

1
Sisteme
Semnalele pot fi supuse prelucrarii in scopul
obtinerii unor alte semnale, sau al obtinerii unor
parametri ai acestora.
Prelucrarile se aplica unui semnal de intrare x(t)
si se obtine un alt semnal, de iesire, y(t).
Modularea/demodularea, filtrarea etc.
1 http://shannon.etc.upt.ro/teaching/ssist/Cap2.pdf
2 2
Sistem analogic
2 ;
2 2
2
S
S
10000
10000
5 ;
V 500 ;
V 0
;
100 ;
500 5
100 k
u
uS
Su
Si
in
in
i
A
uA
V
u uV
A
u V
V
Vi
R
R k
Vi nA
amplificator

2
Sistem digital
Mediere alunecătoare.
Algoritm.
3
4 4
convertor pe 10 biti (1024
nivele de cuantizare)
domeniu al tensiunii de intrare 10V
10V10mV
1024
Eroarea absoluta maxima 5mV
sx nT qx n
q
Simularea sistemului analogic folosind
unul digital

3
Modelul matematic
sau sau dSS
dy t S x t x t y t ; y n S x n x n y n
5
t
-
:
:
dx t x' t
dt
x t x d
Sunt modelate prin operatori.
Sisteme liniare
d d
S ax t aS x t
S ax n aS x n
1 1 2 2 1 1 2 2
1 1 2 2 1 1 2 2d d d
S a x t a x t a S x t a S x t
S a x n a x n a S x n a S x n
Omogenitate
2y(t)
6

4
7 7
Sistem incremental liniar
Pentru un sistem omogen, 0: 0 0 0a S x t S x t
Sisteme cu variatii la iesire proportionale cu variatiile de la
intrare.
Se modeleaza printr-un sistem liniar, la iesirea caruia se
adauga valoarea de repaus (zero-input response) y0
Aditivitatea
Răspunsul sistemului
liniar la suma a doua
semnale de intrare
este suma
răspunsurilor la
fiecare semnal.
8

5
Sisteme invariante la translaţia în
timp
0 0
S x t y t
S x t t y t t
9
Sistem liniar si invariant in timp = SLIT
(linear time-invariant system, LTI)
10
0 0
d
d
S x n y n
S x n n y n n

