Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 94 § 2.5 Discretizarea sistemelor în timp continuu Discretizarea unui sistem în timp continuu reprezintă operaţia prin care unui sistem în timp continuu i se asociază un sistem în timp discret care atunci când lucrează cu secvenţele rezultate prin eşantionarea semnalelor de intrare ale sistemului în timp continuu, fie că reproduce la ieşire, în momentele de discretizare a timpului, în mod exact mărimea de ieşire a sistemului în timp continuu (semnal eşantionat), fie că o aproximează. În primul caz spunem că sistemul în timp discret este o realizare invariantă a sistemului în timp continuu, iar metodele de discretizare le denumim metode de obţinere a realizărilor invariante. Ele sunt aplicabile numai când semnalul de intrare este de un tip bine precizat (realizări invariante la semnal treaptă, la semnal rampă etc.). În al doilea caz vorbim despre discretizare prin metode de aproximare. Ele se utilizează în situaţii când semnalul de intrare este oarecare. Există mai multe tipuri de metode de discretizare prin aproximare. În cadrul paragrafului ne referim numai la cele cunoscute sub denumirea de metode de substituţie. Aspectul practic care ne interesează este cel al implementării de regulatoare numerice. Paragraful este destinat prezentării tipurilor de problemelor de discretizare şi metodelor de discretizare necesare pentru rezolvarea problemelor asociate sistemelor hibride rezultate prin interconectarea de subsisteme analogice şi numerice. 1. Tipuri de probleme de discretizare Ca suport pentru prezentarea problemelor de discretizare se consideră cazul practic al sistemelor de reglare numerică cărora le sunt aplicabile ambele metode. Sistemele de reglare numerică sunt structuri hibride în care procesul condus este de regulă de tip analogic, iar regulatorul este tip digital. În Fig. 1 se prezintă o astfel de structură de reglare. Fig. 1. Structură convenţională de reglare numerică În figură P este procesul condus (sistem în timp continuu), iar RN este regulatorul numeric (sistem în timp discret). Legătura dintre cele două părţi se realizează prin convertorul numeric-analogic CNA şi convertorul analog-numeric CAN. Semnalele notate cu litere supraliniate sunt semnale eşantionate, adică semnale în timp discret necuantizate în amplitudine, iar cele notate cu litere nesupraliniate sunt semnale analogice. RN comandă procesul prin semnalul de comandă [k]} u { şi se informează despre situaţia procesului condus prin semnalul de reacţie [k]} y { obţinut prin eşantionarea şi conversia analog-numerică a mărimii de reglate y(t). Prin semnalul de referinţă [k]} w { se prescrie pentru y un regim de funcţionare dorit.
Transcript
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 94
§ 2.5 Discretizarea sistemelor în timp continuu
Discretizarea unui sistem în timp continuu reprezintă operaţia prin care unui sistem în timp continuu i se asociază
un sistem în timp discret care atunci când lucrează cu secvenţele rezultate prin eşantionarea semnalelor de intrare
ale sistemului în timp continuu, fie că reproduce la ieşire, în momentele de discretizare a timpului, în mod exact
mărimea de ieşire a sistemului în timp continuu (semnal eşantionat), fie că o aproximează.
În primul caz spunem că sistemul în timp discret este o realizare invariantă a sistemului în timp continuu, iar
metodele de discretizare le denumim metode de obţinere a realizărilor invariante. Ele sunt aplicabile numai când
semnalul de intrare este de un tip bine precizat (realizări invariante la semnal treaptă, la semnal rampă etc.).
În al doilea caz vorbim despre discretizare prin metode de aproximare. Ele se utilizează în situaţii când semnalul de
intrare este oarecare. Există mai multe tipuri de metode de discretizare prin aproximare. În cadrul paragrafului ne
referim numai la cele cunoscute sub denumirea de metode de substituţie. Aspectul practic care ne interesează este
cel al implementării de regulatoare numerice.
Paragraful este destinat prezentării tipurilor de problemelor de discretizare şi metodelor de discretizare necesare
pentru rezolvarea problemelor asociate sistemelor hibride rezultate prin interconectarea de subsisteme analogice şi
numerice.
1. Tipuri de probleme de discretizare
Ca suport pentru prezentarea problemelor de discretizare se consideră cazul practic al sistemelor de reglare numerică
cărora le sunt aplicabile ambele metode. Sistemele de reglare numerică sunt structuri hibride în care procesul condus
este de regulă de tip analogic, iar regulatorul este tip digital. În Fig. 1 se prezintă o astfel de structură de reglare.
Fig. 1. Structură convenţională de reglare numerică
În figură P este procesul condus (sistem în timp continuu), iar RN este regulatorul numeric (sistem în timp discret).
Legătura dintre cele două părţi se realizează prin convertorul numeric-analogic CNA şi convertorul analog-numeric
CAN. Semnalele notate cu litere supraliniate sunt semnale eşantionate, adică semnale în timp discret necuantizate în
amplitudine, iar cele notate cu litere nesupraliniate sunt semnale analogice. RN comandă procesul prin semnalul de
comandă [k]}u{ şi se informează despre situaţia procesului condus prin semnalul de reacţie [k]}y{ obţinut prin
eşantionarea şi conversia analog-numerică a mărimii de reglate y(t). Prin semnalul de referinţă [k]}w{ se prescrie
pentru y un regim de funcţionare dorit.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 95
În scopul dezvoltării unor modele utilizabile pentru sinteza sistemului de reglare, CNA şi CAN se înlocuiesc, în
contextul precizat în continuare, cu structurile sistemice reprezentate în Fig.1 deasupra acoladelor.
