Page 1
MĂSURAREA FRECVEŢEI
Deşi există şi metoda analogică de măsurarea frecvenţei, în prezent predomină
metodele numerice datorită preciziei ridicate şi a complexităţii relativ reduse. Se
întâlnesc, frecvent, două categorii de aparate:
- numărătoare universale care, în afara măsurării frecvenţelor mici, pot măsura
şi perioade de repetiţie, intervale de timp, rapoarte de frecvenţe, durate ale
impulsurilor, numărare de impulsuri etc.
- frecvenţmetre numerice, având doar posibilitatea măsurării frecvenţei.
Frecvenţmetrul poate fi considerat un subset al numărătorului universal.
1. Blocuri componente ale numărătorului universal
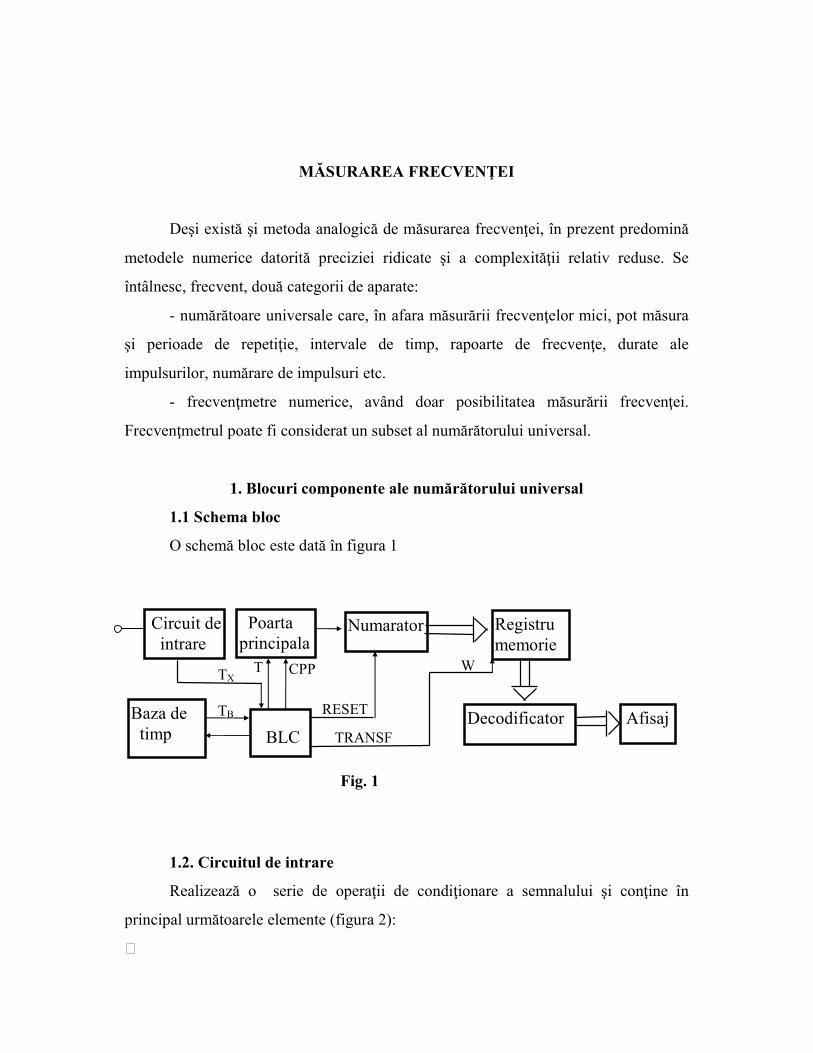
1.1 Schema bloc
O schemă bloc este dată în figura 1
1.2. Circuitul de intrare
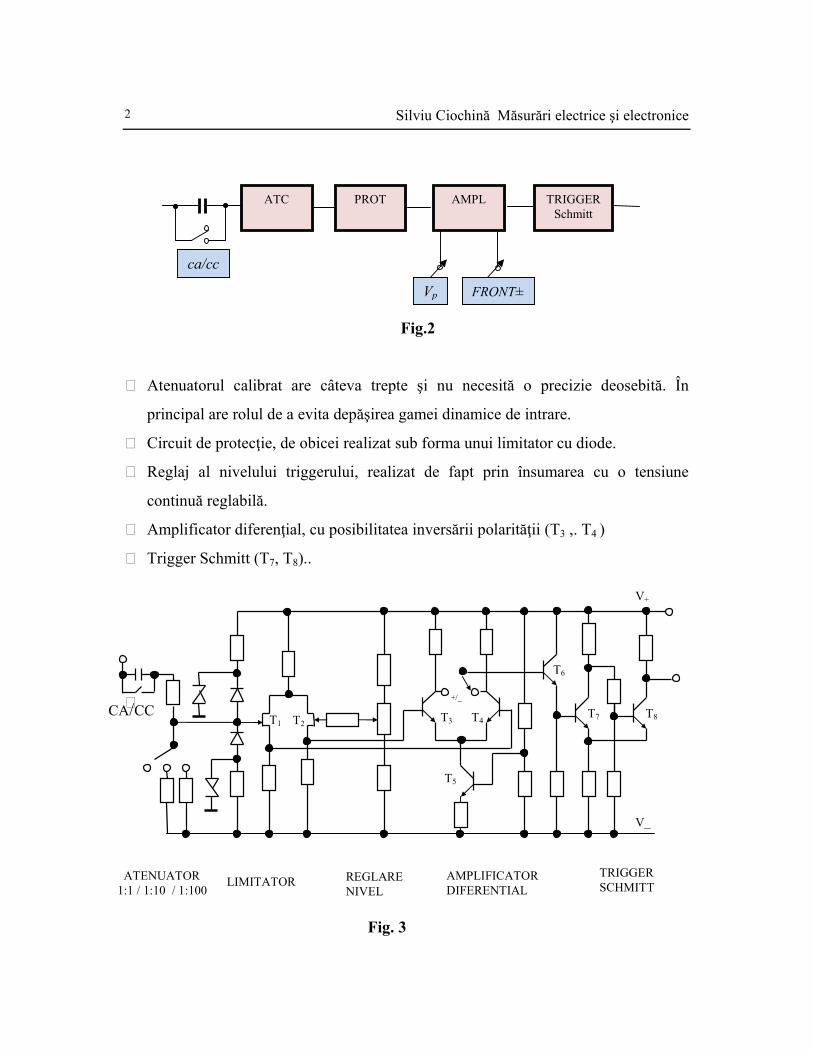
Realizează o serie de operaţii de condiţionare a semnalului şi conţine în
principal următoarele elemente (figura 2):
Circuit de intrare
Baza de timp
Poarta principala
BLC
Numarator Registru memorie
Decodificator TB
T CPP TX
RESET N
TRANSF
W
Afisaj
Fig. 1
Page 2
Silviu Ciochină Măsurări electrice şi electronice 2
Fig.2
Atenuatorul calibrat are câteva trepte şi nu necesită o precizie deosebită. În
principal are rolul de a evita depăşirea gamei dinamice de intrare.
Circuit de protecţie, de obicei realizat sub forma unui limitator cu diode.
Reglaj al nivelului triggerului, realizat de fapt prin însumarea cu o tensiune
continuă reglabilă.
Amplificator diferenţial, cu posibilitatea inversării polarităţii (T3 ,. T4 )
Trigger Schmitt (T7, T8)..
PROT ATC AMPL TRIGGER Schmitt
Vp FROT±
ca/cc
ATENUATOR 1:1 / 1:10 / 1:100
LIMITATOR REGLARE NIVEL
AMPLIFICATOR DIFERENTIAL
TRIGGER SCHMITT
CA/CC
V_
V+
T1 T2 T3 T4
T5
T6
T7 T8
+/_
Fig. 3
Page 3
Măsurarea frecvenţelor 3
Un exemplu de scemă detaliată este dată în fgura 3.
Caracteristici determinate de circuitul de intrare
Impedanţa de intrare - până la frecvenţe de ordinul zecilor de MHz se preferă o
rezistenţă de intrare de 1 ΩM , în paralel cu care apare, inevitabil, o capacitate de
ordinul a câteva zeci de pF. Pentru frecvenţe mai mari se preferă o impedanţă de
50Ω , la care efectul capacităţii este mai puţin important.
gamei dinamice – definită ca domeniu al semnalelor de intrare pentru care
amplificatoarele care preced triggerul se comportă liniar- este mai puţin importantă
decât la alte aparate, de exemplu osciloscoape, voltmetre. Totuşi, depăşirea acestei
game poate duce la fenomenul de saturaţie, ce limitează comportarea în frecvenţă
şi poate duce la scăderea impedanţei de intrare. O limitare la intrare este necesară
pentru protecţia amplificatoarelor. Această protecţie este eficientă în cazul
impedanţei de intrare de 1 ΩM , şi mai puţin eficientă în cazul impedanţei de 50
Ω , caz în care se pot utiliza şi siguranţe foarte rapide.
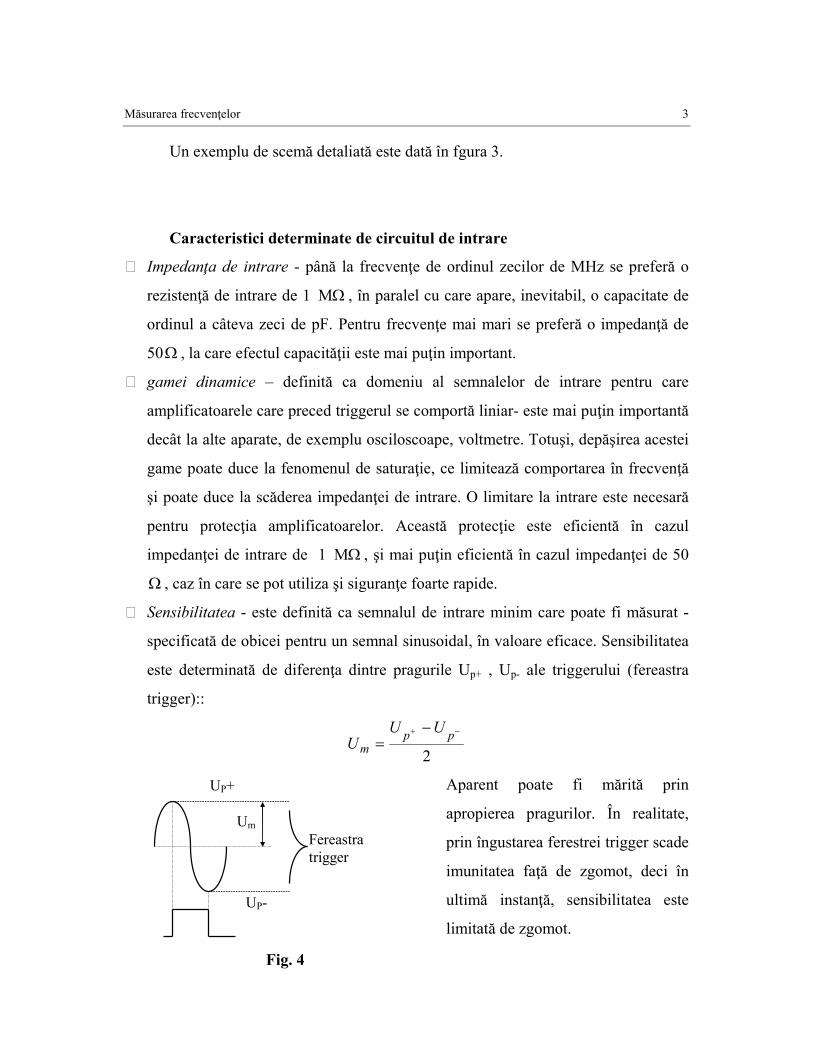
Sensibilitatea - este definită ca semnalul de intrare minim care poate fi măsurat -
specificată de obicei pentru un semnal sinusoidal, în valoare eficace. Sensibilitatea
este determinată de diferenţa dintre pragurile Up+ , Up- ale triggerului (fereastra
trigger)::
2
−+ −= pp
m
UUU
Aparent poate fi mărită prin
apropierea pragurilor. În realitate,
prin îngustarea ferestrei trigger scade
imunitatea faţă de zgomot, deci în
ultimă instanţă, sensibilitatea este
limitată de zgomot.
UP+
UP-
Um
Fereastra trigger
Fig. 4
Page 4
Silviu Ciochină Măsurări electrice şi electronice 4
1.3. Poarta principală
Este un circuit ŞI, având pe una din intrări impulsurile de numărat iar pe
cealaltă un semnal de comandă ce determină deschiderea porţii pe o durată
determinată de timp.
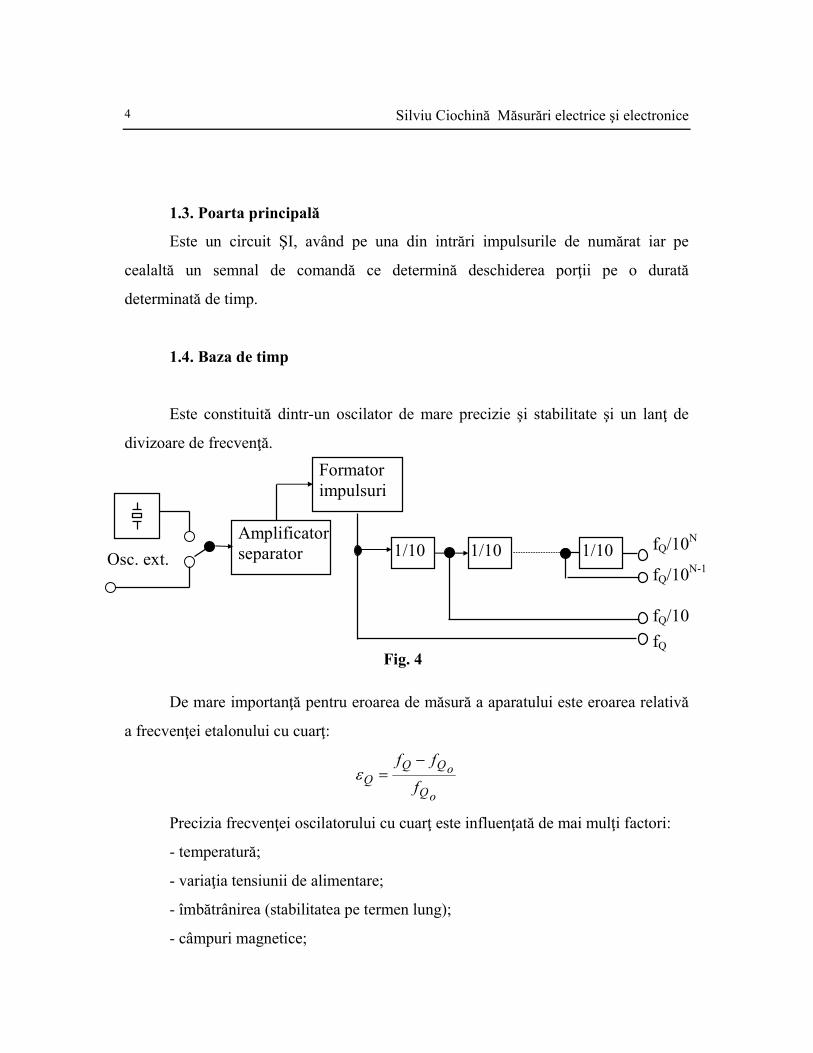
1.4. Baza de timp
Este constituită dintr-un oscilator de mare precizie şi stabilitate şi un lanţ de
divizoare de frecvenţă.
De mare importanţă pentru eroarea de măsură a aparatului este eroarea relativă
a frecvenţei etalonului cu cuarţ:
oQ
oQQ
Qf
ff −=ε
Precizia frecvenţei oscilatorului cu cuarţ este influenţată de mai mulţi factori:
- temperatură;
- variaţia tensiunii de alimentare;
- îmbătrânirea (stabilitatea pe termen lung);
- câmpuri magnetice;
Amplificator separator
Formator impulsuri
Osc. ext. fQ/10N-1
1/10 1/10 fQ/10N
fQ/10
fQ
1/10
Fig. 4
Page 5
Măsurarea frecvenţelor 5
- câmpuri gravitaţionale;
- vibraţii, umiditate etc.
