122
SIMONA ROATEŞI SILVIA MARZAVAN PROBLEME DE ALGEBRA LINIARĂ ÎN INGINERIE 2
| Date post: | 26-Dec-2015 |
| Category: |
Documents |
| Upload: | vladparaschiv |
| View: | 39 times |
| Download: | 1 times |

SIMONA ROATEŞI SILVIA MARZAVAN
PROBLEME DE ALGEBRA LINIARĂ
ÎN INGINERIE
EDITURA ACADEMIEI TEHNICE MILITAREBUCUREŞTI, 2010
CUPRINS
2
CUPRINS..................................................................................................................3
PREFAŢĂ ………………………………………………………………………... 5
CAP. I. CALCUL VECTORIAL............................................................................... 6
§ 1.1. Calcul vectorial – aspecte teoretice……………………………...….…..… 6 § 1.2. Probleme rezolvate…………………….…………………...……….……. 11 § 1.3. Probleme propuse spre rezolvare…………………………………….……. 30
CAP. II. SPAŢII VECTORIALE……….………………………………...……... 35
§ 2.1. Spaţii vectoriale – aspecte teoretice …………...…….................................. 35 § 2.2. Probleme rezolvate ………………………………………….……….......... 37 § 2.3. Probleme propuse spre rezolvare .................................................................. 47
CAP. III. APLICAŢII LINIARE ……………………….………………................ 54
§ 3.1. Aplicaţii liniare – aspecte teoretice ……….……….……......................... 54 § 3.2. Probleme rezolvate …………………………….………………................. 57 § 3.3. Probleme propuse spre rezolvare….............................................................. 70
CAP. IV. VECTORI ŞI VALORI PROPRII. FORMA DIAGONALĂ.................. 77
§ 4.1. Vectori şi valori proprii. Forma diagonală – aspecte teoretice..……….....… 77 § 4.2. Probleme rezolvate ……………………………………................................ 81 § 4.3. Probleme propuse spre rezolvare …………………………........................... 95
CAP. V. DETERMINANŢI. MATRICE. SISTEME DE ECUAŢII LINIARE…. 100
§ 5.1. Determinanţi. Matrice. Sisteme de ecuaţii liniare – aspecte teoretice…..... 100 § 5.2. Probleme rezolvate ….................................................................................. 111 § 5.3. Probleme propuse spre rezolvare…………….............................................. 123
CAP. VI. SPAŢII EUCLIDIENE............................................................................ 131
§ 6.1. Spaţii euclidiene – aspecte teoretice …….………………………….……... 131
§ 6.2. Probleme rezolvate ………………...……………………………………… 137
§ 6.3. Probleme propuse spre rezolvare …….……………………………….…… 146
3
CAP. VII. OPERATORI DEFINŢI PE SPAŢII EUCLIDIENE……………...... 150
§ 7.1 Operatori definiţi pe spaţii euclidiene – aspecte teoretice......………………. 150
§ 7.2. Probleme rezolvate ………………..……………………………………..… 158
§ 7.3. Probleme propuse spre rezolvare …….……………………………….…… 172
CAP. VIII. FORME BILINIARE. FORME PĂTRATICE……………………….. 175
§ 8.1. Forme biliniare. Forme pătratice – aspecte teoretice ………………….….. 175
§ 8.2. Probleme rezolvate ………….…………………………...……………..….. 181
§ 8.3. Probleme propuse spre rezolvare ………….……………...……………….. 193
BIBLIOGRAFIE........................................................................................................ 198
PREFAŢĂ
4
Este unanim recunoscut faptul că nu se poate înţelege, asimila, adânci şi justifica
matematica numai prin însuşirea unor cunoştinţe teoretice, fără aplicaţii ale acestora.
Teoria se fixează şi se aprofundează printr-un număr mare de probleme, exerciţii,
exemple şi contraexemple care nuanţează rezultatele şi pun în evidenţă importanţa lor.
Prezenta culegere răspunde acestui deziderat. Conţinutul ei este conturat pe baza
programei analitice a disciplinei Algebră liniară pentru studenţii anului I de studiu din
universităţile tehnice.
Materialul este structurat în opt capitole, şi anume: 1. Calcul vectorial, 2. Spaţii
vectoriale, 3. Aplicaţii liniare, 4. Vectori şi valori proprii. Forma diagonală, 5.
Determinanţi. Matrice. Sisteme de ecuaţii liniare, 6. Spaţii euclidiene, 7. Operatori
definiţi pe spaţii euclidiene, 8. Forme biliniare. Forme pătratice.
La începutul fiecărui capitol am conceput un paragraf în care sunt prezentate
sumar noţiunile elementare, precum şi rezultatele teoretice ce urmează a fi aplicate în
rezolvarea exerciţiilor. Următorul paragraf al fiecărui capitol este dedicat prezentării a
numeroase probleme reprezentative complet rezolvate, selectate şi aranjate în strânsă
concordanţă cu chestiunile teoretice prezentate anterior. Un larg spaţiu apoi este acordat
într-un al treilea paragraf, exerciţiilor şi problemelor propuse spre rezolvare, unele
asemănătoare cu cele rezolvate, altele fiind o continuare a acestora, respectându-se
gradarea dificultăţii de rezolvare.
Aducem mulţumirile noastre Prof. dr. Dan Pascali pentru timpul alocat parcurgerii
manuscrisului şi a sugestiilor făcute.
Simona Roateşi
Silvia Marzavan
5
Capitolul I
CALCUL VECTORIAL
Mulţimea tuturor punctelor din spaţiu, notate cu litere mari ( …) se va
nota cu , numit spaţiu geometric.
Planul va fi notat cu .
Vectori legaţi, vectori liberi. Un segment orientat , , , se
numeşte vector legat, fiind caracterizat prin noţiunile geometrice: direcţie, sens, mărime
(lungime). Doi vectori legaţi şi se numesc echipolenţi şi se notează
dacă au acelaşi suport sau suporturi paralele, au aceeaşi mărime şi acelaşi sens. Numim
vector liber determinat de vectorul legat mulţimea tuturor vectorilor legaţi
echipolenţi cu : . Doi vectori sunt egali dacă au aceeaşi direcţie,
acelaşi sens şi aceiaşi lungime.
Definiţia I. 1. Un vector de lungime unu se numeşte versor sau vector unitar. Un
vector de lungime egală cu zero se numeşte vector nul. Opusul unui vector este un
vector , care are aceeaşi direcţie şi lungime cu , dar sensul este opus aceluia lui .
Mulţimea tuturor vectorilor liberi se va nota cu .
Definiţia I. 2. Fie , . Se numeşte suma vectorilor şi
vectorul , (regula triunghiului) (figura 1).
Figura 1
Definiţia I. 3. Fie şi . Fie şi fie diagonala
paralelogramului construit pe şi .
6
O
A
B
Figura 2
Vectorul liber determinat de este prin definiţie suma vectorilor liberi şi
, adică (regula paralelogramului).
Proprietatea I. 4.
a. Comutativitate: ;
b. Asociativitate: ;
c. Existenţa elementului nul: ;
d. Existenţa elementului simetric: .
Din proprietăţile a,b,c,d rezultă că (V3,+) este grup abelian (comutativ).
Propoziţia I. 5. Fie , . Atunci .
Înmulţirea unui vector cu un scalar. Fie , . Vectorul are
următoarele proprietăţi: are aceeaşi direcţie cu , mărimea vectorului este
, sensul vectorului este: acelaşi cu dacă , sens opus lui
dacă şi dacă , atunci prin definiţie: .
Definiţia I. 6. Fie . Se numeşte versorul vectorului nenul , un vector de
mărime 1 care are aceeaşi direcţie şi acelaşi sens cu . Dacă notăm cu versorul lui ,
atunci: .
Definiţia I. 7. Doi vectori se numesc coliniari dacă au suporturi paralele sau
coincid.
Propoziţia I. 8. Doi vectori liberi nenuli , sunt coliniari (dacă şi
numai dacă) \ astfel încât .
7
O
C
B
A
Definiţia I. 9. Trei vectori se numesc coplanari dacă suporturile lor sunt paralele
cu acelaşi plan.
Propoziaţia I. 10. Vectorii cu sunt coplanari dacă şi numai
dacă există astfel încât .
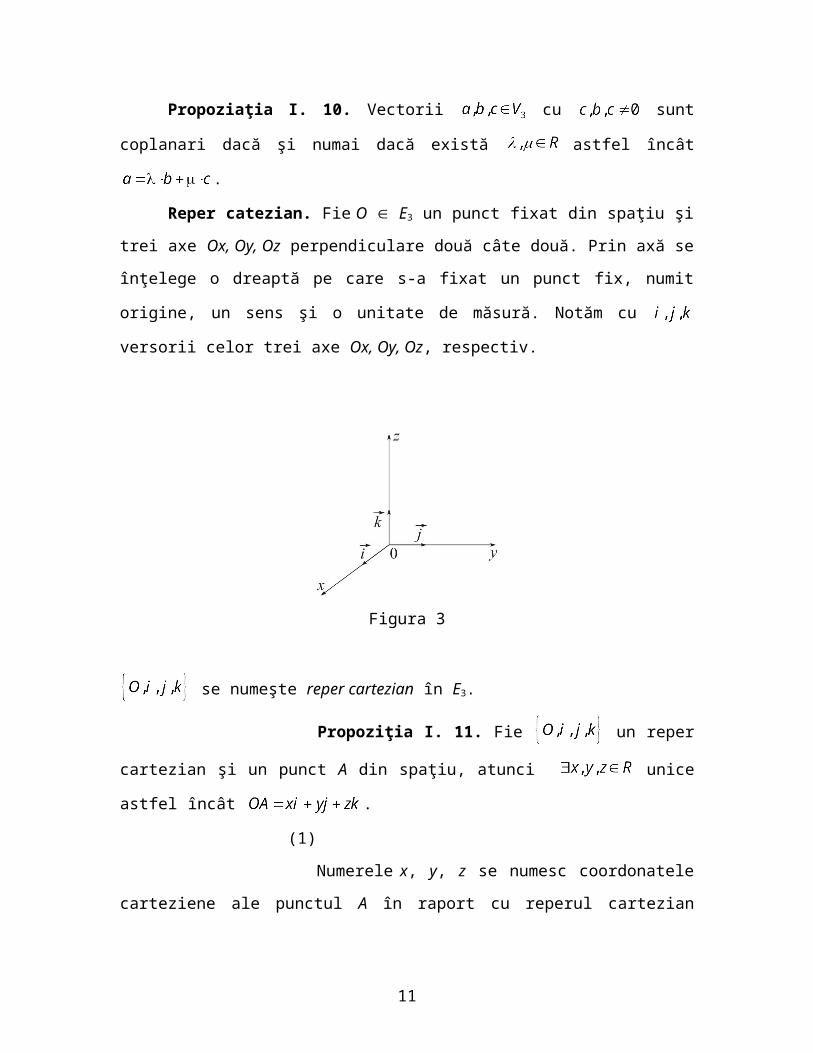
Reper catezian. Fie O E3 un punct fixat din spaţiu şi trei axe Ox, Oy, Oz
perpendiculare două câte două. Prin axă se înţelege o dreaptă pe care s-a fixat un punct
fix, numit origine, un sens şi o unitate de măsură. Notăm cu versorii celor trei axe
Ox, Oy, Oz, respectiv.
Figura 3
se numeşte reper cartezian în E3.
Propoziţia I. 11. Fie un reper cartezian şi un punct A din spaţiu,
atunci unice astfel încât . (1)
Numerele x, y, z se numesc coordonatele carteziene ale punctul A în raport cu
reperul cartezian şi vom nota A(x, y, z). Relaţia (1) se numeşte expresia
analitică a vectorului .
Propoziţia I. 12. Fie A, B E3, reper. Dacă A(x1, y1, z1), B(x2, y2, z2)
atunci .
8

