58
1 1 MODELAREA PROCESELOR FIZICE SI CHIMICE (MPFC) Miercuri, D01, 12.00h, anii I(A+C), C1+C2+C3
11
MODELAREA PROCESELOR FIZICE SI CHIMICE (MPFC)
Miercuri, D01, 12.00h, anii I(A+C), C1+C2+C3
22
CUPRINS-pag1 1. Introducere
1.1 Aplicatii ale modelelor matematice (MM) 1.2 Tipuri de sisteme 1.3 Pasii de modelare a unui sistem dinamic 1.4 Tipuri de modele 1.5 Modele in timp continuu sau in timp discret?
2. Bazele modelarii proceselor chimice 2.1 Starile sistemelor chimice 2.2 Bilanturi de masa la lichide si gaze 2.3 Bilanturi de energie 2.4 Bilanturi si echilibre la nivel de componente 2.5 Modelarea mediului
3. Utilizarea tehnicilor de transformare la determinarea MM 3.1 Transformata Laplace 3.2 Functii de transfer 3.3 Aproximari discrete 3.4 Transformate z
33
CUPRINS-pag.2
4. Linearizarea ecuatiilor neliniare ale MM
4.1 MM neliniare aferente proceselor
4.2 Metode de linearizare
4.3 Exemple de linearizari
4.3.1 MM aferente evaporatoarelor
4.3.2 MM aferente reactoarelor chimice5. Simularea proceselor si sistemelor chimice
6. Dinamica reactoarelor tanc de amestec
7. Dinamica reactoarelor tubulare
8. Dinamica schimbatoarelor de caldura
9. Dinamica evaporatoarelor si separatoarelor
10. Dinamica coloanelor de distilare
11. Modelare si modele fuzzy
12. Modelare si modele neuro-fuzzy
13. Modele hibride
44
CUPRINS-pag.3
Astazi:- Functii dar si comenzi Matlab mult utilizate
- Operatori Matlab (\; /; *; ; .*; ^; .^;’; .’;…;:;%;@ )- Constante interne existente in Matlab (pi; NaN;; Inf: eps; exp;
i….)- Functii interne existente in Matlab (abs; acos; asin; atan;
bessel; cos; cosh;- Comenzi Matlab;- Comenzi grafice;- Programare Matlab- Comenzi Simulink- Blocuri Simulink
55
Vezi si Cap. 11 – “Sisteme si modelare” (Systems and Modelling Polytechnic Hong Kong) din partitia E:\Kalman_Tarbuc_licenta_2006-2007_ISA_etc\c_process control and automation\PLCTraining_2_ISA\PLC, pentru cursul de Ch & MP (bilanturi de masa , de energie, tratarea apelor uzate, Newton etc),iar aici: (1) PLC Theory Book.pdf (1056pag!)
(2) Industrial Control Hong Kong 2000.pdf! (3) PC_Process Control_4-ISA_Fuzzy_NN, (4) Engineering_Technical_Handbook.pdf (5) Tech_Handbook.pdf (6) PLC_Automated_Control+Process_3_ISA.pdf…. (7) Advanced_Control_Engineering.pdf, 2,643KB!!!Burns, Oxford (8) Control Tutorial_5_ISA (9) Doc_ISA_Valve (10) Control Theory - Robust Systems, Theory And Applications.pdf pt
SICA-TACR !!!
SISTEME: DEFINITIE si concepte introductive
Sistem: ansamblu/colectie de elemente in interactiune, ce constituie un intreg unificat
(gr. ‘sistem’ =a combina, a pune impreuna) Subsistem: sistem ce este parte a altui sistem
(un component, un element) Observatie: un sistem se distinge fata de
elemente, procese ori dispozitive, prin numarul, aranjamentele si complexitatea acestora
6
SISTEME: DEFINITIE si concepte introductive
Sistem: ansamblu/colectie de elemente in interactiune, ce constituie un intreg unificat
(gr. ‘sistem’ =a combina, a pune impreuna) Subsistem: sistem ce este parte a altui sistem
(un component, un element) Observatie: un sistem se distinge fata de
elemente, procese ori dispozitive, prin numarul, aranjamentele si complexitatea acestora
7
SISTEME – exemple
Exemple: o roata → dispozitiv, dar un automobil → sistem! merg la medicul de familie → proces, dar Casa de Sanatate s.c.l.
→ un sistem! Pamantul → element, dar cele 9 planete ce orbiteaza+ Soarele
→ sistemul solar! In corpul uman (fiinte vii):
Sistemul nervos Sistemul circulator Sistemul digestiv Sistemul reproductiv etc…
Paranteză (Stefan Odobleja, “Psihologia consonantista”, 1937)
8
TIPURI DE SISTEME
Sistem deschis: poate fi influentat de evenimente exterioare (exogene) frontierelor definite pentru acesta.
