1 CURS 6 TRADUCTOARE DE VIBRAŢII ŞI ACCELERAŢII1 Noţiuni fundamentale Vibraţiile sunt fenomene dinamice care iau na ştere în medii elastice sau cvasielastice, datorit ăunei excitaţii locale, care se manifest ăprin propagarea acesteia în interiorul mediului sub forma unor oscilaţii (unde) elastice. Oscilaţiareprezintăfenomenul în cursul c ăruia se transformăperiodic, revesibil sau par ţial reversibil, o energie dintr-o formăîn alta. Undaeste rezultatul propagării oscilaţilor într-un mediu elastic, adic ăevoluţia în timp şi repartiţia în spaţiu a mărimilor ce caracterizeaz ăoscilaţia. Excitaţiainiţialăse consider ălocalădacăcel puţin una dintre dimensiunile geometrice ale mediului este suficient de mare. În funcţie de dinamica fenomenului vibratoriu, vibra ţiile pot fi: a)- Vibraţii cu frecvenţe de variaţie scăzute (mici) întâlnite în: structuri mecanice; structuri din construcţii şi în cazul undelor seismice (cutremure). b)- Vibraţii cu frecvenţe mari de variaţie întâlnite în medii fluidice (aer, apă, soluţii chimice etc). Natura fizicăa mediului determinămodul în care se propag ăoscilaţiile. Într-un mediu solid se propagăatât undele longitudinale cât şi cele transversale, iar într-un mediu fluid se propag ănumai undele longitudinale. Ca urmare m ăsurarea vibraţiilor din mediile solide se face cu traductoare pentru mărimi cinematice vectoriale (deplas ări, viteze, accelera ţii), iar pentru măsurarea vibraţiilor în medii fluide (unde sonore în aer) sunt necesare traduc toare de presiune acustic ă, care este o mărime scalară. În funcţie de natura excita ţiei pot fi nedorite (considerate perturba ţii funcţionale) şi perturbaţii dorite – cu parametrii bine determinaţi. Din categoria perturbaţiilor nedorite fac parte vibraţiile cu efecte nocive asupra echipamentelor industriale, iar evaluarea lor cantitativ ăconstituie o condi ţie de funcţionare sau nefunc ţionare a insta- laţiilor respective. Vibraţiile dorite sunt generate pentru a fi utilizate în dou ăscopuri: a – pentru ac ţionarea unor dispozitive cu func ţionare vibratorie în industrie sau în aparatele electrocas- nice; b – pentru crearea condi ţiilor de încercare la vibraţii a echipamente lor mecanice şi electrice (în special a celor utilizate pe navele aeriene sau maritime). Din cele prezentate rezult ăcăpentru punerea în eviden ţăa efectelor vibraţiilor se utilizeazătraductoare în scopul următoarelor tipuri de măsurări: a. Măsurarea nivelelor de vibra ţii la ieşirea unui sistem, pentru a le compara cu nivelele standardadmisibile; b. Măsurarea mărimilor de intrare în sistem (mărimi vibratorii de excitaţie) necesare întocmirii programelor de încărcări mecanice; c. Măsurarea simultanăa ambelor mărimi vibratorii, de la intrarea şi ieşirea sistemului în scopul determinării caracteristicilor acestuia. În cele ce urmeaz ăse prezint ăcâteva aspecte referitoare la vibra ţiile mecanice care au loc în echipamente şi instalaţii industriale. Aceste vibraţii pot fi: a) Cu unul sau dou ăgrade de libertate, figura.1. (a şi b); b) De translaţie (verticale şi orizontale) şi de torsiune cu un singur grad de libertate (figura.1-c,.1-d, respectiv figura.1-e).
Transcript
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Vibraţiile sunt fenomene dinamice care iau naştere în medii elastice sau cvasielastice, datorită unei excitaţii locale, care se manifestă prin propagarea acesteia în interiorul mediului sub forma unoroscilaţii (unde) elastice. Oscilaţia reprezintă fenomenul în cursul căruia se transformă periodic,revesibil sau parţial reversibil, o energie dintr-o formă în alta. Unda este rezultatul propagăriioscilaţilor într-un mediu elastic, adică evoluţia în timp şi repartiţia în spaţiu a mărimilor cecaracterizează oscilaţia. Excitaţia iniţială se consideră locală dacă cel puţin una dintre dimensiunilegeometrice ale mediului este suficient de mare.
În funcţie de dinamica fenomenului vibratoriu, vibraţiile pot fi:a)- Vibraţii cu frecvenţe de variaţie scăzute (mici) întâlnite în: structuri mecanice; structuri dinconstrucţii şi în cazul undelor seismice (cutremure).b)- Vibraţii cu frecvenţe mari de variaţie întâlnite în medii fluidice (aer, apă, soluţii chimice etc).
Natura fizică a mediului determină modul în care se propagă oscilaţiile. Într-un mediu solid sepropagă atât undele longitudinale cât şi cele transversale, iar într-un mediu fluid se propagă numaiundele longitudinale. Ca urmare măsurarea vibraţiilor din mediile solide se face cu traductoare pentrumărimi cinematice vectoriale (deplasări, viteze, acceleraţii), iar pentru măsurarea vibraţiilor în mediifluide (unde sonore în aer) sunt necesare traductoare de presiune acustică, care este o mărime scalară.
În funcţie de natura excitaţiei pot fi nedorite (considerate perturbaţii funcţionale) şi perturbaţiidorite – cu parametrii bine determinaţi.
Din categoria perturbaţiilor nedorite fac parte vibraţiile cu efecte nocive asupra echipamentelorindustriale, iar evaluarea lor cantitativă constituie o condiţie de funcţionare sau nefuncţionare a insta-laţiilor respective. Vibraţiile dorite sunt generate pentru a fi utilizate în două scopuri:
a – pentru acţionarea unor dispozitive cu funcţionare vibratorie în industrie sau în aparatele electrocas-nice;b – pentru crearea condiţiilor de încercare la vibraţii a echipamentelor mecanice şi electrice (în special acelor utilizate pe navele aeriene sau maritime).
