251
Prof.dr.ing.eur.ing. Ioan SÂRBU MODELĂRI NUMERICE ŞI OPTIMIZĂRI ÎN INSTALAŢII Colecţia ”INSTALAŢII PENTRU CONSTRUCŢII” EDITURA POLITEHNICA TIMIŞOARA – 2010
Prof.dr.ing.eur.ing. Ioan SÂRBU
MODEL ĂRI NUMERICE ŞI
OPTIMIZ ĂRI ÎN INSTALA ŢII
Colecţia ”INSTALAŢII PENTRU CONSTRUCŢII”
EDITURA POLITEHNICA TIMIŞOARA – 2010

PREFAłĂ În domeniul cercetării şi proiectării instalaŃiilor pentru construcŃii s-au înregistrat în ultimii ani progrese remarcabile. NecesităŃile creşterii similitudinii dintre procesele re-ale din aceste instalaŃii şi modelele matematice care le reprezintă a condus inevitabil la sporirea complexităŃii modelelor şi implicit la imposibilitatea rezolvării lor, fără aplica-rea unor tehnici moderne de calcul şi utilizarea calculatoarelor electronice numerice. Elaborarea unei lucrări cu un pronunŃat caracter aplicativ privind metodele de calcul numeric şi de optimizare programabile pe calculator, contribuie la pregătirea specia-liştilor care vor lucra în diverse domenii ale instalaŃiilor pentru construcŃii şi se înscrie pe linia generală de promovare a calcului automat în aceste domenii. Prin întreaga ei alcătuire, lucrarea de faŃă tratează o problematică modernă, de o de-osebită actualitate, la un înalt nivel ştiinŃific, bazându-se atât pe cercetări şi realizări originale, cât şi pe sintetizarea unui bogat material bibliografic. Ea este complexă şi originală prin modul în care apropie cititorul de problematica abordată, asigurând o prezentare riguroasă, sistematică, gradată şi argumentată, în scopul sprijinirii specia-liştilor din diversele domenii ale instalaŃiilor pentru construcŃii la aplicarea modelării numerice şi optimizării sistemelor de instalaŃii. Lucrarea îşi propune să sistematizeze şi să prezinte într-o manieră unitară pro-blemele legate de principalele metode numerice şi de optimizare şi algoritmii de calcul orientaŃi pe calculator pentru rezolvarea diverselor tipuri de probleme întâlnite în cer-cetarea, proiectarea şi exploatarea instalaŃiilor pentru construcŃii, fiind structurată în 7 capitole. După ce într-un prim capitol introductiv se expun o serie de elemente necesare pe parcursul lucrării privind rolul metodelor numerice şi de optimizare în calculul insta-laŃiilor, aspectele matematice ale unui algoritm, tipurile de erori introduse la executarea unui algoritm etc., în capitolele 2 şi 3 se efectuează o prezentare generală a metodelor de rezolvare a unor probleme de analiză matematică şi algebră aplicabile la calculul numeric al instalaŃiilor, descriindu-se pentru fiecare din acestea algoritmi orientaŃi pe calculator. Pentru fiecare algoritm în parte se indică avantajele şi limitele de aplicabi-litate. Capitolul 4 abordează metodele moderne de modelare şi simulare numerică a pro-ceselor din instalaŃii, cu referire îndeosebi la metoda cu diferenŃe finite şi respectiv me-toda cu elemente finite, ultima făcând parte integrantă din cercetarea şi proiectarea asistată de calculator. Capitolul 5 este destinat mai multor modele de calcul numeric pentru rezolvarea unor probleme specifice instalaŃiilor ca: simularea numerică şi prevenirea îngheŃului apei în conductele aeriene sub presiune, analiza hidraulică şi simularea dinamică a reŃelelor inelare complexe de distribuŃie a apei şi a energiei termice, analiza numerică a

8 Modelări numerice şi optimizări în instalaŃii
procesului pompării apei în sistemele de alimentare cu apă şi căldură şi a problemelor de conducŃie unidimensională a căldurii, modelarea numerică a procesului de absorbŃie din instalaŃiile frigorifice, modelarea numerică cu elemente finite a conducŃiei bidimen-sionale a căldurii. Capitolul 6 este consacrat tratării unor metode ale calculului operaŃional ca progra-marea matematică (liniară, neliniară, dinamică) şi teoria grafurilor, descriindu-se algo-ritmi aplicabili la optimizarea instalaŃiilor, de mare actualitate şi cu o importanŃă prac-tică deosebită. In capitolul 7 se formulează diverse modele complexe de optimizare pentru calculul instalaŃiilor cum sunt: calculul hidraulic optim al canalelor cu taluze plane şi radier cilindric, alegerea traseului optim al unei magistrale de aducŃiune a apei, optimizarea traseului reŃelelor ramificate de curgere, proiectarea şi analiza optimală a reŃelelor exte-rioare de distribuŃie a apei, a energiei termice şi a gazelor, dimensionarea optimală a reŃelelor de alimentare cu apă în clădiri, optimizarea prin simularea numerică a consu-mului de apă tehnologică al unei întreprinderi cu sistem propriu de alimentare, determi-narea configuraŃiei optime a reŃelelor electrice, dimensionarea optimală a izolaŃiilor frigorifice, dimensionarea optimală a unui ansamblu de schimbătoare de căldură, opti-mizarea încărcării unor sisteme termoenergetice funcŃionând în paralel etc. NoŃiunile teoretice sunt însoŃite în majoritatea cazurilor de scheme logice, precum şi de un material grafic adecvat, în felul acesta fiind mult mai accesibile cititorilor. De asemenea, lucrarea este însoŃită de o bibliografie vastă pentru ca cititorul interesat să-şi poată însuşi mai bine partea teoretică. Prin problemele abordate, lucrarea se adresează cu precădere specialiştilor din toate domeniile instalaŃiilor pentru construcŃii (alimentare cu apă, canalizare, sanitare, gaze, încălzire, răcire etc.), fiind însă utilă şi accesibilă unui grup larg de cititori: ingineri, analişti, cadre didactice, doctoranzi şi studenŃi ai învăŃământului superior de profil şi toŃi cei care doresc să-şi finalizeze lucrările de cercetare şi proiectare cu ajutorul teh-nicilor moderne de calcul. Sper ca informaŃile oferite de această lucrare să trezească interesul cititorului determinându-l să utilizeze metodele numerice şi de optimizare la conceperea modelelor matematice de rezolvare a multor alte probleme ce apar în prac-tica cercetării, proiectării şi exploatării instalaŃiilor, decât cele tratate şi să se strădu-iască să descopere aspecte nesesizate încă în toate domeniile instalaŃiilor pentru cons-trucŃii. Autorul mulŃumeşte tuturor celor care l-au sprijinit în realizarea acestei lucrări şi tuturor celor care vor contribui în viitor la întregirea şi perfecŃionarea ei.
A u t o r u l
CUPRINS
1. INTRODUCERE …………………………………..…………………….……….. 13
1.1. Rolul metodelor numerice şi de optimizare în calculul instalaŃiilor................... 13 1.2. Aspecte matematice ale unui algoritm de calcul ...…………………………… 13
1.3. Instabilitatea numerică a algoritmilor şi natura problemelor....……………….. 14
1.4. NoŃiuni generale privind metodele iterative....................................................... 15
2. METODE NUMERICE DE ANALIZĂ MATEMATICĂ APLICABILE LA CALCULUL INSTALAłIILOR..............................……………………………..
16
2.1. Calculul valorilor funcŃiilor analitice.................................................................. 16
2.2. Aproximarea şi interpolarea funcŃiilor de o variabilă.......…………………….. 16
2.2.1. Interpolarea grafică şi liniară.…............................................................. 17
2.2.2. Interpolarea polinomială.....................................................................… 18
2.2.3. Interpolarea geometrică prin metoda celor mai mici pătrate.................. 22
2.2.4. Interpolarea hermitiană........................................................................... 22
2.2.5. Interpolarea inversă ….........................………………………………... 23 2.3. Interpolarea funcŃiilor de două variabile.........………………………………… 24
2.4. Calculul numeric al integralelor......................................................................... 26
2.4.1. Preliminarii................................................…………………………….. 26
2.4.2. Metoda trapezelor..............................………......……………………… 27
2.4.3. Metoda Simpson .....................………………………………………… 27
2.4.4. Metoda Hermite...................................................................................... 28
2.4.5. Metoda Newton–Côtes............................................................................ 28
2.4.6. Metoda Gauss–Legendre......................................................................... 30
2.4.7. Metoda Monte–Carlo.............................................................................. 31
2.5. Rezolvarea numerică a ecuaŃiilor diferenŃiale.................................................... 32
2.5.1. Metoda Euler ................................................................…...…………... 32 2.5.2. Metoda Runge–Kutta..........................................................................… 32
3. METODE NUMERICE DE ALGEBRĂ APLICABILE LA CALCULUL INSTALAłIILOR...................................................................................................
34
3.1. Rezolvarea aproximativă a ecuaŃiilor algebrice şi transcendente......…………. 34
3.1.1. Schema lui Hörner pentru calculul valorilor unui polinom.…………... 34
3.1.2. Metoda secantei ............……………………………………………….. 35
3.1.3. Metoda Newton ...........................................................................…....... 35
3.1.4. Metoda Cebîşev....................................................................................... 36
3.2. Elemente de calcul matriceal ...............……………………………………….. 37
3.2.1. DefiniŃii. Clasificări .....………………………………………………... 37
3.2.2. OperaŃii algebrice cu matrice .......…………………………………….. 39
3.2.3. Tipuri speciale de matrice............................................................…....... 40
3.3. Rezolvarea sistemelor de ecuaŃii liniare.......................…..........……………… 46
3.3.1 ConsideraŃii preliminare.................................................................….…. 46
3.3.2. Metode directe......................................................................................... 48
10 Modelări numerice şi optimizări în instalaŃii
3.3.3. Metode iterative …………..................................................................... 52
3.3.4. Valori şi vectori proprii ai unei matrice.................................................. 56
3.4. Rezolvarea sistemelor de ecuaŃii neliniare....................………………………. 59
3.4.1. Metoda Newton–Raphson ....................................…......……...………. 59
3.4.2. Metoda suprarelaxărilor succesive ................................…...…...……... 61 3.4.3. Rezolvarea sistemelor neliniare de forma AX+Φ(X)=0.......................... 63
3.5. NoŃiuni de algebră vectorială......................................................……………… 65
4. METODE MODERNE DE MODELARE ŞI SIMULARE NUMERICĂ A PROCESELOR DIN INSTALAłII.......................................................................
68
4.1. Metoda diferenŃelor finite .....................................................…....……………. 68
4.1.1. Principiul metodei ........………………..……………………………… 68
4.1.2. Exprimarea derivatelor în diferenŃe finite.....................................…….. 69 4.2. Metoda elementelor finite.........................................………………………….. 78
4.2.1. Principiul metodei ………………..…........…………………………… 78
4.2.2. Etapele de rezolvare a unei probleme cu metoda elementelor finite...... 80
4.2.3. ProprietăŃi caracteristice elementelor finite nodale.......……………….. 82
4.2.4. Integrarea numerică a expresiilor elementale ....……………………… 87
4.2.5. Tipuri de elemente şi funcŃii de interpolare ...........…………………… 88 4.2.6. ObŃinerea ecuaŃiilor cu elemente finite.........................................…….. 94
5. MODELE NUMERICE PENTRU REZOLVAREA UNOR PROBLEME SPECIFICE DE INSTALAłII .....................................................…....……….…
97
5.1. Simularea numerică şi prevenirea îngheŃului apei în conductele aeriene sub
presiune.…....……………..............................................................……………
97 5.1.1. ConsideraŃii preliminare …......………........…………………………... 97
5.1.2. Formularea modelului matematic.............……......…………………… 98
5.2. Analiza nodală a reŃelelor inelare de alimentare cu apă ............……………… 105
5.2.1. ConsideraŃii preliminare ........…......…………………………………... 105
5.2.2. Bazele calculului hidraulic al reŃelelor inelare........…………………… 106
5.2.3. Principiul metodei nodurilor……………..…………….……………… 107
5.2.4. Modelul numeric de analiză nodală ............................................…...… 108
5.3. Simularea dinamică a reŃelelor de alimentare cu apă ................……………… 111
5.3.1. ConsideraŃii preliminare...............................................………………... 111
5.3.2. EcuaŃiile dinamice ale reŃelei...........................................…………...… 112
5.3.3. Rezolvarea ecuaŃiilor dinamice.........….....…………….……………… 113
5.3.4. Utilizarea integrării explicite........................................................…...… 115 5.3.5. AplicaŃie numerică.........................................................………………. 120
5.3.6. Concluzii.....................................................................….……………... 122
5.4. Analiza reŃelelor complexe de distribuŃie a energiei termice ...……….……… 122
5.4.1. ConsideraŃii preliminare..............................................………………... 122
5.4.2. Bazele calculului hidraulic al reŃelelor termice...................................… 123
5.4.3. Formularea modelului matematic.....….....…………….……………… 124
5.5. Analiza numerică a procesului pompării apei în sistemele de alimentare cu
apă şi căldură...........…...............................................................................……
126
5.5.1. ConsideraŃii preliminare..............................................………………... 126
5.5.2. Formularea modelului numeric...........................................................… 126
5.6. Modelul unidimensional cu diferenŃe finite al conducŃiei căldurii în regim tranzitoriu .....………….…...........…..........................................………………
128
Cuprins 11
5.6.1. ConsideraŃii preliminare..............................................………………... 128
5.6.2. Formularea modelului matematic.......................................................… 129
5.7. Modelarea numerică a procesului de absorbŃie din instalaŃiile frigorifice…… 131
5.7.1. ConsideraŃii preliminare..............................................………………... 131
5.7.2. Formularea modelului matematic.......................................................… 132 5.8. Modelarea numerică cu elemente finite a conducŃiei bidimensionale a căl-
durii.....………….…...........…....................................................………………
135
5.8.1. Modelul analitic al conducŃiei termice.........................………………... 136
5.8.2. Formularea variaŃională a metodei elementelor finite........................… 137
5.8.3. Modelul numeric cu elemente finite al conducŃiei termice în regim sta-
Ńionar.......................….....................................................……………...
138
5.8.4. Modelul numeric cu elemente finite al conducŃiei termice în regim
tranzitoriu............................................................................................…
144
5.9. Aplicarea metodei reziduurilor ponderate la obŃinerea ecuaŃiilor cu elemente
finite pentru mişcarea permanentă a unui fluid între doi pereŃi plani pa-
raleli.....………….…...........…...................................................………………
147
6. METODE ŞI TEHNICI DE OPTIMIZARE .............................……….....…...… 149
6.1. Formularea unei probleme de optimizare...................................……………… 149
6.1.1. Variabilele de proiectare......…………………………………………... 149
6.1.2. RestricŃiile de proiectare ...............................................….…………… 150
6.1.3. FuncŃia obiectiv..........….…..........………..…………............………… 150
6.1.4. Modelul matematic al unei probleme de optimizare...............………… 151 6.2. Elemente de progrmare matematică................................……...……………… 152
6.2.1. NoŃiuni generale...................…………………………………………... 152
6.2.2. Optimizarea necondiŃionată...........................................….…………… 153
6.2.3. Optimizarea condiŃionată..............………..…………............………… 160
6.2.4. Metoda programării dinamice.................................................………… 168
6.3. Elemente de teoria grafurilor...............…….......................................………… 169
6.3.1. NoŃiuni generale ...........…...…………………………………………... 169
6.3.2. Algoritmi pentru determinarea unui arbore de valoare minimă......…… 170
6.3.3. Algoritmi pentru determinarea unui drum de valoare minimă....……… 171
6.3.4. ReŃeaua de transport......................………..…………............………… 174
6.3.5. CondiŃii particulare de aplicare a grafurilor la calculul reŃelelor de curgere.....................................................................................…………
175
7. MODELE DE OPTIMIZARE A INSTALAłIILOR ....………………………... 178
7.1. Calculul hidraulic optim al canalelor cu taluzuri plane şi radier cilindric......… 178
7.2. Alegerea traseului optim al unei magistrale de aducŃiune a apei ......…………. 182
7.2.1. ConsideraŃii preliminare………………..……………………………… 182
7.2.2. Modelul de calcul..........................................................................…….. 182
7.3. Optimizarea traseului reŃelelor ramificate de curgere .......…....……………… 183
7.3.1. ConsideraŃii preliminare………….…………………..………………... 183
7.3.2. Determinarea grafului parŃial al arborilor minimi.......………………… 185
7.3.3. Generarea arborilor minimi .….................………..…………………… 185
7.4. Modele de optimizare pentru analiza reŃelelor inelare de distribuŃie a apei ..… 186
7.4.1 ConsideraŃii preliminare ...............................................……….....….…. 186 7.4.2. Modelul "conŃinut" de analiză pe tronsoane ..............................……… 188
7.4.3. Model de analiză ciclică în formulare variaŃională ......……........….…. 189
7.4.4. Model de analiză nodală în formulare variaŃională ....………………… 191

12 Modelări numerice şi optimizări în instalaŃii
7.5. Optimizarea dimensionării reŃelelor inelare de distribuŃie a apei .....…….....… 192
7.5.1. ConsideraŃii preliminare ....................................................……...….…. 192
7.5.2. Criterii de optimizare a dimensionării ..................................….......…... 193
7.5.3. Optimizarea repartiŃiei debitelor de tranzit .....………………………... 195
7.5.4. Modele de optimizare a dimensionării reŃelelor inelare ..……………... 198 7.6. Dimensionarea optimală a reŃelelor de alimentare cu apă în clădiri ......……… 216
7.7. Optimizarea, prin simulare numerică, a consumului de apă tehnologică al
unei întreprinderi cu sistem propriu de alimentare…........... ……………….....
219
7.7.1. ConsideraŃii preliminare…….……………..………………………..…. 219
7.7.2. Algoritm de simulare numerică a consumului de apă industrială...…… 221
7.8. Optimizarea dimensionării reŃelelor de termoficare .....……..………………... 227 7.8.1. Principii de funcŃionare a unui sistem de termoficare .......……………. 227
7.8.2. Bazele calculului hidraulic al reŃelelor termice......……………….…… 228
7.8.3. Model de optimizare a dimensionării reŃelelor termice ramificate bitu-
bulare cu apă ……………...…………..............................…………….
230
7.9. Calculul simplificat al reŃelelor inelare de distribuŃie a gazelor bazat pe teoria
grafurilor ………...….....................................................................……………
233
7.10. Determinarea momentului optim de înlocuire a conductelor avariate ale reŃe-
lelor de transport ...............…………...............................................………
235
7.11. Determinarea configuraŃiei optime a reŃelelor electrice ......………………… 238
7.12. Optimizarea dimensionării izolaŃiilor frigorifice .................………………… 240
7.12.1. ConsideraŃii preliminare …....................................................….….…. 240 7.12.2. Modelul de optimizare ........................................……......…………... 240
7.13. Dimensionarea optimală a unui ansamblu de schimbătoare de căldură .……. 244
7.14. Optimizarea încărcării unor sisteme termoenergetice funcŃionând în paralel.. 248
7.15. Optimizarea repartiŃiei sarcinilor termice şi electrice pe echipamentele unei
centrale electrice de termoficare în cazul unui regim dat .......……………….
249
BIBLIOGRAFIE …………………………………….……………………………….. 252
Capitolul 1
INTRODUCERE 1.1. ROLUL METODELOR NUMERICE ŞI DE OPTIMIZARE
ÎN CALCULUL INSTALAłIILOR Rolul metodelor numerice în calculul instalaŃiilor pentru construcŃii este de a fur-niza o serie de soluŃii aproximative pentru acele cazuri în care metodele clasice de ana-liză analitică şi experimentală sunt inoperante sau neeficiente. Totodată, ele permit rea-lizarea unor experimente numerice prin simularea fenomenelor şi proceselor termo-hidraulice. Metodele numerice sunt utile şi în prelucrarea datelor experimentale sau în determinarea unor expresii de calcul al proprietăŃilor fizice ale agenŃilor termici şi fri-gorifici. Prin aceasta, metodele numerice contribuie în mod efectiv la deschiderea unor direcŃii noi, în cercetarea şi proiectarea instalaŃiilor pentru construcŃii. Folosirea metodelor numerice nu constituie un scop în sine. Rezultatul aplicării lor, modelul numeric, urmează a fi implementat pe calculator cu ajutorul unui limbaj adec-vat. Utilizarea eficientă a metodelor numerice presupune existenŃa unor cunoştinŃe teo-retice fundamentale în acest domeniu, precum şi a unei experienŃe de programare. De asemenea, disciplinele matematice moderne prin calculul operaŃional pun la în-demâna proiectantului un vast aparat de analiză ştiinŃifică în stabilirea deciziilor opti-me pentru problemele proiectării instalaŃiilor pentru construcŃii. O mare contribuŃie în proiectarea optimală a acestor instalaŃii o aduce crearea programării matematice (lini-ară, neliniară, dinamică, geometrică etc.) şi a teoriei grafurilor, lărgindu-se aria de mo-delare a problemelor optimizării. Proiectarea optimală determină variabilele de proiectare ce respectă anumite con-diŃii (restricŃiile proiectării) impuse de comportarea şi funcŃionalitatea instalaŃiei, mini-mizând o funcŃie de eficienŃă (funcŃia obiectiv). Pentru rezolvarea problemei de optimizare este necesară cunoaşterea unor metode adecvate de calcul.
1.2. ASPECTE MATEMATICE ALE UNUI ALGORITM DE CALCUL NUMERIC
Calculul numeric implică aplicarea matematicii la construcŃia şi algoritmizarea me-todelor care pot fi utilizate la obŃinerea soluŃiei numerice a problemelor cu ajutorul cal-culatorului electronic. De foarte multe ori se constată că anumite rezultate ale analizei clasice nu sunt integral folositoare analizei numerice. De asemenea, uneori, chiar dacă soluŃia analitică a unei probleme date poate fi găsită, aceasta nu poate servi la obŃinerea

14 Modelări numerice şi optimizări în instalaŃii
soluŃiei numerice, exemplificându-se în acest sens următorul sistem de ecuaŃii alge-brice:
nibxa ij
n
j
ij ...,,2,1;1
==∑=
(1.1)
Când acest sistem are o soluŃie unică, se poate rezolva analitic cu ajutorul regulii lui Cramer, însă această metodă de rezolvare a sistemelor liniare algebrice este neindicată pentru n ≥ 3, atunci când se foloseşte calculatorul electronic deoarece trebuie calculaŃi n+1 determinanŃi de ordinul n, iar evaluarea fiecăruia dintre ei implică în general Pn n! operaŃii de înmulŃire, dacă dezvoltarea se face în funcŃie de minori, unde:
( )∑
= −=
n
j
nj
P2 !1
1 (1.2)
De asemenea, este necesar aproximativ acelaşi număr de operaŃii de adunare. În concluzie, rezolvarea sistemului (1.1) prin metoda lui Cramer implică 2Pn(n+1)! ope-raŃii elementare. Dacă n = 20, numărul operaŃiilor elementare va fi de aproximatix 16⋅1019, adică un calculator modern va trebui să ruleze continuu la această problemă peste 2⋅106 ani. Numărul mare al operaŃiilor din cadrul unor metode analitice nu deranjează numai din punctul de vedere al timpului de execuŃie consumat de calculator, dar şi din punctul de vedere al preciziei de calcul, conducând la acumularea erorilor de rotunjire. În cadrul unei aplicaŃii trebuie să se acorde o atenŃie egală atât aspectelor matema-tice, cât şi aspectelor legate de calculator, pentru selectarea unui algoritm adecvat re-zolvării problemei considerate. Baza teoretică a algoritmilor o dau metodele numerice, dar eficienŃa şi performanŃele lor computaŃionale Ńin foarte mult de experienŃa celui care îi dezvoltă şi îi foloseşte. Precizia calculelor numerice este parametrul important în alegerea metodelor de calcul. Cu toate performanŃele calculatoarelor electronice, precizia rezultatelor este influenŃată de mai mulŃi factori. SoluŃia depinde de datele iniŃiale, acestea provenind din măsurări, observaŃii, soluŃii aproximative ale altor probleme, fapt care face ca la rezolvarea numerică a unei proble-me să se introducă erori. Uneori erorile sunt introduse şi de modelul matematic când acesta nu corespunde în toată intimitatea fenomenului fizic modelat, din cauza unor aproximaŃii de modelare. Aceste tipuri de erori se numesc erori inerente. La soluŃionarea numerică a unei probleme se mai poate produce o eroare de meto-dă, iar în procesul de calcul apar erori de trunchiere şi erori de rotunjire. În concluzie, eroarea totală se compune din cele trei tipuri de erori menŃionate: eroarea inerentă, eroarea metodei şi eroarea de calcul. 1.3. INSTABILITATEA NUMERICĂ A ALGORITMILOR ŞI
NATURA PROBLEMELOR Dacă o problemă are proprietatea că o mică perturbaŃie în una din date (sau în toate) conduce la mici perturbaŃii în soluŃia matematică, atunci problema se numeşte bine condiŃionată.
Introducere 15
Dacă mici perturbaŃii chiar numai într-o parte din datele problemei conduce la mari perturbaŃii în soluŃia matematică, atunci problema se numeşte slab condiŃionată. Fie D datele exacte care caracterizează o problemă şi F funcŃia matematică ce con-duce la obŃinerea soluŃiei exacte F(D). Aceasta poate fi scrisă sub forma unei aplicaŃii:
( )DFDF→ (1.3)
În cazul în care datele sunt afectate de erori sau perturbate, se lucrează cu datele perturbate D∗. SoluŃia exactă a problemei cu date perturbate este prezentată sub forma:
( )** DFDF→ (1.4)
AplicaŃia caracterizată de datele D este bine condiŃionată dacă D∗ este apropiat de D şi F(D∗) este apropiată de F(D) într-un anumit sens, altfel aplicaŃia este slab condi-Ńionată. Pentru a măsura distanŃa dintre D∗ şi D, precum şi distanŃa dintre F(D∗) şi F(D), sunt necesare o serie de cunoştinŃe despre forma datelor şi forma soluŃiei. In cazul în care D şi F(D) sunt vectori sau matrice, se va examina distanŃa dintre D şi D∗, respectiv F(D) şi F(D∗) cu ajutorul normei: *DD − şi ( ) ( )*DFDF − .
Fie G un algoritm de calcul pentru rezolvarea unei probleme caracterizată de datele D. Un algoritm G este stabil dacă există D∗ apropiat de D astfel că F(D∗) este apropiată de G(D) într-un anumit sens, altfel algoritmul este instabil. Elementul ce caracterizează un algoritm de calcul stabil este faptul că soluŃia obŃinută cu ajutorul algoritmului este apropiată într-un anumit sens de soluŃia exactă a problemei uşor perturbate. 1.4. NOłIUNI GENERALE PRIVIND METODELE ITERATIVE Utilizarea calculatoarelor electronice oferă posibilitatea folosirii metodelor iterative la rezolvarea anumitor tipuri de probleme. În cadrul unei metode iterative se alege o aproximaŃie iniŃială (număr sau funcŃie) şi succesiv se îmbunătăŃeşte această aproxima-Ńie a soluŃiei (prin iterare) în aşa fel ca şirul de soluŃii îmbunătăŃite să conveargă către soluŃia problemei considerate. Astfel de metode sunt destul de simple pentru a fi utilizate pe un calculator electro-nic, cu toate că implică destul de multe operaŃii aritmetice, lucru care nu devine un im-pediment având în vedere viteza de calcul pentru calculatoarele din actuala etapă. În timp ce metodele directe, cel puŃin teoretic, converg într-un număr finit de etape, metodele iterative necesită un număr infinit de etape pentru convergenŃă. La realizarea metodelor iterative trebuie avute în vedere următoarele elemente: me-toda să fie convergentă, să se poată determina viteza de convergenŃă şi să stabilească criterii pentru stoparea procesului iterativ în momentul obŃinerii unei aproximări accep-tabile pentru soluŃia problemei considerate.

Capitolul 2
METODE NUMERICE DE ANALIZĂ MATEMATICĂ APLICABILE LA CALCULUL INSTALAłIILOR
2.1. CALCULUL VALORILOR FUNCłIILOR ANALITICE
Pentru calculul valorilor funcŃiilor date prin formule, cu ajutorul ordinatoarele elec-tronice, forma funcŃiilor are o mare importanŃă. De aceea se pune problema de mare interes practic, constând în căutarea expresiilor analitice cele mai comode pentru func-Ńiile elementare. Calculul valorilor funcŃiilor se reduce în general la efectuarea unei serii de operaŃii aritmetice elementare. O funcŃie reală f(x) se numeşte funcŃie analitică în punctul ξ dacă într-o vecinătate
ξ−x < R a acestui punct funcŃia se dezvoltă într-o serie întreagă, aproximându-se cu
ajutorul polinomului Taylor:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )nn
xn
fx
fx
ffxf ξ
ξξ
ξξ
ξξ −++−+−+=
!...
!2!12
'''
(2.1)
Pentru ξ = 0 se obŃine polinomul Maclaurin:
( ) ( ) ( ) ( ) ( ) ( ) nn
xn
fx
fx
ffxf
!
0...
!2
0
!1
00 2
'''
++++= (2.2)
Dezvoltarea unei funcŃii în serie Taylor este în multe cazuri o metodă comodă pen-tru a calcula valorile acestei funcŃii. Dacă se cunoaşte f(x) şi trebuie calculate valorile f(x+h), unde h este o mică corec-Ńie, este comod a scrie formula (2.1) sub forma:
( ) ( ) ( ) ( ) ( ) ( ) nn
hn
xfh
xfh
xfxfhxf
!...
!2!12
'''
++++=+ (2.3)
2.2. APROXIMAREA ŞI INTERPOLAREA FUNCłIILOR
DE O VARIABILĂ In multe aplicaŃii practice apare necesitatea evaluării aproximative a unei funcŃii
[ ] Rbaf →,: , punându-se problema determinării unei funcŃii F, care să aproximeze funcŃia f în intervalul [a, b]. Se recurge la această aproximare fie atunci când nu se cu-noaşte expresia analitică a lui f, dar se cunosc valorile sale într-un număr finit de punc-te ca rezultat al unor măsurări experimentale sau ca soluŃii ale unei ecuaŃii diferenŃiale,

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 17
fie atunci când expresia analitică a lui f este destul de complicată şi cu ajutorul acesteia calculele sunt dificile. Pentru evaluarea lui f(x) se caută o altă funcŃie F(x) relativ simplă astfel ca pentru orice valoare a lui x referită ca nod de interpolare, valoarea lui F(x) să fie suficient de aproape de valoarea lui f(x). In multe situaŃii această funcŃie aproximativă se prezintă sub forma unui polinom algebric:
( ) mmm xcxcxccxF ++++= ...2
210 (2.4) Pentru determinarea funcŃiei Fm(x) trebuie cunoscuŃi coeficienŃii c0, c1,..., cm. În scopul determinării acestor coeficienŃi spaŃiul liniar [ ] RbaffM →= ,: se organi-
zează ca un spaŃiu metric, putând defini o funcŃie d, care să măsoare distanŃa dintre două funcŃii f şi F din M prin:
( ) ( ) ( )[ ]2
0
, ∑=
−=n
i
kk xFxfFfd , (2.5)
x0, x1, ..., xn fiind n+1 puncte cunoscute din intervalul [a, b]. Criteriul de determinare a coeficienŃilor c0, c1, ..., cm este ca distanŃa dintre f şi F să fie minimă. Această metodă de aproximare poartă denumirea de metoda celor mai mici pătrate. Considerând distanŃa definită de relaŃia (2.5) în care F(x) se înlocuieşte cu Fm(x) dată de (2.4), în cazul m=n, şi impunând condiŃia de minim, se ajunge la relaŃiile: ( ) ( ) nkxFxf knk ,...,1,0; == (2.6) Aproximarea în cazul acesta poartă denumirea de aproximare prin interpolare, iar polinomul generalizat Fn(x), care satisface condiŃia (2.6) se numeşte polinom de inter-polare.
2.2.1. INTERPOLAREA GRAFICĂ ŞI LINIARĂ Una din metodele cele mai comune ale interpolării este metoda grafică, care constă în desenarea unui grafic continu cu ajutorul valorilor din tabel, Ńinând seama de forma curbei pe intervalul considerat.
Formula generală de interpolare liniară se poate obŃine geometric prin utilizarea asemă-nării triunghiurilor din figura 2.1. Din asemănărea triunghiurilor AED şi ACB rezultă:
AC
AE
BC
DE= (2.7)
sau:
12
1
12
1
)()(
)()(
xx
xx
xfxf
xfxF
−−
=−−
(2.8)
de unde după explicitarea lui F(x) se obŃine
Fig. 2.1 Interpolarea liniară

18 Modelări numerice şi optimizări în instalaŃii
formula de interpolare liniară:
)()()(
)()( 112
121 xx
xx
xfxfxfxF −
−−
+= (2.9)
Evident, dacă f(x) este o funcŃie liniară, atunci procesul de interpolare liniară este
exact, iar )('' xf = 0.
În general, este clar că diferenŃa F(x) − f(x), unde f(x) este funcŃia exactă, depinde de curbura funcŃiei f(x) şi deci de valoarea derivatei ''f (x) = 0.
2.2.2. INTERPOLAREA POLINOMIALĂ O altă metodă mai precisă de interpolare este interpolarea polinomială a funcŃiilor. Dacă se dau n puncte în care valorile funcŃiei sunt cunoscute, se pune problema de-terminării unui polinom de gradul n+1 care să treacă prin cele n puncte, acest polinom numindu-se polinom de interpolare. În general polinomul F(x) de grad cel mult n−1 poate aproxima funcŃia f(x) în intervalul a ≤ x ≤ b, dacă o anumită măsură (distanŃă) a derivatelor polinomului faŃă de funcŃie pe acest interval sunt destul de mici. Polinomul de interpolare de tip Lagrange. Fie f(x) o funcŃie definită pe [a, b]. In-tervalul [a, b] fiind divizat în n−1 subintervale (fig. 2.2), se presupun cunoscute valo-rile fk = f(xk); (k = 1, 2,..., n).
Aproximarea funcŃiei f(x) în orice punct [ ]bax ,∈ poate fi rea-
lizată prin polinomul de interpo-lare Lagrange de gradul n−1:
∑=
=n
k
kk fwxF1
)( (2.10)
în care wk sunt coeficienŃii La-grange, daŃi de relaŃia:
))...()()...()((
))...()()...()((
1121
1121
1 nkkkkkkk
nkkn
kjj jk
j
kxxxxxxxxxx
xxxxxxxxxx
xx
xxw
−−−−−−−−−−
=−
−=
+−
+−
≠=∏ (2.11)
Considerând polinomul ω definit prin:
∏=
−=n
k
kxxx1
)()(ω , (2.12)
se observă că wk se poate exprima prin relaŃia:
( ) )('ω
)(ω
kk
kxxx
xw
−= (2.13)
iar formula de interpolare Lagrange (2.10) se poate pune şi sub altă formă:
Fig. 2.2 Interpolarea polinomială Lagrange

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 19
∑∏∑=
≠== −
=−
−=
n
k kk
k
n
kjj jk
jn
k
kxxx
xf
xx
xxfxF
111 )('ω)(
)(ω)( (2.14)
în care:
∏≠=
−=n
kjj
jkk xxx1
)()('ω (2.15)
Polinoamele de interpolare Lagrange se pot obŃine şi printr-un procedeu recurent ce poartă numele de schema Aitken. Dacă se notează cu F(x1, x2, ..., xn; fx) polinomul de interpolare Lagrange a funcŃiei f(x) cu nodurile x1, x2, ...., xn, acesta satisface relaŃia generală de recurenŃă a lui Aitken:
1
32
1121
21
);...,,,(
);...,,,(
);,...,,(xx
xxxfxxxF
xxxfxxxF
xfxxxFn
nn
n
n −
−
−
=
−
(2.16)
Formula de recurenŃă (2.16) sugerează ideea de a ordona calculul valorilor polino-mului lui Lagrange într-un tabel care conŃine pe lângă polinomul Lagrange de gradul n−1 şi alte polinoame ale lui Lagrange pe noduri de interpolare consecutive:
nikxfxxxFxF ikkkik ≤+= ++ );;...,,,()( 1 (2.17)
Dacă valorile polinomului Lagrange, corespunzător unei funcŃii date, trebuie calcu-late pe mai multe puncte de pe axa reală, în scopul operativităŃii şi preciziei calculelor, se poate folosi forma baricentrică a acestui polinom:
( ) ( )
∑
∑
=
=
−
−=
n
k kk
n
k kk
k
xxx
xxxf
xF
1
1
)('ω)(
1
'ω
1
)( (2.18)
care este mai comodă în calcule manuale, întrucât nu mai necesită determinarea lui ω(x) din relaŃia (2.12) ce conŃine un număr mare de produse. Se vede din (2.15) că şi pentru calculul lui )...,,2,1();('ω nkxk = trebuie calculate câte n−1 produse, însă aces-tea nu depind de diferenŃele x–xk ; (k = 1, 2,..., n) şi de aceea ele pot fi calculate odată pentru totdeauna.
Se consideră două cazuri particulare ale polinomului Lagrange. Pentru n = 2 (fig. 2.3) se obŃine polinomul Lagrange de gradul 1 (in-terpolare liniară):
2211 fwfwF += (2.19)
în care:
sh
hx
xx
xxw −=
−−
=−−
= 121
21 (2.20)
Fig. 2.3 Interpolarea polinomială liniară
20 Modelări numerice şi optimizări în instalaŃii
sh
x
xx
xxw ==
−−
=12
12 (2.21)
iar generalizând:
∑≠= −
−=
n
kjj jk
j
kss
ssw
1
(2.22)
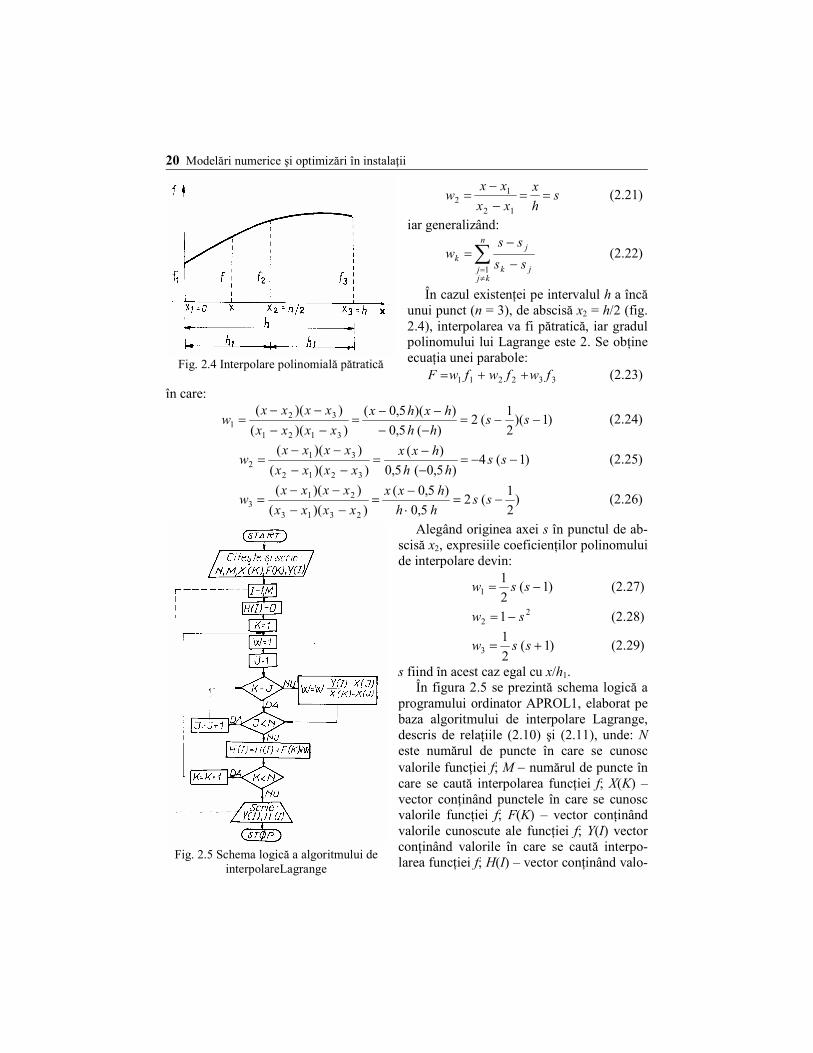
În cazul existenŃei pe intervalul h a încă unui punct (n = 3), de abscisă x2 = h/2 (fig. 2.4), interpolarea va fi pătratică, iar gradul polinomului lui Lagrange este 2. Se obŃine ecuaŃia unei parabole: 332211 fwfwfwF ++= (2.23)
în care:
)1)(2
1(2
)(5,0
))(5,0(
))((
))((
3121
321 −−=
−−−−
=−−−−
= sshh
hxhx
xxxx
xxxxw (2.24)
)1(4)5,0(5,0
)(
))((
))((
3212
312 −−=
−−
=−−
−−= ss
hh
hxx
xxxx
xxxxw (2.25)
)2
1(2
5,0
)5,0(
))((
))((
2313
213 −=
⋅−
=−−−−
= sshh
hxx
xxxx
xxxxw (2.26)
Alegând originea axei s în punctul de ab-scisă x2, expresiile coeficienŃilor polinomului de interpolare devin:
)1(2
11 −= ssw (2.27)
22 1 sw −= (2.28)
)1(2
13 += ssw (2.29)
s fiind în acest caz egal cu x/h1. În figura 2.5 se prezintă schema logică a programului ordinator APROL1, elaborat pe baza algoritmului de interpolare Lagrange, descris de relaŃiile (2.10) şi (2.11), unde: N este numărul de puncte în care se cunosc valorile funcŃiei f; M − numărul de puncte în care se caută interpolarea funcŃiei f; X(K) – vector conŃinând punctele în care se cunosc valorile funcŃiei f; F(K) – vector conŃinând valorile cunoscute ale funcŃiei f; Y(I) vector conŃinând valorile în care se caută interpo-larea funcŃiei f; H(I) – vector conŃinând valo-
Fig. 2.4 Interpolare polinomială pătratică
Fig. 2.5 Schema logică a algoritmului de
interpolareLagrange
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 21
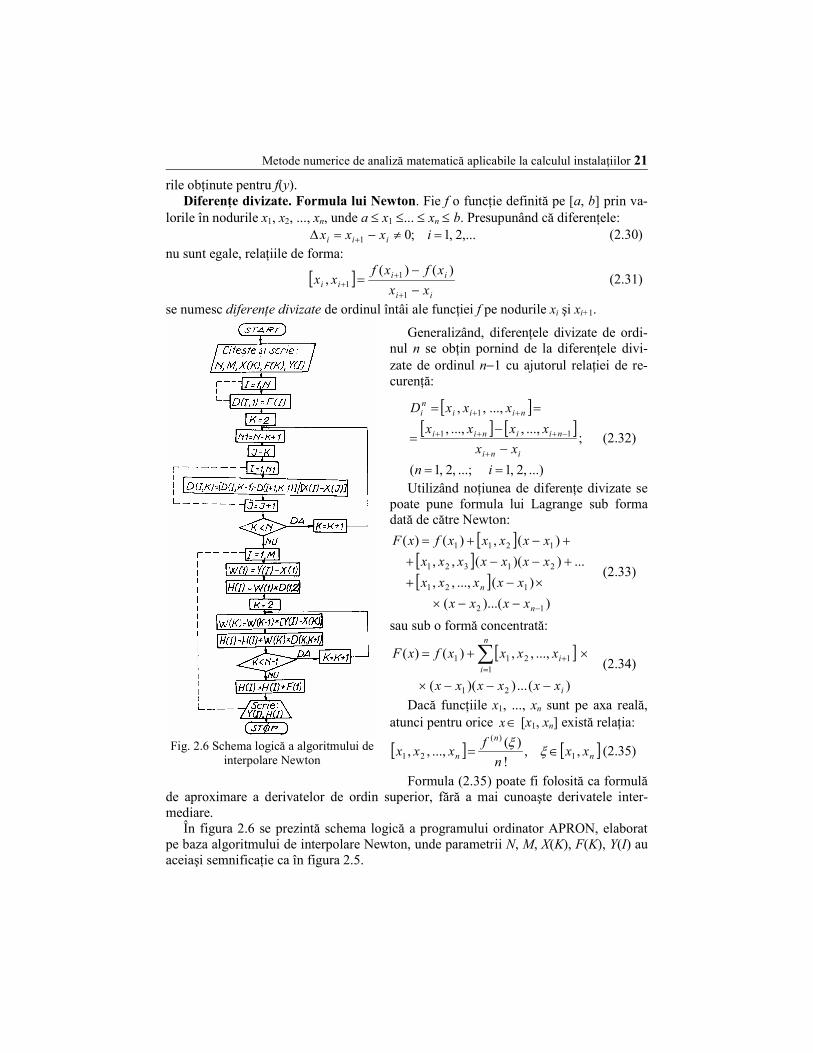
rile obŃinute pentru f(y). DiferenŃe divizate. Formula lui Newton. Fie f o funcŃie definită pe [a, b] prin va-lorile în nodurile x1, x2, ..., xn, unde a ≤ x1 ≤... ≤ xn ≤ b. Presupunând că diferenŃele: ,...2,1;01 =≠−=∆ + ixxx iii (2.30)
nu sunt egale, relaŃiile de forma:
[ ]ii
iiii
xx
xfxfxx
−−
=+
++
1
11
)()(, (2.31)
se numesc diferenŃe divizate de ordinul întâi ale funcŃiei f pe nodurile xi şi xi+1.
Generalizând, diferenŃele divizate de ordi-nul n se obŃin pornind de la diferenŃele divi-zate de ordinul n−1 cu ajutorul relaŃiei de re-curenŃă:
[ ][ ] [ ]
...),2,1...;,2,1(
;...,,...,,
...,,,
11
1
==−−
=
==
+
−+++
++
in
xx
xxxx
xxxD
ini
niinii
niiini
(2.32)
Utilizând noŃiunea de diferenŃe divizate se poate pune formula lui Lagrange sub forma dată de către Newton:
[ ][ ][ ]
))...((
)(...,,,
...))((,,
)(,)()(
12
121
21321
1211
−−−××−+
+−−++−+=
n
n
xxxx
xxxxx
xxxxxxx
xxxxxfxF
(2.33)
sau sub o formă concentrată:
[ ]
)(...))((
...,,,)()(
21
11211
i
n
i
i
xxxxxx
xxxxfxF
−−−×
×+= ∑=
+ (2.34)
Dacă funcŃiile x1, ..., xn sunt pe axa reală, atunci pentru orice x∈ [x1, xn] există relaŃia:
[ ] [ ]nn
n xxn
fxxx ,,
!
)(...,,, 1
)(
21 ∈= ξξ
(2.35)
Formula (2.35) poate fi folosită ca formulă de aproximare a derivatelor de ordin superior, fără a mai cunoaşte derivatele inter-mediare. În figura 2.6 se prezintă schema logică a programului ordinator APRON, elaborat pe baza algoritmului de interpolare Newton, unde parametrii N, M, X(K), F(K), Y(I) au aceiaşi semnificaŃie ca în figura 2.5.
Fig. 2.6 Schema logică a algoritmului de
interpolare Newton

22 Modelări numerice şi optimizări în instalaŃii
2.2.3. INTERPOLAREA GEOMETRICĂ PRIN METODA CELOR MAI MICI PĂTRATE
Fie f(x) o funcŃie definită pe [a, b] prin valorile ei fk în nodurile xk (k=1, ..., n), unde a ≤ x1 ... ≤ xn ≤ b. Pentru aproximarea acestei funcŃii se foloseşte curba geometrică modificată, având expresia matematică:
αxccxF += 0)( (2.36) în care coeficientul c0 se determină prin extrapolare grafică, iar coeficientul c şi expo-nentul α se calculează aplicând metoda celor mai mici pătrate. Potrivit acestei metode se minimizează suma abaterilor curbei teoretice faŃă de curba reală. łinând seama de (2.36) se scrie: kk xccf lglg)(lg 0 α+=− (2.37)
iar pentru expresia:
[ ]∑=
−−+=n
k
kk cfxcd1
20 )(lg)lg(lg α (2.38)
se pun condiŃiile de minim:
0;0)(lg
=∂∂
=∂∂
αd
c
d (2.39)
şi se obŃine:
∑ ∑
∑ ∑ ∑∑
= =
= = ==
−
−−−=
n
k
n
k
kk
n
k
n
k
n
k
k
n
k
kkkk
xxn
xcfxxcf
c
1 1
22
1 1 110
20
)lg()(lg
lg)(lglg)(lg)(lg
lg (2.40)
∑ ∑
∑ ∑ ∑
= =
= = =
−
−−−=
n
k
n
k
kk
n
k
n
k
n
k
kkkk
xxn
cfxcfxn
1 1
22
1 1 100
)lg()(lg
)(lglg)(lglg
α (2.41)
În mod asemănător se poate explica metoda celor mai mici pătrate şi pentru interpo-larea exponenŃială: F(x)=c0+αc
x şi interpolarea hiperbolică: F(x)=1/(c0+cx). Pe baza algoritmului de interpolare geometrică descris de relaŃiile (2.40) şi (2.41) s-a elaborat programul ordinator APROGE [98].
2.2.4. INTERPOLAREA HERMITIANĂ Într-o serie de aplicaŃii practice, pentru aproximarea unor funcŃii se cere ca funcŃia de aproximare să coincidă cu funcŃia de aproximat în punctele de interpolare x1, x2, ..., xn precum şi derivatele funcŃiei de aproximare (de un anumit ordin) să coincidă cu derivatele funcŃiei de aproximat (de un anumit ordin) în anumite puncte din punctele de interpolare date. O astfel de interpolare care impune condiŃii atât funcŃiei de aproxi-

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 23
mare, cât şi derivatelor acestora poartă denumirea de interpolare hermitiană sau inter-polare pe noduri multiple. În cazul interpolării hermitiene, dacă funcŃia de interpolare se notează cu F(x) aceasta trebuie să îndeplinească următoarele condiŃii:
nkxfxF kk ...,,2,1);()( == (2.42)
şi pentru fiecare k, astfel ca αk ≥ 1, să aibă loc relaŃiile:
kki
ki ixfxF α...,,2,1);()( )()( == (2.43)
Se pune problema găsirii unui polinom unic F(x) de grad m sau mai mic, unde:
∑=
+=n
k
knm1
α (2.44)
care să satisfacă condiŃiile (2.42) şi (2.43). Problema se reduce la găsirea a m coefi-cienŃi c1, c2, ...., cm astfel ca cele m condiŃii date prin (2.42) şi (2.43) să aibă loc pentru:
imm
i
i xcxF −
=
−=∑ )β()(1
(2.45)
unde β este o constantă oarecare. Astfel polinomul F(x) poate fi găsit prin metoda coeficienŃilor nedeterminaŃi, rezultând un sistem de m ecuaŃii liniare cu m necunoscute c1, c2, ...., cm. Dacă se consideră cazul în care αk este zero sau unu, adică lui F(x) i se cere doar ca derivata sa de ordinul întâi să coincidă cu derivata lui f(x) în anumite puncte de interpolare, atunci o formă explicită pentru F(x) arată astfel:
−+
−−=∑
=
)()()()(ω
)(ω)(1
)(ω
)(ω)( '
'
1kkkk
kk
kkk
n
k kk
k xfxxxfx
xxx
x
xxF α (2.46)
în care:
1)()(ω1
+∏≠=
−= i
n
kii
ik xxxα (2.47)
2.2.5. INTERPOLAREA INVERSĂ
Se consideră o funcŃie f(x) dată prin puncte sub forma:
x x1 x2 x3 x4 x5 f(x) y1 y2 y3 y4 y5
De această dată se pune problema invers, adică a determinării unei valori x astfel ca pentru o valoare a lui y notată yk, să aibă loc relaŃia:
kyxI =)( (2.48)
Se pune problema cercetării tabelului prin care este definită funcŃia pentru găsirea a două puncte de interpolare ce se vor nota cu x1 şi x2 astfel ca să aibă loc relaŃia: [ ][ ] 0)()( 21 ≤−− kk yxfyxf (2.49)
24 Modelări numerice şi optimizări în instalaŃii
Se construieşte funcŃia liniară, de interpolare inversă:
kyxfxx
xxxf
xx
xxxI =
−−
+−−
= )()()( 212
11
12
2 (2.50)
Din relaŃia (2.50) se exprimă x:
212
11
12
2
)()(
)(
)()(
)(x
xfxf
xfyx
xfxf
yxfx kk
−−
+−−
= (2.51)
Această valoare a lui x reprezintă valoarea argumentului pentru care funcŃia are valoarea yk..
2.3. INTERPOLAREA FUNCłIILOR DE DOUĂ VARIABILE Polinomul Lagrange de interpolare bidimensională. Fie date (m, n) puncte dis-tincte pi j = (xi, yj); i = 1, 2,..., m; j = 1, 2,..., n şi valorile corespunzătoare ale funcŃiei f în aceste puncte f (xi, yj). Se caută un polinom F(x,y) de grad cel mult m în x şi de grad cel mult n în y, astfel încât: njmiyxfyxF jiji ,,...2,1;,,...2,1),,(),( === (2.52)
Un astfel de polinom, denumit polinomul de interpolare Lagrange pentru funcŃii de două variabile, are forma:
∑∑= =
=m
i
n
j
jiji yxayxF
1 1
),( (2.53)
unde coeficienŃii aij urmează să fie determinaŃi. Se notează:
mixx
xxxX
m
ikk ki
kim ,,...2,1,)(
1, =
−−
=∏≠=
(2.54)
njyy
yyyY
n
jkk kj
kjm ,...,2,1,)(
1, =
−−
=∏≠=
(2.55)
şi polinomul cerut are forma:
∑∑= =
=m
i
n
j
jijmim yxfyYxXyxF1 1
,, ),()()(),( (2.56)
În cazul unei funcŃii f = f(x,y) definită pe un domeniu dreptunghiular h1×h2 (fig. 2.7-a), cunoscând valorile funcŃiei în cele patru vârfuri ale dreptunghiului (n = 4), valoarea funcŃiei F în orice punct al domeniului, pentru interpolarea liniară se poate determina cu relaŃia:
∑=
=n
k
kk fwF1
(2.57)
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 25
unde:
)(2
)(14
)(2
)(23
)(1
)(22
)(1
)(11
;
;;yxyx
yxyx
wwwwww
wwwwww
==
== (2.58)
în care )(xjw şi )( y
jw (j = 1, 2) sunt polinoa-
mele de interpolare ale funcŃiei f după di-recŃia axelor x şi y, având valorile:
( ) ;;1
;;1)(
21
)(2
)(1
twtw
swsw
yy
xx
=−=
=−= (2.59)
cu notaŃiile:
21
;h
yt
h
xs == (2.60)
PrezenŃa celor 4 puncte intermediare pe mijloacele laturilor şi a punctului din cen-trul dreptunghiului (fig. 2.7-b) necesită o interpolare pătratică (j = 1, 2, 3), astfel că:
∑=
=9
1k
kk fwF , (2.61)
iar:
)(3
)(39
)(2
)(14
)(1
)(33
)(1
)(22
)(1
)(11
....................yx
yx
yx
yx
yx
www
www
www
www
www
=
=
=
=
=
(2.62)
în care:
( ) ( ) ( ) ( )( ) ( )
( ) ( ) ( ) ( )12
11
2
1
11
12
11
2
1
33
22
22
11
+=+=
−=−=
−=−=
ttwssw
twsw
ttwssw
yx
yx
yx
(2.63)
21
;h
yt
h
xs == (2.64)
În figura 2.8 se prezintă schema logică a programului ordinator APROL2, elaborat pe baza algoritmului pentru calcularea valorii polinomului de interpolare bidimen-sională, unde: XX, YY sunt abscisa, respectiv ordonata punctului în care se face inter-polarea; N, M – numărul punctelor pe Ox, respectiv pe Oy în care se cunosc valorile
Fig. 2.7 Interpolarea bidimensională pe
domeniul dreptunghiular

26 Modelări numerice şi optimizări în instalaŃii
funcŃiei f; X(K), Y(K) – vectori păstrând abscisele, respectiv ordonatele punctelor în care se cunosc valorile funcŃiei f; F(I,J) – matrice de N linii şi M coloane păstrând valorile funcŃiei în punctele (xi, yj), i =1, ...,n; j = 1, ...,m; H – valoare a funcŃiei în punctul (XX, YY).
2.4. CALCULUL NUMERIC AL INTEGRALELOR
2.4.1. PRELIMINARII
Dacă funcŃia f(x) este continuă pe in-tervalul [a, b] şi se cunoaşte primitiva F(x), integrala definită a acestei funcŃii între limitele a şi b poate fi calculată cu formula Newton-Leibniz:
∫ −=b
a
aFbFxxf )()(d)( (2.65)
unde )()(' xfxF =
În multe cazuri practice primitiva F(x) este foarte complicată şi nu se poa-te obŃine prin procedee elementare, de unde rezultă că şi calculul integralei de-finite după formula (2.65) este foarte dificil şi chiar imposibil. De aceea me-todele aproximative şi în primul rând, metodele numerice de calcul a integra-lelor definite au o mare importanŃă. Metodele de calcul numeric al inte-gralelor constau în înlocuirea unei inte-grale printr-o combinaŃie, de cele mai
multe ori liniară, de valori ale funcŃiei de integrat în puncte din domeniul pe care se face integrarea. Calculul numeric al unei integrale simple se numeşte cuadratură, cel al unei inte-grale duble, cubatură, iar formulele respective poartă numele de formule de cuadratură şi formule de cubatură. În continuare se prezintă doar metode de calcul numeric al integralelor simple ce se bazează pe formule de forma:
∑∫=
+=n
k
kk
b
a
fRxfAxxf1
)()(d)( (2.66)
Fig. 2.8 Schema logică a algoritmului de calcul a
valorii polinomului de interpolare bidimensională

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 27
în care f:[a, b] → R este integrabilă pe [a, b], iar constantele Ak şi nodurile xk (k = 1,…,n) sunt astfel alese încât restul R(f ) al formulei (2.66) să fie nul când funcŃia f este înlocuită în (2.66) cu un polinom de un anumit grad m. În practică restul R(f) se neglijează, iar ordinul de mărime al erorii se apreciază după metoda de integrare folosită şi după numărul n de puncte selectate pentru eva-luarea integralei [14].
2.4.2. METODA TRAPEZELOR Dacă funcŃia f:[a, b]→R este continuă în intervalul [a, b] împreună cu pri-mele ei două derivate, atunci se obŃine formula trapezului prin integrarea po-linomului de interpolare Lagrange a lui f cu nodurile: x1 = a; x2 = b, sub forma:
[ ] )(12
)()()(
2d)( ''
3
ξfab
bfafab
xxf
b
a
−−+
−=∫ (2.67)
unde: a< ξ< b. Valoarea aproximativă a integralei se obŃine cu ajutorul formulei trapezului sumată:
+
+= ∑∫
−
−
1
1
)(2
)()(d)(
n
k
k
b
a
xfbfaf
hxxf (2.68)
în care:
nkhkaxn
abh k ,...,2,1,)1(;
1=−+=
−−
= (2.69)
Formula trapezului se aplică cu multă eficienŃă în cazul când funcŃia este cunoscută pe o mulŃime de puncte oarecare situate în [a, b], primind forma:
)(2
)1()(d)( 1
1
1kk
n
k
kk
b
a
xxxfxf
xxf −++
= +
−
=∑∫ (2.70)
În figura 2.9 se prezintă schema logică a programului ordinator TRAPEZ, pentru calculul numeric al integralelor cu formula trapezului, unde: N este numărul nodurilor echidis-
tante ale intervalului de integrare; A, B – limita de integrare inferioară, respectiv su-perioară.
2.4.3. METODA SIMPSON Formula lui Simpson se obŃine prin integrarea polinomului de interpolare Lagrange al funcŃiei f:[a, b]→R cu nodurile x1 = a, x2 = x3 = (a+b)/2, x4 = b, sub forma:
Fig. 2.9 Schema logică a
metodei trapezului
28 Modelări numerice şi optimizări în instalaŃii
)(2880
)(
)()2
(4)(6
d)(
5
ξIV
b
a
fab
bfba
fafab
xxf
−−
−
+
++
−=∫
(2.71)
unde : a< ξ< b. Valoarea aproximativă a integralei se obŃine cu aju-torul formulei lui Simpson sumată:
+++= ∑ ∑∫
= =−
n
k
n
k
kk
b
a
xfxfbfafh
xxf
1 2122 )(2)(4)()(
3d)(
(2.72) în care:
12...,,1,)1(;2
+=−+=−
= nkhkaxn
abh k (2.73)
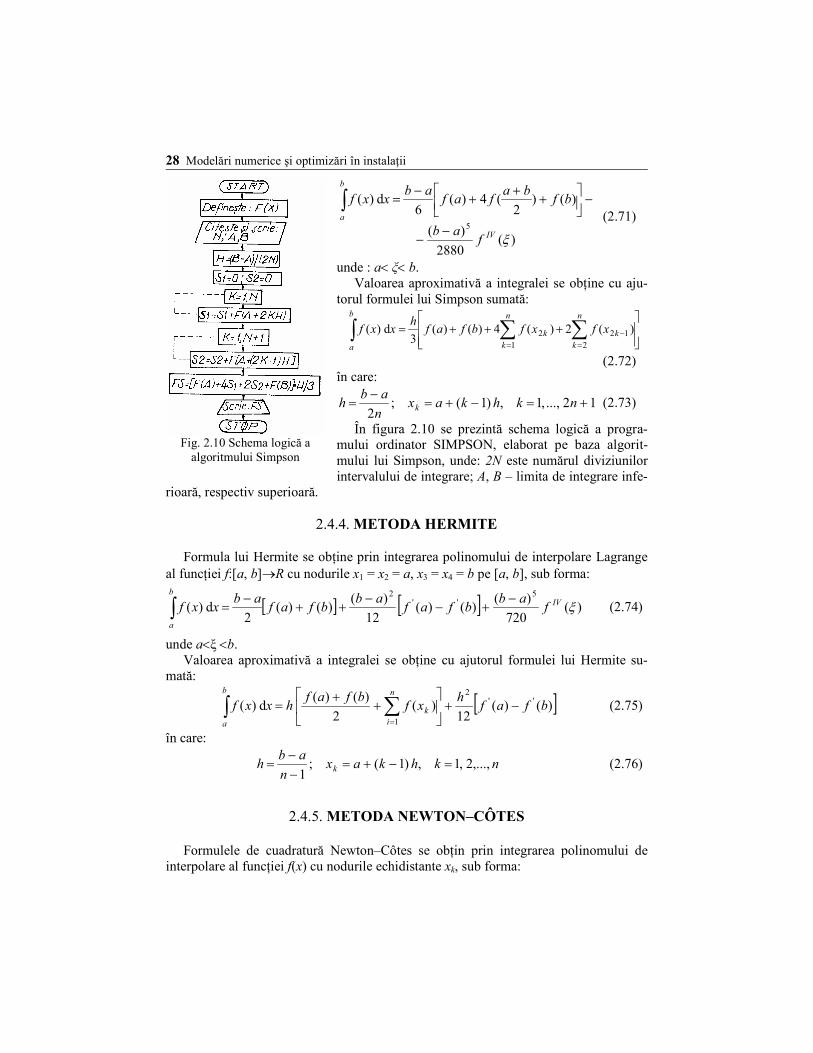
În figura 2.10 se prezintă schema logică a progra-mului ordinator SIMPSON, elaborat pe baza algorit-mului lui Simpson, unde: 2N este numărul diviziunilor intervalului de integrare; A, B – limita de integrare infe-
rioară, respectiv superioară.
2.4.4. METODA HERMITE Formula lui Hermite se obŃine prin integrarea polinomului de interpolare Lagrange al funcŃiei f:[a, b]→R cu nodurile x1 = x2 = a, x3 = x4 = b pe [a, b], sub forma:
[ ] [ ] )(720
)()()(
12
)()()(
2d)(
5''
2
ξIV
b
a
fab
bfafab
bfafab
xxf−
+−−
++−
=∫ (2.74)
unde a<ξ <b. Valoarea aproximativă a integralei se obŃine cu ajutorul formulei lui Hermite su-mată:
[ ])()(12
)(2
)()(d)( ''
2
1
bfafh
xfbfaf
hxxf
b
a
n
i
k −+
+
+=∫ ∑
=
(2.75)
în care:
nkhkaxn
abh k ,...,2,1,)1(;
1=−+=
−−
= (2.76)
2.4.5. METODA NEWTON–CÔTES Formulele de cuadratură Newton–Côtes se obŃin prin integrarea polinomului de interpolare al funcŃiei f(x) cu nodurile echidistante xk, sub forma:
Fig. 2.10 Schema logică a algoritmului Simpson
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 29
∑∫=
−=n
k
kk
b
a
xfwabxxf1
)()(d)( (2.77)
în care:
nkhkaxn
abh k ,...,2,1,)1(;
1=−+=
−−
= (2.78)
[ ]
nkqkq
q
knknw
n nkn
k ,...,2,1,d)!(!
)1(
0
1
=−−
−= ∫
+−
(2.79)
[ ] ))...(1(1 nqqqq n −−=+ (2.80)
CoeficienŃii de pondere satisfac următoarele con-diŃii:
1;1
== ∑=
−
n
k
kknk www (2.81)
Pentru comoditatea scrierii, coeficienŃii de pondere Côtes corespunzători fiecărui număr n de puncte se-lectate în scopul evaluării integrantului, prezentaŃi în tabelul 2.1, se exprimă sub formă de fracŃii:
N
ww kk = (2.82)
unde N este un numitor comun, iar ca verificare este satisfăcută relaŃia:
Nwn
k
k =∑=1
(2.83)
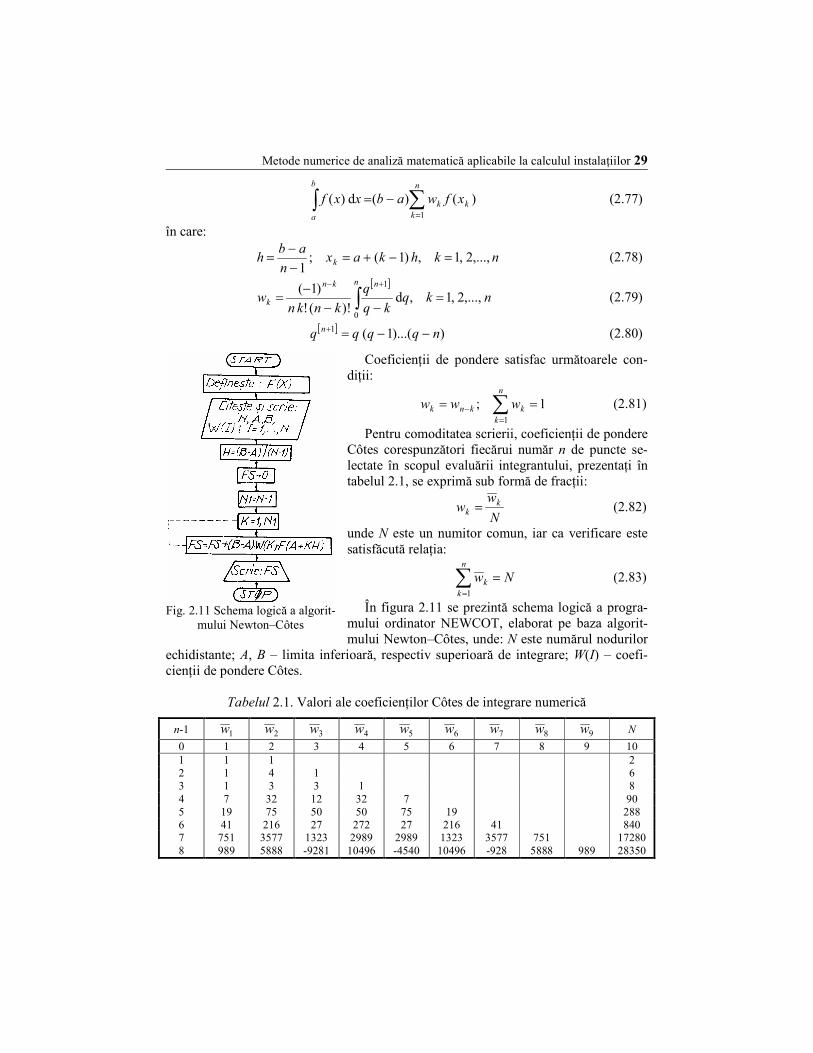
În figura 2.11 se prezintă schema logică a progra-mului ordinator NEWCOT, elaborat pe baza algorit-mului Newton–Côtes, unde: N este numărul nodurilor
echidistante; A, B – limita inferioară, respectiv superioară de integrare; W(I) – coefi-cienŃii de pondere Côtes.
Tabelul 2.1. Valori ale coeficienŃilor Côtes de integrare numerică
n-1 1w 2w 3w 4w 5w 6w 7w 8w 9w N
0 1 2 3 4 5 6 7 8 9 10 1 1 1 2 2 1 4 1 6 3 1 3 3 1 8 4 7 32 12 32 7 90 5 19 75 50 50 75 19 288 6 41 216 27 272 27 216 41 840 7 751 3577 1323 2989 2989 1323 3577 751 17280 8 989 5888 -9281 10496 -4540 10496 -928 5888 989 28350
Fig. 2.11 Schema logică a algorit-
mului Newton–Côtes

30 Modelări numerice şi optimizări în instalaŃii
2.4.6. METODA GAUSS–LEGENDRE
Se numesc polinoame Legendre expresiile de forma:
[ ] ,...1,0;)1(d
d
!2
1)( 2 =−= nx
xnxP n
n
n
nn (2.84)
care posedă n rădăcini distincte şi reale cuprinse în intervalul [–1, 1]. Ca exemple de polinoame Legendre se dau următoarele:
)33035(8
1)(
)35(2
1)(
)13(2
1)(
)(
1)(
244
33
22
1
0
+−=
−=
−=
==
xxxP
xxxP
xxP
xxP
xP
(2.85)
Formula de cuadratură Gauss–Legendre are forma:
∑∫=
−=
n
k
kk
b
a
xfwab
xxf1
)(2
d)( (2.86)
în care:
kk tabab
x22
−+
+= (2.87)
unde rădăcinile tk ale polinomului Legendre Pn(t) şi coeficienŃii de multiplicare (pon-deri de integrare) wk (k = 1, 2,..., n) sunt definiŃi prin sistemul de 2n ecuaŃii:
0
12
2
....................
0
2
12
1
1
22
1
1
=
−=
=
=
−
=
=
−
=
=
∑
∑
∑
∑
nk
n
k
k
n
k
nkk
n
k
kk
n
k
k
tw
ntw
tw
w
(2.88)
Pentru un număr de n puncte de evaluare, polinomul de aproximare trebuie să aibă ordinul 2n–1. În tabelul 2.2 se prezintă valorile aproximative ale absciselor tk şi ale coeficienŃilor de pondere wk, pentru un număr de puncte de evaluare n = 1,...,8.

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 31
Tabelul 2.2. Elemente ale formulei de integrare numerică Gauss-Legendre
n k tk wk
0 1 2 3 1 1 0 2,00000000
2 1; 2 m 0,57735027 1,00000000
1; 3 m 0,77459667 0,55555556 3
2 0 0,88888889
1; 4 m 0,86113631 0,34785484 4
2; 3 m 0,33998104 0,65214516
1; 5 m 0,90617985 0,23692688
2; 4 m 0,53846931 0,47869868 5
3 0 0,56888889
1; 6 m 0,93246951 0,17132450
2, 5 m 0,66120939 0,36076158 6
3; 4 m 0,23861919 0,46791394
1; 7 m 0,94910791 0,12948496
2; 6 m 0,74153119 0,27970540
3; 5 m 0,40584515 0,38182006 7
4 0 0,41795918
1; 8 m 0,96028986 0,10122854
2, 7 m 0,79666648 0,22238104
3; 6 m 0,52553242 0,31370664 8
4; 5 m 0,18343464 0,36268378
2.4.7. METODA MONTE–CARLO
Această metodă constă în general în a reprezenta soluŃia unei probleme printr-un parametru α (sau ca funcŃie cunoscută de un parametru α) al unei variabile aleatoare sau proces stohastic, astfel încât pe baza unei selecŃii de numere aleatoare uniforme să construiască o selecŃie asupra variabilei aleatoare sau a procesului, din care să se poată obŃine estimaŃii ale parametrului α. Se prezintă una din problemele rezolvate prin metoda Monte–Carlo şi anume
calculul integralei ∫b
a
xxf d)( .
Dacă x1, x2, ..., xn sunt numere aleatoare independente pe [a, b], o estimaŃie corectă a integralei este dată de formula:
)(d)(1∑∫=
−=
n
k
k
b
a
xfn
abxxf (2.89)
32 Modelări numerice şi optimizări în instalaŃii
Pentru a genera numerele aleatoare se folosesc metode congruente, putându-se fo-losi subrutina ştiinŃifică RND.
2.5. REZOLVAREA NUMERICĂ A ECUAłIILOR DIFERENłIALE
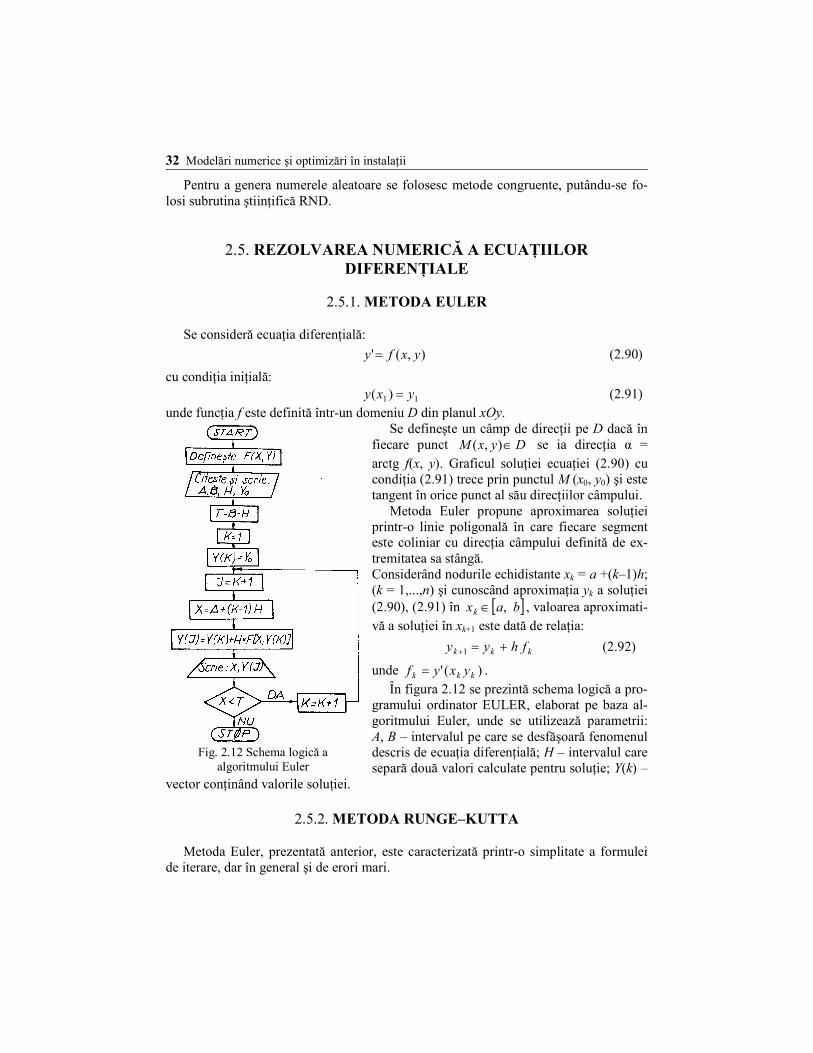
2.5.1. METODA EULER
Se consideră ecuaŃia diferenŃială:
),(' yxfy = (2.90)
cu condiŃia iniŃială: 11 )( yxy = (2.91) unde funcŃia f este definită într-un domeniu D din planul xOy.
Se defineşte un câmp de direcŃii pe D dacă în fiecare punct DyxM ∈),( se ia direcŃia α = arctg f(x, y). Graficul soluŃiei ecuaŃiei (2.90) cu condiŃia (2.91) trece prin punctul M (x0, y0) şi este tangent în orice punct al său direcŃiilor câmpului. Metoda Euler propune aproximarea soluŃiei printr-o linie poligonală în care fiecare segment este coliniar cu direcŃia câmpului definită de ex-tremitatea sa stângă. Considerând nodurile echidistante xk = a +(k–1)h; (k = 1,...,n) şi cunoscând aproximaŃia yk a soluŃiei (2.90), (2.91) în [ ]baxk ,∈ , valoarea aproximati-vă a soluŃiei în xk+1 este dată de relaŃia:
kkk fhyy +=+1 (2.92)
unde )(' kkk yxyf = . În figura 2.12 se prezintă schema logică a pro-gramului ordinator EULER, elaborat pe baza al-goritmului Euler, unde se utilizează parametrii: A, B – intervalul pe care se desfăşoară fenomenul descris de ecuaŃia diferenŃială; H – intervalul care separă două valori calculate pentru soluŃie; Y(k) –
vector conŃinând valorile soluŃiei.
2.5.2. METODA RUNGE–KUTTA Metoda Euler, prezentată anterior, este caracterizată printr-o simplitate a formulei de iterare, dar în general şi de erori mari.
Fig. 2.12 Schema logică a
algoritmului Euler
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 33
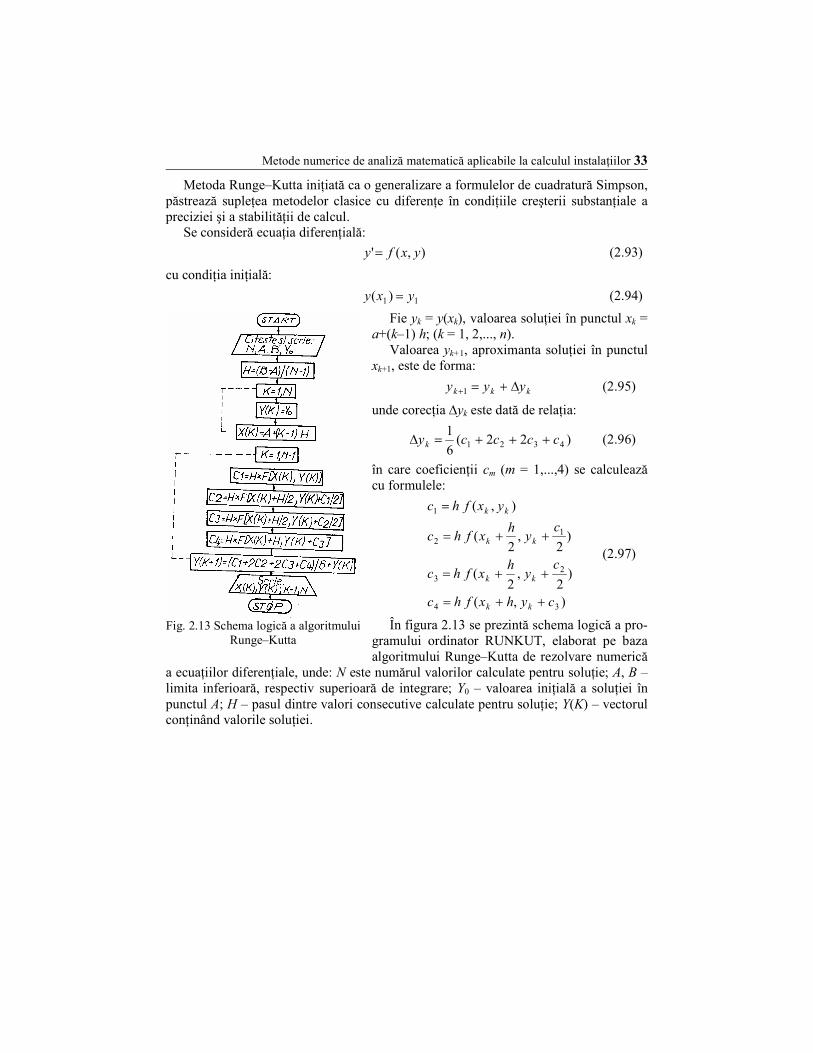
Metoda Runge–Kutta iniŃiată ca o generalizare a formulelor de cuadratură Simpson, păstrează supleŃea metodelor clasice cu diferenŃe în condiŃiile creşterii substanŃiale a preciziei şi a stabilităŃii de calcul. Se consideră ecuaŃia diferenŃială:
),(' yxfy = (2.93)
cu condiŃia iniŃială:
11 )( yxy = (2.94)
Fie yk = y(xk), valoarea soluŃiei în punctul xk = a+(k–1) h; (k = 1, 2,..., n). Valoarea yk+1, aproximanta soluŃiei în punctul xk+1, este de forma:
kkk yyy ∆+=+1 (2.95)
unde corecŃia ∆yk este dată de relaŃia:
)22(6
14321 ccccyk +++=∆ (2.96)
în care coeficienŃii cm (m = 1,...,4) se calculează cu formulele:
),(
)2
,2
(
)2
,2
(
),(
34
23
12
1
cyhxfhc
cy
hxfhc
cy
hxfhc
yxfhc
kk
kk
kk
kk
++=
++=
++=
=
(2.97)
În figura 2.13 se prezintă schema logică a pro-gramului ordinator RUNKUT, elaborat pe baza algoritmului Runge–Kutta de rezolvare numerică
a ecuaŃiilor diferenŃiale, unde: N este numărul valorilor calculate pentru soluŃie; A, B – limita inferioară, respectiv superioară de integrare; Y0 – valoarea iniŃială a soluŃiei în punctul A; H – pasul dintre valori consecutive calculate pentru soluŃie; Y(K) – vectorul conŃinând valorile soluŃiei.
Fig. 2.13 Schema logică a algoritmului
Runge–Kutta

Capitolul 3
METODE NUMERICE DE ALGEBRĂ APLICABILE LA CALCULUL INSTALAłIILOR
3.1. REZOLVAREA APROXIMATIVĂ A ECUAłIILOR ALGEBRICE ŞI TRANSCENDENTE
3.1.1. SCHEMA LUI HÖRNER PENTRU CALCULUL VALORILOR
UNUI POLINOM
Se consideră polinomul P cu coeficienŃi reali, definit prin egalitatea:
nnnn axaxaxaxP ++++= −−
11
10 ...)( (3.1) unde ai (i = 0, 1, ..., n) sunt numere reale şi reprezintă coeficienŃii polinomului P. La calculul valorii polinomului P pentru x = ξ se poate aplica schema lui Hörner, care constă într-o aranjare convenabilă a termenilor polinomului P astfel încât calculele să poată fi executate cât mai simplu şi cu un număr cât mai mic de operaŃii. Valoarea polinomului P pentru x = ξ se poate pune sub forma: nn aaaaaaP +++++= − ξξξξξξ ))))(...((()( 13210 (3.2)
care conduce în final la calculul succesiv al numerelor reale bi (i = 0, 1, ..., n) date de egalităŃile:
nnn
nnn
abb
abb
abb
abb
ab
+=
+=
+=
+=
=
−
−−−
ξ
ξ
ξ
ξ
1
121
212
101
00
LLLLLLLL (3.3)
rezultând: nbP =)(ξ (3.4)
Numerele bi reprezintă coeficienŃii câtului Q(x) obŃinut prin împărŃirea polinomului P(x) prin polinomul x−ξ. Schema lui Hörner poate fi reprezentată astfel: a0 a1 a2 ..... an + 0 b0ξ b1ξ ..... bn-1ξ ξ b0 b1 b2 .....bn=P(ξ)

Modelări numerice şi optimizări în instalaŃii 35
Această schemă poate fi aplicată repetat pentru calculul valorilor derivatelor unui polinom. Făcând schimbarea de variabilă x = y+ξ , expresia (3.1) a polinomului P(x) devine:
nnn AyAyAyP +++=+ − ...)( 1
10ξ (3.5)
Considerând polinomul (3.5) ca dezvoltare Taylor a funcŃiei P(y+ξ) se utilizează repetat schema lui Hörner:
( ) niAiPAP ini
n ,...,2,1;!)(, )( === −ξξ (3.6) în care: )(ξiin PA =− (3.7) Pentru calculul valorilor polinoamelor Pi(ξ) se utilizează repetat schema lui Hörner.
3.1.2. METODA SECANTEI Fie funcŃia [ ] Rbaf →,: şi ecuaŃia f(x) = 0. Conform acestei metode se construieş-te şirul de aproximaŃii ale rădăcinii reale a ecuaŃiei date, cu ajutorul relaŃiei generice:
nkafbf
afbbfax
kk
kkkkk ,...,2,1;
)()(
)()(=
−
−= (3.8)
unde ak şi bk sunt extremităŃile intervalului de aproximare la pasul k. Pentru alegerea noului interval, la pasul k+1 se procedează astfel: − dacă f(ak)·f(xk) ≤ 0, atunci atribuie: ak+1 = ak şi bk+1 = xk ; − dacă f(xk)·f(bk) ≤ 0, atunci atribuie: ak+1 = xk şi bk+1 = bk . Procesul continuă până când se îndeplineşte condiŃia:
ε1 ≤− −nn xx (3.9)
în care ε este eroarea de calcul admisă, iar rădăcina ecuaŃiei date de x = xn.
3.1.3. METODA NEWTON Fie ecuaŃia algebrică sau transcendentă f(x) = 0, în care funcŃia [ ] Rbaf →,: este derivabilă pe intervalul (a, b). Se admite că această ecuaŃie are o singură rădăcină reală şi că derivata 0)(' ≠xf pentru orice x. Metoda lui Newton, cunoscută şi sub denumirea de metoda tangentei, constă în con-strucŃia şirului de aproximaŃii ale rădăcinii ecuaŃiei respective, cu ajutorul formulei de recurenŃă:
nkxf
xfxx
k
kkk ,...,1,0;
)('
)(1 =−=+ (3.10)
Dacă ecuaŃia de rezolvat este algebrică (f(x) este un polinom) şi se notează cu )(knA
şi )(1knA − (k = 0, 1,..., n) valorile polinomului f(x), respectiv valorile derivatelor sale în
punctul xk, atunci relaŃia (3.10) devine:
36 Modelări numerice şi optimizări în instalaŃii
nkA
Axx
kn
kn
kk ,...,1,0;)(1
)(
1 =−=−
+ (3.11)
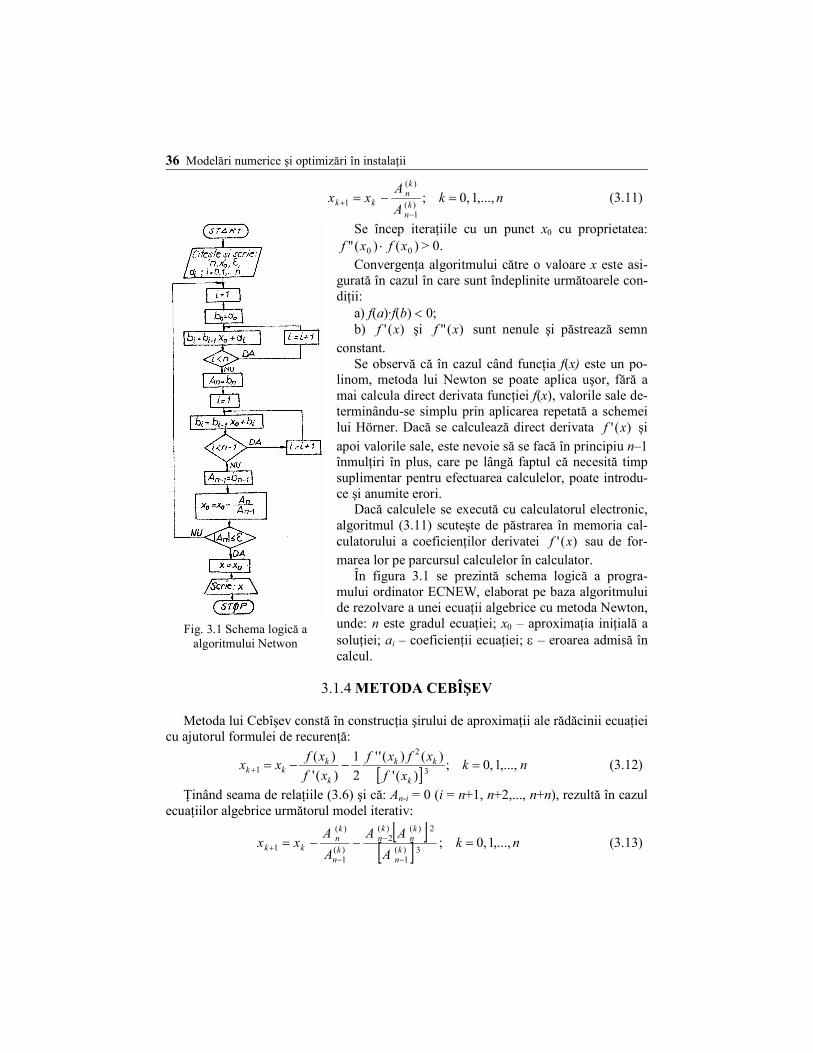
Se încep iteraŃiile cu un punct x0 cu proprietatea: )()(" 00 xfxf ⋅ > 0.
ConvergenŃa algoritmului către o valoare x este asi-gurată în cazul în care sunt îndeplinite următoarele con-diŃii: a) f(a)·f(b) < 0; b) )(' xf şi )(" xf sunt nenule şi păstrează semn constant. Se observă că în cazul când funcŃia f(x) este un po-linom, metoda lui Newton se poate aplica uşor, fără a mai calcula direct derivata funcŃiei f(x), valorile sale de-terminându-se simplu prin aplicarea repetată a schemei lui Hörner. Dacă se calculează direct derivata )(' xf şi
apoi valorile sale, este nevoie să se facă în principiu n–1 înmulŃiri în plus, care pe lângă faptul că necesită timp suplimentar pentru efectuarea calculelor, poate introdu-ce şi anumite erori. Dacă calculele se execută cu calculatorul electronic, algoritmul (3.11) scuteşte de păstrarea în memoria cal-culatorului a coeficienŃilor derivatei )(' xf sau de for-marea lor pe parcursul calculelor în calculator. În figura 3.1 se prezintă schema logică a progra-mului ordinator ECNEW, elaborat pe baza algoritmului de rezolvare a unei ecuaŃii algebrice cu metoda Newton, unde: n este gradul ecuaŃiei; x0 – aproximaŃia iniŃială a soluŃiei; ai – coeficienŃii ecuaŃiei; ε – eroarea admisă în calcul.
3.1.4 METODA CEBÎŞEV
Metoda lui Cebîşev constă în construcŃia şirului de aproximaŃii ale rădăcinii ecuaŃiei cu ajutorul formulei de recurenŃă:
[ ] nk
xf
xfxf
xf
xfxx
k
kk
k
kkk ,...,1,0;
)('
)()(''
2
1
)('
)(3
2
1 =−−=+ (3.12)
łinând seama de relaŃiile (3.6) şi că: An-i = 0 (i = n+1, n+2,..., n+n), rezultă în cazul ecuaŃiilor algebrice următorul model iterativ:
[ ]
[ ] nkA
AA
A
Axx
kn
kn
kn
kn
kn
kk ,...,1,0;3)(
1
2)()(2
)(1
)(
1 =−−=−
−
−+ (3.13)
Fig. 3.1 Schema logică a algoritmului Netwon
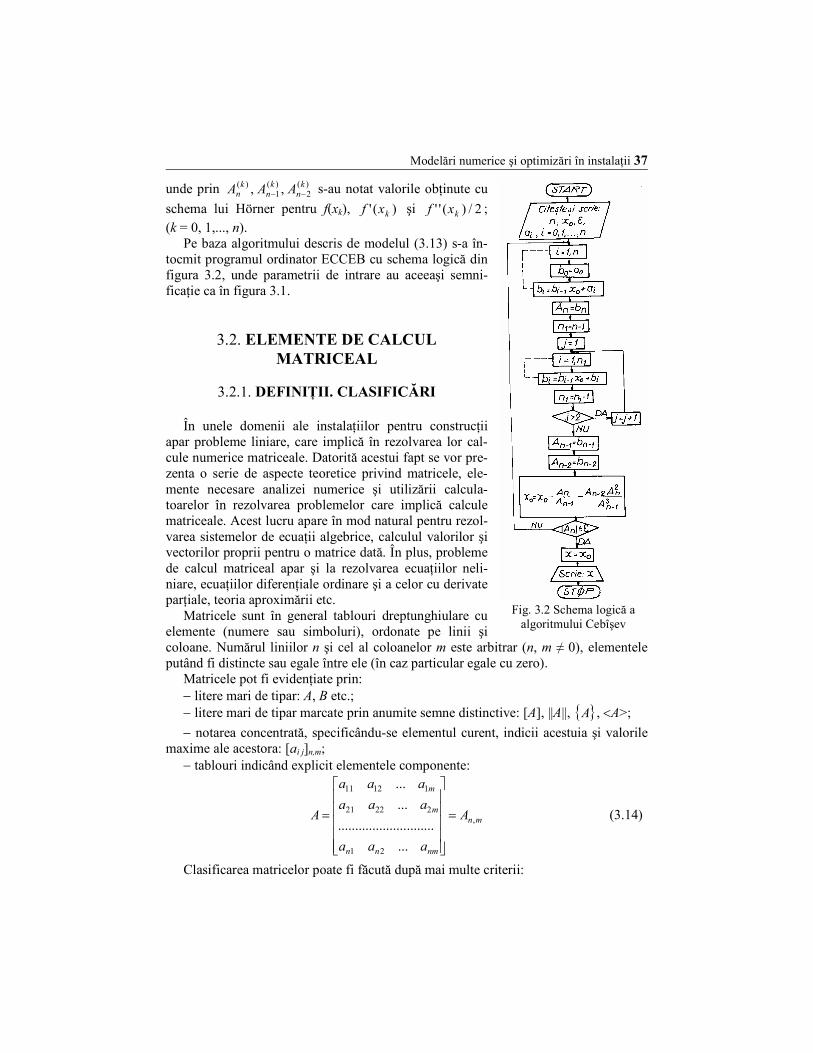
Modelări numerice şi optimizări în instalaŃii 37
unde prin )(2
)(1
)( ,, kn
kn
kn AAA −− s-au notat valorile obŃinute cu
schema lui Hörner pentru f(xk), )(' kxf şi 2/)('' kxf ; (k = 0, 1,..., n). Pe baza algoritmului descris de modelul (3.13) s-a în-tocmit programul ordinator ECCEB cu schema logică din figura 3.2, unde parametrii de intrare au aceeaşi semni-ficaŃie ca în figura 3.1.
3.2. ELEMENTE DE CALCUL MATRICEAL
3.2.1. DEFINIłII. CLASIFICĂRI
În unele domenii ale instalaŃiilor pentru construcŃii apar probleme liniare, care implică în rezolvarea lor cal-cule numerice matriceale. Datorită acestui fapt se vor pre-zenta o serie de aspecte teoretice privind matricele, ele-mente necesare analizei numerice şi utilizării calcula-toarelor în rezolvarea problemelor care implică calcule matriceale. Acest lucru apare în mod natural pentru rezol-varea sistemelor de ecuaŃii algebrice, calculul valorilor şi vectorilor proprii pentru o matrice dată. În plus, probleme de calcul matriceal apar şi la rezolvarea ecuaŃiilor neli-niare, ecuaŃiilor diferenŃiale ordinare şi a celor cu derivate parŃiale, teoria aproximării etc. Matricele sunt în general tablouri dreptunghiulare cu elemente (numere sau simboluri), ordonate pe linii şi coloane. Numărul liniilor n şi cel al coloanelor m este arbitrar (n, m ≠ 0), elementele putând fi distincte sau egale între ele (în caz particular egale cu zero). Matricele pot fi evidenŃiate prin: − litere mari de tipar: A, B etc.; − litere mari de tipar marcate prin anumite semne distinctive: [A], ||A||, A , <A>;
− notarea concentrată, specificându-se elementul curent, indicii acestuia şi valorile maxime ale acestora: [ai j]n,m; − tablouri indicând explicit elementele componente:
mn
nmnn
m
m
A
aaa
aaa
aaa
A ,
21
22221
11211
...
............................
...
...
=
= (3.14)
Clasificarea matricelor poate fi făcută după mai multe criterii:
Fig. 3.2 Schema logică a algoritmului Cebîşev

38 Modelări numerice şi optimizări în instalaŃii
a) după numărul dimensiunilor (numărul de indici ai elementului curent): − monodimensionale (vectori): vector linie, <A> = [ai j]1,m; vector coloană, A = [ai j]n,1
− bidimensionale: dreptunghiulare, [A]= [ai j]n,m (n ≠ m); pătratice, [A]= [ai j]n,m; − tridimensionale: [A]= [ai j k]n,m,1. În mod convenŃional, simbolul va fi ataşat în permanenŃă unei matrice coloană, chiar dacă, pentru a economisi spaŃiu, aceasta se scrie astfel: A=a11 a21 ... an1. b) după valoarea elementelor componente: − matrice nule: ∀i,j, ai j = 0, notate prin [0]n,m; − matrice nenule, cu cel puŃin un element diferit de zero, în această categorie înca-drându-se şi matricele boolene având ca elemente cifrele 0 şi 1.
Matricele pătratice pot fi la rândul lor: − matrice diagonale, având elemente nenule dispuse pe diagonala principală:
[ ]
≠=
=≠=
=ji
jiaa
a
a
a
A jinnji
nn
,0
,0;
000
............................
0...00
0...00
,22
11
(3.15)
− matrice sferice sau scalare.
[ ]
≠=
===
=ji
jiaaa
a
a
a
A jinnji ,0
,;
...000
.........................
0...00
0...00
, (3.16)
− matrice unitate (matrice sferice la care a = 1), fiind notate cu E:
ijE δ
1...000
........................
0...010
0...001
=
= (3.17)
unde:
≠
==
ji
jiji ,1
,0δ (3.18)
este simbolul lui Kronecker.
− matrice simetrice (ai j = aj i; ∀i, j);
− matrice antisimetrice (ai j = −aj i; ∀i, j);
− matrice superior triunghiulare:

Modelări numerice şi optimizări în instalaŃii 39
[ ] 0;
...000
......................................
...00
...0
...
,333
22322
1131211
==
= jinnji
nn
n
n
n
aa
a
aa
aaa
aaaa
A pentru i > j (3.19)
− matrice inferior triunghiulare:
[ ] 0;
...
..............................
0...
0...0
0...00
,
321
333231
2221
11
==
= jinnji
nnnnn
aa
aaaa
aaa
aa
a
A pentru i < j (3.20)
− matrice bandă, având elementele nenule, situate pe diagonala principală şi pe direcŃii paralele şi alăturate acesteia, ca de exemplu:
=
−
−−−
nnnn
nnnn
aa
aa
aa
aaa
aa
A
,1,
,11,1
3332
232221
1211
...000
...000
.................................................
00...0
00...
00...0
(3.21)
DeterminanŃii sunt tablouri pătratice de elemente ordonate pe linii şi coloane, prin a căror compunere, după regulile cunoscute, se obŃin numere sau expresii algebrice. Se notează astfel:
n
nnnn
n
n
A
aaa
aaa
aaa
AA ===
...
............................
...
...
det
21
22221
11211
(3.22)
Minorul Mij al unui element aij aparŃinând determinantului |A|n, reprezintă deter-minatul de ordinul n−1, obŃinut prin eliminarea în |A|n a liniei i şi coloanei j. Produsul unui minor cu (+1) sau (–1) conform expresiei:
jiji
ji M+−=Γ )1( (3.23)
este denumit complementul algebric al elementului aij.
3.2.2. OPERAłII ALGEBRICE CU MATRICE Adunarea şi scăderea este posibilă numai între matrice cu acelaşi număr de linii şi coloane.
40 Modelări numerice şi optimizări în instalaŃii
Dacă [A]= [ai j]n,m şi [B]= [bi j]n,m atunci:
mnijcBAC ,][=±= (3.24)
ijijij bac ±= (3.25)
ÎnmulŃirea este condiŃionată de egalitatea existentă între numărul de coloane al ma-tricei deînmulŃit cu numărul de linii al matricei înmulŃitor: mnmppn CBA ,,, =× (3.26)
unde:
pkipkikijk
p
j
ijik babababac +++==∑=
...22111
(3.27)
Suma şi produsul a două matrice A şi B au proprietăŃile:
AEEA
ABBA
ABBA
×=×
×≠×
+±=±
(3.28)
3.2.3. TIPURI SPECIALE DE MATRICE
Matricele partiŃionate reprezintă o exprimare concentrată a unor matrice, prin evi-denŃierea de submatrice componente, ca de exemplu:
=
=232221
131211
44434241
34333231
24232221
14131211
AAA
AAA
aaaa
aaaa
aaaa
aaaa
A
MM
KKKKMK
MM
MM
MM
(3.29)
în care:
[ ] [ ]44234342224121
34
24
14
13
3332
2322
1312
12
31
21
11
11
;;
;;
aAaaAaA
a
a
a
A
aa
aa
aa
A
a
a
a
A
=>=<=
=
=
= (3.30)
Matricele transpuse se obŃin prin schimbarea liniilor în coloane şi invers în matri-cele iniŃiale numite matrice bază, ca de exemplu:
=
=
2313
2212
2111
232221
131211 ;
aa
aa
aa
Aaaa
aaaA T (3.31)
ProprietăŃile matricelor transpuse sunt:
• AT = A, în cazul matricelor simetrice;
• AT = −A, în cazul matricelor antisimetrice;

Modelări numerice şi optimizări în instalaŃii 41
• AT = <A>; • <A>T = A; • [A×B×C]T = CT×BT×AT; • AT×A este o matrice simetrică. Matricele adjuncte sunt definite numai în cazul matricelor pătratice, având drept elemente complemenŃii algebrici ai elementelor transpuselor matricelor de bază, ca de exemplu:
ΓΓΓ
ΓΓΓ
ΓΓΓ
==
==
=
=
∗
333231
232221
131211
333231
232221
131211
332313
322212
312111
333231
232221
131211
AA
bbb
bbb
bbb
B
aaa
aaa
aaa
A
aaa
aaa
aaa
A
adj
T (3.32)
Matricele ortogonale sunt matrice partiŃionate care verifică relaŃia:
EAAAA TT =×=× (3.33) având proprietatea că |A| = 1. Matricele inverse pot fi definite numai în cazul matricelor pătratice nesingulare (|A| ≠ 0 ), prin relaŃia:
A
AA
∗− =1 (3.34)
şi au proprietăŃile: • A×A−1 = A−1×A = E; • [A×B×C]−1 = C−1×B−1×A−1; • [AT]−1 = [A−1]T; • dacă A este o matrice ortogonală, atunci şi A−1 are această proprietate şi A−1×[A−1]T = [A−1]T×A−1 = E.
Inversarea matricelor poate fi realizată, pe lângă relaŃia de bază (3.34) şi prin alte metode, ca de exemplu metoda partiŃionării (Frobenius−Schur), metoda eliminării (Gauss) şi metoda Cholesky. Dintre acestea, metoda partiŃionării este o combinaŃie între relaŃia de definiŃie a in-versei unei matrice şi scrierea partiŃionată a ei, iar metoda pivoŃilor se bazează pe eli-minarea gaussiană. Metoda Cholesky foarte laborioasă şi ingenioasă în acelaşi timp, re-Ńine în memoria calculatorului numai elementele nenule, fiind esenŃială în inversarea matricelor mari de tip bandă, cu sute de linii şi coloane. • Metoda partiŃionării reduce inversarea matricei bază An,n, la invesarea unor ma-trice de ordin inferior, cu condiŃia ca submatricele rezultate prin partiŃionare, aflate pe diagonala principală să fie pătratice şi nesingulare.

