Tehnica Ventilatiei Industriale Utilizand Instalatii de Reglare prin Frecventa a Vitezei Motorului Asincron
73
Capitolul I Capitolul I ELEMENTE FUNDAMENTALE ALE MOTOARELOR ELEMENTE FUNDAMENTALE ALE MOTOARELOR ASINCRONE ASINCRONE Pentru rezolvarea unui întreg şir de probleme legate de pornirea motoarelor, de comportarea acestora în timpul scurt-circuitelor şi a autopornirii în perioada de restabilire a tensiunii,precum şi alegerea reglajelor protecţiilor prin relee în alte probleme similare, este necesar să existe o reprezentare clară a însuşirilor fundamentale ale motoarelor asincrone trifazate. În cele ce urmează, determinarea tuturor parametrilor necesari motorului asincron se face prin metoda analitică, folosind o serie de formule foarte simple. Construcţia diagramei cercului nu este necesară. 1.1.Schema echivalentă a motorului asincron Schema echivalentă a motorului asincron şi diagrama vectorială sunt date în figura 1.1. Această schemă se va folosi în raţionamentele ulterioare. În figura 1.1, Z 1 =R 1 +j ⋅ X σ 1 reprezintă impedanţa statorului; Z 2 ' = R 2 ' s + j ⋅ X σ 2 ' -impedanţa rotorului raportată la stator pentru o valoare dată şi a alunecării; Z m =j ⋅ R w ⋅ X μ / ( R w + j ⋅ X μ ) - impedanţa circuitului de magnetizare. Curentul din stator este notat cu I 1 , curentul indus I 2 ' şi curentul de magnetizare cu I 10 , curentul prin circuitul 1 I 1 R 1 j ⋅ X σ1 j ⋅ X σ2 ' R 2 ' / s I 2 ' j ⋅ X σ1 j ⋅ X ' σ 2 R 2 ' I 2 ' U I 1 R 1
Transcript
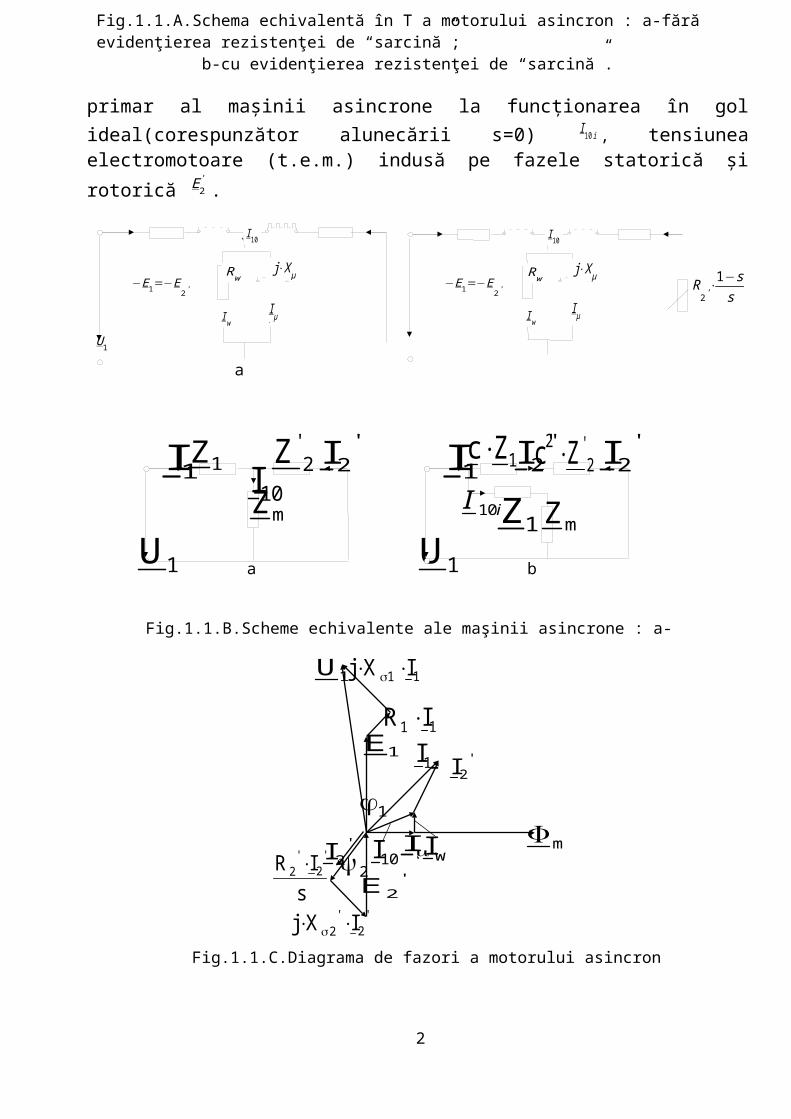
Fig.1.1.A.Schema echivalentă în T a motorului asincron : a-fără evidenţierea rezistenţei de “sarcină”; b-cu evidenţierea rezistenţei de “sarcină”.
Capi to lu l ICap i to lu l I
ELEMENTE FUNDAMENTALE ALE MOTOARELORELEMENTE FUNDAMENTALE ALE MOTOARELOR ASINCRONEASINCRONE
Pentru rezolvarea unui întreg şir de probleme legate de pornirea motoarelor, de comportarea acestora în timpul scurt-circuitelor şi a autopornirii în perioada de restabilire a tensiunii,precum şi alegerea reglajelor protecţiilor prin relee în alte probleme similare, este necesar să existe o reprezentare clară a însuşirilor fundamentale ale motoarelor asincrone trifazate. În cele ce urmează, determinarea tuturor parametrilor necesari motorului asincron se face prin metoda analitică, folosind o serie de formule foarte simple. Construcţia diagramei cercului nu este necesară.
1.1.Schema echivalentă a motorului asincron
Schema echivalentă a motorului asincron şi diagrama vectorială sunt date în figura 1.1. Această schemă se va folosi în raţionamentele ulterioare.
În figura 1.1,Z1=R1+ j⋅X σ 1 reprezintă impedanţa statorului; Z2
' =R2
'
s+ j⋅Xσ 2
'
-impedanţa rotorului raportată la stator pentru o valoare dată şi a alunecării;Zm= j⋅Rw⋅X μ/ (Rw+ j⋅X μ) - impedanţa circuitului de magnetizare. Curentul din stator
este notat cu I 1 , curentul indus I 2' şi curentul de magnetizare cu I 10 , curentul prin
circuitul primar al maşinii asincrone la funcţionarea în gol ideal(corespunzător
alunecării s=0) I 10 i , tensiunea electromotoare (t.e.m.) indusă pe fazele statorică şi
rotorică E2'
.
1
I 1R1
j⋅Xσ 1j⋅X
σ 2' R2 ' /s I
2'
U1
a
j⋅Xμ
I μ
Rw
I w
I 10
−E1=−E2'
j⋅Xσ 1 j⋅X'σ 2 R
2 ' I2'
U1
I 1R1
b
j⋅Xμ
I μ
Rw
I w
I 10
−E1=−E2' R
2'⋅
1−ss
1Zc '2I
1I
b1UiI 10
mZ1Z
2'2 Zc ''2I1Z '
2I
a
1I
1U
10ImZ
2'Z
m
11 IXj 1U
s
IR '2
'2
'2
'2 IXj
I
1E11 IR
wI10I
'2I1I
1
'2E
'2I
2
Fig.1.1.C.Diagrama de fazori a motorului asincron
Toţi parametrii fundamentali ai motorului asincron se determină cu ajutorul alunecării.
1.2. Tensiunea electromotoare
Valoarea tensiunii electromotoare (t.e.m),deci şi valoarea fluxului magnetic propoţional cu ea nu rămân constante, ci variază foarte repede, când alunecarea variază. Folosind schema echivalentă a motorului asincron, se poate scrie:
I 1=I 10−I 2¿=−E2
'⋅( 1Zm
+ 1Z
2' )
, (1-1)
U1=−E2
' + I1⋅Z1=−E2'⋅(1+
Z1
Zm
+Z1
Z2' )
. (1-2)
2
Fig.1.1.B.Scheme echivalente ale maşinii asincrone : a-schema în T; b-schema în Γ;
1,0
0,8
0,6
0,4
0,2
0 1,0 0,8 0,6 0,4 0,2 0
1U
E
s
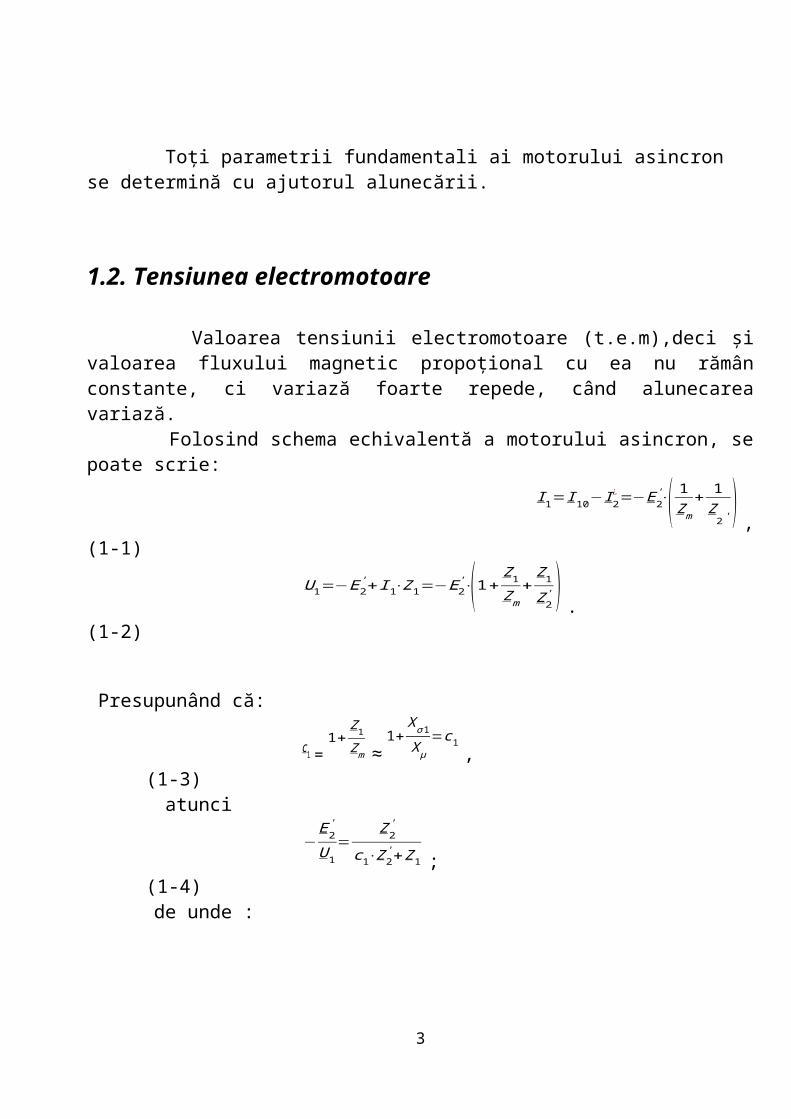
fig1-2.Variaţia t.e.m. a motorului asincron cu alunecarea
Presupunând că:
c1 =1+
Z1
Zm ≈1+
Xσ 1
X μ
=c1, (1-3)
atunci
−
E2'
U1
=Z2
'
c1⋅Z2' +Z1 ; (1-4)
de unde :
E2'
U1
=√ ( R2'
s )2
+ Xσ 2'2
(R1+c1⋅R2
'
s )2
+( Xσ 1+c1⋅X σ 2' )2
(1-5) Se determină variaţia limită a t.e.m. pentru cazurile când motorul merge în gol şi când rotorul este calat. Făcând în expresia (1-5) înlocuirea s=0 şi dezvoltând expresia nedeterminată obţinută prin înmulţirea număratorului şi numitorul expresiei de sub radical cu s2
se obţine:
E2 x⋅x'
U1
= 1c1 sau
c1=U1
E2 x⋅x'
. (1-6) Pentru motoarele de mare putere,raportul dintre tensiunea de la borne şi t.e.m. la mers în gol este aproape
egal cu unitate, prin urmare c1≈1. În cazul când rotorul este calat(s=1) pentru schema
echivalentă simetrică, adică în cazul R1=R2' şi X σ 1=Xσ 2
'
se obţine:
E2 k'
U1
=1
1+c1
≈0,5 (1-7)
Din cele arătate se vede că la o variaţie a alunecării de la 0 până la 1, t.e.m. variază
între limitele E
2 x⋅x' ≈U1 până la E2 k'
≈0,5·U1 (fig 1-2).
3
1111 cosIU3P 1MP
2111J IR3P 2
wwFe IR3P 2'
2'
22J IR3P mP
MPM 22 MP
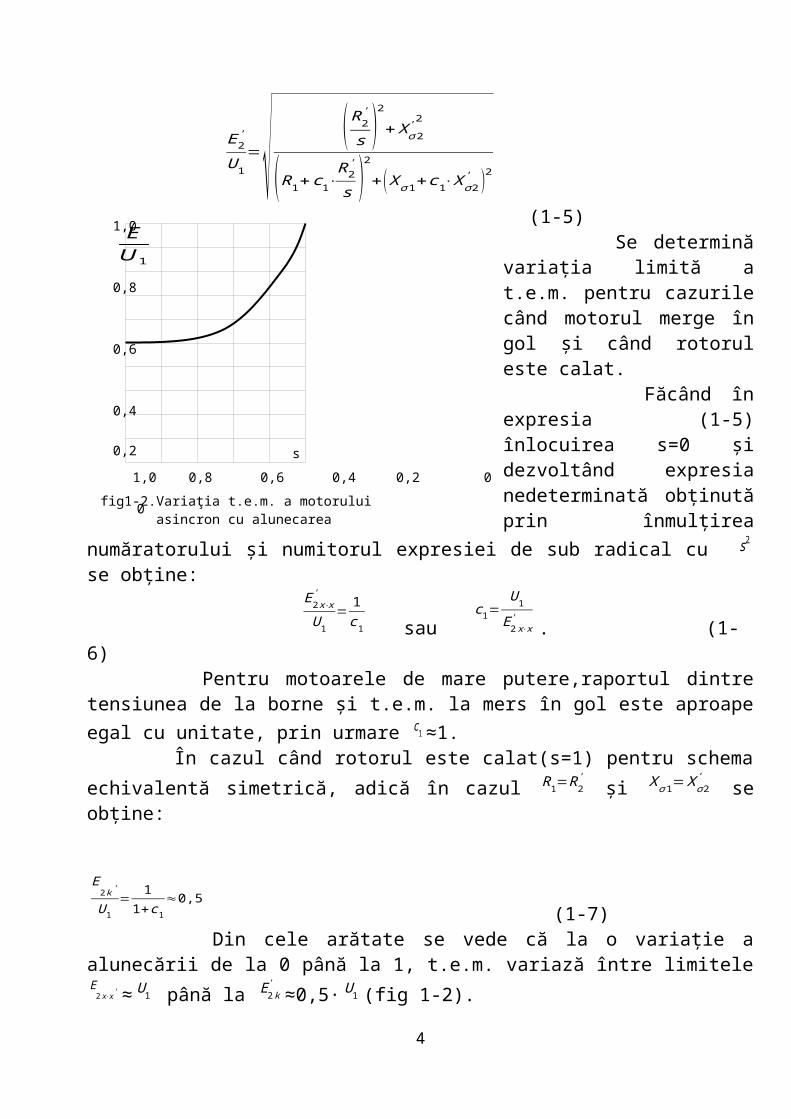
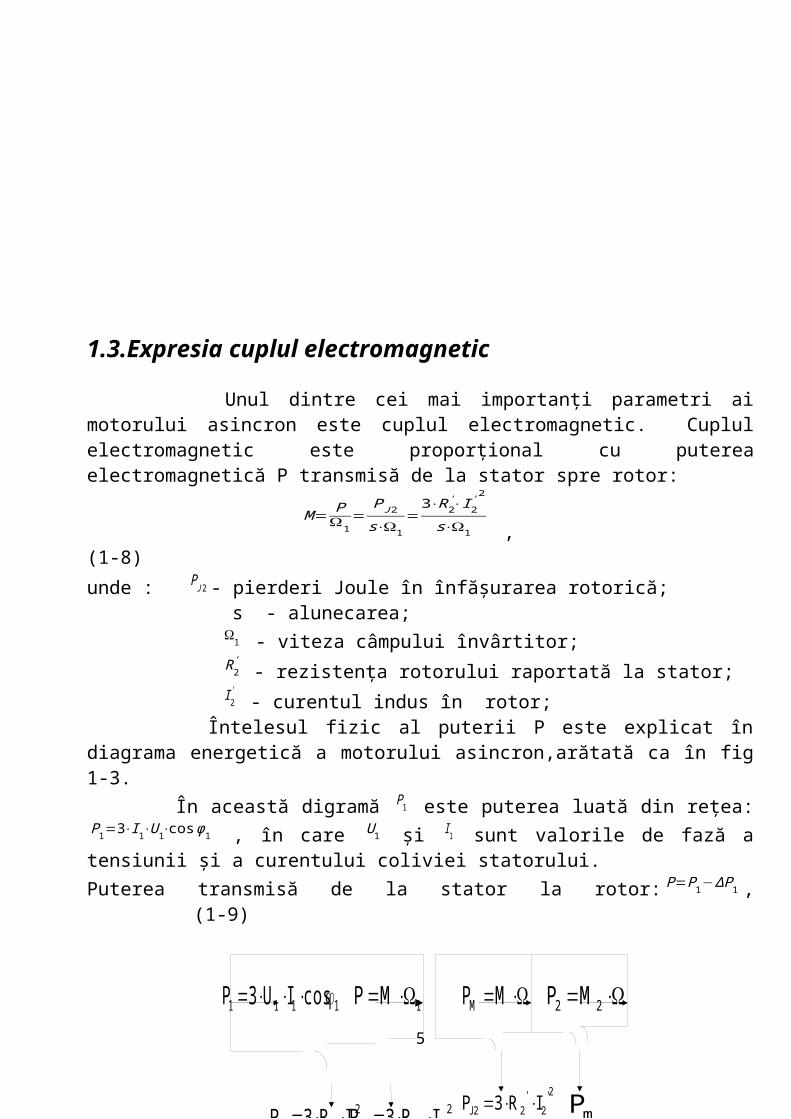
Fig.1.3.Bilanţul puterilor active la motorul asincron
1.3.Expresia cuplul electromagnetic
Unul dintre cei mai importanţi parametri ai motorului asincron este cuplul electromagnetic. Cuplul electromagnetic este proporţional cu puterea electromagnetică P transmisă de la stator spre rotor:
M= P
1=
PJ 2
s⋅1
=3⋅R2
'⋅I 2'2
s⋅1 , (1-8)
unde : PJ 2 - pierderi Joule în înfăşurarea rotorică; s - alunecarea;
1 - viteza câmpului învârtitor;
R2'
- rezistenţa rotorului raportată la stator;
I 2' - curentul indus în rotor;
Întelesul fizic al puterii P este explicat în diagrama energetică a motorului asincron,arătată ca în fig 1-3.
În această digramă P1 este puterea luată din reţea: P1=3⋅I 1⋅U 1⋅cos ϕ1 , în care U1 şi I 1 sunt valorile de fază a tensiunii şi a curentului coliviei statorului.
Puterea transmisă de la stator la rotor:P=P1−ΔP1 , (1-9)
în care ΔP1=PFe+PJ 1=3⋅Rw⋅I
w2+3⋅R1⋅I12 sunt pierderile în fierul şi în cuprul statorului
Puterea pe arbore:
PM=P−PJ 2=P1−ΔP1−PJ 2 (1-10)
în care PJ 2 sunt pierderile în cuprul rotorului. Pierderile în miezul feromagnetic rotoric sunt neglijabile în raport cu cele din miezul statoric, deoarece depind de pătratul frecvenţei rotorice de magnetizare, frecvenţă care la funcţionarea normală a motoarelor nu poate depăşi valoarea de 2…3 Hz. Puterea utilă in arbore:
P2=PM−Pm=P1−ΔP1−PJ 2−Pm (1-11)
4
în care Pm sunt pierderile mecanice la lagăre şi prin ventilaţie.
