai sus), ceea ce conduce la
o valoare f ≠ ct.; se utilizează în cazul agregatelor identice, cu aceleaşi caracteristici aleconsumului specific.
Fig.II.13 Schema de principiu a SRAF-P realizat prin metoda repartiţiei propor ţionalea sarcinii pe agregate
II.3.3.2. Metoda grupului pilot şi repartitor
Această metodă foloseşte un grup cu caracteristică astatică, iar celelalte grupuri aucaracteristici statice dependente ale frecvenţei de puterea activă generată şi se mai numeşte metodacaracteristicilor astatice virtuale. Constituie o perfecţionare a metodei statismului virtual (par.II.3.3.1) şi asigur ă menţinerea constantă a frecvenţei şi o repartiţie a sarcinii complet determinată între agregatele reglante.
Dacă se consider ă că din cele n grupuri, n-1 funcţionează pe caracteristici statice, iar grupul
n pe o caracteristică astatică, se poate scrie:(II.42)
.f f
}1n...2,1{i,PSf f
n0
iif i0
=
−=−=
În mod similar metodei anterioare, modificăm valoarea f 0i cu o componentă propor ţională cu puterea activă totală generată la un moment dat:
unde βi = αi / Sfi.Frecvenţa r ămâne constantă la valoarea f = f 0n, iar puterile unui grup k şi a grupului n, sunt:
∑=
β+−
=n
1iik
k f
n0k 0k P
S
f f P (II.45)
.P1S
f f PPP
n
1ii
1n
k k
1n
1k k f n0k 0
1n
1k k
n
1iin ∑∑∑∑∑ =
−−
=
−
==⎟⎟
⎠
⎞⎜⎜⎝
⎛ β−−
−=−= (II.46)
Dacă f 01 = f 02 =... f on = f 0, relaţiile (II.45), (II.46) devin:
(II.47)∑=
β=n
1iik k PP
(II.48).P1Pn
1ii
1n
1k k n ∑∑
=
−
=⎟⎟
⎠
⎞⎜⎜⎝
⎛ β−=
Metoda asigur ă menţinerea constantă a frecvenţei la valoarea nominală, independent desarcina SE, de numărul grupurilor sau centralelor reglante şi de erorile dispozitivelor auxiliare demăsurare a puterilor. Aceste erori se manifestă nmai asupra puterilor repartizate celor n-1 grupuricu caracteristici statice şi sarcinii care revine şi grupului n, cu caracteristică astatică.
II.3.4. RAF-P în sisteme energetice interconectate
II.3.4.1. Reglarea fază-putere activă
Metoda de reglare fază-putere activă se integrează în actuala strategie de reglare a fecvenţeişi puterii active în SE interconectate care urmăreşte obţinerea unei erori staţionare nule afrecvenţei (εfst=0) şi realizarea repartiţiei univoce a mărimilor perturbatoare (puteri active) încentralele reglante.