6
11 11
Stabilitatea folosind o analogie mecanica
a) Sistem stabil: impulsul
aplicat bilei determina
oscilatii ale pozitiei
sale, care se
amortizeaza –bila
revine in pozitia de
echilibru initial.
b) Sistem stabil la
limita: impulsul
aplicat bilei modifica
pozitia de echilibru.
c) Sistem instabil:
impulsul aplicat bilei
duce la pierderea
echilibrului.
BIBO Stabilitatea sistemelor
Dacă semnalul de intrare este mărginit şi
semnalul de ieşire trebuie să fie mărginit.
12
BIBO- bounded input bounded output
7
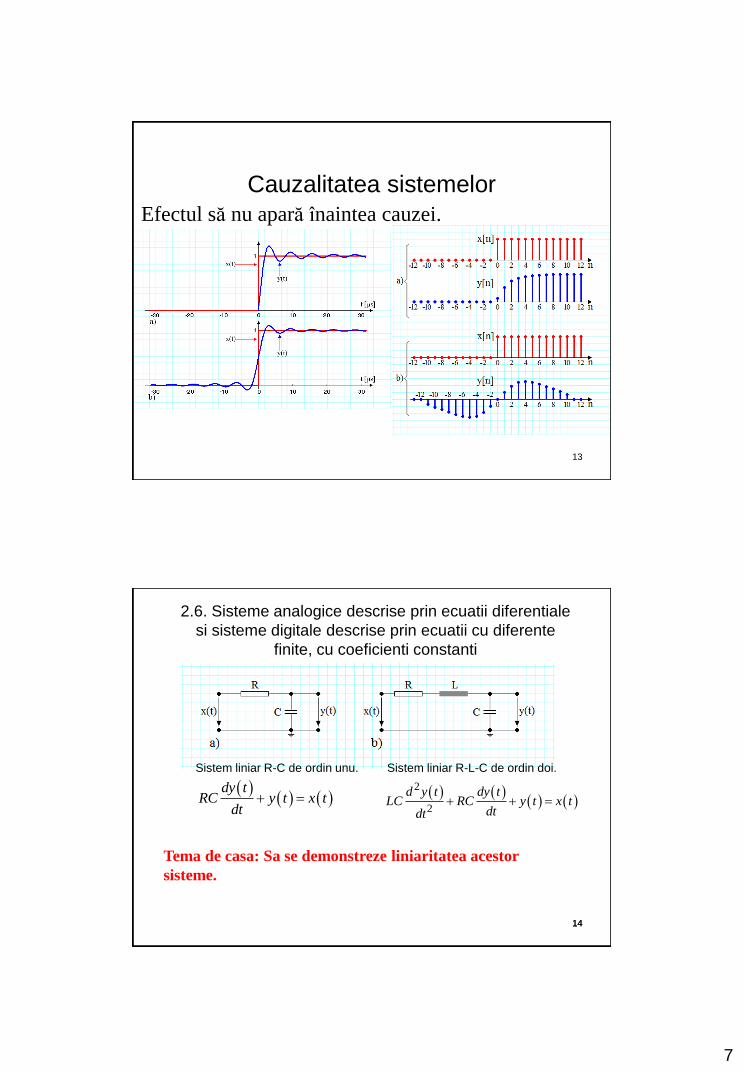
Cauzalitatea sistemelor
Efectul să nu apară înaintea cauzei.
13
14 14
2.6. Sisteme analogice descrise prin ecuatii diferentiale
si sisteme digitale descrise prin ecuatii cu diferente
finite, cu coeficienti constanti
Tema de casa: Sa se demonstreze liniaritatea acestor
sisteme.
Sistem liniar R-C de ordin unu. Sistem liniar R-L-C de ordin doi.
dy tRC y t x t
dt
2
2
d y t dy tLC RC y t x t
dtdt

8
15 15
Forma generala a ecuatiei diferentiale
care descrie un sistem liniar de ordin N
0 0
2 1
0 2 1
0 0 0
, 0 (macar), , const.
Conditiile initiale trebuie sa fie nule daca sistemul este liniar, adica:
... 0
daca momentul de apli
k kN M
k k N k kk kk k
N
N
t t t t t t
d y t d x ta b a a b
dt dt
dy t d y t d y ty t
dt dt dt
0
0
care al semnalului de intrare este
0 pentru
t
x t t t
16 16
Un sistem digital echivalent
sistemului de ordin unu
- Derivata poate fi aproximata:
1
1 1
e
e
e e
e e e
e et nT
e e
t nT
dy tRC y t x t
dt
dy tRC y nT x nT
dt
y n y ndy t y nT y nT T
dt T T
RC RCy n y n x n
T T
Ecuatie cu diferente finite, cu coeficienti constanti, obtinuta prin
aproximarea ecuatiei diferentiale.

9
17 17
• Panta secantei este o aproximare buna pentru panta tangentei daca se considera o valoare mica a pasului de esantionare Te
18 18
2
2
ee
e e
t nTt nT
d y t dy tLC RC y nT x nT
dtdt
Un sistem digital echivalent
sistemului de ordin doi
2
2
2
1 1 2
2 1 2
e e e
ee
t nT t nT T
et nTt nT
e e
e e
dy t dy t
dt dtd y t dy td
dt dt Tdt
y n y n y n y n
y n y n y nT T
T T
2 2 2
21 1 2
e ee e e
LC RC LC RC LCy n y n y n x n
T TT T T
Ecuatie cu diferente finite, cu coeficienti constanti, obtinuta prin
aproximarea ecuatiei diferentiale.

