— -- _ r Cr "ta;— — A•si Ay Introduccre Vibratiile sistemelor liniare 2.1 Vibratiile sistemelor liniare cu un singur grad de libertate 2.1.1 Vibratii libere 2.1.2 Vibratii fortate 2.2 Vibratiile sistemelor liniare cu mai multe grade de libertate 2.2.1 Vibratii libere. Frecvente proprii forme modale (moduri proprii) 2.2.2 Vibratii fortate 2.3 Vibratiile sistemelor continue 3. Analiza in frecventa a vibratiilor ° w(x, t) ,g4\4:_ y(x, r) ptx, h:( r 1-Y2 h kr C? C -.1 g7±...111111 1 y, h, /lb A yi Figura 1.1 Exemple de vibratii mecanice 1
Transcript
—-- _
r Cr"ta;—
—
A•si
Ay
IntroduccreVibratiile sistemelor liniare
2.1 Vibratiile sistemelor liniare cu un singur grad de libertate2.1.1 Vibratii libere2.1.2 Vibratii fortate
2.2 Vibratiile sistemelor liniare cu mai multe grade de libertate2.2.1 Vibratii libere. Frecvente proprii forme modale (moduri proprii)2.2.2 Vibratii fortate
2.3 Vibratiile sistemelor continue3. Analiza in frecventa a vibratiilor
° w(x, t)
,g4\4:_y(x, r)
ptx,
h:(r 1-Y2
hkr C?
C
-.1g7±...1111111 y, h, /lbA yi
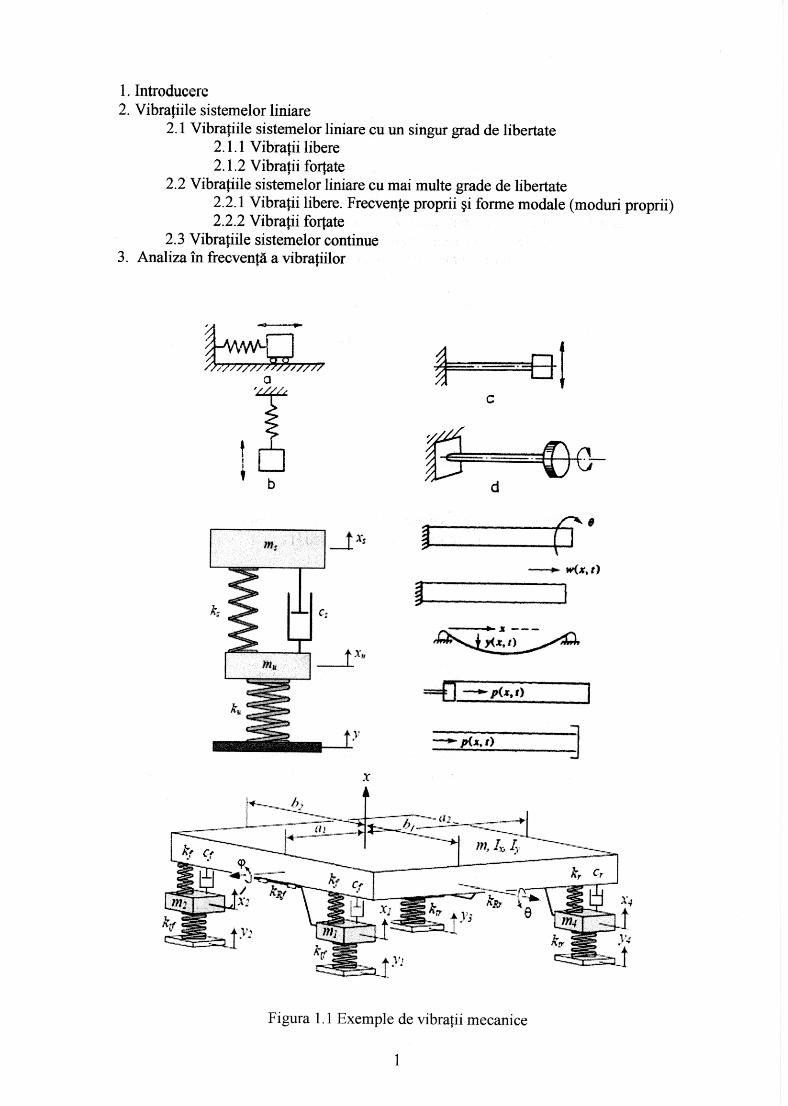
Figura 1.1 Exemple de vibratii mecanice
1
a--
—ro
T
V t
.111nn•n
t Figura 1.2 Simboluri ale elementelor unui sistem oscilant cu miscare de translatie;
elementele principale ale unui sistem capabil sa efectueze vibratii: elementul cu inertie(masa); elementul elastic; elementul amortizor.
