Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor Fie (S): M i (m i ), r i = OM i , i = 1,..., N un sistem material aflat in miscare fata de un reper inertial (in particular, fix) Oxyz si fie un reper cartezian Cx‘y‘z‘ cu originea in centrul maselor C al sistemului considerat si cu axele orientate invariabil in spatiu, adica presupunem ca Cx‘y‘z‘ are doar o miscare de translatie cu viteza punctului C fata de reperul fix Oxyz. Fie r‘ i = CM i , i = 1,..., N. Atunci avem descompunerea: y x O z C M i y‘ r C r i z‘ x‘ r‘ i N i r r r i C i ,..., 1 , ' = + = r r r (1) Definitie: Miscarea sistemului de puncte materiale fata de reperul mobil Cx‘y‘z‘ se numeste miscarea sistemului in jurul centrului de greutate. Curs 13. Teoremele generale in miscarea in jurul centrului maselor 1
Transcript
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
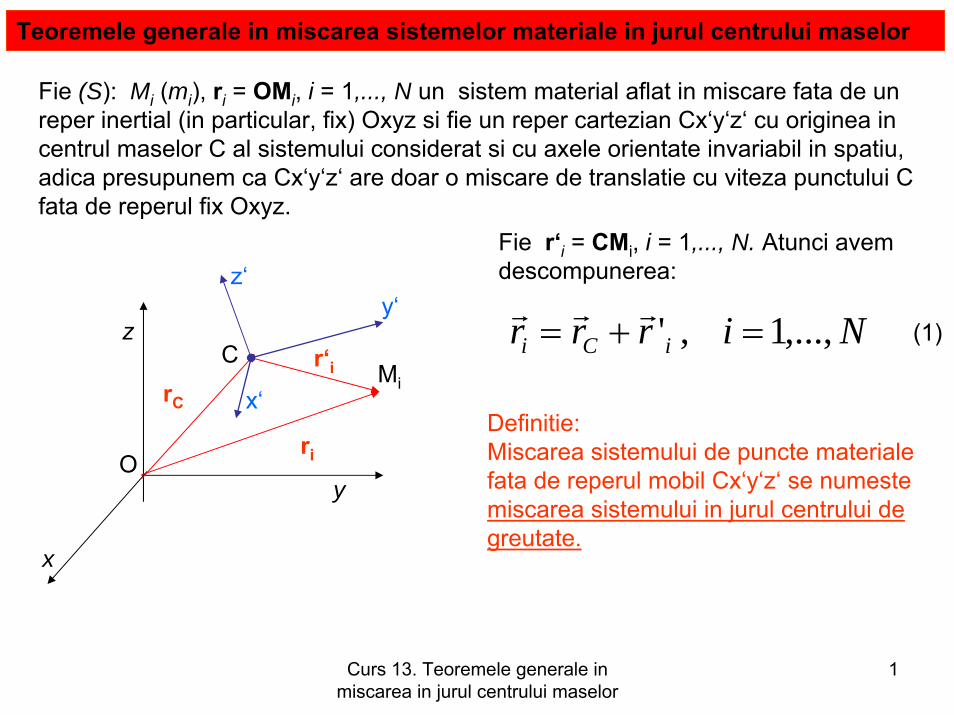
Fie (S): Mi (mi), ri = OMi, i = 1,..., N un sistem material aflat in miscare fata de un reper inertial (in particular, fix) Oxyz si fie un reper cartezian Cx‘y‘z‘ cu originea in centrul maselor C al sistemului considerat si cu axele orientate invariabil in spatiu, adica presupunem ca Cx‘y‘z‘ are doar o miscare de translatie cu viteza punctului C fata de reperul fix Oxyz.
Fie r‘i = CMi, i = 1,..., N. Atunci avem descompunerea:
y
x
O
zC
Mi
y‘
rC
ri
z‘
x‘
r‘iNirrr iCi ,...,1,' =+=
rrr(1)
Definitie: Miscarea sistemului de puncte materiale fata de reperul mobil Cx‘y‘z‘ se numeste miscarea sistemului in jurul centrului de greutate.
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
1
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
iCi vvv 'rrr+=
Derivand (1) avem:
(2)
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
2
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
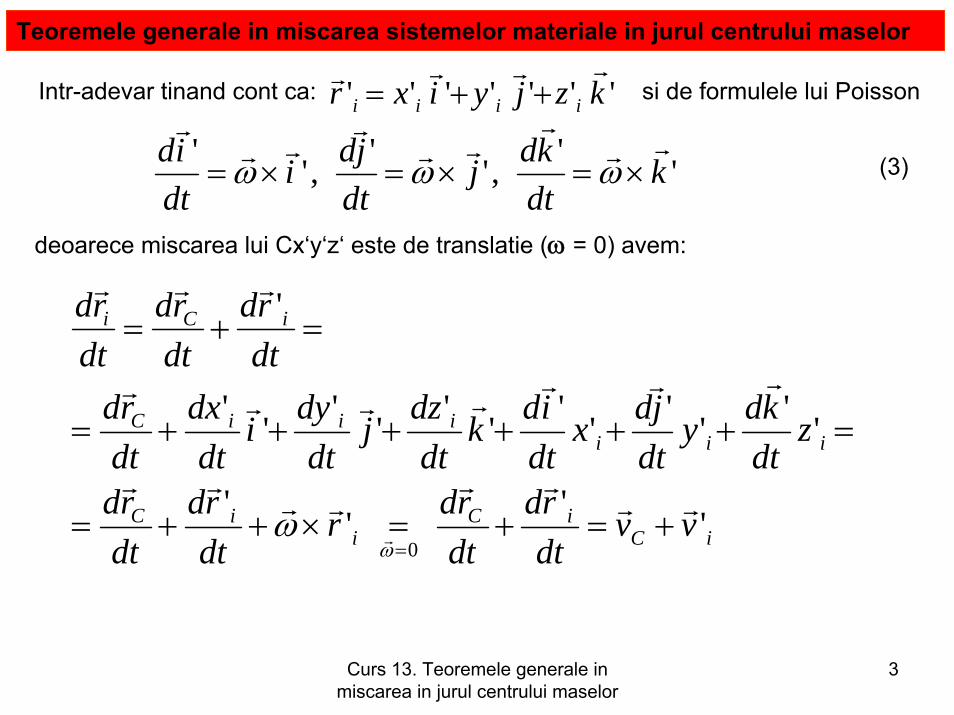
Intr-adevar tinand cont ca: si de formulele lui Poisson''''''' kzjyixr iiii
rrrr++=
'','','' kdtkdj
dtjdi
dtid rr
rrr
rrr
r
×=×=×= ωωω (3)
deoarece miscarea lui Cx‘y‘z‘ este de translatie (ω = 0) avem:
iCiC
iiC
iiiiiiC
iCi
vvdtrd
dtrdr
dtrd
dtrd
zdtkdy
dtjdx
dtidk
dtdzj
dtdyi
dtdx
dtrd
dtrd
dtrd
dtrd
''''
''''''''''''
'
0
rrrr
rrrr
rrrrrrr
rrr
r +=+=×++=
=++++++=
=+=
=ωω
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
3
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
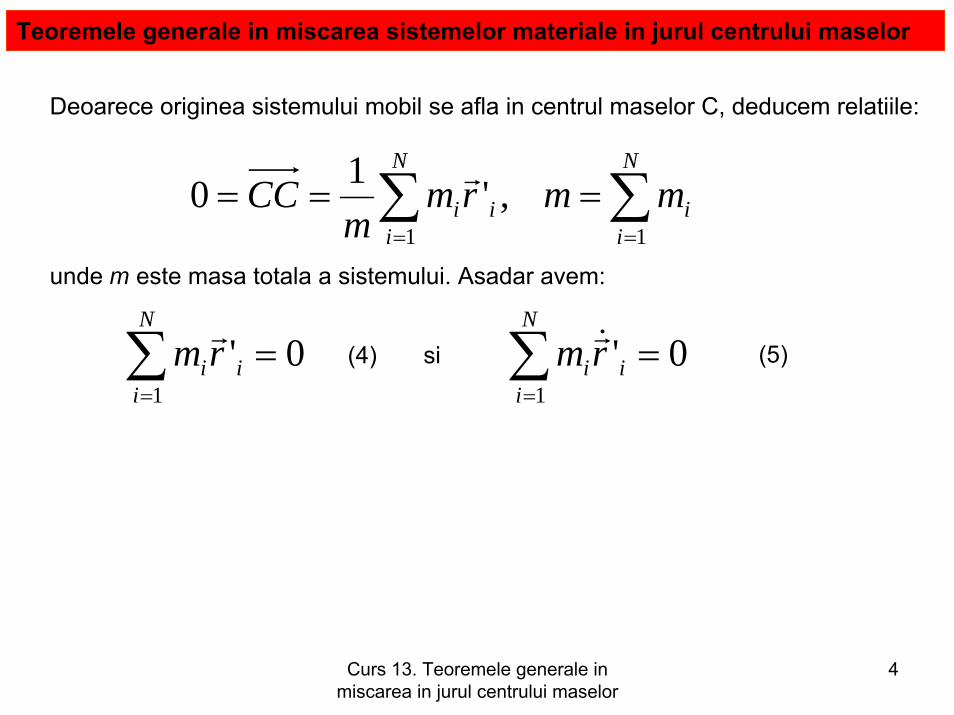
Deoarece originea sistemului mobil se afla in centrul maselor C, deducem relatiile:
∑∑==
===N
ii
N
iii mmrm
mCC
11,'10 r
unde m este masa totala a sistemului. Asadar avem:
0'1
=∑=
N
iiirm r 0'
1=∑
=
N
iiirm &r (5)(4) si
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
4
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
