Page 1
1
I. Mecanisme cu roţi dinţate
Aceste mecanisme fac parte din categoria mecanismelor cu cuple
superioare. Transmiterea mişcării de rotaţie / a momentului de torsiune de la roata
conducătoare (z1) la roata condusă (z2) se realizează prin acţiunea dinţilor aflaţi
succesiv în contact, datorită presiunii exercitate de dinţii roţii conducătoare
asupra dinţilor roţii conduse.
După poziţia relativă a axelor între care are loc transmiterea mişcării,
mecanismele cu roţi dinţate (numite şi angrenaje) se clasifică astfel:
a) Angrenaje cilindrice (axe paralele) (Fig. 36 a,b):
- roţi dinţate cilindrice cu dantură simplă: dinţi drepţi; dinţi înclinaţi; dinţi curbi
- roţi dinţate cilindrice cu dantură compusă (V sau W)
b) Angrenaje conice (axe concurente) (Fig. 37):
Roţi dinţate conice cu dantură simplă: dinţi drepţi; dinţi înclinaţi; dinţi curbi
c) Angrenaje hiperboloidale (axe neparalele şi neconcurente)
Sunt numite roţi pseudocilindrice sau pseudoconice. Exemplu: angrenajul şurub
melc – roată melcată (Fig. 38).
a b
Fig. 36 Angrenaje cilindrice
Page 2
2
Fig. 37 Angrenaje conice
Fig. 38 Angrenaj melc – roată melcată
Page 3
3
Elemente geometrice ale roţilor dinţate cilindrice cu dinţi drepţi
Dintele se consideră o grindă încastrată în corpul (obada) roţii. In Fig. 39
se identifică suprafaţa de flanc, suprafaţa frontală, suprafaţa de cap, de divizare
şi de picior, lăţimea roţii (b).
Fig. 39 Dispunerea suprafeţelor pe dinte
In Fig. 40 sunt reprezentate elementele geometrice ale roţilor dinţate
cilindrice cu dinţi drepţi.
Fig. 40 Elementele geometrice ale roţilor dinţate cilindrice cu dinţi drepţi
Page 4
4
unde Cd = cerc de divizare; Ca = cerc de cap; Cf = cerc de picior; hoa = înălţimea
capului dintelui; h*oa = coeficient de înălţime a capului dintelui; hof = înălţimea
piciorului dintelui; h*of = coeficient de înălţime a piciorului dintelui; co = jocul la
capul dinţilor; z = număr de dinţi; m = modul (se exprimă în mm şi este stabilit
conform standardelor); d = diametrul de divizare; df = diametrul de picior; da =
diametrul de cap; so = grosimea dintelui; eo = grosimea golului dintre dinţi
Treapta unui mecanism cu roţi dinţate reprezintă sistemul de roţi dinţate cuprins
între două axe fixe.
Se defineşte raportul de transmitere (i12 ) astfel:
i12 = - (angrenare exterioară, Fig. 36); i12 = (angrenare interioară, Fig. 41)
Fig. 41 Angrenare interioară
Cercurile de rostogolire (Cw) reprezintă locurile geometrice ale centrelor
instantanee ale mişcării relative (pe aceste cercuri nu există alunecare între
profile).
d = m·z [mm]
da = d + 2hoa; hoa = h*oa · m, unde h
*oa = 1 sau 0,8; rezultă: da = m ( z + 2) [mm]
df = d – 2hof; hof = h*of · m, unde h
*of = 1,25; rezultă df = m (z – 2,5) [mm]
m = p / π [mm]; so = eo = p / 2; co = hof - hoa = 0, 25· m, unde m este modulul,
exprimat în mm.
Page 5
5
Diametrul de bază db = d · cos α, unde α este unghiul de presiune (α = 200 pentru
profilul standardizat)
Raportul de transmitere în cazul roţilor dinţate cu axe fixe montate în serie
(Fig. 42) şi al roţilor dinţate cu axe fixe montate în cascadă (Fig. 43) are
următoarele expresii:
i1N = n1/nN = n1/n2 · n3/n4 · ….nN-1/nN = (- z2/z1) (- z4/z3)……(- zN / zN-1)
Rezultă: i1N = (- 1)N-1
zN / z1
Fig. 42 Roţi dinţate cu axe fixe montate în serie
Fig.43 Roţi dinţate cu axe fixe montate în serie şi paralel (cascadă)
Raportul de transmitere este: i14 = n1 / n4 = (- z2 / z1) (- z4 / z3)
Page 6
6
Mecanisme planetare
Mecanismele planetare se clasifică astfel:
- mecanisme planetare diferenţiale (gradul de mobilitate este 2, deci există 2
elemente conducătoare);
- mecanisme planetare propriu-zise, (gradul de mobilitate este 1, deci există un
element conducător).
