Diagnosticarea Sistemului de franare la standul cu rulouri Importanta pe care sistemul de franare o are in realizarea nivelului corespunzator de securitate activa a automobilelor a condus la conceperea mai multor modalitati de testare si verificare a acestora. Unele dintre ele se efectueaza pe drum in conditii reale de rulare si au in vredere fie determinarea deceleratiei maxime fie spatial minim de franare. Desi aceste incercari ofera avantajul solicitarii sistemului in conditii reale de drum au multe dezavantaje. In present , pentru diagnosticare curenta se folosesc standuri cu rulouri. Acest stand solicita sistemul de franare prin intermediul rulourilor care sunt actionate de motoare electrice. In functie de viteza de rulare simulate standurile pot fi de mai multe tipuri: de viteza mica (5-10 km\h) , de viteza medie (10-20 km\ h) , si de viteza ridicata la care se pot rimula viteze mari (de pana la 120 km\h). Un astfel de stand este format din doua module identice plasate simetric in raport cu axa longitudinala a automobilului aflat in pozitia de lucru pe stand.
Transcript
Diagnosticarea Sistemului de franare la standul cu rulouri
Importanta pe care sistemul de franare o are in realizarea nivelului corespunzator de securitate activa a automobilelor a condus la conceperea mai multor modalitati de testare si verificare a acestora. Unele dintre ele se efectueaza pe drum in conditii reale de rulare si au in vredere fie determinarea deceleratiei maxime fie spatial minim de franare. Desi aceste incercari ofera avantajul solicitarii sistemului in conditii reale de drum au multe dezavantaje.
In present , pentru diagnosticare curenta se folosesc standuri cu rulouri. Acest stand solicita sistemul de franare prin intermediul rulourilor care sunt actionate de motoare electrice. In functie de viteza de rulare simulate standurile pot fi de mai multe tipuri: de viteza mica (5-10 km\h) , de viteza medie (10-20 km\h) , si de viteza ridicata la care se pot rimula viteze mari (de pana la 120 km\h).
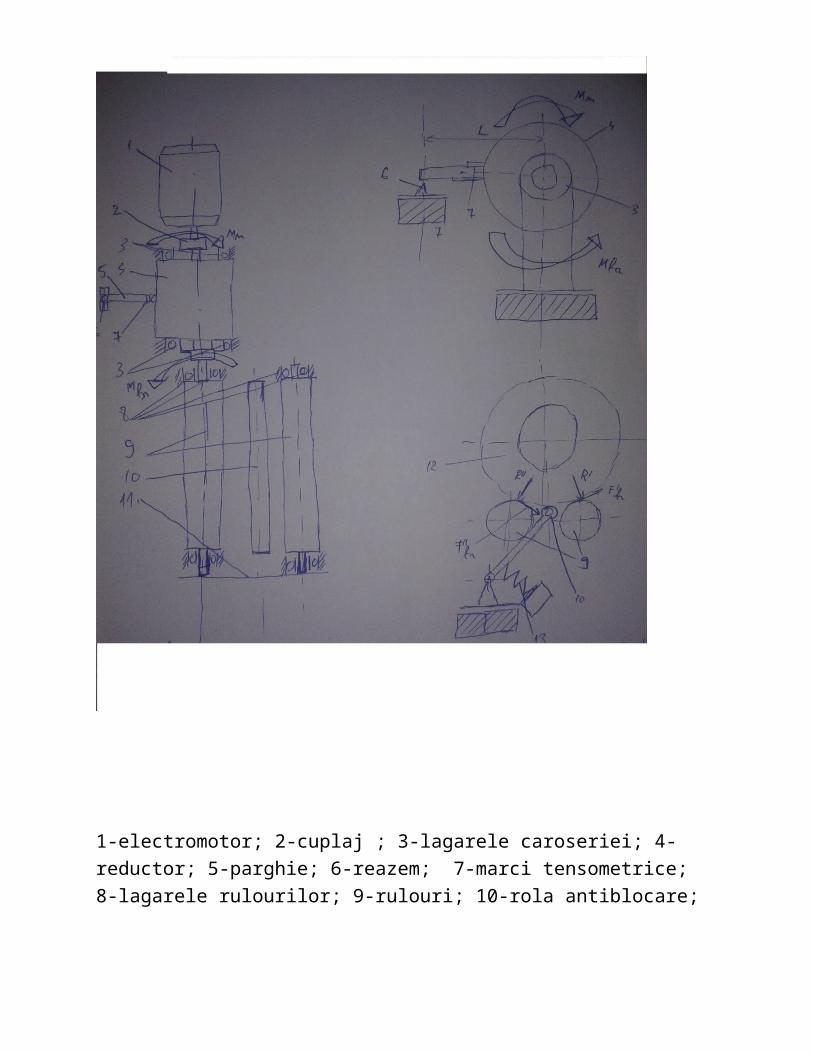
Un astfel de stand este format din doua module identice plasate simetric in raport cu axa longitudinala a automobilului aflat in pozitia de lucru pe stand.