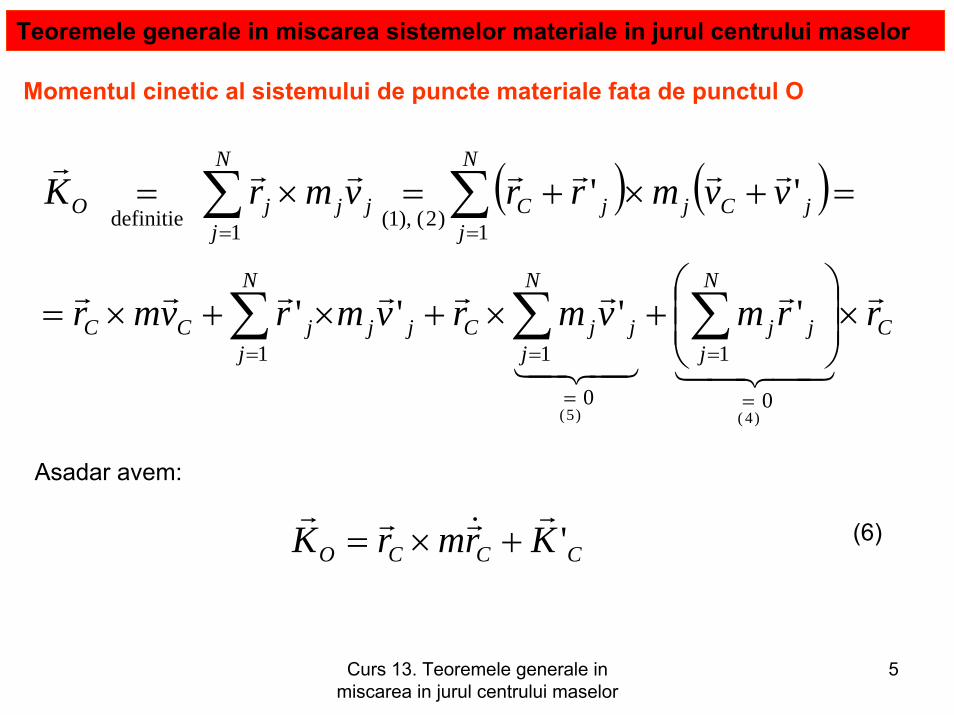
Momentul cinetic al sistemului de puncte materiale fata de punctul O
( ) ( )
C
N
jjj
N
jjjC
N
jjjjCC
N
jjCjjC
N
jjjjO
rrmvmrvmrvmr
vvmrrvmrK
r
43421
r
43421
rrrrrr
rrrrrrr
×⎟⎟⎠
⎞⎜⎜⎝
⎛+×+×+×=
=+×+=×=
=
=
=
==
==
∑∑∑
∑∑
0
1
0
11
1)2(),1(1definitie
)4()5(
''''
''
Asadar avem:
CCCO KrmrK 'r
&rrr+×= (6)
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
5
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
unde
∑=
×=N
jjjjC rmrK
1''' &rrr
(7)
Formula (7) defineste momentul cinetic al sistemului de puncte materiale in miscarea acestuia in jurul centrului maselor.
Definitie:Formula (6) se numeste prima formula a lui Koenig (König) si ne arata ca momentul cinetic al sistemului fata de punctul O este egal cu momentul cinetic al centrului maselor la care se adauga momentul cinetic al miscarii sistemului in jurul centrului maselor.
In continuare aplicam acelasi rationament si in calculul energiei cinetice:
( ) =+== ∑∑==
N
jjCj
N
jjj vrmvmT
1
2
)2(1
2 '21
21 r&r
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
6
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
∑ ∑∑=
=
==
++=N
j
N
jCjjjj
N
jCj vvmvmvm
1
0
1
2
1
2
)5(
''21
21
43421
rrsr(7)
sau
CC TmvT '21 2 += (8)
unde
∑=
=N
jjjC vmT
1
2'21' s (9)
este energia cinetica a sistemului in miscarea in jurul centrului maselor C.
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
7
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
Definitie:Formula (8) reprezinta a doua formula a lui Koenig (König) si ne arata ca energia cinetica a sistemului fata de reperul Oxyz este egala cu energia cinetica a centrului maselor la care se adauga energia cinetica a sistemului in miscarea in jurul centrului maselor C.
Teorema momentului cinetic in miscarea sistemului in jurul centrului maselor C
Avem teorema generala a momentului cinetic:
OO M
dtKd rr
=
unde este momentul rezultant al fortelor exterioare. Dar
(10)
∑=
×=N
jjjO FrM
1
rrr
( ) CCCCCCO KamrKvmr
dtd
dtKd ''
)6(
&rrrrrrr
+×=+×=
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
8
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
Daca tinem cont de teorema centrului maselor, maC = R, avem:
CCO KRr
dtKd '&
rrrr
+×=
Folosind formula de schimbare a momentului rezultant in raport cu polul
(11)
ROCMM CO
rrr×+= (12)
si ecuatiile (11) si (12) avem :
CC
CCC MdtKdMROCKRr
rr
rr&rrr=⇒+×=+×
'' (13)
Teorema momentului cinetic in miscarea sistemului in jurul centrului maselor:Derivata in raport cu timpul t a momentului cinetic al sistemului in raport cu centrul maselor este egala cu momentul rezultant al fortelor exterioare evaluat fata de centrul maselor.
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
9
