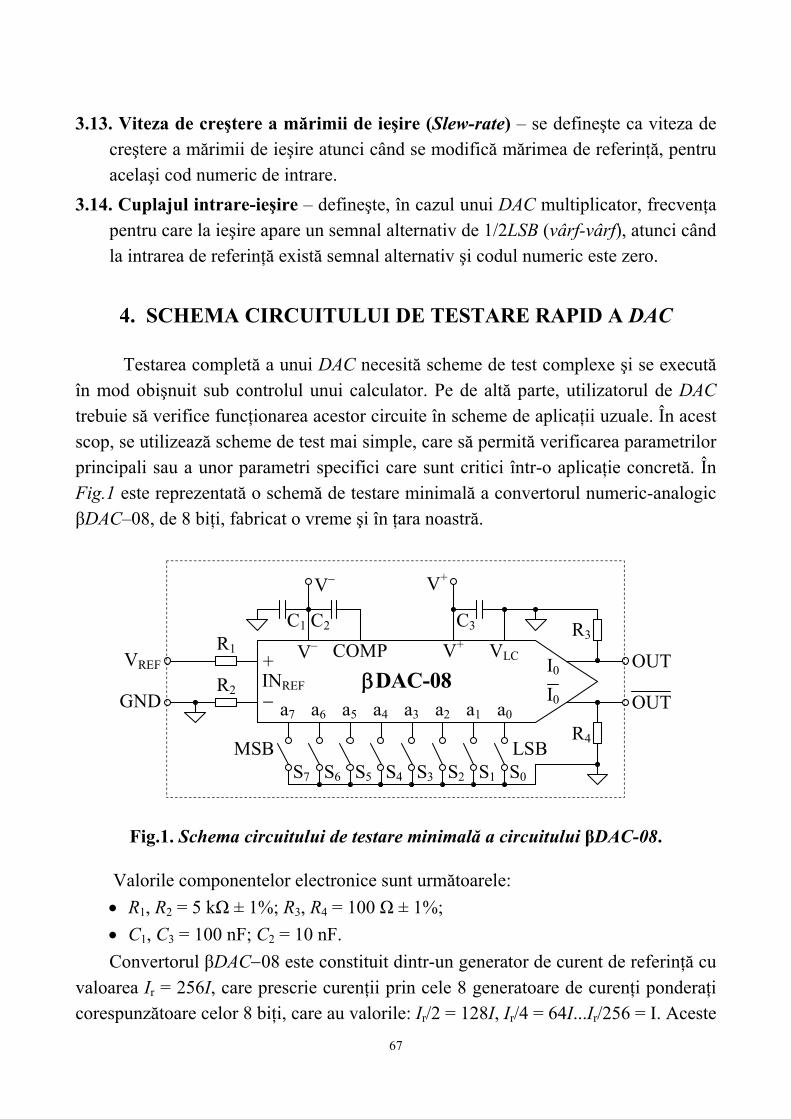
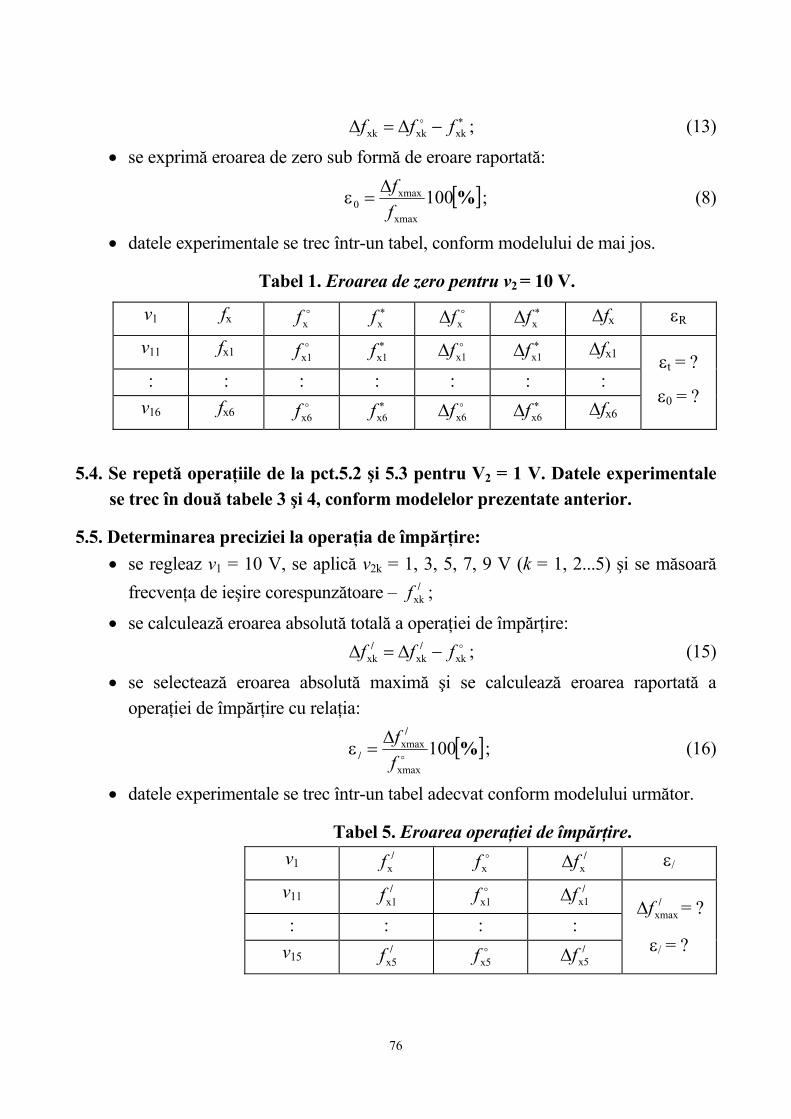
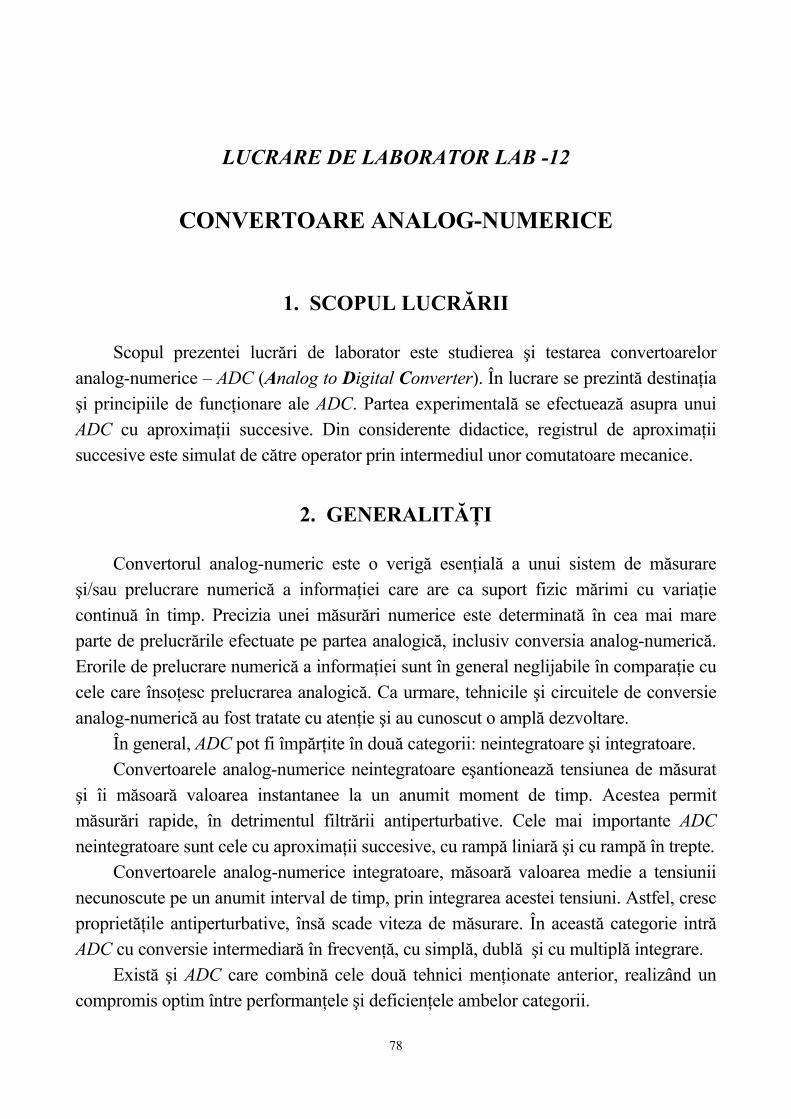
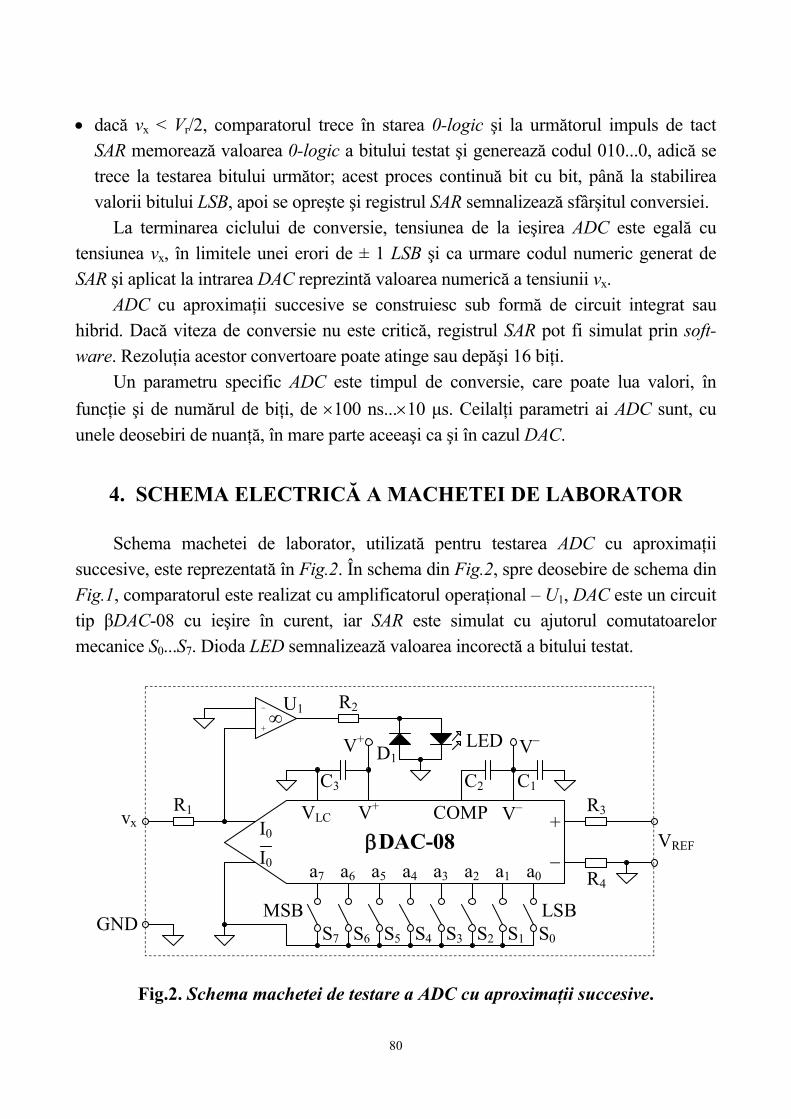
Constantin Harja SISTEME ANALOGICE DE PRELUCRARE DATE EXPERIMENTĂRI Informatică aplicată an III UNIVERSITATEA TEHNICĂ „GH. ASACHI” IAŞI Facultatea de Inginerie Electrică, Energetică şi Informatică Aplicată
Transcript
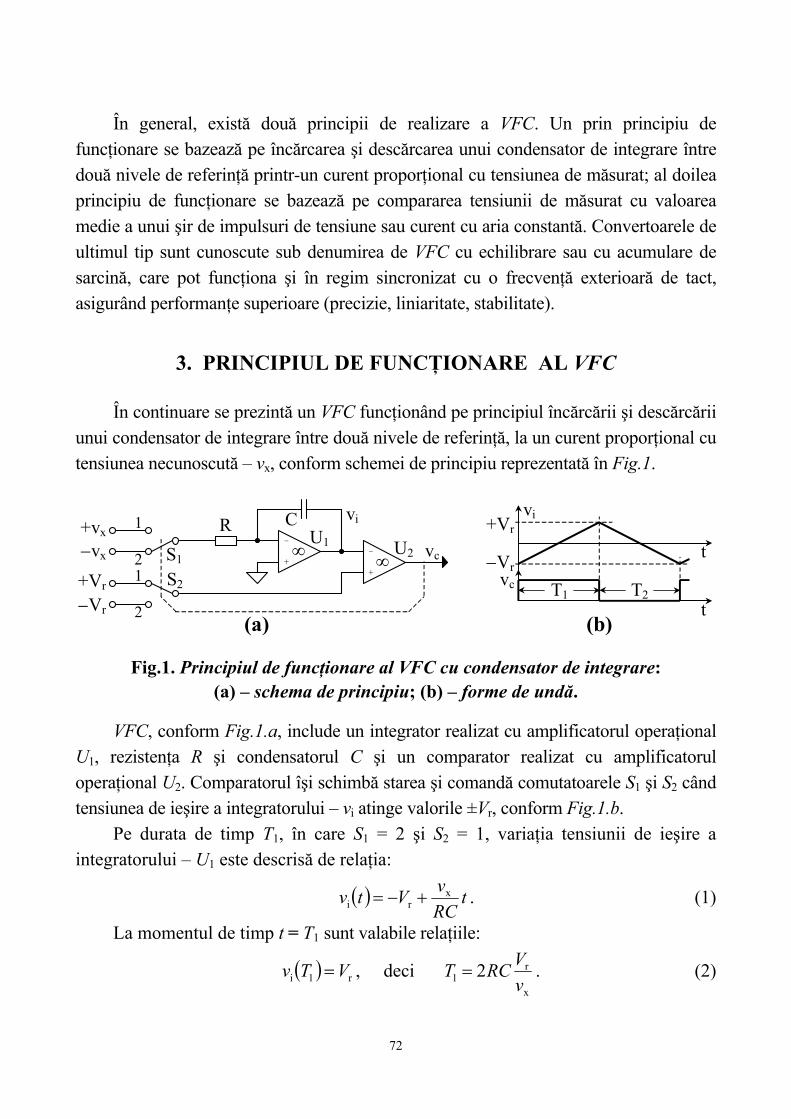
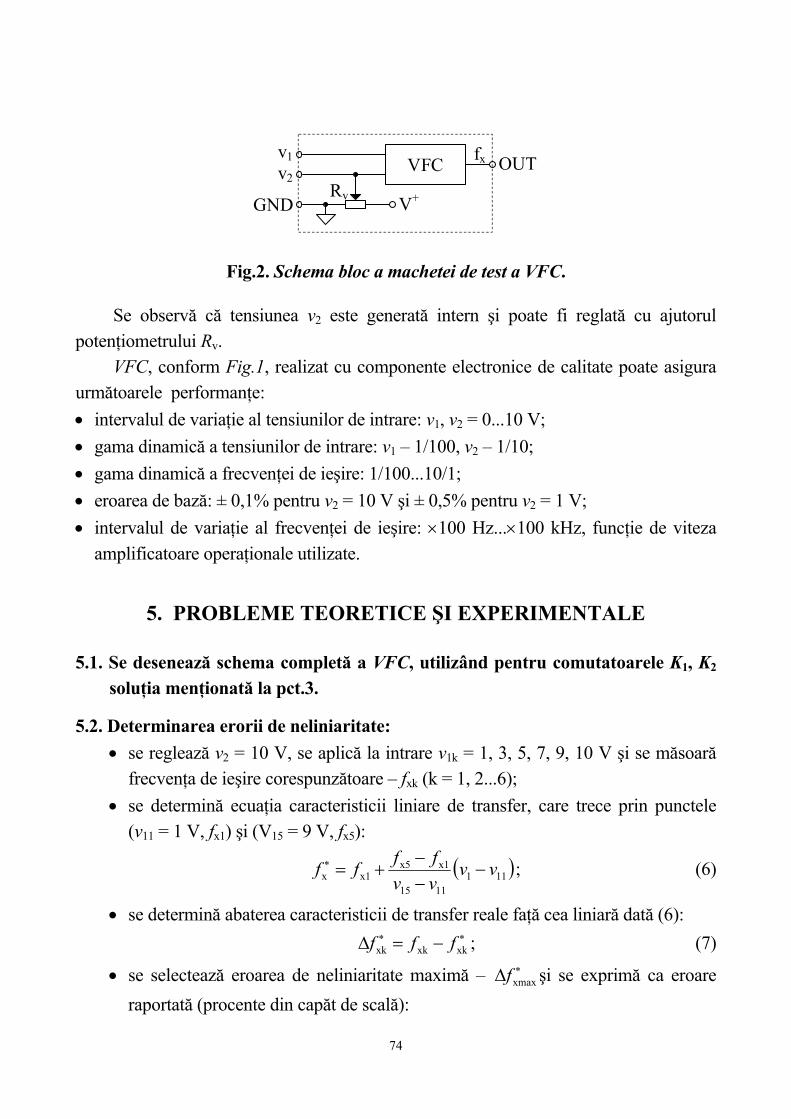
Constantin Harja
SISTEME ANALOGICE
DE PRELUCRARE DATE
EXPERIMENTĂRI
Informatică aplicată an III
UNIVERSITATEA TEHNICĂ „GH. ASACHI” IAŞI
Facultatea de Inginerie Electrică, Energetică şi Informatică Aplicată
I
CUPRINS
LAB.01. Amplificatoare de măsurare fără izolare galvanică ……………………..……………. 1LAB.02. Amplificatoare de măsurare fără izolare galvanică ……………………..……………. 9LAB.03. Amplificatoare de măsurare cu izolare galvanică ……………………………………. 15LAB.04. Amplificatoare logaritmice şi exponenţiale …………………………….……………. 21LAB.05. Convertoare tensiune-curent …………………………………………………………. 27LAB.06. Convertoare curent-tensiune ……………………..……………………..……………. 33LAB.07. Multiplicatoare analogice ……………………..………………………...……………. 38LAB.08. Multiplexoare analogice ……………………..………………………….……………. 47LAB.09. Circuite de eşantionare-memorare ……………………..……………….……………. 56LAB.10. Convertoare numeric-analogice ……………………..………………….……………. 63LAB.11. Convertoare tensiune-frecvenţă ……………………..………………….……………. 71LAB.12. Convertoare analog-numerice ……………………..…………………………………. 78
II
LUCRARE DE LABORATOR LAB-01
AMPLIFICATOARE DE MĂSURARE FĂRĂ IZOLARE GALVANICĂ
– Partea I –
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări este studierea şi testarea amplificatorului instrumental. Analiza acestui tip de amplificator se efectuează prin comparaţie cu amplificatorul diferenţial prevăzut cu repetoare de tensiune la intrare, pentru a se pune în evidenţă creşterea performanţelor antiperturbative ale amplificatorului instrumental.
2. CARACTERISTICI ELECTRICE GENERALE ALE AMPLIFICATOARELOR DE MĂSURARE
1.1. Intervalul de variaţie a tensiunii diferenţiale de intrare – ΔVi: max. ± 10 V. 1.2. Impedanţa diferenţială de intrare – Zid: 108...1012 Ω. 1.3. Impedanţa de intrare de mod comun – Zic: 109...1012 Ω. 1.4. Curentul de polarizare la intrare – IB: 0,003...200 nA. 1.5. Tensiunea de decalaj la intrare – Vd: 0,005...8 mV. 1.6. Curentul de decalaj la intrare – Id: (0,1...0,5)IB. 1.7. Coeficientul de variaţie cu temperatura a tensiunii de decalaj la intrare – αVd:
0,25...50μV/C.
1.8. Factorul de amplificare – A: 1...104. 1.9. Neliniaritatea – ε: 0,002...0,02 %. 1.10. Raportul de rejecţie a tensiunilor de mod comun – RRMC: 80...120 dB. 1.11. Intervalul de variaţie a tensiunii de ieşire – ΔV0: max. ± 10 V. 1.12. Curentul de ieşire – I0: max. 5...10 mA. 1.13. Impedanţa de ieşire – Z0: 10...2000 mΩ. 1.14. Frecvenţa de tăiere – fT: 1kHz...40 MHz.
1
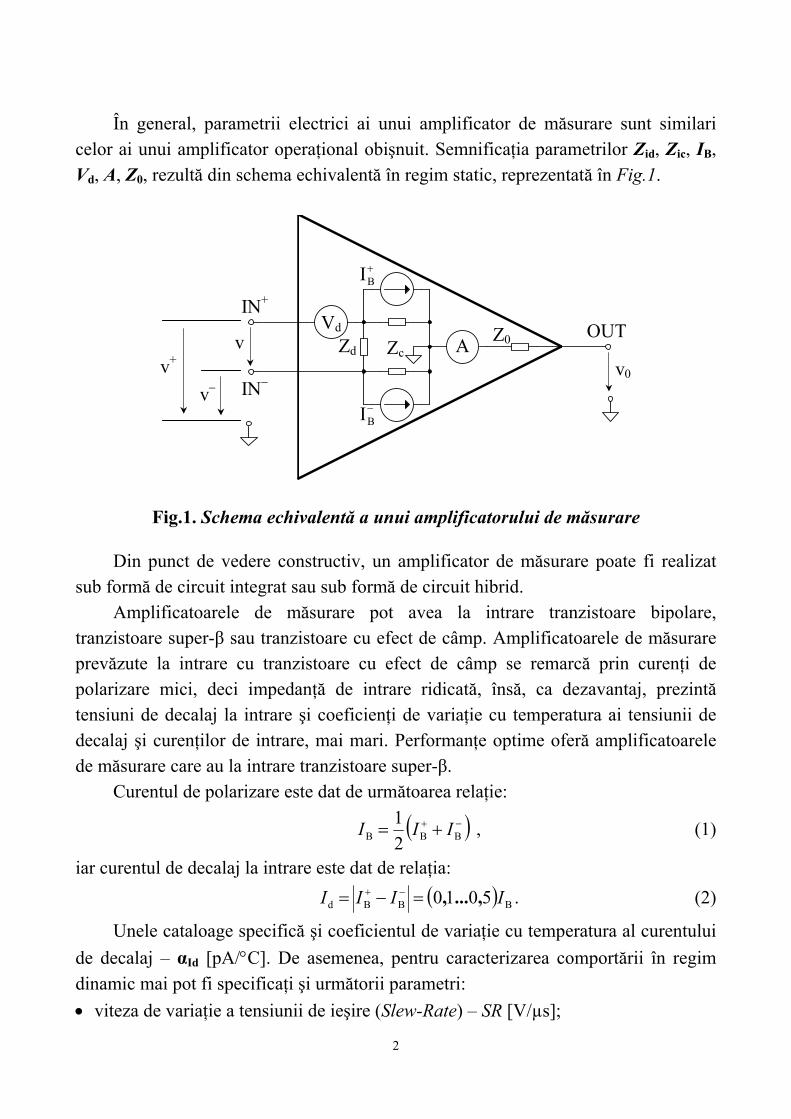
În general, parametrii electrici ai unui amplificator de măsurare sunt similari celor ai unui amplificator operaţional obişnuit. Semnificaţia parametrilor Zid, Zic, IB, Vd, A, Z0, rezultă din schema echivalentă în regim static, reprezentată în Fig.1.
Vd
A
BI
BI
Zd ZcZ0
IN+
IN
OUT
v
v
v0v+
Fig.1. Schema echivalentă a unui amplificatorului de măsurare
Din punct de vedere constructiv, un amplificator de măsurare poate fi realizat sub formă de circuit integrat sau sub formă de circuit hibrid.
Amplificatoarele de măsurare pot avea la intrare tranzistoare bipolare, tranzistoare super-β sau tranzistoare cu efect de câmp. Amplificatoarele de măsurare prevăzute la intrare cu tranzistoare cu efect de câmp se remarcă prin curenţi de polarizare mici, deci impedanţă de intrare ridicată, însă, ca dezavantaj, prezintă tensiuni de decalaj la intrare şi coeficienţi de variaţie cu temperatura ai tensiunii de decalaj şi curenţilor de intrare, mai mari. Performanţe optime oferă amplificatoarele de măsurare care au la intrare tranzistoare super-β.
Curentul de polarizare este dat de următoarea relaţie:
III BBB 2
1, (1)
iar curentul de decalaj la intrare este dat de relaţia:
BBBd 5010 IIII ,..., . (2)
Unele cataloage specifică şi coeficientul de variaţie cu temperatura al curentului
de decalaj – αId [pA/C]. De asemenea, pentru caracterizarea comportării în regim
dinamic mai pot fi specificaţi şi următorii parametri:
viteza de variaţie a tensiunii de ieşire (Slew-Rate) – SR [V/µs];
2
timpul de stabilizare, definit ca timpul după care abaterea tensiunii de ieşire, pentru semnal treaptă la intrare, faţă de valoarea de regim staţionar are a anumită valoare bine precizată (1, 0,1, 0,01%).
De obicei, amplificatoarele de măsurare se utilizează la măsurarea tensiunilor continue sau lent variabile. Performanţele în regim dinamic interesează mai ales când se măsoară semnale rapid variabile sau semnale lent variabile în puncte multiple. Un criteriu de bază pentru clasificarea amplificatoarelor de măsurare este tipul reacţiei negative interne. Din acest punct de vedere, se realizează amplificatoare de măsurare cu reacţie negativă de curent şi amplificatoare de măsurare cu reacţie negativă de tensiune. În prezenta lucrare de laborator se studiază două variante de amplificatoare de măsurare din ultima categorie, realizate cu componente discrete.
3. SCHEMA ELECTRICĂ A AMPLIFICATORULUI DE MĂSURARE
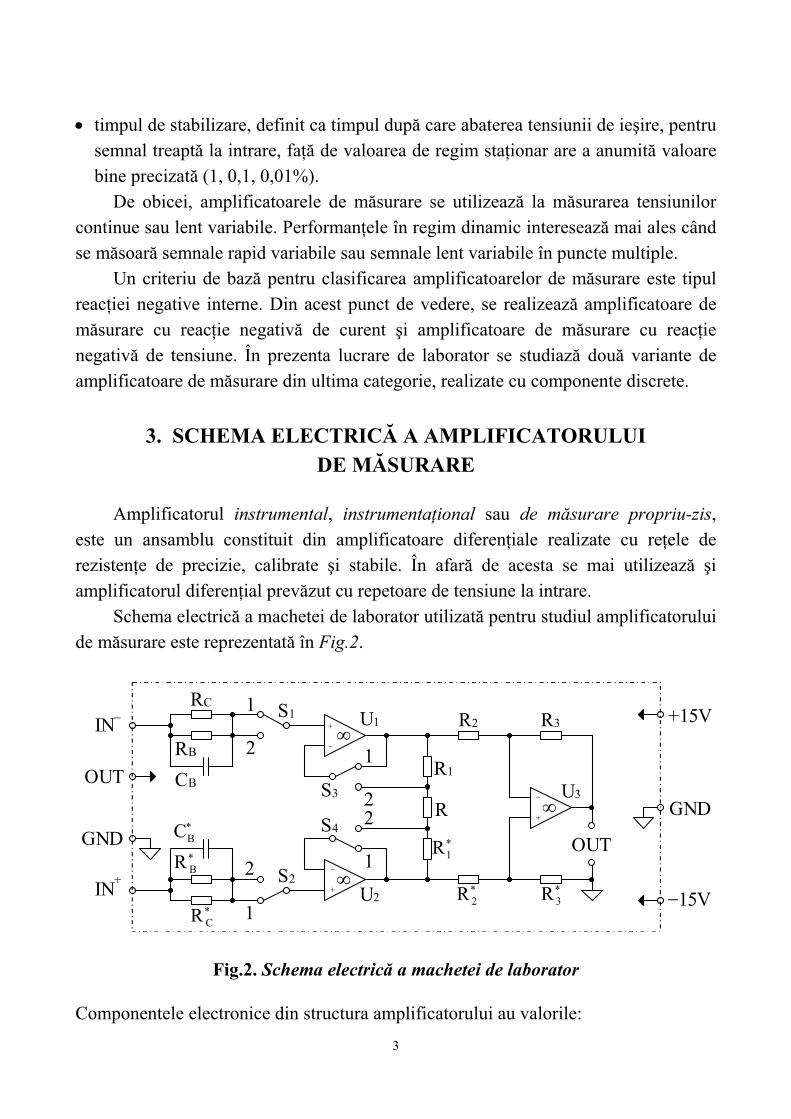
Amplificatorul instrumental, instrumentaţional sau de măsurare propriu-zis, este un ansamblu constituit din amplificatoare diferenţiale realizate cu reţele de rezistenţe de precizie, calibrate şi stabile. În afară de acesta se mai utilizează şi amplificatorul diferenţial prevăzut cu repetoare de tensiune la intrare. Schema electrică a machetei de laborator utilizată pentru studiul amplificatorului de măsurare este reprezentată în Fig.2.