42 Modelări numerice şi optimizări în instalaŃii
Se consideră matricea An,n nesingulară şi o descompunere a acesteia în blocuri:
=
=
2221
1211
21
22221
11211
AA
AA
aaa
aaa
aaa
A
nnnn
n
n
M
KKK
M
L
KKKKKKKK
L
L
(3.35)
unde matricele A11 şi A22 îndeplinesc condiŃiile anterioare. Se exprimă inversa matricei A sub forma:
==−
2221
12111
CC
CC
CA
M
KKK
M
(3.36)
matricele C11, C12, C21 şi C22 urmând a fi determinate. Întrucât :
EACAA =×=×−1 , (3.37) rezultă că:
=
E
E
AA
AA
CC
CC
M
KKK
M
M
KKK
M
M
KKK
M
0
0
2221
1211
2221
1211
(3.38)
Efectuând produsul matriceal se obŃine sistemul:
EACAC
ACAC
ACAC
EACAC
=×+×
=×+×
=×+×
=×+×
22221221
21221121
22121211
21121111
0
0 (3.39)
Notând:
1112112
111 ; −− ×=×= AANAAM (3.40)
prin rezolvarea celor două sisteme matriceale rezultă:
[ ]
NCAC
CMC
NCC
ANAC
×−=
×−=
×−=
×−=
−
−
121
1111
2212
2221
1122222
(3.41)
Particularizând A12 şi A21 la un vector linie, respectiv coloană, se obŃine un algoritm iterativ cu n paşi pentru inversarea lui A. Fie Ak submatricea din A formată cu primele k linii şi k coloane de forma:
= −
αv
uAA
k
k
1 (3.42)
În ipoteza că 11
−−kA este cunoscută, se caută 1−
kA sub forma:

Modelări numerice şi optimizări în instalaŃii 43
=−
βy
xBAk
1 (3.43)
iar din condiŃia kkk EAA =−1 se obŃine sistemul:
1
111
;0
;0;
−
−−−
=+=+
=+=+
k
kkk
ExvyvB
uxAEyuBA
βαα
β (3.44)
de unde:
ββ
βα
β
yxABvAy
uAxuAv
kk
k
k
+=−=
−=−
=
−−
−−
−−−
−
11
11
111
1
;
;1
(3.45)
Luând A1 = a11, 111
1 /1 aA =− şi aplicând algoritmul pentru k =1, 2,..., n se obŃine:
11 −− = nAA (3.46) În figura 3.3 se prezintă schema logică a programului ordinator INVMAP, elaborat pe baza algoritmului de inversare a matricelor pătratice prin metoda partiŃionării, care cuprinde patru subrutine, unde: N este numărul de linii şi coloane ale matricei A(I,J) care se inversează; D(I,J) – inversa matricei A; B(I,J) – matrice de lucru, alocată dina-mic prin program. • Metoda eliminării constă în următoarele: se pune alături de matricea dată o matri-ce unitate de aceeaşi dimensiune şi apoi împărŃind liniile celor două matrice cu anumiŃi factori şi scăzând unele linii din altele se poate obŃine în prima matrice, matricea uni-tate, iar ceea ce rezultă în partea adăugată este matricea inversă. Trecerea la matricea unitate se face împărŃind pe rând fiecare linie a matricei date şi a celei adăugate prin elementul ce se află pe diagonala principală în matricea dată şi apoi se scade această linie înmulŃită cu anumiŃi factori din celelalte linii pentru a se obŃine elemente nule pe coloana de acelaşi rang cu linia pe care ne aflăm. Dacă ele-mentul de pe diagonala principală este nul se caută pe aceeaşi linie un element nenul. Dacă nu se găseşte, matricea este neinversabilă. Dacă se găseşte unul, se schimbă între ele, în matricea dată, două coloane pentru a aduce pe diagonală elementul nenul şi în matricea adăugată cele două linii corespunzătoare, şi se efectuează operaŃiile descrise anterior. După ce s-a obŃinut matricea unitate în matricea dată se restabileşte ordinea de la început a liniilor matricei adăugate şi matricea obŃinută este inversa matricei. În figura 3.4 se prezintă schema logică a programului ordinator INVMAE, elaborat pe baza algoritmului de invesare a matricelor pătratice prin metoda eliminării, unde N este dimensiunea matricei A(I,J) care se inversează; B(I,J) – inversa matricei A; L(I) – vectorul care înregistrează schimbările de linii ce au loc în timpul calculelor. Matricea asemenea. O matrice A este asemenea cu matricea B dacă este îndeplinită relaŃia:
MAMB 1−= (3.47) M fiind o matrice nesingulară. Ca o consecinŃă rezultă:
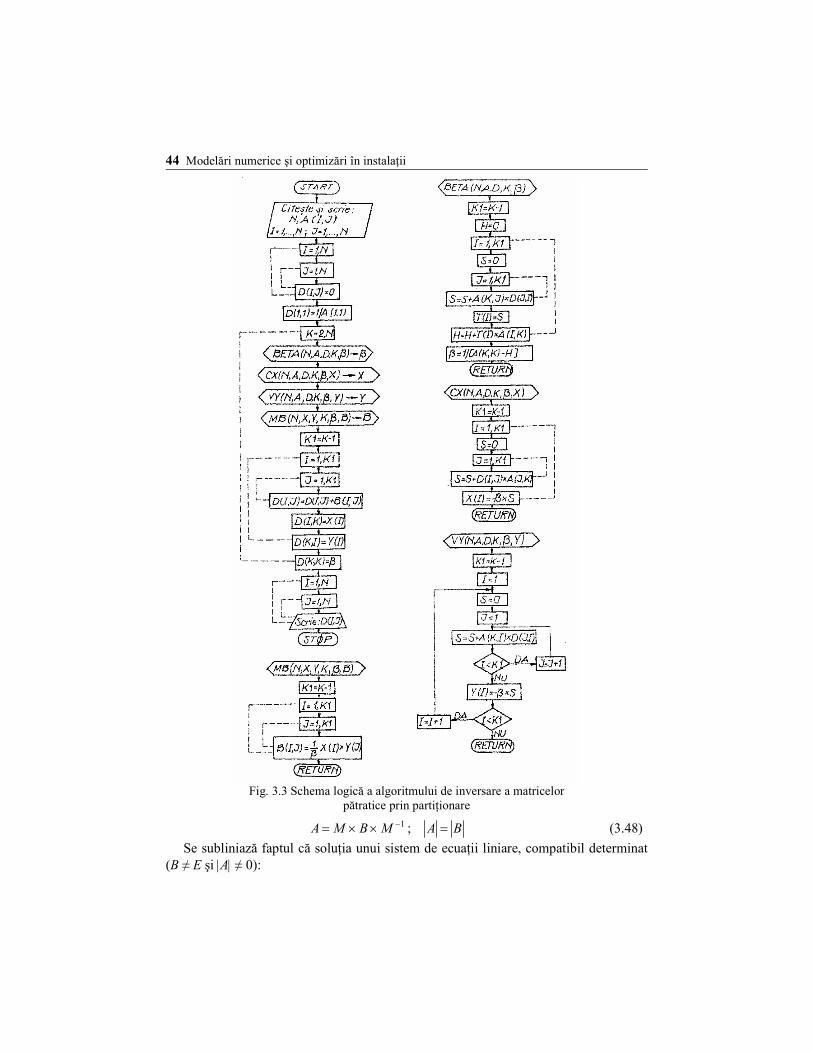
44 Modelări numerice şi optimizări în instalaŃii
Fig. 3.3 Schema logică a algoritmului de inversare a matricelor
pătratice prin partiŃionare
BAMBMA =××= − ;1 (3.48)
Se subliniază faptul că soluŃia unui sistem de ecuaŃii liniare, compatibil determinat (B ≠ E şi |A| ≠ 0):
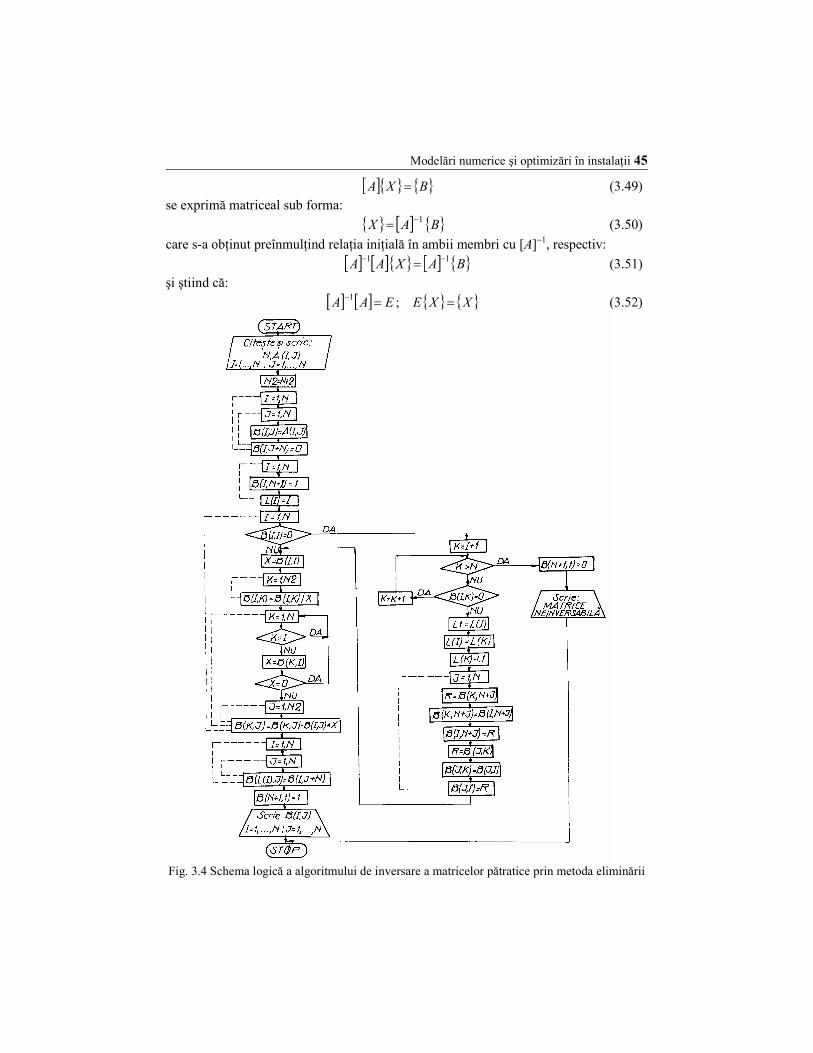
Modelări numerice şi optimizări în instalaŃii 45
[ ] BXA = (3.49) se exprimă matriceal sub forma:
[ ] BAX1−= (3.50)
care s-a obŃinut preînmulŃind relaŃia iniŃială în ambii membri cu [A]−1, respectiv:
[ ] [ ] [ ] BAXAA11 −− = (3.51)
şi ştiind că:
[ ] [ ] XXEEAA ==− ;1 (3.52)
Fig. 3.4 Schema logică a algoritmului de inversare a matricelor pătratice prin metoda eliminării

46 Modelări numerice şi optimizări în instalaŃii
Matricele rare. O matrice (n, n) – dimensională este rară dacă are un număr mic r de elemente nenule, adică r<< n2. Cantitativ matricele rare sunt caracterizate de ra-portul dintre numărul elementelor nenule şi al celor nule, d = r/(n2–r), numit densitatea matricei, care are valori între 0,15% şi 3%. O matrice nesingulară A se poate exprima sub formă de produs a doi factori matri-ceali L şi U, unde L este inferior triunghiulară, iar V superior triunghiulară, cu elemen-tele diagonalei principale egale cu unitatea [3]. Factorizarea unei matrice rare necesită numai n1+2k operaŃii, iar inversarea sa doar n2+k operaŃii. Deoarece k< 1 pentru matricele rare, atât factorizarea cât şi inversarea re-
clamă mai puŃine decât n3 operaŃii, necesare aceloraşi calcule pentru matrice dense. În-trucât n1+2k < n2+k < n3 rezultă că factorizarea implică mai puŃine operaŃii decât inver-sarea, ceea ce face ca în rezolvarea sistemelor liniare să fie utilizată factorizarea. PrezenŃa matricelor rare este remarcată îndeosebi în modelele matematice de ana-liză şi sinteză a reŃelelor fluidice (de distribuŃie a apei, a energiei termice şi a gazelor), precum şi a reŃelelor electrice.
3.3. REZOLVAREA SISTEMELOR DE ECUAłII LINIARE
3.3.1. CONSIDERAłII PRELIMINARE Mai multe probleme din domeniul instalaŃiilor pentru construcŃii necesită pentru so-luŃionare rezolvarea unor sisteme de ecuaŃii algebrice liniare. De asemenea, programa-rea liniară, aplicabilă la soluŃionarea unor probleme de optimizare a instalaŃiilor, im-plică rezolvarea de sisteme de ecuaŃii algebrice liniare. Cuvântul „liniar” este de obicei luat în sensul că variabilele apar la puterea întâi în fiecare ecuaŃie. Dacă matricea sistemului este A, vectorul termenilor liberi B, iar vectorul necunos-cutelor X, atunci un sistem de ecuaŃii liniare se scrie sub una din formele:
=+++
=+++
=+++
nnnnnn
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...
...
2211
22222221
11212111
KKKKKKKKKKKK (3.53)
nibxa i
n
j
jji ,...,2,1;1
==∑=
(3.54)
=
nnnnnn
n
n
b
b
b
x
x
x
aaa
aaa
aaa
MM
K
KKKKKKK
K
K
2
1
2
1
21
22221
11211
(3.55)

Modelări numerice şi optimizări în instalaŃii 47
[ ] BXA = (3.56)
BXA = (3.57)
Un sistem de ecuaŃii algebrice de una din formele (3.53)...(3.57) este consistent da-că are cel puŃin o soluŃie şi este inconsistent dacă nu are nici o soluŃie. Dacă B = 0, sistemul este omogen, iar un astfel de sistem are o soluŃie nebanală dacă şi numai dacă det A = 0, adică dacă A este singulară. Altfel sistemul nu admite o soluŃie unică. Dacă B ≠ 0, sistemul este neomogen şi are o soluŃie unică pentru orice B dacă şi numai dacă sistemul omogen AX = 0 nu are altă soluŃie decât cea banală, adică A este nesingulară. În cazul în care soluŃia sistemului liniar există şi este unică, aceasta poate fi expri-mată fie cu ajutorul regulii lui Cramer, fie cu ajutorul matricei inverse, forme care sunt echivalente. După regula lui Cramer soluŃia sistemului este:
∆
∆=
∆
∆=
∆
∆=
∆
∆= n
n
j
j xxxx ...,,,...,, 22
11 (3.58)
unde determinanŃii ∆j (j = 1, 2,..., n) şi ∆ au formele:
A
aabaaa
aabaaa
aabaaa
nnjnnjnnn
njj
njj
j det;
1,1,21
21,221,22221
11,111,11211
=∆=∆
+−
+−
+−
KK
KKKKKKKKKKKKKKKKKK
KK
KK
(3.59)
Exprimarea soluŃiei sistemului cu ajutorul matricei inverse este de forma (3.50). Metodele de rezolvare a sistemelor de ecuaŃii liniare pot fi grupate în trei clase: − metode bazate pe calculul determinanŃilor; − metode bazate pe eliminare; − metode iterative. Din punctul de vedere al calculelor efectuate cu ajutorul calculatorului, prima clasă bazată pe calculul determinanŃilor este neeficientă, din cauza numărului foarte mare de operaŃii pe care le implică, în plus precizia calculului este afectată dacă numărul ope-raŃiilor este foarte mare şi eroarea de rotunjire se acumulează. Din cauza acestui fapt metodele bazate pe evaluarea determinanŃilor nu se vor mai prezenta în continuare. Ce-lelalte metode se clasifică astfel: − metode directe (exacte), în care o secvenŃă de operaŃii se execută o singură dată, iar rezultatele obŃinute sunt o aproximaŃie a rezultatului exact; − metode indirecte (iterative), care permit găsirea soluŃiei printr-un proces de apro-ximări succesive. O aceiaşi secvenŃă de operaŃii este repetată de mai multe ori, obŃi-nându-se o soluŃie din ce în ce mai bună în sensul preciziei. În cadrul acestor metode, se pune problema de alegere a acelei metode care este convenabilă din punctul de vedere al unei viteze sporite de convergenŃă pentru o apro-ximare adecvată.

48 Modelări numerice şi optimizări în instalaŃii
3.3.2. METODE DIRECTE
Metodele directe pentru rezolvarea sistemelor liniare, cele mai frecvent utilizate, sunt metodele bazate pe procesul de eliminare sau pe descompunerea matricei A. În ambele cazuri sistemul iniŃial trece prin diverse forme, dar toate acestea trebuie să fie echivalente cu forma iniŃială. Metoda de eliminare Gauss. Pentru un sistem de ecuaŃii liniare, cu o matrice den-să, ale cărei elemente sunt stocate în memoria calculatorului, se consideră că metoda de eliminare Gauss reprezintă algoritmul cel mai bun atât în ceea ce priveşte timpul de execuŃie cât şi precizia care caracterizează soluŃia. Metoda lui Gauss de rezolvare a unui sistem de ecuaŃii liniare, scris sub forma ma-triceală: BXA = (3.60) constă în transformarea acestuia într-un sistem echivalent, având matricea coefici-enŃilor superior triunghiulară, prin eliminarea secvenŃială a necunoscutelor şi apoi prin rezolvarea ecuaŃiilor, folosind procedeul de substituŃie înapoi. Transformarea se realizează în m paşi. Primul pas constă în eliminarea necunoscutei x1 din ecuaŃiile sistemului începând cu a doua, după ce pe locul (1, 1) în matricea A se aduce elementul maxim în modul din prima coloană, permutând ecuaŃiile respective ale sistemului. Acest element se numeşte pivot, iar linia corespunzătoare se numeşte linie pivot. După permutarea ecuaŃiilor sistemului (3.60), acesta devine:
)0()0( BXA = (3.61)
cu 1)0(
11 max iaa = .
Sistemul (3.61) se transformă astfel: prima ecuaŃie se împarte cu pivotul )0(11a , iar
din celelalte se elimină necunoscuta x1; ecuaŃia i (i ≥ 2) transformată se obŃine scăzând
din ecuaŃia i a sistemului (3.61) prima ecuaŃie împărŃită cu pivotul şi înmulŃită cu )0(11a .
Se obŃine astfel sistemul:
)1()1( BXA = (3.62) cu:
ninj
aaaaa
a
aaa
jijijii
j
ji
≤≤+≤≤
⋅−==
==
2;12
,0
,,1
)1(1
)0(1
)0()1()1(1
)0(11
)0(1)1()1(
11
(3.63)
În continuare se repetă procedeul expus anterior pentru eliminarea necunoscutei x2 din sistemul format cu ultimele n–1 ecuaŃii ale sistemului (3.60), a cărui matrice este nesingulară.
Se notează tot cu )1(22a elementul maxim în modul din coloana a doua începând cu li-
nia a doua din matricea A(1).

Modelări numerice şi optimizări în instalaŃii 49
La pasul p se obŃine sistemul:
)()( pp BXA = (3.64) sau:
)()(1
)(1,
)()(1
)(1,
)2(2
)2(23
)2(232
)1(1
)1(12
)1(121
...
...
...
...
pnn
pnnk
pkn
pkn
pnkk
pkkk
nn
nn
bxaxa
bxaxax
bxaxax
bxaxax
=++
=+++
=+++
=+++
++
++
(3.65)
unde:
mpnkjnki
aaaaa
a
aaa
pjk
pki
pji
pji
pki
pkk
pjkp
jkpkk
...,2,1;,...,1;,...,1
,0
,,1
)()1()1()()(
)1(
)1()()(
=+=+=
⋅−==
==
−−
−
−
(3.66)
După m paşi se ajunge la un sistem echivalent cu (3.60) având matricea superior triunghiulară:
)()( mm BXA = (3.67) Acest sistem se rezolvă începând cu ultima ecuaŃie:
1...,,1;
1
)()(1
)(1
−=−=
=
∑+=
+
+
nkxaax
ax
j
n
kj
pjk
pnkk
pnnn
(3.68)
Timpul τ necesar pentru rezolvarea unui sistem liniar cu metoda Gauss este apro-
ximativ proporŃional cu cubul numărului de necunoscute n, adică: Nn /3=τ , unde N este numărul de operaŃii ce se efectuează în unitatea de timp. În figura 3.5 se prezintă schema logică a programului ordinator SILGAU, elaborat pe baza algoritmului Gauss de rezolvare a sistemelor de ecuaŃii algebrice liniare, unde: N este numărul ecuaŃiilor şi al necunoscutelor; A(I,J) – matricea sistemului; B(I) – vectorul termenilor liberi; X(I) – vectorul necunoscutelor; W(I,J) – matrice de lucru în care se reŃin elementele matricei sistemului pentru verificarea soluŃiilor. Metoda Gauss–Jordan. Această metodă constituie o formă modificată a metodei eliminării Gauss şi permite rezolvarea unui sistem de n ecuaŃii cu m necunoscute de forma (3.60), în care: === XbBaA
minmji ;;][ , <xj>n.
Potrivit acestei metode se procedează în următoarele etape: E1) Se determină cel mai mare element în valoare absolută din matricea A a siste-mului. Fie ars acest element care este numit pivot. E2) Se împarte ecuaŃia r la elementul ars, obŃinându-se o ecuaŃie echivalentă cu ea, care are pe poziŃia (r, s) valoarea 1. E3) Se înmulŃeşte potrivit ecuaŃia r şi se adună pe rând la celelalte ecuaŃii, astfel încât coeficienŃii necunoscutei xs din celelalte ecuaŃii să devină zero. E4) Se marchează ecuaŃia r şi coloana s a matricei A obŃinute în etapa E3.
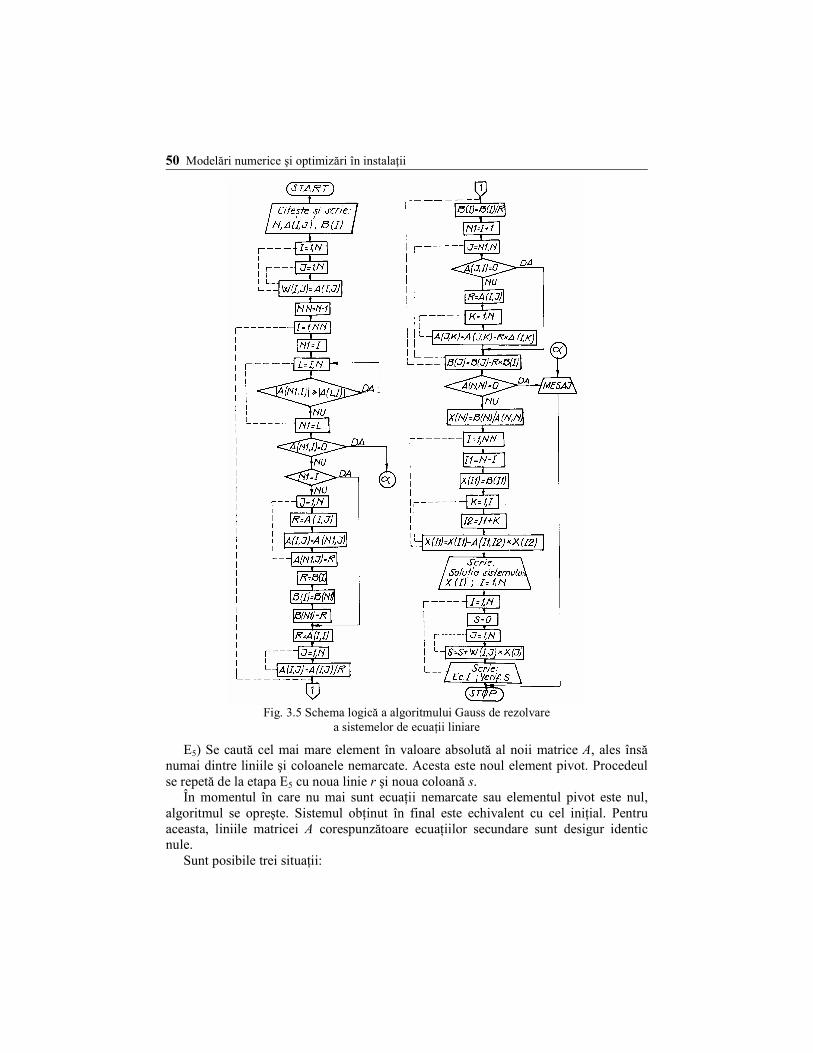
50 Modelări numerice şi optimizări în instalaŃii
Fig. 3.5 Schema logică a algoritmului Gauss de rezolvare
a sistemelor de ecuaŃii liniare
E5) Se caută cel mai mare element în valoare absolută al noii matrice A, ales însă numai dintre liniile şi coloanele nemarcate. Acesta este noul element pivot. Procedeul se repetă de la etapa E5 cu noua linie r şi noua coloană s. În momentul în care nu mai sunt ecuaŃii nemarcate sau elementul pivot este nul, algoritmul se opreşte. Sistemul obŃinut în final este echivalent cu cel iniŃial. Pentru aceasta, liniile matricei A corespunzătoare ecuaŃiilor secundare sunt desigur identic nule. Sunt posibile trei situaŃii:

Modelări numerice şi optimizări în instalaŃii 51
a) dacă între termenii liberi corespunzători ecuaŃiilor secundare din ultimul sistem se află un element nul, atunci sistemul este incompatibil; b) dacă toŃi termenii liberi ai ecuaŃiilor secundare sunt nuli, atunci sistemul este compatibil. Când există necunoscute secundare (coloane nemarcate) atunci sistemul este compatibil nedeterminat. Trecând în membrul doi necunoscutele secundare, se obŃine pentru fiecare necunos-cută pricipală, dependenŃa liniară de cele secundare. c) dacă sistemul este compatibil şi nu există necunoscute secundare, atunci este compatibil determinat. Elementele corespunzătoare din B sunt valorile necunoscutelor. Metoda Cholesky (metoda rădăcinii pătrate). Este o metodă exactă de rezolvare a sistemelor de ecuaŃii algebrice liniare de forma: BXA = (3.69) şi urmăreşte punerea matricei A sub forma unui produs de două matrice inferior, res-pectiv superior triunghiulare. Această metodă se aplică îndeosebi sistemelor în care matricea A este simetrică (aij = aji ) şi pozitiv definită (aii >0). În acest caz matricea A se poate pune sub forma:
TTTA = (3.70) în care T este o matrice inferior triunghiulară, iar TT este transpusa sa. Elementele matricei T se calculează cu următoarele relaŃii:
jit
jittat
t
itat
nja
atat
ji
jk
i
k
ikji
ii
ji
i
k
ikiiii
j
j
>=
<−=
>−=
===
∑
∑−
=
−
=
;0
;)(1
1;
...,,2;,
1
1
1
1
2
11
111111
(3.71)
Cu ajutorul relaŃiilor (3.71) se pot calcula toate elementele matricei T, iar descom-
punerea TTTA = conduce la rezolvarea a două sisteme de ecuaŃii algebrice liniare tri-unghiulare:
,
;
YXT
BYT T
=
= (3.72)
sisteme care se descompun în formă scalară astfel:
nnnnnn bytytyt
bytyt
byt
=+++
=+
=
...2211
2222121
1111
KKKKKKKKKKKK (3.73)

52 Modelări numerice şi optimizări în instalaŃii
nnnn
nn
nn
yxt
yxtxt
yxtxtxt
=
=++
=+++
KKKKKKKKKKKK
22222
11212111
...
...
(3.74)
Din sistemul (3.73) se determină succesiv:
niytbt
yt
by k
i
k
iki
ii
i ,...,2;)(1
,1
111
11 =−== ∑
−
=
(3.75)
iar din sistemul (3.74) se determină necunoscutele xn, xn-1,...,x1 prin intermediul rela-Ńiilor:
1...,,1;)(1
,1
−=−== ∑+=
nixtyt
xt
yx k
n
ik
kii
ii
i
nn
nn (3.76)
În figura 3.6 se prezintă schema logică a programului ordinator SILCHOL, elaborat pe baza algoritmului Cholesky de rezolvare a sistemelor de ecuaŃii liniare cu matrice simetrică, care permite lucrul cu semibanda matricei sistemului, unde: N este numărul ecuaŃiilor sistemului; M – lăŃimea semibenzii; A(I,J) – matricea sistemului; B(I) – vectorul termenilor liberi; X(I) – vectorul necunoscutelor. Metodele directe de rezolvare a sistemelor algebrice liniare au avantajul că necesită un număr fix de operaŃii elementare pentru un număr de ecuaŃii dat şi au dezavantajul că acumulează erori de rotunjire, care conduc la o eroare relativă destul de mare în soluŃie.
3.3.3. METODE ITERATIVE
Metodele iterative pentru rezolvarea sistemului de ecuaŃii liniare (3.60) constau din alegerea unei aproximaŃii iniŃiale X(0) pentru vectorul soluŃie şi determinarea cu ajutorul unui algoritm de calcul iterativ a unui şir de soluŃii aproximative X(1), X(2), ..., X(m), ...., care în principiu trebuie să conveargă către soluŃia exactă a sistemului. Aceste metode sunt iterative în sensul că se trunchiază şirul infinit de operaŃii în momentul în care este atinsă precizia dorită, pe când metodele directe sunt finite deoarece implică un număr finit de operaŃii şi bine determinat de dimensiunea sistemului şi de metoda aleasă. Metoda Jacobi (metoda iteraŃiilor simultane). Pentru sistemul: AX = B cu matri-cea A = [aij]n,n nesingulară şi aii ≠ 0, metoda Jacobi presupune o descompunere a ma-tricei A sub forma: STDA −−= (3.78)
în care:
[ ]
[ ]
[ ]
≤
>−==
≥
<−==
≠
===
ji
jiassS
ji
jiattT
ji
jiaddD
ji
jijs
ji
jiji
ji
jiji
,0
,;
,0
,;
,0
,;
(3.79)
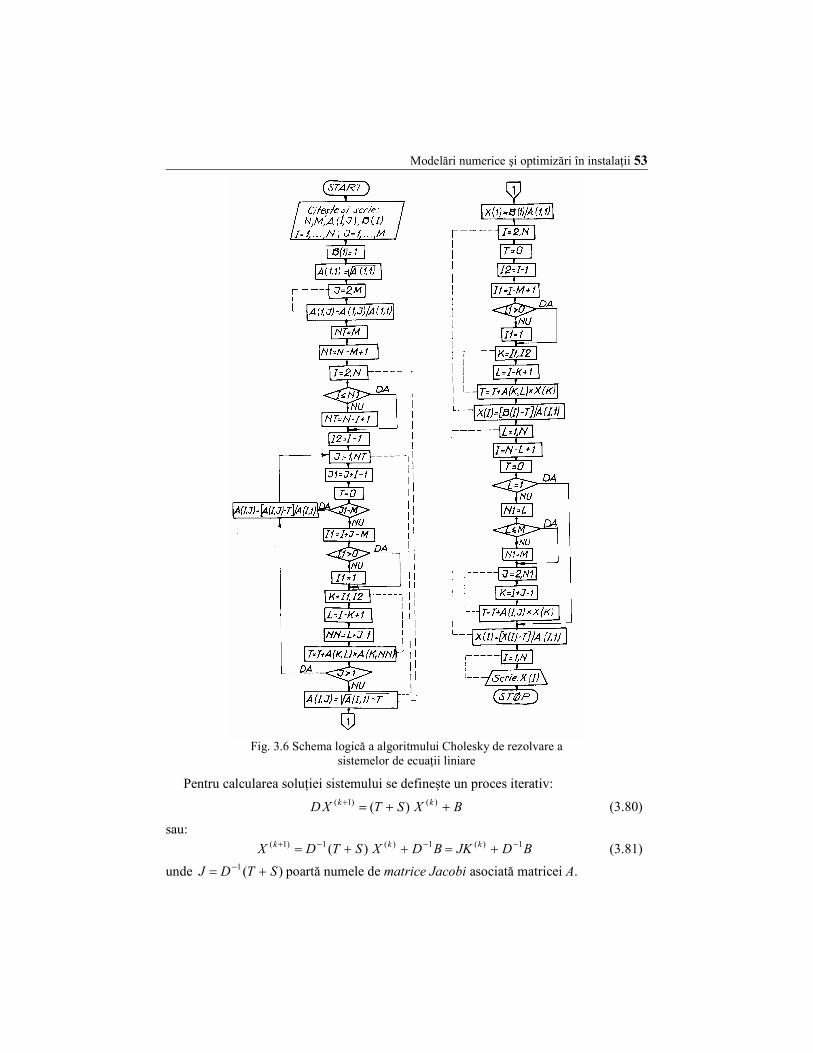
Modelări numerice şi optimizări în instalaŃii 53
Fig. 3.6 Schema logică a algoritmului Cholesky de rezolvare a
sistemelor de ecuaŃii liniare
Pentru calcularea soluŃiei sistemului se defineşte un proces iterativ:
BXSTXD kk ++=+ )()1( )( (3.80)
sau:
BDJKBDXSTDX kkk 1)(1)(1)1( )( −−−+ +=++= (3.81)
unde )(1 STDJ += − poartă numele de matrice Jacobi asociată matricei A.
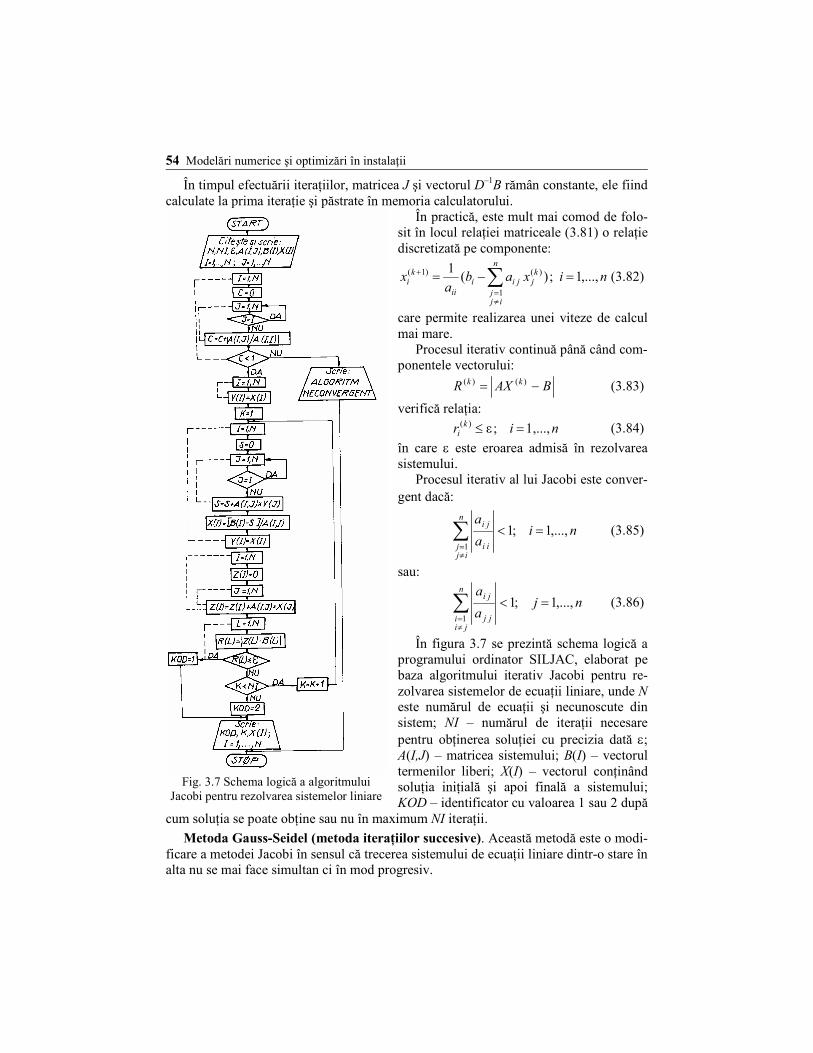
54 Modelări numerice şi optimizări în instalaŃii
În timpul efectuării iteraŃiilor, matricea J şi vectorul D–1B rămân constante, ele fiind calculate la prima iteraŃie şi păstrate în memoria calculatorului.
În practică, este mult mai comod de folo-sit în locul relaŃiei matriceale (3.81) o relaŃie discretizată pe componente:
nixaba
xn
ijj
kjjii
ii
ki ,...,1;)(
1
1
)()1( =−= ∑≠=
+ (3.82)
care permite realizarea unei viteze de calcul mai mare. Procesul iterativ continuă până când com-ponentele vectorului:
BAXR kk −= )()( (3.83)
verifică relaŃia:
nir ki ,...,1;ε)( =≤ (3.84)
în care ε este eroarea admisă în rezolvarea sistemului. Procesul iterativ al lui Jacobi este conver-gent dacă:
∑≠=
=<n
ijj ii
jini
a
a
1
,...,1;1 (3.85)
sau:
∑≠=
=<n
jii jj
jinj
a
a
1
,...,1;1 (3.86)
În figura 3.7 se prezintă schema logică a programului ordinator SILJAC, elaborat pe baza algoritmului iterativ Jacobi pentru re-zolvarea sistemelor de ecuaŃii liniare, unde N este numărul de ecuaŃii şi necunoscute din sistem; NI – numărul de iteraŃii necesare pentru obŃinerea soluŃiei cu precizia dată ε; A(I,J) – matricea sistemului; B(I) – vectorul termenilor liberi; X(I) – vectorul conŃinând soluŃia iniŃială şi apoi finală a sistemului; KOD – identificator cu valoarea 1 sau 2 după
cum soluŃia se poate obŃine sau nu în maximum NI iteraŃii.
Metoda Gauss-Seidel (metoda iteraŃiilor succesive). Această metodă este o modi-ficare a metodei Jacobi în sensul că trecerea sistemului de ecuaŃii liniare dintr-o stare în alta nu se mai face simultan ci în mod progresiv.
Fig. 3.7 Schema logică a algoritmului
Jacobi pentru rezolvarea sistemelor liniare

Modelări numerice şi optimizări în instalaŃii 55
Din matricea A a sistemului AX = B se selectează matricele:
[ ]
<
≥==
ji
jiaaA
ji
ji,0
,)1(
1 (3.87)
[ ]
≥
<==
ji
jiaaA
ji
ji,0
,)2(
2 (3.88)
unde i, j = 1, 2,...., n şi cu care se defineşte procesul iterativ:
BXAXA kk =++ )(2
)1(1 (3.89)
sau:
BAXAAX kk 11
)(2
11
)1( −−+ +−= (3.90)
RelaŃia (3.90) se poate scrie pe componente:
nixaxaba
x kj
n
ij
jikj
i
j
jii
ii
ki ,...,1;)(
1 )(
1
)1(1
1
)1( =−−= ∑∑+=
+−
=
+ (3.91)
CondiŃia de convergenŃă pentru metoda Gauss–Seidel este aceiaşi ca şi pentru me-toda Jacobi. La acelaşi nivel de precizie, metoda Gauss–Seidel este de două ori mai rapidă decât metoda Jacobi, deoarece înlocuieşte imediat în sistem componentele vectorului calculat la iteraŃia curentă, iar necesarul de memorie este mai mic, fiind suficient un singur spaŃiu pentru vectorul soluŃie, spaŃiu care în etapa de iteraŃie k va memora compo-
nentele )(kix ce au fost calculate şi componentele )1( −k
jx pentru j = i+1, i+2,..., n.
Metoda Gauss–Seidel poate fi modificată în continuare pentru sporirea vitezei de convergenŃă a şirului iteraŃiilor. Pentru aceasta se scrie relaŃia (3.91) sub forma:
)(ω
1
)(1
)1()()1( ∑∑=
−
=
++ −−+=n
j
kjji
i
ij
kjjii
ii
ki
ki xaxab
axx (3.92)
unde ω este coeficientul de relaxare cu valori între 0 şi 2, iar metoda definită prin algoritmul (3.92) este cunoscută sub numele de metoda relaxării. Parametrul de relaxare se alege astfel încât să crească viteza de convergenŃă. Deza-vantajul acestei metode constă în faptul că nu se poate şti de la început care este va-loarea optimă pentru coeficientul de relaxare ω . Pentru ω = 1 se regăseşte metoda Gauss–Seidel. În figura 3.8 se prezintă schema logică a programului ordinator SILGAS, elaborat pe baza algoritmului Gauss–Seidel, unde: N este numărul de ecuaŃii şi necunoscute din sistem; NI – numărul maxim de iteraŃii; ε – eroarea admisă; A(I,J) – matricea siste-mului; B(I) – vectorul termenilor liberi; X(I) – vectorul conŃinând soluŃia iniŃială şi apoi finală a sistemului; KOD – identificator cu semnificaŃia specificată pentru algoritmul Jacobi.
Metodele iterative au dezavantajul că apare posibilitatea de neconvergenŃă, implică un număr mare de operaŃii elementare chiar atunci când converg destul de rapid, şi se pot acumula erori de rotunjire destul de însemnate.
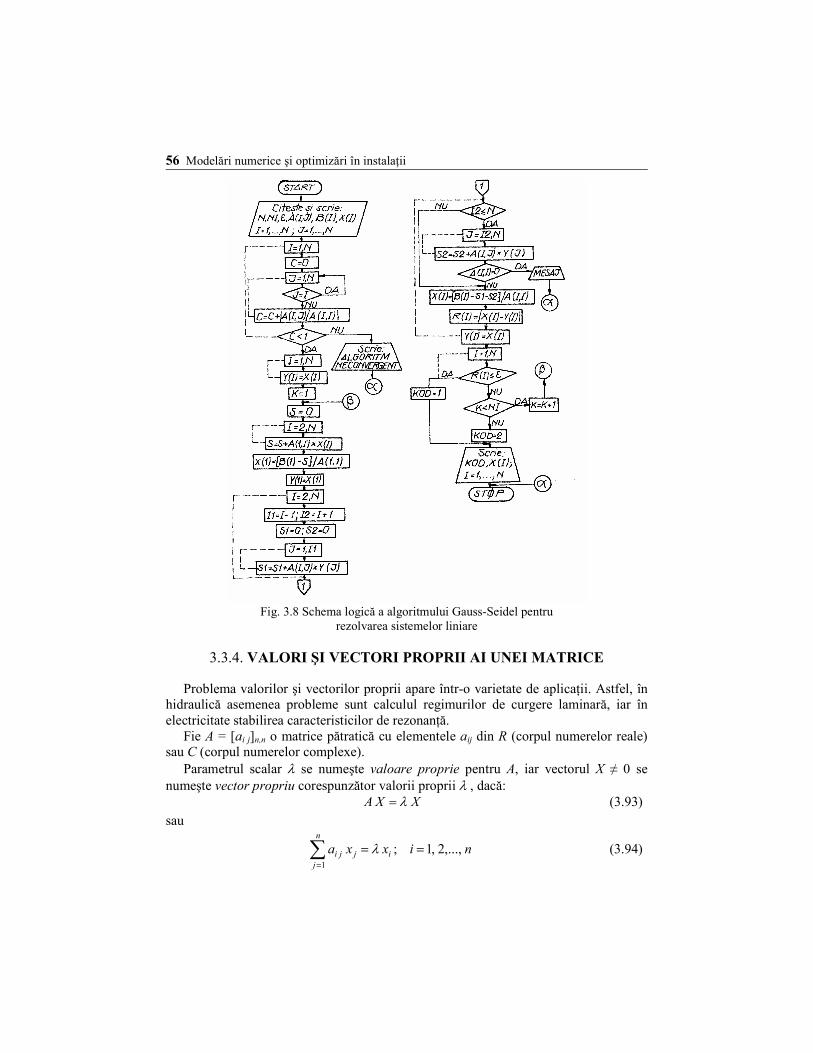
56 Modelări numerice şi optimizări în instalaŃii
Fig. 3.8 Schema logică a algoritmului Gauss-Seidel pentru
rezolvarea sistemelor liniare
3.3.4. VALORI ŞI VECTORI PROPRII AI UNEI MATRICE Problema valorilor şi vectorilor proprii apare într-o varietate de aplicaŃii. Astfel, în hidraulică asemenea probleme sunt calculul regimurilor de curgere laminară, iar în electricitate stabilirea caracteristicilor de rezonanŃă. Fie A = [ai j]n,n o matrice pătratică cu elementele aij din R (corpul numerelor reale) sau C (corpul numerelor complexe). Parametrul scalar λ se numeşte valoare proprie pentru A, iar vectorul X ≠ 0 se numeşte vector propriu corespunzător valorii proprii λ , dacă: XXA λ= (3.93) sau
nixxa ij
n
j
ji ,...,2,1;1
==∑=
λ (3.94)

Modelări numerice şi optimizări în instalaŃii 57
CondiŃia necesară şi suficientă pentru ca λ să fie valoare proprie pentru A este ca: 0)(det =− EA λ (3.95) în care E este matricea unitate de ordinul n. Determinantul (3.95) se numeşte determinant caracteristic al matricei A, iar ecuaŃia (3.95) poartă numele de ecuaŃie caracteristică a matricei A, care sub formă dezvoltată se poate scrie:
0
21
22221
11211
=
−
−
−
λ
λ
λ
nnnn
n
n
aaa
aaa
aaa
K
KKKKKKKKKKKK
K
K
(3.96)
Se observă că det (A−λE) este un polinom de gradul n în λ , astfel încât ecuaŃia ca-racteristică (3.96) are forma:
0... 11
1 =++++ −−
nnnn ccc λλλ (3.97)
Polinomul din primul membru al ecuaŃiei (3.97) este un polinom caracteristic al matricei A. Cele n rădăcini reale sau complexe ale ecuaŃiei caracteristice (3.97): λ1, λ2, ...., λn sunt valorile proprii ale matricei A, iar ansamblul lor se numeşte spectrul matricei A. Pentru determinarea vectorilor proprii Xk ≠ 0 care să satisfacă ecuaŃia matriceală (3.93), pusă sub o altă formă concentrată:
0)( =− kk XEA λ (3.98)
sau sub forma dezvoltată:
=
−
−
−
0
0
0
2
1
21
22221
11211
MM
K
KKKKKKKKKKKKK
K
K
kn
k
k
knnnn
nk
nk
x
x
x
aaa
aaa
aaa
λ
λ
λ
, (3.99)
trebuie determinate rădăcinile λk (k = 1, ..., n) ale ecuaŃiei caracteristice (3.97), iar apoi se rezolvă sistemul liniar omogen (3.99) cu una din metodele convenabile prezentate anterior. Pentru a determina valorile proprii ale unei matrice este necesar să se construiască polinomul caracteristic şi să se rezolve ecuaŃia caracteristică. CoeficienŃii polinomului caracteristic se obŃin din dezvoltarea relaŃiei (3.95), dacă se calculează 2n–1 determinaŃi de diverse ordine. În felul acesta se efectuează un număr mare de operaŃii, iar coefi-cienŃii polinomului se obŃin cu erori de rotunjire care deşi mici, pot modifica esenŃial rădăcinile acestui polinom. Din acest motiv se utilizează metode speciale de calcul ale valorilor proprii, ce se pot grupa în: − metode care determină direct polinomul caracteristic, prin coeficienŃi; − metode care determină valorile proprii şi vectorii proprii prin procedee iterative fără a calcula polinomul caracteristic.

58 Modelări numerice şi optimizări în instalaŃii
Metoda Krîlov permite determinarea coeficienŃilor polinomului caracteristic aso-ciat matricei A reale de dimensiune n:
nnn
nn
n PR θ...θ)()1()( 11 +++=−= −λλλλ (3.100)
Acest algoritm utilizează identitatea Cayley–Hamilton, potrivit căreia matricea A anulează polinomul său caracteristic. Dacă Pn(A)=0, atunci şi Rn(A)=0, relaŃie care se scrie sub forma:
0θ1
=+∑=
−n
i
ini
n AA (3.101)
Notând Vi = An-iY, unde Y este un vector oarecare, ales iniŃial arbitrar, după multi-
plicarea ambilor membri ai egalităŃii (3.101) cu Y rezultă:
0θ1
=+∑=
n
i
iin VYA (3.102)
Această ecuaŃie vectorială se pune sub forma matriceală:
YAV n=Θ (3.103) care cu notaŃia T = AnY devine: TV =Θ (3.104) unde:
=
=Θ
=
nnnnnn
n
n
t
t
t
T
vvv
vvv
vvv
VMM
K
KKKKKKK
K
K
2
1
2
1
21
22221
11211
;
θ
θ
θ
; (3.105)
Cum vectorii Y, AY,..., An-1Y sunt liniari independenŃi, urmează că matricea V a sistemului (3.104) este nesingu-lară şi coeficienŃii polinomului caracteristic se obŃin din re-zolvarea sistemului (3.104) prin orice metodă de rezolvare a sistemelor de ecuaŃii liniare. Dacă matricea V este singulară, se schimbă alegerea pentru vectorul iniŃial Y. Sub formă detaliată, sistemul (3.104) se mai scrie:
)()0()2(2
)1(1
)(2
)0(2
)2(22
)1(21
)(1
)0(1
)2(12
)1(11
θ...θθ
θ...θθ
θ...θθ
nnnn
nn
nn
nn
nn
nn
nn
yyyy
yyyy
yyyy
−=+++
−=+++
−=+++
−−
−−
−−
KKKKKKKKKKKKKKKK (3.106)
în care:
)()1()0( ; kkk YAYAYYY === + (3.107) În figura 3.9 se prezintă schema logică a programului ordinator PCKRIL, elaborat pe baza algoritmului Krîlov
pentru determinarea coeficienŃilor polinomului caracteristic asociat unei matrice pătra-
Fig. 3.9 Schema logică a
algoritmului Krîlov

Modelări numerice şi optimizări în instalaŃii 59
tice A(I,J), cu dimensiunea N×N, unde: Y(I) sunt componentele vectorului ales iniŃial; T(I) – vector de lucru cu dimensiunea N; V(I,J) – matrice de lucru cu dimensiunea N×N; θ(I) – vector ce conŃine coeficienŃii polinomului caracteristic în ordinea descres-cătoare a puterilor.
Metoda Leverrier determină coeficienŃii polinomului caracteristic:
nnn
nn
n PR θ...θ)()1()( 11 +++=−= −λλλλ (3.108)
pentru o matrice reală A de dimensiune n pornind de la formulele lui Newton pentru sumele de puteri ale rădăcinilor ecuaŃiei Rn(λ) = 0.
Dacă ∑=
=n
i
kikS
1
λ , atunci relaŃiile lui Newton dau:
nkSSk
ik
k
i
ikk ,...,1;)θ(1
θ1
1
=+−= −
−
=∑ (3.109)
care se pot calcula cu uşurinŃă deoarece:
∑∑==
===n
i
kii
kn
i
kik aATrS
1
)(
1
)(λ (3.110)
unde: Tr(A) este urma matricei A, iar )(kiia (i = 1, ..., n) – elementele diagonale ale ma-
tricei Ak. Algoritmul este foarte simplu. Se calculează puterile matricei A şi se sumează ele-mentele de pe diagonala acestei matrice. Numărul de calcule este însă foarte mare şi erorile de rotunjire sunt şi ele suficient de mari. Metoda este aplicabilă în cazul în care A este de o formă specială şi anume este o matrice rară (aij = 0 pentru aproape toŃi i, j).
3.4. REZOLVAREA SISTEMELOR DE ECUAłII NELINIARE
3.4.1. METODA NEWTON–RAPHSON Se consideră sistemul de n ecuaŃii neliniare cu n necunoscute de forma:
0)...,,,(
...............................
0)...,,,(
0)...,,,(
21
212
211
=
=
=
nn
n
n
xxxf
xxxf
xxxf
(3.111)
sau sub o formă restrânsă:
nixxxf ni ,...,1;0)...,,,( 21 == (3.112)
Ansamblul necunoscutelor x1, x2,..., xn şi al funcŃiilor f1, f2,..., fn formează câte un vector:
60 Modelări numerice şi optimizări în instalaŃii
,; 2
1
2
1
=
=
nn f
f
f
F
x
x
x
XMM
(3.113)
astfel încât sistemul (3.111) poate fi scris şi sub formă vectorială: 0),...,,(...),...,,()( 21211 == nnn xxxfxxxfXF K (3.114) SoluŃia sistemului (3.111) se obŃine pornind de la o aproximaŃie iniŃială a acesteia
)0()0(2
)0(10 ... nxxxX = la care se adună, succesiv vectori de corecŃie ∆X=δx1 δx2... δxn
cu normă descrescătoare, potrivit procesului iterativ: 11 ++ ∆+= kkk XXX (3.115) în care vectorul de corecŃie de la iteraŃia k+1 este termenul liniar din dezvoltarea în serie Taylor în jurul lui Xk+1 a funcŃiei vectoriale F(f1, f2,..., fn) având expresia:
)(11 kkk XFJX −+ −=∆ (3.116)
unde:
njix
xfXFJ
j
ikk ,...,1,;
)()(' =
∂
∂== (3.117)
poartă numele de matricea Jacobian, corespunzătoare vectorului Xk. Din punct de vedere numeric, metoda Newton–Raphson comportă calculul inversei matricei Jacobian la fiecare pas al iteraŃiei. Deoarece acest calcul este laborios, pentru aplicaŃii practice relaŃia (3.116) se scrie sub forma: )(1 kkk XFXJ −=∆ + (3.118) sau:
( ) nixfxxJ ki
k
ik ,...,1;δ)( )()1()( =−=+ (3.119)
astfel încât inversarea matricei Jk la fiecare pas se înlocuieşte cu operaŃia ceva mai simplă de rezolvare a unui sistem liniar, care dezvoltat are forma:
−
−
−
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
nn
n
nnn
n
n
f
f
f
x
x
x
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
MM
KKK
KKKKKKKKK
KKK
KKK
2
1
2
1
21
2
2
2
1
2
1
2
1
1
1
δ
δ
δ
(3.120)
Dacă în (3.116) se înlocuieşte )(' kxF cu 00 )(' JxF = se obŃine metoda Newton–Raphson modificată:
)(101 kk XFJX −
+ −=∆ (3.121)
în care matricea Jacobian J nu se mai inversează la fiecare pas, ci o singură dată în X0, iar corecŃiile ∆Xk+1 se obŃin relativ simplu.

Modelări numerice şi optimizări în instalaŃii 61
Deşi astfel algoritmul şi-a pierdut din viteza teoretică de convergenŃă, totuşi evita-rea inversării unei matrice la fiecare pas k înlătură o serie de erori şi dă posibilitatea efectuării unui număr mare de iteraŃii în timp scurt. Calculele se continuă până când se satisface un criteriu de precizie (valoarea abso-lută a unei necunoscute xi, valorile absolute ale funcŃiilor −fi, norma vectorului X sau numărul de iteraŃii:
),...,1(εδ
;ε;ε)(
)()()( ni
x
xfx
ki
kik
iki =≤≤−≤ (3.122)
În figura 3.10 se prezintă schema logică a programului ordinator SINNER, elaborat pe baza algoritmului Newton–Raphson sub forma (3.118), unde: N este numărul de ecuaŃii şi de necunoscute din sistem; NI – numărul maxim de iteraŃii; ε − precizia cerută în obŃinerea soluŃiei; X(I) – vector conŃinând iniŃial aproximarea soluŃiei, iar în final soluŃia sistemului; B(I) – vector conŃinând valorile funcŃiei matriceale F cu semn schimbat; AJ(I,J) – matricea Jacobian, conŃinând valorile derivatelor parŃiale; KOD – identificator cu valoarea 1 sau 2 după cum soluŃia cu precizia ε se poate obŃine sau nu în maximum NI iteraŃii. Rezolvarea sistemului liniar se realizează în subrutina SIST-LIN, cu parametrii formali N, ε, A, B reprezentând respectiv dimensiunea sistemului, eroarea admisă în calcul, matricea coeficienŃilor şi vectorul termenilor liberi. După apel subrutina furnizează soluŃiile în zona B. În programul ordinator elaborat pe baza acestei scheme logice se efectuează de fie-care dată de către utilizator anumite modificări relative la calculul funcŃiilor şi al deri-vatelor parŃiale. Folosirea algoritmului Newton–Raphson prezintă inconvenientul că verificarea con-diŃiilor teoremei de existenŃă şi unicitate a soluŃiei este laborioasă, neputându-se pro-grama şi conducând la riscul ca soluŃia să depindă de aproximaŃia iniŃială.
3.4.2. METODA SUPRARELAXĂRILOR SUCCESIVE Fie sistemul de ecuaŃii neliniare scris sub forma vectorială (3.114), unde fi sunt componentele vectorului F, iar xi componentele vectorului necunoscutelor X. Metoda suprarelaxărilor constă în determinarea succesivă a componentelor iteraŃiei Xk+1, cunoscând iteraŃia Xk. Presupunând că primele i–1 componente ale vectorului Xk+1 sunt determinate şi considerând xi soluŃia ecuaŃiei:
( ) 0...,,,,...,, )()(1
)1(1
)1(1 =+
+−
+ kn
kii
ki
ki xxxxxf (3.123)
atunci componenta i a lui Xk+1 se obŃine cu procesul iterativ:
)(ω )()()1( kii
ki
ki xxxx −+=+ (3.124)
unde ω este un factor de relaxare, iar i = 1, 2,..., n. Pentru ω = 1 se obŃine metoda Gauss–Seidel neliniară. Determinarea lui Xk+1 nece-sită rezolvarea a n ecuaŃii neliniare de forma (3.123).
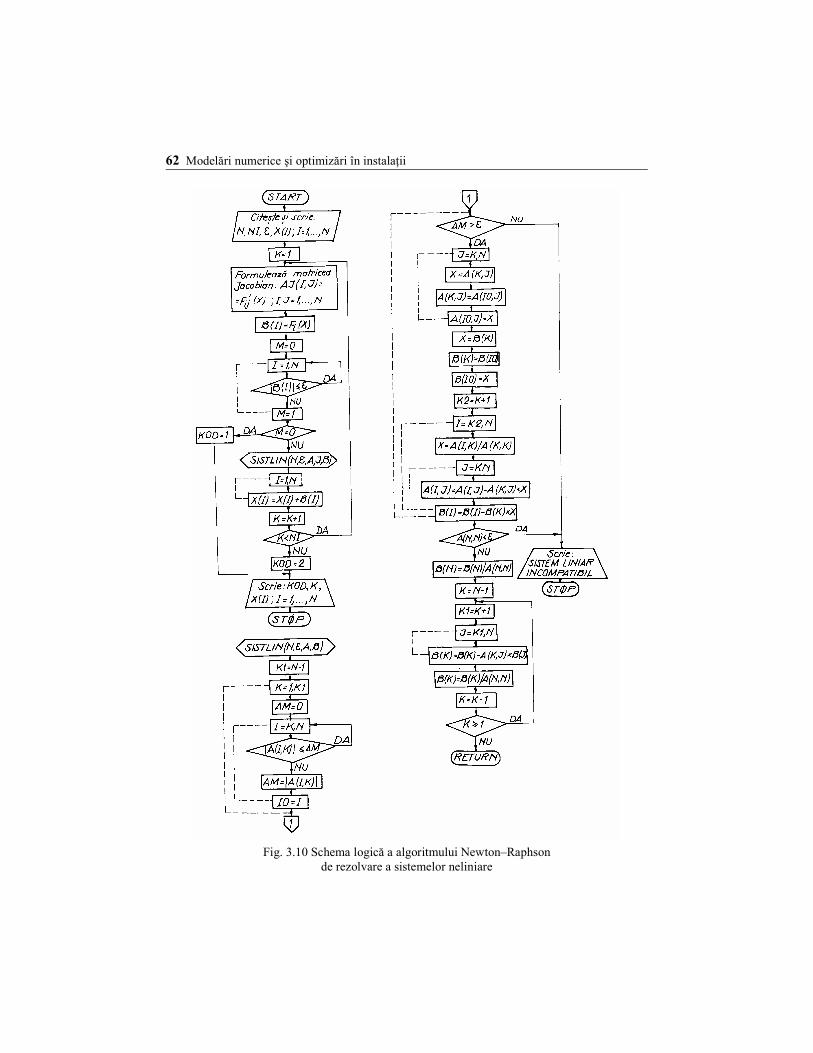
62 Modelări numerice şi optimizări în instalaŃii
Fig. 3.10 Schema logică a algoritmului Newton–Raphson
de rezolvare a sistemelor neliniare
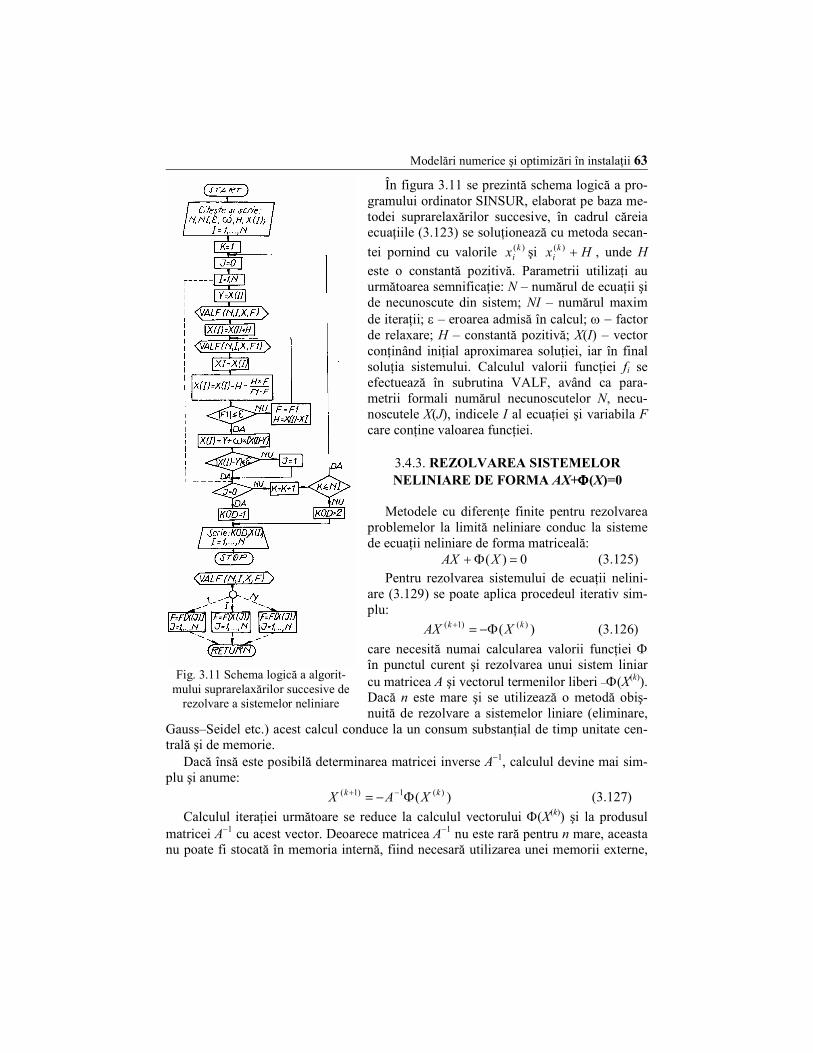
Modelări numerice şi optimizări în instalaŃii 63
În figura 3.11 se prezintă schema logică a pro-gramului ordinator SINSUR, elaborat pe baza me-todei suprarelaxărilor succesive, în cadrul căreia ecuaŃiile (3.123) se soluŃionează cu metoda secan-
tei pornind cu valorile )(kix şi Hx k
i +)( , unde H este o constantă pozitivă. Parametrii utilizaŃi au următoarea semnificaŃie: N – numărul de ecuaŃii şi de necunoscute din sistem; NI – numărul maxim de iteraŃii; ε – eroarea admisă în calcul; ω − factor de relaxare; H – constantă pozitivă; X(I) – vector conŃinând iniŃial aproximarea soluŃiei, iar în final soluŃia sistemului. Calculul valorii funcŃiei fi se efectuează în subrutina VALF, având ca para-metrii formali numărul necunoscutelor N, necu-noscutele X(J), indicele I al ecuaŃiei şi variabila F care conŃine valoarea funcŃiei.
3.4.3. REZOLVAREA SISTEMELOR NELINIARE DE FORMA AX+ΦΦΦΦ(X)=0
Metodele cu diferenŃe finite pentru rezolvarea problemelor la limită neliniare conduc la sisteme de ecuaŃii neliniare de forma matriceală: 0)( =Φ+ XAX (3.125) Pentru rezolvarea sistemului de ecuaŃii nelini-are (3.129) se poate aplica procedeul iterativ sim-plu:
)( )()1( kk XAX Φ−=+ (3.126)
care necesită numai calcularea valorii funcŃiei Φ în punctul curent şi rezolvarea unui sistem liniar cu matricea A şi vectorul termenilor liberi –Φ(X(k)). Dacă n este mare şi se utilizează o metodă obiş-nuită de rezolvare a sistemelor liniare (eliminare,
Gauss–Seidel etc.) acest calcul conduce la un consum substanŃial de timp unitate cen-trală şi de memorie. Dacă însă este posibilă determinarea matricei inverse A−1, calculul devine mai sim-plu şi anume:
)( )(1)1( kk XAX Φ−= −+ (3.127)
Calculul iteraŃiei următoare se reduce la calculul vectorului Φ(X(k)) şi la produsul matricei A−1 cu acest vector. Deoarece matricea A−1 nu este rară pentru n mare, aceasta nu poate fi stocată în memoria internă, fiind necesară utilizarea unei memorii externe,
Fig. 3.11 Schema logică a algorit-mului suprarelaxărilor succesive de rezolvare a sistemelor neliniare

64 Modelări numerice şi optimizări în instalaŃii
ceea ce conduce la mărirea timpului de calcul. Acest neajuns se poate elimina generând elementele bij ale matricei B=A−1, cu relaŃiile:
≥+−
≤+−
+=
jiinj
jijni
nb ji ),1(
,)1(
1
1 (3.128)
unde i, j sunt indicii cunoscuŃi. Spre exemplificare, se consideră următoarea problemă bilocală slab neliniară:
[ ]
β)1(,)0(
1,0;),("
==
∈=
uu
tutfu
α (3.129)
SoluŃia ecuaŃiei, u(t) este o funcŃie de două ori diferenŃiabilă, definită pe intervalul [0, 1] şi cu valori în R. Pentru obŃinerea unei soluŃii aproximative a problemei (3.129) se utilizează metoda cu diferenŃe standard. Fie:
1...,,1,0;1
1, +=
+== nin
hhiti (3.130)
o diviziune a intervalului [0, 1]. În fiecare punct ti al diviziunii se aproximează derivata )(" itu cu diferenŃa divizată de ordinul al doilea:
2
11 )()(2)()("
h
tutututu iiii
−+ +−= (3.131)
în care: β)1()(;)0()(;...,,1 10 ===== + utuutuni nα .
Dacă se notează )...,,1();( nitux ii == şi se scrie ecuaŃia [ ])(,)(" iii tutftu = în
punctele diviziunii ti înlocuind derivata a doua a lui u cu relaŃia (3.131) se obŃine sistemul neliniar:
0),(2 211 =−+− −+ iiiii xtfhxxx (3.132)
sau, înmulŃind cu (−1) şi dezvoltând pentru i = 1, 2, ..., n rezultă sistemul:
0β),(2
0),(2
0),(2
21
222
321
112
21
=−++−
=+−+−
=−+−
− nnnn xtfhxx
xtfhxxx
xtfhxx
KKKKKKKKKKKKKK
α
, (3.133)
care se poate scrie concentrat sub forma matriceală (3.125), unde:
−
−
=Φ
−
−−
−
=
β),(
),(
),(
)(;
210
0121
012
2
222
112
nn xtfh
xtfh
xtfh
XAKKKKKK
KKKKK
KKKKKKKKK
K
KKK α
(3.134)
SoluŃia sistemului (3.125) aproximează soluŃia problemei (3.129), putând fi deci obŃinută prin calcul numeric pe baza algoritmului descris anterior.

Modelări numerice şi optimizări în instalaŃii 65
3.5. NOłIUNI DE ALGEBRĂ VECTORIALĂ În spaŃiul n dimensional, unui vector:
→
=
→
∑= k
n
k
k ivv1
(3.135)
i se poate ataşa o matrice coloană cu n linii, după următorul model:
=
nv
v
v
vM
2
1
(3.136)
în care: →
ki sunt versorii celor n axe de coordonate; vk – proiecŃiile vectorului pe aceste axe. Făcându-se limitare la spaŃiul tridimensional şi considerând următorii doi vectori A=a1 a2 a3 şi B=b1 b2 b3, se definesc:
– Suma sau diferenŃa a doi vectori →
A şi →
B :
±
±
±
=±=→→→
33
22
11
;
ba
ba
ba
CBAC (3.137)
– Produsul unui vector →
A cu un scalar µ:
=
==→→
3
2
1
3
2
1
;
b
b
b
a
a
a
ABA
µ
µ
µ
µµ (3.138)
– Produsul scalar a doi vectori →
A şi →
B :
TT
k
kk BABAbaBA ===⋅ ∑=
→→ 3
1
(3.139)
– Norma unui vector →
A :
TT
k
k AAAAaAAA ===⋅= ∑=
→→→ 3
1
2)(N (3.140)
care în cazul vectorului diferenŃă →
C , are forma:
∑=
→
−=3
1
2)()(k
kk baCN (3.141)

66 Modelări numerice şi optimizări în instalaŃii
– Lungimea unui vector →
A (norma euclidiană):
AAAAAaATT
k
k ===== ∑=
→→ 3
1
2A)( )( NL (3.142)
respectiv în cazul vectorului diferenŃă →
C :
∑=
−=3
1
2)(k
kk baC (3.143)
– Unghiul a doi vectori →
A şi →
B :
=
⋅=
→→
=
→→ ∑
BA
ba
BA
BA k
kk
NN
3
1cosα (3.144)
– Produsul vectorial a doi vectori →
A şi →
B :
)()()( 122131132332
321
321 babakbabajbabai
bbb
aaa
kji
DBA −+−+−===×→→→
→→→
→→→
(3.145)
unde kjirrr
,, sunt versorii sistemului de axe cartezian, faŃă de care se raportează cei doi
vectori→
A şi →
B . Întrucât vectorul →
D este perpendicular pe planul determinat de vectorii →
A şi →
B el este folosit pentru definirea normalei la acest plan. În scrierea matriceală relaŃia (3.145) devine:
−
−
−
=
1221
3113
2332
baba
baba
baba
D (3.146)
– Cosinuşii directori ai unui vector →
A (fig. 3.12):
A
a
A
a
A
a
z
y
x
3
2
1
cos
cos
cos
=
=
=
α
α
α
(3.147)
Se observă că, pe baza relaŃiei (3.142) rezultă:
Fig. 3. 12 Cosinuşii directori ai
vectorului A
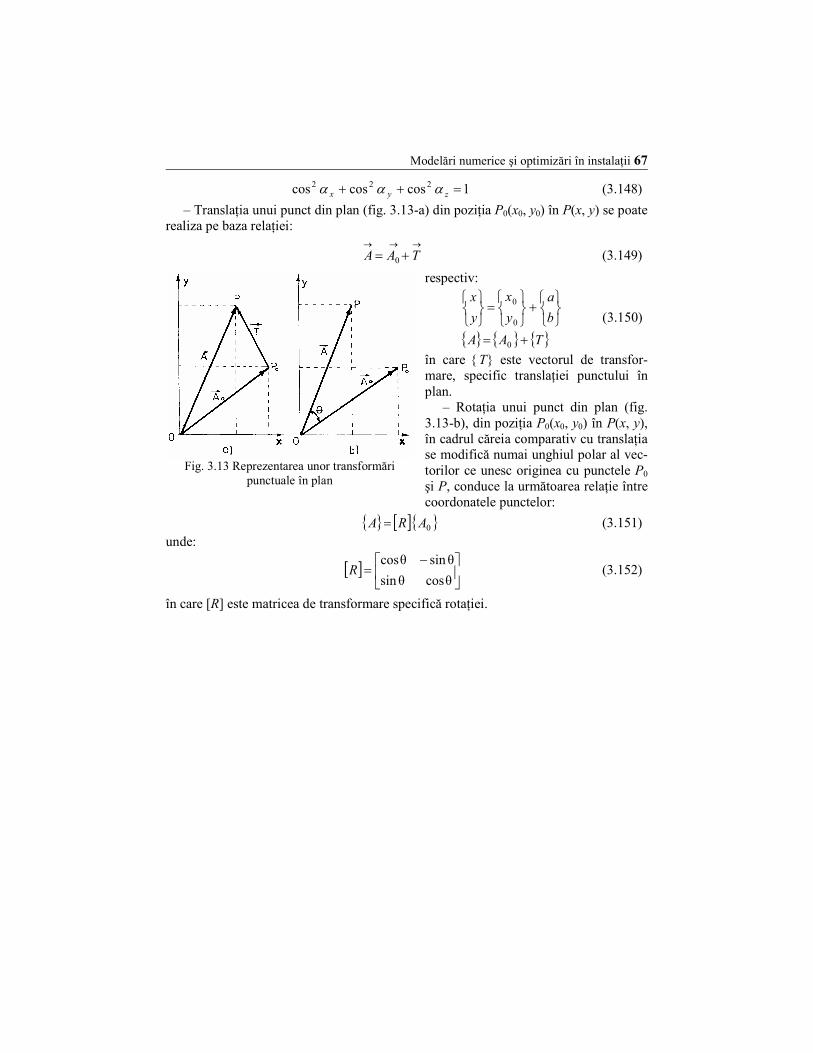
Modelări numerice şi optimizări în instalaŃii 67
1coscoscos 222 =++ zyx ααα (3.148)
– TranslaŃia unui punct din plan (fig. 3.13-a) din poziŃia P0(x0, y0) în P(x, y) se poate realiza pe baza relaŃiei:
→→→
+= TAA 0 (3.149)
respectiv:
TAA
b
a
y
x
y
x
+=
+
=
0
0
0
(3.150)
în care T este vectorul de transfor-mare, specific translaŃiei punctului în plan. – RotaŃia unui punct din plan (fig. 3.13-b), din poziŃia P0(x0, y0) în P(x, y), în cadrul căreia comparativ cu translaŃia se modifică numai unghiul polar al vec-torilor ce unesc originea cu punctele P0 şi P, conduce la următoarea relaŃie între coordonatele punctelor:
[ ] 0ARA = (3.151) unde:
[ ]
−=
θcosθsin
θsinθcosR (3.152)
în care [R] este matricea de transformare specifică rotaŃiei.
Fig. 3.13 Reprezentarea unor transformări
punctuale în plan

Capitolul 4
METODE MODERNE DE MODELARE ŞI SIMULARE NUMERICĂ A PROCESELOR DIN INSTALAłII
4.1. METODA DIFERENłELOR FINITE
4.1.1. PRINCIPIUL METODEI În ştiinŃă şi tehnologie, unul dintre principalele modele de cunoaştere a mediilor continue este cel de aproximare prin discretizare, constând în descompunerea dome-niului analizat într-un număr finit de elemente discrete şi aproximarea întregului prin ansamblul elementelor componente. S-au dezvoltat unele tehnici numerice moderne de aproximare a mediilor continue prin discretizare (metoda diferenŃelor finite, metoda elementelor finite, metoda elementelor de frontieră etc.), care au aplicabilitate şi în rezolvarea unor probleme de calcul al instalaŃiilor pentru construcŃii. Fenomenele fizice sunt descrise din punct de vedere matematic de ecuaŃii diferen-Ńiale, prin a căror integrare, în condiŃii la limită date, se obŃine soluŃia exactă a proble-mei. În acest fel se poate calcula valoarea funcŃiei sau a funcŃiilor în orice punct al do-meniului studiat. Aceasta este calea analitică, obişnuită de rezolvare, aplicabilă însă nu-mai în cazul problemelor relativ simple. Problemele care intervin în activitatea practică sunt de cele mai multe ori complexe încât integrarea ecuaŃiilor diferenŃiale este dificilă sau imposibilă. Rezolvarea analitică nu se poate efectua decât prin crearea unui model într-atât de simplificat încât integrarea ecuaŃiilor diferenŃiale să fie realizabilă. Se ob-Ńine astfel soluŃia exactă, dar pentru un model simplificat. Deseori este însă preferabil ca, în locul soluŃiei exacte a unui model simplificat, să se dispună de o soluŃie aproxi-mativă a problemei reale. SoluŃiile aproximative, obŃinute prin metode numerice, sunt susceptibile să reflecte, în multe cazuri, mai bine realitatea decât soluŃiile exacte ale unor modele simplificate, dar necesită un efort de calcul mai mare, inconvenient ce se elimină în condiŃiile exis-tenŃei calculatoarelor electronice. O asemenea metodă numerică este metoda diferenŃelor finite, concepută sub forma calculului manual încă de pe vremea lui Euler, în cadrul căreia ecuaŃiile diferenŃiale sunt înlocuite prin ecuaŃii algebrice cu diferenŃe finite. SoluŃia problemei se obŃine într-un număr finit de puncte ale unei reŃele rectangulare, printr-o aproximare de natură ma-tematică. Dezavantajul principal al metodei cu diferenŃe finite îl constituie folosirea unei re-Ńele rectangulare de discretizare a domeniului de analiză. Deci, folosirea ei pe domenii cu contururi sau suprafeŃe curbe introduce o serie de dificultăŃi şi artificii de calcul.

