1. Generalitati despre traductoare Traductorul (denumit in unele lucrări - senzorul, au captorul) este definit ca fiind “ un dispoziti v care detectează sau măsoară unele condiţii sau proprietăţ i şi înregist rează, indică sau uneori răspu nde la informaţia primită ”. Astfel, senzorii au funcţia de a converti un stimul într-un semnal măsurabil, cuprinznd att traductorul, care transformă mărimea de intrare în semnal electric util, ct !i circuite pentru adaptarea !i conversia semnalelor, !i eventual pentru prelucrarea !i evaluarea informaţiilor. "timulii pot fi mecanici, termici, electromagnetici, acusticisau chimicila ori#ine, în timp ce semnalul măsur abil este tipic de natură electrică, de!i pot fi folosite semnale pneumatice, $idraulice, optice sau bioelectrici. %n #estionarea proceselor ce se desfă!oară în instalaţiile !i sistemele automobilului, deosebit de importante sunt sistemele inteli#ente de conducere, sisteme ce sunt bazate pe sisteme de calcul inte#rat sau nu. "enzorii !i traductoarele folosite în &electronica îmbarcată pe automobil” se bazează pe un domeniu lar# de principii fizice de operare. 'e asemenea, sunt utilizaţi !i în cazul ce rce t ării, ana liz elor de lab ora tor - senzorii !i traduc toa rele fii nd inc luse în lan ţ ur i de măsurare complee, care sunt conduse automat. istă foarte multe clasificări ale senzorilor si traductoarelor* cu sau fără contact, absoluţi sau incrementali (în funcţie de mărimea de intrare), analo#ici sau di#itali (în funcţie de mărimea de ie!ire) etc. Ale#erea senzorilor si traductoarelor trebuie făcută ţinnd cont de proprietatea de monitorizat, de domeniul în care variază aceasta, de dimensiunile ce trebuie respectate sau de #eometria sistemului, de condiţii speciale de mediu sau de lucru, de tipul mărimii de ie!ire !i nu în ultimul rnd de costuri. Astfel, pot fi identificaţi senzori de proimitate, traductoare de tip +all, traductoare de deplasare si vitez ă, sen zor i !i tra du cto are de for ţă, senzori de tem per atu ră, sen zor i de umiditate, senzori pentru #aze, senzori de curent, sitc$-uri optice, senzori de presiune, cititoare de coduri de bare etc. 2. Sistemele de conducere a proceselor din instal aţ ii le automati zate %n caz ul unu i pro ces au tomatizat, conducerea sis tem ulu i se fac e făr ă int erven ţ ia omului, pe baza informaţiilor culese din proces cu autorul senzorilor. re!terea compleităţii proceselor automatizate, ca !i aceea a modului de conducere a acestora, a avut drept efect distribuirea funcţională !i spaţială a funcţiilor de conducere. %n structura sistemelor complee de automatizare se re#ăsesc trei niveluri distincte* nivelul de monitorizare !i comandă, nivelul de conectare, !i nivelul cmpului. "istem de conducere a proceselor/a nivelul de monitorizare !i comandă, procesul este comandat !i suprave#$eat. Aici este centrul automatizării unde vin toate informaţiile le#ate de instalaţie.
Traductorul (denumit in unele lucrări - senzorul, au captorul) este definit ca fiind “ un
dispozitiv care detectează sau măsoară unele condiţii sau proprietăţi şi înregistrează, indică
sau uneori răspunde la informaţia primită”. Astfel, senzorii au funcţia de a converti un stimulîntr-un semnal măsurabil, cuprinznd att traductorul, care transformă mărimea de intrare în
semnal electric util, ct !i circuite pentru adaptarea !i conversia semnalelor, !i eventual pentru prelucrarea !i evaluarea informaţiilor. "timulii pot fi mecanici, termici, electromagnetici,acustici sau chimici la ori#ine, în timp ce semnalul măsurabil este tipic de natură electrică,de!i pot fi folosite semnale pneumatice, $idraulice, optice sau bioelectrici.
%n #estionarea proceselor ce se desfă!oară în instalaţiile !i sistemele automobilului,deosebit de importante sunt sistemele inteli#ente de conducere, sisteme ce sunt bazate pesisteme de calcul inte#rat sau nu.
"enzorii !i traductoarele folosite în &electronica îmbarcată pe automobil” se bazează pe un domeniu lar# de principii fizice de operare. 'e asemenea, sunt utilizaţi !i în cazulcercetării, analizelor de laborator - senzorii !i traductoarele fiind incluse în lanţuri demăsurare complee, care sunt conduse automat.
istă foarte multe clasificări ale senzorilor si traductoarelor* cu sau fără contact,absoluţi sau incrementali (în funcţie de mărimea de intrare), analo#ici sau di#itali (în funcţiede mărimea de ie!ire) etc.
Ale#erea senzorilor si traductoarelor trebuie făcută ţinnd cont de proprietatea demonitorizat, de domeniul în care variază aceasta, de dimensiunile ce trebuie respectate sau de#eometria sistemului, de condiţii speciale de mediu sau de lucru, de tipul mărimii de ie!ire !inu în ultimul rnd de costuri.
Astfel, pot fi identificaţi senzori de proimitate, traductoare de tip +all, traductoare dedeplasare si viteză, senzori !i traductoare de forţă, senzori de temperatură, senzori deumiditate, senzori pentru #aze, senzori de curent, sitc$-uri optice, senzori de presiune,cititoare de coduri de bare etc.
2. Sistemele de conducere a proceselor din instalaţiile automatizate
%n cazul unui proces automatizat, conducerea sistemului se face fără intervenţiaomului, pe baza informaţiilor culese din proces cu autorul senzorilor.
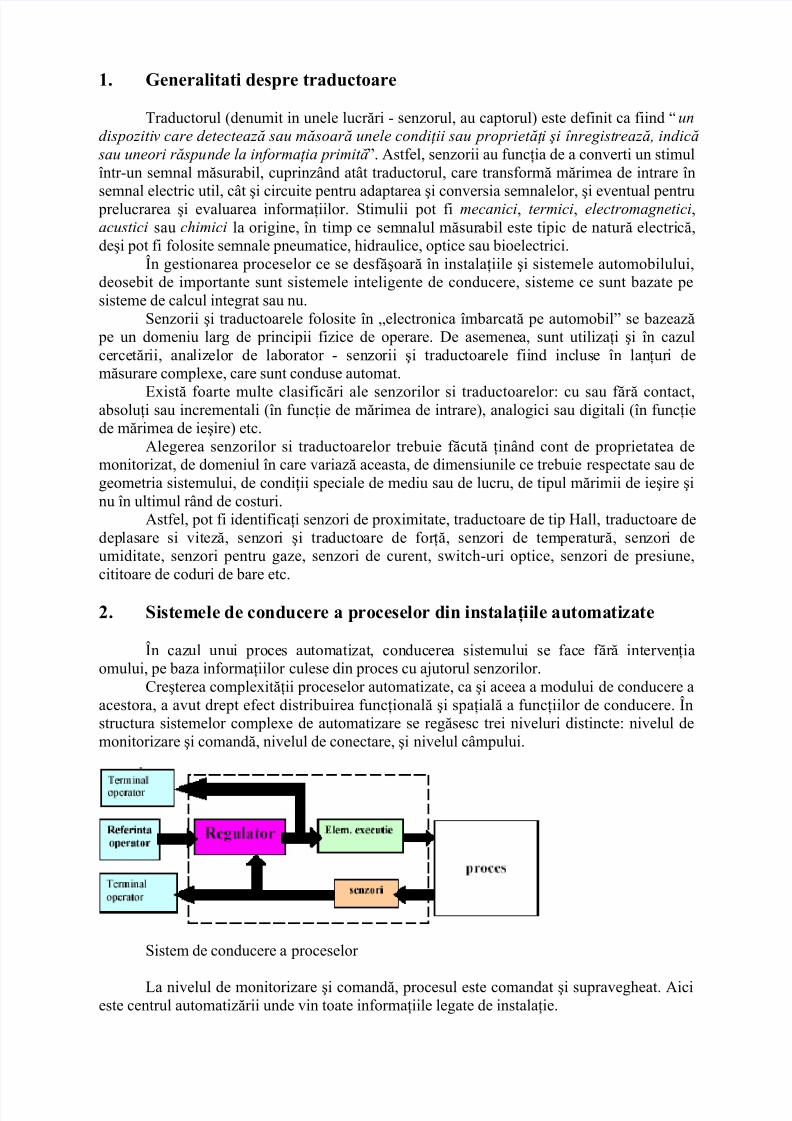
re!terea compleităţii proceselor automatizate, ca !i aceea a modului de conducere aacestora, a avut drept efect distribuirea funcţională !i spaţială a funcţiilor de conducere. %nstructura sistemelor complee de automatizare se re#ăsesc trei niveluri distincte* nivelul demonitorizare !i comandă, nivelul de conectare, !i nivelul cmpului.
"istem de conducere a proceselor
/a nivelul de monitorizare !i comandă, procesul este comandat !i suprave#$eat. Aicieste centrul automatizării unde vin toate informaţiile le#ate de instalaţie.
"arcinile automatizării, cum ar fi controlul automat, decizii în probleme decompleitate sporită etc., revin sistemului de comandă, avnd la bază automate pro#ramabile,0-uri sau calculatoare de proces.
/a nivel de conectare se asi#ură alimentarea cu ener#ie electrică a diferitelorcomponente de măsură, control sau acţionare.
/a nivelul cmpului se #ăsesc senzorii !i elementele de eecuţie (acuatorii). %nanumite cazuri este necesar ca acestea să fie aici alimentate cu ener#ie electrică dar, în medii
periculoase, pentru a evita producerea unor eplozii, alimentarea se face la nivelul deconectare. 'iversitatea componentelor conectate la acest nivel este foarte mare, de la simplisenzori, la subsisteme inteli#ente conectate în diverse structuri.lementele de re#lare finală sunt acţionate sau comandate fie direct fie cu componente însistem de comandă în buclă de re#lare înc$isă.
1ealizarea unor astfel de sisteme necesită soluţionarea unor probleme le#ate defuncţionarea dispozitivelor !i modulelor electronice în mediu industrial, pe de o parte, pe dealtă parte realizarea unui sistem de comunicaţie desc$is !i fleibil, avnd în vedere faptul căinstalaţiile industriale diferă mult una faţă de alta.lementele componente ale structurilor de conducere distribuite din punct de vedere spaţial
comunică între ele prin intermediul diferitelor sisteme de comunicaţie.erinţele impuse sistemelor de comunicaţie sunt foarte variate, în funcţie de aplicaţie.%n instalaţii complee, principala cerinţă o constituie si#uranţa în funcţionare. %n cele maimulte cazuri, în instalaţiile complee se #enerează cmpuri electrice perturbatoare. ondiţiileclimatice pot să influenţeze !i ele ne#ativ funcţionarea unor blocuri electronice. 2iteza dereacţie ridică cerinţe moderate în astfel de instalaţii complee.
