Cap.1 Organizarea generală si alegerea parametrilor principali 1.1. Studiul soluţiilor similare Literatura de specialitate cuprinde pentru fiecare categorie de autovehicule informaţii legate de organizarea generală , de modul de dispunere al motorului , şi punţilor motoare , organizarea transmisiei , principalele dimensiuni geometrice , greutatea utilă etc. Analizând datele culese şi având în vedere soluţiile deja existente pe piaţă se va alege în prezentul proiect un autoturism ce va servi drept model de proiectare . Studiul soluţiilor similare s – a făcut în tabelul următor , prezentând fiecare soluţie similară cu caracteristicile ei : 1
Transcript
Cap.1 Organizarea generală si alegerea parametrilor principali
1.1. Studiul soluţiilor similare
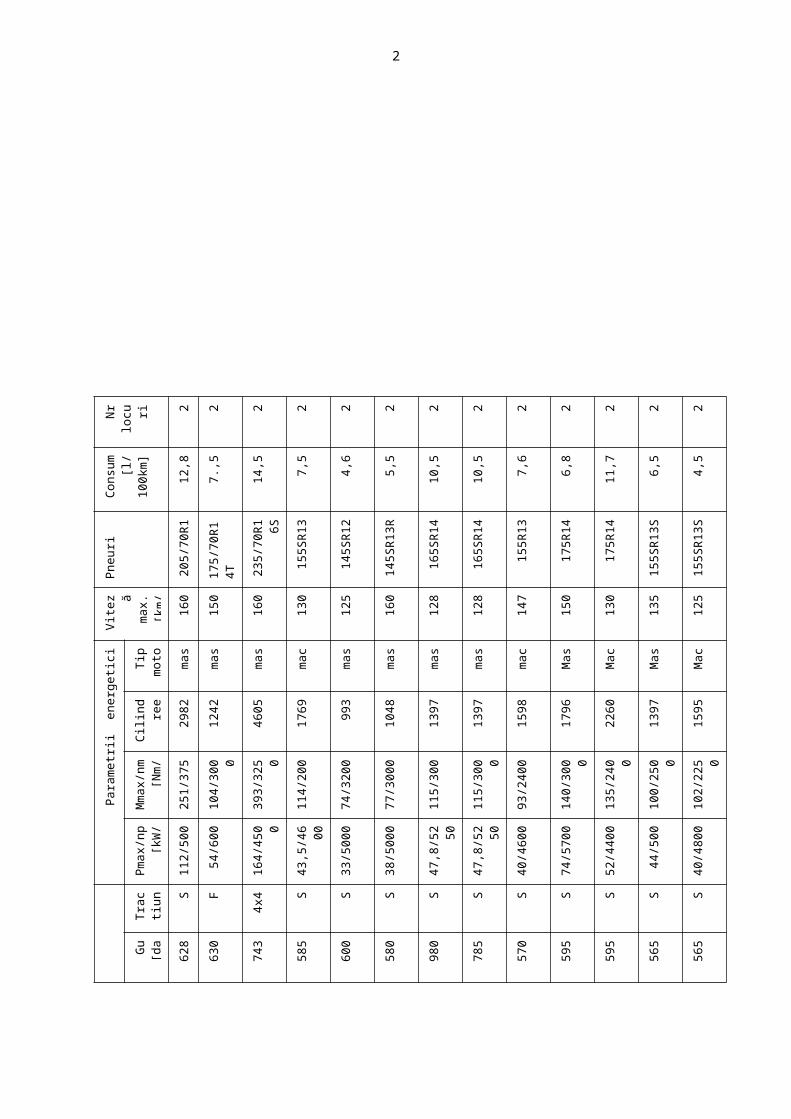
Literatura de specialitate cuprinde pentru fiecare categorie de autovehicule informaţii legate de organizarea generală , de modul de dispunere al motorului , şi punţilor motoare , organizarea transmisiei , principalele dimensiuni geometrice , greutatea utilă etc.
Analizând datele culese şi având în vedere soluţiile deja existente pe piaţă se va alege în prezentul proiect un autoturism ce va servi drept model de proiectare .
Studiul soluţiilor similare s – a făcut în tabelul următor , prezentând fiecare soluţie similară cu caracteristicile ei :
1
Nr
locu
ri 2 2 2 2 2 2 2 2 2 2 2 2 2
Con
sum
[l
/100
km]
12,8
7.,5
14,5 7,5
4,6
5,5
10,5
10,5 7,6
6,8
11,7 6,5
4,5
Pne
uri
205/
70R
15 S17
5/70
R14
T 235/
70R
16 S
155S
R13
145S
R12
145S
R13
R
165S
R14
165S
R14
155R
13
175R
14
175R
14
155S
R13
S
155S
R13
S
Vit
eză
max
.[k
m/h
]
160
150
160
130
125
160
128
128
147
150
130
135
125
Par
amet
rii
ener
geti
ci
Tip
m
otor
mas
mas
mas
mac
mas
mas
mas
mas
mac
Mas
Mac
Mas
Mac
Cil
indr
ee[c
m3 ]
2982
1242
4605
1769 993
1048
1397
1397
1598
1796
2260
1397
1595
Mm
ax/n
m[N
m/r
pm]
251/
3750
104/
3000
393/
3250
114/
200
74/3
200
77/3
000
115/
300
115/
3000
93/2
400
140/
3000
135/
2400
100/
2500
102/
2250
Pm
ax/n
p[k
W/r
pm]
112/
5000
54/6
00
164/
4500
43,5
/460
0
33/5
000
38/5
000
47,8
/525
0
47,8
/525
0
40/4
600
74/5
700
52/4
400
44/5
00
40/4
800
Par
amet
rii c
onst
ruct
ive
Tra
c ţi
une S F
4x4 S S S S S S S S S S
Gu
[da
N]
628
630
743
585
600
580
980
785
570
595
595
565
565
Go
[daN
]
1578
1135
2092 945
780
795
1000
1065
1200
1305
1305 825
870
H[m
m]
1646
1585
1908
1805
1750
1805
1550
1898
1475
1475
1475
1795
1795
L[m
m]
1763
1665
2019
1635
1395
1550
1615
1615
1720
1720
1720
1588
1588
La
[mm
]
5154
4398
6208
3955
3195
3736
4670
4550
4678
4678
4678
3982
3982
Tip
ul a
utov
.
For
d R
ange
rF
iat S
trad
a 75 F
ord
F15
0WS
4X
Cit
roen
C 1
5D
Dai
hats
u J
S 7
5V
Fia
tF
iori
no
Dac
ia 1
304
Pic
k-up
Dac
ia13
07
Ope
l D
Kad
ett –
E
Ope
lR
ecor
d L
S
Ope
lR
ecor
d L
SD
Ren
ault
Exp
res
– ka
tR
enau
ltE
xpre
s D
Nr.
Crt
. 1 2 3 4 5 6 7 8 9 10 11 12 13
2
Nr
locu
ri 2 2 2 2 2 2
Con
sum
[l
/100
km]
4,0
6,2
6,0
6,5
11,5
17,9
Pne
uri
155S
R12
165R
14C
165S
R13
165S
R13
7,5x
16-6
PR
205/
70R
15
Vit
eză
max
.[k
m/h
]
120
135
132
140
135
140
Par
amet
rii
ener
geti
ci
Tip
m
otor
Mas
Mas
Mac
Mas
Mac
Mas
Cil
indr
ee[c
m3 ]
970
1290
1588
1595
2286
4229
Mm
ax/n
m[N
m/r
pm]
75/3
200
94/3
400
100/
2300
125/
2500
140/
1700
277/
1600
Pm
ax/n
p[k
W/r
pm]
33/5
300
41/5
200
40/4
800
55/5
500
60/3
800
110/
3400
Par
amet
rii c
onst
ruct
ive
Tra
c ţi
une S S F F
4x4
4x4
Gu
[da
N]
730
805
670
670
900
850
Go
[daN
]
680
1040 955
955
1985
1960
H[m
m]
1765
1765
1430
1430
1920
1820
L[m
m]
1395
1625
1640
1640
1330
1660
La
[mm
]
3420
3900
4370
4370
4360
4050
Tip
ul a
utov
.
Suz
uki
Sup
er C
arry
Toy
ota
JL
ite
Ace
VW
Cad
dy D
VW
Cad
dy
Lan
d R
over
100
Pic
k-up
Jeep
Mon
choT
ruc
Nr.
Crt
.
