2 PROIECTAREA OPTIMALĂ A UNUI TRANSPORTOR CU LANŢURI În industria metalurgică, siderurgică şi alimentară, pentru deplasarea materialelor granulate sau ambalate (pe direcţie orizontală, verticală, în acelaşi plan sau în spaţiu) se utilizează instalaţii de transport care asigură deplasarea continuă şi cu viteză constantă a sarcinilor. Din această categorie a instalaţiilor de transport cu organ de tracţiune flexibil (lanţuri, benzi sau cabluri) fac parte [1]: transportoarele cu lanţuri portante, cu lanţuri şi plăci, cu lanţuri şi raclete, lanţuri şi cărucioare, elevatoarele cu lanţuri, transportoarele cu bandă, elevatoarele cu bandă, elevatoarele cu fricţiune, transportoarele suspendate. În continuare, se prezintă transportoarele cu plăci. 2.1 Transportoare cu plăci, noţiuni introductive În figura 2.1 este ilustrat schematic un transportor cu plăci pentru transportul sarcinilor granulate. Fig.2.1 Transportor cu plăci 1 – arborele de intrare; 2, 6 – roţi de lanţ; 3 – tablier, 4 – organ de tracţiune (lanţ cu role); 5 – dispozitiv de întindere (şurub – piuliţă); 7 – arbore de ieşire, 8 – cadrul transportorului; 9 – borduri laterale; 10 – role intermediare.
Transcript
22 PROIECTAREA OPTIMALĂ A UNUI TRANSPORTOR CU LANŢURI
În industria metalurgică, siderurgică şi alimentară, pentru deplasarea materialelor granulate sau ambalate (pe direcţie orizontală, verticală, în acelaşi plan sau în spaţiu) se utilizează instalaţii de transport care asigură deplasarea continuă şi cu viteză constantă a sarcinilor.
Din această categorie a instalaţiilor de transport cu organ de tracţiune flexibil (lanţuri, benzi sau cabluri) fac parte [1]: transportoarele cu lanţuri portante, cu lanţuri şi plăci, cu lanţuri şi raclete, lanţuri şi cărucioare, elevatoarele cu lanţuri, transportoarele cu bandă, elevatoarele cu bandă, elevatoarele cu fricţiune, transportoarele suspendate.
În continuare, se prezintă transportoarele cu plăci.
2.1 Transportoare cu plăci, noţiuni introductive
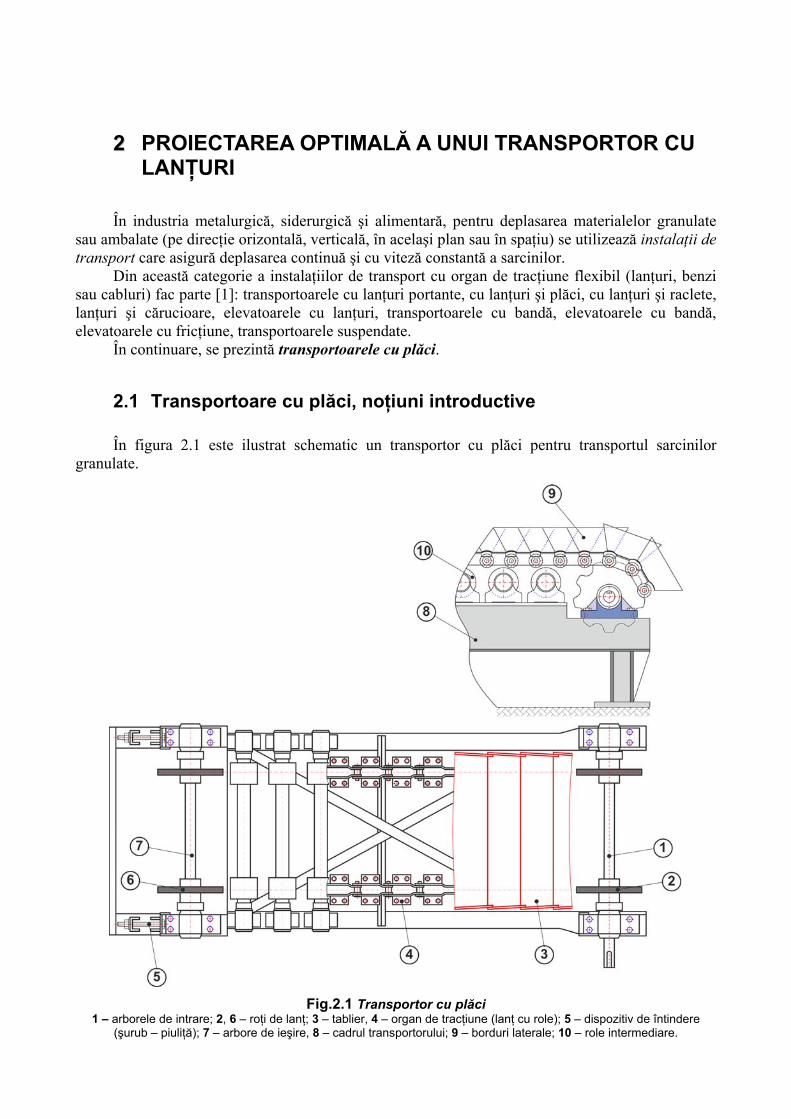
În figura 2.1 este ilustrat schematic un transportor cu plăci pentru transportul sarcinilor granulate.
Fig.2.1 Transportor cu plăci
1 – arborele de intrare; 2, 6 – roţi de lanţ; 3 – tablier, 4 – organ de tracţiune (lanţ cu role); 5 – dispozitiv de întindere (şurub – piuliţă); 7 – arbore de ieşire, 8 – cadrul transportorului; 9 – borduri laterale; 10 – role intermediare.
Organul de tracţiune a transportorului este constituit din două rânduri de lanţuri articulate (cu eclise, bolţuri, bucşe şi role) de care sunt prinse plăcile 3. Plăcile se suprapun parţial una peste alta, iar această acoperire reciprocă se menţine şi în timpul înfăşurării lor pe roţile profilate 2 şi 6 (cu ajutorul lor se realizează antrenarea lanţului). Pentru întinderea lanţului se va utiliza dispozitivul şurub-piuliţă 5. Cadrul transportorului 8 se execută din profile laminate de oţel (L sau U) şi tablă.
Transportul sarcinilor în bucăţi sau a sarcinilor granulate se face pe direcţie orizontală, înclinată sau trasee combinate (orizontal şi înclinat). Unghiul de înclinare nu trebuie să depăşească unghiul de frecare corespunzător coeficientului de frecare dintre material şi plăci, (30º...40º [1]). Viteza de deplasare a sarcinilor se adoptă în funcţie de necesităţile procesului tehnologic. Pentru sarcini în bucăţi viteza este de 0,3...0,9 m/s, iar pentru sarcini granulate 0,1...0,65.
Lungimile de transport pot fi de ordinul metrilor sau a zecilor de metri iar productivităţile variază în limite largi putând atinge valori de 200 t/h pentru sarcini granulate, sau 9000...12000 bucăţi/oră pentru sarcini în bucăţi.
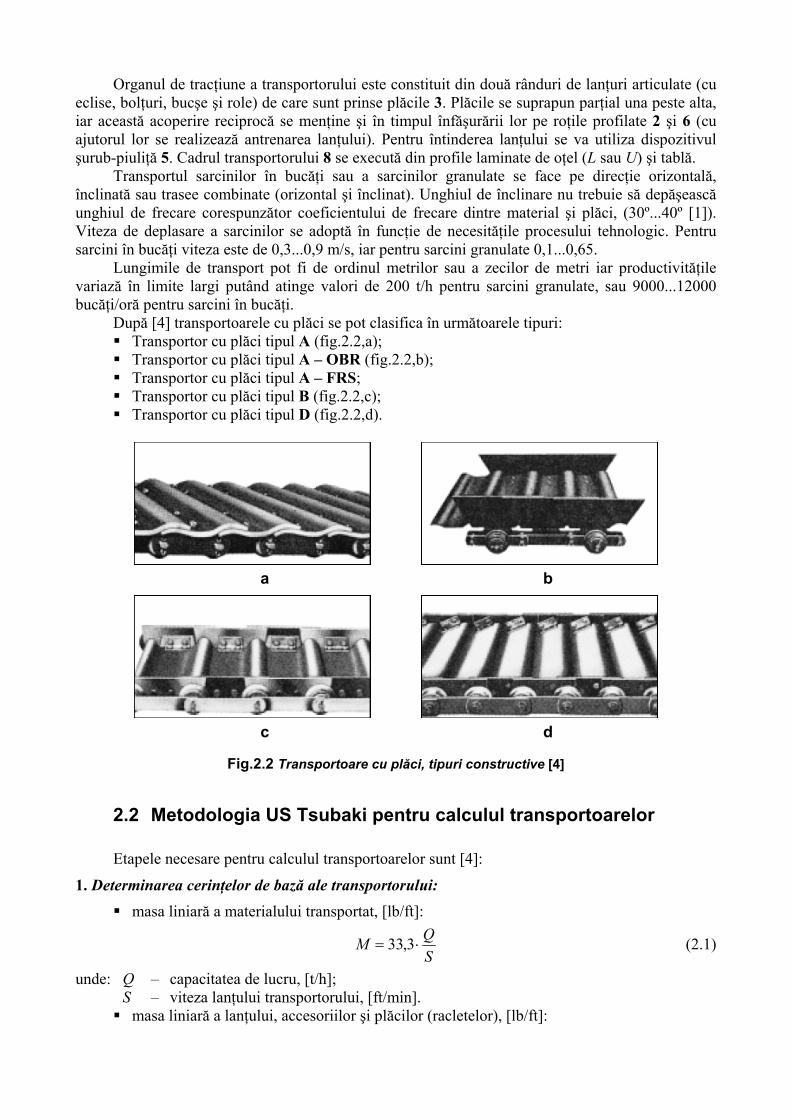
După [4] transportoarele cu plăci se pot clasifica în următoarele tipuri: Transportor cu plăci tipul A (fig.2.2,a); Transportor cu plăci tipul A – OBR (fig.2.2,b); Transportor cu plăci tipul A – FRS; Transportor cu plăci tipul B (fig.2.2,c); Transportor cu plăci tipul D (fig.2.2,d).
Fig.2.2 Transportoare cu plăci, tipuri constructive [4]
2.2 Metodologia US Tsubaki pentru calculul transportoarelor
Etapele necesare pentru calculul transportoarelor sunt [4]:
1. Determinarea cerinţelor de bază ale transportorului: masa liniară a materialului transportat, [lb/ft]:
SQM ⋅= 3,33 (2.1)
unde: Q – capacitatea de lucru, [t/h]; S – viteza lanţului transportorului, [ft/min]. masa liniară a lanţului, accesoriilor şi plăcilor (racletelor), [lb/ft]:
a b
c d
pWNCWW +⋅= (2.2)
unde: CW – masa liniară a lanţului, [lb/ft]; N – numărul de rânduri de lanţuri, ( 3,2=N ); Wp – masa liniară a plăcii (racletei), [lb/ft].