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 69
De aceea, această metodă are un domeniu mai restrâns de aplicabilitate (probleme uni şi bidimensionale) faŃă de metoda elementelor finite. Caracteristica comună a celor două metode o constituie dependenŃa convergenŃei către valorile exacte, de numărul de elemente în care se discretizează domeniul de analiză sau cu alte cuvinte, de fineŃea de discretizare. Este evident că folosirea acestor metode numerice este de neconceput fără apelarea la ordinatoarele electronice. ExistenŃa continuităŃii condiŃiilor la limită sau a unor discontinuităŃi a acestora doar pe un număr redus de intervale este o restricŃie importantă în aplicarea metodei diferen-Ńelor finite la analiza unor medii continue.
4.1.2. EXPRIMAREA DERIVATELOR ÎN DIFERENłE FINITE
4.1.2.1. FuncŃii de o singură variabilă Formulele de derivare cu ajutorul parabolelor de interpolare permit obŃinerea unor expresii aproximative, pentru derivatele unei funcŃii y = y(x) ale cărei valori sunt cunoscute într-o serie de puncte. FuncŃia y se înlocuieşte printr-o parabolă care trece printr-un anumit număr de puncte, de coordonate [x, y(x)] aparŃinând graficului funcŃiei y, iar derivatele parabolei se consideră ca valori aproximative ale derivatelor funcŃiei y. Gradul parabolei de inter-polare este inferior cu o unitate numărului de puncte, al căror ordonate y participă în cadrul formulei de aproximare.
Se consideră graficul unei funcŃii y = f(x) pentru care se cunosc valorile ordo-natelor y ale punctelor Pi−2, Pi−1, Pi+1, Pi+2 (fig. 4.1). • Notând cu i−2, i−1, i+1, i+2 proiec-Ńiile acestor puncte pe axa Ox (distanŃele dintre ele numite intervale de interpolare, fiind egale) şi alegând punctul i ca origine a sistemului de axe, parabola de gradul 2, care trece prin punctele Pi−1, Pi, Pi+1, are ecuaŃia:
CBxAxyP ++= 2 , (4.1) obŃinându-se în consecinŃă:
CBhAhyhy
Cyy
CBhAhyhy
iP
iP
iP
++==
==
+−==−
+
−
21
21
)(
)0(
)(
(4.2)
de unde rezultă:
iiiiii yC
h
yyB
h
yyyA =
−=
+−= −++− ;
2;
2
2 112
11 (4.3)
Fig. 4.1 Graficul funcŃiei y(x) şi al parabolei
de interpolare cu intervale egale
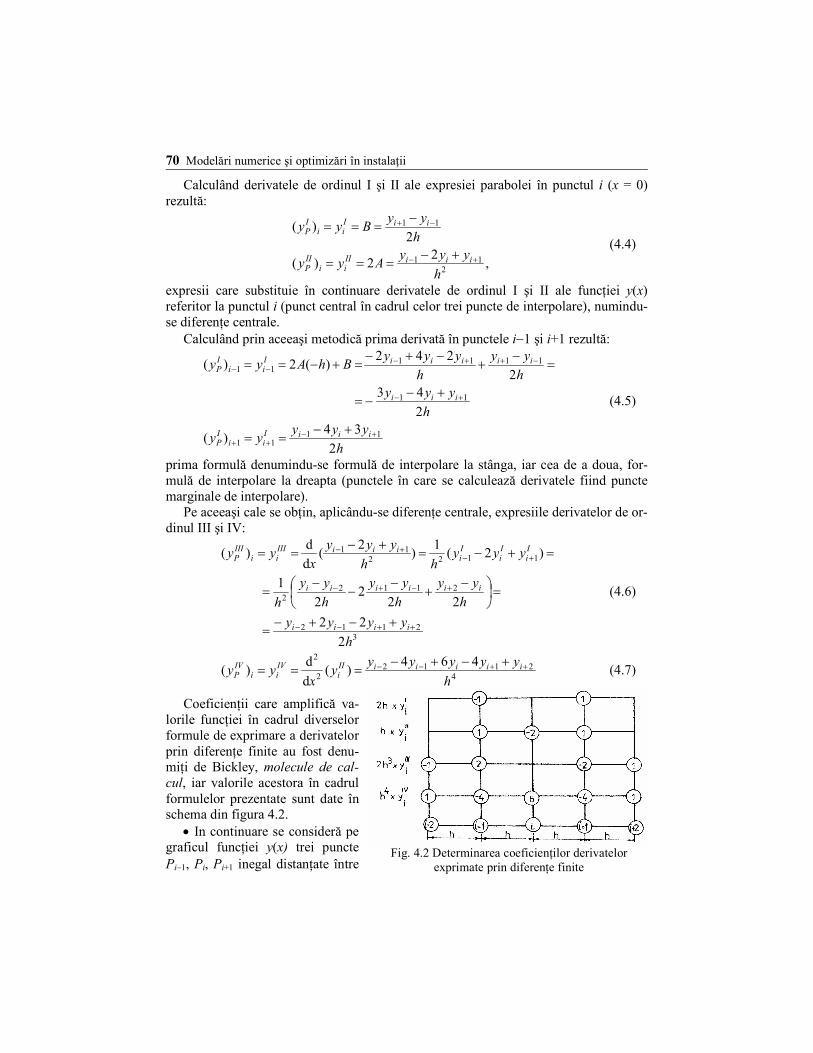
70 Modelări numerice şi optimizări în instalaŃii
Calculând derivatele de ordinul I şi II ale expresiei parabolei în punctul i (x = 0) rezultă:
,2
2)(
2)(
211
11
h
yyyAyy
h
yyByy
iiiIIii
IIP
iiIii
IP
+−
−+
+−===
−===
(4.4)
expresii care substituie în continuare derivatele de ordinul I şi II ale funcŃiei y(x) referitor la punctul i (punct central în cadrul celor trei puncte de interpolare), numindu-se diferenŃe centrale. Calculând prin aceeaşi metodică prima derivată în punctele i−1 şi i+1 rezultă:
h
yyyyy
h
yyy
h
yy
h
yyyBhAyy
iiiIii
IP
iii
iiiiiIii
IP
2
34)(
2
432
242)(2)(
1111
11
111111
+−++
+−
−++−−−
+−==
+−−=
=−
+−+−
=+−==
(4.5)
prima formulă denumindu-se formulă de interpolare la stânga, iar cea de a doua, for-mulă de interpolare la dreapta (punctele în care se calculează derivatele fiind puncte marginale de interpolare). Pe aceeaşi cale se obŃin, aplicându-se diferenŃe centrale, expresiile derivatelor de or-dinul III şi IV:
32112
21122
112211
2
22
222
2
1
)2(1
)2
(d
d)(
h
yyyy
h
yy
h
yy
h
yy
h
yyyhh
yyy
xyy
iiii
iiiiii
Ii
Ii
Ii
iiiIIIii
IIIP
++−−
+−+−
+−+−
+−+−=
=
−+
−−
−=
=+−=+−
==
(4.6)
4
21122
2 464)(
d
d)(
h
yyyyyy
xyy iiiiiII
iIVii
IVP
++−− +−+−=== (4.7)
CoeficienŃii care amplifică va-lorile funcŃiei în cadrul diverselor formule de exprimare a derivatelor prin diferenŃe finite au fost denu-miŃi de Bickley, molecule de cal-cul, iar valorile acestora în cadrul formulelor prezentate sunt date în schema din figura 4.2. • In continuare se consideră pe graficul funcŃiei y(x) trei puncte Pi−1, Pi, Pi+1 inegal distanŃate între
Fig. 4.2 Determinarea coeficienŃilor derivatelor
exprimate prin diferenŃe finite

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 71
ele după axa Ox, prin care trece parabola de interpolare de gradul 2 (fig. 4.3), având expresia:
CBxAxyP ++= 2 (4.8) Rezultă în consecinŃă:
CBbhhbAybhy
Cyy
CahBhaAyahy
iP
iP
iP
++==
==
+−==−
+
−
221
221
)(
)0(
)(
(4.9)
de unde se obŃine:
i
iii
iii
yC
hbaab
yayabybB
hbaab
yaybaybA
=
++−+−
=
+
++−=
+−
+−
)(
)(
)(
)(
1222
12
211
(4.10)
şi:
211
1222
12
)(
)(22
)(
)(
hbaab
yaybaybAy
hbaab
yayabybBy
iiiIIi
iiiIi
+
++−==
++−+−
==
+−
+−
(4.11)
RelaŃiile (4.11) pot fi aplicate şi al-tor puncte de calcul substituindu-se în mod corespunzător, valorile funcŃiei şi lungimea intervalelor de tipul ah şi bh. Spre exemplu, în cazul notaŃiilor din figura 4.4. se poate deduce:
22121
1121221
2121
211
21
222
22
1
)(
)(2
)(
)(
haaaa
yayaayay
haaaa
yayaayay
iiiIIi
iiiIi
+
++−=
++−+−
=
−−−
−−−
(4.12)
24343
2314341
4343
2231
23
24
24
1
)(
)(2
)(
)(
haaaa
yayaayay
haaaa
yayaayay
iiiIIi
iiiIi
+
++−=
++−+−
=
+++
+++
(4.13)
La baza acestor formule se găsesc parabole de gradul 2 care trec prin punctele Pi−2, Pi−1, Pi, respectiv Pi, Pi+1, Pi+2. După aceeaşi structură pot fi deduse expresiile derivatelor de ordinul III şi IV, refe-ritoare la punctul central i:
Fig. 4.3 Graficul parabolei de interpolare cu intervale inegale
Fig. 4.4 Parabole de interpolare în punctele de
calcul Pi-1 şi Pi+1

72 Modelări numerice şi optimizări în instalaŃii
23232
12321324
4
3232
122
22
231
23
3
3
)(
)(2)(
d
d
d
d
)(
)()(
d
d
d
d
haaaa
yayaayay
xx
yy
haaaa
yayaayay
xx
yy
IIi
IIi
IIiII
i
i
IVi
IIi
IIi
IIiII
i
i
IIIi
+++−
==
=
++−+−
==
=
+−
+−
(4.14)
în care derivatele de ordinul I şi II în punctele i−1, i şi i+1 se înlocuiesc prin membrul drept al relaŃiilor (4.11), (4.12) şi (4.13). Se observă că particularizând a1 = a2= a3= a4= 1, rezultă relaŃiile (4.4)...(4.7). Se mai poate constata că derivatele de ordinul III şi IV antrenează ordonatele a cinci puncte, dintre care numai trei sunt situate în mod cert pe parabola de interpolare de gradul 2 (fig. 4.4). Acesta este un aspect al aproximărilor introduse de metoda diferen-Ńelor finite, care subliniază în plus, dependenŃa rezultatelor de lungimea intervalelor de interpolare. • Se consideră parabola de interpolare de gradul 3, având ecuaŃia:
DCxBxAxyP +++= 23 (4.15)
şi presupunând că graficul ei trece prin punctele Pi−1, Pi, Pi+1, Pi+2 situate la intervale egale, se obŃine sistemul de ecuaŃii liniare care permite determinarea coeficienŃilor A, B, C şi D:
DhChBhAyhy
DhChBhAyhy
Dyy
DhChBhAyhy
iP
iP
iP
iP
+++==
+++==
==
+−+−==−
+
+
−
248)2(
)(
)0(
)(
232
231
231
(4.16)
având soluŃiile:
i
iiii
iii
iiii
yD
h
yyyyC
h
yyyB
h
yyyyA
=
−+−−=
+−=
+−+−=
++−
+−
++−
6
6322
26
33
211
211
3211
(4.17)
Cu acestea, expresiile primelor patru derivate corespunzătoare punctului i sunt:
2
11 22
h
yyyBy
Cy
iiiIIi
Ii
+− +−==
= (4.18)
42112
3211
464
336
h
yyyyyy
h
yyyyAy
iiiiiIVi
iiiiIIIi
++−−
++−
+−+−=
+−+−==
(4.19)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 73
Formule de derivare cu ajutorul dezvoltării în serie Taylor. Este evident că ex-primarea derivatelor prin diferenŃe finite depinde, ca exactitate, de fineŃea de discre-tizare, pe lângă tipul funcŃiei de interpolare, care se alege dependent de caracteristicile fenomenului studiat. Pentru a sesiza dependenŃa rezultatelor, de pasul interpolării h, ah sau bh, se ape-lează la dezvoltarea în serie Taylor a unei funcŃii, de exemplu y(x+αh), după cum ur-mează:
K++++=+ )(!3
)()(
!2
)()()()(
32
xyh
xyh
xyhxyhxy IIIIII αααα (4.20)
Aplicând relaŃia (4.20) punctelor i−1 şi i+1 (fig. 4.3) pentru care α = −a, respectiv α = −b, rezultă:
K+−+−==− −IIIi
IIi
Iiii y
ahy
ahahyyyahxy
!3
)(
!2
)()(
32
1 (4.21)
K++++==+ +IIIi
IIi
Iiii y
bhy
bhbhyyyahxy
!3
)(
!2
)()(
32
1 (4.22)
Prin adunarea sau scăderea relaŃiilor (4.21) şi (4.22) se obŃin expresiile derivatelor în punctul central i, astfel: − pentru prima derivată, eliminând pe yi:
K+++−++=− −+IIIi
IIi
Iiii yab
hyab
hybahyy )(
!3)(
!2)( 33
322
2
11
de unde:
K++−−−−−+
= −+IIIi
IIiii
Ii ybaba
hyab
hyy
hbay )(
!3)(
!2)(
)(
1 222
11 (4.23)
− pentru a doua derivată, eliminând pe Iiy :
K
K
K
+−−+++=+
+++++=
++−+−=
+−
+
−
IIIi
IIiiii
IVi
IIIi
IIi
Iiii
IVi
IIIi
IIi
Iiii
ybah
abybah
abbayayby
ybh
aybh
aybh
aybhaayay
yah
byah
byah
bybhabyby
)(!3
)(!2
)(
!4
)(
!3
)(
!2
)(
!4
)(
!3
)(
!2
)(
2232
11
432
1
432
1
+−−
−−++−
+= +− K
IVi
IIIiiii
IIi y
haabbhy
abayybaby
hbaaby
12)(
3)(
)(
!2 222
112 (4.24)
Neglijând termenii cuprinşi în relaŃia (4.25) din expresia (4.23) a primei derivate şi termenii cuprinşi în relaŃia (4.26) din expresia (4.24) a celei de a doua derivate:
K++−−−−= IIIi
IIi
Ii ybaba
hyab
hyE )(
!3)(
!2)( 22
2
(4.25)
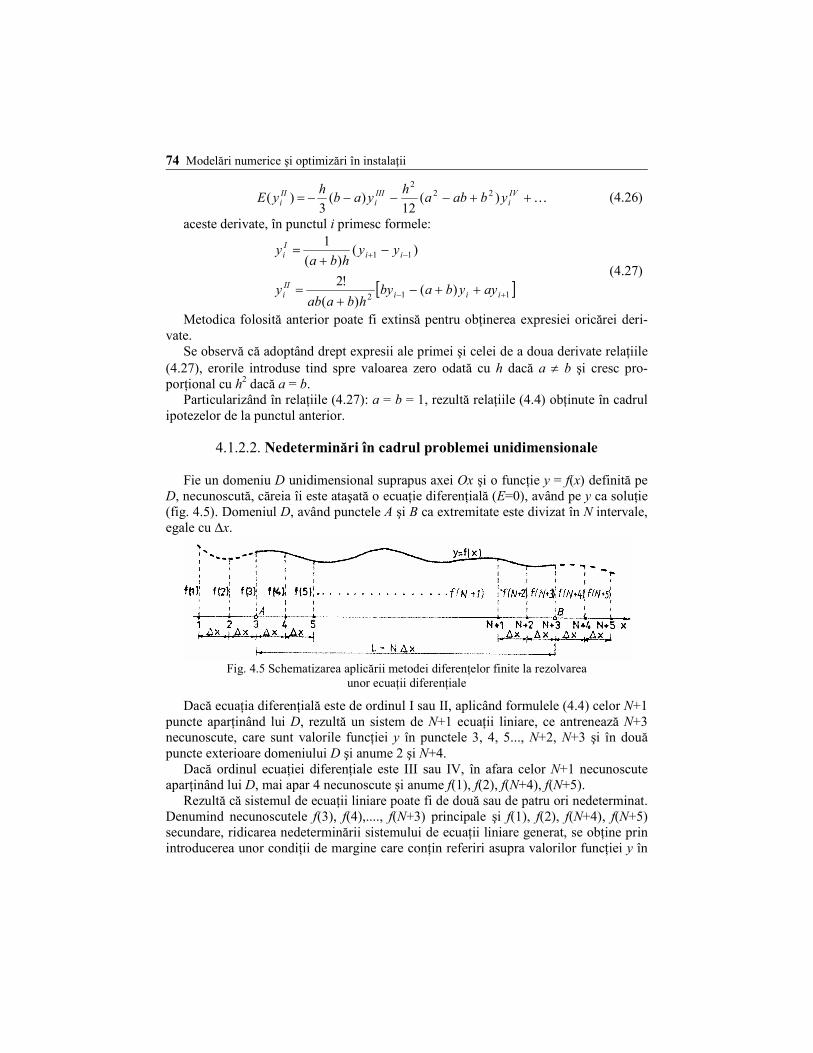
74 Modelări numerice şi optimizări în instalaŃii
K++−−−−= IVi
IIIi
IIi ybaba
hyab
hyE )(
12)(
3)( 22
2
(4.26)
aceste derivate, în punctul i primesc formele:
[ ]112
11
)()(
!2
)()(
1
+−
−+
++−+
=
−+
=
iiiIIi
iiIi
ayybabyhbaab
y
yyhba
y
(4.27)
Metodica folosită anterior poate fi extinsă pentru obŃinerea expresiei oricărei deri-vate. Se observă că adoptând drept expresii ale primei şi celei de a doua derivate relaŃiile (4.27), erorile introduse tind spre valoarea zero odată cu h dacă a ≠ b şi cresc pro-porŃional cu h2 dacă a = b. Particularizând în relaŃiile (4.27): a = b = 1, rezultă relaŃiile (4.4) obŃinute în cadrul ipotezelor de la punctul anterior.
4.1.2.2. Nedeterminări în cadrul problemei unidimensionale Fie un domeniu D unidimensional suprapus axei Ox şi o funcŃie y = f(x) definită pe D, necunoscută, căreia îi este ataşată o ecuaŃie diferenŃială (E=0), având pe y ca soluŃie (fig. 4.5). Domeniul D, având punctele A şi B ca extremitate este divizat în N intervale, egale cu ∆x.
Fig. 4.5 Schematizarea aplicării metodei diferenŃelor finite la rezolvarea
unor ecuaŃii diferenŃiale
Dacă ecuaŃia diferenŃială este de ordinul I sau II, aplicând formulele (4.4) celor N+1 puncte aparŃinând lui D, rezultă un sistem de N+1 ecuaŃii liniare, ce antrenează N+3 necunoscute, care sunt valorile funcŃiei y în punctele 3, 4, 5..., N+2, N+3 şi în două puncte exterioare domeniului D şi anume 2 şi N+4. Dacă ordinul ecuaŃiei diferenŃiale este III sau IV, în afara celor N+1 necunoscute aparŃinând lui D, mai apar 4 necunoscute şi anume f(1), f(2), f(N+4), f(N+5). Rezultă că sistemul de ecuaŃii liniare poate fi de două sau de patru ori nedeterminat. Denumind necunoscutele f(3), f(4),...., f(N+3) principale şi f(1), f(2), f(N+4), f(N+5) secundare, ridicarea nedeterminării sistemului de ecuaŃii liniare generat, se obŃine prin introducerea unor condiŃii de margine care conŃin referiri asupra valorilor funcŃiei y în

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 75
punctele marginale şi a unor corelaŃii dintre necunoscutele principale şi secundare, bazate pe aceste valori.
4.1.2.3. FuncŃii de două variabile Fie funcŃia z = f(x, y) definită pe domeniul D situat în planul xOy şi delimitat de curba C (fig. 4.6). Considerând funcŃia f conti-nuă pe D, valorile f(x, y) descriu în spaŃiul tridimensional Oxyz, în general, o suprafaŃă curbă S deli-
mitată de curba C (C fiind pro-
iecŃia lui C în planul xOy). Pun-
ctul [ ]),(,, yxfyxP este cores-pondentul lui P(x, y) pe S. Divizând domeniul D printr-o reŃea de drepte paralele cu Ox şi Oy într-o serie de suprafeŃe ele-mentare, dreptunghiulare, plane-le verticale (paralele cu Oz) care conŃin aceste drepte, determină prin intersecŃia lor şi a suprafeŃei
S, o serie de puncte P . Studiul variaŃiei funcŃiei z = f(x, y) pe domeniul D se înlocu-ieşte astfel prin studiul valorilor
sale într-un număr finit de puncte de tipul lui P , iar această metodă a diferenŃelor finite poartă numele de metoda reŃelelor.
Evident, cu cât reŃeaua de drepte (sau puncte) din domeniul D este mai deasă, cu atât aproximaŃia este mai bună. Se consideră reŃeaua dreptunghiulară din figura 4.7 şi se aplică noŃiunile teoretice pre-zentate în cazul funcŃiilor de o singură vari-abilă prin reducerea studiului funcŃiei f la studiul variaŃiei sale în plane paralele xOy şi yOz. Tinând seama de notaŃiile din figura 4.8 re-zultă: − în planul zOx:
CBxAxzP ++= 2 (4.28)
Fig. 4.6 Studiul variaŃiei funcŃiei z = f(x,y) cu metoda
diferenŃelor finite
Fig. 4.7 ReŃea dreptunghiulară
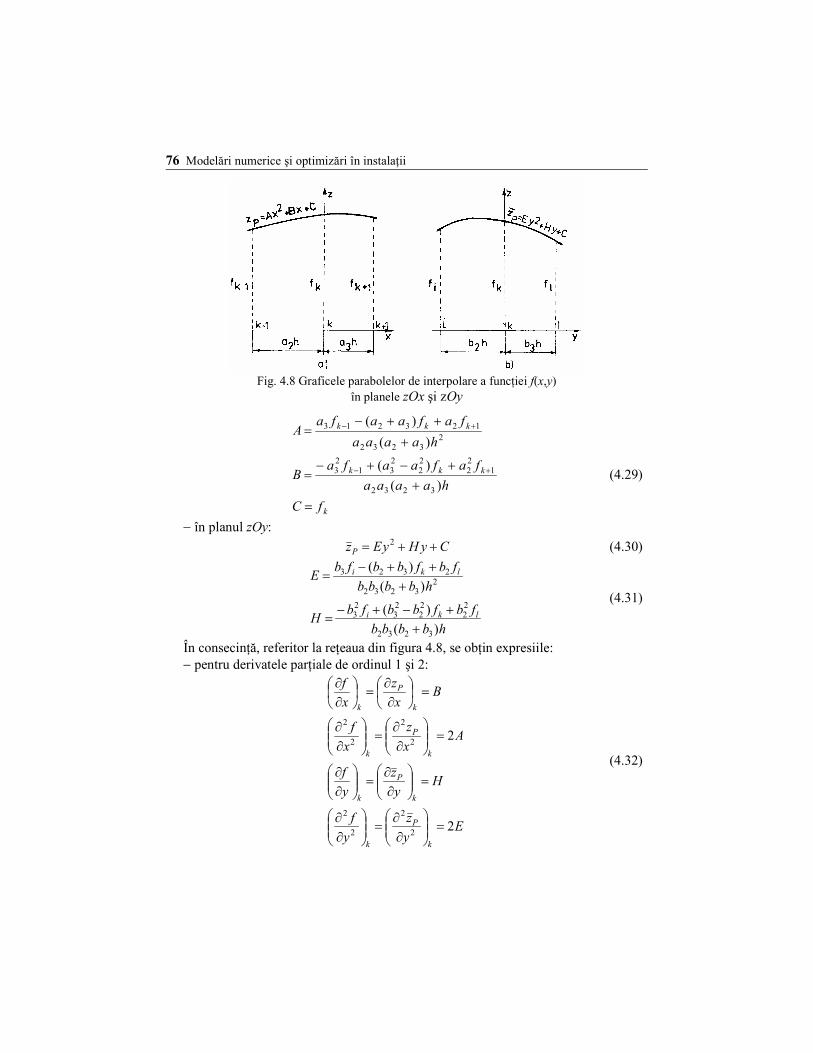
76 Modelări numerice şi optimizări în instalaŃii
Fig. 4.8 Graficele parabolelor de interpolare a funcŃiei f(x,y)
în planele zOx şi zOy
k
kkk
kkk
fC
haaaa
fafaafaB
haaaa
fafaafaA
=
+
+−+−=
+
++−=
+−
+−
)(
)(
)(
)(
3232
122
22
231
23
23232
123213
(4.29)
− în planul zOy:
CyHyEzP ++= 2 (4.30)
hbbbb
fbfbbfbH
hbbbb
fbfbbfbE
lki
lki
)(
)(
)(
)(
3232
22
22
23
23
23232
2323
++−+−
=
+++−
=
(4.31)
În consecinŃă, referitor la reŃeaua din figura 4.8, se obŃin expresiile: − pentru derivatele parŃiale de ordinul 1 şi 2:
Ey
z
y
f
Hy
z
y
f
Ax
z
x
f
Bx
z
x
f
k
P
k
k
P
k
k
P
k
k
P
k
2
2
2
2
2
2
2
2
2
2
=
∂∂
=
∂∂
=
∂∂
=
∂∂
=
∂∂
=
∂∂
=
∂∂
=
∂∂
(4.32)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 77
− pentru derivatele parŃiale de ordinul 3 şi 4:
23232
2
2
22
2
322
2
2
2
2
2
2
22
4
23232
2
2
22
2
322
2
3
2
2
2
2
4
4
3232
2
2222
222
232
223
2
2
3
3
23232
12
2
22
2
32
12
2
3
2
2
2
2
4
4
3232
12
2222
222
23
12
223
2
2
3
3
)(
)(
2
)(
)(
2
)(
)(
)(
)(
2
)(
)(
hbbbb
x
fb
x
fbb
x
fb
y
f
xyx
f
hbbbb
y
fb
y
fbb
x
fb
y
f
yy
f
hbbbb
y
fb
y
fbb
y
fb
y
f
yy
f
haaaa
x
fa
x
faa
x
fa
x
f
xx
f
haaaa
x
fa
x
faa
x
fa
x
f
xx
f
lki
k
lki
kk
lki
kk
kkk
kk
kkk
kk
+
∂
∂+
∂
∂+−
∂
∂
=
∂∂
∂∂
=∂∂
∂
+
∂
∂+
∂
∂+−
∂
∂
=
∂
∂
∂
∂=
∂
∂
+
∂∂
+
∂∂
−+
∂∂
−
=
∂
∂∂∂
=
∂
∂
+
∂∂
+
∂∂
+−
∂∂
=
∂∂
∂∂
=
∂∂
+
∂
∂+
∂
∂−+
∂
∂−
=
∂∂
∂∂
=
∂∂
+−
+−
(4.33)
Aplicarea relaŃiilor (4.32) şi (4.33), complicate la prima vedere, este facilitată de folosirea calculatoarelor numerice.
O formă simplificată, se obŃine în cazul unei reŃele cu pas egal pe direcŃia x şi y, când a1 = a2= a3= a4= a şi b1 = b2= b3= b4= b după cum urmează:
− pentru derivatele parŃiale de ordinul 1 şi 2:
21111
2
222
2
2211
2
2
11
4
2;
2
2;
2
abh
ffff
yx
f
hb
fff
y
f
ha
fff
x
f
bh
ff
y
f
ah
ff
x
f
lili
k
lki
k
kkk
k
li
k
kk
k
++−−
+−
+−
+−−=
∂∂∂
+−=
∂
∂+−=
∂
∂
+−=
∂∂+−
=
∂∂
(4.34)
− pentru derivatele parŃiale de ordinul 3 şi 4:

78 Modelări numerice şi optimizări în instalaŃii
422111111
22
4
444
4
442112
4
4
333
3
332112
3
3
22422
464
;464
2
22
;2
22
hba
fffffffff
yx
f
hb
fffff
y
f
ha
fffff
x
f
hb
ffff
y
f
ha
ffff
x
f
lllkkkiii
k
mlkih
k
kkkkk
k
mlih
k
kkkk
k
+−+−+−
+−−−
++−−
+−+−+−+−=
∂∂∂
+−+−=
∂∂
+−+−=
∂∂
+−+−=
∂
∂
+−+−=
∂
∂
(4.35)
Deci, în cazul funcŃiilor cu mai multe variabile, se pot aproxima derivatele parŃiale cu valorile funcŃiilor în puncte dintr-o reŃea plană.
4.2. METODA ELEMENTELOR FINITE
4.2.1. PRINCIPIUL METODEI Aproximarea prin discretizare constituie un concept fundamental faŃă de care me-toda cu elemente finite reprezintă un caz particular. Metoda elementelor finite este un procedeu de rezolvare aproximativă, cu ajutorul calculatorului electronic, a unei varietăŃi largi de probleme inginereşti. Este o metodă modernă de calcul numeric, fiind aplicată pentru prima dată în anul 1950 pentru calcu-lul mecanic al construcŃiilor metalice aeronautice. Primele publicaŃii referitoare la do-meniul calculului structurilor datează din 1954, aparŃinând lui Turner, Clough, Martin şi Topp. Ulterior Zienkiewicz aplică această metodă în domeniul curgerii fluidelor şi electromagnetismului, pentru ca Oden, în anul 1972 să o extindă într-o serie de pro-bleme ale continuumului material. În aceste probleme se urmăreşte determinarea, într-un domeniu considerat, a valo-rilor uneia sau mai multor funcŃii necunoscute cum sunt de exemplu temperaturile, presiunile, vitezele, deplasările, tensiunile mecanice etc., după natura problemei tratate. Cum domeniul are o infinitate de puncte, valorile funcŃiei sunt în număr infinit. Metoda elementelor finite foloseşte ca punct de plecare un model integral al feno-menului studiat, care poate fi obŃinut în mod direct prin calcul, sau poate fi derivat din modelul diferenŃial corespunzător cu ajutorul calculului variaŃional sau al metodei rezi-duurilor ponderate. Potrivit calculului variaŃional rezolvarea unei ecuaŃii diferenŃiale într-un anumit domeniu şi în anumite condiŃii la limită este echivalentă cu minimizarea în acel domeniu a unei mărimi funcŃionale corespunzătoare ecuaŃiei diferenŃiale şi con-diŃiilor la limită date.
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 79
Spre deosebire de metoda diferenŃelor finite această metodă se bazează pe aproxi-marea locală a variabilelor de câmp pe porŃiuni sau subdomenii ale domeniului ana-lizat, denumite elemente finite, legate între ele în puncte numite noduri. Ca urmare a minimizării funcŃionalei în toate elementele finite în care a fost împărŃit domeniul de analiză şi asamblării pe întreg domeniul a efectelor obŃinute pe elementele finite, rezultă un sistem de ecuaŃii algebrice prin a cărui rezolvare se determină valorile funcŃiei studiate în noduri. În scopul minimizării funcŃionalei pe elementele finite ale domeniului analizat, funcŃia sau funcŃiile necunoscute, continue pe tot domeniul, sunt aproximate printr-un set de funcŃii convenŃionale, continue numai pe cuprinsul elemen-telor finite. Se spune că aproximarea oferită de metoda elementelor finite este de na-tură fizică. În inginerie aplicaŃiile metodei elementelor finite pot fi grupate în trei clase de probleme:
a) probleme de echilibru sau de regim staŃionar, în care funcŃia sau funcŃiile necu-noscute nu depind de timp. Aici se încadrează problemele de transfer termic în regim staŃionar, studiul regimurilor staŃionare de curgere a lichidelor, studiul comportării elastice a corpurilor în regim static etc.
b) probleme de valori proprii în care se determină anumite valori critice ale para-metrilor (de asemenea independenŃi de timp) în condiŃiile respectării configuraŃiei de echilibru. În hidraulică asemenea probleme sunt calculul regimurilor de curgere lami-nară, în electricitate stabilirea caracteristicilor de rezonanŃă etc.
c) probleme de propagare sau de regim tranzitoriu, în care funcŃiile necunoscute sunt dependente de timp. Transferul căldurii în regim tranzitoriu, regimurile de curgere nestaŃionară a lichidelor, studiul dinamic al comportării elastice şi neelastice a structu-rilor sunt exemple de asemenea probleme. Principalele avantaje ale metodei elementelor finite faŃă de metoda diferenŃelor fini-te sunt următoarele: − posibilitatea de a modela forme neregulate prin folosirea de elemente finite cu forme şi dimensiuni diferite, adecvate configuraŃiei domeniului studiat; − posibilitatea de a trata fără dificultăŃi probleme în care proprietăŃile fizice ale me-diului variază, cum sunt mediile neomogene, anizotrope, stratificate etc.; − posibilitatea considerării oricăror condiŃii la limită pentru problema studiată; − posibilitatea elaborării unor algoritmi şi programe cu grad mare de generalitate, capabile să rezolve o gamă largă de probleme dintr-un anumit domeniu de specialitate. Metoda elementelor finite are şi unele dezavantaje, ca: − datele de intrare sunt în general numeroase, fiind necesar un efort relativ mare pentru pregătirea şi introducerea lor; − rezultatele numerice se obŃin sub forma unei ample colecŃii de valori numerice ale funcŃiei sau funcŃiilor studiate, într-un număr relativ mare de noduri; − calitatea rezultatelor depinde de experienŃa şi abilitatea programatorului de a ela-bora un model cu elemente finite pentru problema studiată.
80 Modelări numerice şi optimizări în instalaŃii
4.2.2. ETAPELE DE REZOLVARE A UNEI PROBLEME
CU METODA ELEMENTELOR FINITE Procesul de lucru caracteristic metodei elementelor finite este constituit din două etape principale: etapa modelării şi etapa aplicaŃiilor numerice. Etapa modelării reprezintă un proces specific fiecărui domeniu de investigare, în sensul că în cadrul ei se operează cu ecuaŃiile diferenŃiale care descriu o anumită clasă de probleme fizice. Scopul acestei etape îl constituie realizarea unui model analog cu elemente finite pentru modelul analitic care descrie fenomenul fizic cercetat. Implementarea acestui model pe calculator se face sub forma unui program de calcul. Etapa aplicaŃiilor numerice presupune cunoscute modelul analitic şi modelul cu elemente finite ale problemei. Scopul acestei etape este de a folosi programul de calcul elaborat la soluŃionarea unor probleme concrete. Rezultatul obŃinut îl constituie soluŃia numerică a problemei. OperaŃiile efectuate în cadrul etapei aplicaŃiilor numerice pot fi grupate convenŃional în mai multe faze: a) alegerea tipului de elemente finite şi respectiv a funcŃiilor de interpolare se face în funcŃie de variaŃia parametrilor analizaŃi (liniară, parabolică etc.), de geometria do-meniului investigat şi de capacitatea disponibilă de calcul. Din punct de vedere al geometriei lor, elementele finite pot fi de tip uni, bi sau tridimensional reprezentând bare, suprafeŃe (plane sau curbe) şi volume. Fiecare dintre acestea au ca noduri obligatorii, punctele extreme şi uneori puncte auxiliare situate pe laturi sau interioare. În fiecare nod pot exista una sau mai multe funcŃii necunoscute, denumite grade de libertate, care se aproximează prin funcŃiile de interpolare, iar nu-mărul acestora pentru întregul element finit se obŃine înmulŃind cu numărul de noduri ale elementului. Laturile elementelor finite pot fi drepte sau curbe. De exemplu, o problemă plană poate fi rezolvată folosind triunghiuri, dreptunghiuri sau elemente izoparametrice. Dintre acestea, elementele triunghiulare şi mai ales izopa-rametrice au o sferă mai largă de aplicabilitate, datorită adaptării lor la domenii limitate de contururi cu multe frânturi. La rândul lor, aceste elemente prezintă diverse tipuri cu un număr diferit de grade de libertate. Dacă se dispune de un program de calcul, această fază se concretizează prin selec-tarea unei opŃiuni privind folosirea bibliotecii de elemente finite; b) discretizarea domeniului de analiză înseamnă generarea reŃelei de elemente fi-nite şi a matricei de conexiuni. Această fază poate fi realizată manual sau automat de către calculator printr-o subrutină specializată a programului ordinator. Rezultatele acestei operaŃii constă dintr-un set de elemente finite, un set de noduri şi o matrice de conexiuni între acestea. Totodată se calculează coordonatele globale ale nodurilor; c) constituirea ecuaŃiilor finite şi evaluarea matricelor elementale. Comportarea mediului în cuprinsul unui element finit este descrisă de ecuaŃiile elementelor finite denumite şi ecuaŃii elementale. Acestea alcătuiesc un sistem de ecuaŃii al elementului. Numărul de ecuaŃii ale sistemului este egal cu numărul gradelor de libertate pe ele-ment.
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 81
EcuaŃiile elementale pot fi deduse pe mai multe căi: metoda variaŃională, metoda re-ziduală (Gralerkin), metoda bilanŃului energetic. Cea mai folosită este metoda variaŃi-onală al cărui principiu a fost descris la pct. 4.2.1. Metoda reziduurilor se foloseşte în special când metoda bazată pe calculul varia-Ńional nu se poate aplica, de exemplu din cauză că nu se cunoaşte o mărime funcŃională pentru problema respectivă. Cu excepŃia folosirii unor elemente simple, evaluarea matricelor elementale se face cu ajutorul metodelor de integrare numerică. Ca urmare a aplicării uneia dintre aceste metode se obŃine un sistem de ecuaŃii de forma: [ ] pk e =Φ (4.36)
în care: [k] este matricea caracteristicilor fizico-geometrice ale elementului finit, denu-mită matrice de rigiditate (conductivitate); Φe – vectorul funcŃiilor nodale necunos-cute pe elementul finit; p − vectorul forŃelor generalizate sau al încărcării (termice, mecanice etc.) pe elementul finit. Ultimele două terminologii au fost preluate din me-canica structurilor;
d) asamblarea ecuaŃiilor elementale în sistemul de ecuaŃii al domeniului discretizat impune ca, în nodurile comune elementelor, funcŃia sau funcŃiile necunoscute să aibă aceiaşi valoare. Asamblarea ecuaŃiilor constă în asamblarea matricelor de rigiditate [k] ale elementelor finite în matricea de rigiditate a sistemului şi a vectorilor încărcării pe elemente p în vectorul încărcării pe întreg domeniul. Matricea de rigiditate prezintă inconvenientele structurale de a avea dimensiuni mari şi a conŃine foarte mulŃi coeficienŃi nuli, necesitând un spaŃiu apreciabil de me-morie. Această situaŃie a condus la dezvoltarea unor mijloace specifice de optimizare cum sunt tehnicile de structurare a coeficienŃilor nenuli în benzi şi de minimizare a lăŃimii lor, precum şi utilizarea metodei frontale de rezolvare progresivă a sistemului de ecuaŃii, pe măsura asamblării elementelor;
e) rezolvarea sistemului de ecuaŃii. Metodele numerice de rezolvare a sistemelor de ecuaŃii cu elemente finite se pot grupa în metode liniare şi metode neliniare. Cele mai folosite metode de rezolvare a sistemelor liniare le constituie metoda de eliminare Gauss şi metoda de descompunere Choleski, iar pentru rezolvarea sistemelor neliniare se preferă metoda Newton–Raphson, obŃinându-se valorile funcŃiilor sau gradelor de libertate în noduri. Acestea se numesc şi necunoscute primare sau de ordinul întâi. Prezentarea soluŃiei se face de obicei alfa-numeric sub formă de tabele;
f) efectuarea de calcule suplimentare pentru determinarea necunoscutelor secun-dare. În unele probleme, după aflarea necunoscutelor primare, analiza se încheie. Acesta este de obicei cazul problemelor de conducŃie termică, în care necunoscutele primare sunt temperaturi nodale. În alte probleme însă, analiza trebuie continuată cu determinarea necunoscutelor secundare sau de ordinul doi. Acestea sunt derivate de ordin superior al necunoscutelor primare. Şi în cazul problemelor termice analiza poate continua cu determinarea necunoscutelor secundare, care sunt intensităŃile fluxurilor termice (gradienŃii termci).
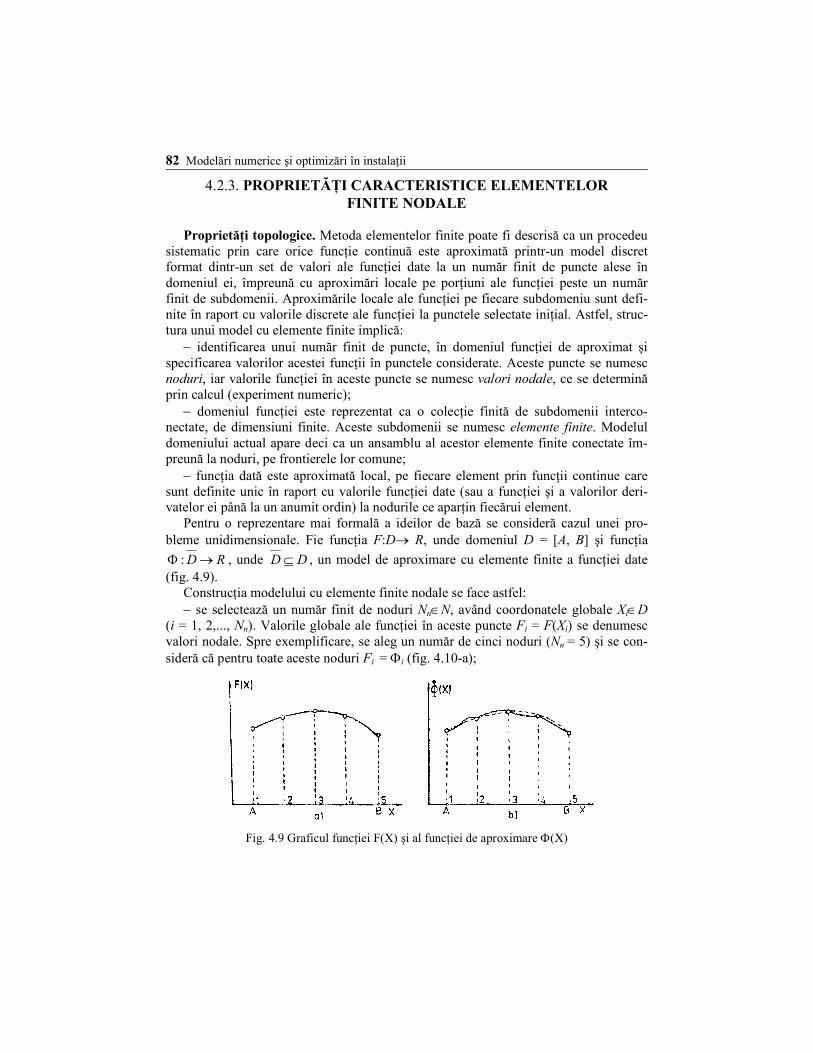
82 Modelări numerice şi optimizări în instalaŃii
4.2.3. PROPRIETĂłI CARACTERISTICE ELEMENTELOR FINITE NODALE
ProprietăŃi topologice. Metoda elementelor finite poate fi descrisă ca un procedeu sistematic prin care orice funcŃie continuă este aproximată printr-un model discret format dintr-un set de valori ale funcŃiei date la un număr finit de puncte alese în domeniul ei, împreună cu aproximări locale pe porŃiuni ale funcŃiei peste un număr finit de subdomenii. Aproximările locale ale funcŃiei pe fiecare subdomeniu sunt defi-nite în raport cu valorile discrete ale funcŃiei la punctele selectate iniŃial. Astfel, struc-tura unui model cu elemente finite implică: − identificarea unui număr finit de puncte, în domeniul funcŃiei de aproximat şi specificarea valorilor acestei funcŃii în punctele considerate. Aceste puncte se numesc noduri, iar valorile funcŃiei în aceste puncte se numesc valori nodale, ce se determină prin calcul (experiment numeric); − domeniul funcŃiei este reprezentat ca o colecŃie finită de subdomenii interco-nectate, de dimensiuni finite. Aceste subdomenii se numesc elemente finite. Modelul domeniului actual apare deci ca un ansamblu al acestor elemente finite conectate îm-preună la noduri, pe frontierele lor comune; − funcŃia dată este aproximată local, pe fiecare element prin funcŃii continue care sunt definite unic în raport cu valorile funcŃiei date (sau a funcŃiei şi a valorilor deri-vatelor ei până la un anumit ordin) la nodurile ce aparŃin fiecărui element. Pentru o reprezentare mai formală a ideilor de bază se consideră cazul unei pro-bleme unidimensionale. Fie funcŃia F:D→ R, unde domeniul D = [A, B] şi funcŃia
RD→Φ : , unde DD ⊆ , un model de aproximare cu elemente finite a funcŃiei date (fig. 4.9). ConstrucŃia modelului cu elemente finite nodale se face astfel: − se selectează un număr finit de noduri Nn∈N, având coordonatele globale Xi∈D (i = 1, 2,..., Nn). Valorile globale ale funcŃiei în aceste puncte Fi = F(Xi) se denumesc valori nodale. Spre exemplificare, se aleg un număr de cinci noduri (Nn = 5) şi se con-sideră că pentru toate aceste noduri Fi = Φi (fig. 4.10-a);
Fig. 4.9 Graficul funcŃiei F(X) şi al funcŃiei de aproximare Φ(X)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 83
Fig. 4.10 Reprezentări globale a) şi locale b)
− se selectează un număr finit de elemente NN e ∈ , fiecărui element asociindu-i un
anumit număr de noduri NN en ∈ . Pentru exemplul considerat se aleg patru elemente
(fig. 4.10-b), fiecare element având câte două noduri (Ne = 4, 2=enN );
− fiecare element (e =1,...,4) se caracterizează acum, în mod local prin coordonatele
nodurilor sale ejx şi valorile nodale ale funcŃiei de aproximare e
jf , pentru j = 1, 2;
− se stabilesc relaŃii de discretizare a domeniului de aproximare în elemente finite (fig.4.10), de forma:
2121
11 , XxXx == , pentru 3
222
21 ,;1 XxXxe === , pentru e = 2
4323
31 , XxXx == , pentru 5
424
41 ,;3 XxXxe === , pentru e = 4
Aceste relaŃii se pot scrie sub forma generală:
( )eenni
eji
ej NeNjNiXx ,...,1;,...,1;,...,1ω ==== (4.37)
în care elementele ejiω ale matricei booleene Ωe sunt definite de relaŃia:
=contrarcazîn,0
;globalnodulpeincidentesteielementuluallocalnoduldacă,1ω
iejeji (4.38)
RelaŃia (4.37) poate fi folosită în mod similar şi pentru valorile nodale ale funcŃiei date:
ieji
ej Ff ω= (4.39)
− se stabilesc relaŃii de asamblare ale fiecărui element finit e în domeniul de aproxi-
mare D . Pentru domeniul considerat avem:
111 xX = , pentru nodul 1; 2
1122 xxX == , pentru nodul 2;
31
223 xxX == , pentru nodul 3; 4
1324 xxX == , pentru nodul 4;
425 xX = , pentru nodul 5
Aceste relaŃii pot fi scrise în mod generic astfel:
),...,1;,..,1;,...,1( eenn
ej
eiji NeNjNixX ==== λ (4.40)

84 Modelări numerice şi optimizări în instalaŃii
în care eijλ are ca rezultat conectarea elementului e la domeniul de aproximareD . O re-
laŃie similară poate fi scrisă şi pentru funcŃii:
ej
eiji fF λ= (4.41)
Se observă că transformările ejiω şi e
ijλ sunt una inversa celeilalte, putându-se scrie:
ijeij
eji δω =λ (4.42)
în care δij este simbolul lui Kronecker. − relaŃiile de discretizare împreună cu cele de asamblare se reunesc în aplicaŃiile practice de programare pe calculator formând matricea de conexiuni. Această matrice stabileşte legături de apartenenŃă dintre elemente, nodurile locale şi cele globale. Pentru exemplul considerat, ma-tricea de conexiuni este prezentată pe elemente în tabelul 4.1. Modelul prezentat anterior poate fi generalizat pentru două şi trei dimensiuni, păs-trând aceeaşi logică. Sisteme de coordonate. După cum a rezultat din modelul de aproximare prezentat anterior punctele nodale sunt identificate prin două sisteme de numerotare: unul global, pentru întregul domeniu de analiză, şi altul local, pentru fiecare element în parte. Este convenabil de a se asocia sistemului local de noduri şi un sistem local de coordonate. Originea acestui sistem poate fi aleasă, practic, oriunde în interiorul unui element. Se preferă totuşi alegerea nodală (la unul dintre nodurile elementului) sau alegerea cen-trului de greutate al elemenului (fig. 4.11). La rândul lor coordonatele locale pot fi nor-male (carteziene), sau naturale, denumite şi coordonate de lungime în cazul elemen-telor unidimensionale, coordonate de arie în cazul elementelor bidimensionale şi coor-donate de volum în cazul elementelor tridimensionale. Coordonatele naturale sunt un fel de coordonate normalizate, în sensul că se obŃin prin raportarea coordonatelor globale, sau a unor arii determinate de punctul gene-ric, la mărimi caracteristice ele-mentului finit (lungimi, arii). Dacă se alege drept origine pentru aceste coordonate naturale centrul ele-mentului, atunci domeniul lor de variaŃie este [−1, 1], iar dacă în loc de un punct unic de origine se aleg origini nodurile elementului, atunci domeniul lor de variaŃie este [0, 1]. Avantajul coordonatelor naturale constă în special în simplificarea operaŃiilor de in-tegrare pe cuprinsul elementului finit.
Tabelul 4.1. Matrice de conexiuni
Noduri globale pentru Elemente j=1 j=2
1 1 2 2 2 3 3 3 4 4 4 5
Fig. 4.11 Coordonate carteziene
a)-globale; b)-locale

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 85
Fig. 4.12 Coordonate pentru elemente unidimensionale
a) globale; b) ξ-naturale; c) L-naturale
Se prezintă în continuare cele mai folosite sisteme de coordonate naturale. Fie un element unidimensional de tip liniar (fig. 4.12). Alegând drept origine a sistemului local de referinŃă centrul de greutate al elementului se obŃine sistemul ξ−natural (fig. 4.12-b). Pentru un punct oarecare cu ( )ji XXX ,∈ se poate scrie:
[ ]1,1ξ,ξ +−∈−
=a
XX G (4.43)
Acest sistem de referinŃă se preferă în cazul folosirii integrării numerice. Alegând drept origini chiar nodurile elementului se obŃine sistemul L–natural (fig. 4.12-c). Pentru un punct oarecare cu ( )ji XXX ,∈ se scrie:
jjii XLXLX += (4.44) 1=+ ji LL (4.45)
Prima relaŃie arată caracterul de funcŃie de pondere a coordonatelor L, iar cea de-a doua relaŃie arată că Li şi Lj nu sunt variabile independente. RelaŃiile (4.44) şi (4.45) conduc la:
a
XXL
a
XXL i
j
j
i 2;
2
−=
−= (4.46)
Acest sistem se preferă atunci când expresiile integrale caracteristice elementului finit se evaluează direct (analitic). În scopul uşurării evaluării lor se foloseşte formula:
)!1(
)(!!
++
−=∫ βα
βαβα ij
X
X
ji
XXdXLL
j
i
(4.47)
în care α şi β sunt numere întregi. În figura 4.13 sunt prezentate coordonatele L–naturale pentru elemente finite triunghiulare cu trei noduri. Coordonatele naturale ale unui punct P(X,Y) de pe elementul finit ijk sunt rapoartele de arie:
e
kk
e
j
j
e
ii
A
AL
A
AL
A
AL === ;; (4.48)
în care Ae este aria elementului finit, iar Ai, Aj, Ak sunt porŃiuni din această arie determinate de pun-ctul P. Legătura dintre coordonatele globale şi cele L–naturale este dată de relaŃia matriceală:
Fig. 4.13 Coordonate L-naturale pentru elemente triunghiulare
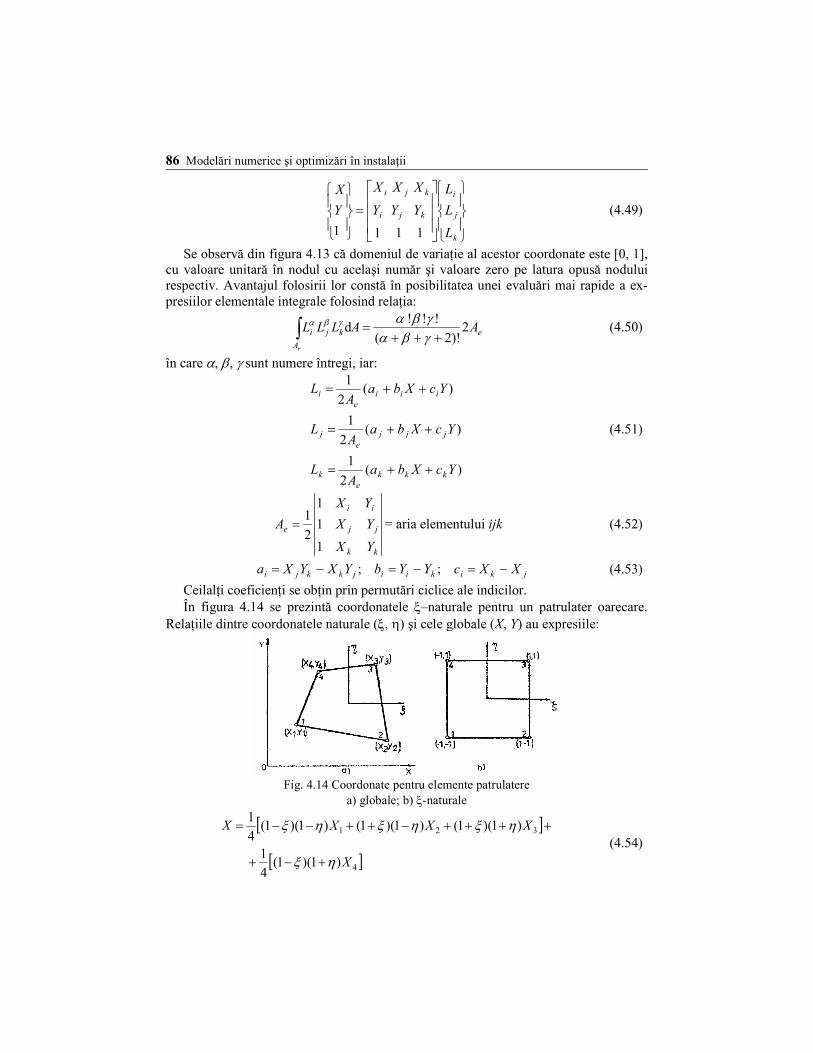
86 Modelări numerice şi optimizări în instalaŃii
=
k
j
i
kji
kji
L
L
L
YYY
XXX
Y
X
1111
(4.49)
Se observă din figura 4.13 că domeniul de variaŃie al acestor coordonate este [0, 1], cu valoare unitară în nodul cu acelaşi număr şi valoare zero pe latura opusă nodului respectiv. Avantajul folosirii lor constă în posibilitatea unei evaluări mai rapide a ex-presiilor elementale integrale folosind relaŃia:
ekj
A
i AALLL
e
2)!2(
!!!d
+++=∫ γβα
γβαγβα (4.50)
în care α, β, γ sunt numere întregi, iar:
)(2
1
)(2
1
)(2
1
YcXbaA
L
YcXbaA
L
YcXbaA
L
kkk
e
k
jjj
e
j
iii
e
i
++=
++=
++=
(4.51)
kk
jj
ii
e
YX
YX
YX
A
1
1
1
2
1= = aria elementului ijk (4.52)
jkikiijkkji XXcYYbYXYXa −=−=−= ;; (4.53)
CeilalŃi coeficienŃi se obŃin prin permutări ciclice ale indicilor. În figura 4.14 se prezintă coordonatele ξ–naturale pentru un patrulater oarecare. RelaŃiile dintre coordonatele naturale (ξ, η) şi cele globale (X, Y) au expresiile:
Fig. 4.14 Coordonate pentru elemente patrulatere
a) globale; b) ξ-naturale
[ ]
[ ]4
321
)1)(1(4
1
)1)(1()1)(1()1)(1(4
1
X
XXXX
ηξ
ηξηξηξ
+−+
++++−++−−= (4.54)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 87
[ ]
[ ]4
321
)1)(1(4
1
)1)(1()1)(1()1)(1(4
1
Y
YYYY
ηξ
ηξηξηξ
+−+
++++−++−−= (4.55)
4.2.4. INTEGRAREA NUMERICĂ A EXPRESIILOR ELEMENTALE Aplicarea metodei Newton–Côtes. Metoda elementelor finite este în esenŃă o me-todă integrală, operând la nivelul elementelor finite folosite. Expresiile rezultate sub semnul integral sunt de cele mai multe ori produse de matrice. Evaluarea lor directă este foarte dificilă, fapt pentru care se apelează frecvent la integrarea numerică. Integralele de evaluat pot fi scrise sub forma:
ςηξςηξηξηξξξ ∫ ∫ ∫∫ ∫∫− − −− −−
1
1
1
1
1
1
1
1
1
1
1
1
ddd),,(;dd),(;d)( fff
unde: f reprezintă de regulă un produs de matrice; ξ, η, ς − coordonate ale elementu-
lui finit; [−1, 1] – domeniul normalizat de variaŃie a coordonatelor. Evaluarea numerică a acestor integrale se face folosind următoarele relaŃii generale:
),,(ddd),,(
),(dd),(
)(d)(
1 1 1
1
1
1
1
1
1
1 1
1
1
1
1
1
1
1
kiikj
n
i
n
j
n
k
i
jij
n
i
n
j
i
i
n
i
i
fwwwf
fwwf
fwf
ξηξςηξςηξ
ηξηξηξ
ξξξ
∑∑∑∫ ∫ ∫
∑∑∫ ∫
∑∫
= = =− − −
= =− −
=−
=
=
=
(4.56)
în care: wi, wj, wk sunt coeficienŃii de pondere ce se iau din tabelul 2.1; ξi, ηj, ξk – puncte de evaluare a integrandului. Limitele de integrare pot fi oarecare, dar dacă se folosesc coordonate naturale sunt (−1) şi (+1). Aproximarea funcŃiei în n puncte selectate a priori se face determinând un polinom de ordinul n−1 care trece prin aceste puncte şi care este apoi integrat exact. De regulă cele n puncte se poziŃionează echidistant în intervalul de integrare [−1, 1]. Prin particularizare se obŃine: − pentru n = 2, regula trapezului:
∫−
+−=1
1
)1()1(d)( fff ξξ (4.57)
− pentru n = 3, regula lui Simpson:
[ ])1()0(4)1(3
1d)(
1
1
ffff ++−=∫−
ξξ (4.58)

88 Modelări numerice şi optimizări în instalaŃii
− pentru n = 4:
++−+−=∫−
)1()3
1(3)
3
1(3)1(
4
1d)(
1
1
fffff ξξ (4.59)
Aplicarea metodei Gauss−−−−Legendre. În loc de predeterminarea punctelor de eva-luare, această metodă permite determinarea acestora prin calcul astfel încât eroarea să fie minimă pentru un număr dat de puncte de evaluare. Metoda optimizează distanŃa dintre puncte, astfel ca pentru acelaşi ordin de mărime al erorii să se folosească un nu-măr mai mic de puncte decât în cazul metodei Newton−Côtes. Dacă integrarea se face în n puncte Gauss gradul polinomului trebuie să fie cel mult 2n−1. În funcŃie de numărul n de puncte Gauss de integrare, coeficienŃii de pondere wi şi coordonatele ξi se iau din tabelul 2.2, iar pentru integrare se folosesc formulele (4.56).
4.2.5. TIPURI DE ELEMENTE FINITE ŞI FUNCłII DE INTERPOLARE
Rezolvarea problemelor cu ajutorul metodei elementelor finite începe cu alegerea tipului de element finit, urmând discretizarea domeniului cu elemente finite. EvoluŃia folosirii metodei elementelor finite a fost însoŃită de diversificarea tipurilor de elemente, în prezent utilizându-se o gamă foarte largă de tipuri, în continuare studiindu-se cele mai folosite dintre acestea. Elementul finit triunghiular cu trei noduri a fost şi continuă să fie folosit în analiza cu elemente finite pentru rezolvarea multor probleme. Pentru anumite probleme, elementele finite de ordin inferior ca cel triun-ghiular nu oferă însă rezultate cu suficientă precizie, recomandându-se în aceste cazuri folosirea elementelor finite de ordin superior. Generarea funcŃiilor de interpolare. O dată cu alegerea tipului de element finit se aleg şi funcŃiile de aproximare, încât descrierea elementelor finite este însoŃită de pre-zentarea funcŃiilor de aproximare asociate. FuncŃia de aproximare Φ se poate scrie sub forma:
[ ] ei
n
i
i NN Φ=Φ=Φ ∑=1
(4.60)
în care: Φe este vectorul valorilor nodale ale funcŃiei de aproximare pentru elementul generic e; [N] – matricea funcŃiilor de formă a acestui element. Drept funcŃii de aproximare se folosesc mai ales polinoame de interpolare datorită uşurinŃei de derivare şi de integrare a acestora. De aceea funcŃiile de aproximare se mai numesc şi funcŃii de interpolare. Ordinul polinomului de interpolare depinde de numă-rul gradelor de libertate asociate elementului finit. Cu alte cuvinte, numărul coeficien-Ńilor polinomiali trebuie să fie egal cu numărul nodurilor disponibile pentru a-i evalua. De exemplu, pentru un element triunghiular liniar, funcŃia de aproximare este un polinom de gradul 1 de forma: yx 321 ααα ++=Φ (4.61) Polinomul de interpolare trebuie să fie în acest caz de ordinul întâi deoarece pe o latură a elementului finit sunt două noduri şi polinomul de gradul întâi interpolează în

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 89
două puncte. Numărul de coeficienŃi αj, numiŃi coordonate generalizate ale elemen-tului este de trei, deoarece triunghiul are trei noduri şi acestea se determină impunând ca în noduri funcŃia să primească valorile Φi, Φj, Φk:
kkk
jjj
iii
yx
yx
yx
321
321
321
ααα
ααα
ααα
++=Φ
++=Φ
++=Φ
(4.62)
Rezolvând sistemul (4.62) în raport cu coordonatele generalizate αj, se obŃine:
)(2
1
)(2
1
)(2
1
3
2
1
kkjjii
e
kkjjii
e
kkjjii
e
cccA
bbbA
aaaA
Φ+Φ+Φ=
Φ+Φ+Φ=
Φ+Φ+Φ=
α
α
α
(4.63)
în care Ae este aria elementului finit:
kk
jj
ii
e
yx
yx
yx
A
1
1
1
2
1= (4.64)
iar coeficienŃii a, b, c au expresiile:
ijkkijjki
jikikjkji
ijjikkiikjjkkji
xxcxxcxxc
yybyybyyb
yxyxayxyxayxyxa
−=−=−=
−=−=−=
−=−=−=
;;
;;
;;
(4.65)
şi sunt constanŃi deoarece depind numai de coordonatele constante ale nodurilor. Introducând (4.63) în (4.61) se obŃine modelul de aproximare:
[ ]
Φ
Φ
Φ
=Φ+Φ+Φ=Φ
k
j
i
kjikkjjii NNNNNN (4.66)
în care funcŃiile de formă ale elementului finit triunghiular sunt date de relaŃiile:
);(2
1
);(2
1
);(2
1
ycxbaA
N
ycxbaA
N
ycxbaA
N
kkk
e
k
jjj
e
j
iii
e
i
++=
++=
++=
(4.67)
RelaŃia (4.66) exprimă variaŃia aproximată Φ a funcŃiei necunoscute în raport cu valorile acestei funcŃii în nodurile elementului finit prin intermediul funcŃiilor de for-

90 Modelări numerice şi optimizări în instalaŃii
mă. Această variaŃie este liniară, funcŃiile de formă sunt şi ele liniare, iar elementul finit cu trei noduri se numeşte liniar. Valoarea funcŃiilor de formă variază între 0 şi 1. Ele au valoarea 1 în nodul la care se referă şi 0 în celelalte noduri. Astfel Ni = 1 în nodul i şi Ni = 0 în nodurile j şi k. Totodată aceste funcŃii de formă sunt aceleaşi ca şi coordonatele L–naturale ale ele-mentului finit triunghiular.
În mod similar se poate proceda şi pentru celelalte elemente bidimensionale. Poli-nomul general de aproximare de ordinul n este dat de relaŃia:
njiyxnT
k
jik ≤+=Φ ∑
=
;1
α (4.68)
în care numărul termenilor din polinom este 2/)2)(1( ++= nnTn .
În expresiile polinoamelor de interpolare (4.61) şi (4.66) funcŃia necunoscută a fost considerată o mărime scalară. În orice punct al elementului finit există un singur parametru necunoscut, sau un singur grad de libertate. Acesta este cazul, de exemplu, al problemelor de conducŃie termică, la care există o singură necunoscută, temperatura. În alte probleme, în fiecare nod de element finit, funcŃia necunoscută poate avea mai multe componente, fiind deci o mărime vectorială. În acest caz problema se rezolvă la fel, dar în raport cu componentele după direcŃiile axelor de coordonate ale funcŃiei. Aceste componente se notează cu u după direcŃia x, cu v după direcŃia y şi cu w după direcŃia z.
În cazul elementului finit triunghiular, pentru fiecare componentă u şi v există un model de aproximare de acelaşi fel cu (4.66):
kkjjii
kkjjii
vNvNvNv
uNuNuNu
++=
++= (4.69)
funcŃiile de formă N fiind aceleaşi din relaŃia (4.67).
Vectorul funcŃiei necunoscute se scrie matriceal:
[ ] e
k
k
j
j
i
i
kji
kjiN
v
u
v
u
v
u
NNN
NNN
v
uΦ=
=
=Φ000
000 (4.70)
în care [N] este matricea funcŃiilor de formă.
Elementul finit triunghiular cu trei noduri fiind un element izoparametric, variaŃia coordonatelor unui punct de pe elementul finit se exprimă în raport cu coordonatele nodale prin intermediul aceleiaşi matrice a funcŃiilor de formă:
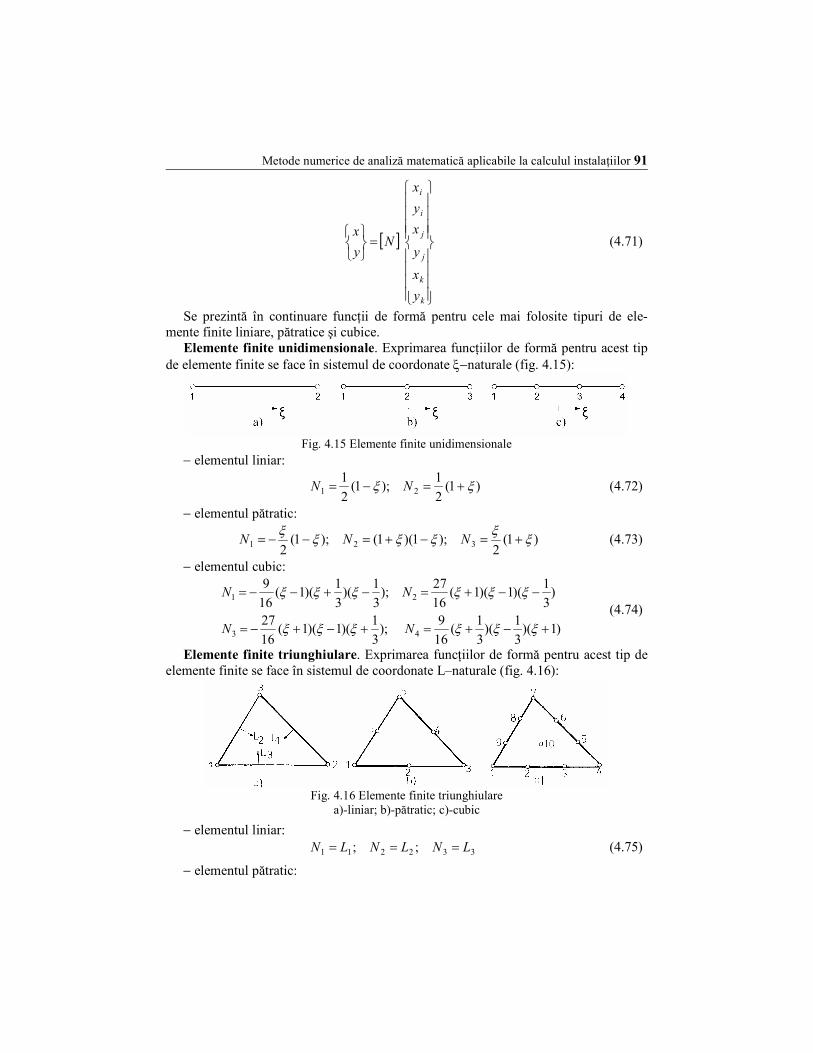
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 91
[ ]
=
k
k
j
j
i
i
y
x
y
x
y
x
Ny
x (4.71)
Se prezintă în continuare funcŃii de formă pentru cele mai folosite tipuri de ele-mente finite liniare, pătratice şi cubice. Elemente finite unidimensionale. Exprimarea funcŃiilor de formă pentru acest tip de elemente finite se face în sistemul de coordonate ξ−naturale (fig. 4.15):
Fig. 4.15 Elemente finite unidimensionale
− elementul liniar:
)1(2
1);1(
2
121 ξξ +=−= NN (4.72)
− elementul pătratic:
)1(2
);1)(1();1(2 321 ξ
ξξξξ
ξ+=−+=−−= NNN (4.73)
− elementul cubic:
)1)(3
1)(
3
1(
16
9);
3
1)(1)(1(
16
27
)3
1)(1)(1(
16
27);
3
1)(
3
1)(1(
16
9
43
21
+−+=+−+−=
−−+=−+−−=
ξξξξξξ
ξξξξξξ
NN
NN
(4.74)
Elemente finite triunghiulare. Exprimarea funcŃiilor de formă pentru acest tip de elemente finite se face în sistemul de coordonate L–naturale (fig. 4.16):
Fig. 4.16 Elemente finite triunghiulare
a)-liniar; b)-pătratic; c)-cubic
− elementul liniar: 332211 ;; LNLNLN === (4.75)
− elementul pătratic:
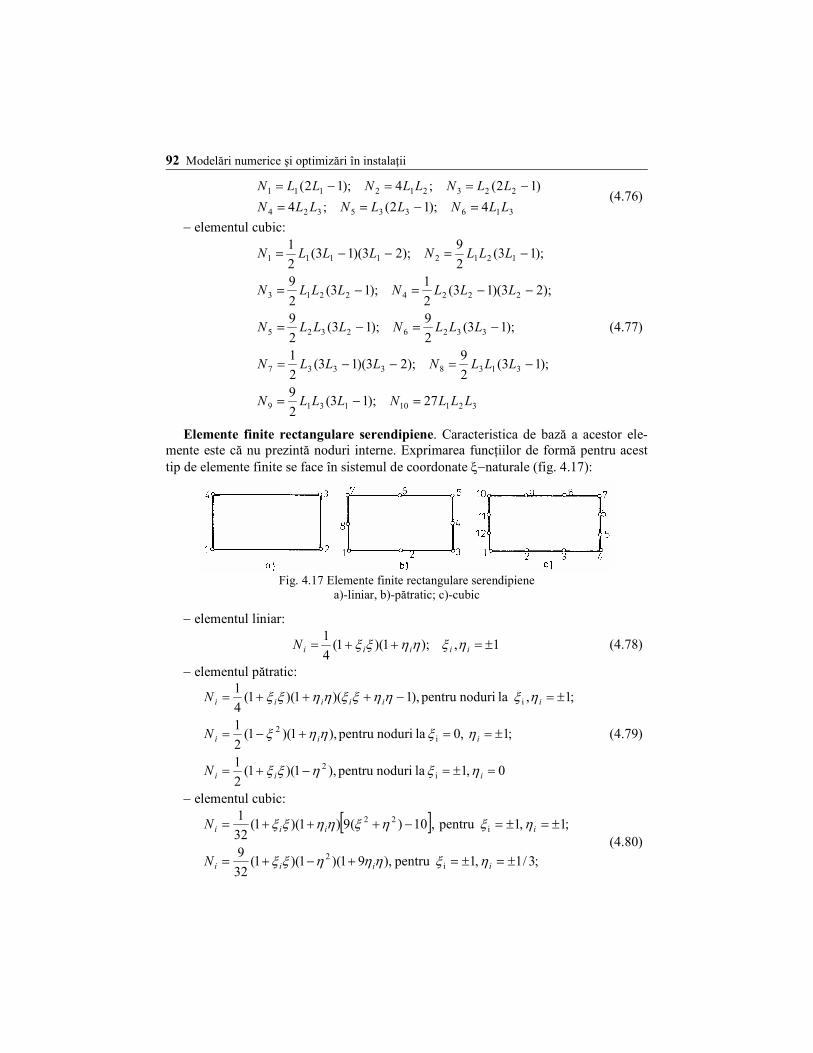
92 Modelări numerice şi optimizări în instalaŃii
316335324
223212111
4);12(;4
)12(;4);12(
LLNLLNLLN
LLNLLNLLN
=−==
−==−= (4.76)
− elementul cubic:
321101319
31383337
33262325
22242213
12121111
27);13(2
9
);13(2
9);23)(13(
2
1
);13(2
9);13(
2
9
);23)(13(2
1);13(
2
9
);13(2
9);23)(13(
2
1
LLLNLLLN
LLLNLLLN
LLLNLLLN
LLLNLLLN
LLLNLLLN
=−=
−=−−=
−=−=
−−=−=
−=−−=
(4.77)
Elemente finite rectangulare serendipiene. Caracteristica de bază a acestor ele-mente este că nu prezintă noduri interne. Exprimarea funcŃiilor de formă pentru acest tip de elemente finite se face în sistemul de coordonate ξ−naturale (fig. 4.17):
Fig. 4.17 Elemente finite rectangulare serendipiene
a)-liniar, b)-pătratic; c)-cubic
− elementul liniar:
1,);1)(1(4
1±=++= iiiiiN ηξηηξξ (4.78)
− elementul pătratic:
0,1 la noduripentru ),1)(1(2
1
;1,0 la noduripentru ),1)(1(2
1
;1, la noduripentru ),1)(1)(1(4
1
i2
i2
i
=±=−+=
±==+−=
±=−+++=
iii
iii
iiiiii
N
N
N
ηξηξξ
ηξηηξ
ηξηηξξηηξξ
(4.79)
− elementul cubic:
[ ]
;3/1,1pentru ),91)(1)(1(32
9
;1,1pentru ,10)(9)1)(1(32
1
i2
i22
±=±=+−+=
±=±=−+++=
iiii
iiii
N
N
ηξηηηξξ
ηξηξηηξξ (4.80)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 93
Elemente finite patrulatere cu opt noduri. Elementul finit patrulater, generali-zează elementele finite bidimensionale (triunghiular, rectangular), putând fi aplicat cu uşurinŃă oricărei geometrii a domeniului de analiză. Acest tip de element are opt noduri din care patru în colŃurile elementului şi patru în mijloacele laturilor (fig. 4.18). Elementul este raportat la un sistem de coordonate ξ−naturale (cu originea în centrul de greutate al elementului), astfel încât laturile sale sunt reprezentate de ecuaŃiile: ξ = −1, ξ = 1, η = −1, η = 1. FuncŃia de aproximare trebuie să fie un po-linom care să aibă opt termeni, deoarece ele-mentul are opt noduri şi să conŃină toŃi ter-menii de gradul întâi şi doi, întrucât pe o latu-ră a elementului finit sunt trei noduri, iar ulti-mii doi termeni să fie de gradul trei, astfel în-cât elementul finit este cubic. FuncŃiile de formă pentru acest tip de element finit au expresiile:
2/)1)(1(;2/)1)(1(
;2/)1)(1(;2/)1)(1(
;4/)1)(1)(1(;4/)1)(1)(1(
;4/)1)(1)(1(;4/)1)(1)(1(
28
27
26
25
43
21
ηξηξ
ηξηξ
ηξηξηξηξ
ηξηξηξηξ
−−=++=
+−=−−=
−++−−=−−++−=
+−−+−=−+−−−=
NN
NN
NN
NN
(4.81)
Geometria bidimensională a elementului finit se exprimă prin relaŃiile:
;;8
1
8
1i
i
ii
i
i yNyxNx ∑∑==
== (4.82)
Acest element finit are avantajul că laturile pot fi curbe, ceea ce permite modelarea mai fidelă a domeniului analizat. Pentru îmbunătăŃirea preciziei se foloseşte deseori un al noulea nod amplasat în centrul elementului, a cărui funcŃie de formă este:
)1)(1( 229 ηξ −−=N (4.83)
Elemente finite curbilinii. Unul dintre avantajele primordiale ale metodei cu ele-mente finite este acela de a putea discretiza forme geometrice complexe, incluzând cele cu laturi şi feŃe curbilinii. Pentru discretizarea elementelor curbilinii au fost create o serie de elemente finite cu laturi curbilinii. Aceste elemente pot fi obŃinute din ele-mente prezentate anterior, prin transformări geometrice convenabile. În figura 4.19 se arată posibilitatea obŃineri de elemente triunghiulare şi patrulatere cu laturi curbilinii. Transformarea coordonatelor se face pe baza relaŃiilor:
i
n
i
ii
n
i
ii
n
i
i zNzyNyxNx ∑∑∑===
===111
;; (4.84)
Fig. 4.18 Element finit patrulater
cu opt noduri

94 Modelări numerice şi optimizări în instalaŃii
în care: xi, yi, zi sunt coordonate carteziene nodale; Ni – funcŃii de formă corespun-zătoare, exprimate în coordonate ξ−naturale; n – numărul de noduri ale elementului.
Fig. 4.19 ObŃinerea elementelor finite cu laturi curbilinii
Dacă aceste transformări au acelaşi ordin de mărime ca şi al reprezentării varia-bilelor de câmp, elementele finite se numesc izoparametrice. Deci, elementele izopara-metrice folosesc aceleaşi funcŃii de formă pentru coordonate şi pentru reprezentarea variabilelor de câmp. Dacă ordinul transformărilor geometrice este superior celui al reprezentării variabi-lelor de câmp, elementele sunt numite supraparametrice, iar dacă situaŃia ordinelor ce-lor două reprezentări este inversă, elementele se numesc subparametrice. Evaluarea derivatelor yNxN ii ∂∂∂∂ /,/ se face cu ajutorul transformaării:
[ ]
∂
∂∂
∂
=
∂
∂∂
∂
∂
∂
∂∂
∂
∂
∂∂
=
∂
∂
∂
∂
y
N
x
N
J
y
N
x
N
yx
yx
N
N
i
i
i
i
i
i
ηη
ξξ
η
ξ (4.85)
unde [J] este Jacobianul transformării.
4.2.6. OBłINEREA ECUAłIILOR CU ELEMENTE FINITE Metoda variaŃională Rayleigh–Ritz. Uneori, problemele de analiză a mediilor continue îşi pot găsi formulări diferite dar echivalente, o formulare diferenŃială şi una variaŃională. În primul caz, soluŃia problemei se obŃine prin integrarea sistemului de ecuaŃii diferenŃiale şi impunerea unor condiŃii iniŃiale şi de limită. În cel de-al doilea caz, soluŃia problemei se obŃine prin căutarea unei funcŃii care să extremizeze (să con-ducă la maxim sau minim), sau să facă staŃionară o funcŃie reală supusă la aceleaşi condiŃii iniŃiale şi de limită. Metoda Reyleigh−Ritz este o metodă generală de studiu a unor fenomene fizice din domeniul transmiterii căldurii, mecanicii fluidelor, elasticităŃii, bazată pe aplicarea principiilor variaŃionale. Fie următoarea integrală:

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 95
yxy
u
x
uuyxFuI dd),,,,()(
∂∂
∂∂
= ∫ ∫ (4.86)
prin care este caracterizat un anumit fenomen, a cărui mărime determinantă este u(x,y). CondiŃiile de margine sunt de forma: )(su Φ= (4.87) referitoare la conturul s1 al domeniului de definiŃie. Se consideră următoarea expresie pentru u:
),,,,,( 21 nyxu ααα KΦ= (4.88)
în care α1, α2, ..., αn sunt parametrii independenŃi. Verificând condiŃiile pe contur (4.87) şi înlocuind expresia (4.88), alături de deri-vatele sale xu ∂∂ / şi yu ∂∂ / în (4.86) rezultă:
),,,()( 21 nIuI ααα K= , (4.89)
iar din condiŃia ca această expresie să fie minimă pentru oricare dintre parametrii αj:
njI
j
,,...2,1;0 ==∂∂α
(4.90)
se obŃine un sistem de n ecuaŃii cu n necunoscute.
Înlocuind soluŃia sistemului 002
01 ,,, nααα K în relaŃia (4.87) se obŃine soluŃia aproxi-
mativă:
),,,,,(),( 002
01 nyxyxu ααα KΦ= (4.91)
Deşi prezintă unele avantaje metodologice, folosirea metodelor variaŃionale în cons-truirea modelelor cu elemente finite nu poate fi generalizată deoarece numai anumite clase de operatori admit formulări variaŃionale. În termodinamică şi mecanica fluidelor, au fost formulate principii variaŃionale pen-tru conducŃia termică, fluide ideale, probleme de stabilitate hidrodinamică şi altele.
Metoda reziduurilor ponderate este o metodă de obŃinere a soluŃiilor aproxima-tive pentru ecuaŃii diferenŃiale liniare şi neliniare. Prin această metodă se caută o solu-Ńie a problemei pe întregul ei domeniu de analiză. Fie o problemă descrisă prin ecuaŃia:
0)( =uG (4.92)
unde G este un operator general, iar ecuaŃia (4.92) poate fi o ecuaŃie diferenŃială ordi-nară, sau o ecuaŃie diferenŃială cu derivate parŃiale de tip parabolic sau hiperbolic. Domeniul de analiză al problemei este D, suprafaŃa care îl mărgineşte este S, iar condiŃiile iniŃiale şi la limită pe S sunt de forma:
),()( trfuQ = (4.93)
în care Q este un operator diferenŃial, de ordin inferior lui G. Se consideră soluŃia aproximativă de încercare:
)()(),(),(1
0 rttrutru i
n
i
i ϕα ⋅+= ∑=
(4.94)
96 Modelări numerice şi optimizări în instalaŃii
care se doreşte convergentă spre soluŃia exactă u(r, t) pe măsură ce n→∞. Această so-luŃie aproximativă se alege astfel încât să satisfacă în mod exact condiŃiile iniŃiale şi la limită ale problemei. Pentru i = 1, 2,..., n, funcŃiile )(riϕ constituie un sistem complet de funcŃii liniar in-
dependente pe domeniul D, iar αi(t) sunt coeficienŃi ce urmează a fi determinaŃi. Se introduce soluŃia aproximativă (4.94) în ecuaŃia (4.92) care nu mai este acum sa-tisfăcută în mod exact: ),,()( itrRuG α= (4.95)
unde R(r, t, αi) este un reziduu de calcul. Deoarece R = 0 pentru soluŃia exactă, acest reziduu poate fi considerat ca o măsură a erorii de aproximare. Metoda reziduurilor ponderate constă în determinarea coeficienŃilor αi astfel încât eroarea R pe întregul domeniu considerat să fie cât mai mică. Aceasta se realizează prin formarea unei medii ponderate a erorii pe întregul domeniu şi prin impunerea con-diŃiei: mkDrWtrR ki ,...,2,1;0d)(),,( ==α (4.96)
în care Wk(r) reprezintă un set de funcŃii de pondere liniar independente, ce depind de aceleaşi variabile independente ca şi funcŃiile ϕi(r) din expresia (4.94). Pe măsură ce n creşte progresiv se aşteaptă ca soluŃia aproximativă u să tindă spre soluŃia exactă u, iar reziduul R să devină tot mai mic. La limită când n→∞ se obŃine u→u şi R→0, iar ecuaŃia (4.96) este satisfăcută pentru orice set de funcŃii de pondere Wk(r). Potrivit procedeului Galerkin de selectare a funcŃiilor de pondere, se poate scrie: )()( rrW kk Φ= (4.97)
unde Φk(r) sunt funcŃiile de interpolare ale modelului cu elemente finite. În această metodă s-a presupus că soluŃia de încercare (4.94) satisface în mod exact condiŃiile de frontieră şi numai aproximativ ecuaŃia diferenŃială generală. Se poate şi invers, respectiv ca soluŃia propusă să satisfacă exact ecuaŃia generală (4.92) şi numai aproximativ condiŃiile de frontieră (4.93), caz în care avem de-a face cu metode de frontieră.

Capitolul 5
MODELE NUMERICE PENTRU REZOLVAREA UNOR PROBLEME SPECIFICE DE INSTALAłII
5.1. SIMULAREA NUMERICĂ ŞI PREVENIREA ÎNGHEłULUI
APEI ÎN CONDUCTELE AERIENE SUB PRESIUNE
5.1.1. CONSIDERAłII PRELIMINARE În exploatarea pe timp friguros a conductelor aeriene ale instalaŃiilor hidroenerge-tice şi de alimentare cu apă se pot întâmpina serioase dificultăŃi din cauza atât a posi-bilităŃii de îngheŃ a apei, astfel încât stratul de gheaŃă format pe peretele interior al con-ductei să afecteze caracteristicile hidraulice ale curgerii, cât şi a deformaŃiilor perma-nente ale conductelor care apar ca o consecinŃă a acestui fenomen. Astfel, dacă se întrerupe curgerea apei pentru eventuale intervenŃii de întreŃinere şi reparaŃii ale sistemului sau conform programului de funcŃionare al centralei hidroe-lectrice şi conducta este plină cu apă, îngheŃul se propagă într-un anumit interval de timp în toată masa de apă conŃinută în conductă. Pentru a preveni acest fenomen, în practică există tendinŃa de a asigura curgerea permanentă prin conductă a unui anumit debit minim. Pentru regimul atmosferic staŃionar (viteza vântului neglijabilă) s-a stabi-lit o relaŃie de calcul aproximativ al debitului minim necesar pentru prevenirea înghe-Ńării apei în conductă [76]:
( )[ ]
ew
ewww
eww
tt
ttc
tttLRG
−
−−++
=0
0min
lnρ
2075,074,9π2 (5.1)
în care: Gmin este debitul minim de protecŃie; R, L – raza interioară şi lungimea con-ductei; ρw, cw – densitatea şi căldura specifică ale apei; tw0, tw – temperaturile iniŃială şi finală ale apei; te – temperatura aerului exterior. Această precauŃie, în majoritatea cazurilor, asigură circulaŃia liberă a debitului prin conductă, însă nu şi lipsa totală a gheŃii pe peretele acesteia, întrucât atunci când tem-peratura apei este aproape de 0 °C este imposibil de a se evita formarea gheŃii, chiar pentru viteze depăşind 10 m/s. Se impune deci a se cerceta dacă conducta este capabilă să transporte debitul minim de protecŃie şi în ipoteza regimului atmosferic nestaŃionar, fără a afecta caracteristicile hidraulice ale curgerii. De asemenea, chiar şi în cazul funcŃionării normale cu un debit dat, se pune problema cercetării dacă conducta este capabilă să transporte acest debit, Ńinând seama de volumul de gheaŃă ce se poate forma în interior. În caz contrar este
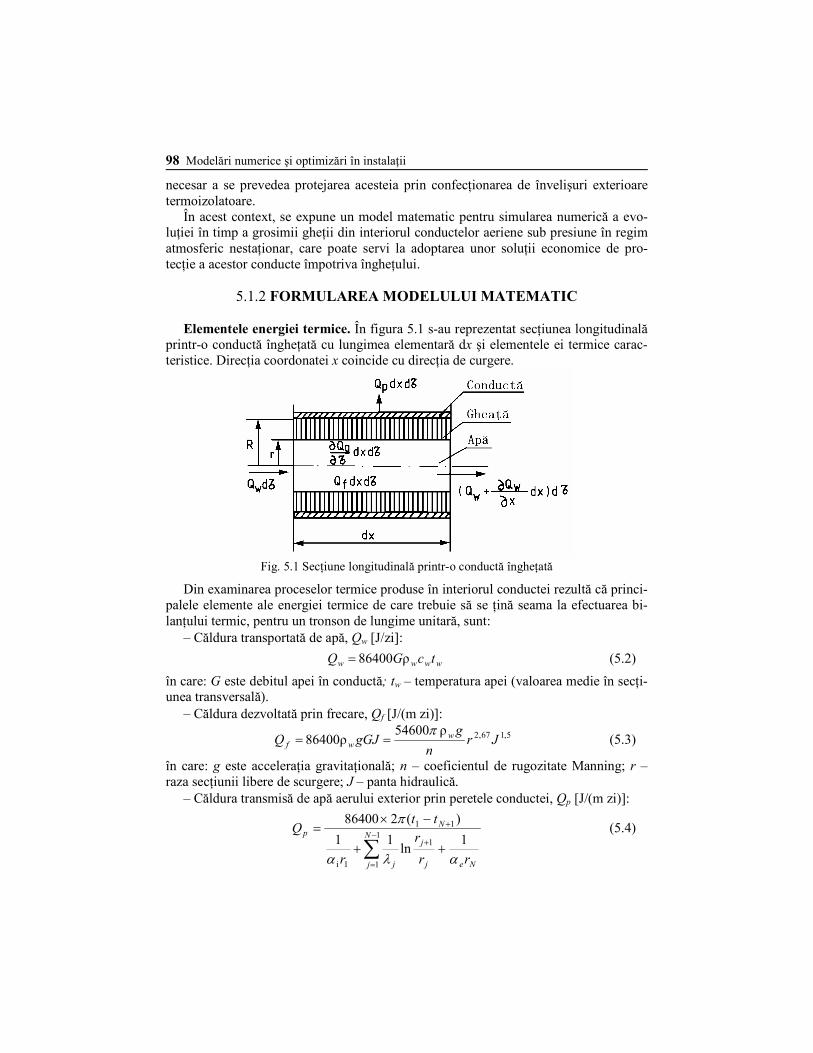
98 Modelări numerice şi optimizări în instalaŃii
necesar a se prevedea protejarea acesteia prin confecŃionarea de învelişuri exterioare termoizolatoare. În acest context, se expune un model matematic pentru simularea numerică a evo-luŃiei în timp a grosimii gheŃii din interiorul conductelor aeriene sub presiune în regim atmosferic nestaŃionar, care poate servi la adoptarea unor soluŃii economice de pro-tecŃie a acestor conducte împotriva îngheŃului.
5.1.2 FORMULAREA MODELULUI MATEMATIC Elementele energiei termice. În figura 5.1 s-au reprezentat secŃiunea longitudinală printr-o conductă îngheŃată cu lungimea elementară dx şi elementele ei termice carac-teristice. DirecŃia coordonatei x coincide cu direcŃia de curgere.
Fig. 5.1 SecŃiune longitudinală printr-o conductă îngheŃată
Din examinarea proceselor termice produse în interiorul conductei rezultă că princi-palele elemente ale energiei termice de care trebuie să se Ńină seama la efectuarea bi-lanŃului termic, pentru un tronson de lungime unitară, sunt: – Căldura transportată de apă, Qw [J/zi]:
wwww tcGQ ρ86400= (5.2)
în care: G este debitul apei în conductă; tw – temperatura apei (valoarea medie în secŃi-unea transversală). – Căldura dezvoltată prin frecare, Qf [J/(m zi)]:
5,167,2ρ5460086400ρ Jr
n
ggGJQ w
wf
π== (5.3)
în care: g este acceleraŃia gravitaŃională; n – coeficientul de rugozitate Manning; r – raza secŃiunii libere de scurgere; J – panta hidraulică. – Căldura transmisă de apă aerului exterior prin peretele conductei, Qp [J/(m zi)]:
∑−
=
+
+
++
−×=
1
1
1
1i
11
1ln
11
)(286400N
j Nej
j
j
Np
rr
r
r
ttQ
αλα
π (5.4)

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 99
în care: αi, αe sunt coeficienŃii de convecŃie interioară şi exterioară; λj – conductivitatea termică a stratului de material j al conductei; N – numărul straturilor de material.
Se neglijează rezistenŃa termică a transferului căldurii prin convecŃie de la apă la conductă (αi are valori ridicate) precum şi rezistenŃa termică a peretelui conductei, da-torită influenŃelor reduse ale acestora asupra fluxului termic, încât relaŃia (5.4) devine:
Rr
R
ttQ
e
Np
αλ
π1
ln1
)(286400
g
11
+
−×= + (5.5)
în care: λg este conductivitatea termică a gheŃii; R – raza interioară a conductei. łinând seama de expresia coeficientului de convecŃie exterioară [65]:
,3,770,3
0,7
R
we =α (5.6)
şi utilizând substituŃia:
fge R
R
Rln
11
λα−= (5.7)
se determină o rază fictivă (de calcul) Rf ce Ńine seama de starea de agitaŃie a aerului exterior:
0,7)(/0,615e wR
f RR ⋅= (5.8)
în care w este viteza vântului.
După introducerea temperaturilor t1 = tg = 0 oC şi tN+1 = te, formula (5.5) primeşte
forma:
fg
ep
R
r
tQ
ln2
186400
λ
π
−
−= (5.9)
în care: te este temperatura aerului exterior; tg – temperatura de topire a gheŃii. – Căldura de solidificare a apei, Qg [J/m]:
wgg LrRQ )(ρ 22 −=π (5.10)
în care: ρg este densitatea gheŃii; Lw – căldura latentă specifică de solidificare a apei. – Căldura transmisă de apă gheŃii, Qt [J/(m zi)]:
)(286400 gwit ttrQ −×= απ (5.11)
Coeficientul de convecŃie interioară se poate determina cu relaŃia [108]:
75,1
75,0
416r
Gi =α (5.12)
în care G este debitul apei în conductă.
Temperatura de topire a gheŃii variază cu presiunea apei din conductă [9]:

100 Modelări numerice şi optimizări în instalaŃii
Ht g310784,0 −×−= (5.13)
în care H este presiunea apei. Introducând relaŃiile (5.12) şi (5.13) în (5.11) se obŃine următoarea expresie:
0,75
36 )100,784(1072
×+×= −
r
GHtQ wt π (5.14)
BilanŃul termic. EcuaŃia de bilanŃ termic al sistemului apă din conductă – gheaŃă – mediul exterior, are expresia:
0τ
=+−+−∂
∂
∂∂ g
pfw
QQQ
x
Q (5.15)
în care τ este timpul. Pentru sistemul gheaŃă – conductă ecuaŃia de bilanŃ termic se scrie astfel:
0τ
=+−∂
∂ g
pt
QQQ (5.16)
EcuaŃia de bilanŃ termic pentru apa din conductă se exprimă astfel:
0=−+− tfw QQx
Q
∂∂
(5.17)
Modelul matematic şi numeric. Din cauza variaŃiei temperaturii şi a presiunii apei în timp de-a lungul conductei, grosimea stratului de gheaŃă va varia şi ea. Astfel, în general r = r(x, τ). În simularea numerică se utilizează următoarele valori ale para-metrilor: ρw = 1000 kg/m
3, g = 9,81 m/s2, cw = 4185 J/(kg K), Lw = 333,3×103 J/kg, ρg =
917 kg/m3, λg = 2,32 W/(m K), n = 0,01. • Strat de gheaŃă cu grosime constantă de-a lungul conductei. Pentru conductele cu lungime apreciabilă (x → ∞) se ia în considerare ipoteza formării unei mantale cilin-drice de gheaŃă pe peretele interior al conductei:
ττ∂
∂∂∂
d
d;0
rr
x
r== , (5.18)
Definind raza relativă a gheŃii (parametru adimensional):
fR
rr =∗ (5.19)
şi Ńinând seama de expresia pantei hidraulice J, dedusă din formula Chézy–Manning:
5,335,33
22 10,255
∗
=rR
GnJ
f
(5.20)
precum şi de relaŃiile (5.2), (5.3), (5.9) şi (5.10), ecuaŃia (5.15) primeşte forma:
0d
dρ2
ln2
1864001ρ
22000ρ86400 **
2
*
33,55,33
32
=−−+−∗ τ
π
λ
π∂∂ r
rRL
r
t
rR
Ggn
x
tcG fwg
g
e
f
wwww (5.21)
Utilizând relaŃiile (5.9), (5.10) şi (5.14), ecuaŃia (5.16) devine:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 101
0d
dρ2
ln2
1864001
)100,784(1072 20,75
0,75
36 =−−
×+× ∗
∗
∗∗
−
τπ
λ
ππ
rrRL
r
t
rR
GHt fwg
g
e
f
w (5.22)
łinând seama de (5.20) se determină gradientul de presiune:
,1
0,2555,335,33
22
∗
−=−=rR
GnJJJ
x
H
f
cc∂∂
(5.23)
în care Jc este panta conductei. Din ecuaŃia (5.22) se obŃine expresia parametrului tw care se derivează în raport cu abscisa x astfel:
−×−=
∗
−5,335,33
223 1
0,25510784,0rR
GnJ
x
t
f
cw
∂∂
(5.24)
Substituind relaŃia (5.24) şi valorile parametrilor cunoscuŃi în (5.21) se obŃine urmă-toarea ecuaŃie diferenŃială:
∗∗
−
∗
−
∗
∗ ×−×+=rrR
t
rR
G
rR
GJr
f
e
ff
c
ln
1100,66
1107,48
10,148
d
d2
36,.337,33
36
2τ, (5.25)
care permite studiul variaŃiei grosimii stratului de gheaŃă în timp. SoluŃia ecuaŃiei diferenŃiale (5.25) se obŃine utilizând metoda numerică de integrare Runge–Kutta, implementată în cadrul programului ordinator EVGHECA [98]. Întrucât temperatura apei, în general, este necesar a fi cunoscută în practică, aceasta se explicitează prin introducerea expresiei (5.25) în ecuaŃia (5.22):
HrR
GrRGJt
f
fcw3
4,584,58
52,240,750,750,25 100,784
1100,6361,256 −
∗
−∗ ×−×+= (5.26)
Derivata dr∗/dτ din ecuaŃia (5.25), pentru anumite condiŃii date, nu este funcŃie decât de raza relativă r∗. Graficul acestei funcŃii (fig. 5.2) intersectează axele de coordonate (dr∗/dτ=0) pentru valoarea: lim∗∗ = rr (5.27)
ce reprezintă raza relativă limită către care tinde gheaŃa din conductă în condiŃiile date. Prin formarea gheŃii pe peretele conductei, coefici-entul de rugozitate scade astfel încât, pentru o anumită grosime a gheŃii caracterizată de raza relativă maxim admisibilă, dată de relaŃia:
f
adR
Rr 0,705=∗ (5.28)
se poate asigura menŃinerea capacităŃii de transport fără a periclita instalaŃia ca urmare a măririi considerabile a vitezei de curgere a apei în conductă.
Fig. 5.2 Graficul funcŃiei dr∗/dτ

102 Modelări numerice şi optimizări în instalaŃii
Protejarea împotriva îngheŃului astfel încât să se obŃină o conductă lipsită complet de gheaŃă poate conduce la costuri de investiŃie foarte mari pentru izolaŃie. De aceea, dacă pentru anumite condiŃii date rezultă că: adlim rr ∗∗ ≥ (5.29)
atunci conducta poate să funcŃioneze fără să fie izolată termic. Dacă condiŃia (5.29) nu este satisfăcută se recomandă să se determine grosimea izolaŃiei termice acceptând for-marea unui strat de gheaŃă caracterizat de raza relativă egală cu r∗ad. În acest caz se va Ńine seama de relaŃia (5.4). Punând G = 0 în ecuaŃia (5.25), integrând ecuaŃia astfel obŃinută cu condiŃia de margine: r∗ = R/Rf, pentru τ = 0 şi considerând r∗ = r∗ad, după introducerea relaŃiei (5.28), se obŃine expresia timpului maxim admisibil de stagnare a apei în conductă τmax, în zile:
−= 0,076ln0,503758
2
maxfe R
R
t
Rτ (5.30)
• Strat de gheaŃă cu grosime variabilă de-a lungul conductei. Pentru conductele cu funcŃionare îndelungată la parametri hidraulici şi termici constanŃi (τ → ∞) se consi-deră ipoteza formării unui strat de gheaŃă variabil în lungul conductei:
x
r
x
rr
d
d;0
τ==
∂∂
∂∂
, (5.31)
În acest caz expresiile (5.21) şi (5.22) ale ecuaŃiilor de bilanŃ termic (5.15) şi (5.16) primesc formele:
0ln
2
1864001ρ
22000ρ86400
*
33.55.33
32
=−+−∗ r
t
rR
Ggn
x
tcG
g
e
f
wwww
λ
π∂∂
(5.32)
0ln
2
1864001
)100,784(10720,75
0,75
36 =−
×+×
∗∗
−
r
t
rR
GHt
g
e
f
w
λ
ππ (5.33)
Din ecuaŃia (5.33) se obŃine:
Hr
r
G
Rtt
f
ew3
75,075,0
10784,0ln
00559,0 −
∗
∗ ×−
= (5.34)
unde:
xrR
GnJHH
f
c
−+=
∗5,335,33
22
01
0,255 (5.35)
în care H0 este sarcina hidraulică disponibilă a conductei. Derivând în raport cu x expresia (5.34) şi introducând în (5.32) valorile cunoscute se obŃine ecuaŃia diferenŃială:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 103
[ ]
−−+
−×−=
∗∗
∗−∗
)ln(75,01
)ln(1000714,0
d
d08,5
2
08,6
75,23
rr
r
Rt
G
x
r
fe
)ln(75,01
)ln(1407,0
)ln(75,01
)ln(110625,0
225,0
75,0
75,025,0
75,025,03
∗
∗∗
∗
∗∗−
−+−
−−+
−×−
r
rr
Rt
GJ
r
rr
RG fe
c
f
(5.36)
care descrie variaŃia stratului de gheaŃă de-a lungul conductei. Graficul funcŃiei (5.36) intersectează axele de coordonate (dr*/dτ=0) pentru valoa-rea r∗lim. SoluŃia ecuaŃiei diferenŃiale (5.36) se obŃine utilizând metoda numerică de in-tegrare Runge–Kutta. Separând variabilele în ecuaŃia diferenŃială (5.32) şi integrând cu condiŃiile la li-mită: x = 0 pentru tw = tw0 şi x = xa pentru tw = twa, se determină abscisa xa a secŃiunii în care începe îngheŃul (r∗ = R∗ = R/Rf):
−
−+×−
−−=
−
∗
∗eac
fe
ewa
txR
GnJH
R
R
G
RtCB
ttCB
C
Ax
33,5
22
03
75,0
75,075,00
255,010784,0ln
0,00559-
)(ln
(5.37) unde:
wwcGA ρ86400= ; 33,5
32ρ22000
R
GgnB w= ;
fg R
R
G
RC
ln1
0024,0
28640075,0
λ
π
+
×= (5.38)
EcuaŃia (5.37) se poate rezolva cu una din metodele numerice cunoscute (metoda secantei, metoda Newton, metoda iteraŃiei). Pentru x = xa şi x = L (r∗ = r∗lim), utilizând relaŃia (5.34) se determină temperaturile apei twa respectiv tw lim. Din egalitatea relaŃiilor (5.2) şi (5.4) scrise sub formă diferenŃială după integrare cu condiŃiile la limită ale variabilelor: tw = tw0 pentru x = 0 şi tw = twL pentru x = L, se ob-Ńine debitul minim pentru prevenirea îngheŃului apei:
ewL
ewww
min
tt
ttc
wRLG
−
−=
0
7,0
lnρ
)(12,6 π (5.39)
în care: L este lungimea conductei; twL – temperatura apei în secŃiunea finală. • Strat de gheaŃă cu grosime variabilă în timp de-a lungul conductei. În general, stratul de gheaŃă format pe peretele interior al conductei variază atât în timp cât şi în lungul conductei: r∗ = r∗(x,τ). În acest caz expresiile (5.16) şi (5.17) ale ecuaŃiilor de bilanŃ termic primesc formele:
0ρ2ln
2
1864001
)100,784(1072 20,75
0,75
36 =−−
×+× ∗
∗
∗∗
−
∂τ∂
π
λ
ππ
rrRL
r
t
rR
GHt fwg
g
e
f
w (5.40)

104 Modelări numerice şi optimizări în instalaŃii
−+−∗
33,55,33
32 1ρ22000ρ86400
rR
Ggn
x
tcG
f
wwww ∂∂
01
)10784,0(107275,0
75,0
36 =
×+×−
∗
−
rR
GHt
f
wπ (5.41)
în care presiunea apei H are expresia (5.35). Din ecuaŃia (5.40) se determină expresia parametrului tw, care este derivată apoi în raport cu x. Substituind în (5.41) relaŃiile astfel obŃinute şi valorile parametrilor cunos-cuŃi rezultă ecuaŃia diferenŃială de ordinul doi:
0τττ
2
=++++ ∗∗∗∗∗ Er
Dx
rC
r
x
rB
x
rA
∂∂
∂∂
∂∂
∂∂
∂∂∂
(5.42)
unde A, B, C, D şi E sunt funcŃii de r∗ şi x definite astfel:
75,175,225,09108,3069 ∗×−= rRGA f
75,075,225,09102,5372 ∗×−= rRGB f
33,633,5
36
225,075,025,09 10106,0
)(ln
1ln75,01002,2
∗
−
∗∗
∗ ×−−
×−=r
x
R
G
rr
rRGtC
f
fe (5.43)
∗×−= rRD f291092,1
GJrR
G
r
tE c
f
e 933,533,5
356 10283,0
110088,2
ln10264,1 ×+×+×−=
∗∗
VariaŃia stratului de gheaŃă în timp în lungul conductei este descrisă de ecuaŃia cu derivate parŃiale de tip hiperbolic (5.42). Rezolvarea acestei ecuaŃii constă în deter-minarea funcŃiei r∗ = r∗(x,τ), care satisface atât ecuaŃia dată cât şi condiŃiile iniŃiale:
r∗(x,0) = R∗ = R/Rf şi 0τ
)0,(=∗
∂∂ xr
. SoluŃia acestei ecuaŃii cu derivate parŃiale se poate
obŃine utilizând integrarea numerică cu diferenŃe finite (metoda reŃelelor) prin proce-deul “în cruce”. Valorile r∗i,j pentru funcŃia r∗(xi,τj) sunt calculate în nodurile (i, j) ale unei reŃele de drepte (i = x/h, j = τ/s) din planul xOτ, unde h şi s sunt pasul de lungime şi de timp. Modelul numeric pentru simularea variaŃiei în timp în lungul conductei a stratului de gheaŃă în conductele aeriene sub presiune are un grad de generalitate sporit, întrucât Ńine seama de starea de agitaŃie a aerului înconjurător. De asemenea, modelul oferă posibilitatea ca, în urma unor calcule economice, să se poată adopta soluŃia optimă pentru protecŃia acestor conducte împotriva îngheŃului apei. Este recomandat a se instala de-a lungul conductelor expuse la vânt un sistem de control format dintr-un număr suficient de teletermometre cu semnalizare şi trans-mitere automată, care indică momentul când temperatura apei atinge limita de 0 °C.
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 105
5.2. ANALIZA NODALĂ A REłELELOR INELARE DE ALIMENTARE CU APĂ
5.2.1. CONSIDERAłII PRELIMINARE
Alimentarea cu apă a marilor centre urbane şi industriale se efectuează prin reŃele de distribuŃie cu dimensiuni din ce în ce mai mari, fiind necesar ca, în scopul asigurării unei uniformizări şi a unei mai mari stabilităŃi a liniilor de presiune cu efecte eco-nomico-energetice favorabile, să se realizeze cu o structură tot mai complexă (reŃele inelare, alimentare din mai multe surse, pompe de suprapresiune, elemente potenŃiale interioare etc.). De asemenea, proiectarea extinderilor sau reconsiderarea unor reŃele în vederea optimizării energetice a funcŃionării acestora conduce la complicarea schemei generale a sistemului şi implicit la sporirea dificultăŃilor de calcul. Formularea unor modele matematice adecvate, care să permită determinarea cir-culaŃiei debitelor şi a distribuŃiei presiunilor în reŃele inelare cu componente nestandard este esenŃială atât pentru rezolvarea corectă şi eficientă a etapei de proiectare, cât şi pentru analiza reŃelei în diferite regimuri de exploatare, normale sau de avarie. Această problemă apare în particular la proiectarea extinderilor sau reconsiderarea unor reŃele în vederea optimizării funcŃional-energetice. Există trei metode pentru analiza curgerii şi a distribuŃiei presiunilor în reŃele inela-re de alimentare cu apă (metoda ciclurilor, metoda nodurilor, metoda tronsoanelor), în funcŃie de parametrii hidraulici consideraŃi ca necunoscute. Pentru oricare din aceste metode trebuie rezolvat un sistem de ecuaŃii algebrice neliniare, caracteristic acestora, prin procedee iterative ca: Hardy-Cross [1], [7], [20], [21], [26], [47], Newton-Raphson [18], [32], [94], [112], teoria liniarizării [57], [139]. O reŃea publică de distribuŃie a apei are o configuraŃie cunoscută, rezultată din pro-iectarea acesteia, şi presiuni de serviciu stabilite în funcŃie de regimul de construcŃie adoptat. În timp, la reŃeaua existentă, se pot adăuga consumatori şi elemente potenŃiale care modifică distribuŃia iniŃială a presiunilor şi, prin urmare, este necesară o analiză în vederea găsirii unor soluŃii pentru asigurarea presiunilor de serviciu în toate nodurile de consum. Folosind un număr suficient de simulări numerice se pot stabili cota piezometrică (cotele piezometrice) a nodului (nodurilor) de alimentare şi alte măsuri necesare pentru asigurarea presiunilor de serviciu, precum şi soluŃiile de optimizare energetică a reŃelei. În acest scop este eficientă folosirea analizei nodale, în care necunoscutele sunt în ge-neral cote piezometrice. Deşi în metoda nodurilor numărul ecuaŃiilor este mai mare de-cât în metoda ciclurilor, densitatea elementelor nenule ale matricei ecuaŃiilor de nod este mai mică decât cea pentru ecuaŃiile pe inele [94], iar sistemul ecuaŃiilor nodale este mai uşor de formulat, furnizând o matrice „rară” a coeficienŃilor. Având în vedere că în Ńara noastră, analiza reŃelelor se efectuează de obicei cu aju-torul ecuaŃiilor de inel, precum şi avantajele metodei nodurilor, se recomandă pentru analiza reŃelelor inelare de distribuŃie metoda nodală, extinzând-o la reŃele complexe şi la probleme noi posibil de rezolvat cu ajutorul ei, în scopul găsirii unor soluŃii de opti-mizare funcŃional-energetică pentru reŃelele existente.