Dinamica punctului material supus la legaturiTeorema energiei cinetice in miscarea sistemului in jurul centrului maselor C
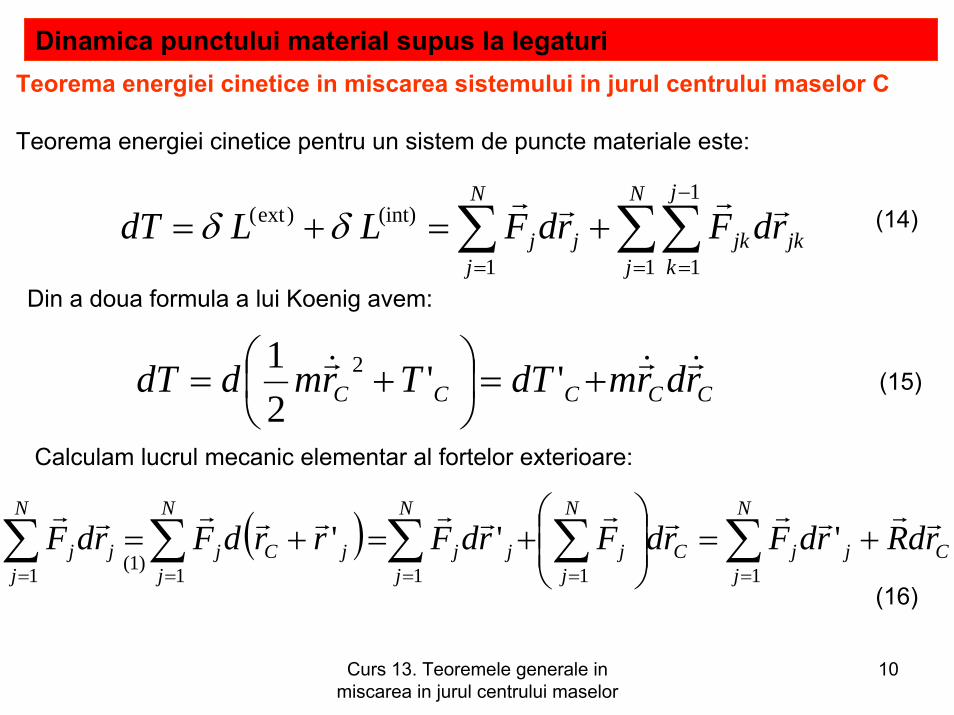
Teorema energiei cinetice pentru un sistem de puncte materiale este:
jk
N
j
j
kjk
N
jjj rdFrdFLLdT rrrr∑∑∑=
−
==
+=+=1
1
11
(int))ext( δδ
Din a doua formula a lui Koenig avem:
(14)
CCCCC rdrmdTTrmddT &r&r&r +=⎟⎠⎞
⎜⎝⎛ += ''
21 2
(15)
Calculam lucrul mecanic elementar al fortelor exterioare:
( ) C
N
jjjC
N
jj
N
jjj
N
jjCj
N
jjj rdRrdFrdFrdFrrdFrdF rrrrrrrrrrrrr
+=⎟⎟⎠
⎞⎜⎜⎝
⎛+=+= ∑∑∑∑∑
===== 1111)1(1
'''(16)
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
10
Dinamica punctului material supus la legaturi
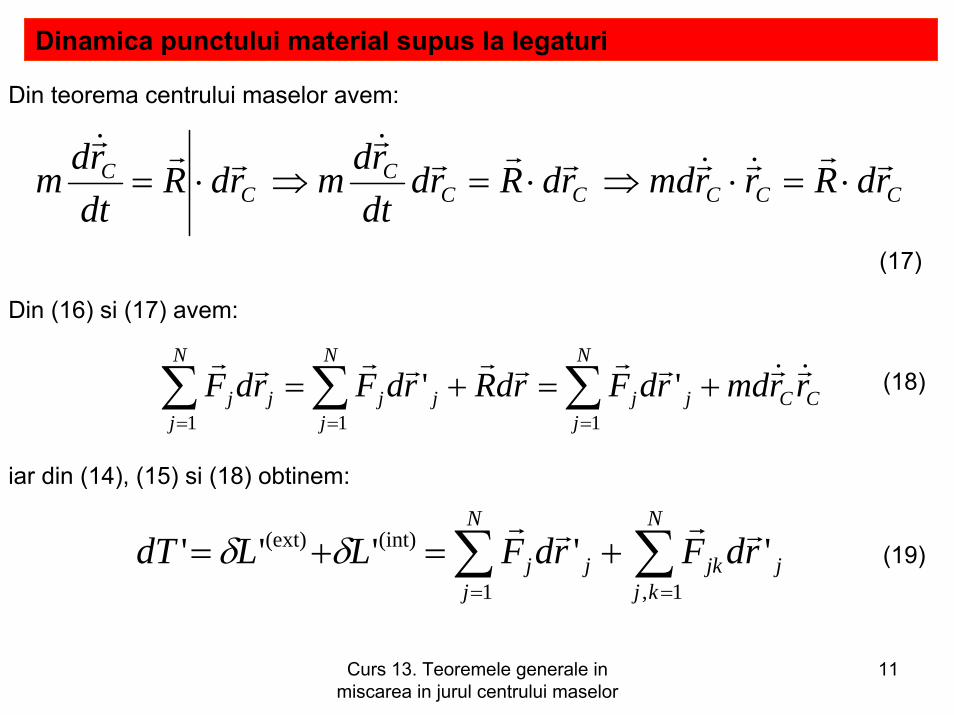
Din teorema centrului maselor avem:
CCCCCC
CC rdRrrmdrdRrd
dtrdmrdR
dtrdm rr
&r&rrrr&rrr&r
⋅=⋅⇒⋅=⇒⋅=
(17)
Din (16) si (17) avem:
CC
N
jjj
N
jjj
N
jjj rrmdrdFrdRrdFrdF &r&rrrrrrrrr
+=+= ∑∑∑=== 111
'' (18)
iar din (14), (15) si (18) obtinem:
∑∑==
+=+=N
kjjjk
N
jjj rdFrdFLLdT
1,1
(int)(ext) ''''' rrrrδδ (19)
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
11
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
unde δL‘(ext) este lucrul mecanic elementar al fortelor exterioare fata de reperul Cx‘y‘z‘, iar δL‘(int) este lucrul mecanic elementar al fortelor interioare fata de reperul Cx‘y‘z‘.
Teorema energiei cinetice in miscarea sistemului in jurul centrului maselor C:Diferentiala energiei cinetice a sistemului aflat in miscare in jurul centrului maselor C este egala cu suma dintre lucrul mecanic elementar al fortelor exterioare si lucrul mecanic elementar al fortelor interioare, ambele evaluate fata de reperul mobil Cx‘y‘z‘.
Curs 13. Teoremele generale in miscarea in jurul centrului maselor
12
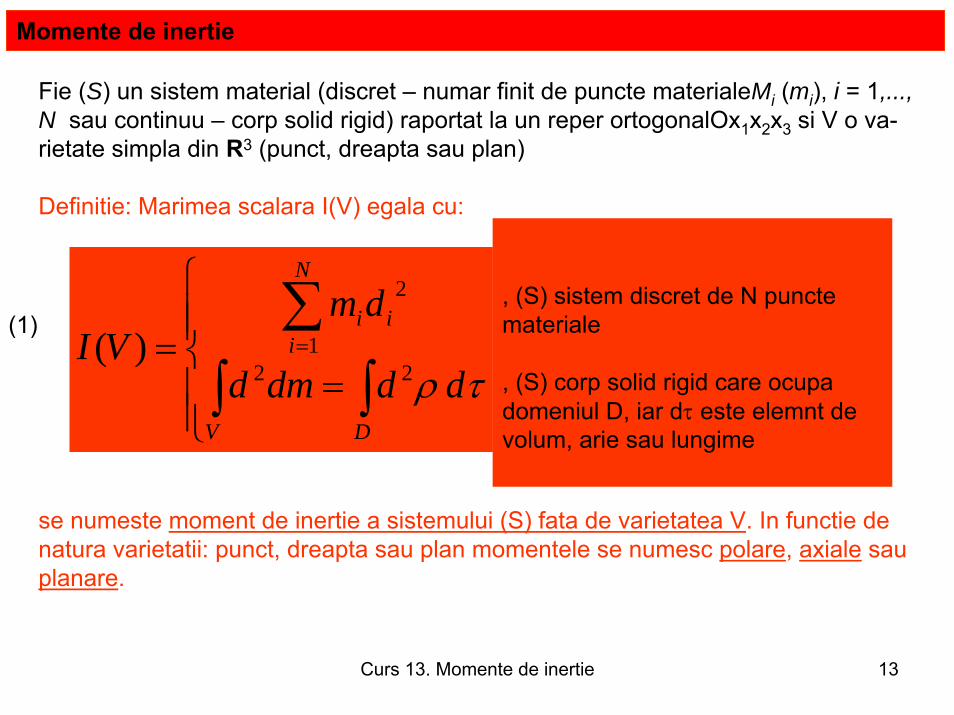
Momente de inertie
Fie (S) un sistem material (discret – numar finit de puncte materialeMi (mi), i = 1,..., N sau continuu – corp solid rigid) raportat la un reper ortogonalOx1x2x3 si V o va-rietate simpla din R3 (punct, dreapta sau plan)
Definitie: Marimea scalara I(V) egala cu:
⎪⎪⎩
⎪⎪⎨
⎧
==
∫∫∑=
DV
N
iii
dddmd
dmVI
τρ221
2
)(, (S) sistem discret de N puncte materiale
, (S) corp solid rigid care ocupa domeniul D, iar dτ este elemnt de volum, arie sau lungime
(1)
se numeste moment de inertie a sistemului (S) fata de varietatea V. In functie de natura varietatii: punct, dreapta sau plan momentele se numesc polare, axiale sau planare.
Curs 13. Momente de inertie 13
Momente de inertie
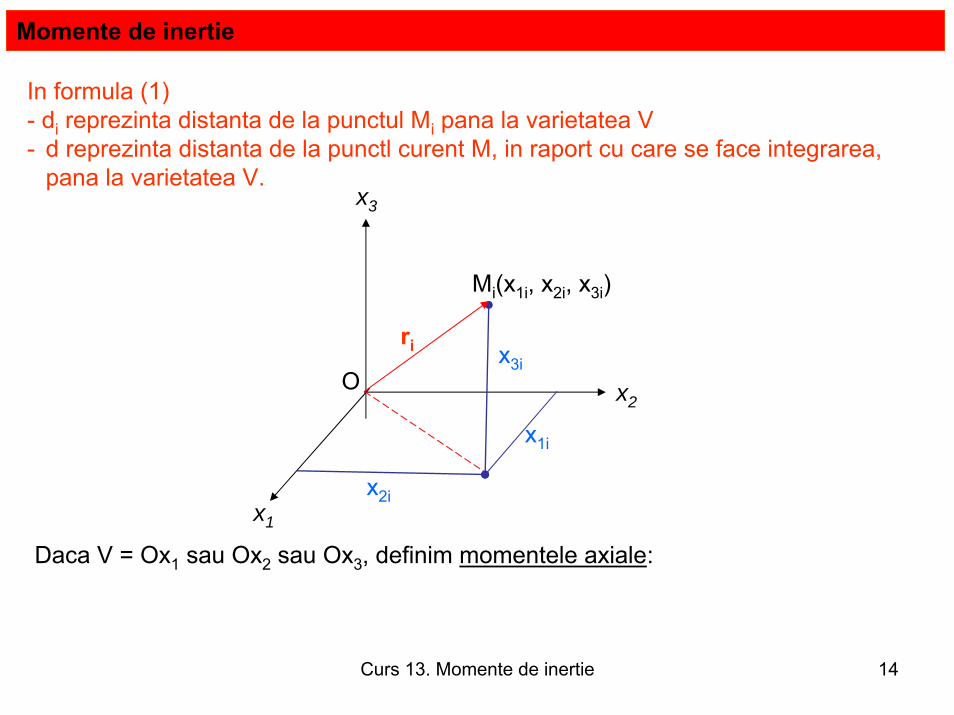
In formula (1)- di reprezinta distanta de la punctul Mi pana la varietatea V- d reprezinta distanta de la punctl curent M, in raport cu care se face integrarea,
pana la varietatea V.
