18
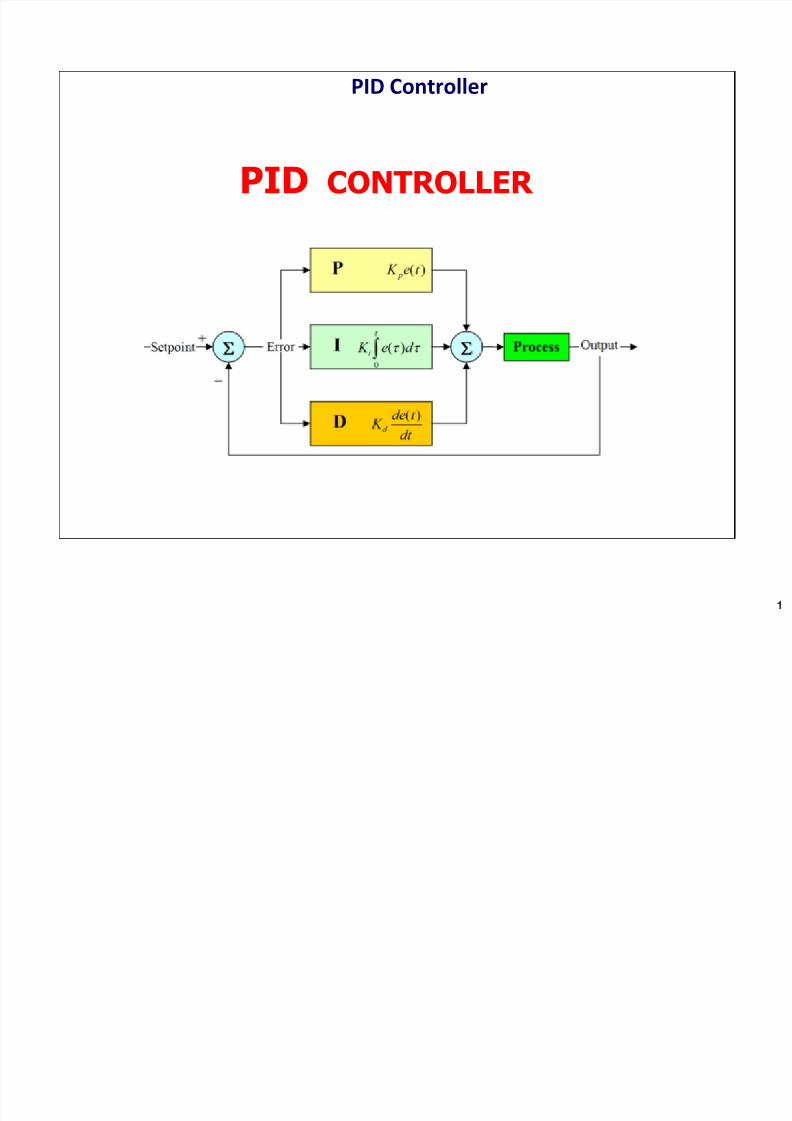
PID CONTROLLER
| Date post: | 04-Mar-2016 |
| Category: |
Documents |
| Upload: | nguyen-le-khanh |
| View: | 22 times |
| Download: | 0 times |
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 1/18
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 2/18
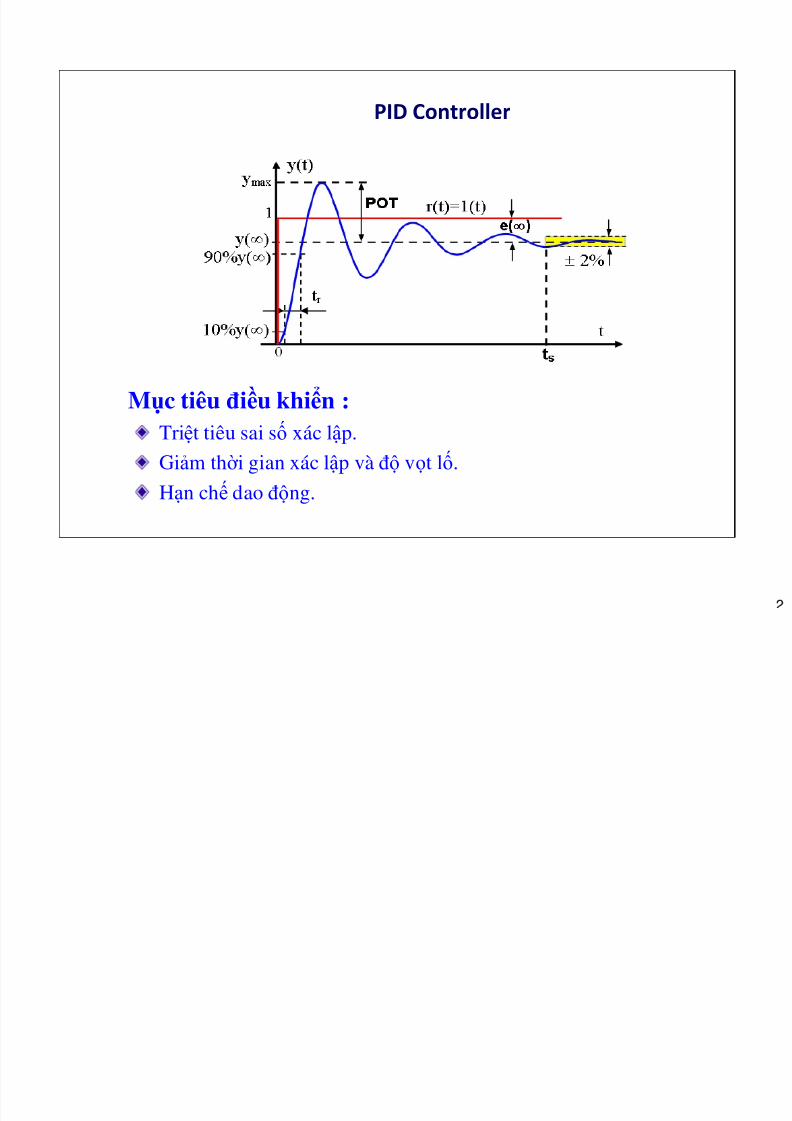
Mục tiêu điều khi ển :Triệt tiêu sai số xác lập.Giảm thờ i gian xác l ập và độ vọt lố.Hạn chế dao động.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 3/18
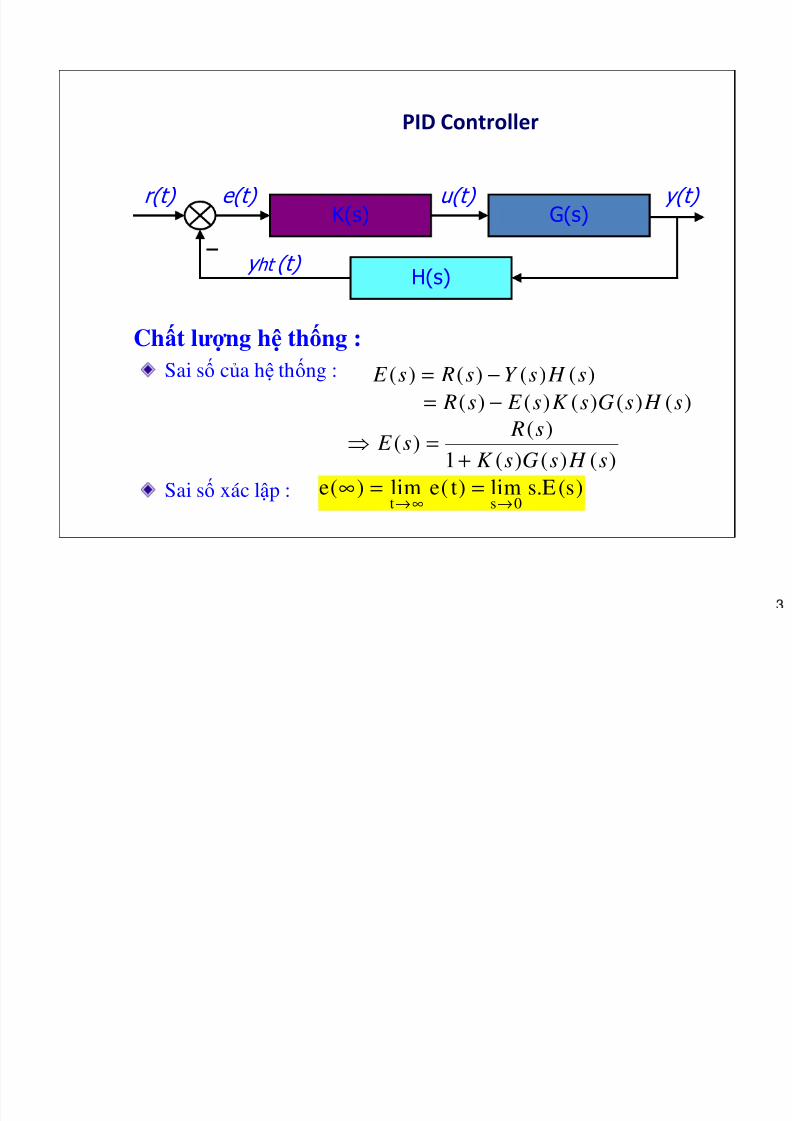
Ch ất lượ ng h ệ thống :Sai số của hệ thống :
Sai số xác lập :
