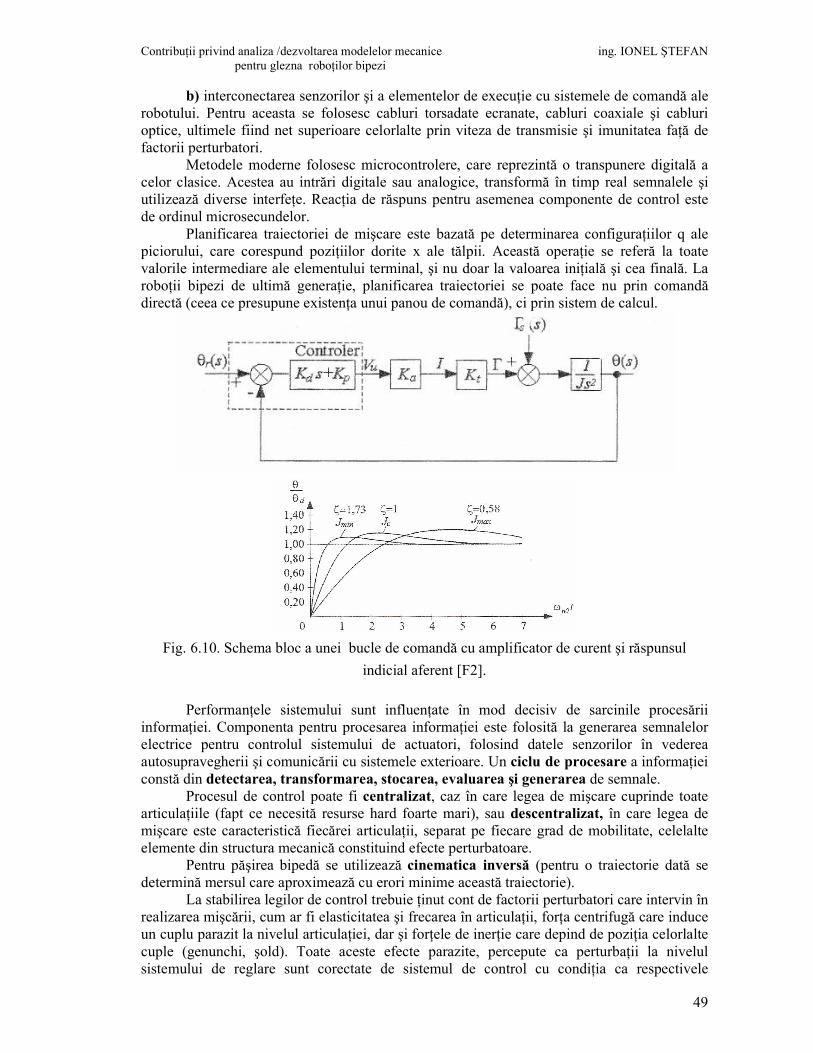
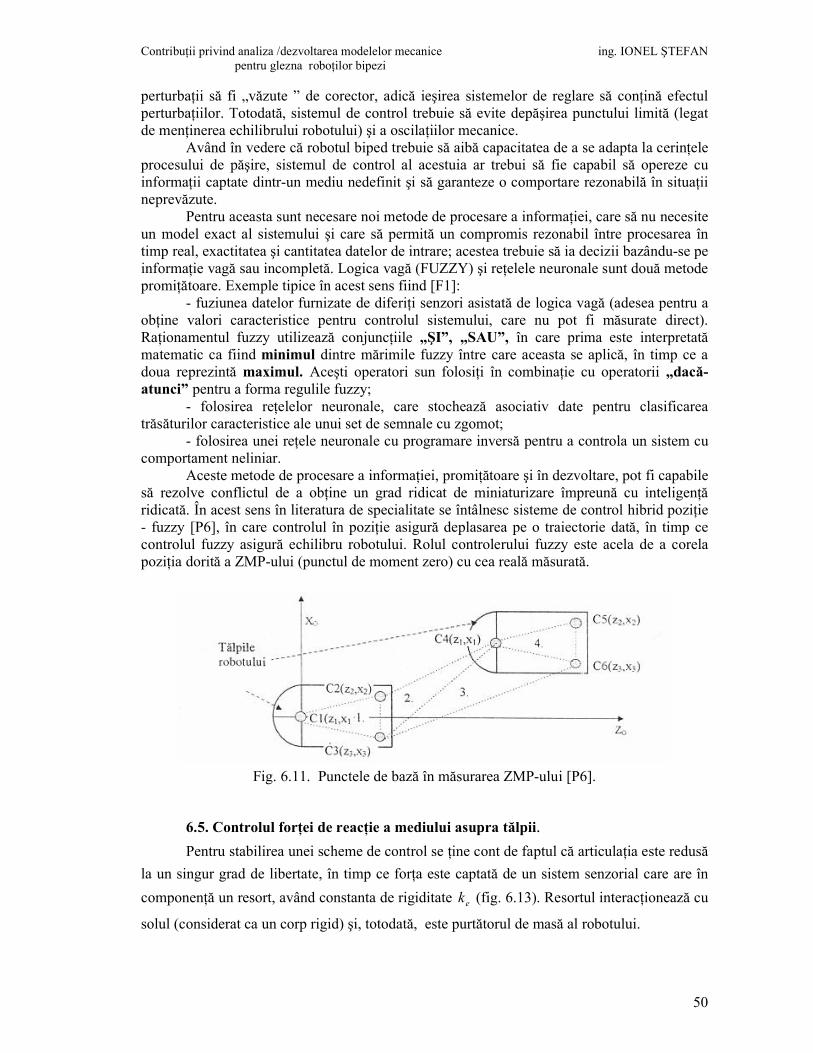
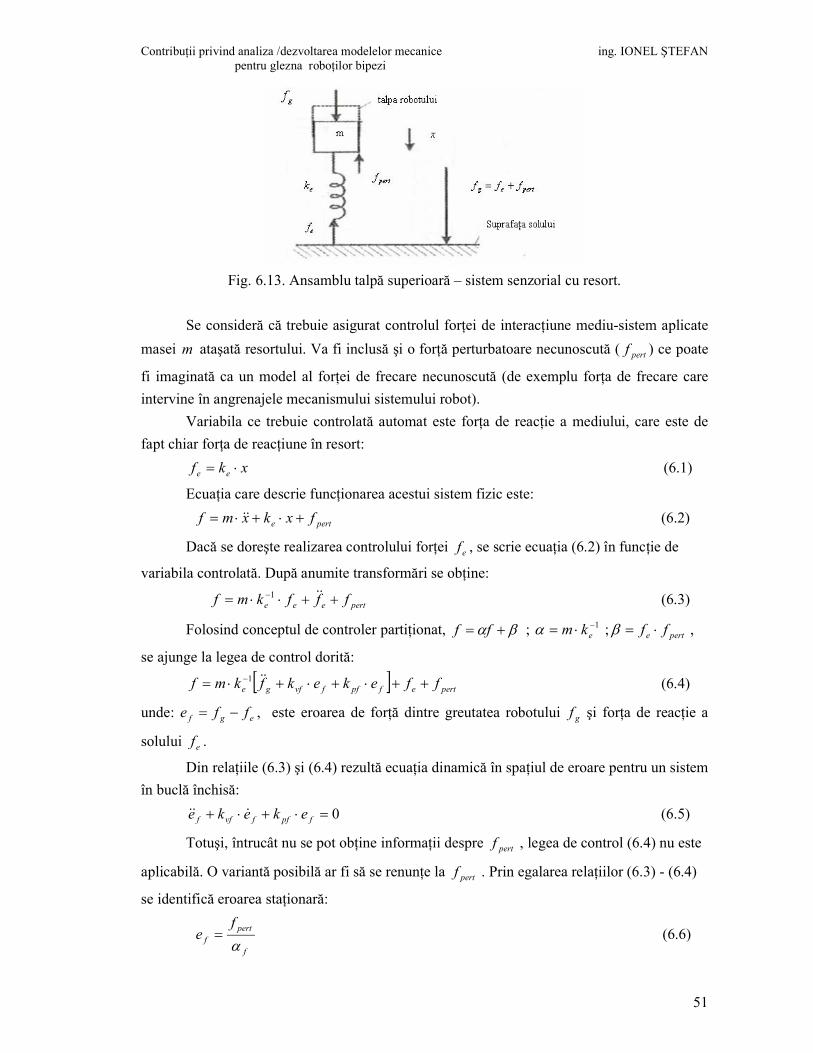
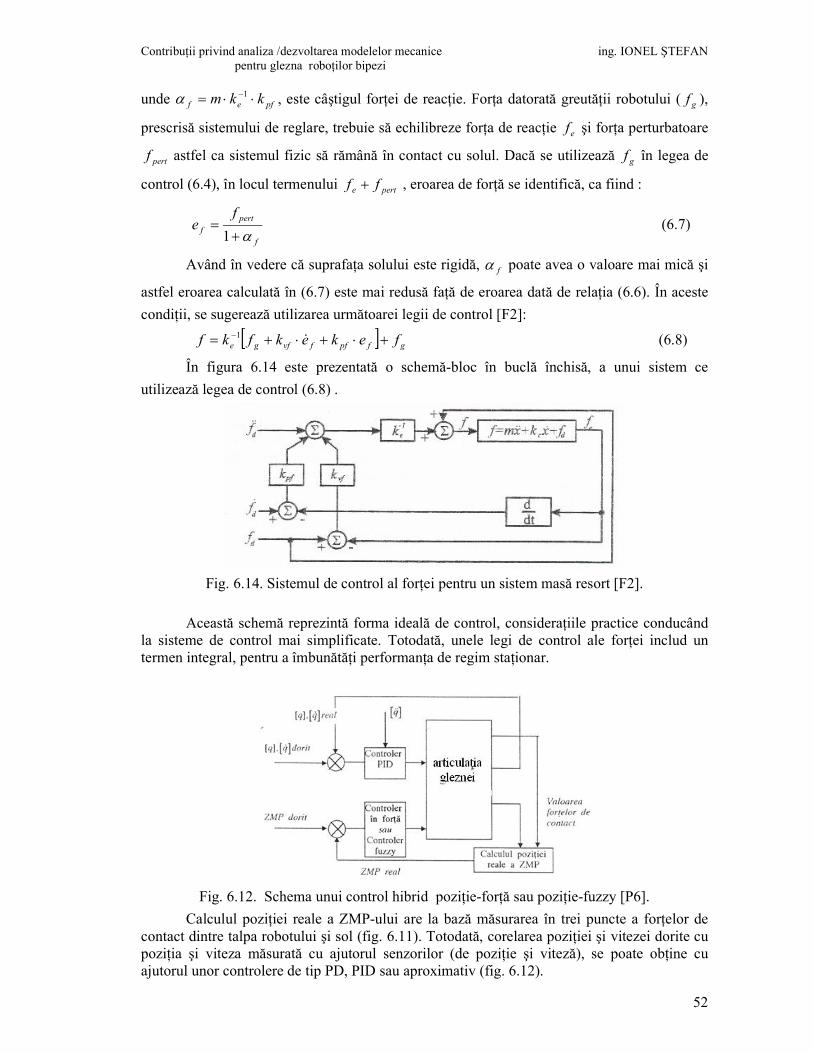
Universitatea Transilvania din Braşov Şcoala Doctorală Interdisciplinară Departament: Design de Produs, Mecatronică şi Mediu CONTRIBUŢII PRIVIND ANALIZA/DEZVOLTAREA MODELELOR MECANICE PENTRU GLEZNA ROBOŢILOR BIPEZI CONTRIBUTIONS TO THE ANALYSIS/DEVELOPMENTOF MECHANICAL MODELS FOR BIPEDAL ROBOTS ANKLE Rezumatul tezei de doctorat Summary of PhD thesis Doctorand: Ionel ŞTEFAN Conducător ştiinţific Prof. univ. dr. ing. Petre ALEXANDRU BRAŞOV, 2014 MINISTERUL EDUCAŢIEI NAŢIONALE Universitatea Transilvania din Braşov Bd. Eroilor 29, 500036 Braşov, Tel/Fax: +40 268 410525, +40 268 412088
Transcript
Universitatea Transilvania din Braşov Şcoala Doctorală Interdisciplinară
Departament: Design de Produs, Mecatronică şi Mediu
CONTRIBUŢII PRIVIND ANALIZA/DEZVOLTAREA
MODELELOR MECANICE PENTRU GLEZNA ROBOŢILOR
BIPEZI
CONTRIBUTIONS TO THE ANALYSIS/DEVELOPMENTOF
MECHANICAL MODELS FOR BIPEDAL ROBOTS ANKLE
Rezumatul tezei de doctorat
Summary of PhD thesis
Doctorand: Ionel ŞTEFAN
Conducător ştiinţific
Prof. univ. dr. ing. Petre ALEXANDRU
BRAŞOV, 2014
MINISTERUL EDUCAŢIEI NAŢIONALE
Universitatea Transilvania din Braşov Bd. Eroilor 29, 500036 Braşov, Tel/Fax: +40 268 410525, +40 268 412088
Universitatea Transilvania din Braşov Facultatea Desing de Produs şi Mediu
DESING DE PRODUS, MECATRONICĂ ŞI MEDIU
D-lui (D-nei)………………………………………………………………
COMPONENŢA COMISIEI DE DOCTORAT
numită prin ordinul Rectorului Universităţii Transilvania din Braşov nr. 6871
din 26.09.2014
PREŞEDINTE: Prof. univ. dr. ing. Codruţa JALIU DIRECTOR – Dep. Didactic Desing de Produs Mecatronică şi Mediu, Universitatea „Transilvania” din Braşov CONDUCĂTOR ŞTIINŢIFIC: Prof. univ. dr. ing. Petre ALEXANDRU Universitatea „Transilvania” din Braşov REFERENŢI: Prof. univ. dr. ing. Iosif TEMPEA Universitatea „Politehnică” din Bucureşti Prof. univ. dr. ing. Ioan ARDELEAN Universitatea Tehnică din Cluj-Napoca Prof. univ. dr. ing. Cătălin ALEXANDRU Universitatea „Transilvania” din Braşov
Data, ora şi locul susţinerii publice a tezei de doctorat: 17.12.2014, ora 11³° , Colina Universităţii, sala - Căsuţa Solară.
Eventualele aprecieri şi observaţii asupra lucrării, vă rugăm să le transmiteţi în timp util pe adresa Universităţii Transilvania din Braşov sau pe adresa de e-mail: [email protected]
Contribuţii privind analiza /dezvoltarea modelelor drd. ing. IONEL ŞTEFAN mecanice pentru glezna roboţilor bipezi
CUPRINS
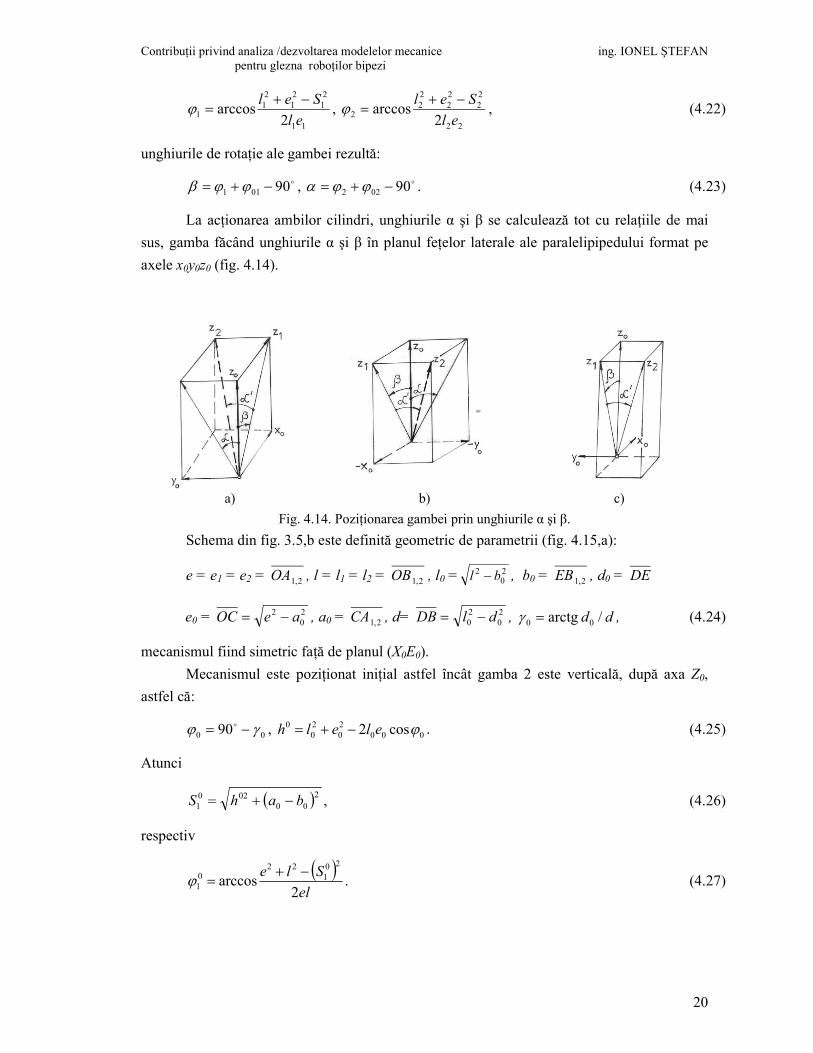
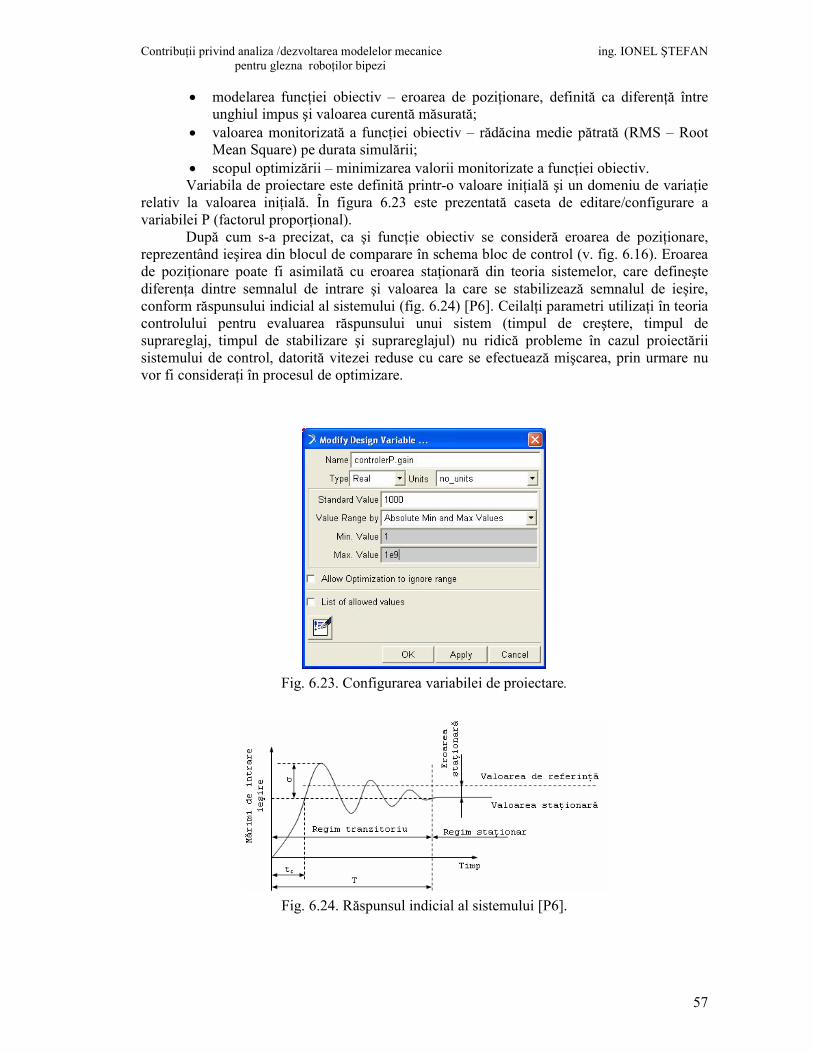
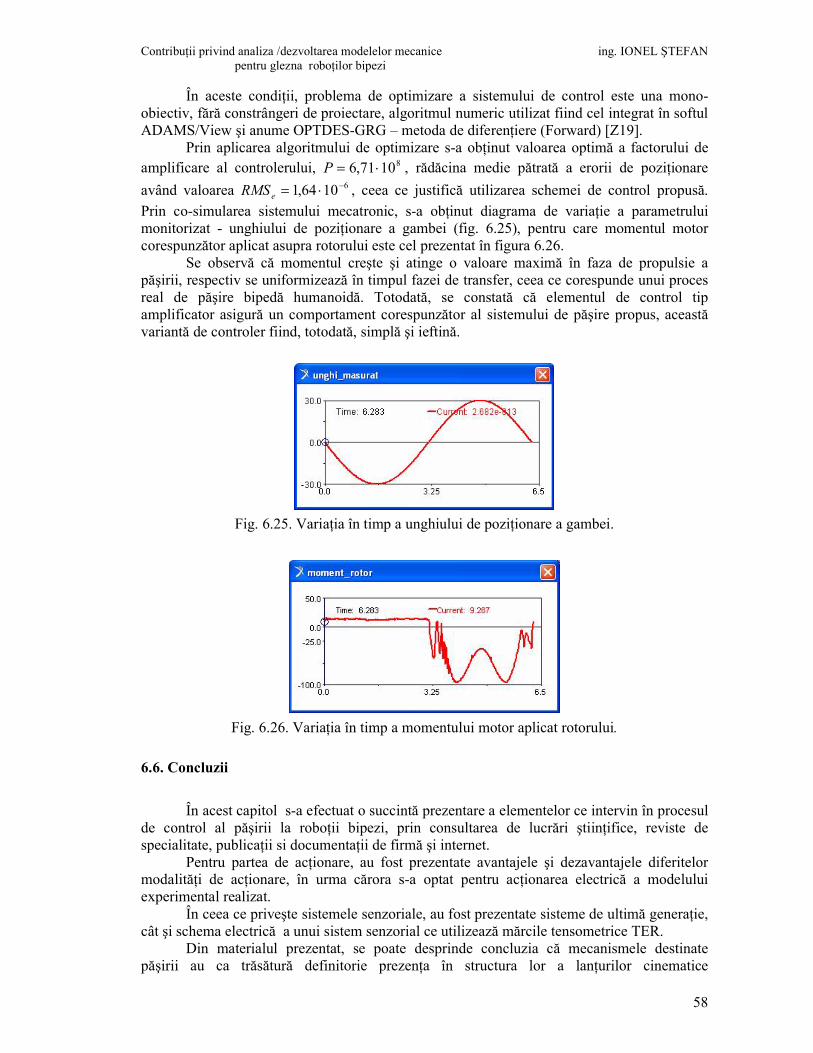
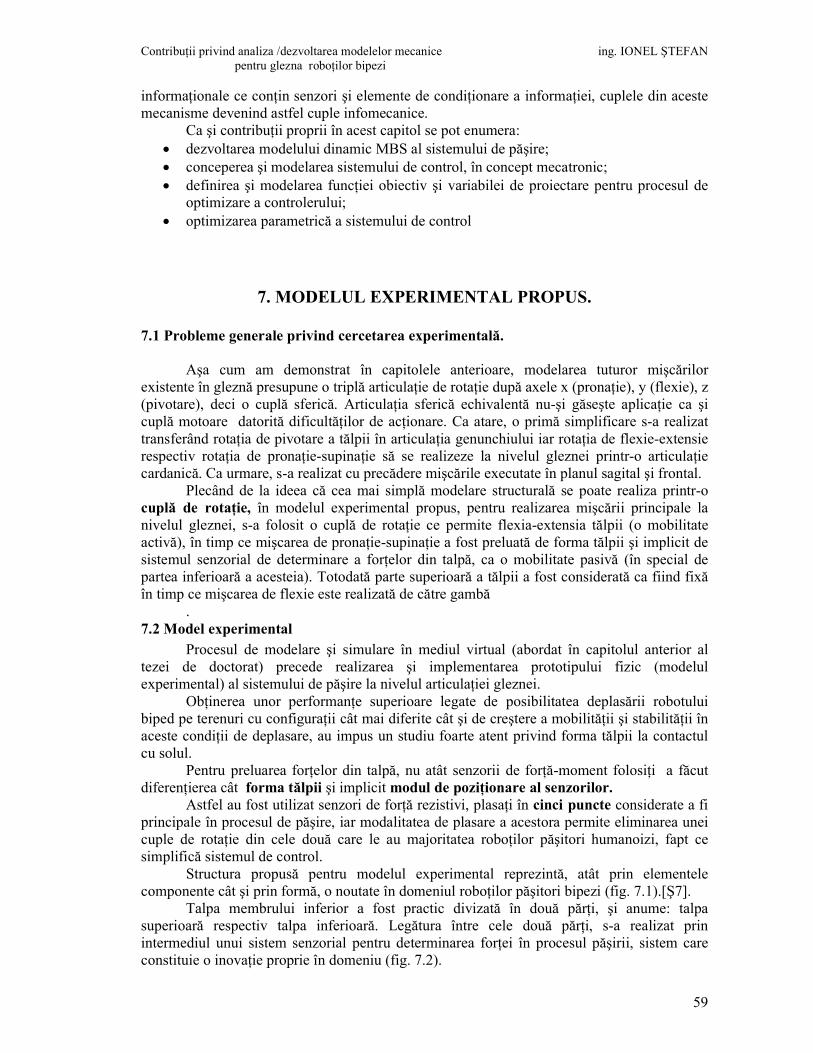
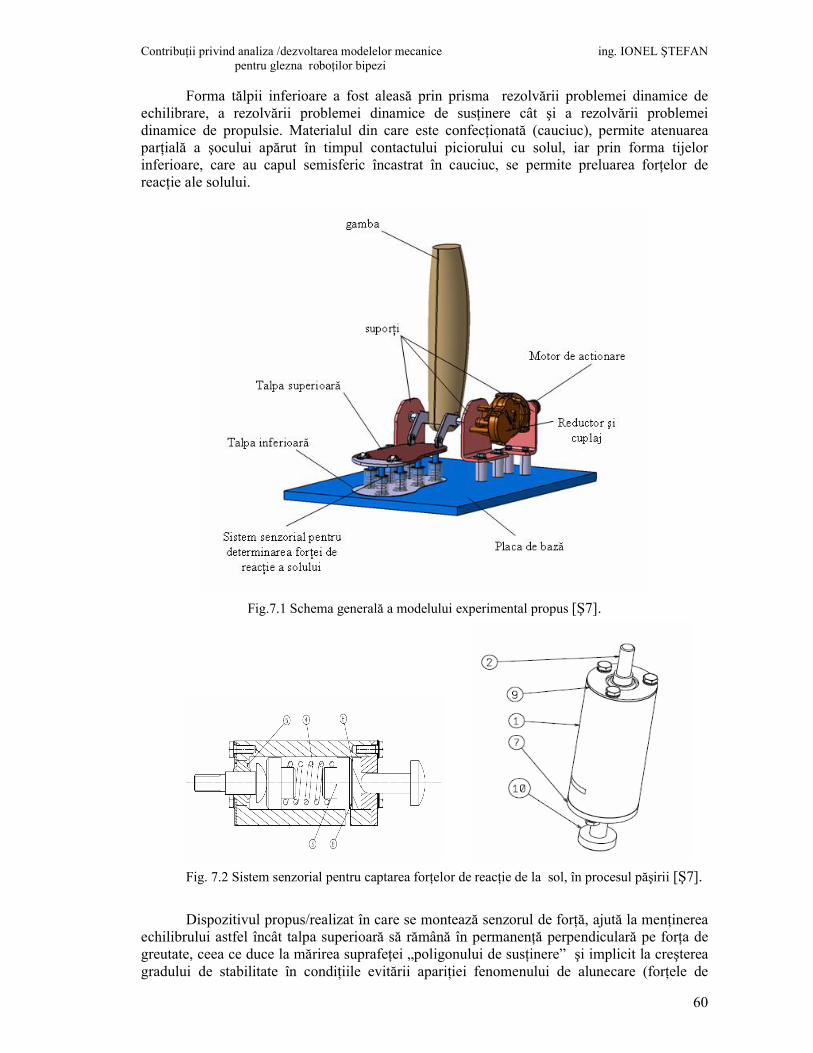
1. INTRODUCERE ............................................................................................................ 1/4 1.1. Scurt istoric al roboţilor bipezi.................................................................................... 4 1.2. Importanţa roboţilor bipezi ......................................................................................... 5 1.3. Prezentarea structurii tezei .......................................................................................... 6 2. STADIUL ACTUAL AL CERCETĂRILOR – REALIZĂRILOR PRIVIND SISTEMUL DE PĂŞIRE BIPED............................................................................... 3/8 2.1. Structura articulară a membrelor inferioare umane...................................................... 8 2.1.1. Elementele membrelor inferioare la sistemul de păşire uman............................... 8 2.1.2. Articulaţiile membrelor inferioare şi sistematizarea mişcărilor din articulaţii..... 10 2.2. Structura mecanică a sistemelor robotizate de păşire bipedă...................................... 15 2.2.1. Unele criterii de modelare structurală ................................................................ 15 2.2.2. Exemple de roboţi bipezi................................................................................... 18 2.3. Structura sistemului de comandă şi control ............................................................... 22 2.3.1. Despre sistemul de conducere............................................................................ 23 2.3.1. Sistemul de acţionare ........................................................................................ 24 2.3.3. Sistemul senzorial la roboţii bipezi .................................................................... 26 2.4. Concluzii şi obiective ale tezei.................................................................................. 30 3. SINTEZĂ STRUCTURALĂ A ARTICULAŢIEI GLEZNEI........................................ 6/34 3.1. Axele şi mişcările de rotaţie ale aparatului locomotor ............................................... 34 3.2. Modelarea articulaţiei gambă-picior.......................................................................... 36 3.2.1. Modelarea articulaţiei gleznei prin bare articulate.............................................. 36 3.2.2. Modelarea articulaţiei gleznei prin roţi dinţate................................................... 39 3.3. Concluzii asupra modelărilor structurale ................................................................... 47 4. MODELĂRI CINEMATICE ALE SISTEMULUI DE PĂŞIRE BIPEDĂ ................ 13/48 4.1. Modelarea geometrico-cinematică a structurilor cu bare articulate ............................ 48 4.1.1. Funcţiile de mişcare pentru modelul articulat cardanic ...................................... 48 4.1.2. Rezultatele modelării cinematice pentru modelul cardanic................................. 53 4.1.3. Funcţiile de mişcare pentru modelul articulat sferic ........................................... 58 4.1.4. Suportul pentru calcule numerice ...................................................................... 61 4.2. Modelarea geometrico-cinematică a structurilor cu roţi dinţate ................................. 61 4.2.1. Funcţiile de mişcare pentru modelul cu roţi dinţate............................................ 61 4.2.2. Suportul pentru calcule numerice ...................................................................... 65 4.3. Concluzii asupra modelărilor cinematice .................................................................. 66 5. MODELARE STATICĂ ŞI DINAMICĂ A SISTEMELOR ARTICULATE GAMBĂ-PICIOR .................................................................................................. 24/67 5.1. Modelarea statică a structurii propuse pentru cu articulaţie sferică în gleznă ............. 67 5.2. Modelarea dinamică a structurii cu articulaţie cardanică în gleznă ............................ 69 5.2.1. Modelări cinematice pentru modelul articulat cardanic ...................................... 69 5.2.2. Modelare dinamică pe baza ecuaţiilor lui Lagrange ........................................... 71 5.2.3. Cazul acţionării cu motoare rotative în cuple ..................................................... 72 5.2.4. Cazul acţionării cu motoare liniare .................................................................... 74
Contribuţii privind analiza /dezvoltarea modelelor drd. ing. IONEL ŞTEFAN mecanice pentru glezna roboţilor bipezi
5.2.5. Studiu de caz – doar mişcarea de flexie .......................................................... 79 5.3. Simulare numerică dinamică..................................................................................... 81 5.3.1. Simularea dinamică cu motoare rotative ............................................................ 81 5.3.2. Simularea dinamică cu motoare liniare .............................................................. 88 5.4. Concluzii asupra modelărilor dinamice ale sistemului............................................. 100 6. COMANDA ŞI CONTROLUL ROBOŢILOR BIPEZI ............................................ 43/101 6.1. Despre controlul roboţilor bipezi ............................................................................ 101 6.2. Probleme privind sistemul de acţionare................................................................... 102 6.3. Probleme privind sistemul senzorial....................................................................... 104 6.4. Probleme privind sistemul de comandă şi controlul................................................. 110 6.5. Controlul forţei de reacţie a mediului asupra tălpii .................................................. 115 6.6. Prototiparea virtuală a sistemului propus................................................................. 117 6.7. Concluzii privin comanda şi controlul sistemului.................................................... 124 7. MODLUL EXPERIMENTAL PROPUS ................................................................... 59/125 7.1. Probleme generale privind cercetarea experimentală............................................... 125 7.2. Model experimental ................................................................................................ 125 8. CONCLUZII FINALE, CONTRIBUŢII ORIGINALE ŞI DISEMINAREA REZULTATELOR64/132 8.1. Concluzii finale şi contribuţii.................................................................................. 132 8.2. Diseminarea rezultatelor ......................................................................................... 134 8.3. Direcţii viitoare de cercetare ................................................................................... 134 9. BIBLIOGRAFIE....................................................................................................... 66/137 10. Anexe .......................................................................................................................... 143
Contribuţii privind analiza /dezvoltarea modelelor drd. ing. IONEL ŞTEFAN mecanice pentru glezna roboţilor bipezi
TABLE OF CONTENTS
1. INTRODUCTION .......................................................................................................... 1/4 1.1. Brief history of bipedal robots .................................................................................... 4 1.2.The importance of bipedal robots................................................................................. 5 1.3. Presentation of thesis structure.................................................................................... 6 2. CURRENT STATUS OF RESEARCH - ACHIEVEMENTS ON SYSTEM BIPED STEPPING ................................................................................................... 3/8 2.1.Structure of human lower limb joint ............................................................................ 8 2.1.1. Items legs stepping human system....................................................................... 8 2.1.2.The joints of the lower limbs and systematization movements of joints ........... 10 2.2. The mechanical structure of stepping bipedal robotic systems................................... 15 2.2.1. Some criteria for structural modeling................................................................. 15 2.2.2. Examples of bipedal robots ............................................................................... 18 2.3. Command and control system structure .................................................................... 22 2.3.1.About connduction sistem ................................................................................. 23 2.3.2. The drive........................................................................................................... 24 2.3.3. Bipedal robots sensory system........................................................................... 26 2.4. Conclusions and objectives of the thesis ................................................................... 30 3. STRUCTURAL SYNTHESIS ANKLE ........................................................................ 6/34 3.1. Axes and rotational movements of the musculoskeletal............................................. 34 3.2. Modeling leg-foot joint ............................................................................................ 36 3.2.1. Modeling ankle by linkage ................................................................................ 36 3.2.2. Modeling ankle through gears ........................................................................... 39 3.3. Conclusion on structural modeling........................................................................... 47 4. KINEMATIC MODELING BIPED STPPING SYSTEM............................................ 13/48 4.1. Geometric modeling kinematic linkage structures ..................................................... 48 4.1.1. Motion functions for model articulated shaft .................................................... 48 4.1.2. Kinematic modeling results for the model propeller........................................... 53 4.1.3. Funcţiile de mişcare pentru modelul articulat sferic ........................................... 58 4.1.4. Support for numerical calculations .................................................................... 61 4.2. Geometric modeling kinematic structures gear.......................................................... 61 4.2.1. Functions for the model moving gear ................................................................ 61 4.2.2. Support for numerical calculations .................................................................... 65 4.3. Conclusions on kinematics modeling ........................................................................ 66 5. STATIC AND DYNAMIC MODELING SYSTEMS GAMBLE-FOOT ARTICULATED ................................................................................................... 24/67 5.1. Static modeling of the structure proposed for the ball joint in ankle .......................... 67 5.2. The dynamic modeling of the structure gimballed in ankle ....................................... 69 5.2.1. Modeling kinematic model articulated shaft ...................................................... 69 5.2.2. Dynamic Modeling based on Lagrange's equations............................................ 71 5.2.3. When working with rotary engines in couplings ................................................ 72
Contribuţii privind analiza /dezvoltarea modelelor drd. ing. IONEL ŞTEFAN mecanice pentru glezna roboţilor bipezi
5.2.4. When working with linear motors .......................................................................... 74 5.2.5. Case study - only flexion ................................................................................ 79 5.3. Dynamic numerical simulation ................................................................................. 81 5.3.1. Dynamic simulation of rotary engines ............................................................... 81 5.3.2. Dynamic simulation of linear motors................................................................. 88 5.4. Conclusions on dynamic modeling system ............................................................. 100 6. ORDER AND BIPEDAL ROBOT CONTROL......................................................... 43/101 6.1. About bipedal robot control .................................................................................... 101 6.2. Problems the driving system .................................................................................. 102 6.3. Problems with sensory system. ............................................................................... 104 6.4. Problems of command and control system .............................................................. 110 6.5. Reaction force control environment on foot ............................................................ 115 6.6. Virtual prototyping of the proposed system ............................................................ 117 6.7. Conclusions command and control of respect ........................................................ 124 7. EXPERIMENTAL MODEL PROPOSED................................................................. 59/125 7.1. General problems experimental research ................................................................ 125 7.2. Model experimental ................................................................................................ 125 8. CONCLUSIONS, ORIGINAL CONTRIBUTIONS AND DISSEMINATION OF RESULTS...................................................................................................... 64/132 8.1. Conclusions and contributions ............................................................................... 132 8.2. Dissemination of results.......................................................................................... 134 8.3. Future research directions ....................................................................................... 134 9. REFERENCES .............................................................................................................. 137 10. ATTACHMENTS .................................................................................................. 66/143
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
1
1. INTRODUCERE
Subiectul prezentei teze aparţine domeniului roboţilor păşitori bipezi, un domeniu deosebit de actual şi dinamic. Complexitatea aspectelor biomecanice care apar în statica sau dinamica corpului uman, necesită metode speciale de analiză pentru fiecare poziţie a corpului în procesul de păşire. Impunerea unor asemenea condiţii structurilor mecanice care încercă să imite modelul biologic, generează complexitatea roboţilor bipezi humanoizi.