3. Transmisia semnalelor
3.1. Bucla de curent - transmisia semnalelor analogice
%n te$nica convenţională, o mărime fizică este preluată prin intermediul unui semnalde urent continu (c.c.) în #ama 3-45 mA. %n anumite cazuri, cnd plaa de variaţie a acesteimărimi este foarte mare, pentru a se obţine o precizie bună a măsurătorilor trebuie folosiţi doisenzori a căror domenii de măsură se utapun. 6olosindu-se transmisia di#itală a informaţieise poate ale#e o plaă de variaţie convenabilă astfel înct să nu se folosească dect un senzorcu rezoluţia dorită.
3.2. ransmisia semnalelor analogice în !uclă de tensiune
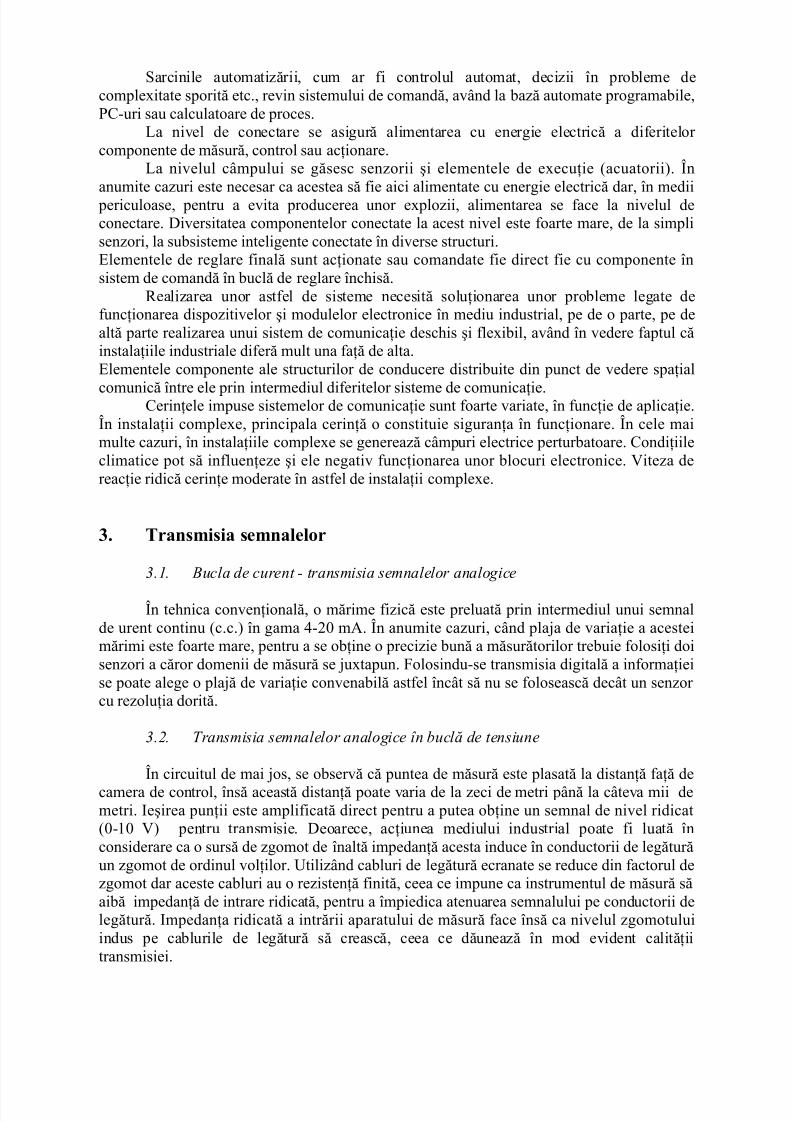
%n circuitul de mai os, se observă că puntea de măsură este plasată la distanţă faţă decamera de control, însă această distanţă poate varia de la zeci de metri pnă la cteva mii demetri. 7e!irea punţii este amplificată direct pentru a putea obţine un semnal de nivel ridicat(5-85 2) pentru transmisie. 'eoarece, acţiunea mediului industrial poate fi luată înconsiderare ca o sursă de z#omot de înaltă impedanţă acesta induce în conductorii de le#ăturăun z#omot de ordinul volţilor. 9tiliznd cabluri de le#ătură ecranate se reduce din factorul dez#omot dar aceste cabluri au o rezistenţă finită, ceea ce impune ca instrumentul de măsură săaibă impedanţă de intrare ridicată, pentru a împiedica atenuarea semnalului pe conductorii dele#ătură. 7mpedanţa ridicată a intrării aparatului de măsură face însă ca nivelul z#omotuluiindus pe cablurile de le#ătură să crească, ceea ce dăunează în mod evident calităţiitransmisiei.
'atorită acestui fapt transmisia în buclă de tensiune poate fi utilizată doar pentru distanţemici (; <5m).
3.3. ransmisia semnalelor analogice în !uclă de curent
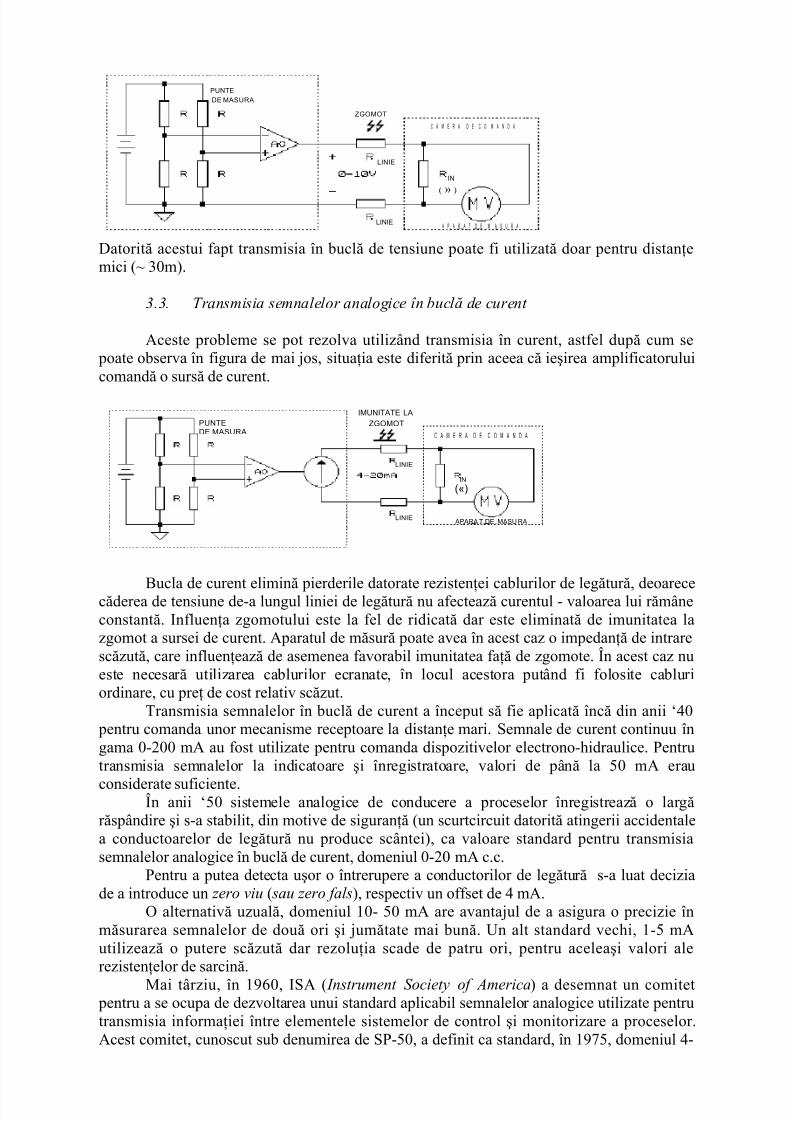
Aceste probleme se pot rezolva utiliznd transmisia în curent, astfel după cum se poate observa în fi#ura de mai os, situaţia este diferită prin aceea că ie!irea amplificatoruluicomandă o sursă de curent.
DE MASURA C A M E R A D E C O M A N D A
ZGOMOT
IMUNITATE LA
PUNTE
LINIE
LINIE
IN
(«)
APARA T DE MASU RA
=ucla de curent elimină pierderile datorate rezistenţei cablurilor de le#ătură, deoarececăderea de tensiune de-a lun#ul liniei de le#ătură nu afectează curentul - valoarea lui rămneconstantă. 7nfluenţa z#omotului este la fel de ridicată dar este eliminată de imunitatea laz#omot a sursei de curent. Aparatul de măsură poate avea în acest caz o impedanţă de intrarescăzută, care influenţează de asemenea favorabil imunitatea faţă de z#omote. %n acest caz nueste necesară utilizarea cablurilor ecranate, în locul acestora putnd fi folosite cabluriordinare, cu preţ de cost relativ scăzut.
Transmisia semnalelor în buclă de curent a început să fie aplicată încă din anii >35 pentru comanda unor mecanisme receptoare la distanţe mari. "emnale de curent continuu în#ama 5-455 mA au fost utilizate pentru comanda dispozitivelor electrono-$idraulice. 0entrutransmisia semnalelor la indicatoare !i înre#istratoare, valori de pnă la ?5 mA erau
considerate suficiente.%n anii >?5 sistemele analo#ice de conducere a proceselor înre#istrează o lar#ărăspndire !i s-a stabilit, din motive de si#uranţă (un scurtcircuit datorită atin#erii accidentalea conductoarelor de le#ătură nu produce scntei), ca valoare standard pentru transmisiasemnalelor analo#ice în buclă de curent, domeniul 5-45 mA c.c.
0entru a putea detecta u!or o întrerupere a conductorilor de le#ătură s-a luat deciziade a introduce un zero viu ( sau zero fals), respectiv un offset de 3 mA.
@ alternativă uzuală, domeniul 85- ?5 mA are avantaul de a asi#ura o precizie înmăsurarea semnalelor de două ori !i umătate mai bună. 9n alt standard vec$i, 8-? mAutilizează o putere scăzută dar rezoluţia scade de patru ori, pentru acelea!i valori alerezistenţelor de sarcină.
ai trziu, în 8BC5, 7"A ( "nstrument #ociet$ of %merica) a desemnat un comitet pentru a se ocupa de dezvoltarea unui standard aplicabil semnalelor analo#ice utilizate pentrutransmisia informaţiei între elementele sistemelor de control !i monitorizare a proceselor.Acest comitet, cunoscut sub denumirea de "0-?5, a definit ca standard, în 8BD?, domeniul 3-
45 mA c.c. aoritatea producătorilor de sisteme !i ec$ipamente de control industrial auaderat la acest standard.