x2
x1
O
x3
Mi(x1i, x2i, x3i)
ri x3i
x1i
x2i
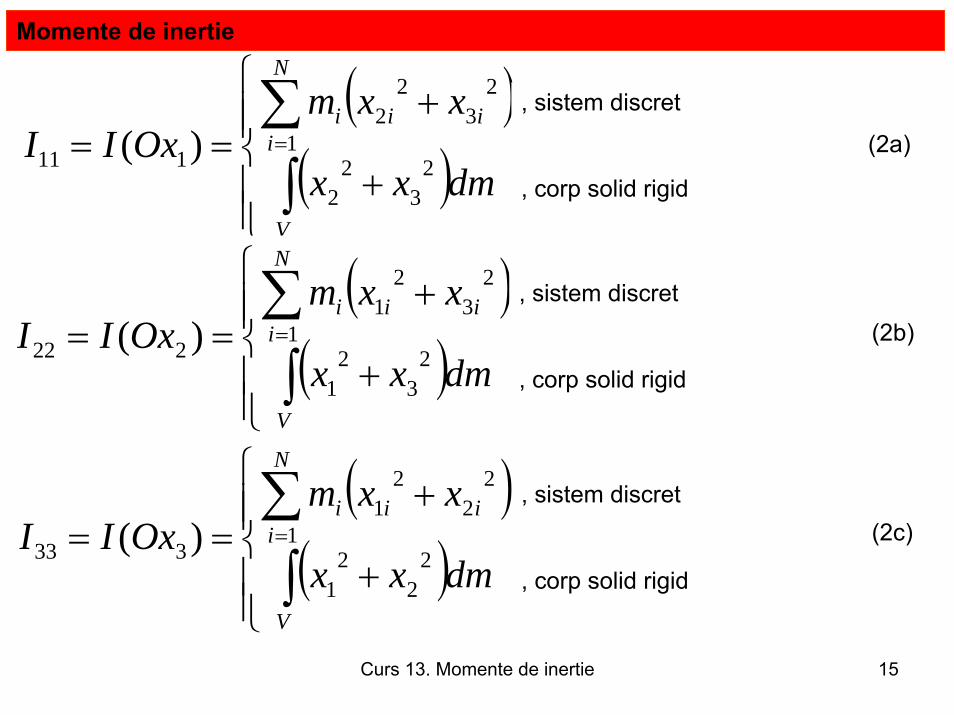
Daca V = Ox1 sau Ox2 sau Ox3, definim momentele axiale:
Curs 13. Momente de inertie 14
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
+
+==
∫∑=
V
N
iiii
dmxx
xxmOxII
23
22
1
23
22
111 )(
Momente de inertie
, sistem discret
, corp solid rigid
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
+
+==
∫∑=
V
N
iiii
dmxx
xxmOxII
23
21
1
23
21
222 )(, sistem discret
, corp solid rigid
(2a)
(2b)
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
+
+==
∫∑=
V
N
iiii
dmxx
xxmOxII
22
21
1
22
21
333 )(, sistem discret
, corp solid rigid
(2c)
Curs 13. Momente de inertie 15
Momente de inertie
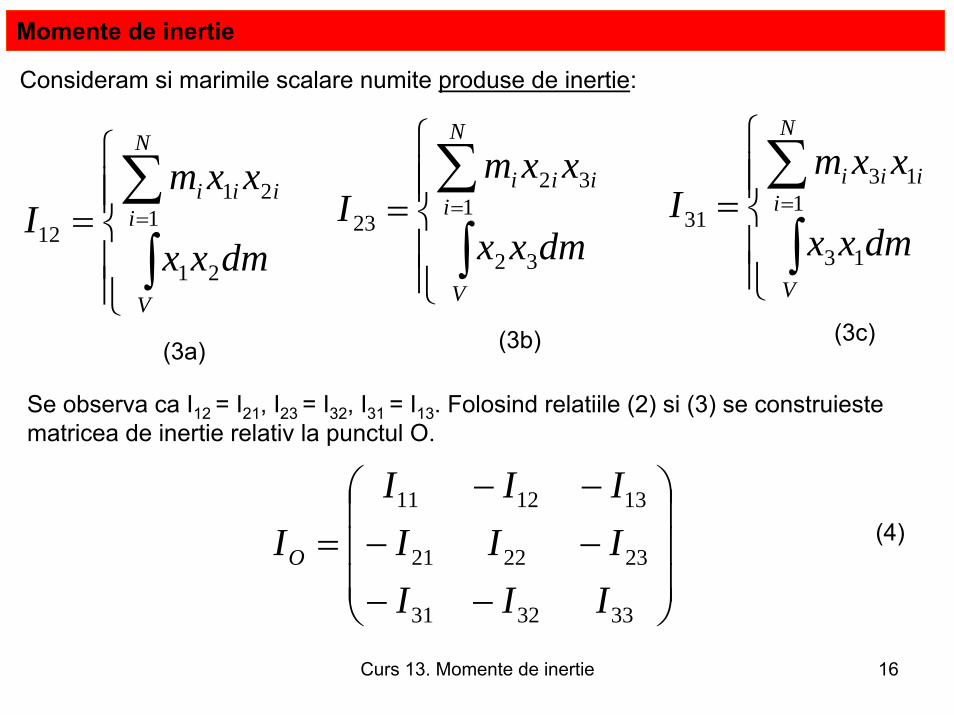
Consideram si marimile scalare numite produse de inertie:
⎪⎪⎩
⎪⎪⎨
⎧
=∫∑=
V
N
iiii
dmxx
xxmI
13
113
31
⎪⎪⎩
⎪⎪⎨
⎧
=∫∑=
V
N
iiii
dmxx
xxmI
32
132
23
⎪⎪⎩
⎪⎪⎨
⎧
=∫∑=
V
N
iiii
dmxx
xxmI
21
121
12
(3c)(3b)(3a)
Se observa ca I12 = I21, I23 = I32, I31 = I13. Folosind relatiile (2) si (3) se construieste matricea de inertie relativ la punctul O.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−−−−
=
333231
232221
131211
IIIIIIIII
IO(4)
Curs 13. Momente de inertie 16
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
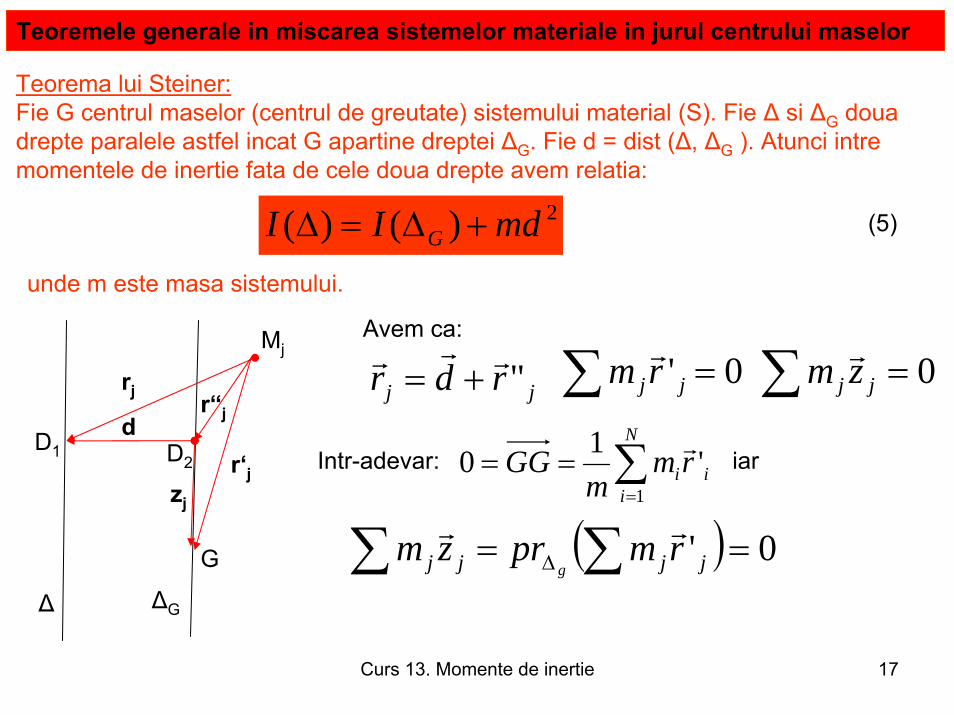
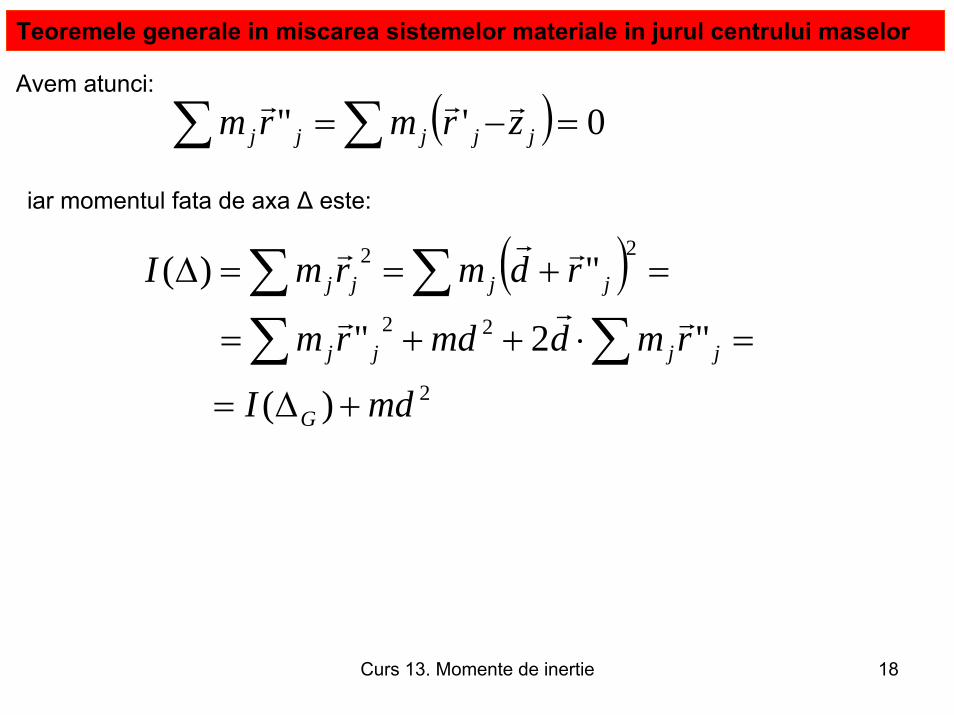
Teorema lui Steiner:Fie G centrul maselor (centrul de greutate) sistemului material (S). Fie ∆ si ∆G doua drepte paralele astfel incat G apartine dreptei ∆G. Fie d = dist (∆, ∆G ). Atunci intre momentele de inertie fata de cele doua drepte avem relatia:
2)()( mdII G +∆=∆ (5)
unde m este masa sistemului.