14 15 16 17 18 19
3
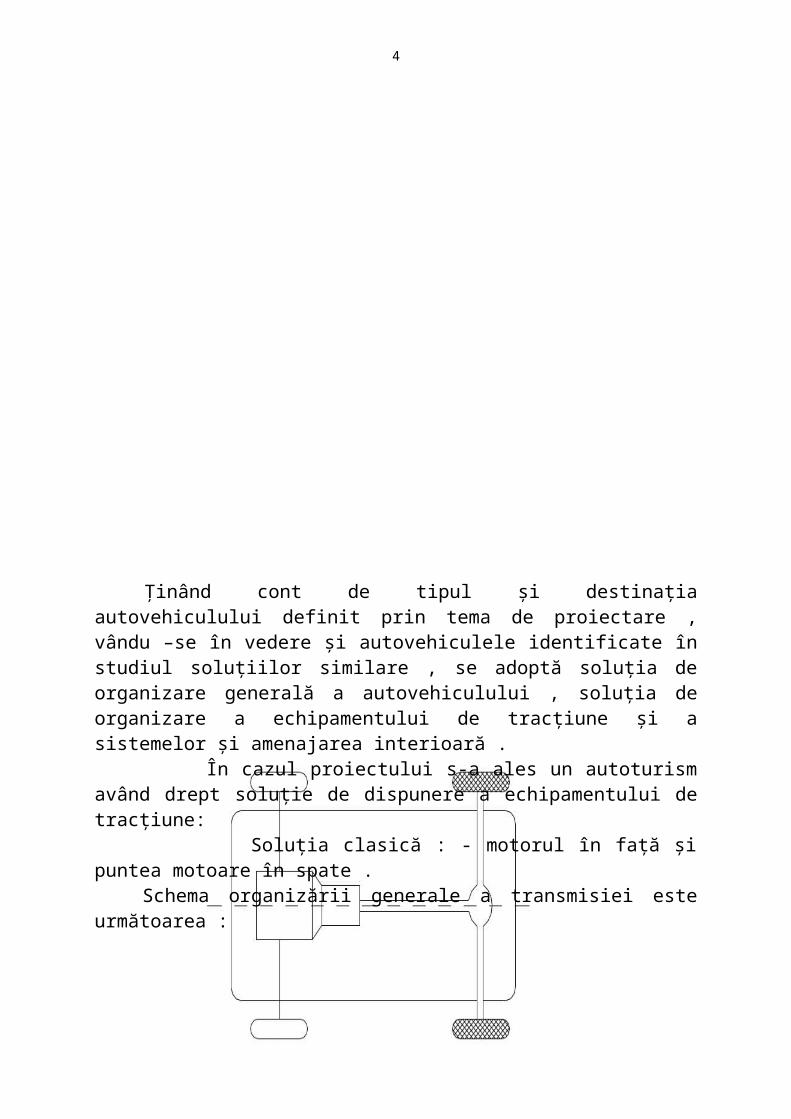
Ţinând cont de tipul şi destinaţia autovehiculului definit prin tema de proiectare , vându –se în vedere şi autovehiculele identificate în studiul soluţiilor similare , se adoptă soluţia de organizare generală a autovehiculului , soluţia de organizare a echipamentului de tracţiune şi a sistemelor şi amenajarea interioară .
În cazul proiectului s-a ales un autoturism având drept soluţie de dispunere a echipamentului de tracţiune: Soluţia clasică : - motorul în faţă şi puntea motoare în spate .
Schema organizării generale a transmisiei este următoarea :
4
1.2 Alegerea principalelor dimensiuni geometrice şi de masă
Dimensiunile geometrice care definesc construcţia unui autovehicul sunt prezentate în STAS 6689/2-80 .
Alegerea parametrilor geometrici pentru automobilul de proiectat trebuie făcută avându-se în vedere construcţiile existente şi recomandările standardizate pentru dimensiunile interioare .
Orientarea asupra dimensiunilor exterioare in prezentul proiect s-a făcut in concordanta cu dimensiunile automobilului ales ca model de proiectare la studiul soluţiilor similare. La alegerea valorilor pentru dimensiunile principale trebuie să fie luate în calcul si dimensiunile volumelor utile:
- compartimentul pentru persoane ;- compartimentul echipamentului moto-propulsor ;- compartimentul pentru transportul lucrurilor materiale ;Astfel se adoptă următoarele dimensiuni : - amplasare motor : în faţă ;- ampatament : L = 2270 mm ;- lungimea : La = 3945 mm ;- înălţimea : H = 1375 mm ; - lăţimea : l = 1560 mm ; - ecartament faţă : E1 = 1340 mm ;- ecartament spate : E2 = 1285 mm ;- consolă faţă : C1 = 665 mm ;- consolă spate : C2 = 895 mm ;
Masa totală a automobilului (ma) , face parte din parametrii generali ai acestuia şi reprezintă suma dintre masa utilă (mu) şi masa proprie (mo) .
Masa utilă (mu ), reprezintă o caracteristică esenţială a autovehiculului , prin ea caracterizându-se posibilităţile de utilizare a acestuia . Ea este determinată de capacitatea de încărcare a autovehiculului prevăzută prin tema de proiectare , sau adoptată în funcţie de tipul autovehiculului .
În cazul automobilului de proiectat masa utilă este impusă pin tema de proiectare şi anume :
mu = 700 kg ; Masa proprie (mo) , este o mărime ce caracterizează construcţia automobilului şi este determinată de suma maselor tuturor sistemelor şi subsistemelor componente când automobilul se află în stare de utilizare .
În cazul autoturismelor metode recomandate pentru alegerea greutăţii proprii constă în adoptarea ei pe baza maselor proprii ale tipurilor similare, avându-se în vedere tendinţele de dezvoltare care vizează utilizarea unor soluţii constructive şi materiale cu mase proprii reduse, astfel că se creează premise reducerii maselor proprii (mase plastice, materiale compozite, oţeluri de înaltă rezistenţă, etc.)
5
Din analiza soluţiilor similare reiese masa proprie:mo = 1050 kg .Astfel masa totală a autovehiculului va fi :
deci : kg .
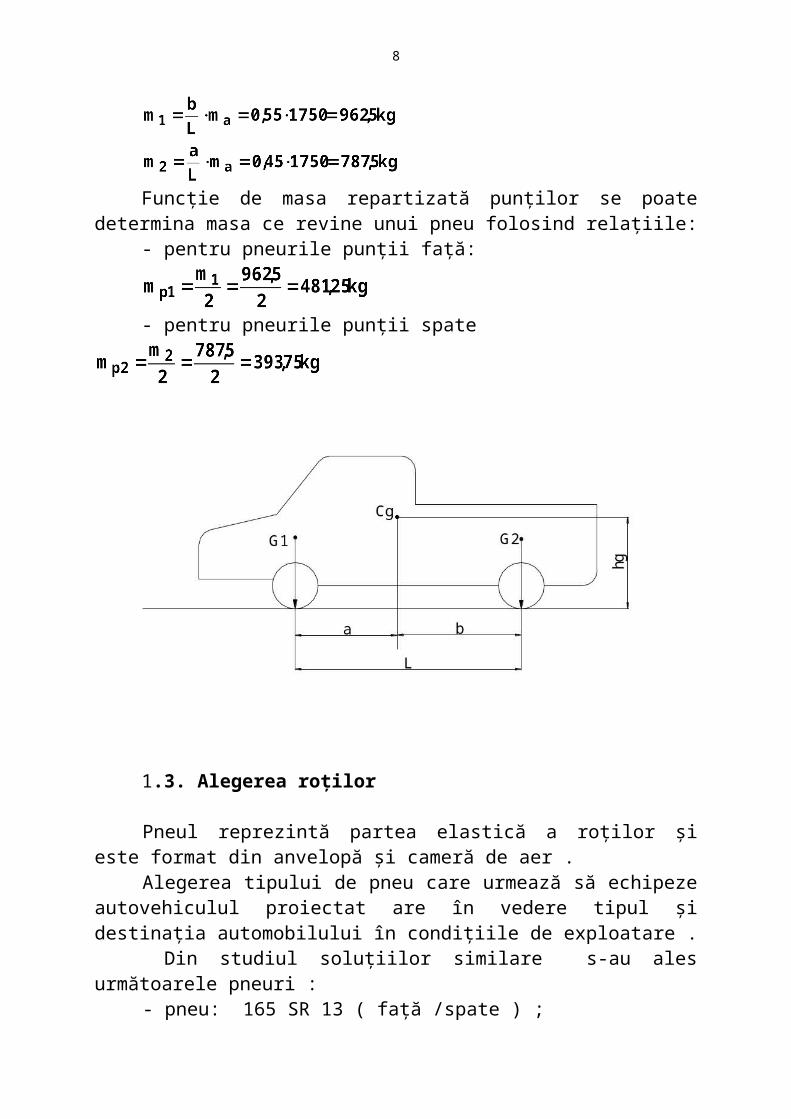
Masa autovehiculului se consideră aplicată în centrul de masă situat în planul vertical ce trece prin axa longitudinală de simetrie a autovehiculului .Poziţia centrului de masă se apreciază prin coordonatele longitudinale a şi b şi înălţimea hg ..
Masele ce revin punţilor sunt:
Funcţie de masa repartizată punţilor se poate determina masa ce revine unui pneu folosind relaţiile:
- pentru pneurile punţii faţă:
- pentru pneurile punţii spate
6
1.3. Alegerea roţilor
Pneul reprezintă partea elastică a roţilor şi este format din anvelopă şi cameră de aer .
Alegerea tipului de pneu care urmează să echipeze autovehiculul proiectat are în vedere tipul şi destinaţia automobilului în condiţiile de exploatare .
Din studiul soluţiilor similare s-au ales următoarele pneuri :- pneu: 165 SR 13 ( faţă /spate ) ;- simbolul jantei: 41 / 2 J x 13 ;- lăţimea secţiunii maxime : 167 mm ;- diametrul exterior : D = 596 mm ;- raza statica : rs = 271 mm- raza dinamică : rd = 278 mm ; - circumferinţa de rulare : 1800 mm ; - mărimea camerei de aer : J 13 ; Pentru calculele de dinamica a autovehiculului este necesara cunoaşterea
razei de rulare , care se apreciază analitic funcţie de raza nominală a roţii şi un coeficient de deformare.
Raza nominala este egală cu raza liberă determinata după diametrul exterior precizat:
Astfel raza de rulare este dată de relaţia :
[mm] .
Coeficientul de deformare depinde de presiunea interioara a aerului din pneu. Astfel pentru pneurile ce utilizează presiuni mai mici de 6 bari coeficientul de deformare este limitat în intervalul : = 0.93…0.935 .