3.&. %vanta'e şi dezavanta'e la transmisiile analogice
istă o serie de motive, pentru care utilizarea semnalelor de c.c. pentru transmitereainformaţiei în sistemele de măsură !i control este încă lar# utilizată*
- "tandardul eistăE- alitatea conductoarelor de le#ătură este minimală. erinţele privind rezistenţa
electrică a acestora !i posibilităţile de ecranare nu sunt criticeE- etoda este încă deosebit de avantaoasă în ceea ce prive!te preţul de cost !i
simplitatea utilizării, în cazul transmiterii la distanţă a unui număr restrns de parametriE
- urentul necesar pentru a asi#ura zeroul viu poate fi utilizat pentru alimentarea dela distanţă a traductoarelorE
- ste posibilă conectarea sarcinilor (ec$ipamente receptoare) în serie.
istă totu!i !i o serie de dezavantae, în special lund în considerare situaţia actuală
în domeniul transmiterii informaţiei*- etoda este lentă. Aceasta se datorează mai puţin ec$ipamentelor emiţătoare saureceptoare ct impedanţei asociate conductoarelor de le#ătură E
- c$ipamentul receptor trebuie să elimine prin circuite electronice analo#icevaloarea zeroului fals din semnalE
- 'epanarea buclelor mari sau a sistemelor complee poate fi dificilăE- 0robabilitatea unor #re!eli de cablare cre!te cu numărul coneiunilorE- %n cazul sistemelor mari sunt necesare mult mai multe coneiuni dect în cazul
utilizării unor staţii inteli#ente distribuite !i a transmisiei di#itale.
3.(. ransmisia digitală a datelor
7ntroducerea te$nicilor di#itale în construcţia sistemelor de automatizare implică !ifolosirea sistemelor de comunicaţie di#itale. %n formă di#itală, informaţia este reprezentată printr-un număr redus (cel mai adesea două) de nivele discrete. Aceste semnale pot fitransmise prin diverse metode, ele putnd fi re#enerate de cteva ori pentru a nu se de#rada,înainte de a atin#e destinaţia finală.
9nul dintre punctele importante care trebuie atinse în proiectarea !i realizarea unuisenzor sau controler inteli#ent este conectivitatea sa întrun sistem numeric de control.'eoarece în domeniul conectării senzorilor !i controlerelor numerice nu eistă un standardrecunoscut, cum eistă de eemplu pentru comunicaţia analo#ică, este de dorit adoptarea unui
protocol de comunicaţie ct mai cunoscut, !i eventual suportarea mai multor standarde decomunicaţie. 'e!i crearea unui protocol specific de comunicaţie este o practică comună, mai
ales pentru firmele mari, care realizează !i inte#rarea sistemelor, adoptarea unui protocolrăspndit permite inte#rarea în sistemele eistente.
3.). %vanta'e faţă de transmisia analogică a semnalelor
3.).1. "nfluenţa mediului.
Transmisia si#ură !i cu acurateţe a semnalelor analo#ice necesită medii de transmisiecu caracteristici bine precizate. Transmisia di#itală nu necesită acela!i #rad de restricţie înaceastă privinţă. Altfel spus, transmisia di#itală este mult mai adaptabilă de la un mediu laaltul deoarece necesită corelarea a numai două nivele de semnal.
3.).2. "munitatea la zgomot .%n cazul transmisiei semnalelor analo#ice, orice z#omot deformează semnalul util. %n
cazul transmisiei di#itale, z#omotul trebuie să deformeze semnalul într-att de puternic înctreceptorul să detecteze un nivel lo#ic eronat. Astfel, numărul scăzut al nivelelor discrete
pentru semnalele di#itale duce la cre!terea imunităţii faţă de z#omote. %n particular, latransmisia semnalelor prin medii supuse unor perturbaţii intense, transmisia di#itală asi#urăla ie!irea receptorului un raport semnal z#omot mai bun dect transmisia analo#ică.
3.*. #tandarde "+++ pentru senzori inteligenţi
onfi#urarea unui sistem de ac$iziţie de date implică specificarea manuală a parametrilor senzorilor (interval de măsurare, sensibilitate, factori de scară etc) ce suntutilizaţi ulterior de către softare.6amilia de standarde 7 83?8 define!te specificaţii prin care această etapă de confi#urare
poate fi efectuată în mod automat, mult mai rapid, obţinndu-se de asemenea automatizareacalibrării, îmbunătăţirea dia#nosticului, reducerea timpilor de reparare sau înlocuire asenzorilor !i sporirea eficienţei mana#ementului datelor.
"tandardul 7 83?8.8-8BBB define!te modelul (FA0) tip obiect, cu specificaţii privind interfaţa, al unui senzor inteli#ent inte#rabil într-o reţea, pe cnd 7 83?8.4-8BBD(primul care a introdus popularul concept T'") define!te o interfaţă di#itală punct-cu-punctce permite conectarea unui senzor cu ie!ire di#itală la un adaptor de reţea pe bază demicroprocesor.
"tandardul 7 083?8.3 define!te de asemenea mecanisme prin care senzorilor cuie!iri analo#ice le poate fi adău#at un comportament de autodescriere. ai curnd dect sădefinească o nouă ma#istrală sau o nouă specificaţie de reţea pentru ace!tia, standarduldefine!te o interfaţă a senzorului !i o structură a informaţiei ce permit efectiv lucrul cu oricetip de interfaţă de măsurare.
4. Caracteristicile senzorilor
aracteristicile principale ale senzorilor pot fi definite prin următorii parametrii*- domeniul de utilizare,- rezoluţia ( sensi!ilitatea - cel mai mic increment măsurabil al stimulului),
- frecvenţa maimă a stimulului ce poate fi detectat ( selectivitatea),- acurateţea (eroarea de măsurare raportată, în procente, la întrea#a scală),- dimensiunile !i masa senzorului,- temperatura de operare !i condiţiile de mediu, durata de viaţă (în ore sau număr de
cicluri de operare),- stabilitatea pe termen lun#,- costul.
aoritatea acestor caracteristici sunt precizate în fi!ele de fabricaţie ale senzorilor.
3.8. #ensi!ilitatea
"ensibilitatea unui senzor este definită ca panta curbei caracteristicii de ie!ire sau,intrarea minimă a parametrilor fizici care va crea o variaţie a ie!irii.
/a unii senzori, sensibilitatea este definită ca parametrul de intrare cerut pentru a produce o standardizare a sc$imbării ie!irii. /a altele, ea este definită ca tensiunea de ie!iredată pentru sc$imbarea parametrului de intrare.
3.4. +roarea de sensi!ilitate
roarea de sensibilitate este punctul de plecare pentru panta ideală a caracteristiciicurbei.
3.<. omeniul de acoperire'omeniul de acoperire al senzorului este maimul si minimul valorilor aplicate parametrilor care pot fi măsurate.
Timpul de răspuns poate fi definit ca fiind timpul necesar ie!irii valorilor unui senzorde a trece din starea precedentă spre o valoare stabilită in limitele unui domeniu de toleranţă anoii valori corecte. Acest concept este într-un fel diferit de termenul de timp constant (T) asistemului. Acest termen poate fi definit într-o manieră similară cu cea a unui condensatorcare se încarcă printr-un rezistor si este de obicei mai mic dect timpul de răspuns.
5. Clasificarea senzorilor
istă mai multe criterii de clasificare a senzorilor utilizaţi în sistemele de comandăale proceselor industriale*
- dacă intră sau nu în contact cu obiectul a cărui proprietate fizică o măsoară,distin#em*o senzori cu contactEo senzori fără contactE
- după proprietăţile pe care le pun în evidenţă*o senzori pentru determinarea formelor !i dimensiunilor (pentru evaluarea în
mediu de lucru)Eo senzori pentru determinarea proprietăţilor fizice ale obiectelor (de forţă,
presiune, de cuplu, de densitate !i elastici)Eo senzori pentru proprietăţi c$imice (de compoziţie, de concentraţie,
analizatoare complee)Eo după mediul de cule#ere a informaţiei*
senzorii pentru mediul etern, senzorii pentru funcţia internă,
o după distanţa la care sunt culese informaţiile* senzori de contact
"enzorii pot fi * acustici, mecanici, ma#netici, termici, pentru radiaţii, c$imici, bioelectrici (preiau semnalele electrice #enerate de corpul uman, în #eneral), inteli#enţi,virtuali. "enzorii sunt conectaţi la circuite de condiţionare si prelucrare a semnalelor furnizatede ace!tia.
6. Tipuri de senzori
6.1. Măsurarea temperaturii
C.8.8. raductorul termocuplu
"e bazează pe efectul termoelectric care spune că la atin#erea a două metale cu proprietăţi electrice diferite apare între ele o diferenţă de potenţial, numită diferenţă de
potenţial de contact . a variază de la cţiva milivolţi la ordinul volţilor, în funcţie de metalelefolosite. Această diferenţă de potenţial este accentuată de temperaturile la care sunt
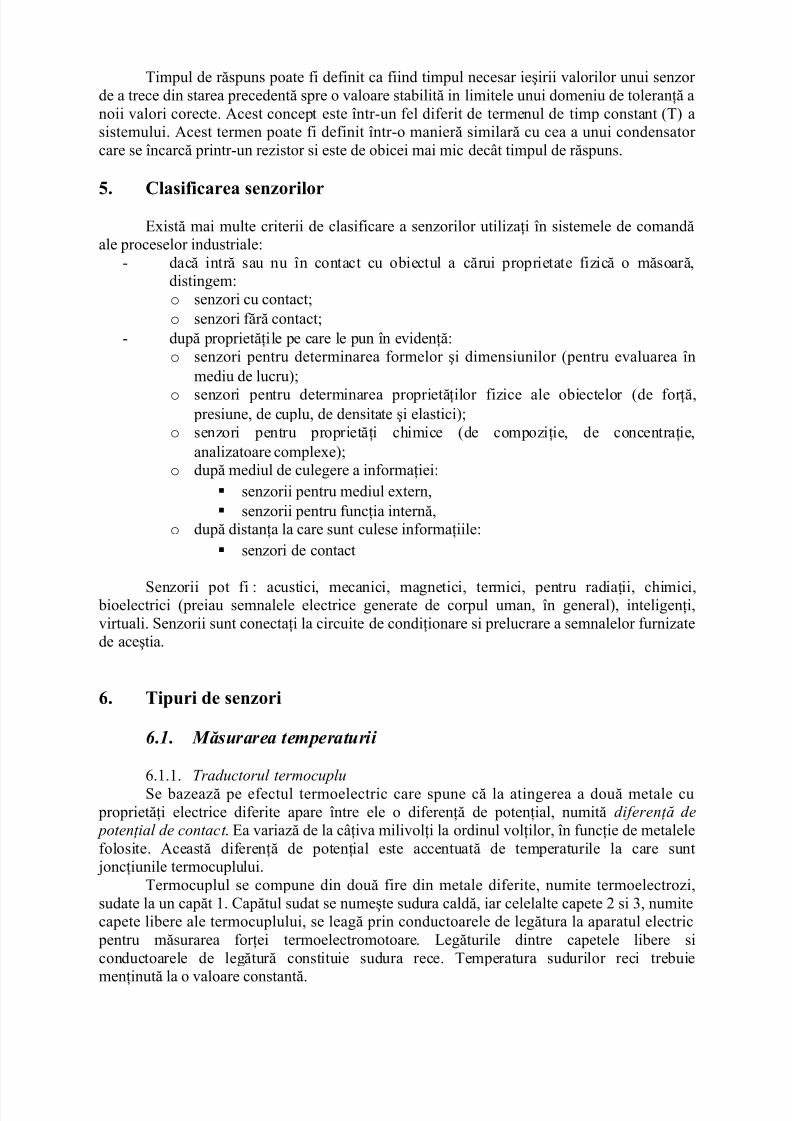
oncţiunile termocuplului.Termocuplul se compune din două fire din metale diferite, numite termoelectrozi,
sudate la un capăt 8. apătul sudat se nume!te sudura caldă, iar celelalte capete 4 si <, numitecapete libere ale termocuplului, se lea#ă prin conductoarele de le#ătura la aparatul electric
pentru măsurarea forţei termoelectromotoare. /e#ăturile dintre capetele libere siconductoarele de le#ătură constituie sudura rece. Temperatura sudurilor reci trebuie
'eoarece termoelectrozii au o lun#ime maimă de 455 cm, din care 4J< intră încuptorul în care se măsoară temperatura, sudura rece se va #ăsi totdeauna în apropiereacuptorului. Acesta fiind la temperatură ridicată, de#aă căldura si creează in urul lui otemperatură mai ridicată dect a camerei si variabilă in timp. 1ezolvarea acestor problemecreate de temperatura înaltă din urul termocuplului se poate face prin prelun#ireatermoelectrozilor cu alte conductoare de aceea!i natură, în #eneral c$iar din acela!i material.7n felul acesta la contactul dintre conductoarele de prelun#ire si firele termocuplului nu se
formează un termocuplu, deci nu ia na!tere forţă termoelectromotoare. Aceste fire se numesccabluri de compensare !i sunt complet separate de termocuplu, le#ătura eecutndu-se numaila montarea termocuplului. ablul de compensare are rolul de a muta sudura rece dinapropierea cuptorului într-un loc cu o temperatura mai constantă. "udura rece se va formaacum la le#ătura dintre cablul de compensare !i cablul de le#ătură.
%n cazul în care contactele(oncţiunile) termocuplului sunt menţinute la aceea!itemperatură forţa electromotoare rezultantă este e#ală cu zero. 'acă contactele termocupluluiau temperaturi diferite, în circuit apare o forţă electromotoare direct proporţională cudiferenţa dintre temperaturile oncţiunilor !i este dată de relaţia *
+ 6 70t 1 - t 2 8 90t 12 - t 2
2
unde* K !i L sunt constantele metalelor din termocuplut8 !i t4 indică temperaturile la care este supus termocuplul
0entru un interval mic de temperatură, variaţia forţei electromotoare este aproimativliniară, astfel poate fi citită cu un milivoltmetru.
Termocuplul este caracterizat de sensibilitate care este eprimată de relaţia* s 6 :+;:t
unde* M este variaţia forţei termoelectromotoare în intervalul de temperatură Mt'acă se ia Mt N 8 o rezultă că s N M, astfel sensibilitatea unui termocuplu este e#ală
cu variaţia forţei termoelectromotoare atunci cnd temperatura variază cu 8 o.Termocuplele sunt utilizate la măsurarea temperaturilor in funcţie de tip în intervalul
--4?I
o
O 4855
o
.0entru temperaturi cuprinse între -4?Io !i 5 o se utilizează termocuplu aur-ar#int, pentru domeniul 5o - I55 o cele mai folosite sunt cupru-constantan, nic$el-fier, nic$el- platină.
%n #ama I55o - 8C55 o se folosesc termocuplele platină-platinăHrodiu, care suntfolosite !i ca termocuple etalon datorită sensibilităţii foarte bune !i stabiltăţii în timp.
0entru temperaturi mai înalte sunt folosite termocuple de cărbune-carbură de siliciucare suportă temperaturi de 8I55o !i termocuple de olfram-molibden care suportă 4855 o.
C.8.4. ip ezistenţă
"unt realizate din fire de metal !i se bazează pe variaţia rezistenţei electrice unui
conductor odată cu modificarea temperaturii. a material se folose!te în special platina, !i pentru temperaturi mai mici !i cuprul, datorită faptului că att platina ct !i cuprul au uncoeficient termic relativ mare în comparaţie cu celelalte metale.
0entru un interval mic de temperatură (5 - 8?5 o) variaţia rezistenţei electrice esteaproape liniară, astfel se folose!te relaţia de mai os.
t 6 o01 8 7t
unde* 1 t rezistenţa firului la t oK este coeficientul termic al rezistenţei1o rezistenţa firului la 5 o
%n cazul în care se dore!te măsurarea temperaturilor cuprinse în intervalul 5o OC<5,?5o (care este punctul de solidificare al stibiului) rezistenţa firului de platină secalculează după relaţia de mai os*
t 6 o01 8 7t 8 9t 2
unde* 1 t rezistenţa firului de platină la t oK constantă, se determină pe baza valorii lui 1 t la punctul de fierbere al apeiL constantă, se determină pe baza valorii lui 1 t la punctul de fierbere al sulfului
(333,C o)1o rezistenţa firului la 5 o
%n intervalul -8I4,BD5 o (punctul de fierbere al oi#enului) !i 5 o rezistenţa firului de
platină se calculează după relaţia de mai os* t 6 o01 8 7t 8 9t 2 8 <t 30t - 144
unde* 1 t rezistenţa firului de platină la t oK,L sunt constanteP constantă, se determină pe baza valorii lui 1 t la punctul de fierbere al
oi#enului1o rezistenţa firului la 5 o
%n cazul temperaturilor cuprinse între C<5,? o !i 85C< o (punctul de solidificare alaurului) temperatura se determină pe baza relaţiei*
+ 6 7 8 9t 8 <t 2
unde* - este forţa termoelectromotoare a unui termocuplu platină G platină H 85Q rodiu, osudură fiind la 5 o, iar cealaltă la t o- K,L,P - constante, care se determină măsurnd la C<5,? o, BC5,I o (temperatura
de solidificare a ar#intului) !i 85C< oaterialul folosit pentru acest tip de senzor trebuie să fie de o puritate foarte mare, cu
o valoare a rezistenţei de 855 o$mi la 5 o !i K cuprins între 5,55<I? G 5,55<B5.
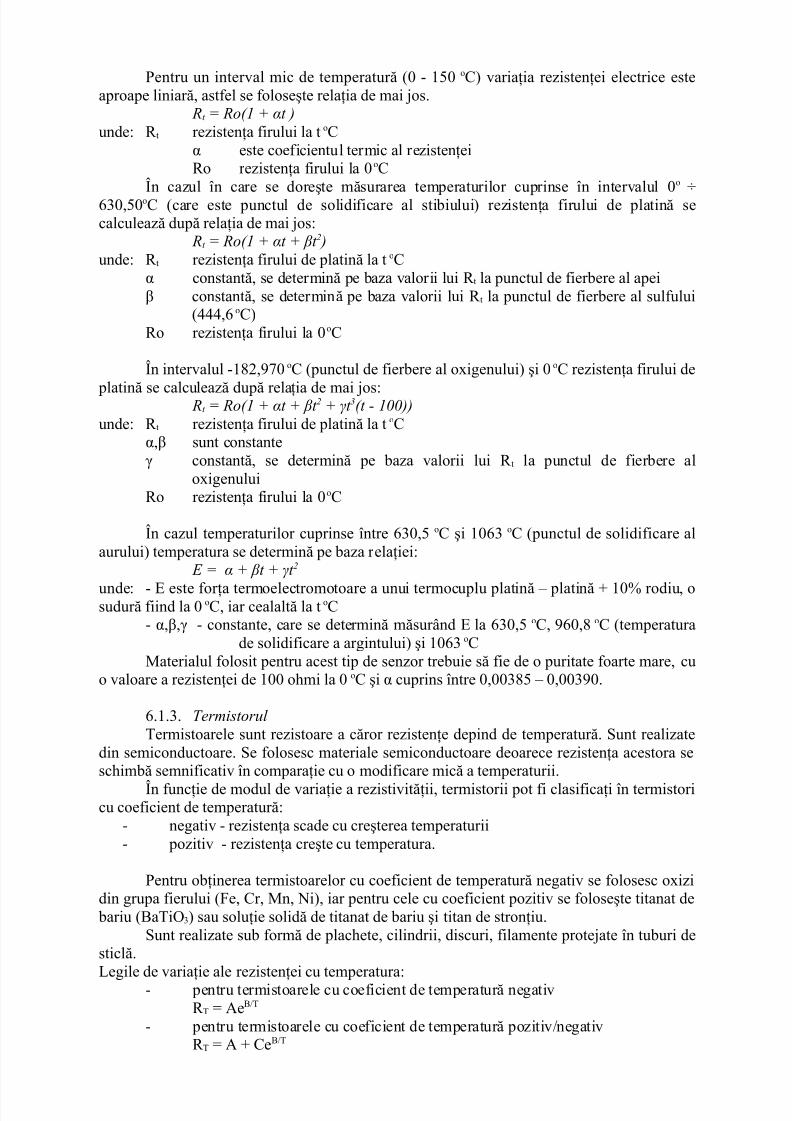
C.8.<. ermistorul
Termistoarele sunt rezistoare a căror rezistenţe depind de temperatură. "unt realizatedin semiconductoare. "e folosesc materiale semiconductoare deoarece rezistenţa acestora sesc$imbă semnificativ în comparaţie cu o modificare mică a temperaturii.
%n funcţie de modul de variaţie a rezistivităţii, termistorii pot fi clasificaţi în termistoricu coeficient de temperatură*
- ne#ativ - rezistenţa scade cu cre!terea temperaturii- pozitiv - rezistenţa cre!te cu temperatura.