e)
CdCdcd
R.n 11.)
Timp t
Figura 1.3 Reprezentarea in timp a miscarii armonicesi mdrimile ei caracteristice [1]
x
Figura 2.1 Sistem liniar cu un grad de libertate - vibratii libere neamortizate
2/rT =
[31Figura 2.2 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere neamortizate
2
Figura 2.3 Sistem liniar cu un grad de libertate - vibratii libere amortizate
X
0 0 5 1.5
2.5
3.5
4
4.5
5t [s]
Figura 2.4 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul 1 - amortizare subcriticd
3
—----------0.5 1.0 1.5 --- --- 2.0----
- ------------ t (s)
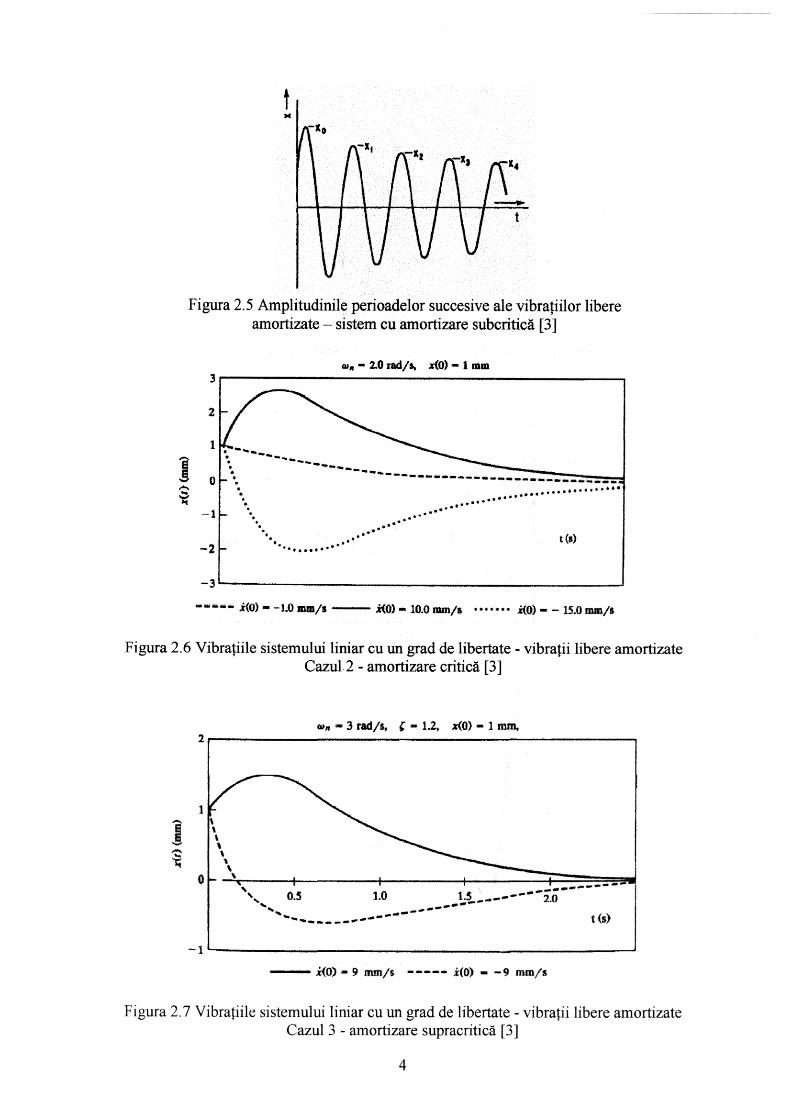
Figura 2.5 Amplitudinile perioadelor succesive ale vibratiilor libereamortizate — sistem cu amortizare subcriticd [3]
aim — 2.0 rad/s, s(0) — 1 mm3
2
1
—2
3
1(0) —3.0 mm/s *(0) 10.0 mm/s 1(0) — 15.0 mm/s