Plecând de la motivul preocupărilor în domeniul roboţilor bipezi formulat de J.A.Golden [G4], şi anume: ”Este necesară găsirea unei soluţii care în condiţiile specifice locomoţiei umane să poată exercita acest tip de locomoţie ”, lucrarea de faţă încearcă să aducă o contribuţie în ceea ce priveşte structura articulaţiei gleznei şi implicit a tălpii, cu efect direct asupra modalităţii de control a acesteia.
*
Doresc să aduc cele mai respectuoase mulţumiri domnului prof. dr. ing. Petre Alexandru, conducătorul ştiinţific, pentru acceptarea mea la pregătirea acestei teze, pentru sprijinul acordat de-a lungul anilor în cercetarea întreprinsă şi nu în ultimul rând pentru înţelegerea de care a dat dovadă pe parcursul elaborării ei. Mulţumiri speciale se cuvin domnului prof. dr. ing. Dorin Diaconescu pentru colaborările fructuoase pe care le-am realizat împreună în valorificarea rezultatelor cercetărilor din acest domeniu, prin pregătirea unor publicaţii.
Adresez mulţumirile mele domnilor prof. dr. ing. Ioan Stroe, prof. dr. ing. Cătălin Alexandru, prof. dr. ing. Mircea Neagoe şi ing. Ioan Ţoţu pentru sugestiile competente făcute şi întregul suport acordat pe parcursul anilor de studiu.
Mulţumesc, de asemenea, întregului colectiv al departamentului Desing de Produs Mecatronică şi Mediu şi colegilor Adrian Buta, Monica Enescu, Marian Bolboe, Bucşă Dorin şi Dan Ţiganea pentru sugestiile valoroase ce au contribuit la rezolvarea unor probleme.
Nu în ultimul rând, aş dori să mulţumesc familiei mele pentru înţelegerea de care a dat dovadă pe parcursul redactării acestei teze. Mă simt îndreptăţit să le cer scuze pentru timpul „răpit”, fiind nevoit, nu de puţine ori, să aleg între dragostea ce le-o port şi pasiunea profesională.
Tuturor colegilor de muncă şi a celor ce mă cunosc, care, într-un mod sau altul, m-au încurajat în munca pentru pregătirea acestei teze de doctorat, le aduc calde mulţumiri. 1.1. Importanţa roboţilor bipezi.
Motivul principal pentru început l-a constituit domeniul medical, care a impus găsirea unor soluţii pentru protezarea membrelor inferioare, cumulat cu domeniul militar care a căutat soluţii pentru dezangrenarea factorului uman din operaţiunile cu grad sporit de pericol.
Cercetările actuale sunt orientate către implementarea unor structuri robotice performante folosind noile tehnologii puse la dispoziţia cercetătorilor, tehnologii care facilitează atât partea de structură mecanică cât şi pe cea de inteligenţă artificială.
Modelarea statică şi dinamică a diferitelor poziţii ocupate de corp în procesul păşirii, reprezintă o etapă importantă în analiza locomoţiei bipede cu aplicabilitate atât în domeniul tehnic, cât şi în domeniul medical.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
2
1.2. Scurt istoric al roboţilor bipezi. Aşa cum reiese din literatura de specialitate studiată [B4], [C3], [D2], [F1], [G3], [I2],
[I3], [M1], [O1], [P5], [P6], [R5], [W1], [Z9], dezvoltarea roboţilor bipezi în timp a cunoscut mai multe etape şi anume:
În prima etapă s-au folosit mecanisme cu bare articulate şi roţi dinţate pentru generarea unor mişcări simple, mecanisme utilizate şi astăzi, însă aceste mecanisme nu se puteau adapta mediului (sfârşitul secolului XIX).
A doua etapă ( a doua jumătate a secolului XX) a urmărit simplificarea construcţiei mecanice paralel cu echiparea multisenzorială.
Cea de-a treia etapă (începutul secolului XXI), se conturează prin dotarea roboţilor bipezi cu inteligenţă artificială, fapt ce le oferă o anumită independenţă faţă de om, prin analizarea mediului în care păşesc şi luarea unor decizii proprii în procesul păşirii (reacţie de feedbeak).
1.3. Prezentarea structurii tezei.
Teza îşi propune efectuarea uni studiu teoretic şi experimental asupra elementului final din locomoţia bipedă, şi anume, ansamblu antropomorf gambă – picior legate prin articulaţia gleznei. Plecând de la variantele constructive existente, în lucrare se vor aborda metode de analiză şi sinteză, astfel încât să se poată defini o soluţie originală – un sistem de păşire cu o mobilitate activă în articulaţia gleznei şi mai multe mobilităţi pasive în structura tălpii,fapt ce îi conferă o flexibilitate ridicată ansamblului prezentat. În acest sens, teza a fost structurată astfel:
Capitolul 1: „Introducere” – prezintă domeniul în care se încadrează cercetările efectuate;
Capitolul 2: „Stadiul actual al cercetărilor – realizărilor privind sistemul de păşire bipedă” – îşi propune o prezentare a sistemului locomotor uman concomitent cu o sistematizare a mişcărilor din articulaţii. Totodată, este prezentată o sinteză a elementelor ce intervin în procesul păşirii exemplificând diferite modele de locomoţie bipedă, identificate în literatura de specialitate studiată. La finalul capitolului sunt prezentate obiectivele cercetării care corespund cu paşii ce au fost urmaţi pe desfăşurării acesteia;
Capitolul 3: „Sinteză structurală a articulaţiei gambă-picior” - tratează aspectele structurale ale mecanismelor de păşire bipedă la nivelul articulaţiei gleznei atât prin bare articulate cât şi prin intermediul roţilor dinţate;
Capitolul 4: „Modelări cinematice ale sistemului de păşire bipedă” – prezintă o serie de structuri spaţiale cu bare articulate, mecanismul articulaţiei gleznei articulat cardanic sau sferic cu rezultatele aferente modelării cinematice; modelarea geometrico-cinematică cu roţi dinţate prin prezentarea diferitelor combinaţii (flexie-pronaţie-pivotare);
Capitolul 5: „Modelarea statică şi dinamică a sistemelor articulate gambă-picior” realizează o cercetare asupra modelelor anterioare funcţie de modalitatea de acţionare a cuplelor, realizându-se simulări în ambele variante;
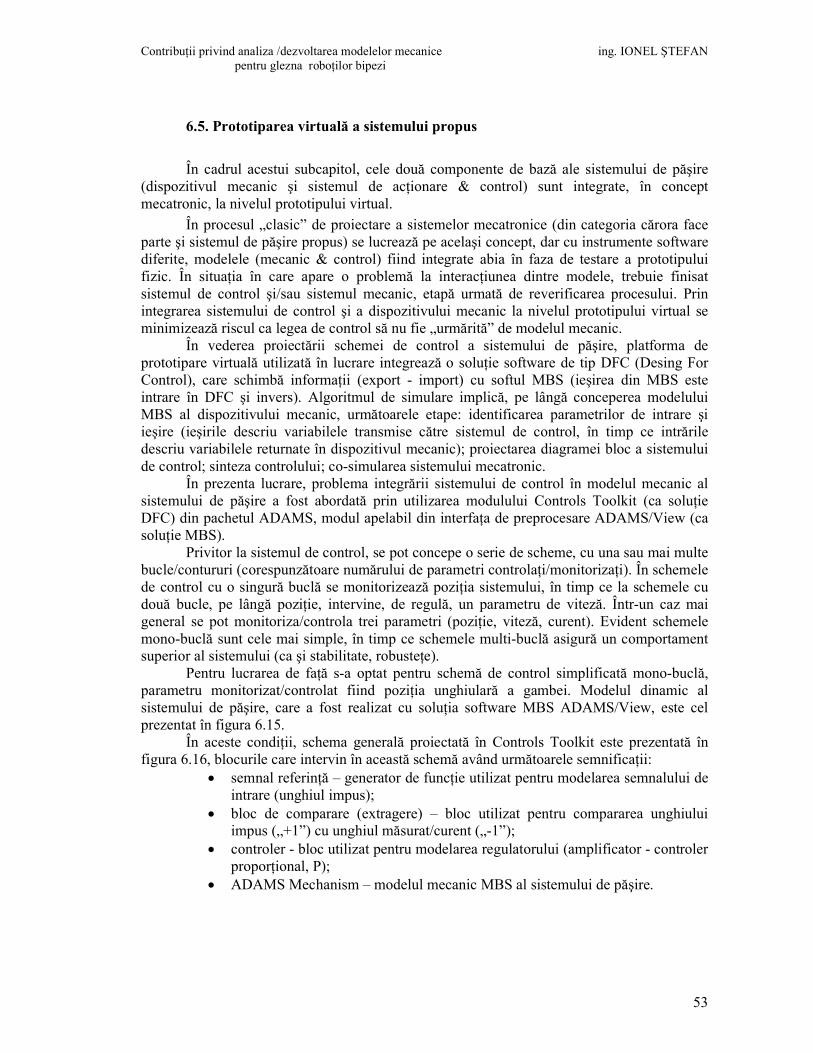
Capitolul 6: „Controlul articulaţiei gleznei la roboţii bipezi” – pe lângă aspectele de control prezentate, concretizează rezultatele studiilor anterioare realizându-se o prototipare virtuală a sistemului propus cu ajutorul softului ADAMS.
Capitolul 7: „Modelul experimental propus” - În urma analizei modelelor tratate a fost concepută o nouă talpă care, prin forma ei, permite realizarea mişcării de pronaţie şi reducerea articulaţiei gleznei la o singură cuplă de rotaţie, pe cale de consecinţă o modelare structurală simplă şi un control simplificat.
Capitolul 8: „Concluzii finale, contribuţii originale şi diseminarea rezultatelor” arată contribuţiile aduse de către autor prin tema de doctorat.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
3
2. Stadiul actual al cercetărilor-realizărilor privind sistemul de păşire biped.
2.1. Structura articulară a membrelor inferioare umane.
În urma studierii literaturii de specialitate prezentate în bibliografie, lucrarea face o
scurtă prezentare a elementelor membrelor inferioare la sistemul de păşire uman şi a tipurilor de articulaţii ce asigură legătura între ele. Printre acestea se numără şi articulaţia gleznei, articulaţie ce face obiectul de studiu al acestei lucrări.
2.2.Structura mecanică a sistemelor robotizate de păşire bipedă.
Plecând de la unele criterii de modelare cât şi de la modelele teoretice prezentate în
literatura de specialitate, a căror structură modelează atât sistemul osos cât şi sistemul muscular, au fost concluzionate condiţiile de bază ce trebuie satisfăcute în vederea simplificării modelului real, ca urmare a posibilităţilor de exercitate a controlului în timpul păşirii. Din modelele studiate şi prezentate a reieşit că:
roboţii bipezi actuali, pentru a se deplasa în condiţii asemănătoare păşirii umane au cel puţin două grade de libertate în articulaţia gleznei;
condiţia ca robotul biped să poată realiza păşirea într-un spaţiu de lucru nedefinit este dată de necesitatea analizării celor trei funcţii de locomoţie – funcţia de susţinere, funcţia de păşire, respectiv funcţia de navigaţie – împreună cu funcţia de echilibrare, pentru a fi evitate căderea robotului, poziţia pasului greşit sau ciocnirea de alte obiecte.
2.3. Structura sistemului de comandă şi control.
Funcţia de bază a robotului biped este reprezentată de mişcarea acestuia în spaţiu.
Astfel, robotul primeşte un vector de intrare definit de forţele generalizate aplicate în articulaţii şi generează un vector de ieşire format din unghiurile (sau deplasările) articulaţiilor.
Variabilele principale ce intervin în conducerea robotului sunt generate sau prelucrate în blocuri şi componente specializate şi anume: blocul de acţionare, blocul senzorial (informaţional) şi blocul de procesare.
În ceea ce priveşte blocul de procesare, în general sistemele robot cuprind un număr variabil de sisteme ierarhice în funcţie de complexitatea şi gradul de „inteligenţă” al sistemului de conducere utilizat.
În literatura studiată [I3, F1, I2, K4, B4,] sistemul de conducere propriu-zis cuprinde patru nivele ierarhice şi anume.
1. Nivelul de recunoaştere (nivel înalt) - corespunde sistemelor ce au posibilitatea recunoaşterii obstacolelor în spaţiul de operare şi permit luarea unor decizii adecvate la schimbarea condiţiilor de lucru.
2. Nivelul strategic - este nivelul imediat inferior în care se produce defalcarea operaţiei preconizate în operaţii elementare.
3. Nivelul tactic – este nivelul în care se produce distribuirea mişcărilor elementare în mişcarea pe fiecare grad de libertate, deci, în cadrul său generându-se efectiv traiectoriile de mişcare.
4. Nivelul executiv (nivel inferior) – este ultimul nivel, acesta coordonând funcţionarea diverselor sisteme de acţionare asociate gradelor de libertate ale robotului. Acesta defineşte spaţiul de operare al robotului.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
4
Operatorul uman reprezintă, ca şi la alte sisteme complexe, nivelul de grad zero (nivel ierarhic superior). El comunică cu sistemul de conducere sub diverse moduri, intervenind periodic numai în cazul schimbării unor direcţii strategice de conducere, situaţii de avarie sau în cazul apariţiei unor perturbaţii externe neprevăzute.[I3]
Sistemul de comandă şi control cuprinde trei subsisteme, a căror interacţiune are ca
rezultat deplasarea robotului în spaţiul de lucru, şi anume:
subsistemul de acţionare;
subsistemul senzorial;
subsistemul de comandă şi control propriu-zis.
2.3.2. Sistemul de acţionare
Sistemele uzuale de acţionare folosesc trei surse primare de energie: electrică,
hidraulică sau pneumatică. La o sintetizare a modalităţilor de acţionare utilizate în construcţia sistemului de păşire
bipedă am concluzionat: acţionarea hidraulică prezintă un raport bun între puterea exercitată de motor şi
greutatea acestuia, însă au o rigiditate scăzută ceea ce reduce performanţele sistemului de control;
acţionarea pneumatică are o pondere mai redusă fiind utilizată cu precădere în sistemele de comandă ale dispozitivelor auxiliare (cazul imitării sistemului muscular la roboţii păşitori [Z10]);
acţionarea electrică (motoarele de curent continuu) oferă puteri medii şi mari prezentând facilităţi în asigurarea controlului şi anume: un randament bun, un timp de întârziere mic. Astfel sistemele de control sunt precise, sigure şi relativ uşor de cuplat la o conducere numerică de nivel înalt, motiv pentru care această metodă este cea mai des utilizată pentru cuplele roboţilor bipezi
Modalităţile de acţionare electrică a cuplelor roboţilor bipezi humanoizi sunt cu motoare rotative(acţionare directă sau indirectă) sau cu motoare cu deplasare liniară.
Acţionarea cu motoare de curent continuu are avantajul important că momentul creat este practic independent de poziţia şi viteza motorului, depinzând numai de câmpul înfăşurărilor şi curentul din armături. Dacă înfăşurările de câmp sunt înlocuite cu un magnet permanent atunci momentul dezvoltat este proporţional cu valoarea curentului din armături şi deci cu tensiunea aplicată.
Ca metodă de reglare a turaţiei s-e foloseşte fie reglarea turaţiei prin variaţia fluxului de excitaţie, fie reglarea turaţiei prin variaţia tensiunii U a sursei de alimentare (se poate vorbi mai cu seamă de variaţia curentului din indusul motorului, decât de variaţia tensiunii de alimentare).Controlul în tensiune al turaţiei este utilizat practic în peste 85% din sistemele de acţionare a roboţilor cu motoare de curent continuu, numai o mică parte utilizează controlul în curent (această ultimă procedură fiind avantajoasă datorită funcţiei de transfer mai simplă între cuplu şi curent).
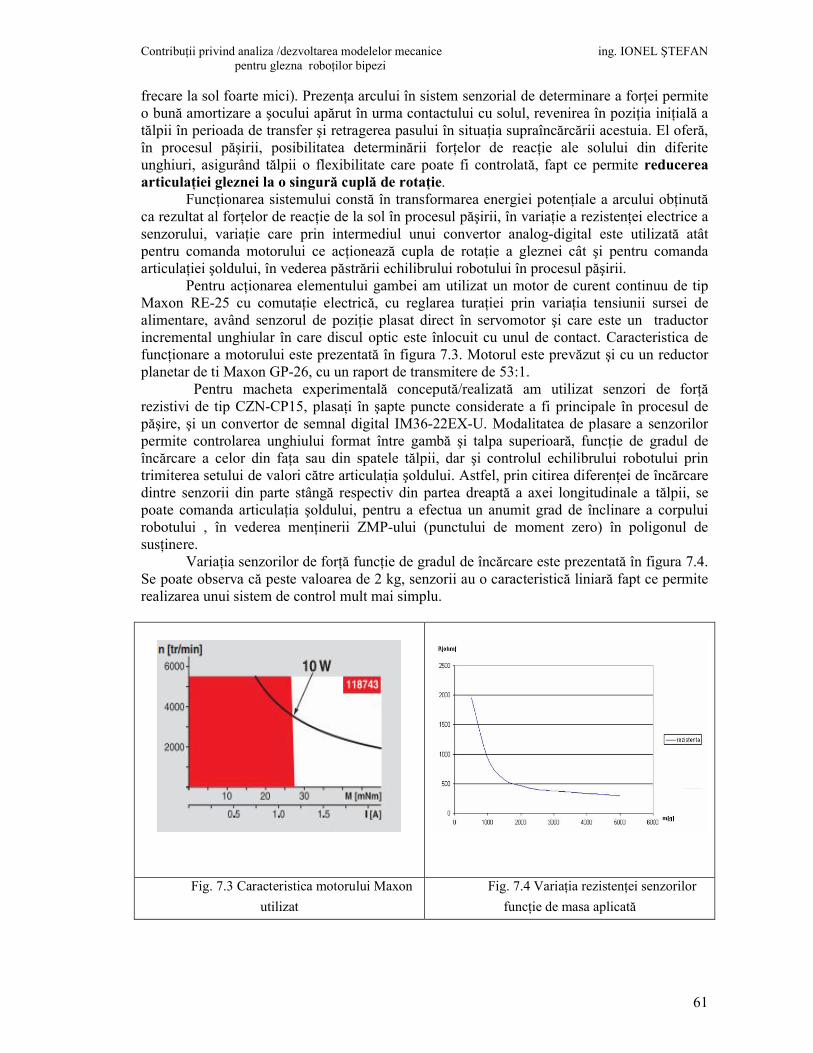
În concluzie, la macheta experimentală concepută, am optat pentru utilizarea unui motor de curent continuu de tip Maxon RE-25 cu comutaţie electrică, cu reglarea turaţiei prin variaţia tensiunii sursei de alimentare, având senzorul de poziţie plasat direct în servomotor şi care este un traductor incremental unghiular în care discul optic este înlocuit cu unul de contact. Motorul este prevăzut şi cu un reductor planetar de ti Maxon GP-26, cu un raport de transmitere de 53:1.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
5
2.3.3 Sistemul senzorial la roboţii bipezi
Varietatea tipurilor de senzori utilizaţi la roboţii bipezi mi-a permis o clasificare a
acestora după şapte criterii distincte. Totodată, au fost prezentate cele două metode de captare a forţelor apărute la interacţiunea robotului cu solul cât şi traductorii utilizaţi în acest sens. 2.4. Concluzii şi obiectivele cercetării. Analiza critică a sistemelor de păşire bipedă humanoidă, a evidenţiat următoarele aspecte:
se constată că structura osoasă a membrelor inferioare ale omului este deosebit de complexă, articulaţiile dintre os având funcţii multiple, toate acestea fiind dificil de realizat printr-o structură mecanică artificială;
Încercarea de a realiza în cadrul roboţilor bipezi mişcările gambă-talpă ale piciorului uman au condus la structuri mecanice şi mecatronice grele şi scumpe;
Toate aceste încercări şi-au propus să reproducă mişcările şi funcţiile principale ale membrelor inferioare umane şi ale articulaţiilor aferente;
Lipsesc abordările teoretice cuprinzătoare privind funcţiile cinematice şi dinamice ale structurii osoase-musculare, cu redare pentru roboţii bipezi;
Lipsesc modelările structurale, cinematice şi dinamice cuprinzătoare ale structurilor mecanice pentru articulaţia gleznei;
având în vedere diferenţa dintre modelul uman şi cel posibil realizabil, problematica modelării locomoţiei bipede rămâne mereu în atenţie.
Ca urmare obiectivul central al prezentei teze de doctorat constă din modelarea
completă structurală, cinematică şi dinamică a unor variante propuse pentru articulaţia gleznei roboţilor păşitori bipezi, cu asigurarea unui controler modern bazat pe prototiparea virtuală.