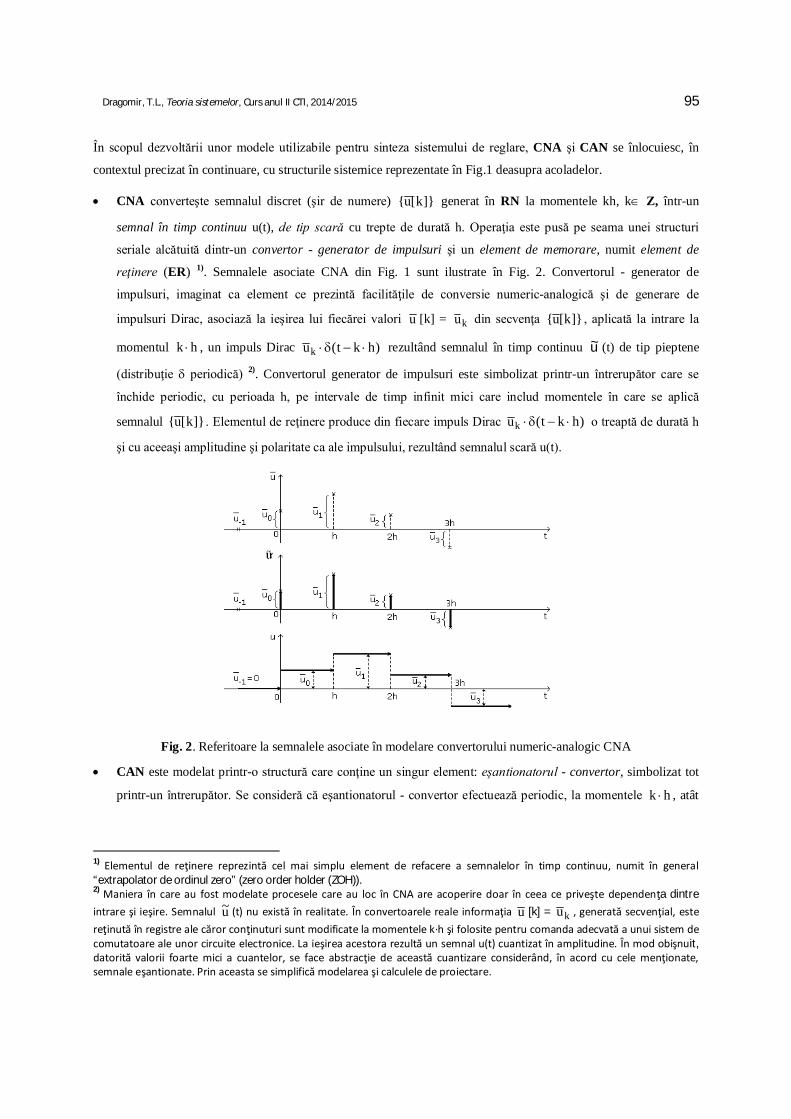
CNA converteşte semnalul discret (şir de numere) ]}k[u{ generat în RN la momentele kh, k Z, într-un
semnal în timp continuu u(t), de tip scară cu trepte de durată h. Operaţia este pusă pe seama unei structuri
seriale alcătuită dintr-un convertor - generator de impulsuri şi un element de memorare, numit element de
reţinere (ER) 1). Semnalele asociate CNA din Fig. 1 sunt ilustrate în Fig. 2. Convertorul - generator de
impulsuri, imaginat ca element ce prezintă facilităţile de conversie numeric-analogică şi de generare de
impulsuri Dirac, asociază la ieşirea lui fiecărei valori u [k] = ku din secvenţa ]}k[u{ , aplicată la intrare la
momentul hk , un impuls Dirac )hkt(uk rezultând semnalul în timp continuu u~ (t) de tip pieptene
(distribuţie periodică) 2). Convertorul generator de impulsuri este simbolizat printr-un întrerupător care se
închide periodic, cu perioada h, pe intervale de timp infinit mici care includ momentele în care se aplică
semnalul ]}k[u{ . Elementul de reţinere produce din fiecare impuls Dirac )hkt(uk o treaptă de durată h
şi cu aceeaşi amplitudine şi polaritate ca ale impulsului, rezultând semnalul scară u(t).
Fig. 2. Referitoare la semnalele asociate în modelare convertorului numeric-analogic CNA
CAN este modelat printr-o structură care conţine un singur element: eşantionatorul - convertor, simbolizat tot
printr-un întrerupător. Se consideră că eşantionatorul - convertor efectuează periodic, la momentele hk , atât
1) Elementul de reţinere reprezintă cel mai simplu element de refacere a semnalelor în timp continuu, numit în general “extrapolator de ordinul zero” (zero order holder (ZOH)). 2) Maniera în care au fost modelate procesele care au loc în CNA are acoperire doar în ceea ce priveşte dependenţa dintre intrare şi ieşire. Semnalul u~ (t) nu există în realitate. În convertoarele reale informaţia u [k] = ku , generată secvenţial, este reţinută în registre ale căror conţinuturi sunt modificate la momentele k·h şi folosite pentru comanda adecvată a unui sistem de comutatoare ale unor circuite electronice. La ieşirea acestora rezultă un semnal u(t) cuantizat în amplitudine. În mod obişnuit, datorită valorii foarte mici a cuantelor, se face abstracţie de această cuantizare considerând, în acord cu cele menţionate, semnale eşantionate. Prin aceasta se simplifică modelarea şi calculele de proiectare.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 96
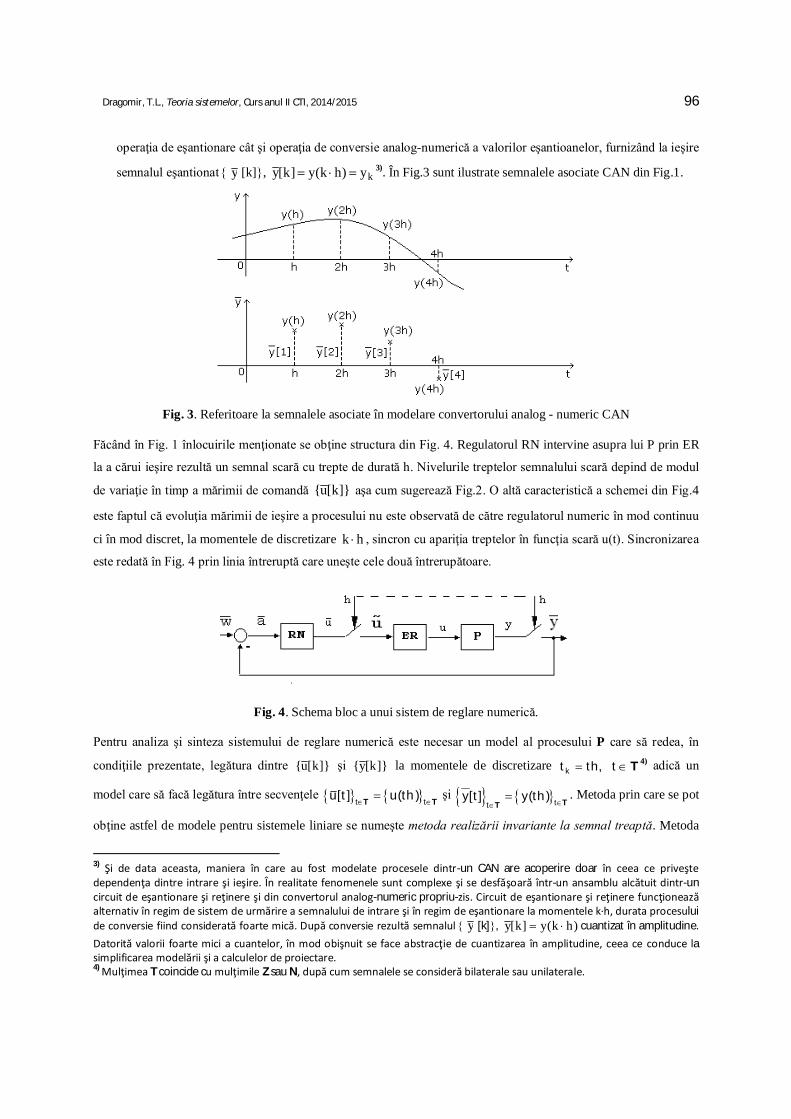
operaţia de eşantionare cât şi operaţia de conversie analog-numerică a valorilor eşantioanelor, furnizând la ieşire
semnalul eşantionat y [k], ky)hk(y]k[y 3). În Fig.3 sunt ilustrate semnalele asociate CAN din Fig.1.