0entru obţinerea termistoarelor cu coeficient de temperatură ne#ativ se folosesc oizidin #rupa fierului (6e, r, n, Fi), iar pentru cele cu coeficient pozitiv se folose!te titanat de
bariu (=aTi@<) sau soluţie solidă de titanat de bariu !i titan de stronţiu."unt realizate sub formă de plac$ete, cilindrii, discuri, filamente proteate în tuburi de
sticlă./e#ile de variaţie ale rezistenţei cu temperatura*
- pentru termistoarele cu coeficient de temperatură ne#ativ1 T N Ae=JT
- pentru termistoarele cu coeficient de temperatură pozitivJne#ativ1 T N A H e=JT
unde A, =, sunt constante de material, iar T este temperatura în R A - constanta ce depinde de #eometria dispozitivuluiET - temperatura in #rade RelvinE1 - rezistenta la temperatura TE= - constanta ce depinde de materialul semiconductor măsurata in R,=N'J4S = cu ' - banda interzisa a semiconductorului si se determina din valorile
rezistentei la doua temperaturi* B 6 = 1> 2 ;0 2 - 1 ? > ln 01 ;2
'enumirea de termistor este o combinare a cuvintelor en#leze!ti t$ermallUsensitive resistor (rezistenţă sensibilă termic). Această denumire descrie cu eactitate funcţiade bază a dispozitivului !i anume aceea de-a avea o sc$imbare de rezistenţă electrică
predictibilă în funcţie de orice sc$imbare a temperaturii sale absolute.
0arametrii utilizaţi pentru a descrie caracteristicile oricărui termistor sunt*- rezistenta electrica nominala la 4? oE- raportul rezistentelor pentru doua temperaturi date (4? o si I? o)E- coeficientul de temperatură al rezistenţei eprimat in QJoE- puterea disipata maimaE- factorul (coeficientul) de disipareE- constanta de timp termicaE- domeniul de temperatura, Tmin si Tma .
"c$imbarea temperaturii termistorilor poate fi clasificată în funcţie de tipul încălzirii*eternă cauzată de temperatura ambiantă internă ca rezultat al puterii dezvoltate de trecerea
curentului prin dispozitiv (auto-încălzire) combinată (eternă H internă).
6.2. Măsurarea forţei
%n principiu forţele pot fi măsurate cu orice traductor de deplasare dacă i se ata!eazăun element elastic în seri cu forţa ce trebuie măsurată.
Traductoare de forţă tensometrice rezistive sunt formate dintr-un fir conductor subţire,lipit pe un suport de $rtie sau alt material izolant. Traductorul se lipe!te pe un suport elasticce se deformează sub acţiunea forţei determinnd o modificare a lun#imii conductorul !iimplicit o modificare a rezistenţei electrice modificare rezistenţei electrice este pusă înevidenţă prin montarea firului într-o punte V$eatstone piezoelectrice sunt realizate dinmateriale piezoelectrice sunt utilizate la determinarea forţelor dinamice ma#netostrictivefuncţionează pe baza variaţiei permeabilităţii ma#netice a unor materiale feroma#neticce,datorită tensiunilor mecanice.
6raţii 0ierre si WaXues urie au observat în anul 8II5 apariţia sarcinilor electrice pefaţa anumitor cristale (cuart, "i@4 cristalin) supuse solicitărilor mecanice (presiune,deformare). ărimea sarcinii electrice este proporţională cu mărimea forţei eercitate, iar
sensul polarizării electrice a cristalului depinde de sensul acţiunii mecanice. Acesta esteefectul piezoelectric direct (cauza este de natură mecanică, efectul produs este electric).'enumirea fenomenului provine de la cuvntul #recesc piezo care înseamnă a apăsa. %nefectul direct aplicarea unei tensiuni mecanice conduce la redistribuirea sarcinilor electrice învolum, rezultnd o polarizare electrică volumică si implicit o sarcină electrică indusă pesuprafaţă.
fectul piezoelectric invers este produs prin aplicarea unui cmp electric cristalului,avnd ca rezultat deformarea cristalului sau apariţia unei forţe (cauza este de natură electrică,efectul este mecanic)."ubstanţele piezoelectrice se împart in doua clase mari*
- su!stanţe piezoelectrice liniare (dependenţa polarizării electrice 0 de cmpul
electric aplicat este liniară),- su!stanţe feroelectrice (sub temperatura urie depenenţa polarizării electrice 0 decmpul electric aplicat este neliniară, peste o anumită valoare a cmpului
polarizarea rămne constantă, se saturează).0este temperatura urie substanţa nu mai este feroelectrică, devine paraelectrică si
implicit nu mai prezintă efect piezoelectric. fectul piezoelectric se manifestă în feroelectricidacă ace!tia sunt polarizaţi, adică domeniile în care polarizarea are o orientare binedeterminată, sunt orientate după o sin#ură direcţie macroscopică, direcţia cmpului etern.
'intre materialele care prezintă acest efect se distin# (utilizează) două cate#orii*- cristalele naturale - reprezentativ fiind în acest sens cuarţul, cu proprietăţile de
utilizare cele mai bune dar dificil de prelucrat (dar !i sarea "ei#nette sau turmalina)E
- materiale ceramice policristaline - ca titanatul de bariu (Ti@<=a), titanatul de plumb sau de zirconiu, denumiti si titano-zirconatii de plumb (0YT) care nu sunt influenţaţide umiditate, iar temperatura urie poate depă!i 355 5 la 0YT.
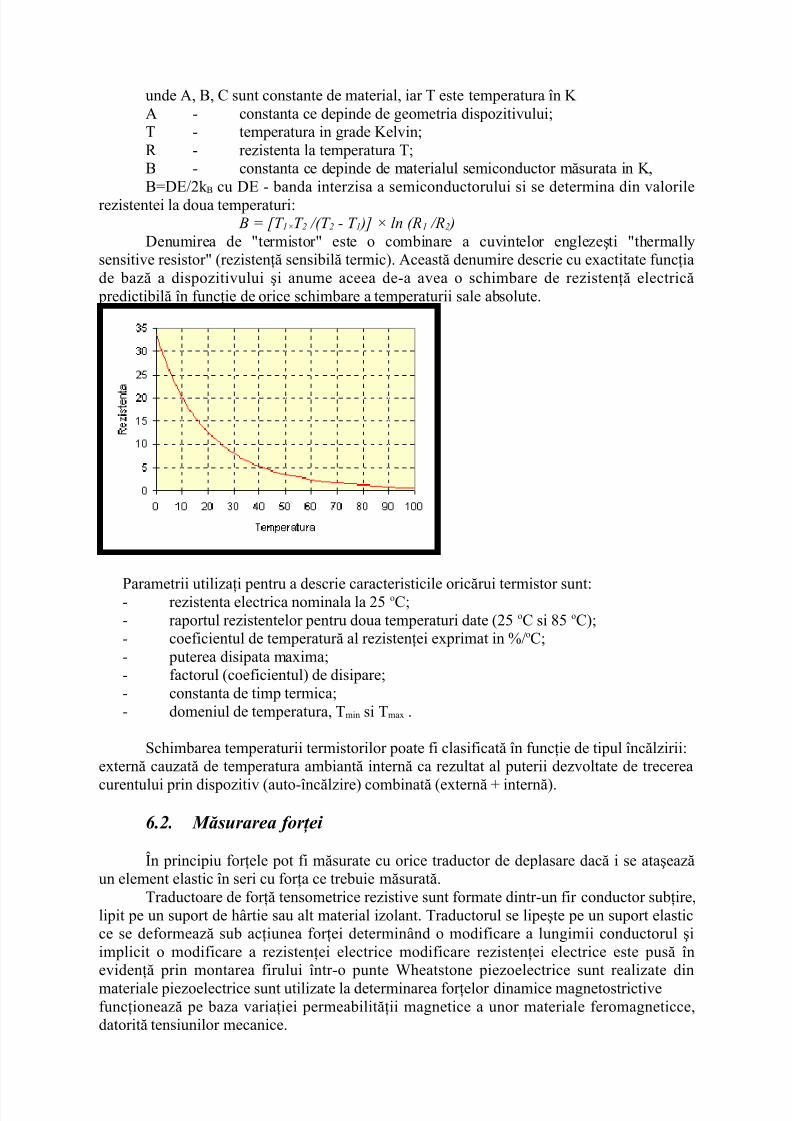
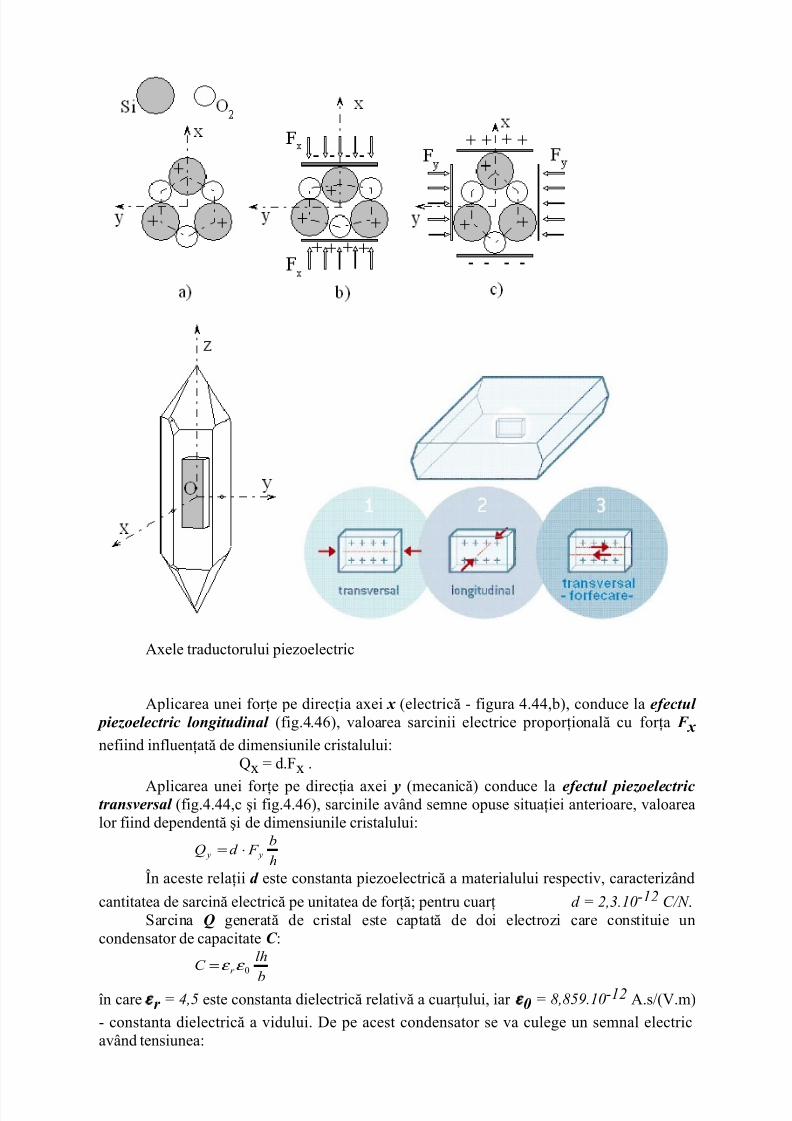
fectul piezoelectric se eplică prin deformarea elastică a reţelei cristaline, fapt ceatra#e modificarea ec$ilibrului sarcinilor electrice între atomii ce constituie reţeaua.