Consider ăm un sistem automat liniar (SAL), perturbat la intrare prin perturba ţia W(s),fig.II.14.a. Dacă Gd(s) este funcţia de transfer a sistemului deschis,
).s(W)s(G)s(W
)s(G1
1)s(
d
=
+
=ε (II.49)
Se notează cu ϕ(t) expresia
(II.50),dt)t()t(t
0∫ ε=ϕ
iar ϕ(t) se numeşte faza sistemului.În domeniul transformatei Laplace, relaţia (II.50) devine:
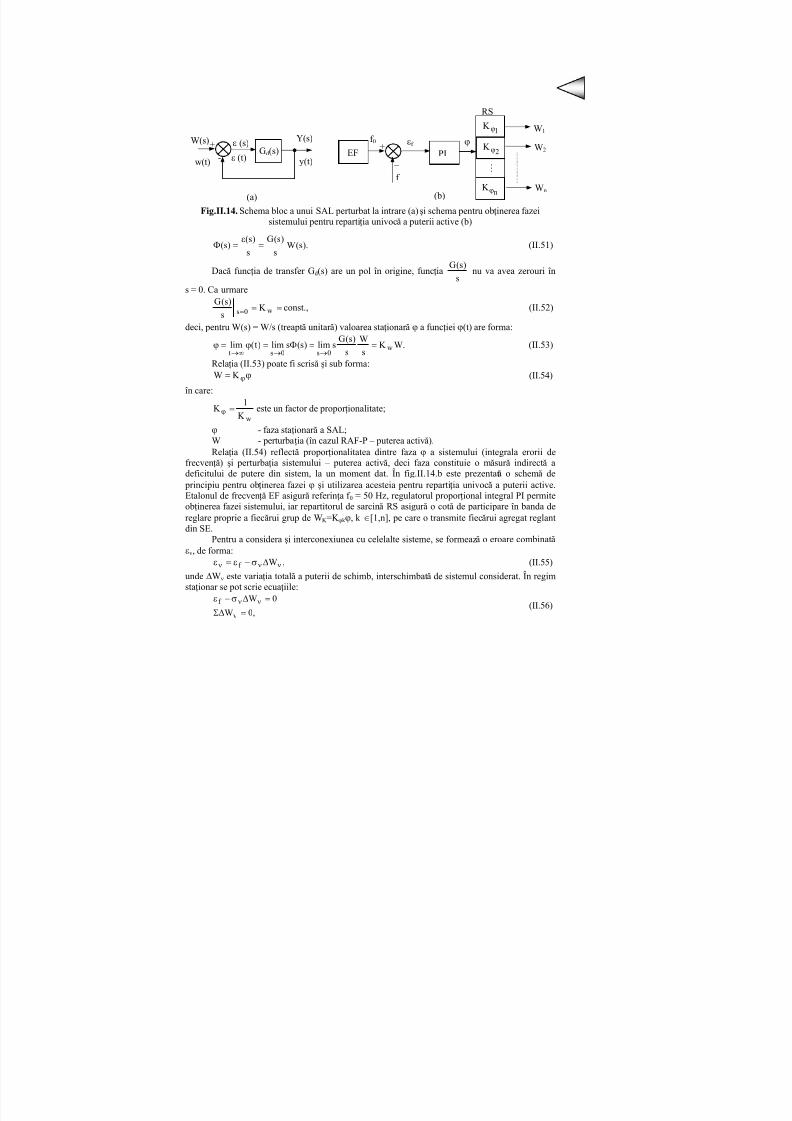
Fig.II.14. Schema bloc a unui SAL perturbat la intrare (a) şi schema pentru obţinerea fazeisistemului pentru repartiţia univocă a puterii active (b)
).s(Ws
)s(G
s
)s()s( =
ε=Φ (II.51)
Dacă funcţia de transfer Gd(s) are un pol în origine, funcţia
s
)s(Gnu va avea zerouri în
s = 0. Ca urmare
=== w0s K s
)s(Gconst., (II.52)
deci, pentru W(s) = W/s (treaptă unitar ă) valoarea staţionar ă ϕ a funcţiei ϕ(t) are forma:
.WK s
W
s
)s(Gslim)s(slim)t(lim w
0s0st==Φ=ϕ=ϕ
→→∞→(II.53)
Relaţia (II.53) poate fi scrisă şi sub forma:(II.54)ϕ= ϕK W
în care:
wK
1K =
ϕeste un factor de propor ţionalitate;
ϕ - faza staţionar ă a SAL;W - perturbaţia (în cazul RAF-P – puterea activă).Relaţia (II.54) reflectă propor ţionalitatea dintre faza ϕ a sistemului (integrala erorii de
frecvenţă) şi perturbaţia sistemului – puterea activă, deci faza constituie o măsur ă indirectă adeficitului de putere din sistem, la un moment dat. În fig.II.14.b este prezentată o schemă de principiu pentru obţinerea fazei ϕ şi utilizarea acesteia pentru repartiţia univocă a puterii active.Etalonul de frecvenţă EF asigur ă referinţa f 0 = 50 Hz, regulatorul propor ţional integral PI permiteobţinerea fazei sistemului, iar repartitorul de sarcină RS asigur ă o cotă de participare în banda dereglare proprie a fiecărui grup de WK =K ϕk ϕ, k ∈[1,n], pe care o transmite fiecărui agregat reglantdin SE.