Avem ca:
jj rdr "rrr+= ∑ = 0' jjrm r
∆ ∆G
G
d
Mj
D2D1
rj r“j
r‘jzj
∑ = 0jj zm r
Intr-adevar: iar∑=
==N
iiirm
mGG
1'10 r
( ) 0' == ∑∑ ∆ jjjj rmprzmg
rr
Curs 13. Momente de inertie 17
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
Avem atunci:
( ) 0'" =−=∑∑ jjjjj zrmrm rrr
iar momentul fata de axa ∆ este:
( )
2
22
22
)(
"2"
")(
mdI
rmdmdrm
rdmrmI
G
jjjj
jjjj
+∆=
=⋅++=
=+==∆
∑∑∑∑
rrr
rrr
Curs 13. Momente de inertie 18
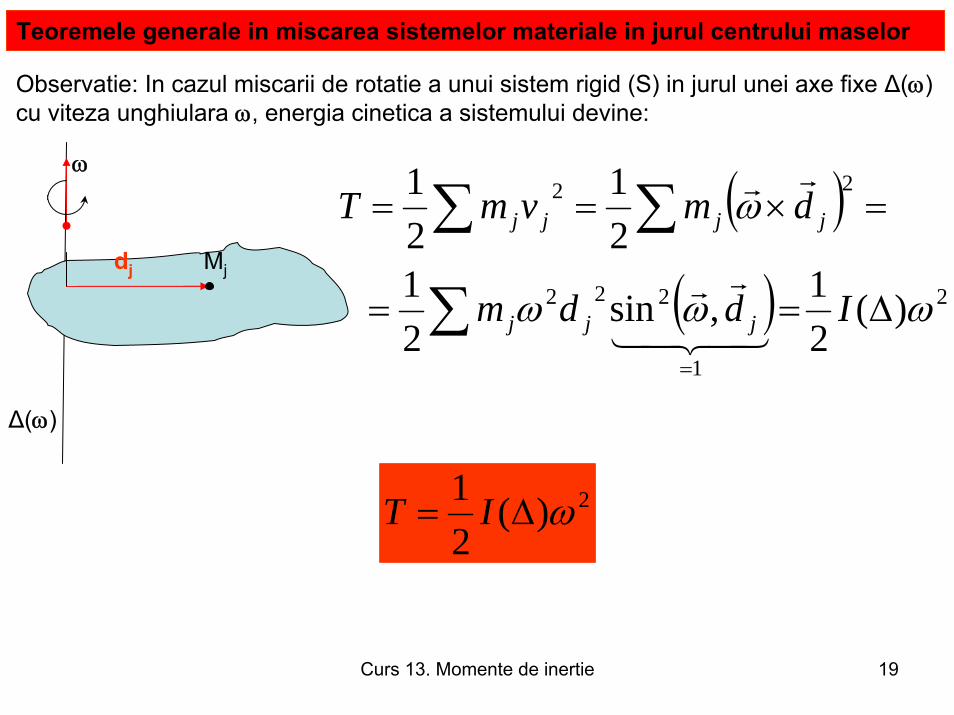
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
Observatie: In cazul miscarii de rotatie a unui sistem rigid (S) in jurul unei axe fixe ∆(ω) cu viteza unghiulara ω, energia cinetica a sistemului devine:
( )( ) 2
1
222
22
)(21,sin
21
21
21
ωωω
ω
∆==
=×==
∑
∑∑
=
Iddm
dmvmT
jjj
jjjj
43421
rr
rr
∆(ω)
ω
Mjdj
2)(21 ω∆= IT
Curs 13. Momente de inertie 19
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
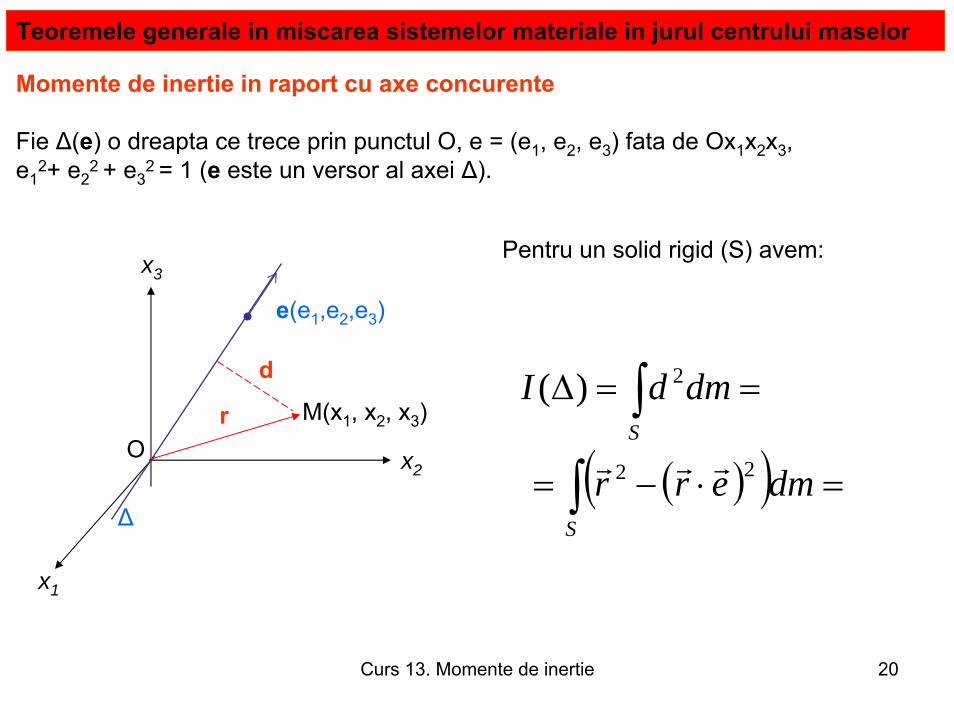
Momente de inertie in raport cu axe concurente
Fie ∆(e) o dreapta ce trece prin punctul O, e = (e1, e2, e3) fata de Ox1x2x3, e1
2+ e22 + e3
2 = 1 (e este un versor al axei ∆).
