Page 1
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
1
UNIVERSITATEA “ŞTEFAN CEL MARE” SUCEAVA
FACULTATEA DE INGINERIE ELECTRICĂ
ŞI ŞTIINŢA CALCULATOARELOR
Contribuţii teoretice şi experimentale preliminare
privind extinderea actuatoarelor electromecanice
cu lichid relizate pe baza unor fenomene
fizico-chimice
REFERAT II
Conducător Ştiinţific
Prof. dr. ing. DOREL CERNOMAZU
Doctorand:
Ing. ILIE NIŢAN
- 2012 -
Page 2
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
2
CUPRINS
CAPITOLUL 1
Consideraţii generale privind actuatoarele electromecanice
1.1. Introducere.................................................................................................................1
1.2. Clasificare...................................................................................................................2
1.3. Principiu de funcţionare.............................................................................................8
CAPITOLUL 2
Stadiul actual al cercetărilor, în domeniul actuatoarelor electromecanice cu lichid
2.1. Stadiul actual privind studiul şi realizarea unor actuatoare electromecanice
cu lichid în cadrul Universităţii “Ştefan cel Mare” Suceava......…………...…..10
2.2 Stadiul actual privind realizarea pe plan mondial a actuatoarelor
electromecanice cu lichid.....................................................................................17
CAPITOLUL 3
Contribuţii la realizarea şi experimentarea unor actuatoare şi motoare solare
3.1. Contribuţii la realizarea unor actuatoare solare..........................................................27
3.2. Contribuţii la realizarea unor motoare solare ............................................................40
CAPITOLUL 4
Contribuţii la realizarea şi experimentarea unor relee şi pompe electrochimice
4.1. Contribuţii la realizarea unor relee electrochimice....................................................47
4.2. Contribuţii la realizarea unor pompe electrochimice.................................................40
CONCLUZII FINALE.......................................................................................................65
REFERINŢE BIBLIOGRAFICE......................................................................................66
Page 3
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
3
CONSIDERAŢII GENERALE PRIVIND ACTUATOARELE
ELECTROMECANICE
1.1. Introducere
În prezent, în domeniul acţionărilor mecanice s-au dezvoltat diferite tipuri de
dispozitive, bazate în funcţionare, pe tehnici de conversie a diferitelor surse de energie.
Tehnologia modernă a actuatoarelor este valorificată într-un număr mare de diferite tipuri
de dispozitive şi metode pentru realizarea acţionărilor mecanice [1].
Un actuator poate fi definit ca fiind un dispozitiv prin intermediul căruia energia
obţinută pe baza unor efecte şi principii fizice, este transformată în energie mecanică,
necesară acţionării în mişcare de rotaţie sau translaţie a unor mecanisme.
Actuatorul (care ar trebui să se cheme acţionator, deoarece termenul actuator a fost
preluat în mod „automat” din limba engleză fără să existe o acţiune corespunzătoare în
limba română – a actua - aşa cum există în limba franceză actionneur de la actionner = a
acţiona) este constituit din materiale inteligente capabile să efectueze o acţiune. Actuatorul
are capacitatea de a-şi modifica: forma (generând lucru mecanic); rigiditatea; poziţia;
frecvenţa vibraţiilor interne; capacitatea de amortizare; frecarea internă sau vâscozitatea, ca
reacţie la variaţiile de temperatură, câmpul electric sau magnetic [2].
Dintre cele mai răspândite materiale folosite la construcţia actuatoarelor (numite şi
materiale reactive sau adaptive) putem enumera următoarele:
materiale caracterizate prin memoria formei;
materiale piezoelectrice;
materiale electro- şi magnetostrictive;
materiale electro- şi magnetoreologice.
Actuatoarele pot fi definite ca fiind “muşchiul” din spatele unui sistem mecatronic
care acceptă o comandă de control (de cele mai multe ori sub forma unui semnal electric)
şi produce o schimbare în sistemul fizic generând putere, mişcare, căldură, curent, etc. De
obicei, actuatoarele sunt utilizate în legătura dintre reţeaua electrică şi un mecanism de
cuplare. Sursa de alimentare furnizează fie energie de curent alternativ, fie energie de
curent continuu la tensiune şi curent nominal. Mecanismul de cuplare funcţionează ca
interfaţă între actuator şi sistemul fizic.
Page 4
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
4
Mecanismele tipice includ:
cremalieră şi pinion;
transmisie cu roţi dinţate;
transmisie prin curea;
şurub de acţionare şi piuliţă;
piston.
1.2. Clasificare [4]
In marea majoritate a cazurilor când ne referim la convertoare, luăm în consideraţie
şapte domenii energetice principale, şi anume: chimic, electric, magnetic, mecanic, optic,
fluidic şi termic. Conversia se poate realiza între oricare, două, dintre aceste domenii
energetice. În plus, fenomenele diferite ale proceselor de conversie sunt posibile pentru o
pereche dată din domeniile energetice. În scopul perfecţionării actuatoarelor sunt analizate
o parte dintre aceste procese de conversie în următoarele paragrafe:
1.2.1. Conversia termomecanică
În acest proces energetic de conversie, energia de intrare este din domeniul termic şi
energia rezultată din domeniul mecanic. Plecând de la acest tip de conversie a energiei pot
fi dezvoltate următoarele:
a) Actuatoare ce conţin aliaje caracterizate prin memoria formei
În cazul acestui tip de actuatoare, energia termică aplicată la intrare determină o
schimbare de fază în aliaj, care are drept urmare recuperarea formei anterioare unei stări
deformate.
b) Actuatoare termice
În cazul acestui tip de actuatoare, diferenţa coeficienţilor termici de expansiune, a
două lamele metalice, determină deformarea structurii compozite la încălzire şi răcire.
Sistemele termice folosesc expansiunea sau contracţia fizică care se petrece în
materialele ce suferă modificări de temperatură. Exemplele tipice includ elementele
termostatice, bimetalice, folosite la reglarea temperaturii. Aceste dispozitive folosesc
Page 5
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
5
coeficienţii diferiţi de expansiune a două materiale legate (combinate) împreună pentru a
produce o deplasare cu deformaţie.
Modificările termice rezultă din transmiterea energiei termice într-un material.
Nakajima a demonstrat faptul că motorul Stirling, care funcţionează pe acest principiu, are
un randament termic ridicat.
Actuatoare termice cu memoria formei [2]
Acest tip de aplicaţii transformă energia termică în energie mecanică. Configuraţia
cea mai des utilizată, de actuator termic cu memoria formei, este cea de resort elicoidal.
Actuatoarele termice cu memoria formei pot fi utilizate în două scopuri:
(1) detectarea unei anumite temperaturi (când joacă rol de senzori);
(2) efectuarea de lucru mecanic atunci când ating o anumită temperatură.
Energia termică, necesară declanşării actuatoarelor este transmisă elementului cu
memoria formei prin convecţie (naturală sau forţată), prin conducţie termică sau chiar prin
radiaţie.
Principalii contracandidaţi ai actuatoarelor termice cu memoria formei sunt
bimetalele termostatice şi actuatoarele cu parafină. Curbele deplasare - temperatură ale
acestor trei tipuri de actuatoare sunt ilustrate în fig.1.1.
Fig. 1.1 Curbe deplasare-temperatură ale principalelor tipuri de actuatoare termice, având o
cursă activă (de control) notată cu A: (a) termostat bimetalic clasic (linie continuă) sau cu
declanşare bruscă (cu linie întreruptă); (b) actuator cu parafină; (c) actuator din AMF Cu-
(15-25) Zn-(6-8) Al (%). Reprodus după [2]
Actuatoarele cu parafină sunt mici containere cu pistoane mobile. La încălzire,
parafina se topeşte, procesul fiind însoţit de o însemnată creştere de volum care deplasează
pistonul. La răcire are loc transformarea inversă, cu un histerezis termic de 2-5 0C însă este
necesară prezenţa unui resort de restabilire (care consumă cca. 30 % din forţa actuatorului)
Page 6
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
6
pentru readucerea pistonului în poziţia iniţială. În funcţie de tipul şi compoziţia parafinei,
deplasarea poate fi neproporţională sau proporţională cu temperatura, în ultimul caz
proporţionalitatea existând pe un interval termic care poate fi redus (cca. 150C) sau lărgit
(aprox. 1500C). În figura anterioară este ilustrată curba deplasare-temperatură, a unui
actuator, proporţional cu un interval termic redus. Intervalul termic de funcţionare a
actuatoarelor cu parafină este - 40…1800C, cursa maximă este de aproximativ 25 mm iar
forţa dezvoltată de 300 N. Cele mei reuşite aplicaţii ale actuatoarelor cu parafină sunt
termostatele auto din sistemul de răcire cu apă sau ulei precum şi supapele din sistemele de
încălzire centrală.
În comparaţie cu actuatoarele bimetalice sau cu cele cu parafină, actuatoarele cu
memoria formei, a căror curbă tipică deplasare-temperatură este ilustrată în fig.1.1 (c), au
următoarele avantaje:
a – în raport cu bimetalele termostatice: dezvoltă forţe mai mari şi curse (de până
la 200 ori) mai mari precum şi deplasări mai variate (în comparaţie cu încovoierea);
b – în raport cu actuatoarele cu parafină: timpii de reacţie sunt mai reduşi şi forma
constructivă este mult mai simplă;
c – au o capacitate mult mai ridicată de înmagazinare a energiei pe unitatea de
volum: (6-25)·106 J/m3.
Pe lângă forma de resort elicoidal, actuatoarele termice cu memoria formei pot fi:
arcuri spirale, sârme, lamele, bare de torsiune, încovoiere sau compresiune, etc.
c) Geluri polimerice active din punct de vedere termic
O parte dintre actuatoarele cu gel polimeric reacţionează la stimuli termici.
d) Actuatoare cu expansiune termică
Este bine ştiut faptul că modificările de temperatură determină expansiunea şi
contracţia materialelor. Expansiunea termică poate fi definită ca fiind un proces direct de
conversie termomecanică. În concluzie, sistemele cu schimbare de fază folosesc
modificările dimensionale (expansiune sau contracţie).
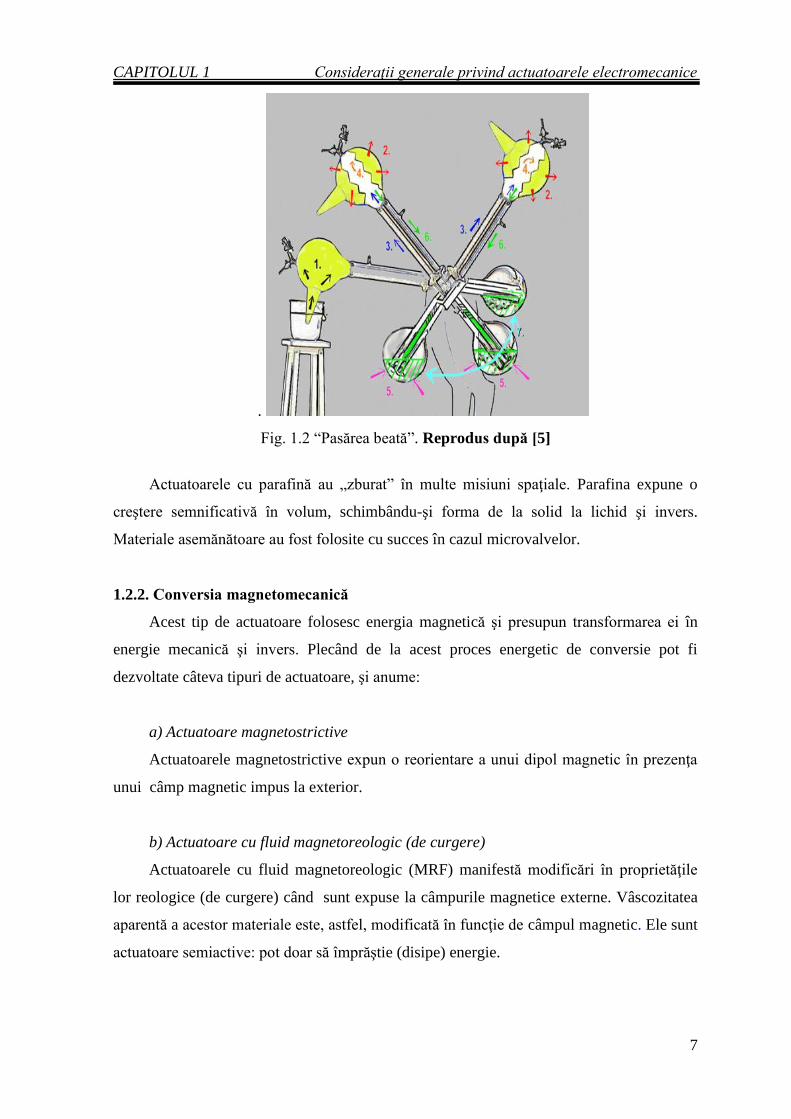
Noutatea jucăriei cunoscută sub denumirea de “ Pasărea Beată” demonstrează o
formă de acţiune cu schimbare de fază la scară mare. Pasărea este un exemplu de motor
termic care funcţionează pe principiul vaporizării apei. Aerul din interiorul ei este înlocuit
cu un lichid uşor volatil; diferenţa de temperatură este convertită într-o mişcare ciclică.
Page 7
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
7
.
Fig. 1.2 “Pasărea beată”. Reprodus după [5]
Actuatoarele cu parafină au „zburat” în multe misiuni spaţiale. Parafina expune o
creştere semnificativă în volum, schimbându-şi forma de la solid la lichid şi invers.
Materiale asemănătoare au fost folosite cu succes în cazul microvalvelor.
1.2.2. Conversia magnetomecanică
Acest tip de actuatoare folosesc energia magnetică şi presupun transformarea ei în
energie mecanică şi invers. Plecând de la acest proces energetic de conversie pot fi
dezvoltate câteva tipuri de actuatoare, şi anume:
a) Actuatoare magnetostrictive
Actuatoarele magnetostrictive expun o reorientare a unui dipol magnetic în prezenţa
unui câmp magnetic impus la exterior.
b) Actuatoare cu fluid magnetoreologic (de curgere)
Actuatoarele cu fluid magnetoreologic (MRF) manifestă modificări în proprietăţile
lor reologice (de curgere) când sunt expuse la câmpurile magnetice externe. Vâscozitatea
aparentă a acestor materiale este, astfel, modificată în funcţie de câmpul magnetic. Ele sunt
actuatoare semiactive: pot doar să împrăştie (disipe) energie.
Page 8
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
8
c) Actuatoare ce conţin aliaje magnetice şi sunt caracterizate prin memoria formei
În majoritatea exemplelor aceste actuatoare sunt considerate o subclasă a
actuatoarelor magnetostrictive. Oricum, ele prezintă caracteristici diferite şi se dezvoltã
într-o clasă nouă independentă de actuatoare.
1.2.3. Conversia electromecanică
Energia electrică aplicată la intrare este transformată în energie mecanică. În
majoritatea următoarelor tipuri de actuatoare procesul de conversie este reversibil.
a) Actuatoare electromagnetice
Interacţiunea Lorentz dintre o sarcină electrică şi un câmp magnetic este valorificată
pentru alimentarea cu energie mecanică (sub formă de mişcare de rotaţie sau translaţie) a
unei bobine. Câmpul magnetic poate fi produs prin intermediul unor magneţi permanenţi
sau prin intermediul unei bobine secundare.
b) Actuatoare Piezoelectrice
Efectul piezoelectric invers, rezultat din interacţiunea unui câmp electric impus şi
dipolii electrici dintr-un material, are drept rezultat o deformare. Această deformare este
folosită pentru acţionarea (punerea în mişcare) a mecanismului (instalaţiei). Efectul
piezoelectric invers poate fi folosit direct sau prin intermediul conceptului de convertor
geometric.
c) Actuatoare ce conţin aliaje caracterizate de memoria formei
Acest tip de actuatoare au fost deja menţionate în cazul conversiei termomecanice.
Energia termică este de obicei furnizată de rezistenţa de încălzire (Efect Joule) şi, de aici,
acestea pot fi considerate convertoare electromecanice.
d) Actuatoare cu polimer electroactiv EAP
În familia largă a actuatoarelor EAP, polimerii de tip uscat utilizează forţele Maxwell
ori fenomenul electrostrictiv pentru a obţine energie mecanică din energie electrică.
Page 9
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
9
e) Actuatoare cu fluid electroreologic ERF
Ca şi actuatoarele MRF, proprietăţile reologice ale actuatoarelor reologice se
modifică când se aplică un câmp electric. Din nou, aceste actuatoare sunt semiactive şi pot
doar să disipe energie mecanismului.
1.2.4. Conversia fluidului mecanic
Câteva actuatoare tradiţionale (pneumatice şi hidraulice) transformă presiunea
fluidului în energie mecanică, mişcare de rotaţie sau de translaţie.
Noile generaţii de actuatoare includ:
actuatoare din materiale tari,
microactuatoare şi
nanoactuatoare.
Page 10
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
10
1.3. Principiu de funcţionare
Actuatorul mai poate fi definit ca fiind un dispozitiv care transformă energia electrică
sau termică într-o mişcare controlabilă [3]. În general, structura şi funcţionarea celor mai
multe tipuri de actuatoare se bazează pe una sau mai multe tehnici de acţionare, şi anume:
acţionare electromagnetică;
acţionare magnetostrictivă;
acţionare hidraulică;
acţionare pneumatică;
acţionare electrotermică;
acţionare electrochimică, etc.
Navele spaţiale utilizează diverse surse de energie electrică şi termică [3].
Surse de energie electrică:
Captarea fotonilor solari ori astrali de către captatoarele solare fotovoltaice;
Reacţii electrochimice în baterii / pile de combustie;
Reacţii nucleare termoelectrice, incluzând generatoare Peltier puse în funcţiune de
dezintegrarea izotopilor radioactivi;
Captarea (colectarea) energiei interastrale.
Surse de energie termică:
Radiaţiile termice solare şi astrale capturate;
Rezistenţă electrică de încălzire;
Dezintegrare termică radioactivă;
Fascicul de căldură;
Reacţie chimică exotermică;
Frecare mecanică.
