Universitatea Tehnică din Cluj-Napoca Facultatea de Mecanică Catedra: Mecanisme, Mecanică Fină şi Mecatronică PROGRAM IDEI ID_1056 Tipul proiectului: Proiect de cercetare exploratorie Contract nr. 85/2007 Planul Naţional de Cercetare, Dezvoltare şi Inovare - PN II MODELAREA, SIMULAREA ŞI REALIZAREA UNOR FAMILII DE SISTEME ROBOTIZATE PENTRU INSPECŢIE ŞI EXPLORARE SINTEZA LUCRĂRII Etapa unica 2008 PROIECTAREA SI REALIZAREA PRINCIPALELOR SUBANSAMBLE DIN STRUCTURA SISTEMELOR ROBOTIZATE DE INSPECTIE IN TEVI SI EXPLORARE Director de proiect: Conf. Dr. Ing. Tătar Mihai Olimpiu Membri: Şef lucr. dr. Ing. Rusu Călin Şef lucr. dr. Ing. Teuţan Emil Asist. Drd. Ing. Besoiu Sorin Drd. Ing. Lungu Ion 2008
Transcript
Universitatea Tehnică din Cluj-Napoca Facultatea de Mecanică Catedra: Mecanisme, Mecanică Fină şi Mecatronică
PROGRAM IDEI ID_1056 Tipul proiectului: Proiect de cercetare exploratorie
Contract nr. 85/2007 Planul Naţional de Cercetare, Dezvoltare şi Inovare - PN II
MODELAREA, SIMULAREA ŞI REALIZAREA UNOR FAMILII DE SISTEME ROBOTIZATE PENTRU INSPECŢIE
ŞI EXPLORARE
SINTEZA LUCRĂRII
Etapa unica 2008 PROIECTAREA SI REALIZAREA PRINCIPALELOR SUBANSAMBLE DIN STRUCTURA SISTEMELOR ROBOTIZATE DE INSPECTIE IN TEVI SI
EXPLORARE
Director de proiect: Conf. Dr. Ing. Tătar Mihai Olimpiu
Membri: Şef lucr. dr. Ing. Rusu Călin Şef lucr. dr. Ing. Teuţan Emil Asist. Drd. Ing. Besoiu Sorin
Drd. Ing. Lungu Ion
2008
Introducere
Problemele diverse datorate îmbătrânirii ţevilor, a coroziunii acestora, precum şi a apariţiei crăpăturilor determină o creştere a activităţilor de inspecţie, întreţinere şi reparare. Realizarea acestor activităţi de către operatorii umani necesită cheltuieli substanţiale. De aceea utilizarea roboţilor pentru întreţinerea ţevilor este una din soluţiile cele mai atractive în acest moment. Inspecţia în ţevi este relevantă şi pentru îmbunătăţirea securităţii şi eficienţei în mediul industrial. Problemele majore întâmpinate în proiectarea acestor sisteme robotizate au în centrul atenţiei sistemul de locomoţie, sursa de energie, comunicarea şi instrumentaţia necesară realizării sarcinilor propuse. O categorie distinctă din acest domeniu o constituie sistemele robotizate pentru inspecţie şi explorare modularizate ce au structura adaptabilă la forma şi dimensiunile ţevii. În aceasta etapa sunt proiectate si realizate modulele a trei sistemele robotizate pentru inspecţie şi explorare modularizate. Aceste sisteme modularizate au în componenţă module motoare realizate din mecanisme cu elemente articulate şi module pasive. 1. MODULE MOTOARE ŞI PASIVE PENTRU SISTEMELE MODULARE DE INSPECŢIE ŞI EXPLORARE
Primul modul motor Primul modul motor este compus din trei mecanisme cu elemente articulate dispuse la 120˚
în jurul axei longitudinale. Forţa cu care mecanismul din structura modulului motor acţionează asupra peretelui ţevii este generată cu ajutorul unui arc extensibil. Arcul extensibil elicoidal dispus pe axul central asigură revenirea structurii modulului motor în cazul variaţiilor diametrului ţevii inspectate. Propulsia modulului motor este realizată prin utilizarea a trei roţi motoare.
Roţile motoare sunt antrenate în mişcarea de rotaţie prin intermediul unor reductoare melc-roată melcată de trei motoare de curent continuu. Roţile sunt prevăzute cu bandaj din poliuretan.
Deplasarea modulului motor se poate realiza în ambele sensuri în ţeavă. Elementele componente ale primului prototip de modul motor de inspecţie în ţevi modelat şi realizat sunt prezentate în figura 1.1 (Anexa 1).
a) b)
c) d)
Fig. 1.1 Modelarea 3D în ţeavă a modulului motor (prototip 1) şi elementele componente din structura sa (a,b). Fotografia modulului motor (c,d)
Elementele componente sunt (Fig. 1.1 b): 1 – arc elicoidal 6 – motor 2 – element culisant 7 – suport motor – element pârghie 3 – melc 8 – pârghie 4 – roată melcată 9 – ax central 5 – suport motor si melc 10 – roata
Elementele componente din structura modulului motor au lungimile 301 =h [mm],
702 =h [mm], 1353 =h [mm], ( CFhDEBChOAh ==== 321 ,, ), roţile au razele r = 25 [mm], lăţimea 17 [mm], iar unghiul θ este cuprins între 15 ÷ 60 [°]. Elementele sunt realizate din aluminiu iar axul central din oţel. Masa primului modul motor împreună cu firele de acţionare este de 987 [g]. Modulul motor poate realiza inspecţii în ţevi orizontale şi verticale cu diametre cuprinse între 140 - 200 [mm]. Viteza de deplasare a modulului motor prin ţeavă depinde de turaţia motoarelor de antrenare.
Transmisia melc-roată melcată utilizată în structura modulului motor este prezentată în figura 1.2. Melcii au un început (z1 = 1), modulul m = 0,6 [mm], unghiul de înclinare al spirelor θ = 4 [°] iar roţile melcate au z2 = 52 dinţi si unghiul de înclinare al dinţilor β = 4 [°].
In funcţie de necesitaţi motorul si transmisia poate fi uşor schimbată.