+
-
+
-
+
-
S1
R
1R
RC+15V
IN+
IN
OUT
1
GND
S2
S3
S4
2
2
1
1
22
1
GND
15V
R1
U1
U2
U3
R2 R3
3R
2R
RB
CB
OUTBCBR
CR
Fig.2. Schema electrică a machetei de laborator
Componentele electronice din structura amplificatorului au valorile:
3
RB, BR = 100 kΩ ± 1%; RC,
CR = 1 kΩ ± 1%; CB, BC = 100 nF;
R1, 1R = 5 kΩ ± 0,25%; R = 1 kΩ ± 0,25%;
R2, 2R = 10 kΩ ± 0,25%; R3,
3R = 100 kΩ ± 0,25%;
iar raportul de rejecţie a modului comun al U1, U2, U3 are valoarea RRMCU = 80 dB.
Rezistenţele RC, au rol de limitare a curenţilor de intrare, în scop de protecţie
la depăşirea tensiunii nominale de intrare, rezistenţele RB, sunt utilizate pentru
măsurarea curenţilor de intrare şi a rezistenţei diferenţiale de intrare, iar
Macheta de laborator permite studiul a două tipuri de amplificatoare de măsurare, configurate cu ajutorul comutatoarelor S3 şi S4: (a) – pentru S3, S4 = 1, U1 şi U2 funcţionează în regim de repetor, iar U3 în regim de
amplificator diferenţial, deci amplificatorul de măsurare este de tipul
amplificator diferenţial cu impedanţă de intrare simetrică şi de valoare ridicată
(rezistenţele R1, R, nu intervin în calculul amplificării, constituind doar o
sarcină suplimentară pentru repetoare);
1R
(b) – pentru S3, S4 = 2, U1 şi U2 constituie un etaj de amplificare simetric, iar U3 un etaj de amplificare diferenţial, rezultând schema de bază a unui amplificator de măsurare propriu-zis, numit şi amplificator instrumental.
Raportul de rejecţie a modului comun – RRMC este definit, în general, astfel:
dc
mc20V
VRRMC log , (3)
unde Vmc este tensiunea de mod comun, iar Vde este o tensiune echivalentă (diferenţială) de intrare care ar produce asupra amplificatorului acelaşi efect ca şi tensiunea de mod comun. În cazul unui amplificator, având în vedere că:
de
0d
V
V=A ,
mc
0c
V
V=A , rezultă
c
d20A
A=RRMC log , (4)
unde V0 este tensiunea de ieşire, Ad este amplificarea pe mod diferenţial, iar Ac este amplificarea pe mod comun. Pentru varianta (a) a amplificatorului de măsurare, tensiunea de ieşire – v0a şi factorul de amplificare – Aa sunt date de următoarele relaţii:
iiaii2
3a0 vvAvv
R
Rv , unde
2
3a R
RA . (5)
4
Raportul de rejecţie a modului comun – RRMCa pentru această variantă a amplificatorului are o componentă dependentă de RRMC al circuitului U3 – RRMCU, fiind egală cu RRMCU şi alta dependentă de împerecherea rezistenţelor din reţeaua de
reacţie (R2/ şi R3/ ) – RRMCR, calculându-se cu relaţiile: 2R
3R
RUa
111
RRMC+
RRMC=
RRMC, , dB80U =RRMC
2
120 a
R
ARRMC log , (6)
unde δ este eroarea relativă a factorului de amplificare Aa:
R2
2
3
3
a
a 22
R
R=
R
R+R
R=A
A= , (7)
iar ΔR/R = R reprezintă eroarea relativă a rezistenţelor din reţeaua de reacţie.
Pentru varianta (b) a amplificatorului de măsurare, tensiunea de ieşire – v0b şi factorul de amplificare – Ab sunt date de relaţiile:
iibii
1
2
3b0
21 vvAvv
R
R
R
Rv , unde a
1b
21 A
R
RA
, (8)
iar raportul de rejecţie a modului comun – RRMCb are expresia:
a1
b
21 RRMC
R
RRRMC
sau dB
2120 a
1b RRMC
R
RRRMC
log . (9)
Acest rezultat apare fiindcă amplificarea etajului de intrare (U1, U2) are valoarea (1+2R1/R) pe mod diferenţial, iar pe mod comun are valoare unitară. RRMC constituie un parametru esenţial al unui amplificator de măsurare. Neglijând efectul neîmperecherii rezistenţelor din reţeaua de reacţie, amplificatorul diferenţial – (a) are RRMC egal cu cel al amplificatorului operaţional utilizat, iar amplificatorul instrumental – (b) are RRMC multiplicat cu factorul de amplificare al etajului de intrare. Această situaţie rămâne neschimbată şi dacă se ia în considerare efectului neîmperecherii rezistenţelor din reţeaua de reacţie a amplificatorului diferenţial. De regulă, efectul neîmperecherii rezistenţelor are pondere mai mare decât RRMC al amplificatoarelor operaţionale utilizate, în limitarea globală a RRMC.
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
4.1. MĂSURĂRI ÎN CURENT CONTINUU
4.1.1. Se analizează schemele electrice ale celor două variante de amplificator de măsurare şi se deduc (5) şi (8).
5
Observaţie: Întreg setul de măsurări se efectuează pentru fiecare din cele două variante ale amplificatorului de măsurare, începându-se cu varianta (a) (S3, S4 = 1) şi continuând apoi cu varianta (b) (S3, S4 = 2). Pentru simplificarea notaţiilor, se renunţă la indicele de desemnare a variantei amplificatorului de măsurare.
4.1.2. Măsurarea tensiunii echivalente de decalaj la intrare:
se calculează valoarea factorului de amplificare – A, cu (5) sau (8), în funcţie de valorile rezistenţelor (pct.3);
se poziţionează S1, S2 = 1;
se conectează ambele intrări ale amplificatorului de măsurare la masă şi se măsoară cu un voltmetru numeric tensiunea de decalaj la ieşire – Vd0;
se calculează tensiunea echivalentă de decalaj la intrare:
A
VV d0
di . (10)
4.1.3. Măsurarea erorii de neliniaritate:
se păstrează S1, S2 = 1;
se calculează valoarea nominală a tensiunii de intrare – Vin:
A
VV
10in ; (11)
se conectează una din intrările amplificatorului de măsurare la masă iar la cealaltă se aplică o tensiune continuă, măsurată cu un voltmetru numeric, cu următoarele valori discrete: vik = (0,25, 0,5, 0,75, 1)Vin (k = 1, 2, 3, 4);
se măsoară valorile tensiunii de ieşire – 0kv , corespunzătoare valorilor
tensiunii de intrare (vik), din care se scade tensiunea de decalaj, rezultând:
d00k0k Vvv ; (12)
se calculează factorul de amplificare măsurat – A0, în punctul corespunzător capătului gamei dinamice (vi4 = Vin, v04):
i4
040 v
vA ; (13)
se calculează ordonatele punctelor de pe caracteristica ideală de transfer (în
sensul de liniară) – 0kv :
ik00k vAv ; (14)
se calculează abaterea dintre caracteristica de transfer reală şi ideală:
6
0k0k0k vvv ; (15)
se calculează eroarea de neliniaritate – εn, cu relaţia:
%1000max
0maxn
v
v ; (16)
datele experimentale se trec în două tabele corespunzătoare celor două variante ale amplificatorului de măsurare, conform modelului următor:
Tabel 1/2. Date experimentale amplificator diferenţial/instrumental
vi 0v v0
0v Δv0 n
0 Vd0 – – –
vi1 01v v01
01v Δv01
: : : : :
vi4 04v v04
04v Δv04
Δv0max = ?
n = ?
4.1.4. Se compară datele pentru cele două variante ale amplificatorului şi se
precizează cauzele posibile care determină diferenţele dintre acestea.
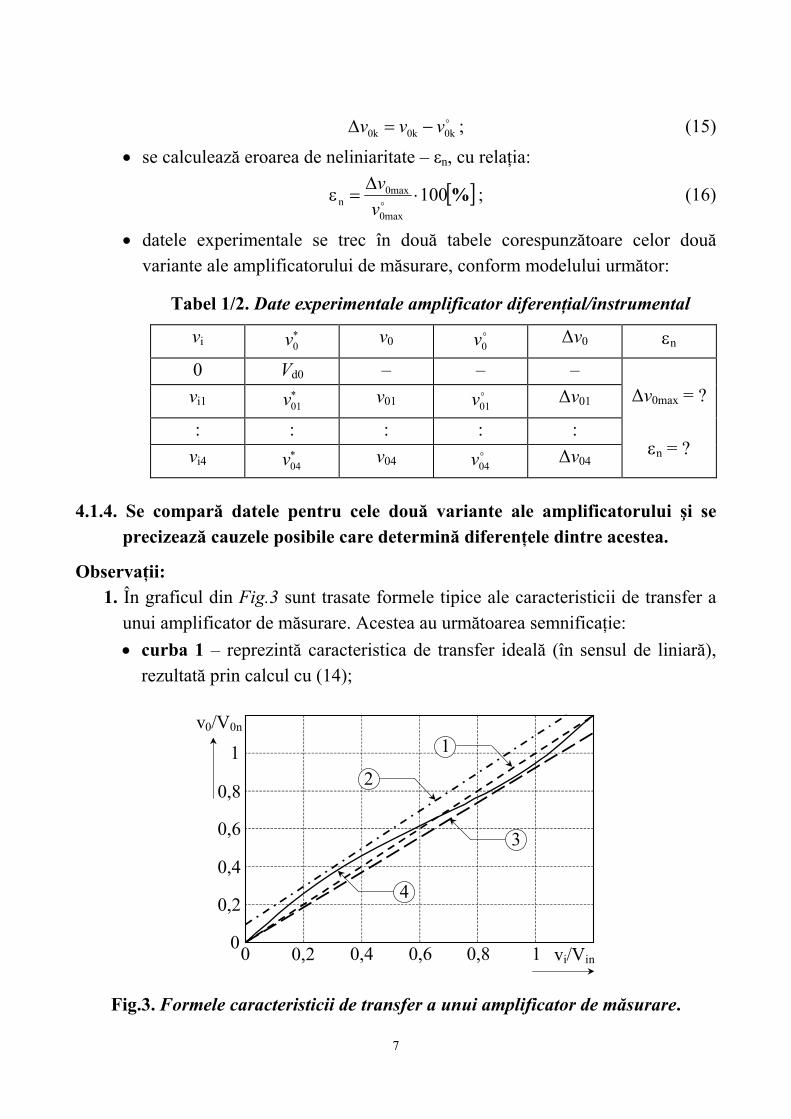
Observaţii: 1. În graficul din Fig.3 sunt trasate formele tipice ale caracteristicii de transfer a
unui amplificator de măsurare. Acestea au următoarea semnificaţie:
curba 1 – reprezintă caracteristica de transfer ideală (în sensul de liniară), rezultată prin calcul cu (14);
0
1
2
3
4
0,2 0,4 0,6 0,8 1
1
0,8
0,6
0,4
0,2
0vi/Vin
v0/V0n
Fig.3. Formele caracteristicii de transfer a unui amplificator de măsurare.
7
curba 2 – reprezintă caracteristica de transfer obţinută prin neglijarea erorii de neliniaritate şi luarea în considerare a tensiunii de decalaj la intrare;
curba 3 – reprezintă caracteristica de transfer obţinută prin neglijarea erorii de neliniaritate şi considerarea abaterii factorului de amplificare real faţă de cel calculat, care are ca efect modificarea pantei caracteristicii de transfer, fapt ceea ce conduce la o eroare de proporţionalitate dată de relaţia:
%1000
0p
A
AA (17)
curba 4 – reprezintă una din formele posibile ale caracteristicii reale de transfer (cu neliniaritate), care poate să rezulte din (12);
2. În mod normal, caracteristica de transfer a unui amplificator de măsurare este afectată simultan de toate cele trei tipuri de erori: eroarea de zero, eroarea de proporţionalitate şi eroarea de neliniaritate, iar caracteristica reală de transfer rezultă ca combinaţie a curbelor 2, 3 şi 4.
5. ÎNTREBĂRI
5.1. Ce diferenţă de potenţial este între intrările unui amplificator operaţional ideal. 5.2. Care sunt diferenţele principale dintre cele două variante ale amplificatorului de
măsurare? 5.3. Cum este avantajos, şi din ce cauză, să fie repartizată amplificarea globală a unui
amplificator instrumental pe cele două etaje componente (U1 + U2 şi U3)? 5.4. Care sunt sursele principale de generare a erorilor de zero, de proporţionalitate şi
de neliniaritate? 5.5. Care este expresia tensiunii totale de decalaj la ieşire, pentru fiecare din cele
două variante ale amplificatorului de măsurare?
8
LUCRARE DE LABORATOR LAB-02
AMPLIFICATOARE DE MĂSURARE FĂRĂ IZOLARE GALVANICĂ
– Partea II –
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
4.1. MĂSURĂRI ÎN CURENT CONTINUU
Observaţie: Pentru continuarea lucrării se utilizează informaţiile şi rezultatele experimentale şi se respectă indicaţiile menţionate în Partea I a prezentei lucrări de laborator (Vezi LUCRARE DE LABORATOR CCSM-01).
4.1.4. Măsurarea raportului de rejecţie de mod comun:
se conectează la masă ambele intrări ale amplificatorului şi se măsoară tensiunea de decalaj la ieşire – Vd0;
se conectează ambele intrări ale amplificatorului la o tensiune de mod comun – Vmc = 10 V şi se măsoară din nou tensiunea de ieşire – V0c;
se calculează valoarea tensiunii echivalente de intrare – Viec care produce la ieşire acelaşi efect ca şi tensiunea de mod comun şi apoi valoarea RRMC:
A
VVV d00c
iec
;
iec
mc20V
VRRMC log ; (18)
se compară valoarea obţinută cu cea dată de (6) şi (9).
4.1.5. Măsurarea curenţilor de polarizare la intrare:
se poziţionează S1 = 2 şi S2 = 1 (se introduce rezistenţa RB în serie cu intrarea
IN a amplificatorului de măsurare);
se conectează la masă ambele intrări ale amplificatorului şi se măsoară
tensiunea de ieşire – 0BV ;
se calculează valoarea curentului de intrare – BI :
9
B
d00BB AR
VVI
; (19)
se inversează poziţia comutatoarelor S1, S2 (S1 = 1, S2 = 2 – se introduce
rezistenţa BR în serie cu intrarea IN+ a amplificatorului de măsurare) şi se
măsoară din nou tensiunea de ieşire – 0BV ;
se calculează valoarea curentului de intrare – BI :
B
d00BB AR
VVI
; (20)
se calculează valoarea curentului de polarizare – IB cu relaţia:
III BBB 2
1; (21)
se calculează valoarea curentului de decalaj la intrare – Id: BBd III . (22)
4.1.6. Măsurarea rezistenţei diferenţiale de intrare:
se poziţionează S1, S2 = 2 (se introduc rezistenţele RB şi BR în serie cu intrările
amplificatorului de măsurare);
se conectează ambele intrări ale amplificatorului la masă şi se măsoară
tensiunea de decalaj la ieşire – d0V , care diferă de valoarea Vd0 datorită
contribuţiei curentului de decalaj la intrare:
d0dBd0d0 2 VIRVV ; (23)
se lasă conectată la masă intrarea IN, se aplică la intrarea IN+ o tensiune
Vi = Vin şi se măsoară tensiunea de ieşire – 01V ;
în aceleaşi condiţii de intrare se poziţionează S1, S2 = 1 şi se măsoară tensiunea
de ieşire – 02V ;
se elimină efectul tensiunilor de decalaj, calculându-se valorile: 0d0101 VVV şi ; (24) 0d0202 VVV
se calculează rezistenţa diferenţială – Rd, având în vedere că:
iBd
d01 2
VRR
RAV
şi i02 AVV ; (25)
rezultă: 0102
01Bd 2
VV
VRR
. (26)
10
4.2. MĂSURĂRI ÎN CURENT ALTERNATIV
Observaţie:
În curent alternativ, tensiunile se măsoară cu un voltmetru numeric şi/sau cu un osciloscop catodic, acesta fiind necesar şi pentru verificarea frecvenţei şi formei de undă a semnalelor. Totodată, se iau în considerare şi următoarele aspecte:
relaţia dintre indicaţiile celor două aparate (voltmetru şi osciloscop);
banda şi eroarea suplimentară cu frecvenţa a voltmetrului numeric;
amplitudinea tensiunii de ieşire a amplificatorului să nu depăşească valoarea nominală (10 V), pentru ca amplificatorul să nu intre în zona neliniară.
4.2.1. Determinarea benzii de frecvenţă şi a frecvenţei de tăiere:
Observaţie: La amplificatoarele de măsurare, ca şi la alte aparate de măsură în curent alternativ, banda de frecvenţă se defineşte, nu la o scădere a amplificării de 3 dB,
ci pentru o scădere impusă de eroarea suplimentară cu frecvenţa – f.
se conectează la masă una din intrările amplificatorului, iar la cealaltă intrare se aplică un semnal sinusoidal de la un generator de semnal cu o frecvenţă de ordinul zecilor de Hz (< 50 Hz), astfel ca tensiunea de ieşire să atingă valoarea nominală, şi se măsoară tensiunile de intrare şi ieşire;
menţinând constantă valoarea tensiunii de intrare a amplificatorului şi se creşte
frecvenţa ei până când tensiunea de ieşire scade cu f = 2% faţă de valoarea
avută iniţial; frecvenţa corespunzătoare acestei scăderi a amplificării reprezintă
limita superioară a benzii de frecvenţă la f;
menţinând constantă tensiunea de intrare, se continuă creşterea frecvenţei până când tensiunea de ieşire a amplificatorului scade cu 3 dB, adică până la
valoarea de 707021 , din valoarea iniţială; frecvenţa corespunzătoare
acestei scăderi reprezintă limita superioară a benzii de frecvenţă la 3 dB;
menţinând constantă tensiunea de intrare a amplificatorului, se continuă creşterea frecvenţei până când tensiunea de ieşire scade la valoarea tensiunii de intrare, adică amplificarea devine unitară; frecvenţa corespunzătoare acestei scăderi a amplificării reprezintă frecvenţa de tăiere – fT;
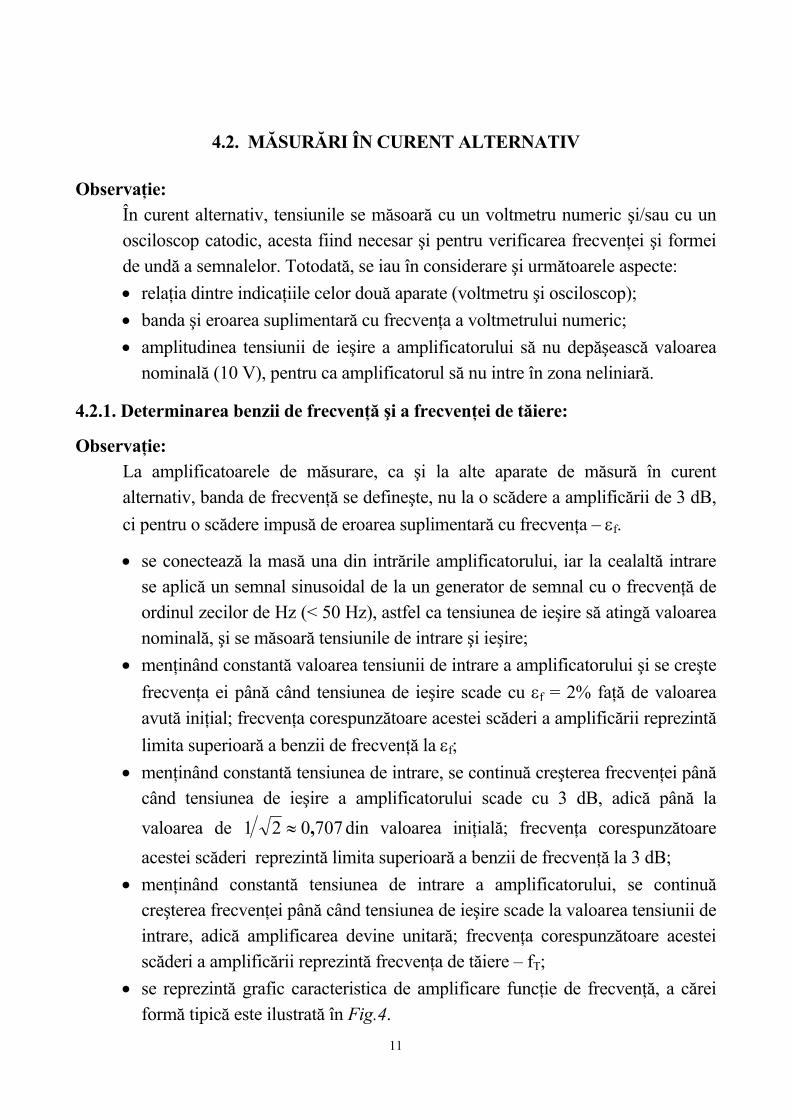
se reprezintă grafic caracteristica de amplificare funcţie de frecvenţă, a cărei formă tipică este ilustrată în Fig.4.
11
A0
0f
A[dB]3 dB f
ff f3dB fT
Fig.4. Caracteristica amplitudine-frecvenţă a unui amplificator de măsurare.
4.2.2. Măsurarea raportului de rejecţie a modului comun:
se aplică la cele două intrări ale amplificatorului, legate împreună, un semnal sinusoidal – Vmc, cu frecvenţa mai mică de 50 Hz şi amplitudinea de max. 10 V şi se măsoară cu osciloscopul tensiunea sinusoidală de ieşire – V0c;
se calculează valoarea tensiunii echivalente de intrare – Viec, care produce asupra amplificatorului de măsurare acelaşi efect ca şi tensiunea de mod comun, şi apoi valoarea raportului de rejecţie a modului comun – RRMCca:
A
VV 0c
iec ; iec
mcca 20
V
VRRMC log ; (27)
se trasează caracteristica RRMCca = F(f), crescând frecvenţa până la valoarea f = fT şi păstrând constantă valoarea tensiunii de mod comun.
4.2.3. Măsurarea rezistenţei diferenţiale de intrare:
se conectează la masă o intrare a amplificatorului, iar la cealaltă intrare se aplică o tensiune sinusoidală – V01 cu frecvenţa mai mică de 50 Hz, astfel ca tensiunea de ieşire să aibă amplitudinea de max. 10 V;
se poziţionează K1, S2 = 2 (se introduc RB şi BR în serie cu intrările
amplificatorului) şi apoi se măsoară valoarea tensiunea de ieşire – V02 < V01;
se calculează rezistenţa diferenţială de intrare Rdca cu relaţia:
0201
02Bdca 2
VV
VRR
. (28)
Observaţie: Determinarea rezistenţei Rdca cu (28) este corectă numai dacă la frecvenţa de lucru este îndeplinită condiţia: f << 1/2πRBCB (să fie neglijabil efectul de şuntare
a rezistenţelor RB, de către condensatoarele CB, ). BR
BC
12
4.2.4. Testarea amplificatorului cu semnal dreptunghiular:
Observaţie: Testarea unui amplificator de măsurare cu semnal dreptunghiular poate furniza informaţii echivalente sau suplimentare şi poate fi mai expeditivă decât testarea cu semnal sinusoidal. Cele două metode de testare au la bază echivalenţa dintre caracteristicilor dinamice în domeniul timpului şi cele în domeniul frecvenţei.
se poziţionează S1, S2 = 1;
se conectează la masă o intrare a amplificatorului, iar la cealaltă intrare se aplică un semnal dreptunghiular, astfel ca tensiunea de ieşire să aibă amplitudinea de max. 10 V;
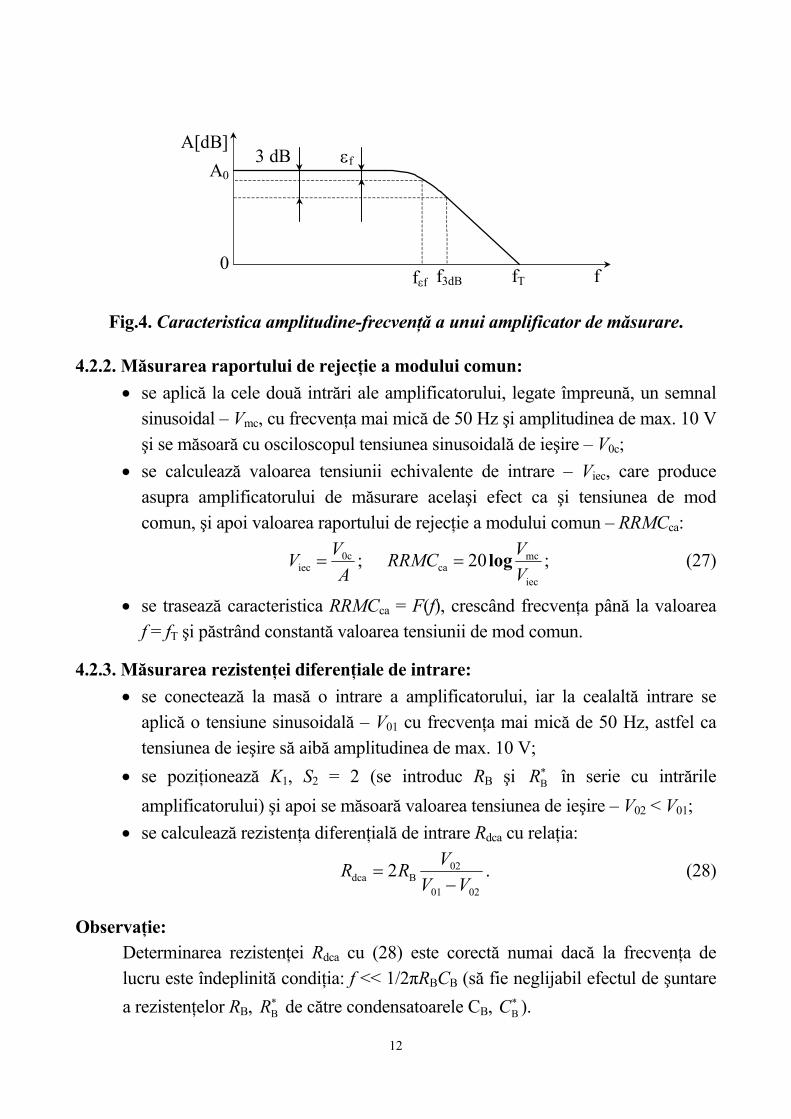
se creşte frecvenţa semnalului de intrare până când fronturile impulsurilor de ieşire sunt alterate sensibil, conform Fig.5.
t
d
Ts
t
v/V0
+0,9+1
10,9
Vms
0
Fig.5. Forma tipică a impulsului la ieşirea unui amplificator de măsurare.
Observaţii: 1. În Fig.5, pe ordonată sunt marcate valorile normate (prin raportare la valoarea
de regim staţionar) ale amplitudinii impulsului de la ieşirea amplificatorului de măsurare – Vms. Prin vizualizarea pe ecranul unui osciloscop a formei de undă, conform Fig.5, se pot determina următoarele mărimi:
timpul de creştere – Tc:
sc tT ; (29)
viteza de variaţie a semnalului de ieşire (Slew-Rate) – SR:
s81
c
ms VT
VSR
, ; (30)
supracreşterea – δ, exprimată uzual în procente din valoarea amplitudinii de regim staţionar – Vms, care reprezintă depăşirea maximă a valorii de regim staţionar (fronturile impulsului sunt echivalente cu două semnale treaptă);
13
timpul de stabilire – Ts, definit ca intervalul de timp după care eroarea
dinamică – d scade sub un anumit nivel bine precizat (1%, 0,1% sau 0,001%),
nu poate fi măsurat pe ecranul osciloscopului, conform Fig.5, fiindcă rezoluţia citirii este mult inferioară celei necesare acestui scop.