e(t) u(t) K(s)
r(t) G(s)
y(t)
H(s)y ht (t)
t s 0e( ) lim e( t) lim s.E (s)
→ ∞ →
∞ = =
)()()()( s H sY s Rs E −=
)()()()()( s H sGsK s E s R −=
)()()(1)()(
s H sGsK
s Rs E +
=
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 4/18
Nh ận xét :Sai số xác lập không ch ỉ phụ thuộc vào cấu trúc và thông s ố củahệ mà còn ph ụ thuộc vào tín hi ệu vào.Sai số xác lập phụ thuộc vào số lượ ng khâu lí t ưở ng có trong hàmtruyền hở G(s)H(s) :
Hệ không có khâu tích phân : luôn có sai s ố xác lập.1 khâu tích phân : e xl = 0 vớ i tín hiệu vào là hàm n ấc.2 khâu tích phân : e xl = 0 vớ i hàm dốc và hàm n ấc.3 khâu tích phân : e xl = 0 vớ i hàm dốc,hàm n ấc và hàm
parabol.Hệ có n khau tích phân lí t ưở ng gọi là hệ vi sai bậc n.
Sai số xác lập :
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 5/18
PID (Proportional Integral Derivative Controller ):Bộ điều khiển hồi tiếp vòng kín đượ c sử dụng nhiều nhấttrong công nghi ệp.
Là sự k ết hợ p của 3 bộ điều khiển : tỉ lệ, tích phân và viphân.
Có kh ả năng làm tri ệt tiêu sai s ố xác lập, tăng tốc độ đáp
ứng, giảm độ vọt lố nếu thông s ố của bộ điều khiển đượ c lựachọn thích h ợ p.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 6/18
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 7/18