Fig. 3. Referitoare la semnalele asociate în modelare convertorului analog - numeric CAN
Făcând în Fig. 1 înlocuirile menţionate se obţine structura din Fig. 4. Regulatorul RN intervine asupra lui P prin ER
la a cărui ieşire rezultă un semnal scară cu trepte de durată h. Nivelurile treptelor semnalului scară depind de modul
de variaţie în timp a mărimii de comandă ]}k[u{ aşa cum sugerează Fig.2. O altă caracteristică a schemei din Fig.4
este faptul că evoluţia mărimii de ieşire a procesului nu este observată de către regulatorul numeric în mod continuu
ci în mod discret, la momentele de discretizare hk , sincron cu apariţia treptelor în funcţia scară u(t). Sincronizarea
este redată în Fig. 4 prin linia întreruptă care uneşte cele două întrerupătoare.
Fig. 4. Schema bloc a unui sistem de reglare numerică.
Pentru analiza şi sinteza sistemului de reglare numerică este necesar un model al procesului P care să redea, în
condiţiile prezentate, legătura dintre ]}k[u{ şi ]}k[y{ la momentele de discretizare kt th, t T 4) adică un
model care să facă legătura între secvenţele t tu[t] u(th)
T T şi tt
y[t] y(th)
TT. Metoda prin care se pot
obţine astfel de modele pentru sistemele liniare se numeşte metoda realizării invariante la semnal treaptă. Metoda
3) Şi de data aceasta, maniera în care au fost modelate procesele dintr-un CAN are acoperire doar în ceea ce priveşte dependenţa dintre intrare şi ieşire. În realitate fenomenele sunt complexe şi se desfăşoară într-un ansamblu alcătuit dintr-un circuit de eşantionare şi reţinere şi din convertorul analog-numeric propriu-zis. Circuit de eşantionare şi reţinere funcţionează alternativ în regim de sistem de urmărire a semnalului de intrare şi în regim de eşantionare la momentele k·h, durata procesului de conversie fiind considerată foarte mică. După conversie rezultă semnalul y [k], )hk(y]k[y cuantizat în amplitudine. Datorită valorii foarte mici a cuantelor, în mod obişnuit se face abstracţie de cuantizarea în amplitudine, ceea ce conduce la simplificarea modelării şi a calculelor de proiectare. 4) Mulţimea T coincide cu mulţimile Z sau N, după cum semnalele se consideră bilaterale sau unilaterale.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 97
face parte din categoria realizărilor invariante 5). În cazul de faţă, în contextul schemei de reglare din Fig.4,
obţinerea unor astfel de modele ale proceselor reprezintă prima problemă de discretizare abordată în cadrul
paragrafului. Operaţia de obţinere o denumim discretizare pentru realizare invariantă la semnal treaptă
(discretizare pentru RIST), iar rezultatul realizare invariantă la semnal treaptă (RIST) sau discretizatul cu pasul h
al procesului în timp continuu.
Al doilea tip de probleme de discretizare care apar în mod frecvent îl reprezintă discretizările prin aproximare.
Pentru a prezenta problema se consideră tot structura din Fig.4. Spre deosebire de cazul RIST, când regulatorul RN
se proiectează direct ca sistem în timp discret, pe baza modelului discretizat al procesului condus, de data aceasta
regulatorul RN se asociază, ca model de aproximare, unui regulator în timp continuu R proiectat pentru un sistem de
reglare în timp continuu, fictiv, care trebuie să conducă procesul P și să realizeze aceleași performanțe ca și sistemul
de reglare numerică din Fig.4.
Pentru a explica modul de asociere notăm în Fig.4 cu P conexiunea serie a blocurilor CNA, P şi CAN. Se obţine
structura simplificată de sistem de reglare numerică din Fig.5a. Având în vedere că blocurile sistemului din Fig.4
sunt separabile iar convertoarele elemente liniare sistemului din Fig.5a îi asociem sistemul în timp continuu din
Fig.5b, cu rol de structură de calcul şi nu de structură fizică.
Asocierea se face parcurgând următorii paşi:
i) Se deplasează CAN în faţa procesului P şi se grupează potrivit algebrei schemelor bloc cele două
convertoare CAN şi CNA într-un singur subsistem în timp continuu numit element de eşantionare şi
reţinere EER, ca în Fig.6. Cele două întrerupătoare se înlocuiesc prin unul singur cu rol de simplu
eşantionator (extrage din semnalul u(t) impulsuri Dirac la momentele de eşantionare). EER este
amplasat în faţa procesului P.
Fig. 6. Referitoare la modul în care rezultă elementul de eşantionare şi reţinere (EER)
5) Realizările (discrete) invariante faţă de o anumită formă a semnalului de intrare asigură între mărimile de intrare, stare şi ieşire exact aceleaşi dependenţe ca şi modelele în timp continuu considerate la momentele de discretizare kt kh, k T . În acest context vorbim despre realizări invariante la semnal treaptă atunci când semnalul u(t) este un semnal scară, despre realizări invariante la semnal rampă când u(t) este ieşirea unui extrapolator de ordinul I ş.a.m.d.
- a - - b - Fig.5. Structuri de reglare referitoare la problema discretizării prin aproximare
P0 R w
u y
y P RN
w
u
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 98
ii) Se grupează apoi, tot potrivit algebrei schemelor bloc, EER împreună cu procesul P sub forma
blocului în timp continuu P (are atât la intrare cât şi la ieşire semnale analogice).
iii) Blocul P fiind un sistem în timp continuu, pentru reglare se foloseşte un regulator în timp continuu R
care, așa cum s-a precizat, trebuie să asigure pentru schema din Fig. 5b aceleaşi performanţe ca şi
regulatorul RN pentru schema din Fig.4.
Problema discretizării prin aproximare se pune cu privire la regulatorul R, proiectat pentru procesul P, în sensul că
prin discretizarea lui R trebuie să rezulte un regulatorul numeric RN care să conserve pentru sistemul de reglare
performanțele impuse la proiectare. Practic, discretizarea constă în generarea unui algoritm care trebuie să
aproximeze potrivit unei metode numerice comportarea regulatorului în timp continuu R. Întrucât semnalul de
intrare în regulatorul R provine de la procesul reglat, el nu mai aparține unei clase de semnale bine precizată ci este
de o formă oarecare. Pentru ca aproximarea să fie admisibilă este necasar ca pasul h folosit în formulele de
discretizare să fie foarte mic. Acest mod de a proceda este cunoscut sub denumirea de metoda cvasi-continuităţii:
dacă pasul de discretizare a timpului este suficient de mic, sistemul din Fig.5a cu RN asociat regulatorului R va
avea o comportare apropiată de cea a sistemului din Fig. 5b, proiectat.