În cazul navelor spaţiale, actuatoarele produc o mişcare folositoare la efectuarea
unor astfel de acţiuni:
1. Cuplarea, decuplarea ori separarea componentelor navei spaţiale;
2. Deschiderea şi închiderea acoperişurilor şi paravanelor;
3. Desfăşurarea, poziţionarea şi retractibilitatea senzorilor, elementelor de execuţie,
antenelor şi mecanismelor.
Page 11
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
11
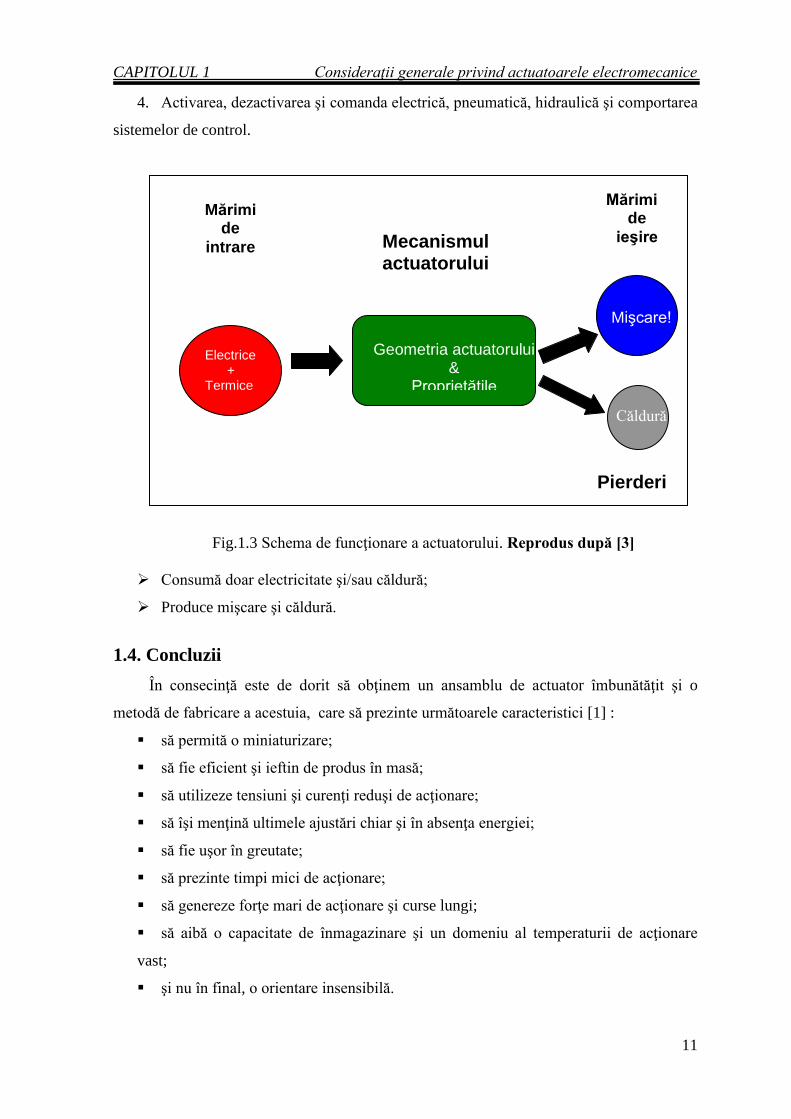
4. Activarea, dezactivarea şi comanda electrică, pneumatică, hidraulică şi comportarea
sistemelor de control.
Fig.1.3 Schema de funcţionare a actuatorului. Reprodus după [3]
Consumă doar electricitate şi/sau căldură;
Produce mişcare şi căldură.
1.4. Concluzii
În consecinţă este de dorit să obţinem un ansamblu de actuator îmbunătăţit şi o
metodă de fabricare a acestuia, care să prezinte următoarele caracteristici [1] :
să permită o miniaturizare;
să fie eficient şi ieftin de produs în masă;
să utilizeze tensiuni şi curenţi reduşi de acţionare;
să îşi menţină ultimele ajustări chiar şi în absenţa energiei;
să fie uşor în greutate;
să prezinte timpi mici de acţionare;
să genereze forţe mari de acţionare şi curse lungi;
să aibă o capacitate de înmagazinare şi un domeniu al temperaturii de acţionare
vast;
şi nu în final, o orientare insensibilă.
Electrice +
Termice
Geometria actuatorului &
Proprietăţile materialului
Mişcare!
Căldură
Pierderi
Mecanismul actuatorului
Mărimi de
ieşire
Mărimi de
intrare
Page 12
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
12
STADIUL ACTUAL AL CERCETĂRILOR, ÎN DOMENIUL
ACTUATOARELOR ELECTROMECANICE CU LICHID
[6], [7], [8], [9], [10], [11], [12], [13], [14], [15], [16],[19],[20],[62]
2.1. Stadiul actual privind studiul şi realizarea unor actuatoare
electromecanice cu lichid din cadrul Universităţii „Ştefan cel Mare”
Suceava
În perioada 1995 – 1999, în cadrul Universităţii “Ştefan cel Mare”, au fost realizate
primele cercetări în domeniul motoarelor şi micromotoarelor solare. În anul 1997 au fost
finalizate primele două modele experimentale de motoare solare prevăzute cu actuatoare cu
silfon [13],[14].
Motoarele solare prezentate sunt constituite, în principal, dintr-un rotor excentric,
asupra căruia acţionează succesiv mai multe actuatoare cu silfon dispuse în jurul rotorului
după un traseu circular.
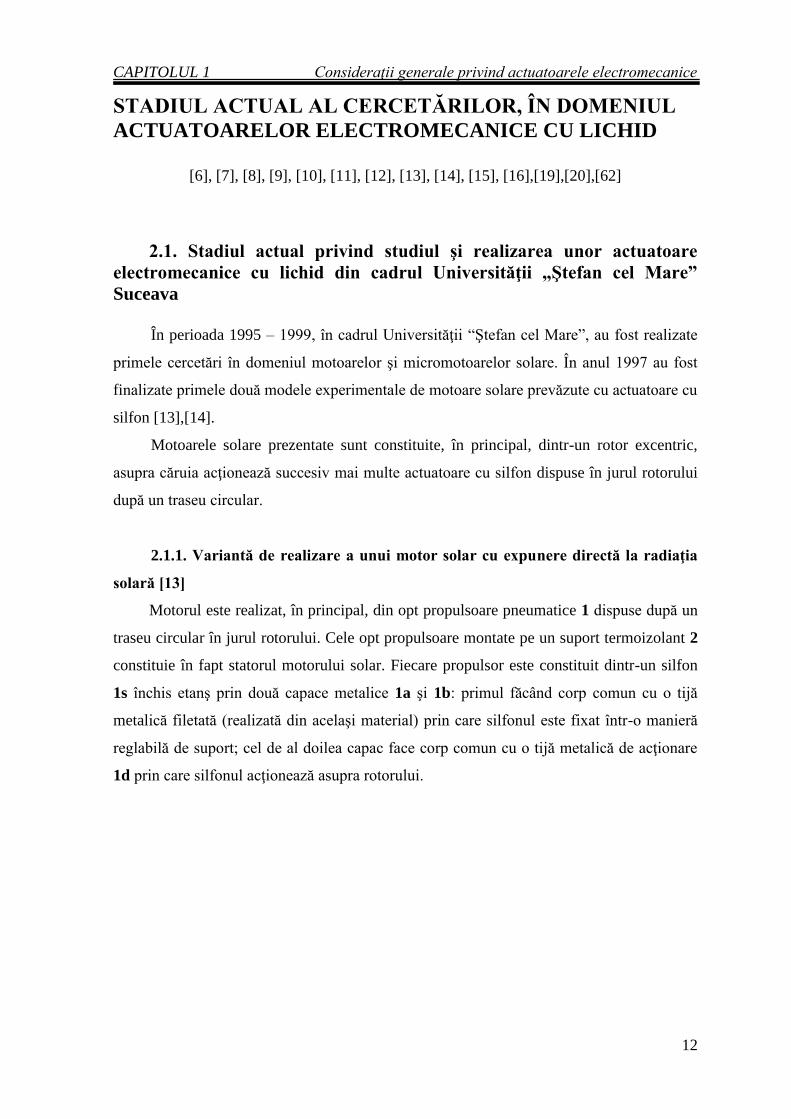
2.1.1. Variantă de realizare a unui motor solar cu expunere directă la radiaţia
solară [13]
Motorul este realizat, în principal, din opt propulsoare pneumatice 1 dispuse după un
traseu circular în jurul rotorului. Cele opt propulsoare montate pe un suport termoizolant 2
constituie în fapt statorul motorului solar. Fiecare propulsor este constituit dintr-un silfon
1s închis etanş prin două capace metalice 1a şi 1b: primul făcând corp comun cu o tijă
metalică filetată (realizată din acelaşi material) prin care silfonul este fixat într-o manieră
reglabilă de suport; cel de al doilea capac face corp comun cu o tijă metalică de acţionare
1d prin care silfonul acţionează asupra rotorului.
Page 13
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
13
Fig. 2.1 Motor solar cu expunere directă la radiaţia solară. Reprodus după [13]
Page 14
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
14
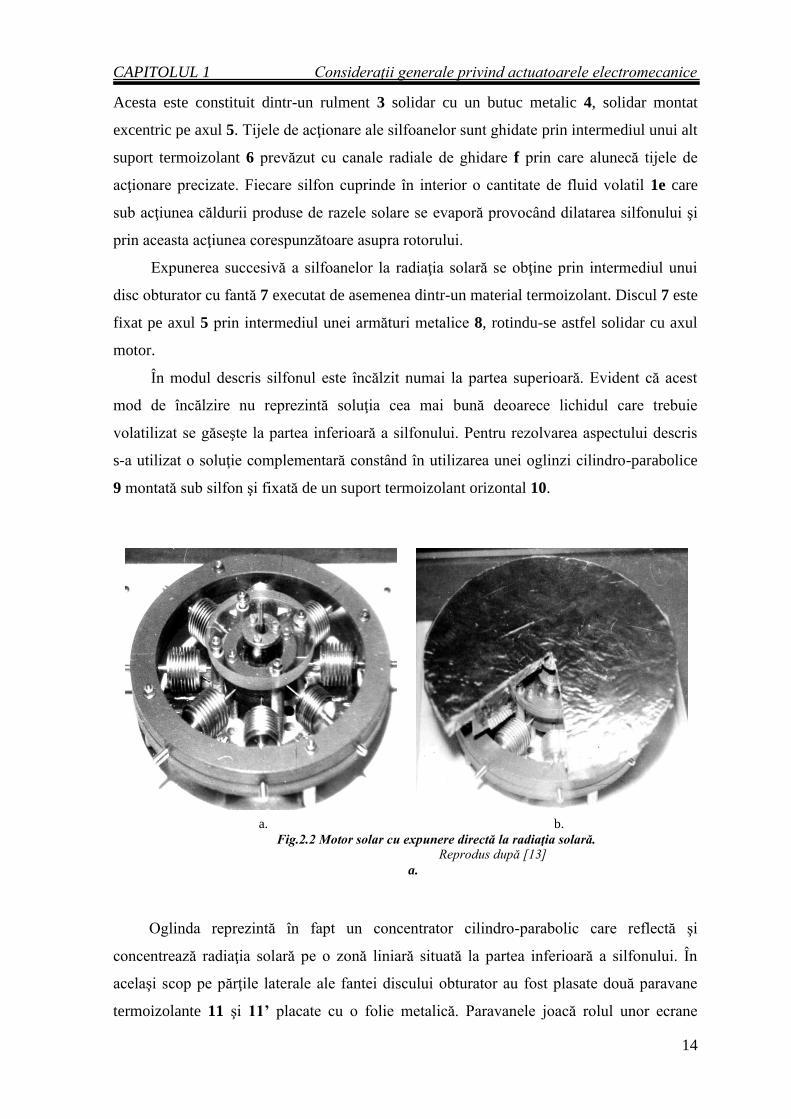
Acesta este constituit dintr-un rulment 3 solidar cu un butuc metalic 4, solidar montat
excentric pe axul 5. Tijele de acţionare ale silfoanelor sunt ghidate prin intermediul unui alt
suport termoizolant 6 prevăzut cu canale radiale de ghidare f prin care alunecă tijele de
acţionare precizate. Fiecare silfon cuprinde în interior o cantitate de fluid volatil 1e care
sub acţiunea căldurii produse de razele solare se evaporă provocând dilatarea silfonului şi
prin aceasta acţiunea corespunzătoare asupra rotorului.
Expunerea succesivă a silfoanelor la radiaţia solară se obţine prin intermediul unui
disc obturator cu fantă 7 executat de asemenea dintr-un material termoizolant. Discul 7 este
fixat pe axul 5 prin intermediul unei armături metalice 8, rotindu-se astfel solidar cu axul
motor.
În modul descris silfonul este încălzit numai la partea superioară. Evident că acest
mod de încălzire nu reprezintă soluţia cea mai bună deoarece lichidul care trebuie
volatilizat se găseşte la partea inferioară a silfonului. Pentru rezolvarea aspectului descris
s-a utilizat o soluţie complementară constând în utilizarea unei oglinzi cilindro-parabolice
9 montată sub silfon şi fixată de un suport termoizolant orizontal 10.
Oglinda reprezintă în fapt un concentrator cilindro-parabolic care reflectă şi
concentrează radiaţia solară pe o zonă liniară situată la partea inferioară a silfonului. În
acelaşi scop pe părţile laterale ale fantei discului obturator au fost plasate două paravane
termoizolante 11 şi 11’ placate cu o folie metalică. Paravanele joacă rolul unor ecrane
a. b.
Fig.2.2 Motor solar cu expunere directă la radiaţia solară.
Reprodus după [13]
a.
Page 15
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
15
termice care protejează silfoanele obturate de acţiunea razelor solare oblice având şi rolul
unor oglinzi plane care prin reflexie expun părţile laterale ale silfonului radiaţiei solare.
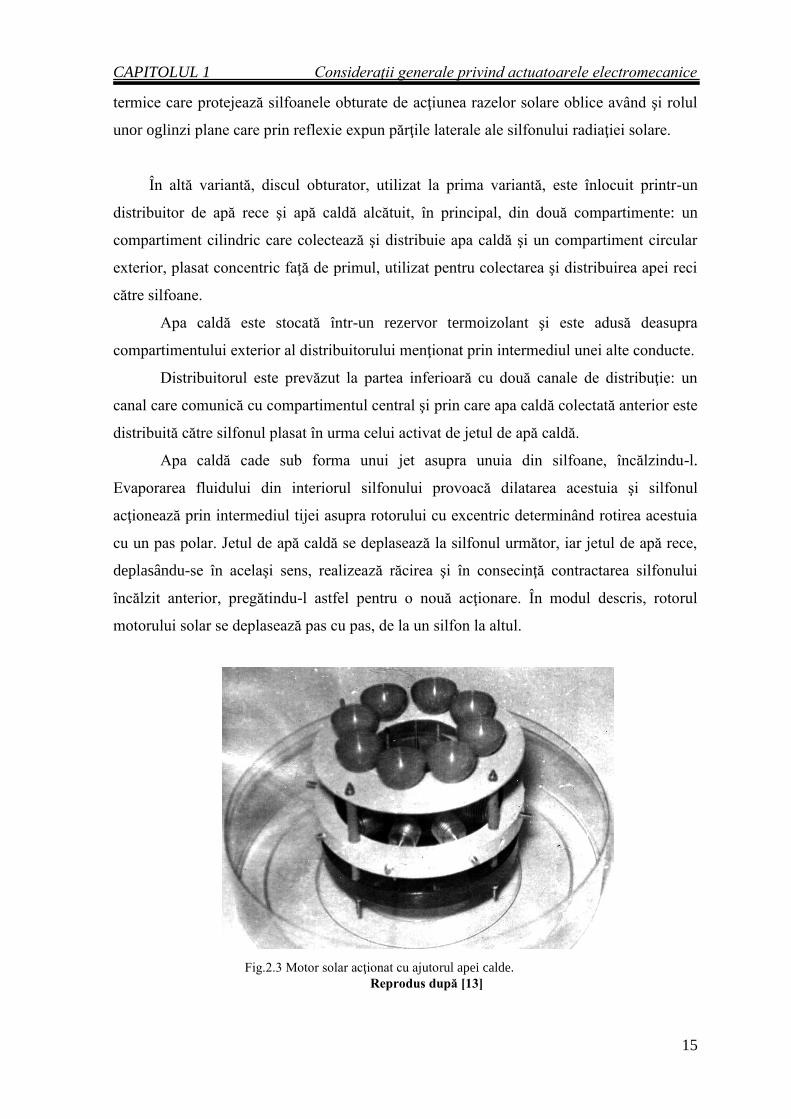
În altă variantă, discul obturator, utilizat la prima variantă, este înlocuit printr-un
distribuitor de apă rece şi apă caldă alcătuit, în principal, din două compartimente: un
compartiment cilindric care colectează şi distribuie apa caldă şi un compartiment circular
exterior, plasat concentric faţă de primul, utilizat pentru colectarea şi distribuirea apei reci
către silfoane.
Apa caldă este stocată într-un rezervor termoizolant şi este adusă deasupra
compartimentului exterior al distribuitorului menţionat prin intermediul unei alte conducte.
Distribuitorul este prevăzut la partea inferioară cu două canale de distribuţie: un
canal care comunică cu compartimentul central şi prin care apa caldă colectată anterior este
distribuită către silfonul plasat în urma celui activat de jetul de apă caldă.
Apa caldă cade sub forma unui jet asupra unuia din silfoane, încălzindu-l.
Evaporarea fluidului din interiorul silfonului provoacă dilatarea acestuia şi silfonul
acţionează prin intermediul tijei asupra rotorului cu excentric determinând rotirea acestuia
cu un pas polar. Jetul de apă caldă se deplasează la silfonul următor, iar jetul de apă rece,
deplasându-se în acelaşi sens, realizează răcirea şi în consecinţă contractarea silfonului
încălzit anterior, pregătindu-l astfel pentru o nouă acţionare. În modul descris, rotorul
motorului solar se deplasează pas cu pas, de la un silfon la altul.