Se adopta = 0.933Astfel :
mm .
Cap 2. Definirea condiţiilor de autopropulsare
7
Deplasarea autovehiculului este determinată de mărimea, direcţia şi sensul
forţelor active şi a forţelor de rezistenţă ce acţionează asupra acestuia .Definirea condiţiilor de autopropulsare precede calculul de tracţiune
împreună cu care condiţionează performanţele autovehiculului . Ea cuprinde precizarea funcţiei de tipul, caracteristicile şi destinaţia autovehiculului , a factorilor specifici de influenţă şi stabileşte relaţiile analitice de evaluare cantitativă a acestor forţe .
2.1. Rezistenţa la rulare
Rezistenţa de rulare (Rr) este o forţă cu acţiune permanentă la rularea roţilor pe cale, de sens opus sensului deplasării autovehiculului.
Cauzele fizice ale acestei rezistenţe sunt : - deformarea cu histerezis a pneului ; - frecările superficiale dintre pneu şi cale ;- frecările din lagărele roţilor ;- deformarea căii ;- percuţia dintre elementele pneului şi microneregularităţile căii ;- efectul de ventuză produs de profilele cu contur închis de pe banda de
rulare .Factorii cu influenţă majoră sunt :
- construcţia pneului ;- viteza de deplasare ;- presiunea aerului din pneu ;- forţele şi momentele ce acţionează asupra roţii .
În calculul de proiectare dinamică a autovehiculelor rezistenţa la rulare este luată în considerare prin coeficientul rezistenţei la rulare f cum reprezintă o forţă specifică la rulare definită prin relaţia:
unde: - - rezistenţa la rulare ;- - componenta greutăţii automobilului normală pe cale ;
- α unghiul de înclinare longitudinală a drumului .Se adoptă : f = 0.025
αmax = 20˚Atunci ,pentru un drum cu înclinaţie longitudinală maximă, avem :
Pentru un drum orizontal vom avea :
8
2.2. Rezistenţei aerului
Rezistenţa aerului (Ra) reprezintă interacţiunea după direcţia deplasării dintre aerul în repaus şi autovehiculul în mişcare rectilinie. Ea este o forţă cu acţiune permanentă de sens opus sensului de deplasare a autovehiculului.
Cauzele fizice ale rezistenţei aerului sunt :- frecarea dintre aer şi suprafeţele pe lângă care are loc curgerea acestuia ;- rezistenţa curenţilor exteriori folosiţi pentru răcirea diferitelor organe şi
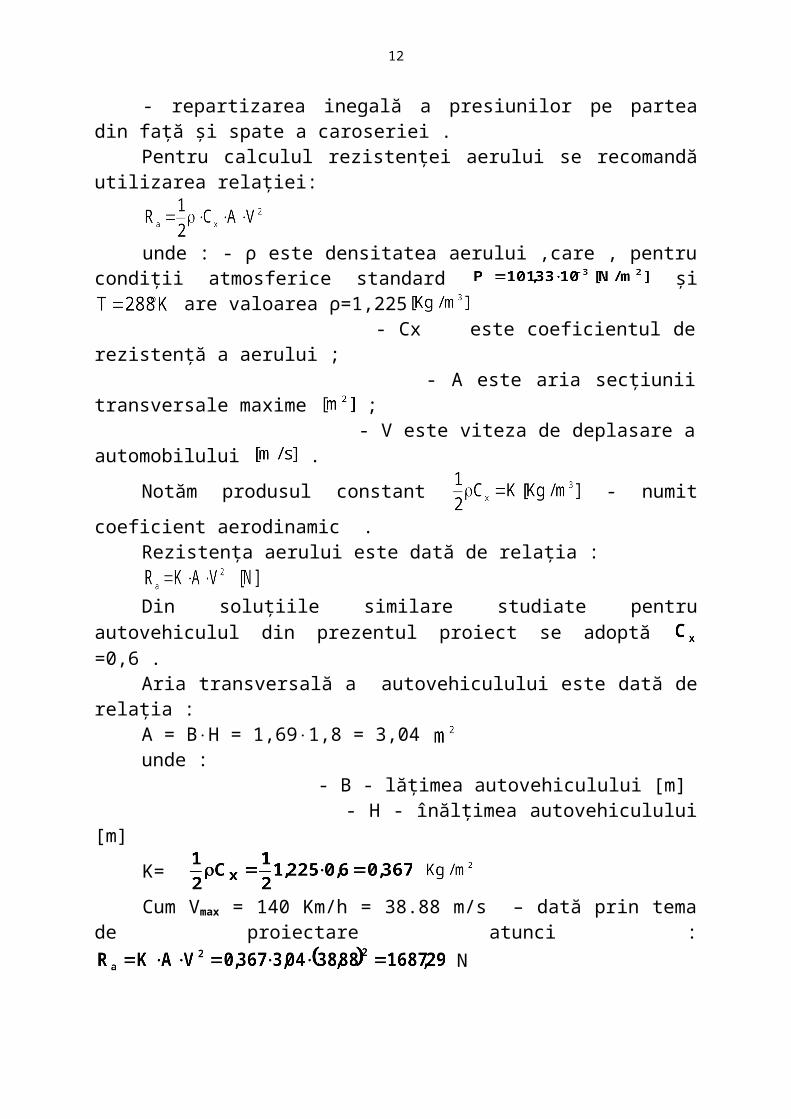
pentru ventilarea caroseriei ;- repartizarea inegală a presiunilor pe partea din faţă şi spate a caroseriei . Pentru calculul rezistenţei aerului se recomandă utilizarea relaţiei:
unde : - ρ este densitatea aerului ,care , pentru condiţii atmosferice standard şi are valoarea ρ=1,225 - Cx este coeficientul de rezistenţă a aerului ; - A este aria secţiunii transversale maxime ; - V este viteza de deplasare a automobilului .
Notăm produsul constant - numit coeficient aerodinamic
.Rezistenţa aerului este dată de relaţia :
Din soluţiile similare studiate pentru autovehiculul din prezentul proiect se adoptă =0,6 .
Aria transversală a autovehiculului este dată de relaţia :A = BH = 1,691,8 = 3,04 unde :
- B - lăţimea autovehiculului [m] - H - înălţimea autovehiculului [m]
K=
Cum Vmax = 140 Km/h = 38.88 m/s – dată prin tema de proiectare atunci : N
2.3. Rezistenţei pantei
9
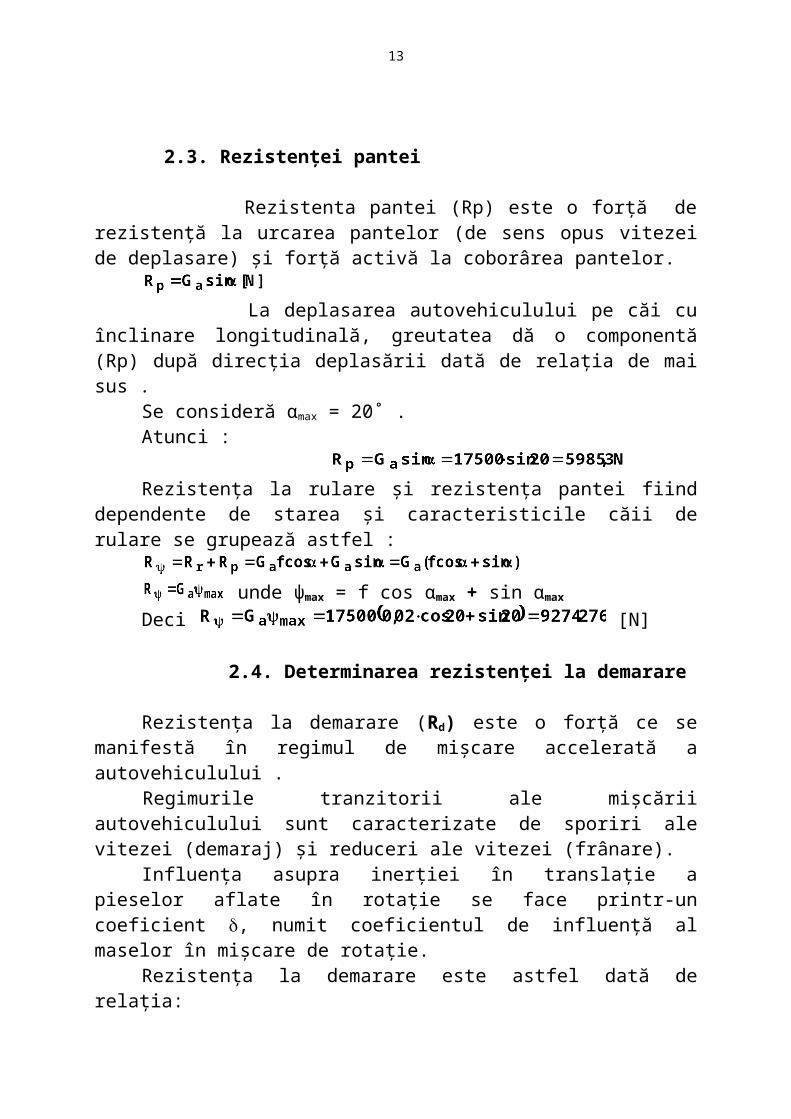
Rezistenta pantei (Rp) este o forţă de rezistenţă la urcarea pantelor (de sens opus vitezei de deplasare) şi forţă activă la coborârea pantelor.
La deplasarea autovehiculului pe căi cu înclinare longitudinală, greutatea dă o componentă (Rp) după direcţia deplasării dată de relaţia de mai sus .