Puterea utilă nominală este indicată pe placa motorului. Folosind schema echivalentă, puterea transmisă de la stator la rotor poate fi exprimată astfel:
P=3⋅I 2
' 2⋅R2
'
s (1-12)
Curentul raportat al rotorului prin tensiunea U1 la bornele motorului este:
I 2' =
−U1⋅Zm
(Z1+Z m⋅Z2
'
Zm+Z2' )⋅( Zm+Z2
' )
=−U 1
Z1+c1⋅Z2'
, (1-13) unde:
c1=1+
Z1
Zm . (1-14) Înlocuind expresia curentului raportat al rotorului in ecuaţia (1-12) se obţine:
P=3⋅U1
2⋅R2
'
s
(R1+c1⋅R2
'
s )2
+( X σ 1+c1⋅Xσ 2' )2
. (1-15) Pentru o valoare anumită a alunecării,puterea transmisă rotorului şi deci cuplul
electromagnetic vor avea valoarea maximă. Luând derivata întâi dPds şi egalând-o cu zero,
se determină valoarea alunecării sk , pentru care puterea transmisă rotorului şi deci cuplul vor avea valoarea maximă:
sk=c1⋅R2
'
√R12+( X σ 1+c1⋅Xσ 2
' )2 . (1-16) Această valoare a alunecării poartă denumirea de alunecare critică. Puterea maximă,transmisă rotorului în cazul valorii critice a alunecării se deduce din
relaţia (1-15), înlocuind s=sk :
Pmax=3⋅U 1
2
2⋅c 1⋅[R1+√R12+( Xσ 1+c1⋅Xσ 2
' )2 ] . (1-17)
Formula lui Kloss.
Pentru calculele practice este mult mai comod să se exprime cuplul electromagnetic sub formă de unităti relative, deoarece nu se cunosc de regulă valorile rezistenţelor şi
5
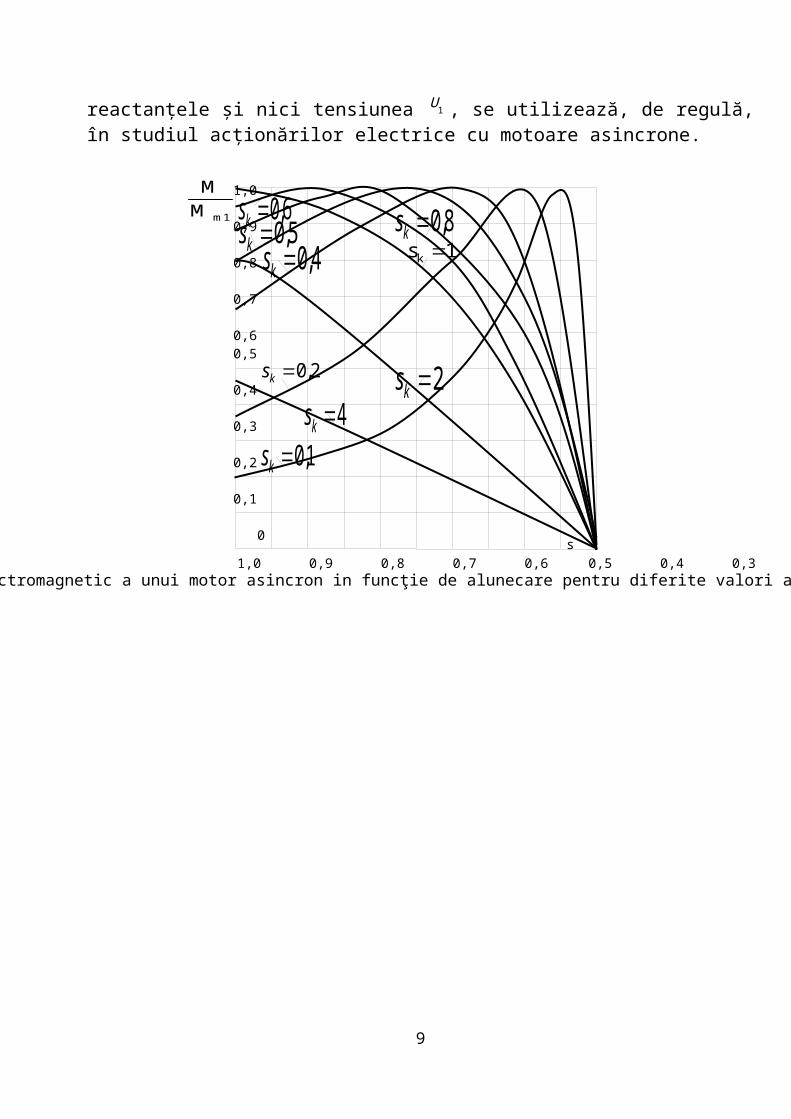
fig.1-4.Cuplul electromagnetic a unui motor asincron in funcţie de alunecare pentru diferite valori ale alunecării critice 1,0 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,2 0,1 0
1,0
0,9
0,8
0,7
0,6 0,5 0,4
0,3
0,2
0,1
0
1mM
M
2,0ks
1,0ks
4ks2ks
4,0ks5,0ks
6,0ks1sk 8,0ks
s
reactanţelor motorului. Se cunoaşte în schimb, capacitatea de suprasarcină a maşini, definită de relaţia :
M m1
M n
=λ (1-18)
Capacitatea de suprasarcină are valori uzuale, în cazul motoarelor de uz general
în intervalul (2…3). Motoarele de macara pot avea această capacitate mai mare, ajungând până la valoarea 4. Formula lui Kloss este o relaţie echivalentă cu (1-15) care ţine seama şi de expresiile (1-16) si (1-17). Aceasta formulă se obţine făcând raportul
dintre cuplul electromagnetic M= P
1 şi cuplul maxim în regim de motor Mm 1=
Pmax
1 . Astfel, după câteva calcule algebrice, se găseşte relaţia (formula lui Kloss):
PPmax
= MMm1
= 2
ssk
+sk
s+
2⋅R1⋅sk
c1⋅R2'
(1-19) Relaţia (1-19) se poate simplifica pentru puteri peste (5…10) kW cu alunecări critice
mari, la care λ⋅sk << 1şi se obţine formula lui Kloss simplificată :
MM m1
= 2
ssk
+sk
s (1-20) La maşinile de putere mică, expresia (1-20) dă erori prea mari şi se recomandă relaţia mai exactă (1-19). Relaţiile (1-19) şi (1-20) în care nu apar rezistenţele sau
reactanţele şi nici tensiunea U1 , se utilizează, de regulă, în studiul acţionărilor electrice cu motoare asincrone.
6
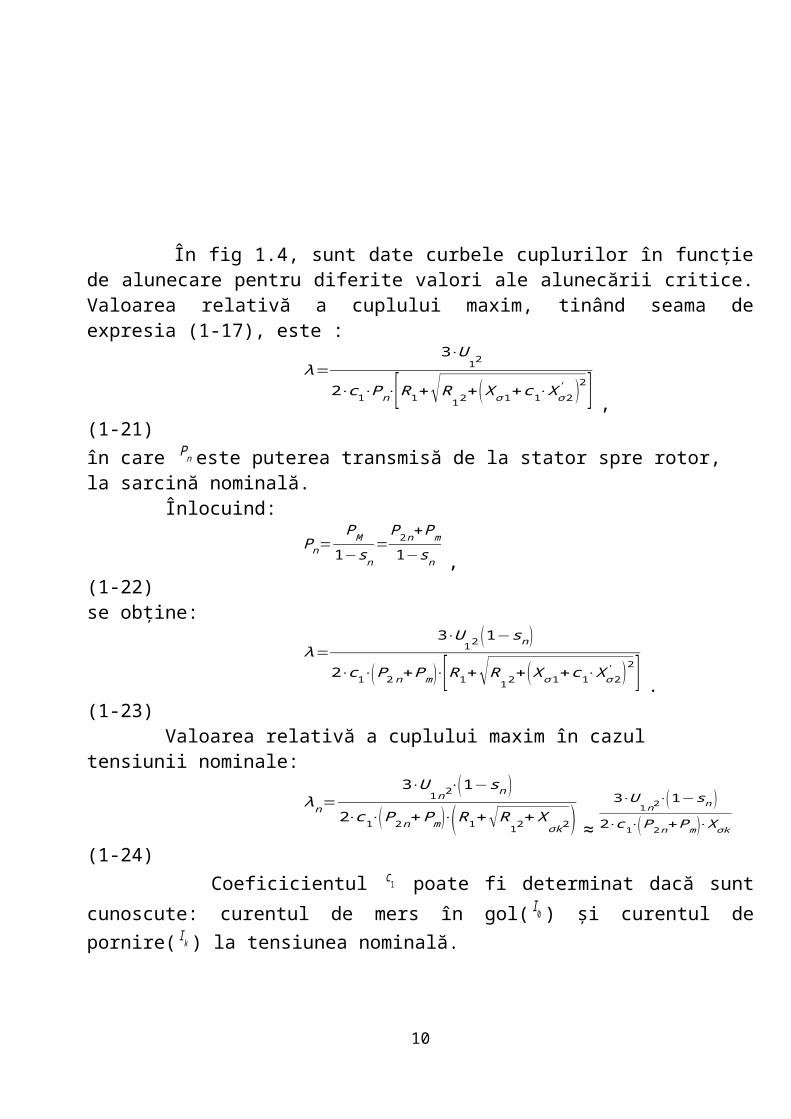
În fig 1.4, sunt date curbele cuplurilor în funcţie de alunecare pentru diferite valori ale alunecării critice. Valoarea relativă a cuplului maxim, tinând seama de expresia (1-17), este :
λ=3⋅U
12
2⋅c1⋅Pn⋅[R1+√R12+( Xσ 1+c1⋅Xσ 2
' )2 ] , (1-21)
în care Pn este puterea transmisă de la stator spre rotor, la sarcină nominală. Înlocuind:
Pn=
PM
1−sn
=P2 n+Pm
1−sn , (1-22)se obţine:
λ=3⋅U
12 (1−sn )
2⋅c1⋅(P2n+ Pm )⋅[R1+√R12+( X σ 1+c1⋅Xσ 2
' )2 ] . (1-23) Valoarea relativă a cuplului maxim în cazul tensiunii nominale:
λn=3⋅U
1n2⋅(1−sn )
2⋅c1⋅(P2 n+Pm )⋅( R1+√ R12+X
σk2) ≈
3⋅U1 n
2⋅(1−sn)2⋅c1⋅( P2n+Pm )⋅Xσk (1-24)
7
Coeficicientul c1 poate fi determinat dacă sunt cunoscute: curentul de mers în gol( I 0
) şi curentul de pornire(I k ) la tensiunea nominală. Întrucât pentru un motor calat impedanţa bobinajului statorului este practic egală cu impedanţa rotorului, adică:
Z1 ≈Z2', (1-25)
atunci
Z1 ≈
Zk
2 (1-26) şi,prin urmare:
c1=1+
Z1
Zm ≈1+
Zk
2⋅Zm ≈1+
I 10
2⋅I k (1-27) Luând valorile medii ale curentului de mers în gol şi ale curentului de pornire: I 10=0,3⋅I n şi I k=5⋅I n , se obţine:
c1=1+0,3
10=1, 03
,
adică valoarea coeficientului c1 este de obicei foarte apropiată de unitate. Din ecuaţia (1-23) rezultă că valoarea fundamentală care determină capacitatea de suprasarcină a cuplului maxim,este reactanţa de dispersie, în bobinajele statorului şi
rotorului(X σ 1 , Xσ 2'
). De aceea, cu cât este mai mică reactanţa cu atât este mai mare curentul de pornire şi cuplul maxim.
Influenţa frecvenţei şi tensiunii asupra cuplului maxim: Din ecuaţia (1-17) ⇒dacă se neglijează rezistenţa statorului,puterea maximă
transmisă de la stator spre rotor(PM ) este invers proporţională cu reactanţa de dispersie, deci invers proporţională cu frecvenţa reţelei.
Din ecuaţia (1-8) rezultă că şi cuplul electromagnetic este direct proporţional cu
P şi invers proporţional cu f 1 , prin urmare valoarea cuplului maxim va varia invers proportional cu pătratul frecvenţei reţelei.
Din ecuaţia (1-24) se vede că valoarea cuplului maxim este direct proporţională cu pătratul tensiunii reţelei.
Din ecuaţia (1-16) ⇒dacă se neglijează rezistenţa statorului alunecarea critică
va fi invers proporţională cu frecvenţa, adică : skf =
sk⋅f n
f
Notând:
ff n
=k f,
UU1n
=ku şi
MM n
=mcdin ecuaţia (1-23) se obţine:
8
1
12
nn
ns
s
1 2 3
1
2
nn2
1
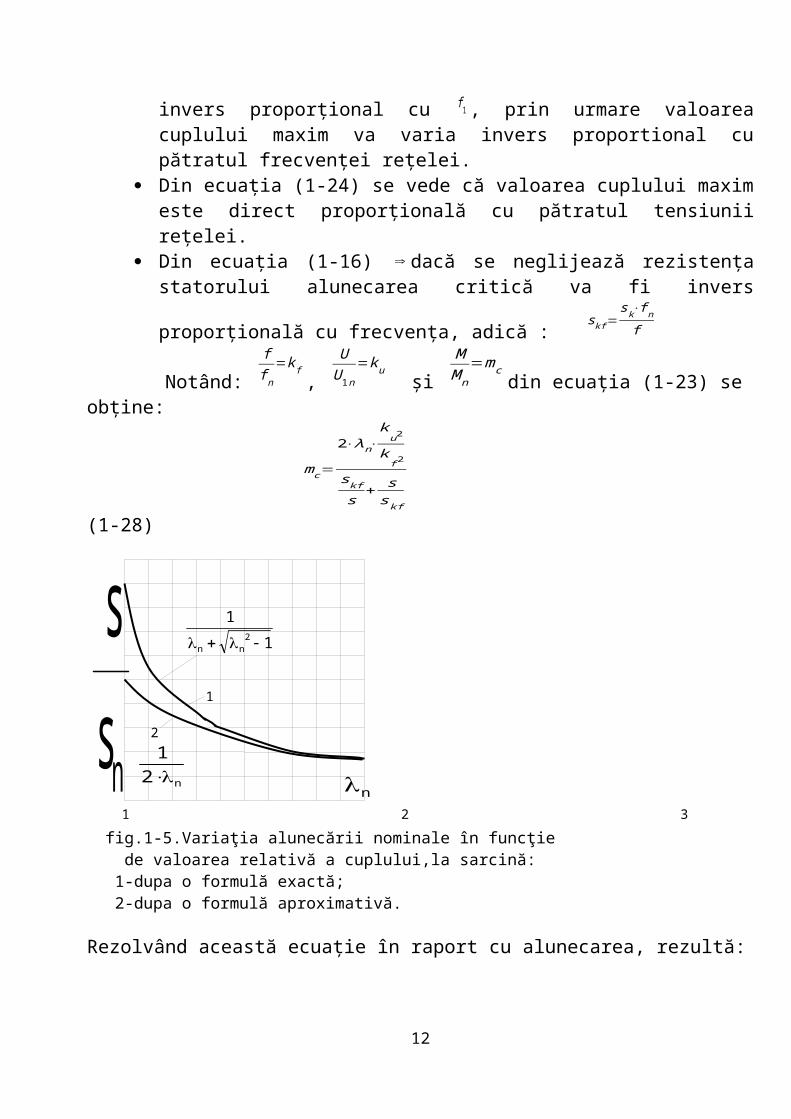
fig.1-5.Variaţia alunecării nominale în funcţie de valoarea relativă a cuplului,la sarcină: 1-dupa o formulă exactă; 2-dupa o formulă aproximativă.
mc=
2⋅λn⋅k
u2
kf2
skf
s+ s
skf (1-28)
Rezolvând această ecuaţie în raport cu alunecarea, rezultă:
s=skf
λn⋅ku2
mc⋅kf 2
+√( λn⋅ku2
mc⋅kf 2 )
2
−1
(1-29) Pentru un regim nominal:
sn=
sk
λn+√ λn
2−1. (1-30)
Alunecarea critică în cazul frecvenţei f va fi:
skf =
sk⋅f n
f=
sk
k f (1-31)
Pentru valoareaλn≥1,6 :
sn≈
sk
2⋅λn (1-32)
1.4.Cuplul de pornire
Cuplul de pornire M p se determină din formula lui Kloss scrisa pentru regimul de pornire:
M p
M n
=2⋅λn⋅sk
1+sk2 (1-33)
sau,exprimând aceasta prin curentul rotorului, se deduce din formulele (1-12) şi (1-22), pentru s=1:
9
M p
M n ≈
3⋅I 2k'2⋅R2
' (1−sn )P2n+Pm ≈
3⋅I 2k'2⋅R2
'
P2n (1-34)
unde: I 2 sc'2
este curentul raportat de scurt circuit, când rotorul este calat.
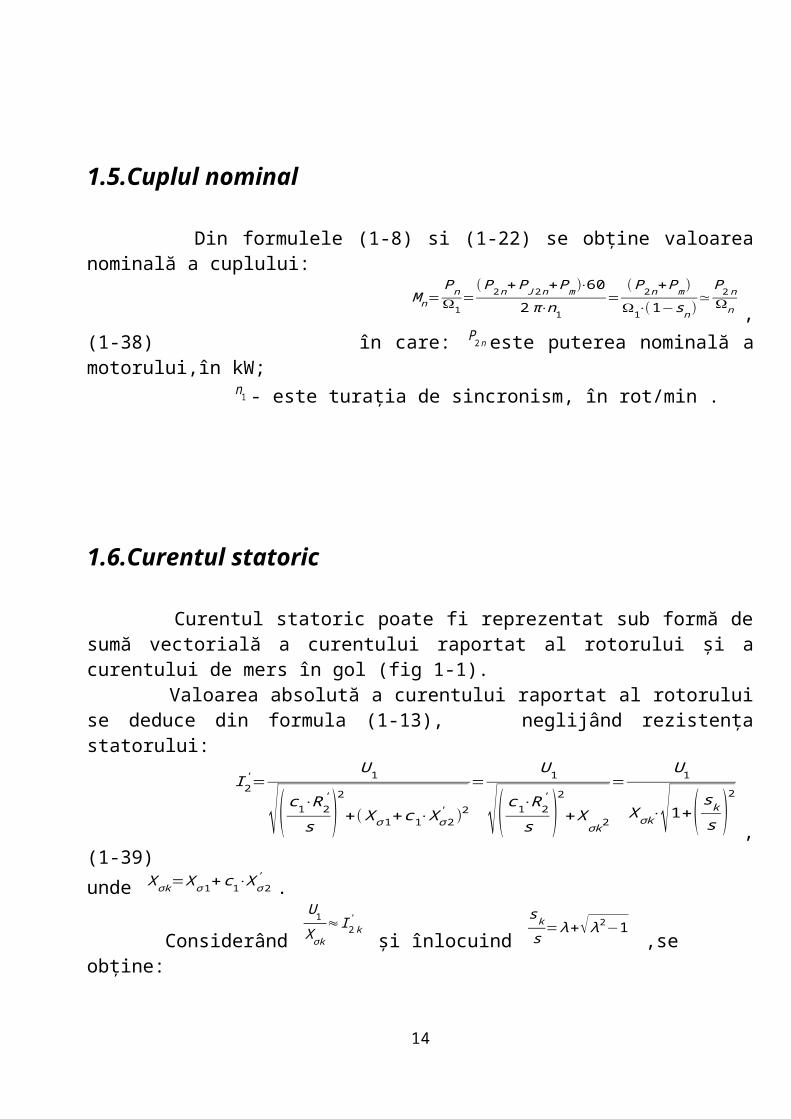
1.5.Cuplul nominal
Din formulele (1-8) si (1-22) se obţine valoarea nominală a cuplului:
M n=
Pn
1=
( P2 n+PJ 2 n+Pm )⋅60
2 π⋅n1
=( P2n+Pm)1⋅(1−sn )
≃P2n
n , (1-38)
în care: P2 neste puterea nominală a motorului,în kW;
n1 - este turaţia de sincronism, în rot/min .
1.6.Curentul statoric
Curentul statoric poate fi reprezentat sub formă de sumă vectorială a curentului raportat al rotorului şi a curentului de mers în gol (fig 1-1). Valoarea absolută a curentului raportat al rotorului se deduce din formula (1-13), neglijând rezistenţa statorului:
I 2' =
U1
√( c1⋅R2'
s )2
+( X σ 1+c1⋅Xσ 2' )2
=U 1
√( c1⋅R2'
s )2
+Xσk
2
=U1
Xσk⋅√1+( sk
s )2
, (1-39)
unde X σk=Xσ 1+c1⋅Xσ 2'
.