2. Timpul de creştere – Tc la semnal mic poate servi şi la determinarea benzii de frecvenţă la 3 dB. Între aceste mărimi există cu bună aproximaţie relaţia:
3dBc
350
fT
, . (31)
3. Viteza de variaţie a semnalului de ieşire, pe lângă răspunsul la semnal treaptă, are ca efect şi distorsionarea oricărui tip de semnal mare, peste o anumită frecvenţă, chiar în interiorul benzii de lucru. Considerând un semnal sinusoidal v = Vmsin(ωt), viteza maximă de variaţie a acestui semnal are expresia:
mmaxmmaxd
dVtV
t
vcos . (32)
Semnalul va rezulta fără distorsiuni numai dacă:
SRV m , adică f
SRVV
mpp 2 . (33)
4.2.5. Se compară datele de c.a. pentru cele două variante ale amplificatorului, cât şi datele de c.a. cu cele de c.c şi se precizează cauzele diferenţelor dintre ele.
5. ÎNTREBĂRI
5.1. Din ce cauză apar diferenţe între valorile raportului de rejecţie a modului comun şi rezistenţei diferenţiale de intrare măsurate în curent continuu comparativ cu valorile aceloraşi mărimi măsurate în curent alternativ?
5.2. Cum se manifestă şi cum se poate reduce efectul curenţilor de polarizare de la intrarea unui amplificator?
5.3. Din ce cauză nu se defineşte banda de frecvenţă a unui amplificator de măsurare tot la 3 dB, ca în cazul general?
5.4. Care sunt avantajele şi dezavantajele testării unui amplificator de măsurare cu semnal dreptunghiular, comparativ cu testarea cu semnal sinusoidal?
5.5. Din ce cauză Slew-Rate distorsionează semnalele de nivel mare, chiar dacă acestea au frecvenţa în interiorul benzii de trecere, reducând astfel banda efectivă de frecvenţă a unui amplificator?
14
LUCRARE DE LABORATOR LAB-03
AMPLIFICATOARE DE MĂSURARE CU IZOLARE GALVANICĂ
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea unui amplificator de măsurare cu izolarea galvanică, cu accent pe necesitatea izolării galvanice şi pe evidenţierea particularităţilor de construcţie şi funcţionare, comparativ cu amplificatoarele fără izolare galvanică. Testarea se efectuează comparativ, în curent continuu, în semnal sinusoidal şi în impulsuri.
2. GENERALITĂŢI
Amplificatoarele de măsurare fără izolare galvanică asigură rejecţia tensiunilor de mod comun cu valori de max. ±10 V, în funcţie de tensiunea de alimentare. În aplicaţiile industriale, între două puncte de legare la pământ, pot apare uzual tensiuni tranzitorii de mod comun de ordinul kilovolţilor. Aceste tensiuni de mod comun, nu numai că pot genera erori de măsurare inacceptabile, dar pot chiar să deterioreze amplificatorul. Din acest motiv a apărut necesitatea unor amplificatoare de măsurare capabile să funcţioneze în astfel de condiţii. Singura soluţie pentru realizarea lor este introducerea unei izolări galvanice între partea de intrare şi partea de ieşire, care să poată suporta tensiunile de mod comun întâlnite în aplicaţiile practice.
Se cunosc două tipuri constructive reprezentative de amplificatoare de măsurare cu izolare galvanică:
cu transmiterea semnalului de măsurare prin cuplaj magnetic (transformator), când acest semnal modulează în durată, poziţie, frecvenţă sau amplitudine, un semnal purtător dreptunghiular sau sinusoidal (numai în frecvenţă sau amplitudine);
cu transmiterea semnalului de măsurare prin cuplaj optic (optocuplor), când nu mai este obligatorie modularea, fiind posibilă transmiterea semnalului fără schimbarea formei de variaţie în timp, într-o bandă de frecvenţă începând cu curentul continuu.
15
Transmiterea semnalului de măsurare fără a fi modulat are avantajul unei benzi de frecvenţă mult mai largi, în detrimentul liniarităţii, preciziei şi stabilităţii în timp, comparativ cu transmiterea modulată.
La ambele tipuri de amplificatoare de măsurare cu izolare galvanică cele două părţi izolate galvanic între ele trebuiesc alimentate de la surse de asemenea izolate galvanic între ele. Soluţia clasică pentru izolarea surselor de alimentare o constituie utilizarea unui transformator. Alte soluţii alternative sunt alimentarea de la baterii sau prin conversie opto-electronică de energie. Aceste soluţii necesită utilizarea unor circuite electronice de consum foarte redus.
În general, parametrii de bază ai amplificatoarelor cu izolare galvanică sunt aceeaşi şi variază între aceleaşi limite ca şi în cazul amplificatoarelor de măsurare fără izolare galvanică (Vezi LUCRAREA CCSM-01). În plus, la amplificatoarele de măsurare cu izolare galvanică apare un parametru nou şi anume raportul de rejecţie a modului de izolare – RRMI, care furnizează informaţii despre calitatea izolării dintre cele două părţi ale amplificatorului. RRMI se defineşte ca raport între tensiunea aplicată izolaţiei şi variaţia corespunzătoare a tensiunii de ieşire. La fel ca şi în cazul RRMC, exprimarea uzuală a RRMI este cea în dB. Valorile tipice ale RRMI se situează în jur de 150...160 dB, pentru tensiuni de mod comun de 2...5 kV.
3. SCHEMA ELECTRICĂ A AMPLIFICATORULUI DE MĂSURARE CU IZOLARE GALVANICĂ
Din considerente practice (realizare mai simplă şi mai accesibilă) s-a optat
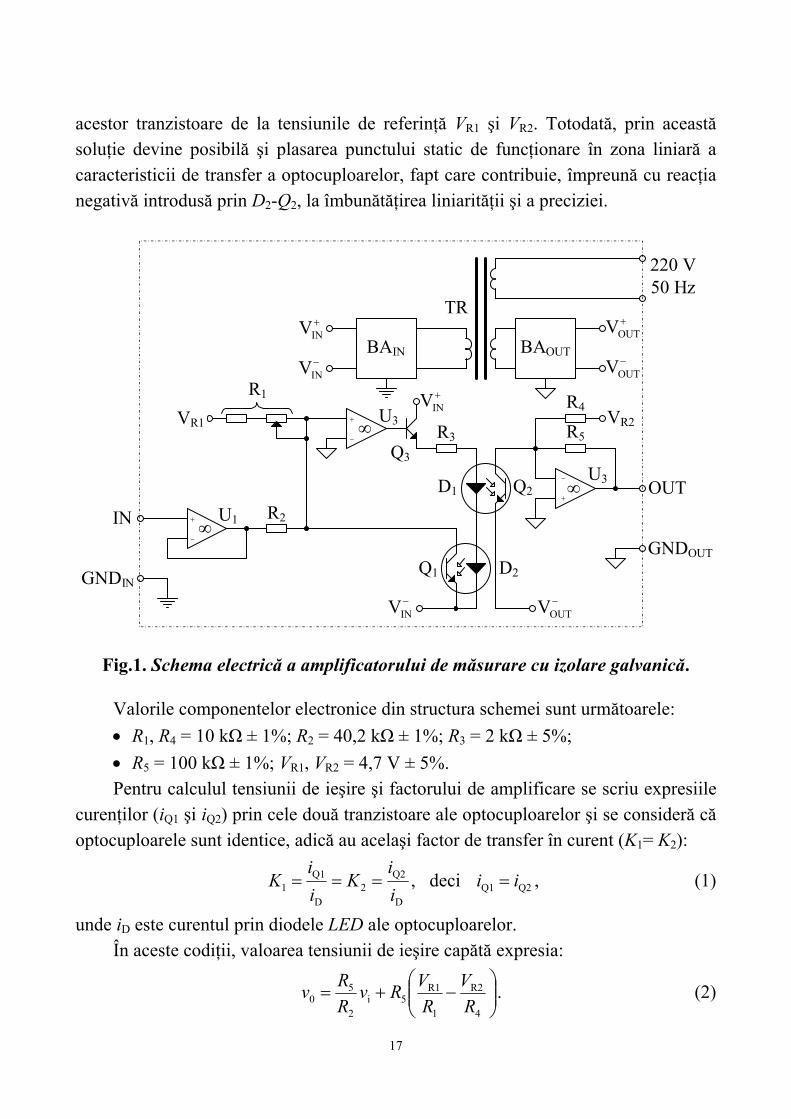
pentru studierea unui amplificator de măsurare cu izolare galvanică realizat pe principiul transmiterii nemodulate a semnalului de măsurare prin optocuplor, realizat cu componente discrete, conform schemei electrice reprezentate în Fig.1.
Amplificatorul operaţional U1 este un repetor de tensiune necesar pentru asigurarea unei impedanţe de intrare de valoare ridicată, iar tranzistorul Q3 evită supraîncărcarea în curent a ieşirii U2, deoarece prin diodele LED ale optocuploarelor curentul poate atinge valori de 15...20 mA.
Semnalul de măsurare izolat galvanic este transmis prin D1-Q1. Pentru reducerea efectului neliniarităţii optocuplorului D1-Q1, datorat în special diodei LED, se utilizează un al doilea optocuplor (D2-Q2) conectat în bucla de reacţie a circuitului U2.
Deoarece tranzistoarele optocuploarelor sunt dispozitive unidirecţionale, pentru ca amplificatorul să poată admite tensiuni bipolare se utilizează prepolarizarea
16
acestor tranzistoare de la tensiunile de referinţă VR1 şi VR2. Totodată, prin această soluţie devine posibilă şi plasarea punctului static de funcţionare în zona liniară a caracteristicii de transfer a optocuploarelor, fapt care contribuie, împreună cu reacţia negativă introdusă prin D2-Q2, la îmbunătăţirea liniarităţii şi a preciziei.
+
-
+
-
+
-
TR
R1
U1
U3
R2
R3
GNDIN
IN
BAIN
220 V50 Hz
OUT
GNDOUT
BAOUT
U3
Q3
Q1
Q2D1
D2
R4
R5
INV
INV
OUTV
INV
INV
OUTV
OUTV
VR1 VR2
Fig.1. Schema electrică a amplificatorului de măsurare cu izolare galvanică.
Valorile componentelor electronice din structura schemei sunt următoarele:
R5 = 100 kΩ ± 1%; VR1, VR2 = 4,7 V ± 5%. Pentru calculul tensiunii de ieşire şi factorului de amplificare se scriu expresiile
curenţilor (iQ1 şi iQ2) prin cele două tranzistoare ale optocuploarelor şi se consideră că optocuploarele sunt identice, adică au acelaşi factor de transfer în curent (K1= K2):
D
Q22
D
Q11 i
iK
i
iK , deci Q2Q1 ii , (1)
unde iD este curentul prin diodele LED ale optocuploarelor. În aceste codiţii, valoarea tensiunii de ieşire capătă expresia:
4
R2
1
R15i
2
50 R
V
R
VRv
R
Rv . (2)
17
Dacă, reglând rezistenţa R1, se îndeplineşte condiţia:
4
R2
1
R1
R
V
R
V , rezultă ii
2
50 Avv
R
Rv ;
2
5
R
RA ; (3)
unde A este factorul de amplificare.
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
4.1. Se analizează schema electrică, se deduce (3) şi se calculează amplificarea.
4.2. Măsurarea erorii de neliniaritate:
se conectează intrarea la masă şi se aduce tensiunea de ieşire la valoarea zero, reglând rezistenţa R1 (se reglează zeroul electric); ulterior, se verifică periodic stabilitatea zeroului electric şi se reface reglajul de zero, dacă este cazul;
se calculează valoarea nominală a tensiunii de intrare – Vin:
A
VV
10in ; (4)
şi apoi se determină experimental;
se aplică la intrare o tensiune continuă – vi cu următoarea succesiune de valori discrete: vik = (0,25, 0,5, 0,75, 1)Vin (k = 1, 2, 3, 4);
se măsoară tensiunea de ieşire – v0k, corespunzătoare valorilor vik;
se calculează factorul de amplificare măsurat – A0, în punctul corespunzător capătului gamei dinamice (vi4 = Vin, v04):
i4
040 v
vA ; (5)
se calculează ordonatele punctelor de pe caracteristica de transfer ideală (în
sensul de liniară) – 0kv a amplificatorului:
ik00k vAv ; (6)
se calculează abaterea dintre caracteristica de transfer reală şi ideală: 0k0k0k vvv ; (7)
se calculează eroarea de neliniaritate – εn, cu relaţia:
%1000max
0maxn
v
v ; (8)
datele experimentale se trec într-un două tabel, conform modelului următor:
18
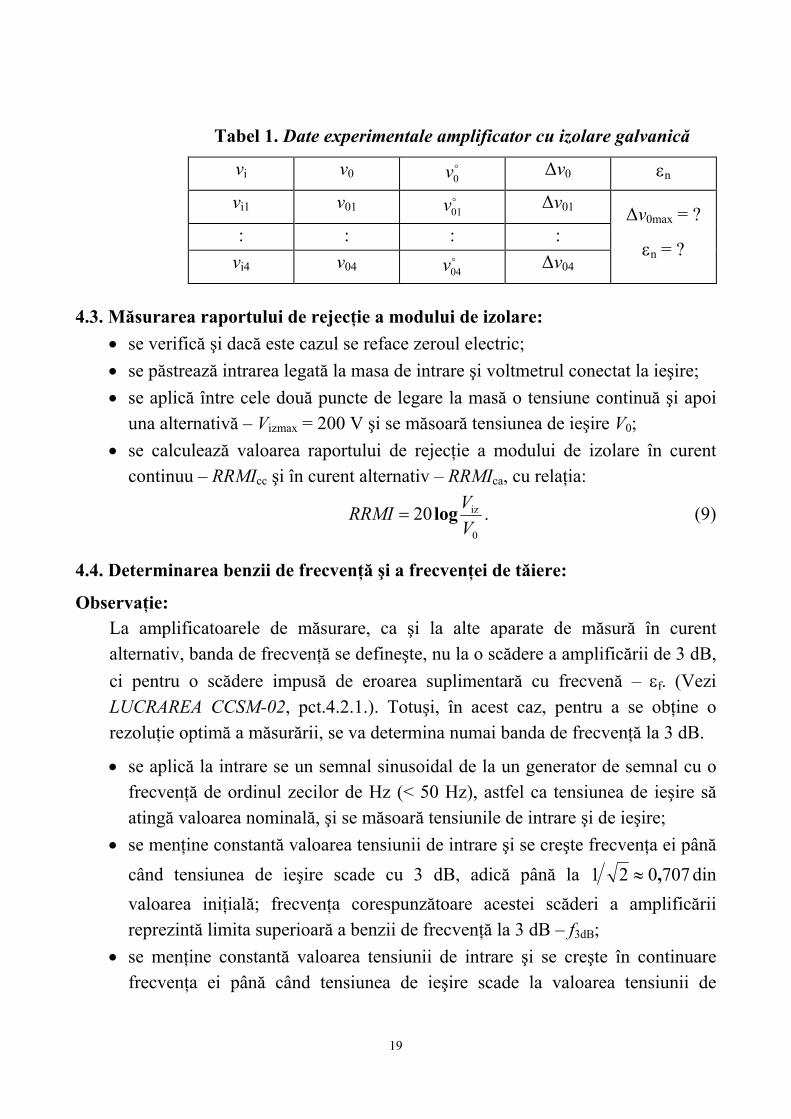
Tabel 1. Date experimentale amplificator cu izolare galvanică
vi v0 0v Δv0 n
vi1 v01 01v Δv01
: : : :
vi4 v04 04v Δv04
Δv0max = ?
n = ?
4.3. Măsurarea raportului de rejecţie a modului de izolare:
se verifică şi dacă este cazul se reface zeroul electric;
se păstrează intrarea legată la masa de intrare şi voltmetrul conectat la ieşire;
se aplică între cele două puncte de legare la masă o tensiune continuă şi apoi una alternativă – Vizmax = 200 V şi se măsoară tensiunea de ieşire V0;
se calculează valoarea raportului de rejecţie a modului de izolare în curent continuu – RRMIcc şi în curent alternativ – RRMIca, cu relaţia:
0
iz20V
VRRMI log . (9)
4.4. Determinarea benzii de frecvenţă şi a frecvenţei de tăiere:
Observaţie: La amplificatoarele de măsurare, ca şi la alte aparate de măsură în curent alternativ, banda de frecvenţă se defineşte, nu la o scădere a amplificării de 3 dB,
ci pentru o scădere impusă de eroarea suplimentară cu frecvenă – f. (Vezi
LUCRAREA CCSM-02, pct.4.2.1.). Totuşi, în acest caz, pentru a se obţine o rezoluţie optimă a măsurării, se va determina numai banda de frecvenţă la 3 dB.
se aplică la intrare se un semnal sinusoidal de la un generator de semnal cu o frecvenţă de ordinul zecilor de Hz (< 50 Hz), astfel ca tensiunea de ieşire să atingă valoarea nominală, şi se măsoară tensiunile de intrare şi de ieşire;
se menţine constantă valoarea tensiunii de intrare şi se creşte frecvenţa ei până
când tensiunea de ieşire scade cu 3 dB, adică până la 707021 , din
valoarea iniţială; frecvenţa corespunzătoare acestei scăderi a amplificării reprezintă limita superioară a benzii de frecvenţă la 3 dB – f3dB;
se menţine constantă valoarea tensiunii de intrare şi se creşte în continuare frecvenţa ei până când tensiunea de ieşire scade la valoarea tensiunii de
19
intrare, adică amplificarea devine unitară; frecvenţa corespunzătoare acestei scăderi a amplificării se numeşte frecvenţa de tăiere – fT;
se reprezintă grafic caracteristica de amplificare funcţie de frecvenţă, marcându-se cele două limite: f3dB şi fT.
5. ÎNTREBĂRI
5.1. Din ce cauză este necesară introducerea unei izolări galvanice pe calea de semnal a unui amplificator de măsurare?
5.2. Care sunt metodele utilizate pentru izolarea galvanică a căii de semnal a unui amplificator de măsurare?
5.3. Este suficientă numai izolarea galvanică a căi de semnal? 5.4. Care este parametrul specific unui amplificator cu izolare galvanică?
20
LUCRARE DE LABORATOR LAB-04
AMPLIFICATOARE LOGARITMICE ŞI EXPONENŢIALE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea amplificatoarelor logaritmice şi exponenţiale. În lucrare se prezintă utilizările şi principiul de funcţionare al amplificatoarelor logaritmice şi exponenţiale, cu precizarea principalelor surse de erori şi a metodelor de compensare a acestora.
2. GENERALITĂŢI Amplificatoarele logaritmice se utilizează pentru compresia semnalelor, atunci când mărimea de măsurat are o gamă largă de variaţie şi este necesară sau posibilă afişarea pe o singură gamă. Prin urmare, scara logaritmică permite afişarea unui interval larg de valori ale măsurandului fără comutarea gamei şi prezintă avantajul că eroarea relativă de măsurare este constantă în orice punct al scării, aceasta fiind o caracteristică proprie numai scării logaritmice. O altă utilizare a amplificatoarelor logaritmice este la calcului analogic al unor
expresii de forma x , x2, x3, 1/x, xy, x/y, etc., situaţie în care pe lângă amplificatorul
logaritmic se mai utilizează şi amplificatoare exponenţiale. În acest scop se fabrică circuite integrate de calcul analogic care pot realiza una sau mai multe din operaţiile matematice menţionate, cu o precizie de 0,1...1%. Funcţionarea amplificatoarelor logaritmice şi exponenţiale se bazează pe caracterul exponenţial al relaţiei curent-tensiune la o joncţiune semiconductoare. Aceeaşi relaţie exponenţială se păstrează şi în cazul unui tranzistor, între curentul de colector şi tensiunea bază-emitor, având expresia simplificată:
T
BECSC V
vIi exp sau
S
CTBE I
ivv ln , (1)
21
unde iC este curentul de colector, IS – curentul de colector de saturaţie, vBE – tensiunea
bază-emitor, iar VT = kT/q – tensiunea termică (k = 8,2610-5eV/K, T – temperatura
absolută, q – sarcina electronului; la temperatura camerei VT 26 mV). O problemă
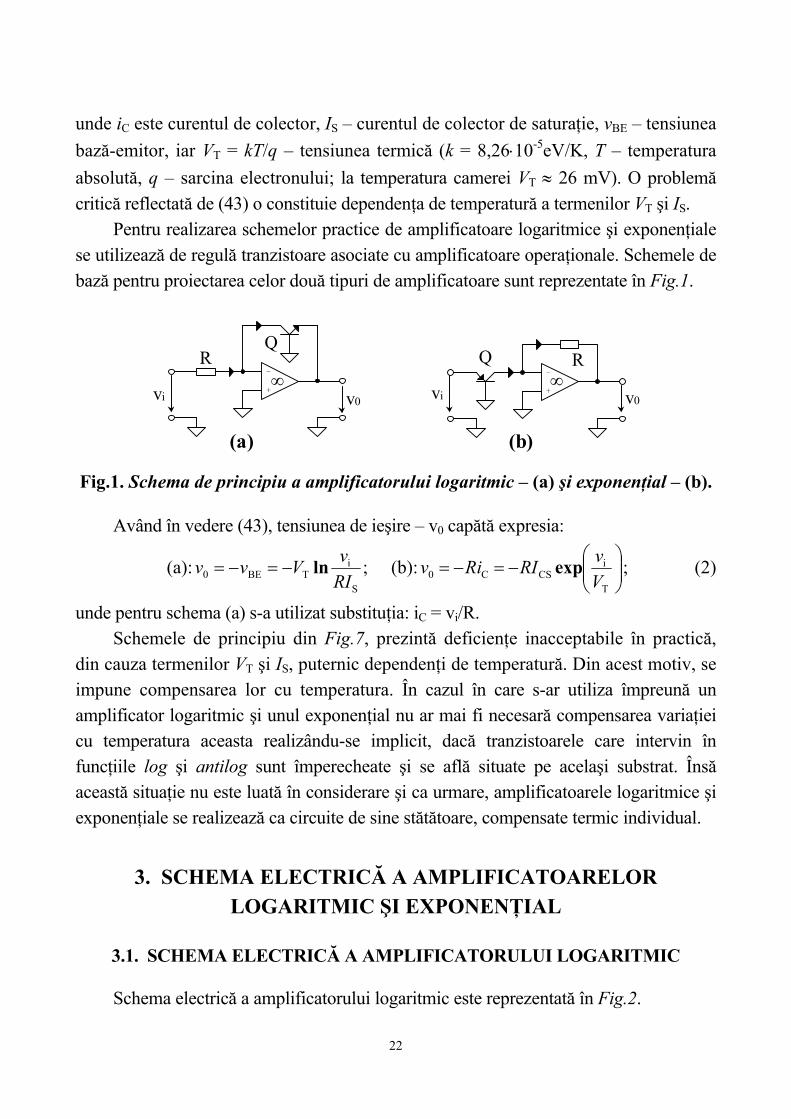
critică reflectată de (43) o constituie dependenţa de temperatură a termenilor VT şi IS. Pentru realizarea schemelor practice de amplificatoare logaritmice şi exponenţiale se utilizează de regulă tranzistoare asociate cu amplificatoare operaţionale. Schemele de bază pentru proiectarea celor două tipuri de amplificatoare sunt reprezentate în Fig.1.
+
-
R
vi v0
Q
(a)
+
-
Q
vi v0
R
(b)
Fig.1. Schema de principiu a amplificatorului logaritmic – (a) şi exponenţial – (b).
Având în vedere (43), tensiunea de ieşire – v0 capătă expresia:
(a):S
iTBE0 RI
vVvv ln ; (b):
T
iCSC0 V
vRIRiv exp ; (2)
unde pentru schema (a) s-a utilizat substituţia: iC = vi/R. Schemele de principiu din Fig.7, prezintă deficienţe inacceptabile în practică,
din cauza termenilor VT şi IS, puternic dependenţi de temperatură. Din acest motiv, se impune compensarea lor cu temperatura. În cazul în care s-ar utiliza împreună un amplificator logaritmic şi unul exponenţial nu ar mai fi necesară compensarea variaţiei cu temperatura aceasta realizându-se implicit, dacă tranzistoarele care intervin în funcţiile log şi antilog sunt împerecheate şi se află situate pe acelaşi substrat. Însă această situaţie nu este luată în considerare şi ca urmare, amplificatoarele logaritmice şi exponenţiale se realizează ca circuite de sine stătătoare, compensate termic individual.
3. SCHEMA ELECTRICĂ A AMPLIFICATOARELOR LOGARITMIC ŞI EXPONENŢIAL
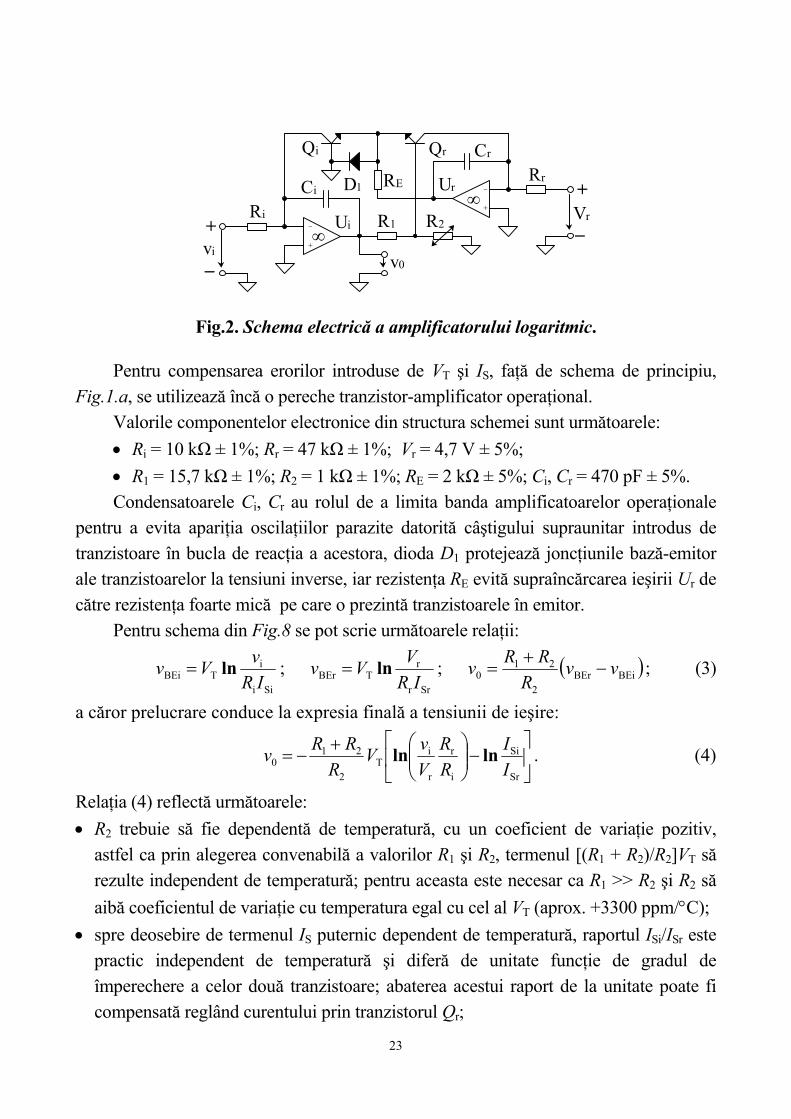
3.1. SCHEMA ELECTRICĂ A AMPLIFICATORULUI LOGARITMIC
Schema electrică a amplificatorului logaritmic este reprezentată în Fig.2.
22
+
-
+
-
Ri
vi
v0
Vr
Rr
Ci
CrQi Qr
RED1
Ui
Ur
R1 R2+
+
Fig.2. Schema electrică a amplificatorului logaritmic.