Variaţia cu temperatura
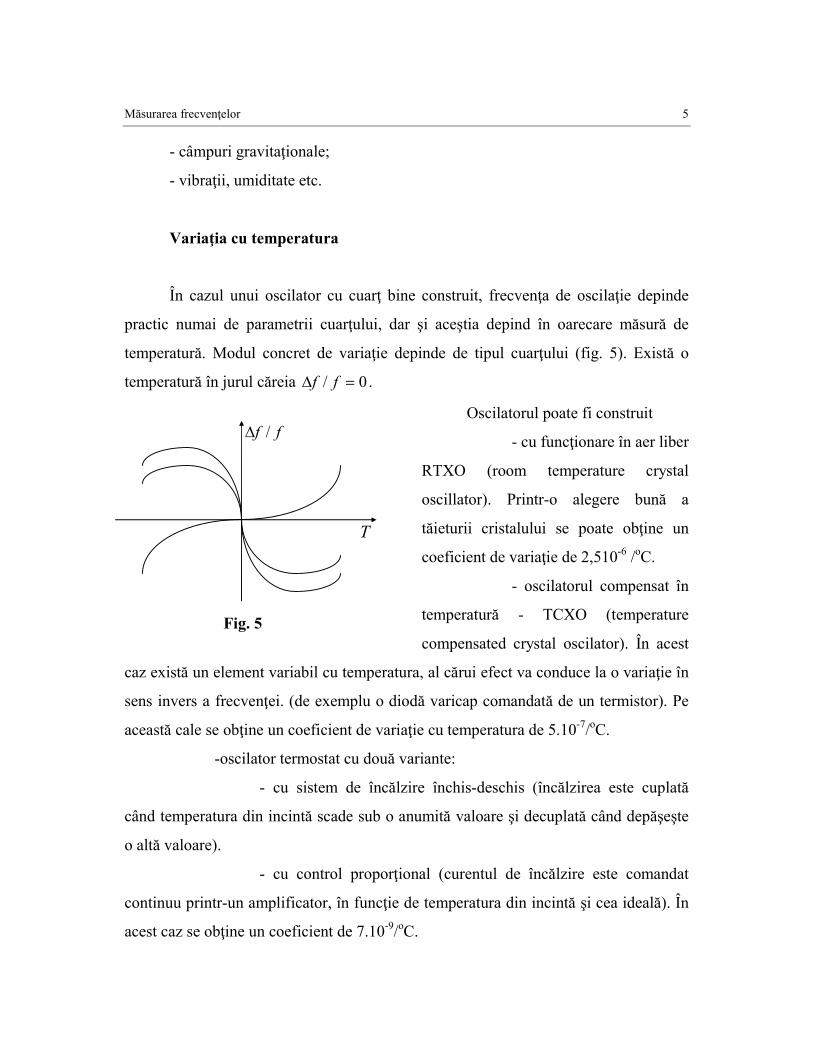
În cazul unui oscilator cu cuarţ bine construit, frecvenţa de oscilaţie depinde
practic numai de parametrii cuarţului, dar şi aceştia depind în oarecare măsură de
temperatură. Modul concret de variaţie depinde de tipul cuarţului (fig. 5). Există o
temperatură în jurul căreia 0/ =∆ ff .
Oscilatorul poate fi construit
- cu funcţionare în aer liber
RTXO (room temperature crystal
oscillator). Printr-o alegere bună a
tăieturii cristalului se poate obţine un
coeficient de variaţie de 2,510-6 /oC.
- oscilatorul compensat în
temperatură - TCXO (temperature
compensated crystal oscilator). În acest
caz există un element variabil cu temperatura, al cărui efect va conduce la o variaţie în
sens invers a frecvenţei. (de exemplu o diodă varicap comandată de un termistor). Pe
această cale se obţine un coeficient de variaţie cu temperatura de 5.10-7/oC.
-oscilator termostat cu două variante:
- cu sistem de încălzire închis-deschis (încălzirea este cuplată
când temperatura din incintă scade sub o anumită valoare şi decuplată când depăşeşte
o altă valoare).
- cu control proporţional (curentul de încălzire este comandat
continuu printr-un amplificator, în funcţie de temperatura din incintă şi cea ideală). În
acest caz se obţine un coeficient de 7.10-9/oC.
T
ff /∆
Fig. 5
Page 6
Silviu Ciochină Măsurări electrice şi electronice 6
Variaţia cu tensiunea de alimentare
Eroarea rezultată din această variaţie este determinată de eficienţa sistemului de
stabilizare a tensiunii de alimentare şi de schema utilizată pentru oscilator. În principiu
se pot obţine coeficienţi de variaţie de ordinul 10-7-10-8 pentru o variaţie de 10% a
tensiunii de alimentare (înainte de stabilizare).
Variaţia în timp
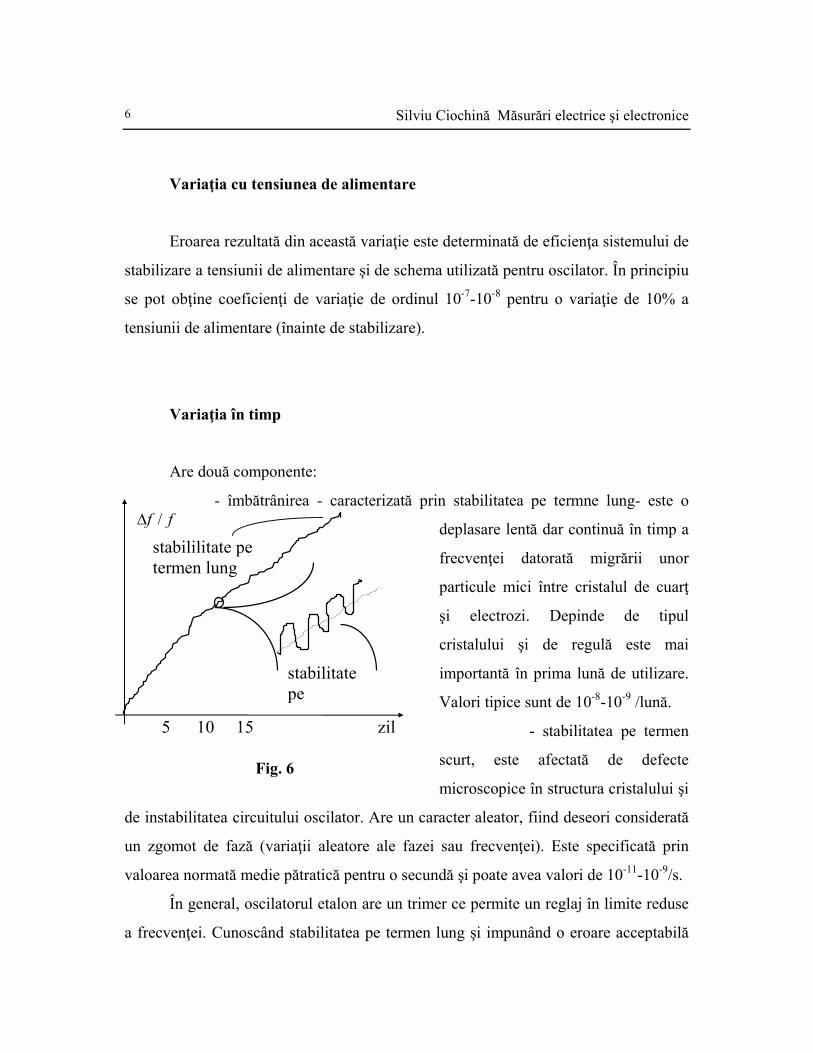
Are două componente:
- îmbătrânirea - caracterizată prin stabilitatea pe termne lung- este o
deplasare lentă dar continuă în timp a
frecvenţei datorată migrării unor
particule mici între cristalul de cuarţ
şi electrozi. Depinde de tipul
cristalului şi de regulă este mai
importantă în prima lună de utilizare.
Valori tipice sunt de 10-8-10-9 /lună.
- stabilitatea pe termen
scurt, este afectată de defecte
microscopice în structura cristalului şi
de instabilitatea circuitului oscilator. Are un caracter aleator, fiind deseori considerată
un zgomot de fază (variaţii aleatore ale fazei sau frecvenţei). Este specificată prin
valoarea normată medie pătratică pentru o secundă şi poate avea valori de 10-11-10-9/s.
În general, oscilatorul etalon are un trimer ce permite un reglaj în limite reduse
a frecvenţei. Cunoscând stabilitatea pe termen lung şi impunând o eroare acceptabilă
zile
5 10 15
ff /∆
stabililitate pe termen lung
stabilitate pe termen scurt
Fig. 6
Page 7
Măsurarea frecvenţelor 7
rezultă intervalele de timp la care este necesară o operaţie de recalibrare a
oscilatorului.
1.5. Blocul logic de control
Furnizează semnale de comandă pentru diversele părţi componente astfel încât
aparatul să îndeplinească funcţiunea dorită.
Poate fi comandat manual sau automat, prin intermediul unei interfeţe pentru
legătura la o magistrală de calculator.
Principalele funcţiuni ale acestui bloc sunt:
- comandă închiderea şi deschiderea porţii principale;
- comandă transferul conţinutului numărătorului în memorie, la sfârşitul unui
ciclu de măsură;
- resetează decadele numărătorului;
- comandă timpul de afişare (reciclare);
- generează impulsurile necesare afişajului dinamic;
- comandă indicaţiile de dimensiune: Hz, kHz, MHz, s, ms sµ şi punctul
zecimal, indicatorul de depăşire şi de deschidere a porţii;
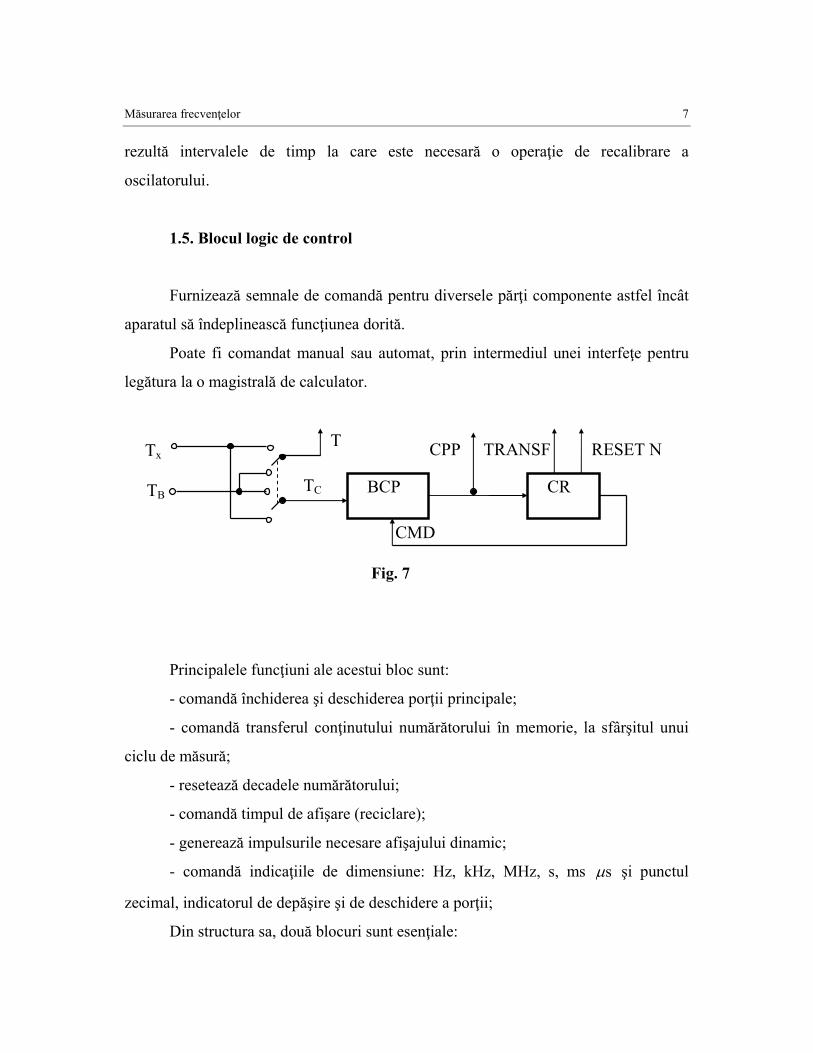
Din structura sa, două blocuri sunt esenţiale:
BCP CR
Tx
TB
T CPP TRANSF RESET N
TC
CMD
Fig. 7
Page 8
Silviu Ciochină Măsurări electrice şi electronice 8
- bistabilul de comandă a porţii principale care va fi notat BCP (figura 7) ;
- circuitul de reciclare, notat cu CR .
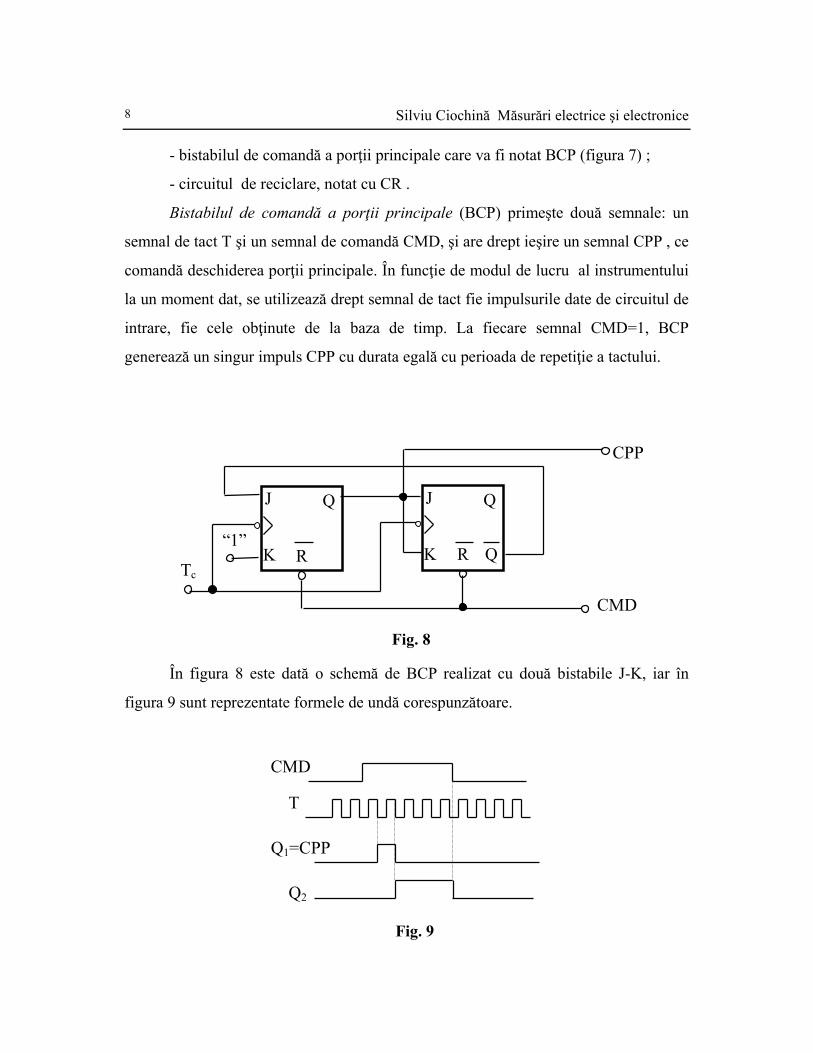
Bistabilul de comandă a porţii principale (BCP) primeşte două semnale: un
semnal de tact T şi un semnal de comandă CMD, şi are drept ieşire un semnal CPP , ce
comandă deschiderea porţii principale. În funcţie de modul de lucru al instrumentului
la un moment dat, se utilizează drept semnal de tact fie impulsurile date de circuitul de
intrare, fie cele obţinute de la baza de timp. La fiecare semnal CMD=1, BCP
generează un singur impuls CPP cu durata egală cu perioada de repetiţie a tactului.