Dacă este vectorul liber determinat de , vom nota cu ,
şi . Rezultă că . Numerele , şi sunt
unic determinate şi se numesc coordonatele (componentele) lui în raport cu reperul
.
Definiţia I. 13. Fie . Se numeşte produsul scalar al vectorilor liberi şi
şi se notează cu numărul
unde [0, ] unghiul format de suporturile celor doi vectori.
Propoziţia I. 14. Vectorii sunt ortogonali (suporturi perpendiculare)
dacă şi numai dacă produsul lor scalar este egal cu 0, .
Definiţia I. 15. Fie . Se numeşte produsul vectorial al vectorilor şi
şi se notează cu , vectorul liber caracterizat prin: direcţie perpendiculară pe planul
format de suporturile lui şi ; sens dat de regula burghiului, adică sensul său coincide
cu sensul de înaintare al unui burghiu care se roteşte de la către cu un unghi minim ;
şi mărime .
Interpretarea geometrică a produsului vectorial. Mărimea a
produsului vectorial a doi vectori liberi şi , este aria paralelogramului format de
suporturile celor doi vectori şi .
Considerăm O un punct în spaţiu, . Construim pe suporturile
celor doi vectori paralelogramul .
În particular, rezultă că aria triunghiului este jumătate din aria acestui
paralelogram, deci .
Expresia analitică a produsului vectorial. Fie un reper cartezian şi
doi vectori liberi şi . Atunci
9
, determinant formal pe care îl dezvoltăm după prima linie.
Definiţia I. 16. Fie . Se numeşte produs mixt şi se notează cu
un număr definit astfel .
Interpretarea geometrică a produsului mixt. Modulul produsul mixt
este egal cu volumul paralelipipedului oblic construit pe suporturile vectorilor şi .
Expresia analitică a produsului mixt. Fie vectorii şi , cu expresiile lor
analitice , şi . Atunci :
.
Volumul paralelipipedului construit pe vectorii este
.
O condiţie necesară şi suficientă ca trei vectori şi să fie colpanari este ca
.
Produsul dublu vectorial a trei vectori. Fie vectorii , . Produsul
dublu vectorial al vectorilor Fie vectorii şi , luaţi în această ordine, este vectorul
. Are loc formula .
10
Probleme rezolvate.
I.1. Fie un punct fix în spaţiu şi şi vectori de poziţie ai punctelor ,
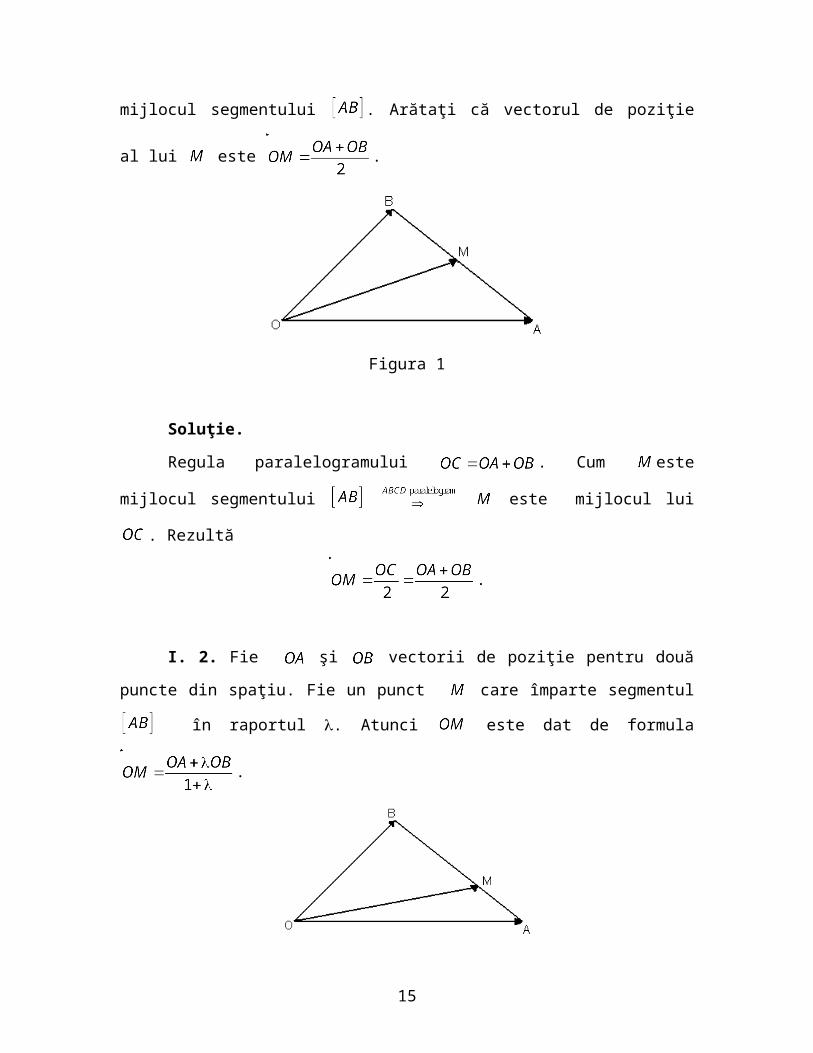
respectiv . Fie mijlocul segmentului . Arătaţi că vectorul de poziţie al lui
este .
Figura 1
Soluţie.
Regula paralelogramului . Cum este mijlocul segmentului
este mijlocul lui . Rezultă
.
I. 2. Fie şi vectorii de poziţie pentru două puncte din spaţiu. Fie un
punct care împarte segmentul în raportul . Atunci este dat de formula
.
Figura 2
11
Soluţie.
şi sunt coliniari, atunci există astfel încât .
.
Avem
.
I. 3. Fie , şi vectorii de poziţie pentru trei puncte din spaţiu,
. Fie G centrul de greutate. Atunci
Figura 3
Soluţie.
Fie mijlocul segmentului . Atunci .
G se află pe la de şi de , atunci
12
Conform Problemei I. 2. avem
.
I. 4. Se dau vectorii:
Se cere:
a) ;
b) Proiecţia ortogonală a lui pe (notată );
c) Aria paralelogramului construit pe cei doi vectori;
d) Să se determine un versor perpendicular pe planul format de cei doi vectori.
Soluţie.
a) ,
= .
b) u · v =
c) paralelogram
d)
.
13

I. 5. Să se demonstreze folosind calculul vectorial teorema cosinusului sau
Pitagora generalizată într-un triunghi.
Figura 4
Soluţie.
Ştim că . Cum şi , avem
, .
Dar , de unde
rezultă că .
I. 6. Să se demonstreze concurenţa înălţimilor.
Figura 5
Soluţie.
14
Cum , şi , rezultă că şi
• înmulţim această relaţie cu , de unde
• înmulţim această relaţie cu 0
.
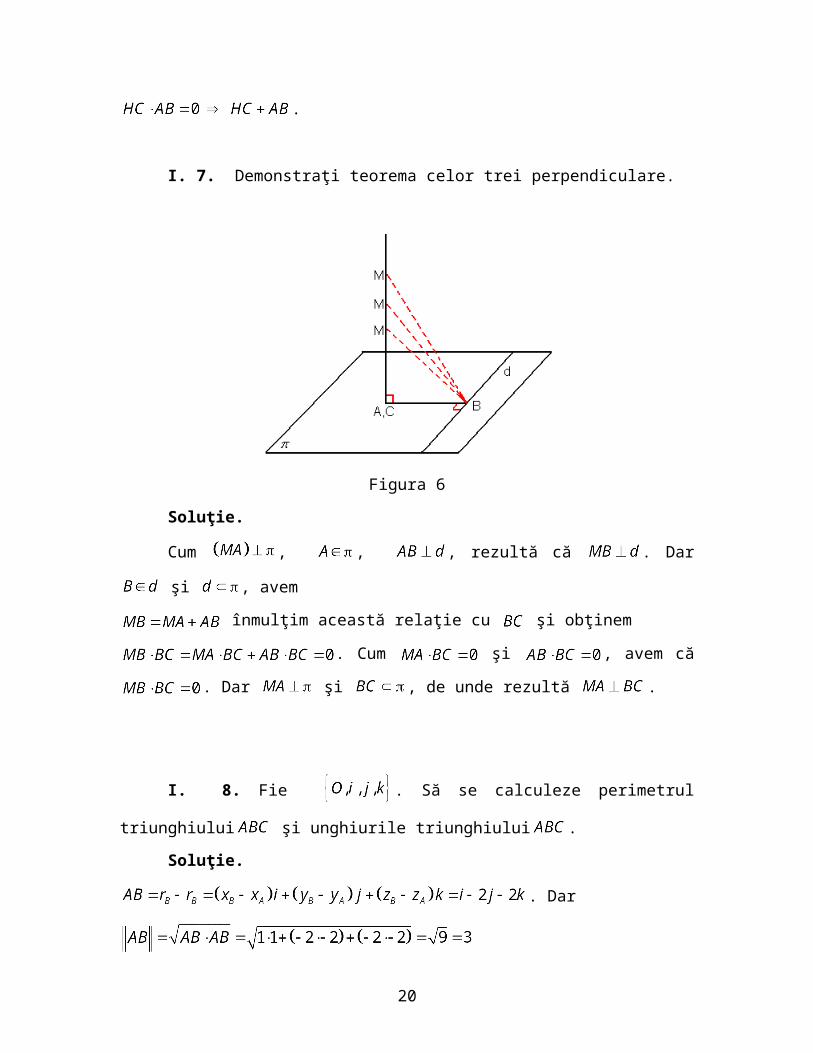
I. 7. Demonstraţi teorema celor trei perpendiculare.
Figura 6
Soluţie.
Cum , , , rezultă că . Dar şi ,
avem
înmulţim această relaţie cu şi obţinem
15

. Cum şi , avem că
. Dar şi , de unde rezultă .
I. 8. Fie . Să se calculeze perimetrul triunghiului şi unghiurile
triunghiului .
Soluţie.
. Dar
Observaţie:
Avem , ,
, . Perimetrul triunghiului este
Ştim că , avem
. Triunghiul este triunghi dreptunghic, atunci
avem că , de unde rezultă că . Cum unghiul
, avem că .
Dar , , ,
. Atunci , deci unghiul .
Dar . Cum ,
16

, avem că , de unde rezultă că
.
I. 9. Se ştie că .
Să se determine astfel încât , unde şi .
Soluţie.
Cum , avem că , de unde rezultă , adică
Dar . Atunci avem
, adică , mai mult decât atât
, scriind , obţinem că .
I. 10. Fie vectorii reciprocii vectorilor definiţi prin
.
Să se verifice identităţile:
a) ;
b) .
Să se calculeze reciprocii vectorilor ,
şi să se verifice identităţile de mai suspentru acest caz.
Soluţie.
a) Să verificăm pentru şi pentru . Analog se procedează
pentru celelalte valori. Avem
17

, .
b) În baza rezultatelor de la punctu a) avem
.
În sfârşit, prin calcul obţinem , astfel că
, , .
Se verifică uşor relaţii a) şi b).
Pentru puctul a) să verificăm pentru şi pentru , avem
,
.
Pentru punctual b) avem
I. 11. Fie punct fixat din spaţiu, , . Fie
. Atunci (expresia vectorului de
poziţie al unui punct care împarte segmentul într-un raport dat).
Soluţie.
18

Figura 7
Avem că vectorii şi sunt coliniari, atunci există , astfel încât
. Deci:
.
I. 12. Fie punct fixat din spaţiu, . Considrăm triunghiul
şi fie , , mediane. Să se determine vectorii de poziţie ai punctelor , ,
şi vectorii (în funcţie de vectorii de poziţie a vârfurilor triunghiului
şi a mărimii laturilor).
Soluţie.
Avem (conform problemei I. 11).
Analog .
.
Analog se calculează vectorii prin permutări circulare.
19
I. 13. Fie reperul şi punctele , ,
. Să se calculeze coordonatele carteziene ale mijloacelor segmentelor .
Soluţie.
Figura 8
Fie şi respectiv mijloacele segmentelor .
Vectorul de poziţie al punctului este:
Analog se calculează coordonatele mijloacelor segmentelor .
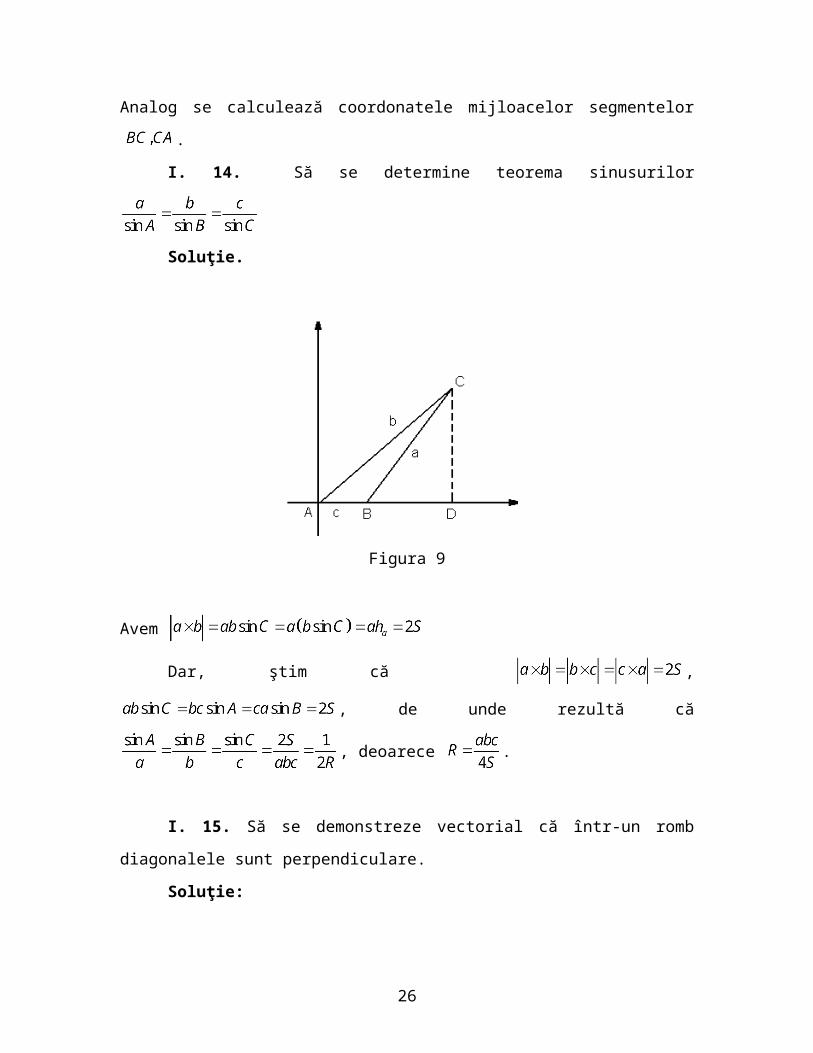
I. 14. Să se determine teorema sinusurilor
Soluţie.
20