Sistem inchis: care se autoconţine, in sensul ca evenimentele exterioare nu-l influenţează (isi este suficient)
Sistem mixt (deschis + inchis): in practica, amestecul, combinarea celor doua de mai sus;
Sistem conceptual: unul realizat din idei (pentru a asista obtinerea unor scopuri specifice sau a modela sisteme fizice)
Sistem dinamic: unul care are componente sau fluxuri I/E care se modifica in timp
Sistem fizic: unul realizat din-/ si functionand cu - masa si energie
9
SISTEME – concepte introductive
SISTEM – o entitate ce proceseaza un set de semnale (intrari) pentru a produce un alt set de semnale (iesiri)
Cutia neagra (black box) este o ilustrare convenabila a unui sistem, variabilele de intrare (cauze: m1(t), m2(t),….mj(t)) sunt aplicate, iar la alt set de terminale accesibile sunt observate variabilele de iesire (efecte: y1(t), y2(t),….yk (t))
10
SISTEME – concepte introductive
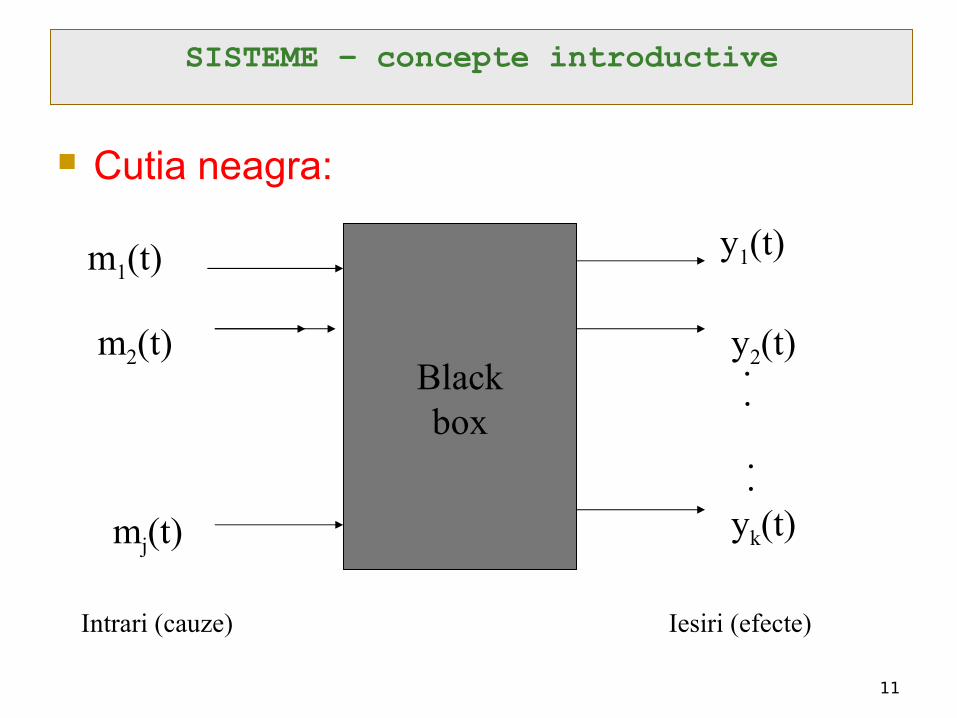
Cutia neagra:
Blackbox
m1(t)
m2(t)
mj(t)
y1(t)
y2(t)
yk(t)
.
.
.
.
Intrari (cauze) Iesiri (efecte)
11
SISTEME – concepte introductive
Studiul sistemelor, trei arii majore: 1. Modelare matematica (MM - vezi mai jos) 2. Analiza:
Cum se determina iesirile sistemului cand sunt date: Intrarile sistemului si Modelul sistemului (regulile de conducere a sistemului)
3. Proiectare (sinteza): Cum se construieste un sistem care va produce un set
dorit de iesiri cand sunt date Intrarile sistemului
12
SISTEME – categorii/ clasificare (I)
1a-b. Sisteme lineare si nelineare 2a-b. Sisteme cu parametri constanti si cu parametri
variabili in timp 3a-b. Sisteme instantanee (fara memorie) si
dinamice (cu memorie) 4a-b. Sisteme cauzale si necauzale/ acauzale 5a-b. Sisteme cu parametri concentrati si cu
parametri distribuiti 6a-b. Sisteme in timp continuu si sisteme in timp
discret 7a-b. Sisteme analogice si digitale
13

SISTEME – categorii/ clasificare (II)
1a-b. Sisteme lineare si nelineare Linearitate avem atunci cand:
E valabil principiul suprapunerii (superpozitie, aditivitate), adica: Daca mai multe cauze/ intrari actioneaza asupra sistemului,
efectul total asupra acestuia datorat acestor cauze, se poate determina considerand fiecare cauza separat, in timp ce celelalte se considera a fi zero. Efectul total este suma tuturor efectelor componentelor.
E valabila proprietatea de omogenitate, adica: Daca o cauza (intrare) creste de n ori, atunci efectul
(iesirea) creste tot de n ori Adica, iesirea sistemului este proportionala cu intrarea
sa
14
SISTEME – categorii/ clasificare (III)
1a-b. Sisteme lineare si nelineare Raspunsul unui sistem linear-SL (SISO sau MIMO)
Iesirea unui sistem la t ≥ 0 are doua cauze independente: 1. Conditiile initiale ale sistemului (starea sistemului) la t = 0
(componenta iesirii se numeste raspuns la intrare zero (RIZ), adica avem f(t) = 0 pentru t ≥ 0) si, a doua componenta,
2. Intrarea f(t) pentru t ≥ 0, cand conditiile initiale (CI, la t=0) se presupune ca sunt zero (cand aceste CI sunt zero, se zice ca sistemul este in starea zero). De aceea, componenta aceasta a raspunsului se numeste raspuns la stare zero (RSZ). Avem:
Raspunsul unui SL = RIZ + RSZ.
15
SISTEME – categorii/clasificare (IV)
2a-b. Sisteme cu parametri invarianti si parametri variabili in timp Cele cu parametri invarianti se mai numesc sisteme cu
parametri constanti. Caracteristici: Pentru orice stare initiala data, evolutia iesirii va depinde
numai de forma (evolutia) intrarii si nu de momentul de timp la care se aplica aceasta.
Observatie: Toate sistemele care au legatura I/E descrisa prin EDO, sunt sisteme lineare. Daca au coeficientii constanti, sunt sisteme lineare invariante in timp (LTI=linear time-invariant), iar daca au coeficientii variabili in timp, se numesc sisteme lineare variabile in timp (LTV=linear time-varying systems)
16
SISTEME – categorii/clasificare (V)
3a-b. Sisteme instantanee (fara memorie) si sisteme dinamice (cu memorie) 3a. Sisteme instantanee (fara memorie)-acelea la care
iesirea acestora la orice moment de timp t, depinde, cel mult, de intensitatea intrarii(lor) la/din acelasi moment de timp, dar de niciuna din valorile trecute sau viitoare ale intrarii(lor).