Obiectivul central este susţinut de obiective operaţionale, precum: propunerea de modele structurale cu bare articulate şi cu roţi dinţate pentru
articulaţia gleznei, adecvate efectuării mişcărilor de flexie, pronaţie şi pivotare; modelarea cinematică a variantelor structurale propuse, cu prezentarea funcţiilor
cinematice şi simularea lor numerică; modelarea dinamică a soluţiilor geometrico-cinematice propuse pentru mişcările
de flexie şi pronaţie, cu prezentarea funcţiilor dinamice şi simulare numerică; prezentare problemelor de comandă şi control a sistemului de păşire bipedă, ca
sistem mecatronic; conceperea, realizarea şi testarea unui model experimental pentru structura gambă-
talpă a unui robot biped; prototiparea virtuală a sistemului propus
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
6
3. SINTEZĂ STRUCTURALĂ A ARTICULAŢIEI GLEZNEI
3.1. Axele şi mişcările de rotaţie ale aparatului locomotor
În vederea unei abordări unitare a studiilor referitoare la locomoţia bipedă în lucrările
de specialitate consacrate roboţilor bipezi a fost adoptată, în mod convenţional, o poziţie de bază a corpului uman, poziţie pe care o vom utiliza şi în lucrarea de faţă, numită poziţie anatomică, aşa cum se poate vedea în figura 3.1 [B4].
Fig. 3.1. Poziţia anatomică a corpului uman [B4].
Astfel mişcările umane sunt studiate prin raportarea la un sistem de coordonate xyz
obţinut prin intersecţia a trei plane şi anume: planul sagital, planul transversal şi planul frontal. Planul sagital (xz) este dispus vertical şi antero-posterior împărţind corpul uman într-o parte dreaptă şi una stângă; planul transversal (xy) este dispus orizontal şi împarte corpul într-o parte superioară şi una inferioară; planul frontal (yz) este dispus paralel cu fruntea şi împarte corpul într-o parte posterioară şi una anterioară. Punctul de incidenţă al acestor plane este considerat în centru de greutate al robotului biped, iar în funcţie de aceste plane sunt definite mişcările principale ale aparatului locomotor uman:
flexia – mişcarea de rotaţie în jurul axei y, având axul în planul frontal şi perpendicular pe planul sagital, prin care două segmente se apropie între ele (se mai numeşte şi flexie plantară);
extensia – mişcare de sens contrar celei de flexie (se mai numeşte şi flexie dorsală);
aducţia – mişcarea de rotaţie în jurul axei x, având axul în planul sagital şi perpendicular pe planul frontal, prin care un segment se apropie lateral de acest plan;
abducţia – mişcarea de sens contrar celei de aducţie, rotaţie internă – mişcare de rotaţie în jurul axei z având axul suprapus cu axul
corpului, această mişcare fiind de pivotare. rotaţie externă – mişcare de sens contrar celei de rotaţie internă; pronaţia şi supinaţia – mişcări complexe formate din succesiuni de mişcări
elementare. Acest sistem s-a impus datorită faptului că sistemul locomotor uman are o „structură
deformabilă cu complexitate ridicată privind geometria, proprietăţile elastice şi sarcinile” [R5].
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
7
Alături de aceste plane, pentru a studia locomoţia bipedă, este necesară şi o bază de susţinere, delimitată de marginile poligonului alcătuit din suprafaţa de contact a corpului cu solul [P7]. În acest sens în 1969, Miomir Vukobratovik introduce conceptul de „Zero Moment Point (ZMP)” , concept care creează un criteriu unic ce urmează a fi aplicat la determinarea stabilităţii locomoţiei bipede. El este punctul de pe sol la care momentul forţelor de inerţie şi de gravitaţie nu au componente de-a lungul axelor orizontale. Astfel ZMP devine indispensabil în stabilirea feedback-lui privind dinamica robotului funcţie de forţele de reacţie ale solului[V2].
În acest context, biomecanica a demonstrat că valorile mişcărilor elementare ale aparatului locomotor uman sunt strâns legate între ele [I1] şi anume:
la nivelul articulaţiei coxo-femurale: amplitudinea totală de flexie-extensie depinde de poziţia în care se găseşte
genunchiul; dacă acesta este extins, flexia copsei este de aproximativ 90º, iar dacă este flectat, flexia coapsei este de aproximativ 130º;
dacă coapsa este extinsă, amplitudinea maximă a abducţiei este de 60º, iar dacă se găseşte în flexie, abducţia poate atinge 70º;
amplitudinea mişcării de rotaţie în afară este de 15º, iar a rotaţiei în interior este de 35º;
la nivelul articulaţiei genunchiului mişcările principale sunt de flexie şi extensie, iar pentru o anumită poziţie a gambei sunt posibile şi mişcări de rotaţie internă/externă cu amplitudine mică;
la nivelul articulaţiei gleznei întâlnim un complex de articulaţii independente anatomic, dar solidare din punct de vedere funcţional, care execută mai multe mişcări şi anume: flexia dorsală, mişcare prin care piciorul se sprijină pe călcâi având vârful
piciorului ridicat de pe sol; flexia plantară (extensie), mişcare prin care piciorul se sprijină dor pe vârf; aducţia, mişcare prin care vârful haluceului se apropie de planul medio-sagital
al corpului; abducţia, mişcare prin care vârful haluceului se depărtează de planul medio-
sagital al corpului; supinaţia, mişcarea prin care marginea medială a piciorului este ridicată de pe
pământ, astfel încât faţa plantară priveşte spre planul medio-sagital al corpului; pronaţia, mişcarea opusă supinaţiei;
la nivelul articulaţiilor metatarso-falangiene întâlnim un singur grad de mobilitate care permite mişcări de flexie - extensie.
Toate aceste mişcări, pentru a fi modelate, sunt raportate la un sistem de referinţă cu originea în centrul de greutate al robotului.
3.2. Modelarea articulaţiei gambă–picior
Pentru început, cercetările în domeniul roboţilor păşitori bipezi au pus accentul pe reprezentările structurale, pe reproducerea mişcărilor şi a mecanismelor care pot substitui modelul natural de păşire.
3.2.1. Modelarea articulaţiei gambei prin bare articulate.
Plecând de la cea mai simplă modelare structurală a gleznei – o cuplă de rotaţie în jurul axei transversale y care să permită rotaţia de flexie/extensia - a fost calculată mobilitatea pentru diferite sisteme concepute, prezentate în figurile de mai jos:
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
8
a) b) c) d)
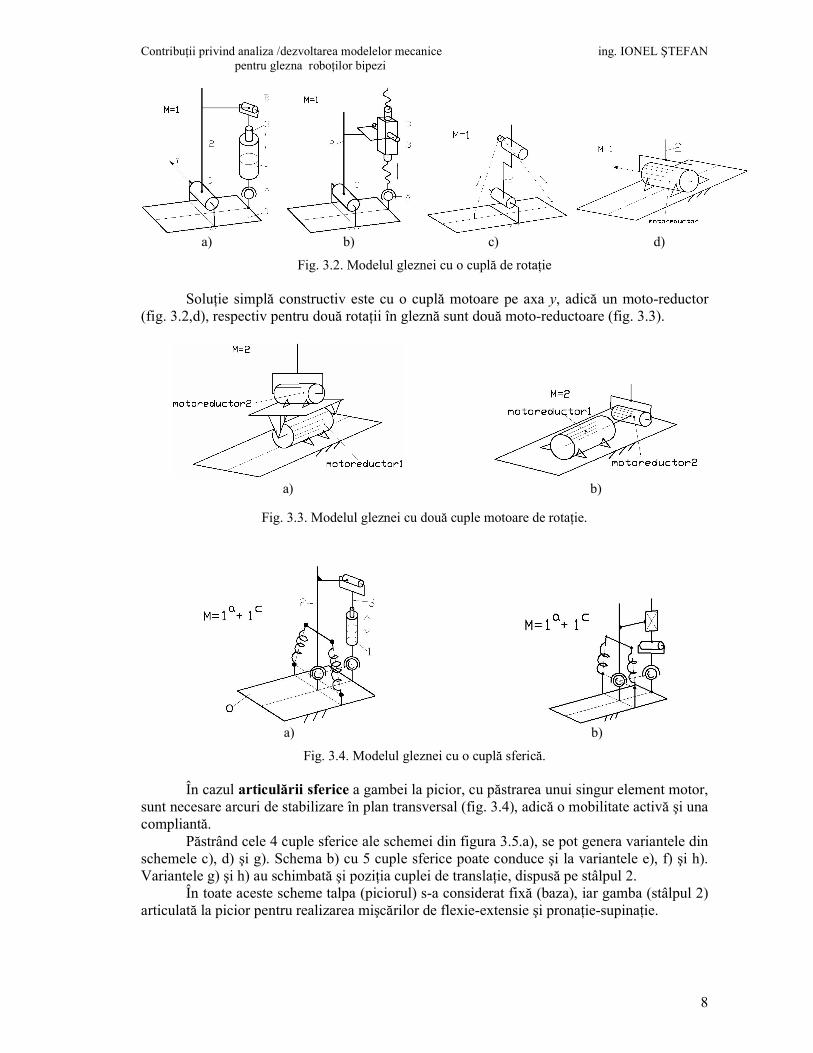
Fig. 3.2. Modelul gleznei cu o cuplă de rotaţie
Soluţie simplă constructiv este cu o cuplă motoare pe axa y, adică un moto-reductor (fig. 3.2,d), respectiv pentru două rotaţii în gleznă sunt două moto-reductoare (fig. 3.3).
a) b)
Fig. 3.3. Modelul gleznei cu două cuple motoare de rotaţie.
a) b)
Fig. 3.4. Modelul gleznei cu o cuplă sferică.
În cazul articulării sferice a gambei la picior, cu păstrarea unui singur element motor, sunt necesare arcuri de stabilizare în plan transversal (fig. 3.4), adică o mobilitate activă şi una compliantă.
Păstrând cele 4 cuple sferice ale schemei din figura 3.5.a), se pot genera variantele din schemele c), d) şi g). Schema b) cu 5 cuple sferice poate conduce şi la variantele e), f) şi h). Variantele g) şi h) au schimbată şi poziţia cuplei de translaţie, dispusă pe stâlpul 2.
În toate aceste scheme talpa (piciorul) s-a considerat fixă (baza), iar gamba (stâlpul 2) articulată la picior pentru realizarea mişcărilor de flexie-extensie şi pronaţie-supinaţie.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
9
a) b) c) d)
e) f) g) h)
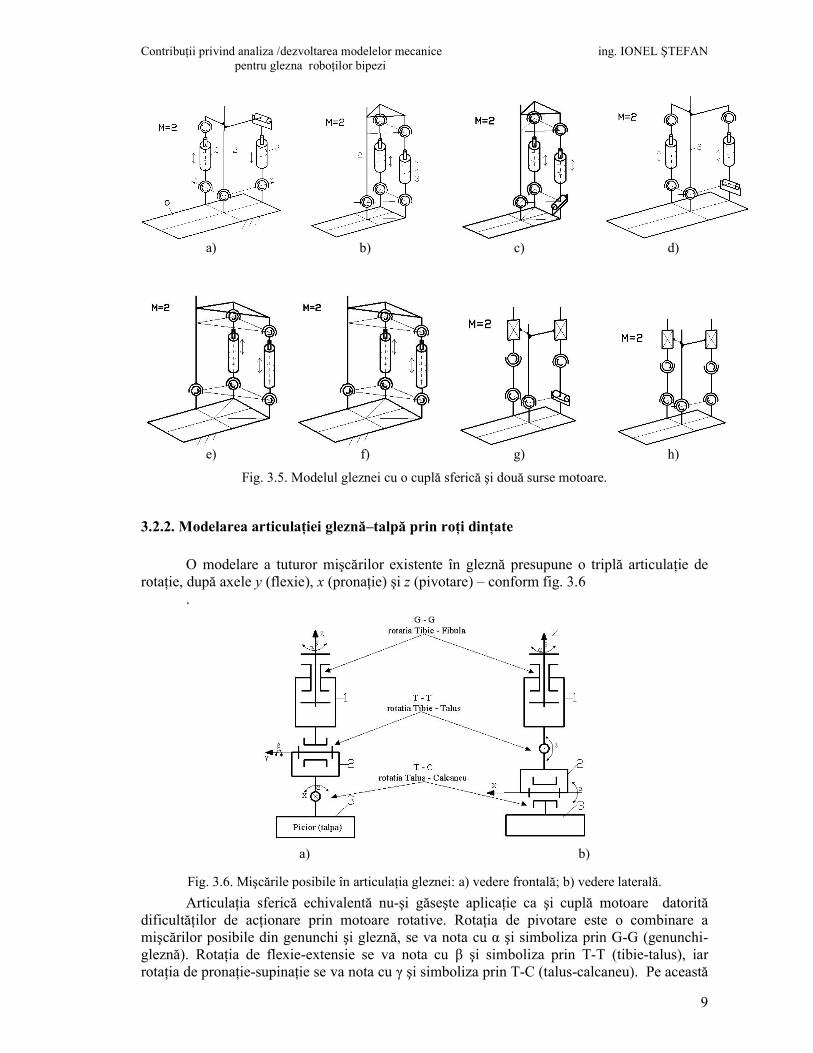
Fig. 3.5. Modelul gleznei cu o cuplă sferică şi două surse motoare.
3.2.2. Modelarea articulaţiei gleznă–talpă prin roţi dinţate
O modelare a tuturor mişcărilor existente în gleznă presupune o triplă articulaţie de
rotaţie, după axele y (flexie), x (pronaţie) şi z (pivotare) – conform fig. 3.6 .
a) b)
Fig. 3.6. Mişcările posibile în articulaţia gleznei: a) vedere frontală; b) vedere laterală.
Articulaţia sferică echivalentă nu-şi găseşte aplicaţie ca şi cuplă motoare datorită dificultăţilor de acţionare prin motoare rotative. Rotaţia de pivotare este o combinare a mişcărilor posibile din genunchi şi gleznă, se va nota cu α şi simboliza prin G-G (genunchi-gleznă). Rotaţia de flexie-extensie se va nota cu β şi simboliza prin T-T (tibie-talus), iar rotaţia de pronaţie-supinaţie se va nota cu γ şi simboliza prin T-C (talus-calcaneu). Pe această
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
10
bază se vor sintetiza-dezvolta structuri cu roţi dinţate care să realizeze parţial sau total cele trei rotaţii.
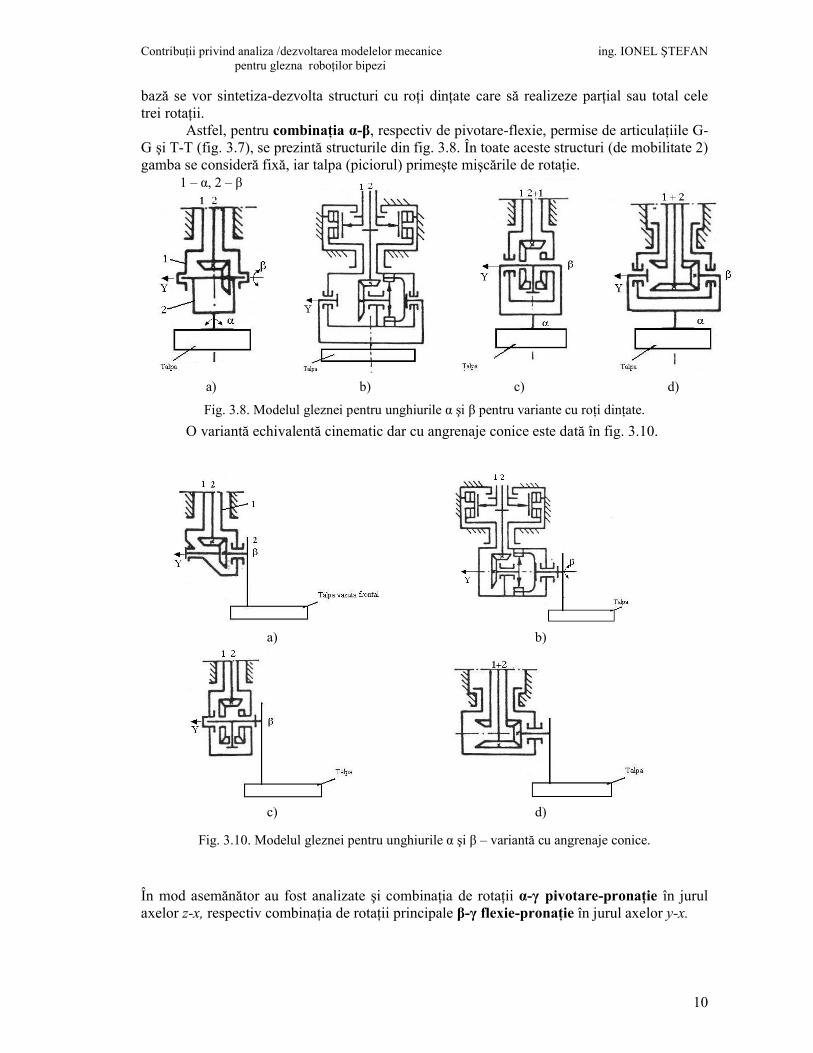
Astfel, pentru combinaţia α-β, respectiv de pivotare-flexie, permise de articulaţiile G-G şi T-T (fig. 3.7), se prezintă structurile din fig. 3.8. În toate aceste structuri (de mobilitate 2) gamba se consideră fixă, iar talpa (piciorul) primeşte mişcările de rotaţie.
1 – α, 2 – β
a) b) c) d)
Fig. 3.8. Modelul gleznei pentru unghiurile α şi β pentru variante cu roţi dinţate.
O variantă echivalentă cinematic dar cu angrenaje conice este dată în fig. 3.10.
a) b)
c) d)
Fig. 3.10. Modelul gleznei pentru unghiurile α şi β – variantă cu angrenaje conice.
În mod asemănător au fost analizate şi combinaţia de rotaţii α-γ pivotare-pronaţie în jurul axelor z-x, respectiv combinaţia de rotaţii principale β-γ flexie-pronaţie în jurul axelor y-x.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
11
a) b)
c) d)
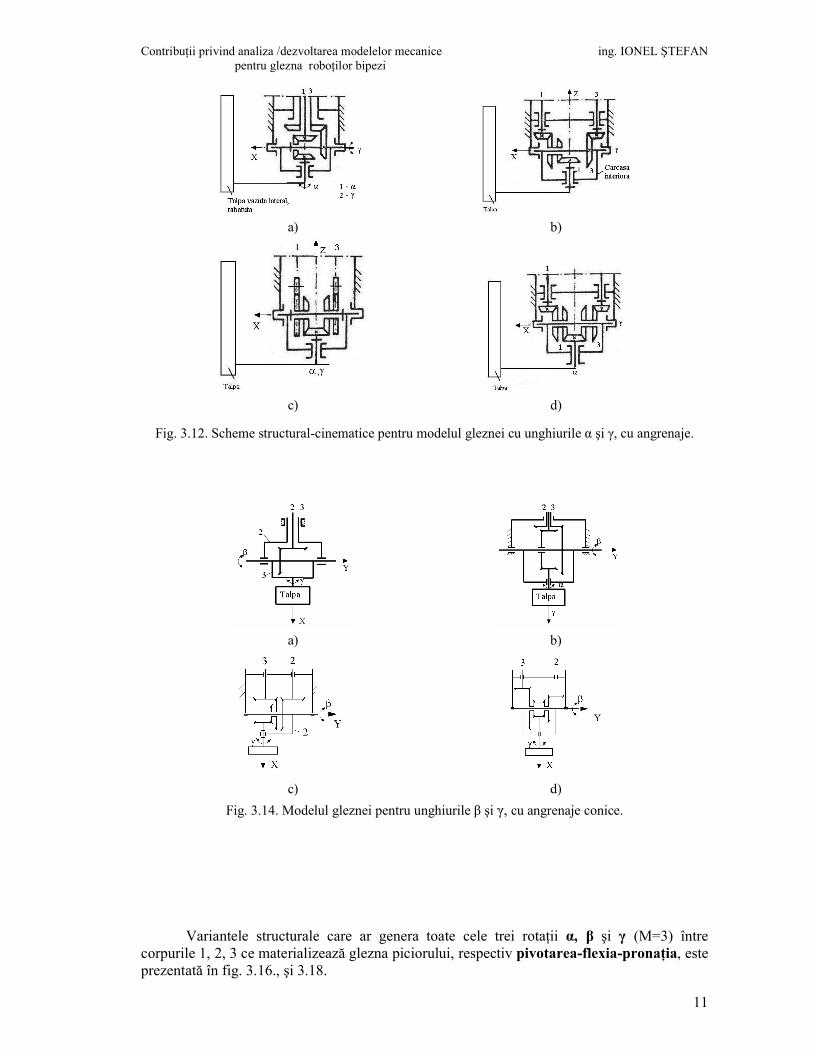
Fig. 3.12. Scheme structural-cinematice pentru modelul gleznei cu unghiurile α şi γ, cu angrenaje.
a) b)
c) d)
Fig. 3.14. Modelul gleznei pentru unghiurile β şi γ, cu angrenaje conice.
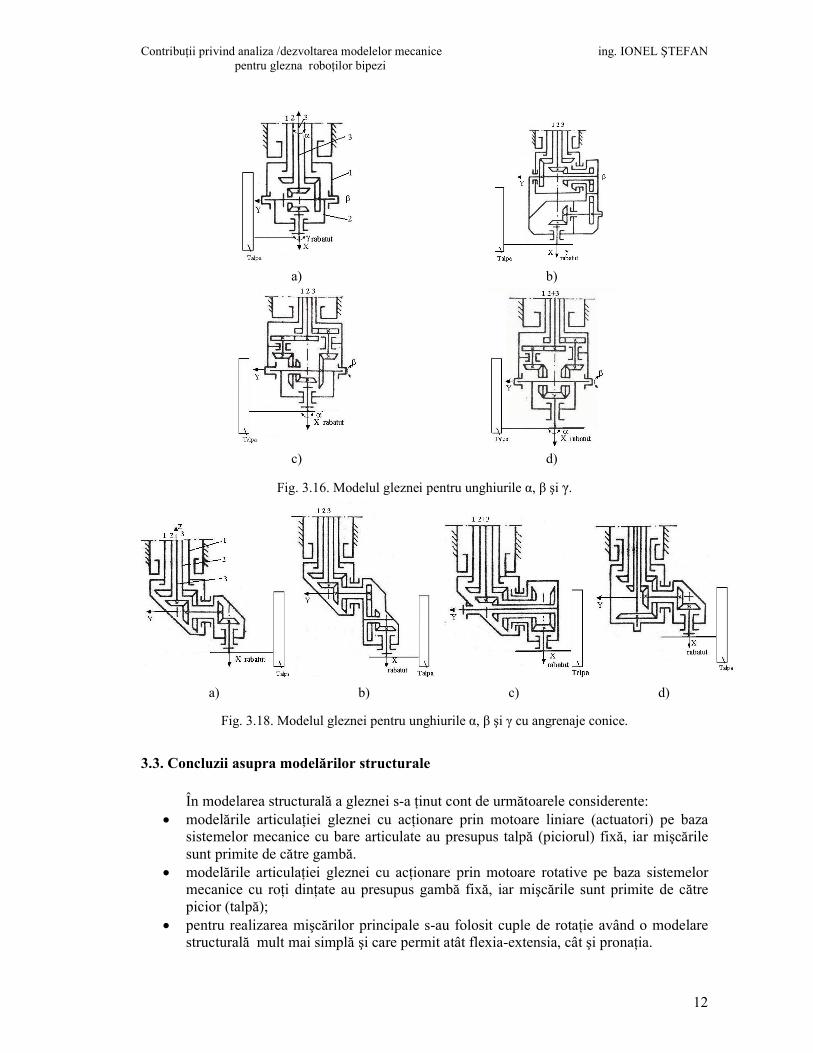
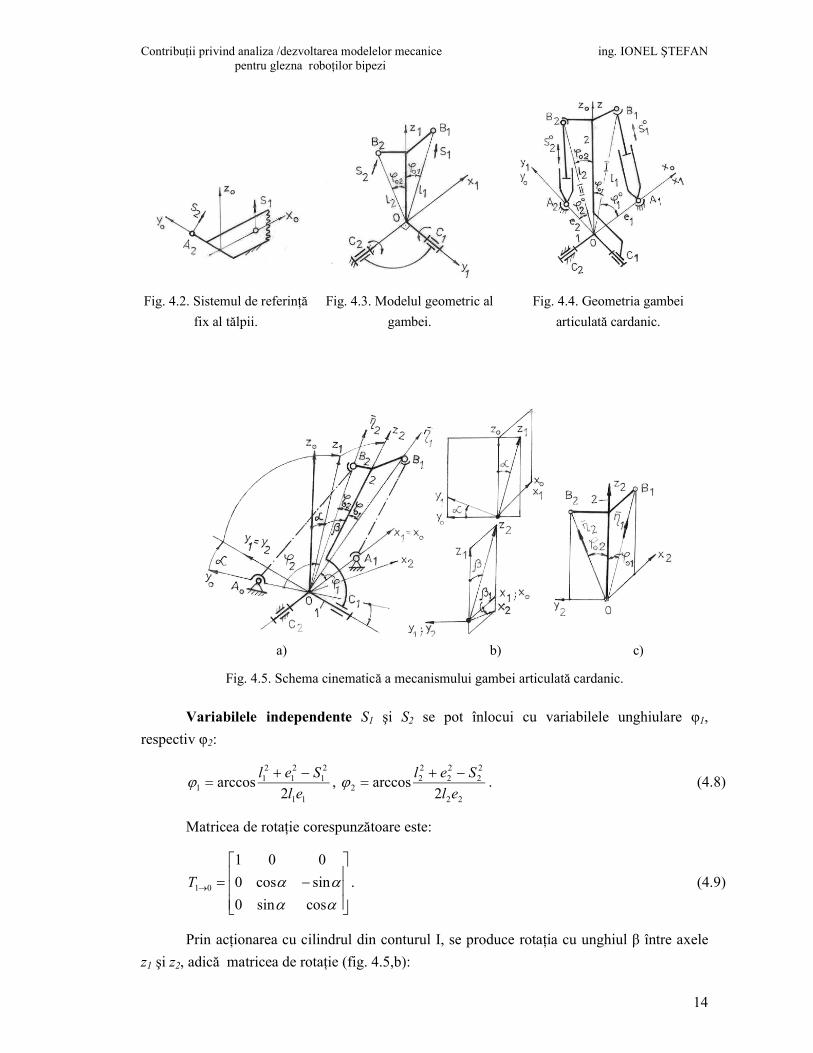
Variantele structurale care ar genera toate cele trei rotaţii α, β şi γ (M=3) între corpurile 1, 2, 3 ce materializează glezna piciorului, respectiv pivotarea-flexia-pronaţia, este prezentată în fig. 3.16., şi 3.18.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
12
a) b)
c) d)
Fig. 3.16. Modelul gleznei pentru unghiurile α, β şi γ.
a) b) c) d)
Fig. 3.18. Modelul gleznei pentru unghiurile α, β şi γ cu angrenaje conice.
3.3. Concluzii asupra modelărilor structurale
În modelarea structurală a gleznei s-a ţinut cont de următoarele considerente:
modelările articulaţiei gleznei cu acţionare prin motoare liniare (actuatori) pe baza sistemelor mecanice cu bare articulate au presupus talpă (piciorul) fixă, iar mişcările sunt primite de către gambă.
modelările articulaţiei gleznei cu acţionare prin motoare rotative pe baza sistemelor mecanice cu roţi dinţate au presupus gambă fixă, iar mişcările sunt primite de către picior (talpă);
pentru realizarea mişcărilor principale s-au folosit cuple de rotaţie având o modelare structurală mult mai simplă şi care permit atât flexia-extensia, cât şi pronaţia.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
13
Plecând de la aceste considerente şi analizând modelările structurale ce au fost făcute, putem trage următoarele concluzii:
s-a demonstrat că modelarea tuturor mişcărilor existente în gleznă presupune o triplă articulaţie de rotaţie după axele x (pronaţie), y (flexie), z (pivotare), deci o cuplă sferică;
articulaţia sferică echivalentă nu-şi găseşte însă aplicaţie în cazul cuplelor motoare datorită dificultăţilor de acţionare;
în cadrul structurilor cu bare articulate este dificilă modelarea celor trei mişcări, flexia-pronaţia-pivotarea, structurile cu roţi dinţate fiind mai promiţătoare în acest sens, deşi dificil de implementat datorită complexităţii constructive;
având în vedere că structura membrelor inferioare, inclusiv a articulaţiilor acestora este una deosebit de complexă, din punct de vedere mecanic nu se pot reproduce fidel mişcările pe care le execută sistemul osos uman, drept pentru care e necesară simplificarea modelului geometric mecanic;
ca urmare s-e vor realiza cu precădere mişcările executate în planul sagital şi frontal.