Figura 9
Avem
Dar, ştim că , , de
unde rezultă că , deoarece .
I. 15. Să se demonstreze vectorial că într-un romb diagonalele sunt
perpendiculare.
Soluţie:
Considerăm rombul cu notaţiile , , cu
.
Avem
Deci obţinem că , de
unde rezultă că .
I. 16. Să se exprime cu ajutorul laturilor unui triunghi vectorii bisectoare ai
triunghiului.
Soluţie.
21
Figura 10
Fie bisectoare. Notăm , , , unde
Conform teoremei bisectoarei avem
de unde rezultă , mai mult rezultă , deci avem că are
expresia
Deoarece rezultă că .
Analog se arată că , .
I. 17. Se dau vectorii: , , . Să se calculeze
a) Volumul paralelipipedului construit pe vectori
b) Înălţimea paralelipipedului corespunzător bazei construite pe vectorii şi .
Soluţie.
Ştim că volumul paralelipipedului construit pe trei vectori este dat de
, iar înălţimea este .
I. 18. Să se calculeze volumul tetraedrului construit pe vectorii ,
, .
Soluţie.
22
Volumul tetraedrului construit pe trei vectori este dat de
I. 19. Se dau vectorii , , . Să se calculeze:
a) Volumul tetraedrului construit pe vectorii .
b) Înălţimea tetraedrului coborâtă din pe planul .
Soluţie.
a) Volumul tetraedrului construit pe vectorii este
b) Înălţimea tetraedrului coborâtă din pe planul este
I. 20. Fiind daţi vectorii , ,
. Să se arate că:
a) Triunghiul este isoscel;
b) Triunghiul este dreptunghic;
c) Să se calculeze perimetrul triunghiului ;
d) Să se calculeze .
Soluţie.
a) ;
b) ;
c) ;
d) .
23

I. 21. Se dau vectorii , , .
Să se determine şi astfel ca vectorul să fie:
a) Perpendicular pe planul ;
b) Egal înclinat faţă de axe.
Soluţie.
a)
b) .
I. 22. Fiind daţi vectorii şi unde şi unghiul
dintre .
Să se calculeze:
a) Lungimea diagonalelor paralelogramului construit pe cei doi vectori şi ;
c) unghiul dintre diagonale.
Soluţie.
a)
b) .
I. 23. Se dau vectorii , . Să se determine astfel încât
unghiul celor doi vectori să fie .
Soluţie.
I. 24. Se dau componentele a trei forţe:
24

.
Să se găsească mărimea şi direcţia părţii rezultante.
Soluţie.
.
I. 25. Se dau vectorii şi .
Se cere:
a) Produsul vectorial ;
b) Mărimea produsului vectorial;
c) Unghiul format de vectorii şi .
Soluţie.
a) Produsul vectorial este ;
b) Mărimea produsului vectorial este ;
c) Unghiul format de vectorii şi este .
I. 26. Se dau vectorii , , ,
. Să se calculeze
Soluţie.
.
I. 27. Să se rezolve sistemul de ecuaţii vectoriale ,
presupunând că şi .
25
Soluţie.
. (Se înmulţeşte a doua relaţie la stânga cu ).
I. 28. Să se rezolve ecuaţia vectorială în care avem ,
şi ştiind că vectorul este perpendicular pe vectorul .
Soluţie.
.
I. 29. Se dau vectorii , , .
Să se calculeze:
a) Volumul paralelipipedului construit pe cei trei vectori;
b) Mărimea diagonalei paralelipipedului;
c) Înălţimea paralelipipedului relativ la baza formată de vectorii şi .
d) Aria totală.
Soluţie.
a) Volumul paralelipipedului construit pe cei trei vectori este ;
b) Mărimea diagonalei paralelipipedului este ;
c) Înălţimea paralelipipedului relativ la baza formată de vectorii şi este ;
d) Aria totală este .
I. 30. Să se calculeze volumul tetraedrului unde , ,
.
Soluţie.
Volumul tetraedrului este .
26

I. 31. Cunoscând două laturi , ale unui triunghi, să se
calculeze lungimea înălţimii sale , ştiind că şi sunt vectori unitate
perpendiculari între ei.
Soluţie.
Lungimea înălţimii este .
I. 32. Să se arate că medianele unui triunghi sunt concurente.
Soluţie.
Figura 11
Fie vectorii de poziţie a vârfurilor triunghiului . Vectorii de poziţie ai
mijloacelor laturilor sunt , , .
Ştim că centrul de greutate se află la de vârf. Notăm vectorul de poziţie a lui
cu .
Atunci , de unde rezultă că , mai mult avem că
, de unde avem că , deci .
27
Procedând analog şi pentru şi obţinem acelaşi vector de poziţie pentru
punctul care împarte segmentele şi în raportul , deci medianele sunt
concurente.
I. 33. Să se arate că înălţimile unui triunghi sunt concurente.
Soluţie.
Fie triunghiul . Notăm , , .
Fie vectorii ce coincid cu înălţimile şi punctul lor de interesecţie.
Notăm , , .
Două din înălţimi sunt concurente, fie ele şi . Vom arăta că dreapta , deci
este perpendiculară pe .
Avem şi de unde rezultă că şi de
unde obţinem că şi .
Adunăm aceste două relaţii si rezultă că , mai mult avem că
, deci , astfel avem că .
I. 34. Să se demonstreze că bisectoarele unui triunghi sunt concurente.
Soluţie.
Se duc bisectoarele şi . Fie intersecţia lor.
Notăm versorii vectorilor cu , , .
Luăm pe laturile şi vectorii unitari , si construim un
paralelogram, diagonala căruia este evident bisectoarea unghiului . Deci situat pe
bisectoare este coliniar cu vectorul de unde rezultă că
28

, unde este parametrul pe care îl vom determina.
Prin permutări circulare avem
Pentru a găsi pe x şi y observăm că , adică
(*)
În această ecuaţie nu putem egala separat coeficienţii lui (nu sunt liniar
independenţi) deoarece sunt coplanari, deci avem , de unde rezultă că
. Înlocuim în relaţia (*) şi rezultă că .
Egalând în această relaţie coeficienţii lui şi avem şi ,
obţinem că şi , de unde rezultă şi
.
Dacă am fi căutat punctul de intersecţie al bisectoarelor şi am fi
găsit şi .
De aici se vede că , deci P şi P' coincid.
I. 35. Să se demonstreze vectorial teorema medianei.
Soluţie.
Avem şi . Atunci şi ,
adunând aceste două relaţii obţinem că , de unde rezultă că
.
29

Probleme propuse spre rezolvare.
I. 1. Fie vectorii ce coincid cu laturile unui triunghi . Să se arate că
.
I. 2. Fie vectorii ce coincid cu laturile unui triunghi .
a) Să se exprime cu ajutorul lor vectorii ce coincid cu medianele triunghiului;
b) Să se arate că vectorii ce coincid cu medianele pot forma un triunghi.
I. 3. Să se arate că medianele unui triunghi sunt concurente.
I.4. Fie vectorii: , , descompuşi
după direcţiile vectorilor .
a) Să se arate că vectorii sunt coplanari;
b) Ce concluzie se poate trage din rezultatul obţinut?
I. 5. Să se descompună vectorul după direcţiile vectorilor
, , .
30

I. 6. Să se determine lungimea vectorului ştiind că vectorii şi
sunt vectori unitari perpendiculari între ei.
I. 7. Să se arate că înălţimile unui triunghi sunt concurente.
I. 8. Fie vectorii: , . Să se calculeze:
a) Produsul lor vectorial;
b) Să se verifice că vectorul obţinut este perpendicular pe fiecare.
I. 9. Se dau vectorii , , . Să se
determine scalarul astfel încât vectorii să fie coplanari.
I. 10. Să se verifice identitatea pentru vectorii
, , .
I. 11. Să se verifice identităţile:
a)
b)
c) .
I. 12. Fie vectorii , , . Să se determine vectorii
astfel încât ei să formeze un reper triortogonal.
I. 13. Fie , , . Să se determine vectorii astfel încât
ei să formeze un reper triortogonal.
I. 14. Fie vectorii , , .
31
a) Să se determine versorii corespunzători;
b) Să se arate că ei determină un reper triortogonal şi să se spună dacă acest triedru are
sau nu aceiaşi orientare cu .
I. 15. Să se demonstreze că bisectoarele unui triunghi sunt concurente.
I. 16. Să se determine că Identitatea lui Lagrange .
I. 17. Să se calculeze produsul ştiind că ,
, , nu sunt versori.
I. 18.Se dau vectorii , , .
Este verificată egalitatea ?
I. 19. Să se calculeze scalarul ştiind că
şi , iar , şi unghiul dintre şi b este
.
I. 20. Să se determine parametrul real astfel încât vectorii
şi să fie perpendiculari.
I. 21. Să se calculeze proiecţiile vectorilor şi pe vectorii reprezentând suma şi diferenţa lor.
I. 22. Fie vectorii şi . Să se calculeze:
a) produsul lor vectorial;b) să se verifice că vectorul este perpendicular pe şi ;
c) aria paralelogramului construit pe şi .
I. 23. Să se determine astfel încât vectorii şi să fie coliniari:
a) , ;
b) , .
32

I. 24. Fie vârfurile unui triunghi. Să se afle
lungimea laturilor, , aria triunghiului, înălţimea din şi .
I. 25. Să se cerceteze coplanaritatea vectorilor , ,
.
I. 26. Fie vectorii , , . Să se determine
parametrul real , astfel ca volumul paralelipipedului construit pe vectorii , , să fie egal cu .
I. 27. Să se arate că vectorii , ,
sunt coplanari.
I. 28. Să se arate că într-un triunghi echilateral înscris în cercul cu centrul
avem relaţia .
I. 29. Se consideră piramida cu vârful şi baza pătratul . Fie punctul
de intersecţie al diagonalelor bazei. Să se arate că .
I. 30. Se dă un tetraedru de vârfuri , , ,
. Să se calculeze lungimea înălţimii coborâte din vârful .
I. 31. Să se calculeze volumul tetraedrului de vârfuri:
a) ;
b) .
I. 32. Să se verifice formula de dezvoltare a dublului produs vectorial pentru vectorii: a) , , ;
b) , , .
I. 33. Să se determine vectorul de poziţie al centrului de greutate al unui triunghi
şi coordonatele carteziene ale centrului de greutate.
33

I. 34. . Să se determine vectorii de poziţie ai punctelor , , ( , ,
sunt bisectoare). Să se determine vectorul de poziţie al centrului cercului înscris în
triunghiul .
I. 35. Fie , , , patru puncte din spaţiu date într-un reper cartezian. Să se
determine volumul tetraedrului .
I. 36. Să se determine volumul tetraedrului . Să se calculeze aria
triunghiului şi distanţa de la origine până la planul .
34
Capitolul II
SPAŢII VECTORIALE
Fie un corp de numere ( sau ) şi o mulţime de elemente pe care
s-au definit două operaţii (legi de compoziţie):
I. (lege aditivă);
II. (lege multiplicativă sau înmulţire cu scalari).
se numeşte spaţiu vectorial peste corpul şi notăm dacă cele două legi
verifică axiomele:
I1. ;
I2. ;
I3. astfel încât ;
I4. astfel încât ;
II1. ;
II2. ;
II3. , ;
II4. elementul unitate din .
Elementele mulţimii V se numesc vectori, iar elementele lui se numesc scalari.
Exemple:
35
a) - mulţimea matricelor de tipul cu elementele din ;
b) - mulţimea polinoamelor în ;
c) - mulţimea polinoamelor de grad mai mic sau egal cu ;
d) ;
e) mulţimea numerelor complexe din spaţiul vectorial peste ;
f) .
Se numeşte subspaţiu vectorial al unui spaţiu vectorial orice parte a sa
care este ea însăşi un spaţiu vectorial pe acelaşi corp. O submulţime este
subspaţiu vectorial al lui , dacă şi numai dacă şi .
Fie un sistem de vectori dat. Mulţimea
formează un subspaţiu vectorial al
lui . Mulţimea se numeşte spaţiu generat de sistemul de vectori , iar
se numeşte sistem de generatori pentru .
Un sistem de vectori etse liniar dependent dacă există scalarii
, astfel încât .
Dacă această relaţie are loc numai dacă şi numai dacă ,
sistemul este liniar independent.
Un sistem de vectori din constituie o bază în spaţiu vectorial , dacă:
a) sistemul de vectori este liniar independent;
b) sistemul de vectori este sistem de generatori (orice alt vector din este o
combinaţie liniară de vectorii sistemului).
Două baze oarecare în au acelaşi număr de vectori. Numărul vectorilor unei
baze reprezintă dimensiunea spaţiului vectorial.
Fie o bază în . Orice vector se descompune în mod
unic în forma .
36
Fie , , şi două baze. Se
numeşte matricea de trecere de la baza la baza şi se notează matricea ce are pe
coloane coordonatele vectorilor în baza .
, , …,
, …, .
Probleme rezolvate.
II. 1. Să se studieze dependenţa liniară pentru sistemele de vectori:
a) în ;
b) în ;
c) în ;
d) în .
Soluţie.
a) Considerăm relaţia . Prin înlocuirea vectorilor
această relaţie este echivalentă cu sistemul omogen ,
.
Rangul matricei acestui system este doi. Prin urmare, sistemul admite şi soluţii
nebanale şi deci sistemul de vectori este liniar dependent. Un system fundamental de
soluţii pentru sistemul omogen este astfel că o relaţie de
dependenţă este .
37
b) Relaţia este echivalentă cu sistemul omogen
, . Rangul matricei sistemului este
doi şi un system fundamental de soluţii este formst dintr-o singură soluţie liniar
independentă: . Avem deci un system de vectori liniar dependent
şi o relaţie de dependenţă .
c) Relaţia este echivalentă cu ,
, , . Rangul acestui system
este doi, deci sistemul de matrice este liniar dependent.
d) Relaţia este echivalentă cu sistemul omogen
, , , ,
. Rangul acestui sistem este doi, deci sistemul de vectori este
liniar dependent. Deoarece un sistem fundamental de soluţii este format din două soluţii
liniar independente, avem două relaţii de dependenţă. Sistemul fundamental de soluţii
este şi , astfel avem
relaţiile şi .
II. 2. Să se determine care din polinoamele şi aparţin spaţiului generat de
.
Soluţie.
Pentru ca două polinoame să aparţină spaţiului, trebuie ca acestea să fie
combinaţie liniară de elementele sistemului de generatori. Deci
şi . Aceste
ralaţii sunt echivalente cu sistemele şi .
38
Se observă că primul system este incompatibil şi deci nu aparţine spaţiului, în
timp ce al doilea system este compatibil , ceea ce arată că
aparţine acestui spaţiu.
II. 3. În se dau vectorii ,
. Să se arate că aceştia formează o bază şi să se determine coordonatele
vectorului în această bază.
Soluţie.
Deoarece este sufficient să arătăm că cei patru vectori sunt liniar
independenţi. Considerându-i ca vectori linie într-o matrice, obţinem matricea
. Rangul acestei matrice este patru, deci vectorii sunt liniar
independenţi. Scriem apoi . Pentru determinarea coordonatelor
şi obţinem sistemul
. Soluţia acestui sistem este .
II. 4. În să se determine o bază a subspaţiului generat de vectorii
, , , .
Soluţie.
Se verifică faptul că sunt liar dependenţi, dar trei dintre vectori sunt
liniar independenţi (de exemplu ). Prin urmare este o combinaţie liniară de
şi . Deoarece orice combinaţie liniară de vectorii şi este o combinaţie
de şi , rezultă că aceştia formează o bază a subspaţiului. Descompunerea
vectorului faţă de această bază conduce la coordonatele
.
39