106 Modelări numerice şi optimizări în instalaŃii
În acest context, se descrie un model de analiză nodală generalizată pentru deter-minarea stării de presiune în reŃele inelare complexe, conŃinând componente nestan-dard de reŃea, în cadrul căruia se utilizează algoritmul numeric Newton–Raphson pen-tru rezolvarea sistemului neliniar de ecuaŃii nodale.
5.2.2. BAZELE CALCULULUI HIDRAULIC AL REłELELOR INELARE
În cazul unei topologii complexe pentru o reŃea inelară, cu rezervoare şi pompe în noduri, numărul total de inele independente (inele închise, conŃinând eventual pompe de suprapresiune şi armături de reglare, şi pseudoinele) M este dat de formula: RPNNTM +−= (5.44) în care: T este numărul conductelor reŃelei; N – numărul de noduri; NRP – numărul to-tal al rezervoarelor şi pompelor din noduri, egal cu numărul nodurilor cu cotă piezome-trică cunoscută. Fiecare inel deschis (pseudoinel) leagă două noduri, fiecare având cota piezometrică cunoscută (rezervor) sau o relaŃie determinată între debit şi nivelul piezometric (staŃie de pompare). În analiza clasică a reŃelelor inelare în regim permanent de curgere a apei, ecuaŃiile fundamentale ale modelului de calcul exprimă: – continuitatea debitului în noduri:
∑≠=
−==+=N
jii
RPjijj NNjqQf1
),...,1(0 (5.45)
în care: fj este debitul rezidual (neînchiderea) din nodul j; Qij – debitul de tranzit al tronsonului ij, cu semnul (+) când intră în nodul j, respectiv (–) când iese din nodul j; qj – debitul concentrat al nodului j, cu semnul (+) când alimentează nodul şi cu semnul (–) când se consumă în nod. – conservarea energiei pe inele:
∑=∈
==−=∆T
ijmij
mijijm Mmfhh
1
),...,1(0ε (5.46)
în care: ∆hm este pierderea de sarcină reziduală (divergenŃa) din inelul m; hij – pierderea de sarcină longitudinală pe tronsonul ij; εij – orientarea tronsonului ij cu valoarea (+1) sau (–1), după cum sensul de curgere al apei în conducta ij este acelaşi sau opus cu sensul de parcurs al inelului m şi valoarea (0) dacă ij ∉ m; fm – sarcina piezometrică introdusă de elemente potenŃiale în inelul m, dată de relaŃiile: • inele închise simple: 0=mf (5.47)
• inele închise conŃinând pompe integrate pe artere:
∑=∈
=T
ijmij
ijpijm Hf
1
,ε (5.48)

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 107
• inele deschise cu pompe şi/sau rezervoare în noduri: EIm ZZf −= (5.49) unde: ZI, ZE sunt cotele piezometrice la instalaŃiile de punere sub presiune de la intrare, respectiv ieşire din inel; Hp,ij – înălŃimea de refulare a pompei integrate pe tronsonul ij, la debitul Qij, aproximată prin interpolare parabolică pe caracteristica dată prin puncte:
CQBQAH ijijijp ++= 2, (5.50)
coeficienŃii A, B, C fiind determinaŃi prin trei puncte ale curbei caracteristice, pentru mai multe tipuri de pompe [101]. Pierderea de sarcină în conducte este dată de relaŃia funcŃională Darcy–Weisbach:
22
8ijr
ij
ijijij Q
D
L
gh λ
π= (5.51)
în care: g este acceleraŃia gravitaŃională; λij – coeficientul de rezistenŃă hidraulică al tronsonului ij, care se poate calcula folosind formula Colebrook–White; Lij, Dij, Qij – lungimea, diametrul şi debitul tronsonului ij; r – exponent având valoarea 5,0. EcuaŃia (5.51) este dificil de utilizat în cazul reŃelelor de conducte şi de aceea este convenabil a se scrie sub următoarea formă generală:
βijijij QRh = (5.52)
în care: β este un exponent cu valoarea 1,8…2; Rij – rezistenŃa hidraulică a tronsonului ij, având expresia:
rij
ij
rij
ij
ijD
LK
D
L
gR ==
2*8
π
λ (5.53)
VariaŃia parametrilor hidraulici λ∗ şi β a fost determinată pentru diferite materiale de conducte şi temperaturi ale apei [107], utilizând un program de calcul. Consumul specific de energie pentru distribuŃia apei în reŃea wsd, în kWh/m3, se obŃine raportând puterea hidraulică disipată pe conducte la suma debitelor de consum din noduri (de alimentare a reŃelei):
∑
∑
<=
=
+
=N
qj
j
T
ij
ijij
sd
q
QR
w
01
'
1
1β
00272,0 (5.54)
în care 'jq este debitul total consumat (concentrat plus distribuit) în nodul j.
5.2.3. PRINCIPIUL METODEI NODURILOR
În cazul în care se impune analiza stării de presiune într-o reŃea de distribuŃie sau când reŃeaua conŃine diverse elemente potenŃiale şi armături este potrivită utilizarea ca necunoscute a cotelor piezometrice, adică a ecuaŃiilor nodale.

108 Modelări numerice şi optimizări în instalaŃii
RelaŃia funcŃională (5.52) se scrie astfel:
1β−
=Π+−= ijijijijjiij QQRZZh (5.55)
sau:
( ) β
β1β
1
β
1
β
1 −−−
Π+−Π+−== ijjiijjiijijijij ZZZZRhRQ (5.56)
în care: Zi şi Zj sunt cotele piezometrice în nodurile i şi j, Πij – presiunea activă intro-dusă de sursa de presiune (pompă intermediară, armături) de pe tronsonul ij. Substituind relaŃia (5.56) în ecuaŃia (5.45) se obŃine un sistem de N–NRP ecuaŃii no-dale neliniare cu N–NRP necunoscute:
( ) ),...,1(0β
β1
1
β
1
RPjijjiijji
N
iji
ijj NNjqZZZZRf −==+Π+−Π+−=−
=≠
−
∑ (5.57)
Prin rezolvarea sistemului de ecuaŃii algebrice neliniare (5.57) se determină cotele piezometrice în N–NRP noduri, întrucât în celelalte NRP noduri cota piezometrică este necesar a fi cunoscută (cel puŃin NRP = 1), iar apoi cu relaŃiile (5.55) şi (5.56) se calcu-lează pierderile de sarcină şi debitele care circulă pe tronsoane. Principiul metodei nodurilor constă în considerarea unui set de cote piezometrice iniŃiale în noduri ca şi cunoscute, care se corectează succesiv până când reziduul debi-telor în noduri fj devine cât mai mic posibil, de unde şi denumirea de „principiul egali-zării debitelor” [1]. Pentru a realiza acest obiectiv se pretează utilizarea algoritmului numeric Newton–Raphson, cu unele precauŃii pentru evitarea punctelor singulare, având în vedere uşurinŃa construcŃiei şi implementării într-un program ordinator a aces-tuia.
5.2.4. MODELUL NUMERIC DE ANALIZĂ NODALĂ Modelul de analiză nodală apelează la următoarele date de bază: topologia re- Ńelei; lungimile, diametrele şi rugozitatea conductelor; cotele geodezice şi debitele concentrate pentru fiecare nod; presiunile active pe tronsoane; cota piezometrică în unul sau mai multe noduri ale reŃelei (puncte obligate, instalaŃii de punere sub presiune).
• Rezolvarea numerică a sistemului de ecuaŃii algebrice neliniare generat de relaŃia (5.57) se face cu algoritmul iterativ Newton–Raphson în următorii paşi principali: a) stabilirea unei aproximări iniŃiale (k = 0) a cotelor piezometrice Z
)0( = Z)0(
1
Z)0(
2 ... Z N)0( , care se realizează din relaŃia (5.57), admiŃând pentru relaŃia (5.56) o
formă liniară:
),...,1()( β)0(
1
)0(1RPjiji
N
iji
jij NNjqZZR −==Π−−∑=≠
− (5.58)

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 109
b) determinarea vectorului de corecŃie ∆Z = δZ1 δZ2 ... δZN la o iteraŃie oarecare (k+1) se face rezolvând următorul sistem de ecuaŃii algebrice liniare:
−
−
=
NN
N
NN
N
f
f
Z
Z
Z
f
Z
f
Z
f
Z
f
MM
LL
MM
LL
11
1
1
1
1
δ
δ
∂∂
∂∂
∂∂
∂∂
(5.59)
unde derivatele parŃiale se obŃin din (5.57). Deoarece obligatoriu trebuie impuse NRP cote piezometrice de referinŃă, sistemul (5.57) se rezolvă pentru N–NRP necunoscute;
c) modificarea vectorului Z al necunoscutelor potrivit relaŃiei:
)1()()1( θ ++ ∆+= kkk ZZZ (5.60)
în care coeficientul de pondere θ ∈ (0, 1], iar vectorul de corecŃie de la iteraŃia (k+1) este termenul ∆Z
(k+1);
d) paşii b şi c se efectuează iterativ până la atingerea preciziei de calcul ε stabilită prin condiŃia:
,),...,1(ε)(RP
kj NNjf −=≤− (5.61)
sau a numărului maxim de iteraŃii admis. După determinarea cotelor piezometrice Zj, se pot calcula uşor şi debitele pe tron-soane cu ajutorul relaŃiei (5.56), precum şi alŃi parametri hidraulici caracteristici reŃelei (presiuni disponibile, viteze de curgere etc.).
• Deşi ecuaŃiile de nod sunt mai uşor de generat, ele sunt însoŃite de unele dificultăŃi de calcul cum ar fi apariŃia oscilaŃiilor în jurul soluŃiei [32] şi existenŃa unor puncte singulare (Zi+Πij ≅ Zj) ale Jacobianului, generate de tronsoanele cu pierderi de sarcină mici. Pentru a elimina dificultăŃile datorate instabilităŃii în punctele singulare se proce-dează la o regularizare de tip spline cubic pentru funcŃia de forma sgn(Zi–Zj+Πij)|Zi–Zj+Πij|
x, înlocuind funcŃiile fj(Zi–Zj) exprimate de (5.57), prin funcŃiile:
( )
( )
≤Π+−=+
−+
Π+−−
Π+−
>Π+−=+Π+−Π+−
=
∑
∑
=≠
−
=≠
−−
ω ;03ω
1ω
ω
ω ;0
1
2
1
11
ijji
N
iji
jijjiijjix
ijx
N
iji
ijjij
x
ijjiijjiij
j
ZZqxZZ
xZZ
R
ZZqZZZZR
f
(5.62) în care x = 1/β, iar ω se alege în mod convenabil (10–4...10–5). Derivatele parŃiale se obŃin din (5.62), după cum urmează:
110 Modelări numerice şi optimizări în instalaŃii
≤Π
−+
Π+−−
>ΠΠ+−
==+−
+−
−
−−
ω;ω
3
ω)1(
ω
3ω
ω;2
1
ijji
ijjixij
x
ijji
x
ijjix
ij
j
i
i
j
ZZxZZ
xR
ZZZZRx
Z
f
Z
f
∂∂
∂
∂ (5.63)
∑=≠
−=N
iji i
j
j
j
Z
f
Z
f
1
∂
∂
∂
∂ (5.64)
• Din examinarea relaŃiei (5.57) se observă că satisfacerea continuităŃii debitelor în noduri se poate realiza admiŃând ca variabile nu numai cotele piezometrice Zj ci şi rezistenŃele hidraulice Rij şi debitele concentrate în noduri qj, cu condiŃia ca suma tuturor acestor necunoscute să fie N–NRP, astfel încât utilizarea modelului poate fi extinsă la rezolvarea de noi probleme.
Dacă se notează necunoscutele cote piezometrice cu wZZZ ...1= , rezistenŃe hidra-
ulice cu prij RRR ...= şi debite concentrate în noduri cu nj qqq ...= , atunci pornind
de la vectorul iniŃial )0()0()0()0()0()0(1
)0( ......... njprijw qqRRZZX = se determină corecŃiile la
fiecare iteraŃie din sistemul liniar:
−
−
−
=
+++
N
w
n
ij
n
NN
n
ww
n
f
f
f
q
R
Z
q
f
Z
f
q
f
Z
f
q
f
Z
f
M
M
M
M
LL
MM
LL
MM
LL
1
11
1
1
1
1
1
1
1
δ
δ
δ
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
(5.65)
în care derivatele parŃiale referitoare la Rij şi qj au expresiile:
−+
Π+−−
Π+−−
Π+−Π+−−
=≤Π+−
>Π+−
+−−
−+−
ω
ω
;3ω
)1(ω
ω
;)(2
)1(
1)1(
ijjiijjiijjix
ijx
ijji
x
ijjiijjix
ij
ij
j
ZZ
ZZ
xZZ
xZZ
Rx
ZZZZRx
R
f
∂
∂
(5.66)
1=j
j
q
f
∂
∂ (5.67)
Sistemul de ecuaŃii algebrice (5.65) nu are soluŃie pentru acele combinaŃii ale necunoscutelor care conduc la existenŃa de linii sau coloane în matricea sistemului cu toŃi termenii nuli. De aceea la alegerea acestor combinaŃii trebuie să se respecte unele reguli:
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 111
– la fiecare nod trebuie să existe cel puŃin una din următoarele necunoscute: debit concentrat în nod, cotă piezometrică la nodul respectiv sau la oricare nod adiacent, rezistenŃă hidraulică a oricărui tronson care concură în nod; – un nod care are debitul concentrat necunoscut trebuie conectat la cel puŃin un alt nod cu debit cunoscut; – un tronson de conductă cu rezistenŃă hidraulică necunoscută nu trebuie să aibă mai mult de o necunoscută la nodurile care îl definesc (cota piezometrică sau debitul consumat în nod). Utilizarea algoritmului Newton–Raphson pentru rezolvarea sistemului de ecuaŃii neliniare (5.62) are următoarele avantaje: – matricea Jacobian conŃine cel mult N+2T elemente nenule [94], ceea ce îi conferă proprietatea de a fi „rară”; – în majoritatea cazurilor această matrice este simetrică, ireductibilă şi slab domi-nant diagonală, ceea ce asigură existenŃa matricei inverse; – mai mult, matricea inversă este o matrice pozitivă, proprietate ce conferă calităŃi de stabilitate numerică în rezolvarea sistemului algebric liniar (5.65) la fiecare iteraŃie de calcul. Pe baza acestui model de analiză nodală s-a elaborat programul ordinator ANOREC [105]. Prin posibilitatea de introducere ca necunoscute a consumurilor la noduri şi a rezistenŃelor hidraulice ale unor conducte, modelul numeric de analiză nodală oferă o elasticitate mai mare şi îşi extinde folosirea la noi probleme, cum sunt studierea unei reŃele existente în vederea stabilirii posibilităŃilor de racordare a noi consumatori sau a identificării rezistenŃelor hidraulice, alături de determinarea stării de presiune în reŃea în scopul asigurării presiunii de serviciu.
5.3. SIMULAREA DINAMICĂ A REłELELOR DE ALIMENTARE CU APĂ
5.3.1. CONSIDERAłII PRELIMINARE
În condiŃii normale de funcŃionare a unei reŃele de distribuŃie a apei se poate con-sidera că apa este un fluid incompresibil, care permite folosirea unor ecuaŃii simple de conservare a debitelor în noduri şi a energiei pe inele, la elaborarea modelului mate-matic de analiză a reŃelelor de alimentare cu apă. Analiza proceselor tranzitorii, care ia în considerare compresibilitatea fluidelor, este utilizată în mod normal numai în cazuri speciale, cum ar fi închiderea bruscă a vanelor sau comutarea pompelor. Se folosesc două tipuri de simulări pentru a determina repartiŃia debitelor pe tron-soane şi a stării de presiune pentru o reŃea cu condiŃii de curgere incompresibilă, şi anu-me simulări momentane şi dinamice. Simularea momentană (statică sau staŃionară) este folosită la determinarea stării hidraulice a reŃelei la un moment dat şi a fost tratată în subcapitolul precedent.

112 Modelări numerice şi optimizări în instalaŃii
În anumite situaŃii, simularea momentană a reŃelei nu oferă o privire de ansamblu suficientă şi se impune analiza comportamentului hidraulic al reŃelei pe perioadă extinsă (simulare dinamică). AplicaŃiile simulării pe perioadă extinsă sunt numeroase [141] şi includ verificarea presiunilor de serviciu, optimizarea în exploatare, evaluarea răspunsului dinamic al reŃelei la diverse evenimente (defecte, avarii) şi analizele sto-hastice pe termen lung pentru evaluarea fiabilităŃii reŃelei. În continuare se face referire în primul rând la teoria de bază a simulării pe perioadă extinsă a fluidelor incompresibile, discutând comportamentul dinamic al reŃelelor de conducte, iar apoi se prezintă o nouă metodă pentru soluŃionarea ecuaŃiilor dinamice, numită metoda integrării explicite, pentru cazul reŃelelor de conducte fără cereri. Utili-zarea acestei metode este ilustrată printr-o aplicaŃie numerică, iar performanŃele (efor-tul de calcul şi precizia) superioare ale acesteia sunt puse în evidenŃă prin comparare cu cele ale metodei clasice Euler.
5.3.2. ECUAłIILE DINAMICE ALE REłELEI AnumiŃi parametri ai unei reŃele de alimentare cu apă variază în timp, fiind denu-miŃi parametri dinamici şi includ înălŃimile apei în rezervoare, grafice de comandă şi anumite condiŃii finale (cererea utilizatorilor, cotele piezometrice la sursă comandate din exterior, defectele elementelor, condiŃiile de avarie din reŃea). Diverşi parametri dinamici nu se cunosc şi trebuie calculaŃi. Graficele de comandă, defectele şi evenimentele de avarie sunt dificil de calculat direct şi sunt determinate indirect, prin proceduri de optimizare, iar apoi sunt evaluate folosind simularea pe perioadă extinsă. Odată ce se cunosc valorile tuturor variabilelor dinamice din reŃea, se poate determina starea hidraulică a reŃelei în orice moment, prin efectuarea unei analize momentane. Legea de conservare a masei pentru curgerea incompresibilă, aplicată unui nod cu acumulare (stocare), arată că debitul de fluid intrat în nod minus debitul de fluid care părăseşte nodul şi variaŃia volumului acumulat în nod trebuie să fie egală cu zero:
0d
d
1
=−−∑=
N
i
it
VqQ (5.68)
în care: N este numărul de conducte conectate în nod; Qi – debitul spre nod în conducta i; q – debitul concentrat consumat (cererea) în nod; V – volumul acumulat în nod; t – timpul. Dacă debitul spre nod şi cererea din nod se însumează, formând afluxul net Q şi rezervorul din nod se presupune că are o arie constantă A a secŃiunii transversale, iar înălŃimea apei (cota piezometrică) în rezervor este Z, ecuaŃia (5.68) se poate scrie sub forma:
Qt
A =d
dZ (5.69)
şi se numeşte ecuaŃia dinamică a rezervorului. Dacă se consideră o reŃea constând dintr-un anumit număr de rezervoare, compor-tamentul dinamic al reŃelei este descris de sistemul de ecuaŃii diferenŃiale:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 113
QZ
A =td
d (5.70)
în care: A este vectorul ariei secŃiunilor transversale ale rezervoarelor; Z – vectorul cotei piezometrice (înălŃimii apei) în rezervoare; Q – vectorul afluxului net în rezer-voare. Afluxurile nete în rezervoarele dintr-o reŃea de conducte nu pot fi determinate ana-litic, ele necesitând o rezolvare iterativă a ecuaŃiilor statice ale reŃelei (simularea mo-mentană). Drept urmare, ecuaŃiile dinamice ale reŃelelor de conducte nu se pot solu-Ńiona analitic. InterdependenŃa afluxurilor nete şi cotelor piezometrice în rezervor face ca soluŃionarea acestor ecuaŃii să fie mult mai dificilă ca integrarea numerică ordinară, unde funcŃia ce trebuie integrată este cunoscută în punctele viitoare. Problema se complică şi mai mult dacă se iau în considerare o serie de factori întâlniŃi pe perioada exploatării cum ar fi modificări în timp a configuraŃiei reŃelei şi suprafeŃe transversale variabile ale rezervoarelor. Este important să se reŃină că în majoritatea cazurilor parametrii dinamici (aflu-xurile nete, suprafeŃele transversale) fie că sunt cunoscuŃi, fie că sunt funcŃii ale cotelor piezometrice în rezervor. Aceasta permite ecuaŃiilor dinamice să fie scrise în forma generală: 0),,( =tF Z'Z (5.71)
unde Z’ este vectorul derivatei de ordinul 1 a lui Z, în funcŃie de t. Din moment ce derivatele de ordinul 1 ale cotelor piezometrice în rezervor nu se cer la efectuarea simulării momentane a reŃelei, această ecuaŃie se poate scrie explicit sub forma: ),( tf ZZ'= (5.72)
Sistemul de ecuaŃii (5.72) este într-o formă potrivită pentru aplicarea tehnicilor de integrare numerică, cum ar fi metodele Euler şi Euler îmbunătăŃită. Aflarea valorii Z’ pentru orice valori ale lui t şi Z implică în primul rând efectuarea unei simulări mo-mentane a reŃelei pentru a obŃine afluxurile nete în rezervor, urmată apoi de convertirea acestor valori ale debitului la Z’ prin împărŃirea afluxului net la aria constantă a supra-feŃei transversale. Sistemul general de ecuaŃii diferenŃiale ale rezervorului este un sistem de ecuaŃii di-ferenŃiale ordinare de primul ordin, neliniare (ordinul lui Z în F este diferit de 1) şi neo-mogene (anumiŃi termeni din partea dreaptă a ecuaŃiei îl vor include numai pe t şi alŃii numai pe Z). Vectorul cotei piezometrice în rezervoare la pornirea analizei Z0 este cu-noscut (Z(t0)=Z0).
5.3.3. REZOLVAREA ECUAłIILOR DINAMICE Metodele care se aplică în mod curent la soluŃionarea ecuaŃiilor dinamice implică folosirea tehnicilor de integrare numerică sau de regresie, care necesită discretizarea ecuaŃiei diferenŃiale. În continuare se descrie o nouă metodă de soluŃionare a ecuaŃiilor dinamice, pe baza ecuaŃiilor simplificate şi aplicarea integrării explicite la soluŃionarea lor.

114 Modelări numerice şi optimizări în instalaŃii
Metodele de integrare numerică pot fi de încredere şi precise, dar necesită adesea un număr mare de evaluări ale funcŃiilor întrucât un optim între complexitatea calcu-lului şi precizie se obŃine la un număr sporit de evaluări. Pentru reŃelele de conducte, fiecare evaluare a funcŃiei necesită o simulare momentană a reŃelei, conducând la o procedură de calcul neeficientă. În practică se folosesc două metode de integrare nume-rică, cele mai simple şi cel mai puŃin precise, la soluŃionarea ecuaŃiilor dinamice ale rezervoarelor. Aceste metode sunt: metoda Euler şi metoda Euler îmbunătăŃită [12]. • Metoda Euler necesită doar o evaluare a funcŃiei la începutul fiecărui interval de timp ∆t. Cota piezometrică în rezervor la sfârşitul intervalului de timp se estimează apoi presupunând că valorile funcŃiei rămân constante pe perioada unui interval. În metoda Euler, afluxurile nete din rezervor, la începutul intervalului de timp sunt determinate prin efectuarea unei simulări momentane. Apoi, pentru fiecare rezervor, se estimează variaŃia ∆Z a cotei piezometrice (înălŃimii apei) pentru intervalul de timp considerat folosind ecuaŃia:
A
tQZ k∆=∆ (5.73)
ÎnălŃimea piezometrică în rezervor la sfârşitul intervalului de timp Zk+1 se calculează adăugând ∆Z la cota piezometrică a rezervorului de la începutul intervalului de timp Zk:
ZZZ kk ∆+=+1 (5.74)
• Metoda Euler îmbunătăŃită aplică aceeaşi strategie ca metoda Euler presupunând că debitele într-un anumit interval de timp rămân constante. Această metodă este mult mai precisă, dar necesită cel puŃin două evaluări ale funcŃiei pe un interval de timp. Primul pas la metoda Euler îmbunătăŃită îl constituie efectuarea unei aproximări iniŃiale a cotei piezometrice în rezervor la finele intervalului de timp folosind metoda Euler. Se face apoi o altă simulare momentană la finele intervalului de timp. Afluxul mediu în rezervor dintre începutul şi sfârşitul intervalului de timp se foloseşte în rela-Ńiile (5.73) şi (5.74) pentru a corecta înălŃimea apei din rezervor la sfârşitul intervalului de timp. Procesul se repetă până când variaŃia cotei piezometrice în rezervor se află în intervalul de precizie admis. Rao şi Bree [86] şi Rao ş.a. [87] au fost primii care au sugerat o procedură siste-matică pentru efectuarea analizelor dinamice ale reŃelelor de conducte de apă, prin apli-carea metodei Euler îmbunătăŃite. Dezavantajul esenŃial atât la metoda Euler cât şi la metoda Euler îmbunătăŃită îl constituie sensibilitatea erorilor cu aproximarea intervalului de timp [62]. Metodele de regresie. La metodele de regresie [24], [63] funcŃiile empirice sau se-miempirice sunt ajustate pentru a calcula datele cu privire la comportamentul reŃelelor de conducte folosind diferite condiŃii de exploatare, cum ar fi înălŃimile relative din re-zervoare, configuraŃiile pompelor şi cererile reŃelei. Dezavantajul major al metodelor de regresie constă în aceea că trebuie calculată o nouă curbă pentru fiecare combinaŃie posibilă de variabile dinamice la fiecare rezervor, mărind numărul de curbe exponenŃial cu numărul de rezervoare şi stările posibile ale reŃelei şi limitând astfel mărimea reŃelei ce poate fi modelată.
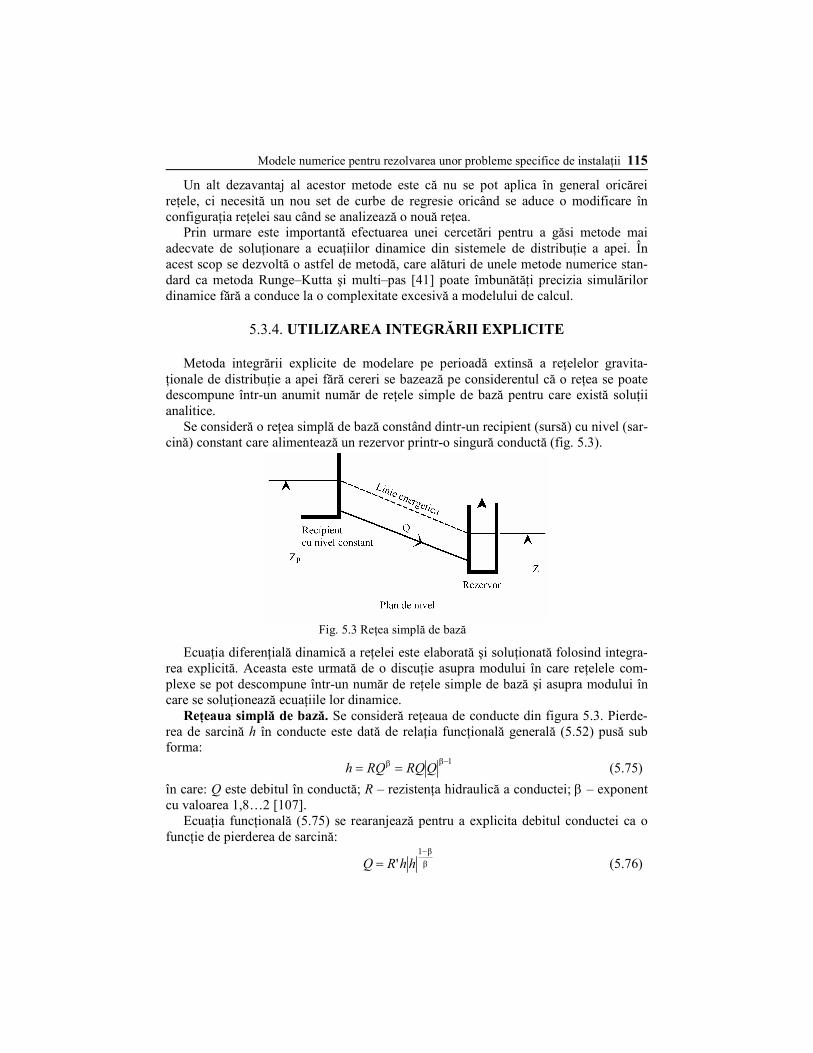
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 115
Un alt dezavantaj al acestor metode este că nu se pot aplica în general oricărei reŃele, ci necesită un nou set de curbe de regresie oricând se aduce o modificare în configuraŃia reŃelei sau când se analizează o nouă reŃea. Prin urmare este importantă efectuarea unei cercetări pentru a găsi metode mai adecvate de soluŃionare a ecuaŃiilor dinamice din sistemele de distribuŃie a apei. În acest scop se dezvoltă o astfel de metodă, care alături de unele metode numerice stan-dard ca metoda Runge–Kutta şi multi–pas [41] poate îmbunătăŃi precizia simulărilor dinamice fără a conduce la o complexitate excesivă a modelului de calcul.
5.3.4. UTILIZAREA INTEGRĂRII EXPLICITE Metoda integrării explicite de modelare pe perioadă extinsă a reŃelelor gravita-Ńionale de distribuŃie a apei fără cereri se bazează pe considerentul că o reŃea se poate descompune într-un anumit număr de reŃele simple de bază pentru care există soluŃii analitice. Se consideră o reŃea simplă de bază constând dintr-un recipient (sursă) cu nivel (sar-cină) constant care alimentează un rezervor printr-o singură conductă (fig. 5.3).
Fig. 5.3 ReŃea simplă de bază
EcuaŃia diferenŃială dinamică a reŃelei este elaborată şi soluŃionată folosind integra-rea explicită. Aceasta este urmată de o discuŃie asupra modului în care reŃelele com-plexe se pot descompune într-un număr de reŃele simple de bază şi asupra modului în care se soluŃionează ecuaŃiile lor dinamice. ReŃeaua simplă de bază. Se consideră reŃeaua de conducte din figura 5.3. Pierde-rea de sarcină h în conducte este dată de relaŃia funcŃională generală (5.52) pusă sub forma:
1ββ −
== QRQRQh (5.75)
în care: Q este debitul în conductă; R – rezistenŃa hidraulică a conductei; β – exponent cu valoarea 1,8…2 [107]. EcuaŃia funcŃională (5.75) se rearanjează pentru a explicita debitul conductei ca o funcŃie de pierderea de sarcină:
β
β1
'−
= hhRQ (5.76)

116 Modelări numerice şi optimizări în instalaŃii
unde:
β
1
1'
=R
R , (5.77)
este un coeficient constant al curgerii (debitului). Scriind această ecuaŃie pentru o reŃea simplă de bază, în cazul în care sursa cu nivel constant are o cotă piezometrică mai mare ca cea din rezervor, se obŃine:
pp ZZZZRQ ≤−= ;)(' β
1
(5.78)
în care: Z este cota piezometrică în rezervor; Zp – cota piezometrică constantă la sursă. Substituind relaŃia (5.78) în ecuaŃia (5.69) şi făcând o rearanjare, se obŃine o ecuaŃie diferenŃială care descrie comportamenul dinamic al reŃelei simple de bază:
( ) tA
R
ZZ
Z
p
d'd
β/1=
− (5.79)
Cu toate că ecuaŃia (5.79) este neliniară şi neomogenă, pentru aceasta există o solu-Ńie analitică sub forma [62]:
( ) CtA
RZZ p +=−
−−
'
β1
ββ1
β
(5.80)
în care C este termenul constant obŃinut din condiŃia iniŃială Z=Z0 la t=t0. Substituind C în ecuaŃie şi rearanjând rezultatele se obŃine următoarea ecuaŃie dinamică a cotei piezo-metrice în rezervor:
( ) ( ) ( )1β
β
0β
1β
0 β
'1β −−
−
−−−−= tt
A
RZZZZ pp (5.81)
Expresia debitului funcŃie de timp se obŃine prin substituirea acestei ecuaŃii în ecu-aŃia (5.68):
( ) ( ) ( )1β
1
0β
1β
0 β
'1β'
−−
−
−−−= tt
A
RZZRQ p (5.82)
Similar, se poate obŃine ecuaŃia dinamică a rezervorului pentru cazul în care Z ≥ Zp, după cum urmează:
( ) ( ) ( )1β
β
0β
1β
0 β
'1β −−
−
−−−+= tt
A
RZZZZ pp (5.83)
ReŃele complexe – Comportamentul dinamic. Energia mecanică E pe unitatea de greutate într-un punct al reŃelei hidraulice (fig. 5.3) este dată de ecuaŃia lui Bernoulli:
g
v
g
pZE
2
α
ρ
2
++= (5.84)
în care: Z este cota punctului considerat, raportată la un plan de nivel; p – presiunea; ρ – densitatea apei; v – viteza apei; α – coeficientul de neuniformitate a distribuŃiei de viteze; g – acceleraŃia gravitaŃională.
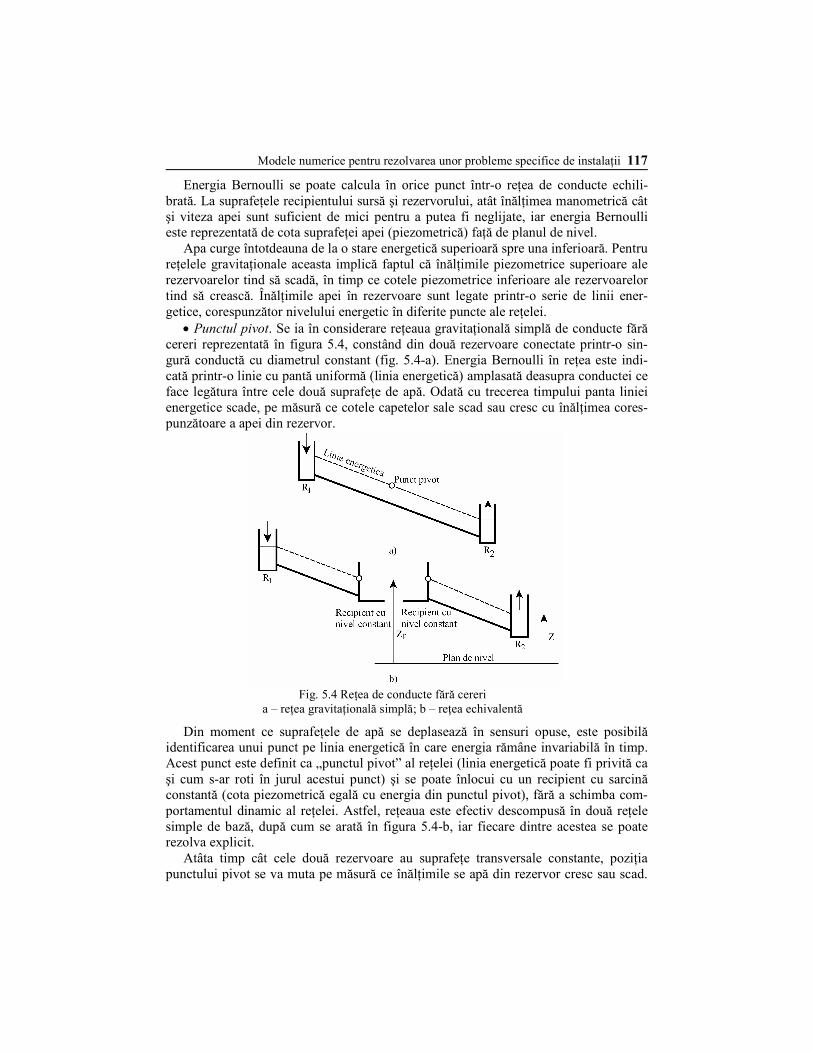
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 117
Energia Bernoulli se poate calcula în orice punct într-o reŃea de conducte echili-brată. La suprafeŃele recipientului sursă şi rezervorului, atât înălŃimea manometrică cât şi viteza apei sunt suficient de mici pentru a putea fi neglijate, iar energia Bernoulli este reprezentată de cota suprafeŃei apei (piezometrică) faŃă de planul de nivel. Apa curge întotdeauna de la o stare energetică superioară spre una inferioară. Pentru reŃelele gravitaŃionale aceasta implică faptul că înălŃimile piezometrice superioare ale rezervoarelor tind să scadă, în timp ce cotele piezometrice inferioare ale rezervoarelor tind să crească. ÎnălŃimile apei în rezervoare sunt legate printr-o serie de linii ener-getice, corespunzător nivelului energetic în diferite puncte ale reŃelei. • Punctul pivot. Se ia în considerare reŃeaua gravitaŃională simplă de conducte fără cereri reprezentată în figura 5.4, constând din două rezervoare conectate printr-o sin-gură conductă cu diametrul constant (fig. 5.4-a). Energia Bernoulli în reŃea este indi-cată printr-o linie cu pantă uniformă (linia energetică) amplasată deasupra conductei ce face legătura între cele două suprafeŃe de apă. Odată cu trecerea timpului panta liniei energetice scade, pe măsură ce cotele capetelor sale scad sau cresc cu înălŃimea cores-punzătoare a apei din rezervor.
Fig. 5.4 ReŃea de conducte fără cereri
a – reŃea gravitaŃională simplă; b – reŃea echivalentă
Din moment ce suprafeŃele de apă se deplasează în sensuri opuse, este posibilă identificarea unui punct pe linia energetică în care energia rămâne invariabilă în timp. Acest punct este definit ca „punctul pivot” al reŃelei (linia energetică poate fi privită ca şi cum s-ar roti în jurul acestui punct) şi se poate înlocui cu un recipient cu sarcină constantă (cota piezometrică egală cu energia din punctul pivot), fără a schimba com-portamentul dinamic al reŃelei. Astfel, reŃeaua este efectiv descompusă în două reŃele simple de bază, după cum se arată în figura 5.4-b, iar fiecare dintre acestea se poate rezolva explicit. Atâta timp cât cele două rezervoare au suprafeŃe transversale constante, poziŃia punctului pivot se va muta pe măsură ce înălŃimile se apă din rezervor cresc sau scad.

118 Modelări numerice şi optimizări în instalaŃii
Totuşi, pentru modificări mici ale cotelor piezometrice din rezervor, punctul pivot se poate presupune că rămâne staŃionar. ExistenŃa unui punct pivot în reŃelele complexe nu este evidentă imediat. Se ia în considerare, de exemplu, reŃeaua de conducte fără cereri din figura 5.5, care constă dintr-o sursă şi trei rezervoare. Pentru estimarea poziŃiei punctului pivot se consideră un interval de timp şi se efectuează simularea momentană la începutul intervalului.
Din rezultatele obŃinute se determină valorile afluxului net (debitului de alimentare) pentru toate rezervoarele din reŃea, care în cazul debitelor consumate din rezervoare sunt negative. Aceste rezultate furnizează deja un interval valabil al cotei piezometrice a punctului pivot, din moment ce cota punctului pivot trebuie să fie mai mică decât cotele piezometrice ale tuturor rezervoarelor cu fluxuri nete (debite consumate) şi mai mare ca a tuturor rezervoarelor cu afluxuri nete. Se alege un punct pivot iniŃial având Zp în intervalul valabil determinat. Folosind punctul pivot presupus, reŃeaua se des-compune în reŃelele sale simple de bază care o constituie. Coeficientul de curgere al fiecărei subreŃele simplificate se calculează din relaŃia (5.76) folosind rezultatele obŃinute an-terior:
( ) β
β1
00
0'−
−−
=
ZZZZ
QR
pp
(5.85)
în care: Q0 este debitul din rezervor, determinat prin simularea momentană; Z – cota piezometrică în rezervor. Introducând estimările coeficientului de curgere în relaŃia (5.76) rezultă un debit în subreŃea funcŃie de înălŃimea apei din rezervor, dat de relaŃia:
0
β
β1
00
QZZ
ZZ
ZZ
ZZQ
p
p
p
p
−
−
−
−
−= (5.86)
Se estimează cota piezometrică în rezervoare la mijlocul intervalului de timp fo-losind metoda Euler şi se efectuează o nouă simulare momentană cu înălŃimile de apă actualizate din rezervoare. Aceasta conduce la un nou set de valori ale afluxului în rezervoare, care sunt folosite la testarea preciziei de selectare a cotei piezometrice iniŃiale a punctului pivot. Dacă s-a ales cota reală a punctului pivot, subreŃelele ar trebui să previzioneze valorile afluxului din rezervoare care să fie identice cu cele de la cea de-a doua simulare momentană. Totuşi, întrucât de obicei alegerea iniŃială a cotei piezometrice a punctului pivot nu este precisă vor exista diferenŃe semnificative ale debitelor. Cota piezometrică reală a punctului pivot se va determina prin minimizarea erorii dintre debitele calculate folosind cota piezometrică iniŃială a acestui punct şi rezultatele celei de-a doua simulări momentane. La determinarea debitelor pentru cotele piezometrice din rezervoare la cea de-a doua simulare momentană se foloseşte relaŃia (5.78). Eroarea ε între debitele previzio-
Fig. 5.5 ReŃea complexă
fără cereri
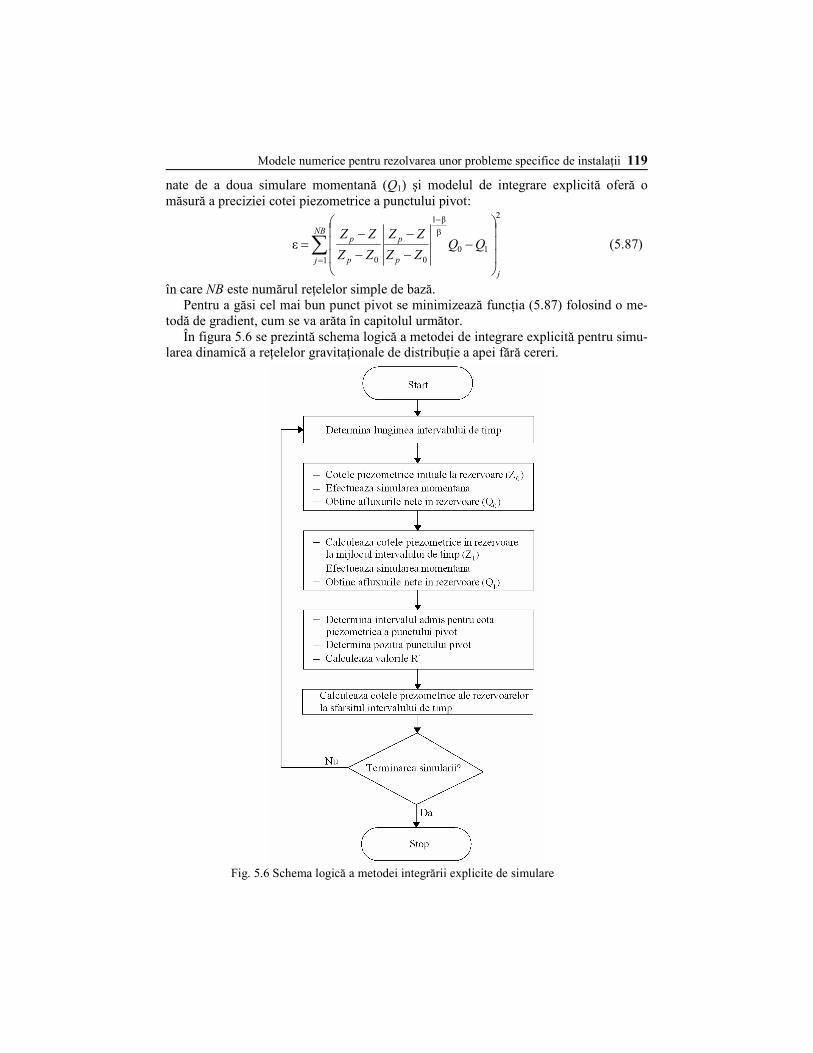
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 119
nate de a doua simulare momentană (Q1) şi modelul de integrare explicită oferă o măsură a preciziei cotei piezometrice a punctului pivot:
2
110
β
β1
00
ε
j
NB
j p
p
p
pQQ
ZZ
ZZ
ZZ
ZZ∑=
−
−−
−
−
−= (5.87)
în care NB este numărul reŃelelor simple de bază. Pentru a găsi cel mai bun punct pivot se minimizează funcŃia (5.87) folosind o me-todă de gradient, cum se va arăta în capitolul următor. În figura 5.6 se prezintă schema logică a metodei de integrare explicită pentru simu-larea dinamică a reŃelelor gravitaŃionale de distribuŃie a apei fără cereri.
Fig. 5.6 Schema logică a metodei integrării explicite de simulare
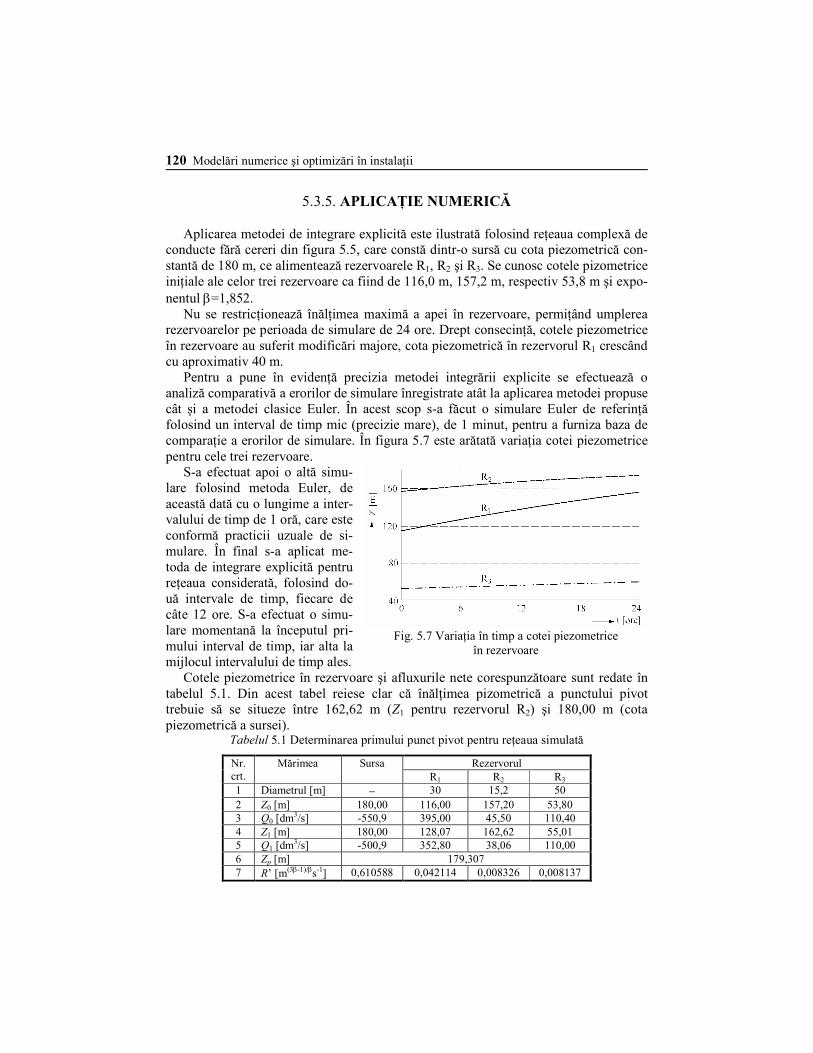
120 Modelări numerice şi optimizări în instalaŃii
5.3.5. APLICAłIE NUMERICĂ
Aplicarea metodei de integrare explicită este ilustrată folosind reŃeaua complexă de conducte fără cereri din figura 5.5, care constă dintr-o sursă cu cota piezometrică con-stantă de 180 m, ce alimentează rezervoarele R1, R2 şi R3. Se cunosc cotele pizometrice iniŃiale ale celor trei rezervoare ca fiind de 116,0 m, 157,2 m, respectiv 53,8 m şi expo-nentul β=1,852. Nu se restricŃionează înălŃimea maximă a apei în rezervoare, permiŃând umplerea rezervoarelor pe perioada de simulare de 24 ore. Drept consecinŃă, cotele piezometrice în rezervoare au suferit modificări majore, cota piezometrică în rezervorul R1 crescând cu aproximativ 40 m. Pentru a pune în evidenŃă precizia metodei integrării explicite se efectuează o analiză comparativă a erorilor de simulare înregistrate atât la aplicarea metodei propuse cât şi a metodei clasice Euler. În acest scop s-a făcut o simulare Euler de referinŃă folosind un interval de timp mic (precizie mare), de 1 minut, pentru a furniza baza de comparaŃie a erorilor de simulare. În figura 5.7 este arătată variaŃia cotei piezometrice pentru cele trei rezervoare. S-a efectuat apoi o altă simu-lare folosind metoda Euler, de această dată cu o lungime a inter-valului de timp de 1 oră, care este conformă practicii uzuale de si-mulare. În final s-a aplicat me-toda de integrare explicită pentru reŃeaua considerată, folosind do-uă intervale de timp, fiecare de câte 12 ore. S-a efectuat o simu-lare momentană la începutul pri-mului interval de timp, iar alta la mijlocul intervalului de timp ales. Cotele piezometrice în rezervoare şi afluxurile nete corespunzătoare sunt redate în tabelul 5.1. Din acest tabel reiese clar că înălŃimea pizometrică a punctului pivot trebuie să se situeze între 162,62 m (Z1 pentru rezervorul R2) şi 180,00 m (cota piezometrică a sursei).
Tabelul 5.1 Determinarea primului punct pivot pentru reŃeaua simulată
Rezervorul Nr. crt.
Mărimea Sursa R1 R2 R3
1 Diametrul [m] − 30 15,2 50 2 Z0 [m] 180,00 116,00 157,20 53,80 3 Q0 [dm
3/s] -550,9 395,00 45,50 110,40 4 Z1 [m] 180,00 128,07 162,62 55,01 5 Q1 [dm
3/s] -500,9 352,80 38,06 110,00 6 Zp [m] 179,307 7 R’ [m(3β-1)/βs-1] 0,610588 0,042114 0,008326 0,008137
Fig. 5.7 VariaŃia în timp a cotei piezometrice
în rezervoare
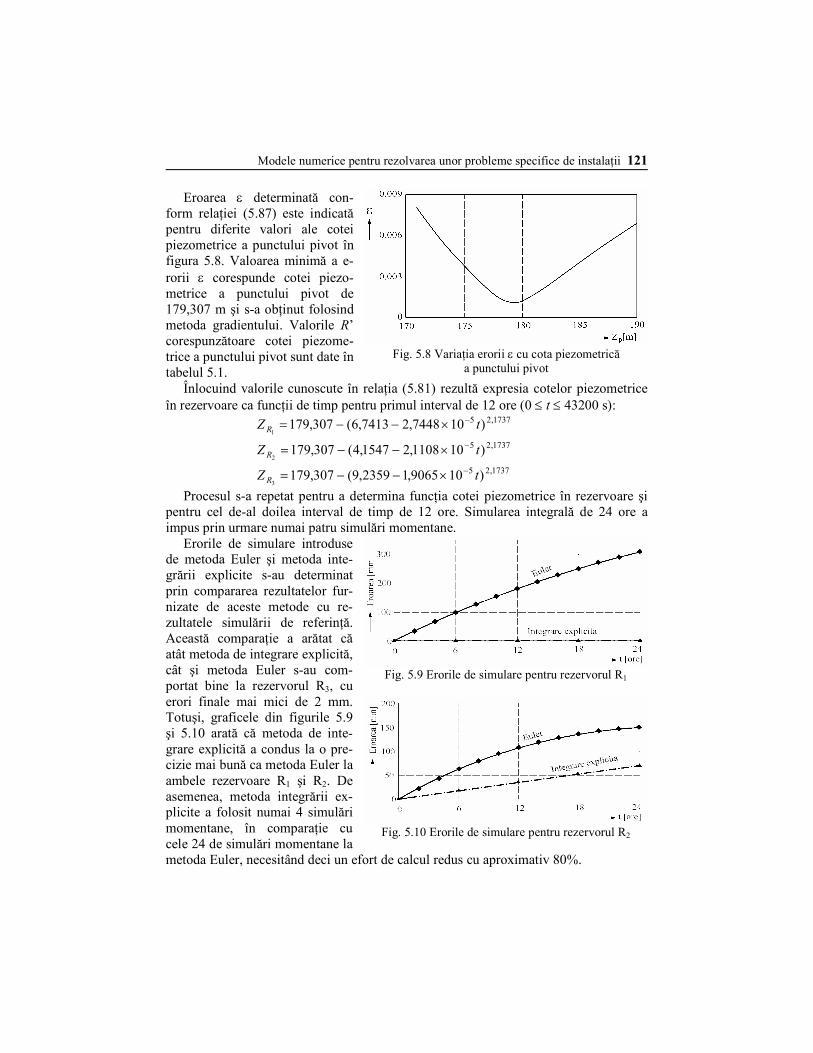
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 121
Eroarea ε determinată con-form relaŃiei (5.87) este indicată pentru diferite valori ale cotei piezometrice a punctului pivot în figura 5.8. Valoarea minimă a e-rorii ε corespunde cotei piezo-metrice a punctului pivot de 179,307 m şi s-a obŃinut folosind metoda gradientului. Valorile R’ corespunzătoare cotei piezome-trice a punctului pivot sunt date în tabelul 5.1. Înlocuind valorile cunoscute în relaŃia (5.81) rezultă expresia cotelor piezometrice în rezervoare ca funcŃii de timp pentru primul interval de 12 ore (0 ≤ t ≤ 43200 s):
1737,25
1737,25
1737,25
)109065,12359,9(307,179
)101108,21547,4(307,179
)107448,27413,6(307,179
3
2
1
tZ
tZ
tZ
R
R
R
−
−
−
×−−=
×−−=
×−−=
Procesul s-a repetat pentru a determina funcŃia cotei piezometrice în rezervoare şi pentru cel de-al doilea interval de timp de 12 ore. Simularea integrală de 24 ore a impus prin urmare numai patru simulări momentane. Erorile de simulare introduse de metoda Euler şi metoda inte-grării explicite s-au determinat prin compararea rezultatelor fur-nizate de aceste metode cu re-zultatele simulării de referinŃă. Această comparaŃie a arătat că atât metoda de integrare explicită, cât şi metoda Euler s-au com-portat bine la rezervorul R3, cu erori finale mai mici de 2 mm. Totuşi, graficele din figurile 5.9 şi 5.10 arată că metoda de inte-grare explicită a condus la o pre-cizie mai bună ca metoda Euler la ambele rezervoare R1 şi R2. De asemenea, metoda integrării ex-plicite a folosit numai 4 simulări momentane, în comparaŃie cu cele 24 de simulări momentane la metoda Euler, necesitând deci un efort de calcul redus cu aproximativ 80%.
Fig. 5.8 VariaŃia erorii ε cu cota piezometrică
a punctului pivot
Fig. 5.9 Erorile de simulare pentru rezervorul R1
Fig. 5.10 Erorile de simulare pentru rezervorul R2
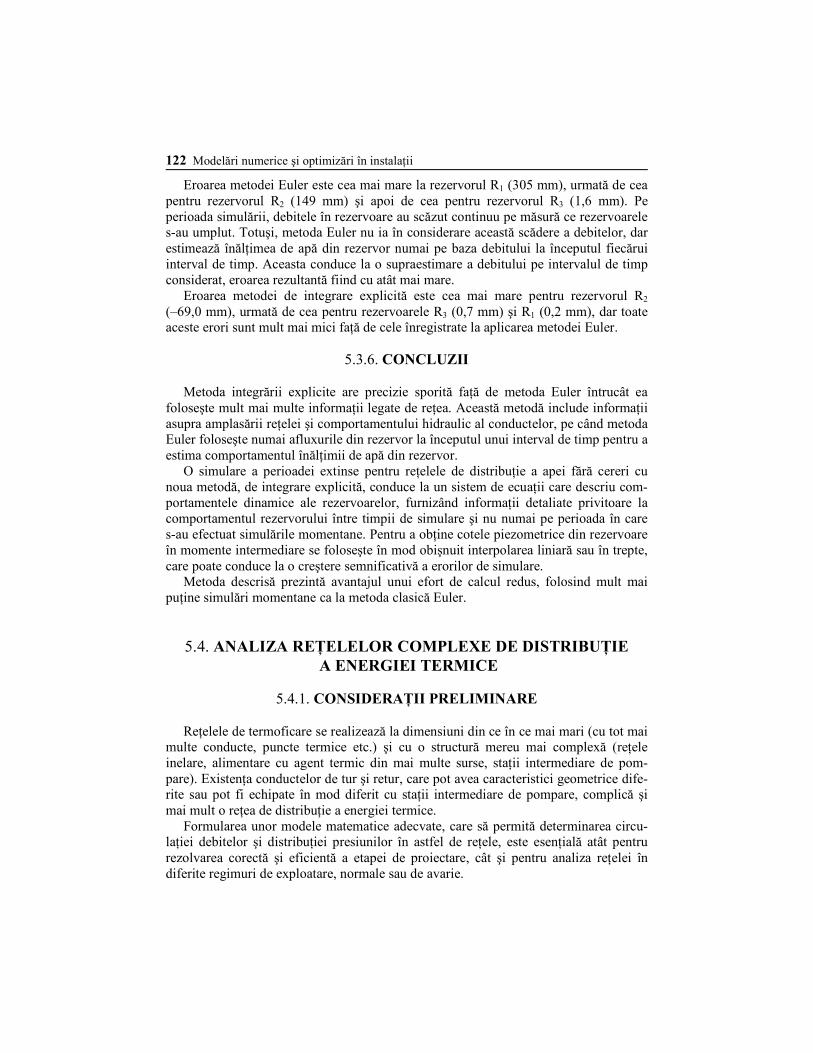
122 Modelări numerice şi optimizări în instalaŃii
Eroarea metodei Euler este cea mai mare la rezervorul R1 (305 mm), urmată de cea pentru rezervorul R2 (149 mm) şi apoi de cea pentru rezervorul R3 (1,6 mm). Pe perioada simulării, debitele în rezervoare au scăzut continuu pe măsură ce rezervoarele s-au umplut. Totuşi, metoda Euler nu ia în considerare această scădere a debitelor, dar estimează înălŃimea de apă din rezervor numai pe baza debitului la începutul fiecărui interval de timp. Aceasta conduce la o supraestimare a debitului pe intervalul de timp considerat, eroarea rezultantă fiind cu atât mai mare. Eroarea metodei de integrare explicită este cea mai mare pentru rezervorul R2 (–69,0 mm), urmată de cea pentru rezervoarele R3 (0,7 mm) şi R1 (0,2 mm), dar toate aceste erori sunt mult mai mici faŃă de cele înregistrate la aplicarea metodei Euler.
5.3.6. CONCLUZII Metoda integrării explicite are precizie sporită faŃă de metoda Euler întrucât ea foloseşte mult mai multe informaŃii legate de reŃea. Această metodă include informaŃii asupra amplasării reŃelei şi comportamentului hidraulic al conductelor, pe când metoda Euler foloseşte numai afluxurile din rezervor la începutul unui interval de timp pentru a estima comportamentul înălŃimii de apă din rezervor. O simulare a perioadei extinse pentru reŃelele de distribuŃie a apei fără cereri cu noua metodă, de integrare explicită, conduce la un sistem de ecuaŃii care descriu com-portamentele dinamice ale rezervoarelor, furnizând informaŃii detaliate privitoare la comportamentul rezervorului între timpii de simulare şi nu numai pe perioada în care s-au efectuat simulările momentane. Pentru a obŃine cotele piezometrice din rezervoare în momente intermediare se foloseşte în mod obişnuit interpolarea liniară sau în trepte, care poate conduce la o creştere semnificativă a erorilor de simulare. Metoda descrisă prezintă avantajul unui efort de calcul redus, folosind mult mai puŃine simulări momentane ca la metoda clasică Euler.
5.4. ANALIZA REłELELOR COMPLEXE DE DISTRIBUłIE A ENERGIEI TERMICE
5.4.1. CONSIDERAłII PRELIMINARE
ReŃelele de termoficare se realizează la dimensiuni din ce în ce mai mari (cu tot mai multe conducte, puncte termice etc.) şi cu o structură mereu mai complexă (reŃele inelare, alimentare cu agent termic din mai multe surse, staŃii intermediare de pom-pare). ExistenŃa conductelor de tur şi retur, care pot avea caracteristici geometrice dife-rite sau pot fi echipate în mod diferit cu staŃii intermediare de pompare, complică şi mai mult o reŃea de distribuŃie a energiei termice. Formularea unor modele matematice adecvate, care să permită determinarea circu-laŃiei debitelor şi distribuŃiei presiunilor în astfel de reŃele, este esenŃială atât pentru rezolvarea corectă şi eficientă a etapei de proiectare, cât şi pentru analiza reŃelei în diferite regimuri de exploatare, normale sau de avarie.
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 123
Astfel, cunoscând topologia reŃelei, caracteristicile conductelor, consumul fiecărui utilizator, producŃia fiecărei centrale de termoficare, precum şi presiunea necesară într-un punct obligat al reŃelei, se pune problema determinării debitelor de curgere pe tron-soane şi a presiunilor în nodurile de consum. Această problemă apare în particular la proiectarea extinderilor sau reconsiderarea unor reŃele în vederea optimizării funcŃio-nării lor. În acest context, se descrie un model matematic pentru analiza stării de presiune în reŃele inelare complexe de distribuŃie a energiei termice, bazat pe metoda ciclurilor, în cadrul căruia se utilizează un algoritm iterativ pentru rezolvarea sistemului neliniar de ecuaŃii pe inele.
5.4.2. BAZELE CALCULULUI HIDRAULIC AL REłELELOR TERMICE
Oricărei reŃele termice îi corespunde un graf neorientat asociat, compus din muchii care pot reprezenta tronsoane de conducte sau pompe şi din vârfuri, ca centrale de termoficare, utilizatori sau intersecŃii de conducte. O reŃea este inelară dacă graful neorientat asociat ei conŃine cel puŃin un ciclu. Un inel este deci format dintr-un ciclu de conducte tur, ce nu conŃine conexiuni între con-ductele de tur şi cele de retur. Acestui inel îi corespunde un altul format cu conductele corespunzătoare de retur. O reŃea este echilibrată din punct de vedere hidraulic când sunt satisfăcute con-diŃiile: – continuitatea debitului în noduri:
∑≠=
−==+N
jii
jij NjqG1
)1,...,1(0 (5.88)
în care: Gij este debitul tronsonului ij, cu semnul (+) când intră în nodul j, respectiv (–) când iese din nodul j; qj – debitul concentrat al nodului j, cu semnul (+) când alimen-tează nodul şi cu semnul (–) când se consumă în nod. – conservarea energiei pe inele:
∑=∈
==∆T
ijmij
ijij Mmp
1
),...,1(0ε (5.89)
în care: εij este orientarea tronsonului ij cu valoarea (+1) sau (–1), după cum sensul de curgere al apei în conducta ij este acelaşi sau opus cu sensul de parcurs al inelului m şi valoarea (0) dacă ij∉m; ∆pij – diferenŃa de presiune între cele două extremităŃi ale tron-sonului ij. Pierderea de presiune este legată de debit prin relaŃia funcŃională de formă generală:
( ) ijijwijijijjiij ZTZTgGGRppp Π−−+=−=∆ ρ (5.90)
unde: ZTi, ZTj sunt cotele geodezice în nodurile i şi j; ρw – densitatea apei; g – acceleraŃia gravitaŃională; Πij – presiunea activă a staŃiei de pompare intermediară de

124 Modelări numerice şi optimizări în instalaŃii
pe tronsonul ij (în cazul că aceasta există), independentă de debit; Rij – rezistenŃa hidra-ulică a tronsonului ij, dată de relaŃia:
+= ij
ij
ijij
ij
wij
D
L
DR ζ
λ
π 42
ρ8 (5.91)
în care: Lij, Dij sunt lungimea şi diametrul tronsonului ij; λij, ζij – coeficientul de rezistenŃă hidraulică longitudinală şi locală al tronsonului ij. Presupunând că ecuaŃiile (5.88) şi (5.89) se referă la curgerea apei în conductele reŃelei de tur, relaŃii analoage se pot scrie şi pentru curgerea apei în conductele reŃelei de retur:
∑≠=
−==+N
jii
jij NjqG1
)1,...,1(0 (5.92)
∑=∈
==∆T
ijmij
ijij Mmp
1
),...,1(0ε (5.93)
unde:
( ) ijijwijijijjiij ZTZTgGGRppp Π−−+=−=∆ ρ (5.94)
Folosind notaŃiile: ( ) ( ) ijijwijijijwij ZZgcZZgc Π−−=Π−−= ρ;ρ (5.95)
relaŃiile funcŃionale (5.90) şi (5.94) devin:
ijijijijjiij cGGRppp +=−=∆ (5.96)
ijijijijjiij cGGRppp +=−=∆ (5.97)
DiferenŃa de presiune între conducta de tur şi de retur într-un nod j trebuie să satis-facă relaŃia: ),...,1(δ Njpp jjj =≥− (5.98)
în care δj este diferenŃa minimă de presiune ce asigură curgerea debitului qj prin insta-laŃia consumatorului racordat în nodul j. Pentru calculul de echilibrare hidraulică a unei reŃele termice inelare de tur sau de retur, cu un singur nod cu cota piezometrică cunoscută, se dispune de un număr T de ecuaŃii dat de relaŃia: 1−+= NMT (5.99) în care: T este numărul tronsoanelor; M – numărul inelelor independente; N – numărul nodurilor.
5.4.3. FORMULAREA MODELULUI MATEMATIC Modelul de calcul presupune cunoscute următoarele date de bază: topologia reŃelei; caracteristicile geometrice şi hidraulice ale conductelor; cotele geodezice şi debitele

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 125
concentrate pentru fiecare nod; presiunile active introduse prin staŃii intermediare de pompare; cota piezometrică într-unul din nodurile reŃelei. Sistemul de ecuaŃii neliniare (5.88) şi (5.96) se compune din N–1 ecuaŃii de tipul (5.88) şi T ecuaŃii de tipul (5.96) pentru determinarea celor T debite în conducte şi N–1 presiuni în nodurile reŃelei. Acesta se reduce la un sistem cu dimensiunea egală cu numărul inelelor independente M dat de relaŃia (5.99), care se rezolvă prin aproximaŃii succesive. Pentru fiecare inel independent m se alege un sens de parcurs şi i se asociază un
debit de corecŃie Gm. Pornind de la o repartiŃie iniŃială a debitelor )0(
ijG , care satisface
relaŃia (5.88), acestea se corectează folosind relaŃia:
∑=∈
+=M
mmij
mijijij GGG
1
)0( ε , (5.100)
în care εij are semnificaŃia din relaŃia (5.89), iar debitele de corecŃie Gm (m = 1, ..., M) se determină rezolvând iterativ sistemul de ecuaŃii (5.89).
Cunoscând soluŃia aproximativă )(kmG (m = 1, ..., M) obŃinută la iteraŃia (k), se caută
printre ecuaŃiile (5.89) pe cea cu divergenŃa cea mai mare. Fie 0)(*
=ijm Gf această
ecuaŃie şi )( )(*
kijm Gf valoarea sa. Se defineşte corecŃia de debit:
=+
≠=+
,pentru,δ
;pentru,
*)(
*)(
)1(
mmGG
mmGG
mk
m
kmk
m (5.101)
cu δGm exprimat prin relaŃia:
( ) ,0δ)(
)( =∂∂
+k
ijGm
mm
kijm
G
fGGf (5.102)
de unde se poate determina:
( )
∑
∑ +
−=
*
*
)(
)()(
2
ε
δ
m
kijij
m
ijk
ijk
ijijij
mGR
cGGR
G (5.103)
Procesul iterativ se opreşte atunci când fiecare din ecuaŃiile (5.89) sunt satisfăcute cu o precizie impusă. Această metodă este eficace întrucât modificarea debitelor în conductele unui inel modifică în mod egal echilibrul celorlalte inele având conducte comune cu acesta.
SoluŃia iniŃială )0(ijG se obŃine considerând debitele nule în conductele care nu apar-
Ńin reŃelei ramificate de bază şi determinând celelalte debite recursiv, pornind de la no-durile extreme ale acestei reŃele. Având astfel obŃinută soluŃia sistemului (5.88) şi (5.96), se aplică acelaşi model de calcul iterativ şi pentru soluŃionarea sistemului (5.92) şi (5.97). În general, o bună solu-
Ńie iniŃială )0(ijG pentru acest sistem este ijij GG −=)0( (ij = 1, ..., T).
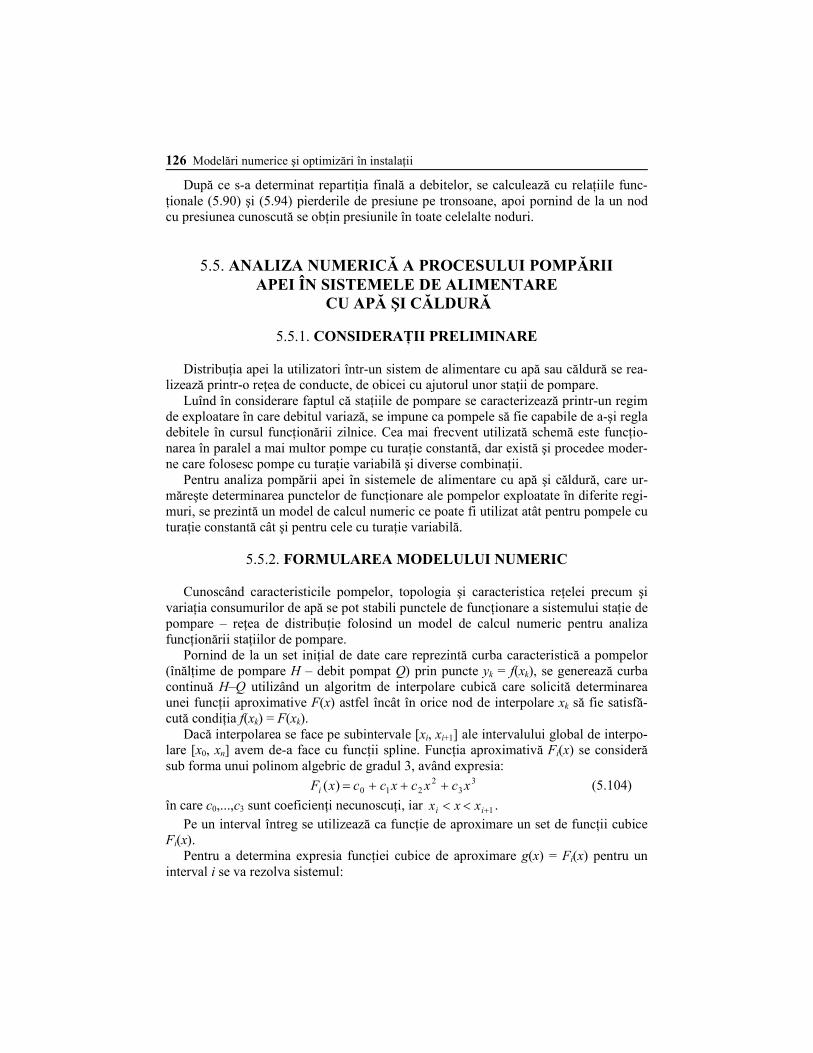
126 Modelări numerice şi optimizări în instalaŃii
După ce s-a determinat repartiŃia finală a debitelor, se calculează cu relaŃiile func-Ńionale (5.90) şi (5.94) pierderile de presiune pe tronsoane, apoi pornind de la un nod cu presiunea cunoscută se obŃin presiunile în toate celelalte noduri.
5.5. ANALIZA NUMERICĂ A PROCESULUI POMPĂRII APEI ÎN SISTEMELE DE ALIMENTARE
CU APĂ ŞI CĂLDURĂ
5.5.1. CONSIDERAłII PRELIMINARE DistribuŃia apei la utilizatori într-un sistem de alimentare cu apă sau căldură se rea-lizează printr-o reŃea de conducte, de obicei cu ajutorul unor staŃii de pompare. Luînd în considerare faptul că staŃiile de pompare se caracterizează printr-un regim de exploatare în care debitul variază, se impune ca pompele să fie capabile de a-şi regla debitele în cursul funcŃionării zilnice. Cea mai frecvent utilizată schemă este funcŃio-narea în paralel a mai multor pompe cu turaŃie constantă, dar există şi procedee moder-ne care folosesc pompe cu turaŃie variabilă şi diverse combinaŃii. Pentru analiza pompării apei în sistemele de alimentare cu apă şi căldură, care ur-măreşte determinarea punctelor de funcŃionare ale pompelor exploatate în diferite regi-muri, se prezintă un model de calcul numeric ce poate fi utilizat atât pentru pompele cu turaŃie constantă cât şi pentru cele cu turaŃie variabilă.
5.5.2. FORMULAREA MODELULUI NUMERIC Cunoscând caracteristicile pompelor, topologia şi caracteristica reŃelei precum şi variaŃia consumurilor de apă se pot stabili punctele de funcŃionare a sistemului staŃie de pompare – reŃea de distribuŃie folosind un model de calcul numeric pentru analiza funcŃionării staŃiilor de pompare. Pornind de la un set iniŃial de date care reprezintă curba caracteristică a pompelor (înălŃime de pompare H – debit pompat Q) prin puncte yk = f(xk), se generează curba continuă H–Q utilizând un algoritm de interpolare cubică care solicită determinarea unei funcŃii aproximative F(x) astfel încât în orice nod de interpolare xk să fie satisfă-cută condiŃia f(xk) = F(xk). Dacă interpolarea se face pe subintervale [xi, xi+1] ale intervalului global de interpo-lare [x0, xn] avem de-a face cu funcŃii spline. FuncŃia aproximativă Fi(x) se consideră sub forma unui polinom algebric de gradul 3, având expresia:
33
2210)( xcxcxccxFi +++= (5.104)
în care c0,...,c3 sunt coeficienŃi necunoscuŃi, iar 1+<< ii xxx . Pe un interval întreg se utilizează ca funcŃie de aproximare un set de funcŃii cubice Fi(x). Pentru a determina expresia funcŃiei cubice de aproximare g(x) = Fi(x) pentru un interval i se va rezolva sistemul:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 127
( )( )
( ) ( )( ) ( )11
313
2121101
33
2210
"
"
++
++++
=
=
+++=
+++=
ii
ii
iiii
iiii
xfxg
xfxg
xcxcxccxf
xcxcxccxf
(5.105)
Expresia matematică obŃinută în urma efectuării calculelor este de forma:
( ) ( ) ( ) ( ) ( ) +
−∆−
∆
−+
−+
−= ++
+ ii
i
ii
i
ii
i
iii xxx
x
xxxg
x
xxxf
x
xxxfxF
211
1 6
")(
( ) ( ) ( )
−∆−
∆
−+ +
+ xxxx
xxxgii
i
ii1
31
6
" (5.106)
Considerând că se folosesc puncte echidistante ∆xi = ∆x, pentru calcularea lui g”(x) care apare în relaŃia (5.106) se aplică condiŃiile la limită: – de aproximare după pantă în xi şi xi+1:
( ) ( )iiii xFxF '1
'−= (5.107)
– de aproximare după curbură în xi:
( ) ( )iiii xFxF "1
"−= (5.108)
În urma efectuării derivărilor impuse de condiŃiile la limită, acestea conduc la un sistem de ecuaŃii liniare de forma (3.57) a cărui rezolvare numerică se face prin metoda Gauss, rezultând valorile g”(xi) pentru toate intervalele încât pentru orice x = Q dat, să se poată calcula valoarea corespunzătoare a lui Fi(x) = H, folosind expresia (5.106). Pe baza caracteristicilor geometrice şi hidraulice (materialul, lungimea şi rezistenŃa hidraulică ale conductelor, nivelul static, intervalele de variaŃie ale debitelor) ale siste-mului de conducte se determină curba sarcină de pompare – caracteristică hidrodina-namică a reŃelei (H – R). Curba caracteristică a reŃelei de conducte exprimă înălŃimea de pompare funcŃie de debit ca sumă a înălŃimii statice şi a pierderilor de sarcină liniare şi locale (rezistenŃa hidrodinamică a reŃelei):
2RQHH s += (5.109) în care: H este înălŃimea de pompare; Hs – sarcina statică; R – rezistenŃa hidrodinamică totală a reŃelei; Q – debitul pompat. Deoarece nivelul apei în camera de aspiraŃie variază între limitele corespunzătoare pornirii şi opririi pompei, sarcina statică variază şi ea determinând o familie de curbe paralele H–R. Curba superioară corespunde nivelului minim în camera de aspiraŃie, iar curba inferioară corespunde nivelului maxim în această cameră. Punctul de funcŃionare al pompei se găseşte la intersecŃia curbelor H–Q şi R–Q, determinându-se folosind o metodă iterativă în cadrul căreia ecuaŃia algebrică (5.109) se rezolvă prin metoda Newton. Primul pas în determinarea acestuia constă în aflarea prin aproximaŃii succesive a unui mic interval în interiorul căruia se intersectează cele două curbe, urmat de aproximarea liniară a curbei H–Q pe acest interval cu o expresie de forma:

128 Modelări numerice şi optimizări în instalaŃii
21 aQaH += (5.110)
pentru Hk+1 ≤ H ≤ Hk. Aplicând relaŃia (5.110) pentru limitele intervalului [k, k+1]:
2111
21
aQaH
aQaH
kk
kk
+=
+=
++
(5.111)
rezultă prin rezolvarea sistemului de ecuaŃii (5.111) coeficienŃii:
1
112
1
11 ;
+
++
+
+
−
−=
−
−=
kk
kkkk
kk
kk
QHQHa
HHa (5.112)
cu care, în final expresia (5.110) primeşte forma:
,1
11
1
1
+
++
+
+
−
−+
−
−=
kk
kkkk
kk
kk
QHQHQ
HHH (5.113)
iar ecuaŃia ce se obŃine, Ńinând seama de (5.109), se poate rezolva cu metoda Newton. Modelul de calcul numeric descris permite analiza asistată de calculator a procesu-lui de pompare, fiind de real folos în proiectarea şi exploatarea sistemelor de alimenta-re cu apă şi căldură.
5.6. MODELUL UNIDIMENSIONAL CU DIFERENłE FINITE AL CONDUCłIEI CĂLDURII
ÎN REGIM TRANZITORIU
5.6.1. CONSIDERAłII PRELIMINARE Transmiterea căldurii este procesul natural de transfer al energiei interne de la me-diile cu temperatură mai mare la cele cu temperatură mai mică sau în interiorul unui mediu de la părŃi ale acestuia cu temperatură mai ridicată spre părŃi cu temperatură mai scăzută. Căldura se transmite prin conducŃie, convecŃie şi radiaŃie. ConducŃia căldurii este procesul de transmitere a căldurii în interiorul unui corp sau între corpuri aflate în contact direct, de la particulă la particulă, adică între atomi şi molecule. ConvecŃia căldurii este procesul de transmitere a căldurii dintr-o parte a spaŃiului în alta prin intermediul unui fluid (agent termic) şi se produce numai în cazul lichidelor şi al gazelor. RadiaŃia este procesul de transmitere a căldurii sub formă de energie radiantă. La corpul radiant energia internă se transformă în energie radiantă şi se transmite sub for-mă de unde electromagnetice spre corpul absorbant, unde energia radiantă se transfor-mă în energie internă. Temperatura t dintr-un corp este o funcŃie de coordonatele spaŃiului x, y, z şi de timpul τ, de forma: )τ,,,( zyxft = (5.114) Această ecuaŃie exprimă matematic câmpul de temperatură, adică totalitatea tempe-raturilor din interiorul unui corp. Dacă temperatura nu variază în timp, câmpul de tem-

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 129
peratură se numeşte staŃionar, iar în caz contrar se numeşte câmp tranzitoriu. După cum temperatura variază în funcŃie de toate cele trei coordonate ale spaŃiului, de două dintre ele sau numai de una, câmpul se numeşte respectiv tri, bi şi unidimensional. Deşi fenomenele termice se desfăşoară în corpuri tridimensionale, câmpurile termi-ce rezultate prezintă uneori variaŃii preponderente pe anumite direcŃii. În astfel de ca-zuri se pot folosi modele matematice bidimensionale sau unidimensionale, conducând la simplificarea problemei şi la obŃinerea unei soluŃii compatibile cu scopul propus.
5.6.2. FORMULAREA MODELULUI MATEMATIC Modelul unidimensional al conducŃiei căldurii în regim tranzitoriu este descris de ecuaŃia lui Fourier cu derivate parŃiale de tip parabolic de forma:
)τ,()τ,(τ
)τ,()τ,(ρ xfx
tx
x
txcx =
∂∂
∂∂
−∂∂
λ (5.115)
în care: ρ(x, τ), c(x, τ), λ(x, τ) sunt densitatea, căldura specifică şi conductivitatea ter-mică a materialului; t(x, τ) – temperatura în punctul de abscisă x la momentul τ (soluŃia ecuaŃiei (5.115)). Domeniul pe care se consideră problema este D = 0 ≤ x ≤ 1, 0 ≤ τ ≤ T, iar soluŃia ecuaŃiei (5.115) este determinată de condiŃiile la limită neliniare de forma:
)()0,(
);,τ()τ,1();,τ()τ,0(
0
21
10
xtxt
tx
tt
x
t
xx
=
=∂∂
−=∂∂
==
ϕλϕλ (5.116)
Presupunând că mediul prin care se transmite căldura este omogen (λ nu depinde de x), ecuaŃia diferenŃială şi condiŃiile la limită devin:
)τ,()τ(τ
)τ,()τ,(ρ 22
2
xfx
ttxcx =
∂∂
−∂∂
λ (5.117)
)()0,(
);,τ()τ();,τ()τ(
0
21
10
xtxt
tx
tt
x
t
xx
=
=∂∂
−=∂∂
==
ϕλϕλ (5.118)
Se aproximează derivatele parŃiale cu diferenŃe finite de forma:
( ) ( )
e
extxtt
xh
hxtxt
xh
xthxt
x
t
h
hxtxthxt
x
t
)τ,()τ,(
τ
1pentru,)τ,()τ,(
0pentru,)τ,()τ,(
τ,)τ,(2τ, 112
2
−−=
∂∂
=−−
=−+
=∂∂
−+−+=
∂∂
(5.119)
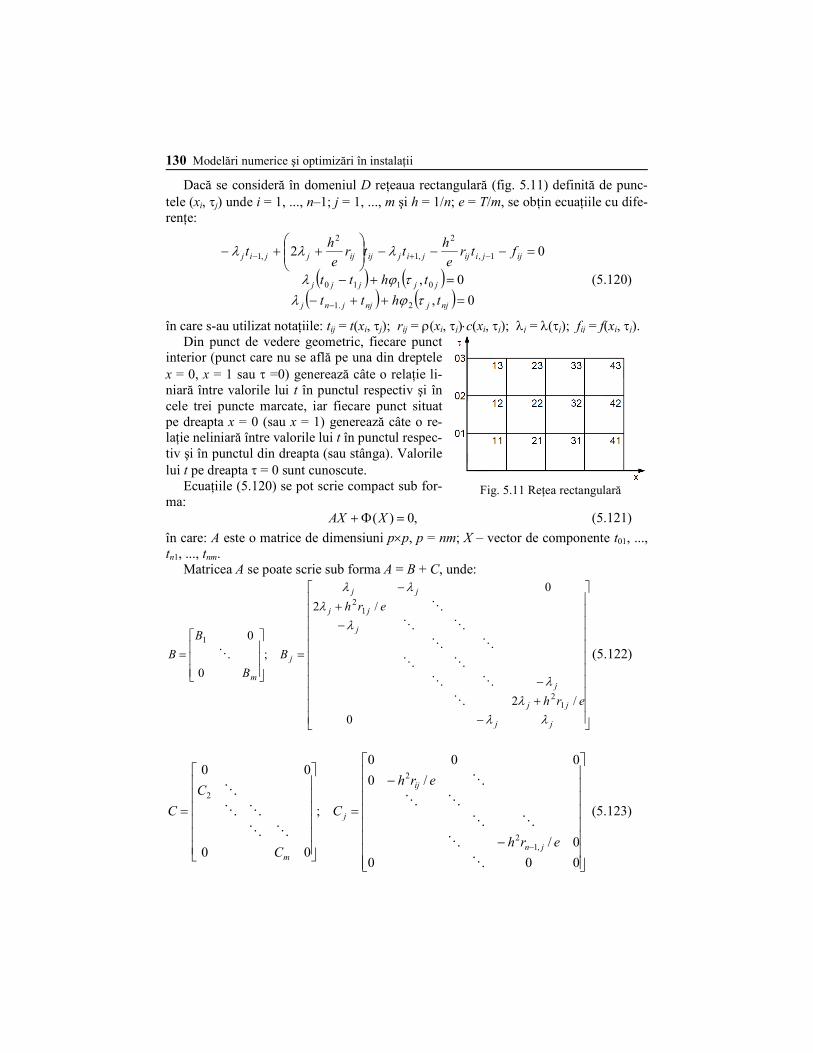
130 Modelări numerice şi optimizări în instalaŃii
Dacă se consideră în domeniul D reŃeaua rectangulară (fig. 5.11) definită de punc-tele (xi, τj) unde i = 1, ..., n–1; j = 1, ..., m şi h = 1/n; e = T/m, se obŃin ecuaŃiile cu dife-renŃe:
( ) ( )( ) ( ) 0,
0,
02
2.1
0110
1,
2
,1
2
,1
=++−
=+−
=−−−
++−
−
−+−
njjnjjnj
jjjjj
ijjiijjijijijjjij
thtt
thtt
ftre
httr
e
ht
τϕλτϕλ
λλλ
(5.120)
în care s-au utilizat notaŃiile: tij = t(xi, τj); rij = ρ(xi, τj)⋅c(xi, τj); λj = λ(τj); fij = f(xi, τj). Din punct de vedere geometric, fiecare punct interior (punct care nu se află pe una din dreptele x = 0, x = 1 sau τ =0) generează câte o relaŃie li-niară între valorile lui t în punctul respectiv şi în cele trei puncte marcate, iar fiecare punct situat pe dreapta x = 0 (sau x = 1) generează câte o re-laŃie neliniară între valorile lui t în punctul respec-tiv şi în punctul din dreapta (sau stânga). Valorile lui t pe dreapta τ = 0 sunt cunoscute. EcuaŃiile (5.120) se pot scrie compact sub for-ma: ,0)( =Φ+ XAX (5.121)
în care: A este o matrice de dimensiuni p×p, p = nm; X – vector de componente t01, ..., tn1, ..., tnm. Matricea A se poate scrie sub forma A = B + C, unde:
−
+
−
−
+
−
=
=
jj
jj
j
j
jj
jj
j
m
erh
erh
B
B
B
B
λλλ
λ
λλ
λλ
0
/2
/2
0
;
0
0
12
12
1
O
OO
OO
OO
OO
O
O (5.122)
−
−
=
=
−
000
0/
/0
000
;
00
00
,12
2
2
O
O
OO
OO
O
OO
OO
O
erh
erh
C
C
C
C
jn
ij
j
m
(5.123)
Fig. 5.11 ReŃea rectangulară

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 131
FuncŃia Φ conŃine valorile funcŃiilor ϕ1, ϕ2 şi valorile lui t de pe dreapta τ = 0 şi are expresia:
=Φ
)(
)(
)(1
Xf
Xf
X
m
M (5.124)
unde:
( )
( )
( )
( )
mj
th
f
f
th
Xf
th
fe
trh
fe
trh
th
Xf
jnj
jn
j
jj
j
n
nnn
,...,2,
,τ
,τ
)(;
,τ
,τ
)(
,2
,1
,1
,01
1,12
1,10,11,12
1,10,11,1
20111
1 =
−
−
−
=
−
−−
−−
=
−−
−−
ϕ
ϕ
ϕ
ϕ
MM (5.125)
Rezolvarea numerică a ecuaŃiei (5.121) se face cu procedeul iterativ simplu:
( ))()1( kk XAX Φ−=+ (5.126)
care comportă numai calcularea valorii funcŃiei Φ în punctul curent şi rezolvarea unui sistem liniar la fiecare pas de iteraŃie. Componentele soluŃiei ecuaŃiei (5.121) reprezintă valori aproximative ale soluŃiei problemei (5.117), (5.118) în punctele reŃelei.
5.7. MODELAREA NUMERICĂ A PROCESULUI DE ABSORBłIE DIN INSTALAłIILE FRIGORIFICE
5.7.1 CONSIDERAłII PRELIMINARE
Principiul de funcŃionare al instalaŃiilor frigorifice cu absorbŃie se bazeazã pe pro-cesul de absorbŃie a vaporilor de agent frigorific de către mediul absorbant aflat în stare lichidă (soluŃie săracă), care se produce în aparatul termic denumit absorbitor, luând naştere soluŃia bogată ce se introduce în fierbător. Procesul din absorbitor este foarte complex, deoarece se suprapun fenomenele de curgere cu cele de schimb de căldură şi masă, având rolul de a reface concentraŃia soluŃiei care se introduce în fierbător. În absorbitor se preia energia termică necesară răcirii soluŃiei cu ajutorul unui agent termic de temperatură moderată. În cazul absor-bitoarelor de tip pelicular (fig. 5.12), căldura rezultată în procesul de schimb de masă legată de diferenŃa de temperatură dintre fazele aflate în contact sau din existenŃa sur-selor interne de căldură (căldură de dizolvare) poate fi mai uşor îndepărtată cu ajutorul apei de răcire. Se va stabili sistemul ecuaŃiilor diferenŃiale ce descriu procesul de absorbŃie al va-porilor în soluŃie hidroamoniacală în cazul absorbitorului vertical cu pelicula de soluŃie la interiorul conductei şi curgerea în contracurent a vaporilor de amoniac, răcirea rea-
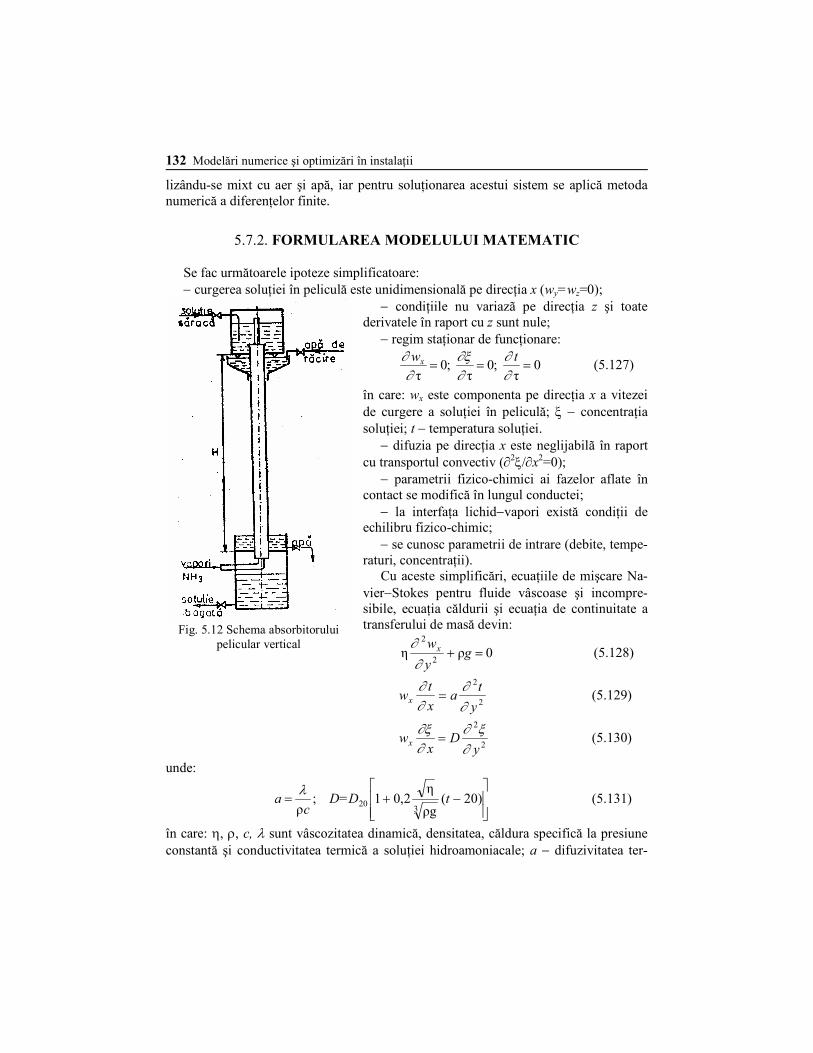
132 Modelări numerice şi optimizări în instalaŃii
lizându-se mixt cu aer şi apă, iar pentru soluŃionarea acestui sistem se aplică metoda numerică a diferenŃelor finite.
5.7.2. FORMULAREA MODELULUI MATEMATIC Se fac următoarele ipoteze simplificatoare: − curgerea soluŃiei în peliculă este unidimensională pe direcŃia x (wy=wz=0);
− condiŃiile nu variazã pe direcŃia z şi toate derivatele în raport cu z sunt nule; − regim staŃionar de funcŃionare:
0τ
;0τ
;0τ
===∂∂
∂∂ξ
∂∂ twx (5.127)
în care: wx este componenta pe direcŃia x a vitezei de curgere a soluŃiei în peliculă; ξ − concentraŃia soluŃiei; t − temperatura soluŃiei. − difuzia pe direcŃia x este neglijabilã în raport cu transportul convectiv (∂2ξ/∂x2=0); − parametrii fizico-chimici ai fazelor aflate în contact se modifică în lungul conductei; − la interfaŃa lichid−vapori există condiŃii de echilibru fizico-chimic; − se cunosc parametrii de intrare (debite, tempe-raturi, concentraŃii). Cu aceste simplificări, ecuaŃiile de mişcare Na-vier−Stokes pentru fluide vâscoase şi incompre-sibile, ecuaŃia căldurii şi ecuaŃia de continuitate a transferului de masă devin:
0ρη2
2
=+ gy
wx
∂
∂ (5.128)
2
2
y
ta
x
twx ∂
∂∂∂
= (5.129)
2
2
yD
xwx ∂
ξ∂∂∂ξ
= (5.130)
unde:
−+= )20(
ρg
η2,01 ;
ρ 320 tD=D
ca
λ (5.131)
în care: η, ρ, c, λ sunt vâscozitatea dinamică, densitatea, căldura specifică la presiune constantă şi conductivitatea termică a soluŃiei hidroamoniacale; a − difuzivitatea ter-
Fig. 5.12 Schema absorbitorului
pelicular vertical

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 133
mică; D − coeficientul de difuzie; D20 − coeficientul de difuzie la 20 oC; g − acceleraŃia
gravitaŃională. În timpul procesului de absorbŃie, căldura de absorbŃie duce la încălzirea soluŃiei din peliculă. Astfel, la interfaŃa lichid−vapori se poate scrie ecuaŃia de bilanŃ (5.132) în ipo-teza că toată căldura de absorbŃie pătrunde transversal în peliculă:
δδ
ρ==
=y
ab
yy
Dqy
t
∂∂ξ
∂∂
λ (5.132)
în care qab este căldura masică de absorbŃie. Din condiŃia de echilibru la interfaŃa lichid−gaz rezultă legătura între temperatură şi concentraŃie: ii btb += 0ξ (5.133) în care b0 şi b sunt constante de echilibru determinând presiunile. Pentru soluŃionarea sistemului de ecuaŃii (5.128), (5.129) şi (5.130) se aplică meto-da aproximativă, constând în rezolvarea separată mai întâi a ecuaŃiei de mişcare (5.128) şi apoi utilizând profilul de viteză obŃinut se rezolvă numeric cu ajutorul diferenŃelor finite, ecuaŃiile pentru transferul termic (5.129) şi de masã (5.130). EcuaŃia (5.128) se integreazã cu condiŃiile pe frontieră:
δ,=pentru ,0
0=pentru ,0
yy
w
yw
x
x
=
=
∂∂ (5.134)
obŃinându-se pentru viteza locală expresia:
−−=
2
δ
δ1
yww Mx (5.135)
unde:
η2
δρ 2gwM = (5.137)
în care: δ este grosimea peliculei de soluŃie; wM − viteza maximă a soluŃiei în peliculă. În continuare se determină variaŃiile de temperatură şi de concentraŃie atât în grosimea peliculei (δ) cât şi pe lungimea ei (H), respectiv ξ şi t pe domeniul [O, H]×[O, δ], prin rezolvarea sistemului (5.129), (5.130), Ńinând seama de: − condiŃiile iniŃiale: 00 ) ,0( ;) ,0( ξξ == ytyt (5.138)
− condiŃiile la limită (la perete): pp xxtx,ttt ξξ === )0 ,( );()0 ( ;)0 ,0( 0 (5.139)
− condiŃiile la interfaŃa lichid−gaz:
δδ
0
) ,(ρ
) ,(
δ) ,()δ ,(
==
=
+=
y
ab
yy
yxDq
y
yxt
xbtbx
∂∂ξ
∂∂
λ
ξ
(5.140)
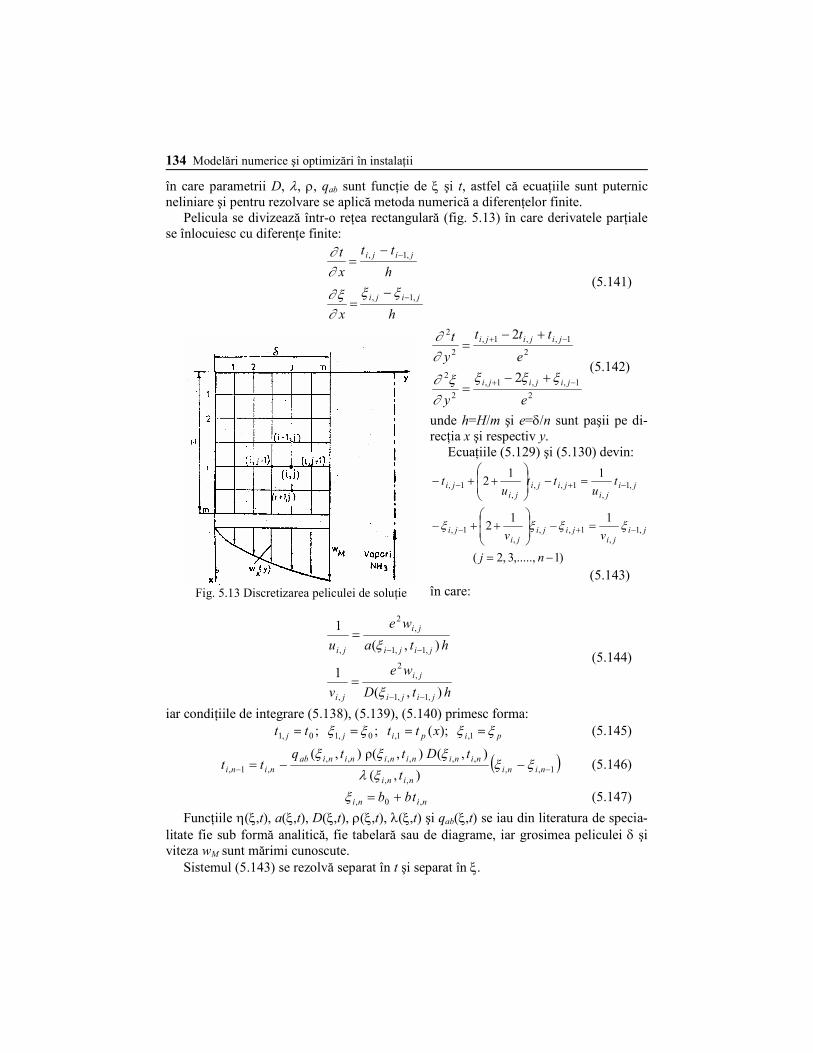
134 Modelări numerice şi optimizări în instalaŃii
în care parametrii D, λ, ρ, qab sunt funcŃie de ξ şi t, astfel că ecuaŃiile sunt puternic neliniare şi pentru rezolvare se aplică metoda numerică a diferenŃelor finite. Pelicula se divizează într-o reŃea rectangulară (fig. 5.13) în care derivatele parŃiale se înlocuiesc cu diferenŃe finite:
hx
h
tt
x
t
jiji
jiji
,1,
,1,
−
−
−=
−=
ξξ
∂ξ∂
∂∂
(5.141)
2
1,,1,
2
2
2
1,,1,
2
2
2
2
ey
e
ttt
y
t
jijiji
jijiji
−+
−+
+−=
+−=
ξξξ
∂ξ∂
∂∂
(5.142)
unde h=H/m şi e=δ/n sunt paşii pe di-recŃia x şi respectiv y. EcuaŃiile (5.129) şi (5.130) devin:
)1 ,.....,3 ,2(
112
112
,1,
1,,,
1,
,1,
1,,,
1,
−=
=−
++−
=−
++−
−+−
−+−
nj
vv
tu
ttu
t
jiji
jijiji
ji
jiji
jijiji
ji
ξξξξ
(5.143) în care:
htD
we
v
hta
we
u
jiji
ji
ji
jiji
ji
ji
) ,(
1
) ,(
1
,1,1
,2
,
,1,1
,2
,
−−
−−
=
=
ξ
ξ (5.144)
iar condiŃiile de integrare (5.138), (5.139), (5.140) primesc forma: pipijj xtttt ξξξξ ==== 1,1,0,10,1 );( ; ; (5.145)
( )1,,,,
,,,,,,,1, ),(
),(),(ρ),(−− −−= nini
nini
ninininininiab
ninit
tDttqtt ξξ
ξλ
ξξξ (5.146)
nini tbb ,0, +=ξ (5.147)
FuncŃiile η(ξ,t), a(ξ,t), D(ξ,t), ρ(ξ,t), λ(ξ,t) şi qab(ξ,t) se iau din literatura de specia-litate fie sub formă analitică, fie tabelară sau de diagrame, iar grosimea peliculei δ şi viteza wM sunt mărimi cunoscute. Sistemul (5.143) se rezolvă separat în t şi separat în ξ.
Fig. 5.13 Discretizarea peliculei de soluŃie

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 135
Cunoscând variaŃiile de temperatură şi de concentraŃie atât în grosimea peliculei cât şi în lungul absorbitorului, determinate prin metoda diferenŃelor finite, se pot determina pe baza teoriei filmului: − fluxul termic unitar:
0=
−=y
y
tq
∂∂
λ (5.148)
sau:
( ) ( ) ( )wpwpp
c
cpi ttttttq −=−=−= 2211 δ
αλ
α (5.149)
în care: λ este conductivitatea termică a soluŃiei; ti − temperatura la interfaŃa lichid-vapori; tp1 − temperatura la peretele interior al conductei; tp2 − temperatura la peretele exterior al conductei; tw − temperatura în pelicula de apă; λc, δc=(de−di)/2 − conduc-tivitatea termică şi grosimea conductei; αw − coeficientul de transfer termic convectiv în pelicula de apă; − fluxul masic unitar:
δ=
−=y
sy
Dq∂∂ξ
(5.150)
Având aceste mărimi, se obŃin coeficienŃii de transfer convectiv (α) şi de transfer de masã (β) în pelicula de soluŃie, cu relaŃiile:
1
)(pi tt
qx
−=α (5.151)
ξξ ρρ)(β
−=
ss
sqx (5.152)
unde ρs şi ξs sunt densitatea şi concentraŃia soluŃiei la saturaŃie. Rezultă apoi valorile medii αm şi βm, definite prin relaŃiile:
∫= dxxH
m )(1
αα (5.153) ∫= , )(β1
β dxxH
m (5.154)
precum şi valorile medii ale fluxului unitar termic şi a fluxului unitar de masă:
∫= dxxqH
qm )(1
(5.155) ∫= dxxqH
q ssm )(1
(5.156)
Modelul de calcul prezentat, programabil pe microsisteme automate, este de un real folos specialiştilor în activitatea de proiectare şi cercetare a absorbitoarelor din cadrul instalaŃiilor frigorifice prin absorbŃie cu soluŃie hidroamoniacală.
5.8. MODELAREA NUMERICĂ CU ELEMENTE FINITE A CONDUCłIEI BIDIMENSIONALE A CĂLDURII
Deşi fenomenele termice se desfăşoară în corpuri tridimensionale, câmpurile ter-mice rezultate prezintă variaŃii preponderente pe anumite direcŃii. De aceea analiza câmpurilor termice din pereŃi plani sau cilindrici se face în mod uzual folosind modele de calcul bidimensionale.