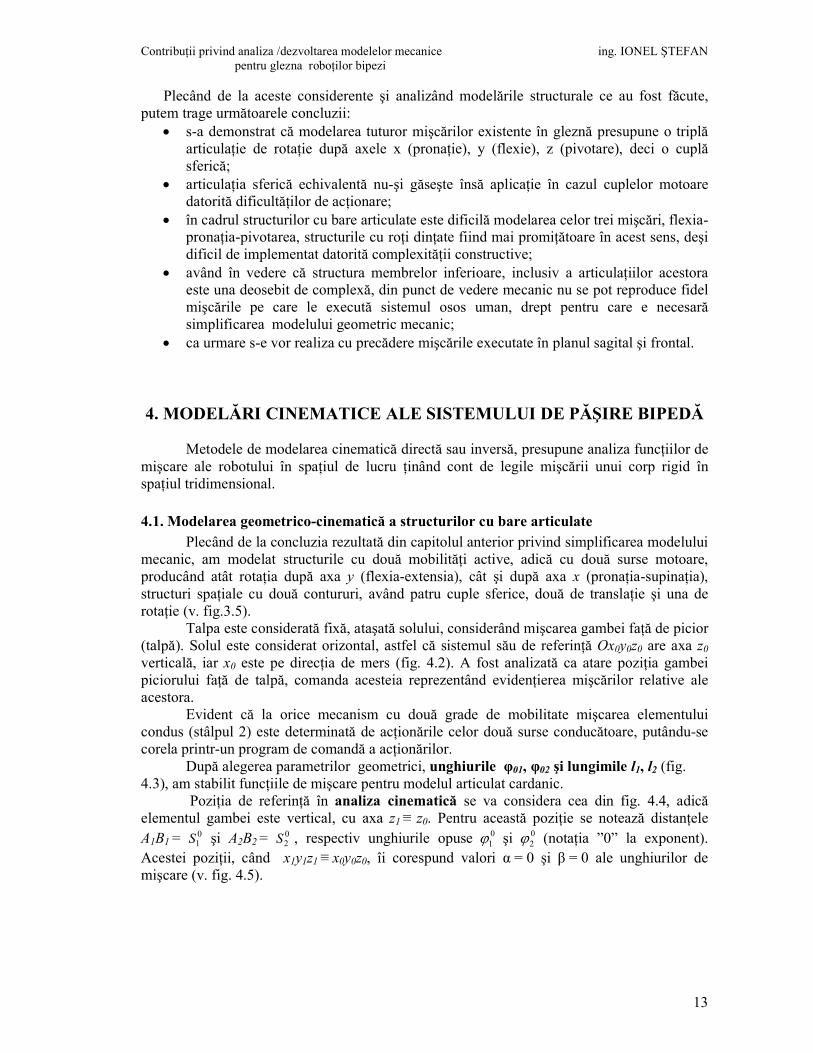
4. MODELĂRI CINEMATICE ALE SISTEMULUI DE PĂŞIRE BIPEDĂ Metodele de modelarea cinematică directă sau inversă, presupune analiza funcţiilor de
mişcare ale robotului în spaţiul de lucru ţinând cont de legile mişcării unui corp rigid în spaţiul tridimensional.
4.1. Modelarea geometrico-cinematică a structurilor cu bare articulate
Plecând de la concluzia rezultată din capitolul anterior privind simplificarea modelului mecanic, am modelat structurile cu două mobilităţi active, adică cu două surse motoare, producând atât rotaţia după axa y (flexia-extensia), cât şi după axa x (pronaţia-supinaţia), structuri spaţiale cu două contururi, având patru cuple sferice, două de translaţie şi una de rotaţie (v. fig.3.5).
Talpa este considerată fixă, ataşată solului, considerând mişcarea gambei faţă de picior (talpă). Solul este considerat orizontal, astfel că sistemul său de referinţă Ox0y0z0 are axa z0 verticală, iar x0 este pe direcţia de mers (fig. 4.2). A fost analizată ca atare poziţia gambei piciorului faţă de talpă, comanda acesteia reprezentând evidenţierea mişcărilor relative ale acestora.
Evident că la orice mecanism cu două grade de mobilitate mişcarea elementului condus (stâlpul 2) este determinată de acţionările celor două surse conducătoare, putându-se corela printr-un program de comandă a acţionărilor.
După alegerea parametrilor geometrici, unghiurile φ01, φ02 şi lungimile l1, l2 (fig. 4.3), am stabilit funcţiile de mişcare pentru modelul articulat cardanic.
Poziţia de referinţă în analiza cinematică se va considera cea din fig. 4.4, adică elementul gambei este vertical, cu axa z1 ≡ z0. Pentru această poziţie se notează distanţele
A1B1 = 01S şi A2B2 = 0
2S , respectiv unghiurile opuse 01j şi 0
2j (notaţia ”0” la exponent).
Acestei poziţii, când x1y1z1 ≡ x0y0z0, îi corespund valori α = 0 şi β = 0 ale unghiurilor de mişcare (v. fig. 4.5).
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
14
Fig. 4.2. Sistemul de referinţă
fix al tălpii.
Fig. 4.3. Modelul geometric al
gambei.
Fig. 4.4. Geometria gambei
articulată cardanic.
a) b) c)
Fig. 4.5. Schema cinematică a mecanismului gambei articulată cardanic.
Variabilele independente S1 şi S2 se pot înlocui cu variabilele unghiulare φ1,
respectiv φ2:
11
21
21
21
12
arccosel
Sel -=j ,
22
22
22
22
22
arccosel
Sel -=j . (4.8)
Matricea de rotaţie corespunzătoare este:
-=
aa
aa
cossin0
sincos0
001
01T . (4.9)
Prin acţionarea cu cilindrul din conturul I, se produce rotaţia cu unghiul β între axele
z1 şi z2, adică matricea de rotaţie (fig. 4.5,b):
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
15
-
=
bb
bb
cos0sin
010
sin0cos
01T . (4.10)
Variabilele dependente, mărimile căutate, sunt astfel unghiurile α şi β, rotaţia cu α corespunzând rotaţiei braţului OC1 (deci balansarea gambei) în jurul axei OS2.
Matricea de trecere din sistemul gambei în al tălpii:
baaba-
ba-aba
bb
=
bb
bb
aa
a-a==
coscossinsincos
cossincossinsin
sin0cos
cos0sin
010
sin0cos
cossin0
sincos0
001
120102 TTT . (4.11)
Pentru determinarea variabilelor independente, se exprimă din geometria
mecanismului versorii direcţiilor 1OB şi 2OB în sistemul bazei x0y0z0.
Versorii direcţiilor 1OB şi 2OB au următoarele expresii în sistemul gambei (fig.
4.5,c):
==
01
01
)2(11
cos
0
sin
222
j
j
zyx
OB ,
==
02
02)2(22
cos
sin
0
222
j
jzyx
OB . (4.12)
şi respectiv în sistemul bazei:
-
=
-
-
===
bja
bja
bj
bajbaj
bajbaj
bjbj
01
01
01
0101
0101
0101
)2(102)0(11
coscos
cossin
sin
coscoscossincossin
cossincossinsinsin
sincoscossin
000
s
Tzyx
,
=
-===
0
0
0
000
2
2
2
0202
0202
02
)2(202)0(22
cos
cos
cos
coscoscossinsin
cossincoscossin
sincos
z
y
x
zyx T
bajaj
bajaj
bj
. (4.13)
Necunoscutele căutate sunt unghiurile α şi β. Se identifică astfel cosinusurilor directoare din expresiile η1(0) şi η2(0), cu proiecţiile pe
x0 (adică cos φ1), respectiv pe y0 (adică cos φ2) – (v. fig. 4.5,a).
Se constată că unghiul β (4.14) depinde numai de variabila φ1 din conturul 1 (această mişcare fiind decuplată), reprezentând rotaţia în planul sagital (x0z0), mişcarea principală dintre gambă şi talpă, folosită la păşire şi adaptare pe teren.
Variabila α (4.16) depinde atât de unghiul φ2, cât şi de β – adică de φ1 (având deci caracter de mişcare cuplată), reprezentând rotaţia de balansare, folosită în special la adaptarea pe teren. Dacă unghiul α = 0, atunci:
a) acţionare numai în planul sagital (longitudinal), S1/φ1 → β(φ1); b) acţionare numai în planul transversal S2/φ2 → α(φ2); c) acţionare cuplată, cu S1/φ1 parametru şi S2 → α(φ1, φ2).
Domeniu raţional pentru α = +50º…–15º şi β = +35º…–25º, astfel că simularea se poate efectua şi într-o cinematică inversă, adică se pleacă de la domeniile de variaţie ale unghiurilor α şi β şi se văd valorile de acţionare S1/φ1, respectiv S2/φ2.
4.1.2. Rezultatele modelării cinematice pentru modelul cardanic
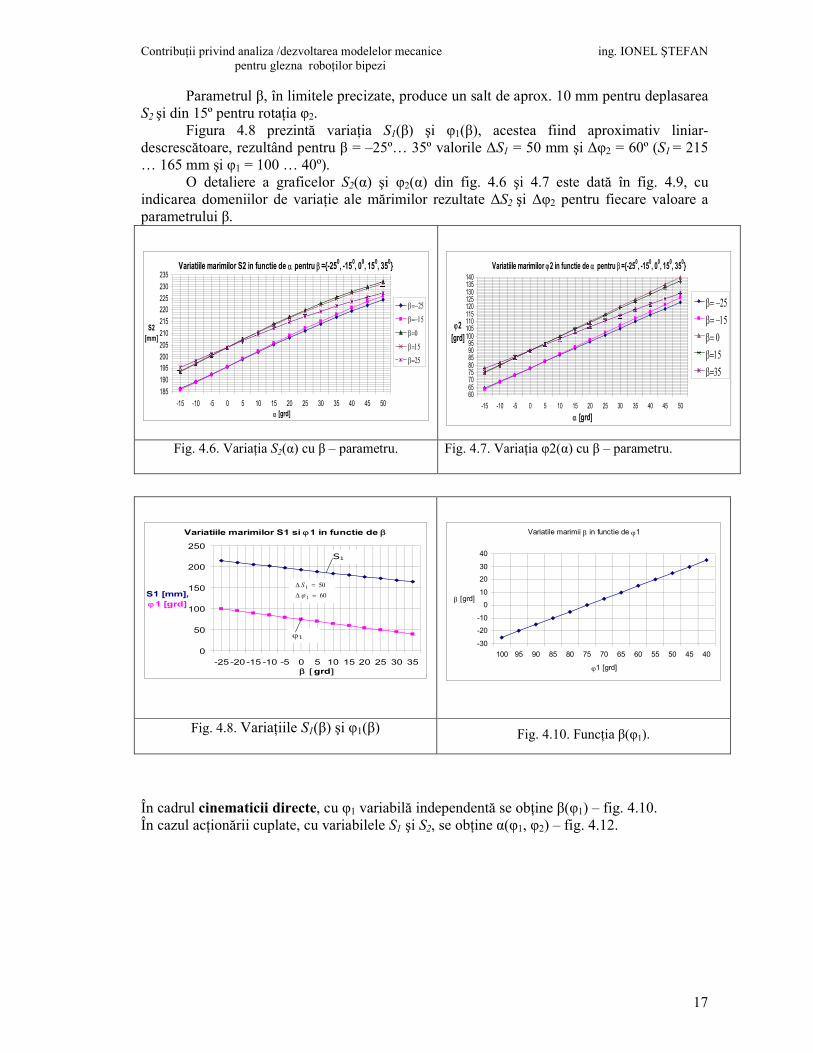
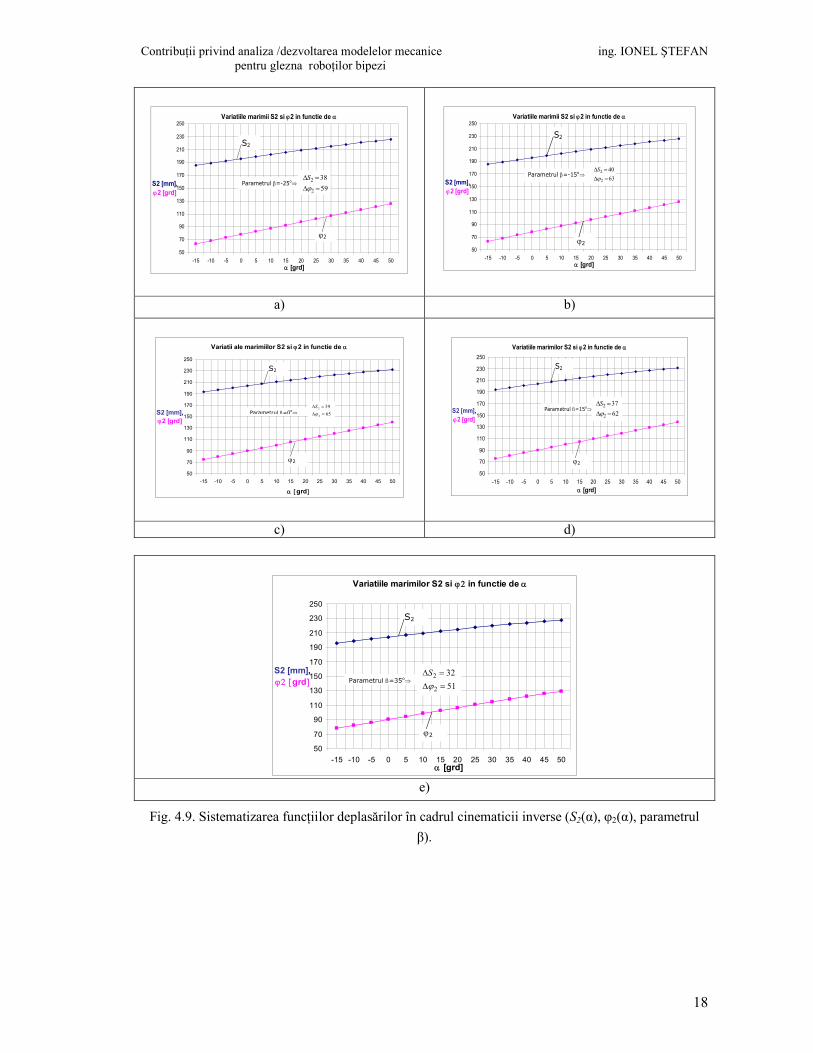
Pe baza programului conceput, primele simulări cinematice corespund cinematicii inverse. Astfel, în fig. 4.6 şi 4.7 se prezintă funcţiile S2(α) şi φ2(α) pentru parametrul β = –25º, –15º, 0º, +15º, +35º.
Se constată o creştere aproximativ liniară a deplasării S2 şi φ2 cu unghiul α, pentru α = –15…50º rezultând ΔS2 = 185 … 230 mm şi φ2 = 64º … 140º.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
17
Parametrul β, în limitele precizate, produce un salt de aprox. 10 mm pentru deplasarea S2 şi din 15º pentru rotaţia φ2.
Figura 4.8 prezintă variaţia S1(β) şi φ1(β), acestea fiind aproximativ liniar-descrescătoare, rezultând pentru β = –25º… 35º valorile ΔS1 = 50 mm şi Δφ2 = 60º (S1 = 215 … 165 mm şi φ1 = 100 … 40º).
O detaliere a graficelor S2(α) şi φ2(α) din fig. 4.6 şi 4.7 este dată în fig. 4.9, cu indicarea domeniilor de variaţie ale mărimilor rezultate ΔS2 şi Δφ2 pentru fiecare valoare a parametrului β.
Variatiile marimilor S2 in functie de a pentru b ={-250, -15
0, 0
0, 15
0, 35
0}
185
190
195
200
205
210
215
220
225
230
235
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a [grd]
S2
[mm]
b=-25
b=-15
b=0
b=15
b=25
Variatiile marimilor j2 in functie de a pentru b={-250, -15
0, 0
0, 15
0, 35
0}
6065707580859095
100105110115120125130135140
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a [grd]
j2
[grd]
b= -25
b= -15
b= 0
b=15
b=35
Fig. 4.6. Variaţia S2(α) cu β – parametru. Fig. 4.7. Variaţia φ2(α) cu β – parametru.
Variatiile marimilor S1 si j1 in functie de b
0
50
100
150
200
250
-25-20-15 -10 -5 0 5 10 15 20 25 30 35b grd
S1 [mm],
j1 [grd]60
50
1
1
=
=
j
S
S1
j1
Variatile marimii b in functie de j1
-30
-20
-10
0
10
20
30
40
100 95 90 85 80 75 70 65 60 55 50 45 40
j1 [grd]
b [grd]
Fig. 4.8. Variaţiile S1(β) şi φ1(β) Fig. 4.10. Funcţia β(φ1).
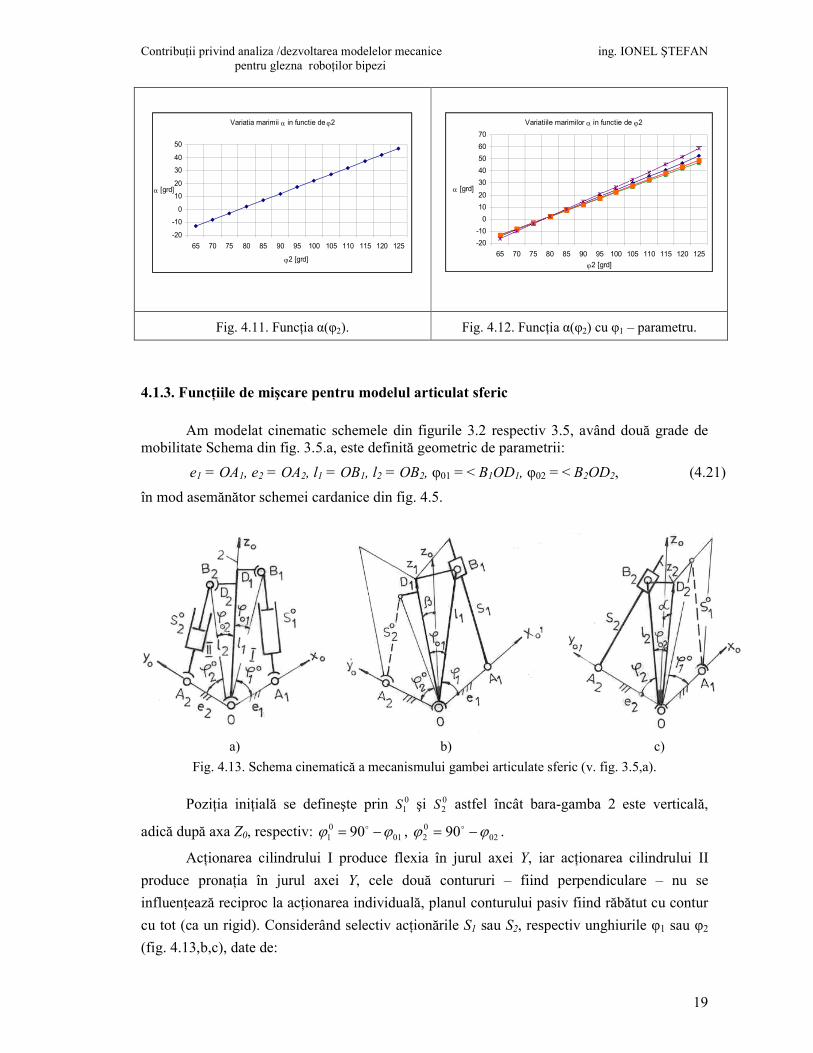
În cadrul cinematicii directe, cu φ1 variabilă independentă se obţine β(φ1) – fig. 4.10. În cazul acţionării cuplate, cu variabilele S1 şi S2, se obţine α(φ1, φ2) – fig. 4.12.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
18
Variatiile marimii S2 si j2 in functie de a
50
70
90
110
130
150
170
190
210
230
250
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a [grd]
S2 [mm],
j2 [grd]
S2
59
38
2
2
=
=
j
S
j2
Parametrul b=-25o
Variatiile marimii S2 si j2 in functie de a
50
70
90
110
130
150
170
190
210
230
250
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a [grd]
S2 [mm],
j2 [grd]
63
40
2
2
=
=
j
SParametrul b=-15o
S2
j2
a) b)
Variatii ale marimiilor S2 si j2 in functie de a
50
70
90
110
130
150
170
190
210
230
250
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a grd
S2 [mm],
j2 [grd]
S2
j2
Parametrul b=0o 65
39
2
2
=
=
j
S
Variatiile marimilor S2 si j2 in functie de a
50
70
90
110
130
150
170
190
210
230
250
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50
a [grd]
S2 [mm],
j2 [grd]62
37
2
2
=
=
j
S Parametrul b=15o
S2
j2
c) d)
Variatiile marimilor S2 si j2 in functie de a
50
70
90
110
130
150
170
190
210
230
250
-15 -10 -5 0 5 10 15 20 25 30 35 40 45 50a [grd]
S2 [mm],
j2 grd 51
32
2
2
=
=
j
S Parametrul b=35o
S2
j2
e)
Fig. 4.9. Sistematizarea funcţiilor deplasărilor în cadrul cinematicii inverse (S2(α), φ2(α), parametrul
β).
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
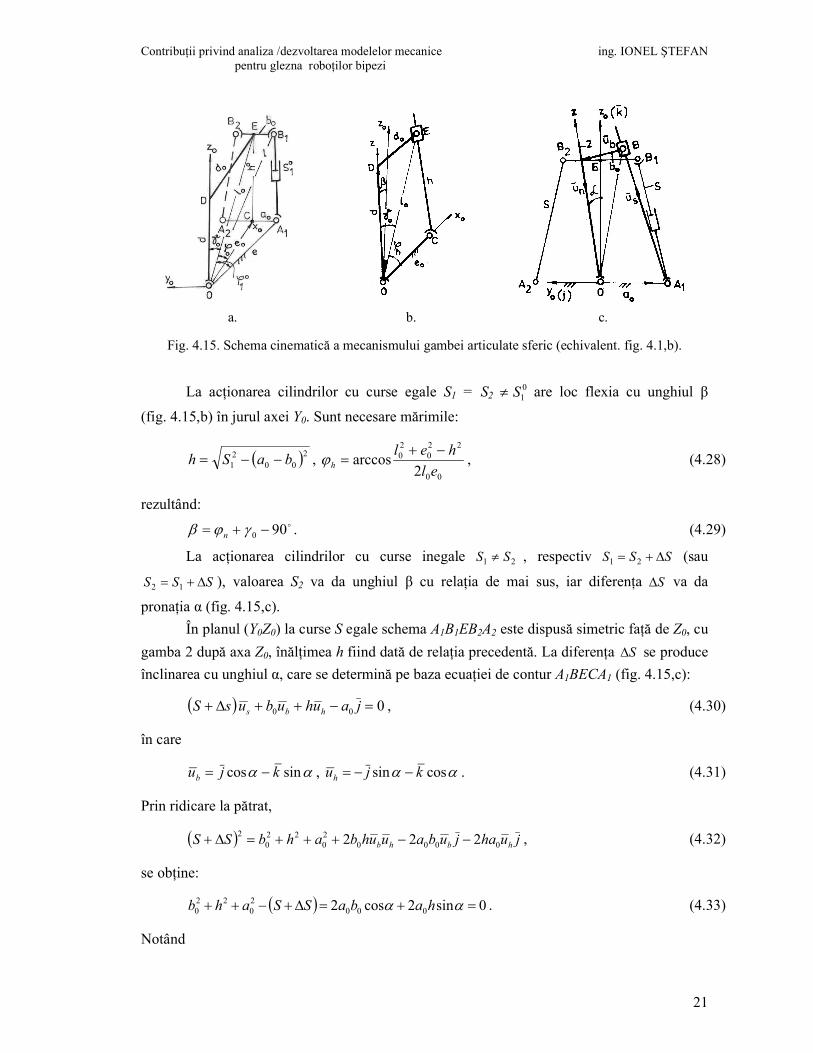
La acţionarea cilindrilor cu curse egale S1 = S2 01S are loc flexia cu unghiul β
(fig. 4.15,b) în jurul axei Y0. Sunt necesare mărimile:
2
002
1 baSh --= , 00
220
20
2arccos
el
helh
-=j , (4.28)
rezultând: 900 -= jb n . (4.29)
La acţionarea cilindrilor cu curse inegale 21 SS , respectiv SSS = 21 (sau
SSS = 12 ), valoarea S2 va da unghiul β cu relaţia de mai sus, iar diferenţa S va da
pronaţia α (fig. 4.15,c).
În planul (Y0Z0) la curse S egale schema A1B1EB2A2 este dispusă simetric faţă de Z0, cu
gamba 2 după axa Z0, înălţimea h fiind dată de relaţia precedentă. La diferenţa S se produce
înclinarea cu unghiul α, care se determină pe baza ecuaţiei de contur A1BECA1 (fig. 4.15,c):
0 00 =- jauhubusS hbs , (4.30)
în care
aa sincos kjub -= , aa cossin kjuh --= . (4.31)
Prin ridicare la pătrat,
juhajubauuhbahbSS hbhb 000020
220
2222 --= , (4.32)
se obţine:
0sin2cos2 00020
220 ==- aa habaSSahb . (4.33)
Notând
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
22
haA 02= , 002 baB -= , 2220
20 SShbaC -= , (4.34)
ecuaţia devine
0cossin = CBA aa , (4.35)
având soluţia
CB
CBAA
-
-=
222
2tg
a. (4.36)
Celelalte scheme din fig. 3.5 trebuie tratate exclusiv ca mecanisme spaţiale cu două grade de mobilitate, respectiv două acţionări concomitente.
4.1.4. Suportul pentru calcule numerice
Pe baza relaţiilor (4.21)...(4.36), cu parametrii geometrici precizaţi, ale căror valori
urmează a fi indicate, se calculează funcţiile cinematice ale gambei fără de talpă α(φ1/S1), α(φ2/S2) şi β(φ1/S1).
Deoarece în cap. 5, în cadrul calculelor statico-dinamice, sunt necesare şi calculele cinematice, convenim ca rezultatele numerice ale calculelor cinematice să fie date comasat cu cele statico-dinamice în cap. 5.
4.2. Modelarea geometrico-cinematică a structurilor cu roţi dinţate
4.2.1. Funcţiile de mişcare pentru modelul cu roţi dinţate
Funcţiile de mişcare ale structurilor ce modelează glezna prin mecanisme cu roţi
dinţate au fost definite prin expresiile rapoartelor de transmitere în lanţurile cinematice care realizează rotaţiile α, β şi γ (v. cap. 3).
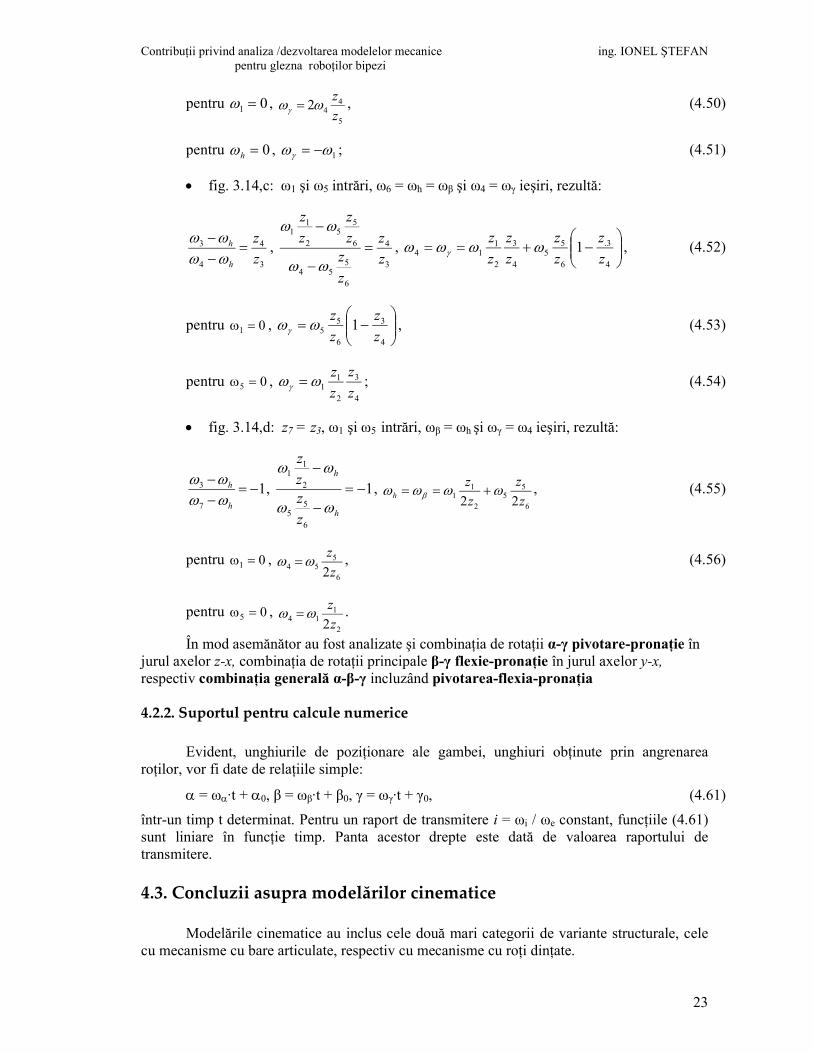
Astfel, pentru combinaţia β-γ, adică flexia-pronaţia, s-au obţinut: fig. 3.14,a: ω1 şi ωh intrări, ωβ = ω2 şi ωγ = ωh ieşiri, rezultă:
1
2
2
1
z
z
h
h =-
-
,
-==
2
1
2
112 1
z
z
z
zhb , (4.47)
pentru 0=h , 2
11
z
zb = , 01 = ,
-=
2
11z
zhb ; (4.48)
fig. 3.14,b: z3 = z1, ω1 şi ω4 intrări, ωβ = ωh şi ωγ = ω3 ieşiri, rezultă:
13
1 -=-
-
h
h
, 1
5
443
5
441
-=
-
-
z
z
z
z
, 1
5
443 2 -=
z
z , (4.49)
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
23
pentru 01 = , 5
442
z
z = , (4.50)
pentru 0=h , 1 -= ; (4.51)
fig. 3.14,c: ω1 şi ω5 intrări, ω6 = ωh = ωβ şi ω4 = ωγ ieşiri, rezultă:
3
4
4
3
z
z
h
h =-
-
,
3
4
6
554
6
55
2
11
z
z
z
z
z
z
z
z
=
-
-
,
-==
4
3.
6
55
4
3
2
114 1
z
z
z
z
z
z
z
z , (4.52)
pentru 01 = ,
-=
4
3
6
55 1
z
z
z
z , (4.53)
pentru 05 = , 4
3
2
11
z
z
z
z = ; (4.54)
fig. 3.14,d: z7 = z3, ω1 şi ω5 intrări, ωβ = ωh şi ωγ = ω4 ieşiri, rezultă:
17
3 -=-
-
h
h
, 1
6
55
2
11
-=
-
-
h
h
z
z
z
z
, 6
55
2
11
22 z
z
z
zh b == , (4.55)
pentru 01 = , 6
554
2z
z = , (4.56)
pentru 05 = , 2
114
2z
z = .