Considerând
U1
Xσk
≈I 2 k'
şi înlocuind
sk
s= λ+√ λ2−1
,se obţine:
I 2'
I 2 k'
= 1
√1+ (λ+√λ2−1)2= 1
√2⋅λ⋅(λ+√λ2−1) . (1-40)
Pentru valoarea λ≥16:
I 2'
I 2 k'
≈ 12⋅λ . (1-41)
Valoarea relativă a curentului raportat al rotorului, raportat la curentul nominal al rotorului, este luat din formula (1-31), tinând cont de variaţia la frecvenţă şi tensiune:
10
I 2'
I 2 n'
=U 1⋅f n
U1 n⋅f⋅√ λn⋅(λn+√λ
n2−1)λ⋅(λ+√ λ2−1 )
=ku
k f
⋅√ λn⋅(λn+√ λn2−1)
λ⋅( λ+√λ2−1 ) (1-42) Decalajul curentului raportat al rotorului faţă de tensiunea din reţea rezultă din fig.1-1
tg ϕ1' =
X σk
R1+R2
'
s
≃s⋅X σk
R2'
= ssk
= 1
λ+√ λ2−1≃ 1
2⋅λ
(1-43) Pentru funcţionarea motorului pe porţiunea stabilă a caracteristicii cuplului
electromagnetic, rezistenţa statorului se poate neglija în comparaţie cu valoarea
R2'
s . Considerând că curentul de mers în gol ar fi pur reactiv, curentul statorului va avea valoarea:
I 1=√(I 10+ I 2'⋅sin ϕ1
' )2+(I 2'⋅cos ϕ1
' )2 (1-44)
Tinând seama de pierderile la mersul in gol,
I 1=√(I 10⋅sin ϕ10+ I 2'⋅sin ϕ1
' )2+( I10⋅cosϕ10+ I 2'⋅cos ϕ1
' )2 (1-44 ' )
1.7.Curentul nominal raportat al rotorului
Din ecuaţia (1-44 ' ) pentru curentul statorului se poate determina curentul nominal al rotorului:
I 2 n'
I 1 n
=√1−I 10n
2
I1 n2
⋅(1−sin2ϕ1 n' )−
I 10n
I 1n
⋅sin ϕ1 n'
(1-45)
Se poate neglija valoarea sin2 ϕ1n'
de sub radical se atunci se obţine:
I 2 n'
I 1 n
≈√1−I 10 n
2
I 1n2
−I 10 n
I 1 n
⋅sin ϕ1n'
(1-46)
1.8.Impedanţa motorului
Pentru rezolvarea unui şir de probleme relative la pornirea şi la comportarea motoarelor la tensiunile scăzute din timpul scurt-circuitelor şi din perioada de restabilire a tensiunii dupa repararea porţiunii scurt-circuitate, este necesar să se cunoască variaţia
11
2,4
2,0
1,6
1,2
0,8
0,4
0
1,0 0,8 0,6 0,4 0,2 0
s
kZ
Z
kZ
Z
kI
I
1,0sk
1 2 3 4
5
4
3
2
1
0
kZ
Z
ks
s
ks/s
impedanţei totale a motorului, precum şi a rezistenţei şi reactanţei, în funcţie de alunecare. Neglijând rezistenţa statorului, se va găsi din formula (1-39) relaţia între impedanţa motorului şi alunecare. Expresia care determină curentul raportat al rotorului este:
Zs=√( c1⋅R2
'
s )2
+ Xσk2
(1-49)Pentru rotorul calat, adică pentru alunecare s=1:
ZK=√c
12⋅R2
'2+X
σk2 (1-50)
Prin împărţirea celor doua egalităti,se obţine:
Zs
Zk
=√( c1⋅R2'
s )2
+X σk2
c12⋅R2
'2+ Xσk2
=√ 1+( sk
s )2
1+sk
2
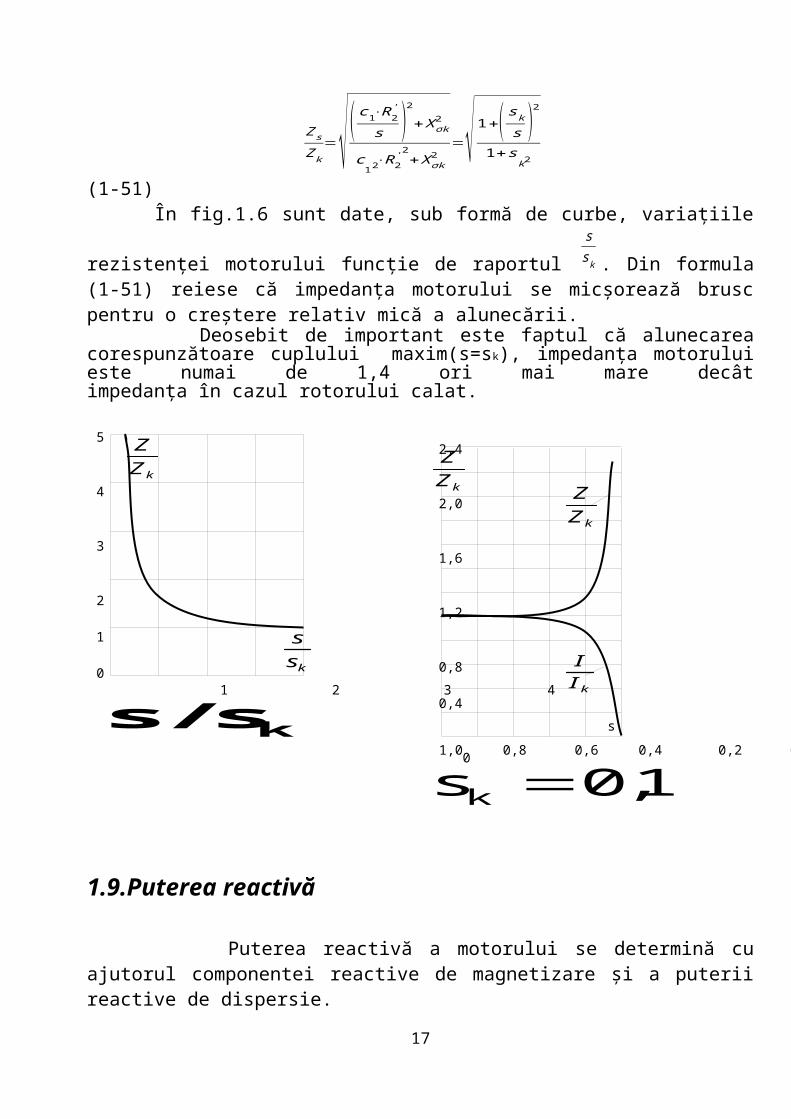
(1-51) În fig.1.6 sunt date, sub formă de curbe, variaţiile rezistenţei motorului funcţie de
raportul
ssk . Din formula (1-51) reiese că impedanţa motorului se micşorează brusc
pentru o creştere relativ mică a alunecării. Deosebit de important este faptul că alunecarea corespunzătoare cuplului maxim(s=sk), impedanţa motorului este numai de 1,4 ori mai mare decât impedanţa în cazul rotorului calat.
12
1.9.Puterea reactivă
Puterea reactivă a motorului se determină cu ajutorul componentei reactive de magnetizare şi a puterii reactive de dispersie. Puterea reactivă de magnetizare, în mod practic, nu depinde de sarcina motorului. Trebuie ca puterea de magnetizare să fie cât mai mică, şi în afară de aceasta, ca la o creştere a tensiunii, ea să nu crească prea mult; de aceea, nu se admite să fie luate inducţii prea mari în fierul statorului. Puterea reactivă de dispersie, determinate de decalajul de fază a curentului raportat al rotorului faţă de tensiunea reţelei, depinde de reactanţa de dispersie din bobinajele statorului şi rotorului, de rezistenţa ohmică a rotorului şi de alunecare. Această putere reactivă se determină din raportul dintre cuplul maxim şi cuplul de sarcină. Cu cât este mai mare valoarea relativă a cuplului de sarcină, cu atât va fi mai micã puterea reactivã de dispersie. În felul acesta:
Q=3⋅U⋅(I 2'⋅sin ϕ1
' + I 10) (1-53)
Înlocuind curentul raportat al rotorului din formula (1-42) şi pe sin ϕ1'din formula (1-
43) se va obţine:
Q=3⋅U⋅(I 2n' ⋅
ku
k f
⋅√ λn⋅(λn+√ λn2−1)
2⋅λ2 ( λ+√ λ2−1)2+ I 10)
(1-54)
Pentru regim nominal:
Qn=3⋅U n⋅(I 2n' ⋅√ 1
2⋅λn (λn+√λn2−1)
+ I 10 n) (1-55)
Făcând raportul se obţine:
QQn
=ku⋅
I 2n' ⋅
ku
k f √ λn⋅( λn+ λn⋅√ λn2−1)
2⋅λ2⋅( λ+√λ+√ λ2−1)2+ I 10
I 2 n' ⋅√ 1
2⋅λn⋅(λn+√ λn2−1)
+ I 10 n
(1-56)
unde: k u=
UUn şi
λ=λn⋅k
u2
mc⋅kf2 .
13
1,0
0,8
0,6
0,4
0,2
n1
n10
I
I
cos φn
1 2 3 4
sinφ,cosφ
n
0,5 0,4 0,30,20,5
0,4
0,3
0,2
sin φn
nsin
Cu ajutorul acestei ecuaţii se poate determina variaţia consumului de putere reactivă în funcţie de variaţia sarcinii motorului,a tensiunii şi a frecvenţei. Influenţa cuplului maxim asupra puterii respective, consumată de motor din reţea: din expresia (1-54) a puterii reactive consumate de motor din reţea, rezultă că pe măsură ce cuplul maxim descreşte, creşte consumul de putere reactivă.
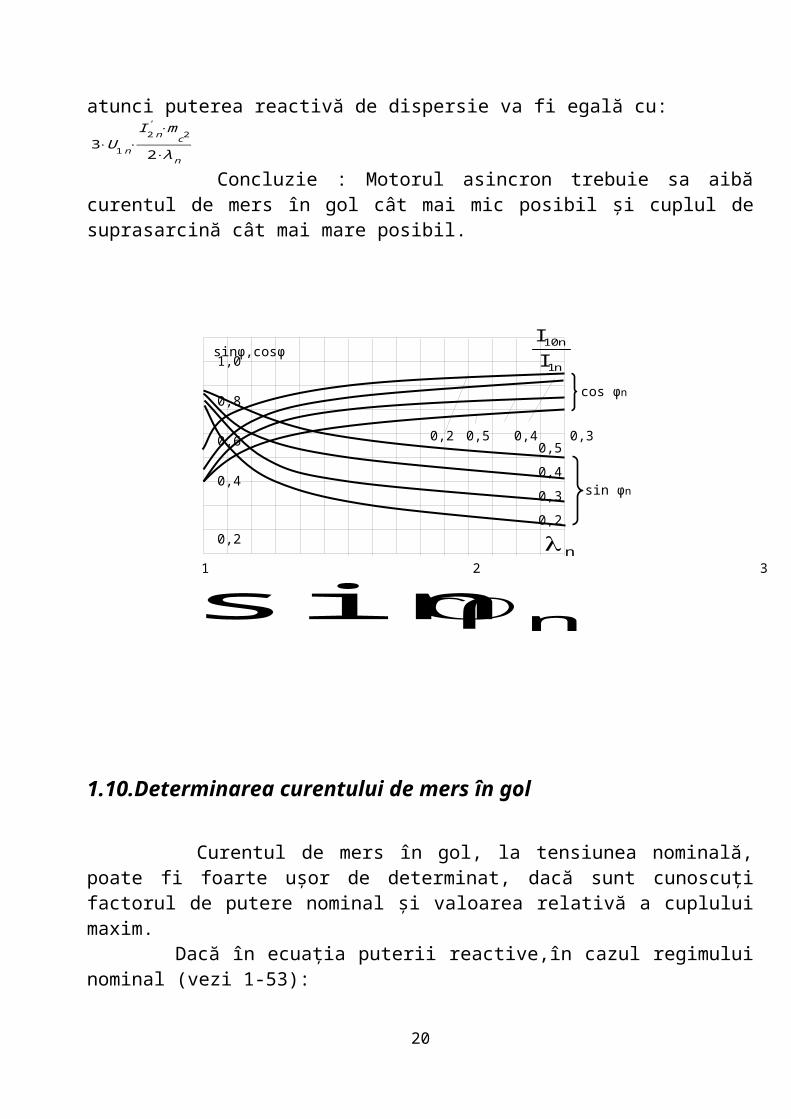
Pentru exemplificare, în fig.1.10 sunt date curbele valorilor mărimilor cos ϕn şi sin ϕn în funcţie de valoarea relativă a cuplului maxim pentru diferite valori ale valoarii relative a curentului de mers în gol. Trebuie să ţinem seama că, dacă puterea reactivă creşte, cresc şi pierderile de putere şi energie. De exemplu, creşterea valoarea relative a cuplului maxim de la 1,6-3 va duce la micşorarea consumului de energie reactivă cu aproape 30%, ceea ce echivalează cu o creştere a randamentului motorului, cu cel putin 3%, în medie. La variaţia sarcinii, puterea reactivă de magnetizare rămâne practic constantă. Puterea reactivă de dispersie se schimbă însă, aproximată proporţional cu pătratul coeficientului de sarcină a motorului.
În adevăr, dacă se introduc în ecuaţia (1-56) valorile λn ≥1,6 şi λ≥1,6:
λn+√ λn−1≃2⋅λn şi λ+√ λ2−1≃2⋅λ=
2⋅λn
mc
atunci puterea reactivă de dispersie va fi egală cu: 3⋅U 1n⋅
I 2 n' ⋅m
c2
2⋅λn
Concluzie : Motorul asincron trebuie sa aibă curentul de mers în gol cât mai mic posibil şi cuplul de suprasarcină cât mai mare posibil.
14
1,0
0,8
0,6
0,4
0,2
0
nM
M
1
2
3
1.10.Determinarea curentului de mers în gol
Curentul de mers în gol, la tensiunea nominală, poate fi foarte uşor de determinat, dacă sunt cunoscuţi factorul de putere nominal şi valoarea relativă a cuplului maxim. Dacă în ecuaţia puterii reactive,în cazul regimului nominal (vezi 1-53):
Qn=3⋅U n (I 2 n' ⋅sin ϕ1 n
' + I 10 n) (1-57)
se înlocuieşte curentul nominal raportat al rotorului din ecuaţia:
I 2 n'
I 1 n
≈cosϕ1 n
cosϕ1 n'
şi se rezolvă această ecuaţie în raport cu curentul de mers în gol la valoarea nominală a tensiunii, atunci:
Din cele expuse mai sus s-a văzut ca elementul fundamental care determină valoarea cuplului maxim este impedanţa motorului. Rezistenţa şi reactanţa motorului, nu au, în majoritatea cazurilor, valori constante, ci depind de o serie intreagă de factori:
influenţa frecvenţei curentului din rotor: când rotorul este calat, rezistenţa va avea valoarea maximă; pe măsură ce scade frecvenţa curentului din rotor, rezistenţa scade şi ea.
la valori mici ale alunecării, rezistenţa va fi practic egală cu rezistenţa de curent continuu.
reactanţa de dispersie a rotorului, care variază invers proporţional cu rezistenţa are valoare minimă când rotorul este calat, mărindu-se pe măsură ce alunecarea scade.
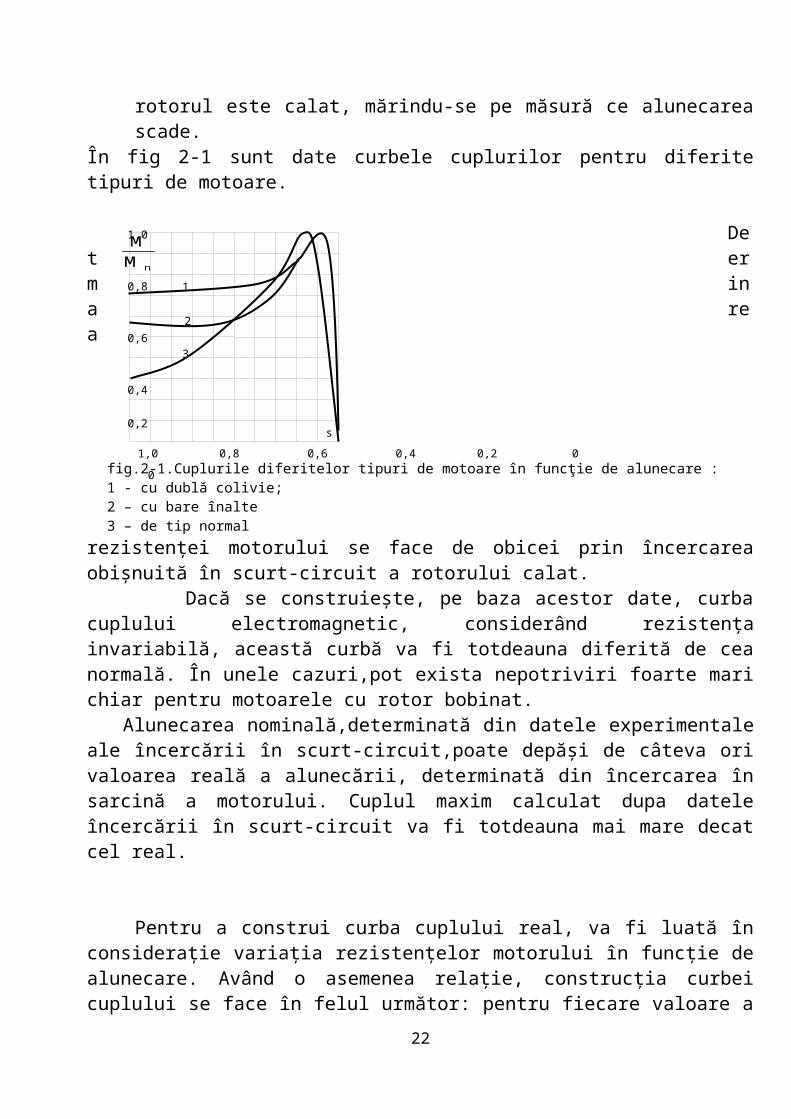
În fig 2-1 sunt date curbele cuplurilor pentru diferite tipuri de motoare.
15
Determinarea rezistenţei motorului se face de obicei prin încercarea obişnuită în scurt-circuit a rotorului calat. Dacă se construieşte, pe baza acestor date, curba cuplului electromagnetic, considerând rezistenţa invariabilă, această curbă va fi totdeauna diferită de cea normală. În unele cazuri,pot exista nepotriviri foarte mari chiar pentru motoarele cu rotor bobinat.
Alunecarea nominală,determinată din datele experimentale ale încercării în scurt-circuit,poate depăşi de câteva ori valoarea reală a alunecării, determinată din încercarea în sarcină a motorului. Cuplul maxim calculat dupa datele încercării în scurt-circuit va fi totdeauna mai mare decat cel real.
Pentru a construi curba cuplului real, va fi luată în consideraţie variaţia rezistenţelor motorului în funcţie de alunecare. Având o asemenea relaţie, construcţia curbei cuplului se face în felul următor: pentru fiecare valoare a alunecării, alunecarea critică se determină din relaţia (1-16) şi valoarea relativă a cuplului maxim din formula (1-27).Valoarea cuplului,pentru o anumită alunecare,se determină din formula (1-23). În mod practic,este suficient a găsi cuplul electromagnetic pentru parametrii motorului,corespunzători alunecărilor s=1,s=0,3 şi s=0. În măsura în care rezistenţa raportată a rotorului şi reactanţa de dispersie a motorului, pentru valorile mici ale alunecării,variază foarte puţin, curba cuplurilor, construită cu ajutorul parametrilor motorului corespunzători alunecărilor s=0, poate fi considerată,pe porţiunea curbei de la s=0 până alunecarea critică, ca o curba reală. Cealaltă porţiune a curbei cuplului se construieşte cu ajutorul punctelor s=1 si s=0,5.
