ROMÂNIA NECLASIFICAT MINISTERUL APĂRĂRII NAŢIONALE Exemplar nr. CENTRUL DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE APROB ŞEFUL CENTRULUI DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE Comandor dr. ing. Georgică SLĂMNOIU De acord, rog a aproba Locţiitor ştiinţific Comandor ing. Gheorghe CALANCEA Director de proiect Comandor dr. ing. Georgică SLĂMNOIU Responsabil ştiinţific proiect Comandor ing. Ovidiu RADU RAPORT ŞTIINŢIFIC ŞI TEHNIC PROIECTUL: Sistem pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral ETAPA aII-a: Proiectare constructiv-tehnologică şi dezvoltare model funcţional SIROLC
Transcript
ROMÂNIA NECLASIFICAT MINISTERUL APĂRĂRII NAŢIONALE Exemplar nr. CENTRUL DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE
APROB ŞEFUL CENTRULUI DE CERCETARE ŞTIINŢIFICĂ PENTRU FORŢELE NAVALE Comandor dr. ing.
Georgic ă SLĂMNOIU
De acord, rog a aproba
Loc ţiitor ştiin ţific Comandor ing.
Gheorghe CALANCEA
Director de proiect Comandor dr. ing. Georgic ă SLĂMNOIU
Responsabil ştiin ţific proiect Comandor ing.
Ovidiu RADU
RAPORT ŞTIINŢIFIC ŞI TEHNIC
PROIECTUL: Sistem pentru detec ţie, localizare, urm ărire şi identificare a factorilor de risc la adresa obiecti velor de importan ţă strategic ă din zone de litoral
ETAPA aII-a: Proiectare constructiv-tehnologic ă şi dezvoltare model func ţional
SIROLC
NECLASIFICAT
Neclasificat 2 din 20
1. Obiectivul proiectului şi etapei Obiectivul proiectului SIROLC este (aşa cum se menţionează în documentaţia pe baza
căreia s-a aprobat finanţarea) de a realiza modelul funcţional al unui sistem destinat detecţiei, localizării şi, după caz, a identificării factorilor de risc la adresa securităţii infrastructurilor critice (de navigaţie şi obiective de interes aflate sub apă) dinspre mediul acvatic, în ape puţin sau foarte puţin adânci (zone de litoral, canale, ape fluviale, deltă, lacuri etc.).
Obiectivul general al prezentei etape a proiectului SIROLC este de elaborare a proiectului tehnic / tehnologic şi a documentaţiei constructive (activităţi de identificare, experimentare şi transpunere în documentaţie de execuţie a soluţiilor posibile de proiectare şi realizare constructivă) pentru realizarea modelului funcţional al sistemului.
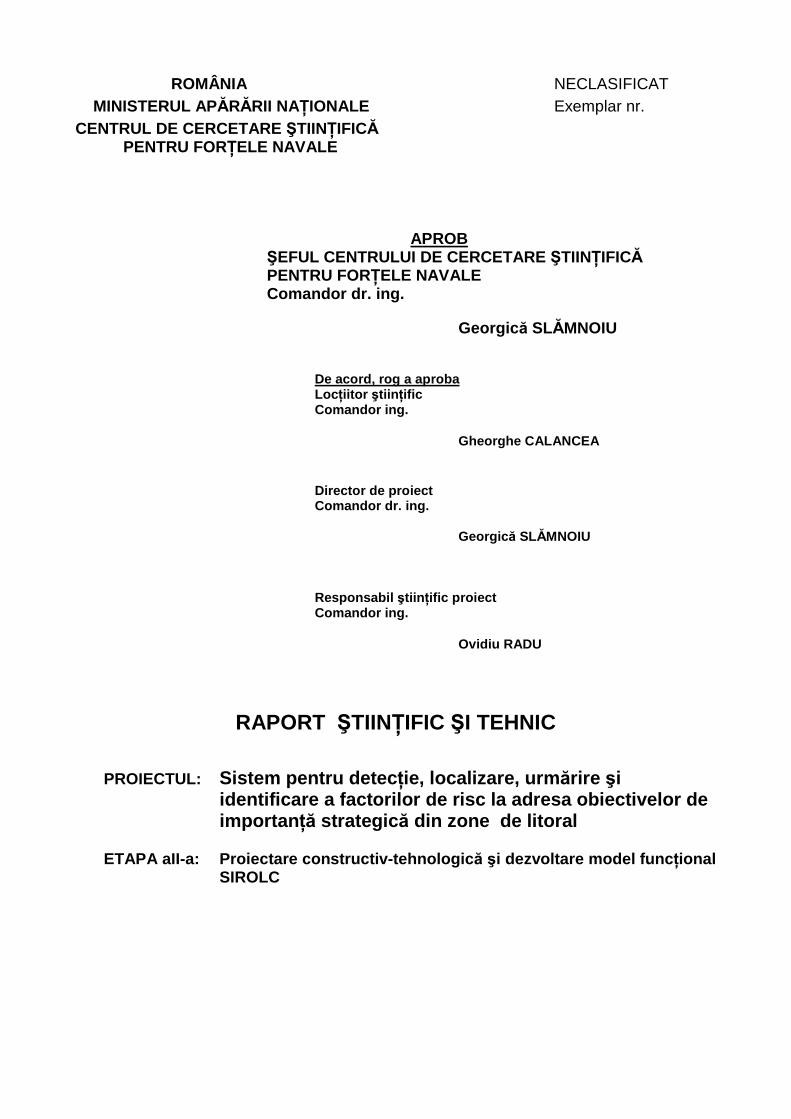
Sistemul pentru detecţie, localizare, urmărire şi identificare a factorilor de risc la adresa obiectivelor de importanţă strategică din zone de litoral – SIROLC va fi compus din două subsisteme:
• subsistem AUV;
• subsistem hidroacustic pentru determinarea amprentelor potenţialelor ţinte.
Figura 1 – Configuraţia funcţională a sistemului SIROLC
2. Activit ăţi realizate în cadrul etapei Activităţile realizate în cadrul etapei au constat în:
1. Proiectare subsistem vehicul subacvatic autonom (partea a II-a) 2. Proiectare constructiv-tehnologică şi dezvoltare subsistem hidroacustic de
determinare a amprentelor potenţialelor ţinte (partea I) 3. Proiectare constructiv-tehnologică şi dezvoltare subsistem hidroacustic de
determinare a amprentelor potenţialelor ţinte (partea a II-a parţial)
3. Rezumatul etapei
3.1. Activitatea 1 Unul dintre obiectivele proiectului SIROLC este de a dezvolta (pornind de la o platformă
existentă) un vehicul subacvatic autonom pentru securitate maritimă, destinat monitorizării fundului mării. Misiunea acestui vehicul este de detectare a pericolelor imersate. Spectrul de utilizare poate
NECLASIFICAT
Neclasificat 3 din 20
fi de la căutarea de nave scufundate, de materiale periculoase sau poluante pierdute în larg, la observarea eroziunii plajei sau a mişcărilor geologice.
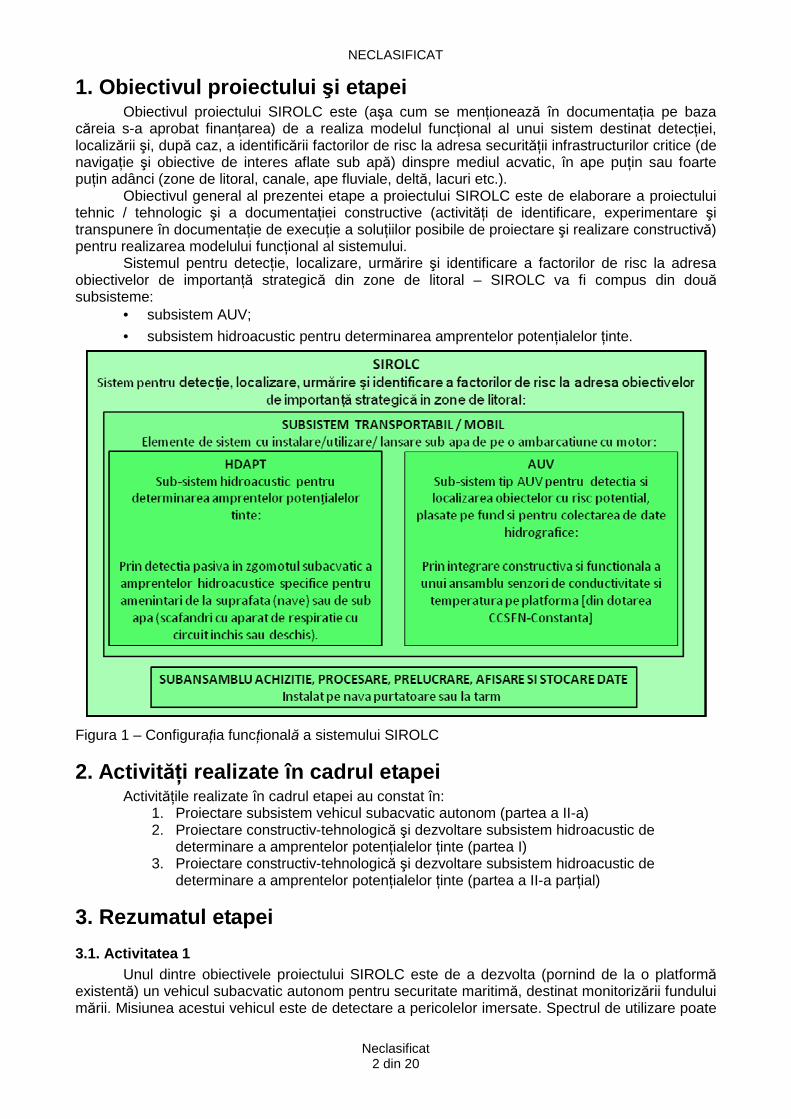
Platforma subacvatică mobilă autonomă (aflată în dotarea CCSFN) a fost dezvoltată avându-se în vedere următoarele:
• necesitatea efectuării de misiuni de inspecţie şi colectare de informaţii hidrografice, date de mediu şi alte date relevante din punct de vedere al securităţii în zona de litoral românesc a Mării Negre, lacuri de acumulare etc.
• conceptul de platformă expandabilă, astfel încât să permită instalarea ulterioară de senzori suplimentari sau reconfigurarea tipului de senzori instalaţi;
• utilizarea de componente, module, subansamble etc. de tip OEM sau COTS, fabricate într-un volum cât mai mare şi disponibile comercial.
Principalele caracteristici tehnico-tactice ale AUV-ului sunt următoarele: • masa (în aer): ≈ 25 kg
• autonomie: min. 8 h / 2 – 2.5 Nd
• viteza: max. 4 Nd
• navigaţie: � la suprafaţă: GPS � în imersiune: compas magnetic, adâncime, viteză estimată
• imersiune maximă: 100 m
• conectivitate: WiFi 802.11g (la suprafaţă). Pentru controlul vehiculului, achiziţia datelor de la senzori, procesarea şi/sau salvarea şi
transferul datelor, navigaţie etc. platforma are instalată un sistem de calcul de tip PC, cu sistem de operare Windows® XP. Ţinându-se cont de necesităţile de calcul pentru sonarul cu scanare laterală AUV-ul are instalată o unitate suplimentare de calcul şi procesare.
AUV-ul are integrat un sonar cu scanare laterală având următoarele caracteristici: • frecvenţă: 450 kHz nominal (430 – 470 kHz);
• traductoare hidroacustice: 2 traductoare cu prindere pe corpul AUV; � dimensiuni (Lxlxh): 432 x 41 x 18 mm. � lăţime caracteristici de directivitate (VxO): 60° x 0,5° (-3 dB);
• domeniul de acoperire: 1 m ….100 m pe canal;
• nivel putere la emisie: < 210 dB rel. 1µPa /1m.
Figura 2
Verificarea stării platformei subacvatice mobile autonome (şi eventual a senzorilor suplimentari instalaţi), planificare misiune, încărcare misiune în sistemul de calcul „de bază” (navigaţie şi control poziţie vehicul), recepţia datelor/memorarea/prelucrarea datelor post-misiune se efectuează prin intermediul unei console operator de tip laptop.