a) b)
Fig. 1.2 Transmisia melc-roată melcată utilizată în structura modulului motor: a) Modelare 3D; b) Fotografia transmisiei
Al doilea prototip de modul motor
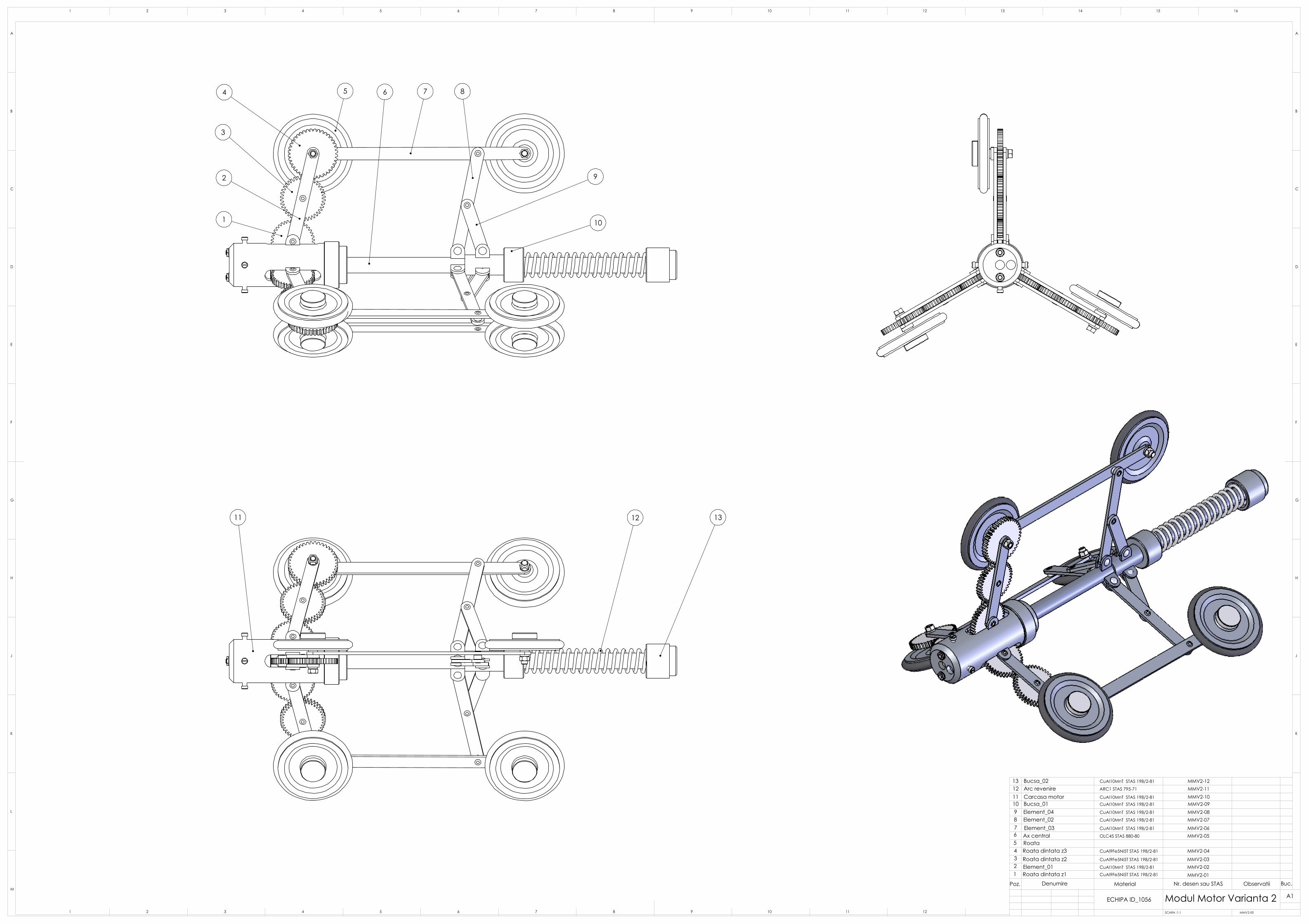
Utilizând o structură asemănătoare dar, cu un singur motor şi o transmisie cu trei roţi dinţate cu dinţi înclinaţi s-a proiectat şi realizat prototipul prezentat în figura 1.3, (Anexa 2).
E1
B1
F1
O1
A1
C1D1
O1
OO2
A2
B2
E2
F2C2
h1
h2
h3
2θ
B’ME
D2
G1
G2
a) b) c)
a) b)
Fig. 1.3 Schema structurală a modulului motor (prototip 2) (a), modelarea 3D (b,c) şi
fotografia sa
Roţile au razele r = 25 [mm], lăţimea 7 [mm], elementele componente au lungimile: 301 =h [mm], 702 =h [mm], 1353 =h [mm], ( CFhDEBChOAh ==== 321 ,, ) şi unghiul θ cuprins
între 15÷ 60 [°]. Masa modulului motor împreună cu firele de acţionare este de 550 [g]. Acest prototip de modul motor este mai compact din punct de vedere constructiv şi utilizează un singur motor de curent continuu pentru acţionare, dispus pe axul central. Transmiterea mişcării de la motorul de antrenare la roţile motoare ale modulului motor se realizează utilizând trei transmisii cu roţi dinţate (Fig. 1.4 d).
E1
D1
ME
G1
1
2
3
4
nM
nR
a) b) c)
d)
Fig. 1.4 Transmisia cu roţi dinţate din structura modulului motor: a) schema structurală, b) modelul 3D c), d) fotografia transmisiei
• 1 – melc (z1 = 1, modulul m = 0,75 mm, unghiul de înclinare al spirelor melcului θ = 4°), • 2, 3, 4 – roţi dinţate cu dinţi înclinaţi (unghiul de înclinare al dinţilor β = 4°) • z2 = 39 , z3 = 39 , z4 = 44 – dinţi.
Dacă în anumite condiţii este necesar un cuplu mai ridicat la rotile motoare, motorul dispus axial poate fi uşor schimbat si înlocuit cu alt motor sau cu un motor cu reductor (Fig. 1.4 b).
Transmiterea mişcării de la cea de-a treia roată dinţată a transmisiei utilizate (Fig. 1.5a) la roata motoare a modulului motor se face utilizând un şurub ca cel prezentat in figura 1.5b. Şurubul
este ax comun atât pentru roata dinţata cu dinţi înclinaţi cât si pentru roata motoare a modulului motor. Roata motoare se asamblează cu strângere pe şurub. Roţile modulului motor sunt realizate din aluminiu. In scopul măririi aderenţei dintre roţi şi ţeavă acestea au fost prevăzute cu inele din cauciuc.
a) b) Fig. 1.5 a) Modelul 3D al transmisiei utilizate b) Modelarea 3D a şurubului de legătura dintre roata
dinţata şi roata motoare
În figura 1.6 se prezintă modulul motor în ţevi cu diametrele Φ150 şi Φ190.
Fig. 1.6 Modulul motor în ţevi cu diametrele Φ150 şi Φ190.
Cele două module motoare realizate sunt prezentate în figura 1.7.
Fig. 1.7 Modulule motoare (prototip 2).