II. 5. Se dau vectorii şi
şi vectorii . Să se
calculeze coordonatele vectorului în baza .
Soluţie.
Să observăm mai întâi că vectorii sunt liniar independenţi (rangul
matricei formate cu cei trei vectori ca linii este egal cu trei) şi deci formează o bază în .
Coodonatele vectorului în baza sunt . Se poate verifica
faptul că sistemul de vectori formează o în bază . Se cer coordonatele
vectorului în această bază. Fie , adică
. După teorema
descompunerii unice într-o bază rezultă
. Rezolvând acest sistem de ecuaţii, obţinem penrtu coordonatele lui
în baza valorile , astfel că .
II. 6. Fie , şi două baze cu
, şi
. Să se scrie matricea de trecere de la baza la baza .
Cum se transformă coordonatele vectorului la schimbarea bazei?
Soluţie.
Matricea de trecere de la baza la baza este matricea .
Coordonatele vectorului la schimbarea bazei sunt , unde
;
40
;
.
II. 7. Să se stabilească formulele de transformare ale coordonatelor când se trece
de la baza la baza , dacă , ,
şi , ,
, în .
Soluţie.
Să determinăm mai întâi relaţiile de trecere de la o baâă la alta. Se verifică faptul
că şi formează baze în . Determinăm apoi descompunerea fiecăruia din vectorii
, după baza şi descompunerea fiecăruia din vectorii ,
după baza . Obţinem , şi
, .
Fie un vector oarecare şi fie descompunerile sale după cele două baze
şi ..
Să determinnăm legătura dintre coordonatele şi , în cele două
baze. Înlocuind vectorii , cu descompunerile lor în baza , obţinem
După teorema descompunerii unice a uni vector într-o bază, rezultă că ,
, , .
Similar, înlocuind vectorii prin descompunerile lor în baza ,
obţinem , , , .
Ultimile relaţii se pot obţine şi prin inversarea relaţiilor anterioare.
41
II. 8. În spaţiul vectorial al polinoamelor de grad mai mic sau egal cu doi,
fie vectorii , , , . Dacă , , sunt liniar
indpendenţi, cum sunt vectorii , , ?
Soluţie.
Metoda 1. Cum , , sunt liniar indpendenţi, adică
dacă şî numai dacă . Ne interesează cum sunt
vecorii , , . Astfel calculăm
Ştim că , , sunt liniar independenţi. Rezultă că
, de unde avem că , de unde , adică
, , sunt liniar independenţi.
Metoda 2. Scriem vectorii , , descompuşi după baza
şi găsim matricea . Dacă , atunci , , sunt
liniar independenţi.
II. 9. În spaţiul vectorial al polinoamelor de grad mai mic sau egal cu doi,
fie vectorii , , , . Să se arate că aceşti vectori sunt
liniar dependenţi şi orice trei vectori sunt liniar independenţi.
Dacă formează o bază să se scrie şi faţă de
această bază.
Soluţie.
Ştim că formează o bază în . Pentru a studia natura vectorilor
calculăm combinaţia liniară , de unde
avem câ .
42
Dar sunt liniar independenţi. Rezultă
, de unde avem că .
Verificăm că sunt liniar dependenţi. Luăm baza .
Astfel , rezultă
, adică .
, rezultă
adică .
II. 10. În spaţiul liniar al soluţiilor sistemului:
fie soluţiile , , , .
Să se arate că:
a) vectorii sunt liniar independenţi.
b) vectorii sunt liniar dependenţi, ca şi vectorii şi .
c) Să se găsească relaţiile de dependenţă liniară.
Soluţie.
Se lucrează cu rangul matricei, sau bază, de unde şi
.
II. 11. Fie spaţiul vectorial generat de vectorii
. Să se determine dimensiunea spaţiului şi
o bază a sa.
Soluţie.
43
, de unde rezultă
liniar dependenţi, iar liniar independenţi, rezultă , deci bază.
II. 12. Se dă spaţiul generat de vectorii: , ,
, . Să se determine dimensiunea spaţiului şi o bază a sa.
Soluţie.
Dimensiunea spaţiului este şi baza este .
II. 13. Se dă spaţiul generat de vectorii: , , ,
, , . Să se determine dimensiunea spaţiului şi o bază a
sa.
Soluţie.
Dimensiunea spaţiului este şi baza este .
II. 14. Să se găsească matricea de trecere şi inversa sa când se trece de la baza
, , la baza , , .
Soluţie.
Exprimăm în funcţie de . Astfel avem
, rezultă ,
, rezultă ,
, rezultă
, , .
Deci matricea de trecere este .
Calculând în funcţie de am fi obţinut
44

, matrice care se poate obţine şi din , de unde rezultă
.
II. 15. Să se găsească matricea de trecere de la baza , unde
, , , la baza , unde ,
, .
Soluţie.
Matricea de trecere de la baza la baza este
.
II. 16. Să se determine matricea de trecere de la baza , unde
, , , la baza
, unde , , , .
Soluţie.
Matricea de trecere de la baza la baza este
.
45
II. 17. Să se găsească formulele de transformare a coordonatelor unui vector din
spaţiul când se trece de la baza la baza , unde
, , şi , , .
Soluţie.
Fie şi , avem
, rezultă ,
, rezultă ,
, rezultă .
Deci
Dar
, de unde rezultă ,
, .
Deci sau . De asemenea şi , iar ,
.
II. 18. Coordonatele unui vector în baza , unde
sunt . Să se afle coordonatele vectorului
când se trece la baza , unde .
Soluţie.
Coordonatele vectorului când se trece la baza sunt
.
46

Probleme propuse spre rezolvare.
II. 1. Să se arate că următoarele mulţimi sunt subspaţii vectoriale ale spaţiilor
vectoriale indicate.
a) ;
b) ;
c) ;
d) .
II. 2. Să se determine subspaţiul vectorial generat de vectorii:
a) în ;
b) în ;
c) în .
d) în .
II. 3. Să se studieze dependenţa liniară pentru sistemele de vectori:
47

a) în .
b) în ;
c) în ;
d) în ;
e) în .
II. 4. Care din următoarele mulţimi de vectori din sunt liniar independente?
a) ;
b) ;
c) ;
d) ;
II. 5. Să se arate că vectorii , , ,
sunt liniar independenţi.
II. 6. Să se arate că vectorii , , ,
sunt liniar independenţi.
II. 7. Să se arate că dacă sunt liniar independenţi, atunci şi
vectorii sunt liniar independenţi.
II. 8. Să se arate că dacă sunt liniar independenţi, atunci şi
vectorii sunt liniar independenţi.
48
II. 9. Să se determine parametrii reali şi astfel ca matricele
şi să fie liniar dependente.
II. 10. Să se determine parametrii reali şi astfel ca matricele
şi să fie liniar dependente.
II. 11. Să se cerceteze dependenţa liniară a vectorilor:
a) în ;
b) în ;
c) în ;
d) în .
II. 12. care este condiţia necesară şi suficientă ca vectorii
să fie liniar independenţi?
II. 13. Ce relaţie trebuie să satisfacă scalarul astfel încât vectorii
să formeze o bază în ?
II. 14. Ce condiţii trebuie să îndeplinească scalarul pentru ca vectorii
să formeze o bază în ?
II. 15. Să se arate că vectorii formează o
bază în .
II. 16. Să se arate că vectorii , , ,
sunt liniar independenţi. Să se găsească coordonatele vectorului
în baza .
III. 17. Se dau vectorii: , , ,
şi . Să se arate că formează o bază şi să se găsească
coordonatele vectorului în de această bază.
49
II. 18. Fie spaţiul vectorial real şi . Să se verifice dacă vectorul
este o combinaţie liniară de vectorii pentru:
a) ;
b) ;
c) ;
d) .
II. 19. În se dau vectorii . Să se arate că
aceştia formează o bază şi apoi să se determine coordonatele vectorilor şi
în această bază.
II. 20. În spaţiul vectorial se consideră matricile:
.
a) Să se arate că este o bază a lui ;
b) Să se reprezinte matricea ca o combinaţie liniară de vectorii bazei .
II. 21. În se dau vectorii , ,
. Să se arate că aceştia formează o bază. Se cer coordonatele vectorului
în această bază.
II. 22. În se dau vectorii . Să se arate că
aceştia formează o bază în şi apoi să se determine coordonatele vectorilor
şi în această bază.
II. 23. Să se determine valorile parametrului real pentru ca
să fie o bază în .
II. 24. Să se studieze dependenţa liniară a vectorilor şi să se determine relaţiile de
dependenţă. Să se pună în evidenţă o bază în fiecare din subspaţiile generate.
a) ;
50
b) ;
c) ;
d) .
II. 25. În spaţiul se dau vectorii ,
, . Care este dimensiunea subspaţiului
generat de aceştia? Alegând o bază în subspaţiu, să se raporteze toţi ceilalţi ceilalţi
vectori la baza aleasă.
II. 26. Fie Să se determine componentele vectorului în baza
, unde .
II. 27. În considerăm vectorii ,
, . Arătaţi că este o bază în şi calculaţi
coordonatele lui în această bază.
II. 28. În considerăm vectorii şi . Arătaţi că este
o bază în şi calculaţi coordonatele lui în această bază.
II. 29. Care din următoarele mulţimi de vectori generează spaţiul la care aparţin?
a) în ;
b) în ;
c) în ;
d) în .
II. 30. Să se arate că următoarele sisteme de vectori formează o bază şi sa se
determine coordonatele vectorului în raport cu fiecare bază.
a) ;
b) ;
c) ;
d) .
51
II. 31. Fie , reprezentat în baza ,
. Determinaţi componentele vectorului în baza
.
II. 32. Completaţi următoarele mulţimi de vectori ca să fie baze în spaţiile
considerate:
a) ; b) ; c) ;
d) .
II. 33. Să se determine matricea de trecere de la baza la baza în următoarele
cazuri:
a) în ;
b) în ;
c) în ;
d) în .
II. 34. Să se stabilească formulele de transformare ale coordonatelor cănd se trece
de la baza la baza :
,
în .
II. 35. Să se stabilească formulele de transformare a coordonatelor unui vector
când se trece de la baza la baza , unde
, , , şi ,
, , .
II. 36. Să se stabilească formulele de transformare a coordonatelor de trecere de la
baza la baza , unde ,
, , şi , ,
, .
52
II. 37. În considerăm vectorii , şi .
Arătaţi că este liniar dependentă dacă şi numai dacă sau .
II. 38. Să se determine valorile parametrului real paentru care
este:
a) liniar dependentă;
b) liniar independentă;
c) formează o bază în .
II. 39. Se dau vectorii şi
şi vectorii , , . Să
calculeze coordonatele vectorului în baza .
II. 40. Fie , şi două baze cu
şi . Să se
scrie matricea de trecere de la baza la baza . Dacă este baza canonică, să se
determine coordonatele lui , , şi , în baza .
53
Capitolul III
APLICAŢII LINIARE
Definiţia III. 1. Fie şi două spaţii vectoriale. O aplicaţie (funcţie)
se numeşte liniară dacă:
a) T(x + y) = T(x) + T(y), x, y V (aditivă);
b) T(α · x) = , x V şi α K (omogenă).
O aplicaţie liniară se numeşte endomorfism.
O aplicaţie liniară se mai numeşte funcţională liniară.
Mulţimea tuturor aplicaţiilor liniare definite pe se notează cu
L(V, W).
L(V, W) este spaţiu vectorial în raport cu adunarea funcţiilor şi cu înmulţirea cu
numere (scalari).
Definiţia III. 2. Fie , T L (V, W). Se numeşte nucleul lui şi se
notează cu .
Avem şi 0v KerT deoarece T(0v) = 0w.
Definiţia III. 3. Fie , T L (V, W). Se numeşte imaginea lui şi se
notează cu .
Avem .
Definiţia III. 4. Aplicaţia liniară se numeşte izomorfism dacă este
bijectivă (injectivă şi surjectivă).
În cazul că există un izomorfism de la V la W spunem că cele două spaţii sunt
izomorfe şi notăm V W.
Definiţia III. 5. Fie , T L (V, W), cu dimV = n, dimW = m. Fie B =
{e1,…,en} V o bază, F = {f1,…,fm} W o bază. Matricea A = (aij)m,n construită astfel
încât pe coloane sunt coordonatele vectorilor
T(e1), T(e2)…T(en) în baza F se numeşte matricea asociată lui T în raport cu bazele B şi F.
54
Exemplu
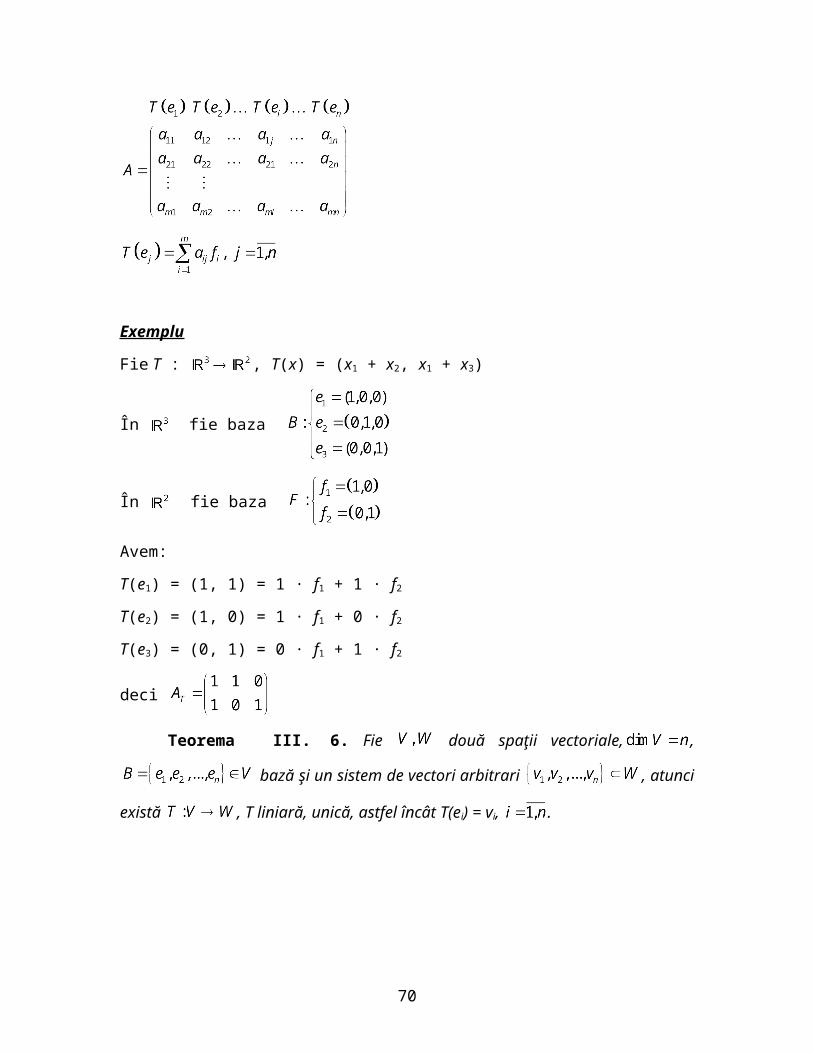
Fie T : , T(x) = (x1 + x2, x1 + x3)
În fie baza
În fie baza
Avem:
T(e1) = (1, 1) = 1 · f1 + 1 · f2
T(e2) = (1, 0) = 1 · f1 + 0 · f2
T(e3) = (0, 1) = 0 · f1 + 1 · f2
deci
Teorema III. 6. Fie două spaţii vectoriale, ,
bază şi un sistem de vectori arbitrari , atunci
există , T liniară, unică, astfel încât T(ei) = vi, .
VW
x1
x2
x3
v1
v2v3
55
Exemple:
Fie V = cu baza {e1, e2, e3} astfel: e1 = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1).
Fie W = cu baza {v1, v2, v3} astfel: v1 = (1, 2), v2 = (1, 1), v3 = (–1, 1).
Fie şi , cu
În particular pentru avem .
Teorema III. 7. F = {f1, f2,…,fm} W (bază în W) .
Fie A Mn,m, matricea asociată în raport cu B şi F.
Fie A' Mn,m, matricea asociată în raport cu B' şi F'.
Rezultă sau .
Observaţii
Fie V finit dimensional şi T : V → V liniară.
Fie B = {e1, e2,…,en} şi două baze în V.
Dacă C este matricea de trecere de la B la B' şi AT este matricea asociată lui T în raport cu
baza B, atunci matricea A' asociată lui T în raport cu B' este A' = C–1AC.
Avem :
CA' = AC = A' = C–1AC
56