Se consideră αmax = 20˚ .Atunci :
Rezistenţa la rulare şi rezistenţa pantei fiind dependente de starea şi
caracteristicile căii de rulare se grupează astfel :
unde ψmax = f cos αmax + sin αmax
Deci [N]
2.4. Determinarea rezistenţei la demarare
Rezistenţa la demarare (Rd) este o forţă ce se manifestă în regimul de mişcare accelerată a autovehiculului .
Regimurile tranzitorii ale mişcării autovehiculului sunt caracterizate de sporiri ale vitezei (demaraj) şi reduceri ale vitezei (frânare).
Influenţa asupra inerţiei în translaţie a pieselor aflate în rotaţie se face printr-un coeficient , numit coeficientul de influenţă al maselor în mişcare de rotaţie.
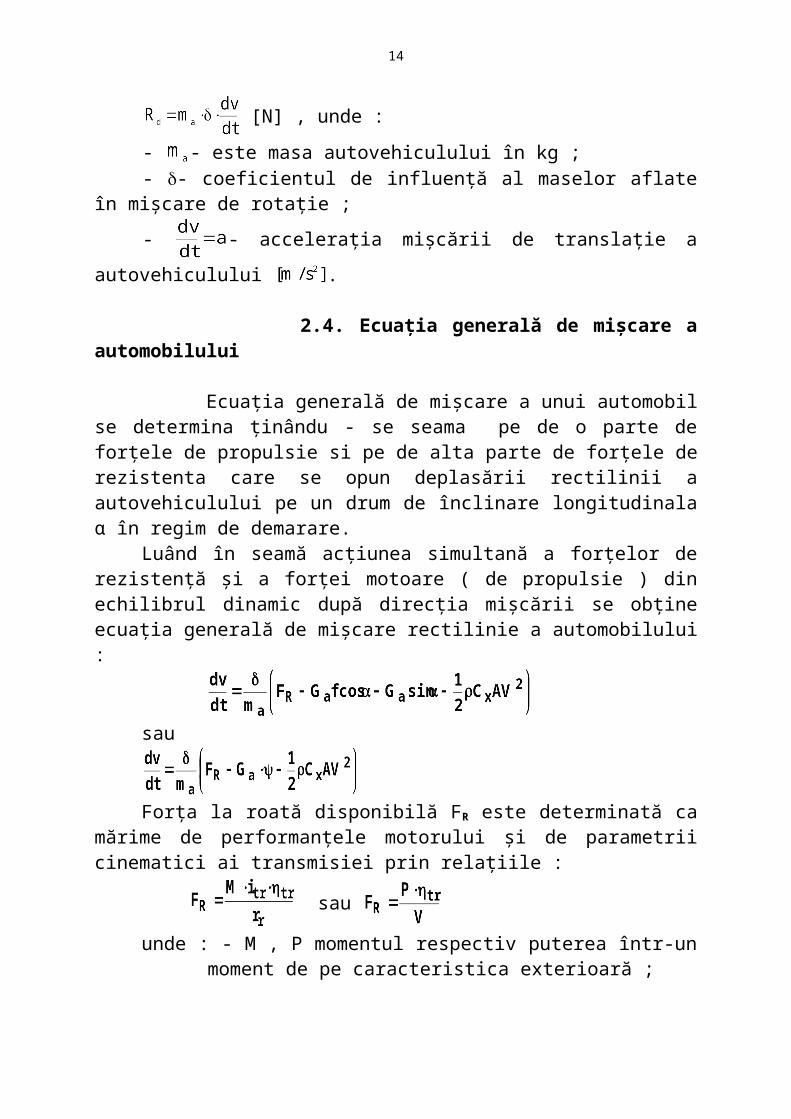
Rezistenţa la demarare este astfel dată de relaţia:
[N] , unde :
- - este masa autovehiculului în kg ;- - coeficientul de influenţă al maselor aflate în mişcare de rotaţie ;
- - acceleraţia mişcării de translaţie a autovehiculului .
2.4. Ecuaţia generală de mişcare a automobilului
Ecuaţia generală de mişcare a unui automobil se determina ţinându - se seama pe de o parte de forţele de propulsie si pe de alta parte de forţele de rezistenta care se opun deplasării rectilinii a autovehiculului pe un drum de înclinare longitudinala α în regim de demarare.
Luând în seamă acţiunea simultană a forţelor de rezistenţă şi a forţei motoare ( de propulsie ) din echilibrul dinamic după direcţia mişcării se obţine ecuaţia generală de mişcare rectilinie a automobilului :
sau
10
Forţa la roată disponibilă FR este determinată ca mărime de performanţele motorului şi de parametrii cinematici ai transmisiei prin relaţiile :
sau
unde : - M , P momentul respectiv puterea într-un moment de pe caracteristica exterioară ;- itr raportul de transmitere al transmisiei ;- ηtr randamentul transmisiei ;- rr raza de rulare a roţilor ;- V viteza de deplasare .
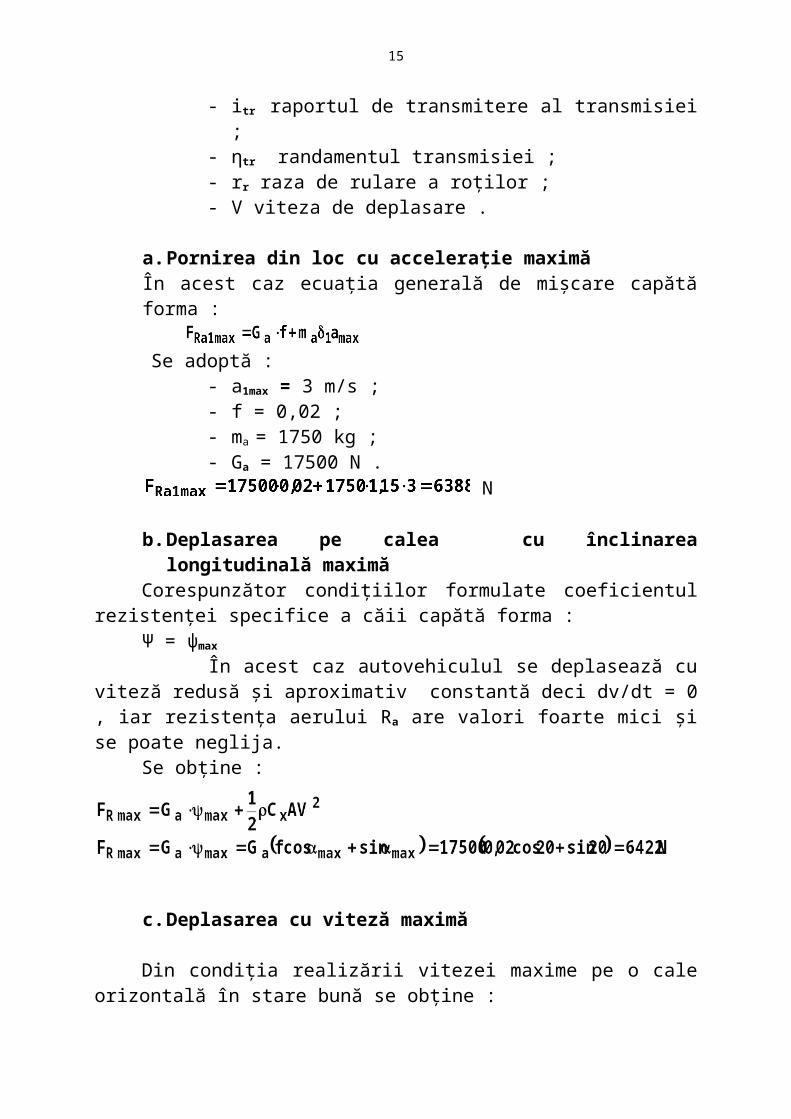
a. Pornirea din loc cu acceleraţie maximăÎn acest caz ecuaţia generală de mişcare capătă forma :
Se adoptă :
- a1max = 3 m/s ;- f = 0,02 ; - ma = 1750 kg ; - Ga = 17500 N .
N
b. Deplasarea pe calea cu înclinarea longitudinală maximăCorespunzător condiţiilor formulate coeficientul rezistenţei specifice a
căii capătă forma : Ψ = ψmax
În acest caz autovehiculul se deplasează cu viteză redusă şi aproximativ constantă deci dv/dt = 0 , iar rezistenţa aerului Ra are valori foarte mici şi se poate neglija.
Se obţine :
c. Deplasarea cu viteză maximă
Din condiţia realizării vitezei maxime pe o cale orizontală în stare bună se obţine :
unde :
11
- ρ = 1,225 kg/m3 ; î- f = 0,02 ;- Cx = 0,6 ;- A = 3,04 m2 ;- Vmax = 140 km/h = 38,8 m/s .
Atunci vom obţine :
Cap3.Calculul de tracţiune
Calculul de tracţiune se face în scopul determinării parametrilor principali ai motorului şi transmisiei, astfel ca autovehiculul de proiectat cu caracteristicile definite anterior în cap. 1 şi 2 să fie capabil să realizeze performanţele prescrise în tema de proiectare sau a performanţelor celor mai bune modele existente sau de perspectivă.
12
3.1. Randamentului transmisieiTransmiterea fluxului de putere este caracterizată de pierderile datorate
fenomenelor de frecare din organele transmisiei. Calitativ pierderile de putere din transmisie se apreciază prin randamentul transmisiei .
ηt = ηcv η0 unde : - ηcv este randamentul cutiei de viteze ;
- η0 este randamentul transmisiei principale . Pentru propulsarea autovehiculului puterea dezvoltată de motor trebuie să
fie transmisă roţilor motoare ale acestuia.