În figura 8 este dată o schemă de BCP realizat cu două bistabile J-K, iar în
figura 9 sunt reprezentate formele de undă corespunzătoare.
J Q
K R Q Tc
“1”
CPP
CMD
J Q
K R
Fig. 8
CMD
Q2
Q1=CPP
T
Fig. 9
Page 9
Măsurarea frecvenţelor 9
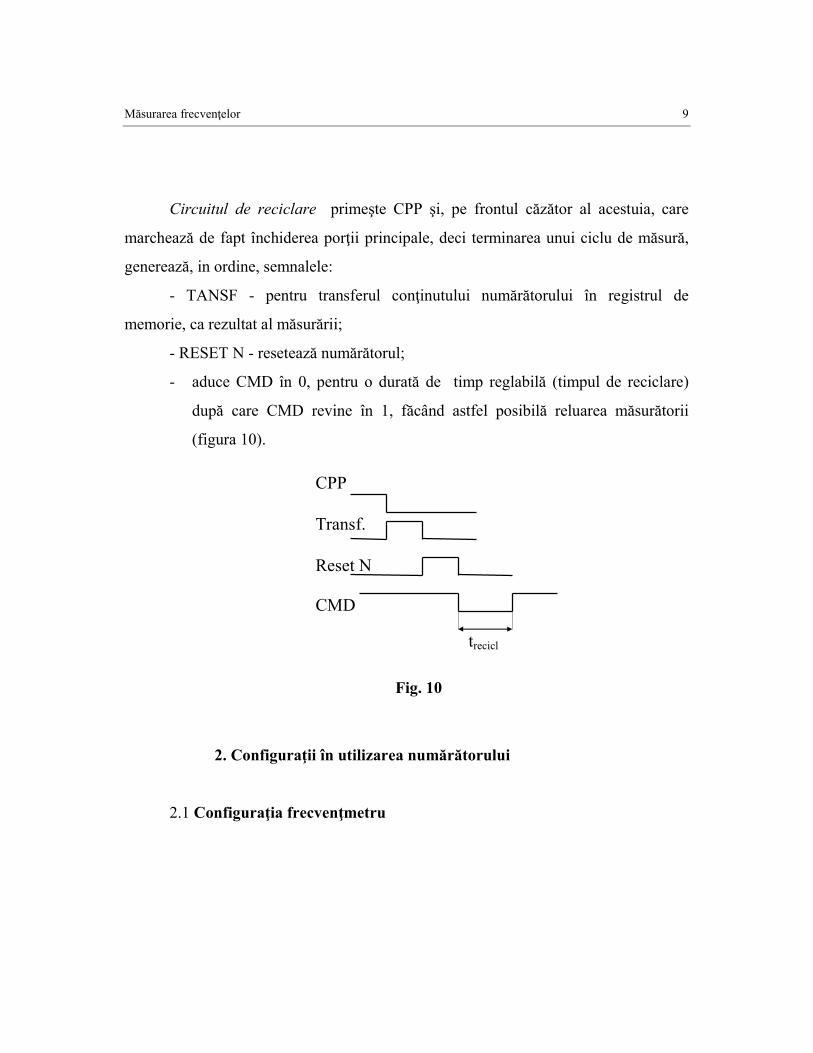
Circuitul de reciclare primeşte CPP şi, pe frontul căzător al acestuia, care
marchează de fapt închiderea porţii principale, deci terminarea unui ciclu de măsură,
generează, in ordine, semnalele:
- TANSF - pentru transferul conţinutului numărătorului în registrul de
memorie, ca rezultat al măsurării;
- RESET N - resetează numărătorul;
- aduce CMD în 0, pentru o durată de timp reglabilă (timpul de reciclare)
după care CMD revine în 1, făcând astfel posibilă reluarea măsurătorii
(figura 10).
2. Configuraţii în utilizarea numărătorului
2.1 Configuraţia frecvenţmetru
trecicl
Transf.
Reset N
CMD
CPP
Fig. 10
Page 10
Silviu Ciochină Măsurări electrice şi electronice 10
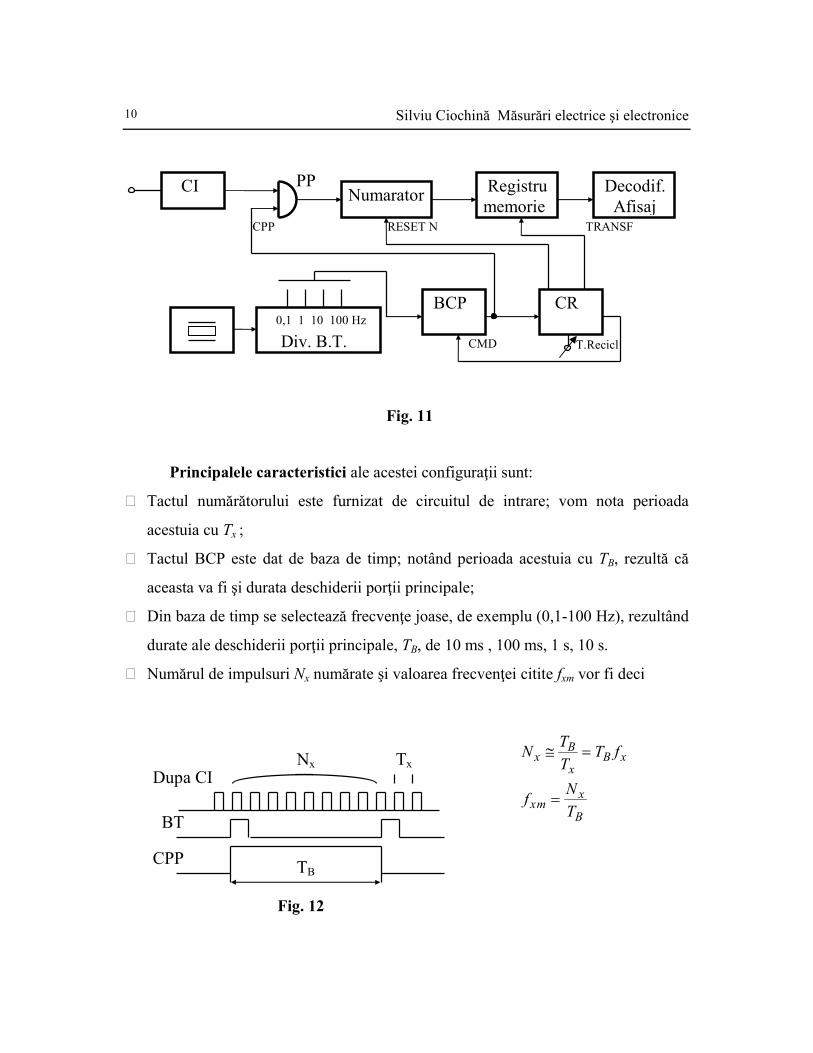
Principalele caracteristici ale acestei configuraţii sunt:
Tactul numărătorului este furnizat de circuitul de intrare; vom nota perioada
acestuia cu Tx ;
Tactul BCP este dat de baza de timp; notând perioada acestuia cu TB, rezultă că
aceasta va fi şi durata deschiderii porţii principale;
Din baza de timp se selectează frecvenţe joase, de exemplu (0,1-100 Hz), rezultând
durate ale deschiderii porţii principale, TB, de 10 ms , 100 ms, 1 s, 10 s.
Numărul de impulsuri x numărate şi valoarea frecvenţei citite fxm vor fi deci
B
xmx
xBx
Bx
T
f
fTT
T
=
=≅
CI Numarator Registru memorie
Decodif. Afisaj
Div. B.T.
BCP CR
CPP RESET N TRANSF
CMD T.Recicl
0,1 1 10 100 Hz
PP
Fig. 11
TB CPP
BT
Dupa CI Nx Tx
Fig. 12
Page 11
Măsurarea frecvenţelor 11
Rezoluţia
Este evident dată de
Bx
Tf
10 =
deci rezoluţia optimă se obţine pe treapta cu TB maxim.
Semnificaţia lui x şi poziţia virgulei
Să considerăm pentru TB valorile 0,1s, 1s şi 10s. Pentru aceste valori, poziţia punctului
zecimal (virgulei) şi unitatea de măsură în care este afişat rezultatul sunt date în tabelul
de mai jos.
TB = 10 s fxm=0,1 x (Hz) x x x x x , x (Hz)
TB = 1 s fxm= x (Hz) x x x x x x (Hz)
TB = 0,1 s fxm=10 x (Hz)= 0,01 x (kHz) x x x x, x x
(kHz)
Erori în măsurarea frecvenţelor
Se pot pune în evidenţă trei cauze de erori.
A) O primă categorie de erori rezultă din chiar reprezentarea rezultatului printr-
un număr întreg. Aceste erori pot fi considerate erori de cuantizare.
În realitate, din cauza nesincronismului dintre momentul deschiderii porţii şi
impulsurile numărate apare o incertitudine de o unitate. De exemplu, să presupunem
TB=1,3Tx. În cazul a, dacă numărătorul numără pe front pozitiv, Nx=1, iar în cazul b,
Nx =2 (figura 13). În general putem scrie:
( )1+
=
x
Bx
T
T
a
b
Fig. 13
Page 12
Silviu Ciochină Măsurări electrice şi electronice 12
Sau, altfel spus, numărul de impulsuri (întreg) este egal cu partea întreagă a raportului,
plus eventual o unitate. Dar
x
B
x
B
x
B
T
T
T
T
T
T≤
<−1
1111 +≤<−⇒+≤<−x
BBx
x
B
x
Bx
x
B
T
TTf
T
T
T
T
T
Tm
Bxx
BBxx
Bx
Tff
TTff
Tf
mm
1111≤−<−⇒+≤<−
Rezultă o eroare relativă
xBxx
xx
rTff
ffm 11
±≅±=−
±=′ε
Datorită acestei forme de exprimare, eroarea aceasta mai este numită eroare de tip
1/. Ea este reprezentată, ca funcţie de frecvenţă în figura 14.a în scară logaritmică şi
în figura 14.b în scară liniară. Este evident că ea scade cu frecvenţa, deci poate avea
valori supărătoare la frecvenţe mici. Poate fi redusă prin mărirea duratei deschiderii
porţii principale, deci a lui TB. O creştere peste valoarea de 10s nu este însă practică,
deoarece ar echivala cu o mărire exagerată a duratei măsurătorii.
′ε r [%]
f f 1 10
10
102
10-7
102
10-1 108
TB=10 s TB=1 s
TB=0,1 s
TB=10 s
TB=1 s
a.
′ε r [%]
b.
Fig. 14
Page 13
Măsurarea frecvenţelor 13
B) Eroarea datorată impreciziei oscilatorului cu cuarţ
Valoarea citită Nx este interpretată ca
0B
xx
T
f
m=
unde 0BT este valoarea nominală a perioadei bazei de timp. Valoarea sa reală este
afectată de o anumită eroare, ce derivă din eroarea etalonului cu cuarţ:
( ) ( )QBQQ
n
Q
n
BB T
fffT ε
ε−=
+=== 1
1
101010
0
deci
Bxx Tf =
şi în consecinţă
( )QxB
Bxx f
T
Tff
mε−== 1
0
Rezultă deci o eroare relativă
Qx
xxr
f
ffm εε −=−
=′′
Eroarea totală esteε ε εr r r= ′ + ′′ . La frecvenţe mici este mai important primul tip de
eroare, în timp ce la frecvenţe mari , va predomina cel de-al doilea. Ca urmare, la
creşterea frecvenţei eroarea nu mai scade nelimitat, ea fiind mărginită inferior de
valoarea rε ′ . De exemplu, în figura 14.a au fost reprezentate şi erorile globale, pentru
εQ
=10-8. Se observă curbarea caracteristicilor, care tind către o asimptotă orizontală.
B) Erori datorate basculării incorecte a triggerului. Acestea de datorează
zgomotului sau alegerii incorecte a nivelului triggerului.
Efectul zgomotului
Page 14
Silviu Ciochină Măsurări electrice şi electronice 14
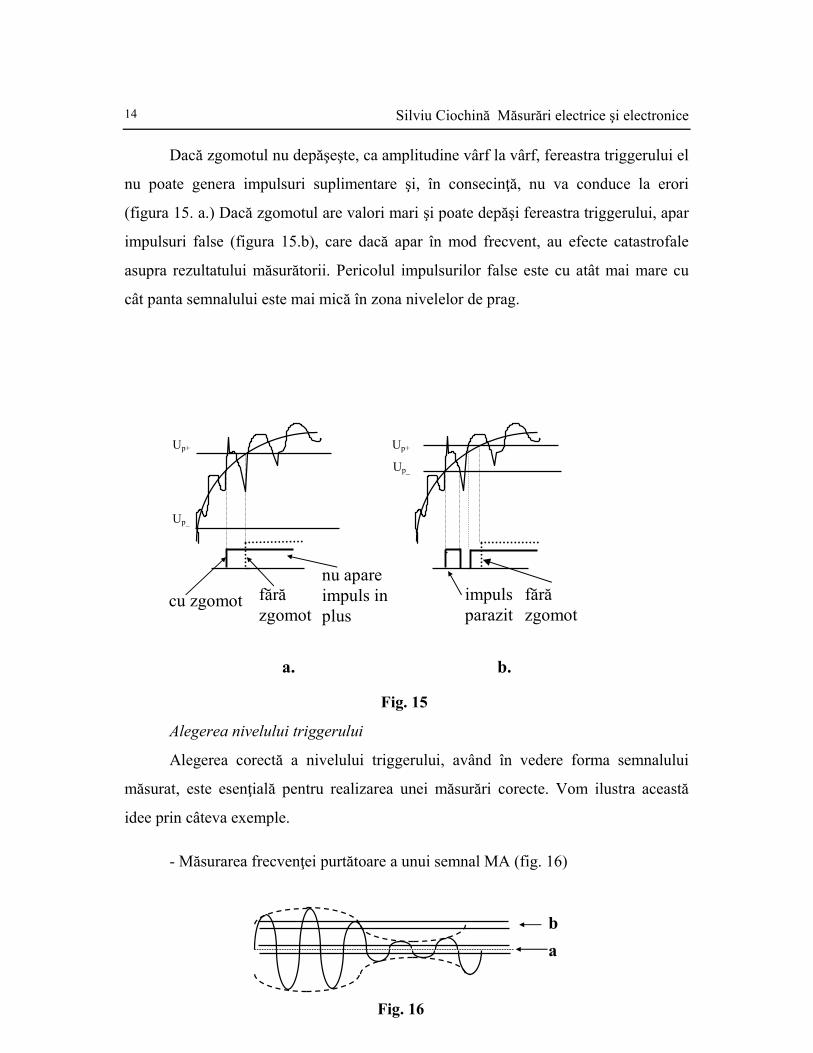
Dacă zgomotul nu depăşeşte, ca amplitudine vârf la vârf, fereastra triggerului el
nu poate genera impulsuri suplimentare şi, în consecinţă, nu va conduce la erori
(figura 15. a.) Dacă zgomotul are valori mari şi poate depăşi fereastra triggerului, apar
impulsuri false (figura 15.b), care dacă apar în mod frecvent, au efecte catastrofale
asupra rezultatului măsurătorii. Pericolul impulsurilor false este cu atât mai mare cu
cât panta semnalului este mai mică în zona nivelelor de prag.
Alegerea nivelului triggerului
Alegerea corectă a nivelului triggerului, având în vedere forma semnalului
măsurat, este esenţială pentru realizarea unei măsurări corecte. Vom ilustra această
idee prin câteva exemple.
- Măsurarea frecvenţei purtătoare a unui semnal MA (fig. 16)
nu apare impuls in plus zgomot
cu zgomot fără zgomot
impuls parazit
Up+
Up_
fără zgomot
a. b.