NECLASIFICAT
Neclasificat 4 din 20
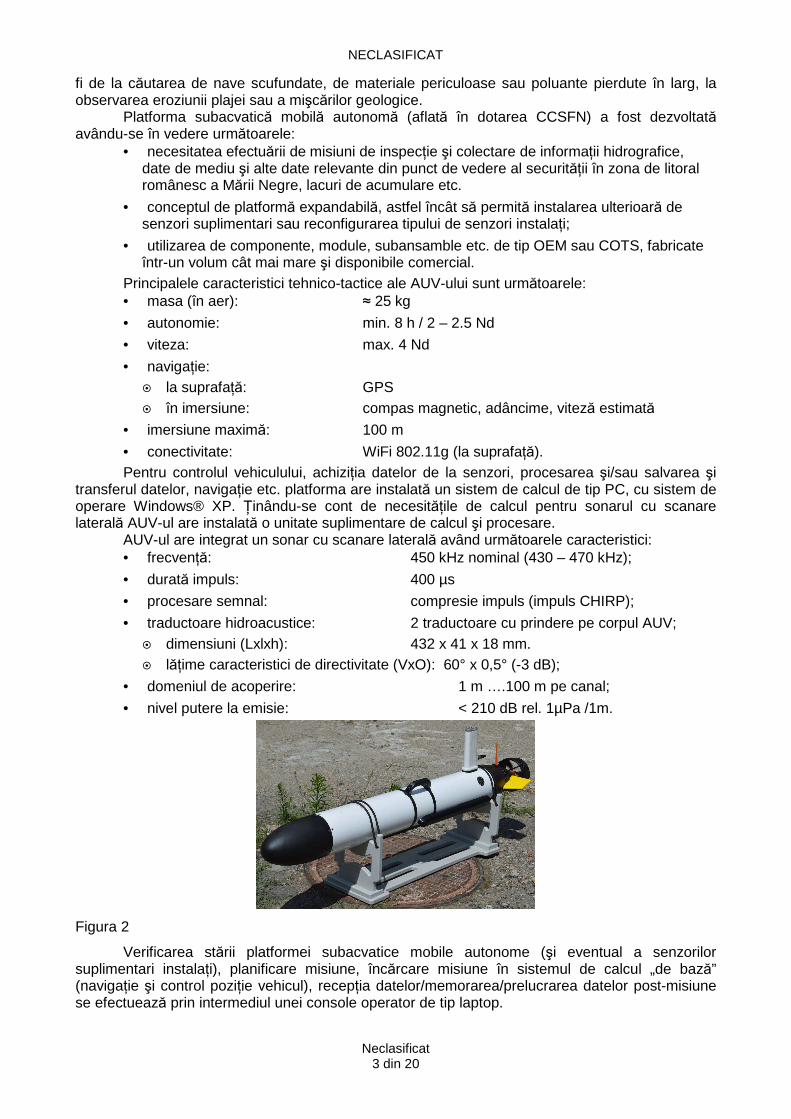
Ţinându-se cont de caracteristicile sonarului cu scanare laterală (prelucrare de semnal cu compresie în impuls, folosirea impulsurilor cu modulaţie liniară de frecvenţă) se poate calcula rezoluţia în distanţă (perpendicular pe direcţia de deplasare) conform formulei:
∆ry = c / (2 x B) (1)
unde B este banda impulsului (40 kHz în cazul de faţă).
Figura 3 – Rezoluţia în distanţă, perpendicular pe direcţia de deplasare
Considerând viteza sunetului în mediul marin de 1500 m/s, rezultă o rezoluţie în distanţă ∆ry = 0.01875 m (18,75 mm).
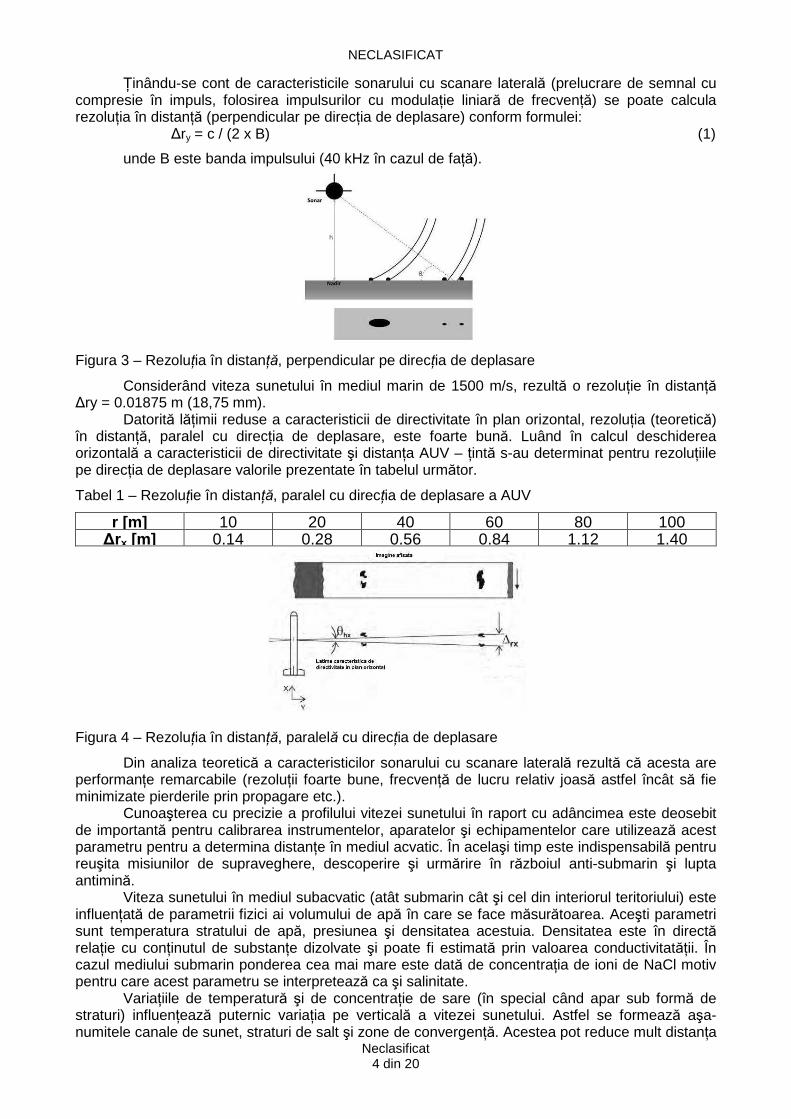
Datorită lăţimii reduse a caracteristicii de directivitate în plan orizontal, rezoluţia (teoretică) în distanţă, paralel cu direcţia de deplasare, este foarte bună. Luând în calcul deschiderea orizontală a caracteristicii de directivitate şi distanţa AUV – ţintă s-au determinat pentru rezoluţiile pe direcţia de deplasare valorile prezentate în tabelul următor.
Tabel 1 – Rezoluţie în distanţă, paralel cu direcţia de deplasare a AUV
Figura 4 – Rezoluţia în distanţă, paralelă cu direcţia de deplasare
Din analiza teoretică a caracteristicilor sonarului cu scanare laterală rezultă că acesta are performanţe remarcabile (rezoluţii foarte bune, frecvenţă de lucru relativ joasă astfel încât să fie minimizate pierderile prin propagare etc.).
Cunoaşterea cu precizie a profilului vitezei sunetului în raport cu adâncimea este deosebit de importantă pentru calibrarea instrumentelor, aparatelor şi echipamentelor care utilizează acest parametru pentru a determina distanţe în mediul acvatic. În acelaşi timp este indispensabilă pentru reuşita misiunilor de supraveghere, descoperire şi urmărire în războiul anti-submarin şi lupta antimină.
Viteza sunetului în mediul subacvatic (atât submarin cât şi cel din interiorul teritoriului) este influenţată de parametrii fizici ai volumului de apă în care se face măsurătoarea. Aceşti parametri sunt temperatura stratului de apă, presiunea şi densitatea acestuia. Densitatea este în directă relaţie cu conţinutul de substanţe dizolvate şi poate fi estimată prin valoarea conductivitatăţii. În cazul mediului submarin ponderea cea mai mare este dată de concentraţia de ioni de NaCl motiv pentru care acest parametru se interpretează ca şi salinitate.
Variaţiile de temperatură şi de concentraţie de sare (în special când apar sub formă de straturi) influenţează puternic variaţia pe verticală a vitezei sunetului. Astfel se formează aşa-numitele canale de sunet, straturi de salt şi zone de convergenţă. Acestea pot reduce mult distanţa
NECLASIFICAT
Neclasificat 5 din 20
de descoperire în funcţie de poziţia sesizorului faţă de ţintă; în interiorul canalului sau în zonele de convergenţă distanţa de descoperire poate să crească substanţial, iar în zonele ecranate scade sau tinde către zero. Prin reflexia undelor sonore pe suprafaţa şi pe fundul mării, în special în ape puţin adânci, apare ecoul, care influenţează distanţele de descoperire mai ales în cazul hidrolocaţiei active.
Valorile medii lunare multianuale ale temperaturii apei din perioada 1959 - 2008 şi cele medii lunare din anii 2009 - 2011 diferă nesemnificativ. S-a observat creşterea continuă a valorilor medii începând cu anul 2003 până în 2011, mediile anuale pentru ultimii ani diferind semnificativ de cele din anii 1959 – 2002.
Distribuţia spaţială a salinităţii apei de-a lungul litoralului românesc evidenţiază gradientul crescător dinspre zona gurilor Dunării spre zona sudică şi spre larg indiferent de perioada de prelevare. Se remarcă valorile minime din zonele apelor costiere şi marine înregistrate la suprafaţă, datorate regimului vânturilor, precipitaţiilor şi influenţei aportului fluvial.