3b. Sisteme dinamice (cu memorie)- acelea la care iesirea depinde de intrari, spre deosebire de 3a.
3b’. Sisteme cu memorie finita – acelea la care raspunsul la momentul de timp t este complet determinat de semnalele de intrare din trecutul (memoria) de T secunde [intervalul de la (t-T) la timpul t. Observatie: Sistemele instantanee sunt cazuri speciale de
s.dinamice
17
SISTEME – categorii/clasificare (VI-a)
4a-b. Sisteme cauzale si necauzale 4a. Sistem cauzal (cunoscut si ca sistem fizic sau
neanticipativ) - unul pentru care iesirea la orice moment de timp t0 depinde numai de valoarea intrarii f(t) pentru t ≤ t0, adica (la momentul respectiv), depinde numai de valorile trecute si prezente ale intrarii f(t), nu si de cele viitoare. Simplu: cauzal = nu avem iesire inainte de a se aplica intrarea. Sist. fizice sunt in mod necesar cauzale!
4b. Sistem necauzal (anticipativ) – unul care violeaza conditia de mai sus (unul care poate raspunde la intrarile viitoare; unul profetic: cunoaste intrarea viitoare si actioneaza la aceasta in prezent!). Nu se poate construi in practica
18
SISTEME – categorii/clasificare (VI-b)
4b. Sistem necauzal (anticipativ) continuare: Desi nu sunt realizabile in timp real, se studiaza deoarece:
1. Sunt realizabile cand variabila independenta este alta decat “timpul” (de exemplu spaţiul). Exemplu: o sarcina electrica q(x) plasata in lungul axei x, pentru x ≥ 0, produce campul electric E(x) care-i prezent in fiecare punct al axei x (de la x = - ∞ la + ∞). Intrarea este densitatea de sarcina q(x) care starteaza la x = 0, dar iesirea [campul electric E(x)] incepe inainte de x =0 (de la - ∞). Rezulta ca sistemul cu sarcina spatiala este necauzal.
2. La sistemele temporale de procesare a semnalelor ce au toate datele de intrare preinregistrate (geofizice, meteorologice, de vorbire etc), adica avem disponibile valorile viitoare ale intrarii, pentru a calcula iesirea y(t) dupa, pentru orice t, dar nu in timp real!
3. Dau marginea superioara a performantei unui sistem (filtru) cauzal, la proiectarea filtrelor de separare a semnalului din zgomot. In aceste cazuri, filtrul optim este un filtru necauzal.... nerealizabil!
19

SISTEME – categorii/clasificare (VII)
5a-b. Sisteme cu parametri concentrati si cu parametri distribuiti
5a. Sisteme cu parametri concentrati – la care se presupune ca fiecare componenta a sistemului este concentrata intr-un singur punct in spatiu. Mai departe: la MM cu parametri concentrati, marimile sunt functii numai de o singura variabila independenta (timpul), deci folosim numai EDO.
5b. Sistemele cu parametri distribuiti – semnalele sunt functii de spatiu si de timp → MM cu EDP.
20
SISTEME – categorii/clasificare (VIII-a)
6a-b. Sisteme in timp continuu si sisteme in timp discret 6a. Sisteme in timp continuu – acele sisteme ale caror intrari
si iesiri, adica m(t) si y(t), sunt semnale in timp continuu, adica t :T→ℛ.
6b. Sisteme in timp discret – sisteme ale caror intrari si iesiri sunt semnale in timp discret, adica definite numai la momente discrete de timp t0, t1, t2, ….,tk,…, notate m(tk), y(tk) etc, k fiind un intreg oarecare. Adica, avem semnale in timp discret: t :T→ℤ. Se p.p. ca momentele discrete t0, t1, t2, …, sunt uniform spatiate, adica avem tk+1 – tk = T, pentru orice k (T- perioada de esantionare, v. Shannon, Nyquist).
21
22
SISTEME – categorii/clasificare (VIII-b)
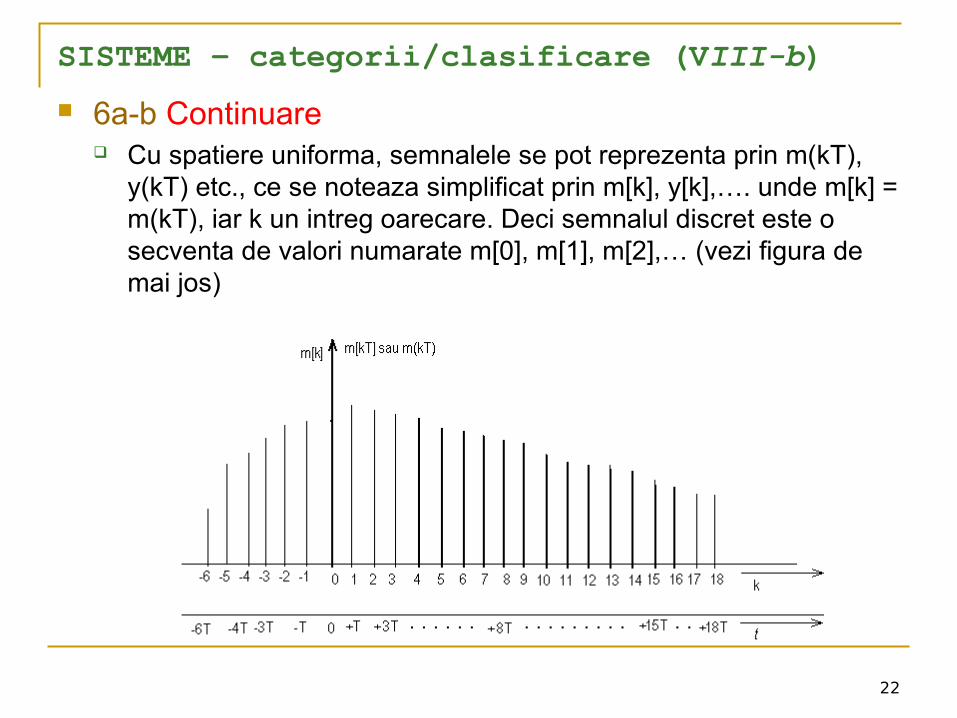
6a-b Continuare Cu spatiere uniforma, semnalele se pot reprezenta prin m(kT),
y(kT) etc., ce se noteaza simplificat prin m[k], y[k],…. unde m[k] = m(kT), iar k un intreg oarecare. Deci semnalul discret este o secventa de valori numarate m[0], m[1], m[2],… (vezi figura de mai jos)
SISTEME – categorii/clasificare (IX-a)
7a-b. Sisteme analogice si digitale 7a. Semnal analogic – acela a carei amplitudine poate lua
orice valoare intr-o plaja continua (o infinitate de numere pentru valori)
7b. Semnal digital – unul a carei amplitudine poate lua numai un numar finit de valori. Cele digitale asociate cu PC-uri digitale, sunt digitale deoarece iau numai doua valori (semnale binare adica; 0 sau 1, DA sau NU, tot sau nimic)
Un semnal digital insa, NU are restrictionat numarul de valori doar la doua! Poate sa fie un numar finit.Un semnal digital a carui amplitudine poate lua N valori este un semnal N-ar, iar cazul binar (N=2) este un caz special.
