Universitatea Politehnica din București Facultatea de Automatică și Calculatoare Departamentul de Automatică și Ingineria Sistemelor PROIECT DE DIPLOMĂ Sisteme de monitorizare și control pentru supravegherea și securizarea spațiilor publice Coordonator ştiinţific: Prof. univ.dr.ing.Dumitru Popescu Absolvent: Dumitru Toma BUCUREŞTI 2013
Transcript
Universitatea Politehnica din București
Facultatea de Automatică și Calculatoare Departamentul de Automatică și Ingineria Sistemelor
PROIECT DE DIPLOMĂ
Sisteme de monitorizare și control pentru supravegherea și securizarea
spațiilor publice
Coordonator ştiinţific: Prof. univ.dr.ing.Dumitru Popescu
Absolvent: Dumitru Toma
BUCUREŞTI
2013
2
Mulțumiri
Cele mai sincere mulțumiri celor care mi-au fost mentori, m-au sprijinit și mi-au
acordat sprijin permanent pe toată durata realizării acestei lucrării, domnului profesor
indrumător dr.ing. Dumitru Popescu, domnului inginer Apolodor Gheorghiu și doamnei
Bădiță Cecilia, din cadrul firmei SC IPA SA .
Această lucrare de diplomă conchide cei patru ani pe care i-am petrecut în această
instituție și pe această cale țin sa multumesc tuturor profesorilor, colegilor și familiei, ce m-
au calauzit și inspirat pe tot parcursul perioadei de studiu.
3
Listă figuri
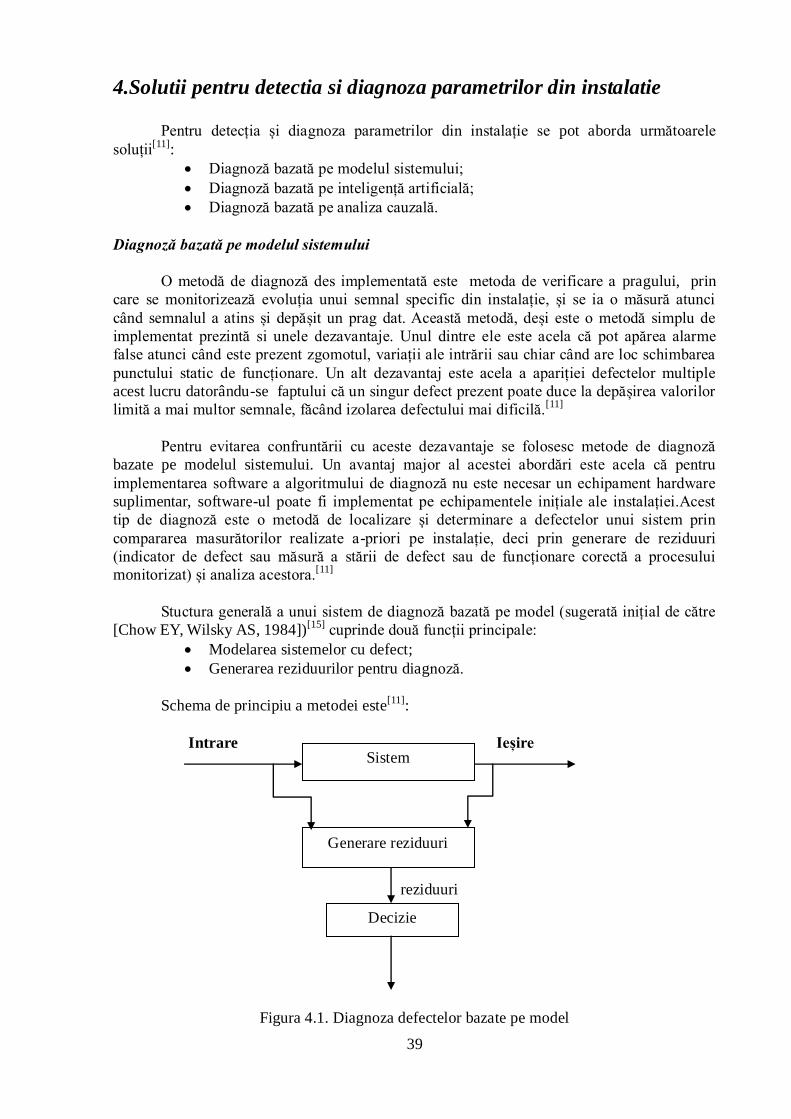
Figura 4.1. Diagnoza defectelor bazate pe model 39
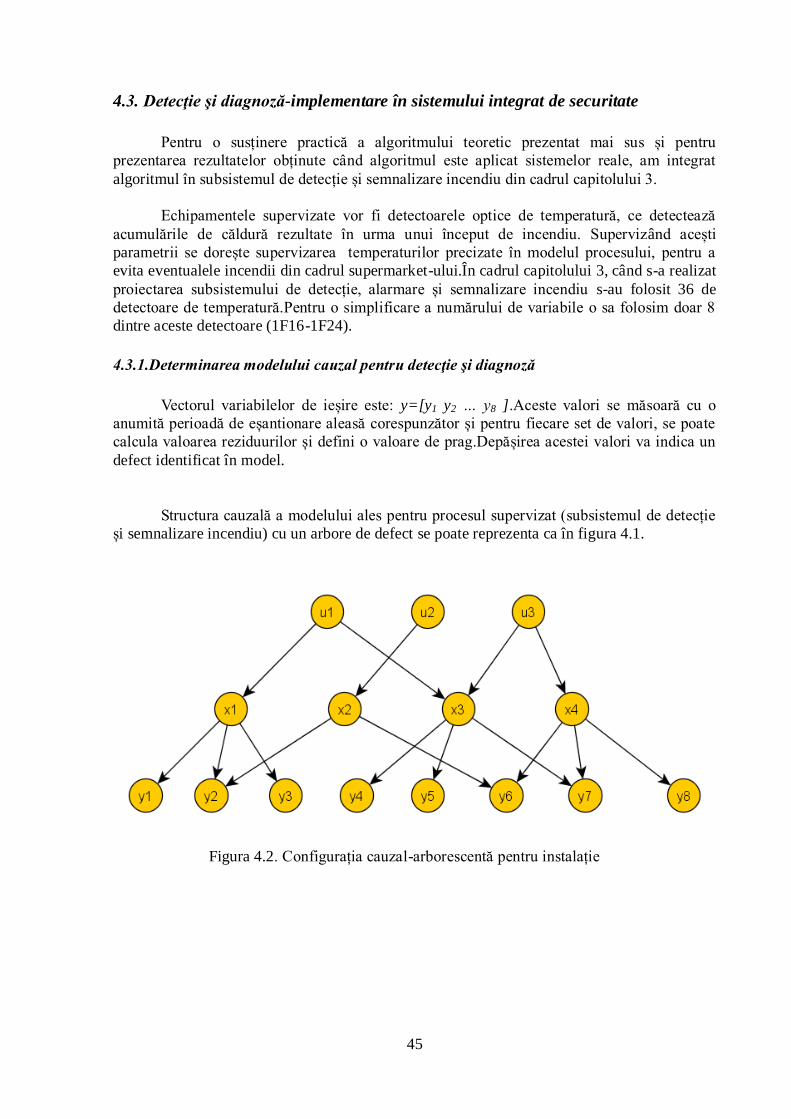
Figura 4.2. Configuratia cauzal-arborescenta pentru instalație 45
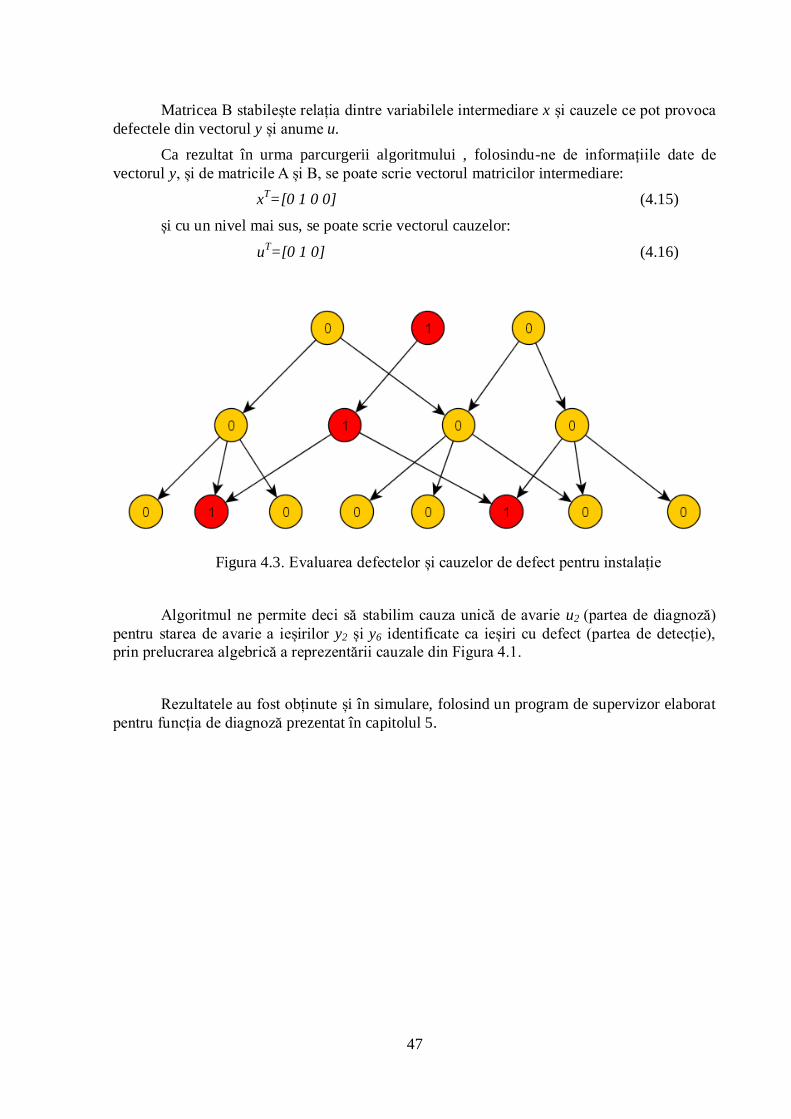
Figura 4.3. Evaluarea defectelor și cauzelor de defect pentru instalatie 47
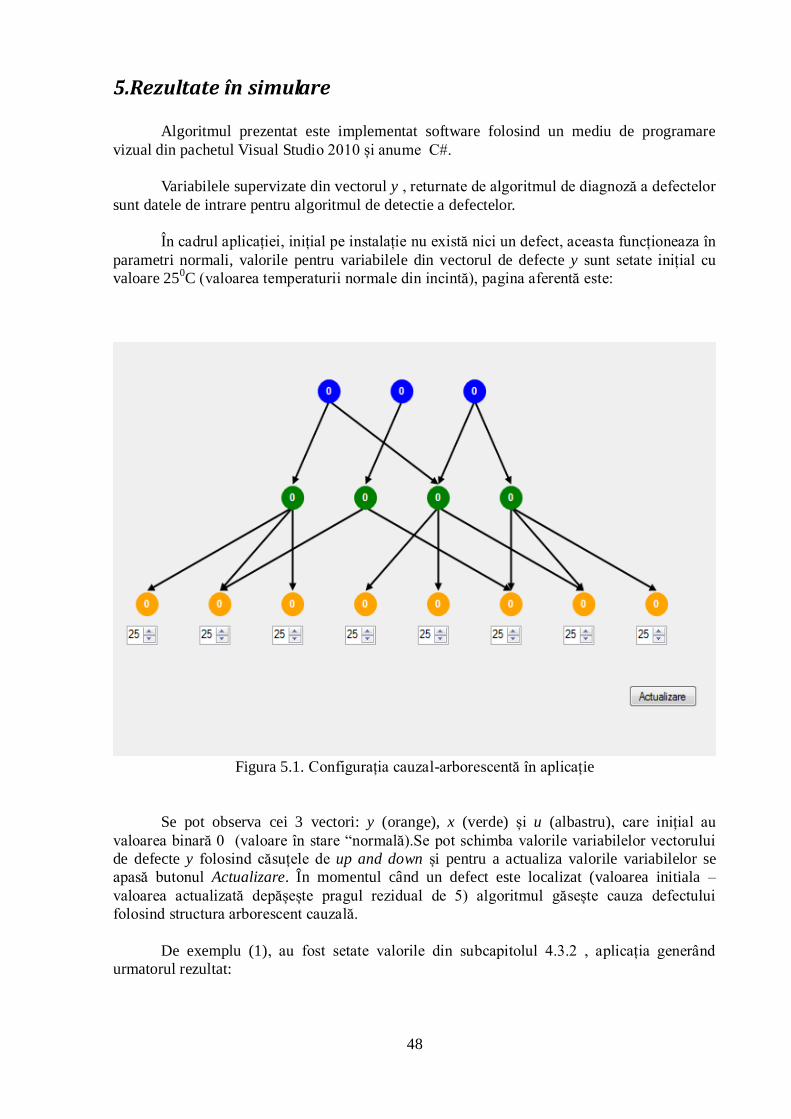
Figura 5.1. Configurația cauzal-arborescenta în aplicație 48
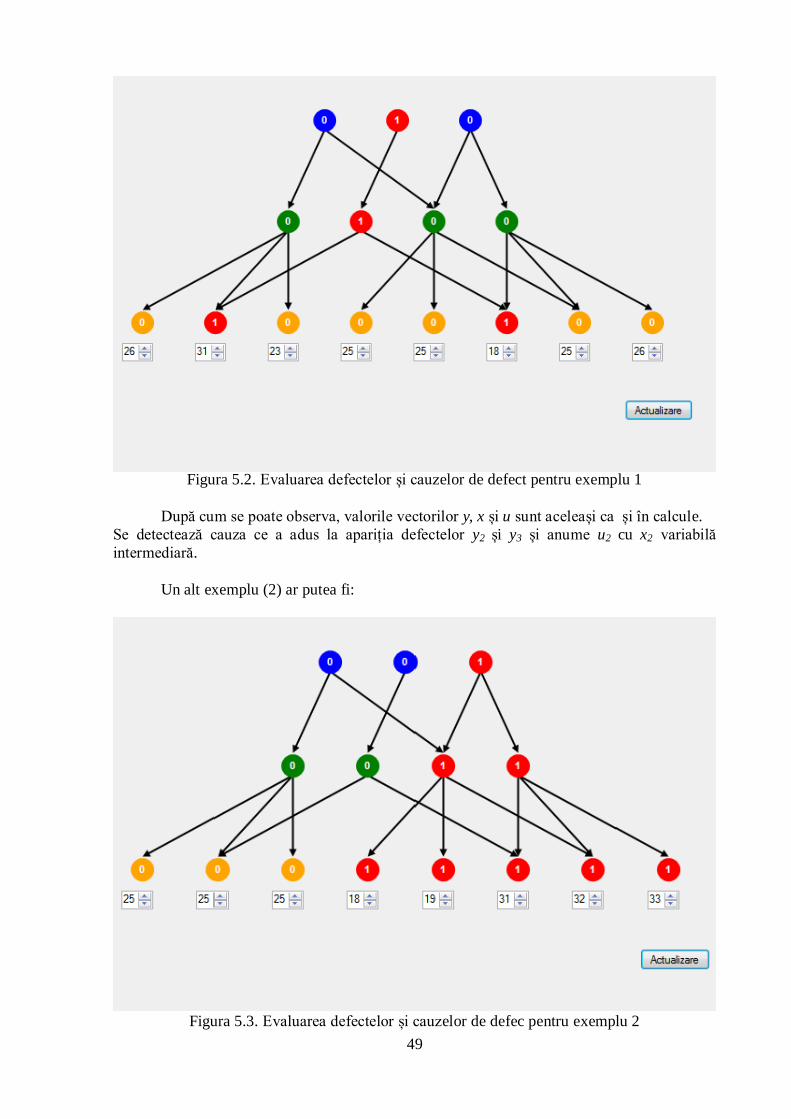
Figura 5.2. Evaluarea defectelor si cauzelor de defect pentru exemplu 1 49
Figura 5.3. Evaluarea defectelor și cauzelor de defect pentru exemplu 2 49
4
Listă tabele
Tabel 3.1. Echipamente subsistem incendiu 32
Tabel 3.2. Echipamente subsistem anti-efracție 33
Tabel 3.3. Echipamente subsistem TVCI alimentate din sursa UPS1 35
Tabel 3.4. Echipamente subsistem TVCI alimentate din sursa UPS2 35
Tabel 3.5.Echipament subsistem TVCI alimentate din sursa de 12Vc.c 36
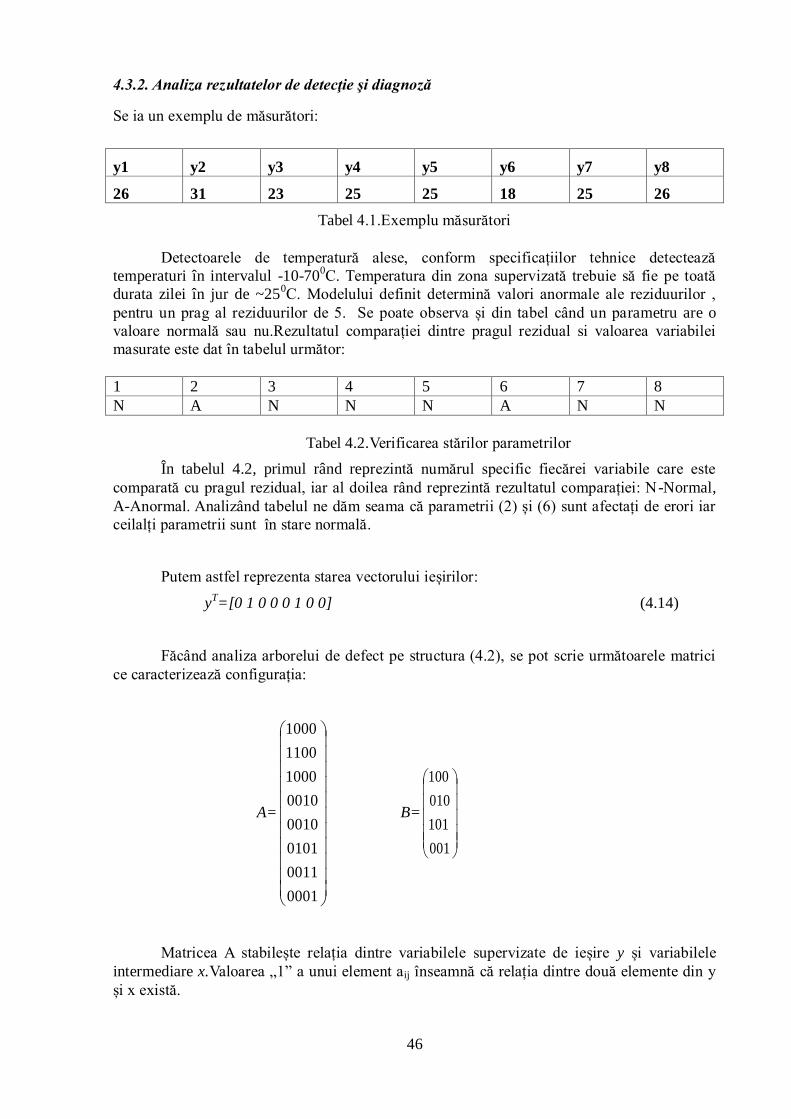
Tabel 4.1.Exemplu masuratori 46
Tabel 4.2.Verificarea stărilor parametrilor 46
5
Listă Abrevieri
TVCI -Televiziune cu Circuit Închis
TTL -Time Lapse Recorder
TCP/IP -Transmission Control Protocol/Internet Protocol
HD SDI -High Definition Serial Digital Interface
UTP -Unshielded Twisted Pair
FO -Fibră Optică
IP -Internet Protocol
GSM-GPR -Global System for Mobile-General Packet Radio Service
2.CONFIGURAȚIA ȘI FUNCȚIILE SISTEMELOR DE SECURITATE ........................................................... 8