Există mecanisme planetare cu o roată centrală şi mecanisme planetare cu două
roţi centrale. La mecanismul planetar din Fig. 44 se identifică următoarele
elemente:
- z1 roată centrală (solară); z2 satelit (are mişcare de transport imprimată de S şi
de rotaţie în jurul axului propriu); S - braţ port-satelit
Fig. 44 Mecanism planetar cu o roată centrală
Numărul de elemente mobile, n = 3; cuple de clasa a 5-a, C5 = 3; cuple de clasa a
4-a, C4 = 1 (IV);
Gradul de mobilitate: M3 = 3m – 2C5 - C4 = 9 - 6 - 1 = 2. Prin urmare,
trebuie solicitate simultan 2 elemente pentru funcţionarea mecanismului.
Dacă z1 este fixă (adică n1 = 0) rezultă M3 = 1
Analiza cinematică a mecanismului planetar din Fig. 44 se face aplicând
metoda Willis, care constă în imprimarea întregului ansamblu a unei mişcări cu
(– nS), astfel încât braţul port-satelit să rămână fix. In acest fel se poate scrie
relaţia raportului de transmitere:
iS
12 = nS
1 / nS
2 = (n1 – nS) / (n2 – nS) = - z2 / z1
Page 7
7
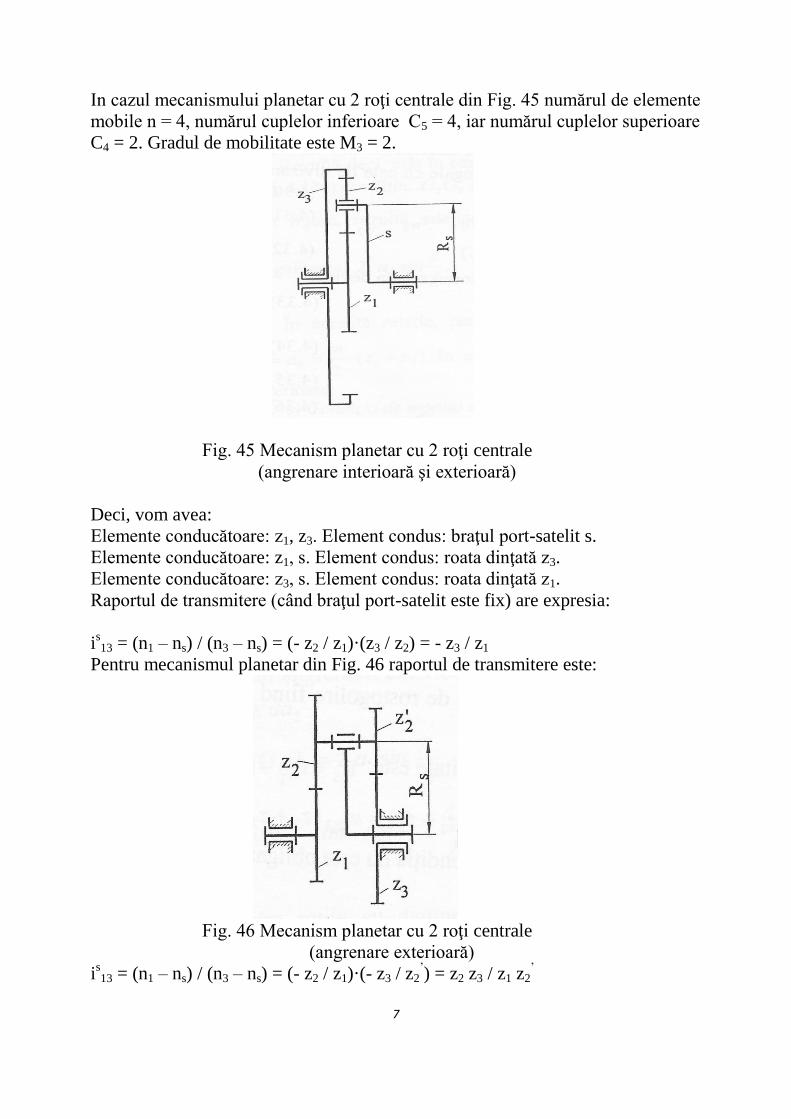
In cazul mecanismului planetar cu 2 roţi centrale din Fig. 45 numărul de elemente
mobile n = 4, numărul cuplelor inferioare C5 = 4, iar numărul cuplelor superioare
C4 = 2. Gradul de mobilitate este M3 = 2.
Fig. 45 Mecanism planetar cu 2 roţi centrale
(angrenare interioară şi exterioară)
Deci, vom avea:
Elemente conducătoare: z1, z3. Element condus: braţul port-satelit s.
Elemente conducătoare: z1, s. Element condus: roata dinţată z3.