136 Modelări numerice şi optimizări în instalaŃii
Transmiterea căldurii şi în special conducŃia termică constituie un domeniu în care metoda elementelor finite a găsit un câmp larg de aplicare.
5.8.1. MODELUL ANALITIC AL CONDUCłIEI TERMICE Temperatura într-un corp este o funcŃie de coordonatele spaŃiului x, y, z şi de timpul τ. Totalitatea punctelor din interiorul unui corp care au aceeaşi temperatură se află pe o suprafaŃă izotermă, care în cazul câmpurilor bidimensionale devine o curbă izotermă. Cantitatea de căldură care trece în unitatea de timp printr-o suprafaŃă izotermă S se numeşte flux de căldură, Q:
sqQ
S
∫= d (5.157)
unde:
tn
tq grad
λ
∂∂
λ −=−= (5.158)
în care: q este fluxul termic unitar, dat de legea lui Fourier; λ − conductivitatea termică a materialului; n − normala la suprafaŃă. Pentru majoritatea materialelor variaŃia coeficientului λ cu temperatura poate fi aproximată prin relaŃia liniară: ( )[ ]00 +1 ttb −= λλ (5.159)
în care: λ0 este conductivitatea termică la temperatura t0; b − constantă ce depinde de material. Se consideră cazul general de transfer de căldură prin conducŃie într-un mediu neo-mogen, anizotrop (regiuni cu materiale diferite, având proprietăŃi ce se propagă diferit în direcŃii diferite) şi liniar (coeficient de conductivitate termică constant). VariaŃia temperaturii în spaŃiu şi timp în interiorul unui astfel de mediu se exprimă prin ecuaŃia diferenŃială a conducŃiei de formă generală, sau ecuaŃia lui Fourier:
0
τ
ρ Q
z
t
zy
t
yx
t
x
tc zyx +
+
+
=∂∂
λ∂∂
∂∂
λ∂∂
∂∂
λ∂∂
∂∂
(5.160)
în care: t este temperatura; τ − timpul; ρ, c − densitatea şi căldura specifică a mate-rialului; λx, λy, λz − componentele conductivităŃii termice pe cele trei axe x, y şi z; Q0 − debitul surselor interioare de căldură. Analiza numerică cu elemente finite a câmpurilor termice constituie o metodologie specifică de lucru pentru problemele de stare ale sistemelor termice. Formularea lor co-rectă şi completă impune cunoaşterea geometriei mediului de analizat, a proprietăŃilor fizice ale materialelor constituiente şi a interacŃiunii dintre sistemul termic şi mediul ambiant. Această interacŃiune se specifică din punct de vedere matematic sub forma condiŃiilor la limită (spaŃiale) şi respectiv a condiŃiilor iniŃiale (de timp) pentru cazul regimurilor tranzitorii. CondiŃiile iniŃiale stabilesc distribuŃia de temperatură la începutul procesului:
),,()0τ,,,( zyxfzyxft === (5.161)

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 137
CondiŃiile la limită spaŃiale stabilesc parametrii schimbului de căldură pe frontierele domeniului analizat, fiind de următoarele tipuri:
− condiŃii Dirichlet (de tipul întâi), care speci-fică temperatura pe segmentul de suprafaŃă St al domeniului analizat (fig. 5.14) ca o funcŃie spa-Ńială constantă sau variabilă în timp: ( ) τ, , , zyxft = (5.162)
− condiŃii Neumann (de tipul al doilea), care specifică valoarea fluxului termic unitar de supra-faŃă pe segmentul de frontieră Sq:
zzyyxx nz
tn
y
tn
x
tq
∂∂
λ∂∂
λ∂∂
λ ++= (5.163)
în care nx, ny, nz sunt cosinusurile directoare ale normalei la suprafaŃa Sq. − condiŃii Cauchy (de tipul al treilea). În acest
caz se specifică temperatura mediului exterior şi valoarea coeficientului de transfer convectiv între segmentul de frontieră Sα şi fluidul înconjurător:
( ) zzyyxxe nz
tn
y
tn
x
ttt
∂∂
λ∂∂
λ∂∂
λα ++=− (5.164)
în care: α este coeficientul de transfer termic convectiv de la segmentul de frontieră Sα la mediul înconjurător sau invers; te − temperatura mediului ambiant. Modelul analitic (5.160)…(5.164) trebuie completat cu o ecuaŃie de material, care descrie variaŃia proprietăŃilor fizice în funcŃie de temperatură. Pentru corpurile cu pro-prietăŃi fizice liniare, aceste ecuaŃii sunt de forma λ = const., fapt pentru care ele nu se mai scriu în cadrul modelului. Integrarea ecuaŃiei diferenŃiale a conducŃiei termice (5.160) în condiŃiile la limită corespunzătoare problemei de rezolvat permite determinarea temperaturii în orice punct al domeniului şi în orice moment. Integrarea analitică este posibilă doar în cazul problemelor simple (conducŃia prin pereŃi plani, cilindrici, sferici, simpli sau compuşi), fiind foarte dificilă şi chiar imposibilă în cazul domeniilor cu forme geometrice com-plicate, când se apelează la integrarea numerică. Pentru realizarea modelului numeric cu elemente finite, modelul analitic (5.160).. …(5.164) trebuie transformat într-un model integral adecvat domeniului de analiză considerat. Această transformare se va face folosind metoda variaŃională, care prezintă avantajul unei interpretări fizice a fenomenului modelat.
5.8.2. FORMULAREA VARIAłIONALĂ A METODEI ELEMENTELOR FINITE
FuncŃia de temeratură t(x, y, z, τ ) ce satisface ecuaŃia fundamentală a transferului de căldură (5.160) şi condiŃiile (5.161)…(5.164) va satisface şi ecuaŃia de staŃionaritate în domeniul de analiză V:
Fig. 5.14 CondiŃii la limită spaŃiale

138 Modelări numerice şi optimizări în instalaŃii
0δ =F (5.165) în care F este funcŃionala conducŃiei căldurii. Deci, integrarea ecuaŃiei diferenŃiale a conducŃiei căldurii (5.160), în condiŃiile la limită (5.161)…(5.164), este echivalentă cu minimizarea funcŃionalei:
−
−
+
+
= ∫∫ VtQt
cVz
t
y
t
x
tF
V
zyx
V
d
ρ +d
2
10
222
τ∂∂
∂∂
λ∂∂
λ∂∂
λ
StttStq
qS S
e d2
1 d ∫ ∫
−+−α
α (5.166)
în care: Q0 este pozitiv dacă sursele interioare debitează căldură şi negativ dacă absorb căldură; q este pozitiv când pătrunde în corp dinspre mediul exterior şi negativ când iese din corp spre mediul exterior; α este pozitiv pe suprafeŃele care cedează căldură mediului exterior şi negativ pe cele ce absorb căldură de la mediul exterior. Prin particularizarea funcŃionalei (5.166) se obŃin cazurile frecvent întâlnite în prac-tica modelării cu elemente finite a câmpurilor termice: − regim termic staŃionar fără surse interne de căldură:
∫ ∫∫
−+−
+
+
=
qS S
ezyx
V
StttStqVz
t
y
t
x
tF
α
α∂∂
λ∂∂
λ∂∂
λ d2
1dd
2
1222
(5.167)
− regim termic staŃionar omogen şi izotrop, fără surse interne de căldură:
StttSqtVz
t
y
t
x
tF
S
e
SV q
d2
1dd
2
222
∫∫∫
−+−
+
+
=
α
α∂∂
∂∂
∂∂λ
(5.168)
− regim termic staŃionar omogen şi izotrop, fără surse interne de căldură şi condiŃii la limită de tip Dirichlet:
Vz
t
y
t
x
tF
V
d2
1222
∫
+
+
=
∂∂
∂∂
∂∂
(5.169)
Minimizarea funcŃionalei se face pe elemente finite, efectul de asamblare obŃi-nându-se prin cumularea contribuŃiei fiecărui element finit în parte. În fiecare nod există un singur parametru care este temperatura, mărime scalară.
5.8.3. MODELUL NUMERIC CU ELEMENTE FINITE AL CONDUCłIEI TERMICE ÎN REGIM STAłIONAR
În transferul staŃionar de căldură, temperatura este constantă în timp şi, în con-secinŃă, în (5.166), 0τ/ =∂∂ t . Pentru probleme bidimensionale (plane) temperatura nu
variază în direcŃia axei z, încât 0/ =zt ∂∂ . Ca probleme bidimensionale se studiază problemele plane. Forma generală a ecuaŃiei elementelor finite. În acest caz funcŃionala (5.166) primeşte forma:
Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 139
∫ −
−
+
+
=V
zyx VtQz
t
y
t
x
tF d
2
10
222
∂∂
λ∂∂
λ∂∂
λ
StttSqt
S
e d2
1d
qS∫∫
−+−α
α (5.170)
Deoarece funcŃia convenŃională prin care se aproximează temperatura nu este continuă pe tot domeniul ci numai pe cuprinsul elementelor finite, integrala din (5.170) trebuie efectuată pe elemente finite. FuncŃionala F pentru toată structura se scrie ca o sumă de funcŃionale pentru m elemente finite în care a fost divizat domeniul:
∑=
=m
e
eFF1
(5.171)
∑ ∫∫=
−−
∂
∂+
∂
∂=
m
10
22
dd2
1
e V
e
V
e
y
e
x
ee
VtQVy
t
x
tF λλ
−+− ∫ ∫qe eS S
eeee StttSqt
α
α d2
1d (5.172)
În relaŃia (5.172) exponentul “e” precizează referirea la un element finit. Pentru simplificarea scrierii el a fost folosit numai în cazul temperaturii, deşi celelalte mărimi care intervin în relaŃie se referă tot la un element finit. Pe cuprinsul unui element finit temperatura te în orice punct se exprimă în raport cu temperaturile nodale printr-o relaŃie de forma:
[ ] enne tNtNtNtNt =+++= ...2211 (5.173)
în care: n este numărul nodurilor elementului finit; [N] − matricea funcŃiilor de formă pe elementul finit; te − vectorul valorilor nodale ale temperaturii. Întrucât în funcŃionala (5.172) intervin şi derivatele parŃiale ale temperaturii, se derivează (5.173) în raport cu x şi y şi se obŃine relaŃia:
[ ] en
n
n
e
e
tJ
t
t
t
y
N
y
N
y
N
x
N
x
N
x
N
y
t
x
t
B =
=
= 2
1
21
21
...
...
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂∂∂
(5.174)
Dacă se notează matricea conductivităŃilor termice:
[ ]
=
y
xD
λλ0
0 (5.175)
funcŃionala (5.172) se scrie, pentru un element finit sub forma:
[ ] ( ) [ ][ ] [ ] [ ] ∫∫∫ +−−=qeee S
e
V
eoe
T
e
V
e StNqVtNQVtJDtJF ddd2
1

140 Modelări numerice şi optimizări în instalaŃii
[ ] ( ) [ ] ∫ ∫−+e eS S
eee StNtStN
α α
αα
dd2
2 (5.176)
Deoarece:
[ ] ( ) [ ][ ] ( ) [ ] ( ) [ ] ( ) [ ] [ ] e
TT
ee
T
ee
TT
e
T
e
tNNttNtNtN
JttJ
==
=2
(5.177)
ecuaŃia (5.176) se scrie:
[ ] [ ][ ] [ ] [ ] ∫∫∫ +−−=qeee S
e
V
eoe
TT
e
V
eStNqVtNQVtJDJtF ddd
2
1
[ ] [ ] [ ] ∫ ∫−+e eS S
eee
TT
e StNtStNNt
α α
αα
dd2
(5.178)
Aplicând regulile de derivare a expresiilor matriceale, se obŃine:
[ ] [ ][ ] [ ] [ ] [ ]∫∫∫ −−
+=
Ve
T
oe
S
TT
Ve
e
VNQtSNNVJDJt
F
ee
dddα
α∂∂
[ ] [ ]∫∫ −−eqe S
T
e
S
TSNtSNq
α
α dd (5.179)
łinând seama că dV=hdA şi dS=hdL, unde h este grosimea elementului finit, dA − elementul diferenŃial de arie, iar dL − elementul diferenŃial de lungime, rezultă:
[ ] [ ][ ] [ ] [ ] [ ]∫∫∫ −−
+=
eee A
T
oe
L
TT
Ae
e
ANQhtLNNAJDJht
Fddd α
∂∂
[ ] [ ]∫∫ −−ee L
T
e
L
TLNthLNqh dd α (5.180)
Grosimea h a elementului finit se consideră constantă, egală cu unitatea. Concentrat, relaŃia (5.180) se scrie:
[ ] ptkt
Fe
e
e
−=∂∂
(5.181)
unde:
[ ] [ ] [ ][ ] [ ] [ ]∫∫ +=ee L
T
A
TLNNhAJDJhk
α
α dd (5.182)
[ ] [ ] [ ]∫∫∫ ++=eqee L
T
e
L
T
A
TLNthLNqhANQhp
α
α ddd0 (5.183)
în care: [k] este matricea de conductivitate, prima integrală a acesteia corespunzând conducŃiei în corp, iar a doua integrală corespunzând convecŃiei pe latura Lαe a supra-feŃei Sαe; p − vectorul încărcării termice, în cadrul căruia integralele reprezintă con-tribuŃia respectiv a surselor interioare de căldură Q0, pe elementul finit de volum Ve, a

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 141
fluxului termic unitar q pe segmentul de frontieră Sqe, şi a convecŃiei termice pe suprafaŃa Sα. Minimizarea funcŃionalei F se obŃine anulând derivata în raport cu temperaturile din toate nodurile domeniului. łinând seama de (5.171) se obŃine:
∑∑
==
==m
e e
m
e
e
t
FF
tt
F
11 ∂∂
∂∂
∂∂
(5.184)
Introducând (5.181) în (5.184) se obŃine sistemul de ecuaŃii al întregului domeniu: [ ] PtK = (5.185) unde:
[ ] [ ] ∑∑ ==m
1
m
1
;k pPK (5.186)
în care: [K] este matricea de conductivitate a domeniului de analiză; P − vectorul în-cărcării termice pentru întreg domeniul; t − vectorul temperaturilor necunoscute pen-tru tot domeniul. EcuaŃia (5.185) este forma cu elemente finite a ecuaŃiei diferenŃiale a conducŃiei căldurii, reprezentând un sistem cu un număr de ecuaŃii egal cu numărul nodurilor cu temperatura necunoscută a domeniului analizat, prin a cărui rezolvare se determină aceste temperaturi. În cele ce urmează se determină expresia matricei de conductivitate (5.182) şi a vectorului încărcării termice pe elementul finit (5.183). Expresia matricei de conductivitate. Folosind elemente finite triunghiulare liniare (fig. 5.15), temperatura te într-un punct al elementului finit este, conform (5.173):
[ ] [ ] e
k
j
i
kjikkjjiie tN
t
t
t
NNNtNtNtNt =
=++= (5.187)
în care: ti, tj, tk sunt temperaturile din no-durile i, j, k ale elementului finit (fig. 5.15), iar [N] − matricea funcŃiilor de formă, care au expresiile (4.67). Matricea de conductivitate a elementu-lui finit (5.182) se scrie sub forma: [ ] [ ] [ ]21 kkk += (5.188)
în care:
[ ] [ ] [ ][ ]
[ ] [ ] [ ]∫
∫=
=
e
e
L
T
A
T
LNNhk
AJDJhk
α
α d
;d
2
1
(5.189)
Matricea [J] se obŃine din relaŃia de de-finiŃie (5.174), care pentru acest tip de ele-
ment finit se scrie astfel:
Fig. 5.15 Element finit triunghiular liniar

142 Modelări numerice şi optimizări în instalaŃii
[ ] e
k
j
i
kji
kji
e
e
tJ
t
t
t
y
N
y
N
y
N
x
N
x
N
x
N
y
t
x
t
B =
=
=
∂∂
∂
∂
∂∂
∂∂
∂
∂
∂∂
∂∂∂∂
(5.190)
Derivând expresiile funcŃiilor de formă se obŃine:
[ ]
==
kji
kji
ekji
kji
ccc
bbb
A
y
N
y
N
y
N
x
N
x
N
x
N
J2
1
∂∂
∂
∂
∂∂
∂∂
∂
∂
∂∂
(5.191)
în care Ae este aria elementului finit, conform (4.64), iar coeficienŃii constanŃi b şi c au expresiile (4.65):
ijkkijjki
jikikjkii
xxcxxcxxc
yybyybyyb
−=−=−=
−=−=−=
;;
;; (5.192)
Rezultă că matricea [J] este constantă. Deoarece conductivităŃile termice λx şi λy sunt considerate constante pe elementul finit, matricea [D] din relaŃia (5.175) este şi ea constantă, încât:
[ ] [ ] [ ][ ] [ ] [ ][ ]∫ ==eA
e
TTAJDJhAJDJhk d1 (5.193)
Înlocuind pe [J] din (5.191) şi pe [D] din (5.175) se obŃine:
[ ]
+++
+++
+++
=
kkykkxjkyjkxikyikx
kjykjxjjyjjxijyijx
kiykixjiyjixiiyiix
eccbbccbbccbb
ccbbccbbccbb
ccbbccbbccbb
A
hk
λλλλλλλλλλλλλλλλλλ
41 (5.194)
Matricea [k2] din relaŃia (5.188) se dezvoltă sub forma:
[ ] L
NNNNNN
NNNNNN
NNNNNN
hk
eLkkjkik
kjjjij
kijiii
d2 ∫
=α
α (5.195)
Introducând coordonatele L−naturale şi considerând că schimbul de căldură prin convecŃie se face pe latura jk a elementului finit se obŃine:
[ ] L
LLLL
LLLLhk
eLkkkj
kjj d
0
0
000
j2 ∫
=α
α (5.196)
Pentru calculul valorii integralei (5.196) se foloseşte formula:
( )!1
)( ! !d
++
−=∫ βα
βαβα ij
X
X
ji
XXxLL
j
i
(5.197)
Pentru produsele cu aceiaşi indici j sau k se obŃine:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 143
( ) 3!1+0+2
0! 2!ddd 2 e
e
L
j
L
kk
L
jj
LLLLLLLLLL
eee
αα
ααα
==== ∫∫∫ (5.198)
iar pentru produsele cu indici j şi k rezultă:
( ) 6!1+1+1
1! 1!dd e
e
L
jk
L
kj
LLLLLLLL
ee
αα
αα
=== ∫∫ (5.199)
Înlocuind în (5.196) se obŃine:
[ ]
=
210
120
000
62eLh
k αα (5.200)
Dacă latura elementului finit cu schimb de căldură prin convecŃie este ij respectiv ki, se obŃine:
[ ] [ ]
=
=
201
000
102
6;
000
021
012
6 22ee Lh
kLh
k αα αα (5.201)
Matricea [k2] se constituie numai dacă elementul respectiv are schimb de căldură prin convecŃie pe una din laturile sale. Expresia vectorului încărcării termice. Acest vector se compune, conform rela-Ńiei (5.183), din trei termeni care se calculează cu ajutorul coordonatelor L−naturale. Primul termen corespunde debitului surselor interioare de căldură pe elementul finit. Considerând debitul Q0 constant pe elementul finit şi folosind formula de integrare (4.50):
( ) e
A
kji AALLL
e
2!2+++
! ! !d
γβαγβαγβα =∫ (5.202)
se obŃine:
[ ]
=
=
== ∫∫∫
1
1
1
3ddd eo
Ak
j
i
o
Ak
j
i
o
A
T
oQ
AhQA
L
L
L
hQA
N
N
N
hQANQhp
eee
(5.203)
Al doilea termen din (5.183) corespunde schimbului de căldură pe contur prin flux termic impus. Presupunând că fluxul de căldură pătrunde prin latura Lki = Lqe a elemen-tului finit şi folosind formula de integrare (5.197), se obŃine:
[ ]
=
=
== ∫∫∫
1
0
1
2d0d0d
qe
Lk
i
Lk
i
L
T
q
hqLL
L
L
hqL
N
N
hqLNqhp
qeqeqe
(5.204)
Al treilea termen din (5.183) corespunde schimbului de căldură prin convecŃie, care se presupune că se produce pe latura jk de lungime Ljk = Lαe a elementului finit. Folo-sind formula de integrare (5.197) se obŃine:

144 Modelări numerice şi optimizări în instalaŃii
[ ]
=
=
== ∫∫∫1
1
0
2d
0
d
0
d ee
Lk
je
Lk
je
L
T
e
LthL
L
LthL
N
NthLNthp
eee
αα
αααα
ααα
(5.205)
De menŃionat că elementul nul din vectorii daŃi de expresiile (5.204) şi (5.205) poa-te ocupa orice poziŃie în vector, după cum nodul opus laturii cu schimb de căldură prin flux termic sau prin convecŃie este nodul i, j sau k. Cu ajutorul expresiilor deduse anterior se constituie sistemul de ecuaŃii al elementu-lui finit, care apoi se asamblează în sistemul de ecuaŃii (5.185) al domeniului analizat, ce se rezolvă folosind metoda Gauss. Pe baza modelului de calcul prezentat s-a elabo-rat programul ordinator ATEFS, implementat pe microcalculatoare IBM-PC. Acesta poate fi folosit şi pentru studiul problemelor de curgere staŃionară în medii poroase.
5.8.4. MODELUL NUMERIC CU ELEMENTE FINITE AL CONDUCłIEI TERMICE ÎN REGIM TRANZITORIU
Comparând funcŃionala (5.166) valabilă pentru cazul general de transfer termic cu funcŃionala (5.170) din cazul regimului staŃionar, se observă că, menŃinând analiza în cadrul problemelor plane, 0/ =∂∂ zt , deosebirea dintre cele două funcŃionale constă în
faptul că în locul termenului ∫−V
VtQ d0 de la regimul staŃionar (5.170) apare termenul:
VtQVtt
cVtQt
c
VVV
ddτ
ρdτ
ρ 00 ∫∫∫ −∂∂
=
−∂∂
(5.206)
la regim tranzitoriu. Deci, pentru trecerea de la regimul staŃionar la cel tranzitoriu trebuie adaugată contribuŃia rezultată prin minimizarea termenului:
( ) Vtt
c
V
ed
τργ
∂∂
= ∫ (5.207)
Deoarece minimizarea se face tot pe elemente finite, pentru un element finit vom avea:
( ) Vtt
c e
e
V
e
e dτ
ργ∂
∂= ∫ (5.208)
Exprimând temperatura te prin intermediul funcŃiilor de formă conform (5.173), în care [N] este independent de timpul τ, se obŃine:
[ ] ττ ∂
∂=
∂
∂ ee t
Nt
(5.209)
Introducând (5.173) şi (5.209) în (5.208), rezultă:

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 145
( ) [ ] [ ] τ
dργ∂
∂= ∫ e
V
T
e
e tVNNc
e
(5.210)
Pentru a minimiza pe γ este necesar ca ,0/γ =∂∂ ee t ceea ce conduce la:
( ) [ ] [ ] 0
τdρ =
∂∂
∫ e
V
T
e
tVNNc
e
(5.211)
Matricea:
[ ] ( ) [ ] [ ]∫=V
T
eVNNcC dρ (5.212)
se numeşte matricea capacităŃilor calorice pentru un element finit. Deci pentru trecerea de la regimul staŃionar la cel tranzitoriu, ecuaŃia elementului finit (5.181) trebuie completată cu termenul [ ] ( ),τ/ ∂∂ etC devenind:
[ ] [ ] 0τ
=−+∂
∂ptk
tC e
e (5.213)
În locul unui sistem de ecuaŃii liniare se obŃine un sistem de ecuaŃii diferenŃiale lini-are de ordinul întâi în raport cu timpul. AdmiŃând că pe parcursul unui element finit mărimile ρ şi c sunt constante, efec-tuarea integralei (5.212) conduce pentru elementul finit triunghiular plan la expresia:
[ ] ( )
=
211
121
112
12
ρ eeAc
hC (5.214)
Pentru integrarea în raport cu timpul a sistemului de ecuaŃii diferenŃiale (5.213) şi determinarea câmpului de temperatură tranzitoriu, se foloseşte metoda reziduurilor (metoda Galerkin). Alegând la nivelul unui element coeficienŃii de pondere Wk = Nτk, condiŃia generală specifică metodei reziduurilor este:
( ) DtRN
D
k d∫ τ (5.215)
în care:
( ) [ ] [ ] ptkt
CtR ee −+
∂∂
=τ
(5.216)
Domeniul de integrare D este pasul de timp ∆τ, încât condiŃia (5.215) se scrie:
[ ] ( ) [ ] [ ] [ ] 0dτ
d00
=
−+∂
∂= ∫∫
∆∆
tptkt
CNttRN eeTT
τ
τ
τ
τ (5.217)
FuncŃiile de forma [Nτ] descriu variaŃia temperaturii în intervalul de timp ∆τ, în raport cu temperaturile la începutul şi respectiv la sfârşitul intervalului de timp, la fel cum funcŃiile de formă [N] descriu variaŃia temperaturii pe suprafaŃa elementului finit în raport cu temperaturile nodale.

146 Modelări numerice şi optimizări în instalaŃii
Dacă se notează tei vectorul temperaturilor din nodurile elementului finit la înce-putul intervalului de timp şi tej – la sfârşitul intervalului de timp, temperatura în no-durile elementului la un moment cuprins între începutul τi şi sfârşitul τj al intervalului de timp, este:
[ ] [ ]
ejjeiiej
ei
jiej
ei
e tNtNt
tNN
t
tNt τττττ +=
=
= (5.218)
AdmiŃând o variaŃie liniară a temperaturii în raport cu timpul, funcŃiile de formă vor fi funcŃii liniare de timp:
ττ ττ ∆
=∆
−=1
;1
1 ji NN (5.219)
Derivata temperaturii în raport cu timpul este:
∆∆
−=∂
∂
ej
ei
t
t
tt
t 11
τ (5.220)
Introducând (5.209) şi (5.220) în (5.217) şi efectuând integrarea se obŃine sistemul de ecuaŃii matriceale:
[ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ]
0
2
τ
32
1
62
1
62
1
32
1
=
∆
−
∆+
∆+−
∆+
∆+−
j
i
ej
ei
p
p
t
t
kCkC
kCkC
ττ
ττ
(5.221)
Pentru rezolvarea pas cu pas a problemei se stabileşte o formulă de recurenŃă, por-nind de la una din ecuaŃiile sistemului (5.221). Folosind a doua ecuaŃie se obŃine:
[ ] [ ] [ ] [ ] jeiej ptkCtkC τ3
τ
3
τ2∆+
∆−=
∆+ (5.222)
Cu această relaŃie de recurenŃă se determină temperaturile tej în nodurile elemen-tului finit la momentul j în funcŃie de temperaturile din noduri tei la momentul i pre-cedent. EcuaŃia elementului finit (5.222) se poate scrie sub formă concentrată, obişnuită:
[ ] tejt ptk = (5.223)
unde:
[ ] [ ] [ ] [ ] [ ] [ ] [ ] tjeit pptrrkCkkC =∆+=∆
−=∆
+ τ;3
τ;
3
τ2 (5.224)
în care: [k]t este matricea de conductivitate a elementului în regim tranzitoriu; pt − vectorul încărcării termice în regim tranzitoriu. Sistemul de ecuaŃii (5.223) se constituie pentru toate elementele finite la fiecare pas de timp şi se asamblează în sistemul de ecuaŃii al domeniului analizat, prin a cărui rezolvare se determină temperaturile nodale la pasul de timp j, în funcŃie de valorile temperaturilor la momentul precedent, i. Pentru calculul câmpurilor conductive tranzi-torii s-a întocmit programul ordinator ATEFT.

Modele numerice pentru rezolvarea unor probleme specifice de instalaŃii 147
Modelarea numerică cu elemente finite constituie un instrument matematic foarte eficient de analiză a câmpurilor termice conductive. 5.9. APLICAREA METODEI REZIDUURILOR PONDERATE LA
OBłINEREA ECUAłIILOR CU ELEMENTE FINITE PENTRU MIŞCAREA PERMANENTĂ A UNUI FLUID ÎNTRE DOI
PEREłI PLANI PARALELI Pentru a ilustra aplicarea metodei Galerkin se consideră ca exemplu mişcarea per-manentă a unui fluid între doi pereŃi plani paraleli (mişcarea Couette generalizată), al cărei model analitic este dat de ecuaŃia:
2
2
d
dη
d
d
y
v
x
p= (5.225)
cu condiŃiile pe frontieră:
00 pentru,
0pentru,0
yyvv
yv
==
== (5.226)
în care: v este viteza fluidului; p – presiunea; η – vâscozitatea dinamică a fluidului. Introducând parametrii adimensionali v∗=v/v0, y∗=y/y0 şi parametrul de presiune
−=∗
x
p
v
yp
d
d
η 0
20 , se obŃine ecuaŃia:
0d
d2
2
=+ ∗∗
∗ py
v (5.227)
cu condiŃiile:
1pentru,1
0pentru,0
==
==
∗
∗
yv
yv (5.228)
Pentru discretizare se folosesc elemente finite unidimensionale cu câte trei noduri. Alegând la nivelul unui element coeficienŃii de pondere Wk = Nk (k = 1, 2, 3) şi apli-când condiŃia generală (4.96) se obŃine:
∫ =
+ ∗∗
∗eL
k ypy
vN 0d
d
d2
2
(5.229)
unde Nk reprezintă funcŃiile de formă. Înlocuind primul termen al integrantului prin expresia:
∗∗∗∗∗
−
=
y
v
y
N
y
vN
yy
vN k
kk d
d
d
d
d
d
d
d
d
d2
2
(5.230)
şi aplicând condiŃiile la limită se obŃine:

148 Modelări numerice şi optimizări în instalaŃii
∫ ∫ ∗∗∗∗∗
=e e
L L
kk ypNy
y
v
y
Ndd
d
d
d
d (5.231)
Considerând pe rând indicii k = 1, 2, 3 se obŃine ecuaŃia caracteristică a elementului generic e, sub formă matriceală:
eee BVA = (5.232) în care:
∫ ∫ ∗∗∗∗∗
== yNpByy
N
y
NA m
em
nmemn d;d
d
d
d
d (5.233)
Asamblarea elementelor finite pe întreg domeniul de analiză conduce în final la ecuaŃia matriceală: BVA = (5.234) în care: A este matricea de rigiditate a sistemului; B – vectorul forŃelor generalizate. Elementele acestor matrice se obŃin astfel:
∑ ∑= =
==2
1
2
1
;e e
em
enmnm BBAA (5.235)
EcuaŃia (5.234) împreună cu condiŃiile la limită impuse nodurilor de frontieră:
1pentru,1
0pentru,0
9
1
==
==
∗
∗
yv
yv (5.236)
constituie modelul analog cu elemente finite al problemei, a cărui soluŃionare conduce la obŃinerea valorilor nodale de viteză v1, v2,..., v9. Orice valoare intermediară se obŃine apoi pe baza acestor valori cu ajutorul funcŃiilor de formă corespunzătoare tipului de elemente considerate.
Capitolul 6
METODE ŞI TEHNICI DE OPTIMIZARE
6.1. FORMULAREA UNEI PROBLEME DE OPTIMIZARE Necesitatea creşterii similitudinii dintre procesele reale din instalaŃiile pentru cons-trucŃii şi modelele matematice care le reprezintă conduce inevitabil la sporirea comple-xităŃii modelelor şi implicit la imposibilitatea rezolvării lor fără aplicarea unor metode şi tehnici moderne de calcul şi utilizarea calculatoarelor electronice. Proiectarea unei anumite instalaŃii poate fi făcută în mai multe alternative, în funcŃie de criteriile care stau la bazele proiectării. Oricare ar fi aceste criterii, rezultatul proiec-tării conduce la alegerea unor valori pentru variabilele de proiectare care pot fi mărimi de natură fizică diferită cum ar fi lungimi, presiuni, temperaturi, curenŃi etc. Proiectarea optimală determină variabilele de proiectare ce respectă anumite condiŃii (restricŃiile proiectării) impuse de comportarea şi funcŃionalitatea instalaŃiei, minimizând o funcŃie de eficienŃă (funcŃia obiectiv). Pentru rezolvarea problemei de optimizare este necesară cunoaşterea unor metode adecvate de calcul. Metodele aplicate pentru determinarea soluŃiei optime nu permit în general obŃine-rea unei soluŃii calitativ diferite pentru problema în studiu, ci conduc la alegerea celor mai bune valori, adică, optimizează soluŃia în concepŃia de proiectare a utilizatorului. Optimizarea unui sistem presupune următoarele etape principale: − delimitarea cadrului problemei; − definirea criteriului de optimizare; − găsirea relaŃiilor tehnologice care descriu limitările sistemului; − rezolvarea programului matematic de optimizare. Procesul de optimizare se poate încheia printr-o ultimă analiză suplimentară care să Ńină seama de elemente necuantificabile: sociale, politice etc., ce pot deplasa optimul matematic.
6.1.1. VARIABILELE DE PROIECTARE Mărimile geometrice, hidraulice, termice, economice care urmează să fie calculate în rezolvarea unei probleme de proiectare se numesc variabile de proiectare. Spre exemplu, în proiectarea optimală a reŃelelor de apă variabilele de proiectare sunt dia-metrele tronsoanelor, debitele pe fiecare tronson, parametrii ce descriu un anumit regim de curgere a apei, acestea grupându-se în clase de variabile între care există o strânsă interdependenŃă.
150 Modelări numerice şi optimizări în instalaŃii
În cazul reŃelelor inelare se stabileşte geometria reŃelei şi debitul de calcul ce încar-că reŃeaua într-o anumită ipoteză de funcŃionare. Ca necunoscute apar atât diametrele cât şi debitele sau pierderile de sarcină pe fiecare tronson, variabile dependende unele de altele. În rezolvarea clasică se predimensionează secŃiunea tronsoanelor (diametrele) pe criteriul vitezelor economice de curgere a apei, după care se calculează debitele reale pe fiecare tronson, în condiŃiile respectării ecuaŃiilor de compatibilitate a reŃelei. Prin optimizarea matematică a reŃelei inelare, în formularea criteriului de optimizare se poate alege ca şi clasă de variabile fie debitele sau pierderile de sarcină, fie diame-trele, stabilindu-se dependenŃa dintre ele prin restricŃiile matematice rezultate din con-diŃiile hidraulice şi economice.
6.1.2. RESTRICłIILE DE PROIECTARE RestricŃiile reprezintă un ansamblu de relaŃii matematice care descriu cât mai fidel interdependenŃa variabilelor proceselor ce au loc în cadrul sistemului de optimizat. Acestea pot exprima direct anumite limitări impuse unei variabile sau unui grup al variabilelor (restricŃii explicite) sau pot exprima indirect aceste limitări asupra unor mărimi de care depind variabilele (restricŃii implicite). Toate restricŃiile se pot transforma în egalităŃi sau inegalităŃi mai mult sau mai puŃin complexe. EgalităŃile din cadrul acestor restricŃii provin din legi generale sau specifice care impun numai anumite legături între parametrii decizionali şi din ecuaŃii de conservare: masă (debit), energie (putere) sau impuls. InegalităŃile semnifică imposibilitatea depăşirii unor anumite limite care constituie, de obicei, minimele sau maximele tehnice ale sistemului. Totodată, situaŃiile în care se impune asigurarea obligatorie a unor mase, debite, puteri etc. pot genera restricŃii de tip inegalitate.
6.1.3. FUNCłIA OBIECTIV FuncŃia obiectiv exprimă relaŃia matematică de optimizat (minimizat/maximizat), dintre variabilele de proiectare şi criteriile de optimizare adoptate. Valoarea funcŃiei obiectiv de obicei se limitează printr-o serie de restricŃii, având de-a face cu o optimizare condiŃionată, iar în cazul că restricŃiile lipsesc, optimizarea este necondiŃionată. FuncŃia obiectiv poate fi concepută astfel încât să exprime criterii simple de cost, consumuri energetice, consumuri de materiale deficitare etc., sau să exprime mai multe criterii simultane (funcŃie multicriterială). În funcŃie de scopul urmărit, aceste criterii se pot împărŃi în patru categorii: tehnice; economice; energetice şi tehnico-economice. • Criteriile tehnice sunt cele care iau în considerare doar efectele elementelor teh-nologice. Din cadrul acestora, cele mai răspândite sunt: randamente, consumuri şi con-sumuri specifice.
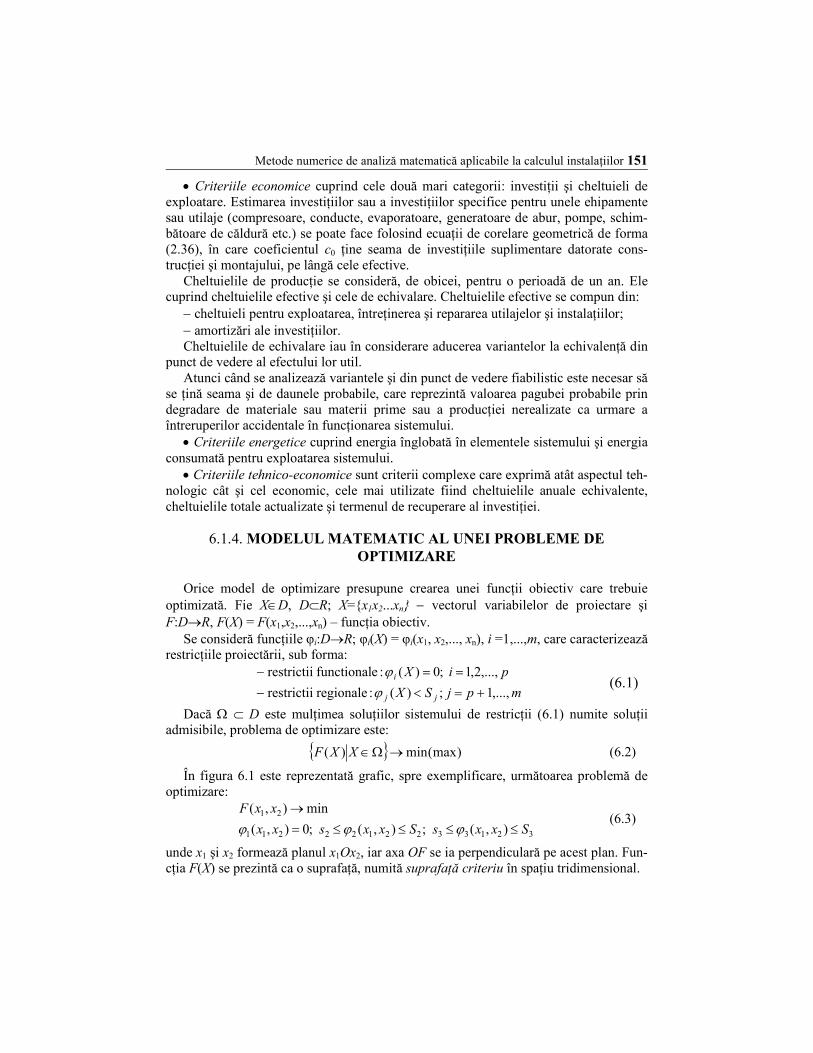
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 151
• Criteriile economice cuprind cele două mari categorii: investiŃii şi cheltuieli de exploatare. Estimarea investiŃiilor sau a investiŃiilor specifice pentru unele ehipamente sau utilaje (compresoare, conducte, evaporatoare, generatoare de abur, pompe, schim-bătoare de căldură etc.) se poate face folosind ecuaŃii de corelare geometrică de forma (2.36), în care coeficientul c0 Ńine seama de investiŃiile suplimentare datorate cons-trucŃiei şi montajului, pe lângă cele efective. Cheltuielile de producŃie se consideră, de obicei, pentru o perioadă de un an. Ele cuprind cheltuielile efective şi cele de echivalare. Cheltuielile efective se compun din: − cheltuieli pentru exploatarea, întreŃinerea şi repararea utilajelor şi instalaŃiilor; − amortizări ale investiŃiilor. Cheltuielile de echivalare iau în considerare aducerea variantelor la echivalenŃă din punct de vedere al efectului lor util. Atunci când se analizează variantele şi din punct de vedere fiabilistic este necesar să se Ńină seama şi de daunele probabile, care reprezintă valoarea pagubei probabile prin degradare de materiale sau materii prime sau a producŃiei nerealizate ca urmare a întreruperilor accidentale în funcŃionarea sistemului. • Criteriile energetice cuprind energia înglobată în elementele sistemului şi energia consumată pentru exploatarea sistemului. • Criteriile tehnico-economice sunt criterii complexe care exprimă atât aspectul teh-nologic cât şi cel economic, cele mai utilizate fiind cheltuielile anuale echivalente, cheltuielile totale actualizate şi termenul de recuperare al investiŃiei.
6.1.4. MODELUL MATEMATIC AL UNEI PROBLEME DE OPTIMIZARE
Orice model de optimizare presupune crearea unei funcŃii obiectiv care trebuie optimizată. Fie X∈D, D⊂R; X=x1x2...xn − vectorul variabilelor de proiectare şi F:D→R, F(X) = F(x1,x2,...,xn) – funcŃia obiectiv. Se consideră funcŃiile φi:D→R; φi(X) = φi(x1, x2,..., xn), i =1,...,m, care caracterizează restricŃiile proiectării, sub forma:
mpjSX
piX
jj
i
,...,1;)(:regionalerestrictii
,...,2,1;0)(:efunctionalrestrictii
+=<−
==−
ϕ
ϕ (6.1)
Dacă Ω ⊂ D este mulŃimea soluŃiilor sistemului de restricŃii (6.1) numite soluŃii admisibile, problema de optimizare este:
)max(min)( →Ω∈XXF (6.2)
În figura 6.1 este reprezentată grafic, spre exemplificare, următoarea problemă de optimizare:
3213322122211
21
),(;),(;0),(
min),(
SxxsSxxsxx
xxF
≤≤≤≤=
→
ϕϕϕ (6.3)
unde x1 şi x2 formează planul x1Ox2, iar axa OF se ia perpendiculară pe acest plan. Fun-cŃia F(X) se prezintă ca o suprafaŃă, numită suprafaŃă criteriu în spaŃiu tridimensional.
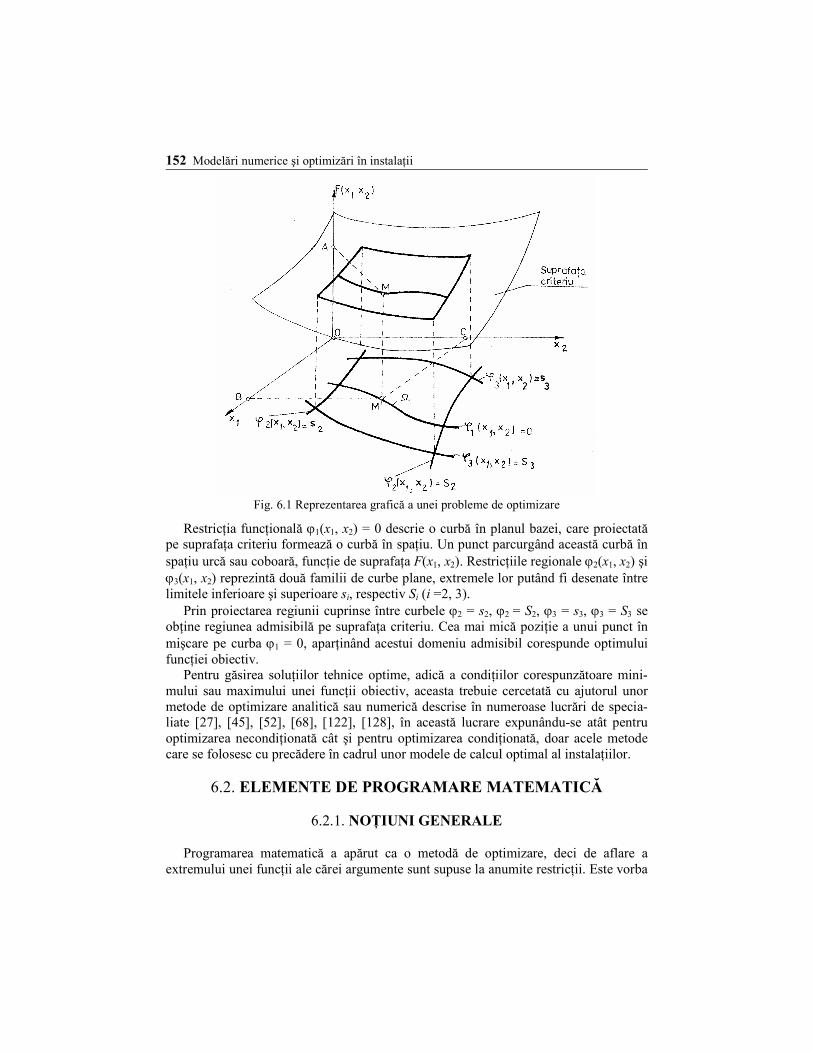
152 Modelări numerice şi optimizări în instalaŃii
Fig. 6.1 Reprezentarea grafică a unei probleme de optimizare
RestricŃia funcŃională ϕ1(x1, x2) = 0 descrie o curbă în planul bazei, care proiectată pe suprafaŃa criteriu formează o curbă în spaŃiu. Un punct parcurgând această curbă în spaŃiu urcă sau coboară, funcŃie de suprafaŃa F(x1, x2). RestricŃiile regionale ϕ2(x1, x2) şi ϕ3(x1, x2) reprezintă două familii de curbe plane, extremele lor putând fi desenate între limitele inferioare şi superioare si, respectiv Si (i =2, 3). Prin proiectarea regiunii cuprinse între curbele ϕ2 = s2, ϕ2 = S2, ϕ3 = s3, ϕ3 = S3 se obŃine regiunea admisibilă pe suprafaŃa criteriu. Cea mai mică poziŃie a unui punct în mişcare pe curba ϕ1 = 0, aparŃinând acestui domeniu admisibil corespunde optimului funcŃiei obiectiv. Pentru găsirea soluŃiilor tehnice optime, adică a condiŃiilor corespunzătoare mini-mului sau maximului unei funcŃii obiectiv, aceasta trebuie cercetată cu ajutorul unor metode de optimizare analitică sau numerică descrise în numeroase lucrări de specia-liate [27], [45], [52], [68], [122], [128], în această lucrare expunându-se atât pentru optimizarea necondiŃionată cât şi pentru optimizarea condiŃionată, doar acele metode care se folosesc cu precădere în cadrul unor modele de calcul optimal al instalaŃiilor.
6.2. ELEMENTE DE PROGRAMARE MATEMATICĂ
6.2.1. NOłIUNI GENERALE Programarea matematică a apărut ca o metodă de optimizare, deci de aflare a extremului unei funcŃii ale cărei argumente sunt supuse la anumite restricŃii. Este vorba
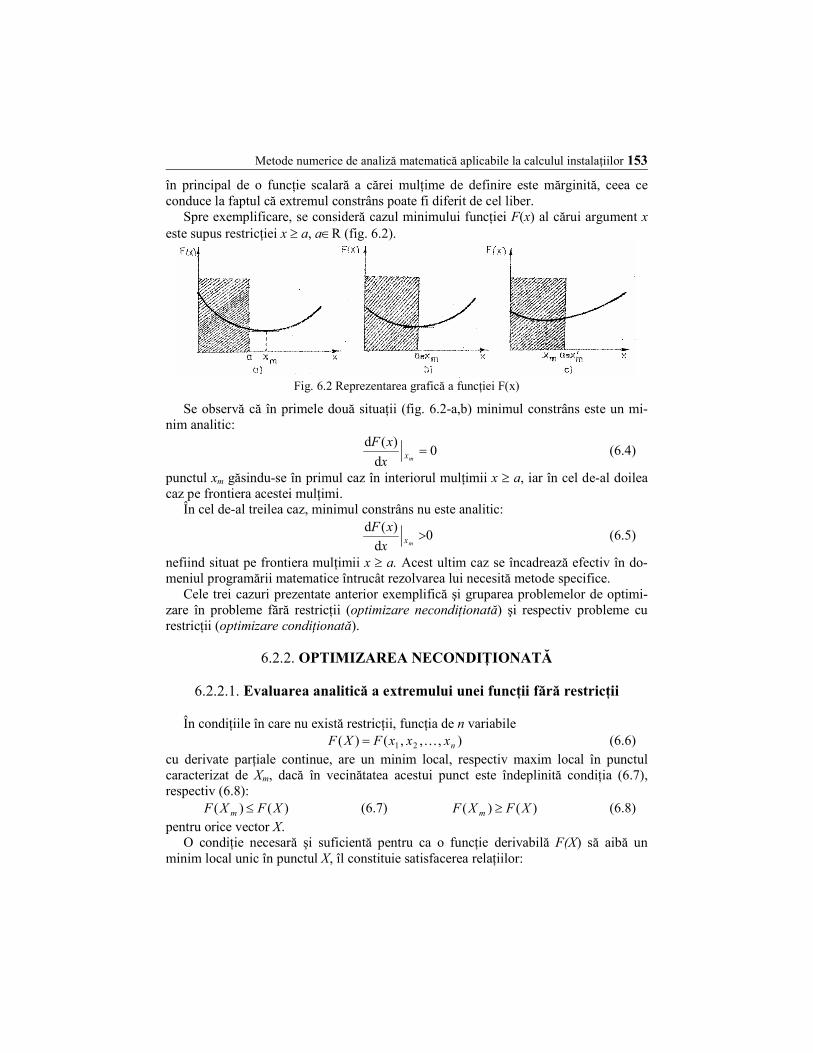
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 153
în principal de o funcŃie scalară a cărei mulŃime de definire este mărginită, ceea ce conduce la faptul că extremul constrâns poate fi diferit de cel liber. Spre exemplificare, se consideră cazul minimului funcŃiei F(x) al cărui argument x este supus restricŃiei x ≥ a, a∈R (fig. 6.2).
Fig. 6.2 Reprezentarea grafică a funcŃiei F(x)
Se observă că în primele două situaŃii (fig. 6.2-a,b) minimul constrâns este un mi-nim analitic:
0d
)(d=
mxx
xF (6.4)
punctul xm găsindu-se în primul caz în interiorul mulŃimii x ≥ a, iar în cel de-al doilea caz pe frontiera acestei mulŃimi. În cel de-al treilea caz, minimul constrâns nu este analitic:
mxx
xF
d
)(d>0 (6.5)
nefiind situat pe frontiera mulŃimii x ≥ a. Acest ultim caz se încadrează efectiv în do-meniul programării matematice întrucât rezolvarea lui necesită metode specifice. Cele trei cazuri prezentate anterior exemplifică şi gruparea problemelor de optimi-zare în probleme fără restricŃii (optimizare necondiŃionată) şi respectiv probleme cu restricŃii (optimizare condiŃionată).
6.2.2. OPTIMIZAREA NECONDIłIONATĂ
6.2.2.1. Evaluarea analitică a extremului unei funcŃii fără restricŃii În condiŃiile în care nu există restricŃii, funcŃia de n variabile ),,,()( 21 nxxxFXF K= (6.6) cu derivate parŃiale continue, are un minim local, respectiv maxim local în punctul caracterizat de Xm, dacă în vecinătatea acestui punct este îndeplinită condiŃia (6.7), respectiv (6.8): )()( XFXF m ≤ (6.7) )()( XFXF m ≥ (6.8) pentru orice vector X. O condiŃie necesară şi suficientă pentru ca o funcŃie derivabilă F(X) să aibă un minim local unic în punctul X, îl constituie satisfacerea relaŃiilor:
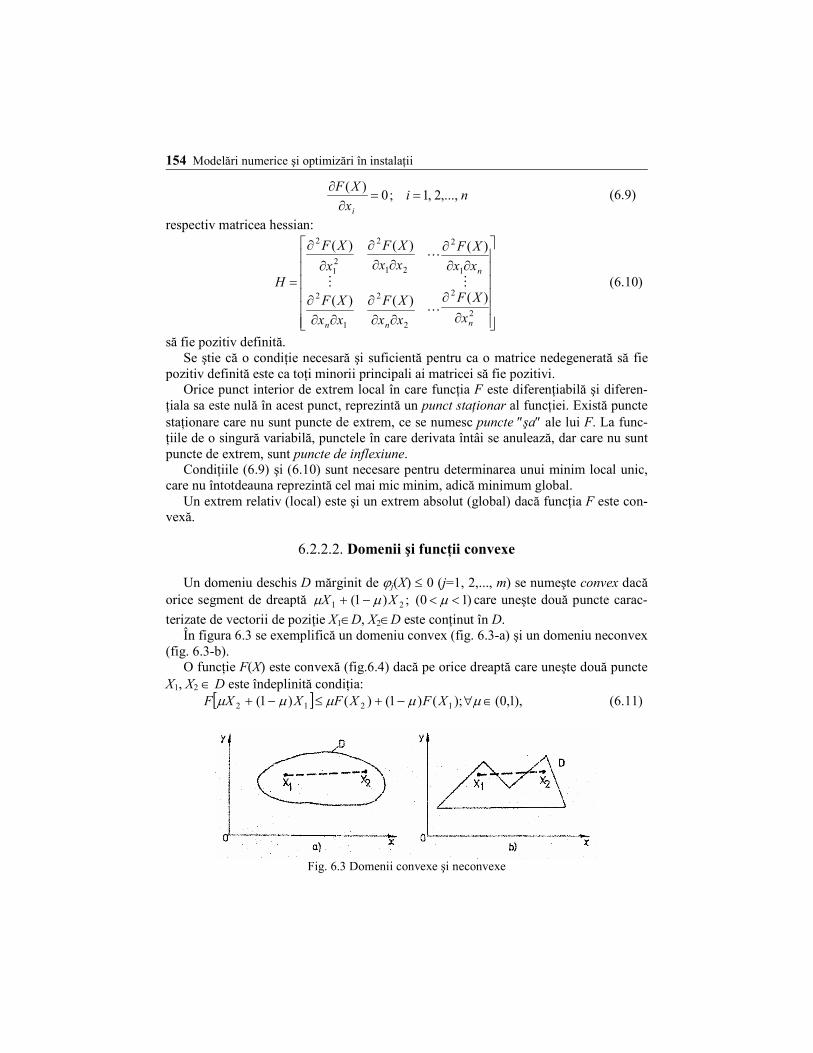
154 Modelări numerice şi optimizări în instalaŃii
nix
XF
i
,...,2,1;0)(
==∂
∂ (6.9)
respectiv matricea hessian:
∂
∂
∂∂
∂
∂∂∂
∂∂∂
∂∂
∂
∂
∂
=
2
2
1
2
2
2
1
2
21
2
21
2
)(
)(
)()(
)()(
n
n
nnx
XF
xx
XF
xx
XF
xx
XF
xx
XF
x
XF
H M
L
M
L
(6.10)
să fie pozitiv definită. Se ştie că o condiŃie necesară şi suficientă pentru ca o matrice nedegenerată să fie pozitiv definită este ca toŃi minorii principali ai matricei să fie pozitivi. Orice punct interior de extrem local în care funcŃia F este diferenŃiabilă şi diferen-Ńiala sa este nulă în acest punct, reprezintă un punct staŃionar al funcŃiei. Există puncte staŃionare care nu sunt puncte de extrem, ce se numesc puncte ″şa″ ale lui F. La func-Ńiile de o singură variabilă, punctele în care derivata întâi se anulează, dar care nu sunt puncte de extrem, sunt puncte de inflexiune. CondiŃiile (6.9) şi (6.10) sunt necesare pentru determinarea unui minim local unic, care nu întotdeauna reprezintă cel mai mic minim, adică minimum global. Un extrem relativ (local) este şi un extrem absolut (global) dacă funcŃia F este con-vexă.
6.2.2.2. Domenii şi funcŃii convexe Un domeniu deschis D mărginit de ϕj(X) ≤ 0 (j=1, 2,..., m) se numeşte convex dacă orice segment de dreaptă )10(;)1( 21 <<−+ µµµ XX care uneşte două puncte carac-
terizate de vectorii de poziŃie X1∈D, X2∈D este conŃinut în D. În figura 6.3 se exemplifică un domeniu convex (fig. 6.3-a) şi un domeniu neconvex (fig. 6.3-b). O funcŃie F(X) este convexă (fig.6.4) dacă pe orice dreaptă care uneşte două puncte X1, X2 ∈ D este îndeplinită condiŃia: [ ] ),1,0();()1()()1( 1212 ∈∀−+≤−+ µµµµµ XFXFXXF (6.11)
Fig. 6.3 Domenii convexe şi neconvexe

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 155
unde partea dreaptă a inegalităŃii reprezintă inter-polarea liniară a funcŃiei de-a lungul dreptei ce u-neşte pe X1 cu X2. FuncŃiile convexe au unele proprietăŃi impor-tante: a) )()()()( 22121 XFXXXFXF ∇−+≥ , pentru
toŃi X1, X2 (6.12)
b) Matricea derivatelor parŃiale ji xxF ∂∂∂ /2 este
pozitiv semidefinită pentru toate punctele X, adică are şi valori caracteristice pozitive şi negative; c) Fiecare minim local într-un domeniu convex D
reprezintă un minim global pentru acest domeniu.
6.2.2.3. Metode numerice de evaluare a optimului unei funcŃii fără restricŃii Metodele analitice bazate pe calculul diferenŃial au o utilizare relativ limitată la rezolvarea problemelor de optim, datorită complexităŃii funcŃiei obiectiv. De aceea se va face referire în continuare la unii algoritmi de optimizare numerică a funcŃiilor. Metoda de evaluare a minimului unei funcŃii monovariabile prin interpolare. Metoda de interpolare constă, de regulă, în aproximarea funcŃiei printr-un polinom de interpolare pătratică sau cubică şi cuplată cu un algoritm de căutare cu pas constant sau accelerat poate fi folosită la evaluarea extremului după o direcŃie, în cadrul unui algo-ritm de determinare a extremului unei funcŃii multivariabile. Un algoritm de căutare a minimului unei funcŃii monovariabile, care cuplează cău-tarea cu pas accelerat cu interpolarea pătratică, cuprinde următoarele etape: E1) Se cercetează funcŃia în acord cu algoritmul de căutare cu pas accelerat într-o succesiune de puncte pentru care rezultă: F(x1) > F(x2) >...> F(xn-1) şi F(xn-1) < F(xn), xn fiind primul punct în care funcŃia creşte. E2) Se reŃin punctele xn-2, xn-1 şi xn, notate cu x1, x2 şi x3, cu ajutorul cărora se aproximează funcŃia printr-un polinom pătratic al cărui minim:
))(())(())((
))(())(())((
2
1
123312231
21
223
23
212
22
231
xxxFxxxFxxxF
xxxFxxxFxxxFr
−+−+−
−+−+−=∗ (6.13)
aproximează minimul funcŃiei de cercetat. E3) Se înlocuieşte cel mai nefavorabil punct dintre x1, x2 şi x3 cu r∗ şi se repetă etapa E2. După a doua interpolare, şi în continuare, se verifică dacă interpolarea este reuşită, adică dacă funcŃia în noul punct de interpolare este mai favorabilă decât în punctul din interpolarea anterioară. Se declară, de asemenea, interpolare nereuşită cazul când nu-mitorul expresiei (6.13) devine egal cu zero. Dacă interpolarea este reuşită, se înlocuieşte cel mai nefavorabil punct dintre x1, x2 şi x3 cu r∗ şi se trece la etapa următoare E3. Dacă interpolarea nu este reuşită, se acceptă drept punct de start punctul din inter-polarea anterioară reuşită, se reduce pasul şi căutarea se reia de la etapa E1.
Fig. 6.4 Reprezentarea unei funcŃii
convexe

156 Modelări numerice şi optimizări în instalaŃii
E4) Se verifică criteriul de convergenŃă, cum ar fi diferenŃa dintre valorile funcŃiei în două puncte de interpolare reuşită consecutive, să fie mai mică decât o valoare cri-tică ε. Dacă convergenŃa nu este satisfăcută, se reia algoritmul de la etapa E2. In figura 6.5 se prezintă schema logică a programului ordinator FMIN1, elaborat pe baza acestui algoritm, unde X(1) este punctul de start, P – pasul, R – coeficientul de re-ducere a pasului în cazul unei interpolări nereuşite; ε – valoarea critică de convergenŃă; X0 – rezultatul de interpolare. În unele situaŃii interpolarea printr-o formă pătratică a funcŃiei de minimizat pe in-tervalul care conŃine minimul nu este suficient de precisă. În consecinŃă, s-au propus polinoame de interpolare de ordin superior, dintre care polinomul de gradul trei este cel mai utilizat. Alte metode directe de evaluare a extremului unei funcŃii monovariabile sunt meto-dele UNIPLEX [68] şi BRENT [13], [27], pe baza ultimei elaborându-se programul ordinator FMIN2. Metode de evaluare a minimului unei funcŃii multivariabile. Metodele numerice de determinare a minimului unei funcŃii multivariabile fără restricŃii pot fi împărŃite în trei categorii: − metode aleatoare de căutare; − metode de căutare unidirecŃională; − metode de gradient. Primul tip de metode conduce la aproximarea minimului global, iar celelalte două metode conduc, în general, doar la determinarea unui minim local. • Metodele aleatoare de căutare au la bază generarea unor numere aleatoare într-un anumit domeniu, numere care se atribuie componentelor vectorului X=x1, x2,..., xn, urmând a calcula funcŃia F(X) pentru fiecare grup de valori date componentelor. Luând un număr mare de încercări se consideră ca valoare minimă a funcŃiei F(X) cea mai mică valoare calculată. • Metodele de căutare unidimensională se bazează pe modificarea succesivă a com-ponentelor vectorului X. În acest sens, se porneşte cu modificarea primei componente x1 până când funcŃia F(X) nu mai scade. Apoi se trece la a doua componentă x2 ş.a. m.d., până ce funcŃia F(X) a atins minimul căutat cu precizia impusă. • Metodele de gradient efectuează modificări simultane ale tuturor variabilelor de care depinde funcŃia F(X), astfel ca aceste modificări să conducă la o deplasare în spaŃiul n–dimensional, într-o direcŃie opusă gradientului funcŃiei obiectiv, care repre-zintă vectorul ortogonal la conturul lui F(X) ce trece prin punctul de coordonate X. Întrucât aceste metode sunt cel mai frecvent utilizate, în continuare se prezintă unele dintre acestea. Această categorie de metode, aplicabile la optimizarea funcŃiilor dife-renŃiabile, se bazează pe ideea că variaŃia cea mai pronunŃată a unei funcŃii F(X) se ob-Ńine prin deplasarea după direcŃia gradientului. După cum funcŃia obiectiv este aproxi-mată la dezvoltarea în serie Taylor printr-o expresie liniară sau pătratică, aceste meto-de se clasifică în metode de gradient de ordinul 1, sau metode de gradient de ordinul 2. a) Metoda gradientului simplu Considerând o funcŃie obiectiv F(X) de n variabile, gradientul în punctul X este vectorul derivatelor de ordinul 1 în acest punct:
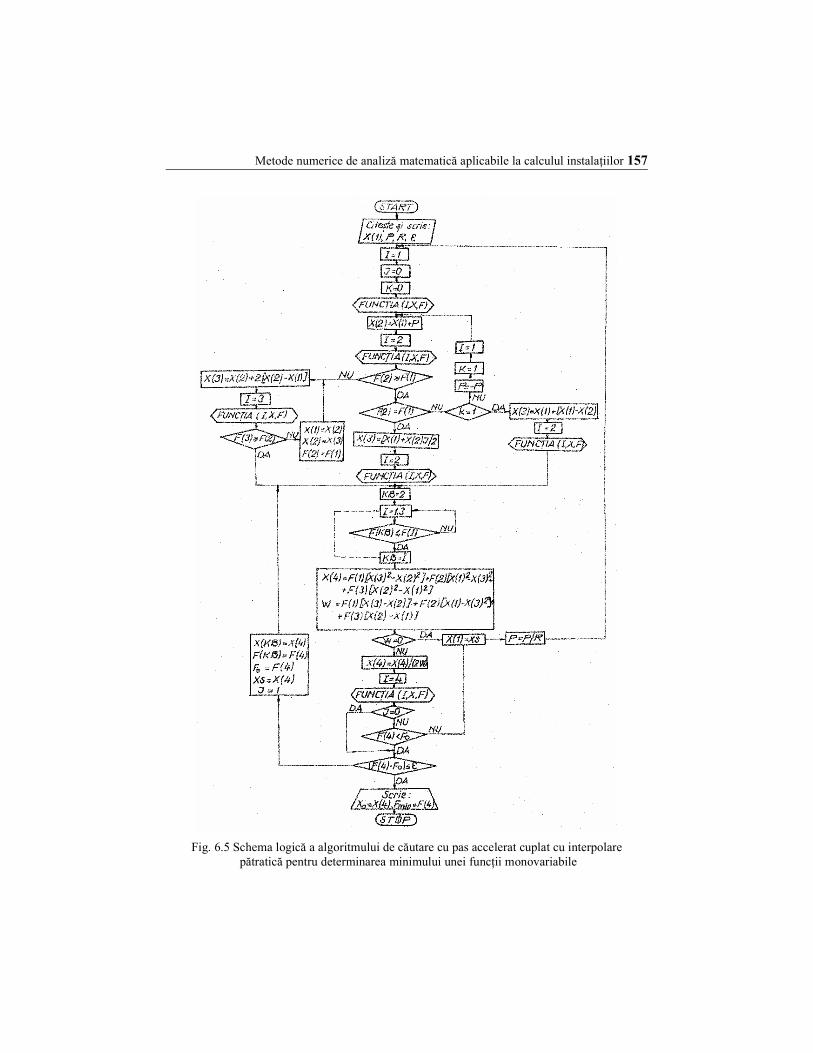
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 157
Fig. 6.5 Schema logică a algoritmului de căutare cu pas accelerat cuplat cu interpolare
pătratică pentru determinarea minimului unei funcŃii monovariabile
158 Modelări numerice şi optimizări în instalaŃii
∂∂
∂∂
∂∂
=∇=nx
F
x
F
x
FXFG K
21
)( (6.14)
Vectorul unitate (direcŃiile normate ale gradientului) corespunzător punctului Xk are expresia:
k
k
k
kk
G
G
XF
XFD ±=
∇
∇±=
)(
)( (6.15)
în care norma euclidiană a vectorului Gk este:
[ ]2/1
1
22/1
∂∂
== ∑=
n
i ki
kTkk
x
FGGG (6.16)
iar semnul plus se utilizează pentru maximizare şi semnul minus pentru minimizare. Dacă se face referire la o problemă de minimizare, algoritmul cuprinde următorii paşi: P1) Se alege un punct de start X0. P2) Se evaluează gradientul de ordinul 1, G0 = ∇F(X0) şi direcŃiile normate cores-punzătoare D0, în acest punct. P3) Se evaluează minimul X1=X0−r∗D0 după prima direcŃie ce trece prin X0 deter-minând parametrul r∗ din condiŃia de minimizare a funcŃiei F(X0−r∗D0), punct utilizat drept vârf de start la iteraŃia următoare. Generalizând, pentru fiecare punct de plecare definit de vectorul Xk se determină un nou punct definit de vectorul Xk+1 pentru care funcŃia F are cea mai mare descreştere, conform cu relaŃia: kkk DrXX ∗+ −=1 (6.17)
relaŃia concretă de determinare a parametrului r∗ putând fi (6.13). P4) După fiecare iteraŃie k se verifică criteriul de convergenŃă: ε≤kG (6.18)
unde valoarea lui ε este legată de precizia cu care se determină minimul. Dacă criteriul este satisfăcut cercetarea se opreşte şi se admite drept minim al func-Ńiei obiectiv minimul ultimei direcŃii, iar în caz contrar se recurge la o nouă iteraŃie. În consecinŃă, procesul de minimizare printr-o metodă de gradient implică repetarea a două etape principale: − determinarea direcŃiei de deplasare; − alegerea valorii parametrului r∗ care minimizează funcŃia într-o anumită direcŃie. Prima etapă reprezintă elementul distinctiv pentru fiecare metodă de gradient, pe când cea de-a doua etapă este comună şi similară metodei de căutare unidimensională. Principalul dezavantaj al metodelor de gradient simplu îl constituie convergenŃa re-lativ lentă în apropierea optimului, ajungându-se la o mişcare ciclică în jurul soluŃiei, fără posibilitatea de a o atinge la anumite valori ale preciziei.
b) metoda gradienŃilor conjugaŃi înlătură dificultăŃile de convergenŃă ale metodei de gradient simplu, utilizând pentru calculul unei direcŃii de explorare formula Fletcher-Reeves: 1;11 ≥+−= ++ kDGD kkkk β (6.19)
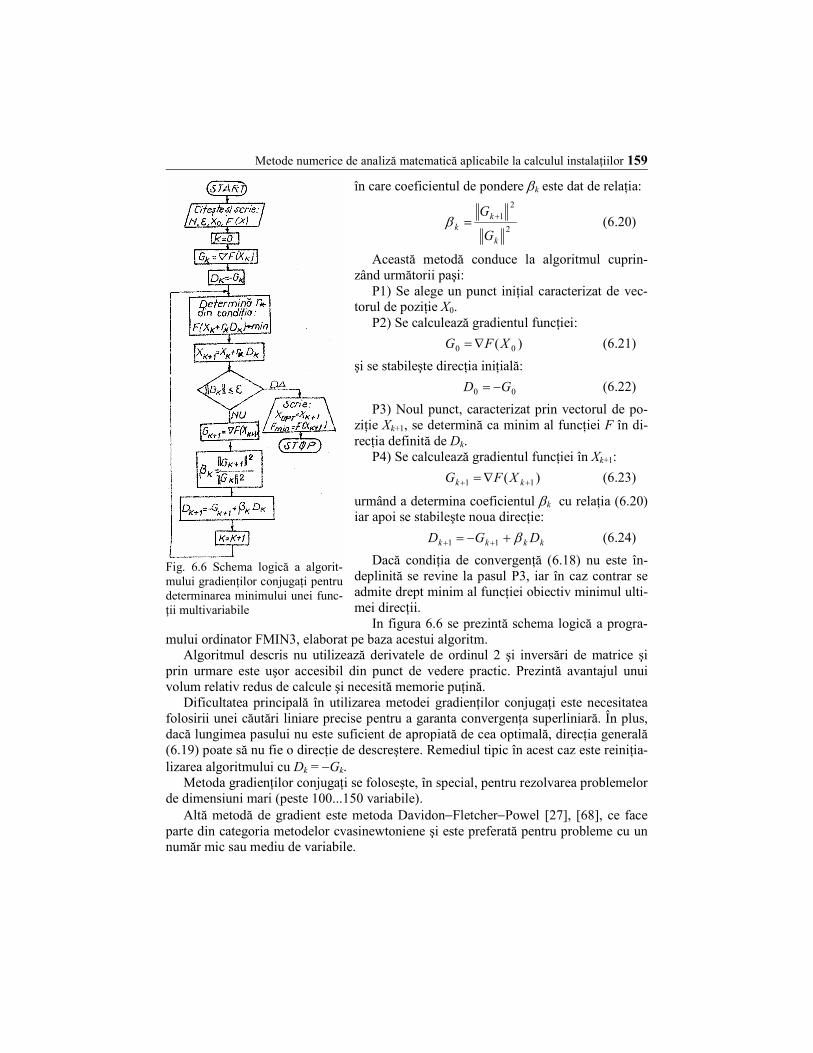
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 159
în care coeficientul de pondere βk este dat de relaŃia:
2
21
k
k
k
G
G +=β (6.20)
Această metodă conduce la algoritmul cuprin-zând următorii paşi: P1) Se alege un punct iniŃial caracterizat de vec-torul de poziŃie X0. P2) Se calculează gradientul funcŃiei:
)( 00 XFG ∇= (6.21)
şi se stabileşte direcŃia iniŃială:
00 GD −= (6.22)
P3) Noul punct, caracterizat prin vectorul de po-ziŃie Xk+1, se determină ca minim al funcŃiei F în di-recŃia definită de Dk. P4) Se calculează gradientul funcŃiei în Xk+1:
)( 11 ++ ∇= kk XFG (6.23)
urmând a determina coeficientul βk cu relaŃia (6.20) iar apoi se stabileşte noua direcŃie:
kkkk DGD β+−= ++ 11 (6.24)
Dacă condiŃia de convergenŃă (6.18) nu este în-deplinită se revine la pasul P3, iar în caz contrar se admite drept minim al funcŃiei obiectiv minimul ulti-mei direcŃii. In figura 6.6 se prezintă schema logică a progra-
mului ordinator FMIN3, elaborat pe baza acestui algoritm. Algoritmul descris nu utilizează derivatele de ordinul 2 şi inversări de matrice şi prin urmare este uşor accesibil din punct de vedere practic. Prezintă avantajul unui volum relativ redus de calcule şi necesită memorie puŃină. Dificultatea principală în utilizarea metodei gradienŃilor conjugaŃi este necesitatea folosirii unei căutări liniare precise pentru a garanta convergenŃa superliniară. În plus, dacă lungimea pasului nu este suficient de apropiată de cea optimală, direcŃia generală (6.19) poate să nu fie o direcŃie de descreştere. Remediul tipic în acest caz este reiniŃia-lizarea algoritmului cu Dk = −Gk. Metoda gradienŃilor conjugaŃi se foloseşte, în special, pentru rezolvarea problemelor de dimensiuni mari (peste 100...150 variabile). Altă metodă de gradient este metoda Davidon−Fletcher−Powel [27], [68], ce face parte din categoria metodelor cvasinewtoniene şi este preferată pentru probleme cu un număr mic sau mediu de variabile.
Fig. 6.6 Schema logică a algorit-mului gradienŃilor conjugaŃi pentru determinarea minimului unei func-Ńii multivariabile

160 Modelări numerice şi optimizări în instalaŃii
6.2.3. OPTIMIZAREA CONDIłIONATĂ
6.2.3.1. Metode analitice de evaluare a extremului unei funcŃii cu restricŃii
S-a arătat la pct. 6.1.4 că o problemă de optimizare neliniară cu p restricŃii de ega-litate şi m−p restricŃii de tip inegalitate, se formulează astfel:
mpjX
piX
xxxFXF
j
i
n
,...,1;0)(
,...,2,1;0)(
min(max)),...,,()( 21
+=≥
==
→=
ϕ
ϕ (6.25)
Deoarece, oricare din inegalităŃi poate fi transformată într-o egalitate, prin introdu-cerea unei variabile wj:
0)( 2 =− jj wXϕ (6.26)
problema (6.25) devine o problemă de optimizare cu restricŃii de tip egalitate. O astfel de problemă se poate rezolva, fie prin metoda substituŃiei directe, fie prin metoda mul-tiplicatorilor Lagrange. Metoda substituŃiei directe constă din explicitarea a q ≤ p variabile (dacă aceasta este posibil) şi substituirea lor în funcŃia obiectiv, problema rezolvându-se în conti-nuare ca una fără restricŃii. În unele cazuri practice explicitarea de variabile în cadrul restricŃiilor de tip egalitate nu este posibilă. În cazul căutării extremului unei funcŃii F(X) de n variabile cu m restricŃii de tip egalitate (m<n), cu ajutorul multiplicatorilor Lagrange, se demonstrează că punctul X0, extremul funcŃiei obiectiv, se obŃine prin optimizarea funcŃiei fără restricŃii:
),,,(),,,(
),,,,,,,(),(
211
21
2121
ni
m
i
in
mn
xxxxxxF
xxxX
KK
KK
ϕλ
λλλ
∑=
+=
=Γ=ΛΓ
(6.27)
în care Γ(X,Λ) este denumită funcŃia Lagrange, iar scalarii λ1, λ2,..., λm – multiplicatori Lagrange. Deci, problema de optimizare cu restricŃii s-a transformat într-o problemă fără res-tricŃii, a cărei soluŃionare constă în rezolvarea unui sistem de ecuaŃii normale, obŃinut prin anularea derivatelor parŃiale de ordinul întâi ale funcŃiei obiectiv, care se scrie astfel:
miX
njxx
F
x
X
i
i
m
i j
ii
jj
,...,1;0),(
...,,1;0),(
1
===∂
ΛΓ∂
==∂∂
+∂∂
=∂
ΛΓ∂ ∑=
ϕλ
ϕλ
(6.28)
Sistemul conŃine n+m ecuaŃii (derivatele parŃiale în raport cu λi fiind chiar relaŃiile de restricŃii), rezultând cele n+m necunoscute: xj (j = 1,..., n) şi λi (i = 1,..., m), cel mai

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 161
accesibil mod de rezolvare a acestuia fiind cel numeric (eliminare Gauss, aproximaŃii succesive Gauss–Seidel, Newton–Raphson etc.). RelaŃiile scrise prezintă condiŃii necesare, dar nu şi suficiente, în cazul general, pen-tru minim. Numai dacă F(X) este o funcŃie convexă şi ϕi(X) sunt liniare, se poate arăta că aceste condiŃii sunt şi suficiente pentru minim.
6.2.3.2. Principiul programării liniare De cele mai multe ori în practică se întâlnesc probleme de optimizare cu restricŃii. În aceste cazuri, dacă restricŃiile şi funcŃia obiectiv sunt funcŃii liniare de componentele vectorului X şi dacă acestor componente li se impun condiŃii de negativitate, modelul de optimizare constituie o problemă de programare liniară. Dacă funcŃia obiectiv şi una sau toate restricŃiile sunt neliniare, atunci problema este de programare neliniară. Programarea liniară constă în esenŃă în determinarea maximului (minimului) func-Ńiei obiectiv de mai multe variabile necunoscute, legate între ele printr-un sistem cu un număr oarecare de ecuaŃii şi inecuaŃii, ce reprezintă restricŃiile. Astfel, se pune problema determinării valorii maxime sau minime a funcŃiei obiec-tiv: max(min)2211 →+++= nn xcxcxcF K (6.29)
satisfăcându-se restricŃiile şi condiŃiile de nenegativitate:
njx
bxaxaxa
bxaxaxa
bxaxaxa
j
mnmnmm
nn
nn
,...,2,1;02211
22222121
11212111
=≥
≤++
≤++
≤++
K
KKKKKKKKKKK
K
K
(6.30)
Sistemul de restricŃii inegalităŃi (6.30) poate fi transformat într-un sistem de ega-lităŃi prin ataşarea unor variabile de ecart xn+i ≥ 0 (i = 1, ..., m) obŃinându-se forma stan-dard a modelului de programare liniară. Evident că programul liniar standard (cu variabile de ecart) poate fi scris mai concis în forma matriceală:
0
max(min)
≥
=
→=
X
BAX
CXF
(6.31)
în care: C este vectorul linie al coeficienŃilor funcŃiei obiectiv; X – vectorul coloană al variabilelor; A – matricea coeficienŃilor din sistemul restricŃiilor; B – vectorul coloană al termenilor liberi din sistemul restricŃiilor. MulŃimea de n+m valori xj care satisfac sistemul restricŃiilor se numeşte soluŃie. Da-că în plus aceasta verifică şi condiŃiile de nenegativitate atunci soluŃia se numeşte posi-bilă. Când restricŃiile sunt liniare independente, iar soluŃia conŃine m componente xj

162 Modelări numerice şi optimizări în instalaŃii
nenule şi n componente xj nule, soluŃia poartă numele de soluŃie de bază. Dacă această soluŃie conŃine un număr de valori xj nenule mai mic decât m, ea este degenerată.
SoluŃia de bază care face ca funcŃia obiectiv să fie maximă (minimă) este denumită soluŃie optimală. Maximizarea funcŃiei obiectiv F se poate transforma în minimizarea funcŃiei:
j
n
j
j xcFF ∑=
−=−=1
' (6.32)
faŃă de restricŃiile date, adică problema minimizării se reduce la o problemă de maxi-mizare prin schimbarea semnului tuturor coeficienŃilor din funcŃia obiectiv, iar în final prin schimbarea semnului maximului obŃinut. Cel mai utilizat algoritm de rezolvare a problemelor de programare liniară este al-goritmul Simplex, elaborat de Dantzig, care s-a dezvoltat ulterior în mai multe varian-te. Principiul acestui algoritm constă în utilizarea în spaŃiul variabilelor funcŃiei obiec-tiv a unei figuri geometrice cu un număr de vârfuri mai mare decât numărul variabi-lelor, figură denumită simplex. Se evaluează funcŃia obiectiv în fiecare vârf al acestei figuri şi se cercetează apoi direcŃia ce trece prin vârful cel mai nefavorabil şi centroidul celorlalte vârfuri. Această cercetare urmăreşte stabilirea unui nou vârf favorabil care să-l înlocuiască pe cel mai nefavorabil din simplexul existent. In acest mod se gene-rează un simplex care migrează în cele mai multe cazuri, în regiunea extremului func-Ńiei obiectiv. In varianta de bază, algoritmul simplex presupune o succesiune de iteraŃii în urmă-toarele etape: E1) Aducerea problemei în forma standard transformând inegalităŃile în egalităŃi prin introducerea variabilelor de ecart. E2) Determinarea unei soluŃii de bază iniŃiale. E3) Trecerea la altă soluŃie de bază, plecând de la baza iniŃială sau precedentă şi modificând una din variabile, care nu este în bază, pentru deplasarea la un alt vârf ce îmbunătăŃeşte funcŃia obiectiv. In cazul unei probleme de maximizare, se alege varia-bila cu coeficientul pozitiv cel mai mare, iar în cazul unei probleme de minimizare, se alege variabila cu coeficientul negativ cel mai mare. E4) Considerarea ca soluŃie optimală a soluŃiei de bază obŃinute după etapa ante-rioară, atunci când nu mai este posibil să se micşoreze (mărească) valoarea funcŃiei obiectiv, ceea ce corespunde situaŃiei în care toŃi coeficienŃii cj, din funcŃia obiectiv devin pozitivi în varianta minimizării şi negativi în cazul maximizării. Pe baza acestui algoritm s-a elaborat programul ordinator SIMPLEX, cuprinzând trei subrutine. Unul din algoritmii utilizaŃi în cazul programării liniare cu variabile întregi este cel al lui Gomory [27].
6.2.3.3. Formularea generală a progrămării neliniare Programarea neliniară este o metodă matematică de optimizare a problemelor ce pot fi descrise prin expresii neliniare.