2.1.IMPORTANȚA SISTEMELOR DE SECURITATE ..................................................................................................... 8 2.2. EVOLUŢIA SISTEMELOR DE SECURITATE ........................................................................................................ 9 2.3. FUNCŢIILE SISTEMELOR DE SECURITATE...................................................................................................... 11 2.4.SISTEME DE SECURITATE INTEGRATE............................................................................................................ 13 2.5.FIABILITATE, DISPONIBILITATE ȘI MENTENABILITATE ................................................................................... 15
3.PROIECTAREA SISTEMULUI INTEGRAT DE SECURITATE ................................................................... 17
3.1BAZA DE PROIECTARE ................................................................................................................................... 17 3.2.CERINȚE GENERALE ..................................................................................................................................... 18 3.3.SISTEMUL INTEGRAT DE SECURITATE ........................................................................................................... 20
3.3.1.Subsistem de detecție si semnalizare la incendiu ................................................................................ 20 3.3.2.Subsistem de securitate antiefracție și de control electronic al accesului ........................................... 22 3.3.3.Subsistem de supraveghere cu televiziune cu circuit inchis (TVCI) ...................................................... 26 3.3.4. Subsistem de management integrat .................................................................................................. 30 3.3.5.Medii de transmisie a informaţiei ....................................................................................................... 31
3.4.CALCULE SPECIFICE ..................................................................................................................................... 32 3.4.1.Calculul energetic pentru fiecare subsistem ........................................................................................ 32 3.4.2.Calculul capacitatii de arhivare pentru sistemul TVCI ......................................................................... 37
4.SOLUTII PENTRU DETECTIA SI DIAGNOZA PARAMETRILOR DIN INSTALATIE ............................ 39
4.1 PREZENTARE ALGORITM CAUZAL PENTRU DETECŢIE ŞI DIAGNOZĂ ............................................................... 41 4.2. PROCEDURI LOGICE FOLOSITE PENTRU IMPLEMENTARE ............................................................................... 44 4.3. DETECŢIE ŞI DIAGNOZĂ-IMPLEMENTARE ÎN SISTEMULUI INTEGRAT DE SECURITATE .................................... 45
4.3.1.Determinarea modelului cauzal pentru detecţie şi diagnoză .............................................................. 45 4.3.2. Analiza rezultatelor de detecţie şi diagnoză ....................................................................................... 46
5.REZULTATE ÎN SIMULARE .......................................................................................................................... 48
Detectarea şi înregistrarea evenimentelor legate de punctele de acces inclusiv data
şi ora.