%n fi#ura este prezentată sc$ematic reţeaua cristalului de cuarţ în starea nesolicitatămecanic 0a !i solicitată pe două direcţii 0!,c. %n le#ătură cu aceasta, s-a constatat că încristalul natural de cuarţ se distin# trei sisteme de ae*
x - aele electriceE y - aele mecaniceE
z - aa optică.0entru fenomenul piezoelectric importante sunt primele două, deta!area lameleitraductorului din cristalul natural făcndu-se în funcţie de orientarea acestor ae.
Aplicarea unei forţe pe direcţia aei x (electrică - fi#ura 3.33,b), conduce la efectul piezoelectric longitudinal (fi#.3.3C), valoarea sarcinii electrice proporţională cu forţa F xnefiind influenţată de dimensiunile cristalului*
Z N d.6 .
Aplicarea unei forţe pe direcţia aei y (mecanică) conduce la efectul piezoelectrictransversal (fi#.3.33,c !i fi#.3.3C), sarcinile avnd semne opuse situaţiei anterioare, valoarealor fiind dependentă !i de dimensiunile cristalului*
h
! @ d A $ $ ⋅=
%n aceste relaţii d este constanta piezoelectrică a materialului respectiv, caracteriznd
cantitatea de sarcină electrică pe unitatea de forţăE pentru cuarţ d 6 2,3.14-12 ;C ."arcina Q #enerată de cristal este captată de doi electrozi care constituie un
condensator de capacitate *
!
lhB r 5ε ε =
în care r 6 &,( este constanta dielectrică relativă a cuarţului, iar ! 6 D,D(E.14-12 A.sJ(2.m)
- constanta dielectrică a vidului. 'e pe acest condensator se va cule#e un semnal electricavnd tensiunea*
9 N ZJ0entru a obţine valori mai importante ale tensiunii se recur#e la montarea mai multor
cristale mecanic în serie !i electric în paralel.'atorită caracteristicilor mecanice ale cuarţului (modul de elasticitate ridicat N
I5555 0aE sarcina admisibilă ?55 0a) el se pretează foarte bine la măsurarea în condiţiidinamice a unor parametri într-un domeniu lar# de valori (forţe, presiuni, acceleraţii, etc.) cu
performanţe de sensibilitate !i frecvenţe proprii ridicate, dificil de obţinut pentru alte tipuri
de traductoare. %n plus, cuarţul poate lucra pnă la temperaturi de <555...3555.'ezavantaele maore sunt le#ate de particularităţile ec$ipamentului electric de
prelucrare a semnalului !i de cvasi-imposibilitatea utilizării pentru măsurări statice.6aţă de cele din cuarţ, traductoarele din materiale piezoelectrice ceramice au o
sensibilitate mai bună dar sunt !i sensibile la variaţiile de temperatură.
6.". #enzori pentru gaz 'intre cate#oriile de senzori enumerate mai sus, cele care semnalează, evaluează !i
monitorizează prezenţa unor #aze prezintă o importanţă deosebită. %n acest contet, senzorii pe bază de materiale oidice ("@) ocupă un loc deosebit datorită, în special, rezistenţei lor
c$imice !i domeniului ridicat de temperatură la care pot fi utilizaţi."tudiile asupra unui număr mare de oizi au demonstrat că variaţia conductivităţii
electrice în prezenţa unor urme de #aze din aer constituie un fenomen comun oizilor !i nuaparţine unei clase specifice J8,4J. 'acă un material oidic prezintă valori ale rezistivităţiicuprinse în domeniul 853-85I Ωcm la <55-355°, atunci el va funcţiona ca un senzor de #azecnd este încălzit la o temperatură situată în acest domeniu.
@id [azul detectabil"n@4 +4, @, F@4, +4", +3
Ti@4 +4, 4+?@+, @4
6e4@< @
r 8.ITi5.4@< F+<
V@< F@4, F+<
7n4@< @<, F@4,/a6e@< F@4, F@
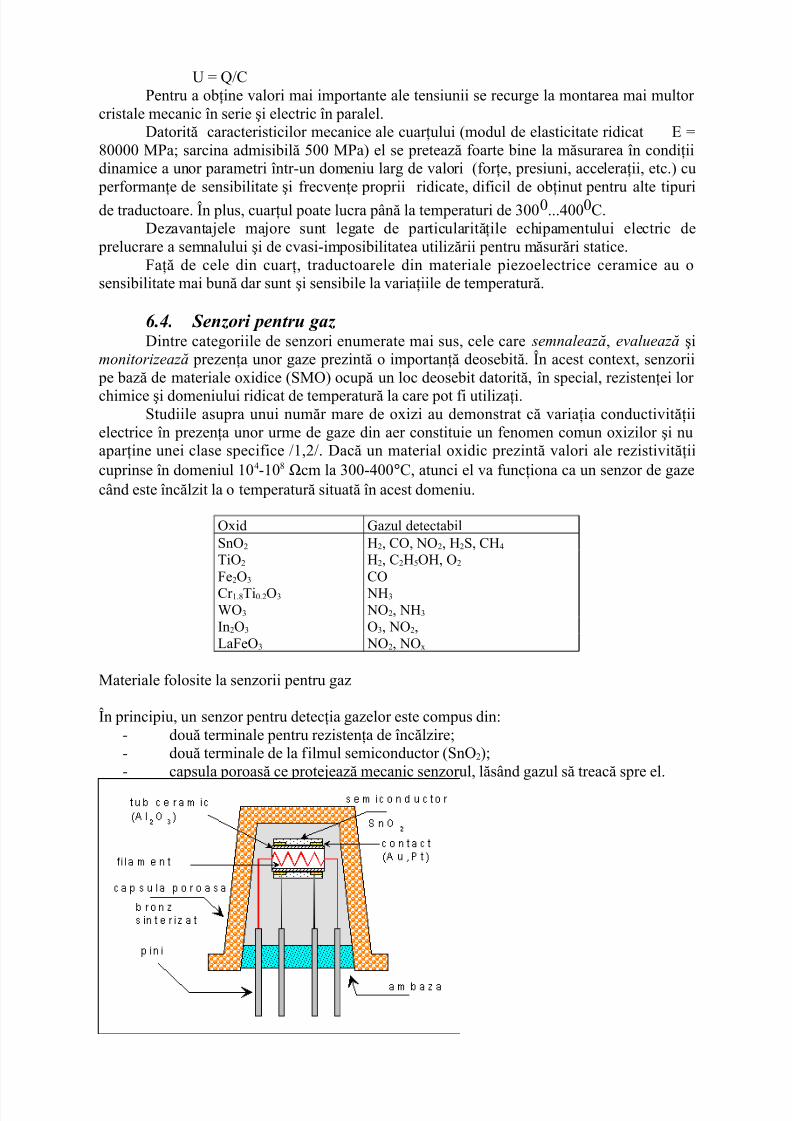
ateriale folosite la senzorii pentru #az
%n principiu, un senzor pentru detecţia #azelor este compus din*- două terminale pentru rezistenţa de încălzireE- două terminale de la filmul semiconductor ("n@4)E- capsula poroasă ce proteează mecanic senzorul, lăsnd #azul să treacă spre el.
"unt traductoare de turaţie !i ele sunt micro#eneratoare de curent continuu sau alternativcare #enerează tensiuni electrice proporţionale cu viteza de rotaţie a arborelui cu care suntcuplate. istă to$o#eneratoare de c.c. !i de c.a.
- Ta$o#eneratoarele consuma o putere de 8÷?5 V care este ne#liabila la puterimari de antrenare, dar la puteri mici apar erori de măsurare a turaţiei.
).(.3. #tro!oscopul
"troboscopul de turaţii permite măsurarea turaţiei fără un contact mecanic cu obiectulaflat în rotaţie. "e folose!te inerţia oc$iului omenesc, prin care un corp în vibraţie sau rotaţie
pare imobil dacă este iluminat cu impulsuri scurte, a căror frecvenţă de repetiţie este e#ală cufrecvenţa de vibraţie sau rotaţie a corpului sau este un multiplu între# al acesteia.
- etoda stroboscopică permite măsurarea celor mai mici turaţii care se întlnesc înte$nică. 6recvenţa impulsurilor poate atin#e valoarea de 8555 +z, la carecorespunde turaţia de C5.555 rotJmin.
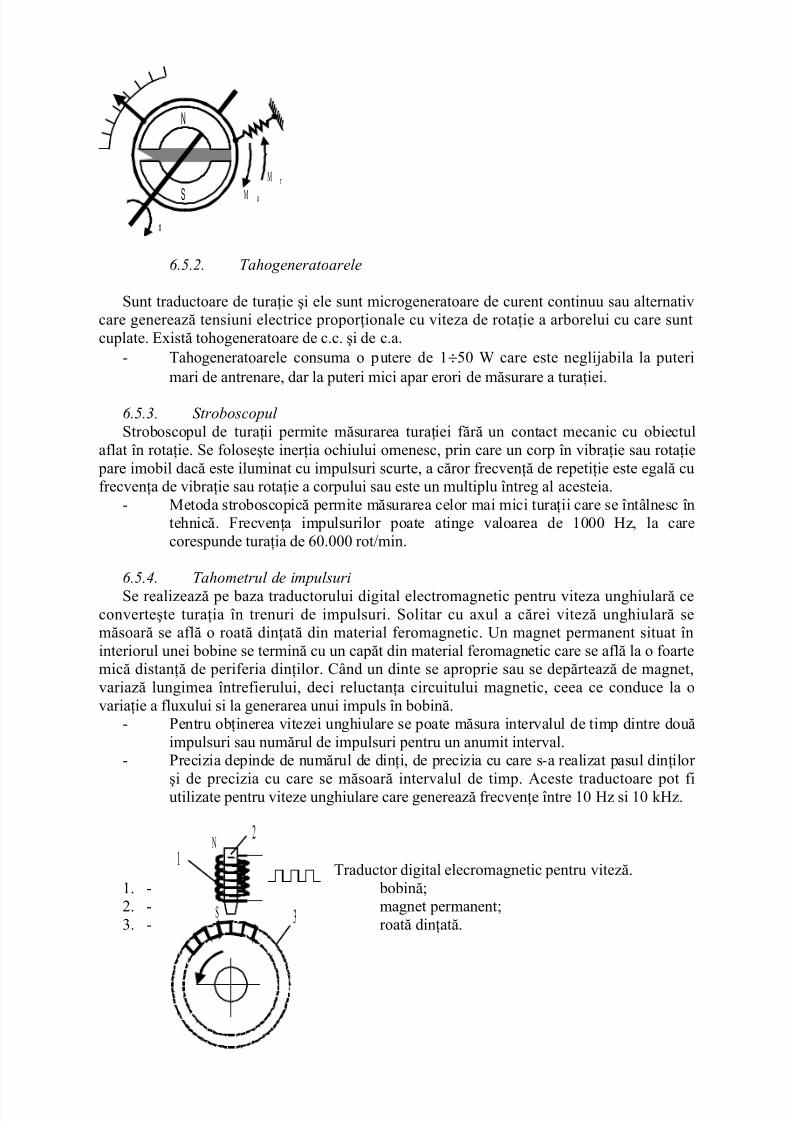
).(.&. ahometrul de impulsuri
"e realizează pe baza traductorului di#ital electroma#netic pentru viteza un#$iulară ceconverte!te turaţia în trenuri de impulsuri. "olitar cu aul a cărei viteză un#$iulară semăsoară se află o roată dinţată din material feroma#netic. 9n ma#net permanent situat îninteriorul unei bobine se termină cu un capăt din material feroma#netic care se află la o foartemică distanţă de periferia dinţilor. nd un dinte se aproprie sau se depărtează de ma#net,variază lun#imea întrefierului, deci reluctanţa circuitului ma#netic, ceea ce conduce la ovariaţie a fluului si la #enerarea unui impuls în bobină.