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 163
În general, pentru rezolvarea problemelor de optimizare condiŃionată se utilizează programarea neliniară cu restricŃii, a cărui model matematic este definit de relaŃiile:
mjX
XF
j K,2,1;0;;)(
(max)min)(
=≤=≥
→
ϕ (6.33)
unde funcŃia obiectiv F şi funcŃiile restricŃii ϕj constituie împreună funcŃii continue ale problemei de optimizare, iar X este vectorul variabilelor de forma: nxxxX ,21 K= (6.34) Modelul matematic (6.33) conduce la o problemă de programare neliniară, în urmă-toarele cazuri posibile: − funcŃia obiectiv neliniară şi restricŃiile liniare; − funcŃia obiectiv liniară şi restricŃiile neliniare; − funcŃia obiectiv neliniară şi restricŃiile neliniare. Înainte de a descrie câteva din metodele de soluŃionare a problemelor de progra-mare neliniară se prezintă condiŃiile Kuhn–Tucker, obŃinute prin extinderea metodei clasice a multiplicatorilor Lagrange şi pentru cazul restricŃiilor de inegalitate. CondiŃiile de optimalitate Kuhn–Tucker. Prin generalizarea metodei clasice a multiplicatorilor Lagrange, Kuhn şi Tucker au stabilit condiŃiile care trebuie să fie sa-tisfăcute de un optim cu restricŃii, local sau global, condiŃii ce stau la baza celor mai mulŃi algoritmi existenŃi pentru rezolvarea problemelor de programare neliniară. Se consideră problema minimizării funcŃiei:
),,,()( 21 nxxxFXF K= (6.35)
în prezenŃa restricŃiilor: nmjxxxX nji <=≤= ,...,2,1;0),,,()( 21 Kϕϕ (6.36)
Cu ajutorul a m variabile auxiliare reale wj, inegalităŃile (6.36) se transformă în egalităŃi:
mjwX jj ,...,2,1;0)( 2 ==+ϕ (6.37)
Aplicând metoda multiplicatorilor Lagrange se defineşte funcŃia auxiliară:
[ ]2
1
)()(),,( jj
m
j
j wXXFWX ++=ΛΓ ∑=
ϕλ (6.38)
care conduce la un punct staŃionar în ipoteza îndeplinirii condiŃiilor:
mjww
WX
mjwXWX
nix
X
x
XF
x
WX
jj
j
jj
j
m
j i
j
j
ii
,...,2,1;02),,(
,...,2,1;0)(),,(
,...,2,1;0)()(),,(
2
1
===∂
ΛΓ∂
==+=∂
ΛΓ∂
==∂
∂+
∂∂
=∂
ΛΓ∂ ∑=
λ
ϕλ
ϕλ
(6.39)
Întrucât mărimile wj sunt variabile auxialiare, acestea pot fi eliminate din sistemul (6.39). Din cea de-a doua relaŃie a acestui sistem rezultă că oricare ar fi j, condiŃia

164 Modelări numerice şi optimizări în instalaŃii
ϕj(X) = 0 are loc numai dacă wj = 0, sau Ńinând seama şi de ultima relaŃie a aceluiaşi sistem se obŃine: 0)( =Xjj ϕλ (j = 1, 2,..., m).
Pentru eliminarea variabilelor wj , rezultă deci condiŃiile necesare pentru minm:
mjx
mjX
nix
X
x
XF
jj
j
i
jm
ij
j
i
,...,2,1;0)(
,...,2,1;0)(
,...,2,1;0)()(
==
=≤
==∂
∂+
∂
∂ ∑=
ϕλϕ
ϕλ
(6.40)
cărora Kuhn şi Tucker le-au adăugat în plus: mjj ,...,2,1;0 =≥λ (6.41)
relaŃii cunoscute sub numele de condiŃiile Kuhn–Tucker, ce sunt necesare atât pentru un minim local, cât şi pentru un minim global. Dacă funcŃiile F(X), ϕj(X) şi domeniul admisibil sunt convexe ele devin condiŃii ne-cesare şi suficiente pentru un minim global. CondiŃiile de optimalitate (6.40), (6.41) înlocuiesc programul matematic general (6.33) printr-un sistem de ecuaŃii şi inecuaŃii, a căror expresie matriceală are forma:
( )0
0
0)(
0)()(
=Λ
=ΛΦ
≤Φ
=ΛΦ∇+∇
X
X
F Txx
(6.42)
în care: F(X), Φ(X) şi domeniul admisibil sunt convexe; Λ − vector cu aceleaşi dimen-siuni ca Φ, iar:
∂∂
∂∂
=∇
n
x
x
x
M
1
(6.43) m
n
Tx
x
x
ϕϕϕ KM 21
1
)(
∂∂
∂∂
=Φ∇ (6.44)
O problemă de programare convexă admite un domeniu admisibil convex şi o func-Ńie obiectiv convexă, lucru asigurat dacă F şi ϕj sunt funcŃii convexe. Dacă o problemă de programare matematică este cunoscută a fi convexă prezintă avantajele: − funcŃia nu are minime locale; − condiŃiile Kuhn−Tucker sunt necesare şi suficiente pentru a indica un minim global. În cele mai multe aplicaŃii concrete din domeniul instalaŃiilor este dificil de a arăta că funcŃia analizată este convexă, însă modelele de optimizare obŃinute în condiŃii de convexitate pot fi aplicate problemelor de programare matematică neconvexă pentru a găsi un minim local. Prezentarea generală a metodelor de soluŃionare a problemelor de programare neliniară. Un algoritm care poate rezolva problema programării neliniare în forma ge-
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 165
nerală (6.33) este de regulă ineficient când se utilizează pentru rezolvarea unor proble-me cu caracteristici speciale. Din acest motiv, pentru orice problemă este avantajos să se evidenŃieze toate trăsăturile particulare care ar putea să conducă la o rezolvare mai uşoară. În [39] Philip Wolfe a făcut o grupare a problemelor de programare după dimen-siuni şi complexitate, în grupa problemelor neliniare aşezând în ordinea complexităŃii probleme cu variabile separate, probleme de programare pătratică, probleme cu res-tricŃii liniare şi funcŃia obiectiv neliniară şi probleme cu funcŃiile de optimizare expli-cite şi cu derivate uşor de calculat. Au fost puşi la punct numeroşi algoritmi, folosiŃi în anumite cazuri particulare, le-gate de forma funcŃiilor F şi ϕj. Dintre algoritmii de rezolvare a problemelor cu structură specială, fac parte algo-ritmul lui Wolfe [35], [37] pentru programarea pătratică şi algoritmul lui Rosen [37] pentru programarea convexă cu restricŃii liniare. Algoritmii de căutare numerică a optimului au la bază: − metode directe de căutare în domeniul admisibil, ce utilizează evaluări ale funcŃiei obiectiv în punctele din domeniul admisibil al variabilelor de optimizat; − metode indirecte, prin care problema cu restricŃii se transformă în una fără res-tricŃii, modificând funcŃia obiectiv; − metode de gradient, ce utilizează evaluări atât ale funcŃiei obiectiv, cât şi ale gra-dientului în puncte din domeniul admisibil. Algoritmii de optimizare parcurg, de regulă, următoarele trei etape: E1) Alegereea unui punct de start X0, punct admisibil în cazul unei probleme cu restricŃii. E2) Deplasarea prin puncte succesive Xk (k = 1, 2...) până când optimul este atins. De la un punct de bază Xk-1 la un punct de bază nou Xk se trece prin deplasarea după o
direcŃie )()(2
)(1 ,, k
nkk
k dddD K= , punctul Xk fiind optimul după această direcŃie. În ca-zul metodelor directe, direcŃiile de deplasare sunt prevăzute în algoritm, pe când cele de gradient sunt evaluate în fiecare punct Xk. E3) Verificarea criteriului de convergenŃă, etapă care decide oprirea sau continuarea procesului de căutare a optimului. Este dificil de a face afirmaŃii general valabile privind superioritatea unui algoritm faŃă de altul. În consecinŃă, alegerea celui mai bun algoritm, pentru o problemă dată, re-prezintă un întreg proces de cercetare. Metoda direcŃiilor admisibile. Din categoria metodelor directe privind minimiza-rea funcŃiilor multivariabile în prezenŃa restricŃiilor de tip inegalitate, metoda direcŃiilor admisibile este cea mai des utilizată, folosind de regulă un procedeu de aproximaŃii succesive de forma: kkk DXX α+=+1 (6.45)
unde direcŃiile de deplasare Dk şi lungimea pasului de deplasare α sunt întotdeauna alese astfel încât Xk+1 să se afle în interiorul domeniului admisibil (fezabil). Această metodă conŃine două etape principale, prima constând în determinarea pen-tru fiecare pas k a unui vector Dk care respectă condiŃiile:

166 Modelări numerice şi optimizări în instalaŃii
0)(;0)( <∇<∇ DXFDX TTjϕ (6.46)
iar cea de-a doua, determină mărimea pasului α. În funcŃie de modul în care sunt rezol-vate cele două etape, există diverse variante ale metodei [27], [84]. Metoda funcŃiilor de penalizare face parte din categoria metodelor indirecte şi re-prezintă o tehnică de rezolvare a problemelor de minimizare în prezenŃa relaŃiilor de restricŃii, prin transformarea acestora în probleme de minimizare fără restricŃii. Minimul neconstrâns al unei probleme de optimizare se poate găsi în interiorul do-meniului admisibil sau în exteriorul lui. a) Metoda penalizării de punct exterior utilizează o funcŃie de penalizare care dă o valoare mare funcŃiei F atunci când punctul X iese din domeniul admisibil sau se află în afara lui. Pentru problema de optimizare neliniară:
mjX
XF
j ,...,2,1;0)(
min)(
=≥
→
ϕ (6.47)
se defineşte funcŃia obiectiv de penalizare: )()(),( XPXFX αα +=Φ (6.48)
unde α este o constantă, iar funcŃia de penalizare P este dată de relaŃia generală:
<><
≥
=∑=
m
j
jj
j
XX
X
XP
1
β 0)(;)(
0)(;0
)(ϕϕ
ϕ
(6.49)
în care β este o constantă nenegativă. Problema de minimizare neliniară (6.47) s-a transformat într-o problemă de mini-mizare fără restricŃii a funcŃiei (6.48).
PrezenŃa termenilor ∑=
><m
j
j X1
β)(ϕα face ca funcŃia Φ să ia o valoare mare atunci
când restricŃiile nu mai sunt îndeplinite, altfel spus penalizează încălcarea restricŃiilor. Pentru cazul 0< β <1, funcŃia Φ este continuă pe frontiera domeniului, putând avea derivate de primul ordin discontinue pe frontiera domeniului. Dacă β =1, există un α foarte mare pentru care minimul lui Φ să coincidă cu minimul lui F şi din această cauză în practică nu se utilizează β = 1, ci de obicei β = 2. Algoritmul corespunzător acestei metode are următoarele etape: E1) Se alege un punct iniŃial X0 şi o valoare iniŃială α şi se determină Xm care mini-mizează valoarea funcŃiei:
∑=
><+=Φm
j
j XXFX1
2)()(),( ϕαα (6.50)
E2) Se verifică dacă Xm∈Da, unde Da este domeniul admisibil, prin condiŃia:
εδ)(
2/1
1
2 ≤
=∆ ∑
=
n
i
iX (6.51)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 167
în care: )()()( 1 kmkm XXX αα −=∆ − (6.52)
Calculul se opreşte dacă este îndeplinită condiŃia (6.51) sau dacă α este de ordinul lui 10–7...10–6. E3) Dacă Xm∉Da se alege α′ > α şi pornind de la X0 = Xm algoritmul reia etapa E1, minimizând Φ(X, α′). Pentru un α suficient de mare se forŃează minimul funcŃiei Φ să intre în Da. b) Metoda penalizării de punct interior foloseşte o funcŃie obiectiv de forma:
∑=
−=Φm
j j XXFX
1 )(
1)(),(
ϕαα (6.53)
în care: F este funcŃia de optimizat; ϕj – restricŃiile care îndeplinesc condiŃiile ϕj ≤ 0 (j = 1, 2,..., m). Dacă α > 0, minimul lui Φ(X, α) se află în domeniul admisibil şi converge către mi-nimul lui F(X) pe măsură ce parametrul α se micşorează. Algoritmul de calcul are următoarele etape: E1) Se alege punctul iniŃial X0 pentru care ϕj(X0) < 0 şi o valoare iniŃială a lui α. E2) Se minimizează funcŃia Φ exprimată prin (6.53) şi se determină Xm. E3) Dacă convergenŃa nu este suficient de bună se micşorează α. E4) Se alege un nou punct iniŃial X0 = Xm şi se repetă etapa E1. Metoda gradienŃilor condiŃionaŃi. Această metodă se utilizează pentru minimiza-rea unei funcŃii neliniare într-un domeniu în care minimul unei funcŃii liniare se obŃine fără dificultăŃi.
Fie F(X), nRX ∈ o funcŃie neliniară continuă şi derivabilă într-un domeniu convex Ω. Se presupune că gradientul ∇F(X) a lui F(X) satisface pentru toate punctele din Ω condiŃia lui Lipschitz: 21021 )()( XXLXFXF −≤∇−∇ (6.54)
unde L0 este constanta lui Lipschitz. Algoritmul corespunzător acestei metode cuprinde următoarele etape: E1) Se alege un punct de start X0 din domeniul Ω. E2) Considerând, în general, aproximaŃia k a aprocesului iterativ, se minimizează
funcŃia liniară ZXF Tk )(∇ şi se determină punctul de minim Z(Xk).
E3) Se calculează direcŃia de explorare: kkk XXZD −= )( (6.55) şi
kT
kk DXFX )()(η ∇= (6.56) E4) Se construieşte noul punct de bază: kkkk DXX α+=+1 (6.57)
unde αk este lungimea pasului în direcŃia Dk egal cu 02 i− , i0 fiind primul indice i = 0, 1, ...., pentru care are loc inegalitatea:

168 Modelări numerice şi optimizări în instalaŃii
2
)(η2)()2( ki
kki
k
XXFDXF −− +≤+ (6.58)
E5) Procesul iterativ se opreşte atunci când este satisfăcut criteriul:
0)(η =kX (6.59)
iar Xk este soluŃia optimă a problemei, care minimizează funcŃia F(X).
6.2.4. METODA PROGRAMĂRII DINAMICE Programarea dinamică reprezintă o metodă de optimizare a sistemelor sau a pro-ceselor în care se operează pe faze sau secvenŃial, având ca aplicare înlocuirea unei probleme de dimensiuni mari printr-o succesiune de probleme de dimensiuni mici. La baza acesteia se află principiul optimalităŃii a lui Bellman, care pe scurt se formulează astfel: „o politică optimă nu poate fi alcătuită decât numai din subpolitici optime”. Procesele secvenŃiale sunt acele procese în cadrul cărora un fluid, un flux de mate-rial sau un flux energetic îşi modifică parametrii (temperatură, presiune, umiditate etc.) în cursul unei serii de transformări succesive. Prin programarea dinamică se pune problema minimizării funcŃiei obiectiv:
),(min 11
ii
N
i
i XXVZ −=∑= (6.60)
ştiind că fiecare mărime Xi poate varia într-un domeniu care depinde de X0 şi Xi+1 , ∀ i = 1, 2,..., N. Formula de optimizare (6.60) se generalizează în cazul în care termenii Xi sunt vec-tori: niiii xxxX K21= (6.61)
având n componente. Forma funcŃiei Z şi natura domeniilor de variaŃie ale variabilelor permit utilizarea unui sistem de N faze pentru care Vi (Xi-1, Xi); (i = 1, 2,..., N) este funcŃia de valoare ataşată fiecărei faze, iar Z – funcŃia de valoare ataşată mulŃimii fazelor. Pentru a găsi valoarea minimă a funcŃiei Z se aplică principiul optimalităŃii, nece-sitând la fiecare pas rezolvarea ecuaŃiei funcŃionale:
)],(),([min),( 101,010,01
−−− +=−
iiiiiX
ii XXfXXVXXfi
(6.62)
unde Xi–1 înseamnă că Xi–1 aparŃine unei mulŃini de valori ce depind numai de X0 şi Xi. Algoritmul de calcul constă în rezolvarea succesivă a problemelor de minimizare (6.62) pentru i = 1, 2,..., N, cu variaŃia discretă a lui X0 şi memorarea rezultatelor inter-mediare, calculându-se astfel subpoliticile optime succesive pentru fazele 1 şi 2 împre-
ună, apoi pentru fazele 1, 2 şi 3 împreună, ..., pentru fazele N,1 împreună, adică poli-tica sau politicile optime:
),(),([min),(min 101,010,01
−−− +==−
NNNNNX
NN XXfXXVXXfZn
(6.63)

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 169
în care: f0,N(X0,XN) este valoarea politicii optime de la X0 la XN; VN(XN-1,XN) – valoarea subpoliticii de la XN–1 la XN; f0,N–1(X0, XN–1) – valoarea politicii optime de la X0 la XN–1. Claritatea ecuaŃiilor funcŃionale face ca ele să poată fi aplicate direct, pe cale ana-litică, fără dificultate. Cu ajutorul acestei metode se poate da o soluŃionare optimă alegerii amplasamen-tului captării şi a traseului unei magistrale de aducŃiune a apei.
6.3. ELEMENTE DE TEORIA GRAFURILOR
6.3.1. NOłIUNI GENERALE Ori de câte ori o structură prezintă o mulŃime de obiecte distincte şi există o lege care să stabilească o corespondenŃă între acestea, avem de-a face cu un graf (fig. 6.7). Pentru un graf trebuie definite în mod simultan atât mulŃimea vârfurilor X = x1, x2,...,xn, cât şi a tranziŃiilor Γ, care există între acestea. Cuplul format din mulŃimile X şi Γ se numeşte graf orientat şi se notează prin G = (X, Γ) sau G = (X, U), unde U este mulŃimea arcelor, reprezentate prin săgeŃi. TranziŃiile de forma (xi→xj) au originea în vârful xi şi extremitatea în vârful xj şi se
mai notează sub formele: (xi, xj), iju sau xi∈Γ(xj).
Grafurile orientate permit tranziŃii de un singur sens. În acest caz între două vârfuri consecutive este un singur arc cu săgeată într-un anumit sens. Arcele care au vârf comun se numesc arce adiacente, iar extremităŃile unui arc se numesc vârfuri adiacente. Un arc este incident la un vârf dacă vârful respectiv este o extremitate a arcului. O succesiune de arce adiacente formează un drum, care dacă trece o singură dată prin vârfurile sale se numeşte drum elementar, dacă se întoarce în punctul de plecare se numeşte circuit, iar dacă trece odată şi numai odată prin fiecare vârf al grafului se nu-meşte drum hamiltonian. Există diferite metode pentru căutarea drumurilor şi circuitelor hamiltoniene (meto-da Kaufmann, teorema König, teorema Dirac). Lungimea drumului este dată, prin convenŃie, de numărul arcelor sale. Pentru cal-culul lungimii minime a drumurilor de la un vârf xi la toate celelalte vârfuri ale unui graf G se foloseşte algoritmul Dantzig [130].
Graful orientat care nu are circuite este denumit arborescenŃă. Numărul ciclomatic al unui graf G dă numărul maxim de cicluri independente c şi se scrie analitic cu ajutorul relaŃiei lui Euler: )1( −−= vac (6.64) în care: a este numărul de arce; v – numărul total de vârfuri. La un graf conjugat un număr egal de ar-
Fig. 6.7 Graf orientat
170 Modelări numerice şi optimizări în instalaŃii
ce se obŃine înlocuind fiecare vârf cu un circuit şi fiecare circuit cu un vârf. Numărul ciclurilor independente c∗ ale grafului conjugat G∗ este dat de relaŃia:
1−=−=∗ vcac (6.65)
OperaŃia prin care fiecărui arc i se atribuie o valoare poartă numele de valorizarea arcelor. Valoarea unui drum este egală cu suma valorilor arcelor ce formează drumul. Prin valorizarea arcelor unui graf se poate determina drumul de valoare optimă din graf folosind diverşi algoritmi: Ford, Bellman–Kalaba, Yen. Graful neorientat nu presupune relaŃii univoce între elementele sale, iar vârfurile sunt legate prin muchii, care se reprezintă fără săgeŃi. În locul drumului, apare lanŃul, a cărui lungime este dată de numărul muchiilor sale. Într-un graf neorientat gradul unui vârf xj este numărul muchiilor care se leagă de vârful xj. Pentru un graf neorientat cu m muchii, suma gradelor vârfurilor sale este egală cu 2m. Un graf complet are proprietatea că oricare două vârfuri sunt unite printr-o muchie, în cazul grafurilor neorientate şi că oricare două vârfuri ale sale xi şi xj sunt unite prin-tr-un arc (xi, xj) sau printr-un arc (xj, xi) ori prin ambele arce (xi, xj) şi (xj, xi), în cazul grafurilor orientate. Un graf se numeşte conex dacă pentru oricare două vârfuri ale sale există în graf cel puŃin un drum (lanŃ) care le leagă, iar în caz contrar graful este neconex. Graful neorientat conex fără cicluri se numeşte arbore. Muchiile complementare muchiilor grafului definesc coarborele. Dacă G = (X, U) este un arbore cu v vârfuri şi m muchii, atunci:
1−= vm (6.66)
Un graf G = (X, Γ) poate conŃine un graf parŃial care să fie şi arbore (numit arbore parŃial) numai dacă este conex. Graful parŃial al lui G = (X, Γ) este prin definiŃie un
graf ),( ∆= XG în care ∀xi, ∆xi ⊂ Γxi.
6.3.2. ALGORITMI PENTRU DETERMINAREA UNUI ARBORE DE VALOARE MINIMĂ
Algoritmul Sollin. Se consideră graful conex G =(X, U) căruia i se ataşează matri-cea valorilor M ale cărei elemente mij sunt:
=
∞=
ji
xx
xxu
m ji
jiij
ij
dacă,0
adiacentesuntnuşivârfuriledacă,
adiacentesuntşivârfuriledacă),(λ
(6.67)
unde )( ijuλ este valoarea atribuită muchiei i
ju ∈U.
Algoritmul Sollin pentru determinarea arborelui de valoare minimă presupune par-curgerea următoarelor etape:
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 171
E1) Se parcurg într-o ordine oarecare vârfurile grafului, constituindu-se arbori ai subgrafurilor grafului dat, formate din vârful considerat şi vârful legat de el prin mu-chia de valoare minimă, arborii rezultaŃi fiind neconectaŃi între ei. E2) Arborii rezultaŃi se consideră a fi vârfuri şi se revine la etapa E1. E3) Procesul de calcul se consideră terminat în momentul când se obŃine un singur arbore, corespunzător unui singur subgraf, care este însuşi graful dat. Acest algoritm este o metodă aproximativă conducând în general la o soluŃie apro-piată de cea optimă. Algoritmul Kruskal este o metodă exactă de determinare a arborelui de valoare minimă într-un graf, necesitând următoarele etape principale: E1) Se alege o muchie a grafului cu valoarea cea mai mică. E2) Dintre muchiile nealese, se alege una care nu formează circuite cu muchiile deja alese şi care are valoarea cea mai mică. E3) Procesul de calcul se consideră terminat în momentul în care s-a determinat
mulŃimea U , formată din cele v-1 muchii ale arborelui:
121
,,,−
=v
uuuU L (6.68)
iar graful ),( UXG = este un arbore de valoare minimă.
Dacă toate valorile )( ijuλ pentru i
ju ∈U sunt distincte, există o soluŃie a problemei
şi numai una. În ipoteza existenŃei unor valori egale la mai multe muchii, problema poate avea mai multe soluŃii. Acest algoritm a fost implementat în cadrul programului ARBMIN [98], putând fi utilizat pentru determinarea configuraŃiei optime a reŃelelor ramificate de distribuŃie a energiei electrice, termice, a gazelor şi a apei.
6.3.3. ALGORITMI PENTRU DETERMINAREA UNUI DRUM DE VALOARE MINIMĂ
Principalii algoritmi de determinare a unui drum de valoare minimă din graf au la bază principiul optimalităŃii, potrivit căruia orice drum optim în graf este format din subdrumuri optime din acel graf. Aceşti algoritmi se utilizează pentru determinarea traseului optim al unor magistrale de aducŃiune a apei şi a gazelor. Algoritmul Ford. Se consideră un graf conex orientat G = (X, U) şi fiecărui arc
iju ∈U i se asociază un număr )( i
juλ ≥0 reprezentând valoarea arcului. Grafului i se
ataşează matricea M ale cărei elemente mij sunt date de relaŃiile (6.67). Drumul µ din graf de valoare minimă are valoarea totală:
min)()µ( →= ∑∈µ
λλiju
iju (6.69)
şi se află, conform algoritmului Ford în următoarele etape: E1) Se numerotează vârfurile grafului într-o ordine oarecare: x0, x1,...,xn în aşa fel încât vârful origine să fie x0, iar vârful extremitate să fie xn.

172 Modelări numerice şi optimizări în instalaŃii
E2) Se atribuie fiecărui vârf ),0( nixi = o marcă li, pe scurt xi(li), care să reprezinte lungimea unui drum arbitrar de la x0 la xi; iniŃial se ia l0 = 0 şi li = ∞, dacă i ≠ 0. E3) Se consideră pe rând toate arcele (xi, xj) din U, se calculează diferenŃa lj−li şi se compară cu λ(xi, xj), iar dacă: ),( jiij xxll λ>− (6.70)
atunci se înlocuieşte de fiecare dată lj prin:
jjiij lxxll <+= ),(' λ (6.71)
obŃinându-se o reducere pentru marca vârfului xj. E4) Se defineşte pentru uniformitate marcajul:
>−+
≤−=
),(dacă),,(
),(dacă,'
jiijjii
jiijj
jxxllxxl
xxllll
λλ
λ (6.72)
E5) Se continuă această reducere până când pentru orice arc din U avem lj−li ≤ λ(xi, xj). E6) Se determină vârfurile prin care trece drumul de valoare minimă: se găseşte vârful xp1(ln) cu proprietatea ln−lp1 = λ(xp1, xn), deci arcul (xp1, xn) este ultimul arc din drum, apoi se găseşte vârful xp2(ln) cu proprietatea lp1−lp2 = λ(xp2, xp1), deci arcul (xp2, xp1) este penultimul arc din drum, ş.a.m.d. până se ajunge la vârful x0. Drumul cu valoare minimă ln este:
),,,,,(µ 110 nppkpk xxxxx K−= (6.73)
Schema logică a acestui algoritm este prezentată în figura 6.8, unde: N este ordinul grafului; M1 – număr foarte mare; M(I,J) – matricea grafului; L(I) – vector ale cărui componente dau mărcile vârfurilor. Algoritmul Bellman–Kalaba. O variantă a algoritmului precedent, prezentată cu ajutorul programării dinamice, este algoritmul Bellman–Kalaba.
Dacă se notează cu Vi valoarea minimă a drumurilor ),1(µ niin = existente de la
vârful xi la xn:
),1(),( niV ini == µλ (6.74)
0=nV , (6.75) atunci conform principiului optimalităŃii:
0);,1;1,1(),(min ==−=+=≠
nijjij
i VnjnimVV (6.76)
Pentru rezolvarea sistemului (6.76) se procedează iterativ, notând cu kiV valoarea
lui Vi obŃinută la iteraŃia k şi anume:
0);1,1(, 00 =−== nini VnimV (6.77) Se calculează:
0);,1;1,1(),(min 101 ==−=+=≠
nijjij
i VnjnimVV (6.78)
şi apoi:
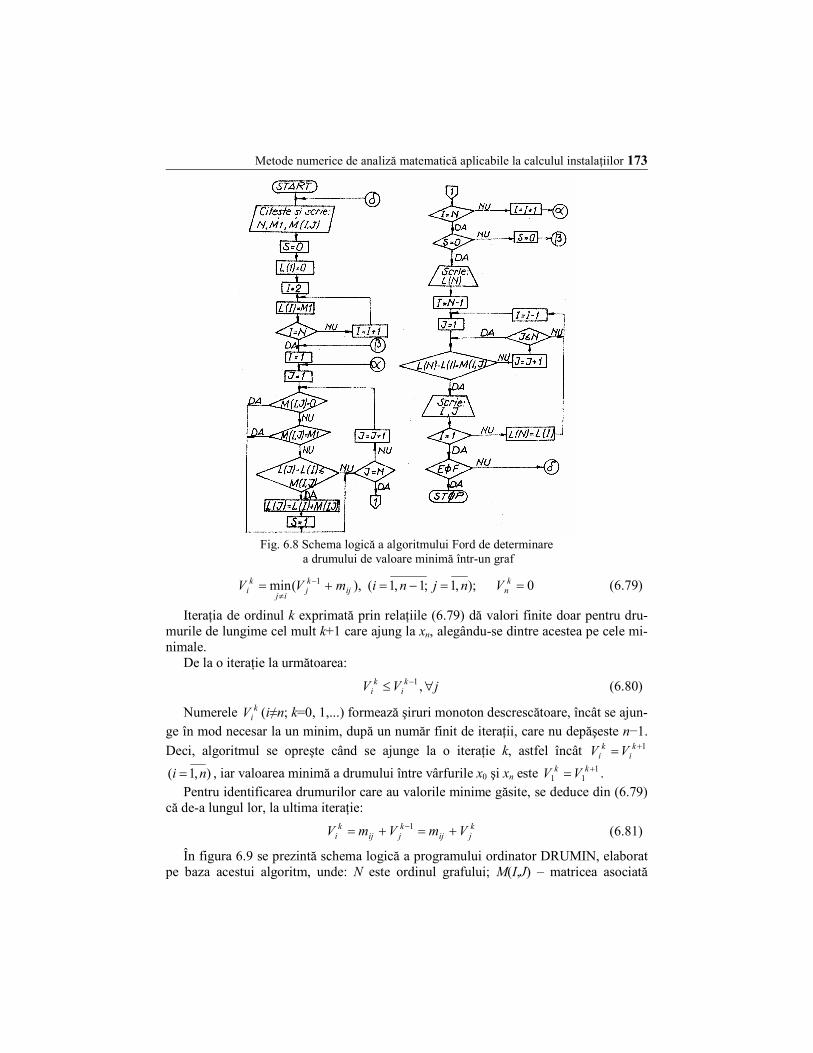
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 173
Fig. 6.8 Schema logică a algoritmului Ford de determinare
a drumului de valoare minimă într-un graf
0);,1;1,1(),(min 1 ==−=+= −
≠
knij
kj
ij
ki VnjnimVV (6.79)
IteraŃia de ordinul k exprimată prin relaŃiile (6.79) dă valori finite doar pentru dru-murile de lungime cel mult k+1 care ajung la xn, alegându-se dintre acestea pe cele mi-nimale. De la o iteraŃie la următoarea:
,1−≤ ki
ki VV ∀j (6.80)
Numerele kiV (i≠n; k=0, 1,...) formează şiruri monoton descrescătoare, încât se ajun-
ge în mod necesar la un minim, după un număr finit de iteraŃii, care nu depăşeste n−1.
Deci, algoritmul se opreşte când se ajunge la o iteraŃie k, astfel încât 1+= ki
ki VV
),1( ni = , iar valoarea minimă a drumului între vârfurile x0 şi xn este 111
+= kk VV . Pentru identificarea drumurilor care au valorile minime găsite, se deduce din (6.79) că de-a lungul lor, la ultima iteraŃie:
kjij
kjij
ki VmVmV +=+= −1 (6.81)
În figura 6.9 se prezintă schema logică a programului ordinator DRUMIN, elaborat pe baza acestui algoritm, unde: N este ordinul grafului; M(I,J) – matricea asociată
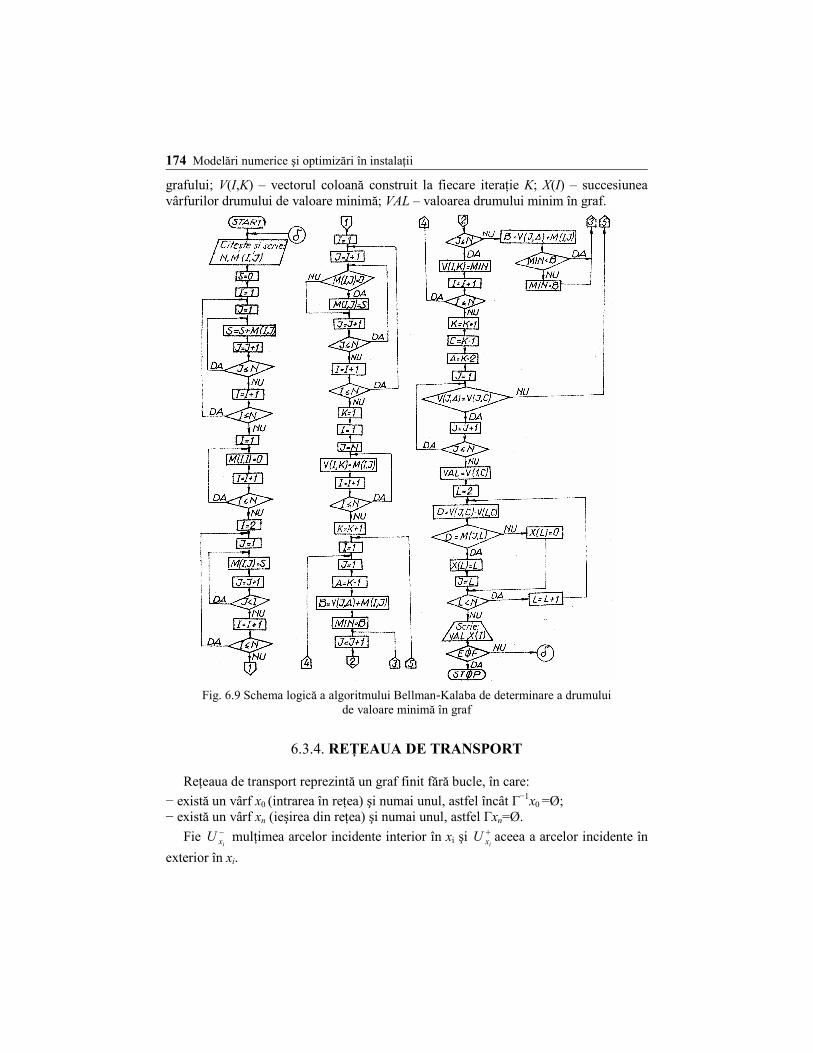
174 Modelări numerice şi optimizări în instalaŃii
grafului; V(I,K) – vectorul coloană construit la fiecare iteraŃie K; X(I) – succesiunea vârfurilor drumului de valoare minimă; VAL – valoarea drumului minim în graf.
Fig. 6.9 Schema logică a algoritmului Bellman-Kalaba de determinare a drumului
de valoare minimă în graf
6.3.4. REłEAUA DE TRANSPORT
ReŃeaua de transport reprezintă un graf finit fără bucle, în care:
− există un vârf x0 (intrarea în reŃea) şi numai unul, astfel încât Γ−1x0 =Ø;
− există un vârf xn (ieşirea din reŃea) şi numai unul, astfel Γxn=Ø.
Fie −ix
U mulŃimea arcelor incidente interior în xi şi +ix
U aceea a arcelor incidente în
exterior în xi.

Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 175
O funcŃie în valori întregi Φ(u) definită pe U este un flux pentru o reŃea de transport dacă sunt satisfăcute relaŃiile: 0)( ≥Φ u ∀u∈U (6.82)
),()()( 0 nii
Uu Uu
xxxxuu
ix ix
≠≠Φ=Φ∑ ∑− +∈ ∈
(6.83)
)()( ucu ≤Φ ∀u∈U (6.84) FuncŃia Φ(u) poate fi asimilată cu o cantitate de materie care trece prin arcul u şi care deci nu trebuie să depăşească capacitatea c(u) a acestui arc. Din relaŃia (6.83) se deduce:
∑∑−+ ∈∈
Φ=Φ=Φ00
0)()(xx UuUu
uu (6.85)
Numărul Φ0 reprezintă cantitatea de materie care iese din x0 spre reŃea şi ajunge prin reŃea în xn.
6.3.5. CONDIłII PARTICULARE DE APLICARE A GRAFURILOR LA CALCULUL REłELELOR DE CURGERE
Orice reŃea de curgere (hidraulică, termică, electrică), poate fi reprezentată, ca mo-del matematic, printr-un graf topologic conex. Graful topologic al reŃelei este reprezentarea în plan a structurii spaŃiale alcătuite din noduri şi conducte interconectate în noduri. Gradul unui nod este dat de numărul conductelor incidente în acel nod şi nu poate fi mai mic decât 1, întrucât reŃelele de conducte sunt întotdeauna grafuri conexe. Gradul 0 îl are un punct izolat, iar nodurile cu gradul 1 sunt noduri periferice. ReŃeaua inelară reprezintă un graf conex care nu are vârfuri cu gradul mai mic de- cât 2. Folosirea şi analiza relaŃiilor dintre elementele reŃelelor de conducte ca şi grafuri au aplicabilitate în rezolvarea unor probleme ca alegerea formei reŃelelor, aprecierea gra-dului de siguranŃă, modul de transformare legat de metodele de calcul, determinarea re-gimului de cugere în reŃea şi probleme economico-energetice. În conformitate cu teoria grafurilor, în graful reŃelelor, numărul maxim de inele in-dependente M în fiecare sistem este egal cu numărul ciclomatic dat de relaŃia (6.64):
1+−= NTM (6.86)
în care: T este numărul tronsoanelor; N – numărul nodurilor reŃelei. În dezvoltarea modernă a studiilor de specialitate, grafurile se utilizează ca modele matematice pentru rezolvarea problemelor tehnice şi economico-energetice ale reŃele-lor de alimentare cu apă, cu gaze, cu energie termică şi electrică prin calcul matriceal. Metoda teoriei grafurilor permite să se efectueze înregistrarea tuturor proprietăŃilor geometrice principale şi a formei reŃelei prin întocmirea unor matrice. Astfel, graful neorientat al unei reŃele poate fi descris prin matricea tranziŃiilor [At]N, N având numărul de linii şi de coloane egal cu numărul de vârfuri N şi elementele aij date de relaŃiile:

176 Modelări numerice şi optimizări în instalaŃii
=adiacentesuntnuşivârfuriledacă,0
adiacentesuntşivârfuriledacă,1
ji
jiaij (6.87)
Neexistând bucle, elementele diagonalei principale sunt nule. Această matrice per-mite determinarea gradului nodurilor, adică numărul de conducte convergente în nod, prin însumarea elementelor nenule pe linii sau pe coloane. Matricea de incidenŃă (matricea vârfurilor) [Av]N, T stabileşte legătura între arcele şi vârfurile grafului orientat al unei reŃele, ilustrând interconectarea nodurilor în reŃea şi având pe linii numărul de ordine al vârfurilor N, iar pe coloane cel al arcelor T. Ele-mentele aij ale acestei matrice sunt definite de relaŃiile:
=ij
ijaij vârfulinincidentaarenuarculdacă,0
vârfulinincidentaarearculdacă,1 (6.88)
Matricea de apartenenŃă (matricea ciclurilor) [Ac]M, T stabileşte legătura între arcele şi ciclurile grafului orientat al unei reŃele, indicând apartenenŃa conductelor la inelele reŃelei şi având pe linii numărul de ordine al inelelor M, iar pe coloane cel al arcelor T. Elementele aij ale acestei matrice sunt definite prin relaŃiile:
=ij
ijaij cicluluiapartinenuarculdacă,0
cicluluiapartinearculdacă,1 (6.89)
Topologia unei reŃele de conducte poate fi descrisă complet şi univoc cu ajutorul matricei de incidenŃă şi a matricei de apartenenŃă. Având în vedere că majoritatea elementelor matriceale ataşate grafului, definite sub formele menŃionate, sunt nule şi că acestea ocupă un volum extrem de mare în memo-ria calculatoarelor electronice, aplicarea în calculul automatizat al reŃelelor a acestor matrice se poate face sub o formă particularizată. Dintre elementele matricei Av se reŃin numai elementele nenule, precizându-se pen-tru fiecare arc j nodul iniŃial NIj şi nodul final NFj, spre care are loc curgerea. Pe lângă faptul că se realizează astfel şi prezentarea elementelor matricei At, eliminându-se pere-chile de noduri care nu sunt interconectate prin conducte, există posibilitatea de orien-tare a mişcării fluidului în conducte. Dintre elementele matricei Ac se reŃin de asemenea numai elementele nenule, prin no-minalizarea tuturor nodurilor care formează un inel. Pentru calculul orientării se consideră în-totdeauna acelaşi sens de parcurgere, de exem-plu sensul orar, începând cu un nod arbitrar şi încheind ciclul cu acelaşi nod. Pentru exemplul de reŃea cu graful topolo-gic din figura 6.10 elementele nenule ale ma-tricei Av şi At asociate grafului, care se reŃin, se scriu astfel:
j 1 2 3 4 5 6 7 8 NIj 1 2 7 6 2 3 7 4 NFj 2 3 4 5 7 4 6 5
Fig. 6.10 Graful topologic al unei reŃele
inelare de conducte
Metode numerice de analiză matematică aplicabile la calculul instalaŃiilor 177
iar matricea Ac are forma particulară:
=
76547
27432cA
adică se înscriu 26 elemente nenule, în loc să se înscrie în total 121 elemente, din care 49 ale matricei At, 56 ale matricei Av şi 16 ale matricei Ac.
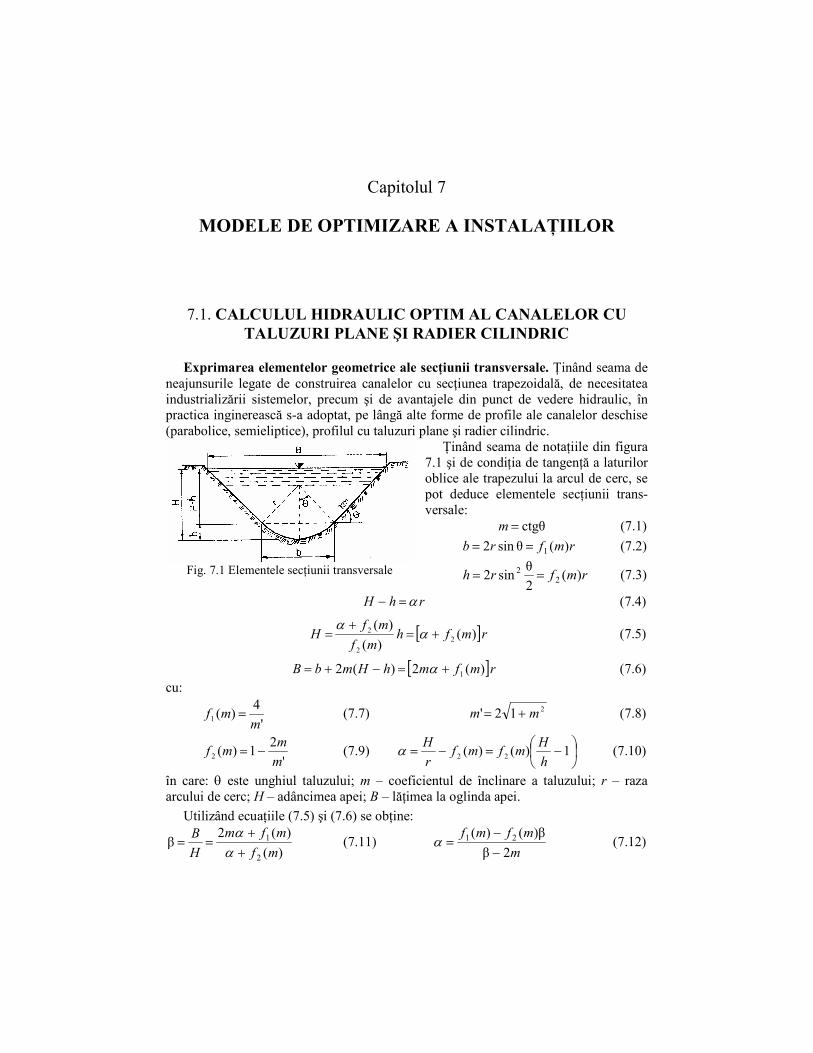
Capitolul 7
MODELE DE OPTIMIZARE A INSTALAłIILOR
7.1. CALCULUL HIDRAULIC OPTIM AL CANALELOR CU TALUZURI PLANE ŞI RADIER CILINDRIC
Exprimarea elementelor geometrice ale secŃiunii transversale. łinând seama de neajunsurile legate de construirea canalelor cu secŃiunea trapezoidală, de necesitatea industrializării sistemelor, precum şi de avantajele din punct de vedere hidraulic, în practica inginerească s-a adoptat, pe lângă alte forme de profile ale canalelor deschise (parabolice, semieliptice), profilul cu taluzuri plane şi radier cilindric.
łinând seama de notaŃiile din figura 7.1 şi de condiŃia de tangenŃă a laturilor oblice ale trapezului la arcul de cerc, se pot deduce elementele secŃiunii trans-versale: ctgθ=m (7.1)
rmfrb )(θsin2 1== (7.2)
rmfrh )(2
θsin2 2
2 == (7.3)
rhH α=− (7.4)
[ ]rmfhmf
mfH )(
)(
)(2
2
2 +=+
= αα
(7.5)
[ ]rmfmhHmbB )(2)(2 1+=−+= α (7.6) cu:
'
4)(1
mmf = (7.7) 212' mm += (7.8)
'
21)(2
m
mmf −= (7.9)
−=−= 1)()( 22h
Hmfmf
r
Hα (7.10)
în care: θ este unghiul taluzului; m – coeficientul de înclinare a taluzului; r – raza arcului de cerc; H – adâncimea apei; B – lăŃimea la oglinda apei.
Utilizând ecuaŃiile (7.5) şi (7.6) se obŃine:
)(
)(2β
2
1
mf
mfm
H
B
+
+==αα
(7.11) m
mfmf
2β
β)()( 21
−
−=α (7.12)
Fig. 7.1 Elementele secŃiunii transversale

Modele de optimizare a instalaŃiilor 179
Potrivit relaŃiei (7.10), dacă h = H (canal circular) sau h = 0 (canal trapezoidal), atunci α primeşte valoarea 0, respectiv ∞. Introducând restricŃiile α = 0 şi α = ∞ în relaŃia (7.11), se obŃine condiŃia de com-patibilitate a problemei:
mm
m2'
4β2
−<< (7.13)
ce exprimă domeniul în care poate fi analizată legătura dintre caracteristicile geome-trice şi hidraulice. În acest caz, pentru perimetrul udat Pu, aria A şi raza hidraulică R rezultă expresiile:
[ ]rmfmrhHmPu )(2'θ2)(12 32 +=+−+= α (7.14)
[ ] [ ] 241
22 )()(2
θ2sinθ2)()( rmfmfmrhHhHmbA ++=
−+−−+= αα (7.15)
rmfm
mfmfm
P
AR
u )(2'
)()(
3
412
+
++==
ααα
(7.16)
în care:
m
mf1
arctg)(3 = (7.17) '
2)()( 34
m
mmfmf −= (7.18)
Cu notaŃiile următoare: )(2 mf+=αϕ (7.19) )(2 1 mfm += ατ (7.20)
)()( 412 mfmfm ++= ααψ (7.21) )(2' 3 mfmf += α (7.22)
se poate exprima fiecare element geometric dimensional în funcŃie de numai un singur element dimensional şi alŃi doi parametri adimensionali m şi α, conform tabelului 7.1.
Tabelul 7.1. Expresia elementelor geometrice ale secŃiunii canalelor cu taluzuri plane şi radier cilindic
Elemen- în funcŃie de: tul r H B A Pu R 0 1 2 3 4 5 6 r
r H
ϕ1
Bτ1
A2
1
ψ
1
fPu
Rf
2ψ
H
rϕ
H B
τϕ
Aψϕ
ϕf
Pu R
f2ψ
ϕ
B
rτ H
ϕτ
B Aψτ
u
Pf
τ R
f2ψ
τ
A
22 rψ
2
2
2
Hϕψ
2
2
2
Bτψ
A 2
2
2
uP
f
ψ 2
2
2
Rf
ψ
Pu
rf Hf
ϕ B
τ1
Aψ1
Pu Rf
2
2
ψ
R r
f
2ψ H
fϕψ 2
Bfτ
ψ 2
ψ 0 5,
fA
uP
f 2
2ψ
R

180 Modelări numerice şi optimizări în instalaŃii
Model de calcul al profilului optim hidraulic. Exprimând viteza apei V cu ajuto-rul formulei Chézy şi adoptând pentru coeficientul de rezistenŃă hidraulică C formula lui Pavlovski, rezultă ecuaŃia cunoscută a debitului:
5,05,01iRA
nQ y+= (7.23)
în care: n este coeficientul de rugozitate; i − panta longitudinală; y − exponent în formula Pavlovski, calculat cu relaŃia:
( )y n R n= − − −2 5 0 13 0 75 0 10, , , , (7.24)
Introducând expresia elementelor geometrice A şi R funcŃie de H (tabelul 7.1) în ecuaŃia debitului (7.23), se obŃine relaŃia generală pentru calculul hidraulic al canalelor cu taluzuri plane şi radier cilindric, în condiŃiile curgerii permanente şi uniforme:
5,05,25,05,2
321iH
fnQ y
yy
y+
++
+
=ϕψ
(7.25)
Expresia razei r obŃinută din relaŃia (7.15) se substituie în relaŃia (7.14) şi se face notaŃia:
)()(
)(2'
412
3
mfmfm
mfmf
++
+==
αα
αψ
λ (7.26)
astfel încât expresia (7.14) a perimetrului udat devine:
APu λ= (7.27) În cazul profilului optim hidraulic, care corespunde perimetrului udat minim la aceleaşi valori A, n şi i, parametrul adimensional λ devine minim şi se obŃine α = αo prin determinarea minimului funcŃiei (7.26) din condiŃia ∂λ/∂α = 0, respectiv:
2
31
4310
1'
2
)(2)('2
1)(')()(
m
m
m
m
mmfmfm
mfmmfmf
+==
−
−=α (7.28)
Introducând relaŃia (7.28) în relaŃia (7.11) rezultă condiŃia profilului optim hidraulic de taluz dat:
20 12'β mm +== (7.29)
Valorile lăŃimii relative optime β0 determinate din relaŃia (7.29) pentru diverse va-lori m sunt prezentate în tabelul 7.2.
Tabelul 7.2. Valorile lăŃimii relative optime β0
m 0 0,25 0,50 0,75 1,00 1,25 1,50 2,00 2,50 3,00 4,00 β0 2,00 2,00 2,24 2,50 2,83 3,20 3,61 4,47 5,39 6,32 8,25
Dacă viteza apei V rezultată în urma calculelor de dimensionare nu se încadrează între limitele admisibile Vm şi VM, indicate în literatură, se măreşte sau se micşorează panta longitudinală i, conform relaŃiei (7.30), iar adâncimea apei H se determină cu relaŃia (7.31):
12
2)(
2
+=
y
Mm
R
Vni (7.30)
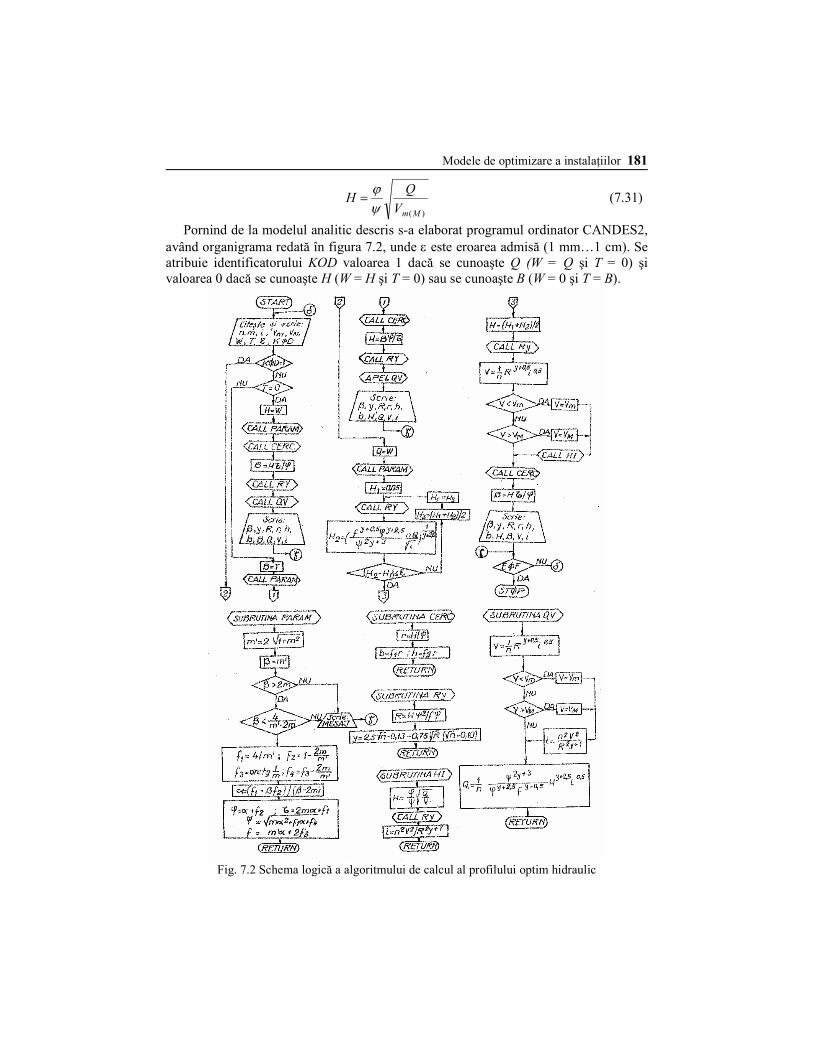
Modele de optimizare a instalaŃiilor 181
)(MmV
QH
ψϕ
= (7.31)
Pornind de la modelul analitic descris s-a elaborat programul ordinator CANDES2, având organigrama redată în figura 7.2, unde ε este eroarea admisă (1 mm…1 cm). Se atribuie identificatorului KOD valoarea 1 dacă se cunoaşte Q (W = Q şi T = 0) şi valoarea 0 dacă se cunoaşte H (W = H şi T = 0) sau se cunoaşte B (W = 0 şi T = B).
Fig. 7.2 Schema logică a algoritmului de calcul al profilului optim hidraulic

182 Modelări numerice şi optimizări în instalaŃii
7.2. ALEGEREA TRASEULUI OPTIM AL UNEI MAGISTRALE DE ADUCłIUNE A APEI
7.2.1. CONSIDERAłII PRELIMINARE
Prin amploarea investiŃiei şi consumul de energie, aducŃiunile au o pondere însem-nată în cadrul sistemelor de alimentare cu apă, iar proiectarea raŃională a acestora com-portă mai multe procese de optimizare, în rândul cărora un loc important îl deŃine optimizarea traseului acestora. În practica actualã de proiectare, stabilirea soluŃiei optime se face, de obicei, prin studierea analitică a două, trei variante selectate din mulŃimea posibilă prin decizii in-tuite, a căror eroare este invers proporŃională cu gradul de experienŃă al proiectantului. Disciplinele matematice moderne prin calculul operaŃional pun la îndemâna proiec-tantului un vast aparat de analiză ştiinŃifică în stabilirea deciziilor optime pentru pro-blemele proiectării sistemelor de alimentare cu apă. În acest context, se descrie un model matematic determinist de optimizare a trase-ului unei magistrale de aducŃiune a apei, bazat pe teoria grafurilor.
7.2.2. MODELUL DE CALCUL Modelarea acestei probleme se realizează prin reprezentarea grafului conex orientat G = (X, U) alcătuit din sursă ca punct de origine, trasee ca arce şi puncte obligate ca
vârfuri. Fiercărui arc Uu ij ∈ i se asociazã un număr 0)( ≥i
juλ , în unităŃi convenŃio-
nale, funcŃie de criteriul de optimizare adoptat. Traseul optim este dat de drumul de valoare minimă în graf, care se determină aplicând algoritmul Bellman-Kalaba. Grafului G = (X, U) i se ataşează o matrice M ale cărei elemente mij sunt:
=−
−∞
−
=
.pentru0
;adiacentesuntnuivârfuriledacă
;laladearculuivaloarea)(
ji
xşx
xxu
m ji
jiij
ij
λ (7.32)
Traseul optim este dat de drumul µ din graf, având valoarea totalã:
∑∈
→=µ
λλiju
iju min)()µ( (7.33)
Dacă se noteazã cu Vi valoarea minimă a drumurilor )0,(,µ niin = existente de la
vârful xi la vârful xn:
)0,(,)(µ niV ini == λ (7.34)
deci: 0=nV (7.35) atunci conform principiului optimalităŃii:

Modele de optimizare a instalaŃiilor 183
0şi)0,;10,(,)min( ==−=+=≠
nij
ij
ji VnjnimVV (7.36)
Pentru rezolvarea sistemului (7.36) se procedează iterativ, notând cu kiV valoarea
lui Vi obŃinută la iteraŃia k, şi anume:
0;)10,( oo =−== nini VnimV (7.37) Se calculează:
0;)0,;10,(,)min( 1o1 ==−=+=≠
nij
ij
ji VnjnimVV (7.38)
şi apoi:
0;)0,;10,(,)min( 1 ==−=+=≠
− kn
ij
ijkj
ki VnjnimVV (7.39)
IteraŃia de ordinul k exprimată prin relaŃiile (7.39) dă valori finite doar pentru drumurile de lungime cel mult k+1 care ajung la xn, alegându-se dintre acestea pe cele minimale. De la o iteraŃie la următoarea:
.1 j,VV ki
ki ∀≤ − (7.40)
Numerele 1,...)0,;( =≠ kniV ki formeazã şiruri monoton descrescătoare, încât se
ajunge în mod necesar la un minim, după un număr finit de iteraŃii care nu depăşeşte
n–1. Deci, algoritmul se opreşte când se ajunge la o iteraŃie k, astfel încât ,1+= ki
ki VV
)0,( ni = , iar valoarea drumului minim între vârfurile x0 şi xn este 1
00+= kk VV .
Pentru identificarea drumurilor care au valorile minime găsite, se deduce din (7.39) că de-a lungul lor, la ultima iteraŃie:
kjij
kjij
ki VmVmV +=+= −1 (7.41)
Pe baza algoritmului descris s-a conceput programul ordinator OPTRAD, având schema logică din figura 7.3, unde: N este ordinul grafului; V(I,J) – vectorul coloană construit la fiecare iteraŃie k; X(I) – succesiunea drumului de valoare minimă; VAL – valoarea drumului minim în graf; M(I,J) – matricea asociată grafului.
7.3. OPTIMIZAREA TRASEULUI REłELELOR RAMIFICATE DE CURGERE
7.3.1. CONSIDERAłII PRELIMINARE
În cadrul proceselor de optimizare pe care le necesită proiectarea raŃională a reŃe-lelor ramificate de curgere de o mare importanŃă este optimizarea traseului acestora. Având în vedere că această problemă de optimizare poate avea una sau mai multe soluŃii, s-a conceput un algoritm bazat pe teoria grafurilor, care generează toŃi arborii minimi ai grafului format cu nodurile unde se amplasează consumatorii şi de legăturile dintre ei, determinându-se astfel toate soluŃiile optime.
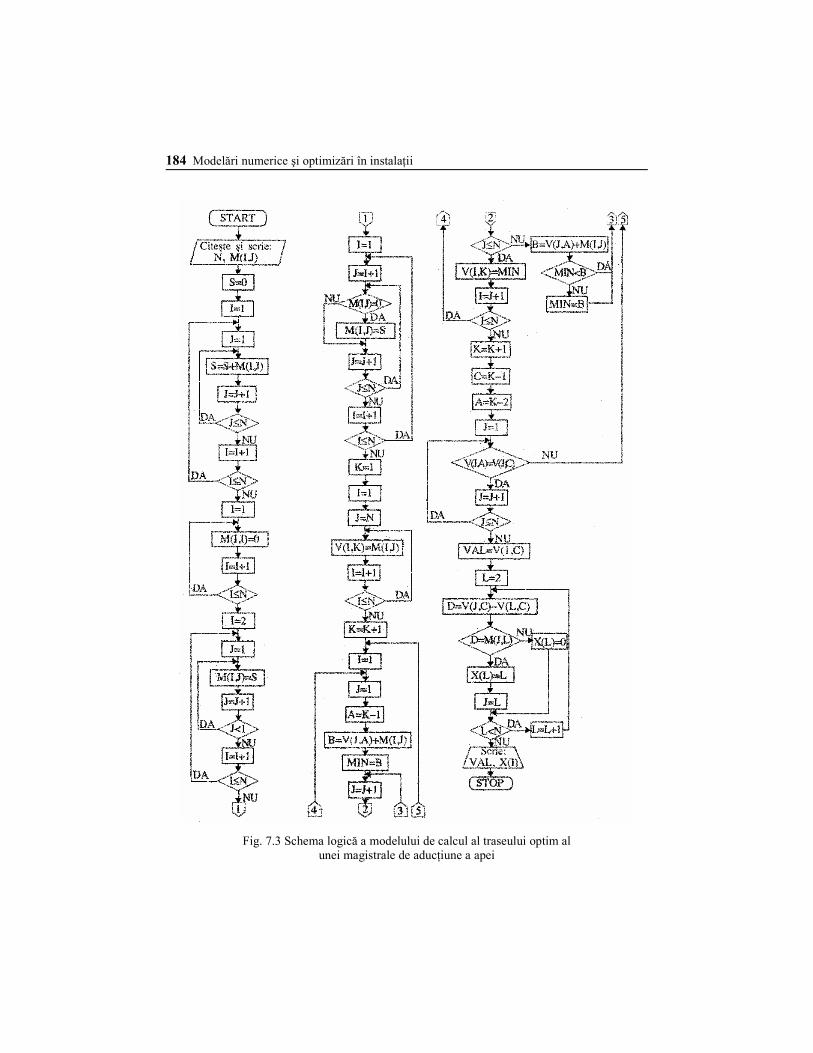
184 Modelări numerice şi optimizări în instalaŃii
Fig. 7.3 Schema logică a modelului de calcul al traseului optim al unei magistrale de aducŃiune a apei

Modele de optimizare a instalaŃiilor 185
Modelarea problemei se realizează prin reprezentarea grafului conex neorientat alcătuit din instalaŃia de punere sub presiune ca origine, nodurile de consum ca vârfuri şi traseele arterelor ce unesc aceste puncte ca muchii. Fie graful conex neorientat G = (X, U) cu X = 1, 2, ..., n reprezentând mulŃimea indicilor vârfurilor şi U − mulŃimea muchiilor, în care fiecare muchie Uu
ij∈ are aso-
ciată o valoare ( ) 0>ijuλ , în unităŃi convenŃionale, conform criteriului de optimizare a-
doptat. Acestui graf i se ataşează matricea C de ordin n ale cărei elemente sunt:
=∉∞
∈=
jiUu
Uuuc
ij
ij
ij
ij sau,dacă,
dacă),(λ (7.42)
unde uij este muchia u cu o extremitate în vârful i şi cealaltã extremitate în vârful j.
Dacă toate valorile ( )ijuλ pentru Uu
ij∈ sunt distincte, existã o soluŃie unică a pro-
blemei. În cazul că există valori ( )ijuλ egale la mai multe muchii, problema poate avea
mai multe soluŃii.
7.3.2. DETERMINAREA GRAFULUI PARłIAL AL ARBORILOR MINIMI
Indicii vârfurilor muchiilor uij , ce aparŃin grafului parŃial al arborilor minimi, şi va-
lorile corespunzătoare cij se reŃin într-o matrice M care, potrivit faptului că un arbore minim are n−1 muchii, va avea 3 coloane şi n−1 linii. Această matrice se construieşte în următoarele etape: E1) Se determină elementele minime de pe fiecare linie a matricei C. E2) Se alege una din liniile pentru care elementul minim este unic şi se notează cu r, s indicii săi. E3) Se înregistrează pe prima linie a matricei M valorile r, s, crs şi se marchează elementele crs, csr din matricea C. E4) Se determină minimul elementelor nemarcate de pe liniile matricei C pe care există cel puŃin un element marcat şi se notează cu r, s indicii elementului minim sau a unuia dintre ele în cazul că există mai multe. E5) Dacă pe linia s a matricei C există elemente marcate, se marchează şi ele-mentele crs, csr şi se trece la etapa E6, iar dacă pe linia s a matricei C nu există elemente marcate, pentru fiecare element cis aflat pe o linie marcată şi egal cu crs se adaugă matricei M o nouă linie formată din valorile i, s, cis şi se marchează elementele cis, csi din matricea C, după care se trece la etapa E6. E6) Se trece la etapa E4 sau se opresc calculele după cum mai există sau nu linii în matricea C cu nici un element nemarcat.
7.3.3. GENERAREA ARBORILOR MINIMI
Dacă pentru matricea M, rezultã un numãr de linii mai mare decât ordinul grafului considerat, problema arborelui minim are mai multe soluŃii.

186 Modelări numerice şi optimizări în instalaŃii
În acest caz se permută mai întâi liniile matricei M astfel încât elementele coloanei a doua să fie ordonate crescător. Pe coloana a doua se vor găsi numai indicii a n−1 vârfuri ale grafului. Dacă se notează frecvenŃele absolute a acestor indici pe coloana a
doua a matricei M cu F1, F2, ..., Fn, iar frecvenŃele cumulate cu ∗∗∗nFFF ..., , , 21 (i=1,
2,..., n−1), numărul de arbori minimi ai grafului na, are valoarea dată de relaŃia:
∏−
=
=1
1
n
i
ia Fn (7.43)
Pentru identificarea celor na arbori minimi se construieşte o matrice A cu n−1 linii şi na coloane, în etapele: E7) Se asociazã fiecărei frecvenŃe absolute Fi o variabilã Vi ale cărei valori sunt
elementele mulŃimii ( ] NFFN iii I∗∗
−= ,1 , (i = 1, 2, ..., n−1) unde N este mulŃimea
numerelor naturale, iar ∗0F = 0.
E8) Pe fiecare linie i a matricei A se înregistreazã de na/Fi ori elementele Vi ale mulŃimii Ni, astfel ca matricea A obŃinutã în final să aibă coloanele ordonate lexi-cografic. Pe fiecare coloană a matricei A se găsesc indicii liniilor matricei M ce conŃin carac-teristicile muchiilor unuia din arborii optimi. În cazul că soluŃia obŃinută este multiplă, alegerea soluŃiei optime se face Ńinând seama şi de alte criterii. Pe baza algoritmului descris s-a elaborat programul OTREDIRA, cu schema logică din figura 7.4, unde: N este ordinul grafului ataşat reŃelei; C(I,J) − matricea criterială asociată grafului topologic al reŃelei; MIN(I) − minimul elementelor de pe linia I; NEM(I) − numãrul elementelor minime de pe linia I; MAR(I) − numãrul elementelor marcate de pe linia I; MINLM − minimul elementelor marcate de pe liniile ce conŃin elemente marcate; A(I,J) − matrice ajutătoare la identificarea arborilor minimi; M(K,L) − matricea vârfurilor muchiilor optime şi a valorilor corespunzătoare.
7.4. MODELE DE OPTIMIZARE PENTRU ANALIZA REłELELOR INELARE DE DISTRIBUłIE A APEI
7.4.1. CONSIDERAłII PRELIMINARE
Formularea unor modele matematice adecvate, care să permită analiza curgerii şi a stării de presiune în reŃele inelare de distribuŃie a apei este esenŃială atât pentru rezol-varea corectă şi eficientă a etapei de proiectare, cât şi pentru verificarea reŃelei în dife-rite regimuri de exploatare, normale sau de avarie. În literatura de specialitate s-au conturat trei metode pentru determinarea circulaŃiei debitelor şi a distribuŃiei presiunilor în reŃelele inelare de alimentare cu apă (metoda ciclurilor, metoda nodurilor, metoda tronsoanelor), în funcŃie de parametrii hidraulici adoptaŃi ca necunoscute. Pentru oricare din aceste metode trebuie rezolvat un sistem de
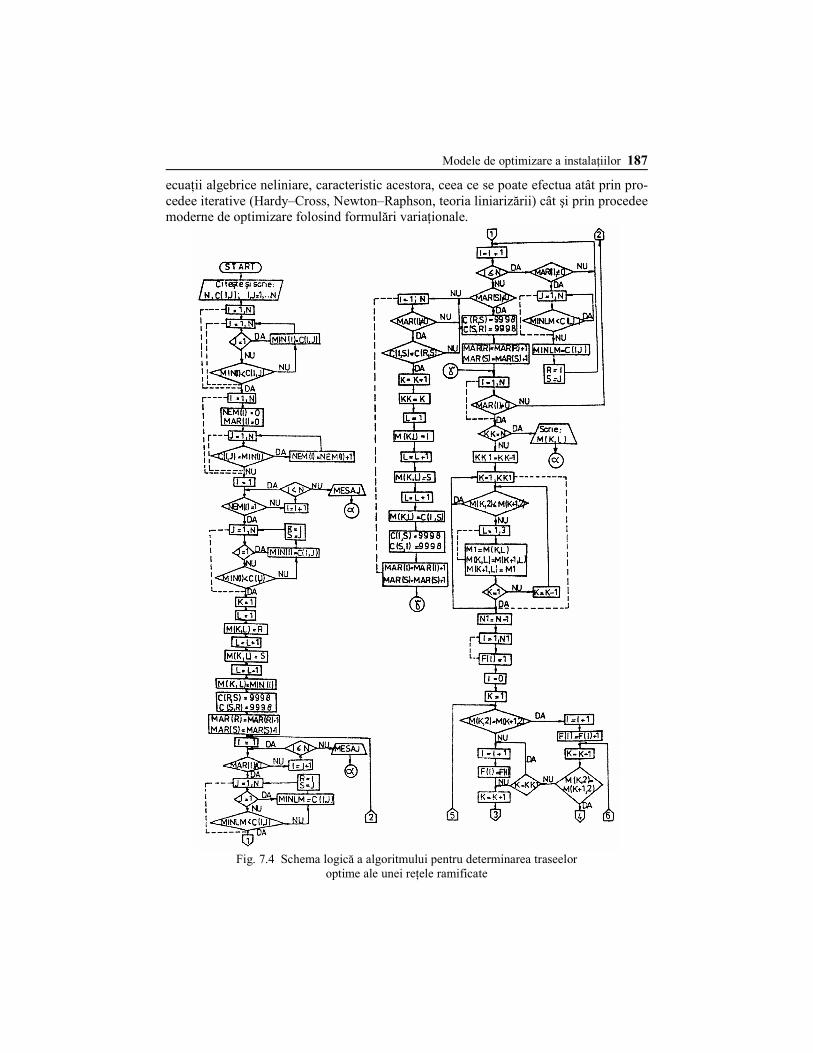
Modele de optimizare a instalaŃiilor 187
ecuaŃii algebrice neliniare, caracteristic acestora, ceea ce se poate efectua atât prin pro-cedee iterative (Hardy–Cross, Newton–Raphson, teoria liniarizării) cât şi prin procedee moderne de optimizare folosind formulări variaŃionale.
Fig. 7.4 Schema logică a algoritmului pentru determinarea traseelor
optime ale unei reŃele ramificate
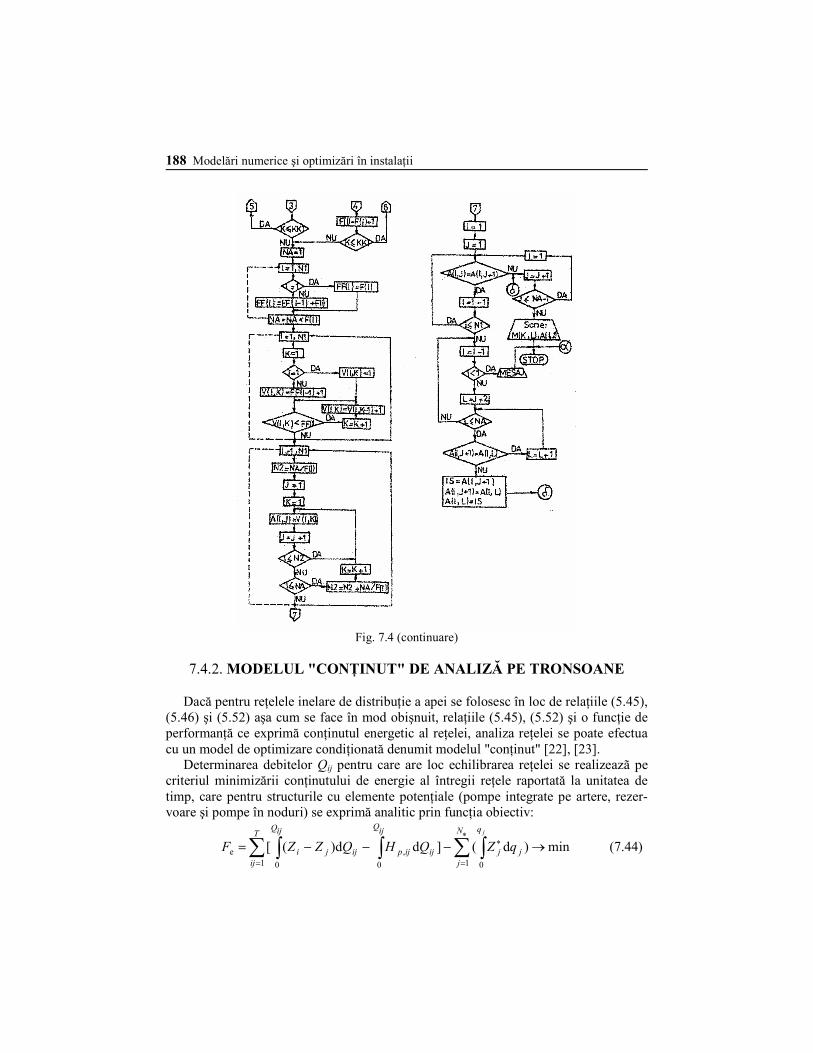
188 Modelări numerice şi optimizări în instalaŃii
Fig. 7.4 (continuare)
7.4.2. MODELUL "CONłINUT" DE ANALIZĂ PE TRONSOANE
Dacă pentru reŃelele inelare de distribuŃie a apei se folosesc în loc de relaŃiile (5.45), (5.46) şi (5.52) aşa cum se face în mod obişnuit, relaŃiile (5.45), (5.52) şi o funcŃie de performanŃă ce exprimă conŃinutul energetic al reŃelei, analiza reŃelei se poate efectua cu un model de optimizare condiŃionată denumit modelul "conŃinut" [22], [23]. Determinarea debitelor Qij pentru care are loc echilibrarea reŃelei se realizeazã pe criteriul minimizării conŃinutului de energie al întregii reŃele raportată la unitatea de timp, care pentru structurile cu elemente potenŃiale (pompe integrate pe artere, rezer-voare şi pompe în noduri) se exprimă analitic prin funcŃia obiectiv:
∫ ∑ ∫∑ ∫∗
=
∗
=
→−−−=ij
Q N
j
q
jjijijp
T
ij
ijQ
ijji
j
qZQHQZZF
0 1 0
,1 0
e min)d(]dd)([ (7.44)

Modele de optimizare a instalaŃiilor 189
supusă la restricŃiile de continuitate (5.45) şi cele de nenegativitate pentru debite:
0≥ijQ (7.45)
unde: Zi şi Zj sunt cotele piezometrice în nodurile i şi j, Hp,ij – înălŃimea de refulare a pompelor integrate pe artera ij, la debitul Qij; N∗ – numărul nodurilor de alimentare cu
cotele piezometrice Z j
∗ .
Introducând în funcŃia obiectiv (7.44) relaŃia funcŃională (5.52) scrisă sub forma:
βijijjiij QRZZh =−= (7.46)
şi Ńinând seama de relaŃia (5.50) de aproximare a înălŃimii de refulare a pompelor in-tegrate pe artere, în urma efectuării integralelor din (7.44), expresia funcŃiei criteriale devine:
∑∑∗
=
∗
=
+ →−
++−+
=N
j
jj
T
ij
ijijijijijijijij qZQCQBQAQRF11
231βe ,min
2
1
3
1
1β
1 (7.47)
iar împreună cu restricŃiile (5.45) şi (7.45) formeazã un model de programare nelini-ară, ce poate fi rezolvat aplicând algoritmul gradienŃilor condiŃionaŃi. Având determinată repartiŃia debitelor pe tronsoane, după calcularea pierderilor de sarcină cu relaŃia (7.46) se determinã cotele piezometrice Zj în noduri, pornind de la un nod cu cota piezometrică cunoscută, în funcŃie de care rezultă presiunile disponibile Hj în noduri: jjj ZTZH −= (7.48)
în care ZTj este cota geodezică în nodul j.
7.4.3. MODEL DE ANALIZĂ CICLICĂ ÎN FORMULARE VARIAłIONALĂ
În formularea clasică a analizei ciclice a reŃelelor inelare relaŃiile fundamentale de calcul sunt ecuaŃia de continuitate (5.45), ecuaŃia de conservare a energiei pe inele (5.46) şi ecuaŃia funcŃională (5.52), iar determinarea debitelor Qij pentru care are loc echilibrarea reŃelei se efectuează pe criteriul conservării energiei în fiecare inel separat. Asociind fiecărui inel m un debit de corecŃie ∆Qm şi alegând o repartiŃie iniŃială de
debite pe tronsoane )0(ijQ , care trebuie însă să respecte restricŃiile (5.45), se poate scrie:
∑=∈
=∆+=M
mmij
mijijij TijQQQ
1
)0( ),...,1(ε (7.49)
iar sistemul (5.45), (5.46), cu ecuaŃia (5.46) explicitată Ńinând seama de relaŃia funcŃi-onalã (5.52) scrisă sub forma:
1β−
=−= ijijijjiij QQRZZh (7.50)
se reduce pentru inele simple (fm = 0) la sistemul:
190 Modelări numerice şi optimizări în instalaŃii
),...,1(0ε)ε(ε
1β
1 1
)0(
)(
)0( MmQQQQRM
mmij
M
mmij
mijijmij
m
ijijij ==∆+∆+
−
=∈
=∈
∑ ∑∑ (7.51)
în care orientarea εij a tronsonului ij este datã de relaŃia:
≠−
∉
≡+
=
mij
mij
mij
ij
senssensdacă1,
dacă0,
senssensdacă1,
ε (7.52)
Se poate ajunge şi la o formulare variaŃională a calculului de echilibrare hidraulică a reŃelelor inelare în metoda ciclurilor, atunci când determinarea debitelor Qij se reali-zează pe criteriul minimizării consumului de energie în reŃea raportată la unitatea de timp (putere), exprimat analitic prin funcŃia obiectiv:
min)d()d(]d)([1 01 0
,1 0
e →−−−= ∑ ∫∑ ∫∑ ∫∗
=
∗
==
N
j
jq
jj
T
ij
ijQ
ijijpijj
T
ij
ijQ
i qZQHQZZF (7.53)
supusă la restricŃiile (5.45) de continuitate a debitelor în noduri şi cu notaŃiile având semnificaŃia menŃionată anterior. În relaŃia (7.53), funcŃionalele din primul termen semnificã pierderea de putere pe tronsoanele reŃelei atunci când aceasta transportă debitele rezultate din condiŃiile de continuitate, iar funcŃionalele din al doilea şi al treilea termen reprezintă aportul de putere provenit din exteriorul sistemului. Introducând în funcŃia obiectiv (7.53) relaŃia funcŃionalã (7.50) şi Ńinând seama de relaŃia (7.49) de corectare a debitelor în conducte, precum şi de expresia (5.50) a înăl-Ńimii de pompare, se elimină toate restricŃiile, iar determinarea debitelor în reŃea se re-duce la găsirea minimului unei funcŃii de M variabile (∆Qm) fără restricŃii, care în urma efectuării integralelor devine: min3e2e1ee →−−= FFFF (7.54)
unde:
∑ ∑=
+
=∈
∆++
=T
ij
M
mmij
mijijij QQRF1
1β
1
)0(1e ε
1β
1 (7.55)
∑ ∑∑=
=∈
=∈
+∆++∆+=T
ij
M
mmij
mijijij
M
mmij
mijijij QQBQQAF1
2
1
(o)
3
1
)0(2e ε
2
1ε
3
1
∆++ ∑=∈
M
mmij
mijijij QQC
1
)0( ε (7.56)

Modele de optimizare a instalaŃiilor 191
j
N
j
j qZF ∑∗
=
∗=1
3e (7.57)
Se observă că punând pentru (7.54) condiŃiile de extremum ∂Fe/∂∆Qm=0 (m = 1,
2,..., M), se obŃine în cazul unei reŃele simple, sistemul de ecuaŃii (7.51) din formularea clasicã a problemei. Formularea variaŃională reduce considerabil dimensiunile problemei, ajungându-se de la o funcŃie cu T necunoscute şi N–NRP restricŃii la o funcŃie doar cu M necunoscute, fără restricŃii, devenind astfel avantajoasă folosind un algoritm specific pentru a mini-miza direct funcŃia (7.54), cum este algoritmul gradienŃilor conjugaŃi, care s-a imple-mentat în cadrul programului ordinator ACIREV [105]. ConvergenŃa procesului de calcul al corecŃiilor de debit depinde foarte mult de so-luŃia iniŃială, motiv pentru care se recomandă considerarea întâi a corecŃiilor obŃinute la prima iteraŃie a procedeului Lobacev. Debitele în conducte Qij se obŃin folosind relaŃia (7.49), în care se introduc corecŃiile ∆Qm rezultate din minimizarea funcŃiei criteriale, iar în final, dupã calcularea pierde-rilor de sarcină cu relaŃia (5.52), se determinã cotele piezometrice Zj şi presiunile disponibile Hj în noduri cu ajutorul relaŃiei (7.48), pornind de la un nod cu cota piezo-metrică cunoscută.
7.4.4. MODEL DE ANALIZĂ NODALĂ ÎN FORMULARE VARIAłIONALĂ
Dacă în cadrul metodei nodurilor, în loc de ecuaŃiile clasice (5.57) se folosesc relaŃiile (5.46), (5.56) şi o funcŃie de performanŃă, care exprimă consumul energetic în reŃea, analiza nodală a reŃelelor inelare de distribuŃie a apei se poate efectua cu un model de optimizare necondiŃionată. Astfel, se ajunge la o formulare variaŃională a analizei nodale a reŃelelor inelare, atunci când determinarea cotelor piezometrice Zj se realizează pe criteriul minimizării consumului de energie în reŃea, raportată la unitatea de timp (putere), exprimat analitic prin funcŃia obiectiv:
∑ ∫ ∑ ∫= =
→−=T
ij
ijhN
j
jZ
jjijij ZqhQF1 0 1 0
e min)d()d( (7.58)
supusă la restricŃiile (5.46) de conservare a energiei pe inele. În urma introducerii în funcŃia obiectiv (7.58) a relaŃiei funcŃionale (5.56) şi a efec-tuării integralelor se elimină restricŃiile, iar problema se reduce la găsirea minimului unei funcŃii de N–NRP variabile (Zi, Zj) fără restricŃii:
,min1β
β
1
β
1β
1
β
1
e →−Π+−+
= ∑∑=
+
=
− N
j
jj
T
ij
ijjiij ZqZZRF (7.59)
Se observă că punând condiŃiile de extremum ∂Fe/∂Zj=0 (j = 1, ..., N–NRP) se obŃine sistemul de ecuaŃii la noduri (5.57).

192 Modelări numerice şi optimizări în instalaŃii
Pentru determinarea unei aproximante iniŃiale a cotelor piezometrice nodale se re-zolvă sistemul liniar asociat (5.58). Formularea variaŃională reduce considerabil dimensiunile problemei, ajungându-se de la un sistem de N–NRP ecuaŃii neliniare independente cu N–NRP necunoscute şi M restricŃii la doar o funcŃie cu N–NRP necunoscute, fără restricŃii. Această formulare de-vine astfel avantajoasă folosind un algoritm specific pentru a minimiza direct funcŃia (7.59), cum este algoritmul gradienŃilor conjugaŃi. Eroarea admisă în calcul ε se poate considera egală cu 10–5. Având determinate cotele piezometrice în noduri, se calculează presiunile dispo-nibile şi apoi debitele de tranzit în conducte Qij cu relaŃia (5.56), precum şi alŃi para-metri hidraulici ai reŃelei. Pe baza acestui model de calcul al regimului hidraulic în reŃele inelare s-a elaborat programul ordinator ANOREV [105].
Modelele matematice exprimate prin funcŃiile obiectiv (7.54) şi (7.59) constituie o nouă modalitate de analiză ciclică şi respectiv nodală a reŃelelor inelare complexe, ba-zată pe procedee de optimizare necondiŃionată.
7.5. OPTIMIZAREA DIMENSIONĂRII REłELELOR INELARE DE DISTRIBUłIE A APEI
7.5.1. CONSIDERAłII PRELIMINARE
La proiectarea reŃelelor inelare s-au conturat două probleme principale de calcul hidraulic: – analiza reŃelei, având drept scop determinarea debitelor reale în conducte şi veri-ficarea cotelor piezometrice în noduri, considerând ca date topologia reŃelei, debitele concentrate în noduri şi respectiv diametrele, pentru care s-au studiat unele modele de optimizare la pct. 7.4; – proiectarea (sinteza) reŃelei, presupunând atât dimensionarea reŃelei, care este ne-cesar a se efectua după criterii tehnice şi economico-energetice bine fundamentate (proiectarea optimală), cât şi verificarea hidraulică a acesteia.
Oricărei reŃele de distribuŃie îi corespunde un graf orientat asociat, compus din arce care pot reprezenta tronsoane, pompe sau armături şi vârfuri ca rezervoare, pompe sau intersecŃii de conducte. Topologia unei astfel de reŃele poate fi descrisă complet şi univoc cu ajutorul matricei de incidenŃă şi a matricei ciclurilor, construite pentru graful asociat acesteia. Pentru o reŃea inelarã cu topologie simplă se poate stabili relaŃia (6.86) între numă-rul de tronsoane T, noduri N şi inele fundamentale (conŃinând eventual şi pompe inte-grate pe artere) M, iar în cazul topologiei complexe cu rezervoare şi pompe în noduri, la numărul de inele fundamentale dat de această relaŃie se mai adaugă NRP–1 pseu-doinele (fictive), astfel încât numărul total de inele independente M se determină cu relaŃia:
Modele de optimizare a instalaŃiilor 193
RPNNTM +−= (7.60) în care NRP este numărul total al rezervoarelor şi pompelor din noduri. Fiecare inel deschis (pseudoinel) leagă două noduri, fiecare având cota piezometrică cunoscută (rezervor) sau o relaŃie determinată între debit şi nivelul piezometric (staŃie de pompare). În calculul de dimensionare al unei reŃele inelare cu T tronsoane intervin două serii de necunoscute: T valori ale debitelor în conducte şi T valori ale diametrelor conduc-telor, în total 2T necunoscute. Pentru dimensionare există T relaŃii hidraulice independente ce exprimă legile de mişcare a apei de-a lungul tuturor conductelor (5.45) şi (5.46), apărând din punct de vedere matematic o problemă nedeterminată, cu gradul de nedeterminare egal cu nu-mărul ciclomatic al reŃelei. Nedeterminarea, în metoda clasică, se ridică alegându-se diametrele printr-un calcul de predimensionare, iar în metoda optimizării ar trebui să se ridice obŃinând celelalte T ecuaŃii prin anularea derivatelor parŃiale ale expresiei analitice a unui criteriu de opti-mizare în raport cu diametrele conductelor. Deci, teoretic ar exista posibilitatea deter-minării unei soluŃii absolut optime, însă, practic, din punct de vedere matematic, se în-tâmpină serioase dificultăŃi la obŃinerea unui minim pe cale analitică, aşa cum se arată în continuare.
7.5.2. CRITERII DE OPTIMIZARE A DIMENSIONĂRII Calculul de optimizare a diametrelor pentru conductele reŃelelor de distribuŃie a apei presupune stabilirea unei funcŃii obiectiv, mono sau multicriteriale, care prezintă prioritate din punct de vedere economico-energetic în etapa respectivă. Se pot folosi criterii de cost sau energetice, simple ori compuse, care Ńin seama de investiŃia necesară realizării reŃelei, costul energiei de pompare, cheltuielile de exploatare, energia înglo-bată, energia consumată etc. InvestiŃia necesară pentru o reŃea, Cc, se obŃine prin însumarea investiŃiilor nece-sare fiecărei conducte componente, cu relaŃia:
ij
T
ij
ijc LDbaC )(1∑=
+= α (7.61)
în care: T este numărul tronsoanelor de conducte din reŃea; a, b, α – parametrii de cost, depinzând de materialul conductei [105]; Dij, Lij – diametrul şi lungimea tronsonului ij. InvestiŃia în staŃia de pompare, Cp, proporŃionalã cu puterea instalată, are forma:
)(ση
81,90HhQfC ijpp += ∑ (7.62)
în care: η este randamentul global al instalaŃiei de pompare; f – costul de instalare a unităŃii de putere; σ – factor supraunitar ce Ńine seama de rezerva de putere instalată; Qp – debitul pompat în reŃea prin staŃie; Σhij – suma pierderilor de sarcină pe un traseu defavorabil, plecând de la staŃia de pompare spre punctul obligat; H0 – componenta geodezică şi de utilizare a înălŃimii de pompare.

194 Modelări numerice şi optimizări în instalaŃii
Costul anual al energiei de pompare, Ce, se defineşte prin expresia:
∑ ∑ +Φ==12
10 )(730
η
81,9HhQeeWC ijpkee τ (7.63)
unde: We este energia consumată pentru pomparea apei; e – tariful energiei electrice; τ = Tp/8760 – coeficientul pompării, ce Ńine seama de numărul efectiv de ore Tp de pompare pe perioada unui an; Φk – raportul între debitul lunar mediu şi debitul pompat, cu valoarea 1 pentru întreprinderi industriale la care se livrează un debit constant pe tot parcursul anului şi pentru care corespunde ΣΦk=12, iar pentru centrele populate se poate opera cu un şir de 12 valori, căruia îi corespunde ΣΦk=10,44. Cheltuielile anuale de exploatare, Cex, se exprimã sub forma: epcex CCpCpC ++= 21 (7.64)
în care p1 şi p2 sunt cotele de reparaŃii, întreŃinere şi revizii periodice pentru conduc-tele reŃelei, respectiv pentru staŃia de pompare. Cheltuielile anuale de investiŃie şi exploatare, Can, se definesc cu ajutorul funcŃi-ei multicriteriale: expcan CCCC ++= )(β 0 (7.65)
în care β0 = 1/Tr este cota de amortizare pentru durata de exploatare Tr. Cheltuielile totale actualizate, Cac, se exprimă prin funcŃia multicriterială:
ext
t
pcac CCCC)β1(β
1)β1(
00
0
+−+
++= (7.66)
şi se consideră pe toată durata de exploatare (t = Tr). Energia înglobată în reŃea, Wc, se defineşte cu ajutorul funcŃiei obiectiv binomiale de forma (7.61), în care parametrii a, b, α au valori determinate corespunzător. Consumul energetic al reŃelei, Wt, însumează energia înglobată în reŃea şi cea cheltuită pentru exploatarea reŃelei, corespunzător perioadei de un an şi se exprimă cu relaŃia: ect WWpW ++= )(β 10 (7.67) în care: Wc este energia înglobatã în reŃea; We – energia consumată pentru pomparea apei, având expresia dedusă din (7.63). łinând seama de relaŃiile (7.61)...(7.67) şi fãcând notaŃiile:
t
t
ar )β1(β
1)β1(
00
0
+−+
= (7.68) r
a
r
aT
tpr
T
tpr +=+= 2211 ; ξξ (7.69)
)τ730σ(η
9,81ψ
12
12 ∑Φ+= kaerf ξ (7.70)
se stabileşte o funcŃie obiectiv complexă multicriterială, de forma generală:
∑ ∑∑==
+++=NP
j
jijjpij
T
ij
ij HhQLDbaF1
0,1
1o )(ψ)( αξ (7.71)
unde: t este durata pentru care se aplică criteriul de optimizare exprimat prin funcŃia obiectiv, având valoarea 1 sau Tr; NP – numărul staŃiilor de pompare.
Modele de optimizare a instalaŃiilor 195
FuncŃia obiectiv (7.71) dă posibilitatea ca prin particularizarea parametrului de timp t şi a celorlalŃi parametrii economici şi energetici caracteristici sistemului de distribuŃie să se obŃină câte o funcŃie criterială particulară având una din formele (7.61)...(7.67). De exemplu, pentru t = 1, ra = 1, e = 1, f = 0 se obŃine criteriul consumului energetic minim al reŃelei. Având în vedere că diametrele conductelor unei reŃele pot lua valori în gama dia-metrelor succesive variind între 20 şi 30 %, se pot adopta valori medii pentru anumiŃi parametri cu variaŃii în limite cunoscute. Pentru reŃelele alimentate prin pompare se recomandă folosirea criteriului cheltuie-lor anuale minime (CAN), dar adoptând la realizarea investiŃiei diametrele optime ast-fel obŃinute, ele devin neeconomice la un moment dat după execuŃie din cauza evoluŃiei preŃurilor în timp. De aceea este recomandabilă dinamizarea criteriului CAN folosind criteriul cheltu-
ielilor totale actualizate minime (CTA), primul reprezentând de fapt un caz particular al celui de-al doilea, atunci când investiŃia se realizează într-un an, cheltuielile de ex-ploatare sunt aceleaşi de la an la an, iar durata de viaŃă a sistemului de distribuŃie este mare. De asemenea, se recomandã utilizarea unor criterii diferite de cele de cost, cum sunt cele energetice. În acest sens, un alt mod de a pune problema, care-şi păstrează mai bine valabilitatea în timp şi conduce la omogenizarea funcŃiei criteriale este dimensio-narea reŃelei pe criteriul consumului energetic minim (WT).
7.5.3. OPTIMIZAREA REPARTIłIEI DEBITELOR DE TRANZIT
7.5.3.1. Necesitatea optimizării repartiŃiei debitelor de tranzit Este cunoscut că deşi sistemul inelar de reŃea necesită, de obicei, o investiŃie sporită faŃă de cel ramificat care alimentează aceleaşi noduri şi are aceeaşi încărcare hidra-ulică, la reŃelele inelare securitatea alimentării nodurilor este mult mai mare şi prin urmare se impune introducerea în calculul de dimensionare optimală şi a unei condiŃii referitoare la gradul de siguranŃă în exploatare. FuncŃia obiectiv de forma generală (7.71), utilizatã la dimensionarea optimală a reŃelelor de distribuŃie a apei, este din punct de vedere matematic o funcŃie atât de debitele Qij (prin intermediul pierderii de sarcină hij) cât şi de diametrele Dij ale fiecărui tronson, ceea ce face să se întâmpine serioase dificultăŃi în problema obŃinerii unui minim pe cale analitică. Prin anulare, derivatele parŃiale de forma ∂Fo/∂Dij şi ∂Fo/∂Qij arată că funcŃia obiectiv Fo admite extreme, însă derivatele de ordinul doi indică trecerea funcŃiei obiectiv Fo prin valori minime în raport cu diametrele Dij şi prin valori maxime în raport cu debitele Qij, ceea ce complică soluŃionarea problemei. De asemenea, cunoscând la dimensionarea reŃelelor inelare debitele consumate în noduri faŃă de debitul de alimentare, se pot stabili debitele de tranzit pe tronsoane într-o infinitate de moduri, astfel încât să satisfacă restricŃiile (5.45) de continuitate în noduri, afectând însă gradul de siguranŃă şi condiŃiile tehnice şi economico-energetice ale sis-temului. Astfel, în cazul utilizării de criterii exclusiv cantitative (CAN, CTA, WT) la

196 Modelări numerice şi optimizări în instalaŃii
dimensionarea optimală a tipurilor uzuale de sisteme inelare, pot rezulta ramuri de ali-mentare cu diametre de valori foarte diferite, ceea ce din punct de vedere practic cons-tituie o reŃea mixtă. Pentru a evita aceste situaŃii, calculul de dimensionare optimală a reŃelelor inelare este necesar a se etapiza în două procese principale: – optimizarea repartiŃiei debitelor de tranzit pe baza unui criteriu calitativ, care Ńine seama de gradul de siguranŃă în exploatare; – determinarea efectivă a diametrelor optime prin aplicarea unui criteriu de optimi-zare, Ńinând seama de debitele de tranzit optimizate.
7.5.3.2. Modele de calcul al repartiŃiei optime a debitelor de tranzit Optimizarea debitelor de tranzit pe tronsoane presupune cunoaşterea elementelor geometrice ale reŃelei şi admiterea ipotezei consumului la noduri. Numărul soluŃiilor acceptabile pentru repartiŃia debitelor în conductele unei reŃele date se restrânge consi-derabil dacă se foloseşte criteriul calitativ de siguranŃă în exploatare. În acest sens, se utilizează pentru optimizarea debitelor criteriul lucrului de trans-
port minim, care se exprimă analitic prin M funcŃii obiectiv de forma:
∑=∈
=→=T
ijmij
ijijt MmQLF
1
γ ),...,1(,min (7.72)
unde lungimile Lij ale conductelor sunt cunoscute şi la care se alătură şi ecuaŃiile de continuitate (5.45) ca restricŃii. • Modelul descris de relaŃiile (7.72), (5.45) asigură alimentarea nodurilor reŃelei pe drumul cel mai scurt şi cu un efort minim de transport, iar pentru rezolvarea acestuia se aplică metoda iteraŃiilor, calculând câte un debit de corecŃie ∆Qm în fiecare inel m, din condiŃia:
min)( γ
1
→∆+=∑=∈
T
ijmij
mijijt QQLF (7.73)
care necesită egalarea cu zero a derivatei ∂Ft /∂∆Qm = f(∆Qm), adică:
∑=∈
− =∆+=∆T
ijmij
mijijm QQLQf
1
1γ ,0)(γ)( (7.74)
de unde, pentru simplificare se reŃin numai primii doi termeni ai seriei Mac-Laurin:
0)0()0()( =′∆+=∆ fQfQf mm (7.75)
Făcând derivata funcŃiei (7.74) şi particularizând-o pentru ∆Qm = 0, rezultă:
∑=∈
−−=′T
ijmij
ijijQLf
1
2γ)1(γγ)0( (7.76)
cu care, din relaŃia (7.75), se obŃine:

Modele de optimizare a instalaŃiilor 197
),...,1(
)1(γ
1
2γ
1
1γ
Mm
QL
QL
QT
ijmij
ijij
T
ijmij
ijij
m =−
−=∆
∑
∑
=∈
−
=∈
−
(7.77)
unde debitele Qij sunt mărimi orientate, având semnul (+) atunci când sensul lor, pe tronsoane coincide cu sensul de parcurs al inelului, iar în caz contrar având semnul (–). Pornind de la soluŃia iniŃială, obŃinută considerând debitele nule în conductele care nu aparŃin reŃelei virtual ramificate de bază şi determinând celelalte debite recursiv, începând cu nodurile extreme ale acestei reŃele, se corectează debitele iterativ, până se atinge precizia prescrisă prin eroarea maximă admisă pe un ciclu. Debitul corectat Qij se calculeazã cu relaŃia (7.78) sau (7.79) după cum conducta considerată este singulară sau comună la inelele m şi k:
mijij QQQ ∆+= )0( (7.78) kmijij QQQQ ∆−∆+= )0( (7.79)
în care: Qij
)0( este debitul în conducta ij la aproximaŃia precedentă; ∆Qm, ∆Qk – corecŃia
de debit ce se aplică în inelul m şi respectiv k. łinând seama de faptul că funcŃia 1/(γ–1) are valori foarte mari în vecinătatea punc-
tului 1, în raport cu funcŃia putere Qij
1γ− , modelul de optimizare (7.77) poate fi aplicat
la reŃele având mai mult de 3...10 inele, cu rezultate corespunzătoare din punct de ve-dere tehnic, doar pentru valori ale exponentului γ în domeniile: 0< γ <0,5 şi γ > 1,23. Pe baza acestui model de optimizare s-a elaborat subprogramul OPREDEC, care s-a implementat în cadrul unor programe ordinatoare complexe de analiză sau dimensi-onare a reŃelelor inelare. • Modelul de optimizare a debitelor de tranzit poate fi reformulat ca un program neliniar de minim condiŃionat, având funcŃia obiectiv unică:
∑=
→=T
ij
ijijt QLF1
γ min (7.80)
supusă pe lângă restricŃiile de continuitate (5.45) şi la restricŃiile de ordin tehnic:
),...,1(0 TijQQij =≥ ∗ (7.81)
în care ∗0Q este un debit minim necesar în conductele reŃelei astfel încât să se evite
posibilitatea transformării reŃelei inelare într-una parŃial ramificată. Modelul de optimizare (7.80), (7.81) are dezavantajul că necesită cunoaşterea apri-orică a sensului de curgere pe fiecare tronson, iar rezolvarea sa se poate efectua aplicând metoda gradienŃilor condiŃionaŃi. Din analizele numerice efectuate pe diverse reŃele inelare cu dimensiuni şi încărcări hidraulice diferite a rezultat valoarea optimă a exponentului γ din funcŃiile obiectiv (7.72) şi (7.80) ca fiind egală cu 2 [115], aşa încât se recomandă minimizarea produ-selor de transport pătratice pentru determinarea repartiŃiei optime a debitelor de tranzit.
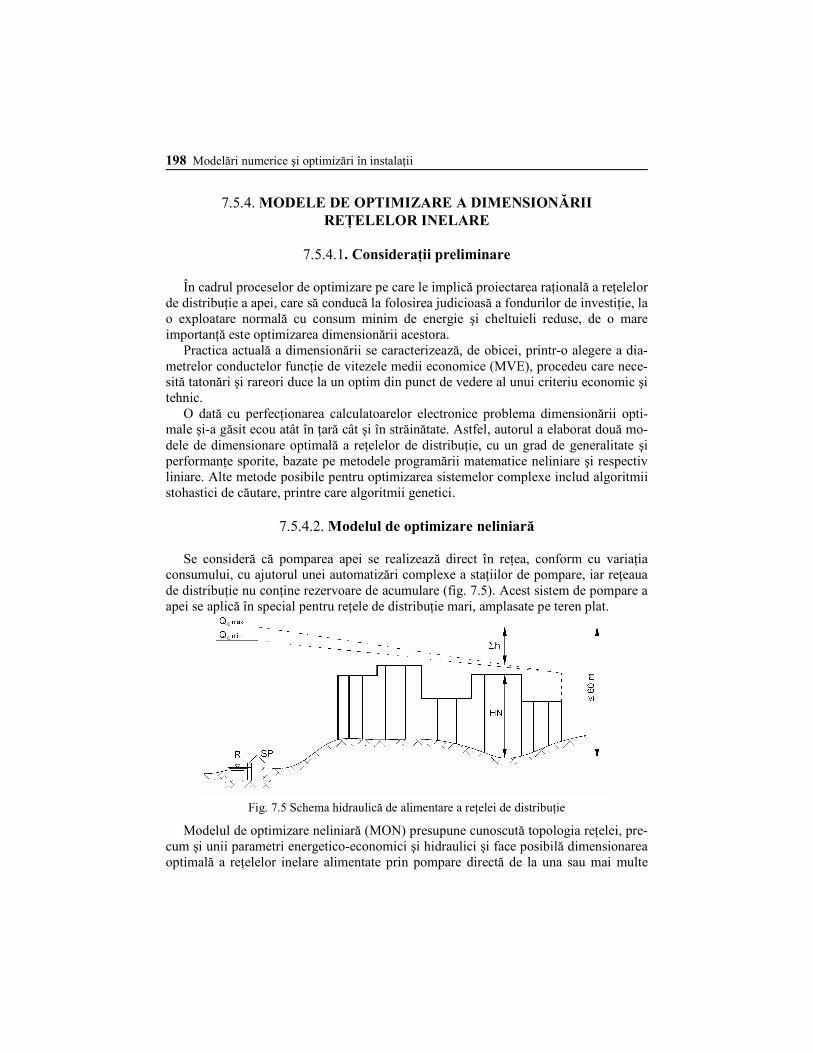
198 Modelări numerice şi optimizări în instalaŃii
7.5.4. MODELE DE OPTIMIZARE A DIMENSIONĂRII
REłELELOR INELARE
7.5.4.1. ConsideraŃii preliminare În cadrul proceselor de optimizare pe care le implică proiectarea raŃională a reŃelelor de distribuŃie a apei, care să conducă la folosirea judicioasă a fondurilor de investiŃie, la o exploatare normală cu consum minim de energie şi cheltuieli reduse, de o mare importanŃă este optimizarea dimensionării acestora. Practica actuală a dimensionării se caracterizează, de obicei, printr-o alegere a dia-metrelor conductelor funcŃie de vitezele medii economice (MVE), procedeu care nece-sită tatonări şi rareori duce la un optim din punct de vedere al unui criteriu economic şi tehnic. O dată cu perfecŃionarea calculatoarelor electronice problema dimensionării opti-male şi-a găsit ecou atât în Ńară cât şi în străinătate. Astfel, autorul a elaborat două mo-dele de dimensionare optimală a reŃelelor de distribuŃie, cu un grad de generalitate şi performanŃe sporite, bazate pe metodele programării matematice neliniare şi respectiv liniare. Alte metode posibile pentru optimizarea sistemelor complexe includ algoritmii stohastici de căutare, printre care algoritmii genetici.
7.5.4.2. Modelul de optimizare neliniară Se consideră că pomparea apei se realizează direct în reŃea, conform cu variaŃia consumului, cu ajutorul unei automatizări complexe a staŃiilor de pompare, iar reŃeaua de distribuŃie nu conŃine rezervoare de acumulare (fig. 7.5). Acest sistem de pompare a apei se aplică în special pentru reŃele de distribuŃie mari, amplasate pe teren plat.
Fig. 7.5 Schema hidraulică de alimentare a reŃelei de distribuŃie
Modelul de optimizare neliniară (MON) presupune cunoscută topologia reŃelei, pre-cum şi unii parametri energetico-economici şi hidraulici şi face posibilă dimensionarea optimală a reŃelelor inelare alimentate prin pompare directă de la una sau mai multe

Modele de optimizare a instalaŃiilor 199
surse, prin minimizarea unuia dintre criteriile de optimizare CAN, CTA sau WT, exprimate prin funcŃia obiectiv (7.71). Dacă se explicitează diametrul Dij din relaŃia funcŃională (5.52) în funcŃie de debit şi de pierderea de sarcină:
rij
rij
rij
rij LhQKD
11β1−
= (7.82)
şi se introduce în funcŃia obiectiv (7.71), aceasta devine:
∑ ∑∑==
−→++
+=
NP
j
jijjpij
T
ij
rij
rij
rij
r HhQLLhQKbaF1
0,1
β
1o min)(ψαααα
ξ (7.83)
şi este supusă următoarelor restricŃii:
),...,1(0
1
NPNjqQN
iji
jij −==+∑=≠
(7.84)
∑=∈
==−T
ijmij
mijij Mmfh
1
),...,1(0ε (7.85)
),...,1(0)(ε ,01
,, NPjZHhZ j
jNT
ij
ijpijijjSP ==−−−∑=
(7.86)
în care: ZSP,j este cota piezometrică la staŃia de pompare SPj; Z0,j – cota piezometrică în nodul obligat Oj; NTj – numărul tronsoanelor de conducte aflate pe traseul SPj – Oj; Hp,ij – înălŃimea de refulare a pompelor integrate pe artera ij. Modelul de optimizare (7.83)...(7.86) reprezintă o problemă de programare nelini-ară cu restricŃii de egalitate, care se reduce prin aplicarea procedeului coeficienŃilor nedeterminaŃi de tip Lagrange la un sistem de ecuaŃii neliniare. Se formează funcŃia lagrangean Γ de forma:
+−Λ++Λ+=Γ ∑ ∑ ∑ ∑−
==≠ =
=∈
NPN
n
N
iji
M
m
T
ijmij
mijijmjijn fhqQF1
11
1
o )ε()(
∑ ∑= =
−−−Λ+
NP
j
jNT
ij
jijpijijjSPj ZHhZ1 1
,0,, )(ε (7.87)
în care Λn, Λm, Λj sunt multiplicatori Lagrange. SoluŃia optimă a modelului (7.83)...(7.86) se obŃine prin anularea derivatelor parŃi-ale de ordinul întâi ale funcŃiei Γ în raport cu yi∈Qij, hij şi multiplicatorii Λn, Λm şi Λj:
+−
Λ++
Λ+=Γ ∑ ∑∑ ∑
=
−
=
M
m i
mijij
m
NPN
n i
jij
n
ii y
fh
y
y
F
y 11
o)ε()(
∂
∂
∂
∂
∂∂
∂∂
[ ]
0)(ε
1
,0,,=
−−−Λ+∑ ∑
=
NP
j i
jijpijijjSP
jy
ZHhZ
∂
∂ (7.88)
200 Modelări numerice şi optimizări în instalaŃii
),...,1(0
1
NPNjqQ j
N
iji
ij
n
−==+=Λ
Γ ∑=≠∂
∂ (7.89)
∑=∈
==−=Λ
Γ T
ijmij
mijij
m
Mmfh
1
),...,1(0ε∂∂
(7.90)
),...,1()(1
,0,, NPjZHhZ
jNT
ij
jijpijijjSP
j
=−−−=ΛΓ ∑
=
ε∂∂
(7.91)
Prin eliminarea multiplicatorilor Λn, Λm, Λj sistemul se reduce la 2T+NP ecuaŃii cu tot atâtea necunoscute (Qij, hij, ZSP,j) alcătuit din: a) N–NP ecuaŃii nodale de tipul (7.89); b) M ecuaŃii de inel (7.90); c) NP ecuaŃii funcŃionale (7.91); d) N–NP ecuaŃii energetico-economice de nod de tipul:
−+=
=−=∑=≠
∗
),...,1(noduricelelaltepentru;0
) ,...,1( pompareprinalimentatenoduripentru;ψ
,
1NPNNPj
NPjQAQ jp
N
iji
ij (7.92)
unde:
r
r
ijr
r
ijr
ijij LhQQ
++−∗ =
αααβ
(7.93) rKbr
A
α
ξα
1= (7.94)
e) M ecuaŃii energetico-economice de inel având forma:
),...,1(0
1
MmHT
ijmij
ij ==∑=∈
∗ (7.95)
unde:
r
r
ijr
ijr
r
ijij LhQH
+−
−∗ =
αααβ
(7.96)
EcuaŃiile (7.92) se scriu în acelaşi mod ca şi ecuaŃiile de continuitate a debitului,
atribuind lui ∗ijQ acelaşi semn ca şi pentru Qij, iar ecuaŃiile (7.95) se scriu la fel ca şi
ecuaŃiile de bilanŃ energetic pe inele, atribuind lui ∗ijH acelaşi semn ca şi pentru hij.
În principiu sistemul de ecuaŃii (7.89)...(7.92) şi (7.95) permite determinarea varia-bilelor Qij şi hij, însă trebuie cercetată existenŃa extremului funcŃiei obiectiv Fo. Derivatele de ordinul doi ale funcŃiei Fo în raport cu hij şi Qij sunt:
r
r
ijr
r
ijr
ij
ij
LhQAr
r
h
F++
−+=
αααα
∂∂
2β
2o
2
(7.97)
r
r
ijr
ijr
r
ij
ij
LhQr
rA
Q
F+
−−
−=
αααα∂∂ 2β
2o
2 2ββ (7.98)

Modele de optimizare a instalaŃiilor 201
Întrucât Qij ≥ 0, hij ≥ 0 şi Ńinând seama că pentru valorile uzuale ale lui α, raportul
(α+r)/r > 0, rezultă că 0/ 2o
2 >ijhF ∂∂ .
Pentru valorile practice luate de α şi β, raportul (βα–2r)/r < 0, astfel încât rezultă că
0/ 2o
2 <ijQF ∂∂ .
În consecinŃă în toate cazurile funcŃia obiectiv Fo este convex–concavă în domeniul de definire şi prin urmare nu are extremum. Pentru stabilirea unui extremum trebuie să se cunoască un set de variabile (Qij sau hij). Astfel, dacă este cunoscută distribuŃia debitelor în conducte, valorile lui hij se determină minimizând funcŃia obiectiv Fo. Dacă însă pierderile de sarcină sunt date, valorile Qij se determină maximizând funcŃia obiectiv Fo. • Considerând ca necunoscute variabilele hij, calculul de optimizare presupune ur-mătoarele etape principale: a) – determinarea repartiŃiei debitelor de tranzit Qij şi optimizarea acesteia pe baza criteriului lucrului mecanic de transport minim folosind unul din modelele matematice prezentate la pct. 7.5.3.2; b) – calculul pierderilor de sarcină hij, prin rezolvarea sistemului de ecuaŃii (7.90), (7.91) şi (7.92), şi a cotelor piezometrice la nodurile de alimentare ZSP,j. Făcând notaŃiile:
r
r
ijr
ijij LQc
+
=ααβ
(7.99) r
rx
+−=α
(7.100)
ecuaŃiile energetico-economice nodale (7.92) devin:
−+=
=−=∑=≠ ),...,1(0
),...,1(ψ
,
1NPNNPj
NPjQAhc jp
N
iji
xijij (7.101)
şi împreună cu ecuaŃiile (7.90) şi (7.91) formează un sistem neliniar, care se rezolvă aplicând metoda gradienŃilor. Pentru soluŃionarea sistemului neliniar (7.90), (7.91), (7.101) scris sub forma vec-torială: ,0),...,,(...,),,...,,()( 21211 == nnn hhhfhhhfHF (7.102) metoda gradienŃilor utilizează procesul iterativ de forma:
)(θ )()()1( kTk
kk HFJHH −=+ (7.103)
în care: H(k), H(k+1) sunt componentele iteraŃiei (k) şi (k+1); kT
J – matricea Jacobian
transpusă, corespunzătoare vectorului X(k); θ – coeficientul de pondere, cuprins între
limitele: 0 < θ ≤ 1/max2
J H( ) .
Terminarea procesului iterativ este condiŃionată de îndeplinirea condiŃiilor:
),...,1(ε)( nif ki =≤ (7.104)
sau de depăşirea unui anumit număr de iteraŃii. Pentru stabilirea aproximaŃiei iniŃiale H(0) a vectorului necunoscutelor H, se efec-tuează cu valorile optimizate Qij o predimensionare a reŃelei după MVE.