Up+
Up_
Fig. 15
b
a
Fig. 16
Page 15
Măsurarea frecvenţelor 15
În cazul alegerii nivelului astfel încât fereastra triggerului să fie plasată ca în varianta
a, la fiecare perioadă a purtătoarei se generează câte un impuls, aşa încât se va măsura
corect frecvenţa purtătoare. În varianta b instrumentul va indica o valoare mai mică
decât cea corectă.
În cazul unui semnal MF, dacă perioada semnalului modulator este un
submultiplu al duratei deschiderii porţii, Tm=TB/k, se măsoară corect frecvenţa
purtătoare. Dacă Tm<<TB se obţine aproximativ aceeaşi frecvenţă.
- Măsurarea frecvenţei de repetiţie a unui semnal periodic oarecare (fig. 17)
Se observă că în cazul a instrumentul măsoară corect frecvenţa de repetiţie a
semnalului, în timp ce în cazul b, se generează câte două impulsuri în fiecare
perioadă, deci se măsoară de fapt frecvenţa armonicii a doua.
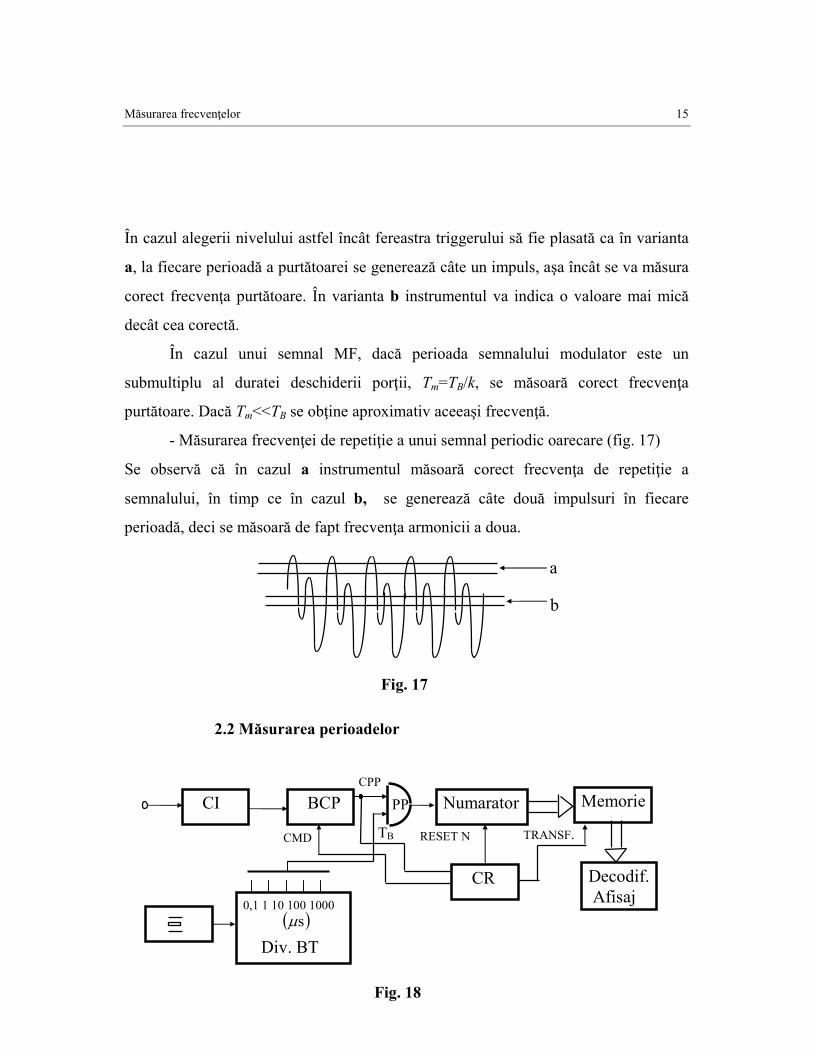
2.2 Măsurarea perioadelor
a
b
Fig. 17
CI BCP Numarator Memorie
Decodif. Afisaj
CR
Div. BT
0,1 1 10 100 1000
( )sµ
RESET N TRANSF.
PP
CPP
CMD TB
Fig. 18
Page 16
Silviu Ciochină Măsurări electrice şi electronice 16
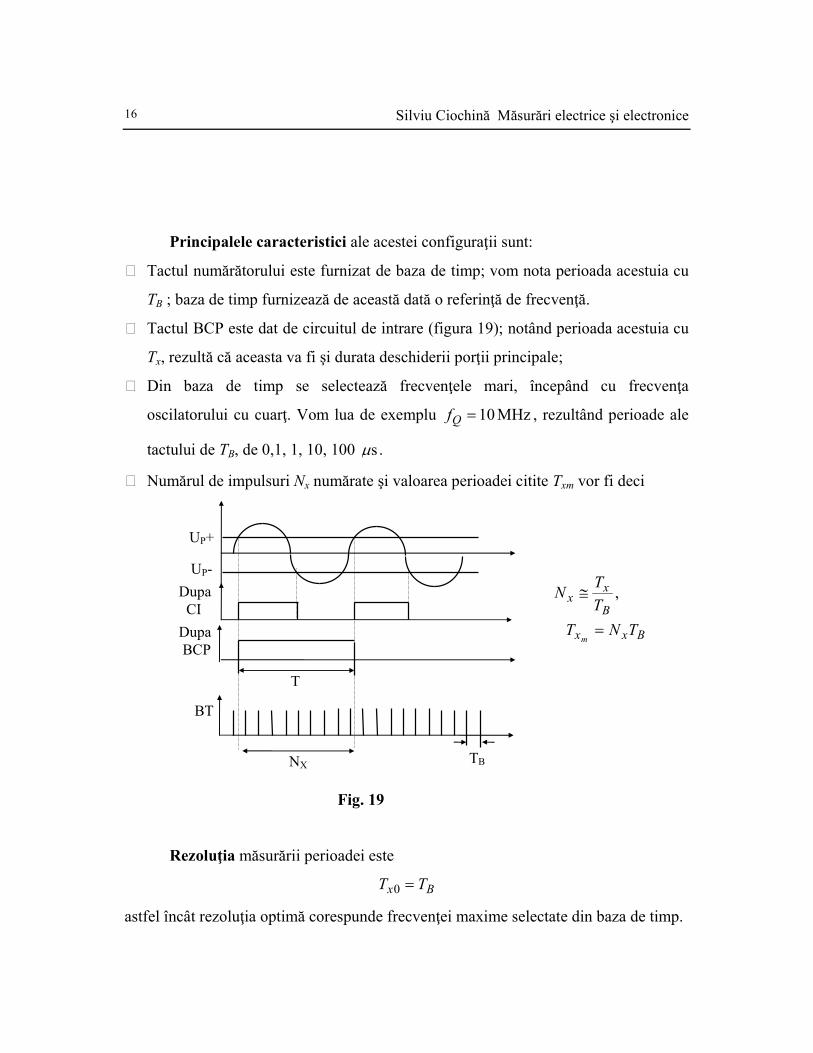
Principalele caracteristici ale acestei configuraţii sunt:
Tactul numărătorului este furnizat de baza de timp; vom nota perioada acestuia cu
TB ; baza de timp furnizează de această dată o referinţă de frecvenţă.
Tactul BCP este dat de circuitul de intrare (figura 19); notând perioada acestuia cu
Tx, rezultă că aceasta va fi şi durata deschiderii porţii principale;
Din baza de timp se selectează frecvenţele mari, începând cu frecvenţa
oscilatorului cu cuarţ. Vom lua de exemplu MHz10=Qf , rezultând perioade ale
tactului de TB, de 0,1, 1, 10, 100 sµ .
Numărul de impulsuri x numărate şi valoarea perioadei citite Txm vor fi deci
Rezoluţia măsurării perioadei este
Bx TT =0
astfel încât rezoluţia optimă corespunde frecvenţei maxime selectate din baza de timp.
Bxx
B
xx
TT
T
T
m=
≅ ,
UP+
UP-
Dupa CI
Dupa BCP
BT
T
NX TB
Fig. 19
Page 17
Măsurarea frecvenţelor 17
Semnificaţia indicaţiei poziţia şi virgulei
Rezoluţie
TB=0,1 sµ Txm=0,1Nx ( sµ ) x x x x x x, x ( sµ ) 0,1 sµ
TB=1 sµ Txm= Nx ( sµ ) x x x x x x x ( sµ ) 1 sµ
TB=10 sµ Txm=10 Nx ( sµ )= x x x x x, x x (ms) 10 sµ
=0,01 Nx (ms)
TB=100 sµ Txm=100 Nx ( sµ )= x x x x x x, x (ms) 100 sµ
=0,1 Nx (ms)
TB=1 ms Txm= Nx (ms) x x x x x x x (ms) 1 ms
TB=10 ms Txm=10 Nx (ms)= x x x x x, x x (s) 10 ms
=0,01 (s)
Erori
A) Eroarea de cuantizare
Ca şi în configuraţia precedentă, deoarece x este un număr întreg,
( ),1+
=
B
xx
T
T
deci
11 +<<−B
xx
B
x
T
T
T
T
BxxBB
x
B
mx
B
x TTTTT
T
T
T
T
Tm
<−<−⇒+<<− 11
xxB
x
B
x
xx
r
fTT
T
T
TTm 1Max ±≅±=±=−
±=′ε
Se constată că în această configuraţie eroarea este proporţională cu frecvenţa
semnalului şi are valoarea minimă când se lucrează cu frecvenţa maximă a bazei de
timp.
Page 18
Silviu Ciochină Măsurări electrice şi electronice 18
Să comparăm această eroare cu eroarea de acelaşi tip în cazul configuraţiei
frecvenţmetru. Avem în cele două cazuri
xBrxB
r fTfT TT
F
F±=′±=′ εε ,
1
Vom numi frecvenţă critică frecvenţa pentru care ′ = ′ε εr rF T
, deci:
TF
T
F BBcrcrB
crB TTffT
fT
11=⇒=
Pentru o evaluare corectă, vom lua pentru fiecare caz perioada bazei de timp care
conduce la eroarea minimă, deci
minMax
1
TF BBcr
TTf =
De exemplu, pentru TBT = 0,1 sµ , TBF=10 s, se obţine fcr=1 kHz.
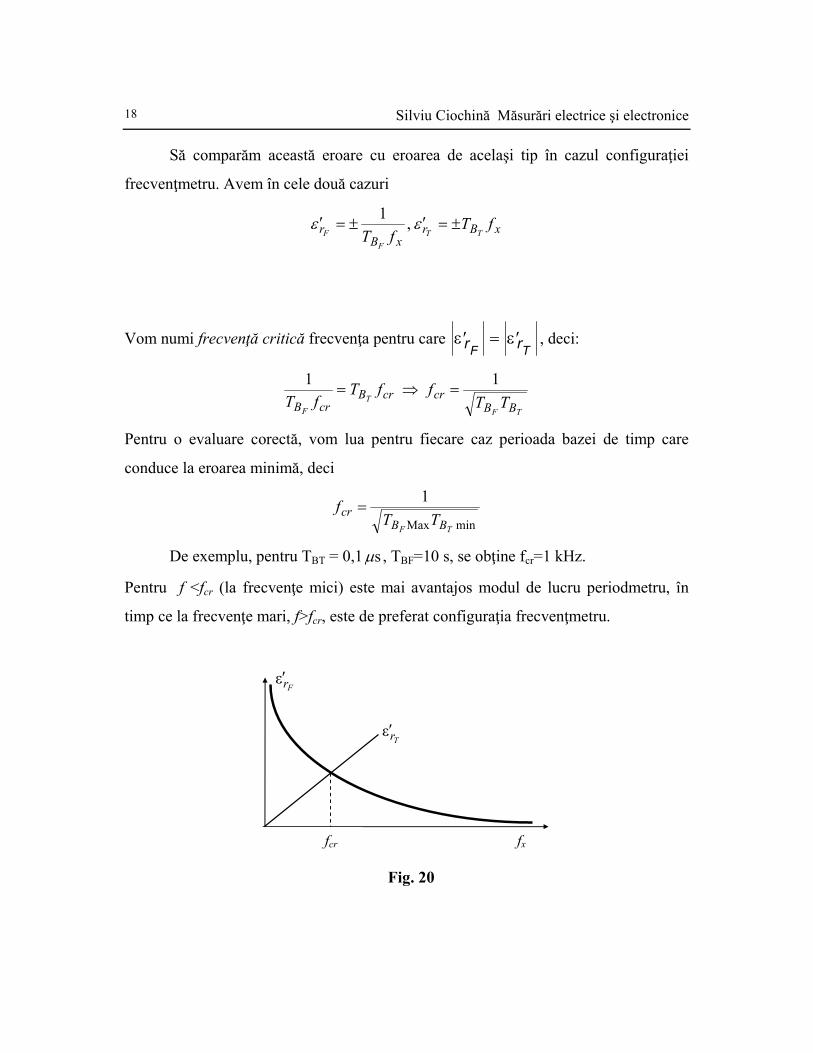
Pentru f <fcr (la frecvenţe mici) este mai avantajos modul de lucru periodmetru, în
timp ce la frecvenţe mari, f>fcr, este de preferat configuraţia frecvenţmetru.
Frε′
Trε′
fcr fx
Fig. 20
Page 19
Măsurarea frecvenţelor 19
B) Erori datorate impreciziei oscilatorului cu cuarţ
Numărul citit este interpretat ca
Boxx TTm=
unde TB0 este valoarea nominală a perioadei bazei de timp. În realitate
( ),1 QxQo
QxBo
B
xx T
f
fTT
T
TT
mε+===
deci
Qr εε =′
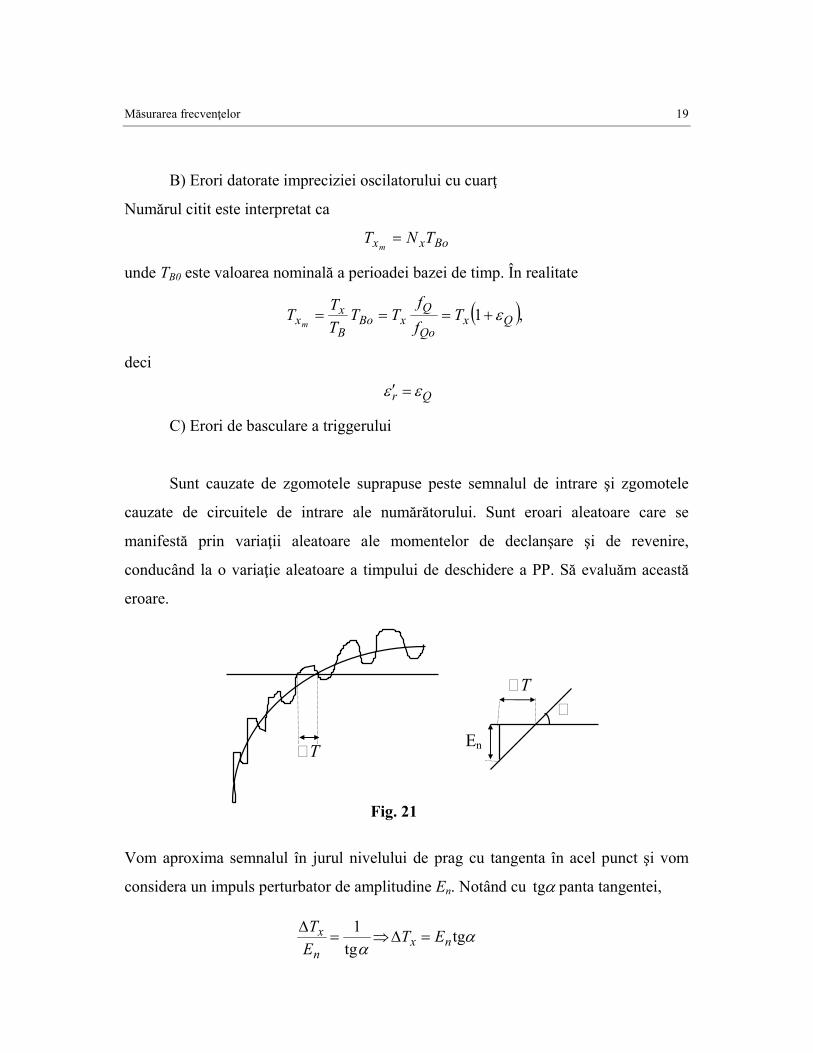
C) Erori de basculare a triggerului
Sunt cauzate de zgomotele suprapuse peste semnalul de intrare şi zgomotele
cauzate de circuitele de intrare ale numărătorului. Sunt eroari aleatoare care se
manifestă prin variaţii aleatoare ale momentelor de declanşare şi de revenire,
conducând la o variaţie aleatoare a timpului de deschidere a PP. Să evaluăm această
eroare.
