61
1
Marius KLOETZER Octavian PĂSTRĂVANU
MODELAREA SISTEMELOR FIZICE
– Îndrumar de laborator –
2012
2
Introducere
Prezenta carte oferă un suport de studiu pentru orele de aplicaţii ale disciplinei de
"Modelarea sistemelor fizice". Această disciplină este în prezent oferită studenţilor anului II ai Facultăţii de Automatică şi Calculatoare, Departamentul de Automatică şi Informatică Aplicată, din cadrul Universităţii Tehnice "Gheorghe Asachi" din Iaşi. Suportul de curs pentru această disciplină este constituit de primele capitole ale cărţii:
O. Păstrăvanu, R. Ibănescu: Limbajul Bond-Graph în modelarea şi simularea sistemelor fizico-tehnice, Editura Gh. Asachi, 2001, ISBN: 9738292123.
Orele de aplicaţii vin în sprijinul studenţilor ce urmează cursul sus-amintit, oferind o mai bună înţelegere a aspectelor studiate. Astfel, îndrumarul de laborator conţine, pentru fiecare subiect de interes, o scurtă prezentare a noţiunilor teoretice tratate în detaliu în cadrul cursului, o serie de indicaţii ce permit simularea comportării unor anume tipuri de sisteme, exemple de probleme rezolvate şi probleme propuse spre rezolvare. Simulările software ce permit o interpretare facilă a comportării anumitor sisteme vor fi conduse în mediul de programare MATLAB, iar pentru simplificarea efortului de programare al studenţilor vor fi puse la dispoziţie o serie de programe ajutătoare. În cadrul problemelor propuse spre rezolvare, un accent deosebit va fi pus pe realizarea conexiunilor între comportările aşteptate ale anumitor sisteme (deduse din considerente de natură analitică) şi rezultatele simulărilor obţinute.
În cadrul orelor de aplicaţii ale disciplinei amintite se vor trata următoarele aspecte: lucrarea I oferă o introducere în mediul software MATLAB, care va fi folosit de studenţi pentru efectuarea diverselor simulări, atât în cadrul disciplinei curente, cât şi în cadrul altor discipline ulterioare. Lucrarea II se referă la modele simple, de tip integrator şi derivator, unde problemele se referă la simulări ale comportării acestora şi la rezolvări analitice. În lucrarea III sunt prezentate modelele de tip ecuaţie diferenţială de ordin I şi sunt propuse studii prin simulare ale comportării unor sisteme de acest gen. Lucrarea IV indică modalităţi de rezolvare analitică ale problemelor tipice ce pot fi întâlnite în cazul modelelor de tip ecuaţie diferenţială de ordin I. Sistemele studiate sunt generalizate în lucrarea V prin introducerea modelelor liniare de tip intrare-stare-ieşire şi prin realizarea de simulări specifice. Lucrarea VI oferă o reţetă de obţinere a modelelor de tip intrare-stare-ieşire pentru sisteme electrice şi pentru sisteme mecanice în mişcare de translaţie.

3
4
Lucrarea I: ELEMENTE INTRODUCTIVE PRIVIND UTILIZAREA
MEDIULUI SOFTWARE MATLAB
1. Consideraţii generale, motivaţie şi obiectiv Pachetul de programe MATLAB (MATrix LABoratory) oferă un mediu performant având ca scop principal simplificarea modului de prelucrare numerică a datelor. Modul interactiv de utilizare, simplitatea operării şi gama extrem de variată a aplicaţiilor pentru care pachetul de programe oferă facilităţi specifice au condus la o răspândire din ce în ce mai mare în prezent. Matlab-ul permite exprimarea soluţiilor unor aplicaţii având caracter ştiinţific sau tehnico-ingineresc într-un limbaj simplu, apropiat de formularea analitică (matematică) a problemei în cauză. In acest mod, utilizatorul se poate concentra în primul rând asupra metodei de rezolvare fără a întâmpina dificultăţi majore în traducerea soluţiei în limbajul propriu MATLAB-ului. Nucleul MATLAB încorporează un numar mare de funcţii predefinite destinate operaţiilor matematice de uz general (aritmetica în virgulă mobilă, calcul polinomial, funcţii trigonometrice, exponenţiale, logaritmice, speciale, etc.), manipulării tablourilor şi matricelor, rezolvării unor probleme de analiză numerică, reprezentării grafice 2D şi 3D, dezvoltării de programe în limbaj MATLAB şi interfaţării acestora cu sistemul de operare gazdă. La aceste funcţii predefinite disponibile în nucleul de bază se adaugă un numar însemnat de pachete de programe (toolbox-uri) acoperind domenii specifice (procesarea semnalelor, teoria controlului, statistică, reţele neurale, calcul simbolic, procesarea imaginilor, optimizare etc.). Aceste toolbox-uri, ca şi programele utilizatorilor, sunt pachete de fişiere sursă scrise într-un limbaj de programare simplu propriu mediului MATLAB. Prin parcurgerea acestei şedinţe de aplicaţii, studentul va deprinde modul de utilizare al mediului MATLAB şi va putea efectua operaţii elementare cum ar fi lucrul cu vectori şi matrici precum şi reprezentarea grafică a funcţiilor.
2. Cunoştinţe prealabile necesare - exploatarea la nivel elementar a aplicaţiilor WINDOWS; - notiuni de algebra privind operaţiile cu matrici; - noţiuni de fizică la nivel de liceu.
3. Indicaţii de utilizare a mediului MATLAB
3.1. Lansarea in executie si interfatarea cu sistemul de operare În varianta existentă pe reţeaua din laborator, nucleul MATLAB se lansează în lucru prin intermediul pictogramei aferente (se recomandă folosirea Matlab 2008a). Odată ajunşi sub controlul nucleului MATLAB, prompterul implicit este " >> ". Nucleul accepta
5
introducerea unei comenzi MATLAB interne sau externe. Comenzile de tip extern sunt de fapt funcţii scrise în limbaj MATLAB (forma sursă) care sunt încărcate, interpretate şi executate de nucleu. Execuţia unei comenzi externe poate fi realizată dacă fişierul sursă cu numele corespunzător şi extensie .M se află în directorul curent sau în unul din directoarele specificate în calea de căutare a MATLAB-ului. Părăsirea nucleului se poate face cu una dintre urmatoarele comenzi: >>quit >><Ctrl/Q> >>exit
În timpul unei sesiuni MATLAB, utilizatorul poate crea şi atribui valori unui număr de variabile aflate în memoria internă afectată nucleului. Pentru a salva aceste valori şi a relua ulterior execuţia cu acelaşi context de lucru se pot utiliza comenzi de salvare/restaurare de forma: >>save <nume-fisier> - salvează variabilele în fişierul cu numele precizat >>load <nume-fisier> - restaurează contextul de lucru folosind fişierul precizat Extensia implicită pentru aceste fişiere este .MAT. Dacă numele fişierului este omis atunci implicit se foloseşte fişierul MATLAB.MAT. 3.2. Help "on-line"
Funcţia "help" permite obţinerea unor informaţii având caracter general despre comenzile interne şi externe MATLAB. Ea poate fi apelată în mai multe forme: help - oferă informaţii despre elementele limbajului MATLAB şi a fisierelor .M din directorul curent. help <nume-funcţie> - oferă informaţii despre funcţia în cauză.
3.3 Variabile şi spaţiu de lucru În cadrul unei sesiuni MATLAB, deci atâta timp cât ne aflam sub prompter ">>",
putem defini variabile de tip constantă numerică, vector sau matrice, dându-le nume diferite, desemnate atât cu majuscule cât şi cu minuscule (MATLAB-ul este "case-sensitive").
Apăsarea tastei <ENTER> va determina afişarea rezultatului sau acţiunii liniei introduse (principiul interpretorului). Dacă rezultatului liniei introduse nu i s-a desemnat un nume prin atribuiri explicite: "variabila=expresie", deci are doar forma "expresie", va fi afişat numele "ans" (answer) ce desemneaza ultimul rezultat nenominalizat (valoarea expresiei). Cu excepţia salvărilor explicite, spaţiul de lucru ce conţine toate variabilele de lucru dintr-o sesiune MATLAB, se pierde o dată cu părăsirea voită sau accidentală a mediului. 3.4 Introducerea si manipularea vectorilor si matricilor
Masivele (vectori şi matrici) pot fi introduse în MATLAB în diferite moduri: 1. listă explicită de elemente; 2. construite cu ajutorul funcţiilor şi instrucţiunilor specifice; 3. create cu ajutorul fişierelor .M; 4. încărcate din fişiere externe; Spaţiul de memorare se alocă automat, la orice nouă definire de variabilă, până la completarea spaţiului de lucru, a cărui dimensiune depinde de calculatorul folosit. Cel mai simplu mod de introducere a matricilor este dat in 1., pentru care elementele se introduc pe linie. Separatorul dintre linii este ; , iar intregul masiv va fi cuprins între paranteze pătrate [...]:

6
>> A=[1 2 3;4 5 6;7 8 9] Orice instrucţiune MATLAB urmată de ; va determina inhibarea afişării pe ecran a rezultatului respectivei instrucţiuni; în caz contrar acesta, sau acţiunea specifică, vor fi afişate. Elementele unei matrici pot fi şi expresii: >>x=[-1.3 sqrt(3);(1+2+3)*5 4/5] sau chiar masive: >>r=[10 11 12] >>A=[A;r] Elementele unui masiv sunt nominalizate prin înscrierea poziţiei elementului în paranteze rotunde. Comanda: >>A(1,2) furnizează elementul de pe linia 1, coloana 2. Putem referi submasive mai mici în cadrul unor masive mai mari, de exemplu: >>A(1:3,:) extrage submatricea formată din liniile 1,2,3 indiferent de indicele de coloană. Extragerea submatricei formată din liniile 1 şi 3 şi coloanele 2 şi 3 se poate efectua cu sintaxa: >>A([1,3],[2,3]) unde locul liniilor, respectiv al coloanelor este ocupat de vectori conţinând indicii doriţi. Vectorii pot fi generaţi prin comenzi de forma: >>x=1:5 care duce la generarea unui vector x=[1 2 3 4 5]. Dacă este necesar se poate specifica incrementul, de exemplu: >>y=0:pi/4:pi furnizeză un vector y=[0.000 0.7854 1.5706 2.3562 3.1416].
3.5 Operatori aritmetici şi funcţionali Operatorii aritmetici de bază pentru lucrul cu expresii şi masive sunt:
+ adunare; - scadere; * înmultire; / împărţire dreapta; \ împărţire stânga; ^ ridicare la putere; Împărţirea / şi \ este analogă pentru expresii, dar provoacă ieşiri diferite în cadrul calculului matricial: A\B este echivalent cu înmulţirea la stânga cu inversa lui A (sau soluţia ecuaţiei A*X=B); A/B este echivalent cu înmulţirea la dreapta cu inversa lui A (sau soluţia ecuaţiei X*A=B); În afara acestor operatori există şi operatori specifici lucrului cu masive: a. operatorul de transpunere ('). Comenzile: >A=[1 2 3;4 5 6;7 8 9] >B=A' vor determina ca B să fie egal cu: B= 1 4 7 2 5 8 3 6 9
Pentru matrici sau vectori având aceeaşi dimensiune, este posibilă efectuarea unor operaţii element cu element. De exemplu, dacă A şi B au forma de mai sus, comanda A.*B realizează înmulţirea elementelor de pe acceaşi poziţie din A şi din B (rezultatul fiind bineînţeles diferit de A*B). Rezultatul comenzii A.^2 este ridicarea la pătrat a fiecărui element al matricei A (operaţia fiind utilă şi pentru vectori, de exemplu în cazul în care se doreşte reprezentarea grafică a unei funcţii de genul t2). Lista operaţiilor element cu element este inclusă în secţiunea 6.
7
3.6 Generarea de matrici utile Cuprinde funcţiile ce generează masive particulare, cum ar fi: a. zeros(M,N) - generează o matrice nulă cu M linii şi N coloane (la matricile pătrate se poate omite numărul de coloane); b. ones(M,N) - generează o matrice cu elemente unitare; c. rand(M,N) - generează o matrice cu elemente aleatoare uniform distribuite în intervalul (0,1); d. eye(M,N) - generează o matrice identitate.
4. Structuri pentru controlul execuţiei comenzilor 4.1 Bucla FOR Forma generală a unei bucle for este: for variabila=start : pas : final instrucţiuni end -variabila reprezintă variabila de contorizare a buclei; -start reprezintă valoarea atribuită iniţial variabilei de contorizare; -pas reprezintă pasul de incrementare al variabilei de contorizare; -final reprezintă valoarea finală atribuită variabilei de contorizare; -instrucţiuni reprezintă o succesiune de una sau mai multe comenzi MATLAB; -end marchează sfirşitul buclei for. Reamintim că în cazul în care instrucţiunile sunt urmate de caracterul ";" , se inhibă afişarea rezultatelor intermediare din bucla for (se recomandă folosirea acestui caracter).
Exemplu. n=10; for i=1:n x(i)=i^2; end; Pot exista şi situaţii în care este necesară folosirea mai multor bucle for imbricate; în aceste cazuri buclele trebuie să fie strict incluse una în cealaltă şi să respecte forma generală de scriere. 4.2. Bucla WHILE
Aceasta permite ca o instrucţiune sau un grup de instrucţiuni să fie repetat de un număr neprecizat de ori în funcţie de o condiţie logică. Forma sa generală este: while condiţie instructiuni end
Exemplu. Să se determine primul număr întreg n pentru care factorialul n! este un număr de 5 cifre: n=1; while factorial(n)<1.e4 n=n+1; end Bucla va fi executată atât timp cât condiţia (n!<104) este îndeplinită.

8
4.3. Instructiunea IF
Instrucţiunea IF este folosită pentru luarea unei decizii multiple. Forma sa generală este: if condiţie-1 instrucţiuni-1 elseif condiţie-2 instrucţiuni-2 … else instrucţiuni-rest end iar forma cea mai simplă: if condiţie instrucţiuni end Dacă condiţia-1 este îndeplinită, se vor executa instrucţiuni-1; dacă însă ea nu este îndeplinită, se testează condiţia-2; dacă aceasta este satisfacută, se va executa grupul 2 de instrucţiuni ş.a.m.d. Dacă nici una din condiţii nu este îndeplinită, se execută grupul instructiuni-rest. În general condiţia apare sub forma: expresie operator-relational expresie unde operatorul relaţional poate fi: <,<=,>,>=,==,~=.
5. Funcţii grafice în MATLAB
5.1. Grafica in coordonate rectangulare Dacă y este un vector, comanda: plot(y) produce afişarea elementelor lui y în funcţie de indexul elementelor.
Exemplu. y=[0. .48 .84 .1 .91 .6 .14]; plot(y)
Obs. Datele sunt autoscalate şi axele x şi y sunt desenate pe ecran. Desenul este afişat pe ecranul grafic; pe unele sisteme (ex. varianta MATLAB sub Windows) ambele ecrane – de comanda şi grafic – pot fi vizualizate simultan. Acestei comenzi de desenare simplă i se pot adauga: -inscripţionarea unui titlu; -etichetarea axelor; -trasarea verticalelor şi orizontalelor în dreptul fiecărei diviziuni de pe axe
Exemplu. title('Primul desen') xlabel('Abscisa') ylabel('Ordonata') grid Dacă x şi y sunt vectori de aceeaşi lungime, comanda: plot(x,y) desenează elementele lui y funcţie de elementele lui x.