Pentru compensarea erorilor introduse de VT şi IS, faţă de schema de principiu, Fig.1.a, se utilizează încă o pereche tranzistor-amplificator operaţional. Valorile componentelor electronice din structura schemei sunt următoarele:
Ri = 10 kΩ ± 1%; Rr = 47 kΩ ± 1%; Vr = 4,7 V ± 5%;
R1 = 15,7 kΩ ± 1%; R2 = 1 kΩ ± 1%; RE = 2 kΩ ± 5%; Ci, Cr = 470 pF ± 5%. Condensatoarele Ci, Cr au rolul de a limita banda amplificatoarelor operaţionale pentru a evita apariţia oscilaţiilor parazite datorită câştigului supraunitar introdus de tranzistoare în bucla de reacţia a acestora, dioda D1 protejează joncţiunile bază-emitor ale tranzistoarelor la tensiuni inverse, iar rezistenţa RE evită supraîncărcarea ieşirii Ur de către rezistenţa foarte mică pe care o prezintă tranzistoarele în emitor. Pentru schema din Fig.8 se pot scrie următoarele relaţii:
Sii
iTBEi IR
vVv ln ;
Srr
rTBEr IR
VVv ln ; BEiBEr
2
210 vv
R
RRv ; (3)
a căror prelucrare conduce la expresia finală a tensiunii de ieşire:
Sr
Si
i
r
r
iT
2
210 I
I
R
R
V
vV
R
RRv lnln . (4)
Relaţia (4) reflectă următoarele:
R2 trebuie să fie dependentă de temperatură, cu un coeficient de variaţie pozitiv, astfel ca prin alegerea convenabilă a valorilor R1 şi R2, termenul [(R1 + R2)/R2]VT să rezulte independent de temperatură; pentru aceasta este necesar ca R1 >> R2 şi R2 să
aibă coeficientul de variaţie cu temperatura egal cu cel al VT (aprox. +3300 ppm/C);
spre deosebire de termenul IS puternic dependent de temperatură, raportul ISi/ISr este practic independent de temperatură şi diferă de unitate funcţie de gradul de împerechere a celor două tranzistoare; abaterea acestui raport de la unitate poate fi compensată reglând curentului prin tranzistorul Qr;
23
pentru a fi posibilă trecerea la logaritmul natural la cel zecimal este necesară
asigurarea egalităţii [(R1 + R2)/R2]VT = lg(e) 0,4343, unde “e” reprezintă baza
logaritmului natural. Cu observaţiile de mai sus, având în vedere valorile componentelor exprimate în SISTEMUL INTERNAŢIONAL DE UNITĂŢI, (4) devine:
ii
r
r
i0 v
R
R
V
vv lglg
. (5)
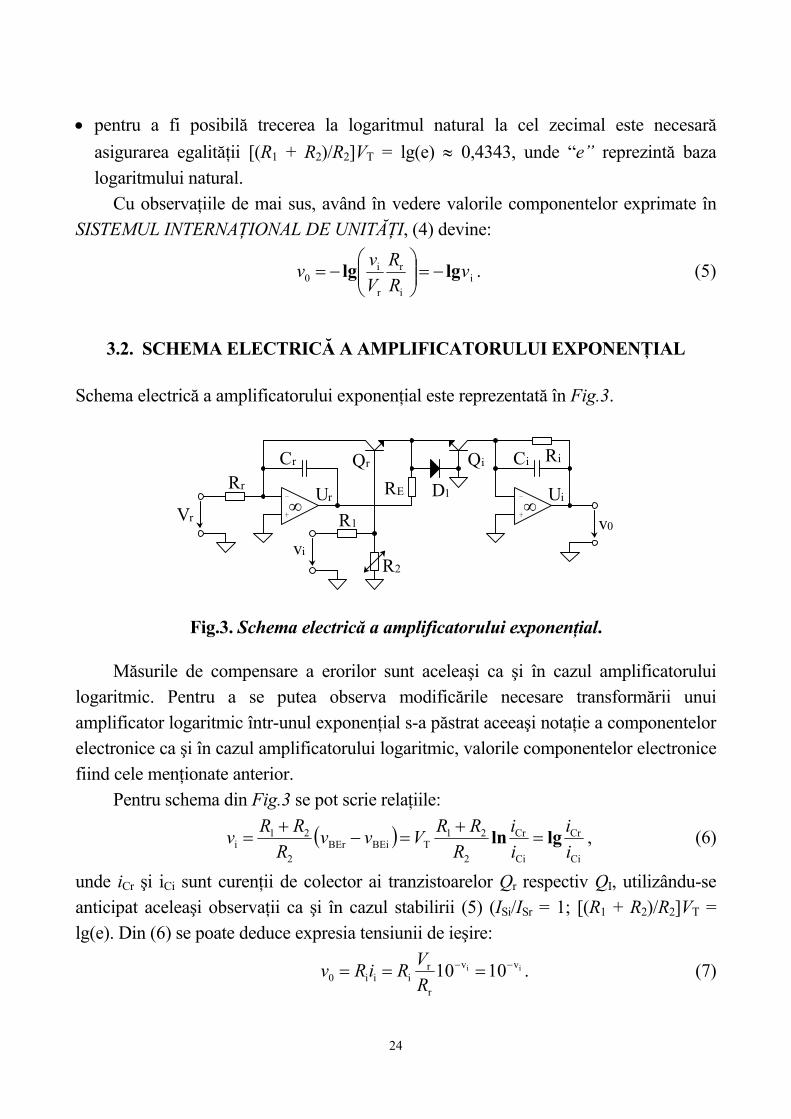
3.2. SCHEMA ELECTRICĂ A AMPLIFICATORULUI EXPONENŢIAL
Schema electrică a amplificatorului exponenţial este reprezentată în Fig.3.
+
-
+
-
Ri
vi
v0Vr
Rr
CiCr QiQr
RE D1 UiUr
R1
R2
Fig.3. Schema electrică a amplificatorului exponenţial.
Măsurile de compensare a erorilor sunt aceleaşi ca şi în cazul amplificatorului logaritmic. Pentru a se putea observa modificările necesare transformării unui amplificator logaritmic într-unul exponenţial s-a păstrat aceeaşi notaţie a componentelor electronice ca şi în cazul amplificatorului logaritmic, valorile componentelor electronice fiind cele menţionate anterior. Pentru schema din Fig.3 se pot scrie relaţiile:
Ci
Cr
Ci
Cr
2
21TBEiBEr
2
21i i
i
i
i
R
RRVvv
R
RRv lgln
, (6)
unde iCr şi iCi sunt curenţii de colector ai tranzistoarelor Qr respectiv QI, utilizându-se anticipat aceleaşi observaţii ca şi în cazul stabilirii (5) (ISi/ISr = 1; [(R1 + R2)/R2]VT = lg(e). Din (6) se poate deduce expresia tensiunii de ieşire:
ii vv
r
riii0 1010 R
VRiRv . (7)
24
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
Observaţie: Pe macheta de laborator cele două amplificatoare (logaritmic şi exponenţial) sunt realizate cu aceleaşi componente, selectarea unuia sau altuia dintre ele realizându-se cu ajutorul a două comutatoare notate S1 şi S2.
4.1. Se analizează schemele electrice ale amplificatorului logaritmic şi exponenţial se calculează şi se verifică valorile numerice ale termenilor din (5) şi (7).
4.2. Verificarea funcţiei de transfer a amplificatorului logaritmic:
se poziţionează S1, S2 = 1;
se aplică la intrare o tensiune continuă – vi cu următoarele valori: 10, 20...90 mV; 0,1, 0,2...0,9 V; 1, 2...10 V şi se măsoară cu un voltmetru numeric tensiunea de intrare – vi şi de ieşire – v0, în fiecare punct;
se calculează în fiecare punct valoarea ideală a tensiunii de ieşire cu (5) – 0v ;
se calculează eroarea relativă în fiecare punct cu relaţia:
%1000
00
0
0
v
vv
v
v
; (8)
datele experimentale se trec într-un tabel, conform modelului următor:
Tabel 1/2. Date experimentale amplificator logaritmic/exponenţial
vi v0 0v Δv0 n
vi1 v01 01v Δv01 1
: : : : :
vin v0n 0nv Δv0n n
se selectează eroarea relativă maximă care reprezintă eroarea amplificatorului;
se reprezintă grafic curbele: v0 = f(vi) şi = f(vi);
4.3. Verificarea funcţiei de transfer a amplificatorului exponenţial:
se poziţionează S1, S2 = 2 şi se repetă operaţiile de la pct.4.2, utilizând pentru calculul valorii ideale a tensiunii de ieşire (7).
datele experimentale se trec într-un tabel conform modelului de mai sus.
4.4. Se analizează rezultatele şi căile de reducere a erorilor.
25
26
5. ÎNTREBĂRI
5.3. Ce utilizări au amplificatoarele logaritmice şi exponenţiale? 5.1. Ce fapt stă la baza funcţionării amplificatoarelor logaritmice şi exponenţiale? 5.2. Care sunt principalele surse de erori ce intervin în funcţionarea amplificatoarelor
logaritmice şi exponenţiale şi care sunt metodele de compensare a acestora?
LUCRARE DE LABORATOR LAB-05
CONVERTOARE TENSIUNE-CURENT
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea convertoarelor tensiune-curent, în curent continuu şi în curent alternativ. Lucrarea cuprinde aspecte referitoare la utilizarea, clasificarea, principiile de funcţionare, proiectarea şi realizarea convertoarelor tensiune-curent.
2. GENERALITĂŢI
Convertoarele tensiune-curent sunt blocuri funcţionale uzuale în structura aparatelor electronice de măsură şi control. Astfel de convertoare se utilizează la realizarea convertoarelor tensiune-frecvenţă, a generatoarelor de tensiune liniar variabilă controlate în tensiune, a convertoarelor analog-numerice şi la transmiterea semnalelor pe linii lungi sau pe sarcini inductive. O aplicaţie tipică a convertoarelor tensiune-curent este aceea de bloc de ieşire pentru aparatele destinate sistemelor de măsurare şi/sau automatizare care lucrează cu curenţi unificaţi (4...20 mA etc.).
Convertoarele tensiune-curent pot fi realizate şi cu ieşiri multiple. Acestea sunt utilizate la realizarea convertoarelor numeric-analogice cu generatoare de curenţi ponderaţi. În aceste caz, curenţii de ieşire sunt proporţionali cu puterile cifrei doi, iar numărul de ieşiri este egal cu numărului de biţi ai convertorului.
Convertoarele tensiune-curent pot genera curenţi unidirecţionali (de o singură polaritate) sau bidirecţionali (de ambele polarităţi).
Convertoarele tensiune-curent unidirecţionale provin din generatoarele de curent constant cu tranzistor bipolar sau cu efect de câmp, tensiunea de referinţă fiind înlocuită cu o tensiune de comandă variabilă.
Cel mai simplu convertor tensiune-curent bidirecţional, pentru sarcini flotante, se poate obţine conectând impedanţa de sarcină în locul rezistenţei de reacţie intrare-ieşire a unui amplificator operaţional în montaj inversor.
27
Schemele de convertoare tensiune-curent diferă şi în funcţie de modul cum se conectează rezistenţa de sarcină. Din acest punct de vedere, rezistenţa de sarcină poate fi flotantă sau poate avea în mod obligatoriu o bornă conectată la masă.
În ceea ce priveşte intrarea, convertoarele tensiune-curent pot avea intrare simplă (o singură bornă de semnal, a două fiind în mod obligatoriu masa) sau intrare diferenţială (cu două borne de semnal şi una de masă), caz în care tensiunea de comandă poate fi şi flotantă.
Parametrul esenţial pentru un convertor tensiune-curent este, ca la orice sursă de curent, rezistenţa echivalentă de ieşire, deoarece se manifestă ca o rezistenţă fizică conectată în paralel cu sarcina. Acest parametru poate fi uneori mai greu de realizat la un nivel performant, decât precizia sau stabilitatea.
Convertoarele tensiune-curent pentru sarcini cu o bornă la masă şi tensiune de intrare flotantă se realizează plecând de la configuraţiile cunoscute de amplificatoare diferenţiale. Aceste tipuri de convertoare au performanţe mai slabe decât cele unidirecţionale pentru că sunt afectate de tensiunile de mod comun şi de imposibilitatea împerecherii perfecte a rezistenţelor din reţeaua de reacţie, fapt ce se reflectă în reducerea rezistenţei de ieşire a convertorului. De exemplu, un convertor tensiune-curent unidirecţional poate avea o rezistenţă de ieşire cu valoarea tipică de 109 Ω, pe când unul bidirecţional doar de 105…106 Ω.
3. SCHEMA ELECTRICĂ A CONVERTORULUI TENSIUNE-CURENT
Convertorul tensiune-curent studiat în continuare este un convertor bidirecţional
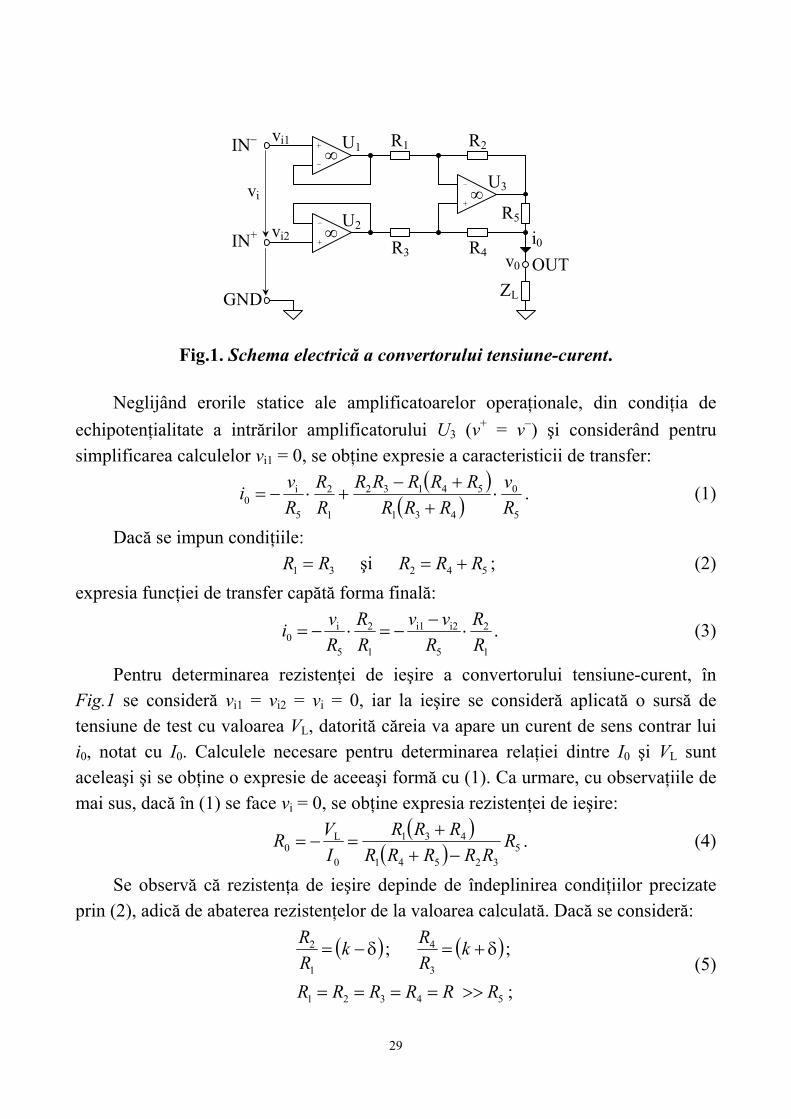
cu intrare diferenţială şi sarcină conectată la masă (sau alt potenţial, fără depăşirea gamei dinamice a tensiunii de ieşire), conform Fig.1.
Convertorul tensiune-curent este realizat cu amplificatorul operaţional U3 şi rezistenţele aferente (R1...R5). Repetoarele de tensiune U1 şi U2 au numai rolul de a asigura o impedanţă mare de intrare. Ele pot lipsi dacă sursa de semnal de intrare are o impedanţă de ieşire suficient de mică, comparativ cu impedanţa de intrare a convertorului tensiune-curent.
Analizând schema electrică din F1g.1, se poate uşor observa că acest tip de convertor tensiune-curent provine dintr-un amplificator diferenţial.
Fig.1. Schema electrică a convertorului tensiune-curent.
Neglijând erorile statice ale amplificatoarelor operaţionale, din condiţia de
echipotenţialitate a intrărilor amplificatorului U3 (v+ = v) şi considerând pentru
simplificarea calculelor vi1 = 0, se obţine expresie a caracteristicii de transfer:
5
0
431
54132
1
2
5
i0 R
v
RRR
RRRRR
R
R
R
vi
. (1)
Dacă se impun condiţiile:
31 RR şi 542 RRR ; (2)
expresia funcţiei de transfer capătă forma finală:
1
2
5
i2i1
1
2
5
i0 R
R
R
vv
R
R
R
vi
. (3)
Pentru determinarea rezistenţei de ieşire a convertorului tensiune-curent, în Fig.1 se consideră vi1 = vi2 = vi = 0, iar la ieşire se consideră aplicată o sursă de tensiune de test cu valoarea VL, datorită căreia va apare un curent de sens contrar lui i0, notat cu I0. Calculele necesare pentru determinarea relaţiei dintre I0 şi VL sunt aceleaşi şi se obţine o expresie de aceeaşi formă cu (1). Ca urmare, cu observaţiile de mai sus, dacă în (1) se face vi = 0, se obţine expresia rezistenţei de ieşire:
5
32541
431
0
L0 R
RRRRR
RRR
I
VR
. (4)
Se observă că rezistenţa de ieşire depinde de îndeplinirea condiţiilor precizate prin (2), adică de abaterea rezistenţelor de la valoarea calculată. Dacă se consideră:
;
; ;
54321
3
4
1
2
RRRRRR
kR
Rk
R
R
(5)
29
(4) devine:
5
531
4310
RR
kkRR
RRRR . (6)
unde δ este abaterea raportului k de la valoarea calculată. Valoarea lui abaterii δ poate fi exprimată funcţie de eroarea rezistenţelor:
R550 2
1
2
2
RR
RRR
R
Rk
RR
RR, (7)
unde ΔR este eroarea absolută, iar R eroarea relativă a rezistenţelor.
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
4.1. Se deduc, efectuând toate operaţiile, (3) şi (7) şi se calculează valorile lor numerice.
4.2. Considerând că tensiunea de intrare nominală este Vin = 1 V şi că tensiunea maximă de ieşire a amplificatorului operaţional U3 = 10V se calculează valoarea maximă a rezistenţei de sarcină.
4.3. Se calculează valorile componentelor schemei din Fig.0, astfel încât să se obţină un convertor tensiune-curent cu următoarele caracteristici:
tensiunea diferenţială de intrare: 0...10 V;
curentul de ieşire: 0...10 mA;
rezistenţa de sarcină: max. 1 k;
tensiunea de ieşire a amplificatorului U3 = max. 11 V;
rezistenţa echivalentă la intrările U3: max. 10 kΩ.
4.4. Determinarea erorii de neliniaritate în curent continuu:
se conectează o intrare la masă, la cealaltă intrare se aplică o tensiune continuă – vi cu valorile vik = (0, 0,25, 0,5, 0,75, 1)Vin (k = 1...5) şi se măsoară valorile corespunzătoare ale curentului de ieşire – i0k;
se calculează admitanţa de transfer – J21 în punctul (vi5 = Vin, i03) cu relaţia:
i5
0521 v
iJ ; (8)
se calculează valorile curentului de ieşire de pe caracteristica ideală de transfer (în sensul de liniară):
30
ik21k0 vJi ; (9)
se calculează eroarea absolută: k0k0k0 iii ; (10)
se selectează eroarea absolută maximă şi se calculează eroarea de neliniaritate:
%1000max
0maxn i
i ; (11)
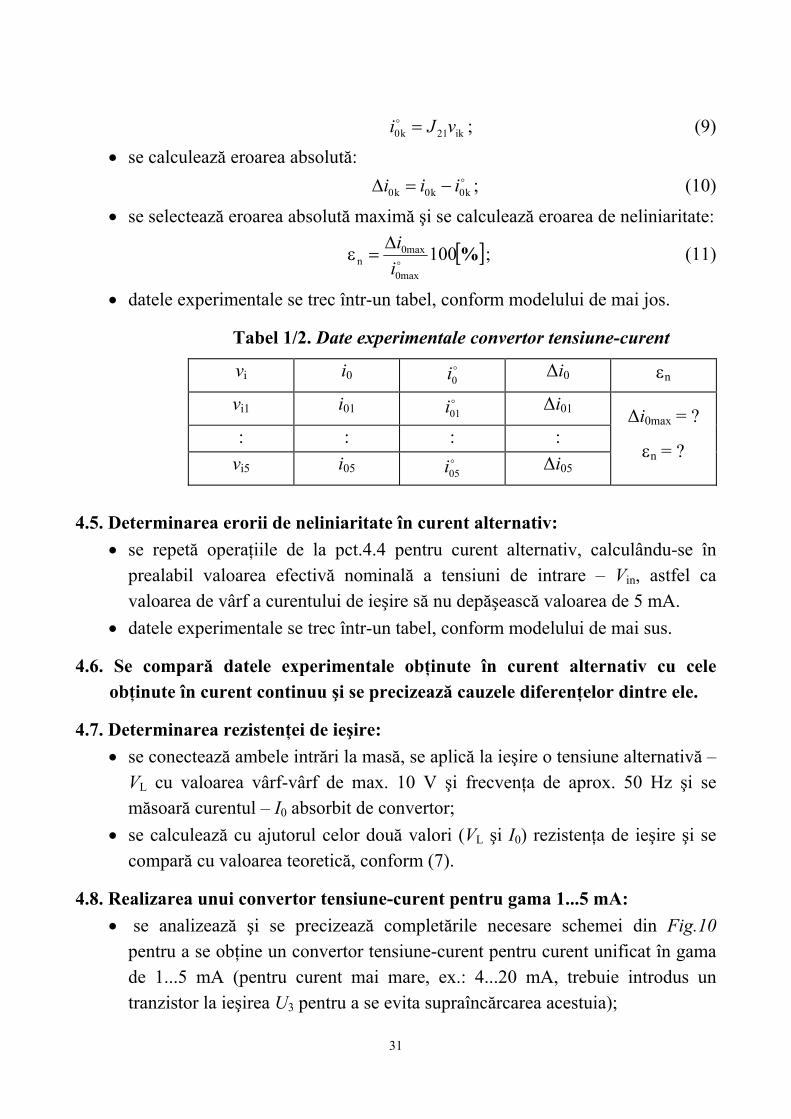
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1/2. Date experimentale convertor tensiune-curent
vi i0 0i Δi0 n
vi1 i01 01i Δi01
: : : :
vi5 i05 05i Δi05
Δi0max = ?
n = ?
4.5. Determinarea erorii de neliniaritate în curent alternativ:
se repetă operaţiile de la pct.4.4 pentru curent alternativ, calculându-se în prealabil valoarea efectivă nominală a tensiuni de intrare – Vin, astfel ca valoarea de vârf a curentului de ieşire să nu depăşească valoarea de 5 mA.
datele experimentale se trec într-un tabel, conform modelului de mai sus.
4.6. Se compară datele experimentale obţinute în curent alternativ cu cele obţinute în curent continuu şi se precizează cauzele diferenţelor dintre ele.
4.7. Determinarea rezistenţei de ieşire:
se conectează ambele intrări la masă, se aplică la ieşire o tensiune alternativă – VL cu valoarea vârf-vârf de max. 10 V şi frecvenţa de aprox. 50 Hz şi se măsoară curentul – I0 absorbit de convertor;
se calculează cu ajutorul celor două valori (VL şi I0) rezistenţa de ieşire şi se compară cu valoarea teoretică, conform (7).
4.8. Realizarea unui convertor tensiune-curent pentru gama 1...5 mA:
se analizează şi se precizează completările necesare schemei din Fig.10 pentru a se obţine un convertor tensiune-curent pentru curent unificat în gama de 1...5 mA (pentru curent mai mare, ex.: 4...20 mA, trebuie introdus un tranzistor la ieşirea U3 pentru a se evita supraîncărcarea acestuia);
31
se realizează practic convertorul tensiune-curent în gama 1...5 mA şi i se ridică caracteristica de transfer;
se proiectează un convertor tensiune-curent pentru gama 4...20 mA.
4.9. Se analizează comportarea şi caracteristicile metrologice ale schemei din Fig.1 şi se propun măsuri de îmbunătăţire a performanţelor.
5. ÎNTREBĂRI
5.1. Care sunt utilizările tipice ale convertoarelor tensiune-curent? 5.2. Care sunt tipurile principale de convertoarelor tensiune-curent? 5.3. Care este efectul unei rezistenţe de ieşire a convertoarelor tensiune-curent de
valoare redusă? 5.4. Ce modificări trebuie aduse schemei unui convertor tensiune-curent de uz
general pentru a-l face capabil să lucreze în sistemele de curenţi unificaţi?
32
LUCRARE DE LABORATOR LAB-06
CONVERTOARE CURENT-TENSIUNE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea convertoarelor curent-tensiune. Lucrarea prezintă aspecte referitoare la utilizarea, caracteristicile, principiile de funcţionare, proiectarea şi realizarea convertoarelor curent-tensiune. Pentru experimentare este prezentat un convertor curent-tensiune care permite măsurarea curentului într-un punct de potenţial flotant, fără a introduce rezistenţă serie suplimentară în circuitul de măsurare.
2. GENERALITĂŢI Sesizarea, măsurarea sau prelucrarea prin mijloace electronice a unui semnal sub formă de curent electric presupune de cele mai multe ori conversiunea curent-tensiune. Această situaţie apare fiindcă tensiunea este mărimea care se pretează cel mai simplu la majoritatea prelucrărilor cunoscute care trebuie efectuate asupra unui semnal electric, fiind mărimea convertibilă cel mai simplu şi direct sub formă numerică. Ca urmare, convertoarele curent-tensiune au o utilizare largă în structura aparatelor de măsurare şi control, care le situează în rândul blocurilor de bază, alături de amplificatoare, multiplicatoare, circuite de eşantionare-memorare, convertoare tensiune-curent, analog-numerice sau numeric-analogice, etc.
Cel mai simplu convertor curent-tensiune este o rezistenţă cuadripolară, numită şunt atunci când este utilizată la măsurarea curentului. Convertorul cu ajutorul căruia este sesizată căderea de tensiune pe şunt trebuie să aibă o rezistenţă de intrare mult mai mare decât cea a şuntului, pentru a nu introduce erori inacceptabile. Şuntul construit sub formă de rezistenţă cuadripolară reclamă utilizarea unui amplificator diferenţial, indiferent dacă şuntul este conectat la masa sau este situat la un potenţial flotant. În cazul măsurării curenţilor mici cu precizii moderate se poate utiliza şi o rezistenţă în conexiune dipolară, care în cazul în care este conectată cu o bornă la masă
33
nu necesită amplificator diferenţial, fiind suficient un amplificator cu o singură intrare (cealaltă fiind masa). Introducerea şuntului în circuitul de măsurare produce o eroare sistematică de metodă, fiindcă schimbă rezistenţa totală a circuitului, deci şi valoarea curentului. În cazul prelucrării curenţilor de valoare redusă, care nu depăşesc curenţii de ieşire ai amplificatoarelor operaţionale, este posibil ca şuntul să fie plasat în reţeaua de reacţie a unui amplificator operaţional, situaţie în care curentul prin circuit nu mai este influenţat de prezenţa şuntului, ci numai de tensiunea de decalaj a amplificatorului operaţional, cu efect practic neglijabil. În cazul în care curentul poate fi măsurat într-un punct aflat la potenţialul masei, problema poate fi rezolvată simplu cu ajutorul unui amplificator operaţional şi a unei rezistenţe de precizie plasată în bucla de reacţie a acestuia. Situaţia este mai complicată dacă trebuie măsurat curent într-un punct de potenţial flotant. Această problemă poate fi rezolvată clasic, utilizând un şunt şi un amplificator de măsurare diferenţial, necesar pentru măsurarea căderii de tensiune pe şunt. Convertoarele curent-tensiune fără şunt nu se utilizează pentru curenţi mari, deoarece curentul de intrare se închide prin sursele de alimentare şi prin ieşirea amplificatoarelor operaţionale utilizate, crescând astfel puterea disipată.