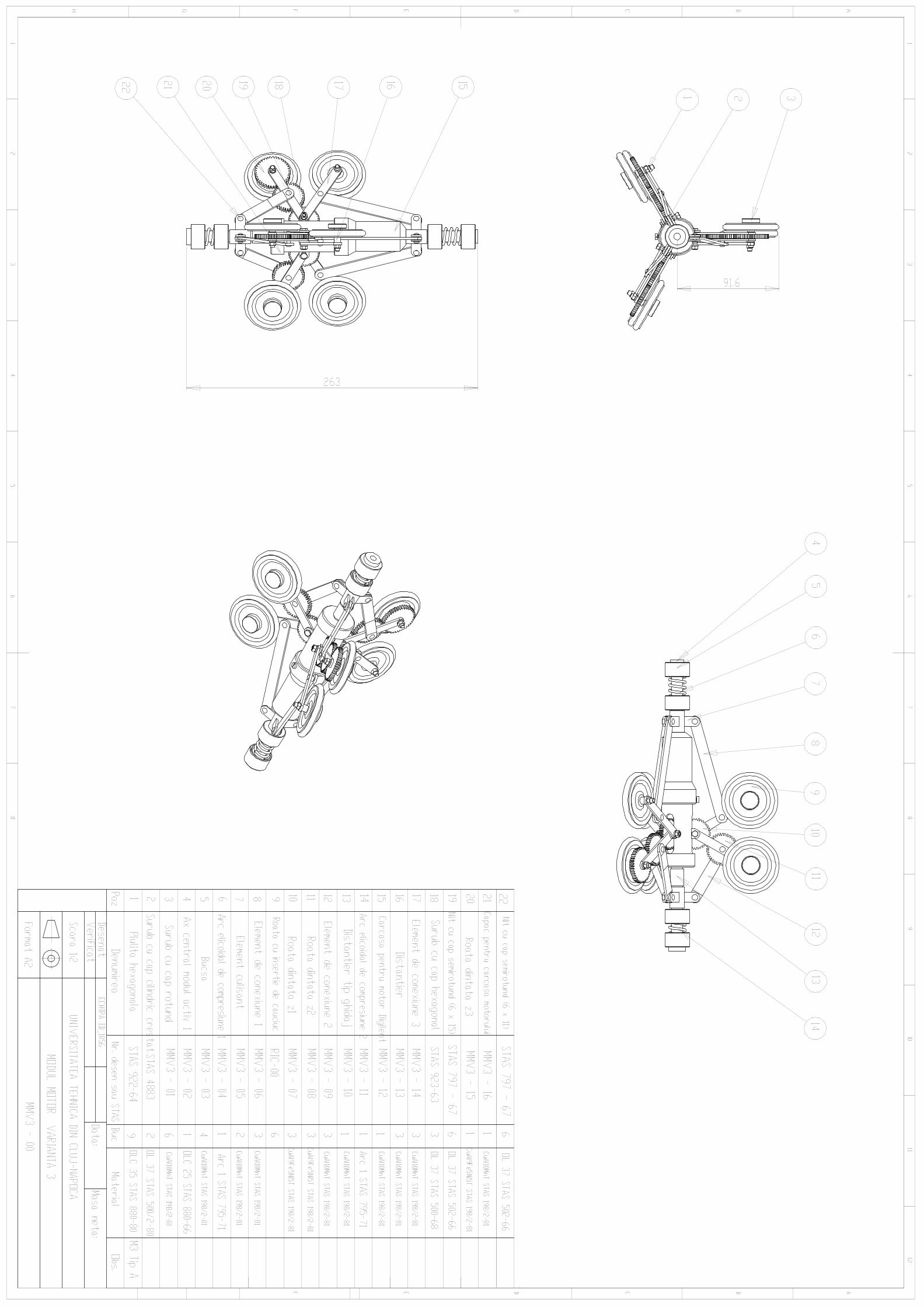
Al treilea prototip de modul motor Modulul motor este compus din 6 mecanisme de tip manivelă-piston. Acestea sunt aşezate câte două în trei planuri dispuse la 120˚ în jurul axului central. Generarea forţei de apăsare a roţilor pe suprafaţa interioară a ţevii este realizata de două arcuri elicoidale.
Schema structurală pentru cel de-al treilea modul motor este prezentată în figura 1.8. Acesta soluţie constructiva prezintă avantajul ca roţile motoare se adaptează independent de roţile conduse la diametrul ţevii. Una din problemele apărute în cadrul proiectării acestui modul a constituit-o dimensiunile motorului cu reductor ceea ce a făcut ca cele 6 mecanisme bielă manivelă să nu fie identice. De asemenea cele două arcuri utilizate au dimensiuni diferite.
E2
ME
E1
D1
F1
C1
F2
C2
A2
B2
B1 O1
A1
O1
OO2
D2
R
h1h2h2h3
Fig. 1.8 Schema structurală a modului motor 3
Roţile au razele r = 25 [mm], lăţimea 7 [mm], iar elementele componente au lungimile:
3322113 FEFEFEh === ). Unghiul θ este limitat constructiv între 15÷ 60 [°]. Lungimea totală a modulului motor este de 307 [mm]. Masa modulului motor împreună cu firele de acţionare este de 630 [g], (Anexa 3).
a) b)
c)
Fig. 1.9 Modelarea 3D a modulului motor (prototip 3) şi fotografia sa
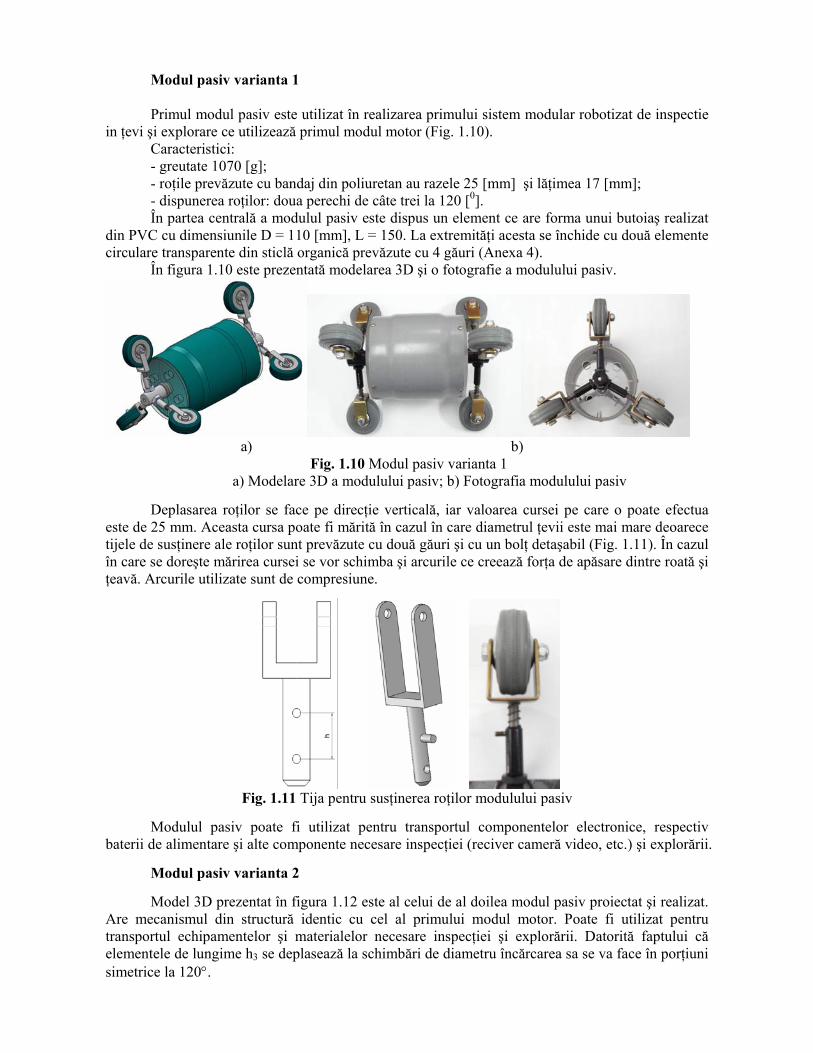
Modul pasiv varianta 1 Primul modul pasiv este utilizat în realizarea primului sistem modular robotizat de inspectie in ţevi şi explorare ce utilizează primul modul motor (Fig. 1.10).