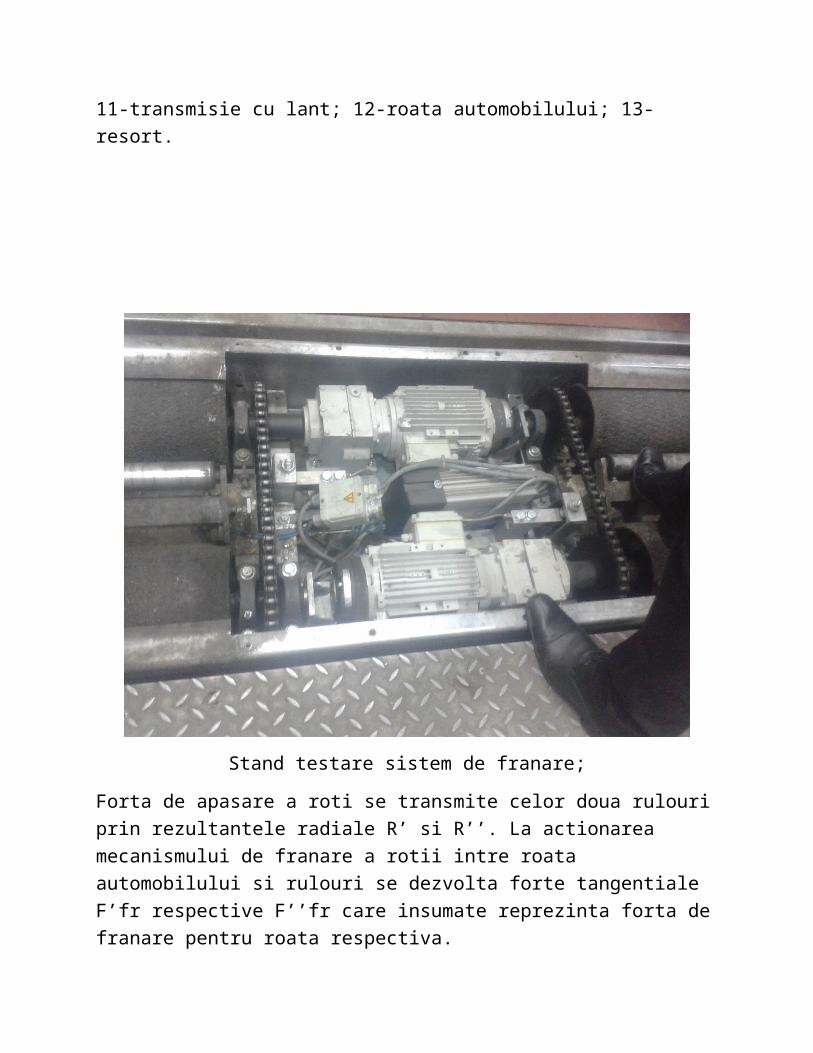
Forta de apasare a roti se transmite celor doua rulouri prin rezultantele radiale R’ si R’’. La actionarea mecanismului de franare a rotii intre roata automobilului si rulouri se dezvolta forte tangentiale F’fr respective F’’fr care insumate reprezinta forta de franare pentru roata respectiva.