Pe de altă parte:
.
Probleme rezolvate.
III. 1. Să se determine care din următoarele aplicaţii sunt liniare:
a) ;
b) ;
c) .
Soluţie.
a) Fie şi . Avem
, astfel că
. Rezultă că este
aplicaţie liniară.
b) Fie . Atunci şi
şi deci este aplicaţie liniară.
c) Fie şi . Deoarece
, rezultă
şi
deci este aplicaţie liniară.
57

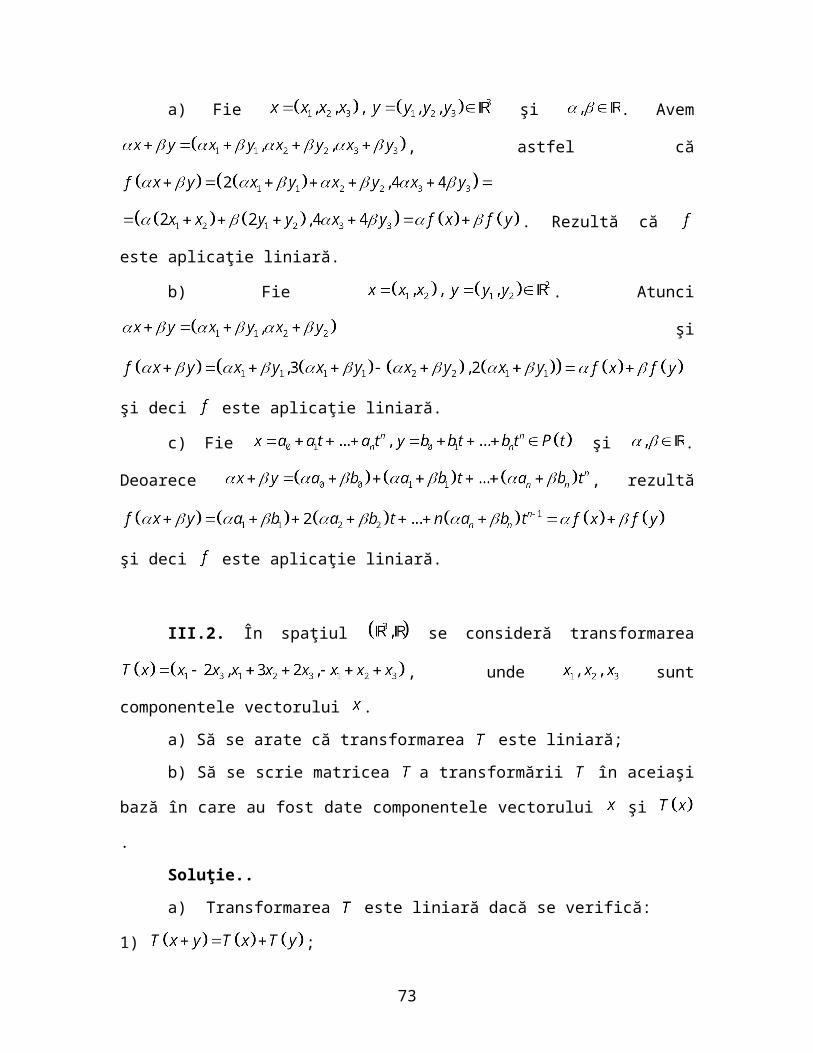
III.2. În spaţiul se consideră transformarea
, unde sunt componentele
vectorului .
a) Să se arate că transformarea este liniară;
b) Să se scrie matricea a transformării în aceiaşi bază în care au fost date
componentele vectorului şi .
Soluţie..
a) Transformarea este liniară dacă se verifică:
1) ;
2) .
b) Avem , rezultă .
III. 3. Fie ,
pentru orice , o aplicaţie liniară. Să se determine şi .
Soluţie.
Fie cu astfel că . Rezultă atunci că
. Fie . Se observă că
, iar minorul principal este şi necunoscute
58
secundare. Atunci punând sistemul devine cu
soluţiile .
Deci
.
Fie , , formează un
system de generatori pentru subspaţiul . Să arătăm că sunt şi liniari
independenţi. Pentru aceasta fie astfel ca , rezultă
.
59

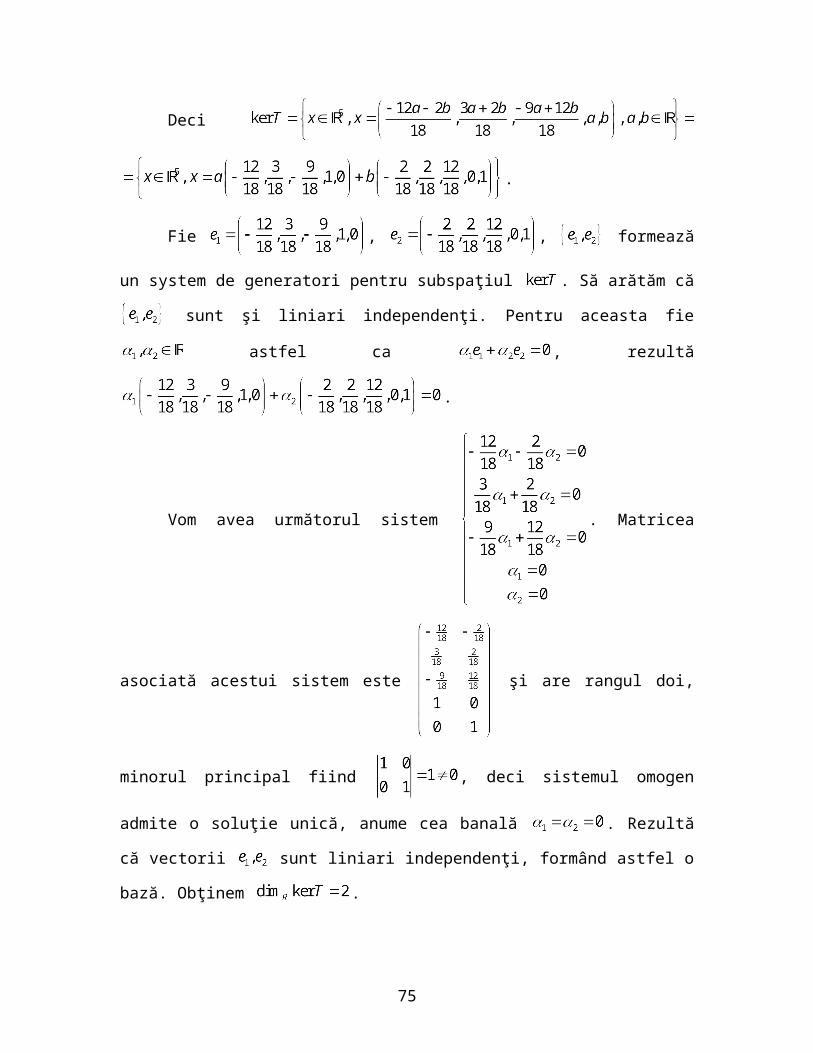
Vom avea următorul sistem . Matricea asociată acestui sistem
este şi are rangul doi, minorul principal fiind , deci sistemul
omogen admite o soluţie unică, anume cea banală . Rezultă că vectorii
sunt liniari independenţi, formând astfel o bază. Obţinem .
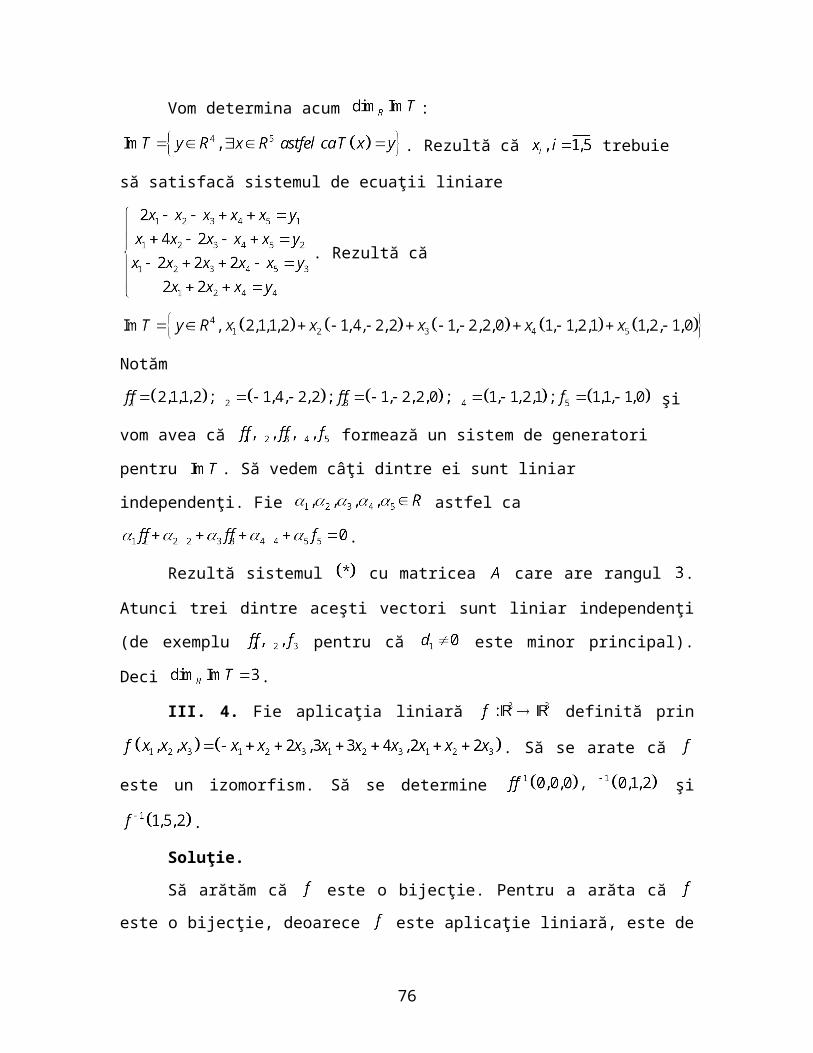
Vom determina acum : .
Rezultă că trebuie să satisfacă sistemul de ecuaţii liniare
. Rezultă că
Notăm
şi
vom avea că formează un sistem de generatori pentru . Să vedem
câţi dintre ei sunt liniar independenţi. Fie astfel ca
.
Rezultă sistemul cu matricea care are rangul . Atunci trei dintre aceşti
vectori sunt liniar independenţi (de exemplu pentru că este minor
principal). Deci .
60
III. 4. Fie aplicaţia liniară definită prin
. Să se arate că este un
izomorfism. Să se determine şi .
Soluţie.
Să arătăm că este o bijecţie. Pentru a arăta că este o bijecţie, deoarece
este aplicaţie liniară, este de ajuns să arătăm că ecuaţia are numai soluţia
. Ecuaţia este echivalentă cu sistemul omogen
. Singura soluţie a acestui sistem
este . Să arătăm că . Fie ; să arătăm că
există astfel încât . Această ecuaţie este echivalentă cu
sistemul , care rezolvat
conduce la . Prin
urmare este izomorfism. Aplicaţia liniară inversă este
. Deci
, , .
III. 5. Să se găsească matricea tranformării liniare ce transformă
astfel vectorii
în baza .
Soluţie.
Ştim formulele de transformare a vectorilor , , adică
61