Ţinând seama de tipul şi destinaţia autovehiculului , din studiul soluţiilor similare am adoptat :
- ηcv = 0,95- η0 = 0,95
3.2.Determinarea caracteristicii externe a motoruluiDeterminrea puterii maxime a motorului
Aprecierea motorului ca sursă de energie pentru autopropulsarea autovehiculului se face prin oferta de putere şi moment motor printr-un câmp de caracteristici.
Caracteristica externă este alcătuită din curbele de variaţie P = f(n) şi M= f(n) şi se completează şi cu curba consumului specific de combustibil (e=f(n)) .
Funcţionarea automobilului în condiţii normale de exploatare are loc în regim tranzitoriu, gama rezistenţelor la înaintare fiind foarte mare. În aceste condiţii rezultă că la roţile motoare ale automobilului necesarul de forţă de tracţiune şi de putere la roată sunt câmpuri de caracteristici având în abscisă viteza aleasă de conducător.
Delimitarea unui asemenea câmp de caracteristici este realizată raţional din următoarele condiţii:
a) motorul să echilibreze prin posibilităţile proprii întreaga gamă de rezistenţe. Acest lucru este posibil când puterea furnizată este constantă în toate regimurile de deplasare.
Dacă această valoare constantă corespunde puterii maxime se obţine caracteristica ideală de tracţiune dată de relaţia:
unde: - FR este forţa la roată ;- V este viteza de deplasare ;- PRmax este puterea maximă la roată .b) viteza maximă este delimitată prin puterea maximă de autopropulsare
13
este forţa la roată necesară deplasării cu viteza maximă de performanţă .
c) la viteze mici limita este dată de aderenţa roţilor cu calea:
=0,7-0,8 coeficient de aderenţăeste greutatea aderentă, respectiv greutatea ce revine în condiţii de
demaraj roţilor motoare.Din definirea condiţiilor de autopropulsare de deplasarea cu viteză
maximă presupune dezvoltarea unei forţe la roată FRVmax . Din definirea puterii ca produs între forţă şi viteză realizarea performanţei de viteză maximă în condiţiile prevăzute, presupune pentru motor dezvoltarea unei puteri.
este puterea dezvoltată de motor pentru atingerea vitezei maxime este forţa la roată la viteză maximă ;
este randamentul transmisiei .Din explicitarea analitică a forţei la roată rezultă :
unde pentru automobilul de proiectat avem :- ρ = 1,225 kg/m3 ; î- f = 0,02 ;- Cx = 0,6 ;- A = 3,04 m2 ;- Vmax = 140 km/h = 38,8 m/s ;- Ga = 17500 N .
Atunci vom obţine :
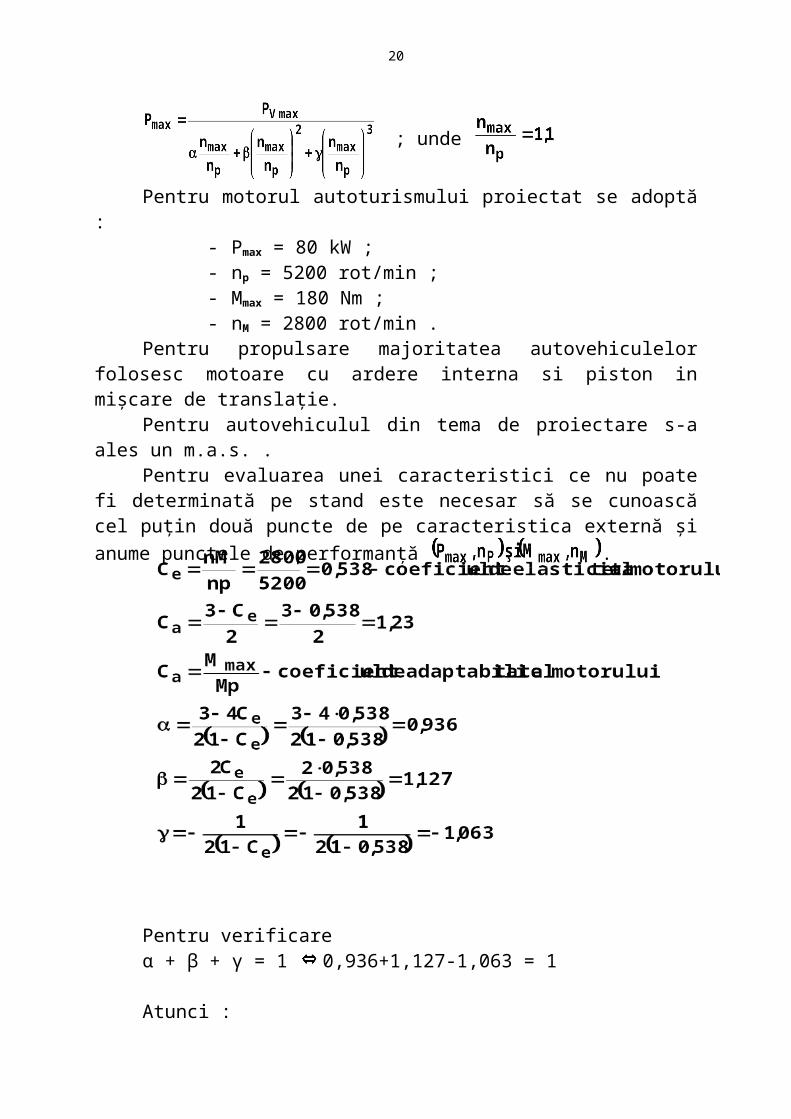
Punând condiţia ca puterea la viteză maximă să corespundă turaţiei maxime a motorului se obţine :
- nM = 2800 rot/min .Pentru propulsare majoritatea autovehiculelor folosesc motoare cu ardere
interna si piston in mişcare de translaţie.Pentru autovehiculul din tema de proiectare s-a ales un m.a.s. . Pentru evaluarea unei caracteristici ce nu poate fi determinată pe stand
este necesar să se cunoască cel puţin două puncte de pe caracteristica externă şi anume punctele de performanţă .
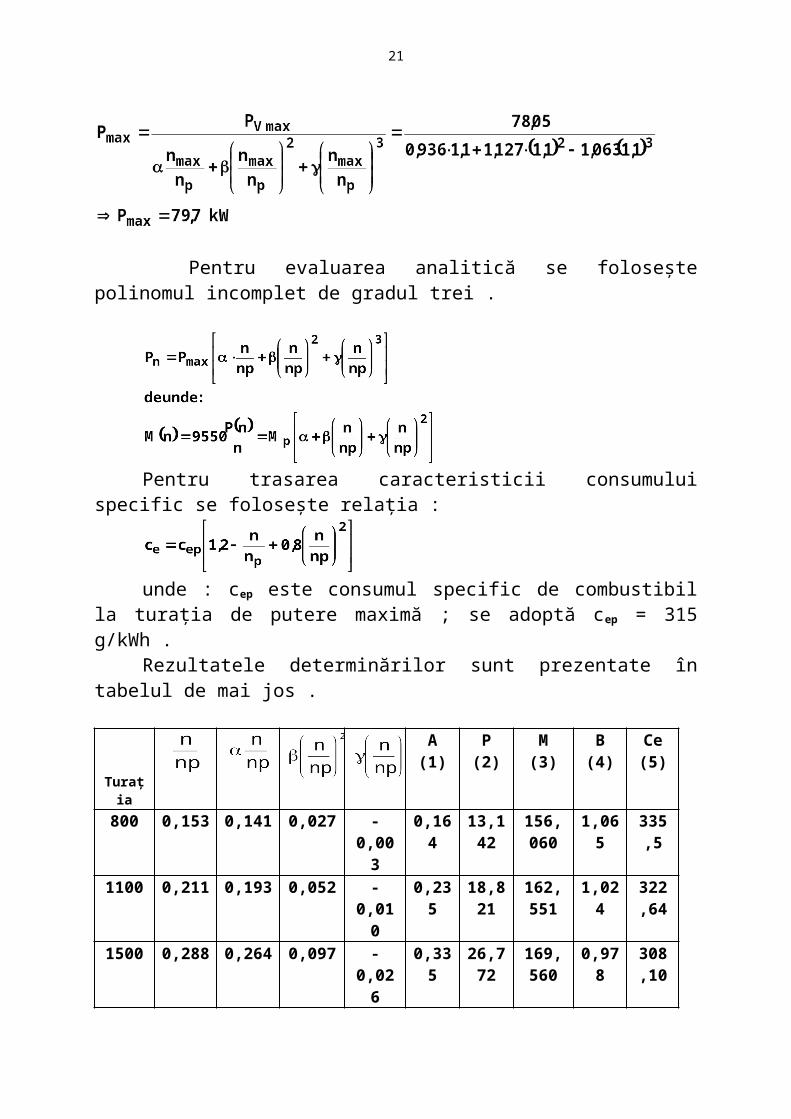
Pentru evaluarea analitică se foloseşte polinomul incomplet de gradul trei .
Pentru trasarea caracteristicii consumului specific se foloseşte relaţia :
15
unde : cep este consumul specific de combustibil la turaţia de putere maximă ; se adoptă cep = 315 g/kWh .