- 0entru obţinerea vitezei un#$iulare se poate măsura intervalul de timp dintre douăimpulsuri sau numărul de impulsuri pentru un anumit interval.
- 0recizia depinde de numărul de dinţi, de precizia cu care s-a realizat pasul dinţilor
!i de precizia cu care se măsoară intervalul de timp. Aceste traductoare pot fiutilizate pentru viteze un#$iulare care #enerează frecvenţe între 85 +z si 85 S+z.
Traductoarele electrice utilizate pentru măsurarea deplasării liniare permit măsurareadeplasării într-un interval cuprins de la cţiva microni pnă la deplasări de ordinul metrilor,iar cele pentru deplasări un#$iulare într-un interval de la cteva secunde la <C5°.0entru conversia deplasării într-o mărime electrică traductoarele de deplasare pot cuprinde
senzori rezistivi, capacitivi, inductivi, optici sau di#itali.
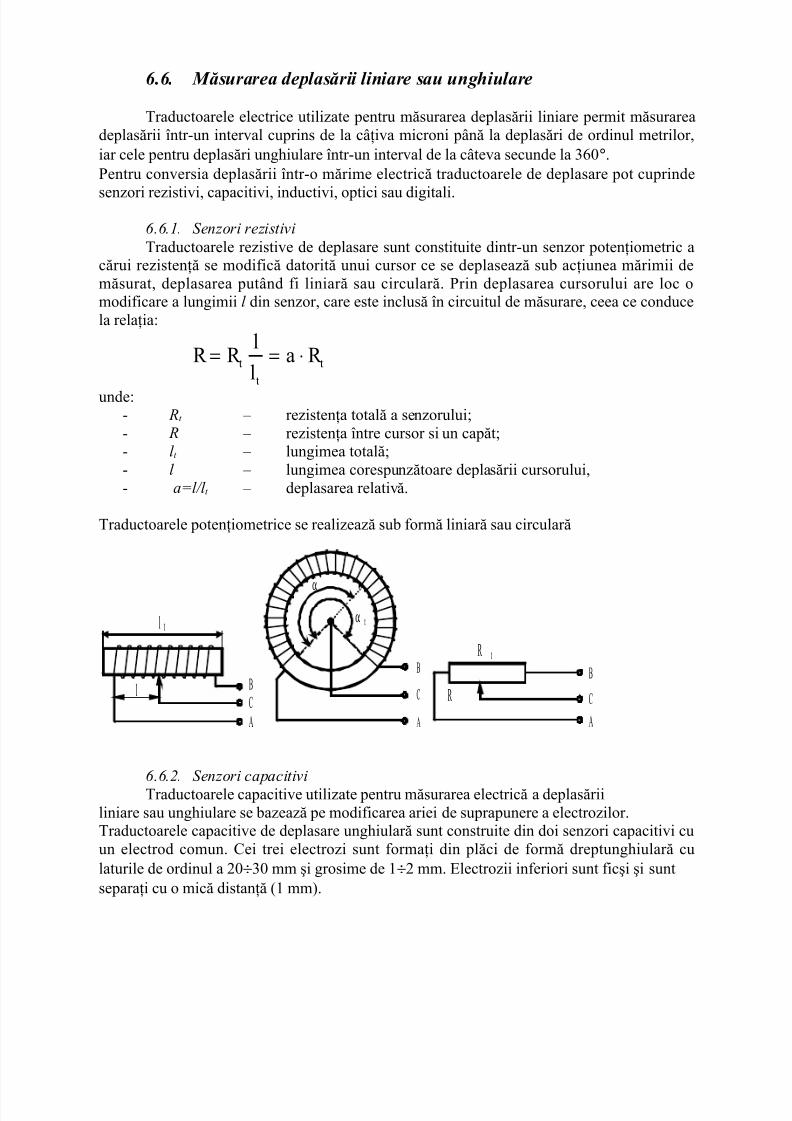
).).1. #enzori rezistivi
Traductoarele rezistive de deplasare sunt constituite dintr-un senzor potenţiometric acărui rezistenţă se modifică datorită unui cursor ce se deplasează sub acţiunea mărimii demăsurat, deplasarea putnd fi liniară sau circulară. 0rin deplasarea cursorului are loc omodificare a lun#imii l din senzor, care este inclusă în circuitul de măsurare, ceea ce conducela relaţia*
t
t
t1 a
l
l1 1 ⋅==
unde*- t G rezistenţa totală a senzoruluiE- G rezistenţa între cursor si un capătE- l t G lun#imea totalăE- l G lun#imea corespunzătoare deplasării cursorului,- a6l;l t G deplasarea relativă.
Traductoarele potenţiometrice se realizează sub formă liniară sau circulară
l
l =
.
A
t
=
.
A
α
α t
=
.
A
1
1 t
).).2. #enzori capacitivi
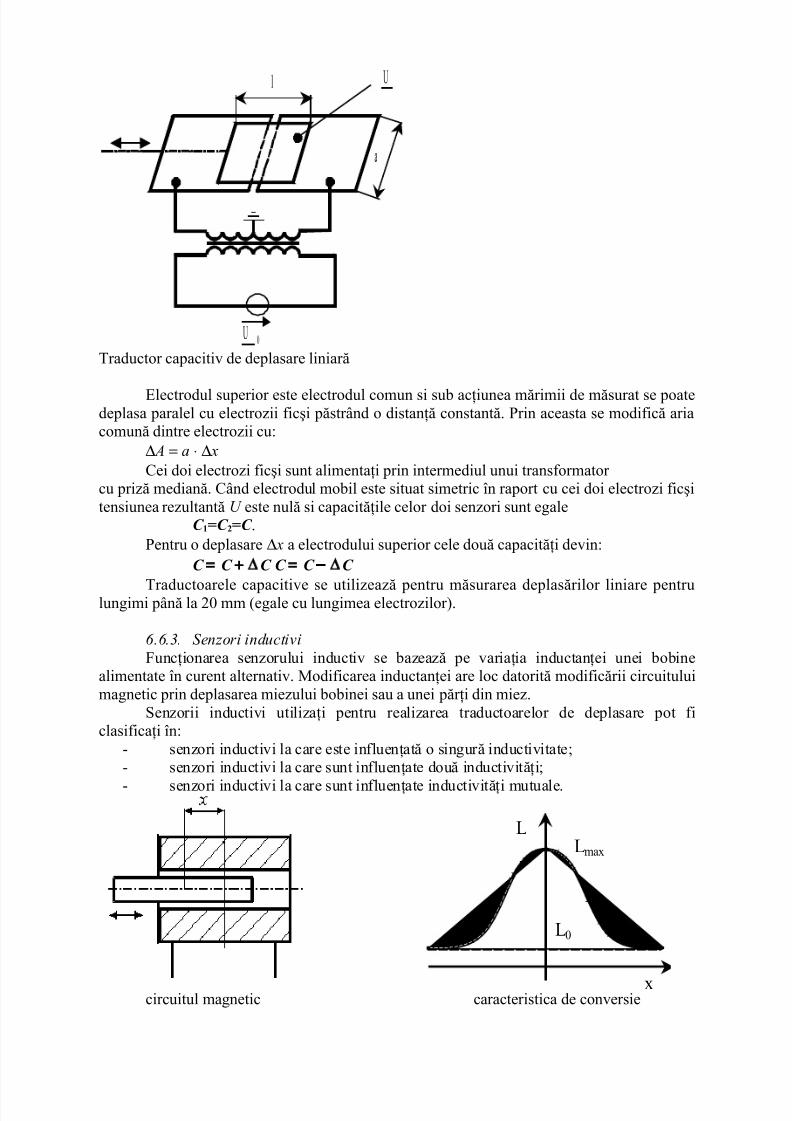
Traductoarele capacitive utilizate pentru măsurarea electrică a deplasăriiliniare sau un#$iulare se bazează pe modificarea ariei de suprapunere a electrozilor.Traductoarele capacitive de deplasare un#$iulară sunt construite din doi senzori capacitivi cuun electrod comun. ei trei electrozi sunt formaţi din plăci de formă dreptun#$iulară culaturile de ordinul a 45÷<5 mm !i #rosime de 8÷4 mm. lectrozii inferiori sunt fic!i !i suntseparaţi cu o mică distanţă (8 mm).
lectrodul superior este electrodul comun si sub acţiunea mărimii de măsurat se poatedeplasa paralel cu electrozii fic!i păstrnd o distanţă constantă. 0rin aceasta se modifică ariacomună dintre electrozii cu*
∆ % = a ⋅ ∆ H
ei doi electrozi fic!i sunt alimentaţi prin intermediul unui transformator cu priză mediană. nd electrodul mobil este situat simetric în raport cu cei doi electrozi fic!itensiunea rezultantă I este nulă si capacităţile celor doi senzori sunt e#ale
1= 2= .0entru o deplasare ∆ H a electrodului superior cele două capacităţi devin*
= ∆ = − ∆
Traductoarele capacitive se utilizează pentru măsurarea deplasărilor liniare pentrulun#imi pnă la 45 mm (e#ale cu lun#imea electrozilor).