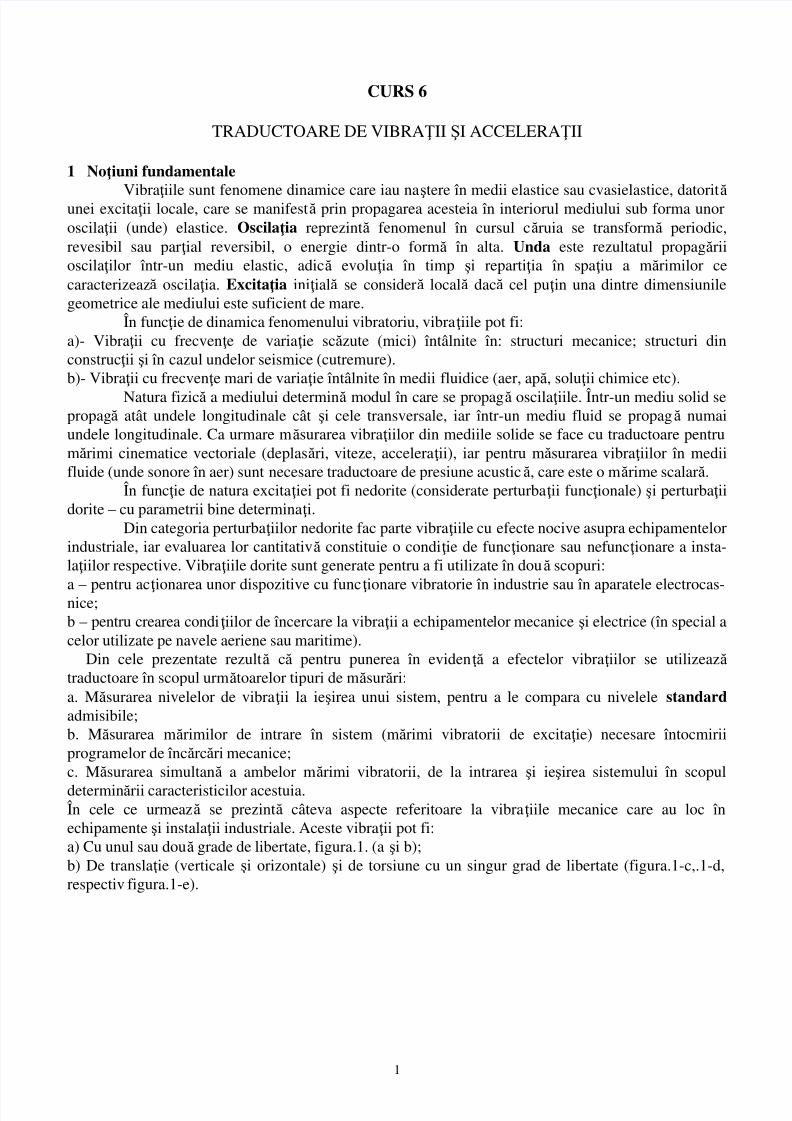
Din cele prezentate rezultă că pentru punerea în evidenţă a efectelor vibraţiilor se utilizează traductoare în scopul următoarelor tipuri de măsurări:a. Măsurarea nivelelor de vibraţii la ieşirea unui sistem, pentru a le compara cu nivelele standard admisibile;b. Măsurarea mărimilor de intrare în sistem (mărimi vibratorii de excitaţie) necesare întocmiriiprogramelor de încărcări mecanice;c. Măsurarea simultană a ambelor mărimi vibratorii, de la intrarea şi ieşirea sistemului în scopuldeterminării caracteristicilor acestuia.În cele ce urmează se prezintă câteva aspecte referitoare la vibraţiile mecanice care au loc înechipamente şi instalaţii industriale. Aceste vibraţii pot fi:a) Cu unul sau două grade de libertate, figura.1. (a şi b);b) De translaţie (verticale şi orizontale) şi de torsiune cu un singur grad de libertate (figura.1-c,.1-d,respectiv figura.1-e).
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Fig..1. Sisteme oscilante: a) cu un grad de libertate; b) cu două grade de libertate; c) translaţie peorizontală; d) translaţie pe verticală; e) torsiune.
2. Mărimile caracteristice şi unităţile de măsură specifice
vibraţiilor
Indiferent de natura vibraţiilor, mărimile specifice acestora sunt: deplasarea liniară sauunghiulară, viteza, acceleraţia şi frecvenţa. Se consideră, ca exemplu, sistemul oscilant cu un grad delibertate, din figura.1 – a asupra căruia acţionează o forţă externă F(t). Legea de mişcare a masei m este
dată de ecuaţia:
( )tFkydt
dy
dt
ydm
2
2=++ (.1)
O ecuaţie de mişcare similară poate fi scrisă şi în cazul vibraţiilor de torsiune (figura 8.1-e) la caredeplasarea liniară x este înlocuită cu unghiul de rotaţie ϕ:
Mkdt
dc
dt
dJ
2
2=ϕ+
ϕ+
ϕ(.2)
Mărimile şi uităţile de măsură ce caracterizează sistemele oscilante, descrise prin cele două ecuaţii,sunt:
M - cuplul activ - [N ⋅⋅⋅⋅ m];J - moment de inerţie a discului [Kg⋅ m2]m - masă în mişcare - [Kg]c - coeficient de amortizare - [N · S/m]k - coeficient de rigiditate (constanta elastică)- [N ⁄ m]F - forţa externă (de excitaţie)- [N]y - deplasare liniară - [m]φ - deplasare unghiulară - [rad]
ϕ=ϕ
&
dt
d- viteză unghiulară - [s-1]
ϕ=ϕ
&&2
2
dt
d- acceleraţie unghiulară - [s-2]
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
ϕ&&J - cuplul forţelor de inerţie → [N·m]Pentru o vibraţie sinusoidală ecuaţia ce descrie mişcarea punctului material este:
( ) tsinXtf 2sinXT
t2sinXx vvv ω=⋅⋅π=
π= (.3)
unde: Xv este valoarea maximă (de vârf)a deplasării x, iar ω = 2πf – pulsaţia.
Viteza şi acceleraţia se pot exprima prin relaţiile:
π+ω=ωω===
2tsinVtcosX
dt
dxvx vv& ; (.4)
( )π+ω=ωω−=== tsinAtsinXdt
xdxa vv
22
2&& ; (.5)
în care: Vv şi Av reprezintă valorile de vârf ale vitezei şi acceleraţieiObservaţie:Vibraţiile nearmonice (complexe) întâlnite cel mai des în practică se pot analiza prin înregistrarea
spectrelor care pun în evidenţă frecvenţele şi amplitudinile componentelor.În funcţie de tipul vibraţiei şi scopul urmărit, traductoarele pot converti: valori instantanee ; valori devârf ; valori medii sau valori eficace.Dacă vibraţia este armonică, este suficient să se măsoare frecvenţa şi una din mărimile menţionate (mai
sus), iar celelalte mărimi rezultă prin calcul utilizând relaţiile (.4) şi (.5).1. Amplitudinea vibraţiei dă informaţii asupra jocurilor (radiale, axiale) existente în maşini în special
asupra jocurilor din piesele care vibrează (jocuri în lagăre, articulaţii etc). Traductoarele dedeplasare sunt preferate numai pentru măsurarea amplitudinilor mari specifice vibraţiilor de joasă frecvenţă.
2. Acceleraţia vibraţiei dă informaţii asupra forţelor care solicită maşina (instalaţia) sau materialul.Măsurarea acceleraţiilor se face în special atunci când este necesară evidenţierea vibraţiilor de înaltă frecvenţă.
3. Viteza este factorul fizic de care depinde zgomotul produs de mediul care vibrează şi se măsoară cutraductoare de presiune acustică.
O informaţie globală privind nivelul semnalului se obţine prin determinarea valorii medii absolute xm şia valorii eficace xef utilizând relaţiile:
dtxT
1x
T
0m ∫= ; dtx
T
1x
T
0
2ef ∫= ; (.6)
3 – Principii de realizare a traductoarelor de vibraţii
Structura unui traductor de vibraţii este prezentată în figura .2, unde se observă că elementulsensibil la vibraţii (ESV) generează la ieşire tot o mărime de natură mecanică (deplasarea sau forţă). Ca
urmare, pentru obţinerea unui semnal electric care să fie prelucrat (calibrat) de adaptor, este necesar unconvertor intermediar care să transforme mărimea mecanică într-o mărime electrică.
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Separarea ESV de convertorul intermediar (CI) are numai un caracter funcţional, deoarece sub raportconstructiv cele două elemente formează o singură unitate constructivă.