Pentru un solid rigid (S) avem:
x2
x1
O
x3
M(x1, x2, x3)r
e(e1,e2,e3)
∆
d
( )( ) =⋅−=
==∆
∫
∫
S
S
dmerr
dmdI
22
2)(
rrr
Curs 13. Momente de inertie 20
Teoremele generale in miscarea sistemelor materiale in jurul centrului maselor
( )( ) ( ){ }( ) ( ) ( ){
}dmeexxeexxeexx
exxexxexx
dmexexexeeexxx
S
S
131332322121
23
22
21
22
23
21
21
23
22
2332211
23
22
21
23
22
21
222 −−−
−+++++=
=++−++++=
∫
∫
Deci
1331322321122
3332
2222
111 222)( eeIeeIeeIeIeIeII −−−++=∆(6)
sau condensat, in forma matriciala:
{ } [ ]{ }eIeI OT rr
=∆)( (6‘)
Curs 13. Momente de inertie 21
Momente de inertie
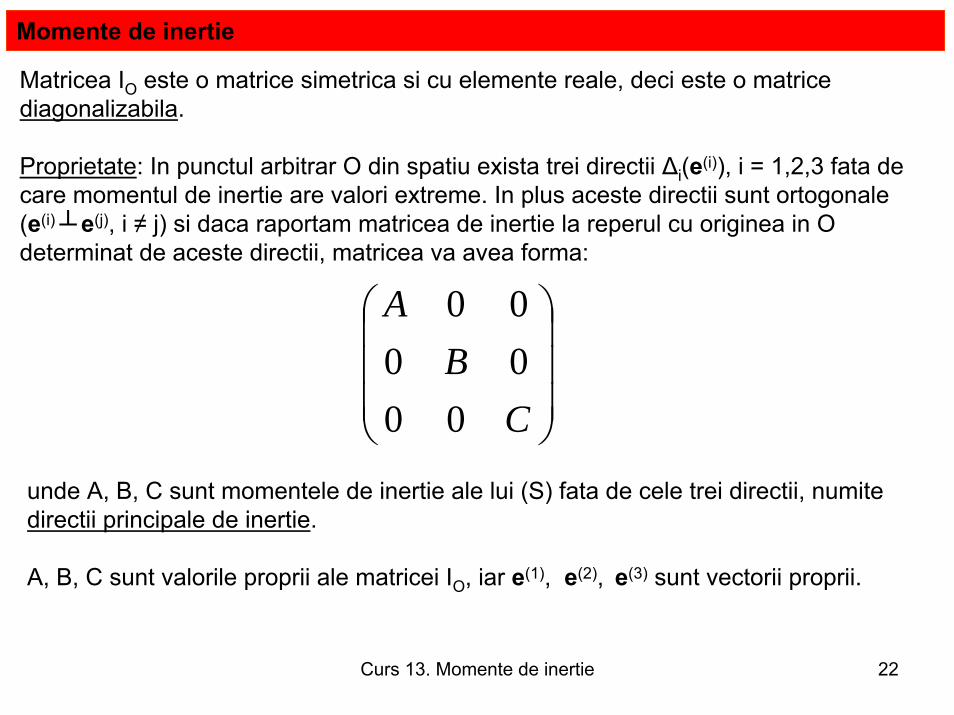
Matricea IO este o matrice simetrica si cu elemente reale, deci este o matrice diagonalizabila.
Proprietate: In punctul arbitrar O din spatiu exista trei directii ∆i(e(i)), i = 1,2,3 fata de care momentul de inertie are valori extreme. In plus aceste directii sunt ortogonale (e(i) ┴ e(j), i ≠ j) si daca raportam matricea de inertie la reperul cu originea in O determinat de aceste directii, matricea va avea forma:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
CB
A
000000
unde A, B, C sunt momentele de inertie ale lui (S) fata de cele trei directii, numite directii principale de inertie.
A, B, C sunt valorile proprii ale matricei IO, iar e(1), e(2), e(3) sunt vectorii proprii.
Curs 13. Momente de inertie 22
Momente de inertie
Daca (S) admite un plan de simetri π atunci centrul de greutate G, apartine planului, doua axe principale de inertie apartin planului π si a treia este perpendiculara pe π.
Daca ∆ este o dreapta de simetrie pentru (S), atunci centrul de greutate G apartine dreptei si ∆ este o axa principala de inertie.
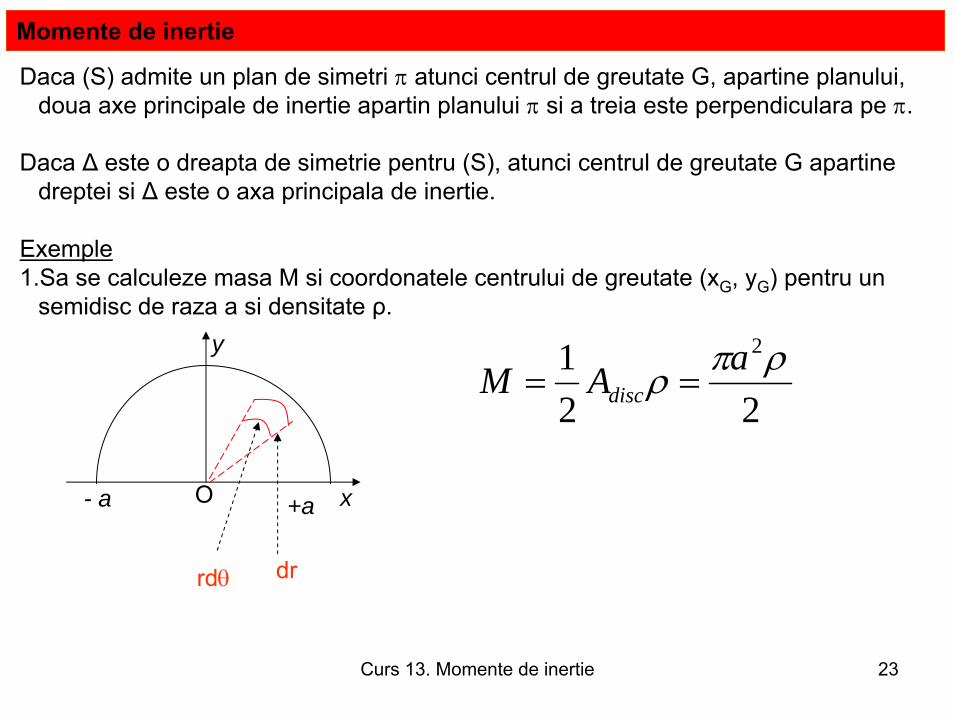
Exemple1.Sa se calculeze masa M si coordonatele centrului de greutate (xG, yG) pentru un
semidisc de raza a si densitate ρ.
221 2ρπρ aAM disc ==
- a xO
y
drrdθ
+a
Curs 13. Momente de inertie 23
Momente de inertie
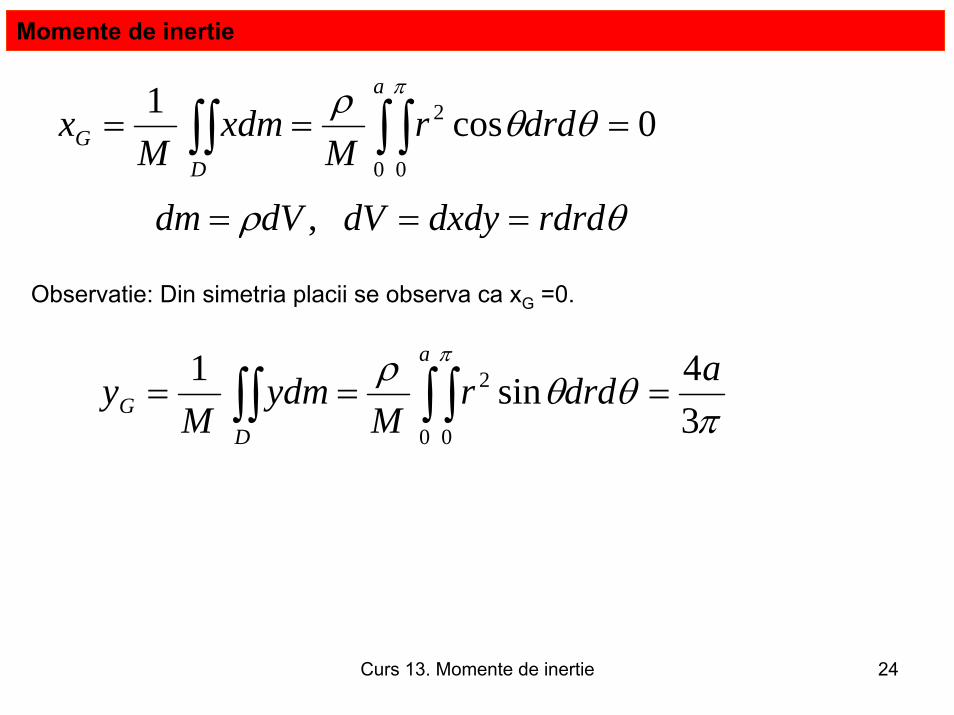
0cos1
0 0
2 === ∫ ∫∫∫a
DG drdr
Mxdm
Mx
π
θθρ
θρ rdrddxdydVdVdm === ,
Observatie: Din simetria placii se observa ca xG =0.