).).3. #enzori inductivi
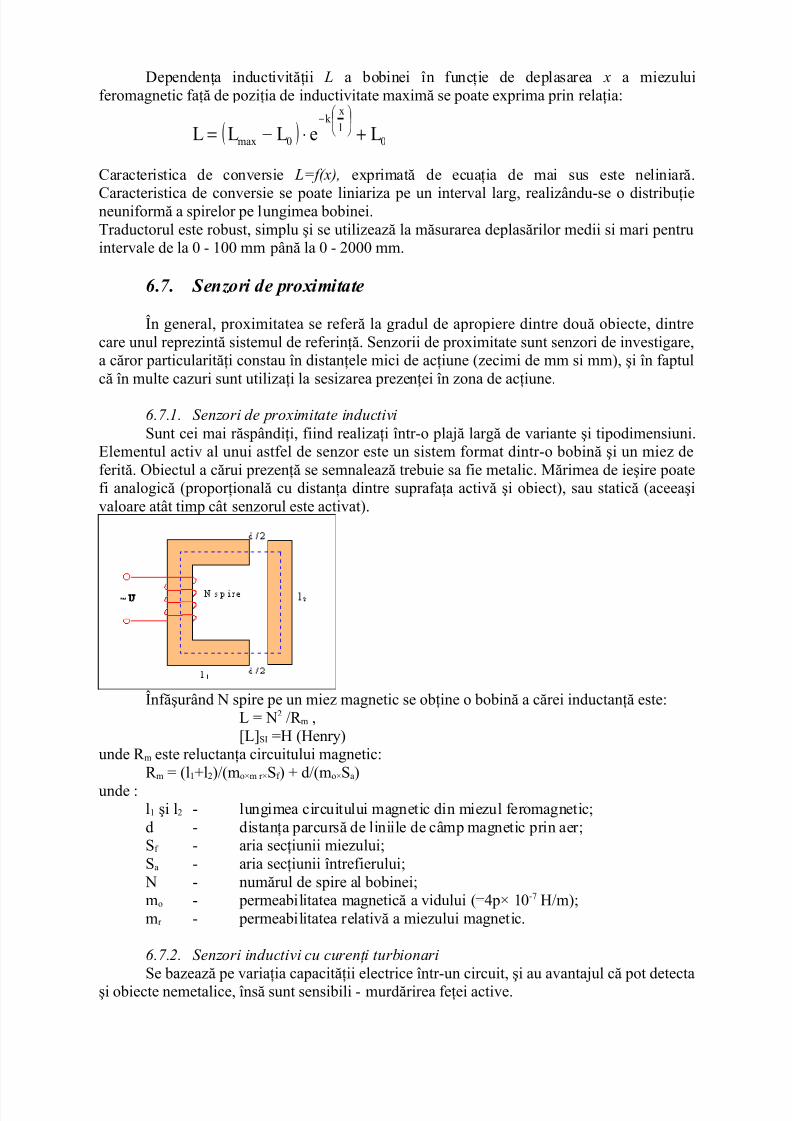
6uncţionarea senzorului inductiv se bazează pe variaţia inductanţei unei bobinealimentate în curent alternativ. odificarea inductanţei are loc datorită modificării circuituluima#netic prin deplasarea miezului bobinei sau a unei părţi din miez.
"enzorii inductivi utilizaţi pentru realizarea traductoarelor de deplasare pot ficlasificaţi în*
- senzori inductivi la care este influenţată o sin#ură inductivitateE- senzori inductivi la care sunt influenţate două inductivităţiE
- senzori inductivi la care sunt influenţate inductivităţi mutuale.
'ependenţa inductivităţii a bobinei în funcţie de deplasarea H a miezuluiferoma#netic faţă de poziţia de inductivitate maimă se poate eprima prin relaţia*
( )55ma(
/e///l
(S
+⋅−=
−
aracteristica de conversie 6f0H, eprimată de ecuaţia de mai sus este neliniară.
aracteristica de conversie se poate liniariza pe un interval lar#, realizndu-se o distribuţieneuniformă a spirelor pe lun#imea bobinei.Traductorul este robust, simplu !i se utilizează la măsurarea deplasărilor medii si mari pentruintervale de la 5 - 855 mm pnă la 5 - 4555 mm.
6.&. #enzori de proximitate
%n #eneral, proimitatea se referă la #radul de apropiere dintre două obiecte, dintrecare unul reprezintă sistemul de referinţă. "enzorii de proimitate sunt senzori de investi#are,a căror particularităţi constau în distanţele mici de acţiune (zecimi de mm si mm), !i în faptulcă în multe cazuri sunt utilizaţi la sesizarea prezenţei în zona de acţiune.
).*.1. #enzori de proHimitate inductivi
"unt cei mai răspndiţi, fiind realizaţi într-o plaă lar#ă de variante !i tipodimensiuni.lementul activ al unui astfel de senzor este un sistem format dintr-o bobină !i un miez deferită. @biectul a cărui prezenţă se semnalează trebuie sa fie metalic. ărimea de ie!ire poatefi analo#ică (proporţională cu distanţa dintre suprafaţa activă !i obiect), sau statică (aceea!ivaloare att timp ct senzorul este activat).
%nfă!urnd F spire pe un miez ma#netic se obţine o bobină a cărei inductanţă este*/ N F4 J1 m ,\/]"7 N+ (+enrU)
unde 1 m este reluctanţa circuitului ma#netic*1 m N (l8Hl4)J(mo^m r^"f ) H dJ(mo^"a)
unde *l8 !i l4 - lun#imea circuitului ma#netic din miezul feroma#neticEd - distanţa parcursă de liniile de cmp ma#netic prin aerE"f - aria secţiunii miezuluiE"a - aria secţiunii întrefieruluiE
F - numărul de spire al bobineiEmo - permeabilitatea ma#netică a vidului (N3p^ 85-D +Jm)Emr - permeabilitatea relativă a miezului ma#netic.
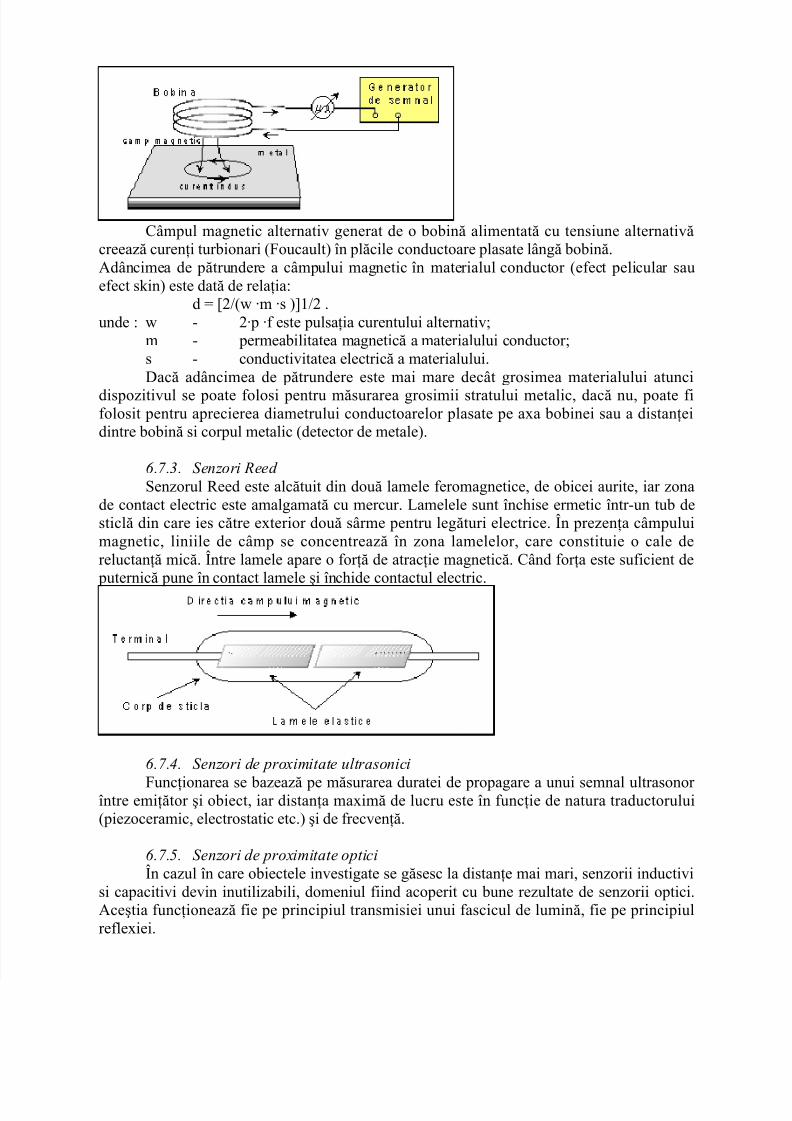
).*.2. #enzori inductivi cu curenţi tur!ionari
"e bazează pe variaţia capacităţii electrice într-un circuit, !i au avantaul că pot detecta!i obiecte nemetalice, însă sunt sensibili - murdărirea feţei active.
mpul ma#netic alternativ #enerat de o bobină alimentată cu tensiune alternativăcreează curenţi turbionari (6oucault) în plăcile conductoare plasate ln#ă bobină.Adncimea de pătrundere a cmpului ma#netic în materialul conductor (efect pelicular sauefect sSin) este dată de relaţia*
d N \4J( _m _s )]8J4 .unde * - 4_p _f este pulsaţia curentului alternativE
m - permeabilitatea ma#netică a materialului conductorEs - conductivitatea electrică a materialului.'acă adncimea de pătrundere este mai mare dect #rosimea materialului atunci
dispozitivul se poate folosi pentru măsurarea #rosimii stratului metalic, dacă nu, poate fifolosit pentru aprecierea diametrului conductoarelor plasate pe aa bobinei sau a distanţeidintre bobină si corpul metalic (detector de metale).
).*.3. #enzori eed
"enzorul 1eed este alcătuit din două lamele feroma#netice, de obicei aurite, iar zonade contact electric este amal#amată cu mercur. /amelele sunt înc$ise ermetic într-un tub desticlă din care ies către eterior două srme pentru le#ături electrice. %n prezenţa cmpuluima#netic, liniile de cmp se concentrează în zona lamelelor, care constituie o cale dereluctanţă mică. %ntre lamele apare o forţă de atracţie ma#netică. nd forţa este suficient de
puternică pune în contact lamele !i înc$ide contactul electric.
).*.&. #enzori de proHimitate ultrasonici
6uncţionarea se bazează pe măsurarea duratei de propa#are a unui semnal ultrasonorîntre emiţător !i obiect, iar distanţa maimă de lucru este în funcţie de natura traductorului(piezoceramic, electrostatic etc.) !i de frecvenţă.
).*.(. #enzori de proHimitate optici
%n cazul în care obiectele investi#ate se #ăsesc la distanţe mai mari, senzorii inductivisi capacitivi devin inutilizabili, domeniul fiind acoperit cu bune rezultate de senzorii optici.Ace!tia funcţionează fie pe principiul transmisiei unui fascicul de lumină, fie pe principiulrefleiei.