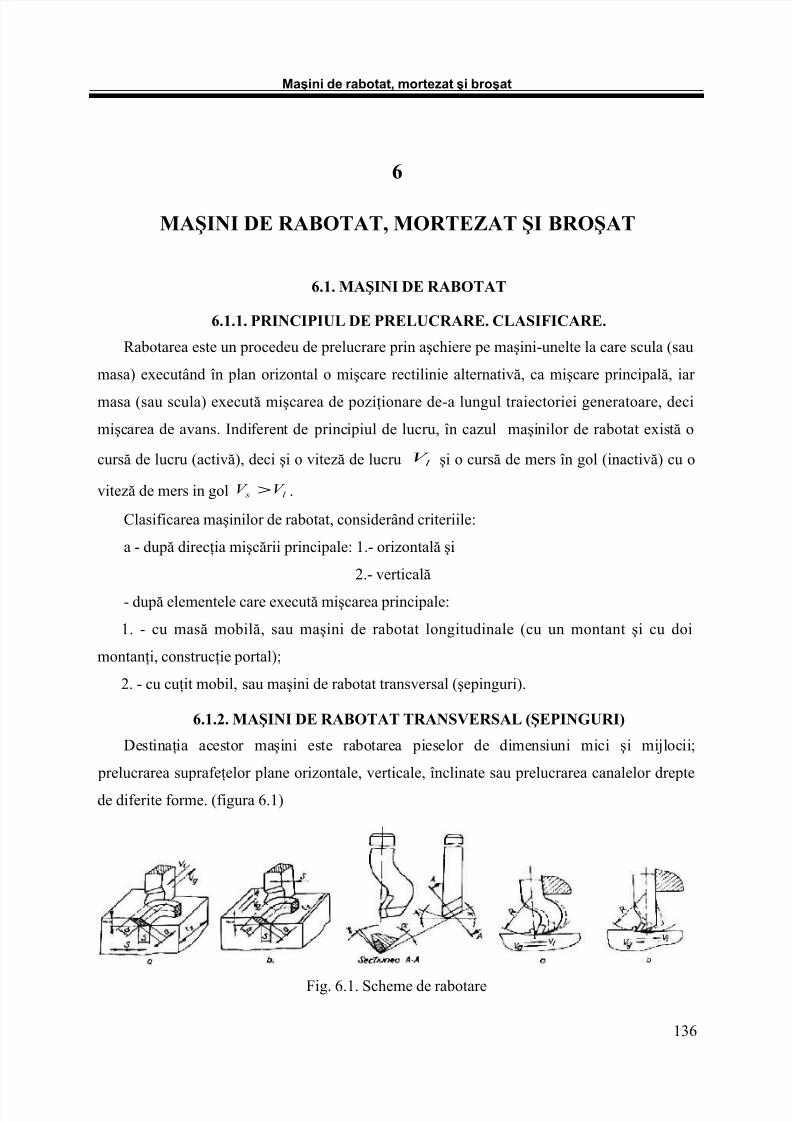
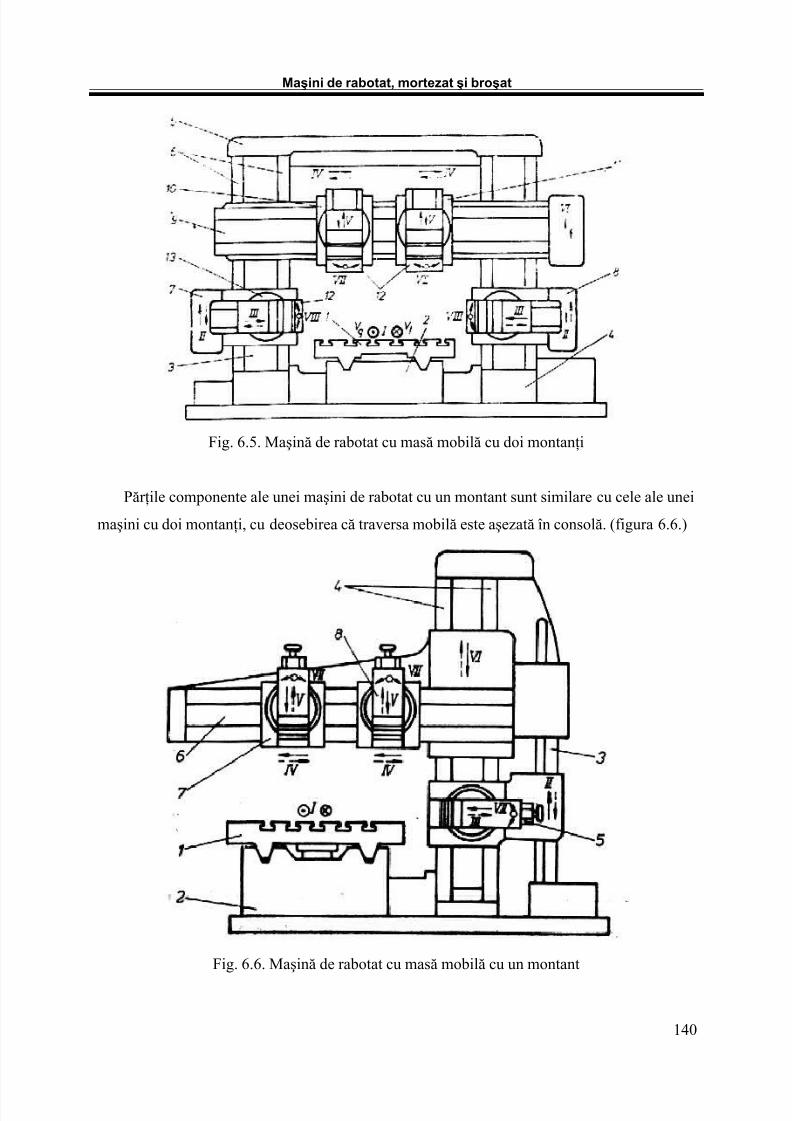
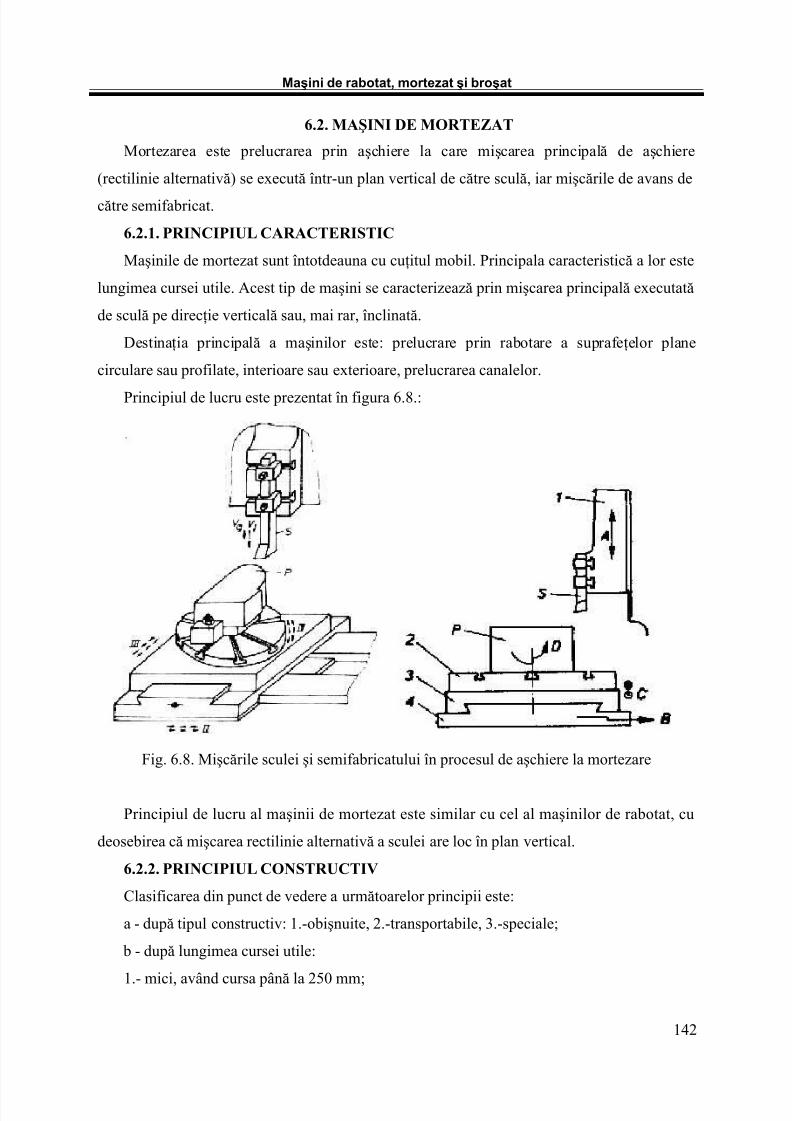
Maşini de rabotat, mortezat şi broşat 6 MAŞINI DE RABOTAT, MORTEZAT ŞI BROŞAT 6.1. MAŞINI DE RABOTAT 6.1.1. PRINCIPIUL DE PRELUCRARE. CLASIFICARE. Rabotarea este un procedeu de prelucrare prin aşchiere pe maşini-unelte la care scula (sau masa) executând în plan orizontal o mişcare rectilinie alternativă, ca mişcare principală, iarmasa (sau scula) execută mişcarea de poziţionare de-a lungul traiectoriei generatoare, deci mişc area de avans. Indi ferent de princ ipiul de lucru, în cazul maşi nilor de rabotat există o cursă de lucru (activă), deci şi o viteză de lucru lVşi o cursă de mers în gol (inactivă) cu o viteză de mers in gol ls VV> . Clasificarea maşinilor de rabotat, considerând criteriile: a - după direcţia mişcării principale: 1.- orizontală şi 2.- verticală - după elementele care execută mişcarea principale: 1. - cu masă mobil ă, sau maşini de rabotat longitudinale (cu un montant şi cu doi montanţi, construcţie portal); 2. - cu cuţit mobil, sau maşini de rabotat transversal (şepinguri). 6.1.2. MAŞINI DE RABOTAT TRANSVERSAL (ŞEPINGURI) De st in aţ ia ac es tor ma ş i ni este rabo ta re a pies el or de dime ns iuni mi ci ş i mi jlocii; prelucrarea suprafeţelor plane orizontale, verticale, înclinate sau prelucrarea canalelor drepte de diferite forme. (figura 6.1) Fig. 6.1. Scheme de rabotare 136
mişcărilor; - gama de avansuri; - numărul treptelor de reglare a avansului; - puterea motorului
electric de acţionare.
6.1.2.2. Principiul constructiv
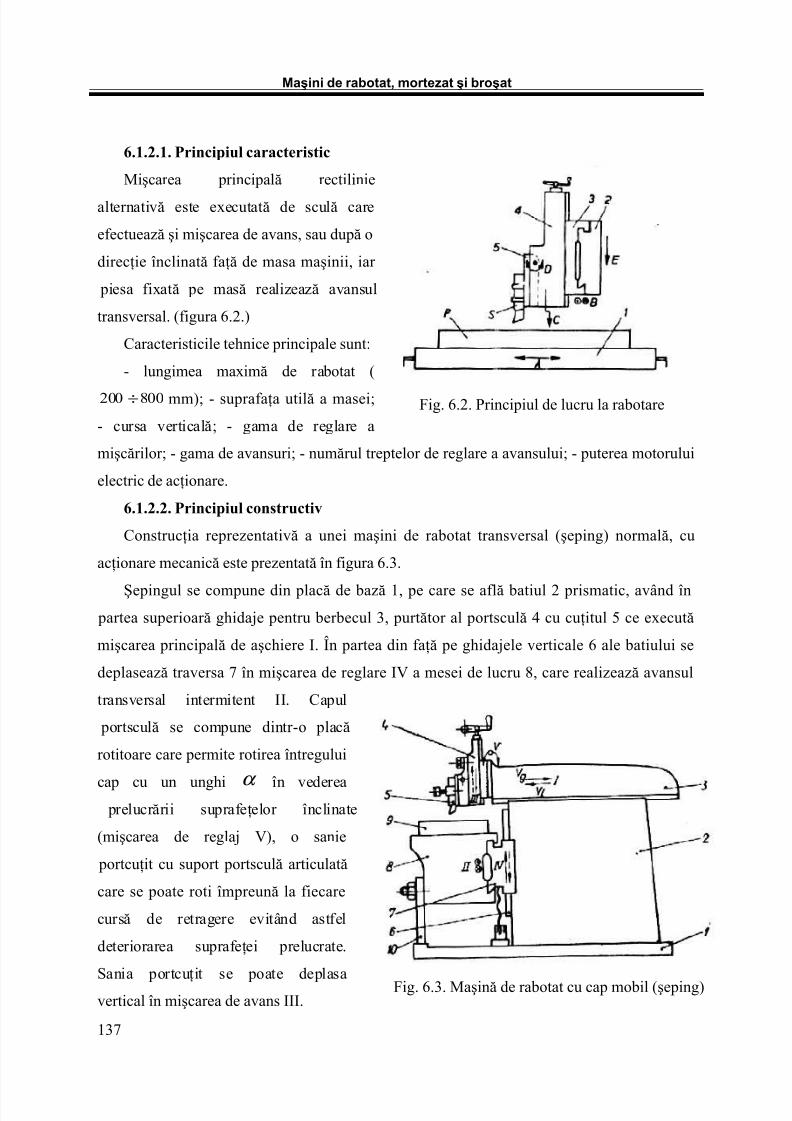
Construcţia reprezentativă a unei maşini de rabotat transversal (şeping) normală, cu
acţionare mecanică este prezentată în figura 6.3.