Vom aproxima semnalul în jurul nivelului de prag cu tangenta în acel punct şi vom
considera un impuls perturbator de amplitudine En. Notând cu αtg panta tangentei,
α
αtg
tg
1nx
n
x ETE
T=∆⇒=
∆
TEn
T
Fig. 21
Page 20
Silviu Ciochină Măsurări electrice şi electronice 20
În cazul cel mai defavorabil, o eroare de sens contrar poate apărea la bascularea
următoare, care conduce la lungirea cu xT∆2 a timpului de deschidere a PP. Rezultă o
eroare relativă
αε
tg
22
x
n
x
xr
T
E
T
T=
∆=′′′
unde pUut
tu
==
d
)(dtgα reprezintă panta de variaţie a semnalului (slew-rate).
Evident, eroarea este cu atât mai mare cu cât panta este mai mică.
În cazul unui semnal sinusoidal:
)cos(d
)(d)sin()( tU
t
tutUtu ωωω =⇒=
Panta maximă se obţine când semnalul trece prin zero
1)cos(0)sin( ±=⇒= tt ωω
Valoarea optimă a pragului este deci 0=pU , pentru care se obţin
U
E
UT
EU
dt
tdu n
x
nr
U pπω
εω12
,)(
==′′′=
De exemplu, pentru un raport semnal / zgomot 100=nE
U, deci 40 dB, se obţine
%3,0[%]100
''' ≅=π
ε r
valoare destul de ridicată, chiar în condiţiile unui raport semnal / zgomot bun.
Deoarece această eroare este generată de zgomot, este normal ca ea să fie exprimată
sub forma erorii medii pătratice,
αεεε
tg
12)()()( 2
22
12
xefnrrr
TE=′′′+′′′=′′′
Page 21
Măsurarea frecvenţelor 21
în care s-au presupus că erorile corespunzătoare basculărilor succesive ale triggerului
sunt independente. Dacă se pun în evidenţă cele două tipuri de zgomote:
- NCI - zgomotul propriu al CI;
- Ns - zgomotul ce însoţeşte semnalul:
( )α
εtg
222
2
x
SefCIefr
T
+=′′′
Această a treia cauză de eroare este mai supărătoare în cazul configuraţiei de
periodmetru, faţă de configuraţia de frecvenţmetru, intervenind chiar la nivele mici ale
zgomotului în raport cu fereastra triggerului.
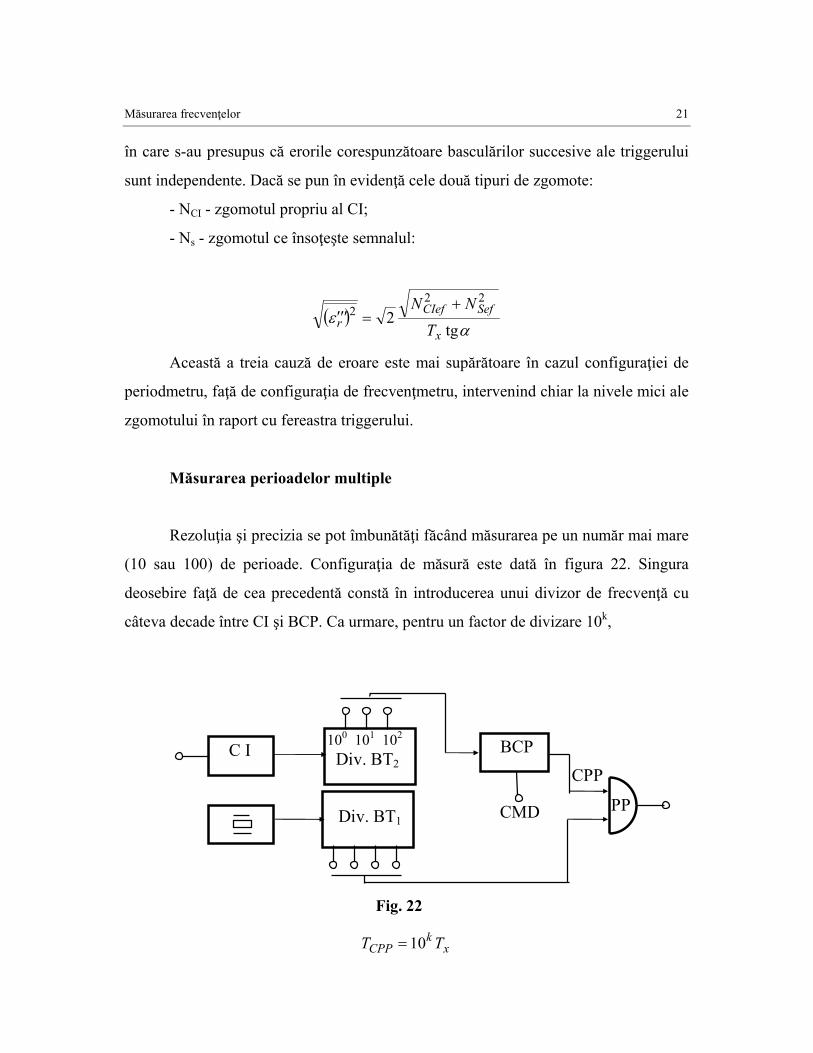
Măsurarea perioadelor multiple
Rezoluţia şi precizia se pot îmbunătăţi făcând măsurarea pe un număr mai mare
(10 sau 100) de perioade. Configuraţia de măsură este dată în figura 22. Singura
deosebire faţă de cea precedentă constă în introducerea unui divizor de frecvenţă cu
câteva decade între CI şi BCP. Ca urmare, pentru un factor de divizare 10k,
xk
CPP TT 10=
BCP
Div. BT1
100 101 102 Div. BT2
C I
CPP
CMD PP
Fig. 22
Page 22
Silviu Ciochină Măsurări electrice şi electronice 22
xBk
xmB
xkx TT
T
T −=⇒= 1010
Rezoluţia este evident 10−kBT , deci de 10k ori mai bună. Acelaşi rezultat s-ar putea
obţine şi utilizând o frecvenţa de la BT de 10k ori mai mare, dar s-ar putea ajunge la
frecvenţe prea mari şi numărătorul ar fi greu de realizat.
Eroarea de primul tip va fi
ork
kxB
xkr
fT
εε ′±=±=±=′ −10
10
1
deci se reduce de 10k ori.
Eroarea datorată bazei de timp rămâne nemodificată:
′ ′ = ′′ −ε ε εr k r Qo
Eroarea datorată triggerului rămâne xT∆2 , dar pentru 10k xT , deci pentru Tx:
kro
xk
xrk
T
T −′′′=∆
=′′′ 1010
2εε
Mărirea lui k cimplică însă creşterea foarte importantă a timpului de măsurare.
2.3 Măsurarea raportului a două frecvenţe
BCP
100 101 102 Div. BT2
f1(mare) mica
C I1 PP
C I2
C R
f2 mică
102
−kf
Fig. 23
Page 23
Măsurarea frecvenţelor 23
Se observă că de această dată apar două circuite de intrare (figura 22).
Semnalul aplicat la intrarea primului circuit de intrare este cel cu frecvenţa mai mare şi
el determină frecvenţa de tact. Durata deschiderii porţii (durata impusului CPP) este
determinată semnalul de pe canalul al doilea, de frecvenţă mai mică,
22
1010
1T
f
k
k=
−
Numărul de impulsuri numărate în acest interval este:
( ) ,1010
110
2
1
1
2
1
2
f
f
T
T
T
T k
k
x
k
x =≅⇒+
=
deci valoarea măsurată a raportului de frecvenţe este
Rezoluţia este 10−k .
Erori
- eroarea de cuantizare,
1
2
1101
−−
±=±=′
m
k
xr
f
f
kε ;
- baza de timp nu mai intervine, aşa încât eroarea de tipul al doilea dispare;
- eroarea de basculare datorată canalului CI2, care asigură durata deschiderii
porţii principale, este ca la periodmetre ,or
ε ′′′ iar având în vedere măsurarea
multiplă,
ok rk
r εε ′′′=′′′ −10 .
xk
m
f
f −=
10
2
1
Page 24
Silviu Ciochină Măsurări electrice şi electronice 24
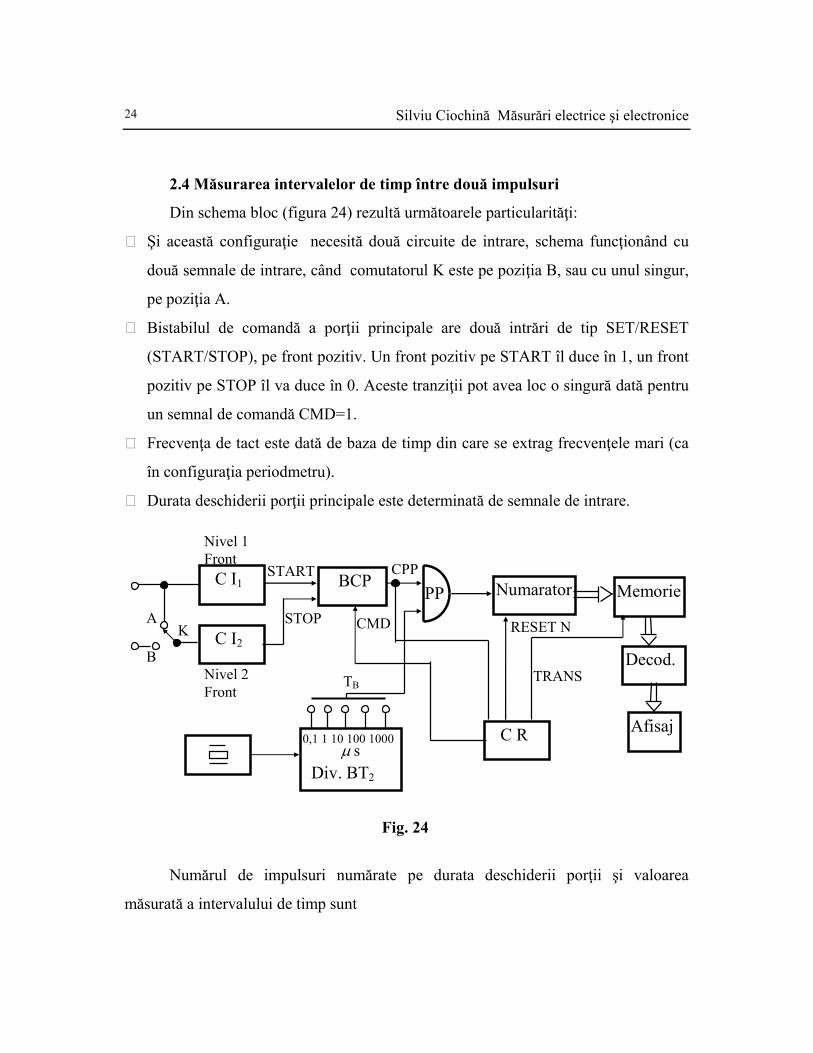
2.4 Măsurarea intervalelor de timp între două impulsuri
Din schema bloc (figura 24) rezultă următoarele particularităţi:
Şi această configuraţie necesită două circuite de intrare, schema funcţionând cu
două semnale de intrare, când comutatorul K este pe poziţia B, sau cu unul singur,
pe poziţia A.
Bistabilul de comandă a porţii principale are două intrări de tip SET/RESET
(START/STOP), pe front pozitiv. Un front pozitiv pe START îl duce în 1, un front
pozitiv pe STOP îl va duce în 0. Aceste tranziţii pot avea loc o singură dată pentru
un semnal de comandă CMD=1.
Frecvenţa de tact este dată de baza de timp din care se extrag frecvenţele mari (ca
în configuraţia periodmetru).
Durata deschiderii porţii principale este determinată de semnale de intrare.
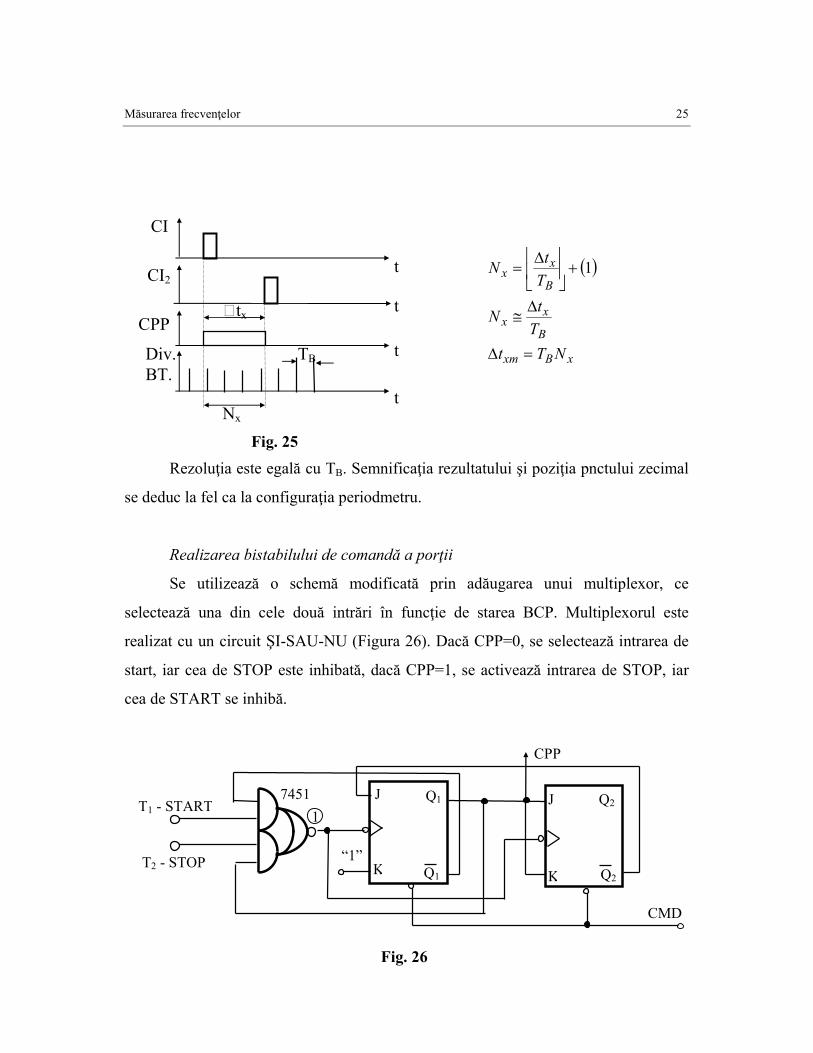
Numărul de impulsuri numărate pe durata deschiderii porţii şi valoarea
măsurată a intervalului de timp sunt
BCP
C I1
0,1 1 10 100 1000 sµ
Div. BT2
CPP
CMD
PP
C I2
Numarator Memorie
Decod.
Afisaj C R
RESET N
TRANS
A
B
K
START
STOP
Nivel 1 Front
Nivel 2 Front
TB
Fig. 24
Page 25
Măsurarea frecvenţelor 25
Rezoluţia este egală cu TB. Semnificaţia rezultatului şi poziţia pnctului zecimal
se deduc la fel ca la configuraţia periodmetru.