Fig.2.3 Motor solar acţionat cu ajutorul apei calde.
Reprodus după [13]
Page 16
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
16
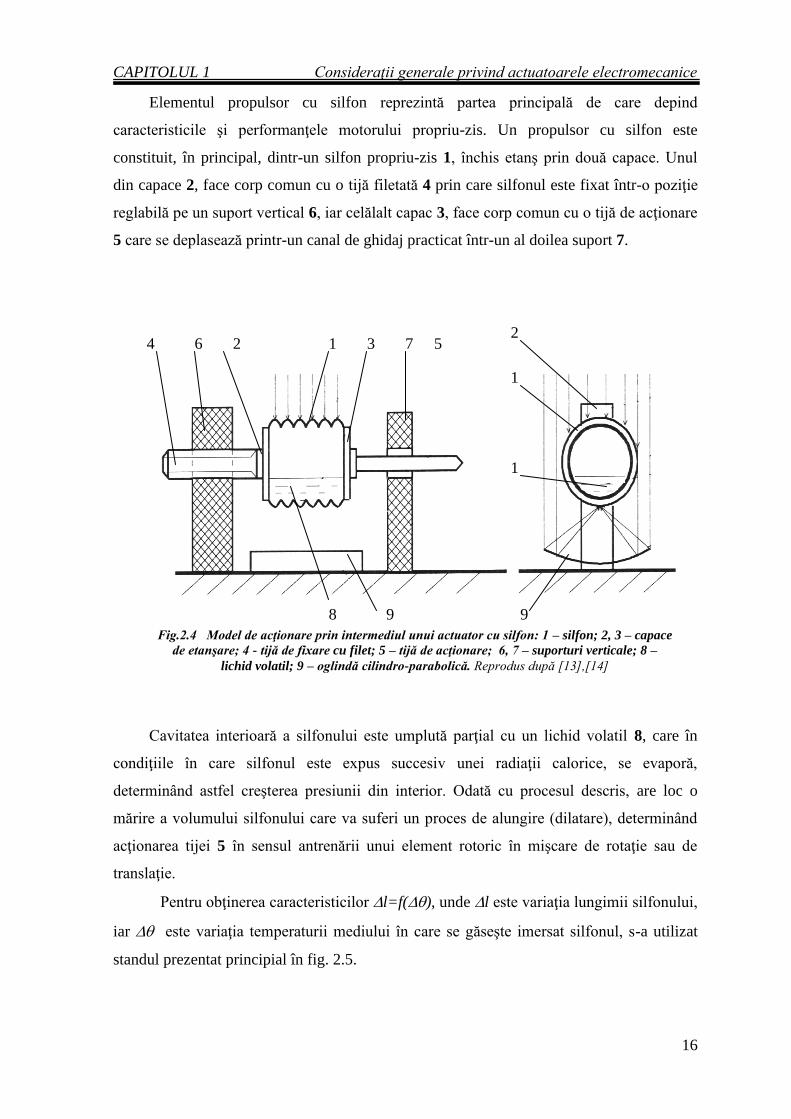
Elementul propulsor cu silfon reprezintă partea principală de care depind
caracteristicile şi performanţele motorului propriu-zis. Un propulsor cu silfon este
constituit, în principal, dintr-un silfon propriu-zis 1, închis etanş prin două capace. Unul
din capace 2, face corp comun cu o tijă filetată 4 prin care silfonul este fixat într-o poziţie
reglabilă pe un suport vertical 6, iar celălalt capac 3, face corp comun cu o tijă de acţionare
5 care se deplasează printr-un canal de ghidaj practicat într-un al doilea suport 7.
Cavitatea interioară a silfonului este umplută parţial cu un lichid volatil 8, care în
condiţiile în care silfonul este expus succesiv unei radiaţii calorice, se evaporă,
determinând astfel creşterea presiunii din interior. Odată cu procesul descris, are loc o
mărire a volumului silfonului care va suferi un proces de alungire (dilatare), determinând
acţionarea tijei 5 în sensul antrenării unui element rotoric în mişcare de rotaţie sau de
translaţie.
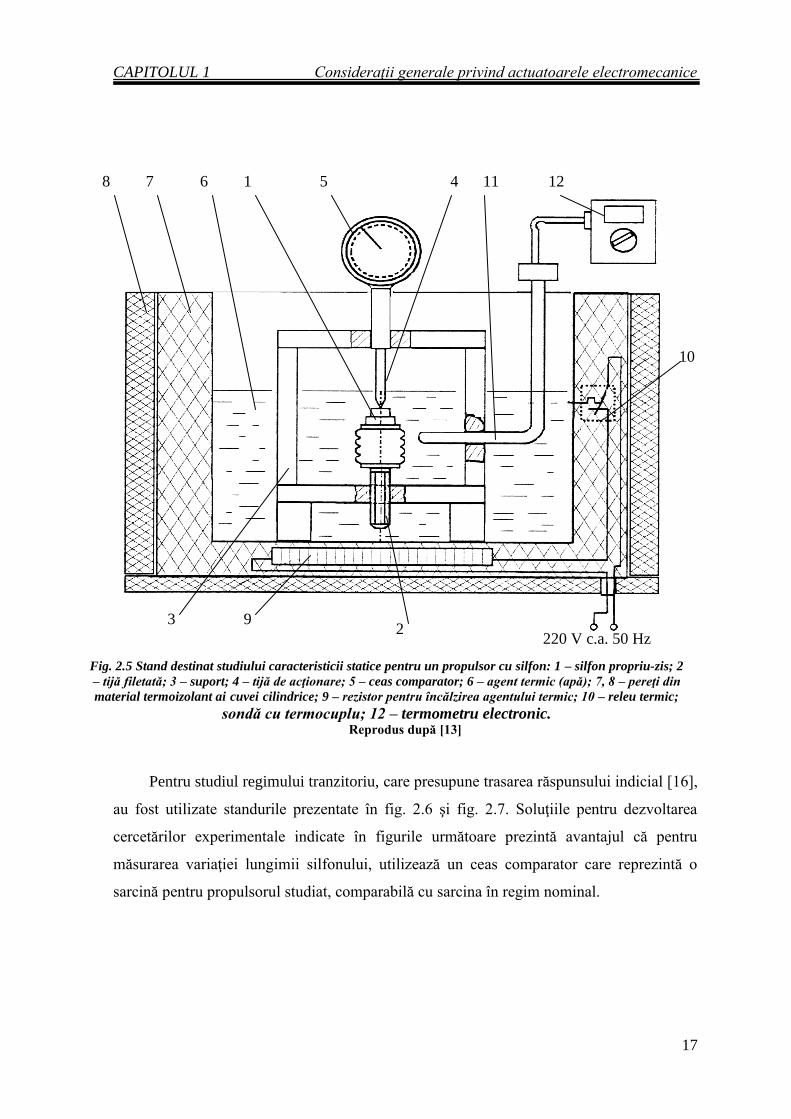
Pentru obţinerea caracteristicilor l=f(), unde l este variaţia lungimii silfonului,
iar este variaţia temperaturii mediului în care se găseşte imersat silfonul, s-a utilizat
standul prezentat principial în fig. 2.5.
1
1
2
1
3 2 7 6 4 5
8 9 9
Fig.2.4 Model de acţionare prin intermediul unui actuator cu silfon: 1 – silfon; 2, 3 – capace
de etanşare; 4 - tijă de fixare cu filet; 5 – tijă de acţionare; 6, 7 – suporturi verticale; 8 –
lichid volatil; 9 – oglindă cilindro-parabolică. Reprodus după [13],[14]
Page 17
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
17
Reprodus după [13]
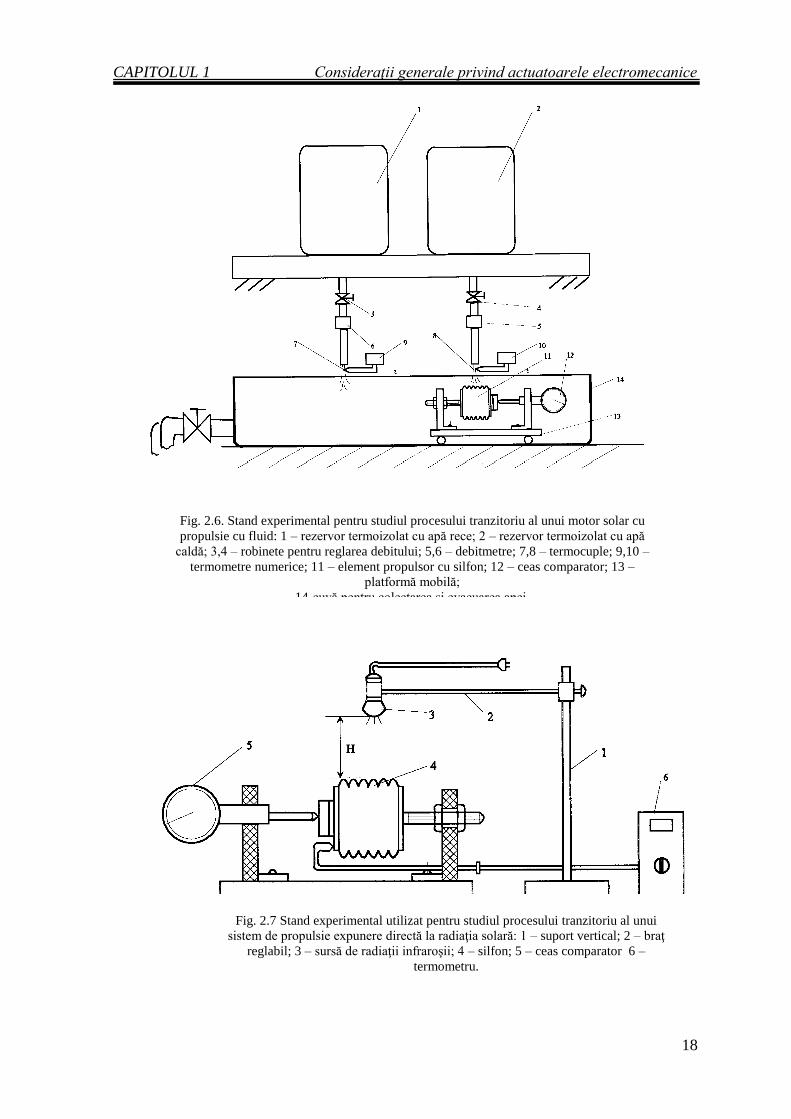
Pentru studiul regimului tranzitoriu, care presupune trasarea răspunsului indicial [16],
au fost utilizate standurile prezentate în fig. 2.6 şi fig. 2.7. Soluţiile pentru dezvoltarea
cercetărilor experimentale indicate în figurile următoare prezintă avantajul că pentru
măsurarea variaţiei lungimii silfonului, utilizează un ceas comparator care reprezintă o
sarcină pentru propulsorul studiat, comparabilă cu sarcina în regim nominal.
10
Fig. 2.5 Stand destinat studiului caracteristicii statice pentru un propulsor cu silfon: 1 – silfon propriu-zis; 2
– tijă filetată; 3 – suport; 4 – tijă de acţionare; 5 – ceas comparator; 6 – agent termic (apă); 7, 8 – pereţi din
material termoizolant ai cuvei cilindrice; 9 – rezistor pentru încălzirea agentului termic; 10 – releu termic;
sondă cu termocuplu; 12 – termometru electronic.
1 4 8 7 6 11 12 5
2 9 3
220 V c.a. 50 Hz
Page 18
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
18
Fig. 2.6. Stand experimental pentru studiul procesului tranzitoriu al unui motor solar cu
propulsie cu fluid: 1 – rezervor termoizolat cu apă rece; 2 – rezervor termoizolat cu apă
caldă; 3,4 – robinete pentru reglarea debitului; 5,6 – debitmetre; 7,8 – termocuple; 9,10 –
termometre numerice; 11 – element propulsor cu silfon; 12 – ceas comparator; 13 –
platformă mobilă;
14-cuvă pentru colectarea şi evacuarea apei.
Fig. 2.7 Stand experimental utilizat pentru studiul procesului tranzitoriu al unui
sistem de propulsie expunere directă la radiaţia solară: 1 – suport vertical; 2 – braţ
reglabil; 3 – sursă de radiaţii infraroşii; 4 – silfon; 5 – ceas comparator 6 –
termometru.
Page 19
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
19
2.2. Stadiul actual privind realizarea pe plan mondial a actuatoarelor electromecanice
cu lichid
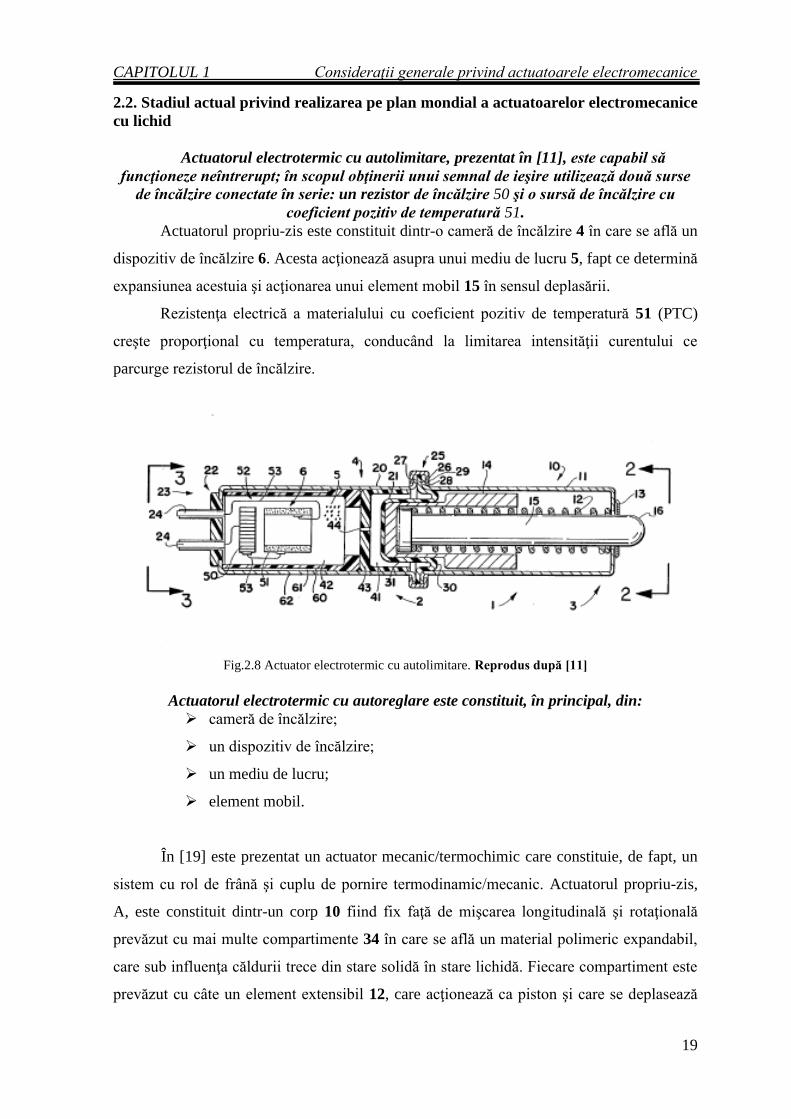
Actuatorul electrotermic cu autolimitare, prezentat în [11], este capabil să
funcţioneze neîntrerupt; în scopul obţinerii unui semnal de ieşire utilizează două surse
de încălzire conectate în serie: un rezistor de încălzire 50 şi o sursă de încălzire cu
coeficient pozitiv de temperatură 51.
Actuatorul propriu-zis este constituit dintr-o cameră de încălzire 4 în care se află un
dispozitiv de încălzire 6. Acesta acţionează asupra unui mediu de lucru 5, fapt ce determină
expansiunea acestuia şi acţionarea unui element mobil 15 în sensul deplasării.
Rezistenţa electrică a materialului cu coeficient pozitiv de temperatură 51 (PTC)
creşte proporţional cu temperatura, conducând la limitarea intensităţii curentului ce
parcurge rezistorul de încălzire.
Fig.2.8 Actuator electrotermic cu autolimitare. Reprodus după [11]
Actuatorul electrotermic cu autoreglare este constituit, în principal, din:
cameră de încălzire;
un dispozitiv de încălzire;
un mediu de lucru;
element mobil.