Elemente conducătoare: z3, s. Element condus: roata dinţată z1.
Raportul de transmitere (când braţul port-satelit este fix) are expresia:
is13 = (n1 – ns) / (n3 – ns) = (- z2 / z1)·(z3 / z2) = - z3 / z1
Pentru mecanismul planetar din Fig. 46 raportul de transmitere este:
Fig. 46 Mecanism planetar cu 2 roţi centrale
(angrenare exterioară)
is13 = (n1 – ns) / (n3 – ns) = (- z2 / z1)·(- z3 / z2
’) = z2 z3 / z1 z2
’
Page 8
8
In cazul mecanismului planetar din Fig. 47, raportul de transmitere între cele
două roţi centrale este:
Fig. 47 Mecanism planetar cu 2 roţi centrale
(angrenare interioară)
is13 = (n1 – ns) / (n3 – ns) = (z2 / z1)·(z3 / z2
’) = z2 z3 / z1 z2
’
Raportul de transmitere la mecanismul planetar din Fig. 48 este dat de expresia:
Fig. 48 Mecanism planetar cu 2 roţi centrale
(angrenare exterioară şi interioară)
is13 = (n1 – ns) / (n3 – ns) = (- z2 / z1)·(z3 / z2
’) = - z2 z3 / z1 z2
’
Page 9
9
Condiţii suplimentare impuse mecanismelor planetare
Prima condiţie pentru funcţionarea mecanismelor planetare este ca roţile
centrale şi braţul port-satelit (elemente legate la bază) să fie coliniare. Aceasta
este condiţia de coaxialitate.
Pentru mecanismele din Fig. 45 – 48 această condiţie se scrie astfel:
Rs = rw1 + rw2 = rw3 – rw2; rezultă rw3 = rw1 + 2rw2 (mecanism din Fig. 45)
Exprimat în numere de dinţi: z3 = z1 + 2z2
Rs = rw1 + rw2 = rw3 + rw2’; rezultă z1 +z2 = z3 + z2’ (mecanism din Fig. 46)
Rs = rw1 - rw2 = rw3 - rw2’; rezultă z1 -z2 = z3 - z2’ (mecanism din Fig. 47)
Rs = rw1 + rw2 = rw3 - rw2’; rezultă z1 +z2 = z3 - z2’ (mecanism din Fig. 48)
A doua condiţie este condiţia de vecinătate, care impune ca 2 sateliţi vecini
(Fig. 49) să aibă distanţa dintre centre mai mare decât diametrul de cap, astfel
încât dinţii lor să nu se atingă în timpul funcţionării. Condiţia se aplică atât la
angrenarea exterioară, cât şi la cea interioară.
Fig. 49 Dispunerea sateliţilor
Condiţia de vecinătate limitează numărul maxim de sateliţi ce pot fi montaţi pe
periferia unei roţi centrale.
Notând cu p numărul acestor sateliţi, rezultă:
p ≤ π / arcsin(da2 / 2a)
A treia condiţia este condiţia de montaj simultan a “p” sateliţi.
Pentru mecanismul din Fig. 45 avem:
z3 + z1 = pk , k aparţinând mulţimii numerelor întregi
Pentru mecanismele din Fig. 46 şi 47:
(z1 z2’ - z2 z3) / (z2 - z2’) = pk, k aparţinând mulţimii numerelor întregi
Pentru mecanismele din Fig. 48:
(z1 z2’ + z2 z3) / (z2 - z2’) = pk, k aparţinând mulţimii numerelor întregi
Legea fundamentală a angrenării. Curbe ciclice. Grad de acoperire. Roţi
dinţate cu dantură deplasată
Legea fundamentală a angrenării stabileşte condiţia necesară şi suficientă
ca transmiterea mişcării de rotaţie prin profile reciproc conjugate (două curbe
Page 10
10
care se rostogolesc cu alunecare una faţă de cealaltă rămânând tot timpul tangente
între ele) să se facă sub un raport de transmitere constant.
Enunţ: Condiţia necesară şi suficientă ca transmiterea mişcării de rotaţie prin
profile reciproc conjugate să se facă sub un raport de transmitere constant este
ca în fiecare moment al angrenării normala comună la cele două profile să
treacă printr-un punct fix situat pe linia centrelor. Acest punct se numeşte polul
angrenării (C).
Pentru realizarea profilului dintelui se folosesc în general curbe ciclice,
adică curbe generate de un punct al unui cerc (ruletă), care se rostogoleşte fără
alunecare peste o curbă (curbă de bază). Condiţia ca ruleta să se rostogolească
fără alunecare pe curba de bază este ca arcul parcurs pe curba de bază să fie egal
cu arcul parcurs pe ruletă.