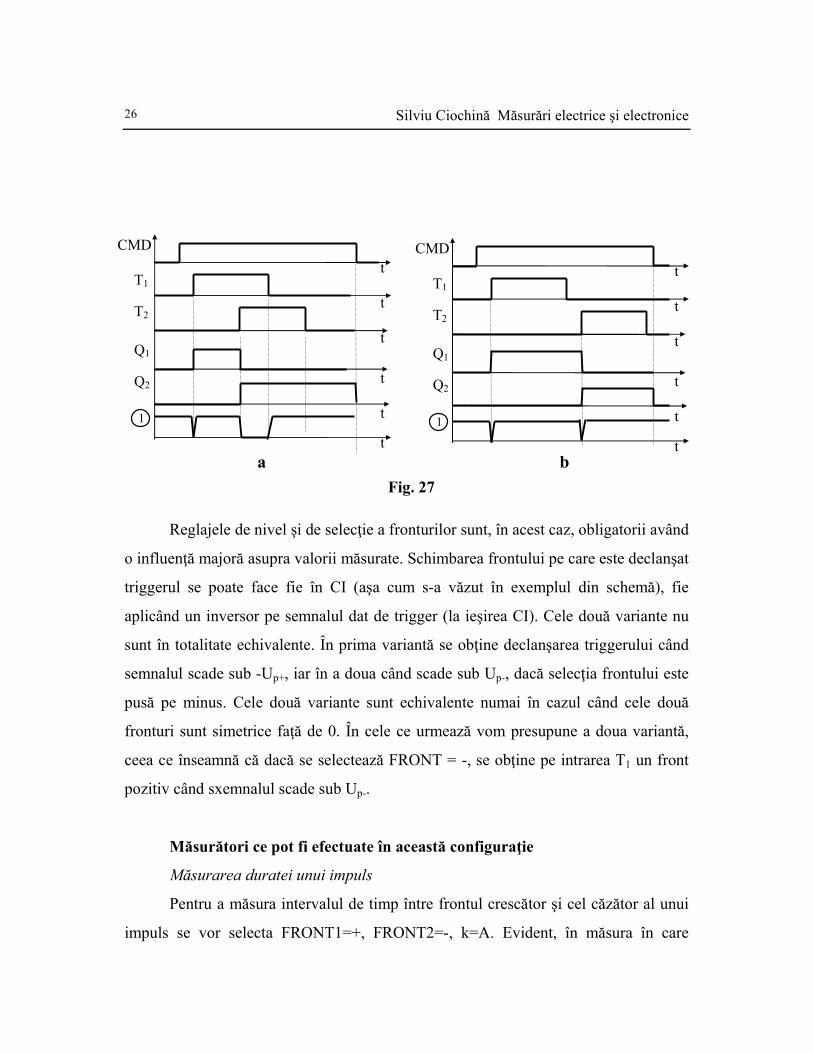
Realizarea bistabilului de comandă a porţii
Se utilizează o schemă modificată prin adăugarea unui multiplexor, ce
selectează una din cele două intrări în funcţie de starea BCP. Multiplexorul este
realizat cu un circuit ŞI-SAU-NU (Figura 26). Dacă CPP=0, se selectează intrarea de
start, iar cea de STOP este inhibată, dacă CPP=1, se activează intrarea de STOP, iar
cea de START se inhibă.
( )
xBxm
B
xx
B
xx
Tt
T
t
T
t
=∆
∆≅
+
∆= 1
CI2
CI
CPP
Div. BT.
Nx
TB
tx
t
t
t
t
Fig. 25
J
K
Q2
Q2
J
K
Q1
Q1
T1 - START
T2 - STOP
7451
“1”
CPP
CMD
1
Fig. 26
Page 26
Silviu Ciochină Măsurări electrice şi electronice 26
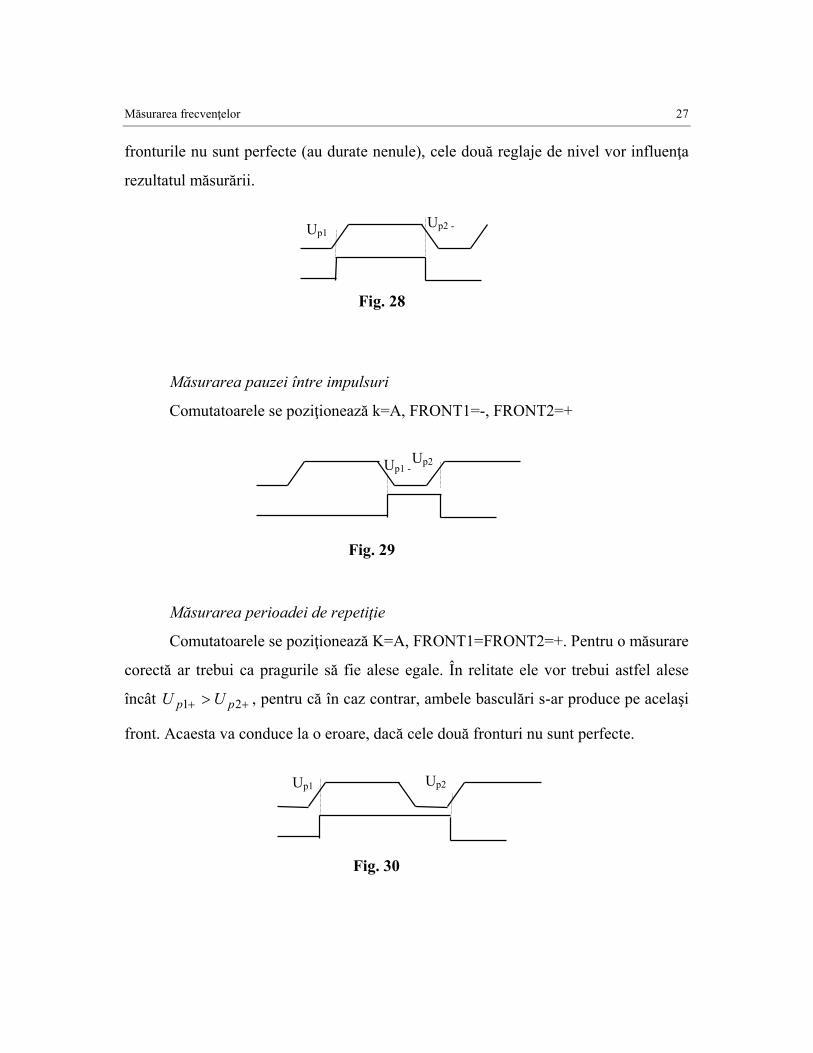
Reglajele de nivel şi de selecţie a fronturilor sunt, în acest caz, obligatorii având
o influenţă majoră asupra valorii măsurate. Schimbarea frontului pe care este declanşat
triggerul se poate face fie în CI (aşa cum s-a văzut în exemplul din schemă), fie
aplicând un inversor pe semnalul dat de trigger (la ieşirea CI). Cele două variante nu
sunt în totalitate echivalente. În prima variantă se obţine declanşarea triggerului când
semnalul scade sub -Up+, iar în a doua când scade sub Up-, dacă selecţia frontului este
pusă pe minus. Cele două variante sunt echivalente numai în cazul când cele două
fronturi sunt simetrice faţă de 0. În cele ce urmează vom presupune a doua variantă,
ceea ce înseamnă că dacă se selectează FRONT = -, se obţine pe intrarea T1 un front
pozitiv când sxemnalul scade sub Up-.
Măsurători ce pot fi efectuate în această configuraţie
Măsurarea duratei unui impuls
Pentru a măsura intervalul de timp între frontul crescător şi cel căzător al unui
impuls se vor selecta FRONT1=+, FRONT2=-, k=A. Evident, în măsura în care
CMD
T1
T2
Q1
1
t
t
t
t
t
t
CMD
T1
T2
Q1
1
t
t
t
t
t
t
Q2 Q2
a b
Fig. 27
Page 27
Măsurarea frecvenţelor 27
fronturile nu sunt perfecte (au durate nenule), cele două reglaje de nivel vor influenţa
rezultatul măsurării.
Măsurarea pauzei între impulsuri
Comutatoarele se poziţionează k=A, FRONT1=-, FRONT2=+
Măsurarea perioadei de repetiţie
Comutatoarele se poziţionează K=A, FRONT1=FRONT2=+. Pentru o măsurare
corectă ar trebui ca pragurile să fie alese egale. În relitate ele vor trebui astfel alese
încât ++ > 21 pp UU , pentru că în caz contrar, ambele basculări s-ar produce pe acelaşi
front. Acaesta va conduce la o eroare, dacă cele două fronturi nu sunt perfecte.
Up1
Up2 -
Fig. 28
Up1 - Up2
Fig. 29
Up1
Up2
Fig. 30
Page 28
Silviu Ciochină Măsurări electrice şi electronice 28
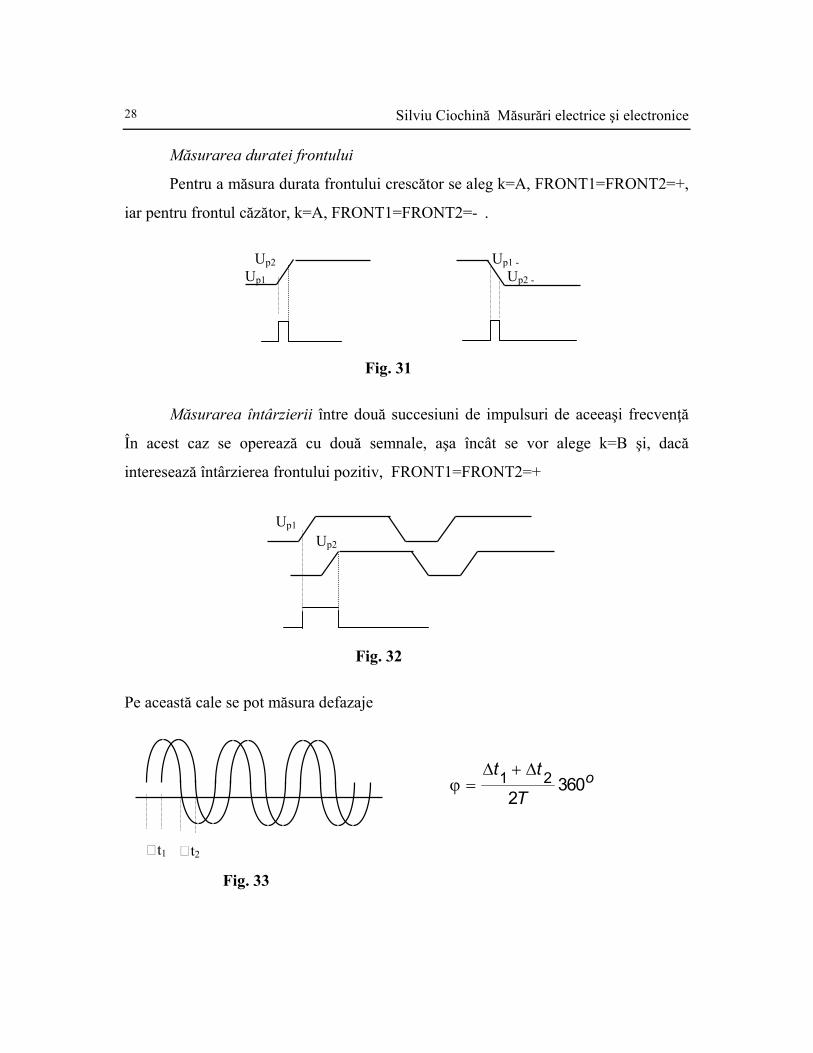
Măsurarea duratei frontului
Pentru a măsura durata frontului crescător se aleg k=A, FRONT1=FRONT2=+,
iar pentru frontul căzător, k=A, FRONT1=FRONT2=- .
Măsurarea întârzierii între două succesiuni de impulsuri de aceeaşi frecvenţă
În acest caz se operează cu două semnale, aşa încât se vor alege k=B şi, dacă
interesează întârzierea frontului pozitiv, FRONT1=FRONT2=+
Pe această cale se pot măsura defazaje
ϕ =+∆ ∆t t
T
o1 2
2360
Up1 -
Up2 - Up1
Up2
Fig. 31
Up1
Up2
Fig. 32
t1 t2
Fig. 33
Page 29
Măsurarea frecvenţelor 29
Erori
♣ Eroarea de cuantizare este , la fel ca la celelalte configuraţii:
x
B
xr
T
T
∆±=±=′
1ε
♣ Eroarea datorată etalonului de frecvenţă ′ ′ =ε εr Q
♣ Eroarea datorată basculării incorecte a triggerelor
Aceste erori au o componenta aleatoare, datorată surselor de zgomot aferente celor
două canale şi celor zgomotelor suprapuse peste cele două semnale. Erorile respective
se pot evalua, cum s-a arătat la configuraţia periodmetru, separat pentru cele două
canale:
2
2
1
1
22
11 ,
pp U
ne
U
ne
dt
du
Et
dt
du
Et =∆=∆
În cazul cel mai defavorabil, apar în acelaşi sens şi eroarea totală este:
., 21
21x
ee
x
ereee
t
tt
t
tttt
∆
∆+∆=
∆∆
=′′∆+∆=∆ ε
Deoarece 1nE şi
2nE au caracter de zgomot
222
222
222222
111111
,
,
SCInSCIn
SCInSCIn
EEEE
EEEE
+=+=
+=+=
Page 30
Silviu Ciochină Măsurări electrice şi electronice 30
Este util să se evalueze eroarea medie pătratică
( ) ( ) ( )2
2
22
21
22222 2211
21
++
+=∆+∆=∆
dt
du
dt
du
ttt
SCISCIeee
Pot însă să apară asemenea erori şi ca urmare a alegerii incorecte a pragurilor în raport
cu mărimea ce se doreşte a fi măsurată (eroare subiectivă- datorată operatorului), dar
şi a unei neidentităţi a celor 2 circuite de intrare, inclusiv a cablurilor de legătură
dintre instrument şi obiectul măsurat (eroare sistematică).
Pentru a evita sau reduce asemenea erori este util să se cunoască foarte exact
momentele basculărilor. Pentru aceasta, unele numărătoare au ieşiri speciale, destinate
vizualizării pe un osciloscop, a semnalului de comandă a porţii, sau a ieşirilor celor
două circuite de intrare.
Metode de îmbunătăţire a rezoluţiei şi preciziei
Măsurarea intervalelor de timp multiple
Metoda măsurării multiple, care a fost prezentată în cazul configuraţiei
periodmetru. poate fi utilizată şi în acest caz pentru îmbunătăţirea rezoluţiei
măsurătorii şi reducerea erorilor. Ştergerea numărătorului şi memorarea rezultatului se
fac o dată la 10k impulsuri CPP.
Pe această cale se reduce de 10k ori eroarea decuantizare. Eroarea datorată
oscilatorului cu cuarţ nu este afectată. Eroarea datorată triggerului se reduce într-o
anumită măsură. Dacă aceasta ar avea un caracter pur aleator, cum este componenta
datorată zgomotului, ea s-ar reduce de 10k ori. Componenta sistematică şi cea
obiectivă nu sunt însă afectate de această îmbunătăţire.
