Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012 Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale 1 PARTEA a II-a Studiul implicatiilor in conceperea sistemelor de actionare industriale la aplicarea tehnicilor de comanda predictiva
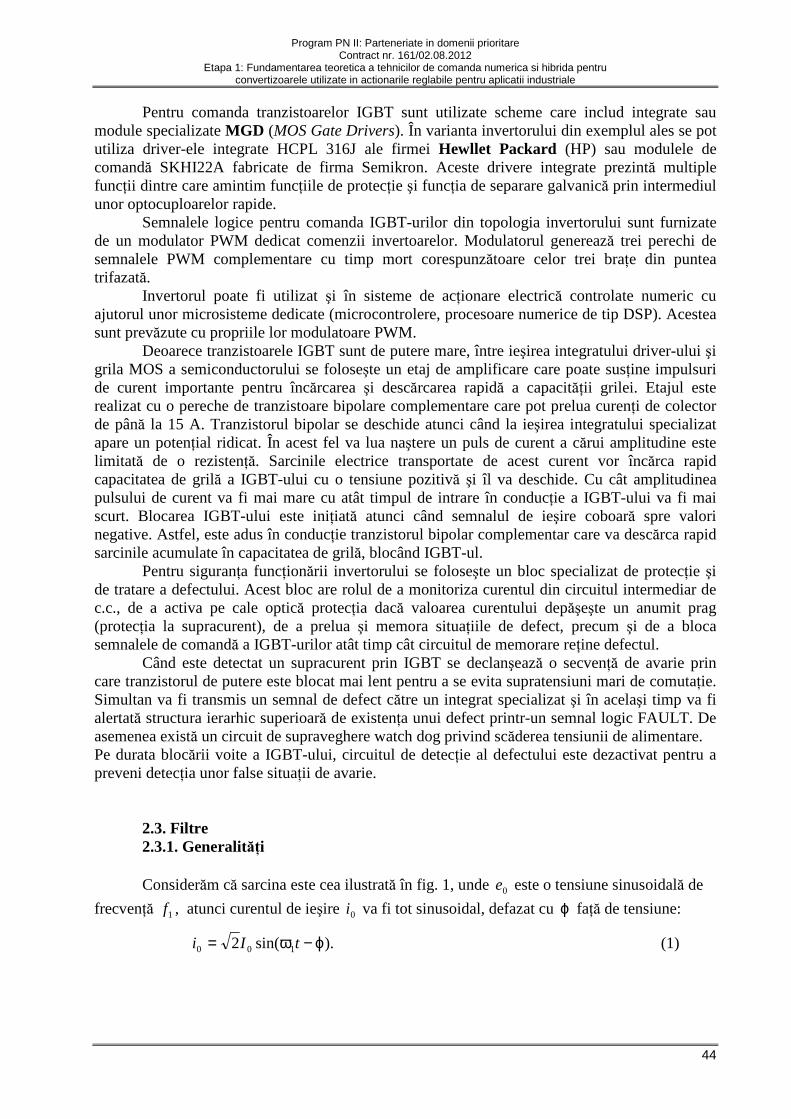
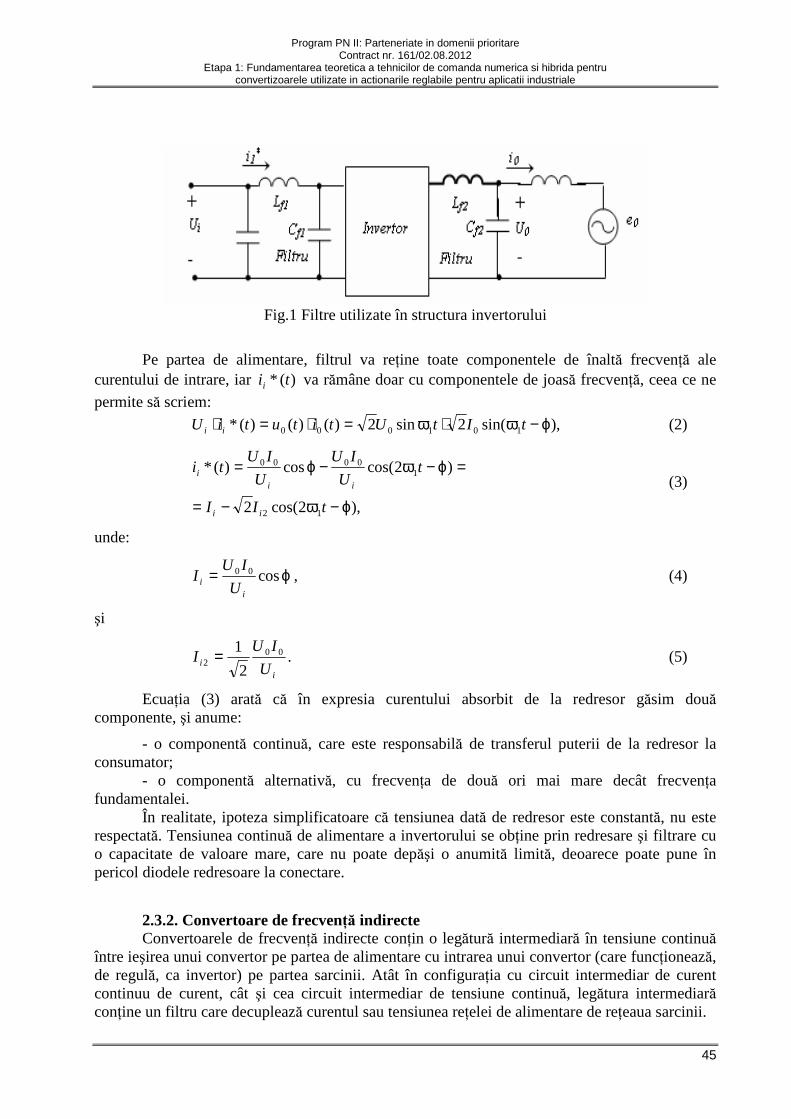
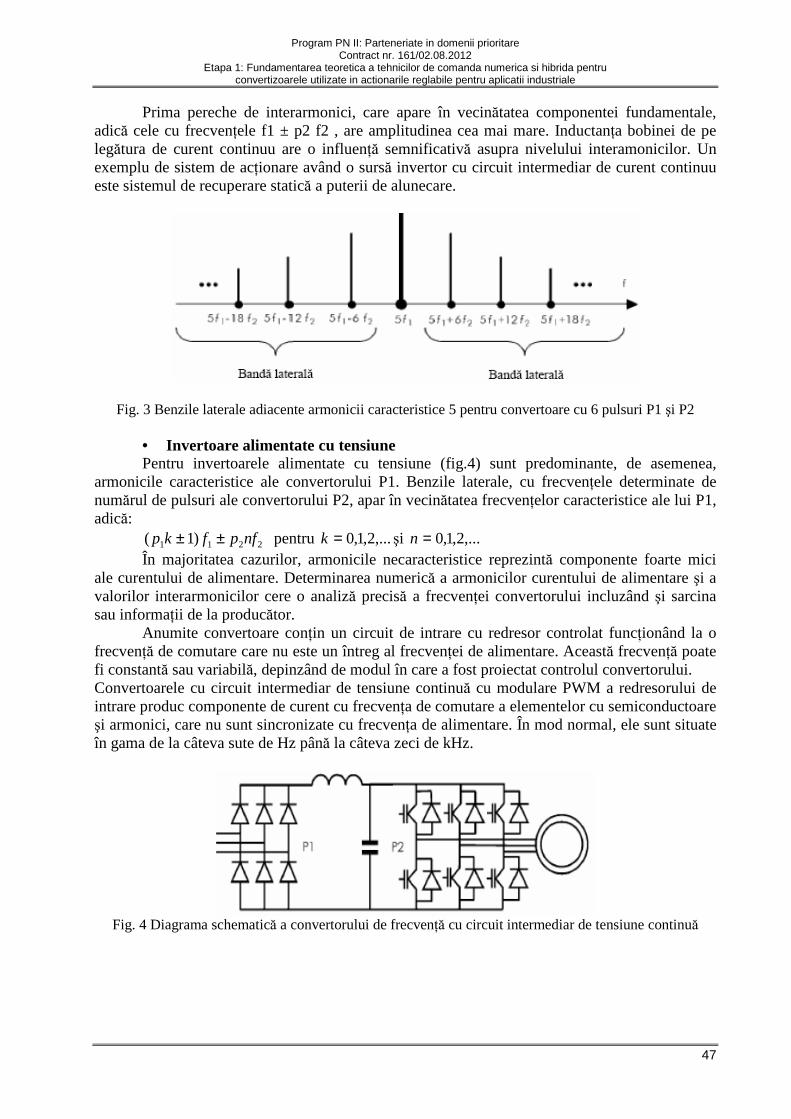
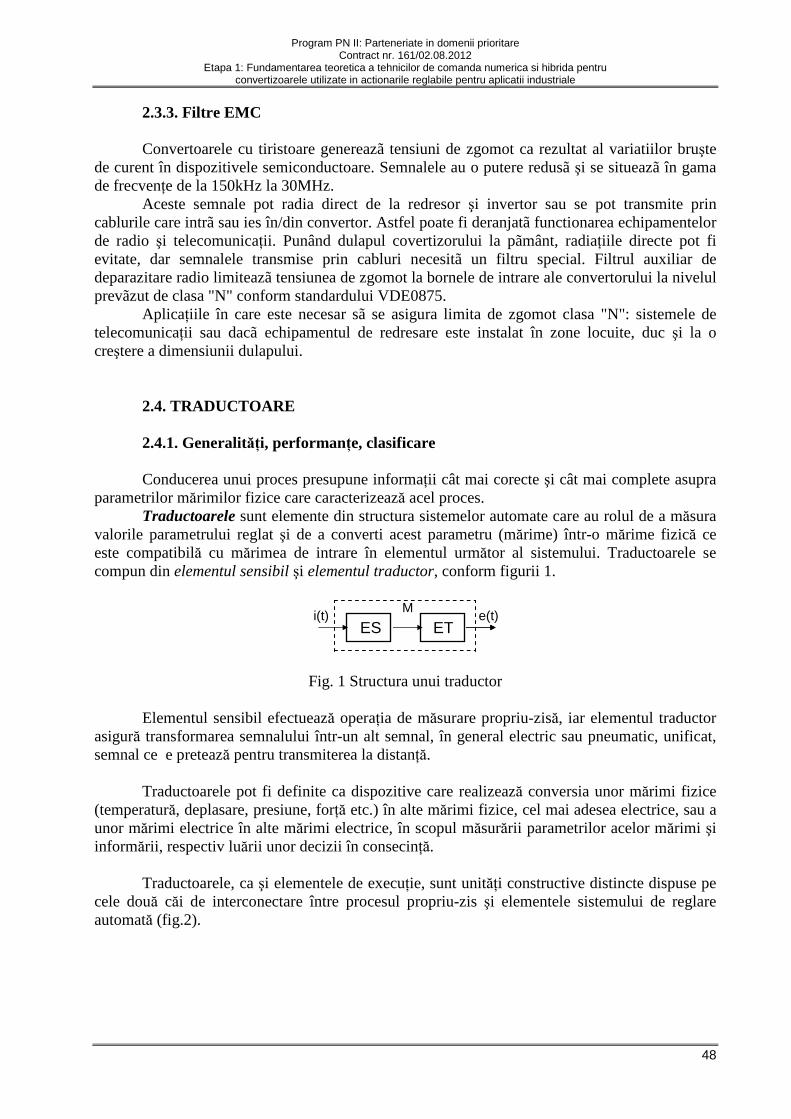
Transcript
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
1
PARTEA a II-a Studiul implicatiilor in conceperea sistemelor de actionare industriale la aplicarea tehnicilor de comanda predictiva
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
2
CUPRINS
CAPITOLUL 1 CONTROLUL SISTEMELOR DE AC łIONARE ELECTRICĂ 1.1. CONTROLUL SCALAR 1.1.1. Convertoare statice utilizate pentru alimentarea maşinilor asincrone 1.1.2. Controlul acŃionării maşinilor de inducŃie trifazate alimentate cu frecvenŃă variabilă 1.1.3. Controlul scalar al maşinilor de inducŃie 1.2. CONTROLUL VECTORIAL 1.2.1. Controlul vectorial direct 1.2.2. Controlul vectorial indirect 1.2.3. Controlul vectorial direct în cuplu şi flux 1.3. CONTROLUL VECTORIAL AL MA ŞINILOR DE INDUCłIE TRIFAZATE 1.3.1. Principiul orientării după câmp 1.3.2. Metode de conducere vectorială. Scheme echivalente în sisteme dq particulare. Caracteristici mecanice corespunzătoare
CAPITOLUL 2 ELECTRONICĂ DE PUTERE ÎN CONVERTOARELE STATICE DE FRECVENłĂ 2.1. INVERTOARE 2.1.1. GeneralităŃi şi principii de funcŃionare 2.1.2. Tipuri de Invertoare 2.1.2.1. Invertoare de tensiune şi curent realizate cu comutatoare statice 2.1.2.2. Invertoare realizate cu tiristoare obişnuite 2.2. CIRCUITE DRIVER PENTRU INVERTOARE 2.3. FILTRE 2.3.1. GeneralităŃi 2.3.2. Convertoare de frecvenŃă indirecte 2.3.3. Filtre EMC 2.4. TRADUCTOARE 2.4.1. GeneralităŃi, performanŃe, clasificare 2.4.2. Traductoare de curent 2.4.3. NoŃiuni introductive asupra efectului HALL 2.4.4. Traductoare de curent cu efect Hall în buclă deschisă 2.4.5. Traductoare de curent cu efect Hall în buclă închisă CAPITOLUL 3 MODELE HIBRIDE APLICATE CONVERTOARELOR STATICE DE P UTERE BIBLIOGRAFIE
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
3
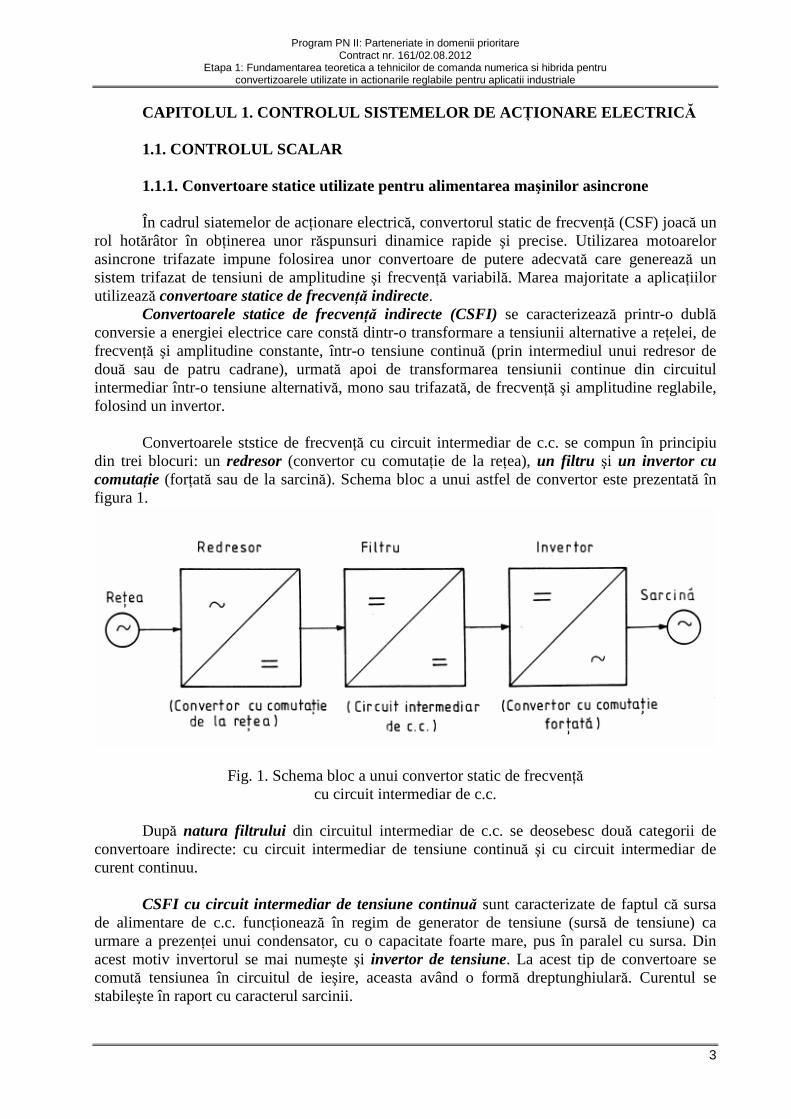
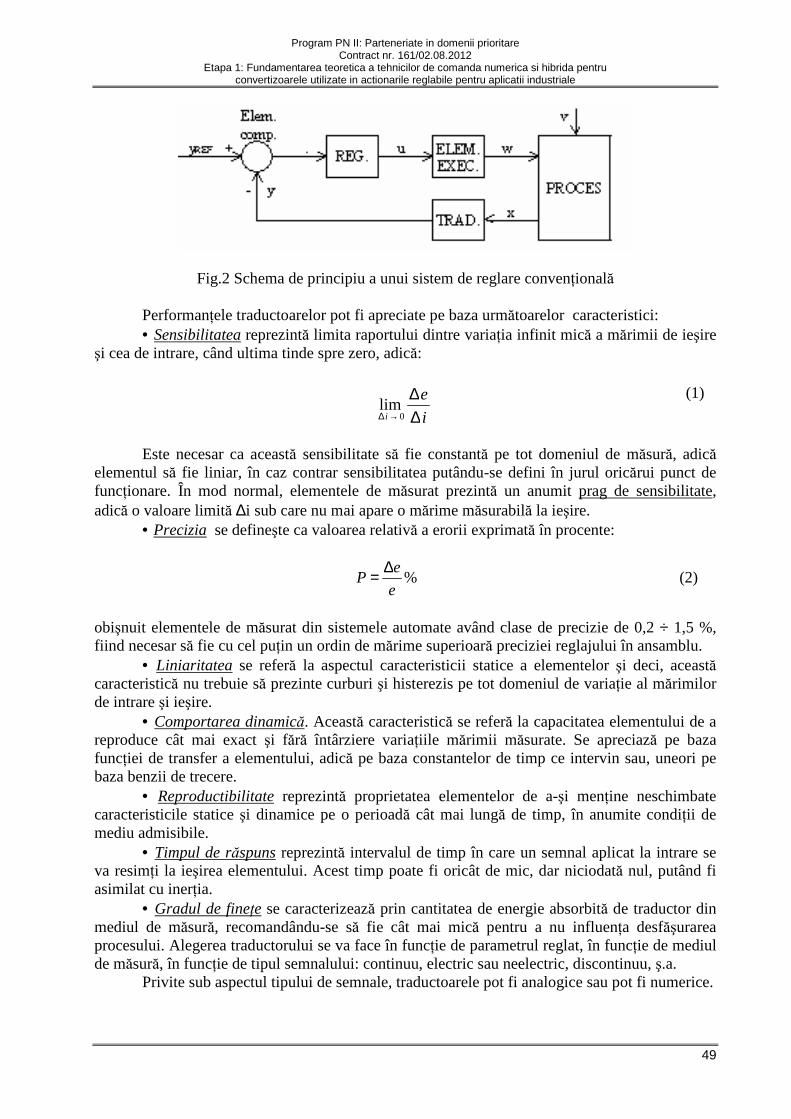
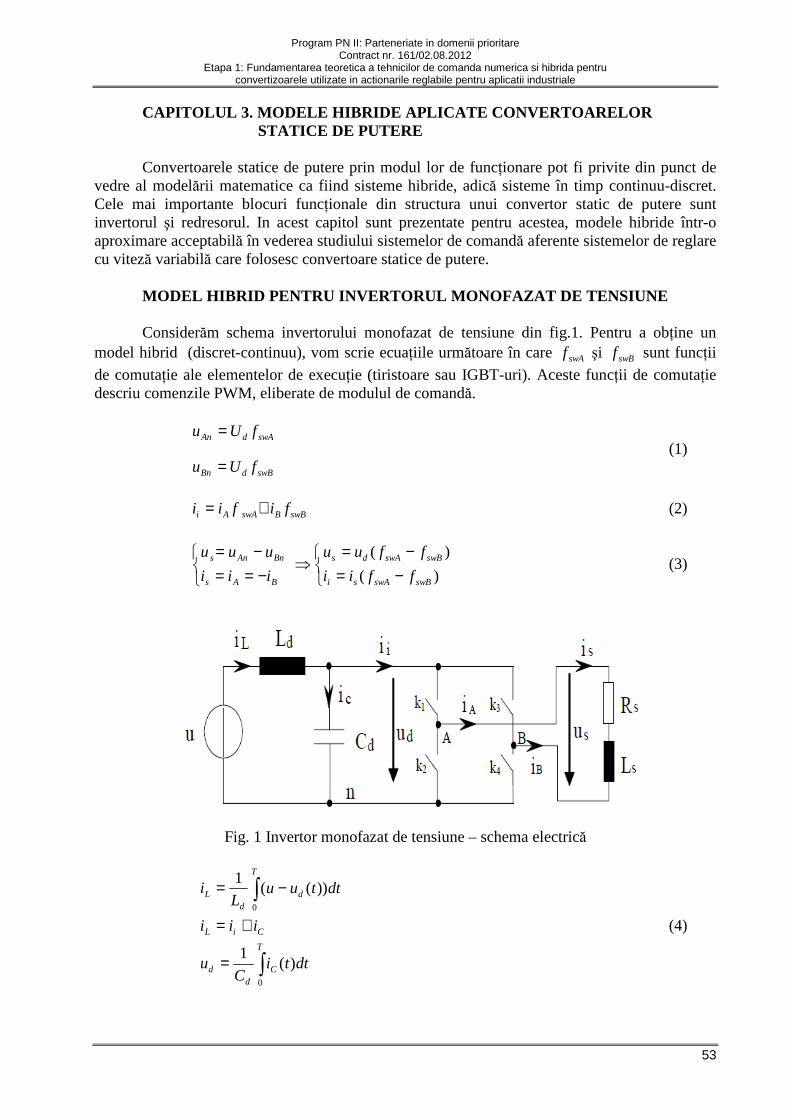
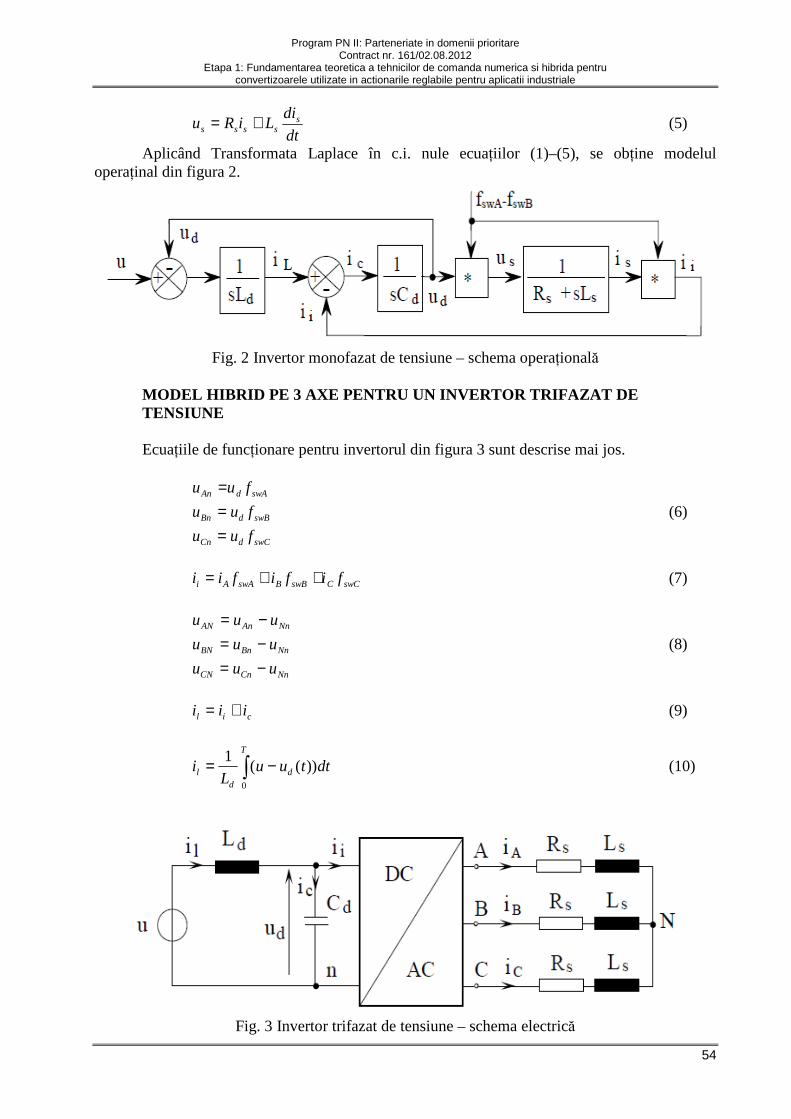
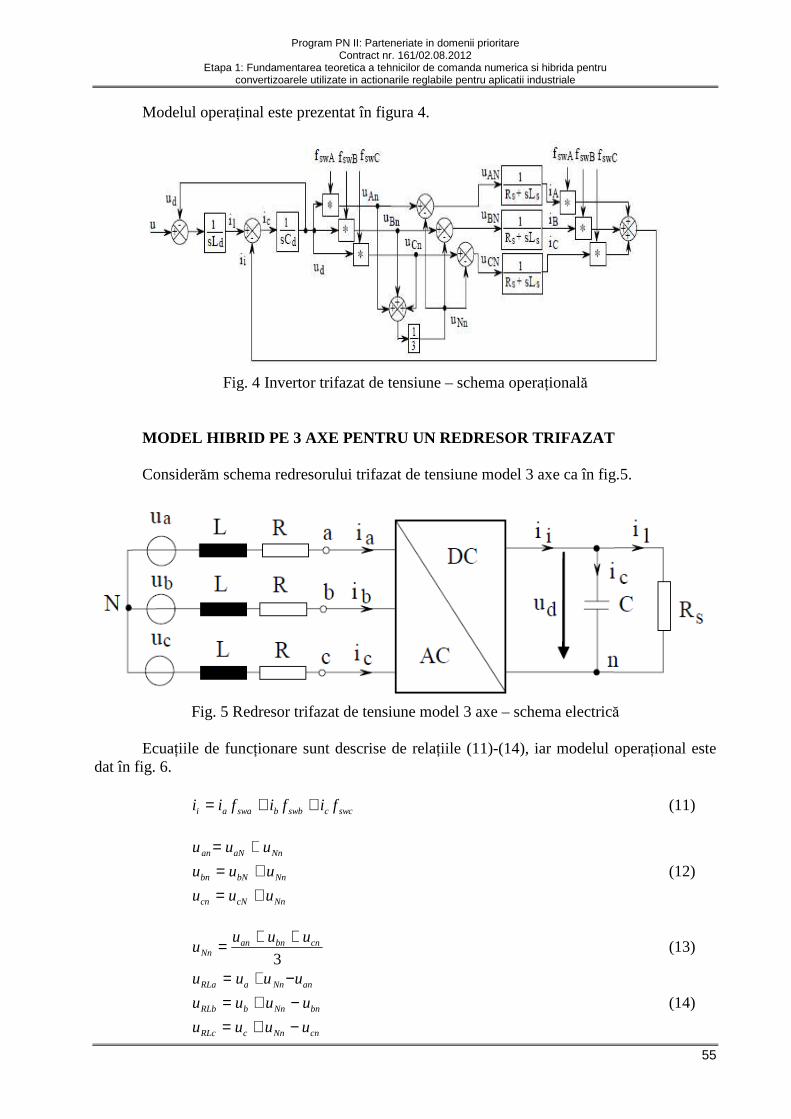
CAPITOLUL 1. CONTROLUL SISTEMELOR DE AC łIONARE ELECTRIC Ă 1.1. CONTROLUL SCALAR 1.1.1. Convertoare statice utilizate pentru alimentarea maşinilor asincrone În cadrul siatemelor de acŃionare electrică, convertorul static de frecvenŃă (CSF) joacă un rol hotărâtor în obŃinerea unor răspunsuri dinamice rapide şi precise. Utilizarea motoarelor asincrone trifazate impune folosirea unor convertoare de putere adecvată care generează un sistem trifazat de tensiuni de amplitudine şi frecvenŃă variabilă. Marea majoritate a aplicaŃiilor utilizează convertoare statice de frecvenŃă indirecte. Convertoarele statice de frecvenŃă indirecte (CSFI) se caracterizează printr-o dublă conversie a energiei electrice care constă dintr-o transformare a tensiunii alternative a reŃelei, de frecvenŃă şi amplitudine constante, într-o tensiune continuă (prin intermediul unui redresor de două sau de patru cadrane), urmată apoi de transformarea tensiunii continue din circuitul intermediar într-o tensiune alternativă, mono sau trifazată, de frecvenŃă şi amplitudine reglabile, folosind un invertor. Convertoarele ststice de frecvenŃă cu circuit intermediar de c.c. se compun în principiu din trei blocuri: un redresor (convertor cu comutaŃie de la reŃea), un filtru şi un invertor cu comutaŃie (forŃată sau de la sarcină). Schema bloc a unui astfel de convertor este prezentată în figura 1.
