Page 1
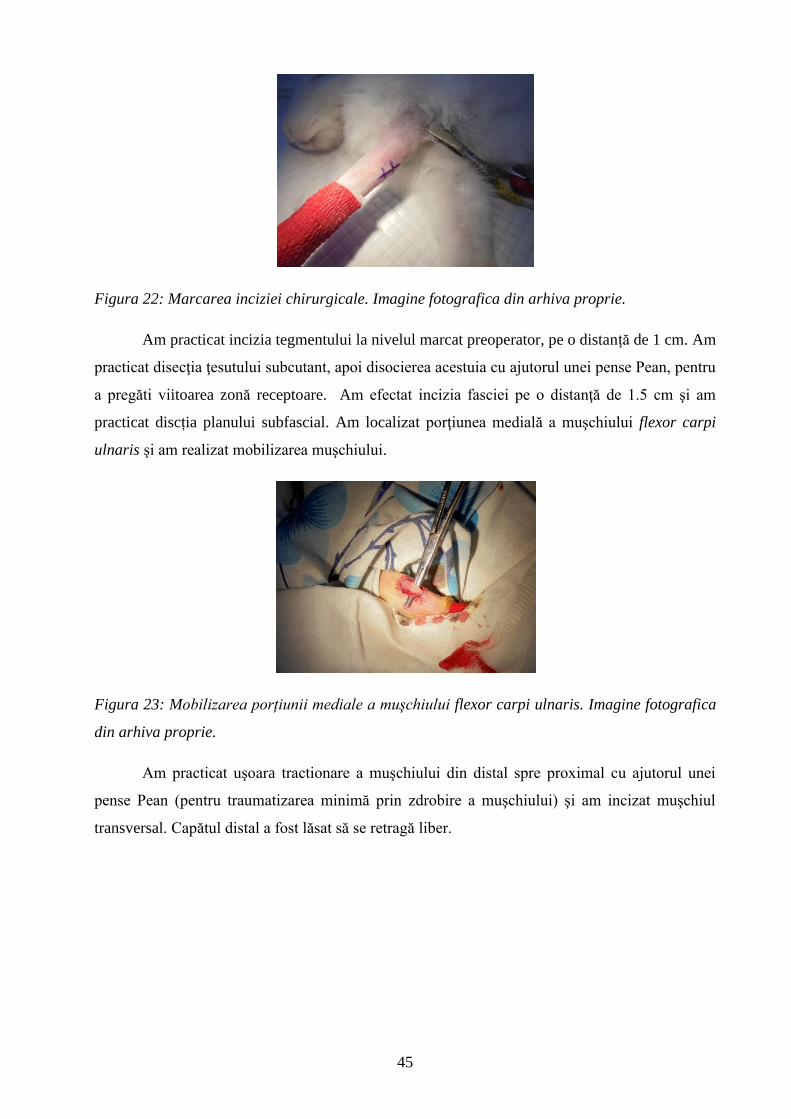
UNIVERSITATEA DE MEDICINĂ ȘI FARMACIE “CAROL DAVILA” BUCUREȘTI
DISCIPLINA DE ORTOPEDIE ȘI TRAUMATOLOGIE
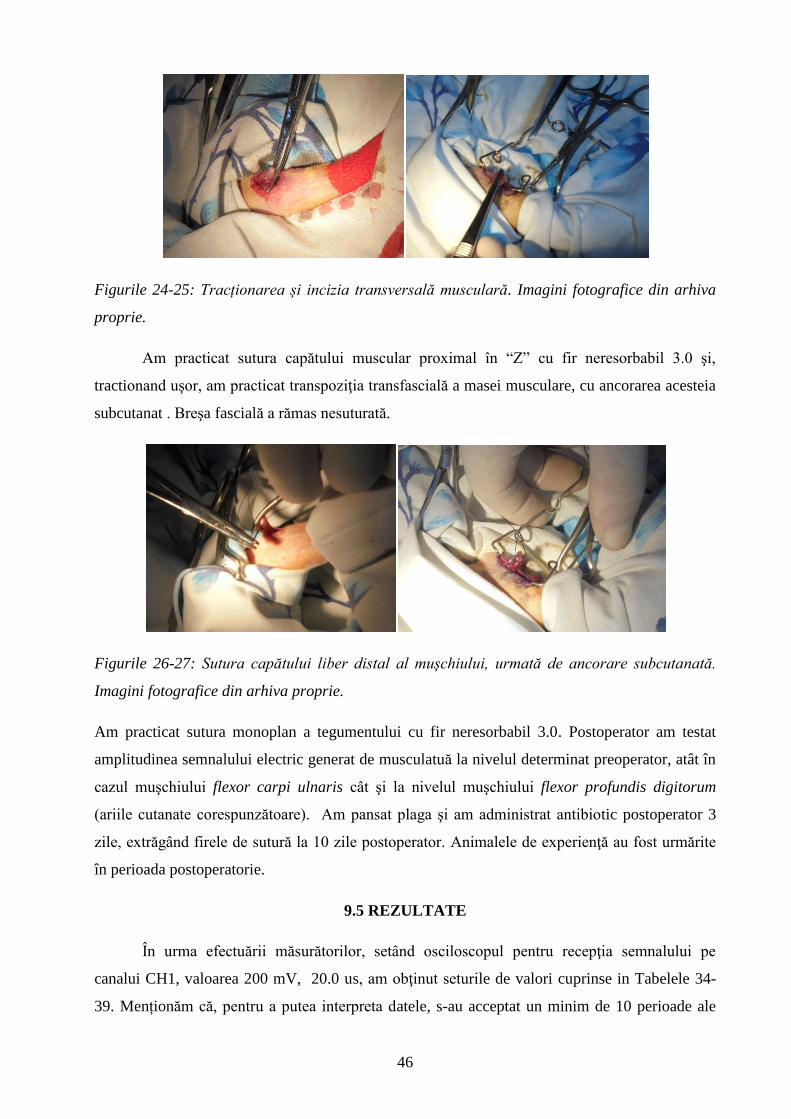
REZUMAT
AL TEZEI DE DOCTORAT
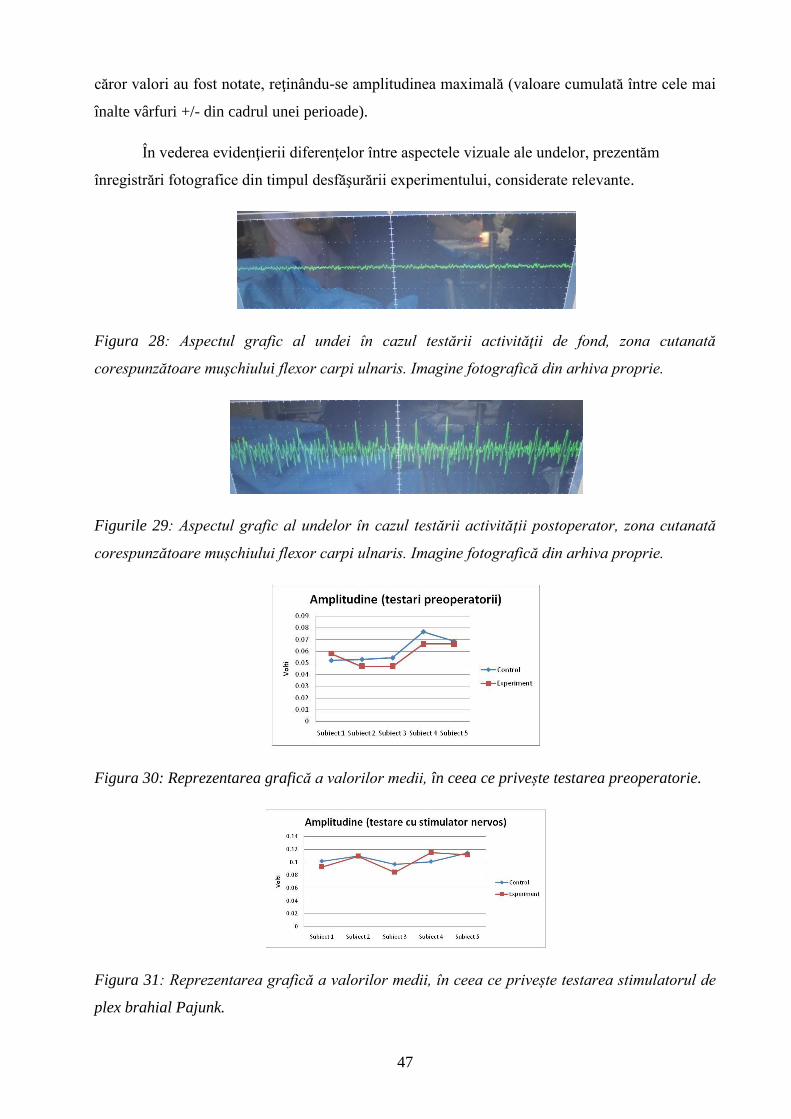
EXOPROTEZA BIONICĂ DE MÂNĂ DOTATĂ CU INTERFAȚĂ
SENZORIALĂ: INOVAȚII TEHNICE ȘI REZULTATE
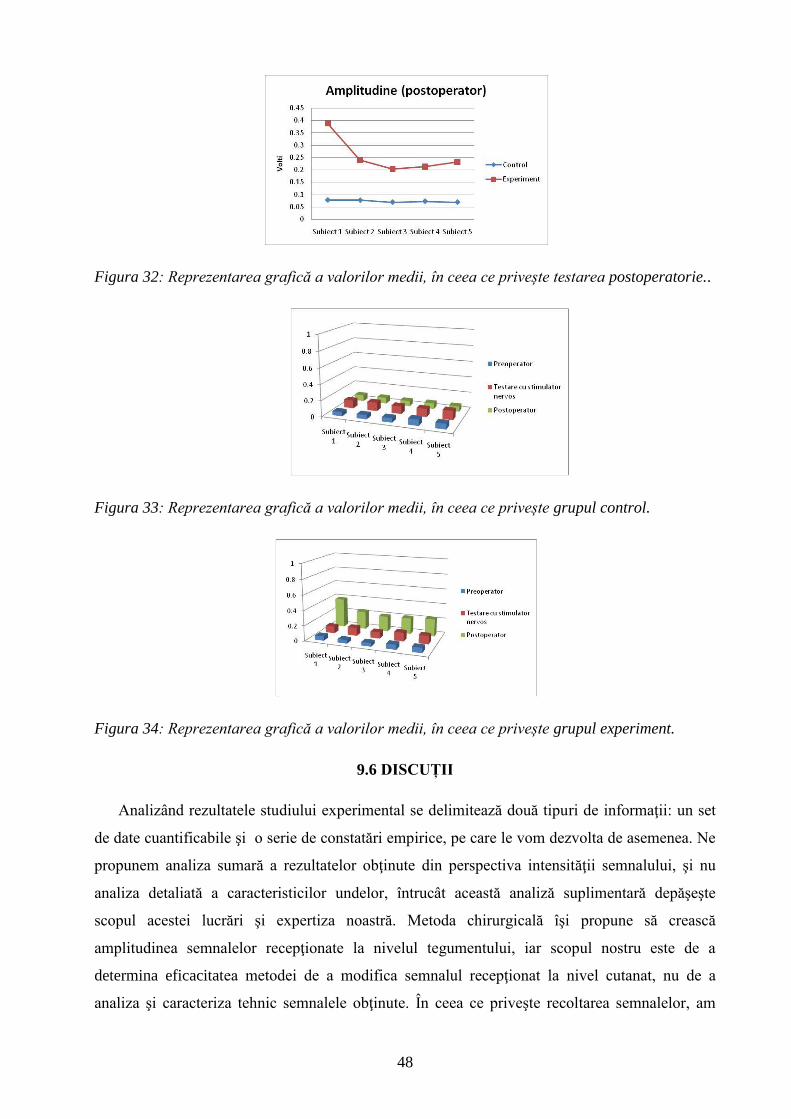
FUNCȚIONALE
COORDONATOR ȘTIINȚIFIC:
PROF. UNIV. DR. G-RAL(r) BARBILIAN ADRIAN GHEORGHE
DOCTORAND:
DR. POGĂRĂȘTEANU MARK-EDWARD
BUCUREȘTI
2016
Page 2
2
CUPRINS
Mulțumiri.......................................................................................................................................2
Cuprins...........................................................................................................................................3
A. PARTEA GENERALĂ
1. Introducere………...……..........................................................................................................8
1.1. Motivaţie……………..……………………………………….....................................8
1.2. Istoric…………………………………………………………………………............8
1.3. Importanța temei de cercetare…………………………………………….....………10
1.4. Contextul actual………………………………………………..…............................11
1.5. Scopul…………………………………………………….........................................12
2. Anatomie…………….……………………..............................................................................12
2.1 Considerente generale..................................................................................................12
2.2. Topografie………………………….………………..................................................12
2.3. Osteologie………………………………………………….…………………..........15
2.4. Miologie………………………………………………………………......................19
2.5. Inervaţie…………………………………………………………………..................25
2.6. Vascularizaţie…………………………………………………………..……...........28
3. Biomecanică.........................................................................………………….……................29
3.1 Biomecanica articulaţiei cotului…………………………………………….….....…29
3.2 Biomecanica antebraţului…………………………………….……….......................30
3.3 Biomecanica pumnului şi a mâinii……………………………………...……….......32
4. Tehnici de amputaţie la nivelul antebraţului şi mâinii.........................................................35
4.1 Indicaţiile amputaţiei de antebraţ şi mâna...................................................................35
4.1.1 Generalităţi...................................................................................................35
4.1.2 Traumă..........................................................................................................36
4.1.3 Tumoral.........................................................................................................41
4.1.4 Infecţie..........................................................................................................44
4.1.5 Arsura şi degerătura......................................................................................46
4.2 Principiile tehnicilor clasice de amputaţie la nivelul antebraţului..............................46
4.2.1 Introducere....................................................................................................46
4.2.1 Tehnici de realizare a amputaţiilor la nivelul antebraţului şi mâinii............48
Page 3
3
4.3 Principiile tehnicii osteomioplastice de amputaţie a antebraţului...............................49
4.4 Principiile tehnicii osteneuromioplastice circumferenţiale (CONM) de amputaţie a
antebraţului........................................................................................................................49
4.5 Amputaţia la nivelul antebraţului................................................................................52
4.5.1 Tehnica operatorie........................................................................................52
4.5.2 Rezecţie şi reimplantare................................................................................56
4.5.3 Intervenţia Krukemberg................................................................................56
4.6 Dezarticulaţia de pumn................................................................................................56
4.7 Amputaţia transcarpiană şi amputaţiile la nivelul degetelor........................................57
4.8 Îngrijirea postoperatorie...............................................................................................60
4.9 Complicaţii..................................................................................................................60
4.9.1 Hematom.......................................................................................................61
4.9.2 Infecţie..........................................................................................................61
4.9.3 Necroza de bont............................................................................................61
4.9.4 Redoarea articulară şi contracturile..............................................................62
4.9.5 Durerea.........................................................................................................62
4.10 Evaluarea postoperatorie a pacienţilor cu amputaţie de antebraţ şi mână.................63
4.10.1 Scoruri funcţionale..................................................................................................64
4.10.2 Telemedicina...........................................................................................................70
5. Proteză mioelectrică de antebraţ şi mână.............................................................................72
5.1 Noţiuni generale privind protezarea antebraţului şi a mâinii.............................................72
5.2 Noţiuni generale privind mioproteza de antebraţ şi mâna.................................................77
5.3 Electromiografia................................................................................................................79
5.4 Senzorii EMG....................................................................................................................81
5.5 Biofeedback-ul...................................................................................................................85
6. Interfaţa bont-proteză.............................................................................................................85
6.1 Metode chirurgicale de realizare a interfeţei bont-proteză..........................................86
6.1.1 Cineplastia....................................................................................................86
6.1.2 Oseointegrarea..............................................................................................87
6.1.3 Reinervarea musculară ţintită ......................................................................87
6.1.4 Senzori implantaţi.........................................................................................88
6.1.5 Interfaţa neuronală........................................................................................89
6.2 Alte metode de realizare a interfeţei bont-proteză......................................................90
6.2.1 Senzori EMG de suprafaţă.......................................................................................90
Page 4
4
6.2.2 Senzori tactili artificiali............................................................................................90
6.3 Dificultăţi în recepţionarea semnalului de către electrozii de suprafaţă.....................91
B. PARTEA SPECIALĂ
7. Studiu: Evaluarea pacienţilor cu patologie la risc pentru amputaţie de antebraţ şi
mână..............................................................................................................................................95
7.1 Contextul actual.................................................................................................... ......95
7.2 Obiective și ipoteză de lucru........................................................................................95
7.3 Materiale şi metode......................................................................................................96
7.4 Rezultate......................................................................................................................99
7.5 Discuţii......................................................................................................................127
7.6 Concluzii....................................................................................................................130
8: Contribuţii la evaluarea şi dezvoltarea interfeţei pacient-exoproteza: recoltarea
semnalelor, exoproteza de mână şi mâna virtuală..................................................................130
8.1 Introducere.................................................................................................................130
8.2 Ipoteză........................................................................................................................133
8.3 Obiective....................................................................................................................134
8.4 Materiale şi metodă...................................................................................................134
8.4.1 Măsurători EMG preliminare.....................................................................140
8.4.2 Retuș de bont prin tehnica CONM.............................................................147
8.4.3 Alegerea metodelor de procesare a semnalelor
EMG.................................152
8.4.4 Alegerea soluțiilor tehnice și proiectarea sistemului..................................156
8.4.5 Proiectarea mediului virtual de modelare a mișcărilor...............................158
8.4.6 Proiectarea machetei experimentale de mână artificială și realizarea
antrenamentelor...................................................................................................161
8.4.7 Urmărirea pacienţilor utilizând sistemul de telemedicină..........................164
8.5 Rezultate....................................................................................................................167
8.6 Discuții.......................................................................................................................173
8.7 Concluzii....................................................................................................................176
9. Studierea aplicabilităţii practice a conceptului transpoziţiei mioplastice prin breşă
fascială la nivelul antebraţului (studiu
experimental)..............................................................................................................................177
9.1 Introducere.................................................................................................................177
Page 5
5
9.2 Scopul studiului.........................................................................................................182
9.3 Ipoteza.......................................................................................................................183
9.4 Materiale și metode...................................................................................................183
9.4.1Materiale............................................................................................................183
9.4.2Metode...............................................................................................................184
9.5 Rezultate....................................................................................................................192
9.6 Discuții.......................................................................................................................203
9.7 Concluzii....................................................................................................................205
10. Concluzii...............................................................................................................................206
11. Direcții de continuare a cercetărilor..................................................................................207
Bibliografie.................................................................................................................................209
Sprijin financiar.........................................................................................................................217
Articole publicate.......................................................................................................................218
Page 6
6
A. PARTEA GENERALĂ
CAPITOLUL 1: INTRODUCERE
1.1 MOTIVAŢIE
În chirurgie există un dicton: ―cea mai bună pensă este pensa digitală‖. Acest dicton este
adevărat pentru toate domeniile activităţilor omeneşti, privind situaţia prin prisma utilizării
membrului toracic în absolut toate activităţile umane, probabil încă din perioada în care, ca şi
specie, am devenit bipezi.
Motivaţia cercetărilor întreprinse în domeniul amputaţiilor de antebraţ şi mâna şi acela al
exoprotezarii la acest nivel este dorinţa de îmbunătăţire a calităţii vieţii pacienţilor, şi oferire a
unei palete cât mai largi de soluţii fezabile pentru reîntoarcerea acestora cu succes la o viaţă cât
mai apropiată de cea dinainte de a suferi amputaţia.
1.2 ISTORIC
Istoricul amputaţie şi protezării începe, probabil, cu prima instanţă în care o fiinţă umană şi-a
pierdut un membru şi i-a căutat un înlocuitor. Folosim termenul ―probabil‖ întrucât acest
eveniment este pierdut în negura istoriei şi şansele de a-l descoperi sunt practic inexistente.
Totuşi, la nivel mondial, istoria consemnată a amputaţiei şi protezării începe cu întâmplarea
relatată de Herodot, în care, în 484 i.e. n. un soldat persan a evadat din captivitate secţionându-şi
un picior şi înlocuindu-l cu unul din lemn.
Istoricul amputaţiei şi implicit a protezării de antebraţ şi mâna în România îşi are debutul, din
punct de vedere al surselor consemnate, în urmă cu aproximativ un secol.
1.3 IMPORTANȚA TEMEI DE CERCETARE
Tema de cercetare aleasă şi anume interacţiunea bont de amputaţie – proteză mioelectrică,
vine din dorinţa de a extinde plaja de informaţie disponibilă în acest domeniu.
Încă de la primele tentative istorice de protezare, scopul absolut este înlocuirea membrului
pierdut cu unul cât mai apropiat de cel amputat. În epoca modernă, progresul în acest sens a fost
uimitor, plecând de la îmbunătăţirea protezelor estetice şi până la dezvoltarea protezelor robotice
de antebraţ şi mâna.
Page 7
7
Tehnicile chirurgicale de amputaţie şi de gestiune a bontului au cunoscut şi ele o evoluţie,
axându-se din ce în ce mai mult pe tehnici de reinervare şi de re-distribuire a sistemului de
comandă biologic într-o încercare de a face uz de semnalele electrice plecate de la nivel cerebral,
dar care sunt lipsite de efectori (muşchii pierduţi la momentul amputaţiei).
1.4 CONTEXTUL ACTUAL
Realitatea cotidiană în România, la fel ca şi în multe alte ţări, este că mâna robotică
rămâne o perspectivă greu de atins din punct de vedere financiar, mulţi pacienţi permiţându-şi
doar o proteză estetică sau cu acţionare mecanică. Institutul Politehnic din Bucureşti a realizat, în
ultimii ani, o activitate de cercetare, inovaţie şi dezvoltare axată pe domeniul protezării
mioelectrice a antebraţului şi mâinii, vizând dezvoltarea unui model de exoproteza cu cost de
producere scăzut şi care să fie completat de un protocol de evaluare sEMG a pacienţilor, de
antrenament în realitatea virtuală utilizând tehnici de biofeedback, precum şi de urmărire în timp
şi la distanţă utilizând mijloace moderne (telemedicina).