În mod asemănător au fost analizate şi combinaţia de rotaţii α-γ pivotare-pronaţie în jurul axelor z-x, combinaţia de rotaţii principale β-γ flexie-pronaţie în jurul axelor y-x, respectiv combinaţia generală α-β-γ incluzând pivotarea-flexia-pronaţia
4.2.2. Suportul pentru calcule numerice
Evident, unghiurile de poziţionare ale gambei, unghiuri obţinute prin angrenarea
într-un timp t determinat. Pentru un raport de transmitere i = ωi / ωe constant, funcţiile (4.61) sunt liniare în funcţie timp. Panta acestor drepte este dată de valoarea raportului de transmitere.
4.3. Concluzii asupra modelărilor cinematice
Modelările cinematice au inclus cele două mari categorii de variante structurale, cele cu mecanisme cu bare articulate, respectiv cu mecanisme cu roţi dinţate.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
24
În cadrul modelărilor variantelor cu bare articulate, s-a considerat modelul gambei articulate prin articulaţie cardanică şi respectiv prin articulaţie sferică în gleznă, corespunzător mişcărilor de flexie şi pronaţie, luate independent sau corelat.
Au fost precizaţi parametrii geometrici care definesc sistemul (lungimi/unghiuri, respectiv număr de dinţi), parametrii cinematici de intrare (deplasări unghiulare/liniare, respectiv viteze unghiulare) şi parametrii de ieşire (unghiuri a/β, respectiv rapoarte de transmitere).
S-au dedus relaţiile funcţiilor cinematice de poziţie folosind metode specifice teoriei mecanismelor.
S-au efectuat numeroase calcule pe baza programelor proprii, rezultatele fiind evidenţiate prin grafice de variaţie ale parametrilor cinematici.
Funcţiile cinematice S2(a) şi φ2(a), cu β parametru, au o variaţie cvasiliniară, ca şi
funcţia β(φ1) – evident crescătoare.
Variaţiile S2 30...40 mm pentru a = -15...+50,
β = -25...+35 pentru φ1 = 40...100,
a = -15...+45 pentru φ2 = 65...125
pentru articulaţie cardanică în gleznă.
Relaţiile deduse acoperă o gamă largă a modelărilor geometrice
5. MODELARE STATICĂ ŞI DINAMICĂ A SISTEMELOR
ARTICULATE GAMBĂ-PICIOR
Obţinerea unor performanţe superioare, legate de posibilitatea deplasării robotului
biped pe terenuri cu configuraţii cât mai diferite, cât şi de creşterea mobilităţii şi stabilităţii în
aceste condiţii de deplasare, impun un studiu foarte atent privind controlul traiectoriei. La
baza controlului stă modelarea dinamică a robotului biped, inclusiv a mecanismelor
picioarelor. Problemele de dinamică generate de funcţiile locomotoare ale unui robot biped
sunt interconectate şi ajută la stabilirea algoritmului general de analiză dinamică care are ca
scop: rezolvarea problemei dinamice de echilibrare, rezolvarea problemei dinamice de
susţinere şi rezolvarea problemei dinamice de propulsie.
Prezentul capitol reprezintă o analiză a problemei dinamice de propulsie localizată la
nivelul articulaţiei gleznă-talpă. Funcţia de bază a robotului este reprezentată de mişcarea
acestuia în spaţiu. Astfel, piciorul robotului primeşte un vector de intrare definit de forţele
generalizate / aplicate în talpă şi generează un vector de ieşire format din unghiurile (sau
deplasările) articulaţiilor gleznei.
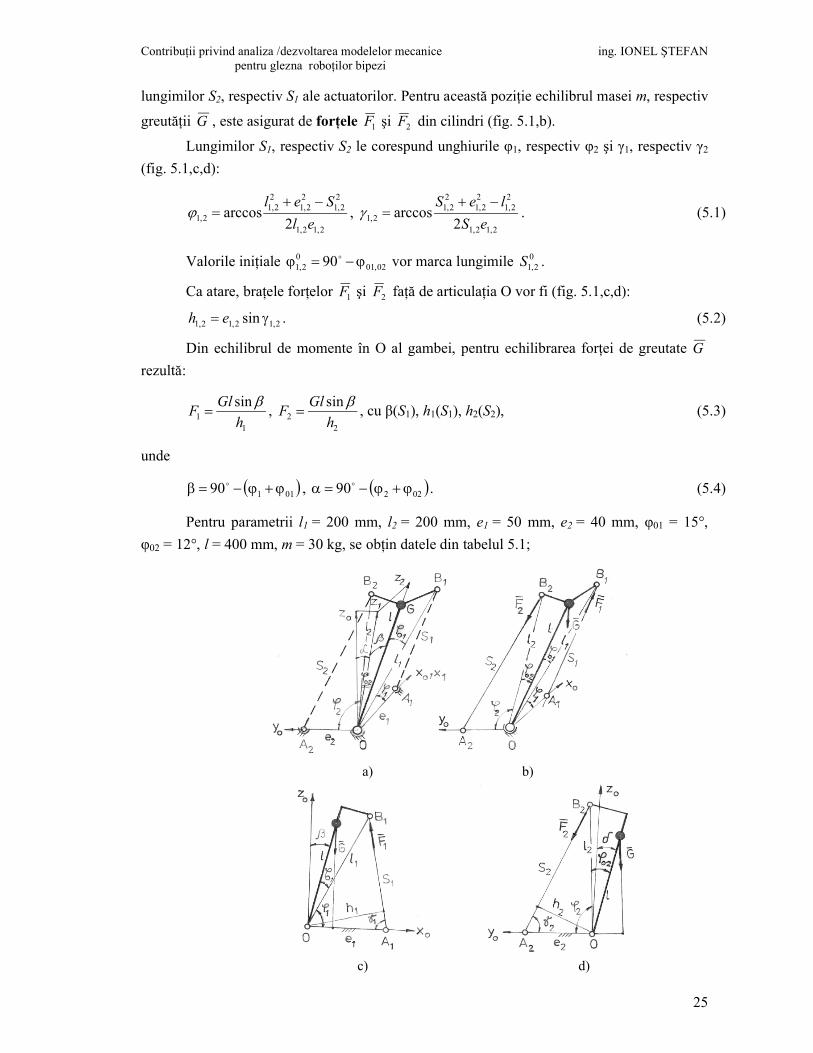
5.1. Modelarea statică a structurii propuse cu articulaţie sferică în gleznă.
În fig. 5.1,a (reprezentarea modelului articulat) este redată poziţia curentă a gambei
acţionată de doi actuatori liniari, unghiurile curente de pronaţie a şi de flexie b corespunzând
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
25
lungimilor S2, respectiv S1 ale actuatorilor. Pentru această poziţie echilibrul masei m, respectiv
greutăţii G , este asigurat de forţele 1F şi 2F din cilindri (fig. 5.1,b).
Lungimilor S1, respectiv S2 le corespund unghiurile φ1, respectiv φ2 şi γ1, respectiv γ2
(fig. 5.1,c,d):
2,12,1
22,1
22,1
22,1
2,12
arccosel
Sel -=j ,
2,12,1
22,1
22,1
22,1
2,12
arccoseS
leS -= . (5.1)
Valorile iniţiale 02,010
2,1 90 j-=j vor marca lungimile 02,1S .
Ca atare, braţele forţelor 1F şi 2F faţă de articulaţia O vor fi (fig. 5.1,c,d):
2,12,12,1 sin = eh . (5.2)
Din echilibrul de momente în O al gambei, pentru echilibrarea forţei de greutate G
rezultă:
1
1
sin
h
GlF
b= ,
2
2
sin
h
GlF
b= , cu β(S1), h1(S1), h2(S2), (5.3)
unde
01190 jj-=b , 02290 jj-=a . (5.4)
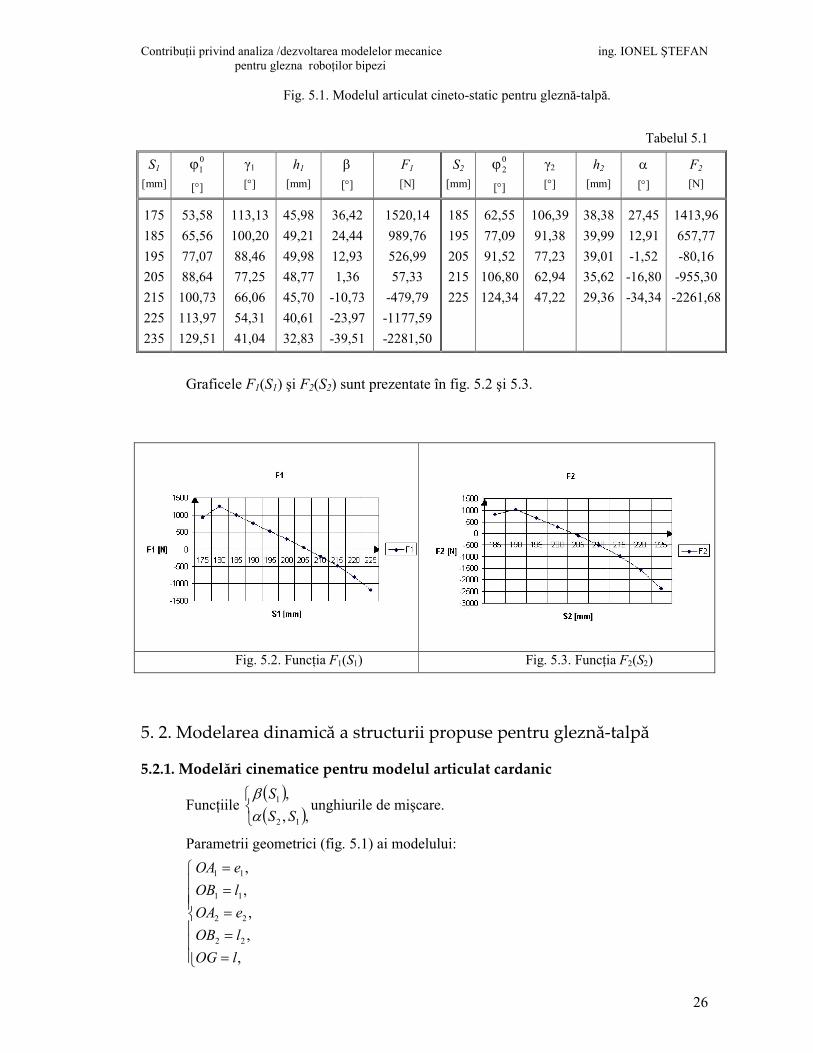
Pentru parametrii l1 = 200 mm, l2 = 200 mm, e1 = 50 mm, e2 = 40 mm, φ01 = 15°,
φ02 = 12°, l = 400 mm, m = 30 kg, se obţin datele din tabelul 5.1;
a) b)
c) d)
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
26
Fig. 5.1. Modelul articulat cineto-static pentru gleznă-talpă.
Tabelul 5.1
S1
[mm]
01j
[]
γ1
[]
h1
[mm]
b
[]
F1
[N]
S2
[mm]
02j
[]
γ2
[]
h2
[mm]
a
[]
F2
[N]
175
185
195
205
215
225
235
53,58
65,56
77,07
88,64
100,73
113,97
129,51
113,13
100,20
88,46
77,25
66,06
54,31
41,04
45,98
49,21
49,98
48,77
45,70
40,61
32,83
36,42
24,44
12,93
1,36
-10,73
-23,97
-39,51
1520,14
989,76
526,99
57,33
-479,79
-1177,59
-2281,50
185
195
205
215
225
62,55
77,09
91,52
106,80
124,34
106,39
91,38
77,23
62,94
47,22
38,38
39,99
39,01
35,62
29,36
27,45
12,91
-1,52
-16,80
-34,34
1413,96
657,77
-80,16
-955,30
-2261,68
Graficele F1(S1) şi F2(S2) sunt prezentate în fig. 5.2 şi 5.3.
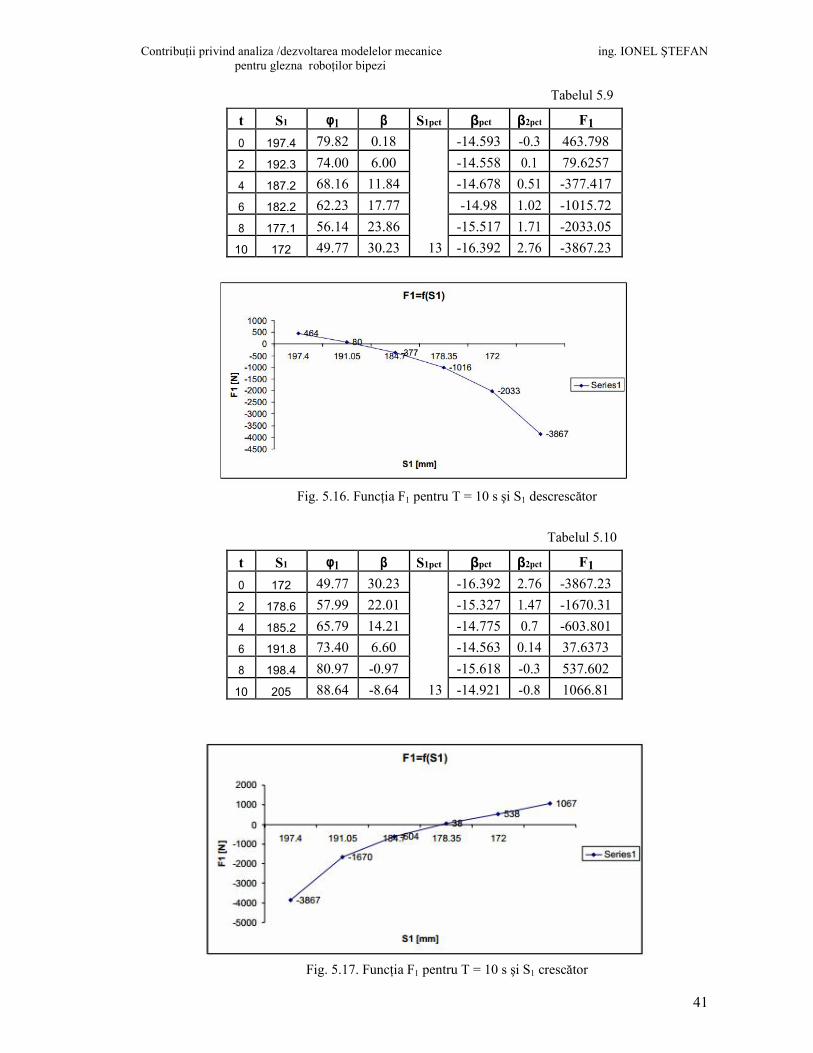
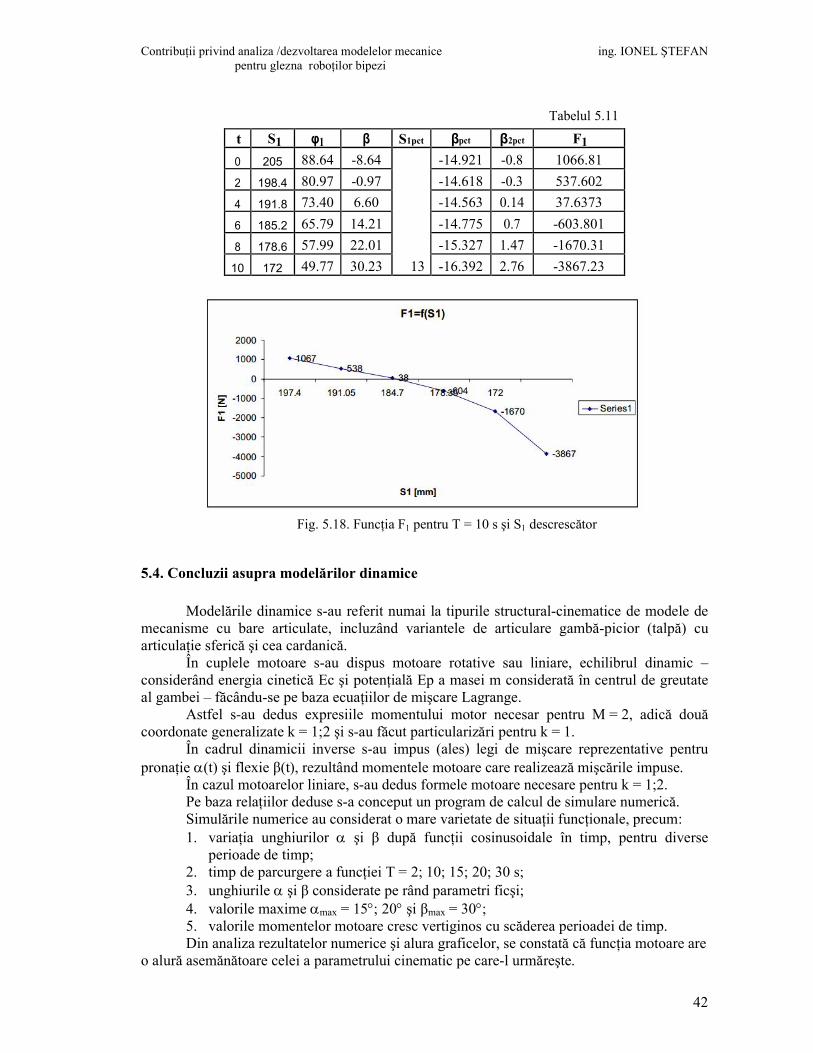
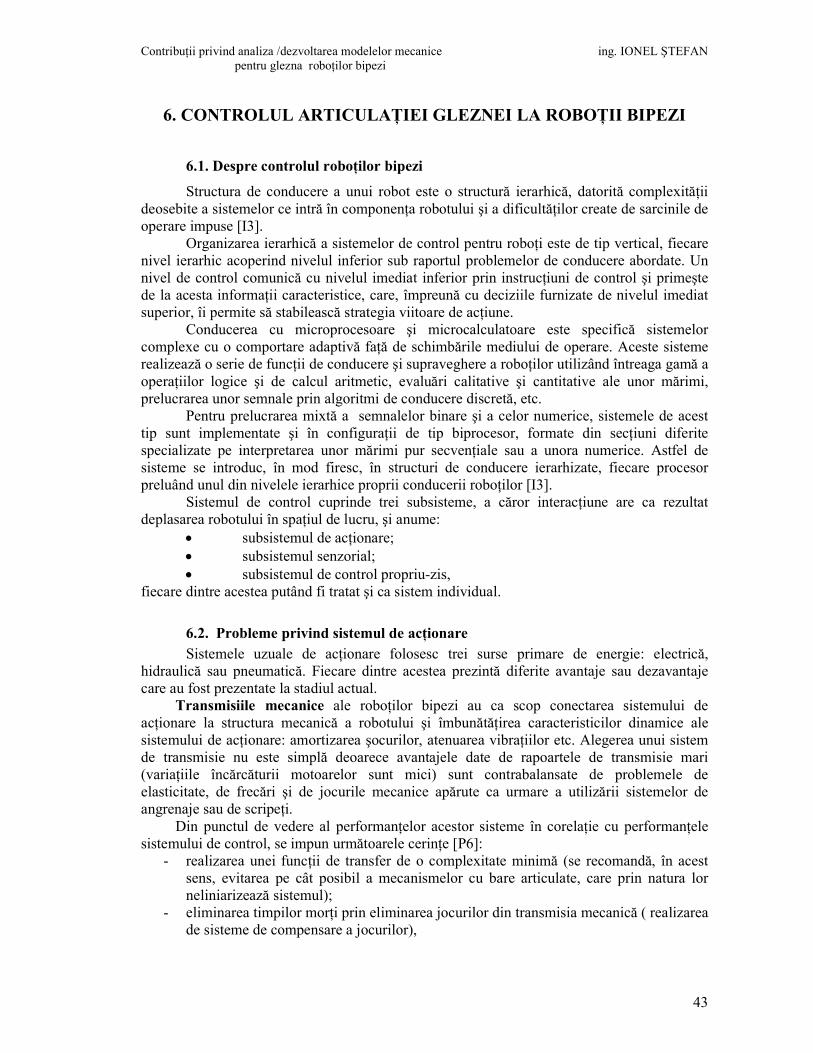
Fig. 5.2. Funcţia F1(S1) Fig. 5.3. Funcţia F2(S2)
5. 2. Modelarea dinamică a structurii propuse pentru gleznă-talpă
5.2.1. Modelări cinematice pentru modelul articulat cardanic
Funcţiile
,,
,
12
1
SS
S
a
bunghiurile de mişcare.
Parametrii geometrici (fig. 5.1) ai modelului:
=
=
=
=
=
,
,
,
,
,
22
22
11
11
lOG
lOB
eOA
lOB
eOA
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
Componentele axei Z2, versor 2k , sunt deci babab coscossinsinsin2 kjik -= .
Versorii liniilor OB1,2:
2221010122211 cos ;0;sinzyx
zyxOB jj == ,
2222020222222 cos ;sin ;0zyx
zyxOB jj == ,
Ca urmare:
jba
jba-
jbjb
==
01
01
0101
1021
coscos
cossin
cossinsincos
222000 zyxzyxT , (5.7)
jbaja
jba-ja
jb
==
0202
0202
02
2022
coscoscossinsin
coscossinsincos
cossin
222000 zyxzyxT . (5.8)
Din geometria curentă a mecanismului, respectiv prima linie a parametrului 1 , care
marchează unghiul faţă de axa x0 a versorului 1 ( 101 cosj= i ), se obţine:
,90sincossin 1101 j-=j=jb
de unde rezultă:
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
28
01190 j-j-=b , (5.9)
unde
11
21
21
21
12
arccosel
Sel -=j ,
11
21
21
21
010
2arccos90
el
Sel ----= jb . (5.10)
Unghiul de flexie β depinzând doar de acţionarea Ѕ1 din actuatorul A
Din linia a doua (5.8) a versorului 2 ( 202 cosj= j ) rezultă:
20202 coscoscossinsincos j=jba-ja , (5.11)
Înlocuind 2
tga
=u rezultă:
2022022
2
coscoscos1
2sin
1
1j=jb
-j
-
u
u
u
u;,
22
202022
02 coscoscoscos2sinsin jj=jb-j-j uuu .
0cossincoscos2sincos 202020222 =jj-jbjj uu .
Deci
2
tgsincos
sincoscoscoscoscos
022
022
222
0202 a
jj
jjjbjb=
---=u , (5.12)
unde
22
22
22
22
22
arccosel
Sel -=j . (5.13)
Pentru 900 022 =jj=x .
5.2.2. Modelare dinamică pe baza ecuaţiilor lui Lagrange – pentru modelul
articulat cardanic.
Energia cinetică a masei 2/2Gc mvE = şi energia potenţială Gp mgzE = .
Vectorul de poziţie a masei concentrate (fig. 5.4) este:
2klrG = ,
000
coscos
cossin
sin
zyOx
G lr
ba
ba-
b
= ; OGl = (G c. d. m.). (5.14)
Viteza c. d. m. G are expresia:
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
29
000
cossinsincos
coscossinsin
cos
zyOz
GG l
dt
rdv
baa-bab-
baa-bab
bb
==
. (5.15)
Energia cinetică a masei m, în cazul general:
.coscossin2
1cos
2
1
2
1]cossin
cossinsincos[]cossincossin2cossin
sincoscossincossin2coscossinsin[ 2
1
cossinsincoscoscossinsincos2
1
2
1
22222222222222
2222222
222222
222222
baaabbabbaa
aabbbbbbaababaa
babbbaababaababbb
baababbaababbb
==
=
-=
=-==
mlmlml
cml
mlmvE Gc
Ca urmare, energia cinetică este dată de soluţia:
2222 cos5.0 bba= mlEc (5.16)
Energia potenţială a masei m:
ba== coscosmglmgZE Gp . (5.17)
Funcţia compusă Langrange (potenţialul cinetic) va fi:
ba-bba=-= coscoscos5.0 2222 mglmlEEL pc . (5.18)
Ecuaţia Lagrange (ecuaţia de mişcare):
k
kk
Qq
L
q
L
dt
d=
-
; k = 1; 2. (5.19)
cu qk – constanta generalizată şi Qk - forţa generalizată.
Pentru cazul acţionării cu motoare rotative în cuple, mobilitatea mecanismului M=2,
acţionare independentă, va conduce la momentele motoare T1 si T2 pentru funcţiile α(t) şi β(t)
având variaţiile stabilite. În urma aplicării ecuaţiei Lagrange pentru k=2, expresiile obţinute a
momentului motor din cupla „B” respectiv cupla „A” pentru echilibrarea dinamică este:
babbaba cossin2sincos 2222 mglmlmlT --= . (moment motor din cupla B) (5.21)
babbab sincossincos2221 mglmllmT -= . (moment motor din cupla A) (5.23)
Pentru simularea dinamică inversă se impun (aleg) diverse legi de mişcare
reprezentative a = a(t), b = b(t) şi se stabilesc variaţiile momentelor motoare care realizează
mişcările impuse:
T1 = T1(t) şi T2 = T2(t).
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
30
De ex. pentru a = c1t şi b = c2t 0,, 21 =b=a=b=a cc , rezultă:
,cossin2sin 2122
212 tctcmgltcmlccT --= (5.21’)
.sincossincos 211222
11 tctcmgltctcmlcT -= (5.23’)
Pentru simularea numerică se va alege o variaţie cosinusoidală a legilor a(t) şi b(t).
În cazul acţionării cu motoare liniare, ecuaţia Lagrange pentru coordonata S1 (după
efectuarea tuturor calculelor) devine
1
11
PS
L
S
L
dt
d=
-
(P1 – forţa actuatorului),
deci
1
1111
22
1
1
11
21
2
1
2
sincoscossincossincos
2sincoscos
PSS
mglSSS
BSS
AS
ml
=
ba
bba
a-
bb-bb
bab
aa
-b
bbb
aba-bab
aa
(5.48)
obţinând forţa generalizată în cupla „A”.
Pentru coordonata S2 s-a obţinut forţa actuatorului 2 în cupla „B”:
baa
ba
baa
baba
a
cossin
2sincoscos
2
22
222
2
2.2
Smgl
SSA
SmlP
-
-
-
-
=
(5.52)
Relaţiile de mai sus fiind destul de complicate le-am simplificat pentru cazul unei
singure acţionări –flexia.
5.2.5. Studiu de caz – doar mişcarea de flexie b
Unghiul b (5.9,5.10) este dat de:
01190 jj-=b ,11
21
21
21
12
cosel
Sel -=j , 101 cossin j=jb ,
iar derivata 0111
1
1 cos jb-=
b
el
S
dS
d,
Din matricea
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
31
bb-
bb
=
b
b
=
bb-
bb
=
sin
0
cos
,
cos
0
sin
cos0sin
010
sin0cos
01
lvlrT GG .
Cum
,cos ,2
sin11
1101
11
21
21
21
01el
SS
el
Sel -
=-
= jbbjb (5.53)
11
112
101
201 sincos
el
SSS --
=- jbbjbb . (5.54)
va rezulta:
0111
11
cos jb-=b
el
SS ,
0111
112
111012
cos
sin
jb
-jbb=b
el
SSSel .
0111
1
1 cos jb-=
b
el
S
dS
d ,
0111
1
1 cos jb-=
b
el
S
Sd
d
.
Energia cinetică şi potenţială
222 5.02
1b== mlmvE Gc , b== cosmglmgZE Gp . (5.55)
Lagrangeanul
b-b=-= cos5.0 2 glmlEEL pc .
Ecuaţia lui Lagrange
1
11
PS
L
S
L
dt
d=
-
, (5.56)
conţine
;
cossin
cossin
0111
1
0111
12
11
2
1 jbb
jbb
bb
bb
-
-=
=
el
Smgl
el
Sml
Smgl
Sml
S
L
(5.57’)
;
cos 0111
12
1
2
1 jbb
bb
-=
=
el
Sml
Sml
S
L
.
coscos 0111
12
0111
12
1
2
1
2
1 jbb
jbb
bb
bb
-
--=
=
el
Sml
el
Sml
Sdt
dml
Sml
S
L
dt
d
(5.57”)
Înlocuind în relaţia (5.56) se obţine expresia forţei P1, pentru cazul acţionării doar a
actuatorului flexiei:
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
32
.
cos
sin
0111
11 jb
bb
=
el
lgmlSP
(5.58)
5.3. Simulare numerică dinamică a modelului articulat cardanic.
5.3.1. Simularea dinamică cu motoare rotative
Pentru simulare am considerat următoarele valori ale parametrilor geometrici:
e1 = 50 mm, e2 = 40 mm, l1 = 200 mm, l2 = 200 mm.
Cum simularea sistemului cu actuatori liniari este complexă, am efectuat simularea sistemului bimobil cu două motoare rotative în articulaţiile A şi B (fig. 5.5), pentru care am considerat mărimile:
l = 400 mm, m = 30 kg.