şi încă două sisteme şi avem în final matricea .
III. 6. În se definesc aplicaţiile şi
unde .
Care aplicaţie este liniară? În caz de liniaritate să se găsească matricea ataşată
aplicaţiei în baza în care sunt date coordonatele vectorului şi .
Rezultat împortant
Având matricea unei transformări liniare vectorii bazei se transformă cu ajutorul
coloanelor matricei, iar coordonatele unui vector se transformă cu ajutorul liniilor.
.
III. 7. În fie , , o bază si
transformarea liniară care transformă vectorii: în , în
în .
Care este matricea a transformării în baza
Dar cea a transformării în baza
62
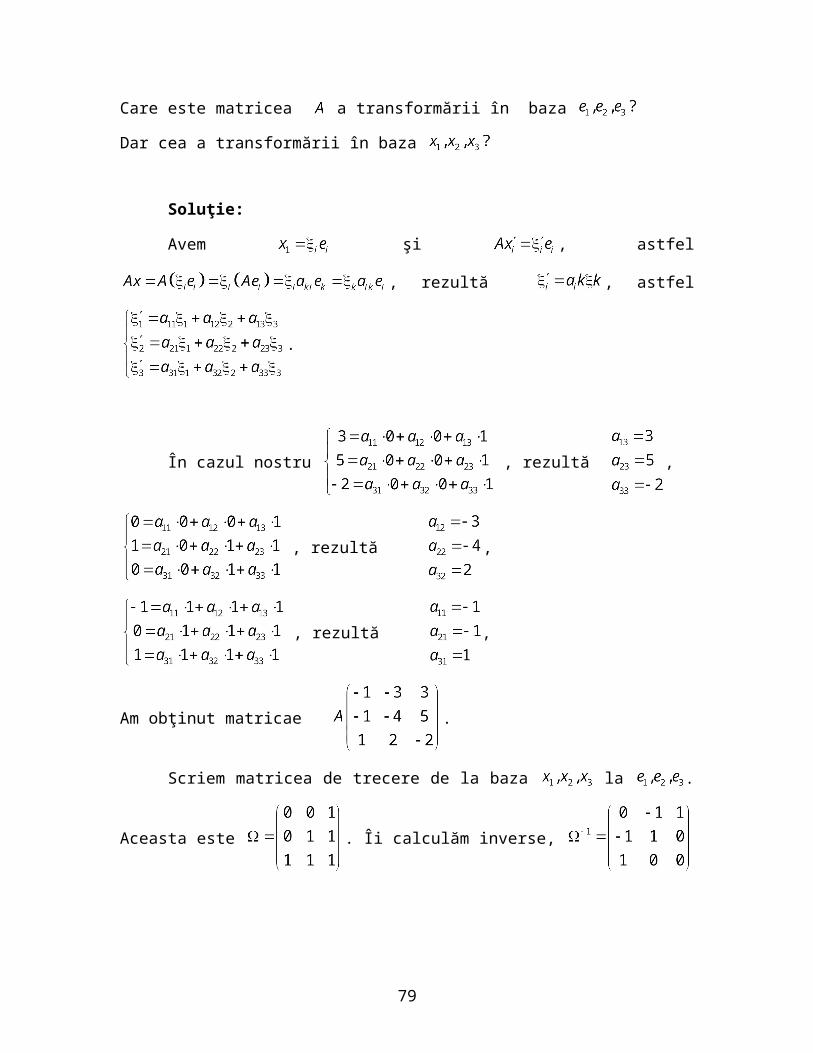
Soluţie:
Avem şi , astfel ,
rezultă , astfel .
În cazul nostru , rezultă ,
, rezultă ,
, rezultă ,
Am obţinut matricae .
Scriem matricea de trecere de la baza la . Aceasta este
. Îi calculăm inverse, . Atunci matricea transformată
în noua bază este .
63
III. 8. În fie , , o bază şi
transformarea liniară care transformă vectorii: ,
şi .
Care este matricea a transformării în
Dar matricea a transformării în baza
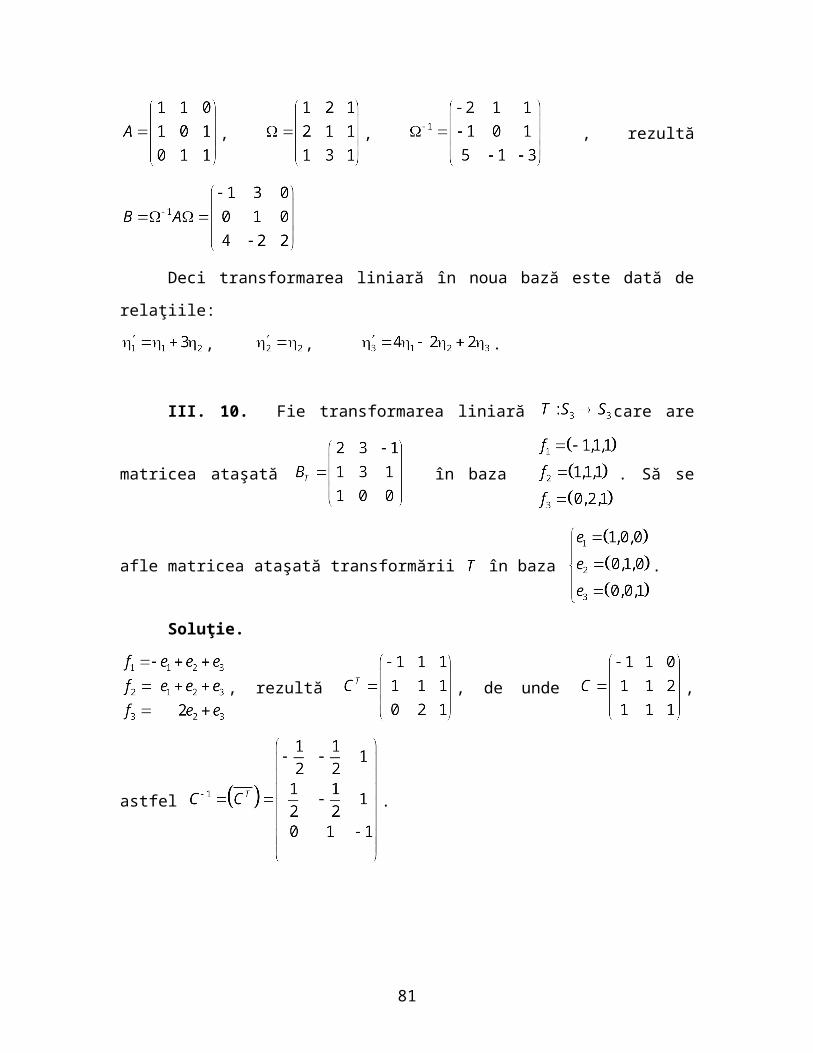
Soluţie.
; .
III. 9. Fie transformarea liniară relativă la baza , ,
, . Să se găsească transformarea în baza dată de
, , .
Soluţie.
, , , rezultă
Deci transformarea liniară în noua bază este dată de relaţiile:
, , .
64
III. 10. Fie transformarea liniară care are matricea ataşată
în baza . Să se afle matricea ataşată transformării în
baza .
Soluţie.
, rezultă , de unde , astfel
.
Ştim că de unde rezultă A, astfel avem
.
III. 11. Fie transformarea liniară unde
. Să se scrie matricea ataşată transformării în baza
, unde , , ,
şi în baza , unde , , ,
.
65
Soluţie.
Fie , avem , de
unde rezultă , adică matricea ataşată transsformării în baza
este .
Cont mat. care schimbă baza:
, rezultă , de unde
, astfel .
III. 12. Se dă transformarea liniară unde
. Să se scrie matricea ataşată transformării în
baza , unde , , şi de asemenea matricea
în baza , unde , , .
Soluţie.
Matricea ataşată transformării în baza este .
66
Pentru a afla matricea , trebuie să găsim matricea de legătură între baze,
aceasta este , de unde şi avem
.
III. 13. În fie , , o bază şi transformarea
liniară care transformă vectorii în , în şi
.
Care este matricea a transformării în baza Dar matricea în baza
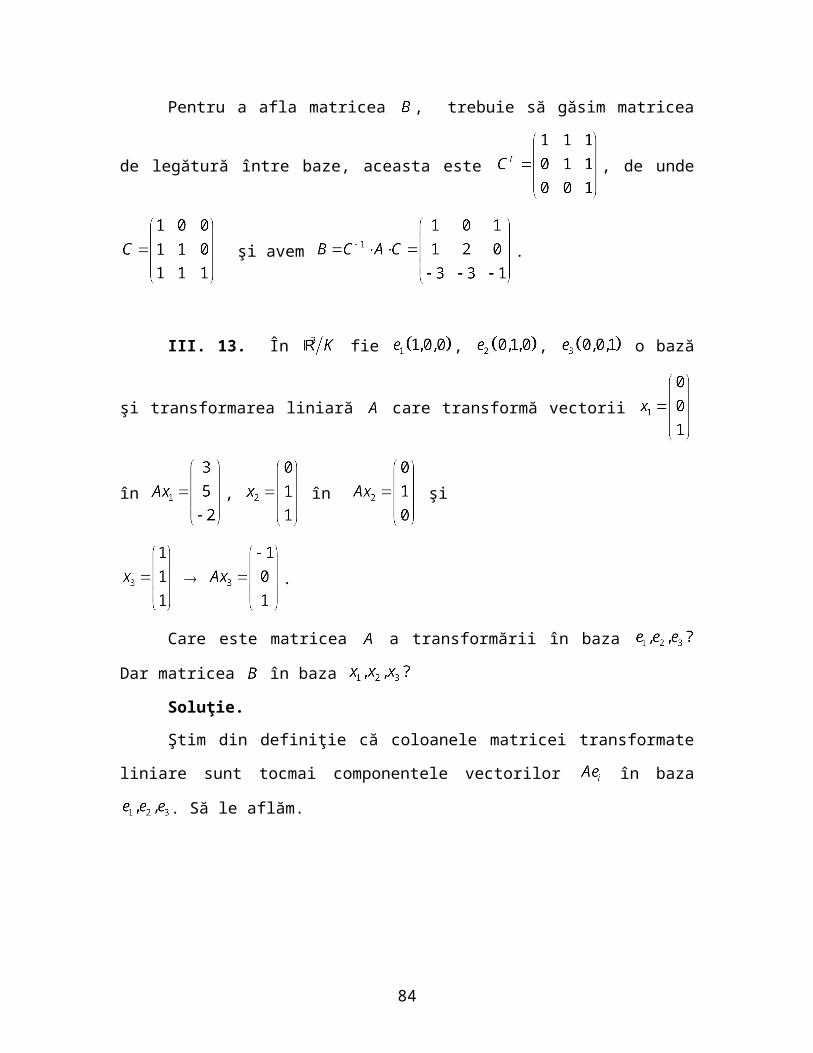
Soluţie.
Ştim din definiţie că coloanele matricei transformate liniare sunt tocmai
componentele vectorilor în baza . Să le aflăm.
de unde rezultă , astfel
matricea a transformării în baza este , .
Pentru a afla matricea , trebuie să găsim matricea de legătură între baze:
67
, astfel avem , de unde matricea de legătură între baze
este, . Astfel , de unde
.
III. 14. În spaţiul vectorial fie , , o
bază şi transformarea liniară care transformă vectorii ,
şi .
Care este matricea a transformării în baza Dar matricea în baza
Soluţie.
Matricea a transformării în baza este , iar
matricea B în baza este .
68
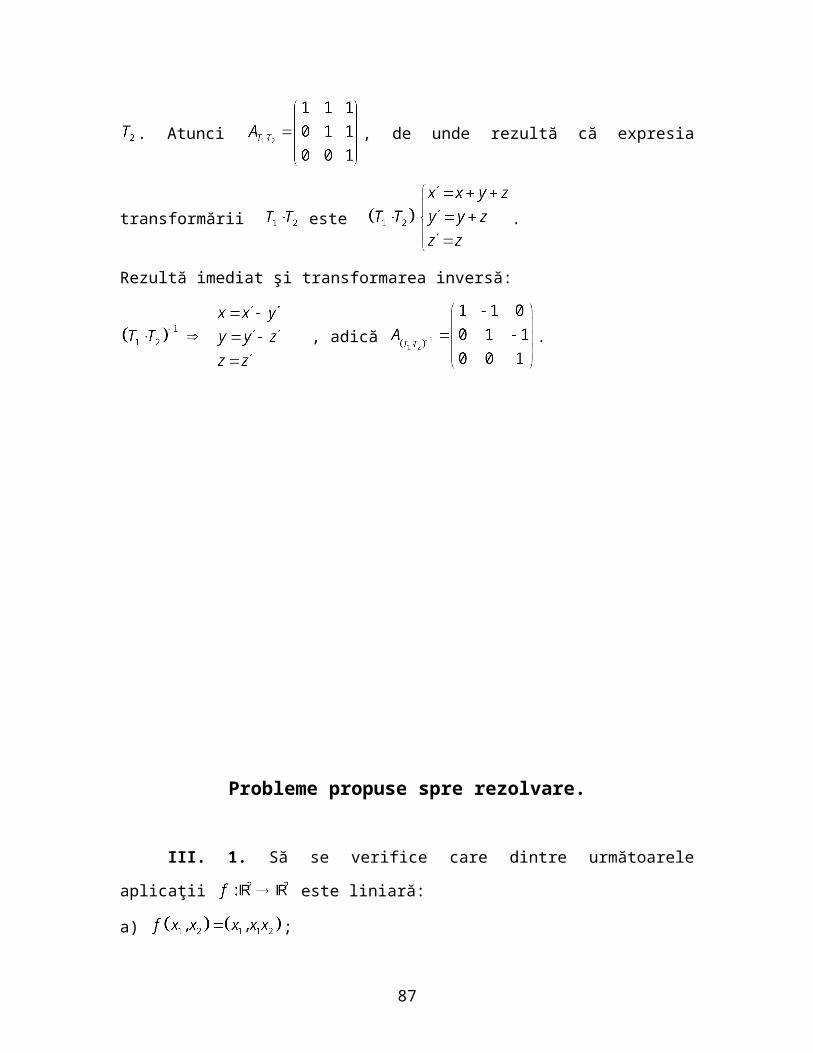
III. 15. Se consideră transformările liniare:
şi
Să se determine expresia transformării .
Soluţie.
Fie matricea asociată transformării liniare şi
matricea asociată transformării liniare . Atunci , de unde rezultă că
expresia transformării este .
Rezultă imediat şi transformarea inversă:
, adică .
69
Probleme propuse spre rezolvare.
III. 1. Să se verifice care dintre următoarele aplicaţii este liniară:
a) ;
b) ;
c) ;
d) ;
e) .
III. 2. Să se verifice dacă este aplicaţie liniară.
a) ;
b) ;
c) ;
d) , .
III. 3. Să se arate că următoarele aplicaţii sun liniare:
a) ;
b) ;
c) , ;
d) ;
e) .
III. 4. Fie . Să se arate că
este aplicaţie liniară, să se calculeze , şi să se verifice teorema rangului.
III. 5. Fie .
a) Să se scrie matricea aplicaţie în raport cu baza canonică.
70