3. SCHEMA ELECTRICĂ A CONVERTORULUI CURENT-TENSIUNE
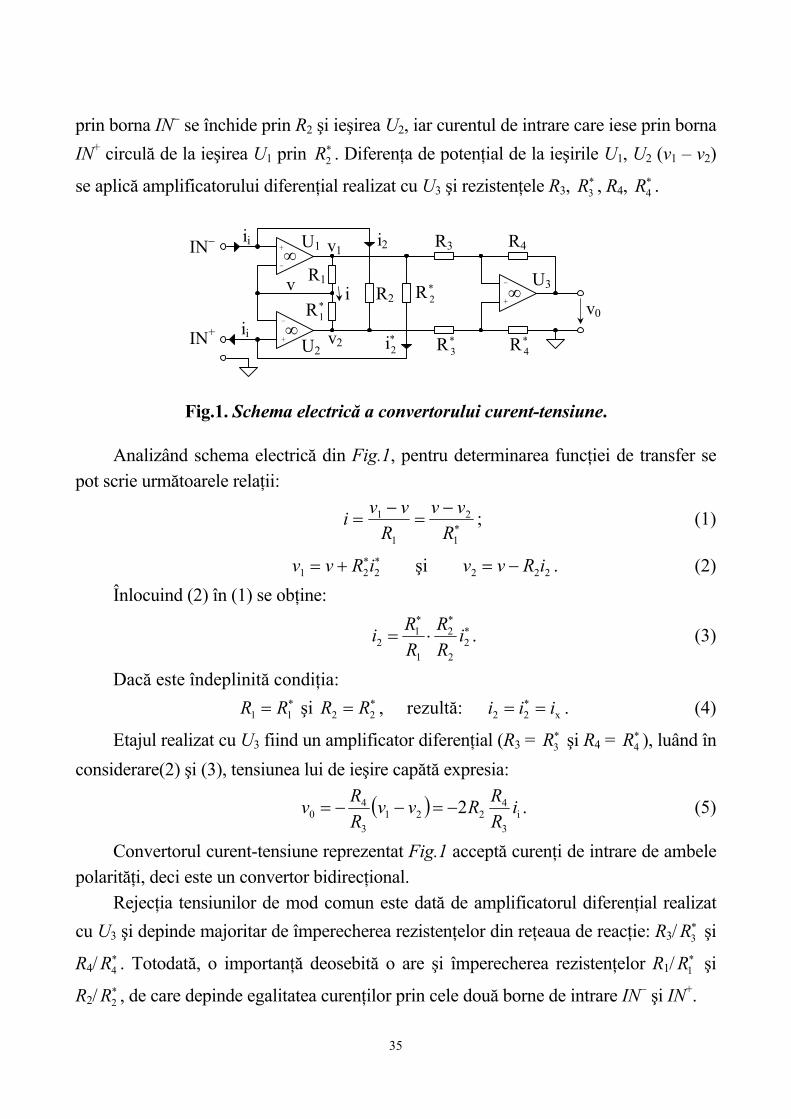
Convertorul curent-tensiune studiat în continuare este un convertor care rezolvă într-un mod elegant problema măsurării curentului într-un punct de potenţial flotant, fără a necesita utilizarea unui şunt, deci prezintă avantajul de a nu introduce o rezistenţă suplimentară în circuitul de măsurare, conform schemei electrice reprezentată în Fig.1. Valorile rezistenţelor din componenţa convertorului sunt următoarele:
R1 = 1R = R3 =
3R = 10 kΩ ± 0,25%;
R2 = 2R = 100 Ω ± 0,25%; R4 =
4R = 100 kΩ ± 0,25%.
Din Fig.11 se observă că singura perturbare a circuitului de măsurare o constituie suma tensiunilor de decalaj a amplificatoarelor U1 şi U2, care este mult mai mică decât căderea de tensiune pe un şunt şi apoi aceasta poate fi compensată prin metode uzuale. Neglijând erorile statice ale amplificatoarelor operaţionale, se poate observa că
diferenţa de potenţial dintre intrările IN şi IN+ este nulă. Curentul de intrare care intră
34
prin borna IN se închide prin R2 şi ieşirea U2, iar curentul de intrare care iese prin borna
IN+ circulă de la ieşirea U1 prin . Diferenţa de potenţial de la ieşirile U1, U2 (v1 – v2)
se aplică amplificatorului diferenţial realizat cu U3 şi rezistenţele R3, , R4, .
2R
3R
4R
+
-
+
-
+
-
ii
R1
v01R
IN+
ii
U1
U2
U3R2
R4R3IN
2R
3R
4R
v i
v1
v2
i2
2i
Fig.1. Schema electrică a convertorului curent-tensiune.
Analizând schema electrică din Fig.1, pentru determinarea funcţiei de transfer se pot scrie următoarele relaţii:
1
2
1
1
R
vv
R
vvi ; (1)
221 iRvv şi 222 iRvv . (2)
Înlocuind (2) în (1) se obţine:
22
2
1
12 i
R
R
R
Ri . (3)
Dacă este îndeplinită condiţia: 11 RR şi , rezultă: . (4) 22 RR x22 iii
Etajul realizat cu U3 fiind un amplificator diferenţial (R3 = şi R4 = ), luând în
considerare(2) şi (3), tensiunea lui de ieşire capătă expresia:
3R
4R
i3
4221
3
40 2 i
R
RRvv
R
Rv . (5)
Convertorul curent-tensiune reprezentat Fig.1 acceptă curenţi de intrare de ambele polarităţi, deci este un convertor bidirecţional. Rejecţia tensiunilor de mod comun este dată de amplificatorul diferenţial realizat
cu U3 şi depinde majoritar de împerecherea rezistenţelor din reţeaua de reacţie: R3/ şi
R4/ . Totodată, o importanţă deosebită o are şi împerecherea rezistenţelor R1/ şi
R2/ , de care depinde egalitatea curenţilor prin cele două borne de intrare IN şi IN+.
3R1R
4R2R
35
4. PROBLEME TEORETICE ŞI EXPERIMENTALE
4.1. Considerând că tensiunile nominale la intrările şi ieşirile amplificatoarelor operaţionale sunt de 10 V, se calculează următoarele:
intervalul de variaţie a curentului de intrare;
intervalul maxim de variaţie a tensiunii de mod comun la intrare.
4.2. Cu aceleaşi restricţii ca la pct.4.1 se proiectează un convertor curent-tensiune pentru curent unificat gama 4...20 mA, care să accepte o tensiune de mod comun de 9,8 V.
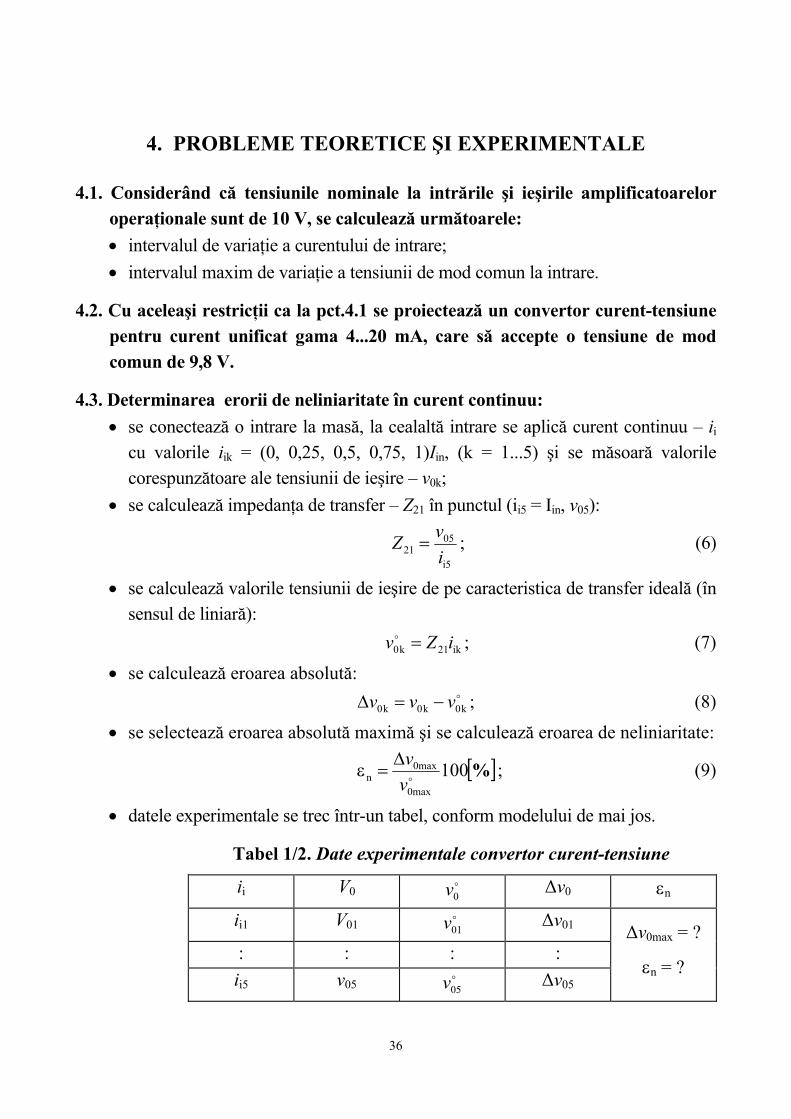
4.3. Determinarea erorii de neliniaritate în curent continuu:
se conectează o intrare la masă, la cealaltă intrare se aplică curent continuu – ii
cu valorile iik = (0, 0,25, 0,5, 0,75, 1)Iin, (k = 1...5) şi se măsoară valorile corespunzătoare ale tensiunii de ieşire – v0k;
se calculează impedanţa de transfer – Z21 în punctul (ii5 = Iin, v05):
i5
0521 i
vZ ; (6)
se calculează valorile tensiunii de ieşire de pe caracteristica de transfer ideală (în sensul de liniară):
ik21k0 iZv ; (7)
se calculează eroarea absolută: k0k0k0 vvv ; (8)
se selectează eroarea absolută maximă şi se calculează eroarea de neliniaritate:
%1000max
0maxn v
v ; (9)
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1/2. Date experimentale convertor curent-tensiune
ii V0 0v Δv0 n
ii1 V01 01v Δv01
: : : :
ii5 v05 05v Δv05
Δv0max = ?
n = ?
36
4.4. Determinarea caracteristicii de transfer în curent alternativ:
se repetă operaţiile de la pct.4 pentru curent alternativ, calculându-se în prealabil valoarea efectivă nominală a curentului de intrare – Iin, astfel ca valoarea de vârf a tensiunii de ieşire să nu depăşească 10 V;
datele experimentale se trec într-un tabel, conform modelului de mai sus.
4.5. Se compară rezultatele obţinute în curent alternativ cu cele obţinute în curent continuu şi se precizează cauzele diferenţelor dintre rezultate.
5. ÎNTREBĂRI
5.1. Care sunt utilizările tipice ale convertoarelor curent-tensiune? 5.2. Care sunt tipurile reprezentative de convertoare curent-tensiune? 5.3. Care este principala sursă de erori a convertoarelor curent-tensiune?
37
LUCRARE DE LABORATOR LAB-07
MULTIPLICATOARE ANALOGICE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea multiplicatoarelor analogice. Lucrarea prezintă aspecte referitoare la utilizarea, principiile de funcţionare şi la caracteristicile specifice ale multiplicatoarelor analogice. Pentru experimentare este prezentat un multiplicator analogic cu modulare amplitudine-durată, care, dintre toate tipurile de multiplicatoare analogice cunoscute, oferă cea mai mare precizie.
2. GENERALITĂŢI
Datorită dezvoltării tehnologiei circuitelor integrate, multiplicatorul analogic a devenit un bloc funcţional uzual, la fel ca şi amplificatorul operaţional. Creşterea performanţelor, concomitent cu scăderea preţului de cost, a extins foarte mult aria de aplicaţii a multiplicatoarelor analogice. Operaţiile de bază care pot fi efectuate cu ajutorul multiplicatoarelor analogice sunt: înmulţire, ridicare la pătrat, împărţire, extragere rădăcină pătrată, ridicare la o putere variabilă, calculul valorii medii pătratice, generarea unei serii de puteri, etc., iar aplicaţiile sunt în următoarele domenii:
circuite de calcul analogic; wattmetre electronice;
generatoare de semnal controlate prin tensiune;
circuite pentru controlul automat al amplificării;
dubloare de frecvenţă; modulatoare în amplitudine;
detectoare sincrone şi detectoare sensibile la fază;
demodulatoare pentru modulaţie în frecvenţă;
circuite cu calare de fază – PLL (phase-lock loop). Multiplicatorul analogic este un bloc electronic de calcul analogic prevăzut cu două intrări şi o ieşire, la care tensiunea de ieşire – v0 este proporţională cu produsul celor două tensiuni vx şi vy aplicate la intrare, conform relaţiei:
38
k
vvv yx
0
, (1)
unde k este o constantă numită factor de proporţionalitate sau factor de scară şi are dimensiunea unei tensiuni, fiind exprimată în volţi. Multiplicatoarele analogice pot funcţiona în unul, două sau patru cadrane, în funcţie de semnul (polaritatea) tensiunilor de intrare accptat, semnul tensiunii de ieşire corespunzând semnului rezultat din produsul algebric.
3. CARACTERISTICILE MULTIPLICATOARELOR ANALOGICE
Luând în considerare erorile inerente oricărui obiect sau sistem fizic, expresia (1), corespunzătoare situaţiei ideale, capătă forma:
k
vvv yx
0 , (2)
unde reprezintă eroarea totală, funcţie de ambele variabile de intrare vx, vy, poate fi
reprezentată ca o suprafaţă în planul tridimensional (vx, vy, ε). O astfel de eroare este mai greu de evaluat, în comparaţie cu erorile circuitelor cu o singură intrare de semnal. În unele cataloage, suprafaţa (vx, vy) este descrisă prin contururi de eroare constantă în planul (vx, vy), în altele sunt reprezentate curbele obţinute prin intersectarea acestei suprafeţe cu planele (vx = 0, vy = ±vymax) şi (vy = 0, vx = ±vxmax). În specificaţiile sumare este dată în procente o eroare maximă raportată la tensiunea de ieşire nominală. Eroarea totală poate fi descompusă în mai multe componente, care pot fi grupate în erori statice şi erori dinamice.
3.1. ERORILE STATICE ALE MULTIPLICATOARELOR ANALOGICE
Prin erori statice se înţeleg erorile măsurabile la ieşire când tensiunile de intrare sunt continue sau lent variabile. 3.1.1. Tensiunea de decalaj la ieşire – reprezintă tensiunea măsurată la ieşire când
tensiunile de intrare sunt nule:
0vv0d0yx
VV . (3)
Vd0 poate atinge câteva zeci de mV şi poate fi compensată prin reglaje exterioare. Se poate specifica şi coeficientul de variaţie cu temperatura a tensiunii de decalaj.
39
3.1.2. Tensiunile de decalaj datorită cuplajului parazit – reprezintă tensiunile ce apar la ieşire când la una din intrări se aplică tensiune zero, iar la cealaltă tensiune maximă. Valorile acestor tensiuni de decalaj sunt tot de ordinul zecilor de mV.
3.1.3. Eroarea de neliniaritate – reprezintă deviaţia procentuală maximă faţă de caracteristica de transfer liniară, pentru fiecare intrare, cealaltă fiind conectată la tensiunea nominală. Uzual, această eroare se situează sub valoarea de 1 %.
3.1.4. Eroarea factorului de scară – se defineşte ca abaterea procentuală a factorului de scară de la valoarea ideală. Factorul de scară poate fi ajustat din exterior şi astfel această eroare nu prezintă importanţă dacă factorul de scară este stabil în timp şi cu temperatura.
3.2. ERORILE DINAMICE ALE MULTIPLICATOARELOR ANALOGICE Limitările în frecvenţă ale multiplicatorului şi zgomotul de bandă largă, reprezintă surse de creştere a erorii totale, atunci când frecvenţa semnalelor de intrare se măreşte. Pentru determinarea comportării dinamice se aplică tensiune continuă pe una din intrări, iar la cealaltă intrare se aplică semnal sinusoidal cu frecvenţa variabilă, semnal treaptă sau impulsuri dreptunghiulare. Banda de frecvenţă la 3 dB, parametrii regimului tranzitoriu şi de zgomot se definesc identic ca la amplificatoarele operaţionale. În mod obişnuit comportarea dinamică a unui multiplicator analogic este caracterizată prin eroarea scalară şi eroarea vectorială. 3.2.1. Eroarea scalară – se defineşte ca variaţia procentuală a modulului tensiunii de
ieşire la semnal alternativ de mică amplitudine:
%100teoretic0
măăsura0teoretic0s v
vv . (4)
3.2.2. Eroarea vectorială – este dată de defazajul dintre tensiunea de ieşire măsurată şi cea teoretică şi se specifică în procente:
100100v sin% , (5)
unde defazajul este exprimat în radiani şi presupus suficient de mic.
Se poate observa că v = 1% pentru Φ = 0,01 rad = 0,57, în timp ce eroarea
scalară corespunzătoare aceleeaşi frecvenţe este doar de 0,005%. În foile de catalog se specifică frecvenţa la care eroarea vectorială ajunge la valoarea de 1%, notată uzual cu f(1% Vector) şi frecvenţa la care eroarea scalară ajunge la valoarea de 1%, notată cu f(1%).
40
Ca ordin de mărime, pentru un multiplicator cu o bandă de frecvenţa f3dB = 1 MHz, rezultă f(1%) = 70...100 kHz şi f(1% Vector) = 5...10 kHz. Regimul dinamic influenţează şi erorile datorate cuplajului parazit. Ca urmare, se specifică frecvenţa la care eroarea dată de cuplajul parazit atinge valoarea de 1%, fie valoarea acestei erori la diferite frecvenţe.
4. PRINCIPIUL MULTIPLICATOARELOR ANALOGICE
Există numeroase tehnici de realizare a operaţiei de multiplicare analogică a două semnale electrice. Dintre acestea s-au consacrat, prin performanţe şi răspândire, următoarele:
multiplicatoarele cu transconductanţă variabilă;
multiplicatoarele cu sumare logaritmică;
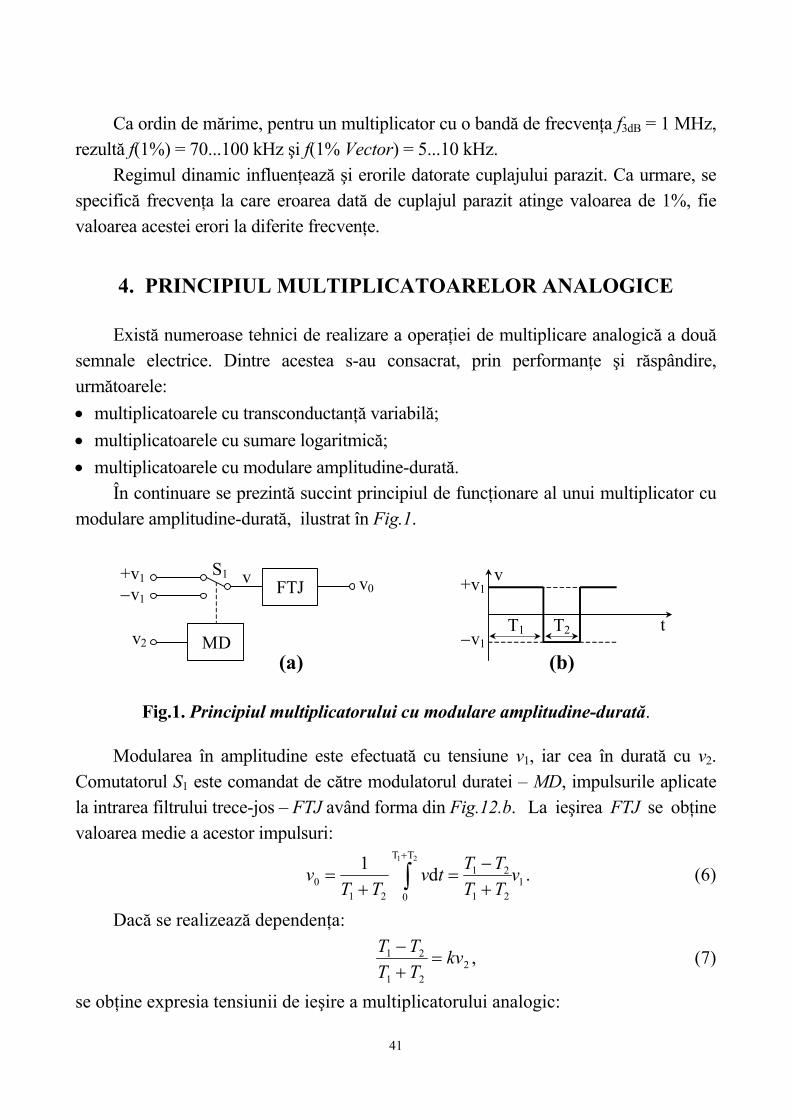
multiplicatoarele cu modulare amplitudine-durată. În continuare se prezintă succint principiul de funcţionare al unui multiplicator cu modulare amplitudine-durată, ilustrat în Fig.1.
(b)
v+v1
v1
tT1 T2
(a)
MD
+v1 v0
v2
FTJv1
S1 v
Fig.1. Principiul multiplicatorului cu modulare amplitudine-durată.
Modularea în amplitudine este efectuată cu tensiune v1, iar cea în durată cu v2. Comutatorul S1 este comandat de către modulatorul duratei – MD, impulsurile aplicate la intrarea filtrului trece-jos – FTJ având forma din Fig.12.b. La ieşirea FTJ se obţine valoarea medie a acestor impulsuri:
1
TT
0 21
21
210
21
d1
vTT
TTtv
TTv
. (6)
Dacă se realizează dependenţa:
221
21 kvTT
TT
, (7)
se obţine expresia tensiunii de ieşire a multiplicatorului analogic:
41
210 vvkv . (8)
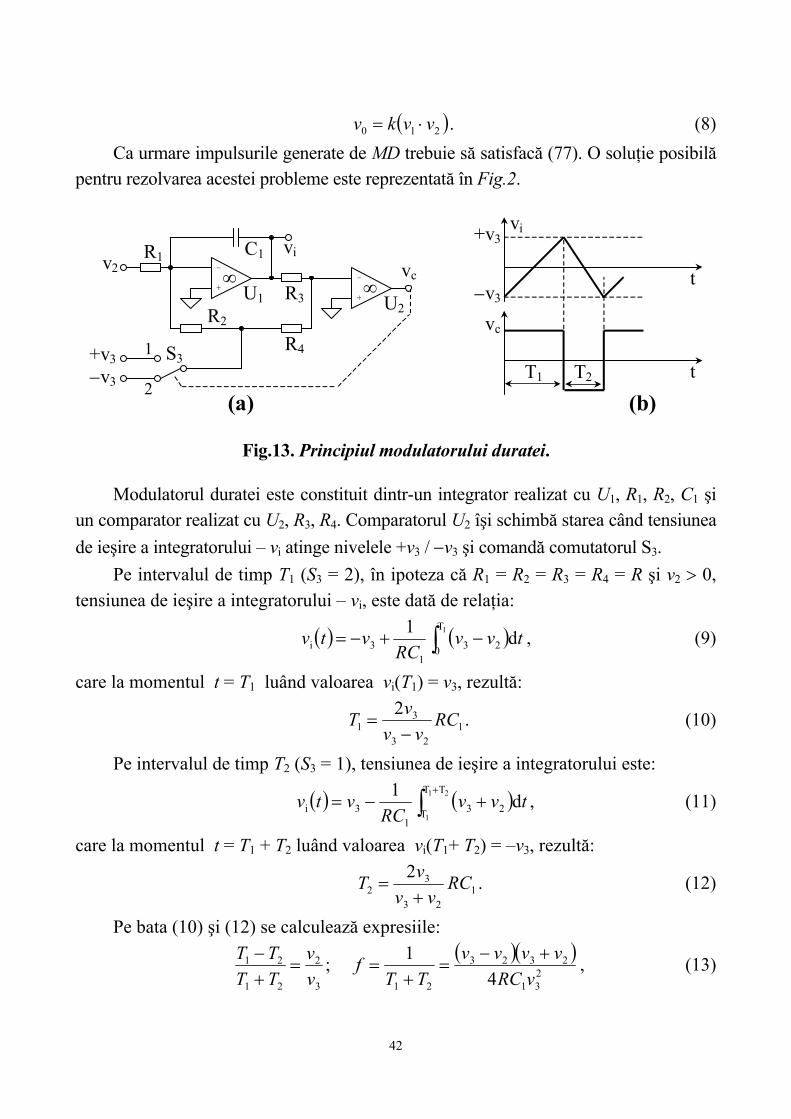
Ca urmare impulsurile generate de MD trebuie să satisfacă (77). O soluţie posibilă pentru rezolvarea acestei probleme este reprezentată în Fig.2.
(b)
vi
vc
tT1 T2
+v3
v3
t
(a)
+
-
+
-
+v3
vcv2
v3
S3
vi
U1
U2
R1
R3
R4
R2
C1
1
2
Fig.13. Principiul modulatorului duratei.
Modulatorul duratei este constituit dintr-un integrator realizat cu U1, R1, R2, C1 şi un comparator realizat cu U2, R3, R4. Comparatorul U2 îşi schimbă starea când tensiunea
de ieşire a integratorului – vi atinge nivelele +v3 / v3 şi comandă comutatorul S3.
Pe intervalul de timp T1 (S3 = 2), în ipoteza că R1 = R2 = R3 = R4 = R şi v2 0,
tensiunea de ieşire a integratorului – vi, este dată de relaţia:
1T
0 231
3i d1
tvvRC
vtv , (9)
care la momentul t = T1 luând valoarea vi(T1) = v3, rezultă:
123
31
2RC
vv
vT
. (10)
Pe intervalul de timp T2 (S3 = 1), tensiunea de ieşire a integratorului este:
21
1
TT
T 231
3i d1
tvvRC
vtv , (11)
care la momentul t = T1 + T2 luând valoarea vi(T1+ T2) = –v3, rezultă:
123
32
2RC
vv
vT
. (12)
Pe bata (10) şi (12) se calculează expresiile:
231
2323
213
2
21
21
4
1 ;
vRC
vvvv
TTf
v
v
TT
TT
, (13)
42
unde f este frecvenţa internă de lucru a multiplicatorului, egală cu frecvenţa tensiunii liniar variabile – vi sau a impulsurilor de la ieşirea comparatorului – vc. Frecvenţa internă variază funcţie de raportul dintre v2 şi v3, având valoarea maximă fmax = 1/4RC1 pentru v2 = 0. Dacă intervalul de variaţie a tensiunii v2 se limitează la valoarea v2 = 0,5v3, rezultă fmin = 0,75fmax. Luând în considerare şi modulaţia în amplitudine, din (7), (8) şi (13) se obţine:
3
210 v
vvv
. (14)
Pentru ca (10), (12) şi (13) să fie definite (deci modulatorul să funcţioneze) şi
fmin = 0,75fmax, sunt necesare următoarele condiţii:
03 v şi 32 5,0 vv . (15)
Din (14), respectând (15), se observă că multiplicatorul analizat poate efectua operaţia de multiplicare analogică în patru cadrane (v1 şi v2 pot fi tensiuni pozitive sau negative) şi operaţia de divizare în două cadrane (v3 poate fi numai pozitivă). Pentru o funcţionare corectă, trebuie ca valorile tensiunilor v1, v2 şi v3 să fie astfel alese încât valoarea tensiunii de ieşire calculată cu (84) să nu depăşească 10 V.
5. SCHEMA ELECTRICĂ A MULTIPLICATORULUI AMPLITUDINE-DURATĂ
Schema electrică a multiplicatorului cu modulare amplitudine-durată, care constituie obiectul prezentei lucrări de laborator este reprezentată în Fig.3. Această schemă se remarcă printr-un raport optim complexitate/performanţe. Valorile componentelor electronice sunt următoarele:
R1 = R2 =...= R11 = R 12 = 100 kΩ ± 0,25%;
R 13 = 20 kΩ ± 5%; C1 = 0,33 μF ± 5%; C2 = 1,5 μF ± 5%. Comutatorul S1 este realizat cu amplificatorul operaţional U4 şi rezistenţele R8, R9, R10 şi Q2, iar FTJ cu U5, R11, R12 şi C2 (Fig.12). Funcţie de starea tranzistorului Q2, saturat sau blocat, amplificatorul U4 lucrează ca inversor (A = – 1) sau repetor (A = +1). Modulatorul duratei este identic ca structură şi notaţii cu cel reprezentat în Fig.2, comutatorul S3 fiind realizat cu U3, R5, R6, R7 şi Q1, pe acelaşi principiu ca şi S1. Dioda D1 şi rezistenţa R13 asigură comanda celor două tranzistoare cu efect de câmp (cu canal n) numai cu alternanţa negativă a impulsurilor de la ieşirea comparatorului U2.
43
+
-+
-
+
-
+
-
+
-
Q2
v1
U1R1 R3
R4R2
C1
R7
U2
U5U4
U3R5
R6
R8
R9
R10
R11
R12
R13
D1
C2
Q1
v2
v3
v0
Fig.3. Schema electrică a multiplicatorului amplitudine-durată.
6. PROBLEME TEORETICE ŞI EXPERIMENTALE
6.1. Se aprofundează funcţionarea modulatorului, sub aspect calitativ şi cantitativ, şi se precizează principalele surse de erori.
6.2. Se calculează caracteristica de transfer a filtrului trece-jos şi frecvenţa internă de lucru a multiplicatorului.
6.3. Determinarea tensiunilor de decalaj ale multiplicatorului:
se reglează tensiunea v3 = 10 V;
se măsoară tensiunea de decalaj la ieşire – Vd0, conform definiţiei;
se măsoară tensiunile de decalaj la ieşire datorită cuplajului parazit – Vd1 şi Vd2, conform definiţiei.
