176
AACR & ROMATSA Ediţia 1.0 25-04-2000 NAVIGAŢIA AERIANĂ ROM.NAVIGAŢIE AERIANĂ 01. Ediţia : 1.0 Data : 25.04.2000 Statut : APROBAT Clasificare : Circulaţie limitată
| Date post: | 22-Oct-2015 |
| Category: |
Documents |
| Upload: | valerian-strat |
| View: | 172 times |
| Download: | 7 times |
AACR & ROMATSA
Ediţia 1.0 25-04-2000
NAVIGAŢIA AERIANĂ
ROM.NAVIGAŢIE AERIANĂ 01.
Ediţia : 1.0Data : 25.04.2000Statut : APROBATClasificare : Circulaţie limitată
AACR & ROMATSA
Editia 1.0 - ii - 25/04/2000
PAGINĂ LIBERĂ LASATĂ INTENŢIONAT
AACR & ROMATSA
Ediţia 1.0 iii 25/04/2000
PAGINĂ IDENTIFICARE DOCUMENT
DESCRIERE DOCUMENTTitlu Document
Navigaţie Aeriană.
NUMĂR DE REFERINŢĂ ROMATSA : ROM.NAVIGAŢIE AERIANĂ 1.0.Index Referinţa Program EDIŢIA : 1.0ROMNAVAER DATA : 25.04.2000
RezumatAcest document structurează cerinţele privind pregatirea profesională pentru formareacontrolorilor de trafic aerian dirijare.
Cuvinte cheie
PERSOANE DECONTACT : M.EPURESCU; SERVICIUL: ACH - ROMATSA
TIP DocumentSTARE DOCUMENT CATEGORIE CLASIFICAREDocument � Sarcină la nivel
executiv� Public �
Propunere � Sarcină la nivelspecialist
� Circulaţie limitată*�
Propunere spreaprobare
� Sarcină la nivel iniţial � Restricţionat �
Aprobat � Intern �
• Acest document a fost elaborat de către ROMATSA şi AACR. Circulaţiadocumentului va fi limitată la instituţiile de aviaţie civilă: ROMATSA; AACR;ARA.
Orice modificare va fi efectuată cu acordul unităţilor : ROMATSA si AACR .

AACR & ROMATSA
Editia 1.0 - iv - 25/04/2000
BACKUP ELECTRONICNUME DE REFERINŢĂ INTERN: D:\lucrari finale\word\navaerSISTEM de OPERARE SUPORT SOFTWARE(S)Microsoft Windows NT.4.0. Tip : Hard disk MS WORD 97 ( MS97)
Identificator:
AACR & ROMATSA
Editia 1.0 - v - 25/04/2000
APROBARE DOCUMENT
Tabelul urmator cuprinde factorii de decizie din cadrul ROMATSA siAACR care au aprobat documentul.
ROMATSA AACR
DirectorDMTA D. ESTER
DirectorSNA V. N. LEU
DirectorGeneral S. CALOIANU
DirectorGeneral G. GAVRIL
AACR & ROMATSA
Editia 1.0 - vi - 25/04/2000
PAGINĂ LIBERĂ LASATĂ INTENŢIONAT
AACR & ROMATSA
Editia 1.0 - vii - 25/04/2000
PAGINĂ AVIZĂRI
Urmatorul tabel identifică toţi factorii de decizie din cadrulROMATSA şi AACR care au avizat succesiv aceasta versiune de
document.
ROMATSA AACR
SefServiciuACH C.CROITORU
ŞefServiciuSASSTA B. BRĂGUŢĂ
SEFSERVICIUSAF I.DELIANIS
SEFSERVICIUODF S.BOT
SEFSERVICIUAIS A.IOAN

AACR & ROMATSA
Editia 1.0 - viii - 25/04/2000
Pagină liberă lasată intenţionat
AACR & ROMATSA
Editia 1.0 - ix - 25/04/2000
Listă de control
Pagina Data Pagina Data Pagina Data Pagina Data 1 25042000 45 25042000 89 25042000 133 25042000 2 25042000 46 25042000 90 25042000 134 25042000 3 25042000 47 25042000 91 25042000 135 25042000 4 25042000 48 25042000 92 25042000 136 25042000 5 25042000 49 25042000 93 25042000 137 25042000 6 25042000 50 25042000 94 25042000 138 25042000 7 25042000 51 25042000 95 25042000 139 25042000 8 25042000 52 25042000 96 25042000 140 25042000 9 25042000 53 25042000 97 25042000 141 25042000
10 25042000 54 25042000 98 25042000 142 25042000 11 25042000 55 25042000 99 25042000 143 25042000 12 25042000 56 25042000 100 25042000 144 25042000 13 25042000 57 25042000 101 25042000 145 25042000 14 25042000 58 25042000 102 25042000 146 25042000 15 25042000 59 25042000 103 25042000 147 25042000 16 25042000 60 25042000 104 25042000 148 25042000 17 25042000 61 25042000 105 25042000 149 25042000 18 25042000 62 25042000 106 25042000 150 25042000 19 25042000 63 25042000 107 25042000 151 25042000 20 25042000 64 25042000 108 25042000 152 25042000 21 25042000 65 25042000 109 25042000 153 25042000 22 25042000 66 25042000 110 25042000 154 25042000 23 25042000 67 25042000 111 25042000 155 25042000 24 25042000 68 25042000 112 25042000 156 25042000 25 25042000 69 25042000 113 25042000 157 25042000 26 25042000 70 25042000 114 25042000 158 25042000 27 25042000 71 25042000 115 25042000 159 25042000 28 25042000 72 25042000 116 25042000 160 25042000 29 25042000 73 25042000 117 25042000 161 25042000 30 25042000 74 25042000 118 25042000 162 25042000 31 25042000 75 25042000 119 25042000 163 25042000 32 25042000 76 25042000 120 25042000 164 25042000 33 25042000 77 25042000 121 25042000 165 25042000 34 25042000 78 25042000 122 25042000 166 25042000 35 25042000 79 25042000 123 25042000 167 25042000 36 25042000 80 25042000 124 25042000 168 25042000 37 25042000 81 25042000 125 25042000 169 25042000 38 25042000 82 25042000 126 25042000 170 25042000 39 25042000 83 25042000 127 25042000 171 25042000 40 25042000 84 25042000 128 25042000 172 25042000 41 25042000 85 25042000 129 25042000 173 25042000 42 25042000 86 25042000 130 25042000 174 25042000 43 25042000 87 25042000 131 25042000 175 25042000 44 25042000 88 25042000 132 25042000 176 25042000

AACR & ROMATSA
Editia 1.0 - x - 25/04/2000
PAGINĂ LIBERĂ LĂSATĂ INTENŢIONAT
AACR & ROMATSA
Editia 1.0 - xi - 25/04/2000
CUPRINS
INTRODUCERE .........................................................................................................................................15
1.1. SCOPUL ŞI FOLOSIREA NAVIGAŢIEI AERIENE...................................................................................151.1.1. Istoric.....................................................................................................................................151.1.2. Metodele navigaţiei aeriene ..................................................................................................151.1.3. Mijloace de navigaţie aeriană ...............................................................................................161.1.4. Noţiuni legate de zborul avionului ........................................................................................17
PĂMÂNTUL................................................................................................................................................19
2.1. MIŞCĂRILE PĂMÂNTULUI...............................................................................................................192.1.1. Forma Pământului.................................................................................................................192.1.2. Mărimea Pământului.............................................................................................................192.1.3. Mişcarea de revoluţie ............................................................................................................202.1.4. Mişcarea de rotaţie................................................................................................................202.1.5. Măsurarea timpului ...............................................................................................................21
2.2. PUNCTE ŞI LINII PE SUPRAFAŢA PĂMÂNTULUI ................................................................................222.2.1. Puncte şi linii pe suprafaţa Pământului ................................................................................222.2.2. Sistemul de coordonate..........................................................................................................232.2.3. Sistemul de coordonate polare ..............................................................................................242.2.4. Calcularea distanţelor pe meridiane şi paralele ...................................................................25
2.2.4.1. Calcularea distanţelor pe meridiane............................................................................................. 252.2.4.2. Calcularea distanţelor pe paralele ................................................................................................ 25
2.2.5. Transformarea longitudinii în unitaţi de timp .......................................................................252.2.6. Transformarea timpului in longitudine .................................................................................26
2.3. FUSELE ORARE ...............................................................................................................................272.3.1. Fusele orare (time zones) ......................................................................................................272.3.2. Calcularea timpului...............................................................................................................272.3.3. Calcularea orei de decolare în funcţie de ora de aterizare ...................................................282.3.4. Linia de schimbare a datei (international date line) .............................................................29
2.4. LINIILE DE POZIŢIE ALE AERONAVEI ...............................................................................................292.4.1. Loxodroma (Rhumb Line Route) ...........................................................................................302.4.2. Ortodroma (Great Circle Route) ...........................................................................................302.4.3. Linia azimuturilor (relevmentelor) egale ..............................................................................312.4.4. Linia distanţelor egale...........................................................................................................32
2.5 MAGNETISMUL TERESTRU..............................................................................................................322.5.1. Magnetismul terestru .............................................................................................................322.5.2. Înclinaţia magnetică (Magnetic Dip) ....................................................................................332.5.3. Declinaţia magnetică (Variation)..........................................................................................342.5.4. Deviaţia compas (Deviation).................................................................................................34
2.6. UNITĂŢI DE MĂSURĂ UTILIZATE ÎN NAVIGAŢIA AERIANĂ ...............................................................352.6.1. Măsurarea distanţelor :.........................................................................................................352.6.2. Măsurarea vitezelor : ............................................................................................................352.6.3. Măsurarea presiunii : ............................................................................................................36
HĂRŢI AERONAUTICE ...........................................................................................................................37
3.1. PROIECŢII CARTOGRAFICE ..............................................................................................................373.1.1. Generalităţi............................................................................................................................373.1.2. Tipuri de proiecţii ..................................................................................................................373.1.3. Proiecţii uzuale......................................................................................................................41
3.1.3.1. Proiecţia Mercator ....................................................................................................................... 413.1.3.2. Proiecţia conică conformă (Lambert) .......................................................................................... 41
AACR & ROMATSA
Editia 1.0 - xii - 25/04/2000
3.1.3.3. Proiecţia stereografică polară ...................................................................................................... 423.1.4. Reprezentarea reliefului în cartografie .................................................................................42
3.1.4.1. Reprezentarea contururilor (liniilor de nivel) .............................................................................. 423.1.4.2. Marcarea vîrfurilor (înălţimilor predominante) ........................................................................... 433.1.4.3. Utilizarea culorilor....................................................................................................................... 43
3.2. HĂRŢI AERONAUTICE .....................................................................................................................443.2.1. Generalităţi............................................................................................................................443.2.2. Elementele hărţii....................................................................................................................44
3.2.2.1. Scara hărţii................................................................................................................................... 443.2.2.2. Proiecţia....................................................................................................................................... 453.2.2.3. Nivelmentul ................................................................................................................................. 453.2.2.4. Planimetria................................................................................................................................... 453.2.2.5. Hidrografia .................................................................................................................................. 453.2.2.6. Semne convenţionale................................................................................................................... 46
3.2.3. Hărţile aeronautice................................................................................................................463.2.3.1. Clasificarea hărţilor aeronautice .................................................................................................. 463.2.3.2. Hărţile de radionavigaţie.............................................................................................................. 46
3.2.3.2.1. Hărţi utilizate pentru navigaţia pe rută ..................................................................................... 473.2.3.2.2. Hărţi utilizate în procedurile de apropiere şi aterizare / decolare ............................................. 49
BAZELE NAVIGAŢIEI AERIENE ..........................................................................................................59
4.1. ELEMENTELE NAVIGAŢIEI AERIENE ................................................................................................594.1.1. Elemente care determină direcţia..........................................................................................59
4.1.1.1. Drum............................................................................................................................................ 614.1.1.2. Cap .............................................................................................................................................. 624.1.1.3. Relatii între drumuri si capete...................................................................................................... 634.1.1.4. Abaterea laterală liniară (ALL) si Abaterea laterală unghiulară (ALU)....................................... 644.1.1.5. Unghiul de derivă (drift angle) .................................................................................................... 64
4.1.2. Viteze de zbor ........................................................................................................................654.1.2.1. Viteza de zbor indicată Vi............................................................................................................ 654.1.2.2. Viteza de zbor calibrată Vc .......................................................................................................... 664.1.2.3. Viteza de zbor echivalentă Ve...................................................................................................... 664.1.2.4. Viteza de zbor adevărată Va......................................................................................................... 664.1.2.5. Viteza faţă de sol Vs .................................................................................................................... 664.1.2.6. Viteza verticală Vv....................................................................................................................... 664.1.2.7. Numărul Mach M ........................................................................................................................ 67
4.1.3. Înălţimea de zbor...................................................................................................................684.2. INFLUENŢA VÂNTULUI ASUPRA AERONAVELOR..............................................................................69
4.2.1. Acţiunea vântului asupra aeronavelor ..................................................................................694.2.2. Componenta longitudinală şi transversală a vântului...........................................................734.2.3. Triunghiul de navigaţie al vitezelor.......................................................................................74
4.2.3.1. Prescurtări şi definiţii .................................................................................................................. 744.2.3.2.Rezolvarea triunghiului de navigaţie ..................................................................................................... 76
4.3. VIRAJUL AERONAVEI......................................................................................................................824.3.1. Calculul razei de viraj ...........................................................................................................824.3.2. Calculul distanţei de prevenire a virajului ............................................................................844.3.3. Calculul corecţiei de revenire la traiect prin 2 viraje inverse...............................................85
ELEMENTE DE RADIONAVIGAŢIE.....................................................................................................87
5.1. SISTEMUL DE RADIONAVIGAŢIE DE LA SOL.....................................................................................875.1.1. Clasificarea mijloacelor de radionavigaţie ...........................................................................875.1.2. Navigaţia cu ajutorul radiofarului nedirecţional NDB .........................................................885.1.3. Radiomarker ..........................................................................................................................935.1.4. Navigaţia cu ajutorul radiofarului omnidirecţional VOR şi a echipamentului de măsurare adistanţei DME........................................................................................................................................935.1.5. Determinărea poziţiei aeronavei cu ajutorul mijloacelor de radionavigaţie ........................96
5.1.5.1. NDB - NDB................................................................................................................................. 975.1.5.2. VOR - VOR................................................................................................................................. 975.1.5.3. DME - DME................................................................................................................................ 985.1.5.4. VOR - DME ................................................................................................................................ 995.1.5.5. NDB - DME ................................................................................................................................ 99
AACR & ROMATSA
Editia 1.0 - xiii - 25/04/2000
5.1.6. Sistemul de apropiere şi aterizare ILS.................................................................................1025.1.6.1. Clasificare.................................................................................................................................. 1025.1.6.2. Componenţă............................................................................................................................... 1025.1.6.3. Volumul de acoperire operaţional.............................................................................................. 103
5.1.7. Utilizarea radarului în navigaţia aeriană ...........................................................................1045.1.7.1. Clasificarea staţiilor Radar ........................................................................................................ 1065.1.7.2. Functiile radarului ..................................................................................................................... 107
5.2. NAVIGAŢIA DE SUPRAFAŢA ..........................................................................................................107
NOŢIUNI DE CINEMATICA TRAFICULUI AERIAN.......................................................................111
6.1. INTRODUCERE ..............................................................................................................................1116.2. METODE DE REZOLVARE A PROBLEMELOR DE CINEMATICĂ .........................................................113
6.2.1. Aeronave zburînd în acelaşi sens .......................................................................................1136.2.2. Aeronave zburînd în sens contrar........................................................................................1146.2.3. Urcare/coborire...................................................................................................................115
NOŢIUNI DE ALTIMETRIE ..................................................................................................................121
7.1. DEFINIŢII: .....................................................................................................................................1217.2. CARE SÎNT ELEMENTELE DE NAVIGAŢIE ÎN URCARE ŞI COBORÎRE ? ..............................................1227.3. STRATUL DE TRANZIŢIE................................................................................................................1237.4. CALAJUL ALTIMETRIC .................................................................................................................124
NAVIGAŢIA BAZATĂ PE SISTEME DE SATELIŢI .........................................................................127
8.1. INTRODUCERE ..............................................................................................................................1278.2. PRINCIPIUL DE FUNCŢIONARE.......................................................................................................128
8.2.1. Determinărea distanţei satelit-utilizator (pseudorange) .....................................................1298.2.2. Îmbunăţirea preciziei...........................................................................................................130
8.2.2.1. Utilizarea pseudo-sateliţilor....................................................................................................... 1318.2.2.2. Metoda corecţiilor diferenţiale – DGPS .................................................................................... 132
8.3. SISTEME ACTUALE DE NAVIGAŢIE PRIN SATELIT...........................................................................1338.3.1. Sistemul GPS .......................................................................................................................133
8.3.1.1. Segmentul spaţial....................................................................................................................... 1338.3.1.2. Segmentul terestru ..................................................................................................................... 1348.3.1.3. Segmentul utilizatori ................................................................................................................. 1348.3.1.4. Caracteristicile sistemului GPS ................................................................................................ 134
8.3.2. Sistemul GLONASS..............................................................................................................1358.3.2.1. Segmentul spaţial....................................................................................................................... 1358.3.2.2- Segmentul terestru ..................................................................................................................... 1358.3.2.3. Segmentul utilizatori ................................................................................................................. 1358.3.2.4. Caracteristicile sistemului GLONASS ...................................................................................... 136
PROCEDURI DE APROPIERE..............................................................................................................137
9.1. GENERALITĂŢI .............................................................................................................................1379.2. PROCEDURI DE APROPIERE INSTRUMENTALE -INSTRUMENT APPROACH PROCEDURES.................137
9.2.1. Segmentele procedurii de apropiere instrumentală ........................................................................ 1399.2.1.1. Segmentul de sosire................................................................................................................... 1419.2.1.2. Segmentul iniţial........................................................................................................................ 141
9.2.1.2A. Procedura de inversare................................................................................................... 1419.2.1.2B. Procedura racetrack........................................................................................................ 1439.2.1.2C. Proceduri de zbor pentru procedurile de inversare şi racetrack...................................... 143
9.2.1.3. Segmentul intermediar............................................................................................................... 1479.2.1.4. Segmentul final.......................................................................................................................... 147
9.2.1.4A. Segmentul final al unei apropieri fără pantă electronică................................................ 1489.2.1.4B. Segmentul final al unei apropieri de precizie ILS.......................................................... 150
9.2.1.5. Segmentul de întrerupere a apropierii........................................................................................ 1539.3. PROCEDURI DE APROPIERE LA VEDERE .........................................................................................155
9.3.1 Procedura de apropiere la vedere – visual approach ........................................................1559.3.2. Procedura de apropiere cu manevre la vedere - visual manoeuvring (circling).................156
9.4. PROCEDURA DE INIŢIERE ŞI CONTINUARE A APROPIERII (APPROACH BAN)....................................1579.5. ALTITUDINEA MINIMĂ DE SECTOR (ALTITUDINEA MINIMĂ DE SIGURANŢĂ)..................................158
AACR & ROMATSA
Editia 1.0 - xiv - 25/04/2000
9.6. PROCEDURI DE ZBOR ÎN ZONA DE AERODROM ..............................................................................1589.6.1. Turul de pistă.......................................................................................................................1599.6.2. Turul de pistă la vedere .......................................................................................................159
PRINCIPIILE ZBORULUI......................................................................................................................161
10.1. INTRODUCERE ..........................................................................................................................16110.2. ARIPA.......................................................................................................................................16310.3. FUSELAJ ...................................................................................................................................16510.4. AMPENAJUL VERTICAL SI ORIZONTAL.....................................................................................167
10.4.1. Ampenaj Orizontal...............................................................................................................16810.4.2. Ampenaj Vertical .................................................................................................................168
10.5. PRINCIPALELE FORTE CARE ACTIONEAZA ASUPRA AVIONULUI ..............................................16810.6. FACTORII CARE INFLUENTEAZA PERFORMANTELE AERONAVELOR ...........................................171
BIBLIOGRAFIE .......................................................................................................................................175
NAVIGAŢIE AERIANĂ
Editia 1.0. - 15 - 25/04/2000
CAPITOLUL 1.
INTRODUCERE
1.1. Scopul şi folosirea navigaţiei aeriene
1.1.1. Istoric
Navigaţia aeriană este ştiinţa care se ocupă cu studiul metodelor şiprocedeelor necesare pentru alegerea, pregătirea şi efectuarea unui zbor pe undrum obligat între două puncte de pe suprafaţa pământului. Este ştiinţa caredetermină punctul unde te afli, direcţia încotro vrei să te deplasezi, timpul şicombustibilul necesar să ajungi unde doreşti.
Navigaţia aeriană este folosită atât în pilotarea unei aeronave cât şi încontrolul traficului aerian pentru a direcţiona aeronavele de-a lungul unor rutesau spre puncte prestabilite. Navigaţia aeriană (în spaţiul tridimensional) s-adezvoltat din navigaţia maritimă (în spaţiul bidimensional), cu care a fost şiconfundată. Aceasta din urmă a fost practicată de pe vremea fenicienilor carenavigau pe timpul nopţii, fără a avea repere terestre.
Prima deplasare aerienă s-a efectuat cu balonul în anul 1785 latraversarea Canalului Mânecii, iar prima deplasare cu o aeronavă, folosindmijloacele navigaţiei aeriene propriu-zise, s-a efectuat în anul 1910 din Elveţia înItalia.
1.1.2. Metodele navigaţiei aeriene
Navigaţia aeriană se realizează prin mai multe metode, care se pot aplicaîn mod independent sau combinat. Cele mai importante sunt :
• metoda navigaţiei observate;
• metoda navigaţiei estimate;
• metoda navigaţiei radioelectrice;
• metoda navigaţiei astronomice;
• metoda navigaţiei inertiale;
• metoda navigaţiei izobarice;
• metoda navigaţiei cu ajutorul sistemului GNSS.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 16 - 25/04/2000
Metoda navigaţiei observate cuprinde ansamblul procedurilor pentruurmarea unui traiect aerian determinăt de două sau mai multe puncte, precum şideterminărea poziţiei aeronavei prin compararea reperelor de la sol cu o harta,direct cu ochiul liber sau cu instrumente optice adecvate acestui scop.
Metoda navigaţiei estimate cuprinde ansamblul procedurilor pentruurmarea unui traiect aerian determinăt de două sau mai multe puncte şideterminărea poziţiei aeronavei cu ajutorul indicaţiilor instrumentelor de bord şi alcalculului fără a se face referire la reperele de pe sol.
Metoda navigaţiei radioelectrice foloseşte mijloace radioelectronicepentru a determină elementele necesare deplasării pe un traiect aerian.Navigaţia radioelectrică poate fi “de bord”, dacă elementele de navigaţie sedetermină cu ajutorul echipamentelor aflate la bordul aeronavei sau “de sol” dacăaceste elemente se determină cu ajutorul unor echipamente instalate la sol.
Metoda navigaţiei astronomice cuprinde ansamblul procedurilor careasigură determinărea poziţiei aeronavei şi urmărirea unui traiect determinăt, prinobservarea aştrilor cereşti cu ajutorul unor instrumente specializate în acestsens.
Metoda navigaţiei inertiale permite determinărea poziţiei aeronavei şiurmărirea unui traiect stabilit, prin două sau mai multe puncte exprimate încoordonate geografice, pe baza integrării informaţiilor obţinute de laaccelerometrele de la bord care acţionează în lungul celor trei axe de deplasareale aeronavei.
Metoda navigaţiei izobarice este utilizată în zborurile la mare înalţimedeasupra oceanului şi permite controlul aeronavei în direcţie prin determinăreaderivei şi a drumului real urmat, din înălţimea citită la altimetrul barometric şiradioaltimetru.
Metoda navigaţiei cu ajutorul sistemului GNSS permite determinăreapoziţiei tridimensionale ale aeronavei şi urmărirea unui traiect stabilit, prin douăsau mai multe puncte exprimate în coordonate geografice, pe baza măsurăriidistanţei faţă de cel puţin patru sateliţi din acest sistem (configuraţia completăeste de 24 de sateliţi).
1.1.3. Mijloace de navigaţie aeriană
Metodele de navigaţie se realizează în practică cu ajutorul mijloacelor denavigaţie, care se pot clasifica în:
• mijloace generale sau geotehnice de navigaţie;
• mijloace de radionavigaţie;
• mijloace astronomice de navigaţie;
• mijloace luminoase de navigaţie;
• sistemul GNSS.
Mijloacele generale sau geotehnice de navigaţie se bazează pemăsurarea diferiţilor parametrii ce depind de forma, dimensiunile şi proprietăţilor
NAVIGAŢIE AERIANĂ
Editia 1.0. - 17 - 25/04/2000
pământului şi atmosferei terestre. Din această categorie fac parte: compaselemagnetice, girocompasele, sistemele direcţionale, vitezometrele, altimetrele cucapsulă aneroida, termometrele, sistemele inerţiale.
Mijloacele de radionavigaţie au la bază principiile electronicii. Dinaceastă categorie fac parte radiogoniometrele, radiofarurile, DME-urile, radarele.
Mijloacele astronomice de navigaţie se bazează pe măsurareadeplasării aştrilor pe bolta cerească. Din această categorie fac parteastrocompasul, astrosextantul.
Mijloacele luminoase de navigaţie folosesc energia luminoasă pentruorientare. Din acestea fac parte: balizajul luminos al pistei, farurile de aerodrom,sistemul luminos de apropiere, sistemul luminos de semnalizare a poziţieiaeronavelor.
Sistemul GNSS şi echipamentele de la bord aferente formează cel maimodern şi precis mijloc de navigaţie aeriană. Pentru determinărea poziţieiaeronavei sunt necesari patru sateliţi în câmpul de vedere peste masca aplicatăla orizont. In plus pentru depistarea unui satelit defect sunt necesari cinci sateliţi,iar pentru eliminarea acestuia din calcul sunt necesari şase sateliţi. Pentru uzulnavigaţiei aeriene, Serviciul de Poziţionare Standard – SPS (SUA) asigurăprecizia de determinăre a poziţiei în limita a 100 metri sau mai puţin, cu oprobabilitate de 95% şi în limita a 300 de metri cu o probabilitate de 99.99%.
Din cele relatate anterior se poate observa ca mijloacele de navigaţie sînt dispuse atît la bordulaeronavelor , cît şi la sol. In general utilizarea acestor mijloace se face combinat, formind categoriasistemelor de navigaţie radioelectrică, cum ar fi :
- VOR=Vhf Omnidirectional Radio Range;- ILS=Instrument Landing System;
1.1.4. Noţiuni legate de zborul avionului
Parametri care caracterizează deplasarea unei aeronave de-a lungul unuitraiect sunt următorii:
- traiect de zbor;- puncte de drum;- linia drumului obligat (LDO);- linia drumului real (LDR);- poziţia aeronavei;- abatere laterală unghiulară
(ALU);- abatere laterală liniară (ALL);- direcţie;- distanţă;- timp;- unghi de derivă;
- unghi de contraderivă;- înălţime;- altitudine;- viteze orizontale (IAS, TAS,GS, M);- viteze verticale;- vector vânt;- unghi de tangaj;- unghi de înclinare;- unghi de giraţie;- viteza unghiulară.

NAVIGAŢIE AERIANĂ
Editia 1.0. - 18 - 25/04/2000
Pagină liberă lasată intenţionat
NAVIGAŢIE AERIANĂ
Editia 1.0. - 19 - 25/04/2000
CAPITOLUL 2.
PĂMÂNTUL
2.1. Mişcările Pământului
2.1.1. Forma Pământului
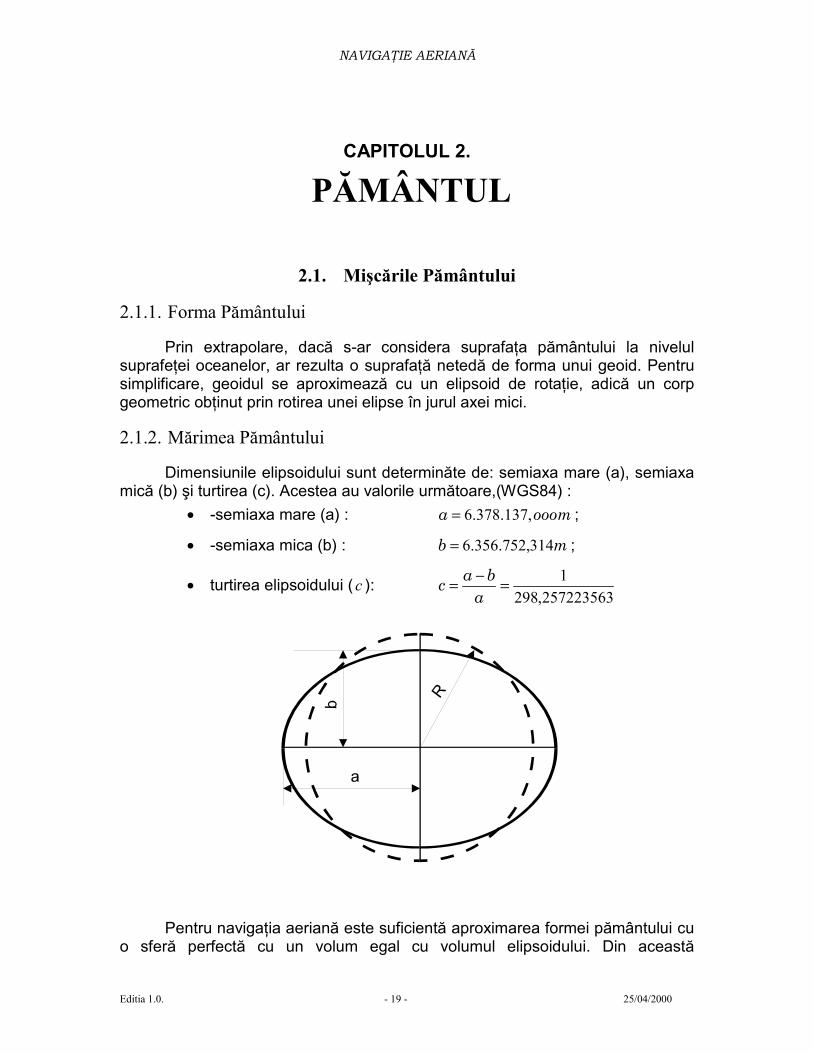
Prin extrapolare, dacă s-ar considera suprafaţa pământului la nivelulsuprafeţei oceanelor, ar rezulta o suprafaţă netedă de forma unui geoid. Pentrusimplificare, geoidul se aproximează cu un elipsoid de rotaţie, adică un corpgeometric obţinut prin rotirea unei elipse în jurul axei mici.
2.1.2. Mărimea Pământului
Dimensiunile elipsoidului sunt determinăte de: semiaxa mare (a), semiaxamică (b) şi turtirea (c). Acestea au valorile următoare,(WGS84) :
• -semiaxa mare (a) : oooma ,137.378.6= ;
• -semiaxa mica (b) : mb 314,752.356.6= ;
• turtirea elipsoidului (c ):257223563,2981=−=
aba
c
Pentru navigaţia aeriană este suficientă aproximarea formei pământului cuo sferă perfectă cu un volum egal cu volumul elipsoidului. Din această
NAVIGAŢIE AERIANĂ
Editia 1.0. - 20 - 25/04/2000
aproximare rezultă erori maxime, care se neglijează, de ± 0,5% la determinăreadistanţelor şi ± 12’ la determinărea unghiurilor.
Raza globului pămîntesc se poate determină întrebuintîndu-se diferite metode. De obicei aceasta seia egală cu raza sferei al carei volum este egal cu volumul elipsoidului pămîntesc.
Volumul elipsoidului de rotaţie : baV er2
34 π=
Volumul sferei 3
34 RV S π=
Din egalitatea celor doua volume :
�=VV Ser =ba 2
34 π 3
34 Rπ
se poate determină raza3 2baR =
Înlocuind în această relaţie valoarea lui kma 6378= şi valoarea lui kmb 6356= adoptate
pentru elipsoidul internaţional găsim : kmkmR 63719,6370 ≅= (valoare care se foloseşte şi în
calcule).
2.1.3. Mişcarea de revoluţie
Mişcarea de revoluţie este deplasarea Pământului în jurul Soarelui, carese efectuează pe o traiectorie închisă de forma unei elipse numită orbită.Aceasta are o lungime de 930 milioane de km. Timpul unei rotaţii complete estede 1 an (365,242 zile solare medii) cu o viteză de aproximativ 30 km/sec. Axapământului este înclinată faţă de planul elipsei cu un unghi de 66° 33’, iar planulecuatorului pământesc cu 23° 27’. Poziţia soarelui nu este în centrul elipsei,punctul cel mai apropiat de soare (periheliu) fiind la o distanţă de 147.072.254km, iar punctul cel mai îndepărtat de soare (afeliu) fiind la o distanţă de162.089.116 km. Mişcarea de revoluţie generează anotimpurile.
Când soarele se află în prelungirea planului orizontului adevărat alpământului, ziua este egală cu noaptea la echinocţiu de primăvară (21 martie) şila cel de toamnă (21 septembrie). Punctele de pe orbită în care distanţa esteminimă, respectiv maximă se numesc punctele solstiţiilor (21 decembrie şi 21iunie).
2.1.4. Mişcarea de rotaţie
Mişcarea pământului în jurul axei sale este mişcarea de rotaţie; o rotaţiecompletă se face în 23 ore 56 minute şi 0,4 secunde. Această rotaţie determinăalternanţa zilelor cu nopţile, iar înclinarea axei pământului faţă de orbitădetermină inegalitatea zilelor şi a nopţilor, funcţie de anotimpuri. Rotireapământului se face de la vest către est, cu o viteză maximă realizată pe ecuatorde 1669 km/h, reducându-se spre poli la zero.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 21 - 25/04/2000
2.1.5. Măsurarea timpului
Din rotaţia completă a pământului, presupusă uniformă, în jurul soarelui şiîn jurul axei sale, se poate măsura timpul. Unitatea de timp între două trecericonsecutive ale meridianului locului prin dreptul unui astru considerat fix, senumeşte zi siderală şi are valoarea de 23 ore 56 minute şi 04 secunde. Aceastăunitate de timp se foloseşte în astronomie, nefolosindu-se în mod curent datorităfaptului că ziua siderală începe la diferite ore din cauza mişcării proprii aparentea soarelui în diferite anotimpuri.
Pentru măsurarea timpului se consideră ziua solară adevărată, adicădurata unei rotaţii aparente complete a soarelui în 24 de ore, zi care nu aredurata constantă pe parcursul unui an, diferenţa maximă fiind în limitele a uneijumătăţi de oră. Din această cauză se ia în considerare o medie anuală şi anumeziua solară medie.
Durata unei zile solare medii este mai mare decât cea a unei zile sideralecu 3 minute şi 56 secunde.
În practică se utilizează ziua solară medie (Mean Solar Day), carereprezintă timpul mediu necesar pentru o rotaţie completă a Pămîntului în jurulaxei sale. Acest interval este divizat în 24 de unităţi, numite ore.
Începutul unei zi solare medii se conşideră a fi la ora 00:00 (12:00noaptea), adică ora la care Soarele traversează antimeridianul locului respectiv.
Orele locurilor pe diferite meridiane se diferenţiază între ele în raport cudiferenţa de longitudine a acestor locuri, exprimate în unităţi de timp.
Astfel timpul măsurat cu ajutorul metodelor astronomice, pentru un anumitmeridian, poartă numele de timp mediu local (Local Mean Time - LMT).
Acest timp determină ziua civilă ca intervalul de timp de 24 de ore solare,dîntre miezurile a două nopţi consecutive.
Acest timp este util în aplicaţiile locale, dar în cazul aeronavelor care sedeplasează pe distanţe mari apar probleme datorită schimbărilor de longitudineşi implicit a diferenţelor între timpii locali. De aceea în aviaţie se utilizează untimp de referinţă care este timpul mediu local al meridianului zero; acest timp senumeşte timp universal coordonat (Universal Time Coordinated - UTC). Întrecut aceast timp se mai numea şi ora Greenwich (Greenwich Mean Time -GMT), după numele meridianului de referinţă
Pentru controlul traficului aerian cunoaşterea măsurării timpului estedeosebit de importantă în comunicaţii, procesarea planurilor de zbor, eşalonări,controlul fluxurilor de trafic aerian, controlul întârzierilor aeronavelor, etc. Inaviaţie timpul este exprimat printr-un grup de patru cifre. Ziua se sfârşeşte cu ora2400, minutul următor fiind 0001. In comunicaţiile efectuate în banda defrecvenţe VHF, timpul în cadrul aceleiaşi ore se precizează doar prin minutulformat dintr-un grup de două cifre, ora subînţelegându-se, iar în comunicaţiile înbanda de frecvenţe HF se foloseşte pentru timp grupul întreg de patru cifre.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 22 - 25/04/2000
2.2. Puncte şi linii pe suprafaţa Pământului
2.2.1. Puncte şi linii pe suprafaţa Pământului
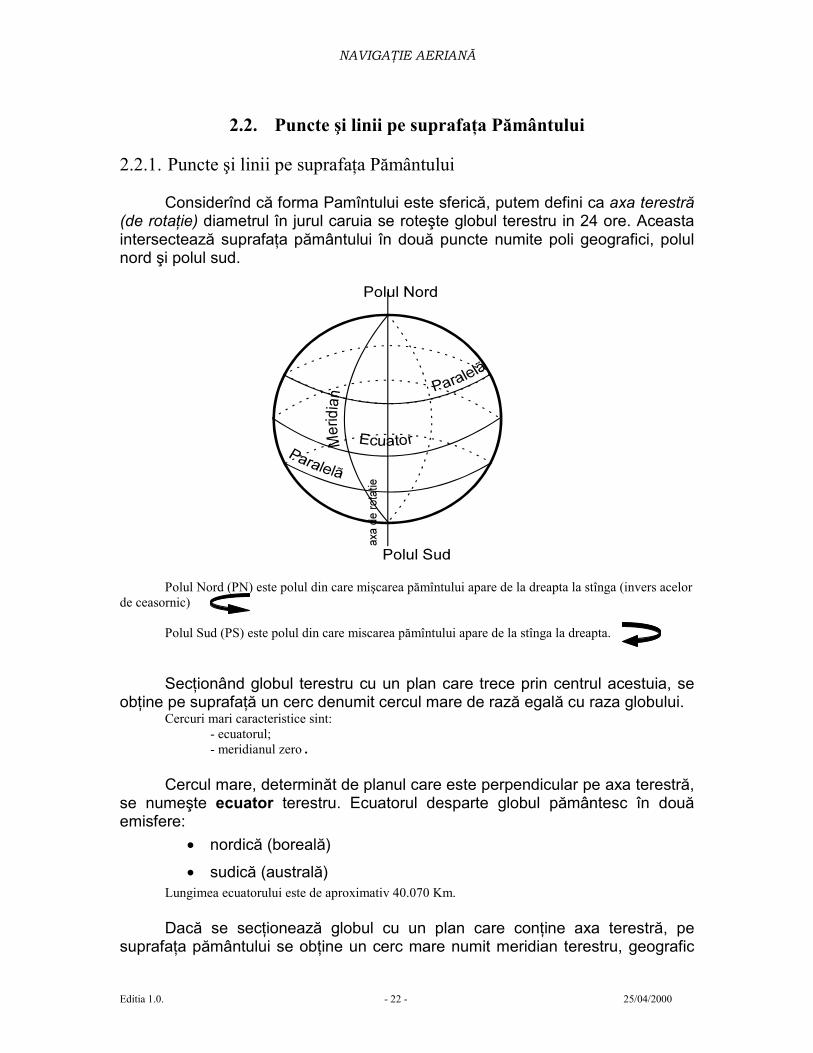
Considerînd că forma Pamîntului este sferică, putem defini ca axa terestră(de rotaţie) diametrul în jurul caruia se roteşte globul terestru in 24 ore. Aceastaintersectează suprafaţa pământului în două puncte numite poli geografici, polulnord şi polul sud.
Polul Nord (PN) este polul din care mişcarea pămîntului apare de la dreapta la stînga (invers acelorde ceasornic)
Polul Sud (PS) este polul din care miscarea pămîntului apare de la stînga la dreapta.
Secţionând globul terestru cu un plan care trece prin centrul acestuia, seobţine pe suprafaţă un cerc denumit cercul mare de rază egală cu raza globului.
Cercuri mari caracteristice sint:- ecuatorul;- meridianul zero .
Cercul mare, determinăt de planul care este perpendicular pe axa terestră,se numeşte ecuator terestru. Ecuatorul desparte globul pământesc în douăemisfere:
• nordică (boreală)
• sudică (australă)Lungimea ecuatorului este de aproximativ 40.070 Km.
Dacă se secţionează globul cu un plan care conţine axa terestră, pesuprafaţa pământului se obţine un cerc mare numit meridian terestru, geografic
NAVIGAŢIE AERIANĂ
Editia 1.0. - 23 - 25/04/2000
sau adevărat. Meridianul de origine este considerat meridianul care trece prinobservatorul astronomic din Greenwich.
Jumatatea de meridian cuprinsă între polii tereştri, care trece printr-un anumit punct de pe suprafaţaPamîntului, se numeşte meridianul locului. Cealaltă jumatate a acestui meridian se numeşte antimeridian.
Deosebim urmatoarele meridiane importante:- meridianul zero (primul meridian) sau Greenwich;- antimeridianul, opus cu 1800 meridianului Greenwich
Circumferinţa meridianelor este egală.
Dacă planul de intersecţie nu trece prin centrul pământului, se obţine pesuprafaţă un cerc denumit cercul mic.
Planurile paralele cu planul ecuatorial determină pe suprafaţa globuluicercuri mici numite paralele terestre.
Paralele importante sint:• -paralela Tropicului Racului şi Cercul Polar De Nord in emisfera
nordica;
• -paralela Tropicul Capricornului şi Cercul Polar De Sud in emisferade sud;
Circumferinţa paralelor descreşte de la ecuator spre poli.
2.2.2. Sistemul de coordonate
Pentru navigaţia aeriană este nevoie de un sistem de referinţă pentruindicarea poziţiei aeronavelor. Acest sistem îl reprezintă meridianele şi paralelelede pe suprafaţa pământului. Intersecţia acestora determină puncte caracterizateprin coordonate. Când aceste seturi de valori sunt în raport cu ecuatorul şi cumeridianul de origine, ele se denumesc coordonate geografice.
Pentru a se determină poziţia unui punct s-a adoptat un sistem demasurare, iar ca unitate de masură s-a adoptat gradul sexagesimal, care
reprezintă 3601 din cerc cu submultiplii: minutul şi secunda unghiulara.
10=60/=3600// (1grd=60 min=3600 sec)
Valoarea unui grad (10) la ecuator se obţine din relaţia 036063712 ×π şi este
egală cu 111,138 km.Valoarea unui m inut (1/) la ecuator se obţine din relaţia
603602
603602 3 2
×=
×baR ππ şi este egală 1,852 km.
Coordonatele geografice sunt latitudinea si longitudinea.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 24 - 25/04/2000
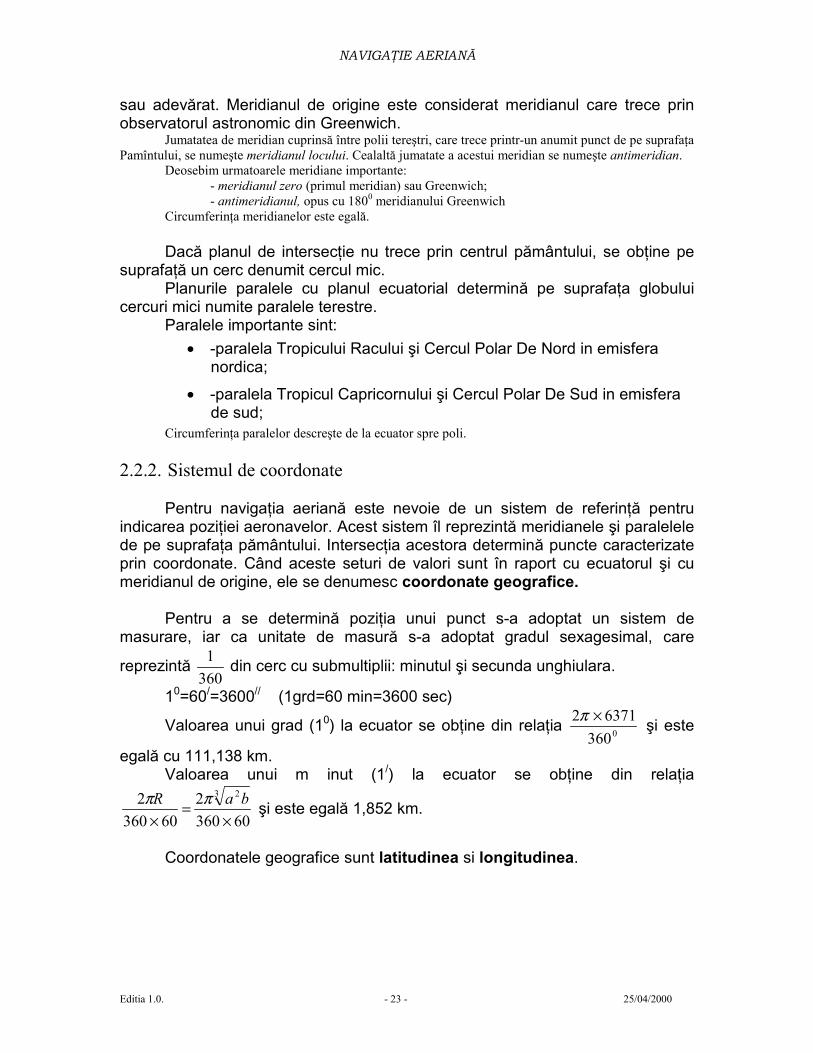
Latitudinea (ϕ )unui punct este valoarea în grade a unghiului format deraza pământului în acel punct şi proiecţia acesteia pe planul ecuatorului.Latitudinea masurată în emisferanordică se numeşte latitudine nordică(+), iar cea din emisfera sudicălatitudine sudică(-).
Longitudinea( λ ) unui puncteste valoarea în grade a unghiuluiformat între planul meridianului deorigine şi planul meridianului ce conţinepunctul respectiv. Longitudinea spreest de meridianul de origine senumeşte longitudine estică(E; +), iar lavest de acest meridian se numeştelongitudine vestică(W;-).
Coordonatele geografice aleunui punct se exprimă, în ordine, prinlatitudine şi apoi longitudine.
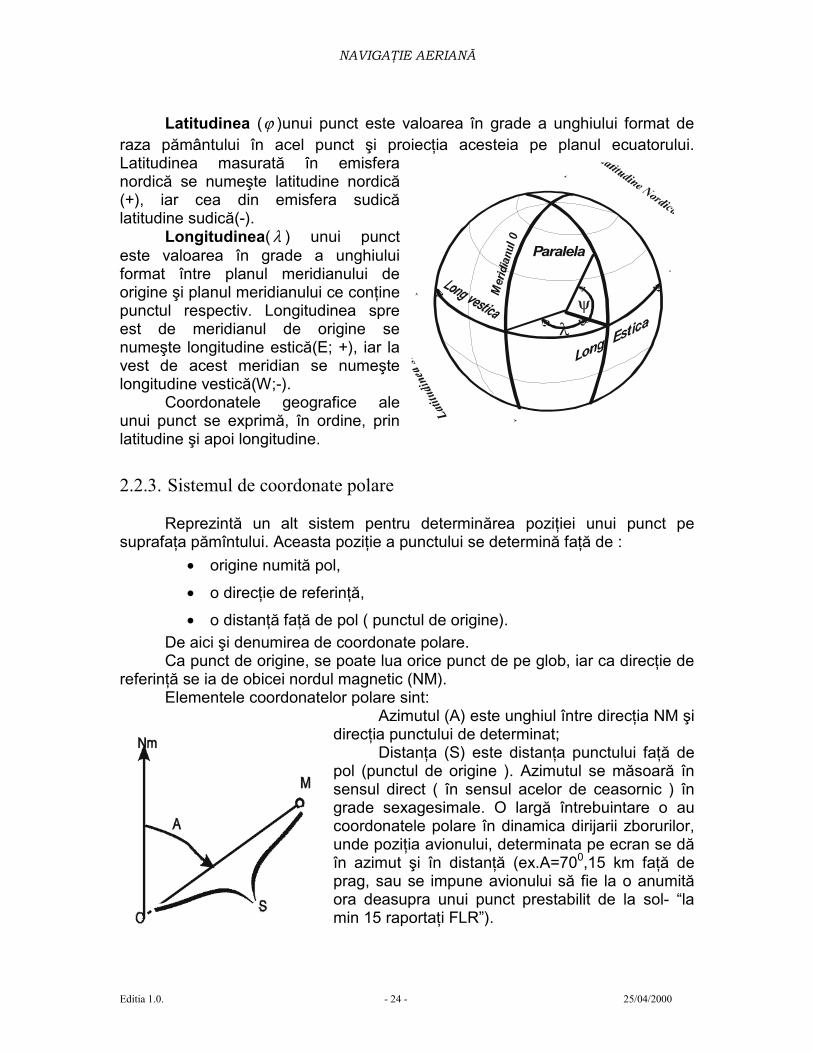
2.2.3. Sistemul de coordonate polare
Reprezintă un alt sistem pentru determinărea poziţiei unui punct pesuprafaţa pămîntului. Aceasta poziţie a punctului se determină faţă de :
• origine numită pol,
• o direcţie de referinţă,
• o distanţă faţă de pol ( punctul de origine).De aici şi denumirea de coordonate polare.Ca punct de origine, se poate lua orice punct de pe glob, iar ca direcţie de
referinţă se ia de obicei nordul magnetic (NM).Elementele coordonatelor polare sint:
Azimutul (A) este unghiul între direcţia NM şidirecţia punctului de determinat;
Distanţa (S) este distanţa punctului faţă depol (punctul de origine ). Azimutul se măsoară însensul direct ( în sensul acelor de ceasornic ) îngrade sexagesimale. O largă întrebuintare o aucoordonatele polare în dinamica dirijarii zborurilor,unde poziţia avionului, determinata pe ecran se dăîn azimut şi în distanţă (ex.A=700,15 km faţă deprag, sau se impune avionului să fie la o anumităora deasupra unui punct prestabilit de la sol- “lamin 15 raportaţi FLR”).
λψ
Paralela
NAVIGAŢIE AERIANĂ
Editia 1.0. - 25 - 25/04/2000
2.2.4. Calcularea distanţelor pe meridiane şi paralele
2.2.4.1. Calcularea distanţelor pe meridiane
Lungimea unui meridian este:2×π×R = 2×π×6370,9 km = 40029 km = 21614 NMMeridianul având 360°, rezultă că :10 pe meridian are lungimea = 60 NM=111,138 km1’ pe meridian are lungimea = 1 NM=1,852 km (21614 NM : 360° : 60’).1’’ pe meridian are lungimea = 0.0167 NM=30,87m
Deci pentru a calcula distanţa în mile marine între două puncte situate peacelaşi meridian, se înmulţeşte diferenţa de latitudine, exprimată în minute,dintre cele două puncte cu 1 NM.
2.2.4.2. Calcularea distanţelor pe paralele
Lungimea ecuatorului se poate aproxima cu lungimea meridianului, iarlungimea unui minut pe ecuator are valoarea de o milă marină.
Distanţa în mile marine între două puncte situate pe aceiaşi paralelă esteegală cu diferenţa de longitudine, exprimată în minute, înmulţită cu o milă marinăşi înmulţită cu cosinusul unghiului de latitudine.
Dparalela = Decuator x cos ( latitudine )unde :
Dparalela = distanţă pe arcul respectivDecuator = distanţă pe arcul dat, masurata la ecuatorLatitudine = latitudinea la care se afla arcul respectiv
Exemplu :Sa se determine lungimea unui arc de paralela de 10 la lat = 450 NDecuator = 10 x 60 Nm = 60 NmDparalelă = Decuator x cos ( lat ) = 60 x cos (45 0) = 42.426 Nm
2.2.5. Transformarea longitudinii în unitaţi de timp
În navigaţia aeriană, longitudinea se poate exprima şi în unitati de timp.O rotire de 360° completă a pământului făcându-se în 24 de ore (fiecare
meridian revine în poziţia iniţială după 24 de ore ), rezultă următoarelecorespondenţe (viteza de rotaţie este 360°: 24 = 15°/ora şi este folosită lamăsurarea timpului) .
Exprimarea longitudinii unui meridian prin timp (ore, minute, secunde) seface faţă de meridianul zero ( Greenwich )
150-------------------------------------------1h (60 min)10-----------------------------------------------X
min415
min600 ==X
NAVIGAŢIE AERIANĂ
Editia 1.0. - 26 - 25/04/2000
Folosind aceeaşi regula se poate determina şi pentru minute şi secunde.
DECI:Relatiile deTransformare sunt:
Exemplu: Daca la Greenwich este ora locala 12.00, care este ora locala la meridianul 48 040/EST?480*4 min =192 min =3h 12 min40/ *4sec =160 sec = 2 min 40 sec
=3 h 14 min 40 sec+12h 00 min 00 sec
15 h 14 min 40 sec (ora locala)
2.2.6. Transformarea timpului in longitudine
Pentru calcul transformarii longitudinii in timp şi invers, este necesar sa seţină cont de relaţia între valorile unghiulare ale longitudinii şi timpul de rotaţieaparenta a soarelui.
24 h ----------------------------------------------------3600
1 h--------------------------------------------------------X
00
1524
360X ==
Folosind aceeaşi regula se poate determina şi pentru minute şi secunde.
DECI:Relatiile deTransformare sunt:
Exemple:Sa se calculeze meridianul de longitudine estica caruia ii corespunde o diferenţă de timp de 6 h 40
min 45 sec.6 h * 150 900
40 min *15/=600/=100
45 sec*15//=675//=11/15//
λ=100011/15//
Diferenţa între ora locala Tokio şi ora Greenwich este de 9 h 19 min 39 sec. Care este longitudineaorasului Tokio ?
9h*150=1350
19min*15/=285/=4045/
30sec*15//=450// =7/ 30//
λ=139052/30//
10long. =4 min.1/long. =4 sec.1//long. =1/15 sec = 0.067 sec
1 ora = 15 0 long.1 min =15/ long.
1 sec =15// long.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 27 - 25/04/2000
2.3. Fusele orare
2.3.1. Fusele orare (time zones)
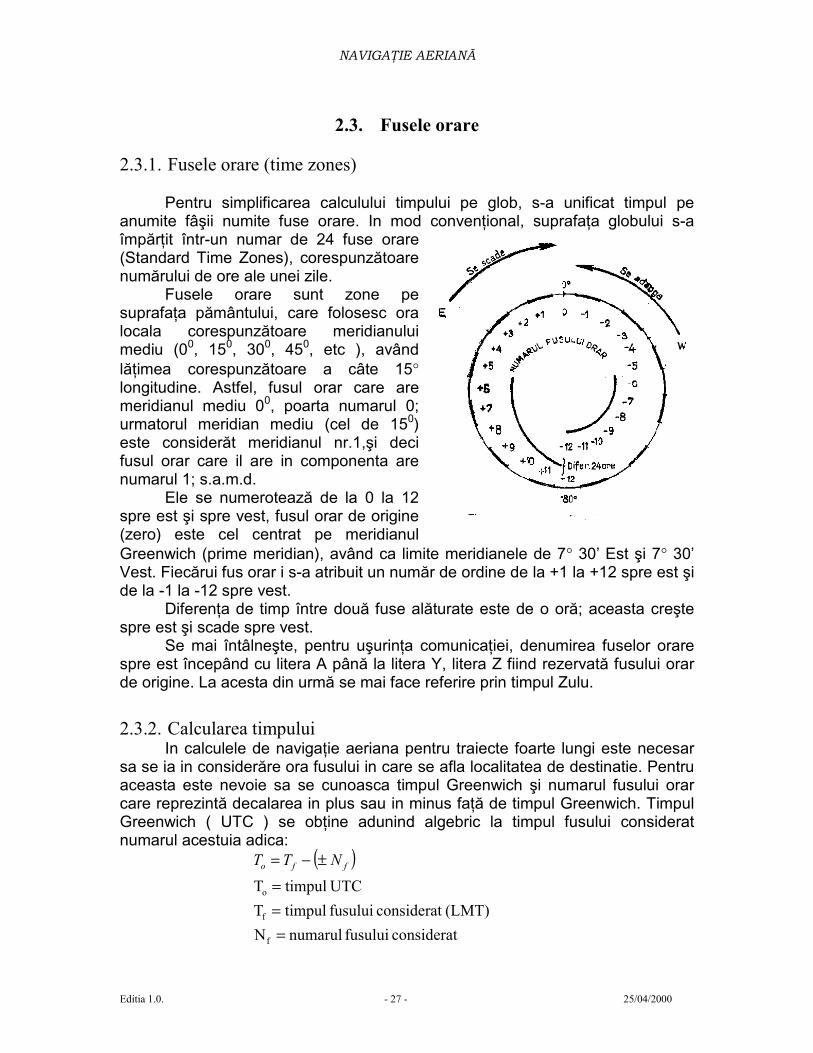
Pentru simplificarea calculului timpului pe glob, s-a unificat timpul peanumite fâşii numite fuse orare. In mod convenţional, suprafaţa globului s-aîmpărţit într-un numar de 24 fuse orare(Standard Time Zones), corespunzătoarenumărului de ore ale unei zile.
Fusele orare sunt zone pesuprafaţa pământului, care folosesc oralocala corespunzătoare meridianuluimediu (00, 150, 300, 450, etc ), avândlăţimea corespunzătoare a câte 15°longitudine. Astfel, fusul orar care aremeridianul mediu 00, poarta numarul 0;urmatorul meridian mediu (cel de 150)este considerăt meridianul nr.1,şi decifusul orar care il are in componenta arenumarul 1; s.a.m.d.
Ele se numerotează de la 0 la 12spre est şi spre vest, fusul orar de origine(zero) este cel centrat pe meridianulGreenwich (prime meridian), având ca limite meridianele de 7° 30’ Est şi 7° 30’Vest. Fiecărui fus orar i s-a atribuit un număr de ordine de la +1 la +12 spre est şide la -1 la -12 spre vest.
Diferenţa de timp între două fuse alăturate este de o oră; aceasta creştespre est şi scade spre vest.
Se mai întâlneşte, pentru uşurinţa comunicaţiei, denumirea fuselor orarespre est începând cu litera A până la litera Y, litera Z fiind rezervată fusului orarde origine. La acesta din urmă se mai face referire prin timpul Zulu.
2.3.2. Calcularea timpuluiIn calculele de navigaţie aeriana pentru traiecte foarte lungi este necesar
sa se ia in considerăre ora fusului in care se afla localitatea de destinatie. Pentruaceasta este nevoie sa se cunoasca timpul Greenwich şi numarul fusului orarcare reprezintă decalarea in plus sau in minus faţă de timpul Greenwich. TimpulGreenwich ( UTC ) se obţine adunind algebric la timpul fusului consideratnumarul acestuia adica:
( )
considerat fusului numarulN(LMT) considerat fusului timpulT
UTCtimpulT
f
f
o
===
±−= ffo NTT
NAVIGAŢIE AERIANĂ
Editia 1.0. - 28 - 25/04/2000
Exemplul 1: Dacă LMT la Delhi (85o E) este 17:45, care este timpul UTC ?Diferenţa de timp = 85o longitudine x 4 minute/grad = 340 minute = 5 ore 40 minDelhi se află la est de meridianul zero, deci UTC = LMT - 5 ore 40 min = 12:05
Exemplul 2: Dacă ora UTC este 14:30, care este ora locală la Los Angeles (127o 45’W) ?127o longitudine x 4 minute/grad = 508 minute = 8 ore 28 min45’ longitudine x 15 sec/grad = 3 minuteDiferenţa de timp = 8 ore 31 minDeorece Los Angeles se află la vest de meridianul zero diferenţa de timp trebuie scăzută din oraUTC pentru a afla ora locală, deci:LMT = UTC - 8 ore 31 min = 05:59
Exemplul 3: Dacă LMT în Papua Noua Guinee (159o E) este 21:10, cît este LMT la 170o W ?Va trebui să raportăm orele la meridianul zero:Diferenţa de timp între Papua Noua Guinee şi Greenwich:159o longitudine x 4 minute/grad = 636 minute = 10 ore 36 minOra UTC = 21:10 - 10 ore 36 min = 10:34Diferenţa de timp între Greenwich şi meridianul 170o W:170o longitudine x 4 minute/grad = 680 min = 11 ore 20minOra locală la 170o W = 10:34 - 11 ore 20 min = 23:14 ziua precedentă
Exemplul 4: Dacă ora locală la Midway (166o W) este 19:35, care este ora UTC ?166o longitudine x 4 minute/grad = 664 min = 11 ore 4minPentru a determină ora UTC, deoarece Midway se află la vest, trebuie să adunăm diferenţa de timp
la ora locală:19:35 + 11 ore 4 min = 06:39 ziua următoare
Nota: Timpul UTC se obţine adunând algebric la timpul fusului considerat (LMT) numărulacestuia (Nf):
UTC = LMT – (±Nf)
2.3.3. Calcularea orei de decolare în funcţie de ora de aterizare
Cind punctul de decolare şi punctul de aterizare nu sint in acelaşi fusorar,este necesar sa se tina cont de acest lucru pentru calcul orei de decolareViteza maxima periferica a pămîntului este maxima la ecuator şi scade catrepoli.Pentru calculul orei de decolare in raport cu ora la care trebuie sa aterizezeavionul se utilizeza urmatoarea relatie:
) km ( parcurs spatiulS) h / (kmcroaziera deviteza V
aterizare delocala ora Tdecolare delocala ora
a
====
−±=
d
fad
TVSNTT
La zborurile de la Vest spre Est se scade ora fusului, iar de la EST spre VEST se aduna ora fusului( numarul fusului ).
NOTA: In unele lucrari de specialitate in loc de Nf, veti gaşi notatia∆f=diferernta de fuse orare între localitatea de decolare şi localitatea de aterizare.
Exemplu: La ce ora locala trebuie sa decoleze un avion de la Paris spre Bucuresti stiind ca aterizareatrebuie sa se efectuieze la ora 12.00 LT. Viteza de zbor este de 450 km/h, iar spaţiul este de 1800 km.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 29 - 25/04/2000
LT 8.00ora este Bucurestila iar, LT 6.00ora este ParisLa
6450180021200
1800/450
21200
=−−=
��
�
��
�
�
==
==
df
a
T
kmShkmV
NT
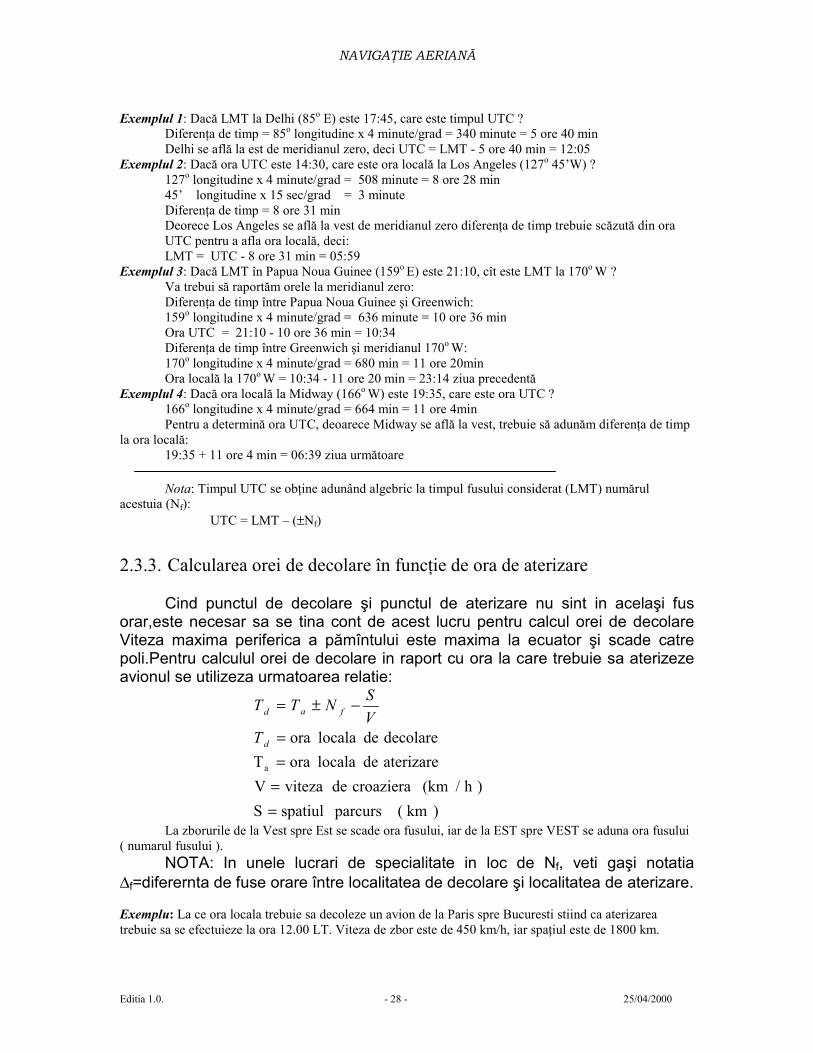
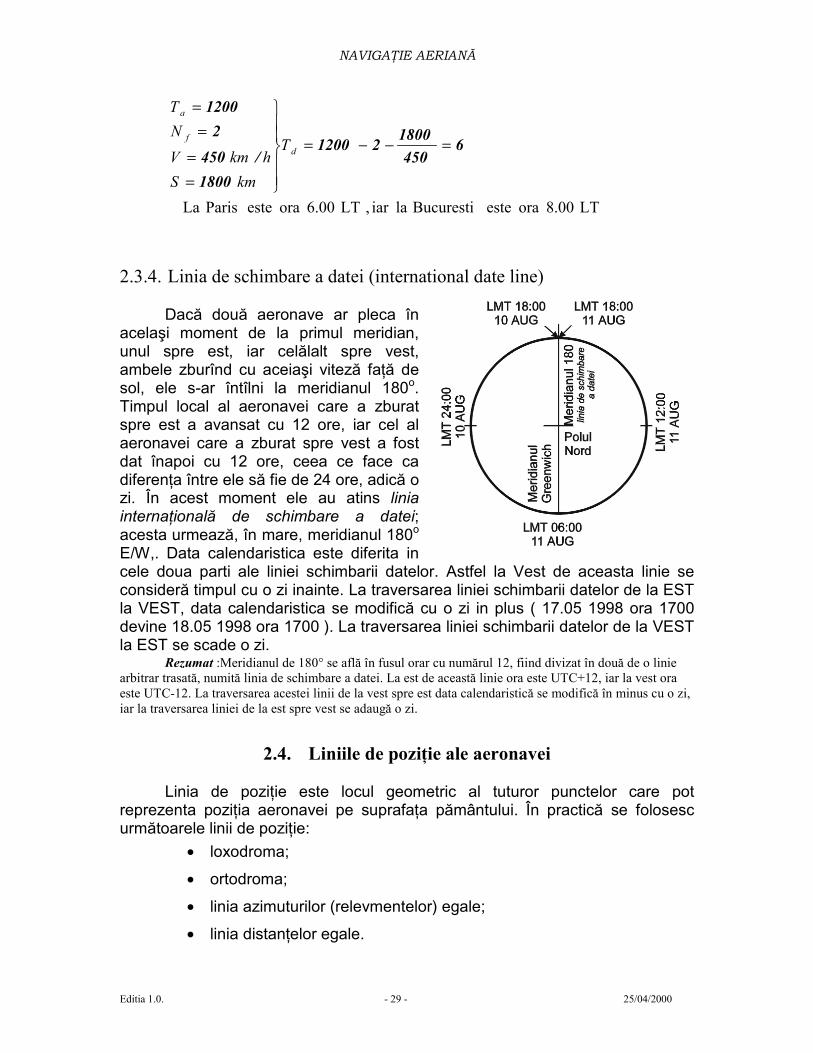
2.3.4. Linia de schimbare a datei (international date line)
Dacă două aeronave ar pleca înacelaşi moment de la primul meridian,unul spre est, iar celălalt spre vest,ambele zburînd cu aceiaşi viteză faţă desol, ele s-ar întîlni la meridianul 180o.Timpul local al aeronavei care a zburatspre est a avansat cu 12 ore, iar cel alaeronavei care a zburat spre vest a fostdat înapoi cu 12 ore, ceea ce face cadiferenţa între ele să fie de 24 ore, adică ozi. În acest moment ele au atins liniainternaţională de schimbare a datei;acesta urmează, în mare, meridianul 180o
E/W,. Data calendaristica este diferita incele doua parti ale liniei schimbarii datelor. Astfel la Vest de aceasta linie seconsideră timpul cu o zi inainte. La traversarea liniei schimbarii datelor de la ESTla VEST, data calendaristica se modifică cu o zi in plus ( 17.05 1998 ora 1700devine 18.05 1998 ora 1700 ). La traversarea liniei schimbarii datelor de la VESTla EST se scade o zi.
Rezumat :Meridianul de 180° se află în fusul orar cu numărul 12, fiind divizat în două de o liniearbitrar trasată, numită linia de schimbare a datei. La est de această linie ora este UTC+12, iar la vest oraeste UTC-12. La traversarea acestei linii de la vest spre est data calendaristică se modifică în minus cu o zi,iar la traversarea liniei de la est spre vest se adaugă o zi.