12
Informaţii sintetice pe baza analizei evenimentelor pe diferite perioade (zi, lună, an
sau la cerere pe un inteval de timp) pe persoane sau grupuri de persoane.
Majoritatea subsistemelor de acces permit realizarea pontajului.Întrucât unele funcţii
ale ultimelor subsisteme prezentate (efracţie şi control acces) sunt complementare, unii
producători le oferă ca un singur sistem integrat.
d) Subsistem de televiziune cu circuit închis (TVCI)
Este subsistemul cu cea mai rapidă evoluţie şi cel mai eficient în domeniile :
Retail
Transport
Educaţie
Industrial
Instituţii guvernamentale
Sanatate
Banci şi finanţe
Principalele funcţii ale subsistemului sunt:
Captarea de imagini cu o cameră TV (fixă / mobilă (pan-tilt-zoom/speed-dome),
alb-negru / color, cu parametri ficşi reglabili/nereglabili, în spectru vizibil sau
infraroşu etc.).
Transmiterea acestor imagini către o destinaţie (semnal analogic, semnal video, IP,
pe TCP/IP sau semnal HD-SDI High Definition pe diferite suporturi: coaxial, UTP,
FO, microunde sau reţele publice).
Managementul informaţiei primite cu ajutorul echipamentelor şi programelor
specializate pentru prelucrare, afişare, înregistrare şi arhivare imagini.
Introducerea camerelor IP cu rezoluţii mari (uzual 1MP-5MP) a impus utilizarea unor
soluții hardware și software complexe.
În afara celor 4 subsisteme prezentate, care acoperă un spectru larg de aplicaţii, se mai
întâlnesc câteva subsisteme destinate unor aplicaţii speciale:
a) Subsistem de protecţie perimetrală - utilizat în cazul unor incinte împrejmuite, de
mari dimensiuni (de la câteva sute de metri până la zeci de kilometri), pentru
detectarea şi alarmarea tentativelor de efracţie. Prin intermediul unor cabluri
(coaxial, fibră optică) de construcţie specială, instalate pe gardul de protecţie,
subsistemul detectează vibraţiile induse de forţarea trecerii peste sau prin gard.
Semnalele sunt transmise la distanţă unde, prin intermediul unei unităţi
inteligente, sunt prelucrate, afişate şi înregistrate.
b) Subsistem de sonorizare („Public Address”) - utilizat în principal pentru
monitorizarea situaţiilor de urgenţă (generate de incendiu, explozii etc.), în care
este necesară avertizarea şi îndrumarea pesoanelor pentru evacuarea din zonă în
condiţii optime.
13
c) Subsistem apelare de urgenţă („Nurse Call”) - utilizat în spitale cu următoarele
funcţii:
apelare personal medical
monitorizare bolnavi
localizare personal medical
înregistrare evenimente
2.4 Sisteme de securitate integrate
O analiză a subsistemelor prezentate evidenţiază următoarele:
Fiecare subsistem are funcţii specifice şi poate funcţiona de sine stătător.
Există şi funcţii comune (ex. pătrunderea într-o zonă restricţionată poate fi detectată şi
de sistemul de efracţie şi de cel de control acces).
În mare parte funcţiile subsistemelor analizate sunt complementare.
Pentru aplicaţii de mică anvergură cerinţele de securizare pot fi acoperite cu unul sau
două subsisteme.
Există însă aplicaţii a căror importanţă este dată de gradul de securitate (aeroporturi,
porturi, apărare) importanţa valorilor de securizat (bănci, muzee) sau aglomerări de persoane
(complexe comerciale, spitale, instituţii de învăţământ) iar cerinţele de securitate şi protecţie
devin din ce în ce mai complexe. În cazul acestora nu se poate asigura un grad de protecţie
acceptabil decât prin utilizarea a doua sau mai multor subsisteme din cele prezentate.
Însă, fără o coordonare între subsisteme, cantitatea mare de informaţii oferită nu poate
fi utilizată în mod optim şi, în consecinţă, nici măsurile şi acţiunile ce trebuie întreprinse nu
vor avea efectul scontat.
Experienţa a dovedit că prin integrarea subsistemelor se potenţează funcţiile acestora
şi se obţine un sistem eficient.
Avantajele sistemelor integrate sunt următoarele:
creşterea eficienţei şi implicit a nivelului de protecţie;
scăderea preţului de cost;
flexibilitatea sistemului;
scalabilitatea.
Într-un astfel de sistem, un eveniment detectat de subsistemul de efracţie sau de acces
poate determina poziţionarea unei camere mobile pe zona în alarmă.
Sistemele integrate pot înteracţiona cu alte instalaţii aferente obiectivului
supravegheat. De exemplu, in cazul declanşării unui incendiu se deschid trapele şi se pornesc
ventilatoarele de desfumare, iar subsistemul de control acces deblochează uşile pentru a
permite evacuarea persoanelor din zonele securizate. Concomitent sistemul de sonorizare
oferă anunţuri şi ghidează persoanele spre căile disponibile.
14
În comparaţie cu subsistemele independente, ca o consecinţă directă a integrării, apar
două cerinţe suplimentare:
necesitatea prelucrării unui volum mare de informaţii preluate de la mai multe
subsisteme;
rezolvarea interconectării subsistemelor : suport fizic, proceduri şi protocoale de
comunicaţie.
În prezent, producătorii importanţi (precum Tico-GE Security, Bosch Security,
Honeywell, s.a.) au capacitatea de a oferi echipamente integrabile şi software-ul aferent.
Marea majoritate a furnizorilor de sisteme de securitate oferă echipamente şi software
pentru unul sau mai multe subsisteme care, în general nu sunt integrabile.
Ca urmare, multe firme (în general instalatori) şi-au elaborat propriile instrumente,
hardware şi software pentru integrarea aparatelor, echipamentelor și subsistemelor de
securitate.
15
2.5 Fiabilitate, disponibilitate și mentenabilitate
“Dezvoltarea rapidă a aparaturii electronice a condus la preocupări susținute în
domeniul fiabilității produselor, de cîteva zeci de ani fiabilitatea reprezentând o ramură
separată a științei. Definirea fiabilității comportă două aspecte: unul cantitativ și unul
calitativ.”[2]
„Din punct de vedere cantitativ, fiabilitatea unui dispozitiv (sistem) reprezintă
probabiliatatea P(t) ca aceasta să își îndeplinească funcțiile pentru care a fost conceput, în
mod corespunzător, până la momentul de timp t, în condiții de utilizare specificate.În mod
normal, un produs este însoțit de un manual tehnic, în care sunt specificate condițiile în care
produsul poate fi folosit (temperatura, umiditate, șocuri, tensiune de alimentare, etc.).În
studiul fiabilității unui produs trebuie respectate condițiile specificate de fabricantul
produsului.”[2]
„Din punct de vedere calitativ, fiabilitatea reprezintă proprietatea, aptitudinea unui
produs de a-și îndeplini în mod corespunzător funcțiile pentru care a fost proiectat, o anumită
perioadă de timp, în condiții de utilizare specificate.”[2]
„Obiectivele fiabiliății sunt:
studiul defectelor apărute în sistem (mecanisme de defectare, cauze, înfluența
defectelor, combaterea lor).
aprecierea comportării sistemelor în funcționare, în raport cu condițiile de exploatare.
realizarea de modele fiabilistice ale produselor, pe baza cărora se calculează
fiabilitatea lor, existând astfel posibilitatea comparării diferitelor variante și
structuri.”[2]
Noțiunea de bază cu care fiabilitatea lucrează este defectul.În urma apariției unui
defect în sistem acesta poate sa îsi piardă total capacitatea de funcționare (defectarea
microprocesorului central la un microcalculator), sau să își înrautățească performanțele
(defectarea unei unități de disc flexibil al un sistem cu mai multe unități).Din punct de vedere
probabilistic, un defect reprezintă un eveniment a cărui realizare conduce la modificarea
performanțelor sistemului, în sensul înrăutățirii lor.
Dacă sistemul poate fi reparat, sistemul trece printr-un proces de restabilire, fiind
implicat conceptul de mentenabilitate, care reprezintă aptitudinea sistemelor, exprimată
calitativ sau cantitativ, de a fi reparate, după apariția unui defect, ca urmare a unor acțiuni de
mentenanță.Mentenabilitatea se referă la module și sisteme și mai puțin la componente.
Conceptul de disponibilitate înglobează atât fiabilitatea, cât și mentenabilitatea,
caracterizând starea de funcționare sau defectare a unui sistem.
„Din punct de vedere cantitativ, disponibilitatea reprezintă probabilitatea ca un sistem
cu restabilire să se afle în funcțiune la momentul de timp t, în condiții de exploatare și de
mentenanță specificate.”[2]
„Din punct de vedere calitativ, disponibilitatea reprezintă aptitudinea unui sistem cu
restabilire de a fi în funcțiune la un moment dat, în condiții de exploatare și de mentenanță
specificate.”[2]
16
Fără un plan de mentenanță un sistem de securitate se va deteriora în timp.Trebuie
decise de la început tipurile de acțiuni și perioadele de intevenție pentru:
Acțiuni preventive: curățăre echipamente, verificare funcționalități de bază
(încadrarea unghiurilor de vizualizare, pozițiile camerelor în raport cu proiectul
inițial,verificarea calității imaginilor afișate și înregistrate, verificarea comenzilor șî a
interconectării sistemelor).
Acțiuni corective, ca urmare a defectării unor echipamente defecte ce necesită reparare
sau înlocuire.
Pentru verificarea disponibilității trebuie ținute înregistrări ale unor defecte apărute în
cadrul sistemelor și a verificărilor efectuate asupra sistemului de securitate.
Înregistrarea fiecărui defect trebuie să cuprindă:
Data și ora înregistrării acestuia.
Ultima data și oră când se știa că sistemul funcționează în parametrii normali.
Cât dureaza defectul și numărul de sisteme care au fost afectate.
Înregistrările trebuie arhivate cel puțin doi ani, ele fiind utilizate pentru determinarea
disponibilității sistemului.[3]
Durata defectului este determinată după formula:
NA TR)+(DF=FT (2.1)
unde: FT- durata defectului (minute)
DF-durata remedierii (minute)
TR-timpul de raportare a defectului (minute)
NA-numărul de sisteme afectate
Disponibilitatea lunară se calculează dupa formula:
M=1- 10043800
NC
SF (2.2)
unde: MA-disponibilitatea lunară (%)
SF- timpii de defect însumați (minute)
NC-numărul de sisteme conectate (constant pe toată durata lunii)
43800-numărul de minute dintr-o lună
Disponibilitatea anuală se calculează dupa următoarea formulă:
MA=12
M12)..…M2+(M1 (2.3)
unde: MA-disponibilitatea anuală (%)
M1,M2…M12-disponibilitatea pe fiecare lună (%)
17
3.Proiectarea sistemului integrat de securitate
În continuare lucrarea trateaza proiectarea unui sistem integrat de securitate, de
monitorizare și control, pentru supravegherea și securizarea unui spațiu public: un magazin
de tip “hipermarket”, unde se vand produse de larg consum atat in sistem de autoservire, cat si
in mod clasic in spatii comerciale separate (farmacie, banca, magazin aparate electrocasnice si
altele). Totodata in cladire se desfasoara si activitati conexe: aprovizionare si depozitare
marfuri, prelucrare produse alimentare, casierie, birouri personal, spatii tehnice.