Caracteristici: - greutate 1070 [g]; - roţile prevăzute cu bandaj din poliuretan au razele 25 [mm] şi lăţimea 17 [mm]; - dispunerea roţilor: doua perechi de câte trei la 120 [0]. În partea centrală a modulul pasiv este dispus un element ce are forma unui butoiaş realizat din PVC cu dimensiunile D = 110 [mm], L = 150. La extremităţi acesta se închide cu două elemente circulare transparente din sticlă organică prevăzute cu 4 găuri (Anexa 4). În figura 1.10 este prezentată modelarea 3D şi o fotografie a modulului pasiv.
a) b)
Fig. 1.10 Modul pasiv varianta 1 a) Modelare 3D a modulului pasiv; b) Fotografia modulului pasiv
Deplasarea roţilor se face pe direcţie verticală, iar valoarea cursei pe care o poate efectua este de 25 mm. Aceasta cursa poate fi mărită în cazul în care diametrul ţevii este mai mare deoarece tijele de susţinere ale roţilor sunt prevăzute cu două găuri şi cu un bolţ detaşabil (Fig. 1.11). În cazul în care se doreşte mărirea cursei se vor schimba şi arcurile ce creează forţa de apăsare dintre roată şi ţeavă. Arcurile utilizate sunt de compresiune.
Fig. 1.11 Tija pentru susţinerea roţilor modulului pasiv
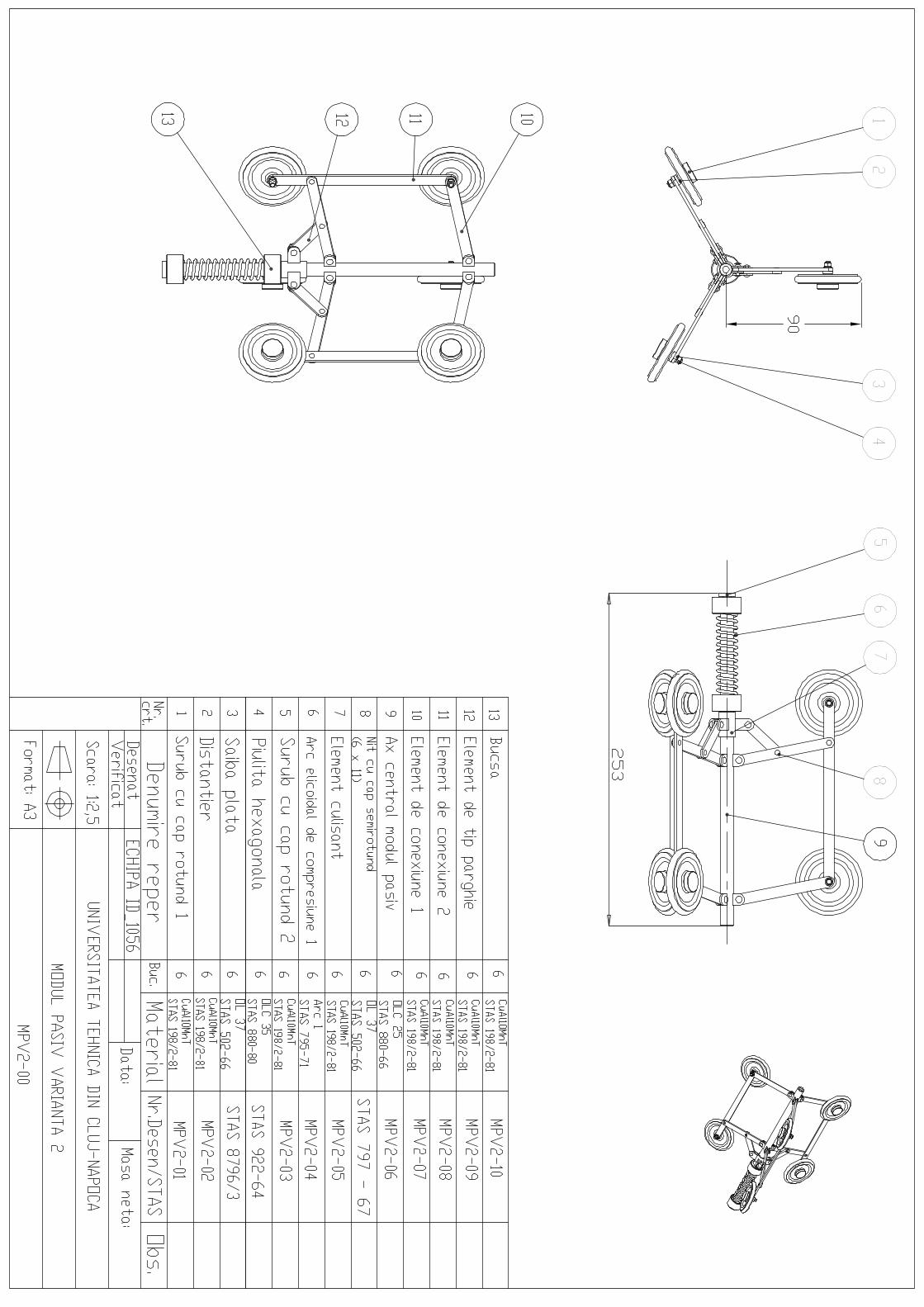
Modulul pasiv poate fi utilizat pentru transportul componentelor electronice, respectiv baterii de alimentare şi alte componente necesare inspecţiei (reciver cameră video, etc.) şi explorării. Modul pasiv varianta 2 Model 3D prezentat în figura 1.12 este al celui de al doilea modul pasiv proiectat şi realizat. Are mecanismul din structură identic cu cel al primului modul motor. Poate fi utilizat pentru transportul echipamentelor şi materialelor necesare inspecţiei şi explorării. Datorită faptului că elementele de lungime h3 se deplasează la schimbări de diametru încărcarea sa se va face în porţiuni simetrice la 120°.
E’1 B’1
F’1
O1
A’1
C’1D’1
O’
OO’2
A’2
B’2
D’2
E’2
F’2 C’2
h3
h2 h1
a) b) c)
Fig. 1.12 Modulul pasiv varianta 2 a) Modelare 3D; b) schema funcţionala c) prototip realizat
Roţile au razele r = 25 [mm], lăţimea 7 [mm] iar elementele componente au lungimile: h1 = 30,7 [mm], h2 = 70,4 [mm], h3 = 136,6 [mm] ( h1 = O'1A1 = O'2A2 = O'3A3, h2 = E'1B1 = E'2B2 = E'3B3, h3 = E'1F1 = E'2F2 = E'3F3 ). Elementele din structura modulului pasiv sunt realizate din aluminiu iar axul central din oţel (Anexa 5). Masa modulului pasiv este de 500 [g]. Modul pasiv varianta 3 Cel de al treilea modul pasiv are o structură asemănătoare cu cel de al doilea modul pasiv. Diferenţa majoră o constituie diametrul roţilor, grosimea acestora şi implicit cursa tijei cu roata. Acest modul pasiv este realizat in două variante constructive: cu roţi Φ 34 (Anexa 6) utilizat in construcţia celui de al treilea sistem modular şi cu roti Φ 50 (Anexa 7) utilizat in construcţia celui de al doilea sistem modular. În figura 1.13 şi 1.14 este prezentată modelarea 3D a modulului pasiv şi o fotografie a sa. Modulul pasiv din figura 1.13 are lungimea totală L = 244 [mm], raza roţilor r = 17 [mm], lăţimea roţilor 7 [mm] şi greutatea de 700 [g].