10
19 19
Forma generala a ecuatiei cu diferente
finite care descrie un sistem digital
liniar de ordin N
0 0
, 0 (macar)
, const.
N M
k k N
k k
k k
A y n k B x n k A
A B
Exemple de sisteme şi simboluri folosite
20
*Circuite Integrate Analogice
Simbolul folosit pentru
sistemul proportional
ideal
Simbolul folosit pentru
sistemul diferentiator
ideal
Simbolul folosit pentru
sistemul integrator ideal
11
21 21
2.7. Câteva exemple de sisteme
i) Sistemul proportional ideal
, y t ax t a , y n ax n a
Sistem fara memorie: Valoarea curenta a semnalului de
iesire depinde doar de valoarea curenta a semnalului de la
intrare, nu si de valorile sale anterioare.
22 22
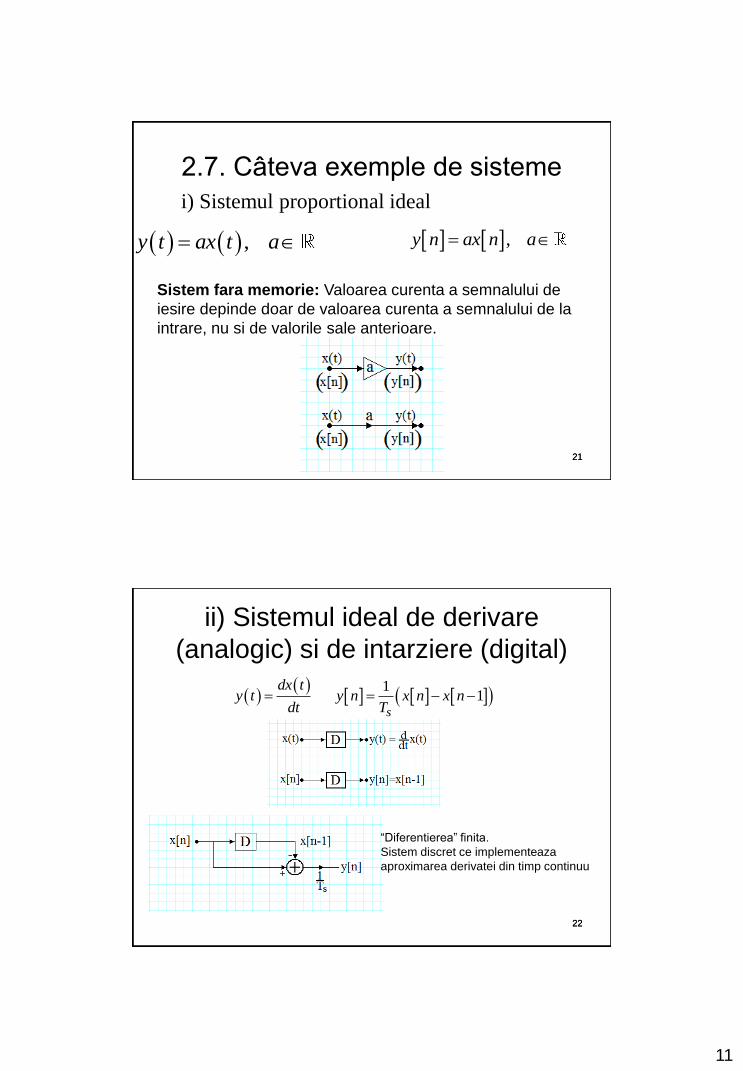
ii) Sistemul ideal de derivare
(analogic) si de intarziere (digital)
1
1s
dx ty t y n x n x n
dt T
“Diferentierea” finita.
Sistem discret ce implementeaza
aproximarea derivatei din timp continuu