În cadrul Clinicii de Ortopedie şi Traumatologie din cadrul Spitalului Universitar de
Urgenţă Militar Central Bucureşti, Profesorul Adrian Barbilian, împreună cu echipa pe care o
conduce şi din care face parte şi autorul acestei Teze Doctorale, au dezvoltat tehnica inovativă de
amputaţie denumită osteoneuromioplastie circumferenţială, sau pe scurt CONM.
Din dorinţa de a înţelege la un nivel aprofundat interacţiunea bont de amputaţie - proteză
mioelectrica am participat, împreună cu Profesorul A. Barbilian, la cercetările întreprinse în
cadrul Institutului Politehnic Bucureşti, menţionate anterior. Aria de interes este interfaţa bont-
proteza şi modul în care se realizează comunicarea comenzilor la acest nivel, precum şi
caracteristicile semnalelor sEMG culese de la nivelul bontului. O altă arie de interes în cadrul
acestor cercetări este protocolul de antrenament şi de urmărire postoperatorie a pacienţilor, prin
intermediul telemedicinii.
Bineînţeles, fiind prin formare chirurg, interesul şi dorinţa de dezvoltare se îndreaptă şi
asupra considerentelor preoperatorii de diagnostic şi mai ales indicaţie chirurgicală, precum şi
incidență a amputaţiilor de antebraţ şi mână, pentru a cuantifica prevalența patologiei ce duce la
decizia de amputaţie şi a ajunge la o înţelegere mai bună a acestor aspecte.
1.5 SCOP
Page 8
8
Scopul final al acestor cercetări este acela de a aduce o contribuţie, din perspectiva
chirurgicală, în domeniul interfeţei bont-proteză, fiind o arie puţin studiată şi cu potenţial real de
ameliorare.
CAPITOLUL 2: ANATOMIE
2.1 CONSIDERENTE GENERALE
Pentru a realiza o înţelegere aprofundată a naturii regiunii supusă studiului, considerăm
necesară punctarea noţiunilor esenţiale de anatomie a antebraţului şi mâinii, fără de care nici un
studiu chirurgical nu poate fi efectuat cu succes.
2.2 TOPOGRAFIE
Regiunea anterioară a antebraţului este delimitată de planul orizontal ce are traiect prin
capul ulnar, proximal şi de pliul cutanat ce se formează la flexia pumnului, distal. Forma este
convexă, putând fi palpate vene, artere şi reliefuri osoase la persoanele la care stratul adipos
subcutanat nu este extrem de dezvoltat. Regiunea posterioară a antebraţului este înscrisă între
aceleaşi limite ca şi regiunea anterioară a antebraţului.
Regiunea palmară este cuprinsă între planul ce trece prin pisiform şi tuberculul
navicularului în proximal, în timp ce în distal limita este dată de pliurile digitopalmare. Regiunea
dorsală a mâinii are aceleaşi limite ca şi regiunea palmară, mai puţin limita distală, care în acest
caz este constitutită de un plan care trece prin articulaţiile metacarpofalangiene.
2.3 OSTEOLOGIE
Radiusul şi ulna constituie scheletul antebraţului, fiind două oase lungi, articulate între
ele proximal şi distal. Proximal se articulează cu scheletul braţului, reprezentat de epifiza distală
a humerusului, în timp ce distal atât radiusul cât şi ulna se articulează cu scheletul mâinii,
reprezentat de primul rând de oase carpiene.
Segmentul proximal al scheletului mâinii este reprezentat de oasele carpiene, în număr de
opt, dispuse pe două rânduri. Metacarpul face parte din scheletul mâinii şi este format din cinci
oase, numerotate radio-ulnar de la I la V. Falangele alcătuiesc scheletul degetelor, şi sunt câte
trei pentru degetele III-V (falangă proximala, medie, distală); policele are în alcătuirea sa doar
două falange, cea proximală şi cea distală.
Page 9
9
2.4 MIOLOGIE
În studiul chirurgical al amputaţiei de antebraţ şi mână considerăm nelipsită şi esenţială
revizitarea noţiunilor de anatomie a acestor regiuni, dar punctul focal al acestei teze îl constituie
interfaţa senzorială dintre semnalele electrice generate la nivelul musculaturii, ca punct de
pornire, şi proteza mioelectrică, în postura de receptor final şi punct iniţiator de acţiune externă.
Astfel, se impune necesitatea punctării într-un grad avansat de detaliu reperele anatomice ale
musculaturii antebraţului şi mâinii.
Musculatura antebraţului este împărţită anatomic şi funcţional în trei grupe, numite şi
loje: anterioară, posterioară şi laterală. Muşchii lojei anterioare a antebraţului sunt dispuşi în
patru planuri. Muşchii lojei laterale a antebraţului sunt dispuşi în patru planuri. Muşchii lojei
posterioare a antebraţului sunt dispuşi în două planuri, cel superficial şi cel profund.
Muşchii eminenței tenare constituie grupa laterală dintre muşchii mâinii. Muşchii
eminentei hipotenare constituie grupul medial dintre muşchii mâinii. Muşchii lombricali
(lumbricales) sunt în număr de 4 şi îşi au originile pe tendoanele muşchiului flexor profund al
degetelor, în timp ce inserţiile lor sunt pe articulaţiile metacarpofalangiene II-V şi pe tendoanele
muşchiului extensor al degetelor la nivelul degetelor II-V. Muşchii interosoşi palmari (interossei
palmares) sunt în număr de 3.
2.5 INERVAŢIE
Toată inervaţia membrului toracic, la nivelul antebraţului şi mâinii, îşi are originea din
plexul brahial, format prin anastomozarea ramurilor anterioare ale nervilor spinali C5-T1, ce se
unesc în 3 trunchiuri: superior (C5-C6), mijlociu (C7) şi inferior (C8-T1). Fiecare dintre cele trei
trunchiuri se divide într-o ramură anterioară şi una posterioară, care se vor uni, formând
fascicule. Fasciculul posterior este format din ramurile posterioare (toate trei), fasciculul lateral
este format din ramurile anterioare ale trunchiurilor mijlociu şi superior, iar fasciculul medial
este în fapt ramura anterioară a trunchiului inferior.
2.6 VASCULARIZAȚIE
Vascularizaţia arterială a regiunilor antebraţului şi mâinii este, cu excepţia regiunii
cotului, realizată prin bifurcaţia arterei brahială în artera ulnară şi artera radială, la 1-2 cm distal
de plica cotului. Regiunea cotului este vascularizată arterial de către ramuri ale arterei brahiale
profunde: artera colaterală medie şi artera colaterală radială, precum şi de către arterele
Page 10
10
colaterală ulnară superioară şi colaterală ulnară inferioară, care se anastomozează cu ramura
posterioară a arterei recurente ulnare şi respectiv cu ramura anterioară a arterei recurente ulnare.
CAPITOLUL 3: BIOMECANICĂ
3.1 BIOMECANICA ARTICULAȚIEI COTULUI
La nivelul cotului, mişcarea cea mai importantă este cea de flexie-extensie a antebraţului
pe braţ, cu o amplitudine de 140-150 de grade în arc de cerc determinată de muşchii principali
flexori şi extensori de la nivelul braţului. Această mișcare este realizată prin implicarea
articulaţiilor humero-ulnară (trochleartroză, în fapt o articulaţie tip ginglim) şi humero-radială
(articulaţie elipsoidă).
3.2 BIOMECANICA ANTEBRAȚULUI
Mişcarea de pronație-supinație este una dintre cele mai importante mişcări realizate de
către membrul toracic, contribuind decisiv la paleta largă de mişcări accesibile pumnului şi
mâinii, şi contribuind la complexitatea manualităţii umane. Axul de realizare al acestor mişcări
este oblic, trecând prin capul radiusului şi prin capul ulnei.
3.3 BIOMECANICA PUMNULUI ȘI A MÂINII
Mişcările ce pot fi realizate la nivelul pumnului aparţin în principal articulaţiei
radiocarpiene (articulaţie condiliană) şi sunt: flexie, extensie, deviaţie ulnară (adducţie), deviaţie
radială (abducţie), uşoară pronaţie, uşoară supinaţie, precum şi circumducţie, o mişcare
complexă. Aceste mişcări sunt executate prin participarea atât a articulaţiilor radiocarpiene, cât
şi a celor mediocarpiene şi intercarpiene. De asemenea, există şi minime mişcări de alunecare
între oasele carpiene, ce se sumează.
CAPITOLUL 4. TEHNICI DE AMPUTAȚIE LA NIVELUL ANTEBRAȚULUI ȘI
MÂINII
4.1 INDICAȚIILE AMPUTAȚIEI DE ANTEBRAȚ ȘI MÂNĂ
4.1.1 GENERALITĂȚI
Page 11
11
Amputaţia la nivelul antebraţului şi distal de acesta, în cazul pacientului adult, are
următoarele indicaţii majore:traumă, tumoră, infecție, arsură termică sau electrică si degeratură.
Dintre acestea, în cazul pacienţilor tineri, cel mai des întâlnită este amputaţia în context
traumatic, urmată de amputaţia în contextul unei patologii maligne. Indicaţia cu caracter absolut
este pusă de către prezenta ischemiei ireversibile la nivelul membrului afectat traumatic sau în alt
context.
4.1.2 TRAUMA
Traumatismele constituie cauza principală de amputație, afectând îndeosebi pacienții
tineri, activi, de sex masculin, implicaţi în activităţi profesionale sau recreaţionale ce presupun
efort fizic la nivelul membrului toracic, sau în cazul accidentelor rutiere. Procentual, trauma este
cauza amputaţiei de membru toracic în 80% - 90% din cazuri, afectând îndeosebi pacienţii de sex
masculin, cu vârsta cuprinsă între 20 şi 40 de ani. Deseori, tehnicile chirurgicale permit
reconstruirea membrului, sau chiar reatașarea acestuia, iar chirurgul este pus în faţa unei decizii
dificile: păstrarea unui segment disfuncţional, sau amputarea acestuia şi înlocuirea cu o proteză
ce poate, în funcţie de model, suplini funcţiile bazale ale membrului toracic.
Un scenariu este cel al traumatismului acut, în care scala de evaluare a riscului (oricare ar
fi aceasta) indică în mod decisiv amputaţia ca fiind singura soluţie reală de conduită terapeutică.
Bontul de amputaţie trebuie, pe cât posibil, să respecte un nivel ce poate să permită şi o
redobândire în cât mai mare măsură a funcţiei, fără a se compromite reuşita intervenţiei
chirurgicale.
4.1.3 TUMORAL
În cazul majorităţii pacienţilor cu formaţiuni tumorale maligne la nivelul membrului
toracic este posibilă rezecţia oncologică; totuşi în 5-10% din cazuri este necesară amputaţia.
Formaţiunile tumorale, fie ele primitive sau metastaze, constituie o indicaţie pentru
amputaţia antebraţului sau mâinii, în anumite condiţii:
-tumori maligne ce au potenţial mare de metastazare şi/sau nu răspund la chimio/radioterapie;
-tumori benigne ce înglobează vase şi nervi, neputând fi extirpate chirurgical în condiţii de
siguranţă.
4.1.4 INFECȚIE
Page 12
12
Fenomenele infecţioase ce pot duce la indicaţia chirurgicală de amputaţie a antebraţului
sau mâinii pot fi de natură acută sau cronică, dacă acestea nu răspund la alte forme de tratament
(chirurgical şi antibiotic) şi pun în pericol viaţa pacientului.
4.1.5 ARSURA ȘI DEGERĂTURA
Arsurile, fie de natură termică, fie de natură electrică, pot duce în final la amputaţia
segmentului anatomic afectat, în ciuda aspectului iniţial uneori înşelător. Amputaţia se
efectuează după debridarea repetată a ţesuturilor neviabile, asociate cu fasciotomii, dacă există o
şansă teoretică de vindecare. Totuşi, trebuie punctată necesitatea efectuării rapide a amputaţiei,
înainte că riscul de infecţie locală, infecţie sistemică, sau insuficienţă renală indusă de
mioglobină să devină prea mare.
Degerăturile se produc prin scăderea temperaturii corporale, fie doar local la nivelul
antebraţului şi mâinii, fie local şi central (hipotermie), în condiţiile expunerii corpului la
temperaturi scăzute, fie în context profesional, fie în context recreativ. Efectul este accentuat de
prezenţa umidităţii crescute local, în contact cu pielea, care facilitează schimburile termice.
4.2 PRINCIPIILE TEHNICILOR CLASICE DE AMPUTAȚIE LA NIVELUL
ANTEBRAȚULUI
4.2.1 INTRODUCERE
Prioritar în urma unei amputaţii este de a se evalua contextul psiho-social în care
pacientul îşi va desfăşura activitatea şi de a se lua măsuri pentru re-integrarea cât mai rapidă a
pacientului într-un stil de viaţă acceptabil pentru acesta. Aceasta este dependentă în egală măsură
de pacient, medic, precum şi de societatea şi cutumele acesteia privind amputaţia de membru
toracic.
4.2.2 TEHNICI DE REALIZARE A AMPUTAŢIILOR LA NIVELUL ANTEBRAŢULUI
ŞI MÂINII.
Nivelul de rezecţie optim este cel mai distal posibil la care se realizează vindecarea fără
complicaţii a plăgii postoperatorii. Disecţia se practică având grijă ca aceasta să fie cât mai
atraumatică posibil, cu hemostază riguroasă, dar fără a utiliza electrocauterul în vecinătatea
nervilor.
Page 13
13
Flap-urile, aşa cum sunt denumite tranșele amputaţiei, trebuie să aibă un volum cât mai
mare distal de tranșa osoasă, pentru a asigura un bont cu o bună acoperitre de ţesuturi moi;
absenţa unei acoperiri de calitate duce în timp la apariţia cicatricelor aderențiale, ce fac dificilă
montarea şi utilizarea protezei. Disecţia trebuie redusă la minim, pentru a asigura o cât mai bună
vascularizaţie la nivelul bontului, iar neregularităţile în crearea flap-urilor trebuie de asemenea
evitate, întrucât acestea fac dificilă montarea manşonului protezei.
Musculatura se incizează proximal faţă de nivelul inciziei la piele, dar la câţiva centimetri
distal faţă de os. Ulterior, fiecare muşchi va fi fixat, pentru a realiza o bună acoperire a bontului
şi pentru a preveni atrofia musculară şi retracţia la acest nivel; un studiu a arătat că la 2 ani de la
amputaţie atrofia musculară poate atinge 40-60% dacă fixarea nu este fermă.
4.3 PRINCIPIILE TEHNICII OSTEOMIOPLASTICE DE AMPUTAŢIE A
ANTEBRAŢULUI
Pentru amputaţia transradială se recomandă a se utiliza tehnica denumită mioplastie, ce
constă în sutura musculaturii flexoare la musculatura extensoare; se poate utiliza de asemenea şi
miodeza cu fixare transosoasă. Utilizarea acestei tehnici facilitează protezarea cu o exoproteza
mioelectrică, întrucât se previne retracţia musculară şi migrarea grupelor musculare în proximal,
se acoperă capetele osoase radial şi ulnar, şi se asigura o ―inserţie‖ în distal ce funcţionează ca
bază pentru contracţiile musculare postoperatorii, necesare pentru menţinerea tonusului
muscular.
4.4 PRINCIPIILE TEHNICII OSTENEUROMIOPLASTICE CIRCUMFERENŢIALE
(CONM) DE AMPUTAŢIE A ANTEBRAŢULUI
În 2013 a fost înregistrată metoda CONM (Circumferenţial Osteoneuromyoplasty –
osteoneuromioplastia circumferenţială), o metodă de amputaţie concepută de către Prof.Univ.Dr.
Adrian Barbilian, din cadrul Universităţii de Medicină şi Farmacie ―Carol Davila‖, Bucureşti,
România, împreună cu echipa chirurgicală din care face parte şi autorul acestei Teze Doctorale.
Metoda are ca scop îmbunătăţirea metodologiei de amputare a unui membru, prin
suturarea grupelor musculare în aşa fel încât să se realizeze superficializarea grupelor musculare
profunde. Dezideratul este de a obţine semnale mioelectrice clare şi distincte, recepţionate prin
intermediul senzorilor externi ataşaţi la nivelul pielii, ceea ce va permite comanda distinctă a
mişcării elementelor exoprotezei purtată de pacient, astfel realizându-se şi o mişcare mai
Page 14
14
apropiată de cea naturală a protezei. În acest mod exoproteza poate fi dotată cu un număr sporit
de funcţii motoare, depinzând de capacităţile fiecărui pacient în parte.
4.5 AMPUTAȚIA LA NIVELUL ANTEBRAȚULUI
4.5.1 TEHNICA OPERATORIE
Unul dintre principiile amputaţiei de antebraţ este păstrarea unui maxim tisular posibil,
astfel oferind un grad cât mai mare de pronatie-supinatie, cât şi o bază cât mai fermă pe care să
fie montată ulterior exoproteza. În ceea ce priveşte nivelul amputaţiei, aceasta poate fi realizată
la orice nivel, păstrând un maxim de lungime, dar se delimitează trei zone predilect utilizate:
proximală, medie şi distală.
Incizia se realizează în mai multe moduri, în funcţie de condiţiile locale, preferinţa
chirurgului, precum şi intenţia de protezare ulterioară. Importantă este acoperirea
corespunzătoare cu ţesuturi moi (muşchi, fascie, ţesut adipos şi piele) a viitorului bont de
amputaţie.
4.5.2 REZECȚIE ȘI REIMPLANTARE
Intervenţia chirurgicală de rezecţie şi reimplantare este echivalentul intervenţiei Van Nes,
dar efectuată la nivelul membrului toracic; oferă o alternativă la amputaţie, şi poate fi
considerată ca o amputaţie parţială sau ca o rezecţie largă urmată de reatașarea segmentului
distal.
4.5.3 INTERVENȚIA KRUKEMBERG
Intervenţia Krukemberg a fost pusă la punct în 1917 de către autorul omonim, având
scopul de a converti o amputaţie distală de antebraţ într-un bont funcţional, în care ulna şi
radiusul, fiecare îmbrăcat în manşon de ţesuturi moi, acţionează ca o pensă (se poate asemui unei
pense anatomice), apropierea acestora fiind realizată de către muşchiul pronator teres.
4.6 DEZARTICULAȚIA DE PUMN
Tradiţional se consideră că amputaţia la nivelul antebraţului distal este de dorit faţă de
dezarticulaţia de pumn dar actual se preferă dezarticulaţia de pumn, întrucât păstrarea articulaţiei
Page 15
15
radioulnare distale permite efectuarea prono-supinatiei, iar expansiunea stiloidei radiale conferă
o stabilitate mai mare protezei ce va fi montată ulterior.
4.7 AMPUTAŢIA TRANSCARPIANĂ ŞI AMPUTAŢIILE LA NIVELUL DEGETELOR
Amputaţia transcarpiană este utilizată în cazuri izolate, şi nu prezintă avantaje notabile
faţă de amputaţia de treime distală de radius sau dezarticulaţia de pumn.
Vom aminti sumar restul amputaţiilor de la nivelul mâinii, cu alte cuvinte amputaţiile
degetelor şi amputaţiile de rază, întrucât acestea nu sunt cuprinse în scopul acestei Teze
doctorale, şi ca atare nu au decât rolul de a stabili contextul chirurgical ce stă la baza unei direcţii
noi de dezvoltare ulterioară a protezării mioelectrice, şi anume proteza mioelectrică de deget.
4.8 ÎNGRIJIREA POSTOPERATORIE
Îngrijirea imediat postoperatorie este cea tipică oricărei plăgi chirurgicale, cu extragerea
tubului de dren la 24-48 de ore, pansamentul plăgii în funcţie de condiţiile locale (mai rar dacă
plaga este ―uscată‖ şi mai des dacă pansamentul este îmbibat de secreţii), extragere firelor de
sutură la 12-14 zile, şi protecte antibiotică imediat postoperator, în funcţie de natura amputaţiei şi
de protocolul clinicii.
4.9 COMPLICAȚII
4.9.1 HEMATOM
Formarea unui hematom postoperator este evitată printr-o hemostază riguroasă, efectuată
prin electrocauterizarea vaselor mici şi ligatura vaselor de calibru mare.
4.9.2 INFECȚIE
În cazul amputaţiilor de membru toracic, cel mai mare pericol de infecţie vine din
prezenţa unei amputaţii traumatice cu contaminarea părţilor moi; bineînţeles, infecţia poate
apărea şi postoperator. În ambele cazuri, tratamentul este în principal chirurgical.
4.9.3 NECROZA DE BONT
În cazul apariţiei necrozei de bont, aceasta are de obicei un fundament în starea generală
proastă a pacientului, cu un deficit nutriţional accentuat, diabet zaharat (deşi acesta afectează, din
Page 16
16
acest punct de vederee, mai degrabă bonturile de amputaţie de la nivelul membrului pelvin) sau
deseori fumat în doze mari.
4.9.4 REDOAREA ARTICULARĂ ȘI CONTRACTURILE
Contracturile musculare, urmate în timp de redoare, pot fi evitate printr-o echilibrare
atentă a musculaturii, prin mobilizare iniţial pasivă şi apoi activă a bontului de amputaţie,
precum şi prin adaptarea meticulaoasa a protezei. Redoarea articulară poate fi evitată dacă se
realizează reconstrucţia manşonului muscular în poziţie neutră, ce va permite ulterior reluarea
mişcării în limitele posibile..
4.9.5 DUREREA
Durerea cauzată de proteză poate fi uşor distinsă de celelalte tipuri, şi necesită
examinarea atentă a bontului şi a manşonului protezei. Se cauta mărci lezionale pe bont, sau
zone denivelate în manşon, ce pot fi defecte în fabricaţie, sau pot semnaliza faptul că adaptarea
bontlui încă se desfăşoară şi este necesară refacerea protezei, sau, în rare cazuri, revizia bontului.
Durerea cauzată de un neurom poate fi prevenită la momentul amputaţiei, prin tracţiunea
blândă de nerv şi rezecţia acestuia cât mai proximal, dintr-o singură mişcare. Asfel, nervul se
poate retracta în masă musculară şi şansele de formare a unui neurom sunt minime.