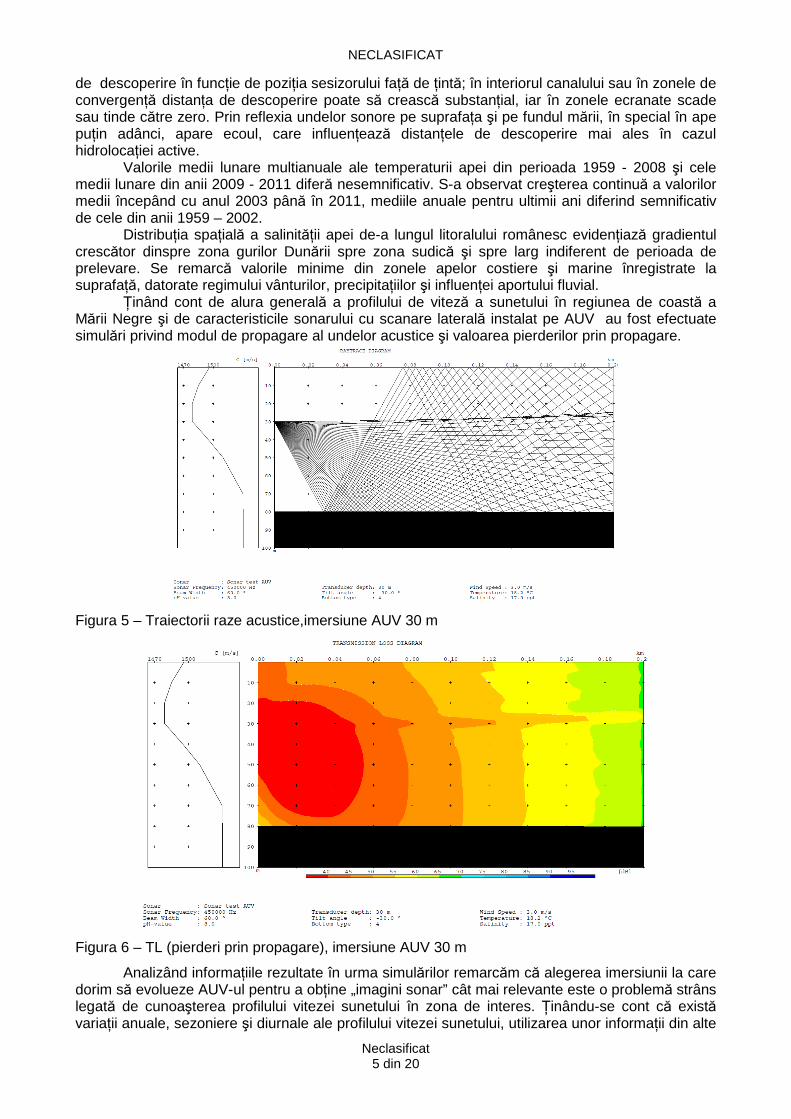
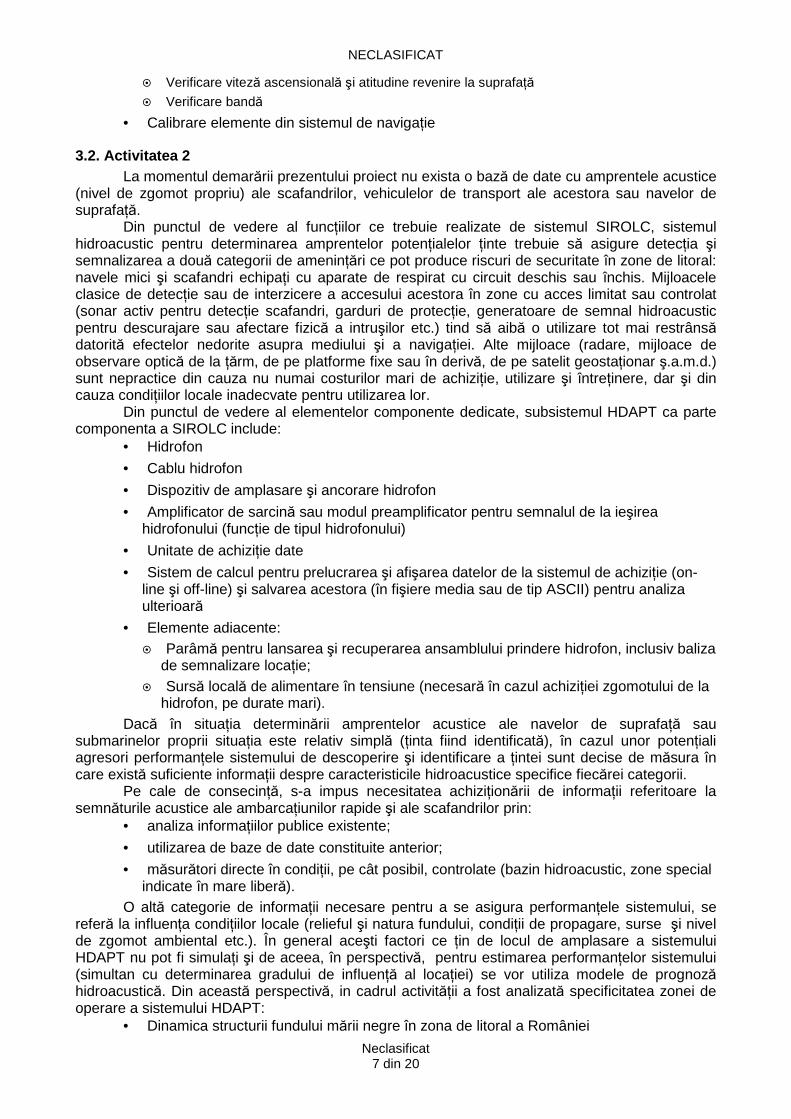
Ţinând cont de alura generală a profilului de viteză a sunetului în regiunea de coastă a Mării Negre şi de caracteristicile sonarului cu scanare laterală instalat pe AUV au fost efectuate simulări privind modul de propagare al undelor acustice şi valoarea pierderilor prin propagare.
Figura 5 – Traiectorii raze acustice,imersiune AUV 30 m
Figura 6 – TL (pierderi prin propagare), imersiune AUV 30 m
Analizând informaţiile rezultate în urma simulărilor remarcăm că alegerea imersiunii la care dorim să evolueze AUV-ul pentru a obţine „imagini sonar” cât mai relevante este o problemă strâns legată de cunoaşterea profilului vitezei sunetului în zona de interes. Ţinându-se cont că există variaţii anuale, sezoniere şi diurnale ale profilului vitezei sunetului, utilizarea unor informaţii din alte
NECLASIFICAT
Neclasificat 6 din 20
campanii de măsurători conduce la o apreciere nerealistă a imersiunii la care ar trebui să navige platforma subacvatică.
Pentru determinarea distanţelor la ţintă şi a dimensiunilor ţintei cunoaşterea vitezei sunetului are o importanţă majoră. În acest sens, presupunând o eroare în aprecierea vitezei sunetului de 1 % (de exemplu 1505 m/s în loc de valoarea reală de 1490 m/s) aprecierea dimensiunilor ţintelor şi a distanţelor faţă de traiectul AUV-ului (deci poziţia) ar fi afectate aprioric de aceiaşi eroare de 1% .
O soluţie de rezolvare a problemelor mai sus amintite este de a se monta pe AUV un senzor de determinare a vitezei sunetului, iar în zona de interes, prima misiune (de „calibrare”) să impună vehiculului o traiectorie ondulatorie (de la suprafaţă spre imersiunea maximă). La finalul acestei misiuni se obţin profile ale vitezei sunetului cu adâncimea, şi, utilizând un software de prognoză hidroacustică, se pot determina parametrii evolutivi optimi ai AUV-ului pentru detecţia ţintelor.
Pentru determinarea variantei optime de sistem cu multiple utilizări s-au analizat posibilele configuraţii din punctul de vedere al tipului senzorilor utilizaţi:
• măsurare directă viteză sunet („sing around” sau „time of flight”) - DSV;
• măsurare conductivitate (salinitate) şi temperatură [CT] şi cu informaţia de presiune (adâncime) dată de senzorul instalat pe AUV se calculează viteza sunetului - CTD.
În baza analizei putem afirma că varianta optimă de dotare a AUV-ului cu un senzor de determinare a vitezei sunetului este varianta CTD: senzori de conductivitate şi temperatură.
Pentru calcularea vitezei sunetului în apa de mare în funcţie de temperatură, salinitate şi adâncime (presiune) se pot utiliza mai multe formule, cu un grad de complexitate şi de precizie diferit. Deşi algoritmul UNESCO este algoritmul recunoscut ca standard internaţional, există multe dezbateri în literatura de specialitate cu privire la acurateţea şi gama de aplicabilitate a acestei ecuaţii şi ecuaţiei lui Del Grosso. Este important să recunoaştem că ecuaţiile prezentate aici sunt rezultatul interpolărilor unor date experimentale, de la mai multe experimente diferite, şi fiecare are o incertitudine asociată în predicţia sa de viteză a sunetului. Alegerea ecuaţiei depinde de acurateţea şi precizia acceptate pentru o aplicaţie specifică.
Au fost analizate doar acele ecuaţii valabile în condiţiile specifice Mării Negre, aşa cum au fost ele obţinute în urma cercetării datelor preliminare, mai ales ţinându-se cont de valoarea scăzută a salinităţii.
Ecuaţia Leroy aproximează cel mai bine valorile vitezei sunetului obţinute prin măsurare directă. Acest fapt iese în evidenţă mai ales în zona apelor marine.
Complexitatea calculelor în cazul ecuaţiilor Medwin, Coppens şi Leroy este mai redusă în comparativ cu ecuaţia UNESCO. Totodată, primele trei ecuaţii nu necesită efectuarea conversiei adâncime – presiune.
Intervalele de valabilitate pentru temperatură, salinitate şi adâncime în cazul ecuaţiei Leroy permit utilizarea acesteia în întregul bazin al Mării Negre (spre deosebire de ecuaţia Medwin care este limitată până la adâncimi de 1000 m).
În timp ce caracteristicile diferitelor platforme subacvatice variază, indiferent de model există câteva reguli generale care trebuiesc să fie luate în considerare atunci când se analizează modul în care urmează să fie integraţi anumiţi senzori pe platforma în cauză. Au fost analizate interacţiunile generate de montarea senzorului CT cu AUV-ul din perspectiva următorilor parametri:
• rezistenţa la înaintare, flotabilitatea şi gradul de integrare/compatibilitate;
• rata de eşantionare a senzorului;
• viteza de reacţie senzorului şi timpul de răspuns caracteristice senzorului;
� Verificare viteză ascensională şi atitudine revenire la suprafaţă
� Verificare bandă
• Calibrare elemente din sistemul de navigaţie
3.2. Activitatea 2 La momentul demarării prezentului proiect nu exista o bază de date cu amprentele acustice
(nivel de zgomot propriu) ale scafandrilor, vehiculelor de transport ale acestora sau navelor de suprafaţă.
Din punctul de vedere al funcţiilor ce trebuie realizate de sistemul SIROLC, sistemul hidroacustic pentru determinarea amprentelor potenţialelor ţinte trebuie să asigure detecţia şi semnalizarea a două categorii de ameninţări ce pot produce riscuri de securitate în zone de litoral: navele mici şi scafandri echipaţi cu aparate de respirat cu circuit deschis sau închis. Mijloacele clasice de detecţie sau de interzicere a accesului acestora în zone cu acces limitat sau controlat (sonar activ pentru detecţie scafandri, garduri de protecţie, generatoare de semnal hidroacustic pentru descurajare sau afectare fizică a intruşilor etc.) tind să aibă o utilizare tot mai restrânsă datorită efectelor nedorite asupra mediului şi a navigaţiei. Alte mijloace (radare, mijloace de observare optică de la ţărm, de pe platforme fixe sau în derivă, de pe satelit geostaţionar ş.a.m.d.) sunt nepractice din cauza nu numai costurilor mari de achiziţie, utilizare şi întreţinere, dar şi din cauza condiţiilor locale inadecvate pentru utilizarea lor.
Din punctul de vedere al elementelor componente dedicate, subsistemul HDAPT ca parte componenta a SIROLC include:
• Hidrofon
• Cablu hidrofon
• Dispozitiv de amplasare şi ancorare hidrofon
• Amplificator de sarcină sau modul preamplificator pentru semnalul de la ieşirea hidrofonului (funcţie de tipul hidrofonului)
• Unitate de achiziţie date
• Sistem de calcul pentru prelucrarea şi afişarea datelor de la sistemul de achiziţie (on-line şi off-line) şi salvarea acestora (în fişiere media sau de tip ASCII) pentru analiza ulterioară
• Elemente adiacente: � Parâmă pentru lansarea şi recuperarea ansamblului prindere hidrofon, inclusiv baliza
de semnalizare locaţie; � Sursă locală de alimentare în tensiune (necesară în cazul achiziţiei zgomotului de la
hidrofon, pe durate mari). Dacă în situaţia determinării amprentelor acustice ale navelor de suprafaţă sau
submarinelor proprii situaţia este relativ simplă (ţinta fiind identificată), în cazul unor potenţiali agresori performanţele sistemului de descoperire şi identificare a ţintei sunt decise de măsura în care există suficiente informaţii despre caracteristicile hidroacustice specifice fiecărei categorii.
Pe cale de consecinţă, s-a impus necesitatea achiziţionării de informaţii referitoare la semnăturile acustice ale ambarcaţiunilor rapide şi ale scafandrilor prin:
• analiza informaţiilor publice existente;
• utilizarea de baze de date constituite anterior;
• măsurători directe în condiţii, pe cât posibil, controlate (bazin hidroacustic, zone special indicate în mare liberă).
O altă categorie de informaţii necesare pentru a se asigura performanţele sistemului, se referă la influenţa condiţiilor locale (relieful şi natura fundului, condiţii de propagare, surse şi nivel de zgomot ambiental etc.). În general aceşti factori ce ţin de locul de amplasare a sistemului HDAPT nu pot fi simulaţi şi de aceea, în perspectivă, pentru estimarea performanţelor sistemului (simultan cu determinarea gradului de influenţă al locaţiei) se vor utiliza modele de prognoză hidroacustică. Din această perspectivă, in cadrul activităţii a fost analizată specificitatea zonei de operare a sistemului HDAPT:
• Dinamica structurii fundului mării negre în zona de litoral a României
NECLASIFICAT
Neclasificat 8 din 20
� Natura fundului mării în zona litorală Sulina � Natura fundului mării în zona litorală Sf. Gheorghe –Vadu � Natura fundului mării în zona litorală Cap Tuzla - Mangalia
• Reglementarea navigaţiei la litoralul românesc � Rada Mangalia � Rada Constanţa � Rada Midia � Rada Sulina � Dispozitivul de separare a traficului pentru porturile Constanţa şi Midia
• Traficul maritim prin porturile româneşti şi s-au concluzionat următoarele: • Orice deviere a unei nave civile de la ruta planificată şi raportată organelor române de
control a navigaţiei civile, poate deveni un pericol sau o ameninţare care trebuie verificată şi raportată.