a) b)
Fig. 1.13 Modul pasiv varianta 3 cu roţi Φ 34 a) Modelarea 3D a modulului pasiv b) Fotografia modulului pasiv
Fig. 1.14 Modul pasiv varianta 3 cu roti Φ 50:
a) Modelarea 3D a modulului pasiv b) Fotografia modulului pasiv
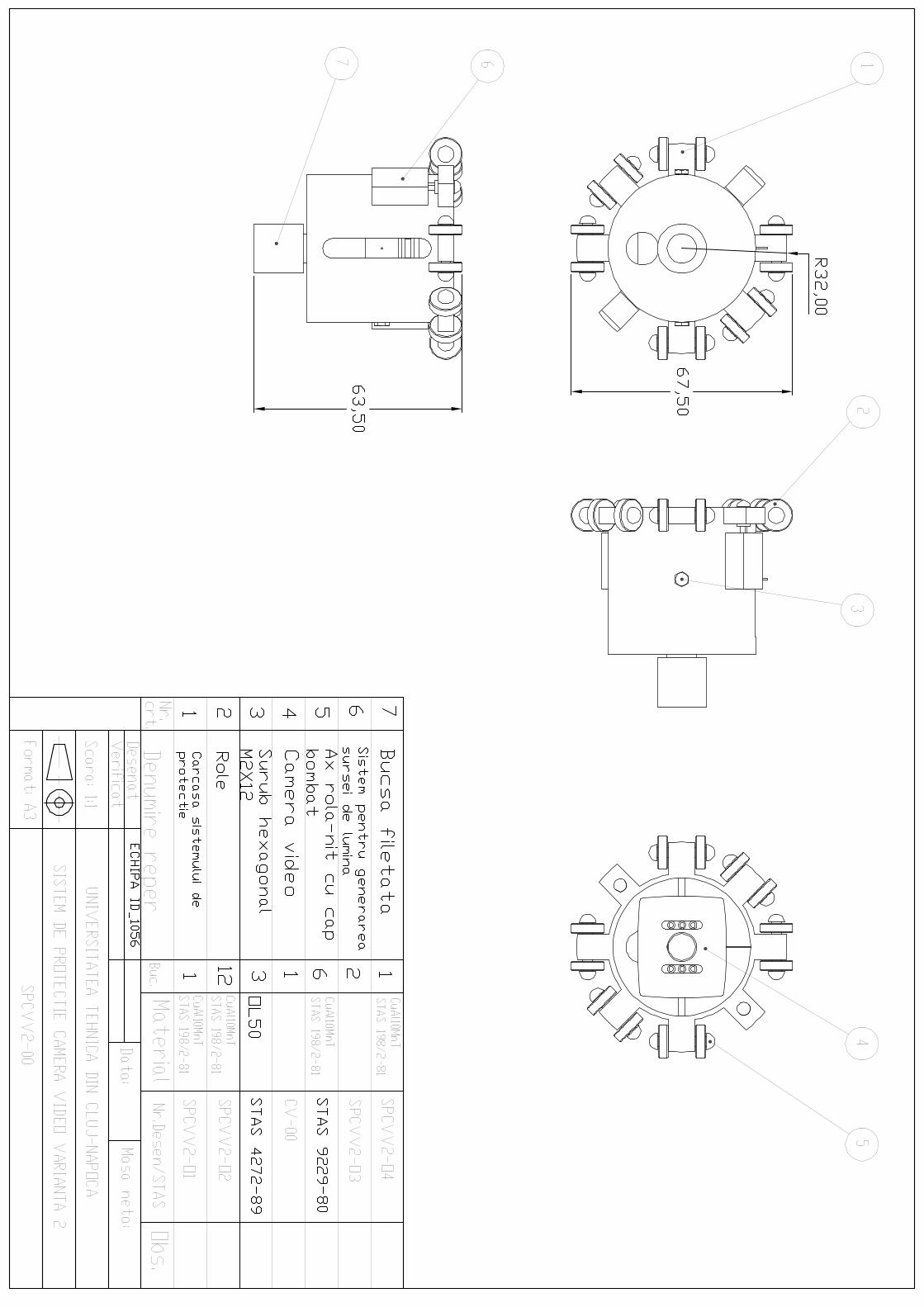
Sistem de protecţie propus pentru camera video
Pentru camera video utilizată de sistemele robotizate sunt propuse sistemele de protecţie din figurile următoare:
a) b)
c)
Fig. 1.15 Modelul 3D al sistemelor de protecţie pentru camera video propuse
a) b)
Fig. 1.17 Fotografia sistemelor de protecţie realizate Sistemele de protecţie proiectate şi realizate (Anexa 8, Anexa 9) sunt compuse dintr-o
carcasa prevăzuta in exterior cu role si doua leduri pentru generarea luminii in ţeava (Fig. 1.17). Camera video se montează din exterior cu doua şuruburi M3.
Sistemul de protecţie se fixează pe axul unui modul motor al sistemului de inspecţie şi explorare. Sistemul montat pe modulele motoare ale sistemului robotizat se prezintă în figura 1.18.
a) b)
c) d)
Fig. 1.18 Modelele 3D ale modulelor motoare ale sistemelor robotizate cu sisteme de
protecţie pentru camera video şi fotografia modulului motor 1 Conectarea modulelor motoare si pasive ale sistemelor robotizate Intre modulele sistemului robotizat se utilizează cuplajul cardanic cu elementul intermediar proiectat şi realizat din figura 1.19 (Anexa 10).