Figura 2.6 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul.2 - amortizare critic. [3]
— 3 radis, — 1.2, x(0) — 1 mm,
i(0) 9 mm/s i(0) —9 mm/s
Figura 2.7 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul 3 - amortizare supracriticd [3]
4
vrarcz,/te proprie0) F4,1 k
u.)„ 1- / ey,-;
r -t vi&rafie ifilrefinufd
Fo/k
1 --(0 2 10)2
--vibratie reztfilaril-a
X
Figura 2.8 Sistem liniar cu un grad de libertate - vibratii fortate neamortizate
2
1.5
0.5
-0.5
-1
-1.5
-20 2 4 6 8
10 12
14t [ms]
Figura 2.9 Vibratiile sistemului liniar cu un grad de libertate - vibratii fortate neamortizate
5
X
o
= (On
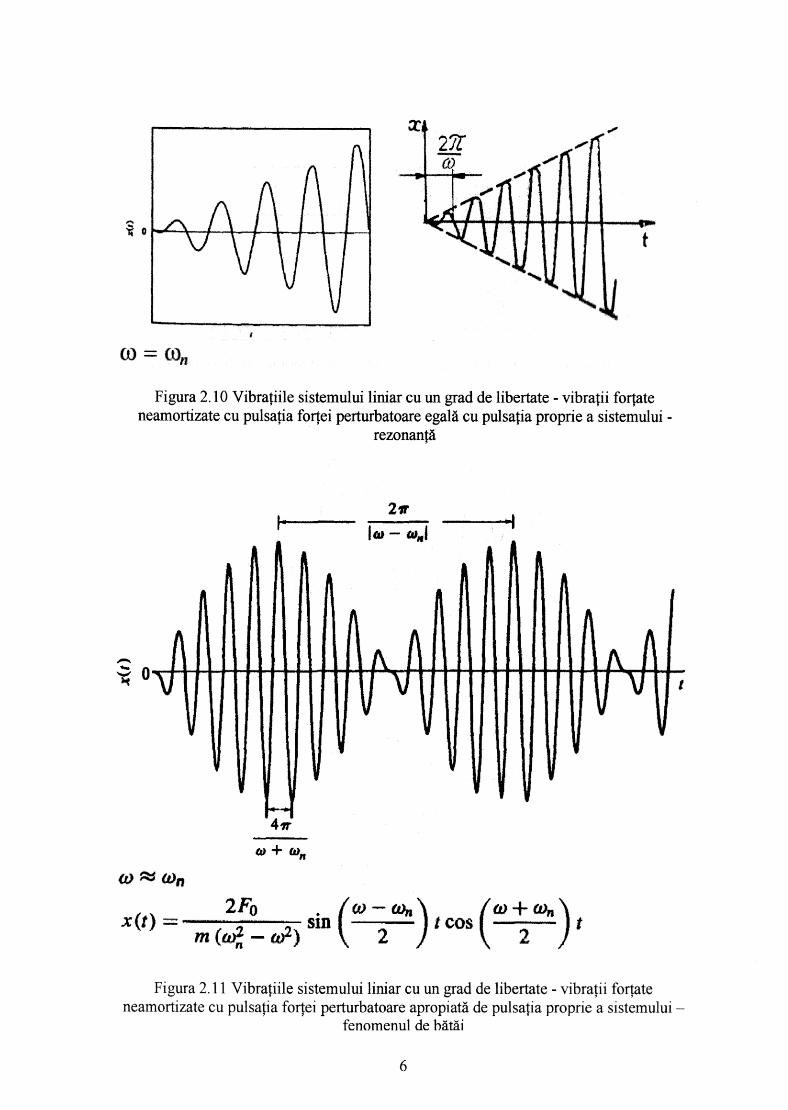
Figura 2.10 Vibratiile sistemului liniar cu un grad de libertate - vibratii fortateneamortizate cu pulsatia fortei perturbatoare egald cu pulsatia proprie a sistemului -
rezonanta
2 ir
+