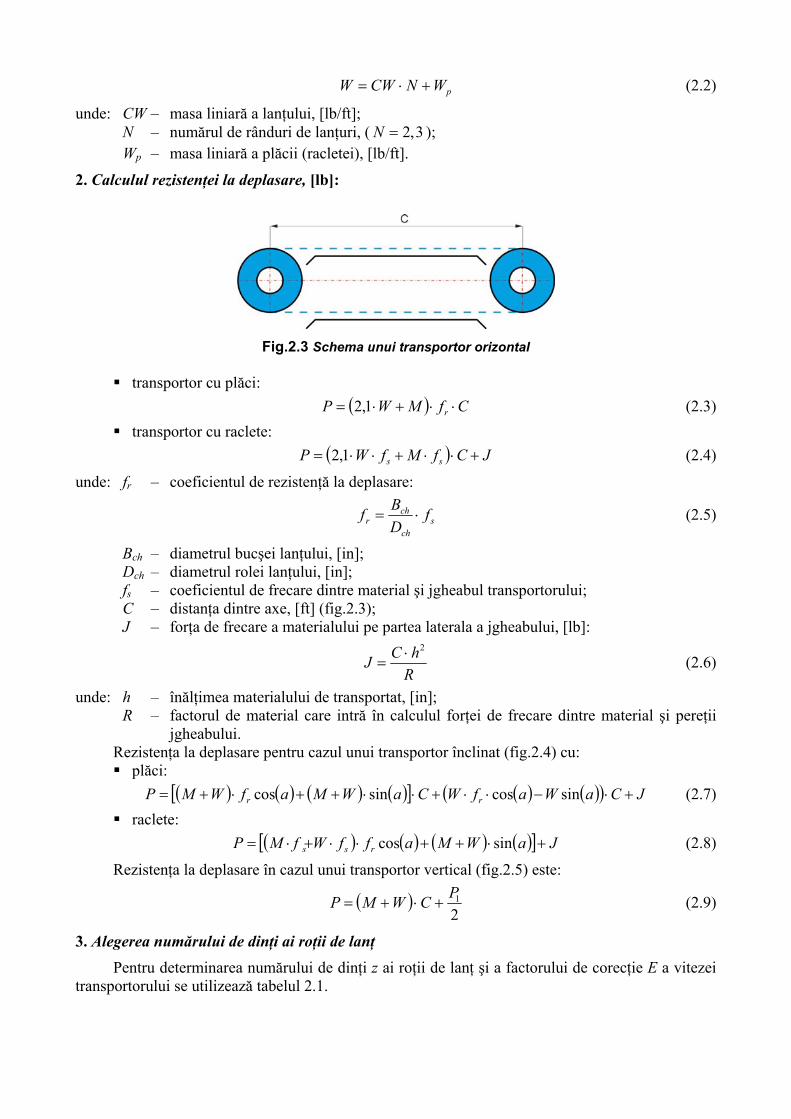
2. Calculul rezistenţei la deplasare, [lb]:
Fig.2.3 Schema unui transportor orizontal
transportor cu plăci:
( ) CfMWP r ⋅⋅+⋅= 1,2 (2.3) transportor cu raclete:
( ) JCfMfWP ss +⋅⋅+⋅⋅= 1,2 (2.4)
unde: fr – coeficientul de rezistenţă la deplasare:
sch
chr f
DBf ⋅= (2.5)
Bch – diametrul bucşei lanţului, [in]; Dch – diametrul rolei lanţului, [in]; fs – coeficientul de frecare dintre material şi jgheabul transportorului; C – distanţa dintre axe, [ft] (fig.2.3); J – forţa de frecare a materialului pe partea laterala a jgheabului, [lb]:
RhCJ
2⋅= (2.6)
unde: h – înălţimea materialului de transportat, [in]; R – factorul de material care intră în calculul forţei de frecare dintre material şi pereţii
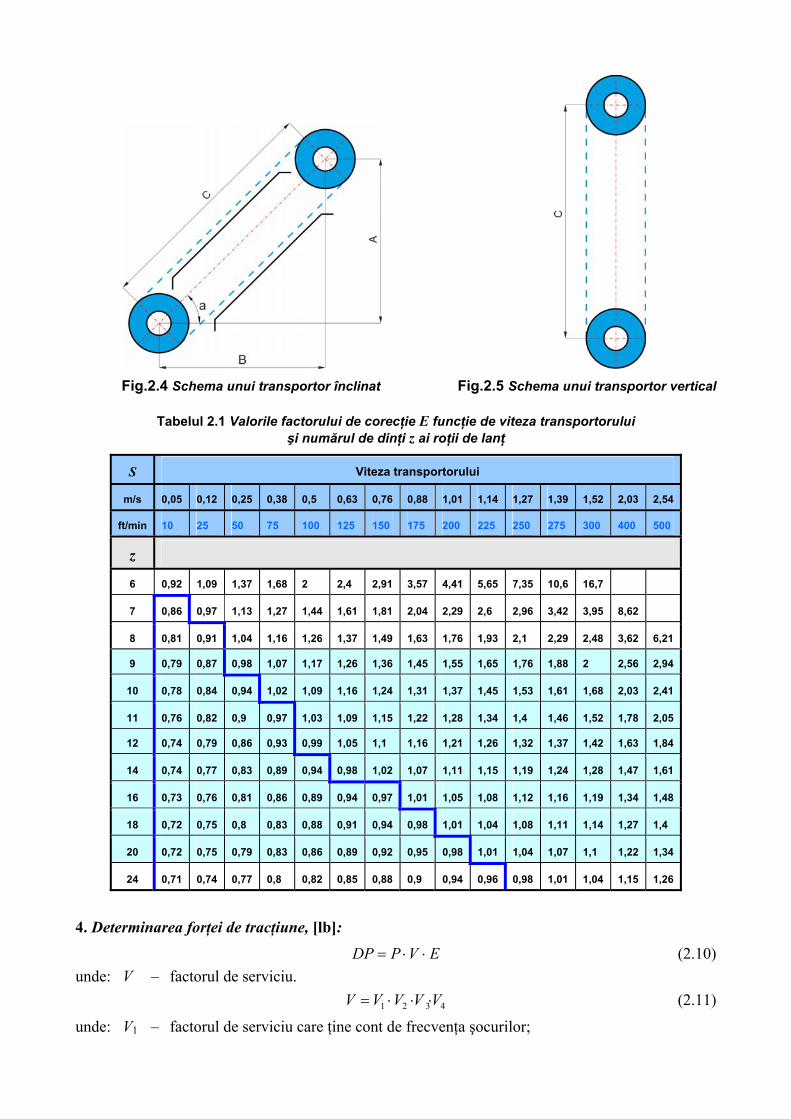
jgheabului. Rezistenţa la deplasare pentru cazul unui transportor înclinat (fig.2.4) cu: plăci:
EVPDP ⋅⋅= (2.10) unde: V – factorul de serviciu. 4321 VVVVV ⋅⋅⋅= (2.11)
unde: V1 – factorul de serviciu care ţine cont de frecvenţa şocurilor;
V2 – factorul de serviciu care ţine cont de tipul încărcării transportorului; V3 – factorul de serviciu care ţine cont de condiţiile de lucru şi funcţionare; V4 – factorul de serviciu care ţine cont de numărul de schimburi.
5. Sarcina în ramura ce se înfăşoară pe roata de acţionare, [lb]:
N
DPT ⋅= 2,1 (2.12)
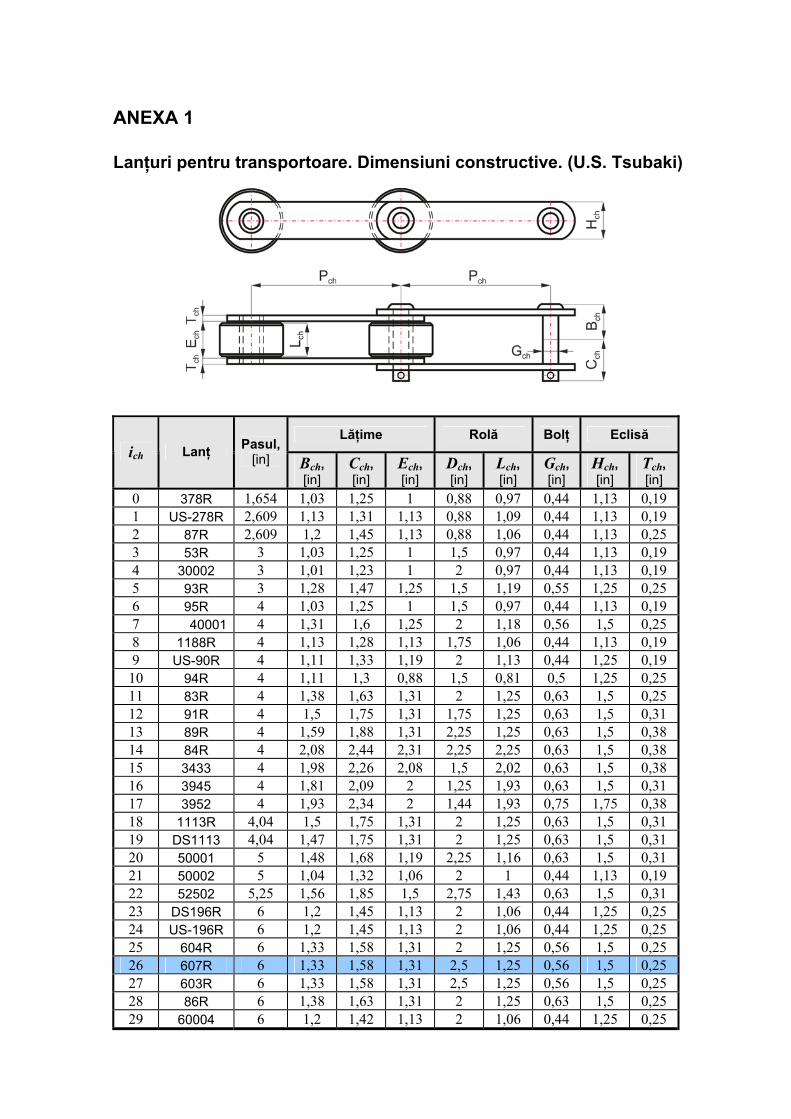
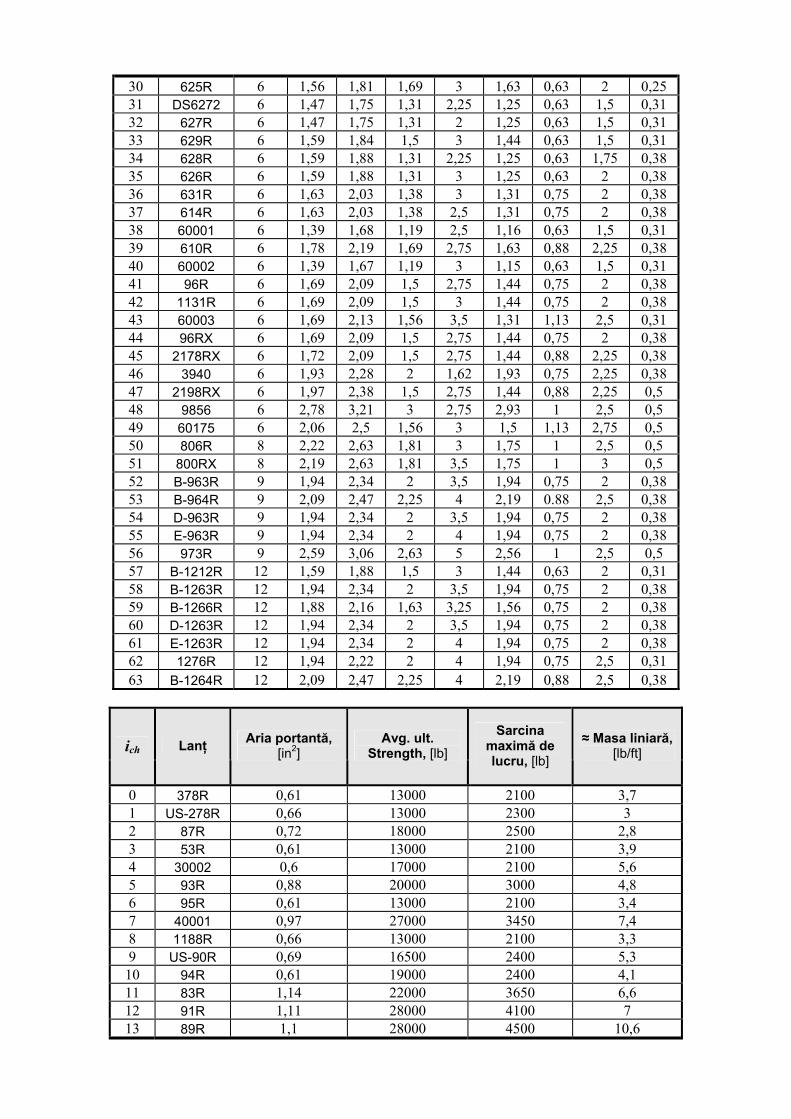
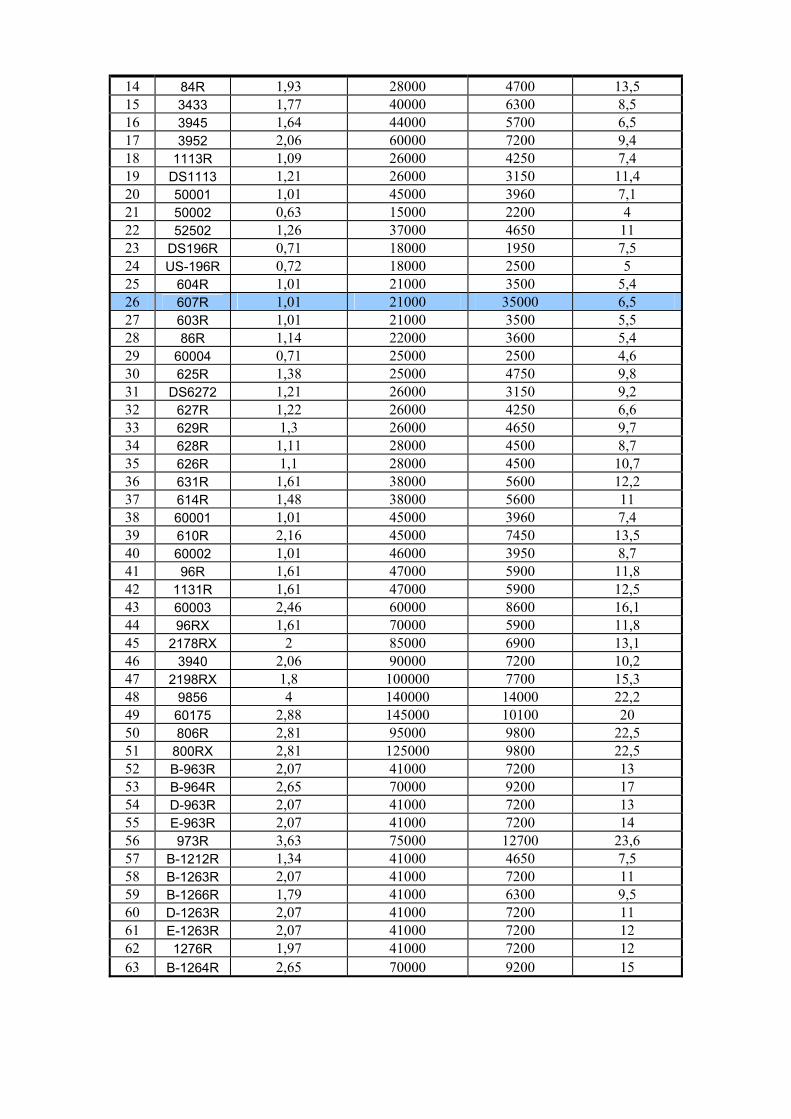
6. Alegerea tipului de lanţ. Se alege tipul de lanţ (Anexa 1) cu sarcina maximă de lucru imediat superioară faţă de cea
calculată la punctul precedent.
7. Recalcularea sarcinii ce se înfăşoară pe roata de acţionare, [lb]:
neunif
c KzTT
⋅⋅
=2 (2.13)
unde: Kneunif– coeficientul de încărcare a rolelor pe roata de lanţ ( 75,0=neunifK ).
8. Calculul presiunii de contact.
BATBP c= (2.14)
unde: BA – aria portantă a bolţului.
2.3 Proiectarea optimală a unui transportor cu plăci
În vederea proiectării optimale a unui transportor cu plăci (fig.2.1) trebuie parcurse o serie de etape pentru determinarea mărimilor esenţiale pentru descrierea funcţiei obiectiv şi a restricţiilor problemei de optimizare. Aceste etape vor fi prezentate în cele ce urmează.