3.1 Elemente sensibile pentru traductoare de vibraţii (ESV)
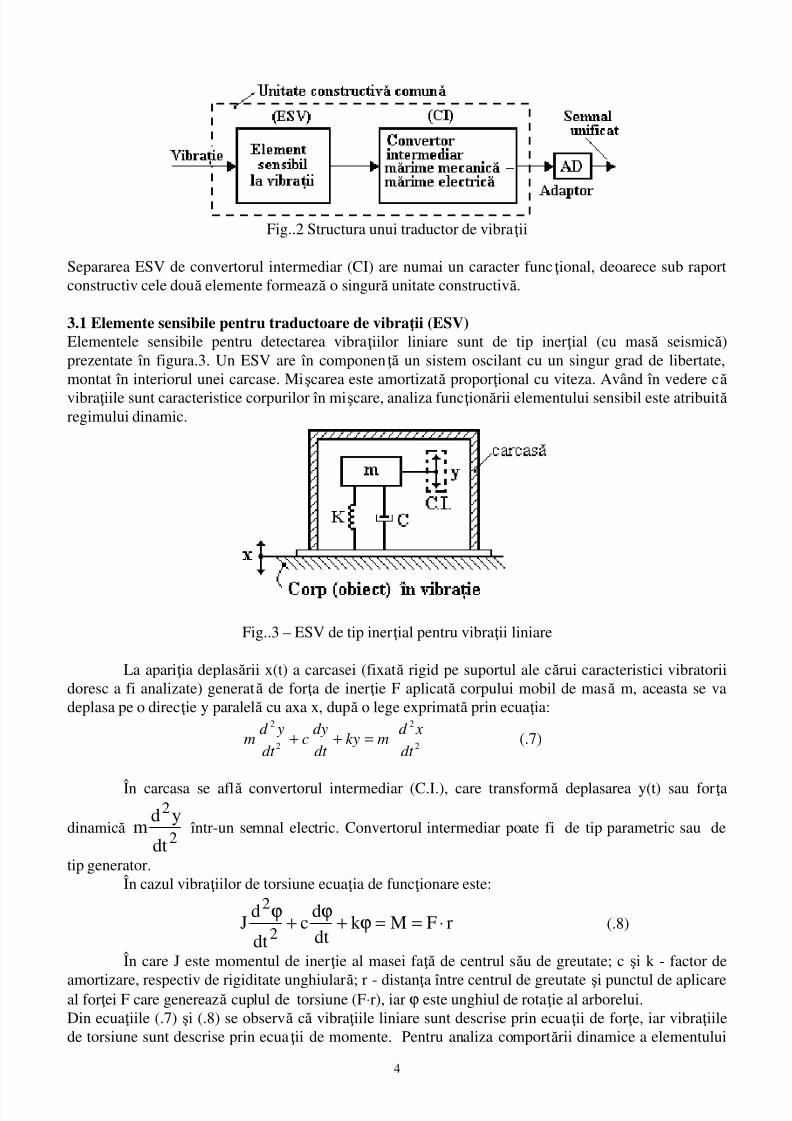
Elementele sensibile pentru detectarea vibraţiilor liniare sunt de tip inerţial (cu masă seismică)prezentate în figura.3. Un ESV are în componenţă un sistem oscilant cu un singur grad de libertate,montat în interiorul unei carcase. Mişcarea este amortizată proporţional cu viteza. Având în vedere că vibraţiile sunt caracteristice corpurilor în mişcare, analiza funcţionării elementului sensibil este atribuită regimului dinamic.
Fig..3 – ESV de tip inerţial pentru vibraţii liniare
La apariţia deplasării x(t) a carcasei (fixată rigid pe suportul ale cărui caracteristici vibratoriidoresc a fi analizate) generată de forţa de inerţie F aplicată corpului mobil de masă m, aceasta se vadeplasa pe o direcţie y paralelă cu axa x, după o lege exprimată prin ecuaţia:
2
2
2
2
dt
xd mky
dt
dyc
dt
yd m =++ (.7)
În carcasa se află convertorul intermediar (C.I.), care transformă deplasarea y(t) sau forţa
dinamică 2
2
dt
ydm într-un semnal electric. Convertorul intermediar poate fi de tip parametric sau de
tip generator.În cazul vibraţiilor de torsiune ecuaţia de funcţionare este:
rFMkdt
dc
dt
dJ
2
2⋅==ϕ+
ϕ+
ϕ(.8)
În care J este momentul de inerţie al masei faţă de centrul său de greutate; c şi k - factor de
amortizare, respectiv de rigiditate unghiulară; r - distanţa între centrul de greutate şi punctul de aplicareal forţei F care generează cuplul de torsiune (F⋅r), iar ϕ este unghiul de rotaţie al arborelui.Din ecuaţiile (.7) şi (.8) se observă că vibraţiile liniare sunt descrise prin ecuaţii de forţe, iar vibraţiilede torsiune sunt descrise prin ecuaţii de momente. Pentru analiza comportării dinamice a elementului
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
sensibil, destinat vibraţiilor liniare, este necesară rezolvarea ecuaţiei (.7). În rezolvarea acestei ecuaţii sepot distinge trei situaţii specifice:
a) se consideră m – foarte mare, c şi k fiind neglijabile (amortizare şi resort slab). În acestecondiţii ecuaţia (8.7) devine:
2
2
2
2
dt xd
dt yd ≈ , deci: y = x (.9)
În acest caz, masa m nu urmăreşte mişcarea carcasei, ci rămâne fixă în spaţiul din interiorulcarcasei, carcasa deplasându-se faţă de m. Deci elementul sensibil la vibraţii este utilizabil pentrumăsurarea deplasării x(t).b) Amortizarea este puternică (c - foarte mare), m şi k fiind neglijabile. În această situaţie ecuaţia (.7)devine:
2
2
dt
xd m
dt
dyc ≈ , deci:
dt
dx
c
my ⋅≈ (.10)
Rezultă că deplasarea y este proporţională cu viteza de măsurat, adică ESV este utilizat la măsurareavitezei )t(x& .
b) Resortul este foarte rigid (k - foarte mare), iar m şi c fiind neglijabile. Similar se obţine:
2
2
dt
xd m yk ≈ ; deci: 2
2
dt
xd
k
m y ⋅≈ (.11)
În această situaţie rezultă că deplasarea masei este proporţională cu acceleraţia de măsurat, ESV fiindutilizat la măsurarea acceleraţiei imprimate carcasei.
Analiza f ăcută asupra modului de rezolvare în domeniul timp a ecuaţiei (.7) este doarcalitativă, deoarece ea nu arată dependenţa soluţiilor obţinute de caracterul excitaţiei (de naturavibraţiilor).
3.2 Convertoare intermediare asociate elementelor sensibile pentru
conversia în semnal electric
Convertoarele intermediare pot fi de tip parametric sau de tip generator. În cele ce urmează se prezintă câteva tipuri de convertoarele intermediare parametrice.