4.10 EVALUAREA POSTOPERATORIE A PACIENŢILOR CU AMPUTAŢIE DE
ANTEBRAŢ ŞI MÂNĂ
Evaluarea pe termen lung a pacienţilor cu amputaţie de antebraţ şi mână se face prin
control medical periodic, unde se vor evalua o serie de aspecte de ordin medical şi chirurgical,
cuprinse de regulă în cadrul unui scor funcţional, ce evaluează atât adaptarea pacientului la
regimul de viaţă actual, cât şi satisfacţia sa.
4.10.1 SCORURI FUNCȚIONALE
Scorurile funcţionale, în general, sunt destinate pacienţilor cu dizabilităţi la nivelul
membrului toracic, şi pot fi cu uşurinţă adaptate pacienţilor cu amputaţie la nivelul antebraţului
şi mâinii, dar pot fi utilizate şi ulterior protezării, pentru a evalua evoluţia pacientului cu un
anumit tip de proteză, rezultatele putând ajuta în decizia obiectivă între mai multe modele de
proteză. Prezentăm scorul DASH (Disabilities of the Arm, Shoulder and Hand), varianta
revizuită.
Page 17
17
4.10.2 TELEMEDICINA
Telemedicina poate fi definită ca şi procesul de utilizare a tehnologiilor informatice şi a
telecomunicaţiilor în cadrul oferirii de servicii medicale la distanţă, eliminând barierele ce ţin de
distanţa fizică dintre medic şi pacient. Avantajul real oferit de serviciile de telemedicină constă
în posibilitatea interacţiunii cu pacientul în timp real de la distanţă, putând urmări starea de
vindecare a bontului de amputaţie, gradele de mişcare la nivel articular, calitatea tegumentului de
la nivelul bontului, precum şi modul de utilizare a protezei de antebraţ şi mână.
CAPITOLUL 5: PROTEZA MIOELECTRICĂ DE ANTEBRAȚ ȘI MÂNĂ
5.1 NOŢIUNI GENERALE PRIVIND PROTEZAREA ANTEBRAŢULUI ŞI A MÂINII
Protezarea antebraţului şi implicit a mâinii ca şi element de mobilitate trece prin 5 etape
după momentul chirurgical, fiecare etapă fiind marcată de tipul său de proteză: postoperatorie,
iniţială, preparatorie, definitivă şi specială. Deşi este dezirabil că aceste 5 etape să fie atinse,
majoritatea pacienţilor vor beneficia doar de proteză preparatorie şi de cea definitivă, în mare
parte datorită costului ridicat de realizare a fiecărei protezei şi a necesităţii prezenţei personalului
calificat.
Proteza postoperatorie este necesară din primele 24 de ore după operaţia de amputaţie, şi
este rareori executată. Uzul sau este în cazul pacienţilor de vârstă tânără, deşi teoretic poate fi
adaptată oricărui pacient. Proteză iniţială este utilizată după scoaterea firelor, şi până la 4
săptămâni după amputaţie, şi este adaptată la procesul de atrofiere rapidă a bontului de
amputaţie. Proteza preparatorie este utilizată în primele luni din procesul de reabilitare a
pacientului, fiind o etapă de tranziţie spre proteză definitivă. Proteză definitivă urmează protezei
preparatorii, după maturarea bontului de amputaţie, şi modelul este ales în funcţie de dezideratul
pacientului, de experienţă acumulată utilizând proteză preparatorie, şi de cost.
Ca şi tip de control a protezei, aceasta poate fi mecanică (modelele vechi), mioelectrică
(modelele în uz curent) sau robotice (modelele cele mai avansate, aflate în cea mai mare parte
sub formă de prototip, cu un cost încă prohibitiv pentru pacienţi. Interfaţa proteză-pacient poate
fi dotată cu senzori tip EMG, care colectează semnale de la nivelul muşchilor şi le transformă în
comenzi predeterminate, dar şi cu unităţi executoare de feed-back kinetic sau termic, ce transmit
pacientului informaţii recepţionate la nivelul protezei, vizând forţa, atingere, sau temperatura.
Page 18
18
5.2 NOŢIUNI GENERALE PRIVIND MIOPROTEZA DE ANTEBRAŢ ŞI MÂNĂ
Modul de acţiune al mioprotezelor (proteze mioelectrice) este fundamentat în colectarea
şi măsurarea semnalelor mioelectrice de la nivelul bontului de amputaţie.
În urma intervenţiei de amputaţie, la nivelul bontului rămân muşchi ce, nefiind inseraţi
distal tendinos, nu pot determina mişcare utilă; totuşi, ei sunt inervaţi motor şi se contractă,
acţiune ce rămâne în mod normal fără efect dar generează activitate electrică. Această activitate
electrică este captată de către senzori (electrozi) şi utilizată pentru a comanda acţiunea protezei
mioelectrice. Electrozii, numiţi şi mioelectrozi, pot fi de suprafaţă (aplicaţi pe piele) sau
intramusculari (implantaţi chirurgical la nivelul muşchiului). Cel mai des utilizaţi sunt
mioelectrozii de suprafaţă, datorită comodităţii de aplicare.
5.3 ELECTROMIOGRAFIA
Electromiografia (EMG) este un procedeu medical de înregistrare a semnalelor electrice
emise de către muşchii scheletici. Acest procedeu este realizat utilizând un electromiograf, iar
înregistrarea poartă numele de electromiografie. Semnalele EMG, reprezentând înregistrarea
grafică a potenţialului electric emis de celulele musculare, este utilizat în controlul mioprotezei.
Este important nivelul ales pentru măsurarea semnalelor EMG, deoarece pot fi măsuraţi
clar muşchii superficial, semnalul de la cei profunzi devenind mai dificil de recepţionat datorită
suprapunerii deasupra lor a muşchilor superficiali. De asemenea trebuie menţionat faptul că
grosimea stratului adipos ce se interpune între muşchi şi senzor EMG diminuă în sens direct
proporţional intensitatea semnalului.
5.3 SENZORII EMG
Există mai multe tipuri de mioelectrozi ce pot fi utilizaţi în comandă mâinii artificiale; o
primă clasificare îi împarte în electrozi de suprafaţă şi electrozi intramusculari.
Electrozii de suprafaţa au avantajul de a fi non-invazivi, şi pot fi pasivi (utilizează un gel
electrolit în preluarea semnalului, fără amplificare), sau activi (intră în contact direct cu piele şi
amplifica semnalul preluat de la nivelul pielii). Electrozii intramusculari măsoară potenţiale în
profunzime şi sunt la rândul lor de două tipuri: tip ac de seringă şi tip sârmă (bipolar, două fire
metalice implantate în masă muşchiului).
Indiferent de tipul lor, mioelectrozii sunt realizaţi din materiale conductive electric, precum
oţelul inoxidabil sau metalele preţioase (aur, argint). Factorii în funcţie de care variază valorile
Page 19
19
semnalului EMG sunt tipul de contracţie, mărimea muşchiului şi diferenţele de tehnică şi
metodologie.
5.4 BIOFEEDBACK-UL
Biofeedback-ul constă în controlul şi modularea unei funcţii sau a unui proces fiziologic
utilizând în mod principal instrumente externe ce furnizează informaţii asupra desfăşurării acelui
proces sau acelei funcţii. Instrumentele externe pot furniza informaţii vizuale, auditive, tactile,
etc., în funcţie de preferinţele şi capacităţile persoanei ce este supusă acestui proces.
CAPITOLUL 6: INTERFAȚA BONT-PROTEZĂ
Interfaţa dintre bontul de amputaţie şi proteză constituie o arie importantă de interes,
întrucât prin intermediul acestei interfeţe se realizează comunicarea, transmiterea informaţiei de
la pacient la efector (proteză). În sens îngust, interfaţa este constituită de zona delimitată de
stratul superficial al pielii de pe bont şi acea parte a exoprotezei care intră în contact cu acest
strat (făcând astfel referire la manşon, senzori EMG etc.). În sens larg, termenul de interfaţă face
referire la toate mijloacele de realizare a acestei comunicări, fie ele bazate pe o metodă
chirurgicală sau pe o metodă non-invazivă de recepţionare şi / sau transmitere a informaţiilor.
6.1 METODE CHIRURGICALE DE REALIZARE A INTERFEŢEI BONT-PROTEZĂ
În ceea ce este privit bontul clasic de amputaţie, notăm faptul că interfaţa dintre
manşonul protezei şi os (care realizează principalul suport mecanic) este realizată de către
ţesuturile moi. Pentru a menţine o funcţie optimă la nivelul bontului, masa musculară trebuie să
fie lipsită de aderente şi mobilă, în timp ce pielea trebuie să fie însoţită de ţesut subcutanat.
6.1.1 CINEPLASTIA
Cineplastia este una din cele mai vechi tentative de modificare a tehnicii de amputaţie în
scopul de a îmbunătăți transmiterea forţei musculare direct către proteză; a fost introdusă de
către Vanghetti în anul 1858. Ideea ce stă în spatele acestei tehnici este aceea de a controla direct
funcţiile protezei de membru toracic prin intermediul contracţiilor musculare. Principiul constă
în utilizarea unor ―tuburi‖ de piele pentru a canaliza un muşchi major de la nivelul bontului de
amputaţie; de obicei erau utilizaţi doi muşchi complementari, un flexor şi un extensor.
6.1.2 OSEOINTEGRAREA
Page 20
20
Oseointegrarea constă în conectarea directă a exoprotezei la bontul de amputaţie a
pacientului, transcutanat, cu fixare la nivelul osului remanent. Deşi dificil de imaginat la nivelul
antebraţului datorită relaţiei complexe între ulna şi radius, tehnica este utilizată la nivelul braţului
şi în ultimii ani a cunoscut o revenire.
6.1.3 REINERVAREA MUSCULARĂ ȚINTITĂ
Principiul metodei constă în disecţia plexului brahial şi individualizarea fiecăruia dintre
nervii importanţi, cu transpoziţia lor ulterioară la nivlul muşchilor pectoral mic şi pectoral mare,
fiecare nerv într-o anumită porţiune, unde vor reinerva senzitiv şi motor zona respectivă. Deşi
metoda chirurgicală nu a fost utilizată explicit în cazul unui pacient cu amputaţie de antebraţ şi
mâna, principiul ce stă la baza metodei este valoros, şi poate fi util în cazul bonturilor unde
există o fibroză importantă la nivelul bontului, acompaniata de retracţia şi atrofia musculară
importanta.
6.1.4 SENZORI IMPLANTAȚI
Conceptul de implantare a senzorilor EMG se îndreaptă în două direcţii principale:
utilizarea unor senzori direct conectaţi la exoproteză, practic electrozi intramusculari implantaţi
percutan, şi utilizarea unor senzori ce au rolul de a fi amplasaţi chirurgical în masă musculară, şi
sunt autonomi, comunicând cu exoproteza prin intermediul undelor.
6.1.5 INTERFAȚA NEURONALĂ
În literatura de specialitate, o serie de articole descriu mai multe moduri de realizare
directă a unei interfeţe între creier şi computer, în care activitatea corticală a unor grupe specifice
de neuroni este analizată, iar informaţia este transformată într-o comandă de realizare a unei
mişcări specifice. Pe de altă parte este adus în discuţie cazul în care interfaţa cu creierul are rolul
de a determina transmiterea unor informaţii recepţionate periferic, până la creier, prin
intermediulunei inferfețe neuronale, prin microstimularea intracorticală a somatocortexului
senzitiv.
6.2 ALTE METODE DE REALIZARE A INTERFEŢEI BONT-PROTEZĂ
6.2.1 SENZORI EMG DE SUPRAFAȚĂ
Senzorii EMG de suprafaţă, sEMG, sunt electrozi Ag/AgCl ce funcţionează prin
interpunerea receptarea semnalelor electrice de la nivel tegumentar; în mod uzual între aceştia şi
Page 21
21
piele este necesară prezenţa unui strat de gel; de asemenea sunt descrişi şi electrozi ce suprafaţă
ce funcţionează fără un strat intermediar de gel, aceştia fiind uzual utilizaţi în cadrul
exoprotezelor mioelectrice.
6.2.2 SENZORI TACTILI ARTIFICIALI
Încercările de a dota proteză mioelectrică, ce altfel are, în concepţia sa iniţială, un
feedback redus, chiar şi cel rudimentar (presiunea transmisă direct la atingere prin masa
protezei), au fost un subiect ce a interesat încă din primii ani de dezvoltare a mioprotezei. În ceea
ce priveşte tipul acestor senzori, majoritatea au fost axaţi pe redarea senzatiei tactile, încercând
să stabilească la modul calitativ dacă un obiect este atins şi cantitativ cu ce presiune acel obiect
este atins.
6.3 DIFICULTĂȚI ÎN RECEPTIONAREA SEMNALULUI DE CĂTRE ELECTROZII
DE SUPRAFAȚĂ
Principalele dificultăţi ce intervin stabilirea unei bune interfeţe bont-proteză, în ceea ce
este privit pacientul, sunt legate de starea pielii şi probleme dermatologice locale. Acestea pot
afecta direct calitatea semnalului recepţionat de către electrozii de suprafaţă prin modificarea
caracteristicilor pielii.
O problemă des întâlnită este dermatita de contact, manifestată prin prurit şi senzaţie de
arsură la zona de contact cu proteză; poate fi cu uşurinţă confundată cu infecţia.
Foliculita bacteriană apare în zonele cu pilozitate crescută, pe ten gras. Poate fi
declanşată sau exacerbată de bărbierirea zonei şi de igienă defectuoasă.
Dermatofitozele, între care se înscrie şi cadidoza, duc la apariţia unui tegument uscat,
cornos, pruriginos, de multe ori acompaniat de apariţia veziculelor.
Cicatricele, fie chirurgicale, fie posttraumatice, pot influenţa calitatea semnalului
recepţionat de senzorii sEMG, şi de regulă recomandăm a fi evitate în amplasarea acestor
senzori.
Page 22
22
B. PARTEA SPECIALĂ
CAPITOLUL 7: STUDIU: EVALUAREA PACIENŢILOR CU PATOLOGIE LA RISC
PENTRU AMPUTAŢIE DE ANTEBRAŢ ŞI MÂNĂ
7.1 CONTEXTUL ACTUAL
Fără a relua discuţia largă expusă în subcapitolul dedicat indicaţiilor amputaţiei de
antebraţ şi mână, putem puncta faptul că exoprotezarea membrului toracic înseamnă de cele mai
multe ori exoprotezarea antebraţului şi a mâinii, întrucât acestea sunt cele două zone cele mai
predispuse la incidentele traumatice care duc la amputaţie.
7.2 OBIECTIVE ȘI IPOTEZĂ DE LUCRU
Obiectivul principal constă în evaluarea patologiei traumatice, tumorale şi infecţioase,
localizate la nivelul antebraţului şi mâinii, din totalul pacienţilor trataţi chirurgical în cadrul
Secţiei de Ortopedie a Spitalului Centre Hospitalier de la Dracénie, Draguignan, France, în
perioada 2012-2014.
De asemenea am evaluat o serie de indici, precum numărul, raportul între sexe, indicii de
vârstă, şi durata şederii acestor pacienţi, în raport cu grupa de pacienţi trataţi chirurgical la
nivelul membrului toracic în aceeaşi secţie, în perioadă dată, pentru a determina dacă există
diferenţe semnificative.
În cele din urmă, am determinat în ce măsură există cazuri de amputaţie la nivelul
antebraţului şi mâinii în cazuistica dată, şi am analizat caracteristicile acestor cazuri.
Prima ipoteza pe care am intentionat sa o demonstrez este aceea ca amputatia la nivelul
antebratului si mainii constituie un numar foarte mic din totalul interventiilor chirurgicale
ortopedice.
A doua ipoteză pe care am intenţionat să o demonstez este că grupele de pacienţi
prezentând patologie traumatică, tumorală sau infectioasă la nivelul antebraţului şi mâinii are
caracteristici diferite faţă de grupă pacienţilor cu aceeaşi patologie la nivelul membrului toracic
în întregime şi faţă de grupul complet al pacienţilor luaţi în analiză.
7.3 MATERIALE ŞI METODE
Pentru a realiza obiectivele si a testa ipoteza, am pus la punct un studiu observațional
retrospectiv, în care am analizat o bază de date din perioada 2012-2014, cuprinzând datele
statistice ale pacienţilor asupra cărora s-a intervenit chirurgical în această perioadă în Secţia de
Page 23
23
Ortopedie a Spitalului Centre Hospitalier de la Dracénie, Draguignan, France. Am efectuat
această analiză ca şi parte a unui stagiu de pregătire doctorală, ce a cuprins două aspecte:
-analiza statistică a datelor pacienţilor operaţi
-largirea experienţei de lucru prin participarea la intervenţii chirurgicale şi consultaţii,
punând accent pe patologia membrului toracic
7.4 REZULTATE
Tabel 1: Sinteza datelor privind totalitatea pacienților introduși in studiu.
TOTAL
număr pacienţi 3203
M 1413
F 1790
vârsta min 6
vârsta max 101
vârsta medie 61.1
durata spitalizării 5.04
număr intervenţii 3483
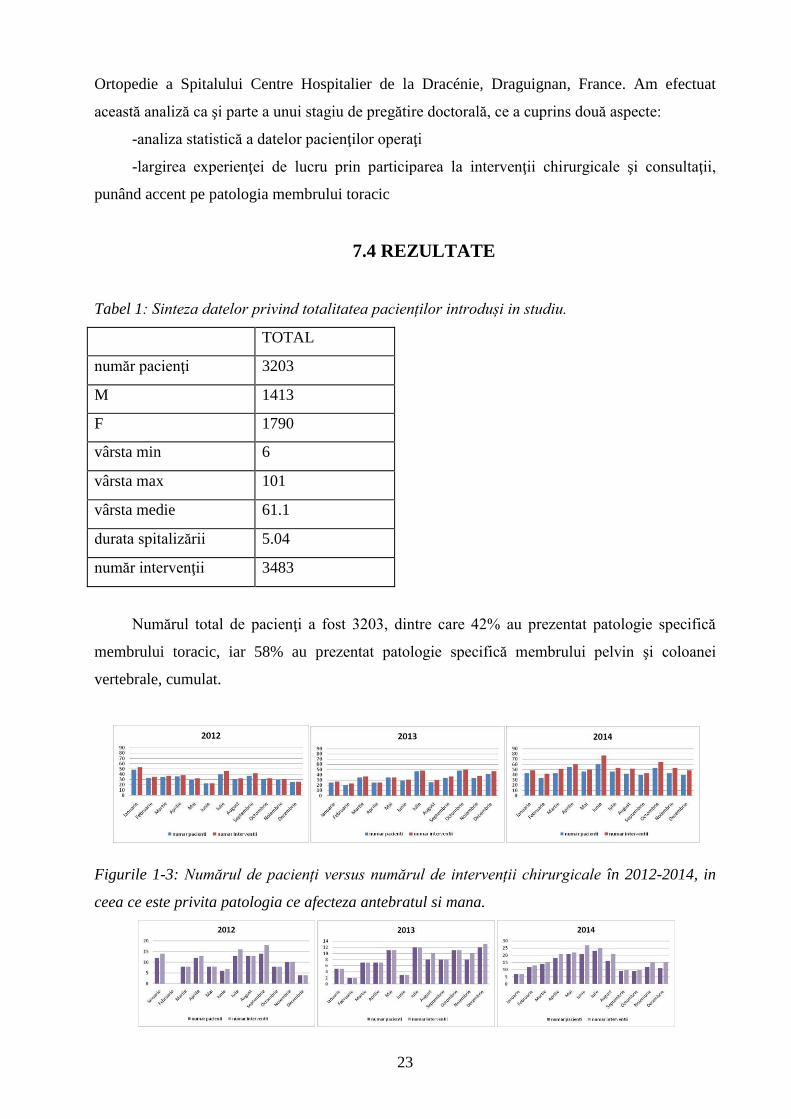
Numărul total de pacienţi a fost 3203, dintre care 42% au prezentat patologie specifică
membrului toracic, iar 58% au prezentat patologie specifică membrului pelvin şi coloanei
vertebrale, cumulat.
Figurile 1-3: Numărul de pacienți versus numărul de intervenții chirurgicale în 2012-2014, in
ceea ce este privita patologia ce afecteza antebratul si mana.
Page 24
24
Figurile 4-6: Numărul de pacienți versus numărul de intervenții chirurgicale în 2012-2014, in
ceea ce priveste patologia traumatica la nivelul antebratului si mainii.
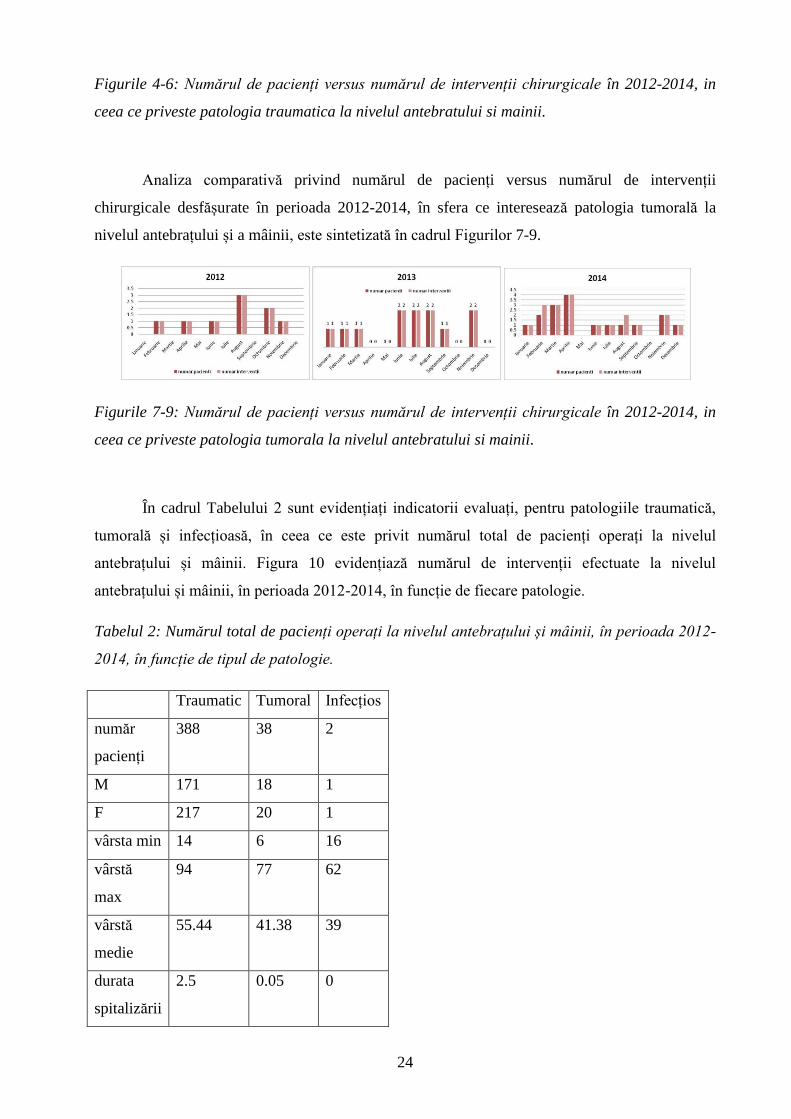
Analiza comparativă privind numărul de pacienți versus numărul de intervenții
chirurgicale desfășurate în perioada 2012-2014, în sfera ce interesează patologia tumorală la
nivelul antebrațului și a mâinii, este sintetizată în cadrul Figurilor 7-9.