• Zonele de monitorizat de către sistemul HDAPT au dimensiuni mari (zonele de radă, intrarea în porturi etc.) şi sunt distribuite pe întreaga lungime a litoralului românesc.
• Înregistrările de amprente hidroacustice ale navelor se pot face: � în perioada iulie – octombrie (când traficul este relativ intens), obţinând informaţii
despre un număr mare de contacte; � în perioada noiembrie – iunie, când traficul este mai redus (implicit zgomotul de
fond) şi, pe cale de consecinţă creşte calitatea informaţiilor obţinute.
• Dispozitivul de amplasare şi ancorare a hidrofoanelor trebuie să nu se afunde în zonele cu nisip fin, nisipuri siltice, silturi argiloase şi depozite cochilifere, zone care se găsesc predominant de-a lungul litoralului românesc.
Înainte de proiectarea algoritmilor şi structurarea subsistemului HDAPT au fost analizate semnăturile acustice ale potenţialelor ţinte: nave de suprafaţă şi scafandri autonomi.
Simularea în totalitate a caracteristicilor câmpului acustic este dificilă datorită imposibilităţii descrierii cu exactitate (chiar şi probabilistic) a interacţiunilor dintre corpul navei şi valuri şi totodată a sensibilităţii extreme a rezultatelor faţă de modificarea unor valori de intrare (turaţia elicii, oboseala în timp a unor amortizori etc.).
În conformitate cu prevederile „Small Vessel Security Strategy” (aprilie 2008), emis de Department for Homeland Security (USA) şi în sensul analizelor efectuate în cadrul prezentului proiect în etapa anterioară, vom considera ca fiind navă mică orice ambarcaţiune, indiferent de metoda de propulsie, având un volum mai mic de 300 GT. Categoria menţionată poate include vase de pescuit, iahturi şi alte ambarcaţiuni utilizate pentru activităţi recreaţionale, remorchere, nave de pasageri etc.
Amprenta acustică a unei nave depinde de viteza sa de deplasare. La viteze mici, zgomotul provocat prin vibraţia maşinilor, produsă de către piesele componente aflate în mişcare de rotaţie sau de translaţie, produce un zgomot de fond cu vârfuri ocazionale, multe din acestea fiind produse prin rezonanţă. La astfel de viteze de deplasare, propulsoarele, cu toate că funcţionează fără cavitaţie, sunt excitate în stare de vibraţie („cântă”) datorită câmpului de presiune nesimetric produs de către propulsor, iar zgomotul produs se adaugă la amprenta acustică generală în domeniul de frecvenţe de la 200 la 2000 Hz.
Când se măreşte viteza de deplasare, creşte şi zgomotul maşinilor, dar şi zgomotul curgerii hidrodinamice în jurul carenei navei (care este neglijabil la viteze reduse) până când, la viteze peste 10 Nd, acesta din urmă devine componenta dominantă a amprentei acustice.
La vitezele uzuale de deplasare ale navelor, curgerea apei în jurul carenei este turbulentă, producând un câmp de presiune fluctuant, care generează zgomot. La viteze de deplasare mai ridicate, în curgerea din jurul carenei se formează vârtejuri, ale căror centre se află la presiune foarte scăzută, zonă în care sunt generate bule de cavitaţie. Aceste bule sunt supuse colapsului când ele se deplasează departe de navă şi vârtejurile se disipă. Amplitudinea zgomotului curgerii hidrodinamice din jurul carenei este aproximativ constantă pe întregul domeniu de frecvenţe, dar
NECLASIFICAT
Neclasificat 9 din 20
există câteva vârfuri înguste care corespund vibraţiilor excitate de către curgerea turbulentă pe carenă şi pe apendicii navei.
Amprenta acustică a navei creşte constant o dată cu creşterea vitezei de deplasare până când este atinsă viteza de apariţie a cavitaţiei propulsorului, moment în care se constată o creştere bruscă a acesteia. Zgomotul datorat cavitaţiei propulsorului este produs de către colapsul bulelor formate în zona de presiune redusă ce se deplasează către regiuni cu presiune mai ridicată.
Predicţia zgomotului datorat cavitaţiei prin mijloace teoretice este mai complexă decât cea pentru propulsorul fără cavitaţie şi ca o consecinţă, cele mai multe predicţii sunt executate utilizând modele de propulsoare ce funcţionează în un tunel de cavitaţie. În prezent inabilitatea metodelor teoretice de a ţine cont în detaliu de stratul limită şi de dinamica cavitaţiei tinde să limiteze valoarea acestor metode, cu toate că utilizează pentru calcul facilităţi mari de calcul numeric.
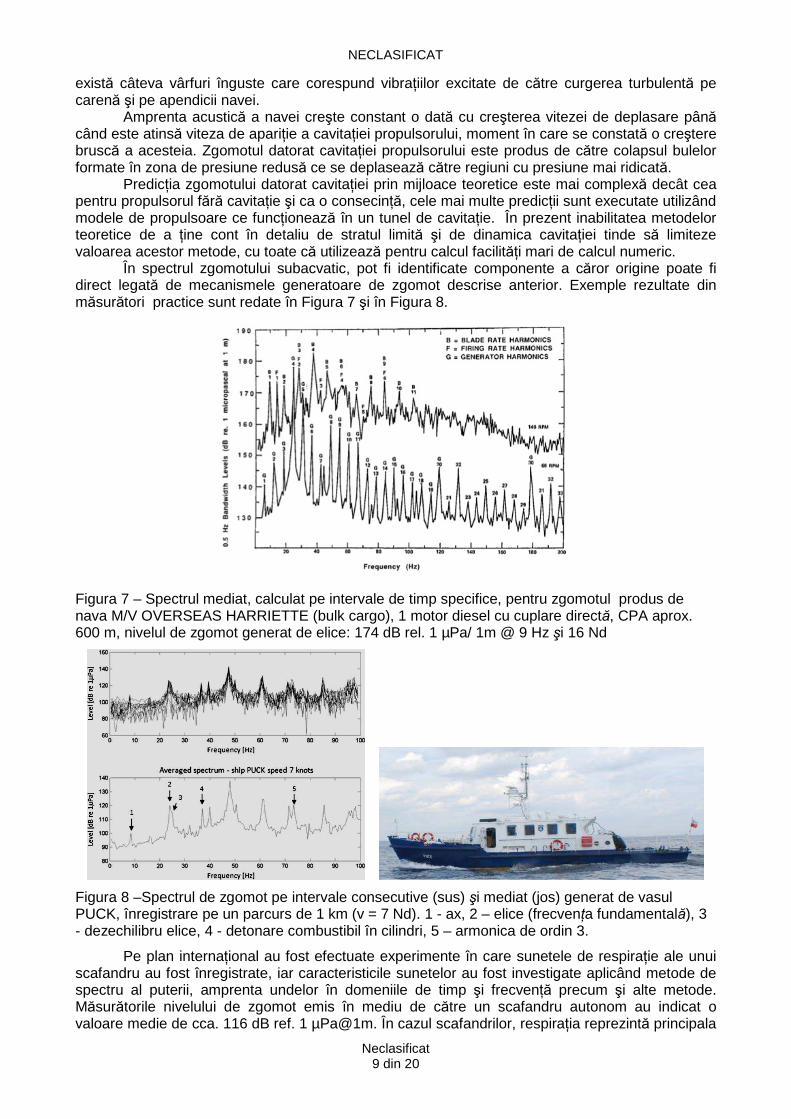
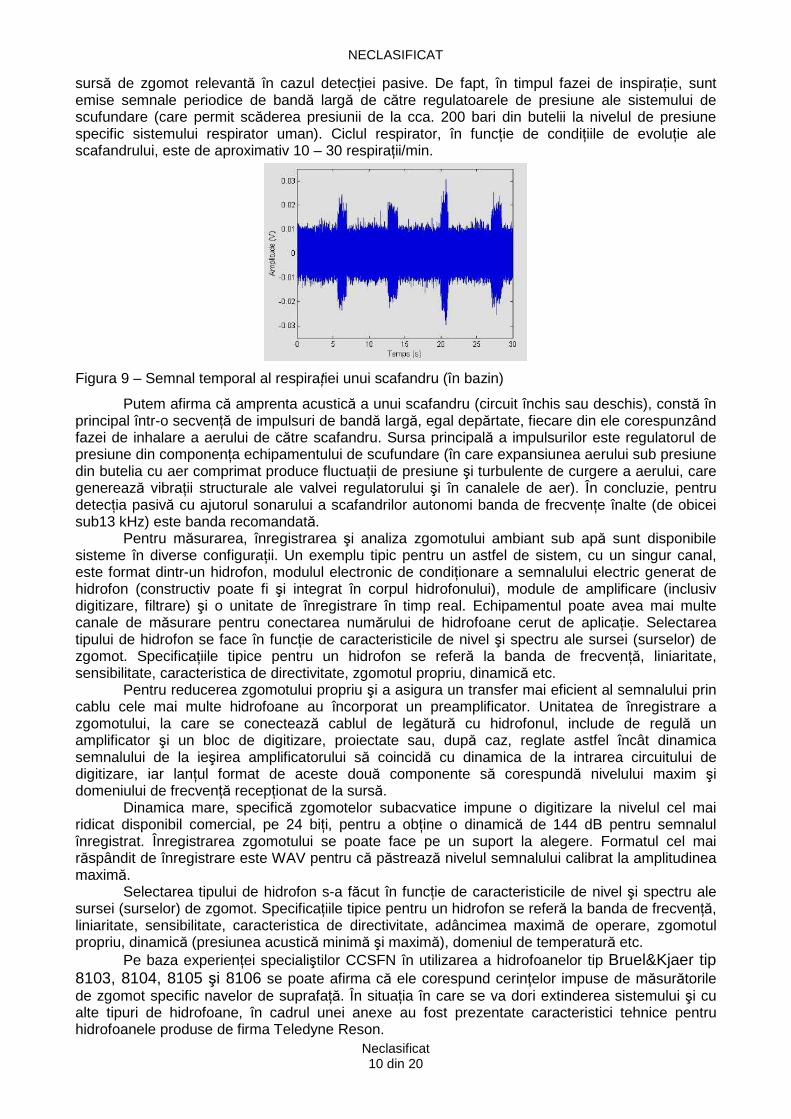
În spectrul zgomotului subacvatic, pot fi identificate componente a căror origine poate fi direct legată de mecanismele generatoare de zgomot descrise anterior. Exemple rezultate din măsurători practice sunt redate în Figura 7 şi în Figura 8.
Figura 7 – Spectrul mediat, calculat pe intervale de timp specifice, pentru zgomotul produs de nava M/V OVERSEAS HARRIETTE (bulk cargo), 1 motor diesel cu cuplare directă, CPA aprox. 600 m, nivelul de zgomot generat de elice: 174 dB rel. 1 µPa/ 1m @ 9 Hz şi 16 Nd
Figura 8 –Spectrul de zgomot pe intervale consecutive (sus) şi mediat (jos) generat de vasul PUCK, înregistrare pe un parcurs de 1 km (v = 7 Nd). 1 - ax, 2 – elice (frecvenţa fundamentală), 3 - dezechilibru elice, 4 - detonare combustibil în cilindri, 5 – armonica de ordin 3.