Pentru a considera şi interconexiunea cu celelalte sisteme, se formează o eroare combinată
εν, de forma: (II.55),Wf ννν Δσ−ε=ε
unde ΔWν este variaţia totală a puterii de schimb, interschimbată de sistemul considerat. În regimstaţionar se pot scrie ecuaţiile:
deoarece variaţiile de putere pe liniile de interconexiune în regim staţionar sunt nule. Unica soluţiea ecuaţiilor (II.56) este εf = 0 şi ΔWν = 0.
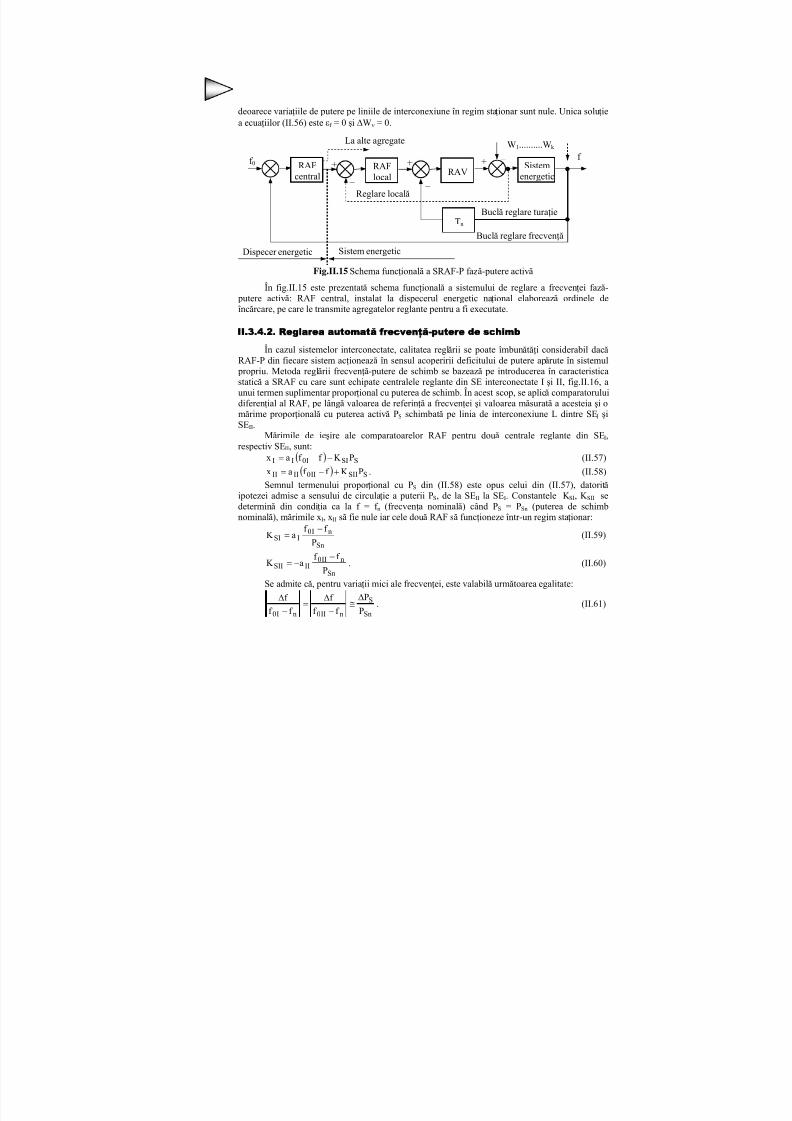
Fig.II.15Schema funcţională a SRAF-P fază-putere activă
În fig.II.15 este prezentată schema funcţională a sistemului de reglare a frecvenţei fază- putere activă: RAF central, instalat la dispecerul energetic naţional elaborează ordinele deîncărcare, pe care le transmite agregatelor reglante pentru a fi executate.