2.3.1 Detalierea calculelor necesare pentru descrierea problemei de optimizare
Pentru determinarea cerinţelor de bază ale transportorului (masa unei plăci, respectiv masa liniară a acesteia şi a materialului transportat – §2.2) mai întâi trebuie determinate dimensiunile geometrice ale plăcii (res, rid, red, rid, α1d, α2d, α1s şi α2s – figura 2.6).
În continuare, (în §2.3.1.1) vor fi prezentate relaţiile necesare pentru determinarea acestor dimensiuni iar ulterior (în §2.3.1.2) vor fi ilustrate expresiile pentru calculul masei, respectiv masei liniare a unei plăci.
2.3.1.1 Determinarea dimensiunilor geometrice ale plăcii Pornind de la schiţa transportorului cu plăci, ilustrată în figura 2.1, se poate întocmi schema
de calcul (fig.2.6) a dimensiunilor geometrice ale plăcilor acestuia. Pentru determinarea dimensiunilor geometrice (res, rid, red, rid, α1d, α2d, α1s, α2s) ale unei plăci
s-a adoptat un sistem de referinţă x0y, cu originea la distanţa 2chP faţă de axa de simetrie (în plan vertical) a rolei lanţului.
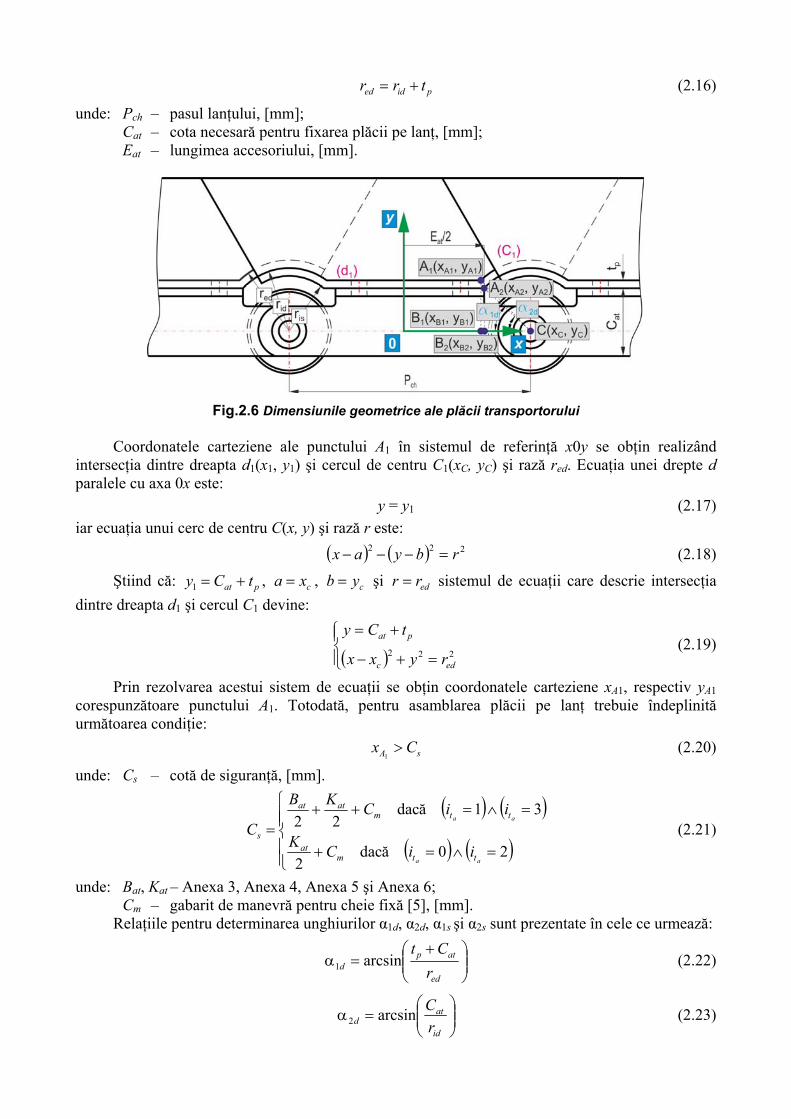
Din triunghiul dreptunghic CB2A2 (fig.2.6) rezultă razele de curbură a plăcii, la interior (rid), respectiv la exterior (red), (în partea dreaptă a plăcii):
Fig.2.6 Dimensiunile geometrice ale plăcii transportorului
Coordonatele carteziene ale punctului A1 în sistemul de referinţă x0y se obţin realizând
intersecţia dintre dreapta d1(x1, y1) şi cercul de centru C1(xC, yC) şi rază red. Ecuaţia unei drepte d paralele cu axa 0x este: y = y1 (2.17) iar ecuaţia unui cerc de centru C(x, y) şi rază r este:
( ) ( ) 222 rbyax =−−− (2.18)
Ştiind că: pat tCy +=1 , cxa = , cyb = şi edrr = sistemul de ecuaţii care descrie intersecţia dintre dreapta d1 şi cercul C1 devine:
( )⎪⎩
⎪⎨⎧
=+−
+=222
edc
pat
ryxx
tCy (2.19)
Prin rezolvarea acestui sistem de ecuaţii se obţin coordonatele carteziene xA1, respectiv yA1 corespunzătoare punctului A1. Totodată, pentru asamblarea plăcii pe lanţ trebuie îndeplinită următoarea condiţie: sA Cx >
1 (2.20)
unde: Cs – cotă de siguranţă, [mm].