Pe plan internaţional au fost efectuate experimente în care sunetele de respiraţie ale unui scafandru au fost înregistrate, iar caracteristicile sunetelor au fost investigate aplicând metode de spectru al puterii, amprenta undelor în domeniile de timp şi frecvenţă precum şi alte metode. Măsurătorile nivelului de zgomot emis în mediu de către un scafandru autonom au indicat o valoare medie de cca. 116 dB ref. 1 µPa@1m. În cazul scafandrilor, respiraţia reprezintă principala
NECLASIFICAT
Neclasificat 10 din 20
sursă de zgomot relevantă în cazul detecţiei pasive. De fapt, în timpul fazei de inspiraţie, sunt emise semnale periodice de bandă largă de către regulatoarele de presiune ale sistemului de scufundare (care permit scăderea presiunii de la cca. 200 bari din butelii la nivelul de presiune specific sistemului respirator uman). Ciclul respirator, în funcţie de condiţiile de evoluţie ale scafandrului, este de aproximativ 10 – 30 respiraţii/min.
Figura 9 – Semnal temporal al respiraţiei unui scafandru (în bazin)
Putem afirma că amprenta acustică a unui scafandru (circuit închis sau deschis), constă în principal într-o secvenţă de impulsuri de bandă largă, egal depărtate, fiecare din ele corespunzând fazei de inhalare a aerului de către scafandru. Sursa principală a impulsurilor este regulatorul de presiune din componenţa echipamentului de scufundare (în care expansiunea aerului sub presiune din butelia cu aer comprimat produce fluctuaţii de presiune şi turbulente de curgere a aerului, care generează vibraţii structurale ale valvei regulatorului şi în canalele de aer). În concluzie, pentru detecţia pasivă cu ajutorul sonarului a scafandrilor autonomi banda de frecvenţe înalte (de obicei sub13 kHz) este banda recomandată.
Pentru măsurarea, înregistrarea şi analiza zgomotului ambiant sub apă sunt disponibile sisteme în diverse configuraţii. Un exemplu tipic pentru un astfel de sistem, cu un singur canal, este format dintr-un hidrofon, modulul electronic de condiţionare a semnalului electric generat de hidrofon (constructiv poate fi şi integrat în corpul hidrofonului), module de amplificare (inclusiv digitizare, filtrare) şi o unitate de înregistrare în timp real. Echipamentul poate avea mai multe canale de măsurare pentru conectarea numărului de hidrofoane cerut de aplicaţie. Selectarea tipului de hidrofon se face în funcţie de caracteristicile de nivel şi spectru ale sursei (surselor) de zgomot. Specificaţiile tipice pentru un hidrofon se referă la banda de frecvenţă, liniaritate, sensibilitate, caracteristica de directivitate, zgomotul propriu, dinamică etc.
Pentru reducerea zgomotului propriu şi a asigura un transfer mai eficient al semnalului prin cablu cele mai multe hidrofoane au încorporat un preamplificator. Unitatea de înregistrare a zgomotului, la care se conectează cablul de legătură cu hidrofonul, include de regulă un amplificator şi un bloc de digitizare, proiectate sau, după caz, reglate astfel încât dinamica semnalului de la ieşirea amplificatorului să coincidă cu dinamica de la intrarea circuitului de digitizare, iar lanţul format de aceste două componente să corespundă nivelului maxim şi domeniului de frecvenţă recepţionat de la sursă.
Dinamica mare, specifică zgomotelor subacvatice impune o digitizare la nivelul cel mai ridicat disponibil comercial, pe 24 biţi, pentru a obţine o dinamică de 144 dB pentru semnalul înregistrat. Înregistrarea zgomotului se poate face pe un suport la alegere. Formatul cel mai răspândit de înregistrare este WAV pentru că păstrează nivelul semnalului calibrat la amplitudinea maximă.
Selectarea tipului de hidrofon s-a făcut în funcţie de caracteristicile de nivel şi spectru ale sursei (surselor) de zgomot. Specificaţiile tipice pentru un hidrofon se referă la banda de frecvenţă, liniaritate, sensibilitate, caracteristica de directivitate, adâncimea maximă de operare, zgomotul propriu, dinamică (presiunea acustică minimă şi maximă), domeniul de temperatură etc.
Pe baza experienţei specialiştilor CCSFN în utilizarea a hidrofoanelor tip Bruel&Kjaer tip 8103, 8104, 8105 şi 8106 se poate afirma că ele corespund cerinţelor impuse de măsurătorile de zgomot specific navelor de suprafaţă. În situaţia în care se va dori extinderea sistemului şi cu alte tipuri de hidrofoane, în cadrul unei anexe au fost prezentate caracteristici tehnice pentru hidrofoanele produse de firma Teledyne Reson.
NECLASIFICAT
Neclasificat 11 din 20
Deoarece hidrofonul B&K 8103 este un hidrofon de laborator şi utilizat în activităţile specifice de calibrare şi efectuare a măsurătorilor în bazine fonoabsorbante el nu a mai fost analizat în detaliu. Deoarece, odată cu creşterea frecvenţei, hidrofonul Bruel&Kjaer 8104 este prea directiv în plan xOz (în plan vertical), acesta nu este considerat adecvat a fi utilizat în cadrul subsistemului HDAPT (creşte riscul de a atenua componente ale semnalului produs de potenţialele ţinte - nave de suprafaţă sau scafandri - care sunt poziţionate în afara axului caracteristicii de directivitate).
Ţinându-se cont de datele prezentate, de faptul că în dotarea CCSFN se află hidrofoane de tip Bruel&Kjaer 8105 şi 8106, de necesitatea încadrării în bugetul aprobat al proiectului etc. concluzionăm că pentru realizarea modelului funcţional al sistemului HDAPT se vor utiliza cele două tipuri de hidrofoane menţionate. În funcţie de rezultatele obţinute pe parcursul derulării etapei a III-a (din 2016) se va stabili care dintre cele două tipuri de hidrofoane participă mai eficient la realizarea unui raport eficienţă-cost optim.
Analizând soluţiile aplicate în situaţii similare pentru realizarea ansamblului de prindere, unul dintre parteneri a realizat un model funcţional al dispozitivului de amplasare şi ancorare a hidrofonului după cum este prezentat în continuare.
• înălţime picior: reglabil între 100 cm şi 150 cm
• distanţa între picioare: reglabilă între 100 cm şi 150 cm
• înălţimea pe axa centrală: reglabilă între 100 cm şi 130 cm
• lungime coloană centrală fixă: 50 cm
• lungime coloană centrală telescopică: reglabilă între 10 cm şi 50 cm
• masă: 8 kg
Figura 10 – Model funcţional trepied pentru fixare hidrofon
Pentru hidrofoanele Bruel&Kjaer 8106 (care includ preamplificator) CCSFN deţine cabluri AO-1433 cu lungimea de 200 m şi respectiv 30 m şi, în acelaşi timp şi două cabluri AO-0390 de câte 10 m fiecare. În vederea conectării hidrofonului 8106 la unitatea de achiziţie date, CCSFN are în dotare două adaptoare WI-1260 (trecere de la conector JP-0717 la conector cu 7 pini tip LEMO).
În cazul hidrofoanelor Bruel&Kjaer 8105 CCSFN deţine cabluri AO-1431 cu lungimea de peste 40 m, dar având la capete conectori JJ/JP – 0415 vulcanizaţi. Hidrofoanele 8105 aflate în dotarea CCSFN sunt prevăzute cu cablu de 10 m, având la capăt mufă BNC (demontabilă) tip JP – 0108.
Pe parcursul etapei de proiectare constructiv-tehnologică, ţinându-se cont de structura stabilită pentru subsistemul HDAPT, de caracteristicile hidrofoanelor utilizate, de speficitatea zonei de utilizare şi a semnalelor de la potenţialele ţinte a fost întocmită specificaţia tehnică de achiziţie pentru unitatea de achiziţie date aferentă (Sistem mobil de achiziţie şi procesare date – achiziţie şi înregistrare semnale de la hidrofoane).
Dintre produsele existente pe piaţă şi care răspund cerinţelor din specificaţia tehnică menţionăm:
NECLASIFICAT
Neclasificat 12 din 20
• LAN – XI 3052, cu acumulator 2831-A şi software LAN – XI NOTAR BZ-7848-A, produsă de Bruel & Kjaer, Danemarca
• EA-SDA14 RTSYS – Marine Technologies, Franţa – unitate complet imersată
• ST 1400 ENV, produsă de Cetacean Research Technology, SUA. Fişele de produs pentru sistemul produs de Bruel & Kjaer şi cel produs de Cetacean
Research Technology sunt prezentate în anexele raportului de cercetare aferent etapei a II-a. În urma derulării procesului de achiziţie, CCSFN a achiziţionat un sistem mobil de achiziţie şi procesare date – achiziţie şi înregistrare semnale de la hidrofoane a cărui compunere este:
• LAN – XI 3052 – 1 buc.
• acumulator 2831-A – 1 buc.
• software LAN – XI NOTAR BZ-7848-A – 1 buc.
• front panel 3 canale BNC – 1 buc.
• front panel 3 canale LEMO – 1 buc. Pe timpul recepţiei produsului au fost efectuate şi achiziţii de semnal de la hidrofoane (B&K
8105 şi 8106). Modalitatea cea mai simplă de achiziţie a informaţiei este de a asculta, analiza şi interpreta
sunetele subacvatice, utilizând unul sau mai multe hidrofoane, cu scopul de a stabili dacă ele includ zgomote generate de contacte prietene sau inamice, naturale sau antopogenice. Cea mai simplă cale de a realiza acest scop este de a filtra zgomotul achiziţionat într-o bandă în care se cunoaşte că nivelul zgomotului generat de sursa căutată este mai mare decât cel generat de restul surselor ce contribuie la zgomotul ambiant. Metode bazate pe algoritmi de detecţie (DEMON, LOFAR, CAPON, MUSIC, ESPRIT) a platformelor mobile subacvatice şi de suprafaţă au fost elaborate iniţial pentru sonare în regim pasiv.
Activitatea de proiectare tehnică pentru sub-sistemul HDAPT a avut ca obiectiv evaluarea acestor algoritmi şi îmbunătăţirea performanţelor lor, în vederea aplicării la realizarea sistemului.
O metodă simplă de separare a semnalului util (periodic) de zgomot ar fi utilizarea unei medieri sincrone, acest proces presupunând medierea unor secţiuni de semnal cu lungimea egală cu perioada componentei armonice de interes. Această mediere ar diminua toate componentele mai puţin pe cea periodică. Metoda este valoroasă la nivel teoretic, dar inaplicabilă în situaţia de faţă datorită imposibilităţii cunoaşterii cu precizie a perioadei componentei armonice şi/sau a modului de variaţie a acestei perioade.
O altă metodă posibilă pentru separarea componentelor periodice dintr-un zgomot de bandă largă ar presupune liftrarea (filtrare - liftrare) în domeniul cepstrum. Efectuarea analizei CEPSTRUM presupune filtrarea zgomotului recepţionat în conformitate cu etapele prezentate în figura următoare. În cepstrum-ul semnalului componentele periodice s-ar manifesta ca un tren de ramonice ce ar putea fi izolat prin liftrare.
Au mai fost identificate două modalităţi de abordare a problemei detecţiei „zgomotului” produs de rotirea axului şi a palelor elicei „ascuns” în semnalul de bandă largă captat de hidrofon. O prima metoda este considerată clasică, ea fiind dezvoltată iniţial pentru detecţia pasivă a navelor de pe submarin (DEMON – DEtection of Modulation On Noise).
O a doua metodă se bazează pe ipoteza că zgomotul cules de hidrofon este de tip ciclostaţionar.Termenul de ciclostaţionar se referă la o clasă specială de semnale nestaţionare, aleatoare, dar care în statisticile lor prezintă o anumită periodicitate. Un semnal ciclostaţionar de ordinul întâi (CS1) va prezenta periodicitate în statisticile sale de prim ordin (adică media în ansamblu va fi periodică), pentru CS2 autocovarianţa va fi periodică ş.a.m.d. Metoda importată din aplicaţii de diagnosticare acustică a echipamentelor şi dispozitivelor mecanice, cu subansamble în mişcare periodică, încearca o fundamentare teoretică a algoritmului DEMON, considerat empiric. Prin aceasta abordare, metoda bazata pe ciclostaţionaritatea statistică de diferite ordine a zgomotului recepţionat îşi propune să rezolve două limitări ale aplicării practice a algoritmului DEMON :
• stabilirea benzii de frecvenţă a filtrului de tip trece bandă aplicat semnalului cules de hidrofon, înainte de aplicarea algoritmului. In sistemul clasic, aceasta era decisă de operator prin ascultarea în cască a zgomotului de la hidrofon;
NECLASIFICAT
Neclasificat 13 din 20
• determinarea unui prag statistic de detecţie pentru semnalizarea automată a prezenţei ţintei.