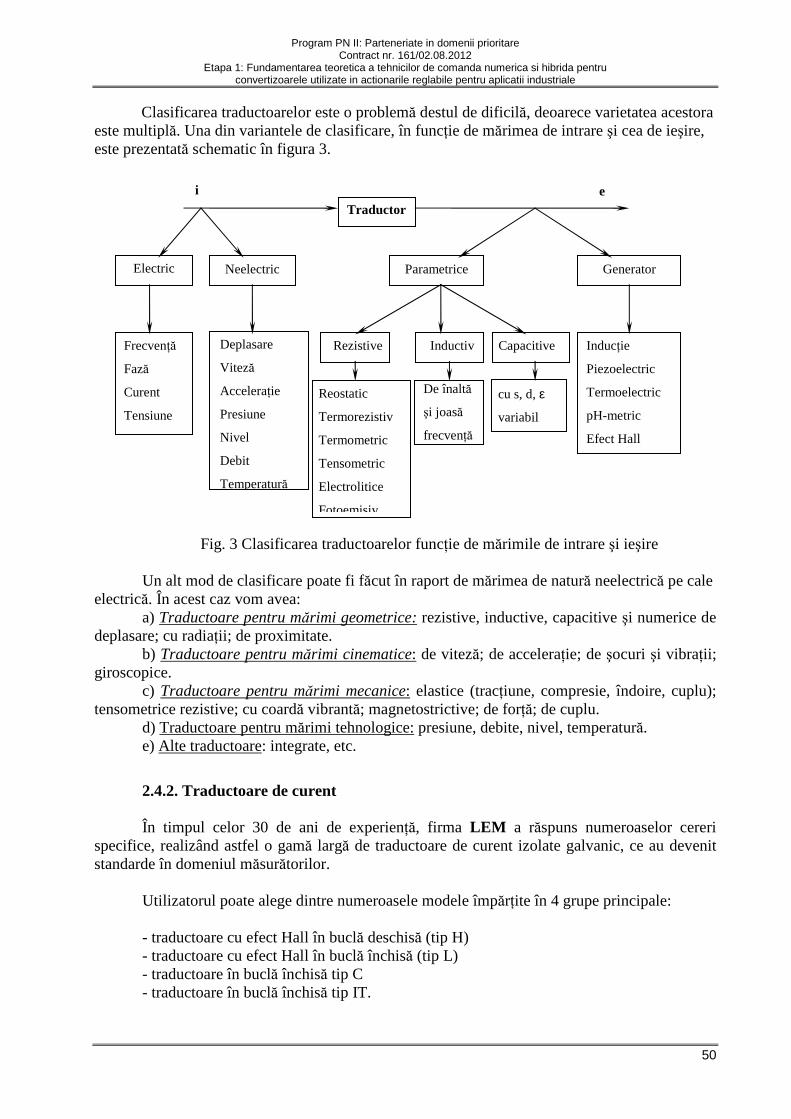
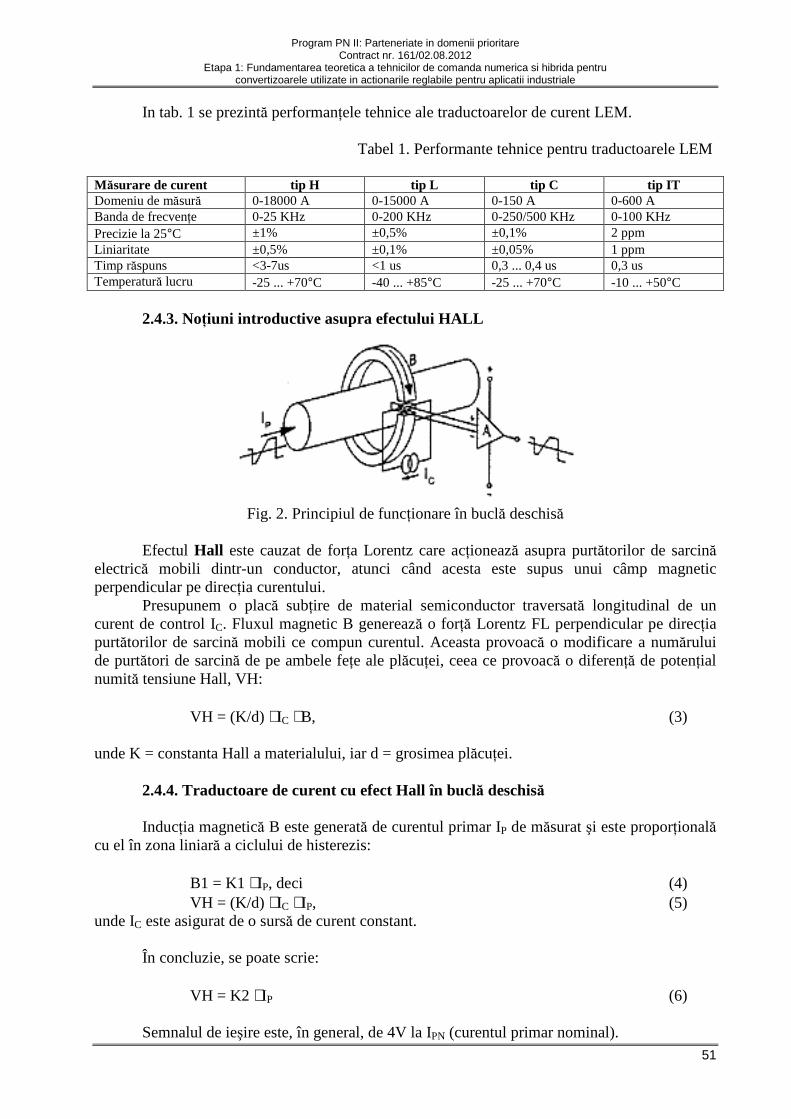
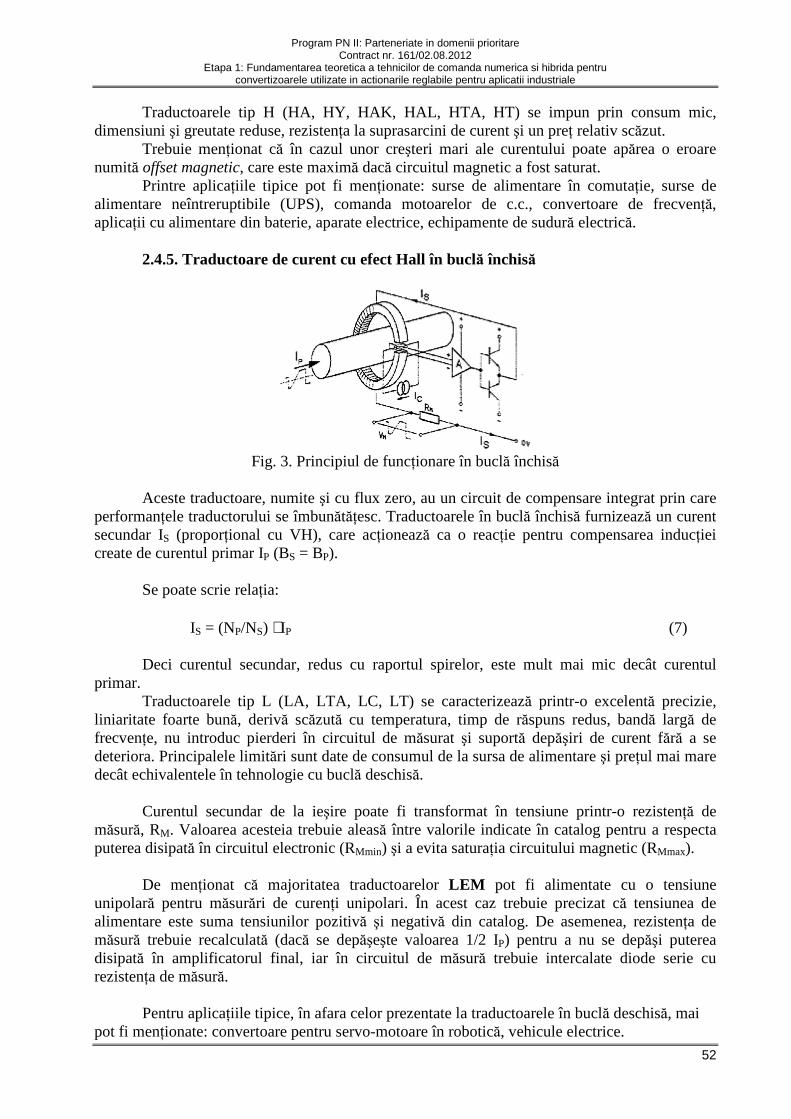
Fig. 1. Schema bloc a unui convertor static de frecvenŃă cu circuit intermediar de c.c.
După natura filtrului din circuitul intermediar de c.c. se deosebesc două categorii de convertoare indirecte: cu circuit intermediar de tensiune continuă şi cu circuit intermediar de curent continuu. CSFI cu circuit intermediar de tensiune continuă sunt caracterizate de faptul că sursa de alimentare de c.c. funcŃionează în regim de generator de tensiune (sursă de tensiune) ca urmare a prezenŃei unui condensator, cu o capacitate foarte mare, pus în paralel cu sursa. Din acest motiv invertorul se mai numeşte şi invertor de tensiune. La acest tip de convertoare se comută tensiunea în circuitul de ieşire, aceasta având o formă dreptunghiulară. Curentul se stabileşte în raport cu caracterul sarcinii.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
4
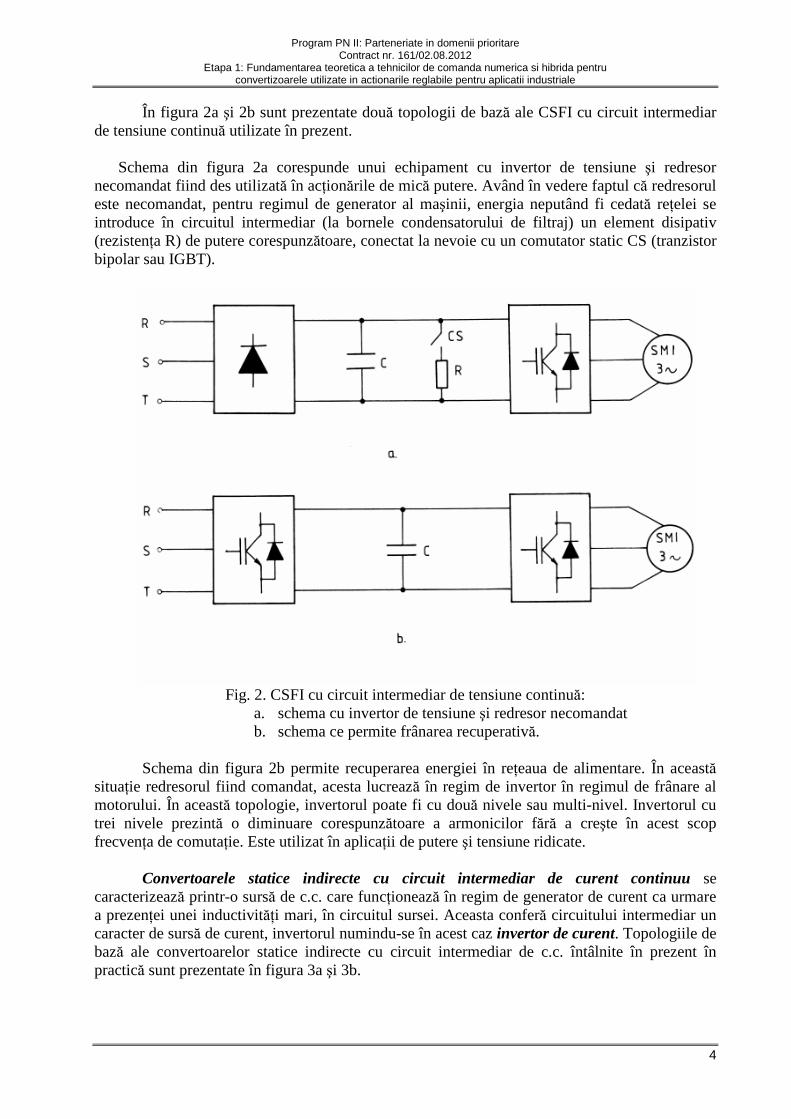
În figura 2a şi 2b sunt prezentate două topologii de bază ale CSFI cu circuit intermediar de tensiune continuă utilizate în prezent.
Schema din figura 2a corespunde unui echipament cu invertor de tensiune şi redresor necomandat fiind des utilizată în acŃionările de mică putere. Având în vedere faptul că redresorul este necomandat, pentru regimul de generator al maşinii, energia neputând fi cedată reŃelei se introduce în circuitul intermediar (la bornele condensatorului de filtraj) un element disipativ (rezistenŃa R) de putere corespunzătoare, conectat la nevoie cu un comutator static CS (tranzistor bipolar sau IGBT).
Fig. 2. CSFI cu circuit intermediar de tensiune continuă:
a. schema cu invertor de tensiune şi redresor necomandat b. schema ce permite frânarea recuperativă.
Schema din figura 2b permite recuperarea energiei în reŃeaua de alimentare. În această
situaŃie redresorul fiind comandat, acesta lucrează în regim de invertor în regimul de frânare al motorului. În această topologie, invertorul poate fi cu două nivele sau multi-nivel. Invertorul cu trei nivele prezintă o diminuare corespunzătoare a armonicilor fără a creşte în acest scop frecvenŃa de comutaŃie. Este utilizat în aplicaŃii de putere şi tensiune ridicate.
Convertoarele statice indirecte cu circuit intermediar de curent continuu se
caracterizează printr-o sursă de c.c. care funcŃionează în regim de generator de curent ca urmare a prezenŃei unei inductivităŃi mari, în circuitul sursei. Aceasta conferă circuitului intermediar un caracter de sursă de curent, invertorul numindu-se în acest caz invertor de curent. Topologiile de bază ale convertoarelor statice indirecte cu circuit intermediar de c.c. întâlnite în prezent în practică sunt prezentate în figura 3a şi 3b.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
5
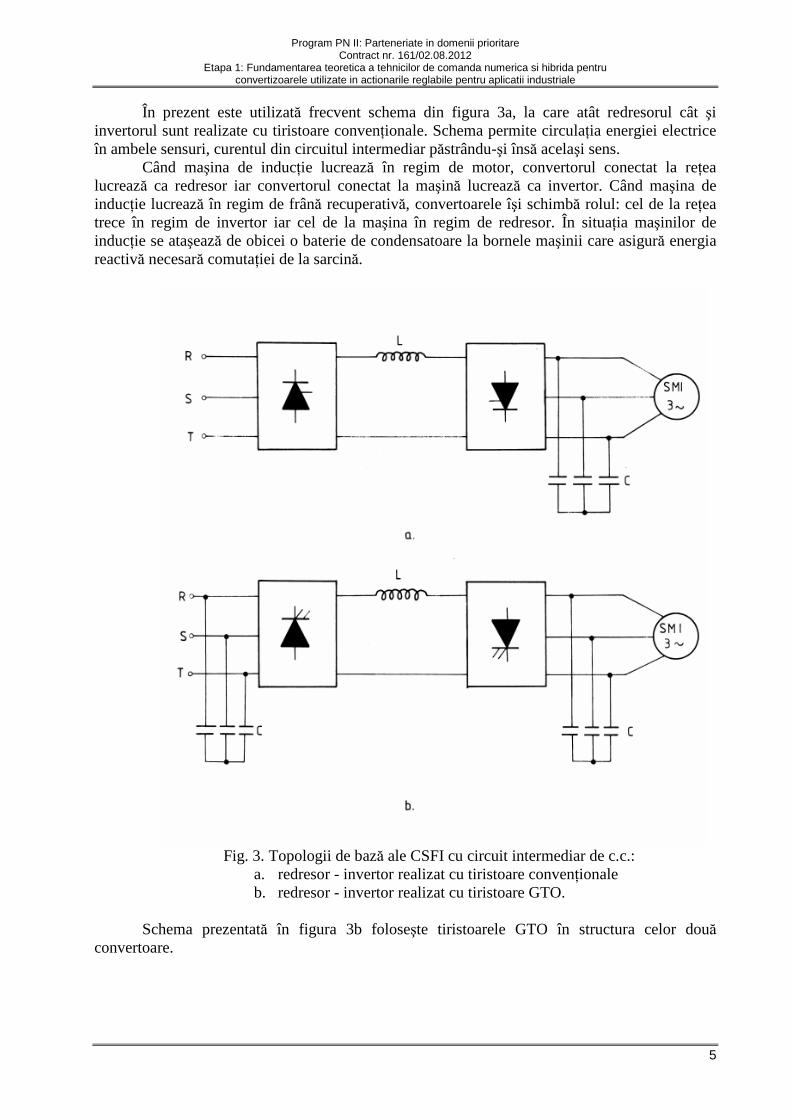
În prezent este utilizată frecvent schema din figura 3a, la care atât redresorul cât şi invertorul sunt realizate cu tiristoare convenŃionale. Schema permite circulaŃia energiei electrice în ambele sensuri, curentul din circuitul intermediar păstrându-şi însă acelaşi sens.
Când maşina de inducŃie lucrează în regim de motor, convertorul conectat la reŃea lucrează ca redresor iar convertorul conectat la maşină lucrează ca invertor. Când maşina de inducŃie lucrează în regim de frână recuperativă, convertoarele îşi schimbă rolul: cel de la reŃea trece în regim de invertor iar cel de la maşina în regim de redresor. În situaŃia maşinilor de inducŃie se ataşează de obicei o baterie de condensatoare la bornele maşinii care asigură energia reactivă necesară comutaŃiei de la sarcină.
Fig. 3. Topologii de bază ale CSFI cu circuit intermediar de c.c.:
a. redresor - invertor realizat cu tiristoare convenŃionale b. redresor - invertor realizat cu tiristoare GTO.
Schema prezentată în figura 3b foloseşte tiristoarele GTO în structura celor două
convertoare.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
6
1.1.2. Controlul acŃionării ma şinilor de inducŃie trifazate alimentate cu frecvenŃă variabil ă
În ciuda construcŃiei sale simple şi robuste, controlul acŃionării acestor tipuri de maşini
trebuie să Ńină seama de complexitatea modelului dinamic neliniar şi variabil în timp şi de faptul că parametrii fazici ai maşinii nu sunt întodeauna cunoscuŃi cu foarte mare precizie.
În aceste condiŃii controlul acşionării presupune controlul vitezei şi/sau controlul
poziŃiei, respectiv controlul cuplului. Cu cât se obŃine un răspuns în cuplu mai rapid cu atât controlul acŃionării este mai performant.
Principial există două strategii de control: - controlul scalar - controlul vectorial. Controlul sau reglarea scalară poate fi efectuat în buclă deschisă sau închisă de control
a vitezei şi se poate realiza prin legături între mărimile scalare, de exemplu, us = f(f1) sau is = f(f2). De obicei, se impune condiŃia de păstrare a fluxului statoric constant şi egal cu cel nominal (ψs = ψsn = const.).
Această strategie se bazează pe un model simplu, de regim permanent al maşinii de inducŃie. Avantajul controlului scalar constă în simplitatea circuitelor de reglare, dar prezintă dezavantajul obŃinerii în general a unor viteze variabile cu precizie scăzută, performanŃele dinamice ale sistemului fiind de asemenea scăzute.
Rezultă un reglaj satisfăcător doar atunci când maşina lucrează cu viteze staŃionare perioade lungi de timp. În situaŃia în care apar fluctuaŃii în tensiune, perturbaŃii în sarcină sau dacă sistemul necesită acceleraŃii sau deceleraŃii rapide, reglajul în buclă deschisă este nesatisfăcător, impunându-se controlul în buclă închisă.
Ca o concluzie se poate spune că implementarea controlului scalar, deşi este simplă, este limitată de acurateŃea răspunsului în viteza şi cuplu al maşinii.
Controlul vectorial este fundamentat pe modelul dinamic al maşinii de inducŃie,
bazându-se pe caracterul vectorial al mărimilor funcŃionale ale maşinii. A fost dezvoltat ca o metodă de control în buclă închisă a vitezei/cuplului şi se utilizează atunci când răspunsul dinamic al sistemului şi precizia controlului acŃionării sunt importante.
Controlul vectorial restabileşte unul din avantajele sistemelor de acŃionare electrică de
curent continuu, separarea buclelor de viteză şi cuplu. Există strategii de control vectorial directe, indirecte şi directe în cuplu.
Din punctul de vedere al realizării practice, sistemele de control vectorial se pot grupa
în: - sisteme analogice, realizate cu circuite integrate şi tranzistoare - sisteme digitale, realizate cu procesoare de semnal DSP, microprocesoare şi interfeŃe de
calculator - sisteme hibride, la care circuitele de comandă sunt analogice şi digitale.
O altă clasificare a metodelor de control se poate face după modul în care sunt măsurate mărimile cinematice. Astfel se disting:
- controlul acŃionării cu traductoare de mărimi cinematice - controlul fără traductoare de mişcare.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
7
Metodele de control care utilizează traductoare de mărimi cinematice (poziŃie şi viteză) se folosesc pentru aplicaŃii într-o gamă extinsă de turaŃii (1:1000; 1:10000). Trebuie subliniat faptul că traductoarele sunt în general scumpe, sensibile la perturbaŃii şi variaŃii de temperatură, mărind totodată greutatea şi gabaritul sistemului.
Conducerea fără traductoare de mişcare, cunoscută în literatura de specialitate sub
denumirea de „sensorless control”, se impune ca o alternativă la prima strategie, fiind necesară pentru reducerea părŃii hardware a sistemelor (a sistemelor de acŃionare în general) precum şi pentru creşterea siguranŃei în exploatare. Se aplică în sistemele de acŃionare electrică caracterizate de o gamă moderată de turaŃii (1:100). În această situaŃie, mărimile cinematice sunt estimate, observatoarele de stare din sistem utilizând informaŃii de curent şi tensiune măsurabile la borne.
1.1.3. Controlul scalar al maşinilor de inducŃie Controlul scalar al maşinilor de inducŃie a fost implementat pe modelul de regim permanent al acestora. Marele avantaj al acestei strategii este dat de simplitatea circuitelor de reglare, prezentând însă inconvenientul obŃinerii unor performanŃe dinamice modeste.
Sub aspectul pierderilor, procedeul de modificare a vitezei maşinii de inducŃie prin schimbarea frecvenŃei este cel mai economic, în sensul că pierderile în plus care apar în maşină faŃă de funcŃionare la frecvenŃa şi tensiunea nominală sunt relativ mici şi se datorează sistemului de modificare a frecvenŃei.
Pe baza relaŃiilor care definesc modelul matematic în regim staŃionar al maşinii de inducŃie rezultă că turaŃia sincronă se modifică proporŃional cu frecvenŃa şi, în acelaşi timp, cuplul electromagnetic prin intermediul reactanŃelor. Dacă frecvenŃa de alimentare f1 nu este mult diferită de frecvenŃa nominală f1n, expresia cuplului critic se poate scrie sub o formă mai simplă, neglijând rezistenŃa statorică în raport cu reactanŃele de dispersie:
2
12'
11
21
)(4
⋅=
+⋅=
f
UA
XCxf
pUmM s
rs
sk π
, (1)
în care A este o constantă ce înglobează toate elementele constante, pentru a evidenŃia
dependenŃa cuplului critic de pătratul raportului 1
s
f
U şi anume egală cu
n1
sn
f
U. Dacă acest raport
nu este menŃinut constant şi de exemplu f1 scade în timp ce U1 = const., atunci pe baza relaŃiei:
ssess cfNfUU φφπ111
2
2 ==≈ , (2)
în care sφ este amplitudinea fluxului total statoric şi “c” o constantă, rezultă creşterea fluxului cu
scăderea frecvenŃei. Mărirea fluxului Φs determină saturarea miezului şi deci creşterea curentului de magnetizare.
La creşterea frecvenŃei în timp ce Us = const., fluxul în maşină scade, ceea ce determină micşorarea cuplului dezvoltat. Dacă fluxul statoric poate fi menŃinut constant, comportarea maşinii de inducŃie comandată în frecvenŃă este analogă cu cea a motorului de c.c. cu excitaŃie separată comandat în tensiune.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
8
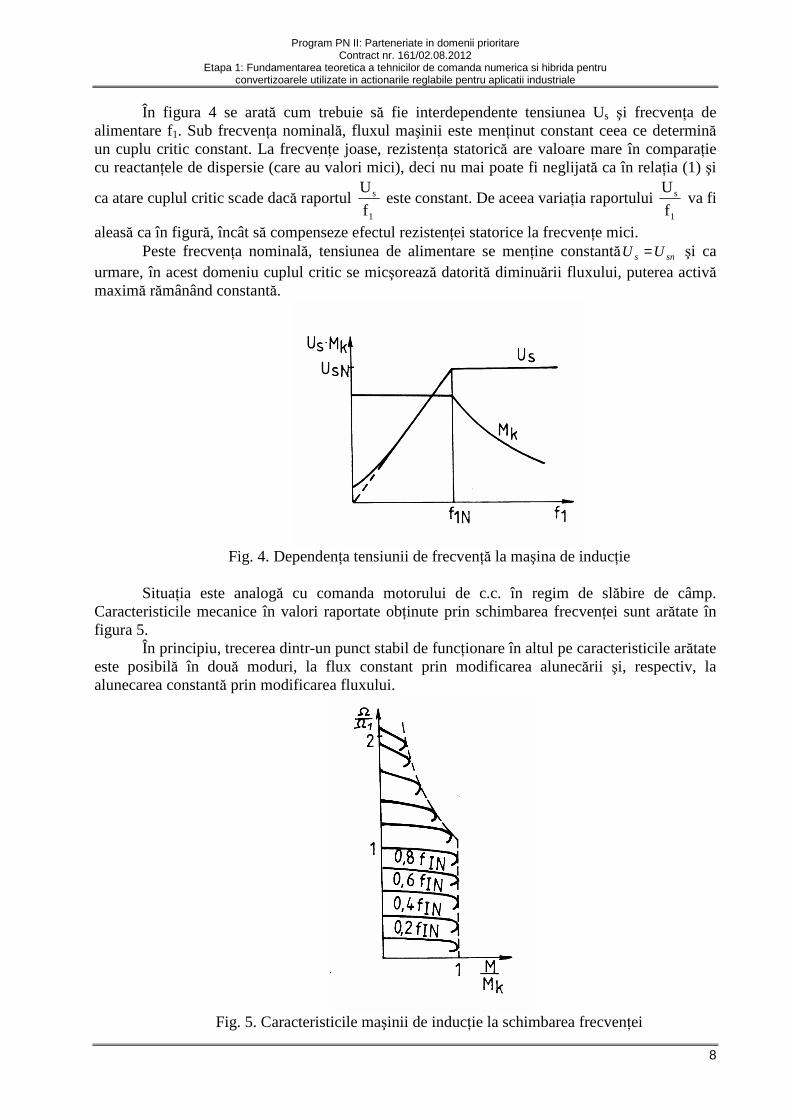
În figura 4 se arată cum trebuie să fie interdependente tensiunea Us şi frecvenŃa de alimentare f1. Sub frecvenŃa nominală, fluxul maşinii este menŃinut constant ceea ce determină un cuplu critic constant. La frecvenŃe joase, rezistenŃa statorică are valoare mare în comparaŃie cu reactanŃele de dispersie (care au valori mici), deci nu mai poate fi neglijată ca în relaŃia (1) şi
ca atare cuplul critic scade dacă raportul 1
s
f
U este constant. De aceea variaŃia raportului
1
s
f
U va fi
aleasă ca în figură, încât să compenseze efectul rezistenŃei statorice la frecvenŃe mici. Peste frecvenŃa nominală, tensiunea de alimentare se menŃine constantă sns UU = şi ca
urmare, în acest domeniu cuplul critic se micşorează datorită diminuării fluxului, puterea activă maximă rămânând constantă.