Figurile 7-9: Numărul de pacienți versus numărul de intervenții chirurgicale în 2012-2014, in
ceea ce priveste patologia tumorala la nivelul antebratului si mainii.
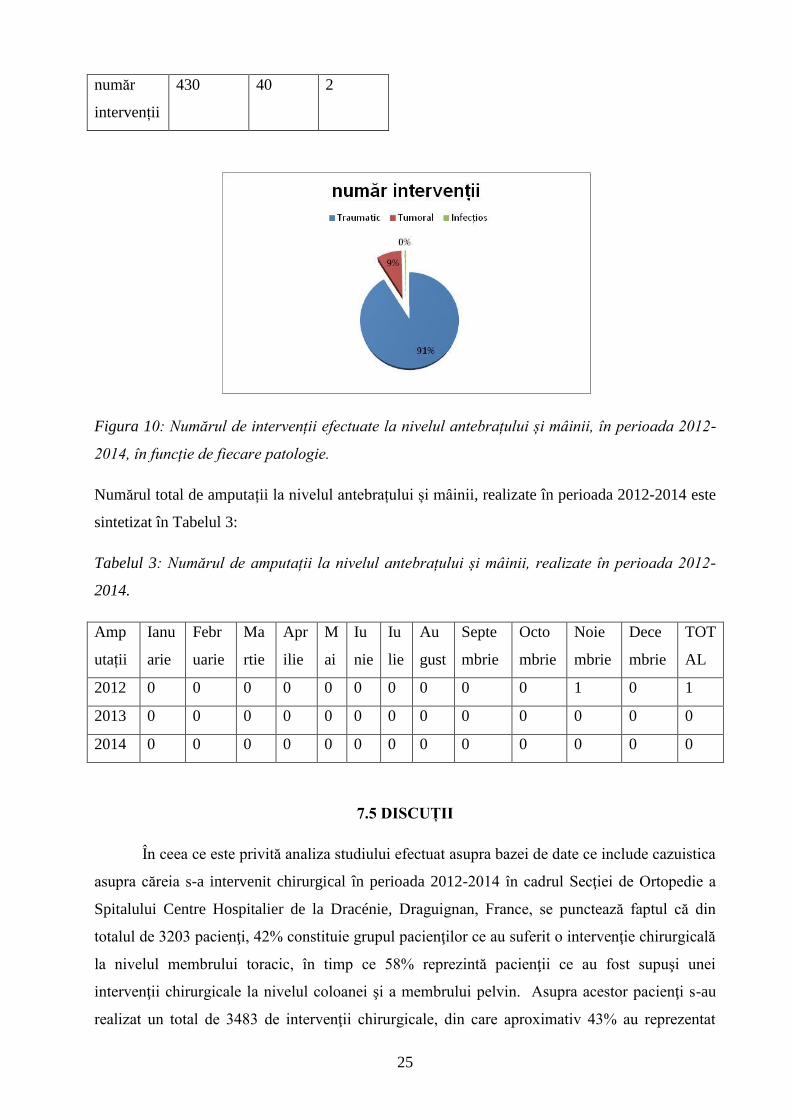
În cadrul Tabelului 2 sunt evidențiați indicatorii evaluați, pentru patologiile traumatică,
tumorală și infecțioasă, în ceea ce este privit numărul total de pacienți operați la nivelul
antebrațului și mâinii. Figura 10 evidențiază numărul de intervenții efectuate la nivelul
antebrațului și mâinii, în perioada 2012-2014, în funcție de fiecare patologie.
Tabelul 2: Numărul total de pacienți operați la nivelul antebrațului și mâinii, în perioada 2012-
2014, în funcție de tipul de patologie.
Traumatic Tumoral Infecțios
număr
pacienți
388 38 2
M 171 18 1
F 217 20 1
vârsta min 14 6 16
vârstă
max
94 77 62
vârstă
medie
55.44 41.38 39
durata
spitalizării
2.5 0.05 0
Page 25
25
număr
intervenții
430 40 2
Figura 10: Numărul de intervenții efectuate la nivelul antebrațului și mâinii, în perioada 2012-
2014, în funcție de fiecare patologie.
Numărul total de amputații la nivelul antebrațului și mâinii, realizate în perioada 2012-2014 este
sintetizat în Tabelul 3:
Tabelul 3: Numărul de amputații la nivelul antebrațului și mâinii, realizate în perioada 2012-
2014.
Amp
utații
Ianu
arie
Febr
uarie
Ma
rtie
Apr
ilie
M
ai
Iu
nie
Iu
lie
Au
gust
Septe
mbrie
Octo
mbrie
Noie
mbrie
Dece
mbrie
TOT
AL
2012 0 0 0 0 0 0 0 0 0 0 1 0 1
2013 0 0 0 0 0 0 0 0 0 0 0 0 0
2014 0 0 0 0 0 0 0 0 0 0 0 0 0
7.5 DISCUȚII
În ceea ce este privită analiza studiului efectuat asupra bazei de date ce include cazuistica
asupra căreia s-a intervenit chirurgical în perioada 2012-2014 în cadrul Secţiei de Ortopedie a
Spitalului Centre Hospitalier de la Dracénie, Draguignan, France, se punctează faptul că din
totalul de 3203 pacienţi, 42% constituie grupul pacienţilor ce au suferit o intervenţie chirurgicală
la nivelul membrului toracic, în timp ce 58% reprezintă pacienţii ce au fost supuşi unei
intervenţii chirurgicale la nivelul coloanei şi a membrului pelvin. Asupra acestor pacienţi s-au
realizat un total de 3483 de intervenţii chirurgicale, din care aproximativ 43% au reprezentat
Page 26
26
intervenţiile asupra membrului toracic, iar aproximativ 57% au reprezentat intervenţii asupra
membrului pelvin şi a coloanei.
Din totalul de 1343 de pacienţi asupra cărora s-a intervenit chirurgical la nivelul
membrului toracic, 428 (31.8 %) au suferit intervenţii la nivelul antebraţului şi mâinii, iar dintre
aceştia din urmă, 388 de pacienţi (90.6%) au fost supuşi intervenţiilor pentru o patologie
traumatică, 38 (8.87%) pentru o patologie tumorală şi 2 (0.4%) pentru o patologie infecţioasă.
Din totalul de 1499 de intervenţii chirurgicale asupra membrului toracic, 472 (31.48 %)
s-au efectuat la nivelul antebraţului şi mâinii, iar dintre acestea 430 (91.1%) s-au efectuat în
contextul unei patologii traumatice, 40 (8.47%) în contextul unei patologii tumorale şi 2 (0.4%)
în context de infecţie.
Analiza comparativă privind numărul de pacienți versus numărul de intervenții
chirurgicale desfășurate în perioada 2012-2014, în sfera ce interesează patologia traumatică la
nivelul antebrațului și a mâinii, remarcă o evoluţie fluctuentă atât a numărului de cazuri internate
cât şi a numărului de intervenţii chirurgicale, cu o tendinţă de creştere a acestui număr în lunile
de vară.
În grupul iniţial de pacienţi, cei de sex masculin au constituit 44.11% din total, în timp ce
pacienţii de sex feminin au constituit 55.88% din total. În grupul pacienţilor ce au suferit
intervenţii la nivelul membrului toracic, cei de sex masculin au constituit 48.99% din total,în
timp ce pacienţii de sex feminin au constituit 51.01% din totalul pacienţilor. În cadrul pacienţilor
ce au suferit intervenţii chirurgicale la nivelul antebraţului şi mâinii, cei din sfera traumatică au
fost 44.07% de sex masculin şi 55.92% de sex feminin, cei din sfera tumorală au fost 47.36% de
sex feminin şi 52.63% de sex masculin, iar cei din sfera tumorală au fost 50% de sex masculin şi
50% de sex feminin.
Distribuția pacienților în funcție de sex, în perioada 2012-2014, în sfera globală a
patologiei ce afectează membrul toracic, arata numărul mai mare al pacienţilor de sex masculin,
cu un vârf în luna septambrie 2013, tendinţa ce se accentuează în 2014, cu creşterea diferenţei
numerice între cele două sexe în favoarea sexului masculin.
Analiza comparativă privind distribuția pacienților în funcție de sex, în perioada 2012-
2014, în sfera ce interesează patologia traumatică la nivelul antebrațului și a mâinii, remarcă
numărul superior al pacienţilor de sex masculin, precum şi absenţa datelor în ceea ce este privită
luna februarie a anului 2012.
Page 27
27
Vârsta pacienţilor din grupul iniţial a cunoscut un minim global situat la valoarea de 6
ani, un maxim global situat la valoarea de 101 ani, şi o medie populaţionala de 61.1 ani. Pacienţii
ce au suferit intervenţie chirurgicală pentru patologie la nivelul membrului toracic au avut vârsta
minimă de 6 ani, vârstă maximă de 100 de ani, şi media populaţionala de 54.54 ani. În ceea ce
sunt priviţi pacienţii ce au suferit o intervenţie chirurgicală al nivelul antebraţului şi mâinii, cei
ce s-au încadrat în sfera traumatică au avut vârsta cuprinsă între 14 şi 94 de ani, cu o medie de
55.44 de ani, cei din sfera tumorală au avut vârsta cuprinsă între 6 şi 77 de ani, cu o medie de
41.38 ani, iar cei din sfera infecţioasă au avut vârsta cuprinsă între 16 şi 62 de ani, cu media de
39 de ani.
În cadrul analizei comparative privind distribuția pacienților în funcție de vârsta minimă,
maximă și medie, în perioada 2012-2014, în sfera globală a patologiei ce afectează membrul
toracic, se remarcă o plajă largă în ceea ce sunt privite extremele de vârstă, dar o menţinere
relativ stabilă a mediei de vârsta a pacienţilor în perioada 2012-2014.
Se remarcă o evoluţie uşor fluctuentă în distribuția pacienților în funcție de vârsta
minimă, maximă și medie, în perioada 2012-2014, în sfera ce interesează patologia traumatică la
nivelul antebrațului și a mâinii, cu absenţa datelor pentru luna februarie 2012 şi cu o creştere
notabilă a vârstei minime, precum şi medii, în cazul lunii iunie 2012.
Durata internării în unitatea spitalicească pentru întreaga populaţie a variat între 0 zile
(interpretat ca internare de zi, <24 ore) şi 54 de zile, valori identice cu extremele internării în
secţia de Ortopedie a aceluiaşi spital, dar diferenţa rezidă în zilele de spitalizare medie, 5.36 zile
în primul caz (deviaţia standard 6.41) şi 5.04 în cazul internărilor în secţie (deviaţia standard
5.94 în cel de-al doilea caz). În cazul pacienţilor ce au suferit o intervenţie la nivelul membrului
toracic, durata medie de spitalizare a fost 1.58 zile, în timp ce, din grupul pacienţilor operaţi la
nivelul antebraţului şi mâinii, cei ce au avut patologie traumatică au stat internaţi în medie 2.5
zile, iar cei ce au avut patologie tumorală sau infecţioasă au stat internaţi pe secţie mai puţin de
24 de ore.
Se remarcă o evoluţie fluctuentă de la lună la lună în durata medie a internărilor în
perioada 2012-2014, în sfera globală a patologiei ce afectează membrul toracic, ce tinde să se
menţină în perioadele corespunzătoare; singura excepţie notabilă este creşterea perioadei de
spitalizare în lunile august şi septembrie ale anilor 2012 şi 2013.
Din totalul de cazuri supuse analizei s-a decelat un singur caz în care s-a efectuat
amputaţie la nivelul antebraţului şi mâinii, mai precis o amputaţie de deget în cazul unui pacient
Page 28
28
de sex feminin, în 2012, pentru patologie traumatică. Aceasta reprezintă 0.21% din totalul
intervenţiilor realizate asupra antebraţului şi mâinii, şi 0.23% din totalul intervenţiilor realizate la
acest nivel în context traumatic.
Considerăm că obiectivele studiului au fost atinse, întrucât am evaluat relaţia dintre
multiplii indici ce caracterizează grupele traumatice, tumorale şi infecţioase, atât între ele cât şi
cu restul pacienţilor asupra cărora s-a intervenit chirurgical în aceeaşi perioadă, şi de asemeni am
decelat şi caracterizat incidenta amputaţiei ca şi intervenţie la nivelul antebraţului şi mâinii.
7.6 CONCLUZII
Analizând datele obţinute în urma desfăşurării studiului retrospectiv şi a efectuării
stagiului practic din cadrul bursei doctorale, putem concluziona că, deşi patologia ce, în teorie, ar
reprezenta o posibilă sursă de amputaţii la nivelul antebraţului şi mâinii, este bine reprezentată,
totuşi amputaţia la nivelul antebraţului şi mâinii reprezintă o intervenţie rară în cadrul cazuisticii
date.
În ceea ce sunt privite diferenţele intre grupul iniţial de pacienţi, grupul de pacienţi ce au
fost supuşi intervenţiilor chirurgicale la nivelul membrului toracic, şi cei ce au fost supuşi
intervenţiilor chirurgicale doar la nivelul antebraţului şi mâinii, putem concluziona:
- majoritatea intervenţiilor chirurgicale la nivelul antebraţului şi mâinii s-au desfăşurat în
context traumatic;
- adresabilitatea pacienţilor este mai mare în cadrul lunilor de vară;
- se observă o uşoară predominanță a sexului feminin în cadrul tuturor grupelor;
- în cazul patologiei traumatice la nivelul antebraţului şi a mâinii se remarcă o tendinţă de
creştere a vârstei minime şi medii faţă de celelalte grupe;
- se observă, în cazul pacienţilor cu patologie traumatică la nivelul antebraţului şi mâinii, o
durată mai mare a internării pe secţie, dar totuşi mult mai mică faţă de pacienţii cu
patologie a coloanei şi membrului pelvin.
CAPITOLUL 8: CONTRIBUŢII LA EVALUAREA ŞI DEZVOLTAREA INTERFEŢEI
PACIENT-EXOPROTEZA: RECOLTAREA SEMNALELOR, EXOPROTEZA DE
MÂNĂ ŞI MÂNA VIRTUALĂ
Page 29
29
8.1 INTRODUCERE
Obiectivul cercetării este constituit de dezvoltarea şi implementarea unui protocol de
antrenament a pacienţilor cu amputaţie de antebraţ şi/sau mâna, în vederea utilizării unei protezei
bionice inteligente, cu sistem de comandă mioelectric.
Aspectele tehnice şi inginereşti ale cercetării, atât vizând partea teoretică, cât şi cea practică,
au fost realizate de către cercetătorii din cadrul Institutului Politehnic Bucureşti, şi nu fac
obiectul prezentei Teze sau al domeniului de activitate a doctorandului; aceste aspecte vor fi
incluse în redactarea textului cercetării pentru a clarifica anumite aspecte relevante, dar nu vor fi
studiate în detaliu.
În afară de etapa de documentare iniţială, a fost realizată o etapă de măsurători preliminare,
necesară pentru a dobândi o înţelegere aprofundată a statutului specific pacientului cu amputaţie
de antebraţ şi mâna. Această etapă va servi ca o bază de cunoştinţe pentru a pune în practică
soluţiile de antrenament ce sunt adaptate la realităţile acestor pacienţi.
Modalităţile de antrenament au fost concepute în aşa fel încât pacientul să exercite un control
iniţial conştient, şi abia în a doua etapă reflex asupra funcţiilor cu care este înzestrată
mioproteza, controlată direct de către pacient prin semnalele mioelectrice de suprafaţă, ce sunt
culese de la nivelul bontului de amputaţie. Astfel, am optat pentru utilizarea unei versiuni
virtuale a unei mâini umane, precum şi a unei proteze de mână, ce vor putea fi ulterior adaptate
grafic în funcţie de aspectul exoprotezei pe care fiecare pacient o va achiziţiona. Pe perioada
cercetării am optat pentru utilizarea unui model experimental de mioproteză, pus la punct în
cadrul laboratoarelor Institului Politehnic Bucureşti, atât pentru a testa modul de utilizare a
acestei proteze în condiţii practice, cât şi pentru a menţine costul cercetărilor la un nivel ce poate
să permită realizarea efectivă a acestora.
Astfel, pacientul poate să înceapă antrenamentul neuronal al utilizării protezei înainte de a
achiziţiona fizic proteză, şi poate de asemenea beneficia de ghidarea şi siguranţă psihologică
oferite de către antrenament. Astfel, se poate câştiga o durată semnificativă de timp în favoarea
pacientului, şi anume etapă de realizare, configurare şi personalizare a exoprotezei, care în cele
mai multe cazuri este făcută la comandă, pacientul fiind deja pregătit să o utilizeze cu succes
când aceasta este definitivată. Sistemul în care este realizat antrenamentul este pus la punct în
aşa fel încât să ofere un biofeedback vizual al utilizării protezei în simulare virtuală, putând
repeta procesul de câte ori este nevoie, până realizează un control corect al mişcărilor membrului
artificial în mediu virtual. Conceptul ce stă în spatele acestui sistem este că oferirea unui
Page 30
30
biofeedback duce la un control progresiv mai bun al funcţiilor unei proteze iniţial în mediu
virtual, apoi în utilizarea variantei fizice, aceasta traducându-se într-o experienţă de utilizare net
superioară pentru pacient.
Primul pas este selectarea semnalelor mioelectrice adecvate, implicând analiza EMG a
bonturilor de amputaţie, semnale ce sunt testate în vederea determinării capacităţii pacientului de
a le controla independent, condiţie importantă în acţionarea comenzilor unei exoproteze
mioelectrice. Aceste semnale sunt apoi alocate în vederea comenzii elementelor mobile ale
viitoarei protezei, ce poate fi dotată cu un număr variabil de caracteristici şi părţi mobile, în
funcţie de numărul de semnale şi de calitatea acestora.
În ceea ce sunt privite sesiunile de antrenament, acestea vor consta în realizarea de contracţii
musculare de către pacient, atât la nivelul bontului cât şi la nivelul membrului sănătos, după un
protocol predeterminat, cu afişarea informaţiilor recoltate de către senzori tip EMG în format
virtual, sau traducerea directă a acestor mişcări în mişcări ale exoprotezei.
După realizarea antrenamentelor pacientul este urmărit în timp, la distanţă prin utilizarea unui
sistem de telemedicină, pe care pacientul îl poate accesa de acasă, fiind necesară doar conexiune
la internet şi un sistem PC sau echivalent.
8.2 IPOTEZĂ
Ipoteza de la care s-a pornit în acest demers ştiinţific este că bontul de amputaţie are
caracteristici bioelectrice diferite în ceea ce este privită interacţiunea cu exoproteza mioelectrică,
iar aceste caracteristici pot fi modificate în scopul îmbunatăţirii experienţei de utilizare.
8.3 OBIECTIVE
Obiectivul principal constă în dezvoltarea şi implementarea unui protocol de antrenament a
pacienţilor cu amputaţie de antebraţ şi/sau mâna, în vederea utilizării unei protezei bionice
inteligente, cu sistem de comandă mioelectric.
Obiectivele secundare sunt:
- evaluarea caracteristicilor biologice şi electrice ale bontului de amputaţie de la nivelul
antebraţului şi mâinii, şi compararea lor cu caracteristicile antebraţului şi mâinii
sănătoase;
- evaluarea unui model inovativ de exoproteza mioelectrică, dotat cu interfaţa senzorială;
Page 31
31
- dezvoltarea unui protocol de interacţiune medic-pacient, cu scop de evaluare properatorie
şi urmărire postoperatorie a pacienţilor cu amputaţie de antebraţ şi mâna, prin
implementarea unui sistem de telemedicină.
8.4 MATERIALE ŞI METODĂ
Pentru verificarea ipotezei de lucru şi pentru îndeplinirea obiectivelor propuse am realizat
colaborarea cu colectivul de cercetare din cadrul Universităţii Politehnice Bucureşti, condus de
Prof. Dr. Eduard Franti, în perioada 2013-2016, în conformitate cu acordul de colaborare.
Pentru realizarea cercetării s-a recrutat un grup de 5 subiecţi ce au suferit amputaţie la
nivelul antebraţului sau mâinii.
Într-unul din cazuri amputaţia a fost bilaterală, aşa încât am putut studia în fapt 6 bonturi
de amputaţie, care au fost organizate într-un lot numit Lotul 1. Caracteristicile generale ale
acestora au fost determinate astfel: nivelul precis al amputaţiei, partea de care a fost realizată
amputaţia (dreapta sau stânga), timpul trecut de la realizarea amputaţiei, natura indicaţiei
chirurgicală (traumatică, tumorală, infecţioasă, termică), tipul amputaţiei precum şi existenţa
cicatricelor cheloide.
De asemeni, s-au luat în studiu un număr de 6 antebraţe sănătoase, 4 provenind de la
pacienţi care au şi amputaţie la celalat antebraţ şi 2 provenind de la un voluntar inclus în studiul
de cercetare, care la rândul lor au fost organizate într-un lot numit Lotul 2. S-a ales crearea cestui
lot cu rol comparativ în ceea ce sunt privite caracteristicile antebraţului.