9
Exemplu. Reprezentarea grafică a funcţiei sin(t) pentru valori ale lui t în intervalul [0,4π] se poate efectua folosind comenzile: t=0:0.05:4*pi; y=sin(t); plot(t,y) Pentru a suprapune mai multe grafice pe aceeaşi fereastră, se poate proceda astfel: -dacă y este o matrice şi x este un vector, plot(x,y) va trasa graficele corespunzătoare liniilor sau coloanele lui y în funcţie de vectorul x, folosind caractere diferite pentru fiecare dintre ele; -dacă x este o matrice şi y un vector se aplică o regulă similară trasându-se graficele corespunzătoare liniilor lui x în funcţie de vectorul y; -dacă x şi y sunt matrici de aceeaşi dimensiune, se va trasa graficul corespunzător coloanelor lui y funcţie de coloanele lui x. Un alt mod de a realiza desene multiple se poate obţine cu comanda de mai jos: plot(x1,y1,x2,y2,...,xn,yn) unde: -(x1,y1),(x2,y2),... sunt perechi de vectori. În acest fel se obţine reprezentarea grafică pentru fiecare pereche (x,y). Acest tip de grafic are avantajul că permite afişarea simultană a vectorilor de lungimi diferite. Fiecare pereche de vectori va folosi un alt tip de linie pentru afisare. Se poate indica tipul de caracter cu care se face trasare. Valorile posibile sunt: solid - întrerupt(dashed) -- doua puncte(dotted) : linie-punct(dashdot) -. punct(point) . plus + stea(star) * cerc(circle) o x-mark x Pentru monitoare color se poate utiliza o opţiune de culoare: 'w' (white), 'k' (black), 'r' (red), 'g' (green), 'b' (blue), 'y' (yellow).
5.2. Controlul ecranului Divizarea ecranului grafic este disponibilă în MATLAB cu ajutorul comenzii: subplot(mnp) - subdivizează ecranul grafic; parametrii (cifrele) m, n, p au următoarea semnificaţie: m reprezintă numărul de grafice pe linie; n reprezintă numarul de grafice pe coloană; p reprezintă poziţia primului grafic inscriptionat în partiţia ecran realizată (maxim 9).
Exemplu. subplot(211),plot(abs([2 -7 3 5 17 -25])) subplot(212),plot(rand(1,10));
10
Observaţii 1. Se pot scrie mai multe instrucţiuni pe aceeaşi linie prin separarea lor cu virgule. 2. În unele situaţii se renunţă la scalarea automată a graficului în favoarea unei scalări manuale, cu ajutorul comenzilor: v=[x_min,x_max,y_min,y_max] axis(v) 3. Pentru a evita efectul deformant introdus de ecran se poate utiliza comenzile: axis('square') sau axis('equal') (a se vedea help-ul) 4. Menţinerea unui grafic pe ecran în vederea suprapunerii unui alt grafic poate fi obţinută cu ajutorul comenzii hold on.
6. Comenzi MATLAB uzuale În această anexă, sunt prezentate pe scurt câteva dintre cele mai uzuale comenzi din
mediul MATLAB. Pentru explicaţii mai amănunţite privitoare la orice comandă, se tastează help nume_comandă.
Operaţii de bază help nume_fişier afişează comentariile din partea de sus a unui fişier de tip .m quit părăseşte mediul MATLAB exit analog comenzii quit type nume_fişier afişează conţinutul unui fişier .m who afişează variabilele existente în acel moment whos analog comenzii who, dar mai detaliat clear Şterge variabilele din memorie what afişează fişierele de tip .m aflate intr-un director which localizează fişierele de tip .m format schimbă formatul de afişare a rezultatelor demo lansează programe demonstrative din MATLAB
Valori disponibile în MATLAB pi π inf ∞ i,j 1− ans răspunsul curent tic, toc, cputime comenzi utile pentru măsurarea timpului de execuţie
Operaţii aritmetice şi cu matrice + adunarea a două numere (scalari), vectori sau matrice - scăderea a două numere (scalari), vectori sau matrice * înmulţirea a două numere, vectori sau matrice compatibile .* înmulţirea element cu element a matricelor sau vectorilor de aceeaşi dimensiune / împărţirea numerelor, împărţirea la dreapta a matricelor compatibile ./ împărţirea element cu element a matricelor sau vectorilor de aceeaşi dimensiune \ împărţirea la stânga a matricelor compatibile
11
^ ridicarea la putere a unui număr sau matrice pătratică .^ ridicarea la putere element cu element a vectorilor sau matricelor ′ transpunerea unui vector sau a unei matrice size dimensiunea unui vector sau a unei matrice length lungimea unui vector sum, prod suma, respectiv produsul elementelor unui vector norm norma unui vector
Funcţii matematice uzuale sin, cos, tan funcţii trigonometrice uzuale acos, asin inversele acestor funcţii exp, log exponenţială şi logaritm natural sqrt rădăcină pătrată rand generare de numere aleatoare cuprinse între 0 şi 1 round rotunjire la cel mai apropiat număr întreg fix rotunjire la cel mai apropiat număr întreg, neglijând partea fracţionară abs valoarea absolută a unui număr real sau complex angle argumentul unui număr complex real, imag partea reală şi, respectiv, partea imaginară a unui număr complex conj conjugatul unui număr complex
Funcţii referitoare la matrice det determinantul unei matrice pătratice eig valorile şi vectorii proprii ai unei matrice pătratice inv inversa unei matrice pătratice rank rangul unei matrice svd valorile şi vectorii singulari ai unei matrice
Operaţii grafice plot reprezintare grafică într-un sistem de coordonate x-y cu scară liniară hold on/off supra-afişare, păstrând reprezentarea grafică anterioară clg ştergerea ferestrelor grafice mesh reprezentarea unei suprafaţe tridimensionale (3D) meshgrid generarea domeniului pentru o suprafaţă tridimensională contour reprezentarea liniilor de nivel corespunzătoare unei suprafeţe bar reprezentare grafică cu bare title scrierea titlului xlabel, ylabel scrierea notaţiilor pe axe axis scara axelor text introducerea unui text în grafic print tipărirea ferestrei grafice curente
12
Operaţii asupra funcţiilor fmin minimul unei funcţii de o variabilă fmins minimul unei funcţii de mai multe variabile fzero zeroul unei funţii spline funcţia spline aplicată elementelor unui vector quad calculul unei integrale definite ode23 integrarea unui sistem de ecuaţii diferenţiale prin metoda Runge-Kutta de ordinul 2 şi 3
Calcule statistice mean media elementelor unui vector std abaterea standard cumsum sumă cumulativă cov corelaţia dintre valorile elementelor unui vector min, max minimul şi, respectiv, maximul elementelor unui vector
Operaţii de încărcare/salvare şi citire/afişare save salvează datele într-un fişier load încarcă datele dintr-un fişier diary nume_fişier salvează textul unei sesiuni MATLAB chdir schimbă directorul dir afişează conţinutul directorului input citirea unei valori furnizate de utilizator fprintf afişare formatată în fereastra de comandă
13
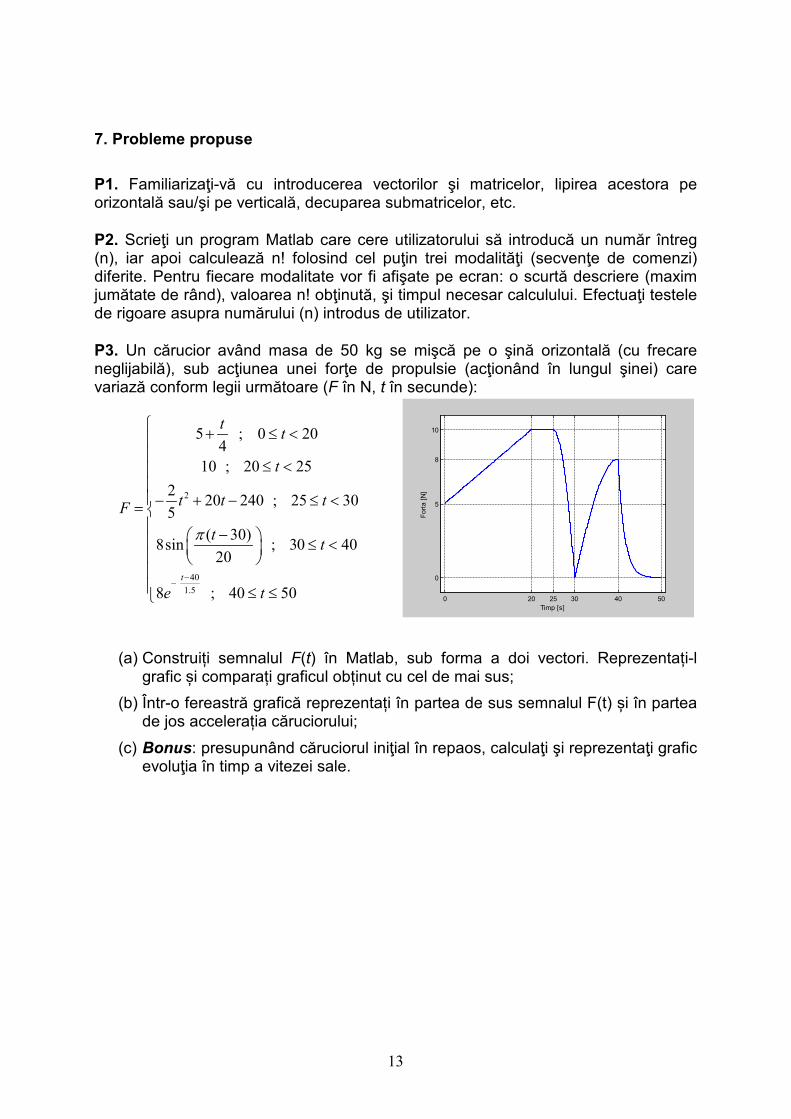
7. Probleme propuse P1. Familiarizaţi-vă cu introducerea vectorilor şi matricelor, lipirea acestora pe orizontală sau/şi pe verticală, decuparea submatricelor, etc. P2. Scrieţi un program Matlab care cere utilizatorului să introducă un număr întreg (n), iar apoi calculează n! folosind cel puţin trei modalităţi (secvenţe de comenzi) diferite. Pentru fiecare modalitate vor fi afişate pe ecran: o scurtă descriere (maxim jumătate de rând), valoarea n! obţinută, şi timpul necesar calculului. Efectuaţi testele de rigoare asupra numărului (n) introdus de utilizator. P3. Un cărucior având masa de 50 kg se mişcă pe o şină orizontală (cu frecare neglijabilă), sub acţiunea unei forţe de propulsie (acţionând în lungul şinei) care variază conform legii următoare (F în N, t în secunde):
2
40 1.5
5 ; 0 204
10 ; 20 252 20 240 ; 25 305
( 30)8sin ; 30 4020
8 ; 40 50t
t t
t
t t tF
t t
e t
π
−−
+ ≤ <
≤ <− + − ≤ <= − ≤ < ≤ ≤
(a) Construiți semnalul F(t) în Matlab, sub forma a doi vectori. Reprezentați-l
grafic și comparați graficul obținut cu cel de mai sus; (b) Într-o fereastră grafică reprezentați în partea de sus semnalul F(t) și în partea
de jos accelerația căruciorului;
(c) Bonus: presupunând căruciorul iniţial în repaos, calculaţi şi reprezentaţi grafic evoluţia în timp a vitezei sale.
0 20 25 30 40 50
0
5
8
10
Timp [s]
Forta
[N]
14
Lucrarea II: STUDIUL PRIN SIMULARE ÎN MEDIUL MATLAB
AL TRANZIŢIEI CAUZALE INTRARE-IEŞIRE PENTRU PROCESE
FIZICE CU COMPORTARE DE TIP INTEGRATOR SAU DERIVATOR
1. Consideraţii generale, motivaţie şi obiectiv Un număr mare de sisteme fizice de naturi diferite sunt descrise prin legi care evidenţiază legătura dintre o mărime fizică derivată şi o altă mărime fizică nederivată. Interpretarea tranziţiei cauzale intrare-ieşire pentru o astfel de lege se poate face apelând la modele de tip integrator sau de tip derivator. Prin parcurgerea acestei şedinţe de aplicaţii, studentul va studia comparativ aplicabilitatea celor două tipuri de modele (integrator sau derivator) şi va efectua experienţe de simulare în mediul MATLAB cu referire la funcţionarea (descrisă prin astfel de modele) a unor procese fizice frecvent întâlnite în practica tehnico-inginerească.
2. Cunoştinţe prealabile necesare - operaţii elementare în mediul software MATLAB - Paragrafele "Modele de tip integrator" şi "Modele de tip derivator" din cadrul cursului de
"Modelarea sistemelor fizice".
3. Breviar teoretic
3.1. Tranziţia cauzală intrare-ieşire pentru procese fizice cu comportare de tip integrator Modele de tip integrator sunt descrise, în cazul unei comportări liniare, de o ecuaţie de forma:
0,)0();()( 0 ≠== ayytutya (1)
unde u(t) este o funcţie continuă, notând mărimea (variabila sau semnalul) cauză (sau de intrare), iar y(t) notează mărimea efect (sau de ieşire). Denumirea de "model tip integrator" se datorează faptului că y(t) poate fi exprimat drept:
).0()(1)(0
ydua
tyt
+= ∫ tt (2)
Exprimarea integrală (2) pune în evidenţă funcţionarea de tip acumulativ în raport cu mărimea de intrare u(t), în sensul că integrarea utilizează toate valorile semnalului u de pe întreg intervalul [0, t]. Forma integrală (2) posedă avantajul că poate fi utilizată şi în cazul mai general când u(t) este continuă pe porţiuni (cu discontinuităţi de speţa întâi). De exemplu, dacă u(t) este definită cu o discontinuitate de speţa întâia în t1 prin:
15
≤<≤
=tttu
tttutu
12
11
);(0);(
)( ,
unde u1(t) şi u2(t) sunt funcţii continue, atunci, conform relaţiei (2), se poate scrie:
≤+
+
<≤+=
∫ ∫
∫
ttydudua
ttyduaty
t t
t
t
10 21
0 11
);0()()(1
0);0()(1
)(1
1tttt
tt
Este evident că acest exemplu poate fi formulat şi în spiritul ecuaţiei (1), definind modelul astfel: pentru 10 tt <≤ , modelul este: 01 )0();()( yytutya == pentru tt ≤1 , modelul este ).(lim)();()(
11
12 tytytutya
tttt
<→
==
Cu alte cuvinte, condiţia finală de pe intervalul [0, t1), exprimată prin ),(lim)(
11
1 tyty
tttt
<→
= devine
condiţie iniţială pentru intervalul [t1, ∞). În final, facem precizarea că majoritatea textelor inginereşti consideră drept subînţeleasă posibilitatea ca u(t) să prezinte discontinuităţi de speţa întâia în condiţiile exprimării de forma (1) (fără a mai furniza explicaţii anterioare privitoare la transformarea condiţiei finale în condiţie iniţială).
3.2. Tranziţia cauzală intrare-ieşire pentru procese fizice cu comportare de tip derivator Modelele de tip derivator sunt descrise, în cazul unei comportări liniare, de o ecuaţie de forma:
,0),()( ≠= btubty (3)
unde u(t) este o funcţie netedă (de clasă C1) notând variabila cauză (sau de intrare) şi y(t) notează variabila efect (sau de ieşire). Facem precizarea că în unele texte inginereşti exprimarea (3) este utilizată şi în sensul mai larg când u(t) este derivabilă pe porţiuni, rezultând că y(t) va avea un număr de puncte de discontinuitate de speţa întâia (corespunzătoare punctelor unghiulare ale lui u(t)). Exprimarea derivativă (3) pune în evidenţă funcţionarea de tip anticipativ în raport cu mărimea de intrare u(t), în sensul că definiţia derivatei )( 0tu ca limită a raportului incremental presupune cunoaşterea valorilor lui u(t) şi la momente de timp t > t0 (adică în avans faţă de momentul curent considerat t0, unde se evaluează )( 0tu ).
3.3. Studiul comparativ al unor legi ale fizicii cu exprimare cauzală de tip integral sau derivativ Un număr mare de legi întâlnite în diverse domenii ale fizicii posedă exprimări în forma implicită:
0,0)()( ≠=− ktwtvk (4)
unde v(t) şi w(t) sunt două mărimi (variabile sau semnale) dependente, ca evoluţie în timp,
16
una de cealaltă. Din punctul de vedere al construcţiei unui model, una din cele două mărimi trebuie privită drept cauză, iar cealaltă drept efect. În unele situaţii, modul de funcţionare al procesului fizic modelat dă informaţii precise privind care din cele două variabile v sau w reprezintă cauza şi care efectul. Există însă numeroase situaţii când rămâne la latitudinea modelatorului desemnarea variabilei cu rol de cauză şi a celei cu rol de efect. Vor exista atunci două opţiuni: (i) w cauză şi v efect, caz când modelul este tip integrator, cu exprimarea de forma (1) sau
(2). (ii) v cauză şi w efect, caz când modelul este de tip derivator, cu exprimarea de forma (3). În condiţiile când se utilizează opţiunea (i), se spune că legea (4) este exprimată în cauzalitate de tip integral sau, mai simplu, în cauzalitate integrală. În condiţiile când se utilizează opţiunea (ii), se spune că legea (4) este exprimată în cauzalitate de tip derivativ sau, mai simplu, în cauzalitate derivativă. În baza celor discutate în secţiunile precedente, se preferă (ori de câte ori este posibil) exprimarea legii (4) în cauzalitate integrală, datorită următoarelor aspecte (evidenţiate deja anterior): Cauzalitatea integrală evidenţiază o funcţionare de tip acumulativ, care este în deplină
concordanţă cu sensul fizic intuitiv (spre deosebire de caracterul anticipativ al exprimării cauzale derivative);
Exprimarea în cauzalitate integrală, adică forma (1) sau (2), pune mai puţine restricţii asupra mărimii de intrare (spre deosebire de intrarea (3) de tip derivativ).
Un alt motiv (de altfel, deosebit de important) pentru care se preferă utilizarea cauzalităţii integrate îl constituie faptul că în simulare, calculul lui y(t) (prin metode discrete, specifice analizei numerice – adică nu analitic, exact!) se realizează cu mai bună precizie pentru o descriere de forma (1) sau (2), decât pentru o descriere de forma (3).
4. Facilităţi dezvoltate în mediul MATLAB pentru simularea proceselor fizice cu comportare de tip integrator sau derivator Programele menţionate sunt disponibile studenţilor ce urmează cursul de "Modelarea sistemelor fizice", acestea fiind incluse în folderul "MSF\Laboratoare\Scripturi Matlab" de pe calculatoarele pe care se efectuează aplicaţiile la disciplina amintită.
4.1. Programul integrator Obiectiv: Calculează numeric ieşirea y(t) a unui model de tip integrator (1) pentru condiţie iniţială y(0) = y0 şi variabila de intrare funcţie scară, de forma:
<≤
<≤≤≤
=
−
−
nnn
jjj
tttu
tttuttu
tu
1
1
11
;
;0;
)(
Apelează funcţia MATLAB ode23 (vezi help) Date de intrare:
vect_t = [t1…tn] - vector linie cu n componente, precizând momentele de timp când se modifică valoarea mărimii de intrare u
Observaţie: Valorile t1< … <tn trebuie să fie în secvenţă strict crescătoare vect_u = [u1…un] - vector linie cu n componente, precizând valorile intrării u pe
17
cele n intervale de timp yini - condiţia iniţială a integratorului a - constanta din ecuaţia (1) a integratorului
Date de ieşire: timp - vector linie, precizând momentele de timp la care se calculează ieşirea y Observaţie: Momentele de timp colectate în vectorul timp sunt stabilite automat (din
raţiuni de precizie a calculului numeric) de către funcţia MATLAB ode23, deci dimensiunea vectorului timp nu este cunoscută apriori.
ydetimp - vector linie, precizând valorile ieşirii y la momentele din vectorul timp udetimp - vector linie, precizând valorile intrării u la momentele din vectorul timp
Reprezentări grafice: graficul u(t) graficul y(t)
Descrierea algoritmului de calcul:
1. citeşte momentele de timp în vectorul vect_t; 2. citeşte valorile treptelor aplicate la intrare în vectorul vect_u; 3. citeşte constanta de timp a integratorului în variabila a; 4. citeşte condiţia iniţială în variabila yini; 5. extrage numărul treptelor aplicate la intrare în variabila nr_int; 6. iniţializează variabilele timp, udetimp, ydetimp cu vectori fără elemente (ex.: timp = []); 7. declară variabilele u şi a de tip global; 8. pentru i = 1: nr_int execută atribuie tini ← vect_t(i) atribuie tfin ← vect_t(i+1) atribuie u ← vect_u(i) [twork, ywork] = ode23(‘fun’,[tini tfin], yini); atribuie timp ← [timp twork’] atribuie udetimp ← [udetimp vect_u(i)*ones(1,length(twork))] atribuie ydetimp ←[ydetimp ywork’] atribuie yini ← ywork(length(ywork)) 9. reprezintă grafic, în aceeaşi fereastră grafică, în sisteme de coordonate diferite, perechile (timp, udetimp) şi (timp, ydetimp). 10. editarea funcţiei fun:
function yp = fun(t,y) global u a; yp=u/a;
4.2. Programul deri Obiectiv: Calculează numeric ieşirea y(t) a unui model tip derivator (3) pentru o mărime de intrare oarecare, definită prin secvenţa de n valori u1 = u(t1), …, un = u(tn) Apelează funcţia MATLAB diff (vezi help) Date de intrare:
vect_t = [t1, …, tn] - vector linie cu n componente, precizând momentele de timp la care este cunoscută valoarea intrării u
vect_u =[u1, …, un] - vector linie cu n componente, precizând valorile mărimii de intrare n la momentele de timp din vect_t.
b - constanta din ecuaţia (3) a derivatorului