3.1Baza de proiectare
La realizarea proiectului s-a tinut seama de urmatoarele documente și normative[4]
:
Legea 333/2003 privind paza obiectivelor, bunurilor, valorilor si protectia persoanelor
cu modificarile si completarile ulterioare (OUG 16/2005, Legea 9/2007 si Legea
40/2010) si normele de aplicare conform HG 301/2012
Legea 307/2006 privind apărarea impotriva incendiilor cu modificările și completările
ulterioare. OMAI 163/2007 - Norme generale de apărare împotriva incendiilor P118/99 - Norme tehnice de proiectare si realizare a constructiilor privind protectia la actiunea
focului,
NP I7-2011:Normativ pentru proiectarea , execuția și exploatarea instalațiilor electrice
pentru clădiri;
NP I18/1-2001:Normativ pentru proiectarea, și executarea instalațiilor electrice
interioare de curenți slabi aferente clădirilor civile si de producție;
NP I18/2-2002: Normativ pentru proiectarea , și executarea instalațiilor de semnalizare
a incendiilor și a sistemelor de alarmare contra efracției în clădiri;
NTE007/08/00: Normativ pentru proiectarea și executarea rețelelor de cabluri.
Standarde românești pentru sisteme de alarmă:
SR EN 50131 - Sisteme de alarma impotriva efracției;
SR EN 50132 - Sisteme de supraveghere TVCI (televiziune în circuit închis);
SR EN 50133 - Sisteme de control al accesului
utilizate în aplicații de securitate;
SR EN 54 1÷24 - Sisteme de detectare și alarmare la incendiu.
Planurile de arhitectură ale construcției cu configurația incintelor. (Anexa A.1-2).
Indicațiile din documentațiile tehnice ale echipamentelor și aparatelor prevăzute
(manuale, prospecte, specificații)
18
3.2.Cerințe generale
Dimensionarea fiecărui subsistem se va face având în vedere faptul că sistemul
integrat de securitate va trebui să monitorizeze şi gestioneze în timp real toate funcţiile sale.
De asemenea sistemul trebuie să permită extinderea ulterioară şi reconfigurarea în
funcţie de schimbarea destinațiilor unor zone din hipermarket.
În continuare se vor prezenta cerințele pentru fiecare subsistem în parte:
a) Subsistem de detectare, semnalizare şi alarmare la incendiu
Principalele cerințe ce subsistemul trebuie sa le îndeplinească sunt:
Alegerea tipului detectoarelor (de fum, de temperatura, tip bariera, cu aspiratie
pentru tubulatura de ventilatie) adecvate destinației/activității spațiului protejat;
Determinarea numarului optim de detectoare și butoane de semnalizare care sa
acopere in totalitate aria supravegheata;
Retransmiterea către subsistemul antiefracție a stărilor de alarmă incendiu;
Funcționare in regim de zi/noapte( cu/fără personal);
Calculul energetic al subsistemului pentru a asigura autonomia in functionare in
cazul caderilor de tensiune.
b) Subsistem de alarmare la efracție
Principalele cerințe ce subsistemul trebuie sa le îndeplinească sunt:
Posibilitatea de transmisie către dispeceratul de monitorizare a tuturor datelor
relevante, folosind subsistemul de intercomunicație;
În cazul deschiderii neautorizate a ușilor protejate , va fi semnalata sonor și vizual
starea de alarmă (în timpul zilei alarmele vor fi de tip silențios pentru a nu creea
panică sau disconfort clienților);
Se va permite dezactivarea locală (pe bază de cheie, cod sau card) pentru activități
autorizate.
Pentru indeplinirea acestor deziderate, sistemele locale vor avea următoarea structură:
Detector de prezenţă în infrarosu în zonele cu acces restricţionat
Contact de supraveghere a stării ușii (închis/deschis)
Contact de supraveghere a blocării ușii
Element de semnalizare sonoră și luminoasă a alarmelor
Activarea /dezactivarea sistemului, la terminarea/ începerea programului, se va face
din exteriorul clădirii, cu card și cod, folosind un dispozitiv de activare instalat în vecinătatea
ușii de acces pentru personal.
Se va realiza calculul energetic al subsistemului pentru fiecare sursă folosită.
19
c) Subsistem de control al accesului
Se cere o soluție cu posibilități de extindere (număr de puncte de acces controlate,
număr de persoane , număr de orare și/sau agende de funcționare etc.);
Subsistemul va controla mai multe puncte de acces:
Intrarea personalului (punctul de acces va fi controlat bidirecțional, cu cartela de acces
în anumite intervale prestabilite).
Intrarea în spațiile tehnice și intrarea în sala de aprovizionare ATM (punctele de acces
vor fi controlate unidirecțional ).
Intrarea în spațiul de birouri, în sala de decontări, în caserie (punctele de acces vor fi
controlate bidirecțional).
d) Subsistem de televiziune în circuit închis (TVCI)
Principala cerință ce subsistemul trebuie sa o îndeplinească este supravegherea
următoarelor locații:
perimetrul exterior al clădirii
zonele de intrare pentru clienți si personal
spaţiul deschis, cu autoservire, de desfacere a produselor
zona caselor de marcat
zonele de manipulare și stocare marfă/valori
ATM-ul
Se va realiza calculul energetic al subsistemului pentru fiecare sursă folosită.
e) Subsistem de management integrat
Principalele cerințe ce subsistemul trebuie sa le îndeplinească sunt:
Asigurarea căilor și echipamentelor de transmitere a semnalizărilor de la sistemul
de securitate la dispeceratul de monitorizare, folosind cel puțin două canale
alternative dintre cele enumerate mai jos:
Pe linie telefonică fixă
Prin Ethernet
Prin rețeaua GSM-GPRS
Radio
Transmiterea nu doar de semnale de alarmă, ci şi de informații de stare ale
sistemului și de activare/dezactivare a partițiilor.
Asigurarea compatibilității între subsistemul de intercomunicație și echipamentele
din dispeceratul de monitorizare. Comunicația va fi protejată.
20
3.3.Sistemul integrat de securitate
Sistemul de securitate propus include mai multe subsisteme de securitate( ce vor fi
prezentate pe larg în subcapitolele următoare):
Subsistemul de detecție si semnalizare la incendiu
Subsistemul de securitate antiefracție și de control electronic al accesului
Subsistemul de supraveghere cu televiziune cu circuit inchis (TVCI)
Subsistemul de management integrat
3.3.1.Subsistem de detecție si semnalizare la incendiu
Toate echipamentele utilizate în sistemele de detecție și alarmare incendiu trebuie să
dețină certificate de conformitate EN 54 corespunzătoare categoriei din care fac parte.
Pentru îndeplinirea cerințelor menționate în subcapitolul 3.2, privind subsistemul de
detecție și semnalizare incendiu, se folosesc următoarele echipamente :
a) Centrala de detectare şi avertizare la incendiu (FP)
Principalele caracteristici ale centralei de incendiu sunt:
Centrala este analog adresabilă cu 2 bucle, cu maxim 128 adrese pe buclă.
S-a ales o centrală adresabilă deoarece se poate identifica cu uşurință locul unde se
află potențialul incendiu, datorită faptului ca fiecare dispozitiv local (detector de
fum, de temperatură, buton manual de alarmare, sirenă, modul de interfaţă) are
adresă proprie.
Asigură alimentarea şi monitorizarea stării elementelor locale de detectare,
semnalizare și alarmare;
Modulele de interfaţă asigură conectarea detectoarelor convenţionale
(neadresabile) și a semnalelor intrări/ieşiri de tip contact;
Interfaţa intuitivă de operare; panoul operator dispune de un ecran LCD cu 8x40
caractere alfanumerice;
Indicaţii optice cu LED pe panoul frontal pentru 16 zone;
Istoric de evenimente cu memorarea de pana la 1000 evenimente;
Funcţii booleene (operaţii logice) prin intermediul cărora se pot comanda /
semnaliza stările unor dispozitive externe;
Centrala se amplasează in camera de paza, unde se afla permanent personal care poate
urmări funcţionarea sistemului de detectare şi alarmare la incendiu.
b) Detectoare optice de fum și de temperatură adresabile (F)
Principalele caracteristici ale detectoarelor de fum sunt:
Detectează acumulările de fum, respectiv căldură rezultate în urma unui început de
incendiu.
Sunt prevăzute cu un LED propriu care semnalizează starea în care se găsesc
(culoare roşie în alarmă).
21
Detectoarele de temperatura se utilizează acolo unde detectoarele optice de fum pot
genera alarme false : zone cu praf, fum (altul decât cel generat de incendiu).[5]
c) Declansatoarele manuale de semnalizare incendiu adresabile (FA)
Se utilizează pentru semnalizarea manuală a unui început de incendiu.Butonul este
prevăzut cu geam care prin apăsare se sparge producând declanşarea alarmei.
Declansatoarele se amplasează în locuri ușor accesibile, pe traseele/căile de evacuare şi la fiecare ieşire spre exterior.
d) Sonerii
d1) Sonerii de interior adresabile, culoare roşie (FH)
Se utilizează pentru avertizarea sonoră în scopul evacuării persoanelor prezente în
zonele afectate de incendiu.
La stabilirea numărului şi locului de amplasare a soneriilor s-a avut în vedere:
să asigure un semnal sonor cu intensitate suficientă pentru a putea fi auzit;
să se monteze în apropierea sau pe căile de evacuare.
d2) Soneria de exterior, culoare roşie (FH0) cu flash şi autoalimentare (prin
acumulator propriu)
Se amplasează în zona intrării principale, pe peretele exterior, la o înălţime adecvată
pentru a putea fi auzită şi observată și de la distanță.
Sistemul mai include şi urmatoarele module auxiliare:
e) Izolatoare de buclă (N)
Acestea împart bucla în mai multe segmente şi în cazul unui defect este izolat numai
segmentul dintre 2 izolatoare, restul buclei funcţionând în continuare.La împărţirea
dispozitivelor adresabile se ţine cont să nu se depăşească 20 dispozitive pe un segment
(între două izolatoare).
f) Module de interfaţă de intrări/ieşiri (U)
Module adresabile sunt utilizate pentru interconectarea dintre centrala de incendiu şi
alte echipamente. Acestea pot prelua informaţii privind starea unor dispozitive şi pot
transmite comenzi către acestea prin intermediul unor contacte de releu. Prin
intermediul acestor module se pot conecta elemente neadresabile (care oferă
informația sub formă de contact), sau se pot da comenzi pentru pornire/oprire
instalaţie ventilaţie sau desfumare şi deschiderea unor uşi sau trape acţionate electric.