6.4. Determinarea factorului de scară al multiplicatorului:
valorile nominale ale tensiunilor de intrare sunt: V1n = 10 V, V2n = 5 V;
se determină factorul de scară pentru v3 = 10 V, conform definiţiei.
6.5. Determinarea erorilor de neliniaritate ale multiplicatorului:
44
se determină erorile de neliniaritate, conform definiţiei, pentru cele două intrări, dându-se tensiunilor de intrare v1 şi v2 valori pozitive şi negative, din volt în volt, cu respectarea condiţiilor din (85);
se calculează, pentru fiecare intrare, eroarea absolută cu relaţia:
000 vvv ;
k
vvv 21
0 , (16)
unde v0 este valoarea măsurată a tensiunii de ieşire, k este factorul de scară
determinat anterior, iar este valoarea tensiunii de ieşire calculată cu (81); 0v
se calculează eroarea de neliniaritate:
0max
0maxn v
v ; (17)
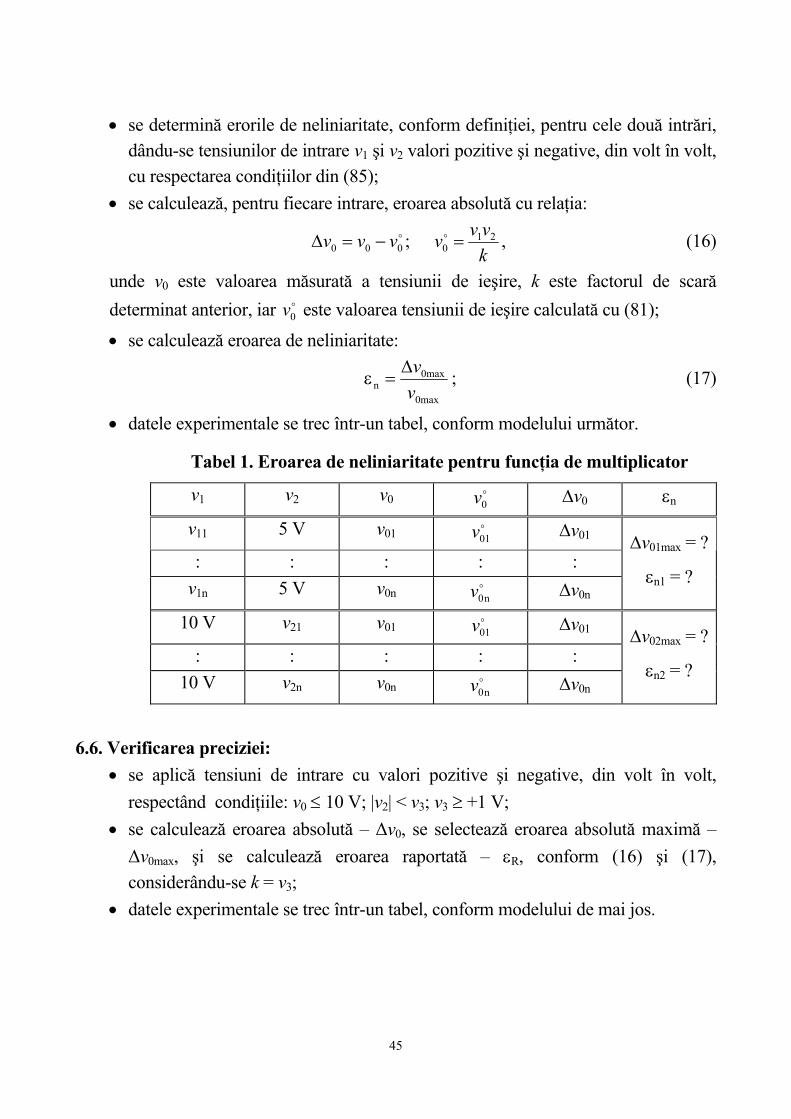
datele experimentale se trec într-un tabel, conform modelului următor.
Tabel 1. Eroarea de neliniaritate pentru funcţia de multiplicator
v1 v2 v0 0v v0 n
v11 5 V v01 01v v01
: : : : :
v1n 5 V v0n n0v v0n
v01max = ?
n1 = ?
10 V v21 v01 01v v01
: : : : :
10 V v2n v0n n0v v0n
v02max = ?
n2 = ?
6.6. Verificarea preciziei:
se aplică tensiuni de intrare cu valori pozitive şi negative, din volt în volt,
se calculează eroarea absolută – Δv0, se selectează eroarea absolută maximă –
Δv0max, şi se calculează eroarea raportată – R, conform (16) şi (17),
considerându-se k = v3;
datele experimentale se trec într-un tabel, conform modelului de mai jos.
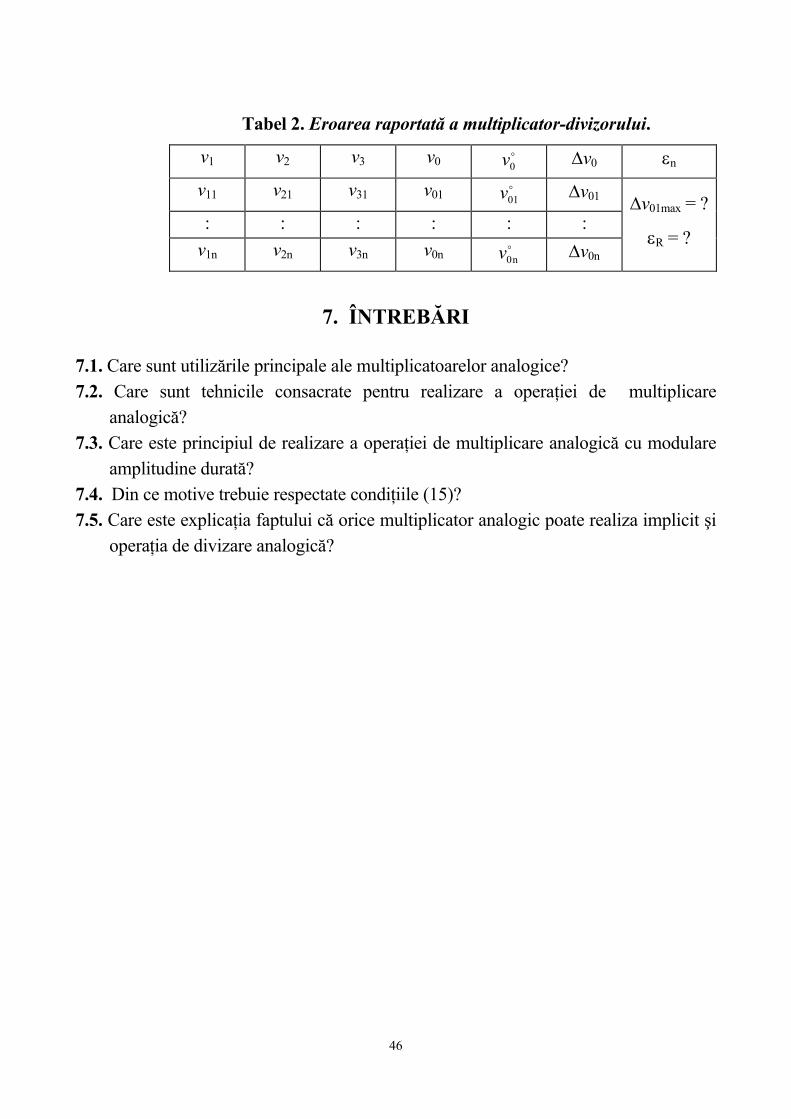
45
Tabel 2. Eroarea raportată a multiplicator-divizorului.
v1 v2 v3 v0 0v v0 n
v11 v21 v31 v01 01v v01
: : : : : :
v1n v2n v3n v0n n0v v0n
v01max = ?
R = ?
7. ÎNTREBĂRI
7.1. Care sunt utilizările principale ale multiplicatoarelor analogice? 7.2. Care sunt tehnicile consacrate pentru realizare a operaţiei de multiplicare
analogică? 7.3. Care este principiul de realizare a operaţiei de multiplicare analogică cu modulare
amplitudine durată? 7.4. Din ce motive trebuie respectate condiţiile (15)? 7.5. Care este explicaţia faptului că orice multiplicator analogic poate realiza implicit şi
operaţia de divizare analogică?
46
LUCRARE DE LABORATOR LAB-08
MULTIPLEXOARE ANALOGICE
1. SCOPUL LUCRĂRII
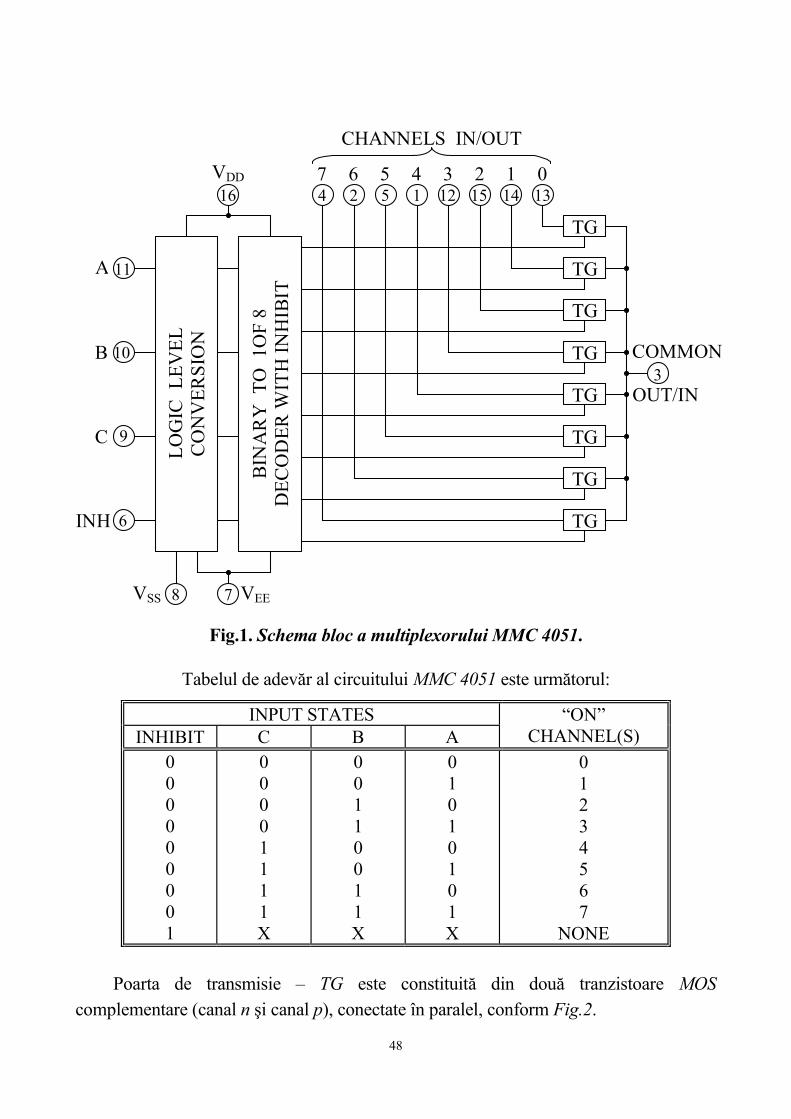
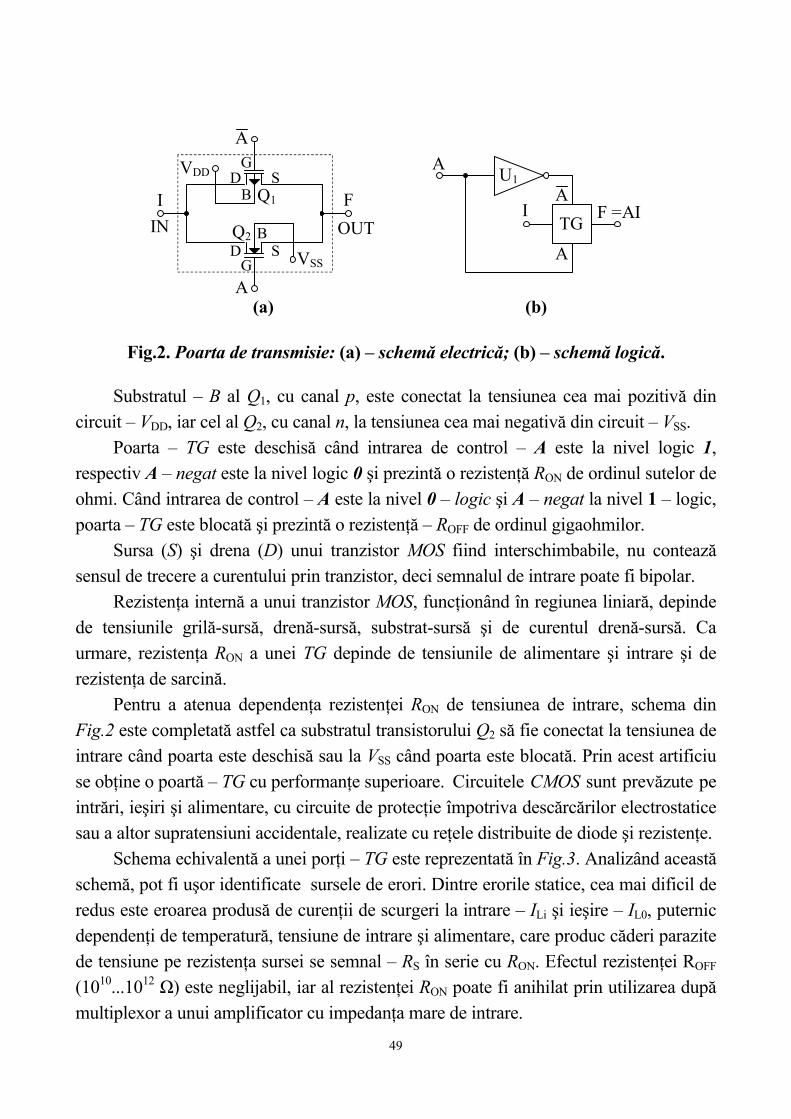
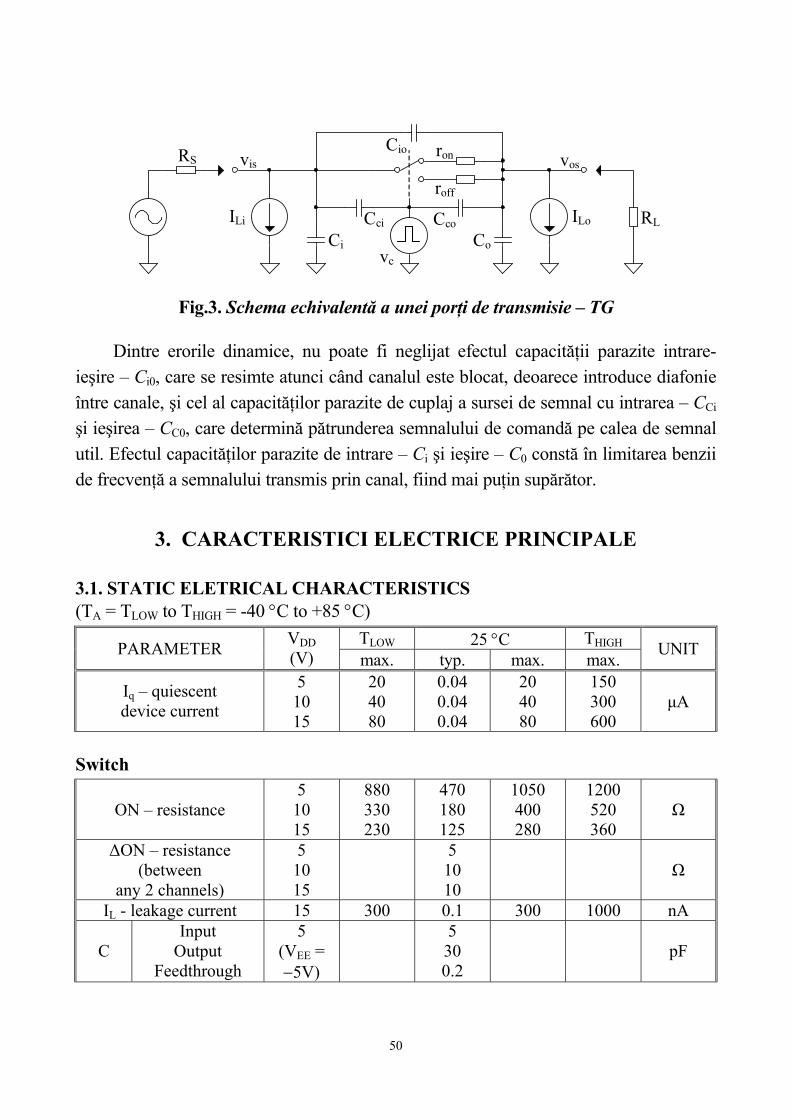
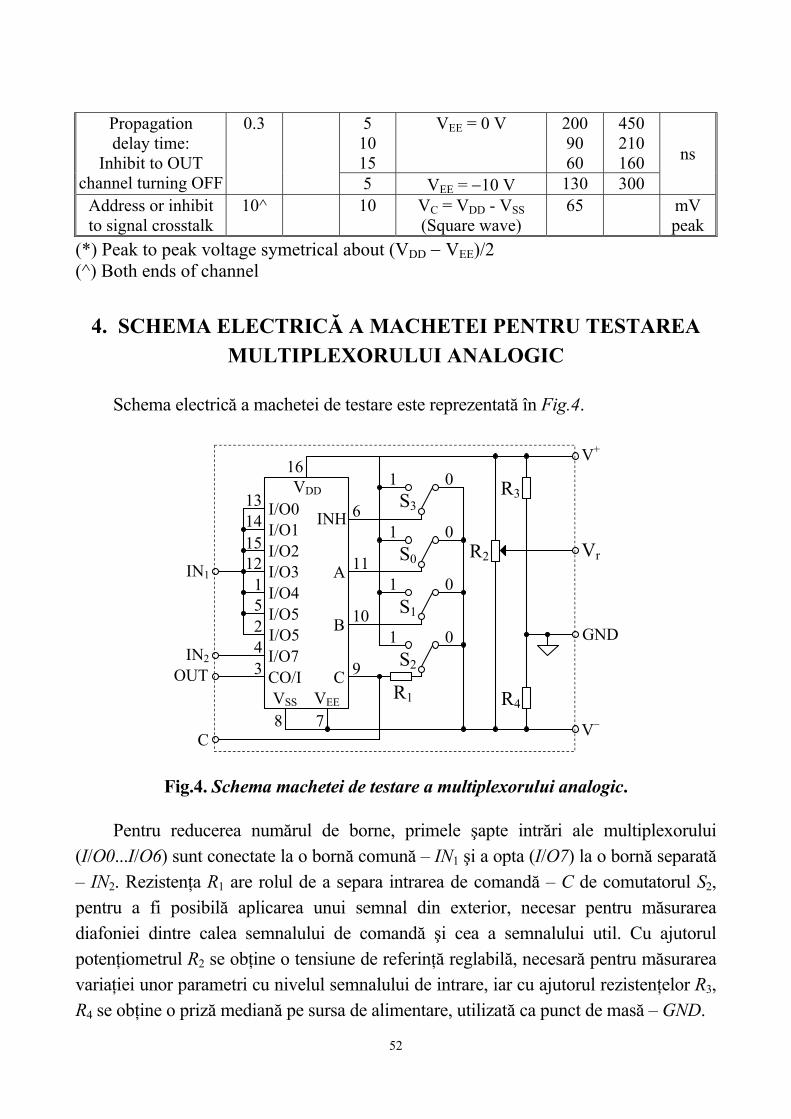
Scopul prezentei lucrări de laborator este studierea şi testarea multiplexoarelor şi demultiplexoarelor analogice. În lucrare se prezintă aspecte referitoare la utilizarea, structura şi caracteristicile electrice ale multiplicatoarelor şi demultiplexoarelor analogice. Partea experimentală se efectuează asupra unui multiplexor analogic realizat sub formă de circuit integrat în tehnologie CMOS.
2. DESTINAŢIE, STRUCTURĂ ŞI FUNCŢIONARE
Multiplexorul analogic serveşte pentru conectarea succesivă a mai multor surse de semnal la o cale comună, precum şi la operaţia inversă, când este numit demultiplexor. Un multiplexor poate fi realizat cu comutatoare mecanice, relee, diode, tranzistoare bipolare sau tranzistoare cu efect de câmp. Performanţe optime şi o largă răspândire o au multiplexoarele realizate sub formă de circuite integrate în tehnologie CMOS. Un multiplexor CMOS este constituit din mai multe comutatoare bilaterale conectate astfel încât să poată realiza diferite tipuri de funcţii cum ar fi: 1 din 16 sau
2(1 din 8), 1 din 8 sau 2(1 din 4) şi 3(1 din 2). Pentru comanda comutatoarelor
multiplexoarele sunt prevăzute cu decodoare binare adecvate. Spre exemplificare, în Fig.1 este reprezentată schema bloc a multiplexorului MMC 4051, de tipul 1 din 8. MMC 4051 este constituit dintr-un circuit de conversie a nivelului, un decodor 1 din 8 şi cele 8 canale – TG (Transmission Gate) conectate la o bornă comună. Circuitul de deplasare a nivelului are rolul de a permite semnale unipolare pentru selecţia canalelor şi semnale bipolare transmise prin canale. Astfel, dacă VDD = +5 V,
VSS = 0, VEE = 5 V, semnalele de comandă pot avea nivele logice între 0 şi +5 V şi
semnalele transmise pot avea amplitudinea între 5 V şi +5 V.
Comutatoarele bilaterale sunt realizate cu porţi de transmisie – TG (Transmission Gate), care constituie unul din blocurile fundamentale ale circuitelor logice CMOS.
47
7
TG
TG
TG
TG
TG
TG
TG
TG
3
4 2 5 1 12 15 14 1316
11
10
9
6
8 7
6 5 4 3 2 1 0
A
CHANNELS IN/OUT
COMMON
OUT/IN
VDD
B
C
INH
VSS VEE
LO
GIC
LE
VE
LC
ON
VE
RS
ION
BIN
AR
Y T
O 1
OF
8D
EC
OD
ER
WIT
H I
NH
IBIT
Fig.1. Schema bloc a multiplexorului MMC 4051.
Tabelul de adevăr al circuitului MMC 4051 este următorul:
INPUT STATES INHIBIT C B A
“ON” CHANNEL(S)
0 0 0 0 0 0 0 0 1
0 0 0 0 1 1 1 1 X
0 0 1 1 0 0 1 1 X
0 1 0 1 0 1 0 1 X
0 1 2 3 4 5 6 7
NONE Poarta de transmisie – TG este constituită din două tranzistoare MOS complementare (canal n şi canal p), conectate în paralel, conform Fig.2.
48
Q1I
Q2 OUTIN
B
B
G
GD
D S
S
VDD
VSS
F
A
A(a)
U1A
A
A
TGI F =AI
(b)
Fig.2. Poarta de transmisie: (a) – schemă electrică; (b) – schemă logică. Substratul – B al Q1, cu canal p, este conectat la tensiunea cea mai pozitivă din circuit – VDD, iar cel al Q2, cu canal n, la tensiunea cea mai negativă din circuit – VSS. Poarta – TG este deschisă când intrarea de control – A este la nivel logic 1, respectiv A – negat este la nivel logic 0 şi prezintă o rezistenţă RON de ordinul sutelor de ohmi. Când intrarea de control – A este la nivel 0 – logic şi A – negat la nivel 1 – logic, poarta – TG este blocată şi prezintă o rezistenţă – ROFF de ordinul gigaohmilor. Sursa (S) şi drena (D) unui tranzistor MOS fiind interschimbabile, nu contează sensul de trecere a curentului prin tranzistor, deci semnalul de intrare poate fi bipolar. Rezistenţa internă a unui tranzistor MOS, funcţionând în regiunea liniară, depinde de tensiunile grilă-sursă, drenă-sursă, substrat-sursă şi de curentul drenă-sursă. Ca urmare, rezistenţa RON a unei TG depinde de tensiunile de alimentare şi intrare şi de rezistenţa de sarcină. Pentru a atenua dependenţa rezistenţei RON de tensiunea de intrare, schema din Fig.2 este completată astfel ca substratul transistorului Q2 să fie conectat la tensiunea de intrare când poarta este deschisă sau la VSS când poarta este blocată. Prin acest artificiu se obţine o poartă – TG cu performanţe superioare. Circuitele CMOS sunt prevăzute pe intrări, ieşiri şi alimentare, cu circuite de protecţie împotriva descărcărilor electrostatice sau a altor supratensiuni accidentale, realizate cu reţele distribuite de diode şi rezistenţe. Schema echivalentă a unei porţi – TG este reprezentată în Fig.3. Analizând această schemă, pot fi uşor identificate sursele de erori. Dintre erorile statice, cea mai dificil de redus este eroarea produsă de curenţii de scurgeri la intrare – ILi şi ieşire – IL0, puternic dependenţi de temperatură, tensiune de intrare şi alimentare, care produc căderi parazite de tensiune pe rezistenţa sursei se semnal – RS în serie cu RON. Efectul rezistenţei ROFF (1010...1012 Ω) este neglijabil, iar al rezistenţei RON poate fi anihilat prin utilizarea după multiplexor a unui amplificator cu impedanţa mare de intrare.
49
vos
RLILi
RS vis
ILo
vc
Ci Co
Cio
CcoCci
ron
roff
Fig.3. Schema echivalentă a unei porţi de transmisie – TG
Dintre erorile dinamice, nu poate fi neglijat efectul capacităţii parazite intrare-ieşire – Ci0, care se resimte atunci când canalul este blocat, deoarece introduce diafonie între canale, şi cel al capacităţilor parazite de cuplaj a sursei de semnal cu intrarea – CCi şi ieşirea – CC0, care determină pătrunderea semnalului de comandă pe calea de semnal util. Efectul capacităţilor parazite de intrare – Ci şi ieşire – C0 constă în limitarea benzii de frecvenţă a semnalului transmis prin canal, fiind mai puţin supărător.
3. CARACTERISTICI ELECTRICE PRINCIPALE
3.1. STATIC ELETRICAL CHARACTERISTICS (TA = TLOW to THIGH = -40 C to +85 C)
TLOW 25 C THIGH PARAMETER
VDD (V) max. typ. max. max.
UNIT
Iq – quiescent device current
5 10 15
20 40 80
0.04 0.04 0.04
20 40 80
150 300 600
μA
Switch
ON – resistance
5 10 15
880 330 230
470 180 125
1050 400 280
1200 520 360
Ω
ΔON – resistance (between
any 2 channels)
5 10 15
5 10 10
Ω
IL - leakage current 15 300 0.1 300 1000 nA
C Input
Output Feedthrough
5 (VEE = 5V)
5 30 0.2
pF
50
Control (Address or Inhibit)
VIL Input low voltage
5 10 15
1.5 3 4
1.5 3
4
1.5 3 4
V
VIH Input high voltage ((!) min. values)
5 10 15
3.5(!) 7(!)
11(!)
3.5(!) 7(!)
11(!)
3.5(!) 7(!)
11(!)
V
IL leakage current 15 0.3 103 0.3 1 μA Ci input capacitance 5 7.5 pF
V0 at com. OUT/IN 20 f3dB(sine wave) at 20lgV0/VIS = 3 dB
1 5* 10 V0 at any channel 60
MHz
V0 at com. OUT/IN 12 Feedthrough at 20lgV0/VIS= 40dB (all channels OFF)
1
5*
10
V0 at any channel 8
Frequency crosstalk 20lg 0/VIS = 40 dB
1 5* 10 Between any 2
channels 3 MHz
Sine wave distorsion fIS = 1 kHz (sine wawe)
10
2* 3* 5*
5 10 15
0.3 0.2 0.12
%
Control (Address or Inhibit)
5 10 15
VEE = 0 V 360 160 120
720 320 240
Propagation delay time:
Address to OUT channels ON/OFF
5 VEE = 5 V 225 450
ns
5 10 15
VEE = 0 V 360 160 120
720 320 240
Propagation delay time:
Inhibit to OUT channel turning ON
10
5 VEE = 10 V 200 400
ns
51
5 10 15
VEE = 0 V 200 90 60
450 210 160
Propagation delay time:
Inhibit to OUT channel turning OFF
0.3
5 VEE = 10 V 130 300
ns
Address or inhibit to signal crosstalk
10^ 10 VC = VDD - VSS (Square wave)
65 mV peak
(*) Peak to peak voltage symetrical about (VDD VEE)/2 (^) Both ends of channel
4. SCHEMA ELECTRICĂ A MACHETEI PENTRU TESTAREA MULTIPLEXORULUI ANALOGIC
Schema electrică a machetei de testare este reprezentată în Fig.4.