18
Date de ieşire: vect_y = [y1, …, yn-1] - vector linie cu n - 1 componente, precizând valorile mărimii
de ieşire y la primele n - 1 momente de timp din vect_t. Observaţie: Calculul numeric al derivatei este realizat de funcţia MATLAB diff care evaluează rapoartele incrementate:
[ ] ;1,,1)()()( 11 −=−−= ++ njtttutuR jjjjj
Valoarea Rj, j=1, …, n-1, poate fi utilizată pentru a aproxima fie ).(fie),( 1+jj tutu În programul deri, este considerată aproximarea:
.1,,1,)( −== njRtu jj
Descrierea algoritmului de calcul:
1. citeşte momentele de timp în vectorul vect_t; 2. citeşte valorile treptelor aplicate la intrare în vectorul vect_u; 3. citeşte constanta de timp a integratorului în variabila b; 4. calcul vector al valorilor mărimii de ieşire în variabila vect_y:
vect_y = b*diff(vect_u)./diff(vect_t); 5. reprezintă garfică în aceeaşi fereastră grafică, în sisteme de coordonate diferite, perechile:
(vect_t, vect_u) şi (vect_t(1:length(vect_t)-1), vect_y)
4.3. Programul rezervor
Obiectiv: Calculează numeric nivelul lichidului h ≥ 0 dintr-un rezervor cilindric de arie A, suficient de înalt, alimentat cu un debit q ≥ 0 funcţie scară de forma:
≤≤
≤≤<≤
=
−
−
nnn
jjj
tttq
tttqttq
tq
1
1
11 0)(
şi din care se evacuează lichid la debit constant qevac. Nivelul iniţial al fluidului în rezervor este h(0) = h0 Apelează: funcţia MATLAB ode23 (vezi help). Date de intrare:
vect_rez = [t1…tn] - vector linie cu n componente, precizând momentele de timp când se modifică debitul de alimentare q
Observaţie: Elementele vectorului vect_rez t1 <…< tn sunt în secvenţă strict crescătoare.
vecq_rez = [q1…qn] - vector linie cu n componente, precizând valorile debitului de alimentare q pe cele n intervale de timp.
Observaţie: Elementele vectorului vecq_rez sunt mai mari sau egale cu zero. A - aria secţiunii rezervorului cilindric h0 - nivelul iniţial al fluidului în rezervor (h0) qevac - debitul constant de evacuare (qevac)
Date de ieşire: timp - vector linie, precizând momentele de timp la care se calculează nivelul h Observaţie: Momentele de timp colectate în vectorul timp sunt stabilite automat (din
raţiuni de precizie a calculului numeric) de către funcţia MATLAB ode23, deci dimensiunea vectorului timp nu este cunoscută apriori.
19
hdetimp - vector linie, precizând valorile nivelului h la momentele din vectorul timp qdetimp - vector linie, precizând valorile debitului de alimentare q la momentele din
vectorul timp Reprezentări grafice: graficul q(t) graficul h(t)
5. Exemplu de problemă rezolvată analitic
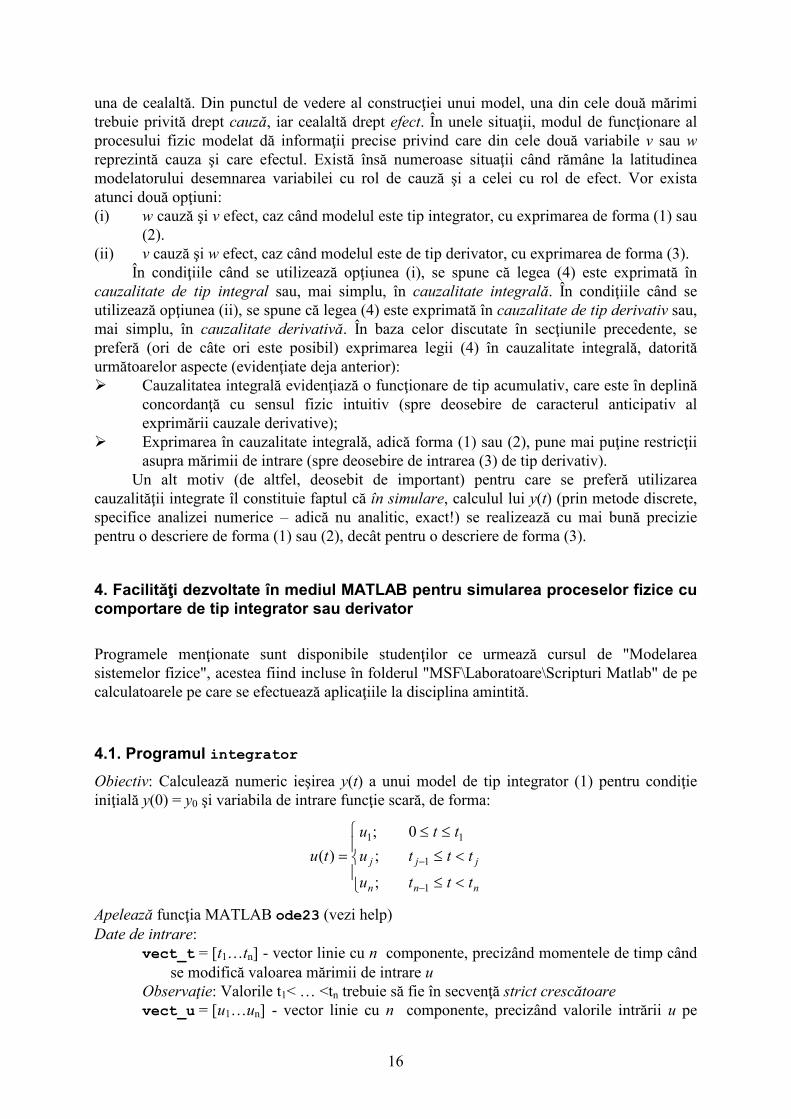
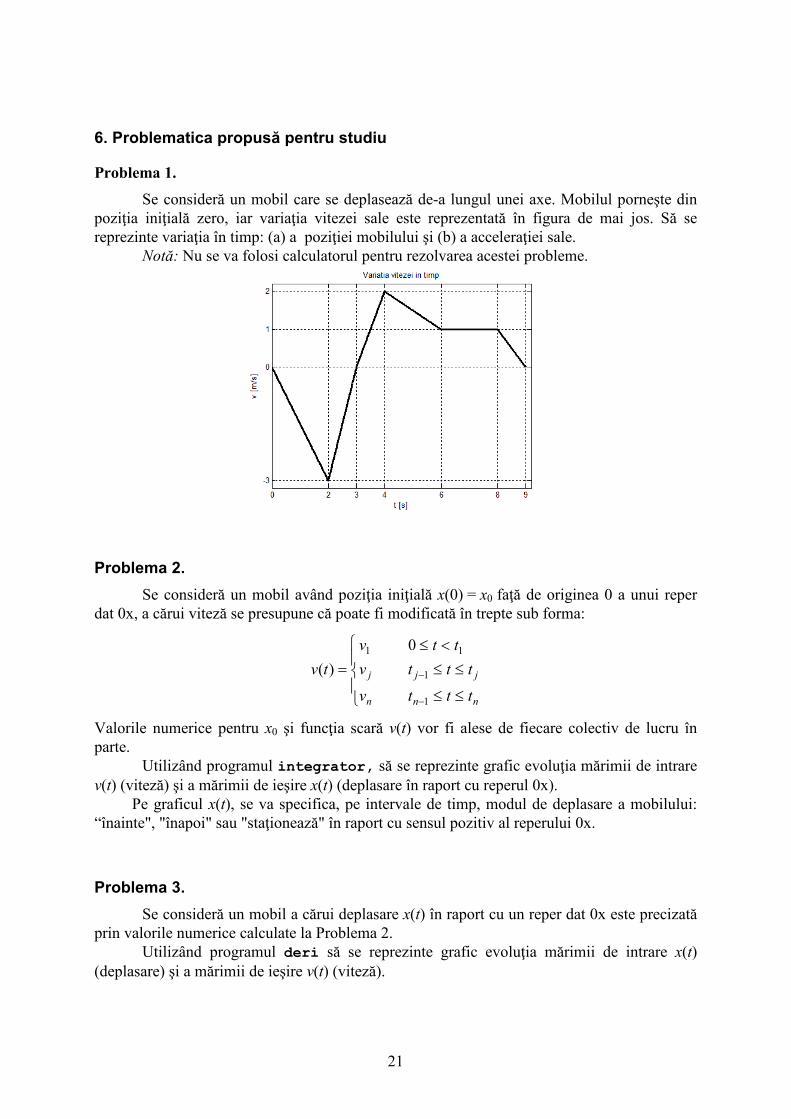
Se consideră un mobil care se deplaseaza de-a lungul unei axe. Mobilul porneste din pozitia initială x(0)=0, iar variaţia vitezei sale v(t) este reprezentată în figura de mai jos. Să se reprezinte variaţia în timp a poziţiei mobilului, x(t).
Având în vedere că legătura între mărimea de intrare (viteza) şi cea de ieşire (poziţia)
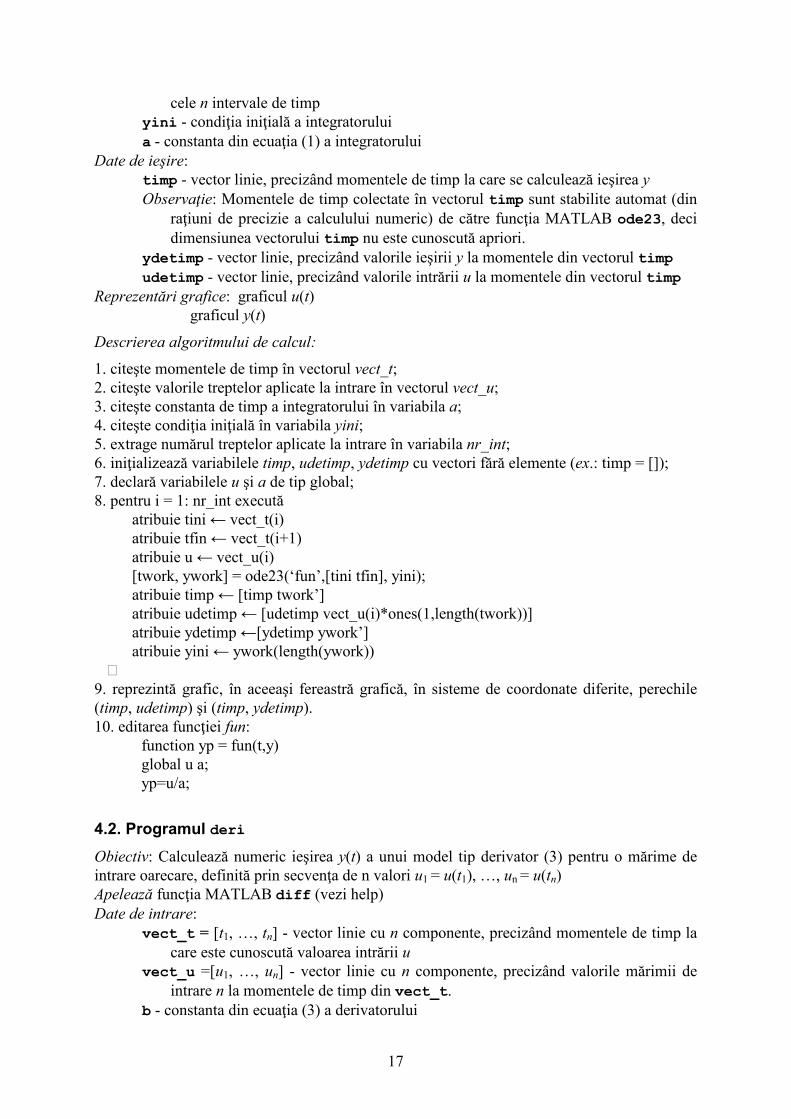
este ( ) ( )x t v t= , avem un model de tip integrator, cu constanta integratorului 1 şi condiţia iniţială x(0)=0. Soluţia acestei ecuaţii (de forma integrală (2)) poate fi calculată în punctele t = 2, 3, 4, 6 pornind de la obsevaţia că integrala definită are semnificaţie de arie cuprinsă între grafic şi axa absciselor.
Astfel, în figura de mai sus marcăm ariile de interes şi putem calcula valorile poziţiei
mobilului la momentele de timp t = 2, 3, 4, 6 după cum urmează:
A1 A2
A3
A4
20
x(2) = A1 + x(0) = 2+0 = 2 (aria triunghiului dreptunghic A1 fiind jumătate din produsul catetelor, adică 1
2 22
A ⋅= )
x(3) = A2 + x(2) = 1+2 = 3 x(4) = A3 + x(3) = 0+3 = 3 x(6) = -A4 + x(4) = -3+3 = 0 (aria triunghiului A4 se consideră cu semn negativ, deoarece
viteza pe intervalul de timp [4,6] este negativă, prin urmare la fel va fi şi integrala definită a acesteia)
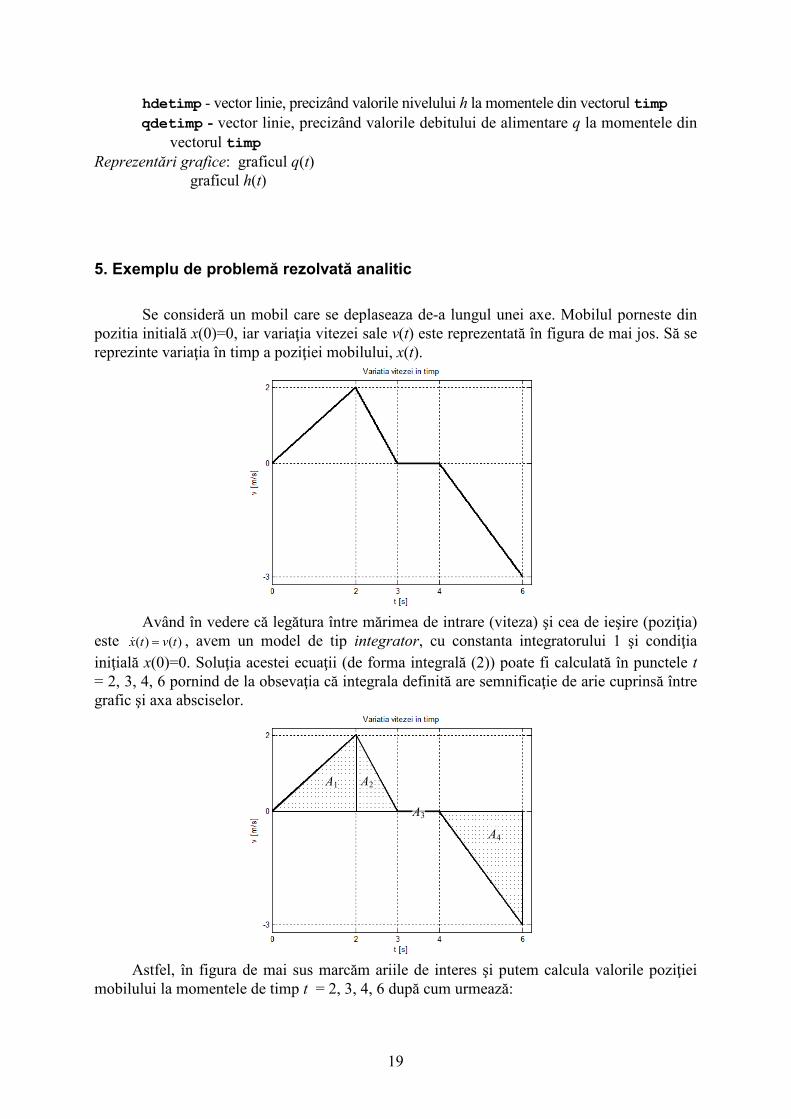
Pentru obţinerea graficului x(t) se reprezintă mai întâi punctele x(t), t = 0, 2, 3, 4, 6, iar
apoi se unesc aceste puncte conform următoarelor observaţii: - pe intervalul [0,2)t ∈ , mărimea de intrare creşte linear, ceea ce înseamnă că integrala
acesteia va fi o ecuaţie de grad 2 cu coeficient dominant pozitiv (graficul fiind porţiune de parabolă concavă – grafic care "ţine apa");
- pe intervalul [2,3)t ∈ , mărimea de intrare descreşte linear, ceea ce înseamnă că integrala acesteia va fi o ecuaţie de grad 2 cu coeficient dominant negativ (graficul fiind porţiune de parabolă convexă – grafic care "nu ţine apa");
- pe intervalul [3,4)t ∈ , intrarea este nulă, prin urmare ieşirea rămâne constantă (în cazul în care intrarea ar fi constantă, dar diferită de zero, ieşirea ar evolua linear);
- pentru intervalul [4,6)t ∈ se aplică aceeaşi regulă ca şi pentru intervalul [0,2)t ∈ (graficul lui x(t) "ţine apa"). Menţionăm că diferenţa faţă de intervalul [0,2)t ∈ este semnul mărimii de intrare, care implică sensul de variaţie al mărimii de ieşire, însă fără a-i afecta curbura. Conform explicaţiilor de mai sus, graficul mărimii de ieşire poate fi reprezentat ca în
figura următoare:
21
6. Problematica propusă pentru studiu
Problema 1. Se consideră un mobil care se deplasează de-a lungul unei axe. Mobilul porneşte din
poziţia iniţială zero, iar variaţia vitezei sale este reprezentată în figura de mai jos. Să se reprezinte variaţia în timp: (a) a poziţiei mobilului şi (b) a acceleraţiei sale.
Notă: Nu se va folosi calculatorul pentru rezolvarea acestei probleme.
Problema 2. Se consideră un mobil având poziţia iniţială x(0) = x0 faţă de originea 0 a unui reper
dat 0x, a cărui viteză se presupune că poate fi modificată în trepte sub forma:
≤≤
≤≤<≤
=
−
−
nnn
jjj
tttv
tttvttv
tv
1
1
11 0)(
Valorile numerice pentru x0 şi funcţia scară v(t) vor fi alese de fiecare colectiv de lucru în parte.
Utilizând programul integrator, să se reprezinte grafic evoluţia mărimii de intrare v(t) (viteză) şi a mărimii de ieşire x(t) (deplasare în raport cu reperul 0x). Pe graficul x(t), se va specifica, pe intervale de timp, modul de deplasare a mobilului: “înainte", "înapoi" sau "staţionează" în raport cu sensul pozitiv al reperului 0x.
Problema 3. Se consideră un mobil a cărui deplasare x(t) în raport cu un reper dat 0x este precizată
prin valorile numerice calculate la Problema 2. Utilizând programul deri să se reprezinte grafic evoluţia mărimii de intrare x(t)
(deplasare) şi a mărimii de ieşire v(t) (viteză).
22
Problema 4. a) Utilizând programul rezervor să se reprezinte grafic evoluţia debitului de alimentare q(t) (mărime de intrare) şi a nivelului de lichid h(t) (mărime de ieşire) pentru valori numerice reprezentative, stabilite de fiecare colectiv de lucru în parte. b) Pe graficul h(t) se va specifica, pe intervale de timp, modul de evoluţie a nivelului: "creşte", "scade" sau "staţionează", precum şi relaţia "<", ">", sau "=" dintre debitul de alimentare q(t) şi debitul de evacuare qevac. c) Pornind de la modelul tip integrator discutat în secţiunea 3, să se construiască un model matematic pentru funcţionarea rezervorului, considerând drept mărime de intrare, debitul de alimentare q(t) (variabil în timp) şi debitul de evacuare qevac (constant în timp).
Probleme facultative: Să se reia problemele 1, 2 pentru a studia comportarea în cauzalitate integrală, respectiv derivativă, a legilor de forma (4) care descriu:
a) dependenţa dintre curentul prin şi tensiunea pe un condensator de capacitate C; b) dependenţa dintre viteza extremităţii libere a unui arc cu constante de elasticitate k şi forţa elastică din arc; c) dependenţa dintre forţa aplicată unui rigid de masă m şi viteza de deplasarea acestuia;

23
24
Lucrarea III: STUDIUL PRIN SIMULARE ÎN MEDIUL MATLAB
AL COMPORTĂRII PROCESELOR FIZICE MODELABILE PRIN
ECUAŢII DIFERENŢIALE DE ORDINUL I, LINIARE,
CU COEFICIENŢI CONSTANŢI
1. Consideraţii generale, motivaţie şi obiectiv În practica tehnico-inginerească se întâlnesc frecvent sisteme fizice a căror funcţionare poate fi modelată prin ecuaţii diferenţiale de ordinul I, liniare, cu coeficienţi constanţi. Astfel de sisteme sunt uzual acţionate de mărimi de intrare ce variază în timp după legi standard, uşor de realizat tehnologic, cum ar fi semnale treaptă, semnale armonice (sinusoidale) etc. Efectul acestor tipuri de intrări se manifestă prin instalarea unui regim permanent de funcţionare a sistemului, când variabila de ieşire reproduce anumite trăsături fundamentale ale variabilei de intrare. Manifestările inerţiale, inerente operării sistemului fizic, fac ca instalarea regimului permanent să nu se producă instantaneu, ci după un anumit interval de timp dependent, ca durată, de valorile parametrilor fizici ce caracterizează elementele componente ale sistemului. Prin parcurgerea acestei şedinţe de aplicaţii, studentului i se oferă posibilitatea unui studiu sistematizat al comportării proceselor fizice modelabile prin ecuaţii diferenţiale de ordinul I, liniare, cu coeficienţi constanţi, care pune accentul (cu ajutorul unor experimente de simulare comparative) asupra următoarelor aspecte definitorii ale comparării: dependenţa de valorile parametrilor fizici ce caracterizează elementele componente ale
sistemului; dependenţa de trăsăturile fundamentale ale unor mărimi de intrare, uzitate frecvent în practică; dependenţa de condiţiile iniţiale, pre-existente în sistemul fizic.
Însuşirea tuturor acestor aspecte este deosebit de importantă pentru pregătirea studentului din următoarele raţiuni didactice: - Studentul poate face referiri imediate şi cu diverse suporturi intuitive, care, în cazul
modelelor studiate, sunt deosebit de simple, şi sugestive sub raportul funcţionării; - Noţiunile introductive şi proprietăţile evidenţiate în comportarea sistemelor fizice
modelabile prin ecuaţii diferenţiale de ordinul I se vor regăsi (generalizate sub diverse forme) în cazul modelelor de tip ecuaţie diferenţială de ordin superior.
2. Cunoştinţe prealabile necesare - Operaţii elementare în mediul software MATLAB; - Capitolul "Modele de tip ecuaţie diferenţială de ordinul I, liniare, cu coeficienţi constanţi"
din cadrul cursului de "Modelarea proceselor fizice".