b) Să se scrie matricea aplicaţie în raport cu baza
.
III. 6. Fie . Să se arate că
este aplicaţie liniară, să se calculeze , , şi să se verifice teorema
rangului.
III. 7. Să se arate că următoarele aplicaţii sunt liniare. Care dintre acestea sunt
izomorfisme?
a) ;
b) , ;
c) ;
d) .
III. 8. Să se determine şi şi să se verifice că acestea sunt aplicaţii
liniare, dacă:
a) ,
;
b) ,
;
c)
.
III. 9. Fie transformarea liniară . Să se arate
că fiind aplicaţia identitate.
III. 10. Să se cerceteze dacă aplicaţia liniară:
a) ;
b) ;
c) ,
71

este inversabilă şi să se determine inverse sa. Să se verifice că inverse este tot o aplicaţie
liniară.
III. 11. Să se arate că aplicaţia
este o aplicaţie liniară. În se dau
vectorii liniar independenţi. Cum sunt imaginile lor, şi
III. 12. Fie aplicaţia liniară
. Să se cerceteze dependenţa
liniară a vectorilor în şi a vectorilor imagine
în .
III. 13. Se consideră transformarea liniară definită într-o bază prin
matricea . Să se verifice că este o transformare ortogonală şi că ( este
transpusa matricei ):
a) ; b) .
III. 14. Să se determine care dintre următoarele transformări liniare sunt
ortogonale:
a) , ;
b) , ;
c) , ;
d) , ;
e) , .
72
III. 15. Fie transformarea liniară , definită într-o bază prin matricea
. Să se arate că există o bază în faţă de care matricea transformării liniare are
forma diagonală. Să se scrie matricea trecerii da la baza iniţială la baza . Matricea
transformării este dată de:
a) ; b) ; c) ; d) .
III. 16. Arătaţi că funcţia ,
este o plicaţie liniară şi scrieţi matricea asociată ei în baza canonică.
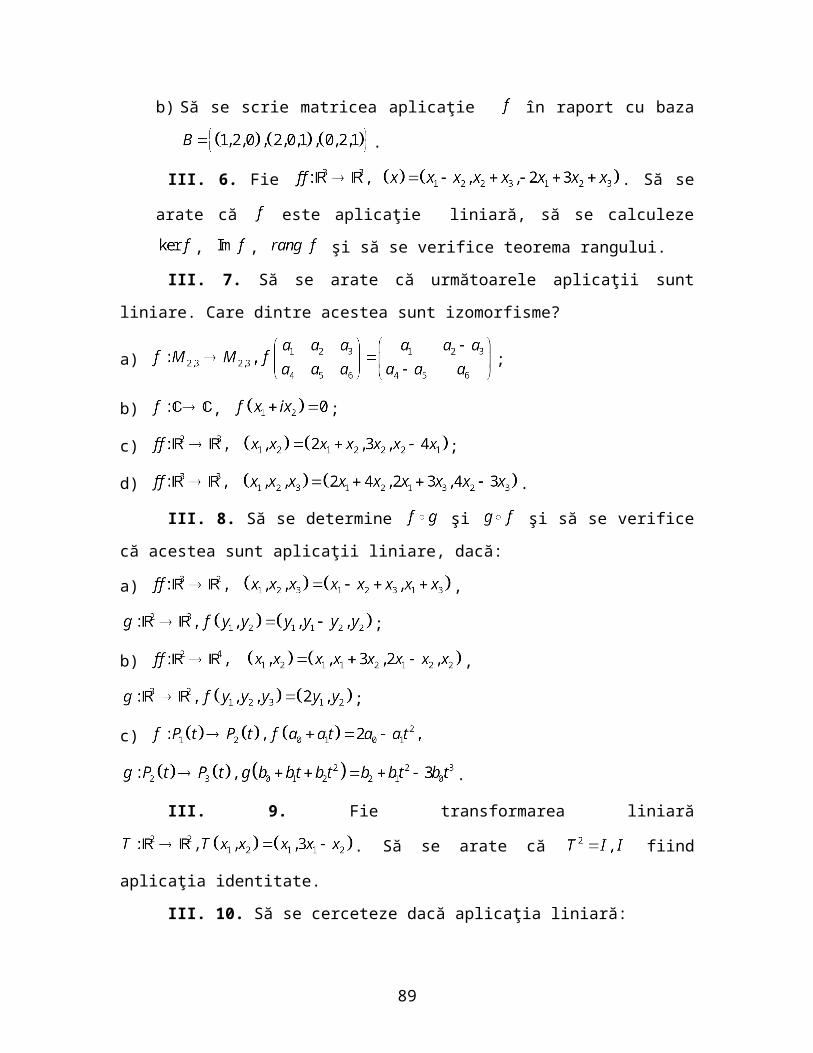
III. 17. Să se determine aplicaţia liniară dată în baza canonică prin
matricea .
III. 18. Fie aplicaţia liniară dată în baza canonică prin matricea
. Se cere:
a) Să se determine ;
b) Să se calculeze .
III. 19. Fiind dată matricea , scrieţi aplicaţia liniară
corespunzătoare, astfel încât .
III. 20. În se consideră aplicaţia liniară care în baza canonică are matricea
.
Se cere:
a) Să se determine ;
73

b) Calculaţi .
III. 21. Determinaţi aplicaţiile liniare care verifică relaţiile:
a) ;
b) , unde este baza canonică
în . Calculaţi apoi pentru fiecare caz în parte, .
III. 22. Fie o aplicaţie liniară astfel încât
, unde este baza canonică din .
Determinaţi aplicaţia .
III. 23. Se dau aplicaţiile ,
;
.
Se cere:
a) Să se deterime că sunt aplicaţii liniare;
b) Să se determine , unde este baza canonică în .
III. 24. Fie aplicaţiile liniare :
;
.
Să se determine:
a) Matricele corespunzătoare lor în baza canonică;
b) Aplicaţiile compuse şi .
c) , .
III. 25. Fie aplicaţia ,
.
Se cere:
a) Arătaţi că este o aplicaţie liniară;
74
b) Calculati matricea corespunzătoare lui în baza canonică;
c) Arătaţi că aplicaţia este bijectivă şi determinaţi ;
d) Calculaţi .
III. 26. Fie aplicaţia ,
.
Să se arate că:
a) este aplicaţie liniară;
b) Aplicaţia este o aplicaţie inversabilă şi să se determine inverse sa ;
c) Să se arat că este tot o aplicaţie liniară.
III. 27. Fie aplicaţia ,
.
Să se arate că:
a) este aplicaţie liniară;
b) Aplicaţia este un izomorfism;
c) Să se determine şi .
III. 28. Fie şi , două aplicaţii liniare care au în baza canonică a
lui matricile: şi .
a) Arătaţi că şi sunt aplicaţii liniare ale spaţiului ;
b) Calculaţi şi .
III. 29. Să se determine nucleul şi imaginea pentru aplicaţiile liniare:
şi pentru .
III. 30. Fie .
Să se arate că este aplicaţie liniară şi .
III. 31. Fie o aplicaţie liniară descrisă într-o bază a lui
de relaţiile:
75
,
,
.
Să se afle:
a) Nucleul aplicaţiei şi dimensiunea sa.
b) Imaginea aplicaţiei şi dimensiunea acesteia.
c) Să se verifice Teorema dimensiunii.
III. 32. Să se găsească matricea transformării liniare ce transformă
astfel vectorii: , ,
în baza .
76
Capitolul IV
VALORI ŞI VECTORI PROPRII.
FORMA DIAGONALĂ
Fie un spaţiu vectorial peste corpul comutativ .
Definiţia IV. 1. Fie T : V → V, T endomorfism (operator linear). Un scalar K,
se numeşte valoare proprie pentru T dacă există x V, x 0v, astfel încât T(x)= · x.
Vectorul x se numeşte vector propriu al endomorfismului T..
Definiţia IV. 2. Fie V/K spaţiu vectorial, S V subspaţiu şi T : V → V un
endomorfism. Subspaţiul S se numeşte subspaţiu invariant în raport cu T dacă T(S)
este subspaţiu şi T(S) S, unde .
Definiţia IV. 3. Dacă K, vom nota cu V multimea tuturor vectorilor proprii
ai lui T corespunzători valorii proprii adică şi cu
.
Definiţia IV. 4. Fie T : V → V, T L (V, V). Dacă este valoare proprie a lui T,
atunci dim( ) = r se numeşte multiplicitate geometrică a valorii proprii , iar V'() se
numeşte subspaţiu propriu asociat valorii proprii .
Polinom caractersitic.
Teorema IV. 5. Fie V/C spaţiu vectorial, T : V → V, T endomorfism, T L (V,
V), dimV = n T are cel puţin o valoare proprie şi vector propriu.
Teorema indică un procedeu efectiv de determinare a valorilor şi vectorilor
proprii.
77

Demonstraţie:
Întrucât dimV = n B = { e1,…,en} bază.
Fie A Mn,m, A = (aij) matricea asociată în raport cu B T(ei) = .
Căutăm un vector x = x1e1 + x2e2 + …+xnen, x 0v, T(x) = · x. Atunci (1)
T(x) = T(x1e1 + …+xnen) =
deci
Dar {e1,…,en} liniar independenţi, rezultă , j.
(2)
Pentru ca sistemul omogen (2) să admită soluţii diferite de cea banală trebuie ca
determinantul sistemului să fie egal cu 0.
det(A – In) = 0 (3)
Aşadar, va exista x Ov astfel încât T(x) = x dacă ecuaţia (3) are cel puţin o soluţie. Dar
conform teoremei fundamentale a algebrei, ecuaţia (3), care este o ecuaţie algebrică de
gradul n cu coeficienţi în are cel puţin o soluţie, deci există C valoare proprie
pentru T.
În continuare vom nota cu PT() = det(A – In).
78
Observaţii:
1) K este valoare proprie pentru T, dacă şi numai dacă este rădăcină a ecuației (3).
2) Se numeşte multiplicitate algebrică a valorii proprii , şi se notează cu μ ordinul de
multiplicitate a rădăcinii a ecuaţiei (3).
3) În general r ≤ μ, unde r = dim multiplicitatea geometrică.
4) p() = ()n + p1()n1 + p2()n2 + … + pn, unde p1, p2,…,pn sunt invarianţi.
De exemplu: p1 = (a11 + a22 + … + ann) = Tr(A) urma matricei A.
Caz particular
Pentru n =3:
= ()3 + p1 2 + p2 () + p3, unde
p1 = a11 + a22 + a33 = Tr(A)
p3 = detA
Teorema IV. 6. Polinomul PT, unde PT() = det(A – In) este invariabil în raport
cu schimbarea bazei (nu depinde de baza în care s-a asociat matricea A).
Diagonalizarea matricelor
Definiţia IV. 7. A Mm,n(f) se numeşte matrice diagonală dacă elementele ai.j =
0, , .
79