23
SISTEME – categorii/clasificare (IX-b)
7a-b. S.A.D.- continuare: Semnalele continue se pot converti in semnale
discrete (CAN, CAD, conversia analog-numerica sau analog-digitala) prin cuantizare
Termenii “timp-continuu” si “timp discret” se refera la natura semnalului in lungul axei orizontale a timpului (vezi figura)
Termenii “analogic”/analog” si “digital”/ numeric” se refera la natura amplitudinii semnalului (adica pe axa verticala) (v. slide-ul)
24
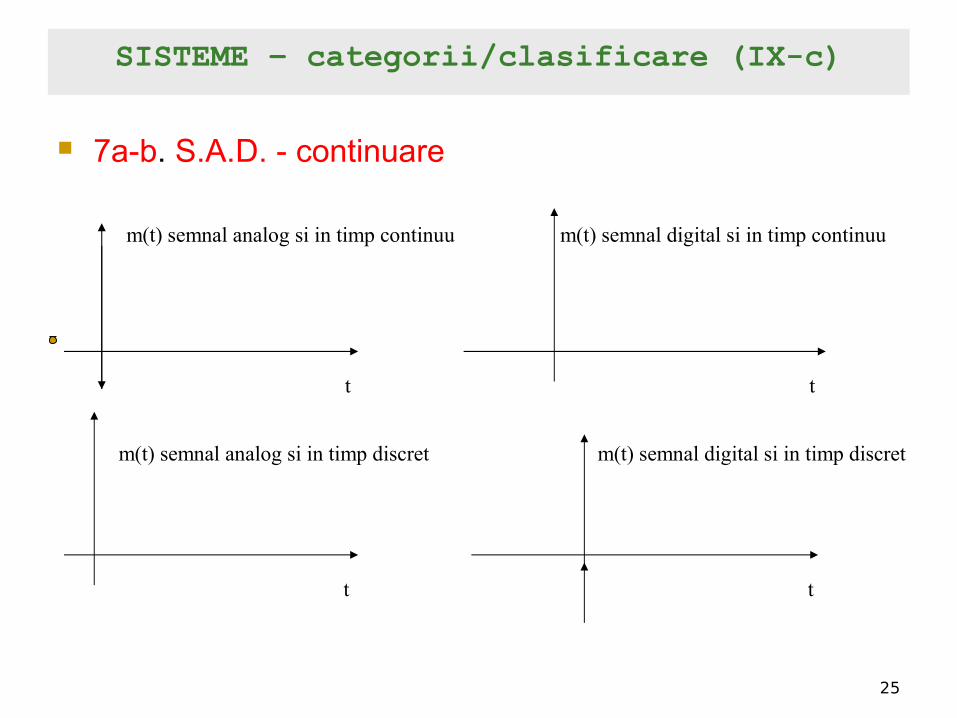
SISTEME – categorii/clasificare (IX-c)
7a-b. S.A.D. - continuare
t t
t t
m(t) semnal analog si in timp continuu m(t) semnal digital si in timp continuu
m(t) semnal analog si in timp discret m(t) semnal digital si in timp discret
25
26
TIPURI DE MODELE (I)
Cuvântul/ notiunea model are intelesuri diferite, functie contextul in care e utilizat: 1. Modele ca reprezentari (adica abstractizari) 2. Modele ca/de obiecte fizice 3. Modele de oameni 4. Modele in software 5. Nume propriu de “model”, utilizat de oameni (in
modă, modeling), SC sau SA, organizatii etc.
26
27
TIPURI DE MODELE (II)(numai poz. 1 reprezentari)
1. Modele ca reprezentari (adica abstractizari): Modele abstracte (sau conceptuale) –reprezentari/constructii
teoretice ale fenomenelor/proceselor fizice, chimice, biologice, sociale (adica modele matematice-MM). Se utilizeaza variabilele specifice si legaturile logice si cantitative dintre acestea
Modele mentale- reprezentarea cunosterii unei persoane, a unei idei, a procesului de gandire
Teoria modelarii- studierea reprezentarii conceptelor matematice La programarea neuro-lingvistica – studierea structurii
experientei subiective (Ce si cum facem cand facem? Cum invatam? Cum gandim? Cum ne conectam cu un alt om si cu lumea inconjuratoare, la nivel fizic si spiritual?).