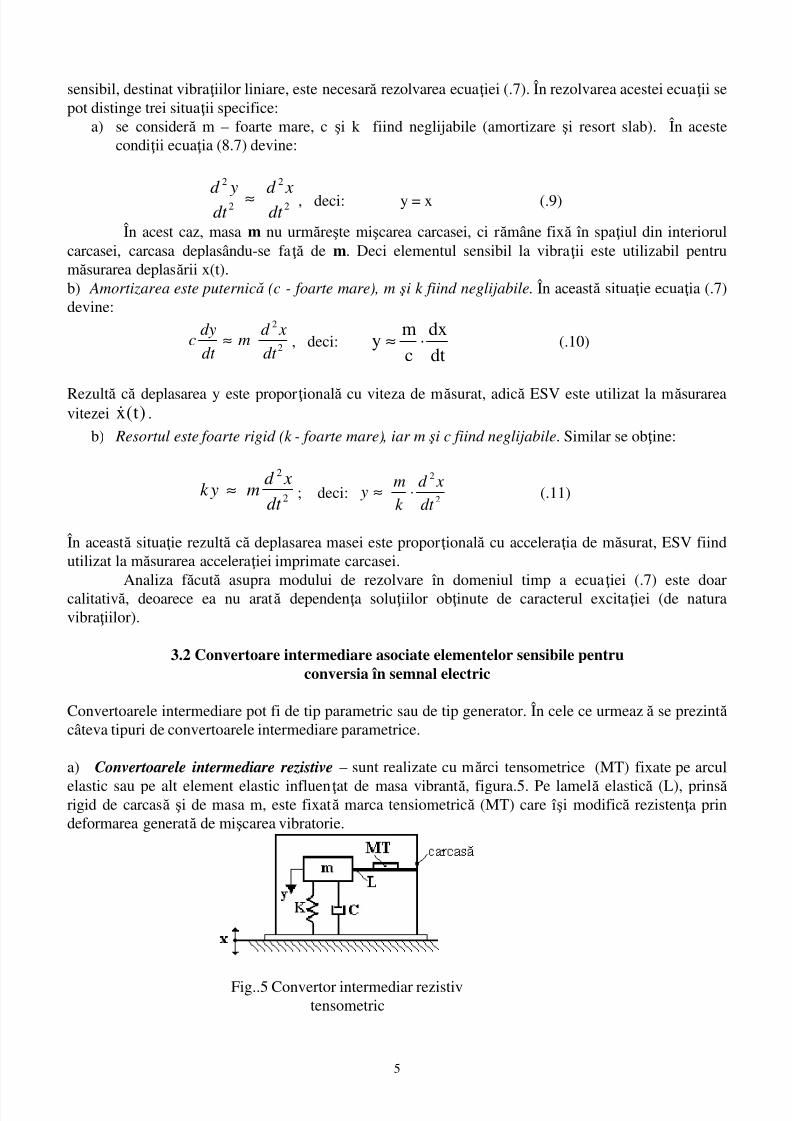
a) Convertoarele intermediare rezistive – sunt realizate cu mărci tensometrice (MT) fixate pe arcul
elastic sau pe alt element elastic influenţat de masa vibrantă, figura.5. Pe lamelă elastică (L), prinsă rigid de carcasă şi de masa m, este fixată marca tensiometrică (MT) care î şi modifică rezistenţa prindeformarea generată de mişcarea vibratorie.
Fig..5 Convertor intermediar rezistivtensometric
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Elemente sensibile tensometrice rezistive Elementele sensibile tensometrice rezistive reprezintă elemente sensibile rezistive la care
variaţia rezistenţei electrice se produce prin variaţia lungimii conductorului, ca efect al alungirii saucontracţiei. Dacă elementul sensibil tensometric este fixat pe o porţiune dintr-o piesă care se defor-mează din cauza unei solicitări, el se va deforma la fel cu piesa.
Măsurând prin metode electrice variaţia de rezistenţă a elementului sensibil tensometric, careeste proporţională cu alungirea sa, se poate determina, pe baza unei etalonări prealabile, deformaţia înporţiunea de piesă studiată şi în final mărimea neelectrică care a produs această deformaţie.
Pentru a stabili relaţia care există între deformaţia firului rezistiv şi variaţia rezistenţei sale elec-trice, se consideră un conductor rectiliniu de lungime l şi de secţiune transversală S, confecţionat dintr-un material având rezistivitatea ρ.
Rezistenţa iniţială a firului este:
.S
l R ⋅⋅⋅⋅==== ρ ρρ ρ (4.35)
Logaritmând relaţia (4.35) şi diferenţiind-o, se obţine:
lnR = lnρ + lnl-lnS, (4.36)
S
S
l
l
R
R ∆∆∆∆∆∆∆∆
ρ ρρ ρ
ρ ρρ ρ ∆∆∆∆∆∆∆∆−−−−++++==== . (4.37)
Deoarece
l
l 2
S
S ∆∆∆∆ µ µµ µ
∆∆∆∆⋅⋅⋅⋅⋅⋅⋅⋅−−−−==== . (4.38)
unde µ este coeficientul Poisson (raportul dintre deformaţia transversală şi cea longitudinală), rezultă:
Rezultă că între variaţia de rezistenţă a firului şi alungirea sa specifică ε =l
l∆există relaţia lini-
ară:
.ε ⋅=∆
t S R
R(4.43)
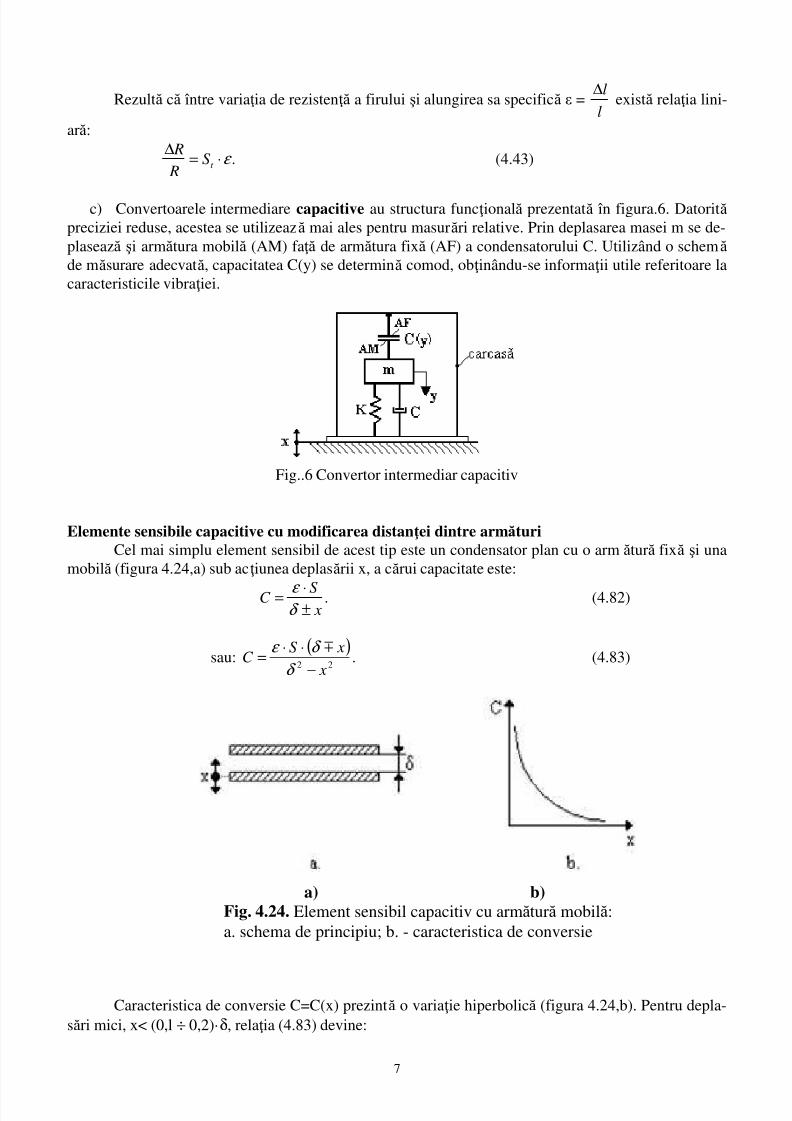
c) Convertoarele intermediare capacitive au structura funcţională prezentată în figura.6. Datorită preciziei reduse, acestea se utilizează mai ales pentru masurări relative. Prin deplasarea masei m se de-plasează şi armătura mobilă (AM) faţă de armătura fixă (AF) a condensatorului C. Utilizând o schemă de măsurare adecvată, capacitatea C(y) se determină comod, obţinându-se informaţii utile referitoare lacaracteristicile vibraţiei.