2.4. Liniile de poziţie ale aeronavei
Linia de poziţie este locul geometric al tuturor punctelor care potreprezenta poziţia aeronavei pe suprafaţa pământului. În practică se folosescurmătoarele linii de poziţie:
• loxodroma;
• ortodroma;
• linia azimuturilor (relevmentelor) egale;
• linia distanţelor egale.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 30 - 25/04/2000
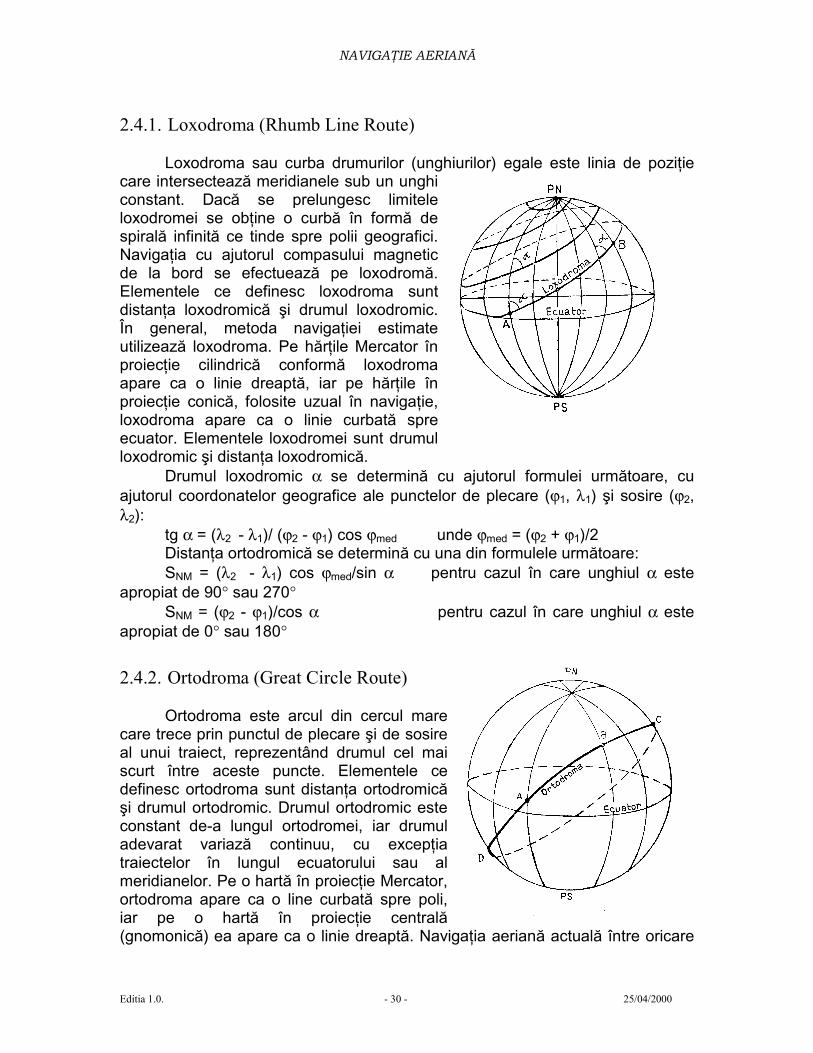
2.4.1. Loxodroma (Rhumb Line Route)
Loxodroma sau curba drumurilor (unghiurilor) egale este linia de poziţiecare intersectează meridianele sub un unghiconstant. Dacă se prelungesc limiteleloxodromei se obţine o curbă în formă despirală infinită ce tinde spre polii geografici.Navigaţia cu ajutorul compasului magneticde la bord se efectuează pe loxodromă.Elementele ce definesc loxodroma suntdistanţa loxodromică şi drumul loxodromic.În general, metoda navigaţiei estimateutilizează loxodroma. Pe hărţile Mercator înproiecţie cilindrică conformă loxodromaapare ca o linie dreaptă, iar pe hărţile înproiecţie conică, folosite uzual în navigaţie,loxodroma apare ca o linie curbată spreecuator. Elementele loxodromei sunt drumulloxodromic şi distanţa loxodromică.
Drumul loxodromic α se determină cu ajutorul formulei următoare, cuajutorul coordonatelor geografice ale punctelor de plecare (ϕ1, λ1) şi sosire (ϕ2,λ2):
tg α = (λ2 - λ1)/ (ϕ2 - ϕ1) cos ϕmed unde ϕmed = (ϕ2 + ϕ1)/2Distanţa ortodromică se determină cu una din formulele următoare:SNM = (λ2 - λ1) cos ϕmed/sin α pentru cazul în care unghiul α este
apropiat de 90° sau 270°SNM = (ϕ2 - ϕ1)/cos α pentru cazul în care unghiul α este
apropiat de 0° sau 180°
2.4.2. Ortodroma (Great Circle Route)
Ortodroma este arcul din cercul marecare trece prin punctul de plecare şi de sosireal unui traiect, reprezentând drumul cel maiscurt între aceste puncte. Elementele cedefinesc ortodroma sunt distanţa ortodromicăşi drumul ortodromic. Drumul ortodromic esteconstant de-a lungul ortodromei, iar drumuladevarat variază continuu, cu excepţiatraiectelor în lungul ecuatorului sau almeridianelor. Pe o hartă în proiecţie Mercator,ortodroma apare ca o line curbată spre poli,iar pe o hartă în proiecţie centrală(gnomonică) ea apare ca o linie dreaptă. Navigaţia aeriană actuală între oricare
NAVIGAŢIE AERIANĂ
Editia 1.0. - 31 - 25/04/2000
două puncte de-a lungul traiectelor de zbor foloseşte principiile zboruluiortodromic.
Elementele ortodromei sunt distanţa ortodromică şi drumul ortodromic.Distanţa ortodromică se determină cu ajutorul formulei următoare:cos S°ort = sin ϕ1 x sin ϕ2 + cos ϕ1 cos ϕ2 cos (λ2 - λ1)Valoarea distanţei în NM se obţine prin transformarea arcului de cerc în
unităţi de distanţă:Sort = S°ort x 60
Când se cunoaşte direcţia traiectului ordodromic în punctul de plecare,adică azimutul ortodromic α, atunci distanţa ortodromică se calculează cuajutorul formulei:
sin S°ort = sin (λ2 - λ1) cos ϕ2/sin αValoarea azimutului ortodromic în punctul de plecare sau a drumului
ortodromic se calculează cu ajutorul formulei:ctg α = tg ϕ2 cos ϕ1 cosec (λ2 - λ1) – sin ϕ1 ctg (λ2 - λ1)
Valoarea azimutului ortodromic în punctul de sosire se calculează cuajutorul formulei:
ctg β = tg ϕ1 cos ϕ2 cosec (λ2 - λ1) - sin ϕ2 ctg (λ2 - λ1)
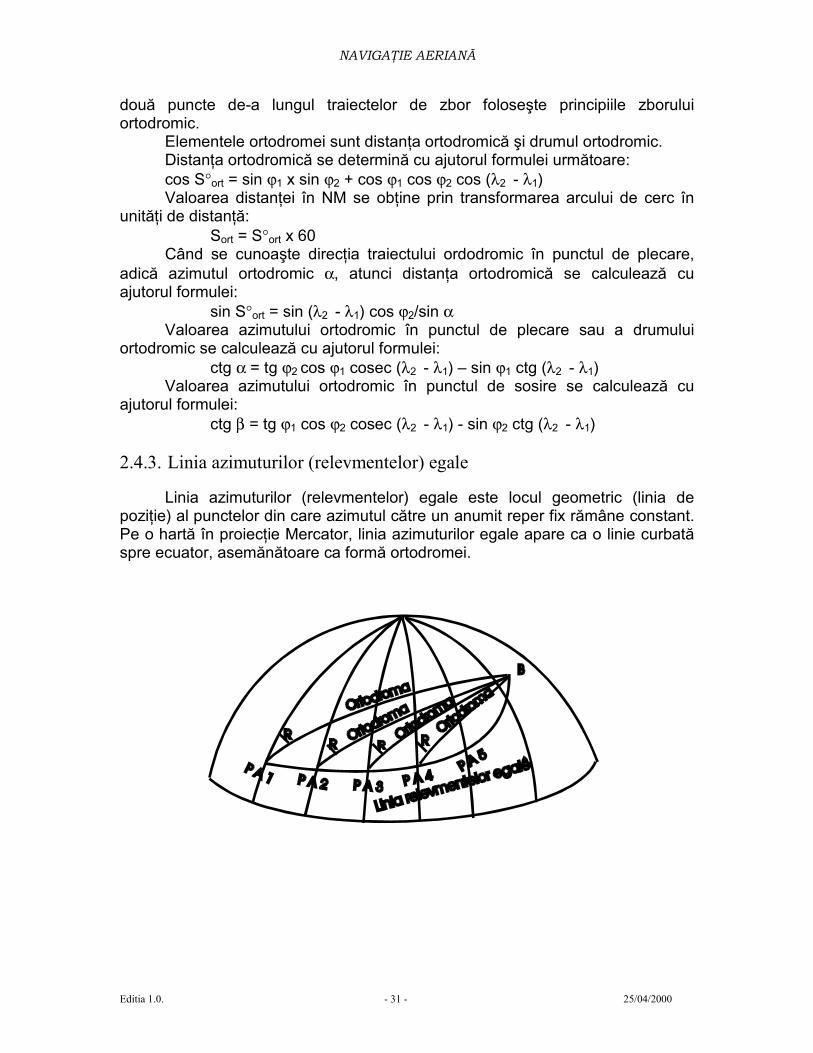
2.4.3. Linia azimuturilor (relevmentelor) egale
Linia azimuturilor (relevmentelor) egale este locul geometric (linia depoziţie) al punctelor din care azimutul către un anumit reper fix rămâne constant.Pe o hartă în proiecţie Mercator, linia azimuturilor egale apare ca o linie curbatăspre ecuator, asemănătoare ca formă ortodromei.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 32 - 25/04/2000
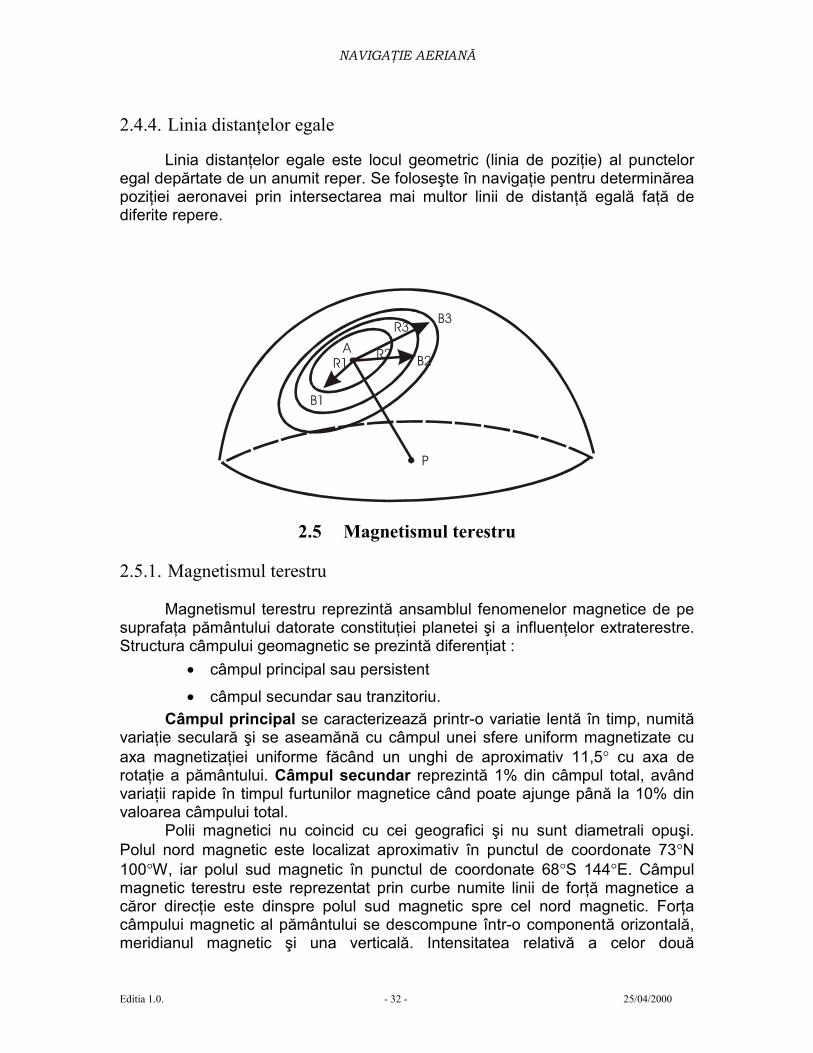
2.4.4. Linia distanţelor egale
Linia distanţelor egale este locul geometric (linia de poziţie) al puncteloregal depărtate de un anumit reper. Se foloseşte în navigaţie pentru determinăreapoziţiei aeronavei prin intersectarea mai multor linii de distanţă egală faţă dediferite repere.
A
P
B1
B2
B3
R1R2
R3
2.5 Magnetismul terestru
2.5.1. Magnetismul terestru
Magnetismul terestru reprezintă ansamblul fenomenelor magnetice de pesuprafaţa pământului datorate constituţiei planetei şi a influenţelor extraterestre.Structura câmpului geomagnetic se prezintă diferenţiat :
• câmpul principal sau persistent
• câmpul secundar sau tranzitoriu.Câmpul principal se caracterizează printr-o variatie lentă în timp, numită
variaţie seculară şi se aseamănă cu câmpul unei sfere uniform magnetizate cuaxa magnetizaţiei uniforme făcând un unghi de aproximativ 11,5° cu axa derotaţie a pământului. Câmpul secundar reprezintă 1% din câmpul total, avândvariaţii rapide în timpul furtunilor magnetice când poate ajunge până la 10% dinvaloarea câmpului total.
Polii magnetici nu coincid cu cei geografici şi nu sunt diametrali opuşi.Polul nord magnetic este localizat aproximativ în punctul de coordonate 73°N100°W, iar polul sud magnetic în punctul de coordonate 68°S 144°E. Câmpulmagnetic terestru este reprezentat prin curbe numite linii de forţă magnetice acăror direcţie este dinspre polul sud magnetic spre cel nord magnetic. Forţacâmpului magnetic al pământului se descompune într-o componentă orizontală,meridianul magnetic şi una verticală. Intensitatea relativă a celor două
NAVIGAŢIE AERIANĂ
Editia 1.0. - 33 - 25/04/2000
componente variază pe suprafaţa pământului, astfel la polii magneticicomponenta verticală este maximă şi cea orizontală este minimă. La jumătateadistanţei dîntre poli componenta orizontală este maximă şi cea verticală esteminimă. Doar componenta orizontală este folosită pentru a induce forţa dedirecţionare a compasului magnetic; de aceea în zona polilor pe o arie deaproximativ 1000 NM, unde această componentă este minimă, navigaţia aerianătrebuie să se bazeze pe alte metode.
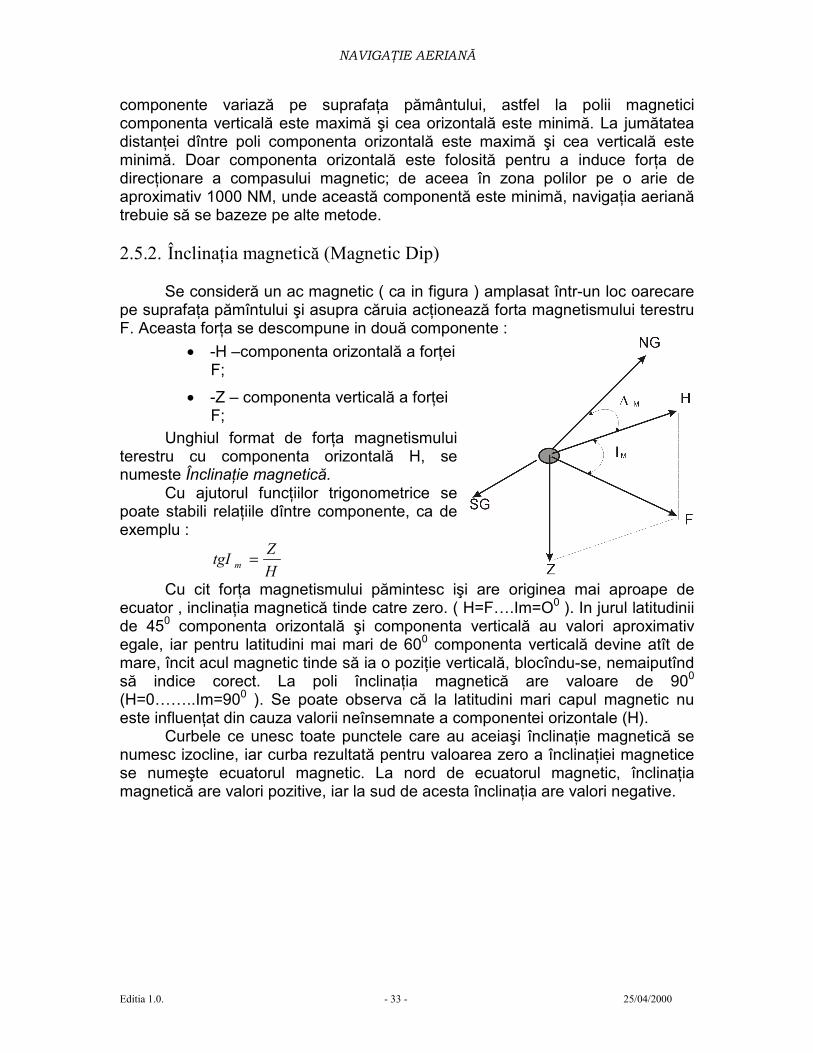
2.5.2. Înclinaţia magnetică (Magnetic Dip)
Se consideră un ac magnetic ( ca in figura ) amplasat într-un loc oarecarepe suprafaţa pămîntului şi asupra căruia acţionează forta magnetismului terestruF. Aceasta forţa se descompune in două componente :
• -H –componenta orizontală a forţeiF;
• -Z – componenta verticală a forţeiF;
Unghiul format de forţa magnetismuluiterestru cu componenta orizontală H, senumeste Înclinaţie magnetică.
Cu ajutorul funcţiilor trigonometrice sepoate stabili relaţiile dîntre componente, ca deexemplu :
HZtgI m =
Cu cit forţa magnetismului pămintesc işi are originea mai aproape deecuator , inclinaţia magnetică tinde catre zero. ( H=F….Im=O0 ). In jurul latitudiniide 450 componenta orizontală şi componenta verticală au valori aproximativegale, iar pentru latitudini mai mari de 600 componenta verticală devine atît demare, încit acul magnetic tinde să ia o poziţie verticală, blocîndu-se, nemaiputîndsă indice corect. La poli înclinaţia magnetică are valoare de 900
(H=0……..Im=900 ). Se poate observa că la latitudini mari capul magnetic nueste influenţat din cauza valorii neînsemnate a componentei orizontale (H).
Curbele ce unesc toate punctele care au aceiaşi înclinaţie magnetică senumesc izocline, iar curba rezultată pentru valoarea zero a înclinaţiei magneticese numeşte ecuatorul magnetic. La nord de ecuatorul magnetic, înclinaţiamagnetică are valori pozitive, iar la sud de acesta înclinaţia are valori negative.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 34 - 25/04/2000
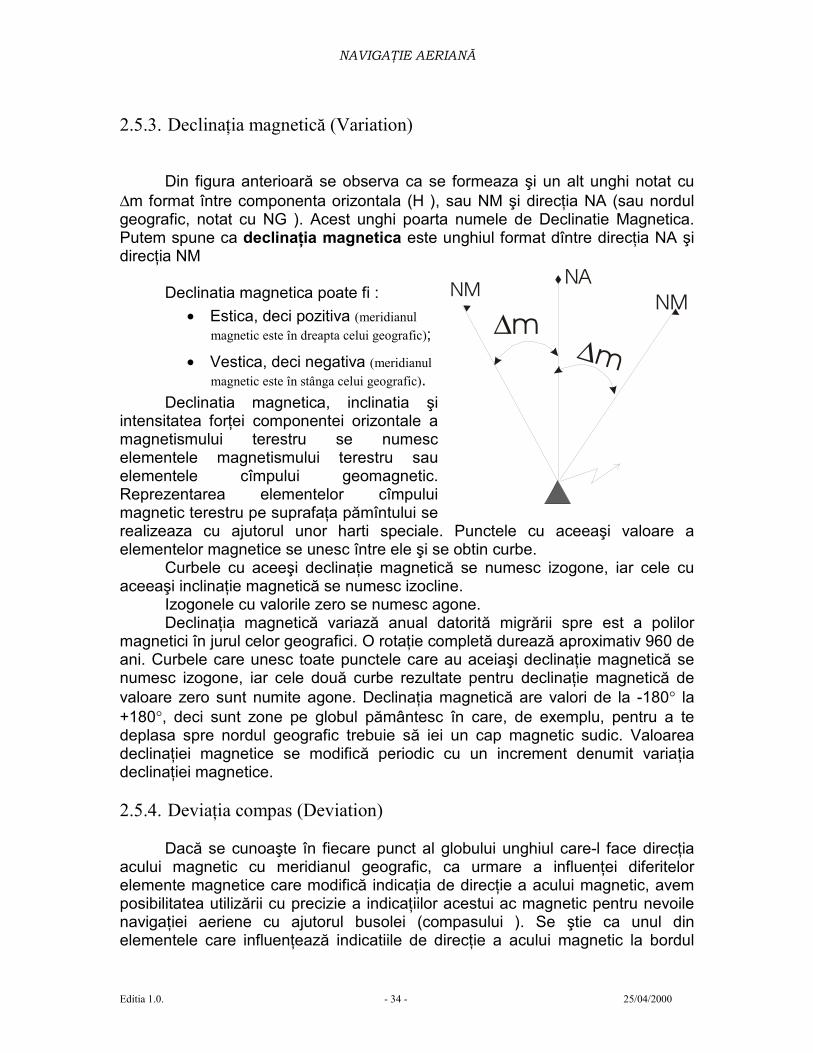
2.5.3. Declinaţia magnetică (Variation)
Din figura anterioară se observa ca se formeaza şi un alt unghi notat cu∆m format între componenta orizontala (H ), sau NM şi direcţia NA (sau nordulgeografic, notat cu NG ). Acest unghi poarta numele de Declinatie Magnetica.Putem spune ca declinaţia magnetica este unghiul format dîntre direcţia NA şidirecţia NM
Declinatia magnetica poate fi :• Estica, deci pozitiva (meridianul
magnetic este în dreapta celui geografic);
• Vestica, deci negativa (meridianulmagnetic este în stânga celui geografic).
Declinatia magnetica, inclinatia şiintensitatea forţei componentei orizontale amagnetismului terestru se numescelementele magnetismului terestru sauelementele cîmpului geomagnetic.Reprezentarea elementelor cîmpuluimagnetic terestru pe suprafaţa pămîntului serealizeaza cu ajutorul unor harti speciale. Punctele cu aceeaşi valoare aelementelor magnetice se unesc între ele şi se obtin curbe.
Curbele cu aceeşi declinaţie magnetică se numesc izogone, iar cele cuaceeaşi inclinaţie magnetică se numesc izocline.
Izogonele cu valorile zero se numesc agone.Declinaţia magnetică variază anual datorită migrării spre est a polilor
magnetici în jurul celor geografici. O rotaţie completă durează aproximativ 960 deani. Curbele care unesc toate punctele care au aceiaşi declinaţie magnetică senumesc izogone, iar cele două curbe rezultate pentru declinaţie magnetică devaloare zero sunt numite agone. Declinaţia magnetică are valori de la -180° la+180°, deci sunt zone pe globul pământesc în care, de exemplu, pentru a tedeplasa spre nordul geografic trebuie să iei un cap magnetic sudic. Valoareadeclinaţiei magnetice se modifică periodic cu un increment denumit variaţiadeclinaţiei magnetice.
2.5.4. Deviaţia compas (Deviation)
Dacă se cunoaşte în fiecare punct al globului unghiul care-l face direcţiaacului magnetic cu meridianul geografic, ca urmare a influenţei diferitelorelemente magnetice care modifică indicaţia de direcţie a acului magnetic, avemposibilitatea utilizării cu precizie a indicaţiilor acestui ac magnetic pentru nevoilenavigaţiei aeriene cu ajutorul busolei (compasului ). Se ştie ca unul dinelementele care influenţează indicatiile de direcţie a acului magnetic la bordul
∆m∆m
NMNA
NM
NAVIGAŢIE AERIANĂ
Editia 1.0. - 35 - 25/04/2000
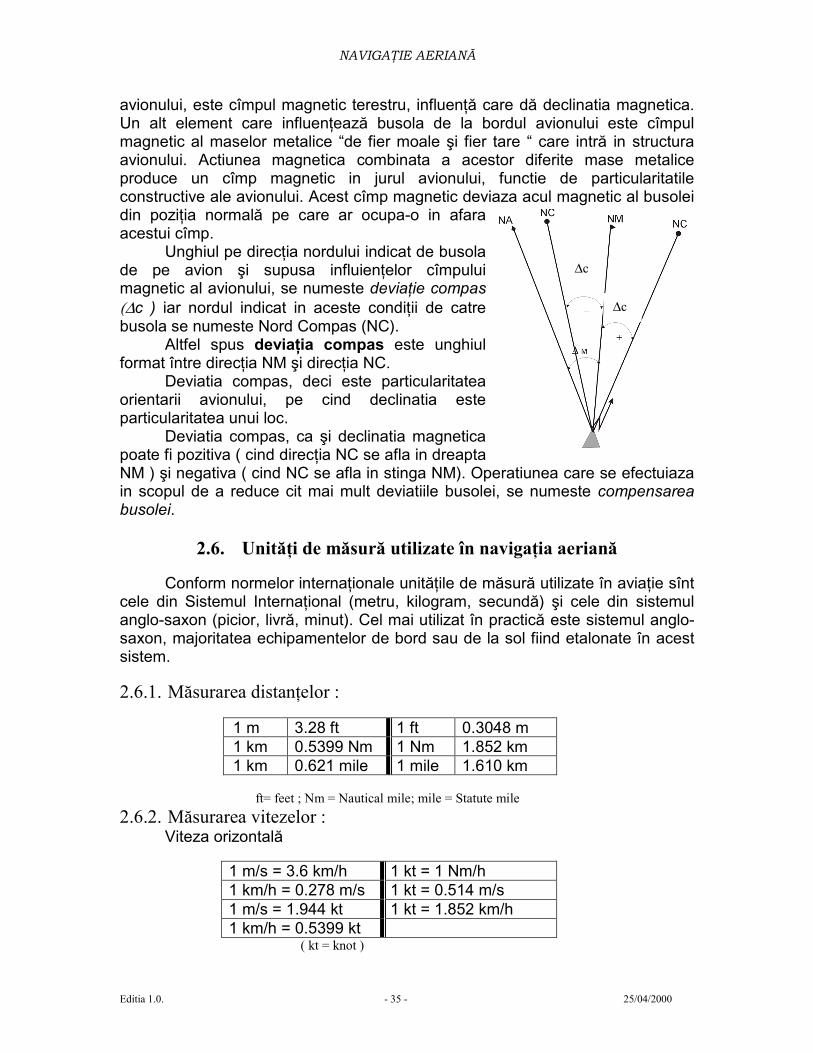
avionului, este cîmpul magnetic terestru, influenţă care dă declinatia magnetica.Un alt element care influenţează busola de la bordul avionului este cîmpulmagnetic al maselor metalice “de fier moale şi fier tare “ care intră in structuraavionului. Actiunea magnetica combinata a acestor diferite mase metaliceproduce un cîmp magnetic in jurul avionului, functie de particularitatileconstructive ale avionului. Acest cîmp magnetic deviaza acul magnetic al busoleidin poziţia normală pe care ar ocupa-o in afaraacestui cîmp.
Unghiul pe direcţia nordului indicat de busolade pe avion şi supusa influienţelor cîmpuluimagnetic al avionului, se numeste deviaţie compas(∆c ) iar nordul indicat in aceste condiţii de catrebusola se numeste Nord Compas (NC).
Altfel spus deviaţia compas este unghiulformat între direcţia NM şi direcţia NC.
Deviatia compas, deci este particularitateaorientarii avionului, pe cind declinatia esteparticularitatea unui loc.
Deviatia compas, ca şi declinatia magneticapoate fi pozitiva ( cind direcţia NC se afla in dreaptaNM ) şi negativa ( cind NC se afla in stinga NM). Operatiunea care se efectuiazain scopul de a reduce cit mai mult deviatiile busolei, se numeste compensareabusolei.
2.6. Unităţi de măsură utilizate în navigaţia aeriană
Conform normelor internaţionale unităţile de măsură utilizate în aviaţie sîntcele din Sistemul Internaţional (metru, kilogram, secundă) şi cele din sistemulanglo-saxon (picior, livră, minut). Cel mai utilizat în practică este sistemul anglo-saxon, majoritatea echipamentelor de bord sau de la sol fiind etalonate în acestsistem.
2.6.1. Măsurarea distanţelor :
1 m 3.28 ft 1 ft 0.3048 m1 km 0.5399 Nm 1 Nm 1.852 km1 km 0.621 mile 1 mile 1.610 km
ft= feet ; Nm = Nautical mile; mile = Statute mile2.6.2. Măsurarea vitezelor :
Viteza orizontală
1 m/s = 3.6 km/h 1 kt = 1 Nm/h1 km/h = 0.278 m/s 1 kt = 0.514 m/s1 m/s = 1.944 kt 1 kt = 1.852 km/h1 km/h = 0.5399 kt
( kt = knot )
∆c
∆c
NAVIGAŢIE AERIANĂ
Editia 1.0. - 36 - 25/04/2000
Formule de transformare :
[m/s] = [km/h] / 3.6 = ~ 2 x [kt] [km/h] = 3.6 x [m/s] = 1.852 x [kt]
[kt] = ~ [m/s] / 2 = [km/h] / 1.852
Viteza verticală
1 m/s = 60 m/min 1 ft/s = 60 ft/min1m/min = 0.0167 m/ s 1 ft/s = 0.3048 m/s
1 m/s = 3.28 ft/s = 196.8 ft/min 1 ft/min = 0.005 m/s = 0.3048 m/min
Formule de transformare :[m/s] = [m/min] / 60 = [ft/min] / 200 = [ft/s] / 3.28 [ft/min] = [ft/s] / 60 = 200 x [m/s]
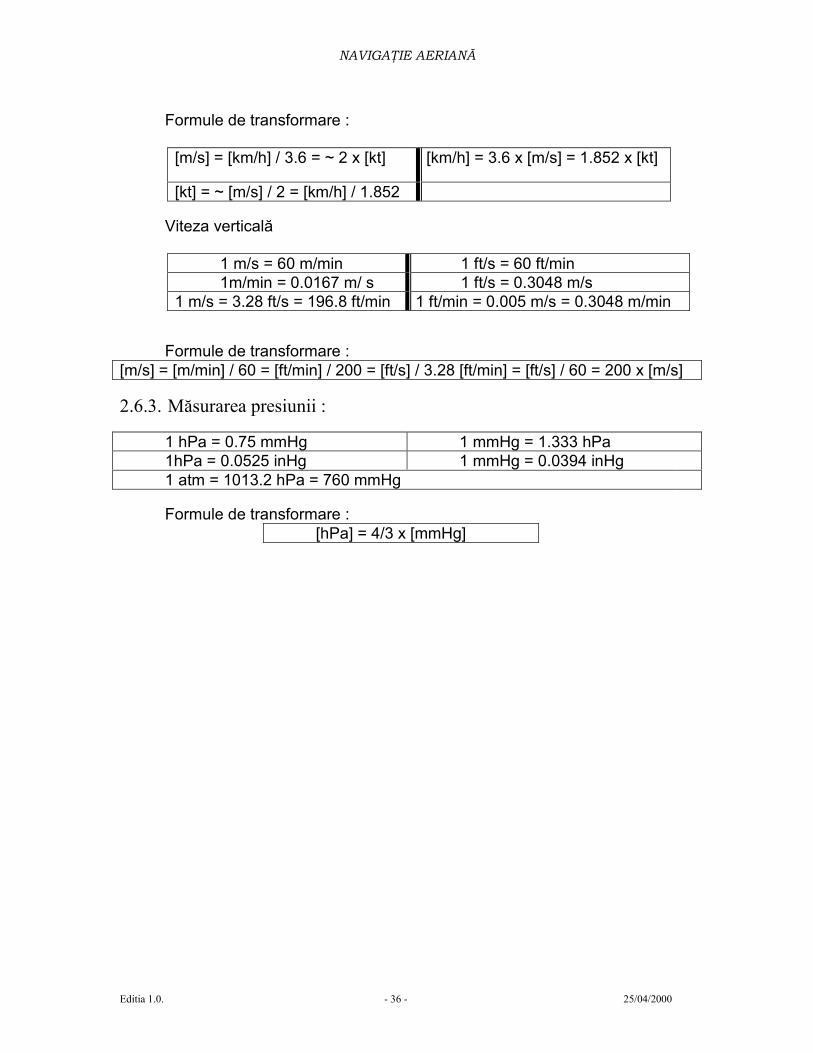
2.6.3. Măsurarea presiunii :
1 hPa = 0.75 mmHg 1 mmHg = 1.333 hPa1hPa = 0.0525 inHg 1 mmHg = 0.0394 inHg1 atm = 1013.2 hPa = 760 mmHg
Formule de transformare :[hPa] = 4/3 x [mmHg]
NAVIGAŢIE AERIANĂ
Editia 1.0. - 37 - 25/04/2000
CAPITOLUL 3.
HĂRŢI AERONAUTICE
3.1. Proiecţii cartografice
3.1.1. Generalităţi
Reprezentarea redusă în plan bidimensional a suprafeţei terestre poartădenumirea de hartă. Factorul de reducere a dimesiunilor detaliilor terestre senumeşte scara hărţii; aceasta arată de cîte ori trebuie multiplicată o unitate demăsură din plan pentru a reprezenta aceiaşi dimensiune corespunzătoare înteren.
Reprezentarea plană a suprafeţei pământului pe hărţi se face în mai multemodalităţi denumite proiecţii cartografice. Proiecţiile permit transpunereasuprafeţei pământului fie pe o suprafaţă plană, fie pe o suprafaţă desfăşurabilăce poate fi suprafaţa laterală a conului sau a cilindrului. Alegerea unei hărţipentru a fi utilizată în navigaţia aeriană depinde de trăsăturile caracteristice alefiecărei proiecţii cartografice. Condiţia esenţială pentru întocmirea hărţilor denavigaţie aeriană este respectarea unghiurilor.
Proiecţiile cartografice ar trebui să îndeplinească următoarele condiţii:• să reprezinte forma adevărată a terenului;
• să indice corect unghiurile;
• să păstreze proporţionalitatea distanţelor;
• ortodroma să apară ca o linie dreaptă;
• loxodroma să apară ca o linie dreaptă.
3.1.2. Tipuri de proiecţii
Procedeul matematic prin care se face corespondenţa între punctele de pesuprafaţa Pămîntului şi reprezentare lor în plan poartă numele de proiecţie. Înmod ideal o proiecţie ar trebui să aibă următoarele proprietăţi:
• -scala trebuie să fie constantă în orice punct al hărţii;
• -unghiurile, formele şi suprafeţele să fie reprezentate fidel;
NAVIGAŢIE AERIANĂ
Editia 1.0. - 38 - 25/04/2000
• -cercurile mari şi loxodromele (linia care intersectează meridianelesub acelaşi unghi) să fie reprezentate prin linii drepte;
• -direcţiile reprezentate pe hartă să fie identice cu cele din teren;
• -meridianele şi paralele să se intersecteze în unghi drept;
• -părţile adiacente ale unei hărţi să se potrivească perfect;
• -un set complet de hărţi să acopere toată suprafaţa Pămîntului;
În realitate, nici o proiecţie nu poate îndeplini toate cerinţele de mai sus, deaceea se utilizează mai multe tipuri de proiecţii în funcţie de destinaţia hărţii.
Proiecţiile cartografice care au utilizare în întocmirea hărţilor de navigaţieaeriană se clasifică din punct de vedere al:
A - caracterului deformărilor;B - suprafeţei de proiecţie;C - poziţiei punctului de vedere.
A - Din punct de vedere al deformărilor, proiecţiile cartografice seclasifică în:
• conforme;
• echidistante;
• echivalente;
• arbitrare.
Proiecţiile conforme (ortomorfe) sunt proiecţiile în care se păstreazăegalitatea unghiurilor măsurate pe suprafaţa pământului, deci figurile de pe hartăsunt asemănătoare cu cele din teren.
Proiecţiile echidistante sunt proiecţiile în care lungimile pe o anumitădirecţie de pe hartă se reprezintă fără deformări fiind reduse în modcorespunzător.
Proiecţiile echivalente (homalografice) sunt proiecţiile în care se păstreazăproporţionalitatea suprafeţelor.
Proiecţiile arbitrare nu păstrează nici una din proprietăţile proiecţiiloranterioare.
B - Din punct de vedere al suprafeţei de proiecţie ( con, plan, cilindru)se deosebesc proiecţiile:
• cilindrice;
• conice;
• azimutale;
• de perspectivă.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 39 - 25/04/2000
Dacă suprafaţa de proiecţie este tangentă sau secantă la elipsoidulterestru apar sistemele de proiecţii tangente sau sisteme de proiecţii secante.
După poziţia suprafeţei de proiecţie în raport cu elipsoidul terestru,proiecţiile pot fi:
• - ecuatoriale ( normale );
• - polare ( transversale );
• - oblice.
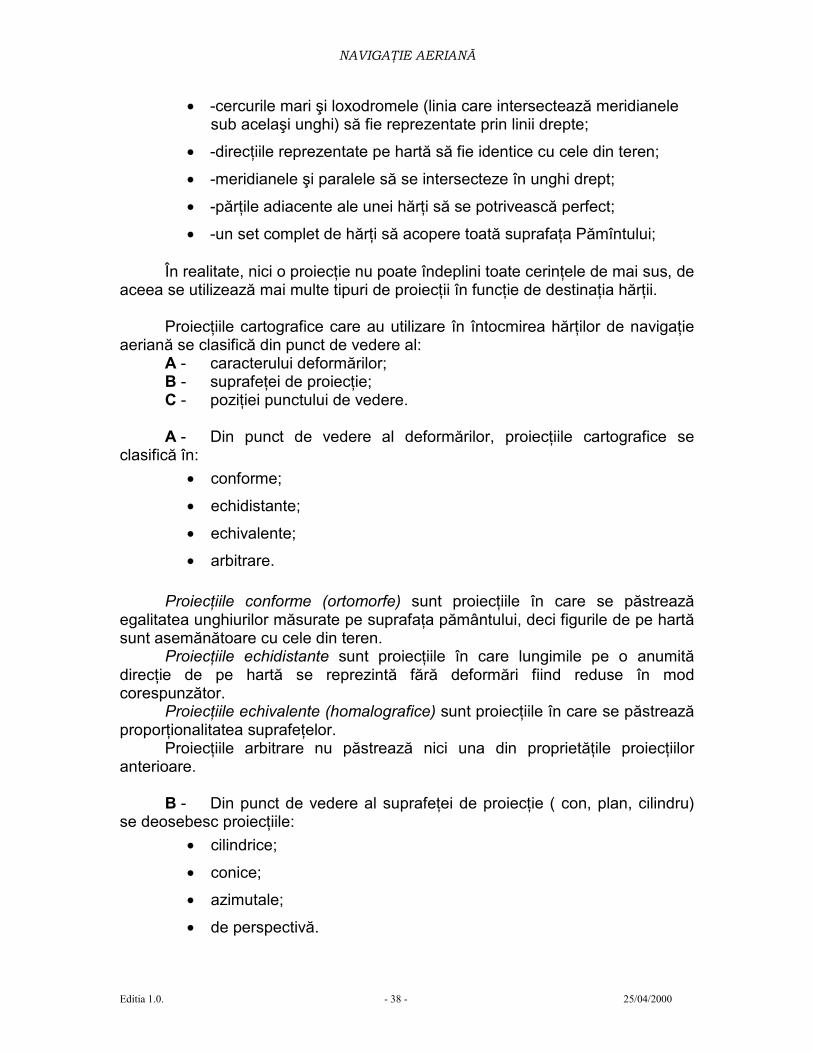
Proiecţie cilindrică normală:
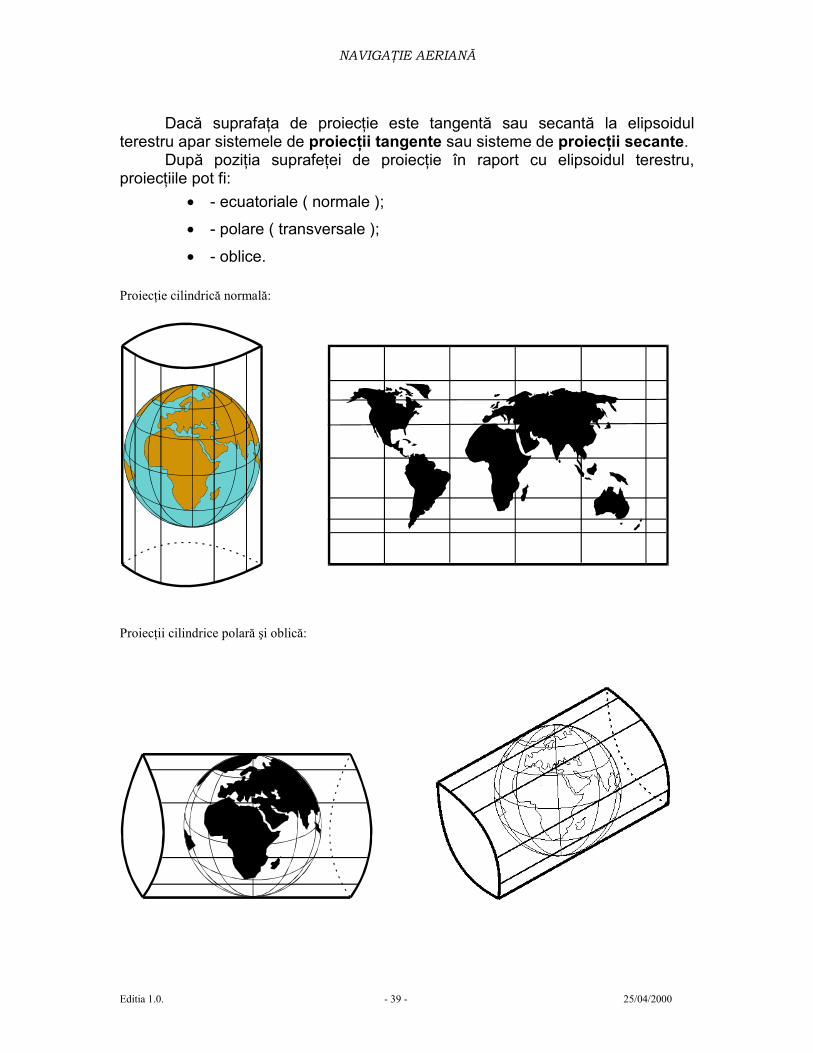
Proiecţii cilindrice polară şi oblică:
NAVIGAŢIE AERIANĂ
Editia 1.0. - 40 - 25/04/2000
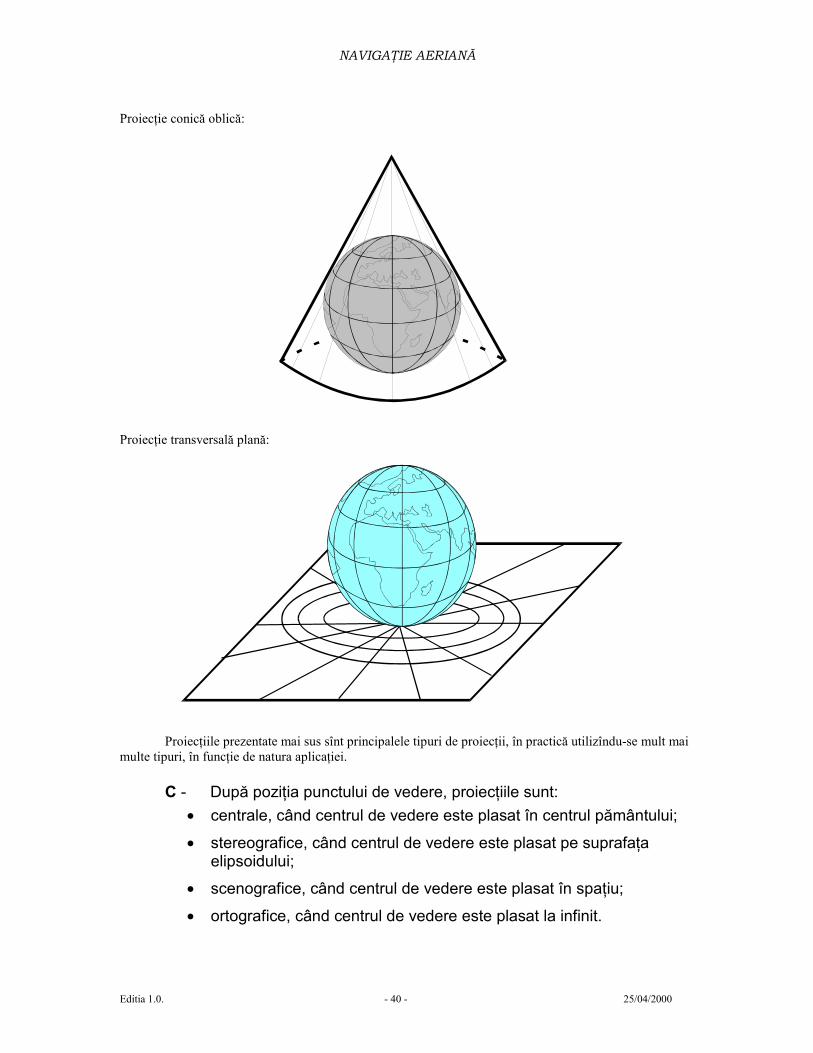
Proiecţie conică oblică:
Proiecţie transversală plană:
Proiecţiile prezentate mai sus sînt principalele tipuri de proiecţii, în practică utilizîndu-se mult maimulte tipuri, în funcţie de natura aplicaţiei.
C - După poziţia punctului de vedere, proiecţiile sunt:• centrale, când centrul de vedere este plasat în centrul pământului;
• stereografice, când centrul de vedere este plasat pe suprafaţaelipsoidului;
• scenografice, când centrul de vedere este plasat în spaţiu;
• ortografice, când centrul de vedere este plasat la infinit.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 41 - 25/04/2000
3.1.3. Proiecţii uzuale
În aviaţie se utilizează, în general trei tipuri de proiecţii:• Mercator;
• Lambert ;
• polară stereografică.
3.1.3.1. Proiecţia Mercator
Proiecţia Mercator este o proiecţie cilindrică tangentă, în care scara hărţiicreşte odată cu îndepărtarea faţă de linia de contact între cilindrul de proiecţie şiglobul Pămîntesc. Pentru a se păstra similitudinea detaliilor, prin proiecţiaMercator se lungesc meridianele.
Cea mai utilizată proiecţie de acest tip este cea ecuatorială, care areurmătoarele caracteristici:
• meridianele şi paralelele sunt drepte perpendiculare;
• distanţa între meridiane este constantă;
• distanţa între paralele este variabilă;
• proiecţia este conformă;
• scara de-a lungul unei paralele este constantă;
• scara de-a lungul unui meridian este variabilă;
• loxodroma apare ca o linie dreaptă;
• ortodroma, cu excepţia ecuatorului şi a meridianului, apare ca o liniecurbată spre poli;
• suprafaţa pământului peste latitudinea de 78° nu mai poate fi redată(harta nu poate fi utilizata).
Proiecţia Mercator este cea mai cunoscută proiecţie, fiind folosită laîntocmirea hărţilor în mod special pentru navigaţia peste suprafeţele întinse deapă şi cea astronomică.
3.1.3.2. Proiecţia conică conformă (Lambert)
Proiecţia conică conformă se obţine utilizând ca suprafaţă de proiecţie uncon secant la elipsoid, astfel ca axa conului să coincidă cu axa pământului. Aparastfel două paralele standard, spaţiul dîntre ele se comprimă, iar cel din exteriorse extinde.
Caracteristicile proiecţiei Lambert sunt:• meridianele apar ca linii drepte convergente spre poli;
• paralelele sunt cercuri concentrice;
NAVIGAŢIE AERIANĂ
Editia 1.0. - 42 - 25/04/2000
• distanţa între paralele este variabilă;
• meridianele sunt perpendiculare pe paralele;
• proiecţia este conformă;
• are o scară de distanţe constantă;
• loxodroma apare ca o spirală, iar pentru distanţe până în 1000 kmse poate trasa ca o linie dreaptă;
• ortodroma se aproximează cu o linie dreaptă.Proiecţia Lambert este folosită la întocmirea hărţilor de navigaţie aeriană
în mod special pentru zborurile VFR.
3.1.3.3. Proiecţia stereografică polară
Proiecţia stereografică polară are centrul de vedere amplasat pe suprafaţaelipsoidului terestru în punctul opus centrului hărţii cu planul de proiecţie dispusla poli. Aceste proiecţii au utilizare la întocmirea hărţilor regiunilor polare,completând în acest mod proiecţiile Mercator pentru latitudinile ridicate.
Loxodroma, în această proiecţie, apare ca o spirală, iar ortodroma, pentrutraiecte sub 2000 km lungime, apare ca o linie dreaptă.
3.1.4. Reprezentarea reliefului în cartografie
Cu toată că majoritatea aeronavelor moderne zboară utilizînd mijloacefoarte performante de radionavigaţie, sînt încă foarte necesare hărţi aeronauticecare să prezinte suficiente detalii fizice, astfel încît să permită orientarea vizuală(pentru zborul aeronavelor VFR, pentru faza de apropiere şi aterizare, etc). Înaviaţie se foloseşte reprezentarea verticală a reliefului deoarece informaţiilefurnizate de aceasta au următoarele caracteristici:
• -rămîn neschimbate în timp;
• -acoperă suprafeţe mari şi au detalii suficiente pentru a permitenavigaţia pe rută sau punct cu punct.
3.1.4.1. Reprezentarea contururilor (liniilor de nivel)
Contururile (liniile de nivel) sînt curbe continue, desenate pe hartă, careunesc punctele care au înălţimi egale. Intervalul pe verticală, între două contururiadiacente este determinăt de:
• -scara hărţii;
• -intervalul determinăt între înălţimea maximă şi minimă,reprezentate pe hartă;
• -unităţile de măsură utilizate.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 43 - 25/04/2000
În general aceste intervale sînt standardizate pentru un anumit tip de hărţi şi sînt precizate în legenda hărţiirespective.
3.1.4.2. Marcarea vîrfurilor (înălţimilor predominante)
În orice hartă care descrie relieful unei zone, este necesară reprezentareape lîngă curbele de nivel şi a vîrfurilor sau a înălţimilor predominante. Aceastaeste necesară deoarece intervalele verticale între două curbe de nivel pot fidestul de mari încît să includă valoarea înălţimii vîrfului respectiv, deci practicacesta nu ar putea fi identificat pe hartă. Marcarea vîrfurilor sau a înălţimilorpredominante se face prin simboluri speciale şi prin tipărirea pe hartă a valoriiînălţimii lor. Pentru descrierea lor se folosesc aceleaşi unităţi de măsură, ca celeutilizate în restul hărţii.
3.1.4.3. Utilizarea culorilor
Pentru a îmbunătăţi reprezentarea relifului, realizată cu ajutorul curbelorde nivel, se utilizează umplerea intervalelor delimitate de aceste curbe, cu culorideosebite. În mod uzual culorile devin din ce în ce mai închise odată cucreşterea altitudinii.

NAVIGAŢIE AERIANĂ
Editia 1.0. - 44 - 25/04/2000
3.2. Hărţi aeronautice
3.2.1. Generalităţi
Harta reprezintă transpunerea convenţională pe un plan de dimensiunireduse a suprafeţei elipsoidului terestru sau a unei părţi din ea.
3.2.2. Elementele hărţii
Elementele hărţii sunt părţile componente care determină alegerea şifolosirea unei hărţi într-un scop determinăt. Elementele principale sunt:
• scara ;
• proiecţia;
• nivelmentul;
• planimetria;
• hidrografia;
• semne convenţionale şi date de conţinut special.
3.2.2.1. Scara hărţii
Scara hărţii este raportul de reducere liniară a marimilor de pe hartă faţade cele de pe teren, sau raportul între lungimea distanţei de pe harta şi lungimeadistanţei masurată pe teren, folosind aceiaşi unitate de măsură.
Acest raport se exprimă sub forma :
• De fracţie, şi se numeşte scară numerică (1:100000;100000
1 )
• Grafică, şi se numeşte scară grafică;
Relaţia de corespondenţa dîntre elementele scării numerice este:
scariinumitorulN)m ( teren pemasurata lungimea L (m)harta pemasurata lungimea l
==
=
=NL
l 1

NAVIGAŢIE AERIANĂ
Editia 1.0. - 45 - 25/04/2000
Din această relaţie rezultă :
lLN
NLl
lNL
=
=
×=
;
;
Exemple:1. Scara harţii este 1:1000000. Cît reprezintă în realitate (teren) 10 cm măsuraţi pe hartă ?
kmmcmLlNL 10010000010000000101000000 ===×=�×=
2. Ce lungime va avea pe o hartă la scara de 1:20000, 100 m măsuraţi in teren ?
mmcmlNLl 55,0
2001
20000100 ====�=
3.2.2.2. Proiecţia
În cazul în care harta nu precizează tipul proiecţiei în care a fost întocmită,este necesară determinărea acesteia, prin efectuarea de măsurători pe hartă saudin reţeaua de coordonate.
3.2.2.3. Nivelmentul
Nivelmentul reprezintă totalitatea formelor de teren, adică relieful.Reprezentarea nivelmentului se realizează printr-unul din următoarele
procedee:• curbe de nivel (contururi );
• haşuri;
• tente hipsometrice;
• tente umbrite;
• cote.
3.2.2.4. Planimetria
Elementele de planimetrie reprezintă totalitatea construcţiilor de pe teren şise realizează prin semne convenţionale. Înscrierea pe hartă a elementelor deplanimetrie este determinătă de scopul pentru care a fost întocmită harta,precum şi de scara acesteia.
3.2.2.5. Hidrografia
Hidrografia înfăţişează pe hartă cursurile şi suprafeţele de apă de peterenul reprezentat. Hidrografia este naturală şi artificială.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 46 - 25/04/2000
3.2.2.6. Semne convenţionale
Semnele convenţionale şi datele de conţinut special sunt simbolurilefolosite pentru ca harta să poată reprezenta într-un mod cât mai sugestiv atâtelementele hărţii cât şi conţinutul ei.
3.2.3. Hărţile aeronautice
Hărţile aeronautice sunt reprezentări reduse la scară a unor suprafeţe deteren şi care conţin în principal elemente specifice activităţii de zbor.
3.2.3.1. Clasificarea hărţilor aeronautice
Hărţile aeroanutice se clasifică din două puncte de vedere:• scara hărţii
• scopul pentru care au fost destinate.
Din punct de vedere al scării, hărţile aeronautice se clasifică în:• hărţi la scară mică, cuprinse între 1 : 10.000.000 şi 1: 2.000.000;
• hărţi la scară medie, cuprinse între 1 : 1.000.000 şi 1 : 200.000;
• hărţi la scară mare sub 1 : 50.000.
Din punct de vedere al scopului, hărţile se clasifică în:• hărţi de ansamblu, destinate pentru pregătirea generală a traiectelor
lungi;
• hărţi de navigaţie, destinate pentru pregătirea şi desfăşurareazborurilor pe diferite traiecte;
• hărţile regiunilor terminale de control;
• hărţile de apropiere la vedere sau instrumentală;
• hărţile de aterizare;
• hărţile de obstacole de aerodrom;
• hărţile de aerodrom;
• hărţile cu profilul terenului pentru apropierea de precizie.
3.2.3.2. Hărţile de radionavigaţie
Hărţile de radionavigaţie sunt întocmite pentru a furniza elementelenecesare asigurării navigaţiei de-a lungul traiectelor prestabilite, a informăriizborului şi de a se conforma procedurilor de control al traficului aerian.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 47 - 25/04/2000
Se foloseşte pentru zborul pe cãile aeriene, în conformitate cu procedurile ATC
Elementele hartii de radionavigaţie sint:
• Organizarea spaţiului aerian;
• Mijloacele radionavigaţie ;
• Toate datele necesare aplicarii pe caile aeriene a regulilor de zborinstrumentale.
3.2.3.2.1. Hărţi utilizate pentru navigaţia pe rută
Pentru navigaţia pe rutã, care implicã distanţe mari de zbor se utilizeazãurmãtoarele tipuri de hãrţi:
• harta de radionavigaţie;
• harta aeronauticã la scara 1:500 000;
• harta aeronauticã la scara 1:1 000 000;
• harta aeronauticã la scara mare.În funcţie de nivelele de zbor, hărţile se pot împărţi în hărţi de
radionavigaţie pentru :• spaţiul aerian inferior
• spaţiul aerian superiorDin punct de vedere al informaţiilor aeronautice hărţie utilizate pentru
navigaţia de rută cuprind următoarele informaţii:• mijloace de radionavigaţie, cu indicative şi frecvenţe de lucru, unităţi
de control al traficului aerian cu indicative şi frecvenţe decomunicaţii;
• delimitări ale regiunilor de control în plan orizontal şi vertical, puncteobligate de raport, delimitări ale regiunilor de informare a zborului;
• drumuri magnetice ale tronsoanelor de căi aeriene cu distanţele şidenumirile corespunzătoare;
• nivele minime de zbor pe tronsoanele de căi aeriene, altitudiniminime de zonă;
• aeroporturi deschise traficului aerian internaţional;
• zone reglementate ( interzise, restricţionate,periculoase;)
• curbe de egală declinaţie magnetică.
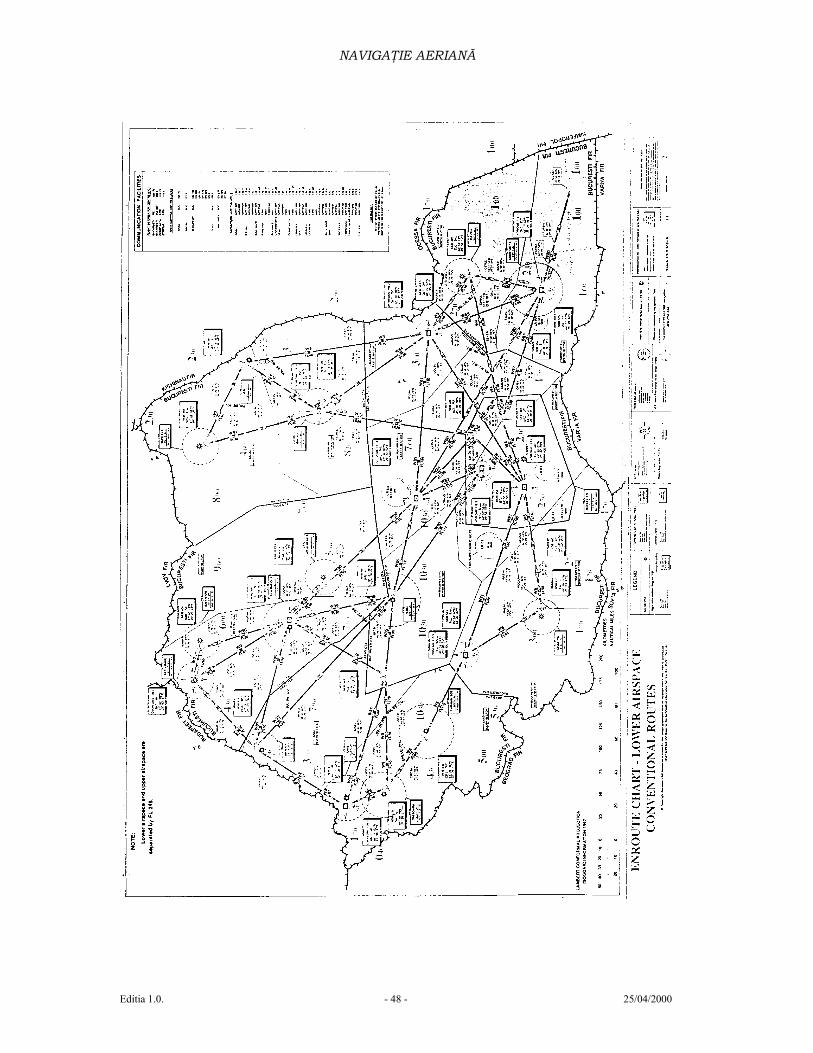
NAVIGAŢIE AERIANĂ
Editia 1.0. - 48 - 25/04/2000
NAVIGAŢIE AERIANĂ
Editia 1.0. - 49 - 25/04/2000
3.2.3.2.2. Hărţi utilizate în procedurile de apropiere şi aterizare / decolare
Principalele tipuri de harti utilizate in procedurile de apropiere sint:• Hartile regiunilor terminale de control;
• Hartile de apropiere instrumentală;
• Hartile pentru apropierea la vedere;
• Hartile de aterizare;
• Hartile de aerodrom;
• Hartile cu profilul terenului pentru apropierea de precizie;
• Hartile de obstacolare de aerodrom.
Harta regiunii terminale de control - are scara cuprinsa între 1: 2000000şi 1:500000. În aceasta hartă se prezintă:
• -instalaţiile şi serviciile de radionavigaţie, cu numele, indicativul şifrecventele de lucru;
• -mijloacele de radionavigaţie pentru traictele de plecare, sosire şipentru procedurile de aşteptare;
• -delimitările spaţiului aerian, punctele obligate de raport,relevmentele de control, etc .
• -rutele de sosire/plecare (STAR / SID) cu elementele definitorii aleacestora;
• -zone reglementate şi restricţii de zbor.
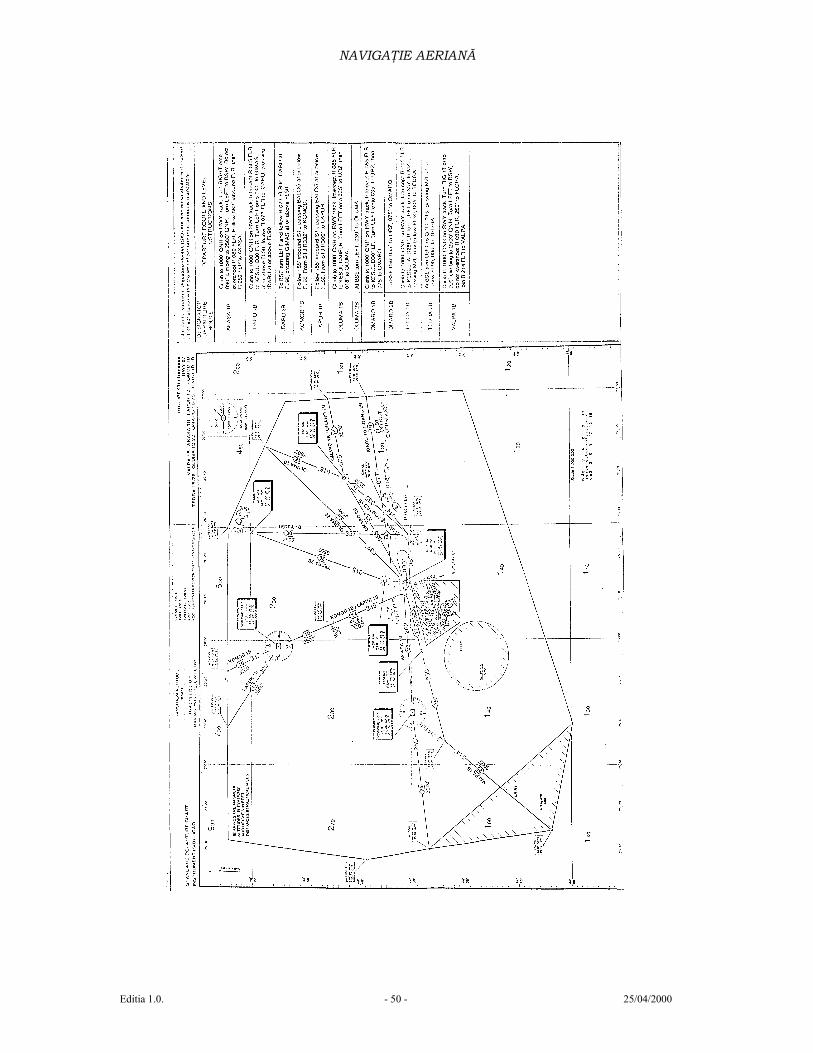
NAVIGAŢIE AERIANĂ
Editia 1.0. - 50 - 25/04/2000
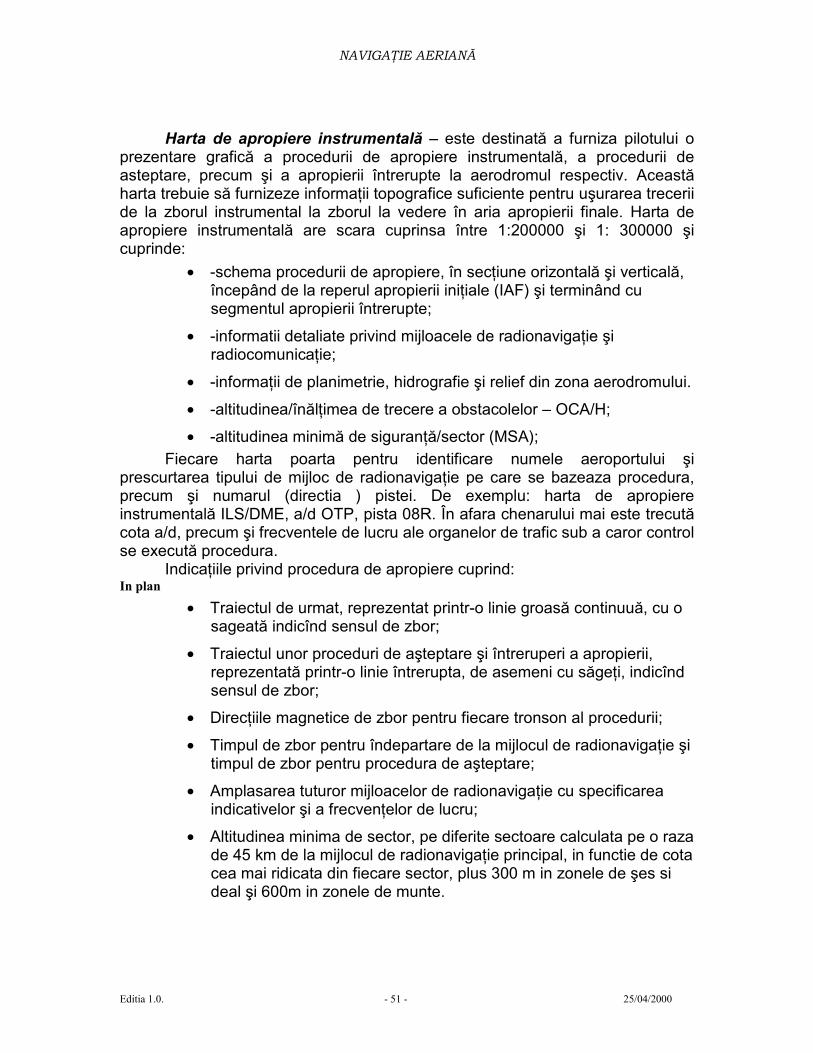
NAVIGAŢIE AERIANĂ
Editia 1.0. - 51 - 25/04/2000
Harta de apropiere instrumentală – este destinată a furniza pilotului oprezentare grafică a procedurii de apropiere instrumentală, a procedurii deasteptare, precum şi a apropierii întrerupte la aerodromul respectiv. Aceastăharta trebuie să furnizeze informaţii topografice suficiente pentru uşurarea treceriide la zborul instrumental la zborul la vedere în aria apropierii finale. Harta deapropiere instrumentală are scara cuprinsa între 1:200000 şi 1: 300000 şicuprinde:
• -schema procedurii de apropiere, în secţiune orizontală şi verticală,începând de la reperul apropierii iniţiale (IAF) şi terminând cusegmentul apropierii întrerupte;
• -informatii detaliate privind mijloacele de radionavigaţie şiradiocomunicaţie;
• -informaţii de planimetrie, hidrografie şi relief din zona aerodromului.
• -altitudinea/înălţimea de trecere a obstacolelor – OCA/H;
• -altitudinea minimă de siguranţă/sector (MSA);Fiecare harta poarta pentru identificare numele aeroportului şi
prescurtarea tipului de mijloc de radionavigaţie pe care se bazeaza procedura,precum şi numarul (directia ) pistei. De exemplu: harta de apropiereinstrumentală ILS/DME, a/d OTP, pista 08R. În afara chenarului mai este trecutăcota a/d, precum şi frecventele de lucru ale organelor de trafic sub a caror controlse execută procedura.
Indicaţiile privind procedura de apropiere cuprind:In plan
• Traiectul de urmat, reprezentat printr-o linie groasă continuuă, cu osageată indicînd sensul de zbor;
• Traiectul unor proceduri de aşteptare şi întreruperi a apropierii,reprezentată printr-o linie întrerupta, de asemeni cu săgeţi, indicîndsensul de zbor;
• Direcţiile magnetice de zbor pentru fiecare tronson al procedurii;
• Timpul de zbor pentru îndepartare de la mijlocul de radionavigaţie şitimpul de zbor pentru procedura de aşteptare;
• Amplasarea tuturor mijloacelor de radionavigaţie cu specificareaindicativelor şi a frecvenţelor de lucru;
• Altitudinea minima de sector, pe diferite sectoare calculata pe o razade 45 km de la mijlocul de radionavigaţie principal, in functie de cotacea mai ridicata din fiecare sector, plus 300 m in zonele de şes sideal şi 600m in zonele de munte.