25
3. Breviar teoretic 3.1. Modele de tip ecuaţie diferenţială de ordinul I, liniare, cu coeficienţi constanţi
Un model de acest tip este definit prin ecuaţia diferenţială de forma:
000101 )(,0,0);()()( ytyaatutyatya =>>=+ , (1)
unde u(t) este o funcţie continuă, notând mărimea (variabila sau semnalul) cauză (sau de intrare), iar y(t) notează mărimea efect (sau de ieşire). Pentru un semnal de intrare u(t) precizat şi o condiţie iniţială y(t) = y0, semnalul de ieşire este dat de soluţia ecuaţiei diferenţiale (1):
( )( )
( )( )
( )dττua
etyetytt
τtaatt
aa
10
10
1
00
1
0
∫−−−−
+= (2)
Condiţia impusă semnalului de intrare u(t) poate fi realizată în sensul că u(t) trebuie să fie continuă pe porţiuni, cu discontinuităţi de speţa întâia. De exemplu, dacă u(t) este definită cu o discontinuitate de speţa întâia în t1 prin:
≤<≤
=tttu
ttttutu
12
101);();(
)( ,
unde u1(t) şi u2(t) sunt funcţii continue pe intervale considerate, atunci, utilizând relaţia (2) în ipoteza continuităţii lui y(t) în t1, putem scrie:
( )
( )( )
( )( )
( ) ( )( )
( )( )
( )( )
≤+
+
<≤+
=
∫∫
∫
−−−−−−−−
−−−−
<→
t
t
τtaa
ty
t
t
τtaatt
aatt
aa
t
t
τtaatt
aa
ttdττua
edττua
etyee
tttdττua
etye
ty
tttt
1
1
0
11
1
0
11
001
1
01
1
0
0
1
00
1
0
121
)(lim
10
101
0
;11
;1
(((((( ((((((
Este evident că acest exemplu poate fi formulat în spiritul ecuaţiei (1), definind modelul astfel: - pentru 10 ttt <≤ , modelul este: 00101 )();()()( ytytutyatya ==+ ; - pentru tt ≤1 , modelul este: )(lim)();()()(
11
1201 tytytutyatya
tttt
<→
==+ .
Cu alte cuvinte, în baza continuităţii semnalului y(t) în t1, condiţia finală de pe intervalul [0, t1), exprimată prin )(lim)(
11
1 tyty
tttt
<→
= , devine condiţie iniţială pentru intervalul [t1, ∞].
Facem precizarea că majoritatea textelor inginereşti consideră drept subînţeleasă posibilitatea ca u(t) să prezinte discontinuităţi de speţa întâia în condiţiile exprimării de forma (1) (fără a mai furniza explicaţiile anterioare privitoare la transformarea condiţiei finale în condiţie iniţială).
În general, un model de forma (1) descrie comportarea unui sistem fizic alcătuit dintr-un element care acumulează energie (cu o comportare de tip integrator) şi un element care disipă energie (cu o comportare de tip rezistiv, exprimată printr-o ecuaţie algebrică v(t)-kw(t) = 0). Din punct de vedere fizic, elementul integrator nu îşi poate modifica energia acumulată prin salt şi astfel asigură condiţia de continuitate presupusă pentru y(t) în cele prezentate mai sus.
26
3.2. Comportare de regim liber şi de regim forţat
Soluţia (2) a ecuaţiei diferenţiale (1) poate fi descompusă sub forma:
)()()( tytyty fl += , (3)
unde forma componentă:
( ))()( 0
01
0
tyetytt
aa
l−−
= (4)
defineşte comportarea de regim liber sau răspunsul liber al sistemului (determinat numai de condiţia iniţială y(t) = y0, considerând semnalul de intrare nul), iar cea de a doua componentă:
( )( )
( )dττua
etytt
τtaa
f1
10
1
0
∫−−
= (5)
defineşte comportarea de regim forţat sau răspunsul forţat al sistemului (determinat numai de semnalul de intrare u(t), considerând condiţia iniţială nulă). Descompunerea (3) pune în evidenţă următoarele aspecte: yl(t), exprimat prin (4), poate fi privit ca soluţia ecuaţiei diferenţiale (1) în forma omogenă
(adică ( ) 0≡tu ) cu condiţia iniţială y0 din (1) ceea ce conduce la modelul de regim liber:
( ) ( ) ( ) 000101 000 yty;a,a,tyatya ll =>>=+ (6)
yf(t), exprimat prin (5), poate fi privit ca soluţia ecuaţiei diferenţiale (1) în forma neomogenă, în condiţia iniţială nulă (adică y(t0) = 0), ceea ce conduce la modelul de regim forţat:
( ) ( ) ( ) ( ) 000 00101 =>>=+ ty;a,a,tutyatya ff (7)
Astfel, descompunerea (3), ne arată că modelul (1) considerat iniţial, constituie un model complet al comportării sistemului fizic, iar y(t) din (2) reprezintă răspunsul complet, care cuprinde informaţiile privitoare atât la evoluţia liberă cât şi la evoluţia forţată. Subliniem faptul că, din punct de vedere practic, observarea semnalului y(t) prin măsurare, înregistrare etc.) nu permite evidenţierea separată a celor două componente yl(t) şi respectiv yf(t) din descompunerea (3). Această descompunere are rolul de a preciza la nivel conceptual faptul că evoluţia în timp a semnalului de ieşire y(t) este datorată structurii sistemului (sintetizată în coeficienţii a1, a0) asupra căreia acţionează, pe de o parte, condiţia iniţială (modelul de regim liber (6)), iar, pe de altă parte semnalul de intrare (modelul de regim forţat (7)). Trebuie remarcat faptul că descompunerea (3) este posibilă datorită liniarităţii modelului. În cazul când ipoteza de liniaritate a comportării este respectată practic cu suficientă acurateţe, se pot organiza trei tipuri de experimente: 1) experimente corespunzătoare modelului complet (1) pentru observarea y(t); 2) experimente corespunzătoare modelului de regim liber (6) pentru observarea yl(t); 3) experimente corespunzătoare modelului de regim forţat (7) pentru observarea yf(t); şi ulterior, se poate verifica validitatea descompunerii (3). Este evident faptul că, în practică, majoritatea situaţiilor necesită studierea răspunsului complet, dar există şi cazuri când obiectul studiului îl poate constitui fie numai răspunsul liber, fie numai răspunsul forţat.
27
3.3. Dinamica de regim forţat pentru semnalele de intrare standard Dinamica de regim forţat corespunde modelului (7), care derivă din modelul complet
(1), pentru cazul particular al condiţiei iniţiale nule, adică y(t0) = 0. Evoluţia mărimii de ieşire y(t) este dată de relaţia (5).
Din punct de vedere practic prezintă interes studierea efectelor datorate semnalelor de intrare de tip treaptă şi sinusoidal (ca un caz particular al unui semnal armonic mai complex).
Pentru simplificarea scrierii, vom considera drept moment iniţial t0 = 0, dar aspectele ce urmează a fi discutate, îşi păstrează valabilitatea pentru orice valoare a lor.
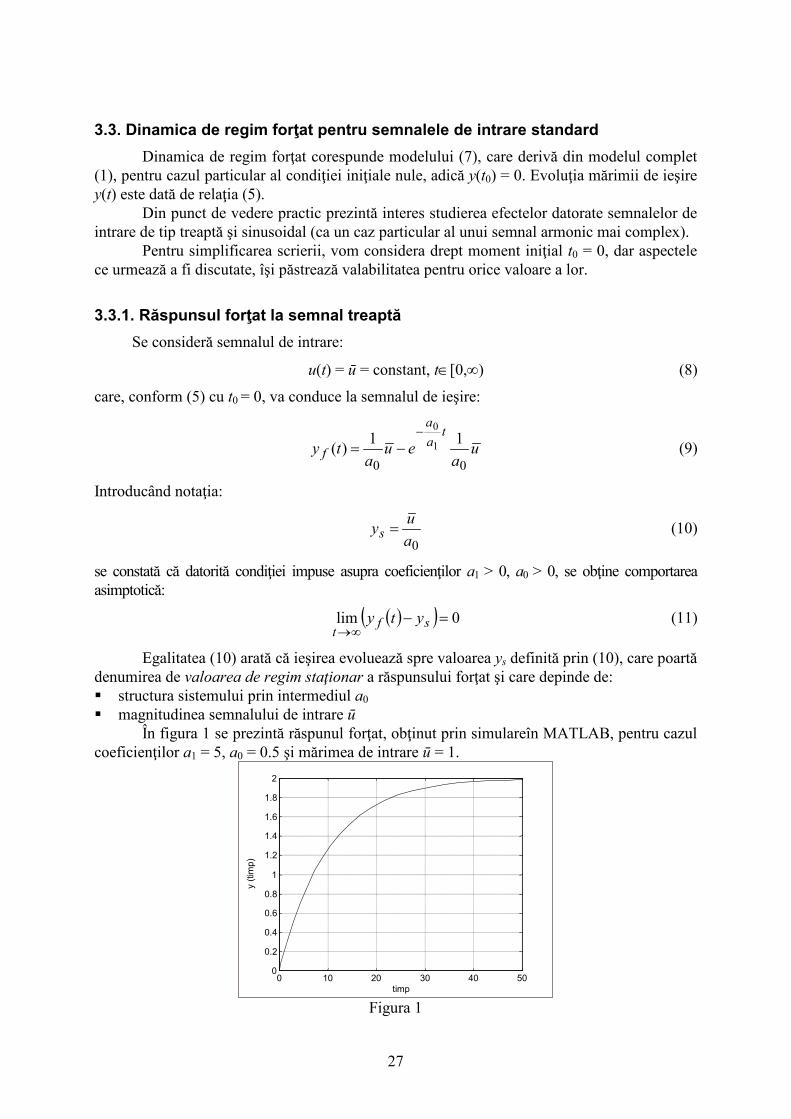
3.3.1. Răspunsul forţat la semnal treaptă Se consideră semnalul de intrare:
u(t) = ū = constant, t∈[0,∞) (8)
care, conform (5) cu t0 = 0, va conduce la semnalul de ieşire:
ua
eua
tyt
aa
f00
11)( 1
0−−= (9)
Introducând notaţia:
0a
uys = (10)
se constată că datorită condiţiei impuse asupra coeficienţilor a1 > 0, a0 > 0, se obţine comportarea asimptotică:
( )( ) 0lim =−∞→
sft
yty (11)
Egalitatea (10) arată că ieşirea evoluează spre valoarea ys definită prin (10), care poartă denumirea de valoarea de regim staţionar a răspunsului forţat şi care depinde de: structura sistemului prin intermediul a0 magnitudinea semnalului de intrare ū
În figura 1 se prezintă răspunul forţat, obţinut prin simulareîn MATLAB, pentru cazul coeficienţilor a1 = 5, a0 = 0.5 şi mărimea de intrare ū = 1.
0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
timp
y (ti
mp)
Figura 1

28
Sub raport experimental, interesează, intuitiv vorbind, cât de "repede" se realizează "apropierea" lui yf(t) de valoarea de regim staţionar ys, adică un criteriu pentru caracterizarea în timp a procesului de trecere la limită (11). Un atare criteriu se obţine considerând evoluţia în timp a raportului:
( )( )( )
( ) taa
s
sf
sf
sfs e
y
yty
yy
ytytε 1
0
0
−=
−=
−
−= , (12)
care are semnificaţia unei erori relative a ecartului curent ( ) sf yty − faţă de ecartul iniţial
( ) ssf yyy =−0 . Eroarea relativă es(t), conform (12), depinde de:
structura sistemului, caracterizată prin a1 > 0, a0 > 0, timpul curent t.
Pentru un sistem dat (deci a1 > 0, a0 > 0 precizate) se pot impune praguri corelate cu acurateţea observaţiei pentru a evalua procentul es(t) din (12), având în vedere faptul că es(t) este o funcţie strict decrescătoare în raport cu t. De exemplu, pentru t luând valoarea:
0
13 3
aat = (13)
se obţine %5100
5)( 33 =≅= −etse ,iar pentru t luând valoarea:
0
14 4
aat = (14)
se obţine %2100
2)( 44 =≅= −etse .
Cu alte cuvinte t ≥ ts , cu ts dat de (13) (respectiv (14)), ecartul curent ( ) sf yty −
ajunge la 5% (respectiv 2%) din valoarea ecartului iniţial ( ) ssf yyy =−0 . Aşadar
raportându-ne la un prag de acurateţe a observaţiei de 5% (respectiv 2%) din ecartul iniţial, se poate considera că sistemul ajunge în regimul staţionar după un timp finit ts = 3(a1 / a0), conform (13) (respectiv ts = 4(a1 / a0), conform (14)).
În intervalul de timp [0, ts) se spune că sistemul se află în regim tranzitoriu, semnalul de ieşire yf(t) fiind suficient de îndepărtat de valoarea ys către care tinde (ecartul curent
( ) sf yty − este mare în comparaţie cu ecartul final sy ).
În conformitate cu expresiile (13), respectiv (14), care definesc durata regimului tranzitoriu pentru o eroare de 5% (respectiv 2%), se constată că dinamica sistemului este caracterizată de raportul:
[ ]secunde0
1aaT = , (15)
denumit constantă de timp a sistemului. În consecinţă putem afirma că durata regimului tranzitoriu este cu atât mai mică cu cât constanta de timp a sistemului este mai mică, (indiferent de expresia (13) sau (14) care este utilizată pentru estimarea lui ts). În final, atragem atenţia asupra unei alte modalităţi de scriere a modelului (1) care

29
uzitează notaţia T din (15) şi care este preferată în majoritatea textelor de sorginte tehnică:
0)0(,0,0)()()( yykTtkutytyT =>>=+ , (16)
în care constanta k poartă denumirea de factor de amplificare şi are valoarea:
0
1a
k = (17)
Această scriere evidenţiază faptul că valoarea ieşirii în regim staţionar ys din (10) poate fi privită ca provenind din "amplificarea" valorii constante a semnalului de intrareu. Subliniem faptul că termenul de "amplificare" este utilizat în sens larg, k putând lua orice valoare pozitivă (deci, inclusiv subunitară). Cu aceste notaţii, yf(t) din (9) poate fi rescris drept:
( )uekty Ttf
/1)( −−= (18)
3.3.2. Răspunsul forţat la semnal sinusoidal Se consideră semnalul de intrare:
)[0,0,0,,sin)( ∞∈>>= tωAtωAtu (19)
care, conform (5) cu t0 = 0, va conduce (în urma calculelor) la semnalul de ieşire:
t
aa
f ARAMty 1
0
)e())(-t)sin(()(−
+= ωωϕωω , (20)
unde notaţiile:
( )1
122
(17)not(15),
221
20 +
=+
=ωT
k
ωaaM ω (21)
( ) ( )Tωωaaω arctgarctg
(17)not(15),
0
1 =
=ϕ (22)
( )122
(17)not(15),
221
20
1
+=
+=
ωTkTω
ωaaωaR ω (23)
pun în evidenţă dependenţa yf(t) de: structura sistemului prin intermediul a1 > 0, a0 > 0 sau, echivalent T > 0, k > 0; pulsaţia ω a semnalului de intrare (19). Introducând notaţia
))(sin()()( ωϕωω −= tAMty p (24)
se constată că, datorită condiţiei impuse asupra coeficienţilor a1 > 0, a0 > 0, se obţine comportarea asimptotică:
30
( ) 0lim)()()(lim 1
0
==−−
∞→∞→
taa
tpf
teARtyty ω (25)
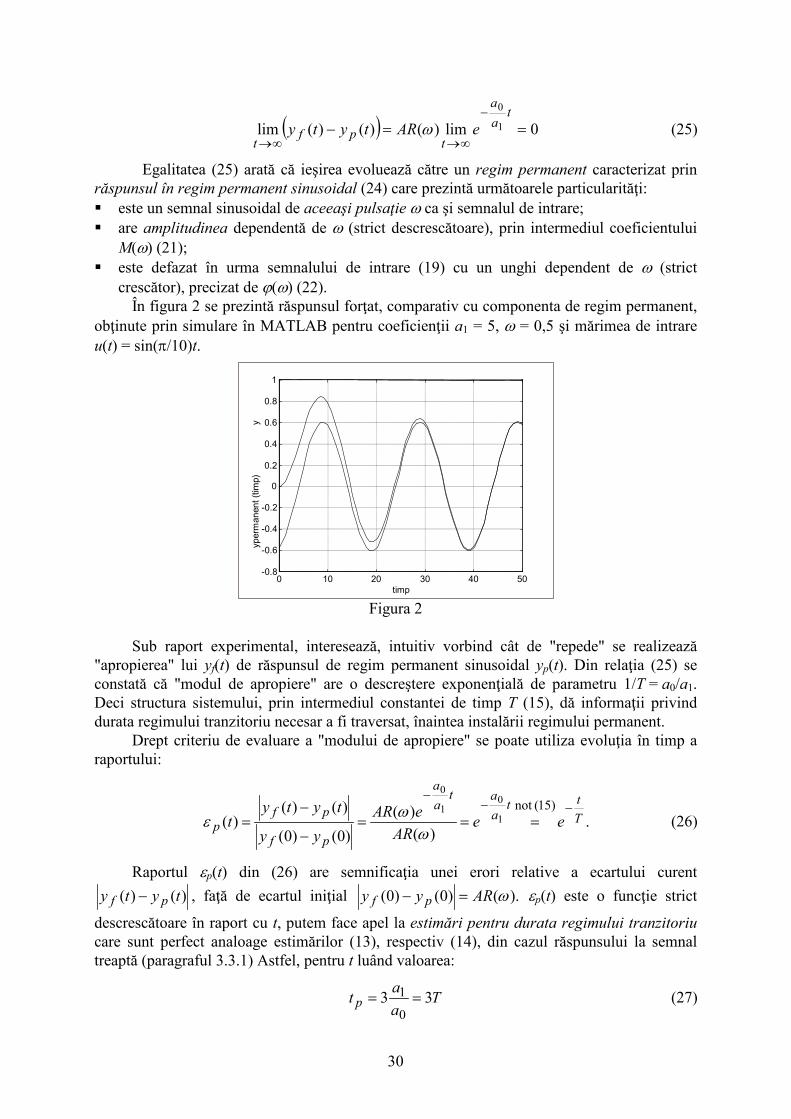
Egalitatea (25) arată că ieşirea evoluează către un regim permanent caracterizat prin răspunsul în regim permanent sinusoidal (24) care prezintă următoarele particularităţi: este un semnal sinusoidal de aceeaşi pulsaţie ω ca şi semnalul de intrare; are amplitudinea dependentă de ω (strict descrescătoare), prin intermediul coeficientului
M(ω) (21); este defazat în urma semnalului de intrare (19) cu un unghi dependent de ω (strict
crescător), precizat de ϕ(ω) (22). În figura 2 se prezintă răspunsul forţat, comparativ cu componenta de regim permanent, obţinute prin simulare în MATLAB pentru coeficienţii a1 = 5, ω = 0,5 şi mărimea de intrare u(t) = sin(π/10)t.
0 10 20 30 40 50-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
timp
yper
man
ent (
timp)
y
Figura 2
Sub raport experimental, interesează, intuitiv vorbind cât de "repede" se realizează "apropierea" lui yf(t) de răspunsul de regim permanent sinusoidal yp(t). Din relaţia (25) se constată că "modul de apropiere" are o descreştere exponenţială de parametru 1/T = a0/a1. Deci structura sistemului, prin intermediul constantei de timp T (15), dă informaţii privind durata regimului tranzitoriu necesar a fi traversat, înaintea instalării regimului permanent. Drept criteriu de evaluare a "modului de apropiere" se poate utiliza evoluţia în timp a raportului:
.)(
)()0()0(
)()()(
)15(not1
01
0
Ttt
aat
aa
pf
pfp ee
AReAR
yy
tytyt
−−−
===−
−=
ωωe (26)
Raportul ep(t) din (26) are semnificaţia unei erori relative a ecartului curent )()( tyty pf − , faţă de ecartul iniţial ).()0()0( ωARyy pf =− ep(t) este o funcţie strict
descrescătoare în raport cu t, putem face apel la estimări pentru durata regimului tranzitoriu care sunt perfect analoage estimărilor (13), respectiv (14), din cazul răspunsului la semnal treaptă (paragraful 3.3.1) Astfel, pentru t luând valoarea:
Taat p 33
0
1 == (27)
31
se obţine ep(tp) = e–3 ≅ 5%, iar pentru t luând valoarea:
Taat p 44
0
1 == (28)
se obţine ep(tp) = e–4 ≅ 2%. Cu alte cuvinte, din punctul de vedere al observaţiei fizice se poate spune că regimul
permanent se instalează după un timp finit tp dat de (27) (respectiv (28)), cu o precizie de 5% (respectiv 2%) din ecartul iniţial.
3.3.3. Comentarii asupra unor aspecte comportamentale ale sistemelor puse în evidenţă de răspunsul forţat Din analiza efectuată în paragrafele anterioare 3.3.1 şi 3.3.2 se constată că, după traversarea regimului tranzitoriu, în răspunsul de regim forţat se regăsesc caracteristicile esenţiale ale semnalului de intrare, şi anume: semnal constant ys (10), în cazul intrării treaptă (8); semnal sinusoidal yp(t) (24), în cazul intrării sinusoidale (19), ambele posedând aceeaşi pulsaţie
ω. Din aceste motive se mai spune că în regim forţat, după expirarea regimului tranzitoriu, ieşirea "copie" forma semnalului de intrare. Această afirmaţie nu vizează numai semnalele de intrare treaptă sau sinusoidale, ea păstrându-şi valabilitatea pentru o clasă mai largă de semnale de intrare. De asemenea, mai precizăm că afirmaţia de mai sus este probată şi prin modele liniare descrise prin ecuaţii diferenţiale de ordin superior. Durata regimului tranzitoriu este dependentă de structura sistemului conform (13), (14) sau (27), (28) şi constituie o măsură a inerţiei pe care o manifestă sistemul la părăsirea condiţiei iniţiale nule y(0) = 0. Încheiem comentariile din acest paragraf, subliniind faptul că termenul de regim permanent acoperă semantic şi cazul regimului staţionar, în sensul unui echivalent ca exprimare de tipul "regim permanent constant" (spre deosebire, de exemplu, de "regim permanent sinusoidal"). Mai mult, din punct de vedere al formalizării matematice, se constată că atât yf(t) dat de (9) (pentru intrare treaptă), cât şi yf(t) dat de (20) (pentru intrare sinusoidală) pot fi scrise sub forma:
)()()( tytyty tpf += (29)
cu următoarea semnificaţie a notaţiilor: yp(t) notează componenta permanentă a răspunsului forţat yf(t), având expresia concretă
yp(t) = ys = constant (10) şi respectiv yp(t) din (24); yt(t) notează componenta tranzitorie a răspunsului forţat (cu semnificaţia evidentă,
conform (29), că )(tyt reprezintă ecartul curent) având proprietatea
0)(lim =∞→
tytt
, (30)
care asigură comportarea asimptotică a regimului forţat, indiferent de tipul semnalului de intrare. Inspectând modul în care s-a abordat anterior problema duratei regimului tranzitoriu, se observă că dependenţa acestei durate de constanta de timp T (15) (adică de structura sistemului) se datorează modului exponenţial în care "se stinge" componenta tranzitorie yt(t). Astfel se justifică în mod unitar valorile obţinute pentru ts şi tp ca estimări ale timpului

32
necesar instalării regimului permanent, indiferent de tipul semnalului de intrare. Aceste estimări sunt legate de evoluţia în timp a unei ieşiri relative, exprimabilă unitar prin:
Ttt
aa
t
t
pf
pf eey
tyyy
tytyt
−−===
−
−=
(15)not1
0
)0()(
)0()0(
)()()(e , (31)
din care se poate obţine atât es(t) (12), cât şi ep(t) (25).
3.4. Dinamica de regim liber Dinamica de regim liber corespunde modelului (6), care derivă din modelul complet (1) pentru cazul particular al mărimii de intrare identic nule, adică u(t) ≡ 0. Pentru simplificarea scrierii, vom considera drept moment iniţial t0 = 0, dar aspectele ce urmează a fi discutate îşi păstrează valabilitatea pentru orice valoare t0. Evoluţia mărimii de ieşire y(t) este dată de relaţia (4) cu t0 = 0, conducând la:
)0()0()((15)not
1
0
yeyety Ttt
aa
l−−
== (32)
Relaţia (29) pune imediat în evidenţă comportarea asimptotică:
0)(lim =∞→
tylt, (33)
pentru orice y(0) ∈ R. Se spune că y = 0 reprezintă un punct de echilibru asimptotic stabil pentru sistemul considerat, în sensul că evoluţia liberă a sistemului din orice condiţie iniţială y(0) se apropie asimptotic de punctul de echilibru. În figura 3 se prezintă răspunsul liber obţinut prin simularea în mediul MATLAB pentru cazul coeficienţilor a1 = 5, a0 = 0,5 şi condiţia iniţială y(0) = 1. Subliniem faptul că această comportare este valabilă numai pentru restricţia a1 > 0, a0 > 0 impusă coeficienţilor ecuaţiei diferenţiale (1).
0 10 20 30 40 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
timp
ylib
er (t
imp)
Figura 3
Drept criteriu pentru a evalua "modul de apropiere" a lui yl(t) de 0 se poate utiliza
raportul

33
Ttt
aa
l
ll ee
yty
t−−
===(15)not
1
0
)0()(
)(e , (34)
care are semnificaţia unei erori relative a ecartului curent )(tyl faţă de ecartul iniţial )0(y . Cum el(t) este o funcţie descrescătoare de t, putem utiliza praguri de eroare analoge estimărilor (13), respectiv (14). Astfel, pentru t luând valoarea:
Taa
tl 330
1 == , (35)
se obţine el(tl) = e–3 ≅ 5%, iar pentru t luând valoarea:
,440
1 Taa
tl == (36)
se obţine el(tl) = e–4 ≅ 2%. Cu alte cuvinte, din punct de vedere al observaţiei fizice se poate spune că răspunsul liber "se stinge" după un timp finit tl dat de (35) (respectiv (36)), cu o precizie de 5% (respectiv 2%) din modulul condiţiei iniţiale.
3.5. Răspunsul complet pentru semnale de intrare standard Vom considera, ca şi în paragraful 3.3, situaţia semnalelor de intrare treaptă şi sinusoidale. De asemenea, vom apela la simplificarea scrierii rezultată din alegerea momentului iniţial t0 = 0. Ca mod de tratare însă, vom face uz de punctul de vedere unificator dezvoltat la finele paragrafului 3.3.3, şi anume de exprimarea răspunsului forţat sub forma (29). Cu aceasta, în baza relaţiei (3), putem scrie pentru răspunsul complet expresia:
)()()()( tytytyty ptl ++= , (37)
indiferent de tipul semnalului de intrare. Constatăm imediat că suma de semnale yl(t)+yt(t) posedă proprietatea:
( ) 0)()(lim =+∞→
tyty tlt
, (38)
care asigură comportarea de tip asimptotic a răspunsului complet:
( ) 0)()(lim =−∞→
tyty pt
(39)
Mai mult, din analiza efectuată în paragrafele anterioare, se constată că anularea sau "stingerea" sumei de semnale yl(t) + yt(t) are loc într-o manieră exponenţială caracterizată prin eroarea relativă:
Ttt
aa
tl
tl
p
pee
yytyty
yy
tytyt
−−==
+
+=
−
−=
(15)not1
0
)0()0()()(
)0()0(
)()()(e (40)
Cu alte cuvinte, se poate afirma şi în cazul răspunsului complet că, din punct de vedere practic, regimul permanent se instalează după un interval finit de timp, dependent de structura sistemului, prin intermediul constantei de timp T (15), astfel:

34
după 3T, dacă se consideră o eroare de 5% din ecartul iniţial )0()0( tl yy +
după 4T, dacă se consideră o eroare de 2% din ecartul iniţial )0()0( tl yy + În scopul evitării oricărei confuzii, precizăm că ecartul iniţial se explicitează diferit în cazul semnalelor treaptă şi sinusoidale, după cum urmează: pentru semnalul treaptă (9):
)0()0()0( yyyy stl −=+ , (41)
cu ys definit în (10); pentru semnal sinusoidal (20):
)0()()0()0( yARyy tl +=+ ω , (42)
cu R(ω) definit în (23).
4. Facilităţi dezvoltate în mediul MATLAB pentru simularea proceselor fizice descrise prin ecuaţii diferenţiale de ordinul I
4.1. Funcţia ed1_cst
Obiectiv: Calculează numeric ieşirea y(t) a unui model de tip ecuaţie diferenţială de ordinul întâi de forma (1), pentru condiţie iniţială y(0) = y0 şi variabilă de intrare funcţie scară, definită prin:
≤≤<≤
<≤=
−
−
nnn
jjjtttutttu
ttutu
1;
1;
11 0;)(
Apelează: funcţia MATLAB ode23 (vezi help) Date de intrare:
a1 - coeficientul a1 > 0 al termenului în dy/dt din ecuaţia (1) a0 - coeficientul a0 > 0 al termenului în y din ecuaţia (1) vect_ed1 = [t1…tn] - vector linie cu n componente , precizând momente de timp când
se modifică valoarea mărimii de intrare u. Observaţie: Valorile t1 < …< tn trebuie să fie în secvenţă strict crescătoare. vecu_ed1 = [u1…un] - vector linie cu n componente precizând valorile intrării u pe
cele n intervale de timp y0 - condiţia iniţială (y(0) = y0)
Date de ieşire: timp - vector linie, precizând momentele de timp la care se calculează ieşirea y Observaţie: Momentele de timp colectate în vectorul timp sunt stabilite automat (din
raţiuni de precizie a calculului numeric) de către funcţia MATLAB ode23, deci dimensiunea vectorului timp nu este cunoscută apriori).
udetimp - vector linie, precizând valorile intrării u la momentele din vectorul timp ydetimp - vector linie, precizând valorile ieşirii y la momentele din vectorul timp ysdetimp - vector linie, precizând valorile de regim staţionar către care evoluează
ieşirea sistemului pentru momentele din vectorul timp Mod de utilizare: În mediul MATLAB, se introduce o linie cu următoarea secvenţă de apel a funcţiei ed1_cst:
[timp, udetimp, ydetimp, ysdetimp] = ed1_cst(a1, a0, vect_ed1, vecu_ed1, y0);
35
4.2. Funcţia ed1_sin
Obiectiv: Calculează numeric ieşirea y(t) a unui model de tip ecuaţie diferenţială de ordinul întâi de forma (1), pentru condiţie iniţială y(0) = y0 şi variabilă de intrare funcţie sinusoidală
tAtu ωsin)( = pe intervalul de timp [0, tfinal]. Apelează: funcţia MATLAB ode23 (vezi help) Date de intrare:
a1 - coeficientul a1 > 0 al termenului în dy/dt din ecuaţia (1) a0 - coeficientul a0 > 0 al termenului în y din ecuaţia (1) ampl - amplitudinea semnalului sinusoidal de intrare (A) omega - pulsaţia semnalului sinusoidal de intrare (ω) tfin - extremitatea dreaptă a intervalului pe care se realizează simularea (tfinal) y0 - condiţia iniţială (y(0) = y0)
Date de ieşire: timp - vector linie, precizând momentele de timp la care se calculează ieşirea y Observaţie: Momentele de timp colectate în vectorul timp sunt stabilite automat (din
raţiuni de precizie a calculului numeric) de către funcţia MATLAB ode23, deci dimensiunea vectorului timp nu este cunoscută apriori).
udetimp - vector linie, precizând valorile intrării u la momentele din vectorul timp ydetimp - vector linie, precizând valorile ieşirii y la momentele din vectorul timp ypdetimp - vectorul linie, precizând valorile de regim permanent sinusoidal către care
evoluează ieşirea sistemului pentru momente din vectorul timp. Mod de utilizare: În mediul MATLAB, se introduce o linie cu următoarea secvenţă de apel a funcţiei ed1_sin:
[timp, udetimp, ydetimp, ypdetimp] = ed1_sin(a1, a0, ampl, omega, tfin, y0);
4.3. Funcţia derivata
Obiectiv: calculează numeric derivata unei funcţii oarecare, definită prin secvenţa de n valori y1 = y(t1), …, yn = y(tn). Apelează: funcţia MATLAB diff (vezi help) Date de intrare:
timp = [t1…tn] - vector linie cu n componente, precizând momentele de timp la care este cunoscută funcţia y
ydetimp = [y1…yn] - vector linie cu n componente, precizând valorile funcţiei y la momentele din vectorul timp
Date de ieşire: timpd = [t1…tn] - vector linie cu n–1 componente, conţinând primele n–1 elemente din
vectorul timp, ce reprezintă momentele la care este calculata derivata ddetimpd = [d1…dn-1] - vectorul linie cu n–1 componente, conţinând valorile
derivatelor la momentele de timp corespunzătoare vectorului timpd Observaţie: Calculul numeric al derivatei este realizat de funcţia MATLAB diff care
furnizează aproximările:
1...,,1,)()()( 11 −=−−=≅ ++ njttyydtjy jjjjj
Mod de utilizare: În mediul MATLAB, se introduce o linie cu următoarea secvenţă de apel a funcţiei derivata:
[timpd, ddetimpd] = derivata (timp, ydetimp);

36
5. Problematica propusă pentru studiu Problema 1
Se consideră un sistem mecanic alcătuit dintr-un resort cu constanta de elasticitate k = 2 [N/cm], conectat în paralel cu amortizor cu frecare vâscoasă, având coeficientul γ = 4 [Νs/cm], conform figurii 4:
k
γ
x(t) 0 x
A F(t)
Figura. 4
În punctul A se aplică o forţă F(t), care se modifică în timp după o lege precizată. Sub
acţiunea lui F(t), punctul A îşi modifică poziţia x(t) măsurată în raport cu punctul fix 0 ce corespunde situaţiei când arcul nu este tensionat ( ( ) 0≡tF ). Sensul pozitiv al axei 0x este dat de alungirea arcului în raport cu situaţia când acesta este netensionat (adică spre dreapta). Viteza de deplasare a punctului A se notează cu v(t).
a) Să se construiască un model matematic al sistemului dat. Indicaţie: modelul obţinut trebuie să fie un model de tip ecuaţie diferenţială de ordin I; se vor identifica valorile numerice ale constantelor generice a0 şi a1.
Utilizând programul ed1_cst, pentru modelul procesului considerat se simulează în mediul MATLAB comportarea de regim forţat pe intervalul [0, 12] s, atunci când se aplică o forţă constantă F(t) = F = 10 [N] b) Examinând graficul deplasării să se estimeze durata regimului tranzitoriu, marcând pe
grafic momentul de timp aferent: 1) pentru o eroare relativă de 5% 2) pentru o eroare relativă de 2%
c) Pe baza punctului b) să se estimeze valoarea constantei de timp a sistemului. d) Utilizând ecuaţia diferenţială a modelului de la punctul a), să se determine analitic
valoarea constantei de timp, precum şi durata regimului tranzitoriu: 1) pentru o eroare relativă de 5% 2) pentru o eroare relativă de 2%
e) Să se compare rezultatele estimărilor de la punctele b) şi c) cu valorile obţinute analitic la punctul d).
f) Examinând cele două grafice, să se estimeze valoarea factorului de amplificare. g) Utilizând ecuaţia diferenţială a modelului să se determine analitic valoarea factorului de
amplificare. h) Să se compare rezultatul estimării de la punctul f) cu valoarea obţinută analitic la punctul g).
Problema 2 a) Se reia Problema 1, punctele b) şi c), considerând noua valoare γ1 = 0.5γ şi menţinând neschimbate restul valorilor numerice. b) Să se explice sensul fizic al deosebirilor şi asemănărilor dintre rezultatele obţinute şi rezultatele anterioare de la Problema 1.
37
Problema 3 Pentru valorile numerice k, γ din Problema 1, se simulează în mediul MATLAB (utilizând programul ed1_cst) comportarea de regim liber a sistemului pe acelaşi interval de timp [0, 12] s, considerând pentru poziţia iniţială următoarele situaţii:
1) x(0) = x0=1 [cm]; 2) x(0) = -5 [cm].
a) Examinând graficele să se explice (utilizând valorile numerice observabile pe grafice) modul cum se procedează pentru a estima durata de "stingere" (anulare) a regimului liber în situaţiile 1 şi 2, considerând drept criteriu experimental o eroare relativă de 5%. b) Un experimentator reia studiul prin simulare asupra regimului liber, dar pentru o valoare numerică nouă k1 = 2k. Experimentatorul obţine reprezentări grafice identice cu cele obţinute anterior la punctul a). Să se precizeze (motivând fizic) setul complet de condiţii în care a fost reluat experimentul de simulare. (Pentru verificare, setul complet de condiţii poate fi testat prin simulare).
Problema 4 Se urmăreşte studiul comportării sistemului mecanic din Problema 1 sub acţiunea unei forţe de intrare sinusoidale.
Pentru valorile numerice k = 2 [N/cm], γ = 4 [Νs/cm], se simulează în mediul MATLAB (utilizând programul ed1_sin) răspunsul forţat al sistemului pe intervalul [0, 10] secunde, pentru o forţă externă
ttF πsin3)( = [N]
a) Să se determine analitic momentele de timp unde eroarea relativă este de 5%, respectiv 2% şi să se verifice dacă aceste valori sunt în concordanţă cu graficele obţinute. b) Examinând pe graficele obţinute porţiunea corespunzătoare regimului permanent să se estimeze:
1) raportul amplitudinilor lui F(t) şi x(t) 2) defazajul dintre x(t) şi F(t)
c) Să se calculeze analitic mărimile estimate la punctul c). d) Se reiau punctele a) şi b), pentru aceleaşi valori numerice k, γ, A, t şi considerând noua valoare ω1 = 0.5ω. Să se comenteze sensul fizic al deosebirilor dintre rezultatele obţinute la aceast subpunct şi rezultatele obţinute anterior.
Problemă facultativă
Să se construiască un model matematic pentru circuitul RC serie din figura 5, considerând drept mărime de intrare tensiunea e(t) a sursei şi drept mărime de ieşire, sarcina Q acumulată pe condensator.
e(t)
(R)
(C) Q(t)
Figura 5