Funcţiile a şi b necesare relaţiilor (5.17) şi (5.19) – de determinare a momentelor
motoare necesare l-am considerat cosinusoidale, cu plecare din poziţia flexată. Astfel,
,cos110cos118
cos1max ttpt
aa === (5.59)
,cos115cos112
cos1max ttpt
bb === (5.60)
Am considerat amplitudinile amax = 20° şi bmax = 30° la t = 2s, în combinaţiile:
1) a = 15° şi tt
b cos112
cos115 == ;
2) tt
==a cos118
cos110 şi b = 15°;
3) t
=a cos118
şi t
b cos112
= . (5.61)
Derivatele:
tt -=
-=b sin15sin12
2
, tt -=
-=b cos15cos12
23
; (5.62)
tt -=
-=a sin10sin18
2
, tt -=
-=a cos10cos18
23
. (5.63)
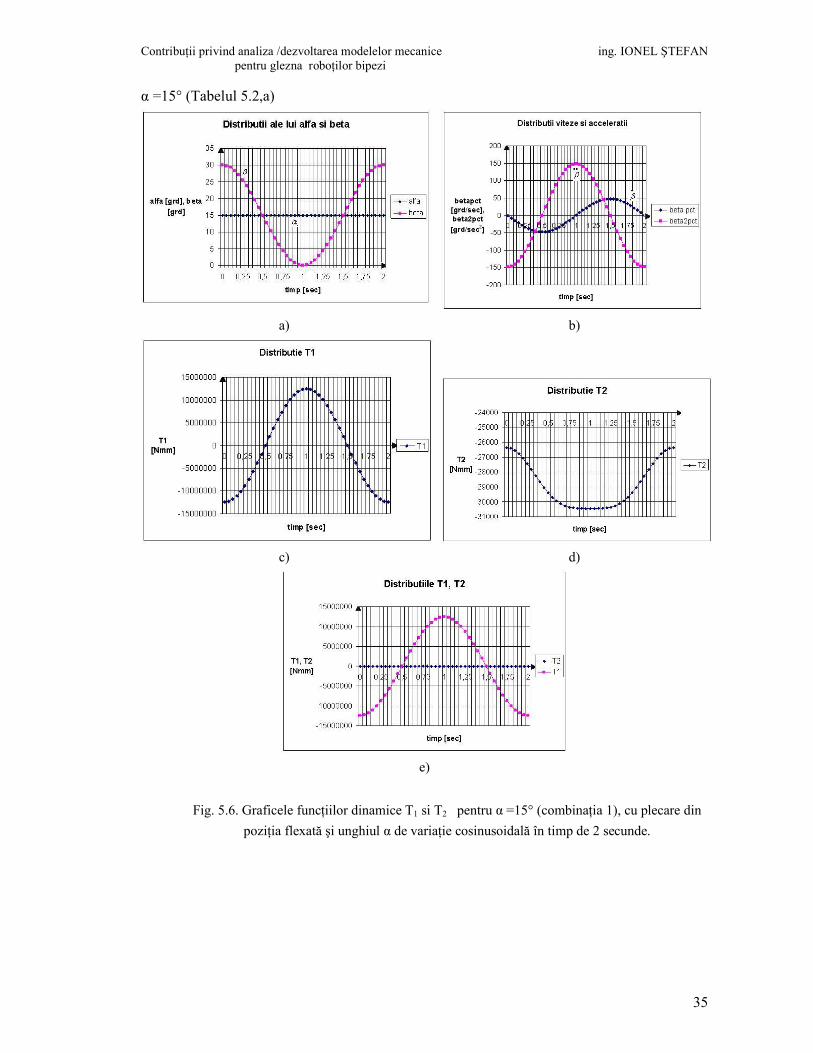
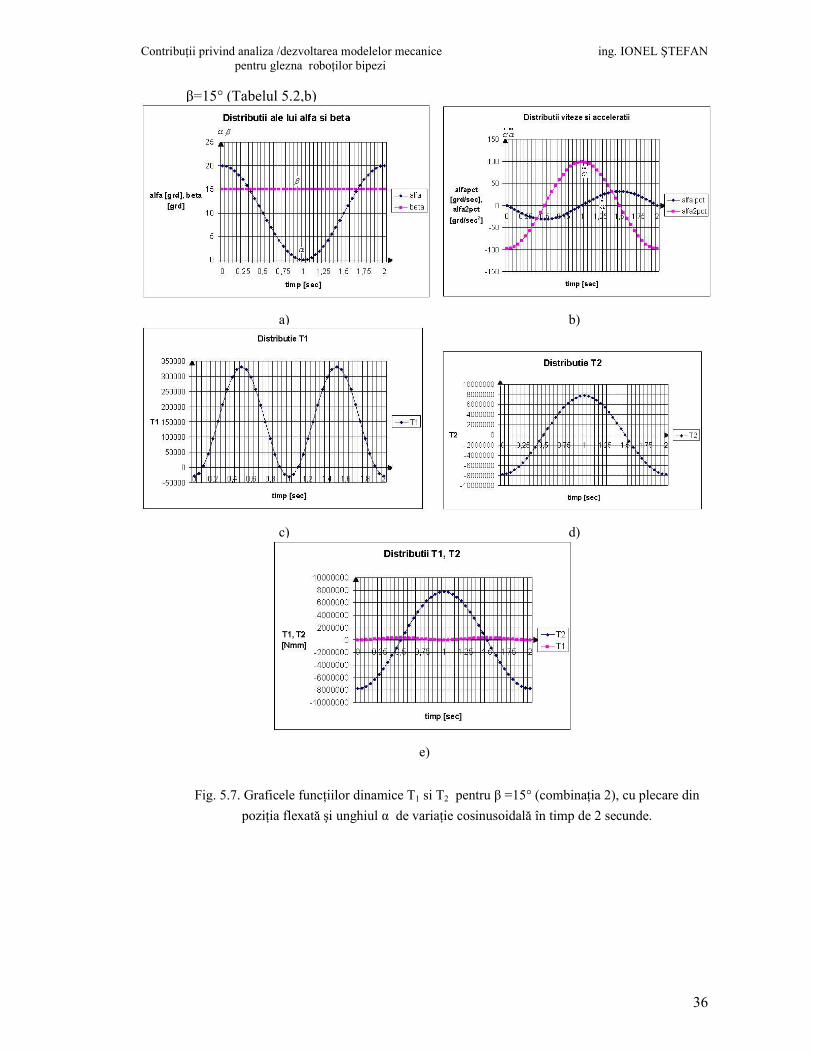
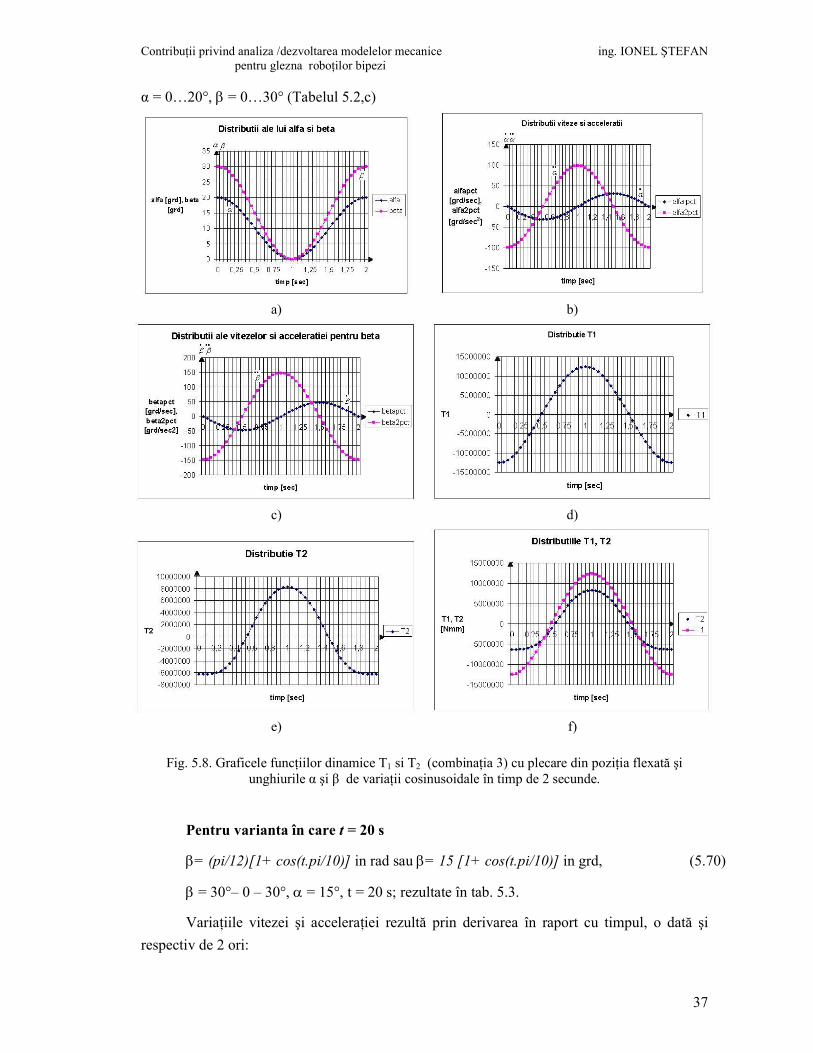
Rezultatele simulării dinamice sunt prezentate în figurile 5.6, 5.7 şi 5.8, respectiv pentru combinaţiile 1), 2), 3), rezultate evidenţiate în tabelul 5.2
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
33
Pentru modelarea dinamică se poate considera, în vederea simplificării, că legea de variaţie în timp a lui a(t) şi b(t) corespund celor impuse pentru motor rotativ în cuple, de momente T1(t) şi T2(t).
Ca atare se poate deduce T1(a) şi T2(b). Având şi braţele h1(a), respectiv h2(b), se poate imagina o corelaţie h2 – T1 , respectiv
h1 – T2 . Ca atare se poate deduce valoarea forţei necesare în cilindru F1 = T2 / h1, respectiv F2 = T1 / h2.
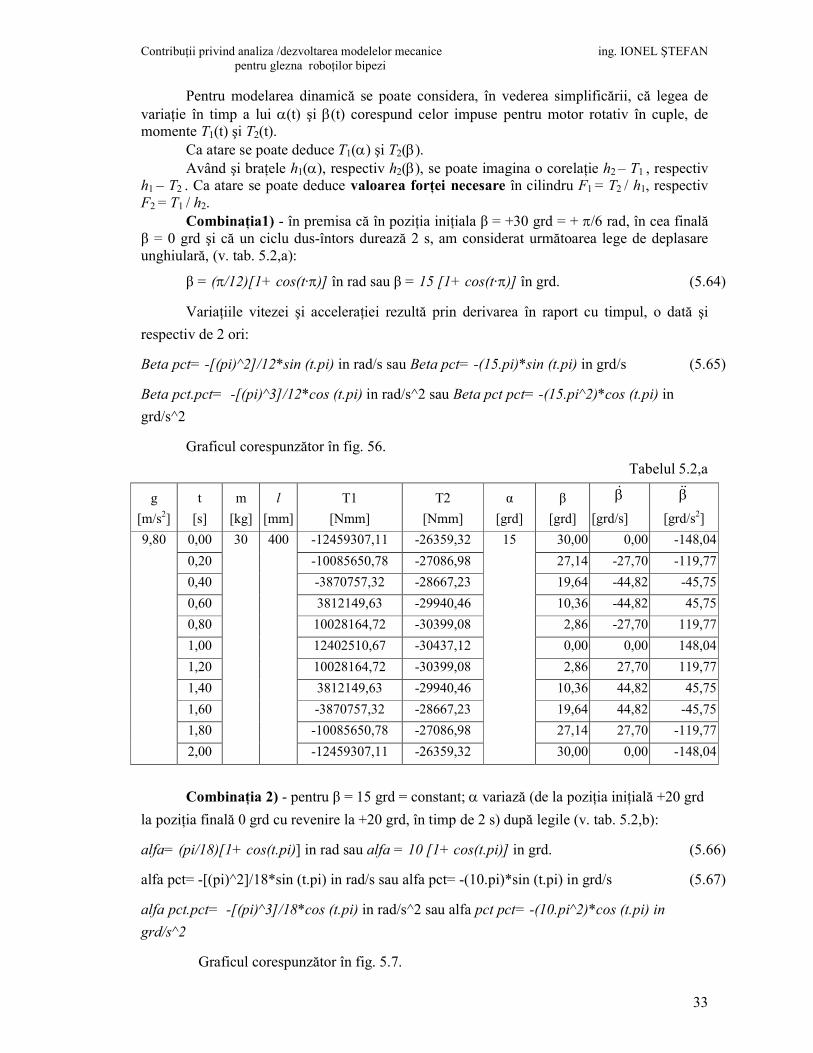
Combinaţia1) - în premisa că în poziţia iniţiala β = +30 grd = + /6 rad, în cea finală β = 0 grd şi că un ciclu dus-întors durează 2 s, am considerat următoarea lege de deplasare unghiulară, (v. tab. 5.2,a):
β = (/12)[1+ cos(t∙)] în rad sau β = 15 [1+ cos(t∙)] în grd. (5.64)
Variaţiile vitezei şi acceleraţiei rezultă prin derivarea în raport cu timpul, o dată şi
respectiv de 2 ori:
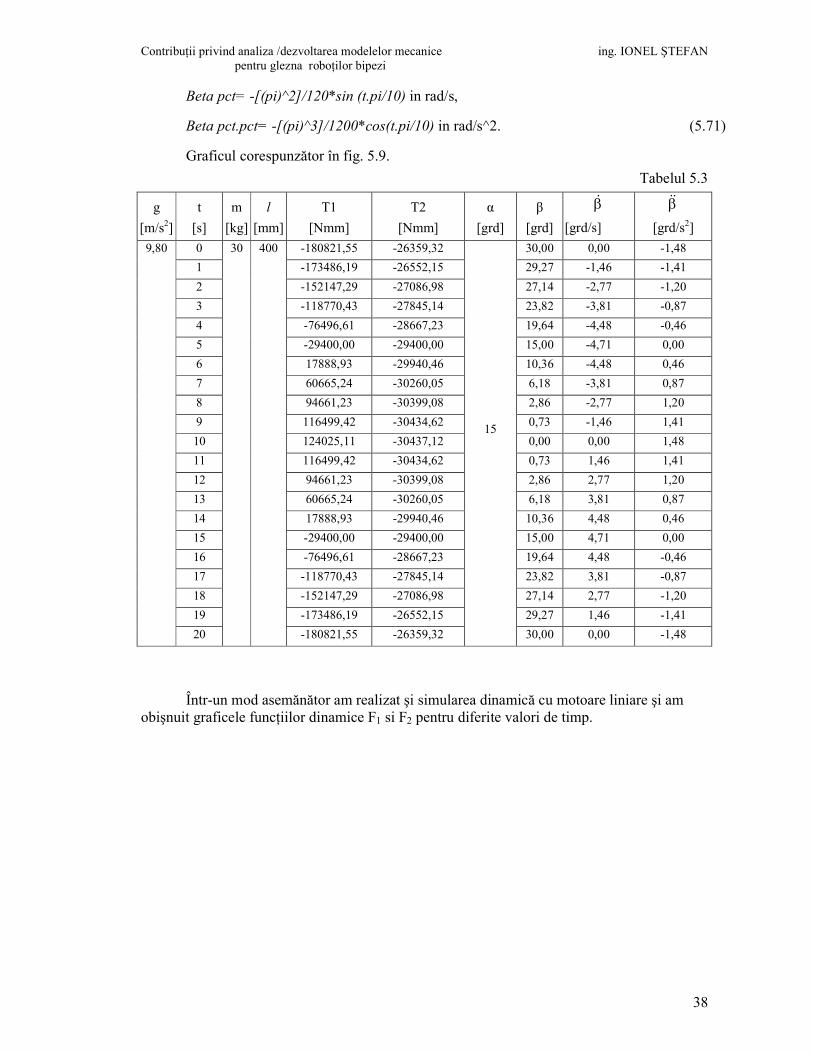
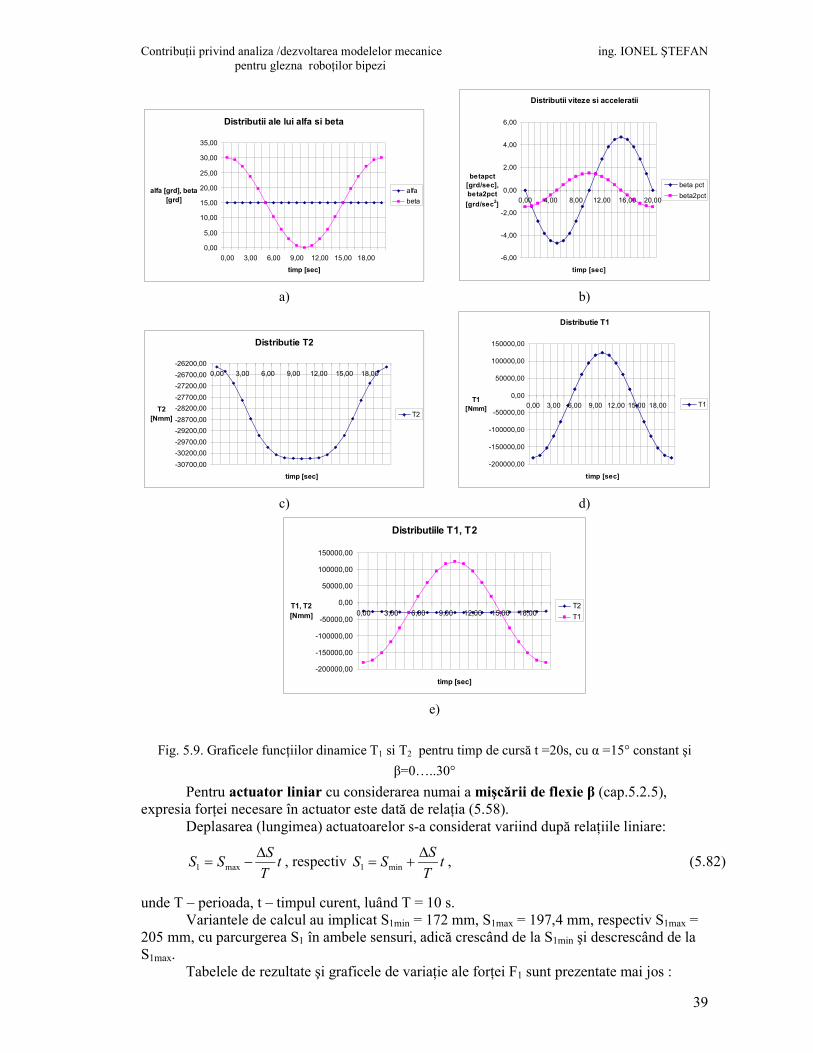
Beta pct= -[(pi)^2]/12*sin (t.pi) in rad/s sau Beta pct= -(15.pi)*sin (t.pi) in grd/s (5.65)
Beta pct.pct= -[(pi)^3]/12*cos (t.pi) in rad/s^2 sau Beta pct pct= -(15.pi^2)*cos (t.pi) in
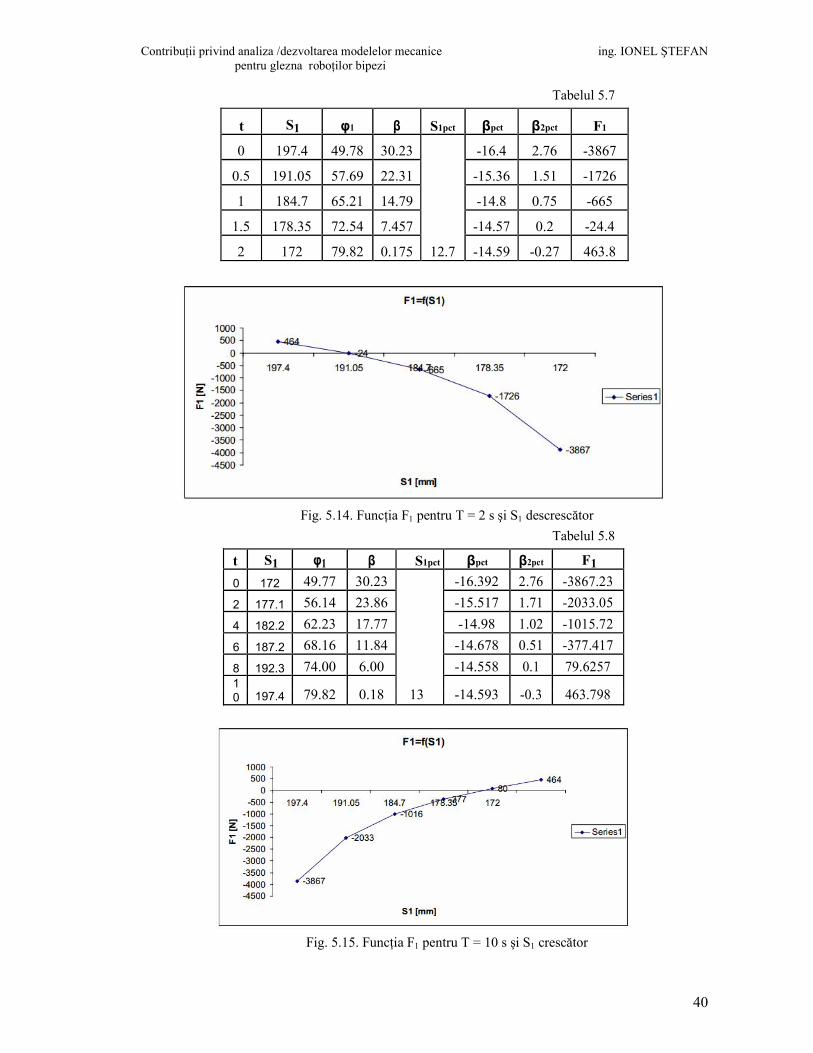
grd/s^2
Graficul corespunzător în fig. 56.
Tabelul 5.2,a
g
[m/s2]
t
[s]
m
[kg]
l
[mm]
T1
[Nmm]
T2
[Nmm]
α
[grd]
β
[grd]
b
[grd/s]
b
[grd/s2]
0,00 -12459307,11 -26359,32 30,00 0,00 -148,04
0,20 -10085650,78 -27086,98 27,14 -27,70 -119,77
0,40 -3870757,32 -28667,23 19,64 -44,82 -45,75
0,60 3812149,63 -29940,46 10,36 -44,82 45,75
0,80 10028164,72 -30399,08 2,86 -27,70 119,77
1,00 12402510,67 -30437,12 0,00 0,00 148,04
1,20 10028164,72 -30399,08 2,86 27,70 119,77
1,40 3812149,63 -29940,46 10,36 44,82 45,75
1,60 -3870757,32 -28667,23 19,64 44,82 -45,75
1,80 -10085650,78 -27086,98 27,14 27,70 -119,77
9,80
2,00
30 400
-12459307,11 -26359,32
15
30,00 0,00 -148,04
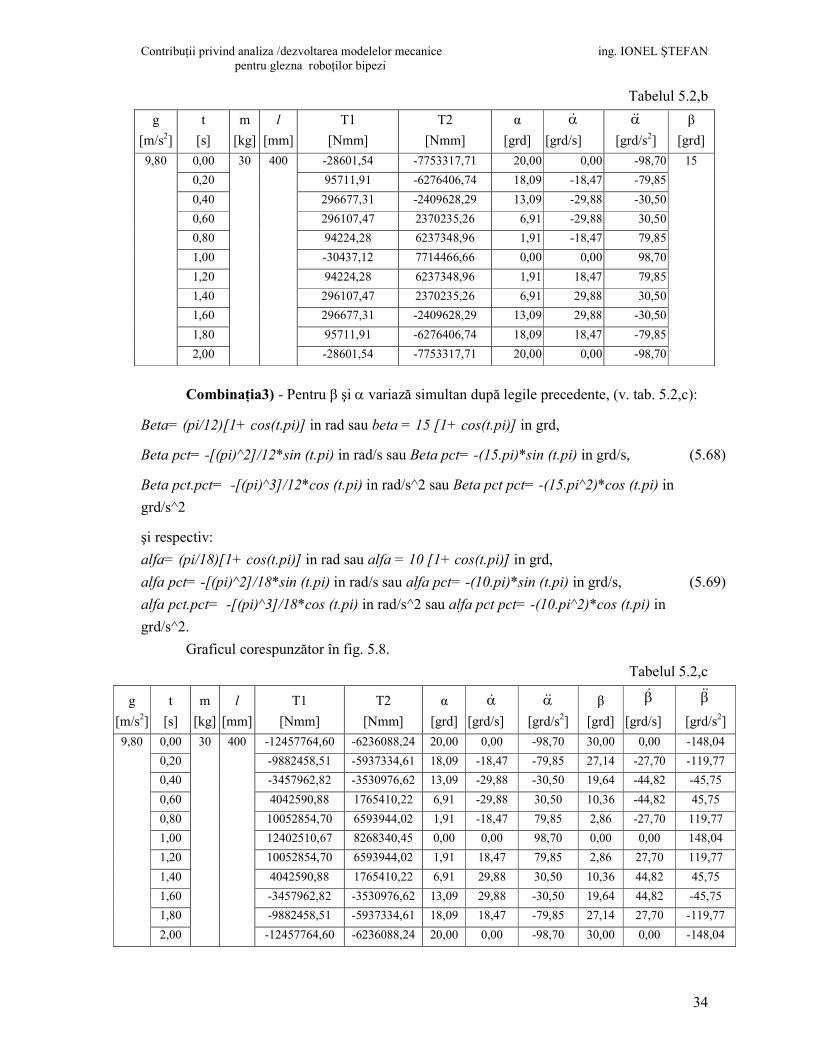
Combinaţia 2) - pentru β = 15 grd = constant; a variază (de la poziţia iniţială +20 grd
la poziţia finală 0 grd cu revenire la +20 grd, în timp de 2 s) după legile (v. tab. 5.2,b):
alfa= (pi/18)[1+ cos(t.pi)] in rad sau alfa = 10 [1+ cos(t.pi)] in grd. (5.66)
alfa pct= -[(pi)^2]/18*sin (t.pi) in rad/s sau alfa pct= -(10.pi)*sin (t.pi) in grd/s (5.67)
alfa pct.pct= -[(pi)^3]/18*cos (t.pi) in rad/s^2 sau alfa pct pct= -(10.pi^2)*cos (t.pi) in
grd/s^2
Graficul corespunzător în fig. 5.7.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
34
Tabelul 5.2,b
g
[m/s2]
t
[s]
m
[kg]
l
[mm]
T1
[Nmm]
T2
[Nmm]
α
[grd]
a
[grd/s]
a
[grd/s2]
β
[grd]
0,00 -28601,54 -7753317,71 20,00 0,00 -98,70
0,20 95711,91 -6276406,74 18,09 -18,47 -79,85
0,40 296677,31 -2409628,29 13,09 -29,88 -30,50
0,60 296107,47 2370235,26 6,91 -29,88 30,50
0,80 94224,28 6237348,96 1,91 -18,47 79,85
1,00 -30437,12 7714466,66 0,00 0,00 98,70
1,20 94224,28 6237348,96 1,91 18,47 79,85
1,40 296107,47 2370235,26 6,91 29,88 30,50
1,60 296677,31 -2409628,29 13,09 29,88 -30,50
1,80 95711,91 -6276406,74 18,09 18,47 -79,85
9,80
2,00
30 400
-28601,54 -7753317,71 20,00 0,00 -98,70
15
Combinaţia3) - Pentru β şi a variază simultan după legile precedente, (v. tab. 5.2,c):
Beta= (pi/12)[1+ cos(t.pi)] in rad sau beta = 15 [1+ cos(t.pi)] in grd,
Beta pct= -[(pi)^2]/12*sin (t.pi) in rad/s sau Beta pct= -(15.pi)*sin (t.pi) in grd/s, (5.68)
Beta pct.pct= -[(pi)^3]/12*cos (t.pi) in rad/s^2 sau Beta pct pct= -(15.pi^2)*cos (t.pi) in
grd/s^2
şi respectiv:
alfa= (pi/18)[1+ cos(t.pi)] in rad sau alfa = 10 [1+ cos(t.pi)] in grd,
alfa pct= -[(pi)^2]/18*sin (t.pi) in rad/s sau alfa pct= -(10.pi)*sin (t.pi) in grd/s, (5.69)
alfa pct.pct= -[(pi)^3]/18*cos (t.pi) in rad/s^2 sau alfa pct pct= -(10.pi^2)*cos (t.pi) in
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
35
α =15° (Tabelul 5.2,a)
a) b)
c) d)
e)
Fig. 5.6. Graficele funcţiilor dinamice T1 si T2 pentru α =15° (combinaţia 1), cu plecare din
poziţia flexată şi unghiul α de variaţie cosinusoidală în timp de 2 secunde.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
36
β=15° (Tabelul 5.2,b)
a) b)
c) d)
e)
Fig. 5.7. Graficele funcţiilor dinamice T1 si T2 pentru β =15° (combinaţia 2), cu plecare din
poziţia flexată şi unghiul α de variaţie cosinusoidală în timp de 2 secunde.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
37
α = 0…20°, b = 0…30° (Tabelul 5.2,c)
a) b)
c) d)
e) f)
Fig. 5.8. Graficele funcţiilor dinamice T1 si T2 (combinaţia 3) cu plecare din poziţia flexată şi
unghiurile α şi β de variaţii cosinusoidale în timp de 2 secunde.
Pentru varianta în care t = 20 s
b= (pi/12)[1+ cos(t.pi/10)] in rad sau b= 15 [1+ cos(t.pi/10)] in grd, (5.70)
b = 30°– 0 – 30°, a = 15°, t = 20 s; rezultate în tab. 5.3.
Variaţiile vitezei şi acceleraţiei rezultă prin derivarea în raport cu timpul, o dată şi
respectiv de 2 ori:
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
38
Beta pct= -[(pi)^2]/120*sin (t.pi/10) in rad/s,
Beta pct.pct= -[(pi)^3]/1200*cos(t.pi/10) in rad/s^2. (5.71)
Graficul corespunzător în fig. 5.9.