Fig..6 Convertor intermediar capacitiv
Elemente sensibile capacitive cu modificarea distanţei dintre armături
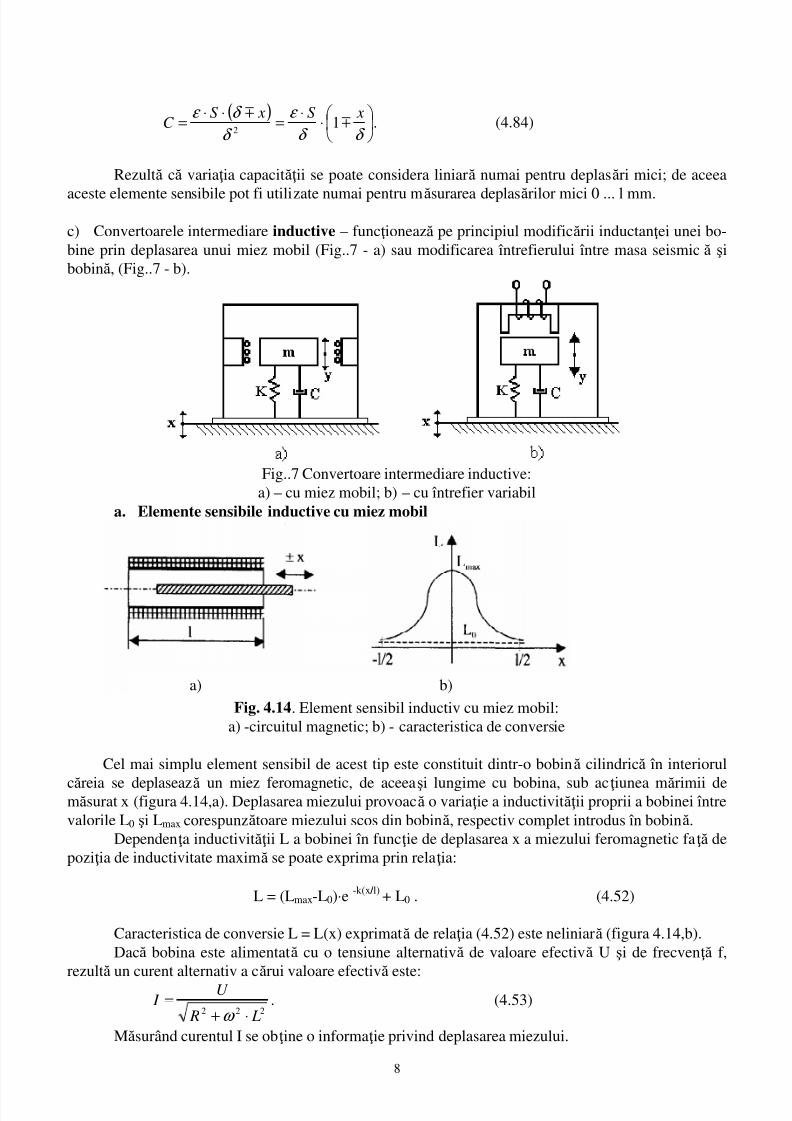
Cel mai simplu element sensibil de acest tip este un condensator plan cu o armătură fixă şi unamobilă (figura 4.24,a) sub acţiunea deplasării x, a cărui capacitate este:
. xSC
±⋅=
δ ε (4.82)
sau:( )
.22
x
xSC
−
⋅⋅=
δ
δ ε m(4.83)
a) b)Fig. 4.24. Element sensibil capacitiv cu armătură mobilă:a. schema de principiu; b. - caracteristica de conversie
Caracteristica de conversie C=C(x) prezintă o variaţie hiperbolică (figura 4.24,b). Pentru depla-sări mici, x< (0,l ÷ 0,2)·δ, relaţia (4.83) devine:
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Rezultă că variaţia capacităţii se poate considera liniară numai pentru deplasări mici; de aceea
aceste elemente sensibile pot fi utilizate numai pentru măsurarea deplasărilor mici 0 ... l mm.
c) Convertoarele intermediare inductive – funcţionează pe principiul modificării inductanţei unei bo-bine prin deplasarea unui miez mobil (Fig..7 - a) sau modificarea întrefierului între masa seismică şibobină, (Fig..7 - b).
Fig..7 Convertoare intermediare inductive:a) – cu miez mobil; b) – cu întrefier variabil
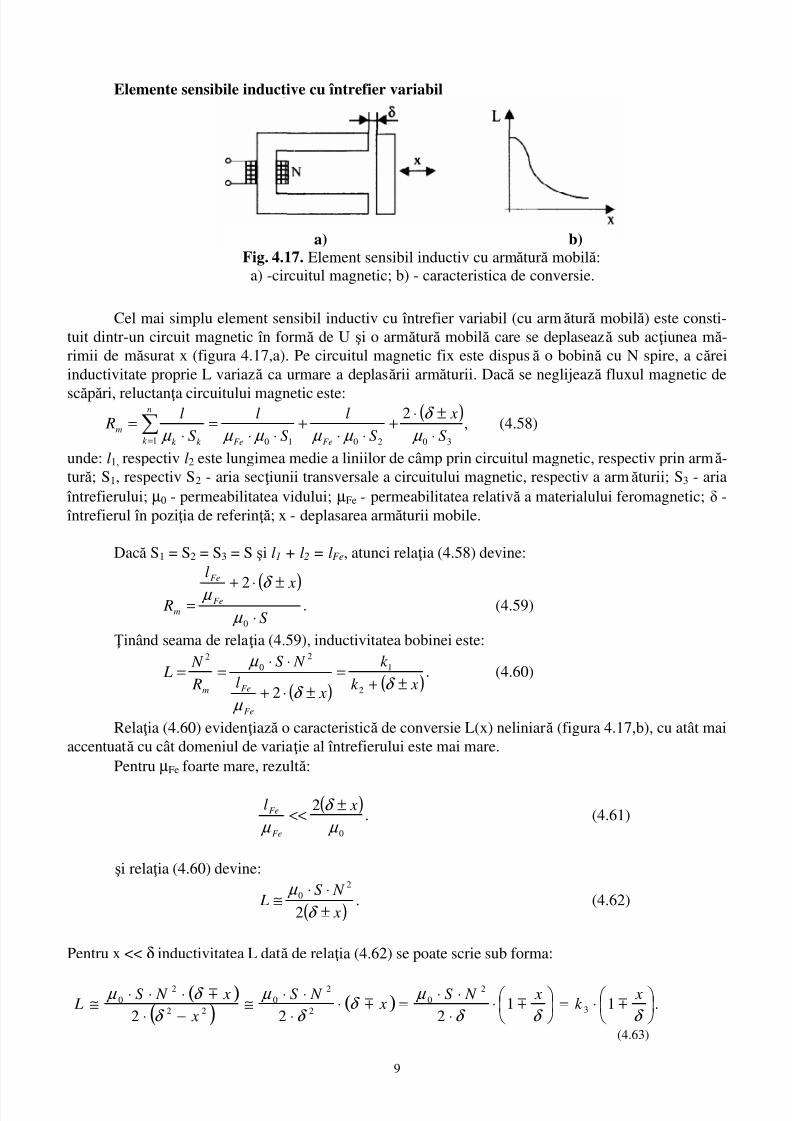
a. Elemente sensibile inductive cu miez mobil
a) b)
Fig. 4.14. Element sensibil inductiv cu miez mobil:a) -circuitul magnetic; b) - caracteristica de conversie
Cel mai simplu element sensibil de acest tip este constituit dintr-o bobină cilindrică în interiorul
căreia se deplasează un miez feromagnetic, de aceeaşi lungime cu bobina, sub acţiunea mărimii demăsurat x (figura 4.14,a). Deplasarea miezului provoacă o variaţie a inductivităţii proprii a bobinei întrevalorile L0 şi Lmax corespunzătoare miezului scos din bobină, respectiv complet introdus în bobină.