II.3.4.2. Reglarea automată frecvenţă-putere de schimb
În cazul sistemelor interconectate, calitatea reglării se poate îmbunătăţi considerabil dacă RAF-P din fiecare sistem acţionează în sensul acoperirii deficitului de putere apărute în sistemul propriu. Metoda reglării frecvenţă-putere de schimb se bazează pe introducerea în caracteristicastatică a SRAF cu care sunt echipate centralele reglante din SE interconectate I şi II, fig.II.16, aunui termen suplimentar propor ţional cu puterea de schimb. În acest scop, se aplică comparatoruluidiferenţial al RAF, pe lângă valoarea de referinţă a frecvenţei şi valoarea măsurată a acesteia şi o
mărime propor ţională cu puterea activă PS schimbată pe linia de interconexiune L dintre SEI şiSEII.Mărimile de ieşire ale comparatoarelor RAF pentru două centrale reglante din SEI,
respectiv SEII, sunt:(II.57)( ) SSII0II PK f f ax −−=
. (II.58)( ) SSIIII0IIII PK f f ax +−=Semnul termenului propor ţional cu PS din (II.58) este opus celui din (II.57), datorită
ipotezei admise a sensului de circulaţie a puterii PS, de la SEII la SEI. Constantele K SI, K SII sedetermină din condiţia ca la f = f n (frecvenţa nominală) când PS = PSn (puterea de schimbnominală), mărimile xI, xII să fie nule iar cele două RAF să funcţioneze într-un regim staţionar:
Sn
nI0ISI P
f f aK
−= (II.59)
Sn
nII0IISII P
f f aK −−= . (II.60)
Se admite că, pentru variaţii mici ale frecvenţei, este valabilă următoarea egalitate:
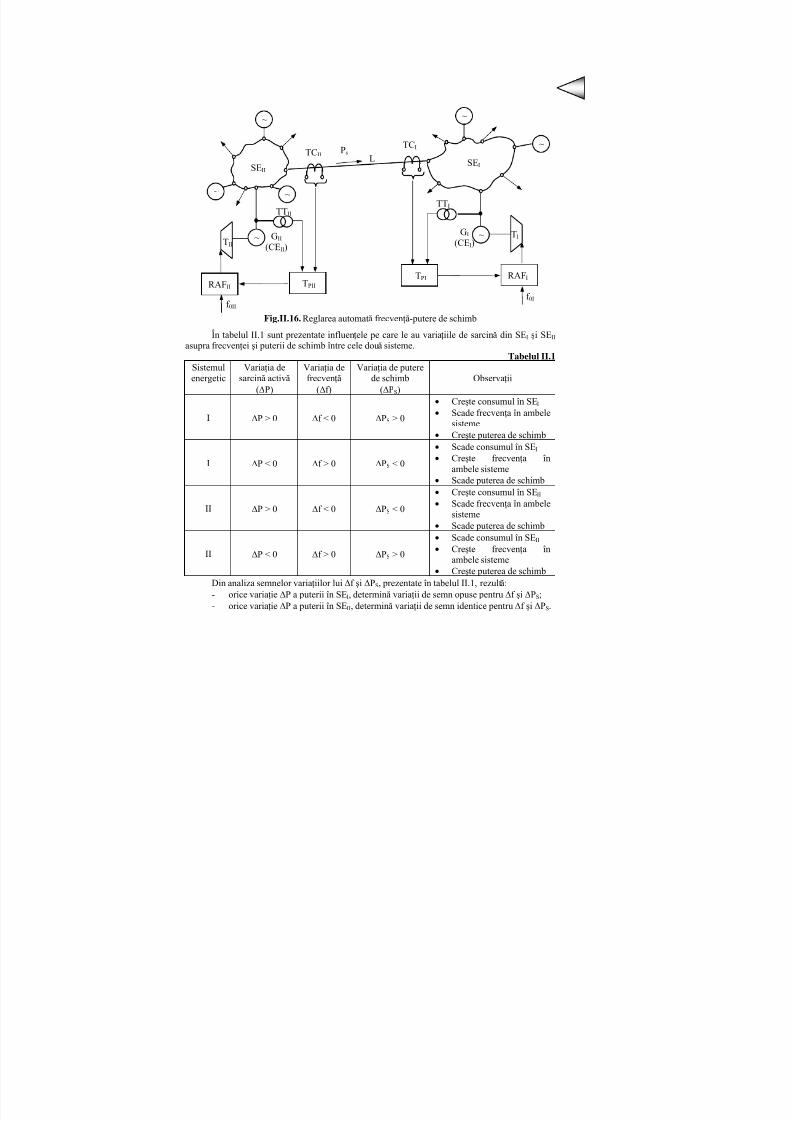
Fig.II.16. Reglarea automată frecvenţă-putere de schimb
~
~
~
~~
~
RAFII TPII
TII
TTII
GII
(CEII)
TCIIPs
L
TPI
TCI
TTI
RAFI
~ TIGI
(CEI)
SEIISEI
f 0II
f 0I
În tabelul II.1 sunt prezentate influenţele pe care le au variaţiile de sarcină din SEI şi SEII asupra frecvenţei şi puterii de schimb între cele două sisteme.