Atât în ceea ce priveşte antebraţele cuprinse în Lotul 1, cât şi în ceea ce priveşte
antebraţele cuprinse în Lotul 2, s-au efectuat o serie de măsurători (în măsura în care au fost
posibile). Atât bonturile de amputaţie, cât şi antebraţele sănătoase, au fost testate utilizând
aparatura specifică de recoltare a semnalelor mioelectrice, electromiograf (EMG).
8.4.1 MĂSURĂTORI EMG PRELIMINARE
Etapa iniţială, cea de măsurare a semnalelor EMG, a fost realizată în cazul tuturor celor 6
participanţi la studiul de cercetare, atât în ceea ce sunt privite antebraţele cu amputaţie cât şi cele
sănătoase. Scopul a fost de a evalua calitatea semnalelor mioelectrice obţinute de pe bonturile de
amputaţie, dar şi de pe antebraţele sănătoase, precum şi de a utiliza aceste informaţii în scopul de
a optimiza procesul de antrenare, cu intenţia de a îmbunătăți atât amplitudinea semnalelor EMG,
cât şi capacitatea pacienţilor de a controla în mod voluntar contracţia musculaturii vizate.
Page 32
32
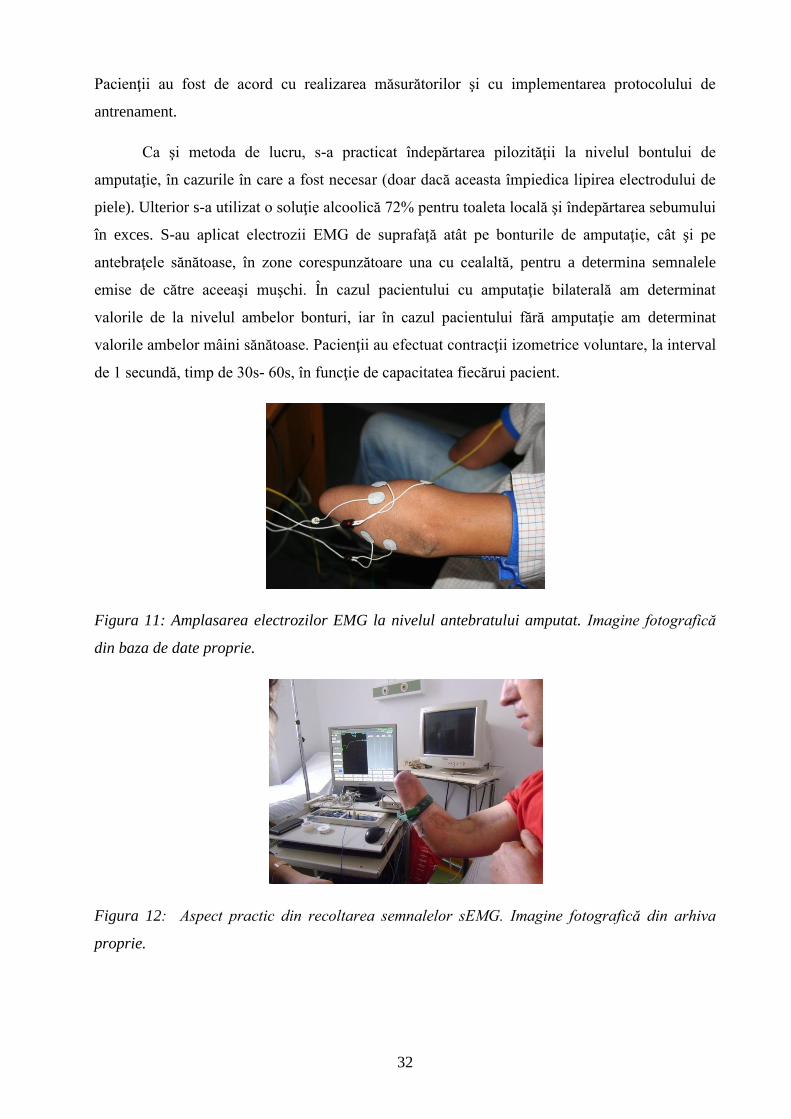
Pacienţii au fost de acord cu realizarea măsurătorilor şi cu implementarea protocolului de
antrenament.
Ca şi metoda de lucru, s-a practicat îndepărtarea pilozităţii la nivelul bontului de
amputaţie, în cazurile în care a fost necesar (doar dacă aceasta împiedica lipirea electrodului de
piele). Ulterior s-a utilizat o soluţie alcoolică 72% pentru toaleta locală şi îndepărtarea sebumului
în exces. S-au aplicat electrozii EMG de suprafaţă atât pe bonturile de amputaţie, cât şi pe
antebraţele sănătoase, în zone corespunzătoare una cu cealaltă, pentru a determina semnalele
emise de către aceeaşi muşchi. În cazul pacientului cu amputaţie bilaterală am determinat
valorile de la nivelul ambelor bonturi, iar în cazul pacientului fără amputaţie am determinat
valorile ambelor mâini sănătoase. Pacienţii au efectuat contracţii izometrice voluntare, la interval
de 1 secundă, timp de 30s- 60s, în funcţie de capacitatea fiecărui pacient.
Figura 11: Amplasarea electrozilor EMG la nivelul antebratului amputat. Imagine fotografică
din baza de date proprie.
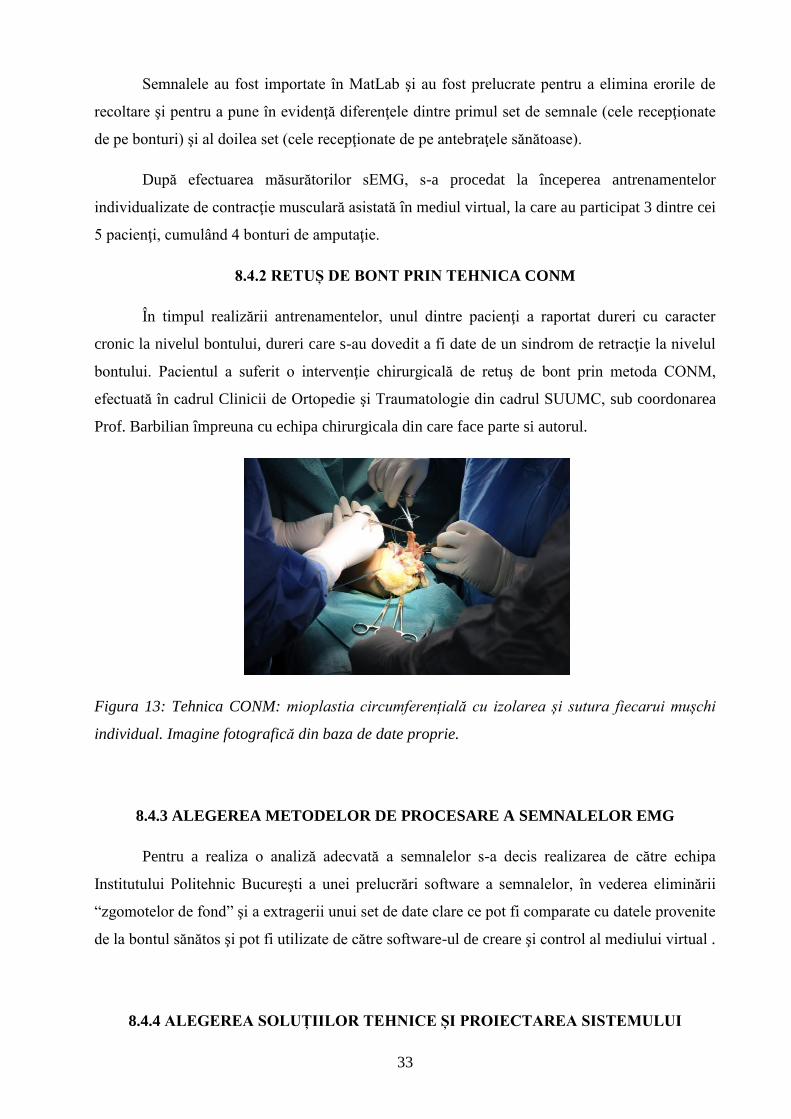
Figura 12: Aspect practic din recoltarea semnalelor sEMG. Imagine fotografică din arhiva
proprie.
Page 33
33
Semnalele au fost importate în MatLab şi au fost prelucrate pentru a elimina erorile de
recoltare şi pentru a pune în evidenţă diferenţele dintre primul set de semnale (cele recepţionate
de pe bonturi) şi al doilea set (cele recepţionate de pe antebraţele sănătoase).
După efectuarea măsurătorilor sEMG, s-a procedat la începerea antrenamentelor
individualizate de contracţie musculară asistată în mediul virtual, la care au participat 3 dintre cei
5 pacienţi, cumulând 4 bonturi de amputaţie.
8.4.2 RETUȘ DE BONT PRIN TEHNICA CONM
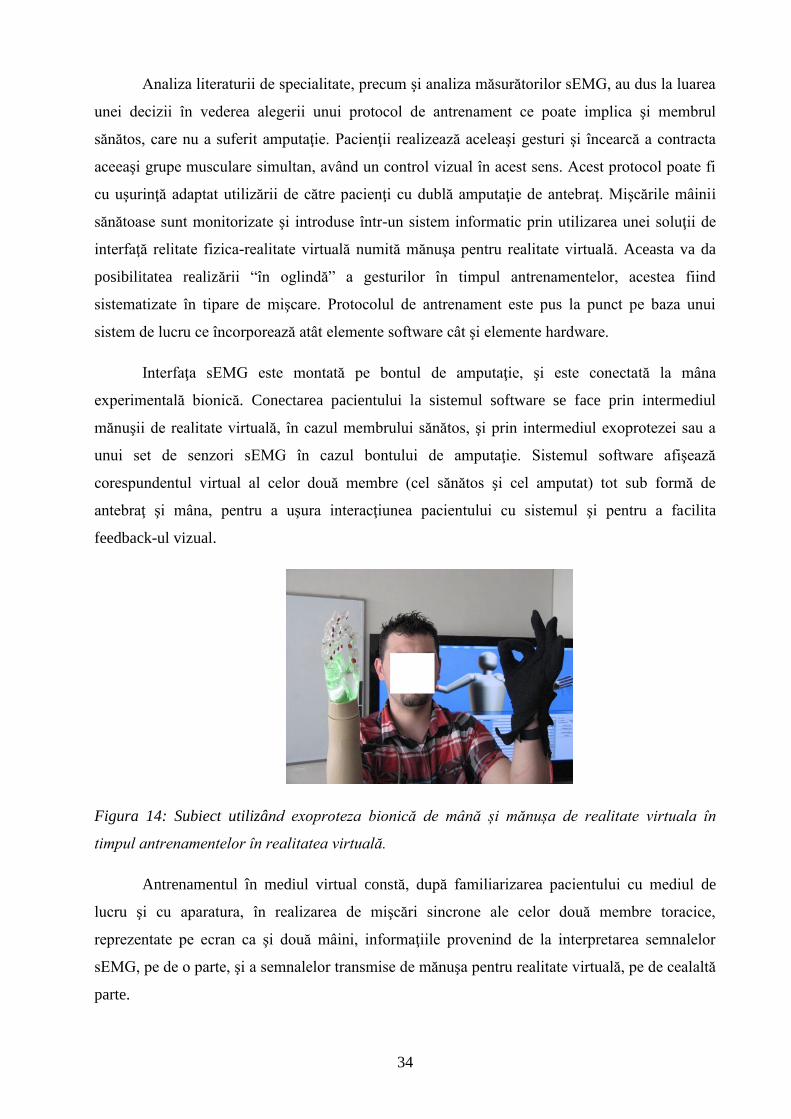
În timpul realizării antrenamentelor, unul dintre pacienţi a raportat dureri cu caracter
cronic la nivelul bontului, dureri care s-au dovedit a fi date de un sindrom de retracţie la nivelul
bontului. Pacientul a suferit o intervenţie chirurgicală de retuş de bont prin metoda CONM,
efectuată în cadrul Clinicii de Ortopedie şi Traumatologie din cadrul SUUMC, sub coordonarea
Prof. Barbilian împreuna cu echipa chirurgicala din care face parte si autorul.
Figura 13: Tehnica CONM: mioplastia circumferențială cu izolarea și sutura fiecarui mușchi
individual. Imagine fotografică din baza de date proprie.
8.4.3 ALEGEREA METODELOR DE PROCESARE A SEMNALELOR EMG
Pentru a realiza o analiză adecvată a semnalelor s-a decis realizarea de către echipa
Institutului Politehnic Bucureşti a unei prelucrări software a semnalelor, în vederea eliminării
―zgomotelor de fond‖ şi a extragerii unui set de date clare ce pot fi comparate cu datele provenite
de la bontul sănătos şi pot fi utilizate de către software-ul de creare şi control al mediului virtual .
8.4.4 ALEGEREA SOLUȚIILOR TEHNICE ȘI PROIECTAREA SISTEMULUI
Page 34
34
Analiza literaturii de specialitate, precum şi analiza măsurătorilor sEMG, au dus la luarea
unei decizii în vederea alegerii unui protocol de antrenament ce poate implica şi membrul
sănătos, care nu a suferit amputaţie. Pacienţii realizează aceleaşi gesturi şi încearcă a contracta
aceeaşi grupe musculare simultan, având un control vizual în acest sens. Acest protocol poate fi
cu uşurinţă adaptat utilizării de către pacienţi cu dublă amputaţie de antebraţ. Mişcările mâinii
sănătoase sunt monitorizate şi introduse într-un sistem informatic prin utilizarea unei soluţii de
interfaţă relitate fizica-realitate virtuală numită mănuşa pentru realitate virtuală. Aceasta va da
posibilitatea realizării ―în oglindă‖ a gesturilor în timpul antrenamentelor, acestea fiind
sistematizate în tipare de mişcare. Protocolul de antrenament este pus la punct pe baza unui
sistem de lucru ce încorporează atât elemente software cât şi elemente hardware.
Interfaţa sEMG este montată pe bontul de amputaţie, şi este conectată la mâna
experimentală bionică. Conectarea pacientului la sistemul software se face prin intermediul
mănuşii de realitate virtuală, în cazul membrului sănătos, şi prin intermediul exoprotezei sau a
unui set de senzori sEMG în cazul bontului de amputaţie. Sistemul software afişează
corespundentul virtual al celor două membre (cel sănătos şi cel amputat) tot sub formă de
antebraţ şi mâna, pentru a uşura interacţiunea pacientului cu sistemul şi pentru a facilita
feedback-ul vizual.
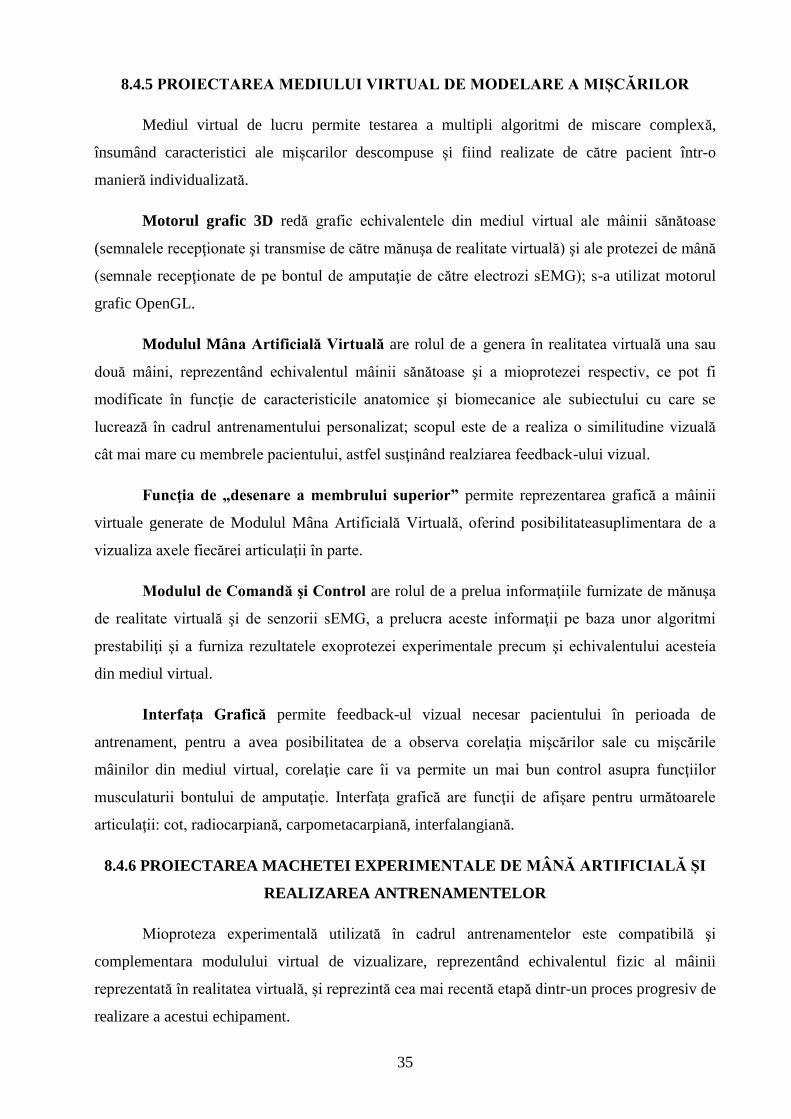
Figura 14: Subiect utilizând exoproteza bionică de mână și mănușa de realitate virtuala în
timpul antrenamentelor în realitatea virtuală.
Antrenamentul în mediul virtual constă, după familiarizarea pacientului cu mediul de
lucru şi cu aparatura, în realizarea de mişcări sincrone ale celor două membre toracice,
reprezentate pe ecran ca şi două mâini, informaţiile provenind de la interpretarea semnalelor
sEMG, pe de o parte, şi a semnalelor transmise de mănuşa pentru realitate virtuală, pe de cealaltă
parte.
Page 35
35
8.4.5 PROIECTAREA MEDIULUI VIRTUAL DE MODELARE A MIȘCĂRILOR
Mediul virtual de lucru permite testarea a multipli algoritmi de miscare complexă,
însumând caracteristici ale mișcarilor descompuse și fiind realizate de către pacient într-o
manieră individualizată.
Motorul grafic 3D redă grafic echivalentele din mediul virtual ale mâinii sănătoase
(semnalele recepţionate şi transmise de către mănuşa de realitate virtuală) şi ale protezei de mână
(semnale recepţionate de pe bontul de amputaţie de către electrozi sEMG); s-a utilizat motorul
grafic OpenGL.
Modulul Mâna Artificială Virtuală are rolul de a genera în realitatea virtuală una sau
două mâini, reprezentând echivalentul mâinii sănătoase şi a mioprotezei respectiv, ce pot fi
modificate în funcţie de caracteristicile anatomice şi biomecanice ale subiectului cu care se
lucrează în cadrul antrenamentului personalizat; scopul este de a realiza o similitudine vizuală
cât mai mare cu membrele pacientului, astfel susţinând realziarea feedback-ului vizual.
Funcţia de „desenare a membrului superior” permite reprezentarea grafică a mâinii
virtuale generate de Modulul Mâna Artificială Virtuală, oferind posibilitateasuplimentara de a
vizualiza axele fiecărei articulaţii în parte.
Modulul de Comandă şi Control are rolul de a prelua informaţiile furnizate de mănuşa
de realitate virtuală şi de senzorii sEMG, a prelucra aceste informaţii pe baza unor algoritmi
prestabiliţi şi a furniza rezultatele exoprotezei experimentale precum şi echivalentului acesteia
din mediul virtual.
Interfața Grafică permite feedback-ul vizual necesar pacientului în perioada de
antrenament, pentru a avea posibilitatea de a observa corelaţia mişcărilor sale cu mişcările
mâinilor din mediul virtual, corelaţie care îi va permite un mai bun control asupra funcţiilor
musculaturii bontului de amputaţie. Interfaţa grafică are funcţii de afişare pentru următoarele
articulaţii: cot, radiocarpiană, carpometacarpiană, interfalangiană.
8.4.6 PROIECTAREA MACHETEI EXPERIMENTALE DE MÂNĂ ARTIFICIALĂ ȘI
REALIZAREA ANTRENAMENTELOR
Mioproteza experimentală utilizată în cadrul antrenamentelor este compatibilă şi
complementara modulului virtual de vizualizare, reprezentând echivalentul fizic al mâinii
reprezentată în realitatea virtuală, și reprezintă cea mai recentă etapă dintr-un proces progresiv de
realizare a acestui echipament.
Page 36
36
Componentele mioprotezei experimentale sunt:
-bloc de colectare şi de condiţionare a semnalelor sEMG, ce este realizat utilizând electrozi de
suprafaţă;
-bloc de procesare a semnalelor sEMG;
-bloc de comandă;
-bloc de acţionare motoare a protezei.
Figurile 15-16: Exoproteza bionică de mână, comandată de catre un subiect indemn. Imagine
fotografică din arhiva proprie.
Elementele mobile ale protezei experimentale sunt dotate cu servomotoare cu comanda
PWM (Pulse With Modulation), senzori localizaţi la zona tactilă de predilecţie (zona
corespunzătoare falangei distale, distal).
Antrenamentul individual al fiecărui subiect a constat iniţial din simplă executare a
mişcărilor de flexie şi extensie la nivelul degetelor, iniţial câte un singur deget, apoi multiple
degete simultan. Mişcarea a fost reprodusă la nivelul realităţii virtuale prin recepţionarea,
prelucrarea şi interpretarea semnalelor primite de la mănuşa de realitate virtuală şi de la senzorii
sEMG amplasaţi la nivelul bontului de amputaţie. S-a cerut fiecărui subiect să se concentreze pe
realizarea precisă a mişcărilor, scopul final al antrenamentelor fiind controlul mai bun asupra
fineţii mişcărilor, determinat empiric de către pacient.
În urma realizării antrenamentelor iniţiale, s-a constatat un control rapid îmbunătăţit al
funcţiilor de bază ale protezei, şi s-a decis cererea subiecţilor de a manipula obiecte utilizând
mioproteza experimentală.
8.4.7 URMĂRIREA PACIENTILOR UTILIZÂND SISTEMUL DE TELEMEDICINĂ
Page 37
37
În urma realizării antrenamentelor utilizând exoproteza bionică experimentală cu
interfaţa senzorială în mediu virtual, s-a practicat urmărirea pacienţilor utilizând un sistem de
telemedicină.