Page 31
Măsurarea frecvenţelor 31
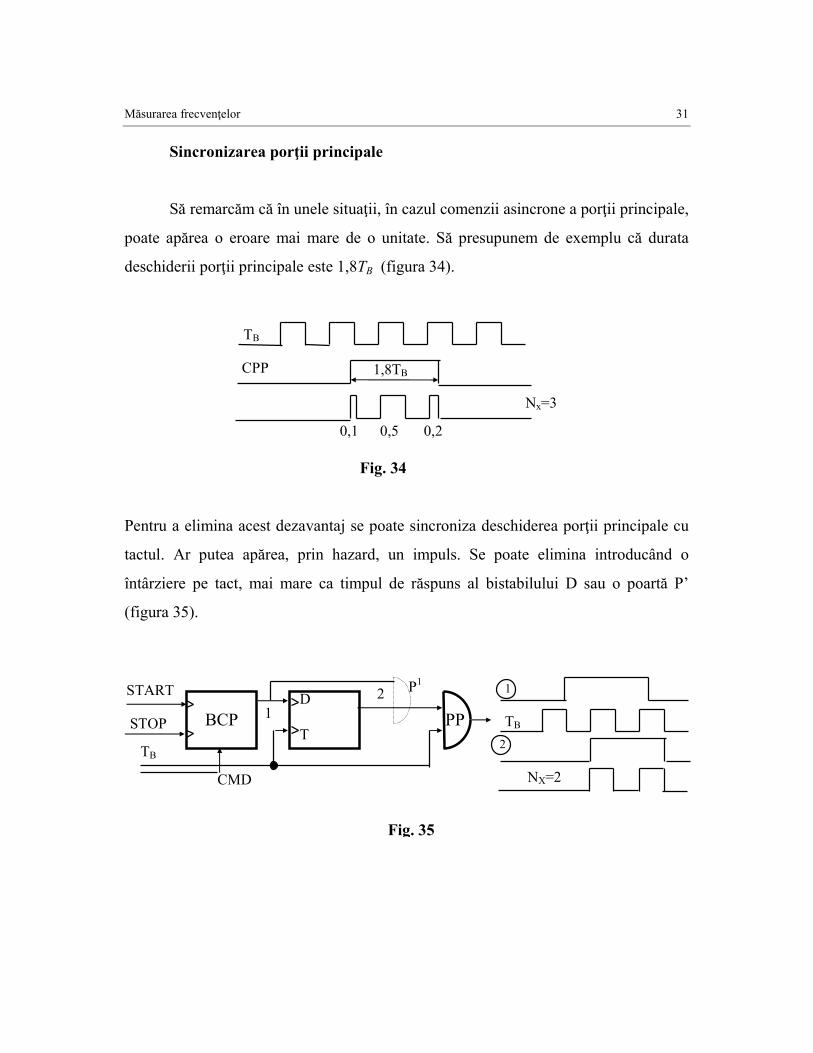
Sincronizarea porţii principale
Să remarcăm că în unele situaţii, în cazul comenzii asincrone a porţii principale,
poate apărea o eroare mai mare de o unitate. Să presupunem de exemplu că durata
deschiderii porţii principale este 1,8TB (figura 34).
Pentru a elimina acest dezavantaj se poate sincroniza deschiderea porţii principale cu
tactul. Ar putea apărea, prin hazard, un impuls. Se poate elimina introducând o
întârziere pe tact, mai mare ca timpul de răspuns al bistabilului D sau o poartă P’
(figura 35).
TB
1
2
NX=2
CPP
TB
Nx=3
0,1 0,5 0,2
1,8TB
Fig. 34
START
STOP PP
CMD
TB
1 2 P1
D T
BCP
Fig. 35
Page 32
Silviu Ciochină Măsurări electrice şi electronice 32
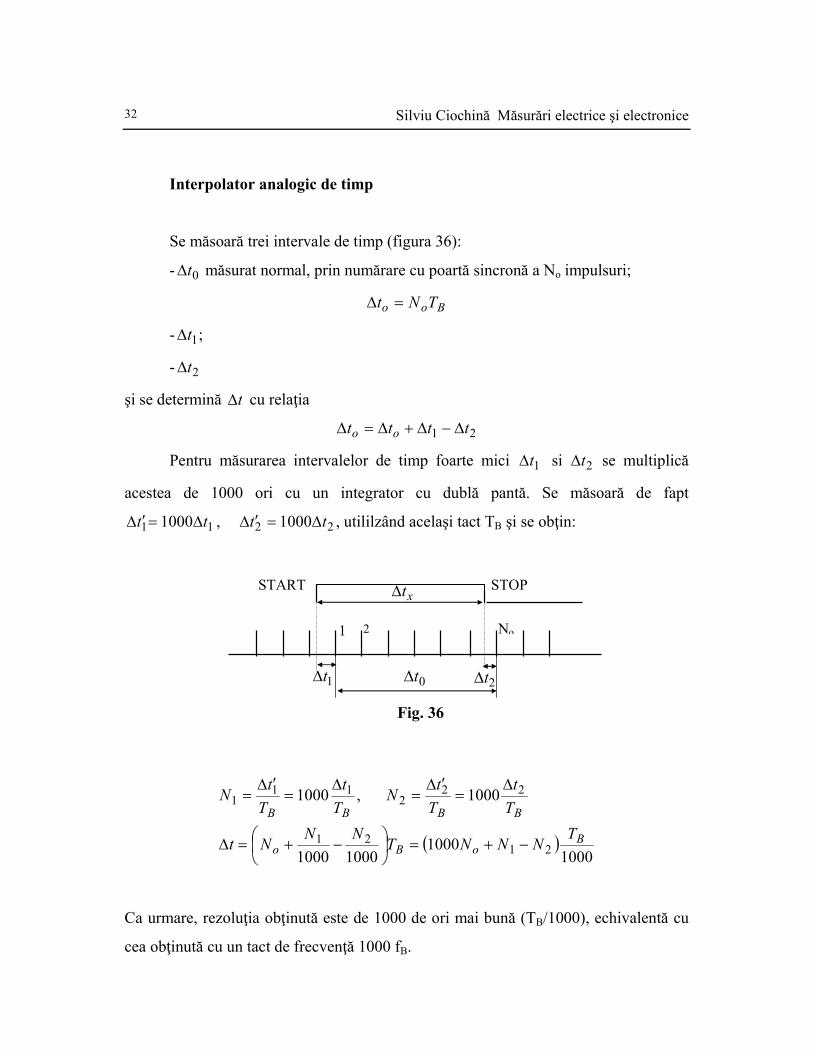
Interpolator analogic de timp
Se măsoară trei intervale de timp (figura 36):
- 0t∆ măsurat normal, prin numărare cu poartă sincronă a No impulsuri;
Boo Tt =∆
- 1t∆ ;
- 2t∆
şi se determină t∆ cu relaţia
21 tttt oo ∆−∆+∆=∆
Pentru măsurarea intervalelor de timp foarte mici 21 si tt ∆∆ se multiplică
acestea de 1000 ori cu un integrator cu dublă pantă. Se măsoară de fapt
2211 1000,1000 tttt ∆=′∆∆=′∆ , utililzând acelaşi tact TB şi se obţin:
( )1000
100010001000
1000,1000
2121
222
111
BoBo
BBBB
TT
t
T
t
T
t
T
t
T
t
−+=
−+=∆
∆=
′∆=
∆=′∆
=
Ca urmare, rezoluţia obţinută este de 1000 de ori mai bună (TB/1000), echivalentă cu
cea obţinută cu un tact de frecvenţă 1000 fB.
2 1 No
START STOP xt∆
0t∆ 1t∆ 2t∆
Fig. 36
Page 33
Măsurarea frecvenţelor 33
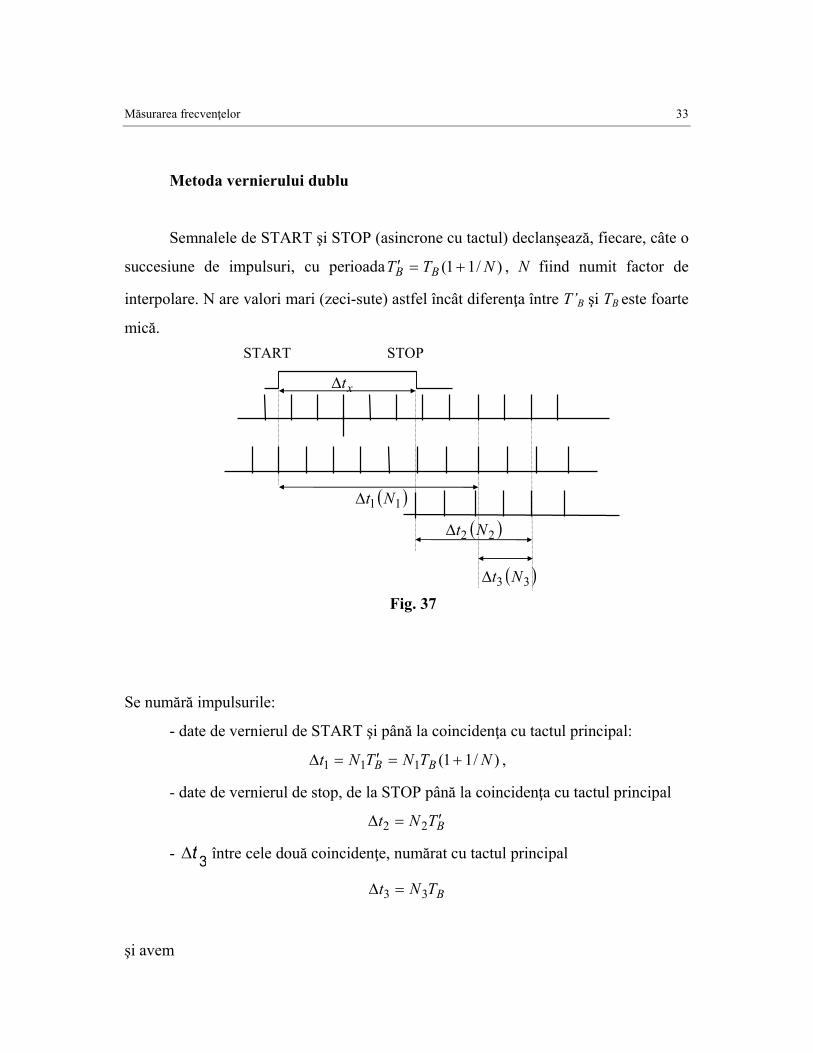
Metoda vernierului dublu
Semnalele de START şi STOP (asincrone cu tactul) declanşează, fiecare, câte o
succesiune de impulsuri, cu perioada )/11( TT BB +=′ , fiind numit factor de
interpolare. N are valori mari (zeci-sute) astfel încât diferenţa între T’B şi TB este foarte
mică.
Se numără impulsurile:
- date de vernierul de START şi până la coincidenţa cu tactul principal:
)/11(111 TTt BB +=′=∆ ,
- date de vernierul de stop, de la STOP până la coincidenţa cu tactul principal
BTt ′=∆ 22
- ∆t3
între cele două coincidenţe, numărat cu tactul principal
BTt 33 =∆
şi avem
START STOP
( )11 t∆
xt∆
( )22 t∆
( )33 t∆
Fig. 37
Page 34
Silviu Ciochină Măsurări electrice şi electronice 34
))(/11( 213231
312
TTttttt
tttt
BBxx
x
−++=∆⇒∆−∆+∆=∆
∆+∆=∆+∆
Relaţia este practic exactă, intervalele respective fiind, prin modul cum s-au definit,
multipli ai tactului cu care s-au măsurat.
TTt BBx
21213 )(
−+−+=∆
Evident, rezoluţia este TB/. Exemplu: Numărătorul HP 5370A are oscilatorul de
referinţă pe frecvenţa de 200 MHz, deci TB=5 ns, iar ′TB
:
nsTT BB 02,5)250/11( =+=′
Rezoluţia va fi de 20 ps, care altfel, ar fi necesitat un tact de 1/20 ps=50 GHz .
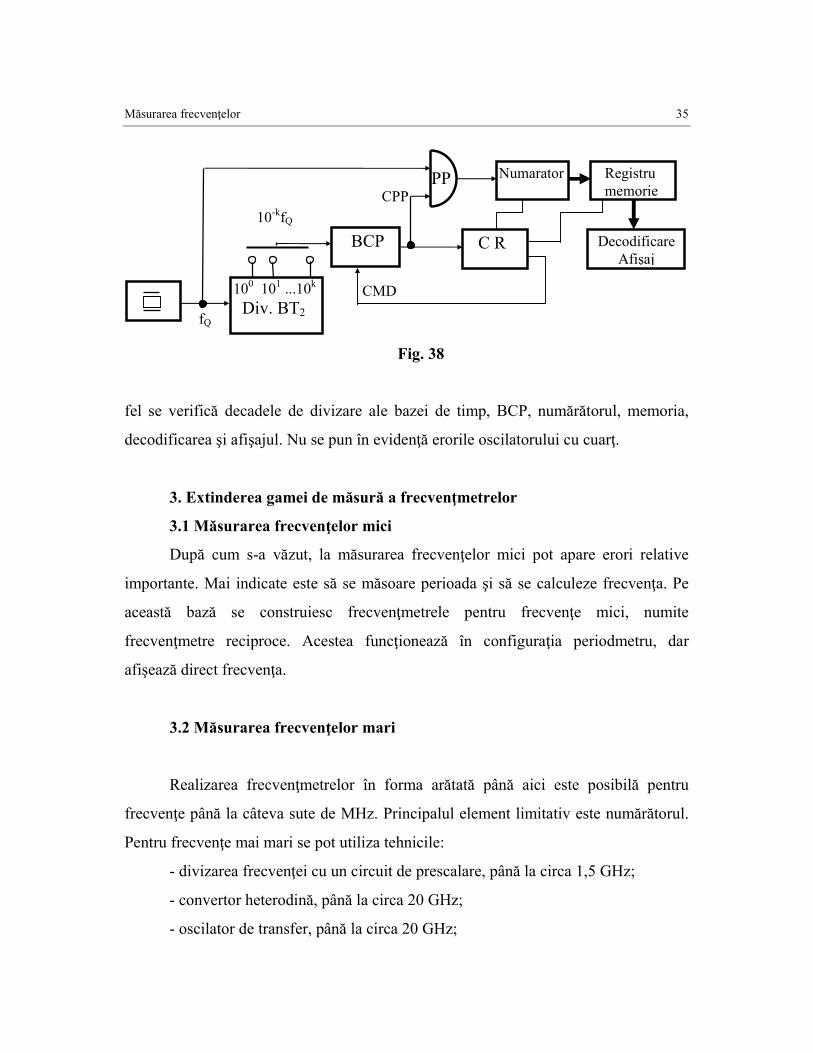
2.5 Configuraţia auto-test
Majoritatea numărătoarelor universale sunt prevăzute cu o posibilitate de auto-
test. Această configuraţie este prezentată în figura 38. Poarta principală este deschisă
un timp de 10k Tq deci kqk
x
qT
T 10
10== . Prin urmare, afişajul va trebui să indice o
putere a lui 10, depinzând de treapta de divizare selectată de la baza de timp. În acest
Page 35
Măsurarea frecvenţelor 35
fel se verifică decadele de divizare ale bazei de timp, BCP, numărătorul, memoria,
decodificarea şi afişajul. Nu se pun în evidenţă erorile oscilatorului cu cuarţ.
3. Extinderea gamei de măsură a frecvenţmetrelor
3.1 Măsurarea frecvenţelor mici
După cum s-a văzut, la măsurarea frecvenţelor mici pot apare erori relative
importante. Mai indicate este să se măsoare perioada şi să se calculeze frecvenţa. Pe
această bază se construiesc frecvenţmetrele pentru frecvenţe mici, numite
frecvenţmetre reciproce. Acestea funcţionează în configuraţia periodmetru, dar
afişează direct frecvenţa.
3.2 Măsurarea frecvenţelor mari
Realizarea frecvenţmetrelor în forma arătată până aici este posibilă pentru
frecvenţe până la câteva sute de MHz. Principalul element limitativ este numărătorul.
Pentru frecvenţe mai mari se pot utiliza tehnicile:
- divizarea frecvenţei cu un circuit de prescalare, până la circa 1,5 GHz;
- convertor heterodină, până la circa 20 GHz;
- oscilator de transfer, până la circa 20 GHz;
BCP
100 101 ...10k Div. BT2
CMD
Numarator
fQ
PP
C R
10-kfQ
Registru memorie
Decodificare Afişaj
Fig. 38
CPP
Page 36
Silviu Ciochină Măsurări electrice şi electronice 36
- convertor heterodină armonic, până la circa 40 GHz.