Şepingul se compune din placă de bază 1, pe care se află batiul 2 prismatic, având în partea superioară ghidaje pentru berbecul 3, purtător al portsculă 4 cu cuţitul 5 ce execută
mişcarea principală de aşchiere I. În partea din faţă pe ghidajele verticale 6 ale batiului se
deplasează traversa 7 în mişcarea de reglare IV a mesei de lucru 8, care realizează avansul
transversal intermitent II. Capul
portsculă se compune dintr-o placă
rotitoare care permite rotirea întregului
cap cu un unghi α în vederea prelucrării suprafeţelor înclinate
(mişcarea de reglaj V), o sanie
portcuţit cu suport portsculă articulată
care se poate roti împreună la fiecare
cursă de retragere evitând astfel
deteriorarea suprafeţei prelucrate.
Sania portcuţit se poate deplasavertical în mişcarea de avans III.
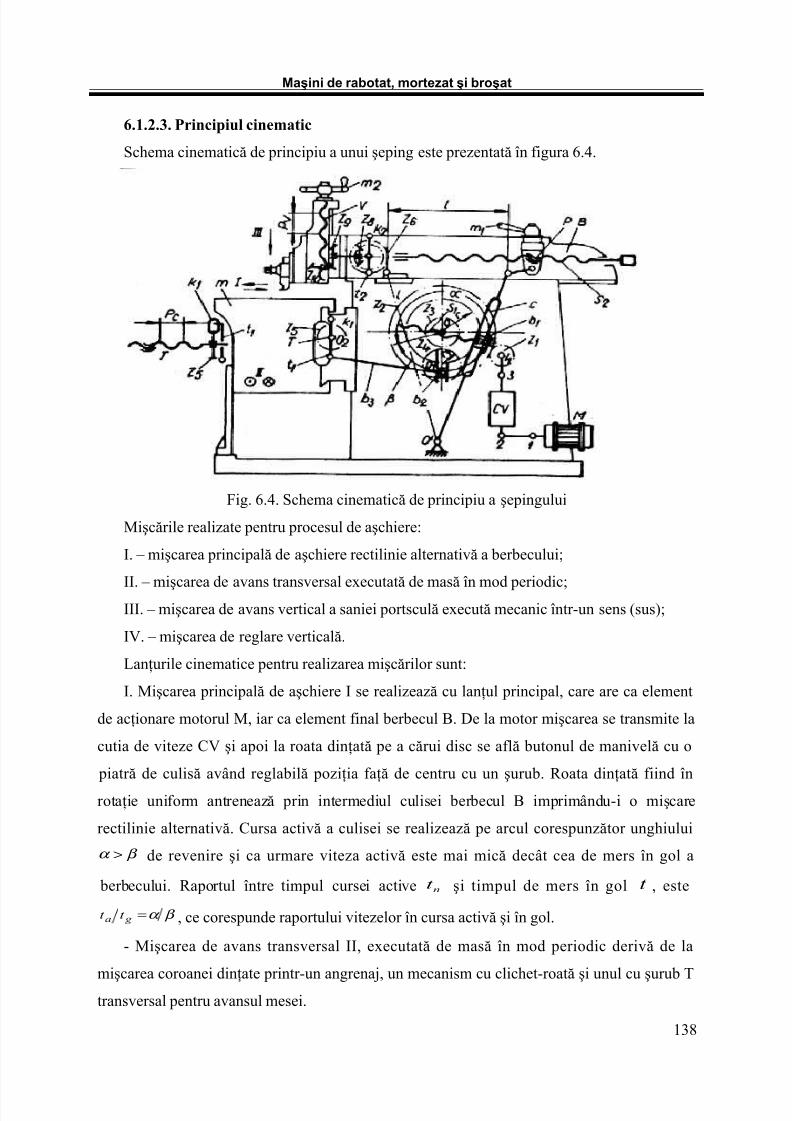
Schema cinematică de principiu a unui şeping este prezentată în figura 6.4.