Fig. 4. DependenŃa tensiunii de frecvenŃă la maşina de inducŃie
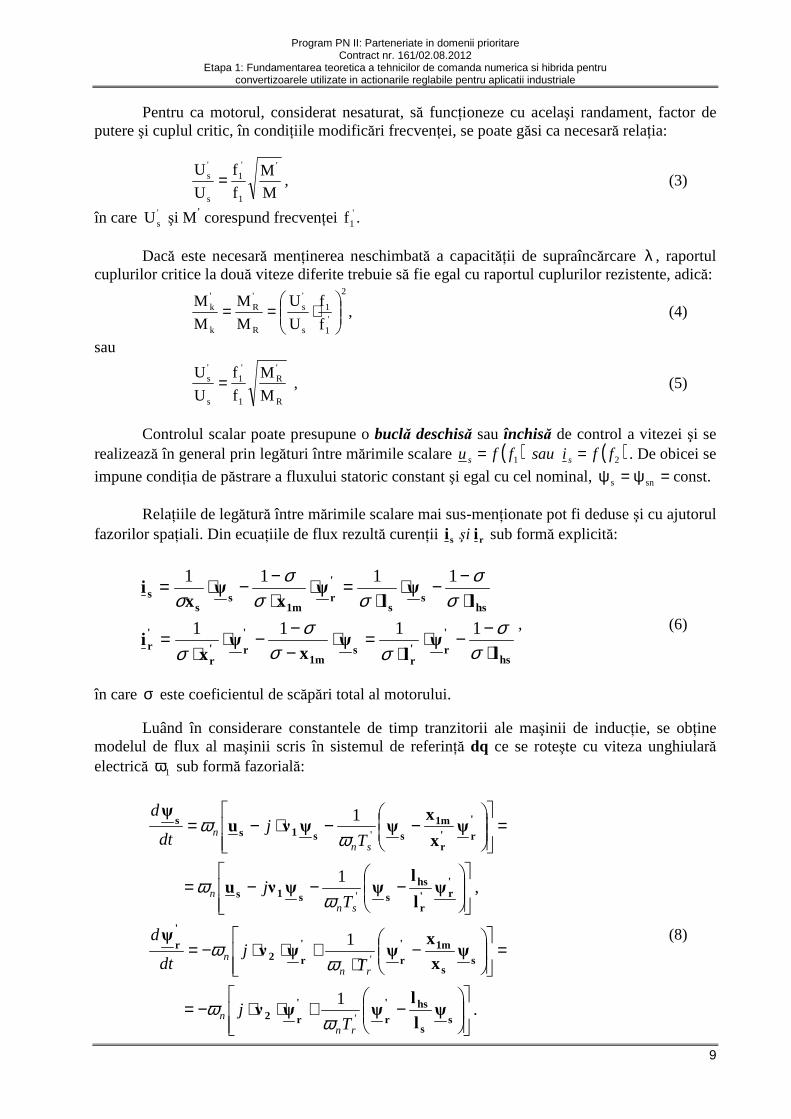
SituaŃia este analogă cu comanda motorului de c.c. în regim de slăbire de câmp.
Caracteristicile mecanice în valori raportate obŃinute prin schimbarea frecvenŃei sunt arătate în figura 5.
În principiu, trecerea dintr-un punct stabil de funcŃionare în altul pe caracteristicile arătate este posibilă în două moduri, la flux constant prin modificarea alunecării şi, respectiv, la alunecarea constantă prin modificarea fluxului.
Fig. 5. Caracteristicile maşinii de inducŃie la schimbarea frecvenŃei
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
9
Pentru ca motorul, considerat nesaturat, să funcŃioneze cu acelaşi randament, factor de putere şi cuplul critic, în condiŃiile modificări frecvenŃei, se poate găsi ca necesară relaŃia:
M
M
f
f
U
U '
1
'1
s
's = , (3)
în care 'sU şi M ’ corespund frecvenŃei '
1f .
Dacă este necesară menŃinerea neschimbată a capacităŃii de supraîncărcare λ , raportul cuplurilor critice la două viteze diferite trebuie să fie egal cu raportul cuplurilor rezistente, adică:
2
'1
1
s
's
R
'R
k
'k
f
f
U
U
M
M
M
M
⋅== , (4)
sau
R
'R
1
'1
s
's
M
M
f
f
U
U= , (5)
Controlul scalar poate presupune o buclă deschisă sau închisă de control a vitezei şi se realizează în general prin legături între mărimile scalare ( ) ( )21 ffisauffu ss == . De obicei se
impune condiŃia de păstrare a fluxului statoric constant şi egal cu cel nominal, .constsns =ψ=ψ
RelaŃiile de legătură între mărimile scalare mai sus-menŃionate pot fi deduse şi cu ajutorul fazorilor spaŃiali. Din ecuaŃiile de flux rezultă curenŃii rs ii şi sub formă explicită:
hs
'
r'r
s1m
'
r'r
'r
hss
s
'
r1m
ss
s
lψ
lψ
xψ
xi
lψ
lψ
xψ
xi
⋅−−⋅
⋅=⋅
−−−⋅
⋅=
⋅−−⋅
⋅=⋅
⋅−−⋅=
σσ
σσσ
σ
σσ
σσσ
σ1111
1111
, (6)
în care σ este coeficientul de scăpări total al motorului. Luând în considerare constantele de timp tranzitorii ale maşinii de inducŃie, se obŃine modelul de flux al maşinii scris în sistemul de referinŃă dq ce se roteşte cu viteza unghiulară electrică 1ω sub formă fazorială:
.1
1
,1
1
'
'
'
'
−+⋅⋅−=
=
−
⋅+⋅⋅−=
−−−=
=
−−⋅−=
ss
hs'
r
'
r2
ss
1m'
r
'
r2
'
r
'r'
r
hsss1s
'
r'r
1mss1s
s
ψl
lψψν
ψx
xψψν
ψ
ψl
lψψνu
ψx
xψψνu
ψ
rnn
rnn
snn
snn
Tj
Tj
dt
d
Tj
Tj
dt
d
ωω
ωω
ωω
ωω
(8)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
10
Pentru valori constante ale fluxului statoric şi rotoric ( 0=dt
dsψ
şi 0=dt
d '
rψ
) se determină
tensiunea statorică su în modul conform relaŃiei:
( ) ( )
( )2'
22'2
1
1
rn
rnsnrsn
sn T
TTTT
T ωωωω
ω2
2121ss
ν
ννννψu
+
++−= (9)
Legătura între curentul statoric is şi frecvenŃa ν2 are expresia în modul:
( )( )
( )( )2'
2
2'
2
1
1
1
1
rn
rn
rn
rn
T
T
T
T
ωω
ωω
2
2
s
s
2
2
s
ss
ν
ν
l
ψ
ν
ν
x
ψi
+
+=
+
+= (10)
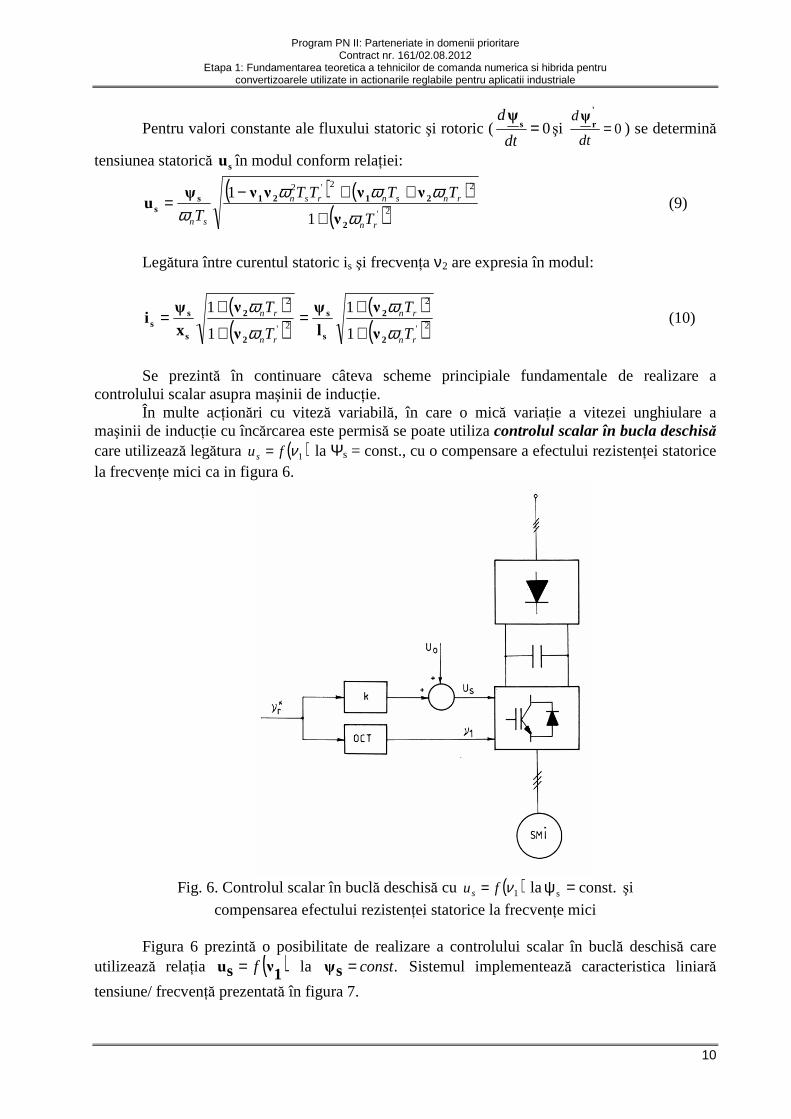
Se prezintă în continuare câteva scheme principiale fundamentale de realizare a controlului scalar asupra maşinii de inducŃie. În multe acŃionări cu viteză variabilă, în care o mică variaŃie a vitezei unghiulare a maşinii de inducŃie cu încărcarea este permisă se poate utiliza controlul scalar în bucla deschisă care utilizează legătura ( )1νfu s = la Ψs = const., cu o compensare a efectului rezistenŃei statorice la frecvenŃe mici ca in figura 6.
Fig. 6. Controlul scalar în buclă deschisă cu ( )1νfu s = la .consts =ψ şi
compensarea efectului rezistenŃei statorice la frecvenŃe mici
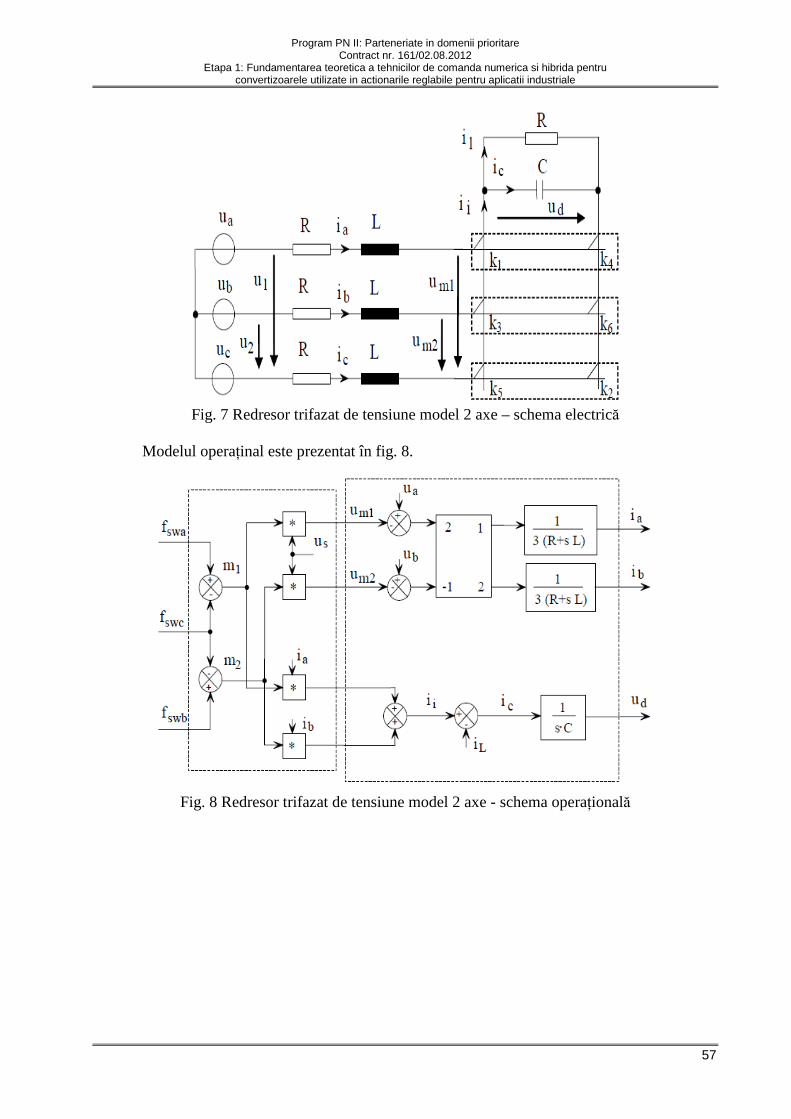
Figura 6 prezintă o posibilitate de realizare a controlului scalar în buclă deschisă care utilizează relaŃia ( )1νsu f= la .const=sψ Sistemul implementează caracteristica liniară
tensiune/ frecvenŃă prezentată în figura 7.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
11
Fig. 7. Explicativă la caracteristica liniară tensiune/frecvenŃă utilizată de sistemul din fig. 6.
Caracteristica 1 din figura 7 este neliniară. Tensiunea statorică Us şi frecvenŃa f1 sunt proporŃionale în zona frecvenŃelor înalte dar în zona frecvenŃelor joase este necesară o compensare a efectului rezistenŃei statorice pentru a păstra cuplul critic constant. Caracteristica liniară după care este condus sistemul din figura 6, este definită de următoarea ecuaŃie: 10 kfUU s += , (11)
unde U0 reprezintă componenta constantă a tensiunii statorice iar k este panta caracteristicii. Cele două mărimi se aleg de aşa manieră încât tensiunea necesară compensării efectului rezistenŃei statorice să se aplice la f1 = 0 [Hz], iar la f1 = f1n să se obŃină Us = Usn.
FrecvenŃa de comandă a invertorului ν1 generată de oscilatorul comandat prin tensiune pe baza valorii de referinŃă a vitezei relative a maşinii de inducŃie, determină direct şi tensiunea de comandă.
Controlul în buclă deschisă prezintă dezavantajul că are loc o creştere a alunecării la încărcarea maşinii. De asemenea, performanŃele dinamice ale acesteia sunt modeste. Din aceste motive este agreat controlul scalar în buclă închisă.
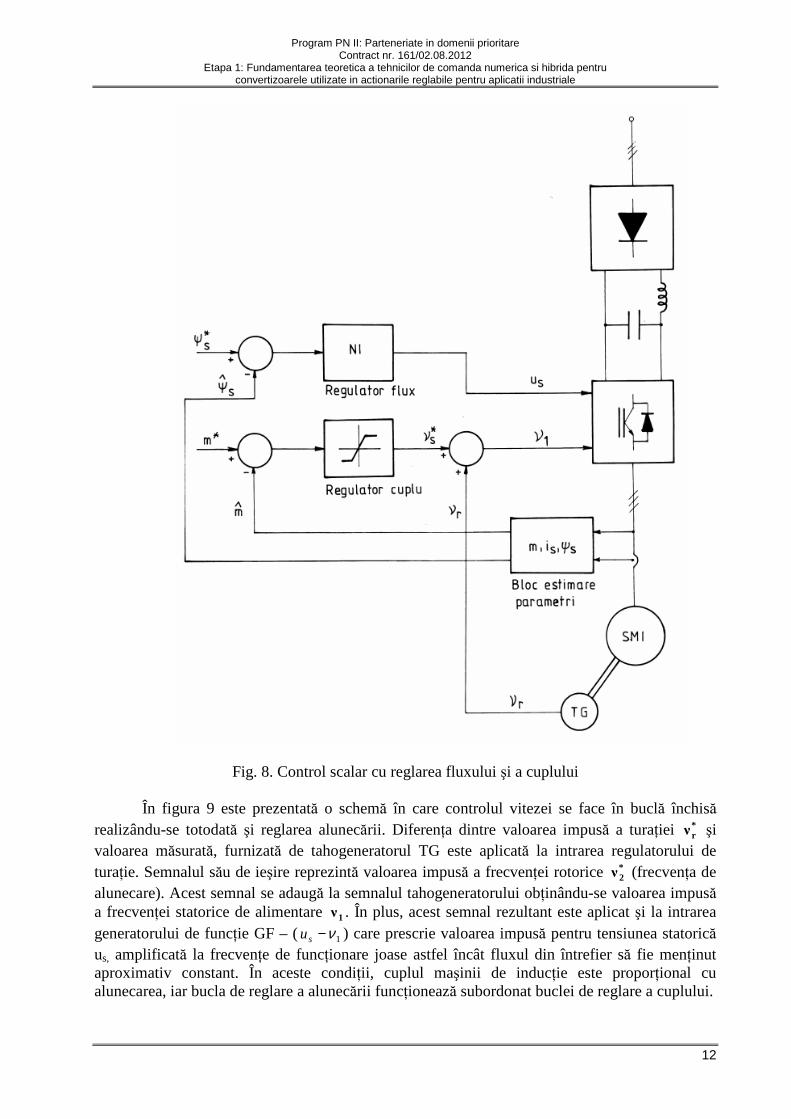
O schemă de control în buclă închisă cu reglarea fluxului şi a cuplului este arătată în figura 8. La ieşirea regulatorului de cuplu se generează un semnal proporŃional cu alunecarea sν
care, adunat cu turaŃia maşinii rν , generează frecvenŃa de comandă 1ν .
Fluxul maşinii poate fi menŃinut constant, ca la maşina de c.c. cu excitaŃie separată sau programat în funcŃie de cuplul electromagnetic dezvoltat.
Există şi posibilitatea reglării bipoziŃionale a curentului maşinii, dacă blocul de estimare a parametrilor permite generarea unui sistem trifazat proporŃional cu curenŃii maşinii.
Schema are performanŃe dinamice ridicate deoarece prezintă doar constanta de timp electromecanică de valoare mare care poate fi anihilată în procesul de reglare.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
12
Fig. 8. Control scalar cu reglarea fluxului şi a cuplului În figura 9 este prezentată o schemă în care controlul vitezei se face în buclă închisă realizându-se totodată şi reglarea alunecării. DiferenŃa dintre valoarea impusă a turaŃiei *
rν şi valoarea măsurată, furnizată de tahogeneratorul TG este aplicată la intrarea regulatorului de turaŃie. Semnalul său de ieşire reprezintă valoarea impusă a frecvenŃei rotorice *
2ν (frecvenŃa de alunecare). Acest semnal se adaugă la semnalul tahogeneratorului obŃinându-se valoarea impusă a frecvenŃei statorice de alimentare 1ν . În plus, acest semnal rezultant este aplicat şi la intrarea generatorului de funcŃie GF – ( 1ν−su ) care prescrie valoarea impusă pentru tensiunea statorică us, amplificată la frecvenŃe de funcŃionare joase astfel încât fluxul din întrefier să fie menŃinut aproximativ constant. În aceste condiŃii, cuplul maşinii de inducŃie este proporŃional cu alunecarea, iar bucla de reglare a alunecării funcŃionează subordonat buclei de reglare a cuplului.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
13
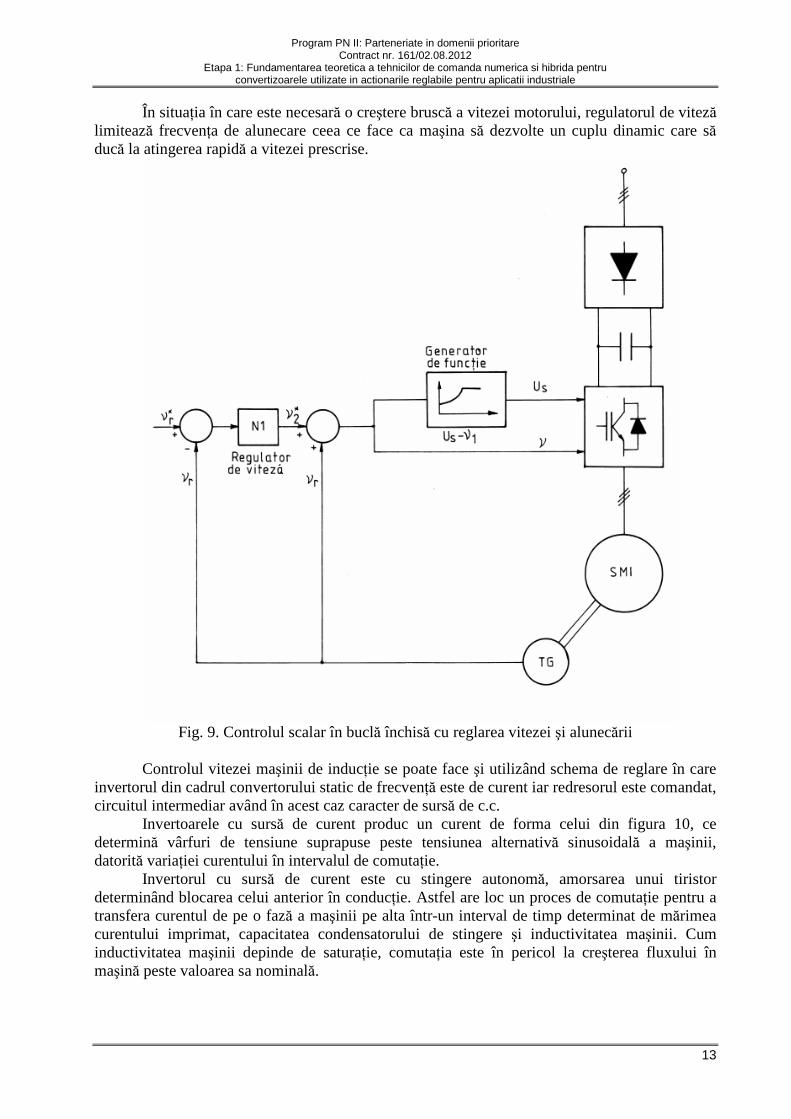
În situaŃia în care este necesară o creştere bruscă a vitezei motorului, regulatorul de viteză limitează frecvenŃa de alunecare ceea ce face ca maşina să dezvolte un cuplu dinamic care să ducă la atingerea rapidă a vitezei prescrise.
Fig. 9. Controlul scalar în buclă închisă cu reglarea vitezei şi alunecării
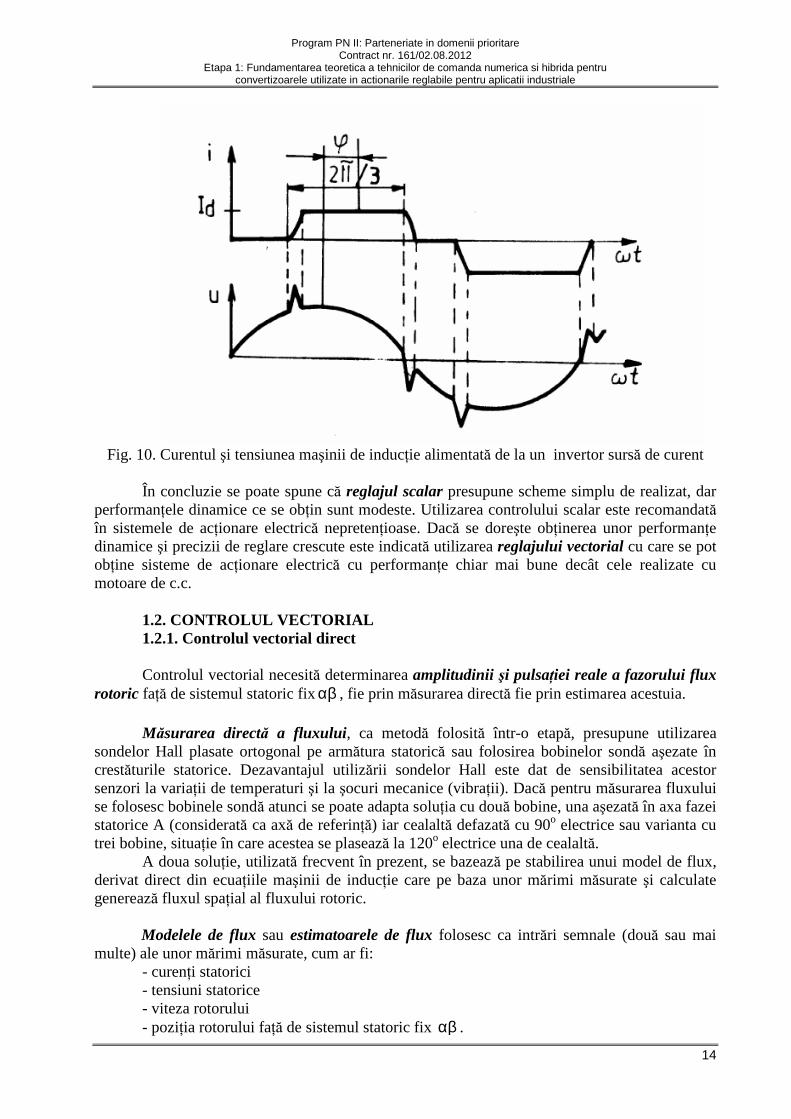
Controlul vitezei maşinii de inducŃie se poate face şi utilizând schema de reglare în care invertorul din cadrul convertorului static de frecvenŃă este de curent iar redresorul este comandat, circuitul intermediar având în acest caz caracter de sursă de c.c. Invertoarele cu sursă de curent produc un curent de forma celui din figura 10, ce determină vârfuri de tensiune suprapuse peste tensiunea alternativă sinusoidală a maşinii, datorită variaŃiei curentului în intervalul de comutaŃie.