2.1.Motorul cu bare înalte
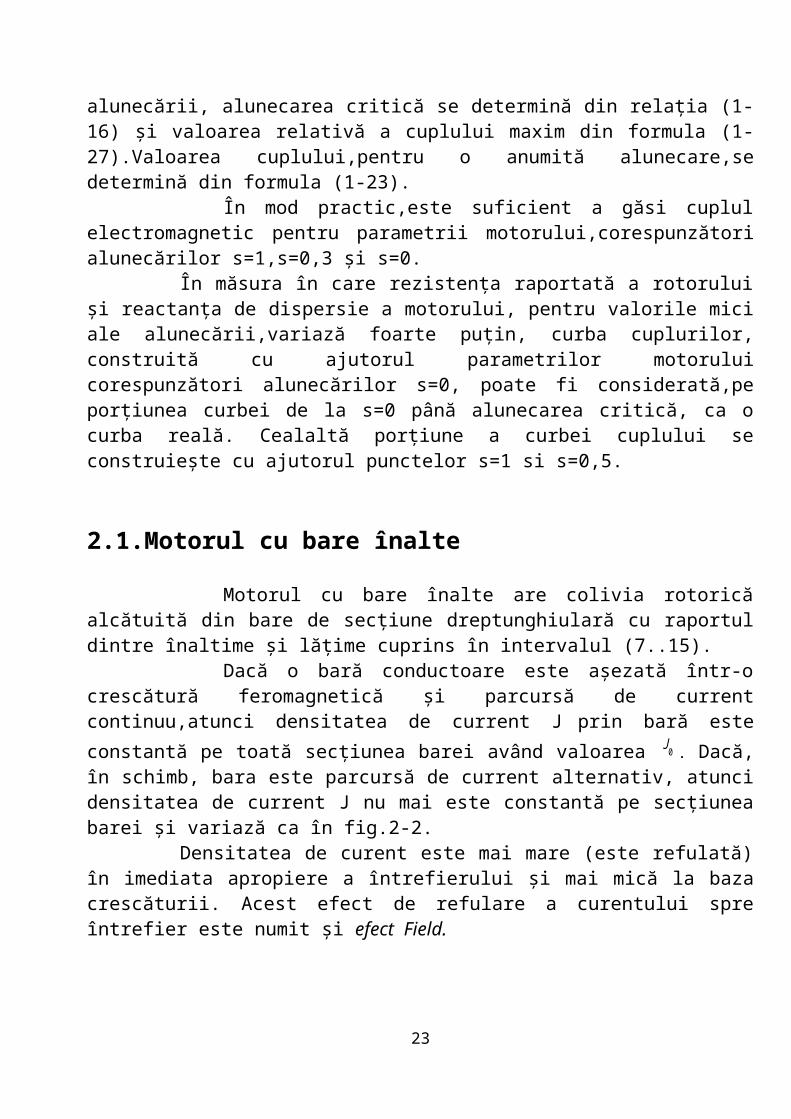
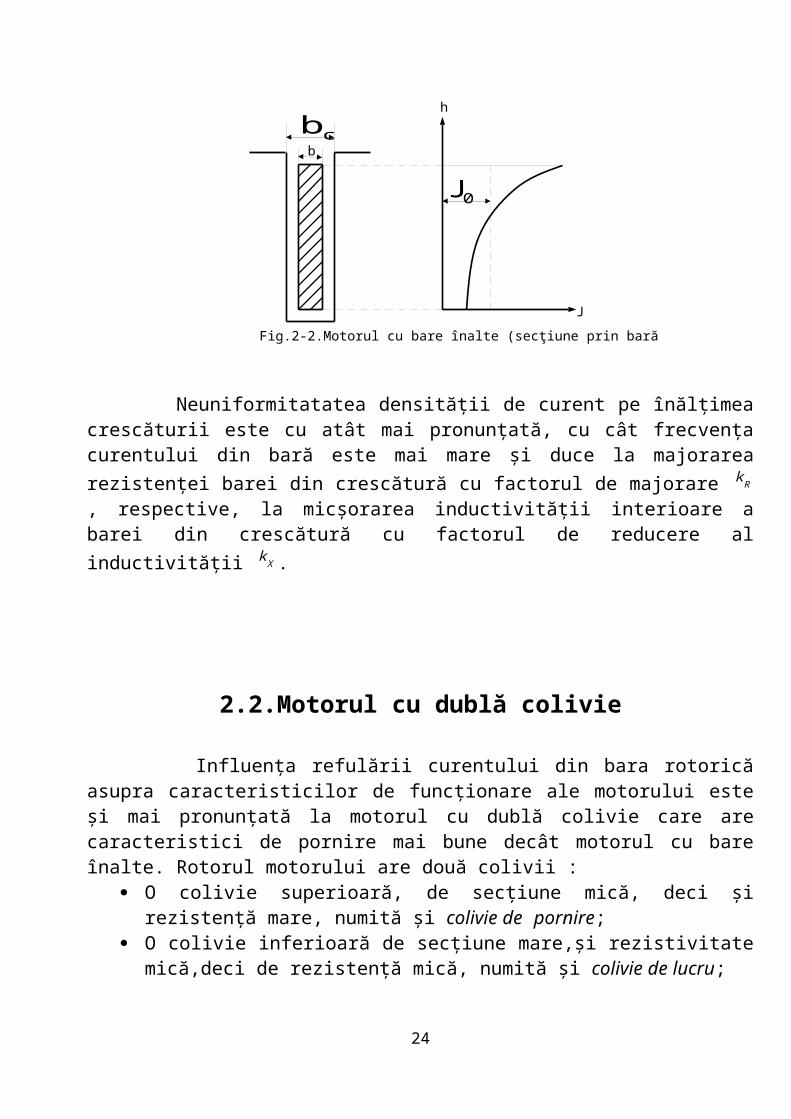
Motorul cu bare înalte are colivia rotorică alcătuită din bare de secţiune dreptunghiulară cu raportul dintre înaltime şi lăţime cuprins în intervalul (7..15). Dacă o bară conductoare este aşezată într-o crescătură feromagnetică şi parcursă de current continuu,atunci densitatea de current J prin bară este constantă pe toată secţiunea
barei având valoarea J0 . Dacă, în schimb, bara este parcursă de current alternativ, atunci densitatea de current J nu mai este constantă pe secţiunea barei şi variază ca în fig.2-2. Densitatea de curent este mai mare (este refulată) în imediata apropiere a întrefierului şi mai mică la baza crescăturii. Acest efect de refulare a curentului spre întrefier este numit şi efect Field.
16
bcb
0J
J
h
Fig.2-2.Motorul cu bare înalte (secţiune prin bară
s
c
Neuniformitatatea densităţii de curent pe înălţimea crescăturii este cu atât mai pronunţată, cu cât frecvenţa curentului din bară este mai mare şi duce la majorarea
rezistenţei barei din crescătură cu factorul de majorare k R , respective, la micşorarea
inductivităţii interioare a barei din crescătură cu factorul de reducere al inductivităţii k X .
2.2.Motorul cu dublă colivie
Influenţa refulării curentului din bara rotorică asupra caracteristicilor de funcţionare ale motorului este şi mai pronunţată la motorul cu dublă colivie care are caracteristici de pornire mai bune decât motorul cu bare înalte. Rotorul motorului are două colivii :
O colivie superioară, de secţiune mică, deci şi rezistenţă mare, numită şi colivie de pornire;
O colivie inferioară de secţiune mare,şi rezistivitate mică,deci de rezistenţă mică, numită şi colivie de lucru;
În fig.2-7 se prezintă o secţiune transversală printr-o dublă colivie. Rezistenţa
coliviei superioare R2 s este mai mare decât rezistenţa coliviei inferioare R2 i . În schimb,
reactanţa coliviei superioare X σ 2 seste mai mică decat reactanţa coliviei inferioare X σ 2i ,
deoarece fluxul de dispersie al coliviei superioare ϕσs este mai mic decât fluxul de
dispersie al coliviei inferioare ϕσi . Acest lucru se explică prin faptul că fluxul de
dispersie ϕσs parcurge două istmuri de aer, pe când ϕσi ,numai unul. Cele două colivii au caracteristici diferite care le imprimă şi roluri diferite în procesul de pornire sau de funcţionare.
17
La pornire, frecvenţa f 2 a curenţilor rotorici este mare, deci contează mult reactanţele coliviilor ,şi cum reactanţa coliviei superioare este mică, aproape tot curentul rotoric va circula prin colivia superioară, rămânând doar o mică parte a curentului rotoric
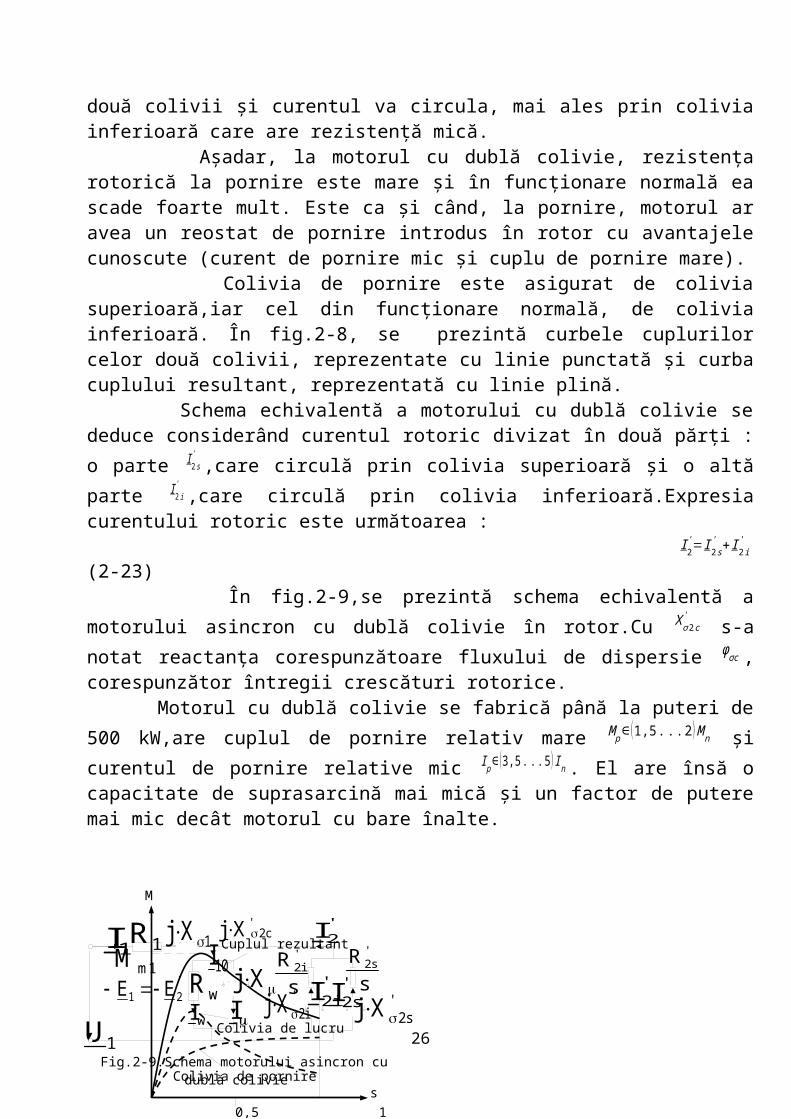
care va circula şi prin colivia inferioară. În funcţionarea normală, frecvenţa f 2 a curenţilor rotorici este mică, reactanţele sunt neglijabile, deci repartiţia curenţilor rotorici pe cele două colivii o vor face rezistenţele celor două colivii şi curentul va circula, mai ales prin colivia inferioară care are rezistenţă mică. Aşadar, la motorul cu dublă colivie, rezistenţa rotorică la pornire este mare şi în funcţionare normală ea scade foarte mult. Este ca şi când, la pornire, motorul ar avea un reostat de pornire introdus în rotor cu avantajele cunoscute (curent de pornire mic şi cuplu de pornire mare). Colivia de pornire este asigurat de colivia superioară,iar cel din funcţionare normală, de colivia inferioară. În fig.2-8, se prezintă curbele cuplurilor celor două colivii, reprezentate cu linie punctată şi curba cuplului resultant, reprezentată cu linie plină. Schema echivalentă a motorului cu dublă colivie se deduce considerând curentul
rotoric divizat în două părţi : o parte I 2 s'
,care circulă prin colivia superioară şi o altă parte I 2i
',care circulă prin colivia inferioară.Expresia curentului rotoric este următoarea :
I 2' =I 2 s
' + I 2i'
(2-23) În fig.2-9,se prezintă schema echivalentă a motorului asincron cu dublă colivie în
rotor.Cu X σ 2 c'
s-a notat reactanţa corespunzătoare fluxului de dispersie ϕσc , corespunzător întregii crescături rotorice. Motorul cu dublă colivie se fabrică până la puteri de 500 kW,are cuplul de pornire
relativ mare M p∈ (1,5. . .2 ) M n şi curentul de pornire relative mic I p∈ (3,5 . .. 5 ) I n. El are însă o capacitate de suprasarcină mai mică şi un factor de putere mai mic decât motorul cu bare înalte.
18
1mM
0,5 1
Cuplul rezultant
Colivia de lucru
Colivia de pornire
M
s
Fig.2-8.Caracteristicile M=f(s) ale motorului cu dublă colivie
1Xj c2'Xj '
2I
1U
1I 1R
wR Xj
IwI
10I'21 EE s
R 's2
s
R 'i2
's2Xj '
i2Xj '
i2I 's2I
Fig.2-9.Schema motorului asincron cu dublă colivie
Pentru puteri mari şi foarte mari nu se construiesc motoare cu rotor în colivie deoarece, pentru a fi pornite necesită o reţea de alimentare de putere mult mai mare decât a motorului, ceea ce este neeconomic. În asemenea cazuri, se construiesc motoare cu rotorul bobinat care pornesc cu ajutorul reostatului de pornire, absorbind la pornire un
current mult mai mic: I p∈ (1,2 . .. 1,8 ) I n .
Capi to lu l I I ICap i to lu l I I I
D E T E R M I N A R E A R A N D A M E N T U L U I M O TO R U L U I A S I N C R O ND E T E R M I N A R E A R A N D A M E N T U L U I M O TO R U L U I A S I N C R O N
3.1.Expresia generală a randamentului
Din diagrama energetică din fig 1-3. reiese că puterea utilă la arbore este:
P2=PM−Pm=P1−ΔP1−PJ 2−Pm . (3-1) Randamentul motorului este egal cu raportul dintre puterea utilă şi puterea consumată de motor din reţea:
η=
P2
P1
=P2
P2+ΔP1+PJ 2+Pm . (3-2) Randamentul unui motor poate fi reprezentat sub forma unui produs a 3 randamente:
η=ηst⋅ηr⋅ηm , (3-3)în care randamentul statorului va fi :
19
n1
1
P
P
1,0
0,8
0,6
0,4
0,2
0
14
12
10
8
6
4
2
0
n1
1
P
P
ηst=
PP1
=P1−ΔP1
P1
= PP+ΔP1 , (3-4)
randamentul rotorului:
ηr=
PM
P=
P−PJ 2
P= P−P⋅s
P=1−s
(3-5)şi randamentul mecanic:
ηm=
P2
P2+Pm
=PM−Pm
PM
=P⋅(1−s )−Pm
P⋅(1−s ) . (3-6) Pierderile mecanice la regim nominal se exprimă sub forma unei fracţiuni din puterea electromotorului în regim nominal, considerând pentru simplificare că pierderile mecanice variază proporţional cu turaţia. Această simplificare este pe deplin admisibilă, tinând seama că pierderile mecanice sunt mici:
Pm=a⋅Pn⋅(1−s ) (3-7) unde a<1,atunci:
ηm=
P⋅(1−s )−a⋅Pn(1−s )P⋅(1−s )
=P−a⋅Pn
P . (3-8)În felul acesta:
η=
P⋅(1−s )⋅( P−a⋅Pn)( P+ΔP1 )⋅P
=(1−s )⋅(P−a⋅Pn )
P+ΔP1 . (3-9) Valoarea alunecării din această formulă depinde de puterea electromagnetică transmisă rotorului, care la rândul ei este proporţională cu capacitatea de suprasarcină a cuplului la arborele motorului.
Dacă:
M m1
M n
=Pm
Pn
≥1,6, corespunde
s=sn⋅MM n
=sn⋅PPn , (3-
10)
in care sn este alunecarea pentru valoarea nominala a cuplului. Subtituind valoarea alunecării în formula (3-9) se obţine:
η=
(1−sn⋅PPn
)⋅( P−Pn )
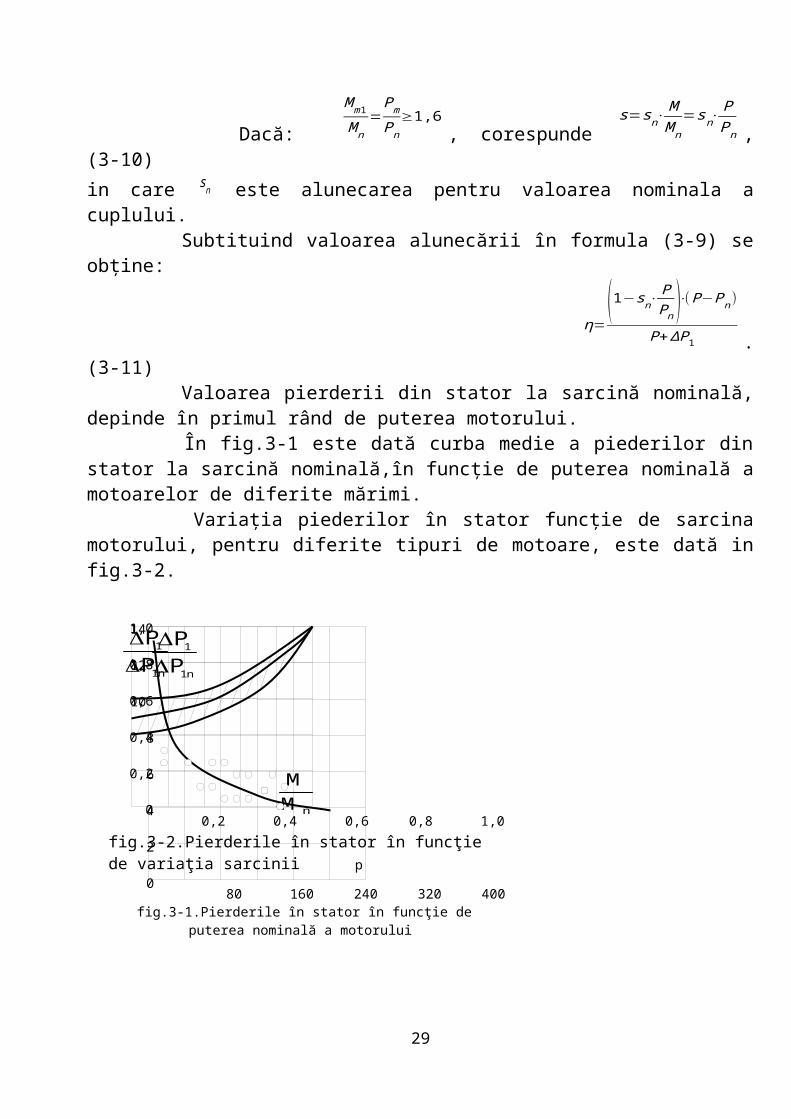
P+ΔP1 . (3-11) Valoarea pierderii din stator la sarcină nominală, depinde în primul rând de puterea motorului. În fig.3-1 este dată curba medie a piederilor din stator la sarcină nominală,în funcţie de puterea nominală a motoarelor de diferite mărimi. Variaţia piederilor în stator funcţie de sarcina motorului, pentru diferite tipuri de motoare, este dată in fig.3-2.
20
3.2.Variaţia randamentului la reglarea de frecvenţa
În acest caz trebuie să se tină seama,în procesul de reglare a funcţionării mecanismelor antrenate, că puterea motorului la micşorarea frecvenţei va fi totdeauna mai mică decât puterea lui nominală. Piederile în cupru vor fi de asemenea totdeauna mai mici decât cele nominale. Pentru a obţine valoarea maximă a randamentului, tensiunea de alimentare a motorului va trebui micşorată în aşa fel,încât pierderile din fier şi din cupru să atingă valoarea cea mai mică, la o încărcare dată. Considerăm că piederile mecanice variază proporţional cu turaţia. În realitate variaţiile piederilor mecanice sunt mai mari, fapt care nu are valoare practică, deoarece piederile mecanice în motor sunt mici.
Pierderile din fier, considerând valoarea fluxului constantă, adică atunci când k u=k f
, variază ceva mai mult decât în prima fază, din cauza variaţiei frecvenţei. Se consideră că pierderile în fier sunt:
PFe=PFe⋅n⋅
ku2
k f . (3-12)
21
Pierderile in cuprul statorului si al rotorului, neglijând valoarea curentului de magnetizare, când valoarea cuplului va fi mic, sunt:
PJ 1≈PJ1⋅n⋅
mc⋅kf 2
ku
2 . (3-13)
În felul acesta, randamentul în plină sarcină mc⋅k f⋅Pn este:
η=mc⋅k f⋅P2n
mc⋅k f⋅P2n+ Pm⋅n⋅k f+PFe⋅n⋅k
u2
k f
+PJ 1⋅n⋅m
c2⋅kf 2
ku2
sau
η= 1
1+Pm⋅n
Pn⋅mc
+PFe⋅n⋅k
u2
mc⋅Pn⋅kf2
+PJ 1⋅n mc⋅k f
ku
2⋅P2n (3-14)
iar randamentul va avea o valoare maximă când :
k u=4√k
f 7⋅PJ1⋅n
PFe⋅n (3-17)
Capi to lu l Cap i to lu l IVIV
Funcţ ionarea motoare lor a s incrone l a aba ter i a l eFunc ţ ionarea motoare lor a s incrone l a aba ter i a l e f recvenţe i , t ens iun i i ş i sarc in i i de l a va lor i l e l orf recvenţe i , t ens iun i i ş i sarc in i i de l a va lor i l e l or
nomina lenomina le
4.1.Consideraţii generale
În practica exploatării se produc de cele mai multe ori abateri de lungă durată a tensiunii şi frecvenţei de la valorile lor nominale. Câteodata aceste abateri ating valori considerabile. În afară de aceasta, uneori este necesar să folosim motoarele racordate la reţea, la o tensiune sau frecvenţa diferită de cele indicate pe placuţa motorului. Astfel de abateri se prezintă în următoarele cazuri:
Utilizarea motoarelor calculate pentru 60 per/s în reţele de frecvenţa standard de de 50 per/s;
22
Motoare calculate pentru tensiunea nominală de 3kV, cu bobinajul standard legat în stea, care funcţioneaza prin comutarea în triunghi a bobinajului statorului, într-o reţea de 2 kV;
Funcţionarea motoarelor la care legătura normală a bobinajului statorului este în triunghi, dar care, atunci când nu este în plină sarcină sunt comutate în stea;
a) Variaţia tensiunii la frecvenţa nominală .