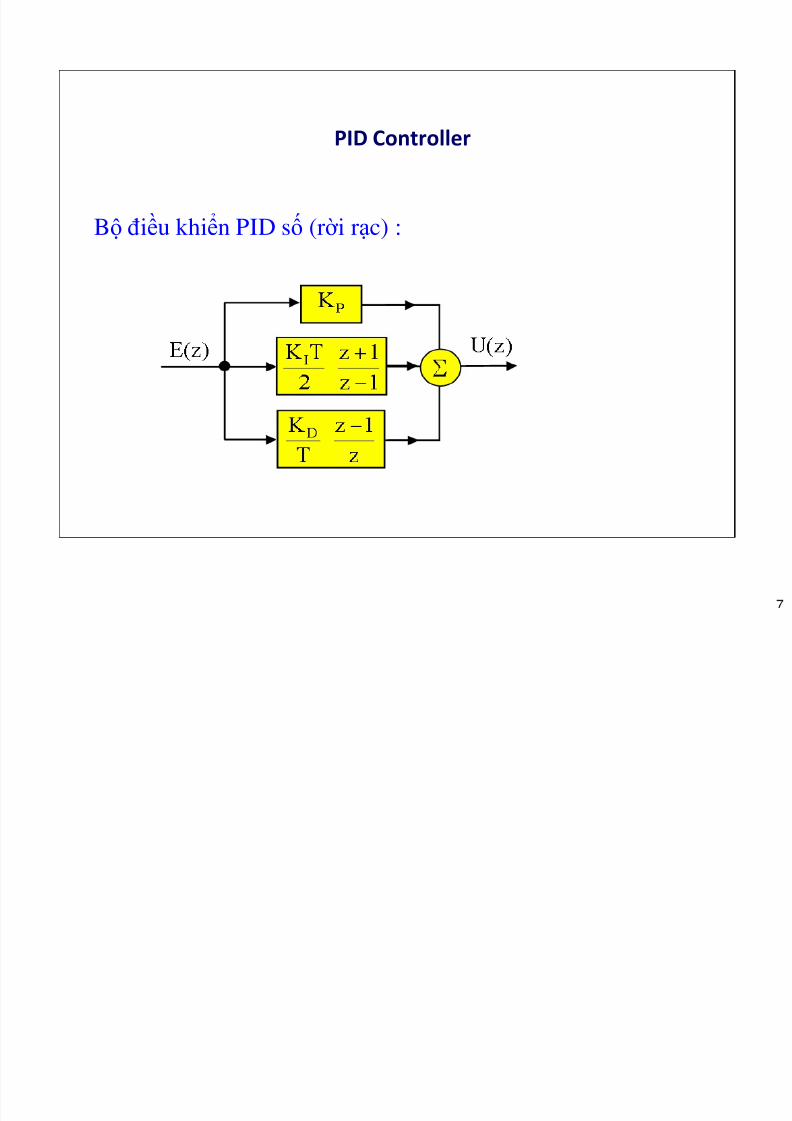
Bộ điều khiển PID số (rờ i rạc) :
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 8/18
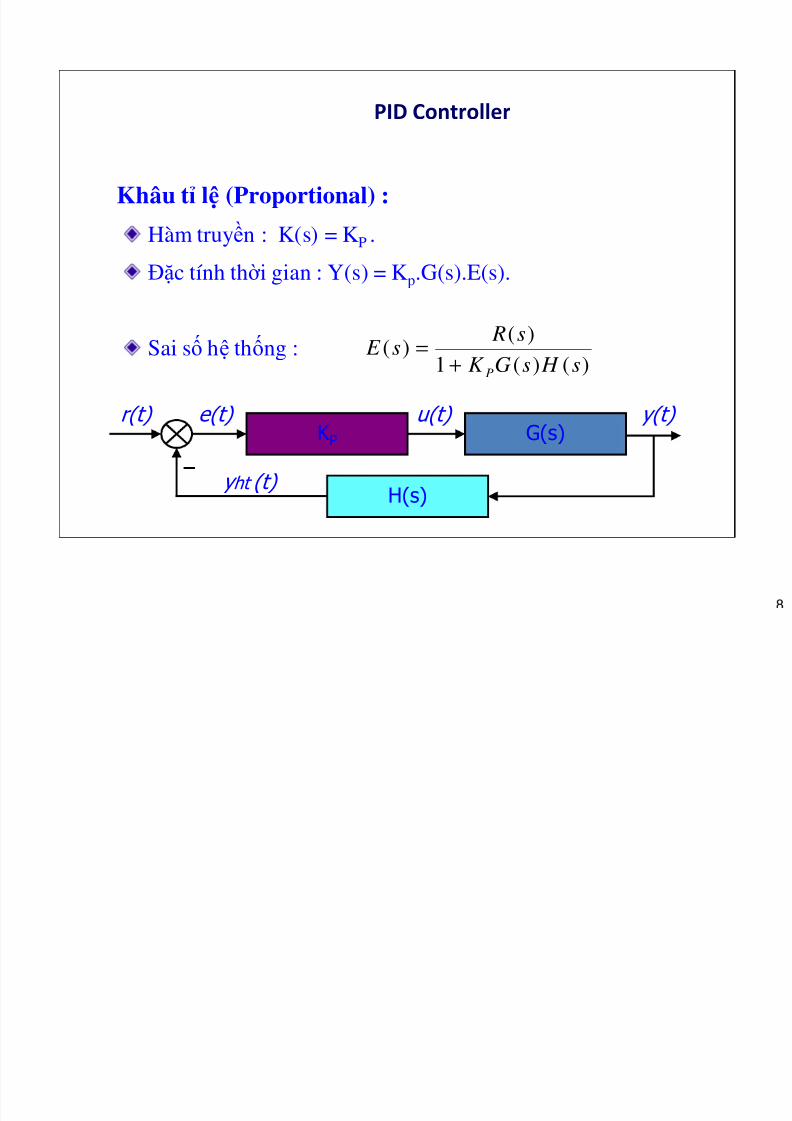
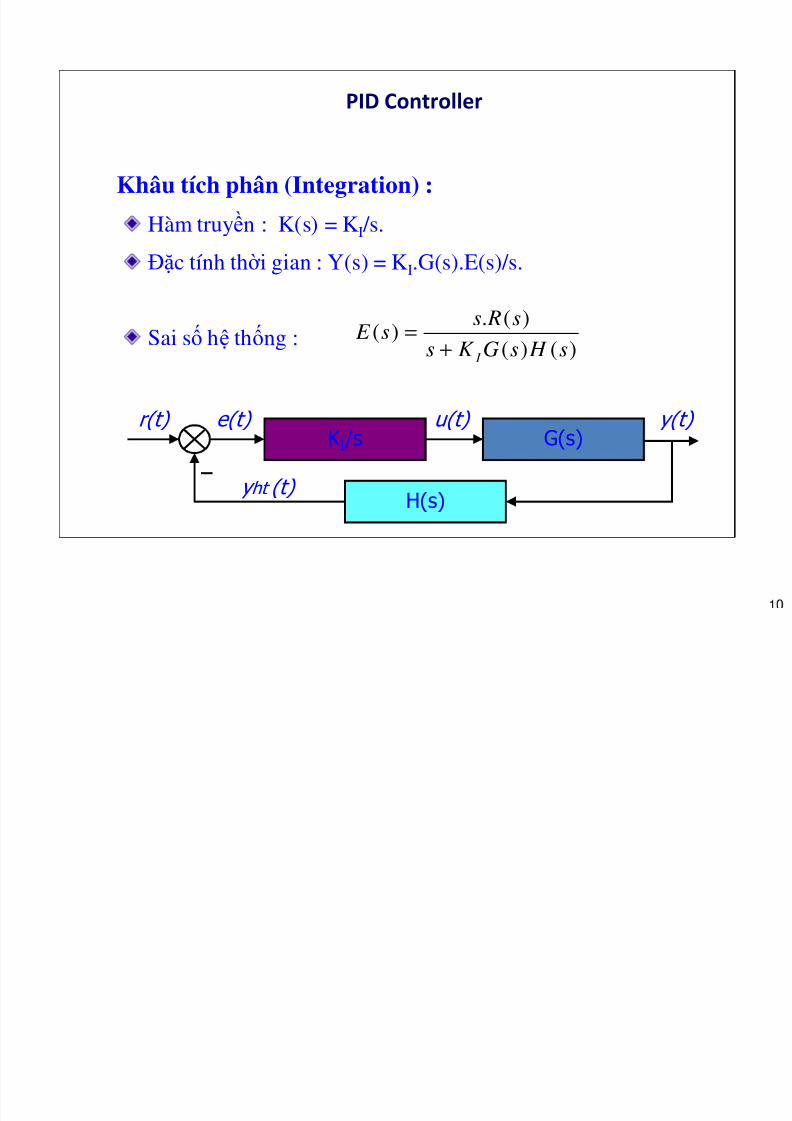
Khâu t ỉ lệ (Proportional) :
Hàm truy ền : K(s) = K P .
Đặc tính th ờ i gian : Y(s) = K p.G(s).E(s).
Sai số hệ thống :)()(1
)()(
s H sGK
s Rs E
P+
=
e(t) u(t) K P
r(t) G(s)
y(t)
H(s)y ht (t)
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 9/18
Nhận xét :
Kp càng l ớ n thì tốc độ đáp ứng càng nhanh.
Kp càng l ớ n thì sai số xác lập càng nh ỏ (nhưng không th ểtriệt tiêu).
Kp càng l ớ n thì các c ực của hệ thống có xu h ướ ng di chuy ểnra xa trục thực => Hệ thống càng dao động và độ vọt lố càngcao.
Nếu Kp tăng quá giá tr ị giớ i hạn thì hệ thống sẽ dao độngkhông t ắt dần => mất ổn định.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 10/18
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 11/18
Nh ận xét :
Tín hiệu ngõ ra đượ c xác định bở i sai số.
K I càng lớ n thì đáp ứng quá độ càng ch ậm.
K I càng lớ n thì sai số xác lập càng nh ỏ. Đặc biệt hệ sốkhuếch đại của khâu tích phân b ằng vô cùng khi t ần số bằng0 => triệt tiêu sai s ố xác lập vớ i hàm n ấc.