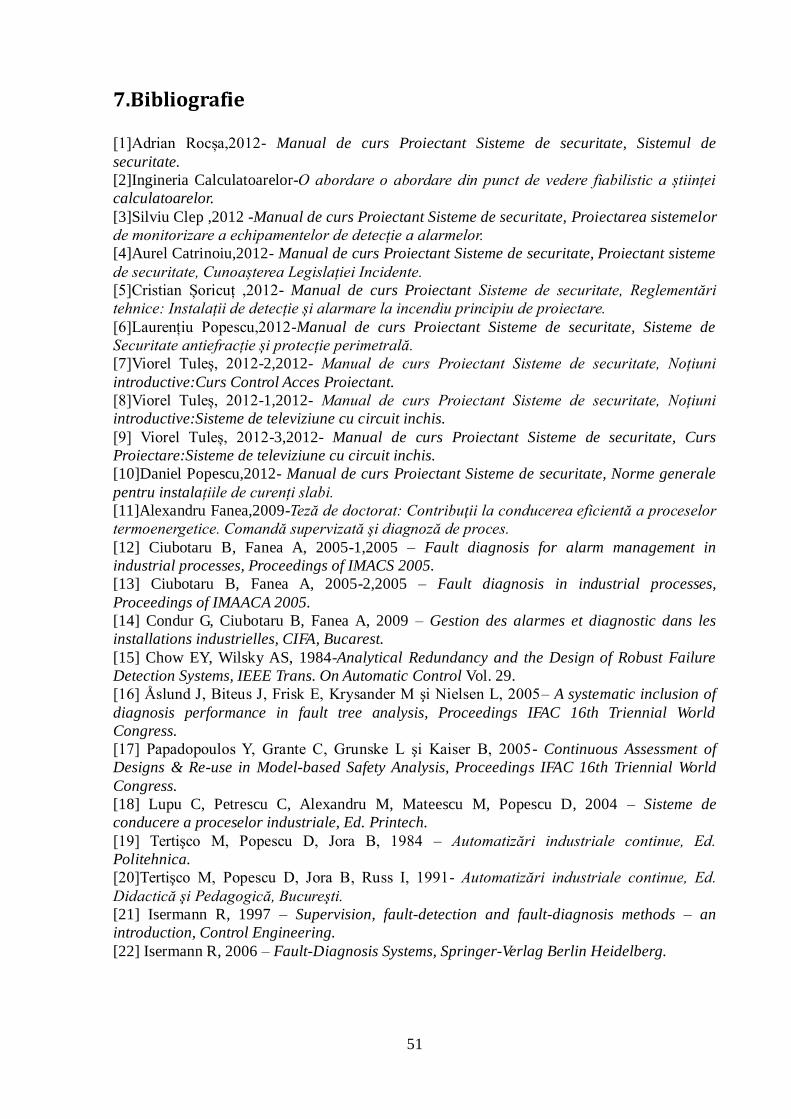
În anexa A.1 este prezentată amplasarea echipamentelor subsistemului de detecție si
semnalizare la incendiu în incinta hipermarket-ului.
22
3.3.2 Subsistem de securitate antiefracție și de control electronic al accesului
Pentru îndeplinirea cerințelor menționate in subcapitolul 3.2, privind subsistemul de
securitate antiefracție si de control electronic al accesului, se folosesc următoarele
echipamente:
Subsistem de securitate antiefracție:
a) Centrala de efracție (BP)
Principalele caracteristici ale centralei de efracție sunt:
16 zone, extensibilă la 256 prin intermediul modulelor de extensie cu 8 zone,16
partitii, maxim 16 tastaturi și 16-64 usi pentru control acces.
Monitorizarea stărilor tuturor elementelor de detecţie din subsistem.
Memorie de evenimente de pana la 1000 de alarme și 1000 de evenimente de acces
și cu pana la 11.000 utilizatori.
Posibilități de realizare sisteme integrate complexe (efractie-acces, incendiu,
TVCI).
b) Tastatura inteligenta (RK)
Principalele caracteristici ale tastaturii inteligente sunt:
Afisaj LCD alfanumeric;
Buzer încorporat;
Utilizarea pentru programarea sistemului, pentru operațiile de armare/dezarmare si
pentru identificarea elementelor de detecţie în stare de alarmă/defect.
Exista două astfel de tastaturi , una in camera de paza si una în apropierea uşii de
intrare pentru reducerea temporizării de intrare la cel mult 10 secunde.
c) Contact magnetic (CM)
Contactul magnetic este un senzor activ, format dintr-un releu REED fix si un
magnet mobil montat rigid pe partea mobilă a uşii.[6]
Prin modificarea poziției acestuia, câmpul magnetic care acționează releul și îl
“ține” în poziția închis (N.C.) scade în intensitate până când contactul se deschide,
semnalizând o stare de alarmă.Este util ca un element suplimentar de control deoarece
poate fi sabotat, relativ ușor, prin utilizaea unui magnet exterior puternic.[2]
Aceste contacte magnetice sunt montate pe uşile de acces în unitate, pe uşile de
acces în incaperile unde trebuie sa intre doar personal autorizat si la geamurile cu
deschidere, care nu sunt protejate cu grilaj.
23
d) Detector de prezenţă PIR (P)
Principalele caracteristici ale PIR-ului sunt:
Este un senzor pasiv în infrarosu, dual, volumetric; utilizează un dispozitiv sensibil
la radiația infraroșie din spectrul termic (8-14µm) numit piroelement și detectează
deplasarea cu minim 10-15cm/s a unui corp, cu diferența de temperatură fața de
mediu de minim 3-50C;
Utilizează un ansamblu de lentile Fresnel pentru concentrarea radiației infraroșii;
PIR-ul prezintă mai multe avantaje[6]
:
Elementele de delimitare a pereților (pereți, geamuri, uși) sunt opace la radiația IR,
astfel încât senzorul nu detectează mișcare în exteriorul spațiului protejat;
Datorită flexibilității ce o oferă construcția oglinzilor Fresnel, există tipuri variate
de detectoare PIR cu unghiul si aria de acoperire diferite: volumetric, cortina, raza;
Cost scăzut.
e) Detector PIR cu protecţie la mascare (P)
Principalele caracteristici ale PIR-ului antimasking sunt:
Este un detector special, cu dubla tehnologie care sesizeaza obturarea zonei
supravegheate cu un obiect plasat în proximitatea senzorului și semnalizează
acţiunea de sabotaj prin intermediul unui contact separat de cel pentru alarmă.
Rata redusă a alarmelor false și siguranță in exploatare oferită de funcția anti-
masking.
Acest tip de detector antimasking se utilizează la ATM si în camera cu valori
(casierie).
f) Detector de şoc / vibraţii (S)
Principalele caracteristici ale detectorului de șoc sunt:
Are încorporat un traductor de tip piezoelectric, care transformă semnale de tip
șoc/vibrații în semnale electrice;
Distanţă de detecție variabilă, în funcție de natura materialului din care este
contruit peretele protejat (1,5 m pentru ciment; 2,5 m pentru cărămidă);
Este posibilă reglarea sensibilității, însa senzorul nu trebuie să fie extrem de
sensibil pentru a elimina pe cât posibil alarmele false datorate zgomotului din
mediul ambiant;
Este folosit pentru protecția unor zone importante cum ar fi: ATM-ul si casa de
bani din casierie.
g) Detector de geam spart (BG)
Principalele caracteristici ale detectorului de geam spart sunt:
Funcționarea pe principiul analizei spectrale a sunetului produs de spargerea
suprafeței vitrate (spectrul între 1 si 5 Khz).
24
Sunetul produs are în componența sa armonici superioare la o anumită intensitate
sonoră ceea ce face ca sunetul să poată fi distins de alte zgomote din mediu;
O arie de acoperire de până la 6 metri.
Atât detectoarele de șocuri cât și cele de geam spart au limitări în utilizare. Un geam
poate fi taiat fără a genera zgmotul specific spargerii geamului. De aceea se recomandă
utilizarea celelor două tipuri de detectoare în conjuncție cu alte elemente de detecție
volumetrică (PIR-uri).
h) Buton de panică cu blocare mecanică (PA)
Acest tip de buton se află în birourile unde se lucrează cu bani, în general în casierii.
În urma activării butonul se blochează pentru a putea identifica locul activării, urmând ca
deblocarea să se facă cu o cheie specială pentru a putea identifica locul activării.
i) Buton de panică radio (PAr)
Are incorporată o baterie litiu de 3,6V.Fiecare casier de la casele de marcat va avea
câte un buton de panică tip telecomandă pentru a putea anunța paza în situația apariției unei
amenințări. Raza de acțiune a butonului este de 100 m.
j) Sonerie de interior (H)
Semnalizează sonor (110 dB/1m) situaţiile de alarmă detectate de centrala de
efracţie.În timpul zilei sunt programate în mod silențios pentru a nu creea disconfort/panică
clienţilor.
La centrala de efractie se contecteaza pe interfata RS485, controlerul de acces (CA),
elementul central al subsistemului de control acces.
Subsistemul de securitate control acces:
a) Controlerul inteligent de acces (CA)
Principalele caracteristici ale controlerului de acces sunt:
Supervizeaza 4 uşi si maxim 16 cititoare (câte 2 pe sens pe fiecare uşă)
Este prevăzut cu 4 ieșiri pe relee, extensibile la 52 si 1 iesire pentru sirena
Suportă o gamă diversificată de tipuri de cititoare si de cartele
Până la 11.000 de utilizatori (cartele)
Sursă de comutație de 2,5A și sursă separată pentru zăvoare.
Functii extinse de control acces: antipassback, controlul regiunilor, numarator intrari/iesiri.
b) Cititoare de cartele Smart Card cu tastatura (PKR)
Principalele caracteristici ale cititoarelor de acces sunt:
Restrictionează accesul în zonele protejate, intrarea fiind permisa doar
personalului desemnat care este in posesia unei cartele Smart valide.
25
Cititorul cu tastatură ofera posibilitea utilizarii unui cod de acces combinat (cod
cartela +cod PIN). Distanţa de citire este de 6-10 cm.
c) Cartele inteligente Smart Card
Principalele caracteristici ale cartelei Smart Card sunt[7]
:
Cardurile sunt codate folosind echipamente speciale și au un grad de rezistență
medie/mare privind modalitatea de transfer/copiere a informației stocate;
Accesul se face pe baza citirii de catre cititor a unui Smart Card, identificându-se
ID-ul credențial, unic pentru fiecare card în parte;
Sunt bazate pe tehnologia RF 13.56 MHz;
Au în componență un circuit în care sunt stocate informațiile de autentificare prin
care se face accesul la zona de memorie protejată în care se află ID-ul credențial;
Permite utilizarea zonelor de memorie pentru mai multe aplicații, comunicarea
dintre card și cititor se face criptat folosind algoritmi avansați.
Pentru blocarea/deblocarea usilor de acces s-au prevazut zăvoare, bolțuri electrice sau
electromagneți de forță in functie de tipul usii (din geam, metal, lemn) si de greutate.
Spre deosebire de încuietoarea mecanică obișnuită, o incuietoare electrică (yală) are
elementul de acționare al bolțului comandat de o bobina în care se induce un curent electric,
câmpul electromagnetic astfel creat acționând asupra elementului de blocare/deblocare a
bolțului.