Să presupunem că s-a micşorat tensiunea adusă la bobinajul statorului motorului, care lucrează cu un cuplu rezistent constant. Ca rezultat al micşorării tensiunii, se micşorează şi t.e.m. a electromotorului şi fluxul magnetic. Cuplul electromagnetic a motorului, care depinde de pătratul tensiunii, va fi mai mic decât cuplul rezistent, iar alunecarea motorului se măreşte până când ajunge la valoarea la care cuplul motorului va fi egal cu cuplul rezistent. Creşterea alunecării duce la creşterea curentului rotoric şi la creşterea unghiului de decalaj dintre curentul raportat al rotorului şi tensiunea reţelei. Curentul de mers în gol se micşorează dacă tensiunea scade iar curentul din stator va fi egal cu suma geometrică a curentului rotoric raportat şi a curentului de mers în gol putând să crească sau să se micşoreze în funcţie de încărcare, pe măsură ce creşte tensiunea, cresc t.e.m. şi fluxul magnetic, iar alunecarea şi curentul rotoric scad. Curentul de mers în gol va creşte, iar curentul din stator poate să crească sau să scadă. Ca şi la scădere de tensiune, există o anumită valoare a tensiunii la care curentul din stator va incepe să crească. În felul acesta, o scădere de tensiune produce totdeauna o creştere a curentului rotoric, iar creşterea tensiunii duce totdeauna la scăderea curentului rotoric. De acest fapt trebuie să ţinem seama totdeauna, întrucât după valoarea curentului din stator nu putem trage concluzii asupra influenţei pe care o are variaţia de tensiune asupra curentului rotoric. Funcţionarea la tensiune scăzută cu mai mult de 5 % faţă de valoarea nominală se admite numai cu condiţia ca încărcarea motorului să fie sub valoarea ei nominală. Dacă nu se respectă aceasta condiţie este posibilă supraîncălzirea bobinajului rotorului, ceea ce va avea ca urmare o uzură prematură a coliviei. Puterea dezvoltată de motor va rămâne practic invariabilă, deoarece turaţia va varia foarte puţin.
b)Variaţia frecvenţei la valoarea nominală a tensiunii.
Să studiem cazul când motorul lucrează având cuplul rezistent constant şi tensiunea nominală, iar frecvenţa sub cea nominală. Micşorarea frecvenţei va duce la o creştere a fluxului magnetic şi o creştere a cuplului electromagnetic. Deoarece cuplul rezistent rămâne constant, alunecarea se va micşora până la o valoare la care cuplul electromagnetic al motorului şi cuplul rezistent se echilibrează. Ca urmare a creşterii fluxului, se va micşora curentul din rotor, iar curentul de mers în gol se va mări. Curentul din stator va putea să crească sau să
23
descrească,la fel ca în cazul creşterii de tensiune. În felul acesta, scăderea frecvenţei este în mod practic echivalentă cu scăderea de tensiune. Prin urmare, dacă la o scădere de frecvenţa va scădea concomitent tensiunea, atunci fluxul magnetic, deci şi curentul de mers în gol din rotor şi stator,vor avea aceeaşi valoare ca pentru regimul de funcţionare normală. Datorită acestui fapt, va avea loc o variaţie a pierderilor în fier, deci şi a componentei active a curentului de mers în gol.Aceste variaţii nu vor influenţa practic valoarea curentului din stator.
4.2.Influenţa tensiunii şi frecvenţei asupra parametrilor fundamentali la motorul asincron
a) Fluxul magnetic.
Neglijând căderea de tensiune datorită rezistenţei şi reactanţei statorului,variaţia fluxului magnetic devine direct proporţională cu variaţia de tensiune şi invers proporţională cu variaţia de frecvenţă. Aceasta reiese din ecuaţia fundamentală :
E≈U=4 , 44⋅ω⋅f⋅Φ⋅10−8=A⋅f⋅Φ (4-1)
ΦΦn
=ku
k f , (4-2)
în care : k u=
UUn şi
k f=ff n sunt variaţiile relative de tensiune şi frecvenţa.
b) Cuplul electromagnetic. Valoarea relativă a cuplului maxim variază proporţional cu pătratul tensiunii şi invers proporţional cu frecvenţa. Dacă se neglijează valoarea rezistenţei statorului, atunci valoarea relativă cuplului maxim va varia invers proporţional cu pătratul variaţiei de frecvenţa, adică :
λkf =
λn⋅ku2
kf2⋅mc .
c) Alunecarea .
Dacă motorul lucrează având cuplul rezistent constant, valoarea alunecării, când frecvenţa şi tensiunea variază, este:
24
1,61,20,80,4 0
n10
10
I
I
n
0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0fig.4-1.Caracteristicile de mers în gol ale unui
motor asincron,în valori relative
s=
skf
λkf +√λkf
2−1. (4-
5) Valoarea alunecării la regim nominal va fi :
sn=
sk
λn+√ λn
2−1. (4-6)
d) Turaţia.
Pe baza turaţiei se determină variaţia productivităţii mecanismului antrenat de motor.La abateri ale tensiunii de la valoarea ei normală, la frecvenţa nominală, turaţia variază foarte puţin. De exemplu,pentru un motor a cărui alunecare este de 2%,iar valoarea relativă a cuplului maxim este egal cu doi,dacă tensiunea scade cu 20%,turaţia se micşorează numai cu aproximativ 1,6%. La abaterile frecvenţei de la valoarea ei nominală, turaţia va varia, în mod practic, proporţional cu frecvenţa. De exemplu, pentru acelaşi motor, dacă frecvenţa scade cu 20%, concomitent cu aceasta scăzând şi tensiunea cu 20%, turaţia se va micşora cu aproximativ 20%.
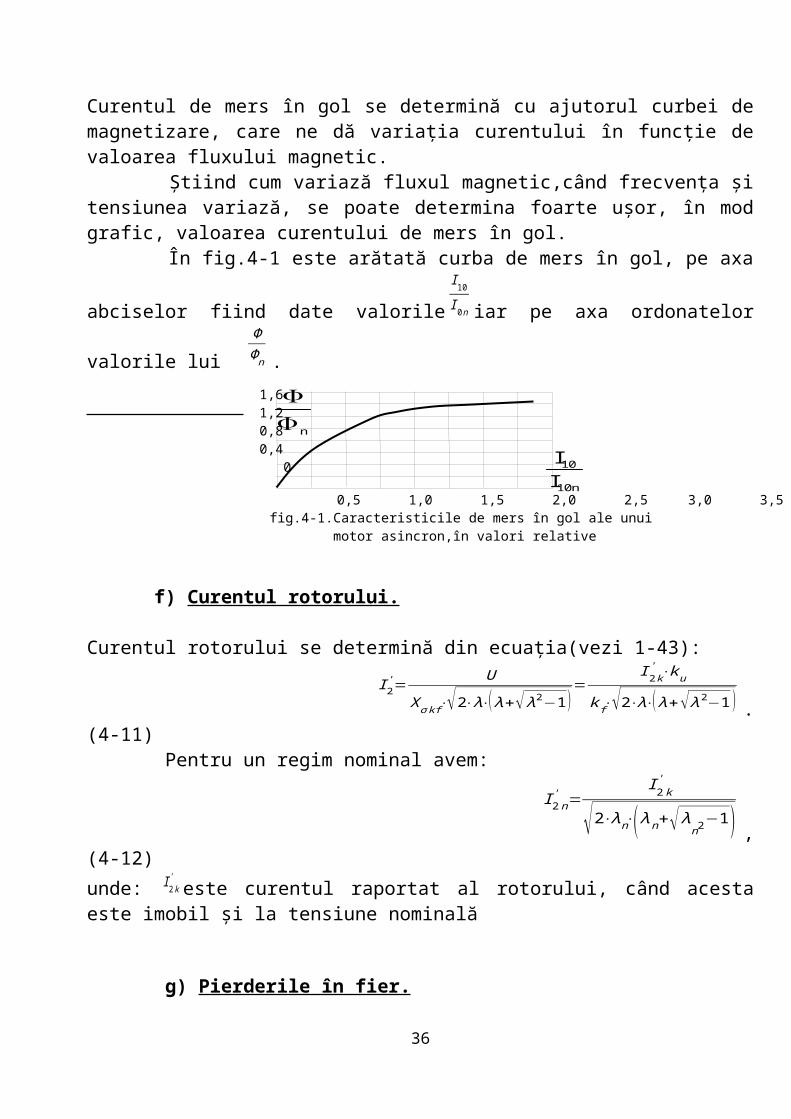
e) Curentul de mers în gol.
Curentul de mers în gol se determină cu ajutorul curbei de magnetizare, care ne dă variaţia curentului în funcţie de valoarea fluxului magnetic. Ştiind cum variază fluxul magnetic,când frecvenţa şi tensiunea variază, se poate determina foarte uşor, în mod grafic, valoarea curentului de mers în gol.
În fig.4-1 este arătată curba de mers în gol, pe axa abciselor fiind date valorile
I 10
I 0 n iar
pe axa ordonatelor valorile lui
ΦΦn .
f) Curentul rotorului.
Curentul rotorului se determină din ecuaţia(vezi 1-43):
25
nFe
Fe
P
P
fig.4-3.Pierderile în fierul statorului în funcţie de frecvenţă: 1.pierderile când fluxul magnetic este constant 2.pierderile la tensiune nominală
1,6 1,4 1,2 1.0 0,8 0,6 0,4 0,2 0
0,2 0,4 0,6 0,8 1,0 1,2 f
n
kf
f
2
1
I 2' = U
X σ kf⋅√2⋅λ⋅( λ+√λ2−1)=
I 2 k' ⋅ku
k f⋅√2⋅λ⋅(λ+√ λ2−1) . (4-11) Pentru un regim nominal avem:
I 2n' =
I 2k'
√2⋅λn⋅(λn+√ λn2−1) , (4-12)
unde: I 2k'
este curentul raportat al rotorului, când acesta este imobil şi la tensiune nominală
g) Pierderile în fier.
Pierderile specifice în fier (W/Kg),compuse din pierderi prin curenţi turbionari şi pierderi prin histeresis, se pot exprimă, dacă variaţia inducţiei în funcţie de timp este sinusoidală, prin formula :
PFe=[δg⋅
f100
+δΦ⋅( f100 )
2 ]⋅( B1000 )
2
(4-16)
Dacă frecvenţa nominală f n =50 Hz, pentru table de dinam având grosimea 0,5 mm,
atunci δg =4,4 şi δΦ =5,6. Pierderile specifice nominale în fier:
PFe⋅n=3,6⋅( Bn
1000 )2
. (4-17) Împărţind (4-16) la (4-17) se obţine:
PFe
PFe⋅n=( B
Bn )2
⋅4,4⋅ f
100+5,6⋅( f
100 )2
3,6=
4,4⋅ f100
+5,6⋅( f100 )
2
3,6⋅
ku2
kf2 , (4-18)
întrucât :
BBn
≈ku
k f . În fig.4-3 este dată curba de variaţie a pierderilor în fier în funcţie de frecvenţă, în ipoteza păstrării constante a tensiunii
nominale, adică k u=1(curba 2). După cum reiese din curbă, pierderile variază destul de puţin la scăderea frecvenţei. De exemplu, dacă frecvenţa scade la 40 Hz, pierderile în fier se măresc aproximativ cu 15%. Creşterea pierderilor la motoarele înfăşurările bine
26
ventilate creează în mod practic numai o creştere a temperaturii tolelor, neînfluenţând aproape deloc temperature bobinajului. Pentru motoarele capsulate, creşterea pierderilor în fier influenţează ceva mai puternic temperatura cuprului.
Dacă fluxul magnetic rămâne invariabil, deci când k u=k f , pe măsură ce se micşoreaza frecvenţa, pierderile nu se vor mări, ci se vor micşora. Tot în fig 4-3 sunt date curbele de variaţie a pierderilor în funcţie de frecvenţă, când fluxul magnetic rămâne invariabil (curba 1).
h) Influenţa variaţiei de frecvenţa asupra încălzirii motorului.
Dacă frecvenţa este variabilă, în mod corespunzător va varia şi turaţia motorului. Este necesar să se determine felul în care variază modul de răcire în funcţie de turaţie.Transmisia căldurii în mediul exterior se face prin radiaţie, prin conductibilitate termică şi convecţie. La motoarele bine ventilate, radiaţia joacă un rol neînsemnat, putând fi neglijată. Pentru valori mici ale încălzirii motorului (încălzirea=diferenţa dintre temperatura unei părti a maşinii şi temperatura mediului), transmisia de căldură prin conductibilitate termică şi convecţie nu depinde, practic, de temperatură. Pentru maşinile ventilate, se poate considera că coeficientul de transmisie a căldurii variază în funcţie de puterea 0,8 (în medie) a aerului.Deoarece viteza aerului de răcire este,de exemplu,proporţională cu puterea întâia a turaţiei, putem considera că transmisia de căldură va fi proporţională cu puterea 0,8 a turaţiei. Putem considera că pierderile variază proporţional cu pătratul curentului.Odată cu variaţia turaţiei,curentul trebuie să varieze direct proporţional cu puterea 0,4 a turaţiei,adică:
I 1
I 1 n
=( n1
n1n)0,4
≈( ff n
)0,4
=kf0,4
.
i) Cuplul de pornire.
Cuplul de pornire al motorului este direct proporţional cu produsul dintre pătratul curentului şi rezistenţa rotorului şi invers proporţional cu frecvenţa:
M p⋅f
M p⋅n
=R2 kf
' ⋅ku2
R2 n' ⋅k
f 3 . În felul acesta, cuplul de pornire, considerând toleranţele admise, variază direct proporţional cu pătratul tensiunii şi invers proporţional cu cubul frecvenţei.
27
4.3.Regimul de funcţionare a motorului cu conexiunea normală în triunghi, la pornirea prin comutare in stea
Să examinăm regimul de funcţionarea a unui motor, conectat la o tensiune de √3 ori mai mică decât valoarea nominală, ceea ce echivalează cu pornirea în stea a motorului conectat normal in triunghi. Trebuie determinate: variaţia cuplului, turaţiei sau alunecării şi puterii la arbore, cu condiţia ca curentul din rotor să rămână egal cu valoarea lui nominală, deoarece, după cum s-a arătat mai înainte, acest curent este factorul limitator în cazul când tensiunea scade. Cuplul maxim al motorului se micşoreaza de trei ori, deoarece tensiunea de
alimentare a motorului s-a micşorat de √3ori. De aceea, în scopul de a păstra stabilitatea de funcţionare, ar fi fost necesar ca şi cuplul rezistent să fie micşorat de trei ori. Deoarece, în aceste împrejurări, puterea la arbore se va micşora de asemenea de trei ori,
iar curentul rotorului se va micşora de √3ori. Daca mecanismul antrenat de motor poate funcţiona şi cu un cuplu având valoarea relativă mai mică,atunci cuplul rezistent poate fi micşorat mai puin decât de trei ori. În acest caz se va lua ca criteriu rotoric, care nu trebuie să depăşească valoarea sa nominală. Scăderea necesară a cuplului rezistent, exprimat sub formă de fracţie zecimală faţă de valoarea lui nominală, este dată de formula (4-15):
mc=
√2⋅λn⋅( λn+√ λn−1)−1
λn+√ λn−1 . Variaţia cuplului rezistent depinde de valoarea relativă a cuplului; de exemplu,
pentru λn=1,6; mc =0,5;iar pentru λn=3; mc =0,56. Pe măsura creşterii lui λn , mărimea
mc tinde spre valoarea
1
√3 =0,578 . Turaţia se va micşora dar puţin, iar puterea la arbore va varia aproximativ
proporţional cu cuplul rezistent. În felul acesta, pentru valorile întâlnite frecvent λn ≈1,6...2,0, puterea la arborele motorului va trebui sa fie micşorată aproximativ de două ori. Trebuie remarcat faptul că daca sarcina motorului ar fi evaluată după curentul statorului, întrucât în urma micşorării curentului de mers în gol, curentul statorului va avea o valoarea mai mică decât cea nominală.
28
6
5
4
3
2
1
0
ns
s3,0
2,0
6,1n
n2
2
I
I
3,0
2,0
6,1n
2,8
2,4
2,0
1,6
1,2
0,8
0,4
4.4.Influenţa sarcinii asupra curenţilor rotorului şi statorului
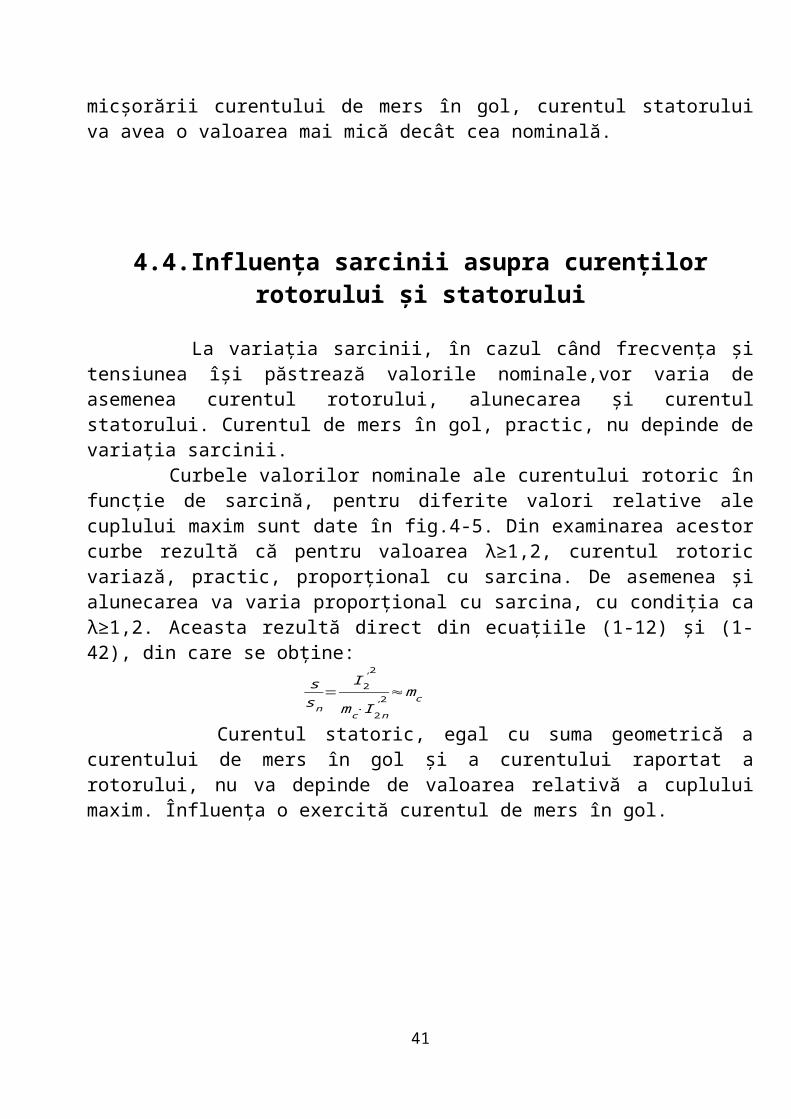
La variaţia sarcinii, în cazul când frecvenţa şi tensiunea îşi păstrează valorile nominale,vor varia de asemenea curentul rotorului, alunecarea şi curentul statorului. Curentul de mers în gol, practic, nu depinde de variaţia sarcinii. Curbele valorilor nominale ale curentului rotoric în funcţie de sarcină, pentru diferite valori relative ale cuplului maxim sunt date în fig.4-5. Din examinarea acestor curbe rezultă că pentru valoarea λ≥1,2, curentul rotoric variază, practic, proporţional cu sarcina. De asemenea şi alunecarea va varia proporţional cu sarcina, cu condiţia ca λ≥1,2. Aceasta rezultă direct din ecuaţiile (1-12) şi (1-42), din care se obţine:
ssn
=I 2
'2
mc⋅I 2 n'2≈mc
Curentul statoric, egal cu suma geometrică a curentului de mers în gol şi a curentului raportat a rotorului, nu va depinde de valoarea relativă a cuplului maxim. Înfluenţa o exercită curentul de mers în gol.