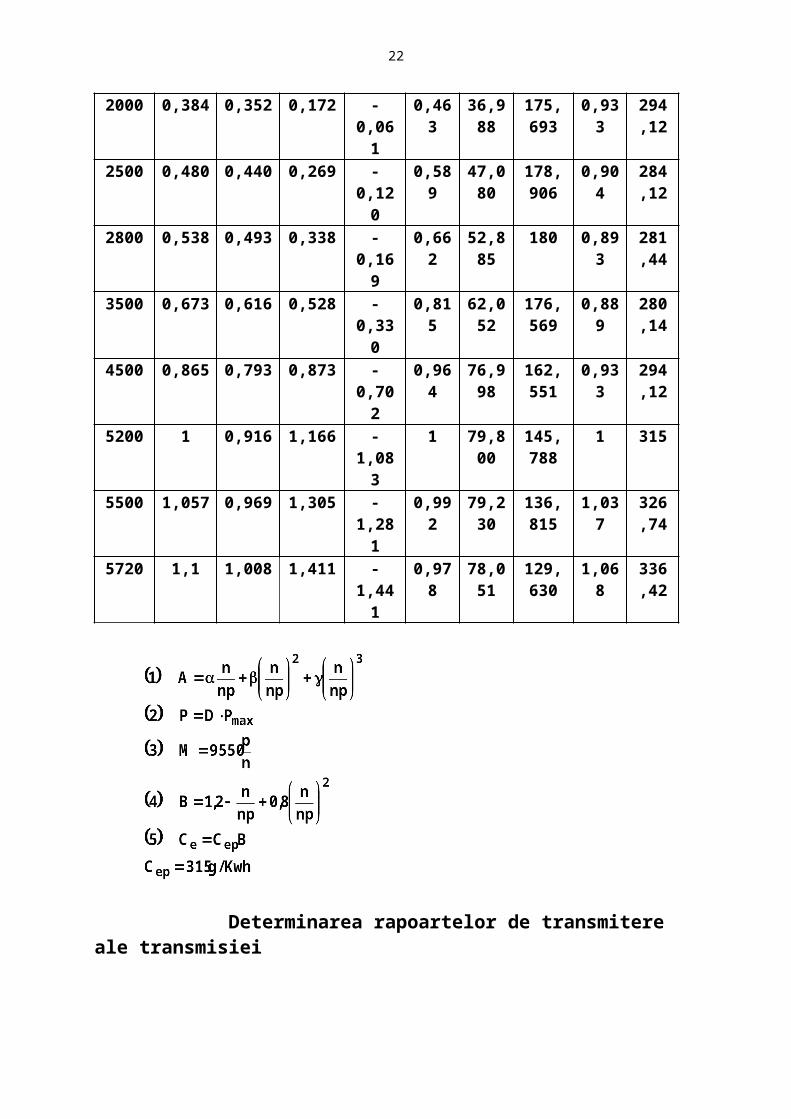
Rezultatele determinărilor sunt prezentate în tabelul de mai jos .
Turaţia
A(1)
P(2)
M(3)
B(4)
Ce(5)
800 0,153 0,141 0,027 -0,003 0,164 13,142
156,060
1,065 335,5
1100 0,211 0,193 0,052 -0,010 0,235 18,821
162,551
1,024 322,64
1500 0,288 0,264 0,097 -0,026 0,335 26,772
169,560
0,978 308,10
2000 0,384 0,352 0,172 -0,061 0,463 36,988
175,693
0,933 294,12
2500 0,480 0,440 0,269 -0,120 0,589 47,080
178,906
0,904 284,12
2800 0,538 0,493 0,338 -0,169 0,662 52,885
180 0,893 281,44
3500 0,673 0,616 0,528 -0,330 0,815 62,052
176,569
0,889 280,14
4500 0,865 0,793 0,873 -0,702 0,964 76,998
162,551
0,933 294,12
5200 1 0,916 1,166 -1,083 1 79,800
145,788
1 315
5500 1,057 0,969 1,305 -1,281 0,992 79,230
136,815
1,037 326,74
5720 1,1 1,008 1,411 -1,441 0,978 78,051
129,630
1,068 336,42
Determinarea rapoartelor de transmitere ale transmisiei
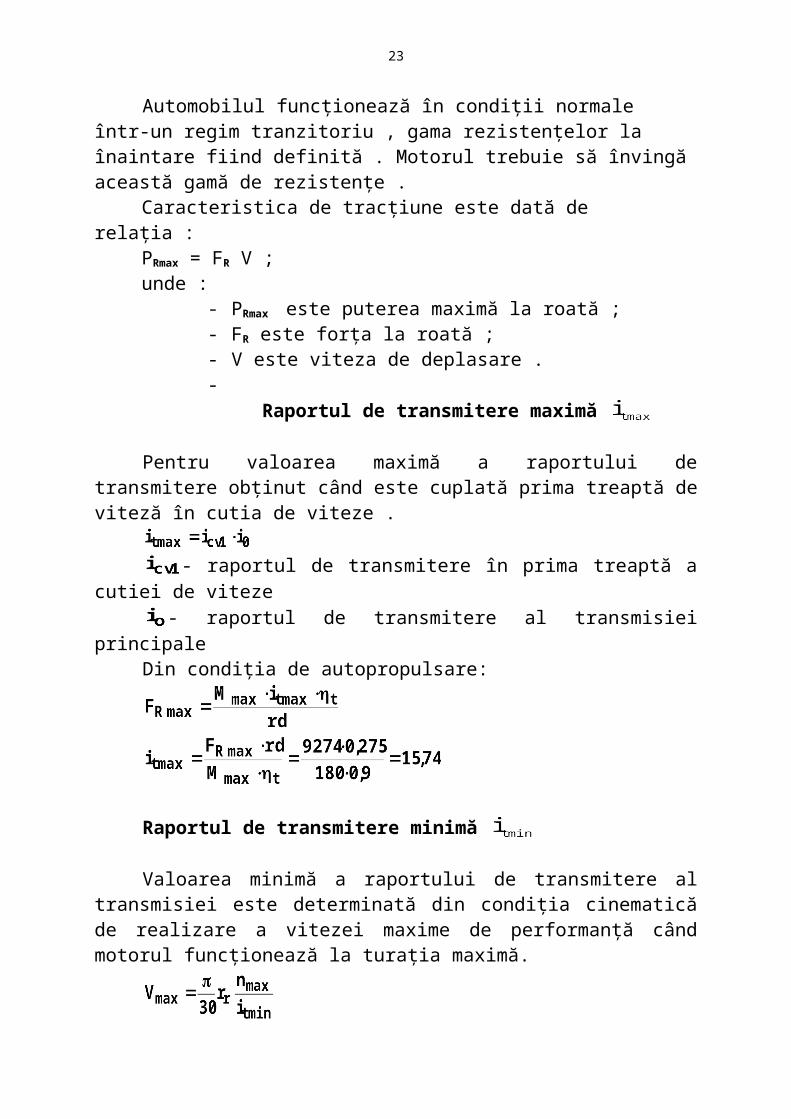
Automobilul funcţionează în condiţii normale într-un regim tranzitoriu , gama rezistenţelor la înaintare fiind definită . Motorul trebuie să învingă această gamă de rezistenţe .
Caracteristica de tracţiune este dată de relaţia :
16
PRmax = FR V ; unde :
- PRmax este puterea maximă la roată ; - FR este forţa la roată ;- V este viteza de deplasare .-
Raportul de transmitere maximă
Pentru valoarea maximă a raportului de transmitere obţinut când este cuplată prima treaptă de viteză în cutia de viteze .
- raportul de transmitere în prima treaptă a cutiei de viteze
- raportul de transmitere al transmisiei principaleDin condiţia de autopropulsare:
Raportul de transmitere minimă
Valoarea minimă a raportului de transmitere al transmisiei este determinată din condiţia cinematică de realizare a vitezei maxime de performanţă când motorul funcţionează la turaţia maximă.
Raportul de transmitere al transmisiei principale io
Raportul de transmitere al primei trepte din cutia de viteze
Determinarea numărului de trepte pentru cutia de viteze
17
În cazul etajării cutiei în progresie geometrică, între valoarea maximă şi minimă , în cutia de viteze sunt necesare n trepte date de relaţia:
Se adoptă n = 4 trepte de viteză .