Bolțul electric este cu acționare electromagnetică, cu temporizare selectabila (0, 3, 6 ,9
sec) şi cu monitorizare stare ușă. Este indicat în special pentru ușile care se deschid în ambele
direcții. Modul de lucru este de tip fail-safe, adică este alimentat în momentul cand uşa este
blocată şi pentru deblocarea uşii alimentarea este întreruptă. Acest mod de funcţionare permite
deschiderea uşilor în caz de incendiu (situatie care in care se impune oprirea alimentarii cu
energie electrica).Zăvoarele si electromagnetii alesi pentru aplicatia de fata rezistă la o forță
de maxim 300 kgf.
În anexa A.2 este prezentată amplasarea echipamentelor subsistemului de securitate
antiefracție și de control electronic al accesului în incinta hipermarket-ului.
26
3.3.3.Subsistem de supraveghere cu televiziune cu circuit inchis (TVCI)
Prin tipul de echipamente propuse, prin amplasarea lor și datorita modului de operare
rapid al elementelor subsistemului, acesta va permite urmărirea și documentarea tentativelor
de sustragere de marfuri cât și asigurarea integrității personalului si a clienților.[9]
Pentru îndeplinirea dezideratelor menționate în subcapitolul 3.2, privind subsistemul
de supraveghere cu televiziune cu circuit inchis (TVCI) se folosesc următoarele echipamente:
a) Echipamentul de înregistrare video digitală (Digital Video Recorder- DVR)
Se folosesc 4 astfel de echipamente ce asigură preluarea imaginilor de la camerele TV.
Înregistratorul folosit este de tip stand-alone, adică este un echipament de calcul
dedicat, utilizand o placă de baza cu procesor industrial în care sunt înglobate funcțiile de
conversie analog-digitală, compresie, interfață cu utilizatorul. Pe această structură este instalat
un sistem de operare LINUX Embedded.
Modul de operare se poate face fie cu ajutorul tastaturii de pe panoul frontal, fie cu un
mouse si/sau o telecomanda.
DVR-ul utilizat executa simultan 5 funcții (pentaplex) specifice unui echipament de
inregistrare video:vizualizare, înregistrare, redare, arhivare și comunicație.
a1) Vizualizarea în timp real a zonelor de interes
Principalele caracteristici ale DVR-ului aferente aceastei funcții sunt:
Numărul de intrari video este 16
Ieșirile video (către monitoare) sunt: un conector de tip VGA și 2 conectori
BNC
Echipamentul permite vizualizarea in timp real a uneia sau mai multe imagini
(canale video) simultan (1 ,4 ,8 ,9 și 16) cu o rezoluție de 400 fps-uri (cadre pe
secundă)
a2) Înregistrarea imaginilor pe suport (HDD)
Principalele caracteristici ale DVR-ului aferente aceastei funcții sunt:
Rezoluțiile de înregistrare (calitatea imaginii) selectabile sunt:
4CIF(704x576), 2CIF(704x288), CIF(352x288), corespunzand cu o viteză de
înregistrare de 100 fps, 200 fps, maxim 400 fps-uri, și cu o calitate a
înregistrărilor ce poate fi reglabilă în 3 trepte;
Modalitățile de înregistrare sunt de doua tipuri: după eveniment (detecție de
mișcare sau alarmă) și după program; detecția de miscare permite declanșarea
înregistrării în momentul sesizării unei mișcări. Se mai poate regla
sensibilitatea (performanța camerei în condiții de iluminare slabă) și aria de
detecție pentru fiecare canal în parte;
Memoria de evenimente contine informatii despre : alarme, detecție miscare,
Principalele caracteristici ale DVR-ului aferente aceastei funcții sunt:
Cautare inregistrare după dată și oră, după eveniment (detecţie mişcare,
alarma).
Vizualizarea înregistrării (playback) se poate face cu viteză variabila de
derulare sau pas cu pas şi permite utilizarea unui zoom digital (x2).
a4) Salvarea imaginilor (back-up) pe un dispozitiv extern conectat pe port USB sau
intern CD/DVD R/W (opțional).
a5) Comunicația cu rețeaua Ethernet permite accesarea DVR-ului in rețea (pentru
vizualizare în timp real sau vizualizare inregistrari) prin intermediul unui software client cu
maxim 16 utilizatori conectați simultan.
b) Camere video folosite
b1. Cameră color de luat vederi (TV) fixă de interior
Senzorul de imagine este de tip CCD (Charged Coupled Device )[8]
color, ales datorită
sensibilității ridicate față de senzorul de imagine CMOS rezultând astfel o calitate mai buna a
imaginii în condiții de iluminat scăzut (sensibilitate sporită prin functia WDR-Wide Dynamic
Range care este abilitatea camerei de a converti lumina in mod optim, dintr-o scenă cu
porțiuni iluminate diferit) , cu un format de 1/3’ și o rezoluție de 530 linii TV .
Raportul semnal zgomot (SNR-ul) este un parametru care descrie comportamentul
camerei si capacitatea ei de a compensa influența perturbatoare a „zgomotului” (semnalului
parazit) care se suprapune peste semnalul util[8]
. Pentru camerele selectate este mai mare de
50 dB. Încorporând și functia DNR -Digital Noise Reduction rezultă o capacitate mare de a
reduce zgomotul, obtinându-se astfel o imagine de calitate ridicată .
Camera este prevazută cu lentilă autoiris (AI). Acest tip de obiectiv este controlat în
mod automat și constant de cameră pentru obținerea unui nivel de iluminare optim pe
senzorul de imagine și varifocală (VF), cu distanță focală reglabilă, cu valoarea deschiderii de
3,5..8mm.
b2. Cameră color de luat vederi (TV) fixă de exterior cu carcasa si infrarosu
Senzorul de imagine este de tip CCD (Charged Coupled Device ) color, cu un senyor
de imagine de 1/3’, funcția WDR încorporată, cu regim Day/Night şi rezoluție înaltă de 650 TVL.
Camera are o construcție compactă (cameră, carcasă termostatată şi iluminatorul IR
cu LED-uri în construcţie comună).
28
Este prevăzută cu lentilă autoiris (AI) și varifocală (VF), de 9-22mm sau 6-50mm, în
funcție de distanța de vizualizare;
LED-urile IR încorporate asigură vizibilitate până la 60m pe timp de noapte.
b3. Camerele color de luat vederi (TV) mobilă de interior tip speed dome
Senzorul de imagine este de tip CCD (Charged Coupled Device ) color, cu un standard
de imagine de 1/3’, funcția WDR încorporată, cu regim Day/Night , cu o rezoluție înaltă de
650 TVL.
Raportul semnal zgomot (SNR-ul) este mai mare de 52 dB, de unde rezultă o
capacitate mare de a reduce zgomotul (încorporând și functia de reducere zgomot DNR -
Digital Noise Reduction), furnizând astfel o imagine de calitate bună .
Zoom-ul optic este de x27 iar cel digital 10x.Sunt permise doua tipuri de rotație: rotatie orizontală 360º și pe verticală 10~92º; viteza de rotatie maximă de 180º/s ;
Comunicația are la bază un protocol serial de distanță mare (RS-485), ce folosește cablul UTP ca mediu de transmisie a semnalului video.
Camera are încorporata funcția AGC (Automatic Gain Control ) care are rolul de a
compensa fluctuațiile de iluminat care duc la scăderea semnalului video. [8]
b4) Camere video mobile instalate în tub tip rail (culisante)
Camera este montata pe un carucior, care culisează pe o șina din aluminiu cu viteza de
la 2÷6 m/s. Șina și camera sunt mascate de un tub pentru o supraveghere discretă a zonelor cu
autoservire.
Camera permite un zoom digital de până la zom x12, co rezoluție înaltă de 625TVL și
este prevăzută cu lentilă varifocală de 4-88 mm;
Camera încorporează și funcțiile AGC și BLC (Back Light Compensation), utile
atunci când marea parte a luminii vine din spatele obiectului/persoanei vizate.
Echiparea cu una sau două camere mobile culisante montate în tub este o soluție
ideală pentru supravegherea unui punct de vânzare mare (hipermarket). Datorită mișcării sale
rapide, fără zgomot și funcțiilor avansate de care dispune, oferă vizibilitate instantanee pe
zone foarte mari. Sistemul permite configurarea și controlul direct de la tastatura de
comanda.
c) Monitoarele video folosite, sunt în număr de 8 (LED, 19’), cu o rezoluție de
1920x1080, asigurând interfața subsistemului TVCI cu personalul de pază. Ele sunt
montate pe perete in camera de paza pentru a permite urmarirea lor in timp real.
d) Tastaturile de comandă și control pentru camere video mobile au următoarele funcții:
selectarea camerei ce se doreşte a fi controlată;
comanda orientării acesteia în plan vertical şi orizontal;
29
comanda apropierii/depărtării planului de vizualizare (zoom);
programarea parametrilor camerelor video mobile (pozitii prestabilite,
repozitionare la semnale de alarma, etc.).
e) Sursele UPS de 2000VA/1800W, vor asigura alimentarea DVR-urilor, monitoarelor, a
camerelor de mobile speed-dome și a celor doua camere de tip rail, în perioadele în
care cade reţeaua de alimentare.
f) Sursele de 12Vcc pentru camerele de luat vederi fixe și pentru camerele TV cu IR și
carcasă.
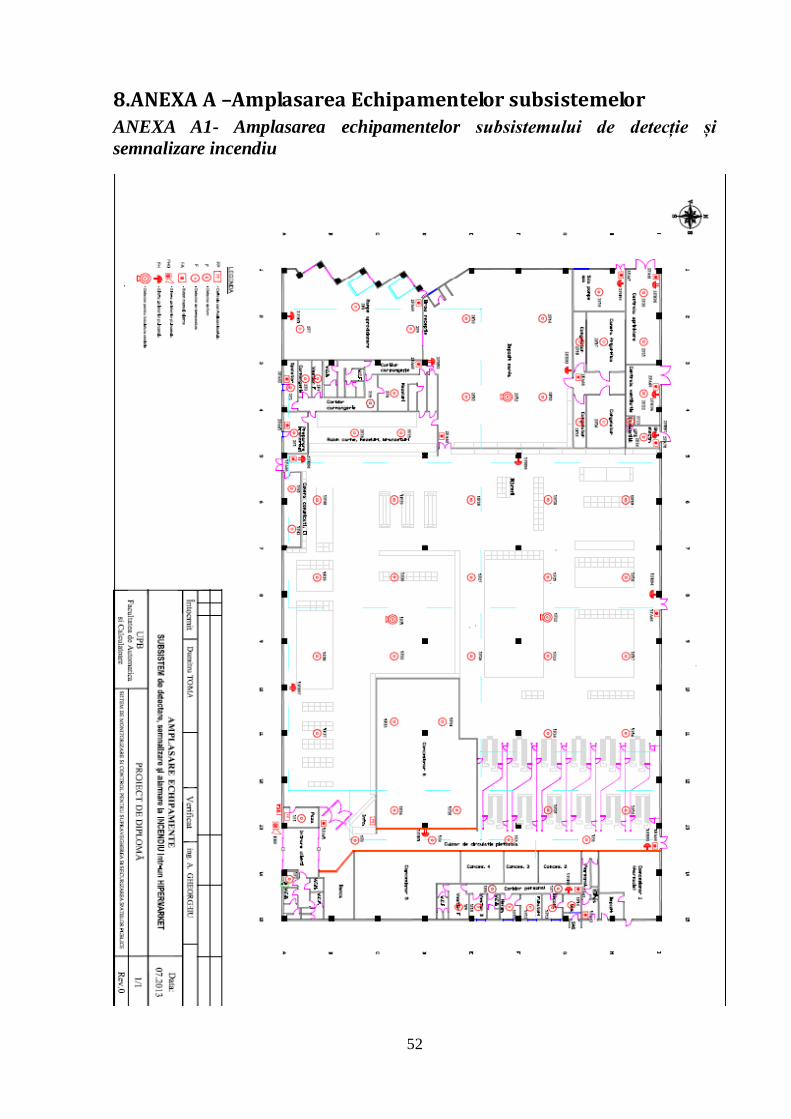
În anexa A.3 este prezentată schema bloc cu modul de interconectare a componentelor și in anexa A.2 amplasarea echipamentelor aferente subsistemului TVCI.