In acest moment, rezultatele obţinute sunt mai mult la nivel de aparat matematic aplicat pe modele teoretice ale semnalelor. Până la acest moment metoda nu a demonstrat performanţe net superioare de detecţie faţă de algoritmul DEMON (din punctul de vedere al prelucrării semnalului fiind aplicate proceduri similare: limitarea benzii semnalului prin filtrare, ridicarea la pătrat, filtrarea trece jos, denormalizarea şi FFT).
Ca urmare, pentru algoritmul de detecţie se va lua în analiză algoritmul DEMON, cu dezvoltările avute pe măsura aplicării lui, şi identificarea posibilităţilor de creştere a lor prin aplicarea de soluţii proprii.
3.3. Activitatea 3 Pentru evaluarea performanţelor diferitelor variante ale algoritmului s-au utilizat înregistrări
audio pentru zgomotul subacvatic generat de nave în condiţii reale sau zgomote simulate, iar pentru zgomote de fond au fost utilizate atât zgomote înregistrate în condiţii reale, cât şi zgomote de tip alb sau roz, generate de produsele software de procesare semnal (nave reale: feriboat, navă mică cu motor Diesel, nave simulate: cu o elică având 3-5 pale, viteză 10 Nd, turaţie 197 rpm; condiţii meteo: vânt, ploaie uşoară sau intensă, zăpadă). Pentru zgomote de fond au fost utilizate atât zgomote înregistrate în condiţii reale cât şi zgomote de tip alb sau roz, generate de software de procesare semnal.
Exemple de înregistrări de zgomote de navă, în condiţii reale, utilizate pentru testarea performantelor algoritmilor:
• Alaska state ferry_Oct_02_2000@101413
• Merchant vessel CERES
• Small_diesel_Nov_01_2000@085906-2
• Yacht_drive_slow_decelerate
• JP-1 Sonar Trening Records: � Surface Ship Sounds Distr w F 500Hz; � Surface Ship Sounds Patrula coasta small 6000yar_mods; � Surface Ship Sounds PT Boat;
• Tanker@6000;
• Propeller cavitation from a large tanker
• Propeller cavitation from a tug boat Înregistrări de semnal zgomot navă simulat, utilizate pentru testarea implementării corecte
a algoritmilor: • 10KTS_197RPM_5P0175_3 nava cu elice cu trei pale, 197 rot/min, 10 Nd;
• 10KTS_197RPM_5P0175_4 nava cu elice cu patru pale, 197 rot/min, 10 Nd;
• 10KTS_197RPM_5P0175_5 nava cu elice cu cinci pale, 197 rot/min, 10 Nd. În cadrul testelor s-au verificat următoarele variante ale algoritmului DEMON: • varianta clasică 1:
Figura 11 – Schemă bloc – DEMON clasic
• varianta clasică 2:
Figura 12 – Schemă bloc – variantă DEMON clasic
NECLASIFICAT
Neclasificat 14 din 20
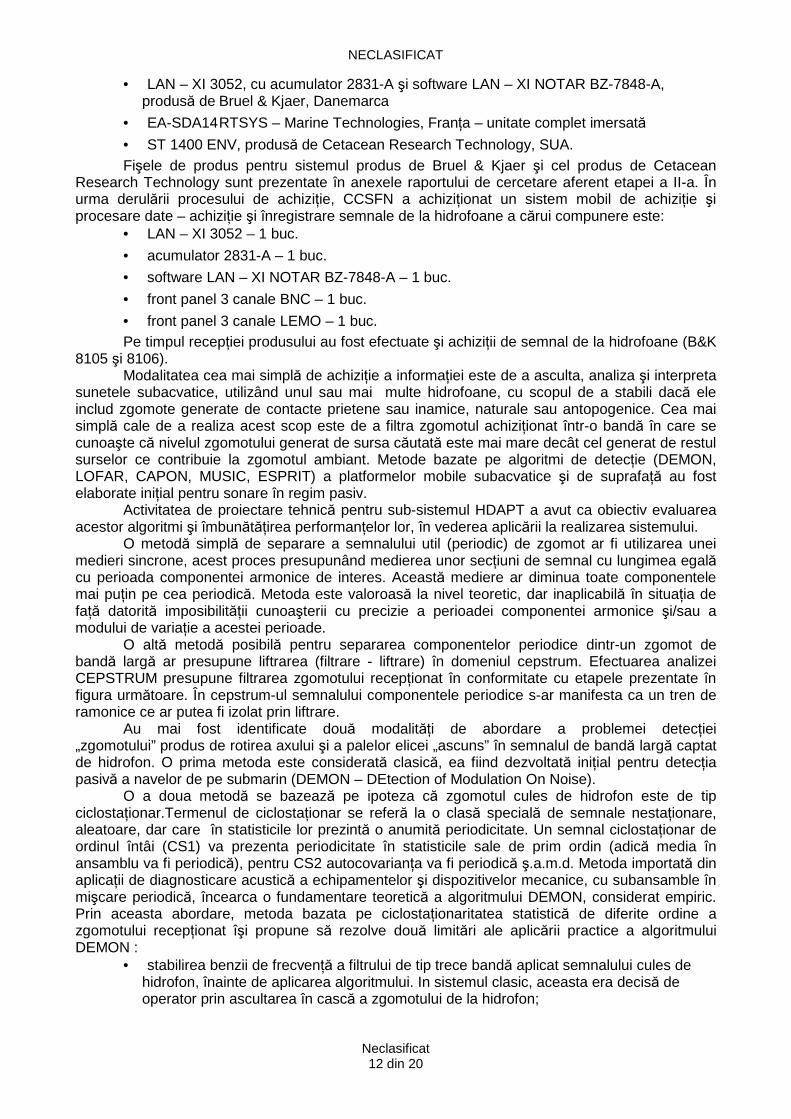
• variantă multibandă - cu împărţirea semnalului acustic în mai multe benzi de frecvenţă, cu aplicarea pentru fiecare semnal filtrat a algoritmului DEMON cf. Figura 12 şi însumarea rezultatelor (medie):
Figura 13 – Schemă bloc – DEMON cu extindere multibandă
• variantă DEMON multibandă 2 - constă în utilizarea împărţirii în benzi de frecvenţă a semnalului recepţionat şi autocorelaţia fiecărui semnal filtrat, cu însumarea rezultatelor obţinute:
Figura 14 – Schemă bloc – variantă DEMON multibandă
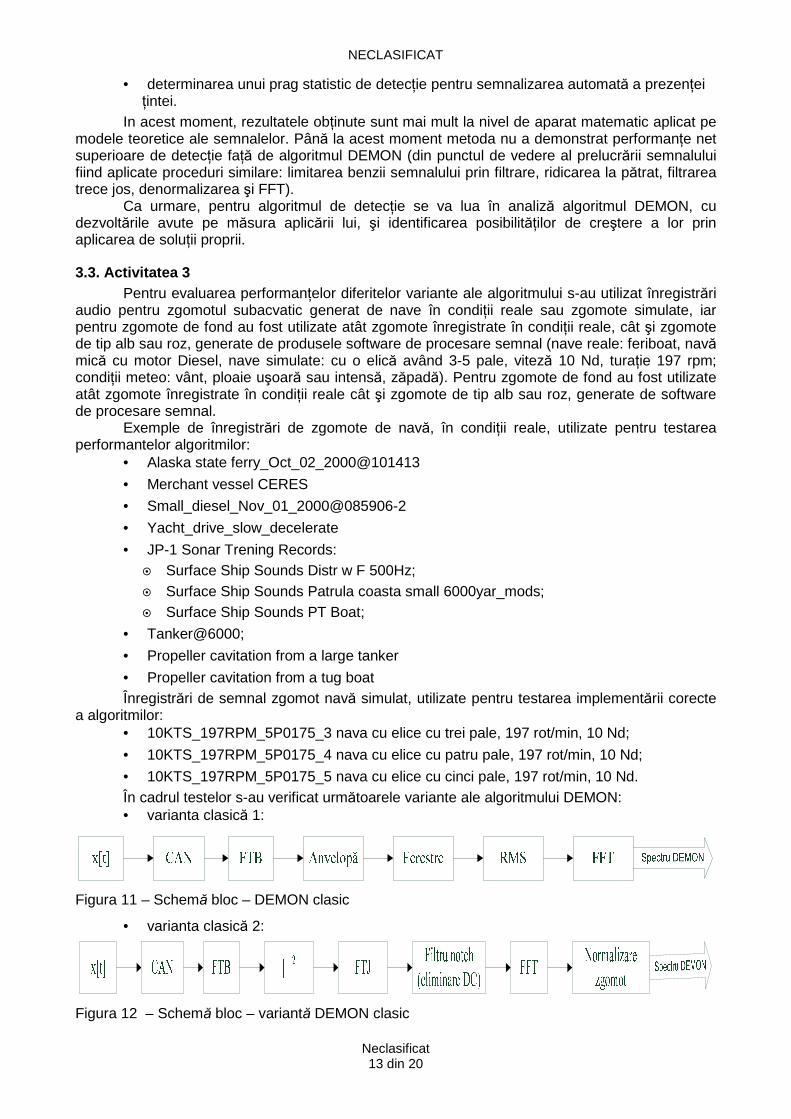
Analizând propunerile de îmbunătăţire a performanţelor în cazul aplicării algoritmului DEMON s-a elaborat o schema simplificată de aplicare a algoritmului pornind de la ideea că semnalul de la hidrofon are două componente: una de zgomot necorelat, de bandă largă, şi una corelată statistic, ce conţine informaţia rezultată a fenomenului de cavitaţie a propulsorului. Pornind de la aceasta observaţie, propunem pentru sistemul HDAPT aplicabil la nave mici utilizarea unui algoritm DEMON conform schemei ilustrate în figura următoare.
Figura 15 – Schema bloc a algoritmului DEMON pentru realizarea sistemului HDAPT - nave
Evident că pe baza schemei din Figura 15 se poate realiza o configuraţie cu bancuri de filtre (similar structurilor din Figura 13 şi Figura 14). Testele comparative efectuate cu înregistrările avute la dispoziţie nu au relevat creşteri de performanţă semnificative, care să justifice creşterea complexităţii calculelor. Algoritmul propus în Figura 15, a fost testat şi pentru înregistrări de zgomot generat de scafandri, cu rezultate pozitive în ceea ce priveşte determinarea/estimarea perioadei de respiraţie.
Pentru a ilustra modul de interpretare a spectrelor DEMON, folosim structura din Figura 12, DEMON clasic 2, pentru un semnal simulat al unei nave ce se deplasează cu 10 Nd, are un propulsor cu 3 pale ce se roteşte cu o turaţie de 197 rpm.
Pentru a ilustra diferenţa dintre performanţele variantelor de algoritm DEMON prezentate s-a ales un semnal considerat înregistrare de zgomot natural ([email protected]).
Aşa cum se menţionează în titlu, înregistrarea include şi zgomotul unei nave. În situaţia folosirii algoritmului DEMON clasic, rezultatul prelucrării nu permite identificarea
prezenţei unei nave.