12
23 23
iii) Sistemul integrator ideal
t
y t x d
1
1
n n
k k
y n x k x k x n
y n y n x n
Timp continuu
Timp discret:
sumator
(acumulator)
Sisteme cu memorie sau
dinamice:
•Diferentierea si integrarea
(in timp continuu)
•Diferenta finita si
acumulatorul in timp discret
Ex: contorul de apa/curent etc.
24 24
2.8. Exemple i) Analizam liniaritatea si invarianta in timp pentru un sistem
analogic descris prin ecuatia diferentiala cu coeficienti variabili in timp
22
22
d y t dy tt t y t x t
dtdt
a) Sistem liniar = aditiv + omogen
21 1 2
1 1 1 12
22 2 2
2 2 2 22
22
1 2 1 2 1 2 1 22
1 2 1 2
2
2
2
d y t dy tx t y t t t y t x t
dtdt
d y t dy tx t y t t t y t x t
dtdt
d dy t y t t y t y t t y t y t x t x t
dtdt
x t x t y t y t
Sistem aditiv ?

13
25 25
22
2
22
2
2
2
d y t dy tx t y t t t y t x t
dtdt
d day t t ay t t ay t ax t ax t ay t
dtdt
Sistem omogen ?
b) Invarianta la deplasare in timp
22
2
223 3
0 3 0 0 3 02
2
2
d y t dy tx t y t t t y t x t
dtdt
d y t dy tx t t y t t t t t y t x t t
dtdt
3 0Dar sistemul este liniar dar nu si invariant
la deplasarea in timp
y t y t t
20 0 2
0 02
Daca sistemul ar fi invariant la deplasarea in timp:
2d y t t dy t t
t t y t t x t tdtdt
26
ii) Analizam importanta conditiilor initiale
nule asupra liniaritatii unui sistem analogic.
00
2
0
0 0
dy ty t x t
dt
K cos t , tx t K cos t t
, t
Sistem dinamic descris prin ecuatia diferentiala de ordinul unu, cu coeficienti
constanti
cu semnalul de intrare:

14
27
Solutia fortata de Kcos(ω0t), de regim stationar
0
02
0
2 cos , 0
cos , 04
f
f
f
dy ty t K t t
dt
Ky t t t
Solutia de regim liber, tranzitorie. Este solutia
ecuatiei omogene
2 2
2 0
, 0 and , 0
tr
tr
t t
tr tr
dy ty t t
dt
y t Be t y t Ce t
28
Solutia finala trebuie sa fie
continua in t=0
2 2
0 02
0
2
0
2 2
0 02
0
, 0
, 0
cos cos , 04
, 0
cos cos4
tr f
tr
t t
t
t t
y t y t ty t
y t t
Ky e t e t
y t
y e t
Ky t y e t e
t t
2
00
0
sistem liniarPentru 0 : 0 0
Numai cu conditie initiala nula, 0, sistemul este liniar
t
KK x t y t y e
y

15
29
iii) Importanta conditiilor initiale nule
asupra liniaritatii unui sistem digital
00
, 00 5 1
0 , 0
K cos n ny n , y n x n x n K cos n n
n
Solutia de regim stationar
00
0
0
00
0.5 1 cos Re , 0
cos
0.5sin; arctg
1 0.5cos1.25 cos
j nf f
f
j
y n y n K n Ke n
y n A n
KA e
0 5 1 0 ,
0 5 , 0 si 0 5 , 0
tr tr
n ntr tr
y n , y n n
y n B , n y n C , n
Solutia de regim tranzitoriu
Sistem dinamic discret, descris prin ecuatia cu diferente finite, de ordinul unu, cu
coeficienti constanti, cu semnalul de intrare:
30
Solutia finala
00
00
0.5 cos , 01.25 cos
0.5 , 0
Sistem liniar conditii initiale nule: 1 0
cos1.25 cos
Pentru un sistem de or
n
n
KB n n
y n
C n
y
Ky n n n
din , conditiile initiale sunt:
1 2 ... 0
N
y y y N
Pentru un sistem liniar si invariant in timp (SLIT),
conditiile initiale sunt nule.