(On
x(t) 2F0co.n cOs
-- con ) (to + ton sim (to! — 012 ) 2 2
Figura 2.11 Vibratiile sistemului liniar cu un grad de libertate vibratii fortateneamortizate cu pulsatia fortei perturbatoare apropiatà de pulsatia proprie a sistemului —
fenomenul de hätAi
6
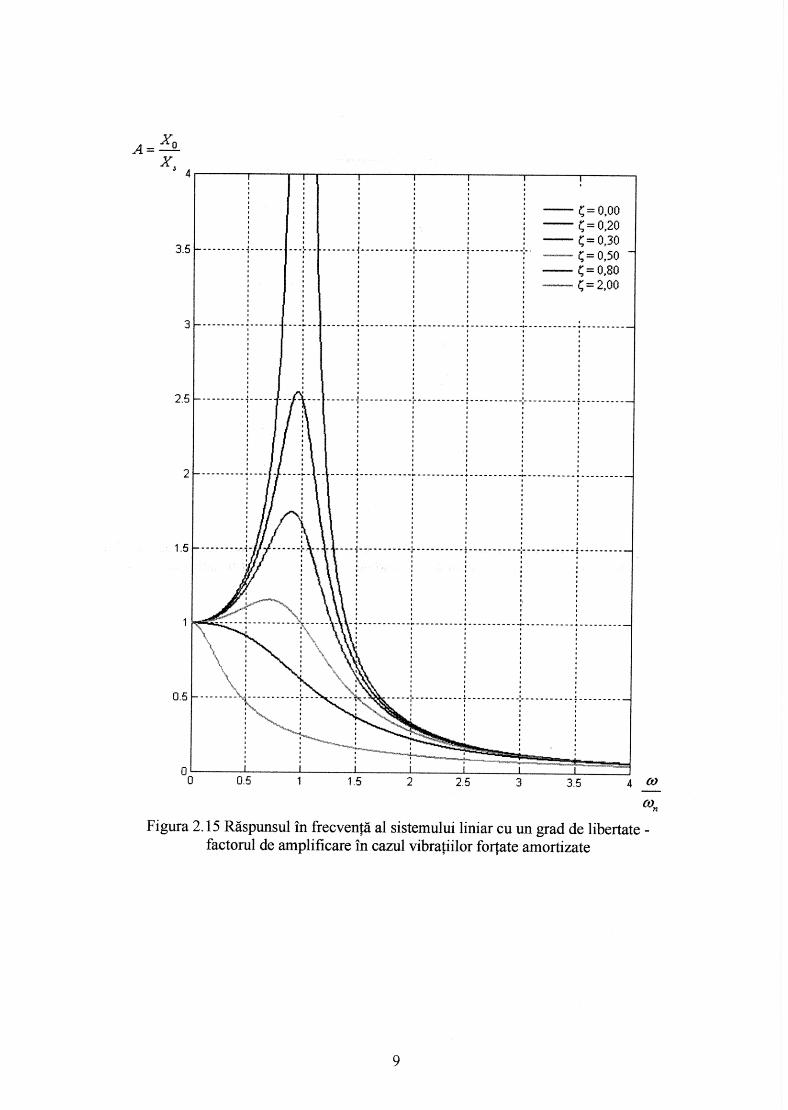
A= X °X,
Figura 2.12 Rdspunsul in frecventä al sistemului liniar cu un grad de libertate -factorul de amplificare in cazul vibratiilor fortate neamortizate
7
E
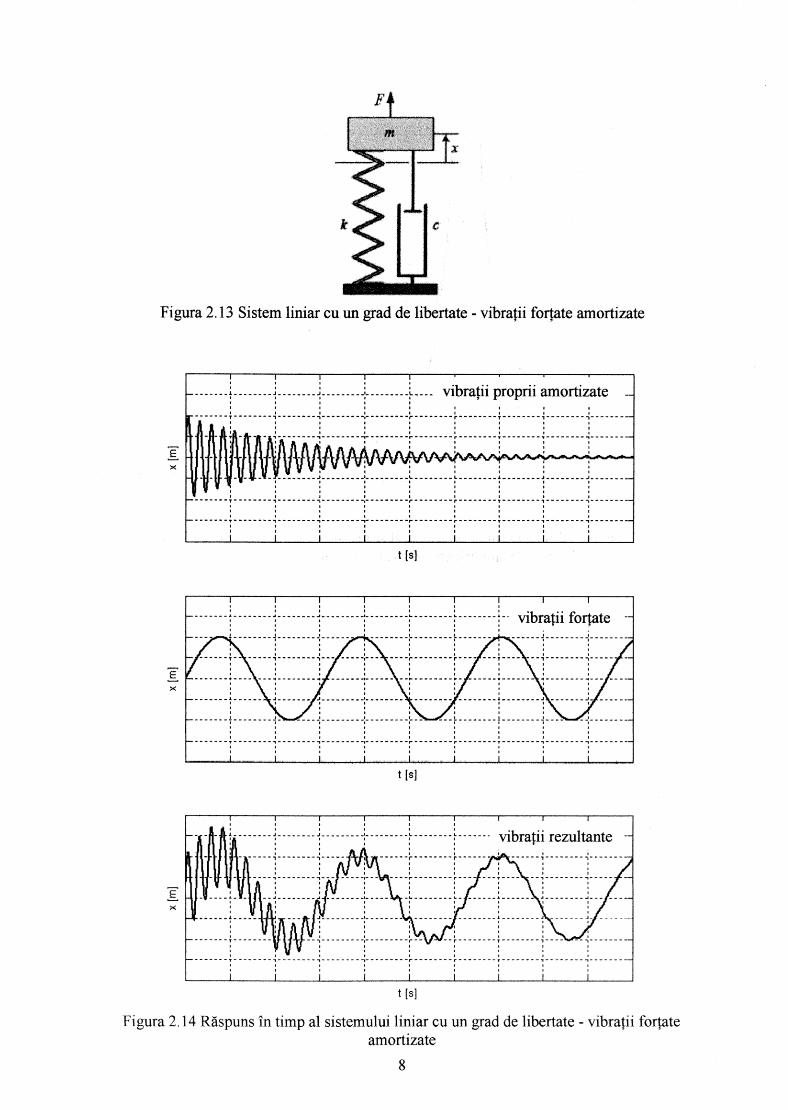
vibratii proprii amortizate
vibratii rezultante
Figura 2.13 Sistem liniar cu un grad de libertate - vibratii fortate amortizate
t [s]
Figura 2.14 Waspuns in timp al sistemului liniar cu un grad de libertate - vibratii fortateamortizate
8
XA= °
4
3 5
- 0,00
- 0,20
-0,30
=0,50 -
- 0,80
- 2,00
2.5
1.5
0.5 1.5 2 2.5 3 3.5 4 ()
on
Figura 2.15 Rdspunsul in frecventd al sistemului liniar cu un grad de libertate -factorul de amplificare in cazul vibratiilor foiate amortizate
Figura 2.16 Diferenta de fazd dintre vibratiile proprii cele fortate pentru raspunsul infrecventd al sistemului liniar cu un grad de libertate - vibratii fortate amortizate
05
15
25
3.5CO
CO.
Figura 2.17 Transmisibilitatea fortei - vibratii fortate amortizate
10
3.5
3
2.5
2
1.5
as
0
3.5
2.5
2'
15
0
in 8 = —k5 (x — xu)
mu xu = k, (xs — xu ) —k-u (xu
771 s 0 -
0 in„X$
X tt
ks —ks—ksks + ku
Xs
XU= 0
Figura 2.18 Vibratiile libere neamortizate ale sistemelor liniare cu mai multe grade delibertate - modelul simplificat al unui sfert de automobil
= —k,(x,— x„) —
= ks — xu ) Cs — ±„) — ku xu — Cu
ins 0 .. -xs Cs —Cs xs k, —ks x s
0 u —Cs CS ± Cu „i+ —k, k5 -F k„ xu.