NECLASIFICAT
Neclasificat 15 din 20
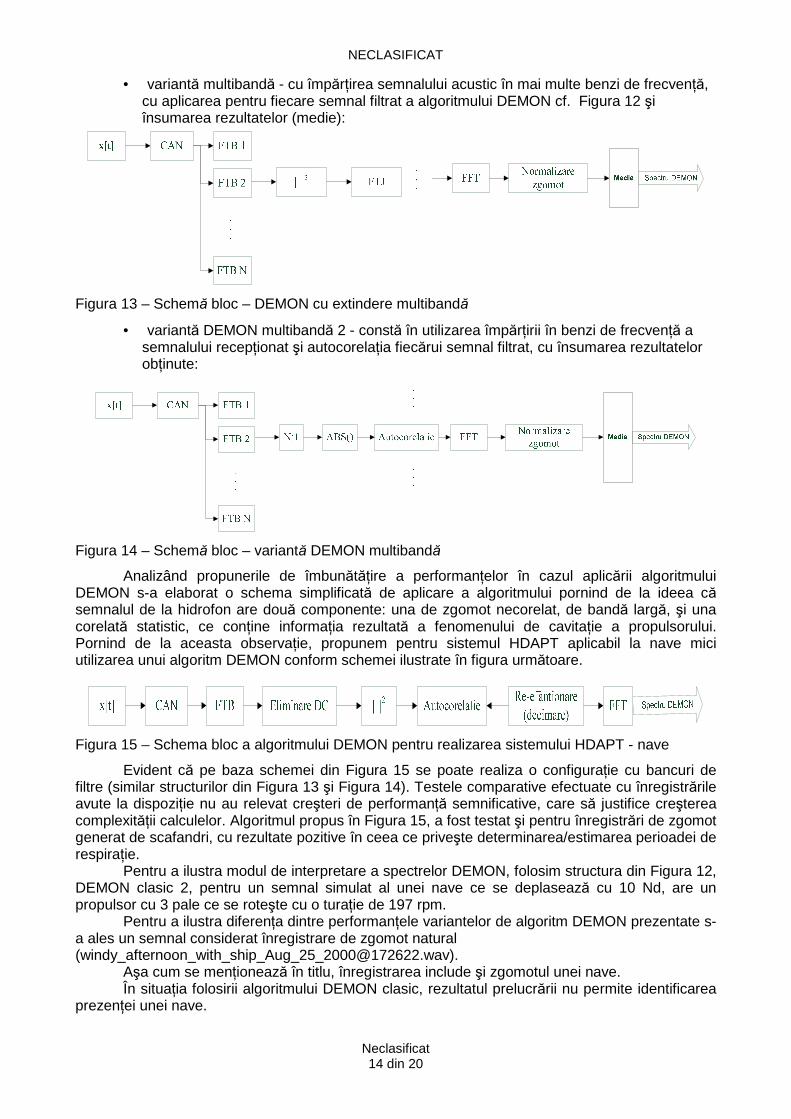
Figura 16 – algoritm DEMON clasic – spectru DEMON pentru un zgomot real (navă + vânt)
Rezultate similare se obţin şi dacă aplicăm varianta algoritmului DEMON clasic.
Figura 17 – algoritm variantă DEMON clasic – spectru pentru un zgomot real
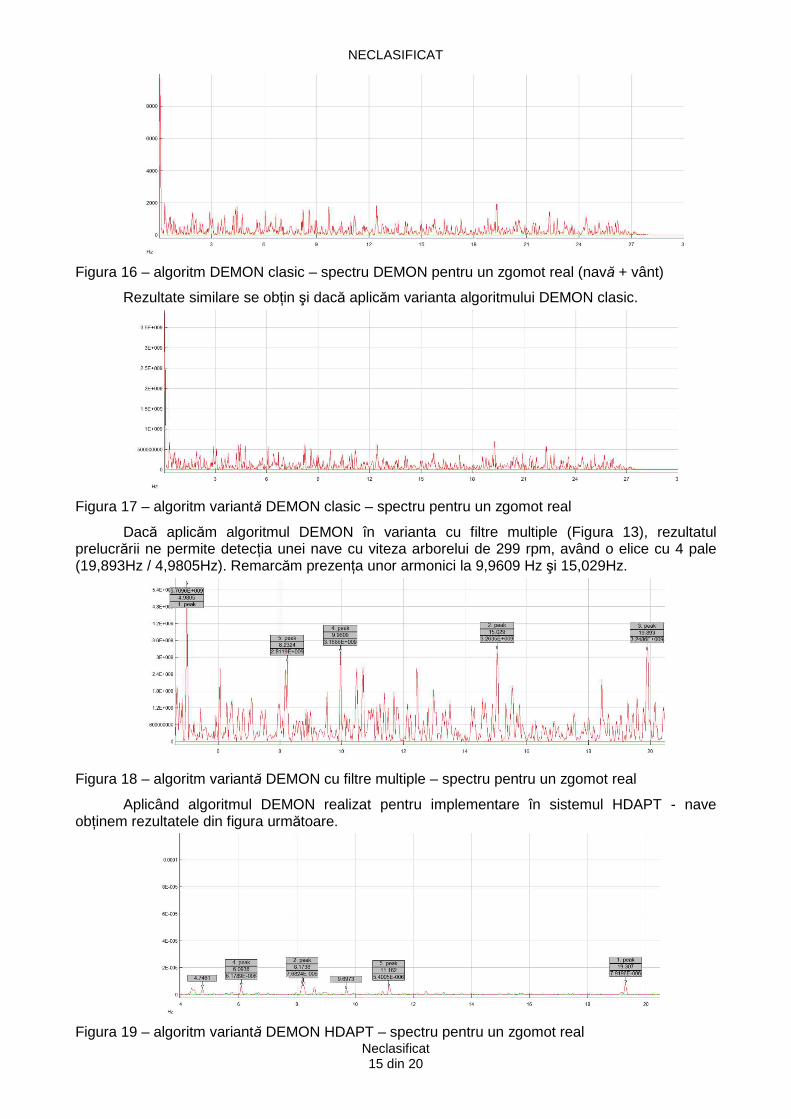
Dacă aplicăm algoritmul DEMON în varianta cu filtre multiple (Figura 13), rezultatul prelucrării ne permite detecţia unei nave cu viteza arborelui de 299 rpm, având o elice cu 4 pale (19,893Hz / 4,9805Hz). Remarcăm prezenţa unor armonici la 9,9609 Hz şi 15,029Hz.
Figura 18 – algoritm variantă DEMON cu filtre multiple – spectru pentru un zgomot real
Aplicând algoritmul DEMON realizat pentru implementare în sistemul HDAPT - nave obţinem rezultatele din figura următoare.
Figura 19 – algoritm variantă DEMON HDAPT – spectru pentru un zgomot real
NECLASIFICAT
Neclasificat 16 din 20
Chiar daca rezultatele diferă puţin - viteza arbore 285 rpm, 4 pale (19,307 Hz / 4,7461Hz) - reducerea complexităţii calculelor este în avantajul algoritmului care permite obţinerea unor informaţii relevante referitoare la navă.
In cazul analizat zgomotul de bandă largă generat de cavitaţie este acoperit de zgomotul local (vânt), mai puternic şi cu banda de frecvenţe superioară (în zona în care, uzual, se selectează banda FTB). Pentru a aprecia creşterea eficienţei aplicării algoritmului în diferitele lui variante, faţă de condiţiile uzuale, în care banda zgomotului local este de joasă frecvenţă, am utilizat un filtru trece bandă cu frecvenţa centrală în zona frecvenţelor mai joase. Rezultatele aplicării algoritmilor sunt prezentate în figurile următoare.
Figura 20 – DEMON clasic – zgomot real, FTB în joasă frecvenţă
Se poate observa că prin luarea în considerare a condiţiilor discutate, algoritmul bazat pe detecţia şi prelucrarea anvelopei zgomotului de banda largă, prezenţa navei este vizibilă, cu viteza arborelui de 299 rot/min, propulsorul având 4 pale (19,922 Hz / 4,9805Hz). Aplicarea algoritmului DEMON clasic 2, are rezultate similare, cu diferenţa că semnalul la frecvenţele relevante este mai vizibil datorita ridicării la pătrat.
Deşi aplicarea algoritmului DEMON cu filtre multiple şi însumare ar trebui să aibă ca efect o scoatere în evidenţă mai netă a caracteristicilor navei, din cauza prezenţei zgomotului generat de vânt, efectul pozitiv obţinut în zona benzilor inferioare este oarecum atenuat de raportul semnal/zgomot mic existent în benzile superioare. Totuşi aplicarea algoritmului detectează şi indică corect informaţiile despre navă.
Figura 21 – varianta DEMON cu extindere multibandă – zgomot real, FTB în joasă frecvenţă
Rezultatele aplicării algoritmului DEMON specific HDAPT sunt similare. Diferenţa constă în imunitatea mai mare la zgomot a algoritmului şi, totodată, în simplitatea apropiată de varianta a doua a algoritmului DEMON clasic.
NECLASIFICAT
Neclasificat 17 din 20
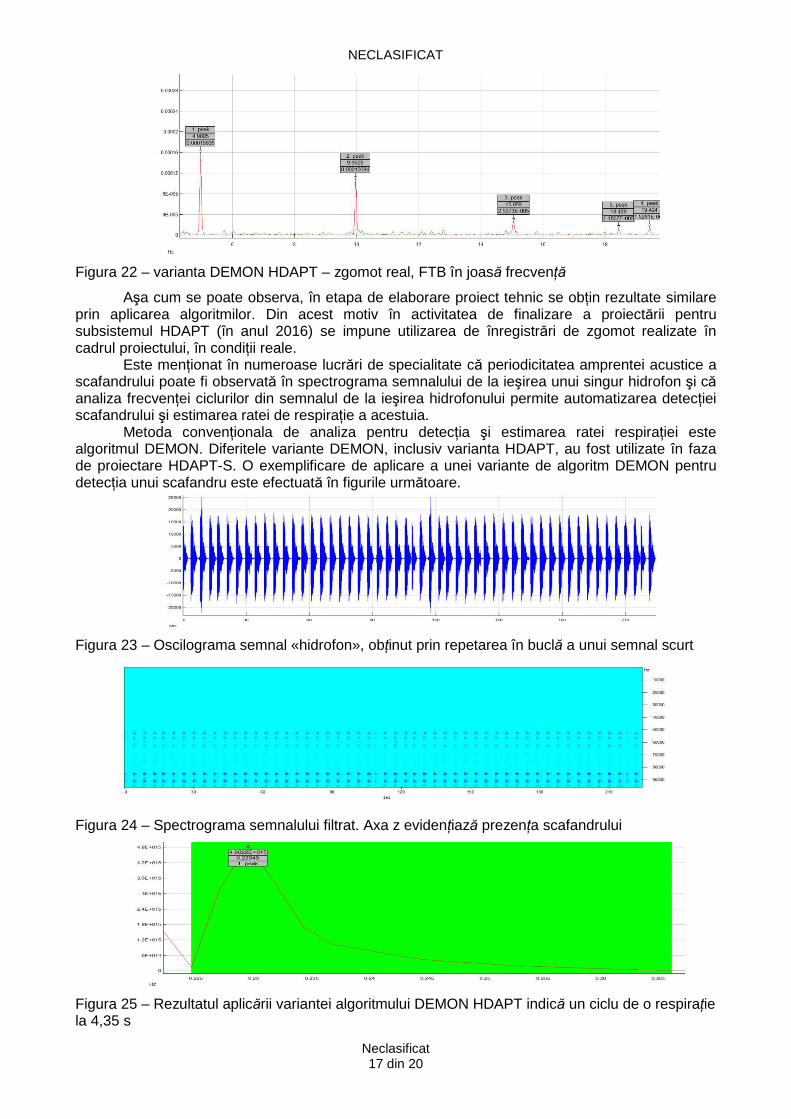
Figura 22 – varianta DEMON HDAPT – zgomot real, FTB în joasă frecvenţă
Aşa cum se poate observa, în etapa de elaborare proiect tehnic se obţin rezultate similare prin aplicarea algoritmilor. Din acest motiv în activitatea de finalizare a proiectării pentru subsistemul HDAPT (în anul 2016) se impune utilizarea de înregistrări de zgomot realizate în cadrul proiectului, în condiţii reale.
Este menţionat în numeroase lucrări de specialitate că periodicitatea amprentei acustice a scafandrului poate fi observată în spectrograma semnalului de la ieşirea unui singur hidrofon şi că analiza frecvenţei ciclurilor din semnalul de la ieşirea hidrofonului permite automatizarea detecţiei scafandrului şi estimarea ratei de respiraţie a acestuia.
Metoda convenţionala de analiza pentru detecţia şi estimarea ratei respiraţiei este algoritmul DEMON. Diferitele variante DEMON, inclusiv varianta HDAPT, au fost utilizate în faza de proiectare HDAPT-S. O exemplificare de aplicare a unei variante de algoritm DEMON pentru detecţia unui scafandru este efectuată în figurile următoare.