Acest sistem se bazează pe utilizarea unei platforme virtuale, şi necesită conexiune la
internet, cu o viteză de upload/download de date cât mai mare, pentru a facilita transferul video
şi audio ce cât mai bună calitate.
Figura 17: Pagina home a platformei online din cadrul sistemului de telemedicină. Imagine
fotografică din arhiva proprie (captură ecran).
Această platformă este activă, şi accesul la ea se poate face prin orice unitate de date:
calculator, laptop, telefon mobil tip smartphone, atât timp cât caracteristicile permit.
8.5 REZULTATE
Am calculat valorile medii ale amplitudinilor pentru semnalele sEMG emise de muşchii
flexor carpi radialis, brahioradialis, extensor digitorum communis, pe intervalul contracției
efective (0,5 secunde) și am obținut valorile cuprinse în Tabelele 4, 5 și 6. Reprezentarea vizuală
a datelor obținute este cuprinsă în Figurile 18-20.
Tabel 4: Valorile medii ale amplitudinilor pentru semnalele sEMG emise de mușchiul flexor
carpi radialis.
Nr. Crt. Antebraț sănătos Bont amputație
1 4,6 nW 0.043 nW
2 4.0 nW 0.037 nW
3 3.9 nW 0.047 nW
Page 38
38
4 4.3 nW 0.062 nW
5 3.6 nW 0.034 nW
6 4.8 nW 0.046 nW
Figura 18: Reprezentarea grafică a valorilor medii ale amplitudinilor pentru semnalele sEMG
emise de mușchiul flexor carpi radialis.
Tabel 5: Valorile medii ale amplitudinilor pentru semnalele sEMG emise de mușchiul
brahioradialis.
Nr. Crt. Antebraț sănătos Bont amputație
1 3.8 nW 0.048 nW
2 3.5 nW 0.027 nW
3 4.5 nW 0.043 nW
4 2.8 nW 0.038 nW
5 3.4 nW 0.042 nW
6 2.9 nW 0.047 nW
Page 39
39
Figura 19: Reprezentarea grafică a valorilor medii ale amplitudinilor pentru semnalele sEMG
emise de mușchiul brahioradialis.
Tabel 6: Valorile medii ale amplitudinilor pentru semnalele sEMG emise de mușchiul extensor
digitorum communis.
Nr. Crt. Antebraț sănătos Bont amputație
1 4.3 nW 0.043 nW
2 4.8 nW 0.047 nW
3 3.2 nW 0.039 nW
4 4.6 nW 0.055 nW
5 3.6 nW 0.041 nW
6 4.5 nW 0.038 nW
Figura 20: Reprezentarea grafică a valorilor medii ale amplitudinilor pentru semnalele sEMG
emise de mușchiul extensor digitorum communis.
Page 40
40
8.6 DISCUȚII
În ceea ce priveşte caracteristicile generale ale bonturilor de amputaţie, nivelul de
amputaţie a fost atât treimea proximală a antebraţului, cât şi treimea medie, treimea distală,
precum şi o amputaţie la nivelul mediocarpului. Dintre cele 6 bonturi de amputaţie, 5 au fost de
partea dreaptă, şi doar unul de partea stângă. Timpul de la realizarea amputaţiei a variat, între 8
luni şi 22 de ani. Indicaţia chirurgicală a fost în 5 din 6 cazuri traumatică, iar într-un singur caz a
fost infecţioasă, în fapt această infecţie reprezentând o complicaţie a unei traume iniţiale. În toate
cazurile s-aaplicat tehnica standard de amputaţie, iar în cazul pacientului E. C. s-a realizat un
retuş de bont prin tehnica CONM, urmată de re-evaluare sEMG şi reincludere în antrenamente.
În 5 din cele 6 bonturi studiate s-a constatat absenţa unei cicatrici posttraumatice extensive, iar în
al şaselea caz aceasta cicatrice s-a dovedit a nu pune probleme deosebite în recoltarea
semnalelor, datorită formei sale (îngustă).
În urma măsurătorilor anatomice determinate la nivelul bonturilor de amputaţie s-a
evidenţiat tendinţa acestora de a avea circumferinţa redusă şi stratul adipos uşor diminuat. Aceste
tendinţe au fost remarcate şi vizual, atât de către subiecţi, cât şi de către examinatori, şi pot fi
interpretate în contextul atrofiei musculare instalate în timp. Aceasta informatie se coreleaza cu
masuratorile sEMG, relevând o severă atrofie musculară.
Constatăm o diferenţă remarcabilă între cele două seturi de valori ale semnalelor sEMG
recoltate de la nivelul bonturilor de amputaţie şi de la nivelul antebraţelor sănătoase, diferenţă
dată de atrofia musculară şi fibroză existente la nivelul bontului de amputaţie, diferenţa ce poate
fi aproximată la două ordine de mărime. În fiecare caz, si pentru fiecare dintre muschii alesi,
valorile au cunoscut o variabilitate scăzută între datele din fiecare Lot.
Se remarcă creşterea valorii amplitudinii în cazul subiectului ce a fost supus intervenţiei
chiurgicale de retuş de bont, fapt ce sugerează (în contextul imposibilităţii extrapolării de la un
singur caz) utilitatea tehnicii CONM în ameliorarea calităţilor semnalului sEMG recepţionat de
la nivelul bonturilor de amputaţie.
Utilizarea mioprotezei experimentale a oferit toate avantajele unei exoproteze
comerciale, având posibilitatea de a fi încorporată într-un manşon şi utilizată de către subiecţi,
dar a oferit şi avantajul incontestabil al posibilităţii studierii directe a procesului de creaţie a
acestui tip de mioproteză. Astfel, s-a putut studia procesul de recoltare a semnalelor sEMG,
precum şi procesul de antrenament al subiecţilor în utilizarea acestei mioproteze, utilizand un
mediu software.
Page 41
41
Procesul de antrenament al subiecţilor a implicat utilizarea mioprotezei în conjunctură cu
utilizarea unui mediu virtual de lucru, în care se proiecta o reprezentare grafică a membrelor
acestora, care efectua aceleaşi mişcări ca şi subiectul. Acest feed-back vizual, în conjunctură cu
informatiile tactile culese de senzorii de la nivelul protezei, şi traduşi în informaţii vizuale
(procent de intensitate pe o bară de vizualizare) au permis depăşirea fazei iniţiale de
antrenament, care fusese prevăzută la începutul desfăşurării cercetărilor, şi anume simplul
control al mişcărilor de fineţe, şi desfăşurarea de mişcări complexe, cum ar fi manipularea unor
obiecte fragile. Acest fapt sugerează că efectul cumulativ al tehnicilor utilizate este remarcabil.
După desfăşurarea antrenamentelor, subiecţii au fost urmăriţi utilizând un sistem de
telemedicina, dezvoltat prin colaborarea aceleiaşi echipe, ce a permis un contact direct cu aceştia
precum şi monitorizarea evoluţiei în timp după încetarea antrenamentelor, în ceea ce este privită
experienţa de utilizare a protezelor iniţial purtate de subiecți.
8.7 CONCLUZII
În urma desfăşurării activităţilor de cercetare în domeniul exoprotezarii antebraţului şi mâinii,
utilizând un model experimental de mioproteză cu interfaţa senzorială, putem concluziona:
- mioproteza cu interfaţa senzorială constituie o alternativă superioară din punct de vedere
al experienţei subeictului utilizator faţă de varianta considerată clasică (fără a fi dotată cu
senzori tactili);
- semnalele sEMG recoltate de la nivelul bonturilor de amputaţie sunt inferioare calitativ
faţă de cele recoltate de la nivelul antebraţelor sănătoase, dar utilizabile în comandă unei
mioproteze;
- calitatea semnalelor sEMG recepţionate de pe suprafaţa unui bont de amputaţie poate fi
îmbunătăţită prin utilizarea tehnicii chirurgicale CONM;
- antrenamentul subiecţilor utilizând modelul experimental de mioproteză, împreună cu
utilizarea realităţii virtuale, precum şi a interfeţei senzitive, a dus la îmbunătăţirea
controlului acestora asupra mişcărilor comandate, la nivelul bontului de amputaţie;
- utilizarea telemedicinii oferă posibilitatea urmăririi evoluţiei pacienţilor cu amputaţie de
antebraţ şi mâna, precum şi urmărirea utilizării de către aceştia a exoprotezei bionice de
mână.
Page 42
42
CAPITOLUL 9. STUDIEREA APLICABILITĂŢII PRACTICE A CONCEPTULUI
TRANSPOZIŢIEI MIOPLASTICE PRIN BREŞĂ FASCIALĂ LA NIVELUL
ANTEBRAŢULUI (STUDIU EXPERIMENTAL)
9.1 INTRODUCERE
Analizând tehnica de amputaţie transradială clasică şi tehnica CONM, precum şi
principiile de realizare a recoltării semnalelor EMG de la nivelul suprafeţei tegumentului, am
ajuns la următoarele idei:
-principalul material biologic ce ecranează impulsul electric de la sursă (muşchi) şi până la
electrodul de suprafaţa este ţesutul adipos;
-unul din principiile de realizare a tehnicii CONM este transpoziţia nervilor medial, radial şi
ulnar, precum şi rezecţia parţială a fasciei, ceea ce constituie un progres important, dar care poate
fi continuat prin eliminarea completă a stratului izolant;
-nu este considerată practică rezecţia completă a stratului subcutanat adipos, atât din raţiuni
chirurgicale (compromiterea vascularizaţiei tegumentare) cât şi din raţiuni ce privesc bontul de
amputaţie (compromiterea stratului adipos ar face protezarea dificilă prin compresia directă, fără
amortizare, a manşonului prostetic, asupra bontului).
Astfel, în vederea îmbunatăţirii semnalului mioelectric cules de la nivelul bontului de
amputaţie, propunem un concept chirurgical denumit „mioplastie transpozițională prin breşă
fascială‖ ce îşi propune să depăşească inconvenientele izolării electrice a muşchilor antebraţului
de către straturile fascial şi subcutanat adipos prin transpoziţia muşchiului (individual)
transfascial şi trans-adipos, cu reinserţia largă la nivel subdermic, conceptual acest gest
chirurgical ducând la minimalizarea zonei de rezistenţă electrică din parcusul semnalului generat
de muşchi şi receptat de senzorul cutanat.
Am decis testarea metodei chirurgicale utilizând un model animal, şi anume iepurele
domestic, datorită asemănărilor majore dintre regiunea antebraţului şi mâinii a acestuia şi a
subiectului uman, precum şi datorită convenientelor legate de aspectele practice ale realizării
experimentelor.
9.2 SCOPUL STUDIULUI
Page 43
43
Scopul principal al studiului este testarea aplicabilităţii practice a principiului ce stă la
baza tehnicii chirurgicale mioplastice prin breşă fascială. Scopul secundar al studiului este
evaluarea influenţei pe care o are aplicarea practică a metodei asupra amplitudinii semnalului
electric generat de activitatea musculară recepţionat la nivelul zonei supuse intervenţiei
chirurgicale mioplastice.
9.3 IPOTEZA
Ipoteza principală de la care de la care am pornit este că metoda transpoziţiei mioplastice
prin breşă fasciala este fezabilă practic, facil de implementat şi reproductibilă.
Ipoteza secundară este că aplicarea practică a acestei metode de lucru duce la creşterea
amplitudinii semnalelor generate muscular şi recepţionate superficial la nivelul epidermului.
9.4 MATERIALE ȘI METODE
9.4.1 MATERIALE
Materialele necesare pentru realizarea studiului au inclus:
-5 exemplare iepure domestic, Oryctolagus cuniculus, cu vârsta cuprinsă între 3 şi 6 luni,
M:F=1:4
-osciloscop tip Hantek Oscilloscope dso-2090 usb (vezi Figura 168)
-laptop cu programul software necesar osciloscopului Hantek (vezi Figura 169)
-electromiostimulator cutanat tip TENS MA LTM710-711
-electromiostimulator transcutanat Pajunk Nerve Stimulator Multistim Sensor
-echipament chirurgical standard
-fir chirurgical neresorbabil 3/0
-materiale şi substanţe anestezice
-cuști în vederea găzduirii animalelor de experienţă
-furaje standardizate
9.4.2 METODE
Page 44
44
Pentru testarea ipotezei şi realizarea obiectivelor am decis efectuarea unui studiu
experimental. Pentru buna desfăşurare a studiului experimental şi pentru maximizarea şanselor
de reuşită, acesta a fost desfăşurat în colaborare cu personalul Catedrelor de Fiziologie,
Anatomie Comparată, Chirurgie şi Anestezie Terapie Intensivă din cadrul USAMV Bucureşti.
S-a efectuat anestezierea animalelor de experienţă (anestezie generală, Midazolam şi
Ketamină), după care zonă vizată (membrul toracic stâng, umăr, braţ şi antebraţ) a fost epilată.
La nivelul antebraţului am înregistrat activitatea electrică generată de către mușchiii
flexor carpi ulnaris şi flexor profundis digitorum, ca şi activitate de fond şi referinţă de control.
În acest scop am utilizat osciloscopul Hantek, conectat la un laptop dotat cu software-ul propriu
osciloscopului, care a permis atât vizualizarea grafică sub formă de undă oscilantă a semnalului,
cât şi măsurarea amplitudinii maximale.
Prima etapa in recoltarea semnalelor a fost constituita de catre umectarea zonei cu solutie
alcoolica 72%, pentru a facilita transmiterea impulsurilor electrice; se noteaza faptul ca si dupa
pregatirea prin radere cu aparat electric (trimmer) a zonei vizate, pilozitatea remanenta a fost
semnificativa .
Figura 21: Testări preliminare în vederea calibrării aparaturii, după umectarea zonei. Imagine
fotografica din arhiva proprie.
Am practicat electrostimularea transcutanată a plexului brahial stâng utilizând
electrostimulatorul Pajunk Nerve Stimulator Multistim Sensor (15 mA, 1 Hz), și am reluat
măsurarea amplitudinii semnalelor electrice transmise la nivel cutanat cu ajutorul osciloscopului.
Am notat rezultatele obținute în cazul muschilor flexor carpi ulnaris și flexor profundis
digitorum. Am practicat pregătirea preoperatorie prin marcarea zonei de incizie (aria cutanată
corespunzătoare zonei medii a muşchiului flexor carpi ulnaris), antisepsie locală (betadine) şi
izolare cu câmpuri sterile.
Page 45
45
Figura 22: Marcarea inciziei chirurgicale. Imagine fotografica din arhiva proprie.
Am practicat incizia tegmentului la nivelul marcat preoperator, pe o distanță de 1 cm. Am
practicat disecţia ţesutului subcutant, apoi disocierea acestuia cu ajutorul unei pense Pean, pentru
a pregăti viitoarea zonă receptoare. Am efectat incizia fasciei pe o distanţă de 1.5 cm şi am
practicat discția planului subfascial. Am localizat porţiunea medială a muşchiului flexor carpi
ulnaris şi am realizat mobilizarea muşchiului.
Figura 23: Mobilizarea porțiunii mediale a muşchiului flexor carpi ulnaris. Imagine fotografica
din arhiva proprie.
Am practicat uşoara tractionare a muşchiului din distal spre proximal cu ajutorul unei
pense Pean (pentru traumatizarea minimă prin zdrobire a muşchiului) şi am incizat muşchiul
transversal. Capătul distal a fost lăsat să se retragă liber.
Page 46
46
Figurile 24-25: Tracționarea și incizia transversală musculară. Imagini fotografice din arhiva
proprie.
Am practicat sutura capătului muscular proximal în ―Z‖ cu fir neresorbabil 3.0 şi,
tractionand uşor, am practicat transpoziţia transfascială a masei musculare, cu ancorarea acesteia
subcutanat . Breşa fascială a rămas nesuturată.
Figurile 26-27: Sutura capătului liber distal al mușchiului, urmată de ancorare subcutanată.
Imagini fotografice din arhiva proprie.
Am practicat sutura monoplan a tegumentului cu fir neresorbabil 3.0. Postoperator am testat
amplitudinea semnalului electric generat de musculatuă la nivelul determinat preoperator, atât în
cazul muşchiului flexor carpi ulnaris cât şi la nivelul muşchiului flexor profundis digitorum
(ariile cutanate corespunzătoare). Am pansat plaga şi am administrat antibiotic postoperator 3
zile, extrăgând firele de sutură la 10 zile postoperator. Animalele de experienţă au fost urmărite
în perioada postoperatorie.
9.5 REZULTATE
În urma efectuării măsurătorilor, setând osciloscopul pentru recepţia semnalului pe
canalui CH1, valoarea 200 mV, 20.0 us, am obţinut seturile de valori cuprinse in Tabelele 34-
39. Menționăm că, pentru a putea interpreta datele, s-au acceptat un minim de 10 perioade ale
Page 47
47
căror valori au fost notate, reţinându-se amplitudinea maximală (valoare cumulată între cele mai
înalte vârfuri +/- din cadrul unei perioade).
În vederea evidenţierii diferenţelor între aspectele vizuale ale undelor, prezentăm
înregistrări fotografice din timpul desfăşurării experimentului, considerate relevante.
Figura 28: Aspectul grafic al undei în cazul testării activităţii de fond, zona cutanată
corespunzătoare muşchiului flexor carpi ulnaris. Imagine fotografică din arhiva proprie.
Figurile 29: Aspectul grafic al undelor în cazul testării activității postoperator, zona cutanată
corespunzătoare mușchiului flexor carpi ulnaris. Imagine fotografică din arhiva proprie.
Figura 30: Reprezentarea grafică a valorilor medii, în ceea ce privește testarea preoperatorie.
Figura 31: Reprezentarea grafică a valorilor medii, în ceea ce privește testarea stimulatorul de
plex brahial Pajunk.
Page 48
48
Figura 32: Reprezentarea grafică a valorilor medii, în ceea ce privește testarea postoperatorie..
Figura 33: Reprezentarea grafică a valorilor medii, în ceea ce privește grupul control.
Figura 34: Reprezentarea grafică a valorilor medii, în ceea ce privește grupul experiment.
9.6 DISCUȚII
Analizând rezultatele studiului experimental se delimitează două tipuri de informaţii: un set
de date cuantificabile şi o serie de constatări empirice, pe care le vom dezvolta de asemenea. Ne
propunem analiza sumară a rezultatelor obţinute din perspectiva intensităţii semnalului, şi nu
analiza detaliată a caracteristicilor undelor, întrucât această analiză suplimentară depăşeşte
scopul acestei lucrări şi expertiza noastră. Metoda chirurgicală îşi propune să crească
amplitudinea semnalelor recepţionate la nivelul tegumentului, iar scopul nostru este de a
determina eficacitatea metodei de a modifica semnalul recepţionat la nivel cutanat, nu de a
analiza şi caracteriza tehnic semnalele obţinute. În ceea ce priveşte recoltarea semnalelor, am
Page 49
49
eliminat erorile de recoltare şi semnalele neconcludente obţinute, şi am repetat testarea în cazul
fiecărui subiect până la obţinerea unor semnale clare, cuantificabile şi stabile.
Amplitudinea medie a semnalului transmis la nivel cutanat şi recepţionat de către oscilograf
a avut valori apropiate în cazul fiecărui subiect, în ceea ce sunt privite testările preoperatorii, atât
în ceea ce este privită aria tegumentară corespunzătoare muşchiului flexor profundis digitorum
(semnalul control) cât şi în ceea ce este privită aria tegumentară corespunzătoare muşchiului
flexor carpi ulnaris (semnalul de studiat). În ambele cazuri, valorile medii globale s-au situat
între o minimă de 0.051 mV şi o maximă de 0.068 mV pentru grupul control, şi o minimă de
0.046 mV şi o maximă de 0.066 mV. Global, în cazul celor 5 subiecţi, valorile au fost apropiate,
fără a arăta o diferenţă marcată între aria control şi aria corespunzătoare muşchiului asupra
căruia s-a intervenit.
În dorinţa de a discerne dacă valorile obţinute în cadrul primei testări reprezintă o activitate
preponderent influenţată muscular, şi întrucât nu se putea cere subiecţilor executarea unei
anumite mişcări la comandă, pentru a analiza mişcarea voluntară, am efectuat o testare utilizând
stimularea plexului brahial cu ajutorul miostimulatorului Pajunk. Astfel, valorile medii obţinute
se situează, în cazul setului conrol, între o minimă de 0.094 mV şi o maximă de 0.114 mV, în
imp ce grupul experiment are valori cuprinse între o minimă de 0.084 mV şi o maximă de 0.114
mV. Global, în cazul celor 5 subiecţi, valorile au fost apropiate, fără diferenţe marcante între
ariile control şi ariile corespunzătoare muşchilor asupra cărora am intervenit chirurgical.
În urma efectuării intervenţiei chirurgicale de transpoziţie mioplastica prin breşă fascială la
nivelul antebraţului, am efectuat o nouă testare utilizând osciloscopul, în urma căreia, pentru
grupul control, am obţinut valori medii cuprinse între o minimă de 0.068 mV şi o maximă de
0.077 mV, în timp ce pentru grupul experiment valorile obţinute au fost cuprinse între o minimă
de 0.203 mV şi o maximă de 0.388 mV. Global, valorile obţinute în urma efectuării transpoziţiei
mioplastice prin breşă fascială au fost semnificativ crescute faţă de cele recoltate din aria control,
în cazul acesteia valorile situându-se în apropierea valorilor obţinute în cadrul testării
preoperatorii.
În continuare dorim să exprimăm o serie de considerente practice, ce ţin de realizarea
experimentului. Am enunţat prealabil faptul că am ales să utilizăm osciloscopul ca şi instrument
de măsurare în locul electromiografului, datorită faptului că electrozii la care am avut acces în
mod comercial au aria de contact mare, fiind dificil de utilizat cu un grad rezonabil de fineţe în
cazul unui antebraţ de iepure, acesta având dimensiuni mici.
Page 50
50
În ceea ce este privită anestezia, am constatat descreşterea necesităţii efectuării unei doze
suplimentare de anestezic, şi considerăm că acest fapt indică o pantă rapidă de învăţare a
tehniciii chirurgicale. Această constatare este în acord cu observaţiile empirice, timpul necesar
efectuării intervenţiilor fiind progresiv descrescător, şi considerăm că tehnica este facil de
executat, odată ce este asimilat conceptul ce stă la baza acesteia, şi anume necesitatea de a aduce
masă musculară vizată cât mai aproape de suprafaţa tegumentului, astfel şuntând planurile
fascial şi mai ales adipos.