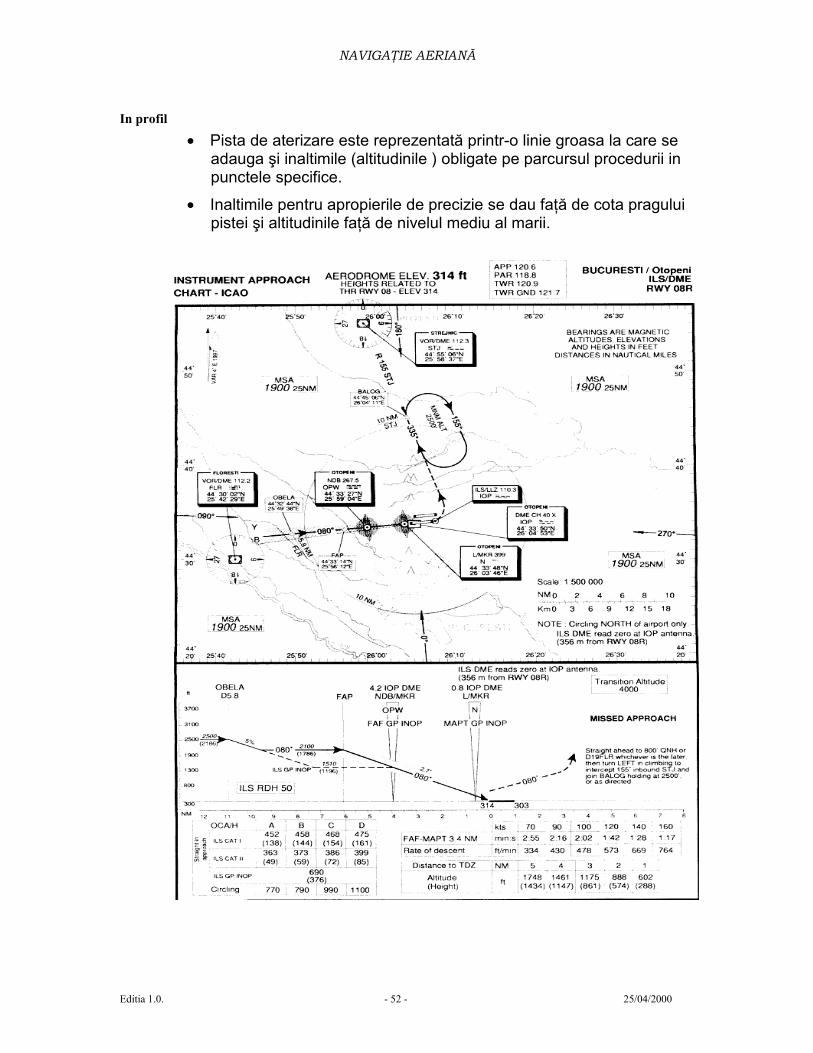
NAVIGAŢIE AERIANĂ
Editia 1.0. - 52 - 25/04/2000
In profil
• Pista de aterizare este reprezentată printr-o linie groasa la care seadauga şi inaltimile (altitudinile ) obligate pe parcursul procedurii inpunctele specifice.
• Inaltimile pentru apropierile de precizie se dau faţă de cota praguluipistei şi altitudinile faţă de nivelul mediu al marii.
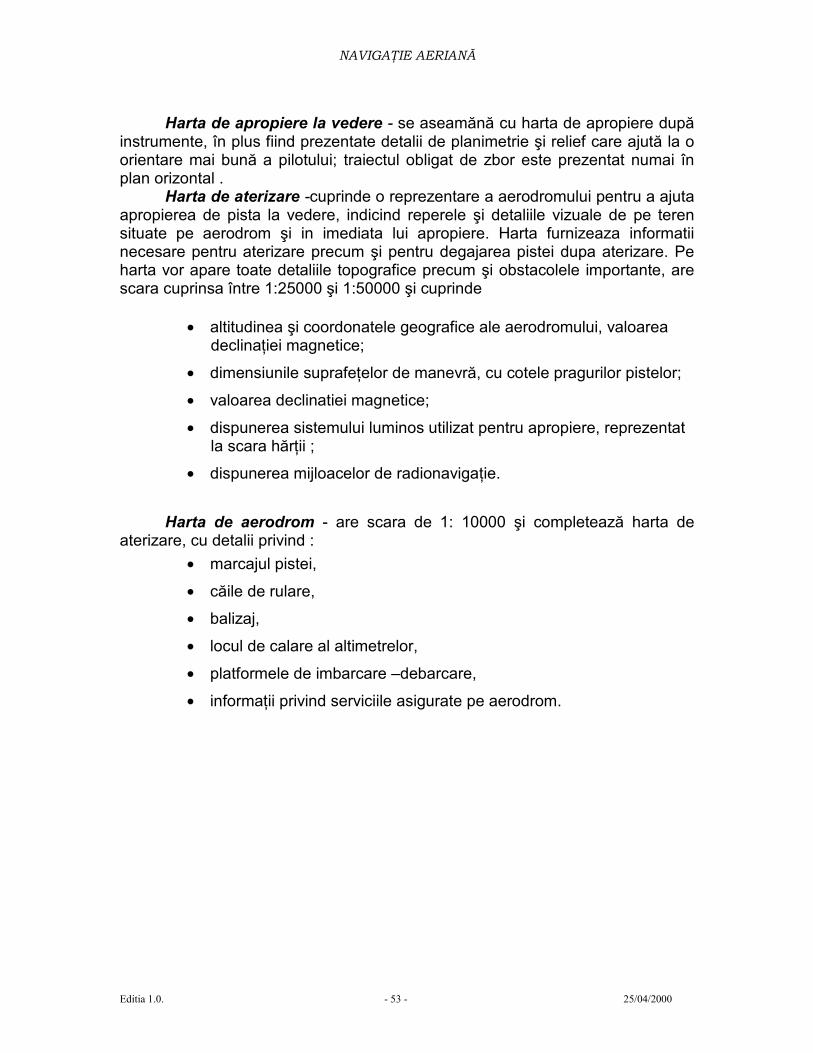
NAVIGAŢIE AERIANĂ
Editia 1.0. - 53 - 25/04/2000
Harta de apropiere la vedere - se aseamănă cu harta de apropiere dupăinstrumente, în plus fiind prezentate detalii de planimetrie şi relief care ajută la oorientare mai bună a pilotului; traiectul obligat de zbor este prezentat numai înplan orizontal .
Harta de aterizare -cuprinde o reprezentare a aerodromului pentru a ajutaapropierea de pista la vedere, indicind reperele şi detaliile vizuale de pe terensituate pe aerodrom şi in imediata lui apropiere. Harta furnizeaza informatiinecesare pentru aterizare precum şi pentru degajarea pistei dupa aterizare. Peharta vor apare toate detaliile topografice precum şi obstacolele importante, arescara cuprinsa între 1:25000 şi 1:50000 şi cuprinde
• altitudinea şi coordonatele geografice ale aerodromului, valoareadeclinaţiei magnetice;
• dimensiunile suprafeţelor de manevră, cu cotele pragurilor pistelor;
• valoarea declinatiei magnetice;
• dispunerea sistemului luminos utilizat pentru apropiere, reprezentatla scara hărţii ;
• dispunerea mijloacelor de radionavigaţie.
Harta de aerodrom - are scara de 1: 10000 şi completează harta deaterizare, cu detalii privind :
• marcajul pistei,
• căile de rulare,
• balizaj,
• locul de calare al altimetrelor,
• platformele de imbarcare –debarcare,
• informaţii privind serviciile asigurate pe aerodrom.
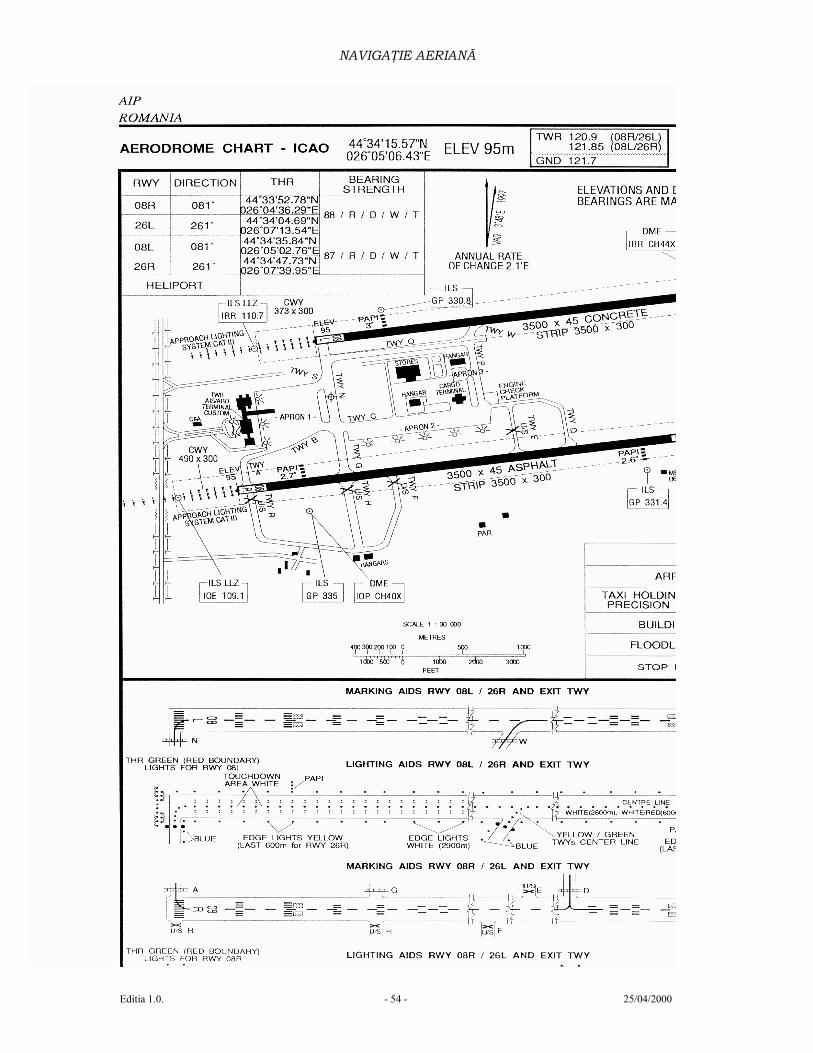
NAVIGAŢIE AERIANĂ
Editia 1.0. - 54 - 25/04/2000
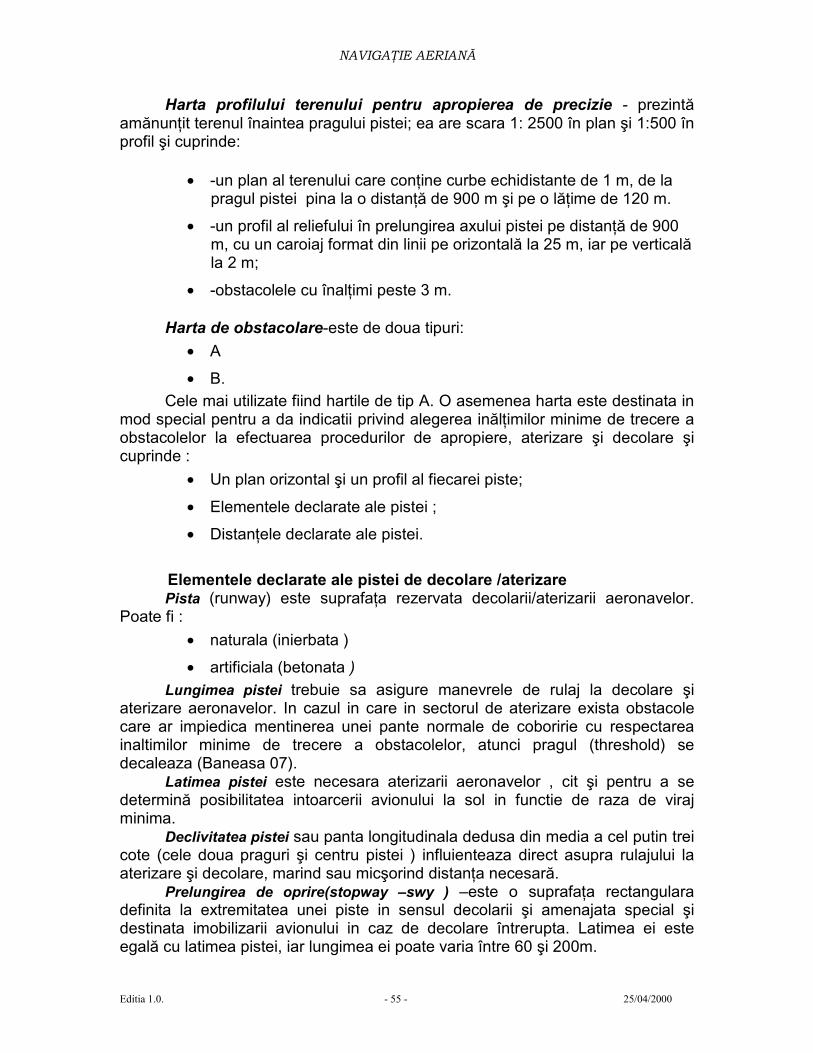
NAVIGAŢIE AERIANĂ
Editia 1.0. - 55 - 25/04/2000
Harta profilului terenului pentru apropierea de precizie - prezintăamănunţit terenul înaintea pragului pistei; ea are scara 1: 2500 în plan şi 1:500 înprofil şi cuprinde:
• -un plan al terenului care conţine curbe echidistante de 1 m, de lapragul pistei pina la o distanţă de 900 m şi pe o lăţime de 120 m.
• -un profil al reliefului în prelungirea axului pistei pe distanţă de 900m, cu un caroiaj format din linii pe orizontală la 25 m, iar pe verticalăla 2 m;
• -obstacolele cu înalţimi peste 3 m.
Harta de obstacolare-este de doua tipuri:• A
• B.Cele mai utilizate fiind hartile de tip A. O asemenea harta este destinata in
mod special pentru a da indicatii privind alegerea inălţimilor minime de trecere aobstacolelor la efectuarea procedurilor de apropiere, aterizare şi decolare şicuprinde :
• Un plan orizontal şi un profil al fiecarei piste;
• Elementele declarate ale pistei ;
• Distanţele declarate ale pistei.
Elementele declarate ale pistei de decolare /aterizarePista (runway) este suprafaţa rezervata decolarii/aterizarii aeronavelor.
Poate fi :• naturala (inierbata )
• artificiala (betonata )Lungimea pistei trebuie sa asigure manevrele de rulaj la decolare şi
aterizare aeronavelor. In cazul in care in sectorul de aterizare exista obstacolecare ar impiedica mentinerea unei pante normale de coboririe cu respectareainaltimilor minime de trecere a obstacolelor, atunci pragul (threshold) sedecaleaza (Baneasa 07).
Latimea pistei este necesara aterizarii aeronavelor , cit şi pentru a sedetermină posibilitatea intoarcerii avionului la sol in functie de raza de virajminima.
Declivitatea pistei sau panta longitudinala dedusa din media a cel putin treicote (cele doua praguri şi centru pistei ) influienteaza direct asupra rulajului laaterizare şi decolare, marind sau micşorind distanţa necesară.
Prelungirea de oprire(stopway –swy ) –este o suprafaţa rectangularadefinita la extremitatea unei piste in sensul decolarii şi amenajata special şidestinata imobilizarii avionului in caz de decolare întrerupta. Latimea ei esteegală cu latimea pistei, iar lungimea ei poate varia între 60 şi 200m.
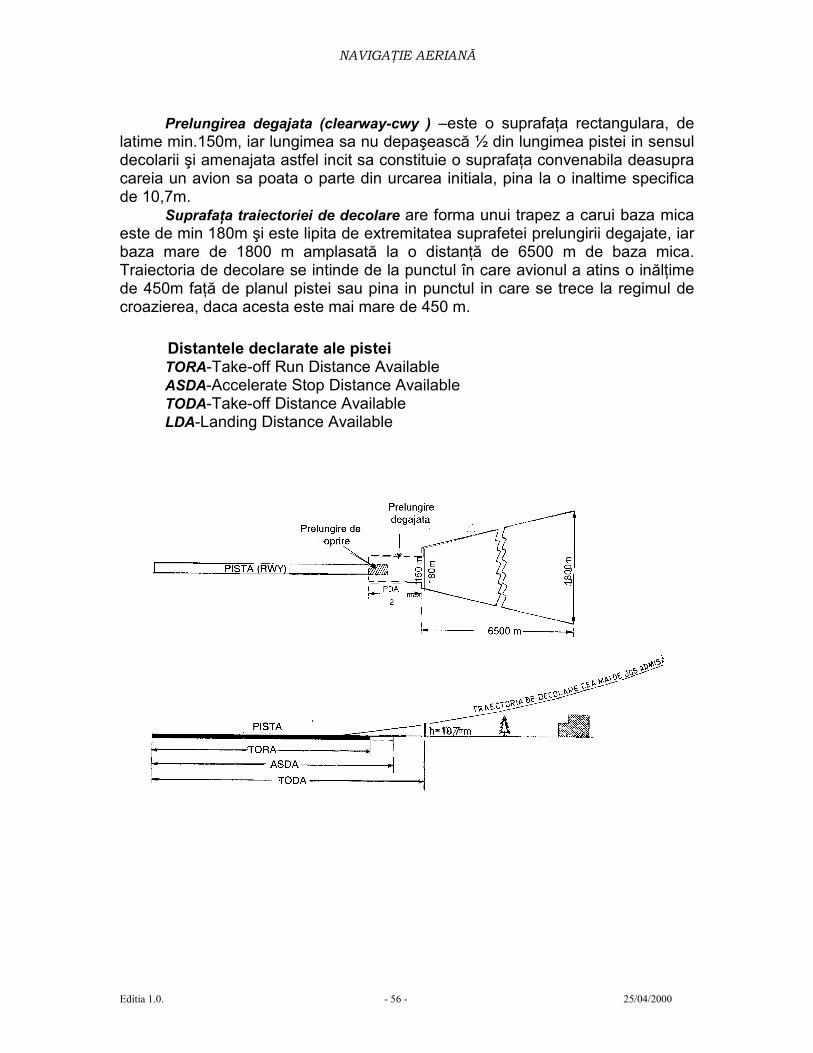
NAVIGAŢIE AERIANĂ
Editia 1.0. - 56 - 25/04/2000
Prelungirea degajata (clearway-cwy ) –este o suprafaţa rectangulara, delatime min.150m, iar lungimea sa nu depaşească ½ din lungimea pistei in sensuldecolarii şi amenajata astfel incit sa constituie o suprafaţa convenabila deasupracareia un avion sa poata o parte din urcarea initiala, pina la o inaltime specificade 10,7m.
Suprafaţa traiectoriei de decolare are forma unui trapez a carui baza micaeste de min 180m şi este lipita de extremitatea suprafetei prelungirii degajate, iarbaza mare de 1800 m amplasată la o distanţă de 6500 m de baza mica.Traiectoria de decolare se intinde de la punctul în care avionul a atins o inălţimede 450m faţă de planul pistei sau pina in punctul in care se trece la regimul decroazierea, daca acesta este mai mare de 450 m.
Distantele declarate ale pisteiTORA-Take-off Run Distance AvailableASDA-Accelerate Stop Distance AvailableTODA-Take-off Distance AvailableLDA-Landing Distance Available
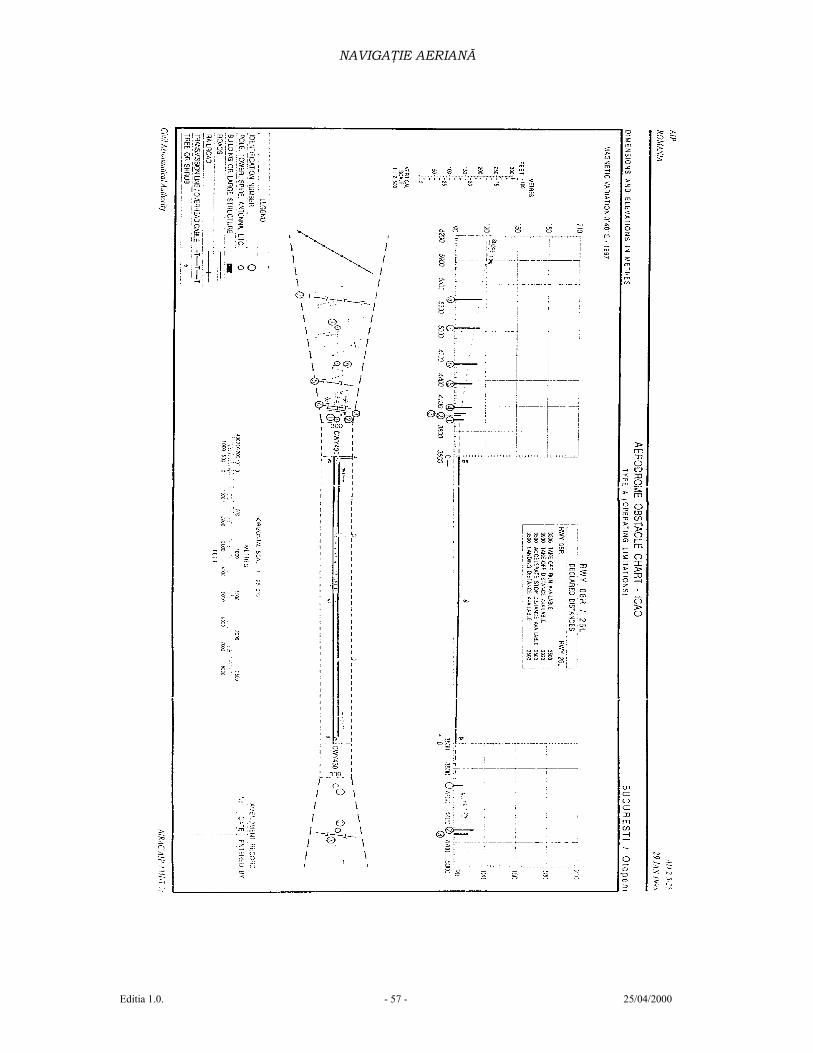
NAVIGAŢIE AERIANĂ
Editia 1.0. - 57 - 25/04/2000

NAVIGAŢIE AERIANĂ
Editia 1.0. - 58 - 25/04/2000
Pagină liberă lasată intenţionat
NAVIGAŢIE AERIANĂ
Editia 1.0. - 59 - 25/04/2000
CAPITOLUL 4.
BAZELE NAVIGAŢIEI AERIENE
4.1. Elementele navigaţiei aeriene
Parametrii deplasării unei aeronave se numesc elemente de navigaţieaeriană. Aceste elemente se împart în trei grupe distincte:
• elemente care determină direcţia;
• elemente care determină viteza;
• elemente care determină înălţimea de zbor.Elementele de navigaţie sunt datele obţinute prin diferite procedee
cu ajutorul cărora se determină şi se menţine traiectoria de zbor a aeronavei.
4.1.1. Elemente care determină direcţia
Elementele de navigaţie care determină direcţia de zbor sunt :• drumul,
• capul de zbor,
• abaterea laterală unghiulară,
• deriva avionului.
În general, prin direcţie se înţelege poziţia pe care o ocupa un punct faţăde altul, în raport de un punct cardinal, fără referire la distanţa care le separa.Determinărea direcţiei se poate face atit in plan vertical cit şi in plan orizontal.Direcţiile se materializează ca unghiuri.
Determinărea unei direcţii în plan orizontal se face prin unghiul de azimutcare are ca origine linia nord-sud a meridianului. Azimutul este unghiul măsuratîn plan orizontal, determinăt de planul meridianului punctului de origine şi planulce trece prin verticala punctului origine şi cuprinde dreapta ce uneşte punctulorigine de punctul determinăt (sau, unghiul format între directia norduluigeografic sau magnetic şi o alta directie).
Sistemul numeric de specificare a direcţiei împarte orizontul în 360°,începând cu nordul la 360° şi continuând în sensul acelor de ceas spre est 090°,spre sud 180°, spre vest 270° şi înapoi spre nord. Acest cerc se numeşte rozavânturilor (compass rose).
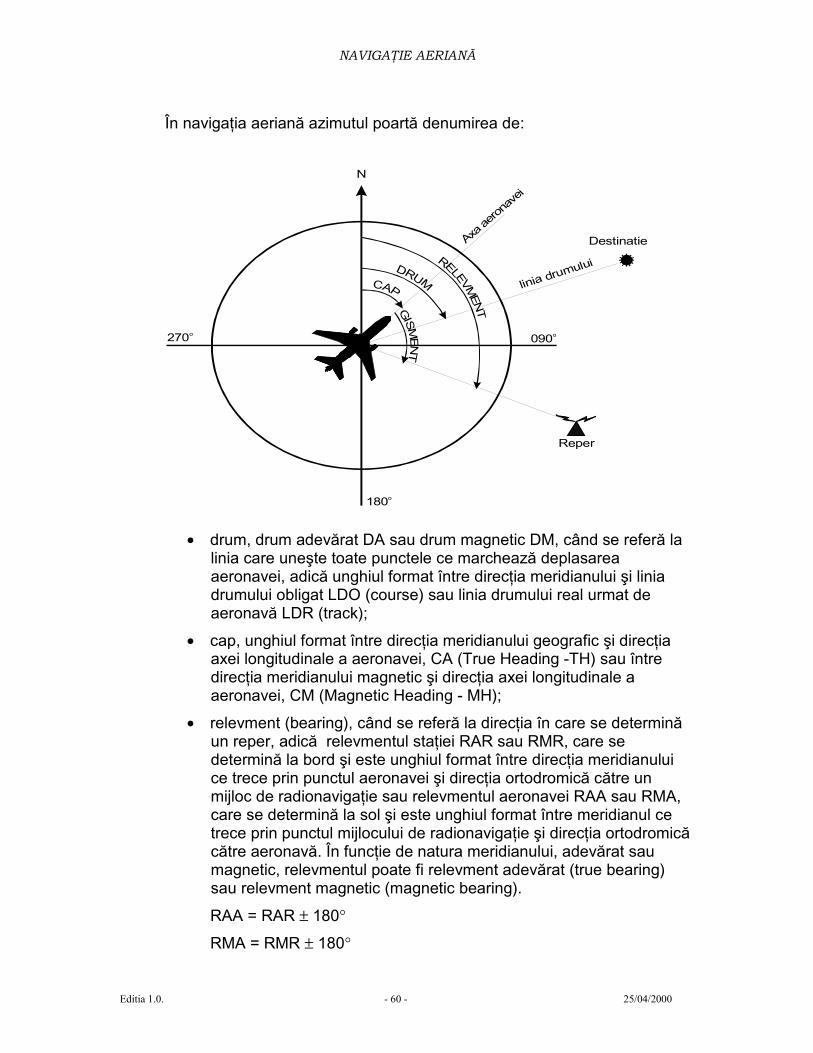
NAVIGAŢIE AERIANĂ
Editia 1.0. - 60 - 25/04/2000
În navigaţia aeriană azimutul poartă denumirea de:
CAP
GISM
ENT
DRUM
RELEVMEN
T
Axa ae
ronav
ei
linia drumului
Reper
Destinatie
N
090o270o
180o
• drum, drum adevărat DA sau drum magnetic DM, când se referă lalinia care uneşte toate punctele ce marchează deplasareaaeronavei, adică unghiul format între direcţia meridianului şi liniadrumului obligat LDO (course) sau linia drumului real urmat deaeronavă LDR (track);
• cap, unghiul format între direcţia meridianului geografic şi direcţiaaxei longitudinale a aeronavei, CA (True Heading -TH) sau întredirecţia meridianului magnetic şi direcţia axei longitudinale aaeronavei, CM (Magnetic Heading - MH);
• relevment (bearing), când se referă la direcţia în care se determinăun reper, adică relevmentul staţiei RAR sau RMR, care sedetermină la bord şi este unghiul format între direcţia meridianuluice trece prin punctul aeronavei şi direcţia ortodromică către unmijloc de radionavigaţie sau relevmentul aeronavei RAA sau RMA,care se determină la sol şi este unghiul format între meridianul cetrece prin punctul mijlocului de radionavigaţie şi direcţia ortodromicăcătre aeronavă. În funcţie de natura meridianului, adevărat saumagnetic, relevmentul poate fi relevment adevărat (true bearing)sau relevment magnetic (magnetic bearing).
RAA = RAR ± 180°
RMA = RMR ± 180°
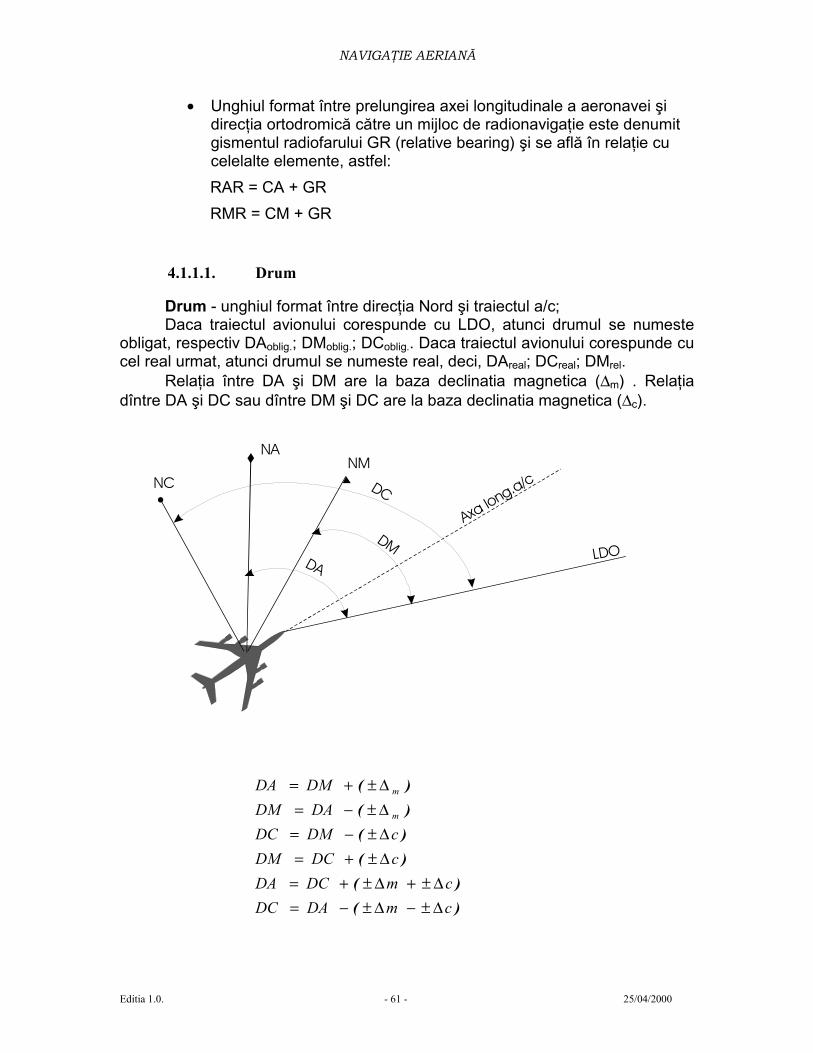
NAVIGAŢIE AERIANĂ
Editia 1.0. - 61 - 25/04/2000
• Unghiul format între prelungirea axei longitudinale a aeronavei şidirecţia ortodromică către un mijloc de radionavigaţie este denumitgismentul radiofarului GR (relative bearing) şi se află în relaţie cucelelalte elemente, astfel:RAR = CA + GRRMR = CM + GR
4.1.1.1. Drum
Drum - unghiul format între direcţia Nord şi traiectul a/c;Daca traiectul avionului corespunde cu LDO, atunci drumul se numeste
obligat, respectiv DAoblig.; DMoblig.; DCoblig.. Daca traiectul avionului corespunde cucel real urmat, atunci drumul se numeste real, deci, DAreal; DCreal; DMrel.
Relaţia între DA şi DM are la baza declinatia magnetica (∆m) . Relaţiadîntre DA şi DC sau dîntre DM şi DC are la baza declinatia magnetica (∆c).
NANM
NC
Axa long.a/c
LDODA
DM
DC
)()(
)()()()(
cmDADCcmDCDA
cDCDMcDMDC
DADMDMDA
m
m
∆±−∆±−=∆±+∆±+=
∆±+=∆±−=∆±−=∆±+=
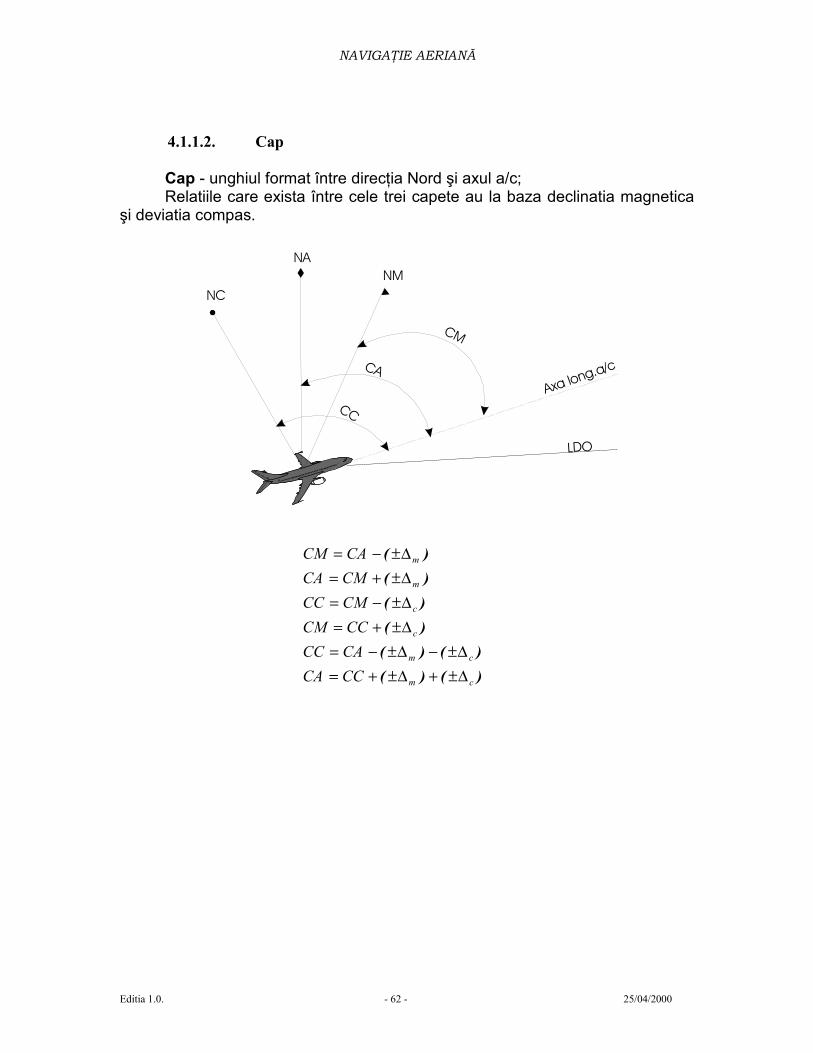
NAVIGAŢIE AERIANĂ
Editia 1.0. - 62 - 25/04/2000
4.1.1.2. Cap
Cap - unghiul format între direcţia Nord şi axul a/c;Relatiile care exista între cele trei capete au la baza declinatia magnetica
şi deviatia compas.
LDO
Axa long.a/c
NANM
NC
CM
CA
CC
)()()()(
)()()()(
cm
cm
c
c
m
m
CCCACACCCCCMCMCCCMCACACM
∆±+∆±+=∆±−∆±−=
∆±+=∆±−=∆±+=∆±−=
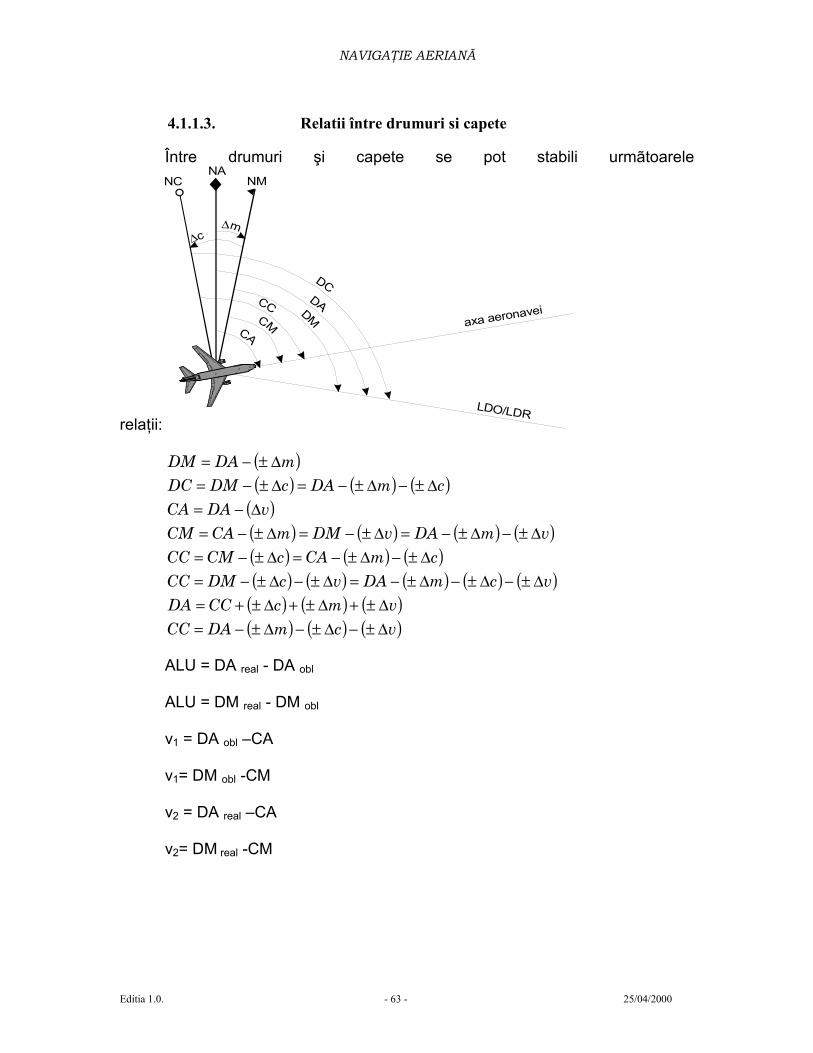
NAVIGAŢIE AERIANĂ
Editia 1.0. - 63 - 25/04/2000
4.1.1.3. Relatii între drumuri si capete
Între drumuri şi capete se pot stabili urmãtoarele
relaţii:
axa aeronavei
LDO/LDR
NANMNC
DCDA
DM
CCCM
CA
∆c∆m
( )( ) ( ) ( )
( )( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( )( ) ( ) ( )vcmDACC
vmcCCDA
vcmDAvcDMCC
cmCAcCMCC
vmDAvDMmCACM
vDACA
cmDAcDMDC
mDADM
∆±−∆±−∆±−=∆±+∆±+∆±+=
∆±−∆±−∆±−=∆±−∆±−=∆±−∆±−=∆±−=
∆±−∆±−=∆±−=∆±−=∆−=
∆±−∆±−=∆±−=∆±−=
ALU = DA real - DA obl
ALU = DM real - DM obl
v1 = DA obl –CA
v1= DM obl -CM
v2 = DA real –CA
v2= DM real -CM
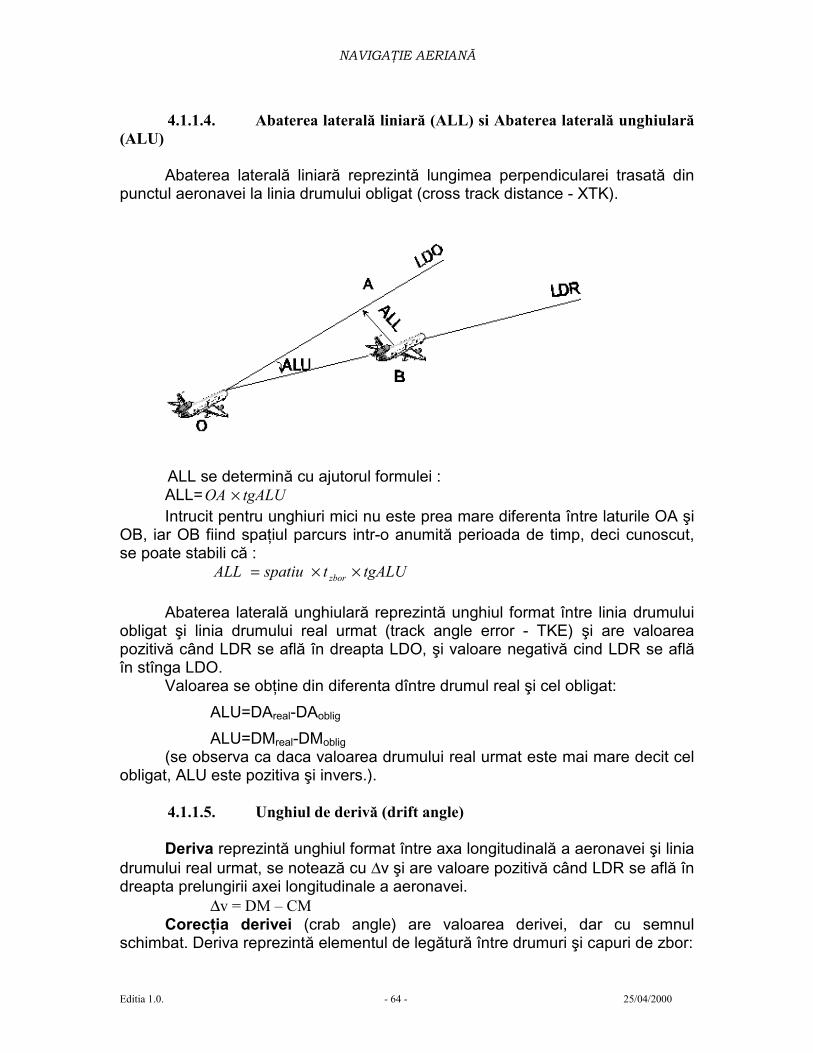
NAVIGAŢIE AERIANĂ
Editia 1.0. - 64 - 25/04/2000
4.1.1.4. Abaterea laterală liniară (ALL) si Abaterea laterală unghiulară(ALU)
Abaterea laterală liniară reprezintă lungimea perpendicularei trasată dinpunctul aeronavei la linia drumului obligat (cross track distance - XTK).
ALL se determină cu ajutorul formulei :ALL= tgALUOA ×Intrucit pentru unghiuri mici nu este prea mare diferenta între laturile OA şi
OB, iar OB fiind spaţiul parcurs intr-o anumită perioada de timp, deci cunoscut,se poate stabili că :
tgALUtspatiuALL zbor ××=
Abaterea laterală unghiulară reprezintă unghiul format între linia drumuluiobligat şi linia drumului real urmat (track angle error - TKE) şi are valoareapozitivă când LDR se află în dreapta LDO, şi valoare negativă cind LDR se aflăîn stînga LDO.
Valoarea se obţine din diferenta dîntre drumul real şi cel obligat:ALU=DAreal-DAoblig
ALU=DMreal-DMoblig(se observa ca daca valoarea drumului real urmat este mai mare decit cel
obligat, ALU este pozitiva şi invers.).
4.1.1.5. Unghiul de derivă (drift angle)
Deriva reprezintă unghiul format între axa longitudinală a aeronavei şi liniadrumului real urmat, se notează cu ∆v şi are valoare pozitivă când LDR se află îndreapta prelungirii axei longitudinale a aeronavei.
∆v = DM – CMCorecţia derivei (crab angle) are valoarea derivei, dar cu semnul
schimbat. Deriva reprezintă elementul de legătură între drumuri şi capuri de zbor:
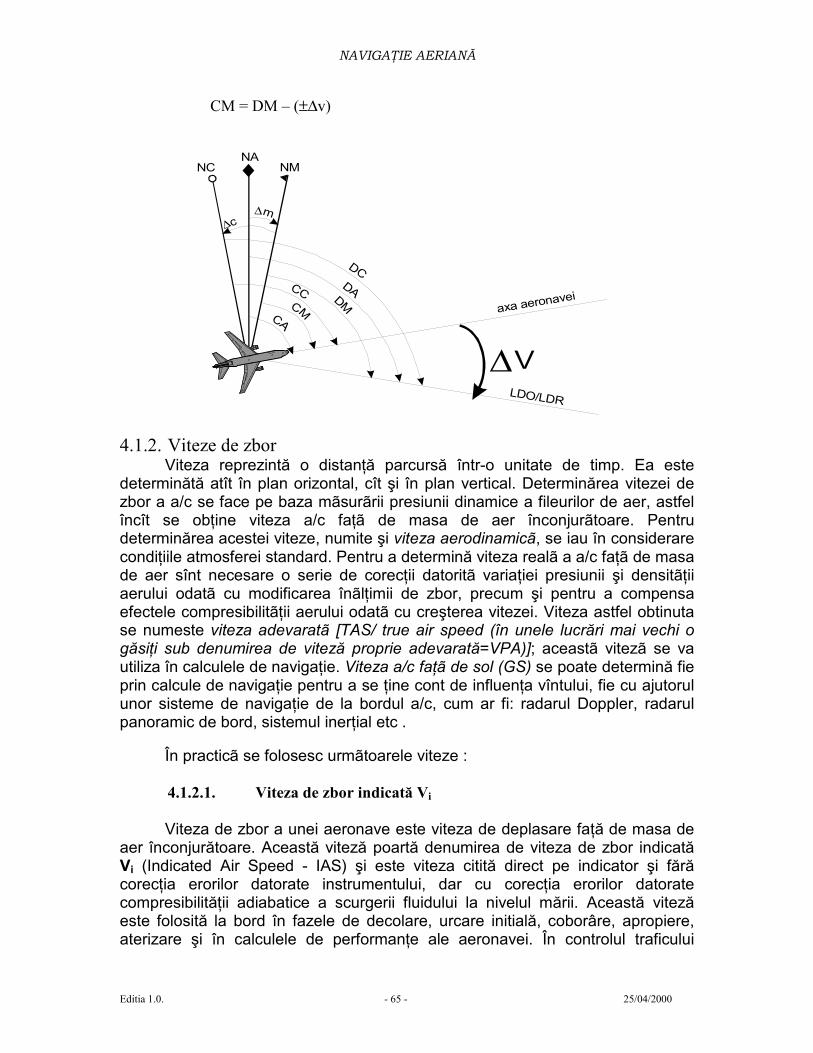
NAVIGAŢIE AERIANĂ
Editia 1.0. - 65 - 25/04/2000
CM = DM – (±∆v)
axa aeronavei
LDO/LDR
NANMNC
DCDA
DM
CCCM
CA
∆c∆m
4.1.2. Viteze de zborViteza reprezintă o distanţă parcursă într-o unitate de timp. Ea este
determinătă atît în plan orizontal, cît şi în plan vertical. Determinărea vitezei dezbor a a/c se face pe baza mãsurãrii presiunii dinamice a fileurilor de aer, astfelîncît se obţine viteza a/c faţã de masa de aer înconjurãtoare. Pentrudeterminărea acestei viteze, numite şi viteza aerodinamicã, se iau în considerarecondiţiile atmosferei standard. Pentru a determină viteza realã a a/c faţã de masade aer sînt necesare o serie de corecţii datoritã variaţiei presiunii şi densitãţiiaerului odatã cu modificarea înãlţimii de zbor, precum şi pentru a compensaefectele compresibilitãţii aerului odatã cu creşterea vitezei. Viteza astfel obtinutase numeste viteza adevaratã [TAS/ true air speed (în unele lucrări mai vechi ogăsiţi sub denumirea de viteză proprie adevarată=VPA)]; aceastã vitezã se vautiliza în calculele de navigaţie. Viteza a/c faţã de sol (GS) se poate determină fieprin calcule de navigaţie pentru a se ţine cont de influenţa vîntului, fie cu ajutorulunor sisteme de navigaţie de la bordul a/c, cum ar fi: radarul Doppler, radarulpanoramic de bord, sistemul inerţial etc .
În practicã se folosesc urmãtoarele viteze :
4.1.2.1. Viteza de zbor indicată Vi
Viteza de zbor a unei aeronave este viteza de deplasare faţă de masa deaer înconjurătoare. Această viteză poartă denumirea de viteza de zbor indicatăVi (Indicated Air Speed - IAS) şi este viteza citită direct pe indicator şi fărăcorecţia erorilor datorate instrumentului, dar cu corecţia erorilor datoratecompresibilităţii adiabatice a scurgerii fluidului la nivelul mării. Această vitezăeste folosită la bord în fazele de decolare, urcare initială, coborâre, apropiere,aterizare şi în calculele de performanţe ale aeronavei. În controlul traficului
NAVIGAŢIE AERIANĂ
Editia 1.0. - 66 - 25/04/2000
aerian viteza de zbor indicată este folosită în asigurarea eşalonărilor pe timpulurcării sau coborârii aeronavelor sub FL 240.
4.1.2.2. Viteza de zbor calibrată Vc
Viteza de zbor calibrată Vc (Calibrated Air Speed - CAS) este viteza dezbor indicată corectată pentru erorile de instrument şi de poziţie a prizelor depresiune statică.
Se utilizeazã pentru viteze mai mari de 220 kt
4.1.2.3. Viteza de zbor echivalentă Ve
Viteza de zbor echivalentă Ve (Equivalent Air Speed - EAS) este vitezacalibrată corectată pentru eroarea datorată compresibilităţii adiabatice a scurgeriifluidului pentru o altitudine specificată.
4.1.2.4. Viteza de zbor adevărată Va
Pentru navigaţia aeriană este nevoie de viteza de zbor adevărată Va (TrueAir Speed TAS), în unele lucrari este notată VPA, care este viteza de zborechivalentă corectată pentru eroarea de densitate a aerului (presiune şitemperatură). Această viteză este folosită la bord pentru calculele de navigaţie şide performanţă ale aeronavei, iar în controlul traficului aerian în asigurareaeşalonărilor dîntre aeronave în zbor de croazieră.
4.1.2.5. Viteza faţă de sol Vs
Viteza faţă de sol a aeronavei Vs (Ground Speed GS) se determină cuajutorul echipamentelor de bord: DME, radar, inerţiale, GPS sau la sol cu ajutorulradarului. Viteza faţă de sol se foloseşte pentru determinărea elementelor denavigaţie şi pentru asigurarea eşalonărilor. Viteza faţă de sol este rezultatuladunării vectoriale a vectorului viteză de zbor adevărată şi vectorului vânt.
Unitatea de măsură a acestor viteze este kt (mile nautice pe oră) saukm/h.
4.1.2.6. Viteza verticală Vv
În profil vertical se determină viteza verticală Vv (vertical speed) care poatefi viteza verticală de urcare (rate of climb) sau viteza verticală de coborâre (rateof descent); aceste viteze se pot folosi în controlul traficului aerian pentruasigurarea eşalonărilor între aeronave în urcare sau coborâre.
Unitatea de măsură a vitezei verticale este ft/min sau m/sec.

NAVIGAŢIE AERIANĂ
Editia 1.0. - 67 - 25/04/2000
4.1.2.7. Numărul Mach M
Pentru controlul regimurilor de zbor ale aeronavelor turbo-jet se foloseştenumărul Mach, care este raportul dîntre viteza de zbor adevărată şi vitezasunetului la nivelul de zbor respectiv. Toţi factorii, în afară de temperatură, nu aupractic nici un efect asupra vitezei sunetului, deci rezultă că pentru o anumităvaloare a numărului Mach vom determină câte o viteză de zbor adevărată pentrufiecare valoare a temperaturii luată în considerare. Pentru asigurarea eşalonărilorlongitudinale dîntre aeronave se foloseşte numărul Mach adevărat (true Machnumber).
Termenul “tehnica numărului Mach” se foloseşte pentru a descrie tehnicade autorizare a aeronavelor turbo-jet, ce operează de-a lungul aceleiaşi rute şizboară la acelaşi nivel sau care sunt în urcare sau în coborâre spre acelaşi nivel,de a menţine numere Mach specificate pentru a păstra eşalonarea longitudinalăîntre ele.
Dacă două aeronave intenţionează să opereze de-a lungul aceleiaşi rutela acelaşi nivel de zbor, aeronava din urmă având un număr Mach mai mare,intervalul de timp dîntre aeronave la punctul de intrare trebuie mărit cu un intervalde timp adiţional. Această mărire trebuie să tină cont de vitezele faţă de solrelative şi lungimea traiectoriei de parcurs până la punctul de ieşire pentruasigurarea eşalonării longitudinale minime în acest punct. Pentru a realizaaceasta, se poate aplica următoarea regulă simplă: pentru fiecare 600 NM dindistanţa dîntre punctul de intrare şi cel de ieşire din aria în care se aplică tehnicanumărului Mach, se adună un minut pentru fiecare increment de 0,01 dindiferenţa dîntre numerele Mach ale celor două aeronave, pentru a compensafaptul că cea de a doua aeronavă o va ajunge din urmă pe prima.
Prin utilizarea tehnicii numărului Mach, eşalonarea stabilită iniţial sepăstrează deoarece aeronavele în cauză evoluează în aceiaşi masă de aer, înaproximativ aceleaşi condiţii de vânt şi temperatură. Variaţiile mici în viteză, carepot creşte sau descreşte intervalul dîntre aeronave, tind să fie anulate peperioade lungi de zbor. Această stabilitate a zborului permite prevederea cuacurateţe suficientă a eşalonării longitudinale dîntre aeronave la punctedistanţate faţă de punctul unde eşalonarea s-a stabilit iniţial, prin aceastalimitându-se intervenţia frecventă din partea unităţilor de control al traficuluiaerian.
Tabelul 1 – Aplicarea tenhicii numărului Mach cândaeronava ce urmează este mai rapidă
Distanţa de zbor şi eşalonarea (în minute) necesară la punctul de intrareDiferenţa înMach 001-600 NM 601-1200 NM 1201-1800 NM 1801-2400 NM 2401-3000 NM0,01 11 12 13 14 150,02 12 14 16 18 200,03 13 16 19 22 250,04 14 18 22 26 300,05 15 20 25 30 35

NAVIGAŢIE AERIANĂ
Editia 1.0. - 68 - 25/04/2000
0,06 16 22 28 34 400,07 17 24 31 38 450,08 18 26 34 42 500,09 19 28 37 46 550,10 20 30 40 50 60
Unităţile de control al traficului aerian, care folosesc tehnica număruluiMach, trebuie să aibe la dispoziţie informaţii actualizate despre vântul la înălţimesau informaţii de poziţii obţinute de la aeronavele anterioare. Aceste informaţiisunt necesare pentru a permite unităţilor ATC să pregătească, manual sau prinintermediul calculatorului, benzile de evidenţă progresivă care să indice timpiiestimaţi până la punctul de ieşire din zona în care se aplică această tehnică, cuscopul de a se confirma că la punctul de ieşire va exista eşalonarea longitudinalăcerută.
În continuare vom prezenta cîteva formule empirice pentru estimarea TAS:
Pentru IAS = 240 - 380 kt şi FL = 60 - 160
TAS = IAS + FL / 2
Exemplu : IAS = 320 kt şi FL = 120:TAS = 320 + 120 / 2 = 380 kt
În realitate TAS = 379 kt deci eroarea este 1 kt.
Exemplu : IAS = 240 kt şi FL 120TAS = 240 + 120 / 2 = 300 kt
În realitate TAS = 286 kt deci o eroare de 14 kt sau 4.5 % .
Pentru viteze mai mici se poate folosi şi :
TAS = IAS + ( 1.5 % IAS xZp ) unde Zp înãlţimea în mii de picioare .
Exemplu : IAS = 200 kt FL = 150 :
TAS = 200 + ( 1.5 % 200 x 15 ) = 200 + ( 3 x 15 ) = 245 ktÎn realitate TAS = 252 kt deci o eroare de 7 kt sau 3 % .
4.1.3. Înălţimea de zbor
Înălţimea se defineşte ca distanţa pe verticală a unui punct în raport cu osuprafaţă de referinţă. În navigaţia aeriană ca suprafeţe de referinţă, avem:
• suprafaţa mării, cu denumirea de nivelul mediu al mării;
• suprafaţa care conţine cota pragului pistei sau cota aerodromului;
• suprafaţa terenului deasupra căruia se execută zborul;
• suprafaţa izobarică de 1013,2 hPa.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 69 - 25/04/2000
Înălţimile măsurate faţă de suprafeţele de referinţă de mai sus, sunt:• înălţimea absolută sau altitudinea este distanţa pe verticală
măsurată de la nivelul mediu al mării până la punctul considerat;
• înălţimea relativă este distanţa măsurată pe verticală de la suprafaţade referinţă a aerodromului până la punctul considerat;
• înălţimea adevărată este distanţa măsurată pe verticală de lasuprafaţa de referinţă ce trece prin cota terenului survolat până lapunctul considerat;
• înălţimea nivelului de zbor este distanţa măsurată pe verticală de lasuprafaţa de referinţă izobarică de 1013,2 hPa .
Pentru navigaţia aeriană se consideră următoarele distanţe pe verticală:• înălţimea de zbor, care este distanţa măsurată pe verticală de la
suprafaţa orizontală ce trece prin cota aerodromului sau prin cotapragului pistei până la aeronavă;
• altitudinea de zbor, care este distanţa măsurată pe verticală de lanivelul mediu al mării până la aeronavă;
• nivelul de zbor, care este o suprafaţă de presiune atmosfericăconstantă care este raportată la o suprafaţă de referinţă depresiune specifică, 1013,2 hPa şi este separată de alte astfel desuprafeţe prin intervale de presiune specifice (definiţie OACI).
Unităţile de măsură ale înălţimilor, altitudinilor şi nivelelor de zbor suntpicioarele (ft) sau metri. Denumirea nivelelor de zbor se face printr-un număr decod ce reprezintă distanţa pe verticală măsurată în picioare suprimând ultimeledouă zerouri (FL310 este identic cu 31000 ft).
4.2. Influenţa vântului asupra aeronavelor
4.2.1. Acţiunea vântului asupra aeronavelor
Mediul in care se deplasează avionul este atmosfera. Ea nu se gaseşteniciodată în repaos, ci permanent masele de aer se deplasează atît pe orizontalăcît şi pe verticală. Deplasarea se datorează diferenţelor de presiune a aeruluicreate in diferite regiuni ale globului. Deplasările maselor de aer pe orizontalădetermină vînturile, iar pe vericală, curenţi ascendenţi sau descendenţi. Un avionin zbor este supus acţiunii vîntului şi este deviat de pe LDO in direcţia in care“bate “vîntul, modificîndu-i viteza şi direcţia de zbor.
Vîntul se defineşte ca o mişcare orizontalã a unei mase de aer. Aceastãmişcare este caracterizatã prin, vectorul vînt (Vv), determinăt prin:
• Direcţia vântului (DV) este direcţia din care bate vântul şi seexprimă în grade sexagesimale de la direcţia nord geografică,pentru vântul în altitudine – wind aloft şi de la direcţia nordmagnetică, pentru vântul din zona de aerodrom folosit în fazele de
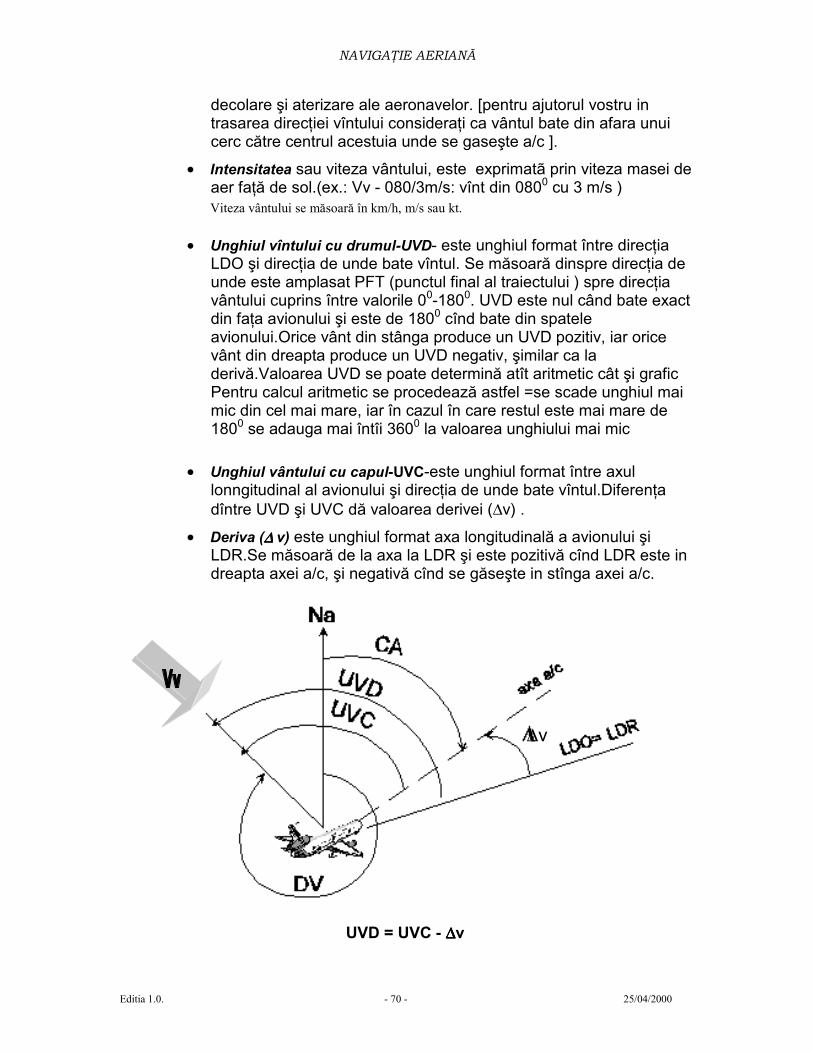
NAVIGAŢIE AERIANĂ
Editia 1.0. - 70 - 25/04/2000
decolare şi aterizare ale aeronavelor. [pentru ajutorul vostru intrasarea direcţiei vîntului consideraţi ca vântul bate din afara unuicerc către centrul acestuia unde se gaseşte a/c ].
• Intensitatea sau viteza vântului, este exprimatã prin viteza masei deaer faţă de sol.(ex.: Vv - 080/3m/s: vînt din 0800 cu 3 m/s )Viteza vântului se măsoară în km/h, m/s sau kt.
• Unghiul vîntului cu drumul-UVD- este unghiul format între direcţiaLDO şi direcţia de unde bate vîntul. Se măsoară dinspre direcţia deunde este amplasat PFT (punctul final al traiectului ) spre direcţiavântului cuprins între valorile 00-1800. UVD este nul când bate exactdin faţa avionului şi este de 1800 cînd bate din spateleavionului.Orice vânt din stânga produce un UVD pozitiv, iar oricevânt din dreapta produce un UVD negativ, şimilar ca laderivă.Valoarea UVD se poate determină atît aritmetic cât şi graficPentru calcul aritmetic se procedează astfel =se scade unghiul maimic din cel mai mare, iar în cazul în care restul este mai mare de1800 se adauga mai întîi 3600 la valoarea unghiului mai mic
• Unghiul vântului cu capul-UVC-este unghiul format între axullonngitudinal al avionului şi direcţia de unde bate vîntul.Diferenţadîntre UVD şi UVC dă valoarea derivei (∆v) .
• Deriva (∆∆∆∆℘℘℘℘v) este unghiul format axa longitudinală a avionului şiLDR.Se măsoară de la axa la LDR şi este pozitivă cînd LDR este indreapta axei a/c, şi negativă cînd se găseşte in stînga axei a/c.
UVD = UVC - ∆∆∆∆v
∆v
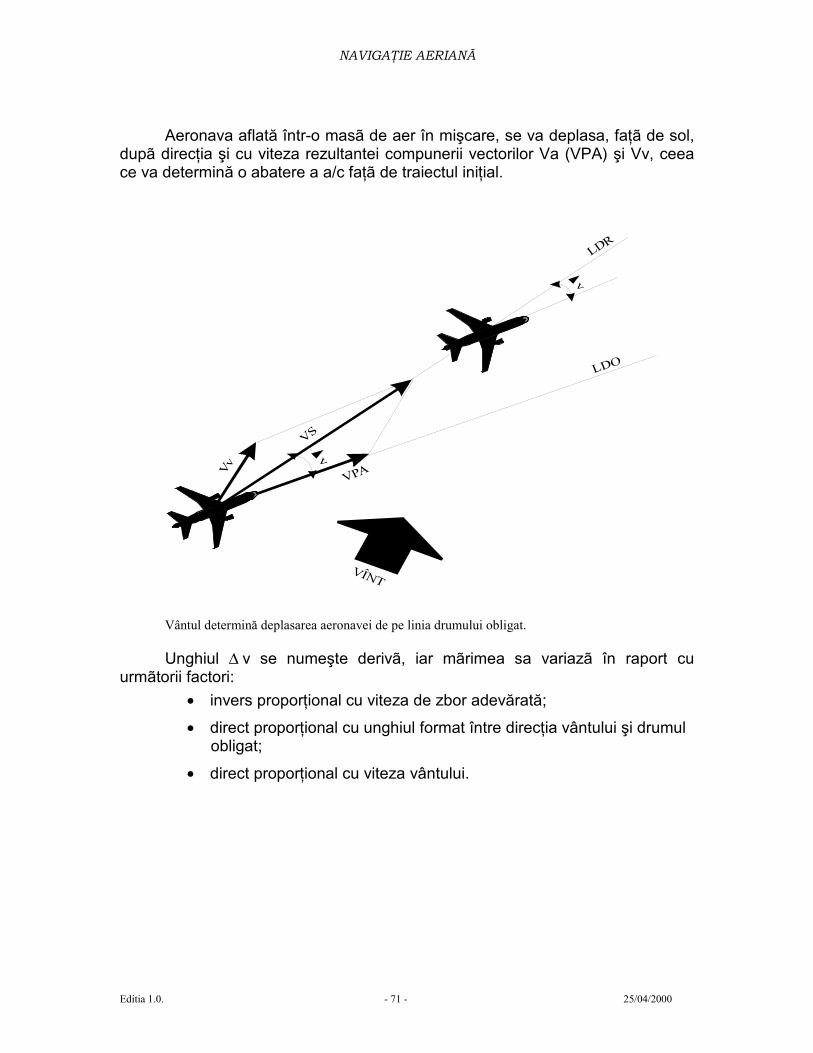
NAVIGAŢIE AERIANĂ
Editia 1.0. - 71 - 25/04/2000
Aeronava aflată într-o masã de aer în mişcare, se va deplasa, faţã de sol,dupã direcţia şi cu viteza rezultantei compunerii vectorilor Va (VPA) şi Vv, ceeace va determină o abatere a a/c faţã de traiectul iniţial.
VÎNT
VPA
VS
Vvv
v
LDO
LDR
Vântul determină deplasarea aeronavei de pe linia drumului obligat.
Unghiul ∆℘v se numeşte derivã, iar mãrimea sa variazã în raport cuurmãtorii factori:
• invers proporţional cu viteza de zbor adevărată;
• direct proporţional cu unghiul format între direcţia vântului şi drumulobligat;
• direct proporţional cu viteza vântului.
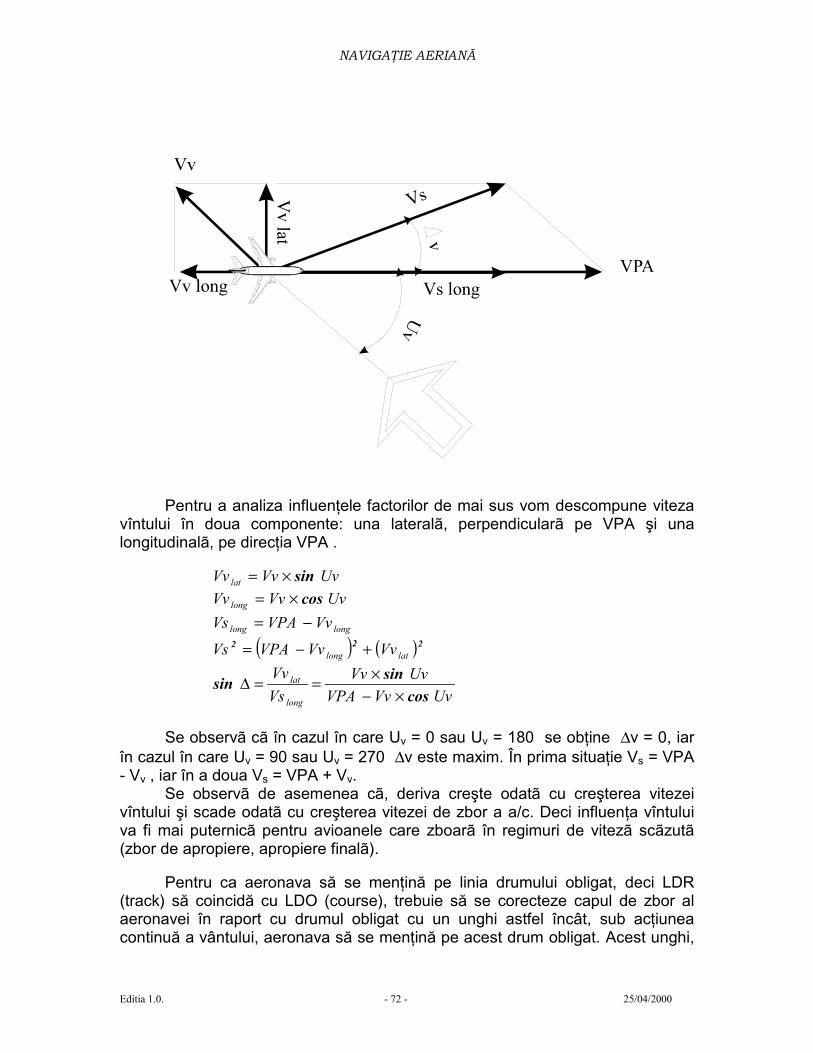
NAVIGAŢIE AERIANĂ
Editia 1.0. - 72 - 25/04/2000
Pentru a analiza influenţele factorilor de mai sus vom descompune vitezavîntului în doua componente: una lateralã, perpendicularã pe VPA şi unalongitudinalã, pe direcţia VPA .
UvVvVv lat sin×=UvVvVv long cos×=
longlong VvVPAVs −=
( ) ( )222latlong VvVvVPAVs +−=
UvVvVPAUvVv
VsVv
long
lat
cossinsin
×−×==∆
Se observã cã în cazul în care Uv = 0 sau Uv = 180 se obţine ∆v = 0, iarîn cazul în care Uv = 90 sau Uv = 270 ∆v este maxim. În prima situaţie Vs = VPA- Vv , iar în a doua Vs = VPA + Vv.
Se observã de asemenea cã, deriva creşte odatã cu creşterea vitezeivîntului şi scade odatã cu creşterea vitezei de zbor a a/c. Deci influenţa vîntuluiva fi mai puternicã pentru avioanele care zboarã în regimuri de vitezã scãzutã(zbor de apropiere, apropiere finalã).