Figura 23 – Oscilograma semnal «hidrofon», obţinut prin repetarea în buclă a unui semnal scurt
Figura 24 – Spectrograma semnalului filtrat. Axa z evidenţiază prezenţa scafandrului
Figura 25 – Rezultatul aplicării variantei algoritmului DEMON HDAPT indică un ciclu de o respiraţie la 4,35 s
NECLASIFICAT
Neclasificat 18 din 20
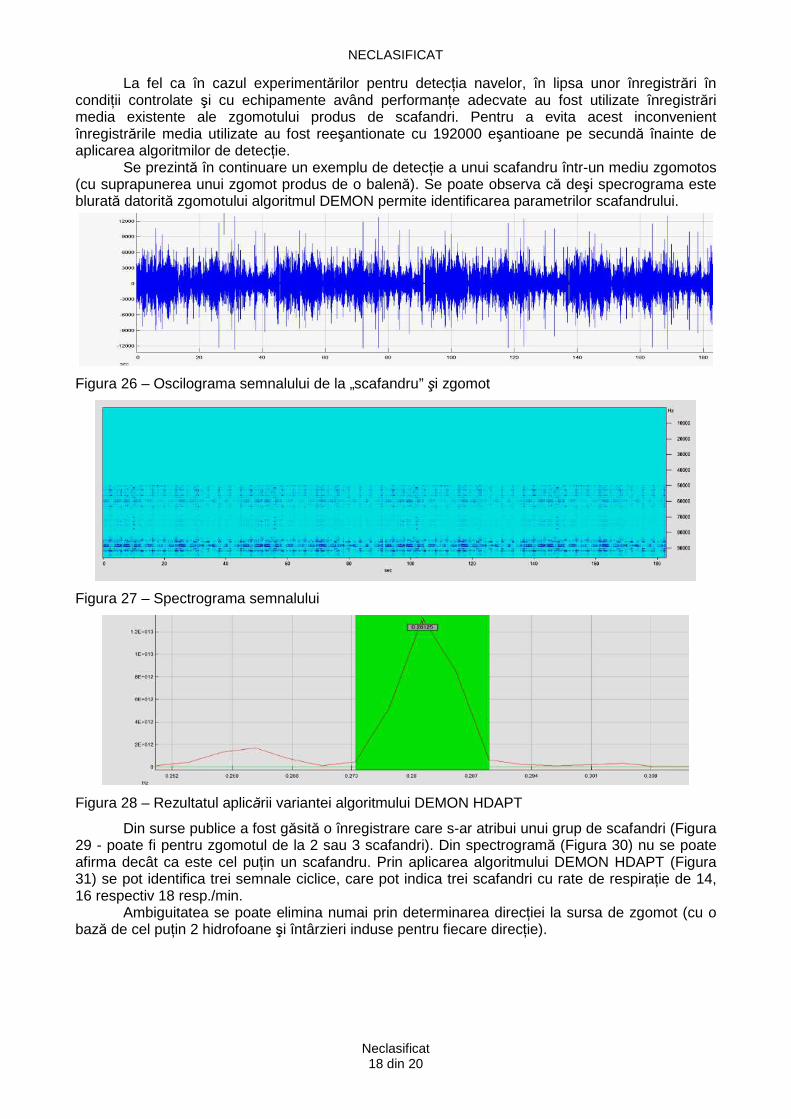
La fel ca în cazul experimentărilor pentru detecţia navelor, în lipsa unor înregistrări în condiţii controlate şi cu echipamente având performanţe adecvate au fost utilizate înregistrări media existente ale zgomotului produs de scafandri. Pentru a evita acest inconvenient înregistrările media utilizate au fost reeşantionate cu 192000 eşantioane pe secundă înainte de aplicarea algoritmilor de detecţie.
Se prezintă în continuare un exemplu de detecţie a unui scafandru într-un mediu zgomotos (cu suprapunerea unui zgomot produs de o balenă). Se poate observa că deşi specrograma este blurată datorită zgomotului algoritmul DEMON permite identificarea parametrilor scafandrului.
Figura 26 – Oscilograma semnalului de la „scafandru” şi zgomot
Figura 27 – Spectrograma semnalului
Figura 28 – Rezultatul aplicării variantei algoritmului DEMON HDAPT
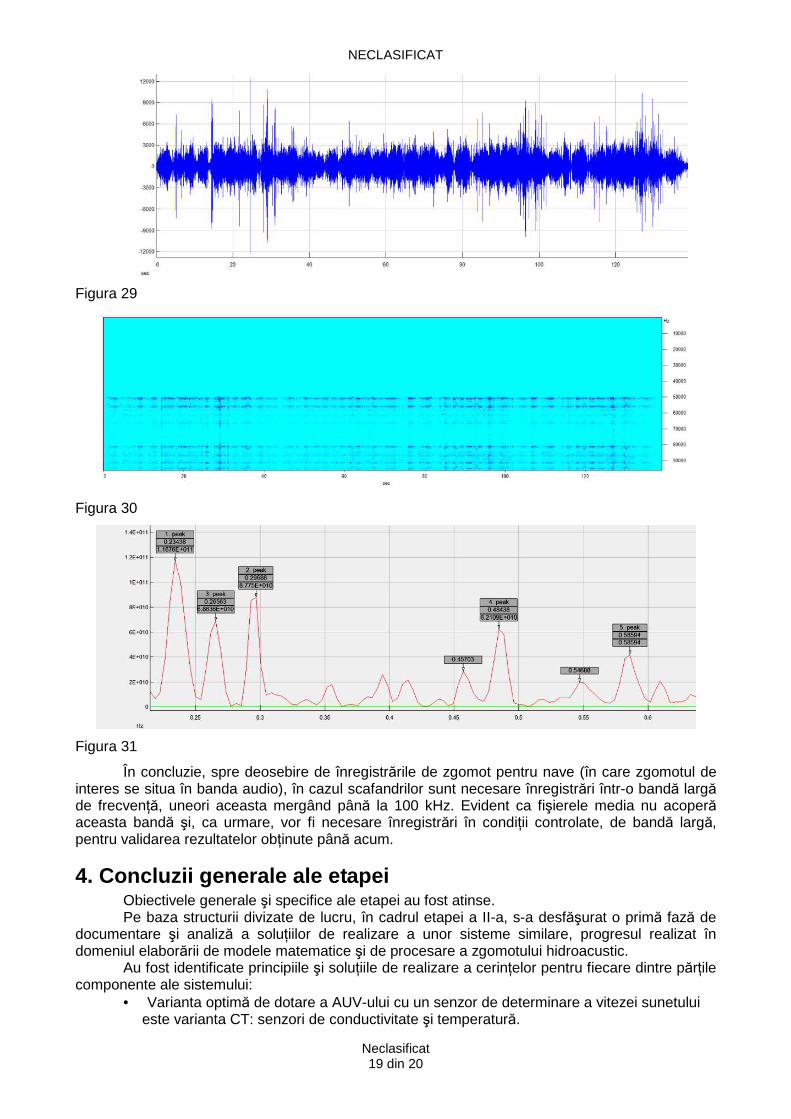
Din surse publice a fost găsită o înregistrare care s-ar atribui unui grup de scafandri (Figura 29 - poate fi pentru zgomotul de la 2 sau 3 scafandri). Din spectrogramă (Figura 30) nu se poate afirma decât ca este cel puţin un scafandru. Prin aplicarea algoritmului DEMON HDAPT (Figura 31) se pot identifica trei semnale ciclice, care pot indica trei scafandri cu rate de respiraţie de 14, 16 respectiv 18 resp./min.
Ambiguitatea se poate elimina numai prin determinarea direcţiei la sursa de zgomot (cu o bază de cel puţin 2 hidrofoane şi întârzieri induse pentru fiecare direcţie).
NECLASIFICAT
Neclasificat 19 din 20
Figura 29
Figura 30
Figura 31
În concluzie, spre deosebire de înregistrările de zgomot pentru nave (în care zgomotul de interes se situa în banda audio), în cazul scafandrilor sunt necesare înregistrări într-o bandă largă de frecvenţă, uneori aceasta mergând până la 100 kHz. Evident ca fişierele media nu acoperă aceasta bandă şi, ca urmare, vor fi necesare înregistrări în condiţii controlate, de bandă largă, pentru validarea rezultatelor obţinute până acum.
4. Concluzii generale ale etapei Obiectivele generale şi specifice ale etapei au fost atinse. Pe baza structurii divizate de lucru, în cadrul etapei a II-a, s-a desfăşurat o primă fază de
documentare şi analiză a soluţiilor de realizare a unor sisteme similare, progresul realizat în domeniul elaborării de modele matematice şi de procesare a zgomotului hidroacustic.
Au fost identificate principiile şi soluţiile de realizare a cerinţelor pentru fiecare dintre părţile componente ale sistemului:
• Varianta optimă de dotare a AUV-ului cu un senzor de determinare a vitezei sunetului este varianta CT: senzori de conductivitate şi temperatură.
NECLASIFICAT
Neclasificat 20 din 20
• Ecuaţia Leroy aproximează cel mai bine valorile vitezei sunetului obţinute prin măsurare directă.
• Indiferent de tipul AUV-ului, la integrarea senzorului CT trebuie avute în vedere condiţionările date de: rezistenţa la înaintare, flotabilitatea şi gradul de integrare/compatibilitate, rata de eşantionare a senzorului etc.
• A fost analizată specificitatea litoralului românesc al Mării Negre şi modul în care influenţează subsistemul HDAPT.
• Modelele nu permit obţinerea riguroasă a unor detalii referitoare la „amprentele” hidroacustice ale potenţialelor ţinte astfel încât să poată fi realizată identificarea acestora cu o precizie ridicată.
• Ţinându-se cont de datele prezentate, de faptul că în dotarea CCSFN se află hidrofoane de tip Bruel&Kjaer 8105 şi 8106, de necesitatea încadrării în bugetul aprobat al proiectului etc. pentru realizarea modelului funcţional al sistemului HDAPT se vor utiliza cele două tipuri de hidrofoane menţionate.
• Unul dintre parteneri a realizat un model funcţional al dispozitivului de amplasare şi ancorare a hidrofonului.
• CCSFN a achiziţionat un sistem mobil de achiziţie şi procesare date – achiziţie şi înregistrare semnale de la hidrofoane a cărui compunere este: � Bruel&Kjaer LAN – XI 3052 – 1 buc. � acumulator 2831-A – 1 buc. � software LAN – XI NOTAR BZ-7848-A – 1 buc. � front panel 3 canale BNC – 1 buc. � front panel 3 canale LEMO – 1 buc.
• Pe simulările realizate în etapa de elaborare proiect tehnic se obţin rezultate similare prin aplicarea algoritmului DEMON HDAPT la detecţia navelor de suprafaţă şi scafandrilor autonomi comparativ cu ceilalţi algoritmi de tip DEMON. Diferenţa constă în imunitatea mai mare la zgomot a algoritmului specific HDAPT şi, totodată, în simplitatea apropiată de varianta a doua a algoritmului DEMON clasic
În activitatea de finalizare a proiectării pentru subsistemul HDAPT (în anul 2016) se impune utilizarea de înregistrări de zgomot realizate în cadrul proiectului, în condiţii reale.
Diseminarea rezultatelor (parţial) a fost efectuată în cadrul workshop-ului „Realizări şi perspective ale cercetării ştiinţifice în CCSFN” desfăşurat pe data de 15.10.2015 la sediul CCSFN.
Pentru efectuarea experimentărilor în etapele de proiectare (etapa a III-a, din anul 2016), testare şi evaluare a performanţelor sistemului HDAPT sunt imperios necesare următoarele facilităţi şi mijloace specifice:
• ambarcaţiune uşoara pentru transportul a 3 - 6 persoane, echipamente, dispozitive şi accesorii sistem HDAPT;
• sursă calibrată de zgomot pentru evaluarea nivelului de zgomot specific ţintelor;
• modem radio cu GPS pentru măsurarea distanţelor relative dintre ţinte şi punctul de instalare al hidrofoanelor.
5. Aspecte relevante privind respectarea documentel or de planificare:
Documentele de planificare s-au respectat.
6. Modific ări semnificative ce se impun in concep ţia proiectului pentru realizarea obiectivelor
Nu se impun modificări semnificative pentru realizarea proiectului.