Admitem că, fiind un studiu experimental cu model animal, rezultatele nu sunt în totalitate
translabile în ceea ce priveşte desfăşurarea aceleiaşi intervenţii asupra unor pacienţi umani.
Totuşi, considerăm că în cazul subiecţilor umani, rezultatele au potenţialul de a fi superioare,
întrucât stratul adipos de la nivelul antebraţului de iepure este minim, având mai degrabă
caracterul unui ţesut lax-adipos, în timp ce antebraţul uman dispune de un strat adipos
semnificativ mai mare.
Considerăm că în urma desfăşurării studiului am verificat ipoteză şi am realizat atingerea
obiectivelor stabilite.
9.7 CONCLUZII
În urma desfăşurării studiului de tip experimental am desprins o serie de concluzii:
- Transpoziţia mioplastică prin breşă fascială este o tehnică chirurgicală ce determină creşterea
postoperatorie a amplitudinii semnalelor mioelectrice recepţionate la nivel tegumentar.
- Transpoziţia mioplastică prin breşă fascială este facil de executat, simplă conceptual şi cu o
curbă a învăţării rapidă.
- Transpoziţia mioplastică prin breşă fascială poate fi executată pentru fiecare muşchi ce poate fi
individualizat la nivelul antebraţului, astfel oferind posibilitatea utilizării a peste 15 arii de
control, unde semnalul mioelectric recepţionat poate controla o funcţie a mioprotezei; se oferă
posibilitatea dotării mioprotezei cu un număr mult mai mare de funcţii faţă de cele disponibile
actual. Astfel, se deschide posibilitatea realizării unei mioproteze cu toate funcţiile biomecanice
importante ale antebraţului şi mâinii, aceasta constitutind un pas improtant în dezvoltarea
potenţială a tehnicii ce contribuie la construirea mioprotezelor.
- Amplitudinea semnalului mioelectric este influenţată direct de către distanţa pe care trebuie să
o parcurgă de la emiţător (muşchi) până la receptor (electrod) precum şi de natura ţesuturilor ce
se interpun.
Page 51
51
CAPITOLUL 10. CONCLUZII
În cadrul realizării cercetării doctorale, am decis evaluarea din punct de vedere medical a
procesului pe care îl parcurge un pacient, de la stadiu pre-spitalicesc (condiţiile medicale ce duc
la amputaţia de antebraţ şi mână; adresabilitatea acestor pacienţi față de sistemul medical;
incidența amputaţiei de antebraţ şi mâna în cadrul patologiei ce duce la aceasta), intraspitalicesc
(evaluarea incidenței patologiei ce poate duce potenţial la amputaţie de antebraţ şi mâna versus
numărul efectiv de amputaţii ce se efectuează în unitatea de timp dată într-un spital; tehnicile
uzuale utilizate în cazul amputaţiei de antebraţ şi de mână; tehnici noi ce au apărut recent în
literatură şi în practică cu exemplu de caz; propunerea unei tehnici chirurgicale inovative) şi
postspitalicesc (evaluarea bonturilor de amputaţie pentru protezarea cu mâna bionică; probe de
antrenament cu proteza experimentală cu care s-a lucrat în mediu virtual; urmărirea evoluției
pacienților prin intermediul telemedicinii).
Întrebarea pe care mi-am adresat-o este: poate fi îmbunătăţită interfaţa bont-proteză la
nivelul bontului? Pentru a răspunde, am găsit nimerită ridicarea şi a altor întrebări:
-cat de frecventă este patologia?
-care sunt aspectele de ordin practic ce guvernează interacţiunea pacient-mioproteză?
-cum poate fi ameliorată tehnica amputaţiei de membru toracic?
Pentru a răspunde la aceste întrebări am pus la punct multiple etape de lucru în măsură să
răspundă la întrebările secundare şi implicit la întrebarea principală ce guvernează studiul.
Iniţial, am efectuat o analiză statistică şi am efectuat un stagiu de perfecţionare practică,
şi deşi am adunat multe informaţii valoroase ce stabilesc contextul în care traumatismele,
tumorile şi infecţiile de antebraţ şi mâna se desfăşoară, am stabilit de asemenea şi faptul că
amputaţia la acest nivel este o patologie rară.
Am studiat interacţiunea dintre un model de proteză experimentală şi pacient, prin
intermediul bontului de amputaţie, dar şi a acestuia din urmă cu un mediu virtual de lucru şi cu
sistemul de comunicare la distanţă numit telemedicină. Am stabilit ca recoltarea semnalelor
sEMG este mai dificilă la nivelul bontului de amputaţie faţă de antebraţul sănătos, amplitudinea
semnalelor fiind diminuata la nivelul bontului. Utilizarea formelor de feed back vizual în cadrul
antrenamentelor aduce un real beneficiu pacientului, iar încorporarea unei interfeţe senzoriale în
cadrul mioprotezei reprezintă un salt calitativ ce conduce la o experienţă îmbunătăţită pentru
Page 52
52
utilizatorul acesteia. Telemedicina oferă o posibilitate de interacţiune la distanţa între medic şi
pacient, în cazul pacientului suferind de amputaţie la nivelul antebraţului şi mâinii aceasta
însemnând un antrenament ce poate fi continuat acasă, sub supraveghere medicală.
Observând o scădere a amplitudinii semnalelor sEMG la nivelul bonturilor de amputaţie
examinate, am dezvoltat o tehnică chirurgicală inedită, ce nu a fost raportată încă în literatura
mondială. Astfel, transpoziţia mioplastica prin breşa fascială este o metodă chiurgicală uşor de
învăţat şi de executat, bazată pe un principiu clar, şi care determină creşterea semnificativă a
amplitudinii semnalelor sEMG, precum şi potenţial creşterea numărului acestora, prin
superficializarea musculaturii profunde. Teoretic, aceasta va duce la posibilitatea înzestrării
mioprotezelor cu un număr superior de funcţii, fără un cost real semnificativ crescut.
În cadrul desfăşurării cercetărilor din cadrul Tezei Doctorale, atât de natura teoretică, cât
şi de natura practică, am ţintit perfecţionarea atât a subiectului de cercetare, cât şi a mea ca şi
cercetător şi chirurg. Inovaţia în domeniul ales este extensivă, dar din punct de vedere
tehnologic; în urma cercetării efectuate consider că există o nouă direcţie de dezvoltare şi
inovaţie chirurgicală în domeniul amputaţiei de antebraţ şi mâna şi utilizare a mioprotezei cu
interfaţa senzorială.
CAPITOLUL 11. DIRECȚII DE CONTINUARE A CERCETĂRILOR
În ceea ce este privită dezvoltarea viitoare a cercetărilor, ne propunem punerea la punct şi
implementarea a două modele experimentale:
- Un studiu pe model animal în care să realizăm amputaţia antebraţului şi transpoziţia
mioplastică prin breşă fascială, urmărind timp de 3 luni modificările caracteristicilor
bontului de amputaţie, atât biologic cât şi electric.
- Un studiu cu subiect uman, în care să realizăm transpoziţia mioplastică prin breşă facială,
atât ca şi parte integrată a amputaţiei de antebraţ, cât şi că metodă de revizie de bont, în
cazul pacienţilor care optează pentru utilizarea mioprotezei cu interfaţa senzorială.
De asemenea, se deschid trei posibilităţi de dezvoltare ulterioare interesante:
- studierea utilităţii tehnicii chirurgicale dezvoltate la nivelul membrului pevin;
Page 53
53
- utilizarea transpoziţiei mioplastice prin breşă facială pentru controlul unei mioproteze cu
interfaţa senzorială, dotată cu un număr superior de funcţii, în care antrenamentul în
utilizarea protezei se face cu ajutorul realităţii virtuale;
- punerea la punct a unei platforme online ce permite antrenamentul pacienţilor, prin
intermediul telemedicinii, utilizând o proteză ce se afla la distanţă şi ale cărei mişcări pot
fi urmărite prin transmisiune video.
BIBLIOGRAFIE
1. Selincourt, A. Herodotus, the Histories. New York : Penguin Books, 1954.
2. Canale, S.T. Campbell's Operative Orthopaedics 11th Edition. s.l. : Mosby Elsevier, 2008.
Part IV – Amputations.
3. Pare, A. Oeuvres Completes. Paris : Edition Malgaigne, 1840. pp. 616-621. Vol. 1.
4. Garrison, F.H. An introduction to the History of Medicine. Philadelphia : WB Saunders Co,
1963.
5. Bier, A. Uber amputationen und exarticulation. Chirurgie . 1900, Vol. 78, pg. 1439-1474.
6. Ertl, J. Uber amputationsstumpfe. s.l. : Chirurgie 26, 1949. pg. 20:218-224.
7. Mondry, F. Der muskelkraftige ober- und underschenkel-stumpf. Chirurgie. 1952, Vol. 23, p.
517.
8. Bowker, J., Michael J. Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation
Principles. s.l. : Mosby, August 1992. Year Book; 2 Sub edition , Chapter 1 - History of
Amputation Surgery and Prosthetics.
9. Panait, Gh. Ortopedie-Traumatologie Practica. Bucuresti : Editura Publistar, 2001. p. 302.
10. Bionic hand exoprosthesis – Perspectives for the future in Romania. Pogărășteanu, M.E.,
Barbilian, A.G. Oct-Dec, s.l. : Journal of Medicine and Life, 2014, Vol. 7(4), pg. 601–603.
11. Kirkup, J. A History of Limb Amputation, 1st Edition. s.l. : Springer, 2007.
12. Advances in Upper Extremity Prosthetics. Zlotolow, D., Kozin, S. 4, 2012, Hand Clinics,
New and Emerging Technology in the Treatment of the Upper Extremity, Vol. 28, pg. 587–593.
13. Differences in myoelectric and body-powered upperlimb prostheses: Systematic literature
review. Carey, S., Lura, D., Highsmith, J. 3, 2015, Journal of Rehabilitation Research and
Development, Vol. 52, pg. 247-262.
14. The use of targeted muscle reinnervation for improved myoelectric prosthesis control in a
bilateral shoulder disarticulation amputee. Kuiken, T. A., Dumanian, G. A., Lipschutz, R.D.,
Miller, L.A., Stubblefield, K.A. 3, 2004, Prosthet Orthot Int. , Vol. 28, pg. 245-53.
15. Selective nerve transfers to improve the control of myoelectrical arm prostheses. Aszmann,
O.C., Dietl, H., Frey, M. 1, 2008 Feb, Handchir Mikrochir Plast Chir. , Vol. 40, pg. 60-65.
10.1055/s-2007-989415.
16. Control of a six degree of freedom prosthetic arm after targeted muscle reinnervation
surgery. Miller, L.A., Lipschutz, R.D., Stubblefield, K.A., Lock, B.A., Huang, H., Williams,
T.W., Weir, R.F., Kuiken, T.A. 11, 2008, Arch Phys Med Rehabil, Vol. 89, pg. 2057-2065.
17. Development of novel 3D printed robotic prosthetic for transradial amputees. Gretsch, K.,
Lather, H., Peddada, K., Deeken, C., Wall, L., Goldfarb, C. 05 2015, Prosthet Orthot Int.
18. The Low Cost Design of a 3D Printed Multi-Fingered Myoelectric Prosthetic Hand. van der
Riet, D., Stopforth, R., Bright, G., Diegel, O. 2015, Mechatronics: Principles, Technologies
and Applications. 978-1-63482-801-7.
Page 54
54
19. Personalized support system for the patients with forearm amputations. Franti, E., Milea,
L., Dascalu, M., Schiopu, P., Barbilian, A., Moga, M., Lazo, F., Pogărășteanu, M.E. 4, 2012,
ROMJIST, Vol. 15, pg. 368-376.
20. http://drks-neu.uniklinik-
freiburg.de/drks_web/navigate.do?navigationId=trial.HTML&TRIAL_ID=DRKS00004868.
[Interactiv] [Citat: 17 05 2016.]
21. Lupu, G., Terteliu F., Diaconescu, B., Bulescu, I. Anatomie, Peretii trunchiului si
membrele, Lucrari practice. Bucuresti : Editura Universitara „Carol Davila‖, 2010. pg. 17 -32,
102-175. 978-973-708-532-0.
22. Ranga, V., Zaharia, C., Panaitescu, V., Ispas, Al. Anatomia omului, Membrele. Bucuresti :
Editura Cerma, 2002. pg. 9-86. 973-95578-7-2.
23. Papilian, V. Anatomia omului: Aparatul locomotor. Bucuresti : Editura All, 2003. pg. 62-67,
112-122, 212-225. Vol. 1. 973-571-468-X.
24. Rohen, J., Yokochi, C., Lutjen-Drecoll, E. Color atlas of anatomy. 7. s.l. : Wolters Kluwer,
2011. pg. 374-430.
25. Ifrim, M., Niculescu, Gh., Precup, C., Olariu, T., Gyori, Z., Toth, C., Bulzan, O.,
Barbilian, A., Stanescu, C., Deme, S., Hategan, O. Compendiu de anatomie: topografica,
clinica si functionala. Arad : Editura ―Vasile Goldis‖ University Press, 2014. pg. 627-655.
26. Thompson, J. Netter’s concise orthopaedic anatomy. 2. s.l. : Saunders Elsevier, 2002. pg.
140-180.
27. Sinelnikov, R. Atlas de anatomie umana. Moscova : Mir, 1984. pg. 357-384.
28. Diaconescu, S., Mestes, T., Diaconescu, T. Membrul superior: Amputatie si protezare. s.l. :
Editura Militara, 2000. pg. 70-76. 973-32-0579-6.
29. Skinner, H. Lange: Current Diagnosis and Treatment in Orthopedics. 4. s.l. : The McGraw-
Hill Companies, Lange, 2006. Chapter 12 Amputations.
30. Chapman, M. Chapman's Orthopaedic Surgery. 3. s.l. : Lippincott Williams & Wilkins,
2001 . Chapter 121 Amputations Of The Upper Extremity.
31. The results of radial and ulnar arterial repair in the forearm. Experience in three medical
centers. Gelberman, R.H. , Nunley, J.A., Koman, L.A., Gould, J.S., Hergenroeder, P.T.,
MacClean, C.R., Urbaniak, J.R. 64, 1982, J Bone Joint Surg Am, Vol. 3, pg. 383 -387 .
32. Upper-Extremity Amputations And Prostheses. McKeever, F. 6, 1944, J Bone Joint Surg
Am, Vol. 24, pg. 660 -706 .
33. Traumatic and Trauma-Related Amputations, Part II: Upper Extremity and Future
Directions. Tintle, S., Baechler, M., Nanos III, G., Forsberg, J., Potter, B. 18, 2010 , J Bone
Joint Surg Am, Vol. 92, pg. 2934-2945.
34. Morrey, B., Sanchez-Sotelo, J. The Elbow and Its Disorders. 4. s.l. : Saunders Elsevier,
2009. CHAPTER 73 – Elbow Disarticulation Amputation.
35. The Surgery of Arm and Forearm Amputation. Baumgartner, R. 1981, Orthop Clin N Am,
Vol. 12, p. 805.
36. The mangled extremity syndrome (MES): a severity grading system for multisystem injury of
the extremity. Gregory, R.T., Gould, R.J., Peclet, M. 1985, J Trauma , Vol. 25, p. 1147.
37. The utility of scores in the decision to salvage or amputation in severely injured limbs.
Shanmuganathan, R. 4, 2008, Indian Journal of Orthopaedics. , Vol. 42, pg. 368-376.
38. Limb salvage versus amputation: preliminary results of the mangled extremity severity score.
Helfet, D.L., Howey, T., Sanders, R. 80, 1990, Clin Orthop , Vol. 256.
39. Seiler, J.G. Essentials of Hand Surgery. 1. s.l. : Lipincott Williams & Wilkins, 2002.
Chapter 31 - Amputations.
40. Above Elbow Limb Replantation. Functional Results. Wood, M.B., Cooney, W.P. 1986, J
Hand Surg , Vol. 11A, p. 682.
41. Browner, B. Skeletal Trauma: Basic Science, Management, and Reconstruction. 3. s.l. :
Saunders Elsevier, 2003. Chapter 64 – Amputations in Trauma.
Page 55
55
42. Prospective Randomized Evaluations of the Role of Limb-Sparing Surgery, Radiation
Therapy and Adjuvant Chemoimmunotherapy in the Treatment of Adult Soft Tissue Sarcomas.
Rosenberg, S.A., Kent, H., Costa, J. 1978, Surgery .
43. The role of amputation and bionic hand exoprosthesis in the long term treatment of renal cell
carcinoma metasthases to the upper limb. Pogărășteanu, M.E., Moga M. 4, Bucuresti : s.n.,
2015, Revista Romana de Urologie, Vol. 14, pg. 15-21.
44. Primary Epithelioid Sarcoma Of The Hand And Forearm, A Review Of Thirteen Cases.
Bryan, R., Soule, E., Dobyns, J., Pritchard, D., Linscheid, R. 3, 1974 , J Bone Joint Surg Am,
Vol. 56, pg. 458-465.
45. The continuing problem of gas gangrene: a review and report of illustrative Cases.
DeHaven, K.E., Evarts, C.M. 983, 1971, J Trauma, Vol. 11.
46. Barbilian, A., Moga, M., Codorean, I., Drignei, M., Pogarasteanu, M.E., Albu, V.,
Dinache, G. Note de curs Ortopedie-Traumatologie. Bucuresti : Editura Anamarol, 2015. p. 28.
978-606-640-132-6.
47. Jebson, P., Louis, D. Green: Green's Operative Hand Surgery. 5. s.l. : Elsevier, 2005.
PART VIII – Other Disorders of the Upper Extremity, CHAPTER 55 – Amputations.
48. Long-term reorganization of motor cortex outputs after arm amputation. Roricht, S., Meyer,
B.U., Niehaus, L., Brandt, S.A. 1999, Neurology , Vol. 53, pg. 106-111.
49. Rehabilitation process and functional results of patients with amputated fingers. Sagiv, P.,
Shabat, S., Mann, M. 2002, Plast Reconstr Surg , Vol. 110, pg. 497-503.
50. Rapid functional plasticity of the somatosensory cortex after finger amputation. Weiss, T.,
Miltner, W.H., Huonker, R. 2000, Exp Brain Res, Vol. 134, pg. 199-203.
51. Pinzur, M. Greene: Netter's Orthopaedics. 1. s.l. : Saunders Elsevier, 2006 . Chapter 11 –
Amputations.
52. Changes in hip muscles after above-knee amputation. Jaegers, S.M., Arendzen, J.H., de
Jongh, H.J. 319, 1995 , Clin Orthop Relat Res, p. 276.
53. Amputations et désarticulations des membres. Masmejean, E., Ouaknine, M., Valenti, P.,
Camilleri, A., Chiesa, G. Paris : Encycl Méd Chir (Editions Scientifiques et Médicales Elsevier
SAS). Membre supérieur – Techniques chirurgicales – Orthopédie-Traumatolo.
54. The principles of amputations of the fingers and hand. Slocum, D.B., Pratt, D.R. 26, 1944, J
Bone Joint Surg, pg. 535-546.
55. Rob, C., Smith, R., Pulvertaft, G. Operative Surgery: The Hand,. 3. London :
Butterworths, 1977. p. 353.
56. Amputation surgery in the upper extremity. Tooms, R.E. 3, 1972, Orthop Clin North Am, pg.
383-395.
57. Resection-Replantation for Primary Malignant Tumours of the Arm: An Alternative to Fore-
quarter Amputation. Windhager, R., Millesi, H., Kotz, R. 1995, J Bone Joint Surg.
58. Doyle, J. Hand and Wrist. 1. s.l. : Lippincott Williams & Wilkins, 2006 . Chapter 14 -
Amputations.
59. The Upper-Extremity Amputee: Early and Immediate Post-surgical Prosthetic Fitting.
Burkhalter, W.E., Mayfield, G., Carmona, L.S. 1976, J Bone Joint Surg.
60. Wedge resection of amputation stumps, a valuable salvage procedure. Hadden, W., Marks,
R., Murdoch, G. 69B, 1987, J Bone Joint Surg, p. 306.
61. Reliability, Validity, and Responsiveness of the QuickDASH in Patients With Upper Limb
Amputation. Resnik, L., Borgia, M. 9, 2015, Archives of Physical Medicine and Rehabilitation,
Vol. 96, pg. 1676–1683.
62. Development of an upper extremity outcome measure: the DASH (disabilities of the arm,
shoulder and hand) [corrected]. The Upper Extremity Collaborative Group (UECG). Hudak,
P.L., Amadio, P.C., Bombardier, C. 6, 1996 , Am J Ind Med, Vol. 29, pg. 602-608.
63. http://www.dash.iwh.on.ca/. [Interactiv] [Citat: 12 06 2016.]
Page 56
56
64.
http://www.orthopaedicscore.com/scorepages/disabilities_of_arm_shoulder_hand_score_dash.ht
ml. [Interactiv] [Citat: 12 06 2016.]
65. http://www.who.int/goe/publications/goe_telemedicine_2010.pdf. [Interactiv] [Citat: 17 06
2016.]
66. Schwartz, G., Cayten C., Schwartz G. Principles and Practice of Emergency Medicine.
s.l. : Lea & Febiger, 1992, Vol. 2, p. 3202.
67. Functional and Clinical Outcomes of Upper Extremity Amputation. Fitzgibbons, P.,
Medvedev, G. 12, Dec 2015, Journal of the American Academy of Orthopaedic Surgeons, Vol.
23, pg. 751-760.
68. Functional outcome following traumatic upper limb amputation and prosthetic limb fitting.
Pinzur, M., Angelats, J., Light, T., Izuierdo, R., Pluth, T. 5, Sep 1994, The Journal of, Vol.
19, pg. 836-839.
69. Management of Major Traumatic Upper Extremity Amputations. Solarz, M., Thoder, J.,
Rehman, S. 47, 2016 , Orthop Clin N Am, pg. 127–136.
70. Spires, M., Kelly, B., Davis, A. Prosthetic Restoration and Rehabilitation of The Upper and
Lower Extremity. s.l. : Demos Medical, 2014. pg. 179-193. 978-1-936287-66-6.