Calculul rapoartelor de transmitere pentru celelalte trepte din cutia de
viteze
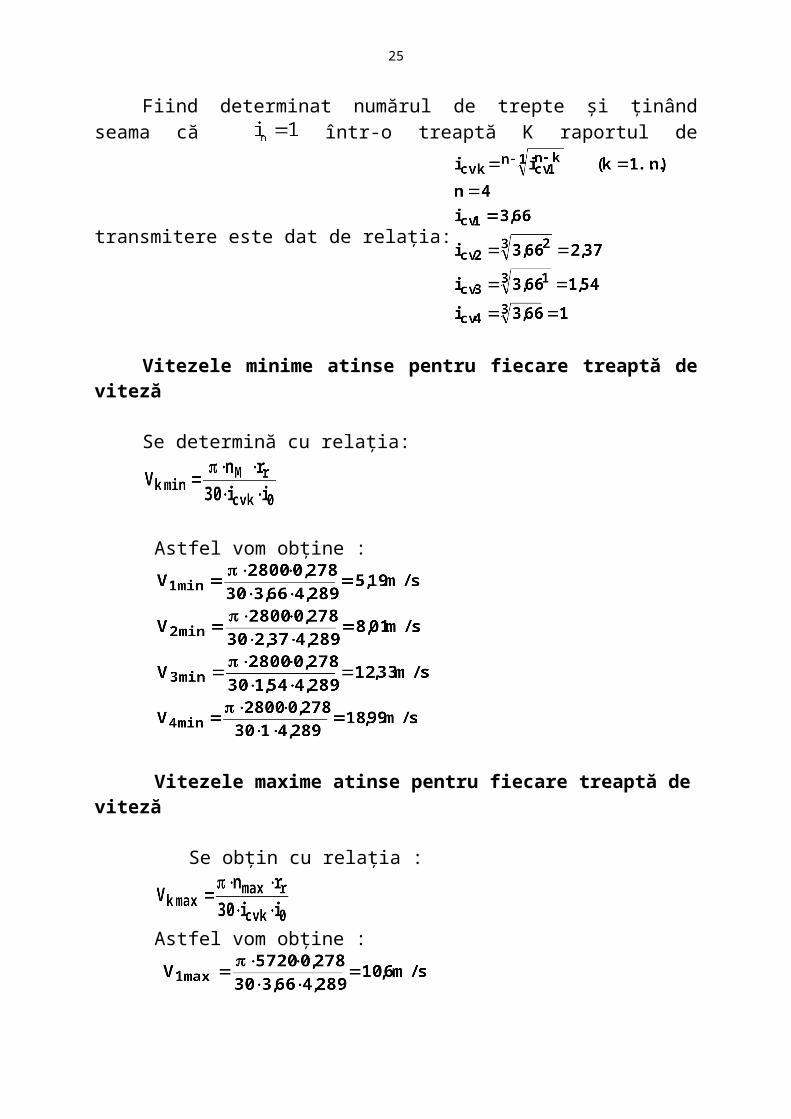
Fiind determinat numărul de trepte şi ţinând seama că într-o treaptă
K raportul de transmitere este dat de relaţia:
Vitezele minime atinse pentru fiecare treaptă de viteză
Se determină cu relaţia:
Astfel vom obţine :
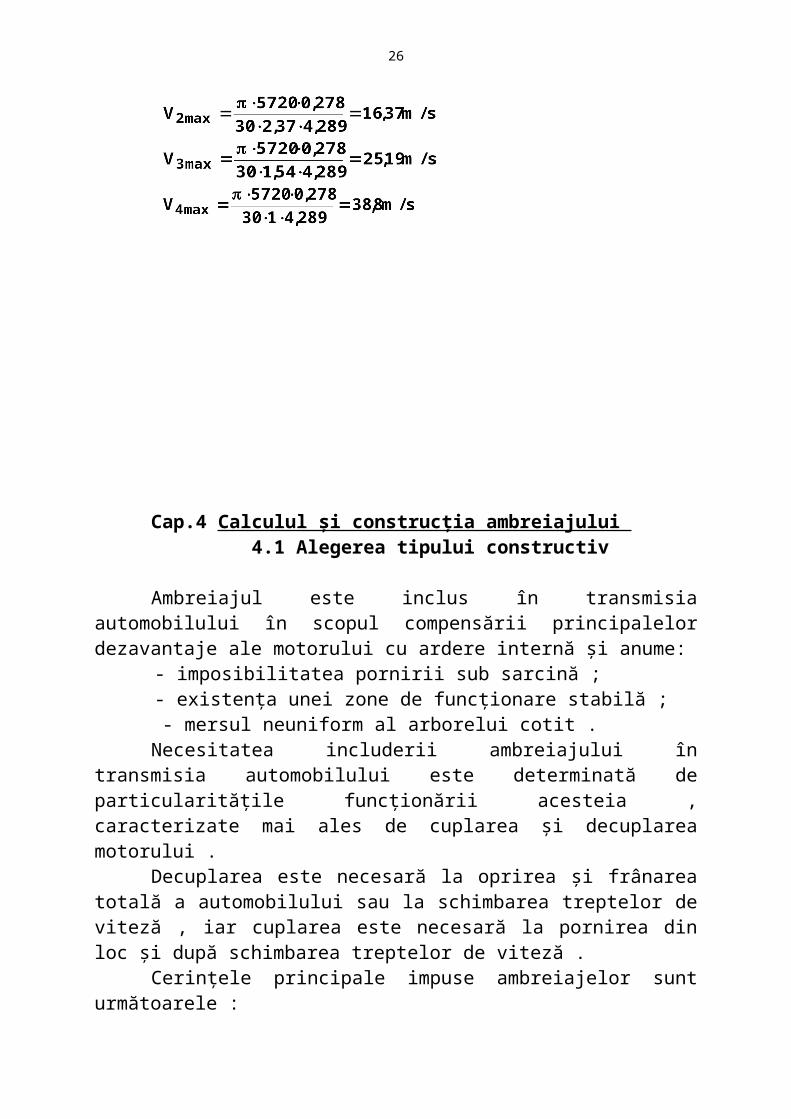
Vitezele maxime atinse pentru fiecare treaptă de viteză Se obţin cu relaţia :
18
Astfel vom obţine :
Cap.4 Calculul şi construcţia ambreiajului 4.1 Alegerea tipului constructiv
Ambreiajul este inclus în transmisia automobilului în scopul compensării principalelor dezavantaje ale motorului cu ardere internă şi anume:
- imposibilitatea pornirii sub sarcină ;- existenţa unei zone de funcţionare stabilă ; - mersul neuniform al arborelui cotit . Necesitatea includerii ambreiajului în transmisia automobilului este
determinată de particularităţile funcţionării acesteia , caracterizate mai ales de cuplarea şi decuplarea motorului .
Decuplarea este necesară la oprirea şi frânarea totală a automobilului sau la schimbarea treptelor de viteză , iar cuplarea este necesară la pornirea din loc şi după schimbarea treptelor de viteză .
Cerinţele principale impuse ambreiajelor sunt următoarele : - la decuplare , să izoleze rapid şi complet motorul de transmisie pentru a
face posibilă schimbarea treptelor fără şocuri ; - la cuplare , să îmbine motorul cu transmisia lin , pentru a evita pornirea
bruscă din loc a automobilului şi şocurile din mecanismele transmisiei ;- în stare cuplată , să asigure o îmbinare perfectă între motor şi
transmisie , fără patinări ;- elementele conduse ale sale să aibă momente de inerţie cât mai reduse
pentru micşorarea sarcinilor dinamice în transmisie ;- să aibă o funcţionare sigură şi de lungă durată ;
19
- acţionarea să fie simplă şi uşoară ;- regimul termic să aibă valori reduse şi să permită o bună transmitere a
căldurii în mediul înconjurător ;- construcţia să fie simplă .Clasificarea ambreiajelor se face după mai multe criterii :1. după principiul de funcţionare :
Ţinând cont de tipul şi destinaţia autovehiculului proiectat , de tipul motorului ce echipează acest autovehicul şi de studiul soluţiilor similare se alege ca element de legătură între motor şi transmisie un ambreiaj mecanic cu arc central de tip diafragmă .
Ambreiajele mecanice reprezintă cea mai largă categorie de ambreiaje acoperind peste 90 % din tipurile şi mărcile de automobile şi peste 99 % din numărul de autovehicule . Această răspândire se explic prin costurile deosebit de reduse .
La aceste ambreiaje legătura de cuplare se realizează prin intermediul forţelor de frecare ce iau naştere între suprafeţele conjugate ale părţilor conduse şi conducătoare , sub acţiunea unei forţe normale de apăsare dezvoltată într-un sistem mecanic .
4.2 Alegerea valorilor pentru principalii parametrii constructivi şi de funcţionare
Parametrii care caracterizează calităţile constructiv – funcţionale ale ambreiajului sunt :
- coeficientul de siguranţă ( β ) ;- presiunea specifică ( ps ) ; - creşterea de temperatură ( Δt ) .Coeficientul de siguranţă al ambreiajului ( β ) se defineşte ca raport
dintre momentul capabil al ambreiajului şi momentul maxim al motorului :
20
Din condiţia ca în orice situaţie de funcţionare ambreiajul să fie capabil să transmită integral momentul maxim al motorului , coeficientul de siguranţă este supraunitar .
În faza predimensionării constructive a ambreiajului coeficientul de siguranţă se adoptă cu valori apropiate celor ce caracterizează construcţiile existente . Astfel , în cazul autovehiculului de proiectat coeficientul de siguranţă ( β ) poate lua valori în intervalul 1,5 ... 2 . Se adoptă β = 1,8 .
Presiunea specifică ( ps ) este o mărime definită ca raportul dintre forţa normală de apăsare pe suprafeţele de frecare în starea cuplată a ambreiajului şi aria garniturilor de frecare :
Valoarea de predimensionare a presiunii specifice se alege din aşa numita condiţie de exploatare la care pentru garniturile de tipul garniturilor cu inserţie metalică limitele admisibile sunt cuprinse între 0,25 ... 0,4 MPa .
Creşterea de temperatură la cuplare a ambreiajului este o caracteristică funcţională ce caracterizează capacitatea ambreiajului de a prelua fără încălziri periculoase căldura rezultată în procesul de patinare din fazele de cuplare ale ambreiajului .
Durata mica a procesului de cuplare a ambreiajului ( 1s la pornire din loc şi 0,2 ... 0,3 s la schimbarea treptelor de viteză ) face ca întreaga cantitate de căldură rezultată prin patinare să fie preluată de piesele metalice aflate în vecinătatea suprafeţelor de frecare .
Din punct de vedere termic ambreiajul se consideră corect dimensionat dacă creşterea de temperatură la pornirea din loc nu depăşeşte 12 ... 15 ˚C . Se adoptă t = 13˚C .
În caz contrar , când temperaturile locale pot ajunge la 95 ... 100˚C , se creează pericolul fluidizării liantului din reţeta garniturilor de frecare , situaţie în care prin reducerea coeficientului de frecare scade brusc momentul capabil al ambreiajului şi patinarea se accentuează şi poate duce la arderea garniturilor de frecare .