30
3.3.4. Subsistem de management integrat
Cerințele ce s-au impus privind sistemul integrat de securitate sunt: acesta trebuie sa
lucreze concertat: echipamentele ce compun sistemul integrat trebuie sa fie compatibile între
ele pentru a putea comunica optim,să utilizeze un produs software cu capacitate de a gestiona
un volum mare de informații și să permită monitorizarea subsistemelor și a parametrilor
acestora în timp real.
Platforma sofware de tip GUI folosită pentru monitorizarea și administrarea unitară a
sistemelor antiefracție, control acces, detecție incendiu si TVCI este o aplicație multi user ce
permite acces simultan operatorilor la baza de date cu următoarele caracterisitici:
Structura client – server (MS SQL Server), cu pana la 5 clienti
Maxim 128 centrale efractie ATS și 16 DVR-uri;
Maxim 5 sisteme de incendiu formate din centrale de incendiu interconectate
in retea;
Permite accesarea imaginilor video inregistrate folosind markeri generati de
evenimentele de alarma sau control acces.Permite verificarea prin TVCI a oricarui eveniment
generat de sistemul de securitate.
Interfata grafica permite definirea unor hărți pentru localizarea ușoară a alarmelor.
Detectoarele componente ale sistemului sunt reprezentate simbolic si amplasate pe hartile cu
locatiile din teren. Culoarea detectorului ne indica starea in care acesta se gaseste: verde –
stare normala de functionare, galben – defect tehnic, rosu – alarma, albastru –dezactivat.
În cazul in care apare un eveniment programul de monitorizare afiseaza automat
fereastra de “Notificare Alarma” si harta asociata; alarmele sunt insotite si de o semnalizare
sonora care va inceta in momentul in care alarma este confirmata de operator in fereastra de
monitorizare.
Programul permite vizualizarea istoricului evenimentelor, utilizand diverse filtre
pentru alarme, probleme tehnice, etc) si generarea de rapoarte (configurate de operator sau
predefinite anterior).
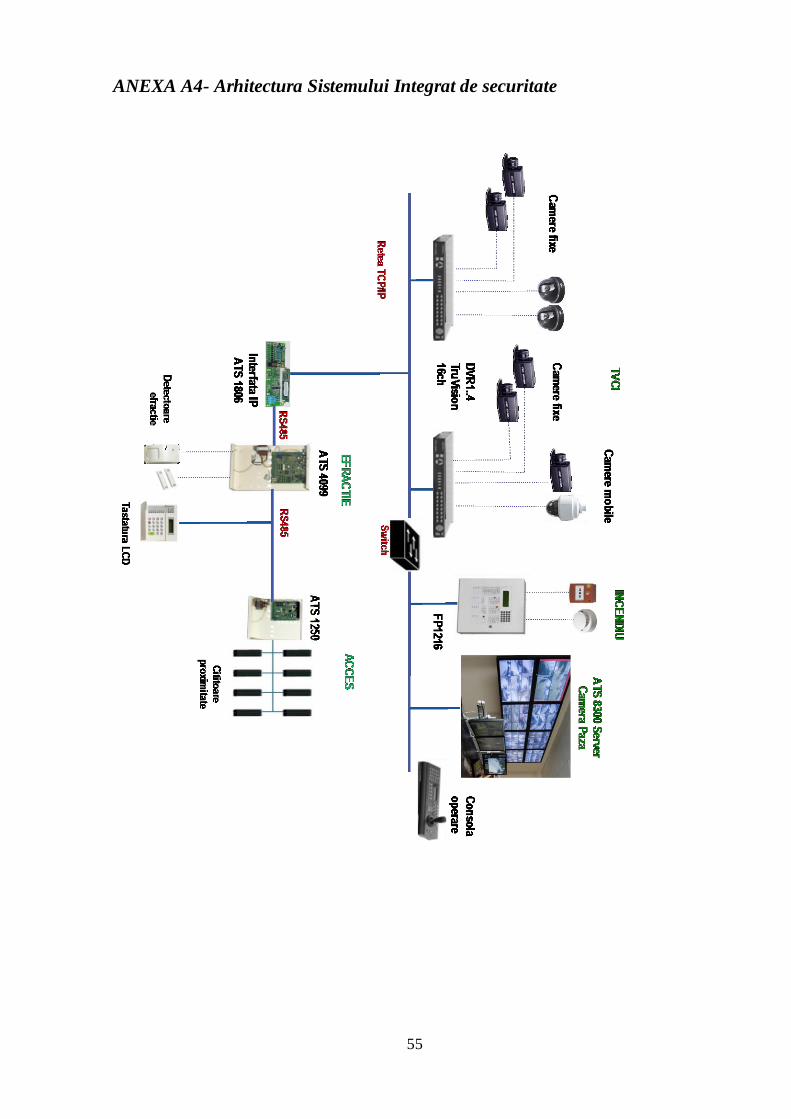
În anexa A.4, este prezentată arhitectura sistemului integrat de securitate cu toate
subsistemele si echipamentele folosite.
31
3.3.5.Medii de transmisie a informaţiei
Echipamentele componente ale subsistemelor sunt conectate între ele prin diferite
medii de transmisie a informațiilor și schimbă permanent sau periodic informații între ele.
Mediile de transmisie a informațiilor în sistemul de securitate propus sunt:
Cablurile electrice (cablul de incendiu, cablul coaxial, cablul de alimentare,
cablul de semnalizare netorsadat si cablul UTP ).
Undele radio.
Cablurile electrice de comunicaţie traversează de cele mai multe ori zone în care sunt
prezente câmpuri electromagnetice care pot perturba semnalul util.
Dacă se impune o imunitate ridicată la zgomote în circuitele electrice de curenți slabi,
se folosesc impreună torsadarea și ecranarea (în special pentru cablurile de exterior).
Cablul UTP (Unshielded Twisted Pair) este folosit pentru transmisia semnalelor video
la distanțe care depășesc 150 m sau pentru legarea echipamentelor în reţea (maxim 1200m) și
are următoarele avantaje: costuri mult mai mici decât fibra optică, imunitate ridicată la
perturbații de joasă frecvență.[10]
Cablul coaxial RG59 se utilizează în sistemul de supraveghere cu televiziune cu
circuit închis (TVCI) pentru distanţe de până la 150 m. Este un cablu electric ce se compune
dintr-un fir conductor înconjurat de un material izolator, utilizat pentru transmisii de înaltă
frecvență sau pentru semnale de bandă largă de frecvență.
O problemă care poate afecta negativ transmisia semnalului video prin cablul coaxial
apare când se realizează legături la pamânt diferite pentru camera video și pentru DVR. Apare
fenomenul de buclă între cele doua legături care constă în producerea unei diferențe de
tensiune între cele două legături la pământ și implicit a unui curent prin buclă care poate
distruge echipamentele. Soluția constă în folosirea unei singure legături la pământ sau
utilizarea unor sisteme de izolare galvanică cu optocuploare care separă electric cele două
echipamente.[10]
Transmisia prin Unde Radio se utilizează în acele locuri unde nu pot fi executate
trasee de cabluri din motive tehnice si/sau estetice .În aplicatia de fata acest tip de
comunicatie (radio) este folosit de catre butoanele de panica mobile cu care sunt dotaţi
operatorii de la casele de marcat, pentru a chema personalul de pază în caz de necesitate.
Pentru interconectarea dispozitivelor sistemului de efractie si control acces se
utilizeaza interfata RS485 pe care vitezele de transmisie sunt următoarele[10]
:
35 Mbit/s pentru distanțe până la 10 m;
100 kbit/s pentru distanțe până la 1200 m.
32
3.4.Calcule specifice
Calculele specifice sistemului integrat de securitate sunt:
Calculul energetic pentru fiecare subsistem;
Calculul capacității de arhivare pentru sistemul TVCI.
3.4.1.Calculul energetic pentru fiecare subsistem
Calculul energetic al sistemelor de securitate se efectuează pentru stabilitea capacității
acumulatorului din sursa de alimentare de rezervă, necesară pentru a asigura autonomia
funcționării sistemului de securitate în cazul întreruperii alimentării din sursa de bază.
Calculul energetic pornește de la ipoteza că acumulatoarele sunt noi și încărcate la
capacitatea maximă. Pentru a preintampina aceasta diminuare in timp a caracteristicilor
acumulatoarelor în calcul se ia in considerare obtinerea unor valori acoperitoare.
Calculul energetic se efectuează pentru fiecare sursă de alimentare de rezervă în parte,
aferentă părții din sistem pe care o alimentează.
Din calculul energetic trebuie să rezulte capacitatea acumulatorului electric care
asigură timpul de funcționare reglementat pentru fiecare sursă de rezervă, în funcție de tipul
de sistem alimentat și tipul de obiectiv protejat.
Dacă se optează pentru utilizarea mai multor surse de alimentare de rezervă, atunci ele
vor alimenta părți distincte ale sistemului de securitate, fără a fi conectare în paralel.[10]
.
a) Subsistem de detecție şi semnalizare incendiu
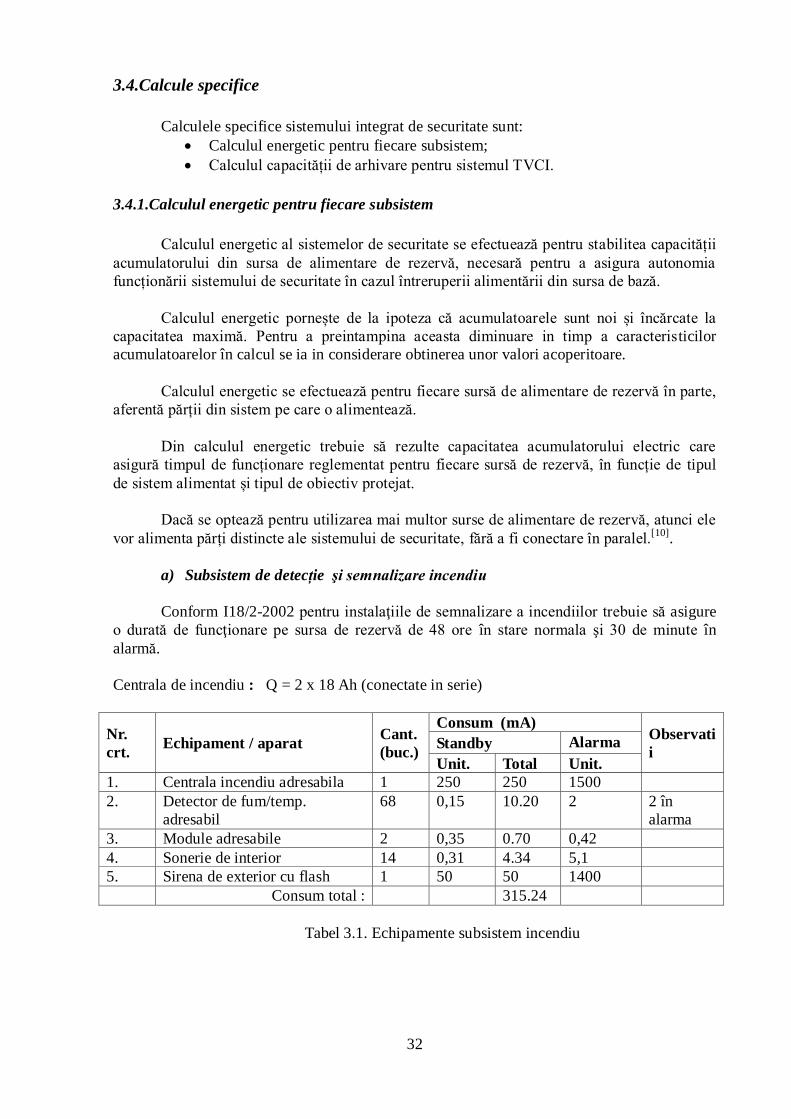
Conform I18/2-2002 pentru instalaţiile de semnalizare a incendiilor trebuie să asigure
o durată de funcţionare pe sursa de rezervă de 48 ore în stare normala şi 30 de minute în
alarmă.