Modelarea solidelor- reprezentarea corpurilor solide sau a partilor din acestea pentru procesare pe calculator (animatie, grafica, CAD-Computer Aided Design/drafting/assisted/design and drafting, realitate virtuala etc)Produse software comerciale: AutoCAD, ECAD, MCAD, AEC, Catia, Pro/ENGINEER etc.
27
28
MODEL MATEMATIC- definitii
(1) Un MM: “o reprezentare/constructie matematica abstracta ce utilizeaza un limbaj matematic pentru a descrie comportarea/ dinamica a unui sistem”.
(2) Definitie Eykhoff(1974): “o reprezentare a aspectelor esentiale ale unui sistem, care prezinta cunoasterea starii intr-o forma uzuala”
28
29
MODELE MATEMATICE conceptuale: utilizari(I)
Scopurile/ utilizarile unui model conceptual sunt: Furnizeaza un cadru de argumentari si evaluari,
utilizand rationamente logice si matematice pentru diverse situatii, folosind testari/ simulari repetate.
La evaluarea ipotezelor teoretice, ori la descoperirea de noi fapte sau proceduri experimentale.
La implementarea pe calculator a simularilor sistemelor, pentru a observa comportarea in timp a acestora.
29
30
MODELE MATEMATICE – utilizari concrete(II)
La analiza (cum functioneaza, sau estimarea evenimentelor nedorite ce-l afecteaza…), controlul (diferite scenarii de control in simulare) si optimizarea sistemului fizic modelat, respectiv in/la:
Cercetare si dezvoltare (interpretarea cunoasterii, masuratorilor, date si statii pilot…)
Proiectare (determinarea corecta a parametrilor, studierea aspectelor economice si de siguranta a procesului)
Planificare si scheduling (programare orara, calendaristica) Optimizarea functionarii (simulari, simulari…→ optimum) Predictie si control (modelele se utilizeaza adesea la predictia
valorilor variabilelor)
30
31
MODELAREA: procesul obtinerii unui model(I)
Modelare → generarea unui model, ca o reprezentare conceptuala Doua (sau mai multe) modele ale aceluiasi sistem/ fenomen,
pot fi mult diferite intre ele. Diferenţele dintre modele pot fi cauzate de:
Cerintele si ipotezele de modelare diferite ale utilizatorilor modelului
Diferentele conceptuale ale modelatorilor Consideratiile estetice diferite ale acestora Preferintele acestora privind structura MM (probabilistic,
deterministic, stochastic, in timp continuu, in timp discret etc) Rezulta ca: utilizatorii unui MM trebuie sa inteleaga
bine scopul initial al acestuia, ipotezele de modelare, unde se utilizeaza acesta (validitate).
31
32
MODELAREA: procesul obtinerii unui model(II)
Validitatea tuturor MM este limitata: Din cauzele de mai sus Din cauza acuratetei modelarii Din cauza riscului utilizarii acestuia in exteriorul punctului
sau ariei de lucru a acestuia Rezulta ca un MM nu este niciodata adevarat sau
exact Rezulta ca in cel mai bun caz el este valid si posibil
credibil Rezulta ca intotdeauna trebuie sa fim critici cu un
MM
32
33
MODELAREA: a ramane critici fata de un MM obtinut, inseamna:
A nu se comite greseli cum sunt: “Efectul Pygmalion”- “Don’t fall in love with your model” (regele
Cyprului si sculptor, sculptura fildeş Afrodita, rugaminte la aceasta, insufletire, casatorie). Sistemul e cel mai important si nu MM!
“Efectul Procust” – (Tâlhar sangeros din mitologia greaca cunoscut pentru patul său-patul lui
Procust, unde îi scurta sau alungea pe cei pe care-i tâlharea). Deci, nu vom forta realitatea pentru a se suprapune cu MM; trebuie intotdeauna sa vrem sa modificam un MM (fapte noi, observatii noi etc)
“Ori sa nu fim atenti la precizia/ incertitudinea MM”. Precizia MM si nivelul de aproximare trebuie cunoscute, atunci cand se interpreteaza rezultatele simularii.
33
34
MODELARE – abordari (I)
Abordarea teoretica (analitica) Reprezentarea realitatii se face prin intermediul
ecuatiilor matematice care sunt: ecuatii de bilanturi de energie (EDO, EDţ), ecuatii de bilanturi de masa (EDO, EDţ), ecuatii de bilanturi de momente (EDO, EDţ) si deseori ecuatii algebrice (transfer de masa, de energie,
constante pentru diverse fenomene, reactii etc)
34
35
MODELARE – abordari (II)
Abordare experimentala (identificare) Se identifica intrarile si iesirile (I/E) procesului,
dupa care se alege o tehnica adecvata pentru determinarea legaturii I/E.
Modelul dinamic (linear) empiric rezultat din datele procesului, poate fi: EDO sau EDţ (cazul uzual, respectiv f.d.t. lineara discreta)
35
36
VARIABILELE MM (I)
MM uzual descrie un sistem prin: un set de variabile (reale, intregi, booleene, şiruri
etc) si un set de ecuatii (stabilesc legatura dintre variabile)
Variabilele reprezinta proprietati ale sistemului (semnale, date, evenimente etc. ale I/E sau I/S/E aferente sistemului, masurate), si constituie impreuna cu setul de ecuatii/functii modelul matematic.