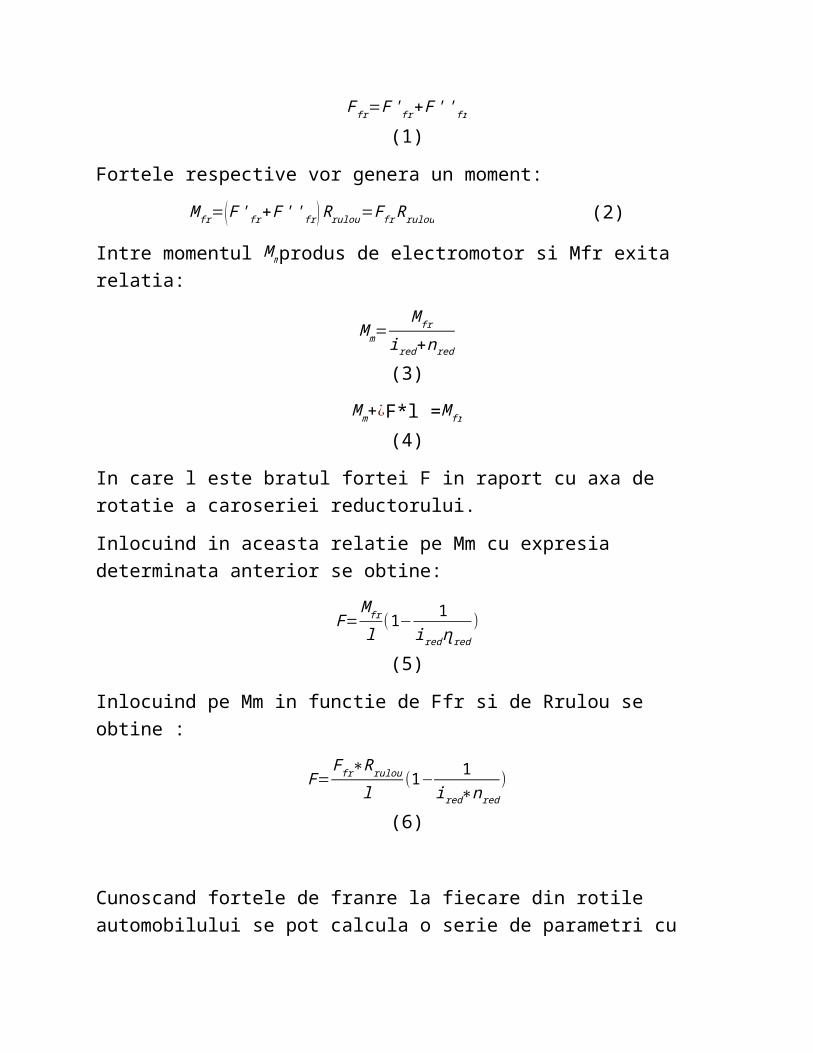
F fr=F ' fr+F ' ' fr (1)
Fortele respective vor genera un moment:
M fr= (F ' fr+F ' ' fr )R rulou=F frR rulou (2)
Intre momentul Mmprodus de electromotor si Mfr exita relatia:
Mm=M fr
ired+nred (3)
Mm+¿F*l =M fr (4)
In care l este bratul fortei F in raport cu axa de rotatie a caroseriei reductorului.
Inlocuind in aceasta relatie pe Mm cu expresia determinata anterior se obtine:
F=M fr
l(1− 1
ired ɳred) (5)
Inlocuind pe Mm in functie de Ffr si de Rrulou se obtine :
F=F fr∗Rrulou
l(1− 1
ired∗nred) (6)
Cunoscand fortele de franre la fiecare din rotile automobilului se pot calcula o serie de parametri cu ajutorul carora se evalueaza starea tehnica a sistemului de franare:
-Dezechilibrul relative intre fortele de franare ale rotilor unei punti :
D=|F frstg−F frdr|
max (F frstg−F frdr)∙100 [%] (7)
-Eficacitatea sistemului de franare :
E=∑i=1
π
¿¿¿ (8)
Unde:
∑i=1
π
¿¿este suma fortelor de franre maxime ale tuturor rotilor , iar G este grutatea
automobilului in timpul testului .
-Deceleratia automobilului :
a=g ∙∑ F frG
(9)
-Variatia fortei de franare la mentinerea constanta a apasarii pedalei , datorata deformarii suprafetelor de franare ale mecanismului de franare , denumita conventional ovalizare .