Tabelul II.1
Sistemulenergetic
Variaţia desarcină activă
(ΔP)
Variaţia defrecvenţă
(Δf)
Variaţia de puterede schimb
(ΔPS)Observaţii
I ΔP > 0 Δf < 0 ΔPS > 0
• Creşte consumul în SEI
• Scade frecvenţa în ambelesisteme• Creşte puterea de schimb
I ΔP < 0 Δf > 0 ΔPS < 0
• Scade consumul în SEI • Creşte frecvenţa în
ambele sisteme• Scade puterea de schimb
II ΔP > 0 Δf < 0 ΔPS < 0
• Creşte consumul în SEII • Scade frecvenţa în ambele
sisteme• Scade puterea de schimb
II ΔP < 0 Δf > 0 ΔPS > 0
• Scade consumul în SEII
•
Creşte frecvenţa înambele sisteme• Creşte puterea de schimb
Din analiza semnelor variaţiilor lui Δf şi ΔPS, prezentate în tabelul II.1, rezultă:- orice variaţie ΔP a puterii în SEI, determină variaţii de semn opuse pentru Δf şi ΔPS;- orice variaţie ΔP a puterii în SEII, determină variaţii de semn identice pentru Δf şi ΔPS.
Identitatea semnelor lui Δf şi ΔPS indică o variaţie a puterii ΔP în SEII iar semnul opus întreΔf şi ΔPS indică o variaţie a puterii în SEI.
În condiţiile relaţiei (II.61), pentru variaţiile de sarcină ΔP produse în SEI (când Δf şi ΔPS au semne opuse), relaţiile (II.57), (II.58) se pot scrie:0f a2PK f ax ISSIII ≠Δ=Δ−Δ=
0PK f ax SSIIIIII
(II.62)
=Δ+Δ=
0PK f ax SSIII =Δ−Δ=
0f a2PK f ax IISSIIIIII
(II.63)
În mod similar, pentru variaţii de sarcină ΔP produse în SEII (când Δf şi ΔPS au semneidentice), relaţiile (II.57), (II.58) se pot scrie:
(II.64)
≠Δ=Δ+Δ=
ES Δ+Δ
(II.65)
II.3.4.3. Reglarea automată frecvenţă-putere activă în sistemul
energetic naţional (SEN)
Se observă că vor interveni numai RAF din SE în care s-a produs varia ţia de sarcină, prinmărimea de comandă diferită de zero în timp ce RAF din SE în care nu s-a produs variaţia desarcină primeşte o mărime de comandă egală cu zero.