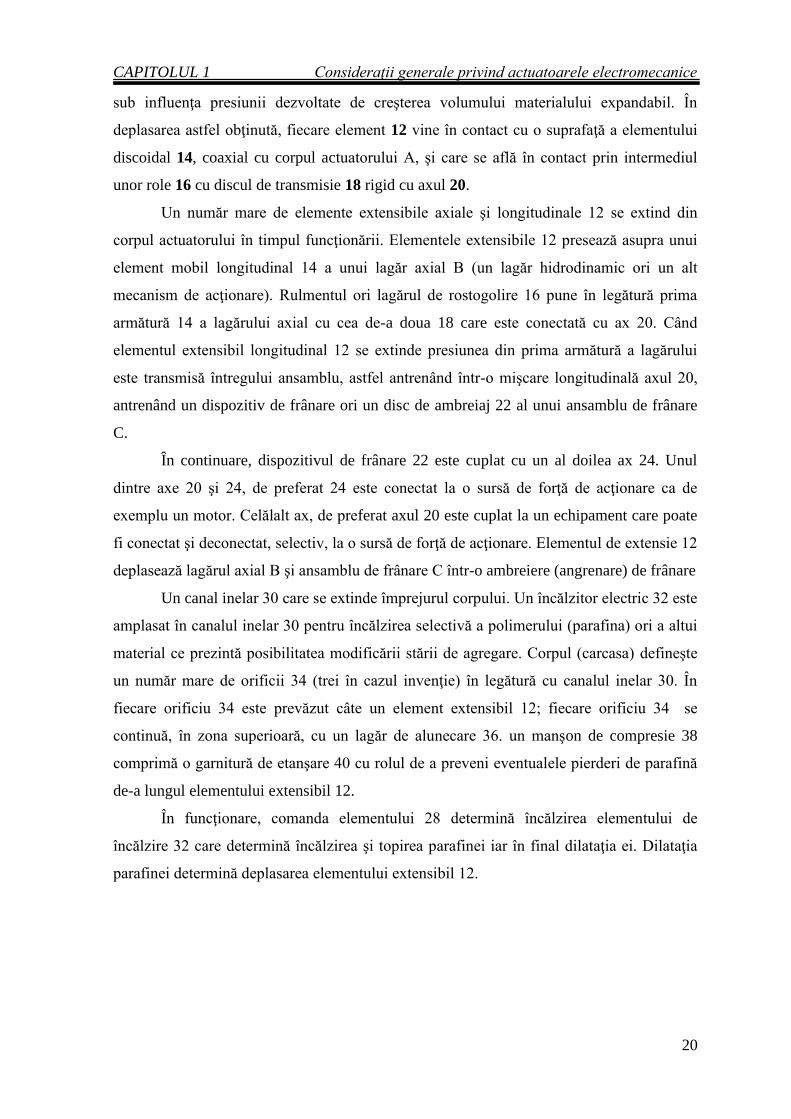
În [19] este prezentat un actuator mecanic/termochimic care constituie, de fapt, un
sistem cu rol de frână şi cuplu de pornire termodinamic/mecanic. Actuatorul propriu-zis,
A, este constituit dintr-un corp 10 fiind fix faţă de mişcarea longitudinală şi rotaţională
prevăzut cu mai multe compartimente 34 în care se află un material polimeric expandabil,
care sub influenţa căldurii trece din stare solidă în stare lichidă. Fiecare compartiment este
prevăzut cu câte un element extensibil 12, care acţionează ca piston şi care se deplasează
Page 20
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
20
sub influenţa presiunii dezvoltate de creşterea volumului materialului expandabil. În
deplasarea astfel obţinută, fiecare element 12 vine în contact cu o suprafaţă a elementului
discoidal 14, coaxial cu corpul actuatorului A, şi care se află în contact prin intermediul
unor role 16 cu discul de transmisie 18 rigid cu axul 20.
Un număr mare de elemente extensibile axiale şi longitudinale 12 se extind din
corpul actuatorului în timpul funcţionării. Elementele extensibile 12 presează asupra unui
element mobil longitudinal 14 a unui lagăr axial B (un lagăr hidrodinamic ori un alt
mecanism de acţionare). Rulmentul ori lagărul de rostogolire 16 pune în legătură prima
armătură 14 a lagărului axial cu cea de-a doua 18 care este conectată cu ax 20. Când
elementul extensibil longitudinal 12 se extinde presiunea din prima armătură a lagărului
este transmisă întregului ansamblu, astfel antrenând într-o mişcare longitudinală axul 20,
antrenând un dispozitiv de frânare ori un disc de ambreiaj 22 al unui ansamblu de frânare
C.
În continuare, dispozitivul de frânare 22 este cuplat cu un al doilea ax 24. Unul
dintre axe 20 şi 24, de preferat 24 este conectat la o sursă de forţă de acţionare ca de
exemplu un motor. Celălalt ax, de preferat axul 20 este cuplat la un echipament care poate
fi conectat şi deconectat, selectiv, la o sursă de forţă de acţionare. Elementul de extensie 12
deplasează lagărul axial B şi ansamblu de frânare C într-o ambreiere (angrenare) de frânare
Un canal inelar 30 care se extinde împrejurul corpului. Un încălzitor electric 32 este
amplasat în canalul inelar 30 pentru încălzirea selectivă a polimerului (parafina) ori a altui
material ce prezintă posibilitatea modificării stării de agregare. Corpul (carcasa) defineşte
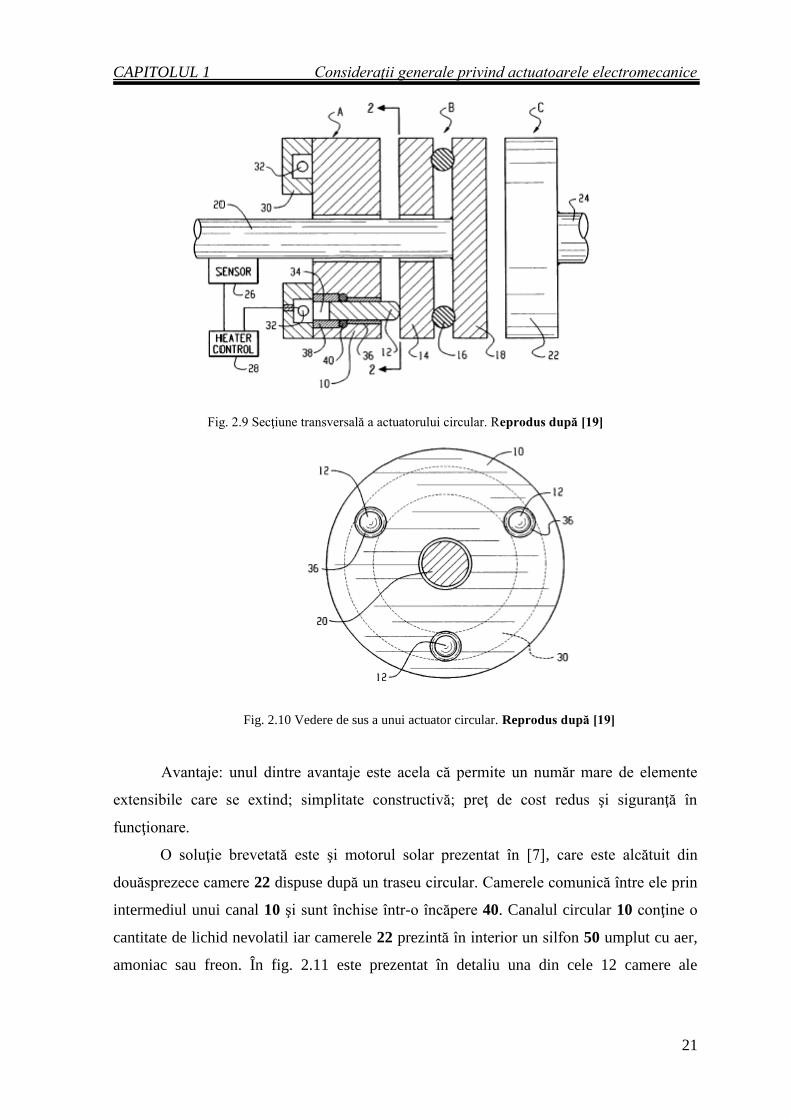
un număr mare de orificii 34 (trei în cazul invenţie) în legătură cu canalul inelar 30. În
fiecare orificiu 34 este prevăzut câte un element extensibil 12; fiecare orificiu 34 se
continuă, în zona superioară, cu un lagăr de alunecare 36. un manşon de compresie 38
comprimă o garnitură de etanşare 40 cu rolul de a preveni eventualele pierderi de parafină
de-a lungul elementului extensibil 12.
În funcţionare, comanda elementului 28 determină încălzirea elementului de
încălzire 32 care determină încălzirea şi topirea parafinei iar în final dilataţia ei. Dilataţia
parafinei determină deplasarea elementului extensibil 12.
Page 21
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
21
Fig. 2.9 Secţiune transversală a actuatorului circular. Reprodus după [19]
Fig. 2.10 Vedere de sus a unui actuator circular. Reprodus după [19]
Avantaje: unul dintre avantaje este acela că permite un număr mare de elemente
extensibile care se extind; simplitate constructivă; preţ de cost redus şi siguranţă în
funcţionare.
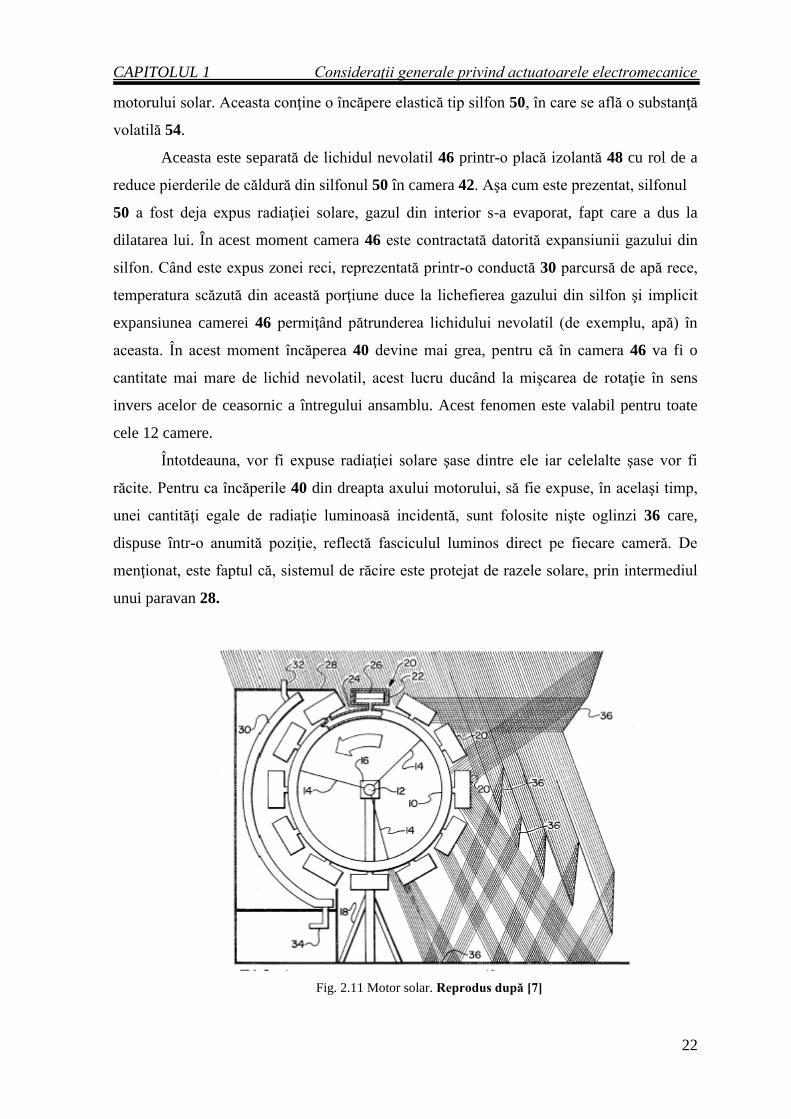
O soluţie brevetată este şi motorul solar prezentat în [7], care este alcătuit din
douăsprezece camere 22 dispuse după un traseu circular. Camerele comunică între ele prin
intermediul unui canal 10 şi sunt închise într-o încăpere 40. Canalul circular 10 conţine o
cantitate de lichid nevolatil iar camerele 22 prezintă în interior un silfon 50 umplut cu aer,
amoniac sau freon. În fig. 2.11 este prezentat în detaliu una din cele 12 camere ale
Page 22
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
22
motorului solar. Aceasta conţine o încăpere elastică tip silfon 50, în care se află o substanţă
volatilă 54.
Aceasta este separată de lichidul nevolatil 46 printr-o placă izolantă 48 cu rol de a
reduce pierderile de căldură din silfonul 50 în camera 42. Aşa cum este prezentat, silfonul
50 a fost deja expus radiaţiei solare, gazul din interior s-a evaporat, fapt care a dus la
dilatarea lui. În acest moment camera 46 este contractată datorită expansiunii gazului din
silfon. Când este expus zonei reci, reprezentată printr-o conductă 30 parcursă de apă rece,
temperatura scăzută din această porţiune duce la lichefierea gazului din silfon şi implicit
expansiunea camerei 46 permiţând pătrunderea lichidului nevolatil (de exemplu, apă) în
aceasta. În acest moment încăperea 40 devine mai grea, pentru că în camera 46 va fi o
cantitate mai mare de lichid nevolatil, acest lucru ducând la mişcarea de rotaţie în sens
invers acelor de ceasornic a întregului ansamblu. Acest fenomen este valabil pentru toate
cele 12 camere.
Întotdeauna, vor fi expuse radiaţiei solare şase dintre ele iar celelalte şase vor fi
răcite. Pentru ca încăperile 40 din dreapta axului motorului, să fie expuse, în acelaşi timp,
unei cantităţi egale de radiaţie luminoasă incidentă, sunt folosite nişte oglinzi 36 care,
dispuse într-o anumită poziţie, reflectă fasciculul luminos direct pe fiecare cameră. De
menţionat, este faptul că, sistemul de răcire este protejat de razele solare, prin intermediul
unui paravan 28.
Fig. 2.11 Motor solar. Reprodus după [7]
Page 23
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
23
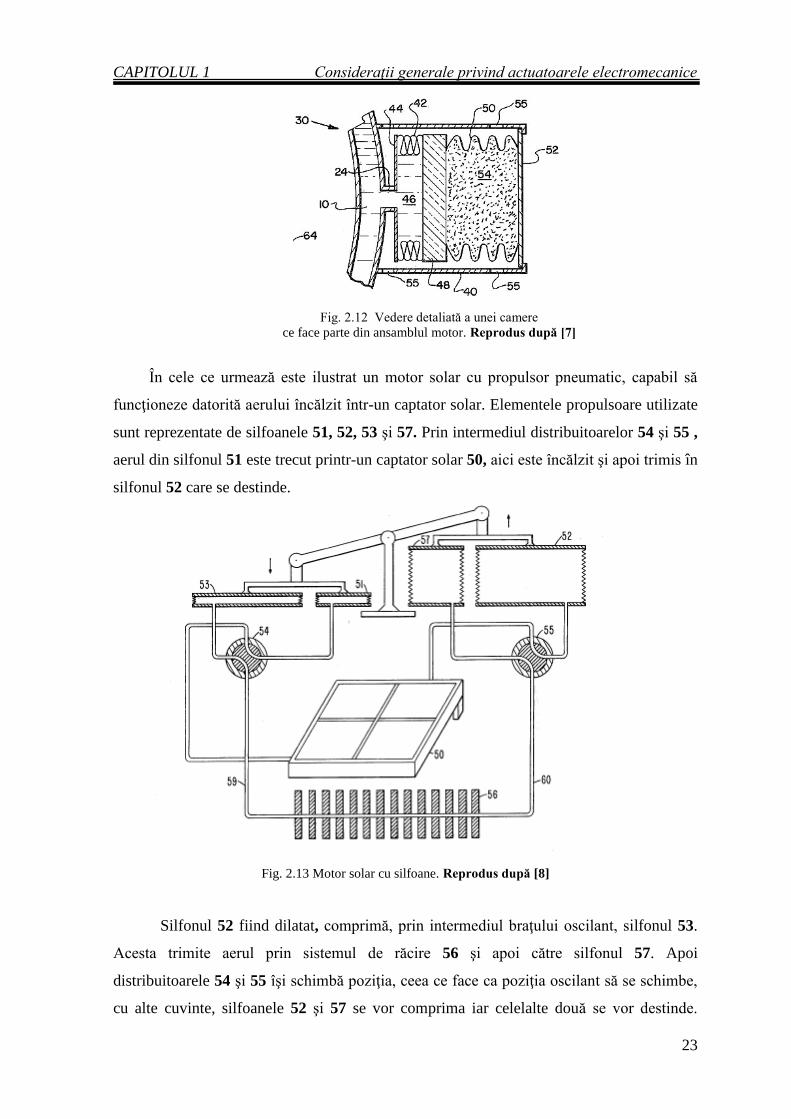
Fig. 2.12 Vedere detaliată a unei camere
ce face parte din ansamblul motor. Reprodus după [7]
În cele ce urmează este ilustrat un motor solar cu propulsor pneumatic, capabil să
funcţioneze datorită aerului încălzit într-un captator solar. Elementele propulsoare utilizate
sunt reprezentate de silfoanele 51, 52, 53 şi 57. Prin intermediul distribuitoarelor 54 şi 55 ,
aerul din silfonul 51 este trecut printr-un captator solar 50, aici este încălzit şi apoi trimis în
silfonul 52 care se destinde.
Fig. 2.13 Motor solar cu silfoane. Reprodus după [8]
Silfonul 52 fiind dilatat, comprimă, prin intermediul braţului oscilant, silfonul 53.
Acesta trimite aerul prin sistemul de răcire 56 şi apoi către silfonul 57. Apoi
distribuitoarele 54 şi 55 îşi schimbă poziţia, ceea ce face ca poziţia oscilant să se schimbe,
cu alte cuvinte, silfoanele 52 şi 57 se vor comprima iar celelalte două se vor destinde.
Page 24
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
24
Rezultă o mişcare oscilantă a braţului, care poate fi transformată în mişcare continuă prin
intermediul unei roţi “frei”[8].