O=F frmax−F frminF frmax
∙100[%] (10)
-Coeficientul de amplificare al mecanismului de franare :
A=∑F rmaxF ped
(11)
Acesta poate fi calculat pentru fiecare punte in parte sau pentru toate rotile .
Pentru efectuarea diagnosticarii sistemului de franre al automobilului Skoda Octavia s-a utilizat un stand de tip BOSCH model BSA/SDL43XX. In component acestuia intra cele doua module dinamometrice (Subansamblul electromotor –reductor-rulouri) ,calculator tip PC cu softwareul specific , auxiliarele acestuia(monitor ,mouse ,tastatura etc),telecomanda , pedometrul precum si un set de teste a suspensiei.
Nr. P[bar] G[daN]
G01[daN]
G02[daN]
E[%] D[%] O[%] a[m/s2]
1 1454 849 605 80 6 14 7.688
2 1.5 1608 905 703 78 5 12 7.459
3 1680 857 823 79 3 11 7.931
4 1513 903 610 64 5 13 6.898
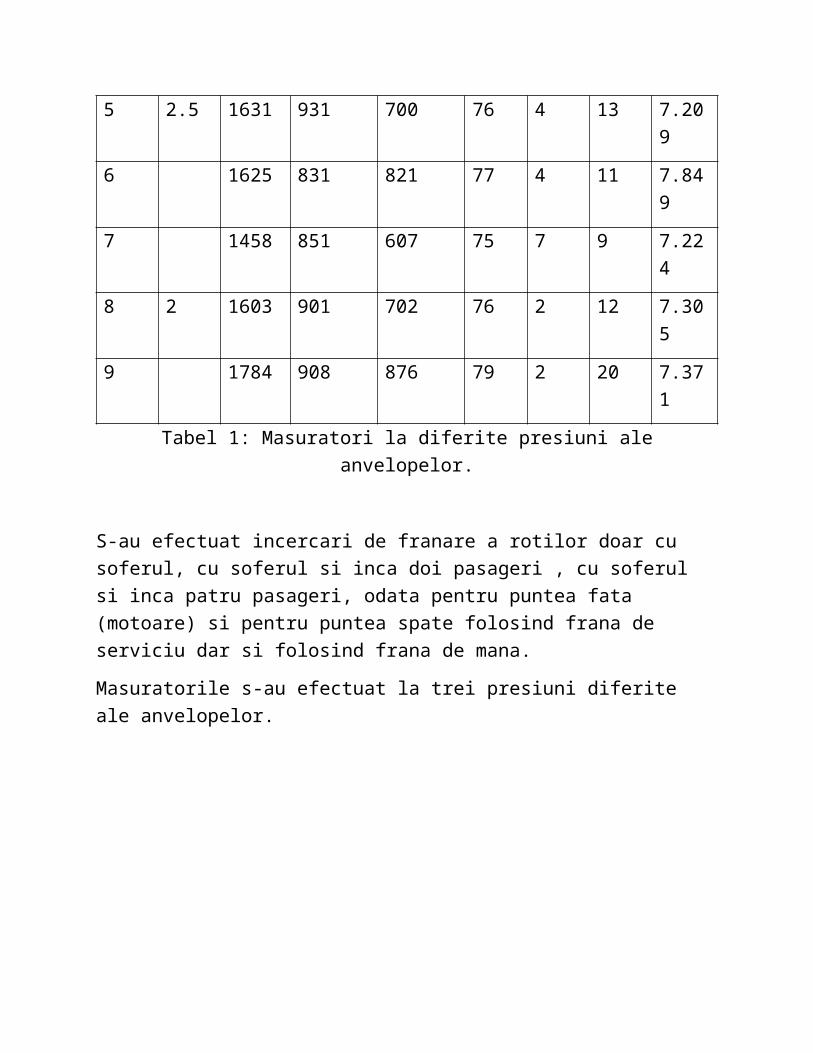
5 2.5 1631 931 700 76 4 13 7.209
6 1625 831 821 77 4 11 7.849
7 1458 851 607 75 7 9 7.224
8 2 1603 901 702 76 2 12 7.305
9 1784 908 876 79 2 20 7.371
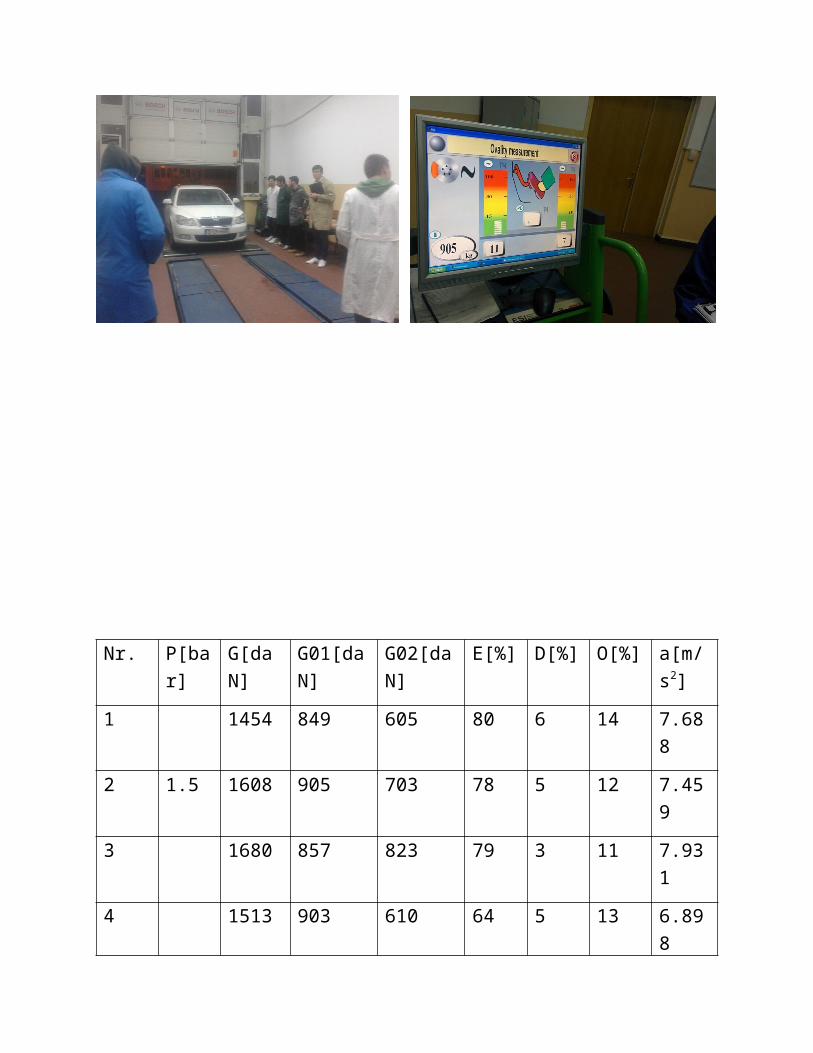
Tabel 1: Masuratori la diferite presiuni ale anvelopelor.
S-au efectuat incercari de franare a rotilor doar cu soferul, cu soferul si inca doi pasageri , cu soferul si inca patru pasageri, odata pentru puntea fata (motoare) si pentru puntea spate folosind frana de serviciu dar si folosind frana de mana.
Masuratorile s-au efectuat la trei presiuni diferite ale anvelopelor.