Pentru ca aeronava să se menţină pe linia drumului obligat, deci LDR(track) să coincidă cu LDO (course), trebuie să se corecteze capul de zbor alaeronavei în raport cu drumul obligat cu un unghi astfel încât, sub acţiuneacontinuă a vântului, aeronava să se menţină pe acest drum obligat. Acest unghi,
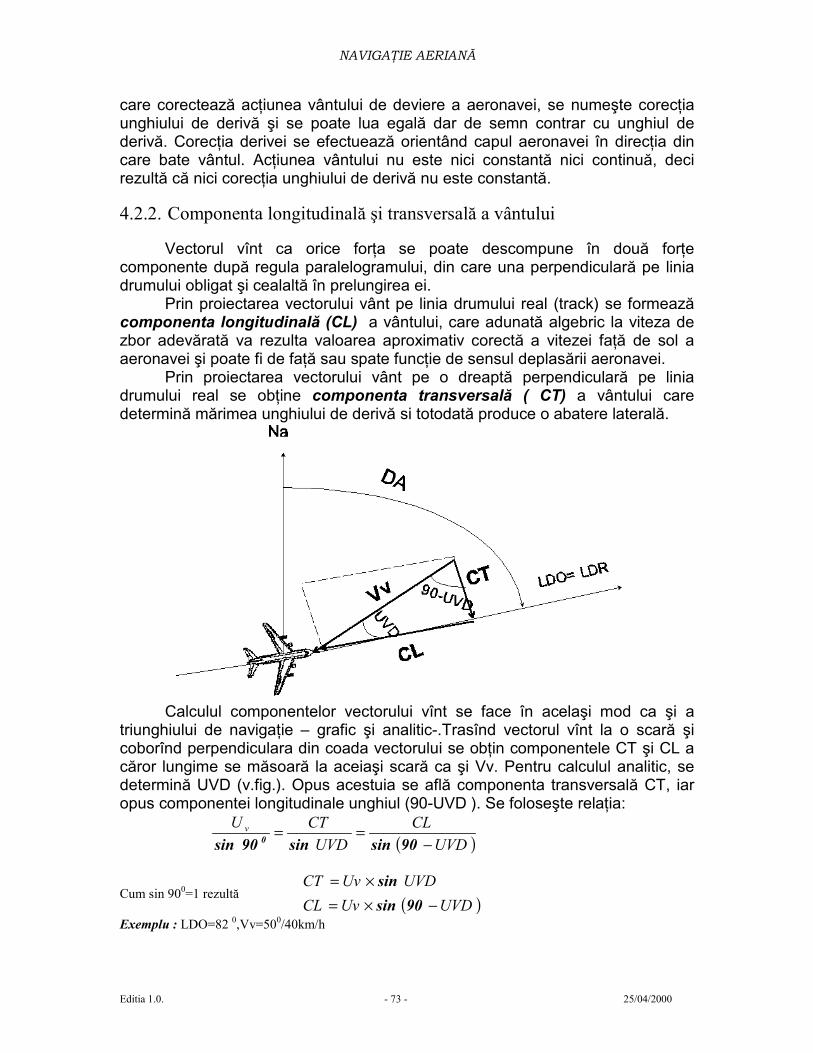
NAVIGAŢIE AERIANĂ
Editia 1.0. - 73 - 25/04/2000
care corectează acţiunea vântului de deviere a aeronavei, se numeşte corecţiaunghiului de derivă şi se poate lua egală dar de semn contrar cu unghiul dederivă. Corecţia derivei se efectuează orientând capul aeronavei în direcţia dincare bate vântul. Acţiunea vântului nu este nici constantă nici continuă, decirezultă că nici corecţia unghiului de derivă nu este constantă.
4.2.2. Componenta longitudinală şi transversală a vântului
Vectorul vînt ca orice forţa se poate descompune în două forţecomponente după regula paralelogramului, din care una perpendiculară pe liniadrumului obligat şi cealaltă în prelungirea ei.
Prin proiectarea vectorului vânt pe linia drumului real (track) se formeazăcomponenta longitudinală (CL) a vântului, care adunată algebric la viteza dezbor adevărată va rezulta valoarea aproximativ corectă a vitezei faţă de sol aaeronavei şi poate fi de faţă sau spate funcţie de sensul deplasării aeronavei.
Prin proiectarea vectorului vânt pe o dreaptă perpendiculară pe liniadrumului real se obţine componenta transversală ( CT) a vântului caredetermină mărimea unghiului de derivă si totodată produce o abatere laterală.
Calculul componentelor vectorului vînt se face în acelaşi mod ca şi atriunghiului de navigaţie – grafic şi analitic-.Trasînd vectorul vînt la o scară şicoborînd perpendiculara din coada vectorului se obţin componentele CT şi CL acăror lungime se măsoară la aceiaşi scară ca şi Vv. Pentru calculul analitic, sedetermină UVD (v.fig.). Opus acestuia se află componenta transversală CT, iaropus componentei longitudinale unghiul (90-UVD ). Se foloseşte relaţia:
( )UVDCL
UVDCTU v
−==
90sinsin90sin 0
Cum sin 900=1 rezultă ( )UVDUvCLUVDUvCT
−×=×=
90sinsin
Exemplu : LDO=82 0,Vv=500/40km/h
NAVIGAŢIE AERIANĂ
Editia 1.0. - 74 - 25/04/2000
( ) kmCLkmCT
349271,04058sin403290sin402,215299,04032sin40
0
0
=×=×=−×=
=×=×=
Componenta longitudinală şi transversală a vectorului vînt sînt parametrice joacă un rol foarte important în calcul performanţelor de decolare şi aterizarea unui avion. Astfel, componenta longitudinală scurtează sau lungeşte distanţade decolare sau aterizare a unui avion. Componenta transversală limiteazăposibilitatea de decolare sau aterizare în sensul asigurării securităţii zborului
4.2.3. Triunghiul de navigaţie al vitezelor
Compunerea grafică a vectorului vânt (wind vector), vectorului viteză faţăde sol (ground vector) şi vectorului viteză de zbor adevărată (air vector)formează triunghiul de navigaţie al vitezelor.
Vectorul vânt este format din direcţia şi viteza vântului, vectorul viteză faţăde sol este format din drumul real adevărat şi viteza faţă de sol, iar vectorulviteză de zbor adevărată este format din capul adevărat şi viteza de zboradevărată.
4.2.3.1. Prescurtări şi definiţii
• NA - Nord adevarat - direcţia cãtre polul Pãmîntului (nord geografic)indicat de direcţia meridianelor ;
• NM - Nord magnetic - direcţia cãtre nordul magnetic al Pãmîntului;
• ∆m - Declinaţie magneticã - unghiul format între NA şi NM. Sensulpozitiv este în sens orar; dacã este "E" are semnul "+" , iar dacãeste "W" are semnul "-".
• NC - Nord compas - direcţia faţã de care se obţin indicaţiile de capla bordul a/c (direcţia Nord indicatã de busola de la bord);
• ∆c - Deviatie compas - unghiul format între NM şi NC. Se mãsoarãde la NM, iar sensul pozitiv este orar;
• LDO - Linia drumului obligat - linia drumului pe care ar trebui sã sedeplaseze a/c ;
• LDR - Linia drumului real - linia drumului pe care se deplaseazã a/c;
• DA - Drum adevarat - unghiul format între NA şi linia drumului(traiect);
• DM - Drum magnetic - unghiul format între NM şi linia drumului(traiect);
• DC - Drum compas - unghiul format între NC şi linia drumului(traiect).
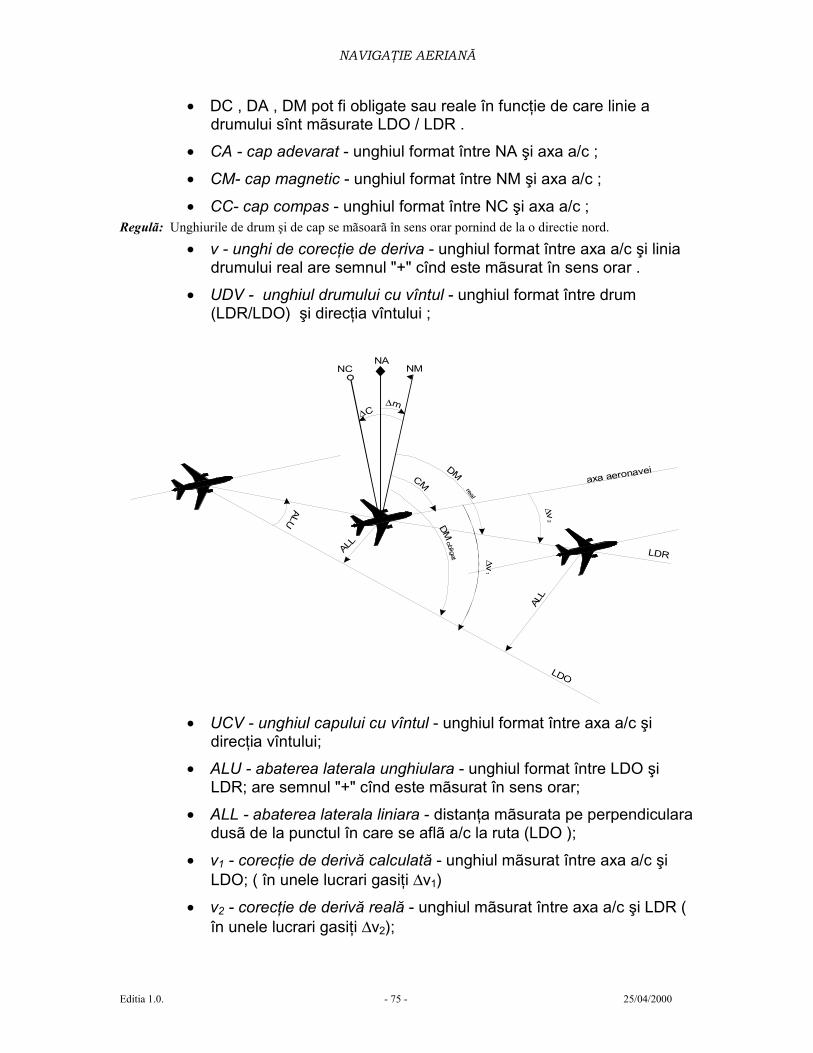
NAVIGAŢIE AERIANĂ
Editia 1.0. - 75 - 25/04/2000
• DC , DA , DM pot fi obligate sau reale în funcţie de care linie adrumului sînt mãsurate LDO / LDR .
• CA - cap adevarat - unghiul format între NA şi axa a/c ;
• CM- cap magnetic - unghiul format între NM şi axa a/c ;
• CC- cap compas - unghiul format între NC şi axa a/c ;Regulã: Unghiurile de drum şi de cap se mãsoarã în sens orar pornind de la o directie nord.
• v - unghi de corecţie de deriva - unghiul format între axa a/c şi liniadrumului real are semnul "+" cînd este mãsurat în sens orar .
• UDV - unghiul drumului cu vîntul - unghiul format între drum(LDR/LDO) şi direcţia vîntului ;
axa aeronavei
LDR
NANMNC
DM
real
CM
∆C∆m
DMobligat
LDO
ALL
ALL
ALU
∆v1
∆v2
• UCV - unghiul capului cu vîntul - unghiul format între axa a/c şidirecţia vîntului;
• ALU - abaterea laterala unghiulara - unghiul format între LDO şiLDR; are semnul "+" cînd este mãsurat în sens orar;
• ALL - abaterea laterala liniara - distanţa mãsurata pe perpendicularadusã de la punctul în care se aflã a/c la ruta (LDO );
• v1 - corecţie de derivă calculată - unghiul mãsurat între axa a/c şiLDO; ( în unele lucrari gasiţi ∆v1)
• v2 - corecţie de derivă reală - unghiul mãsurat între axa a/c şi LDR (în unele lucrari gasiţi ∆v2);
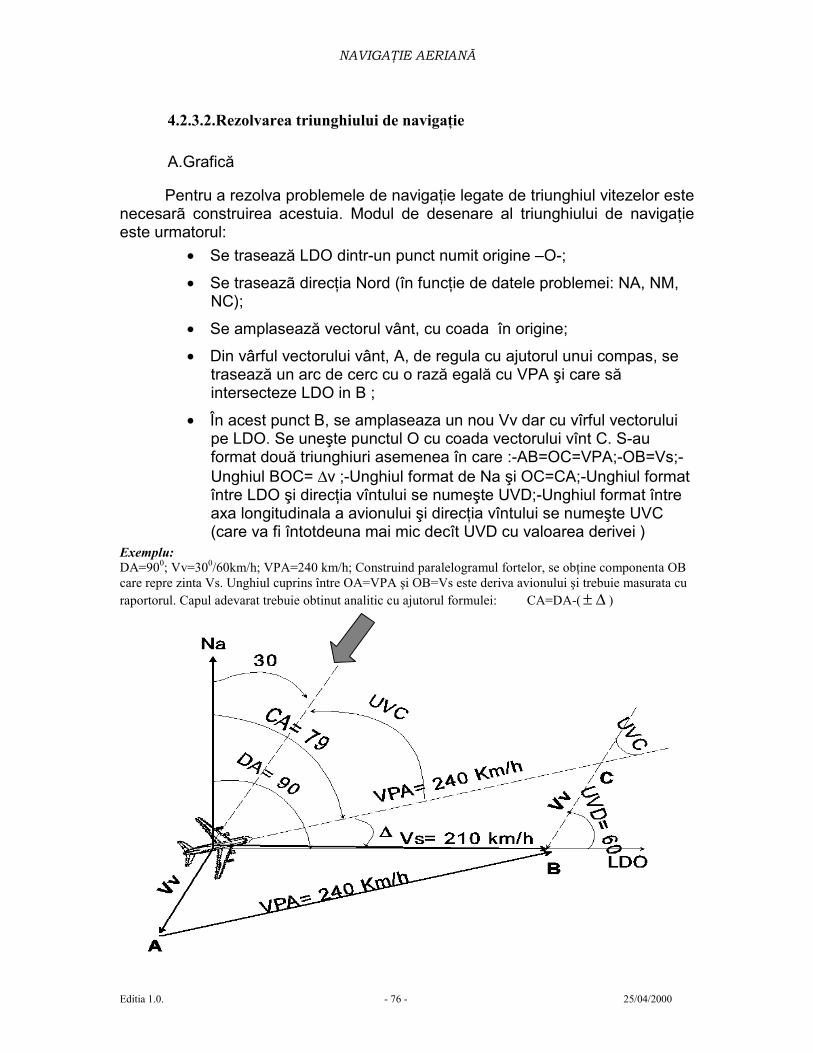
NAVIGAŢIE AERIANĂ
Editia 1.0. - 76 - 25/04/2000
4.2.3.2.Rezolvarea triunghiului de navigaţie
A.Grafică
Pentru a rezolva problemele de navigaţie legate de triunghiul vitezelor estenecesarã construirea acestuia. Modul de desenare al triunghiului de navigaţieeste urmatorul:
• Se trasează LDO dintr-un punct numit origine –O-;
• Se traseazã direcţia Nord (în funcţie de datele problemei: NA, NM,NC);
• Se amplasează vectorul vânt, cu coada în origine;
• Din vârful vectorului vânt, A, de regula cu ajutorul unui compas, setrasează un arc de cerc cu o rază egală cu VPA şi care săintersecteze LDO in B ;
• În acest punct B, se amplaseaza un nou Vv dar cu vîrful vectoruluipe LDO. Se uneşte punctul O cu coada vectorului vînt C. S-auformat două triunghiuri asemenea în care :-AB=OC=VPA;-OB=Vs;-Unghiul BOC= ∆v ;-Unghiul format de Na şi OC=CA;-Unghiul formatîntre LDO şi direcţia vîntului se numeşte UVD;-Unghiul format întreaxa longitudinala a avionului şi direcţia vîntului se numeşte UVC(care va fi întotdeuna mai mic decît UVD cu valoarea derivei )
Exemplu:DA=900; Vv=300/60km/h; VPA=240 km/h; Construind paralelogramul fortelor, se obţine componenta OBcare repre zinta Vs. Unghiul cuprins între OA=VPA şi OB=Vs este deriva avionului şi trebuie masurata curaportorul. Capul adevarat trebuie obtinut analitic cu ajutorul formulei: CA=DA-( ∆± )
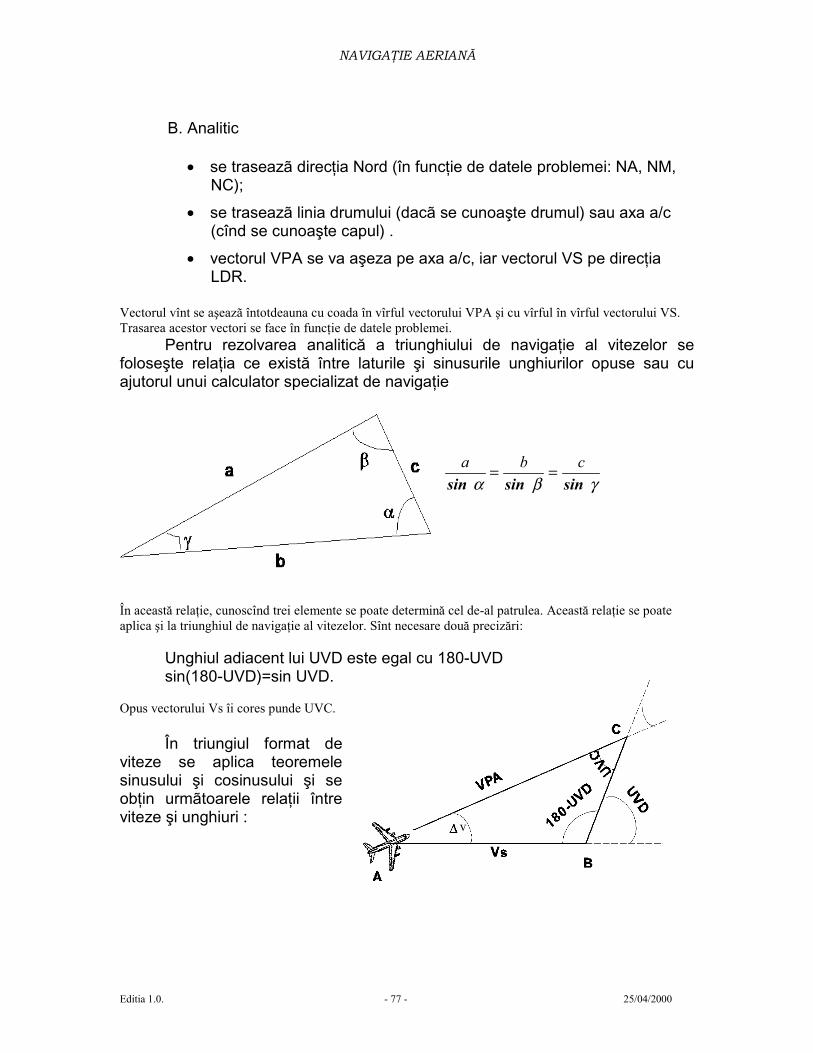
NAVIGAŢIE AERIANĂ
Editia 1.0. - 77 - 25/04/2000
B. Analitic
• se traseazã direcţia Nord (în funcţie de datele problemei: NA, NM,NC);
• se traseazã linia drumului (dacã se cunoaşte drumul) sau axa a/c(cînd se cunoaşte capul) .
• vectorul VPA se va aşeza pe axa a/c, iar vectorul VS pe direcţiaLDR.
Vectorul vînt se aşeazã întotdeauna cu coada în vîrful vectorului VPA şi cu vîrful în vîrful vectorului VS.Trasarea acestor vectori se face în funcţie de datele problemei.
Pentru rezolvarea analitică a triunghiului de navigaţie al vitezelor sefoloseşte relaţia ce există între laturile şi sinusurile unghiurilor opuse sau cuajutorul unui calculator specializat de navigaţie
γβα sinsinsincba ==
În această relaţie, cunoscînd trei elemente se poate determină cel de-al patrulea. Această relaţie se poateaplica şi la triunghiul de navigaţie al vitezelor. Sînt necesare două precizări:
Unghiul adiacent lui UVD este egal cu 180-UVDsin(180-UVD)=sin UVD.
Opus vectorului Vs îi cores punde UVC.
În triungiul format deviteze se aplica teoremelesinusului şi cosinusului şi seobţin urmãtoarele relaţii întreviteze şi unghiuri : v
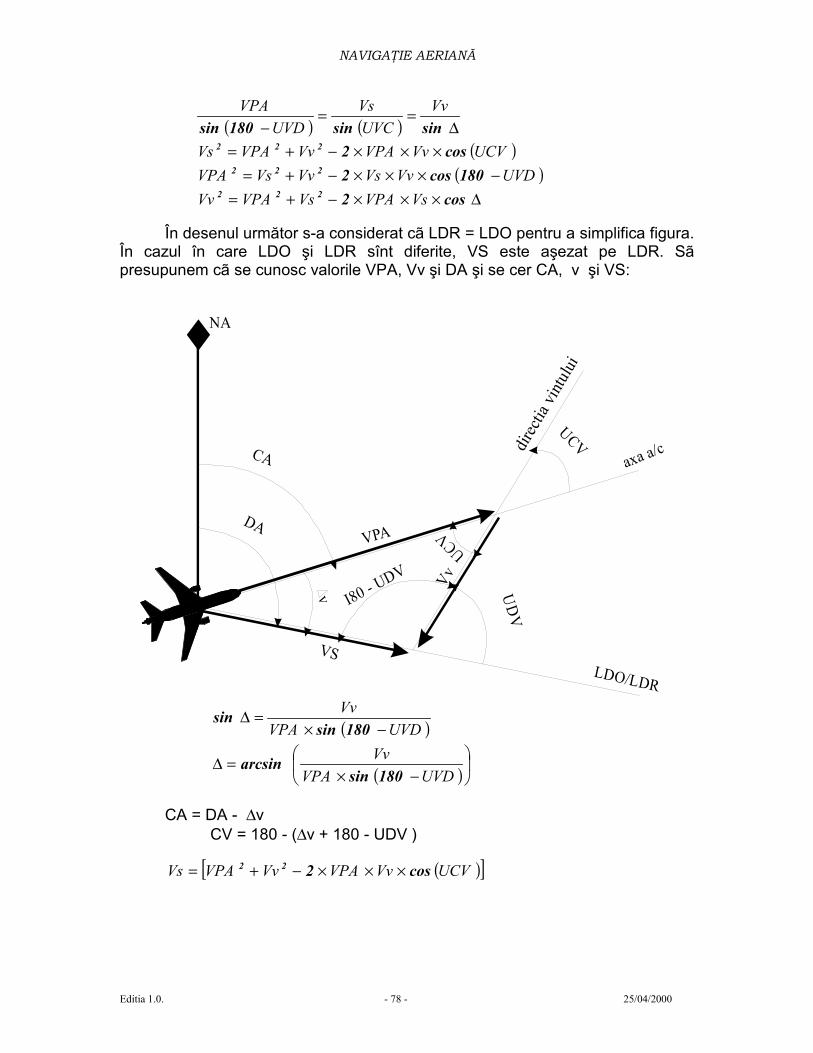
NAVIGAŢIE AERIANĂ
Editia 1.0. - 78 - 25/04/2000
( ) ( ) ∆==
− sinsin180sinVv
UVCVs
UVDVPA
( )UCVVvVPAVvVPAVs cos2222 ×××−+=( )UVDVvVsVvVsVPA −×××−+= 180cos2222
∆×××−+= cos2222 VsVPAVsVPAVv
În desenul următor s-a considerat cã LDR = LDO pentru a simplifica figura.În cazul în care LDO şi LDR sînt diferite, VS este aşezat pe LDR. Sãpresupunem cã se cunosc valorile VPA, Vv şi DA şi se cer CA, v şi VS:
VPA
VS
VvCA
DA
NAU
DV
UCVaxa a/c
LDO/LDR
v I80 - UDV
UCVdir
ectia
vintu
lui
( )UVDVPAVv
−×=∆
180sinsin
( ) ���
��
�
−×=∆
UVDVPAVv180sin
arcsin
CA = DA - ∆vCV = 180 - (∆v + 180 - UDV )
( )[ ]UCVVvVPAVvVPAVs cos222 ×××−+=
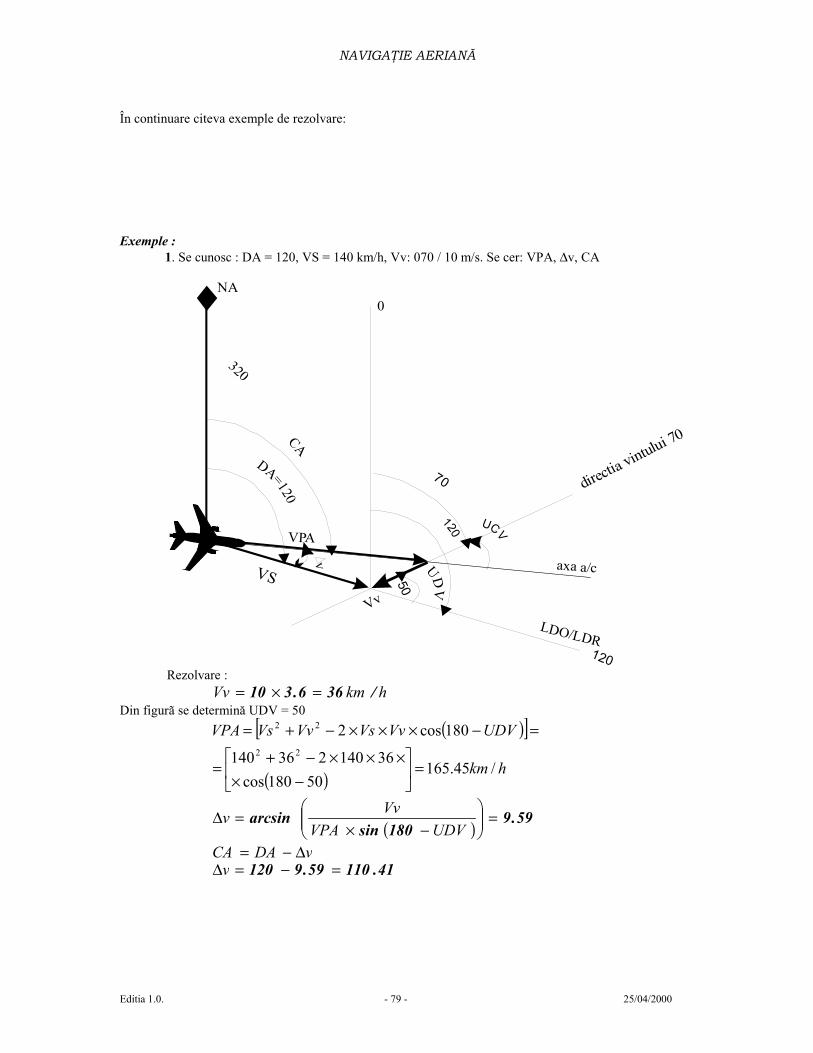
NAVIGAŢIE AERIANĂ
Editia 1.0. - 79 - 25/04/2000
În continuare citeva exemple de rezolvare:
Exemple :1. Se cunosc : DA = 120, VS = 140 km/h, Vv: 070 / 10 m/s. Se cer: VPA, ∆v, CA
VS
CA
DA=120
NA
axa a/c
LDO/LDR
vdirec
tia vintului 70
VPA
UDV
Vv
0
320120 UCV
70
120
50
Rezolvare :hkmVv /366.310 =×=
Din figurã se determină UDV = 50( )[ ]
( ) hkm
UDVVvVsVvVsVPA
/45.16550180cos
36140236140
180cos222
22
=��
���
�
−××××−+
=
=−×××−+=
( ) 59.9180sin
arcsin =���
����
�
−×=∆
UDVVPAVvv
vDACA ∆−=41.11059.9120 =−=∆v
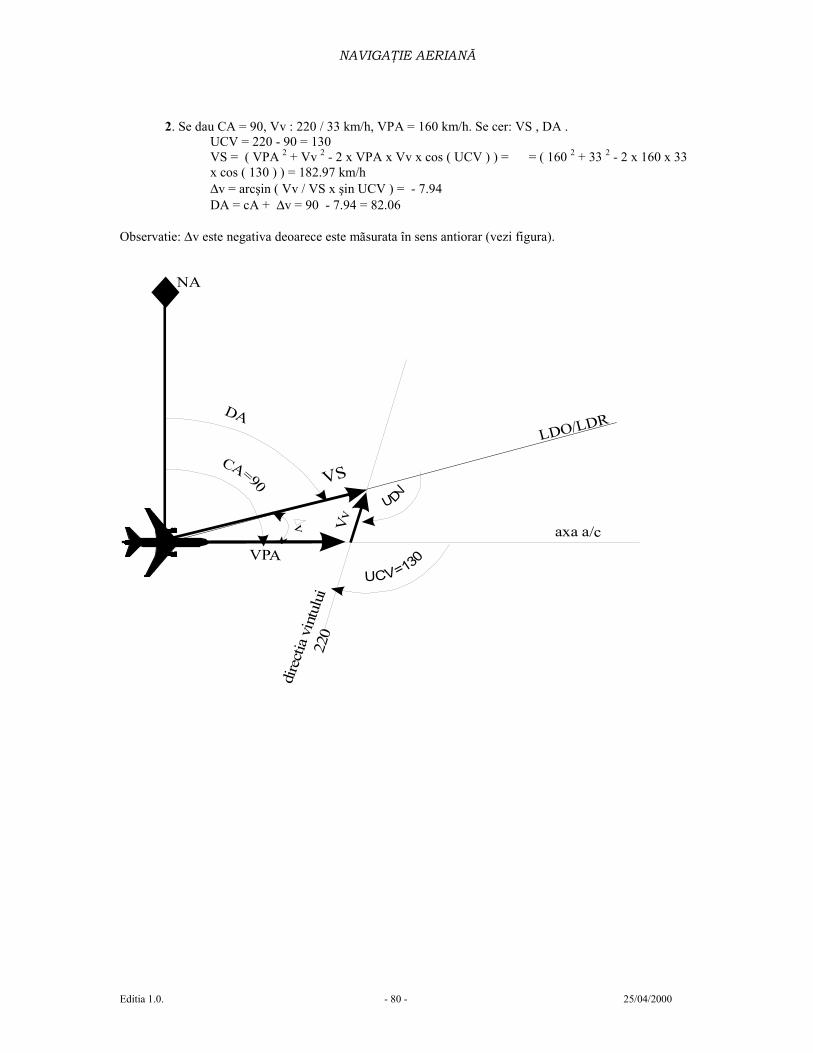
NAVIGAŢIE AERIANĂ
Editia 1.0. - 80 - 25/04/2000
2. Se dau CA = 90, Vv : 220 / 33 km/h, VPA = 160 km/h. Se cer: VS , DA .UCV = 220 - 90 = 130VS = ( VPA 2 + Vv 2 - 2 x VPA x Vv x cos ( UCV ) ) = = ( 160 2 + 33 2 - 2 x 160 x 33x cos ( 130 ) ) = 182.97 km/h∆v = arcşin ( Vv / VS x şin UCV ) = - 7.94DA = cA + ∆v = 90 - 7.94 = 82.06
Observatie: ∆v este negativa deoarece este mãsurata în sens antiorar (vezi figura).
VSCA=90
DA
NA
axa a/c
LDO/LDR
v
dire
ctia
vin
tulu
i
220
VPA
Vv
UDV
UCV=13
0
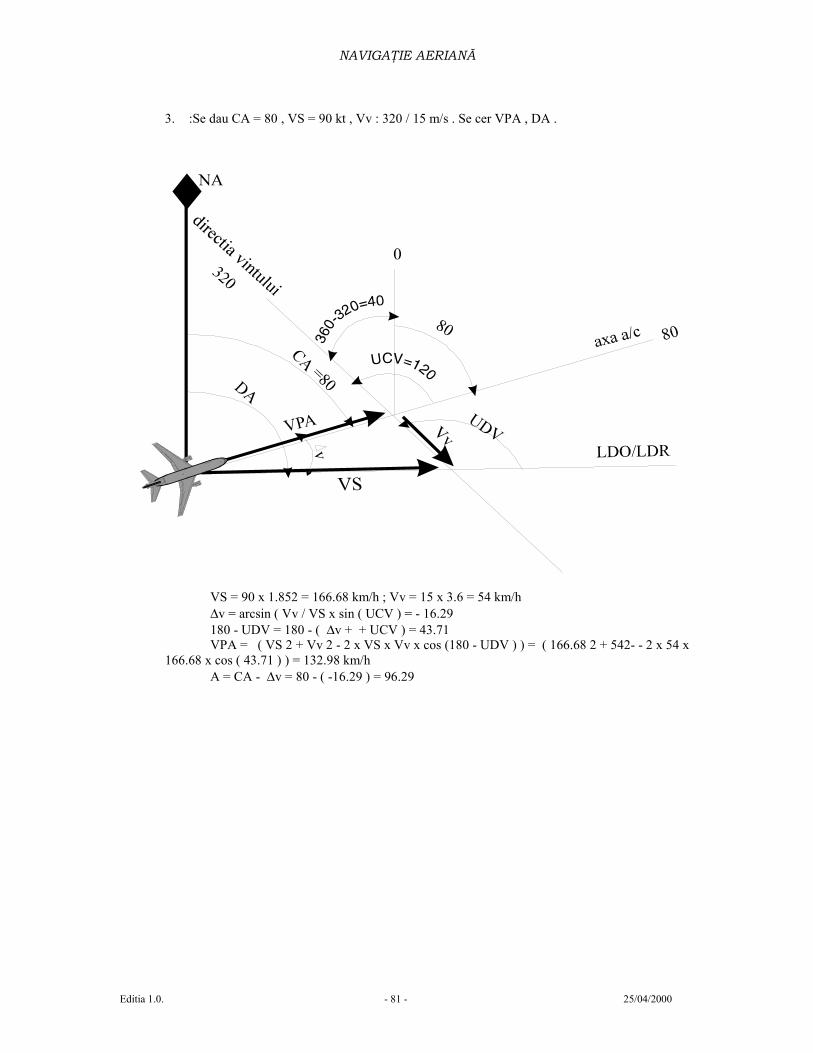
NAVIGAŢIE AERIANĂ
Editia 1.0. - 81 - 25/04/2000
3. :Se dau CA = 80 , VS = 90 kt , Vv : 320 / 15 m/s . Se cer VPA , DA .
VS = 90 x 1.852 = 166.68 km/h ; Vv = 15 x 3.6 = 54 km/h∆v = arcsin ( Vv / VS x sin ( UCV ) = - 16.29180 - UDV = 180 - ( ∆v + + UCV ) = 43.71VPA = ( VS 2 + Vv 2 - 2 x VS x Vv x cos (180 - UDV ) ) = ( 166.68 2 + 542- - 2 x 54 x
166.68 x cos ( 43.71 ) ) = 132.98 km/hA = CA - ∆v = 80 - ( -16.29 ) = 96.29
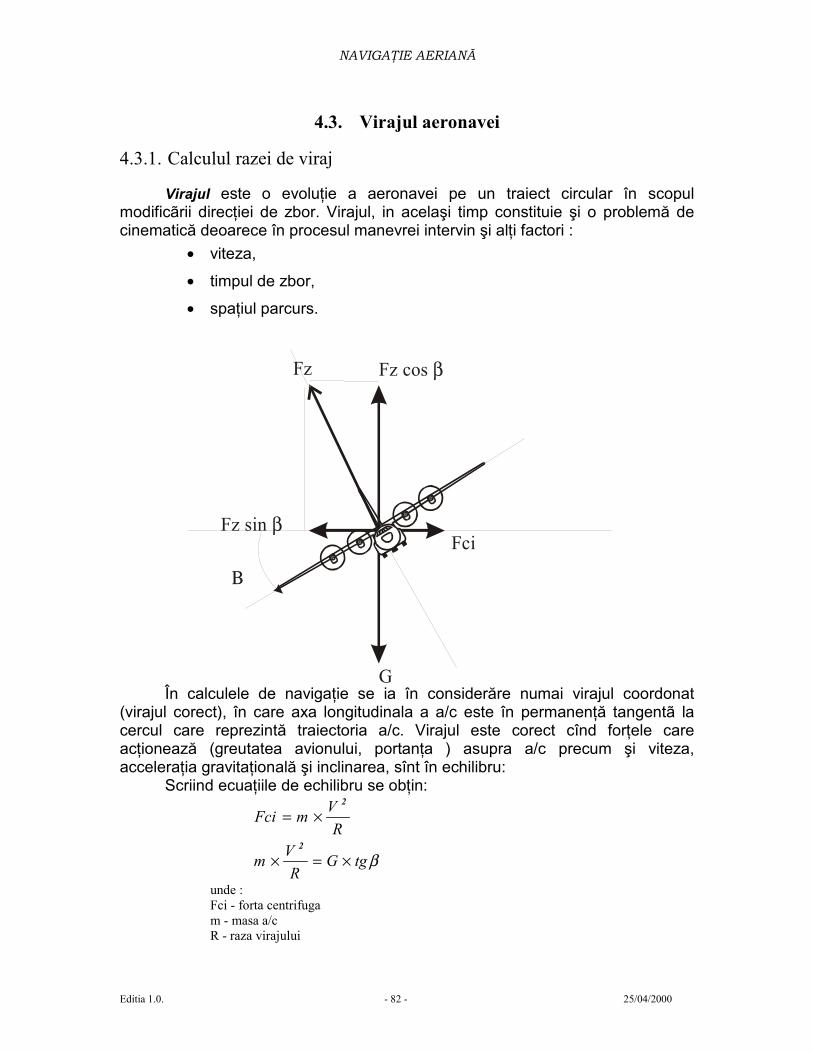
NAVIGAŢIE AERIANĂ
Editia 1.0. - 82 - 25/04/2000
4.3. Virajul aeronavei
4.3.1. Calculul razei de viraj
Virajul este o evoluţie a aeronavei pe un traiect circular în scopulmodificãrii direcţiei de zbor. Virajul, in acelaşi timp constituie şi o problemă decinematică deoarece în procesul manevrei intervin şi alţi factori :
• viteza,
• timpul de zbor,
• spaţiul parcurs.
Fz
G
Fci
Fz cos β
Β
Fz sin β
În calculele de navigaţie se ia în considerăre numai virajul coordonat(virajul corect), în care axa longitudinala a a/c este în permanenţă tangentã lacercul care reprezintă traiectoria a/c. Virajul este corect cînd forţele careacţionează (greutatea avionului, portanţa ) asupra a/c precum şi viteza,acceleraţia gravitaţională şi inclinarea, sînt în echilibru:
Scriind ecuaţiile de echilibru se obţin:
βtgGR
Vm
RVmFci
×=×
×=
2
2
unde :Fci - forta centrifugam - masa a/cR - raza virajului
NAVIGAŢIE AERIANĂ
Editia 1.0. - 83 - 25/04/2000
V - viteza a/cG - greutatea a/cβ - unghiul de inclinare în viraj
Pentru un viraj coordonat, forţa de portanţă a aeronavei este înclinată cuun unghi β faţă de verticală, iar proiecţia forţei de portanţă pe planul vericaltrebuie să egaleze greutatea aeronavei. Pentru acest tip de viraj, forţa centripetă(G tgβ) trebuie să egaleze forţa centrifugă (mV2/R), egalitate din care rezultăvaloarea razei de viraj.
Coordonarea acestor factori îşi găseşte expresia în raza virajului(R )Din formula anterioară se poate observa că pentru raza de viraj se obţine
urmãtorea relaţie de calcul :
βtggVR×
=2
unde g = 9.81 m/s 2 -acceleraţia gravitaţionalã.Exemplu : V=600km/h (167 m/sec ),Înclinarea 150
mtg
R 609,102679,081,9
277781581,9
1670
2
=×
=×
=
Durata virajului. Pentru un traiect în viraj egal cu un cerc durata virajului sedetermină
metriin raza Rm/sec in a/c
==
=
vitezaVV
Rt π2360
Cînd virajul are un anumit unghi ( Uv ) durata acestuia se determină:
03602 UvV
RtUv ×= π
sau
βtgV
gUvtUv ×
××= 0360
2
Viteza unghiularã (ω ) de viraj este valoarea arcului de cerc parcurs deavion în unitatea de timp, de regulă pe secundă :
RV
saut
3,57
3600360
0
=
=
ω
ω
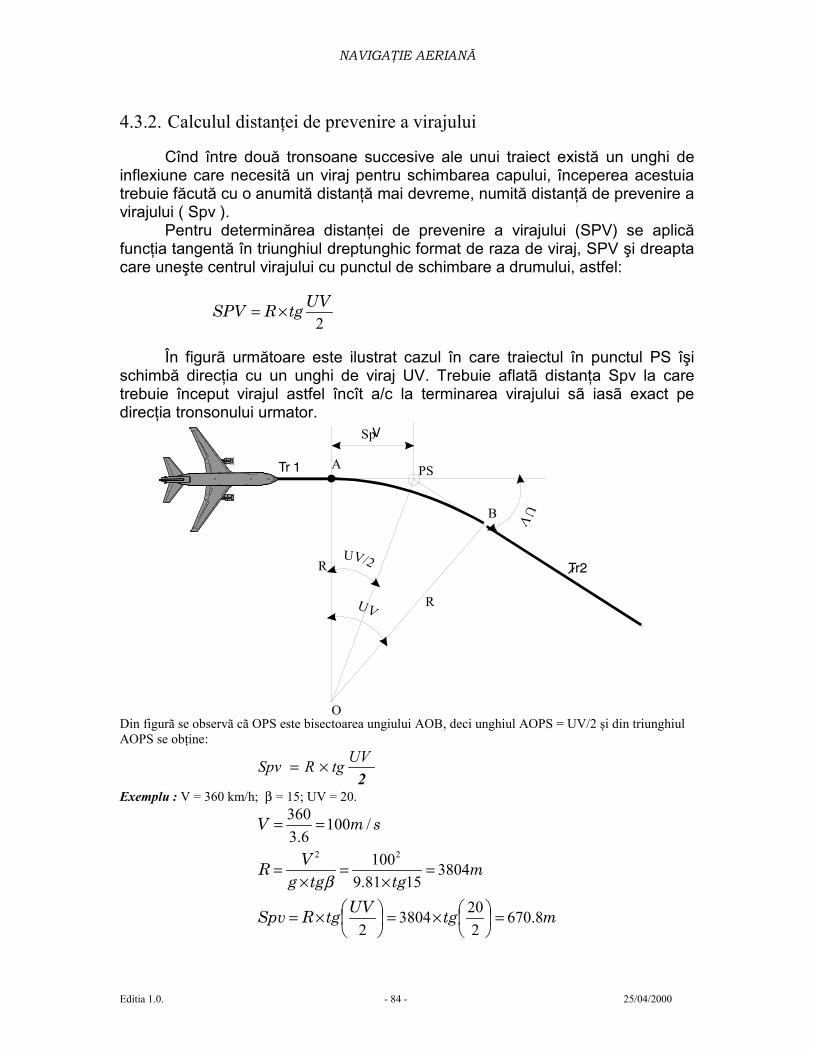
NAVIGAŢIE AERIANĂ
Editia 1.0. - 84 - 25/04/2000
4.3.2. Calculul distanţei de prevenire a virajului
Cînd între două tronsoane succesive ale unui traiect există un unghi deinflexiune care necesită un viraj pentru schimbarea capului, începerea acestuiatrebuie făcută cu o anumită distanţă mai devreme, numită distanţă de prevenire avirajului ( Spv ).
Pentru determinărea distanţei de prevenire a virajului (SPV) se aplicăfuncţia tangentă în triunghiul dreptunghic format de raza de viraj, SPV şi dreaptacare uneşte centrul virajului cu punctul de schimbare a drumului, astfel:
2UV
tgRSPV ×=
În figurã următoare este ilustrat cazul în care traiectul în punctul PS îşischimbă direcţia cu un unghi de viraj UV. Trebuie aflatã distanţa Spv la caretrebuie început virajul astfel încît a/c la terminarea virajului sã iasã exact pedirecţia tronsonului urmator.
Sp
PS
UV
UV/2
UV
R
R
A
B
O
Tr 1
Tr2
Din figurã se observã cã OPS este bisectoarea ungiului AOB, deci unghiul AOPS = UV/2 şi din triunghiulAOPS se obţine:
2UVtgRSpv ×=
Exemplu : V = 360 km/h; β = 15; UV = 20.
mtgUV
tgRSpv
mtgtgg
VR
smV
8.6702
2038042
38041581.9
100
/1006.3
360
22
=��
���
�×=��
���
�×=
=×
=×
=
==
β
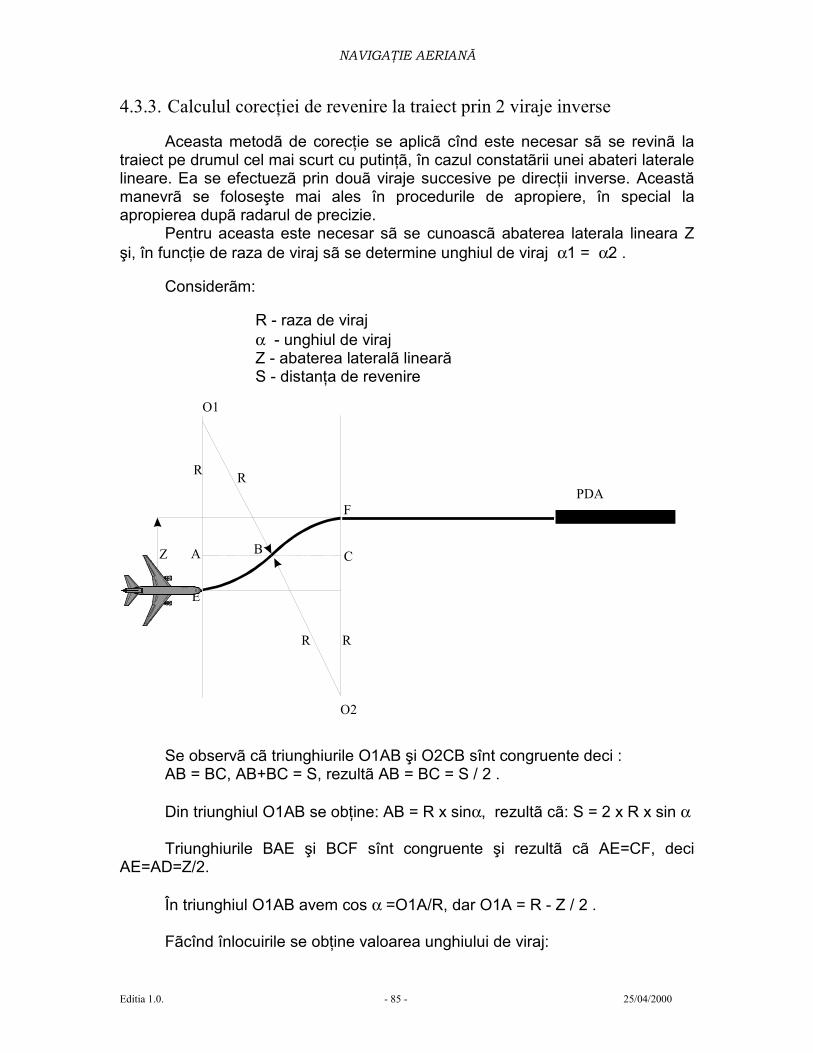
NAVIGAŢIE AERIANĂ
Editia 1.0. - 85 - 25/04/2000
4.3.3. Calculul corecţiei de revenire la traiect prin 2 viraje inverse
Aceasta metodã de corecţie se aplicã cînd este necesar sã se revinã latraiect pe drumul cel mai scurt cu putinţã, în cazul constatãrii unei abateri lateralelineare. Ea se efectuezã prin douã viraje succesive pe direcţii inverse. Aceastămanevrã se foloseşte mai ales în procedurile de apropiere, în special laapropierea dupã radarul de precizie.
Pentru aceasta este necesar sã se cunoascã abaterea laterala lineara Zşi, în funcţie de raza de viraj sã se determine unghiul de viraj α1 = α2 .
Considerãm:
R - raza de virajα - unghiul de virajZ - abaterea lateralã linearăS - distanţa de revenire
O1
O2
Z A
R R
R R
C
F
E
B
PDA
Se observã cã triunghiurile O1AB şi O2CB sînt congruente deci :AB = BC, AB+BC = S, rezultã AB = BC = S / 2 .
Din triunghiul O1AB se obţine: AB = R x sinα, rezultã cã: S = 2 x R x sin α
Triunghiurile BAE şi BCF sînt congruente şi rezultã cã AE=CF, deciAE=AD=Z/2.
În triunghiul O1AB avem cos α =O1A/R, dar O1A = R - Z / 2 .
Fãcînd înlocuirile se obţine valoarea unghiului de viraj:
NAVIGAŢIE AERIANĂ
Editia 1.0. - 86 - 25/04/2000
��
���
� −=
−=
RZar
iarR
Z
21cos
21cos
α
α
În procedura de apropiere, este foarte important să se cunoască şidistanţa rectilinie S parcursă, care se poate determină cu ajutorul relaţiei:
αsin2 RS =
Exemplu :Se dã viteza avionului V = 280 km/h, β = 15 ºi abaterea Z = 500 m; sã se calculeze unghiul de
revenire prin douã viraje:
V = 280 / 3.6 = 77.78 m/sR = V 2 / ( g x tg β ) = 77.78 2 / ( 9.81 x tg 15 ) = 2301 mcos α = 1 - ( Z / ( 2 x R )) = 1 - 500 / ( 2 x 2301 ) = 0.891α = arccos ( 1 - ( Z / ( 2 x R )) ) = 26.95tv=(6,28 x 2,3 / 280) x (26.95 / 360)=0,689 miniar pentru întreaga manevră 0,689 x 2=1,3781min=1min 23secDistanţa rectilinie va fiS=4.602 x şin 26.95 = 4,602 x 0,4532=2,08568 km
NAVIGAŢIE AERIANĂ
Editia 1.0. - 87 - 25/04/2000
CAPITOLUL 5.
ELEMENTE DERADIONAVIGAŢIE
5.1. Sistemul de radionavigaţie de la sol
Pentru determinărea elementelor de navigaţie sunt utilizate mijloacele deradionavigaţie. În majoritatea cazurilor acestea funcţionează în corelaţie, cele dela bord cu cele amplasate la sol sau pe sateliţi, caz în care poartă denumirea desisteme de radionavigaţie. Există mijloace de radionavigaţie independente sauautonome care funcţionează independent la bordul aeronavelor.
Pentru asigurarea preciziei şi siguranţei navigaţiei aeriene, mijloacele deradionavigaţie trebuiesc identificate. Fiecare mijloc de radionavigaţie transmiteun semnal de identificare în cod Morse sau în clar; în cazul în care acesta nueste recepţionat elementele furnizate de către mijlocul respectiv nu trebuiescluate în considerare. În acest caz staţia este scoasă din funcţie sau este în lucrăride întreţinere, caz în care unele echipamente, pe canalul de identificare, transmitun semnal specific.
5.1.1. Clasificarea mijloacelor de radionavigaţie
Mijloacele de radionavigaţie se pot clasifica după diverse criterii în maimulte grupe:
a) din punct de vedere al distanţei de acţiune:• mijloace pentru distanţe scurte (inclusiv cele de apropiere şi
aterizare) cu acţiune până la 100 km;
• mijloace pentru distanţe medii cu acţiune până la 500 km;
• mijloace de mare distanţă cu acţiune peste 500 km.
b) din punct de vedere al frecvenţei de lucru:• mijloace care funcţionează în frecvenţe foarte joase (VLF);
• mijloace care funcţionează în frecvenţe joase (LF);
• mijloace care funcţionează în frecvenţe medii (MF);
• mijloace care funcţionează în frecvenţe înalte (HF);
• mijloace care funcţionează în frecvenţe foarte înalte (VHF);
NAVIGAŢIE AERIANĂ
Editia 1.0. - 88 - 25/04/2000
• mijloace care funcţionează în frecvenţe ultra înalte (UHF);
• mijloace care funcţionează în frecvenţe superioare (SHF).
c) din punct de vedere al principiului de funcţionare:• mijloace cu unde întreţinute;
• mijloace cu unde modulate în amplitudine;
• mijloace cu unde modulate în frecvenţă;
• mijloace cu impulsuri.
d) din punct de vedere al caracterului elementelor de navigaţie:• mijloace goniometrice care determină azimutul faţă de meridianul
terestru;
• mijloace telemetrice care determină distanţa faţă de reper;
• mijloace combinate sau goniotelemetrice care determină atâtazimutul cât şi distanţa faţă de locul de amplasare pe sol;
• mijloace hiperbolice care determină coordonatele avionului prin liniide poziţie de forma hiperbolei.
5.1.2. Navigaţia cu ajutorul radiofarului nedirecţional NDB
Radiofarul nedirecţional - NDB (Non-Directional radio Beacon) estetermenul ce desemnează mijlocul de radionavigaţie instalat pe sol care emite unsemnal pe o frecvenţă purtătoare continuă de valori joase sau medii modulată înamplitudine cu o frecvenţă de 400 sau 1020 Hz. Acesta radiază o diagramă desemnal nedirecţional sau circular, care face ca informaţia de navigaţie furnizatăsă nu fie direcţională în cuprinsul celor 360° ale radiofarului. Depinzând deputerea de emisie, care poate fi de la mai puţin de 25 W la 2000 W, raza deacţiune a unui radiofar nedirecţional variază de la mai puţin de 15 MN la maimulte sute de mile nautice. La verticala radiofarului nedirecţional NDB există ozonă de ambiguitate de forma unui con cu unghiul la vârf de 80° lipsită deindicaţii numită deasemenea zona de efect de con.
Radiofarurile nedirecţionale, în funcţie de utilitatea lor, se clasifică în:• radiofaruri nedirecţionale de rută folosite pentru a asigura navigaţia
pe căile aeriene. Acestea sunt amplasate la distanţe de 100-150 kmşi au o putere de 200-300 W;
• radiofaruri nedirecţionale de mică putere (20-50 W) denumiteradiobalize sau locatoare (compass locator) când sunt folosite camijloc de radionavigaţie primar pentru efectuarea procedurii deapropiere instrumentale NDB sau când sunt colocate cu markereledin procedura de apropiere ILS.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 89 - 25/04/2000
La bord se poate transforma semnalul nedirecţional în informaţiedirecţională cu ajutorul radiocompasului - ADF (automatic direction finder).Echipamentul sesizează direcţia spre emiţătorul de sol şi poate determinărelevmentele (bearing) RMR, RMA şi gismentul radio (relative bearing) GR.
Cu ajutorul radiocompasului se pot rezolva următoarele:• controlul în direcţie al drumului în timpul zborului de îndepărtare şi
de apropiere de un radiofar;
• determinărea abaterii laterale faţă de traiectul obligat şi deci acapului magnetic corectat de urmat la zborul de îndepărtare şiapropiere;
• controlul zborului în distanţă cu ajutorul unui radiofar lateral;
• determinărea punctului aeronavei cu ajutorul relevmentelor de ladouă radiofaruri;
• determinărea vitezei faţă de sol cu două poziţii succesive aleaeronavei precum şi a direcţiei şi vitezei vântului.
Avantajele sistemului NDB/ADF sunt:• semnalul transmis poate fi recepţionat şi folosit pentru navigaţie la
altitudini joase, deoarece unda terestră urmăreşte curburapământului. Poate fi folosită în zonele unde recepţia în linie dreaptănu este disponibilă;
• receptorul ADF are o bandă de acord largă. Se pot folosi pentrunavigaţie şi staţiile de radiodifuziune, cu dezavantajul că acestea nutransmit identificarea permanent;
• radiofarurile nedirecţionale au o folosire diversă:• pot fi folosite ca un sistem de navigaţie de rezervă;• poate ajuta pilotul în tranziţia de la zborul de pe rută laapropierea ILS, pentru interceptarea direcţiei ILS;
• pot fi folosite pentru a efectua o procedură de aşteptare.
În navigaţia cu ajutorul NDB-ului la bordul a/c se utilizezazăradiocompasul. Funcţionarea acestuia se bazează pe utilizarea proprietăţilor dedirectivitate ale antenei cadru. Aceasta se utilizeză împreuna cu o antenadeschisă astfel încît să se obţină o caracteristică de directivitate de tip cardioidă;prin rotirea antenei cadru pînă cînd semnalul recepţionat este nul, se suprapuneaxa antenei cadru, cu direcţia în care se afla staţia. Unghiul de rotire al anteneifaţă de axa longitudinală a a/c este trimis la aparatul indicator, la care se vor citirelevmentul şi gismentul faţă de staţie. Deci acul radiocompasului va indicaîntotdeauna direcţia în care se află radiofarul.
În figura urmatoare sînt arătate cîteva indicaţii ale radiocompasului înfuncţie de poziţia a/c faţă de NDB.
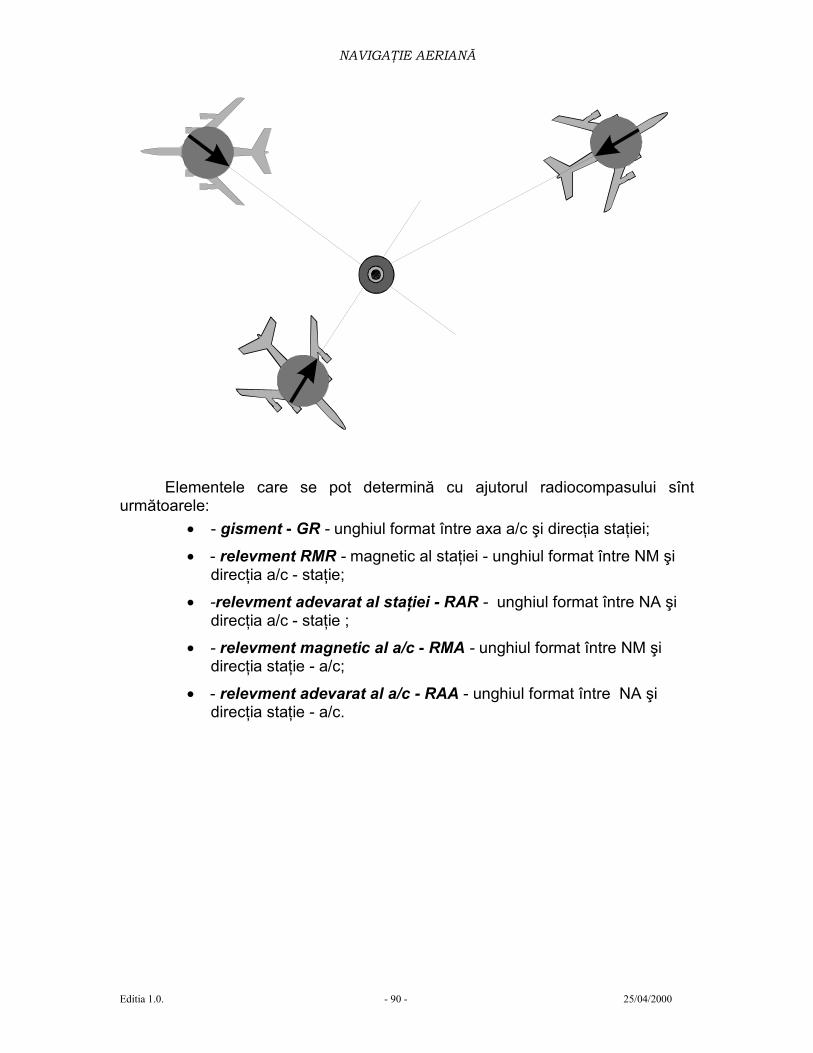
NAVIGAŢIE AERIANĂ
Editia 1.0. - 90 - 25/04/2000
Elementele care se pot determină cu ajutorul radiocompasului sînturmătoarele:
• - gisment - GR - unghiul format între axa a/c şi direcţia staţiei;
• - relevment RMR - magnetic al staţiei - unghiul format între NM şidirecţia a/c - staţie;
• -relevment adevarat al staţiei - RAR - unghiul format între NA şidirecţia a/c - staţie ;
• - relevment magnetic al a/c - RMA - unghiul format între NM şidirecţia staţie - a/c;
• - relevment adevarat al a/c - RAA - unghiul format între NA şidirecţia staţie - a/c.
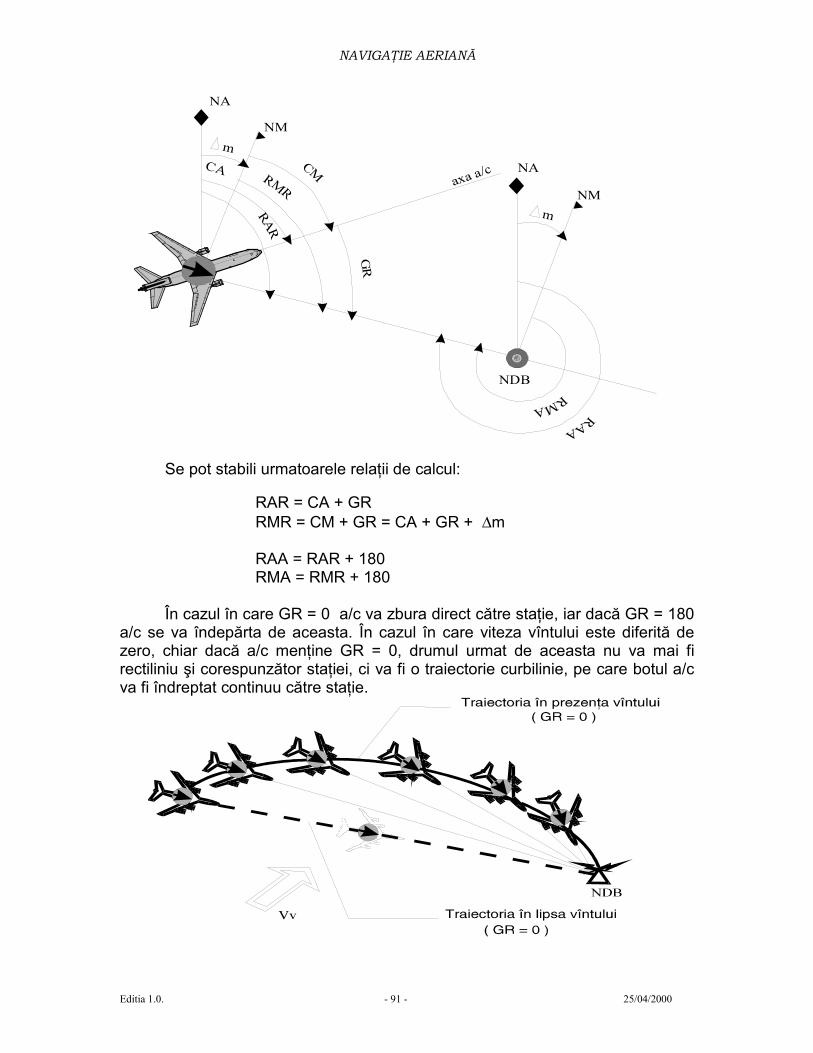
NAVIGAŢIE AERIANĂ
Editia 1.0. - 91 - 25/04/2000
m
m
CMRMR
RAR
CA
GR
axa a/c
NDB
NA
NM
NA
NM
RAA
RMA
Se pot stabili urmatoarele relaţii de calcul:
RAR = CA + GRRMR = CM + GR = CA + GR + ∆m
RAA = RAR + 180RMA = RMR + 180
În cazul în care GR = 0 a/c va zbura direct către staţie, iar dacă GR = 180a/c se va îndepărta de aceasta. În cazul în care viteza vîntului este diferită dezero, chiar dacă a/c menţine GR = 0, drumul urmat de aceasta nu va mai firectiliniu şi corespunzător staţiei, ci va fi o traiectorie curbilinie, pe care botul a/cva fi îndreptat continuu către staţie.
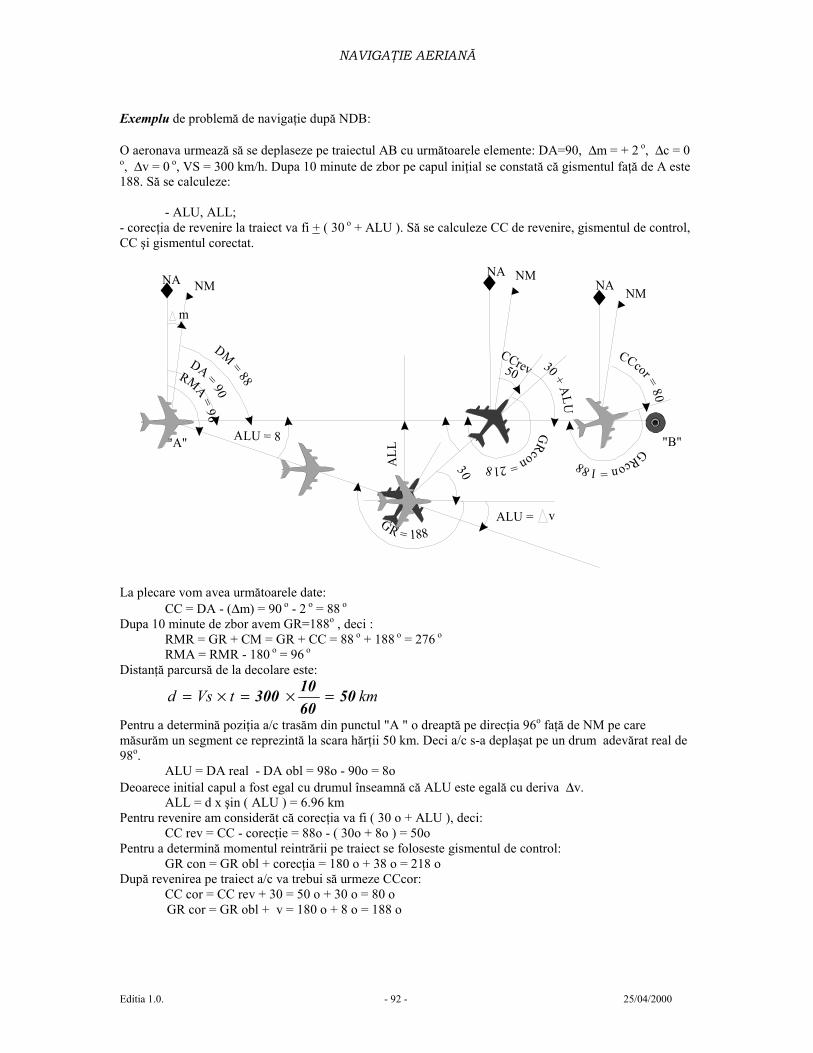
NAVIGAŢIE AERIANĂ
Editia 1.0. - 92 - 25/04/2000
Exemplu de problemă de navigaţie după NDB:
O aeronava urmează să se deplaseze pe traiectul AB cu următoarele elemente: DA=90, ∆m = + 2 o, ∆c = 0o, ∆v = 0 o, VS = 300 km/h. Dupa 10 minute de zbor pe capul iniţial se constată că gismentul faţă de A este188. Să se calculeze:
- ALU, ALL;- corecţia de revenire la traiect va fi + ( 30 o + ALU ). Să se calculeze CC de revenire, gismentul de control,CC şi gismentul corectat.
ALL
GR = 188 ALU = v
3030 + A
LU
CCrev
GRcon = 218
CCcor = 80GRcon = 188
50
ALU = 8
NA NMNA NM
"B"
NA NM
DM = 88
DA = 90
RMA = 96
"A"
m
La plecare vom avea următoarele date:CC = DA - (∆m) = 90 o - 2 o = 88 o
Dupa 10 minute de zbor avem GR=188o , deci :RMR = GR + CM = GR + CC = 88 o + 188 o = 276 o
RMA = RMR - 180 o = 96 o
Distanţă parcursă de la decolare este:
kmtVsd 506010300 =×=×=
Pentru a determină poziţia a/c trasăm din punctul "A " o dreaptă pe direcţia 96o faţă de NM pe caremăsurăm un segment ce reprezintă la scara hărţii 50 km. Deci a/c s-a deplaşat pe un drum adevărat real de98o.
ALU = DA real - DA obl = 98o - 90o = 8oDeoarece initial capul a fost egal cu drumul înseamnă că ALU este egală cu deriva ∆v.
ALL = d x şin ( ALU ) = 6.96 kmPentru revenire am considerăt că corecţia va fi ( 30 o + ALU ), deci:
CC rev = CC - corecţie = 88o - ( 30o + 8o ) = 50oPentru a determină momentul reintrării pe traiect se foloseste gismentul de control:
GR con = GR obl + corecţia = 180 o + 38 o = 218 oDupă revenirea pe traiect a/c va trebui să urmeze CCcor:
CC cor = CC rev + 30 = 50 o + 30 o = 80 oGR cor = GR obl + v = 180 o + 8 o = 188 o
NAVIGAŢIE AERIANĂ
Editia 1.0. - 93 - 25/04/2000
5.1.3. Radiomarker
Radiomarkerele sînt staţii de radio emişie cu o diagramă de radiaţiedispusă în plan vertical, care poate avea forma unui con ( Z markere ) sau formaunui evantai (fan markere ) avînd o distanţă de acţiune de 8-9 km. La verticalaantenei radiofarului nedirecţional ia naştere o zonă în formă de con cu vîrful înjos unde nu există nici un fel de semnale utilizabile pentru navigaţie şi deciindicaţiile radiocompasului nu sînt şigure. Pentru a materializa cu mai multăprecizie survolarea radiofarului nedirecţional este recomandabil ca acestă sa fiecompletat cu un radiomarker. Diagrama de radiaţie a radiomarkerului este maiîngustă decît dimensiunea conului de ambiguitate a radiofarului nedirecţional,astfel încît semnalizează cu mai multă precizie survolarea acestuia, ceea ce estefoarte important în efectuarea procedurii de apropiere instrumentală.
Radiomarkerele se utilizează pentru indicarea :• Poziţiilor exacte a radiofarurilor de rută, a radiofarurilor de aşteptare
sau radiobalizelor;
• Unor puncte –de începerea coborîrii la alt nivel, survolarea unei cotepericuloase zborului;
• Distanţelor faţă de prag în procedura de apropiere instrumentalăILS.
În documentele de informare aeronautică radiomarkerele, cu excepţiacelor din sistemul ILS, poartă abreviaţia de MKR.
Radiomarkerele din sistemul ILS vor fi tratate la descrierea sistemului deapropiere şi aterizare ILS.