36
37
VARIABILELE MM (II)
Exista sase tipuri principale de variabile: Variabile de intrare ……… Variabile de iesire - dependente de starea sistemului (adica
de variabilele de stare ale acestuia) Variabile de stare – variabile interne ale sistemului,
dependente de variabilele de decizie, de cele de intrare, de cele aleatoare si de cele exogene
Variabile de decizie (control/comanda)- cunoscute si ca variabile independente
Variabile aleatoare ……… Variabile exogene – cunoscute si sub denumirea de
parametri sau constante (variabile exterioare)
37
38
STRUCTURI de MM (I)
Aplicatiile diferite ale modelelor, si scopurile de modelare diferite ale acestora conduc la structuri diferite de modele (1a,b - 6 a,b):
1a. MM lineare, la care: Toate functiile obiectiv si toate constrangerile sunt numai ecuatii lineare Se aplica la ele principiul suprapunerii, respectiv:
Daca α si β sunt constante, iar MM este de forma y = f(u), principiul superpozitiei statueaza ca αf(u1) + βf(u2) = f(α u1 + βu2)
Deseori MM dinamice lineare se utilizeaza ca o aproximare a realitatii Totusi, daca plaja de functionare este limitata, MM lineare descriu cu
suficienta acuratete realitatea. Exemplu: aproximarea de ordinul I din dezvoltarea in serie Taylor in jurul PSF (punctului static de functionare).
1b. MM nelineare, la care: Macar o functie obiectiv sau o constrangere este neliniara, MM e neliniar Sunt greu de rezolvat analitic (met. numerice, v.Matlab, GNU Octave etc) Se utilizeaza la optimizarea proceselor
38
39
STRUCTURI de MM (II)
2a. MM deterministe (deterministice) un MM care are acelasi fel de a fi
(comportare identica), pentru un set dat de aceleasi conditii initiale
2b. MM stochastice (probabilistice, stohastice) un MM la care este intotdeauna prezenta
comportarea aleatoare/ stohastica, atunci cand sunt date aceleasi conditii initiale
39
40
STRUCTURI de MM (III)
3a. MM statice Sunt MM la care legaturile dintre variabile (ecuatiile adica), nu
sunt functii de timp Variabilele MM statice nu au memorie Ele sunt dependente numai de cele mai recente valori ale
variabilelor independente 3b. MM dinamice
Sunt MM care ţin seama de timp, la care ecuatiile sunt functii de timp; sunt reprezentate cu ecuatii cu diferente (EDţ) sau ecuatii diferentiale (ED) (adica au dinamica)
MM dinamice au memorie pentru starea lor, o pot descrie ca functie de timp la modificarea variabilelor independente (raspunsul tranzitoriu!)
Observatie: Diferenta dintre un MM dinamic si unul static, daca ambele sunt bazate pe ecuatii de continuitate, este aceea ca la cel static termenii ce reprezinta acumulari sunt setati la zero
40
41
STRUCTURI de MM (IV)
4a. MM cu parametri concentrati Sunt MM omogene, adica au starea consistenta in intregul sistem
(au parametrii concentrati). Parametrii concentrati sunt reprezentati prin EDţ si prin ED ordinare
(EDO). Nu descriu variatiile spatiale, deci pot fi aproximatii ale realitatii
4b. MM cu parametri distribuiti Sunt MM eterogene, starea lor variaza in interiorul sistemului (adica
au parametrii distribuiti). Parametrii distribuiti se reprezinta uzual cu ED partiale (EDP). Variabilele de proces independente si proprietatile sistemului pot
varia in lungul unei coordonate spatiale – axiala, radiala, carteziana (R la cabluri, θ° C la brame, θ° si concentratia la reactoare chimice etc)
MM complex care ia in consideratie variatiile spatiale este un MM cu parameti distribuiti (element, celula, volum finit)
41
42
STRUCTURI de MM (V)
5a. MM continue (in timp continuu) Sunt acele MM a caror variabile au valori la oricare moment
de timp dat (variabile continue, timp continuu, adica t : T → R)
5b. MM discrete (in timp discret) Acele MM care descriu starea sistemului numai la
momente de timp discrete (la intervale de timp date; variabile discrete, timp discret, adica t : T →Z) MM discrete necesita metode de rezolvare numerica Calculul iesirii unui sistem cu calculatorul, necesita ca MM
continue sa fie discretizate (Matlab, GNU Octave etc) Discretizarea ecuatiilor unui MM continuu: aproximarea
derivatelor de ordinul ≥ 1 prin una dintre metodele de aproximare a diferentelor: inainte, in urma, sau centrala.
42
43
STRUCTURI de MM (VI)
6a. MM in domeniul timp (“t”) MM la care variabila independenta in ecuatiile de model
este timpul (continuu t :R→R, sau discret t :Z→Z) MM cu EDO (ecuatii diferentiale ordinare, I-E si I-S-E) MM cu EDţ (ecuatii cu diferente, I-E si I-S-E) MM de stare (I-S-E, structural functionale)