Tabelul 5.3
g
[m/s2]
t
[s]
m
[kg]
l
[mm]
T1
[Nmm]
T2
[Nmm]
α
[grd]
β
[grd]
b
[grd/s]
b
[grd/s2]
0 -180821,55 -26359,32 30,00 0,00 -1,48
1 -173486,19 -26552,15 29,27 -1,46 -1,41
2 -152147,29 -27086,98 27,14 -2,77 -1,20
3 -118770,43 -27845,14 23,82 -3,81 -0,87
4 -76496,61 -28667,23 19,64 -4,48 -0,46
5 -29400,00 -29400,00 15,00 -4,71 0,00
6 17888,93 -29940,46 10,36 -4,48 0,46
7 60665,24 -30260,05 6,18 -3,81 0,87
8 94661,23 -30399,08 2,86 -2,77 1,20
9 116499,42 -30434,62 0,73 -1,46 1,41
10 124025,11 -30437,12 0,00 0,00 1,48
11 116499,42 -30434,62 0,73 1,46 1,41
12 94661,23 -30399,08 2,86 2,77 1,20
13 60665,24 -30260,05 6,18 3,81 0,87
14 17888,93 -29940,46 10,36 4,48 0,46
15 -29400,00 -29400,00 15,00 4,71 0,00
16 -76496,61 -28667,23 19,64 4,48 -0,46
17 -118770,43 -27845,14 23,82 3,81 -0,87
18 -152147,29 -27086,98 27,14 2,77 -1,20
19 -173486,19 -26552,15 29,27 1,46 -1,41
9,80
20
30 400
-180821,55 -26359,32
15
30,00 0,00 -1,48
Într-un mod asemănător am realizat şi simularea dinamică cu motoare liniare şi am obişnuit graficele funcţiilor dinamice F1 si F2 pentru diferite valori de timp.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
39
Distributii ale lui alfa si beta
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
0,00 3,00 6,00 9,00 12,00 15,00 18,00
timp [sec]
alfa [grd], beta
[grd]
alfa
beta
Distributii viteze si acceleratii
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
0,00 4,00 8,00 12,00 16,00 20,00
timp [sec]
betapct
[grd/sec],
beta2pct
[grd/sec2]
beta pct
beta2pct
a) b)
Distributie T2
-30700,00
-30200,00
-29700,00
-29200,00
-28700,00
-28200,00
-27700,00
-27200,00
-26700,00
-26200,00
0,00 3,00 6,00 9,00 12,00 15,00 18,00
timp [sec]
T2
[Nmm]T2
Distributie T1
-200000,00
-150000,00
-100000,00
-50000,00
0,00
50000,00
100000,00
150000,00
0,00 3,00 6,00 9,00 12,00 15,00 18,00
timp [sec]
T1
[Nmm]T1
c) d)
Distributiile T1, T2
-200000,00
-150000,00
-100000,00
-50000,00
0,00
50000,00
100000,00
150000,00
0,00 3,00 6,00 9,00 12,00 15,00 18,00
timp [sec]
T1, T2
[Nmm]
T2
T1
e)
Fig. 5.9. Graficele funcţiilor dinamice T1 si T2 pentru timp de cursă t =20s, cu α =15° constant şi
β=0…..30°
Pentru actuator liniar cu considerarea numai a mişcării de flexie β (cap.5.2.5), expresia forţei necesare în actuator este dată de relaţia (5.58). Deplasarea (lungimea) actuatoarelor s-a considerat variind după relaţiile liniare:
tT
SSS
-= max1 , respectiv t
T
SSS
= min1 , (5.82)
unde T – perioada, t – timpul curent, luând T = 10 s. Variantele de calcul au implicat S1min = 172 mm, S1max = 197,4 mm, respectiv S1max =
205 mm, cu parcurgerea S1 în ambele sensuri, adică crescând de la S1min şi descrescând de la S1max.
Tabelele de rezultate şi graficele de variaţie ale forţei F1 sunt prezentate mai jos :
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
40
Tabelul 5.7
t S1 φ1 β S1pct βpct β2pct F1
0 197.4 49.78 30.23 -16.4 2.76 -3867
0.5 191.05 57.69 22.31 -15.36 1.51 -1726
1 184.7 65.21 14.79 -14.8 0.75 -665
1.5 178.35 72.54 7.457 -14.57 0.2 -24.4
2 172 79.82 0.175 12.7 -14.59 -0.27 463.8
Fig. 5.14. Funcţia F1 pentru T = 2 s şi S1 descrescător
Tabelul 5.8
t S1 φ1 β S1pct βpct β2pct F1
0 172 49.77 30.23 -16.392 2.76 -3867.23
2 177.1 56.14 23.86 -15.517 1.71 -2033.05
4 182.2 62.23 17.77 -14.98 1.02 -1015.72
6 187.2 68.16 11.84 -14.678 0.51 -377.417
8 192.3 74.00 6.00 -14.558 0.1 79.6257
1
0 197.4 79.82 0.18 13 -14.593 -0.3 463.798
Fig. 5.15. Funcţia F1 pentru T = 10 s şi S1 crescător
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
41
Tabelul 5.9
t S1 φ1 β S1pct βpct β2pct F1
0 197.4 79.82 0.18 -14.593 -0.3 463.798
2 192.3 74.00 6.00 -14.558 0.1 79.6257
4 187.2 68.16 11.84 -14.678 0.51 -377.417
6 182.2 62.23 17.77 -14.98 1.02 -1015.72
8 177.1 56.14 23.86 -15.517 1.71 -2033.05
10 172 49.77 30.23 13 -16.392 2.76 -3867.23
Fig. 5.16. Funcţia F1 pentru T = 10 s şi S1 descrescător
Tabelul 5.10
t S1 φ1 β S1pct βpct β2pct F1
0 172 49.77 30.23 -16.392 2.76 -3867.23
2 178.6 57.99 22.01 -15.327 1.47 -1670.31
4 185.2 65.79 14.21 -14.775 0.7 -603.801
6 191.8 73.40 6.60 -14.563 0.14 37.6373
8 198.4 80.97 -0.97 -15.618 -0.3 537.602
10 205 88.64 -8.64 13 -14.921 -0.8 1066.81
Fig. 5.17. Funcţia F1 pentru T = 10 s şi S1 crescător
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
42
Tabelul 5.11
t S1 φ1 β S1pct βpct β2pct F1
0 205 88.64 -8.64 -14.921 -0.8 1066.81
2 198.4 80.97 -0.97 -14.618 -0.3 537.602
4 191.8 73.40 6.60 -14.563 0.14 37.6373
6 185.2 65.79 14.21 -14.775 0.7 -603.801
8 178.6 57.99 22.01 -15.327 1.47 -1670.31
10 172 49.77 30.23 13 -16.392 2.76 -3867.23
Fig. 5.18. Funcţia F1 pentru T = 10 s şi S1 descrescător
5.4. Concluzii asupra modelărilor dinamice
Modelările dinamice s-au referit numai la tipurile structural-cinematice de modele de
mecanisme cu bare articulate, incluzând variantele de articulare gambă-picior (talpă) cu articulaţie sferică şi cea cardanică.
În cuplele motoare s-au dispus motoare rotative sau liniare, echilibrul dinamic – considerând energia cinetică Ec şi potenţială Ep a masei m considerată în centrul de greutate al gambei – făcându-se pe baza ecuaţiilor de mişcare Lagrange.
Astfel s-au dedus expresiile momentului motor necesar pentru M = 2, adică două coordonate generalizate k = 1;2 şi s-au făcut particularizări pentru k = 1.
În cadrul dinamicii inverse s-au impus (ales) legi de mişcare reprezentative pentru pronaţie a(t) şi flexie β(t), rezultând momentele motoare care realizează mişcările impuse.
În cazul motoarelor liniare, s-au dedus formele motoare necesare pentru k = 1;2. Pe baza relaţiilor deduse s-a conceput un program de calcul de simulare numerică. Simulările numerice au considerat o mare varietate de situaţii funcţionale, precum: 1. variaţia unghiurilor a şi β după funcţii cosinusoidale în timp, pentru diverse
perioade de timp; 2. timp de parcurgere a funcţiei T = 2; 10; 15; 20; 30 s; 3. unghiurile a şi β considerate pe rând parametri ficşi; 4. valorile maxime amax = 15; 20 şi βmax = 30; 5. valorile momentelor motoare cresc vertiginos cu scăderea perioadei de timp. Din analiza rezultatelor numerice şi alura graficelor, se constată că funcţia motoare are
o alură asemănătoare celei a parametrului cinematic pe care-l urmăreşte.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
43
6. CONTROLUL ARTICULAŢIEI GLEZNEI LA ROBOŢII BIPEZI
6.1. Despre controlul roboţilor bipezi
Structura de conducere a unui robot este o structură ierarhică, datorită complexităţii deosebite a sistemelor ce intră în componenţa robotului şi a dificultăţilor create de sarcinile de operare impuse [I3].
Organizarea ierarhică a sistemelor de control pentru roboţi este de tip vertical, fiecare nivel ierarhic acoperind nivelul inferior sub raportul problemelor de conducere abordate. Un nivel de control comunică cu nivelul imediat inferior prin instrucţiuni de control şi primeşte de la acesta informaţii caracteristice, care, împreună cu deciziile furnizate de nivelul imediat superior, îi permite să stabilească strategia viitoare de acţiune.
Conducerea cu microprocesoare şi microcalculatoare este specifică sistemelor complexe cu o comportare adaptivă faţă de schimbările mediului de operare. Aceste sisteme realizează o serie de funcţii de conducere şi supraveghere a roboţilor utilizând întreaga gamă a operaţiilor logice şi de calcul aritmetic, evaluări calitative şi cantitative ale unor mărimi, prelucrarea unor semnale prin algoritmi de conducere discretă, etc.
Pentru prelucrarea mixtă a semnalelor binare şi a celor numerice, sistemele de acest tip sunt implementate şi în configuraţii de tip biprocesor, formate din secţiuni diferite specializate pe interpretarea unor mărimi pur secvenţiale sau a unora numerice. Astfel de sisteme se introduc, în mod firesc, în structuri de conducere ierarhizate, fiecare procesor preluând unul din nivelele ierarhice proprii conducerii roboţilor [I3].
Sistemul de control cuprinde trei subsisteme, a căror interacţiune are ca rezultat deplasarea robotului în spaţiul de lucru, şi anume:
subsistemul de acţionare; subsistemul senzorial; subsistemul de control propriu-zis,
fiecare dintre acestea putând fi tratat şi ca sistem individual.
6.2. Probleme privind sistemul de acţionare
Sistemele uzuale de acţionare folosesc trei surse primare de energie: electrică, hidraulică sau pneumatică. Fiecare dintre acestea prezintă diferite avantaje sau dezavantaje care au fost prezentate la stadiul actual.
Transmisiile mecanice ale roboţilor bipezi au ca scop conectarea sistemului de acţionare la structura mecanică a robotului şi îmbunătăţirea caracteristicilor dinamice ale sistemului de acţionare: amortizarea şocurilor, atenuarea vibraţiilor etc. Alegerea unui sistem de transmisie nu este simplă deoarece avantajele date de rapoartele de transmisie mari (variaţiile încărcăturii motoarelor sunt mici) sunt contrabalansate de problemele de elasticitate, de frecări şi de jocurile mecanice apărute ca urmare a utilizării sistemelor de angrenaje sau de scripeţi.
Din punctul de vedere al performanţelor acestor sisteme în corelaţie cu performanţele sistemului de control, se impun următoarele cerinţe [P6]:
- realizarea unei funcţii de transfer de o complexitate minimă (se recomandă, în acest sens, evitarea pe cât posibil a mecanismelor cu bare articulate, care prin natura lor neliniarizează sistemul);
- eliminarea timpilor morţi prin eliminarea jocurilor din transmisia mecanică ( realizarea de sisteme de compensare a jocurilor),
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
44
- realizarea unor sisteme cu timp mic de întârziere (evitarea transmisiilor prin fire elastice, evitarea roţilor dinţate cu momente mari de inerţie şi a cuplajelor care prezintă fenomenul de frecare).
La o sintetizare a celor studiate se poate spune că, deoarece acţionarea electrică prezintă facilităţi în asigurarea controlului această metodă este cea mai des utilizată pentru cuplele roboţilor bipezi, inclusiv datorită sistemelor performante de control, care sunt precise, sigure şi relativ uşor de cuplat la o conducere numerică de nivel înalt.
6.3 Probleme privind sistemul senzorial
Activitatea omului în procesul de păşire se caracterizează prin faptul că mişcările şi acţiunile pe care le execută pentru a se deplasa în condiţii de echilibru necesită contribuţia sistemelor senzoriale şi a centrilor de coordonare nervoşi, pentru identificarea parametrilor de mediu şi optimizarea, după diferite criterii, a acţiunilor întreprinse. Astfel, funcţia de informare reprezintă una dintre principalele funcţii în conducerea şi controlul păşirii, iar elementele utilizate în acest proces au o influenţă majoră în păstrarea echilibrului robotului.
Din literatura de specialitate studiată [D3,D6,D11,D12,P2,P3,S4,S5] se constată că sistemele automate de conducere a procesului de păşire, respectiv controlul roboţilor bipezi humanoizi, efectuează operaţiile de măsurare şi informare prin intermediul traductorilor, respectiv senzorilor. Aceşti senzori sunt cunoscuţi ca transformatori de energie, dispozitive capabile de a converti mărimea fizică de măsurare într-un semnal electric de ieşire.
O condiţie de bază a dezvoltării robotizării o constituie realizarea senzorilor inteligenţi. Senzorii utilizaţi pentru efectuarea operaţiilor de informare privind mediul de păşire se pot
clasifica după următoarele criterii: după distanţa de culegere a informaţiei: senzori de contact - tactili, de relief, de alunecare, de efort şi senzori fără contact - de proximitate, optici (zonă apropiată), de investigare (zonă îndepărtată); după natura contactului: de cuplare directă ( senzorii de forţă plasaţi în talpă) şi de cuplare indirectă (cazul senzorilor de forţă-moment plasaţi în articulaţii).
Pentru detectarea forţelor apărute la interacţiunea robotului cu solul în procesul
păşirii, sunt utilizate două metode, şi anume: metoda directă - metodă în care senzorii sunt plasaţi direct pe talpa
robotului; metoda indirectă - metodă în care senzorii sunt sub formă de celule de
captare pe mai multe direcţii amplasate în articulaţiile picioarelor. Pentru măsurarea forţei de apăsare, cel mai bine se comportă captoarele sub formă de
bară curbă închisă sau celule elastice fixate pe o placă de bază. Totuşi, utilizarea unor astfel de sisteme complică schemele de acţionare, fiind necesare punţi Wheatstone de echilibrare pentru fiecare sistem senzorial.
Variaţiile alungirilor şi a tensiunii de ieşire din puntea Wheatstone în funcţie de variaţiile sarcinii au fost testate de autor şi sunt prezentate în tabelul 6.1, iar în figura 6.1 respectiv figura 6.2 sunt reprezentările grafice [Ş1].
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
Pentru obţinerea unei sensibilităţi cât mai ridicate a captorului este necesar ca
traductorul electrorezistiv să fie aplicat într-o zonă a elementului elastic în care deformaţia
specifică să fie maximă, adică în punctele de abscisă maximă (v. fig.6.3).
Fig. 6.3. Deformaţia specifică unui captor bară curbă.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
46
De regulă, dimensionarea elementului elastic se face astfel încât, la sarcina nominală,
alungirea specifică maximă să ajungă la valoarea de 1000 – 1500 m / m , fără a depăşi
domeniul elastic al materialului, întrucât nu se obţine o liniaritate satisfăcătoare şi nici
revenirea la zero.
Un alt factor care influenţează foarte mult procesul păşirii îl reprezintă forma tălpii,
implicit suprafaţa de contact a acesteia (diferenţa sesizabilă dintre talpa normală şi cea cu
platfus, sau dintre talpa unui copil şi a unui adult).
Având în vedere că terenul pe care se deplasează un robot biped poate să nu fie plat şi
orizontal, ci să aibă neregularităţi, este de dorit ca tălpile picioarelor să aibă o formă adecvată
mersului pe orice fel de suprafeţe. O formă neadecvată a tălpii în raport cu suprafaţa de
contact implică transmiterea la sol a unor forţe mici din partea robotului, fapt ce determină
imposibilitatea deplasării ca urmare a unei forţe de reacţiune insuficiente din partea solului.
Cel de al treilea factor care intervine în menţinerea echilibrului robotului, atât în
timpul păşirii cât şi în timpul staţionării acestuia, este poziţia senzorilor de captare a forţelor
de reacţiune a solului. Senzorii pot fi dispuşi în mod singular în puncte cheie de pe suprafaţa
de contact a tălpii, fie sub formă matriceală, atât pe suprafaţa inferioară a părţii din faţă
(vârful ) cât şi pe suprafaţa inferioară a călcâiului (fig. 6.6).
Un alt factor care are influenţă majoră este amortizarea şocului din timpul
contactului cu solul în momentul păşirii. Îndeplinirea acestei cerinţe permite realizarea unui
mers uniform asemănător mersului uman.
Fig. 6.6. Modul de poziţionare al senzorilor [S1].
Literatura de specialitate [S1, I2] precizează că această condiţie se realizează printr-o
formă constructivă adecvată a tălpii, şi anume prin realizarea unor curburi în faţa şi în spatele
tălpii, corespunzător degetelor şi călcâiului de la piciorul uman (fig. 6.7). Totodată mărimea
acestor curburi influenţează suprafaţa de contact dintre talpă şi sol, şi implicit stabilitatea
robotului în repaus. Această stabilitate este strâns legată şi de sistemul de acţionare a cuplelor
robotului, deoarece ideal ar fi ca motoarele să nu fie sub tensiune, dar totodată nici nu se poate
întrerupe alimentarea. Analiza stării de echilibru la roboţii bipezi se face funcţie de cele trei
faze ale păşirii şi anume: sprijinirea pe un singur picior, sprijinirea pe ambele picioare şi
faza de transfer pentru ambele picioare.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
47
Fig. 6.7. Forme de tălpi [S1, I2].
Existenţa proeminenţelor are rolul de a uniformiza mersul şi, totodată de a compensa
reducerea suprafeţei de contact dintre talpă şi sol, datorată curburilor ce imită degetele şi călcâiul.
6.4. Probleme privind controlul păşirii
Roboţii bipezi autonomi necesită un control inteligent ierarhic, datorită specificului natural de a lucra cu informaţii descriptive imprecise, legate de mişcarea proprie şi de condiţiile de mediu, pentru a realiza misiuni complexe.
În general controlul păşirii roboţilor bipezi este un control în forţă, având ca informaţie de bază forţele de reacţiune din picioarele robotului la interacţiunea cu solul. Această informaţie trebuie transmisă, prelucrată şi utilizată în realizarea algoritmilor de păşire şi control autonom.
Principala sarcină a sistemului de comandă şi control în procesul păşirii o reprezintă asigurarea păşirii în condiţii de stabilitate.
Controlul păşirii roboţilor bipezi presupune două faze, şi anume: controlul în timpul deplasării - fază ce impune atât un control al traiectoriei de
deplasare cât şi un control al poziţiei de stabilitate; controlul în timpul staţionării - fază ce impune numai controlul poziţiei de
stabilitate. Transmiterea informaţiei în sistem are loc adesea întru-un mediu cu zgomot, care este
departe de cel ideal. De aceea, este importantă folosirea unui transfer tolerant la erori şi/sau a
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
48
unor metode inteligente de procesare. Se impun, în consecinţă, două sisteme de magistrale deschise distincte: una care leagă între ele sistemele de comandă şi alta care leagă senzorii şi elementele de execuţie cu diferitele sisteme de comandă.
Pentru deplasarea corectă într-un teren necunoscut, robotul trebuie să determine mişcarea articulară de referinţă, mărime ce reprezintă referinţa sistemului de reglare a acţionărilor axelor motoare. Totodată, trebuie să efectueze sinteza propriu-zisă a legii de comandă în spaţiul articular. Pentru aceasta se utilizează dispozitive cu înalt grad de integrare pentru amplificarea, transformarea, postprocesarea, stocarea şi procesarea semnalului.
Metodele convenţionale folosesc în acest sens în procesul de control controlere de tip proporţional – derivativ (PD), proporţional –integrativ (PI) sau proporţional - integrativ-derivativ (PID), care au ca scop analizarea şi reducerea perturbaţiilor apărute în timpul procesului. Toate au la bază o funcţie de transfer asociată, faţă de care se urmăreşte obţinerea unui regim critic amortizat ( ζ=1, unde ζ este factorul de amortizare asociat funcţiei de transfer). La un controler PID, elementul integrativ joacă rolul unei memorii în timp ce factorul derivativ este de tip anticipativ şi ţine cont de derivata mărimii de intrare sesizând creşterea şi descreşterea ei.
Din literatura de specialitate [F2,I3, P6] reiese că, în mod frecvent se controlează poziţia şi/sau viteza motoarelor din articulaţii. Această metodă constă în a controla viteza de deplasare a roboţilor prin modularea tensiunii de alimentare a motoarelor de antrenare din articulaţii. La această metodă avantajul esenţial îl reprezintă faptul că variaţiile de inerţii mecanice afectează doar timpii de răspuns ai robotului, şi mai puţin lanţul cinematic de stabilitate. Problema care apare este legată însă de cuplurile motoarelor, care cer o putere considerabilă pentru a învinge forţele apărute în articulaţie în faza de propulsie. Schema bloc a unui astfel de sistem este prezentată în figura 6.8. alături de răspunsul efectiv al sistemului, în timp ce figura 6.9 prezintă o schemă de reglare a vitezei cu regulator proporţional – integrativ.
Fig. 6.8. Schema bloc a unei bucle de comandă cu amplificator de tensiune şi
răspunsul aferent [F2].
O altă metodă este dată de controlul cuplului motoarelor, metodă care prezintă avantaje în conducerea complianţă - conducerea mişcării bazată pe măsurarea forţelor în care controlul articulaţiei cuprinde atât bucla de reglare a mişcării cât şi bucla de reglare a forţei de apăsare. Acest fapt necesită un sistem de conducere superior, capabil să facă schimbul de informaţii de la o buclă la alta.
Această metodă constă în a injecta într-un motor curentul adecvat pentru a obţine un cuplu dorit care să învingă cuplu rezistent datorat frecărilor, gravitaţiei şi inerţiei. Schema bloc a unui astfel de sistem cu un controler PD, alături de răspunsul indicial al sistemului, este prezentată în figura 6.10.
Problema schimbului de informaţii în cazul unui robot biped trebuie analizată din două puncte de vedere:
a) interconectarea sistemului de acţionare al robotului cu sisteme de comandă cu care colaborează în cadrul unor procese automate complexe;
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
49
b) interconectarea senzorilor şi a elementelor de execuţie cu sistemele de comandă ale robotului. Pentru aceasta se folosesc cabluri torsadate ecranate, cabluri coaxiale şi cabluri optice, ultimele fiind net superioare celorlalte prin viteza de transmisie şi imunitatea faţă de factorii perturbatori.
Metodele moderne folosesc microcontrolere, care reprezintă o transpunere digitală a celor clasice. Acestea au intrări digitale sau analogice, transformă în timp real semnalele şi utilizează diverse interfeţe. Reacţia de răspuns pentru asemenea componente de control este de ordinul microsecundelor.
Planificarea traiectoriei de mişcare este bazată pe determinarea configuraţiilor q ale piciorului, care corespund poziţiilor dorite x ale tălpii. Această operaţie se referă la toate valorile intermediare ale elementului terminal, şi nu doar la valoarea iniţială şi cea finală. La roboţii bipezi de ultimă generaţie, planificarea traiectoriei se poate face nu prin comandă directă (ceea ce presupune existenţa unui panou de comandă), ci prin sistem de calcul.
Fig. 6.10. Schema bloc a unei bucle de comandă cu amplificator de curent şi răspunsul
indicial aferent [F2].
Performanţele sistemului sunt influenţate în mod decisiv de sarcinile procesării
informaţiei. Componenta pentru procesarea informaţiei este folosită la generarea semnalelor electrice pentru controlul sistemului de actuatori, folosind datele senzorilor în vederea autosupravegherii şi comunicării cu sistemele exterioare. Un ciclu de procesare a informaţiei constă din detectarea, transformarea, stocarea, evaluarea şi generarea de semnale.
Procesul de control poate fi centralizat, caz în care legea de mişcare cuprinde toate articulaţiile (fapt ce necesită resurse hard foarte mari), sau descentralizat, în care legea de mişcare este caracteristică fiecărei articulaţii, separat pe fiecare grad de mobilitate, celelalte elemente din structura mecanică constituind efecte perturbatoare.
Pentru păşirea bipedă se utilizează cinematica inversă (pentru o traiectorie dată se determină mersul care aproximează cu erori minime această traiectorie).
La stabilirea legilor de control trebuie ţinut cont de factorii perturbatori care intervin în realizarea mişcării, cum ar fi elasticitatea şi frecarea în articulaţii, forţa centrifugă care induce un cuplu parazit la nivelul articulaţiei, dar şi forţele de inerţie care depind de poziţia celorlalte cuple (genunchi, şold). Toate aceste efecte parazite, percepute ca perturbaţii la nivelul sistemului de reglare sunt corectate de sistemul de control cu condiţia ca respectivele
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
50
perturbaţii să fi „văzute ” de corector, adică ieşirea sistemelor de reglare să conţină efectul perturbaţiilor. Totodată, sistemul de control trebuie să evite depăşirea punctului limită (legat de menţinerea echilibrului robotului) şi a oscilaţiilor mecanice.
Având în vedere că robotul biped trebuie să aibă capacitatea de a se adapta la cerinţele procesului de păşire, sistemul de control al acestuia ar trebui să fie capabil să opereze cu informaţii captate dintr-un mediu nedefinit şi să garanteze o comportare rezonabilă în situaţii neprevăzute.
Pentru aceasta sunt necesare noi metode de procesare a informaţiei, care să nu necesite un model exact al sistemului şi care să permită un compromis rezonabil între procesarea în timp real, exactitatea şi cantitatea datelor de intrare; acestea trebuie să ia decizii bazându-se pe informaţie vagă sau incompletă. Logica vagă (FUZZY) şi reţelele neuronale sunt două metode promiţătoare. Exemple tipice în acest sens fiind [F1]:
- fuziunea datelor furnizate de diferiţi senzori asistată de logica vagă (adesea pentru a obţine valori caracteristice pentru controlul sistemului, care nu pot fi măsurate direct). Raţionamentul fuzzy utilizează conjuncţiile „ŞI”, „SAU”, în care prima este interpretată matematic ca fiind minimul dintre mărimile fuzzy între care aceasta se aplică, în timp ce a doua reprezintă maximul. Aceşti operatori sun folosiţi în combinaţie cu operatorii „dacă-atunci” pentru a forma regulile fuzzy;
- folosirea reţelelor neuronale, care stochează asociativ date pentru clasificarea trăsăturilor caracteristice ale unui set de semnale cu zgomot;
- folosirea unei reţele neuronale cu programare inversă pentru a controla un sistem cu comportament neliniar.
Aceste metode de procesare a informaţiei, promiţătoare şi în dezvoltare, pot fi capabile să rezolve conflictul de a obţine un grad ridicat de miniaturizare împreună cu inteligenţă ridicată. În acest sens în literatura de specialitate se întâlnesc sisteme de control hibrid poziţie - fuzzy [P6], în care controlul în poziţie asigură deplasarea pe o traiectorie dată, în timp ce controlul fuzzy asigură echilibru robotului. Rolul controlerului fuzzy este acela de a corela poziţia dorită a ZMP-ului (punctul de moment zero) cu cea reală măsurată.
Fig. 6.11. Punctele de bază în măsurarea ZMP-ului [P6].
6.5. Controlul forţei de reacţie a mediului asupra tălpii.
Pentru stabilirea unei scheme de control se ţine cont de faptul că articulaţia este redusă
la un singur grad de libertate, în timp ce forţa este captată de un sistem senzorial care are în
componenţă un resort, având constanta de rigiditate ek (fig. 6.13). Resortul interacţionează cu
solul (considerat ca un corp rigid) şi, totodată, este purtătorul de masă al robotului.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
51
Fig. 6.13. Ansamblu talpă superioară – sistem senzorial cu resort.
Se consideră că trebuie asigurat controlul forţei de interacţiune mediu-sistem aplicate
masei m ataşată resortului. Va fi inclusă şi o forţă perturbatoare necunoscută ( pertf ) ce poate
fi imaginată ca un model al forţei de frecare necunoscută (de exemplu forţa de frecare care
intervine în angrenajele mecanismului sistemului robot).
Variabila ce trebuie controlată automat este forţa de reacţie a mediului, care este de
fapt chiar forţa de reacţiune în resort:
xkf ee = (6.1)
Ecuaţia care descrie funcţionarea acestui sistem fizic este:
perte fxkxmf = (6.2)
Dacă se doreşte realizarea controlului forţei ef , se scrie ecuaţia (6.2) în funcţie de
variabila controlată. După anumite transformări se obţine:
perteee fffkmf = - 1 (6.3)
Folosind conceptul de controler partiţionat, ba = ff ; 1-= ekma ; perte ff =b ,
se ajunge la legea de control dorită:
pertefpffvfge ffekekfkmf = - 1 (6.4)
unde: egf ffe -= , este eroarea de forţă dintre greutatea robotului gf şi forţa de reacţie a
solului ef .
Din relaţiile (6.3) şi (6.4) rezultă ecuaţia dinamică în spaţiul de eroare pentru un sistem
în buclă închisă:
0= fpffvff ekeke (6.5)
Totuşi, întrucât nu se pot obţine informaţii despre pertf , legea de control (6.4) nu este
aplicabilă. O variantă posibilă ar fi să se renunţe la pertf . Prin egalarea relaţiilor (6.3) - (6.4)
se identifică eroarea staţionară:
f
pert
f
fe
a= (6.6)
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
52
unde pfef kkm = -1a , este câştigul forţei de reacţie. Forţa datorată greutăţii robotului ( gf ),
prescrisă sistemului de reglare, trebuie să echilibreze forţa de reacţie ef şi forţa perturbatoare
pertf astfel ca sistemul fizic să rămână în contact cu solul. Dacă se utilizează gf în legea de
control (6.4), în locul termenului perte ff , eroarea de forţă se identifică, ca fiind :
f
pert
f
fe
a=
1 (6.7)
Având în vedere că suprafaţa solului este rigidă, fa poate avea o valoare mai mică şi
astfel eroarea calculată în (6.7) este mai redusă faţă de eroarea dată de relaţia (6.6). În aceste
condiţii, se sugerează utilizarea următoarei legii de control [F2]:
gfpffvfge fekekfkf = - 1 (6.8)
În figura 6.14 este prezentată o schemă-bloc în buclă închisă, a unui sistem ce
utilizează legea de control (6.8) .