202 Modelări numerice şi optimizări în instalaŃii
c) – calcularea diametrelor optime Dij cu relaŃia (7.82) şi rotunjrea acestora la valori comerciale; d) – recalcularea pierderilor de presiune cu relaŃia (5.51) sau (5.52) şi efectuarea echilibrării hidraulice a reŃelei folosind metoda Hardy–Cross sau unul din modelele de optimizare expuse la pct. 7.4.
• Dacă sunt date iniŃial pierderile de sarcină hij, se determinã debitele Qij, prin rezol-varea sistemului de ecuaŃii (7.84), (7.86) şi (7.95), funcŃie de care se calculează diame-trele optime tot cu relaŃia (7.82). Se determină cotele piezometrice în noduri Zn pornind de la un nod cu cota piezo-metrică cunoscută, iar apoi se calculează presiunile disponibile în noduri folosind re-laŃia (7.48). La o dimensionare optimalã, linia piezometrică a unui traseu de NTj conducte, situ-ate în aceeaşi zonă de presiune, trebuie să reprezinte o linie poligonală care să se apro-pie cât mai bine de forma optimă exprimată prin ecuaŃia:
∑∑
−−=
++
=
j
j
NT
ij
ij
r
NT
ij
ij
jSPn h
L
dZZ
1=
1β
1
, -11
αα
(7.105)
în care: Zn este cota piezometrică în nodul n; d – distanŃa nodului n faŃă de instalaŃia de punere sub presiune j. Modelul de optimizare neliniară este implementat în cadrul programului ordinator OPNELIRA [105]. Modelul de optimizare neliniară are un grad de generalitate şi precizie sporit fiind aplicabil reŃelelor inelare alimentate din una sau mai multe surse, considerând curgerea apei în regim turbulent tranzitoriu sau pătratic şi oferind posibilitatea folosirii a mul-tiple criterii de optimizare, putându-se alege în cadrul său ca şi clasă de variabile fie pierderile de sarcină, fie debitele conductelor.
7.5.4.3. Modelul de optimizare liniară Pentru a elimina dezavantajul MON de a furniza o soluŃie optimă alterată ca urmare a alegerii unor valori comerciale pentru diametrele optime calculate, s-a conceput un model perfecŃionat cu grad sporit de generalitate şi precizie pentru dimensionarea optimală a reŃelelor de distribuŃie noi şi parŃial extinse funcŃionând prin pompare sau gravitaŃional. Acesta se bazează pe metoda programării liniare şi permite determinarea unei repartiŃii optime a diametrelor standardizate pe lungimea fiecărui tronson al reŃelei şi a lungimii sectoarelor de tronsoane corespunzătoare acestor diametre, cu posibili-tatea luării în considerare a diferite regimuri de funcŃionare caracteristice în exploatare şi a consumului continuu uniform distribuit. La elaborarea modelului de optimizare liniară (MOL) se presupun cunoscute: topo-logia reŃelei; debitele introduse în reŃea, corespunzătoare fiecărei zone de consum şi

Modele de optimizare a instalaŃiilor 203
ipoteză de funcŃionare; parametrii energetico-economici şi hidraulici; cota geodezică, presiunile de serviciu şi debitele concentrate pentru fiecare nod de consum; cotele nive-lului apei în bazinele de aspiraŃie, în cazul că instalaŃiile de punere sub presiune sunt staŃii de pompare; cotele piezometrice la instalaŃiile de punere sub presiune, când se aleg apriori. Pentru fiecare ipoteză de funcŃionare se determină debitele de tranzit pe tronsoane Qij, a căror repartiŃie în cazul reŃelelor inelare se optimizează pe baza criteriului lucru-lui de transport minim aplicând modelul iterativ prezentat la pct. 7.5.3. Se stabileşte pentru fiecare tronson ij seria diametrelor standardizate posibil a fi utilizate Dk,ij∈[Dmax,ij, Dmin,ij] pe baza valorilor limită ale diametrelor optime Dmax,ij şi Dmin,ij calculate cu relaŃia de optimizare (7.106) pentru reŃelele alimentate prin pompare sau cu relaŃia (7.107) pentru reŃelele alimentate gravitaŃional:
rij
rp
rij QQED +++= ααα
β11
)min(max),min(max (7.106)
ij
ij
ijV
QD
),max(min),min(max
4
π= (7.107)
în care: Qij este debitul de calcul al tronsonului ij; Qp = ΣQp,j – debitul pompat în reŃea, Vmin, Vmax – limitele vitezei economice a apei în conductă. Factorul energetico-economic al conductelor E:
αξ b
KrE
1
ψ= (7.108)
se introduce în relaŃia (7.106) cu valoarea maximă respectiv minimă calculată [105], în funcŃie de criteriul de optimizare adoptat, corespunzător valorilor limită de variaŃie ale parametrilor energetico-economici ai sistemului de distribuŃie. Pentru optimizarea diametrelor în cazul extinderii unei reŃele existente, s-a conceput un coeficient de penalizare pij, care la conductele cu diametre fixate are valoarea, în m, a diametrului corespunzător impus, rezultând Dk,ij = pij. AdmiŃând că un tronson ij de lungime Lij al unei reŃele alcătuite din T tronsoane, funcŃionând prin pompare, poate fi format din sij sectoare k de diametre Dk,ij şi lungime Xk,ij şi Ńinând seama de notaŃiile:
)( ,1,αξ ijkijk Dbac +=∗ (7.109) ∑ += jijjIPP HhZ )( 0, (7.110)
funcŃia obiectiv (7.71) primeşte forma:
∑∑∑== =
∗ →+=NP
j
jIPPjp
T
ij
ijs
k
ijkijk ZQXcF1
,,1 1
,,o minψ (7.111)
Necunoscutele funcŃiei obiectiv sunt variabilele Xk,ij şi ZIPP,j în număr de
∑=
+T
ij
ijsNP1
Când instalaŃia de punere sub presiune este constituită din unul sau mai multe rezer-voare (ψ = 0), expresia (7.111) a funcŃiei de performanŃă devine:

204 Modelări numerice şi optimizări în instalaŃii
,min1 1
,,o →=∑∑= =
∗T
ij
ijs
k
ijkijk XcF (7.112)
minimizând energia înglobată sau costul de investiŃie al reŃelei şi având ca necunoscute variabilele Xk,ij. łinând seama de relaŃia funcŃionalã (5.51), se poate determina în ipoteza clasică a consumului la noduri, pentru fiecare sector k al tronsonului ij, pierderea de sarcină specifică Jk,ij cu relaŃia:
r
ijk
ij
ijk
ijk
ijk
ijkD
Q
gX
hJ
,
2
,2,
,,
8λ
π== (7.113)
unde coeficientul de rezistenŃă hidraulică al sectorului k de pe tronsonul ij, λk,ij, în regimul normal de exploatare al turbulenŃei tranzitorii se calculează cu relaŃia:
λλ
k ij
pA A A
A,
,
,=
+ +2 22
1
1
20 38
2 55 (7.114)
cu notaŃiile:
138,1lg2
1
,
+∆
−=
ijk
p
D
λ (7.115) ν2
,1
ijk
ij
D
QA
∆= (7.116)
4)8274,1( 12 −+= pAA λ (7.117)
în care: ∆ este rugozitatea absolută a peretelui conductei; ν – vâscozitatea cinematică a apei; λp – coeficientul de rezistenŃă hidraulică corespunzător regimului turbulent pătra-tic de mişcare a apei. Întrucât în condiŃiile reale de funcŃionare, debitul pe tronsoanele reŃelei de distribu-Ńie (în speŃă de serviciu) scade de la o secŃiune la alta în sensul de curgere al apei, aces-ta creează la ieşirea din conductă, printr-un fenomen asemănător reculului, o creştere a presiunii în conductă, care are ca efect diminuarea pierderii de sarcină, astfel încât în cazul consumului continuu uniform distribuit se obŃine expresia pierderii de sarcină specifice pe fiecare sector k al tronsonului ij sub forma [101], [103]:
Ω−Θ==
∗∗
ijk
ijk
ijijk
ijk
ijk
ijkX
JX
hJ
,
,,
,
,, (7.118)
unde:
2
2
)θ(2
33θθ
3
4
ij
ijij
ij−
+−=Θ (7.119)
)θ2(
4
,
,0,
ijijk
ijk
ijk
D
−=Ωλ
α (7.120)
în care θij = Q0/Qc este parametrul consumului; α0 – coeficientul de neuniformitate a distribuŃiei vitezei în secŃiunea conductei; Q0 – debitul conductei, introdus în secŃiunea iniŃială; Qc – debitul consumat la prizele de pe conducta ij. Aşadar, trebuie determinate valorile variabilelor astfel încât să se minimizeze func-Ńia criterială Fo, în condiŃiile satisfacerii restricŃiilor:

Modele de optimizare a instalaŃiilor 205
• de tip constructiv:
),...,1(1
, TijLX ij
ijs
k
ijk ==∑=
(7.121)
• de tip funcŃional, care se scriu în fiecare ipoteză de funcŃionare, exprimând condi-Ńia ca pornind pe diverse trasee de la instalaŃiile de punere sub presiune IPPj (fig. 7.6) la punctele obligate să fie asigurată presiunea necesară HNo:
Fig. 7.6 Schema unui traseu IPPj – punctul obligat O
−+≥Θ−∑∑= =
o1 1
o,,, ε HNZTXJZ
jNT
ij
ijs
k
ijkijkijijjIPP
∑ ∑= =
+Ω−
jNT
ij
ijp
ijs
k
ijkijkij HJ1
,1
,,ε (7.122)
în care: NTj este numărul de tronsoane pe traseul IPPj–O; ZTo – cota geodezică în punctul obligat O; ZIPP,j – cota piezometrică la instalaŃia de punere sub presiune j; Hp,ij – presiunea introdusă de pompa intermediară amplasată pe tronsonul ij, având expresia (5.50). • de tip hidraulic, caracteristice numai reŃelelor inelare, ce exprimă condiŃia de con-servare a energiei pe fiecare inel m:
),...,1(εε
1 1
,,,, MmfJXJ m
T
ijmij
T
mmij
ijkijkijijkijkijij =+Ω=Θ∑ ∑=∈
=∈
(7.123)
în care sarcina piezometrică fm se exprimã prin relaŃiile (5.47), (5.48) şi (5.49), iar orientarea tronsoanelor εij este dată de relaŃia (7.52). În situaŃia că nivelele piezometrice ZIPP,j sunt cunoscute, nefiind necesar a se deter-mina prin optimizare, funcŃia obiectiv (7.111) primeşte forma (7.112), iar valorile ZIPP,j intră în componenŃa termenului liber al restricŃiilor (7.122) şi (7.123). FuncŃia obiectiv (7.111) sau (7.112) şi restricŃiile (7.121), (7.122) şi (7.123) fiind li-niare în raport cu necunoscutele sistemului, soluŃia optimă se determină pe baza meto-dei programării liniare, utilizând algoritmul Simplex.

206 Modelări numerice şi optimizări în instalaŃii
Într-o soluŃie optimă, pentru un tronson dat, de obicei, cel mult două din variabilele Xk,ij vor fi diferite de zero, astfel încât soluŃia respectivă este realizabilă din punct de vedere tehnic, mai ales dacă lungimea tronsonului este însemnată. Determinând prin optimizare necunoscutele ZIPP,j, la reŃelele funcŃionând prin pom-pare rezultă înălŃimile de pompare corespunzătoare: jSPjIPPjp ZZH ,,, −= (7.124)
în care ZSP,j este cota nivelului apei în bazinul de aspiraŃie al IPPj. łinând seama de pierderea de sarcină HIPP,j-n pe traseul IPPj – n:
∑∑ ∑ ∑= = = =
−
+Ω−Θ=
jNT
ij
ijs
k
jNT
ij
ijs
k
ijpijkijkijkijkijnjIPP HJXJH1 1 1 1
,,,,,, (7.125)
se obŃin cota piezometrică Zn şi presiunea disponibilă Hn în nodul de consum n, cu relaŃiile: njIPPjIPPn HZZ −−= ,, (7.126) nnn ZTZH −= (7.127)
în care ZTn este cota geodezică în nodul de consum n. În figura 7.7 se prezintă schema logică a modelului de optimizare liniară a diame-trelor reŃelelor de distribuŃie a apei, pe baza căruia s-a elaborat programul ordinator OPLIRA. Aplicarea modelului de optimizare liniară în ipoteza consumului uniform distribuit conduce la micşorarea consumului energetic şi la o mai bună distribuŃie a energiei de pompare în sistem, prin eliminarea presiunilor disponibile sporite pe unele trasee chiar la consum maxim. Reducerea astfel a presiunii în reŃea contribuie la micşorarea pierde-rilor de apă în sistem.
7.5.4.4. Model de optimizare a dimensionării combinate a conductelor şi vanelor de control din reŃea
ConsideraŃii preliminare. CondiŃiile de exploatare a reŃelelor de apă se schimbă zilnic din cauza consumului variabil, apărând necesitatea reglării presiunii cu ajutorul vanelor de control. Reducerea presiunii poate scădea pierderile de apă din reŃea. Date experimentale indică faptul că pierderea de apă este o funcŃie putere a presiunii, cu exponentul variind de la 1,15 la 1,18 [48]. Controlul presiunii reduce, de asemenea, uzura în dispozitivele de reglare, prin aceasta limitând riscul de pierderi. Folosirea algoritmilor genetici în scopul reducerii piererilor de apă prin reglarea presiunii a fost propusă de Reis ş.a. [90] pentru alegerea amplasamentului optim al vanelor de control şi de către Pezzinga şi Gueli [81] pentru determinarea deschiderii optime a vanelor de control anterior amplasate în reŃea. În acest context, se prezintă un model de optimizare a dimensionării combinate a conductelor şi vanelor de control în reŃelele de distribuŃie a apei, care utilizează un algoritm genetic pentru selectarea diametrelor optime ale conductelor şi a amplasa-mentului optim al vanelor de control a presiunii şi un algoritm de programare neliniară pentru determinarea setării acestor vane. FuncŃia obiectiv de minimizat include atât costul conductelor reŃelei cât şi costul pierderilor de apă din sistem. Combinarea cos-
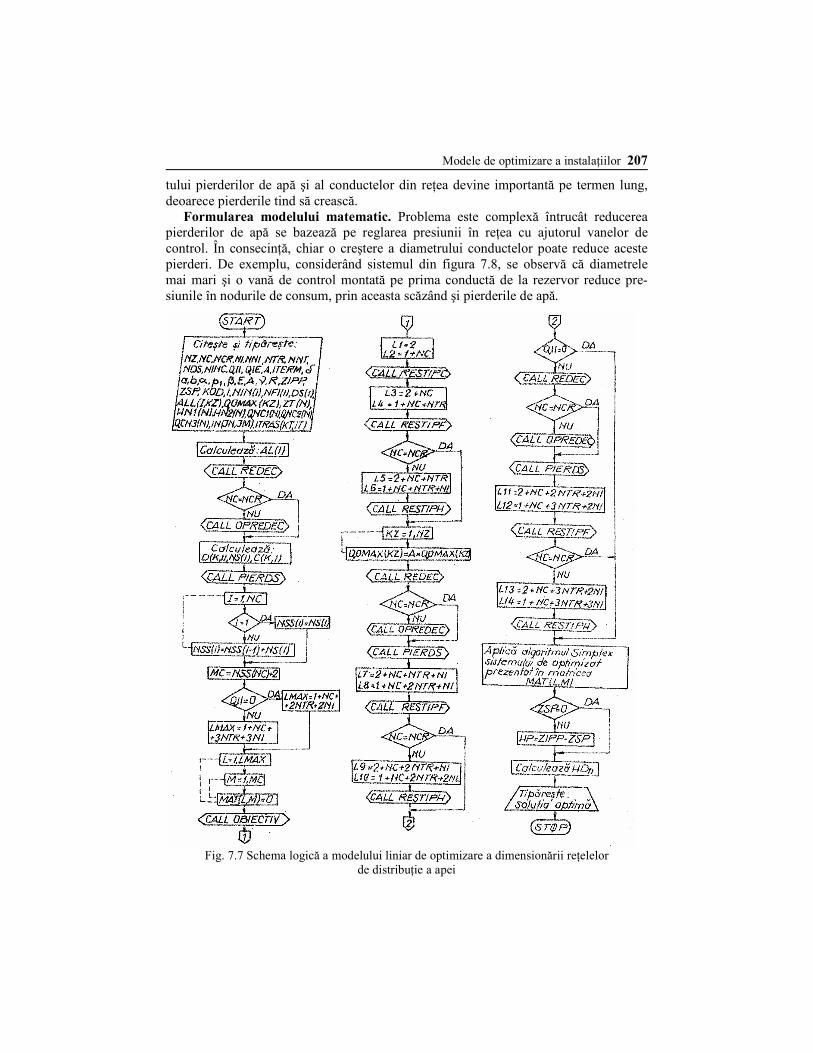
Modele de optimizare a instalaŃiilor 207
tului pierderilor de apă şi al conductelor din reŃea devine importantă pe termen lung, deoarece pierderile tind să crească. Formularea modelului matematic. Problema este complexă întrucât reducerea pierderilor de apă se bazează pe reglarea presiunii în reŃea cu ajutorul vanelor de control. În consecinŃă, chiar o creştere a diametrului conductelor poate reduce aceste pierderi. De exemplu, considerând sistemul din figura 7.8, se observă că diametrele mai mari şi o vană de control montată pe prima conductă de la rezervor reduce pre-siunile în nodurile de consum, prin aceasta scăzând şi pierderile de apă.
Fig. 7.7 Schema logică a modelului liniar de optimizare a dimensionării reŃelelor
de distribuŃie a apei
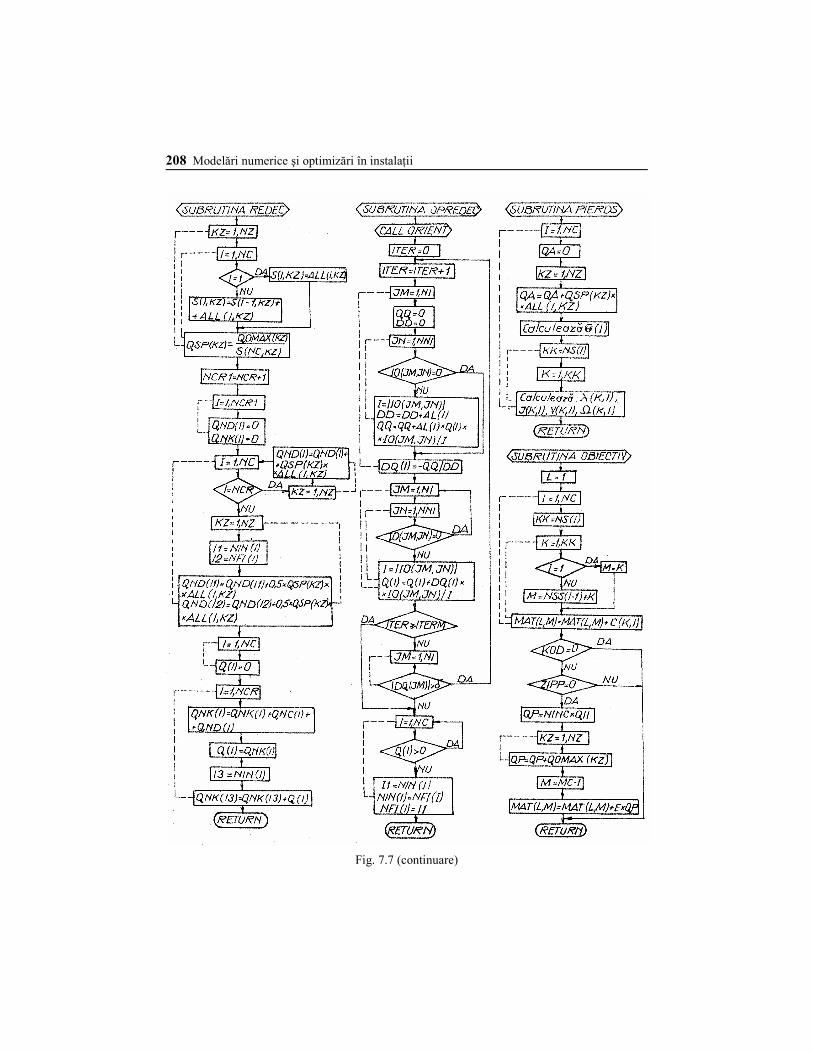
208 Modelări numerice şi optimizări în instalaŃii
Fig. 7.7 (continuare)
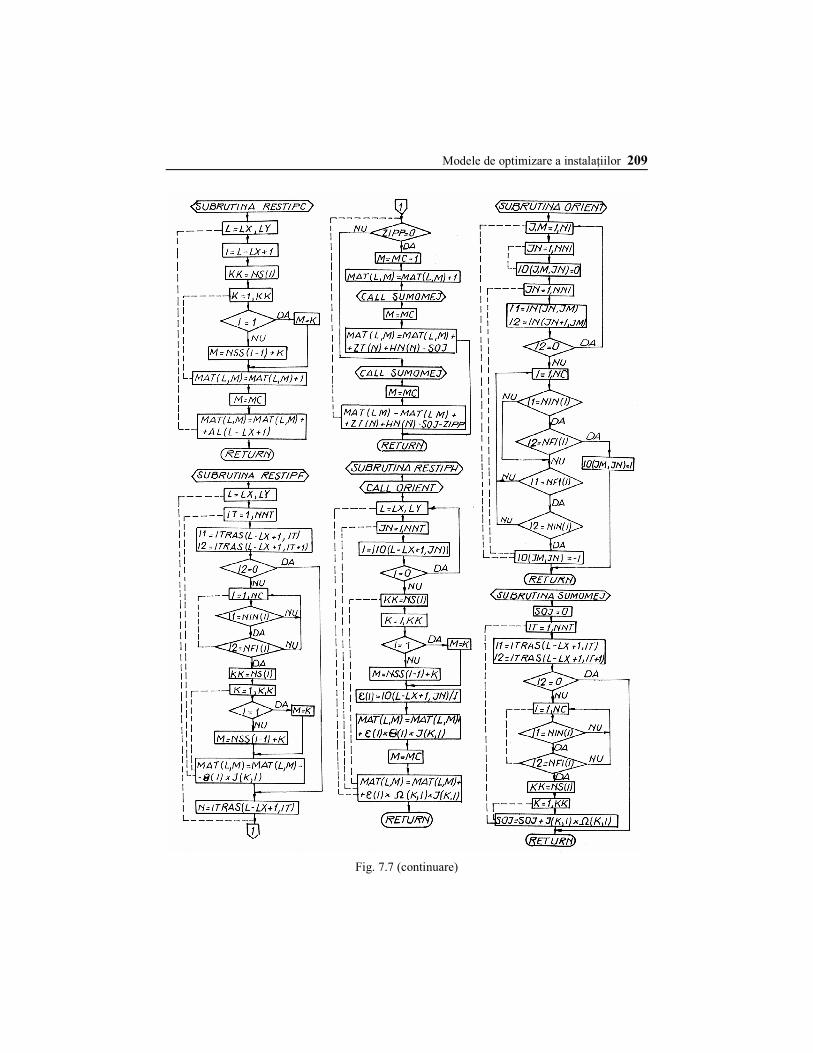
Modele de optimizare a instalaŃiilor 209
Fig. 7.7 (continuare)

210 Modelări numerice şi optimizări în instalaŃii
În perioada de 24 de ore, din cauza comportamentului neliniar al reŃelei, presiunile sunt neuniforme în diferitele noduri de consum. Da-că reglarea presiunii se face prin pierderea de sarcină cauzată de va-nele de control, pierderile de sar-cină longitudinale sunt mai mici pentru diametre mai mari şi posibi-litatea de reglare creşte, asigurân-du-se astfel o creştere a fiabilităŃii reŃelei. Se utilizează un algoritm gene-tic pentru selectarea diametrelor conductelor şi a poziŃiei optime a vanelor de control, cuplat cu un model de optimizare care determină iterativ deschiderea optimă a vanelor de control pentru minimizarea pierderilor de apă. FuncŃia obiectiv Fo are forma:
∑=
+=CN
ij
wijij WCLCF1
L0o β (7.128)
în care: Cij este costul unităŃii de lungime pentru conducta ij, dependent de diametrul Dij al conductei; Lij – lungimea conductei ij; NC – numărul conductelor din reŃea; β0 – cota de amortizare pentru conducte; Cw – costul unităŃii de volum al apei; WL – volumul anual al pierderilor, depinzând de poziŃia şi parametrul vanelor de control Vk, definit ca raport între debitul actual al conductei şi cel pentru vana complet deschisă în aceleaşi condiŃii. Întrucât costul vanelor de control nu reprezintă decât un mic procent din costul conductelor acesta se poate neglija. • Modelul de optimizare a deschiderii vanelor de control. Pentru fiecare soluŃie lua-tă în considerare de algoritmul genetic, minimizarea pierderilor de apă ale reŃelei se re-alizează prin definirea valorilor optime ale deschiderii vanelor de control Vk pe durata a 24 ore. În fiecare interval de timp obiectivul este minimizarea debitului total pierdut Q:
∑=
=C
ij
N
ij
QQ1
L (7.129)
în care ij
QL este debitul de apă pierdut în conducta ij. Integrând debitul de apă pierdut
în timpul a 24 de ore, se poate calcula uşor volumul anual WL al pierderilor de apă. SoluŃia problemei de optimizare neliniară se obŃine prin liniarizări succesive [58]. EcuaŃiile de continuitate la noduri sunt:
Nj
N
jii
N
jii
ij NjqQQN N
ij,...,1;0
2
1
1 1L ==++∑ ∑
≠=
≠=
(7.130)
Fig. 7.8 Schema reglării presiunii

Modele de optimizare a instalaŃiilor 211
în care: Qij este debitul prin conducta ij; qj – debitul concentrat al nodului j; NN – numărul nodurilor din reŃea. Se observă că debitul pierdut
ijQL este egal repartizat la
nodurile i şi j. RelaŃia între debit şi pierderea de sarcină, exprimată prin ecuaŃia (5.52), se scrie sub forma [107]:
( ) β
β1β
1 −
−−= jijiijkij ZZZZRVQ (7.131)
în care: Rij este rezistenŃa hidraulică a conductei ij; β – exponent cu valoarea 1,8...2; Zi, Zj – cotele piezometrice la nodurile i şi j. PrezenŃa posibilă a vanei de control este luată în considerare prin parametrul Vk variind de la 0 la 1, după cum vana este total închisă sau deschisă. Pierderea de apă în conductă se exprimă cu ajutorul presiunii medii prin relaŃia:
cijij hLCQ
ijij LL = (7.132)
unde ij
CL este o constantă empirică, c este un exponent considerat egal cu 1,18, iar hij
este presiunea medie în conducta ij, aproximată ca medie a presiunilor disponibile (Hi şi Hj) din nodurile i şi j:
( )jiij HHh +=2
1 (7.133)
jjjiii ZTZHZTZH −=−= ; (7.134)
în care ZTi şi ZTj sunt cotele geodezice ale nodurilor i şi j. Alte restricŃii sunt legate de exploatarea corectă a vanelor de control: Vkkk NkVVV ,...,1;
maxmin=≤≤ (7.135)
cu minkV şi
maxkV , respectiv valorile minime şi maxime pentru Vk, iar NV numărul vanelor
de control, şi de cota piezometrică minimă necesară la noduri: Rjj NjZZ ,...,1;
min=≥ (7.136)
în care: minjZ este cota piezometrică minimă necesară la nodul j; NR – numărul nodu-
rilor de referinŃă. • Algoritmul genetic. SoluŃiile potenŃiale ale unei probleme de optimizare, de obicei codate prin lanŃuri binare, reprezintă o „populaŃie” de „indivizi”. PopulaŃia iniŃială este generată la întâmplare şi numărul de indivizi este constant în fiecare generaŃie. „Potri-virea” fiecărui individ este apoi evaluată cu ajutorul funcŃiei obiectiv a problemei. În procesul „reproducerii” unei noi populaŃii se iau în considerare trei mari operaŃii: „se-lecŃia”, „intersecŃia” şi „transformarea”, care îmbunătăŃesc gradual soluŃia. FuncŃia obiectiv Fo a problemei de optimizare depinde de n parametri reali, fiecare definiŃi printr-o posibilă serie: njxxxxxxFF jMjmjn ,...,2,1],[),...,,( 21oo =∈= (7.137)
în care xjm şi xjM sunt, respectiv, valorile minime şi maxime ale lui xj. Algoritmul genetic simplu (AG) operează asupra unei structuri de date constând dintr-o populaŃie de indivizi reprezentată prin lanŃuri binare de lungime m⋅n fiecare,

212 Modelări numerice şi optimizări în instalaŃii
unde m este numărul cifrelor binare reprezentând fiecare variabilă. Mecanismul de selectare este întâmplător, cu frecvenŃe proporŃionale cu potrivirea f a individului ai, reprezentat prin membrul i din populaŃie, unde ai este o realizare codată a vectorului de decizie x = (x1, x2,…, xn). Potrivirea este evaluată prin normalizarea între 0 şi 1 a funcŃiei obiectiv Fo, sau:
minomaxo
omaxo )()(
FF
aFFaf
i
i −
−= (7.138)
în care Fo max şi Fo min sunt, respectiv, valorile maxime şi minime ale funcŃiei obiectiv din generaŃia curentă. Procedura de selecŃie detaliată cuprinde următoarele etape:
a) considerarea unei populaŃii alcătuită din N indivizi a1, a2,…, aN; b) evaluarea potrivirii f(ai) a fiecărui individ; c) calcularea sumei F a potrivirii tuturor indivizilor; d) evaluarea probabilităŃii de selecŃie a fiecărui individ pi = f(ai)/F; e) calcularea probabilităŃii cumulative de selecŃie pentru fiecare individ,
Pi = Σipi; f) generarea unui număr arbitrar s între 0 şi 1 şi selectarea individului ca:
iiipp PsPaaPsaa ≤<=≤= −111 dacă;dacă (7.139)
Acest proces de selecŃie este repetat de N ori, în vederea menŃinerii unei populaŃii consistente. Operatorii genetici ai intersecŃiei şi transformării se aplică noii populaŃii selectate. Procedura intersecŃiei selectate se aplică fiecărui individ cu probabilitatea pc. Dacă ap = b1, b2,…, bm⋅n este un individ selectat el este „împerecheat” cu un altul „părinte” ,...,, 21 nmp bbba ⋅′′′=′ , prin schimbarea de părŃi din lanŃurile lor la puncte de in-
tersecŃie aleatorii, producând doi „copii”. În particular, dacă se generează la întâmpla-re un număr întreg jx între 1 şi m⋅n–1, lanŃurile părinŃilor sunt separate la poziŃia jx:
)...,,,...,,,(
),...,,,,...,,(
121
121
mnjxjxp
mnjxjxp
bbbbba
bbbbba
⋅+
⋅+
′′′′′=′
= (7.140)
dând, prin schimbarea părŃii a doua, cei doi copii noi as şi sa′ :
)...,,,...,,,(
),...,,,,...,,(
121
121
mnjxjxs
mnjxjxs
bbbbba
bbbbba
⋅+
⋅+
′′′′′=′
= (7.141)
Transformarea se aplică fiecărei părŃi a fiecărui individ cu o probabilitate pm. Dacă bjy este partea selectată pentru transformare, ea este substituită de complementul ei
jyjy bb −=′ 1 .
Variabilele de decizie ale problemei sunt diametrele fiecărei conducte şi poziŃia va-nelor de control. Pentru codificarea problemei într-o formă convenabilă se folosesc sublanŃuri cu trei părŃi: prima indică prezenŃa (KV = 1) sau nu (KV = 0) a vanei de con-trol, iar celelalte două reprezintă patru diametre posibile. RestricŃiile privind presiunile minime necesare la noduri se iau în considerare trans-formând optimizarea condiŃionată într-una necondiŃionată prin adoptarea unei pena-
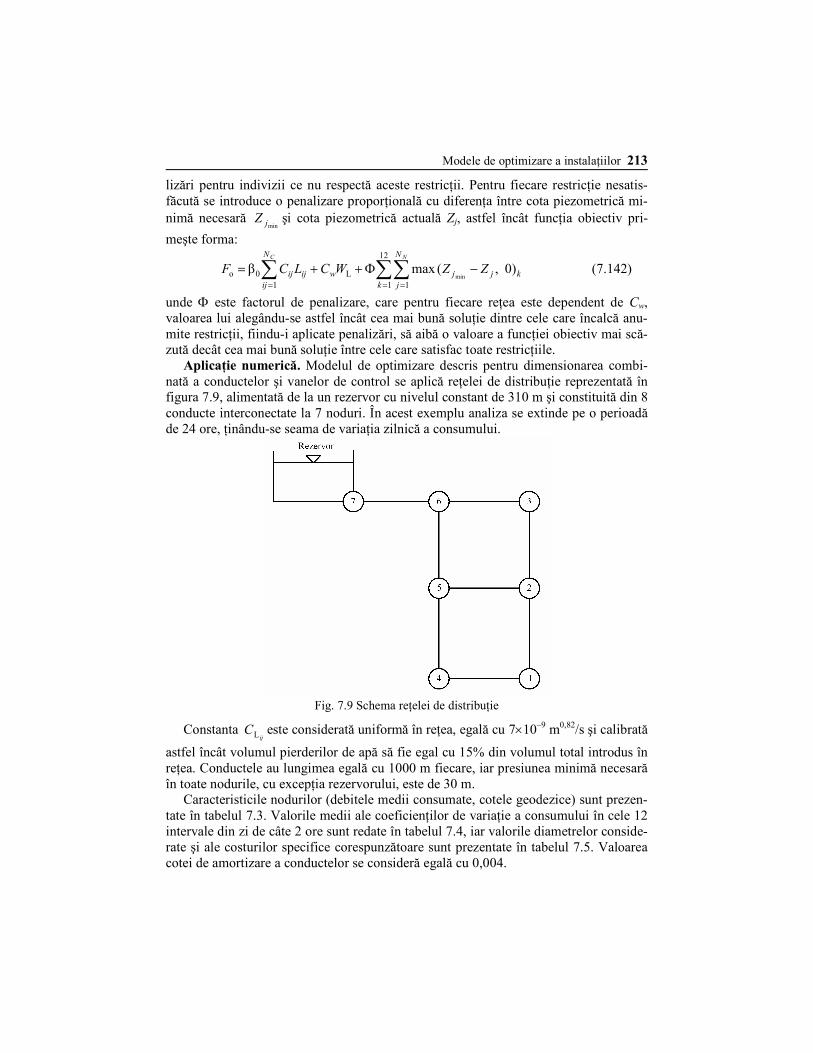
Modele de optimizare a instalaŃiilor 213
lizări pentru indivizii ce nu respectă aceste restricŃii. Pentru fiecare restricŃie nesatis-făcută se introduce o penalizare proporŃională cu diferenŃa între cota piezometrică mi-nimă necesară
minjZ şi cota piezometrică actuală Zj, astfel încât funcŃia obiectiv pri-
meşte forma:
∑ ∑∑= = =
−Φ++=C NN
ij k
N
j
kjjwijij ZZWCLCF1
12
1 1L0o )0,(maxβ
min (7.142)
unde Φ este factorul de penalizare, care pentru fiecare reŃea este dependent de Cw, valoarea lui alegându-se astfel încât cea mai bună soluŃie dintre cele care încalcă anu-mite restricŃii, fiindu-i aplicate penalizări, să aibă o valoare a funcŃiei obiectiv mai scă-zută decât cea mai bună soluŃie între cele care satisfac toate restricŃiile. AplicaŃie numerică. Modelul de optimizare descris pentru dimensionarea combi-nată a conductelor şi vanelor de control se aplică reŃelei de distribuŃie reprezentată în figura 7.9, alimentată de la un rezervor cu nivelul constant de 310 m şi constituită din 8 conducte interconectate la 7 noduri. În acest exemplu analiza se extinde pe o perioadă de 24 ore, Ńinându-se seama de variaŃia zilnică a consumului.
Fig. 7.9 Schema reŃelei de distribuŃie
Constanta ij
CL este considerată uniformă în reŃea, egală cu 7×10–9 m0,82/s şi calibrată
astfel încât volumul pierderilor de apă să fie egal cu 15% din volumul total introdus în reŃea. Conductele au lungimea egală cu 1000 m fiecare, iar presiunea minimă necesară în toate nodurile, cu excepŃia rezervorului, este de 30 m. Caracteristicile nodurilor (debitele medii consumate, cotele geodezice) sunt prezen-tate în tabelul 7.3. Valorile medii ale coeficienŃilor de variaŃie a consumului în cele 12 intervale din zi de câte 2 ore sunt redate în tabelul 7.4, iar valorile diametrelor conside-rate şi ale costurilor specifice corespunzătoare sunt prezentate în tabelul 7.5. Valoarea cotei de amortizare a conductelor se consideră egală cu 0,004.
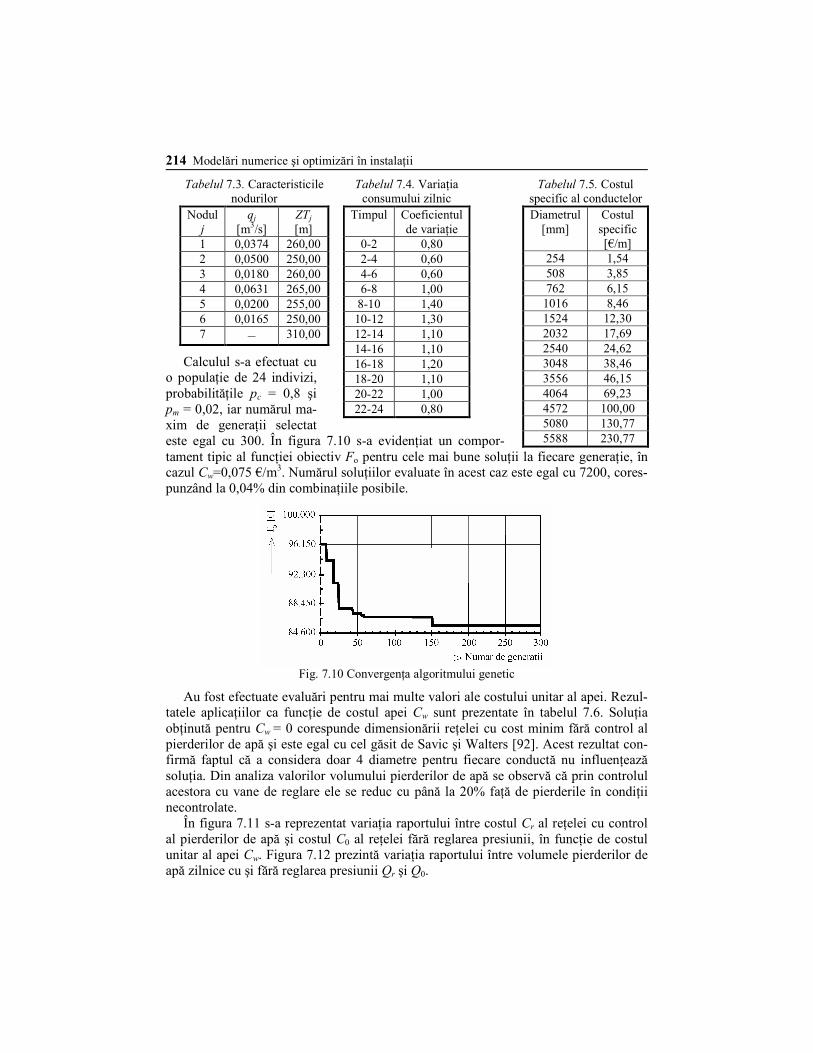
214 Modelări numerice şi optimizări în instalaŃii
Calculul s-a efectuat cu o populaŃie de 24 indivizi, probabilităŃile pc = 0,8 şi pm = 0,02, iar numărul ma-xim de generaŃii selectat este egal cu 300. În figura 7.10 s-a evidenŃiat un compor-tament tipic al funcŃiei obiectiv Fo pentru cele mai bune soluŃii la fiecare generaŃie, în cazul Cw=0,075 €/m3. Numărul soluŃiilor evaluate în acest caz este egal cu 7200, cores-punzând la 0,04% din combinaŃiile posibile.
Fig. 7.10 ConvergenŃa algoritmului genetic
Au fost efectuate evaluări pentru mai multe valori ale costului unitar al apei. Rezul-tatele aplicaŃiilor ca funcŃie de costul apei Cw sunt prezentate în tabelul 7.6. SoluŃia obŃinută pentru Cw = 0 corespunde dimensionării reŃelei cu cost minim fără control al pierderilor de apă şi este egal cu cel găsit de Savic şi Walters [92]. Acest rezultat con-firmă faptul că a considera doar 4 diametre pentru fiecare conductă nu influenŃează soluŃia. Din analiza valorilor volumului pierderilor de apă se observă că prin controlul acestora cu vane de reglare ele se reduc cu până la 20% faŃă de pierderile în condiŃii necontrolate. În figura 7.11 s-a reprezentat variaŃia raportului între costul Cr al reŃelei cu control al pierderilor de apă şi costul C0 al reŃelei fără reglarea presiunii, în funcŃie de costul unitar al apei Cw. Figura 7.12 prezintă variaŃia raportului între volumele pierderilor de apă zilnice cu şi fără reglarea presiunii Qr şi Q0.
Tabelul 7.5. Costul specific al conductelor Diametrul
[mm] Costul specific [€/m]
254 1,54 508 3,85 762 6,15 1016 8,46 1524 12,30 2032 17,69 2540 24,62 3048 38,46 3556 46,15 4064 69,23 4572 100,00 5080 130,77 5588 230,77
Tabelul 7.4. VariaŃia consumului zilnic
Timpul Coeficientul de variaŃie
0-2 0,80 2-4 0,60 4-6 0,60 6-8 1,00 8-10 1,40 10-12 1,30 12-14 1,10 14-16 1,10 16-18 1,20 18-20 1,10 20-22 1,00 22-24 0,80
Tabelul 7.3. Caracteristicile nodurilor
Nodul j
qj [m3/s]
ZTj [m]
1 0,0374 260,00 2 0,0500 250,00 3 0,0180 260,00 4 0,0631 265,00 5 0,0200 255,00 6 0,0165 250,00 7 – 310,00
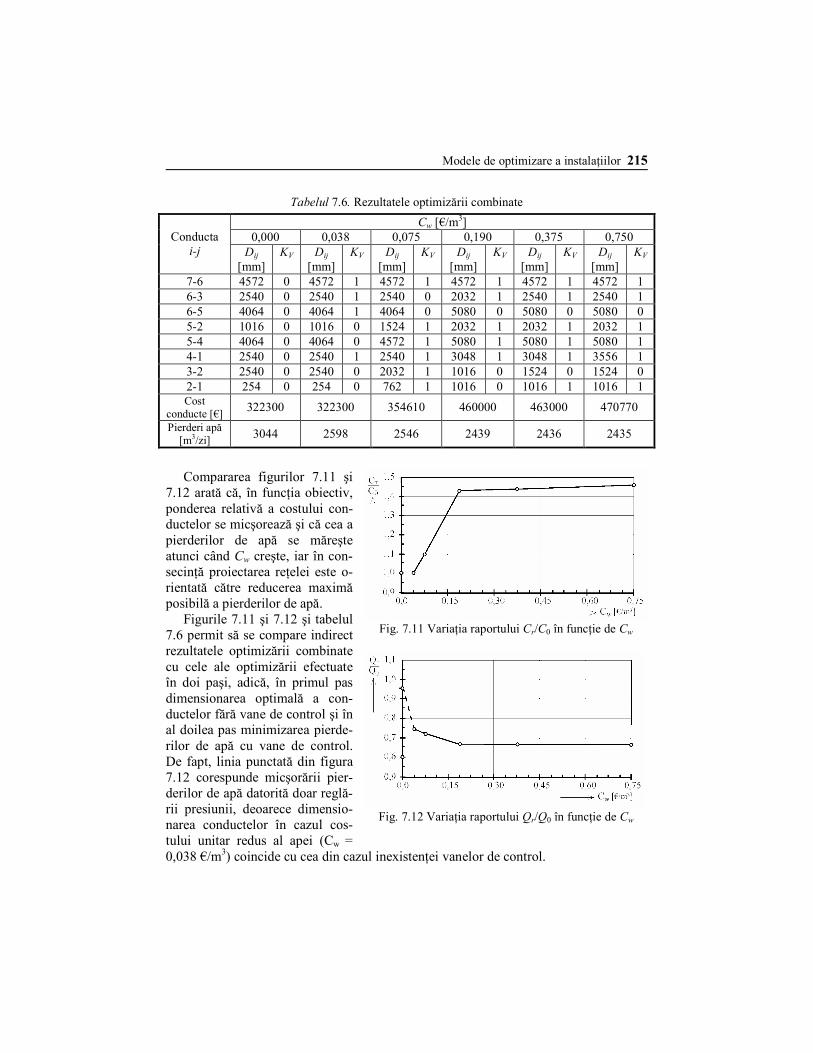
Modele de optimizare a instalaŃiilor 215
Tabelul 7.6. Rezultatele optimizării combinate
Cw [€/m3]
0,000 0,038 0,075 0,190 0,375 0,750
Conducta i-j Dij
[mm] KV Dij
[mm] KV Dij
[mm] KV Dij
[mm] KV Dij
[mm] KV Dij
[mm] KV
7-6 4572 0 4572 1 4572 1 4572 1 4572 1 4572 1 6-3 2540 0 2540 1 2540 0 2032 1 2540 1 2540 1 6-5 4064 0 4064 1 4064 0 5080 0 5080 0 5080 0 5-2 1016 0 1016 0 1524 1 2032 1 2032 1 2032 1 5-4 4064 0 4064 0 4572 1 5080 1 5080 1 5080 1 4-1 2540 0 2540 1 2540 1 3048 1 3048 1 3556 1 3-2 2540 0 2540 0 2032 1 1016 0 1524 0 1524 0 2-1 254 0 254 0 762 1 1016 0 1016 1 1016 1 Cost
conducte [€] 322300 322300 354610 460000 463000 470770
Pierderi apă [m3/zi]
3044 2598 2546 2439 2436 2435
Compararea figurilor 7.11 şi 7.12 arată că, în funcŃia obiectiv, ponderea relativă a costului con-ductelor se micşorează şi că cea a pierderilor de apă se măreşte atunci când Cw creşte, iar în con-secinŃă proiectarea reŃelei este o-rientată către reducerea maximă posibilă a pierderilor de apă. Figurile 7.11 şi 7.12 şi tabelul 7.6 permit să se compare indirect rezultatele optimizării combinate cu cele ale optimizării efectuate în doi paşi, adică, în primul pas dimensionarea optimală a con-ductelor fără vane de control şi în al doilea pas minimizarea pierde-rilor de apă cu vane de control. De fapt, linia punctată din figura 7.12 corespunde micşorării pier-derilor de apă datorită doar reglă-rii presiunii, deoarece dimensio-narea conductelor în cazul cos-tului unitar redus al apei (Cw = 0,038 €/m3) coincide cu cea din cazul inexistenŃei vanelor de control.
Fig. 7.11 VariaŃia raportului Cr/C0 în funcŃie de Cw
Fig. 7.12 VariaŃia raportului Qr/Q0 în funcŃie de Cw
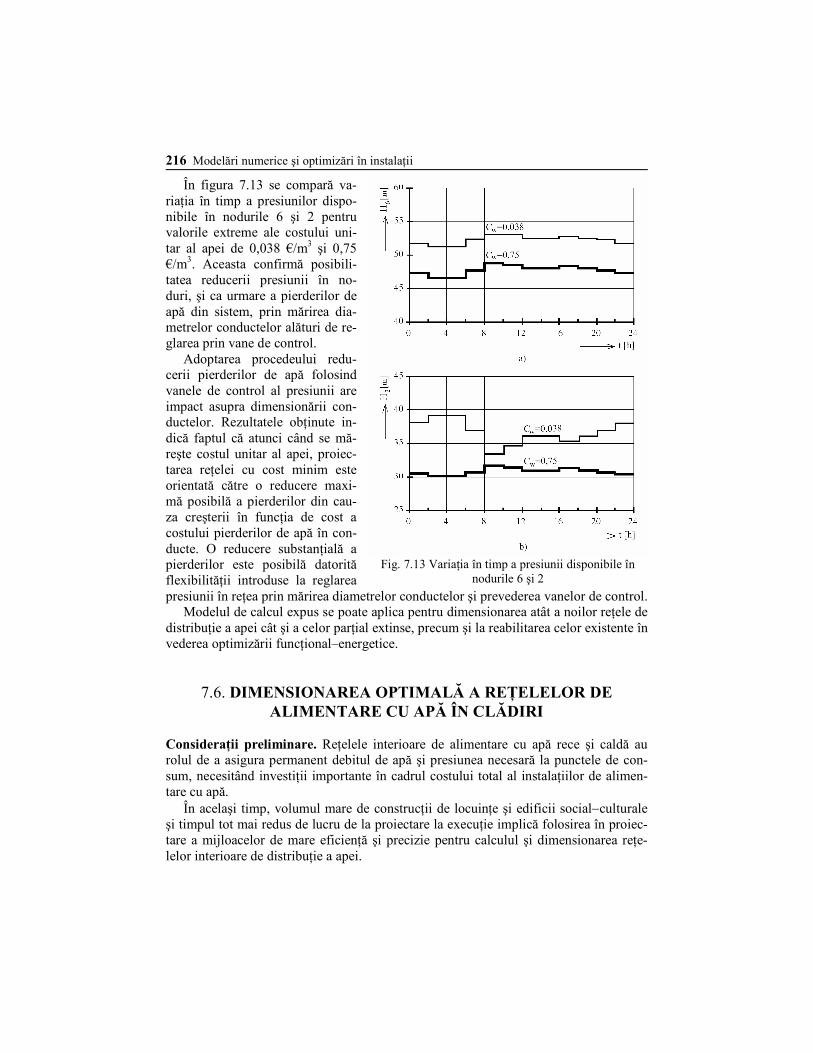
216 Modelări numerice şi optimizări în instalaŃii
În figura 7.13 se compară va-riaŃia în timp a presiunilor dispo-nibile în nodurile 6 şi 2 pentru valorile extreme ale costului uni-tar al apei de 0,038 €/m3 şi 0,75 €/m3. Aceasta confirmă posibili-tatea reducerii presiunii în no-duri, şi ca urmare a pierderilor de apă din sistem, prin mărirea dia-metrelor conductelor alături de re-glarea prin vane de control. Adoptarea procedeului redu-cerii pierderilor de apă folosind vanele de control al presiunii are impact asupra dimensionării con-ductelor. Rezultatele obŃinute in-dică faptul că atunci când se mă-reşte costul unitar al apei, proiec-tarea reŃelei cu cost minim este orientată către o reducere maxi-mă posibilă a pierderilor din cau-za creşterii în funcŃia de cost a costului pierderilor de apă în con-ducte. O reducere substanŃială a pierderilor este posibilă datorită flexibilităŃii introduse la reglarea presiunii în reŃea prin mărirea diametrelor conductelor şi prevederea vanelor de control. Modelul de calcul expus se poate aplica pentru dimensionarea atât a noilor reŃele de distribuŃie a apei cât şi a celor parŃial extinse, precum şi la reabilitarea celor existente în vederea optimizării funcŃional–energetice.
7.6. DIMENSIONAREA OPTIMALĂ A REłELELOR DE ALIMENTARE CU APĂ ÎN CLĂDIRI
ConsideraŃii preliminare. ReŃelele interioare de alimentare cu apă rece şi caldă au rolul de a asigura permanent debitul de apă şi presiunea necesară la punctele de con-sum, necesitând investiŃii importante în cadrul costului total al instalaŃiilor de alimen-tare cu apă. În acelaşi timp, volumul mare de construcŃii de locuinŃe şi edificii social−culturale şi timpul tot mai redus de lucru de la proiectare la execuŃie implică folosirea în proiec-tare a mijloacelor de mare eficienŃă şi precizie pentru calculul şi dimensionarea reŃe-lelor interioare de distribuŃie a apei.
Fig. 7.13 VariaŃia în timp a presiunii disponibile în
nodurile 6 şi 2

Modele de optimizare a instalaŃiilor 217
Practica actuală a dimensionării reŃelelor interioare de alimentare cu apă rece şi cal-dă se caracterizează printr-o alegere a diametrelor conductelor funcŃie de vitezele medii economice, care însă nu pot Ńine seama de dinamica parametrilor economico-energetici acestora, fiind necesară optimizarea dimensionării lor. Având în vedere aceste considerente, se prezintă un model de calcul pentru dimen-sionarea optimizată a reŃelelor cu distribuŃie inferioară pentru alimentarea cu apă a clă-dirilor, implementat în cadrul unui program ordinator. Modelul de optimizare. Se consideră cunoscute următoarele date de bază: felul şi numărul consumatorilor de apă; schema coloanelor şi planul de distribuŃie; lungimea, coeficientul de rezistenŃă hidraulică locală şi echivalentul de debit aferent pentru fie-care tronson de conductă; rugozitatea absolută a conductelor; temperatura apei; înăl-Ńimile geodezice în fiecare nod al reŃelei, măsurate faŃă de consumatorul situat în pozi-Ńia cea mai defavorabilă pe fiecare coloană; presiunea de utilizare caracteristică fiecărei coloane. După întocmirea schemei coloanelor şi a planului de distribuŃie, se numerotează tronsoanele reŃelei astfel încât nodul final al unui tronson se ia identic numărului de or-dine al său, se începe cu 1 la nodul terminal al traseului ce conŃine punctul de consum din situaŃia cea mai defavorabilă, iar apoi la fiecare ramificaŃie se dă un număr nodului şi tronsonului respectiv amonte, numai după ce au fost epuizate toate căile alimentate din ramificaŃia considerată. Se determină apoi repartiŃia debitelor de calcul pe tronsoane, folosind relaŃia gene-rală (7.143) pentru clădiri de locuit şi relaŃia (7.144) pentru clădiri social−culturale:
)004,0( ijijij EEACBG += (7.143) ijij EABCG = (7.144)
în care: Gij este debitul de calcul al tronsonului ij; Eij − suma echivalenŃilor punctelor de consum alimentate de tronsonul ij; A − coeficient funcŃie de regimul de furnizare a apei în reŃeaua de distribuŃie; B − coeficient funcŃie de felul apei (rece sau caldă); C − coeficient funcŃie de destinaŃia clădirii. Pentru toate categoriile de clădiri la valori ale lui Ei mai mici decât cele indicate în STAS-ul 1478, se foloseşte relaŃia:
ijij ABEG = (7.145)
Se Ńine seama de expresia pierderii de sarcină pentru un tronson ij:
224
2
2λ
π
8ζλ
π
8ijr
ij
ij
ijij
ij
ij
ij
ij
ij
ij GD
Le
gD
L
D
G
gh =
+= (7.146)
în care: Dij, Lij, Leij sunt diametrul, lungimea şi lungimea echivalentă ale tronsonului ij; hij − pierderea de sarcină pe tronsonul ij; v − viteza apei; λij − coeficientul de rezistenŃă hidraulică liniară a tronsonului ij; ζij − suma coeficienŃilor de rezistenŃă hidraulică locală a tronsonului ij; g − acceleraŃia gravitaŃională; r − exponent cu valoarea 5,0. Având în vedere că pe întreaga durată de exploatare a reŃelei se consumă energie necesară pentru pomparea apei, dimensionarea optimală a acesteia impune respectarea atât a condiŃiilor hidraulice de asigurare a debitului şi presiunii de utilizare în toate

218 Modelări numerice şi optimizări în instalaŃii
punctele de consum, cât şi a celor de natură economico−energetică, minimizându-se o funcŃie obiectiv de forma:
( ) ( ) minψξ 01
α1o →+Σ++= ∑
=
HhGLDbaF ijij
T
ij
ij (7.147)
unde:
t
t
ar )β1(β
1)β1(
00
0
+−+
= (7.148) r
a
r
aT
tpr
T
tpr +=+= 2211 ξ;ξ (7.149)
)τ730ξσ(η
9,81ψ
12
12 ∑Φ+= ka erf (7.150)
în care: a, b, α sunt parametrii costului specific de investiŃie sau ai energiei specifice pentru conducte; G − debitul pompat în reŃea; Σhij − suma pierderilor de sarcină pe traseul de conducte cel mai defavorabil; H0 − componenta geodezică şi de utilizare a înălŃimii de pompare; η − randamentul global al instalaŃiei de pompare; f − costul de instalare a unităŃii de putere; σ − factor supraunitar ce Ńine seama de rezerva de putere instalată; e − preŃul energiei electrice; τ − coeficientul pompării, ce Ńine seama de neuniformitatea funcŃionării staŃiei de ridicare a presiunii; Φk − raportul între debitul lunar mediu şi debitul pompat, cu valoarea 1; p1 şi p2 − cotele de reparaŃii, întreŃinere şi revizii periodice pentru conductele reŃelei, respectiv pentru staŃia de ridicare a pre-siunii; β0 = 1/Tr − cota de amortizare pentru durata de exploatare Tr; t − durata, în ani, pentru care se aplică criteriul de optimizare adoptat, având valoarea de un an la aplicarea criteriilor cheltuieli anuale minime sau consum energetic minim, respectiv egală cu Tr la aplicarea criteriului cheltuielilor totale actualizate minime. Anulând derivata parŃială a funcŃiei obiectiv (7.150) în raport cu oricare diametru Dij al reŃelei se obŃine expresia generală a diametrului optim:
( ) rij
rijrij GEGD +++= α
2
α
1
α
1
λ (7.151)
în care factorul energetico−economic al conductelor E are expresia:
αξπ
ψ8
12 bg
rE = (7.152)
Parametrii energiei specifice în-globate în conducte (a, b, α), con-fecŃionate din cupru, oŃel, polipro-pilenă (PP−R), polietilenă reticulată (PER), policrorură de vinil clorurată (PVC−c) şi polibutenă (PB), au valo-rile date în tabelul 7.7. Calculul coeficientului de rezis-tenŃă hidraulică λij, în regimul nor-mal de exploatare al turbulenŃei tranzitorii se efectuează cu relaŃia (7.114).
Tabelul 7.7. Parametrii energiei specifice înglobate şi rugozitatea absolută a conductelor
Parametrul Nr.crt.
Materialul conductei a b α
Rugozitatea ∆ [mm]
0 1 2 3 4 5
1 Cupru 0,20 7945 2,03 0,001 2 OŃel 0,18 2780 1,98 0,10 3 PP-R 0,17 990 2,03 0,007 4 PER 0,15 2134 2,32 0,01 5 PVC-c 0,13 562 1,97 0,001 6 PB 0,10 908 2,20 0,007
Modele de optimizare a instalaŃiilor 219
Pentru traseul pe care se găseşte punctul de consum din situaŃia cea mai defa-vorabilă se determină presiunea necesară Hnec la punctul de alimentare, pentru a asigura buna funcŃionare a tuturor consumatorilor:
ugij HHhH ++Σ=nec (7.153)
în care: Σhij este pierderea de sarcină pe traseul de conducte cel mai defavorabil; Hg − înălŃimea geodezică; Hu − presiunea de utilizare la punctul de consum cel mai deza-vantajat.
Pentru traseele pe care se găsesc celelalte puncte de consum, se calculează presi-unea disponibilă în limita căreia se stabilesc diametrele tronsoanelor respective, cu condiŃia nedepăşirii vitezelor maxime admise ale apei în conducte. Disponibilul exce-dentar de presiune calculat ca diferenŃa dintre pierderea de sarcină de pe traseul cel mai defavorabil şi pierderile de sarcină de pe traseul de alimentare a consumatorilor respec-tivi, se preia cu ajutorul robinetelor de reglaj sau al diafragmelor de reglaj, al căror diametru D0,j, în mm, se determină cu relaŃia.
5,01,0
H
GD
j
j∆
=α (7.154)
în care: Gj este debitul vehiculat prin diafragma j, în dm3/s; ∆H – presiunea disponibilă excedentară, în mm H2O; iar α1=27,1–3,35β1, unde β1 reprezintă raportul între grosi-mea şi diametrul diafragmei.
Modelul de optimizare expus, implementat în cadrul programului ordinator DIRE-INT, având schema logică din figura 7.14, permite să se Ńină seama la analiza soluŃiilor optime de reŃele interioare de distribuŃie a apei de variaŃia în timp a principalilor para-metri economici, cum sunt: costul specific al energiei electrice, duratele de amortizare ale investiŃiilor, costurile specifice ale materialelor etc.
7.7. OPTIMIZAREA, PRIN SIMULARE NUMERICĂ, A CONSUMULUI DE APĂ TEHNOLOGICĂ AL
UNEI ÎNTREPRINDERI CU SISTEM PROPRIU DE ALIMENTARE
7.7.1. CONSIDERAłII PRELIMINARE
La stabilirea sistemului de alimentare cu apă în industrii şi a schemei de reŃea se Ńine seama de condiŃiile alimentării neîntrerupte a utilizatorilor, cu consum energetic minim, atât în scopul realizării producŃiei planificate, cât şi pentru a evita avarierea utilajelor şi pierderea producŃiei pe un interval de timp mai lung din cauza unor eventuale întreruperi ale alimentării cu apă a consumatorilor. Astfel în cadrul unor întreprinderi industriale se adoptă sistemul propriu de alimentare cu apă tehnologică cu recirculare.
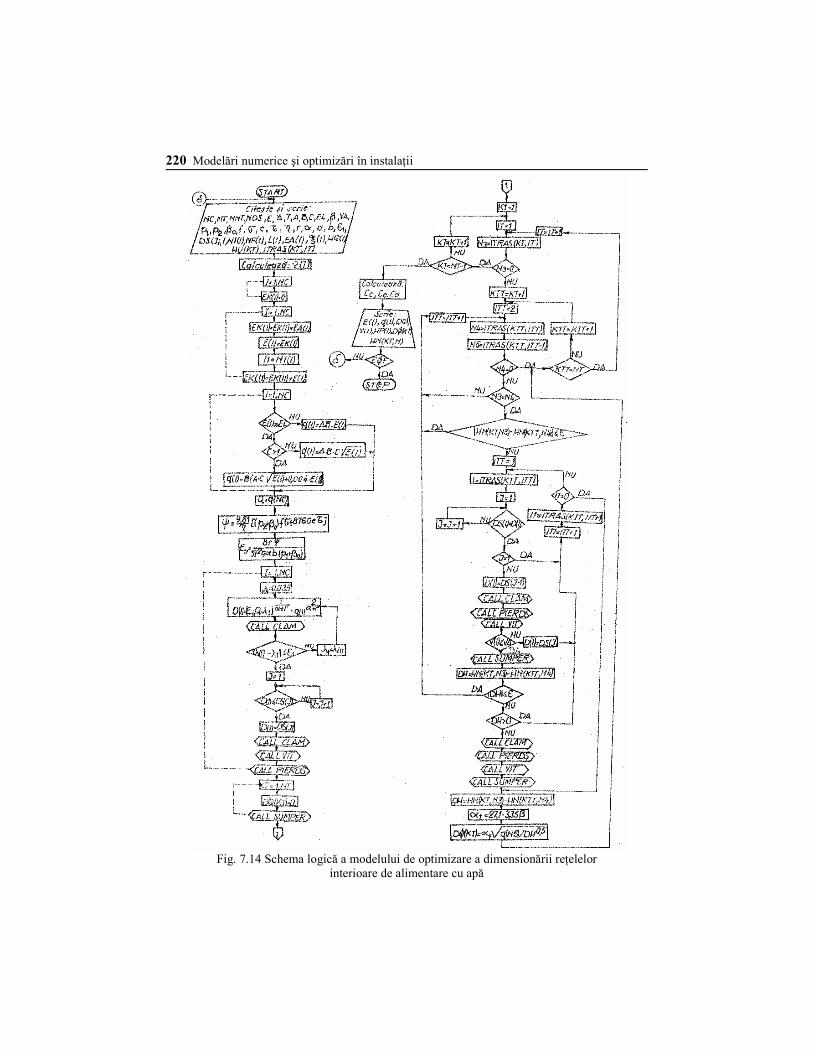
220 Modelări numerice şi optimizări în instalaŃii
Fig. 7.14 Schema logică a modelului de optimizare a dimensionării reŃelelor
interioare de alimentare cu apă
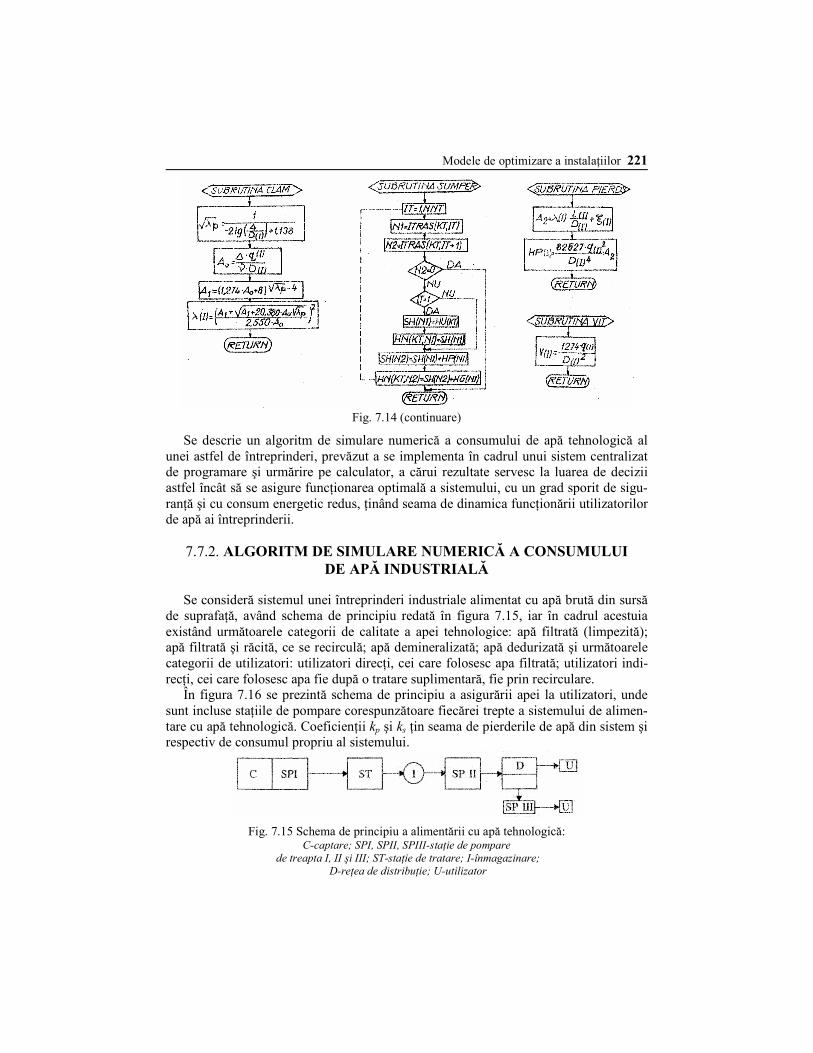
Modele de optimizare a instalaŃiilor 221
Fig. 7.14 (continuare)
Se descrie un algoritm de simulare numerică a consumului de apă tehnologică al unei astfel de întreprinderi, prevăzut a se implementa în cadrul unui sistem centralizat de programare şi urmărire pe calculator, a cărui rezultate servesc la luarea de decizii astfel încât să se asigure funcŃionarea optimală a sistemului, cu un grad sporit de sigu-ranŃă şi cu consum energetic redus, Ńinând seama de dinamica funcŃionării utilizatorilor de apă ai întreprinderii.
7.7.2. ALGORITM DE SIMULARE NUMERICĂ A CONSUMULUI DE APĂ INDUSTRIALĂ
Se consideră sistemul unei întreprinderi industriale alimentat cu apă brută din sursă de suprafaŃă, având schema de principiu redată în figura 7.15, iar în cadrul acestuia existând următoarele categorii de calitate a apei tehnologice: apă filtrată (limpezită); apă filtrată şi răcită, ce se recirculă; apă demineralizată; apă dedurizată şi următoarele categorii de utilizatori: utilizatori direcŃi, cei care folosesc apa filtrată; utilizatori indi-recŃi, cei care folosesc apa fie după o tratare suplimentară, fie prin recirculare. În figura 7.16 se prezintă schema de principiu a asigurării apei la utilizatori, unde sunt incluse staŃiile de pompare corespunzătoare fiecărei trepte a sistemului de alimen-tare cu apă tehnologică. CoeficienŃii kp şi ks Ńin seama de pierderile de apă din sistem şi respectiv de consumul propriu al sistemului.
Fig. 7.15 Schema de principiu a alimentării cu apă tehnologică:
C-captare; SPI, SPII, SPIII-staŃie de pompare
de treapta I, II şi III; ST-staŃie de tratare; I-înmagazinare;
D-reŃea de distribuŃie; U-utilizator

222 Modelări numerice şi optimizări în instalaŃii
Fig. 7.16 Schema de principiu a asigurării apei la utilizatori
Algoritmul pentru simularea numerică cu ajutorul calculatorului a consumului de apă tehnologică urmăreşte stabilirea cantităŃilor de apă tehnologică în secŃiunile semni-ficative ale sistemului, reprezentate prin utilizatori, înmagazinare, staŃie de tratare şi captare, presupunând cunoscute următoarele date de bază: producŃia orară şi consumul specific pe unitatea de produs, pe categorii de calitate a apei tehnologice, pentru fie-care utilizator; durata de realizare a producŃiei fiecărui utilizator într-o zi; volumul şi durata de refacere a rezervei intangibile de incendiu; capacitatea maximă a staŃiei de tratare. Necesarul de apă al utilizatorilor, reprezentând cantitatea de apă care trebuie furni-zată în punctele de folosire, astfel încât procesele în care este utilizată să fie satisfăcute în mod raŃional, se determină pe baza tehnologiilor de producŃie adoptate, în funcŃie de producŃia orară şi de debitul specific pe unitatea de produs, pentru fiecare categorie de calitate a apei. CerinŃa de apă a utilizatorilor, reprezentând cantitatea de apă care trebuie preluată din sursă pentru a acoperi necesarul de apă în mod raŃional, cu reutilizarea sau recir-cularea internă optimă fără diminuarea producŃiei, precum şi pentru acoperirea pierde-rilor de apă din sistem şi a consumului propriu al acestuia, se determină pe ore şi pe categorii de calitate a apei, după cum urmează: jijjspji tPqfkkQf ,, = (7.155) jijjspji tPqmkkQm ,, = (7.156)
jijjspji tPqdkkQd ,, = (7.157) jijjspji tPqrkkQr ,j
j, t
to
∆
∆= (7.158)
jijijijiji QrQdQmQfQ ,,,,, +++= (7.159)
∑=
=24
1,
i
jij QfQfu (7.160) ∑=
=24
1,
i
jij QmQmu (7.161)
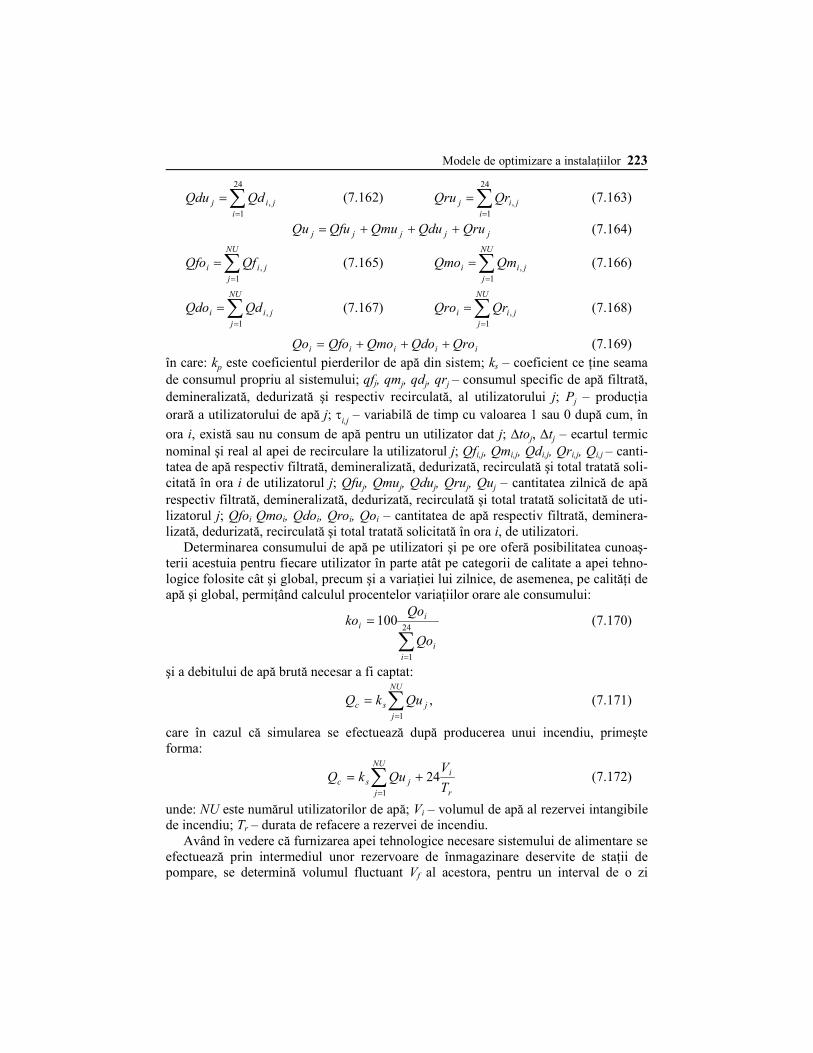
Modele de optimizare a instalaŃiilor 223
∑=
=24
1,
i
jij QdQdu (7.162) ∑=
=24
1,
i
jij QrQru (7.163)
jjjjj QruQduQmuQfuQu +++= (7.164)
∑=
=NU
j
jii QfQfo1
, (7.165) ∑=
=NU
j
jii QmQmo1
, (7.166)
∑=
=NU
j
jii QdQdo1
, (7.167) ∑=
=NU
j
jii QrQro1
, (7.168)
iiiii QroQdoQmoQfoQo +++= (7.169) în care: kp este coeficientul pierderilor de apă din sistem; ks – coeficient ce Ńine seama de consumul propriu al sistemului; qfj, qmj, qdj, qrj – consumul specific de apă filtrată, demineralizată, dedurizată şi respectiv recirculată, al utilizatorului j; Pj – producŃia orară a utilizatorului de apă j; τ
i,j – variabilă de timp cu valoarea 1 sau 0 după cum, în
ora i, există sau nu consum de apă pentru un utilizator dat j; ∆toj, ∆tj – ecartul termic nominal şi real al apei de recirculare la utilizatorul j; Qfi,j, Qmi,j, Qdi,j, Qri,j, Qi,j – canti-tatea de apă respectiv filtrată, demineralizată, dedurizată, recirculată şi total tratată soli-citată în ora i de utilizatorul j; Qfuj, Qmuj, Qduj, Qruj, Quj – cantitatea zilnică de apă respectiv filtrată, demineralizată, dedurizată, recirculată şi total tratată solicitată de uti-lizatorul j; Qfoi Qmoi, Qdoi, Qroi, Qoi – cantitatea de apă respectiv filtrată, deminera-lizată, dedurizată, recirculată şi total tratată solicitată în ora i, de utilizatori. Determinarea consumului de apă pe utilizatori şi pe ore oferă posibilitatea cunoaş-terii acestuia pentru fiecare utilizator în parte atât pe categorii de calitate a apei tehno-logice folosite cât şi global, precum şi a variaŃiei lui zilnice, de asemenea, pe calităŃi de apă şi global, permiŃând calculul procentelor variaŃiilor orare ale consumului:
∑=
=24
1
100
i
i
ii
Qo
Qoko (7.170)
şi a debitului de apă brută necesar a fi captat:
,1∑=
=NU
j
jsc QukQ (7.171)
care în cazul că simularea se efectuează după producerea unui incendiu, primeşte forma:
r
iNU
j
jscT
VQukQ 24
1
+= ∑=
(7.172)
unde: NU este numărul utilizatorilor de apă; Vi – volumul de apă al rezervei intangibile de incendiu; Tr – durata de refacere a rezervei de incendiu. Având în vedere că furnizarea apei tehnologice necesare sistemului de alimentare se efectuează prin intermediul unor rezervoare de înmagazinare deservite de staŃii de pompare, se determină volumul fluctuant Vf al acestora, pentru un interval de o zi

224 Modelări numerice şi optimizări în instalaŃii
(24 ore), utilizând metoda diferenŃelor cumulate prin procedeul analitic descris în lite-ratura de specialitate. Volumul util necesar al rezervoarelor de înmagazinare este: ntfu VVV += , în care
Vnt = 0,1Qc reprezintă volumul de apă pentru nevoile tehnologice ale sistemului. În ipoteza funcŃionării normale a sistemului de alimentare cu apă tehnologică a întreprinderii, volumul util necesar Vu al înmagazinării este egal cu volumul util exis-tent V0, realizat prin construcŃia acesteia, iar capacitatea maximă QMAX a staŃiei de tra-tare, la o turbiditate dată a apei brute, este cel puŃin egală cu debitul apei captate ce determină volumul V0. Atunci când în exploatarea sistemului există abateri de la valorile normale ale debi-telor de apă, apar două situaŃii distincte de funcŃionare a rezervoarelor de înmaga-zinare: a) când Vu < V0: – dacă ,MAXc QQ ≤ (7.173) începând din ora în care în rezervoare se acumulează apă, se poate reduce debitul de apă brută captată cu valoarea:
T
VVQ u
c
−=∆ 0 (7.174)
în care T este durata de timp din momentul acumulării apei din rezervoarele de înmaga-zinare până la atingerea volumului fluctuant; – dacă MAXc QQ > , (7.175) se introduc restricŃii la utilizatori, reducerea necesară a consumului de apă al acestora ∆QUT, fiind dată de relaŃia:
s
MAXcUT
k
QQQ
−=∆ (7.176)
b) când Vu > V0: – dacă este îndeplinită condiŃia (7.173) rezervoarele de înmagazinare funcŃionează doar cu rol de bazin de aspiraŃie al staŃiei de pompare a apei în reŃeaua de distribuŃie; – dacă se verifică însă inegalitatea (7.175), este necesară introducerea de restricŃii la utilizatori, reducerea iniŃială a consumului de apă al acestora:
,2
0VVQ u
UT
−=∆ (7.177)
determinându-se prin aproximaŃii succesive, astfel încât să se respecte condiŃia: ε0 ≤−VVu (7.178)
în care ε este eroarea admisă la calculul volumului util (0,5...2 m3). În cazul că se menŃine în continuare inegalitatea (7.175), se introduc restricŃii mai severe, reducându-se încă consumul de apă al utilizatorilor cu valoarea dată de relaŃia (7.176). Pentru fiecare utilizator j căruia i se permite diminuarea producŃiei orare (ψj = 0) se determină reducerea necesară a consumului de apă tehnologică al acestuia:
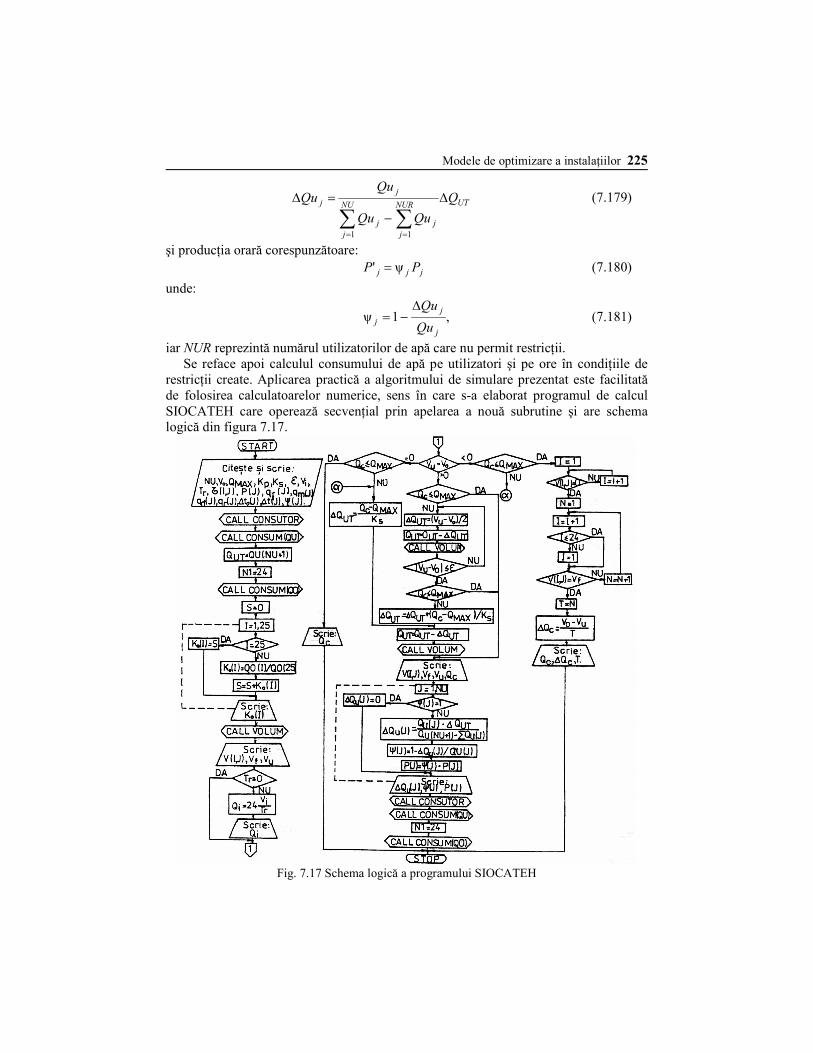
Modele de optimizare a instalaŃiilor 225
UTNU
j
NUR
j
jj
j
j Q
QuQu
QuQu ∆
−
=∆
∑ ∑= =1 1
(7.179)
şi producŃia orară corespunzătoare: jjj PP ψ' = (7.180)
unde:
,1ψj
j
jQu
Qu∆−= (7.181)
iar NUR reprezintă numărul utilizatorilor de apă care nu permit restricŃii. Se reface apoi calculul consumului de apă pe utilizatori şi pe ore în condiŃiile de restricŃii create. Aplicarea practică a algoritmului de simulare prezentat este facilitată de folosirea calculatoarelor numerice, sens în care s-a elaborat programul de calcul SIOCATEH care operează secvenŃial prin apelarea a nouă subrutine şi are schema logică din figura 7.17.
Fig. 7.17 Schema logică a programului SIOCATEH
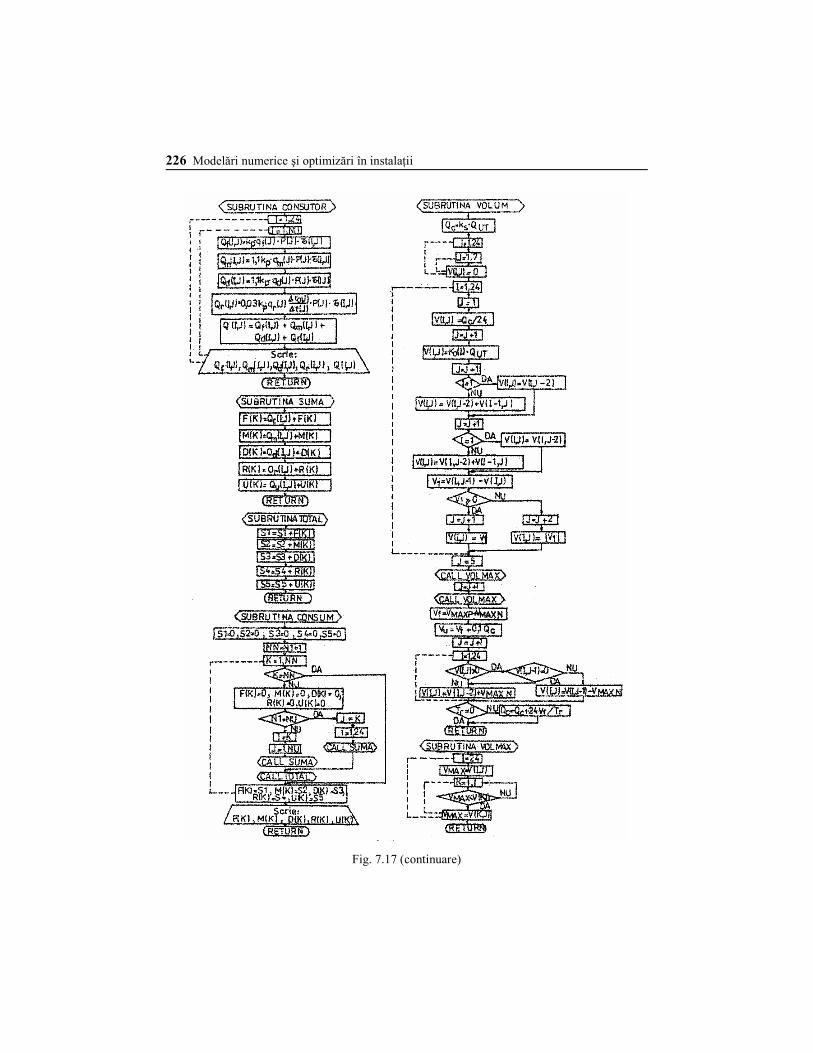
226 Modelări numerice şi optimizări în instalaŃii
Fig. 7.17 (continuare)

Modele de optimizare a instalaŃiilor 227
Acest program de calcul se pretează bine a fi implementat în cadrul unui sistem centralizat de urmărire şi control a consumului de apă tehnologică, cu ajutorul cal-culatorului, ce va optimiza alimentarea cu apă a instalaŃiilor tehnologice, eliminând risipa de apă, evitând producerea de pagube materiale, crescând siguranŃa în funcŃio-nare, reducând cheltuielile materiale privind consumul de reactivi pentru tratarea apei şi economisind cantităŃi însemnate de energie electrică.
7.8. OPTIMIZAREA DIMENSIONĂRII REłELELOR DE TERMOFICARE
7.8.1. PRINCIPII DE FUNCłIONARE A UNUI SISTEM
DE TERMOFICARE Un sistem centralizat de alimentare cu căldură permite producerea centralizată a căldurii necesare unui ansamblu de consumatori, care pot fi instalaŃii de încălzire sau de alimentare cu apă caldă de consum şi instalaŃii industriale. El se compune din urmă-toarele elemente principale (fig. 7.18): centrale de producere a căldurii (generatoare); reŃele de distribuŃie, constând din conducte magistrale de ducere şi întoarcere; puncte termice, în care se face transferul căldurii în reŃelele consumatorilor; instalaŃii ale con-sumatorilor. Căldura furnizată de către o centrală de termoficare este transmisă unui agent termic, care circulă în reŃeaua de distribuŃie ce face legătura între centrală şi con-sumatori. După ce cedează în instalaŃia unui consumator o parte din energia acumu-lată, agentul de transport se reîntoarce la centrala de termoficare. Se formează astfel un circuit închis, unde fiecare tronson al reŃelei de distribuŃie este compus din două con-ducte (bitubular) denumite ducere (tur) şi întoarcere (retur). Ca agent termic se utilizează apa fierbinte sau aburul. Având în vedere că aburul permite atingerea de temperaturi mai ridicate, necesare de obicei proceselor tehnolo-gice şi că reŃelele realizate pentru încălzire (consumatori urbani şi industriali) utilizează apa ca agent termic, se va face în continuare referire doar la termoficarea cu apă. Într-o centrală de termoficare, apa este încălzită de la temperatura de 70 oC din conducta de întoarcere până la 130… 150 oC în conducta de ducere, în funcŃie de instalaŃii şi modul lor de funcŃionare. Temperatura minimă este funcŃie de ca-racteristicile schimbătoarelor de căldură, iar temperatura maximă depinde de pre-siunile suportate de instalaŃii, căci apa trebuie menŃinută sub presiune pentru a fi conservată în stare lichidă. Se admite că, în ciuda pierderilor de căldură din conducte, apa rămâne la o temperatură constantă în toate conductele reŃelei de distribuŃie, ceea ce necesită ca viteza de circulaŃie în con-ducte să fie superioară unei valori minime date.
Fig. 7.18 Schema de principiu a unui sistem
centralizat de alimentare cu căldură
228 Modelări numerice şi optimizări în instalaŃii
InstalaŃia unui consumator reprezintă un element important de conexiune între conducta de ducere şi cea de întoarcere, conŃinând un schimbător de căldură şi un sistem de reglare. În practică se disting două tipuri de instalaŃii, unele cu racordare directă şi altele cu racordare indirectă, după cum apa din reŃeaua de distribuŃie circulă în aparatele termice ale consumatorului sau aceasta transmite căldura sa prin inter-mediul unui schimbător la o reŃea secundară. În instalaŃia consumatorului, apa prelevată din conducta de ducere a reŃelei de distribuŃie la temperatura t se evacuează din schimbătorul de căldură la temperatura t−∆t, funcŃie de t, care este temperatura apei ce circulă prin conductele de întoarcere ale reŃelei. Sistemul de reglaj permite modificarea debitului de apă ce traversează instalaŃia în funcŃie de necesarul de căldură şi de temperatura t, asigurând ca diferenŃa de presiune în punctul de conexiune între conducta de ducere şi întoarcere să fie supe-rioară unei valori minime date. CirculaŃia apei în circuitul închis format din reŃeaua de ducere şi cea de întoarcere este asigurată de o instalaŃie de pompe de circulaŃie amplasată în centrala de termo-ficare. Pe de altă parte, pentru reglarea şi fixarea presiunii într-un punct al unei con-ducte a reŃelei se prevăd rezervoare de expansiune, iar pentru a se ridica presiunea apei în unele puncte ale reŃelei se prevăd staŃii de pompare intermediare. În comparaŃie cu regimul de presiune la funcŃionarea numai a pompelor de circu-laŃie, introducerea staŃiilor intermediare de pompare pe conducta de ducere a reŃelei coboară presiunea apei atât în aparatele de încălzire de la centrală, cât şi pe porŃiunea din conducta de ducere dintre cele două instalaŃii de pompare. Introducerea staŃiilor intermediare de pompare pe conducta de întoarcere a reŃelei coboară, de asemenea, pre-siunea în schimbătoarele de căldură de la centrală şi în porŃiunea de conductă dintre cele două staŃii de pompare. În ambele cazuri presiunea pompelor de circulaŃie se re-duce cu presiunea pompelor din staŃiile intermediare. Presiunea apei în toate punctele reŃelei trebuie să rămână între limita minimă nece-sară pentru evitarea fierberii apei la temperatura de funcŃionare şi limita maximă de nedepăşire a rezistenŃelor mecanice admisibile pentru toate elementele reŃelei de termo-ficare. Aceste condiŃii asupra presiunii sunt determinante pentru dimensionarea reŃelei de distribuŃie. Reglarea regimurilor de funcŃionare a sistemelor de termoficare cu apă se face în funcŃie de temperatura aerului exterior după următoarele procedee: − prin varierea temperaturii apei în conducta de ducere şi întoarcere, respectiv reglarea calitativă a agentului termic şi implicit a debitului de căldură, menŃinând con-stant debitul de apă; − prin varierea debitului de agent termic, păstrând constantă temperatura apei, res-pectiv reglarea cantitativă. Corectarea reglării centralizate a regimului de funcŃionare se face prin reglări supli-mentare în punctele termice (PT) ale cartierelor de locuinŃe, industriilor, clădirilor şi în instalaŃiile consumatorilor.
7.8.2. BAZELE CALCULULUI HIDRAULIC AL REłELELOR TERMICE
Elementele necesare pentru efectuarea calculului hidraulic al reŃelelor de termo-ficare cu apă sunt următoarele: topologia reŃelei; schema de preparare a apei fierbinŃi în

Modele de optimizare a instalaŃiilor 229
centrală (CET sau CT); puterile termice de calcul ale consumatorilor; parametrii iniŃiali ai agentului termic. Prin calculul hidraulic de dimensionare se determină diametrele conductelor reŃelei şi pierderile de presiune în fiecare tronson, iar pe baza acestui calcul se întocmesc gra-ficele de distribuŃie a presiunilor în reŃea în regim dinamic (de funcŃionare) şi în regim static. ReŃeaua de distribuŃie este alcătuită din ansamblul tronsoanelor de conducte ce fac legătura între sursele de căldură şi consumatori. Fiecare tronson comportă două con-ducte, de tur şi retur, cu aceleaşi dimensiuni. Oricărei reŃele termice îi corespunde un graf orientat asociat, compus din arce care pot reprezenta tronsoane, pompe sau armături şi vârfuri ca puncte critice (puncte înalte, staŃii de pompare), centrale de termoficare, consumatori sau intersecŃii de conducte. Topologia unei astfel de reŃele poate fi descrisă complet şi univoc cu ajutorul ma-tricei de incidenŃă şi a matricei ciclurilor construite pentru graful asociat. Calculul pierderii de presiune în conductele reŃelelor termice se efectuează cu rela-Ńia de forma generală:
4
2
2
ρ8
ij
ij
ij
ij
ijij
ijD
G
D
Lp
+=∆ ζ
λ
π (7.182)
în care: Lij, Dij, Gij sunt respectiv lungimea, diametrul şi debitul de apă al tronsonului ij; λij – coeficientul de rezistenŃă hidraulică longitudinală al tronsonului ij; ζij – suma coeficienŃilor de rezistenŃă hidraulică locală a tronsonului ij; ρ – densitatea apei. În figura 7.19 se prezintă variaŃia presiunii într-o reŃea formată dintr-un singur tronson între centrală şi consumator, la altitudine constantă, unde p1–p2 este pierderea de presiune în conducta de tur, 22 pp − – pierderea de presiune în instalaŃia consumatorului, iar 12 pp − – pierderea de presiune în conducta de
retur. Presupunând rezistenŃa hidraulică longitudinală constantă şi neglijând rezistenŃele locale, se poate fo-losi pentru calculul aproximativ al pierderii de presi-une relaŃia:
252
ρ8ij
ij
ij
ij GD
Lp
πλ
=∆ (7.183)
CondiŃiile extreme de funcŃionare a reŃelei sunt atinse în ziua cea mai friguroasă a anului, consumul de căldură fiind funcŃie de diferenŃa între temperatura necesară în clădiri şi temperatura aerului exterior. Consumul maxim al unui utilizator, exprimat sub forma puterii termice maxime este calculat în raport cu temperatura de calcul a aerului exterior, considerată în funcŃie de condiŃiile climaterice ale zonei în care este amplasat sistemul de termoficare. Determinarea puterii termice pentru încălzirea clădirilor se face Ńinând seama de volumul şi caracteristica termică a acestora.
Fig. 7.19 Graficul de presiune al
unui tronson de conductă

230 Modelări numerice şi optimizări în instalaŃii
Necesarul maxim de căldură se exprimă printr-un debit de apă consumat în nodul în care este racordat consumatorul. În ipoteza funcŃionării sistemului cu diferenŃa maximă de temperatură între reŃeaua de tur şi cea retur, ∆tmax debitul de apă qj concentrat într-un nod j se exprimă, în funcŃie de puterea termică a consumatorului Qj, prin relaŃia:
maxtc
j
j ∆= (7.184)
în care c este căldura specifică a apei la presiune constantă. Pentru reŃelele ramificate, debitele de apă concentrate în noduri determină univoc repartiŃia debitelor de calcul pe tronsoanele reŃelei. Examinând diverse tipuri de curbe ale consumului zilnic de căldură se confirmă că practic toŃi utilizatorii au un consum maxim fie dimineaŃa între orele 6 şi 10, fie seara între orele 16 şi 20. Se vor considera ca date pentru fiecare consumator atât puterea termică minimă cât şi cea maximă necesară în două momente critice din ziua cea mai friguroasă a anului, ce conduc la debitele de apă corespunzătoare minime şi maxime concentrate în fiecare nod j al reŃelei, cărora le corespunde debitul mediu qj. În calculele de dimensionare optimală a reŃelei de distribuŃie se poate folosi cu sufi-cientă precizie practică, pentru determinarea energiei consumate anual de către o pom-pă, relaŃia:
TGW Π=η
1 (7.185)
în care η este randamentul general al pompei; T – durata perioadei de încălzire; G – debitul de calcul al conductei considerate, determinat cu ajutorul debitelor medii con-centrate în noduri qj; П – presiunea de pompare ce asigură funcŃionarea reŃelei sub încărcarea hidraulică medie qj.
7.8.3. MODEL DE OPTIMIZARE A DIMENSIONĂRII REłELELOR TERMICE RAMIFICATE BITUBULARE CU APĂ
Având în vedere că pe întreaga durată de exploatare a reŃelei se consumă energie necesară pentru pomparea apei, dimensionarea optimală a acesteia impune respectarea atât a condiŃiilor hidraulice de asigurare a debitului de apă şi a presiunii în toate punc-tele de consum, cât şi a celor de natură economică, folosindu-se criteriul de optimizare al cheltuielilor anuale de construcŃie şi exploatare minime, pentru o stare staŃionară a sistemului. ReŃeaua de distribuŃie fiind ramificată, debitele de calcul pe tronsoane Gij sunt univoc determinate prin debitele concentrate qj care sunt cunoscute în nodurile reŃelei, iar aceste debite de calcul, pentru o încărcare dată a reŃelei, au aceeaşi valoare în re-
Ńeaua de tur şi cea de retur, doar sensurile fiind schimbate ijij GG −=( ).
Cunoscând repartiŃia debitelor de calcul pe tronsoanele reŃelei se stabileşte pentru fiecare tronson ij seria diametrelor comerciale posibil a fi utilizate Dk,ij∈[Dmax,ij, Dmin,ij], pe baza valorilor limită Vmin şi Vmax ale vitezei apei ce se impune, respectiv pentru a nu

Modele de optimizare a instalaŃiilor 231
se răci apa prea tare şi a evita producerea zgomotelor şi vibraŃiilor, corespunzător că-rora rezultă:
ij
ij
ijV
GD
min(max),max(min),
4
π= (7.186)
în care Gij este debitul de calcul al tronsonului ij provenit din încărcarea medie qj a reŃelei. Neglijând pierderile de presiune locale şi admiŃând că un tronson ij de lungime Lij al unei reŃele alcătuite din T tronsoane este format din sij sectoare k de diametre comer-ciale Dk,ij şi lungimi Xk,ij, se poate liniariza relaŃia care exprimă diferenŃa de presiune între cele două extremităŃi ale unei conducte:
)(γ,1
, ijijijk
s
k
ijkji ZTZTXppij
−+Π−=− ∑=
α (7.187)
unde:
5,
2,
ρ8
ijk
ijijij
ijkD
GG
π
λα = (7.188)
în care: Пij este presiunea activă a staŃiei de pompare intermediară de pe tronsonul ij; ZTi, ZTj – cotele geodezice în nodurile i şi j ; γ – greutatea specifică a apei. łinând seama de expresiile investiŃiei în conductele reŃelei, în staŃiile de pompare intermediare şi de costul energiei electrice consumate pentru pompare, funcŃia obiectiv Fo are forma:
min)(η
1)(
)(η
1
1,
1,
1, 1,o
→
Π+Π++++
+−+=
∑
∑∑∑
=
== =
∗
NP
ji
ijijijij
ij
ijijijijij
jjj
NS
j i
ijk
T
ji
s
k
ijk
GGeTrrByA
ppqeTXcFij
(7.189)
în care: ∗ijkc , este costul specific anual al unui tronson de diametru Dk,ij, dat de relaŃia
(7.109); e – preŃul energiei electrice; T – durata perioadei de încălzire; NS – numărul surselor de căldură; NP – numărul staŃiilor de pompare intermediare; Aij – costul anual fix pentru o staŃie de pompare; Bij – costul anual proporŃional cu puterea unei staŃii de pompare; rij, ijr – puterea maximă a unei pompe intermediare care se integrează pe
tronsonul ij de tur, respectiv de retur, dacă rij, ijr rezultă diferit de 0; pj, jp − presiunea
în nodurile reŃelei de tur şi retur; Gij, ijG − debitele de calcul pe tronsoanele reŃelei de
tur şi de retur; ijij ΠΠ , − presiunile active pe tronsonul ij al reŃelei de tur şi de retur pe
care se poate instala o staŃie de pompare intermediară, amplasamentul acesteia fiind prin convenŃie în imediata apropiere a nodului i.