( ) ( )
( ) ( )⎪⎪⎩
⎪⎪⎨
⎧
=∧=+
=∧=++=
20dacă2
31dacă22
aa
aa
ttmat
ttmatat
s
iiCK
iiCKB
C (2.21)
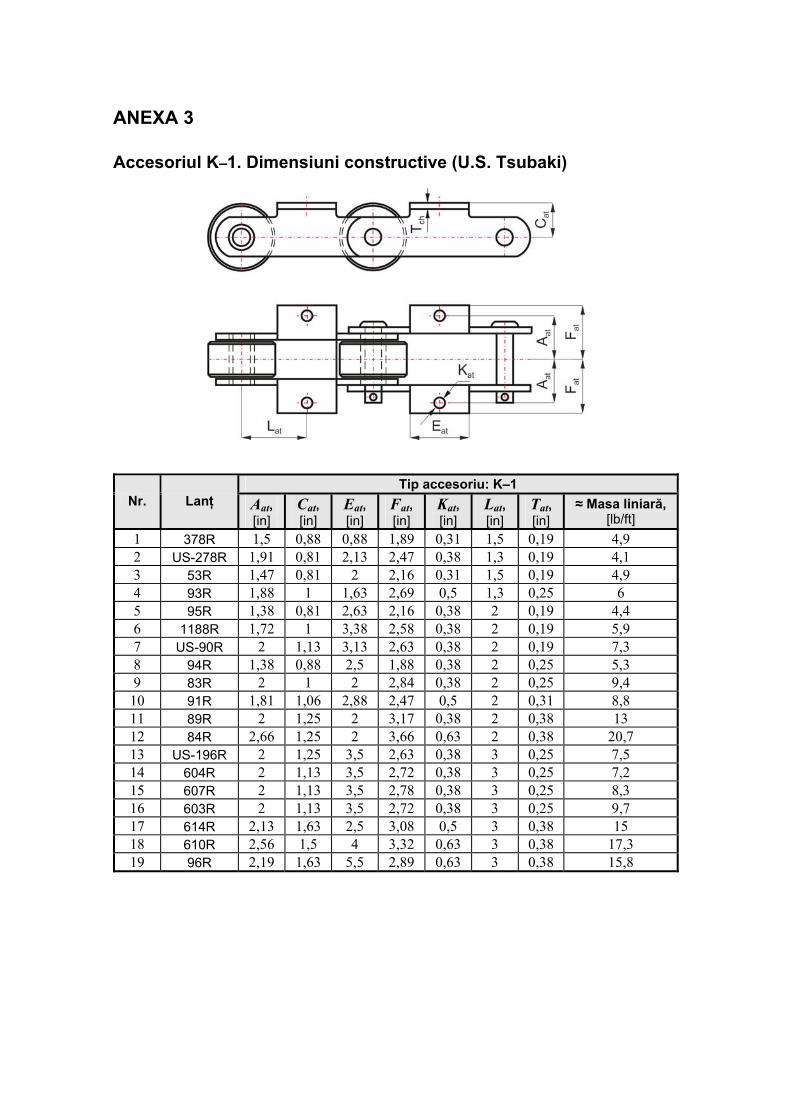
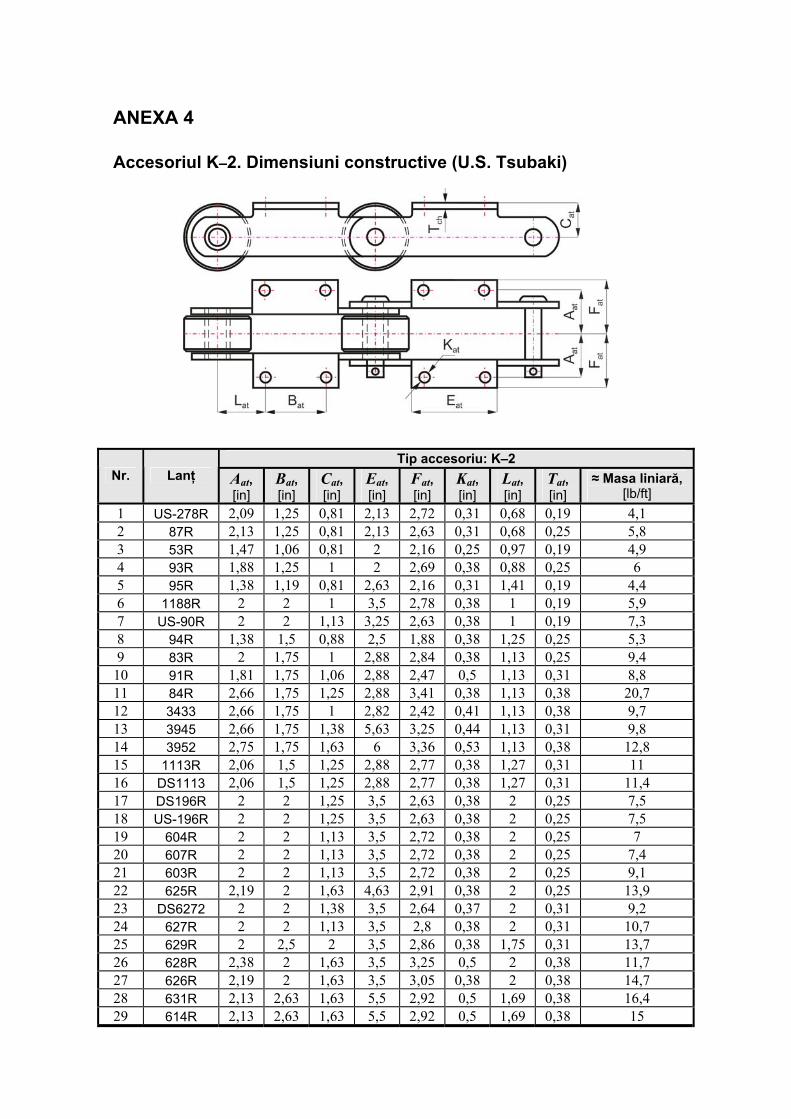
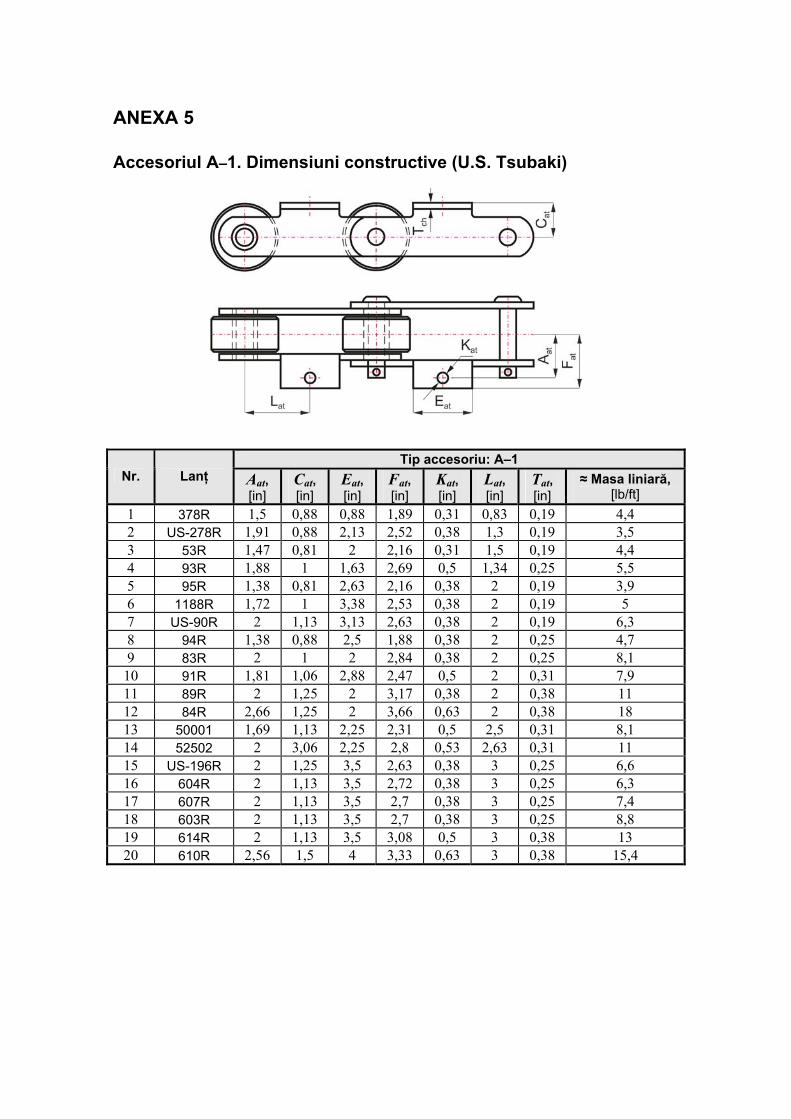
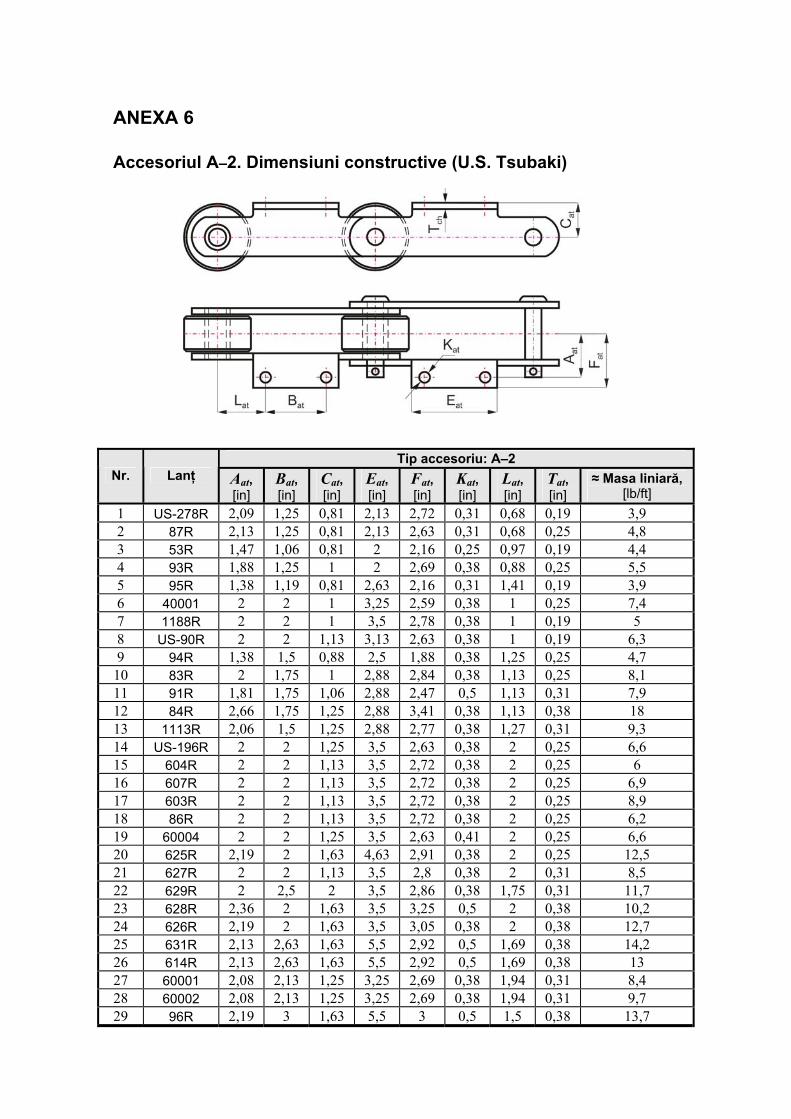
unde: Bat, Kat – Anexa 3, Anexa 4, Anexa 5 şi Anexa 6; Cm – gabarit de manevră pentru cheie fixă [5], [mm].
Relaţiile pentru determinarea unghiurilor α1d, α2d, α1s şi α2s sunt prezentate în cele ce urmează:
⎟⎟⎠
⎞⎜⎜⎝
⎛ +=α
ed
atpd r
Ctarcsin1 (2.22)
⎟⎟⎠
⎞⎜⎜⎝
⎛=α
id
atd r
Carcsin2 (2.23)
⎟⎟⎠
⎞⎜⎜⎝
⎛ +=α
es
atps r
Ctarcsin1 (2.24)
⎟⎟⎠
⎞⎜⎜⎝
⎛=α
is
ats r
Carcsin2 (2.25)
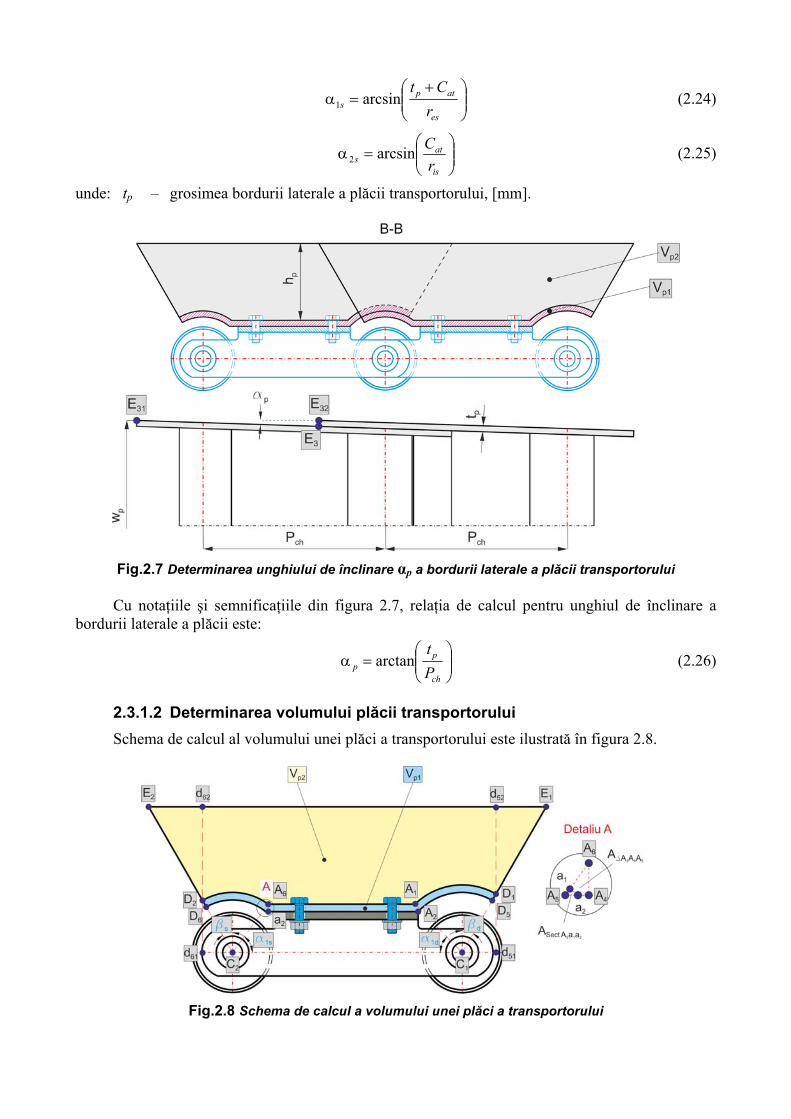
unde: tp – grosimea bordurii laterale a plăcii transportorului, [mm].