Invertorul cu sursă de curent este cu stingere autonomă, amorsarea unui tiristor determinând blocarea celui anterior în conducŃie. Astfel are loc un proces de comutaŃie pentru a transfera curentul de pe o fază a maşinii pe alta într-un interval de timp determinat de mărimea curentului imprimat, capacitatea condensatorului de stingere şi inductivitatea maşinii. Cum inductivitatea maşinii depinde de saturaŃie, comutaŃia este în pericol la creşterea fluxului în maşină peste valoarea sa nominală.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
14
Fig. 10. Curentul şi tensiunea maşinii de inducŃie alimentată de la un invertor sursă de curent
În concluzie se poate spune că reglajul scalar presupune scheme simplu de realizat, dar performanŃele dinamice ce se obŃin sunt modeste. Utilizarea controlului scalar este recomandată în sistemele de acŃionare electrică nepretenŃioase. Dacă se doreşte obŃinerea unor performanŃe dinamice şi precizii de reglare crescute este indicată utilizarea reglajului vectorial cu care se pot obŃine sisteme de acŃionare electrică cu performanŃe chiar mai bune decât cele realizate cu motoare de c.c. 1.2. CONTROLUL VECTORIAL 1.2.1. Controlul vectorial direct Controlul vectorial necesită determinarea amplitudinii şi pulsaŃiei reale a fazorului flux rotoric faŃă de sistemul statoric fixαβ , fie prin măsurarea directă fie prin estimarea acestuia. Măsurarea directă a fluxului , ca metodă folosită într-o etapă, presupune utilizarea sondelor Hall plasate ortogonal pe armătura statorică sau folosirea bobinelor sondă aşezate în crestăturile statorice. Dezavantajul utilizării sondelor Hall este dat de sensibilitatea acestor senzori la variaŃii de temperaturi şi la şocuri mecanice (vibraŃii). Dacă pentru măsurarea fluxului se folosesc bobinele sondă atunci se poate adapta soluŃia cu două bobine, una aşezată în axa fazei statorice A (considerată ca axă de referinŃă) iar cealaltă defazată cu 90o electrice sau varianta cu trei bobine, situaŃie în care acestea se plasează la 120o electrice una de cealaltă.
A doua soluŃie, utilizată frecvent în prezent, se bazează pe stabilirea unui model de flux, derivat direct din ecuaŃiile maşinii de inducŃie care pe baza unor mărimi măsurate şi calculate generează fluxul spaŃial al fluxului rotoric.
Modelele de flux sau estimatoarele de flux folosesc ca intrări semnale (două sau mai
multe) ale unor mărimi măsurate, cum ar fi: - curenŃi statorici - tensiuni statorice - viteza rotorului - poziŃia rotorului faŃă de sistemul statoric fix αβ .
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
15
În funcŃie de strategia de control aplicată se distinge: controlul în curent, controlul în tensiune respectiv controlul combinat în tensiune şi curent.
a) Controlul vectorial direct cu comandă în curent
Se poate realiza fie utilizând invertoare de curent fie adoptând soluŃia cu invertoare de
tensiune PWM comandate în curent. În ambele situaŃii controlul curentului se face în coordonate statorice. La comanda în curent, ecuaŃiile de tensiune statorice nu intervin în modelul matematic şi prin urmare nu influenŃează răspunsul dinamic al sistemului.
Invertoarele sursă de curent reprezintă o soluŃie mai ieftină pentru comanda maşinii
asincrone fiind utilizate în acŃionări la care reglarea vitezei se face în domeniul 100:1 sau mai mare.
Fără a menŃiona în mod special pierderile suplimentare datorate armonicilor conŃinute în curentul dreptunghiular, invertorul sursă de curent mai prezintă următoarele dezavantaje:
- pulsaŃii pronunŃate ale cuplului datorate formei dreptunghiulare a curentului, în special la turaŃii mici
- frecvenŃă de comutaŃie mai joasă decât la invertorul de tensiune, datorată în special comutaŃiei lente la mers în gol.
b) Controlul vectorial direct cu comandă în tensiune La sistemele de acŃionare electrică de puteri mari se renunŃă la strategia de comandă în
curent cu invertoare de tensiune PWM deoarece este necesară reducerea frecvenŃei de comutaŃie pentru a diminua pierderile. În astfel de situaŃii se apelează la comanda în tensiune a invertoarelor PWM.
Modelul matematic trebuie să primească o astfel de formă încât pe de-o parte să se
realizeze decuplarea ecuaŃiilor de tensiuni, iar pe de altă parte să se asigure controlul separat al curenŃilor isd şi isq, aşa cum cere principiul orientării după câmp.
Dacă se iau în calcul două ipoteze simplificatoare, şi anume: - frecvenŃa statorică relativă ν1, greu de determinat, se înlocuieşte cu turaŃia relativă a
motorului ;rν1ν,rν ≈
- sistemul de control conŃine bucle de reglare separate de cuplu şi flux, se obŃin ecuaŃiile care realizează decuplarea motorului de inducŃie orientat după fluxul rotoric şi comandat în tensiune:
.
,1
sds1'r'
r
hsrqs
qss1
'r
'r
hsds
ilνψll
νu
ilνψ
ll
u
σ
σω
+⋅≅
−⋅≅dt
d
n (1)
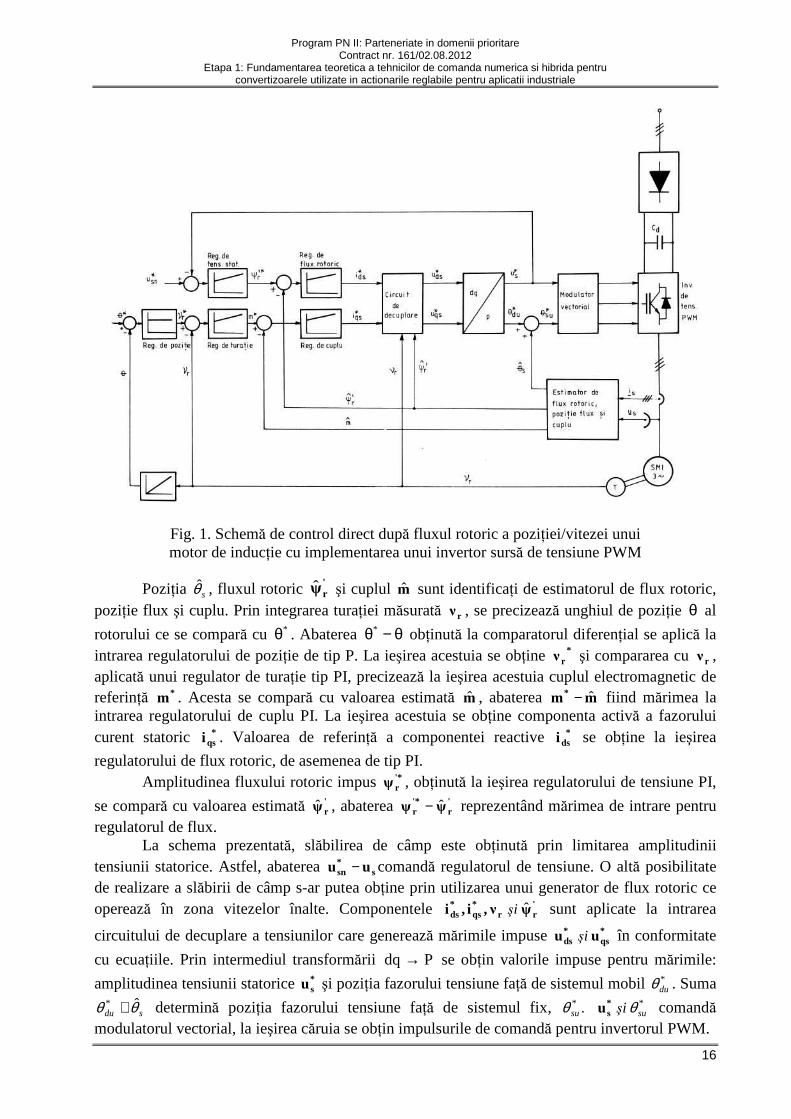
În figura 1 este prezentată o schemă de control direct după fluxul rotoric a poziŃiei/vitezei
unui motor de inducŃie cu implementarea unui invertor sursă de tensiune PWM.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
16
Fig. 1. Schemă de control direct după fluxul rotoric a poziŃiei/vitezei unui motor de inducŃie cu implementarea unui invertor sursă de tensiune PWM
PoziŃia sθ̂ , fluxul rotoric 'rψ̂ şi cuplul m̂ sunt identificaŃi de estimatorul de flux rotoric,
poziŃie flux şi cuplu. Prin integrarea turaŃiei măsurată rν , se precizează unghiul de poziŃie θ al
rotorului ce se compară cu *θ . Abaterea θ−θ* obŃinută la comparatorul diferenŃial se aplică la intrarea regulatorului de poziŃie de tip P. La ieşirea acestuia se obŃine *
rν şi compararea cu rν , aplicată unui regulator de turaŃie tip PI, precizează la ieşirea acestuia cuplul electromagnetic de referinŃă *m . Acesta se compară cu valoarea estimată m̂ , abaterea mm* ˆ− fiind mărimea la intrarea regulatorului de cuplu PI. La ieşirea acestuia se obŃine componenta activă a fazorului curent statoric *
qsi . Valoarea de referinŃă a componentei reactive *dsi se obŃine la ieşirea
regulatorului de flux rotoric, de asemenea de tip PI. Amplitudinea fluxului rotoric impus '*
rψ , obŃinută la ieşirea regulatorului de tensiune PI,
se compară cu valoarea estimată 'rψ̂ , abaterea '
r'*r ψψ ˆ− reprezentând mărimea de intrare pentru
regulatorul de flux. La schema prezentată, slăbilirea de câmp este obŃinută prin limitarea amplitudinii tensiunii statorice. Astfel, abaterea s
*sn uu − comandă regulatorul de tensiune. O altă posibilitate
de realizare a slăbirii de câmp s-ar putea obŃine prin utilizarea unui generator de flux rotoric ce operează în zona vitezelor înalte. Componentele '
rr*qs
*ds ψν,i,i ˆşi sunt aplicate la intrarea
circuitului de decuplare a tensiunilor care generează mărimile impuse *qs
*ds uu şi în conformitate
cu ecuaŃiile. Prin intermediul transformării Pdq → se obŃin valorile impuse pentru mărimile:
amplitudinea tensiunii statorice *su şi poziŃia fazorului tensiune faŃă de sistemul mobil *duθ . Suma
sdu θθ ˆ* + determină poziŃia fazorului tensiune faŃă de sistemul fix, ** . susu şi θθ *su comandă
modulatorul vectorial, la ieşirea căruia se obŃin impulsurile de comandă pentru invertorul PWM.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
17
1.2.2. Controlul vectorial indirect Controlul vectorial indirect se bazează pe o strategie de reglare prin anticipare (feed- forward control) şi presupune calcularea poziŃiei fazorului fluxului rotoric sθ faŃă de sistemul
statoric fix αβ în funcŃie de alunecare (frecvenŃa rotorică relativă). Această metodă de control se bazează pe măsurarea curenŃilor statorici şi calculul amplitudinii şi poziŃiei fluxului pe baza acestor curenŃi.
Prin urmare, controlul vectorial indirect elimină traductoarele sau estimatoarele de flux, dar necesită o măsurare foarte precisă a poziŃiei rotorului în vederea determinării cât mai exacte a poziŃiei fazorului flux rotoric. Cum măsurarea unghiului θ este fundamentală, nu se recomandă determinarea acestuia prin integrarea vitezei obŃinută de la un tahogenerator. Se recomandă folosirea în sistem a unui encoder (sau similar) ceea ce duce la obŃinerea unui răspuns bun în cuplu.
O altă cerinŃă a metodei este cunoaşterea valorii corecte a constantei de timp rotorice Tr în calculul alunecării. Acest lucru constituie un dezavantaj al controlului indirect întrucât parametrii rotorici se modifică, '
rR cu temperatura şi efectul pelicular iar 'rL cu nivelul fluxului.
Controlul vectorial indirect poate fi realizat fie aplicându-se comanda în curent fie comanda în tensiune sau cea combinată.
Controlul cu comandă în curent poate fi obŃinut ca şi la controlul direct, utilizând invertoare de curent sau invertoare de tensiune PWM comandate în curent.
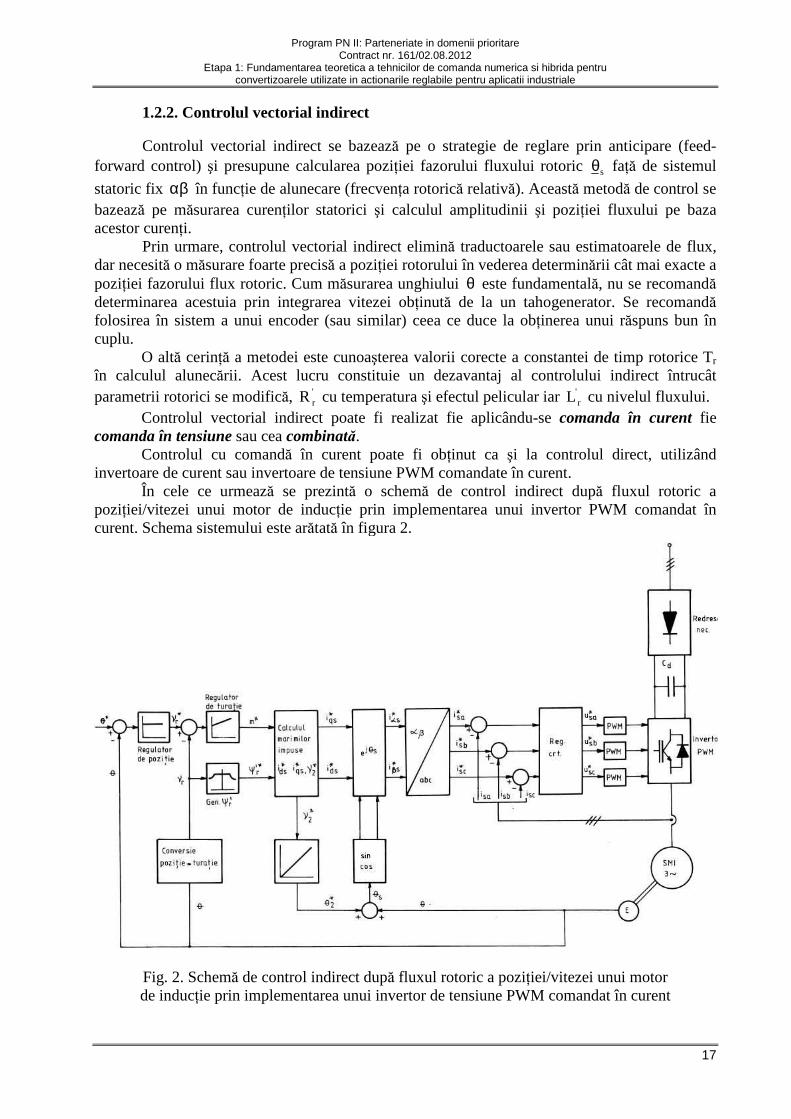
În cele ce urmează se prezintă o schemă de control indirect după fluxul rotoric a poziŃiei/vitezei unui motor de inducŃie prin implementarea unui invertor PWM comandat în curent. Schema sistemului este arătată în figura 2.
Fig. 2. Schemă de control indirect după fluxul rotoric a poziŃiei/vitezei unui motor de inducŃie prin implementarea unui invertor de tensiune PWM comandat în curent
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
18
Controlul vectorial indirect al motorului din figura 2 se face orientând maşina după fluxul rotoric. PoziŃia rotorului θ , obŃinută de la encoderul E, se compară cu mărimea de referinŃă *θ , abaterea θ−θ* aplicându-se la intrarea regulatorului de poziŃie de tip P.
La ieşirea acestuia se obŃine valoarea impusă pentru viteza relativă a maşinii *rν care se
compară cu valoarea măsurată rν rezultată la ieşirea unui bloc de conversie poziŃie – turaŃie, pe
baza poziŃiei rotorului θ . Regulatorul de turaŃie de tip PI preia abaterea rνν *r − şi precizează la
ieşirea sa cuplul electromagnetic impus m*. Acesta împreună cu fluxul rotoric impus '*rψ
reprezintă mărimile de la intrarea regulatorului pentru control vectorial indirect care calculează componentele ortogonale ale fazorului curent statoric *
qs*ds ii şi precum şi frecvenŃa rotorică
relativă (alunecarea) *2ν , obŃinută în baza relaŃiei:
'2r
'r
'r
qshs'r
'r
2 ψ
mrψ
il
lr
ν⋅=
⋅= . (2)
Utilizarea consecutivă a blocurilor transformatoare de coordonate Sje θ
respectiv de faze abc→αβ , generează curenŃii de referinŃă *
sc*sb
*sa ii,i şi care se compară apoi cu valorile măsurate
scsbsa i,i,i . Abaterile sc*scsb
*sbsa
*sa ii,ii,ii −−− comandă regulatorul de curent, la ieşirea căruia se
obŃin tensiunile de comandă *sc
*sb
*sa u,u,u . Acestea generează semnalele pentru comanda
tranzistoarelor IGBT ce echipează invertorul PWM.
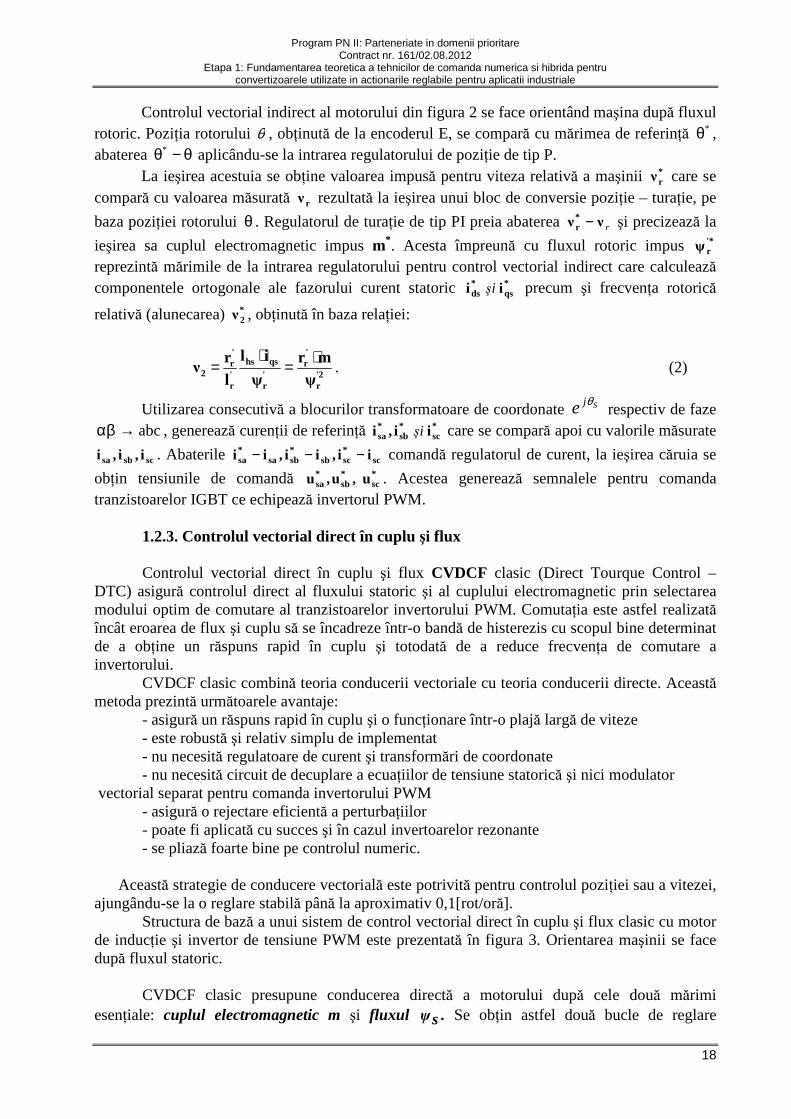
1.2.3. Controlul vectorial direct în cuplu şi flux Controlul vectorial direct în cuplu şi flux CVDCF clasic (Direct Tourque Control – DTC) asigură controlul direct al fluxului statoric şi al cuplului electromagnetic prin selectarea modului optim de comutare al tranzistoarelor invertorului PWM. ComutaŃia este astfel realizată încât eroarea de flux şi cuplu să se încadreze într-o bandă de histerezis cu scopul bine determinat de a obŃine un răspuns rapid în cuplu şi totodată de a reduce frecvenŃa de comutare a invertorului. CVDCF clasic combină teoria conducerii vectoriale cu teoria conducerii directe. Această metoda prezintă următoarele avantaje:
- asigură un răspuns rapid în cuplu şi o funcŃionare într-o plajă largă de viteze - este robustă şi relativ simplu de implementat - nu necesită regulatoare de curent şi transformări de coordonate - nu necesită circuit de decuplare a ecuaŃiilor de tensiune statorică şi nici modulator
vectorial separat pentru comanda invertorului PWM - asigură o rejectare eficientă a perturbaŃiilor - poate fi aplicată cu succes şi în cazul invertoarelor rezonante - se pliază foarte bine pe controlul numeric.
Această strategie de conducere vectorială este potrivită pentru controlul poziŃiei sau a vitezei,
ajungându-se la o reglare stabilă până la aproximativ 0,1[rot/oră]. Structura de bază a unui sistem de control vectorial direct în cuplu şi flux clasic cu motor
de inducŃie şi invertor de tensiune PWM este prezentată în figura 3. Orientarea maşinii se face după fluxul statoric.
CVDCF clasic presupune conducerea directă a motorului după cele două mărimi
esenŃiale: cuplul electromagnetic m şi fluxul sψ . Se obŃin astfel două bucle de reglare
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
19
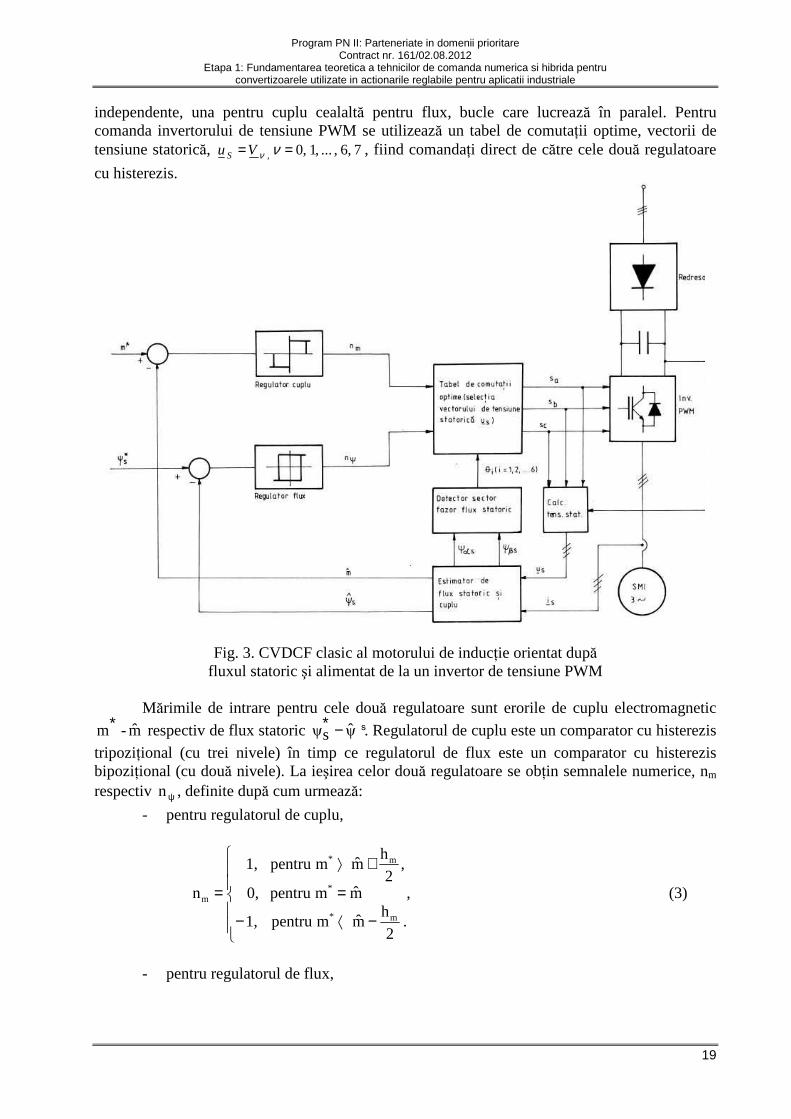
independente, una pentru cuplu cealaltă pentru flux, bucle care lucrează în paralel. Pentru comanda invertorului de tensiune PWM se utilizează un tabel de comutaŃii optime, vectorii de tensiune statorică, 7,6,...,1,0, == ννVu S , fiind comandaŃi direct de către cele două regulatoare
cu histerezis.
Fig. 3. CVDCF clasic al motorului de inducŃie orientat după fluxul statoric şi alimentat de la un invertor de tensiune PWM
Mărimile de intrare pentru cele două regulatoare sunt erorile de cuplu electromagnetic
m̂-m∗ respectiv de flux statoric sψ̂sψ −∗ . Regulatorul de cuplu este un comparator cu histerezis
tripoziŃional (cu trei nivele) în timp ce regulatorul de flux este un comparator cu histerezis bipoziŃional (cu două nivele). La ieşirea celor două regulatoare se obŃin semnalele numerice, nm respectiv ψn , definite după cum urmează:
- pentru regulatorul de cuplu,
,
.2
hm̂mpentru1,
m̂mpentru0,
,2
hm̂mpentru1,
n
m*
*
m*
m
−⟨−
=
+⟩
= (3)
- pentru regulatorul de flux,
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
20
−⟨
+⟩=
.2
hψ̂ψpentru0,
,2
hψ̂ψpentru1,
nψ
s*s
ψ
s*s
ψ (4)
În relaŃiile de mai sus, hm şi ψh reprezintă lăŃimea benzii de histerezis a celor două
regulatoare. Mărimile m̂ şi Sψ̂ sunt estimate pe baza tensiunilor statorice şi a curenŃilor statorici măsuraŃi.