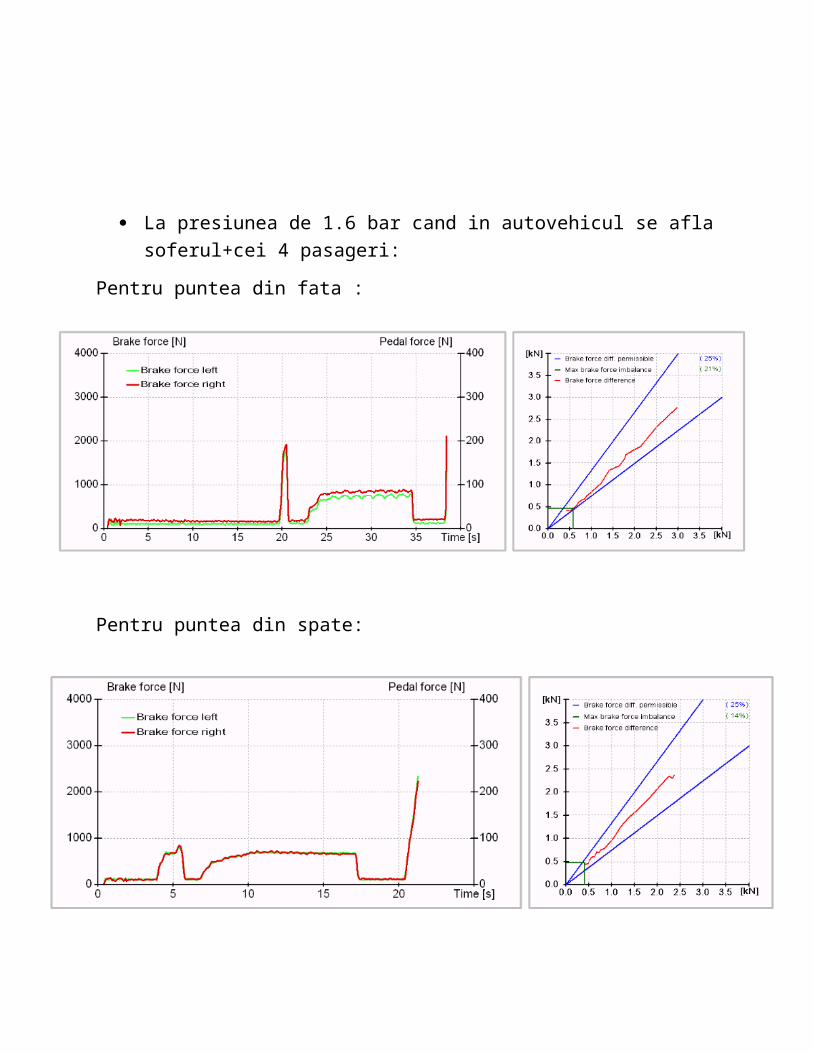
La presiunea de 1.6 bar cand in autovehicul se afla soferul+cei 4 pasageri:
Pentru puntea din fata :
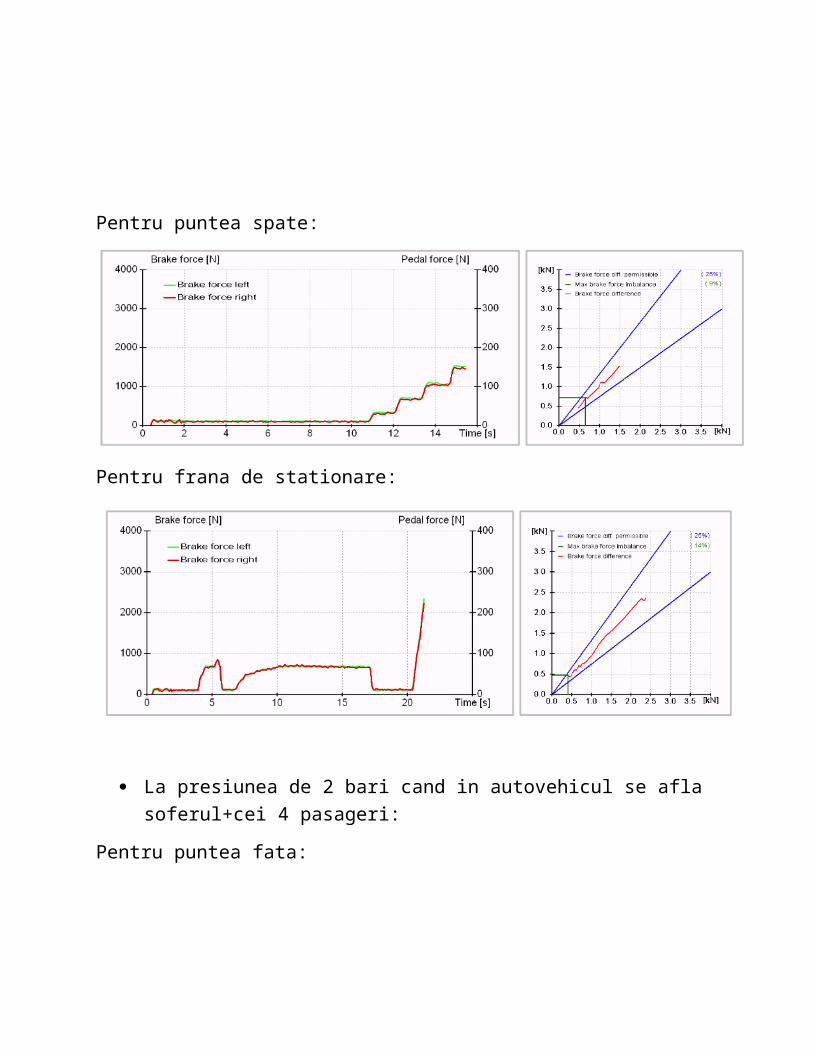
Pentru puntea din spate:
Pentru frana de stationare:
La presiunea de 2.5 bar cand in autovehicul se afla soferul+cei 4 pasageri:
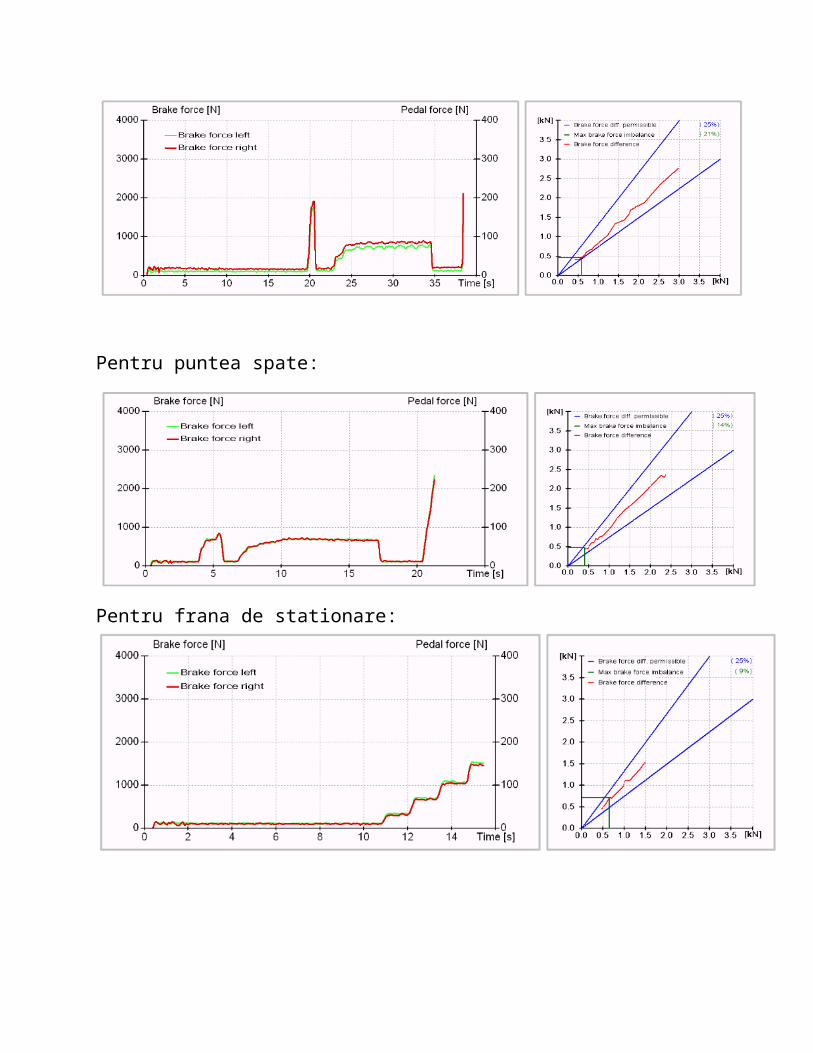
Pentru puntea fata:
Pentru puntea spate:
Pentru frana de stationare:
La presiunea de 2 bari cand in autovehicul se afla soferul+cei 4 pasageri:
Pentru puntea fata:
Pentru puntea spate:
Pentru frana de stationare:
In Figura 1 sunt reprezentate eficacitatea,ovalizarea,deceleratia si dezechilibrul relative pentru presiunea de 1,5 bar in functie de incarcarea autovehiculului.
1454 1608 16800
10
20
30
40
50
60
70
80
90
80 79 78
6 5 3
14 12 117.688 7.459 7.931
e D O a
Figura 1.