Fig. 6.14. Sistemul de control al forţei pentru un sistem masă resort [F2].
Această schemă reprezintă forma ideală de control, consideraţiile practice conducând
la sisteme de control mai simplificate. Totodată, unele legi de control ale forţei includ un termen integral, pentru a îmbunătăţi performanţa de regim staţionar.
Fig. 6.12. Schema unui control hibrid poziţie-forţă sau poziţie-fuzzy [P6].
Calculul poziţiei reale a ZMP-ului are la bază măsurarea în trei puncte a forţelor de contact dintre talpa robotului şi sol (fig. 6.11). Totodată, corelarea poziţiei şi vitezei dorite cu poziţia şi viteza măsurată cu ajutorul senzorilor (de poziţie şi viteză), se poate obţine cu ajutorul unor controlere de tip PD, PID sau aproximativ (fig. 6.12).
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
53
6.5. Prototiparea virtuală a sistemului propus
În cadrul acestui subcapitol, cele două componente de bază ale sistemului de păşire
(dispozitivul mecanic şi sistemul de acţionare & control) sunt integrate, în concept mecatronic, la nivelul prototipului virtual.
În procesul „clasic” de proiectare a sistemelor mecatronice (din categoria cărora face parte şi sistemul de păşire propus) se lucrează pe acelaşi concept, dar cu instrumente software diferite, modelele (mecanic & control) fiind integrate abia în faza de testare a prototipului fizic. În situaţia în care apare o problemă la interacţiunea dintre modele, trebuie finisat sistemul de control şi/sau sistemul mecanic, etapă urmată de reverificarea procesului. Prin integrarea sistemului de control şi a dispozitivului mecanic la nivelul prototipului virtual se minimizează riscul ca legea de control să nu fie „urmărită” de modelul mecanic.
În vederea proiectării schemei de control a sistemului de păşire, platforma de prototipare virtuală utilizată în lucrare integrează o soluţie software de tip DFC (Desing For Control), care schimbă informaţii (export - import) cu softul MBS (ieşirea din MBS este intrare în DFC şi invers). Algoritmul de simulare implică, pe lângă conceperea modelului MBS al dispozitivului mecanic, următoarele etape: identificarea parametrilor de intrare şi ieşire (ieşirile descriu variabilele transmise către sistemul de control, în timp ce intrările descriu variabilele returnate în dispozitivul mecanic); proiectarea diagramei bloc a sistemului de control; sinteza controlului; co-simularea sistemului mecatronic.
În prezenta lucrare, problema integrării sistemului de control în modelul mecanic al sistemului de păşire a fost abordată prin utilizarea modulului Controls Toolkit (ca soluţie DFC) din pachetul ADAMS, modul apelabil din interfaţa de preprocesare ADAMS/View (ca soluţie MBS).
Privitor la sistemul de control, se pot concepe o serie de scheme, cu una sau mai multe bucle/contururi (corespunzătoare numărului de parametri controlaţi/monitorizaţi). În schemele de control cu o singură buclă se monitorizează poziţia sistemului, în timp ce la schemele cu două bucle, pe lângă poziţie, intervine, de regulă, un parametru de viteză. Într-un caz mai general se pot monitoriza/controla trei parametri (poziţie, viteză, curent). Evident schemele mono-buclă sunt cele mai simple, în timp ce schemele multi-buclă asigură un comportament superior al sistemului (ca şi stabilitate, robusteţe).
Pentru lucrarea de faţă s-a optat pentru schemă de control simplificată mono-buclă, parametru monitorizat/controlat fiind poziţia unghiulară a gambei. Modelul dinamic al sistemului de păşire, care a fost realizat cu soluţia software MBS ADAMS/View, este cel prezentat în figura 6.15.
În aceste condiţii, schema generală proiectată în Controls Toolkit este prezentată în figura 6.16, blocurile care intervin în această schemă având următoarele semnificaţii:
semnal referinţă – generator de funcţie utilizat pentru modelarea semnalului de intrare (unghiul impus);
bloc de comparare (extragere) – bloc utilizat pentru compararea unghiului impus („+1”) cu unghiul măsurat/curent („-1”);
ADAMS Mechanism – modelul mecanic MBS al sistemului de păşire.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
54
Fig. 6.15. Modelul dinamic MBS al sistemului de păşire propus.
Fig. 6.16. Schema generală de control monobuclă.
Semnalul de intrare corespunde unui pas de mişcare de tip sinusoidal, cu amplitudinea de 30°, care se execută în 2 secunde, ceea ce înseamnă o funcţie de forma „30d·sin(time)”. Prin blocul de extragere, unghiul impus se compară cu unghiul realizat de sistem, ieşirea din acest bloc fiind, de fapt, eroarea de poziţionare. Acesta constituie intrarea în controler, care generează momentul motor pentru modelul mecanic MBS dezvoltat de ADAMS/View.
Pentru a sigura comunicaţia dintre modelul mecanic (ADAMS/VIEW) şi sistemul de control (Controls Toolkit), s-au definit variabilele de intrare & ieşire, şi respectiv funcţiile prin care aceste variabile sunt apelate (fig. 6.17).
prin care aceste variabile sunt apelate (fig. 6.17).
Fig. 6.17. Schema comunicaţiilor în sistemul mecatronic.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
55
Pentru variabila de intrare, reprezentând momentul motor (dezvoltat de motorul de curent continuu), funcţia de timp are valoarea 0.0, şi acesta deoarece variabila urmează să îşi primească valoarea din sistemul de control. Caseta de editare în ADAMS a variabilei de stare „moment_motor” este prezentată în figura 6.18.
Fig. 6.18. Modelarea variabilei de stare la intrare.
Ulterior această variabilă a fost atribuită ca şi funcţie pentru momentul aplicat asupra
rotorului, utilizând funcţia predefinită VARVAL – Variable Value (fig. 6.19), prin care se returnează valoarea variabilei de stare.
Pentru variabila de ieşire, funcţia de timp returnează unghiul de poziţie al gambei, pentru a cărei modelare s-a utilizat funcţia predefinită AZ – „Angle about Axis” (Z fiind axa locală de mişcare în cupla de rotaţie). Sistemele de coordonate utilizate pentru modelare sunt poziţionate în cupla de rotaţie, pe elementele adiacente, caseta de modelare a variabilei de stare „unghi_pozitie” fiind prezentată în figura 6.20.
Pe baza variabilelor de stare menţionate, s-au definit intrările (PINPUT – Plant Input) şi ieşirile (POUTPUT – Plant Output) procesului controlat, casetele de editare fiind prezentate în figurile 6.21 şi 6.22.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
56
Fig. 6.20. Modelarea variabilei de stare la ieşire.
Fig. 6.21. Modelarea parametrului de intrare (PINPUT).
Fig. 6.22. Modelarea parametrului de ieşire (POUTPUT).
După cum s-a menţionat, ca element de control se utilizează un controler proporţional (tip amplificator), în cele ce urmează fiind abordată problema acordării controlerului, în speţă determinarea factorul proporţional (P), astfel încât să se obţină indicii de performanţă impuşi (stabilitate, robusteţe).
Acordarea controlerului poate fi realizată prin diferite metode specifice teoriei sistemelor automate, care includ metoda locului rădăcinilor, metode frecvenţiale ş.a. În lucrarea de faţă acordarea controlerului este privită ca o problemă de proiectare parametrică optimală, conform metodologiei prezentate în [A2].
Datele specifice procesului de optimizare a sistemului de control (controlerului) sunt: modelarea variabilei de proiectare – factorul de amplificare al controlerului
proporţional;
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
57
modelarea funcţiei obiectiv – eroarea de poziţionare, definită ca diferenţă între unghiul impus şi valoarea curentă măsurată;
valoarea monitorizată a funcţiei obiectiv – rădăcina medie pătrată (RMS – Root Mean Square) pe durata simulării;
scopul optimizării – minimizarea valorii monitorizate a funcţiei obiectiv. Variabila de proiectare este definită printr-o valoare iniţială şi un domeniu de variaţie
relativ la valoarea iniţială. În figura 6.23 este prezentată caseta de editare/configurare a variabilei P (factorul proporţional).
După cum s-a precizat, ca şi funcţie obiectiv se consideră eroarea de poziţionare, reprezentând ieşirea din blocul de comparare în schema bloc de control (v. fig. 6.16). Eroarea de poziţionare poate fi asimilată cu eroarea staţionară din teoria sistemelor, care defineşte diferenţa dintre semnalul de intrare şi valoarea la care se stabilizează semnalul de ieşire, conform răspunsului indicial al sistemului (fig. 6.24) [P6]. Ceilalţi parametri utilizaţi în teoria controlului pentru evaluarea răspunsului unui sistem (timpul de creştere, timpul de suprareglaj, timpul de stabilizare şi suprareglajul) nu ridică probleme în cazul proiectării sistemului de control, datorită vitezei reduse cu care se efectuează mişcarea, prin urmare nu vor fi consideraţi în procesul de optimizare.
Fig. 6.23. Configurarea variabilei de proiectare.
Fig. 6.24. Răspunsul indicial al sistemului [P6].
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
58
În aceste condiţii, problema de optimizare a sistemului de control este una mono-obiectiv, fără constrângeri de proiectare, algoritmul numeric utilizat fiind cel integrat în softul ADAMS/View şi anume OPTDES-GRG – metoda de diferenţiere (Forward) [Z19].
Prin aplicarea algoritmului de optimizare s-a obţinut valoarea optimă a factorului de
amplificare al controlerului, 81071,6 =P , rădăcina medie pătrată a erorii de poziţionare
având valoarea 61064,1 -=eRMS , ceea ce justifică utilizarea schemei de control propusă.
Prin co-simularea sistemului mecatronic, s-a obţinut diagrama de variaţie a parametrului monitorizat - unghiului de poziţionare a gambei (fig. 6.25), pentru care momentul motor corespunzător aplicat asupra rotorului este cel prezentat în figura 6.26.
Se observă că momentul creşte şi atinge o valoare maximă în faza de propulsie a păşirii, respectiv se uniformizează în timpul fazei de transfer, ceea ce corespunde unui proces real de păşire bipedă humanoidă. Totodată, se constată că elementul de control tip amplificator asigură un comportament corespunzător al sistemului de păşire propus, această variantă de controler fiind, totodată, simplă şi ieftină.
Fig. 6.25. Variaţia în timp a unghiului de poziţionare a gambei.
Fig. 6.26. Variaţia în timp a momentului motor aplicat rotorului.
6.6. Concluzii
În acest capitol s-a efectuat o succintă prezentare a elementelor ce intervin în procesul
de control al păşirii la roboţii bipezi, prin consultarea de lucrări ştiinţifice, reviste de specialitate, publicaţii si documentaţii de firmă şi internet.
Pentru partea de acţionare, au fost prezentate avantajele şi dezavantajele diferitelor modalităţi de acţionare, în urma cărora s-a optat pentru acţionarea electrică a modelului experimental realizat.
În ceea ce priveşte sistemele senzoriale, au fost prezentate sisteme de ultimă generaţie, cât şi schema electrică a unui sistem senzorial ce utilizează mărcile tensometrice TER.
Din materialul prezentat, se poate desprinde concluzia că mecanismele destinate păşirii au ca trăsătură definitorie prezenţa în structura lor a lanţurilor cinematice
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
59
informaţionale ce conţin senzori şi elemente de condiţionare a informaţiei, cuplele din aceste mecanisme devenind astfel cuple infomecanice.
Ca şi contribuţii proprii în acest capitol se pot enumera: dezvoltarea modelului dinamic MBS al sistemului de păşire; conceperea şi modelarea sistemului de control, în concept mecatronic; definirea şi modelarea funcţiei obiectiv şi variabilei de proiectare pentru procesul de
optimizare a controlerului; optimizarea parametrică a sistemului de control
7. MODELUL EXPERIMENTAL PROPUS. 7.1 Probleme generale privind cercetarea experimentală.
Aşa cum am demonstrat în capitolele anterioare, modelarea tuturor mişcărilor existente în gleznă presupune o triplă articulaţie de rotaţie după axele x (pronaţie), y (flexie), z (pivotare), deci o cuplă sferică. Articulaţia sferică echivalentă nu-şi găseşte aplicaţie ca şi cuplă motoare datorită dificultăţilor de acţionare. Ca atare, o primă simplificare s-a realizat transferând rotaţia de pivotare a tălpii în articulaţia genunchiului iar rotaţia de flexie-extensie respectiv rotaţia de pronaţie-supinaţie să se realizeze la nivelul gleznei printr-o articulaţie cardanică. Ca urmare, s-a realizat cu precădere mişcările executate în planul sagital şi frontal.
Plecând de la ideea că cea mai simplă modelare structurală se poate realiza printr-o cuplă de rotaţie, în modelul experimental propus, pentru realizarea mişcării principale la nivelul gleznei, s-a folosit o cuplă de rotaţie ce permite flexia-extensia tălpii (o mobilitate activă), în timp ce mişcarea de pronaţie-supinaţie a fost preluată de forma tălpii şi implicit de sistemul senzorial de determinare a forţelor din talpă, ca o mobilitate pasivă (în special de partea inferioară a acesteia). Totodată parte superioară a tălpii a fost considerată ca fiind fixă în timp ce mişcarea de flexie este realizată de către gambă
. 7.2 Model experimental
Procesul de modelare şi simulare în mediul virtual (abordat în capitolul anterior al tezei de doctorat) precede realizarea şi implementarea prototipului fizic (modelul experimental) al sistemului de păşire la nivelul articulaţiei gleznei.
Obţinerea unor performanţe superioare legate de posibilitatea deplasării robotului biped pe terenuri cu configuraţii cât mai diferite cât şi de creştere a mobilităţii şi stabilităţii în aceste condiţii de deplasare, au impus un studiu foarte atent privind forma tălpii la contactul cu solul.
Pentru preluarea forţelor din talpă, nu atât senzorii de forţă-moment folosiţi a făcut diferenţierea cât forma tălpii şi implicit modul de poziţionare al senzorilor.
Astfel au fost utilizat senzori de forţă rezistivi, plasaţi în cinci puncte considerate a fi principale în procesul de păşire, iar modalitatea de plasare a acestora permite eliminarea unei cuple de rotaţie din cele două care le au majoritatea roboţilor păşitori humanoizi, fapt ce simplifică sistemul de control.
Structura propusă pentru modelul experimental reprezintă, atât prin elementele componente cât şi prin formă, o noutate în domeniul roboţilor păşitori bipezi (fig. 7.1).[Ş7].
Talpa membrului inferior a fost practic divizată în două părţi, şi anume: talpa superioară respectiv talpa inferioară. Legătura între cele două părţi, s-a realizat prin intermediul unui sistem senzorial pentru determinarea forţei în procesul păşirii, sistem care constituie o inovaţie proprie în domeniu (fig. 7.2).
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
60
Forma tălpii inferioare a fost aleasă prin prisma rezolvării problemei dinamice de echilibrare, a rezolvării problemei dinamice de susţinere cât şi a rezolvării problemei dinamice de propulsie. Materialul din care este confecţionată (cauciuc), permite atenuarea parţială a şocului apărut în timpul contactului piciorului cu solul, iar prin forma tijelor inferioare, care au capul semisferic încastrat în cauciuc, se permite preluarea forţelor de reacţie ale solului.
Fig.7.1 Schema generală a modelului experimental propus [Ş7].
Fig. 7.2 Sistem senzorial pentru captarea forţelor de reacţie de la sol, în procesul păşirii [Ş7].
Dispozitivul propus/realizat în care se montează senzorul de forţă, ajută la menţinerea echilibrului astfel încât talpa superioară să rămână în permanenţă perpendiculară pe forţa de greutate, ceea ce duce la mărirea suprafeţei „poligonului de susţinere” şi implicit la creşterea gradului de stabilitate în condiţiile evitării apariţiei fenomenului de alunecare (forţele de
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
61
frecare la sol foarte mici). Prezenţa arcului în sistem senzorial de determinare a forţei permite o bună amortizare a şocului apărut în urma contactului cu solul, revenirea în poziţia iniţială a tălpii în perioada de transfer şi retragerea pasului în situaţia supraîncărcării acestuia. El oferă, în procesul păşirii, posibilitatea determinării forţelor de reacţie ale solului din diferite unghiuri, asigurând tălpii o flexibilitate care poate fi controlată, fapt ce permite reducerea articulaţiei gleznei la o singură cuplă de rotaţie.
Funcţionarea sistemului constă în transformarea energiei potenţiale a arcului obţinută ca rezultat al forţelor de reacţie de la sol în procesul păşirii, în variaţie a rezistenţei electrice a senzorului, variaţie care prin intermediul unui convertor analog-digital este utilizată atât pentru comanda motorului ce acţionează cupla de rotaţie a gleznei cât şi pentru comanda articulaţiei şoldului, în vederea păstrării echilibrului robotului în procesul păşirii.
Pentru acţionarea elementului gambei am utilizat un motor de curent continuu de tip Maxon RE-25 cu comutaţie electrică, cu reglarea turaţiei prin variaţia tensiunii sursei de alimentare, având senzorul de poziţie plasat direct în servomotor şi care este un traductor incremental unghiular în care discul optic este înlocuit cu unul de contact. Caracteristica de funcţionare a motorului este prezentată în figura 7.3. Motorul este prevăzut şi cu un reductor planetar de ti Maxon GP-26, cu un raport de transmitere de 53:1.
Pentru macheta experimentală concepută/realizată am utilizat senzori de forţă rezistivi de tip CZN-CP15, plasaţi în şapte puncte considerate a fi principale în procesul de păşire, şi un convertor de semnal digital IM36-22EX-U. Modalitatea de plasare a senzorilor permite controlarea unghiului format între gambă şi talpa superioară, funcţie de gradul de încărcare a celor din faţa sau din spatele tălpii, dar şi controlul echilibrului robotului prin trimiterea setului de valori către articulaţia şoldului. Astfel, prin citirea diferenţei de încărcare dintre senzorii din parte stângă respectiv din partea dreaptă a axei longitudinale a tălpii, se poate comanda articulaţia şoldului, pentru a efectua un anumit grad de înclinare a corpului robotului , în vederea menţinerii ZMP-ului (punctului de moment zero) în poligonul de susţinere.
Variaţia senzorilor de forţă funcţie de gradul de încărcare este prezentată în figura 7.4. Se poate observa că peste valoarea de 2 kg, senzorii au o caracteristică liniară fapt ce permite realizarea unui sistem de control mult mai simplu.
Fig. 7.3 Caracteristica motorului Maxon
utilizat
Fig. 7.4 Variaţia rezistenţei senzorilor
funcţie de masa aplicată
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
62
Sistemul de comandă are ca rol acţionarea in condiţii sigure si precise a întregului ansamblu mecanic al "simulatorului bigfoot"(denumirea sistemului de comandă şi control conceput). Acestea se datorează coordonării cu un sistem comandat de microcontroller pe baza unui program PLC (Programabile Logic Controller) care gestionează resursele interne şi stările externe (ex. traductoare rezistive de forţa FSR , poziţia unghiulară a întregului sistem , diverse comenzi externe , etc.).
Fig. 7.5 Descrierea sistemului de comandă şi control al modelului experimental
Automatul PLC este cel care comanda acţiunea driverului pentru motor in funcţie de solicitări , urmărind ca parametrii de comandă ai motorului sa fie întotdeauna în valorile de protecţie rezultând în acest mod o antrenare sigură dar şi precisă a motorului care comandă arborele principal al acţionării simulatorului . Motorul si întreg ansamblul de transmisie (reductor si cuplaje) reprezintă partea de execuţie a mecanismului ce pune in mişcare "simulatorul bigfoot" . Supravegherea corectă a mişcării executate este dată de potenţiometrul de poziţie (feedback) care oferă PLC-ului informaţia în timp real asupra poziţiei întregului mecanism direct la arborele principal de comandă. Descrierea componentelor Controllerului BigFoot (fig.7.5). Arhitectura sistemului de comanda si control al întregii acţionări este compusă din următoarele module principale :
1. Modulul de alimentare al sistemului - acesta are ca rol alimentarea cu energie electrică a întregului controller si are in componenta următoarele submodule : alimentare monofazata 230 Vac protejata de un întrerupător si o siguranţă F1;
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
63
transformator monofazat care are rolul de a reduce tensiunea reţelei de 230 Vac la un nivel de tensiune utilizat in controller si anume la valoarea de 24 Vac dar şi de a asigura o separare galvanica a celor 2 sisteme de tensiuni ;
redresor in punte monofazat care asigura conversia (redresarea) energiei alternative in cea continua, necesara funcţionării echipamentelor ce intra in componenta controllerului;
filtru capacitiv are rolul de a aplatiza vârful de tensiune rezultat in urma redresării si susţinerea componentei de energie continua la parametrii doriţi (se face referire la termenul de energie deoarece aceasta conţine toate mărimile necesare si in principal tensiune si curent );
convertor DC/DC cu rolul de a pregăti si forma si alte tensiuni utilizate in controller de exemplu ;
24 Vdc – pentru alimentare Automat PLC; 12 Vdc - Motor Controller respectiv Motor MAXON; 10 Vdc – pentru alimentare traductoare de forţa FSR 1-3 si potenţiometru de
pozitie. 2. Automat PLC SIEMENS tip LOGO! 24 RC acesta are rolul de a gestiona toate
resursele sistemului atât interne cat si externe si de a comanda Motor controller pentru execuţia mişcărilor dorite/solicitate .
Funcţionarea corectă a automatului se face pe baza unui program dedicat ce ţine cont de mărimile de intrare care pot fi analogice sau digitale (analog = valoare liniară 0-10 Vdc sau 4-20 mA // digital = valoare în impuls de 24 Vdc) in cazul acestei aplicaţii , traductoare de forţă FSR şi de poziţie. Potenţiometrele sunt mărimi analogice cu semnal 0-10 V iar butoanele de comandă sunt digitale 24 Vdc.
Programul intern face corespondenţa între aceste mărimi de intrare si cele de ieşire care mai sunt denumite şi acţiuni sau comenzi .
Automatul utilizat dispune de 8 intrări - 4 analogice şi 4 digitale iar ieşirile sunt pe releu în număr de 4. Aceste ieşiri sunt folosite la comanda motor - controller dar si pentru comanda unui LED / lampă de semnalizare stare funcţionare.
3. Motorul MAXON - reprezintă elementul de execuţie ce transformă energia electrică în energie mecanică disponibilă la arborele (rotorul) lui;
4. Controller tip EPOS 24/5 dedicat pentru comanda motorului MAXON – acesta realizează acţionarea motorului ce antrenează întregul mecanism şi este totodată interfaţa între comenzile externe (butoane,traductoare de presiune si poziţie) prelucrate de PLC, elementul de execuţie care este motorul electric DC (curent continuu) şi mai departe reductorul care asigură cuplul şi turaţia necesară antrenării.
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
64
8. CONCLUZII FINALE , CONTRIBUŢII ORIGINALE ŞI DISEMINAREA
REZULTATELOR 8.1 Concluzii finale şi contribuţii
S-a constatat că încercările de a realiza în cadrul roboţilor bipezi mişcările gambă-
picior ale membrului inferior uman, au condus la structuri mecanice/mecatronice complexe şi scumpe.
S-a constatat că lipsesc modelări cuprinzătoare structurale, cinematice şi dinamice ale articulaţiei gleznei.
Ca urmare obiectivul general al tezei de doctorat constă din modelarea completă structurală, cinematică şi dinamică a unor variante propuse pentru articulaţia gleznei roboţilor păşitori bipezi, cu asigurarea unui controler modern bazat pe prototiparea virtuală.
În urma cercetărilor efectuate au fost obţinute o serie de concluzii, din care redăm pe următoarele:
Structura biologică a sistemului osos al piciorului uman, respectiv a gleznei este imposibil de redat printr-o structură mecanică, ci numai aproximată;
Structura mecanismului de locomoţie a robotului biped trebuie să conţină elementele principale din sistemul locomotor uman, ca şi dispunerea geometrică a acestora;
Modelarea articulaţiei prin bare este relativ simplă structural, modelele propuse având una sau două cuple de rotaţie, respectiv o cuplă sferică între gambă şi picior;
Acţionarea modelelor articulate cu cuple de rotaţie se poate face atât cu motoare liniare (actuatori) cât şi cu motoare rotative;
Modelarea articulaţiei gleznei prin roţi dinţate permite obţinerea combinărilor dorite între mişcările de flexie, pronaţie, pivotare, soluţiile constructive fiind însă mai greoaie;
Modelul structural/geometric cu cuple de rotaţie în gleznă urmăreşte mişcarea relativă gambă-picior în considerentul talpă fixă gambă mobilă;
Modelul structural/geometric cu două articulaţii simple în gleznă (articulaţia cardanică) acţionat prin două actuatoare liniare este un model relativ simplu geometric şi cinematic;
În modelul structural/cinematic cu articulaţie cardanică, funcţiile de mişcare sunt cvasiliniare (β( 1j ), α( 21,jj ));
Programul propriu de calcul cinematic a considerat variantele de acţionare separat în
plan sagital (β( 1j ), în plan transversal (α( 2j )), respectiv combinat (β( 1j ), α( 21,jj ));
Selecţiile şi programul de calcul generalizate permit acţionarea cu motoare liniare sau rotative;
Modelul structural/geometric cu articulaţie sferică în gleznă este adecvat acţionării cu actuatoare, obţinându-se de asemenea mişcările de flexie şi pronaţie;
Modelul structural/geometric cu roţi dinţate urmăreşte mişcarea relativă gambă – picior în considerentul gambă fixă – picior(talpă) mobil;
Modelele structural - geometrico/cinematice cu roţi dinţate tip planetare au mişcări independente sau cuplate pentru toate funcţiile unghiulare a = ωa·t + a0, β = ωβ·t + β0, γ = ωγ·t + γ0, funcţiile de viteză ωα, ωβ, ωγ , rezultând din rapoartele de transmitere ale lanţurilor cinematice aferente;
Relaţiile cinematice deduse acoperă o gamă largă a modelărilor geometrice;
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
65
Acţionarea electrică a sistemelor mecanice care materializează glezna robotului este cea mai potrivită;
Integrarea dispozitivului mecanic cu sistemul de acţionare/control, în concept mecatronic, la nivelul prototipului virtual asigură varianta cea mai simplă şi ieftină pentru obţinerea unui comportament corespunzător al sistemului de păşire propus
Modelul experimental în care talpa reprezintă elementul esenţial de sesizare a forţelor, dar şi a simplificării articulaţiei gleznei, confirmă practic reuşita investigaţiei din această teză.
Dintre contribuţiile originale aduse prin tema de doctorat se pot enumera: Evaluarea critică a unor variante reprezentative de roboţi bipezi; Identificarea – formularea unei liste de obiective operaţionale; Propunerea de modele structurale cu bare articulate pentru articulaţia gleznei; Propunerea de modele structurale cu roţi dinţate pentru efectuarea mişcărilor de flexie,
pronaţie şi pivotare caracteristice gleznei; Realizarea de scheme cinematice pentru structurile propuse, cu deducere de relaţii de
calcul ale funcţiilor de poziţie gambă – picior; Programul de calcul pentru simularea funcţiilor de poziţie, cu prezentarea grafică a
rezultatelor simulării; Realizarea de modele dinamice pentru structurile articulate cardanic cu acţionare prin
motoare rotative şi liniare; Deducerea de relaţii de calcul, pe baza ecuaţiilor Lagrange, pentru funcţiile
momentelor motoare de echilibru dinamic al sistemului acţionat prin motoare rotative; Deducerea de relaţii de calcul, pe baza formalismului Lagrange, pentru funcţiile
forţelor motoare de echilibru dinamic al sistemului acţionat prin actuatori; Concepere de program de calcul al funcţiilor dinamice; Realizarea/simularea numerică dinamică pentru o serie de variante de mişcare
acţionare/acţionare cu prezentarea tabelară şi grafică a rezultatelor; Conceperea prototipului virtual integrat, sistem mecanic şi sistem de control, DFC-
MBS, cu o schemă de control monobuclă; Optimizarea parametrică a sistemului de control; Conceperea şi realizarea de prototip experimental dotat cu sistem original în talpă.
8.2. Diseminarea rezultatelor
Cercetările efectuate pe parcursul elaborării prezentei lucrări de doctorat au fost
valorificate printr-o serie de articole publicate în reviste şi buletine, comunicări în
simpozioane internaţionale, brevete de invenţie şi contracte de cercetare, după cum
urmează:
o propunere brevet de invenţie; un contract de cercetare derulat pe parcursul a trei ani; şase articole publicate în buletine; trei comunicări în simpozioane internaţionale.
8.3. Direcţii viitoare de cercetare
Ca direcţii de cercetare viitoare considerăm că se impune: Definirea constructivă a unei soluţii optimizate de articulaţie a gleznei pentru roboţii
bipezi; Conceperea realizarea constructivă a unui sistem mecanic complet gambă-gleznă-talpă;
Contribuţii privind analiza /dezvoltarea modelelor mecanice ing. IONEL ŞTEFAN pentru glezna roboţilor bipezi
66
8. BIBLIOGRAFIE
A.1 Alexandrescu, N., Mecatronica, stadiul actual de dezvoltare, Revista Română de