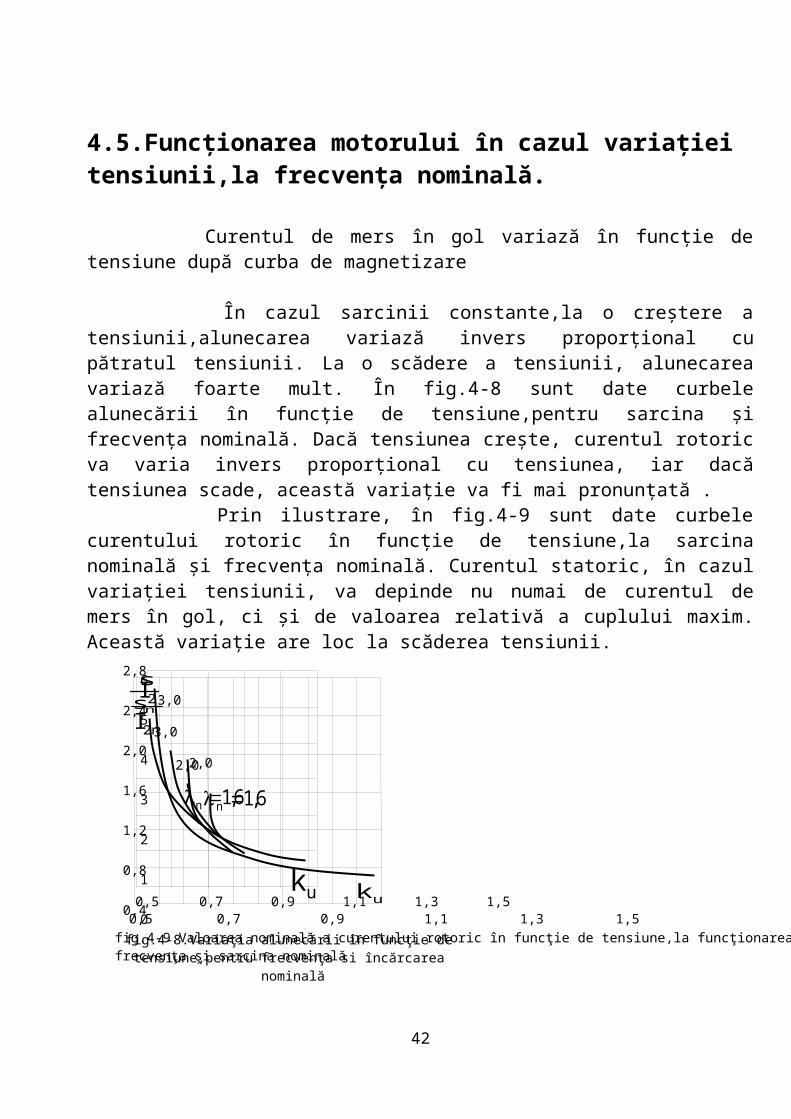
4.5.Funcţionarea motorului în cazul variaţiei tensiunii,la frecvenţa nominală.
Curentul de mers în gol variază în funcţie de tensiune după curba de magnetizare
În cazul sarcinii constante,la o creştere a tensiunii,alunecarea variază invers proporţional cu pătratul tensiunii. La o scădere a tensiunii, alunecarea variază foarte mult. În fig.4-8 sunt date curbele alunecării în funcţie de tensiune,pentru sarcina şi frecvenţa nominală. Dacă tensiunea creşte, curentul rotoric va varia invers proporţional cu tensiunea, iar dacă tensiunea scade, această variaţie va fi mai pronunţată . Prin ilustrare, în fig.4-9 sunt date curbele curentului rotoric în funcţie de tensiune,la sarcina nominală şi frecvenţa nominală. Curentul statoric, în cazul variaţiei tensiunii, va depinde nu numai de curentul de mers în gol, ci şi de valoarea relativă a cuplului maxim. Această variaţie are loc la scăderea tensiunii.
29
0,5 0,7 0,9 1,1 1,3 1,5
n0
0
Q
Q
nn1
1
f
f
U
U
2 1
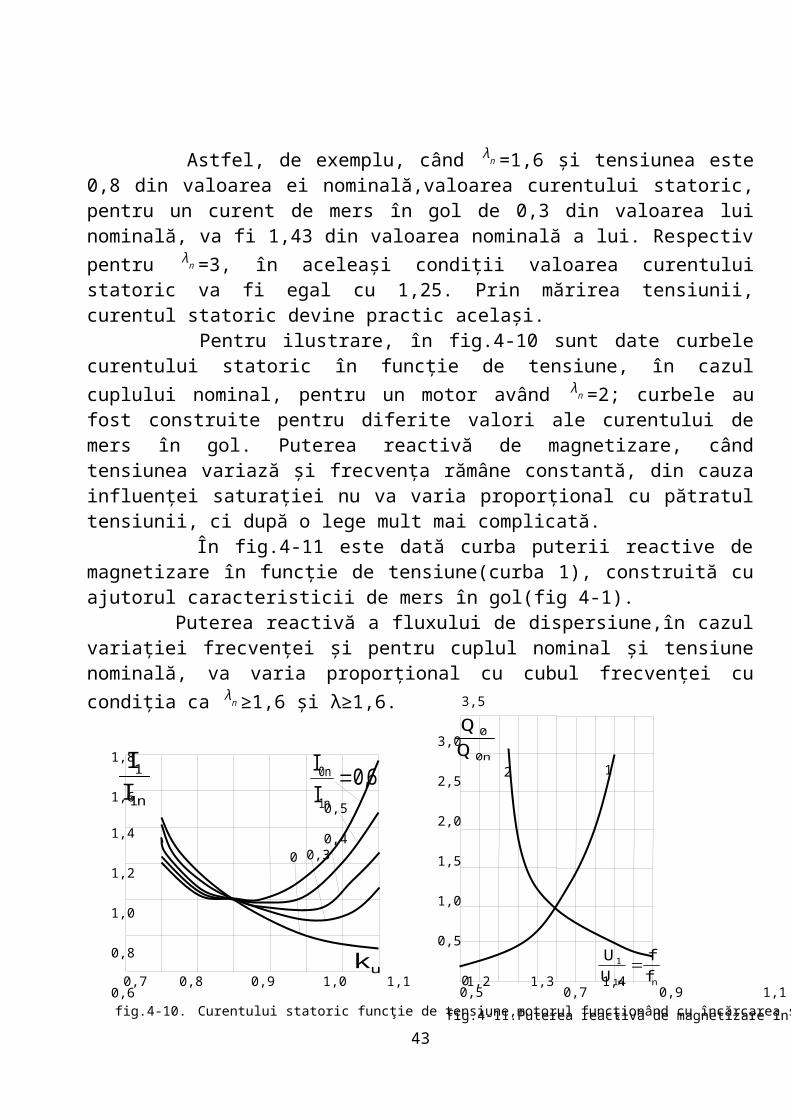
fig.4-11.Puterea reactivă de magnetizare în funcţie de tensiune,pentru valoarea nominală a frecvenţei(curba 1) şi în funcţie de frecvenţă pentru o tensiune nominală(curba 2).
3,5
3,0
2,5
2,0
1,5
1,0
0,5
0
1,8
1,6 1,4
1,2
1,0
0,8
0,6
0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4uk
n1
1
I
I6,0
I
I
n1
n0 0,5
0,40,30
fig.4-10. Curentului statoric funcţie de tensiune,motorul funcţionând cu încărcarea si frecvenţa nominale,pentru valoarea relativă a cuplului maxim λn=2
Astfel, de exemplu, când λn=1,6 şi tensiunea este 0,8 din valoarea ei nominală,valoarea curentului statoric, pentru un curent de mers în gol de 0,3 din valoarea
lui nominală, va fi 1,43 din valoarea nominală a lui. Respectiv pentru λn=3, în aceleaşi condiţii valoarea curentului statoric va fi egal cu 1,25. Prin mărirea tensiunii, curentul statoric devine practic acelaşi. Pentru ilustrare, în fig.4-10 sunt date curbele curentului statoric în funcţie de
tensiune, în cazul cuplului nominal, pentru un motor având λn=2; curbele au fost construite pentru diferite valori ale curentului de mers în gol. Puterea reactivă de magnetizare, când tensiunea variază şi frecvenţa rămâne constantă, din cauza influenţei saturaţiei nu va varia proporţional cu pătratul tensiunii, ci după o lege mult mai complicată. În fig.4-11 este dată curba puterii reactive de magnetizare în funcţie de tensiune(curba 1), construită cu ajutorul caracteristicii de mers în gol(fig 4-1). Puterea reactivă a fluxului de dispersiune,în cazul variaţiei frecvenţei şi pentru cuplul nominal şi tensiune nominală, va varia proporţional cu cubul frecvenţei cu
condiţia ca λn≥1,6 şi λ≥1,6.
30
ns
s
nf f
fk
0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4 1,5 1,6
3,2 2,8 2,4 2,0 1,6 1,2 0,8 0,4 0
2,03,0
6,1n
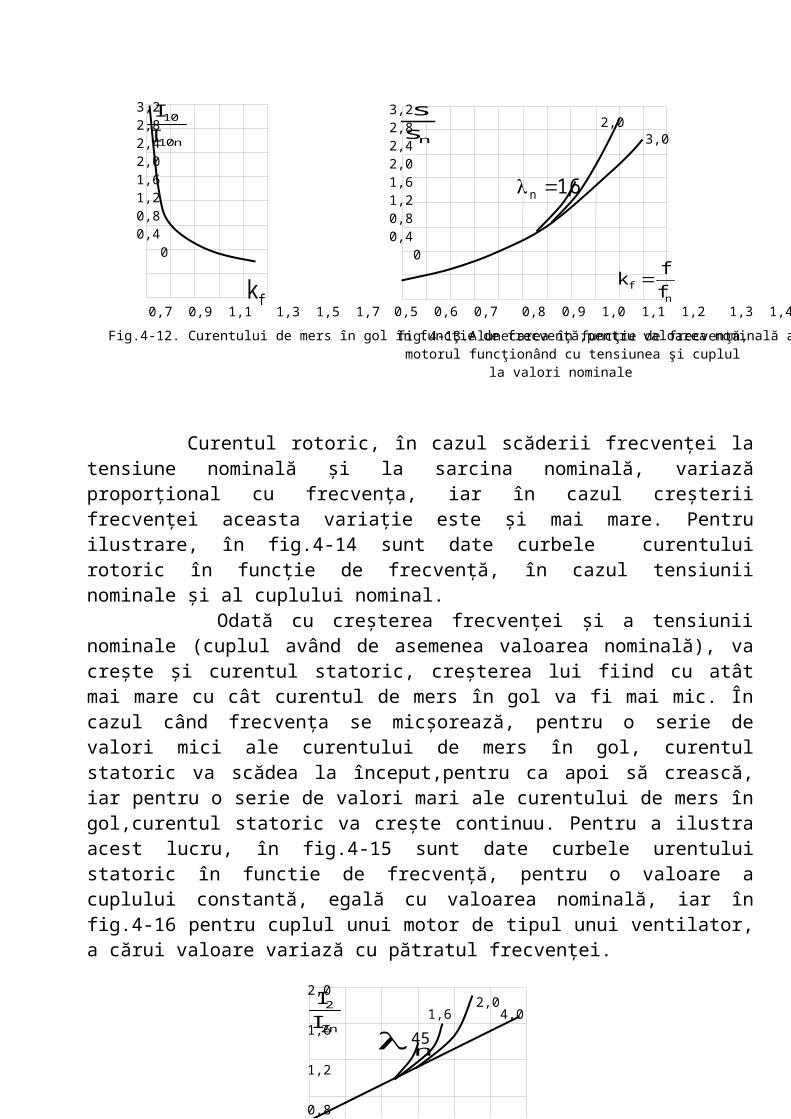
fig.4-13.Alunecarea în funcţie de frecvenţă, motorul funcţionând cu tensiunea şi cuplul
la valori nominale
fk
n10
10
I
I
0,7 0,9 1,1 1,3 1,5 1,7
3,2 2,8 2,4 2,0 1,6 1,2 0,8 0,4 0
Fig.4-12. Curentului de mers în gol în funcţie de frecvenţă,pentru valoarea nominală a tensiunii
4.6.Funcţionarea motorului în cazul variaţiei frecvenţei la tensiune nominală
Inducţia în fier va varia invers proporţional cu frecvenţa şi, în mod corespunzător, va varia şi curentul de mers în gol. În fig.4-12 este arătată variaţia curentului de mers în gol în funcţie de frecvenţă, cu condiţia ca tensiunea să fie egală cu valoarea nominală. Din curbă reiese că o scădere de frecvenţă determină o creştere bruscă a curentului de mers în gol,creştere analoagă creşterii de tensiune. Alunecarea, în cazul funcţionării cu sarcina continuă şi cu scădere a frecvenţei,variază proporţional cu frecvenţa, iar în cazul când frecvenţa creşte mult, alunecarea variază în măsură şi mai mare. În fig.4-13 sunt date curbele de variaţie ale alunecării în funcţie de frecvenţă în cazul funcţionării cu valoarea nominală a cuplului.
Curentul rotoric, în cazul scăderii frecvenţei la tensiune nominală şi la sarcina nominală, variază proporţional cu frecvenţa, iar în cazul creşterii frecvenţei aceasta variaţie este şi mai mare. Pentru ilustrare, în fig.4-14 sunt date curbele curentului rotoric în funcţie de frecvenţă, în cazul tensiunii nominale şi al cuplului nominal.
31
n2
2
I
I 2,0
1,6
1,2
0,8
0,4
0
2,04,01,6
n
0,5 0,7 0,9 1,1 1,3 1,5 1,7
nf f
fk
fig.4-14. Curentului rotoric în funcţie de frecvenţă,pentru funcţionarea la tensiune şi cuplu nominal
0,3
0,5
0,4
0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,4
nf f
fk
n1
1
I
I 1,6
1,5
1,4
1,3
1,2
1,1
1,0
0,9
0,8
0,6
0,2
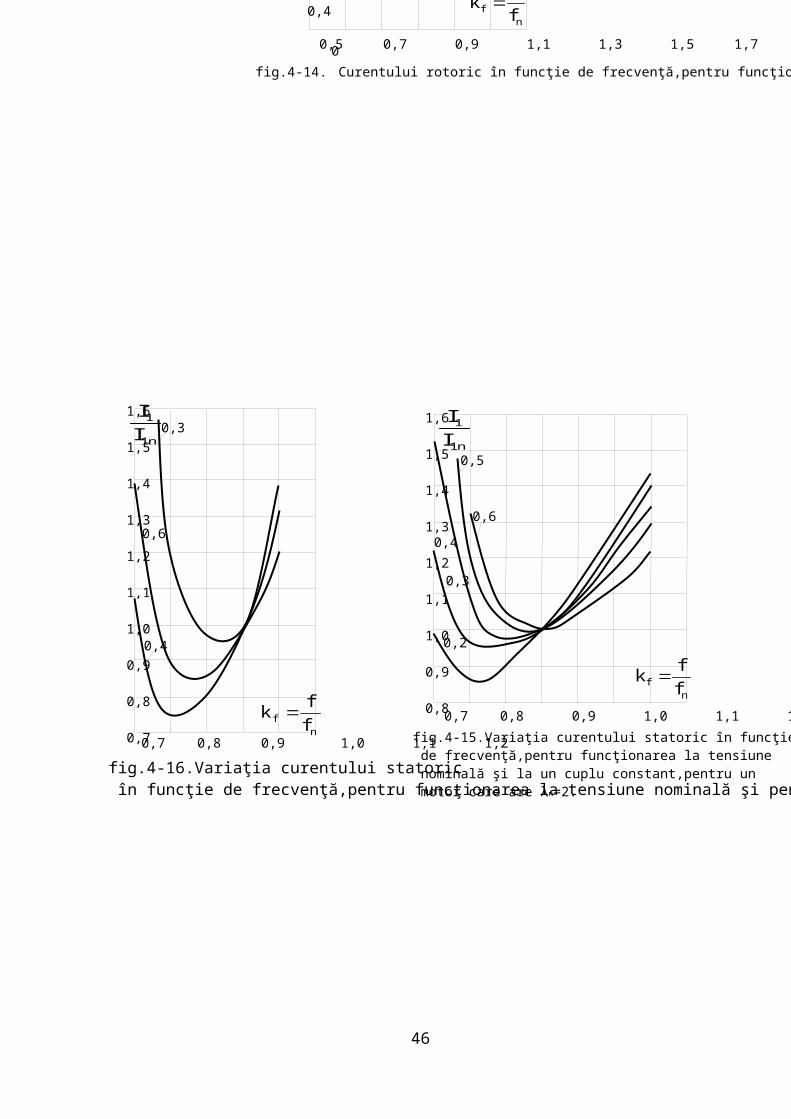
fig.4-15.Variaţia curentului statoric în funcţie de frecvenţă,pentru funcţionarea la tensiune nominală şi la un cuplu constant,pentru un motor care are λn=2.
1,6
1,5
1,4
1,3
1,2
1,1
1,0
0,9
0,8
0,7
0,7 0,8 0,9 1,0 1,1 1,2n
f f
fk
n1
1
I
I0,3
0,6
0,4
fig.4-16.Variaţia curentului statoric în funcţie de frecvenţă,pentru funcţionarea la tensiune nominală şi pentru cuplul rezistent,pentru care are λn=2.
Odată cu creşterea frecvenţei şi a tensiunii nominale (cuplul având de asemenea valoarea nominală), va creşte şi curentul statoric, creşterea lui fiind cu atât mai mare cu cât curentul de mers în gol va fi mai mic. În cazul când frecvenţa se micşorează, pentru o serie de valori mici ale curentului de mers în gol, curentul statoric va scădea la început,pentru ca apoi să crească, iar pentru o serie de valori mari ale curentului de mers în gol,curentul statoric va creşte continuu. Pentru a ilustra acest lucru, în fig.4-15 sunt date curbele urentului statoric în functie de frecvenţă, pentru o valoare a cuplului constantă, egală cu valoarea nominală, iar în fig.4-16 pentru cuplul unui motor de tipul unui ventilator, a cărui valoare variază cu pătratul frecvenţei.
32
4.7.Modificarea frecvenței tensiunii de alimentare
A. Generalități
Reglarea turației prin modificarea frecvenței tensiunii de alimentare se realizează alimentând motorul de la un convertor de frecvență care poate fi un invertor sau un cicloconvertor. Se vor examina câteva aspecte referitoare la funcționarea motorului asincron la frecvența variabilă.
Frecventa nu poate fi variată independent de tensiunea de alimentare. Într-adevar, neglijând căderile de tensiune pe impedanța de fază a statorului motorului putem scrie:
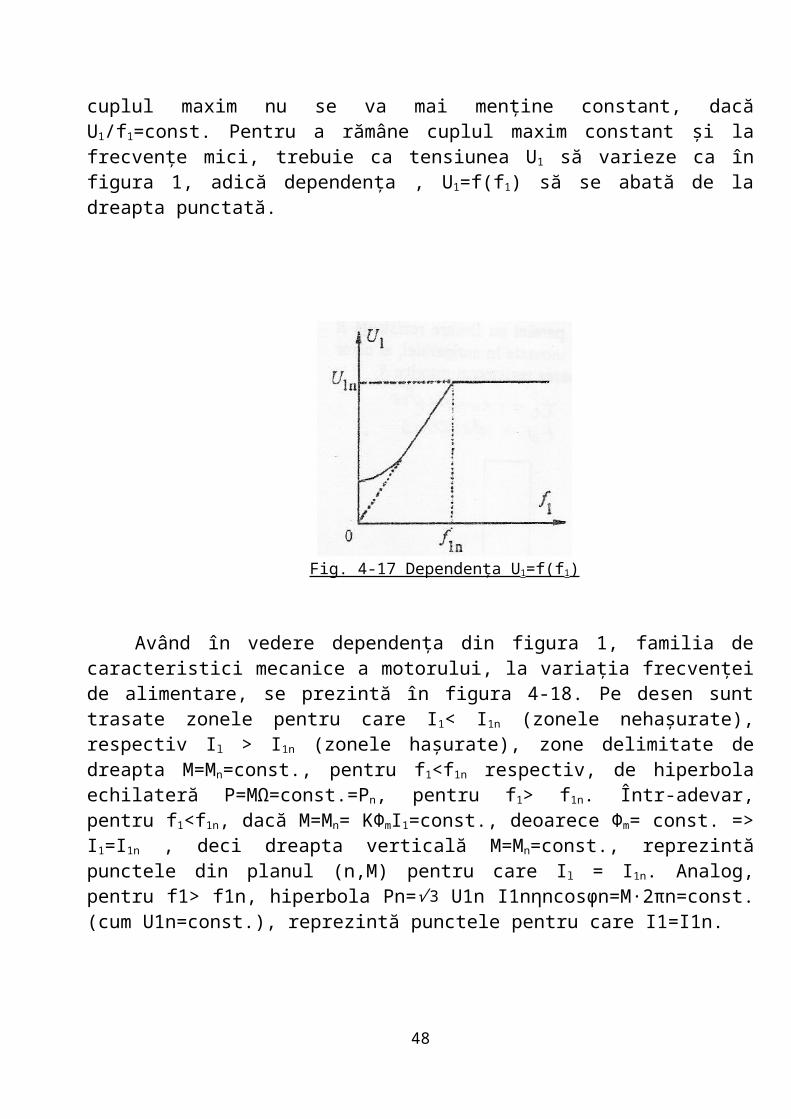
U1≈E1=4,44f 1ω1kw1Φm=const ∙f1 Φm, în care U1 este valoarea efectivă a tensiunii de fază aplicată motorului. Pentru a nu influența performanțele motorului (cuplul, curentul de mers în gol, curentul nominal), fluxul magnetic Φm trebuie să rămână, pe cât posibil, constant. Prin urmare, din ecuație se deduce că raportul U1/ f1 = const., adică tensiunea trebuie să fie proporțională cu frecvența. Această relație se adoptă la scăderea frecvenței fi sub valoarea nominală. La creșterea frecvenței peste valoarea nominală, tensiunea U1 rămâne constantă (U1= U1n) din motive de izolație și de majorare a pierderilor în fier, astfel încât o dată cu creșterea frecvenței peste valoarea nominală are loc o scădere a fluxului magnetic Φm.