Dependenţa inductivităţii L a bobinei în funcţie de deplasarea x a miezului feromagnetic faţă depoziţia de inductivitate maximă se poate exprima prin relaţia:
L = (Lmax-L0)⋅e -k(x / l) + L0 . (4.52)
Caracteristica de conversie L = L(x) exprimată de relaţia (4.52) este neliniară (figura 4.14,b).Dacă bobina este alimentată cu o tensiune alternativă de valoare efectivă U şi de frecvenţă f,
rezultă
un curent alternativ a cărui valoare efectiv
ăeste:
.222
L R
U I
⋅+=
ω (4.53)
Măsurând curentul I se obţine o informaţie privind deplasarea miezului.
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
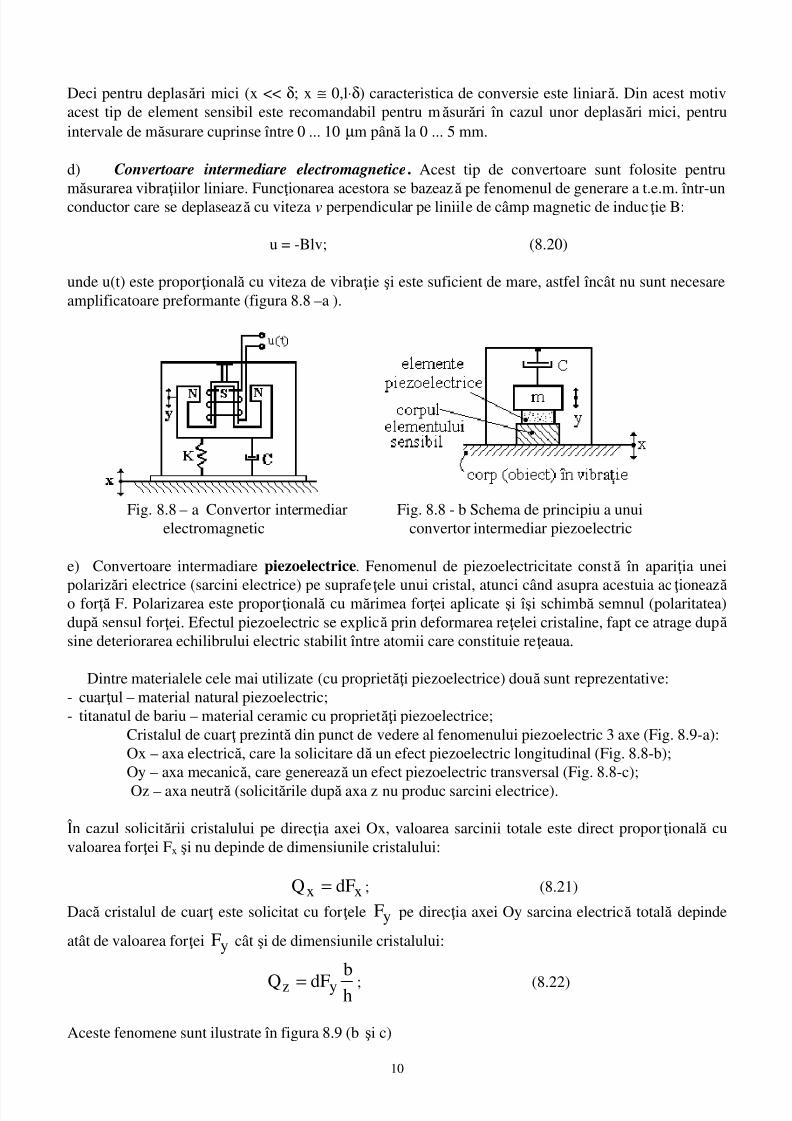
Elemente sensibile inductive cu întrefier variabil
a) b)
Fig. 4.17. Element sensibil inductiv cu armătură mobilă:
a) -circuitul magnetic; b) - caracteristica de conversie.
Cel mai simplu element sensibil inductiv cu întrefier variabil (cu armătură mobilă) este consti-tuit dintr-un circuit magnetic în formă de U şi o armătură mobilă care se deplasează sub acţiunea mă-rimii de măsurat x (figura 4.17,a). Pe circuitul magnetic fix este dispusă o bobină cu N spire, a căreiinductivitate proprie L variază ca urmare a deplasării armăturii. Dacă se neglijează fluxul magnetic de
scăpări, reluctanţa circuitului magnetic este:( )
,2
1 302010∑
= ⋅
±⋅+
⋅⋅+
⋅⋅=
⋅=
n
k FeFek k
mS
x
S
l
S
l
S
l R
µ
δ
µ µ µ µ µ (4.58)
unde: l1, respectiv l2 este lungimea medie a liniilor de câmp prin circuitul magnetic, respectiv prin armă-tură; S1, respectiv S2 - aria secţiunii transversale a circuitului magnetic, respectiv a armăturii; S3 - aria
întrefierului; µ0 - permeabilitatea vidului; µFe - permeabilitatea relativă a materialului feromagnetic; δ - întrefierul în poziţia de referinţă; x - deplasarea armăturii mobile.
Dacă S1 = S2 = S3 = S şi l1 + l2 = lFe, atunci relaţia (4.58) devine:
( ).
2
0 S
x
l
R Fe
Fe
m⋅
±⋅+=
µ
δ µ (4.59)
Ţinând seama de relaţia (4.59), inductivitatea bobinei este:
( )( )
.2 2
12
02
xk
k
xl
N S
R
N L
Fe
Fem ±+=
±⋅+
⋅⋅==
δ δ
µ
µ (4.60)
Relaţia (4.60) evidenţiază o caracteristică de conversie L(x) neliniară (figura 4.17,b), cu atât maiaccentuată cu cât domeniul de variaţie al întrefierului este mai mare.
Pentru µFe foarte mare, rezultă:
( ).
2
0 µ
δ
µ
xl
Fe
Fe ±<< (4.61)
şi relaţia (4.60) devine:
( ).