K I càng lớ n thì độ vọt lố càng cao.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 12/18
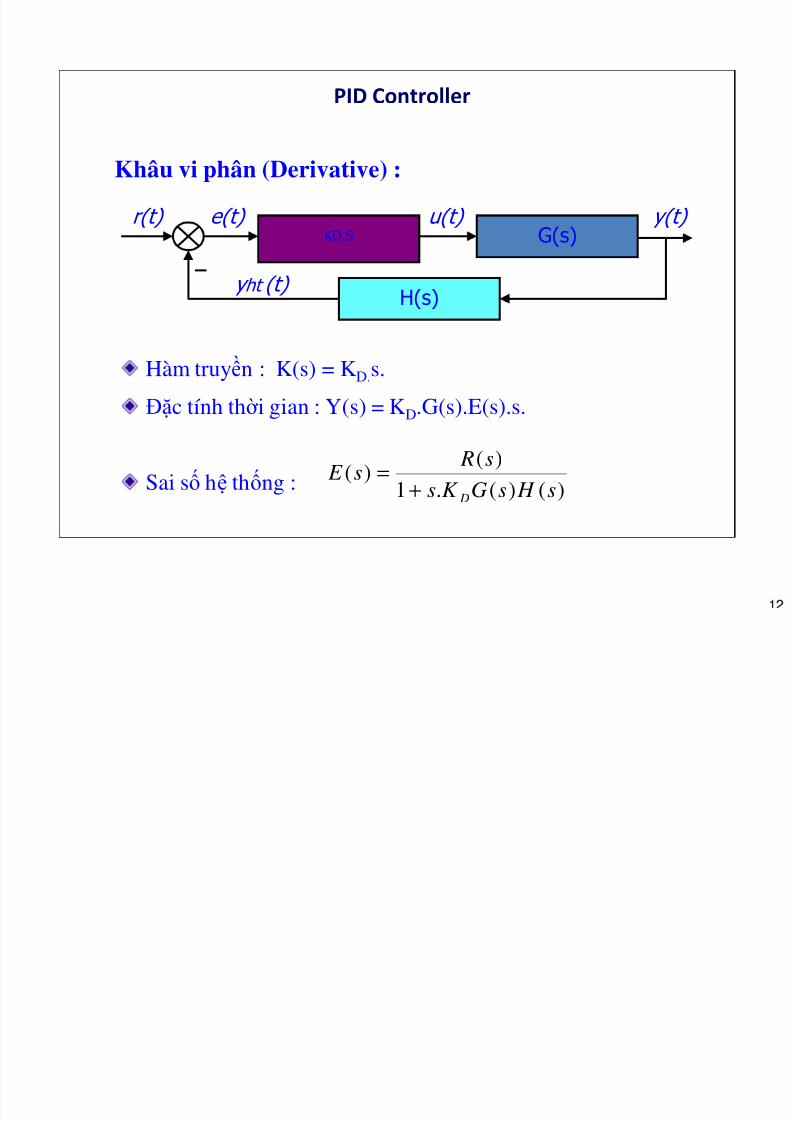
Khâu vi phân (Derivative) :
Hàm truy ền : K(s) = K D.s.
Đặc tính th ờ i gian : Y(s) = K D.G(s).E(s).s.
Sai số hệ thống : )()(.1
)()(
s H sGK s
s Rs E
D+
=
e(t) u(t) KD.Sr(t) G(s) y(t)
H(s)y ht (t)
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 13/18
Nh ận xét :KD càng lớ n thì đáp ứng quá độ càng nhanh.
KD càng lớ n thì độ vọt lố càng nh ỏ.
Hệ số khuếch đại tại tần số cao là vô cùng l ớ n nên khâu hi ệuch ỉnh D rất nhạy vớ i nhiễu tần số cao.
Khâu vi phân không th ể sử dụng một mình mà ph ải dùng k ếthợ p vớ i các khâu P ho ặc I.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 14/18
Bộ điều khi ển PID :Kết hợ p của ba khâu thành ph ần.
Biểu diễn :
Cách 1 :
Cách 2 :
Cách 3 :
sK sK K sK D I P . / )( ++=
].). /(11[)( sT sT K sK D I P
++=
).1)(.1()( 21 sT sT
sK sK R
++=
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 15/18
Các ph ươ ng pháp tìm thông s ố PID (Kp, Ki, Kd) :
Ch ỉnh định bằng tay.Phươ ng pháp Ziegler – Nichols.Ch ỉnh định dùng ph ần mềm.