Întrucât obiectul discretizării îl reprezintă regulatorul R, la intrarea căruia avem un semnal oarecare, regulatorul RN
obținut ca rezultat al discretizării va opera cu un semnal eșantionat care nu mai corespunde unui semnal în timp
continuu cu o formă bine precizată între două momente de discretizare succesive (cum se întâmplă în cazul RIST).
Ca urmare, semnalul de la ieșirea lui RN va fi întotdeauna o aproximare a semnalului de la ieșirea lui R. În acest
context distingem un al doilea tip de operaţii de discretizare denumite operaţii de discretizare prin aproximare
(d.a.). Metodele de discretizare prin aproximare se folosesc de regulă în varianta cunoscută sub denumirea de
metode de substituţie sau metode de transformare. Cele mai cunoscute metode de substituţie sunt metoda
dreptunghiului şi metoda trapezului.
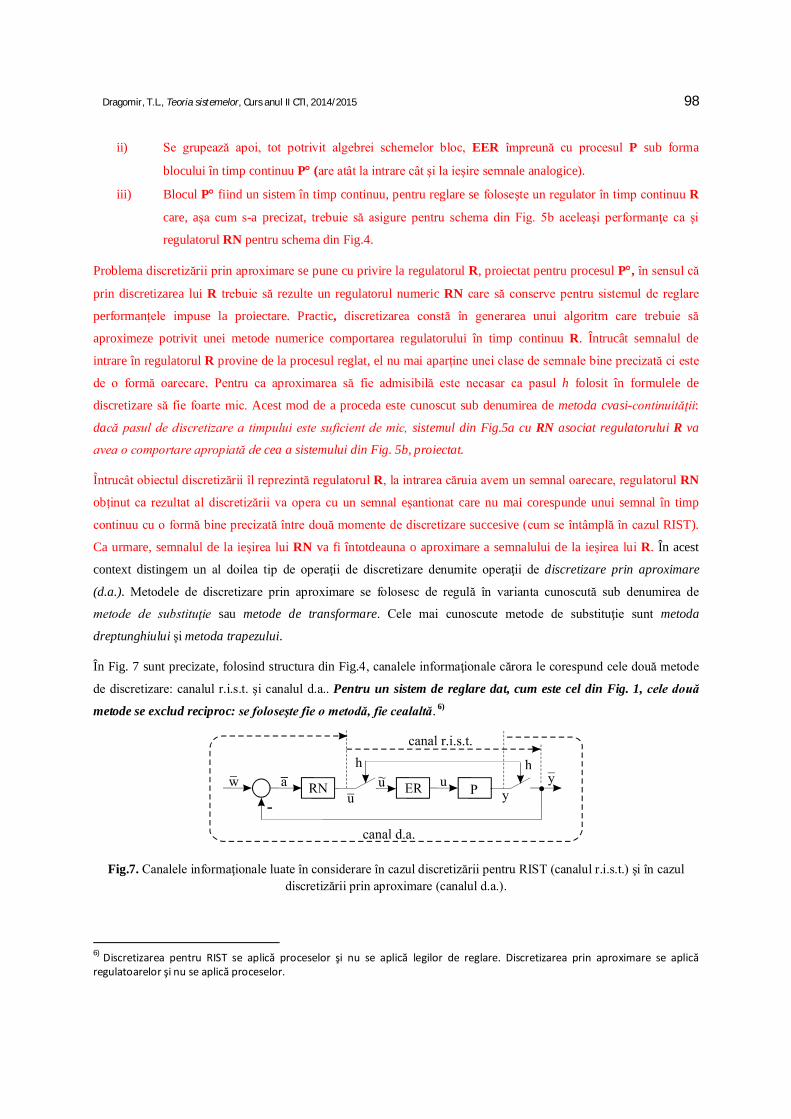
În Fig. 7 sunt precizate, folosind structura din Fig.4, canalele informaţionale cărora le corespund cele două metode
de discretizare: canalul r.i.s.t. şi canalul d.a.. Pentru un sistem de reglare dat, cum este cel din Fig. 1, cele două
metode se exclud reciproc: se foloseşte fie o metodă, fie cealaltă. 6)
Fig.7. Canalele informaţionale luate în considerare în cazul discretizării pentru RIST (canalul r.i.s.t.) şi în cazul discretizării prin aproximare (canalul d.a.).
6) Discretizarea pentru RIST se aplică proceselor şi nu se aplică legilor de reglare. Discretizarea prin aproximare se aplică regulatoarelor şi nu se aplică proceselor.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 99
2. Realizări invariante la semnal treaptă pentru sisteme fără timp mort
Formulele folosite la discretizarea pentru RIST se obţin pe baza structurii din Fig.8. Ea se regăsește atât în Fig. 4 cât
și în Fig.7 (canal r.i.s.t.). Procesul P , discretizat, este liniar.
Din punctul de vedere al metodelor de calcul distingem două situaţii după cum avem de discretizat: i) modele în
domeniul timp sau ii) modele în domeniul imaginilor. În prima situaţie se operează cu modele intrare-stare-ieşire, în
a doua cu funcţii de transfer. Rezultatele obţinute în cele două situaţii sunt echivalente în ceea ce priveşte
dependenţa intrare-ieşire.
u y P ER
u~u y
h h
Fig.8. Structura considerată pentru stabilirea formulelor de discretizare pentru RIST.