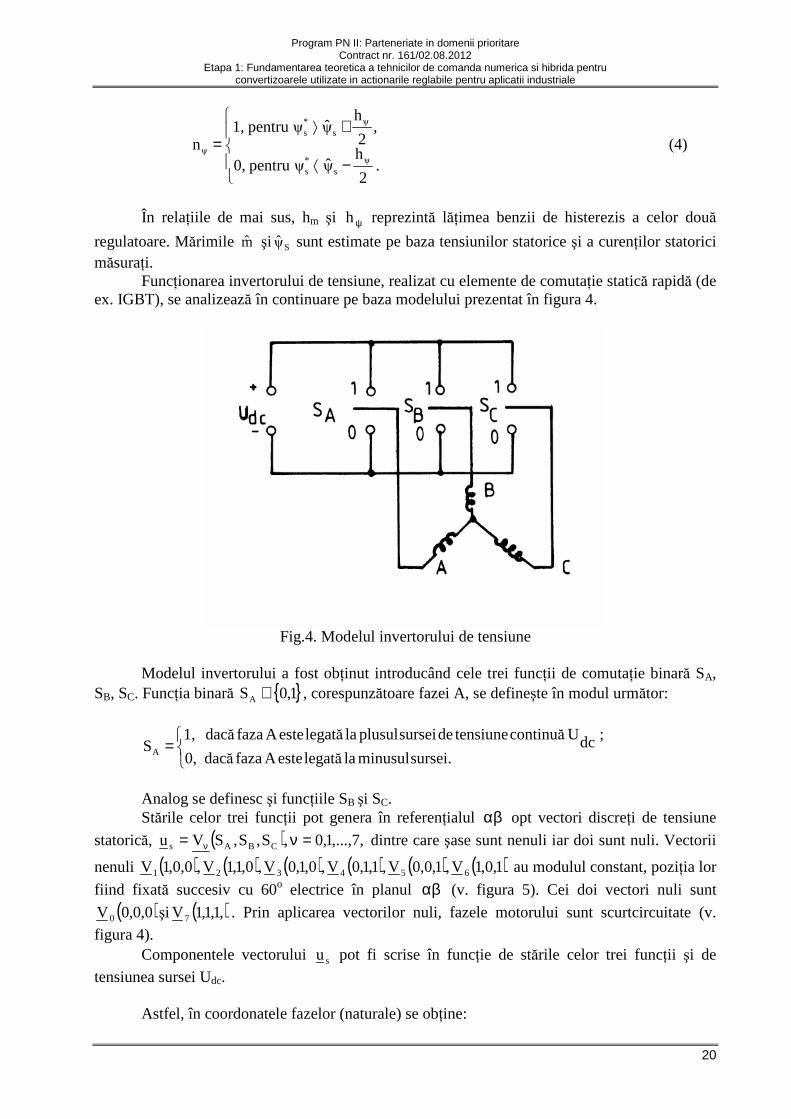
FuncŃionarea invertorului de tensiune, realizat cu elemente de comutaŃie statică rapidă (de ex. IGBT), se analizează în continuare pe baza modelului prezentat în figura 4.
Fig.4. Modelul invertorului de tensiune
Modelul invertorului a fost obŃinut introducând cele trei funcŃii de comutaŃie binară SA,
SB, SC. FuncŃia binară { }1,0SA ∈ , corespunzătoare fazei A, se defineşte în modul următor:
Analog se definesc şi funcŃiile SB şi SC. Stările celor trei funcŃii pot genera în referenŃialul αβ opt vectori discreŃi de tensiune
statorică, ( ) ,7,...,1,0,S,S,SVu CBAs =ν= ν dintre care şase sunt nenuli iar doi sunt nuli. Vectorii
nenuli ( ) ( ) ( ) ( ) ( ) ( )1,0,1V,1,0,0V,1,1,0V,0,1,0V,0,1,1V,0,0,1V 654321 au modulul constant, poziŃia lor
fiind fixată succesiv cu 60o electrice în planul αβ (v. figura 5). Cei doi vectori nuli sunt
( ) ( ),1,1,1Vşi0,0,0V 70 . Prin aplicarea vectorilor nuli, fazele motorului sunt scurtcircuitate (v.
figura 4). Componentele vectorului su pot fi scrise în funcŃie de stările celor trei funcŃii şi de
tensiunea sursei Udc. Astfel, în coordonatele fazelor (naturale) se obŃine:
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
21
( )
( )
( ).2SSS3
UU
,S2SS3
UU
,SS2S3
UU
CBAdc
S
CBAdc
S
CBAdc
S
C
B
A
+−−=
−+−=
−−=
(5)
iar în referenŃialul αβ :
( )
( ) .SS3
U3U
,SS2S3
UU
CBdc
sβ
CBAdc
sα
−=
−−= (6)
La relaŃiile (6) s-a ajuns prin transformata ( )βα(ABC) → . Pentru a selecta corespunzător vectorii de tensiune, astfel încât să fie asigurat fluxul statoric şi cuplul electromagnetic necesar, se porneşte de la ecuaŃia vectorială a tensiunii statorice în sistemul de referinŃă αβ , în care se neglijează rezistnŃa statorică Rs:
,dtud ss⋅≈ψ (7)
de unde se obŃine:
∫+=t
ssosdtu
0
ψψ , (8)
relaŃie care pune în evidenŃă evoluŃia vectorului flux statoric s
ψ în funcŃie de vectorul tensiune
statorică.
În intervalul de timp [0, tc) între două comutaŃii succesive, ( )CBAs S,S,Su este constant ca
amplitudine şi orientare. În aceste condiŃii, relaŃia (8) se poate scrie sub forma: ( ) [ )cCBAss0s
t,0tcutS,S,Suψψ ∈⋅+= , (9)
sau ( ) [ ) .t,0tcutS,S,SuψψΨ∆ cCBAss0ss ∈⋅=−= (10)
Pentru a vedea cum se selectează vectorii de tensiune necesari pentru controlul fluxului statoric, planul αβ se împarte în şase sectoare 1,2,...6,i,iθ = fiecare având 60o electrice şi
vectorul corespunzător iV drept bisectoare (v. figura 5). Din motive legate de algoritmi de calcul, delimitarea sectoarelor se face de către bisectoare. Pentru a menŃine traiectoria vectorului flux în interiorul benzii de histereză hψ trebuie selectat vectorul optim de tensiune
)S,S,(SVu CBAis = posibil a fi aplicat. Acest vector depinde de poziŃia iniŃială a fazorului flux
statoric s0Ψ ce se reduce în cazul de faŃă la cunoaşterea de fapt a sectorului iθ în care se găseşte
,0s
ψ informaŃie care se poate obŃine de la simple comparatoare.
Comanda invertorului de tensiune se realizează prin alegerea optimă a tripletei (SA, SB, SC) funcŃie de eroarorile de cuplu m̂mε *
m −= şi de flux s*sψ ψ̂ψε −= , traduse de cele două
regulatoare în variabilele numerice nm şi ψn , precum şi de sectorul iθ în care se găseşte vectorul
flux.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
22
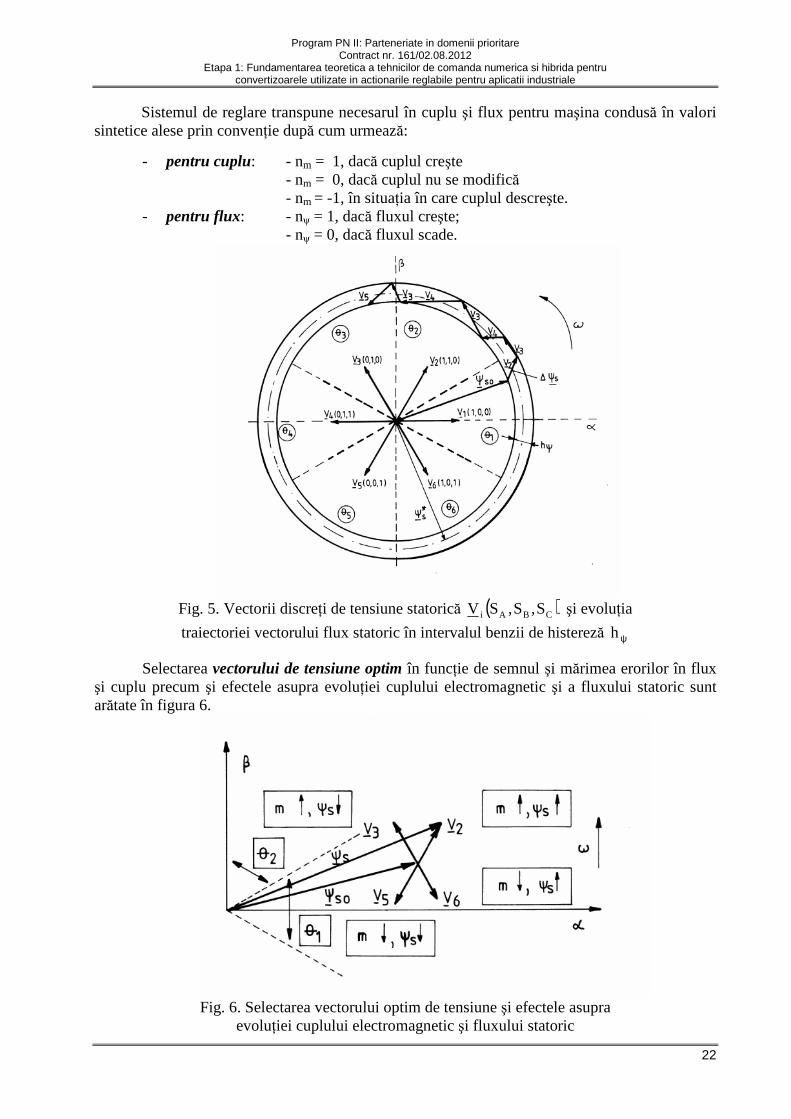
Sistemul de reglare transpune necesarul în cuplu şi flux pentru maşina condusă în valori sintetice alese prin convenŃie după cum urmează:
- pentru cuplu: - nm = 1, dacă cuplul creşte - nm = 0, dacă cuplul nu se modifică - nm = -1, în situaŃia în care cuplul descreşte. - pentru flux: - nψ = 1, dacă fluxul creşte; - nψ = 0, dacă fluxul scade.
Fig. 5. Vectorii discreŃi de tensiune statorică ( )CBAi S,S,SV şi evoluŃia
traiectoriei vectorului flux statoric în intervalul benzii de histereză ψh
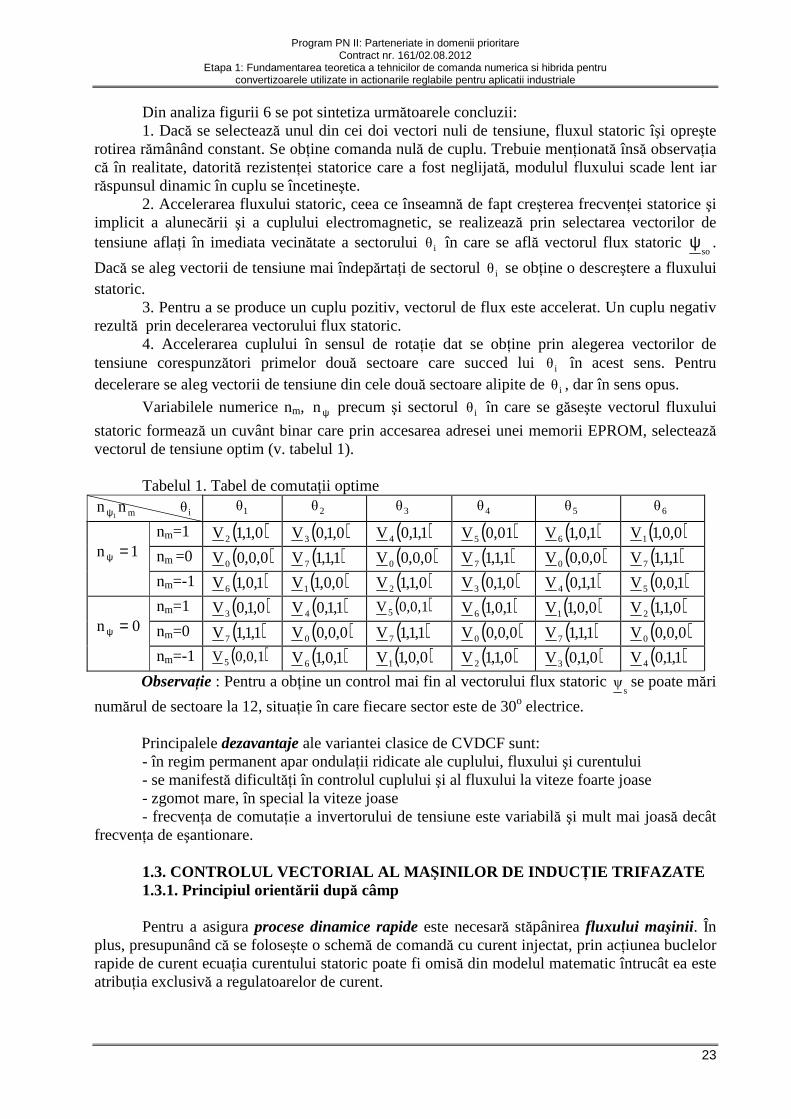
Selectarea vectorului de tensiune optim în funcŃie de semnul şi mărimea erorilor în flux şi cuplu precum şi efectele asupra evoluŃiei cuplului electromagnetic şi a fluxului statoric sunt arătate în figura 6.
Fig. 6. Selectarea vectorului optim de tensiune şi efectele asupra
evoluŃiei cuplului electromagnetic şi fluxului statoric
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
23
Din analiza figurii 6 se pot sintetiza următoarele concluzii: 1. Dacă se selectează unul din cei doi vectori nuli de tensiune, fluxul statoric îşi opreşte
rotirea rămânând constant. Se obŃine comanda nulă de cuplu. Trebuie menŃionată însă observaŃia că în realitate, datorită rezistenŃei statorice care a fost neglijată, modulul fluxului scade lent iar răspunsul dinamic în cuplu se încetineşte.
2. Accelerarea fluxului statoric, ceea ce înseamnă de fapt creşterea frecvenŃei statorice şi implicit a alunecării şi a cuplului electromagnetic, se realizează prin selectarea vectorilor de tensiune aflaŃi în imediata vecinătate a sectorului iθ în care se află vectorul flux statoric
soψ .
Dacă se aleg vectorii de tensiune mai îndepărtaŃi de sectorul iθ se obŃine o descreştere a fluxului statoric.
3. Pentru a se produce un cuplu pozitiv, vectorul de flux este accelerat. Un cuplu negativ rezultă prin decelerarea vectorului flux statoric.
4. Accelerarea cuplului în sensul de rotaŃie dat se obŃine prin alegerea vectorilor de tensiune corespunzători primelor două sectoare care succed lui iθ în acest sens. Pentru decelerare se aleg vectorii de tensiune din cele două sectoare alipite de iθ , dar în sens opus.
Variabilele numerice nm, ψn precum şi sectorul iθ în care se găseşte vectorul fluxului
statoric formează un cuvânt binar care prin accesarea adresei unei memorii EPROM, selectează vectorul de tensiune optim (v. tabelul 1).
ObservaŃie : Pentru a obŃine un control mai fin al vectorului flux statoric sψ se poate mări
numărul de sectoare la 12, situaŃie în care fiecare sector este de 30o electrice. Principalele dezavantaje ale variantei clasice de CVDCF sunt: - în regim permanent apar ondulaŃii ridicate ale cuplului, fluxului şi curentului - se manifestă dificultăŃi în controlul cuplului şi al fluxului la viteze foarte joase - zgomot mare, în special la viteze joase - frecvenŃa de comutaŃie a invertorului de tensiune este variabilă şi mult mai joasă decât
frecvenŃa de eşantionare.
1.3. CONTROLUL VECTORIAL AL MA ŞINILOR DE INDUC łIE TRIFAZATE 1.3.1. Principiul orientării dup ă câmp
Pentru a asigura procese dinamice rapide este necesară stăpânirea fluxului maşinii . În
plus, presupunând că se foloseşte o schemă de comandă cu curent injectat, prin acŃiunea buclelor rapide de curent ecuaŃia curentului statoric poate fi omisă din modelul matematic întrucât ea este atribuŃia exclusivă a regulatoarelor de curent.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
24
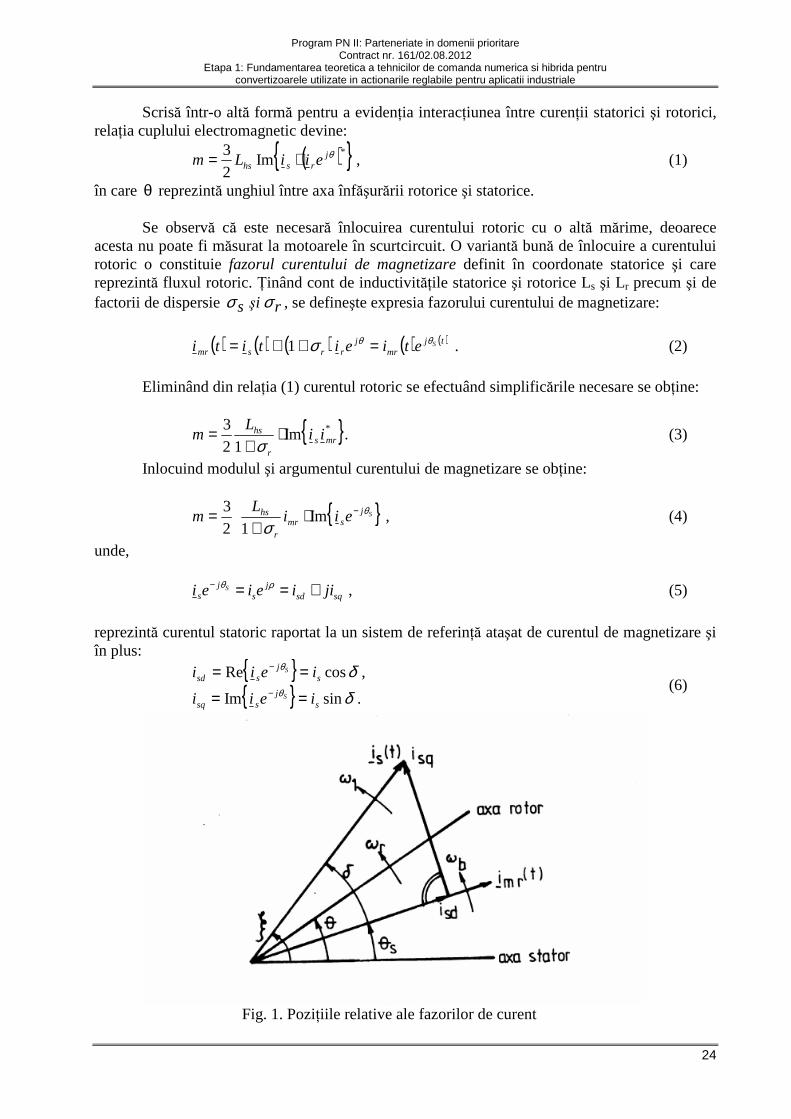
Scrisă într-o altă formă pentru a evidenŃia interacŃiunea între curenŃii statorici şi rotorici, relaŃia cuplului electromagnetic devine:
( ){ }*Im
2
3 θjrshs eiiLm ⋅= , (1)
în care θ reprezintă unghiul între axa înfăşurării rotorice şi statorice. Se observă că este necesară înlocuirea curentului rotoric cu o altă mărime, deoarece acesta nu poate fi măsurat la motoarele în scurtcircuit. O variantă bună de înlocuire a curentului rotoric o constituie fazorul curentului de magnetizare definit în coordonate statorice şi care reprezintă fluxul rotoric. łinând cont de inductivităŃile statorice şi rotorice Ls şi L r precum şi de factorii de dispersie rşis σσ , se defineşte expresia fazorului curentului de magnetizare:
( ) ( ) ( ) ( ) ( )tj
mrj
rrsmrSetieititi θθσ =++= 1 . (2)
Eliminând din relaŃia (1) curentul rotoric se efectuând simplificările necesare se obŃine:
{ }*Im12
3mrs
r
hs iiL
m ⋅+
=σ
. (3)
Inlocuind modulul şi argumentul curentului de magnetizare se obŃine:
{ }Sjsmr
r
hs eiiL
m θ
σ−⋅
+= Im
12
3 , (4)
unde, sqsd
js
js jiieiei S +==− ρθ , (5)
reprezintă curentul statoric raportat la un sistem de referinŃă ataşat de curentul de magnetizare şi în plus:
{ }{ } .sinIm
,cosRe
δδ
θ
θ
sj
ssq
sj
ssd
ieii
ieiiS
S
==
==−
−
(6)
Fig. 1. PoziŃiile relative ale fazorilor de curent
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
25
În regim staŃionar isd şi isq sunt constante, si fiind constant şi deci si şi mri se rotesc sincron cu un anumit decalaj între ele. Introducând componentele (6) în relaŃiile (4) şi (5) se obŃine: sqmrikim = , (7)
în care,
r
hsLk
σ+=
12
3 . (8)
RelaŃia (7) se aseamănă cu relaŃia cuplului electromagnetic a motorului de c.c. Curentul imr joacă rolul fluxului, iar isq pe cel al curentului indusului. În acest mod există analogie între motorul de c.c. şi cel asincron trifazat cu condiŃia transformării vectorului curentului statoric în coordonate de câmp sau cu alte cuvinte, orientarea după câmp. După cum se observă în figura 1, curentul de magnetizare imr este controlat prin componenta isd a curentului statoric, prin analogie cu tensiunea de excitaŃie a motorului de c.c. Rezultă că isd, isq reprezintă mărimi independente ce determină cuplul electromagnetic, iar unghiul de poziŃie δ se modifică cu sarcina, fiind nul la mers în gol. Avem de a face cu o reglare vectorială a cuplului, cele două componente determinând vectorul .i s
rrr
r jRidt
dψω
ψ+== 0 (9)
Rescriind membrul drept al relaŃiei (9) în funcŃie de relaŃia (2) şi Ńinând cont de constanta de timp rotorică Tr şi de expresiile vitezelor unghiulare pentru vectorul curentului de magnetizare, respectiv curentul statoric (v. fig. 1), se obŃin ecuaŃiile (10), (11), (12) care împreună cu ecuaŃia de mişcare constituie un model pentru motorul de inducŃie cu orientare după câmp, ca în figura 2.
( )[ ] 01 =+++=+ −− θθ σ jsrrhsrr
jmrhsrr eii
dt
dLiRei
dt
dLiR , (10)
,sdmrmr
r iidt
idT =+ (11)
.1 2
nn
r
mrrn
sq
n
rS
n iT
i
dt
d
ωω
ωω
ωωωθ
ω+=+= (12)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
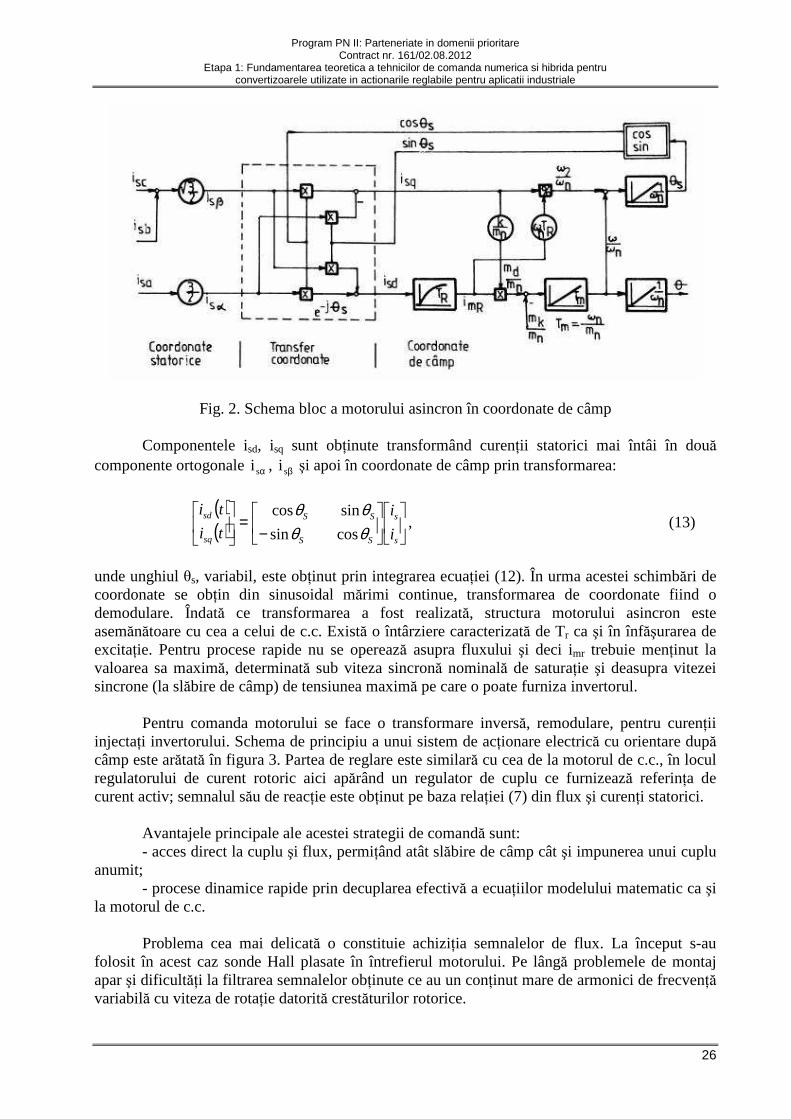
26
Fig. 2. Schema bloc a motorului asincron în coordonate de câmp Componentele isd, isq sunt obŃinute transformând curenŃii statorici mai întâi în două componente ortogonale αsi , βsi şi apoi în coordonate de câmp prin transformarea:
( )( )
−=
s
s
SS
SS
sq
sd
i
i
ti
ti
θθθθ
cossin
sincos, (13)
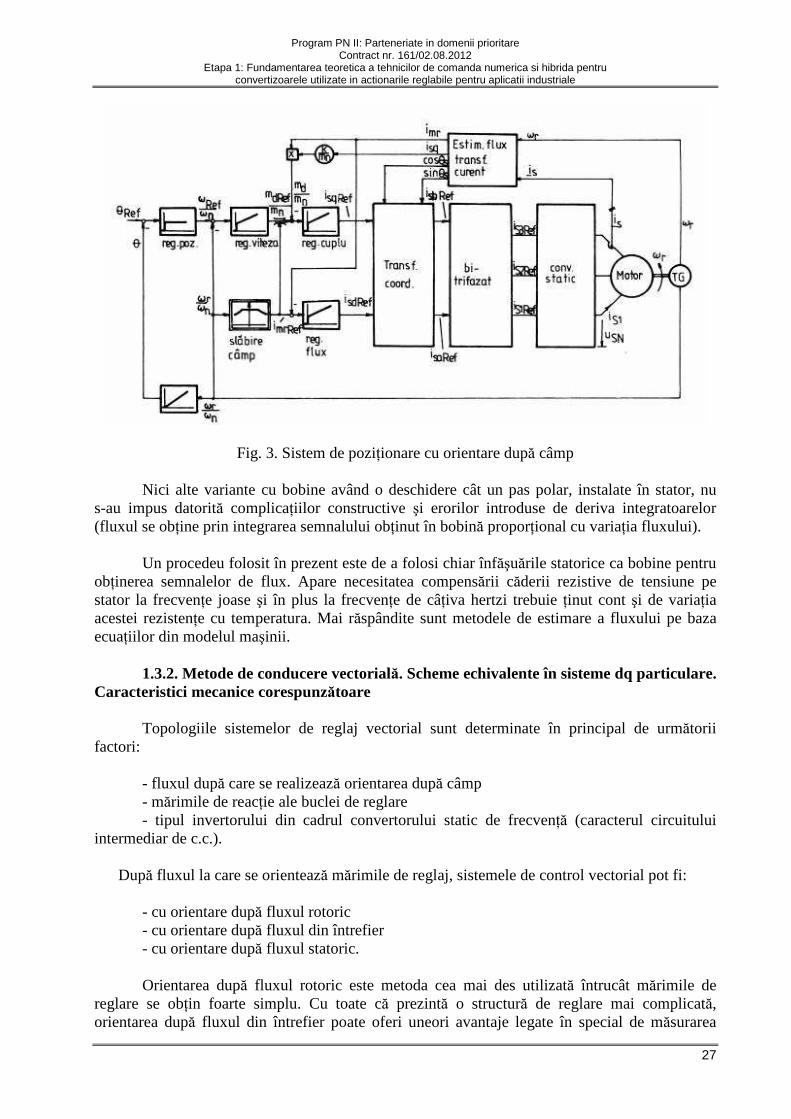
unde unghiul θs, variabil, este obŃinut prin integrarea ecuaŃiei (12). În urma acestei schimbări de coordonate se obŃin din sinusoidal mărimi continue, transformarea de coordonate fiind o demodulare. Îndată ce transformarea a fost realizată, structura motorului asincron este asemănătoare cu cea a celui de c.c. Există o întârziere caracterizată de Tr ca şi în înfăşurarea de excitaŃie. Pentru procese rapide nu se operează asupra fluxului şi deci imr trebuie menŃinut la valoarea sa maximă, determinată sub viteza sincronă nominală de saturaŃie şi deasupra vitezei sincrone (la slăbire de câmp) de tensiunea maximă pe care o poate furniza invertorul. Pentru comanda motorului se face o transformare inversă, remodulare, pentru curenŃii injectaŃi invertorului. Schema de principiu a unui sistem de acŃionare electrică cu orientare după câmp este arătată în figura 3. Partea de reglare este similară cu cea de la motorul de c.c., în locul regulatorului de curent rotoric aici apărând un regulator de cuplu ce furnizează referinŃa de curent activ; semnalul său de reacŃie este obŃinut pe baza relaŃiei (7) din flux şi curenŃi statorici. Avantajele principale ale acestei strategii de comandă sunt: - acces direct la cuplu şi flux, permiŃând atât slăbire de câmp cât şi impunerea unui cuplu anumit; - procese dinamice rapide prin decuplarea efectivă a ecuaŃiilor modelului matematic ca şi la motorul de c.c. Problema cea mai delicată o constituie achiziŃia semnalelor de flux. La început s-au folosit în acest caz sonde Hall plasate în întrefierul motorului. Pe lângă problemele de montaj apar şi dificultăŃi la filtrarea semnalelor obŃinute ce au un conŃinut mare de armonici de frecvenŃă variabilă cu viteza de rotaŃie datorită crestăturilor rotorice.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
27
Fig. 3. Sistem de poziŃionare cu orientare după câmp Nici alte variante cu bobine având o deschidere cât un pas polar, instalate în stator, nu s-au impus datorită complicaŃiilor constructive şi erorilor introduse de deriva integratoarelor (fluxul se obŃine prin integrarea semnalului obŃinut în bobină proporŃional cu variaŃia fluxului). Un procedeu folosit în prezent este de a folosi chiar înfăşuările statorice ca bobine pentru obŃinerea semnalelor de flux. Apare necesitatea compensării căderii rezistive de tensiune pe stator la frecvenŃe joase şi în plus la frecvenŃe de câŃiva hertzi trebuie Ńinut cont şi de variaŃia acestei rezistenŃe cu temperatura. Mai răspândite sunt metodele de estimare a fluxului pe baza ecuaŃiilor din modelul maşinii. 1.3.2. Metode de conducere vectorială. Scheme echivalente în sisteme dq particulare. Caracteristici mecanice corespunzătoare Topologiile sistemelor de reglaj vectorial sunt determinate în principal de următorii factori:
- fluxul după care se realizează orientarea după câmp - mărimile de reacŃie ale buclei de reglare - tipul invertorului din cadrul convertorului static de frecvenŃă (caracterul circuitului
intermediar de c.c.).