Fig.2.7 Determinarea unghiului de înclinare αp a bordurii laterale a plăcii transportorului
Cu notaţiile şi semnificaţiile din figura 2.7, relaţia de calcul pentru unghiul de înclinare a
bordurii laterale a plăcii este:
⎟⎟⎠
⎞⎜⎜⎝
⎛=α
ch
pp P
tarctan (2.26)
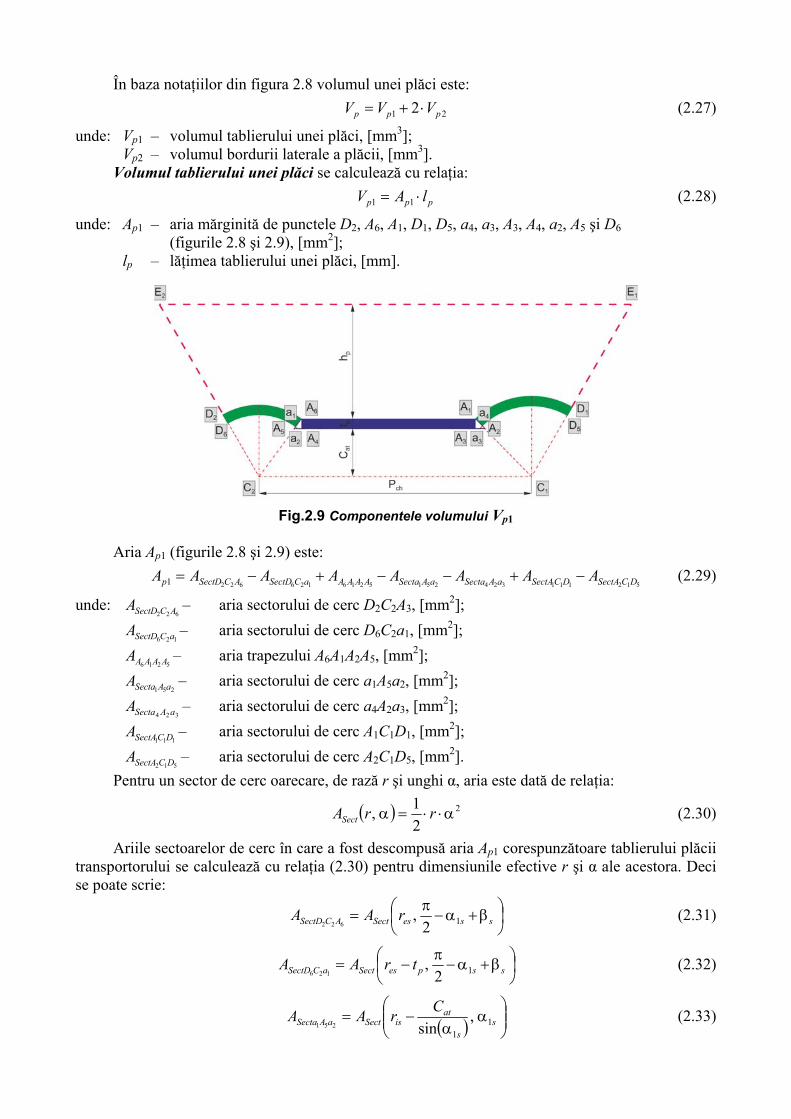
2.3.1.2 Determinarea volumului plăcii transportorului Schema de calcul al volumului unei plăci a transportorului este ilustrată în figura 2.8.
Fig.2.8 Schema de calcul a volumului unei plăci a transportorului
În baza notaţiilor din figura 2.8 volumul unei plăci este: 21 2 ppp VVV ⋅+= (2.27)
unde: Vp1 – volumul tablierului unei plăci, [mm3]; Vp2 – volumul bordurii laterale a plăcii, [mm3].
Volumul tablierului unei plăci se calculează cu relaţia: ppp lAV ⋅= 11 (2.28)
unde: Ap1 – aria mărginită de punctele D2, A6, A1, D1, D5, a4, a3, A3, A4, a2, A5 şi D6 (figurile 2.8 şi 2.9), [mm2];
unde: 622 ACSectDA – aria sectorului de cerc D2C2A3, [mm2];
126 aCSectDA – aria sectorului de cerc D6C2a1, [mm2];
5216 AAAAA – aria trapezului A6A1A2A5, [mm2];
251 aASectaA – aria sectorului de cerc a1A5a2, [mm2];
324 aASectaA – aria sectorului de cerc a4A2a3, [mm2];
111 DCSectAA – aria sectorului de cerc A1C1D1, [mm2];
512 DCSectAA – aria sectorului de cerc A2C1D5, [mm2]. Pentru un sector de cerc oarecare, de rază r şi unghi α, aria este dată de relaţia:
( ) 2
21, α⋅⋅=α rrASect (2.30)
Ariile sectoarelor de cerc în care a fost descompusă aria Ap1 corespunzătoare tablierului plăcii transportorului se calculează cu relaţia (2.30) pentru dimensiunile efective r şi α ale acestora. Deci se poate scrie:
⎟⎠⎞
⎜⎝⎛ β+α−
π= ssesSectACSectD rAA 12
,622
(2.31)
⎟⎠⎞
⎜⎝⎛ β+α−
π−= sspesSectaCSectD trAA 12
,126
(2.32)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛α
α−= s
s
atisSectaASecta
CrAA 11
,sin251
(2.33)
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛α
α−= d
d
atidSectaASecta
CrAA 11
,sin324
(2.34)
⎟⎠⎞
⎜⎝⎛ β+α−
π= ddedSectDCSectA rAA 12
,111
(2.35)
⎟⎠⎞
⎜⎝⎛ β+α−
π−= ddpedSectDCSectA trAA 12
,512
(2.36)
Aria trapezului A6A1A2A5 este:
( ) ( ) [
pdedses
chd
p
s
pdedseschAAAA
trr
Ptt
rrPA
⋅⎥⎦
⎤⎟⎠⎞
⎜⎝⎛ α−π
⋅−⎟⎠⎞
⎜⎝⎛ α−π
⋅−
−⋅⎥⎦
⎤⎢⎣
⎡α
+α
+⎟⎠⎞
⎜⎝⎛ α−π
⋅−⎟⎠⎞
⎜⎝⎛ α−π
⋅−=
11
1111
2sin
2sin
tantan2sin
2sin
21
5216
(2.37)
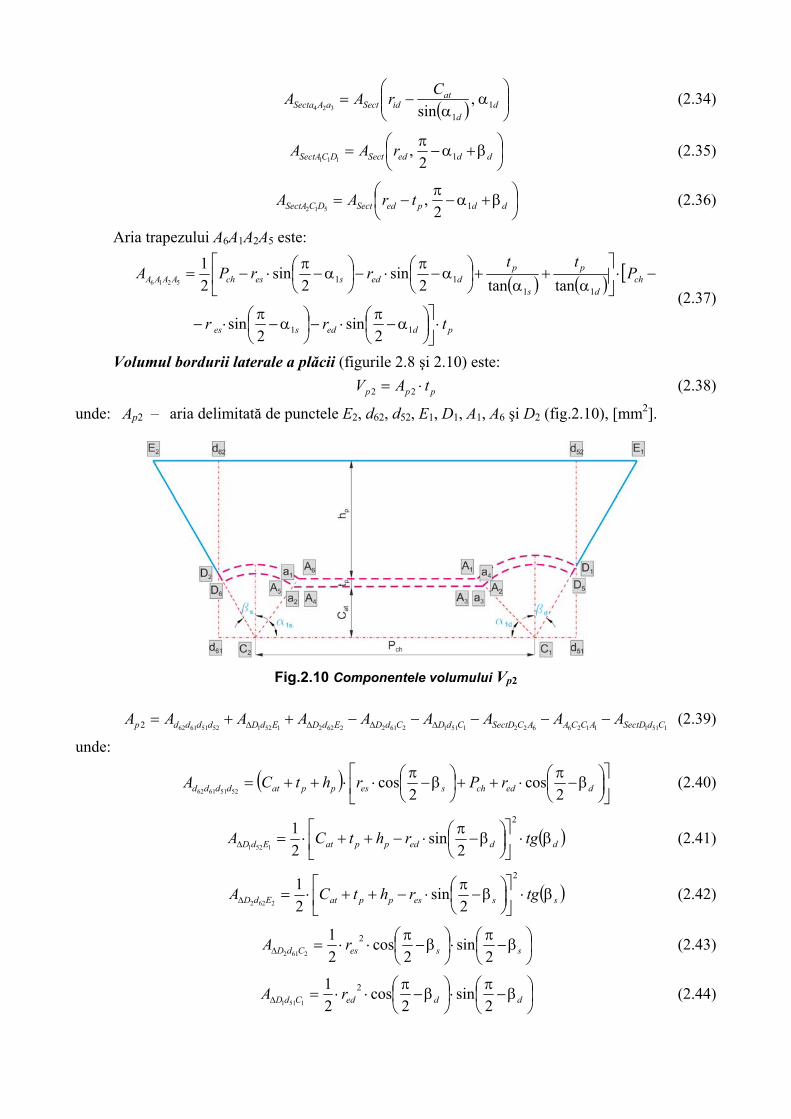
Volumul bordurii laterale a plăcii (figurile 2.8 şi 2.10) este: ppp tAV ⋅= 22 (2.38)
unde: Ap2 – aria delimitată de punctele E2, d62, d52, E1, D1, A1, A6 şi D2 (fig.2.10), [mm2].
În acest moment, cunoscând volumul plăcii transportorului se poate determina masa acesteia. Relaţia de calcul este: ppp VM ρ⋅= (2.48)
unde: ρp – densitatea materialului plăcii, [kg/mm3]. De asemenea, masa liniară a plăcii este:
( ) pppppp thtwW ρ⋅⋅⋅+⋅= 2 (2.49)
În continuare, se vor prezenta relaţiile de calcul pentru tensiunea de încovoiere din secţiunea plăcii şi săgeata acesteia.
chp
ppi Pt
wF⋅⋅
⋅=σ 232 (2.50)
z
pp
IEwF⋅⋅
⋅=δ3
481 (2.51)
unde: Fp – forţa care acţionează asupra plăcii, [N]; E – modulul de elasticitate longitudinal al materialului plăcii
transportorului, (E = 2,1·105 MPa); Iz – momentul de inerţie axial, [mm4].