Metoda ofer ă rezultate bune atât timp cât variaţiile de putere (deci şi cele ale frecvenţei) în
jurul punctului de funcţionare sunt reduse.
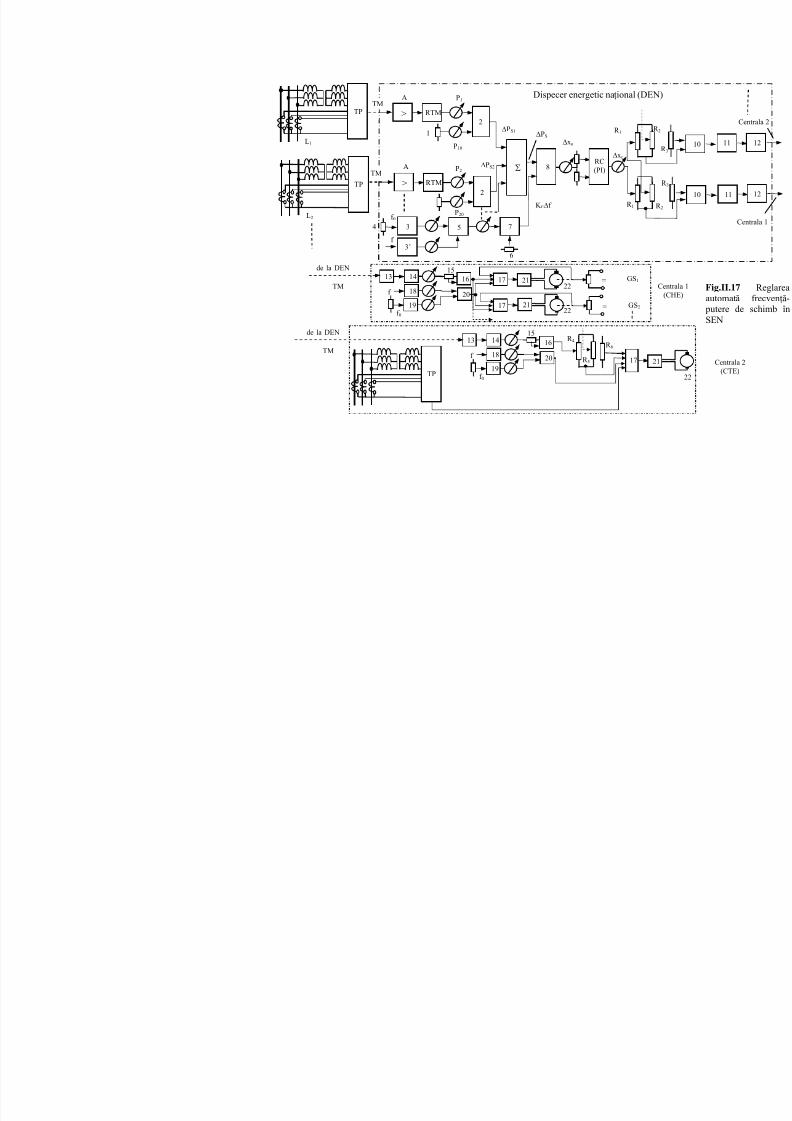
Sistemul de reglare frecvenţă-putere activă din sistemul energetic naţional se compune dininstalaţia centrală de la dispecerul energetic naţional (DEN), instalaţiile din centralele reglante şiinstalaţiile de teletransmisie a semnalelor. Instalaţia permite reglarea simultană a frecvenţei şi puterii de schimb, reglarea frecvenţei în regim neinterconectat şi reglarea puterilor de schimb încazul reglării frecvenţei de către un alt sistem.