Figura 2.19 Vibratiile libcrc amortizate ale sistemelor liniare cu mai multe grade delibertatc - modelul unui sfert de automobil
11
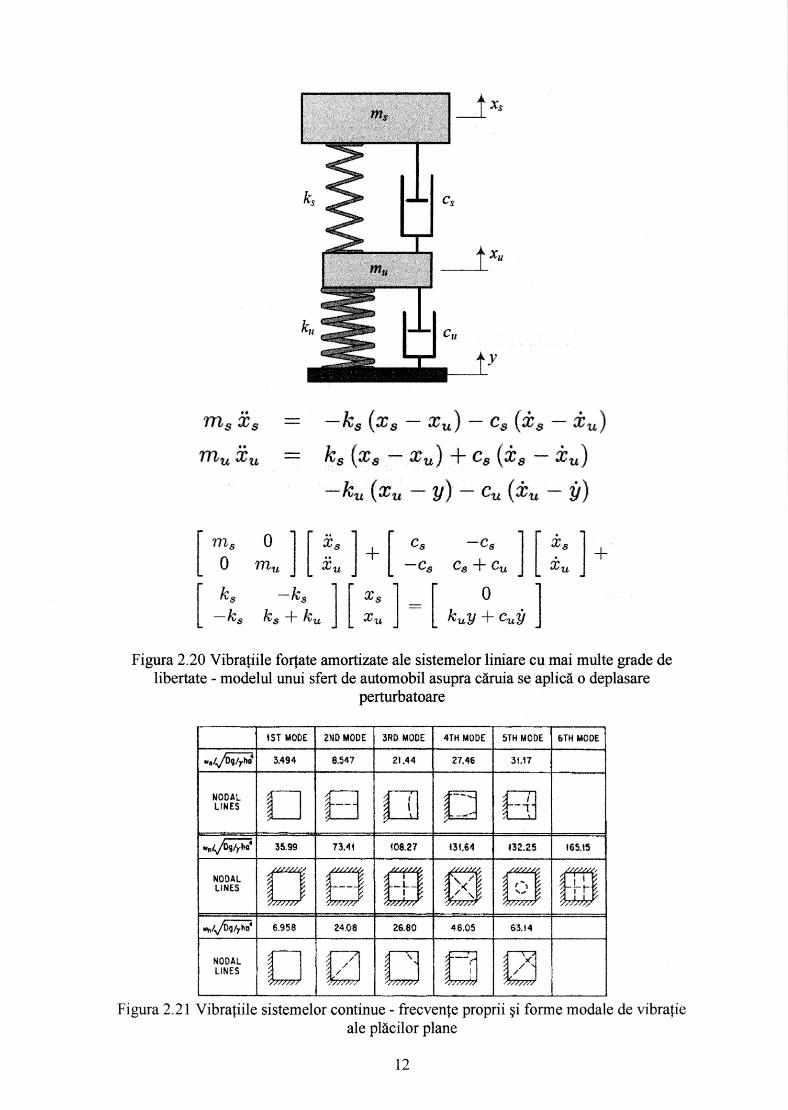
••m s x,
•
7/1u 1u
= —k(x, — xu) — c.s(ths 1,t)
A.7 .5 ( X 8 X tt ) CS ( th •ti )
—k„(x.„ — y) - -
7T1 tt
0s
tt
[
Cs—c,
—c,c, xu
F ks
—k3
[ ks +k
x, 0xt, Icuy + co)
Figura 2.20 Vibratiile fortate amortizate ale sistemelor liniare cu mai multe grade delibertate - modelul unui sfert de automobil asupra cdruia se aplicd o deplasare


















![Vibratii Locale Si Generale in Constructiile Navale - Curs Nave - D.dragomir[1]](https://static.documente.net/doc/80x56/5571fee949795991699c4b05/vibratii-locale-si-generale-in-constructiile-navale-curs-nave-ddragomir1.jpg)