Tipuri de curbe ciclice:
- cicloida – rezultă prin rostogolirea fără alunecare a unui cerc peste o dreaptă
- epicicloida – se obţine prin rostogolirea, fără alunecare, a ruletei în exteriorul
unui cerc de bază
- hipocicloida – se obţine prin rostogolirea, fără alunecare, a ruletei în
interiorul unui cerc de bază
- evolventa - este o curbă ciclică la care ruleta are rază infinită (deci este o
dreaptă), iar curba de bază este un cerc (cerc de bază). Evolventa are câteva
proprietăţi importante şi anume:
- evolventa nu are puncte în interiorul cercului de bază;
- normalele la evolventă sunt tangente la cercul de bază;
- centrele de curbură ale evolventei se găsesc pe cercul de bază;
- la roţile dinţate cu profil evolventic linia de angrenare este dreaptă.
Gradul de acoperire se defineşte ca fiind εα = S / p, unde S este arcul de
angrenare, iar p este pasul danturii. Gradul de acoperire indică numărul de
perechi de dinţi aflaţi simultan în contact. Se recomadă ca εα > 1,25 pentru a se
asigura continuitatea transmiterii mişcării şi o distribuţie corespunzătoare a
forţelor pe dinte.Punctele de contact dintre două profile reciproc conjugate se
găsesc pe linia de angrenare.
Generarea danturii roţilor dinţate se poate realiza prin 2 copiere sau prin
rulare. In cazul copierii, elementul generator (scula aşchietoare) are profilul
golului dintre dinţi, iar în cazul rulării, elementul generator are profilul conjugat
roţii ce se generează, generarea având loc prin reproducerea mişcării relative de
angrenare. Procedeul prin rulare (unde se utilizează cremaliera generatoare) este
larg folosit, fiind şi foarte precis.
Cremaliera de referinţă serveşte la definirea geometrică a danturii în
evolventă. Negativul cremalierei de referinţă este reprezentat de cremaliera
generatoare, care serveşte la definirea sculelor aşchietoare. Curbele de rostogolire
Page 11
11
în procesul de a angrenare a roţii generate cu cremaliera sunt cercul de divizare şi
dreapta (linia) de divizare.
Distanţa dintre linia de referinţă şi linia de divizare se numeşte deplasarea
profilului şi se exprimă prin produsul (x·m), unde x este coeficientul deplasării
specifice de profil. Deplasarea de profil este pozitivă dacă linia de referinţă este
exterioară cercului de divizare şi negativă dacă îl intersectează.
Deplasările negative sunt limitate de fenomenul de subtăiere, iar cele pozitive de
ascuţirea dinţilor la vârf. Pentru evitarea subtăierii (eliminarea unei porţiuni
evolventice de la baza dintelui) trebuie ca numărul minim de dinţi zmin > 17.
Pentru un număr de dinţi z < 17 deplasarea specifică trebuie să fie mai
mare decât o valoare minimă:
x ≥ xmin = (17 – z) / 17
Roţi dinţate cu dinţi înclinaţi
Spre deosebire de roţile dinţate cu dinţi drepţi, roţile dinţate cu dinţi
înclinaţi asigură transmiterea mai silenţioasă a mişcării, din cauză că lungimea
dintelui este mai mare, iar punctul de contact se deplasează de-a lungul flancului.
Totodată, angrenajele cu dinţi înclinaţi asigură transmiterea de puteri mari şi la
turaţii ridicate.
Secţionăm o roată dinţată cu dantură înclinată cu un plan perpendicular pe
axa dintelui (plan normal) şi cu un plan normal pe axa roţii (plan transversal sau
frontal). Se vor defini astfel o serie de parametri corespunzător celor două plane
de secţionare (Fig. 50):
Fig. 50 Parametrii din planul normal şi planul transversal
pas frontal (pt) pas normal pn = pt cosβ
modulul frontal (mt) modulul normal mn = mt cosβ
Page 12
12
unghiul de angrenare (αt) unghiul de angrenare tgαn = tgαt cosβ
Parametrii standardizaţi sunt cei din planul normal. Cei din planul frontal
se calculează în funcţie de aceştia, dar valorile lor numerice nu se rotunjesc la
valori întregi.
Diametrul de divizare:
Diametrul de cap:
Diametrul de picior:
Distanţa dintre axe:
Diametrul cercului de bază:
Din Fig. 50 se observă că l = b / cosβ ; Diametrul cercului de rostogolire:
Gradul de acoperire se determină cu relaţia:
, unde εα - reprezintă gradul de acoperire frontal, iar εβ
- gradul de acoperire axial
la angrenarea exterioară
la angrenarea interioară
Observaţie: Se pot prelucra roţi dinţate cu dinţi înclinaţi cu un număr mai mic de
17 dinţi fără să apară fenomenul de subtăiere.