6b. MM in domeniul frecventa (“s, ω“) MM la care variabila independenta este frecventa ω [rad/s],
sau frecventa complexa s (s = σ + j ω) Caracteristica Nyquist (locul de transfer) Caracteristicile Bode (castig-frecventa si faza-frecventa) Caracteristica (diagrama) Nichols Functii de transfer
43
44
STRUCTURI de MM (VII)
7a. MM cutie alba (white box), sau MM mecanice/fizice, MM bazate pe pricipiile primare (adica pe legile fizice si chimice ale conservarii) Dau un inteles fizic al procesului, dar Necesita eforturi mari pentru realizare. Se compun din: Ecuatii de bilanturi de conservare (dinamica), deci EDO, EDţ, respectiv:
Bilant de masa Bilant de momente Bilant de componente Bilant de energie, impreuna cu,
Ecuatii algebrice ce descriu Transferuri de masa Transferuri de energie, Cinetici diverse
44
45
STRUCTURI de MM (VIII)
7b. MM cutie neagra (black box), sau modele empirice (prin identificare) Nu reflecta structura fizica a procesului Se bazeaza pe date Reflecta legaturile I/E ale procesului Sunt utile atunci cand:
Timpul de dezvoltare a MM este limitat Intelegerea fizica a procesului este incompleta Intelegerea fizica a procesului lipseste Aceste MM sunt:
Seriile de timp (ARMA, ARMAX, ARX etc) RNA (Retele Neuronale Artificiale) MM fuzzy MM ale CMMP
45
46
STRUCTURI de MM (IX)
7c. MM cutie gri (grey box): Cand se dispune de cunoasterea procesului, dar
anumite informatii sau cunostinte lipsesc In astfel de situatii, se combina MM fizice (white
box), cu MM black box: rezulta MM gri (grey box) Exemple:
MM fizice + RNA MM fizice + modele cu logica fuzzy
46
47
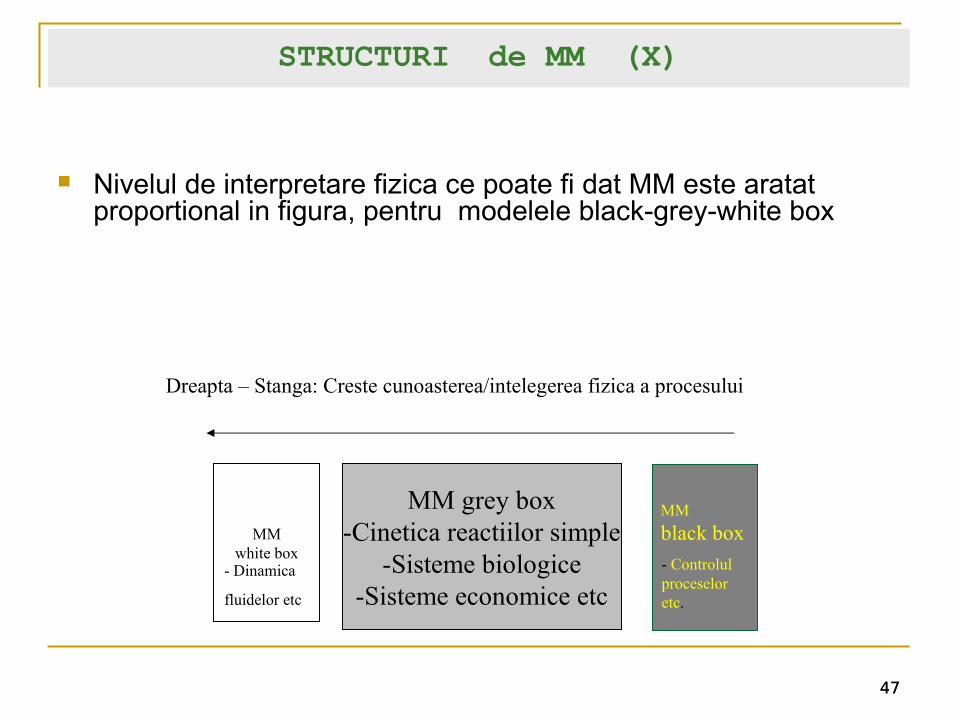
STRUCTURI de MM (X)
Nivelul de interpretare fizica ce poate fi dat MM este aratat proportional in figura, pentru modelele black-grey-white box
MMwhite box
MM grey box-Cinetica reactiilor simple
-Sisteme biologice-Sisteme economice etc
MM
black box
- Controlulproceseloretc.
- Dinamica
fluidelor etc
Dreapta – Stanga: Creste cunoasterea/intelegerea fizica a procesului
47
SISTEME AUTOMATE - SA Tipuri de control/reglare (I-a)
SA – un mecanism/dispozitiv sau un set de dispozitive conectate intr-o astfel de maniera incat controleaza/dirijeaza/conduce direct comportarea altui sistem (altor dispozitive).
SA sau SC (Control System=S. de conducere) Tipuri de control (conducere, administrare):
Control logic Control linear (cu feedback, cu reactie, in bucla inchisa) Control inteligent (fuzzy control = control cu logica fuzzy; neuro
control; neuro-fuzzy si fuzzy-neuro control)
48
CLASIFICARE SLIDE-URI
SA-clasificari, sl.25 SA-functia indeplinita,26 SA- alte clasificari, 27
Control logic, 28 C. linear, 29-32 C. fuzzy: 33-47
Introd .fuzzy 33-47 C. fuzzy, 48-49MM-
Tipuri, 50, 51 Definitii. 52
MM (continuare): Utilizari, 53-54 Obtinerea MM, 55- 56 Greseli (sa fim critici cu
MM), 57 Abordari posibile
Teoretica (analitica), 58 Experim. (identificare),
59 Variabilele MM, 60- 61 Structuri de MM, 62-71
49
SISTEME AUTOMATE - SA Definitii, tipuri (I-b)
SA – clasificare dupa functia indeplinita: Sisteme de control automat (SCtA) - SCADA etc Sisteme de comanda automata (SCdA) –
secventiale, logice, PLCs etc. Sisteme de reglare automata (SRA) Sisteme de protectie automata (SPA) Sisteme de optimizare automata (SOA)
50
SISTEME AUTOMATE - SA Alte tipuri de control/reglare (I-c)
Sisteme de reglare automata (SRA), iar aici: Control conventional (PID etc) Control adaptiv Control H∞ (control robust) Control predictiv bazat pe model Control optimal Control neliniar Control inteligent (F-fuzzy, N-neuro(nal), NF, FN,
AG-algoritmi genetici, SE-sisteme expert…)
51
SISTEME AUTOMATE - SA Tipuri de control/reglare (II)
Controlul logic Utilizeaza logica pura Istoric, primele sisteme logice au fost implementate cu retele de relee si proiectate cu ‘laddere logice’
“Ladder logic’ (scara logica, logica in scara, lant logic) este un limbaj de programare, o metoda de desenare a schemelor logice electrice
Numele de scara logica: programele in acest limbaj seamana cu o scara, cu doua sine verticale si mai multe trepte/traverse intre ele
Programele cu logica in scara (sau diagrame scara = ladder diagram) sunt asemanatoare unei scheme cu un set de circuite cu relee.
Sunt usor de proiectat. Control secvential la operatii mecanice complexe.