Fig. 6.4. Schema cinematică de principiu a şepingului
Mişcările realizate pentru procesul de aşchiere:
I. – mişcarea principală de aşchiere rectilinie alternativă a berbecului;
II. – mişcarea de avans transversal executată de masă în mod periodic;III. – mişcarea de avans vertical a saniei portsculă execută mecanic într-un sens (sus);
IV. – mişcarea de reglare verticală.
Lanţurile cinematice pentru realizarea mişcărilor sunt:
I. Mişcarea principală de aşchiere I se realizează cu lanţul principal, care are ca element
de acţionare motorul M, iar ca element final berbecul B. De la motor mişcarea se transmite la
cutia de viteze CV şi apoi la roata dinţată pe a cărui disc se află butonul de manivelă cu o
piatră de culisă având reglabilă poziţia faţă de centru cu un şurub. Roata dinţată fiind în
rotaţie uniform antrenează prin intermediul culisei berbecul B imprimându-i o mişcare
rectilinie alternativă. Cursa activă a culisei se realizează pe arcul corespunzător unghiului
β α > de revenire şi ca urmare viteza activă este mai mică decât cea de mers în gol a
berbecului. Raportul între timpul cursei active nt şi timpul de mers în gol t , este
β α = g a t t , ce corespunde raportului vitezelor în cursa activă şi în gol.
- Mişcarea de avans transversal II, executată de masă în mod periodic derivă de la
mişcarea coroanei dinţate printr-un angrenaj, un mecanism cu clichet-roată şi unul cu şurub Ttransversal pentru avansul mesei.
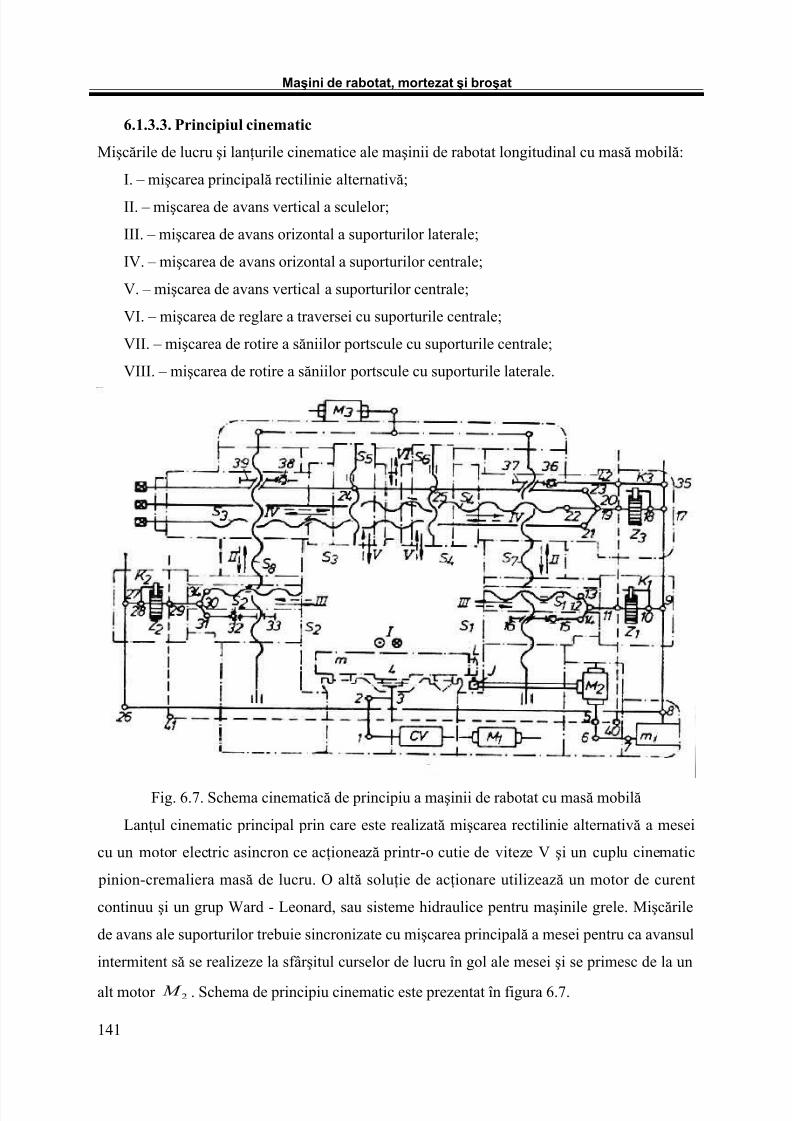
- mişcarea principală rectilinie alternativă a sculei A, care este asigurată de lanţul
cinematic principal de la motorul M1, o cutie de viteze şi un mecanism de transformare de tip
bielă-manivelă.