După fluxul la care se orientează mărimile de reglaj, sistemele de control vectorial pot fi:
- cu orientare după fluxul rotoric - cu orientare după fluxul din întrefier - cu orientare după fluxul statoric.
Orientarea după fluxul rotoric este metoda cea mai des utilizată întrucât mărimile de
reglare se obŃin foarte simplu. Cu toate că prezintă o structură de reglare mai complicată, orientarea după fluxul din întrefier poate oferi uneori avantaje legate în special de măsurarea
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
28
directă a fluxului din întrefier, eliminându-se astfel compensările pe calea sa de măsură. O schemă simplificată pentru orientarea după fluxul din întrefier se obŃine în situaŃia măsurării curentului rotoric. Orientarea după fluxul statoric implică calcule mai complexe ale mărimilor de comandă şi o reglare cu repercursiuni negative asupra performanŃelor dinamice. Fluxul de orientare poate fi determinat prin metode directe sau indirecte, situaŃie în care acesta se calculează din alte mărimi cum ar fi curenŃii statorici, tensiuni sau viteza rotorului. În cadrul reglajului vectorial, convertorul static de frecvenŃă joacă un rol hotărâtor în obŃinerea unor răspunsuri dinamice rapide şi precise precum şi în alegerea strategiilor de control care se aplică, cele mai des întâlnite fiind: controlul în curent, controlul în tensiune precum şi controlul hibrid (în curent şi în tensiune). În continuare se prezintă succint cele trei metode de orientare după flux.
a) Orientarea după fluxul rotoric Este o metodă des utilizată datorită simplităŃii buclei de reglare şi a algoritmului de calcul
a mărimilor de comandă. Pentru această situaŃie, modelul matematic al maşinii se deduce pornind de la sistemul (14) din care se reŃin ecuaŃiile de tensiune rotorică, flux rotoric şi cuplu:
( )
,1
,
,
,
,)(11
*2*
2
**
dt
dT
dt
d
Tdt
dT
dt
dT
dt
dT
dt
dj
dt
d
dt
dj
dt
d
mn
r
mr
nm
rmm
ss
nn
rr
ss
m1m'
hrhs
shs'r
'rs1m
'r
'r
'
r
'rhsss
'r1msss
'r
'
r'r
'r
'
r
'
r'rr
'r
νmm
ixψm
ixψψ
ililixixψ
ililixixψ
ψψ
irψψ
ir'u
=====−
=
⋅==
⋅+⋅=⋅+⋅=
⋅+⋅=⋅+⋅=
⋅−
++⋅=⋅−
⋅+⋅+⋅=
ωω
ωω
ωθ
θθθθωω
(14)
În condiŃiile orientării după fluxul rotoric, modelul dq al maşinii de inducŃie se obŃine dacă sistemul de referinŃă se consideră sincron şi sinfazic cu fazorul fluxului din rotor. Prin descompunerea după axele dq ale sistemului orientat a ecuaŃiilor de tensiune rotorică, flux rotoric şi cuplu electromagnetic şi eliminarea componentelor fazorului curentului rotoric, rezultă expresiile fluxului din rotor, cuplului electromagnetic şi frecvenŃei rotorice scrise în funcŃie de componentele fazorului curentului statoric:
.
,11
,
1
qs'r'
r
hsqs
'r'
r
1m
1qshs'r
'r
'r
qs1m'r
'r
'r
2
'r
dshs
'r
ds1m
'r
'r
'r
ds1m'r
iψl
liψ
x
xm
νilψl
rix
ψx
rν
ψil
ψix
ψ
r
xixψ
⋅⋅=⋅⋅=
⋅=⋅⋅⋅=⋅⋅⋅=
−⋅=⋅−⋅=
=⋅⋅−⋅=
s
dt
dT
dt
dT
dt
d
rr
nω
(15)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
29
Componentele qrdr işii sunt date de expresiile:
.
,11
qs'r
hsqs'
r
1mqr
'r
'r
dr
ill
ixx
i
ψ
ri
⋅−=⋅−=
⋅⋅−=dt
d
nω (16)
RelaŃiile de mai sus indică că motorul în cazul orientării după fluxul rotoric este complet
decuplat pe cele două axe d şi q, situaŃie similară celei de la motorul de c.c. (maşina de c.c. în cazul general).
Mărimile de control sunt proiecŃiile fazorului curent statoric si pe cele două axe. Astfel, componenta după axa d, ids, având un caracter reactiv controlează fluxul din rotor, deci nivelul de solicitare magnetică a maşinii, iar componenta după axa q, iqs, controlează cuplul electromagnetic, fiind un curent activ. În situaŃia în care circuitul intermediar al convertorului static are caracter de sursă de curent nu este nevoie să se compenseze mărimile de control ids şi iqs deoarece fazorul curent rotoric este perpendicular pe fazorul fluxului de orientare în regim staŃionar.
Cuplul electromagnetic se modifică prin intermediul lui qs'r iψ şi .
Dacă '
rψ se consideră variabil, cuplul electromagnetic se modifică lent, datorită lui Tr.
Armonicile suprapuse componentei continue ids, cu efecte asupra lui 'rψ şi m, pot fi diminuate printr-o valoare ridicată a lui Tr.
Dacă 'rψ = const. (ids = const.) atunci cuplul electromagnetic variază practic instantaneu
cu iqs fără suprareglaj (la salt treaptă de turaŃie nu apar regimuri tranzitorii în curentul rotoric).
b) Orientarea după fluxul din întrefier Metodele la care orientarea se face după alt flux decât cel rotoric conduc la topologii ale
sistemului de reglaj mult mai laborioase deoarece nu se mai dispune de avantajul orientării după flux rotoric, dat de perpendicularitatea între fluxul de orientare şi curentul rotoric. Cu toate acestea, orientarea după fluxul din întrefier poate oferi avantaje în anumite condiŃii de măsurare a curentului rotoric.
Pentru determinarea ecuaŃiilor funcŃionale în acest caz, sistemul de referinŃă se consideră sincron şi sinfazic cu fluxul din întrefier (fluxul de orientare). În aceste condiŃii, sistemul (14) se particularizează pentru .0== qmmdm ψψψ şi După efectuarea calculelor rezultă ecuaŃiile:
( ) ( )
( ) ( ){ } .Im
,
,0
qshss*
hs
'drdshsmhs
'drds1mm1mhs
'qrqshs
'qrqs1m
iψiψm
iililiixixψ
iiliix
⋅=⋅=
+=⋅=+=⋅=
+=+⋅=
(17)
RelaŃiile de mai sus arată că fluxul din întrefier depinde de curentul rotoric iar cuplul
electromagnetic este proporŃional cu proiecŃia lui si pe axa q. În această situaŃie nu se realizează o posibilitate de comandă separată, de felul celei obŃinută la proiectarea după fluxul rotoric. Atât comanda în curent cât şi cea în tensiune necesită compensări pentru determinarea proiecŃiei fazorului curent statoric pe axa q.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
30
c) Orientarea după fluxul statoric
Metoda de orientare după fluxul statoric este asemănătoare cu orientarea după fluxul din întrefier, conducând de asemenea la sisteme de reglare mai complicate decât cele orientate după fluxul rotoric.
De data aceasta, sistemul de referinŃă dq se alege sincron şi sinfazic cu fazorul flux statoric
sψ ceea ce se traduce matematic prin particularizarea sistemului (14) pentru
.0== qssds ψψψ şi După efectuarea înlocuirilor în ecuaŃiile fluxului statoric şi a cuplului
electromagnetic se obŃin relaŃiile:
{ } { } .ImRe
,
qsss*
s
*ss
hssσshssσss
iψiψiψm
ψilψixψ
⋅=⋅==
+⋅=+⋅=
j (18)
Analiza relaŃiilor (18) evidenŃiază faptul că fluxul statoric depinde numai de o parte din proiecŃia lui
sψ pe axa d. În schimb, cuplul este proporŃional cu proiecŃia fazorului curent
statoric pe axa q, iqs. De asemeni, apare acelaşi neajuns în ceea ce priveşte comanda separată ca şi în situaŃia orientării după fluxul din întrefier. Prin urmare şi la orientarea după fluxul statoric, la comanda în curent, sunt necesare compensări pentru a determina componenta iqs.
În final, terbuie spus că analiza comparativă a celor trei posibilităŃi de orientare sublinează avantajele considerării orientării după fluxul rotoric , situaŃie în care se obŃine o decuplare a circuitelor motorului, potrivită pentru comanda în regim dinamic.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
31
CAPITOLUL 2. ELECTRONIC Ă DE PUTERE ÎN CONVERTOARELE STATICE DE FRECVENłĂ 2.1. INVERTOARE 2.1.1. GeneralităŃi şi principii de func Ńionare
Invertorul este o instalaŃie electronică ce transformă energia de curent continuu în energie de curent alternativ de o anumită formă, amplitudine şi frecvenŃă. Din punct de vedere al formei tensiunii ce rezultă la bornele unui consumator alimentat prin invertor, deosebim următoarele tipuri de invertoare: - invertoare PWM; - invertoare cu tensiune de ieşire dreptunghiulară; - invertoare rezonante. La invertoarele PWM tensiunea de alimentare provine de la un redresor necomandat. FrecvenŃa şi amplitudinea tensiunii de la ieşire se asigură prin modulaŃie. Există numeroase metode prin care se realizează modulaŃia în durată a tensiunii de ieşire. O atenŃie deosebită va fi acordată modulării de către un semnal sinusoidal. La invertoarele din a doua categorie, tensiunea de alimentare care provine fie de la o baterie, fie de la un sistem de redresare este menŃinută constantă, iar tensiunea alternativă de formă dreptunghiulară are posibilitatea modificării şi a frecvenŃei. Dacă se doreşte să se modifice şi amplitudinea tensiunii de ieşire, atunci este nevoie să se modifice şi valoarea tensiunii de alimentare a invertorului. Invertoarele rezonante sunt acele instalaŃii care au drept circuit de sarcină un circuit oscilant serie sau paralel. În funcŃie de modul în care se comandă elementele active din structura invertorului, la bornele consumatorului se obŃine o tensiune sau un curent de formă sinusoidală. Ele sunt folosite la construcŃia surselor de alimentare pentru instalaŃiile de încălzire prin inducŃie. Invertorul, ca sistem de conversie a energiei, transformă tensiunea constantă într-o tensiune alternativă.
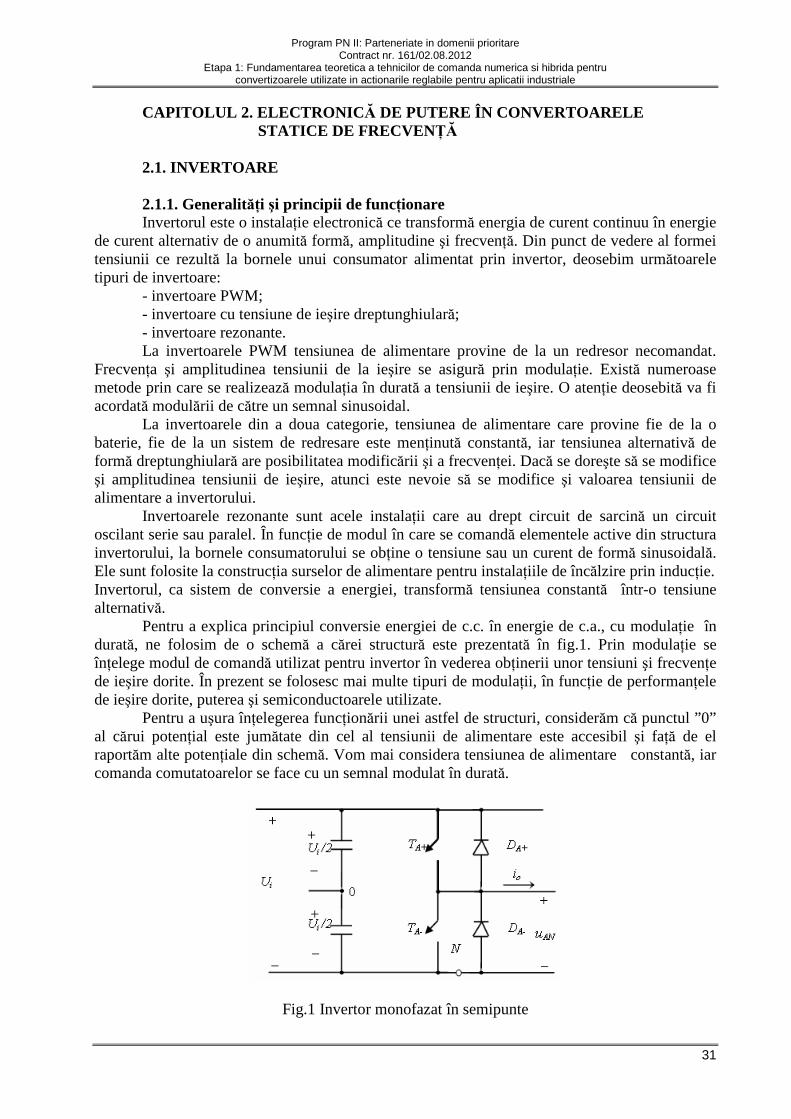
Pentru a explica principiul conversie energiei de c.c. în energie de c.a., cu modulaŃie în durată, ne folosim de o schemă a cărei structură este prezentată în fig.1. Prin modulaŃie se înŃelege modul de comandă utilizat pentru invertor în vederea obŃinerii unor tensiuni şi frecvenŃe de ieşire dorite. În prezent se folosesc mai multe tipuri de modulaŃii, în funcŃie de performanŃele de ieşire dorite, puterea şi semiconductoarele utilizate.
Pentru a uşura înŃelegerea funcŃionării unei astfel de structuri, considerăm că punctul ”0” al cărui potenŃial este jumătate din cel al tensiunii de alimentare este accesibil şi faŃă de el raportăm alte potenŃiale din schemă. Vom mai considera tensiunea de alimentare constantă, iar comanda comutatoarelor se face cu un semnal modulat în durată.
Fig.1 Invertor monofazat în semipunte
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
32
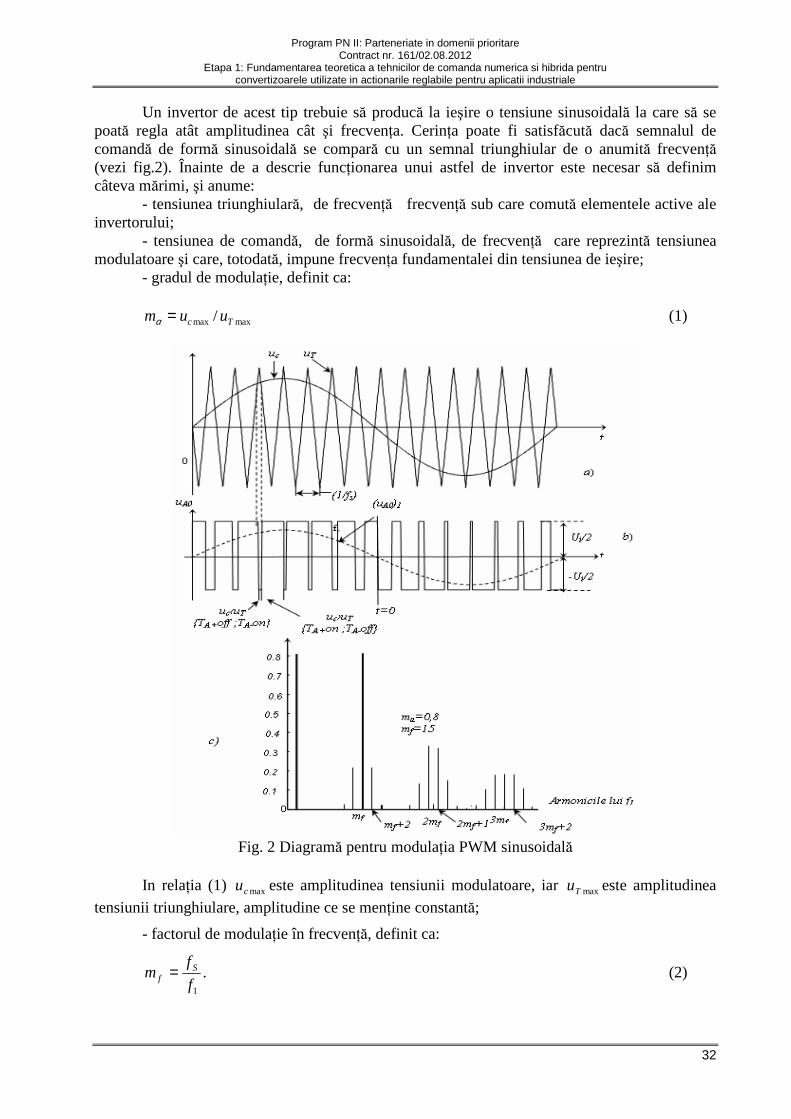
Un invertor de acest tip trebuie să producă la ieşire o tensiune sinusoidală la care să se poată regla atât amplitudinea cât şi frecvenŃa. CerinŃa poate fi satisfăcută dacă semnalul de comandă de formă sinusoidală se compară cu un semnal triunghiular de o anumită frecvenŃă (vezi fig.2). Înainte de a descrie funcŃionarea unui astfel de invertor este necesar să definim câteva mărimi, şi anume: - tensiunea triunghiulară, de frecvenŃă frecvenŃă sub care comută elementele active ale invertorului; - tensiunea de comandă, de formă sinusoidală, de frecvenŃă care reprezintă tensiunea modulatoare şi care, totodată, impune frecvenŃa fundamentalei din tensiunea de ieşire; - gradul de modulaŃie, definit ca:
maxmax / Tc uum =α (1)
Fig. 2 Diagramă pentru modulaŃia PWM sinusoidală
In relaŃia (1) maxcu este amplitudinea tensiunii modulatoare, iar maxTu este amplitudinea
tensiunii triunghiulare, amplitudine ce se menŃine constantă;
- factorul de modulaŃie în frecvenŃă, definit ca:
.1f
fm S
f = (2)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
33
Pentru invertorul din figura 1, comutatoarele −+ AA TT , (în realitate, tranzistoare de putere,
de comutaŃie) sunt controlate de semnale ce rezultă în urma comparării tensiunilor cu şi Tu ,
tensiunea de ieşire nedepinzând de sensul curentului 0i . Astfel:
+> ATc Tuu , este închis şi ,2
iAo
Uu = (3)
−< ATc Tuu , este închis şi .2
iAo
Uu −=
Cum cele două comutatoare nu sunt simultan închise, respectiv deschise, tensiunea
Aou fluctuează între 2/iU şi 2/iU− . Fundamentala tensiunii Aou este reprezentată în figura 2,
pentru 15=fm şi .8,0=am
Spectrul de armonici al tensiunii Aou este redat în figura 2c. Se desprind următoarele
aspecte:
a) amplitudinea componentei fundamentale, ,)( 1Aou este de am ori tensiunea .2/iU Acest
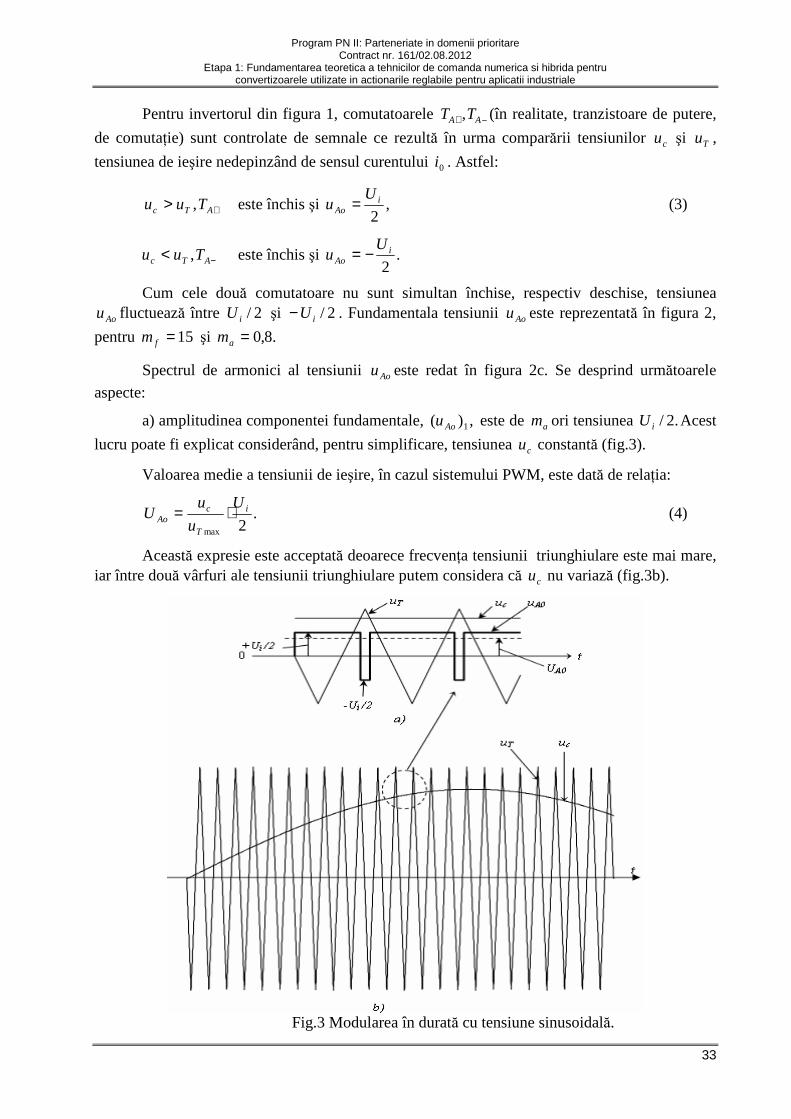
lucru poate fi explicat considerând, pentru simplificare, tensiunea cu constantă (fig.3).
Valoarea medie a tensiunii de ieşire, în cazul sistemului PWM, este dată de relaŃia:
.2max
i
T
cAo
U
u
uU ⋅= (4)
Această expresie este acceptată deoarece frecvenŃa tensiunii triunghiulare este mai mare, iar între două vârfuri ale tensiunii triunghiulare putem considera că cu nu variază (fig.3b).
Fig.3 Modularea în durată cu tensiune sinusoidală.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
34
Dacă tensiunea de comandă variază sinusoidal şi este de frecvenŃă ,1f frecvenŃă ce se doreşte a fi şi a fundamentalei tensiunii de ieşire, atunci:
,sin 1max tuu cc ω⋅= (5)
unde .maxmax Tc uu ≤
Din relaŃiile (4) şi (5) rezultă că fundamentala tensiunii de ieşire se poate scrie:
(,sin2
sin2
)( 11max
max1 t
Umt
U
u
uu ii
T
cAo ωω α== pentru ).1≤am (6)
Din relaŃia (6.6) rezultă că amplitudinea tensiunii de ieşire este:
.2
)( max1 ai
Ao mU
u = (pentru )1≤am (7)
b)Armonicele din spectrul tensiunii de ieşire apar ca benzi laterale faŃă de frecvenŃa de comutaŃie .sf Pentru 9≥fm (caz foarte răspândit), amplitudinile armonicelor devin practic
independente de .fm
c) fm trebuie să fie “impar”. Ca urmare, în spectrul tensiunii Aou avem armonici de ordin
“impar”, cele de ordin “par” sunt nule, coeficienŃii termenilor în “cos“ din dezvoltarea în serie Fourier fiind nuli. Alegerea frecvenŃei de comutare Sf se face astfel încât filtrarea tensiunii de
ieşire să se realizeze cât mai eficient. Este de dorit, din acest punct de vedere, ca Sf să fie cât mai
mare. Dar, pe măsură ce Sf creşte, cresc pierderile de putere în comutaŃie. În cele mai multe
aplicaŃii se alege frecvenŃa Sf fie sub 6 kHz,fie peste 20 kHz, pentru a nu intra în spectrul
acustic. Pentru aplicaŃii ale invertoarelor în acŃionarea motoarelor de c.a. (50Hz) se alege ,9≤fm ceea ce corespunde unei frecvenŃe Sf de 2 kHz sau ,100=fm dacă 20≥Sf kHz. Ca o
valoare uzuală se adoptă .21=fm
Cu privire la alegerea lui 21=fm ca valoarea uzuală în proiectarea şi realizarea
sistemelor de comandă pentru invertoarele PWM, se impun enumerarea câtorva considerente ce rezultă din literatura de specialitate:
- dacă ,21<fm este de preferat sincronismul între semnalul rectangular şi cel sinusoidal,
astfel rezultând subarmonici, altele decât cele prezentate în figura 2c. La trecerea prin zero a celor două tensiuni cu şi ,Tu ele trebuie să fie de polaritate opusă;
- dacă ,21>fm nu există sincronism între cu şi ,Tu amplitudinile armonicelor de ordin
superior sunt neînsemnate în raport cu fundamentala;
- dacă ,1>am se instalează regimul de funcŃionare numit supramodulaŃie, Formele de
undă din figura 2 ne arată că în cazul când 1<am , amplitudinea fundamentalei nu poate fi
mărită oricât. Sunt, însă, situaŃii când se cere ca .1>am SupramodulaŃia creează o tensiune de
ieşire care conŃine mult mai multe armonici decât în cazul 1<am (fig.4). Armonicile cu
amplitudini dominante în sistemul de modulaŃie 1<am nu mai sunt dominante în
supramodulaŃie. Mai mult, în supramodulaŃie amplitudinea armonicii fundamentale nu mai depinde liniar de am .