Fig. 1.19 Fotografia sistemului de conectare dintre modulele sistemelor robotizate
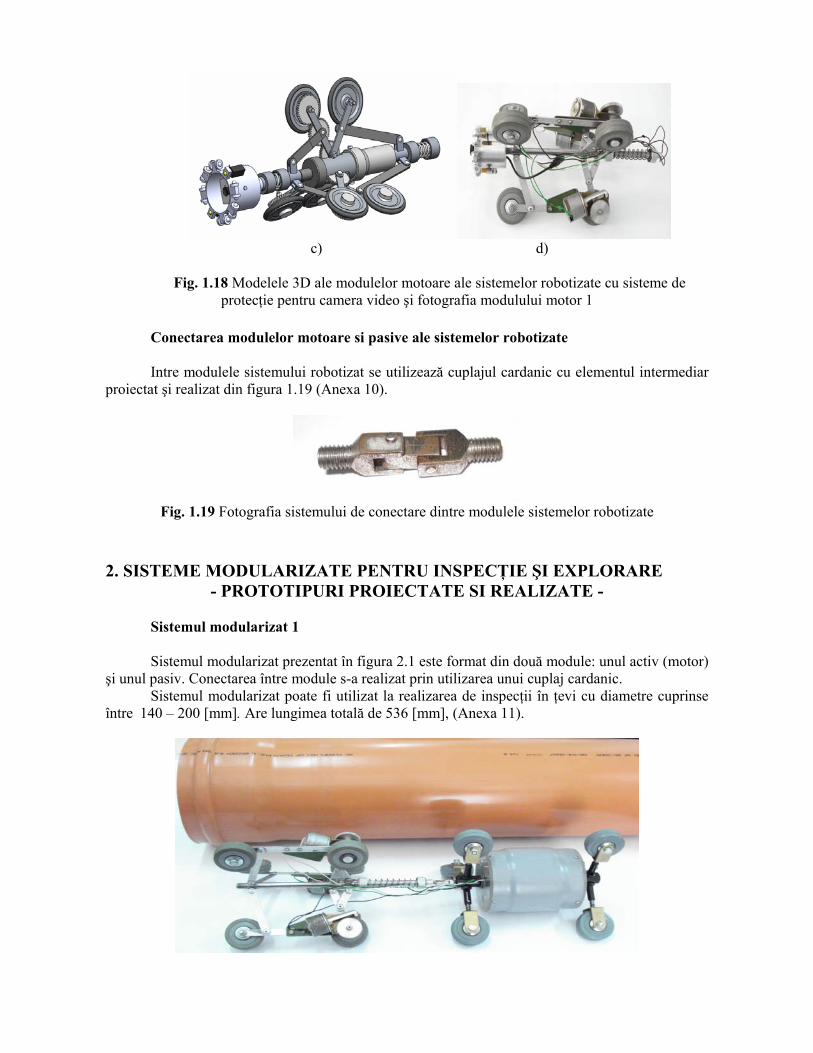
2. SISTEME MODULARIZATE PENTRU INSPECŢIE ŞI EXPLORARE
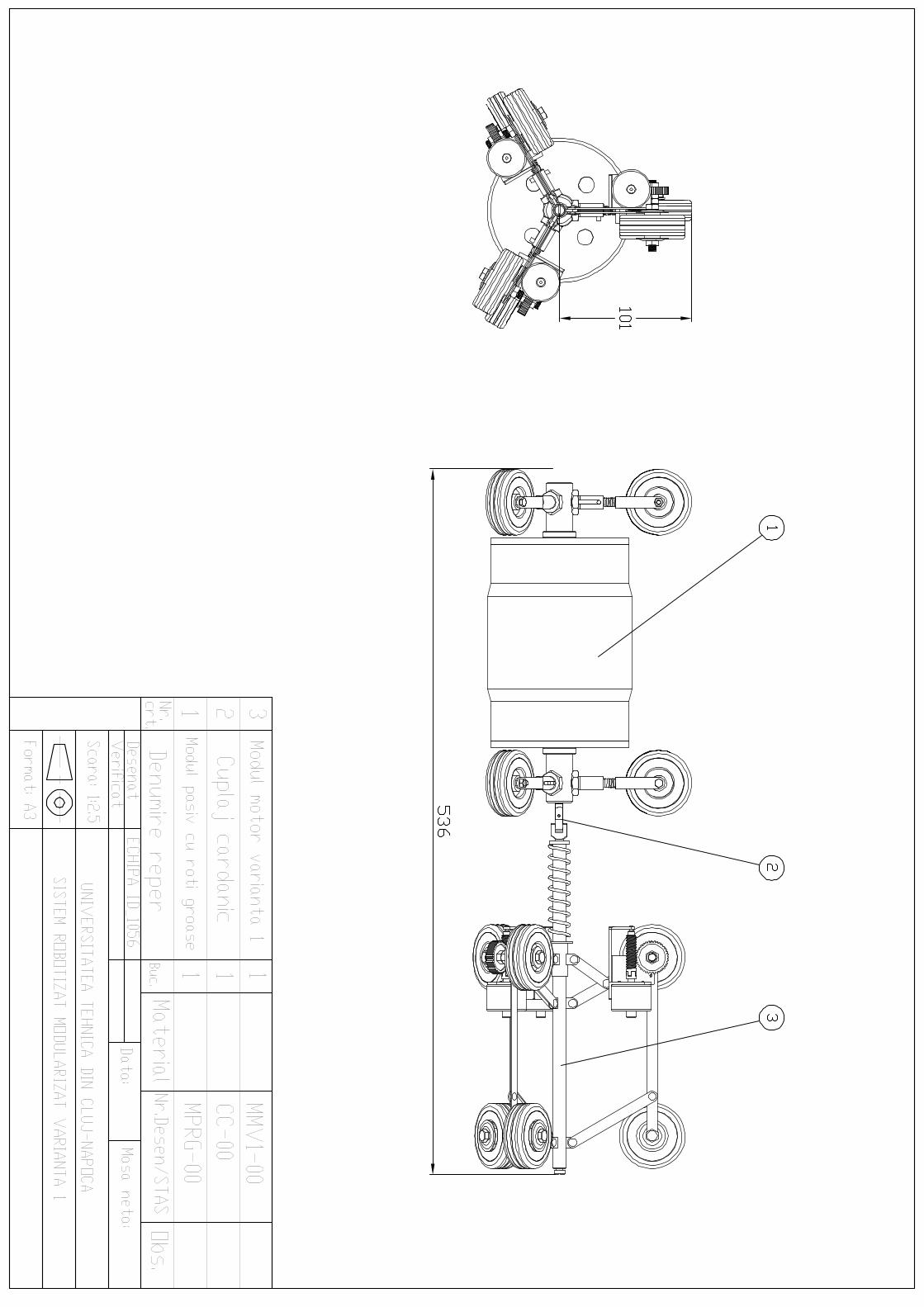
- PROTOTIPURI PROIECTATE SI REALIZATE - Sistemul modularizat 1 Sistemul modularizat prezentat în figura 2.1 este format din două module: unul activ (motor) şi unul pasiv. Conectarea între module s-a realizat prin utilizarea unui cuplaj cardanic. Sistemul modularizat poate fi utilizat la realizarea de inspecţii în ţevi cu diametre cuprinse între 140 – 200 [mm]. Are lungimea totală de 536 [mm], (Anexa 11).