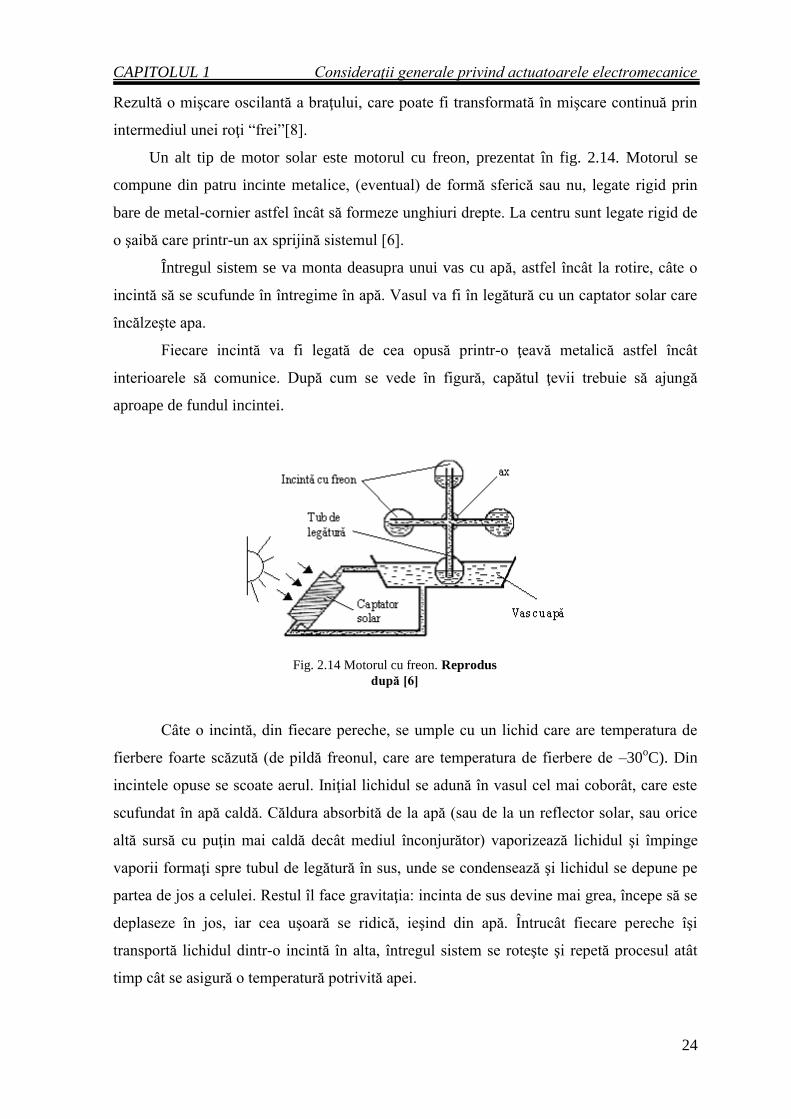
Un alt tip de motor solar este motorul cu freon, prezentat în fig. 2.14. Motorul se
compune din patru incinte metalice, (eventual) de formă sferică sau nu, legate rigid prin
bare de metal-cornier astfel încât să formeze unghiuri drepte. La centru sunt legate rigid de
o şaibă care printr-un ax sprijină sistemul [6].
Întregul sistem se va monta deasupra unui vas cu apă, astfel încât la rotire, câte o
incintă să se scufunde în întregime în apă. Vasul va fi în legătură cu un captator solar care
încălzeşte apa.
Fiecare incintă va fi legată de cea opusă printr-o ţeavă metalică astfel încât
interioarele să comunice. După cum se vede în figură, capătul ţevii trebuie să ajungă
aproape de fundul incintei.
Câte o incintă, din fiecare pereche, se umple cu un lichid care are temperatura de
fierbere foarte scăzută (de pildă freonul, care are temperatura de fierbere de –30oC). Din
incintele opuse se scoate aerul. Iniţial lichidul se adună în vasul cel mai coborât, care este
scufundat în apă caldă. Căldura absorbită de la apă (sau de la un reflector solar, sau orice
altă sursă cu puţin mai caldă decât mediul înconjurător) vaporizează lichidul şi împinge
vaporii formaţi spre tubul de legătură în sus, unde se condensează şi lichidul se depune pe
partea de jos a celulei. Restul îl face gravitaţia: incinta de sus devine mai grea, începe să se
deplaseze în jos, iar cea uşoară se ridică, ieşind din apă. Întrucât fiecare pereche îşi
transportă lichidul dintr-o incintă în alta, întregul sistem se roteşte şi repetă procesul atât
timp cât se asigură o temperatură potrivită apei.
Fig. 2.14 Motorul cu freon. Reprodus
după [6]
Page 25
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
25
Pe acest principiu poate fi construit un sistem mai complex, de pildă, cu şase
perechi de incinte. Motorul va avea o mişcare mai liniştită, iar realizat la dimensiuni destul
de mari ar putea avea calităţi remarcabile. Se estimează că un astfel de sistem de 14 perechi
de incinte (cu dimensiunile unei incinte de 30/120 cm) având diametrul de 12 m, efectuând
o rotaţie pe minut poate dezvolta o putere de circa 5,8 kW.
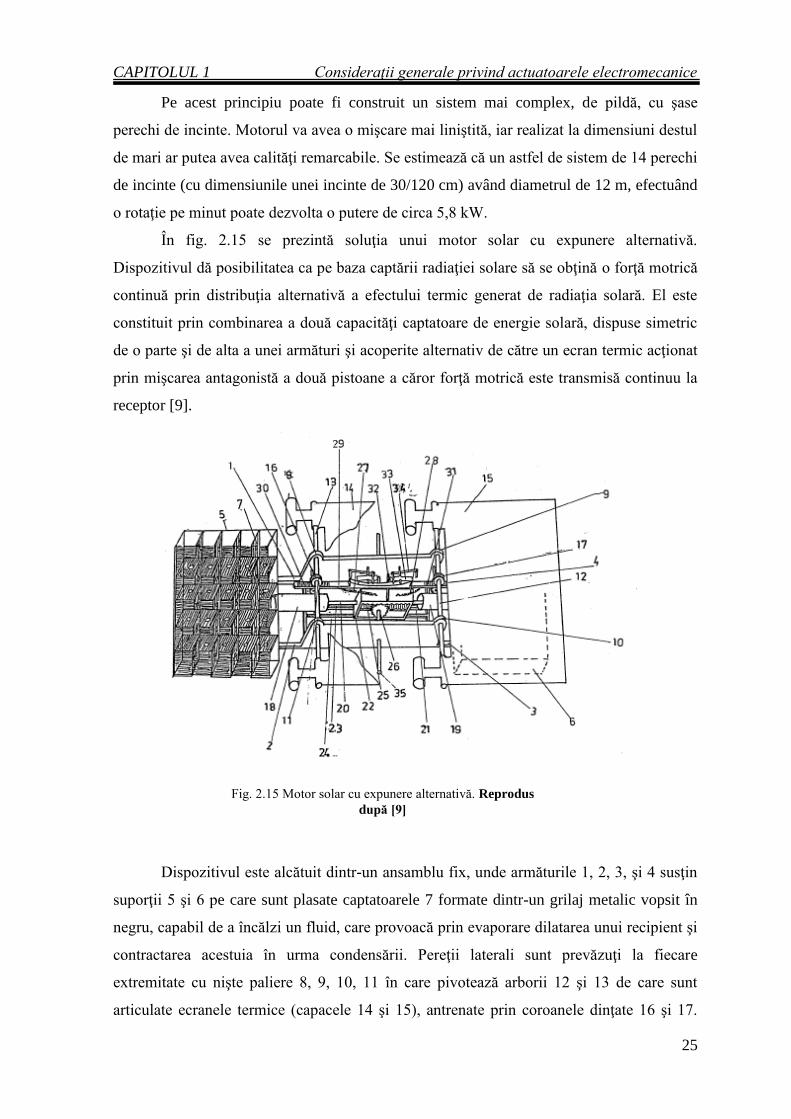
În fig. 2.15 se prezintă soluţia unui motor solar cu expunere alternativă.
Dispozitivul dă posibilitatea ca pe baza captării radiaţiei solare să se obţină o forţă motrică
continuă prin distribuţia alternativă a efectului termic generat de radiaţia solară. El este
constituit prin combinarea a două capacităţi captatoare de energie solară, dispuse simetric
de o parte şi de alta a unei armături şi acoperite alternativ de către un ecran termic acţionat
prin mişcarea antagonistă a două pistoane a căror forţă motrică este transmisă continuu la
receptor [9].
Dispozitivul este alcătuit dintr-un ansamblu fix, unde armăturile 1, 2, 3, şi 4 susţin
suporţii 5 şi 6 pe care sunt plasate captatoarele 7 formate dintr-un grilaj metalic vopsit în
negru, capabil de a încălzi un fluid, care provoacă prin evaporare dilatarea unui recipient şi
contractarea acestuia în urma condensării. Pereţii laterali sunt prevăzuţi la fiecare
extremitate cu nişte paliere 8, 9, 10, 11 în care pivotează arborii 12 şi 13 de care sunt
articulate ecranele termice (capacele 14 şi 15), antrenate prin coroanele dinţate 16 şi 17.
Fig. 2.15 Motor solar cu expunere alternativă. Reprodus
după [9]
Page 26
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
26
Fiecare suport este cuplat la poziţia mediană a pereţilor transversali la doi cilindri 18 şi 19.
În interiorul acestor cilindri culisează două pistoane solidare cu tijele 20 şi 21, care la
rândul lor sunt prevăzute cu două cremaliere 25, pe care angrenează roţile dinţate 26.
Pe această cutie 22 sunt legate două resoarte 27, 28 legate fiecare de extremităţile
unei tije 29 prevăzute cu clicheţii 29 şi 30, prin care se angrenează coroanele dinţate 16 şi
17. Dispozitivul de înclichetare alternativă este constituit din tija 32 solidară cu cutia
cremalierei 22 care împinge degetul de la piesa 34 şi face să basculeze clichetul 33.
Ecranele termice 14 şi 15 acoperă alternativ captatoarele solare 5 şi 6 astfel ca
atunci când încălzirea face să funcţioneze un cilindru 18, răcirea permite pistonului solidar
cu tija 21 să atingă fundul cilindrului 19.
Când unul din pistoane este propulsat, el deplasează mai întâi cutia 22 care
determină mai întâi rotaţia roţii 26 care la rândul ei antrenează arborele motor 36. În
continuare el întinde şi armează resortul 27 care va tracta tija 29, al cărui deget 32 va face
să basculeze cilindrul aferent tijei ce va antrena prin cremaliera 30 coroana dinţată 16 care
asigură rotaţia arborelui 13 şi deschiderea ecranului 14. Ciclul se desfăşoară într-o
alternanţă continuă, transformând mişcarea de translaţie într-o mişcare de rotaţie continuă a
arborelui 35.
Microactuatorul prezentat în [12] se bazează pe principiul generării (printr-o
metodă electrochimică) a unor gaze; în acest fel printr-o variaţie de volum se obţine un
lucru mecanic cu aplicaţii într-un domeniu vast de acţionare.
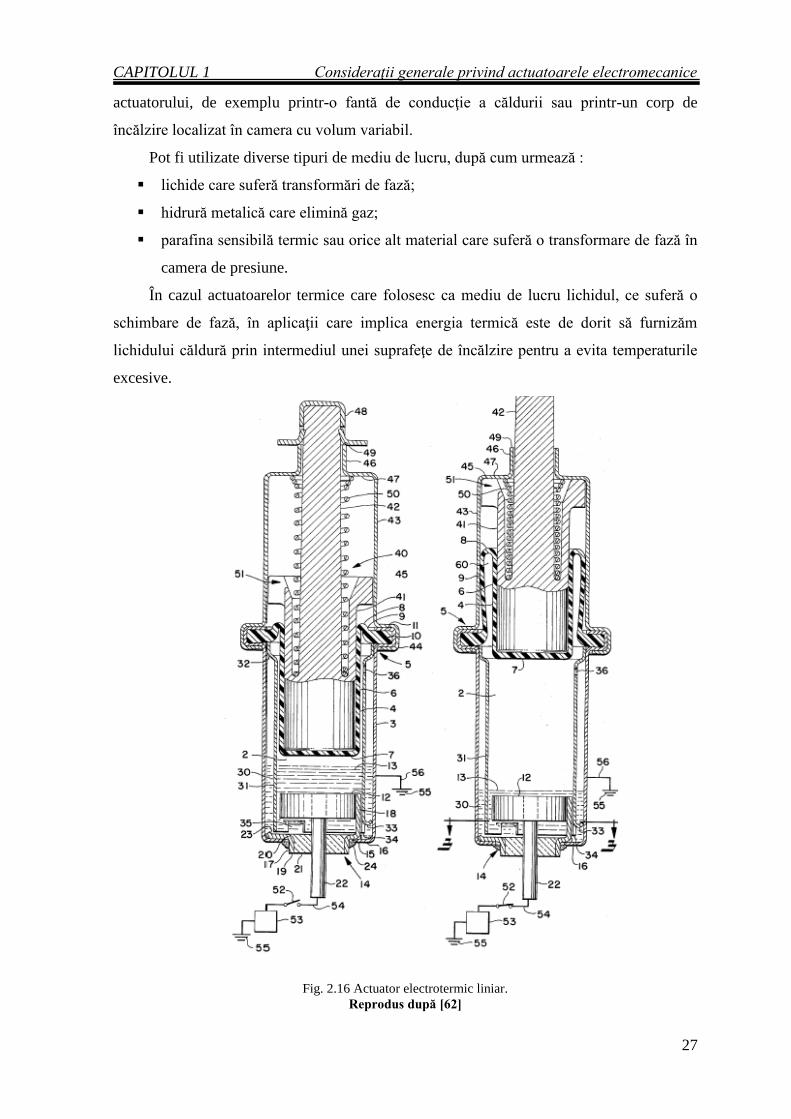
În [62] este prezentat un actuator electrotermic constituit, în principal, dintr-o
încăpere 2, în care se află un mediu de lucru lichid 13, definită de un corp principal 3 şi o
membrana extensibilă 4.
Un actuator cu fluid, în mod obişnuit, este constituit dintr-o cameră, cu volum
variabil, care se extinde şi se contractă ca răspuns la creşterea şi descreşterea presiunii
interioare.
Modificările de volum ale camerei pot fi convertite cu uşurinţă într-o mişcare liniară
realizând astfel un lucru mecanic a unui dispozitiv extern.
În literatura de specialitate sunt cunoscute actuatoare cu fluid la care, un fluid
exterior alimentează o incintă pentru creşterea şi descreşterea presiunii interioare; sunt şi
alte tipuri de actuatoare cu fluid în care camera este închisă etanş şi conţine un mediu de
lucru expansibil şi contractibil. În cazul celui din urmă tip de actuator cu fluid, modificările
din camera de presiune pot fi influenţate de energia mediului de lucru aşa cum este energia
termică sub formă de căldură. Energia termică poate fi folosită prin regiunea principală a
Page 27
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
27
actuatorului, de exemplu printr-o fantă de conducţie a căldurii sau printr-un corp de
încălzire localizat în camera cu volum variabil.
Pot fi utilizate diverse tipuri de mediu de lucru, după cum urmează :
lichide care suferă transformări de fază;
hidrură metalică care elimină gaz;
parafina sensibilă termic sau orice alt material care suferă o transformare de fază în
camera de presiune.
În cazul actuatoarelor termice care folosesc ca mediu de lucru lichidul, ce suferă o
schimbare de fază, în aplicaţii care implica energia termică este de dorit să furnizăm
lichidului căldură prin intermediul unei suprafeţe de încălzire pentru a evita temperaturile
excesive.
Fig. 2.16 Actuator electrotermic liniar.
Reprodus după [62]
Page 28
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
28
CONTRIBUŢII LA REALIZAREA ŞI EXPERIMENTAREA
UNOR ACTUATOARE ŞI MOTOARE SOLARE
3.1. Contribuţii la realizarea unor actuatoare solare
3.1.1. Actuator cu parafină.
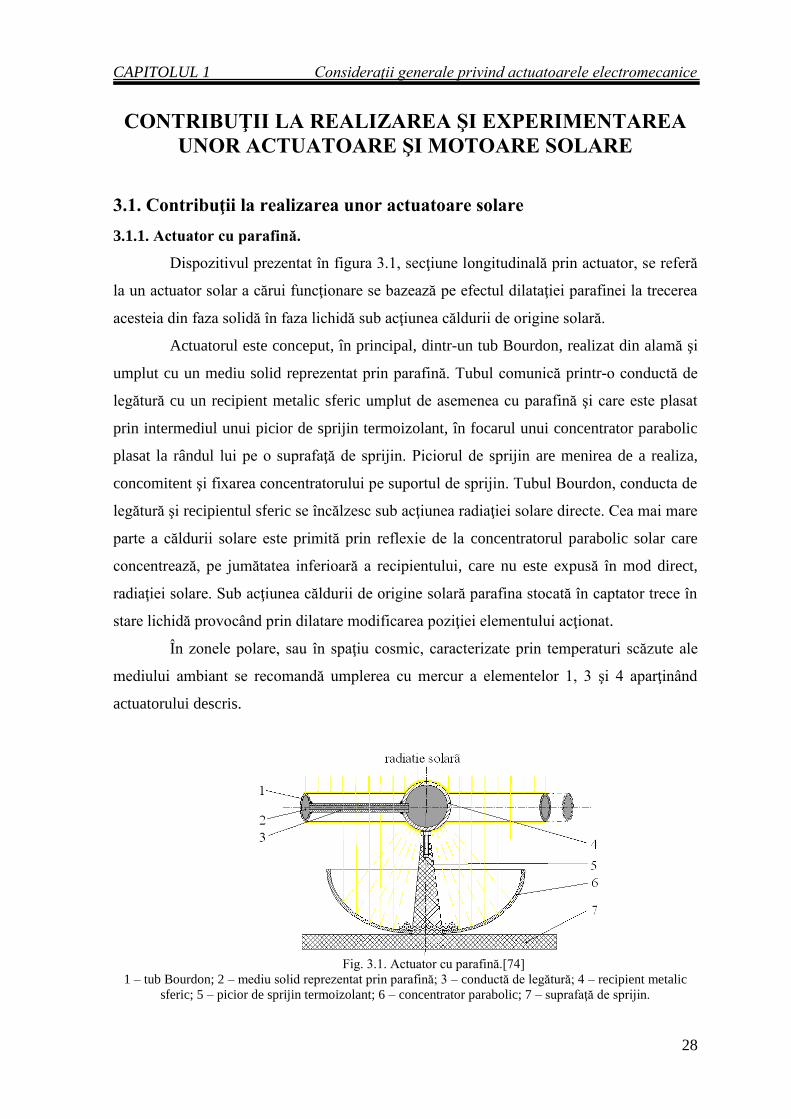
Dispozitivul prezentat în figura 3.1, secţiune longitudinală prin actuator, se referă
la un actuator solar a cărui funcţionare se bazează pe efectul dilataţiei parafinei la trecerea
acesteia din faza solidă în faza lichidă sub acţiunea căldurii de origine solară.