În fig.II.17 este prezentată schema bloc a SRAF-P din SEN. La regulatorul central RC seaduc valorile puterilor pe liniile de interconexiune L1, L2,…., măsurate cu traductoarele de putereTP şi transmise la DEN prin instalaţii de telemăsurare. Prin potenţiometrele 1 se fixează valorile
prescrise ale puterilor de schimb conform graficului orar, iar prin amplificatoarele şi elementeleRTM sunt recepţionate informaţiile privind puterile de schimb primite prin instalaţiile detelemăsurare.
Pentru fiecare linie de interconexiune, puterea reală Pi şi puterea prescrisă Pi0 suntintroduse în elementele 2 – comparatoare diferenţiale şi amplificatoare, obţinându-se abaterea puterii de schim ΔPSi care însumate determină abaterea totală a puterii de schimb ΔPS.
Pentru asigurarea unei precizii de măsur ă a frecvenţei de ±1mHz, este prevăzută măsurareanumerică a frecvenţei reale, elaborarea analogică a abaterii de frecvenţă Δf şi a termenului K EΔf.Valoarea reală a frecvenţei este măsurată local cu traductorul de frecvenţă numeric 3’ şi estecomparată cu valoarea etalon f 0 (convertită numeric în 3) în comparatorul diferenţial numeric şiconvertorul numeric-analogic 5. Valoarea dorită a factorului putere-frecvenţă K E poate fi fixată între 200 – 800 MW/Hz prin potenţiometrul 6, iar multiplicatorul 7 realizează produsul K EΔf.
La ieşirea sumatorului 8 se obţine abaterea totală
,f K Px a =Δaplicată regulatorului central RC de tip PI, la a cărui ieşire se obţine mărimea de comandă
unde: K P şi TI sunt coeficientul de propor ţionalitate şi timpul de integrare (TI = 25÷80s);
este abaterea totală a puterii de schimb.
Mărimea de ieşire Δx
(
∑=−=Δ
n
1i 0SiSiSPPP )
c din RC este distribuită, după considerente tehnico-economice, prin potenţiometrele R 1, R 2. Puterea prescrisă (ordinul de reglaj) fiecărei centrale se stabileşteca o sumă a doi termeni: valoarea rezultată din cota parte corespunzătoare mărimii de ieşire dinRC, preluată de pe R 1, R 2 şi valoarea puterii de bază stabilită de dispecer prin potenţiometrulR 3. Suma celor două componente, obţinută în amplificatorul sumator 10 se transmitecentralelor reglante prin blocul de modulaţie în frecvenţă 11 şi emiţătorul de joasă frecvenţă 12.
La centralele reglante, ordinul de reglaj transmis prin intalaţii telemecanice esterecepţionat şi demodulat în receptorul de joasă frecvenţă 13, convertit în semnal continuu propor ţional cu sarcina impusă în 14. Prin potenţiometrul 15 se fixează limita inferioar ă şisuperioar ă a încărcării grupurilor. Semnalul este amplificat în 16 care repartizează sarcina între
GS în funcţie de centrala reglantă.La centralele hidroelectrice (CHE), datorită caracteristicilor similare ale grupurilor,repartizarea se face în mod egal între grupuri. La centralele termoelectrice (CTE), datorită caracteristicilor diferite ale grupurilor, sarcina totală se repartizează într-un mod prestabilit, prin potenţiometrele R 4, R 5, R 6. Pentru a mări viteza de r ăspuns a centralei la variaţiile de putere, se prevede o corecţie după valoarea locală a frecvenţei. În sumatorul 17 se sumează abaterea frevenţei (obţinută cu elementele 18, 19, 20) cu abaterea dintre puterea primită prinordinul de reglaj şi puterea activă reală a grupului (obţinută cu traductorul TP). Abaterea astfelelaborată se aplică sistemului de comandă cu tiristoare 21 al servomotorului 22 care acţionează asupra regulatorului de putere al turbinei în sensul dorit.
Ordinele de reglaj se transmit de la DEN tuturor centralelor reglante, unde serepartizează pe toate grupurile aflate în funcţiune în acel moment.