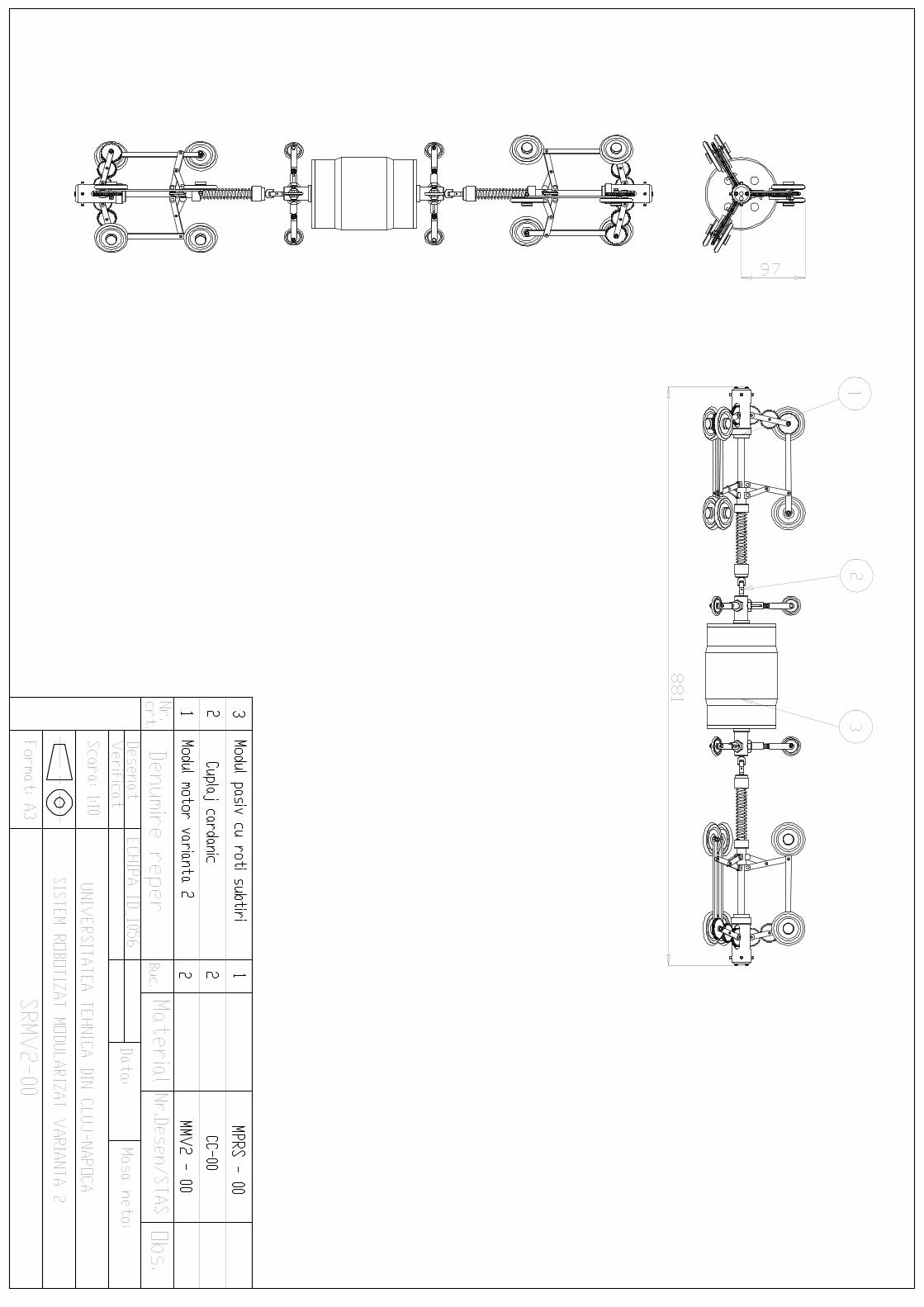
Fig. 2.1 Fotografia sistemului modularizat 1 Sistemul modularizat 2 Sistemul modularizat prezentat în figura 2.2 este format din trei module: două active
(motoare) şi unul pasiv. Va fi utilizat la inspectarea ţevilor cu diametre cuprinse între 130 - 180 [mm] şi are o lungime totală de 881 [mm]. Sistemul robotizat modularizat va putea trece prin coturi în formă de L, (Anexa 12).
Fig. 2.2 Fotografia sistemul modularizat 2
Sistemul modularizat 3
Al treilea sistem modularizat este prezentat în figura 2.3 şi are în componenţă trei module:
două active (motoare) şi unul pasiv. Sistemul robotizat poate fi utilizat la inspectarea ţevilor cu diametre cuprinse între 150-190 [mm]. Are o lungime totală de 856 [mm], (Anexa 13).
Fig. 2.3 Fotografia sistemul modularizat 3 Sistemele robotizate prezentate nu sunt autonome din punct de vedere energetic fiind
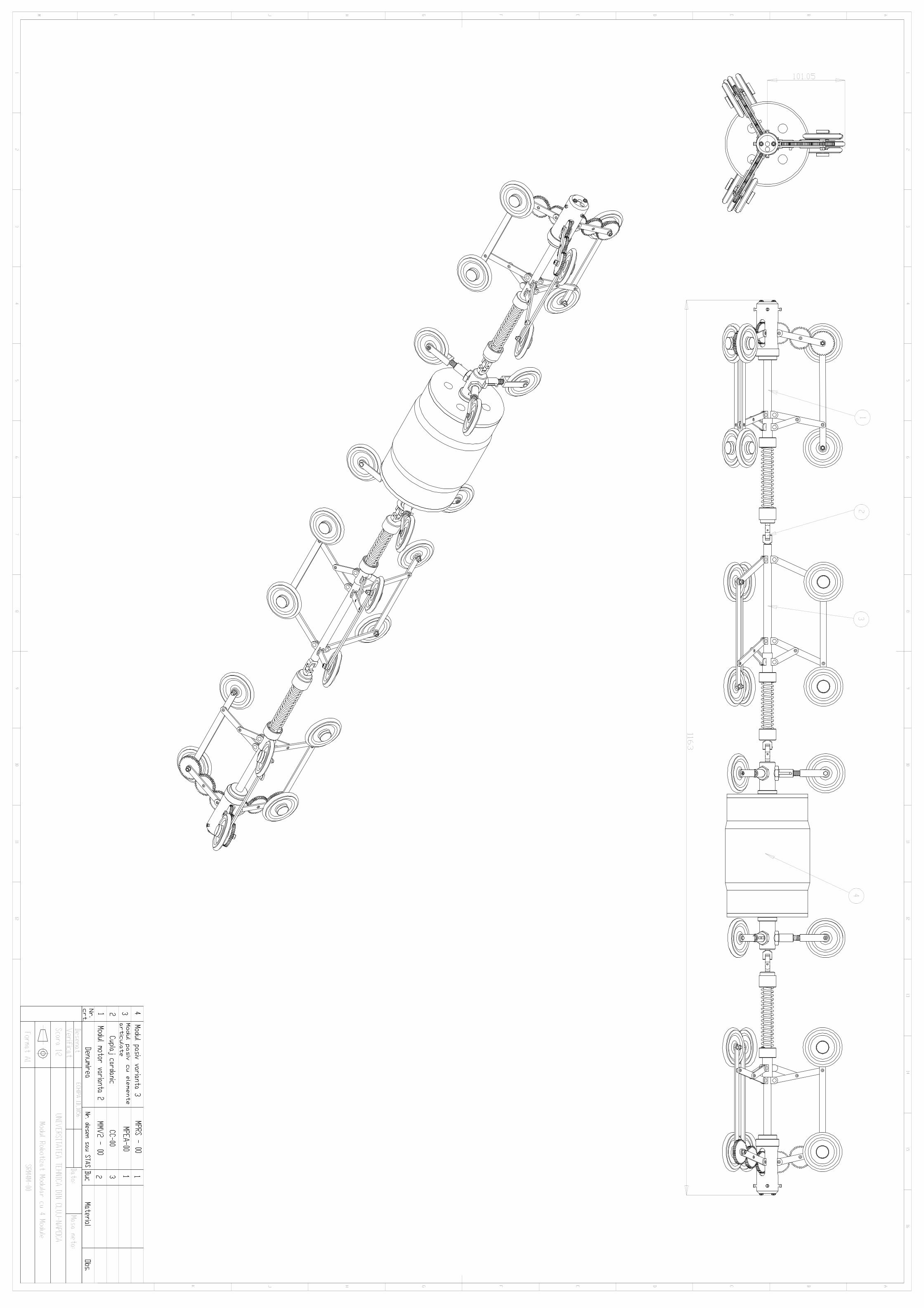
alimentate prin fire. Prin combinarea modulelor active şi pasive se pot obţine în funcţie de necesităţi şi alte sisteme modularizate de inspecţie şi explorare. Astfel în Anexa 14 este prezentat un astfel de sistem cu patru module (două active faţă, spate şi două pasive în zona centrală).