232 Modelări numerice şi optimizări în instalaŃii
Necunoscutele funcŃiei obiectiv Fo sunt variabilele Xk,ij, rij, ijr , ijij ΠΠ , , pj, jp , care
trebuie determinate astfel încât să se minimizeze funcŃia (7.189), în condiŃiile satisfa-cerii următoarelor restricŃii: − de tip constructiv:-
),...,1(;1
, TijLX ij
s
k
ijk
ij
==∑=
(7.190)
− de tip funcŃional, care se scriu în toate nodurile j sau tronsoanele ij ale reŃelei, pentru fiecare din cele trei regimuri de funcŃionare corespunzătoare puterilor termice necesare minime, maxime şi respectiv medii:
)(γ,1
, ijijijk
s
k
ijkji ZTZTXppij
−+Π−=− ∑=
α (7.191)
)(γ,1
, ijijijk
s
k
ijkji ZTZTXppij
−+Π−−=− ∑=
α (7.192)
jjj pp δ≥− (7.193)
0≥Π≥ ijijij Gr (7.194) 0≥Π≥ ijijij Gr (7.195)
ijij Myr ≤ (7.196) ijij Myr ≤ (7.197)
jjj Hph ≤≤ (7.198) jjj Hph ≤≤ (7.199)
jijjj Hph ≤Π+≤ (7.200) ijijjj Hph ≤Π+≤ (7.201)
1,0=ijy (7.202) 0, ≥ijkX (7.203)
− de tip hidraulic, care de asemenea se scriu pentru fiecare din cele trei regimuri de funcŃionare menŃionate:
),...,1(;0
1
NSNjqG j
N
iji
ij −==+∑=≠
(7.204)
),...,1(; TijGG ijij =−= (7.205)
în care: hj, Hj şi jj Hh , sunt limitele inferioare şi superioare ale presiunii în fiecare nod
j al reŃelei de tur şi respectiv de retur; δj – diferenŃa minimă de presiune în nodul j între conducta de tur şi retur care asigură curgerea debitului qj prin instalaŃia consumatorului racordat în nodul respectiv.
RestricŃiile (7.191) şi (7.192) fac legătura între noile variabile Xk,ij şi diferenŃa de presiune în nodurile reŃelei. Într-o soluŃie optimă, pentru un tronson dat, cel mult două din aceste variabile vor fi diferite de 0, astfel încât soluŃia respectivă este realizabilă din punct de vedere tehnic, mai ales dacă lungimea tronsonului este însemnată. Variabilelor yij li se atribuie valoarea 0 sau 1, după cum ele descriu decizia de a intercala sau nu o staŃie de pompare pe tronsonul ij, pe care este posibilă construirea

Modele de optimizare a instalaŃiilor 233
acesteia. Ele sunt legate de puterea maximă a acestor pompe intermediare prin inega-litatea (7.196), unde M reprezintă o constantă cu o valoare suficient de mare. RelaŃiile (7.198) şi (7.200) limitează intervalul de variaŃie a presiunilor din reŃea, fie în noduri, fie la intrarea sau ieşirea din pompele intermediare. FuncŃia obiectiv (7.189) şi restricŃiile (7.190)...(7.205) fiind liniare în raport cu ne-cunoscutele sistemului, soluŃia optimă se poate determina pe baza metodei programării liniare. Se observă că liniarizarea problemei dimensionării unei reŃele termice ramificate se înregistrează o creştere a numărului de variabile. Spre exemplu, pentru o reŃea cu 50 noduri şi 3 amplasamente posibile pentru staŃii de pompare intermediare s-a ajuns la un program liniar conŃinând cca 550 variabile şi tot atâtea necunoscute.
7.9. CALCULUL SIMPLIFICAT AL REłELELOR INELARE DE DISTRIBUłIE A GAZELOR
BAZAT PE TEORIA GRAFURILOR În scopul îmbunătăŃirii performanŃelor programelor ordinatoare pentru calculul hi-draulic laborios al reŃelelor inelare de distribuŃie a gazelor naturale se poate utiliza un algoritm de schematizare a acestor reŃele bazat pe teoria grafurilor, care permite des-compunerea reŃelei în subreŃele ierarhic dependente prin intermediul unui singur nod, ce se expune în cele ce urmează. Calculul hidraulic al unei reŃele de distribuŃie a gazelor constă în determinarea debi-telor pe tronsoanele reŃelei şi a presiunilor în nodurile de consum, conducând în cazul reŃelelor ramificate la rezolvarea numerică a unui sistem de ecuaŃii format din N−1 ecuaŃii liniare de conservare a debitului în noduri şi T ecuaŃii neliniare de pierderi de sarcină pe tronsoane:
)1,...,1(;0
1
−==+∑=≠
NjqQ j
N
iji
ij (7.206)
2ijijji QRXX =− (7.207)
unde:
5ij
ij
ijijD
LrR λ= (7.208)
în care: r este un coeficient ce depinde de natura gazului, de unităŃile de măsură adop-tate şi de regimul de funcŃionare; Lij, Dij, Qij – lungimea, diametrul şi debitul tronso-nului ij; Xi, Xj – presiunile în nodurile i şi j sau pătratul acestor presiuni, după cum conductele funcŃionează în regim cu volum constant sau variabil; qj – debitul consumat în nodul j; λij – coeficientul de rezistenŃă hidraulică al tronsonului ij. Pentru reŃelele ramificate, acest calcul se conduce în două etape, în prima determi-nându-se debitele cu relaŃia (7.206), din aproape în aproape pornind din extremităŃile
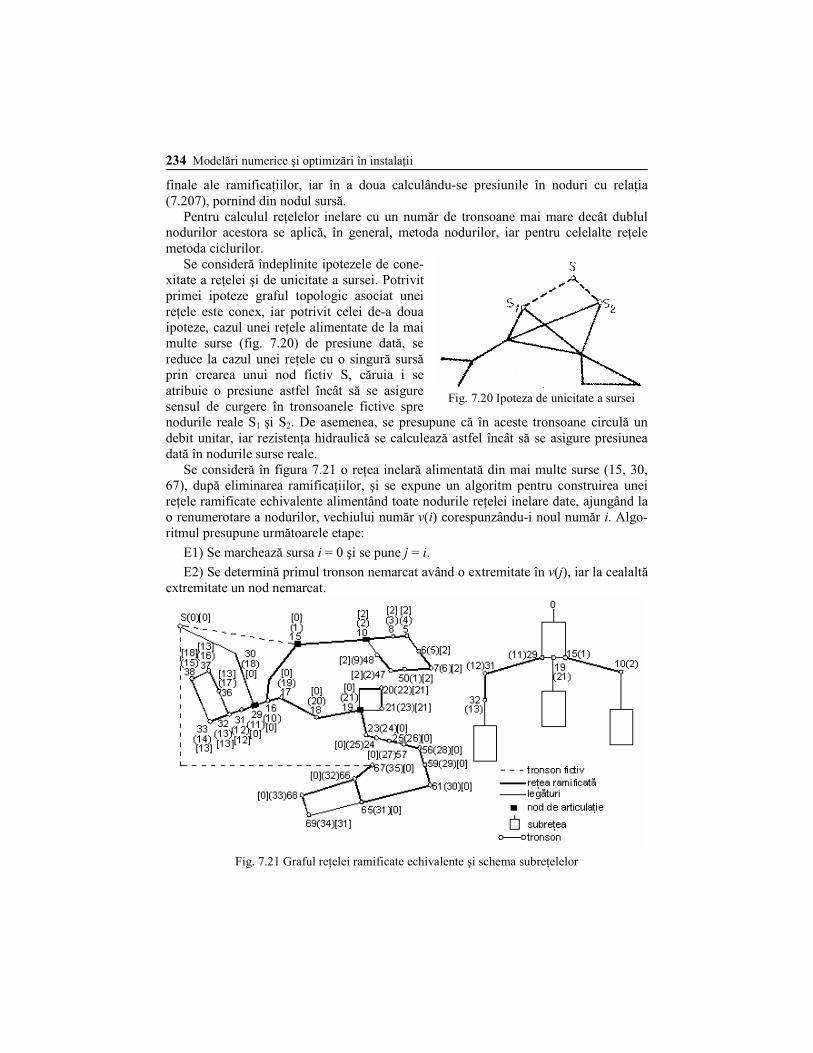
234 Modelări numerice şi optimizări în instalaŃii
finale ale ramificaŃiilor, iar în a doua calculându-se presiunile în noduri cu relaŃia (7.207), pornind din nodul sursă. Pentru calculul reŃelelor inelare cu un număr de tronsoane mai mare decât dublul nodurilor acestora se aplică, în general, metoda nodurilor, iar pentru celelalte reŃele metoda ciclurilor. Se consideră îndeplinite ipotezele de cone-xitate a reŃelei şi de unicitate a sursei. Potrivit primei ipoteze graful topologic asociat unei reŃele este conex, iar potrivit celei de-a doua ipoteze, cazul unei reŃele alimentate de la mai multe surse (fig. 7.20) de presiune dată, se reduce la cazul unei reŃele cu o singură sursă prin crearea unui nod fictiv S, căruia i se atribuie o presiune astfel încât să se asigure sensul de curgere în tronsoanele fictive spre nodurile reale S1 şi S2. De asemenea, se presupune că în aceste tronsoane circulă un debit unitar, iar rezistenŃa hidraulică se calculează astfel încât să se asigure presiunea dată în nodurile surse reale. Se consideră în figura 7.21 o reŃea inelară alimentată din mai multe surse (15, 30, 67), după eliminarea ramificaŃiilor, şi se expune un algoritm pentru construirea unei reŃele ramificate echivalente alimentând toate nodurile reŃelei inelare date, ajungând la o renumerotare a nodurilor, vechiului număr v(i) corespunzându-i noul număr i. Algo-ritmul presupune următoarele etape:
E1) Se marchează sursa i = 0 şi se pune j = i.
E2) Se determină primul tronson nemarcat având o extremitate în v(j), iar la cealaltă extremitate un nod nemarcat.
Fig. 7.21 Graful reŃelei ramificate echivalente şi schema subreŃelelor
Fig. 7.20 Ipoteza de unicitate a sursei
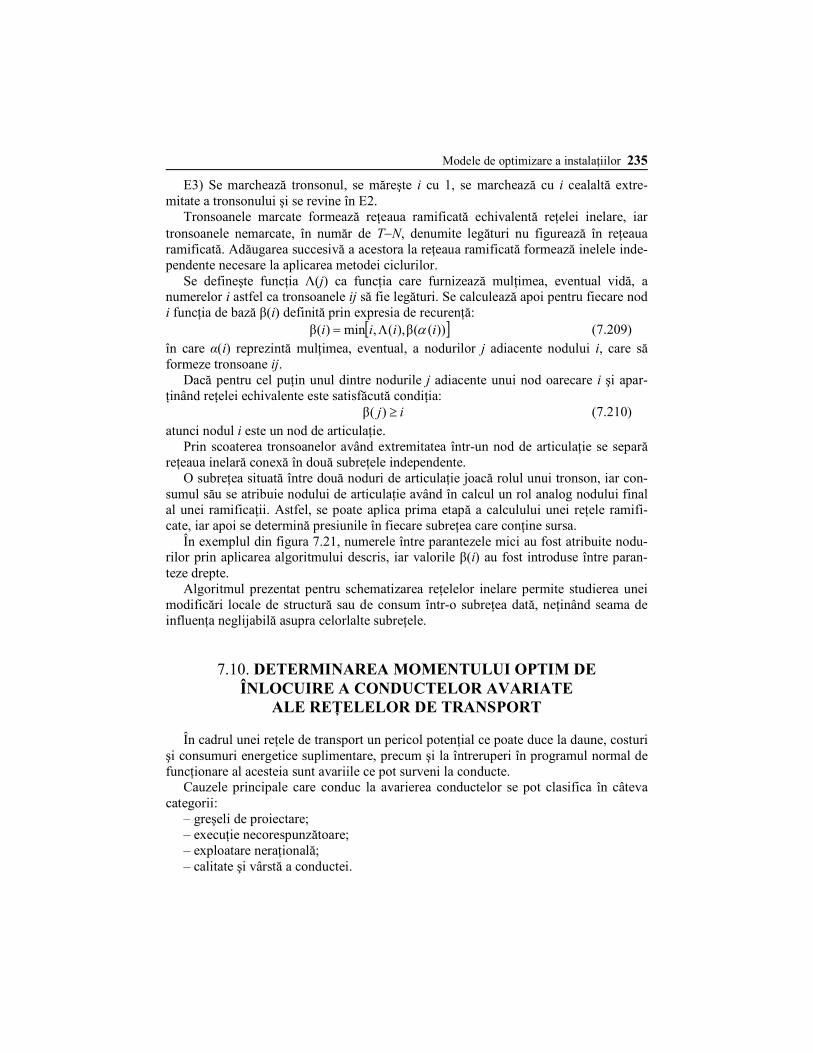
Modele de optimizare a instalaŃiilor 235
E3) Se marchează tronsonul, se măreşte i cu 1, se marchează cu i cealaltă extre-mitate a tronsonului şi se revine în E2. Tronsoanele marcate formează reŃeaua ramificată echivalentă reŃelei inelare, iar tronsoanele nemarcate, în număr de T−N, denumite legături nu figurează în reŃeaua ramificată. Adăugarea succesivă a acestora la reŃeaua ramificată formează inelele inde-pendente necesare la aplicarea metodei ciclurilor. Se defineşte funcŃia Λ(j) ca funcŃia care furnizează mulŃimea, eventual vidă, a numerelor i astfel ca tronsoanele ij să fie legături. Se calculează apoi pentru fiecare nod i funcŃia de bază β(i) definită prin expresia de recurenŃă: [ ]))((β),(,min)(β iiii αΛ= (7.209) în care α(i) reprezintă mulŃimea, eventual, a nodurilor j adiacente nodului i, care să formeze tronsoane ij. Dacă pentru cel puŃin unul dintre nodurile j adiacente unui nod oarecare i şi apar-Ńinând reŃelei echivalente este satisfăcută condiŃia: ij ≥)(β (7.210) atunci nodul i este un nod de articulaŃie. Prin scoaterea tronsoanelor având extremitatea într-un nod de articulaŃie se separă reŃeaua inelară conexă în două subreŃele independente. O subreŃea situată între două noduri de articulaŃie joacă rolul unui tronson, iar con-sumul său se atribuie nodului de articulaŃie având în calcul un rol analog nodului final al unei ramificaŃii. Astfel, se poate aplica prima etapă a calculului unei reŃele ramifi-cate, iar apoi se determină presiunile în fiecare subreŃea care conŃine sursa. În exemplul din figura 7.21, numerele între parantezele mici au fost atribuite nodu-rilor prin aplicarea algoritmului descris, iar valorile β(i) au fost introduse între paran-teze drepte. Algoritmul prezentat pentru schematizarea reŃelelor inelare permite studierea unei modificări locale de structură sau de consum într-o subreŃea dată, neŃinând seama de influenŃa neglijabilă asupra celorlalte subreŃele.
7.10. DETERMINAREA MOMENTULUI OPTIM DE ÎNLOCUIRE A CONDUCTELOR AVARIATE
ALE REłELELOR DE TRANSPORT În cadrul unei reŃele de transport un pericol potenŃial ce poate duce la daune, costuri şi consumuri energetice suplimentare, precum şi la întreruperi în programul normal de funcŃionare al acesteia sunt avariile ce pot surveni la conducte. Cauzele principale care conduc la avarierea conductelor se pot clasifica în câteva categorii: – greşeli de proiectare; – execuŃie necorespunzătoare; – exploatare neraŃională; – calitate şi vârstă a conductei.

236 Modelări numerice şi optimizări în instalaŃii
SoluŃionarea problemei avarierii unei conducte în funcŃiune poate fi efectuată prin două căi: reparare sau înlocuire, iar luarea unei decizii raŃionale în acest sens implică o analiză economică de comparare a celor două alternative. Se prezintă un model general pentru determinarea momentului optim de înlocuire a conductelor avariate, care nu necesită cunoaşterea cauzei avariei ci numai estimarea evoluŃiei avariilor în timp. Caracteristica esenŃială a modelului de calcul o reprezintă necesitatea estimării rea-liste a datelor viitoare de avariere şi se bazează pe următoarele elemente: numărul esti-mativ de avarii pe o conductă nouă ca funcŃie de timp din momentul instalării acesteia; numărul estimativ de avarii pe o conductă existentă; cheltuielile necesare pentru repa-rarea şi pentru înlocuirea unei conducte existente cu alta nouă; stabilirea cheltuielilor viitoare la o valoare actualizată. La înlocuirea unei porŃiuni dintr-o conductă avariată cu alta nouă, noua conductă, poate avea aceeaşi calitate ca şi cea veche, aşteptându-se de la ea acelaşi istoric al ava-riilor sau poate avea o calitate superioară, adică să nu apară avarii pe ea. Un mod con-venabil de măsurare a avariilor este exprimarea acestora în avarii pe an sau pe metru liniar de conductă. Se consideră ecuaŃia de evoluŃie a avariilor de forma exponenŃială:
)()()( 0
0ttA
etFtF−= (7.211)
în care: t este timpul exprimat în ani; t0 – timpul de bază al analizei; A – coeficientul de creştere a numărului de avarii; F(t0) – numărul de avarii pe an. Cheltuielile de reparaŃie pentru t ani sunt date de relaŃia: )(tFcc ar = (7.212) unde ca reprezintă cheltuielile de reparaŃie a unei avarii. Valoarea actualizată a cheltuielilor pentru reparaŃie Cr şi pentru înlocuirea conductei Ci se determină cu relaŃiile:
∑∗=
∗+ −=it
tt
rr tt
cC
)β1( 0
(7.213) ∑∗=
∗−+=
it
tt
ii tt
cC
)β1( 0
(7.214)
în care: t∗ este anul de referinŃă; ti – anul când conducta va fi înlocuită; β0 – rata de inflaŃie; ci – costul înlocuirii conductei. Momentul optim de înlocuire este acel an pentru care cheltuielile totale sunt mi-nime:
min)β1()β1(
)()(
C00
00 →
+ −++ −
−=
∗∗=
∗∑ tt
ct
tttt
ttAetFc
i
ii
aT (7.215)
Prin derivare în raport cu ti, anulare şi rezolvare se obŃine expresia timpului optim de înlocuire:
++=
a
ii
ctF
c
Att
)(
)β1(lnln
1
0
00
0 (7.216)
Se observă că anul de bază t0 utilizat în dezvoltarea ecuaŃiei (7.211) nu influenŃează asupra soluŃiei optime.

Modele de optimizare a instalaŃiilor 237
Dacă pentru ecuaŃia de evoluŃie a avariilor se adoptă forma liniară: )()()( 00 ttAtFtF −= (7.217) atunci rezultă pentru momentul optim de înlocuire a conductei expresia:
a
ii
ctFA
ctt
)(
)β1(ln
0
00
0 ++= (7.218)
SoluŃiile optime astfel obŃinute corespund cazului când conducta nouă nu mai poate fi avariată. De aceea se studiază şi situaŃia când noua conductă poate fi atinsă de avarii, însă începând cu o valoare iniŃială mai mică decât cea corespunzătoare coeficientului de creştere caracteristic conductei existente, întrucât altfel nu ar exista nici un motiv pentru înlocuire. Se consideră că noua conductă este de acelaşi tip cu cea existentă şi după montare are acelaşi istoric al avariilor, iar numărul de avarii creşte după acelaşi coeficient ca în ecuaŃia (7.211). Conducta avariată aflată în funcŃiune se înlocuieşte în anul ti la un cost ci, iar odată instalată noua conductă va fi supusă avariilor şi se reînlocuieşte după tc ani. Mărimea
optimă a ciclului de înlocuire 0ct este dată de relaŃia:
+=
a
ic
ctF
c
At
)(
)β1(lnln
1
0
00 (7.219)
Este necesar să se definească pentru fiecare ciclu cheltuielile de reparaŃie şi de înlo-cuire exprimate în valori raportate la începerea ciclului. Pentru mărimea optimă a ci-
clului 0ct acestea au respectiv expresiile:
)β1(β
1)β1(
1 )β1( 00
0
0
00
0 +
−+
== +
= ∑c
rc
cr
R t
ct
t
tt
cC (7.220)
)β1( 0
0+
=c
ii t
cC (7.221)
Pentru explicitarea cheltuielilor totale CT = CR + Ci se obŃine relaŃia finală:
)β1(
)(
)β1(
)()(
00
00
+ −++
+= + −
−=
∗∗
∗∑ tt
cBcCt
tttt
ttAetFc
Ci
iiRi
aT (7.222)
unde:
)β1( 1
1
1 )β1(
1
0
0
0
0+ −
=∞
= += ∑
cct
nnt
B (7.223)
Minimizând cheltuielile totale se obŃine, în urma efectuării calculelor, pentru mo-mentul optim de înlocuire o expresie similară cu (7.216):
++++=
a
iiRi
ctF
cBcC
Att
)(
))(β1(lnln
1
0
00
0 (7.224)
238 Modelări numerice şi optimizări în instalaŃii
care conŃine în cel de-al doilea termen produsul (CR+ci)B ce Ńine seama de ciclurile viitoare de înlocuire şi reparaŃie. Modelul analitic expus, necesitând doar cunoaşterea unor date referitoare la cheltu-ielile de reparaŃie şi de înlocuire, a coeficientului creşterii numărului de avarii şi a ratei de inflaŃie, oferă posibilitatea de calcul a momentului optim de înlocuire a conductelor avariate, asigurându-se astfel luarea unor decizii importante în mod corect şi cu chel-tuieli minime.
7.11. DETERMINAREA CONFIGURAłIEI OPTIME A REłELELOR ELECTRICE
Pentru un sistem format din m surse de energie electrică (centrale electrice) şi n consumatori se cunoaşte amplasarea surselor şi consumatorilor, puterea disponibilă la fiecare sursă şi puterea cerută de consumatori şi se pune problema determinării confi-guraŃiei optime din punct de vedere tehnico-economic a reŃelei electrice care alimen-tează consumatorii. In cazul unor valori mici pentru m şi n se selectează câteva variante, pe baza expe-rienŃei proiectanŃilor, pentru care se efectuează un calcul tehnico-economic complet, determinându-se în final varianta optimă. Pentru dimensiuni mari ale sistemului, alege-rea variantelor pentru care se face calculul este dificilă, existând riscul de a omite vari-anta optimă. Determinarea variantei optime trebuie să se efectueze pe baza unor meto-de matematice riguroase, care să Ńină seama de toate variantele posibile. Drept criteriu de alegere a variantelor optime se poate utiliza minimizarea pierde-rilor de putere pe ansamblul sistemului, soluŃionarea completă a problemei expuse pre-supunând parcurgerea următoarelor etape: E1) Verificarea bilanŃului puterilor şi calculul distanŃelor dintre surse şi consu-matori. E2) Determinarea riguroasă a schemei sau schemelor optime de alimentare a consu-matorilor, pe baza minimizării pierderilor de putere. E3) ObŃinerea variantelor pentru care se efectuează calculul tehnico-economic com-plet, prin corectarea şi completarea soluŃiei obŃinute la etapa E2 (unirea unor trasee de linii care au aproximativ aceiaşi direcŃie, adăugarea unor linii din motive de siguranŃă în funcŃionare, etc.). E4) Alegerea sau verificarea nivelelor de tensiune ale liniilor efectuându-se corec-Ńiile necesare, cu sau fără revenire la E2. E5) Efectuarea unui calcul tehnico-economic complet pentru variantele obŃinute şi selectarea soluŃiei optime finale. În continuare se urmăreşte soluŃionarea etapei E2, scop în care se defineşte urmă-torul model matematic: a) se iau în considerare numai structurile radiale simple, formate dintr-un număr oarecare de linii radiale între orice sursă i, i∈E (E – mulŃimea centralelor electrice) şi orice consumator j, j∈C (C − mulŃimea consumatorilor), distanŃa dintre ele fiind Lij; b) sensul de circulaŃie al puterii este numai de la surse către consumatori;

Modele de optimizare a instalaŃiilor 239
c) pentru fiecare consumator j (j∈C), suma puterilor pij (i∈E) transportate pe liniile existente, care alimentează consumatorul j, este egală cu puterea Pj cerută de consu-mator; d) din punctul de vedere al bilanŃului de puteri, pierderile de putere, necunoscute iniŃial, dar aproximate prin valori medii de calcul, se consideră incluse în puterile cerute de consumatori; e) pentru fiecare sursă i (i∈E) suma puterilor pij (j∈C), de pe liniile existente, care sunt alimentate de la sursa i, trebuie să fie cel mult egală cu puterea disponibilă a sursei Pi; f) se cere să se determine structura reŃelei de alimentare optime, astfel încât pierde-rile totale de putere pe ansamblul sistemului să fie minime. CerinŃele exprimate la punctele b, c şi e se exprimă prin următoarele relaŃii între necunoscutele pij ale problemei: CjEipij ∈∈≥ ;,0 (7.225)
CjPpEi
jij ∈=∑∈
, (7.226)
EiPp i
Cj
ij ∈≤∑∈
, (7.227)
Evident pentru pij≠0 există linie între sursa i şi consumatorul j, iar pentru pij =0 nu există. BilanŃul general al puterii disponibile la surse şi al celei cerute de consumatori tre-buie să fie de forma:
∑∑∈∈
≥Cj
j
Ei
i PP (7.228)
În ipoteza îndeplinirii condiŃiei de egalitate în relaŃia (7.228), relaŃiile de restricŃie (7.227) devin:
EiPp i
Cj
ij ∈=∑∈
, (7.229)
CondiŃiile de la punctul f) se exprimă printr-o relaŃie de forma:
min→=∑∑∈ ∈Ei Cj
ijpF (7.230)
în care pij reprezintă pierderile de putere pe linia dintre sursa i şi consumatorul j. În condiŃii normale, pentru o linie de înaltă sau medie tensiune, pierderile de putere pe rezistenŃa R a liniei sunt dominante, celelalte componente neglijându-se într-o primă aproximaŃie (pentru simplificarea relaŃiilor, se omite scrierea indicilor):
PLU
j
U
PL
S
IIL
S
II
S
LRIp
ϕϕ cos
ρ3
cos3ρ3ρ3ρ33 22 ===== (7.231)
în care: I este intensitatea curentului electric; ρ − rezistivitatea; S – secŃiunea; U – tensiunea liniei; j – densitatea de curent; cos ϕ − factorul de putere. Presupunând că durata de utilizare a puterii maxime şi factorul de putere au valori apropiate pentru toŃi
consumatorii, rezultă concluzia că expresia ϕ11 cosρ3 −−jU este practic constantă, p
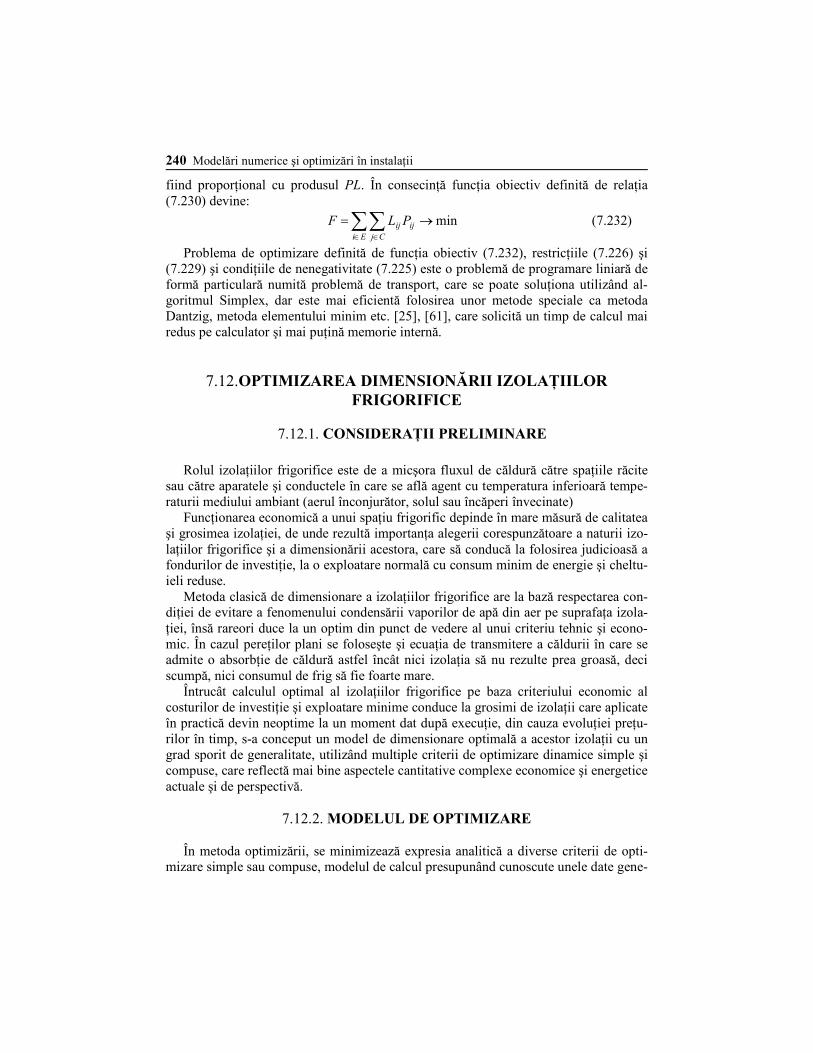
240 Modelări numerice şi optimizări în instalaŃii
fiind proporŃional cu produsul PL. În consecinŃă funcŃia obiectiv definită de relaŃia (7.230) devine:
min→=∑∑∈ ∈
ij
Ei Cj
ij PLF (7.232)
Problema de optimizare definită de funcŃia obiectiv (7.232), restricŃiile (7.226) şi (7.229) şi condiŃiile de nenegativitate (7.225) este o problemă de programare liniară de formă particulară numită problemă de transport, care se poate soluŃiona utilizând al-goritmul Simplex, dar este mai eficientă folosirea unor metode speciale ca metoda Dantzig, metoda elementului minim etc. [25], [61], care solicită un timp de calcul mai redus pe calculator şi mai puŃină memorie internă.
7.12.OPTIMIZAREA DIMENSIONĂRII IZOLAłIILOR FRIGORIFICE
7.12.1. CONSIDERAłII PRELIMINARE
Rolul izolaŃiilor frigorifice este de a micşora fluxul de căldură către spaŃiile răcite sau către aparatele şi conductele în care se află agent cu temperatura inferioară tempe-raturii mediului ambiant (aerul înconjurător, solul sau încăperi învecinate) FuncŃionarea economică a unui spaŃiu frigorific depinde în mare măsură de calitatea şi grosimea izolaŃiei, de unde rezultă importanŃa alegerii corespunzătoare a naturii izo-laŃiilor frigorifice şi a dimensionării acestora, care să conducă la folosirea judicioasă a fondurilor de investiŃie, la o exploatare normală cu consum minim de energie şi cheltu-ieli reduse. Metoda clasică de dimensionare a izolaŃiilor frigorifice are la bază respectarea con-diŃiei de evitare a fenomenului condensării vaporilor de apă din aer pe suprafaŃa izola-Ńiei, însă rareori duce la un optim din punct de vedere al unui criteriu tehnic şi econo-mic. În cazul pereŃilor plani se foloseşte şi ecuaŃia de transmitere a căldurii în care se admite o absorbŃie de căldură astfel încât nici izolaŃia să nu rezulte prea groasă, deci scumpă, nici consumul de frig să fie foarte mare. Întrucât calculul optimal al izolaŃiilor frigorifice pe baza criteriului economic al costurilor de investiŃie şi exploatare minime conduce la grosimi de izolaŃii care aplicate în practică devin neoptime la un moment dat după execuŃie, din cauza evoluŃiei preŃu-rilor în timp, s-a conceput un model de dimensionare optimală a acestor izolaŃii cu un grad sporit de generalitate, utilizând multiple criterii de optimizare dinamice simple şi compuse, care reflectă mai bine aspectele cantitative complexe economice şi energetice actuale şi de perspectivă.
7.12.2. MODELUL DE OPTIMIZARE În metoda optimizării, se minimizează expresia analitică a diverse criterii de opti-mizare simple sau compuse, modelul de calcul presupunând cunoscute unele date gene-

Modele de optimizare a instalaŃiilor 241
rale şi parametrii economico-energetici, date referitoare la încăperi sau conducte şi date referitoare la elementele de construcŃie sau la agentul frigorific transportat.
În figurile 7.22 şi 7.23 se prezintă schemele de calcul ale izolaŃiei fri-gorifice pentru un perete plan şi res-pectiv pentru un perete cilindric. Se exprimă conductivitatea termi-că a materialului izolant λiz sub for-ma unei dependenŃe analitice: miz tbb += 0λ (7.233) în care: b0, b sunt constante ce de-pind de natura materialului; tm −tem-peratura medie a stratului izolant. RezistenŃa totală la transfer ter-mic R se calculează cu relaŃiile: − pentru pereŃii plani ai încăpe-rilor frigorifice:
+++= ∑
= e
NS
j j
j
iiz
izRαλαλ1δ1δ
1
(7.234)
− pentru pereŃii cilindrici ai con-ductelor frigorifice:
+++=i
e
cpeii d
d
ddR ln
1(
2
111
λπαπαπ
)1
ln1
iz
p
pe
iz
iz d
d
d
d
λλ++ (7.235)
unde: ;δ2;δ2 izeizcie dddd +=+=
pizp dd δ2+= (7.236)
în care: δiz este grosimea izolaŃiei; δj, λj − grosimea şi conductivitatea termică a stra-tului j de material component al unui perete plan; δc − grosimea peretelui unei con-ducte; δp − grosimea stratului protector al izolaŃiei conductei; di, de − diametrul interior şi exterior al conductei; αi, αe − coeficienŃii schimbului de căldură convectiv la partea interioară, respectiv exterioară a elementului component al mediului răcit; NS – numă-rul straturilor de materiale componente ale unui element. În calculul grosimii optime a izolaŃiilor frigorifice se minimizează unele criterii analitice care Ńin seama de investiŃia necesară realizării izolaŃiei, cheltuielile de exploa-tare, energia înglobată în izolaŃie, energia cheltuită pentru menŃinerea temperaturii scă-zute etc., cu respectarea condiŃiei de prevenire a condensării umidităŃii din aer pe su-prafaŃa izolaŃiei: − pereŃi plani:
Fig. 7.22 Schema de calcul a izolaŃiei frigorifice
la un perete plan
Fig. 7.23 Schema de calcul izolaŃiei frigorifice
la un perete cilindric

242 Modelări numerice şi optimizări în instalaŃii
)( ipiie tt
R
tt−=
−α (7.237)
− pereŃi cilindrici:
−
−
−≥ 1
2ln
pre
ie
ee
iz
e
iz
e
iz
tt
tt
dd
d
d
d
αλ
(7.238)
în care: ti este temperatura mediului răcit (aer din încăpere sau agent frigorific din conductă); te − temperatura de calcul a aerului exterior; tp – temperatura suprafeŃei inte-rioare a unui perete plan; tpr − temperatura punctului de rouă al aerului. Criteriul economic de optimizare a grosimii izolaŃiei frigorifice este cel al cheltuie-lilor echivalente actualizate minime.łinând seama de expresia investiŃiei specifice to-tale în izolaŃie Iiz, a cheltuielilor anuale pentru întreŃinerea şi repararea izolaŃiei Cir, a costului anual al energiei frigorifice pierdute prin suprafaŃa de izolat Cf şi cea a ratei r de actualizare a cheltuielilor anuale de funcŃionare pe perioada timpului normat T de recuperare a izolaŃiei:
( )
( )( )∑
= +
−+=
+=
T
tT
T
trr
r
rr
1 00
0
0 1
11
1
1 (7.239)
acest criteriu presupune minimizarea funcŃiei obiectiv:
( )∑
= +
++=
T
tt
fir
izCr
CCIF
1 01 (7.240)
în care r0=1/T este cota de amortizare pentru durata de recuperare T (10…15 ani). Valoarea optimă a grosimii izolaŃiei se obŃine prin rezolvarea ecuaŃiei: ∂FC/∂δiz=0, care pentru pereŃi plani conduce în final la relaŃia:
( )
++−
+
−= ∑
=
NS
j ej
j
i
iz
iz
izief
izcrp
ttcr
1
1δ1
)1(1000
τσδ
αλαλ
λ (7.241)
iar pentru pereŃi cilindrici se poate efectua cu metoda aproximaŃiilor succesive, expli-citând relaŃia (7.240) sub forma:
( ) ( )R
ttcrdcrpF
ief
izeizizC 1000
τσδδ)1(
−+++= (7.242)
în care: ciz este costul specific de investiŃie al unui m3 de material izolant; p − cota de amortizare, reparaŃii şi întreŃinere pentru izolaŃie (0,04…0,07); σ − coeficientul pierde-rilor suplimentare de frig prin armăturile conductei sau datorită regimului nestaŃionar (1,05…1,3); τ − numărul de ore necesare furnizării frigului pe perioada unui an (1500…8760); cf − preŃul de cost al energiei frigorifice. Criteriul energetic presupune minimizarea sumei energiei înglobate în izolaŃie Eiz şi energiei de exploatare Ee necesară menŃinerii temperaturii scăzute a mediului răcit, exprimată analitic prin funcŃia: eizE EEF += (7.243) care pentru pereŃi cilindrici primeşte forma particulară:

Modele de optimizare a instalaŃiilor 243
( ) ( )R
ttTdeF ie
izeizizE 1000
τσδδ
−++= (7.244)
şi se poate minimiza aplicând metoda aproximaŃiilor succesive. Explicitând relaŃia (7.243) şi pentru pereŃi plani şi punând condiŃia de minim (∂FE/∂δiz=0) se obŃine, după un şir de transformări algebrice, expresia grosimii optime a izolaŃiei încăperilor frigorifice:
( )( )
( )
++−
+−−
= ∑=
NS
j ej
j
i
iz
izfe
izieciz
te
Ttttt
10
0 1δ1
273ηη1000
στδ
αλαλ
λ (7.245)
în care: eiz este energia specifică înglobată într-un m3 de material izolant; tc, t0 − tem-peratura de condensare şi vaporizare a agentului frigorific; ηe − randamentul mediu de obŃinere a energiei electrice din energia primară (0,2…0,4); ηf − randamentul ciclului frigorific real faŃă de un ciclu Carnot inversat referenŃial (0,6…0,8).
Criteriul economico-energetic ia în considerare în calcul, combinat, cele două cri-terii analizate anterior, reflectând astfel într-un mod mai obiectiv ponderea aspectelor tehnice şi a celor energetice pe durata de viaŃa a construcŃiei sau a conductei izolate.
Deci, dacă se reprezintă curbele FC=f(δiz) şi FE=f(δiz) în două plane perpendiculare (fig. 7.24), se observă că punctul M optim absolut (FC,min şi FE,min), reprezentat într-un al treilea plan format din axele FC şi FE, este un punct fictiv întrucât, în general, nu se află în domeniul de existenŃă a legăturii funcŃi-onale FE=f(FC). Se caută un alt punct N astfel ca distanŃa MN să fie minimă şi se defineşte un criteriu complex care să cuprin-dă pe cele două menŃionate, sub forma minimizării distanŃei eu-clidiene din planul (FC, FE):
( ) ( )2min,2
min, )ψ1(ψ EECCCE FFFFF −−+−= (7.246)
în care ψ este un coeficient de pondere criterială cu ajutorul căruia în diverse conjunc-turi de preŃuri, respectiv de penurie energetică, se poate da preferinŃă unuia sau altuia din criteriile componente. Pentru pereŃi plani se obŃine expresia generală a grosimii optime a izolaŃiei frigo-rifice sub forma:
Fig. 7.24 Reprezentarea tridimensională a optimizării
bicriteriale a grosimii izolaŃiei

244 Modelări numerice şi optimizări în instalaŃii
( )( )
( )
++−
−++
−
+−−
+
= ∑=
NS
j ej
j
i
iz
iziz
izie
fe
cf
izecrp
tt
t
ttTrc
1
0
0
1δ1
)ψ1()1(ψ
1000
στ
273
)ψ1(ψ
δαλα
λ
ληη
(7.247)
Făcând ψ = 1 şi ψ = 0 în relaŃia (7.246) sau (7.247) se regăsesc cazurile particulare de optimizare corespunzătoare criteriului economic şi energetic, exprimate prin relaŃiile (7.241) şi (7.245) pentru pereŃi plani şi prin relaŃiile (7.242) şi (7.244) pentru pereŃi cilindrici.
Pe baza modelului de dimensionare optimală a izolaŃiilor frigorifice s-au elaborat programele ordinatoare DEFRIZOP, pentru încăperi frigorifice şi COFRIZOP, pentru conducte frigorifice, având schemele logice din figurile 7.25 şi 7.26. Aceste programe cuprind şi algoritmul de calcul al grosimii izolaŃiei după metoda clasică.
Prin aplicarea criteriului complex de optimizare, pentru o pondere mai mare a cri-teriului energetic şi pentru ponderi egale ale ambelor criterii componente, valorile gro-simii izolaŃiei rezultă mari, situaŃie ce se poate normaliza admiŃând o pondere micşo-rată pentru criteriul energetic faŃă de cel economic. Valorile mari ale grosimii izolaŃiei se datorează în cazul menŃionat ponderii sporite a energiei necesare menŃinerii tempe-raturii în spaŃiul răcit faŃă de energia înglobată.
7.13. DIMENSIONAREA OPTIMALĂ A UNUI ANSAMBLU DE SCHIMBĂTOARE DE CĂLDURĂ
Schimbătoarele de căldură reprezintă aparate care au drept scop transferul de căl-dură de la un fluid la altul în procese de încălzire, răcire, fierbere, condensare sau în procese termice în care sunt prezente două sau mai multe fluide cu temperaturi diferite. În cadrul instalaŃiilor tehnologice, aparatele de schimb de căldură ocupă o poziŃie particulară, ele putând funcŃiona fie ca organe principale, când constituie părŃi deter-minante ale unor procese tehnologice sau ale unor procese exclusiv termice, fie ca or-gane secundare, introduse în instalaŃii din motive de economie de căldură sau de sub-stanŃă. Tipul cel mai răspândit de schimbătoare de căldură îl constituie aparatele recu-peratoare. Prin proiectarea optimală a acestor aparte ale instalaŃiei tehnologice evident că se obŃine şi o îmbunătăŃire a performanŃelor în faza de exploatare a obiectivelor astfel pro-iectate. Se consideră un ansamblu de patru schimbătoare cu parametrii cunoscuŃi, conectate ca în figura 7.27 şi se cere o dimensionare a ariilor prin care se realizează transferul de căldură astfel încât temperatura produsului util la ieşirea ultimului schimbător să fie maximă. Se impune condiŃia restrictivă ca aria totală de schimb să fie mai mică decât o valoare impusă a.
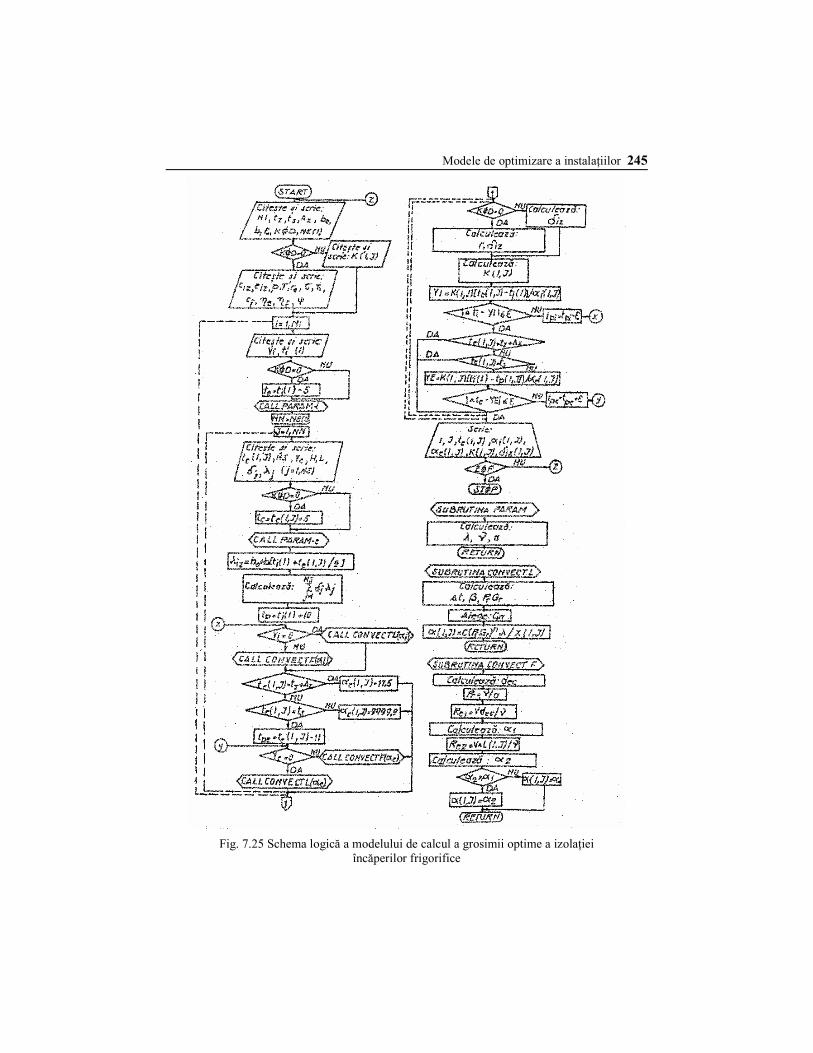
Modele de optimizare a instalaŃiilor 245
Fig. 7.25 Schema logică a modelului de calcul a grosimii optime a izolaŃiei
încăperilor frigorifice
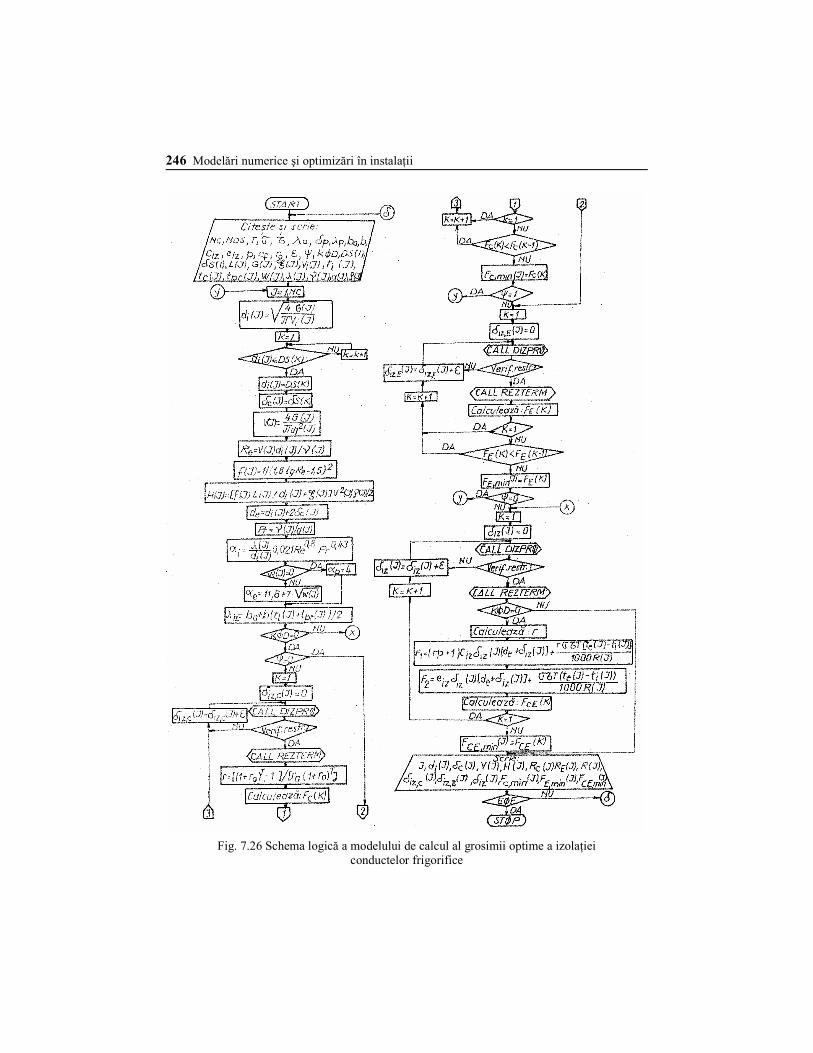
246 Modelări numerice şi optimizări în instalaŃii
Fig. 7.26 Schema logică a modelului de calcul al grosimii optime a izolaŃiei
conductelor frigorifice
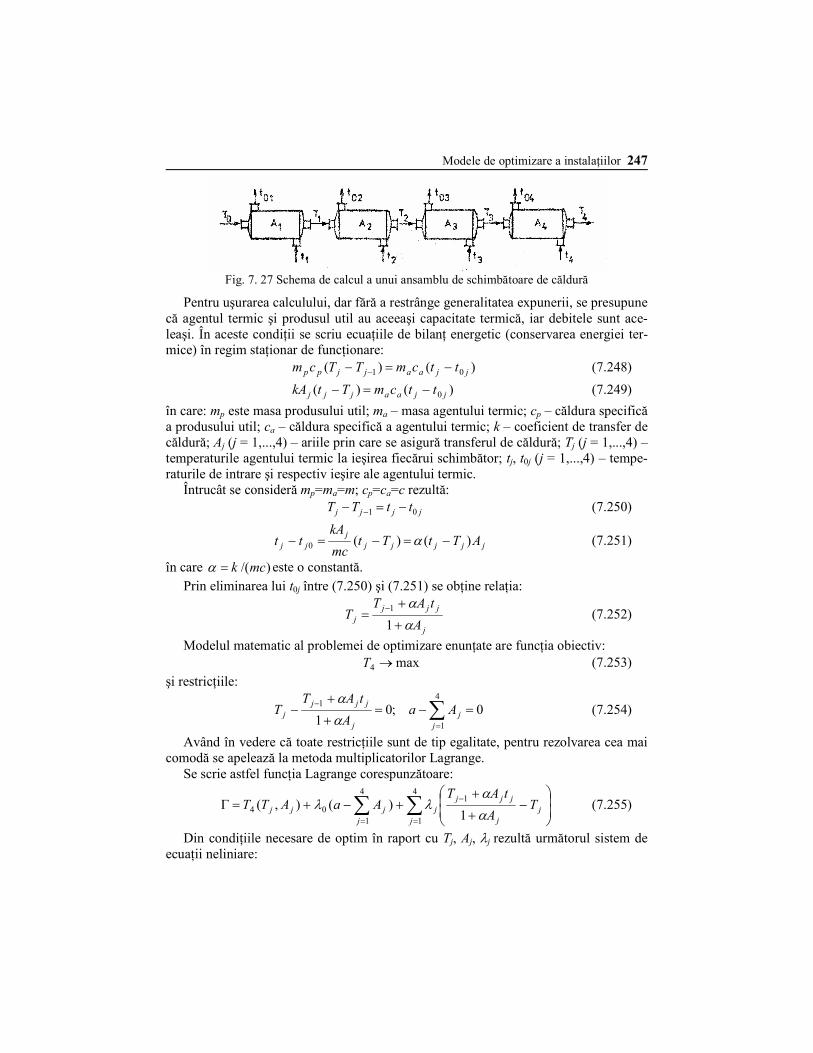
Modele de optimizare a instalaŃiilor 247
Fig. 7. 27 Schema de calcul a unui ansamblu de schimbătoare de căldură
Pentru uşurarea calculului, dar fără a restrânge generalitatea expunerii, se presupune că agentul termic şi produsul util au aceeaşi capacitate termică, iar debitele sunt ace-leaşi. În aceste condiŃii se scriu ecuaŃiile de bilanŃ energetic (conservarea energiei ter-mice) în regim staŃionar de funcŃionare: )()( 01 jjaajjpp ttcmTTcm −=− − (7.248)
)()( 0 jjaajjj ttcmTtkA −=− (7.249)
în care: mp este masa produsului util; ma – masa agentului termic; cp – căldura specifică a produsului util; ca – căldura specifică a agentului termic; k – coeficient de transfer de căldură; Aj (j = 1,...,4) – ariile prin care se asigură transferul de căldură; Tj (j = 1,...,4) – temperaturile agentului termic la ieşirea fiecărui schimbător; tj, t0j (j = 1,...,4) – tempe-raturile de intrare şi respectiv ieşire ale agentului termic. Întrucât se consideră mp=ma=m; cp=ca=c rezultă: jjjj ttTT 01 −=− − (7.250)
jjjjj
j
jj ATtTtmc
kAtt )()(0 −=−=− α (7.251)
în care )/(mck=α este o constantă. Prin eliminarea lui t0j între (7.250) şi (7.251) se obŃine relaŃia:
j
jjj
jA
tATT
α
α
+
+= −
11
(7.252)
Modelul matematic al problemei de optimizare enunŃate are funcŃia obiectiv: max4 →T (7.253)
şi restricŃiile:
0;01
4
1
1 =−=+
+− ∑
=
−
j
j
j
jjj
j AaA
tATT
α
α (7.254)
Având în vedere că toate restricŃiile sunt de tip egalitate, pentru rezolvarea cea mai comodă se apelează la metoda multiplicatorilor Lagrange. Se scrie astfel funcŃia Lagrange corespunzătoare:
−
+
++−+=Γ −
==∑∑ j
j
jjj
j
j
j
jjj TA
tATAaATT
α
αλλ
1)(),(
14
1
4
104 (7.255)
Din condiŃiile necesare de optim în raport cu Tj, Aj, λj rezultă următorul sistem de ecuaŃii neliniare:

248 Modelări numerice şi optimizări în instalaŃii
01
0
)4...,,1()1()(
1
)3,2,1(1)1(
1
4
1
201
4
=−+
+
=−
=+=−
=
==+−
−
=
−
∑
j
j
jjj
j
j
jjjj
jjj
TA
tAT
Aa
jAtt
jA
α
α
λαλ
λ
λαλ
(7.256)
Sistemul (7.256) fiind dificil de rezolvat se preferă o rezolvare numerică de forma (7.255) cu distribuirea calculului la două nivele. La nivelul de coordonare se determină multiplicatorii Lagrange λj (j = 1,...,4) printr-un algoritm de tip gradient după relaŃia iterativă:
( )
)4...,,1()1( =
∂Γ∂
−=+ j
i
j
ij
ij λ
λλ (7.257)
iar la nivelul local se maximizează funcŃia Λ cu parametrii λj furnizaŃi de nivelul coor-donator, cu un algoritm de căutare Hooke–Jeeves prin soluŃionarea succesivă a pro-blemei:
max1
),(1
4
14 →
−
+
++ −
=
∗∑ j
j
jjj
j
jjj TA
tATATT
α
αλ (7.258)
unde i este indicele etapei de calcul.
7.14. OPTIMIZAREA ÎNCĂRCĂRII UNOR SISTEME TERMOENERGETICE FUNCłIONÂND ÎN PARALEL
Se consideră cazul clasic al mai multor cazane de abur funcŃionând în paralel pe o conductă colectoare (fig. 7.28). Caracteristica energetică se exprimă sub forma:
2210 kkkkkk GcGccC ++= (7.259)
în care: Ck este consumul de combustibil al cazanului k; Gk – încărcarea (debitul de abur produs ) cazanului k.
Fig. 7.28 Schema funcŃionării mai multor cazane în paralel

Modele de optimizare a instalaŃiilor 249
FuncŃia obiectiv exprimând consumul total de combustibil:
min)()( 221
10 →++=∑
=kkkk
n
k
kk GcGccGF (7.260)
se minimizează în condiŃiile satisfacerii restricŃiei:
001
=−∑=
GGn
k
k (7.261)
Modelul (7.260), (7.261) reprezentând o problemă de programare neliniară cu res-tricŃie de egalitate se rezolvă aplicând metoda multiplicatorilor Lagrange. Pentru aceas-ta se formulează funcŃia auxiliară:
)()(1
02
21
10 ∑∑==
−Λ+++=Γn
k
kkkk
n
k
kk GGGcGcc (7.262)
Extremul căutat se găseşte printre soluŃiile sistemului:
0;0 =Λ∂Γ∂
=∂Γ∂
kG (7.263)
adică:
0;0 01
=−=Λ+∂∂ ∑
=
GGG
Cn
k
k
k
k (7.264)
pentru k = 1, 2,..., n. Prin eliminarea lui Λ rezultă condiŃia generală de optim, sub forma:
n
n
G
C
G
C
G
C
d
d
d
d
d
d
2
2
1
1 === K (7.265)
combinată cu restricŃia (7.261). Din examinarea relaŃiei (7.265) rezultă că optimul se găseşte acolo unde tangentele geometrice (a căror înclinare este dată de derivatele dCk/dGk) la curbele caracteris-ticilor energetice sunt paralele între ele. Pentru cazul sistemelor identice, rezultă că op-timul căutat este realizat prin încărcarea identică a echipamentelor. Dacă unele din echipamente sunt identice (n1< n), iar restul n−n1 nu, atunci echipamentele identice se încărcă la fel, în timp ce celelalte îndeplinesc condiŃiile (7.265).
7.15. OPTIMIZAREA REPARTIłIEI SARCINILOR TERMICE ŞI ELECTRICE PE ECHIPAMENTELE
UNEI CENTRALE ELECTRICE DE TERMOFICARE ÎN CAZUL UNUI REGIM DAT
Una dintre cele mai eficiente metode de economisire a combustibilului la centrale electrice de termoficare o reprezintă realizarea regimului impus de consumatorul ter-mic şi cel electric printr-o repartiŃie optimă a sarcinilor între agregatele centralei (turbi-ne şi staŃii de reducere−răcire). Deoarece problema este foarte dificilă în cazuri con-crete, se va prezenta doar modelarea sa matematică principală.
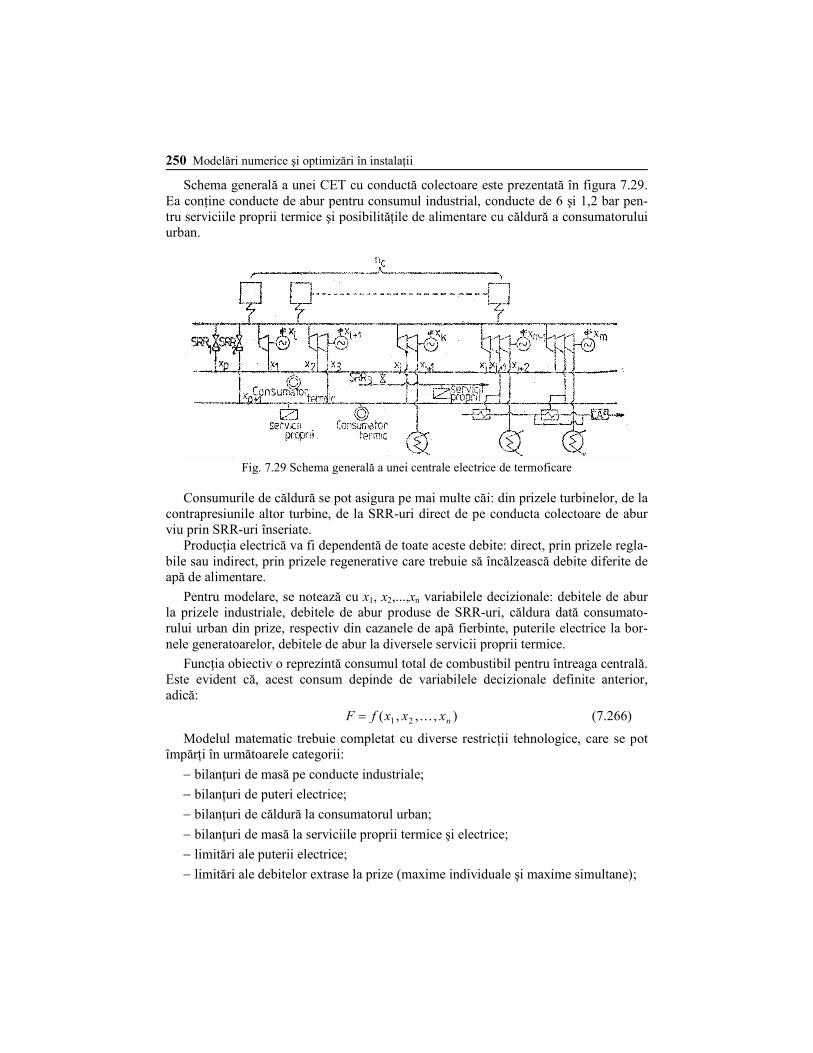
250 Modelări numerice şi optimizări în instalaŃii
Schema generală a unei CET cu conductă colectoare este prezentată în figura 7.29. Ea conŃine conducte de abur pentru consumul industrial, conducte de 6 şi 1,2 bar pen-tru serviciile proprii termice şi posibilităŃile de alimentare cu căldură a consumatorului urban.
Fig. 7.29 Schema generală a unei centrale electrice de termoficare
Consumurile de căldură se pot asigura pe mai multe căi: din prizele turbinelor, de la contrapresiunile altor turbine, de la SRR-uri direct de pe conducta colectoare de abur viu prin SRR-uri înseriate. ProducŃia electrică va fi dependentă de toate aceste debite: direct, prin prizele regla-bile sau indirect, prin prizele regenerative care trebuie să încălzească debite diferite de apă de alimentare.
Pentru modelare, se notează cu x1, x2,...,xn variabilele decizionale: debitele de abur la prizele industriale, debitele de abur produse de SRR-uri, căldura dată consumato-rului urban din prize, respectiv din cazanele de apă fierbinte, puterile electrice la bor-nele generatoarelor, debitele de abur la diversele servicii proprii termice.
FuncŃia obiectiv o reprezintă consumul total de combustibil pentru întreaga centrală. Este evident că, acest consum depinde de variabilele decizionale definite anterior, adică:
),,,( 21 nxxxfF K= (7.266)
Modelul matematic trebuie completat cu diverse restricŃii tehnologice, care se pot împărŃi în următoarele categorii:
− bilanŃuri de masă pe conducte industriale;
− bilanŃuri de puteri electrice;
− bilanŃuri de căldură la consumatorul urban;
− bilanŃuri de masă la serviciile proprii termice şi electrice;
− limitări ale puterii electrice;
− limitări ale debitelor extrase la prize (maxime individuale şi maxime simultane);

Modele de optimizare a instalaŃiilor 251
− limitări ale debitelor de intrare în turbine şi SRR-uri;
−limitări ale debitelor de abur consumate la serviciile proprii termice.
Toate bilanŃurile constituie restricŃii de tip egalitate, corespunzându-le relaŃiile din-tre intrări şi ieşiri:
∑∑==
=l
k
k
m
j
j xx11
(7.267)
în timp ce restricŃiile de tip limitări sunt inegalităŃi:
)()()( max,min, iii xxx ϕϕϕ ≤≤ (7.268)
în care: m reprezintă totalitatea variabilelor intrate în conturul de bilanŃ; l – totalitatea variabilelor ieşite din contur.
În relaŃia (7.268), funcŃia ϕ este dependentă de variabile xi şi exprimă limitări de încărcare ale echipamentelor centralei. Întrucât restricŃiile sunt relaŃii liniare, iar funcŃia obiectiv conŃine caracteristicile energetice ale turbinelor, care sunt tot liniare, progra-mul poate fi tratat ca un program liniar.
BIBLIOGRAFIE
1. ABRAMOV, N. N. et. al., Rascet vodoprovodnîi setei, Stroizdat, Moskva, 1976.
2. ALTMAN, T. BOULOS, P. Solving flow constrained networks: Inverse problem, Journal of Hydraulic Engineering, no. 5, 1995.
3. ANDREI, M. RĂSTURNOIU, G. Matrici rare şi aplicaŃiile lor , Editura Tehnică, Bucureşti, 1983.
4. BELLMAN, R. DREYFUS, S. Programarea dinamică, Editura Tehnică, Bucureşti, 1967.
5. BÉRGE, C. Théorie des graphes et ses applications, Dunod, Paris, 1968.
6. BERTSEKAS, D.P. Constrained optimization and Lagrange multiplier methods, Academic Press, New York, 1982.
7. BHAVE, P.R. Unknown pipe characteristics in Hardy-Cross method of network analysis, Journal Indian Water Works Association, vol. 18(2), 1986.
8. BHAVE, P. R. Extended period simulation of water system – Direct solution, Journal Environmental Engineering, vol. 114(5), 1988.
9. BOGOSLOVSKI, P.A. Ledovîi regim truboprovodov ghidroelektriceskih stanŃii, Gosenergoizdat, Moskva, 1950.
10. BOROŞ, E. OPRIŞ, D. Introducere în optimizarea liniară, Editura Facla, Timişoara, 1979.
11. BRĂTIANU, C. Metode cu elemente finite în dinamica fluidelor, Editura Academiei, Bucureşti, 1983.
12. BRDYS, M. ULANICKI, B. Operational control of water systems: Structures, algorithms and appli-cations, Prentice-Hall, London, UK, 1994.
13. BRENT, R.P. Algorithms for minimization without derivaties, Prentice-Hall, Lonon, 1973.
14. BUCUR, C. Metode numerice, Editura Facla, Timişoara, 1983.
15. BURDUCEA, C. LECA, A. Conducte şi reŃele termice, Editura Tehnică, Bucureşti, 1974.
16. CARLIER, M. Hydraulique générale et appliquée, Eyrolles, Paris, 1980.
17. CÉA, J. Optimisation – Théorie et algorithmes, Dunod, Paris, 1971.
18. CHANDRASHEKAR, M. STEWART, K. Sparsity oriented analysis of large pipe networks, Journal of the Hydraulics Division, ASCE, no. HY4, 1975.
19. CHUNG, T.J. Finite element analysis in fluid dynamics, New York, 1978.
20. CIOC, D. FuncŃionarea pompelor în reŃele de conducte, ConferinŃa de Maşini Hidraulice şi Hidro-dinamică, Timişoara, vol IV, 1985.
21. CIOC, D. Programul RETF pentru calculul regimului permanent în reŃele complexe de conducte, Rev. Hidrotehnica, nr. 10-12, 1990.
22. COOLINS, M. COOPER, L. Solving the pipe network analysis problem using optimization techniques, Management Science, no. 7, 1978.
23. COLLINS, M. et al., Multiple operating points in complex pump network, Journal of the Hydraulics Division, ASCE, no. HY3, 1979.
24. COULBECK, B. Dynamic simulation of water distribution systems, Math. Computational Simulation, vol. 22(3), 1980.
25. CREłU, GH. Optimizarea sistemelor de gospodărire a apelor, Editura Facla, Timişoara, 1980.

Bibliografie 253
26. CROSS, H. Analysis of flow in networks of conduit and conductors, Univ. of Illinois, Bul. no. 286, 1936.
27. DANCEA, I. Metode de optimizare, Editura Dacia, Cluj-Napoca, 1976.
28. DANDY, G.C. SIMPSON, A.R. MURPHY, L.J. An improved genetic algorithm for pipe network opti-mization, Water Resources Research, 32(2), 1996.
29. DAVIS, P.J. RABINOWITZ, P. Methods of numerical integration, Academic Press, New York, 1975.
30. DÉMIDOVITCH, B. MARON, I. Eléments de calcul numérique, Mir, Moscou, 1979.
31. DINICĂ, G. Metode variaŃionale şi aplicaŃii, Editura Tehnică, Bucureşti, 1980.
32. DIVÉNOT, A. Une nouvelle méthode de calcul des réseaux maillés, La Houille Blanche, nr.6, 1980.
33. DODESCU, GH. Metode numerice în algebră, Editura Tehnică, Bucureşti, 1979.
34. DORN, W. CRACKEN, D. Metode numerice cu programe în Fortran, Editura Tehnică, Bucureşti, 1976.
35. DRAGOMIRESCU, M. MALIłA, M. Programare neliniară, Editura ŞtiinŃifică şi Enciclopedică, Bucureşti, 1972.
36. DUMITRESCU, I. AplicaŃii inginereşti ale calculatoarelor, Editura Didactică şi Pedagogică, Bucu-reşti, 1976.
37. DUMITRU, V. Programare neliniară, Editura Academiei, Bucureşti, 1975.
38. FIACCO, A.V. CORMICK, C.P. Nonlinear programming, John Wiley, New York, 1968.
39. FLETCHER, R. Optimization, Academic Press, London, 1969.
40. FORSYTHE, G.E. WASORW, W.R. Finite difference methods for partial differential equation, John Wiley, New York, 1960.
41. FRÖBERG, C. E. Numerical mathematics. Theory and computer applications, Benjamin/Cummings, Amsterdam, 1985.
42. GASS, S.I. Linear programming, Mc. Graw-Hill, New York, 1969.
43. GÂRBEA, D. Analiză cu elemente finite, Editura Tehnică, Bucureşti, 1990.
44. GHEORGHE, G. DistribuŃia şi utilizarea gazelor naturale, Editura Tehnică, Bucureşti, 1972.
45. GILL, P. Practical optimization, Academic Press, London, 1981.
46. GODUNOV, S.K. REABENKI, V.S. Scheme de calcul cu diferenŃe finite, Editura Tehnică, Bucureşti, 1977.
47. GOFMAN, E. RODEH, M. Loop equation with unknown pipe characteristics, Journal of the Hydra-ulics Division, ASCE, no. HY9, 1981.
48. GOODWIN, S.J. The Results of the experimental program on leakage and leakage control, Technical Report TR 154, Walter Research Centre, Swindon, 1980.
49. HIMMELBLAN, D.M. Applied nonlinear programming, Mc. Graw-Hill, New York, 1972.
50. HINTON, E. OWEN, D. Finite element programming, Academic Press, London, 1977.
51. IAMANDI, C. Hidraulica instalaŃiilor, Editura Tehnică, Bucureşti, 1985.
52. ILICI, C. Probleme de optimizare şi algoritmi de aproximare a soluŃiilor, Editura Academiei, Bucu-reşti, 1980.
53. IONESCU, V. POPEEA, C. Optimizarea sistemelor, Editura Didactică şi Pedagogică, Bucureşti, 1981.
54. IONESCU, T. Grafuri, Editura Didactică şi Pedagogică, Bucureşti, 1974.
55. IORGULESCU, I. Metode de calcul a reŃelelor de conducte folosind formulări variaŃionale, Rev. Hidrotehnica, nr. 5, 1987.
56. IRONS, B.M. AHMAD, S. Techniques of finite elements, John Wiley, New York, 1980.
57. ISSACS, L.T. MILLS, K.G. Linear theory methods for pipe network analysis, Journal of the Hydra-ulics Division, ASCE, no. HY7, 1980.

254 Modelări numerice şi optimizări în instalaŃii
58. JOWIT, P.W XU, C. Optimal valve control in water distribution networks, Journal Water Resource Planning Management, ASCE 116(4), 1990.
59. KAMSAY, J.O. A family of gradient methods for optimization, The Computer Journal, no.4, 1970.
60. KAUFMANN, A. Metode şi modele ale cercetării operaŃionale, Editura ŞtiinŃifică şi Enciclopedică, Bucureşti, 1967.
61. KILYENI, ŞT. Optimizări şi calculatoare în electroenergtică, Litografia I.P. Timişoara, 1987.
62. KREYSZING, K. E. Advanced engineering mathematics, John Wiley & Sons, New York, 1999.
63. LANSEY, K. E. AWUMAH, K. Optimal pump operations considering pump switches, Journal Water Resource Planning Management, vol. 120(1), 1994.
64. LECA, A. ş.a. Conducte pentru agenŃi termici, Editura Tehnică, Bucureşti, 1986.
65. LECA, A. MLADIN, C. STAN, M. Transfer de căldură şi masă, Editura Tehnică, Bucureşti, 1998.
66. LEGRAS, J. Méthodes et techniques de l’analyse numérique, Dunod, Paris, 1971.
67. LEONTE, A. VRACIU, G. Elemente de calcul matriceal cu aplicaŃii, Editura Tehnică, Bucureşti, 1975.
68. LITEANU, C. RÎCĂ, I. Optimizarea proceselor analitice, Editura Academiei, Bucureşti, 1985.
69. MARINESCU, GH. ş.a Probleme de analiză numerică rezolvate cu calculatorul, Editura Academiei, Bucureşti, 1987.
70. MARUSCIAC, I. Metode de rezolvare a problemelor de programare neliniară, Editura Dacia, Cluj-Napoca, 1973.
71. MARCHOUK, G.I. Méthodes de calcul numerique, Mir, Moscou, 1980.
72. MÃNESCU, Al. SANDU, M. IANCULESCU, O. Alimentări cu apă, Editura Didactică şi Pedagogică, Bucureşti, 1994.
73. MĂRUŞTER, ŞT. Metode numerice în rezolvarea ecuaŃiilor neliniare, Editura Tehnică, Bucureşti, 1981.
74. MIHOC, C. ŞTEFĂNESCU, A. Programarea matematică, Editura Didactică şi Pedagogică, Bucureşti, 1973.
75. NORRIE, D.H. VRIES, G. An introduction to finite element analysis, Academic Press, New York, 1978.
76. OANCEA, N. SÂRBU, I. RETEZAN, A. Prevenirea îngheŃului apei în conductele aeriene, Rev. Hi-drotehnica, nr. 3, 1984.
77. OLARIU, V. BRĂTIANU, C. Modelarea numerică cu elemente finite, Editura Tehnică, Bucureşti, 1986.
78. PASCARIU, I. Elemente finite, Editura Militară, Bucureşti, 1985.
79. PĂVĂLOIU, I. Rezolvarea ecuaŃiilor prin interpolare, Editura Dacia, Cluj-Napoca, 1981.
80. PCHÉNITCHNY, B. DANILINE, Y. Méthodes numériques dans les problémes d’extrémum, Mir, Moscou, 1977.
81. PEZZINGA, G. GUELI, R. Discussion of “Optimal location of control valves in pipe networks by ge-netic algorithms”, Journal Water Resource Planning Management, ASCE 125(1), 1999.
82. PEZZINGA, G. PITITTO, G. Combined optimization of pipes and control valves in water distribution networks, Journal of Hydraulic Research, 43(6), 2005.
83. PICARD, C.F. Graphes et questionnaires, Gauthier-Wilars, Paris, 1971.
84. POPESCU, H. CHIROIU, H. Calculul structurilor optimale, Editura Academiei, Bucureşti, 1981.
85. PURCARU, I. Elemente de algebră şi programare liniară, Editura ŞtiinŃifică şi Enciclopedică, Bucu-reşti, 1982.
86. RAO, S., BREE, D. Extended period simulation of water systems – Part A, Journal of the Hydraulics Division, ASCE, vol. 103(2), 1977.
Bibliografie 255
87. RAO, S., MARKEL, L. BREE, D. Extended period simulation of water systems – Part B, Journal of the Hydraulics Division, ASCE, vol. 103(3), 1977.
88. RAO, S. The finite element method im engineering, Pergamon Press, New York, 1981.
89. RAMSAY, J.O. A family of gradient methods for optimization, The Computer Journal, no. 4, 1970.
90. REIS, L.F. PORTO, R.M. CHAUDRY, F.H. Optimal location of control valves in pipe networks by genetic algorithms, Journal Water Resource Planning Management, ASCE 123(6), 1997.
91. SALVADORI, M.G. BARON, M.L. Metode numerice în tehnică, Editura Tehnică, Bucureşti, 1972.
92. SAVIC, D.A. WALTERS, G.A. Genetic algorithms for least – cost design of water distribution net-works, Journal Water Resource Planning Management, ASCE 123(2), 1997.
93. SĂVULESCU, T. InstalaŃii de încălzire şi ventilare, Editura Tehnică, Bucureşti, 1985.
94. SÂRBU, I. Model de calcul al regimului hidraulic în reŃele complexe de distribuŃie a apei, Rev. Hi-drotehnica, nr.8, 1987.
95. SÂRBU, I. RETEZAN, A. Optimizarea, prin simulare numerică pe calculator, a consumului de apă tehnologică al unei intreprinderi industriale cu sistem propriu de alimentare, Rev. Hidrotehnica, nr. 9, 1988.
96. SÂRBU, I. Aspects du calcul des réseaux annulaires de distribution des gaz à travers la théorie des graphes, Buletinul ŞtiinŃific al I. P.Timişoara, tom 33, 1988.
97. SÂRBU, I. PODRUMAR, D. BORZA, I. BRATA, S. Optimisation du dimmensionement des réseaux de chauffage, Buletinul ŞtiinŃific al U.T.Timişoara, tom 37, nr. 1-2, 1992.
98. SÂRBU, I. Calculul instalaŃiilor pentru construcŃii, Editura Tehnică, Bucureşti, 1994.
99. SÂRBU, I. BORZA, I. Aplicarea cercetării operaŃionale la optimizarea traseului unei magistrale de aducŃiune, Conf. "InstalaŃii pentru ConstrucŃii şi Economia de Energie", Iaşi, vol I, 1995.
100. SÂRBU, I. Utilizarea calculatoarelor în ingineria de instalaŃii, Editura Helicon, Timişoara, 1996.
101. SÂRBU, I. Optimizarea energetică a sistemelor de distribuŃie a apei, Editura Academiei Române, Bucureşti, 1997.
102. SÂRBU, I. Optimisation du tracé des réseaux arborescents, Buletinul ŞtiinŃific al U.P. Timişoara, tom 42, nr.1, 1997.
103. SÂRBU, I. BORZA, I. Optimal design of water distribution networks, Journal of Hydraulic Research, no. 1, 1997.
104. SÂRBU, I. InstalaŃii frigorifice, Editura Mirton, Timişoara, 1998.
105. SÂRBU, I. KALMAR, F. Proiectarea asistată de calculator a instalaŃiilor, Editura Mirton, Timi-şoara, 2000.
106. SÂRBU, I. Modelarea matematică a procesului de absorbŃie din absorbitoarele instalaŃiilor frigo-
rifice, Conf. Int. "InstalaŃii pentru ConstucŃii. şi Confort Ambiental", Timişoara, vol I, 2000.
107. SÂRBU, I. Analysis of looped water supply networks, La Hoiulle Blanche, no. 3-4, 2001.
108. SÂRBU, I. Numerical simulation and prevention of water freezing in outdoor penstocks, Journal of Hydraulic Research, no. 4, 2001.
109. SÂRBU, I. Calcul hydraulique généralisé des canaux à l’écoulement permanent et uniform, Bule-tinul ŞtiinŃific al U.P. Timişoara, tom 47, nr. 1-2, 2002.
110. SÂRBU, I. KALMAR, F. Optimization of looped water supply networks, Periodica Polytechnica Bu-dapesta, no. 46(1), 2002.
111. SÂRBU, I. KALMAR, F. Optimizarea energetică a clădirilor, Editura Matrix Rom, Bucureşti, 2002.
112. SÂRBU, I. Analiza nodală a reŃelelor inelare de alimentare cu apă, Rev. Hidrotehnica, nr.4, 2004.
113. SÂRBU, I. Dimensionarea optimală a izolaŃiilor frigorifice, Rev. Tehnica InstalaŃiilor, nr.1, 2005.
114. SÂRBU, I. Numerical analysis of two dimensional conductivity in steady state regime, Periodica Polytechnica Budapesta, no. 49(2), 2005.

256 Modelări numerice şi optimizări în instalaŃii
115. SÂRBU, I. Optimizarea repartiŃiei debitelor de tranzit în reŃelele de alimentare cu apă, Rev. Hidro-tehnica, nr. 6, 2005.
116. SÂRBU, I. OSTAFE, G. Simularea dinamică a reŃelelor de distribuŃie a apei, Rev. Hidrotehnica, nr. 1-2, 2007.
117. SÂRBU, I. OSTAFE, G. Proiectarea optimală a reŃelelor complexe de alimentare cu apă, Rev. Hidrotehnica, nr. 4-5, 2007.
118. SÂRBU, I. OSTAFE, G. Optimization model of complex water distribution systems, Fift Int. Sym-posium on Environmental Hydraulics, Tempe, Arizona, 2007.
119. SÂRBU, I. KALMAR, F. CINCA, M. InstalaŃii termice interioare – Optimizare şi modernizare energetică, Editura Politehnica, Timişoara, 2007.
120. SÂRBU, I. Optimal design of water supply networks in buildings, Technical Bulletin of Debrecen University, no. 1-2, 2009.
121. SEGERLIND, L.J. Applied finite element analysis, John Wiley, New York, 1978.
122. SIMA, V. VARGA, A. Practica optimizării asistată de calculator, Editura Tehnică, Bucureşti, 1986.
123. SIMPSON, A.R. DANDY, G.C. MURPHY, L.J. Genetic algorithms compared to other techniques for pipe optimization, Journal Water Resource Planning Management, ASCE 120(4), 1994
124. SMITH, G.D. Numerical solution of partial differential equations, Channdon Press, Oxford, 1978.
125. STARANG, G. The finit element method and approximation theory numerical solution of partial differential equation, Academic Press, New York, 1970.
126. STORKMANN, M. Izolarea împotriva temperaturilor scăzute prin materiale flexibile de izolaŃie, Rev. Tehnica InstalaŃiilor, nr. 5, 2004.
127. ŞCHIOP, A. Analiza unor modele de discretizare, Editura Academiei, Bucureşti, 1978.
128. ŞTEFĂNESCU, A. ZIDĂROIU, C. Cercetări operaŃionale, Editura Didactică şi Pedagogică, Bucu-reşti, 1981.
129. TODINI, E. PILATI, S. A Gradient method for the solution of looped pipe networks, Int. Conf. on Computer Applications in Water Supply and Distribution, V(1), 1987.
130. TOMA, M. OGĂDESCU, I. Metode numerice şi subrutine, Editura Tehnică, Bucureşti, 1980.
131. TOMESCU, I. Grafuri şi programare liniară, Editura Didactică şi Pedagogică, Bucureşti, 1975.
132. TOPAL, N. ContribuŃii privind procesul de absorbŃie din instalaŃiile frigorifice, Rev. ConstrucŃii, nr. 1-2, 1989.
133. ULANICKA, K. ULANICKI, B. RANCE, J. COULBECK, B. Benchmarks for water networks mo-delling, Hydroinformatics ’98, Rotterdam, 1998.
134. VINTILĂ, ŞT. InstalaŃii sanitare şi de gaze-îndrumar de proiectare, Editura Tehnică, Bucureşti, 1987.
135. VRACIU, G. POPA, A. Metode numerice cu aplicaŃii în tehnica de calcul, Editura Scrisul Românesc, Craiova, 1982.
136. WALSH, G.R. Methods of optimization, John Wiley, New York, 1975.
137. WALSKI, T.M. ChASE, D.V. SAVIC, D.A. Water distribution modelling, Haestad Press, Waterbury, 2001.
138. WEGGEL, L. On a discreti version of the Newton-Raphson method, Siam, no. 3, 1966.
139. WOOD, D. CHARLES, C. Hydraulic networks analysis using linear theory, Journal of the Hydra-ulics Division, ASCE, no.HY7, 1972.
140. WOOD, D. Computer analysis of flow in pipe networks including extended period simulation, Uni-versity of Kentucky, Lexington, 1980.
141. WRIGHT, W.G. SCHULTE, A.M. Overview of dynamic computer modelling, Fourth International Conference on Hydraulic Software Hydrosoft, vol. 92, Valencia, Spain, 1992.

