2.3.1.3 Determinarea vitezei transportorului În cazul transportului materialelor granulate, productivitatea transportorului cu plăci, se
calculează cu relaţia: ψ⋅ρ⋅⋅⋅= mp SAQ 3600 (2.52)
unde: Ap – aria secţiunii transversale prin material, [m2]; ρm – densitatea materialului transportat, [t/m3]; S – viteza transportorului, [m/s]; ψ – coeficient de umplere (ψ = 0,65 [1]).
Cunoscând productivitatea transportorului (din datele de intrare ale problemei de proiectare optimală – §2.4.1) şi utilizând notaţiile din figura 2.11 viteza S a transportorului este:
ψ⋅ρ⋅
⋅=pA
QS3600
1 (2.53)
Fig.2.11 Secţiune prin material: plăci cu borduri laterale
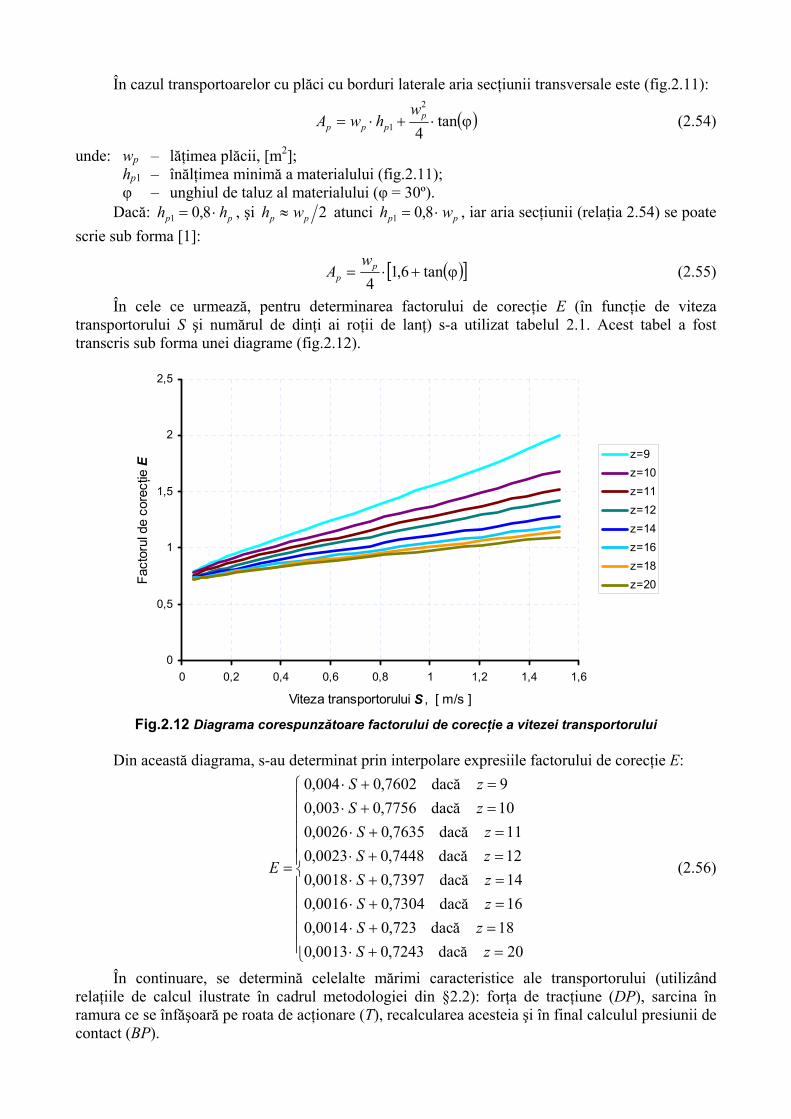
În cazul transportoarelor cu plăci cu borduri laterale aria secţiunii transversale este (fig.2.11):
( )ϕ⋅+⋅= tan4
2
1p
ppp
whwA (2.54)
unde: wp – lăţimea plăcii, [m2]; hp1 – înălţimea minimă a materialului (fig.2.11); φ – unghiul de taluz al materialului (φ = 30º).
Dacă: pp hh ⋅= 8,01 , şi 2pp wh ≈ atunci pp wh ⋅= 8,01 , iar aria secţiunii (relaţia 2.54) se poate scrie sub forma [1]:
( )[ ]ϕ+⋅= tan6,14
pp
wA (2.55)
În cele ce urmează, pentru determinarea factorului de corecţie E (în funcţie de viteza transportorului S şi numărul de dinţi ai roţii de lanţ) s-a utilizat tabelul 2.1. Acest tabel a fost transcris sub forma unei diagrame (fig.2.12).
0
0,5
1
1,5
2
2,5
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6
Viteza transportorului S , [ m/s ]
Fact
orul
de
core
cţie
E
z=9z=10z=11z=12z=14z=16z=18z=20
Fig.2.12 Diagrama corespunzătoare factorului de corecţie a vitezei transportorului
Din această diagrama, s-au determinat prin interpolare expresiile factorului de corecţie E:
În continuare, se determină celelalte mărimi caracteristice ale transportorului (utilizând relaţiile de calcul ilustrate în cadrul metodologiei din §2.2): forţa de tracţiune (DP), sarcina în ramura ce se înfăşoară pe roata de acţionare (T), recalcularea acesteia şi în final calculul presiunii de contact (BP).
2.4 Optimizarea transportorului cu plăci
2.4.1 Date de intrare
În vederea proiectării optimale a transportorului cu plăci s-au luat în considerare următoarele date de intrare:
Productivitatea transportorului: 150=Q [t/h]; Distanţa dintre axe: 192,12=C [m]; Regimul de funcţionare: 24 [h]; Mediul ambiant: cu impurităţi; Factorul de serviciu:
Factorul de serviciu care ţine cont de frecvenţa şocurilor: 2,11 =V ; Factorul de serviciu care ţine cont de tipul încărcării transportorului: 2,12 =V ; Factorul de serviciu care ţine cont de condiţiile de lucru şi funcţionare: 2,13 =V ; Factorul de serviciu care ţine cont de numărul de schimburi: 4,14 =V .
Viteza minimă a transportorului: 2,0min =S [m/s]; Viteza maximă a transportorului: 8,0max =S [m/s]; Presiunea admisibilă (bucşă-rolă): 5=aBP [MPa]; Rezistenţa admisibilă la încovoiere (OL 60) a materialului plăcilor transportorului:
65=σai [MPa]; Săgeata admisibilă în secţiunea mediană a plăcii transportorului: 10=δa [mm]; Densitatea materialului plăcii: 61085,7 −⋅=ρ p [kg/mm3];
Au fost alese 7 gene care descriu problema de optimizare. Ataşarea unor intervale de căutare acestor variabile (cu specificarea numărului de valori posibile) s-a dovedit a fi o problemă deosebit de dificilă. Ca în multe aplicaţii, şi aici s-a pus problema menţinerii dimensiunilor spaţiului de căutare între limite rezonabile (un număr prea mare ar periclita convergenţa căutării), având grijă în acelaşi timp să nu se piardă soluţii valoroase „neaşteptate” prin reducerea excesivă a numărului valorilor posibile.
În cele ce urmează se prezintă genele problemei de optimizare precum şi spaţiul de căutare aferent fiecăreia.
Gena 1: ich – indicele lanţului, variabilă întreagă discretă cu valori în domeniul [ ]630K ; Gena 2:
ati – indicele accesoriului, variabilă întreagă cu valori în domeniul [ ]30K ;
Gena 3: z – numărul de dinţi ai roţii de lanţ, variabilă având următoarele valori posibile: { }20,18,16,14,12,11,10,9 ;
Gena 4: N – numărul de lanţuri, variabilă întreagă având următoarele valori posibile: { }3,2 ;
Gena 5: pti – indicele corespunzător grosimii plăcii, variabilă întreagă cu valori în
domeniul [ ]310K ; Gena 6: hp – înălţimea bordurii laterale, variabilă întreagă cu valori în domeniul
[ ]629K ; Gena 7: wp – lăţimea plăcii, variabilă întreagă cu valori în domeniul [ ]8118K .
2.4.3 Funcţia obiectiv
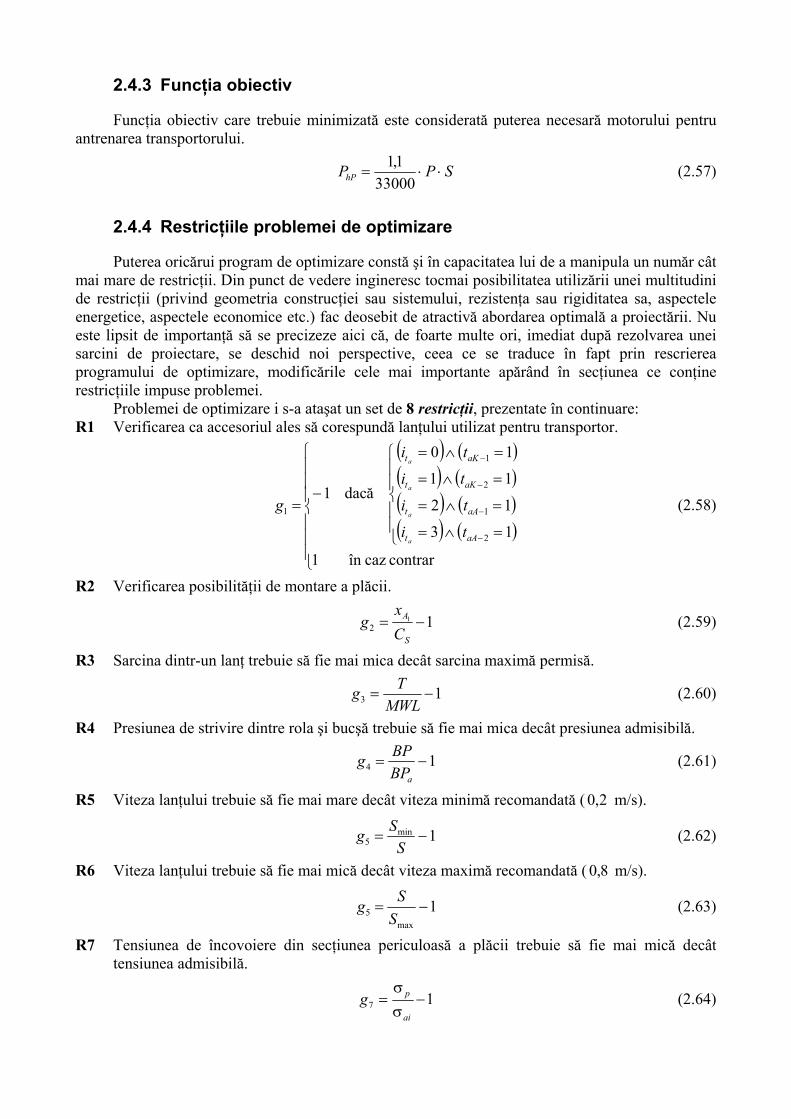
Funcţia obiectiv care trebuie minimizată este considerată puterea necesară motorului pentru antrenarea transportorului.