Dacă în expresia cuplului maxim Mm se neglijează rezistența Rl a înfășurării primare, cuplul maxim al motorului este dat de relația: Mm= const.( U1/f1)2. Ținând seama de această relație, se poate spune că pentru f1< fn cuplul maxim al motorului este constant, iar pentru f1> fn cuplul maxim este invers proporțional cu pătratul frecvenței f1. La frecvențe mici, reactanțele motorului sunt mici și rezistența R1 nu se mai poate neglija. Altfel spus, cuplul maxim nu se va mai menține constant, dacă U1/f1=const. Pentru a rămâne cuplul maxim constant și la frecvențe mici, trebuie ca tensiunea U1 să varieze ca în figura 1, adică dependența , U1=f(f1) să se abată de la dreapta punctată.
33
Fig. 4-17 Dependența U1=f(f1)
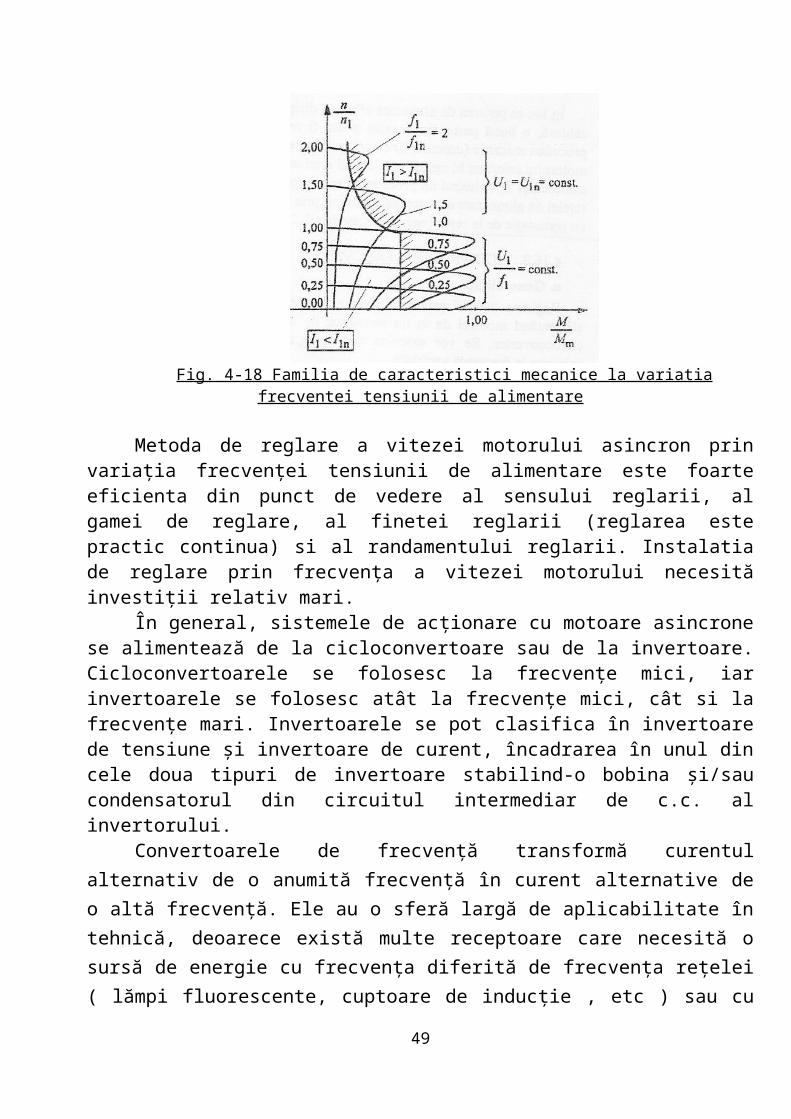
Având în vedere dependența din figura 1, familia de caracteristici mecanice a motorului, la variația frecvenței de alimentare, se prezintă în figura 4-18. Pe desen sunt trasate zonele pentru care I1< I1n (zonele nehașurate), respectiv Il > I1n (zonele hașurate), zone delimitate de dreapta M=Mn=const., pentru f1<f1n respectiv, de hiperbola echilateră P=MΩ=const.=Pn, pentru f1> f1n. Într-adevar, pentru f1<f1n, dacă M=Mn= KΦmI1=const., deoarece Φm= const. => I1=I1n , deci dreapta verticală M=Mn=const., reprezintă punctele din planul (n,M) pentru care Il = I1n. Analog, pentru f1> f1n, hiperbola Pn=√ 3 U1n I1nηncosφn=M∙2πn=const. (cum U1n=const.), reprezintă punctele pentru care I1=I1n.
Fig. 4-18 Familia de caracteristici mecanice la variatia frecventei tensiunii de alimentare
Metoda de reglare a vitezei motorului asincron prin variația frecvenței tensiunii de alimentare este foarte eficienta din punct de vedere al sensului reglarii, al gamei de reglare, al finetei reglarii (reglarea este practic continua) si al randamentului reglarii. Instalatia de reglare prin frecvența a vitezei motorului necesită investiții relativ mari.
În general, sistemele de acționare cu motoare asincrone se alimentează de la cicloconvertoare sau de la invertoare. Cicloconvertoarele se folosesc la frecvențe mici, iar invertoarele se folosesc atât la frecvențe mici, cât si la frecvențe mari. Invertoarele se
34
pot clasifica în invertoare de tensiune și invertoare de curent, încadrarea în unul din cele doua tipuri de invertoare stabilind-o bobina și/sau condensatorul din circuitul intermediar de c.c. al invertorului.
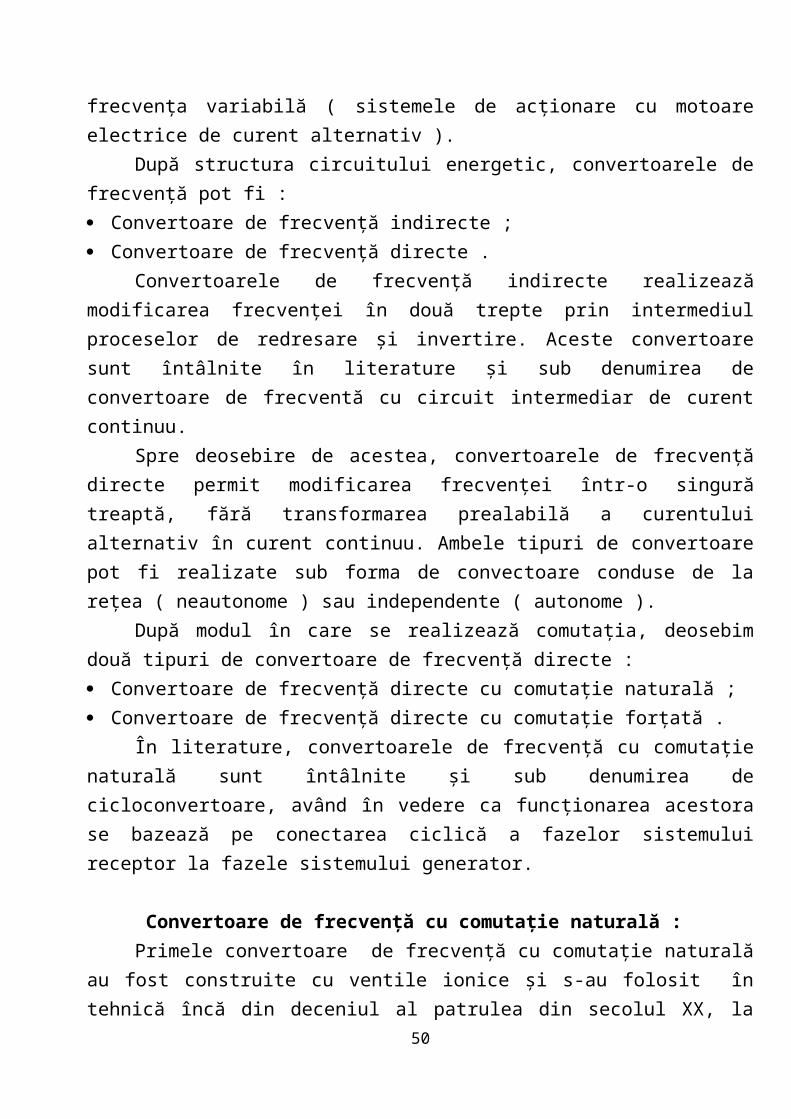
Convertoarele de frecvență transformă curentul alternativ de o anumită frecvență în curent alternative de o altă frecvență. Ele au o sferă largă de aplicabilitate în tehnică, deoarece există multe receptoare care necesită o sursă de energie cu frecvența diferită de frecvența rețelei ( lămpi fluorescente, cuptoare de inducție , etc ) sau cu frecvența variabilă ( sistemele de acționare cu motoare electrice de curent alternativ ).
După structura circuitului energetic, convertoarele de frecvență pot fi : Convertoare de frecvență indirecte ; Convertoare de frecvență directe .
Convertoarele de frecvență indirecte realizează modificarea frecvenței în două trepte prin intermediul proceselor de redresare și invertire. Aceste convertoare sunt întâlnite în literature și sub denumirea de convertoare de frecventă cu circuit intermediar de curent continuu.
Spre deosebire de acestea, convertoarele de frecvență directe permit modificarea frecvenței într-o singură treaptă, fără transformarea prealabilă a curentului alternativ în curent continuu. Ambele tipuri de convertoare pot fi realizate sub forma de convectoare conduse de la rețea ( neautonome ) sau independente ( autonome ).
După modul în care se realizează comutația, deosebim două tipuri de convertoare de frecvență directe : Convertoare de frecvență directe cu comutație naturală ; Convertoare de frecvență directe cu comutație forțată .
În literature, convertoarele de frecvență cu comutație naturală sunt întâlnite și sub denumirea de cicloconvertoare, având în vedere ca funcționarea acestora se bazează pe conectarea ciclică a fazelor sistemului receptor la fazele sistemului generator.
Convertoare de frecvență cu comutație naturală :Primele convertoare de frecvență cu comutație naturală au fost construite cu
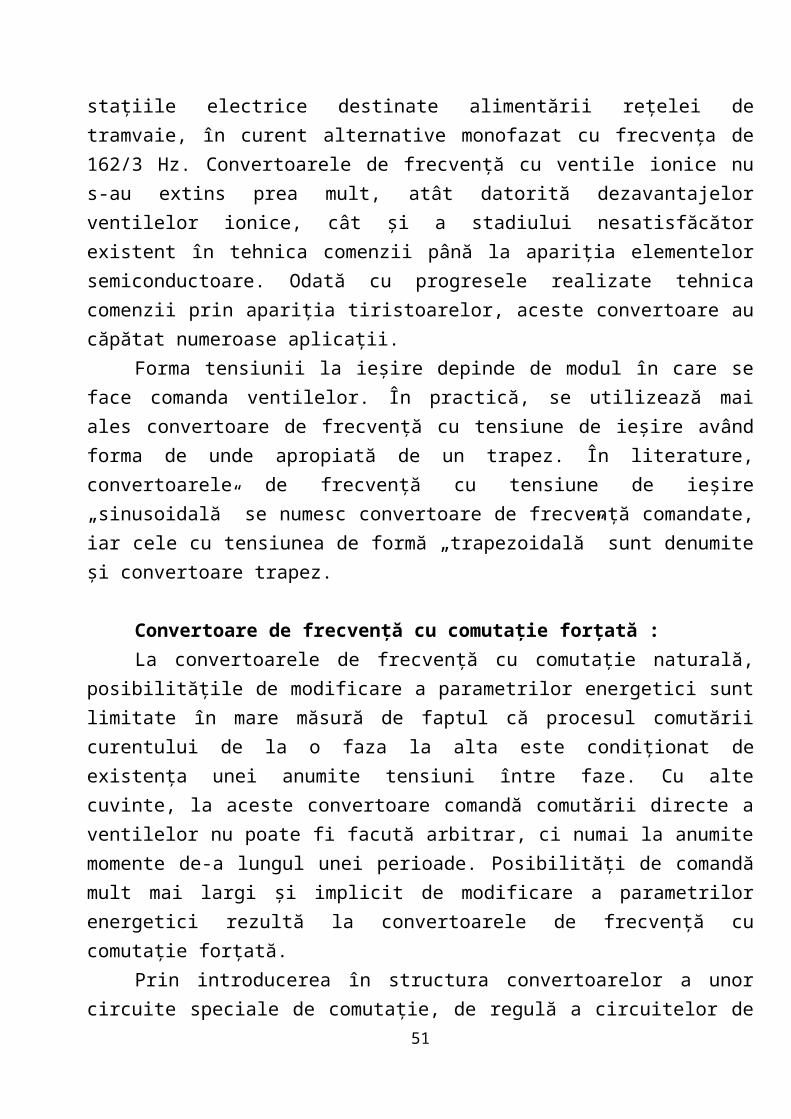
ventile ionice și s-au folosit în tehnică încă din deceniul al patrulea din secolul XX, la stațiile electrice destinate alimentării rețelei de tramvaie, în curent alternative monofazat cu frecvența de 162/3 Hz. Convertoarele de frecvență cu ventile ionice nu s-au extins prea mult, atât datorită dezavantajelor ventilelor ionice, cât și a stadiului nesatisfăcător existent în tehnica comenzii până la apariția elementelor semiconductoare. Odată cu progresele realizate tehnica comenzii prin apariția tiristoarelor, aceste convertoare au căpătat numeroase aplicații.
Forma tensiunii la ieșire depinde de modul în care se face comanda ventilelor. În practică, se utilizează mai ales convertoare de frecvență cu tensiune de ieșire având
35
forma de unde apropiată de un trapez. În literature, convertoarele de frecvență cu tensiune de ieșire „sinusoidală” se numesc convertoare de frecvență comandate, iar cele cu tensiunea de formă „trapezoidală” sunt denumite și convertoare trapez.
Convertoare de frecvență cu comutație forțată :La convertoarele de frecvență cu comutație naturală, posibilitățile de modificare a
parametrilor energetici sunt limitate în mare măsură de faptul că procesul comutării curentului de la o faza la alta este condiționat de existența unei anumite tensiuni între faze. Cu alte cuvinte, la aceste convertoare comandă comutării directe a ventilelor nu poate fi facută arbitrar, ci numai la anumite momente de-a lungul unei perioade. Posibilități de comandă mult mai largi și implicit de modificare a parametrilor energetici rezultă la convertoarele de frecvență cu comutație forțată.
Prin introducerea în structura convertoarelor a unor circuite speciale de comutație, de regulă a circuitelor de comutație cu condensator, devine posibilp comanda comutării directe a ventilelor la momente independente de valoarea tensiunii între faze.În acest caz, momentul comenzii ventilelor este condiționat de existența unei tensiuni pozitive minime pe ventil. Pentru tensiuni mai mari decât această tensiune minimă comanda ventilelor este posibilă, in principiu, la orice moment.
Există și alte condiții care limitează comanda ventilelor la convertoarele de frecvență cu comutație forțată, determinate de structura circuitului energetic și de regimul de funcționare a convertorului, dar în comparație cu convertoarele cu comutație naurală, intervalul de comandă admisibil, adică domeniul de modificare a unghiului de comandă ( plaja de comandă ) este cu mult mai mare. Prin marirea plajei de comandă devine posibilă largirea domeniului de modificare a frecvenței, îmbunătățirea factorului de putere și a altor parametric ai convertorului.
36
37
Convertizor de frecvență OmronCaracteristici tehnice:
Convertizor de frecvență de uz general,
având configurare simplă, dimensiuni reduse, funcție de
protecție termică și detecție automată de
suprasarcină. Capacități de la 0.1 la 4kW, alimentare: 200-230VAC, 1 fază/ 3 faze,
Rolul instalației de ventilație este de a reânoi aerul din încăperi. Adesea aceasta implica și îndepărtarea prafului cu ajutorul filtrelor de aer și încălzirea aerului cu ajutorul bateriilor de încălzire.
Ventilația prin depresiune împiedică pătrunderea gazelor, vaporilor, mirosurilor, prafului etc. în încăperile învecinate. Dacă eterul este doar ușor absorbit din încăpere, atunci aerul proaspăt pătrunde prin crăpăturile sau golurile din ferestre și uși. Dacă acestă este insuficient (în cazul unui nivel înalt de vacuum) trebuie să fie prevăzute deschideri pentru pătrunderea aerului de exemplu din încăperile învecinate cu aer proaspăt (curat) din exterior prin fante practicate în luminatoare; acestea trebuie să fie amplasate astfel încât curentul de aer inițial să fie îndreptat în sus, către tavan.
Sistemul de echilibru se obține prin prevederea unei ventilații de intrare și ieșire. Depresiunea se obține și dacă debitul de aer evacuat este mai mare decat cel care intră.
Ventilația prin suprapresiune se prevede pentru protecția împotriva gazelor din exterior, a prafului, mirosurilor etc. Acest tip de ventilație este potrivit pentru împiedicarea pătrunderii prafului în camere de comandă, laboratoare sau ateliere, de exemplu în fabrici de instrumente de precizie.
Aerul filtrat este insuflat în încăperi de unde se scurge prin goluri și crăpături. Dacă aceasta este insuficient, trebuie prevazută o ventilație de evacuare.
Când se utilizează ventilatoare de introducere și de evacuare a aerului, suprapresinea se obține dacă ventilatoarele de intrare au un debit mai mare.
La un punct de intrare a aerului (guri de introducere sau refulare) este dificil în general să se întrerupă jetul de aer format, ceea ce duce la apariția curenților de aer. Din acest motiv, în cele mai multe cazuri, este necesar un echipament de distribuție a aerului. O soluție ideală este tavanul fals, perforat. De asemenea adesea este avantajos de a se insufla aerul printr-o sită direct sub nivelul tavanului sau vertical prin locașul ferestrei de-a lungul pereților. Această metodă nu se recomandă pentru încăperile foarte înalte sau cele neocupate.
La un punct de evacuare a aerului (guri de evacuare), aerul curge din toate direcțiile în mod uniform spre orificiul de aspirație. Viteza curentului de aer este din această cauză mică și crește mai mult doar pe direcția perpendiculara a gurii de evacuare. Punctele de acces și de evacuare trebuie să fie astfel aranjate încât curenții de aer să circule uniform prin toata incăperea și să nu formeze colțuri moarte.
39
Fig. 5-1 Viteza curentului de aer
40
Chiar dacă această condiție nu este îndeplinită în totalitate, mișcarea aerului în zonele mai puțin accesibile ale încăperii se produce prin circulația naturală a aerului, datorită diferențelor de temperatură în vederea înlăturării curenților de aer supărători în încăpere este important ca atunci când temperatura exterioară este scăzută cantitatea de aer introdusă să fie redusă. Aceasta se obține prin montarea unor clapete de reglaj, prin reducerea turatiei ventilatoarelor sau prin deconectarea câtorva ventilatoare în cazul în care instalația cuprinde mai multe.
Dacă reducerea cantității de aer introdus se dovedește insuficientă sau nu este permisă, aerul introdus trebuie încalzit în vederea împiedicarii aparitiei curentilor de aer, sau formarii cetei în încaperile umede. Umezeala se poate forma, de exemplu, în bucătării, vopsitorii, magazine, încăperi din uzine textile, industria laptelui și a hârtiei sau la instalații de galvanizare. În acest caz sunt necesare dispozitive de reglare automata a temperaturii.
În cazul ventilației prin depresiune (numai cu ventilatoare de evacuare) se va avea în vedere ca încălzirea încăperii trebuie corelată cu încălzirea aerului ce pătrunde în încăpere.