πθθρ π
34sin1
0 0
2 adrdrM
ydmM
ya
DG === ∫ ∫∫∫
Curs 13. Momente de inertie 24
Momente de inertie
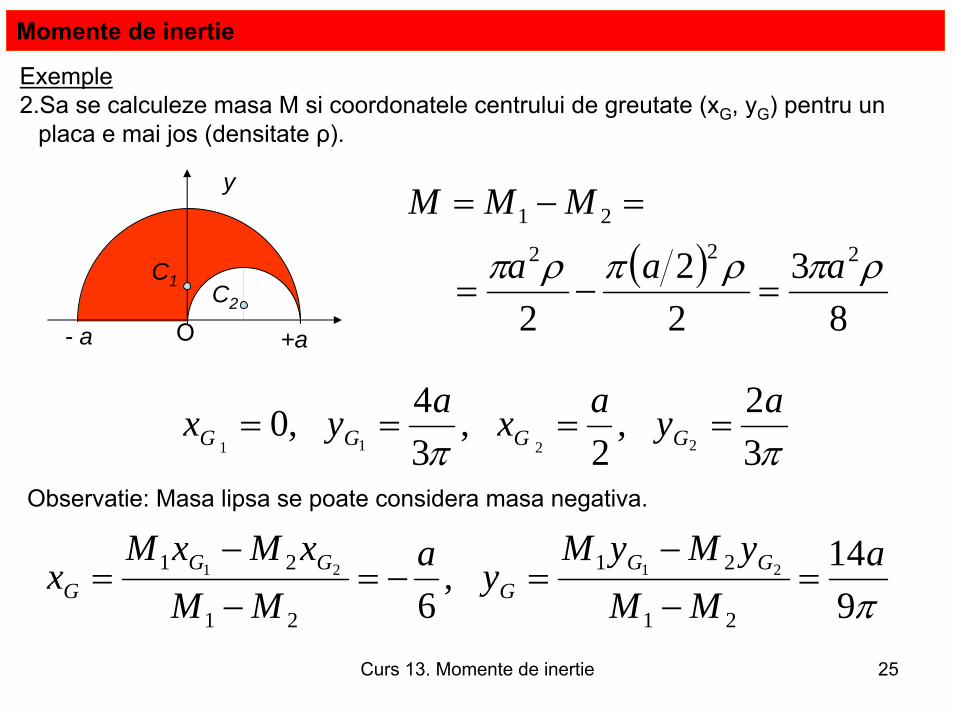
Exemple2.Sa se calculeze masa M si coordonatele centrului de greutate (xG, yG) pentru un
placa e mai jos (densitate ρ).
- a O
y
+a
C1C2
( )8
322
2
222
21
ρπρπρπ aaa
MMM
=−=
=−=
ππ 32,
2,
34,0
2211
ayaxayx GGGG ====
Observatie: Masa lipsa se poate considera masa negativa.
π914,
6 21
21
21
21 2121 aMM
yMyMya
MMxMxM
x GGG
GGG =
−
−=−=
−
−=
Curs 13. Momente de inertie 25
Momente de inertie
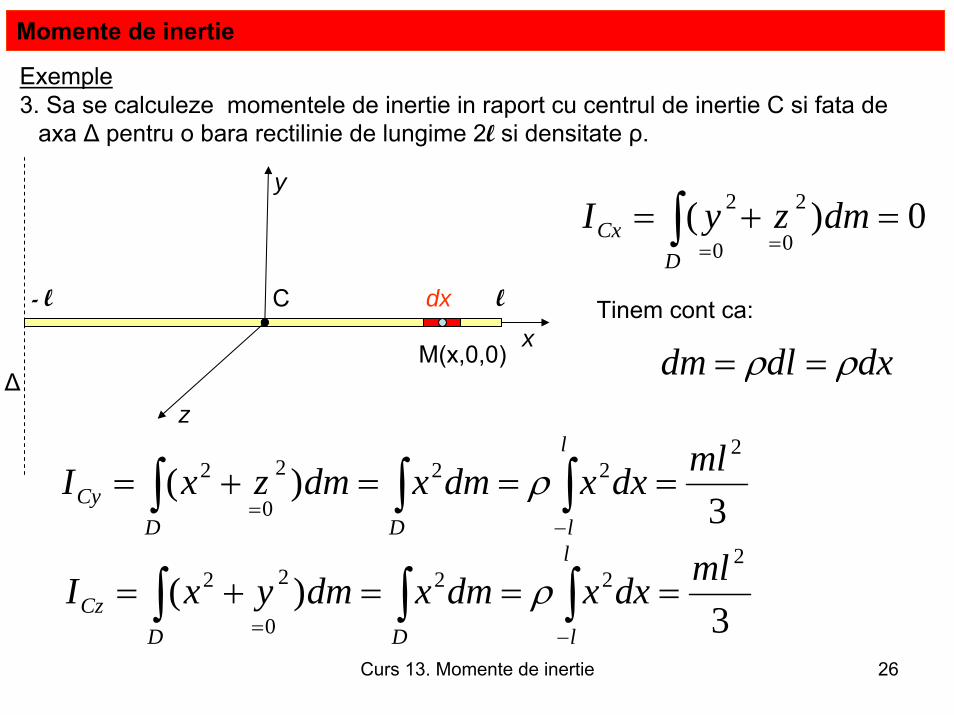
Exemple3. Sa se calculeze momentele de inertie in raport cu centrul de inertie C si fata de
axa ∆ pentru o bara rectilinie de lungime 2l si densitate ρ.
dx
y
∆
C
M(x,0,0)
z
x
l- l
0)( 2
0
2
0=+= ∫ ==D
Cx dmzyI
3)(
2222
0
2 mldxxdmxdmzxIl
lDDCy ===+= ∫∫∫
−=
ρ
dxdldm ρρ ==Tinem cont ca:
3)(
2222
0
2 mldxxdmxdmyxIl
lDDCz ===+= ∫∫∫
−=ρ
Curs 13. Momente de inertie 26
Momente de inertie
0,0,0 ====== ∫∫∫D
xyD
xzD
zy xydmIxzdmIyzdmI
Pentru a calcula momentul fata de dreapta ∆ aplicam teorema lui Steiner:
34 2
22 mlmlIMdII CyG =+=+=∆
Curs 13. Momente de inertie 27
Momente de inertie
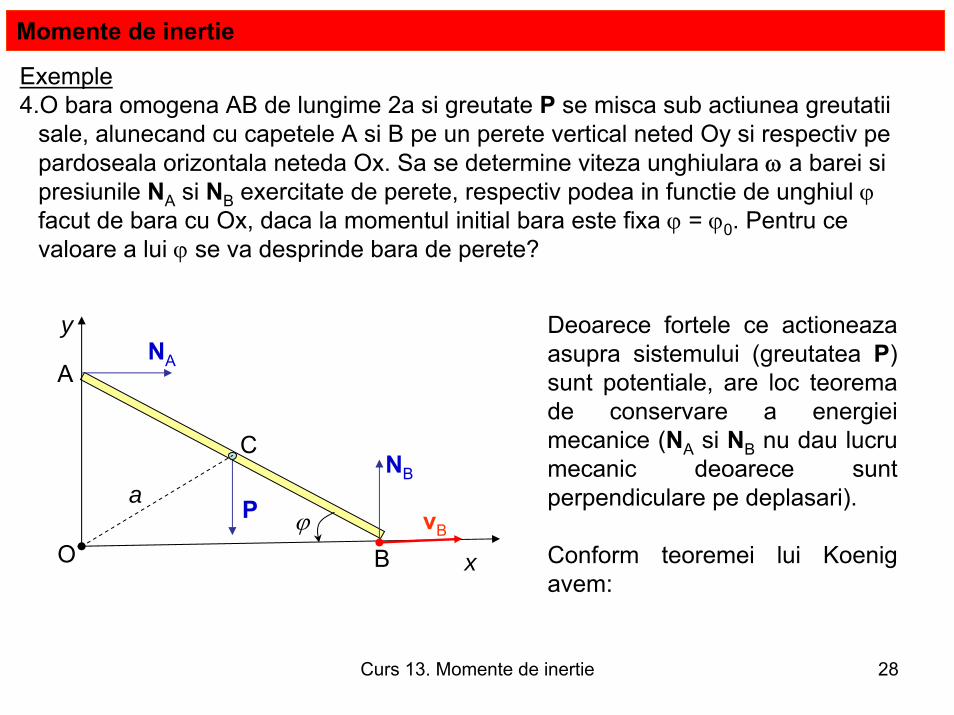
Exemple4.O bara omogena AB de lungime 2a si greutate P se misca sub actiunea greutatii
sale, alunecand cu capetele A si B pe un perete vertical neted Oy si respectiv pe pardoseala orizontala neteda Ox. Sa se determine viteza unghiulara ω a barei si presiunile NA si NB exercitate de perete, respectiv podea in functie de unghiul ϕfacut de bara cu Ox, daca la momentul initial bara este fixa ϕ = ϕ0. Pentru ce valoare a lui ϕ se va desprinde bara de perete?
Deoarece fortele ce actioneaza asupra sistemului (greutatea P) sunt potentiale, are loc teorema de conservare a energiei mecanice (NA si NB nu dau lucru mecanic deoarece sunt perpendiculare pe deplasari).