2
20
x
N S L
±
⋅⋅≅
δ
µ (4.62)
Pentru x << δ inductivitatea L dată de relaţia (4.62) se poate scrie sub forma:
( )( )
( ) .11222 3
20
2
20
22
20
⋅=
⋅
⋅
⋅⋅=⋅
⋅
⋅⋅≅
−⋅
⋅⋅⋅≅
δ δ δ
µ δ
δ
µ
δ
δ µ xk
x N S x
N S
x
x N S L mmm
m
(4.63)
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Deci pentru deplasări mici (x << δ; x ≅ 0,l⋅δ) caracteristica de conversie este liniară. Din acest motivacest tip de element sensibil este recomandabil pentru măsurări în cazul unor deplasări mici, pentruintervale de măsurare cuprinse între 0 ... 10 µm până la 0 ... 5 mm.
d) Convertoare intermediare electromagnetice. Acest tip de convertoare sunt folosite pentru
măsurarea vibraţiilor liniare. Funcţionarea acestora se bazează pe fenomenul de generare a t.e.m. într-unconductor care se deplasează cu viteza v perpendicular pe liniile de câmp magnetic de inducţie B:
u = -Blv; (8.20)
unde u(t) este proporţională cu viteza de vibraţie şi este suficient de mare, astfel încât nu sunt necesareamplificatoare preformante (figura 8.8 –a ).
Fig. 8.8 – a Convertor intermediarelectromagnetic
Fig. 8.8 - b Schema de principiu a unuiconvertor intermediar piezoelectric
e) Convertoare intermadiare piezoelectrice. Fenomenul de piezoelectricitate constă în apariţia unei
polarizări electrice (sarcini electrice) pe suprafeţele unui cristal, atunci când asupra acestuia acţionează o forţă F. Polarizarea este proporţională cu mărimea forţei aplicate şi î şi schimbă semnul (polaritatea)după sensul forţei. Efectul piezoelectric se explică prin deformarea reţelei cristaline, fapt ce atrage după sine deteriorarea echilibrului electric stabilit între atomii care constituie reţeaua.
Dintre materialele cele mai utilizate (cu proprietăţi piezoelectrice) două sunt reprezentative:- cuarţul – material natural piezoelectric;- titanatul de bariu – material ceramic cu proprietăţi piezoelectrice;
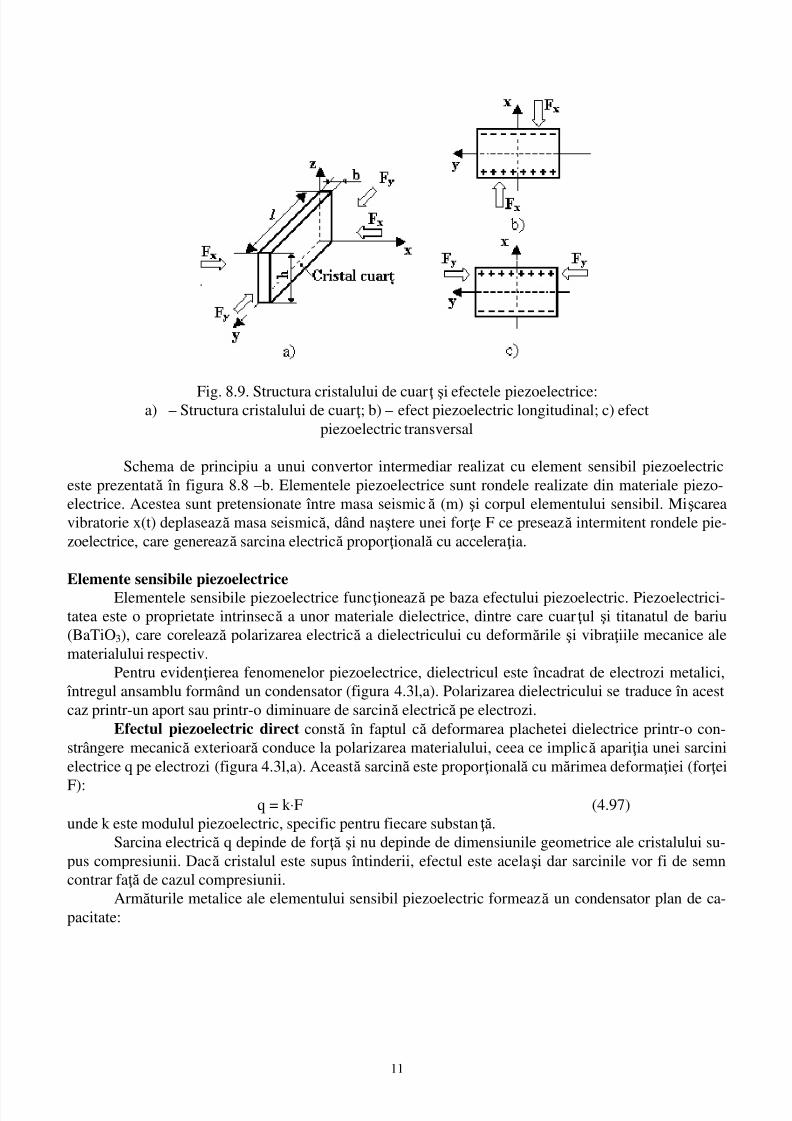
Cristalul de cuarţ prezintă din punct de vedere al fenomenului piezoelectric 3 axe (Fig. 8.9-a):Ox – axa electrică, care la solicitare dă un efect piezoelectric longitudinal (Fig. 8.8-b);Oy – axa mecanică, care generează un efect piezoelectric transversal (Fig. 8.8-c);Oz – axa neutră (solicitările după axa z nu produc sarcini electrice).
În cazul solicitării cristalului pe direcţia axei Ox, valoarea sarcinii totale este direct proporţională cuvaloarea forţei Fx şi nu depinde de dimensiunile cristalului:
xx dFQ = ; (8.21)
Dacă cristalul de cuarţ este solicitat cu forţele yF pe direcţia axei Oy sarcina electrică totală depinde
atât de valoarea forţei yF cât şi de dimensiunile cristalului:
h
bdFQ yz = ; (8.22)
Aceste fenomene sunt ilustrate în figura 8.9 (b şi c)
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Fig. 8.9. Structura cristalului de cuarţ şi efectele piezoelectrice:a) – Structura cristalului de cuarţ; b) – efect piezoelectric longitudinal; c) efect
piezoelectric transversal
Schema de principiu a unui convertor intermediar realizat cu element sensibil piezoelectriceste prezentată în figura 8.8 –b. Elementele piezoelectrice sunt rondele realizate din materiale piezo-electrice. Acestea sunt pretensionate între masa seismică (m) şi corpul elementului sensibil. Mişcareavibratorie x(t) deplasează masa seismică, dând naştere unei forţe F ce presează intermitent rondele pie-zoelectrice, care generează sarcina electrică proporţională cu acceleraţia.
Elemente sensibile piezoelectrice
Elementele sensibile piezoelectrice funcţionează pe baza efectului piezoelectric. Piezoelectrici-tatea este o proprietate intrinsecă a unor materiale dielectrice, dintre care cuarţul şi titanatul de bariu(BaTiO3), care corelează polarizarea electrică a dielectricului cu deformările şi vibraţiile mecanice alematerialului respectiv.
Pentru evidenţierea fenomenelor piezoelectrice, dielectricul este încadrat de electrozi metalici, întregul ansamblu formând un condensator (figura 4.3l,a). Polarizarea dielectricului se traduce în acestcaz printr-un aport sau printr-o diminuare de sarcină electrică pe electrozi.
Efectul piezoelectric direct constă în faptul că deformarea plachetei dielectrice printr-o con-strângere mecanică exterioară conduce la polarizarea materialului, ceea ce implică apariţia unei sarcinielectrice q pe electrozi (figura 4.3l,a). Această sarcină este proporţională cu mărimea deformaţiei (forţei
F):q = k⋅F (4.97)
unde k este modulul piezoelectric, specific pentru fiecare substanţă.Sarcina electrică q depinde de forţă şi nu depinde de dimensiunile geometrice ale cristalului su-
pus compresiunii. Dacă cristalul este supus întinderii, efectul este acelaşi dar sarcinile vor fi de semncontrar faţă de cazul compresiunii.