În prima situaţie presupunem că procesul P are MM-ISI:
)t(Du)t(Cx)t(y)t(Bu)t(Ax)t(x (1)
în care u mR , x nR , y pR , tT = [t0, tf ]. Pentru a obţine RIST considerăm intervalul de timp [tk, tk+1) =
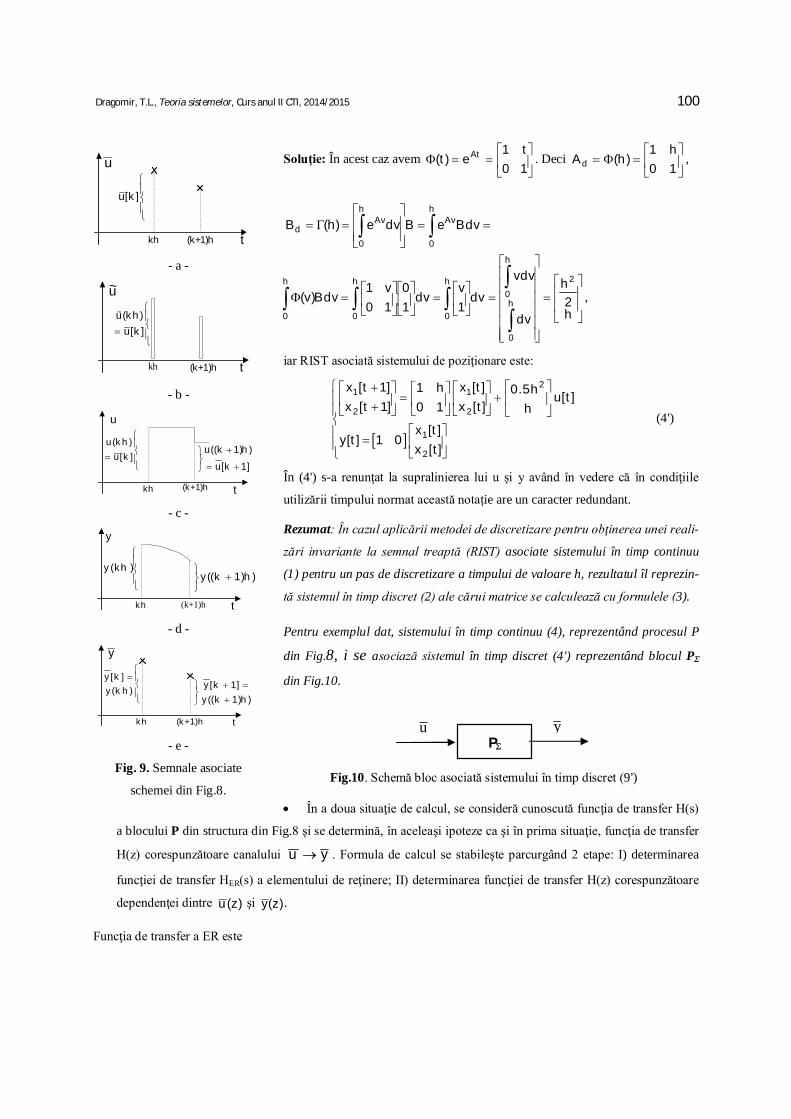
[kh, (k+1)h) T cuprins între două momente de discretizare consecutive. Semnalele care interesează sunt
reprezentate în Fig. 9. Figurile a, b şi c ilustrează etape referitoare la constituirea semnalului u(t) din semnalul u .
Prin aplicarea semnalului u(t) la intrarea procesului P se obţine la ieşire semnalul y(t) (figura d), iar din acesta, prin
eşantionare, rezultă semnalul )t(y (figura e).
RIST associata sistemului (1) se obţine cu formulele:
d d
d d
x[t 1] A x[t] B u[t], ty[t] C x[t] D u[t]
Z , (2)
DD ,CC ,Bdve)h( B ,e)h(A dd
h
0
Avd
Ahd
(3)
unde h este pasul de discretizare, iar A, B, C şi D sunt matricele sistemului în timp continuu (1).
Exemplu: Să se determine RIST pentru sistemul de poziţionare
)t(2x)t(1x
cC
01y(t)
u(t)
bB
10
)t(2x)t(1x
A
0010
)t(2x)t(1x
T
(4)
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 100
y P
u
Soluţie: În acest caz avem
10t1
e)t( At . Deci
10h1
)h(Ad ,
h
0
Avh
0
Avd BdveBdve)h(B
h2
h
dv
vdv
dv1v
dv10
10v1
Bdv)v(2
h
0
h
0h
0
h
0
h
0
,
iar RIST asociată sistemului de poziţionare este:
21 1
2 2
1
2
x [t 1] x [t]1 h 0.5h u[t]x [t 1] x [t]0 1 h
x [t]y[t] 1 0
x [t]
(4')
În (4') s-a renunţat la supralinierea lui u şi y având în vedere că în condiţiile
utilizării timpului normat această notație are un caracter redundant.
Rezumat: În cazul aplicării metodei de discretizare pentru obţinerea unei reali-
zări invariante la semnal treaptă (RIST) asociate sistemului în timp continuu
(1) pentru un pas de discretizare a timpului de valoare h, rezultatul îl reprezin-
tă sistemul în timp discret (2) ale cărui matrice se calculează cu formulele (3).
Pentru exemplul dat, sistemului în timp continuu (4), reprezentând procesul P
din Fig.8, i se asociază sistemul în timp discret (4') reprezentând blocul P
din Fig.10.
Fig.10. Schemă bloc asociată sistemului în timp discret (9')
În a doua situaţie de calcul, se consideră cunoscută funcţia de transfer H(s)
a blocului P din structura din Fig.8 şi se determină, în aceleaşi ipoteze ca şi în prima situaţie, funcţia de transfer
H(z) corespunzătoare canalului yu . Formula de calcul se stabileşte parcurgând 2 etape: I) determinarea
funcţiei de transfer HER(s) a elementului de reţinere; II) determinarea funcţiei de transfer H(z) corespunzătoare
dependenţei dintre )z(u şi )z(y .
Funcţia de transfer a ER este
u[k]
t kh (k+1)h
u
- a -
u(kh)u[k]
t kh (k+1)h
u~
- b -
u((k 1)h)
u[k 1]
u(kh)u[k]
t
u
kh (k+1)h - c -
)kh(y
)h)1k((y
t kh (k+1)h
y
- d -
y[k ]y(kh)
y[k 1]y((k 1)h)
t
y
kh (k+1)h - e -
Fig. 9. Semnale asociate
schemei din Fig.8.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 101
se1)s(H
hs
ER
. (5)
Formula de calcul a f.d.t. a RIST asociată unui STC cu f.d.t H(s) este:
1H(z) (1 z ) ℨ 1H(s)s
. (6)
În aplicarea formulei (6) se parcurg trei etape:
i) Se calculează produsul )s(Hs1 , adică transformata Laplace a răspunsului
la semnal treaptă, şi se aduce expresia )s(Hs1 la o formă pentru care se
pot utiliza tabelele de transformare;
ii) Se calculează ℨ 1 H(s)s
(transformata z a răspunsului la semnal treaptă
unitară al procesului P eşantionat cu pasul h) folosind tabelele de transformare.
iii) Se înmulţeşte rezultatul cu z
1zz1 1 , ceea ce echivalează cu o împărţire prin z
z 1 (care reprezintă
transformata z a semnalului treaptă unitară discretă).
Notă: De regulă z de la numitor se simplifică întrucât ℨ 1 H(s)s
conţine pe z ca factor la numărător.
Exemplu: Să se calculeze funcţia de transfer a realizării invariante la semnal treaptă pentru cazul când
)2s(s1s)s(H
(a), h = 0.2 sec.
Soluţie: Se calculează produsul: )2s(s
1s)s(Hs1
2
. O expresie de această formă nu apare în tabelele de
transformare. Pentru a folosi tabelele recurgem la descompunerea:
)2s(s4
41
)2s(s2
21
)2s(s1
)2s(s1)s(H
s1
22
pentru care din tabelele de transformare reţinem
liniile
)s(f )z(f
2
2a
s (s a)
ah 2 ah ah
2 ah(ah 1 e )z (1 ahe e )z
(z 1) (z e )
a
s(s a)
ah
ah(1 e )z
(z 1)(z e )
)k(u
t kh
u~
- a -
)k(u
t
u
kh (k+1)h
- b -
Fig.11. Referitoare la obţine-rea funcţiei de transfer a ER.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 102
Aplicând aceste formule pentru 2.0h ,2a sec rezultă
ℨ 1 H(s)s
=)ez()1z(2
z)e1(4.0
4.0
+
)ez()1z(4z)ee4.01(z)e6.0(
4.02
4.04.024.0
.