Conform teoremei lui Koenig avem:
xO
y
P
A
C
B
a
NA
NB
vBϕ
Curs 13. Momente de inertie 28
Momente de inertie
Curs 13. Momente de inertie 29
unde T‘C este energia cinetica a sistemului material in miscarea in jurul centrului de greutate (inertie).In miscarea solidului rigid in jurul unei axe fixe ∆ cu viteza unghiulara ω energia cinetica este:
CC TmvT '21 2 +=
2
21 ω∆= IT
avem deci:
3,
21
21 2
22 mlIImvT CzCzC =+= ϕ&
Consideram: si obtinem:ϕϕ sin,cos, ayaxmgP CC ===
22
32 ϕ&maT =
(ii)
(iii)(iv)
(i)
Momente de inertie
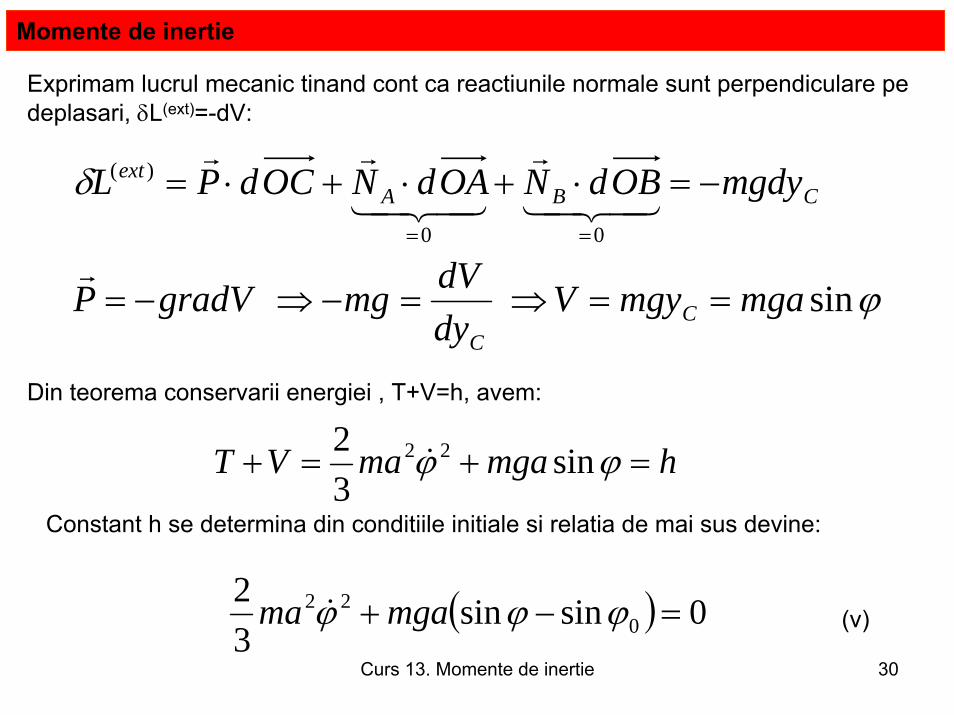
Exprimam lucrul mecanic tinand cont ca reactiunile normale sunt perpendiculare pe deplasari, δL(ext)=-dV:
CBAext mgdyOBdNOAdNOCdPL −=⋅+⋅+⋅=
==43421
r
43421
rr
00
)(δ
ϕsinmgamgyVdydVmggradVP C
C
==⇒=−⇒−=r
Din teorema conservarii energiei , T+V=h, avem:
Constant h se determina din conditiile initiale si relatia de mai sus devine:
hmgamaVT =+=+ ϕϕ sin32 22 &
Curs 13. Momente de inertie 30
( ) 0sinsin32
022 =−+ ϕϕϕ mgama & (v)
Momente de inertie
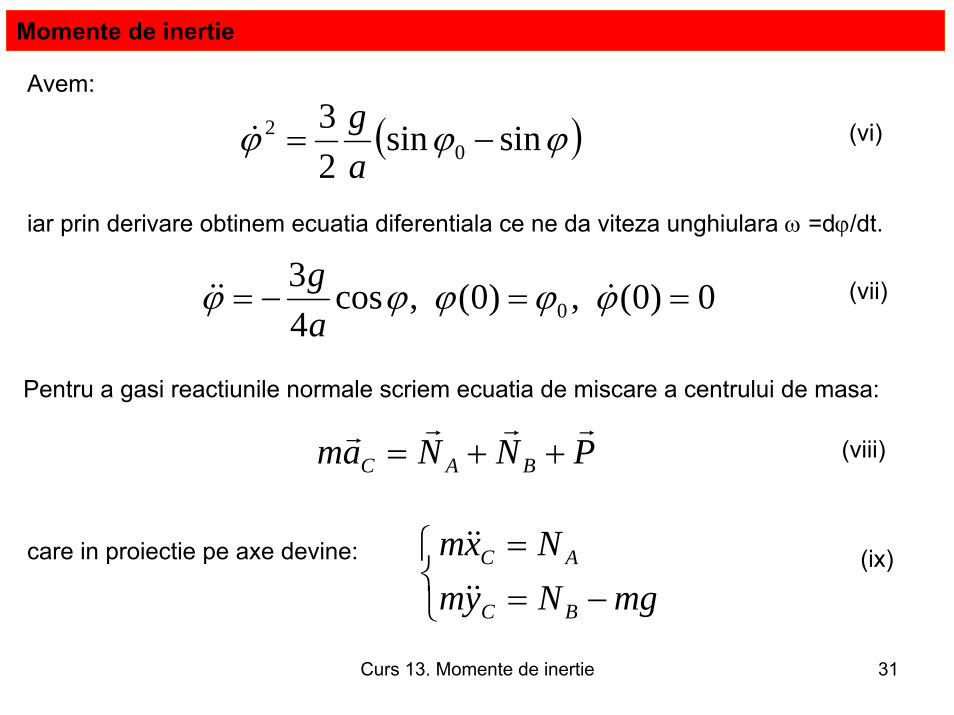
Avem:
( )ϕϕϕ sinsin23
02 −=
ag
& (vi)
iar prin derivare obtinem ecuatia diferentiala ce ne da viteza unghiulara ω =dϕ/dt.
0)0(,)0(,cos43
0 ==−= ϕϕϕϕϕ &&&ag (vii)
Pentru a gasi reactiunile normale scriem ecuatia de miscare a centrului de masa:
PNNam BAC
rrrr++= (viii)
⎩⎨⎧
−==
mgNymNxm
BC
AC
&&
&&care in proiectie pe axe devine: (ix)
Curs 13. Momente de inertie 31
Momente de inertie
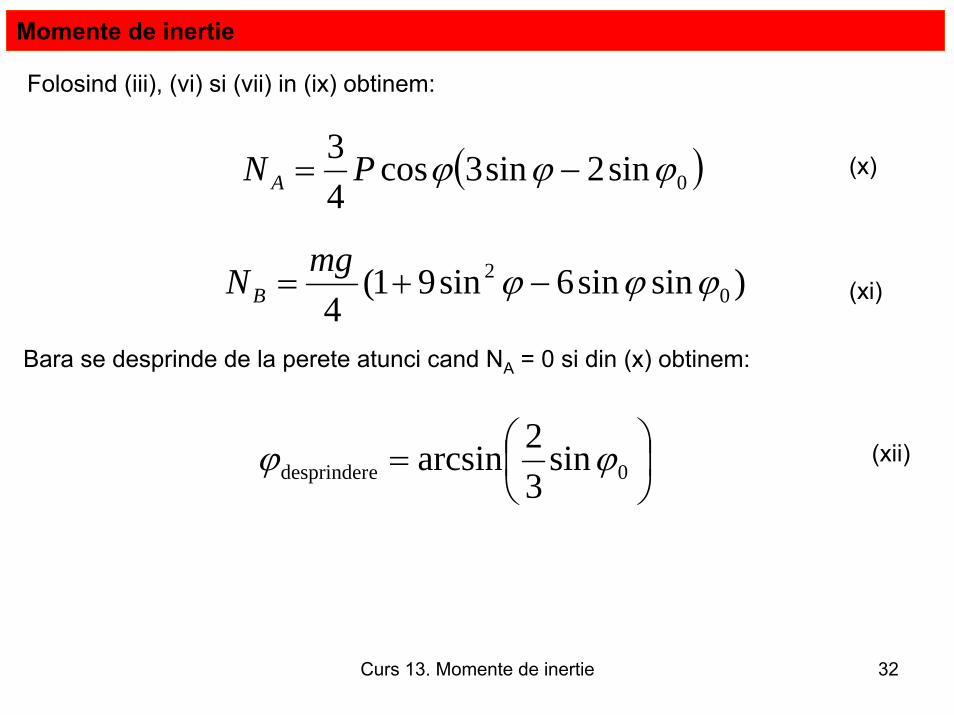
Folosind (iii), (vi) si (vii) in (ix) obtinem:
( )0sin2sin3cos43 ϕϕϕ −= PN A
(x)
)sinsin6sin91(4 0
2 ϕϕϕ −+=mgNB (xi)
Bara se desprinde de la perete atunci cand NA = 0 si din (x) obtinem:




![fileshare.ro_[] Dan Sava - Psihologia maselor la scaune.pdf](https://static.documente.net/doc/80x56/55cf8e81550346703b92dd2f/filesharerowwwfisierulmeuro-dan-sava-psihologia-maselor-la-scaunepdf.jpg)









![[] Dan Sava - Psihologia maselor la scaune](https://static.documente.net/doc/80x56/5571fa51497959916991d4b8/wwwfisierulmeuro-dan-sava-psihologia-maselor-la-scaune-5594935e8ff77.jpg)



![Fileshare.ro_[Www.fisierulmeu.ro] Dan Sava - Psihologia Maselor La Scaune](https://static.documente.net/doc/80x56/55cf8e81550346703b92dee1/filesharerowwwfisierulmeuro-dan-sava-psihologia-maselor-la-scaune.jpg)