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
35
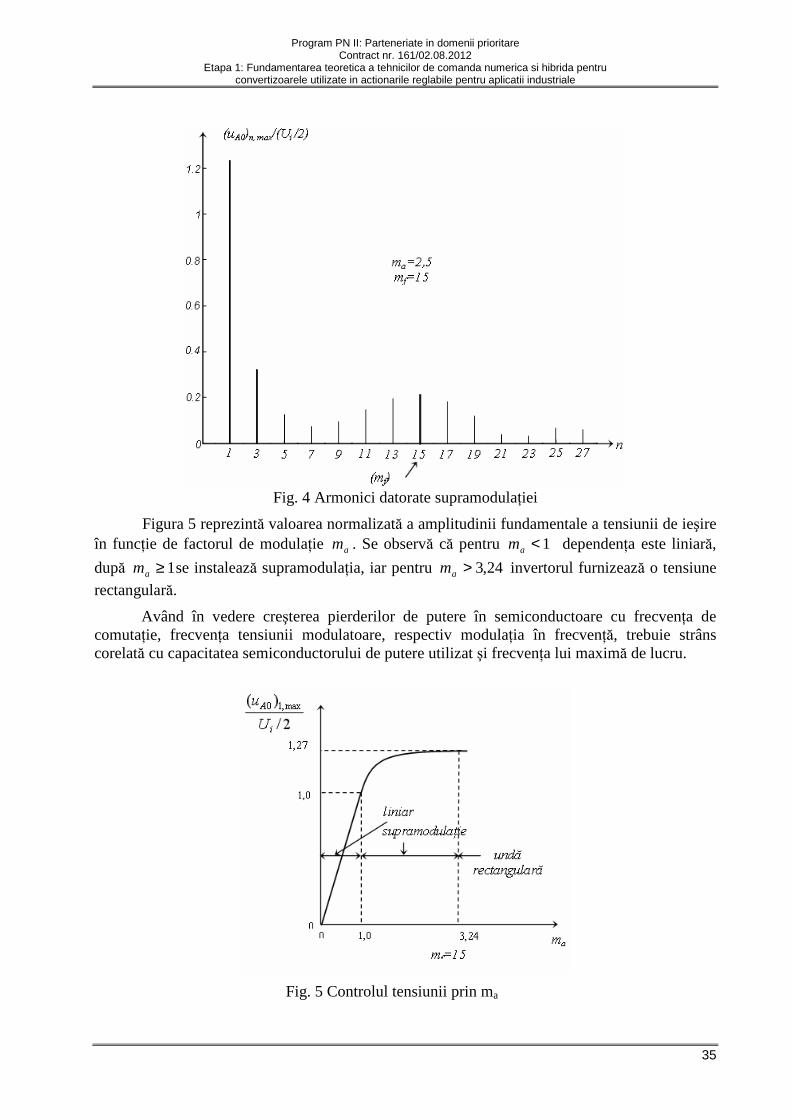
Fig. 4 Armonici datorate supramodulaŃiei
Figura 5 reprezintă valoarea normalizată a amplitudinii fundamentale a tensiunii de ieşire în funcŃie de factorul de modulaŃie am . Se observă că pentru 1<am dependenŃa este liniară,
după 1≥am se instalează supramodulaŃia, iar pentru 24,3>am invertorul furnizează o tensiune
rectangulară.
Având în vedere creşterea pierderilor de putere în semiconductoare cu frecvenŃa de comutaŃie, frecvenŃa tensiunii modulatoare, respectiv modulaŃia în frecvenŃă, trebuie strâns corelată cu capacitatea semiconductorului de putere utilizat şi frecvenŃa lui maximă de lucru.
Fig. 5 Controlul tensiunii prin ma
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
36
2.1.2. Tipuri de Invertoare
2.1.2.1. Invertoare de tensiune şi curent realizate cu comutatoare statice
Sunt în prezent cele mai răspândite invertoare. Până la puteri de ordinul sutelor de KW se utilizează IGBT-uri, BJT-uri şi MOSFET-uri, însoŃite după caz de diode antiparalel rapide. Pentru puteri mai mari se utilizează tiristoare GTO. Schemele de convertoare frecvent utilizate sunt: - invertoare monofazate în semipunte; - invertoare monofazate în punte; - invertoare trifazate.
Schemele sunt completate cu circuite de protecŃie adecvate la supratensiuni şi supracurenŃi, precum şi cu circuite de comandă, individualizate pentru fiecare tip de comutator static utilizat.
Invertoarele de curent şi de tensiune diferă ca schemă şi alimentare în funcŃie de parametrul de ieşire dorit: tensiune sau curent.
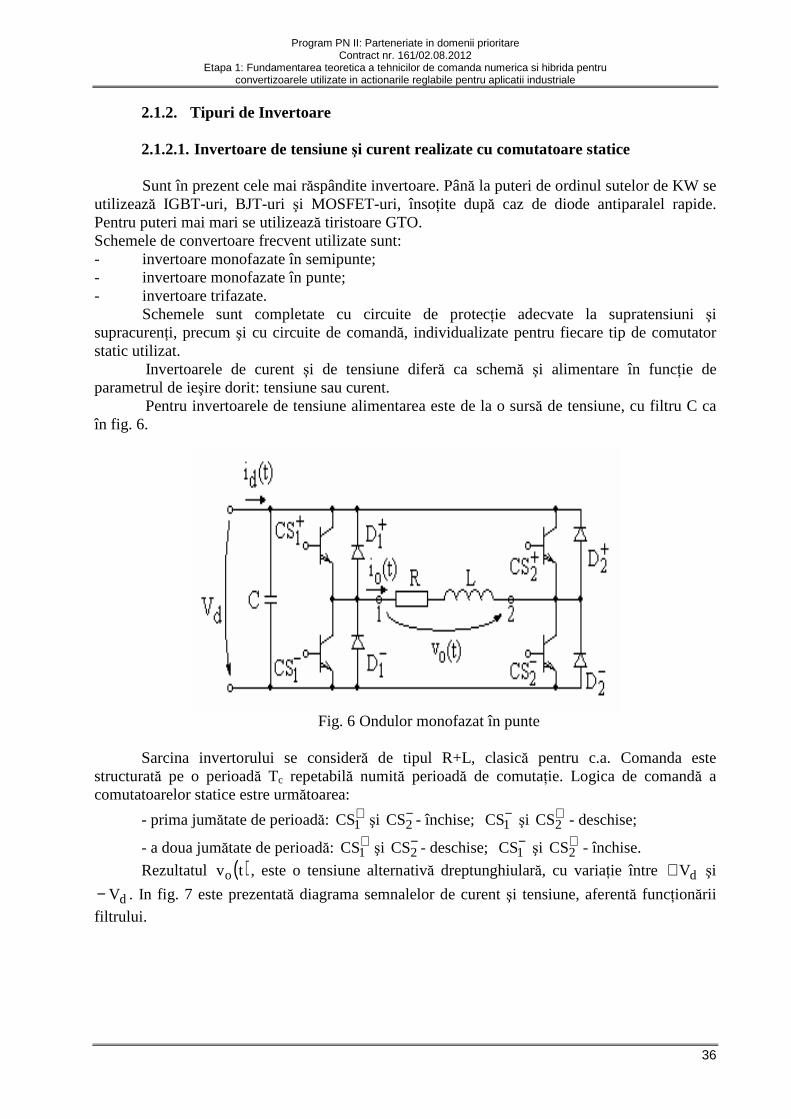
Pentru invertoarele de tensiune alimentarea este de la o sursă de tensiune, cu filtru C ca în fig. 6.
Fig. 6 Ondulor monofazat în punte Sarcina invertorului se consideră de tipul R+L, clasică pentru c.a. Comanda este
structurată pe o perioadă Tc repetabilă numită perioadă de comutaŃie. Logica de comandă a comutatoarelor statice estre următoarea:
- prima jumătate de perioadă: +1CS şi −
2CS - închise; −1CS şi +
2CS - deschise;
- a doua jumătate de perioadă: +1CS şi −
2CS - deschise; −1CS şi +
2CS - închise.
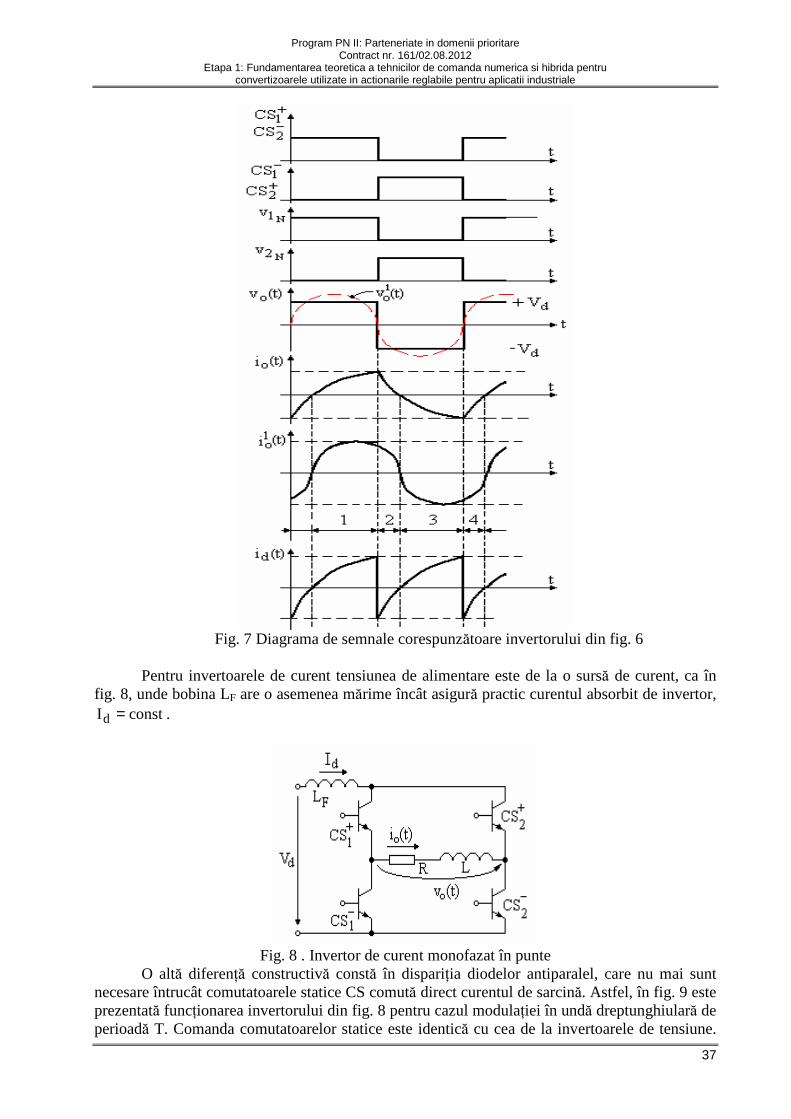
Rezultatul ( )tvo , este o tensiune alternativă dreptunghiulară, cu variaŃie între dV+ şi
dV− . In fig. 7 este prezentată diagrama semnalelor de curent şi tensiune, aferentă funcŃionării
filtrului.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
37
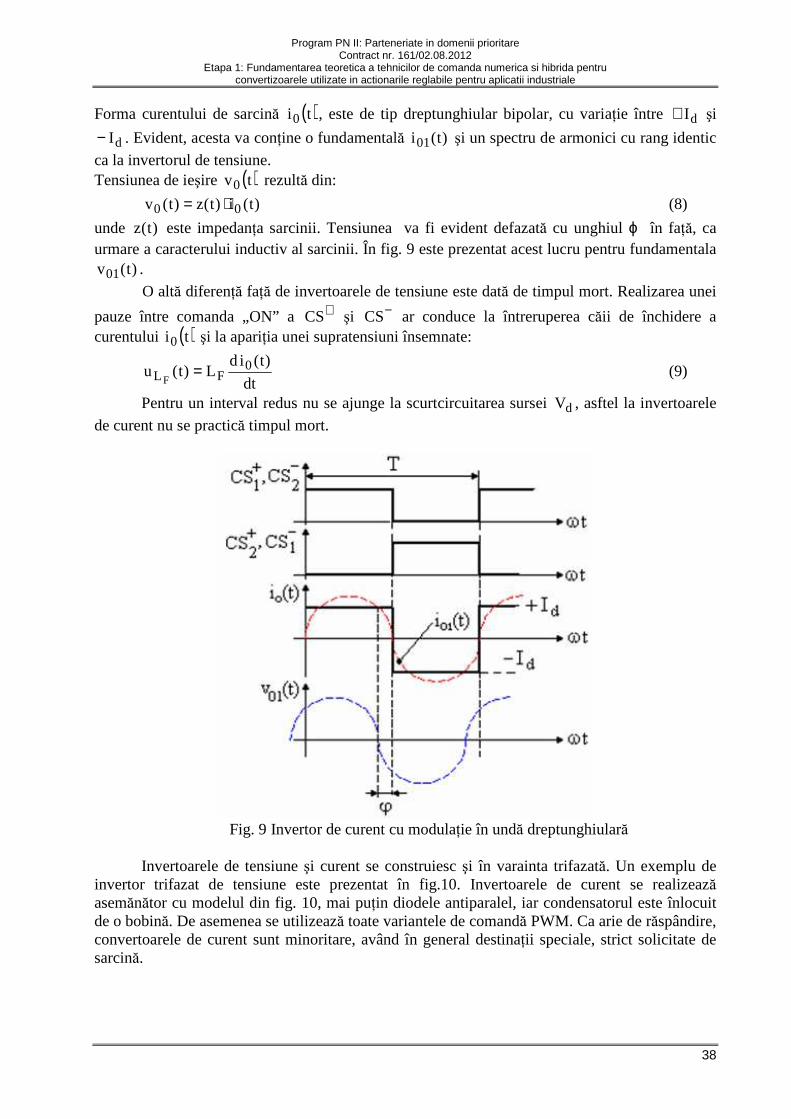
Fig. 7 Diagrama de semnale corespunzătoare invertorului din fig. 6 Pentru invertoarele de curent tensiunea de alimentare este de la o sursă de curent, ca în
fig. 8, unde bobina LF are o asemenea mărime încât asigură practic curentul absorbit de invertor, constId = .
Fig. 8 . Invertor de curent monofazat în punte O altă diferenŃă constructivă constă în dispariŃia diodelor antiparalel, care nu mai sunt
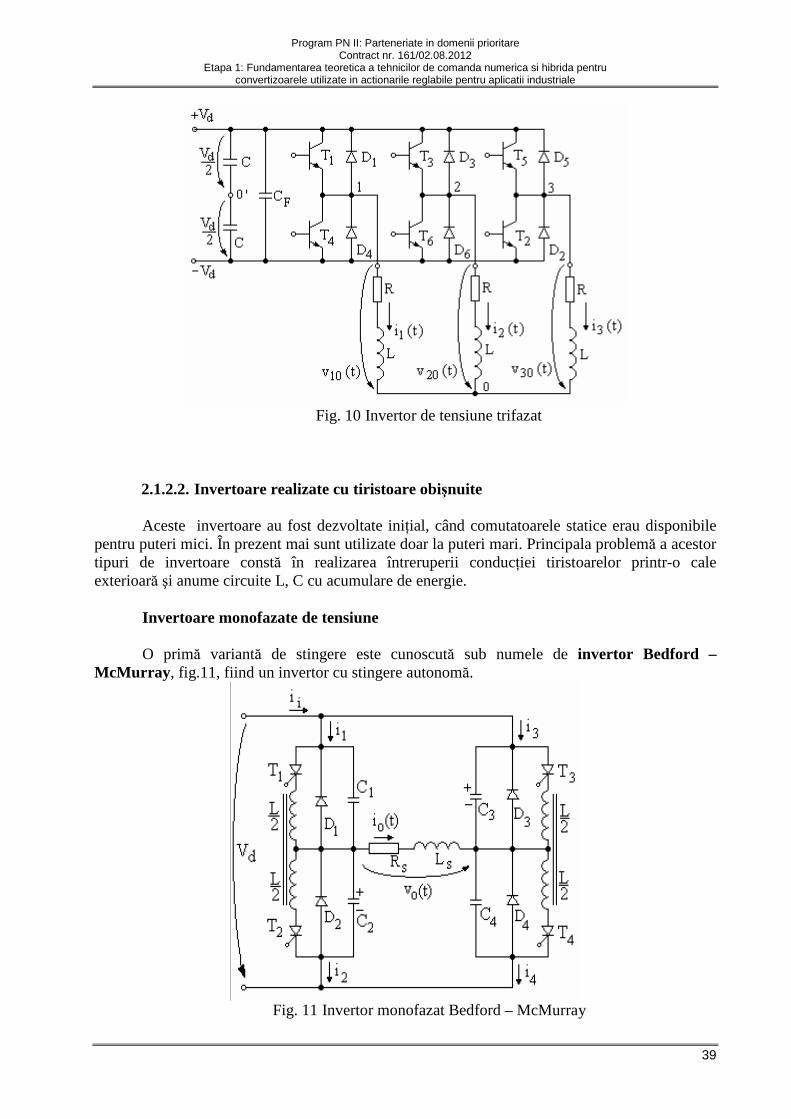
necesare întrucât comutatoarele statice CS comută direct curentul de sarcină. Astfel, în fig. 9 este prezentată funcŃionarea invertorului din fig. 8 pentru cazul modulaŃiei în undă dreptunghiulară de perioadă T. Comanda comutatoarelor statice este identică cu cea de la invertoarele de tensiune.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
38
Forma curentului de sarcină ( )ti 0 , este de tip dreptunghiular bipolar, cu variaŃie între dI+ şi
dI− . Evident, acesta va conŃine o fundamentală )t(i 01 şi un spectru de armonici cu rang identic
ca la invertorul de tensiune. Tensiunea de ieşire ( )tv0 rezultă din:
)t(i)t(z)t(v 00 ⋅= (8)
unde )t(z este impedanŃa sarcinii. Tensiunea va fi evident defazată cu unghiul ϕ în faŃă, ca urmare a caracterului inductiv al sarcinii. În fig. 9 este prezentat acest lucru pentru fundamentala
)t(v01 .
O altă diferenŃă faŃă de invertoarele de tensiune este dată de timpul mort. Realizarea unei
pauze între comanda „ON” a +CS şi −CS ar conduce la întreruperea căii de închidere a curentului ( )ti 0 şi la apariŃia unei supratensiuni însemnate:
dt
)t(idL)t(u 0
FL F= (9)
Pentru un interval redus nu se ajunge la scurtcircuitarea sursei dV , asftel la invertoarele
de curent nu se practică timpul mort.
Fig. 9 Invertor de curent cu modulaŃie în undă dreptunghiulară Invertoarele de tensiune şi curent se construiesc şi în varainta trifazată. Un exemplu de
invertor trifazat de tensiune este prezentat în fig.10. Invertoarele de curent se realizează asemănător cu modelul din fig. 10, mai puŃin diodele antiparalel, iar condensatorul este înlocuit de o bobină. De asemenea se utilizează toate variantele de comandă PWM. Ca arie de răspândire, convertoarele de curent sunt minoritare, având în general destinaŃii speciale, strict solicitate de sarcină.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
39
Fig. 10 Invertor de tensiune trifazat 2.1.2.2. Invertoare realizate cu tiristoare obişnuite
Aceste invertoare au fost dezvoltate iniŃial, când comutatoarele statice erau disponibile
pentru puteri mici. În prezent mai sunt utilizate doar la puteri mari. Principala problemă a acestor tipuri de invertoare constă în realizarea întreruperii conducŃiei tiristoarelor printr-o cale exterioară şi anume circuite L, C cu acumulare de energie.
Invertoare monofazate de tensiune O primă variantă de stingere este cunoscută sub numele de invertor Bedford –
McMurray , fig.11, fiind un invertor cu stingere autonomă.
Fig. 11 Invertor monofazat Bedford – McMurray
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
40
Circuitele de stingere sunt realizate din semibobinele cuplate magnetic 2L şi capacităŃile
41 C...,C , identice ca valoare. Se consideră ca în fig.12 că invertorul este comandat cu undă dreptunghiulară. Sarcina Z este de tip R+L, ceea ce face ca variaŃia curentului de sarcină )t(i 0 să fie de
forma din fig.12. Pe intervalul [0, t2] sunt comandate tiristoarele T1 şi T4. Pe primul interval [0, t1], 0)t(i 0 < , conducŃia se închide prin diodele D1 şi D4.
Fig. 12 Formele de undă pentru invertorul Bedford – McMurray Pe intervalul [t1, t2], T1 şi T4 intră în conducŃie. Pe întreg intervalul [0, t2], condensatoarele C1 şi C4, având practic tensiune nulă la borne, sunt descărcate. În acelaşi timp, condensatoarele C3 şi C2 sunt încărcate, cu polaritatea din desen, la valorile:
dCC Vuu32
≈= (10)
În momentul t2, când primesc comanda de intrarea în conducŃie T2 şi T3, condensatoarele C3 şi C2 se descarcă rapid prin tiristoare şi semibobinele 2L . Ca urmare a cuplajului magnetic dintre semibobine, în anozii tiristoarelor T1 şi T4 se aplică tensiunile de inducŃie mutuală negative din semibobinele 2L , forŃând ieşirea din conducŃie a acestora. În continuare, conducŃia şi blocarea se produce asemănător, inversându-se rolul condensatoarelor şi tiristoarelor.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
41
Invertorul poate fi folosit şi cu regimurile de comandă PWM, cu precauŃia de frecvenŃă de comutare, care să permită regimurile tranzitorii de încărcare şi descărcare a capacităŃilor. O a doua variantă de stingere, fig.13, este cunoscută sub numele de invertor McMurray , fiind un invertor cu stingere independentă.
Fig. 13 Invertorul McMurray
Se recunoaşte imediat invertorul monofazat în punte format din tiristoarele T1,…, T4, diodele D1, …, D4. Circuitele acumulatoare de energie L-C sunt conectate pentru stingerea prin tiristoarele auxiliare
41 ii T,...,T , de putere mult mai mică decât cele ale invertorului.
Schema este mai avantajoasă decât cea a invertorului Bedford – McMurray ca urmare a faptului că prin tiristoarele principale circulă numai curentul de sarcină, curentul de comutaŃie nu depinde de sarcină, iar randamentul conversiei este superior ca urmare a circuitului de închidere a curenŃilor de comutaŃie. Schema poate să funcŃioneze şi la frecvenŃe mari, până la 5 KHz, precauŃiile fiind aceleaşi ca mai sus. Invertoare trifazate de tensiune
Pentru invertoarele trifazate de tensiune se utilizează variantele monofazate cu stingere autonomă sau independentă, cu adaptările necesare funcŃionării trifazate. Pentru invertoarele cu stingere independentă există mai multe variante: • Cu circuit de blocare separat pe fiecare fază şi condensator unic Această schemă provine de la invertorul monofazat McMurray, fig. 13, prin adăugarea celui de al treilea braŃ, identic cu primele două, pentru asigurarea funcŃionării trifazate. În principiu, funcŃionarea invertorului şi proprietăŃile sunt cele ale invertorului McMurray. • Cu circuit de blocare separat şi condensator divizat
In fig.14 este prezentat numai un braŃ, corespunzător fazei A de ieşire. Celelalte braŃe, pentru fazele B şi C sunt identice. FuncŃionarea invertorului este asemănătoare cu cea a invertorului McMurray. DiferenŃa constă în faptul că există câte un condensator separat pentru blocarea conducŃiei fiecărui tiristor principal, C2, pentru T1, C1 pentru T2.
Fig. 14 Invertor cu circuit de blocare separat şi condensator divizat
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
42
• Cu circuit de blocare şi condensator unic, fig. 15. Condensatoarele C0 au rolul de a crea punctul median 0 al sursei dV . Este deci necesar ca:
CC0 >> (11)
Tiristoarele auxiliare 61 ii T,...,T au rolul de a conecta sursa de blocare pe tiristoarele
principale 61 T,...,T . Varianta păstrează toate proprietăŃile invertorului McMurray.
Fig. 15 Invertor de tensiune cu circuit de blocare şi condensator unic
Stingerea autonomă se realizează de asemenea în mai multe variante: •••• Schema cu condensator de blocare pe fiecare fază derivă din cea a invertorului
Bedford – McMurray, în sensul că se completează schema invertorului monofazat din fig.11 cu un al treilea braŃ identic pentru generarea fazei C. FuncŃionarea este asemănătoare, cu diferenŃa generării unei comenzi trifazate, de tip undă dreptunghiulară sau PWM.
•••• Schema cu condensator de blocare între faze este prezentată în fig.16. Dezavantajul principal al schemei constă în faptul că inductivităŃile circuitelor de
încărcare ale condensatoarelor, 61 L,...,L , sunt parcurse de curentul de sarcină, deci vor avea o
dimensiune importantă, iar încărcarea condensatoarelor va fi influenŃată de curentul de sarcină. Asemănător se realizează şi invertoare de curent cu stingere autonomă.
Fig. 16 Invertor cu condensator de blocare între faze
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
43
2.2. CIRCUITE DRIVER PENTRU INVERTOARE Comanda tranzistoarelor de putere din structura invertoarelor este realizată cu ajutorul unor module specializate numite drivere. Acestea primesc semnale logice de putere mică de la modulele de comandă cu ieşire PWM, şi realizează izolarea galvanică precum şi adaptarea în putere a acestor comenzi necesare comutaŃiei tranzistoarelor de putere. În fig. 1 este prezentată schema bloc de comandă a unui invertor PWM trifazat. Topologia de forŃă a invertoarelor PWM este realizată cu module integrate specializate de putere. În figura de mai jos s-au ales spre exemplificare circuitele de tip SKM200GB122D (200A, 1200V) fabricate de firma Semikron.