Armăturile metalice ale elementului sensibil piezoelectric formează un condensator plan de ca-pacitate:
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
Fig. 4.31. Ilustrarea efectului piezoelectric direct (a) şi simbolul
elementului sensibil piezoelectric (b).
,d
AC
⋅=ε
(4.98)
unde: ε este permitivitatea substanţei piezoelectrice; A - aria plachetei; d - grosimea plachetei (distanţa
dintre armături).
q C
C
.a .b
+
−0U
a) b)
Fig. 4.32. Schemele echivalente uzuale ale elementuluisensibil piezoelectric cu generator de sarcină (a) şi cu
generator de tensiune (b).
Tensiunea care se stabileşte la bornele condensatorului (fig. 4.31,a şi 4.32) este o măsură a forţei F:
.0 A
F d
k
C
F k
C
qU ⋅⋅=
⋅==
ε (4.99)
Sensibilitatea în gol a unui element sensibil piezoelectric supus unei solicitări de forţă F:
.00
A
d k
C
k
dF
dU S ⋅===
ε (4.100)
depinde numai de proprietăţile şi dimensiunile geometrice ale dielectricu-lui (k şi C). Cea mai marevaloare a sensibilităţii în gol o posedă cuarţul.
Elementele sensibile de mărimi mecanice care utilizează efectul piezoelectric direct lucrează în-totdeauna pe o sarcină care este, de regulă, intrarea unui amplificator. Impedanţa de sarcină prezintă, încazul general, o componentă rezistivă RS care este, de exemplu, impedanţa de intrare a amplificatorului(de ordinul 106 ... 108
) şi o componentă capacitivă CS, care înglobează şi capacităţile parazite intro-duse de cablurile de conexiune (figura 4.33). În figura 4.33,a, rezisten ţa R este rezistenţa de izolaţie aelementului sensibil (108 ... 1010Ω). Cuplajul element sensibil - impedanţa de sarcină (figura 4.33,a)formează un divizor capacitiv (figura 4.33,b), tensiunea în sarcină fiind dată de relaţia:
5/12/2018 Curs 6 BSA- Traductoare Pentru Vibratii Si Acceleratii - slidepdf.com
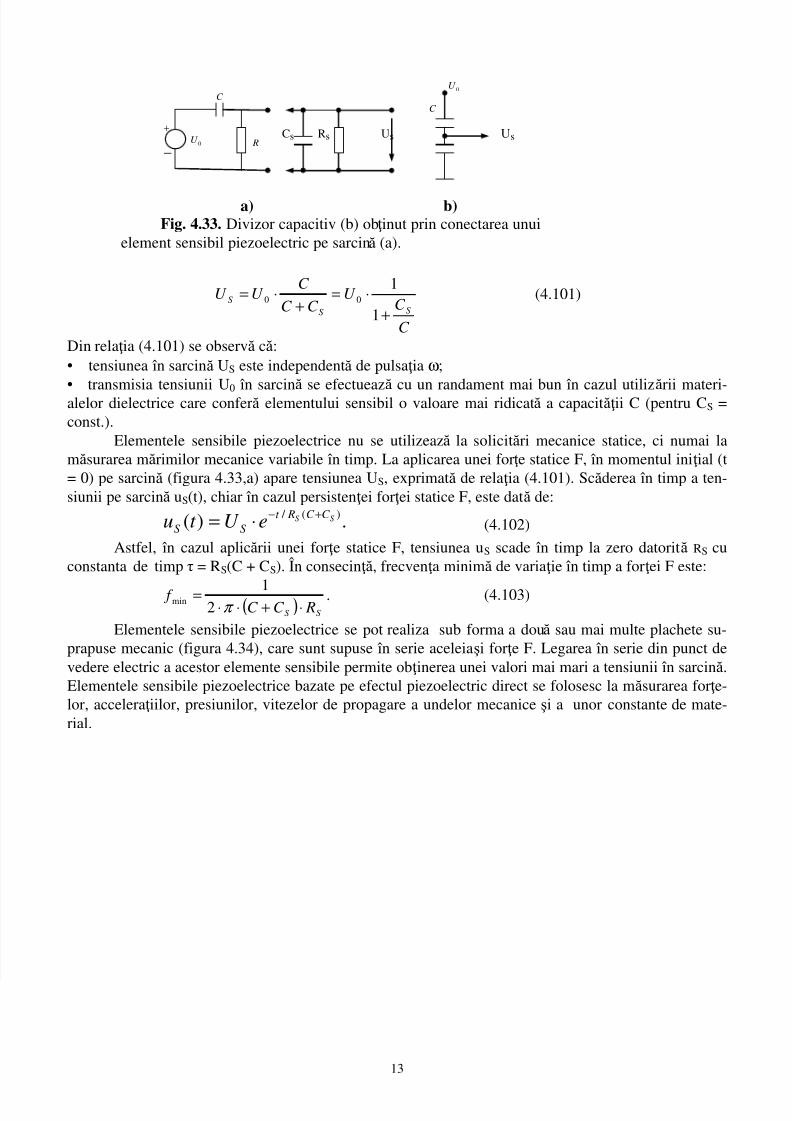
Fig. 4.33. Divizor capacitiv (b) obţinut prin conectarea unui
element sensibil piezoelectric pe sarcină (a).
C
+
−0U
C
0U R
Cs Rs Us
0U
Us
C
C U
C C
C U U
SS
S
+
⋅=+
⋅=
1
100 (4.101)
Din relaţia (4.101) se observă că:• tensiunea în sarcină US este independentă de pulsaţia ω; • transmisia tensiunii U0 în sarcină se efectuează cu un randament mai bun în cazul utilizării materi-alelor dielectrice care conferă elementului sensibil o valoare mai ridicată a capacităţii C (pentru CS =const.).
Elementele sensibile piezoelectrice nu se utilizează la solicitări mecanice statice, ci numai lamăsurarea mărimilor mecanice variabile în timp. La aplicarea unei forţe statice F, în momentul iniţial (t= 0) pe sarcină (figura 4.33,a) apare tensiunea US, exprimată de relaţia (4.101). Scăderea în timp a ten-siunii pe sarcină uS(t), chiar în cazul persistenţei forţei statice F, este dată de:
.)( )( / SS C C Rt
SS eU t u+−⋅= (4.102)
Astfel, în cazul aplicării unei forţe statice F, tensiunea uS scade în timp la zero datorită RS cuconstanta de timp τ = RS(C + CS). În consecinţă, frecvenţa minimă de variaţie în timp a forţei F este:
( ).
21min
SS RC C f
⋅+⋅⋅=
π (4.103)
Elementele sensibile piezoelectrice se pot realiza sub forma a două sau mai multe plachete su-prapuse mecanic (figura 4.34), care sunt supuse în serie aceleiaşi forţe F. Legarea în serie din punct devedere electric a acestor elemente sensibile permite obţinerea unei valori mai mari a tensiunii în sarcină.Elementele sensibile piezoelectrice bazate pe efectul piezoelectric direct se folosesc la măsurarea forţe-lor, acceleraţiilor, presiunilor, vitezelor de propagare a undelor mecanice şi a unor constante de mate-rial.