CONCLUZII
Roboţii pentru inspecţie în ţevi joacă un rol foarte important la întreţinerea reţelelor de ţevi
de aproape orice fel asigurând inspectarea şi chiar repararea acestora. Utilitatea acestor se dovedeşte a fi şi mai importantă atunci când ţevile care trebuiesc inspectate se află în medii ostile.
Unii dintre aceştia au fost proiectaţi pentru a realiza unele sarcini specifice sau pentru diametre fixe ale ţevilor, dar exista şi sisteme robotizate compuse din module active şi pasive care îşi pot adapta structura în funcţie de variaţia diametrului ţevii inspectate şi care pot realiza mai multe tipuri de operaţii (inspecţie video, curăţire, sudare, lipire, tăiere etc).
Sisteme robotizate modelate, proiectate şi realizate în acest proiect pot fi utilizate la inspecţia şi explorarea unor ţevi cu diametre cuprinse între 130 şi 200 mm. Pot fi dotate cu camere de luat vederi, surse de lumina şi acumulatori pentru o autonomie mai ridicată.
Modulele sistemelor robotizate proiectate prezintă următoarele avantaje şi dezavantaje:
Avantaje 1 – Elementele componente ale modulelor motoare sunt constituite în mare parte din
aluminiu ceea ce face ca greutatea sistemelor robotizate să fie redusă; 2 – In cazul modulelor 2 şi 3 se utilizează doar un motor pentru acţionare (numărul firelor de
alimentare fiind mai reduse). 3 – Datorită structurii sale al treilea modulul motor are în contact cu peretele tevii cite trei
roţi chiar şi la variaţia diametrului ţevi. 4 – Cupla cardanică (cu element intermediar) utilizată ca element de legatură între modulele
sistemelor robotizate facilitează traversarea reţelelor de ţevi ce conţin coturi. Dezavantaje şi limitări 1 – Diametrul şi forma ţevii: - posibilităţile de adaptare ale sistemelor robotizate sunt pentru diametre cuprinse
intre 130-200 [mm], daca aceste valori sunt depăşite sistemele robotizate modulare nu pot fi utilizate.
- sistemele robotizate modulare se pot utiliza numai în cazul ţevilor cu secţiune circulară.
2 – numărul de motoare în cazul primului modulul motor reprezintă un dezavantaj deoarece sistemul de control devine mai complicat şi ii cresc greutatea.
3 – lungimea şi numărul cablurilor - utilizarea unui număr mare de cabluri (in special in cazul primului modul motor)
pot îngreuna funcţionarea, acestuia. 4 – roţile din partea din faţă sau din spate ale modulelor motoare 1 şi 2 pot să nu fie în
contact cu ţeava în cazul în care acestea se deplasează în ţevi în care există schimbări de diametre.
Conf. Dr. Ing. Tătar Mihai Olimpiu
ANEXA 1
ANEXA 2
6 754
3
1
2
8
9
10
12 1311
F
8
E
D
C
B
A
G
H
J
K
L
M
7654321 9 10 11 12 13 14 15 16
91 2 3 4 5 6 7 8 10 11 12
K
G
A
B
C
D
E
F
H
J
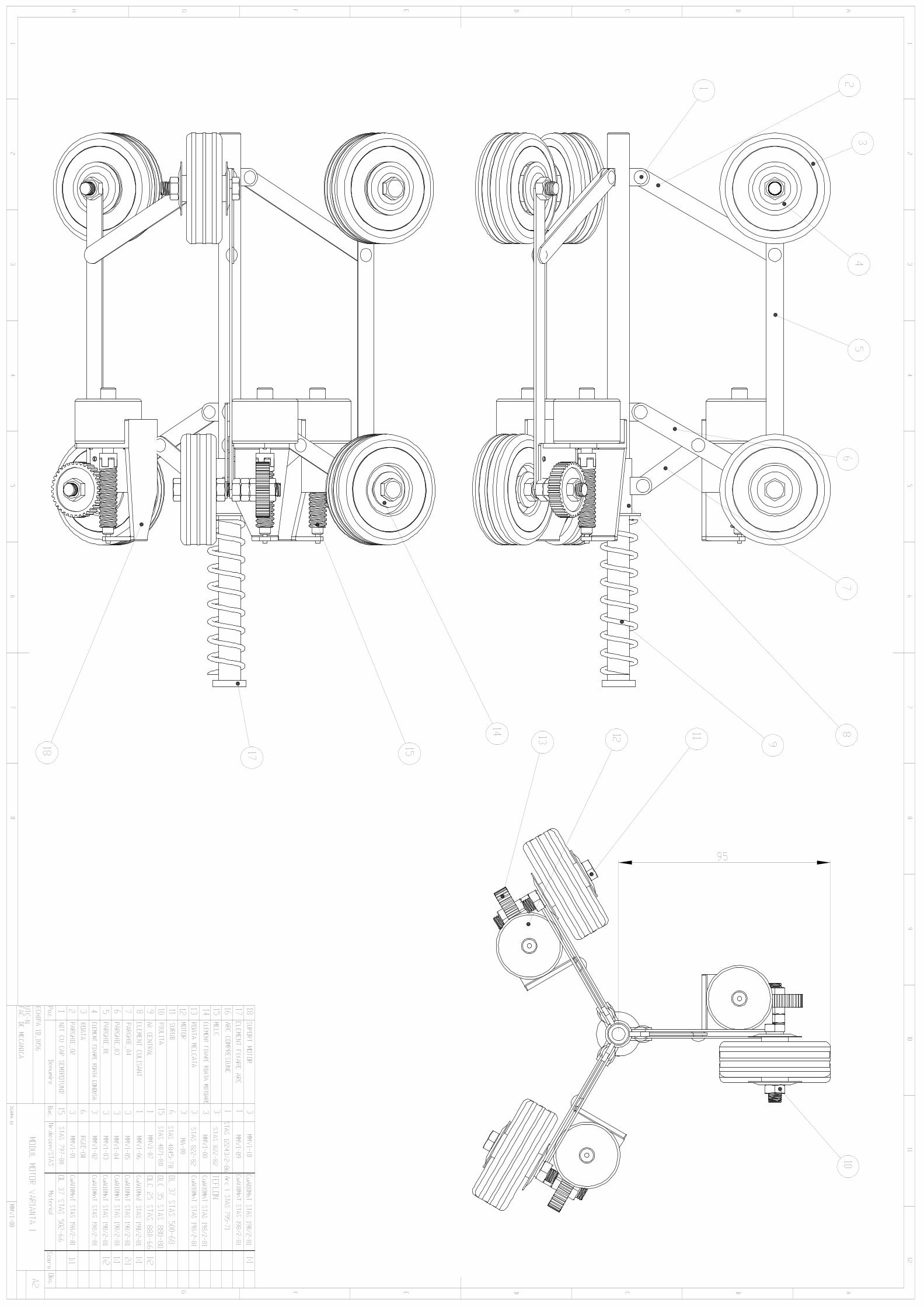
Modul Motor Varianta 2 A1
SCARA :1:1
1
Denumire Material Nr. desen sau STAS Observatii Buc.