71. Upper limb prosthetic management hybrid design approaches. Billock, J.N.:. 9, 1989, Clin
Prosthet Orthot, Vol. 3, pg. 23-35.
72. Upper limb prosthetic rehabilitation. Watve, S., Dodd, G., MacDonal, R., Stoppard, E. 2,
2011, Orthopaedics and Trauma, Vol. 25, pg. 135–142.
73. Golf hand prosthesis performance of transradial amputees. Carey, S., Wernke, M., Lura,
D., Kahle, J., Dubey, R., Highsmith, M.J. 25 Feb 2014, Prosthet Orthot Int .
74. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A
review. Belter, Joseph T., Segil, J., Dollar, A., Weir, R. 5, 2013, Rehabilitation Research and
Development, Vol. 50, pg. 599-618.
75. Michelangelo 03 A versatile hand prosthesis, featuring superb controllability and
sophisticated bio mimicry. Puchhammer, G. s.l. : UNB, 2008. Proceedings of the MEC’08
conference.
76. Clinical Experiences With The Michelangelo Hand, A FourYear Review. Miguelez, J. s.l. :
UNB, 2011. Proceedings of the MEC'11 conference.
77. The Psychosocial and Biomechanical Assessment of Amputees Fitted with Commercial
Multi-grip Prosthetic Hands. Cutti, A., Parel, I., Luchetti, M., Gruppioni, E., Rossi, N.,
Verni, G. s.l. : Bentham Science Publishers, 2012, Grasping the Future: Advances in Powered
Upper Limb Prosthetics, pg. 59-77.
78. Managing the Upper Extremity Amputee: A Protocol for Success. Smurr, L., Gulick, K.,
Yancosek, K., Ganz, O. 2, 2008, Journal of Hand Therapy, Vol. 21, pg. 160–176.
79. The evolution of functional hand replacement: From iron prostheses to hand transplantation.
Zuo, K., Olson, J. 1, 2014, Plast Surg , Vol. 22, pg. 44-51.
80. Biomechanical design considerations for transradial prosthetic interface: A review. Sang,
Y., Li, X., Luo, Y. 2016, Proceedings of the Institution of Mechanical Engineers, Part H: Journal
of Engineering in Medicine.
81. Literature Review on Needs of Upper Limb Prosthesis Users. Cordella, F., Ciancio, A.,
Sacchetti, R., Davalli, A., Cutti., A., Guglielmelli, E., Zollo, L. 2016, Frontiers in
Neuroscience, Vol. 10.
82. Murphy, D. Fundamentals of Amputation Care and Prosthetics. s.l. : Demos Medical, 2014.
pg. 149-163. Chapter 16: Prosthetic Prescriptions for Short Transradial Amputations.
9781936287703.
83. The SmartHand transradial prosthesis. Cipriani, C., Controzzi, M., Controzzi, M.C. 29,
2011, J Neuroeng Rehabil, Vol. 8.
Page 57
57
84. A biomechanical model for the development of myoelectric hand prosthesis control systems.
Peerdeman, B., Boerey, D., Kallenbergy, L., Stramigioli, S., Misra, S. 2010. Conf Proc IEEE
Eng Med Biol Soc. pg. 519-523.
85. A practical and feasible control system for bifunctional myoelectric hand prostheses.
Hamdi, N., Dweiri, Y., Al-Abdallat, Y., Haneya, T. 2, Jun 2010 , Prosthet Orthot Int, Vol. 34,
pg. 195-205.
86. Natural control capabilities of robotic hands by hand amputated subjects. Atzori, M.,
Gijsberts, A., Caputo, B., Muller, H. Chicago, IL : s.n., 2014. 36th Annual International
Conference of the IEEE Engineering in Medicine and Biology Society. p. 4362 4365.
87. Functional assessment of a Multigrasp Myoelectric prosthesis: An amputee case study.
Dalley, S. 2013. IEEE International Conference onRobotics and Automation (ICRA). p. 2640
2644.
88. Satisfaction and Problems Experienced with Wrist Movements: Comparison Between a
Common Body‐Powered Prosthesis and a New Biomechatronics Prosthesis. Razak, A:, Osman,
A., Kamyab, M., Abas, W., Gholizadeh, H. 5, 2014, American Journal of Physical Medicine &
Rehabilitation, Vol. 93, pg. 437–444.
89. Advanced Upper Limb Prosthetic Devices: Implications for Upper Limb Prosthetic
Rehabilitation. Resnik, L., Meucci, M., Lieberman Klinger, S., Fantini, C., Kelty, D., Disla,
R., Sasson, N. , Volume 93, Iss. 4, 2012, Archives of Physical Medicine and Rehabilitation,
Vol. 93, pg. 710-713.
90. High density electromyography data of normally limbed and transradial amputee subjects
for multifunction prosthetic control. Daley, H., Englehart, K., Hargrove, L., Kuruganti, U. 3,
Jun 2012, Journal of Electromyography and Kinesiology, Vol. 22, pg. 478-484.
91. The effect of subcutaneous fat on myoelectric signal amplitude and cross-talk. Kuiken, T.,
Lowery, M., Stoykov, N. 2003, Prosthetics and Orthotics International, Vol. 27, pg. 48-54.
92. Influence of standardized activities on validity of Assessment of Capacity for Myoelectric
Control. Lindner, H., Eliasson, A., Hermansson, L. 10, 2013, Journal of Rehabilitation
Research & Development (JRRD), Vol. 50, pg. 1391 — 1400.
93. Using multiple high-count arrays in human median and ulnar nerves to restore sensorimotor
function after previous transradial amputation of the hand. Clark, G., Page, D., Davis, T.,.
Chicago, IL : s.n., 2014. 36th Annual International Conference of the IEEE Engineering in
Medicine and Biology Society. p. 1977 1980.
94. A preliminary investigation of the effect of force variation for myoelectric control of hand
prosthesis. Al-Timemy, A. Osaka : s.n., 2013. 35th Annual International Conference of the
IEEE Engineering in Medicine and Biology Society. p. 5758 5761.
95. Methods of acquisition and signal processing for myoelectric control of artificial arms.
Franti, E., Milea, L., Butu, V., Cismas, S., Lungu, M., Schiopu, P., Barbilian, A., Plavitu, A. 2, 2012, Romanian Journal of Information Science and Technology, Vol. 15, pg. 91-105.
96. Online myoelectric control of a dexterous hand prosthesis by transradial amputees.
Cipriani, C., Antfolk, C., Controzzi, M., Lundborg, G., Rosen, B., Carrozza, M.C.,
Sebelius, F. 3, Jun 2011 , IEEE Trans Neural Syst Rehabil Eng, Vol. 19, pg. 260-270.
97. Surface Electromyography Signal for Control of Myoelectric Prosthesis of the Upper-Limb
Using Independent Component Analysis. Lazaro, J., Abuan, D., Linsangan, N., Panganiban,
A. 1, Mar 2014, Journal of Automation and Control Engineering , Vol. 2.
98. Restoring Natural Sensory Feedback in Real-Time Bidirectional Hand Prosthesis.
Raspopovic, S., Capogrosso, M., Petrini, F. 222, 05 Feb 2014, Science Translational Medicine,
Vol. 6, p. 222ra19.
99. Conditioning and sampling issues of EMG signals in motion recognition of multifunctional
myoelectric prostheses. Li G, Li Y, Yu L, Geng Y. 6, Jun 2011, Ann Biomed Eng., Vol. 39, pg.
1779-1787.
Page 58
58
100. A Novel Percutaneous Electrode Implant for Improving Robustness in Advanced
Myoelectric Control. Hahne, J., Farina, D., Jiang, N., Liebetanz, D. 31 Mar 2016,
TECHNOLOGY REPORT.
101. Hybrid Bionic Systems for the Replacement of Hand Function. Micera, S. 2006.
Proceedings of the IEEE. Vol. 94:9, p. 1752 1762.
102. Bionic hand exoprosthesis equipped with sensory interface: technical innovations and
functional results. Pogărășteanu, M.E., Barbilian A.G., Moga, M., Mitulescu, Șt.C. s.l. : The
Publishing House of the Romanian Academy Series B, 2014. Proceedings of the Romanian
Academy. Vol. 16:1, pg. 45–47.
103. Building Bionic Interfaces. Kuiken, T. San Antonio, Texas : s.n., 2013. American
Association of Neuromuscular & Electrodiagnostic Medicine 60th Annual Meeting. pg. 7-10.
104. Plastica dei monconi a scopo di protesi cine-matica (plastic surgery of stumps for
cinematic prostheses). Vanghetti, G. 305, 1899, Arch Ortop , Vol. 41, p. 38.
105. Sauerbruch, F., ten Horn, C. Die willkurlich bewegbare kunstliche Hand (artificial hand
capable of voluntary movement). Berlin : Springer-Verlag, 1923.
106. Kineplastic amputations: Arm bimotor and a prosthesis. Bosch Arana, G. 42, 1926, Surg
Gynecol Obstet, pg. 416-420.
107. The Cineplastic Method In Upper-Extremity Amputations. Alldredge, R. 2, Apr 1948 , J
Bone Joint Surg Am, Vol. 30, pg. 359-373.
108. Cineplasty as a control input for externally powered prosthetic components. Wehr, R.,
Heckathorne, C., Childress, D. 4, Jul/Aug 2001, Journal of Rehabilitation Research and
Development, Vol. 38, pg. 357-363.
109. Singer, E. http://www.technologyreview.com/news/421607/implanting-artificial-limbs-in-
the-body/. [Interactiv] Implanting Artificial Limbs in the Body, 2010.
110. Osseointegration amputation prostheses on the upper limbs: methods, prosthetics and
rehabilitation. Johnsson, S., Caine-Winterberger, K., Branemark, R. 2, Jun 2011 , Prosthet
Orthot Int, Vol. 35, pg. 190-200.
111. An osseointegrated human-machine gateway for long-term sensory feedback and motor
control of artificial limbs. Ortiz-Catalan, M., Håkansson, B., Brånemark, R. 257, 08 Oct
2014, Science Translational Medicine , Vol. 6, p. 257.
112. Targeted muscle reinnervation of a muscle-free flap for improved prosthetic control in a
shoulder amputee: case report. Bueno, R.A., French, B., Cooney, D., Neumeister, M.W. 5,
May 2011 , J Hand Surg Am., Vol. 36, pg. 890-893.
113. Development of an implantable myoelectric sensor for advanced prosthesis control.
Merrill, D.R., Lockhart, J., Troyk, P.R., Weir, R.F., Hankin, D.L. 3, 3 Mar 2011 , Artif
Organs, Vol. 35, pg. 249-252.
114. Continuous detection and decoding of dexterous finger flexions with implantable
myoelectric sensors. Baker, J.J., Scheme, E., Englehart, K., Hutchinson, D.T., Greger, B. 4,
Aug 2010 , IEEE Trans Neural Syst Rehabil Eng, Vol. 18, pg. 424-432.
115. Dexterous Control of a Prosthetic Hand Using Fine Wire Intramuscular Electrodes in
Targeted Extrinsic Muscles. Cipriani, C., Segil, J., Birdwell, A., Weir, R. 4, IEEE Transactions
on Neural Systems and Rehabilitation Engineering, Vol. 22, p. 201.
116. Acquisition of myoelectric signals to control a hand prosthesis with implantable epimysial
electrodes. Ruff, R., Poppendieck, W., Gail, A., Westendorff, S., Russold, M., Lewis, S.,
Meiners, T., Hoffmann, K.P. 2010, Conf Proc IEEE Eng Med Biol Soc., p. 507.
117. First-in-man demonstration of a fully implanted myoelectric sensors system to control an
advanced electromechanical prosthetic hand. Pasquina, P., Evangelista, M., Carvalho, A.J.,
Lockhart, J., Griffin, S., Nanos, G., McKay, P., Hansen, M., Ipsen, D, Vandersea, J.,
Butkus, J., Miller, M., Murphy, M., Hankin, D. 2015, Journal of Neuroscience Methods, Vol.
244, pg. 85–93.
Page 59
59
118. A Brain-Machine Interface Enables Bimanual Arm Movements in Monkeys. Ifft, P.,
Shokur, S., Li, Z., Lebedev, M, Nicolelis, M. 210, 06 Nov 2013, Science Translational
Medicine , Vol. 5, p. 210.
119. Touch, Neurotechnology Provides Near-Natural Sense of.
www.darpa.mil/newsevents/20150911. [Interactiv]
120. Restoring the sense of touch with a prosthetic hand through a brain interface. Tabot, G.,
Dammann, J., Berg, J., Tenore, F., Boback, J., Vogelstein, J., Bensmaia, S. s.l. : Proceedings
of the National Academy of Sciences. Vol. 110, no 45.
121. A neural interface provides long-term stable natural touch perception. Tan, D., Schiefer,
M., Keith, M., Anderson, J.R., Tyler, J., Tyler, D. 257, 08 Oct 2014 , Science Translational
Medicine , Vol. 6, p. 257ra138.
122. Sensory feedback by peripheral nerve stimulation improves task performance in individuals
with upper limb loss using a myoelectric prosthesis. Schiefer, M., Tan, D., Sidek, S., Tyler, D.
1, 2015, Journal of Neural Engineering, Vol. 13.
123. Oddo, C., Raspopovic, S., Artoni, F., Mazzoni, A., Spigler, G., Petrini, F.,
Giambattistelli, F., Vecchio, F., Miraglia, F., Zollo, L., Di Pino, G., Camboni, D., Carrozza,
M., Guglielmelli, E., Rossini, P., Faraguna, U., Micera, S. Intraneural stimulation elicits
discrimination of textural features by artificial fingertip in intact and amputee humans.
http://dx.doi.org/10.7554/eLife.09148. [Interactiv] 2016.
124. Behavioral Demonstration of a Somatosensory Neuroprosthesis. Berg, J.A., Dammann,
J.F., Tenore, F.V., Tabot, G.A. 3, 2013, Neural Systems and Rehabilitation Engineering, IEEE
Transactions, Vol. 21, pg. 500-507.
125. A Novel Percutaneous Electrode Implant for Improving Robustness in Advanced
Myoelectric Control. Hahne, J., Farina, D., Jiang, N., Liebetanz, D. 31 Mar 2016,
TECHNOLOGY REPORT. doi: 10.3389/fnins.2016.00114.
126. Ideas on sensory feedback in hand prostheses. Herberts, P., Korner, L. 3, I979,
Prosthetics and Orthotics International, pg. 142-157.
127. Sensory feedback in upper limb prosthetics. Antfolka, C., D’Alonzob, M., Rosénc, B.,
Lundborg, G., Sebeliusa, F., Cipriani, C. 1, 2013, Expert Review of Medical Devices, Vol. 10.
128. A skin-inspired organic digital mechanoreceptor. Tee, B., Chortos, A., Berndt, A.,
Nguyen, A., Tom, A., McGuire, A., Lin, Z., Tien, K., Bae, W.G., Wang, H., Mei, P., Chou,
H.H., Cui, B., Deisseroth, K., Ng, T.N., Bao, Z. 6258, 16 Oct 2015, Science, Vol. 350, pg.
313-331.
129. Myoelectric Prostheses With Sensorial Feedback. Poveda, A.R. Fredericton, New
Brunswick, Canada : s.n., 2002. Proceedings of the 2002 MyoElectric Controls/Powered
Prosthetics Symposium.
130. Noninvasive, temporally discrete feedback of object contact and release improves grasp
control of closedloop myoelectric transradial prostheses. Clemente, F., D’Alonzo, M.,
Controzzi, M., Edin, B. 99, 2015, Vol. PP.
131. Strategies for providing upper extremity amputees with tactile and hand position feedback –
moving closer to the bionic arm. Riso, R.R. 6, 1999, Technology and Health Care, Vol. 7, pg.
401-409.
132. Fingertip skin–inspired microstructured ferroelectric skins discriminate static/dynamic
pressure and temperature stimuli. Park, J., Kim, M., Lee, Y., Lee, H.S., Ko, H. 9, 30 Oct 2015,
Science Advances, Vol. 1.
133. Artificial Redirection of Sensation From Prosthetic Fingers to the Phantom Hand Map on
Transradial Amputees: Vibrotactile Versus Mechanotactile Sensory Feedback. Antfolk, C.;
D'Alonzo, M.; Controzzi, M.; Lundborg, G. 1, 2012, IEEE Transactions on Neural Systems
and Rehabilitation Engineering, Vol. 21, pg. 212-220.
134. Events, Defense Advanced Research Projects Agency News And. HAPTIX Starts Work
to Provide Prosthetic Hands with Sense of Touch. 2015.
Page 60
60
135. Weber, D., , accesat la 13/06/2016. Defense Advanced Research Projects Agency Program
Information Hand Proprioception and Touch Interfaces.
www.darpa.mil/program/handproprioceptionandtouchinterfaces. [Interactiv] [Citat: 13 06
2016.]
136. Modular Software for Artificial Arms Design. Franti, E., Stefan, G., Schiopu, P., Plavitu,
A., Boros, T. Spain : s.n., 2011. Proceedings of International Conference on Automatic
Control,Modelling & Simulation (ACMOS’11). pg. 387–391.
137. Design and Testing an Artificial Arm Microsystems in Virtual Environment. Franti, E.D.,
Zafiu, A., Plavitu, A., Teodorescu, M., Schiopu, P. International Journal Of Mathematics And
Computers In Simulation.
138. Telemedicine Information System for Patients with Amputated Limbs. Dascalu, M.,
Teodorescu, M.St., Barbilian, A.G., Elteto, Z., Streinu, M., Pogărășteanu, M.E., Milea, L.,
Plavitu, A., Coroama, D., Franti, E.,. s.l. : International Journal of Biomedical Science.
139. Evolution in impedance at the electrode-skin interface of two types of surface EMG
electrodes during long-term recordings. Hewson, D.J. et al. Proceedings: XIVth Congress of
the International Society of Electrophysiology and Kinesiology. Vol. 20, pg. 175-176.
140. Changes in performance over time while learning to use a myoelectric prosthesis.
Bouwsema, H., van der Sluis, C., Bongers, R. 16, 2014, Journal of NeuroEngineering and
Rehabilitation, Vol. 11.
141. Important Factors in surface EMG measurement. Day, S. s.l. : Bortec Biomedical, 2009.
142. Essentials of Electromyography. Kamen, G., Gabriel, D. s.l. : Human Kinetics, 2010. 978-
0-7360-6712-6.
143. Kurichi, J., Bates, B., Stineman M. http://cirrie.buffalo.edu/encyclopedia/. Amputation,
Internaţional Encyclopedia of Reabilitation. [Interactiv]
144. Simulator for Autonomous Robots testing”, în Proceedings of the Internaţional Workshop
“Services and software architectures, infrastructures and engineering for enhancing EU
citizen’s quality of life. Dascălu, M., Franţi E., Lazo, F., Ştefan, G., L. Milea. Bucharest :
ROMANIAN ACADEMY LIBRARY, 2007.
145. Raport de cercetare intern ICIA. Bucuresti : s.n., 2015.
146. Remote Tactile Sensing Glove-Based System. Culjat, M., Son, J., Fan, R., Wottawa, C.,
Bisley, J., Grundfest, W., Dutson, E. Buenos Aires : s.n., 2010. 32nd Annual International
Conference of the IEEE EMBS.
147. Raportul de cercetare al proiectului: Contract cercetare PNCDI2 (2007-2010) contr.nr. 11-
069/2007 “Proteze Locomotorii Inteligente – INTELPROT”.
148. http://telemedicina.arthand.ro/#/. [Interactiv]
149. Dyce, K.M., Wensing, C.J.G. Textbook of veterinary anatomy. 4. s.l. : Saunders Elsevier,
2010. pg. 70-98.
150. Crabb, E.D. Principles of funcţional anatomy of the rabbit. Philadelphia : P. Blakiston's
son & co., 1931. pg. 54-60, 70-81.
151. Tobias, K, Johnston, S. Veterinary Surgery: Small Animal. s.l. : Saunders Elsevier , 2012.
pg. 760; 785-788 . Vol. 2. 978-1-4377-0746-5.
152. Sturtz, R., Asprea, L. Anatomy and Physiology for veterinary technitians and nurses. 1.
s.l. : Wiley-Blackwell, 2012. pg. 10-40; 48-50.
153. Horne Craigie, E. Bensley's Practical Anatomy Of The Rabbit. 8. Philadelphia : The
Blakiston Company, 1948. pg. 60-71, 109-117.
154. Tobias, K., Johnston, S.I. Veterinary Surgery: Small Anima. s.l. : Saunders Elsevier, 2012.
pg. 147-290. Vol. 1. 978-1-4377-0746-5.
155. Harcourt-Brown, F. Textbook of rabbit medicine. s.l. : Reed Elsevier, 2002. 0 7506 4002
2.
Page 61
61
ARTICOLE PUBLICATE
Pogărășteanu M. E., Moga M., "The role of amputation and bionic hand exoprosthesis in the
long term treatment of renal cell carcinoma metasthases to the upper limb", Revista Romana de
Urologie, vol. 14, numarul 4, 2015, Bucuresti, p. 15-21
Pogărășteanu M.E., Barbilian A.G. , "Bionic hand exoprosthesis – Perspectives for the future in
Romania", Journal of Medicine and Life, 2014 Oct-Dec; 7(4): 601–603.
Pogărășteanu M.E., Barbilian A.G., Moga M., Mitulescu Șt.C.,"Bionic hand exoprosthesis
equipped with sensory interface: technical innovations and functional results.", Proceedings of
the Romanian Academy, The Publishing House of the Romanian Academy, Series B, 2014,
16(1), p. 45–47
Dascalu M., Teodorescu M. St., Barbilian A.G., Elteto Z., Streinu M., Pogărășteanu M.E.,
Milea L., Plavitu A., Coroama D., Franti E., "Telemedicine Information System for Patients with
Amputated Limbs", International Journal of Biomedical Science and Engineering. Vol. 2, No. 5,
2014, pp. 45-51.
Franti E., Milea L., Dascalu M., Schiopu P., Barbilian A., Moga M., Lazo F., Pogărășteanu
M.E., "Personalized support system for the patients with forearm amputations", ROMJIST
(ISI),Vol 15, nr.4, 2012, 368-376