5.1.4. Navigaţia cu ajutorul radiofarului omnidirecţional VOR şi aechipamentului de măsurare a distanţei DME
Sistemul VOR (Very High Frequency OmniRange ) constituie în prezentsistemul standard adoptat pe plan internaţional de ICAO pentru distanţe ce nudepăşesc 400 km, şi se compune dintr-un radiofar amplasat pe axa căii aeriene,în prelungirea axei pistei sau chiar pe aerodrom şi dintr-un echipament de bordcompus din: receptor VHF; selector de canale; selector de relevmente (OBS=Omnibearing Selector ); indicator de relevmente magnetice (RMI=RadioMagnetic Indicator) ; indicator de abatere de la drum (CDI); indicator de sens“spre” “de la”.
Radiofarul VOR este un emiţător cu unde întreţinute, funcţionînd peprincipiul comparării fazei a două semnale, fiind construit astfel încit cîmpulelectromagnetic emis să reprezinte distinct în azimut direcţii, cu precizia de ungrad. El emite omnidirecţional, marcînd în spaţiu simultan şi continuu 360 dedirecţii distincte, dispuse asemănator spiţelor unei roţi al cărei butuc ar firadiofarul. Aceste direcţii se numesc radiale şi reprezintă relevmente magneticeale a/c (RMA) sau drumuri magnetice (DM) măsurate faţă de NM din punctul deamplasare al radiofarului.
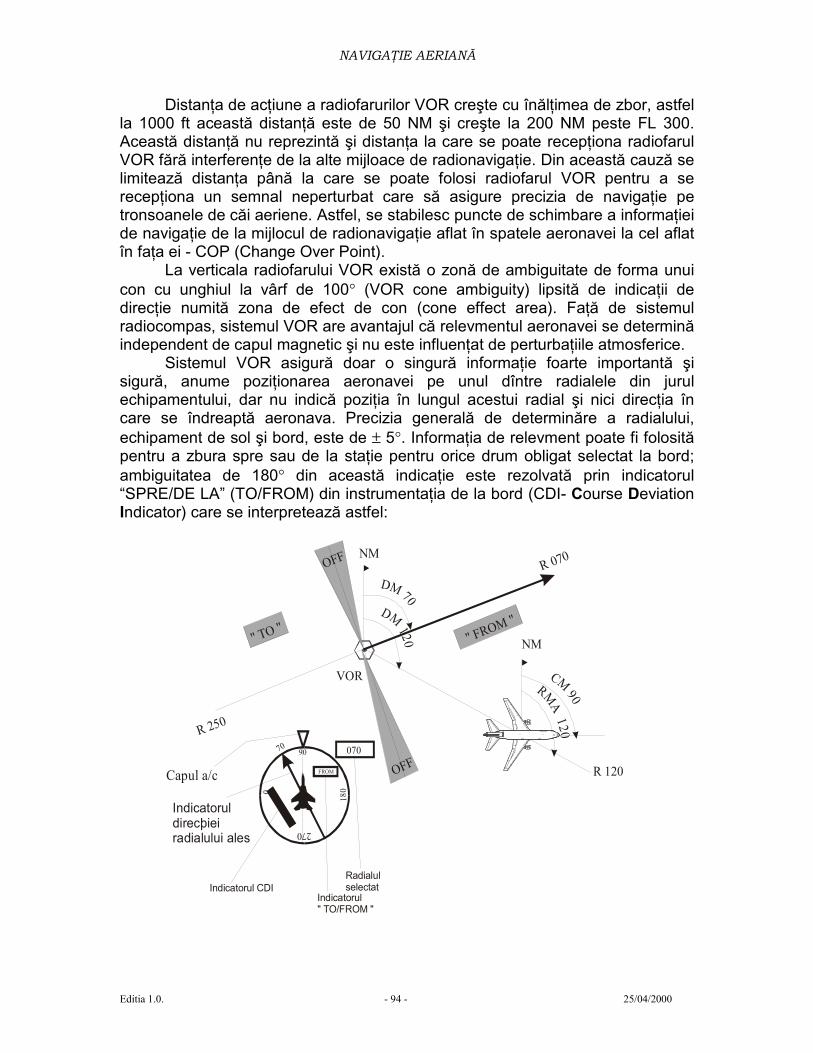
NAVIGAŢIE AERIANĂ
Editia 1.0. - 94 - 25/04/2000
Distanţa de acţiune a radiofarurilor VOR creşte cu înălţimea de zbor, astfella 1000 ft această distanţă este de 50 NM şi creşte la 200 NM peste FL 300.Această distanţă nu reprezintă şi distanţa la care se poate recepţiona radiofarulVOR fără interferenţe de la alte mijloace de radionavigaţie. Din această cauză selimitează distanţa până la care se poate folosi radiofarul VOR pentru a serecepţiona un semnal neperturbat care să asigure precizia de navigaţie petronsoanele de căi aeriene. Astfel, se stabilesc puncte de schimbare a informaţieide navigaţie de la mijlocul de radionavigaţie aflat în spatele aeronavei la cel aflatîn faţa ei - COP (Change Over Point).
La verticala radiofarului VOR există o zonă de ambiguitate de forma unuicon cu unghiul la vârf de 100° (VOR cone ambiguity) lipsită de indicaţii dedirecţie numită zona de efect de con (cone effect area). Faţă de sistemulradiocompas, sistemul VOR are avantajul că relevmentul aeronavei se determinăindependent de capul magnetic şi nu este influenţat de perturbaţiile atmosferice.
Sistemul VOR asigură doar o singură informaţie foarte importantă şisigură, anume poziţionarea aeronavei pe unul dîntre radialele din jurulechipamentului, dar nu indică poziţia în lungul acestui radial şi nici direcţia încare se îndreaptă aeronava. Precizia generală de determinăre a radialului,echipament de sol şi bord, este de ± 5°. Informaţia de relevment poate fi folosităpentru a zbura spre sau de la staţie pentru orice drum obligat selectat la bord;ambiguitatea de 180° din această indicaţie este rezolvată prin indicatorul“SPRE/DE LA” (TO/FROM) din instrumentaţia de la bord (CDI- Course DeviationIndicator) care se interpretează astfel:
VOR
NM
NM
R 070
R 120
R 250
OFF
OFF
" TO "" FROM "
DM 70
DM 120
CM 90RMA 120
070
FROM
7090
0
180
270
Capul a/c
Indicatorul direcþiei radialului ales
Radialulselectat
Indicatorul" TO/FROM "
Indicatorul CDI
NAVIGAŢIE AERIANĂ
Editia 1.0. - 95 - 25/04/2000
• - indicaţia " TO " - arată că relevmentul trebuie considerat spreVOR, adică, relevmentul magnetic al VOR-ului (RMR);
• - indicaţia " FROM " - arată că relevmentul trebuie considerat de laVOR la a/c, adică, relevmentul magnetic al a/c (radialul = RMA).
Uneori indicatorul CDI este cuplat cu un radiocompas sau cu indicatorulsistemului ILS.
În zonele în care declinaţia magnetică nu este constantă de-a lungul unuitronson de cale aeriană determinăt de două staţii VOR, aliniate fiind după nordulmagnetic, diferenţa dîntre radialele celor două staţii va fi mai mare sau mai micăde 180°. Acesta este un alt motiv pentru care referinţa de navigaţie trebuieschimbată de-a lungul căii aeriene la atingerea punctului desemnat.
Pentru determinărea poziţiei aeronavei pe un anumit radial s-a introdusechipamentul de măsurare a distanţei DME, (Distance Measuring Equipment)care, dacă este colocat cu echipamentul VOR, afişează continuu şi precis la bordinformaţia de distanţa oblică (slant range) până la staţia VOR/DME.Echipamentele VOR şi DME funcţionează pe frecvenţe diferite, dar acestea suntîmperechiate, ceea ce înseamnă că fiecare frecvenţă VOR are o frecvenţăstandard DME alocată ei. La bord este suficient să se fixeze frecvenţaechipamentului VOR desemnat, iar selectarea echipamentului DME se face înmod automat.
Echipamentul DME furnizează în mod direct doar informaţia de distanţă,dar din aceasta derivă, în cazul zborului spre sau de la staţie, alte două elementeimportante: viteza faţă de sol şi timpul de zbor până la staţie. Echipamentul DMEde la sol poate fi interogat de aproximativ cel mult 120 de aeronave, motiv pentrucare în zonele aglomerate se recomandă ca la sol aeronavele să-şi întrerupăfuncţionarea echipamentului asociat acestuia.
Având în vedere că valoarea DME măsurată la bord reprezintă distanţaoblică până la staţie, se induc erori în calcularea elementelor de navigaţie lapoziţii ale aeronavei sub anumite valori ale distanţei faţă de staţia de sol. Dinacest motiv s-a stabilit un con de ambiguitate al echipamentului DME de la sol,con cu unghiul la vârf de 110°. În interiorul acestuia nu se iau în considerareinformaţiile de distanţă pentru calcularea elementelor de navigaţie şi se ţine contde acest fapt la definirea de către proiectant a reperelor de navigaţie, astfel încâtacestea să fie poziţionate în afara acestui con.
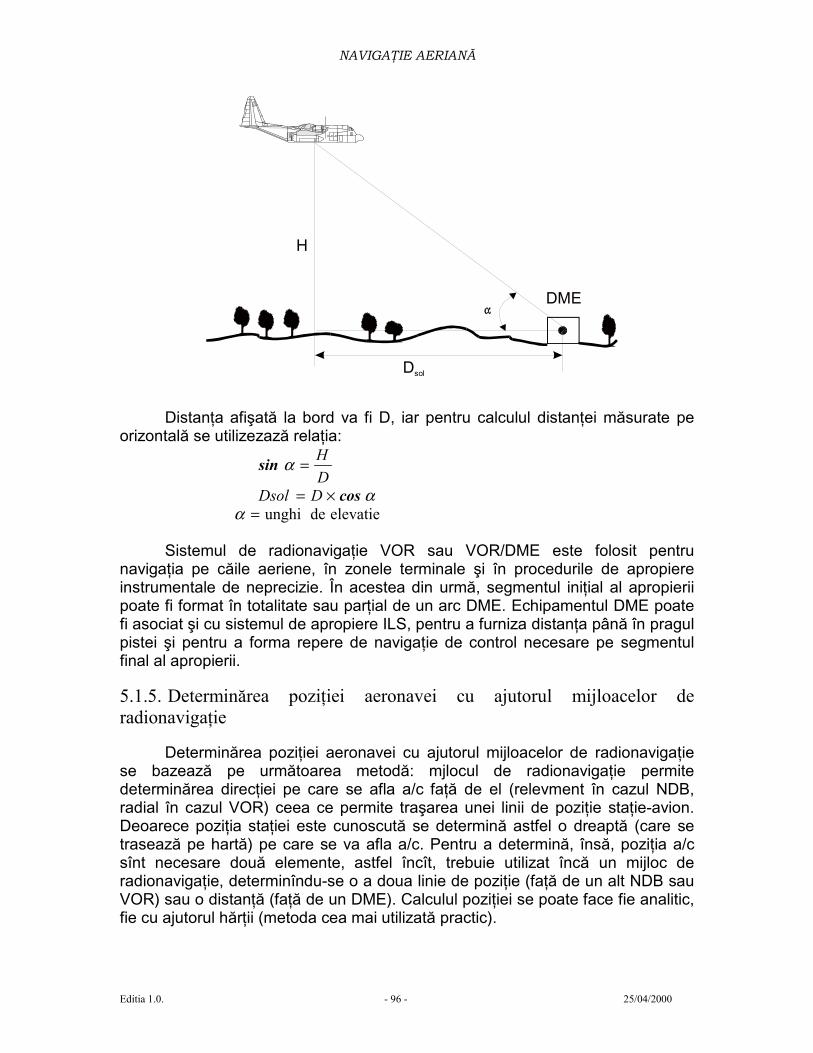
NAVIGAŢIE AERIANĂ
Editia 1.0. - 96 - 25/04/2000
DME
Dsol
H
Distanţa afişată la bord va fi D, iar pentru calculul distanţei măsurate peorizontală se utilizezază relaţia:
DH=αsin
αcos×= DDsolelevatie de unghi=α
Sistemul de radionavigaţie VOR sau VOR/DME este folosit pentrunavigaţia pe căile aeriene, în zonele terminale şi în procedurile de apropiereinstrumentale de neprecizie. În acestea din urmă, segmentul iniţial al apropieriipoate fi format în totalitate sau parţial de un arc DME. Echipamentul DME poatefi asociat şi cu sistemul de apropiere ILS, pentru a furniza distanţa până în pragulpistei şi pentru a forma repere de navigaţie de control necesare pe segmentulfinal al apropierii.
5.1.5. Determinărea poziţiei aeronavei cu ajutorul mijloacelor deradionavigaţie
Determinărea poziţiei aeronavei cu ajutorul mijloacelor de radionavigaţiese bazează pe următoarea metodă: mjlocul de radionavigaţie permitedeterminărea direcţiei pe care se afla a/c faţă de el (relevment în cazul NDB,radial în cazul VOR) ceea ce permite traşarea unei linii de poziţie staţie-avion.Deoarece poziţia staţiei este cunoscută se determină astfel o dreaptă (care setrasează pe hartă) pe care se va afla a/c. Pentru a determină, însă, poziţia a/csînt necesare două elemente, astfel încît, trebuie utilizat încă un mijloc deradionavigaţie, determinîndu-se o a doua linie de poziţie (faţă de un alt NDB sauVOR) sau o distanţă (faţă de un DME). Calculul poziţiei se poate face fie analitic,fie cu ajutorul hărţii (metoda cea mai utilizată practic).
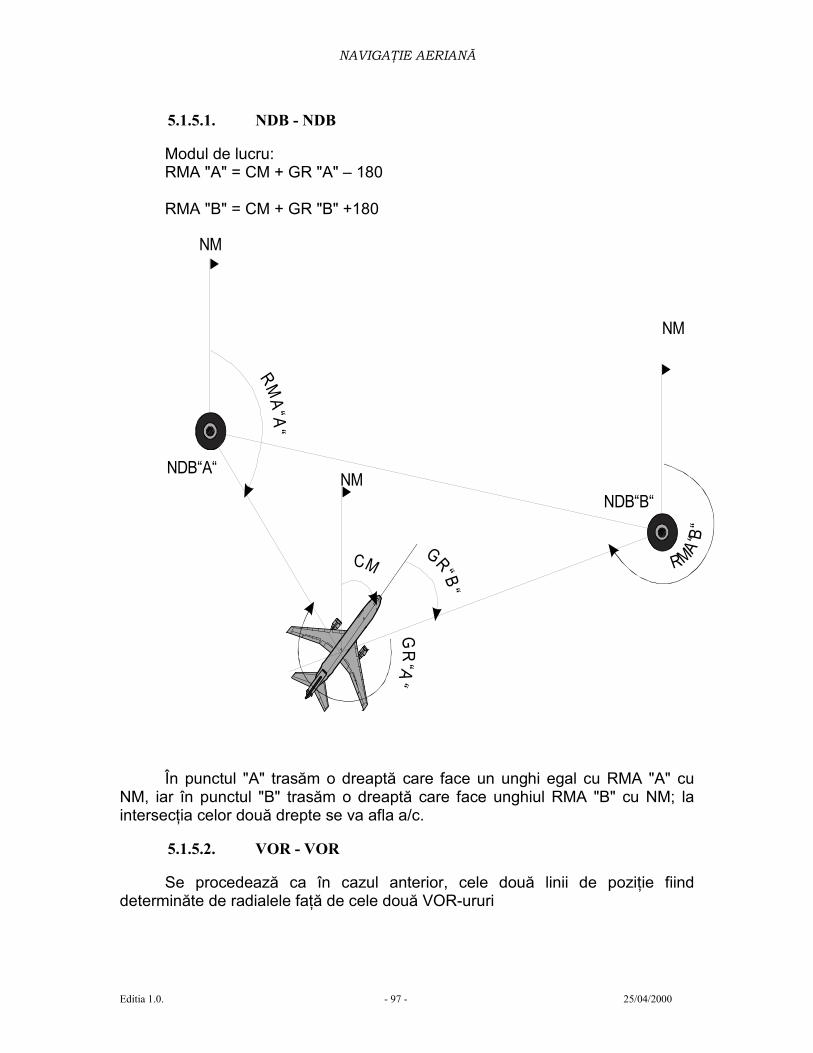
NAVIGAŢIE AERIANĂ
Editia 1.0. - 97 - 25/04/2000
5.1.5.1. NDB - NDB
Modul de lucru:RMA "A" = CM + GR "A" – 180
RMA "B" = CM + GR "B" +180
NM
RMA“A“
GR“B“
CM
NM
NM
RMA“B“
GR
“A“
NDB“A“
NDB“B“
În punctul "A" trasăm o dreaptă care face un unghi egal cu RMA "A" cuNM, iar în punctul "B" trasăm o dreaptă care face unghiul RMA "B" cu NM; laintersecţia celor două drepte se va afla a/c.
5.1.5.2. VOR - VOR
Se procedează ca în cazul anterior, cele două linii de poziţie fiinddeterminăte de radialele faţă de cele două VOR-ururi
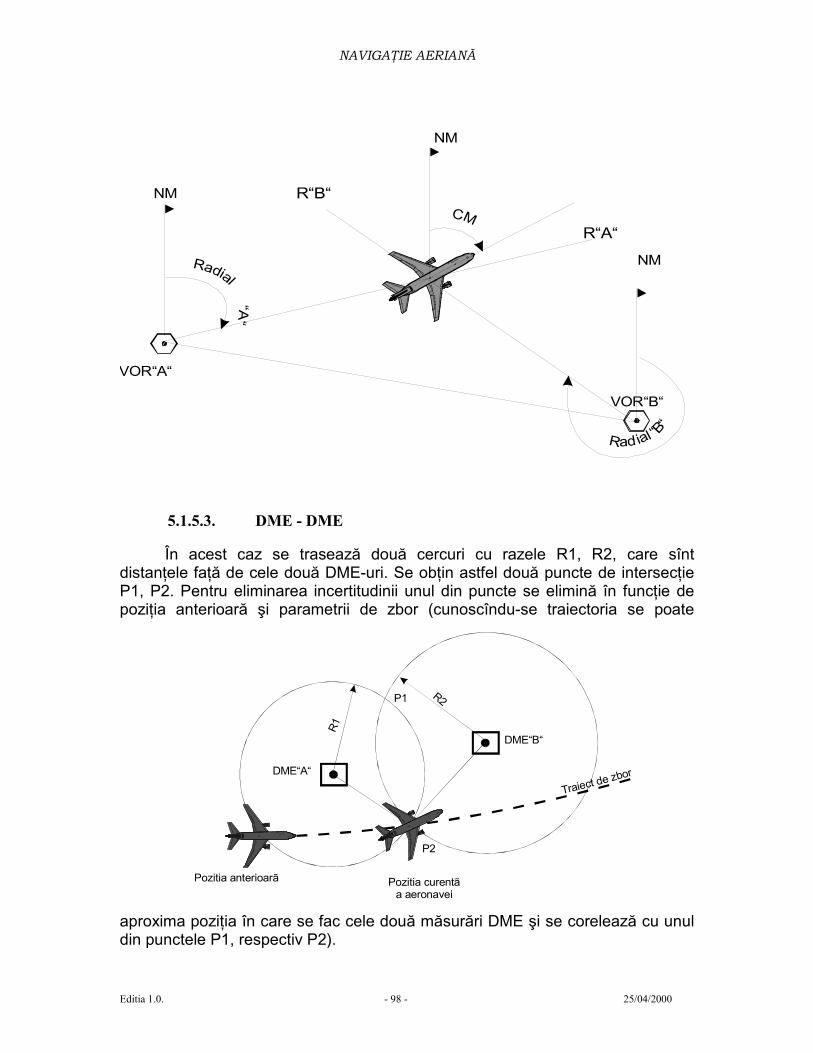
NAVIGAŢIE AERIANĂ
Editia 1.0. - 98 - 25/04/2000
NM
Radial“A“
CM
NM
NM
Rad ial “B“
VOR“A“
VOR“B“
R“A“
R“B“
5.1.5.3. DME - DME
În acest caz se trasează două cercuri cu razele R1, R2, care sîntdistanţele faţă de cele două DME-uri. Se obţin astfel două puncte de intersecţieP1, P2. Pentru eliminarea incertitudinii unul din puncte se elimină în funcţie depoziţia anterioară şi parametrii de zbor (cunoscîndu-se traiectoria se poate
aproxima poziţia în care se fac cele două măsurări DME şi se corelează cu unuldin punctele P1, respectiv P2).
Pozitia curentãa aeronavei
Pozitia anterioarã
Traiect de zborDME“A“
DME“B“
R1
R2P1
P2
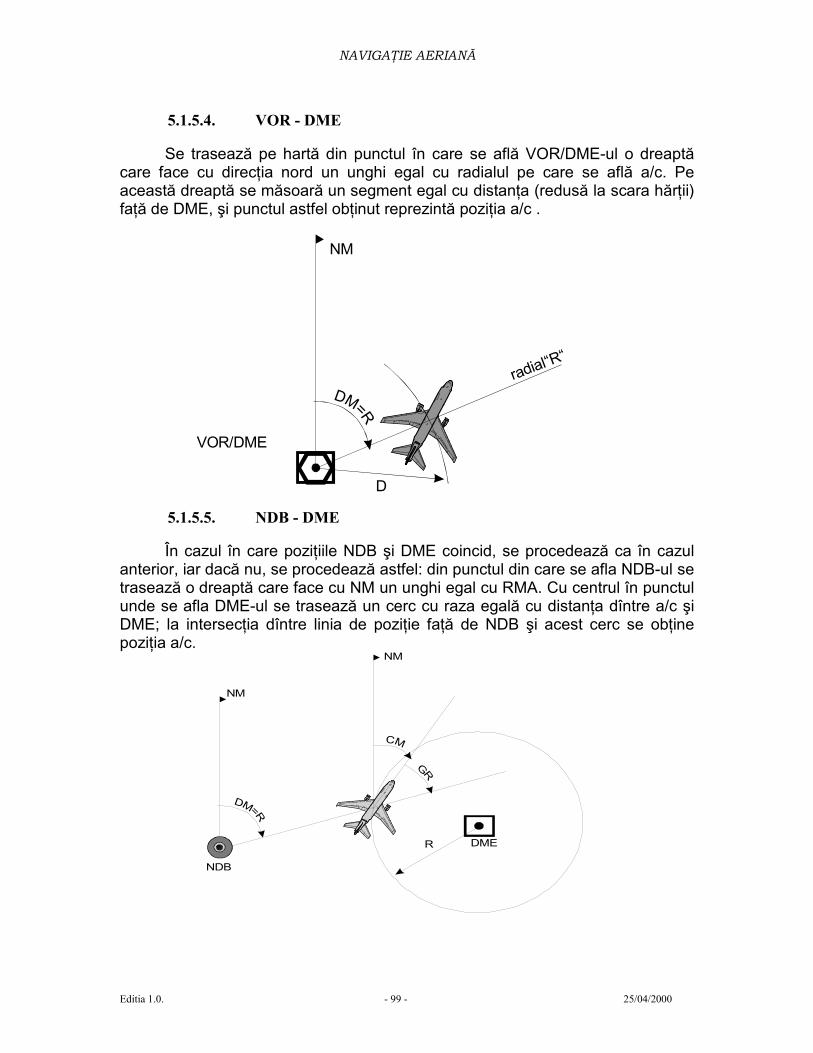
NAVIGAŢIE AERIANĂ
Editia 1.0. - 99 - 25/04/2000
5.1.5.4. VOR - DME
Se trasează pe hartă din punctul în care se află VOR/DME-ul o dreaptăcare face cu direcţia nord un unghi egal cu radialul pe care se află a/c. Peaceastă dreaptă se măsoară un segment egal cu distanţa (redusă la scara hărţii)faţă de DME, şi punctul astfel obţinut reprezintă poziţia a/c .
NM
radial“R“
D
VOR/DME
DM=R
5.1.5.5. NDB - DME
În cazul în care poziţiile NDB şi DME coincid, se procedează ca în cazulanterior, iar dacă nu, se procedează astfel: din punctul din care se afla NDB-ul setrasează o dreaptă care face cu NM un unghi egal cu RMA. Cu centrul în punctulunde se afla DME-ul se trasează un cerc cu raza egală cu distanţa dîntre a/c şiDME; la intersecţia dîntre linia de poziţie faţă de NDB şi acest cerc se obţinepoziţia a/c.
NM
DM=R
NM
R DME
NDB
CM
GR
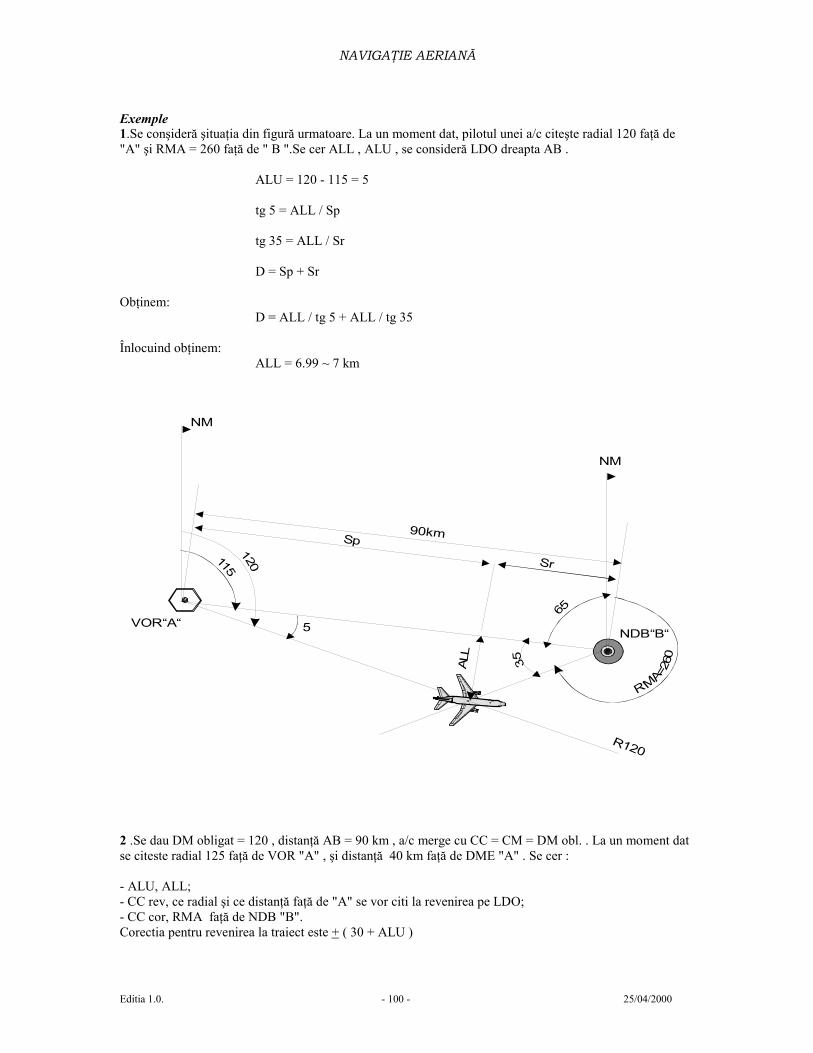
NAVIGAŢIE AERIANĂ
Editia 1.0. - 100 - 25/04/2000
Exemple1.Se conşideră şituaţia din figură urmatoare. La un moment dat, pilotul unei a/c citeşte radial 120 faţă de"A" şi RMA = 260 faţă de " B ".Se cer ALL , ALU , se consideră LDO dreapta AB .
ALU = 120 - 115 = 5
tg 5 = ALL / Sp
tg 35 = ALL / Sr
D = Sp + Sr
Obţinem:D = ALL / tg 5 + ALL / tg 35
Înlocuind obţinem:ALL = 6.99 ~ 7 km
NM
115
NDB“B“
120
90km
5
35
65
RMA=26
0
R120
ALL
Sp
Sr
NM
VOR“A“
2 .Se dau DM obligat = 120 , distanţă AB = 90 km , a/c merge cu CC = CM = DM obl. . La un moment datse citeste radial 125 faţă de VOR "A" , şi distanţă 40 km faţă de DME "A" . Se cer :
- ALU, ALL;- CC rev, ce radial şi ce distanţă faţă de "A" se vor citi la revenirea pe LDO;- CC cor, RMA faţă de NDB "B".Corectia pentru revenirea la traiect este + ( 30 + ALU )
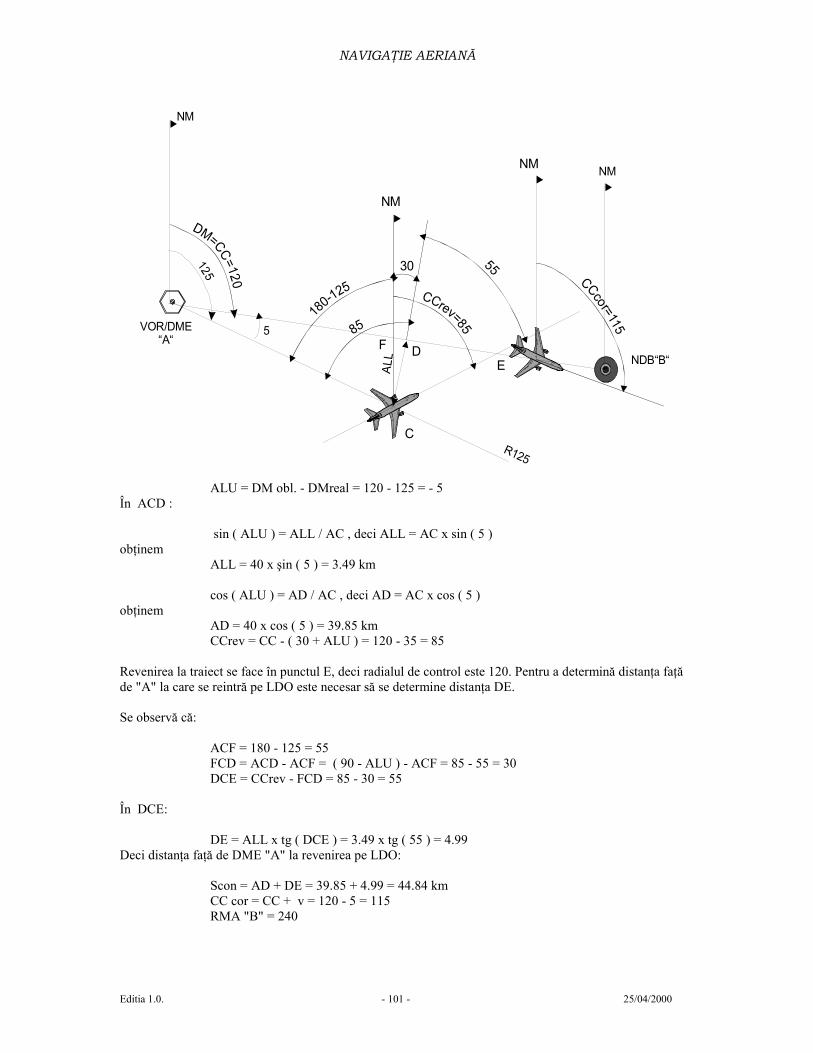
NAVIGAŢIE AERIANĂ
Editia 1.0. - 101 - 25/04/2000
NM
125
NDB“B“
5
R125
ALL
NM
VOR/DME“A“
180-1
25
85
30
NM
NM
CCrev=85
55
CCcor=115
DM=CC=120
C
DE
F
ALU = DM obl. - DMreal = 120 - 125 = - 5În ACD :
sin ( ALU ) = ALL / AC , deci ALL = AC x sin ( 5 )obţinem
ALL = 40 x şin ( 5 ) = 3.49 km
cos ( ALU ) = AD / AC , deci AD = AC x cos ( 5 )obţinem
AD = 40 x cos ( 5 ) = 39.85 kmCCrev = CC - ( 30 + ALU ) = 120 - 35 = 85
Revenirea la traiect se face în punctul E, deci radialul de control este 120. Pentru a determină distanţa faţăde "A" la care se reintră pe LDO este necesar să se determine distanţa DE.
Se observă că:
ACF = 180 - 125 = 55FCD = ACD - ACF = ( 90 - ALU ) - ACF = 85 - 55 = 30DCE = CCrev - FCD = 85 - 30 = 55
În DCE:
DE = ALL x tg ( DCE ) = 3.49 x tg ( 55 ) = 4.99Deci distanţa faţă de DME "A" la revenirea pe LDO:
Scon = AD + DE = 39.85 + 4.99 = 44.84 kmCC cor = CC + v = 120 - 5 = 115RMA "B" = 240
NAVIGAŢIE AERIANĂ
Editia 1.0. - 102 - 25/04/2000
5.1.6. Sistemul de apropiere şi aterizare ILS
5.1.6.1. Clasificare
Sistemul ILS (Instrument Landing System) este sistemul OACI standardde precizie ce asigură informaţiile de navigaţie pentru zborul IFR pe segmentulfinal al apropierii şi aterizarea, în cazul categoriilor superioare de precizie aleechipamentului ILS. În funcţie de precizia de navigaţie şi integritateaechipamentelor, sistemele ILS se clasifică în trei categorii (I, II, III), iar cea de atreia categorie se subdivide în alte trei subcategorii (IIIA, IIIB, IIIC).
• Sistemul ILS de categoria I asigură efectuarea procedurii deapropiere cu o înălţime de decizie nu mai mică decât 200 ft şi ovizibilitate minimă de 800 m sau RVR minim de 550m.
• Sistemul ILS de categoria II asigură efectuarea procedurii deapropiere cu o înălţime de decizie nu mai mică decât 100 ft şi RVRminim de 350 m.
• Sistemul ILS de categoria IIIA asigură efectuarea procedurii deapropiere cu o înălţime de decizie sub 100 ft sau fără înălţime dedecizie şi RVR minim de 200 m.
• Sistemul ILS de categoria IIIB asigură efectuarea procedurii deapropiere cu o înălţime de decizie sub 50 ft sau fără înălţime dedecizie şi RVR minim de 50 m.
• Sistemul ILS de categoria IIIC asigură efectuarea procedurii deapropiere fără înălţime de decizie şi fără limitări ale valorilor RVR.
5.1.6.2. Componenţă
Sistemul ILS se împarte din punct de vedere funcţional în trei părţi:• Informaţia de ghidare: radiofar de direcţie, radiofar de pantă;
• Informaţia de distanţă: radiomarkerele exterior, intermediar şiinterior (OM, MM, IM); condiţia minimă necesară estedisponibilitatea radiomarkerului exterior - OM;
• Informaţia vizuală: sistemul luminos de apropiere – ALS (approachlight system), luminile zonei de contact – TDZL (touchdown zonelighting), luminile de ax de pistă – RCL (runway centerline lighting),luminile de margine de pistă – REL (runway edge lights). Sistemulluminos de apropiere face parte integrantă din sistemul ILS,existenţa suplimentară a unei combinaţii între TDZL, RCL şi RELconduce la reducerea valorii vizibilităţii în lungul pistei – RVR dincadrul minimei de operare.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 103 - 25/04/2000
5.1.6.3. Volumul de acoperire operaţional
Radiofarul de direcţie (LLZ – Localizer) este amplasat in partea opusădirecţiei de aterizare , dincolo de pragul pistei , în prelungirea axei la o distanţăce variază între 200 şi 500 m şi asigură o acoperire cu semnale corespunzătoarenavigaţiei în următorul volum de spaţiu:
• - între o altitudine de 1000 ft peste cota cea mai înaltă din ariile deapropiere finală şi intermediară sau de 2000 ft la verticala praguluipistei, care dîntre cele două altitudini este mai mare şi până la osuprafaţă ce se extinde de la antena radiofarului de direcţie şi facecu suprafaţa orizontală un unghi de 7°;
• - într-un sector de cerc de 10° de o parte şi alta a direcţiei deapropiere până la 25 NM de antena radiofarului de direcţie şi într-unsector de cerc de 35° de o parte şi alta a direcţiei de apropiere pânăla o distanţă de 17 NM de antena radiofarului de direcţie.
Unde condiţiile topografice impun sau cerinţele operaţionale permit,dimensiunea orizontală a volumului de acoperire operaţional poate fi redusă dela 25 NM la 18 NM pentru sectorul de ± 10° şi de la 17 NM la 10 NM pentrusectorul de ± 35°.
Direcţia de apropiere a fascicolului emis de radiofarul de direcţie, folosităîmpreună cu celelalte părţi funcţionale, este denumită direcţia principală (frontcourse) şi are lăţimea de 210 m la pragul pistei. Unele radiofaruri de direcţie ILSemit fascicol şi în direcţia inversă direcţiei principale, denumită direcţie opusă(back course). Folosirea direcţiei opuse pentru apropiere instrumentală estepermisă doar dacă există procedură publicată şi autorizată de către centrul decontrol de apropiere.
Radiofarul de pantă asigură semnale pentru operarea satisfăcătoare aaeronavelor într-un sector de 8° de fiecare parte a liniei centrale a traiectorieipantei până la o distanţă de 10 NM. Acest fascicol se extinde pe verticală de launghiul nominal al pantei θ în jos până la 0,45 θ şi în sus până la 1,75 θ.Valoarea recomandată a unghiului nominal al pantei este de 3°. Acest semnalasigură informaţiile de navigaţie pentru coborâre până la altitudinea/înălţimea dedecizie (DA/DH) specificată în minima de operare autorizată. Traiectoria decoborâre ILS – GLIDE PATH poate să nu fie corespunzătoare navigaţiei subvaloarea DA/DH autorizată şi orice indicaţie a acestei traiectorii subaltitudinea/înălţimea respectivă trebuie să fie complementară referinţei vizualestabilite anterior atingerii respectivei altitudini/înălţimi.
Radiomarkerele VHF au frecvenţa de operare de 75 MHz avândfrecvenţele de modulaţie astfel:
• radiomarkerul interior ( IM-Inner Marker ) 3000 Hz;
• radiomarkerul intermediar ( MM-Middle Marker) 1300 Hz;
• radiomarkerul exterior ( OM – Outer Marker ) 400 Hz.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 104 - 25/04/2000
Radiomarkerele au acoperirea în distanţă, măsurată în lungul traiectorieipantei de coborâre, astfel:
• radiomarkerul interior 150 m ± 50 m;
• radiomarkerul intermediar 300 m ± 100 m;
• radiomarkerul exterior 600 m ±200 m.Indicaţiile radiomarkerele au următoarele semnificaţii pentru navigaţie:
• radiomarkerul interior, când este instalat, indică în condiţii devizibilitate redusă iminenţa apropierii pragului pistei;
• radiomarkerul intermediar indică în condiţii de vizibilitate redusăiminenţa apariţiei ghidării vizuale prin sistemul luminos de apropiere;
• radiomarkerul exterior asigură verificările de înălţime, distanţă şi defuncţionare a echipamentelor la bordul aeronavelor.
Survolarea radiomarkerelor este indicată la bord atât vizual cât şi autitiv.
5.1.7. Utilizarea radarului în navigaţia aeriană
Radarul reprezintă un mijloc de navigaţie care are la bază transmitereaundelor electromagnetice sub formă de impulsuri precum şi recepţionareaacestora după ce au fost reflectate de diferite obiecte, în cazul nostru avionul.Este utilizat pentru localizarea în spaţiu, adică pentru determinărea unorcoordonate (ale avionului ) faţă de statia radar, dîntre care cele mai importantesînt distanţa şi direcţia. Sînt unele radaruri care pot determină pe lîngă direcţie şidistanţă şi înălţimea de zbor ( radarul de precizie ). Aşa cum am arătat şi laînceputul acestui capitol, radarul este un mijloc de radionavigaţie goniotelemetric.
Asemănător radarului şi bazat pe acelaşi principiu este echipamentulpentru măsurarea distanţei DME şi transponderul, unde impulsurile recepţionatenu sînt cele reflectate, ci cele generate de dispozitive speciale.
Coordonatele avionului, pe care le determină radarul sînt :• Azimutul (α)-unghiul în plan orizontal măsurat între NM şi proiecţia
distanţei înclinate între staţia radar şi avion.(se măsoară în sensulacelor de ceasornic)
• Unghiul de înălţare –unghiul măsurat în plan vertical între linia carereprezintă distanţa înclinată radar-avion şi proiecţia ei pe planulorizontal (ε).Ea foloseşte pentru determinărea înălţimii avionului.
• Distanţa înclinată (Di) –distanţa măsurată direct din punctul deamplaşare al radarului spre avion.
Principiul de funcţionare al radarului-impulsurile de energieelectromagnetică se propagă pe direcţia dată de antenă, cu o viteză de aprox.300.000 km/s ceea ce revine la 300m într-o microsecundă ( µs ).Impulsurile sîntradiate unul după altul, la anumite intervale de timp. Întilnind în calea sa o ţintă, oparte din energia electromagnetică este absorbită, iar o parte este reflectată întoate direcţiile, deci şi înspre staţia radar. Cunoscînd durata de timp necesară
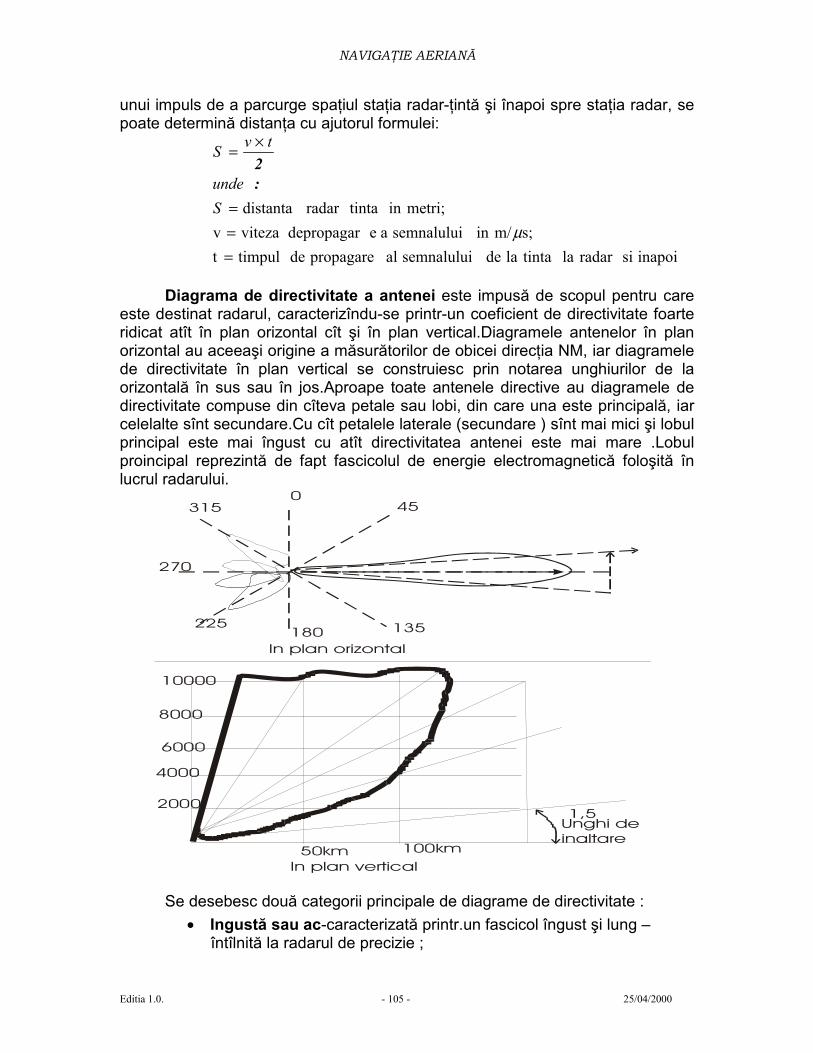
NAVIGAŢIE AERIANĂ
Editia 1.0. - 105 - 25/04/2000
unui impuls de a parcurge spaţiul staţia radar-ţintă şi înapoi spre staţia radar, sepoate determină distanţa cu ajutorul formulei:
inapoi siradar la tinta la de semnalului al propagare de timpults;m/ in semnalului a edepropagar vitezav
metri; in tintaradar distanta
===
×=
µSunde
tvS
:2
Diagrama de directivitate a antenei este impusă de scopul pentru careeste destinat radarul, caracterizîndu-se printr-un coeficient de directivitate foarteridicat atît în plan orizontal cît şi în plan vertical.Diagramele antenelor în planorizontal au aceeaşi origine a măsurătorilor de obicei direcţia NM, iar diagramelede directivitate în plan vertical se construiesc prin notarea unghiurilor de laorizontală în sus sau în jos.Aproape toate antenele directive au diagramele dedirectivitate compuse din cîteva petale sau lobi, din care una este principală, iarcelelalte sînt secundare.Cu cît petalele laterale (secundare ) sînt mai mici şi lobulprincipal este mai îngust cu atît directivitatea antenei este mai mare .Lobulproincipal reprezintă de fapt fascicolul de energie electromagnetică foloşită înlucrul radarului.
Se desebesc două categorii principale de diagrame de directivitate :• Ingustă sau ac-caracterizată printr.un fascicol îngust şi lung –
întîlnită la radarul de precizie ;
045
135180225
270
315
In plan orizontal
2000
4000
6000
8000
10000
1,5Unghi de inaltare
50km 100kmIn plan vertical
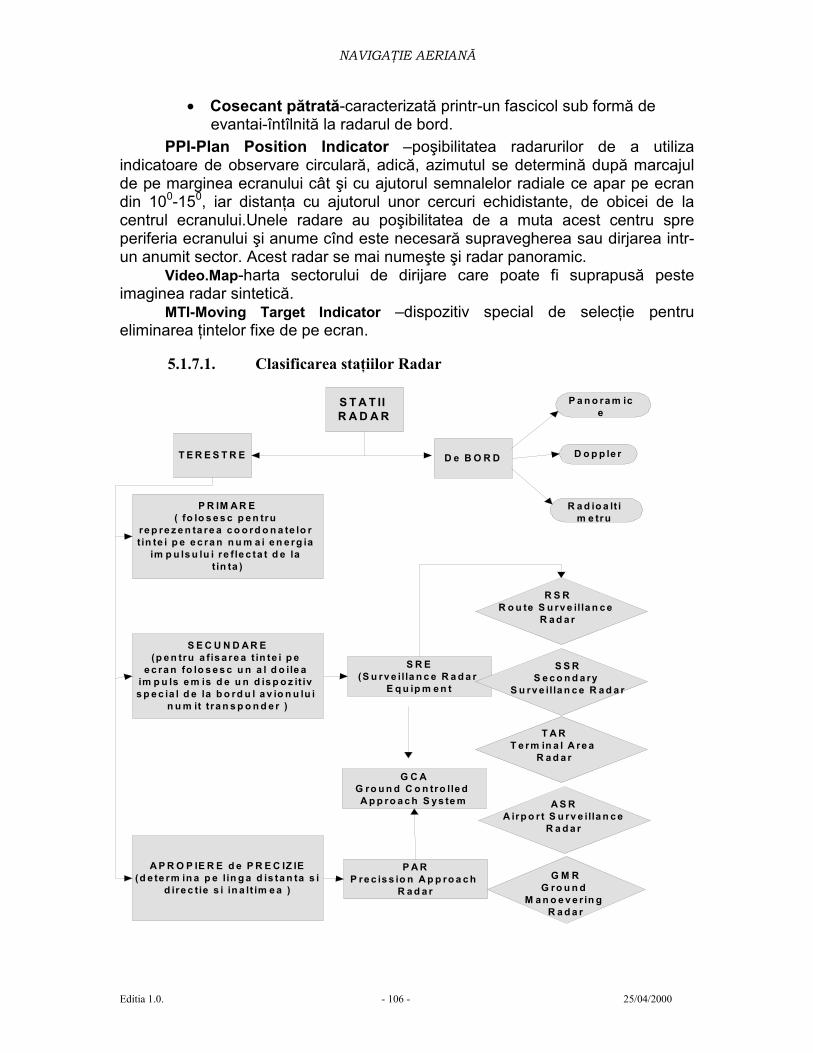
NAVIGAŢIE AERIANĂ
Editia 1.0. - 106 - 25/04/2000
• Cosecant pătrată-caracterizată printr-un fascicol sub formă deevantai-întîlnită la radarul de bord.
PPI-Plan Position Indicator –poşibilitatea radarurilor de a utilizaindicatoare de observare circulară, adică, azimutul se determină după marcajulde pe marginea ecranului cât şi cu ajutorul semnalelor radiale ce apar pe ecrandin 100-150, iar distanţa cu ajutorul unor cercuri echidistante, de obicei de lacentrul ecranului.Unele radare au poşibilitatea de a muta acest centru spreperiferia ecranului şi anume cînd este necesară supravegherea sau dirjarea intr-un anumit sector. Acest radar se mai numeşte şi radar panoramic.
Video.Map-harta sectorului de dirijare care poate fi suprapusă pesteimaginea radar sintetică.
MTI-Moving Target Indicator –dispozitiv special de selecţie pentrueliminarea ţintelor fixe de pe ecran.
5.1.7.1. Clasificarea staţiilor Radar
S T A T II R A D A R
T E R E S T R E
P R IM A R E( fo lo s e s c p e n tru
re p re z e n ta re a c o o rd o n a te lo r t in te i p e e c ra n n u m a i e n e rg ia
im p u ls u lu i re f le c ta t d e la t in ta )
S E C U N D A R E(p e n tru a f is a re a t in te i p e
e c ra n fo lo s e s c u n a l d o ile a im p u ls e m is d e u n d is p o z it iv s p e c ia l d e la b o rd u l a v io n u lu i
n u m it tra n s p o n d e r )
A P R O P IE R E d e P R E C IZ IE(d e te rm in a p e l in g a d is ta n ta s i
d ire c tie s i in a lt im e a )
S R E(S u rv e il la n c e R a d a r
E q u ip m e n t
G C AG ro u n d C o n tro lle d A p p ro a c h S ys te m
P A RP re c is s io n A p p ro a c h
R a d a r
R S RR o u te S u rv e il la n c e
R a d a r
S S RS e c o n d a ry
S u rv e il la n c e R a d a r
T A RT e rm in a l A re a
R a d a r
A S RA irp o r t S u rv e illa n c e
R a d a r
G M RG ro u n d
M a n o e v e r in g R a d a r
D e B O R D
P a n o ra m ice
D o p p le r
R a d io a lt im e tru
NAVIGAŢIE AERIANĂ
Editia 1.0. - 107 - 25/04/2000
5.1.7.2. Functiile radarului
• Supravegherea generală a traficului aerian în scopul de a furnizacontrolotilor de trafic informaţii mai multe şi mai complete privindpoziţia avioanelor într-o zonă determinătă;
• Vectorizarea avioanelor după decolare în scopul aşigurării esalonăriiregulamentare precum şi de a da informaţii de navigaţii spreanumite puncte obligate de ieşire din zonă;
• Vectorizarea avioanelor care sosesc într-o zonă, pentru aşigurareaeşalonării necesare precum şi a furniza elemente de navigaţieavioanelor pentru efectuarea procedurii de apropiere la aterizare;
• Să informeze pilotii asupra traficului din zonă;
• Descoperirea zonelor orajoase şi evitarea acestora prin dirijareaavioanelor ,ori de cîte ori este poşibil;
• Asigurarea asistenţei avioanelor aflate în pericol;
• Urmărirea corectitudinii efectuării procedurilor de catre piloti, şiinformarea acestora de catre controlori despre abaterea efectuată;
• Asigură dirijarea de precizie (PAR);
• Supraveghează şi dirijează avioanele în rulajul lor pe pistă şi căilede rulare atunci cînd condiţiile meteo impun aceasta;
5.2. Navigaţia de suprafaţa
Navigaţia de suprafaţa, (Area Navigation-RNAV-) reprezintă o metodă denavigaţie care permite unei aeronave să opereze în interiorul unei zone acoperităde un sistem de referinţa VOR/DME şi DME/DME.
Echipamentul RNAV de la bordul avionului determină automat poziţiaaeronavei (distantă, relevment faţă de mijlocul de radionavigaţie, generarea desemnale de comandă pilotului automat şi corectarea pentru revenirea la capulcorect cînd aeronava este abătută lateral etc. ) prin procesarea datelor de la unulsau mai mulţi senzori şi conduce aeronava intr-un mod cît mai adecvat înconcordanţa cu instructiunile date de controlori.
Necesitatea acestei metode de navigaţie a apărut din cauza creşteriivertiginoase a traficului aerian şi a diverşificării vitezelor şi profilelor de zbor aleaeronavelor, care pot duce la un moment dat la saturarea căilor aeriene sau arutelor prestabilite din zonele terminale de control. Metoda navigaţiei desuprafaţa are drept scop descongestionarea căilor aeriene prin alegerea altortraiecte, altele decît cele obişnuite directe spre sau de la un reper sau mijloc deradionavigaţie, avînd de-a lungul acestor traiecte alese informaţii permanente denavigaţie sub forma coordonatelor polare.
În traficul aerian s-a materializat prin apariţia rutelor RNAV care sîntclasificate astfel:
NAVIGAŢIE AERIANĂ
Editia 1.0. - 108 - 25/04/2000
• RNAV fixe-căi aeriene permanante utilizate numai de a/c dotate cuechipament RNAV;
• RNAV temporare-utilizate numai pe perioade limitate (ore, zile,sezoane ),
• RNAV aleatoare-rute nepublicate ,care pot fi stabilite în cuprinsulunor zone publicate ca Random RNAV AREAS;
Lăţimea rutelor RNAV este definită funcţie de precizia sistemului şiechipamentului RNAV de la bordul a/c precum şi a celui de la sol astfel:
• Categoria de bază (B-RNAV-Basic RNAV )-lăţimea rutelor este de18,5 km (10NM),unde a/c i se permite o abatere de NM5± pentrucel putin 95% din timpul de zbor, lucru posibil numai cu oinfrastructura adecvată la sol prin echiparea cu următoareleechipamente:DME/DME; VOR/DME; LORAN C; GPS. În spaţiulaerian al statelor membre Eurocontrol principalele sisteme deradionavigaţie de la sol vor fi VOR/DME, DME/DME, şi GPS (acestanu mai devreme de anul 2005).
• Categoria de precizie (P-RNAV)-lăţimea rutelor este de 3,7km(2NM).Pentru utilizarea rutelor RNAV de precizie echipamentele dela sol trebuie să aşigure obligatoriu urmatoarele capabilităţi:
• Dubla acoperire radar MSSR;• Prelucrarea şi evidenţa computerizată a planurilor de zborcorelată cu echipamentele radar şi posibilitatea amendăriiîn timp real a acestora de către operatorul radar;
• Funcţii de prevedere în sistem a conflictelor de traficpotenţiale şi a celor pe termen scurt, cu afişare pe ecranulradar;
• Afişarea automată a track-urilor directe între punctele de intrare şiieşire din zonele pentru rute RNAV aleatoare;
• Bază de date computerizată pentru zborul pe rute RNAV de precizieşi pentru zonele de rute RNAV aleatoare.
Basic RNAV poate fi comparat cu conceptul de RPN5 ( RequiredNavigation Performance ) care nu este altceva decît cresterea performanţelornavigaţiei aeriene necesare operării aeronavelor într-un spaţiu bine definit, şicare a îmbunătăţit echipamentul atît de la sol cît şi de la bordul a/c necesarnavigaţiei B-RNAV.
Introducerea operărilor pe rute B-RNAV,în spaţiul aerian al statelormembre. Eurocontrol asigură o serie de avantaje, atît pentru sistemele deradionavigaţie de la sol cît mai ales pentru siguranţa circulaţiei aeriene. Acesteavantaje sînt :
• Creşterea administrării fluxurilor de trafic aerian prin repoziţionareaintersecţiilor căilor aeriene ;
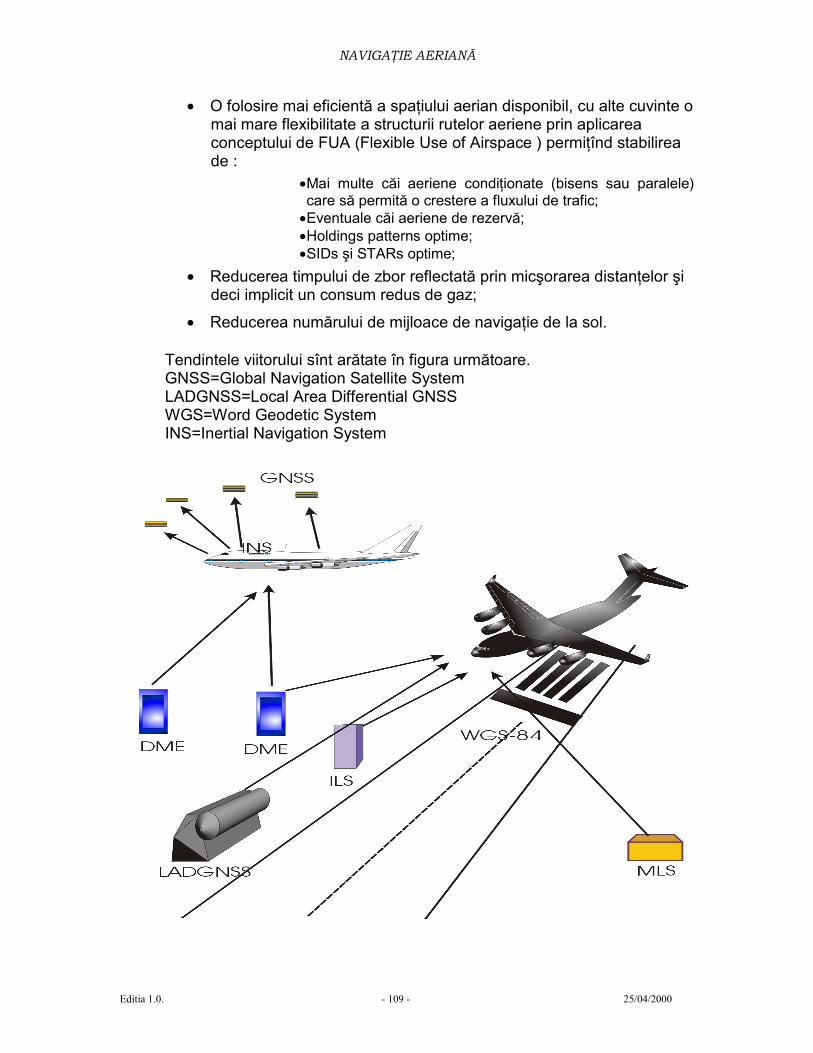
NAVIGAŢIE AERIANĂ
Editia 1.0. - 109 - 25/04/2000
• O folosire mai eficientă a spaţiului aerian disponibil, cu alte cuvinte omai mare flexibilitate a structurii rutelor aeriene prin aplicareaconceptului de FUA (Flexible Use of Airspace ) permiţînd stabilireade :
• Mai multe căi aeriene condiţionate (bisens sau paralele)care să permită o crestere a fluxului de trafic;
• Eventuale căi aeriene de rezervă;• Holdings patterns optime;• SIDs şi STARs optime;
• Reducerea timpului de zbor reflectată prin micşorarea distanţelor şideci implicit un consum redus de gaz;
• Reducerea numărului de mijloace de navigaţie de la sol.
Tendintele viitorului sînt arătate în figura următoare.GNSS=Global Navigation Satellite SystemLADGNSS=Local Area Differential GNSSWGS=Word Geodetic SystemINS=Inertial Navigation System

NAVIGAŢIE AERIANĂ
Editia 1.0. - 110 - 25/04/2000
Pagină liberă lasată intenţionat
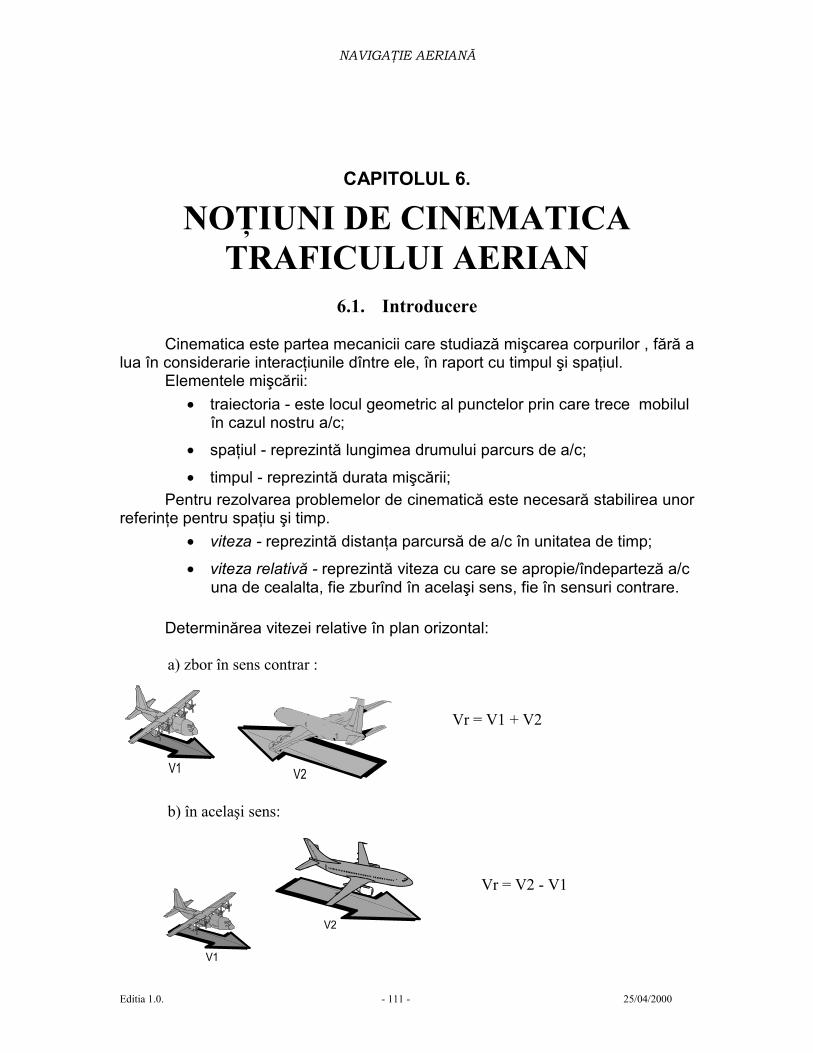
NAVIGAŢIE AERIANĂ
Editia 1.0. - 111 - 25/04/2000
CAPITOLUL 6.
NOŢIUNI DE CINEMATICATRAFICULUI AERIAN
6.1. Introducere
Cinematica este partea mecanicii care studiază mişcarea corpurilor , fără alua în considerarie interacţiunile dîntre ele, în raport cu timpul şi spaţiul.
Elementele mişcării:• traiectoria - este locul geometric al punctelor prin care trece mobilul
în cazul nostru a/c;
• spaţiul - reprezintă lungimea drumului parcurs de a/c;
• timpul - reprezintă durata mişcării;Pentru rezolvarea problemelor de cinematică este necesară stabilirea unor
referinţe pentru spaţiu şi timp.• viteza - reprezintă distanţa parcursă de a/c în unitatea de timp;
• viteza relativă - reprezintă viteza cu care se apropie/îndeparteză a/cuna de cealalta, fie zburînd în acelaşi sens, fie în sensuri contrare.
Determinărea vitezei relative în plan orizontal:
a) zbor în sens contrar :
Vr = V1 + V2
b) în acelaşi sens:
Vr = V2 - V1
V1 V2
V1
V2
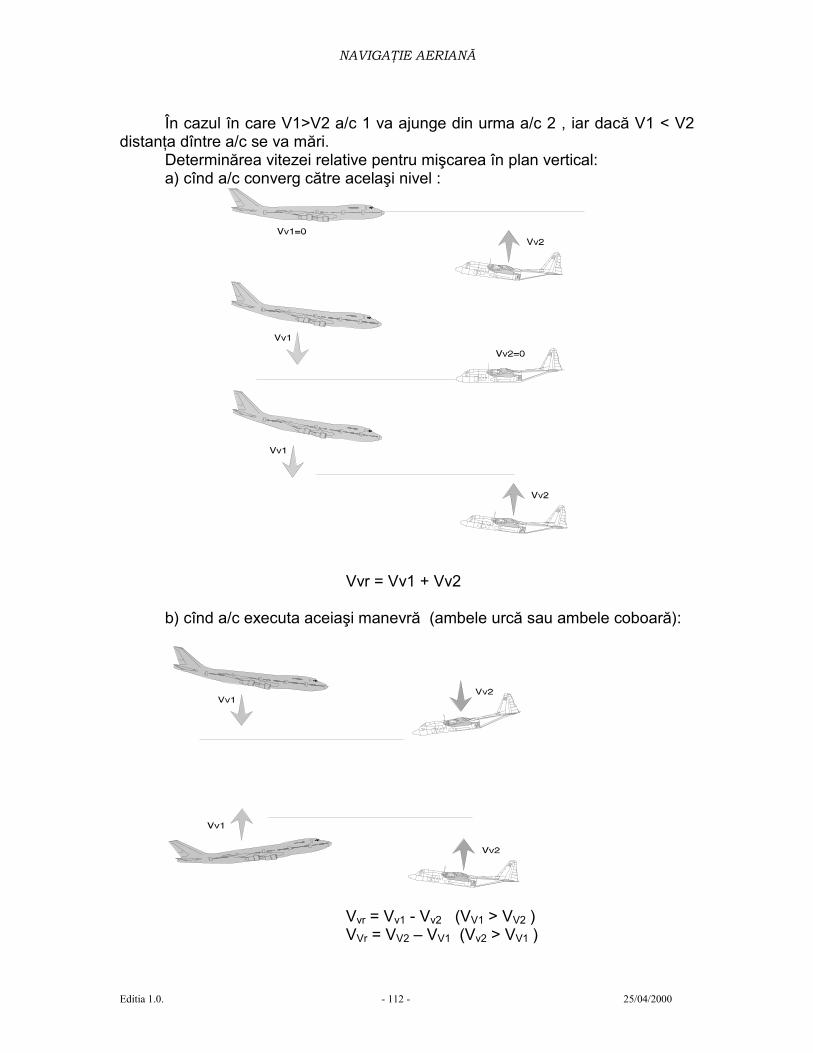
NAVIGAŢIE AERIANĂ
Editia 1.0. - 112 - 25/04/2000
În cazul în care V1>V2 a/c 1 va ajunge din urma a/c 2 , iar dacă V1 < V2distanţa dîntre a/c se va mări.
Determinărea vitezei relative pentru mişcarea în plan vertical:a) cînd a/c converg către acelaşi nivel :
Vvr = Vv1 + Vv2
b) cînd a/c executa aceiaşi manevră (ambele urcă sau ambele coboară):
Vvr = Vv1 - Vv2 (VV1 > VV2 )VVr = VV2 – VV1 (Vv2 > VV1 )
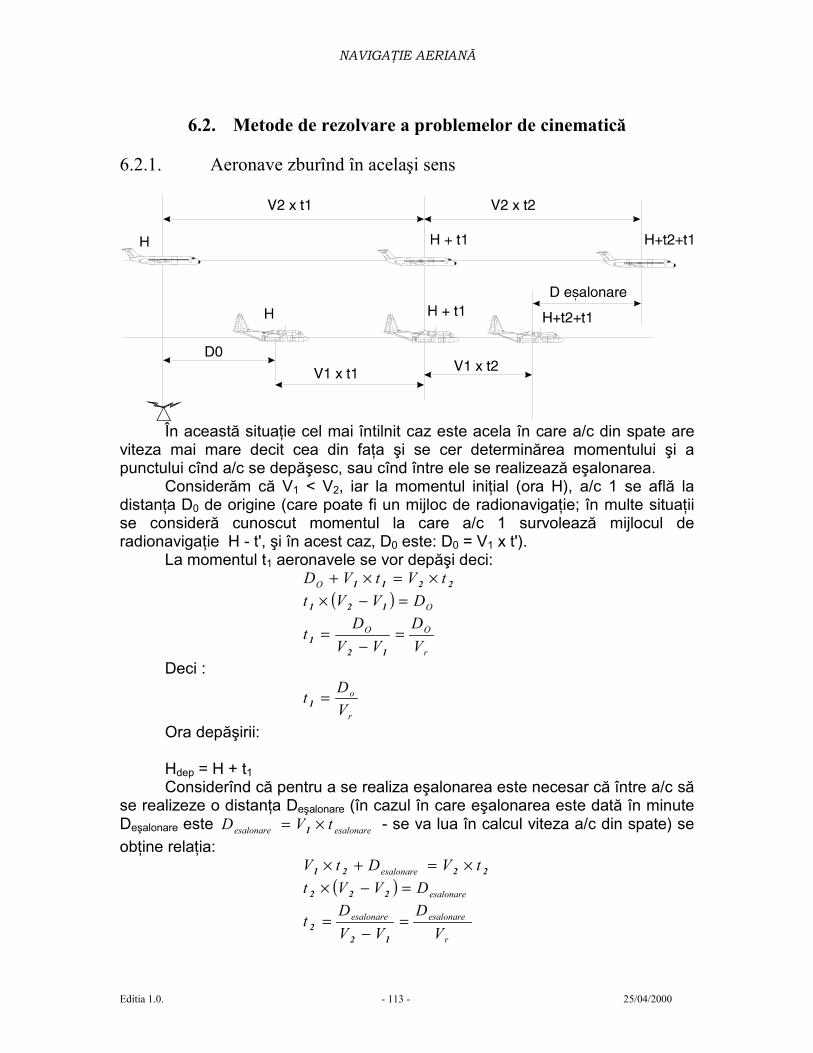
NAVIGAŢIE AERIANĂ
Editia 1.0. - 113 - 25/04/2000
6.2. Metode de rezolvare a problemelor de cinematică
6.2.1. Aeronave zburînd în acelaşi sens
În această situaţie cel mai întilnit caz este acela în care a/c din spate areviteza mai mare decit cea din faţa şi se cer determinărea momentului şi apunctului cînd a/c se depăşesc, sau cînd între ele se realizează eşalonarea.
Considerăm că V1 < V2, iar la momentul iniţial (ora H), a/c 1 se află ladistanţa D0 de origine (care poate fi un mijloc de radionavigaţie; în multe situaţiise consideră cunoscut momentul la care a/c 1 survolează mijlocul deradionavigaţie H - t', şi în acest caz, D0 este: D0 = V1 x t').