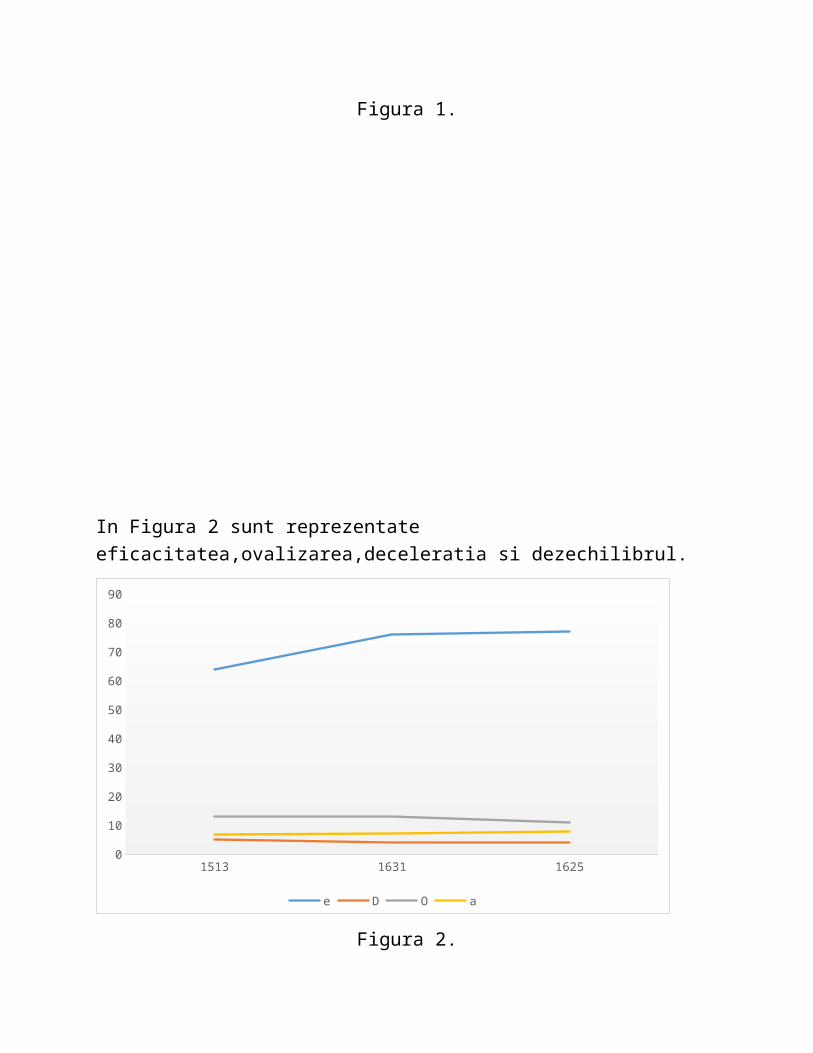
In Figura 2 sunt reprezentate eficacitatea,ovalizarea,deceleratia si dezechilibrul.
1513 1631 16250
10
20
30
40
50
60
70
80
90
e D O a
Figura 2.
In Figura 3 sunt reprezentate eficacitatea,ovalizarea,deceleratia si dezechilibrul relative pentru presiunea de 2,5 bar in functie de incarcarea autovehiculului.
1458 1603 17840
10
20
30
40
50
60
70
80
90
E(2 bar) D(2 bar) O(2 bar) a(2 bar)
Figura 3.
La presiunea de 2 bar eficacitatea are o usoara creste apoi se mentine constanta chiar daca autovehiculul este incarcat.
1.5 2 2.50
10
20
30
40
50
60
70
80
90
8075
64
6 7 5
149
13
E D O
Figura 4.
In Figura 4 sunt reprezentate E,D,O atunci cand in autovehicul se afla doar soferul. Se observa cum la presiuna de 2.5bar eficacitatea sistemului de franare scade considerabil.
Figura 5.
In Figura 5 sunt reprezentate E,D,O la diferite presiuni ale anvelopelor atunci cand in autovehicul se afla soferul + doi pasageri. Se observa cum eficacitatea sistemului de franare are o usoara scadere la presiunea anvelopelor de 2.5 bar.