Astazi, cu ladder logic se programeaza PLCs (Programmable Logic Controllers = Controlere logice programabile) industriale
Totusi: doi furnizori de PLCs, inseamna doua sisteme asociate de logica in scara (limbajele nu sunt complet compatibile)
Deci, ladder logic este mai degraba un limbaj bazat pe reguli decat un limbaj procedural! Exemple la laborator.
52
SISTEME AUTOMATE - SA Tipuri de control/reglare (III)
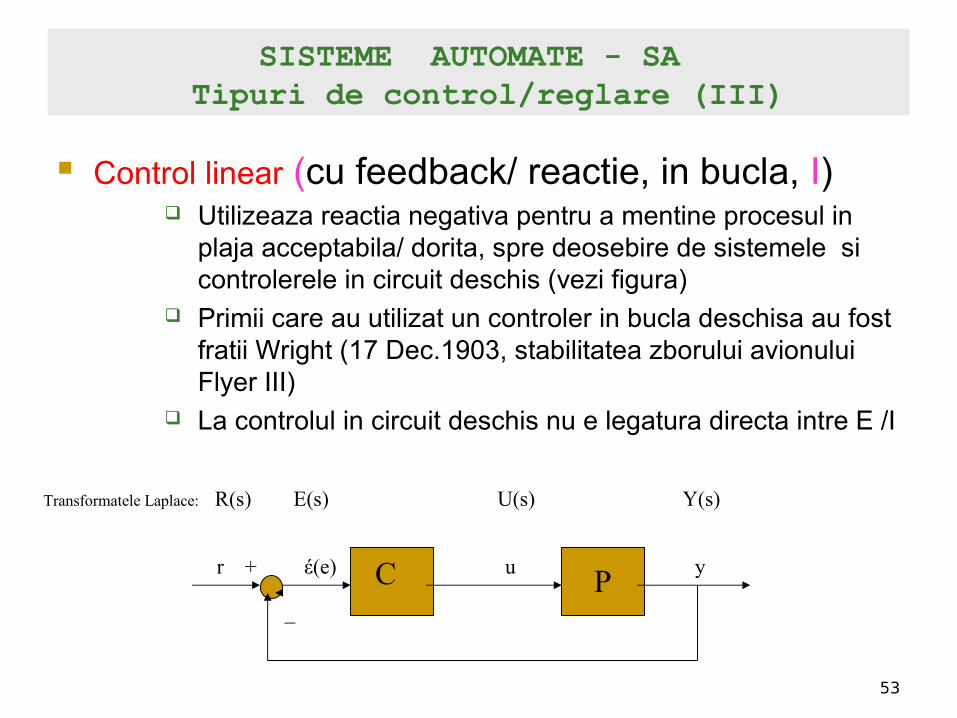
Control linear (cu feedback/ reactie, in bucla, I) Utilizeaza reactia negativa pentru a mentine procesul in
plaja acceptabila/ dorita, spre deosebire de sistemele si controlerele in circuit deschis (vezi figura)
Primii care au utilizat un controler in bucla deschisa au fost fratii Wright (17 Dec.1903, stabilitatea zborului avionului Flyer III)
La controlul in circuit deschis nu e legatura directa intre E /I
r + έ(e) u y
_
C P
Transformatele Laplace: R(s) E(s) U(s) Y(s)
53
SISTEME AUTOMATE - SA Tipuri de control/reglare (IV)
Control linear (cu feedback/ reactie, in bucla, II)
Pentru evitarea problemelor controlului in circuit deschis, teoria controlului/ reglarii introduce reactia (feedback)
Tipul de controler este acela de controler in bucla inchisa sau controler in bucla cu reactie (sistem de reglare SISO)
Sisteme SISO (scalare: Single Input Single Output) si sisteme MIMO (vectoriale: Multi-Input-Multi-Output)
P.p. ca atat P cat si C din figura sunt lineare si invariante in timp (LIT, adica functiile de transfer (f.d.t.) aferente, C(s) si P(s), nu sunt functii de timp); deci putem utiliza tr. Laplace.
54
SISTEME AUTOMATE - SA Tipuri de control/reglare (V)
Control linear (cu feedback/ reactie, in bucla, III) Cu transformata Laplace obtinem:
Y(s) = P(s)U(s)U(s) = C(s)E(s)E(s) = R(s) – Y(s)
Determinand pe Y(s) functie de R(s) obtinem iesirea functie de intrare:
Y(s) = {[P(s)C(s)]/[1+P(s)C(s)]R(s) Termenul notat cu H(s) este functia de transfer a sistemului:
H(s) = Y(s)/R(s) = [P(s)C(s)]/[1+P(s)C(s)]
55
SISTEME AUTOMATE - SA Tipuri de control/reglare (VI)
Control linear (cu feedback/ reactie, in bucla, IV) Daca in functia de transfer asiguram ca:
P(s)C(s) > >1, adica P(s)C(s) are norma foarte mare pentru orice
“s”, atunci Y(s) este aproximativ egal cu R(s)
Adica putem controla iesirea Y prin simpla modificare (setare) a marimii de referinta R!!
56
SISTEME AUTOMATE - SA (VII)Definitii, tipuri
Fuzzy control (control cu logica fuzzy, I) Controlerele fuzzy se proiecteaza usor O masurare intr-un sistem cu logica fuzzy poate fi si doar
partial adevarata: adica, daca DA este 1, si NU este 0, o masuratoare fuzzy poate fi intre 0 si 1 (gri!, nu numai alb sau negru: (0, 1))
Regulile sistemului fuzzy se scriu in limbaj natural si apoi se translateaza in logica fuzzy. Exemplu: “Daca presiunea este prea ridicata, atunci micsoreaza debitul de abur in turbina. Daca presiunea este prea scazuta, creste/ mareste debitul de abur in turbina”.
57
5858
Ultimul slide
Deocamdata atat
TC1 cele 10 functii/5 pagini !
TC2 6 functii simbolice /6 pagini !

