La momentul t1 aeronavele se vor depăşi deci:2211 tVtVDO ×=×+
( ) ODVVt =−× 121
r
OO
VD
VVD
t =−
=12
1
Deci :
r
o
VDt =1
Ora depăşirii:
Hdep = H + t1Considerînd că pentru a se realiza eşalonarea este necesar că între a/c să
se realizeze o distanţa Deşalonare (în cazul în care eşalonarea este dată în minuteDeşalonare este esalonareesalonare tVD ×= 1 - se va lua în calcul viteza a/c din spate) seobţine relaţia:
2221 tVDtV esalonare ×=+×( ) esalonareDVVt =−× 222
r
esalonareesalonare
VD
VVD
t =−
=12
2
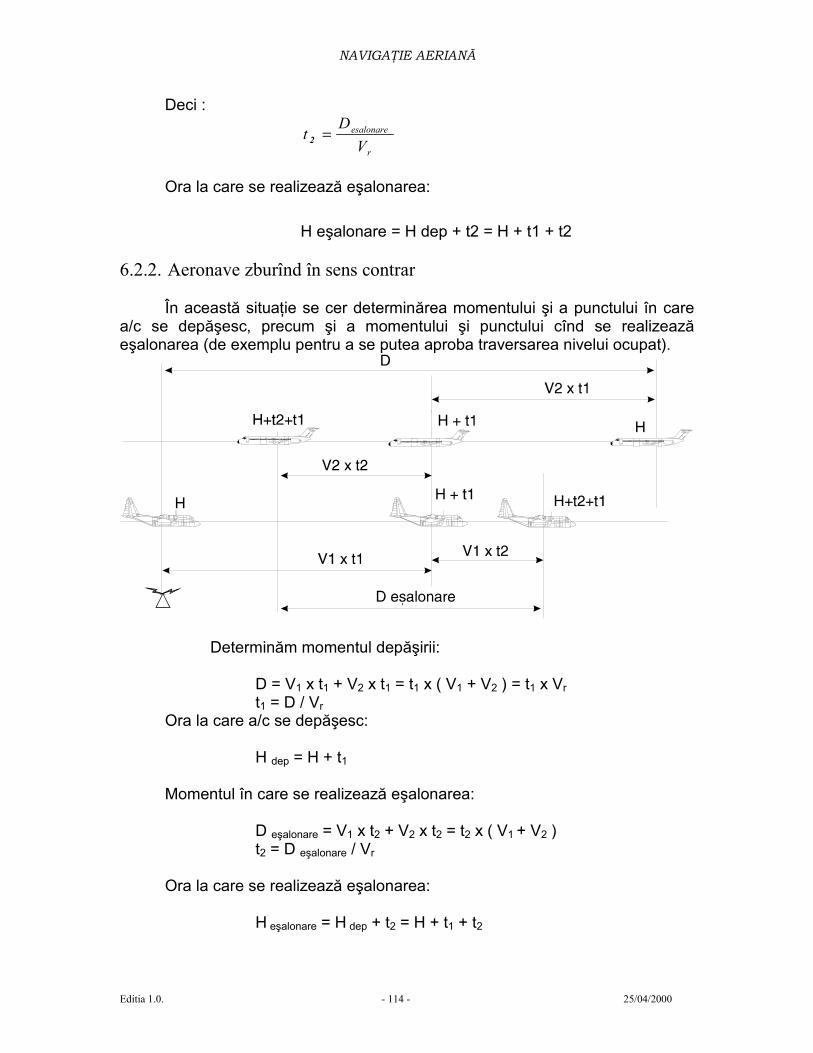
NAVIGAŢIE AERIANĂ
Editia 1.0. - 114 - 25/04/2000
Deci :
r
esalonare
VD
t =2
Ora la care se realizează eşalonarea:
H eşalonare = H dep + t2 = H + t1 + t2
6.2.2. Aeronave zburînd în sens contrar
În această situaţie se cer determinărea momentului şi a punctului în carea/c se depăşesc, precum şi a momentului şi punctului cînd se realizeazăeşalonarea (de exemplu pentru a se putea aproba traversarea nivelui ocupat).
Determinăm momentul depăşirii:
D = V1 x t1 + V2 x t1 = t1 x ( V1 + V2 ) = t1 x Vrt1 = D / Vr
Ora la care a/c se depăşesc:
H dep = H + t1
Momentul în care se realizează eşalonarea:
D eşalonare = V1 x t2 + V2 x t2 = t2 x ( V1 + V2 )t2 = D eşalonare / Vr
Ora la care se realizează eşalonarea:
H eşalonare = H dep + t2 = H + t1 + t2
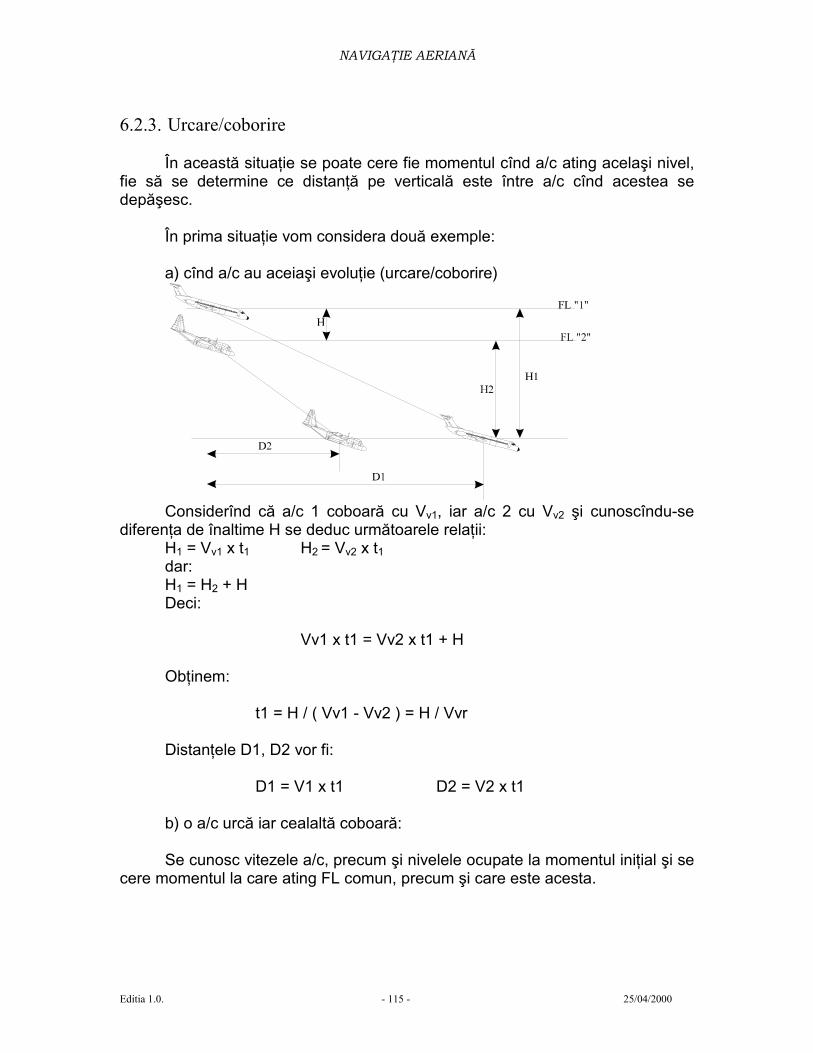
NAVIGAŢIE AERIANĂ
Editia 1.0. - 115 - 25/04/2000
6.2.3. Urcare/coborire
În această situaţie se poate cere fie momentul cînd a/c ating acelaşi nivel,fie să se determine ce distanţă pe verticală este între a/c cînd acestea sedepăşesc.
În prima situaţie vom considera două exemple:
a) cînd a/c au aceiaşi evoluţie (urcare/coborire)
Considerînd că a/c 1 coboară cu Vv1, iar a/c 2 cu Vv2 şi cunoscîndu-sediferenţa de înaltime H se deduc următoarele relaţii:
H1 = Vv1 x t1 H2 = Vv2 x t1dar:H1 = H2 + HDeci:
Vv1 x t1 = Vv2 x t1 + H
Obţinem:
t1 = H / ( Vv1 - Vv2 ) = H / Vvr
Distanţele D1, D2 vor fi:
D1 = V1 x t1 D2 = V2 x t1
b) o a/c urcă iar cealaltă coboară:
Se cunosc vitezele a/c, precum şi nivelele ocupate la momentul iniţial şi secere momentul la care ating FL comun, precum şi care este acesta.
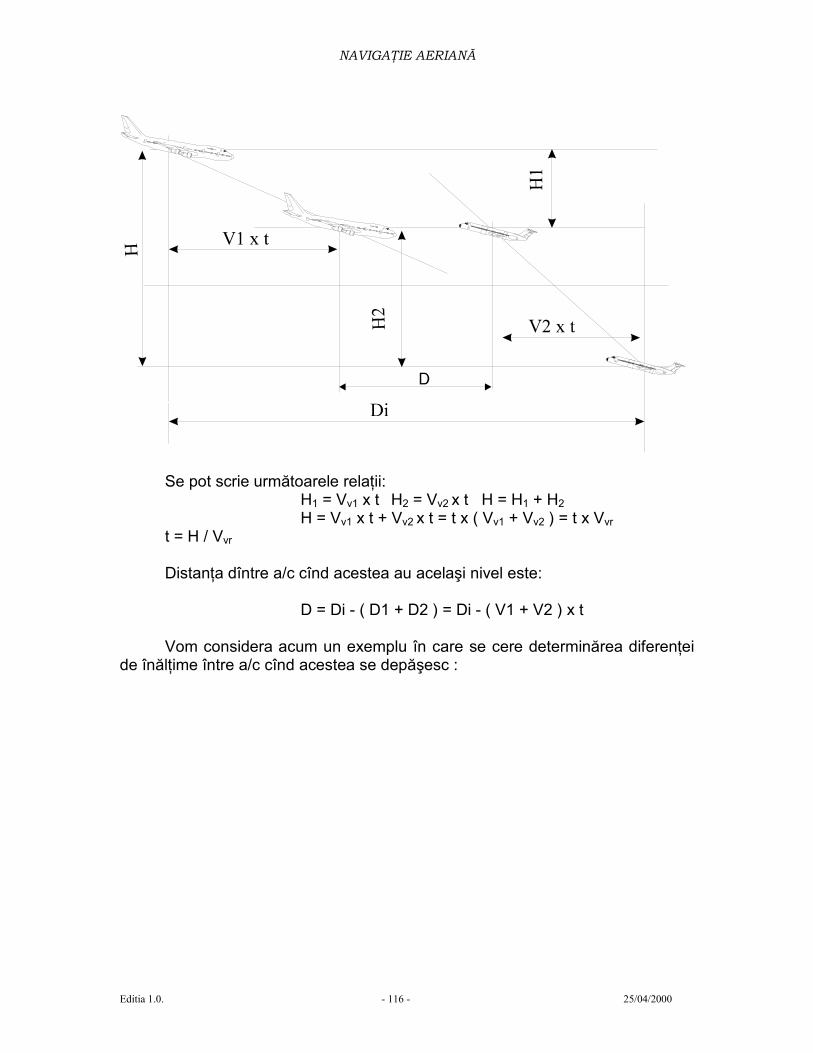
NAVIGAŢIE AERIANĂ
Editia 1.0. - 116 - 25/04/2000
Se pot scrie următoarele relaţii: H1 = Vv1 x t H2 = Vv2 x t H = H1 + H2
H = Vv1 x t + Vv2 x t = t x ( Vv1 + Vv2 ) = t x Vvrt = H / Vvr
Distanţa dîntre a/c cînd acestea au acelaşi nivel este:
D = Di - ( D1 + D2 ) = Di - ( V1 + V2 ) x t
Vom considera acum un exemplu în care se cere determinărea diferenţeide înălţime între a/c cînd acestea se depăşesc :
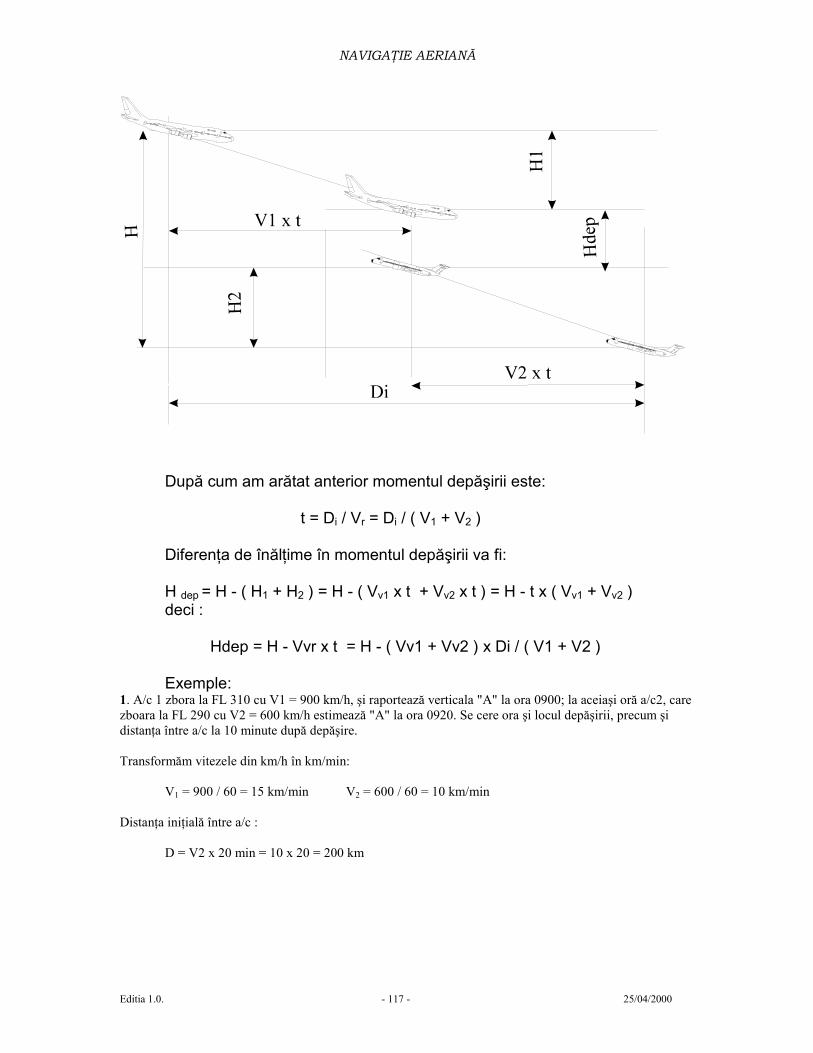
NAVIGAŢIE AERIANĂ
Editia 1.0. - 117 - 25/04/2000
După cum am arătat anterior momentul depăşirii este:
t = Di / Vr = Di / ( V1 + V2 )
Diferenţa de înălţime în momentul depăşirii va fi:
H dep = H - ( H1 + H2 ) = H - ( Vv1 x t + Vv2 x t ) = H - t x ( Vv1 + Vv2 )deci :
Hdep = H - Vvr x t = H - ( Vv1 + Vv2 ) x Di / ( V1 + V2 )
Exemple:1. A/c 1 zbora la FL 310 cu V1 = 900 km/h, şi raportează verticala "A" la ora 0900; la aceiaşi oră a/c2, carezboara la FL 290 cu V2 = 600 km/h estimează "A" la ora 0920. Se cere ora şi locul depăşirii, precum şidistanţa între a/c la 10 minute după depăşire.
Transformăm vitezele din km/h în km/min:
V1 = 900 / 60 = 15 km/min V2 = 600 / 60 = 10 km/min
Distanţa iniţială între a/c :
D = V2 x 20 min = 10 x 20 = 200 km
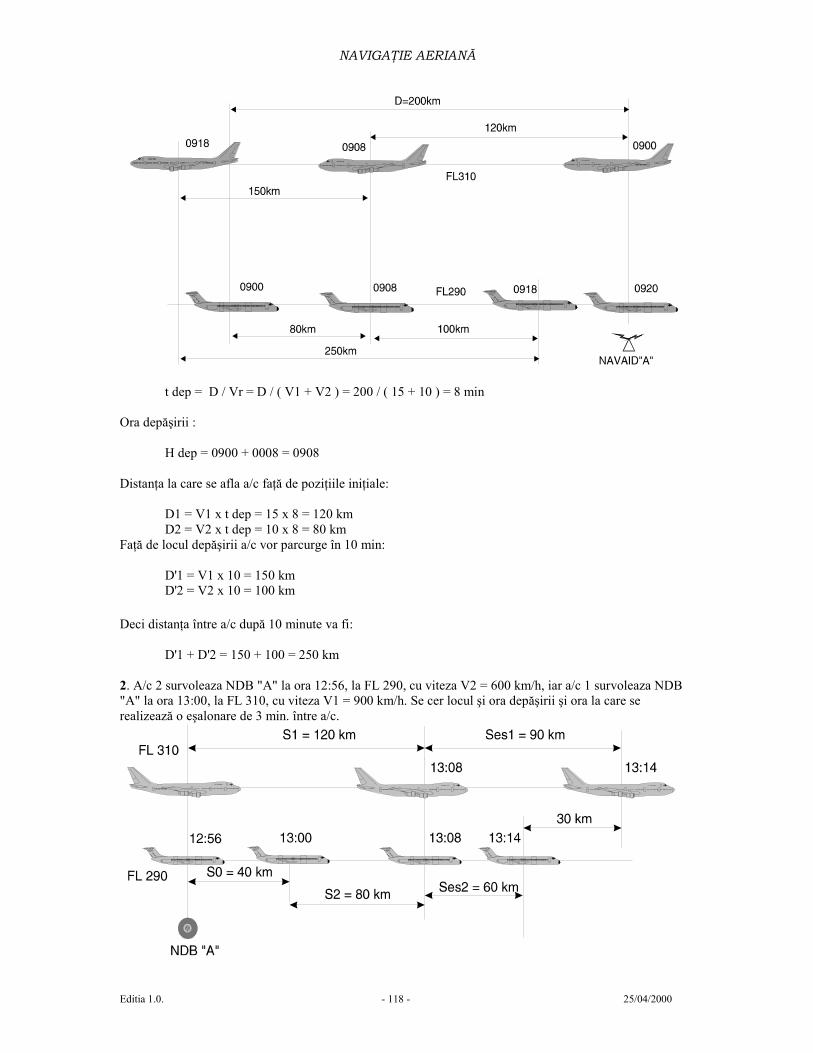
NAVIGAŢIE AERIANĂ
Editia 1.0. - 118 - 25/04/2000
t dep = D / Vr = D / ( V1 + V2 ) = 200 / ( 15 + 10 ) = 8 min
Ora depăşirii :
H dep = 0900 + 0008 = 0908
Distanţa la care se afla a/c faţă de poziţiile iniţiale:
D1 = V1 x t dep = 15 x 8 = 120 kmD2 = V2 x t dep = 10 x 8 = 80 km
Faţă de locul depăşirii a/c vor parcurge în 10 min:
D'1 = V1 x 10 = 150 kmD'2 = V2 x 10 = 100 km
Deci distanţa între a/c după 10 minute va fi:
D'1 + D'2 = 150 + 100 = 250 km
2. A/c 2 survoleaza NDB "A" la ora 12:56, la FL 290, cu viteza V2 = 600 km/h, iar a/c 1 survoleaza NDB"A" la ora 13:00, la FL 310, cu viteza V1 = 900 km/h. Se cer locul şi ora depăşirii şi ora la care serealizează o eşalonare de 3 min. între a/c.
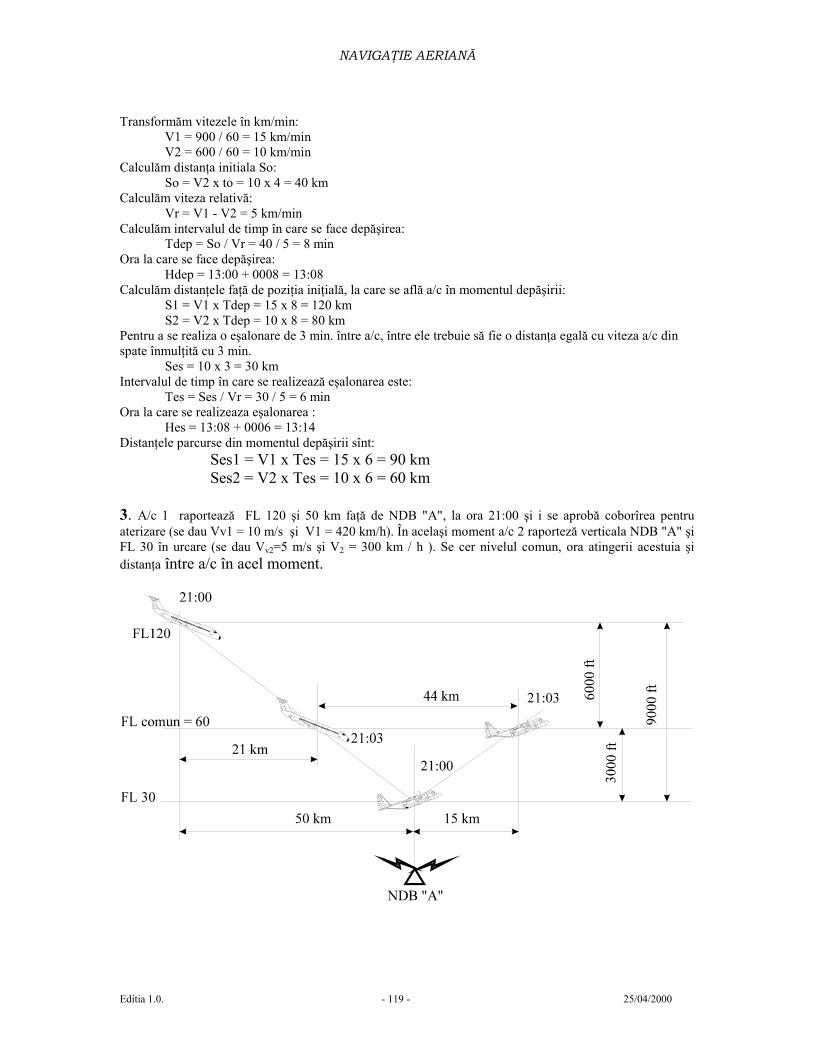
NAVIGAŢIE AERIANĂ
Editia 1.0. - 119 - 25/04/2000
Transformăm vitezele în km/min:V1 = 900 / 60 = 15 km/minV2 = 600 / 60 = 10 km/min
Calculăm distanţa initiala So:So = V2 x to = 10 x 4 = 40 km
Calculăm viteza relativă:Vr = V1 - V2 = 5 km/min
Calculăm intervalul de timp în care se face depăşirea:Tdep = So / Vr = 40 / 5 = 8 min
Ora la care se face depăşirea:Hdep = 13:00 + 0008 = 13:08
Calculăm distanţele faţă de poziţia iniţială, la care se află a/c în momentul depăşirii:S1 = V1 x Tdep = 15 x 8 = 120 kmS2 = V2 x Tdep = 10 x 8 = 80 km
Pentru a se realiza o eşalonare de 3 min. între a/c, între ele trebuie să fie o distanţa egală cu viteza a/c dinspate înmulţită cu 3 min.
Ses = 10 x 3 = 30 kmIntervalul de timp în care se realizează eşalonarea este:
Tes = Ses / Vr = 30 / 5 = 6 minOra la care se realizeaza eşalonarea :
Hes = 13:08 + 0006 = 13:14Distanţele parcurse din momentul depăşirii sînt:
Ses1 = V1 x Tes = 15 x 6 = 90 kmSes2 = V2 x Tes = 10 x 6 = 60 km
3. A/c 1 raportează FL 120 şi 50 km faţă de NDB "A", la ora 21:00 şi i se aprobă coborîrea pentruaterizare (se dau Vv1 = 10 m/s şi V1 = 420 km/h). În acelaşi moment a/c 2 raporteză verticala NDB "A" şiFL 30 în urcare (se dau Vv2=5 m/s şi V2 = 300 km / h ). Se cer nivelul comun, ora atingerii acestuia şidistanţa între a/c în acel moment.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 120 - 25/04/2000
Transformăm vitezele în ft/min, respectiv km/min:Vv1 = 10 x 200 = 2000 ft/min V1 = 420 / 60 = 7 km/minVv2 = 5 x 200 = 1000 ft/min V2 = 300 / 60 = 5 km/min
Calculăm viteza relativă:Vvr = Vv1 + Vv2 = 2000 + 1000 = 3000 ft/min
Timpul de ajungere la FL comun:T = ( FL 120 - FL 30 ) / Vvr = (12000 - 3000) / 3000 = 9000 / 3000 = 3min
Ora atingerii FL comun:H = 21:00 + 0003 = 21:03
Calculăm FL comun:FL comun = ( FL 120 - Vv1 x T ) = ( 12000 - 6000 ) = FL 60
Distanţele parcurse de a/c pîna la atigerea FL comun:D1 = V1 x T = 7 x 3 = 21 kmD2 = V2 x T = 5 x 3 = 15 km
Distanţa între a/c la FL comun:D = Do - D1 + D2 = 50 - 21 + 15 = 44 km
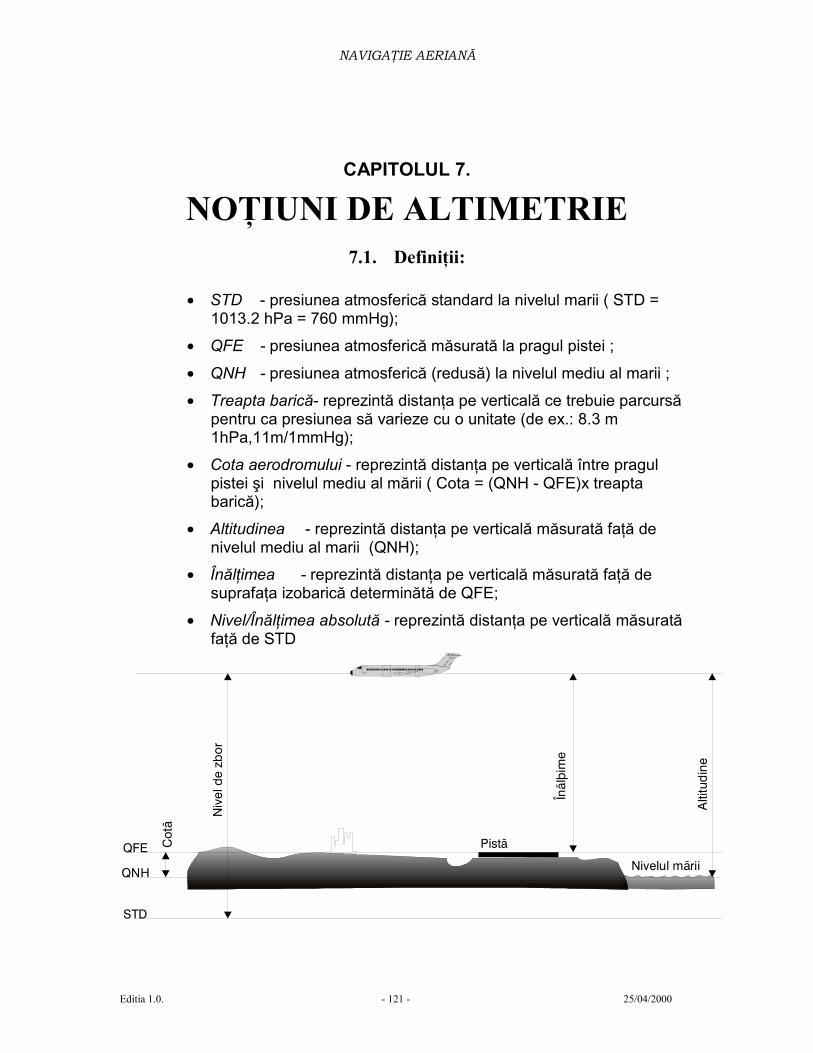
NAVIGAŢIE AERIANĂ
Editia 1.0. - 121 - 25/04/2000
CAPITOLUL 7.
NOŢIUNI DE ALTIMETRIE7.1. Definiţii:
• STD - presiunea atmosferică standard la nivelul marii ( STD =1013.2 hPa = 760 mmHg);
• QFE - presiunea atmosferică măsurată la pragul pistei ;
• QNH - presiunea atmosferică (redusă) la nivelul mediu al marii ;
• Treapta barică- reprezintă distanţa pe verticală ce trebuie parcursăpentru ca presiunea să varieze cu o unitate (de ex.: 8.3 m1hPa,11m/1mmHg);
• Cota aerodromului - reprezintă distanţa pe verticală între pragulpistei şi nivelul mediu al mării ( Cota = (QNH - QFE)x treaptabarică);
• Altitudinea - reprezintă distanţa pe verticală măsurată faţă denivelul mediu al marii (QNH);
• Înălţimea - reprezintă distanţa pe verticală măsurată faţă desuprafaţa izobarică determinătă de QFE;
• Nivel/Înălţimea absolută - reprezintă distanţa pe verticală măsuratăfaţă de STD
Pistã
Nivelul mãriiQFE
QNH
STD
Niv
el d
e zb
or
Înãl
þim
e
Alti
tud
ine
Cot
ã
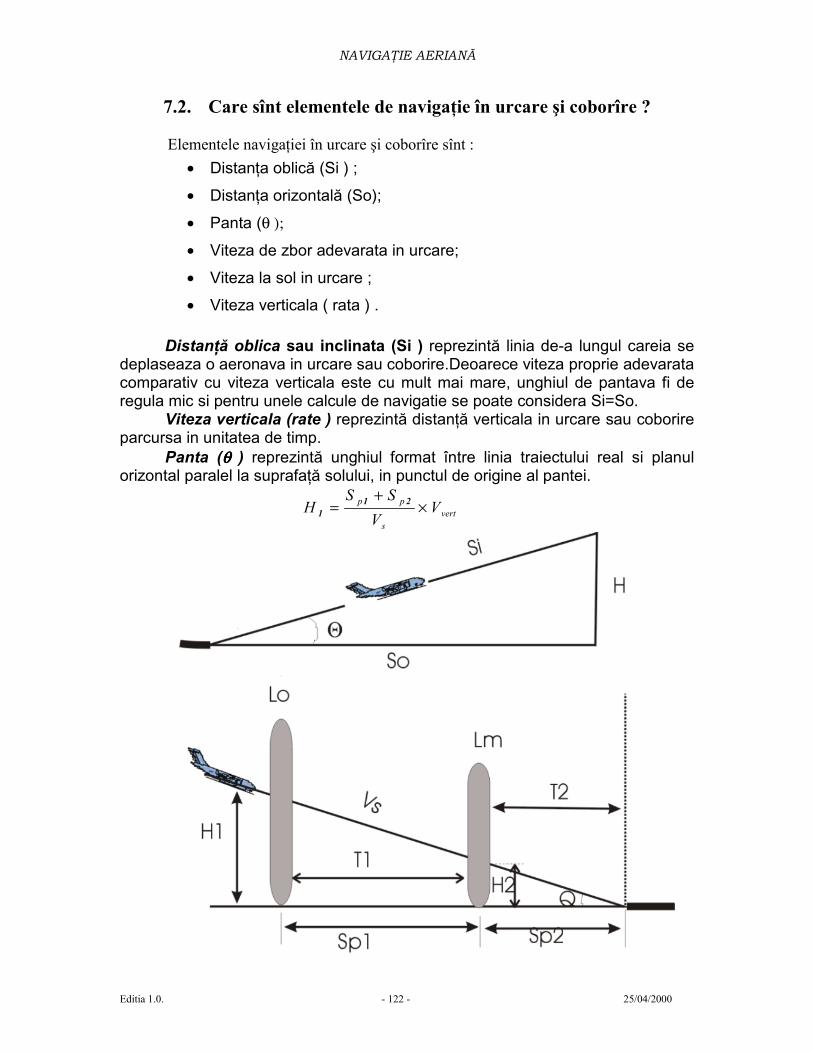
NAVIGAŢIE AERIANĂ
Editia 1.0. - 122 - 25/04/2000
7.2. Care sînt elementele de navigaţie în urcare şi coborîre ?
Elementele navigaţiei în urcare şi coborîre sînt :• Distanţa oblică (Si ) ;
• Distanţa orizontală (So);
• Panta (θµ);
• Viteza de zbor adevarata in urcare;
• Viteza la sol in urcare ;
• Viteza verticala ( rata ) .
Distanţă oblica sau inclinata (Si ) reprezintă linia de-a lungul careia sedeplaseaza o aeronava in urcare sau coborire.Deoarece viteza proprie adevaratacomparativ cu viteza verticala este cu mult mai mare, unghiul de pantava fi deregula mic si pentru unele calcule de navigatie se poate considera Si=So.
Viteza verticala (rate ) reprezintă distanţă verticala in urcare sau coborireparcursa in unitatea de timp.
Panta (θθθθ ) reprezintă unghiul format între linia traiectului real si planulorizontal paralel la suprafaţă solului, in punctul de origine al pantei.
verts
pp VV
SSH ×
+= 21
1
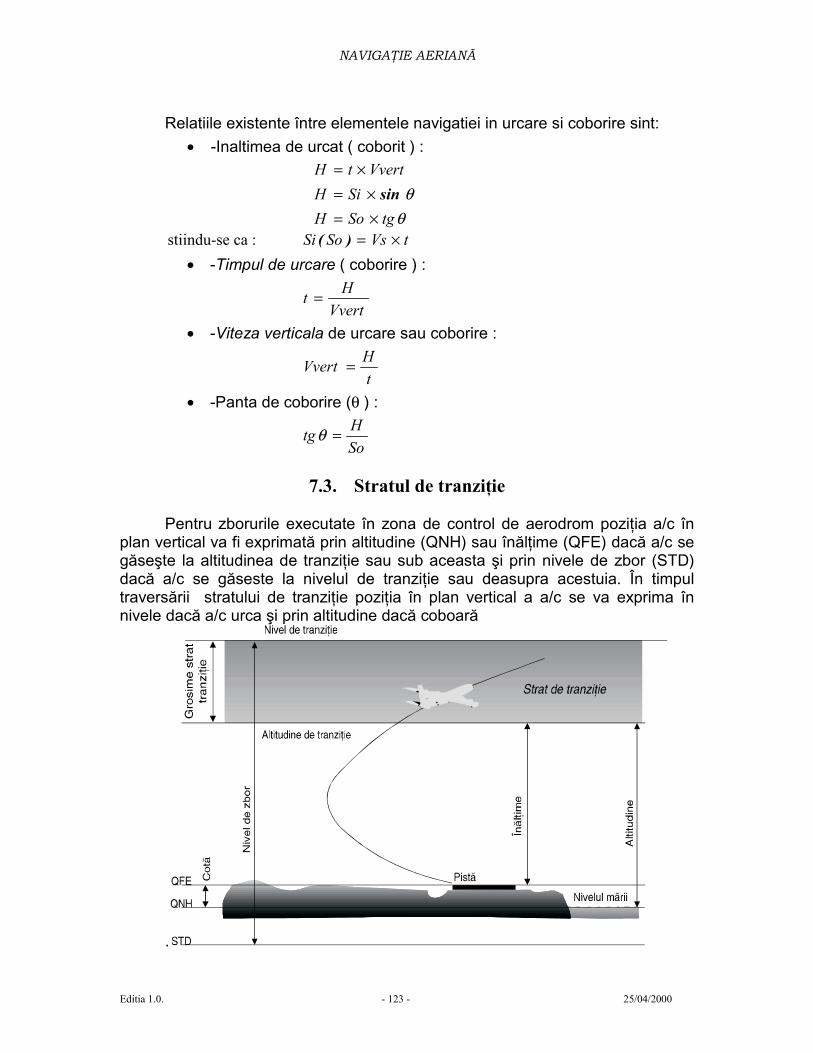
NAVIGAŢIE AERIANĂ
Editia 1.0. - 123 - 25/04/2000
Relatiile existente între elementele navigatiei in urcare si coborire sint:• -Inaltimea de urcat ( coborit ) :
θθ
tgSoHSiH
VverttH
×=×=
×=sin
stiindu-se ca : tVsSoSi ×=)(• -Timpul de urcare ( coborire ) :
VvertHt =
• -Viteza verticala de urcare sau coborire :
tHVvert =
• -Panta de coborire (θ ) :
SoHtg =θ
7.3. Stratul de tranziţie
Pentru zborurile executate în zona de control de aerodrom poziţia a/c înplan vertical va fi exprimată prin altitudine (QNH) sau înălţime (QFE) dacă a/c segăseşte la altitudinea de tranziţie sau sub aceasta şi prin nivele de zbor (STD)dacă a/c se găseste la nivelul de tranziţie sau deasupra acestuia. În timpultraversării stratului de tranziţie poziţia în plan vertical a a/c se va exprima înnivele dacă a/c urca şi prin altitudine dacă coboară
.
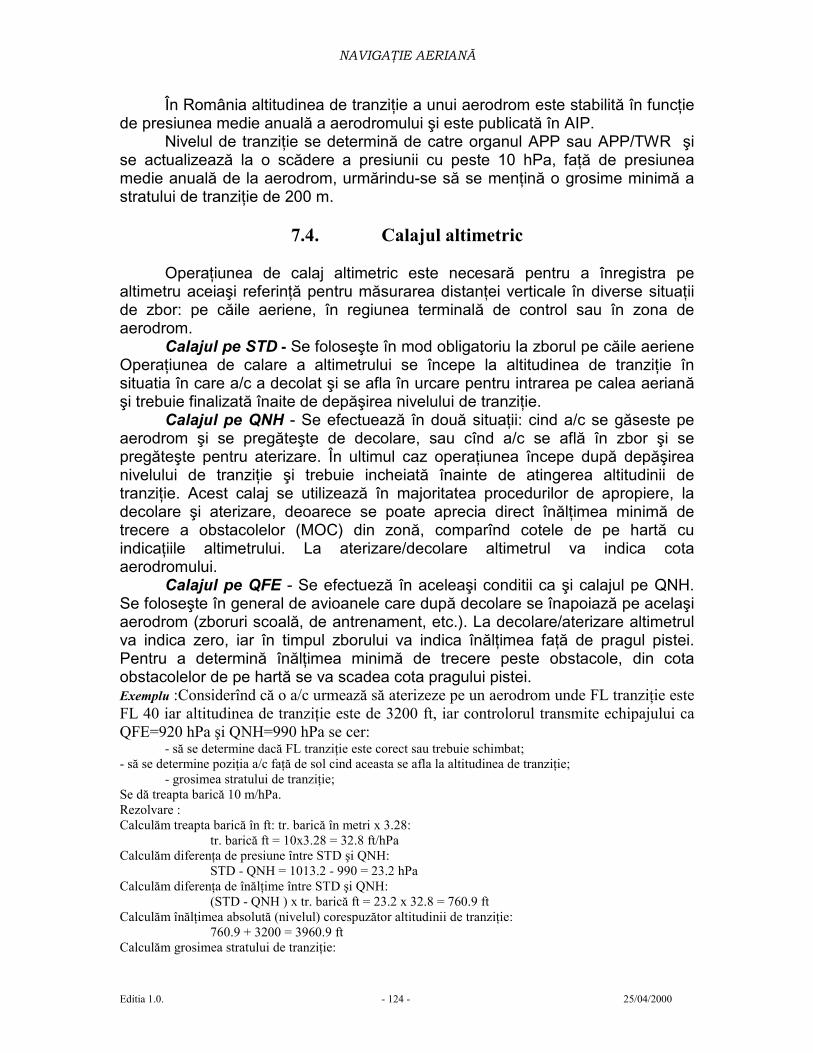
NAVIGAŢIE AERIANĂ
Editia 1.0. - 124 - 25/04/2000
În România altitudinea de tranziţie a unui aerodrom este stabilită în funcţiede presiunea medie anuală a aerodromului şi este publicată în AIP.
Nivelul de tranziţie se determină de catre organul APP sau APP/TWR şise actualizează la o scădere a presiunii cu peste 10 hPa, faţă de presiuneamedie anuală de la aerodrom, urmărindu-se să se menţină o grosime minimă astratului de tranziţie de 200 m.
7.4. Calajul altimetric
Operaţiunea de calaj altimetric este necesară pentru a înregistra pealtimetru aceiaşi referinţă pentru măsurarea distanţei verticale în diverse situaţiide zbor: pe căile aeriene, în regiunea terminală de control sau în zona deaerodrom.
Calajul pe STD - Se foloseşte în mod obligatoriu la zborul pe căile aerieneOperaţiunea de calare a altimetrului se începe la altitudinea de tranziţie însituatia în care a/c a decolat şi se afla în urcare pentru intrarea pe calea aerianăşi trebuie finalizată înaite de depăşirea nivelului de tranziţie.
Calajul pe QNH - Se efectuează în două situaţii: cind a/c se găseste peaerodrom şi se pregăteşte de decolare, sau cînd a/c se află în zbor şi sepregăteşte pentru aterizare. În ultimul caz operaţiunea începe după depăşireanivelului de tranziţie şi trebuie incheiată înainte de atingerea altitudinii detranziţie. Acest calaj se utilizează în majoritatea procedurilor de apropiere, ladecolare şi aterizare, deoarece se poate aprecia direct înălţimea minimă detrecere a obstacolelor (MOC) din zonă, comparînd cotele de pe hartă cuindicaţiile altimetrului. La aterizare/decolare altimetrul va indica cotaaerodromului.
Calajul pe QFE - Se efectueză în aceleaşi conditii ca şi calajul pe QNH.Se foloseşte în general de avioanele care după decolare se înapoiază pe acelaşiaerodrom (zboruri scoală, de antrenament, etc.). La decolare/aterizare altimetrulva indica zero, iar în timpul zborului va indica înălţimea faţă de pragul pistei.Pentru a determină înălţimea minimă de trecere peste obstacole, din cotaobstacolelor de pe hartă se va scadea cota pragului pistei.Exemplu :Considerînd că o a/c urmează să aterizeze pe un aerodrom unde FL tranziţie esteFL 40 iar altitudinea de tranziţie este de 3200 ft, iar controlorul transmite echipajului caQFE=920 hPa şi QNH=990 hPa se cer:
- să se determine dacă FL tranziţie este corect sau trebuie schimbat;- să se determine poziţia a/c faţă de sol cind aceasta se afla la altitudinea de tranziţie;
- grosimea stratului de tranziţie;Se dă treapta barică 10 m/hPa.Rezolvare :Calculăm treapta barică în ft: tr. barică în metri x 3.28:
tr. barică ft = 10x3.28 = 32.8 ft/hPaCalculăm diferenţa de presiune între STD şi QNH:
STD - QNH = 1013.2 - 990 = 23.2 hPaCalculăm diferenţa de înălţime între STD şi QNH:
(STD - QNH ) x tr. barică ft = 23.2 x 32.8 = 760.9 ftCalculăm înălţimea absolută (nivelul) corespuzător altitudinii de tranziţie:
760.9 + 3200 = 3960.9 ftCalculăm grosimea stratului de tranziţie:
NAVIGAŢIE AERIANĂ
Editia 1.0. - 125 - 25/04/2000
FL40 - 3960.9 = 4000 - 3960.9 = 39.1 ft = 11.9 m
Constatăm că grosimea stratului de tranziţie este sub limita admisă (min. 200 m), deci trebuie ridicatnivelul de tranziţie. Noul nivel de tranziţie va fi primul nivel accesibil peste cel iniţial, deci FL tranziţie vafi FL50.Calculăm grosimea stratului de tranziţie pentru FL50:
FL50 - 3960.9 = 5000 - 3960.9 = 1038.1 ft = 316.5 m > 200 mCalculăm cota aerodromului:
( QNH - QFE )x tr. barică = ( 990 - 920 )x32.8 = 2296 ftCalculăm înălţimea a/c la altitudinea de tranziţie:
înălţime = altitudine - cota = 3200 - 2296 = 904 ft

NAVIGAŢIE AERIANĂ
Editia 1.0. - 126 - 25/04/2000
Pagină liberă lasată intenţionat
NAVIGAŢIE AERIANĂ
Editia 1.0. - 127 - 25/04/2000
CAPITOLUL 8.
NAVIGAŢIA BAZATĂ PE SISTEMEDE SATELIŢI
8.1. Introducere
Utilizînd mijloacele clasice de radionavigaţie (NDB, VOR, TACAN), sepoate determină poziţia unui obiect prin determinărea unor linii de poziţie faţă destaţiile de sol, ale căror localizare este cunoscută precis. O altă modalitate pentrudeterminărea poziţiei este aceea de a determină distanţele pînă la anumiterepere, ale căror coordonate sînt cunoscute, şi pe baza acestora să se calculezecoordonatele punctului curent. Această metodă este utilizată în navigaţia desuprafaţă (area navigation), utilizîndu-se staţiile DME.
Odată cu lansarea în 1957 a primului satelit artificial al Pămîntului s-a luatîn consideraţie posibilitatea utilizării sateliţilor pentru navigaţie. Astfel,cunoscîndu-se parametrii orbitei (efemeridele) acestora şi măsurîndu-se distanţaîntre utilizator şi satelit se poate calcula poziţia acestuia.
Primul sistem operaţional de navigaţie prin satelit a fost sistemul americanTRANSIT. Acesta a început să funcţioneze în 1959, fiind destinat iniţial navigaţieisubmarinelor militare. Începînd cu 1967 sistemul a fost deschis accesului public,la ora actuală existînd în jur de 70 000 de utilizatori civili. Sistemul TRANSITpermite determinărea poziţiei prin măsurarea variaţei frecvenţei unui semnalradio emis de satelit, datorate efectului Doppler. Astfel, cunoscîndu-se înălţimeala care se află utilizatorul şi efemeridele satelitului se poate determină poziţia, cuo acurateţe de cîteva sute de metri. Sistemul are cîteva mari dezavantaje, careau dus la o utilizare foarte limitată în aviaţie: în primul rînd este bidimensional, înal doilea rînd pentru determinărea poziţiei trebuie luată în calcul vitezautilizatorului şi de asemenea durata de vizibilitate a sateliţilor este foarte redusă.Sistemul TRANSIT îşi va înceta funcţionarea cînd sistemul GPS va fi completoperaţional (la sfîrşitul anilor ‘90).
Un sistem asemănător este sistemul TSIKADA, lansat de către UniuneaSovietică începînd cu anul 1965. Sistemul este utilizat numai de forţele armateruse şi nu are aplicaţii civile.
Un alt sistem operaţional la ora actuală este sistemul franco-americanARGOS. Acesta utilizeză sateliţi aflaţi pe orbite polare, care măsoară variaţiaDoppler a frecvenţei semnalelor radio emise de către utilizatorii autorizaţi;aceste date sînt transmise către staţiile de telemetrie de la sol, unde sînt
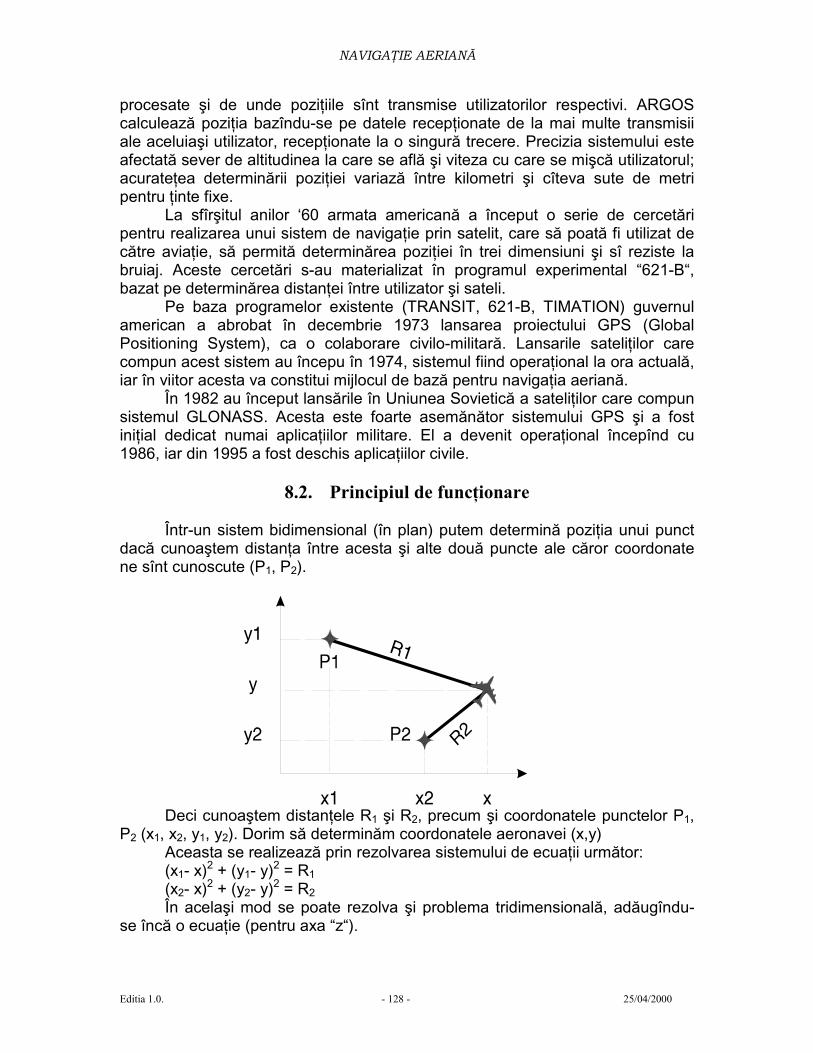
NAVIGAŢIE AERIANĂ
Editia 1.0. - 128 - 25/04/2000
procesate şi de unde poziţiile sînt transmise utilizatorilor respectivi. ARGOScalculează poziţia bazîndu-se pe datele recepţionate de la mai multe transmisiiale aceluiaşi utilizator, recepţionate la o singură trecere. Precizia sistemului esteafectată sever de altitudinea la care se află şi viteza cu care se mişcă utilizatorul;acurateţea determinării poziţiei variază între kilometri şi cîteva sute de metripentru ţinte fixe.
La sfîrşitul anilor ‘60 armata americană a început o serie de cercetăripentru realizarea unui sistem de navigaţie prin satelit, care să poată fi utilizat decătre aviaţie, să permită determinărea poziţiei în trei dimensiuni şi sî reziste labruiaj. Aceste cercetări s-au materializat în programul experimental “621-B“,bazat pe determinărea distanţei între utilizator şi sateli.
Pe baza programelor existente (TRANSIT, 621-B, TIMATION) guvernulamerican a abrobat în decembrie 1973 lansarea proiectului GPS (GlobalPositioning System), ca o colaborare civilo-militară. Lansarile sateliţilor carecompun acest sistem au începu în 1974, sistemul fiind operaţional la ora actuală,iar în viitor acesta va constitui mijlocul de bază pentru navigaţia aeriană.
În 1982 au început lansările în Uniunea Sovietică a sateliţilor care compunsistemul GLONASS. Acesta este foarte asemănător sistemului GPS şi a fostiniţial dedicat numai aplicaţiilor militare. El a devenit operaţional începînd cu1986, iar din 1995 a fost deschis aplicaţiilor civile.
8.2. Principiul de funcţionare
Într-un sistem bidimensional (în plan) putem determină poziţia unui punctdacă cunoaştem distanţa între acesta şi alte două puncte ale căror coordonatene sînt cunoscute (P1, P2).
Deci cunoaştem distanţele R1 şi R2, precum şi coordonatele punctelor P1,P2 (x1, x2, y1, y2). Dorim să determinăm coordonatele aeronavei (x,y)
Aceasta se realizează prin rezolvarea sistemului de ecuaţii următor:(x1- x)2 + (y1- y)2 = R1(x2- x)2 + (y2- y)2 = R2În acelaşi mod se poate rezolva şi problema tridimensională, adăugîndu-
se încă o ecuaţie (pentru axa “z“).
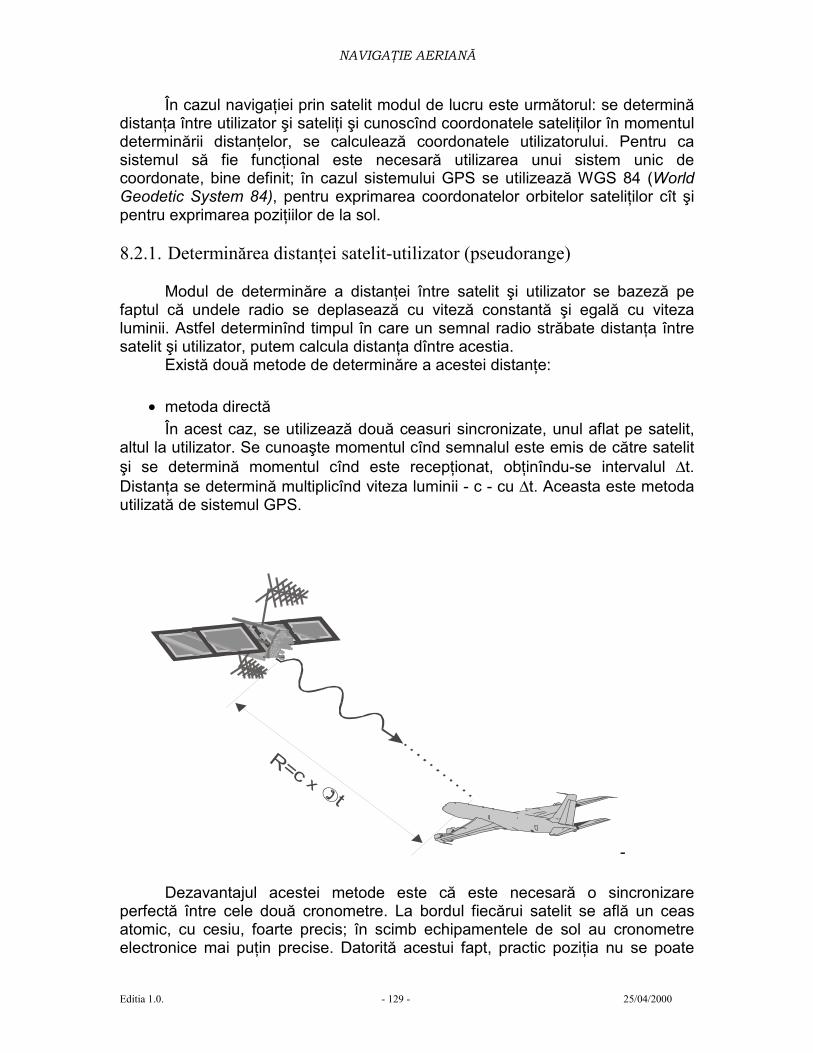
NAVIGAŢIE AERIANĂ
Editia 1.0. - 129 - 25/04/2000
În cazul navigaţiei prin satelit modul de lucru este următorul: se determinădistanţa între utilizator şi sateliţi şi cunoscînd coordonatele sateliţilor în momentuldeterminării distanţelor, se calculează coordonatele utilizatorului. Pentru casistemul să fie funcţional este necesară utilizarea unui sistem unic decoordonate, bine definit; în cazul sistemului GPS se utilizează WGS 84 (WorldGeodetic System 84), pentru exprimarea coordonatelor orbitelor sateliţilor cît şipentru exprimarea poziţiilor de la sol.
8.2.1. Determinărea distanţei satelit-utilizator (pseudorange)
Modul de determinăre a distanţei între satelit şi utilizator se bazeză pefaptul că undele radio se deplasează cu viteză constantă şi egală cu vitezaluminii. Astfel determinînd timpul în care un semnal radio străbate distanţa întresatelit şi utilizator, putem calcula distanţa dîntre acestia.
Există două metode de determinăre a acestei distanţe:
• metoda directăÎn acest caz, se utilizează două ceasuri sincronizate, unul aflat pe satelit,
altul la utilizator. Se cunoaşte momentul cînd semnalul este emis de către satelitşi se determină momentul cînd este recepţionat, obţinîndu-se intervalul ∆t.Distanţa se determină multiplicînd viteza luminii - c - cu ∆t. Aceasta este metodautilizată de sistemul GPS.
R=c t
x�
-
Dezavantajul acestei metode este că este necesară o sincronizareperfectă între cele două cronometre. La bordul fiecărui satelit se află un ceasatomic, cu cesiu, foarte precis; în scimb echipamentele de sol au cronometreelectronice mai puţin precise. Datorită acestui fapt, practic poziţia nu se poate
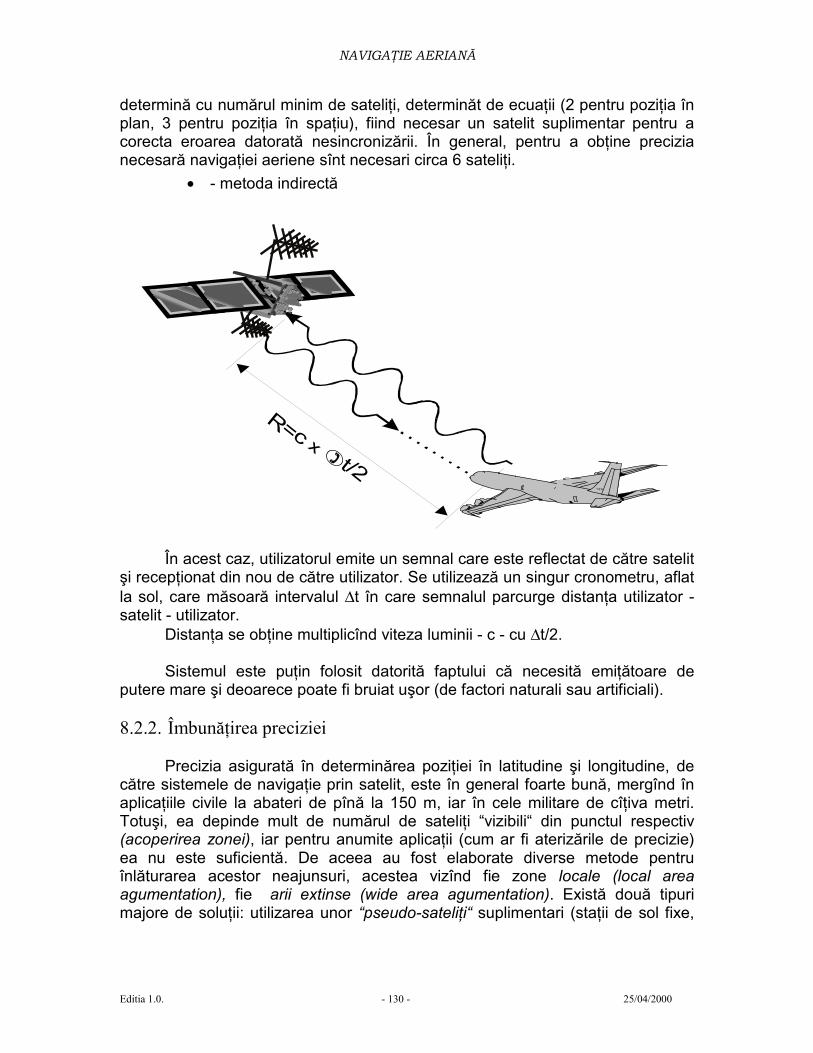
NAVIGAŢIE AERIANĂ
Editia 1.0. - 130 - 25/04/2000
determină cu numărul minim de sateliţi, determinăt de ecuaţii (2 pentru poziţia înplan, 3 pentru poziţia în spaţiu), fiind necesar un satelit suplimentar pentru acorecta eroarea datorată nesincronizării. În general, pentru a obţine precizianecesară navigaţiei aeriene sînt necesari circa 6 sateliţi.
• - metoda indirectă
R=c t/2
x�
În acest caz, utilizatorul emite un semnal care este reflectat de către satelitşi recepţionat din nou de către utilizator. Se utilizează un singur cronometru, aflatla sol, care măsoară intervalul ∆t în care semnalul parcurge distanţa utilizator -satelit - utilizator.
Distanţa se obţine multiplicînd viteza luminii - c - cu ∆t/2.
Sistemul este puţin folosit datorită faptului că necesită emiţătoare deputere mare şi deoarece poate fi bruiat uşor (de factori naturali sau artificiali).
8.2.2. Îmbunăţirea preciziei
Precizia asigurată în determinărea poziţiei în latitudine şi longitudine, decătre sistemele de navigaţie prin satelit, este în general foarte bună, mergînd înaplicaţiile civile la abateri de pînă la 150 m, iar în cele militare de cîţiva metri.Totuşi, ea depinde mult de numărul de sateliţi “vizibili“ din punctul respectiv(acoperirea zonei), iar pentru anumite aplicaţii (cum ar fi aterizările de precizie)ea nu este suficientă. De aceea au fost elaborate diverse metode pentruînlăturarea acestor neajunsuri, acestea vizînd fie zone locale (local areaagumentation), fie arii extinse (wide area agumentation). Există două tipurimajore de soluţii: utilizarea unor “pseudo-sateliţi“ suplimentari (staţii de sol fixe,
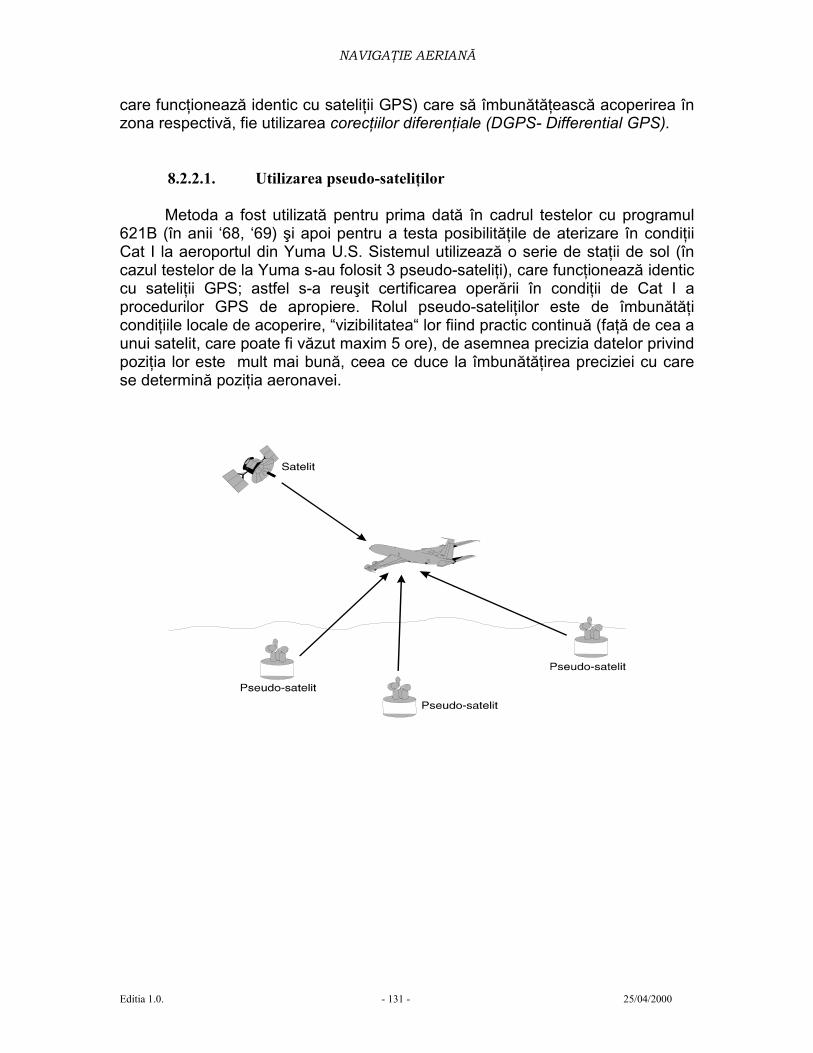
NAVIGAŢIE AERIANĂ
Editia 1.0. - 131 - 25/04/2000
care funcţionează identic cu sateliţii GPS) care să îmbunătăţească acoperirea înzona respectivă, fie utilizarea corecţiilor diferenţiale (DGPS- Differential GPS).
8.2.2.1. Utilizarea pseudo-sateliţilor
Metoda a fost utilizată pentru prima dată în cadrul testelor cu programul621B (în anii ‘68, ‘69) şi apoi pentru a testa posibilităţile de aterizare în condiţiiCat I la aeroportul din Yuma U.S. Sistemul utilizează o serie de staţii de sol (încazul testelor de la Yuma s-au folosit 3 pseudo-sateliţi), care funcţionează identiccu sateliţii GPS; astfel s-a reuşit certificarea operării în condiţii de Cat I aprocedurilor GPS de apropiere. Rolul pseudo-sateliţilor este de îmbunătăţicondiţiile locale de acoperire, “vizibilitatea“ lor fiind practic continuă (faţă de cea aunui satelit, care poate fi văzut maxim 5 ore), de asemnea precizia datelor privindpoziţia lor este mult mai bună, ceea ce duce la îmbunătăţirea preciziei cu carese determină poziţia aeronavei.
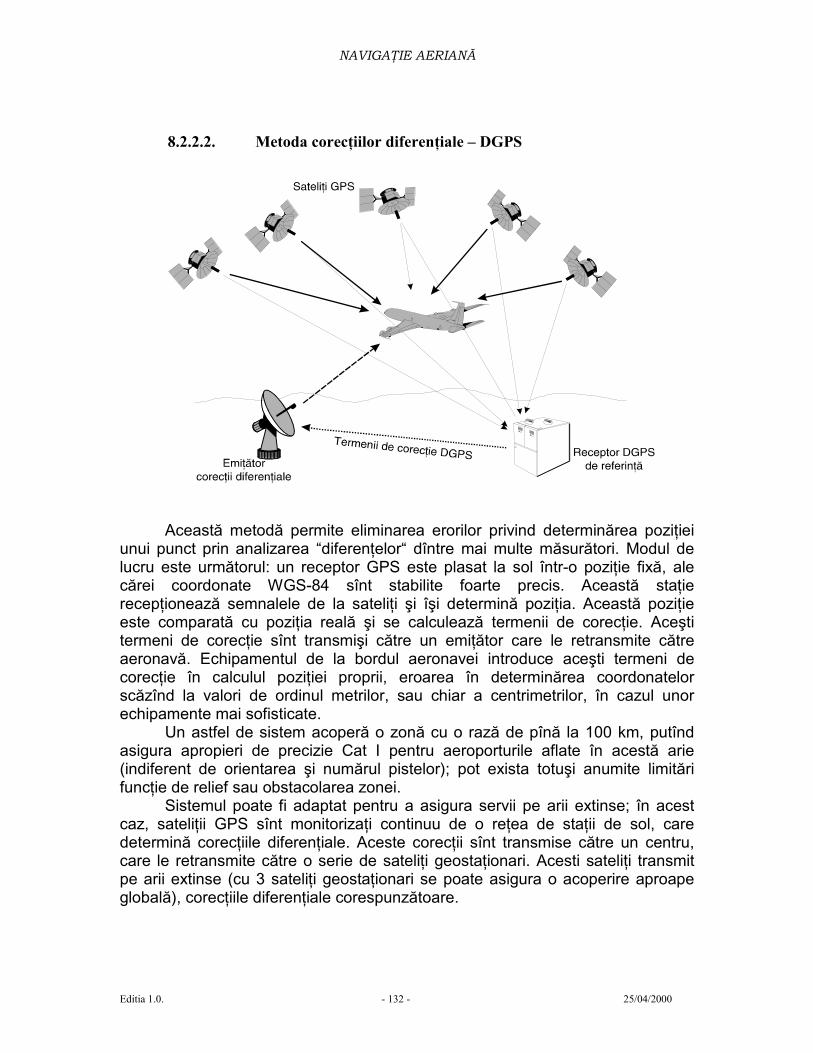
NAVIGAŢIE AERIANĂ
Editia 1.0. - 132 - 25/04/2000
8.2.2.2. Metoda corecţiilor diferenţiale – DGPS
Această metodă permite eliminarea erorilor privind determinărea poziţieiunui punct prin analizarea “diferenţelor“ dîntre mai multe măsurători. Modul delucru este următorul: un receptor GPS este plasat la sol într-o poziţie fixă, alecărei coordonate WGS-84 sînt stabilite foarte precis. Această staţierecepţionează semnalele de la sateliţi şi îşi determină poziţia. Această poziţieeste comparată cu poziţia reală şi se calculează termenii de corecţie. Aceştitermeni de corecţie sînt transmişi către un emiţător care le retransmite cătreaeronavă. Echipamentul de la bordul aeronavei introduce aceşti termeni decorecţie în calculul poziţiei proprii, eroarea în determinărea coordonatelorscăzînd la valori de ordinul metrilor, sau chiar a centrimetrilor, în cazul unorechipamente mai sofisticate.
Un astfel de sistem acoperă o zonă cu o rază de pînă la 100 km, putîndasigura apropieri de precizie Cat I pentru aeroporturile aflate în acestă arie(indiferent de orientarea şi numărul pistelor); pot exista totuşi anumite limitărifuncţie de relief sau obstacolarea zonei.
Sistemul poate fi adaptat pentru a asigura servii pe arii extinse; în acestcaz, sateliţii GPS sînt monitorizaţi continuu de o reţea de staţii de sol, caredetermină corecţiile diferenţiale. Aceste corecţii sînt transmise către un centru,care le retransmite către o serie de sateliţi geostaţionari. Acesti sateliţi transmitpe arii extinse (cu 3 sateliţi geostaţionari se poate asigura o acoperire aproapeglobală), corecţiile diferenţiale corespunzătoare.