Definiţia IV. 8. O matrice A se numeşte matrice diagonalizabilă dacă există C,
nesingulară (detC 0) astfel încât D = C1 A C să fie diagonală (A este asemenea cu
o matrice diagonală).
Definiţia IV. 9. Endomorfismul T : V V se numeşte diagonalizabil dacă există
o bază în V astfel încât matricea lui T în această bază este diagonală.
Teorema IV. 10. Fie T : V V, T L(V, V). T este diagonalizabil există o
bază formată din vectorii proprii.
Observaţie: Matricea diagonală este matricea care pe diagonală are valorile
proprii.
Teorema IV. 11. Fie T : V V, T L (V, V), (T endomorfism). Dacă valorile
proprii ale lui T sunt distincte două câte două atunci T este diagonalizabil (adică există
{v1,…,vn} bază formată din vectori proprii).
Pentru calculul puterii An pentru o matrice diagonalizată.
Conform definiţiei, A diagonalizabilă C nesingulară astfel încât C1 A C =
D este o matrice diagonală, unde D = ,
D2 = = ,
Dn = ,
80
D2 = C1 A A C
D2 = C1 A2 C
An = C Dn C1.
Probleme rezolvate.
IV. 1. Să se determine vectorii şi valorile proprii pentru T : care în baza
canonică are matricea .
Soluţie.
Avem , unde
=
1 = 2, 2 = 1, 3 = 3.
Pentru valoarea proprie 1 = 2, fie v1 vectorul propriu. Atunci:
T(v1) = 1 v1, adică
T(v1 1v1) = Ov (A 1I3) v1 = 0
x3 = 0 x1 x2 = 0 x1 = x2 =
81

Deci v1 = (, , 0) = (1, 1, 0), 0.
Scriem spaţiul propriu asociat valorii proprii 1 = 1:
Avem de asemenea:
= 1, = 1.
Pentru valoarea proprie 2= 1
Rezultă , x3 x2 + x3 = 0, x2 = 2x3
x3 = v2 = (, 2, ) = (1, 2, 1) 0
= {(1, 2, 1)/ 0}
Avem de asemenea:
.
IV. 2. Fie .
a) Este A este diagonalizabilă?
b) Dacă A este diagonalizabilă, să se scrie matricea diagonală şi baza.
c) Să se calculeze A50.
Soluţie.
82

a) p() =
p() = 0
1 3 6 8
1 1 2 8 0
1 = 1; 2 = 4; 3 = –2
Deci există trei valori proprii distincte şi deci T este diagonalizabilă.
b)
Calculăm vectorii proprii.
• Pentru 1 = 1
;
v1 = (2, 1, –2)
• Pentru 2 = 4
83
;
v2 = (2, –2, 1)
• Pentru 3 = –2
;
v3 = (1, 2, 2)
În baza {v1, v2, v3} matricea lui T este D.
c) D = C–1 · A · C A = C · D · C–1
An = C · Dn · C–1
{e1, e2, e3} {v1, v2, v3}
84
detC = –8 + 1 – 8 – 4 – 4 – 4 = –27
Ci,j = Ai,j = (–1)i+j · Mi,j unde Mij – minorul elementului aij.
.
IV. 3. Fie matricea .
Se cere:
a) Dacă x = (x1, x2, x3) în baza {e1, e2, e3} să se determine T(x);
b)Valorile şi vectorii proprii.
Soluţie.
a) T(x) = y
Y = A · X .
85

b) p() =
= (2 – )(–3 – )(–2 – ) + 5(–2 – ) + (–3 – ) = (–2 – )(2 + – 6 + 5) – (3 + ) =
= –22 – 2 + 2 – 3 – 2 + – 3 – = –3 – 32 – 3 – 1 =
= –(3 + 32 + 3 + 1) = –( + 1)3
sau
p()= (–)3 + p1(–)2 + p2(–) + p3, unde
• p1 = Tr(A) = –3;
• p2 =
• p3 = detA = 12 + 3 – 6 – 10 = –1
p() = 0
3 + 32 + 3 + 1 = 0
( + 1)3 = 0
1 = 2 = 3 = –1
Vectorii proprii v = (x1, x2x3), avem
Numărul vectorilor proprii este:
nr = n – rang(A – I3) = 3 – 2 = 1
3 = –x1
x1 = α, x2 = , x3 = –α
v = (α, α, –α) = α(1, 1, –1)
86
o bază (1, 1, –1).
IV. 4. Să se determine vectorii şi valorile proprii pentru care în baza
canonică are matricea .
Soluţie. Avem
= (3 – )(4 – )(5 – ) – (–2)(–2)(3 – ) – 4(5 – ) =
= (3 – )(20 – 4 – 5 + 2) – 4(3 – ) – 4(5 – ) =
= 60 – 20 – 12 + 42 – 15 + 52 + 32 – 3 – 12 – 4 – 20 – =
= –3 – 122 – 39 + 28
–1 12 –39 28
1 –1 11 -28 0
Rezultă 1 = 1
p() = ( – 1)(–2 + 11 – 28)
D = 12(–4 · 28) = 9
•
87

x2 = α
=
1 = 1
IV. 5. Fie care în baza {e1, e2, e3} are matricea .
Se cere:
a) valorile şi vectorii proprii;
b) se poate diagonaliza? Dacă da, să se determine baza în care are forma diagonală;
c) Să se calculeze A2003;
Soluţie.
v Ov T(v) = v
p() = 0 – ecuaţia caracteristică
p() = (A – I3)
=
=
p() = 0 – 1 = 1
– 2 = 3 = 2
• 1 = 1
T(v1) = 1v1
(A – 1I3) · v1 = 0
88
v1 = (α, α, α) α 0
• 2 = 3 = 2
multiplicitatea algebrică = 2
v = ?
rang(B) = 1 sistem dublu nedeterminat multiplicitate geometrică = 2 (vectori
proprii)
–3x1 + 3x2 – x3 = 0
x3 = –3x1 + 3x2
x1 = α
x2 =
v = (α, , –3α + 3) α, 0
v2 = (1, 0, –3)
v3 = (0, 1, 3)
b) Da
În baza {v1, v2, v3} matricea va avea forma diagonală
A' = C–1 · A · C
89

{e1, e2, e3} → {v1, v2, v3}
, rezultă
C · C–1 = I3
c) (A')2003 =
A' = C–1 · A · C
C · A' = C · C–1 · A · C | · C–1
C · A' · C–1 = A
A = C · A' · C–1
A2 = (C · A' · C–1) · (C · A' · C–1) = C · (A')2 · C–1
An = C(A)n · C–1
IV. 6. Fie care în baza {e1, e2, e3} are matricea . Se
cere:
a) valorile şi vectorii proprii;
b) se poate diagonaliza? Dacă da, să se determine baza în care are forma diagonală;
c) Să se calculeze A2003.
Soloţie.
Polinomul characteristic este p() = (A – I3), şi obţinem
90

p() =
, de unde .
a) Să se scrie matricea lui T în baza B.
e1 = (1, 0, 0), e2 = (0, 1, 0), e3 = (0, 0, 1) unde T(e1) = (0, –4, –2), T(e2) = (1, 4, 1),
T(e3) = (0, 0, 2) . Rezultă .
Dacă x = (1, 2, –1). Determinaţi T(x) = ?
T(x) = A · X = sau
T(x) = (2, 4, )
b) T : V → V
T( · v) = · v R v 0
ecuaţia caracteristică p() = 0
p() = det(A – I3)
p() = 0 (–)3 + p1(–)2 + p2(–)1 + p3 = 0
p1 = a11 + a22 + a33 = 6
p3 = detA =
p() =
• 1 = 2 = 3 = 2
v = (x1, x2, x3) vector propriu
91
rangB = 1 3 – 1 = 2 vectori proprii
(compatibil dublu nedeterminat)
–2x1 + x2 = 0 x2 = 2x1
x1 = α
x3 =
v = (α, 2α, ) = (α, 2α, 0) + (0, 0, ) = α(1, 2, 0) + (0, 0, 1)
.
IV. 7. Să se determine vectorii şi valorile proprii pentru care în baza
canonică are matricea . Este diagonalizabilă? Dacă este
diagonalizabilă, să se scrie matricea diagonală.
Soluţie.
Polinomul caracteristic este
, şi obţinem .
Determinăm acum vectorii proprii.
Pentru rezolvăm sistemul . Soluţiile acestui sistem sunt
de forma . Deci un vector propriu este .
92
Pentru rezolvăm sistemul . Soluţiile acestui sistem
sunt de forma , deci un vector propriu ataşat valorii proprii
este .
Pentru rezolvăm sistemul . Soluţiile acestui system
sunt de forma , deci un vector propriu ataşat valorii proprii
este .
Avem trei vectori proprii care corespund la valori proprii distincte, deci sunt liniar
independenţi şi atunci matricea este diagonalizabilă.
Fie şi matricea diagonală. Atunci
.
IV. 8. Fie o aplicaţie liniară care în baza canonică are matricea
.
Să se determine valorile proprii şi vectorii proprii corespunzători.
93
Soluţie. Avem . Cum ,
obţinem . Pentru avem sistemul Acesta are
soluţia , deci un vector propriu corespunzător este .
Pentru avem sistemul rangul matricei
corespunzătoare acestui system este doi, deci avem soluţia . Un
vector propriu este . Vesctorii proprii şi sunt liniar independenţi dar nu
formează o bază. Rezultă că nu există o bază faţă de care ` să poată fi adusă la forma
diagonală.
94
Probleme propuse spre rezolvare.
IV. 1. Să se determine vectorii şi valorile proprii pentru care în baza
canonică are matricea . Să se calculeze .
IV. 2. Se dă o matrice asociată lui într-o bază.
a) este diagonalizabilă?b) Dacă este diagonaliozabilă, să se scrie matricea diagonală si baza.c) Să se calculeze .
IV. 3. Să se determine vectorii şi valorile proprii pentru care în baza
canonică are matricea .
IV. 4. Se dă o matrice asociată lui într-o bază. Să se
calculeze .
IV. 5. Să se determine vectorii şi valorile proprii pentru care în baza
canonică are matricea . Să se calculeze .
IV. 6. Fie o aplicaţie liniară care are în baza canonică a lui matricea
.
a) Găsiţi valorile proprii ale aplicaţiei liniare.b) Pentru fiecare valoare proprie găsiţi câte un system maximal liniar independent
de vectori proprii asociaţi.
c) Indicaţi o bază a lui în care este matrice diagonală.
IV. 7. Fie aplicaţia liniară definită într-o bază prin matricea:
95
.
Să se determine:a) Valorile proprii, vectorii proprii şi subspaţiile proprii corespinzătoare.b) Dacă matricea aplicaţiei liniare este diagonalizabilă.
IV. 8. Fie aplicaţia liniară definită înntr-o bază prin matricea:
.
Să se arate că nu există nici o bază în faţă de care matricea apliocaţie să
aibă forma diagonală.
IV. 9. Fie o aplicaţie liniară definită într-o bază prin matricea :
.
a) Să se determine valorile proprii şi vectorii proprii.
b) Să verifice dacă există o bază în faţă de acre matricea aplicaţiei liniare
are forma diagonală.
IV. 10. Fie o aplicaţie liniară definită într-o bază prin matricea :
.
a) Să se determine valorile proprii şi vectorii proprii.
b) Să verifice dacă există o bază în faţă de acre matricea aplicaţiei liniare
are forma diagonală.
IV. 11. Fie aplicaţia liniară dată într-o bază prin matricea
96
.
Să se verifice dacă există o bază în faţă de care matricea aplicaţiei liniare să
aibe forma diagonală.
IV. 12. Fie aplicaţia liniară dată într-o bază prin matricea
.
Să se verifice dacă există o bază în faţă de care matricea aplicaţiei liniare să
aibe forma diagonală.
IV. 13. Fie aplicaţia liniară dată într-o bază prin matricea
.
Să se verifice dacă există o bază în faţă de care matricea aplicaţiei liniare să
aibe forma diagonală.
IV. 14. Fie o aplicaţie liniară definită într-o bază a lui prin
matricea
.
Să se arate că există o bază în faţă de care matricea aplicaţiei linare are
forma diagonală.
97

IV. 15. Să se cerceteze dacă matricea:
este diagonalizabilă. In caz afirmativ să se determine matricea diagonalizatoare .
IV. 16. Fie matricea .
a) Să se determine valorile proprii şi vectorii proprii corespunzători.
b) Să se arate că matricea diagonalizabilă şi să se precizeze matricea
diagonalizatoare.
c) Folosind forma diagonală a matricei să se determine .
IV. 17. Să se diagonalizeze matricele:
a) ; b) ; c) .
Să se calculeze în fiecare caz .
IV. 18. Fie
.
a) Să se arate că este diagonalizabilă, să se determine forma diagonală şi
matricea diagonalizatoare .
b) Folosin forma diagonală a lui , să se determine o matrice astfel
încât .
98

IV. 19. Fie
.
a) Să se arate că este diagonalizabilă.
b) Există astfel încât ?
IV. 20. Fie o aplicaţie liniară care are în baza canonică a lui
matricea
.
Găsiţi valorile proprii şi subspaţiile proprii corespunzătoare.
IV. 21. Fie T : şi {e1, e2, e3} baza canonică astfel încât T(e1) = ,
, .
Se cere:
a) matricea lui T în baza canonică;
b) T*(x) = ?
c) verificaţi dacă T este ortogonală;
d) Fie x = (1, 2, –1). Să se determine coordonatele lui x în baza canonică.
99

