Pentru calculul căldurii necesare pentru încălzirea aerului.Este preferabilă evacuarea gazelor, a vaporilor sau prafului chiar de la punctul lor
de formare (de origine), astfel ca aerul din încăpere să fie cât mai puțin contaminat cu aceste elemente. Hota de aspirație, necesară acestui scop, trebuie să fie dispusă cât mai aproape de punctul de formare a prafului sau vaporilor. Trebuie să se țină seama de orice mișcare a acestora din urmă, de exemplu de curentul termic ascendent al vaporilor sau de zborul centrifugal tangențial al prafului provenit de la pietrele de polizor. Hotele trebuie să fie cât mai mici posibil, dar în număr suficient pentru a îndeplini condițiile impuse. Pentru suprafețe mai intinse clar cu conținut mai scăzut de vapori sau praf, se pot monta două hote de aspirație de mărimi diferite, una într-alta (hota dublă). Rămâne astfel deschisă doar o margine îngustă și o mică secțiune centrală. Vitezele curenților de aer în secțiunile transversale de admisie și în conducte sunt date în figura 5-1.
41
CAPITOLUL VI .CAPITOLUL VI .
INDICAȚII PRIVIND ALEGEREA SI SPECIFICAȚIA ÎNINDICAȚII PRIVIND ALEGEREA SI SPECIFICAȚIA ÎN COMANDĂ A MASINILOR ELECTRICE ROTATIVECOMANDĂ A MASINILOR ELECTRICE ROTATIVE
Alegerea celei mai indicate mașini pentru o anumită utilizare constituie adesea o problemă dificilă, dat fiind faptul că beneficiarul (proiectantul ) trebuie sa echivaleze condițiile în care va exploata mașina cu unul din regimurile nominale standardizate si apoi sa prescrie tipul cel mai indicat. Alegerea nu trebuie făcută acoperitor, deoarece o masină care poate satisface condiții mult mai grele decât cele absolut necesare înseamnă implicit o mașină mai scumpă și care va lucra in exploatare cu randament mai mic și în cazul motoarelor asincrone - chiar cu un factor de putere mai scăzut. Pe de altă parte, alegerea unei mașini care să nu satisfacă toate necesitațile reale din exploatare inseamnă o masină nesigură, care într-un timp relativ scurt se va defecta, neprezentând deci garanția unei siguranțe depline în funcționare.
Din motivele expuse mai sus, se recomandă ca alegerea mașinilor electrice de acționare să fie efectuată de către un specialist in acționări electrice. Pentru înțelegerea aspectelor generale ale acestei probleme de către inginerii și tehnicienii care exploatează mașinile electrice, precum și pentru rezolvarea unor cazuri mai simple, se prezintă în continuare câteva noțiuni privind alegerea motoarelor electrice de acționare.
Alegerea motoarelor cu care sunt echipate mașinile de lucru se efectuează în baza diagramei de sarcină (caracteristică mecanică) a mașinii de lucru.
6.1.Caracteristica mecanică a sarcinii
Reprezintă dependența dintre cuplul static și una din următoarele mărimi: viteza, unghiul de rotație, spațiul sau timpul.
Cuplul static (Ms) este un moment rezistent, adică opus momentului motor M, fiind specific fiecărui tip de sarcină (pompă, ventilator, compresor, strung etc.) și cuprinde atât momentul necesar lucrului mecanic util, cât și momentul de frecare mecanică (frecare in lagăre, frecare cu aerul, frecarile la perii colectoare).
Legătura dintre cele două cupluri este dată de ecuația fundamentală de mișcare:M=Ms+Md
în care Md: (cuplul dinamic) este un moment de asemenea rezistent, prin care masele inerțiale se opun schimbărilor de viteză (acest termen ține seama de variația energiei cinetice a sistemului). Dacă sistemul motor-mașina de lucru funcționează la turație constanta cuplul dinamic este nul.
42
Cuplul motor al mașinilor electrice poate fi clasificat în următoarele categorii principale:
a) Cuplul motor constant. Deși în funcționare normală nici una din mașinile electrice nu dezvoltă la arborele său un cuplu constant, adică independent de viteza și de poziția relativă între câmpul statoric și câmpul rotoric, se admite, totuși, ca motoarele electrice pot dezvolta un cuplu constant; aceasta se întamplă real în cazul unui sistem de comandă automat, care menține cuplul constant indiferent de variațiile altor parametri.
b) Cuplul motor dependent de viteza unghiulară. La o grupă mare de motoare electrice cuplul variază în funcție de viteza rotorului. Din această grupă fac parte motoarele de curent continuu si motoarele asincrone cu si fără colector.
c) Cuplul motor dependent de unghiul de decalaj al rotorului fată de câmpul rezultant al mașinii. Viteza de rotație a mașinilor, care fac parte din această grupă este constantă și independentă de sarcină.
Cuplul motor în aceste mașini se produce ca urmare a existenței unui unghi de decalaj între poziția rotorului în mișcare și câmpul învârtitor al mașinii, vitezele de rotație fiind aceleași. Cuplurile dependente de unghiul de decalaj al rotorului caracterizează mașinile sincrone.
Cuplul static este compus dintr-un cuplu util, corespunzător lucrului pe care trebuie să-l îndeplinească mecanismul acționat și un cuplu de pierderi datorit frecărilor. Cuplul util poate varia în funcție de unul sau mai mulți parametri. Astfel, el este dependent de temperatură piesei care trebuie prelucrată, în cazul mașinilor de prelucrare prin deformare; este dependent de viteza în cazul ventilatoarelor, pompelor, mașinilor centrifuge etc.; este dependent de cursa efectuată de către piesele mecanismului, în cazul troliilor de acționat vagonete pe poduri înclinate și în cazul troliilor pentru balansiere; poate varia în timpul unui ciclu de funcționare; poate fi constant în cea mai mare parte a ciclului de funcționare, ca în cazul mașinilor de ridicat și transportat.
După modul de variație a cuplului static, se pot deosebi cinci grupe principale de mașini de lucru:
a) Grupa I-a : Cuplul static este independent de viteze (fig. 1, a). La toate mașinile care efectuează ridicări de sarcini, sau înving frecări, cuplul nu variază în funcție de viteza, rămânând constant o anumită perioadă. Puterea este în acest caz proporțională cu viteza (fig. 2,a) adică se poate scrie: Ms =ct. P~n
Din această grupă de masini de lucru fac parte: elevatoarele cu viteză mică de ridicare, căruciorul de pe podurile rulante, care se deplasează în deschiderea unei hale, transportoarele cu bandă, calea cu role de la un laminor, mașinile pentru fabricarea hârtiei, calandrii pentru fabricarea cauciucului, unele mașini de așchiat (ca de exemplu mașinile de găurit și strungurile la care viteza de tăiere este proporțională cu inaintarea).
43
Fig.1 Variația cuplului static Fig. 2 Variația puterii în funcțieîn funcție de turație, pentru diferite de turație, pentru diferite mașini de mașini de lucru lucrub) Grupa a II-a: Cuplul static variază cu viteză liniară sau cu viteză unghiulară a
mecanismului. Se deosebesc mai multe situații:Subgrupa II-1: Cuplul static variază direct proporțional cu viteza (fig. 1,b) iar
puterea este proporțională cu pătratul vitezei.Subgrupa II - 2: Cuplul static variază proporțional cu pătra tul vitezei de rotație
sau vitezei liniare (fig. 1, c), iar puterea corespunzătoare cuplului static este proporțională cu viteza la puterea trei, (fig. 2, e), adică: Ms ~ n P ~ n2
În această subgrupă intră pompele, ventilatoarele, mașinile centrifuge și mașinile cu piston care refulează într-un sistem deschis de conducte. De fapt, la toate aceste mașini, cuplul static are două componente : una variabilă cu pătratul vitezei și alta constantă (independentă de viteză), datorită, de exemplu, frecărilor în conducte și contrapresiunii la refulare; în această situație cuplul static are alura din fig. 1, d - iar puterea corespunzătoare este reprezentată în fig.2,d. Pentru simplificare se poate neglija în unele cazuri cuplul constant (de exemplu, la venlilatoare si pompe centrifuge, când refularea este libera).
Subgrupa II - 3: Cuplul static este invers proporțional cu viteza (fig. 1, c), iar puterea corespunzătoare este constantă (fig. 2,e), adică: Ms ~ 1/n P = ct
În această subgrupă intră mașinile de bobinat fire, hârtie, sârme etc., la care viteza materialului v și forța de tracțiune F trebuie să rămână mereu aceeași, indiferent de diametrul tamburului; în acest caz, viteza unghiulară trebuie să scadă odată cu creșterea diametrului d, în timp ce cuplul crește cu diametrul.
c) Grupa a III-a: Cuplul static variabil cu unghiul de deplasare al unui organ mobil al mașinii. La toate mecanismele cu bielă-manivelă, cum sunt mașinile cu piston (pompe, compresoare cu piston), la mesele basculante de la laminoare etc., cuplul rezistent variază în funcție de poziția manivelei, deci în funcție de poziția unghiulară a rotorului motorului de acționare, având o formă pulsatorie (fig. 3) în raport cu componenta constantă Msm. Pentru ușurința calculelor de acționare, o astfel de curbă se descompune în serie Fourier, din care se iau în considerație fundamentala și primele două armonici.
44
Fig. 4 Variația cuplului static în funcție de unghiul α al arborelui unui compresor cu piston
d) Grupa a IV -a : Cuplul static variabil cu cursa. În această categorie intră mașinile de transportat materiale pe pante cu înclinare variabilă sau strâmbe în spațiu.
e) Grupa a V -a : Cuplul static variabil în funcție de timp. În principiu toți parametrii care intervin într-o acționare sunt funcții de timp, fie direct, fie prin intermediul altor variabile, de aceea toate categoriile de cupluri statice descrise până acum pot fi reprezentate ca funcții de timp.
După stabilirea naturii variației cuplului static, trebuie efectuată reducerea cuplurilor statice la axul motor. Același lucru trebuie făcut și pentru cuplurile dinamice; de asemenea trebuie transformate mișcările de translație din lanțurile cinematice considerate în mișcări de rotație reduse la axul motor.
Odată efectuate aceste calcule, succesiunea operațiilor de alegere și verificare a unui motor electric este următoarea:
- stabilirea graficului caracteristicii de sarcină al mașinii de lucru; - stabilirea diagramei cuplului motor sau a puterii în funcție de timp;- calculul cuplului sau a puterii echivalente;- alegerea motorului (după criteriile expuse mai jos) ;- verificarea cuplului sau puterii echivalente cu cuplul nominal sau puterea
nominală a motorului; - verificarea acoperirii de către cuplul maxim al motorului ales, a vârfului de
sarcină din diagramă ;- verificarea acoperirii de catre cuplul de pornire al motorului ales, a cuplului de
pornire al sarcinii ;- verificarea acoperirii de către suprasarcină termică admisibilă motorului ales, a
punctului de încălzire maximă din diagramă.
45
6.2.Alegerea motoarelor electrice de acționare
Se efectuează în baza a două criterii principale:a) Corespondența dintre caracteristica mecanică a mașinii de lucru și caracteristica
mecanică a motorului de acționare, în sensul alegerii unui motor cu caracteristica suplă sau rigidă.
b) Încălzirea motorului.În cele ce urmează se expun pe scurt metodele pentru determinarea puterii
motorului de acționare după, criteriul încălzirii.1) Determinarea puterii motorului in regim de lungă durată, cu sarcina constantă.
Într-un asemenea regim lucrează motoarele benzilor transportoare, pompelor, ventilatoarelor. Se cunosc: cuplul rezistsnt Mr, raportul transmisiei și randamentul η. Se calculează cuplul nominal al motorului și puterea nominală necesară la turația nn :
Se alege din catalog un motor cu serviciu continuu (S 1) cu putere imediat superioară sau egală lui Pn.
2) Determinarea puterii motorului în regim de lungă durată, cu sarcina variabilă în trepte. Acest regim este specific motoarelor mașinilor unelte de prelucrare a metalelor. În diagrama de sarcină din fig. 4, motorul electric funcționează pe duratele de timp t1...t5 la diferite sarcini P1...P5, cărora le corespund pierderile O1...Q5. Dimensionarea optimă a motorului se poate face prin mai multe metode.
Determinarea puterii motorului prin calcul. Pentru fiecare interval de timp se calculează pierderile, respectiv cantitățile de căldură dezvoltate O. Fiecarui Q îi corespunde o supratemperatură care se acumulează, incepând de la temperatura mediului ambiant până la încălzirea maximă pe care o atinge motorul în decursul unui ciclu de funcționare. Dacă această temperatura în raport cu cea a mediului ambiant depășește temperatura admisibilă a motorului ales, se va adopta un motor de putere superioară. Metoda nu este practică, deoarece calculele sunt lungi.
Determinarea puterii motorului pe cale grafică. Fiecarui motor îi este caracteristică o constantă de timp a încălzirii T și un timp necesar pentru a ajunge la echilibrul termic. Cu aceste date specifice motorului ales se construiește un șablon (fig. 5, a) care permite trasarea rapidă a porțiunilor din curba supratemperaturilor Oa, Ob,... etc. Șablonul folosește atât pentru încălzire cât și pentru răcire așa cum rezulta din fig. 5,b, unde tk este un interval de timp dintr-un ciclu, Tk+1 este intervalul de timp următor, iar Φk este supratemperatura corespunzatoare lui tk. Metoda șablonului se folosește optim atunci când constanta de timp a mașinii pentru care este întocmit șablonul are o mărime de același ordin cu diferitele intervale ale diagramei de sarcină.
Metoda mărimilor echivalente. Se aplică în mai multe variante: - metoda pierderilor echivalente;- metoda curentului echivalent;- metoda cuplului echivalent;- metoda puterii echivalente.
46
Determinarea puterii motorului pe cale grafică:a- Șablonul pentru determinarea supratemperaturii; b – folosirea șablonului.
În funcție de mărimea curentului echivalent se alege motorul al cărui curent nominal este cel puțin egal cu acesta.
3) Determinarea puterii motorului în regim de scurtă durată. Intr-un asemenea regim lucrează motoarele electrice care acționează polizoarele, dispozitivele de prindere a pieselor la mașini unelte, placile turnante.
Dacă nu se dispune de motoare special construite pentru acest regim de funcționare, se poate alege un motor din seriile normale pentru serviciu continuu. Motorul ales va avea puterea nominală P∞ corespunzătoare regimului de funcționare, continuă (de durată infinită).
Cantitatea de căldură degajată, la această putere va fi Q∞, iar după un timp îndelungat de funcționare cu această sarcină temperatura staționară va fi θ∞ (temperatura limita admisibilă). Pentru o buna utilizare a motorului ales, este necesar ca în regim de scurtă durată cantitatea de căldură Qk și durata tk să fie astfel încât temperatura finală, la scoaterea de sub sarcină să fie egală cu θ∞ (fig. 6). De aici rezultă relația între Qk si Q∞, apoi între Pk și P∞. Practic se constată că timpul activ tk este mai mic decât 3Ta, unde Ta este constanta de timp a încălzirii mașinii.
4) Determinarea puterii motorului în regim intermitent. In serviciu intermitent periodic se repetă cicluri identice de cel mult 10 minute. Durata relativă de funcționare activă este standardizată pentru 15, 25, 40 sau 60%.
47
Diagrama de sarcină pentru determinarea puterii motorului în seviciu de scurtă durată
Determinarea puterii motorului electric în acest regim se efectuează printr-o echivalare între o sarcină în regim intermitent si una în regim continuu. In mod practic, dacă PDAl este puterea unui motor la durata relativă de funcționare DA1 se poate recalcula puterea acestui motor PDA2 la o durată relativă, de funcționare DA2 cu expresia:
PDA2=PDA1∙√ DA 1DA 2
Dacă PDA1=P100 este puterea la DA1 = 100%, adică pentru serviciu relația de mai sus devine :
PDA=P100∙√ 100DA
Fără îndoială ca în afară de determinarea puterii motorului, la alegerea unui motor electric pentru acționare trebuie să se țina seama și de tipul constructiv, respectiv de:
- gradul nominal de protecție contra pătrunderii corpurilor solide străine și contra pătrunderii apei;
- protecția specială antideflagrantă și împotriva agenților corozivi;- forma constructivă a motorului electric.
48
6.1.Specificația în comandă a mașinilor electrice rotative
Pentru a se asigura o livrare corectă, beneficiarul trebuie să specifice în comandă următoarele date tehnice:
a. Tipul motorului (indicat în tabelele cu caracteristici din cuprinsul lucrării sau din cataloage).
b. Puterea nominală.c. Serviciul nominal.d. Turația nominală (la motoarele cu mai multe viteze se indică turațiile sau numărul
de poli; la motoarele de curent continuu sau de curent alternativ cu colector se indică și turația maximă).
e. Tensiunea nominală (și conexiunea aleasă pentru mașini de curent alternativ trifazate).
f. Frecvența nominală pentru mașini de curent alternativ.g. Felul excitației pentru mașini de curent continuu si mașini sincroane.h. Sitemul de pornire (eventual aparatajul de pornire).i. Forma constructivă.j. Gradul de protecție.k. Condiții speciale de mediu (tropical, marin, navalizat, cu mult praf altitudine peste
1000 m, temperatură ambiantă peste 40°C, umiditate relativă peste 85%, mediu cu vapori acizi sau corozivi, cu praf metalic sau abraziv, mediu cu pericol de aprindere sau explozie).
l. Indicații asupra amplasării cutiei de borne și modului de introducere a cablurilor de alimentare.
m. Cererea explicită și dimensiunile pentru un al doilea cap de ax liber.n. Condiții speciale de ventilație (in special pentru adaptarea ventilatiei fortate), sau
de racire.o. Condiții speciale de zgomot i vibrații (dacă e cazul).p. Condiții obligatorii pentru unele dimensiuni de gabarit, pentru parametri de
pornire sau energetici și pentru anumiți parametri de pornire sau enrgetici și pentru alte caracteristici, diferite de cele cuprinse in standarde.
ELEMENTE FUNDAMENTALE ALE MOTOARELOR ASINCRONE...........................................................................1
1.1.SCHEMA ECHIVALENTĂ A MOTORULUI ASINCRON.............................................................................................................11.2. TENSIUNEA ELECTROMOTOARE...........................................................................................................................................21.3.EXPRESIA CUPLUL ELECTROMAGNETIC................................................................................................................................41.4.CUPLUL DE PORNIRE...........................................................................................................................................................91.5.CUPLUL NOMINAL..............................................................................................................................................................91.6.CURENTUL STATORIC.........................................................................................................................................................91.7.CURENTUL NOMINAL RAPORTAT AL ROTORULUI.............................................................................................................101.8.IMPEDANŢA MOTORULUI..................................................................................................................................................111.9.PUTEREA REACTIVĂ...........................................................................................................................................................121.10.DETERMINAREA CURENTULUI DE MERS ÎN GOL.............................................................................................................14
2.1.MOTORUL CU BARE ÎNALTE.............................................................................................................................................162.2.MOTORUL CU DUBLĂ COLIVIE.........................................................................................................................................17
3.1.EXPRESIA GENERALĂ A RANDAMENTULUI.......................................................................................................................193.2.VARIAŢIA RANDAMENTULUI LA REGLAREA DE FRECVENŢA............................................................................................21
FUNCŢIONAREA MOTOARELOR ASINCRONE LA ABATERI ALE FRECVENŢEI, TENSIUNII ŞI SARCINII DE LA VALORILE LOR NOMINALE................................................................................................................................22
4.1.CONSIDERAŢII GENERALE................................................................................................................................................224.2.INFLUENŢA TENSIUNII ŞI FRECVENŢEI ASUPRA PARAMETRILOR FUNDAMENTALI LA MOTORUL ASINCRON....................234.3.REGIMUL DE FUNCŢIONARE A MOTORULUI CU CONEXIUNEA NORMALĂ ÎN TRIUNGHI, LA PORNIREA PRIN COMUTARE IN STEA.......................................................................................................................................................................................274.4.INFLUENŢA SARCINII ASUPRA CURENŢILOR ROTORULUI ŞI STATORULUI.........................................................................284.5.FUNCŢIONAREA MOTORULUI ÎN CAZUL VARIAŢIEI TENSIUNII,LA FRECVENŢA NOMINALĂ..............................................294.6.FUNCŢIONAREA MOTORULUI ÎN CAZUL VARIAŢIEI FRECVENŢEI LA TENSIUNE NOMINALĂ..............................................304.7.MODIFICAREA FRECVENȚEI TENSIUNII DE ALIMENTARE..................................................................................................32
5.1.INSTALAȚIA DE VENTILAȚIE.............................................................................................................................................38
INDICAȚII PRIVIND ALEGEREA SI SPECIFICAȚIA ÎN COMANDĂ A MASINILOR ELECTRICE ROTATIVE....................................................................................................................................................................................................41
6.1.CARACTERISTICA MECANICĂ A SARCINII.........................................................................................................................416.2.ALEGEREA MOTOARELOR ELECTRICE DE ACȚIONARE......................................................................................................456.1.SPECIFICAȚIA ÎN COMANDĂ A MAȘINILOR ELECTRICE ROTATIVE....................................................................................48