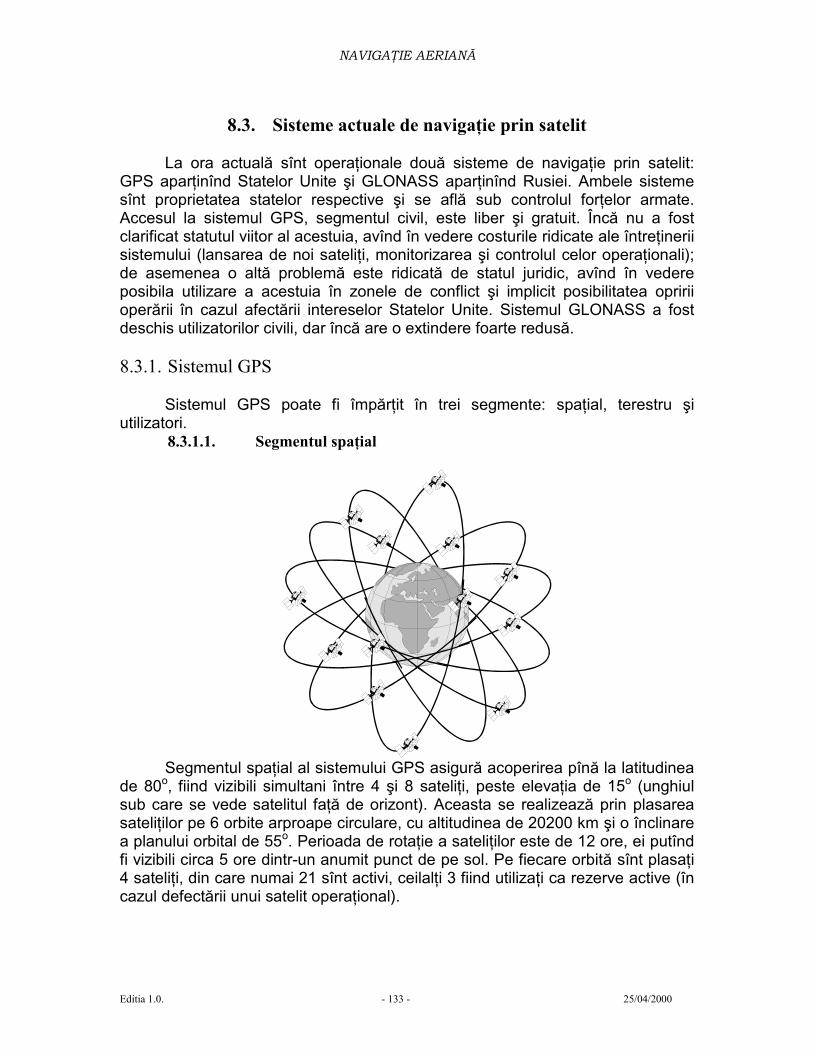
NAVIGAŢIE AERIANĂ
Editia 1.0. - 133 - 25/04/2000
8.3. Sisteme actuale de navigaţie prin satelit
La ora actuală sînt operaţionale două sisteme de navigaţie prin satelit:GPS aparţinînd Statelor Unite şi GLONASS aparţinînd Rusiei. Ambele sistemesînt proprietatea statelor respective şi se află sub controlul forţelor armate.Accesul la sistemul GPS, segmentul civil, este liber şi gratuit. Încă nu a fostclarificat statutul viitor al acestuia, avînd în vedere costurile ridicate ale întreţineriisistemului (lansarea de noi sateliţi, monitorizarea şi controlul celor operaţionali);de asemenea o altă problemă este ridicată de statul juridic, avînd în vedereposibila utilizare a acestuia în zonele de conflict şi implicit posibilitatea opririioperării în cazul afectării intereselor Statelor Unite. Sistemul GLONASS a fostdeschis utilizatorilor civili, dar încă are o extindere foarte redusă.
8.3.1. Sistemul GPS
Sistemul GPS poate fi împărţit în trei segmente: spaţial, terestru şiutilizatori.
8.3.1.1. Segmentul spaţial
Segmentul spaţial al sistemului GPS asigură acoperirea pînă la latitudineade 80o, fiind vizibili simultani între 4 şi 8 sateliţi, peste elevaţia de 15o (unghiulsub care se vede satelitul faţă de orizont). Aceasta se realizează prin plasareasateliţilor pe 6 orbite arproape circulare, cu altitudinea de 20200 km şi o înclinarea planului orbital de 55o. Perioada de rotaţie a sateliţilor este de 12 ore, ei putîndfi vizibili circa 5 ore dintr-un anumit punct de pe sol. Pe fiecare orbită sînt plasaţi4 sateliţi, din care numai 21 sînt activi, ceilalţi 3 fiind utilizaţi ca rezerve active (încazul defectării unui satelit operaţional).
NAVIGAŢIE AERIANĂ
Editia 1.0. - 134 - 25/04/2000
8.3.1.2. Segmentul terestru
Segmentul terestru constă din staţia principală de control şi 5 staţii demonitorizare. Fiecare staţie de monitorizare recepţionează semnale de la toţisateliţii vizibili şi calculează distanţele pînă la ei. Rezultatele acestor măsurătoriîmpreună cu datele meteo şi alte informaţii sînt transmise către staţia principalăde control. Aici se calculează parametrii orbitei şi corecţiile de timp pentru fiecaresatelit; apoiu aceste date sînt transmise sateliţilor care le includ în mesajul emisde ei. De asemenea staţia principală de control monitorizează starea defuncţionare a fiecărui satelit şi asigură efectuarea corecţiilor orbitale.
8.3.1.3. Segmentul utilizatori
Acest segment constă din echipamentul fiecărui utilizator. Acesteechipamente variază de la cele portabile, de putere şi acurateţe redusă (utilizatepentru uz personal), la cele foarte precise utilizate în aviaţie şi geodezie.
La ora actuală majoritatea echipamentelor GPS (peste 70%) sînt utilizateîn afara sferei aviatice: seturi pentru excursionişti, iachting (cu preţuri între 150-1000 $), pentru automobile (numai în Japonia se montează circa 40000 de seturiGPS-auto pe lună), etc. Un segment important îl constituie aplicaţiile geodezice(cartografie, arhitectură, construcţii) unde echipamentele sînt foarte precise şi aupreţuri de cost ce pot atinge 25000$. În aviaţie seturile GPS încep să fie folositetot mai mult, ca component al centralei de navigaţie, atît pentru zborurile pedistanţe mari şi medii (înlocuind echipamentele Omega), cît şi pentru faza deapropiere (atît apropieri non-precizie, cît şi apropieri de precizie Cat I). Preţulunor asemena echipamente variază între 5000 şi 15000$.
8.3.1.4. Caracteristicile sistemului GPS
Principalele caracteristici ale sistemului sînt:
• structura semnalului emis de satelit - cheia funcţionării precise asistemului GPS este controlul exact al componentelor semnaluluiemis; aceasta se realizează de către ceasurile atomice aflate labordul satelitului (4 ceasuri - 2 cu cesiu, 2 cu rubidiu). Semnalul estetransmis pe două unde purtătoare: L1-1575.4 MHz şi L2 1227.6MHz. Pe aceste unde purtătoare se modulează două tipuri de coduri(PRN codes, specifice fiecărui satelit), utilizate pentru determinăreadistanţei utilizator-satelit. Primul cod numit Standard PositioningService sau C/A code este modulat numai pe L1, iar cel de-al doileanumit P-code sau Precise Positioning Service se modulează peambele purtătoare. Ambele coduri sînt transmise împreună cu unmesaj de navigaţie. Codul C/A este utilizat de către utilizatorii civili,iar P-code este utilizat de către militari şi anumiţi utilizatori autorizaţi.Rolul acestor coduri este de a identifica fiecare satelit. Ele se
NAVIGAŢIE AERIANĂ
Editia 1.0. - 135 - 25/04/2000
utilizează şi pentru a scădea precizia determinărilor făcute de ceicare nu deţin P-code; astfel precizia sistemului (fără corecţiidiferenţiale), pentru militari atinge ordinul metrilor, iar cea autilizatorilor civili în jur de 150 m.
• formattul mesajului de navigaţie - lungimea lui este de 30 secunde şieste format din 5 părţi conţinînd date privind efemeridele satelitului,coeficienţi pentru modelarea ionosferei, timpul sistemului, informaţiiprivind funcţionarea satelitului şi date privind deriva ceasului.
• referinţa de timp a sistemului - ceasurile atomice de la bordulsateliţilor au fost calibrate astfel încît originea să fie 6 ianuarie 1980,cînd s-a făcut sincronizarea cu ora UTC. Diferenţa între UTC şitimpul GPS nu depăşeşte 1 milisecundă.
• sistemul de coordonate de referinţă - sistemul utilizat este WGS-84.Acesta defineşte forma elipsoidului terestru, masa şi viteza saunghiulară, cît şi parametrii privind modelul gravitaţional alPămîntului. Ultimii parametri sînt necesari deoarece WGS-84 nu seutilizează numai pentru determinărea coordonatelor terestre, elutilizîndu-se şi pentru determinărea orbitelor sateliţilor GPS.
8.3.2. Sistemul GLONASS
Sistemul GLONASS este un sistem analog cu sistemul GPS, dezvoltat defosta Uniune Sovietică. La ora actuală sistemul aparţine exclusiv Rusiei, iarprogramul a fost mult întîrziat datorită schimbărilor politice şi economicepetrecute.
8.3.2.1. Segmentul spaţial
Constă din 24 de sateliţi palsaţi pe 3 orbite, separate între ele la 120o ,avînd înclinarea de 64.9o . Sateliţii sînt plasaţi echidistant pe fiecare orbită, la 45o
unul de altul. Altitudinea orbitei este de 19100 km, perioada de revoluţie asateliţilor este de 11 ore şi 15 minute. Datorită modului de alegere a orbitelorsistemul GLONASS are o acoperire mai bună decît GPS la latitudini înalte.
8.3.2.2- Segmentul terestru
Ca organizare, segmentul terestru este analog cu cel al GPS. Centrulprincipal de control se află lîngă Moscova, iar staţiile de monitorizare se aflărăspîndite pe teritoriul fostei Uniuni Sovietice.
8.3.2.3. Segmentul utilizatori
Echipamentele de recepţie GLONASS sînt puţin răspîndite, cele deproducţie rusească avînd performanţe scăzute şi dimensiuni mari. La ora actualăcîteva companii occidentale au dezvoltat o serie de interfeţe pentru
NAVIGAŢIE AERIANĂ
Editia 1.0. - 136 - 25/04/2000
achiziţionarea comună de date GPS/GLONASS, care urmează să fie lansate pepiaţă în anii următori.
8.3.2.4. Caracteristicile sistemului GLONASS
• mesajul de navigaţie - fiecare satelit GLONASS emite pe ofrecvenţă proprie în banda L un mesaj de navigaţie conţinînd:efemeridele, deriva de timp a satelitului respectiv, semnalele detimp, parametrii orbitali a celorlalţi sateliţi GLONASS şi o indicaţieprivind funcţionarea/ nefuncţionarea satelitului respectiv.
• referinţa de timp - sitemul GLONASS foloseşte o referinţă de timpdiferită de GPS, bazată pe ora Moscovei
• sistemul de coordonate - sistemul de coordonate utilizat deGLONASS este PE90/SGS-85 (Soviet Geodetic System). Sistemuleste diferit de WGS-84, pînă la ora actuală nefiind deduse completfuncţiile de transformare dintr-un sistem într-altul.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 137 - 25/04/2000
CAPITOLUL 9.
PROCEDURI DE APROPIERE
9.1. Generalităţi
Procedurile de apropiere reprezintă o serie de manevre executate înzonele terminale şi/sau zonele de aerodrom, pentru a realiza tranziţia de la fazade zbor pe rută spre procedura de aterizare la o pistă desemnată sau dacăaterizarea nu este efectuată, în continuare până la reluarea zborului pe rută sauintrarea într-o zonă de aşteptare.
În funcţie de regulile de zbor utilizate, procerdura poate fi de apropieredupă instrumente –IFR-Instrument Flight Rules-, sau la vedere-VFR-Visual FlightRules-. Regulile de zbor instrumental nu trebuie confundate cu condiţiilemeteorologice, care pot fi specifice zborului instrumental –IMC-InstrumentMeteorological Conditions-, sau specifice zborului la vedere –VMC-VisualMeteorological Condition-,
Pe timpul procedurii de apropiere, este de la sine înţeles că atît controlorulcît şi pilotul trebuie să cunoască şi să respecte regulile specifice efectuăriimenevrelor care sînt publicate în hărţile de apropiere ,specifice fiecarui aeroport,din AIP.
Procedurile de apropiere executate de către aeronavele care zboară dupăregulile de zbor instrumental şi care operează în baza unui plan de zbor IFR seclasifică în:
• proceduri de apropiere instrumentale – IAP (Instrument ApproachProcedure);
• proceduri de apropiere la vedere.
9.2. Proceduri de apropiere instrumentale -Instrument ApproachProcedures
O procedură de apropiere instrumentală reprezintă o succesiune demanevre predeterminăte prin referinţă la instrumentele de zbor, cu o protecţiespecificată faţă de obstacole, de la reperul apropierii iniţiale sau acolo unde esteaplicabil de la originea unei rute de sosire definite până la un punct de la care oaterizare poate fi efectuată şi după care, dacă aterizarea nu a fost efectuată,până la o poziţie la care se aplică criteriile de trecere a obstacolelor pentruprocedura de aşteptare sau zborul pe rută.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 138 - 25/04/2000
Fiecare procedură de apropiere instrumentală este proiectată şiprezentată, de regulă, sub forma unei singure hărţi care este publicată înPublicaţia de Informare Aeronautică - AIP. O hartă poate să conţină mai multeproceduri de apropiere instrumentală, aşa cum este cazul hărţii procedurii deapropiere ILS care poate să conţină şi procedura de apropiere ILS cu panta GPinoperativă.
Orice procedură de apropiere instrumentală este specifică unui mijloc deradionavigaţie al aeroportului şi în general direcţiei pistei utilizate. Astfel sedeosebesc proceduri de apropiere după instrumente pentru:
• Sistemul ILS;
• Radarul de precizie –PAR;
• Radarul de supraveghere-SRE;
• Radiofarul omnidirecţional –VOR, sau combinat VOR/DME.
• Unul sau două radiofaruri nedirecţionale NDBLa autorizarea procedurii, controlorul de trafic aerian va folosi numele
procedurii de apropiere aşa cum este publicat şi va preciza componentainoperativă a mijlocului de radionavigaţie.
Aceste proceduri se bazează pe folosirea mijloacelor de radionavigaţie dediferite nivele de precizie de navigaţie, care determină şi clasificarea procedurilorde apropiere instrumentală în:
• procedură de apropiere instrumentală de precizie-precisionapproach procedure- ( oferă posibilitatea ghidarii aeronavei atît îndirecţie cît şi pe pantă, cu referire la distanţă ) :
• - procedura de apropiere instrumentală ILS;• - procedura de apropiere instrumentală PAR;• - procedura de apropiere instrumentală MLS.
• procedură de apropiere instrumentală fără pantă electronică – non-precision approach procedure (procedură de apropiereinstrumentală clasică):
• - procedura de apropiere instrumentală ILS cu panta GPinoperativă;
• - procedura de apropiere instrumentală VOR;• - procedura de apropiere instrumentală NDB;• - procedura de apropiere instrumentală DF;• - procedura de apropiere instrumentală SRE;• - procedura de apropiere instrumentală GPS.
Procedura de apropiere GPS, prin instalarea echipamentelor corespunzătoare de mărire a preciziei dedeterminăre a poziţiei aeronavelor, poate deveni o procedură de apropiere de precizie.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 139 - 25/04/2000
Procedura de apropiere instrumentală se efectuează în vecinătateaaerodromului după străbaterea stratului de tranziţie (fiind situat imediat sub celmai de jos nivel de zbor ). În cuprinsul stratului de tranziţie se efectuează calajulaltimetric ( fixarea unei anumite presiuni de referinţă pe altimetru barometric alaeronavei ).
Vitezele de zbor indicate – IAS în segmentele procedurilor de apropieresunt cuprinse în Tabelul 1 :.
Tabelul 1 – Vitezele pentru proceduri în knots (kt)
Vitezele maxime pentruapropierea întreruptă (kt)Categoria
deaeronavă
Vat (kt) Intervalul deviteze pentruapropiereainiţială (kt)
Intervalul deviteze pentruapropiereafinală (kt)
Vitezelemaximepentruapropierea cumanevre lavedere (kt)
intermediară finală
A < 91 90/150 (110*) 70/100 100 100 110B 91/120 120/180 (140*) 85/130 135 130 150C 121/14
0160/240 115/160 180 160 240
D 141/165
185/250 130/185 205 185 265
E 166/210
185/250 155/230 240 230 275
Vat – este viteza indicată la pragul pistei, egală cu 1,3 x Viteza de înfundare în configuraţia de aterizare lamasa de aterizare certificată maximă* - viteza indicată maximă pentru procedurile de inversare şi racetrack
Echipajul poate efectua o procedură de apropiere instrumentală până laminima de operare în condiţiile în care:
• este autorizat şi antrenat corespunzător;
• sistemul de la sol este operaţional;
• aparatura de bord este operaţională;
• procedura de apropiere instrumentală este autorizată de cătrecentrul de control de apropiere.
9.2.1. Segmentele procedurii de apropiere instrumentală
O procedură de apropiere instrumentală poate avea cinci segmenteseparate:
• - segmentul de sosire – arrival segment;
• - segmentul iniţial – initial segment;
• - segmentul intermediar – intermediate segment;
• - segmentul final – final segment;
• - segmentul apropierii întrerupte – missed approach segment.
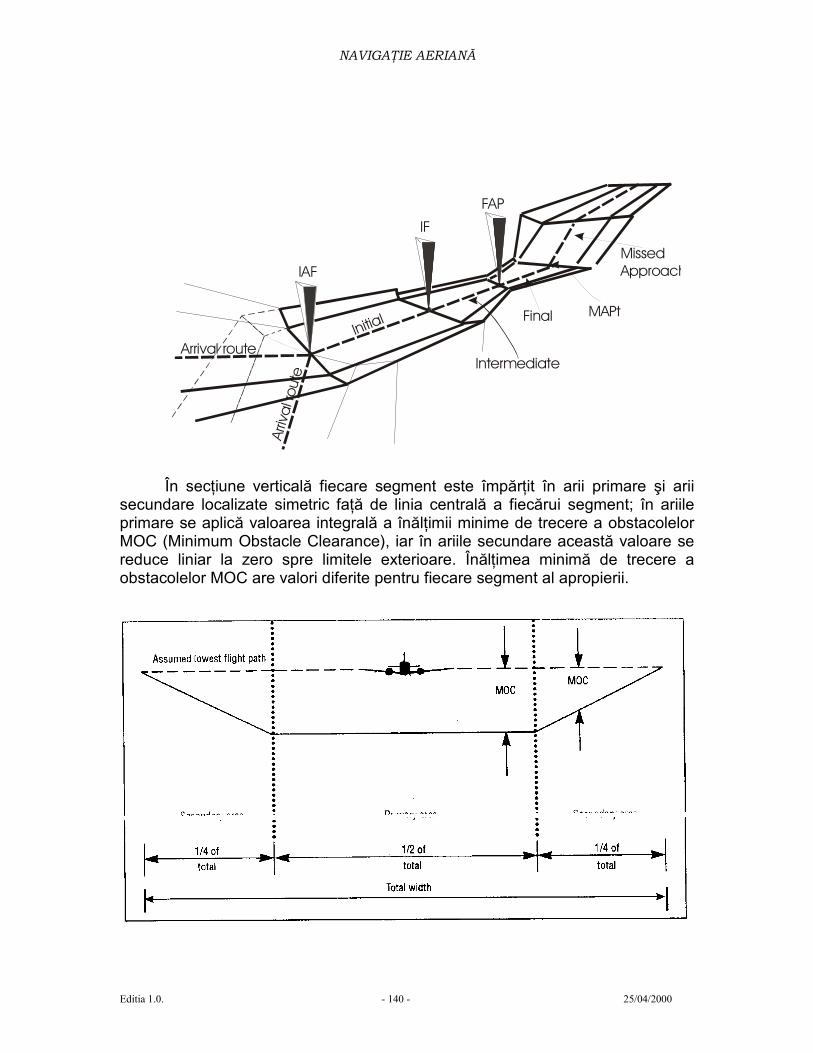
NAVIGAŢIE AERIANĂ
Editia 1.0. - 140 - 25/04/2000
IAF
IF
Arrival route
Arriv
al r
oute
Initial
FAP
Intermediate
Final MAPt
MissedApproach
În secţiune verticală fiecare segment este împărţit în arii primare şi ariisecundare localizate simetric faţă de linia centrală a fiecărui segment; în ariileprimare se aplică valoarea integrală a înălţimii minime de trecere a obstacolelorMOC (Minimum Obstacle Clearance), iar în ariile secundare această valoare sereduce liniar la zero spre limitele exterioare. Înălţimea minimă de trecere aobstacolelor MOC are valori diferite pentru fiecare segment al apropierii.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 141 - 25/04/2000
9.2.1.1. Segmentul de sosire
Când se consideră necesar, se poate publica un segment de sosire (rutăde sosire standard – standard arrival route STAR) care asigură tranziţia de lafaza de zbor pe rută la faza de apropiere, prin legarea unui punct de pe o rutăATS cu un reper sau mijloc de radionavigaţie folosit în iniţierea procedurii deapropiere, denumit reperul apropierii iniţiale - IAF. În aria primară se asigură oînălţime minimă de trecere a obstacolelor MOC de 300 m.
În cazul existenţei controlului radar în zona terminală, segmentul de sosirepoate fi substituit prin vectorizarea aeronavele spre un reper sau spre un punct alsegmentului intermediar, punct de la care pilotul poate continua apropierea cureferinţă la harta procedurii de apropiere instrumentală sau să efectueze oapropiere la vedere.
Vectorizarea radar este singurul caz în care controlorul radar trebuie săemită astfel de autorizări încât să fie respectate înălţimile minime de trecere aobstacolelor până în momentul în care aeronava atinge un punct de la carepilotul poate să revină la navigaţia proprie.
9.2.1.2. Segmentul iniţial
Segmentul apropierii iniţiale începe la reperul apropierii iniţiale IAF şi setermină la reperul apropierii intermediare IF. În aria primară se asigură o înălţimeminimă de trecere a obstacolelor MOC de 300 m. De-a lungul segmentului iniţialspre segmentul intermediar se asigură un drum obligat cu un unghi maxim deinterceptare de 90° pentru apropierea de precizie şi de 120° pentru apropiereafără pantă electronică, cu excepţia cazului când interceptarea segmentuluiintermediar se face printr-un segment de navigaţie estimată – dead reckoningsegment.
În zonele unde nu sunt amplasate corespunzător mijloace deradionavigaţie, pentru desemnarea acestora ca repere ale apropierii iniţiale şiintermediare, se stabilesc proceduri de inversare, proceduri racetrack sauproceduri de aşteptare pentru manevrarea aeronavelor în apropierea iniţială.Alegerea uneia sau alteia dîntre aceste proceduri sau tipuri de manevre, în fazade proiectare, se face în funcţie de mărimea volumului de spaţiu aerian disponibilşi de direcţiile de apropiere ale rutelor de sosire. Volumul de spaţiu aerianprotejat desemnat pentru o procedură publicată nu poate să acomodeze un alttip de procedură numai dacă în faza de proiectare s-a ţinut cont de acest lucru şieste specificat în harta publicată.
9.2.1.2A. Procedura de inversare
Procedura de inversare poate fi de forma unui viraj procedural sau viraj debază. Intrarea în aceste proceduri se face de regulă dintr-un anumit sector cepermite o interceptare a traiectului de îndepărtare sub un unghi maxim de 30°.
Există trei tipuri de manevre recunoscute pentru procedurile de inversare:
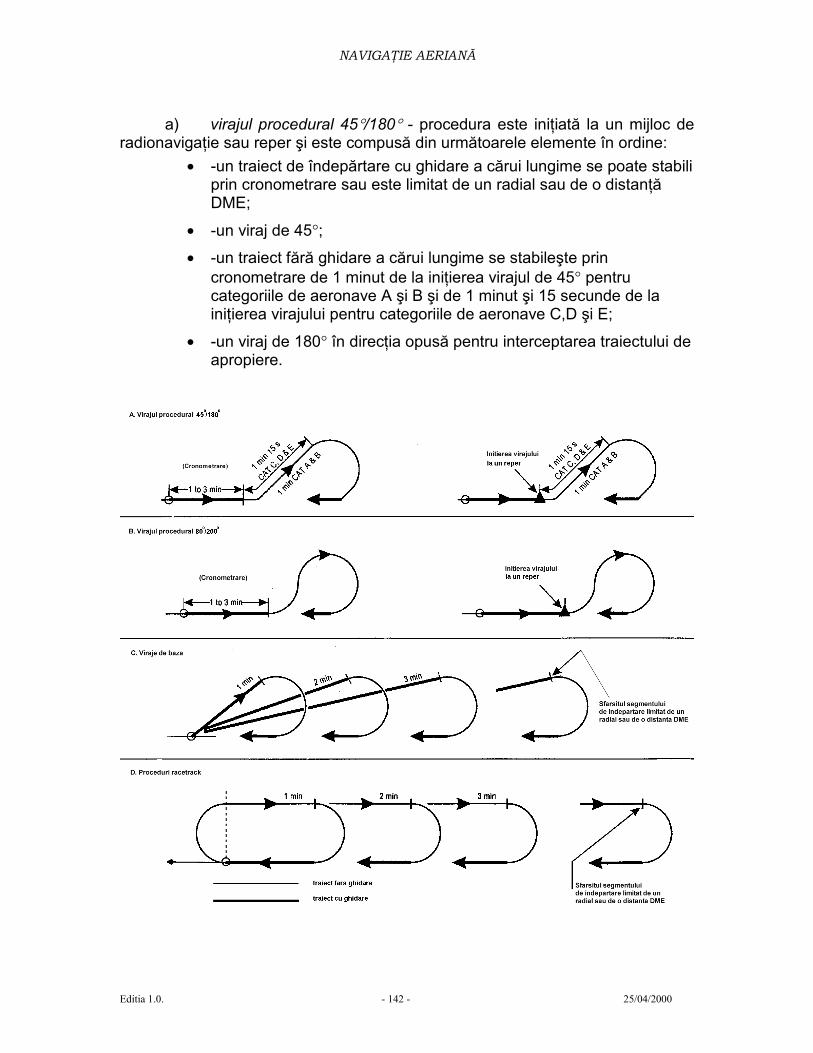
NAVIGAŢIE AERIANĂ
Editia 1.0. - 142 - 25/04/2000
a) virajul procedural 45°/180° - procedura este iniţiată la un mijloc deradionavigaţie sau reper şi este compusă din următoarele elemente în ordine:
• -un traiect de îndepărtare cu ghidare a cărui lungime se poate stabiliprin cronometrare sau este limitat de un radial sau de o distanţăDME;
• -un viraj de 45°;
• -un traiect fără ghidare a cărui lungime se stabileşte princronometrare de 1 minut de la iniţierea virajul de 45° pentrucategoriile de aeronave A şi B şi de 1 minut şi 15 secunde de lainiţierea virajului pentru categoriile de aeronave C,D şi E;
• -un viraj de 180° în direcţia opusă pentru interceptarea traiectului deapropiere.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 143 - 25/04/2000
b) virajul procedural 80°/260° - procedura este iniţiată la un mijloc deradionavigaţie sau reper şi este compusă din următoarele elemente în ordine:
• -un traiect de îndepărtare cu ghidare a cărui lungime se poate stabiliprin cronometrare sau este limitat de un radial sau de o distanţăDME;
• -un viraj de 80°;
• -un viraj de 260° în direcţia opusă pentru interceptarea traiectului deapropiere.
c) virajul de bază – procedura este iniţiată la un mijloc deradionavigaţie şi constă dintr-un traiect de îndepărtare cu ghidare a cărui lungimese stabileşte prin cronometrare sau este limitat de o distanţă DME, urmat de unviraj pentru a intercepta şi a urmări un traiect de apropiere cu ghidare.
9.2.1.2B. Procedura racetrack
Procedura racetrack constă dintr-o serie de elemente executate înurmătoarea ordine:
• -un viraj de 180° iniţiat la verticala unui reper sau mijloc deradionavigaţie;
• -un traiect de îndepărtare fără ghidare a cărui lungime se stabileşteprin cronometrare de 1, 2 sau 3 minute;
• -un viraj de 180° executat în acelaşi sens ca primul viraj;
• -un traiect de apropiere cu ghidare pentru a reveni la acelaşi repersau mijloc de radionavigaţie.
Limitarea traiectului de îndepărtare, ca o alternativă a cronometrării, sepoate face printr-o distanţă DME sau intersecţie cu un radial/relevment.
9.2.1.2C. Proceduri de zbor pentru procedurile de inversare şi racetrack
1. Intrarea în proceduri
De regulă, fără o altă specificare, intrarea într-o procedură se face printr-un traiect dintr-un sector de ± 30° faţă de traiectul de îndepărtare a procedurii deinversare. Pentru virajele de bază, sectorul de intrare precizat anterior se extindepentru a include şi traiectul invers al traiectului de apropiere al acestei proceduri.
Intrarea în procedura racetrack se face identic cu intrarea într-o procedurăde aşteptare, dar cu următoarele elemente suplimentare:
• pentru intrarea decalată într-o procedură racetrack cu traiectul deîndepărtare cronometrat cu 2 sau 3 minute - după survolareareperului sau mijlocului de radionavigaţie, traiectul de îndepărtaredecalat cu 30° fată de opusul traiectului de apropiere se va limitaprin cronometrare la 1 minut şi 30 secunde după care se va vira pe
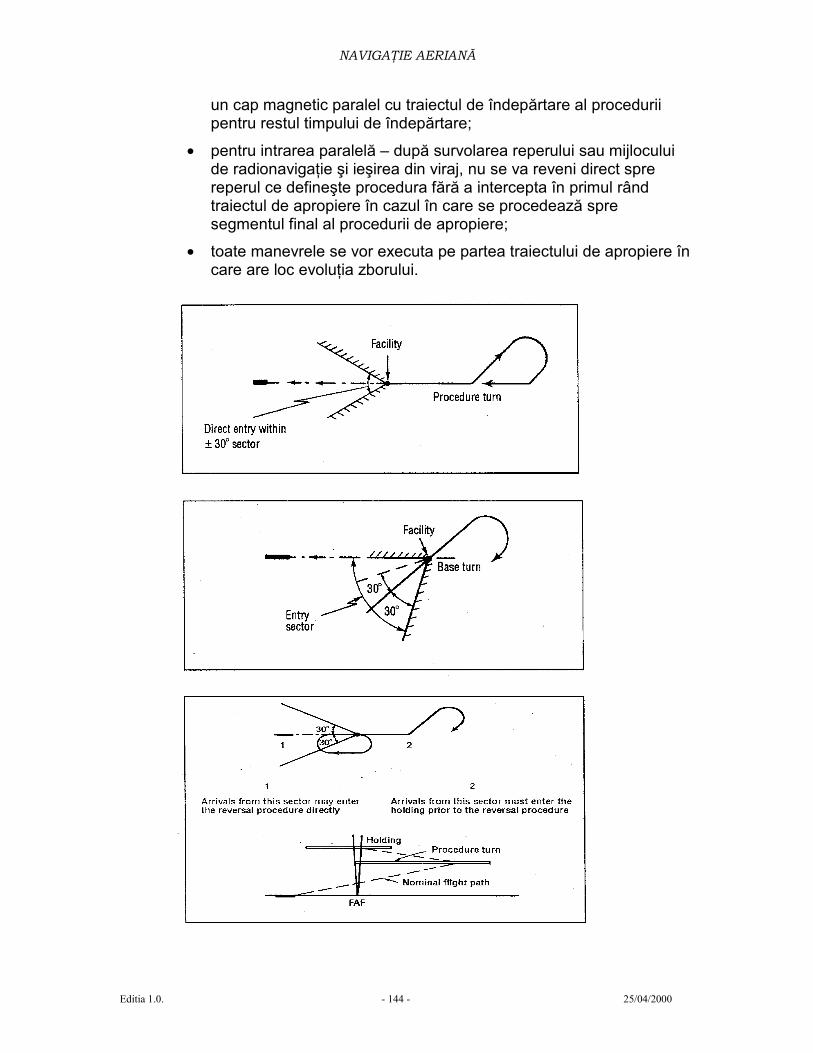
NAVIGAŢIE AERIANĂ
Editia 1.0. - 144 - 25/04/2000
un cap magnetic paralel cu traiectul de îndepărtare al proceduriipentru restul timpului de îndepărtare;
• pentru intrarea paralelă – după survolarea reperului sau mijloculuide radionavigaţie şi ieşirea din viraj, nu se va reveni direct sprereperul ce defineşte procedura fără a intercepta în primul rândtraiectul de apropiere în cazul în care se procedează spresegmentul final al procedurii de apropiere;
• toate manevrele se vor executa pe partea traiectului de apropiere încare are loc evoluţia zborului.
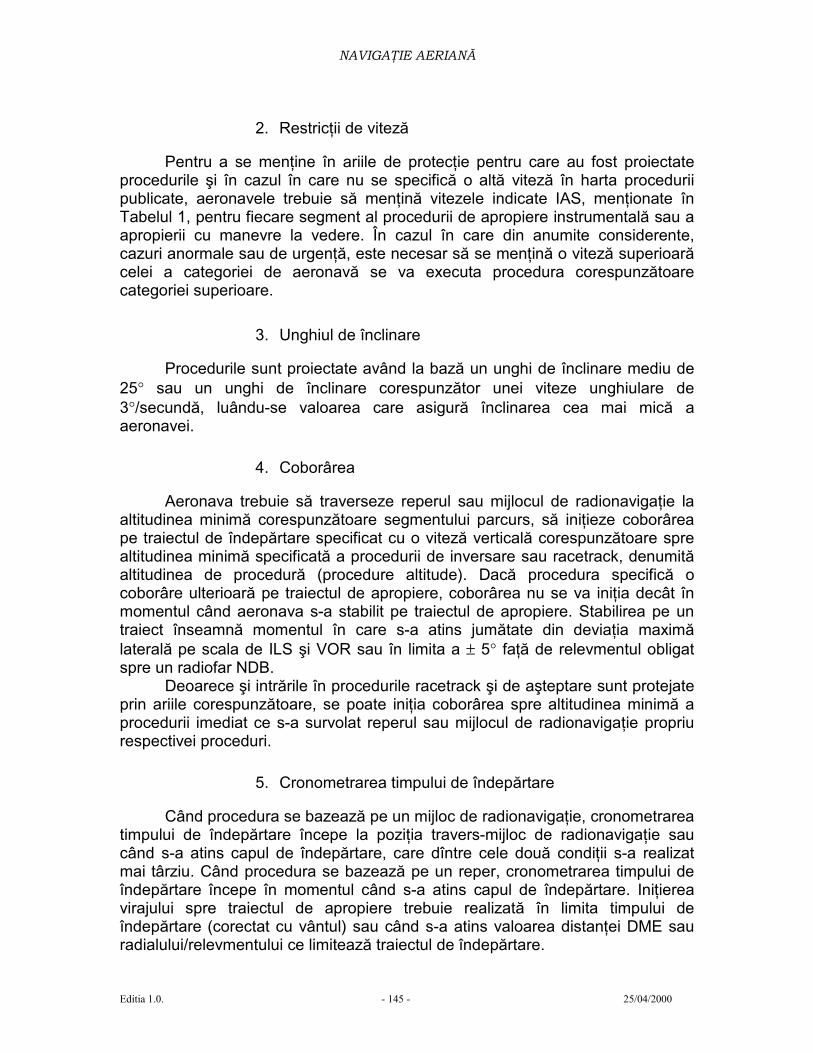
NAVIGAŢIE AERIANĂ
Editia 1.0. - 145 - 25/04/2000
2. Restricţii de viteză
Pentru a se menţine în ariile de protecţie pentru care au fost proiectateprocedurile şi în cazul în care nu se specifică o altă viteză în harta proceduriipublicate, aeronavele trebuie să menţină vitezele indicate IAS, menţionate înTabelul 1, pentru fiecare segment al procedurii de apropiere instrumentală sau aapropierii cu manevre la vedere. În cazul în care din anumite considerente,cazuri anormale sau de urgenţă, este necesar să se menţină o viteză superioarăcelei a categoriei de aeronavă se va executa procedura corespunzătoarecategoriei superioare.
3. Unghiul de înclinare
Procedurile sunt proiectate având la bază un unghi de înclinare mediu de25° sau un unghi de înclinare corespunzător unei viteze unghiulare de3°/secundă, luându-se valoarea care asigură înclinarea cea mai mică aaeronavei.
4. Coborârea
Aeronava trebuie să traverseze reperul sau mijlocul de radionavigaţie laaltitudinea minimă corespunzătoare segmentului parcurs, să iniţieze coborâreape traiectul de îndepărtare specificat cu o viteză verticală corespunzătoare sprealtitudinea minimă specificată a procedurii de inversare sau racetrack, denumităaltitudinea de procedură (procedure altitude). Dacă procedura specifică ocoborâre ulterioară pe traiectul de apropiere, coborârea nu se va iniţia decât înmomentul când aeronava s-a stabilit pe traiectul de apropiere. Stabilirea pe untraiect înseamnă momentul în care s-a atins jumătate din deviaţia maximălaterală pe scala de ILS şi VOR sau în limita a ± 5° faţă de relevmentul obligatspre un radiofar NDB.
Deoarece şi intrările în procedurile racetrack şi de aşteptare sunt protejateprin ariile corespunzătoare, se poate iniţia coborârea spre altitudinea minimă aprocedurii imediat ce s-a survolat reperul sau mijlocul de radionavigaţie propriurespectivei proceduri.
5. Cronometrarea timpului de îndepărtare
Când procedura se bazează pe un mijloc de radionavigaţie, cronometrareatimpului de îndepărtare începe la poziţia travers-mijloc de radionavigaţie saucând s-a atins capul de îndepărtare, care dîntre cele două condiţii s-a realizatmai târziu. Când procedura se bazează pe un reper, cronometrarea timpului deîndepărtare începe în momentul când s-a atins capul de îndepărtare. Iniţiereavirajului spre traiectul de apropiere trebuie realizată în limita timpului deîndepărtare (corectat cu vântul) sau când s-a atins valoarea distanţei DME sauradialului/relevmentului ce limitează traiectul de îndepărtare.
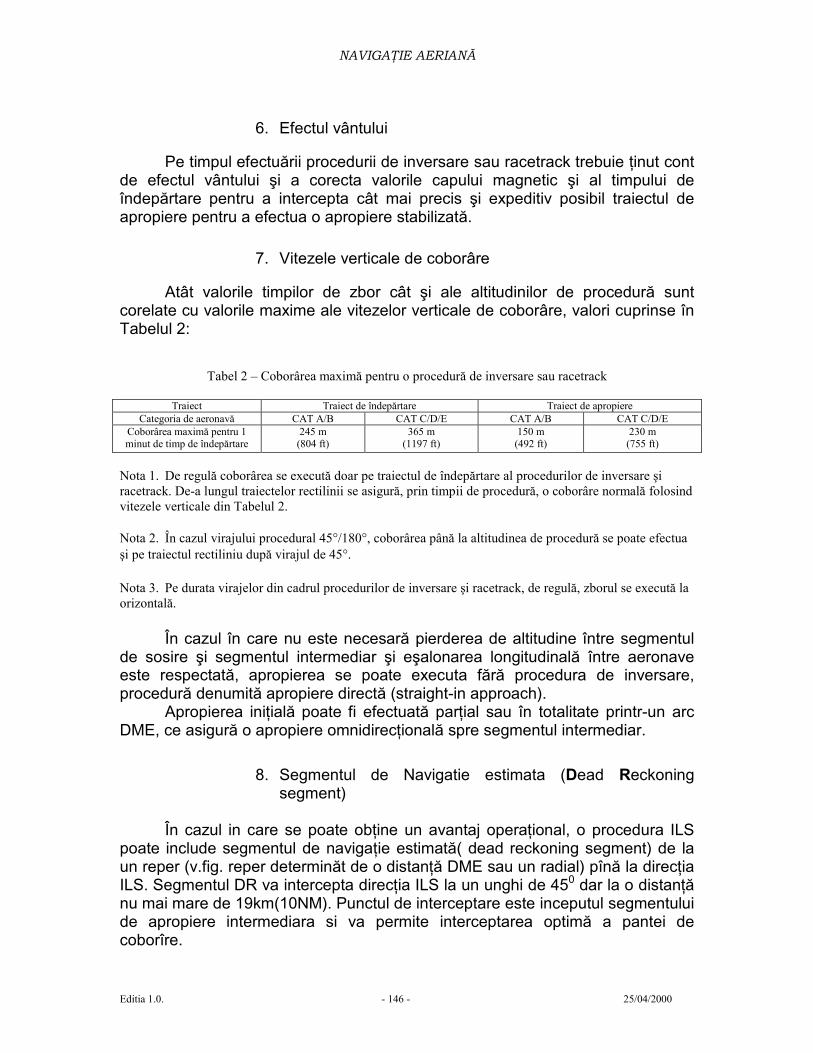
NAVIGAŢIE AERIANĂ
Editia 1.0. - 146 - 25/04/2000
6. Efectul vântului
Pe timpul efectuării procedurii de inversare sau racetrack trebuie ţinut contde efectul vântului şi a corecta valorile capului magnetic şi al timpului deîndepărtare pentru a intercepta cât mai precis şi expeditiv posibil traiectul deapropiere pentru a efectua o apropiere stabilizată.
7. Vitezele verticale de coborâre
Atât valorile timpilor de zbor cât şi ale altitudinilor de procedură suntcorelate cu valorile maxime ale vitezelor verticale de coborâre, valori cuprinse înTabelul 2:
Tabel 2 – Coborârea maximă pentru o procedură de inversare sau racetrack
Traiect Traiect de îndepărtare Traiect de apropiereCategoria de aeronavă CAT A/B CAT C/D/E CAT A/B CAT C/D/E
Coborârea maximă pentru 1minut de timp de îndepărtare
245 m(804 ft)
365 m(1197 ft)
150 m(492 ft)
230 m(755 ft)
Nota 1. De regulă coborârea se execută doar pe traiectul de îndepărtare al procedurilor de inversare şiracetrack. De-a lungul traiectelor rectilinii se asigură, prin timpii de procedură, o coborâre normală folosindvitezele verticale din Tabelul 2.
Nota 2. În cazul virajului procedural 45°/180°, coborârea până la altitudinea de procedură se poate efectuaşi pe traiectul rectiliniu după virajul de 45°.
Nota 3. Pe durata virajelor din cadrul procedurilor de inversare şi racetrack, de regulă, zborul se execută laorizontală.
În cazul în care nu este necesară pierderea de altitudine între segmentulde sosire şi segmentul intermediar şi eşalonarea longitudinală între aeronaveeste respectată, apropierea se poate executa fără procedura de inversare,procedură denumită apropiere directă (straight-in approach).
Apropierea iniţială poate fi efectuată parţial sau în totalitate printr-un arcDME, ce asigură o apropiere omnidirecţională spre segmentul intermediar.
8. Segmentul de Navigatie estimata (Dead Reckoningsegment)
În cazul in care se poate obţine un avantaj operaţional, o procedura ILSpoate include segmentul de navigaţie estimată( dead reckoning segment) de laun reper (v.fig. reper determinăt de o distanţă DME sau un radial) pînă la direcţiaILS. Segmentul DR va intercepta direcţia ILS la un unghi de 450 dar la o distanţănu mai mare de 19km(10NM). Punctul de interceptare este inceputul segmentuluide apropiere intermediara si va permite interceptarea optimă a pantei decoborîre.
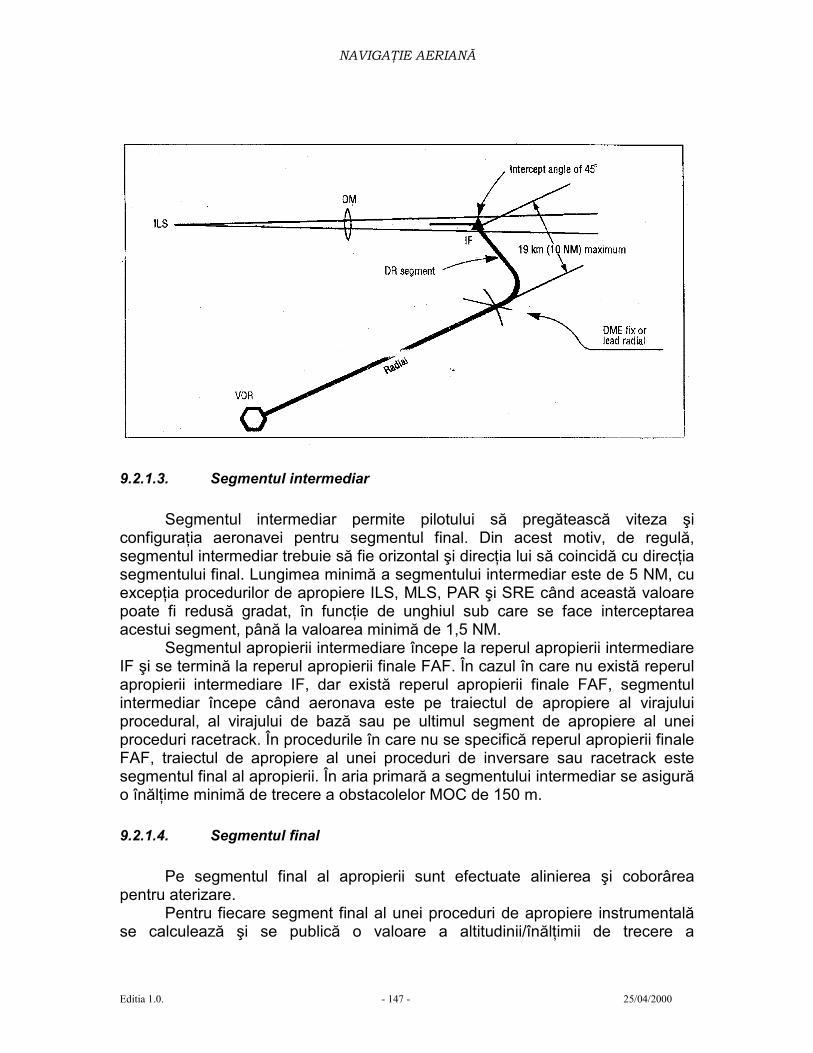
NAVIGAŢIE AERIANĂ
Editia 1.0. - 147 - 25/04/2000
9.2.1.3. Segmentul intermediar
Segmentul intermediar permite pilotului să pregătească viteza şiconfiguraţia aeronavei pentru segmentul final. Din acest motiv, de regulă,segmentul intermediar trebuie să fie orizontal şi direcţia lui să coincidă cu direcţiasegmentului final. Lungimea minimă a segmentului intermediar este de 5 NM, cuexcepţia procedurilor de apropiere ILS, MLS, PAR şi SRE când această valoarepoate fi redusă gradat, în funcţie de unghiul sub care se face interceptareaacestui segment, până la valoarea minimă de 1,5 NM.
Segmentul apropierii intermediare începe la reperul apropierii intermediareIF şi se termină la reperul apropierii finale FAF. În cazul în care nu există reperulapropierii intermediare IF, dar există reperul apropierii finale FAF, segmentulintermediar începe când aeronava este pe traiectul de apropiere al virajuluiprocedural, al virajului de bază sau pe ultimul segment de apropiere al uneiproceduri racetrack. În procedurile în care nu se specifică reperul apropierii finaleFAF, traiectul de apropiere al unei proceduri de inversare sau racetrack estesegmentul final al apropierii. În aria primară a segmentului intermediar se asigurăo înălţime minimă de trecere a obstacolelor MOC de 150 m.
9.2.1.4. Segmentul final
Pe segmentul final al apropierii sunt efectuate alinierea şi coborâreapentru aterizare.
Pentru fiecare segment final al unei proceduri de apropiere instrumentalăse calculează şi se publică o valoare a altitudinii/înălţimii de trecere a
NAVIGAŢIE AERIANĂ
Editia 1.0. - 148 - 25/04/2000
obstacolelor OCA/H (Obstacle Clearance Altitude/Height) în Publicaţia deInformare Aeronautică. Această valoare reprezintă, în general, oaltitudine/înălţime sub care aeronava nu poate coborâ fără să încalce criteriile detrecere a obstacolelor. Din aceste valori ale OCA/H se calculează de cătreoperatorii aerieni şi de către companiile care editează manuale de rută valorilealtitudinilor/înălţimilor de decizie DA/H (Decision Altitude/Height), pentruapropierile de precizie şi valorile altitudinilor/înălţimilor minime de coborâreMDA/H (Minimun Descent Altitude/Height), pentru apropierile fără pantăelectronică. Valorile DA/H şi MDA/H împreună cu valorile vizibilităţii şi/sau RVRreprezintă minimele de operare la aerodromuri.
Apropierea finală se poate executa la o pistă pentru o aterizare directă(straight-in landing) sau la un aerodrom pentru o apropiere cu manevre la vedere(circling).
Efectuarea aterizării directe presupune îndeplinirea a trei condiţii:• să se fi efectuat o procedură de apropiere instrumentală;
• traiectul apropierii finale să formeze cu prelungirea axei pistei ununghi maxim de 30° şi distanţa între pragul pistei şi punctul în caretraiectul apropierii finale intersectează prelungirea axei pistei să nufie mai mică de 900 m – apropiere decalată (offset approach);
• distanţa de la punctul în care s-a atins în coborâre valoarea MDA/H,cu referinţa vizuală stabilită, până la zona de contact TDZ (Touch-Down Zone) să permită coborârea cu o valoare normală a vitezeiverticale (maxim 1000 ft/min) folosind manevre normale.
Când cel puţin una dîntre condiţiile de mai sus nu este îndeplinită,continuarea apropierii prin procedura de aterizare directă nu este autorizată, iarharta procedurii de apropiere instrumentală specifică acest lucru, la secţiuneacorespunzătoare, prin abrevierea NA (Not Authorized). Dacă această procedurănu este autorizată, continuarea apropierii în vederea aterizării se poate efectuadoar prin procedura de apropiere cu manevre la vedere (circling) la aceiaşi pistă,pentru direcţia opusă a pistei de apropiere instrumentală sau la oricare altă pistăde la aerodromul respectiv, funcţie de autorizarea primită.
Există cazuri când nu se publică minime de operare pentru procedura deaterizare directă şi nici nu există abrevierea NA, dar există minime de operarepentru procedura de apropiere cu manevre la vedere. În acest caz se poateefectua procedura de apropiere instrumentală continuată de o aterizare directăfolosind minimele procedurii de apropiere cu manevre la vedere.
9.2.1.4A. Segmentul final al unei apropieri fără pantă electronică
Segmentul final începe la un reper sau mijloc de radionavigaţie numitreper al apropierii finale FAF şi se termină la punctul apropierii întrerupte MAP(Missed Approach Point), având o lungime optimă de 9 km(5 NM), iar maximă de19km(10 NM). Reperul apropierii finale FAF se traversează la o altitudinespecificată şi se iniţiază coborârea cu un gradient publicat până laaltitudinea/înălţimea minimă de coborâre MDA/H; când informaţii de distanţă sunt
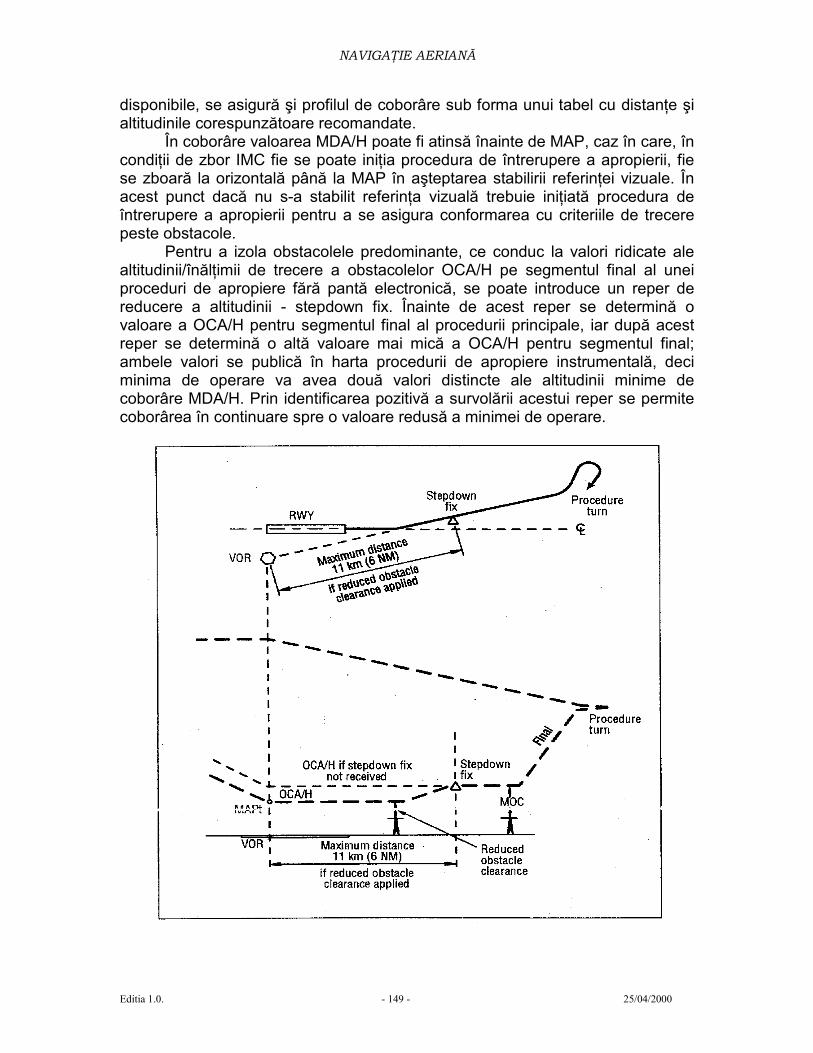
NAVIGAŢIE AERIANĂ
Editia 1.0. - 149 - 25/04/2000
disponibile, se asigură şi profilul de coborâre sub forma unui tabel cu distanţe şialtitudinile corespunzătoare recomandate.
În coborâre valoarea MDA/H poate fi atinsă înainte de MAP, caz în care, încondiţii de zbor IMC fie se poate iniţia procedura de întrerupere a apropierii, fiese zboară la orizontală până la MAP în aşteptarea stabilirii referinţei vizuale. Înacest punct dacă nu s-a stabilit referinţa vizuală trebuie iniţiată procedura deîntrerupere a apropierii pentru a se asigura conformarea cu criteriile de trecerepeste obstacole.
Pentru a izola obstacolele predominante, ce conduc la valori ridicate alealtitudinii/înălţimii de trecere a obstacolelor OCA/H pe segmentul final al uneiproceduri de apropiere fără pantă electronică, se poate introduce un reper dereducere a altitudinii - stepdown fix. Înainte de acest reper se determină ovaloare a OCA/H pentru segmentul final al procedurii principale, iar după acestreper se determină o altă valoare mai mică a OCA/H pentru segmentul final;ambele valori se publică în harta procedurii de apropiere instrumentală, deciminima de operare va avea două valori distincte ale altitudinii minime decoborâre MDA/H. Prin identificarea pozitivă a survolării acestui reper se permitecoborârea în continuare spre o valoare redusă a minimei de operare.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 150 - 25/04/2000
Punctul de coborâre la vedere VDP (concept SUA)
Standardul american de construcţie al procedurilor instrumentale (TERPS) prevede pentru uneleproceduri de apropiere fără pantă electronică cu aterizare directă introducerea unui reper, numit punct decoborâre la vedere VDP (Visual Descent Point), pentru a se preveni o coborâre prematură sau una târzie dela altitudinea/înălţimea minimă de coborâre MDA/H. Segmentul final al unei apropieri conţine o porţiunevizuală, care începe la VDP şi se sfârşeşte la pragul pistei. Punctul de coborâre la vedere VDP este definitca punctul de pe traiectul apropierii finale al unei apropieri fără pantă electronică de la care, cu referinţavizuală stabilită, se poate iniţia o coborâre normală de la valoarea MDA/H la zona de contact TDZ. Pesegmentul final al unei astfel de proceduri se zboară instrumental până la atingerea reperului VDP, chiardacă s-a stabilit anterior referinţa vizuală. După identificarea instrumentală a VDP se poate părăsi MDA/H,iar dacă apropierea instrumentală a fost decalată (offset approach) se poate părăsi direcţia de apropierefinală pentru a lua un cap magnetic convenabil de interceptare a prelungirii axei pistei.
9.2.1.4B. Segmentul final al unei apropieri de precizie ILS
Segmentul final al unei proceduri de apropiere ILS începe la punctulapropierii finale – FAP (Final Approach Point), care este un punct în spaţiu pedirecţia ILS unde altitudinea apropierii intermediare intersectează traiectoria decoborâre ILS – GP şi se termină la punctul apropierii întrerupte MAP.
În cazul procedurilor de apropiere de precizie, minima de operare esteconstituită din valori de RVR/vizibilitate şi altitudinea/înălţimea de decizie DA/H.Această altitudine/înălţime are valoarea egală sau mai mare decâtaltitudinea/înălţimea de trecere a obstacolelor OCA/H. Această valoare a OCA/Hse calculează ţinând cont de obstacolele atât din aria apropierii finale cât şi decele din aria apropierii întrerupte.
Pentru executarea procedurii de apropiere instrumentală de precizie, pesegmentul final trebuie să existe un reper de radionavigaţie publicat (de regulăeste radiomarkerul exterior OM) la verticala căruia să se poată verifica la bordcorectitudinea indicaţiilor traiectoriei pantei de coborâre GP. Numai în cazul încare rezultatul verificării este corect se admite continuarea procedurii deapropiere, în condiţii IMC, până la minima de operare.
Dacă nu există radiomarker exterior sau echivalentul său, echipajul trebuiesă decidă fie să continue sau să întrerupă apropierea înainte de a coborâ pesegmentul final al apropierii sub o înălţime de 1000 ft deasupra coteiaerodromului.
Când una dîntre componentele sistemului ILS este inoperativă va rezultauna sau o combinaţie din situaţiilor următoare:
• când radiofarul de direcţie este inoperativ procedura de apropiereILS nu este autorizată;
• când radiofarul de pantă este inoperativ procedura de apropiere ILSse transformă în procedura de apropiere ILS cu GP inoperativă (ILSapproach with GP OUT);
• când radiomarkerul exterior OM este inoperativ, fără posibilitatea deînlocuire, procedura de apropiere ILS nu este autorizată, iar dacăacest fapt s-a constatat pe durata zborului pe segmentul final, încondiţii de zbor IMC, se va proceda la întreruperea apropierii;
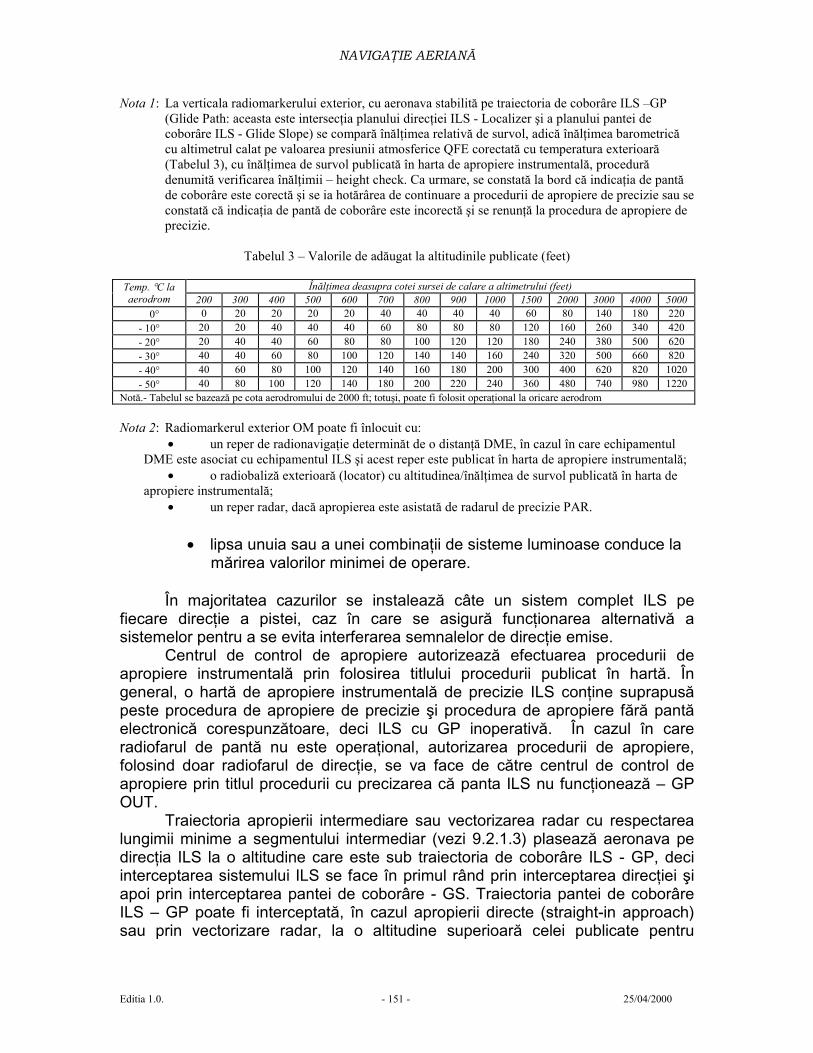
NAVIGAŢIE AERIANĂ
Editia 1.0. - 151 - 25/04/2000
Nota 1: La verticala radiomarkerului exterior, cu aeronava stabilită pe traiectoria de coborâre ILS –GP(Glide Path: aceasta este intersecţia planului direcţiei ILS - Localizer şi a planului pantei decoborâre ILS - Glide Slope) se compară înălţimea relativă de survol, adică înălţimea barometricăcu altimetrul calat pe valoarea presiunii atmosferice QFE corectată cu temperatura exterioară(Tabelul 3), cu înălţimea de survol publicată în harta de apropiere instrumentală, procedurădenumită verificarea înălţimii – height check. Ca urmare, se constată la bord că indicaţia de pantăde coborâre este corectă şi se ia hotărârea de continuare a procedurii de apropiere de precizie sau seconstată că indicaţia de pantă de coborâre este incorectă şi se renunţă la procedura de apropiere deprecizie.
Tabelul 3 – Valorile de adăugat la altitudinile publicate (feet)
Înălţimea deasupra cotei sursei de calare a altimetrului (feet)Temp. °C laaerodrom 200 300 400 500 600 700 800 900 1000 1500 2000 3000 4000 5000
0° 0 20 20 20 20 40 40 40 40 60 80 140 180 220- 10° 20 20 40 40 40 60 80 80 80 120 160 260 340 420- 20° 20 40 40 60 80 80 100 120 120 180 240 380 500 620- 30° 40 40 60 80 100 120 140 140 160 240 320 500 660 820- 40° 40 60 80 100 120 140 160 180 200 300 400 620 820 1020- 50° 40 80 100 120 140 180 200 220 240 360 480 740 980 1220
Notă.- Tabelul se bazează pe cota aerodromului de 2000 ft; totuşi, poate fi folosit operaţional la oricare aerodrom
Nota 2: Radiomarkerul exterior OM poate fi înlocuit cu:• un reper de radionavigaţie determinăt de o distanţă DME, în cazul în care echipamentul
DME este asociat cu echipamentul ILS şi acest reper este publicat în harta de apropiere instrumentală;• o radiobaliză exterioară (locator) cu altitudinea/înălţimea de survol publicată în harta de
apropiere instrumentală;• un reper radar, dacă apropierea este asistată de radarul de precizie PAR.
• lipsa unuia sau a unei combinaţii de sisteme luminoase conduce lamărirea valorilor minimei de operare.
În majoritatea cazurilor se instalează câte un sistem complet ILS pefiecare direcţie a pistei, caz în care se asigură funcţionarea alternativă asistemelor pentru a se evita interferarea semnalelor de direcţie emise.
Centrul de control de apropiere autorizează efectuarea procedurii deapropiere instrumentală prin folosirea titlului procedurii publicat în hartă. Îngeneral, o hartă de apropiere instrumentală de precizie ILS conţine suprapusăpeste procedura de apropiere de precizie şi procedura de apropiere fără pantăelectronică corespunzătoare, deci ILS cu GP inoperativă. În cazul în careradiofarul de pantă nu este operaţional, autorizarea procedurii de apropiere,folosind doar radiofarul de direcţie, se va face de către centrul de control deapropiere prin titlul procedurii cu precizarea că panta ILS nu funcţionează – GPOUT.
Traiectoria apropierii intermediare sau vectorizarea radar cu respectarealungimii minime a segmentului intermediar (vezi 9.2.1.3) plasează aeronava pedirecţia ILS la o altitudine care este sub traiectoria de coborâre ILS - GP, deciinterceptarea sistemului ILS se face în primul rând prin interceptarea direcţiei şiapoi prin interceptarea pantei de coborâre - GS. Traiectoria pantei de coborâreILS – GP poate fi interceptată, în cazul apropierii directe (straight-in approach)sau prin vectorizare radar, la o altitudine superioară celei publicate pentru
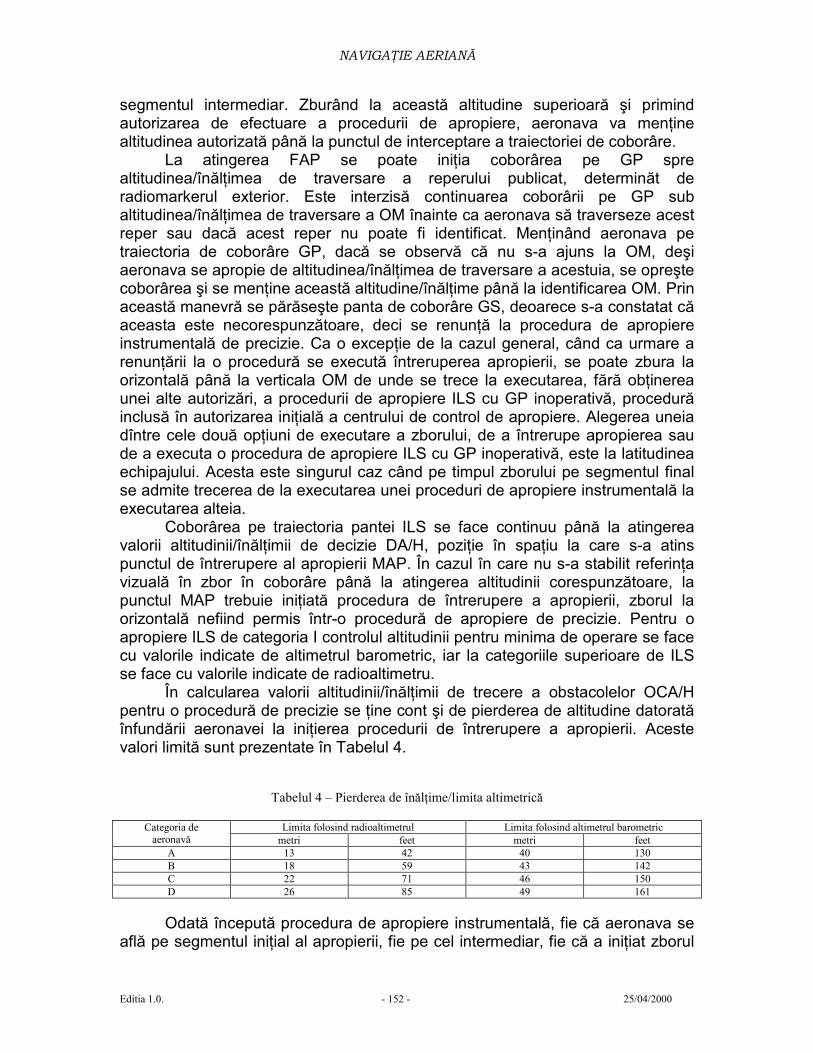
NAVIGAŢIE AERIANĂ
Editia 1.0. - 152 - 25/04/2000
segmentul intermediar. Zburând la această altitudine superioară şi primindautorizarea de efectuare a procedurii de apropiere, aeronava va menţinealtitudinea autorizată până la punctul de interceptare a traiectoriei de coborâre.
La atingerea FAP se poate iniţia coborârea pe GP sprealtitudinea/înălţimea de traversare a reperului publicat, determinăt deradiomarkerul exterior. Este interzisă continuarea coborârii pe GP subaltitudinea/înălţimea de traversare a OM înainte ca aeronava să traverseze acestreper sau dacă acest reper nu poate fi identificat. Menţinând aeronava petraiectoria de coborâre GP, dacă se observă că nu s-a ajuns la OM, deşiaeronava se apropie de altitudinea/înălţimea de traversare a acestuia, se opreştecoborârea şi se menţine această altitudine/înălţime până la identificarea OM. Prinaceastă manevră se părăseşte panta de coborâre GS, deoarece s-a constatat căaceasta este necorespunzătoare, deci se renunţă la procedura de apropiereinstrumentală de precizie. Ca o excepţie de la cazul general, când ca urmare arenunţării la o procedură se execută întreruperea apropierii, se poate zbura laorizontală până la verticala OM de unde se trece la executarea, fără obţinereaunei alte autorizări, a procedurii de apropiere ILS cu GP inoperativă, procedurăinclusă în autorizarea iniţială a centrului de control de apropiere. Alegerea uneiadîntre cele două opţiuni de executare a zborului, de a întrerupe apropierea saude a executa o procedura de apropiere ILS cu GP inoperativă, este la latitudineaechipajului. Acesta este singurul caz când pe timpul zborului pe segmentul finalse admite trecerea de la executarea unei proceduri de apropiere instrumentală laexecutarea alteia.
Coborârea pe traiectoria pantei ILS se face continuu până la atingereavalorii altitudinii/înălţimii de decizie DA/H, poziţie în spaţiu la care s-a atinspunctul de întrerupere al apropierii MAP. În cazul în care nu s-a stabilit referinţavizuală în zbor în coborâre până la atingerea altitudinii corespunzătoare, lapunctul MAP trebuie iniţiată procedura de întrerupere a apropierii, zborul laorizontală nefiind permis într-o procedură de apropiere de precizie. Pentru oapropiere ILS de categoria I controlul altitudinii pentru minima de operare se facecu valorile indicate de altimetrul barometric, iar la categoriile superioare de ILSse face cu valorile indicate de radioaltimetru.
În calcularea valorii altitudinii/înălţimii de trecere a obstacolelor OCA/Hpentru o procedură de precizie se ţine cont şi de pierderea de altitudine datoratăînfundării aeronavei la iniţierea procedurii de întrerupere a apropierii. Acestevalori limită sunt prezentate în Tabelul 4.