SPPhP ⋅⋅=33000
1,1 (2.57)
2.4.4 Restricţiile problemei de optimizare
Puterea oricărui program de optimizare constă şi în capacitatea lui de a manipula un număr cât mai mare de restricţii. Din punct de vedere ingineresc tocmai posibilitatea utilizării unei multitudini de restricţii (privind geometria construcţiei sau sistemului, rezistenţa sau rigiditatea sa, aspectele energetice, aspectele economice etc.) fac deosebit de atractivă abordarea optimală a proiectării. Nu este lipsit de importanţă să se precizeze aici că, de foarte multe ori, imediat după rezolvarea unei sarcini de proiectare, se deschid noi perspective, ceea ce se traduce în fapt prin rescrierea programului de optimizare, modificările cele mai importante apărând în secţiunea ce conţine restricţiile impuse problemei.
Problemei de optimizare i s-a ataşat un set de 8 restricţii, prezentate în continuare: R1 Verificarea ca accesoriul ales să corespundă lanţului utilizat pentru transportor.
( ) ( )( ) ( )( ) ( )( ) ( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎪⎪
⎩
⎪⎪
⎨
⎧
=∧=
=∧=
=∧=
=∧=
−=
−
−
−
−
contrar cazîn 1
13
12
11
10
dacă1
2
1
2
1
1
aAt
aAt
aKt
aKt
ti
ti
ti
ti
g
a
a
a
a
(2.58)
R2 Verificarea posibilităţii de montare a plăcii.
112 −=
S
A
Cx
g (2.59)
R3 Sarcina dintr-un lanţ trebuie să fie mai mica decât sarcina maximă permisă.
13 −=MWL
Tg (2.60)
R4 Presiunea de strivire dintre rola şi bucşă trebuie să fie mai mica decât presiunea admisibilă.
14 −=aBP
BPg (2.61)
R5 Viteza lanţului trebuie să fie mai mare decât viteza minimă recomandată ( 2,0 m/s).
1min5 −=
SSg (2.62)
R6 Viteza lanţului trebuie să fie mai mică decât viteza maximă recomandată ( 8,0 m/s).
1max
5 −=S
Sg (2.63)
R7 Tensiunea de încovoiere din secţiunea periculoasă a plăcii trebuie să fie mai mică decât tensiunea admisibilă.
17 −σσ
=ai
pg (2.64)
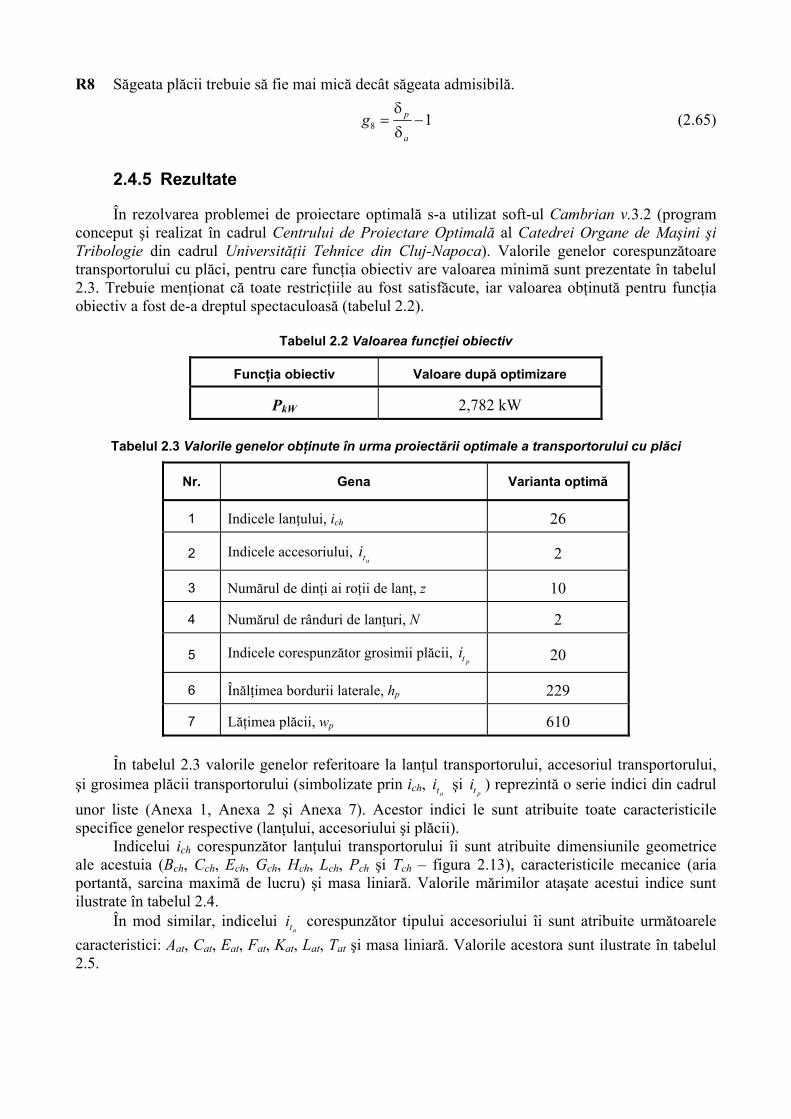
R8 Săgeata plăcii trebuie să fie mai mică decât săgeata admisibilă.
18 −δδ
=a
pg (2.65)
2.4.5 Rezultate
În rezolvarea problemei de proiectare optimală s-a utilizat soft-ul Cambrian v.3.2 (program conceput şi realizat în cadrul Centrului de Proiectare Optimală al Catedrei Organe de Maşini şi Tribologie din cadrul Universităţii Tehnice din Cluj-Napoca). Valorile genelor corespunzătoare transportorului cu plăci, pentru care funcţia obiectiv are valoarea minimă sunt prezentate în tabelul 2.3. Trebuie menţionat că toate restricţiile au fost satisfăcute, iar valoarea obţinută pentru funcţia obiectiv a fost de-a dreptul spectaculoasă (tabelul 2.2).
Tabelul 2.2 Valoarea funcţiei obiectiv
Funcţia obiectiv Valoare după optimizare
PkW 2,782 kW
Tabelul 2.3 Valorile genelor obţinute în urma proiectării optimale a transportorului cu plăci