Actuatorul este conceput, în principal, dintr-un tub Bourdon, realizat din alamă şi
umplut cu un mediu solid reprezentat prin parafină. Tubul comunică printr-o conductă de
legătură cu un recipient metalic sferic umplut de asemenea cu parafină şi care este plasat
prin intermediul unui picior de sprijin termoizolant, în focarul unui concentrator parabolic
plasat la rândul lui pe o suprafaţă de sprijin. Piciorul de sprijin are menirea de a realiza,
concomitent şi fixarea concentratorului pe suportul de sprijin. Tubul Bourdon, conducta de
legătură şi recipientul sferic se încălzesc sub acţiunea radiaţiei solare directe. Cea mai mare
parte a căldurii solare este primită prin reflexie de la concentratorul parabolic solar care
concentrează, pe jumătatea inferioară a recipientului, care nu este expusă în mod direct,
radiaţiei solare. Sub acţiunea căldurii de origine solară parafina stocată în captator trece în
stare lichidă provocând prin dilatare modificarea poziţiei elementului acţionat.
În zonele polare, sau în spaţiu cosmic, caracterizate prin temperaturi scăzute ale
mediului ambiant se recomandă umplerea cu mercur a elementelor 1, 3 şi 4 aparţinând
actuatorului descris.
Fig. 3.1. Actuator cu parafină.[74]
1 – tub Bourdon; 2 – mediu solid reprezentat prin parafină; 3 – conductă de legătură; 4 – recipient metalic
sferic; 5 – picior de sprijin termoizolant; 6 – concentrator parabolic; 7 – suprafaţă de sprijin.
Page 29
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
29
Acest tip de actuator prezintă următoarele avantaje:
- simplitate constructivă;
- deplasare satisfăcătoare la extremităţile elementului mobil;
- utilizarea unei surse de energie neconvenţională ieftină şi practic nelimitată;
- siguranţă în funcţionare.
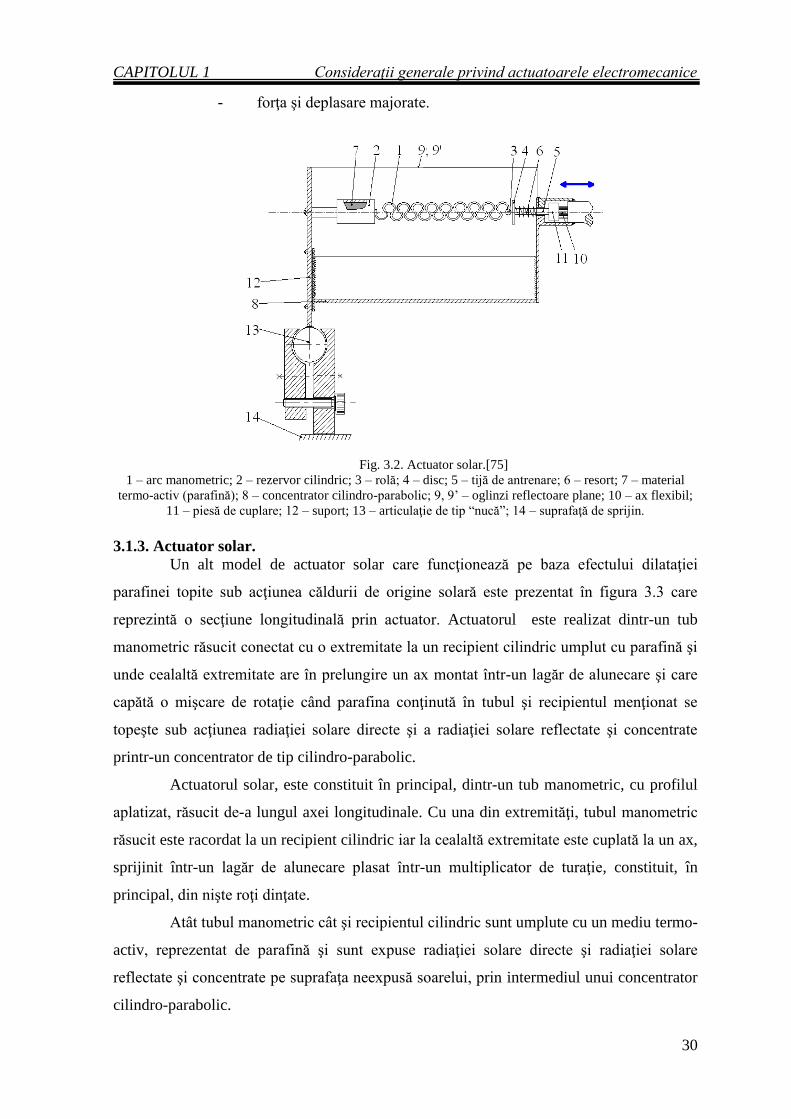
3.1.2. Actuator solar.
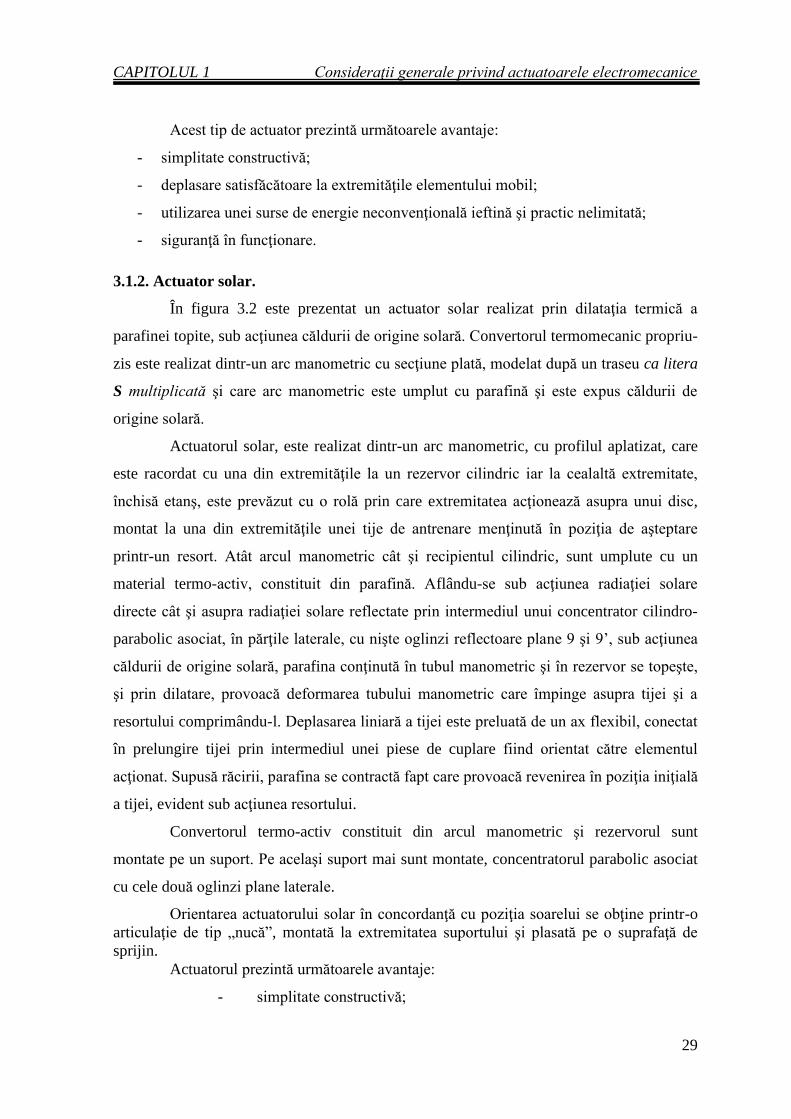
În figura 3.2 este prezentat un actuator solar realizat prin dilataţia termică a
parafinei topite, sub acţiunea căldurii de origine solară. Convertorul termomecanic propriu-
zis este realizat dintr-un arc manometric cu secţiune plată, modelat după un traseu ca litera
S multiplicată şi care arc manometric este umplut cu parafină şi este expus căldurii de
origine solară.
Actuatorul solar, este realizat dintr-un arc manometric, cu profilul aplatizat, care
este racordat cu una din extremităţile la un rezervor cilindric iar la cealaltă extremitate,
închisă etanş, este prevăzut cu o rolă prin care extremitatea acţionează asupra unui disc,
montat la una din extremităţile unei tije de antrenare menţinută în poziţia de aşteptare
printr-un resort. Atât arcul manometric cât şi recipientul cilindric, sunt umplute cu un
material termo-activ, constituit din parafină. Aflându-se sub acţiunea radiaţiei solare
directe cât şi asupra radiaţiei solare reflectate prin intermediul unui concentrator cilindro-
parabolic asociat, în părţile laterale, cu nişte oglinzi reflectoare plane 9 şi 9’, sub acţiunea
căldurii de origine solară, parafina conţinută în tubul manometric şi în rezervor se topeşte,
şi prin dilatare, provoacă deformarea tubului manometric care împinge asupra tijei şi a
resortului comprimându-l. Deplasarea liniară a tijei este preluată de un ax flexibil, conectat
în prelungire tijei prin intermediul unei piese de cuplare fiind orientat către elementul
acţionat. Supusă răcirii, parafina se contractă fapt care provoacă revenirea în poziţia iniţială
a tijei, evident sub acţiunea resortului.
Convertorul termo-activ constituit din arcul manometric şi rezervorul sunt
montate pe un suport. Pe acelaşi suport mai sunt montate, concentratorul parabolic asociat
cu cele două oglinzi plane laterale.
Orientarea actuatorului solar în concordanţă cu poziţia soarelui se obţine printr-o
articulaţie de tip „nucă”, montată la extremitatea suportului şi plasată pe o suprafaţă de
sprijin.
Actuatorul prezintă următoarele avantaje:
- simplitate constructivă;
Page 30
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
30
- forţa şi deplasare majorate.
Fig. 3.2. Actuator solar.[75]
1 – arc manometric; 2 – rezervor cilindric; 3 – rolă; 4 – disc; 5 – tijă de antrenare; 6 – resort; 7 – material
termo-activ (parafină); 8 – concentrator cilindro-parabolic; 9, 9’ – oglinzi reflectoare plane; 10 – ax flexibil;
11 – piesă de cuplare; 12 – suport; 13 – articulaţie de tip “nucă”; 14 – suprafaţă de sprijin.
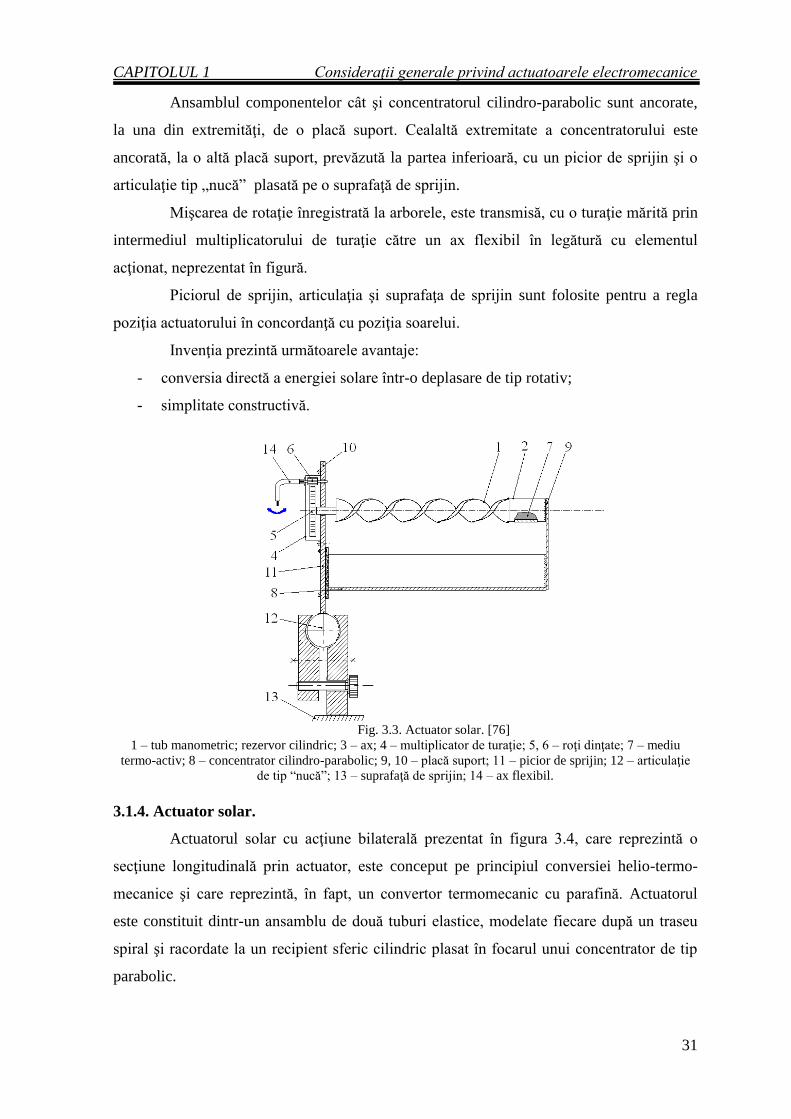
3.1.3. Actuator solar.
Un alt model de actuator solar care funcţionează pe baza efectului dilataţiei
parafinei topite sub acţiunea căldurii de origine solară este prezentat în figura 3.3 care
reprezintă o secţiune longitudinală prin actuator. Actuatorul este realizat dintr-un tub
manometric răsucit conectat cu o extremitate la un recipient cilindric umplut cu parafină şi
unde cealaltă extremitate are în prelungire un ax montat într-un lagăr de alunecare şi care
capătă o mişcare de rotaţie când parafina conţinută în tubul şi recipientul menţionat se
topeşte sub acţiunea radiaţiei solare directe şi a radiaţiei solare reflectate şi concentrate
printr-un concentrator de tip cilindro-parabolic.
Actuatorul solar, este constituit în principal, dintr-un tub manometric, cu profilul
aplatizat, răsucit de-a lungul axei longitudinale. Cu una din extremităţi, tubul manometric
răsucit este racordat la un recipient cilindric iar la cealaltă extremitate este cuplată la un ax,
sprijinit într-un lagăr de alunecare plasat într-un multiplicator de turaţie, constituit, în
principal, din nişte roţi dinţate.
Atât tubul manometric cât şi recipientul cilindric sunt umplute cu un mediu termo-
activ, reprezentat de parafină şi sunt expuse radiaţiei solare directe şi radiaţiei solare
reflectate şi concentrate pe suprafaţa neexpusă soarelui, prin intermediul unui concentrator
cilindro-parabolic.
Page 31
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
31
Ansamblul componentelor cât şi concentratorul cilindro-parabolic sunt ancorate,
la una din extremităţi, de o placă suport. Cealaltă extremitate a concentratorului este
ancorată, la o altă placă suport, prevăzută la partea inferioară, cu un picior de sprijin şi o
articulaţie tip „nucă” plasată pe o suprafaţă de sprijin.
Mişcarea de rotaţie înregistrată la arborele, este transmisă, cu o turaţie mărită prin
intermediul multiplicatorului de turaţie către un ax flexibil în legătură cu elementul
acţionat, neprezentat în figură.
Piciorul de sprijin, articulaţia şi suprafaţa de sprijin sunt folosite pentru a regla
poziţia actuatorului în concordanţă cu poziţia soarelui.
Invenţia prezintă următoarele avantaje:
- conversia directă a energiei solare într-o deplasare de tip rotativ;
- simplitate constructivă.
Fig. 3.3. Actuator solar. [76]
1 – tub manometric; rezervor cilindric; 3 – ax; 4 – multiplicator de turaţie; 5, 6 – roţi dinţate; 7 – mediu
termo-activ; 8 – concentrator cilindro-parabolic; 9, 10 – placă suport; 11 – picior de sprijin; 12 – articulaţie
de tip “nucă”; 13 – suprafaţă de sprijin; 14 – ax flexibil.
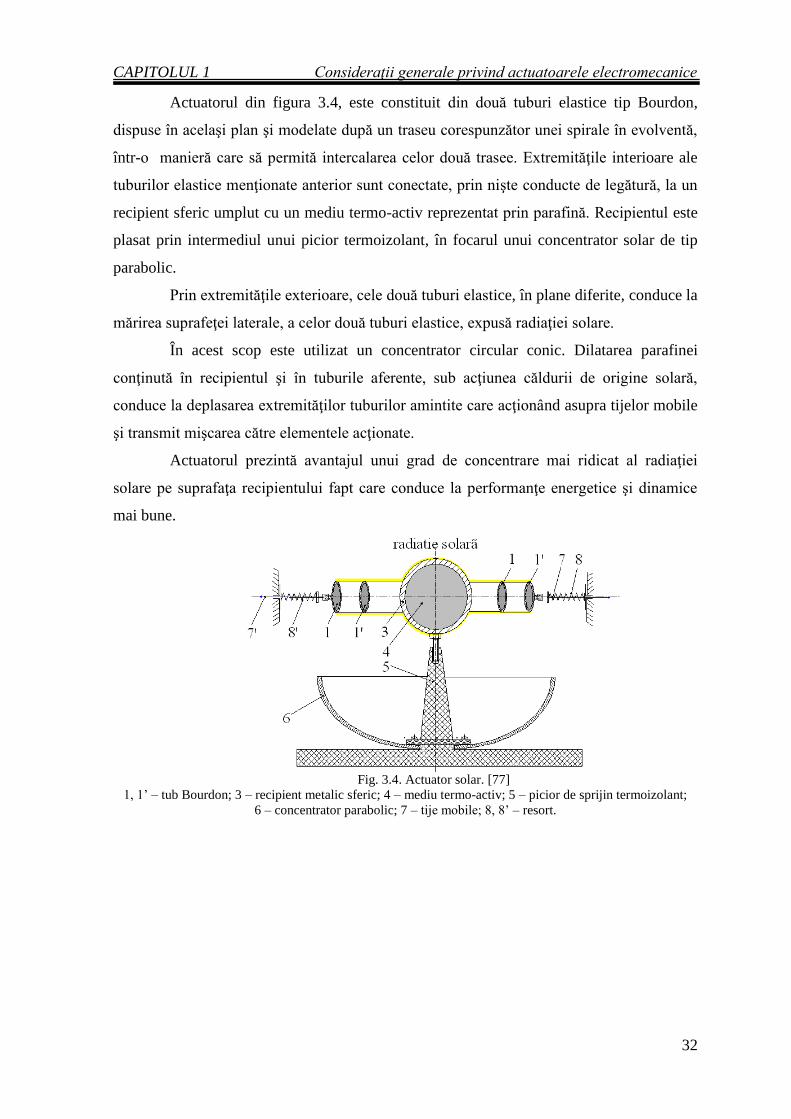
3.1.4. Actuator solar.
Actuatorul solar cu acţiune bilaterală prezentat în figura 3.4, care reprezintă o
secţiune longitudinală prin actuator, este conceput pe principiul conversiei helio-termo-
mecanice şi care reprezintă, în fapt, un convertor termomecanic cu parafină. Actuatorul
este constituit dintr-un ansamblu de două tuburi elastice, modelate fiecare după un traseu
spiral şi racordate la un recipient sferic cilindric plasat în focarul unui concentrator de tip
parabolic.