Ecuaţia de transfer a lanţului este:
01
2
1
21N l
Z
Z ii N cvcd ⋅⋅⋅⋅= , (6.1)
unde cd N este numărul de curse duble raportat la unitatea de timp.
Mişcările de avans sunt intermitente şi au loc la sfârşitul cursei in gol, sincronizându-se
cu mişcarea principală de aşchiere.
Mişcările de poziţionare şi avans, translaţiile II şi III şi rotaţia IV sunt asigurate prin camacilindrică spaţială K, mecanisme cu pârghii T-T, mecanismul cu clichet Mc, cutia de
distribuţie CD şi elementele finale ale fiecărui lanţ, şuruburile conducătoare SC 1 şi SC2 –
pentru translaţii, respectiv angrenajul melcat pentru rotaţie.
Pentru lanţul cinematic de avans care asigură translaţia intermitentă pe direcţia II, ecuaţia
de transfer este:
CDSC CD
c
d i piii Z
N S ⋅⋅⋅⋅⋅=
143 . (6.2)
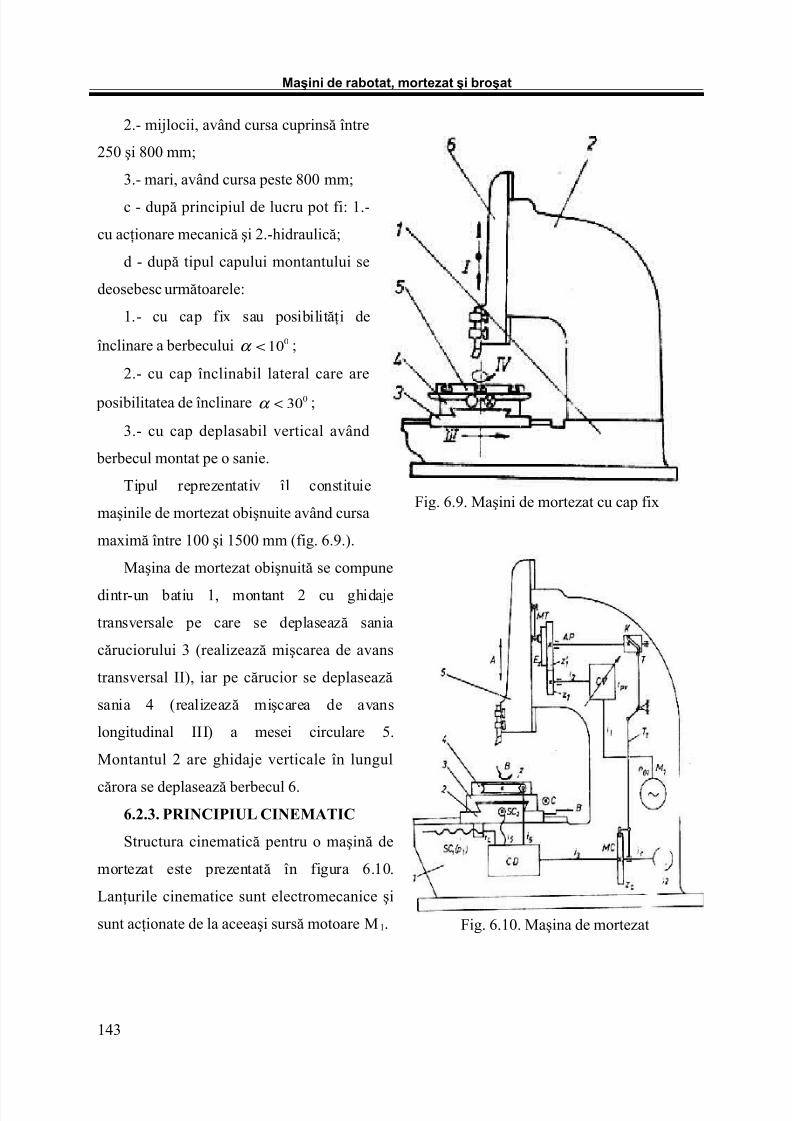
Deplasările rapide se obţin cu ajutorul unui motor electric separat M2.