În final, cu formula (6) obţinem
1H(z) (1 z ) ℨ 1 H(s)s
=)ez(2
e14.0
4.0
+
)ez()1z(4)e6.01(z)e6.0(
4.0
4.04.0
,
respectiv
)ez()1z(41e6.2z)e4.1()z(H 4.0
4.04.0
(b).
Rezumat: În cazul aplicării metodei RIST pentru un sistem în timp continuu fără timp mort cu funcţia de
transfer H(s), pasul de discretizare a timpului având valoare h, rezultatul îl reprezintă sistemul în timp
discret cu funcţia de transfer H(z) dată de formula (6).
Pentru exemplul dat, sistemului în timp continuu cu funcţia de transfer (a), reprezentând procesul P din
Fig.8, i se asociază, pentru un pas de discretizare a timpului h = 0.2 sec sistemul în timp discret cu funcţia
de transfer (b) reprezentând blocul P din Fig.10.
3. Discretizarea prin aproximare
Sistemul în timp continuu pentru care se determină o realizare sistemică în timp discret prin metoda discretizării prin
aproximare, corespunde blocului R din Fig.5b sau „canalului d.a” din Fig.7. Presupunem că R are MM
)t(Du)t(Cx)t(yx)t(x , )t(Bu)t(Ax)t(x 00 . (7)
Sistemului (7) îi corespunde schema bloc din Fig.12. În schemă apar trei tipuri de operaţii: însumări, înmulţiri cu
constante şi integrări. Procedural, primele două operaţii se efectuează la fel indiferent dacă sistemul este un sistem în
timp continuu sau un sistem în timp discret. Operaţia de integrare, căreia îi corespunde blocul din cadrul reprezentat
cu linie întreruptă, nu are un echivalent exact în timp discret. Ea poate fi însă aproximată folosind diferite formule
utilizate în metodele de integrare numerică. Ideea discretizării prin aproximare constă în esenţă tocmai în această
manieră de aproximare.
x
A
uB
y D
Cx
X0
Fig.12. Schemă bloc asociată MM-ISI (7).
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 103
În acest context considerăm un element de transfer integrator cu orientarea u y având modelul matematic
t
0t0 )()y(ty(t) du . În Fig. 13, de principiu, se consideră o variaţie arbitrară a semnalului de intrare u(t) pe un
interval de timp cu lungimea unui pas de discretizare [kh, (k+1)h). Pe acest interval avem
1)k(k
khdtu(t)y(kh)1)h)y((k . (8)
)kh(u
)h)1k((u
t kh (k+1)h
u h)1k(
khdt)t(u
M
P’ N
Q
P N’
u(t)
Fig. 13. Referitoare la aproximarea numerică a operaţiei de integrare.
Datorită formei oarecari a semnalului de intrare integrala din membrul drept se poate evalua numai prin aproximare.
Trei dintre modurile de aproximare posibile sunt următoarele:
)h)1k((u)kh(uhMNPQ)h)1k((uhPQPM
)kh(uhQNMNQNPMdt)t(u
21
h)1k(
kh )MT()MDA()MDR( (9)
Aproximările se bazează pe interpretarea grafică a integralei în sens Riemann h)1k(
kh
dt)t(u . Acesteia îi corespunde
aria QNPM a dreptunghiului curbiliniu QNPM . Pentru valori mici ale lui h ea poate fi aproximată prin ariile:
QNMN , a dreptunghiului QNMN - caz în care vorbim despre metoda Euler sau metoda
dreptunghiului retardată (MDR),
PQPM , a dreptunghiului PQPM - când vorbim despre metoda dreptunghiului avansată 7),
MNPQ a trapezului rectiliniu MNPQ - caz în care vorbim despre aproximarea Tustin sau
metoda trapezului.
Folosirea pentru o problemă dată a uneia dintre cele trei metode - MTR, MDA sau MT – reprezintă opţiunea
utilizatorului.
7) Atributele “retardată” şi “avansată” se referă la faptul că dreptunghiurile considerate au în comun cu trapezul curbiliniu latura din stânga, corespunzătoare momentului kh (aflat în “urmă”), respective latura din dreapta, corespunzătoare momentului (k+1)h (situat “înainte”).
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 104
Rezultatul obţinut poate fi folosit în mai multe moduri. Unul dintre ele îl constituie stabilirea unor formule de
substituţie. Aceasta este calea urmată în continuare. Pentru a stabili formulele de substituţie înlocuim (9) în (8).
Aplicând convenţia de notare a argumentului „timp normat” folosită în secţiunea 1, rezultă succesiv:
12
h u[t]y[t 1] y[t] h u[t 1]
h u[t] u[t 1]
, tT
respectiv
t
t t t1
t t2
h {u[t]}{y[t 1]} {y[t]} h {u[t 1]}
h {u[t]} {u[t 1]}
T
T T T
T T
▯▮
12
h u(z)(z 1)y(z) h zu(z)
h (1 z)u(z)
. (10)
În consecinţă, pentru aproximarea comportării unui ET-I cu funcţia de transfer s1)s(H , se pot folosi un sistem în
timp discret cu orientarea u(z) y(z) şi funcţia de transfer
(MT)
(MDA)
(MDR)
1z1zh
1zzh1z
h
)z(u)z(y)z(H
21
. (11)
Având în vedere remarca privitoare la tipul operaţiilor care apar în schema bloc din Fig.12 şi omiţând problema
tehnică a iniţializării, în locul schemei din Fig.12 se consideră schema din Fig.14 în care blocul integrator a fost
înlocuit cu un bloc având funcţia de transfer (18).
Din punct de vedere formal problema înlocuirii revine la substituirea lui s1 prin:
(MT)
(MDA)
(MDR)
1z1zh
1zzh1z
h
s1
21
(12)
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 105
Pentru a evidenţia că este vorba de aproximare, în schema din Fig.14 intrarea blocului cu funcţia de transfer H(z) s-a
notat cu ů.
În concluzie, aplicarea metodei pentru discretizarea prin aproximare constă în alegerea uneia dintre cele trei formule
comasate în (13) şi efectuarea substituţiei corespunzătoare în funcţia de transfer a sistemului în timp continuu care
trebuie discretizat.
Exemplu: i) Să se determine modelul sistemului în timp discret asociat prin metoda dreptunghiului
avansată sistemului în timp continuu )t(a3)t(u2)t(u5 (c). ii) Să se determine funcţia de transfer a
sistemului în timp discret asociat prin metoda dreptunghiului retardată algoritmului de reglare redat de
funcţia de transfer 2
1H(s)s 2s 5
(d). În ambele cazuri pasul de discretizare a timpului este h.