Page 32
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
32
Actuatorul din figura 3.4, este constituit din două tuburi elastice tip Bourdon,
dispuse în acelaşi plan şi modelate după un traseu corespunzător unei spirale în evolventă,
într-o manieră care să permită intercalarea celor două trasee. Extremităţile interioare ale
tuburilor elastice menţionate anterior sunt conectate, prin nişte conducte de legătură, la un
recipient sferic umplut cu un mediu termo-activ reprezentat prin parafină. Recipientul este
plasat prin intermediul unui picior termoizolant, în focarul unui concentrator solar de tip
parabolic.
Prin extremităţile exterioare, cele două tuburi elastice, în plane diferite, conduce la
mărirea suprafeţei laterale, a celor două tuburi elastice, expusă radiaţiei solare.
În acest scop este utilizat un concentrator circular conic. Dilatarea parafinei
conţinută în recipientul şi în tuburile aferente, sub acţiunea căldurii de origine solară,
conduce la deplasarea extremităţilor tuburilor amintite care acţionând asupra tijelor mobile
şi transmit mişcarea către elementele acţionate.
Actuatorul prezintă avantajul unui grad de concentrare mai ridicat al radiaţiei
solare pe suprafaţa recipientului fapt care conduce la performanţe energetice şi dinamice
mai bune.
Fig. 3.4. Actuator solar. [77]
1, 1’ – tub Bourdon; 3 – recipient metalic sferic; 4 – mediu termo-activ; 5 – picior de sprijin termoizolant;
6 – concentrator parabolic; 7 – tije mobile; 8, 8’ – resort.
Page 33
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
33
3.1.5. Actuator solar.
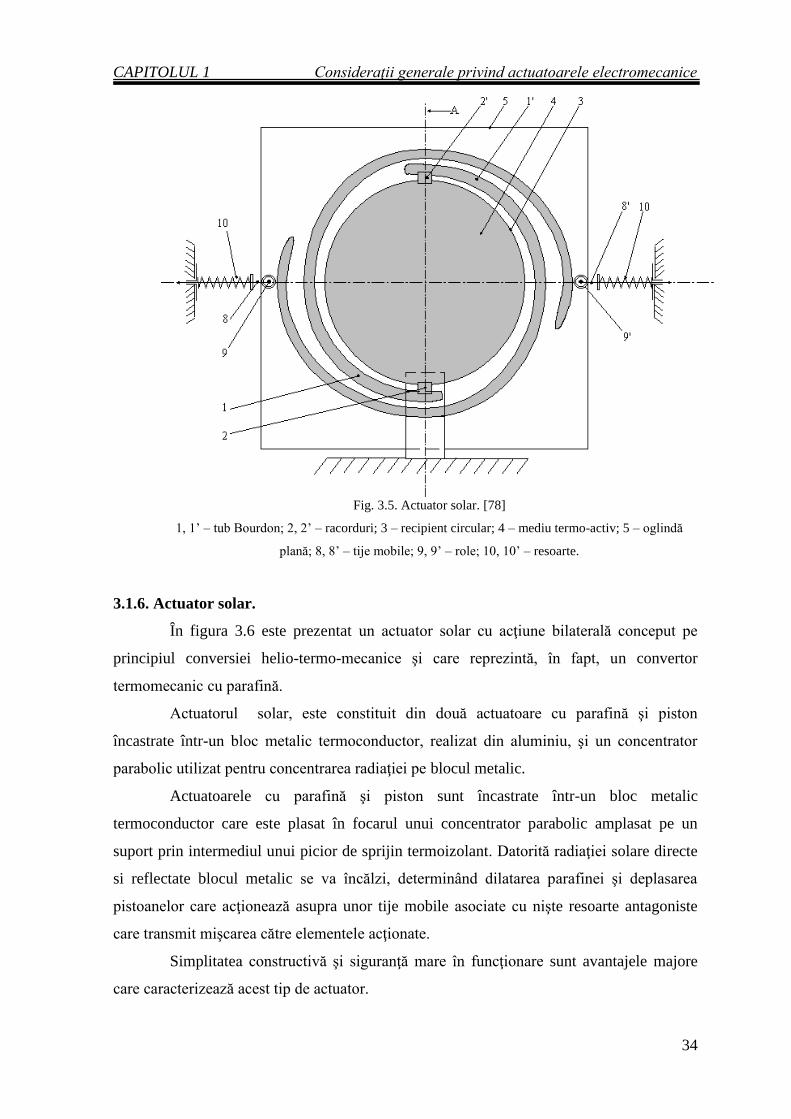
Dispozitivul prezentat în figura 3.5 se referă la un actuator conceput pe principiul
conversiei helio-termo-mecanice şi constituit, în principal, printr-un convertor
termomecanic cu parafină şi reprezintă o prezentare principială a construcţiei şi
funcţionării actuatorului.
Actuatorul este compus în principal dintr-un rezervor circular, cu formă plată, la
care sunt conectate două tuburi Bourdon care se întrepătrund, fiecare dintre ele fiind
modelat după un traseu spiral şi unde dilatarea parafinei conţinută în recipient şi tuburile
Bourdon aferente, se transformă într-o mişcare liniară transmisă la două posturi de lucru.
Actuatorul solar, este constituit în principal, din nişte tuburi elastice tip Bourdon
modelate fiecare, după un traseu spiral, într-o manieră care să permită intercalarea celor
două trasee. Extremităţile interioare ale celor două tuburi tip Bourdon sunt conectate, prin
nişte racorduri la recipientul circular plat, umplut cu un mediu termo-activ, reprezentat prin
parafină. Opţiunea pentru forma plată a recipientului este legată de necesitatea creşterii
suprafeţei în contact cu radiaţia solară reflectată. În acest scop, în părţile laterale, actuatorul
solar conform invenţiei este prevăzut cu nişte oglinzi plane înclinate prin care radiaţia
solară reflectată este dirijată către suprafeţele plane ale recipientului. Cele două oglinzi
înclinate sunt fixate de braţele unor suporturi ancorate la rândul lor, pe o suprafaţă de
sprijin. Pe această suprafaţă, prin intermediul aceloraşi suporturi, este ancorat şi ansamblul
constituit din recipientul şi cele două tuburi flexibile aferente. Dilataţia parafinei provoacă
deformarea celor două tuburi flexibile aferente, care, astfel, acţionează asupra unor tije
mobile, prin intermediul unor role montate la extremităţile lor.
Cu cealaltă extremitate, fiecare tijă, transmite mişcarea, rezultată în urma
conversiei, către cele două elemente acţionate nereprezentate în figurile amintite.
Pentru readucerea tijelor în poziţia iniţială, sunt folosite nişte resoarte.
Simplitatea constructivă, siguranţă în funcţionare şi acţiunea bilaterală asupra a
două posturi de lucru reprezintă avantajele majore ale acestui tip de actuator.
Page 34
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
34
Fig. 3.5. Actuator solar. [78]
1, 1’ – tub Bourdon; 2, 2’ – racorduri; 3 – recipient circular; 4 – mediu termo-activ; 5 – oglindă
plană; 8, 8’ – tije mobile; 9, 9’ – role; 10, 10’ – resoarte.
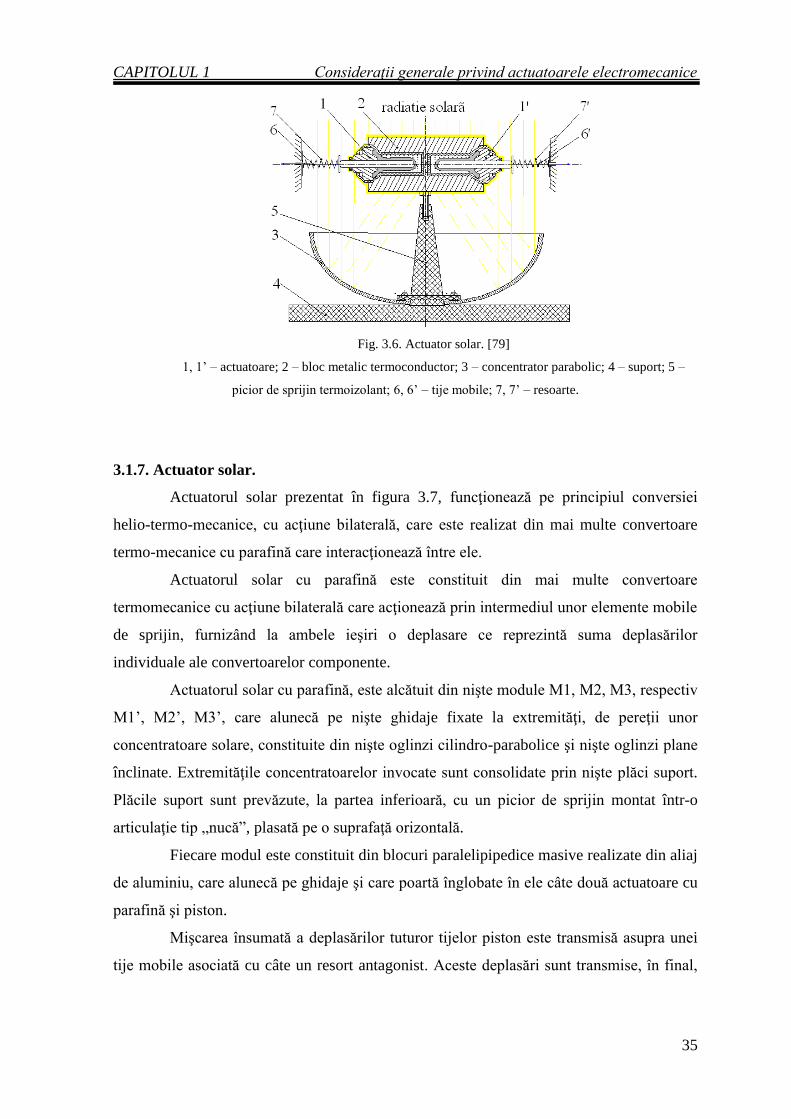
3.1.6. Actuator solar.
În figura 3.6 este prezentat un actuator solar cu acţiune bilaterală conceput pe
principiul conversiei helio-termo-mecanice şi care reprezintă, în fapt, un convertor
termomecanic cu parafină.
Actuatorul solar, este constituit din două actuatoare cu parafină şi piston
încastrate într-un bloc metalic termoconductor, realizat din aluminiu, şi un concentrator
parabolic utilizat pentru concentrarea radiaţiei pe blocul metalic.
Actuatoarele cu parafină şi piston sunt încastrate într-un bloc metalic
termoconductor care este plasat în focarul unui concentrator parabolic amplasat pe un
suport prin intermediul unui picior de sprijin termoizolant. Datorită radiaţiei solare directe
si reflectate blocul metalic se va încălzi, determinând dilatarea parafinei şi deplasarea
pistoanelor care acţionează asupra unor tije mobile asociate cu nişte resoarte antagoniste
care transmit mişcarea către elementele acţionate.
Simplitatea constructivă şi siguranţă mare în funcţionare sunt avantajele majore
care caracterizează acest tip de actuator.
Page 35
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
35
Fig. 3.6. Actuator solar. [79]
1, 1’ – actuatoare; 2 – bloc metalic termoconductor; 3 – concentrator parabolic; 4 – suport; 5 –
picior de sprijin termoizolant; 6, 6’ – tije mobile; 7, 7’ – resoarte.
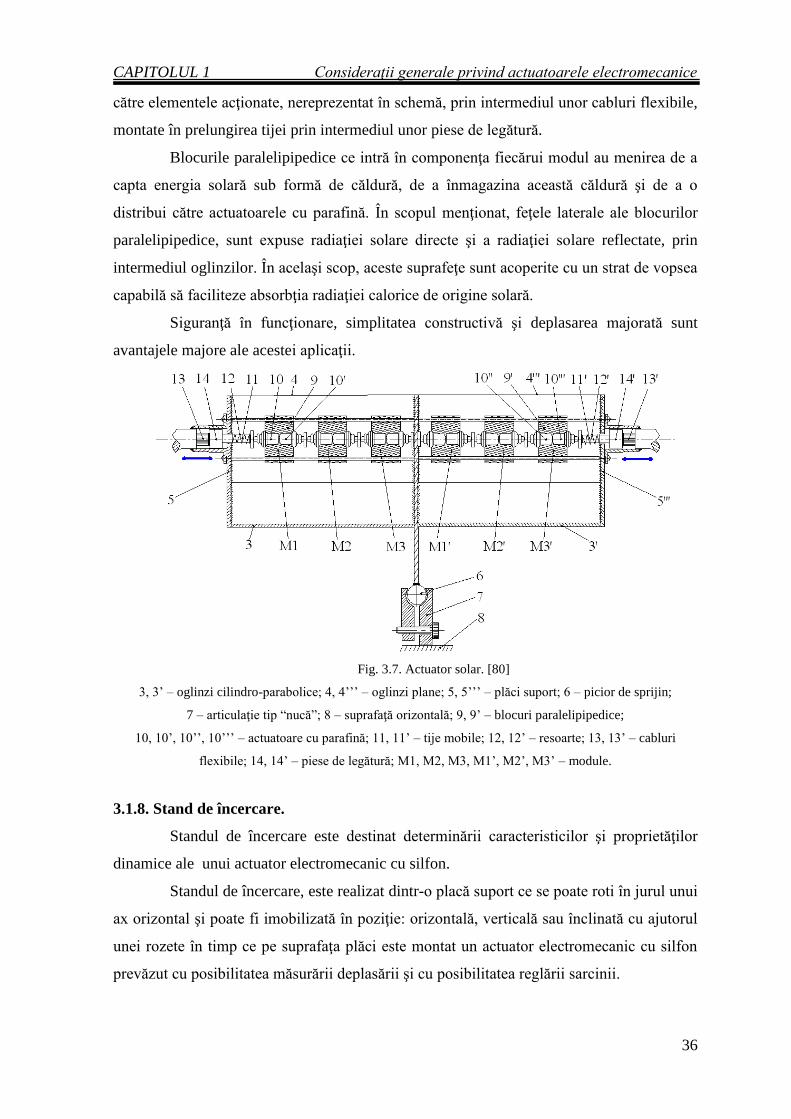
3.1.7. Actuator solar.
Actuatorul solar prezentat în figura 3.7, funcţionează pe principiul conversiei
helio-termo-mecanice, cu acţiune bilaterală, care este realizat din mai multe convertoare
termo-mecanice cu parafină care interacţionează între ele.
Actuatorul solar cu parafină este constituit din mai multe convertoare
termomecanice cu acţiune bilaterală care acţionează prin intermediul unor elemente mobile
de sprijin, furnizând la ambele ieşiri o deplasare ce reprezintă suma deplasărilor
individuale ale convertoarelor componente.
Actuatorul solar cu parafină, este alcătuit din nişte module M1, M2, M3, respectiv
M1’, M2’, M3’, care alunecă pe nişte ghidaje fixate la extremităţi, de pereţii unor
concentratoare solare, constituite din nişte oglinzi cilindro-parabolice şi nişte oglinzi plane
înclinate. Extremităţile concentratoarelor invocate sunt consolidate prin nişte plăci suport.
Plăcile suport sunt prevăzute, la partea inferioară, cu un picior de sprijin montat într-o
articulaţie tip „nucă”, plasată pe o suprafaţă orizontală.
Fiecare modul este constituit din blocuri paralelipipedice masive realizate din aliaj
de aluminiu, care alunecă pe ghidaje şi care poartă înglobate în ele câte două actuatoare cu
parafină şi piston.
Mişcarea însumată a deplasărilor tuturor tijelor piston este transmisă asupra unei
tije mobile asociată cu câte un resort antagonist. Aceste deplasări sunt transmise, în final,
Page 36
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
36
către elementele acţionate, nereprezentat în schemă, prin intermediul unor cabluri flexibile,
montate în prelungirea tijei prin intermediul unor piese de legătură.
Blocurile paralelipipedice ce intră în componenţa fiecărui modul au menirea de a
capta energia solară sub formă de căldură, de a înmagazina această căldură şi de a o
distribui către actuatoarele cu parafină. În scopul menţionat, feţele laterale ale blocurilor
paralelipipedice, sunt expuse radiaţiei solare directe şi a radiaţiei solare reflectate, prin
intermediul oglinzilor. În acelaşi scop, aceste suprafeţe sunt acoperite cu un strat de vopsea
capabilă să faciliteze absorbţia radiaţiei calorice de origine solară.
Siguranţă în funcţionare, simplitatea constructivă şi deplasarea majorată sunt
avantajele majore ale acestei aplicaţii.
Fig. 3.7. Actuator solar. [80]
3, 3’ – oglinzi cilindro-parabolice; 4, 4’’’ – oglinzi plane; 5, 5’’’ – plăci suport; 6 – picior de sprijin;
7 – articulaţie tip “nucă”; 8 – suprafaţă orizontală; 9, 9’ – blocuri paralelipipedice;
10, 10’, 10’’, 10’’’ – actuatoare cu parafină; 11, 11’ – tije mobile; 12, 12’ – resoarte; 13, 13’ – cabluri
flexibile; 14, 14’ – piese de legătură; M1, M2, M3, M1’, M2’, M3’ – module.