Tabelul 4 – Pierderea de înălţime/limita altimetrică
Limita folosind radioaltimetrul Limita folosind altimetrul barometricCategoria deaeronavă metri feet metri feet
A 13 42 40 130B 18 59 43 142C 22 71 46 150D 26 85 49 161
Odată începută procedura de apropiere instrumentală, fie că aeronava seaflă pe segmentul iniţial al apropierii, fie pe cel intermediar, fie că a iniţiat zborul
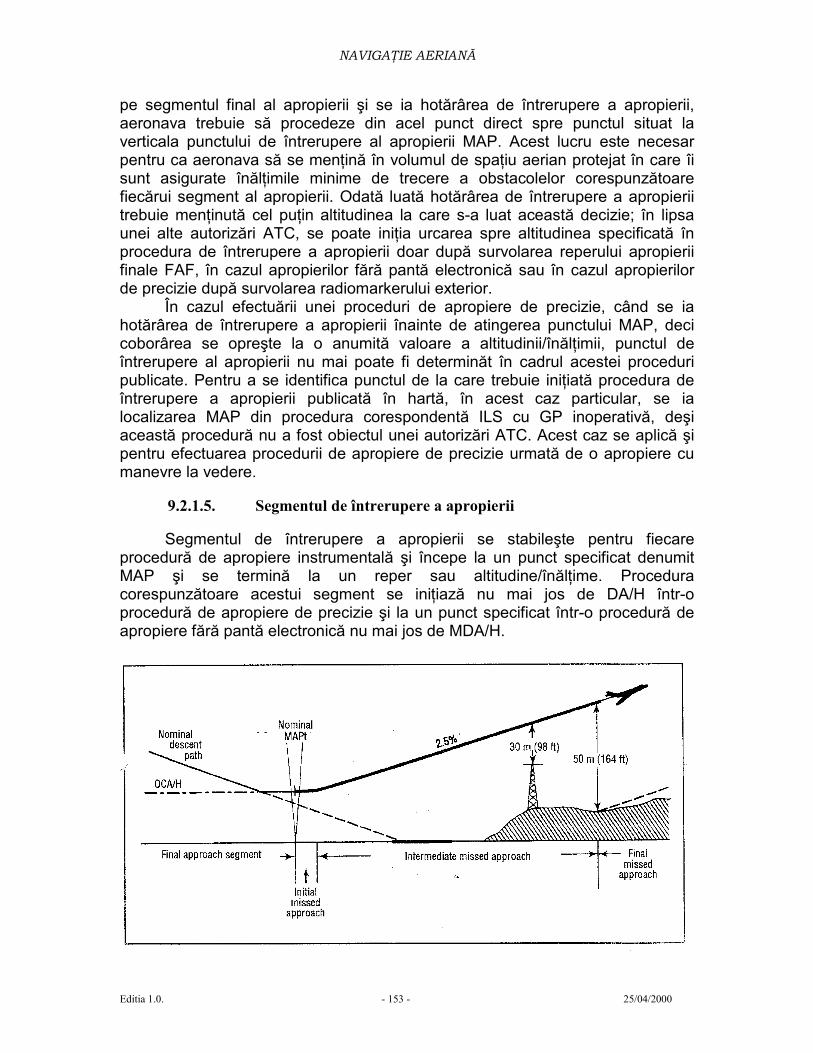
NAVIGAŢIE AERIANĂ
Editia 1.0. - 153 - 25/04/2000
pe segmentul final al apropierii şi se ia hotărârea de întrerupere a apropierii,aeronava trebuie să procedeze din acel punct direct spre punctul situat laverticala punctului de întrerupere al apropierii MAP. Acest lucru este necesarpentru ca aeronava să se menţină în volumul de spaţiu aerian protejat în care îisunt asigurate înălţimile minime de trecere a obstacolelor corespunzătoarefiecărui segment al apropierii. Odată luată hotărârea de întrerupere a apropieriitrebuie menţinută cel puţin altitudinea la care s-a luat această decizie; în lipsaunei alte autorizări ATC, se poate iniţia urcarea spre altitudinea specificată înprocedura de întrerupere a apropierii doar după survolarea reperului apropieriifinale FAF, în cazul apropierilor fără pantă electronică sau în cazul apropierilorde precizie după survolarea radiomarkerului exterior.
În cazul efectuării unei proceduri de apropiere de precizie, când se iahotărârea de întrerupere a apropierii înainte de atingerea punctului MAP, decicoborârea se opreşte la o anumită valoare a altitudinii/înălţimii, punctul deîntrerupere al apropierii nu mai poate fi determinăt în cadrul acestei proceduripublicate. Pentru a se identifica punctul de la care trebuie iniţiată procedura deîntrerupere a apropierii publicată în hartă, în acest caz particular, se ialocalizarea MAP din procedura corespondentă ILS cu GP inoperativă, deşiaceastă procedură nu a fost obiectul unei autorizări ATC. Acest caz se aplică şipentru efectuarea procedurii de apropiere de precizie urmată de o apropiere cumanevre la vedere.
9.2.1.5. Segmentul de întrerupere a apropierii
Segmentul de întrerupere a apropierii se stabileşte pentru fiecareprocedură de apropiere instrumentală şi începe la un punct specificat denumitMAP şi se termină la un reper sau altitudine/înălţime. Proceduracorespunzătoare acestui segment se iniţiază nu mai jos de DA/H într-oprocedură de apropiere de precizie şi la un punct specificat într-o procedură deapropiere fără pantă electronică nu mai jos de MDA/H.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 154 - 25/04/2000
Punctul de întrerupere al apropierii MAP (Missed Approach Point) într-oprocedură poate fi:
• -în cazul procedurilor de apropiere de precizie este intersecţiatraiectoriei de coborâre GP cu valoarea altitudinii/înălţimii de decizieDA/H;
• în cazul procedurilor de apropiere fără pantă electronică este:• -un mijloc de radionavigaţie sau• -un reper sau• -o distanţă specificată de la reperul apropierii finale FAF.
Se publică o singură procedură de urmat în cazul unei întreruperi aapropierii pentru fiecare procedură de apropiere instrumentală. Aceastăprocedură, când se consideră necesar, poate fi înlocuită prin vectorizare radar,caz în care controlorul de trafic aerian trebuie să menţină aeronava în volumul despaţiu aerian ce asigură înălţimea minimă de trecere peste obstacolele din ariade întrerupere a apropierii. În general vectorizarea va fi efectuată de-a lungulsegmentelor de întrerupere a apropierii publicate.
Procedura de întrerupere a apropierii are trei faze:• -faza iniţială, care începe la MAPt şi se termină la punctul unde se
stabileşte urcarea. Pe durata acestei faze, din cauza schimbăriiconfiguraţiei aeronavei, nu se prevăd viraje;
• -faza intermediară, în care se continuă urcarea, în mod normal înlinie dreaptă, până la punctul unde se realizează şi se poatemenţine o înălţime de 50 m deasupra obstacolelor. În această fazătraiectul poate fi schimbat cu o valoare maximă de 15°;
• -faza finală, care începe la punctul unde s-a atins şi se poatemenţine o înălţime de 50 m deasupra obstacolelor şi se termină laun punct de la care se poate iniţia o nouă apropiere, un zbor în zonade aşteptare sau revenirea la zborul pe rută.
Gradientul nominal de urcare într-o procedură de întrerupere a apropieriieste de 2,5%. În cazul în care procedura se bazează pe un alt gradient decât2,5%, acesta trebuie publicat pe harta procedurii de apropiere instrumentală.
Procedurile de întrerupere a apropierii pot fi în linie dreaptă (straightmissed approach) sau cu viraj (turning missed approach). Cele din urmă seîmpart în proceduri de întrerupere a apropierii cu viraj iniţiat la oaltitudine/înălţime desemnată TNA/H (Turning Altitude/Height) şi în proceduri deîntrerupere a apropierii cu viraj la un punct de viraj desemnat TP (Turning Point).În anumite zone obstacolate, se pot stabili proceduri de întrerupere a apropieriicu viraj specificat mai mare de 15° la MAPt.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 155 - 25/04/2000
9.3. Proceduri de apropiere la vedere
Procedurile de apropiere la vedere se clasifică în două categorii:• procedura de apropiere la vedere - visual approach;
• procedura de apropiere cu manevre la vedere - visual manoeuvring(circling).
9.3.1 Procedura de apropiere la vedere – visual approach
În orice punct dintr-o procedură de apropiere instrumentală iniţiată, încazul în care pilotul a stabilit referinţa vizuală şi are certitudinea menţineriiacestei referinţe până la aterizare, poate trece, cu autorizarea centrului decontrol de apropiere, la procedura de apropiere la vedere. Autorizarea pentru oprocedură de apropiere la vedere este considerată o autorizare IFR.
Deasemenea în zonele unde se asigură serviciul radar de către centrul decontrol de apropiere, aeronavele pot fi vectorizate fie spre direcţia de apropierefinală, punct de la care dacă s-a stabilit referinţa vizuală se poate efectua oprocedură de apropiere la vedere, fie spre un segment al turului de pistă (trafficpattern/circuit) de la care se poate efectua o procedură de apropiere la vedere.
Apropierea la vedere este o apropiere a unui zbor IFR când fie o parte sautoate părţile unei proceduri de apropiere instrumentală nu sunt îndeplinite şiapropierea este executată cu referintă vizuală asupra terenului. Deci, procedurade apropiere la vedere este o procedură care se efectuează după regulile dezbor instrumental IFR în condiţii meteorologice de zbor la vedere VMC, în carese renunţă la executarea unor elemente din procedură, dar traiectul urmat este înlimitele segmentelor procedurii de apropiere instrumentală iniţiată. Nefiind oprocedură publicată, deci neavând segmentul de întrerupere a apropierii, centrulde control de apropiere sau turnul de control de aerodrom trebuie să furnizeze, încaz de necesitate, instrucţiuni pilotului pentru a urma o procedură de întreruperea apropierii.
Dacă pilotul stabileşte referinţa vizuală înainte de terminarea procedurii deapropiere instrumentală autorizate, această procedură trebuie să se executeintegral cu excepţia cazului când se solicită şi este autorizat pentru o procedurăde apropiere la vedere.
Aeronavele ce zboară IFR, în condiţii meteorologice de zbor la vedereVMC în zona de aerodrom, pot fi vectorizate pentru a intercepta un segment alturului de pistă (landing pattern), de regulă latura mare, iar după stabilireareferinţei vizuale pot fi autorizate pentru a efectua procedura de apropiere lavedere. În acest caz, pentru a efectua procedura de apropiere, aeronavele vorzbura pe latura mare la o distanţă laterală de pistă de 1,5 la 2 NM şi vor coborî lao înălţime specifică (visual traffic pattern height) cuprinsă între 1000 feet şi 1500feet deasupra solului, înălţime care va fi menţinută până înaintea virajului deaxare pe segmentul final. Stabilirea anterioară a lungimii segmentului final al

NAVIGAŢIE AERIANĂ
Editia 1.0. - 156 - 25/04/2000
apropierii se face prin cronometrarea a 30 - 45 secunde de la poziţia travers apragului de aterizare în prelungirea laturii mari la o viteză indicată IAS pentruapropierea finală.
9.3.2. Procedura de apropiere cu manevre la vedere - visual manoeuvring(circling)
Procedura de apropiere cu manevre la vedere - visual manoeuvring(circling) este faza vizuală a zborului după terminarea unei apropieriinstrumentale pentru aducerea unei aeronave într-o poziţie pentru aterizare pe opistă care nu este poziţionată corespunzător pentru o aterizare directă (vezi9.2.1.4 - condiţiile pentru aterizarea directă). Prin procedura circling se poateefectua apropierea pentru aterizare la aceiaşi pistă pentru care s-a făcutapropierea instrumentală (vezi 9.2.1.4) sau pe direcţia opusă, paralelă sausecantă cu direcţia de apropiere instrumentală.
Pentru a efectua o procedură circling este iniţial obligatoriu să seefectueze o procedură de apropiere instrumentală, iar pe segmentul final să secoboare până la altitudinea/înălţimea de coborâre minimă MDA/Hcorespunzătoare procedurii circling, indiferent de valorile altitudinilor din minimade operare ale procedurii de apropiere instrumentală. Având în vedere că fazainstrumentală a zborului este urmată de una vizuală, pe segmentul final alapropierii instrumentale se va zbura cu o viteză indicată mai mare, de regulă, cu10 la 20 kt faţă de viteza de apropiere finală, iar aeronava nu este în configuraţiade aterizare. Dacă nu s-a stabilit referinţa vizuală şi s-a atins valoarea MDA/H, sepoate zbura la orizontală până la verticala MAP (vezi 9.2.1.4B – ultimul alineat).În cazul în care se stabileşte referinţa vizuală până la survolarea MAP, se poatetrece de la faza instrumentală a zborului la cea vizuală, adică se iniţiazăprocedura circling. Acest punct, care nu este determinăt printr-un reper saumijloc de radionavigaţie, este denumit punct de întrerupere al apropieriiinstrumentale – break off point.
Prin referinţă vizuală, în cazul executării procedurii circling, se înţelegeposibilitatea pilotului de a menţine în câmpul său vizual zona pistei, adică pragulpistei, sistemul luminos de apropiere sau alte marcaje identificabile cu pista.
În lipsa unei autorizări ATC privind sensul virajului de îndepărtare, acestase face ţinând cont ca următoarele viraje pentru axarea aeronavei pe segmentulfinal să se facă pe partea pilotului care efectuează apropierea. Se zboară petraiectul de îndepărtare cel mai scurt spre latura de bază (base leg) sau laturamare (downwind leg) a turului de pistă pentru pista în serviciu, neexistândrestricţii de survolare a aeroportului sau a altor piste. De regulă, distanţa lateralăfaţă de axa pistei de aterizare la care se execută o procedură circling variazăîntre 1 NM şi 2 NM. Sensul turului de pistă se stabileşte în funcţie de pista înserviciu (direcţia de aterizare) şi nu în funcţie de direcţia de apropiere finalăinstrumentală din care se intră în procedura circling. Pe durata procedurii circlingse menţine valoarea MDA/H până înaintea virajului de axare pe segmentul finalşi după intrarea în zona de vizibilitate a indicatorului vizual al pantei de coborâre(VASI, PAPI, T-VASI, etc.), în cazul că acest echipament există în stare de
NAVIGAŢIE AERIANĂ
Editia 1.0. - 157 - 25/04/2000
funcţionare. Stabilirea anterioară a lungimii segmentului final al unei proceduricircling se face, de regulă, prin cronometrarea a 30 secunde de la poziţia traversa pragului de aterizare în prelungirea laturii mari la o viteză indicată IAS pentruapropierea finală.
Valoarea MDA/H asigură înălţimea de trecere a obstacolelor într-o arie deprotecţie specifică pentru efectuarea procedurii circling. Ariile de protecţie suntcalculate ţinând cont de categoria de aeronavă, viteza indicată, viteza medie avântului şi de unghiul de înclinare de 20° al aeronavei în viraj. Dimensiunile ariilorde protecţie, a valorilor altitudinilor/înălţimilor de trecere a obstacolelor OCA/Hdeci şi a valorilor minimelor de operare cresc odată cu valorile vitezelor deevoluţie ale aeronavelor; de exemplu, distanţa maximă faţă de pragurile şi axelepistelor este de 1,68 NM, pentru aeronavele de categoria A şi ajunge la valoareade 6,94 NM pentru aeronavele de categoria E. Valorile minimelor de operarepentru procedura circling sunt clasificate în funcţie de valorile maxime alevitezelor indicate ale aeronavelor specificate pentru procedura circling. Dacă oaeronavă consideră necesar să evolueze la o viteză superioară celei specificate(pentru antremament sau în proceduri anormale), va trebui să-şi selectezevalorile minimelor de operare corespunzătoare vitezei la care efectueazăprocedura.
Dacă referinţa vizuală este pierdută pe durata efectuării procedurii circlingse va urma procedura de întrerupere a apropierii corespunzătoare procedurii deapropiere instrumentală din care s-a intrat în procedura circling. Deoarece capulmagnetic al aeronavei, în momentul luării deciziei de întrerupere a apropierii,poate diferi cu până la 180° de traiectul de întrerupere al apropierii publicat,tranziţia la zborul instrumental se face trecând prin următoarele faze pentru arămâne în cuprinsul volumului de spaţiu aerian protejat până când zborul estestabilizat pe un traiect IFR publicat:
• - se iniţiază un viraj în urcare spre pista de aterizare;
• - se face o trecere la verticala aerodromului;
• - se face un viraj pentru interceptarea traiectului din procedura deîntrerupere a apropierii publicată, nefiind necesară survolarea MAP;
• - se execută restul procedurii de întrerupere a apropierii publicate.Există aeroporturi unde, din cauza procedurilor de evitare a zgomotului,
sunt publicate proceduri pentru apropierea cu manevre la vedere cu traiectorieprescrisă. Navigaţia în aceste proceduri se face cu referinţă vizuală şi oriceelement de radionavigaţie prezent în harta publicată poate fi utilizat doarinformativ.
9.4. Procedura de iniţiere şi continuare a apropierii (approach ban)
Procedura de apropiere instrumentală poate fi iniţiată de către echipajindiferent de valorile condiţiilor meteorologice de vizibilitate/RVR raportate, darnu poate fi continuată dincolo de radiomarkerul exterior sau echivalentul săudacă valorile condiţiilor meteorologice de vizibilitate/RVR raportate scad sub
NAVIGAŢIE AERIANĂ
Editia 1.0. - 158 - 25/04/2000
minima de operare. Dacă valorile condiţiile meteorologice scad sub valorileminimei de operare după survolarea radiomarkerului exterior sau echivalentului,se poate continua apropierea până la atingerea valorii altitudinii/înălţimii dedecizie DA/DH sau a altitudinii/înălţimii minime de coborâre MDA/MDH, punct lacare dacă nu s-a stabilit referinţa vizuală necesară se va iniţia procedura deîntrerupere a apropierii. În cazul în care doar valoarea raportată a plafonuluinorilor sau a vizibilităţii verticale este mai mică decât cea corespunzătoare dinminima de operare, procedura de apropiere poate fi iniţiată şi efectuată până laatingerea valorii altitudinii/înălţimii de decizie DA/DH sau a altitudinii/înălţimiiminime de coborâre MDA/MDH, punct la care dacă nu s-a stabilit referinţavizuală necesară se va iniţia procedura de întrerupere a apropierii.
9.5. Altitudinea minimă de sector (altitudinea minimă de siguranţă)
Altitudinea minimă de sector MSA (Minimum Sector Altitude) se stabileştela fiecare aerodrom unde s-au publicat proceduri de apropiere instrumentală.
Altitudinea minimă de sector este altitudinea cea mai coborâtă care poatefi folosită în c ondiţii de urgenţă care va asigura o înălţime minimă de 300 m(1000 ft) peste toate obstacolele localizate într-o arie cuprinsă într-un sector decerc cu raza de 46 km (25 NM) centrat pe un mijloc de radionavigaţie, de regulămijlocul de radionavigaţie caracteristic sau asociat procedurii de apropiereinstrumentală. În cazul în care diferenţa dîntre altitudinile de sector estenesemnificativă (de ordinul a 100 m sau 300 ft) se va stabili o singură altitudineminimă pentru toate sectoarele ce formează cercul, iar în acest caz altitudineaminimă va fi denumită altitudinea minimă de siguranţă MSA (Minimum SafeAltitude). O denumire non-ICAO este şi altitudinea de siguranţă în caz de urgenţă(emergency safe altitude).
Necesitatea recepţiei mijloacelor de radionavigaţie nu este o condiţie deproiectare a altitudinilor corespunzătoare MSA, drept pentru care aceste altitudinise utilizează doar în situaţii de urgenţă la bord, când din anumite motive nu sepoate zbura ruta publicată sau cea desemnată. Din aceste motive, altitudinileMSA nu pot fi alocate într-o autorizare ATC. În proceduri normale, altitudinileminime autorizate sunt cele corespunzătoare rutelor publicate de sosire/plecareSTAR/SID sau cele desemnate prin vectorizare radar MVA (Minimum VectoringAltitude).
9.6. Proceduri de zbor în zona de aerodrom
Procedurile de zbor în zona de aerodrom, ce nu sunt clasificate dreptproceduri de apropiere instrumentală, sunt următoarele:
• -turul de pistă (traffic circuit);
• -turul de pistă la vedere (visual traffic circuit).
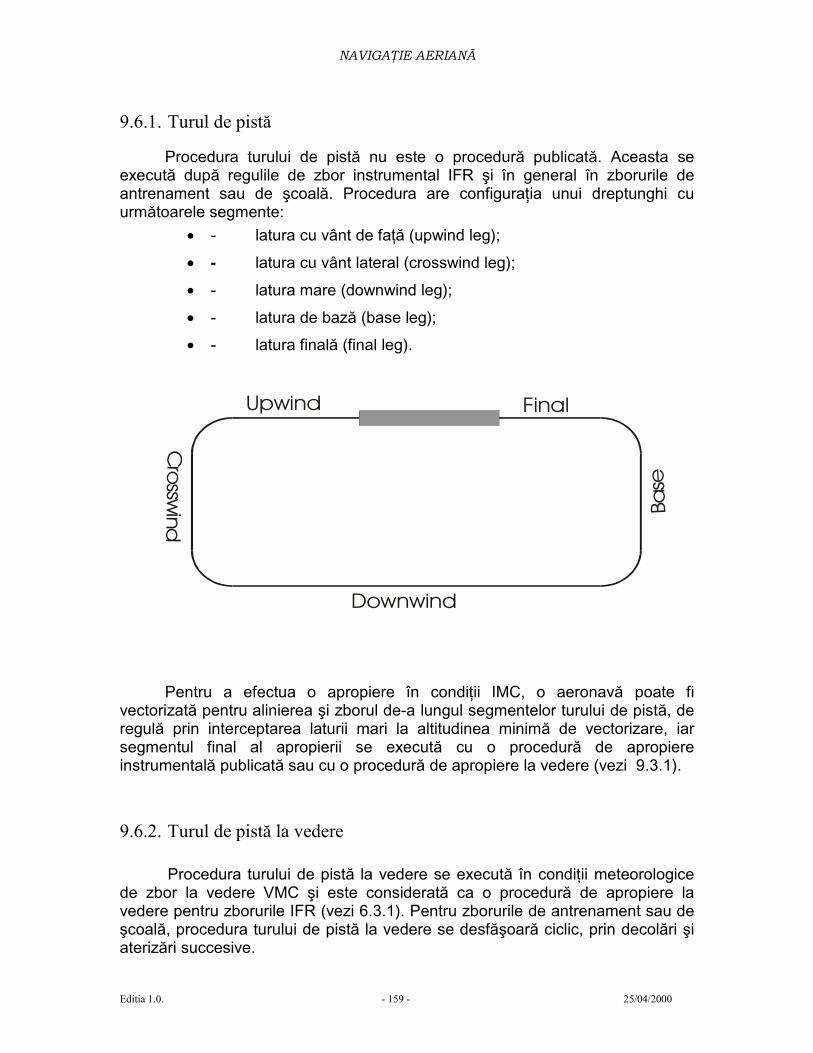
NAVIGAŢIE AERIANĂ
Editia 1.0. - 159 - 25/04/2000
9.6.1. Turul de pistă
Procedura turului de pistă nu este o procedură publicată. Aceasta seexecută după regulile de zbor instrumental IFR şi în general în zborurile deantrenament sau de şcoală. Procedura are configuraţia unui dreptunghi cuurmătoarele segmente:
• - latura cu vânt de faţă (upwind leg);
• - latura cu vânt lateral (crosswind leg);
• - latura mare (downwind leg);
• - latura de bază (base leg);
• - latura finală (final leg).
Upwind
Cro
sswind
Downwind
Base
Final
Pentru a efectua o apropiere în condiţii IMC, o aeronavă poate fivectorizată pentru alinierea şi zborul de-a lungul segmentelor turului de pistă, deregulă prin interceptarea laturii mari la altitudinea minimă de vectorizare, iarsegmentul final al apropierii se execută cu o procedură de apropiereinstrumentală publicată sau cu o procedură de apropiere la vedere (vezi 9.3.1).
9.6.2. Turul de pistă la vedere
Procedura turului de pistă la vedere se execută în condiţii meteorologicede zbor la vedere VMC şi este considerată ca o procedură de apropiere lavedere pentru zborurile IFR (vezi 6.3.1). Pentru zborurile de antrenament sau deşcoală, procedura turului de pistă la vedere se desfăşoară ciclic, prin decolări şiaterizări succesive.

NAVIGAŢIE AERIANĂ
Editia 1.0. - 160 - 25/04/2000
Pagină liberă lasată intenţionat
NAVIGAŢIE AERIANĂ
Editia 1.0. - 161 - 25/04/2000
CAPITOLUL 10.
PRINCIPIILE ZBORULUI10.1. Introducere
Zborul poate fi realizat cu aparate mai usoare sau mai grele decit aerul ;din ultima categorie fac parte toate aparatele cu zbor aerodinamic (planoare,avioane, elicoptere, motoplanoare, girodine, coleoptere, aerodine lenticulare etc )precum si cele cu zbor inertial ( balistic, orbital, cu ricosari ). O categorie aparteeste repezentata de naveta spatiala: decoleaza ca o racheta, evolueaza petraiectorii orbitale si balistice si aterizeaza similar unui planor.
Clasificare :- Functie de viteza:• subsonice ( viteza inferioara vitezei de propagare a sunetului in
mediul de zbor ) ;
• supersonice ( viteza superioara vitezei de propagare a sunetului inmediul de zbor ).
- Functie de de utilizare :• Civile ;
• Militare.- Functie de destinatie:• Pasageri;
• Marfuri;
• Utilitare;
• Turism;
• Sanitare;
• Vinatoare;
• Bombardament;
• Cercetare;
• Supraveghere electronica ;
• Scoala si antrenament.
• Speciale :
• Hidroavioane ( decolare/aterizare pe apa )
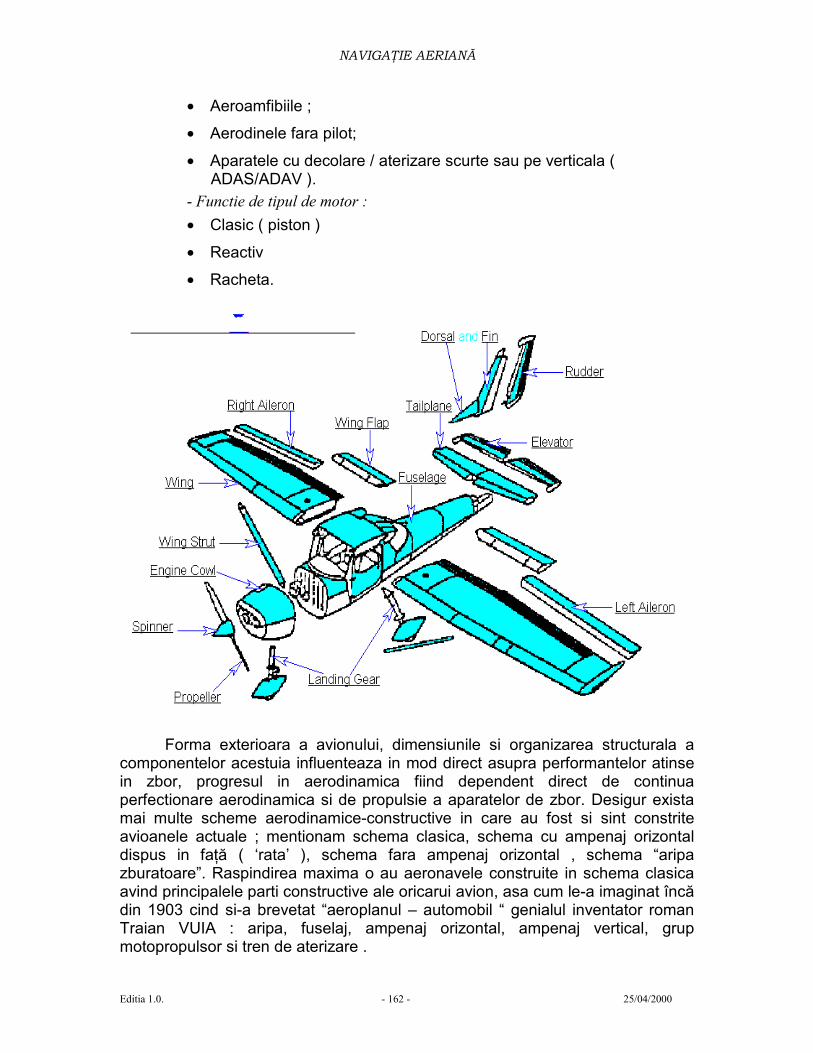
NAVIGAŢIE AERIANĂ
Editia 1.0. - 162 - 25/04/2000
• Aeroamfibiile ;
• Aerodinele fara pilot;
• Aparatele cu decolare / aterizare scurte sau pe verticala (ADAS/ADAV ).
- Functie de tipul de motor :• Clasic ( piston )
• Reactiv
• Racheta.
Forma exterioara a avionului, dimensiunile si organizarea structurala acomponentelor acestuia influenteaza in mod direct asupra performantelor atinsein zbor, progresul in aerodinamica fiind dependent direct de continuaperfectionare aerodinamica si de propulsie a aparatelor de zbor. Desigur existamai multe scheme aerodinamice-constructive in care au fost si sint constriteavioanele actuale ; mentionam schema clasica, schema cu ampenaj orizontaldispus in faţă ( ‘rata’ ), schema fara ampenaj orizontal , schema “aripazburatoare”. Raspindirea maxima o au aeronavele construite in schema clasicaavind principalele parti constructive ale oricarui avion, asa cum le-a imaginat încădin 1903 cind si-a brevetat “aeroplanul – automobil “ genialul inventator romanTraian VUIA : aripa, fuselaj, ampenaj orizontal, ampenaj vertical, grupmotopropulsor si tren de aterizare .
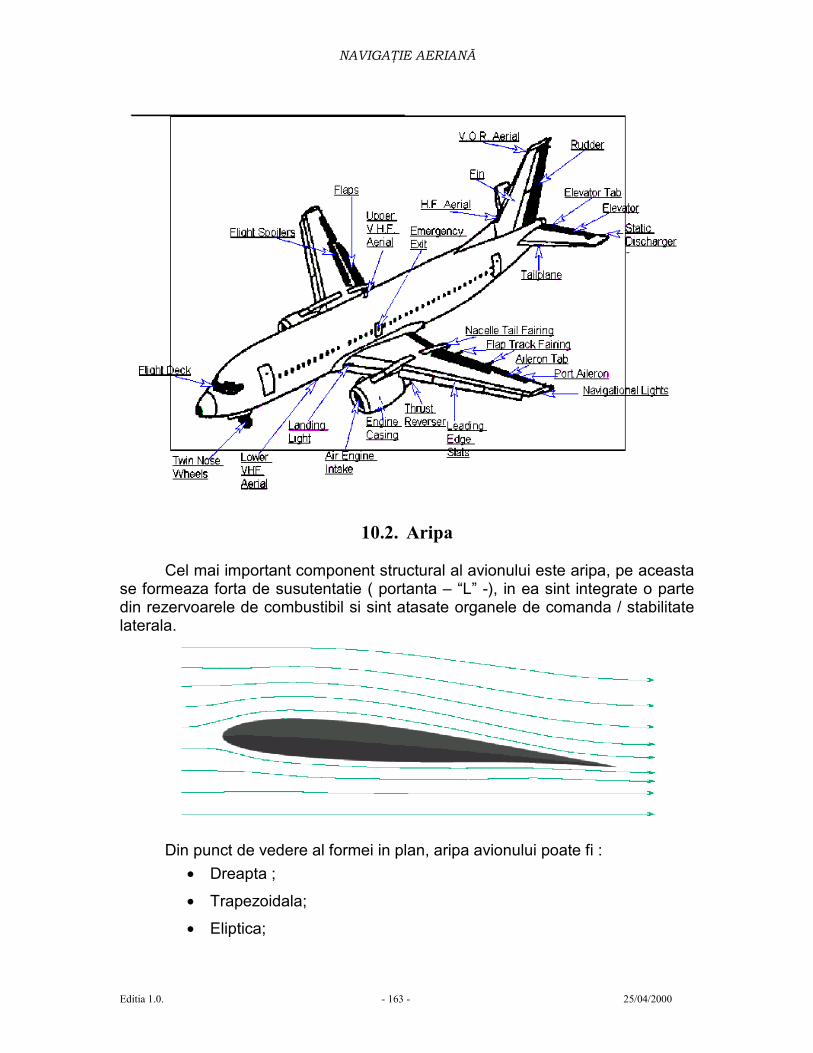
NAVIGAŢIE AERIANĂ
Editia 1.0. - 163 - 25/04/2000
10.2. Aripa
Cel mai important component structural al avionului este aripa, pe aceastase formeaza forta de susutentatie ( portanta – “L” -), in ea sint integrate o partedin rezervoarele de combustibil si sint atasate organele de comanda / stabilitatelaterala.
Din punct de vedere al formei in plan, aripa avionului poate fi :• Dreapta ;
• Trapezoidala;
• Eliptica;
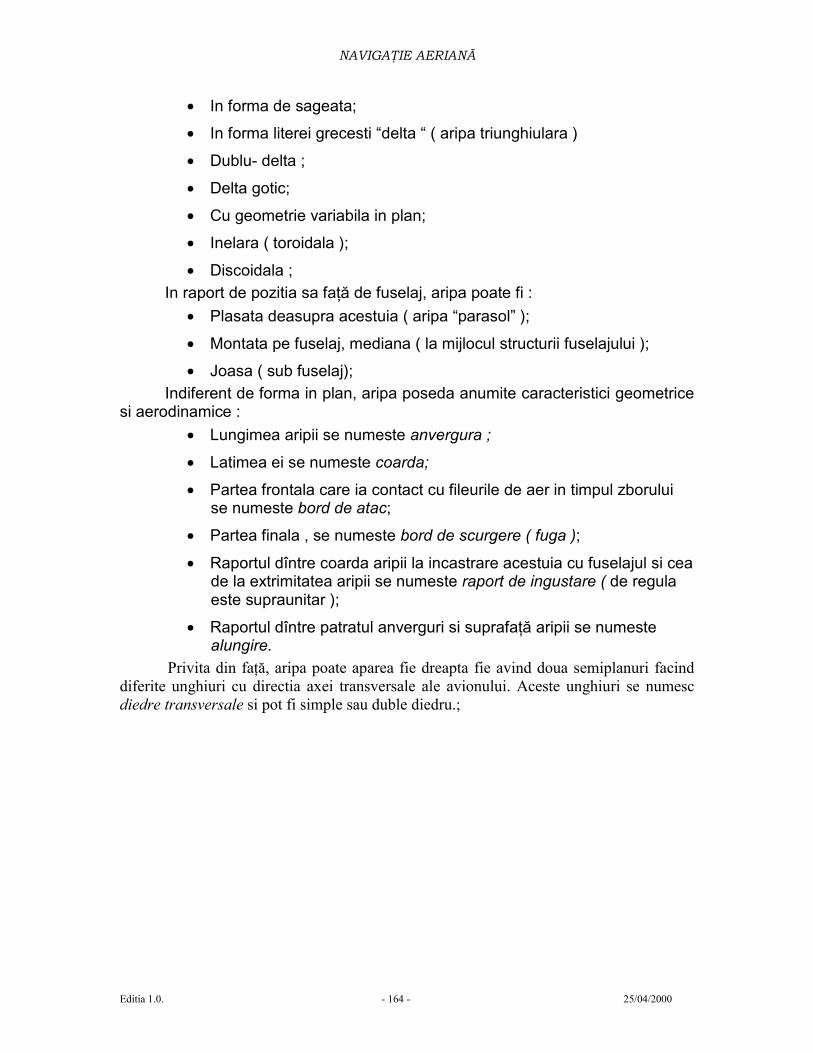
NAVIGAŢIE AERIANĂ
Editia 1.0. - 164 - 25/04/2000
• In forma de sageata;
• In forma literei grecesti “delta “ ( aripa triunghiulara )
• Dublu- delta ;
• Delta gotic;
• Cu geometrie variabila in plan;
• Inelara ( toroidala );
• Discoidala ;In raport de pozitia sa faţă de fuselaj, aripa poate fi :
• Plasata deasupra acestuia ( aripa “parasol” );
• Montata pe fuselaj, mediana ( la mijlocul structurii fuselajului );
• Joasa ( sub fuselaj);Indiferent de forma in plan, aripa poseda anumite caracteristici geometrice
si aerodinamice :• Lungimea aripii se numeste anvergura ;
• Latimea ei se numeste coarda;
• Partea frontala care ia contact cu fileurile de aer in timpul zboruluise numeste bord de atac;
• Partea finala , se numeste bord de scurgere ( fuga );
• Raportul dîntre coarda aripii la incastrare acestuia cu fuselajul si ceade la extrimitatea aripii se numeste raport de ingustare ( de regulaeste supraunitar );
• Raportul dîntre patratul anverguri si suprafaţă aripii se numestealungire.
Privita din faţă, aripa poate aparea fie dreapta fie avind doua semiplanuri facinddiferite unghiuri cu directia axei transversale ale avionului. Aceste unghiuri se numescdiedre transversale si pot fi simple sau duble diedru.;
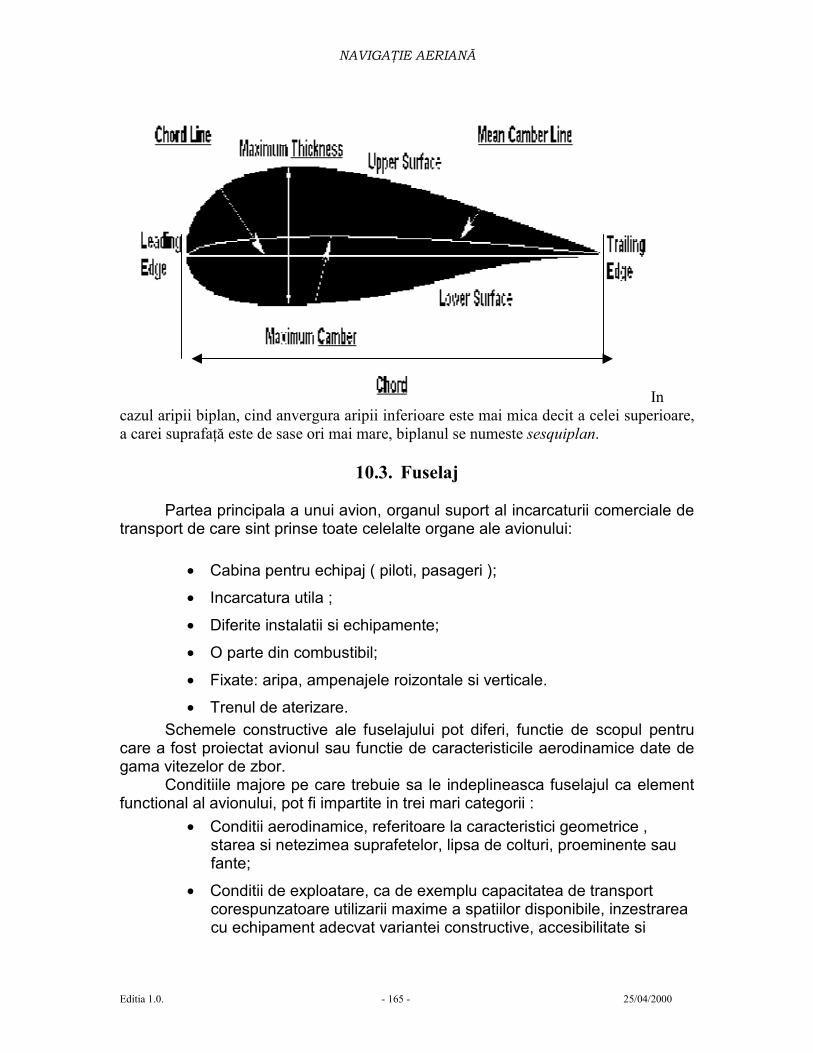
NAVIGAŢIE AERIANĂ
Editia 1.0. - 165 - 25/04/2000
Incazul aripii biplan, cind anvergura aripii inferioare este mai mica decit a celei superioare,a carei suprafaţă este de sase ori mai mare, biplanul se numeste sesquiplan.
10.3. Fuselaj
Partea principala a unui avion, organul suport al incarcaturii comerciale detransport de care sint prinse toate celelalte organe ale avionului:
• Cabina pentru echipaj ( piloti, pasageri );
• Incarcatura utila ;
• Diferite instalatii si echipamente;
• O parte din combustibil;
• Fixate: aripa, ampenajele roizontale si verticale.
• Trenul de aterizare.Schemele constructive ale fuselajului pot diferi, functie de scopul pentru
care a fost proiectat avionul sau functie de caracteristicile aerodinamice date degama vitezelor de zbor.
Conditiile majore pe care trebuie sa le indeplineasca fuselajul ca elementfunctional al avionului, pot fi impartite in trei mari categorii :
• Conditii aerodinamice, referitoare la caracteristici geometrice ,starea si netezimea suprafetelor, lipsa de colturi, proeminente saufante;
• Conditii de exploatare, ca de exemplu capacitatea de transportcorespunzatoare utilizarii maxime a spatiilor disponibile, inzestrareacu echipament adecvat variantei constructive, accesibilitate si
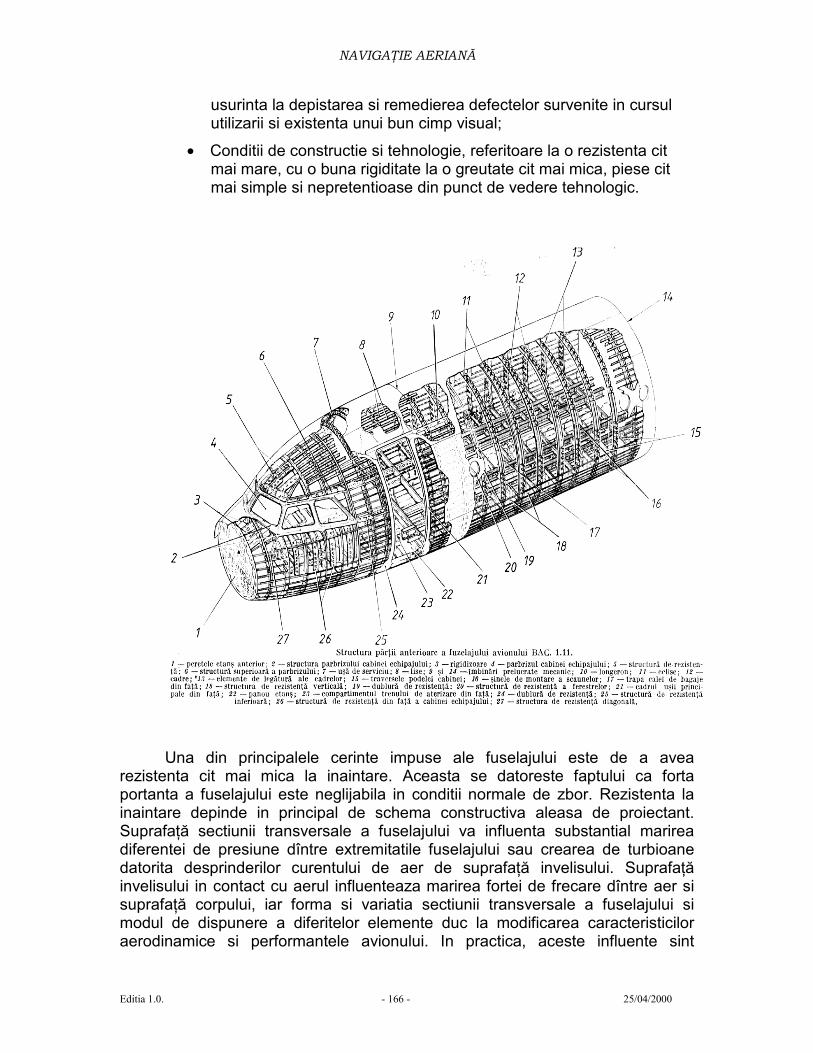
NAVIGAŢIE AERIANĂ
Editia 1.0. - 166 - 25/04/2000
usurinta la depistarea si remedierea defectelor survenite in cursulutilizarii si existenta unui bun cimp visual;
• Conditii de constructie si tehnologie, referitoare la o rezistenta citmai mare, cu o buna rigiditate la o greutate cit mai mica, piese citmai simple si nepretentioase din punct de vedere tehnologic.
Una din principalele cerinte impuse ale fuselajului este de a avearezistenta cit mai mica la inaintare. Aceasta se datoreste faptului ca fortaportanta a fuselajului este neglijabila in conditii normale de zbor. Rezistenta lainaintare depinde in principal de schema constructiva aleasa de proiectant.Suprafaţă sectiunii transversale a fuselajului va influenta substantial marireadiferentei de presiune dîntre extremitatile fuselajului sau crearea de turbioanedatorita desprinderilor curentului de aer de suprafaţă invelisului. Suprafaţăinvelisului in contact cu aerul influenteaza marirea fortei de frecare dîntre aer sisuprafaţă corpului, iar forma si variatia sectiunii transversale a fuselajului simodul de dispunere a diferitelor elemente duc la modificarea caracteristiciloraerodinamice si performantele avionului. In practica, aceste influente sint
NAVIGAŢIE AERIANĂ
Editia 1.0. - 167 - 25/04/2000
determinăte in tunelul aerodinamic, putindu-se aprecia cu un mare grad deexactitate calitatile reale ale avionului.
La elaborarea constructiilor propiu-zise concura mai multi factori, adeseoricontradictori, dar o atentie deosebita se acorda asigurarii securitati avionului incazul degradarii unor elemente ale fuseajului. Toate structurile importante depreluare a sarcinilor la care este supus fuselajul sint prevazute cu dubloare sautraverse care in cazul distrugerii unuia dîntre elementele de rezistenta vor preluasau transmite solicitarea altor elemente.
Structura de rezistenta se compune din :
• Longeroane;
• Lise;
• Panouri etanse;
• Invelisul fuselajului;
• Elemente de dublare ale decuparilor pentru usile de acces alpasagerilor ;
• Trapele compartimentelor calelor de marfa ;
• Traverse de rigiditate diferitelor parti componente .Structura de rezistenta principala longitudinala si transversala se compune
din :• Lise ( formeaza osatura longitudinala si sint amplasate pe pe
conturul exterior al cadrelor, la distante aproximativ egale )
• Cadre ( au forma ovala, forma exterioara diferind de la un avion laaltul, de care se prind aripile )
10.4. Ampenajul Vertical Si Orizontal
Ampenajul reprezintă pentru avion acel dispozitiv care ii asigura prinmarimea fortelor aerodinamice rezultate in cursul zborului, revenirea la atitudineainitiala , dupa ce a suferit o actiune perturbatoare. Efectul unor asemeneadispozitive duce la stabilizarea avionului.
Principalii parametrii de care depind caracteristicile aerodinamice aleampenajului sint suprafetele ampenajului orizontal si vertical, distantele de lacentru de greutate al avionului pina la centrele in care se aplica forteleaerodinamice ale ampenajelor orizontal si vertical, alungirea ampenajelor, forma,precum si pozitia faţă de fuselaj si aripa.
Clasificarea ampenajului:• Ampenajul orizontal ;
• Ampenjul vertical.
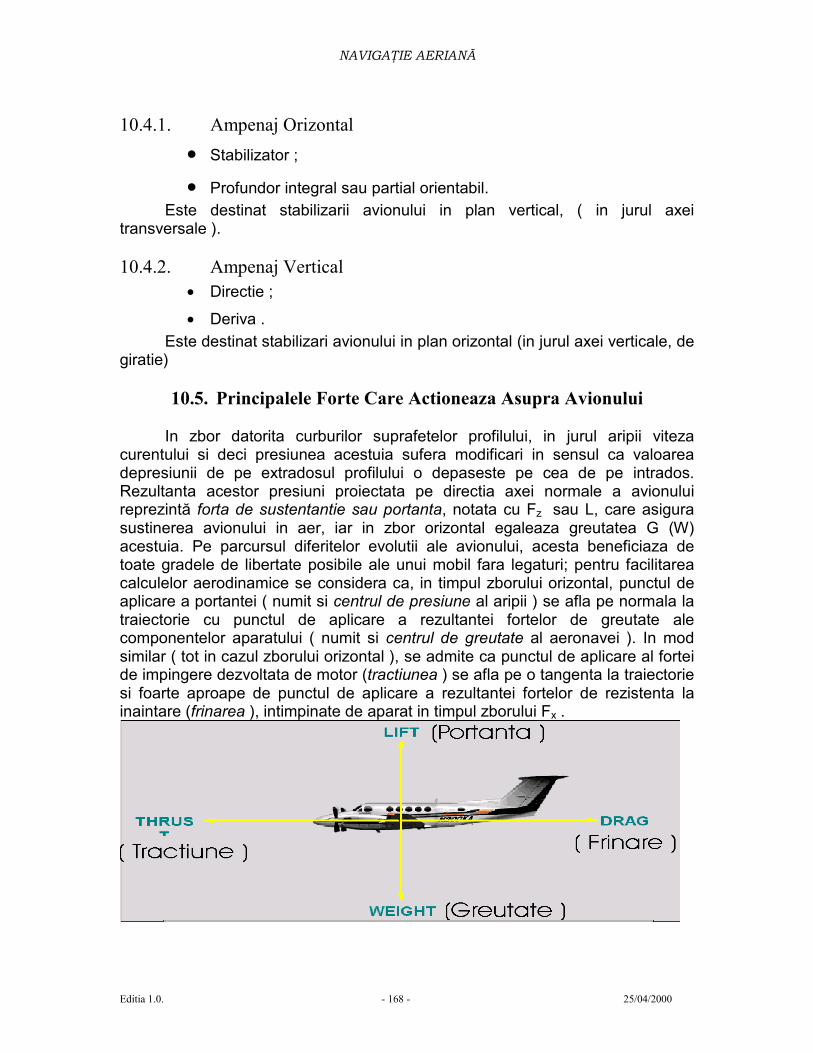
NAVIGAŢIE AERIANĂ
Editia 1.0. - 168 - 25/04/2000
10.4.1. Ampenaj Orizontal• Stabilizator ;
• Profundor integral sau partial orientabil.Este destinat stabilizarii avionului in plan vertical, ( in jurul axei
transversale ).
10.4.2. Ampenaj Vertical• Directie ;
• Deriva .Este destinat stabilizari avionului in plan orizontal (in jurul axei verticale, de
giratie)
10.5. Principalele Forte Care Actioneaza Asupra Avionului
In zbor datorita curburilor suprafetelor profilului, in jurul aripii vitezacurentului si deci presiunea acestuia sufera modificari in sensul ca valoareadepresiunii de pe extradosul profilului o depaseste pe cea de pe intrados.Rezultanta acestor presiuni proiectata pe directia axei normale a avionuluireprezintă forta de sustentantie sau portanta, notata cu Fz sau L, care asigurasustinerea avionului in aer, iar in zbor orizontal egaleaza greutatea G (W)acestuia. Pe parcursul diferitelor evolutii ale avionului, acesta beneficiaza detoate gradele de libertate posibile ale unui mobil fara legaturi; pentru facilitareacalculelor aerodinamice se considera ca, in timpul zborului orizontal, punctul deaplicare a portantei ( numit si centrul de presiune al aripii ) se afla pe normala latraiectorie cu punctul de aplicare a rezultantei fortelor de greutate alecomponentelor aparatului ( numit si centrul de greutate al aeronavei ). In modsimilar ( tot in cazul zborului orizontal ), se admite ca punctul de aplicare al forteide impingere dezvoltata de motor (tractiunea ) se afla pe o tangenta la traiectoriesi foarte aproape de punctul de aplicare a rezultantei fortelor de rezistenta lainaintare (frinarea ), intimpinate de aparat in timpul zborului Fx .
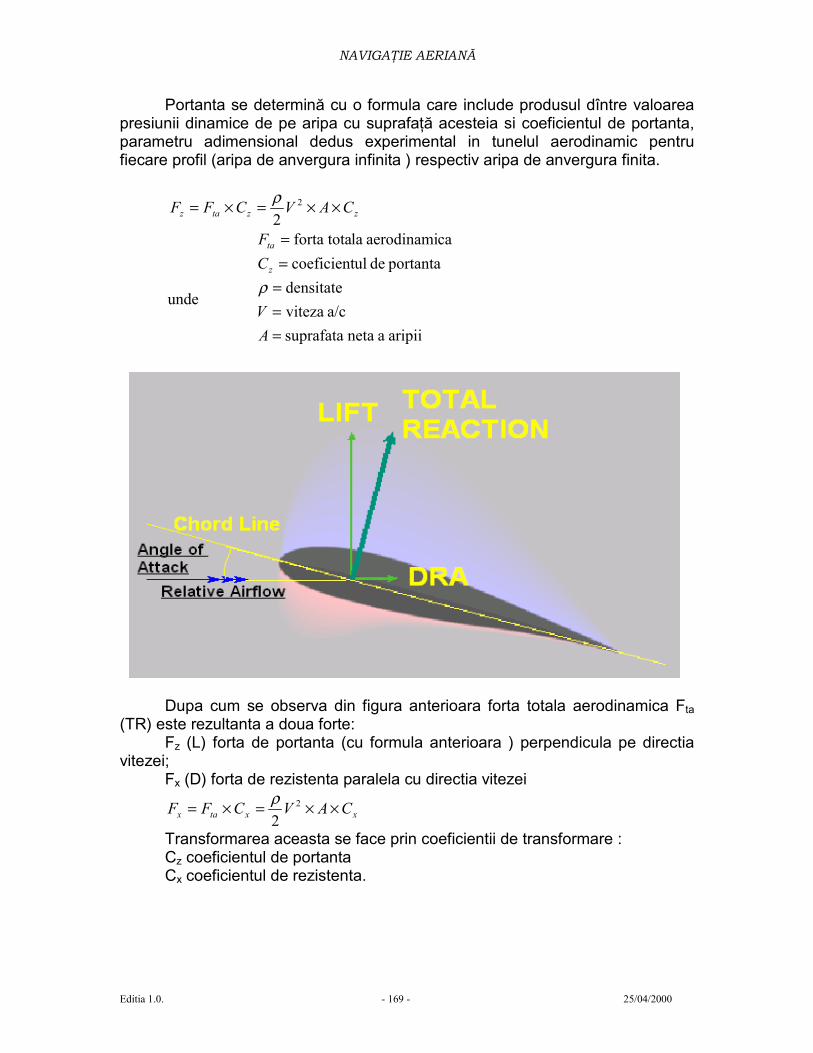
NAVIGAŢIE AERIANĂ
Editia 1.0. - 169 - 25/04/2000
Portanta se determină cu o formula care include produsul dîntre valoareapresiunii dinamice de pe aripa cu suprafaţă acesteia si coeficientul de portanta,parametru adimensional dedus experimental in tunelul aerodinamic pentrufiecare profil (aripa de anvergura infinita ) respectiv aripa de anvergura finita.
zztaz CAVCFF ××=×= 2
2ρ
unde
aripiia neta suprafata a/cviteza
densitateportanta de ulcoeficient
caaerodinamila forta tota
=====
AV
CF
z
ta
ρ
Dupa cum se observa din figura anterioara forta totala aerodinamica Fta(TR) este rezultanta a doua forte:
Fz (L) forta de portanta (cu formula anterioara ) perpendicula pe directiavitezei;
Fx (D) forta de rezistenta paralela cu directia vitezei
xxtax CAVCFF ××=×= 2
2ρ
Transformarea aceasta se face prin coeficientii de transformare :Cz coeficientul de portantaCx coeficientul de rezistenta.
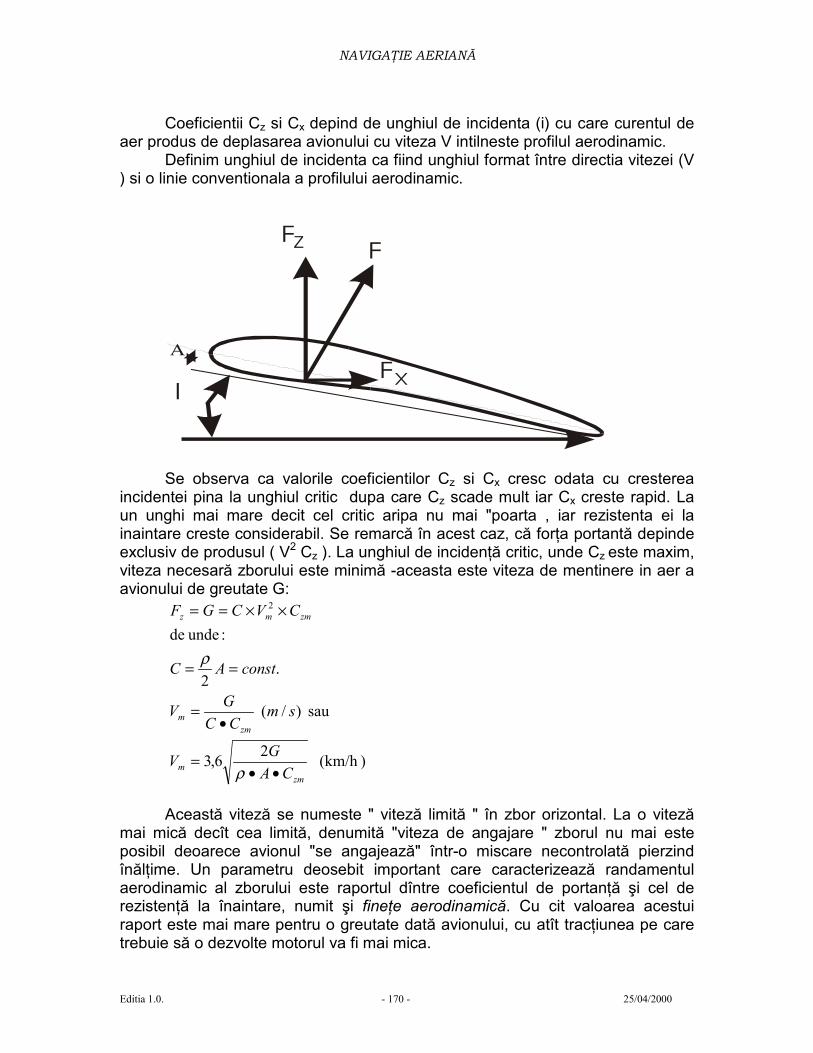
NAVIGAŢIE AERIANĂ
Editia 1.0. - 170 - 25/04/2000
Coeficientii Cz si Cx depind de unghiul de incidenta (i) cu care curentul deaer produs de deplasarea avionului cu viteza V intilneste profilul aerodinamic.
Definim unghiul de incidenta ca fiind unghiul format între directia vitezei (V) si o linie conventionala a profilului aerodinamic.
I
FF
F
Z
X
Α
Se observa ca valorile coeficientilor Cz si Cx cresc odata cu crestereaincidentei pina la unghiul critic dupa care Cz scade mult iar Cx creste rapid. Laun unghi mai mare decit cel critic aripa nu mai "poarta , iar rezistenta ei lainaintare creste considerabil. Se remarcă în acest caz, că forţa portantă depindeexclusiv de produsul ( V2 Cz ). La unghiul de incidenţă critic, unde Cz este maxim,viteza necesară zborului este minimă -aceasta este viteza de mentinere in aer aavionului de greutate G:
) (km/h 26,3
sau )/(
.2
: unde de
2
zmm
zmm
zmmz
CAGV
smCC
GV
constAC
CVCGF
••=
•=
==
××==
ρ
ρ
Această viteză se numeste " viteză limită " în zbor orizontal. La o vitezămai mică decît cea limită, denumită "viteza de angajare " zborul nu mai esteposibil deoarece avionul "se angajează" într-o miscare necontrolată pierzindînălţime. Un parametru deosebit important care caracterizează randamentulaerodinamic al zborului este raportul dîntre coeficientul de portanţă şi cel derezistenţă la înaintare, numit şi fineţe aerodinamică. Cu cit valoarea acestuiraport este mai mare pentru o greutate dată avionului, cu atît tracţiunea pe caretrebuie să o dezvolte motorul va fi mai mica.
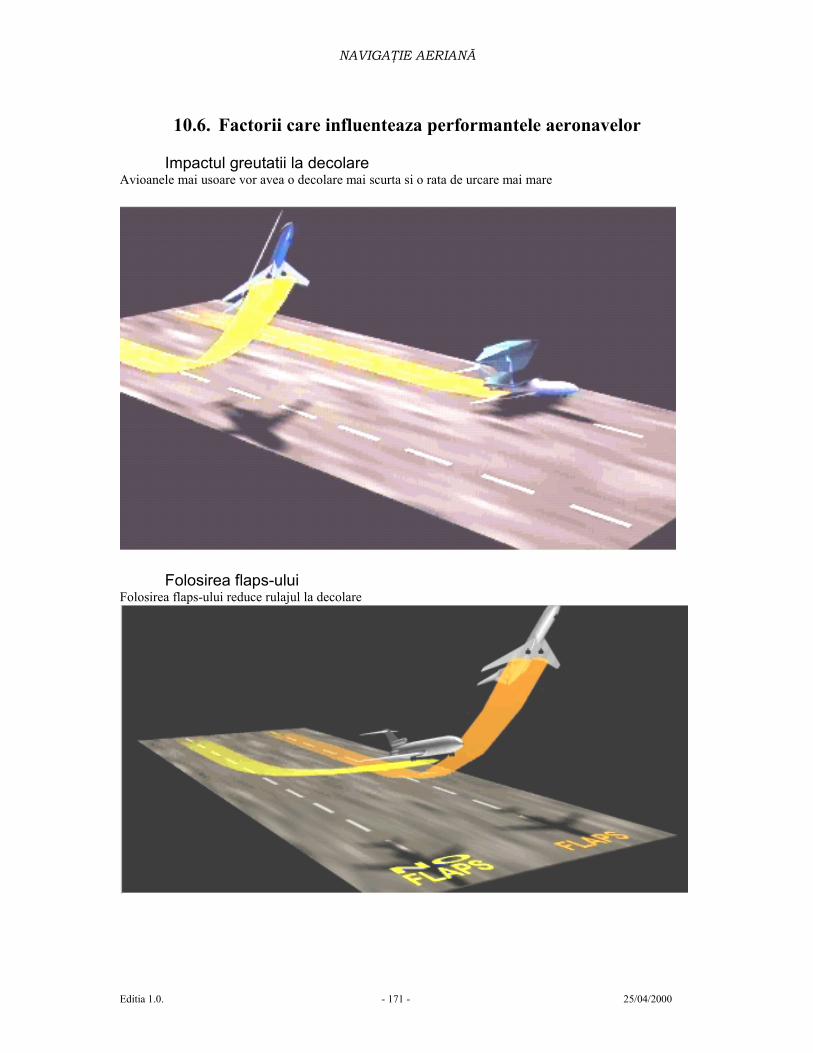
NAVIGAŢIE AERIANĂ
Editia 1.0. - 171 - 25/04/2000
10.6. Factorii care influenteaza performantele aeronavelor
Impactul greutatii la decolareAvioanele mai usoare vor avea o decolare mai scurta si o rata de urcare mai mare
Folosirea flaps-uluiFolosirea flaps-ului reduce rulajul la decolare
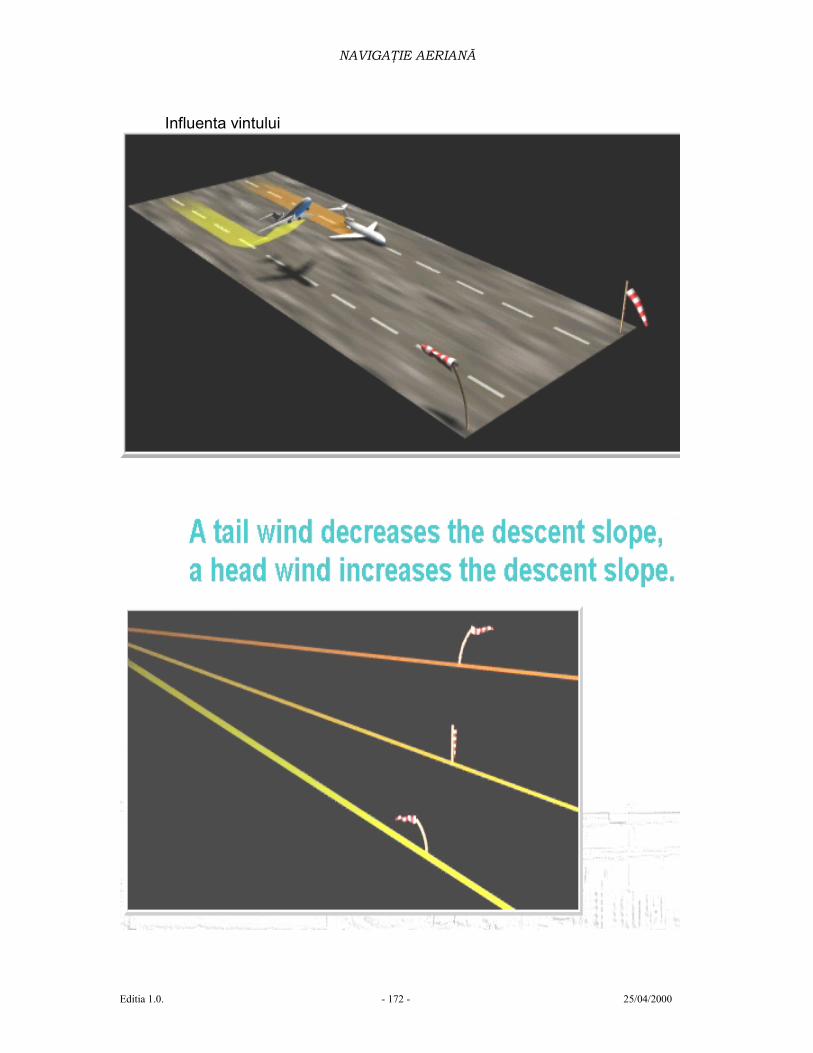
NAVIGAŢIE AERIANĂ
Editia 1.0. - 172 - 25/04/2000
Influenta vintului
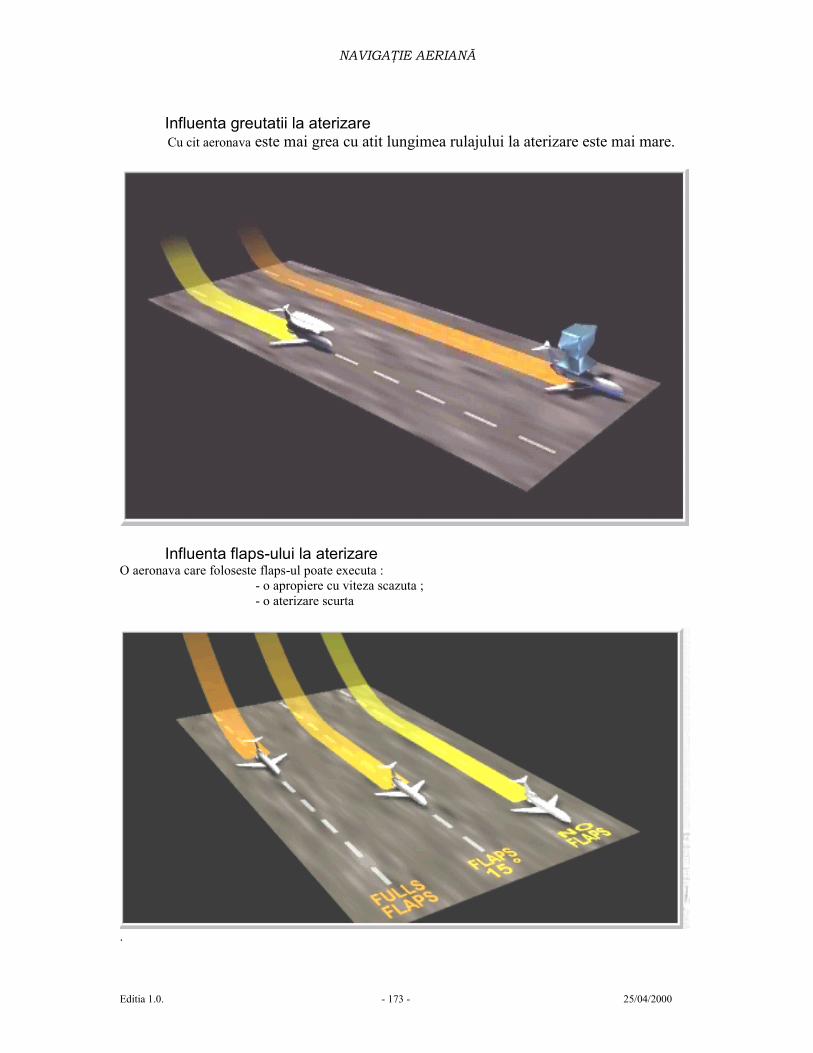
NAVIGAŢIE AERIANĂ
Editia 1.0. - 173 - 25/04/2000
Influenta greutatii la aterizareCu cit aeronava este mai grea cu atit lungimea rulajului la aterizare este mai mare.
Influenta flaps-ului la aterizareO aeronava care foloseste flaps-ul poate executa :
- o apropiere cu viteza scazuta ;- o aterizare scurta
.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 174 - 25/04/2000
Conditiile meteorologiceAterizarea pe o pista uscata, dar cu vint de faţă se executa mai scurt decit decit pe o pista umeda sauacoperita de zapada, gheta.
NAVIGAŢIE AERIANĂ
Editia 1.0. - 175 - 25/04/2000
BIBLIOGRAFIE• Eusebiu Hladiuc ; Alexandru Viorel Popescu - Navigatie aeriana ;• V.Gavriliu ; N.Ene ;- Avionul de transport modern;• Florin Zaganescu - Aviatia ;• F.A.A. Course 55322; - Principles of Navigation• ICAO Doc. 8168 – OPS/611 AIRCRAFT OPERATIONS• ICAO Doc. 9426 – AN/924 AIR TRAFFIC SERVICES PLANNING
MANUAL• ICAO Doc. 9365 – AN/910 MANUAL OF ALL-WEATHER
OPERATIONS

NAVIGAŢIE AERIANĂ
Editia 1.0. - 176 - 25/04/2000
Pagină liberă lasată intenţionat

