Soluţie: i) Sistemului îi corespunde funcţia de transfer
s125
s13
2s53)s(H
, iar în conformitate cu
(19) rezultă 1
1zhz
s1 z5h25
h35z)h25(
hz3
1zhz25
1zhz3
)s(H)z(H
. Întrucât (z)a(z)uH(z) , avem
15z2h53h
(z)a(z)u
, respectiv (z)a3h(z)u5z(z)u2h)(5 1 . În consecinţă modelul în timp discret
este [t]2h5
3h1][t2h5
5[t] auu
(c').
ii) De data aceasta se rescrie H(s) sub forma
2
2
s15
s121
s1
)s(H
, astfel că
221
22
2
2
2
2
1zh
s1 z)h5h21(z)h1(21
zh
)1z(h5
1zh21
)1z(h
)s(H)z(H
(d ').
Rezumat: În cazul aplicării metodei de discretizare prin aproximare (în varianta cunoscută sub denumirea
„metoda substituţiei”) unui sistemului în timp continuu fără timp mort având funcţia de transfer H(s),
pasul de discretizare a timpului fiind h, rezultatul se obţine substituind în expresia lui H(s) pe s1 cu una
dintre expresiile din (13). Rezultatul poate fi utilizat pentru a stabili apoi modele în domeniul timp sub
formă de ecuaţii recursive.
Pentru exemplul dat sistemelor în timp continuu (c) şi (d), reprezentând procesul P din Fig.8, li se
asociază, pentru un pas de discretizare a timpului h sistemele în timp discret (c') şi (d') reprezentând blocul
P din Fig.10.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 106
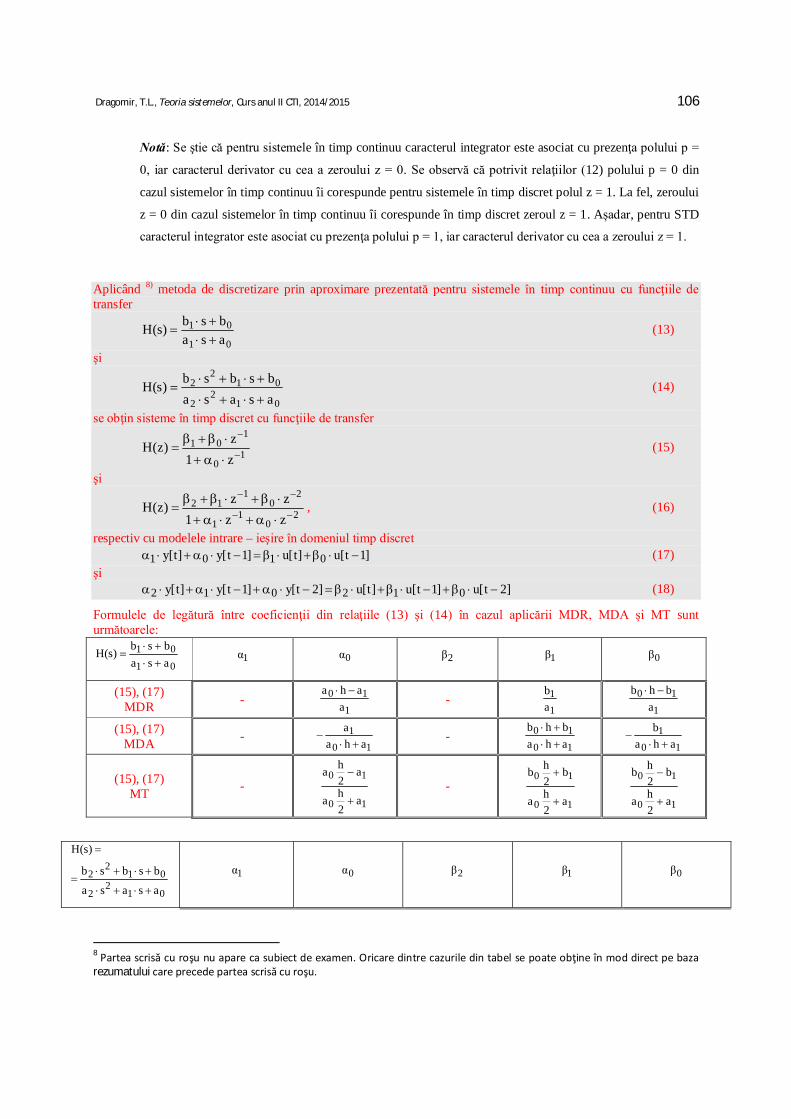
Notă: Se ştie că pentru sistemele în timp continuu caracterul integrator este asociat cu prezenţa polului p =
0, iar caracterul derivator cu cea a zeroului z = 0. Se observă că potrivit relaţiilor (12) polului p = 0 din
cazul sistemelor în timp continuu îi corespunde pentru sistemele în timp discret polul z = 1. La fel, zeroului
z = 0 din cazul sistemelor în timp continuu îi corespunde în timp discret zeroul z = 1. Așadar, pentru STD
caracterul integrator este asociat cu prezenţa polului p = 1, iar caracterul derivator cu cea a zeroului z = 1.