4.3 Dimensionarea garniturilor de frecare ale ambreiajului
Este precedată de o predimensionare în care sunt determinate principalele dimensiuni ale suprafeţelor de frecare astfel încât momentul capabil al ambreiajului , respectiv momentul forţelor de frecare , să fie egal cu momentul necesar . Momentul necesar al ambreiajului este dat de relaţia :
Mnec = βMmax Raza exterioară , respectiv raza interioară , ale acestora sunt date de
relaţiile :
21
De
Di
unde : - β este coeficientul de siguranţă ; β = 1,5 ;- Mmax = 180 Nm momentul maxim al motorului ;- μ = 0,35 ... 0,4 coeficientul de frecare ; se adoptă μ = 0,375 ;- n = 1 numărul de discuri ;- ps = 0,28 MPa presiunea specifică ;
- ; se adoptă c = 0,6 ;
Astfel vom obţine :
În conformitate cu bibliografia de specialitate se adoptă următoarele dimensiuni pentru garniturile de frecare :
- diametrul exterior : De = 200 mm ;- diametrul interior : Di = 130 mm ;
- lungimea radială : mm ;
- grosimea : g = 3,5 mm .Cunoscând aceste dimensiuni se poate calcula presiunea specifică :
4.4 Calculul părţii conducătoare Calculul discului de presiune
Discul de presiune reprezintă dispozitivul de aplicare a forţelor arcurilor pe suprafaţa de frecare , componentă a părţii conducătoare pentru transmiterea momentului , suport pentru arc şi masă metalică pentru preluarea căldurii rezultate în procesul de patinare a ambreiajului .
22
Relaţiile de determinare a dimensiunilor discului condus sunt :- raza exterioară = Re + (2...3) mm = 100 + 2 = 102 mm- raza interioară = Ri – (2...3) mm = 65 – 2 = 63 mmGrosimea necesară a discului este :
[mm] ;
unde : - L = Ls A ; Ls = 10 ... 12 daN/cm2 este lucrul mecanic specific de patinare ; - c = 500 J/kgC ;- α = 0,5 ; - ρ = 7800 kg/m3 ; Atunci : L = 1,2π ( 1022 -632 ) = 23671Deci vom obţine :
mm
Se adoptă h = 14 mm .Masa discului de presiune se calculează cu relaţia :
kgCunoscând acestea putem calcula creşterea de temperatură , care trebuie
să se încadreze în limitele Δt = 7 ... 15˚C :
˚C
Calculul arcului diafragmă
Arcurile de presiune pot fi arcuri periferice sau arcuri centrale . Pentru ambreiajul de proiectat se adoptă arc central de tip diafragmă .
Dimensionarea se face din condiţia de rezistenţă la solicitarea de torsiune . Astfel diametrul Di al arborelui se calculează cu relaţia :
mm
Din STAS6853 – 63 se adoptă următoarele dimensiuni pentru arborele ambreiaj :
- Di = 23 mm ; - De = 29 mm ;- z = 10 caneluri ;- b = 4 mm ; - h = 3 mm .
Calculul butucului discului condus
Canelurile se verifică la strivire şi forfecare :
de unde :
deci :
24
mm ;
Se adoptă l = 24 mm .Se face verificarea la :
- strivire : N/mm2 ;
- forfecare : N/mm2
Calculul elementelor elastice suplimentare
Momentul limită care solicită arcurile şi care limitează rigiditatea lor se consideră a fi momentul capabil atingerii limitei de aderenţă a roţilor motoare dat de relaţia :
N m
Dacă Rmed este raza medie de dispunere a arcurilor , forţa de calcul este :
;
unde : - Rmed = 33 mm ; - z = 6 arcuri ;deci forţa de calcul va fi :
N
Din condiţia ca amplitudinea unghiulară pe care trebuie să o admită arcul să fie cuprinsă în intervalul se obţine valoarea maximă a săgeţii arcului :
f = Rmed sin θ = 33 sin 10 = 5,73 mm
Adoptând un coeficient al arcului rezultă diametrul sârmei
arcului :
mm
Se adoptă d = 4 mm .Capetele arcurilor se sprijină pe ferestrele executate în disc şi în butuc.
25
Lungimea ferestrelor se face mai mică decât lungimea liberă a arcurilor cu circa 15 ... 20 % , astfel încât la montare se pretensionează arcurile .
Pentru dimensionarea ferestrelor s – au adoptat următoarele dimensiuni :
- lf = 21 mm ;- R = 37 mm ; - a = 1,5 mm . Arcurile elementului elastic se verifică la torsiune :
[ N/mm2 ] ;
N/mm2 ;
În acest caz efortul unitar admisibil este N/mm2 .
Cap. 5 Calculul şi construcţia mecanismului de acţionare 5.1 Alegerea tipului constructiv
Mecanismele de acţionare a ambreiajelor trebuie să asigure o cuplare perfectă şi o decuplare rapidă , forţa aplicată la pedală , necesară decuplării ambreiajului să nu fie prea mare ( 100 ... 150 daN ) , cursa totală a pedalei să nu fie prea mare ( 120 ... 150 mm ) , şi pe măsura uzării garniturilor de fricţiune trebuie să permită reglarea sistemului pentru a asigura presiunea uniformă a tuturor arcurilor .
Pentru autovehiculul impus prin tema de proiectare se adoptă un sistem de acţionare mecanic cu cablu .
5.2 Calculul de dimensionare şi verificare al mecanismului de acţionare
Calculul mecanismului de acţionare se face în scopul determinării parametrilor acestuia , cu condiţia ca forţa la pedală şi deplasarea pedalei la decuplarea ambreiajului să fie încadrate limite .
26
Forţa Fp se transmite de la pedala 1 prin cablul 2 la furca 3 , care acţionează manşonul 4 al rulmentului de presiune . De la rulmentul de presiune forţa se transmite discului 6 prin intermediul pârghiilor de debreiere 5 .
Deplasarea totală a manşonului de decuplare Sm este formată din cursa liberă Sl şi cea de lucru , necesară deplasării discului de presiune cu distanţa Δs :
unde : - este raportul de transmitere al pârghiilor de decuplare .
Cum : - Δs = 2 mm ; - Sl = 2 mm ;
- ;
rezultă că : mm .
Cursa totală a pedalei de acţionare se determină cu relaţia : ;
unde : - este raportul de transmitere al pârghiilor mecanismului
de acţionare .
Cum kma = rezultă :
Sp = mm .Deplasarea totală a pedalei trebuie să fie între limitele 90 … 150 mm Forţa necesară dezvoltată de pedală pentru decuplarea ambreiajului este :
daN ;
unde : - Q este forţa de apăsare asupra discului de presiune ;
27
- ηma = 0,7 … 0,8 randamentul mecanismului cu acţionare mecanică . Forţa Fp necesară decuplării complete a ambreiajului trebuie să fie
cuprinsă între limitele 10 … 15 daN .
- BIBLIOGRAFIE –
1. Tabacu Ion , Notiţe curs , Piteşti , 2001 – 2002 .2. M. Untaru , Gh. Poţincu , I. Tabacu , T. Macarie , ş.a. , Calculul şi
Construcţia Automobilelor , Editura Didactică şi Pedagogică , Bucureşti , 1982 .
3. M. Untaru , V. Câmpian , E. Ionescu , ş.a. , Automobile , Editura Didactică şi Pedagogică , Bucureşti , 1975 .
28
Cuprins
1. Organizarea generală şi alegerea parametrilor principali 11.1 Studiul soluţiilor similare 1 1.2 Alegerea principalelor dimensiuni geometrice şi de masă 4 1.3 Alegerea roţilor 6
2. Definirea condiţiilor de autopropulsare 82.1 Rezistenţa la rulare 82.2 Rezistenţa aerului 9 2.3Rezistenţa pantei 10 2.4 Rezistenţa la demarare 102.5 Ecuaţia generală de mişcare a automobilului 10
- pornirea din loc cu acceleraţie maximă 11- deplasarea pe calea cu pantă maximă 11- deplasarea cu viteză maximă 12
3. Calculul de tracţiune 133.1 Randamentul transmisiei 133.2 Determinarea caracteristicii externe a motorului 13
4. Calculul şi construcţia ambreiajului 20 4.1 Alegerea tipului constructiv 204.2 Alegerea valorilor pentru principalii parametrii constructivi şi de funcţionare 214.3 Dimensionarea suprafeţelor de frecare ale ambreiajului 224.4 Calculul părţii conducătoare 234.5 calculul părţii conduse 24
5. Calculul şi acţionarea mecanismului de acţionare 275.1 Alegerea tipului constructiv 275.2 Calculul de dimensionare şi verificare al mecanismului de acţionare 27












![REEDITAT~ DIN 1969 Autoturism - ACR Autoturism/Autoturism_online/2017/REVISTA_nr_4... · struc torilor de automobile, cât [i în dezvoltarea com peti]iilor auto din sistemul FIA.](https://static.documente.net/doc/80x56/5e41e355ca92227e34665865/reeditat-din-1969-autoturism-autoturismautoturismonline2017revistanr4.jpg)






![„SHOW YOUR - ACRacr.ro/pdf/Revista Autoturism/Autoturism_1_2_2008.pdfRevista Autoturism are 51.000 cititori pe edi]ie Pentru membrii ACR, revista se difuzeaz` gratuit la domiciliu.](https://static.documente.net/doc/80x56/6129c1ba216f0d22a37fa28e/ashow-your-autoturismautoturism122008pdf-revista-autoturism-are-51000.jpg)