Fig. 1 Schema bloc de comandă a unui invertor PWM trifazat Fiecare modul integrează un braŃ de punte cu două tranzistoare IGBT şi diode în antiparalel. Tensiunea Ud pentru alimentarea invertorului PWM este furnizată de o sursă de tensiune continuă realizată cu ajutorul unui redresor trifazat cu diode prevăzut cu un filtru capacitiv la ieşire. Sursa include şi un circuit de frânare (Rfr, Tfr) cu rol de a disipa energia vehiculată în sens invers de invertor atunci când motorul electric funcŃionează în regim de frânare.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
44
Pentru comanda tranzistoarelor IGBT sunt utilizate scheme care includ integrate sau module specializate MGD (MOS Gate Drivers). În varianta invertorului din exemplul ales se pot utiliza driver-ele integrate HCPL 316J ale firmei Hewllet Packard (HP) sau modulele de comandă SKHI22A fabricate de firma Semikron. Aceste drivere integrate prezintă multiple funcŃii dintre care amintim funcŃiile de protecŃie şi funcŃia de separare galvanică prin intermediul unor optocuploarelor rapide. Semnalele logice pentru comanda IGBT-urilor din topologia invertorului sunt furnizate de un modulator PWM dedicat comenzii invertoarelor. Modulatorul generează trei perechi de semnalele PWM complementare cu timp mort corespunzătoare celor trei braŃe din puntea trifazată. Invertorul poate fi utilizat şi în sisteme de acŃionare electrică controlate numeric cu ajutorul unor microsisteme dedicate (microcontrolere, procesoare numerice de tip DSP). Acestea sunt prevăzute cu propriile lor modulatoare PWM. Deoarece tranzistoarele IGBT sunt de putere mare, între ieşirea integratului driver-ului şi grila MOS a semiconductorului se foloseşte un etaj de amplificare care poate susŃine impulsuri de curent importante pentru încărcarea şi descărcarea rapidă a capacităŃii grilei. Etajul este realizat cu o pereche de tranzistoare bipolare complementare care pot prelua curenŃi de colector de până la 15 A. Tranzistorul bipolar se deschide atunci când la ieşirea integratului specializat apare un potenŃial ridicat. În acest fel va lua naştere un puls de curent a cărui amplitudine este limitată de o rezistenŃă. Sarcinile electrice transportate de acest curent vor încărca rapid capacitatea de grilă a IGBT-ului cu o tensiune pozitivă şi îl va deschide. Cu cât amplitudinea pulsului de curent va fi mai mare cu atât timpul de intrare în conducŃie a IGBT-ului va fi mai scurt. Blocarea IGBT-ului este iniŃiată atunci când semnalul de ieşire coboară spre valori negative. Astfel, este adus în conducŃie tranzistorul bipolar complementar care va descărca rapid sarcinile acumulate în capacitatea de grilă, blocând IGBT-ul. Pentru siguranŃa funcŃionării invertorului se foloseşte un bloc specializat de protecŃie şi de tratare a defectului. Acest bloc are rolul de a monitoriza curentul din circuitul intermediar de c.c., de a activa pe cale optică protecŃia dacă valoarea curentului depăşeşte un anumit prag (protecŃia la supracurent), de a prelua şi memora situaŃiile de defect, precum şi de a bloca semnalele de comandă a IGBT-urilor atât timp cât circuitul de memorare reŃine defectul. Când este detectat un supracurent prin IGBT se declanşează o secvenŃă de avarie prin care tranzistorul de putere este blocat mai lent pentru a se evita supratensiuni mari de comutaŃie. Simultan va fi transmis un semnal de defect către un integrat specializat şi în acelaşi timp va fi alertată structura ierarhic superioară de existenŃa unui defect printr-un semnal logic FAULT. De asemenea există un circuit de supraveghere watch dog privind scăderea tensiunii de alimentare. Pe durata blocării voite a IGBT-ului, circuitul de detecŃie al defectului este dezactivat pentru a preveni detecŃia unor false situaŃii de avarie. 2.3. Filtre 2.3.1. GeneralităŃi
Considerăm că sarcina este cea ilustrată în fig. 1, unde 0e este o tensiune sinusoidală de
frecvenŃă 1f , atunci curentul de ieşire 0i va fi tot sinusoidal, defazat cu ϕ faŃă de tensiune:
).sin(2 100 ϕ−ω= tIi (1)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
45
Fig.1 Filtre utilizate în structura invertorului
Pe partea de alimentare, filtrul va reŃine toate componentele de înaltă frecvenŃă ale curentului de intrare, iar )(* tii va rămâne doar cu componentele de joasă frecvenŃă, ceea ce ne
permite să scriem:
),sin(2sin2)()()(* 101000 ϕ−ω⋅ω=⋅=⋅ tItUtitutiU ii (2)
),2cos(2
)2cos(cos)(*
12
10000
ϕ−ω−=
=ϕ−ω−ϕ=
tII
tU
IU
U
IUti
ii
iii
(3)
unde:
ϕ= cos00
ii U
IUI , (4)
şi
.2
1 002
ii U
IUI = (5)
EcuaŃia (3) arată că în expresia curentului absorbit de la redresor găsim două componente, şi anume:
- o componentă continuă, care este responsabilă de transferul puterii de la redresor la consumator; - o componentă alternativă, cu frecvenŃa de două ori mai mare decât frecvenŃa fundamentalei. În realitate, ipoteza simplificatoare că tensiunea dată de redresor este constantă, nu este respectată. Tensiunea continuă de alimentare a invertorului se obŃine prin redresare şi filtrare cu o capacitate de valoare mare, care nu poate depăşi o anumită limită, deoarece poate pune în pericol diodele redresoare la conectare.
2.3.2. Convertoare de frecvenŃă indirecte Convertoarele de frecvenŃă indirecte conŃin o legătură intermediară în tensiune continuă
între ieşirea unui convertor pe partea de alimentare cu intrarea unui convertor (care funcŃionează, de regulă, ca invertor) pe partea sarcinii. Atât în configuraŃia cu circuit intermediar de curent continuu de curent, cât şi cea circuit intermediar de tensiune continuă, legătura intermediară conŃine un filtru care decuplează curentul sau tensiunea reŃelei de alimentare de reŃeaua sarcinii.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
46
Din această cauză cele două frecvenŃe fundamentale (cea a sursei şi cea dinspre sarcină) sunt mutual decuplate. Dar un filtru ideal nu există, astfel încât există întotdeuna un anumit grad de cuplare. Drept consecinŃă, componente de curent, asociate sarcinii, sunt prezente în circuitul intermediar şi componente ale acestora sunt prezente şi pe partea de alimentare. Aceste componente sunt subarmonice şi interarmonice în raport cu frecvenŃa sistemului de alimentare, aşa cum se va prezenta în continuare.
• Invertor comandat de curentul de sarcină Având în vedere tehnica de comutare a semiconductoarelor, aceste convertoare sunt
clasificate ca fiind cu comutare indirectă în frecvenŃă. Un convertor de frecvenŃă este alcătuit din două punŃi trifazate P1 şi P2 şi o legătură intermediară în curent continuu, cu bobină (de inductanŃă Ld – figura 2). Una dintre punŃi lucrează în regim de redresor, iar cealaltă în regim de invertor, funcŃiile lor fiind interschimbabile.
Fig. 2 Convertor de frecvenŃă indirect cu invertor comandat de sarcină
PrezenŃa celor două punŃi redresoare alimentate de la două sisteme cu frecvenŃe diferite duce la apariŃia, în legătura de curent continuu a unui curent modulat de cele două frecvenŃe: f1 şi f2. Fiecare dintre convertoare va crea, pe legătura de curent continuu, componente necaracteristice care vor duce la apariŃia unor armonici necaracteristice în zona tensiunii alternative, atât pe partea sarcinii, cât şi în reŃeaua de alimentare.
Componentele pe legătura de curent continuu: pentru sistemul 1: 111 kfpfd = , ,...2,1,0=k
pentru sistemul 2: 222 nfpfd = , ,...2,1,0=n
unde: - p1, p2 = numărul pulsurilor convertorului P1, respectiv P2; - f1 = frecvenŃa fundamentală a sistemului 1 (reŃeaua de alimentare) [Hz]; - f2 = frecvenŃa fundamentală a sistemului 2 (sarcina) [Hz]. FuncŃionarea convertorului P1 va determina armonici caracteristice de curent în reŃeaua
de alimentare care au următoarele frecvenŃe:
11, )1( fkpf charhh ±= , ,...2,1=k
În plus, vor apărea componente asociate cu componentele produse de P2 şi în legătura de curent continuu. Un set complet al frecvenŃelor componentelor curentului din reŃeaua electrică de alimentare poate fi scris astfel : frecvenŃele curentului din reŃeaua de alimentare (sistem 1) = 2211, )1( nfpfkpf charhh ±±= unde:
,...2,1,0=k şi ,...2,1,0=n Considerând că n = 0, pentru k = 0, 1, 2,… vom obŃine rangul armonicilor pentru o configuraŃie dată a convertorului P1. Componentele determinate pentru k = const şi n ≠ 0 sunt benzile adiacente frecvenŃelor caracteristice ale invertorului. Fiecare armonică caracteristică, de exemplu pentru o punte cu şase pulsuri cu armonicile de rang n1 = 1, 5, 7,…. are propriile sale benzi laterale, aşa cum este ilustrat, în figura 3, pentru armonica a 5-a.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
47
Prima pereche de interarmonici, care apare în vecinătatea componentei fundamentale, adică cele cu frecvenŃele f1 ± p2 f2 , are amplitudinea cea mai mare. InductanŃa bobinei de pe legătura de curent continuu are o influenŃă semnificativă asupra nivelului interamonicilor. Un exemplu de sistem de acŃionare având o sursă invertor cu circuit intermediar de curent continuu este sistemul de recuperare statică a puterii de alunecare.
Fig. 3 Benzile laterale adiacente armonicii caracteristice 5 pentru convertoare cu 6 pulsuri P1 şi P2
• Invertoare alimentate cu tensiune Pentru invertoarele alimentate cu tensiune (fig.4) sunt predominante, de asemenea,
armonicile caracteristice ale convertorului P1. Benzile laterale, cu frecvenŃele determinate de numărul de pulsuri ale convertorului P2, apar în vecinătatea frecvenŃelor caracteristice ale lui P1, adică:
2211 )1( nfpfkp ±± pentru ,...2,1,0=k şi ,...2,1,0=n În majoritatea cazurilor, armonicile necaracteristice reprezintă componente foarte mici
ale curentului de alimentare. Determinarea numerică a armonicilor curentului de alimentare şi a valorilor interarmonicilor cere o analiză precisă a frecvenŃei convertorului incluzând şi sarcina sau informaŃii de la producător.
Anumite convertoare conŃin un circuit de intrare cu redresor controlat funcŃionând la o frecvenŃă de comutare care nu este un întreg al frecvenŃei de alimentare. Această frecvenŃă poate fi constantă sau variabilă, depinzând de modul în care a fost proiectat controlul convertorului. Convertoarele cu circuit intermediar de tensiune continuă cu modulare PWM a redresorului de intrare produc componente de curent cu frecvenŃa de comutare a elementelor cu semiconductoare şi armonici, care nu sunt sincronizate cu frecvenŃa de alimentare. În mod normal, ele sunt situate în gama de la câteva sute de Hz până la câteva zeci de kHz.
Fig. 4 Diagrama schematică a convertorului de frecvenŃă cu circuit intermediar de tensiune continuă
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
48
2.3.3. Filtre EMC Convertoarele cu tiristoare genereazã tensiuni de zgomot ca rezultat al variatiilor bruşte
de curent în dispozitivele semiconductoare. Semnalele au o putere redusã şi se situeazã în gama de frecvenŃe de la 150kHz la 30MHz.
Aceste semnale pot radia direct de la redresor şi invertor sau se pot transmite prin cablurile care intrã sau ies în/din convertor. Astfel poate fi deranjatã functionarea echipamentelor de radio şi telecomunicaŃii. Punând dulapul covertizorului la pãmânt, radiaŃiile directe pot fi evitate, dar semnalele transmise prin cabluri necesitã un filtru special. Filtrul auxiliar de deparazitare radio limiteazã tensiunea de zgomot la bornele de intrare ale convertorului la nivelul prevãzut de clasa "N" conform standardului VDE0875.
AplicaŃiile în care este necesar sã se asigura limita de zgomot clasa "N": sistemele de telecomunicaŃii sau dacã echipamentul de redresare este instalat în zone locuite, duc şi la o creştere a dimensiunii dulapului.
2.4. TRADUCTOARE 2.4.1. GeneralităŃi, performanŃe, clasificare Conducerea unui proces presupune informaŃii cât mai corecte şi cât mai complete asupra parametrilor mărimilor fizice care caracterizează acel proces.
Traductoarele sunt elemente din structura sistemelor automate care au rolul de a măsura valorile parametrului reglat şi de a converti acest parametru (mărime) într-o mărime fizică ce este compatibilă cu mărimea de intrare în elementul următor al sistemului. Traductoarele se compun din elementul sensibil şi elementul traductor, conform figurii 1.
Fig. 1 Structura unui traductor
Elementul sensibil efectuează operaŃia de măsurare propriu-zisă, iar elementul traductor asigură transformarea semnalului într-un alt semnal, în general electric sau pneumatic, unificat, semnal ce e pretează pentru transmiterea la distanŃă.
Traductoarele pot fi definite ca dispozitive care realizează conversia unor mărimi fizice (temperatură, deplasare, presiune, forŃă etc.) în alte mărimi fizice, cel mai adesea electrice, sau a unor mărimi electrice în alte mărimi electrice, în scopul măsurării parametrilor acelor mărimi şi informării, respectiv luării unor decizii în consecinŃă.
Traductoarele, ca şi elementele de execuŃie, sunt unităŃi constructive distincte dispuse pe
cele două căi de interconectare între procesul propriu-zis şi elementele sistemului de reglare automată (fig.2).
ES ET i(t) e(t)
M
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
49
Fig.2 Schema de principiu a unui sistem de reglare convenŃională
PerformanŃele traductoarelor pot fi apreciate pe baza următoarelor caracteristici: • Sensibilitatea reprezintă limita raportului dintre variaŃia infinit mică a mărimii de ieşire şi cea de intrare, când ultima tinde spre zero, adică:
(1)
Este necesar ca această sensibilitate să fie constantă pe tot domeniul de măsură, adică
elementul să fie liniar, în caz contrar sensibilitatea putându-se defini în jurul oricărui punct de funcŃionare. În mod normal, elementele de măsurat prezintă un anumit prag de sensibilitate, adică o valoare limită ∆i sub care nu mai apare o mărime măsurabilă la ieşire. • Precizia se defineşte ca valoarea relativă a erorii exprimată în procente:
%e
eP
∆= (2)
obişnuit elementele de măsurat din sistemele automate având clase de precizie de 0,2 ÷ 1,5 %, fiind necesar să fie cu cel puŃin un ordin de mărime superioară preciziei reglajului în ansamblu. • Liniaritatea se referă la aspectul caracteristicii statice a elementelor şi deci, această caracteristică nu trebuie să prezinte curburi şi histerezis pe tot domeniul de variaŃie al mărimilor de intrare şi ieşire. • Comportarea dinamică. Această caracteristică se referă la capacitatea elementului de a reproduce cât mai exact şi fără întârziere variaŃiile mărimii măsurate. Se apreciază pe baza funcŃiei de transfer a elementului, adică pe baza constantelor de timp ce intervin sau, uneori pe baza benzii de trecere. • Reproductibilitate reprezintă proprietatea elementelor de a-şi menŃine neschimbate caracteristicile statice şi dinamice pe o perioadă cât mai lungă de timp, în anumite condiŃii de mediu admisibile. • Timpul de răspuns reprezintă intervalul de timp în care un semnal aplicat la intrare se va resimŃi la ieşirea elementului. Acest timp poate fi oricât de mic, dar niciodată nul, putând fi asimilat cu inerŃia. • Gradul de fineŃe se caracterizează prin cantitatea de energie absorbită de traductor din mediul de măsură, recomandându-se să fie cât mai mică pentru a nu influenŃa desfăşurarea procesului. Alegerea traductorului se va face în funcŃie de parametrul reglat, în funcŃie de mediul de măsură, în funcŃie de tipul semnalului: continuu, electric sau neelectric, discontinuu, ş.a.
Privite sub aspectul tipului de semnale, traductoarele pot fi analogice sau pot fi numerice.
i
ei ∆
∆→∆ 0
lim
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
50
Clasificarea traductoarelor este o problemă destul de dificilă, deoarece varietatea acestora este multiplă. Una din variantele de clasificare, în funcŃie de mărimea de intrare şi cea de ieşire, este prezentată schematic în figura 3.
Fig. 3 Clasificarea traductoarelor funcŃie de mărimile de intrare şi ieşire Un alt mod de clasificare poate fi făcut în raport de mărimea de natură neelectrică pe cale
electrică. În acest caz vom avea: a) Traductoare pentru mărimi geometrice: rezistive, inductive, capacitive şi numerice de
deplasare; cu radiaŃii; de proximitate. b) Traductoare pentru mărimi cinematice: de viteză; de acceleraŃie; de şocuri şi vibraŃii;
giroscopice. c) Traductoare pentru mărimi mecanice: elastice (tracŃiune, compresie, îndoire, cuplu);
tensometrice rezistive; cu coardă vibrantă; magnetostrictive; de forŃă; de cuplu. d) Traductoare pentru mărimi tehnologice: presiune, debite, nivel, temperatură. e) Alte traductoare: integrate, etc.
2.4.2. Traductoare de curent În timpul celor 30 de ani de experienŃă, firma LEM a răspuns numeroaselor cereri specifice, realizând astfel o gamă largă de traductoare de curent izolate galvanic, ce au devenit standarde în domeniul măsurătorilor. Utilizatorul poate alege dintre numeroasele modele împărŃite în 4 grupe principale: - traductoare cu efect Hall în buclă deschisă (tip H) - traductoare cu efect Hall în buclă închisă (tip L) - traductoare în buclă închisă tip C - traductoare în buclă închisă tip IT.
Electric
FrecvenŃă
Fază
Curent
Tensiune
Traductor
Neelectric Parametrice Generator
Deplasare
Viteză
AcceleraŃie
Presiune
Nivel
Debit
Temperatură
Rezistive InducŃie
Piezoelectric
Termoelectric
pH-metric
Efect Hall
Inductiv Capacitive
Reostatic
Termorezistiv
Termometric
Tensometric
Electrolitice
Fotoemisiv
De înaltă
şi joasă
frecvenŃă
cu s, d, ε
variabil
i e
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
51
In tab. 1 se prezintă performanŃele tehnice ale traductoarelor de curent LEM. Tabel 1. Performante tehnice pentru traductoarele LEM Măsurare de curent tip H tip L tip C tip IT Domeniu de măsură 0-18000 A 0-15000 A 0-150 A 0-600 A Banda de frecvenŃe 0-25 KHz 0-200 KHz 0-250/500 KHz 0-100 KHz Precizie la 25°C ±1% ±0,5% ±0,1% 2 ppm Liniaritate ±0,5% ±0,1% ±0,05% 1 ppm Timp răspuns <3-7us <1 us 0,3 ... 0,4 us 0,3 us Temperatură lucru -25 ... +70°C -40 ... +85°C -25 ... +70°C -10 ... +50°C 2.4.3. NoŃiuni introductive asupra efectului HALL
Fig. 2. Principiul de funcŃionare în buclă deschisă
Efectul Hall este cauzat de forŃa Lorentz care acŃionează asupra purtătorilor de sarcină electrică mobili dintr-un conductor, atunci când acesta este supus unui câmp magnetic perpendicular pe direcŃia curentului. Presupunem o placă subŃire de material semiconductor traversată longitudinal de un curent de control IC. Fluxul magnetic B generează o forŃă Lorentz FL perpendicular pe direcŃia purtătorilor de sarcină mobili ce compun curentul. Aceasta provoacă o modificare a numărului de purtători de sarcină de pe ambele feŃe ale plăcuŃei, ceea ce provoacă o diferenŃă de potenŃial numită tensiune Hall, VH: VH = (K/d) ⋅ IC ⋅ B, (3) unde K = constanta Hall a materialului, iar d = grosimea plăcuŃei. 2.4.4. Traductoare de curent cu efect Hall în buclă deschisă InducŃia magnetică B este generată de curentul primar IP de măsurat şi este proporŃională cu el în zona liniară a ciclului de histerezis: B1 = K1 ⋅ IP, deci (4) VH = (K/d) ⋅ IC ⋅ IP, (5) unde IC este asigurat de o sursă de curent constant. În concluzie, se poate scrie: VH = K2 ⋅ IP (6)
Semnalul de ieşire este, în general, de 4V la IPN (curentul primar nominal).
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
52
Traductoarele tip H (HA, HY, HAK, HAL, HTA, HT) se impun prin consum mic, dimensiuni şi greutate reduse, rezistenŃa la suprasarcini de curent şi un preŃ relativ scăzut. Trebuie menŃionat că în cazul unor creşteri mari ale curentului poate apărea o eroare numită offset magnetic, care este maximă dacă circuitul magnetic a fost saturat. Printre aplicaŃiile tipice pot fi menŃionate: surse de alimentare în comutaŃie, surse de alimentare neîntreruptibile (UPS), comanda motoarelor de c.c., convertoare de frecvenŃă, aplicaŃii cu alimentare din baterie, aparate electrice, echipamente de sudură electrică. 2.4.5. Traductoare de curent cu efect Hall în buclă închisă
Fig. 3. Principiul de funcŃionare în buclă închisă
Aceste traductoare, numite şi cu flux zero, au un circuit de compensare integrat prin care performanŃele traductorului se îmbunătăŃesc. Traductoarele în buclă închisă furnizează un curent secundar IS (proporŃional cu VH), care acŃionează ca o reacŃie pentru compensarea inducŃiei create de curentul primar IP (BS = BP). Se poate scrie relaŃia: IS = (NP/NS) ⋅ IP (7) Deci curentul secundar, redus cu raportul spirelor, este mult mai mic decât curentul primar. Traductoarele tip L (LA, LTA, LC, LT) se caracterizează printr-o excelentă precizie, liniaritate foarte bună, derivă scăzută cu temperatura, timp de răspuns redus, bandă largă de frecvenŃe, nu introduc pierderi în circuitul de măsurat şi suportă depăşiri de curent fără a se deteriora. Principalele limitări sunt date de consumul de la sursa de alimentare şi preŃul mai mare decât echivalentele în tehnologie cu buclă deschisă. Curentul secundar de la ieşire poate fi transformat în tensiune printr-o rezistenŃă de măsură, RM. Valoarea acesteia trebuie aleasă între valorile indicate în catalog pentru a respecta puterea disipată în circuitul electronic (RMmin) şi a evita saturaŃia circuitului magnetic (RMmax). De menŃionat că majoritatea traductoarelor LEM pot fi alimentate cu o tensiune unipolară pentru măsurări de curenŃi unipolari. În acest caz trebuie precizat că tensiunea de alimentare este suma tensiunilor pozitivă şi negativă din catalog. De asemenea, rezistenŃa de măsură trebuie recalculată (dacă se depăşeşte valoarea 1/2 IP) pentru a nu se depăşi puterea disipată în amplificatorul final, iar în circuitul de măsură trebuie intercalate diode serie cu rezistenŃa de măsură. Pentru aplicaŃiile tipice, în afara celor prezentate la traductoarele în buclă deschisă, mai pot fi menŃionate: convertoare pentru servo-motoare în robotică, vehicule electrice.
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
53
CAPITOLUL 3. MODELE HIBRIDE APLICATE CONVERTOARELO R STATICE DE PUTERE Convertoarele statice de putere prin modul lor de funcŃionare pot fi privite din punct de vedre al modelării matematice ca fiind sisteme hibride, adică sisteme în timp continuu-discret. Cele mai importante blocuri funcŃionale din structura unui convertor static de putere sunt invertorul şi redresorul. In acest capitol sunt prezentate pentru acestea, modele hibride într-o aproximare acceptabilă în vederea studiului sistemelor de comandă aferente sistemelor de reglare cu viteză variabilă care folosesc convertoare statice de putere. MODEL HIBRID PENTRU INVERTORUL MONOFAZAT DE TENSIUN E
Considerăm schema invertorului monofazat de tensiune din fig.1. Pentru a obŃine un
model hibrid (discret-continuu), vom scrie ecuaŃiile următoare în care swAf şi swBf sunt funcŃii
de comutaŃie ale elementelor de execuŃie (tiristoare sau IGBT-uri). Aceste funcŃii de comutaŃie descriu comenzile PWM, eliberate de modulul de comandă.
swBdBn
swAdAn
fUu
fUu
=
= (1)
swBBswAAi fifii += (2)
−=−=
⇒
−==−=
)(
)(
swBswAsi
swBswAds
BAs
BnAns
ffii
ffuu
iii
uuu (3)
Fig. 1 Invertor monofazat de tensiune – schema electrică
∫
∫
=
+=
−=
T
Cd
d
CiL
T
dd
L
dttiC
u
iii
dttuuL
i
0
0
)(1
))((1
(4)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
54
dt
diLiRu s
ssss += (5)
Aplicând Transformata Laplace în c.i. nule ecuaŃiilor (1)–(5), se obŃine modelul operaŃinal din figura 2.
Fig. 2 Invertor monofazat de tensiune – schema operaŃională
MODEL HIBRID PE 3 AXE PENTRU UN INVERTOR TRIFAZAT DE TENSIUNE
EcuaŃiile de funcŃionare pentru invertorul din figura 3 sunt descrise mai jos.
swCdCn
swBdBn
swAdAn
fuu
fuu
fuu
===
(6)
swCCswBBswAAi fififii ++= (7)
NnCnCN
NnBnBN
NnAnAN
uuu
uuu
uuu
−=−=−=
(8)
cil iii += (9)
∫ −=T
dd
l dttuuL
i0
))((1
(10)
Fig. 3 Invertor trifazat de tensiune – schema electrică
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
55
Modelul operaŃinal este prezentat în figura 4.
Fig. 4 Invertor trifazat de tensiune – schema operaŃională
MODEL HIBRID PE 3 AXE PENTRU UN REDRESOR TRIFAZAT
Considerăm schema redresorului trifazat de tensiune model 3 axe ca în fig.5.
Fig. 5 Redresor trifazat de tensiune model 3 axe – schema electrică
EcuaŃiile de funcŃionare sunt descrise de relaŃiile (11)-(14), iar modelul operaŃional este
dat în fig. 6. swccswbbswaai fififii ++= (11)
NncNcn
NnbNbn
NnaNan
uuu
uuu
uuu
+=+=+=
(12)
3
cnbnanNn
uuuu
++= (13)
cnNncRLc
bnNnbRLb
anNnaRLa
uuuu
uuuu
uuuu
−+=−+=
−+= (14)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
56
Fig. 6 Redresor trifazat de tensiune model 3 axe – schema operaŃională
MODEL HIBRID PE 2 AXE PENTRU UN REDRESOR TRIFAZAT
Modelul hybrid pe 2 axe pentru un redresor trifazat este prezentat în fig. 7. Făcând notaŃiile din (15), ecuaŃiile de funcŃionare sunt date de relaŃiile (16)-(20).
swcswb
swcswa
ffm
ffm
−=−=
2
1 (15)
++−=+
++−=+
cmb
cma
idt
dLRuui
dt
dLR
idt
dLRuui
dt
dLR
)()(
)()(
22
11
(16)
Folosind faptul că bac iii −−= , în continuare obŃinem:
−−
−=
+
22
11
21
12)(3
m
m
b
a
uu
uu
i
i
dt
dLR (17)
bai imimi 21 += (18)
==
dm
dm
umu
umu
22
11 (19)
lid ii
dt
duC −= (20)
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
57
Fig. 7 Redresor trifazat de tensiune model 2 axe – schema electrică
Modelul operaŃinal este prezentat în fig. 8.
Fig. 8 Redresor trifazat de tensiune model 2 axe - schema operaŃională
Program PN II: Parteneriate in domenii prioritare Contract nr. 161/02.08.2012
Etapa 1: Fundamentarea teoretica a tehnicilor de comanda numerica si hibrida pentru convertizoarele utilizate in actionarile reglabile pentru aplicatii industriale
58
BIBLIOGRAFIE Horga V., Controlul vectorial al acŃionărilor electrice, documentaŃie disponibilă pe internet Muşuroi Sorin, Controlul acŃionărilor electrice, documentaŃie disponibilă pe internet Popescu Viorel, Electrinică de putere, documentaŃie disponibilă pe internet Roşu Emil, Invertoare, documentaŃie disponibilă pe internet Floricău Dan, Modele hibride aplicate convertoarelor statice de putere, documentaŃie disponibilă pe internet Chiver Olivian, Traductoare, documentaŃie disponibilă pe internet Albu Mihai, Invertorul PWM trifazat de tensiune, documentaŃie disponibilă pe internet LEM, documentaŃie de firmă Semikron, documentaŃie de firmă Hewllet Packard, documentaŃie de firmă