Aplicând 8) metoda de discretizare prin aproximare prezentată pentru sistemele în timp continuu cu funcţiile de transfer
01
01asabsb)s(H
(13)
şi
012
2
012
2
asasabsbsb)s(H
(14)
se obţin sisteme în timp discret cu funcţiile de transfer
10
101
z1z)z(H
(15)
şi
20
11
20
112
zz1zz)z(H
, (16)
respectiv cu modelele intrare – ieşire în domeniul timp discret ]1t[u]t[u]1t[y]t[y 0101 (17)
şi ]2t[u]1t[u]t[u]2t[y]1t[y]t[y 012012 (18)
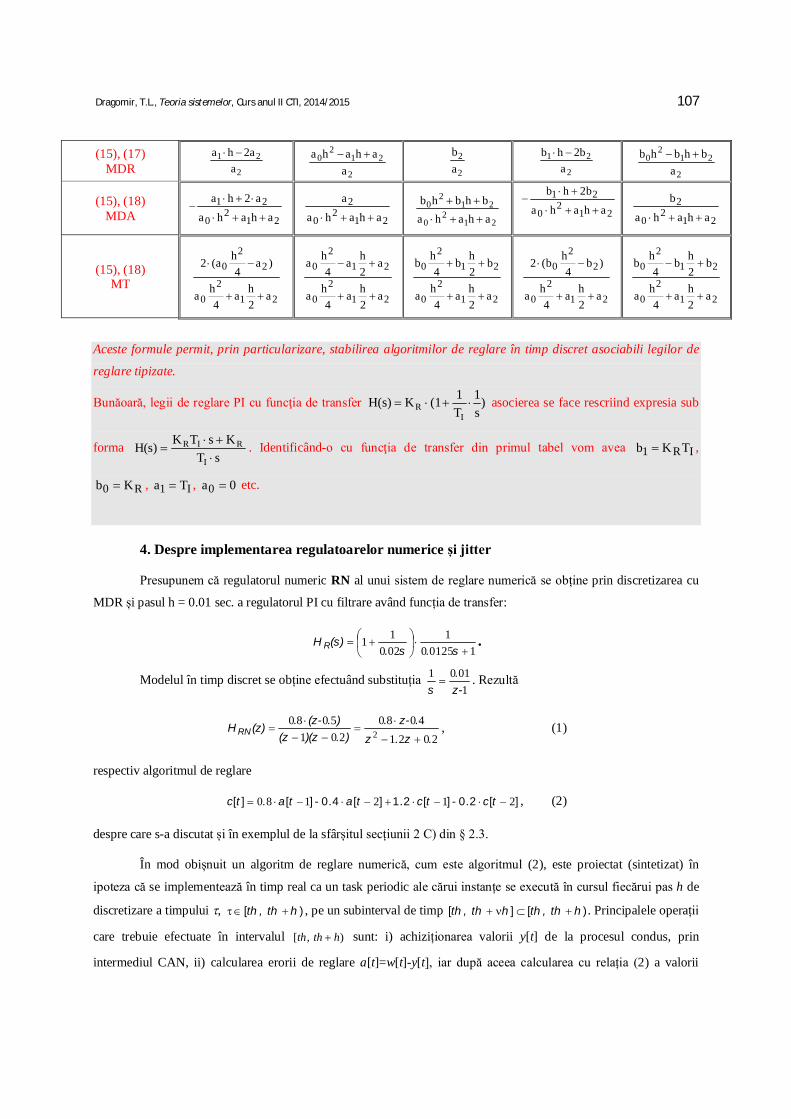
Formulele de legătură între coeficienţii din relaţiile (13) şi (14) în cazul aplicării MDR, MDA şi MT sunt următoarele:
01
01asabsb)s(H
1α 0α 2β 1β 0β
(15), (17) MDR -
110
aaha -
11
ab
110
abhb
(15), (17) MDA -
101
ahaa
- 1010
ahabhb
101
ahab
(15), (17) MT -
10
10
a2ha
a2ha
-
10
10
a2ha
b2hb
10
10
a2ha
b2hb
012
2
012
2asasa
bsbsb
)s(H
1α 0α 2β 1β 0β
8 Partea scrisă cu roşu nu apare ca subiect de examen. Oricare dintre cazurile din tabel se poate obţine în mod direct pe baza rezumatului care precede partea scrisă cu roşu.
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 107
(15), (17) MDR 2
21a
a2ha 2
212
0a
ahaha 2
2ab
2
21a
b2hb 2
212
0a
bhbhb
(15), (18) MDA 21
20
21ahaha
a2ha
212
0
2ahaha
a
21
20
212
0
ahahabhbhb
212
0
21ahaha
b2hb
212
0
2ahaha
b
(15), (18) MT
212
0
22
0
a2ha
4ha
)a4
ha(2
212
0
212
0
a2ha
4ha
a2ha
4ha
212
0
212
0
a2ha
4ha
b2hb
4hb
212
0
22
0
a2ha
4ha
)b4
hb(2
212
0
212
0
a2ha
4ha
b2hb
4hb
Aceste formule permit, prin particularizare, stabilirea algoritmilor de reglare în timp discret asociabili legilor de
reglare tipizate.
Bunăoară, legii de reglare PI cu funcţia de transfer )s1
T1(1KH(s)I
R asocierea se face rescriind expresia sub
forma sT
KsTKH(s)I
RIR
. Identificând-o cu funcţia de transfer din primul tabel vom avea IR1 TKb ,
R0 Kb , I1 Ta , 0a0 etc.
4. Despre implementarea regulatoarelor numerice și jitter
Presupunem că regulatorul numeric RN al unui sistem de reglare numerică se obține prin discretizarea cu
MDR și pasul h = 0.01 sec. a regulatorul PI cu filtrare având funcția de transfer:
1012501
02011
s.s.
(s)HR .
Modelul în timp discret se obține efectuând substituția 1
0101z-.
s . Rezultă
20214080
2015080
2 .z.z.z-.
).)(z(z).(z-.(z)HRN
, (1)
respectiv algoritmul de reglare
][0.2-][1.2][0.4-][][ 212180 tctctata.tc , (2)
despre care s-a discutat și în exemplul de la sfârșitul secțiunii 2 C) din § 2.3.
În mod obișnuit un algoritm de reglare numerică, cum este algoritmul (2), este proiectat (sintetizat) în
ipoteza că se implementează în timp real ca un task periodic ale cărui instanțe se execută în cursul fiecărui pas h de
discretizare a timpului , )[ hth,th , pe un subinterval de timp )[][ hth,thhth,th . Principalele operații
care trebuie efectuate în intervalul )[ hth,th sunt: i) achiziționarea valorii y[t] de la procesul condus, prin
intermediul CAN, ii) calcularea erorii de reglare a[t]=w[t]-y[t], iar după aceea calcularea cu relația (2) a valorii
Dragomir, T.L., Teoria sistemelor, Curs anul II CTI, 2014/2015 108
curente c[t] a mărimii de comandă, iii) transmiterea valorii c[t] a mărimii de comandă, prin intermediul CNA spre
procesul condus.
Nerespectarea în implementare a ipotezei menționate (neadecvarea implementării la ipotezele de proiectare
ale regulatorului) poate compromite în diferite moduri performanțele sistemului de reglare. Aceasta înseamnă că
pentru reușita implementării în proiectarea algoritmului de reglare trebuie să se țină seamă de modul de
implementare și invers, în implementare să se respecte ipotezele pe care s-a bazat proiectarea.
Bunăoară, în situațiile în care resursele de procesare folosite pentru implementarea RN (1) pe baza
algoritmului de reglare (2) sunt limitate, este probabil ca execuția algoritmului de reglare să nu se mai poate efectua
exact în intervalul ][ hth,thI . Sunt posibile diferite situații: decalarea intervalului în timp I, modificarea
lungimii intervalului I, amplasarea momentului hth în cursul următorului pas de discretizare a timpului,
neefectuarea în ordine a operațiilor i), ii) și iii) etc. Toate aceste abateri sunt denumite, la fel ca și în electronica, prin
termenul de jitter 9). Efectele jitterului constau în degradarea valorilor indicatorilor de performanță ale sistemului de
reglare (creșterea suprareglajului, creșterea timpului de reglare etc.) și pot ajunge până la pierderea stabilității
sistemului de reglare.
Din punct de vedere matematic degradarea performanțelor poate fi explicată observând că datorită jitterului
utilizarea algoritmului de reglare (2) nu mai corespunde RN (1) calculat. Astfel, dacă sistemul de reglare rămâne în
regim liniar algoritmul de reglare efectiv implementat va corespunde unei alte funcții de transfer decât (1), iar dacă
sistemul ajunge în regim de funcționare neliniar performanțele se pot modifica în mod complet neașteptat.
Având în vedere aspectele prezentate înseamnă că la proiectarea unui RN trebuie să se țină seamă, prin
intermediul programatorului de taskuri, și de resursele care se vor folosi la implementare și invers, să se folosească