38
Lucrarea IV: STUDIUL ANALITIC AL COMPORTĂRII PROCESELOR
FIZICE MODELABILE PRIN ECUAŢII DIFERENŢIALE DE ORDINUL I,
LINIARE, CU COEFICIENŢI CONSTANŢI
1. Răspunsul complet la semnal de intrare constant Pentru început vor fi reamintite pe scurt rezultatele teoretice din laboratorul anterior, după care se vor rezolva analitic probleme privind comportarea sistemelor modelate prin ecuaţii diferenţiale de ordin I.
Un model de acest tip este definit prin următoarea ecuaţie diferenţială:
1 0 1 0 0 0( ) ( ) ( ); 0, 0, ( )a y t a y t u t a a y t y+ = > > = , (1)
unde u(t) notează mărimea cauză (sau de intrare), iar y(t) notează mărimea efect (sau de ieşire), iar t0 este momentul de timp iniţial. Ecuaţia (1) poate fi rescrisă sub forma următoare:
0 0( ) ( ) ( ) 0, 0, ( )Ty t y t ku t T k y t y+ = > > = , (2)
unde 1
0
aTa
= se numeşte constantă de timp a sistemului, iar 0
1ak
a= poartă denumirea de
factor de amplificare. Constanta de timp T se se măsoară în secunde, iar unitatea de măsură a lui k depinde de unităţile de măsură ale semnalelor u(t) şi y(t).
În cazul aplicării unui semnal de intrare u(t) = ū = constant, t∈[0,∞), ieşirea sistemului are următoarea formă (dedusă în laboratorul anterior ca sumă a comportării de regim liber şi a comportării de regim forţat):
0 0
0 01 1
( ) ( )
00
1( ) ( ) 1a at t t ta ay t e y t e u
a
− − − − = + −
(3)
Conform notaţiilor din ecuaţia (2), şi notând timpul de comportare al sistemului sub acţiunea semnalului de intrare curent cu 0t t t∆ = − , răspunsul complet (3) poate fi rescris astfel:
0( ) ( ) 1t t
T Tay t e y t e k u
∆ ∆− −
= + −
(4)
Pe măsură ce timpul t tinde spre infinit, semnalul de ieşire tinde asimptotic spre o valoare
constantă, denumită valoare de regim staţionar: 0
s auy k ua
= = . Pentru a caracteriza viteza de
tindere a lui y(t) spre valoarea ys, a fost definită eroarea relativă:
( ) ( )( )
0
0
t ts T
s
y t yε t e
y t y
−−−
= =−
(5)
39
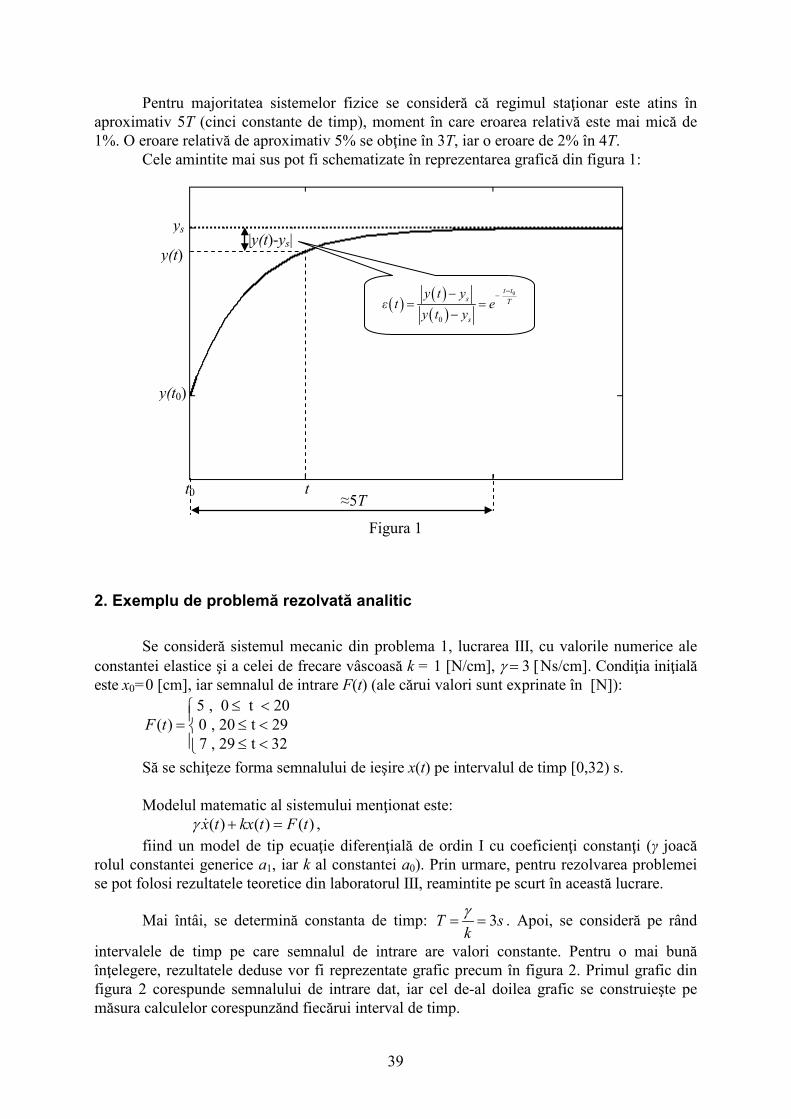
Pentru majoritatea sistemelor fizice se consideră că regimul staţionar este atins în aproximativ 5T (cinci constante de timp), moment în care eroarea relativă este mai mică de 1%. O eroare relativă de aproximativ 5% se obţine în 3T, iar o eroare de 2% în 4T.
Cele amintite mai sus pot fi schematizate în reprezentarea grafică din figura 1:
Figura 1
2. Exemplu de problemă rezolvată analitic
Se consideră sistemul mecanic din problema 1, lucrarea III, cu valorile numerice ale constantei elastice şi a celei de frecare vâscoasă k = 1 [N/cm], γ = 3 [Νs/cm]. Condiţia iniţială este x0=0 [cm], iar semnalul de intrare F(t) (ale cărui valori sunt exprinate în [N]):
5 , 0 t 20( ) 0 , 20 t 29
7 , 29 t 32F t
≤ <= ≤ < ≤ <
Să se schiţeze forma semnalului de ieşire x(t) pe intervalul de timp [0,32) s.
Modelul matematic al sistemului menţionat este: ( ) ( ) ( )x t kx t F tγ + = ,
fiind un model de tip ecuaţie diferenţială de ordin I cu coeficienţi constanţi (γ joacă rolul constantei generice a1, iar k al constantei a0). Prin urmare, pentru rezolvarea problemei se pot folosi rezultatele teoretice din laboratorul III, reamintite pe scurt în această lucrare.
Mai întâi, se determină constanta de timp: 3T skγ
= = . Apoi, se consideră pe rând
intervalele de timp pe care semnalul de intrare are valori constante. Pentru o mai bună înţelegere, rezultatele deduse vor fi reprezentate grafic precum în figura 2. Primul grafic din figura 2 corespunde semnalului de intrare dat, iar cel de-al doilea grafic se construieşte pe măsura calculelor corespunzănd fiecărui interval de timp.
t0
y(t0)
ys
t
y(t)
≈5T
|y(t)-ys|
( ) ( )( )
0
0
t ts T
s
y t yε t e
y t y
−−−
= =−
40
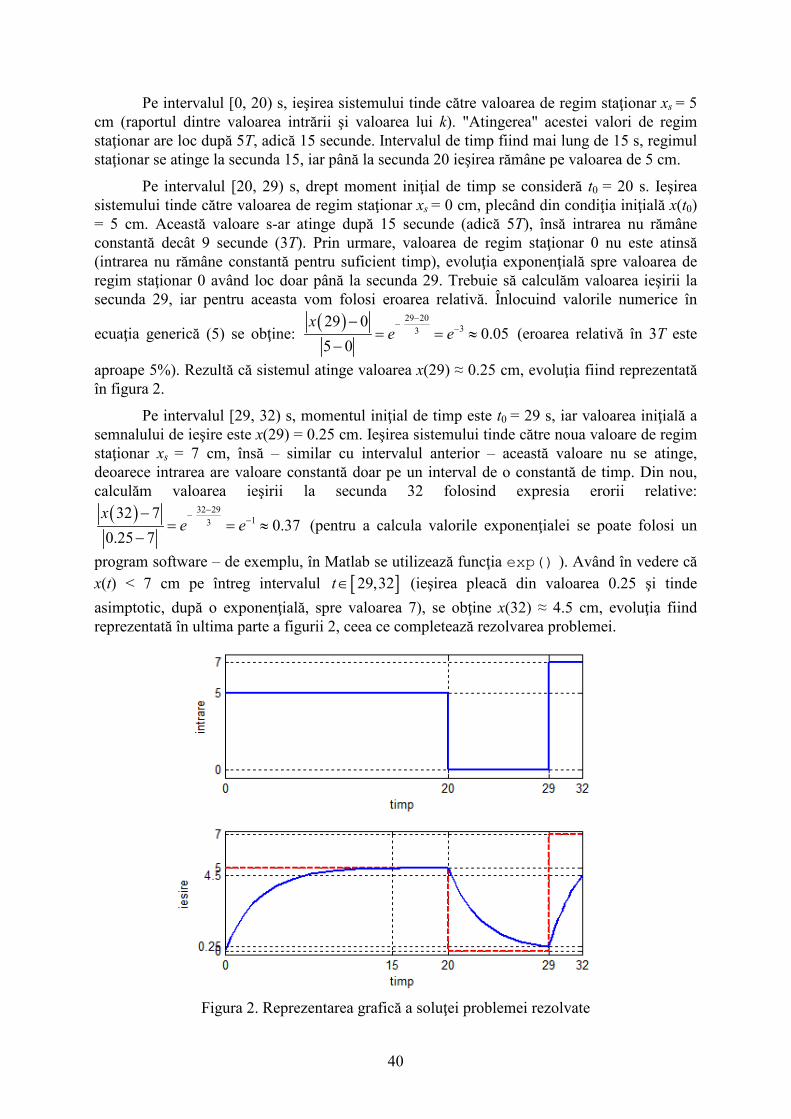
Pe intervalul [0, 20) s, ieşirea sistemului tinde către valoarea de regim staţionar xs = 5 cm (raportul dintre valoarea intrării şi valoarea lui k). "Atingerea" acestei valori de regim staţionar are loc după 5T, adică 15 secunde. Intervalul de timp fiind mai lung de 15 s, regimul staţionar se atinge la secunda 15, iar până la secunda 20 ieşirea rămâne pe valoarea de 5 cm.
Pe intervalul [20, 29) s, drept moment iniţial de timp se consideră t0 = 20 s. Ieşirea sistemului tinde către valoarea de regim staţionar xs = 0 cm, plecând din condiţia iniţială x(t0) = 5 cm. Această valoare s-ar atinge după 15 secunde (adică 5T), însă intrarea nu rămâne constantă decât 9 secunde (3T). Prin urmare, valoarea de regim staţionar 0 nu este atinsă (intrarea nu rămâne constantă pentru suficient timp), evoluţia exponenţială spre valoarea de regim staţionar 0 având loc doar până la secunda 29. Trebuie să calculăm valoarea ieşirii la secunda 29, iar pentru aceasta vom folosi eroarea relativă. Înlocuind valorile numerice în
ecuaţia generică (5) se obţine: ( ) 29 20 3329 0
0.055 0
xe e
−− −−
= = ≈−
(eroarea relativă în 3T este
aproape 5%). Rezultă că sistemul atinge valoarea x(29) ≈ 0.25 cm, evoluţia fiind reprezentată în figura 2.
Pe intervalul [29, 32) s, momentul iniţial de timp este t0 = 29 s, iar valoarea iniţială a semnalului de ieşire este x(29) = 0.25 cm. Ieşirea sistemului tinde către noua valoare de regim staţionar xs = 7 cm, însă – similar cu intervalul anterior – această valoare nu se atinge, deoarece intrarea are valoare constantă doar pe un interval de o constantă de timp. Din nou, calculăm valoarea ieşirii la secunda 32 folosind expresia erorii relative:
( ) 32 29 1332 7
0.370.25 7
xe e
−− −−
= = ≈−
(pentru a calcula valorile exponenţialei se poate folosi un
program software – de exemplu, în Matlab se utilizează funcţia exp() ). Având în vedere că x(t) < 7 cm pe întreg intervalul [ ]29,32t ∈ (ieşirea pleacă din valoarea 0.25 şi tinde asimptotic, după o exponenţială, spre valoarea 7), se obţine x(32) ≈ 4.5 cm, evoluţia fiind reprezentată în ultima parte a figurii 2, ceea ce completează rezolvarea problemei.
Figura 2. Reprezentarea grafică a soluţei problemei rezolvate
41
Soluţia dedusă analitic poate fi testată prin simulare în Matlab, folosind programul ed1_cst (vezi lucrarea de laborator III).
3. Problemă propusă
Se consideră sistemul mecanic din problema 1, lucrarea III. Constanta elastică are valoarea k = 2 [N/cm], constanta de frecare vâscoasă γ = 3 [Νs/cm], iar condiţia iniţială este x0 = 1 [cm]. La intrarea sistemului se aplică semnalul de mai jos (cu valorile exprimate în [N]):
10 , 0 t 1620 , 16 t 18
( ) -6 , 18 t 2420 , 24 t 40
0 , 40 t 60
F t
≤ < ≤ <= ≤ <− ≤ < ≤ <
a) Să se schiţeze forma semnalului de ieşire x(t) pe intervalul de timp [0,60) s,
calculând valorile de interes ale timpului şi ale ieşirii (momente de timp la care se ating valorile de regim staţionar, valorile ieşirii la extremităţile intervalelor de timp pe care semnalul de intrare este constant).
b) Să se testeze rezultatele obţinute prin simulare Matlab.
42
Lucrarea V: STUDIUL PRIN SIMULARE ÎN MEDIUL MATLAB AL
COMPORTĂRII PROCESELOR FIZICE MODELABILE PRIN
REPREZENTĂRI LINIARE INTRARE – STARE – IEŞIRE
1. Consideraţii generale, motivaţie şi obiectiv Reprezentările liniare intrare – stare – ieşire oferă un cadru teoretic general pentru
construirea modelelor prin aplicarea legilor fizice care descriu funcţionarea proceselor: legi constitutive, de tip integral, specifice elementelor acumulatoare de energie (elemente
inerţiale (I) sau capacitive (C), cu comportare liniară); legi constitutive, de tip algebric, specifice elementelor disipatoare de energie (elemente
rezistive (R ), cu comportare liniară); legi de conservare, de tip algebric, specifice interconectării elementelor.
Modelele intrare – stare – ieşire permit analiza detaliată a dinamicii proceselor, ca rezultat (efect) atât al condiţiilor iniţiale, cât şi al semnalelor de intrare. Sub acţiunea anumitor clase de semnale (uşor realizabile din punct de vedere tehnic), procesele fizice permit instalarea regimurilor permanente, când variabilele de stare şi ieşire reproduc trăsăturile fundamentale ale variabilei de intrare. Manifestările inerţiale, inerente operării sistemului fizic, fac ca instalarea regimului permanent să nu se producă instantaneu, ci după un anumit interval de timp dependent, ca durată, de valorile parametrilor fizici ce caracterizează elementele componente ale sistemului.
Prin parcurgerea acestei şedinţe de aplicaţii, studentului i se oferă posibilitatea unui studiu sistematizat al comportării proceselor fizice descrise prin modele liniare intrare – stare – ieşire. Cu ajutorul unor experimente de simulare comparative, acest studiu pune accentul pe următoarele aspecte definitorii ale comportării: natura oscilant – amortizată sau aperiodică a răspunsului liber (pe stare şi ieşire); natura oscilant – amortizată sau aperiodică a răspunsului forţat (pe stare şi ieşire) pe
parcursul regimului tranzitoriu; dependenţa răspunsului pe stare şi ieşire, în regim permanent, de semnalul aplicat intrării; forma răspunsului complet (pe stare şi ieşire) pentru o succesiune de semnale treaptă de
amplitudini şi durate diferite. Procesele fizice luate în discuţie pentru studiul prin simulare urmăresc deopotrivă şi
dezvoltarea suportului intuitiv, care să permită studentului realizarea unor corelaţii cat mai profunde între descrierea matematică şi elementele definitorii ce caracterizează dinamica sub raport experimental.
2. Breviar teoretic
2.1. Modele intrare – stare – ieşire de ordinul doi Definirea unui model de acest tip se bazează pe un sistem de două ecuaţii diferenţiale
liniare de ordinul I, de forma:
43
202101
22221212
12121111
)0(,)0()()()()(
)()()()(
xxxxtubtxatxatx
tubtxatxatx
==++=
++=
(1)
unde u(t) notează variabila (semnalul) de intrare u(t), iar x1(t) şi x2(t) notează variabilele (semnalele) de stare ale sistemului. Valorile x1(0) = x10 şi x2(0) = x20 reprezintă condiţii iniţiale impuse sistemului de ecuaţii diferenţiale.
Variabila (semnalul) de ieşire este definită drept o combinaţie liniară a celor două variabile de stare:
2211)( xcxcty += (2)
Este evident că, în particular, putem avea c1 = 1, c2 = 0, sau c1 = 0, c2 = 1, cazuri în care variabila de ieşire coincide cu una din variabilele de stare. În general, un model de forma (1), (2) descrie comportarea unui sistem fizic alcătuit din : (i) două elemente care acumulează energie (de tip inerţial (I) sau capacitiv (C)), cărora li se
asociază variabilele de stare x1(t) respectiv x2(t), adecvat alese spre a caracteriza funcţionarea în cauzalitate integrală (totodată asigurând continuitatea în raport cu variabila temporală t şi precizarea condiţiilor iniţiale);
(ii) unul sau mai multe elemente care disipă energie (de tip rezistiv (R)). Legile fizicii care descriu interconectarea elementelor (i) şi (ii) conduc la sistemul
de ecuaţii diferenţiale (1).
Variabilele de stare x1(t) şi x2(t) au semnificaţia de mărimi efect în raport cu mărimea cauză u(t). Din punctul de vedere al observării fizice directe (măsurare, înregistrare etc) pot exista situaţii când să nu ne intereseze, ca efect, variabilele de stare x1(t) sau x2(t), ci mărimi exprimabile din variabilele de stare cu ajutorul unor relaţii statice de forma (2). Acest aspect practic justifică introducerea conceptelor diferenţiate de variabilă de stare, respectiv ieşire.
2.2. Modele intrare – stare – ieşire de ordin n În cazul sistemelor fizice care conţin n elemente acumulatoare de energie, conectate în cauzalitate integrală, modelul (1), (2) se generalizează sub forma următoarei scrieri vectorial – matriceale: ecuaţia intrare – stare – ieşire (sau ecuaţia de stare)
0xxbAxx =+= )0();()()( tutt (3)
ecuaţia intrare - ieşire (sau ecuaţia ieşirii):
)()( tty T xc= (4)
În modelul intrare – stare – ieşire (3), (4), semnificaţia notaţiilor este următoarea: - Funcţia vectorială nt RRx →+:)( (5)
colectează cele n variabile de stare şi poartă denumirea de vector de stare, sau vectorul variabilelor de stare. - Vectorul coloană
44
n
nx
xRx ∈
−−−=
0
10)0( (6)
colectează valorile iniţiale ale variabilelor de stare şi poartă denumirea de vector al condiţiilor iniţiale. - Matricea A este pătrată, de ordinul n, adică:
nxn
nnn
n
aa
aaRA ∈
=
............
...
1
111 (7)
- Vectorul b este coloană de dimensiune n, adică:
n
nb
bRb ∈
=
1 (8)
- Vectorul cT este linie de dimensiune n, adică:
[ ] xnn
T cc 11 Rc ∈= (9)
- Funcţiile u(t), y(t): R+→R au semnificaţia semnalelor de intrare, respectiv ieşire. Pentru variabilele de intrare u(t) se impune condiţia (firească pentru practică) de a fi
continuă pe porţiuni, cu discontinuităţi de speţa întâi. Această condiţie reprezintă o relaxare a condiţiei ca u(t) să fie continuă pe R+, relaxare ce operează în baza continuităţii (de natură fizică) a semnalelor x(t). Astfel, în fiecare punct de discontinuitate t* a lui u(t), condiţia finală (la stânga) x(t* - 0) poate fi privită drept o nouă condiţie iniţială x(t*) = x(t* - 0) pentru următorul interval de continuitate a variabilei de intrare u(t).
2.3. Răspunsul complet, răspunsul liber şi răspuns forţat Exprimarea analitică a mărimii de ieşire y(t) se realizează pornind de la soluţia
sistemului de ecuaţii diferenţiale (3) care constituie ecuaţia intrare – stare a modelului, şi anume:
∫ −+= t tt duetet 0)(
0 )()()( ttt bxx AA (10)
Recomandăm ca exprimarea (10) să fie privită drept o generalizare firească a soluţiei ecuaţiei diferenţiale de ordin I, cu coeficienţi constanţi, generalizare care face apel la exponenţiala matricială. Afirmaţiile ce urmează vor pune în evidenţă utilitatea înţelegerii unor atare generalizări. În baza relaţiei (10), vectorul de stare x(t) poate fi scris sub forma:
)()()( ttt fl xxx += (11)
unde
( )0)( xx Atl et = (12)
defineşte componenta liberă (de regim liber) a stării, iar
∫ −= t tf duet 0
)( )()( ttt bx A (13)

45
defineşte componenta forţată (de regim forţat) a stării. Componenta de regim liber xl(t) constituie soluţia ecuaţiei (3) în forma omogenă cu condiţii iniţiale nenule, adică:
0)0(),()( xxAxx == lll tt (14)
Componenta de regim forţat xf(t) constituie soluţia ecuaţiei (3) în forma neomogenă, cu condiţii iniţiale nule, adică:
0)0(),()()( =+= fff tutt xbAxx (15)
Astfel, descompunerea (11) ne arată că modelul (3) constituie un model complet al comportării sistemului, iar x(t) din (10) reprezintă răspunsul complet pe stare, care cuprinde informaţiile privitoare atât la evoluţia liberă a stării, cât şi la evoluţia forţată a stării.
Luând acum în considerare şi ecuaţia ieşirii (4) se constată că descompunerea (11) atrage după sine posibilitatea descompunerii semnalului de ieşire y(t) sub forma:
)()()( tytyty fl += (16)
unde
( )0)()( xcxc AtTl
Tl etty == (17)
defineşte componenta liberă (de regim liber) a ieşirii, iar:
∫ −== t tTf
Tf duetty 0
)( )()()( ttt bcxc A (18)
defineşte componenta forţată (de regim forţat) a ieşirii. Subliniem faptul că din punct de vedere practic, observarea semnalului y(t) (prin
măsurare, înregistrare etc) nu permite evidenţierea separată a celor două componente yl(t) şi yf(t) din descompunerea (16). Această descompunere are rolul de a preciza, la nivel conceptual, faptul că evoluţia în timp a semnalului de ieşire y(t) este datorată structurii sistemului (sintetizată în coeficienţii matricei A şi a vectorilor b, cT) asupra căruia acţionează, pe de o parte, condiţia iniţială, iar pe de altă parte semnalul de intrare. Trebuie remarcat faptul că descompunerea pe stare (11) şi pe ieşire (16) sunt posibile datorită liniarităţii modelului.
În cazul când ipoteza de liniaritate a comportării este respectată practic cu suficientă acurateţe, se pot organiza trei tipuri de experimente: 1) Experimente corespunzătoare modelului complet (3), (4). 2) Experimente corespunzătoare modelului de regim liber (14), (4). 3) Experimente corespunzătoare modelului de regim forţat (15), (4).
Ca şi în cazul modelelor de tip ecuaţie diferenţială de ordinul I, ne vom limita discuţia la modelele (3), (4) în care introducem anumite restricţii asupra coeficienţilor. Restricţiile se referă la coeficienţii matricei A care iau valori de aşa manieră încât toate cele n autovalori ale lui A, λi, i=1,…,n să aibă parte reală negativă, adică:
nii ,...,10Re =<λ . (19)
Aceste restricţii permit delimitarea unei clase largi de sisteme fizice (de altfel, cele mai frecvent întâlnite în practică), care evidenţiază o comportare stabilă.
2.4. Dinamica de regim liber Dinamica de regim liber corespunde modelului (14), (4) care derivă din modelul
complet (3), (4) pentru cazul particular al mărimii de intrare nule, adică u(t) ≡ 0. Relaţia (12)

46
care constituie expresia lui xl(t) împreună cu condiţia (19) pune imediat în evidenţă comportarea de tip asimptotic:
0)0(lim)(lim ==∞→∞→
xx Att
lt
et (20)
pentru orice x(0)∈Rn. Se spune că originea spaţiului Rn, x = 0, reprezintă un punct de echilibru asimptotic stabil pentru sistemul considerat, în sensul că evoluţia liberă a sistemului din orice stare iniţială x(0) se apropie asimptotic de punctul de echilibru.
Comportarea asimptotică a stării, evidenţiată prin relaţia (20), se reflectă la nivelul semnalului de ieşire prin intermediul egalităţii (4) (sau, prelucrat (17)), adică avem:
0)0(lim)(lim ==∞→∞→
xc AtTt
lt
ety (21)
În problemele practice ne interesează (intuitiv vorbind) cât de "repede" se realizează "apropierea" lui xl(t) de punctul de echilibru x =0. Răspunsul la o atare întrebare se poate formula ţinând cont de maniera în care evoluează către 0 funcţiile dependente de timp ce compun matricea eAt. Presupunând că matricea A posedă nr ≤ autovalori distincte notate
rijj ,....,, =λ de multiplicitate rijn j ,....,, = , cu nnn r =++ ...1 , exponenţiala matriceală eAt poate fi scrisă sub forma:
∑=
=r
j
tj
t jetMe1
)( λA (22)
unde Mj(t) sunt matrice de polinoame în variabila t, având expresia:
.,...,1,0,!)1(!)2(
....)(12
11 rjMntM
ntMMtM j
nj
nj
nj
nj
nj
j j
j
j
j
j=≠
−+
−++=
−−
− (23)
În examinarea relaţiei (22) rezultă, în termeni calitativi, că "apropierea" lui xl(t) de x=0 (sau "stingerea" regimului liber) are loc cu atât mai repede cu cât valorile proprii ale matricei A sunt situate mai la stânga în semiplanul complex negativ.
Din punct de vedere practic, se poate afirma că există un moment finit de timp, notat tl, de la care încolo componentele vectorului de stare în regim liber xl(t) sunt neglijabile ca magnitudine. Drept consecinţă, pentru valori ale timpului mai mari ca tl ieşirea în regim liber yl(t) poate fi privită ca anulându-se, în raport cu precizia observaţiei. Acest fapt se poate formaliza matematic prin afirmaţia
)0()(,..0 lllll ytytttiat e≤>∀>∃ (24)
unde el este o valoare subunitară mică, exprimată uzual în procente (frecvent 5% sau 2%). Cu cât valorile rjj ,...,1,Re =λ sunt mai mari (! rjj ,...,1,0Re =<λ ), cu cât tl va fi mai mic. (Subliniem faptul că în cazul unui model de tip ecuaţie diferenţială de ordinul I, se poate vorbi, prin particularizare, de o singură autovaloare λ = -1/T , unde T notează constanta de timp. În cazul sistemelor de ordin superior, estimarea cantitativă a valorii tl în funcţie de valorile rijj ,....,, =λ este o operaţie mult mai dificilă, care se abordează de la caz, la caz, pe situaţii concrete. Din acest motiv analiza noastră anterioară s-a limitat la constatări de factură calitativă).
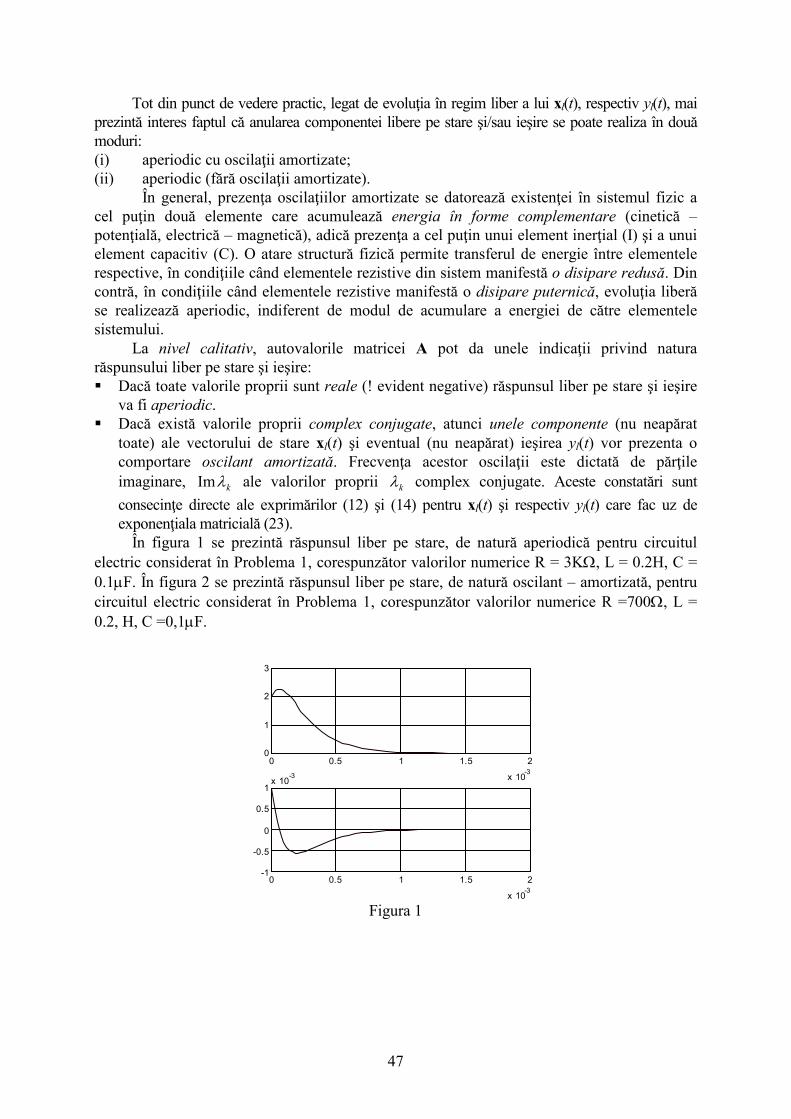
47
Tot din punct de vedere practic, legat de evoluţia în regim liber a lui xl(t), respectiv yl(t), mai prezintă interes faptul că anularea componentei libere pe stare şi/sau ieşire se poate realiza în două moduri: (i) aperiodic cu oscilaţii amortizate; (ii) aperiodic (fără oscilaţii amortizate).
În general, prezenţa oscilaţiilor amortizate se datorează existenţei în sistemul fizic a cel puţin două elemente care acumulează energia în forme complementare (cinetică – potenţială, electrică – magnetică), adică prezenţa a cel puţin unui element inerţial (I) şi a unui element capacitiv (C). O atare structură fizică permite transferul de energie între elementele respective, în condiţiile când elementele rezistive din sistem manifestă o disipare redusă. Din contră, în condiţiile când elementele rezistive manifestă o disipare puternică, evoluţia liberă se realizează aperiodic, indiferent de modul de acumulare a energiei de către elementele sistemului. La nivel calitativ, autovalorile matricei A pot da unele indicaţii privind natura răspunsului liber pe stare şi ieşire: Dacă toate valorile proprii sunt reale (! evident negative) răspunsul liber pe stare şi ieşire
va fi aperiodic. Dacă există valorile proprii complex conjugate, atunci unele componente (nu neapărat
toate) ale vectorului de stare xl(t) şi eventual (nu neapărat) ieşirea yl(t) vor prezenta o comportare oscilant amortizată. Frecvenţa acestor oscilaţii este dictată de părţile imaginare, kλIm ale valorilor proprii kλ complex conjugate. Aceste constatări sunt consecinţe directe ale exprimărilor (12) şi (14) pentru xl(t) şi respectiv yl(t) care fac uz de exponenţiala matricială (23).
În figura 1 se prezintă răspunsul liber pe stare, de natură aperiodică pentru circuitul electric considerat în Problema 1, corespunzător valorilor numerice R = 3KΩ, L = 0.2H, C = 0.1µF. În figura 2 se prezintă răspunsul liber pe stare, de natură oscilant – amortizată, pentru circuitul electric considerat în Problema 1, corespunzător valorilor numerice R =700Ω, L = 0.2, H, C =0,1µF.
0 0.5 1 1.5 2 x 10 -3
0
1
2
3
0 0.5 1 1.5 2 x 10 -3
-1 -0.5
0 0.5
1 x 10 -3
Figura 1
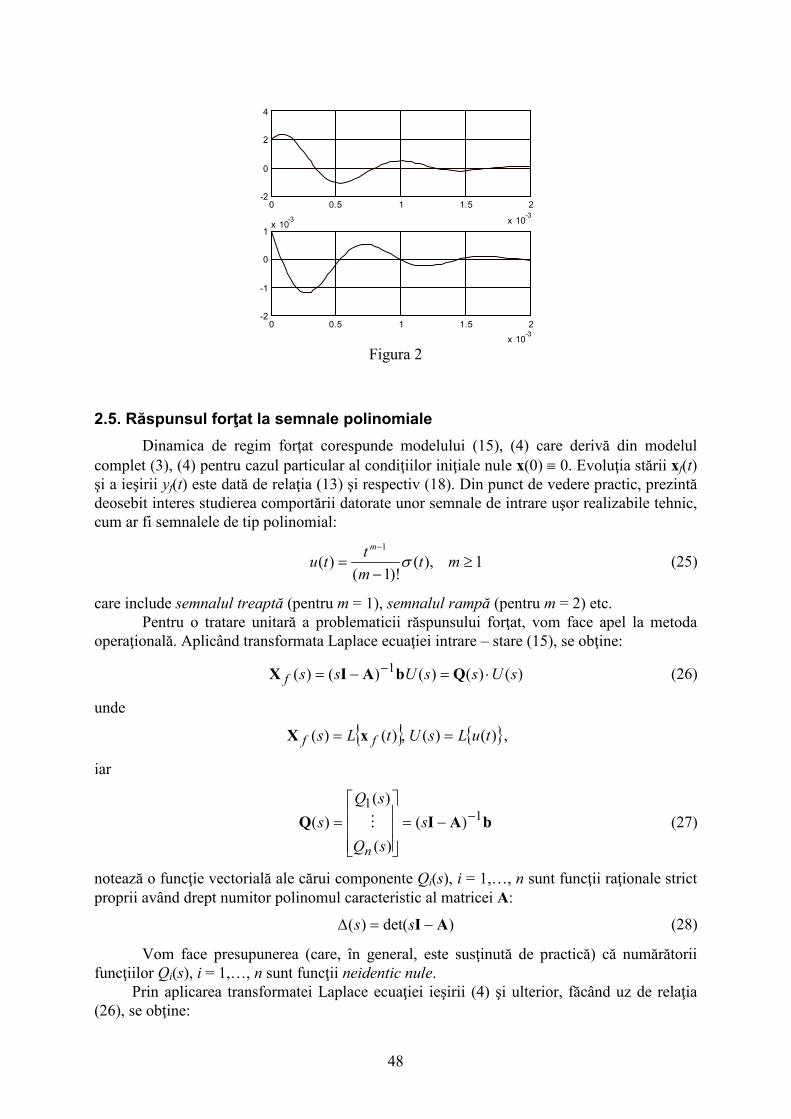
48
0 0.5 1 1.5 2 x 10 -3
-2
0
2
4
0 0.5 1 1.5 2 x 10 -3
-2
-1
0
1 x 10 -3
Figura 2
2.5. Răspunsul forţat la semnale polinomiale Dinamica de regim forţat corespunde modelului (15), (4) care derivă din modelul
complet (3), (4) pentru cazul particular al condiţiilor iniţiale nule x(0) ≡ 0. Evoluţia stării xf(t) şi a ieşirii yf(t) este dată de relaţia (13) şi respectiv (18). Din punct de vedere practic, prezintă deosebit interes studierea comportării datorate unor semnale de intrare uşor realizabile tehnic, cum ar fi semnalele de tip polinomial:
1),()!1(
)(1
≥−
=−
mtmttu
m
σ (25)
care include semnalul treaptă (pentru m = 1), semnalul rampă (pentru m = 2) etc. Pentru o tratare unitară a problematicii răspunsului forţat, vom face apel la metoda
operaţională. Aplicând transformata Laplace ecuaţiei intrare – stare (15), se obţine:
)()()()()( 1 sUssUssf ⋅=−= − QbAIX (26)
unde
)()(,)()( tuLsUtLs ff == xX ,
iar
bAIQ 11
)()(
)()( −−=
= s
sQ
sQs
n
(27)
notează o funcţie vectorială ale cărui componente Qi(s), i = 1,…, n sunt funcţii raţionale strict proprii având drept numitor polinomul caracteristic al matricei A:
)det()( AI −=∆ ss (28)
Vom face presupunerea (care, în general, este susţinută de practică) că numărătorii funcţiilor Qi(s), i = 1,…, n sunt funcţii neidentic nule. Prin aplicarea transformatei Laplace ecuaţiei ieşirii (4) şi ulterior, făcând uz de relaţia (26), se obţine:

49
)()()()()()( 1 sUsGsUsssY Tf
Tf =−== − bAIcXc (29)
unde )()( tyLsY ff = , iar
( ) ( ) bAIc 1−−= ssG T (30)
notează o funcţie scalară, raţională strict proprie (30), având drept numitor polinomul caracteristic ∆(s), dat de (28).
Funcţia G(s) definită prin (30) poartă denumirea de funcţie de transfer, întrucât descrie, prin metoda operaţională, transferul în regim forţat de la imaginea semnalului de intrare U(s), la imaginea semnalului de ieşire Yf(s), conform ultimei egalităţi din (30).
Semnalele polinomiale (25) au transformata Laplace de forma
1,1)( ≥= ms
sU m (31)
de unde rezultă, în baza egalităţii (26) că fiecare componentă a vectorului Xf(s) are forma :
nis
sQsX mifi ...,1,1)()( == (32)
Întrucât toate rădăcinile polinomului ∆(s) sunt situate strict în semiplanul complex stâng, pentru fiecare componentă a lui Xf(s) putem scrie
nisQsm
Q
s
Q
sQsX i
im
imifi
m
,...,1)(~1)!1(
)0(.1
!1)0(1)0()(
)1(
1
'=+⋅
−+⋅+=
−
− (33)
unde )(~ sQi se notează funcţia raţională strict proprie, cu numitorul ∆(s). Trecând la originale, se observă imediat că:
( ) ( ) ( ) nitxim
QmtQ
mtQtx
it
mi
mi
mifi ,...,1),(
!)0(
...!2!1
)0(!1
)0()()1(1'1
=+−
+−
⋅+−
⋅=−−−
(34)
unde )(~1
1 sQLxti−= notează componentele tranzitorii, ale stării care posedă proprietatea:
nitxtit
,...,1,0)(lim ==∞→
(35)
Cu alte cuvinte, pentru răspunsul forţat al stării se pune în evidenţa comportarea de tip asimptotic:
( ) 0)()(lim =−∞→
tt pft
xx (36)
unde xp(t) este o funcţie vectorială cu elementele:
nitkm
tk
Qtx
m
k
kmki
pi ,...,1),()!()!1(
)0()(
1
)1(=⋅
−⋅
−= ∑
=
−−σ (37)
desemnând componentele permanente ale stării. Se constată că aceste componente ale stării copie caracteristicile fundamentale ale semnalului de intrare u(t), fiind polinoame de grad cel mult m-1 în variabilă temporală t. Reluând procedura de descompunere în fracţii de mai sus direct pentru Yf(s) din (29), obţinem, pentru variabila de ieşire, scrierea:
50
)()()( tytyty tpf += (38)
unde yp(t) şi yt(t) notează componenta permanentă şi respectiv componenta tranzitorie a răspunsului forţat yf(t). În mod similar cu cele discutate pentru stare avem:
0)(lim =∞→
tytt
(39)
şi, drept consecinţă directă:
( ) 0)()(lim =−∞→
tyty pft
(40)
unde
)()!()!1(
)0()(1
)1(t
kmt
kGty
kmm
k
kp σ⋅
−⋅
−=
−
=
−∑ (41)
conţine caracteristicile fundamentale ale semnalului de intrare u(t). Observaţie: În cazul unui semnal de intrare u(t) treaptă (m = 1 în relaţia (25)) componentele permanente ale stării xpi(t), i = 1,…,n şi componenta permanentă a ieşirii yp(t) sunt funcţii constante, cu următoarele valori:
nitQtx ipi ,...1),()0()( == σ (42)
)()0()( tGty p σ= (43)
Din acest motiv se mai utilizează denumirea de valori staţionare, sau valori de regim staţionar. Se constată că în regim staţionar G(0) joacă rolul unei amplificări (în sensul larg de proporţionalitate) de la valoarea constantă a intrării, la valoarea constantă a ieşirii. Din acest motiv G(0) este frecvent referită drept factor de amplificare al sistemului.
Din punct de vedere practic ne interesează o cunoaştere mai detaliată a regimului tranzitoriu sub raportul duratei finite de timp şi a prezenţei oscilaţiilor amortizate. (Observăm că această problematică reia chestiuni de tipul celor deja abordate în contextul răspunsului liber, motiv pentru care este de aşteptat să putem formula concluzii asemănătoare).
Viteza de "stingere" a componentelor tranzitorii xti(t), i = 1,…,n şi yt(t) este dată de descreşterea exponenţialelor care intră în expresiile acestor funcţii, adică de modul de amplasare în semiplanul complex stâng a zerourilor lui ∆(s) (care constituie numitorul pentru toate imaginile Laplace luate în discuţie). Echivalent, constatăm că durata regimului tranzitoriu va depinde de valorile proprii λi, i = 1,…,n ale matricei A, în sensul calitativ, cu cât valorile proprii sunt situate mai la stânga, cu atât regimul permanent se va instala mai repede. Magnitudinea valorilor proprii reprezintă aşadar o măsură a inerţiei sistemului. Matematic putem formaliza această constatare prin afirmaţia:
)0()(,..0 tftff ytytttiat e≤>∀>∃ (44)
sau, echivalent
)0()0()()(,..0 pffpftff yytytytttiat −≤−>∀>∃ e (45)
unde ef este o valoare subunitară mică, exprimată uzual în procente (frecvent 5% sau 2%). Prezenţa, respectiv absenţa oscilaţiilor amortizate pe durata regimului tranzitoriu se
justifică, din punct de vedere fizic, ca şi în cazul regimului liber. Sub raport calitativ, valorile proprii ale matricei A pot da unele indicaţii privind natura răspunsului forţat pe stare şi ieşire:
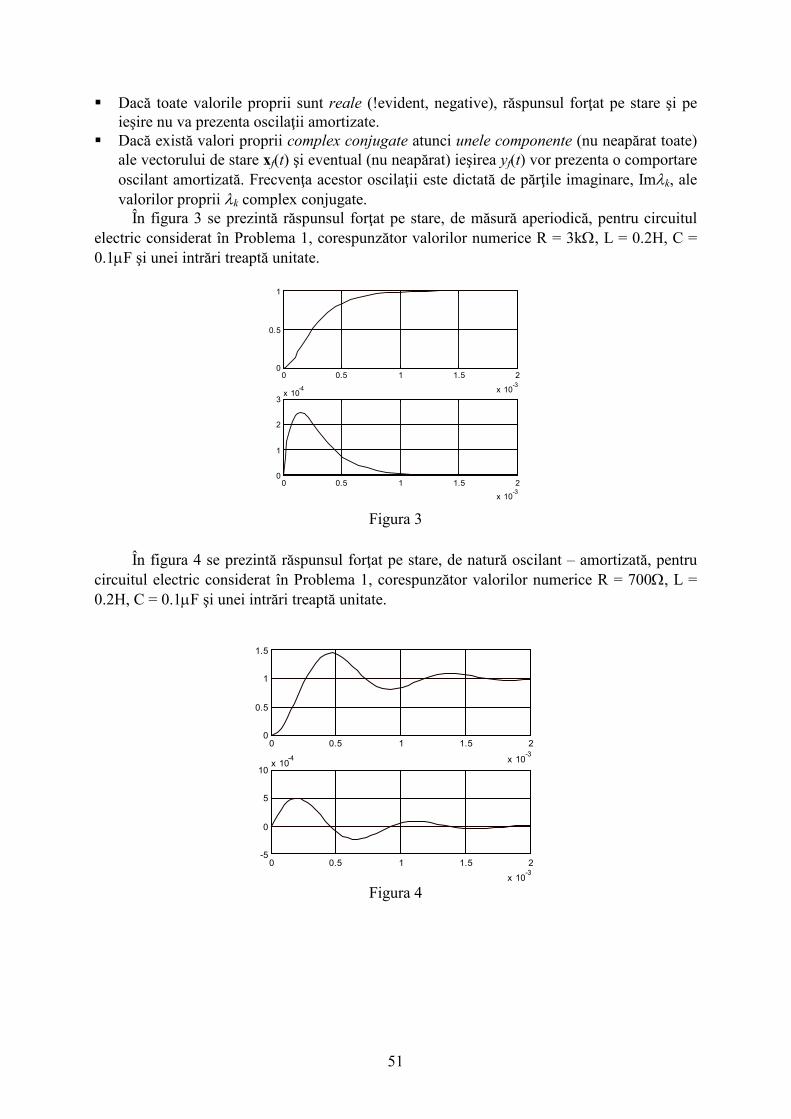
51
Dacă toate valorile proprii sunt reale (!evident, negative), răspunsul forţat pe stare şi pe ieşire nu va prezenta oscilaţii amortizate.
Dacă există valori proprii complex conjugate atunci unele componente (nu neapărat toate) ale vectorului de stare xf(t) şi eventual (nu neapărat) ieşirea yf(t) vor prezenta o comportare oscilant amortizată. Frecvenţa acestor oscilaţii este dictată de părţile imaginare, Imλk, ale valorilor proprii λk complex conjugate.
În figura 3 se prezintă răspunsul forţat pe stare, de măsură aperiodică, pentru circuitul electric considerat în Problema 1, corespunzător valorilor numerice R = 3kΩ, L = 0.2H, C = 0.1µF şi unei intrări treaptă unitate.
0 0.5 1 1.5 2 x 10 -3
0
0.5
1
0 0.5 1 1.5 2 x 10 -3
0
1
2
3 x 10 -4
Figura 3
În figura 4 se prezintă răspunsul forţat pe stare, de natură oscilant – amortizată, pentru circuitul electric considerat în Problema 1, corespunzător valorilor numerice R = 700Ω, L = 0.2H, C = 0.1µF şi unei intrări treaptă unitate.
0 0.5 1 1.5 2 x 10 -3
0
0.5
1
1.5
0 0.5 1 1.5 2 x 10 -3
-5
0
5
10 x 10 -4
Figura 4
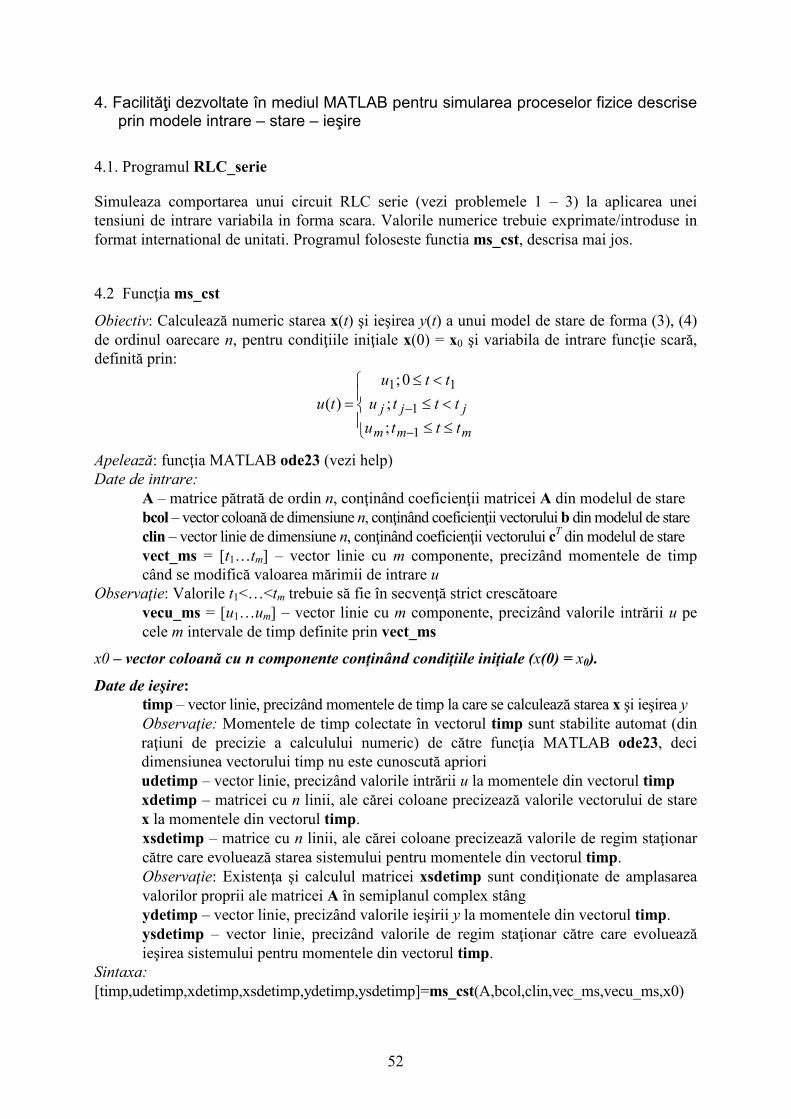
52
4. Facilităţi dezvoltate în mediul MATLAB pentru simularea proceselor fizice descrise prin modele intrare – stare – ieşire
4.1. Programul RLC_serie
Simuleaza comportarea unui circuit RLC serie (vezi problemele 1 – 3) la aplicarea unei tensiuni de intrare variabila in forma scara. Valorile numerice trebuie exprimate/introduse in format international de unitati. Programul foloseste functia ms_cst, descrisa mai jos.
4.2 Funcţia ms_cst
Obiectiv: Calculează numeric starea x(t) şi ieşirea y(t) a unui model de stare de forma (3), (4) de ordinul oarecare n, pentru condiţiile iniţiale x(0) = x0 şi variabila de intrare funcţie scară, definită prin:
≤≤<≤
<≤=
−
−
mmm
jjjtttutttu
ttutu
1
1
11
;;
0;)(
Apelează: funcţia MATLAB ode23 (vezi help) Date de intrare:
A – matrice pătrată de ordin n, conţinând coeficienţii matricei A din modelul de stare bcol – vector coloană de dimensiune n, conţinând coeficienţii vectorului b din modelul de stare clin – vector linie de dimensiune n, conţinând coeficienţii vectorului cT din modelul de stare vect_ms = [t1…tm] – vector linie cu m componente, precizând momentele de timp când se modifică valoarea mărimii de intrare u
Observaţie: Valorile t1<…<tm trebuie să fie în secvenţă strict crescătoare vecu_ms = [u1…um] – vector linie cu m componente, precizând valorile intrării u pe cele m intervale de timp definite prin vect_ms
x0 – vector coloană cu n componente conţinând condiţiile iniţiale (x(0) = x0).
Date de ieşire: timp – vector linie, precizând momentele de timp la care se calculează starea x şi ieşirea y Observaţie: Momentele de timp colectate în vectorul timp sunt stabilite automat (din raţiuni de precizie a calculului numeric) de către funcţia MATLAB ode23, deci dimensiunea vectorului timp nu este cunoscută apriori udetimp – vector linie, precizând valorile intrării u la momentele din vectorul timp xdetimp – matricei cu n linii, ale cărei coloane precizează valorile vectorului de stare x la momentele din vectorul timp. xsdetimp – matrice cu n linii, ale cărei coloane precizează valorile de regim staţionar către care evoluează starea sistemului pentru momentele din vectorul timp. Observaţie: Existenţa şi calculul matricei xsdetimp sunt condiţionate de amplasarea valorilor proprii ale matricei A în semiplanul complex stâng ydetimp – vector linie, precizând valorile ieşirii y la momentele din vectorul timp. ysdetimp – vector linie, precizând valorile de regim staţionar către care evoluează ieşirea sistemului pentru momentele din vectorul timp.
Sintaxa: [timp,udetimp,xdetimp,xsdetimp,ydetimp,ysdetimp]=ms_cst(A,bcol,clin,vec_ms,vecu_ms,x0)
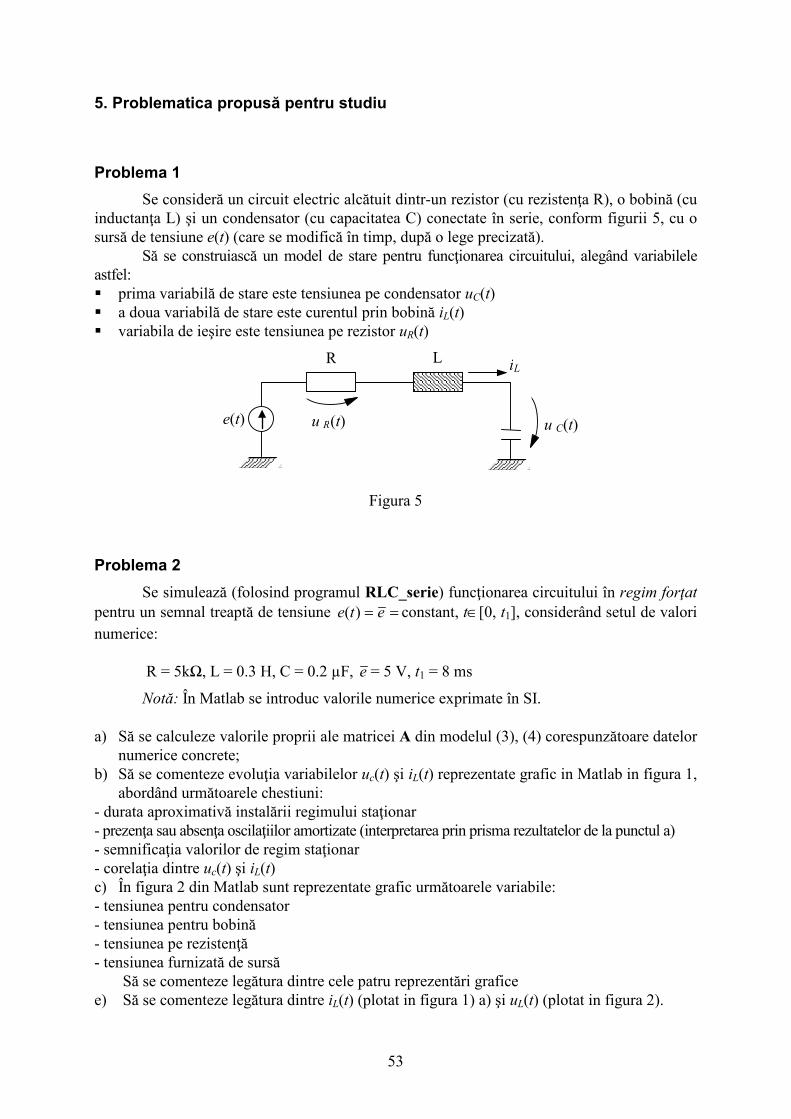
53
5. Problematica propusă pentru studiu
Problema 1 Se consideră un circuit electric alcătuit dintr-un rezistor (cu rezistenţa R), o bobină (cu
inductanţa L) şi un condensator (cu capacitatea C) conectate în serie, conform figurii 5, cu o sursă de tensiune e(t) (care se modifică în timp, după o lege precizată).
Să se construiască un model de stare pentru funcţionarea circuitului, alegând variabilele astfel: prima variabilă de stare este tensiunea pe condensator uC(t) a doua variabilă de stare este curentul prin bobină iL(t) variabila de ieşire este tensiunea pe rezistor uR(t)
Figura 5
Problema 2 Se simulează (folosind programul RLC_serie) funcţionarea circuitului în regim forţat
pentru un semnal treaptă de tensiune == ete )( constant, t∈[0, t1], considerând setul de valori numerice:
R = 5kΩ, L = 0.3 H, C = 0.2 µF, e = 5 V, t1 = 8 ms
Notă: În Matlab se introduc valorile numerice exprimate în SI.
a) Să se calculeze valorile proprii ale matricei A din modelul (3), (4) corespunzătoare datelor numerice concrete;
b) Să se comenteze evoluţia variabilelor uc(t) şi iL(t) reprezentate grafic in Matlab in figura 1, abordând următoarele chestiuni:
- durata aproximativă instalării regimului staţionar - prezenţa sau absenţa oscilaţiilor amortizate (interpretarea prin prisma rezultatelor de la punctul a) - semnificaţia valorilor de regim staţionar - corelaţia dintre uc(t) şi iL(t) c) În figura 2 din Matlab sunt reprezentate grafic următoarele variabile: - tensiunea pentru condensator - tensiunea pentru bobină - tensiunea pe rezistenţă - tensiunea furnizată de sursă
Să se comenteze legătura dintre cele patru reprezentări grafice e) Să se comenteze legătura dintre iL(t) (plotat in figura 1) a) şi uL(t) (plotat in figura 2).
R L i L
e(t) u R (t) u C (t)
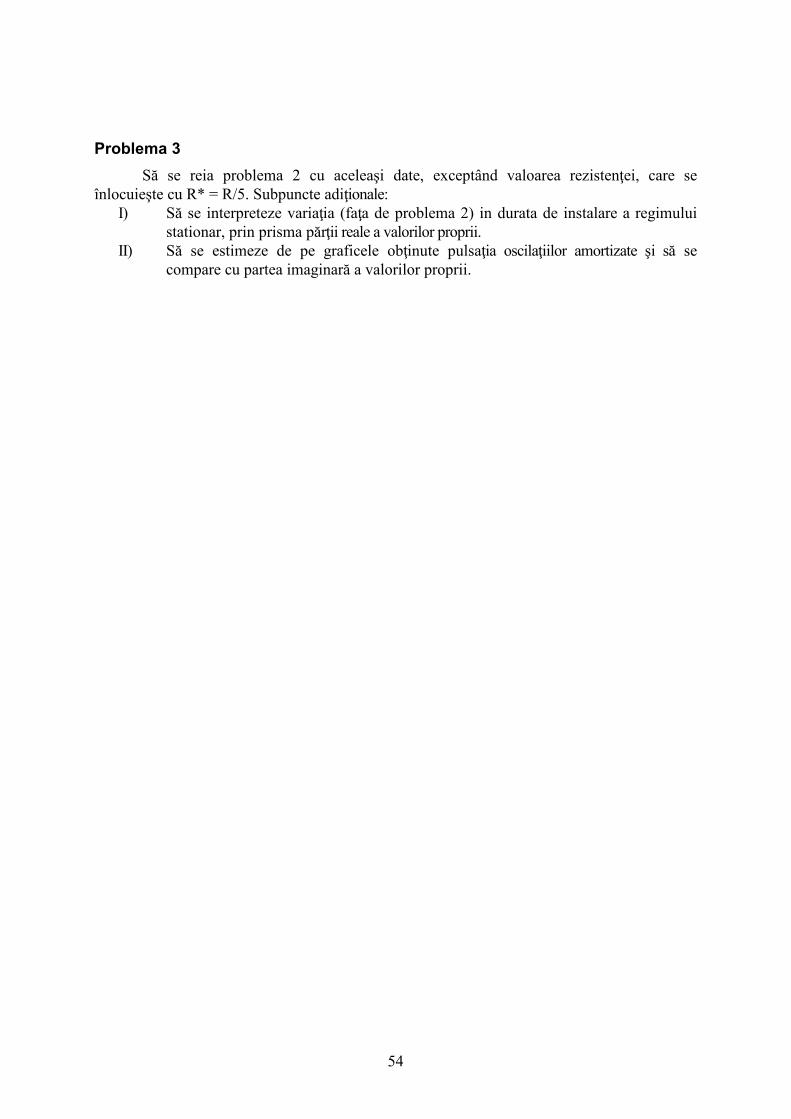
54
Problema 3
Să se reia problema 2 cu aceleaşi date, exceptând valoarea rezistenţei, care se înlocuieşte cu R* = R/5. Subpuncte adiţionale:
I) Să se interpreteze variaţia (faţa de problema 2) in durata de instalare a regimului stationar, prin prisma părţii reale a valorilor proprii.
II) Să se estimeze de pe graficele obţinute pulsaţia oscilaţiilor amortizate şi să se compare cu partea imaginară a valorilor proprii.