Cohen-Coon.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 16/18
Ch ỉnh định b ằng tay :Đặt Ki = Kd = 0. T ăng Kp đến khi hệ thống dao động tuần hoàn.Đặt thờ i gian tích phân b ằng chu k ỳ dao động .
Điều ch ỉnh lại giá tr ị Kp cho phù h ợ p.Nếu có đao động thì điều ch ỉnh giá tr ị Kd.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 17/18
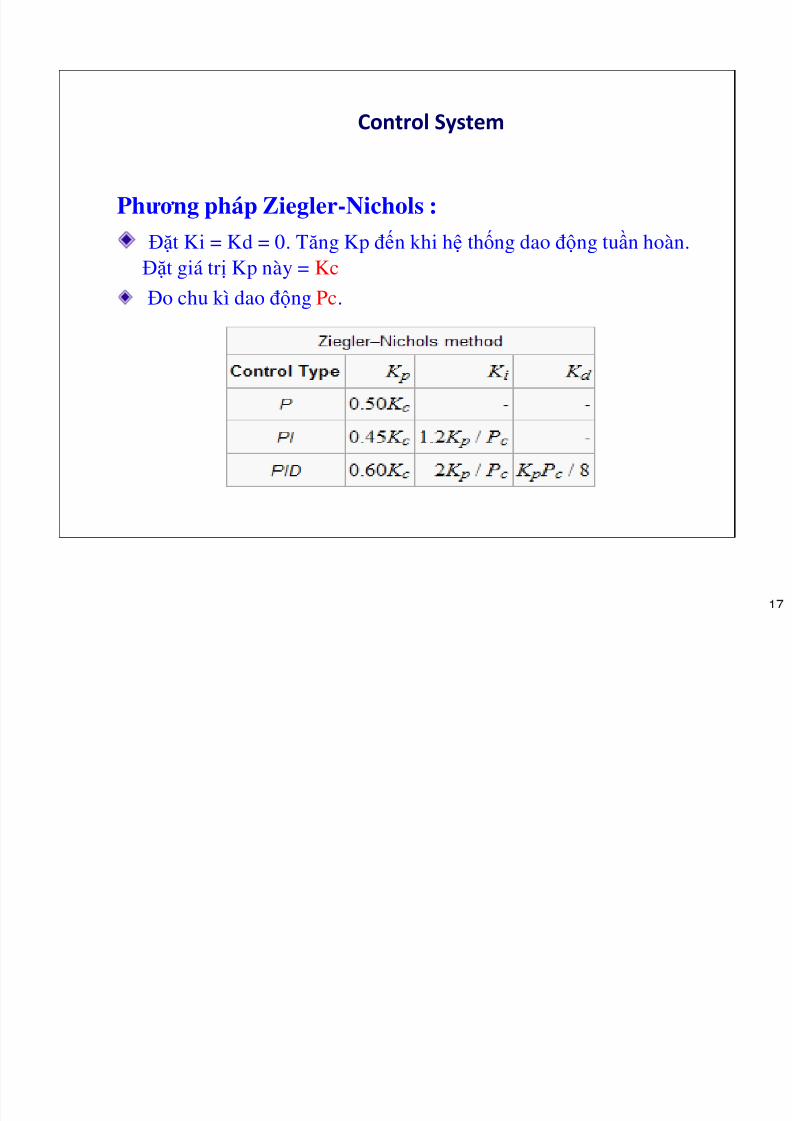
Ph ươ ng pháp Ziegler-Nichols :Đặt Ki = Kd = 0. T ăng Kp đến khi hệ thống dao động tuần hoàn.Đặt giá tr ị Kp này = KcĐo chu kì dao động Pc.
7/21/2019 Bo Dieu Khien Pid
http://slidepdf.com/reader/full/bo-dieu-khien-pid-56d8bf1676b26 18/18
Ch ỉnh định b ằng ph ần mềm :Dùng ph ần mềm để tự động ch ỉnh định thông s ố PID (th ực hiện
trên mô hình toán, ki ểm nghi ệm trên mô hình th ực).Ví dụ dùng gi ải thuật di truyền (GA) để tìm thông s ố sao cho sai
số đo đượ c nhỏ hơ n giá tr ị yêu cầu.

