Nr. Gena Varianta optimă
1 Indicele lanţului, ich 26
2 Indicele accesoriului, at
i 2
3 Numărul de dinţi ai roţii de lanţ, z 10
4 Numărul de rânduri de lanţuri, N 2
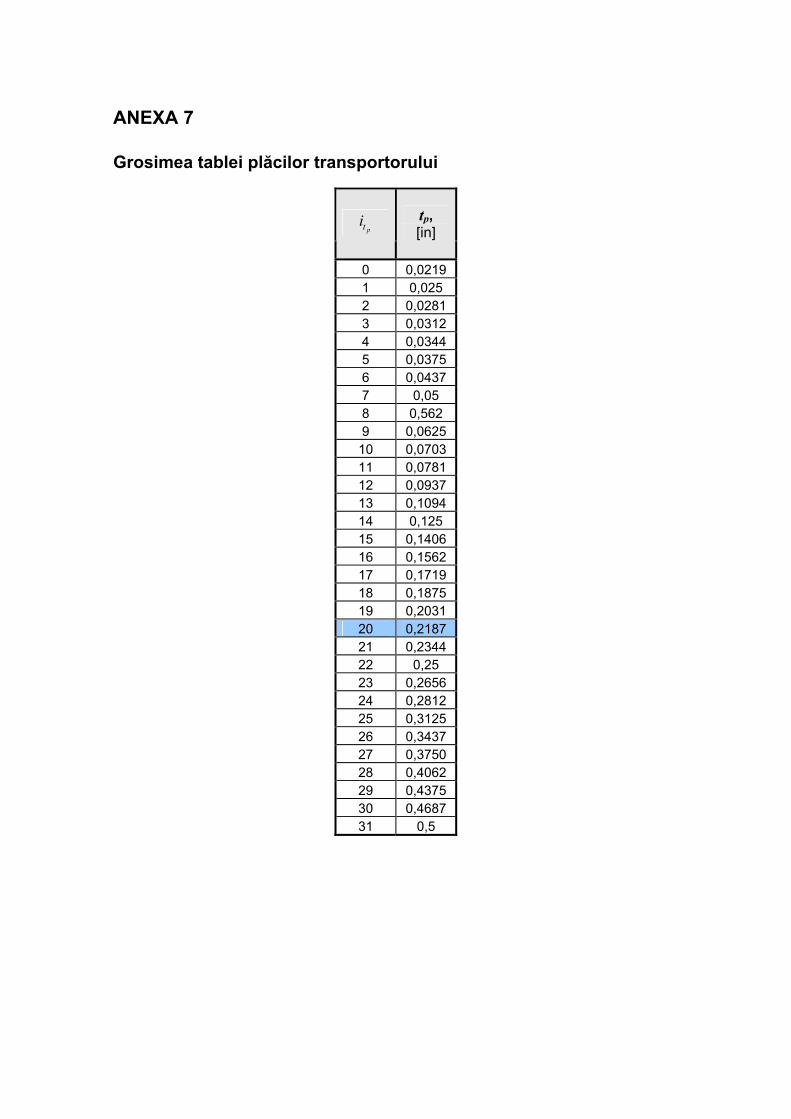
5 Indicele corespunzător grosimii plăcii, pti 20
6 Înălţimea bordurii laterale, hp 229
7 Lăţimea plăcii, wp 610
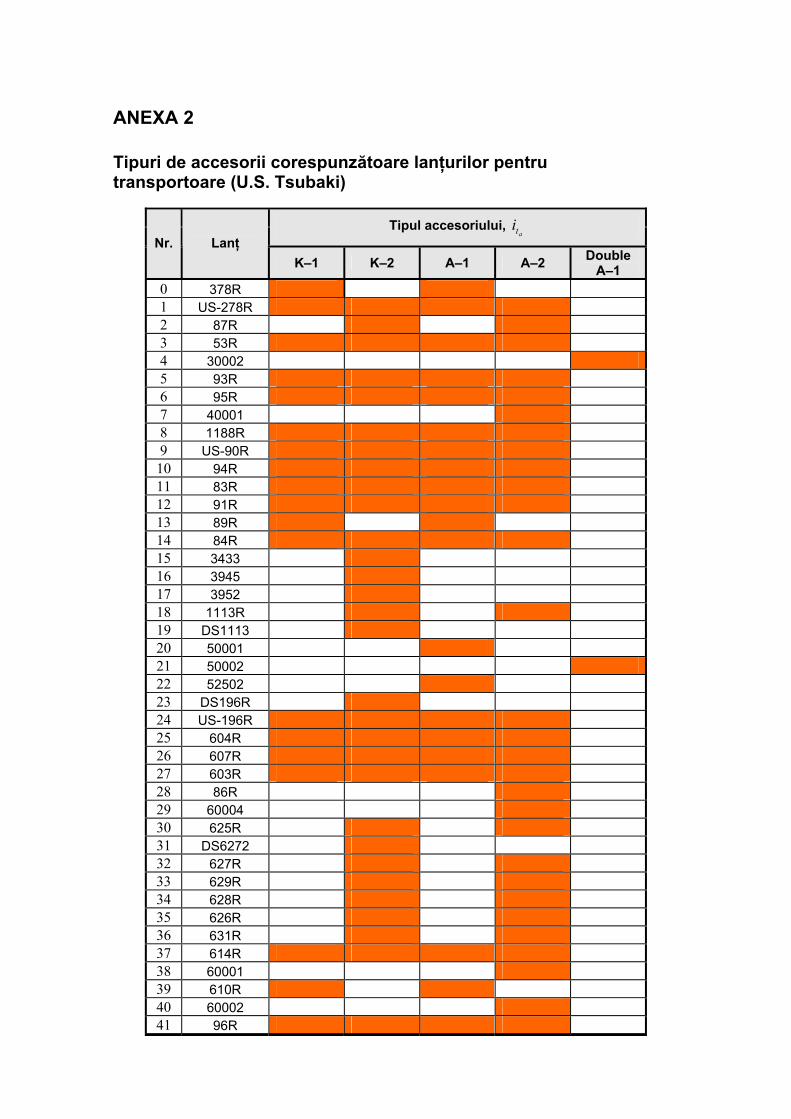
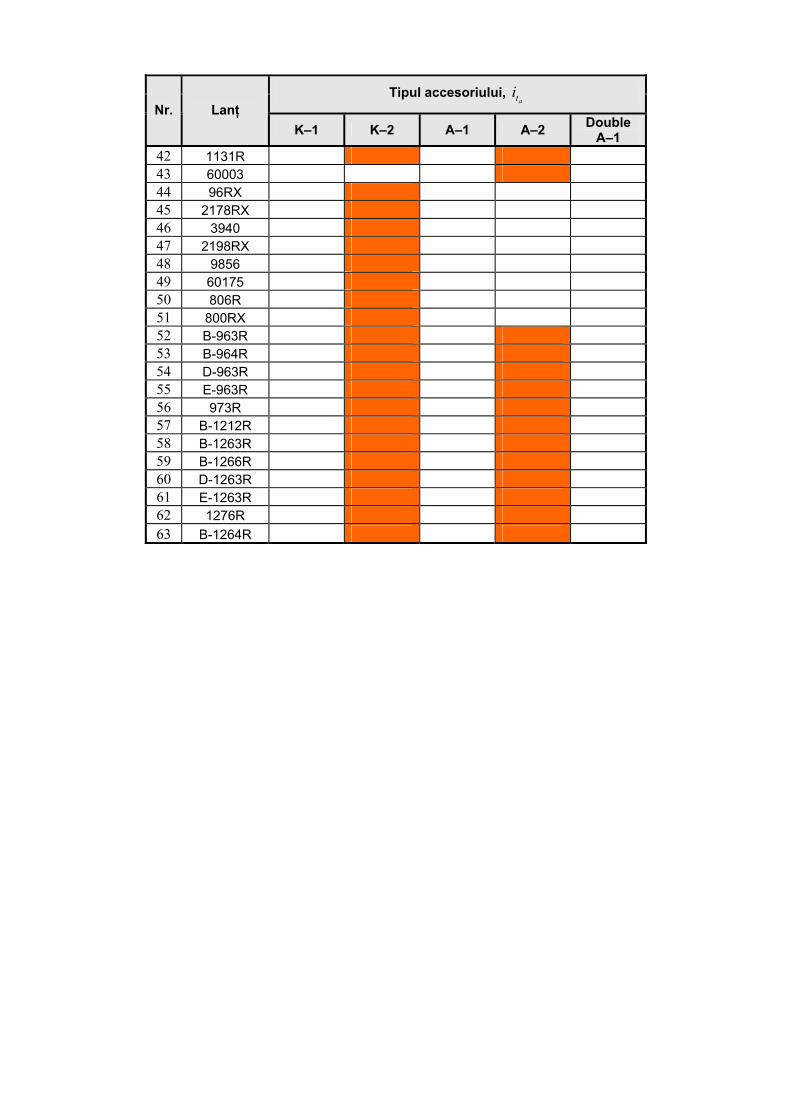
În tabelul 2.3 valorile genelor referitoare la lanţul transportorului, accesoriul transportorului, şi grosimea plăcii transportorului (simbolizate prin ich, at
i şi pti ) reprezintă o serie indici din cadrul
unor liste (Anexa 1, Anexa 2 şi Anexa 7). Acestor indici le sunt atribuite toate caracteristicile specifice genelor respective (lanţului, accesoriului şi plăcii).
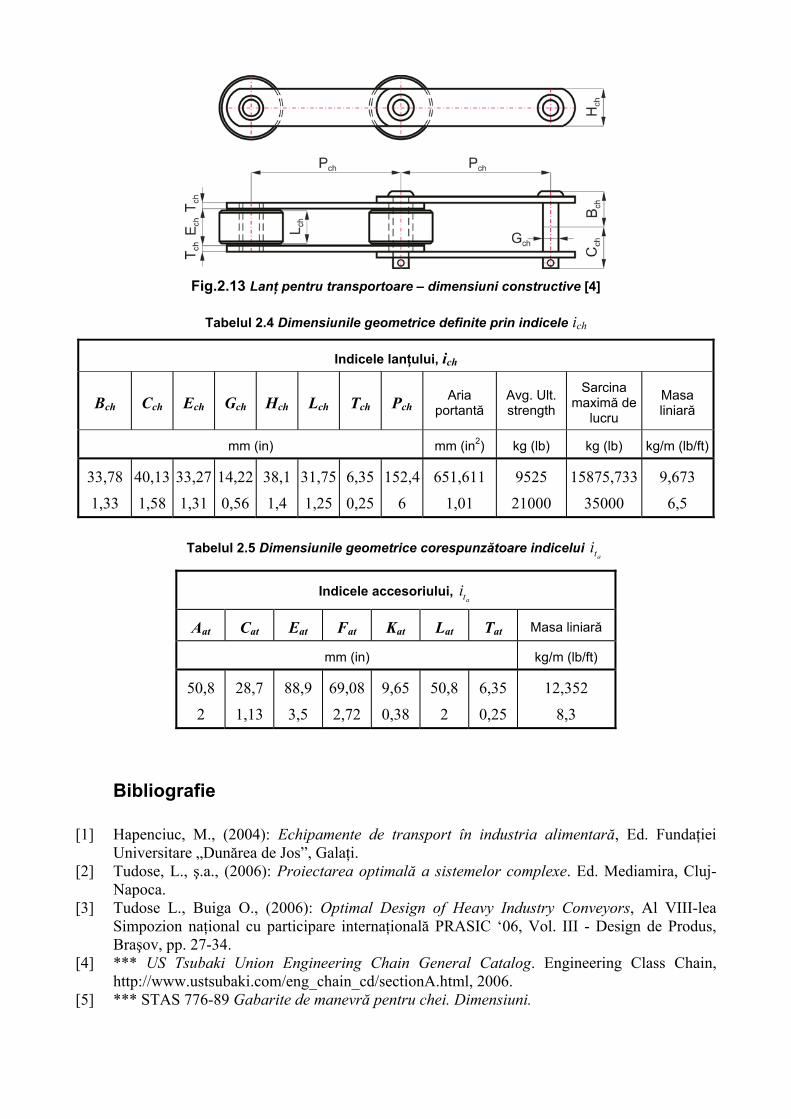
Indicelui ich corespunzător lanţului transportorului îi sunt atribuite dimensiunile geometrice ale acestuia (Bch, Cch, Ech, Gch, Hch, Lch, Pch şi Tch – figura 2.13), caracteristicile mecanice (aria portantă, sarcina maximă de lucru) şi masa liniară. Valorile mărimilor ataşate acestui indice sunt ilustrate în tabelul 2.4.
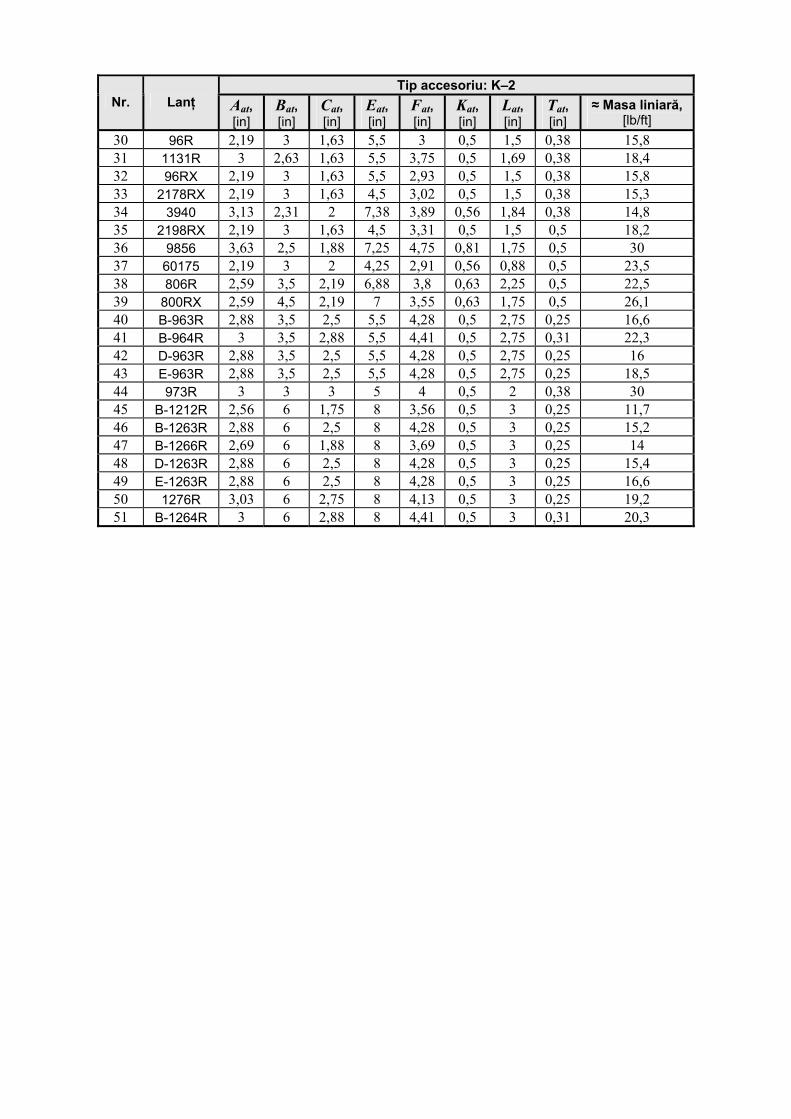
În mod similar, indicelui at
i corespunzător tipului accesoriului îi sunt atribuite următoarele caracteristici: Aat, Cat, Eat, Fat, Kat, Lat, Tat şi masa liniară. Valorile acestora sunt ilustrate în tabelul 2.5.
Fig.2.13 Lanţ pentru transportoare – dimensiuni constructive [4]
Tabelul 2.4 Dimensiunile geometrice definite prin indicele ich
Indicele lanţului, ich
Bch Cch Ech Gch Hch Lch Tch Pch Aria portantă
Avg. Ult. strength
Sarcina maximă de
lucru
Masa liniară
mm (in) mm (in2) kg (lb) kg (lb) kg/m (lb/ft)
33,78
1,33
40,13
1,58
33,27
1,31
14,22
0,56
38,1
1,4
31,75
1,25
6,35
0,25
152,4
6
651,611
1,01
9525
21000
15875,733
35000
9,673
6,5
Tabelul 2.5 Dimensiunile geometrice corespunzătoare indicelui at
i
Indicele accesoriului, at
i
Aat Cat Eat Fat Kat Lat Tat Masa liniară
mm (in) kg/m (lb/ft)
50,8
2
28,7
1,13
88,9
3,5
69,08
2,72
9,65
0,38
50,8
2
6,35
0,25
12,352
8,3
Bibliografie
[1] Hapenciuc, M., (2004): Echipamente de transport în industria alimentară, Ed. Fundaţiei Universitare „Dunărea de Jos”, Galaţi.
[3] Tudose L., Buiga O., (2006): Optimal Design of Heavy Industry Conveyors, Al VIII-lea Simpozion naţional cu participare internaţională PRASIC ‘06, Vol. III - Design de Produs, Braşov, pp. 27-34.
[4] *** US Tsubaki Union Engineering Chain General Catalog. Engineering Class Chain, http://www.ustsubaki.com/eng_chain_cd/sectionA.html, 2006.
[5] *** STAS 776-89 Gabarite de manevră pentru chei. Dimensiuni.
ANEXA 1
Lanţuri pentru transportoare. Dimensiuni constructive. (U.S. Tsubaki)