55
56
Lucrarea VI: CONSTRUCŢIA MODELELOR LINIARE
DE TIP INTRARE – STARE – IEŞIRE
1. Paşii principali ai obţinerii unui model matematic intrare-stare-ieşire Se vor considera cazurile sistemelor electrice şi al sistemelor mecanice aflate în
mişcare de translaţie. Regulile de construcţie următoare fac apel la câteva legi din fizica de liceu, referitoare la funcţionarea liniară a unor sisteme de bază (precum bobină, condensator, resort elastic). O construcţie mai formală a acestor modele se poate face şi prin reprezentări unitare sub formă de Bond-Graphuri, care pot fi uşor create şi pentru alte clase de sisteme, însă această problematică nu face obiectul cursului de "Modelarea proceselor fizice". Pentru studii suplimentare asupra acestor astepecte cititorul este îndrumat spre publicaţiile:
O. Păstrăvanu, R. Ibănescu: Limbajul Bond-Graph în modelarea şi simularea sistemelor fizico-tehnice, Editura Gh. Asachi, 2001, ISBN: 9738292123.
W. Borutzky: Bond Graph Methodology, Development and Analysis of Multi-disciplinary Dynamic System Models, Springer, London, 2010, ISBN: 978-1-84882-881-0.
În vederea obţinerii unei reprezentări intrare-stare-ieşire se vor urmării paşii principali:
1. Daca este posibil, se efectuează simplificări în sistemul fizic dat (de exemplu, rezistorii legaţi în serie sua paralel se înlocuiesc cu unul singur având valoarea echivalentă a cuplării; la fel pentru condensatoare, bobine, resorturi elastice sau corpuri cu masă aflate în mişcare).
2. Se determină variabilele de stare: - numărul variabilelor de stare este egal cu numărul elementelor ce acumulează
energie (pt. sisteme electrice condensatori şi bobine, pt. sisteme mecanice resorturi elastice şi corpuri cu masă aflate în mişcare). Atenţie: nu se consideră elementele care nu pot acumula energie în configuraţia dată (de exemplu un condensator ale cărui terminale sunt scurtcircuitate, un corp cu masă care nu se poate deplasa – aceste elemente trebuie deja eliminate în pasul 1). Menţionăm că în cazul unei singure variabile de stare, modelul obţinut va fi de tip ecuaţie diferenţială de ordin I.
- semnalele corespunzând variabilelor de stare se aleg astfel încât acestea să reprezinte funcţionarea de tip integrator a elementului respectiv. Ca regulă generală, se aleg următoarele variabile de stare:
o pt. fiecare condensator în parte: tensiunea la bornele sale, uC(t); o pt. bobină: intensitatea curentului de străbate bobina, iL(t); o pt. resort elastic: alungirea x(t) (măsurată în raport cu poziţia
nedeformată a resortului); o pt. corp cu masă: viteza de deplasare, v(t).
57
3. Se scrie forma generală a modelului ce trebuie obţinut (folosind notaţiile specifice semnalelor determinate la pasul 2). De exemplu, pentru un sistem cu două variabile de stare, x1 şi x2, forma este (vezi lucrarea de laborator 5):
1 11 1 12 2 1
2 21 1 22 2 2
1 1 2 2
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
x t a x t a x t b u tx t a x t a x t b u ty t c x t c x t Du t
= + += + +
= + +
4. Se exprimă relaţiile de mai sus folosind legile fizice de funcţionare ale elementelor sistemului dat. Cu alte cuvinte, se urmăreşte exprimarea derivatei în raport cu timpul a fiecărei variabile de stare sub forma unei combinaţii liniare ce conţine variabilele de stare (nederivate) şi semnalul de intrare. Similar, se caută o formă de acelaşi tip pentru semnalul de ieşire (nederivat).
5. Exprimarea de la pasul 4 evidenţiază constantele a11, ... c1, ..., D. Astfel, ecuaţiile obţinute se pot scrie sub forma matriceală:
( ) ( ) ( )( ) ( ) ( )t t u t
y t t u t= += +
x Ax BCx D
2. Exemplu de construcţie a unui model intrare-stare-ieşire Se consideră circuitul RLC serie, studiat în lucrarea de laborator 5, cu intrarea
reprezentată de tensiunea e(t) şi ieşirea de tensiunea uR(t). Pentru a construi un model de stare al sistemului dat, urmărim paşii de mai sus.
Menţionăm că nu se pot efectua simplificări în sistemul dat. Conform pasului 2, sunt necesare două variabile de stare, una pentru condensator ( uC(t) ), iar cealaltă pentru bobină ( iL(t) ). Forma generală din pasul 3 constă în obţinerea unor exprimări de genul (pentru simplitate, nu se mai scrie explicit dependenţa de timp, aceasta fiind subînţeleasă pentru semnalele din sistem):
combinaţie liniară ( , , )
comb. lin. ( , , )comb. lin. ( , , )
c C L
LC L
R C L
u u i edi u i edt
u u i e
=
=
=
Primele două ecuaţii sunt ecuaţiile de stare, iar ultima este ecuaţia ieşirii. În pasul 4 se urmăreşte obţinerea explicită a exprimărilor de mai sus. Astfel, pentru Cu
se porneşte de la legea de funcţionare a condensatorului:
CC C C
iCu i uC
= ⇒ =
R L i L
e(t) u R (t) u C (t)

58
Expresia obţinută nu este încă o combinaţie liniară a semnalelor dorite ( , , )C Lu i e , însă deoarece bobina şi condensatorul sunt legate în serie, acestea sunt străbătute de acelaşi curent:
L Ci i= , ceea ce conduce la:
LC
iuC
=
Expresia obţinută este o combinaţie liniară a semnalelor , ,C Lu i e , unde coeficienţii lui
uC şi e sunt zero, iar coeficientul lui iL este 1C
.
Pentru exprimarea celei de-a doua ecuaţii de stare, se porneşte de la legea de funcţionare a bobinei:
L L LL
di di uL udt dt L
= ⇒ =
Este necesară exprimarea lui uL în funcţie de , ,C Lu i e . Scriind legea a doua a lui Kirchhoff pe ochiul de circuit (echilibrul de tensiuni) obţinem:
C L R L C Re u u u u e u u= + + ⇒ = − − În expresia obţinută semnalul uR incomodează, însă conform legii lui Ohm: R Ru Ri= .
Rezistorul este în serie cu bobina (şi cu condensatorul), prin urmare R Li i= , ceea ce conduce la:
L C Ldi e u Ridt L
− −= ,
care este o combinaţie liniară a semnalelor , ,C Lu i e , unde coeficientul lui uC este 1L
− ,
coeficientul lui iL este RL
− , iar coeficientul lui e este 1L
.
Ecuaţia de ieşire a fost deja explicitată mai sus, sub forma R R Lu Ri Ri= = .
Notând vectorul de stare cu C
L
ui
= x , scrierea matriceală din pasul 5 este:
[ ]
1 00( ) ( ) ( )11
( ) 0 ( ) 0 ( )R
Ct t u tRLL L
u t R t u t
= + − −
= + ⋅
x x
x
,
care reprezintă modelul intrare-stare-ieşire al sistemului dat
( [ ]1 00
, ( ), 0 , 011C u t RR
LL L
= = = = − −
A B C D ). Menţionăm că determinarea modelului prin
A,B,C,D permite anumite analize specifice ale comportării sistemului (vezi lucrarea de laborator 5) şi simularea facilă a comportării sistemului pentru anumite valori numerice ale constatelor.
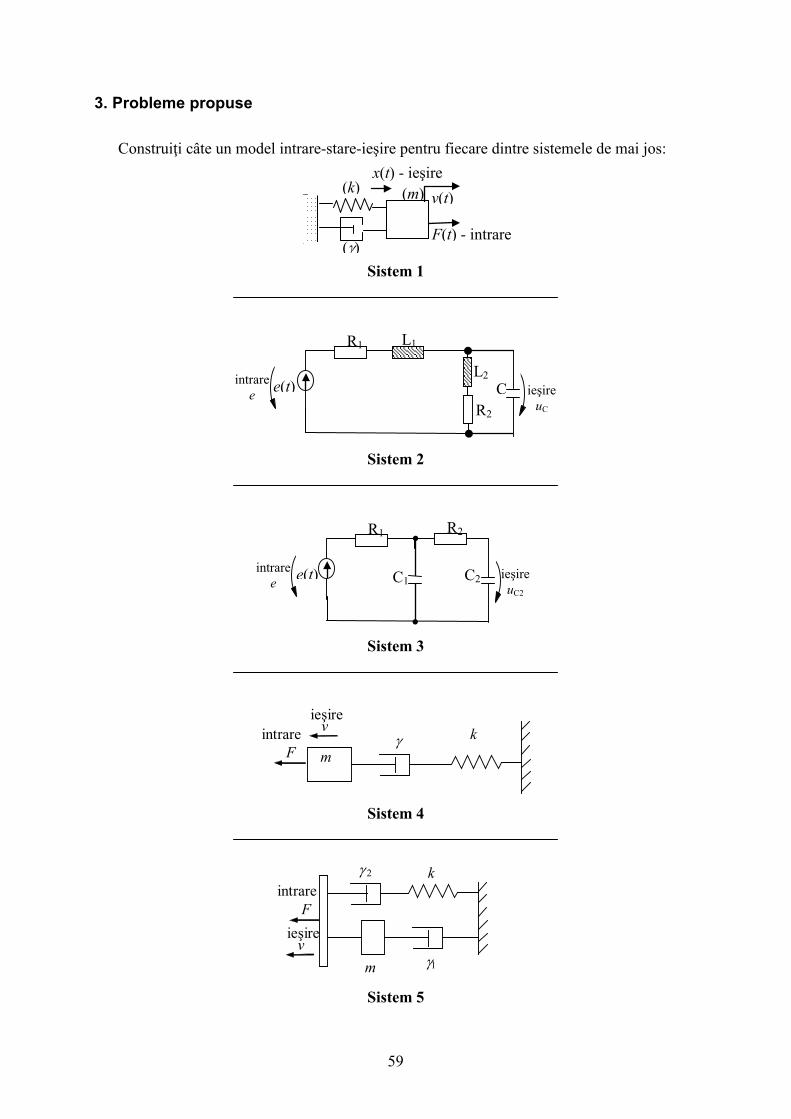
59
3. Probleme propuse
Construiţi câte un model intrare-stare-ieşire pentru fiecare dintre sistemele de mai jos:
Sistem 1
Sistem 2
Sistem 3
k F
intrare γ
v ieşire
m
Sistem 4
k
F
intrare
γ1 m
v ieşire
γ 2
Sistem 5
R1 L1
e(t) C
L2
R2
ieşire uC
intrare e
R1
e(t) C2 ieşire uC2
intrare e
R2
C1
v(t)
F(t) - intrare
(m)
(γ)
(k) x(t) - ieşire
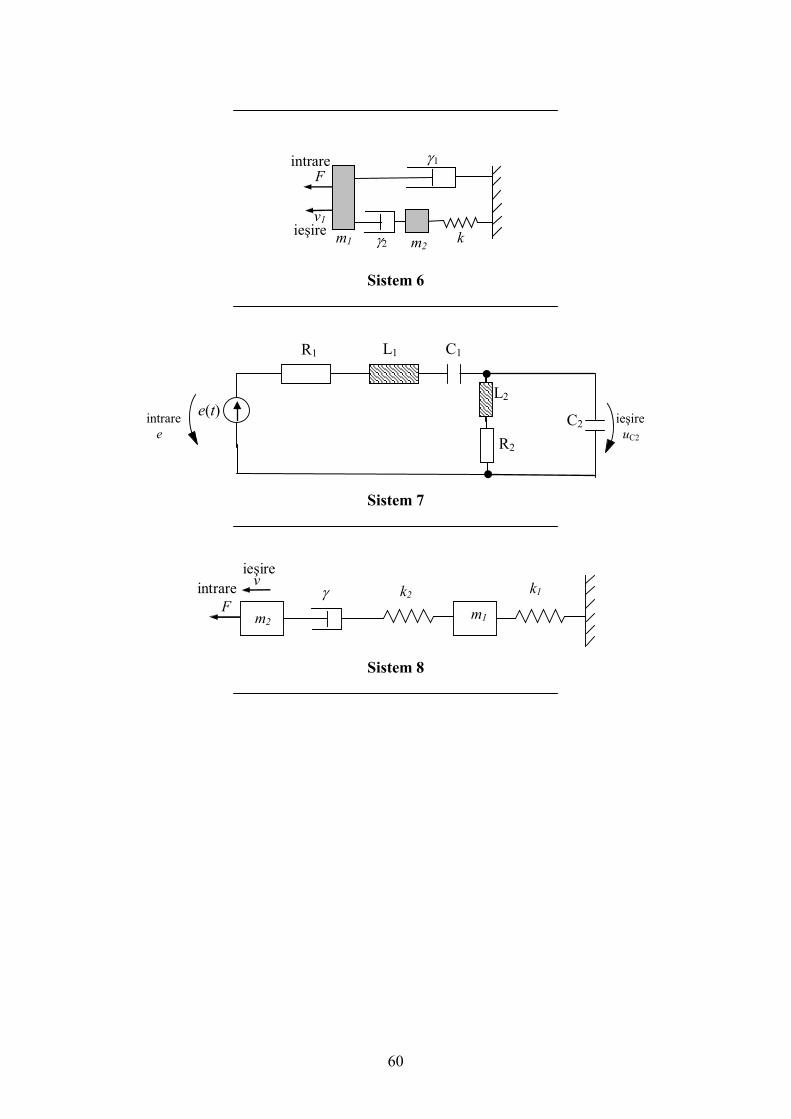
60
k
F
intrare
γ2 m1
v1 ieşire
γ 1
m2
Sistem 6
Sistem 7
k2 F
intrare γ
m2 m1
k1 v
ieşire
Sistem 8
R1 L1
e(t)
C1
C2
L2
R2
ieşire uC2
intrare e

