6.2.4. LUCRĂRI EXECUTATE PE MAŞINILE DE MORTEZAT
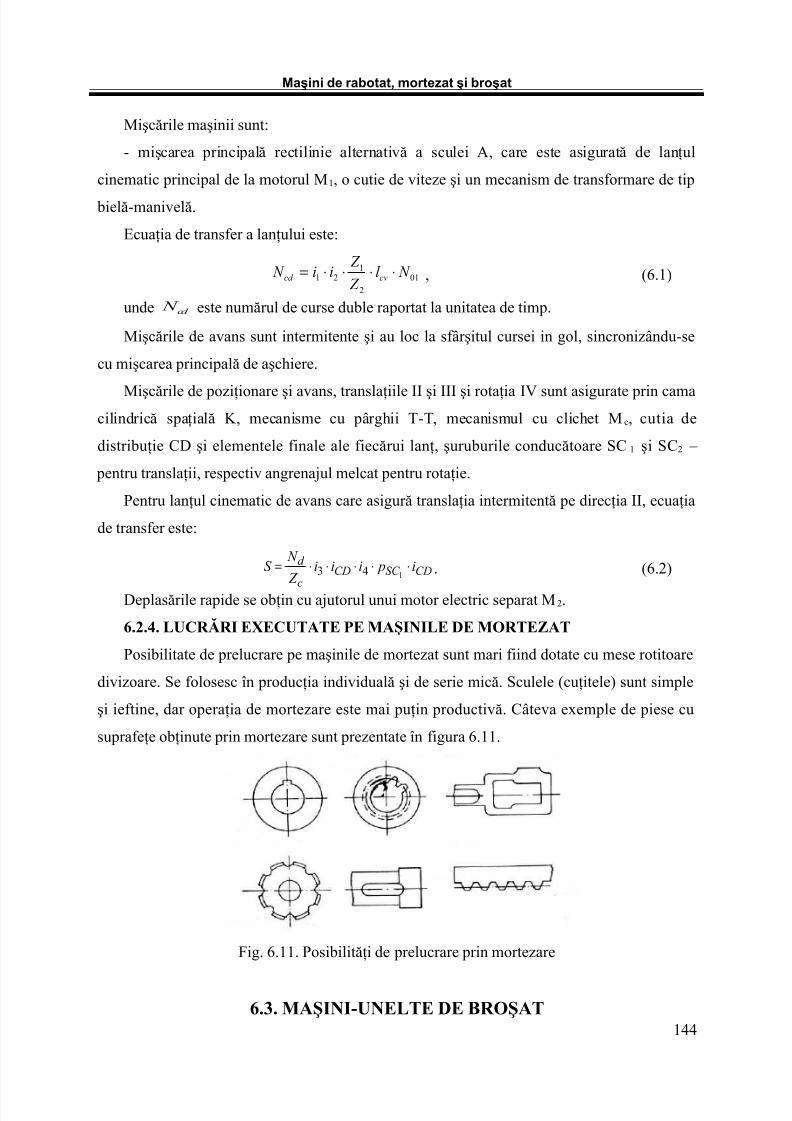
Posibilitate de prelucrare pe maşinile de mortezat sunt mari fiind dotate cu mese rotitoare
divizoare. Se folosesc în producţia individuală şi de serie mică. Sculele (cuţitele) sunt simple
şi ieftine, dar operaţia de mortezare este mai puţin productivă. Câteva exemple de piese cu
suprafeţe obţinute prin mortezare sunt prezentate în figura 6.11.
Fig. 6.11. Posibilităţi de prelucrare prin mortezare
![RÂS {I ÎN}ELEPCIUNE - secolul21.rosecolul21.ro/wp-content/uploads/2015/12/cap6.pdfNu-mi amintesc s\ fi re]inut, acum câteva decenii, rândurile ce urmeaz\, semnate de Mircea Ciobanu.](https://static.documente.net/doc/80x56/5e0c8df33721a841e507318d/rs-i-nelepciune-amintesc-s-fi-reinut-acum-cteva-decenii-rndurile.jpg)
