34251
12151413
16
11
10
9
6
8 7VSS
S3I/O0
VEE
VDD
CO/I
I/O1I/O2
I/O7
I/O5I/O4I/O3
I/O5
INH
A
B
C
S0
S1
S2
1 0
1 0
1 0
1 0
R1
R2
R3
R4
IN1
IN2
OUT
C
V+
V
Vr
GND
Fig.4. Schema machetei de testare a multiplexorului analogic.
Pentru reducerea numărul de borne, primele şapte intrări ale multiplexorului (I/O0...I/O6) sunt conectate la o bornă comună – IN1 şi a opta (I/O7) la o bornă separată – IN2. Rezistenţa R1 are rolul de a separa intrarea de comandă – C de comutatorul S2, pentru a fi posibilă aplicarea unui semnal din exterior, necesar pentru măsurarea diafoniei dintre calea semnalului de comandă şi cea a semnalului util. Cu ajutorul potenţiometrul R2 se obţine o tensiune de referinţă reglabilă, necesară pentru măsurarea variaţiei unor parametri cu nivelul semnalului de intrare, iar cu ajutorul rezistenţelor R3, R4 se obţine o priză mediană pe sursa de alimentare, utilizată ca punct de masă – GND.
52
5. PROBLEME TEORETICE ŞI EXPERIMENTALE
5.1. Verificarea rezistenţei canalelor în starea ON:
se execută pentru VDD = 5, 10 şi 15 V;
se conectează împreună bornele OUT şi GND şi un ohmmetru între bornele IN1 şi GND, apoi, pentru măsurarea ultimului canal, între bornele IN2 şi GND;
se selectează canalele cu ajutorul comutatoarelor S0...S3, conform tabelei de adevăr, şi se măsoară valorile rezistenţelor – RON;
se calculează diferenţa de rezistenţă maximă între două canale – ΔRON;
datele experimentale se trec într-un tabel, conform modelului următor;
se compară datele experimentale cu cele de catalog şi se specifică observaţiile.
Tabel 1. Rezistenţa canalelor în starea ON.
VDD ADDRESS
C B A CHANNEL
5 V 10 V 15 V
0 0 0 0 RON0 = ? RON0 = ? RON0
: : : : :
1 1 1 7 RON7 = ? RON7 = ? RON7 = ?
ΔRONmax = ? = ? = ?
5.2. Verificarea variaţiei rezistenţei ON cu tensiunea de alimentare:
păstrând montajul anterior, se selectează canalul cu RONmax;
se variază VDD între 3 şi 15 V şi se măsoară RON (min. 7 valori);
datele experimentale se trec într-un tabel, conform modelului de mai jos;
Tabel 2. Variaţiei rezistenţei ON cu tensiunea de alimentare.
VDD 3 V 5 V 7 V 9 V 11 V 13 V 15 V
RON = ? = ? = ? = ? = ? = ? = ?
se reprezintă grafic RON= f(VDD).
5.3. Verificarea variaţiei rezistenţei ON cu tensiunea de intrare:
se execută pentru VDD = 5, 10 şi 15 V;
în montajul anterior, se înlocuieşte borna GND cu borna VR;
se variază VR între valorile zero şi maximă (faţă de V), în 5...7 trepte
echidistante, şi se măsoară RON;
53
datele experimentale se trec într-un tabel , conform modelului de mai jos;
Tabel 3. Variaţiei rezistenţei ON cu tensiunea de intrare.
VDD
5 V 10 V 15 V
VIS RON VIS RON VR RON
VIS1 RON1 VIS1 RON1 VIS1 RON1
: : : : : :
VISn RONn VISn RONn VISn RONn
se reprezintă grafic RON= f(VIS).
5.4. Verificarea curentului de scurgere la intrare şi ieşire:
se inhibă multiplexorul;
se conectează un picoampermetru între bornele IN2 şi VR, apoi între bornele OUT şi VR;
se reglează VDD = 15 V, se variază VR între zero şi maxim, în 5...7 trepte echidistante, şi se notează indicaţiile picoampermetrului;
datele experimentale se trec într-un tabel, conform modelului de mai jos;
Tabel 4. Curentul de scurgeri la intrare şi ieşire.
VDD 3 V 5 V 7 V 9 V 11 V 13 V 15 V
ILIN = ? = ? = ? = ? = ? = ? = ?
ILOUT = ? = ? = ? = ? = ? = ? = ?
se reprezintă grafic ILIN = f(VIS). ILOUT = f(VIS).
5.5. Determinarea frecvenţei semnalului de intrare la care cuplajul intrare-ieşire atinge valoarea de 40 dB:
se inhibă multiplexorul;
se conectează o rezistenţă de 1 kΩ între bornele OUT şi GND;
se conectează un osciloscop între bornele OUT şi GND;
se reglează VDD = 15 V şi se aplică între IN2 şi GND semnal sinusoidal cu valoarea Vpp = 5 V (Vpp – valoare vârf-vârf);
se reglează frecvenţa semnalului de intrare până când tensiunea de ieşire creşte la valoarea V0 = VIS/ 100.
54
55
5.6. Determinarea diafoniei între intrările de comandă şi semnal:
se selectează canalul I/O7 şi se reglează VDD = 10 V;
se conectează împreună bornele OUT şi GND şi o rezistenţă de 10 kΩ între bornele IN2 şi GND;
se aplică între bornele C şi GND un semnal dreptunghiular cu VCpp = 10 V şi frecvenţa de 1, 10 şi 100 KHz;
se măsoară cu un osciloscop valoarea vârf-vârf a semnalului de ieşire.
5.7. Se compară toate rezultatele obţinute cu datele de catalog (pct.2) şi se comentează diferenţele sesizate.
6. ÎNTREBĂRI 6.1. Care sunt utilizările multiplexoarelor şi demultiplexoarelor analogice? 6.2. Care sunt deosebirile dintre un multiplexor şi un demultiplexor? 6.3. Ce avantaje prezintă circuitul de deplasare a nivelului? 6.4. Care sunt principalele surse de erori statice şi dinamice, cum se manifestă şi cum
poate fi redus efectul acestora?
LUCRARE DE LABORATOR LAB-09
CIRCUITE DE EŞANTIONARE-MEMORARE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea multiplexoarelor şi circuitelor de eşantionare-memorare. În lucrare se prezintă, spre aprofundare, principiile, legile, fenomenele parazite şi caracteristicile circuitelor de eşantionare-memorare. Se experimentează fenomenul de apariţie a semnalelor alias şi se testează principalii parametri ai unui circuit de eşantionare-memorare.
2. GENERALITĂŢI
Măsurarea numerică a mărimilor cu variaţie continuă în timp presupune discretizarea valorilor acestor mărimi. Procesul de discretizarea se desfăşoară pe două direcţii. Mai întâi are loc o discretizare în timp, în sensul că măsurarea se efectuează la momente de timp prestabilite. Ca urmare, indicaţia unui aparat numeric reprezintă valoarea instantanee a măsurandului la un anumit moment de timp anterior afişării. Apoi are loc o discretizare în amplitudine, în sensul că valorii prelevate la un anumit moment de timp i se pune în corespondenţă un număr, care poate lua în orice interval o mulţime finită de valori, pe când o mărime continuă poate lua o infinitate de valori. Discretizarea în timp se efectuează prin eşantionare, iar cea în amplitudine prin cuantizare (conversie analog-numerică). Ca urmare, eşantionare constă în prelevarea într-un anumit interval de timp a unui număr finit de valori ale mărimii cu variaţie continuă, care apoi sunt convertite şi prelucrate numeric. Memorarea este necesară pentru menţinerea constantă a valorii eşantionate pe durata conversiei analog-numerice. Se pune însă problema, în ce măsură o mărime reprezentată prin eşantioanele sale conservă informaţia conţinută în semnalul iniţial şi poate conduce la refacerea lui. Soluţia este oferită de Teorema lui Shannon, al cărei enunţ este următorul: Semnalul
analogic x(t) este descris complet printr-un şir infinit de eşantioane ale sale, obţinute printr-o eşantionare periodică ideală cu frecvenţa fe, cu condiţia ca spectrul
56
semnalului x(t) să nu conţină nici o componentă de frecvenţă superioară valorii fe/2. Altfel spus, dacă fmax este frecvenţa cea mai ridicată din spectrul semnalului x(t),
condiţia Shannon se exprimă prin: fe = 1/Te 2fmax.
Eşantionarea ideală poate fi exprimată matematic prin produsul dintre semnalul de eşantionat – x(t) şi un şir periodic de impulsuri Dirac cu perioada – Te = 1/fe. În acest caz, densitatea spectrală de putere a semnalului eşantionat corespunde unei repetiţii periodice cu frecvenţa – fe, a densităţii spectrale de putere a semnalului – x(t),
multiplicată cu un factor constant ( ). 2ef
Practic, nu pot fi realizate circuite capabile să determine valoarea instantanee a amplitudinii unui semnal x(t). Ca urmare, va fi determinată valoarea medie a acestei amplitudini pe un interval de timp finit Tμ. Durata de mediere Tμ produce o deformare a spectrului semnalului x(t), corespunzătoare unei filtrări trece-jos aplicată înainte de eşantionare. Din această cauză se impune ca timpul de mediere Tμ să fie cât mai redus. Semnalele fizice nu posedă un spectru de frecvenţă limitat şi aceasta se întâmplă cel puţin din cauză că un semnal este întotdeauna însoşit de zgomot şi mai ales de zgomot alb. Astfel, nu există niciodată garanţia respectării condiţiei Shannon. Nerespectarea condiţiei Shannon conduce la apariţia aşa-ziselor semnale alias,
care sunt nişte semnale false cu frecvenţă fe/2, rezultate din eşantioanele
componentelor spectrale cu frecvenţa fe/2. Din această cauză se impune plasarea
înaintea circuitului de eşantionare a unui filtru trece-jos numit filtru anti-alias, care
limitează spectrul semnalului x(t) la o valoare controlabilă şi fe/2. În această situaţie,
condiţia Shannon se stabileşte în funcţie de frecvenţa de tăiere a filtrului anti-alias. Schema de principiu a unui circuit de eşantionare-memorare este ilustrat în Fig.1.
+
-
viv0
Rc C
S IS IB
Comandă
RSU1
Fig.1. Schema de principiu a unui circuit de eşantionare-memorare.
Circuitul de eşantionare-memorare are două faze de funcţionare:
Faza de eşantionare – când comutatorul S este închis şi tensiunea pe condensatorul C urmăreşte semnalul se intrare – vi, cu o întârziere determinată de constanta de timp:
57
CRR ONSI (1)
unde RS este rezistenţa sursei de semnal – vi, iar RON – rezistenţa comutatorului S în starea închis. Reducerea acestei constante de timp este de mare importanţă, deoarece determină durata eşantionării. Astfel, pentru o eroare de 0,05% durata eşantionării trebuie să fie de minimum 8τI.
Faza de memorare – după ce comutatorul este deschis, iar condensatorul, încărcat la valoarea instantanee a semnalului se intrare din acel moment, se descarcă datorită curenţilor de intrare a amplificatorului operaţional – IB şi de scurgeri a comutatorului – IS, precum şi datorită rezistenţei de pierderi a condensatorului – RC. Viteza de descărcare are expresia:
BC
CBS
C0 11
d
d
d
dI
CR
vII
Ct
v
t
v
. (2)
deoarece ponderea cea mai mare o are curentul de polarizare IB. Pentru ca descărcarea condensatorului să nu introducă erori semnificative, trebuie ca constanta de timp de descărcare să fie de cel puţin 105 ori mai mare decât timpul de memorare pentru care valoarea eşantionată este utilă.
3. SCHEMA CIRCUITULUI DE EŞANTIONARE-MEMORARE
Pentru reducerea constantei de timp de încărcare se utilizează scheme în care comutatorul este inclus într-o buclă de reacţie, datorită căreia efectul rezistenţei RON devine neglijabil. O astfel de schemă constituie obiectul acestei lucrări de laborator, fiind reprezentată în Fig.2.
OUT
+
-+
-
R1
+15 V
U1 U2
D1
D3 D4
D2Q1
Q2
Q3
R2
R3
R4
R5
R6
C1
15 VGND
x(t)
fe
Fig.2. Schema electrică a circuitului de eşantionare-memorare.
58
Circuitele de eşantionare-memorare sunt împărţite în neinversoare, care au câştig unitar şi inversoare, care pot avea şi câştig diferit de unitate. Din Fig.2 se observă că circuitul prezentat este neinversor cu câştig unitar (amplificatoarele operaţionale U1 şi U2 lucrează în regim de repetor). Comutatorul S (Fig.1) este realizat cu tranzistorul Q3 conectat în bucla de reacţie negativă realizată cu amplificatoarele operaţionale U1 şi U2. Când Q3 este deschis, U1 forţează încărcarea condensatorului C1 astfel ca tensiunea de ieşire a amplificatorului U2 să fie egală cu tensiunea de intrare. Când Q3 este blocat, tensiunea de ieşire va fi egală cu tensiunea de pe condensatorul C1 din momentul blocării. Dioda D2 evită polarizarea directă a joncţiunii grilă-sursă a Q3, iar diodele D3, D4 limitează excursia tensiunii de ieşire a U1, îmbunătăţând astfel viteza de răspuns. Tranzistoarele Q1, Q2, dioda D1 şi rezistenţele R1...R4 constituie circuitul de formare a impulsurilor de comandă a comutatorului Q3.
4. PARAMETRII CIRCUITELOR DE EŞANTIONARE-MEMORARE
Parametrii caracteristici circuitelor de eşantionare-memorare sunt puşi în evidenţă pe graficul din Fig.3, unde s-a considerat un circuit de neinversor.
tie tc tse ta tsm
v0
ta
taq
tHOLDEŞANTIONARE(URMĂRIRE) HOLD (MEMORARE)
tie
vx v0
vx
v0
Fig.3. Formele de undă ale unui circuit de eşantionare-memorare.
Parametrii caracteristici fazei de eşantionare sau de urmărire sunt următorii:
Timpul de întârziere la eşantionare – tie, reprezintă intervalul de timp scurs între momentele apariţiei comenzii de eşantionare şi închiderii efective a comutatorului.
59
Parametrul tie depinde de viteza circuitelor numerice din schema de comandă şi a comutatorului şi poate avea valori în intervalul 5-150 ns, tipic 15-20 ns.
Timpul de creştere – tc, reprezintă intervalul de timp necesar pentru ca tensiunea pe condensator să ajungă la nivelul semnalului de intrare. Acesta depinde în principal de viteza de creştere a tensiunii de ieşire (Slew-Rate) a amplificatoarelor operaţionale din structura circuitului. Ca urmare, amplificatoarele utilizate în acest
scop au slew-rate de ordinul a 200-400 V/s, în cazul circuitelor rapide, coborând
până la nivelul de 3-5 V/s pentru circuitele mai lente, de uz general.
Timpul de stabilire la eşantionare – tse, reprezintă intervalul de timp necesar pentru stingerea regimului tranzitoriu al circuitului, care în momentul închiderii comutatorului este solicitat la semnal treaptă.
Timpul de achiziţie – taq, reprezintă suma timpilor de întârziere, de creştere şi de stabilire la eşantionare. Deci taq, este intervalul de timp minim cât trebuie să dureze eşantionarea, pentru ca circuitul să dea rezultate corecte. Timpul de achiziţie are valoarea stabilită în funcţie de precizie. De exemplu, pentru o creştere a preciziei
de la 0,1% la 0,01%, taq trebuie să crească de 4-5 ori, cum ar fi de la 6 la 25 s.
Dacă timpul de eşantionare este mai mare decât timpul de achiziţie, după expirarea acestuia circuitul intră în regim de urmărire a semnalului de intrare, caracterizat de o eroare de câştig, dată de diferenţa dintre tensiunile de intrare şi de ieşire. Cauzele acestei erori sunt tensiunile de offset, constanta de timp de încărcare a condensatorului de memorare, limitările în viteză ale amplificatoarelor etc.
Parametrii caracteristici fazei de memorare sunt următorii:
Timpul de apertură – ta, reprezintă de fapt timpul de întârziere la memorare, adică intervalul de timp scurs între momentele apariţiei comenzii de memorare şi deschiderii efective a comutatorului. Un timp de apertură constant ar rămâne fără nici o influenţă, fiindcă efectul lui ar fi echivalent cu un defazaj constant. În realitate, ta variază atât aleator cât şi sistematic, în funcţie de temperatură, tensiune de alimentare sau tensiune de intrare. De exemplu, timpul de apertură poate avea
pentru unele circuite de eşantionare-memorare o derivă de 3-5%/C.
Timpul de stabilire la memorare – tsm, reprezintă intervalul de timp necesar pentru stingerea regimului tranzitoriu al circuitului, după deschiderea comutatorului. Regimul tranzitoriu care apare la aplicarea comenzii de memorare include şi semnalul parazit care pătrunde prin capacităţile de cuplaj cu sursa de comandă. Din această cauză, apare un aşa-numit decalaj la blocare al tensiuni de ieşire.
60
Diafonia – se defineşte ca variaţia tensiunii de ieşire datorită semnalului de intrare care pătrunde prin capacitatea parazită paralel a comutatorului în starea blocat. Diafonia depinde de frecvenţă şi se exprimă de obicei în decibeli.
Căderea sau panta de cădere a tensiunii de ieşire – v0, apare datorită pierderii de
sarcină a condensatorului de memorare, prin rezistenţele şi generatoarele de curent parazite, care apar în paralel pe acest condensator.
5. PROBLEME TEORETICE ŞI EXPERIMENTALE
5.1. Se analizează funcţionarea schemei electrice şi se calculează valorile numerice ale componentelor electronice.
5.2. Se precizează calitativ sursele de erori care determină parametrii circuitului, conform pct.4.
5.3. Verificarea experimentală a funcţionării circuitului:
se aplică semnal de intrare cu diferite forme (sinusoidal, dreptunghiular, etc.) şi frecvenţe, cu amplitudinea de max.5 V;
se aplică semnal de eşantionare de formă dreptunghiulară cu diferite frecvenţe şi amplitudinea de aprox. 5 V;
se vizualizează cu un osciloscop semnalele de intrare şi ieşire;
se precizează frecvenţele semnalului de intrare şi de eşantionare pentru care se observă modificări ale formei sau amplitudinii semnalului de ieăire, altele decât cele specifice procesului de eşantionare-memorare;
se pune în evidenţă fenomenul de apariţie a semnalelor alias, reglând frecvenţa de eşantionare de la limita Shannon până la valori mult mai reduse.
5.4. Măsurarea timpului de creştere:
se aplică la intrare semnal dreptunghiular cu frecvenţă de sute de Hz şi se măsoară timpul de creştere – tc pe ecranul osciloscopului;
se compară valoarea obţinută cu constanta de timp de încărcare a condensatorului (RON = 100 Ω, C1 = 10 nF).
5.5. Măsurarea pantei de cădere a tensiunii de ieşire:
se aplică la intrare o tensiune continuă şi se scade frecvenţa de eşantionare până când panta de cădere a tensiunii de ieşire devine vizibilă;
61
se determină pe ecranul osciloscopului panta de cădere a tensiunii de ieşire şi se compară cu valoarea calculată, considerând descărcarea condensatorului C1 numai prin curentul de intrare al circuitului U2, care are valoarea de 100 nA.
5.6. Determinarea diafoniei:
se pune la masă intrarea de comandă şi se aplică la intrare semnal sinusoidal cu frecvenţa crescătoare;
se trasează caracteristica amplitudine-frecvenţă a semnalului de ieşire;
diafonia se exprimă prin frecvenţa semnalului de intrare la care raportul în decibeli dintre semnalul de ieşire şi semnalul de intrare atinge o anumită valoare,
ca de exemplu valoarea de 40 dB.
6. ÎNTREBĂRI
6.1. Din ce cauză este necesară operaţia de eşantionare memorare? 6.1. În ce constă operaţia de eşantionare-memorare? 6.2. În ce situaţie este suficientă condiţia Shannon? 6.3. Ce fenomen apare în cazul în care nu este îndeplinită condiţia Shannon? 6.4. Cum se elimină orice posibilitate de apariţia a semnalelor alias? 6.5. Din ce considerente se stabileşte frecvenţa de eşantionare în cazul circuitelor de
eşantionare-memorare reale? 6.6. Prin ce artificii de circuit se reduc în schema din Fig.2 o parte din erorile unui
circuit simplu de eşantionare-memorare care ar funcţiona conform schemei de principiu din Fig.1?
62
LUCRARE DE LABORATOR LAB -10
CONVERTOARE NUMERIC-ANALOGICE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea convertoarelor numeric-analogice – DAC (Digital to Analog Converter). În lucrare se prezintă principiile de funcţionare, parametrii electrici principali şi o schemă de testare rapidă a unui DAC asupra căreia se efectuează partea experimentală.
2. GENERALITĂŢI
Convertorul numeric-analogic este un bloc funcţional de bază din structura unui aparat numeric de măsurare, care realizează conversia unei mărimi exprimată sub formă numerică într-o mărime analogică corespunzătoare. Altfel spus, DAC generează la ieşire un semnal analogic dependent de un cod numeric aplicat la intrarea lui, conform relaţiei:
kNX , (1) în care X reprezintă mărimea analogică rezultată la ieşire, N – numărul prezentat la intrare, iar k – o constantă de proporţionalitate. Numărul N este un număr zecimal exprimat sub formă binară sau zecimală codată binar, deci constanta k trebuie să aibă aceeaşi dimensiune ca şi mărimea analogică X.
Exprimarea binară a unui număr zecimal nu este obligatorie, dar în practică este utilizată din motive de tehnologie a conversiei, cât şi a efectuării operaţiilor matematice în sistemele numerice de calcul.
Expresia binară a unui număr N este de forma:
01i2-n1-n ... ... : aaaaaN , (2)
unde s-a considerat că N are n ranguri binare, adică n biţi şi 1,0i a .
Valoarea zecimală a numărului N se poate calcula cu relaţia:
1-ni
0i
ii
00
11
ii
2-n2-n
1-n1-n 222...2...22 aaaaaaN , (3)
63
iar valoarea maximă a numărului N este:
12nmax N . (4)
De obicei, mărimea analogică de ieşire – X, se exprimă sub formă normată, adică prin valorile ei raportate la o valoare X0, corespunzătoare numărului N0 = 2n:
12 maxn
0 NN , deci 00 kNX . (5)
Raportând membru cu membru (1) şi (5), se obţine:
1-ni
0i
n-ii0
1ni
0i
iin
0n0 22
22aXa
XNXX
-
, (6)
sau:
n0
)1n(1
nii
22-n
11-n0 22...2...22 aaaaaXX - , (7)
Inversând numerotarea indicilor coeficienţilor ai, începând cu cifra 1, (7) devine:
nk
1k
kk
nn
)1n(1-n
kk
22
110 222...2...22 bbbbbbXX . (8)
Din (4) şi (6) se poate calcula valoarea maximă pe care o poate atinge mărimea analogică de ieşire:
n0n
1n
0max 212
2
XXX . (9)
Convertoarele numeric-analogice au la bază diverse principii de funcţionare. Principalele metode pentru obţinerea unor componente analogice ponderate binar utilizează reţele de rezistenţe ponderate binar sau reţele de rezistenţe în scară, de tipul R/2R şi generatoare de curenţi ponderaţi binar.
Indiferent de principiu de realizare, mărimea de ieşire – X este de obicei curent, sau tensiune, iar valoarea X0 este fixată printr-un curent sau o tensiune de referinţă. Astfel, în cazul unui DAC de 4 biţi (4 ranguri binare), considerat a fi realizat cu generatoare de curenţi ponderaţi şi cu ieşirea în curent, (7) şi (8) devin:
16842r
0r
1r
2r
30
Ia
Ia
Ia
IaI ; (10)
16842r
4r
3r
2r
10
Ib
Ib
Ib
IbI ; (11)
în care s-a notat cu I0 (I0 = X) curentul de ieşire şi cu Ir (Ir = X0) curentul de referinţă. Dacă numărul de convertit este N(10) = 10, în binar capătă forma:
101001232 aaaaN ; (12)
iar curentul de ieşire al DAC va avea valoarea:
64
rrrrr
0 16
10
160
81
40
21 I
IIIII ; (13)
Din (10), (11) şi (13) se observă că la ieşirea DAC se obţine un curent egal cu o combinaţie liniară de curenţi ponderaţi cu valorile Ir/2, Ir/4, Ir/8, Ir/16, în funcţie de valoarea binară a biţilor asociaţi fiecărui generator de curent.
Plecând de la (6)...(9) se poate scrie expresia generală a (10) şi (11), valabilă pentru cazul unui DAC cu n biţi:
n
1k
kkr
1n
0i
niir0 22 bIaII şi r
nrn
n
0max 212
12III
; (14)
unde valorile coeficienţilor ai şi bk sunt date de valorile biţilor de rang corespunzător. Biţii extremi, cu ponderea cea mai mare şi cea mai mică, sunt denumiţi cel mai
semnificativ bit – MSB (Most Significant Bit), respectiv cel mai puţin semnificativ bit – LSB (Least Significant Bit). În cazul DAC denumirile MSB şi LSB pot fi atribuite atât biţilor respectivi din codul numeric al intrării, cât şi valorilor corespunzătoare ale mărimii de ieşire. Semnificaţia biţilor LSB şi MSB este următoarea:
LSB – reprezintă cea mai mică variaţie a mărimii analogice de ieşire a DAC, ce se poate obţine la variaţia între stările 0/1 a unui singur bit din codul digital al intrării. Această variaţie a mărimii de ieşire este produsă de bitul cu ponderea cea mai mică (a0 sau bn) şi are valoarea:
nr 2ILSB . (15)
Valoarea bitului LSB este utilizată uzual pentru exprimarea preciziei, rezoluţiei sau neliniarităţii, sub forma unui anumit procent din LSB.
MSB – reprezintă cea mai mare variaţie a mărimii analogice de ieşire a DAC, ce se poate obţine la variaţia între stările 0/1 a unui singur bit din codul digital al intrării. Această variaţie a mărimii de ieşire este produsă de bitul cu ponderea cea mai mare (an-1 sau b1) şi are valoarea:
2rIMSB . (16)
3. PARAMETRII CARACTERISTICI PRINCIPALI AI DAC
3.1. Codul numeric acceptat la intrare. În conversiile numeric-analogice şi analog-numerice se utilizează mai multe tipuri de coduri binare unipolare (binar natural, BCD, Gray) şi bipolare (semn-modul, binar deplasat, complement faţă de 2, complement faţă de 1, inversat analogic).
65
3.2. Capăt de scală (Full Scale – FS) – reprezintă valoarea mărimii de ieşire X0 = kN0 = k(Nmax + 1) = k2n. Această valoarea nu poate fi atinsă niciodată de mărimea de ieşire.
3.3. Domeniul maxim al ieşirii (Full Output Range – FR) – reprezintă valoarea mărimii de ieşire a DAC, când la intrare se aplică valoarea maximă a codului digital: Xmax = kNmax = k(2n - 1) = X0(2
n - 1)/2n = X0(1 - 2n).
3.4. Eroarea de ofsset – reprezintă valoarea mărimii analogice de ieşire când codul digital de intrare corespunde unei valori a mărimii de ieşire egală cu zero. Se exprimă în fracţiuni din FS, ppm, fracţiuni din LSB, μA sau mV.
3.5. Rezoluţia (Resolution – R) – reprezintă numărul de stări distincte ale mărimii de ieşire. În cazul ideal R = 2n. Rezoluţia se mai poate exprima şi în număr de biţi, exemplu R = n (n = numărul de biţi).
3.6. Neliniaritatea – reprezintă abaterea maximă a mărimii de ieşire faţă de linia dreaptă trasată prin punctele extreme ale caracteristicii de transfer a DAC (pentru toţi biţii egali cu 0 respectiv 1). Se exprimă prin procente din capăt de scală (%FS) sau prin fracţiuni din LSB.
3.7. Precizia – se exprimă funcţie de abaterea maximă a mărimii de ieşire de la caracteristica ideală. Include toţi termenii de eroare şi se exprimă în procente din capăt de scală (%FS) sau fracţiuni din LSB.
3.8. Monotonia – este proprietatea mărimii de ieşire a DAC, de a avea o variaţie pozitivă sau cel puţin nulă, la modificarea codului numeric în sens crescător, între două stări succesive.
3.9. Excursia de tensiune a ieşirii – se referă la ieşirea în curent a DAC şi reprezintă excursia de tensiune care produce pentru acelaşi cod numeric o variaţie a curentului de ieşire de ±1/2LSB.
3.10. Rejecţia tensiunilor de alimentare – se exprimă prin variaţia mărimii de ieşire corespunzătoare unei anumite variaţii a tensiunilor de alimentare.