3.2.1 Divizarea de frecvenţă
După CI se introduce un divizor de frecvenţă cu N. Pentru a nu afecta rezoluţia
instrumentului se poate mări simultan de N ori durata deschiderii porţii principale.
Exemplu: numărătorul E0204 are pe intrarea A f max=40 MHz, iar pe intrarea
B, semnalul este divizat cu 10 cu un divizor ECL, frecvenţa maximă fiind ridicată la
300 MHz. Deoarece nu se divizează în acelaşi timp şi fQ, frecvenţmetrul indică fx/10,
iar rezoluţia este mai proastă dacă se utilizează intrarea B, decât în cazul utilizării
intrării A.
3.2.2 Convertorul heterodină
Principiul blocului convertor heterodină constă în scăderea din frecvenţa de
măsurat fx a unei frecvenţe cunoscute, aşa încât frecvenţa diferenţă să se încadreze în
gama de lucru a unui frecvenţmetru obişnuit. Frecvenţa cunoscută se obţine, de regulă,
tot de la baza de timp a frecvenţmetrului, prin multiplicare cu un factor variabil . Fie
aceasta fh, aşa încât frecvenţmetrul va trebui să măsoare:
maxi x hf f f f= − <
unde fmax este frecvenţa maxima până la care poate lucra frecvenţmetrul fără
convertor. Cunoscând şi fo rezultă fx. Operaţia de acord ce constă în căutarea
numărului pentru care 0<fi<fmax se poate realiza manual sau automat.
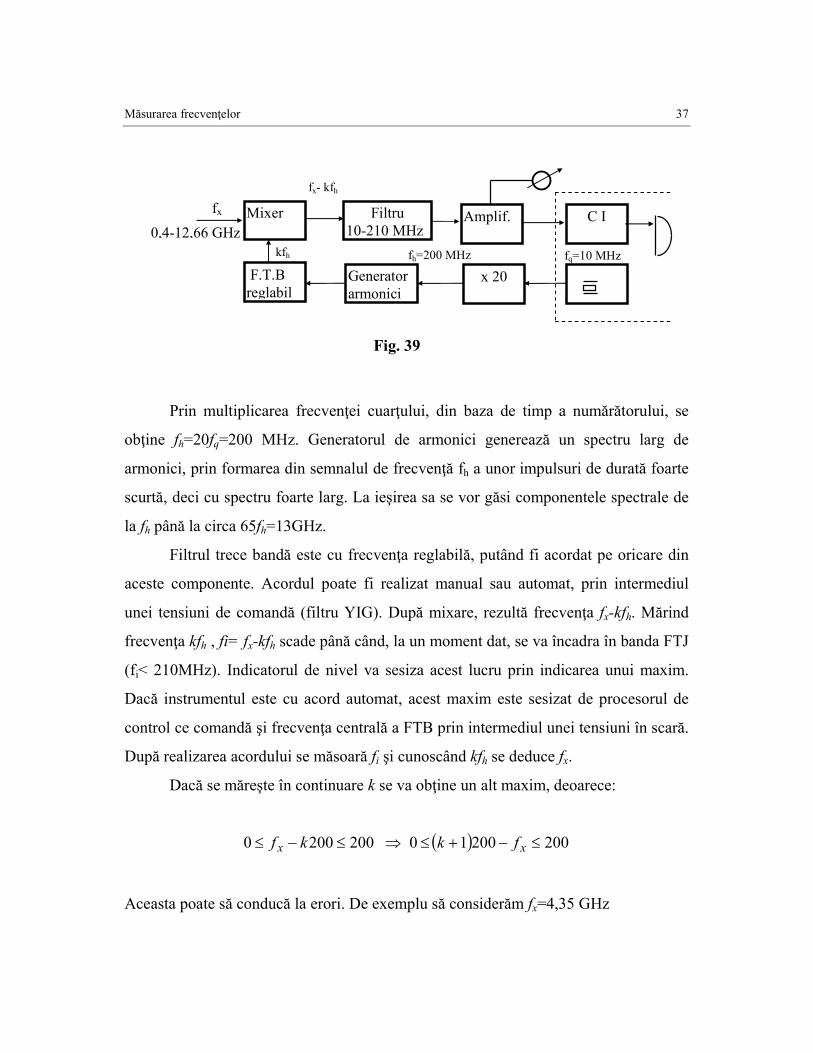
Pentru exemplificare vom considera convertorul heterodină al numărătorului Philips
PM6634 (figura 39).
Page 37
Măsurarea frecvenţelor 37
Prin multiplicarea frecvenţei cuarţului, din baza de timp a numărătorului, se
obţine fh=20fq=200 MHz. Generatorul de armonici generează un spectru larg de
armonici, prin formarea din semnalul de frecvenţă fh a unor impulsuri de durată foarte
scurtă, deci cu spectru foarte larg. La ieşirea sa se vor găsi componentele spectrale de
la fh până la circa 65fh=13GHz.
Filtrul trece bandă este cu frecvenţa reglabilă, putând fi acordat pe oricare din
aceste componente. Acordul poate fi realizat manual sau automat, prin intermediul
unei tensiuni de comandă (filtru YIG). După mixare, rezultă frecvenţa fx-kfh. Mărind
frecvenţa kfh , fi= fx-kfh scade până când, la un moment dat, se va încadra în banda FTJ
(fi< 210MHz). Indicatorul de nivel va sesiza acest lucru prin indicarea unui maxim.
Dacă instrumentul este cu acord automat, acest maxim este sesizat de procesorul de
control ce comandă şi frecvenţa centrală a FTB prin intermediul unei tensiuni în scară.
După realizarea acordului se măsoară fi şi cunoscând kfh se deduce fx.
Dacă se măreşte în continuare k se va obţine un alt maxim, deoarece:
( ) 200200102002000 ≤−+≤⇒≤−≤ xx fkkf
Aceasta poate să conducă la erori. De exemplu să considerăm fx=4,35 GHz
Mixer Filtru 10-210 MHz
Amplif.
F.T.B reglabil
Generator armonici
x 20
C I
0,4-12,66 GHz
fx
kfh fq=10 MHz fh=200 MHz
fx- kfh
Fig. 39
Page 38
Silviu Ciochină Măsurări electrice şi electronice 38
Se obţine un maxim pentru kfh=4,2 GHz şi fx-kfh este măsurat de frecvenţmetru. Se
obţine fx adunând fx=4,20+0,15=4,35 GHz. Pentru următorul k se obţine, de asemenea,
nivel la ieşirea filtrului deoarece kfh=4,4 GHz şi kfh- fx=0,05 GHz<200 MHz (figura
40). Am fi înclinaţi să calculăm frecvenţa după aceeaşi regulă şi ar rezulta valoarea
eronată fx=4,4+0,05=4,45 GHz.
În concluzie, pornind de la valori mici ale lui k, trebuie luat în considerare
primul maxim care apare. Ca verificare, trecând la următorul k trebuie să rezulte o
frecvenţă cu fh /2 mai mare.
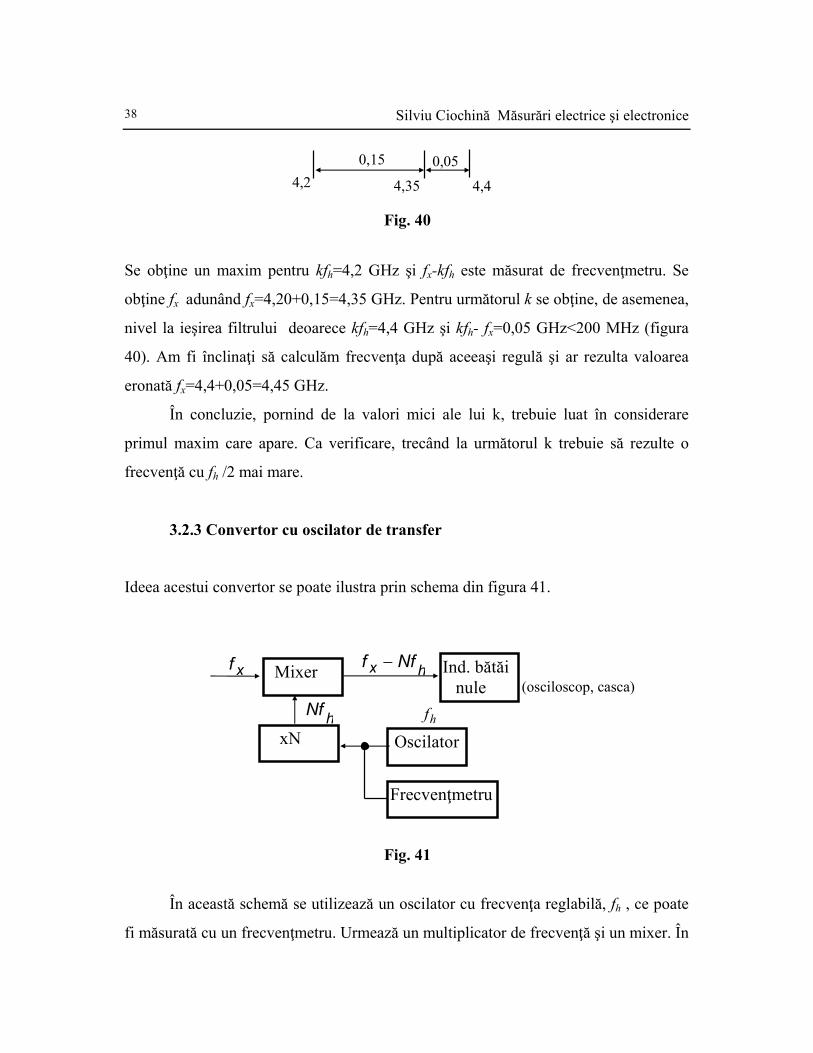
3.2.3 Convertor cu oscilator de transfer
Ideea acestui convertor se poate ilustra prin schema din figura 41.
În această schemă se utilizează un oscilator cu frecvenţa reglabilă, fh , ce poate
fi măsurată cu un frecvenţmetru. Urmează un multiplicator de frecvenţă şi un mixer. În
0,15 0,05
4,2 4,35 4,4 GHz
Fig. 40
f x f Nfx h−
Nfh
Mixer
xN
Ind. bătăi nule
Oscilator
Frecvenţmetru
(osciloscop, casca)
hf
Fig. 41
Page 39
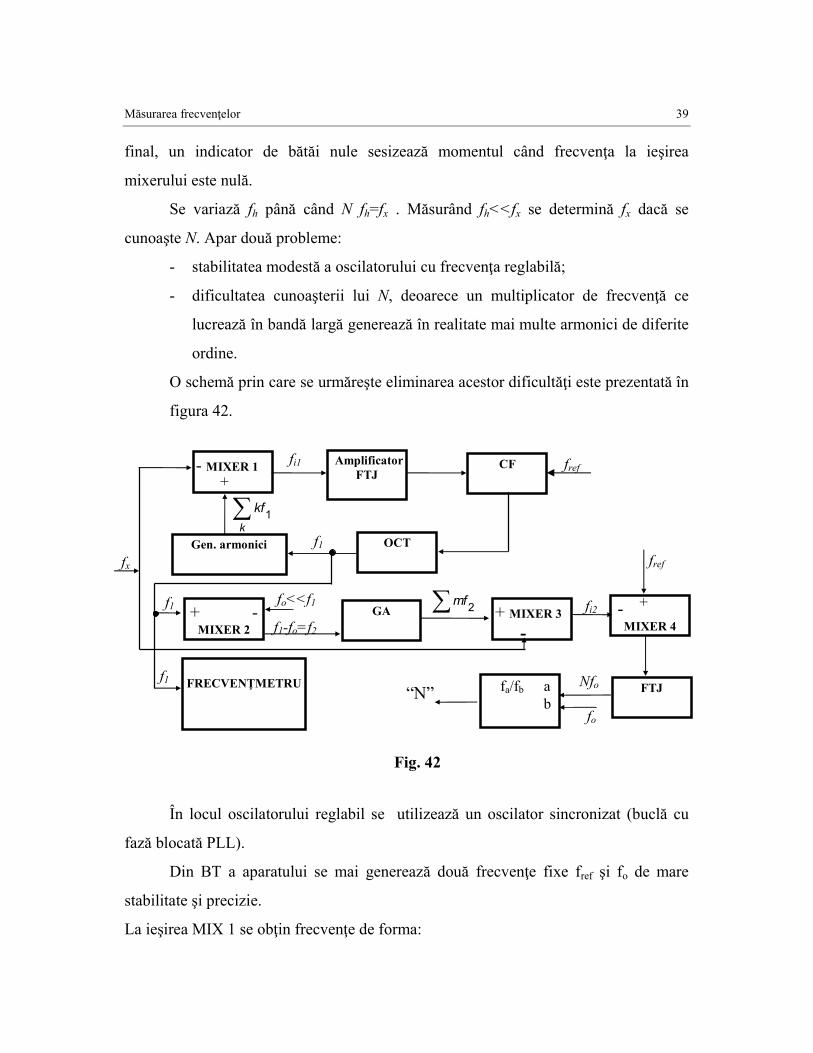
Măsurarea frecvenţelor 39
final, un indicator de bătăi nule sesizează momentul când frecvenţa la ieşirea
mixerului este nulă.
Se variază fh până când fh=fx . Măsurând fh<<fx se determină fx dacă se
cunoaşte . Apar două probleme:
- stabilitatea modestă a oscilatorului cu frecvenţa reglabilă;
- dificultatea cunoaşterii lui , deoarece un multiplicator de frecvenţă ce
lucrează în bandă largă generează în realitate mai multe armonici de diferite
ordine.
O schemă prin care se urmăreşte eliminarea acestor dificultăţi este prezentată în
figura 42.
În locul oscilatorului reglabil se utilizează un oscilator sincronizat (buclă cu
fază blocată PLL).
Din BT a aparatului se mai generează două frecvenţe fixe fref şi fo de mare
stabilitate şi precizie.
La ieşirea MIX 1 se obţin frecvenţe de forma:
- MIXER 1
+ - MIXER 2
+ MIXER 3
-
Amplificator FTJ
CF
Gen. armonici OCT
GA
fa/fb a b
FRECVEŢMETRU
fi1 fref
- MIXER 4
FTJ
fref
f1
f1
f1
fx
fi2
fo
fo
f1-fo=f2
fo<<f1
kf
k
1∑
mf2∑
“N””
+
++
Fig. 42
Page 40
Silviu Ciochină Măsurări electrice şi electronice 40
xi fkfkf −= 1)(1
Aceasta este comparată în CF cu frecvenţa fref. Dacă cele două frecvenţe nu sunt egale,
CF generează o tensiune de eroare care modifică frecvenţa OCT până când, pentru un
anumit k=, se obţine egalitatea
refxi ffff =−= 1)(1
În acest moment bucla PLL este sincronizată. f1 este, în general, o frecvenţă mult mai
mică decât fx şi poate fi măsurată, fref este cunoscut, deci ar mai trebui cunoscut .
Restul schemei are drept scop tocmai determinarea lui . Frecvenţa f1 este mixată în
MIX2 cu fo, fo<<f1 rezultând f2=f1-fo. După generatorul de armonici GA rezultă un
spectru bogat cu frecvenţe de forma mf2 care se aplică la MIX3:
xoxi fmfmffmfmf −−=−= 12)(2
În MIX4 rezultă componentele de forma
2 1 1 1 1( ) ( )
oi o x x o xref reff f m f mf mf f f f mf mf f m f mf− = − + + = − − + + = − +
Cum off >>1 după FTJ rămâne componenta pentru m=, adică fo. Aceasta este
aplicată, împreună cu f 0 unui măsurător de raport de frecvenţe ce determină N.
Frecvenţa mică f1 este măsurată de un frecvenţmetru. În final se determină fx,
refx fff −= 1 .