Centrala de incendiu : Q = 2 x 18 Ah (conectate in serie)
Nr.
crt. Echipament / aparat
Cant.
(buc.)
Consum (mA) Observati
i Standby Alarma
Unit. Total Unit.
1. Centrala incendiu adresabila 1 250 250 1500
2. Detector de fum/temp.
adresabil
68 0,15 10.20 2 2 în
alarma
3. Module adresabile 2 0,35 0.70 0,42
4. Sonerie de interior 14 0,31 4.34 5,1
5. Sirena de exterior cu flash 1 50 50 1400
Consum total : 315.24
Tabel 3.1. Echipamente subsistem incendiu
33
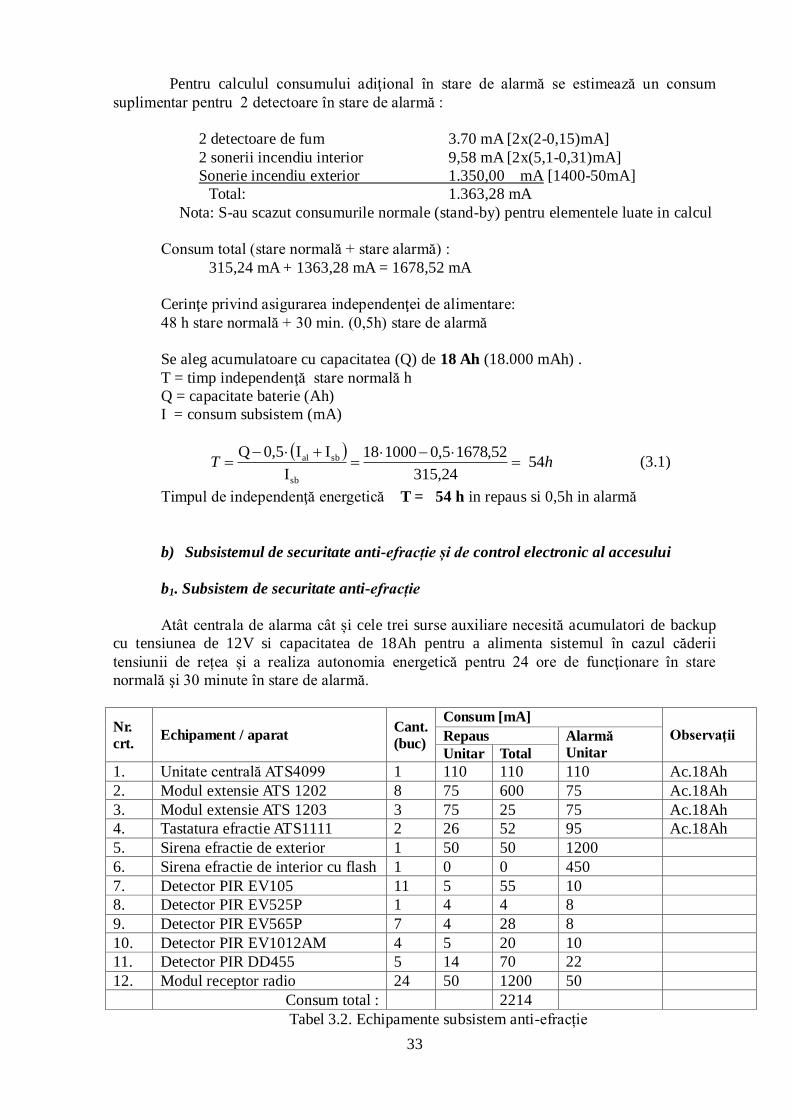
Pentru calculul consumului adiţional în stare de alarmă se estimează un consum
suplimentar pentru 2 detectoare în stare de alarmă :
2 detectoare de fum 3.70 mA [2x(2-0,15)mA]
2 sonerii incendiu interior 9,58 mA [2x(5,1-0,31)mA]
Sonerie incendiu exterior 1.350,00 mA [1400-50mA]
Total: 1.363,28 mA
Nota: S-au scazut consumurile normale (stand-by) pentru elementele luate in calcul
Consum total (stare normală + stare alarmă) :
315,24 mA + 1363,28 mA = 1678,52 mA
Cerinţe privind asigurarea independenţei de alimentare:
48 h stare normală + 30 min. (0,5h) stare de alarmă
Se aleg acumulatoare cu capacitatea (Q) de 18 Ah (18.000 mAh) .
T = timp independenţă stare normală h
Q = capacitate baterie (Ah)
I = consum subsistem (mA)
hT 54
315,24
52,16780,5100018
I
II0,5Q
sb
sbal
(3.1)
Timpul de independenţă energetică T = 54 h in repaus si 0,5h in alarmă
b) Subsistemul de securitate anti-efracție și de control electronic al accesului
b1. Subsistem de securitate anti-efracție
Atât centrala de alarma cât și cele trei surse auxiliare necesită acumulatori de backup
cu tensiunea de 12V si capacitatea de 18Ah pentru a alimenta sistemul în cazul căderii
tensiunii de rețea și a realiza autonomia energetică pentru 24 ore de funcţionare în stare
normală şi 30 minute în stare de alarmă.
Nr.
crt. Echipament / aparat
Cant.
(buc)
Consum [mA]
Observaţii Repaus Alarmă
Unitar Unitar Total
1. Unitate centrală ATS4099 1 110 110 110 Ac.18Ah
2. Modul extensie ATS 1202 8 75 600 75 Ac.18Ah
3. Modul extensie ATS 1203 3 75 25 75 Ac.18Ah
4. Tastatura efractie ATS1111 2 26 52 95 Ac.18Ah
5. Sirena efractie de exterior 1 50 50 1200
6. Sirena efractie de interior cu flash 1 0 0 450
7. Detector PIR EV105 11 5 55 10
8. Detector PIR EV525P 1 4 4 8
9. Detector PIR EV565P 7 4 28 8
10. Detector PIR EV1012AM 4 5 20 10
11. Detector PIR DD455 5 14 70 22
12. Modul receptor radio 24 50 1200 50
Consum total : 2214
Tabel 3.2. Echipamente subsistem anti-efracție
34
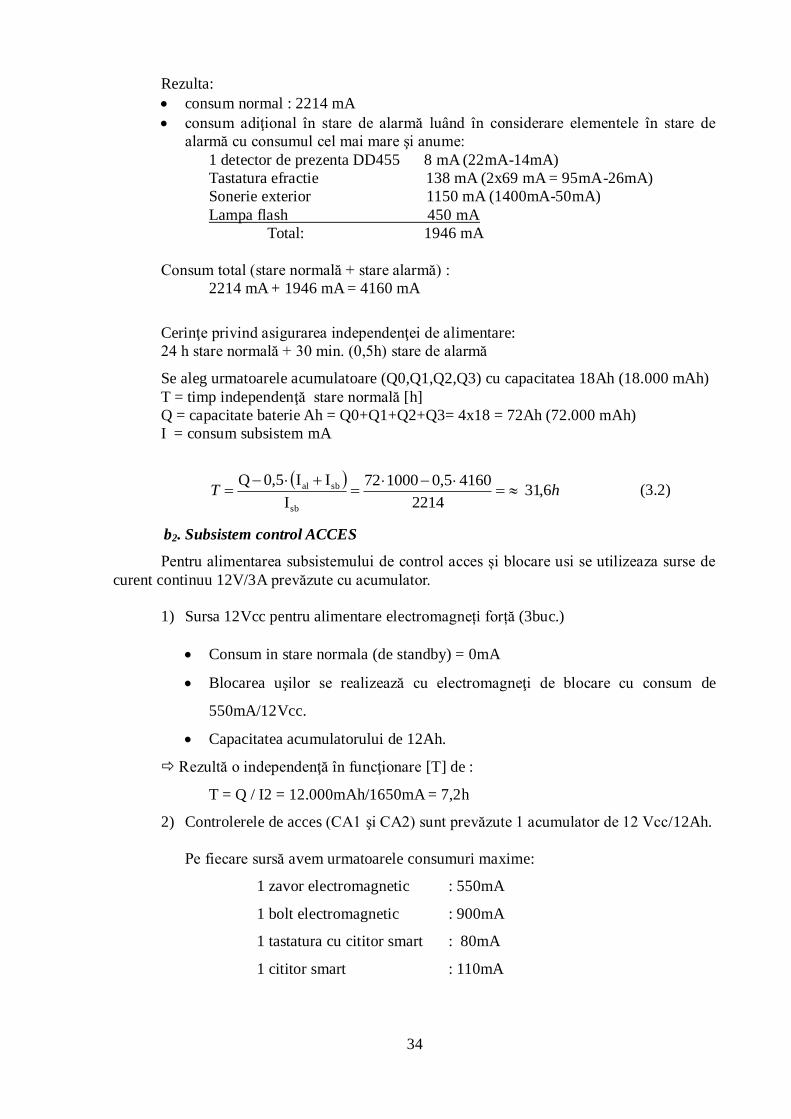
Rezulta:
consum normal : 2214 mA
consum adiţional în stare de alarmă luând în considerare elementele în stare de
alarmă cu consumul cel mai mare şi anume:
1 detector de prezenta DD455 8 mA (22mA-14mA)
Tastatura efractie 138 mA (2x69 mA = 95mA-26mA)
Sonerie exterior 1150 mA (1400mA-50mA)
Lampa flash 450 mA
Total: 1946 mA
Consum total (stare normală + stare alarmă) :
2214 mA + 1946 mA = 4160 mA
Cerinţe privind asigurarea independenţei de alimentare:
24 h stare normală + 30 min. (0,5h) stare de alarmă
Se aleg urmatoarele acumulatoare (Q0,Q1,Q2,Q3) cu capacitatea 18Ah (18.000 mAh)