3.11. Coeficientul de variaţie cu temperatura al capătului de scală – se determină prin raport între variaţia capătului de scală la o anumită temperatură, faţă de temperatura de 25 °C şi se exprimă în ppm/°C.
3.12. Timpul de stabilire – este intervalul de timp necesar mărimii de ieşire pentru a atinge valoarea de regim staţionar. De obicei, se specifică pentru variaţia de la zero la valoarea maximă a codului numeric de intrare şi se acceptă o eroare dinamică de 1/2LSB.
66
3.13. Viteza de creştere a mărimii de ieşire (Slew-rate) – se defineşte ca viteza de creştere a mărimii de ieşire atunci când se modifică mărimea de referinţă, pentru acelaşi cod numeric de intrare.
3.14. Cuplajul intrare-ieşire – defineşte, în cazul unui DAC multiplicator, frecvenţa pentru care la ieşire apare un semnal alternativ de 1/2LSB (vârf-vârf), atunci când la intrarea de referinţă există semnal alternativ şi codul numeric este zero.
4. SCHEMA CIRCUITULUI DE TESTARE RAPID A DAC
Testarea completă a unui DAC necesită scheme de test complexe şi se execută în mod obişnuit sub controlul unui calculator. Pe de altă parte, utilizatorul de DAC trebuie să verifice funcţionarea acestor circuite în scheme de aplicaţii uzuale. În acest scop, se utilizează scheme de test mai simple, care să permită verificarea parametrilor principali sau a unor parametri specifici care sunt critici într-o aplicaţie concretă. În Fig.1 este reprezentată o schemă de testare minimală a convertorul numeric-analogic βDAC–08, de 8 biţi, fabricat o vreme şi în ţara noastră.
OUTR1
V
R2
R3
R4
C1
COMP
GND
VREF
C2 C3
OUT
V+
V+V VLCI0
I0
+
INREF
a1 a0a3 a2a5 a4a7 a6
MSB LSBS7 S6 S5 S4 S3 S2 S1 S0
DAC-08
Fig.1. Schema circuitului de testare minimală a circuitului βDAC-08.
Valorile componentelor electronice sunt următoarele:
R1, R2 = 5 kΩ ± 1%; R3, R4 = 100 Ω ± 1%;
C1, C3 = 100 nF; C2 = 10 nF.
Convertorul βDAC08 este constituit dintr-un generator de curent de referinţă cu
valoarea Ir = 256I, care prescrie curenţii prin cele 8 generatoare de curenţi ponderaţi corespunzătoare celor 8 biţi, care au valorile: Ir/2 = 128I, Ir/4 = 64I...Ir/256 = I. Aceste
67
generatoare sunt realizate cu tranzistoare având în emitor o reţea de rezistenţe ponderată R/2R. Valoarea curentului Ir este fixată prin tensiunea de referinţă VREF şi rezistenţa R1, având valoarea nominală de 2 mA (VREF = 10 V, R1 = 5 kΩ). Rezistenţa R2, egală cu R1, are rolul de a compensa curenţii de intrare ai amplificatorului de eroare al generatorului de curent de referinţă.
Fiecare bit al codului numeric de intrare comandă câte un comutator de curent, care conectează generatorul de curent ponderat corespunzător la ieşirea I0 dacă bitul respectiv are valoarea logică 1 sau la ieşirea non-I0 dacă bitul are valoarea logică 0. Astfel, curentul de ieşire rezultă o combinaţie liniară de curenţi ponderaţi binar, conform (14). Circuitul poate funcţiona şi cu tensiune de referinţă variabilă, caz în care se obţine un DAC multiplicator, al cărui curent de ieşire este proporţional cu produsul dintre VREF şi codul numeric de intrare.
Condensatoarele C1 şi C3 au rol de filtrare a tensiunilor de alimentare, iar C2 de compensare cu frecvenţa a amplificatorului de eroare.
5. PROBLEME TEORETICE ŞI EXPERIMENTALE
5.1. Verificarea liniarităţii:
se efectuează atât pentru ieşirea directă (I0, OUT), cât şi pentru ieşirea complementară (non-I0, non-OUT); pentru simplitate, se consideră, conform (1), (2) şi (3), că tensiunea de ieşire este dată de o relaţia de forma:
00
11
22
33
44
55
66
770 22222222 aaaaaaaakv , (17)
pentru valoarea maximă a codului numeric de intrare se reglează VREF, astfel ca v0max = 0,1995 V, adică:
2550maxv
k ;
7i
0i
ii
0max0 2
255a
vv ; (18)
se dă codului numeric de intrare 5...7 valori echidistante şi se măsoară valorile
corespunzătoare ale tensiunii de ieşire – k0v ;
se calculează eroarea de neliniaritate – n, plecând de la relaţia:
k0k00k vvv ; 0max
0maxn v
v ; (19)
unde v0k sunt valorile tensiunii de ieşire calculate cu (18);
datele experimentale se trec într-un tabel, conform modelului de mai jos.
68
Tabel 1. Verificarea liniarităţii DAC.
Cod zecimal
Cod binar
0v v0 Δv0 n
0 00000000 01v v01 Δv01
: : : : :
255 11111111 0nv v0n Δv0n
Δv0max = ?
n = ?
5.2. Verificarea monotoniei:
Observaţii: 1. Monotonia unui DAC se verifică automat, baleind codul numeric de intrare cu
un numărător şi comparând valoarea actuală a mărimii de ieşire cu valoarea anterioară reţinută cu un circuit de eşantionare-memorare. Evident, această operaţie nu poate fi efectuată manual, din cauza consumului mare de timp.
2. În cazul unui DAC cu generatoare de curenţi ponderaţi, monotonia este determinată de semnul şi valoarea erorii fiecărui generatoar. Dacă unele generatoare au erori pozitive iar altele negative, este posibil ca la creşterea codului numeric cu o unitate, mărimea de ieşire să scadă în loc să crească, dacă suma erorilor negative depăşeşte în modul pe cea a erorilor pozitive.
3. Având în vedere cele menţionate anterior, se poate observa că tranziţiile cele mai probabile să afecteze monotonia sunt cele de forma 0...01...1/0...10...0, adică cele care determină înlocuirea sumei unui anumit număr de curenţi ponderaţi cu curentul de pondere imediat superioară. În formă desfăşurată, pentru un DAC de 8 biţi, aceste tranziţii sunt următoarele:
0000 0000/0000 0001;
0000 0001/0000 0010;
0000 0011/0000 0100;
0000 0111/0000 1000;
0000 1111/0001 0000;
0001 1111/0010 0000;
0011 1111/0100 0000;
0111 1111/1000 0000.
Probabilitatea de a afecta monotonia creşte de la prima tranziţie spre ultima tranziţie, fiindcă erorile se cumulează pas cu pas.
69
se va verifică monotonia DAC din Fig.1, conform procedeului simplificat menţionat mai sus.
5.3. Verificarea Slew-Rate:
pentru valoarea maximă a codului numeric de intrare, se aplică la borna VREF impulsuri dreptunghiulare şi se măsoară Slew-Rate pe ecranul unui osciloscop catodic (Vezi LUCRARE DE LABORATOR CCSM-02, pct.4.2.4).
6. ÎNTREBĂRI
6.1. Care este principiul de funcţionare al DAC, în general, şi al celor cu generatoare de curenţi ponderaţi, în particular?
6.2. Ce relaţie trebuie să existe între erorile relative şi absolute ale celor n (n = număr biţi) generatoare de curent ale unui DAC, pentru ca să fie asigurată cu certitudine monotonia?
70
LUCRARE DE LABORATOR LAB -11
CONVERTOARE TENSIUNE-FRECVENŢĂ
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea convertoarelor tensiune-frecvenţă – VFC (Voltage to Frequency Converter), care sunt incluse şi în categoria convertoarelor analog-numerice – ADC (Analog to Digital Converter) cu conversiune intermediară în timp. În lucrare se prezintă principalele utilizări şi principii de funcţionare ale VFC şi se dezvoltă pentru studiu şi experimentare un VFC, funcţionând pe principiul încărcării şi descărcării unui condensator de integrare, între două nivele de referinţă, cu un curent proporţional cu tensiunea de măsurat.
2. GENERALITĂŢI
Convertoarele tensiune-frecvenţă, cunoscute şi sub denumirea de convertoare cu oscilator comandat, intră în categoria ADC cu conversiune intermediară în frecvenţă. Un VFC converteşte mai întâi tensiunea de măsurat – vx într-un semnal cu frecvenţa – fx, care este apoi măsurată conform metodei de măsurare numerică a frecvenţei, prin numărarea impulsurilor cu frecvenţa necunoscută într-un interval de timp cunoscut. Convertoarele tensiune-frecvenţă sunt utilizate în sistemele de achiziţie a datelor, datorită avantajelor pe care le prezintă. Un VFC poate fi realizat sub formă compactă, este ieftin şi poate asigura precizie şi liniaritate satisfăcătoare în multe aplicaţii. Convertorul tensiune-frecvenţă poate fi plasat la locul de măsurare, astfel că transmisia semnalului până la centrul de achiziţie se efectuează în frecvenţă şi nu în amplitudine. O astfel de transmisie este mult mai puţin perturbabilă comparativ cu transmisia în nivel. În plus, VFC permit introducerea unei separări galvanice simple, prin optocuplor sau transformator, rezolvându-se astfel complet problema rejecţiei perturbaţiilor de mod comun. Datorită acestei particularităţi (separare galvanică), VFC se pot utiliza şi la realizarea amplificatoarelor de măsurare cu izolare galvanică, care funcţionează pe principiul modulării în frecvenţă a semnalului de măsurare.
71
În general, există două principii de realizare a VFC. Un prin principiu de funcţionare se bazează pe încărcarea şi descărcarea unui condensator de integrare între două nivele de referinţă printr-un curent proporţional cu tensiunea de măsurat; al doilea principiu de funcţionare se bazează pe compararea tensiunii de măsurat cu valoarea medie a unui şir de impulsuri de tensiune sau curent cu aria constantă. Convertoarele de ultimul tip sunt cunoscute sub denumirea de VFC cu echilibrare sau cu acumulare de sarcină, care pot funcţiona şi în regim sincronizat cu o frecvenţă exterioară de tact, asigurând performanţe superioare (precizie, liniaritate, stabilitate).
3. PRINCIPIUL DE FUNCŢIONARE AL VFC
În continuare se prezintă un VFC funcţionând pe principiul încărcării şi descărcării unui condensator de integrare între două nivele de referinţă, la un curent proporţional cu tensiunea necunoscută – vx, conform schemei de principiu reprezentată în Fig.1.
vi+Vr
Vrt
T1 T2
t
vc
(b)
+
-
+
-
vi
vc
R CU1 U2
+Vr
Vr
+vx
vx S1
S2
1
21
2(a)
Fig.1. Principiul de funcţionare al VFC cu condensator de integrare: (a) – schema de principiu; (b) – forme de undă.
VFC, conform Fig.1.a, include un integrator realizat cu amplificatorul operaţional U1, rezistenţa R şi condensatorul C şi un comparator realizat cu amplificatorul operaţional U2. Comparatorul îşi schimbă starea şi comandă comutatoarele S1 şi S2 când tensiunea de ieşire a integratorului – vi atinge valorile ±Vr, conform Fig.1.b. Pe durata de timp T1, în care S1 = 2 şi S2 = 1, variaţia tensiunii de ieşire a integratorului – U1 este descrisă de relaţia:
tRC
vVtv x
ri . (1)
La momentul de timp t = T1 sunt valabile relaţiile:
r1i VTv , deci x
r1 2
v
VRCT . (2)
72
În acelaşi moment de timp (t = T1) comparatorul îşi schimbă starea şi comandă S1 = 1 şi S2 = 2. Astfel, pe intervalul de timp T2 tensiunea – vi este descrisă de relaţia:
tRC
vVtv x
ri . (3)
La momentul de timp T = T1 + T2 (3) conduce la concluzia:
r21i VTTv , deci x
r2 2
v
VRCT . (4)
Luând în considerare (2) şi (4), frecvenţa tensiunii liniar variabile de ieşire a integratorului – vi, şi a impulsurilor de la ieşirea comparatorului – vc capătă expresia:
2
1
r
x
xx 4
1
4
11
v
v
RCV
v
RCTf . (5)
Din (5) se observă că frecvenţa impulsurilor de ieşire ale VFC este proporţională cu raportul a două tensiuni (vx/Vr = v1/v2). Când operaţia de împărţire nu interesează, tensiunea v2 se menţine constantă, având rolul unei tensiuni de referinţă care intră în factorul de scală al VFC (v2 = Vr). În aplicaţiile practice pot apare diverse situaţii în care operaţia de împărţire devine importantă, cum ar fi cazul măsurării mărimilor de grad 0 (sau parametrice, exprimabile ca raport a două mărimi de grad 1 sau 2) sau când mărimea de măsurat depinde în mod nedorit şi de o altă mărime instabilă în timp, cum ar fi tensiunea reţelei de alimentare. De exemplu, în cazul măsurării rezistenţei, dacă tensiunea v1 se face proporţională cu tensiunea aplicată rezistenţei iar v2 cu curentul prin rezistenţă, frecvenţa de ieşire va depinde numai de valoarea rezistenţei de măsurat şi nu va mai depinde de valoarea tensiunii de test, ca în mod obişnuit. Această situaţie rămâne valabilă şi dacă se măsoară căderea de tensiune pe rezistenţa necunoscută, produsă de un curent constant. Pentru realizarea comutatoarelor S1 şi S2, o soluţie comodă o reprezintă utilizarea unui amplificator cu amplificare unitară şi cu semnul amplificării comandat printr-un tranzistor cu efect de câmp, utilizat şi ca redresor sincron, ca în cazul multiplicatorului cu modulare amplitudine-durată (Vezi LUCRARE DE LABORATOR CCSM-07).
4. SCHEMA BLOC A MACHETEI DE TEST A VFC
Schema electrică a VFC asupra căruia se efectuează partea experimentală este cea din Fig.1.a, completată cu schema comutatoarelor, conform pct.3. Din acest motiv nu s-a mai prezentat schema electrică completă, urmând ca aceasta să fie completată în laborator. Schema bloc a machetei de test a VFC este reprezentată în Fig.2.
73
Rv
v1
GND
v2
fx OUTVFC
V+
Fig.2. Schema bloc a machetei de test a VFC.
Se observă că tensiunea v2 este generată intern şi poate fi reglată cu ajutorul potenţiometrului Rv. VFC, conform Fig.1, realizat cu componente electronice de calitate poate asigura următoarele performanţe:
intervalul de variaţie al tensiunilor de intrare: v1, v2 = 0...10 V;
gama dinamică a tensiunilor de intrare: v1 – 1/100, v2 – 1/10;
gama dinamică a frecvenţei de ieşire: 1/100...10/1;
eroarea de bază: ± 0,1% pentru v2 = 10 V şi ± 0,5% pentru v2 = 1 V;
intervalul de variaţie al frecvenţei de ieşire: 100 Hz...100 kHz, funcţie de viteza
amplificatoare operaţionale utilizate.
5. PROBLEME TEORETICE ŞI EXPERIMENTALE
5.1. Se desenează schema completă a VFC, utilizând pentru comutatoarele K1, K2 soluţia menţionată la pct.3.
5.2. Determinarea erorii de neliniaritate:
se reglează v2 = 10 V, se aplică la intrare v1k = 1, 3, 5, 7, 9, 10 V şi se măsoară frecvenţa de ieşire corespunzătoare – fxk (k = 1, 2...6);
se determină ecuaţia caracteristicii liniare de transfer, care trece prin punctele (v11 = 1 V, fx1) şi (V15 = 9 V, fx5):
1111115
x1x5x1x vv
vv
ffff
; (6)
se determină abaterea caracteristicii de transfer reale faţă cea liniară dată (6): xkxkxk fff ; (7)
se selectează eroarea de neliniaritate maximă – xmaxf şi se exprimă ca eroare
raportată (procente din capăt de scală):
74
%100xmax
xmaxn f
f ; (8)
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1. Eroarea de neliniaritate pentru v2 = 10 V.
v1 fx xf xf n
v11 fx1 x1f x1f
: : : :
v16 fx6 x6f x6f
xmaxf = ?
n = ?
4.3. Determinarea erorii de zero:
Observaţie: Determinarea erorii de zero a unui VFC nu poate fi efectuată direct, deoarece pentru tensiune de intrare zero, funcţie de semnul tensiunii totale de decalaj, convertorul poate ieşi din funcţiune sau poate funcţiona la o frecvenţă foarte mică, dificil de măsurat. Din acest motiv, eroarea de zero se determină indirect, astfel:
se determină factorul de scală în punctul v16 = 10 V (v2 = 10 V):
Hz616
2 fv
vK ; (9)
se determină ordonatele punctelor de pe caracteristica ideală de transfer (care de data aceasta este considerată ca trecând prin zero) rezultată din (9):
2
1x v
vKf ; (10)
se determină abaterea absolută maximă a caracteristicii de transfer reală faţă de caracteristica ideală cu originea în zero prin zero:
xkxkxk fff ; (11)
unde valorile măsurate – fxk sunt cele determinate la pct.4.2;
se selectează eroarea totală maximă – xmaxf şi se exprimă în procente din capăt
de scală:
%100xmax
xmaxt f
f ; (12)
se determină eroarea de zero cu relaţia:
75
xkxkxk fff ; (13)
se exprimă eroarea de zero sub formă de eroare raportată:
%100xmax
xmax0 f
f ; (8)
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1. Eroarea de zero pentru v2 = 10 V.
v1 fx xf
xf xf xf fx R
v11 fx1 x1f
x1f x1f x1f fx1
: : : : : : :
v16 fx6 x6f
x6f x6f x6f fx6
t = ?
0 = ?
5.4. Se repetă operaţiile de la pct.5.2 şi 5.3 pentru V2 = 1 V. Datele experimentale se trec în două tabele 3 şi 4, conform modelelor prezentate anterior.
5.5. Determinarea preciziei la operaţia de împărţire:
se regleaz v1 = 10 V, se aplică v2k = 1, 3, 5, 7, 9 V (k = 1, 2...5) şi se măsoară
frecvenţa de ieşire corespunzătoare – /xkf ;
se calculează eroarea absolută totală a operaţiei de împărţire:
xkxkxk fff // ; (15)
se selectează eroarea absolută maximă şi se calculează eroarea raportată a operaţiei de împărţire cu relaţia:
%/
/ 100xmax
xmaxf
f ; (16)
datele experimentale se trec într-un tabel adecvat conform modelului următor.
Tabel 5. Eroarea operaţiei de împărţire.
v1 /xf
xf /xf /
v11 /x1f
x1f /x1f
: : : :
v15 /x5f
x5f /x5f
/xmaxf = ?
/ = ?
76
5.6. Se analizează datele experimentale şi se precizează cauzele diferenţelor dintre datele experimentale obţinute la pct.5.3, 5.4 şi 5.5.
6. ÎNTREBĂRI
6.1. Care sunt utilizările VFC? 6.2. Care sunt principiile de funcţionare ale VFC? 6.3. Din ce cauză VFC nu pot funcţiona cu tensiune de intrare în apropierea de zero? 6.4. Ce modificări ar trebui aduse schemei electrice a unui VFC pentru ca acesta să
poată funcţiona în jurul valorii zero a tensiunii de intrare sau cu tensiuni de intrare de ambele polarităţi?
77
LUCRARE DE LABORATOR LAB -12
CONVERTOARE ANALOG-NUMERICE
1. SCOPUL LUCRĂRII
Scopul prezentei lucrări de laborator este studierea şi testarea convertoarelor analog-numerice – ADC (Analog to Digital Converter). În lucrare se prezintă destinaţia şi principiile de funcţionare ale ADC. Partea experimentală se efectuează asupra unui ADC cu aproximaţii succesive. Din considerente didactice, registrul de aproximaţii succesive este simulat de către operator prin intermediul unor comutatoare mecanice.
2. GENERALITĂŢI
Convertorul analog-numeric este o verigă esenţială a unui sistem de măsurare şi/sau prelucrare numerică a informaţiei care are ca suport fizic mărimi cu variaţie continuă în timp. Precizia unei măsurări numerice este determinată în cea mai mare parte de prelucrările efectuate pe partea analogică, inclusiv conversia analog-numerică. Erorile de prelucrare numerică a informaţiei sunt în general neglijabile în comparaţie cu cele care însoţesc prelucrarea analogică. Ca urmare, tehnicile şi circuitele de conversie analog-numerică au fost tratate cu atenţie şi au cunoscut o amplă dezvoltare. În general, ADC pot fi împărţite în două categorii: neintegratoare şi integratoare. Convertoarele analog-numerice neintegratoare eşantionează tensiunea de măsurat şi îi măsoară valoarea instantanee la un anumit moment de timp. Acestea permit măsurări rapide, în detrimentul filtrării antiperturbative. Cele mai importante ADC neintegratoare sunt cele cu aproximaţii succesive, cu rampă liniară şi cu rampă în trepte. Convertoarele analog-numerice integratoare, măsoară valoarea medie a tensiunii necunoscute pe un anumit interval de timp, prin integrarea acestei tensiuni. Astfel, cresc proprietăţile antiperturbative, însă scade viteza de măsurare. În această categorie intră ADC cu conversie intermediară în frecvenţă, cu simplă, dublă şi cu multiplă integrare. Există şi ADC care combină cele două tehnici menţionate anterior, realizând un compromis optim între performanţele şi deficienţele ambelor categorii.
78
Din rândul ADC neintegratoare o largă utilizare o are cel cu aproximaţii succesive. Acest tip de convertor se bazează pe utilizarea unui convertor numeric-analogic şi realizează cel mai bun factor de merit, exprimat ca produs între precizie şi viteză.
3. PRINCIPIUL DE FUNCŢIONARE AL ADC CU APROXIMAŢII SUCCESIVE
Convertorul analog-numeric cu aproximaţii succesive se bazează pe compararea tensiunii de măsurat cu tensiunea de ieşire a unui convertor numeric-analogic – DAC la intrarea căruia se aplică succesiv coduri numerice conform unui anumit protocol. Conversia constă în testarea şi stabilirea valorii fiecărui bit, de la bitul cu cel mai semnificativ – MSB şi până la bitul cel mai puţin semnificativ – LSB. În Fig.1 este reprezentată schema de principiu a unui astfel de convertor.
+
-
U
DAC
. . . . . .
vx
vc
CK
D
SAR
S
MSB LSB
IEŞIRENUMERICĂPARALEL
STOP CONVERSIE
IEŞIRE NUMERICĂ SERIE
START CONVERSIE
TACTDATA
Fig.1. Schema de principiu a ADC cu aproximaţii succesive.
ADC cu aproximaţii succesive include un comparator, care compară tensiunea de măsurat – vx cu o tensiune de referinţă generată de un DAC – vC. Codurile numerice aplicate la intrarea DAC sunt generate de un registru de aproximaţii succesive – SAR, prevăzut cu intrare de tact, start şi date şi cu ieşire numerică paralel, serie şi de semnalizare a sfârşitului conversiei. După primirea comenzii de start, la primul impuls de tact SAR generează codul 10...0, adică testează bitul MSB iar DAC generează o tensiune corespunzătoare – Vr/2 (Vr capătul de scală – FS), care este comparată cu vx:
dacă vx > Vr/2, comparatorul trece în starea 1-logic şi la următorul impuls de tact SAR memorează valoarea 1-logic a bitului testat şi generează codul 110...0, adică se trece la testarea valorii bitului următor;
79
dacă vx < Vr/2, comparatorul trece în starea 0-logic şi la următorul impuls de tact SAR memorează valoarea 0-logic a bitului testat şi generează codul 010...0, adică se trece la testarea bitului următor; acest proces continuă bit cu bit, până la stabilirea valorii bitului LSB, apoi se opreşte şi registrul SAR semnalizează sfârşitul conversiei.
La terminarea ciclului de conversie, tensiunea de la ieşirea ADC este egală cu tensiunea vx, în limitele unei erori de ± 1 LSB şi ca urmare codul numeric generat de SAR şi aplicat la intrarea DAC reprezintă valoarea numerică a tensiunii vx. ADC cu aproximaţii succesive se construiesc sub formă de circuit integrat sau hibrid. Dacă viteza de conversie nu este critică, registrul SAR pot fi simulat prin soft-ware. Rezoluţia acestor convertoare poate atinge sau depăşi 16 biţi. Un parametru specific ADC este timpul de conversie, care poate lua valori, în
funcţie şi de numărul de biţi, de 100 ns...10 μs. Ceilalţi parametri ai ADC sunt, cu
unele deosebiri de nuanţă, în mare parte aceeaşi ca şi în cazul DAC.
4. SCHEMA ELECTRICĂ A MACHETEI DE LABORATOR
Schema machetei de laborator, utilizată pentru testarea ADC cu aproximaţii succesive, este reprezentată în Fig.2. În schema din Fig.2, spre deosebire de schema din Fig.1, comparatorul este realizat cu amplificatorul operaţional – U1, DAC este un circuit tip βDAC-08 cu ieşire în curent, iar SAR este simulat cu ajutorul comutatoarelor mecanice S0...S7. Dioda LED semnalizează valoarea incorectă a bitului testat.
GND
+
-
R1
V+
R2
R3
R4
C1
COMP
VREF
C2C3
V
VV+VLCI0
I0
+
a1 a0a3 a2a5 a4a7 a6
MSB LSBS7 S6 S5 S4 S3 S2 S1 S0
vx
U1
D1LED
DAC-08
Fig.2. Schema machetei de testare a ADC cu aproximaţii succesive.
80
5. PROBLEME TEORETICE ŞI EXPERIMENTALE
5.1. Se construieşte organigrama comparaţiilor şi codurilor care pot rezulta la un ADC cu aproximaţii succesive de 3 biţi.
5.2. Determinarea erorii de neliniaritate:
se aplică la intrare vxk = 1, 3, 5, 7, 9, 10 V, se echilibrează ADC conform pct.3 cu ajutorul comutatoarelor S7...S0, care în final indică codul numeric şi se notează codurilor numerice corespunzătoare în binar – Nbk şi în zecimal – Nzk (k = 1...6);
se determină ecuaţia caracteristicii de transfer liniare, adică a dreptei care trece prin punctele (vx1 = 1 V, Nz1) şi (vx5 = 9V, Nz5):
x1xx1x5
z1z5z1z vv
vv
NNNN
; (1)
se determină eroarea de neliniaritate, adică abaterea caracteristici faţă de (1): zkzkzk NNN ; (2)
se exprimă eroarea de neliniaritate sub formă raportată:
%100zmax
zmaxn N
N ; (3)
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1. Eroarea de neliniaritate.
vx Nb Nz zN zN n
vx1 Nb1 Nz1 z1N z1N
: : : : :
vx6 Nb6 Nz6 z6N z6N
zmaxN = ?
n = ?
5.3. Determinarea erorii totale:
se determină factorul de scală – K în punctul (vx6 = 10 V, Nx6) şi ecuaţia caracteristicii ideale de transfer:
1
6x
z6 Vv
NK ; ; (4) xz KvN
se determină eroarea absolută totală, dată de abaterea caracteristicii reale de transfer, faţă de caracteristica ideală, conform (4):
81
82
zkzkzk NNN ; (5)
se exprimă eroarea absolută totală sub formă de eroarea raportată:
%100zmax
zmaxt N
N ; (6)
se determină eroarea absolută de zero: zkzkzk NNN ; (7)
se exprimă eroarea de zero sub formă de eroare raportată:
%100zmax
zmax0 N
N ; (8)
datele experimentale se trec într-un tabel, conform modelului de mai jos.
Tabel 1. Eroarea totală şi de zero.
vx Nz zN
zN zN ΔNz R
vx1 Nz1 z1N
z1N z1N ΔNz1
: : : : : :
vx6 Nz6 z6N
z6N z6N ΔNz6
t = ?
0 = ?
Observaţie:
Calculele de la pct.5.2 şi 5.3 sunt afectate de o eroare sistematică de metodă de ±1 LSB, datorită caracterului discret al mărimii de ieşire a ADC. Dacă erorile de neliniaritate şi de zero sunt sub nivelul acestei erori determinarea lor devine incertă.
6. ÎNTREBĂRI
6.1. Care sunt caracteristicile ADC integratoare comparativ cu cele neintegratoare? 6.2. Care sunt caracteristicile specifice ale unui ADC cu aproximaţii succesive? 6.3. Cât timp durează un ciclu complet de conversie al unui ADC cu aproximaţii
succesive? 6.4. Care sunt cauzele care limitează numărul de biţi al unui ADC cu aproximaţii