3.1.8. Stand de încercare.
Standul de încercare este destinat determinării caracteristicilor şi proprietăţilor
dinamice ale unui actuator electromecanic cu silfon.
Standul de încercare, este realizat dintr-o placă suport ce se poate roti în jurul unui
ax orizontal şi poate fi imobilizată în poziţie: orizontală, verticală sau înclinată cu ajutorul
unei rozete în timp ce pe suprafaţa plăci este montat un actuator electromecanic cu silfon
prevăzut cu posibilitatea măsurării deplasării şi cu posibilitatea reglării sarcinii.
Page 37
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
37
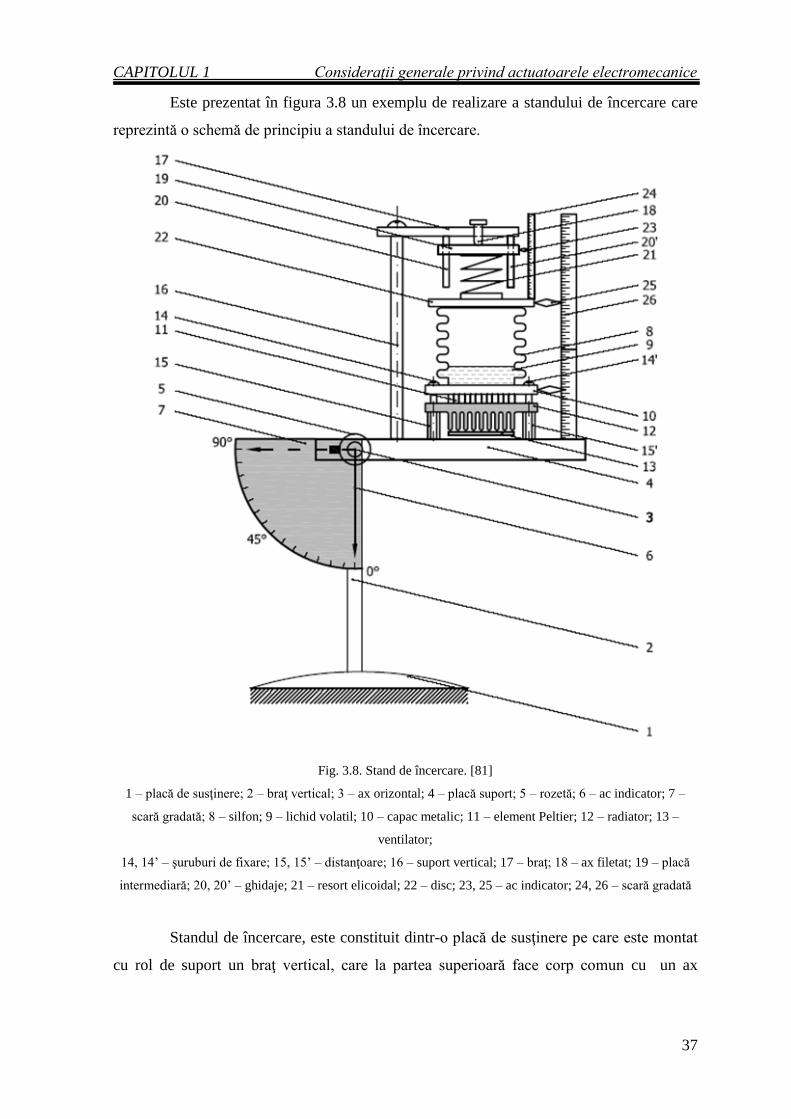
Este prezentat în figura 3.8 un exemplu de realizare a standului de încercare care
reprezintă o schemă de principiu a standului de încercare.
Fig. 3.8. Stand de încercare. [81]
1 – placă de susţinere; 2 – braţ vertical; 3 – ax orizontal; 4 – placă suport; 5 – rozetă; 6 – ac indicator; 7 –
scară gradată; 8 – silfon; 9 – lichid volatil; 10 – capac metalic; 11 – element Peltier; 12 – radiator; 13 –
ventilator;
14, 14’ – şuruburi de fixare; 15, 15’ – distanţoare; 16 – suport vertical; 17 – braţ; 18 – ax filetat; 19 – placă
intermediară; 20, 20’ – ghidaje; 21 – resort elicoidal; 22 – disc; 23, 25 – ac indicator; 24, 26 – scară gradată
Standul de încercare, este constituit dintr-o placă de susţinere pe care este montat
cu rol de suport un braţ vertical, care la partea superioară face corp comun cu un ax
Page 38
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
38
orizontal în care alunecă o placă suport ce poate fi imobilizată într-o anumită poziţie:
orizontală, verticală sau înclinată, prin intermediul unei rozete.
Controlul poziţiei plăcii se realizează cu ajutorul unui ac indicator, ce face corp
comun cu aceasta, şi care se deplasează în faţa unei scări gradată în grade sexazecimale.
Pe placa suport este fixat un actuator electromecanic cu lichid constituit dintr-un silfon
umplut parţial cu un lichid volatil care este închis la partea inferioară cu un capac metalic,
realizat din alamă, ce se găseşte în contact cu una din feţele unei baterii cu elemente Peltier
care pe cealaltă faţă se găseşte în contact cu un radiator cu aripioare, realizat din aluminiu,
ce este răcit de un curent de aer produs de un ventilator. Actuatorul astfel descris este fixat
de placa suport prin intermediul unor şuruburi de fixare şi a unor distanţoare.
Pe placa suport mai este fixat un alt suport vertical prevăzut la partea superioară
cu un braţ în care este montat un ax filetat care acţionează, prin intermediul unei plăcii
intermediare care alunecă pe nişte ghidaje, asupra unui resort elicoidal montat pe
extremitatea superioară a silfonului, cu ajutorul unui disc. Modificând tensiunea resorului
elicoidal se variază în mod corespunzător sarcina actuatorului. Valoarea sarcinii este
indicată prin intermediul unui ac indicator şi a unei scării gradate fixate pe discul.
Standul de încercare, conform invenţiei, permite şi determinarea experimentală a
alungirii actuatorului electromecanic cu silfon, prin intermediul unui ac indicator montat pe
discul şi cu ajutorul unei scări gradate amplasate pe placa.
Invenţia prezintă următoarele avantaje: simplitate constructivă şi preţ de cost
redus.
În altă variantă constructivă, prezentată în figura 3.9, este reprezentată schema
principială a standului de încercare.
Standul de încercare, este constituit dintr-o placă de susţinere pe care este montat,
cu rol de suport, un braţ vertical, ce face la partea superioară, corp comun cu un ax
orizontal, în care alunecă o placă suport, ce poate fi imobilizată prin intermediul unei
rozete într-o anumită poziţie: orizontală, verticală sau înclinată. Controlul poziţiei plăcii, se
realizează cu ajutorul unui ac indicator, ce face corp comun cu placa, şi care se deplasează
în faţa unei scale, gradată, în grade sexagesimale.
Pe placa, prin intermediul unor tije filetate este fixat un dispozitiv care modelează
funcţionarea unui actuator electromecanic cu lichid volatil. Dispozitivul amintit, este
constituit dintr-un cilindru transparent, gradat în cm³ şi realizat din material plastic, umplut
parţial cu o cantitate de lichid volatil. Cilindrul este închis la partea superioară, cu un
piston mobil, deplasabil sub acţiunea presiunii lichidului vaporizat, etanşat în raport cu
Page 39
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
39
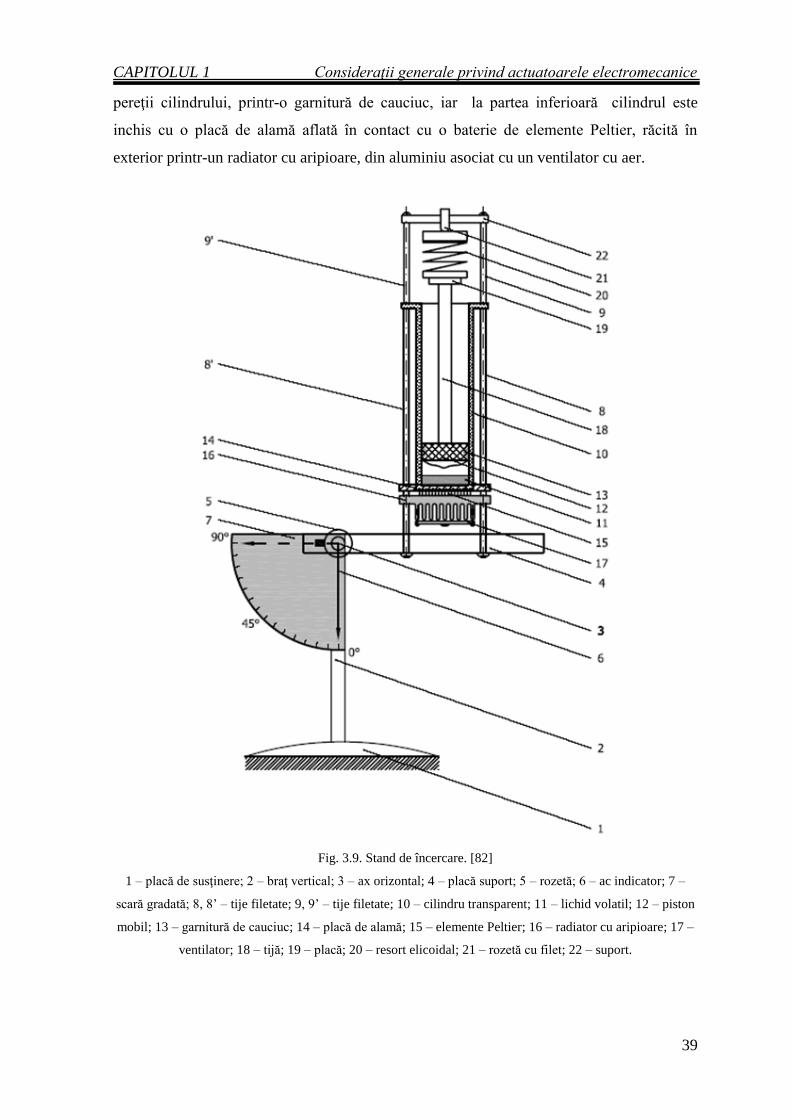
pereţii cilindrului, printr-o garnitură de cauciuc, iar la partea inferioară cilindrul este
inchis cu o placă de alamă aflată în contact cu o baterie de elemente Peltier, răcită în
exterior printr-un radiator cu aripioare, din aluminiu asociat cu un ventilator cu aer.
Fig. 3.9. Stand de încercare. [82]
1 – placă de susţinere; 2 – braţ vertical; 3 – ax orizontal; 4 – placă suport; 5 – rozetă; 6 – ac indicator; 7 –
scară gradată; 8, 8’ – tije filetate; 9, 9’ – tije filetate; 10 – cilindru transparent; 11 – lichid volatil; 12 – piston
mobil; 13 – garnitură de cauciuc; 14 – placă de alamă; 15 – elemente Peltier; 16 – radiator cu aripioare; 17 –
ventilator; 18 – tijă; 19 – placă; 20 – resort elicoidal; 21 – rozetă cu filet; 22 – suport.
Page 40
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
40
Pentru vizualizarea fenomenelor de care depinde evoluţia regimului tranzitoriu, la
functionarea în sarcină a dispozitivului care modelează funcţionarea unui actuator
electromecanic cu lichid volatil, pistonul face corp comun cu o tijă, care are ataşată la
partea superioară o placă, asupra căreia acţionează un resort elicoidal, comprimat cu
ajutorul unei rozete cu filet, ce se deplasează într-un suport.
Invenţia prezintă următoarele avantaje:
- oferă posibilitate vizualizării fenomenelor de care depinde evoluţia regimului
tranzitoriu a unui actuator electromecanic cu lichid volatil;
- prezintă simplitate constructivă;
- prezintă un preţ de cost redus.
Page 41
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
41
3.2. Contribuţii privind realizarea unor motoare solare
3.2.1. Motor solar.
Dispozitivul prezentat în figura 3.10 se referă la un motor solar cu rotor cu
excentric acţionat, pas cu pas, prin intermediul unor actuatoare cu parafină. Figura
reprezintă o secţiune longitudinală prin motorul solar. Motorul solar este realizat, în
principal din patru actuatoare solare cu parafină, decalate la 900, fiecare fiind constituit din
câte un tub Bourdon realizat din alamă, umplut cu parafină, plasat în focarul unui
concentrator solar de tip parabolic şi care actuatoare acţionează succesiv prin intermediul
unui rulment cu bile, montat pe circumferinţa unui rotor excentric.
Ca orice motor rotativ şi motorul solar prezentat este alcătuit dintr-o parte fixă
numită stator şi o parte mobilă numită rotor. Statorul este constituit din nişte actuatoare cu
parafină 1A, 1B, 1C şi 1D, dispuse după un traseu circular şi decalate între ele cu câte π/2
radiani. Fiecare actuator este constituit din câte un tub Bourbon, cu secţiune plată, realizat
din alamă şi umplut cu un mediu solid, reprezentat prin parafină aflată în stare solidă, la
temperatura mediului ambiant. Tubul Bourdon este racordat prin intermediul unei conducte
de legătură la un rezervor sferic din alamă, umplut de asemenea cu parafină. Rezervorul
este plasat prin intermediul unui suport de sprijin, în focarul unui concentrator de tip
parabolic, fixat prin intermediul aceluiaşi suport de sprijin pe o placă suport. Cele patru
actuatoare cu parafină 1A, 1B, 1C şi 1D sunt expuse succesiv radiaţiei solare prin
intermediul unui disc obturator cu fantă, montat solidar cu rotorul motorului solar analizat.
Când accesul radiaţiei solare către unul din cele patru actuatoare este deschis prin
poziţia convenabilă a fantei „f” a discului obturator, parafina se topeşte fapt care conduce
la deformarea, către rotor, a tubului Bourdon care împinge rotorul cu excentric
determinând deplasarea rotorului cu un pas. Discul obturator deschide prin poziţia
corespunzătoare a fantei „f” accesul către următorul actuator care este activat termic în
aceeaşi manieră prezentată în cazul precedent.
Rotorul motorului este constituit, în principal dintr-un ax, asociat cu un dispozitiv
unisens. Axul este fixat într-o poziţie excentrică un butuc, prevăzut pe conturul circular
exterior cu un rulment radial cu bile, prin care mişcarea liniară primită de la actuatorul cu
parafină este convertită într-o mişcare de rotaţie la arbore.
Page 42
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
42
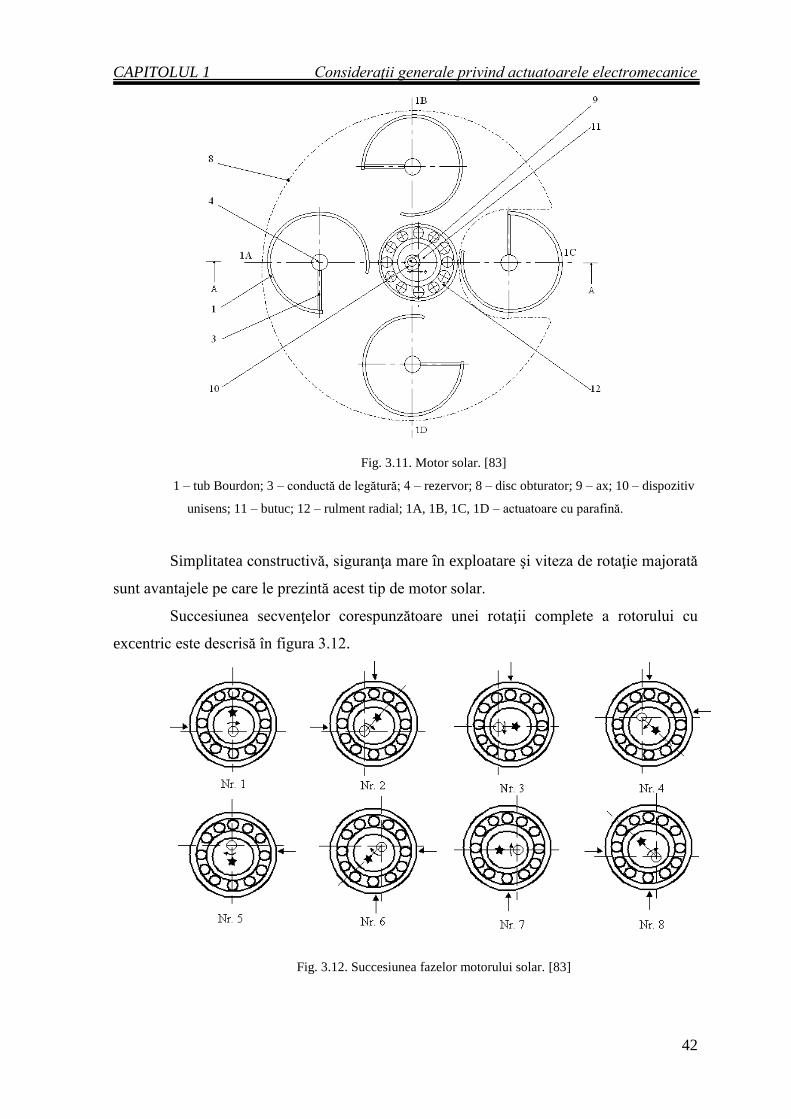
Fig. 3.11. Motor solar. [83]
1 – tub Bourdon; 3 – conductă de legătură; 4 – rezervor; 8 – disc obturator; 9 – ax; 10 – dispozitiv
unisens; 11 – butuc; 12 – rulment radial; 1A, 1B, 1C, 1D – actuatoare cu parafină.
Simplitatea constructivă, siguranţa mare în exploatare şi viteza de rotaţie majorată
sunt avantajele pe care le prezintă acest tip de motor solar.
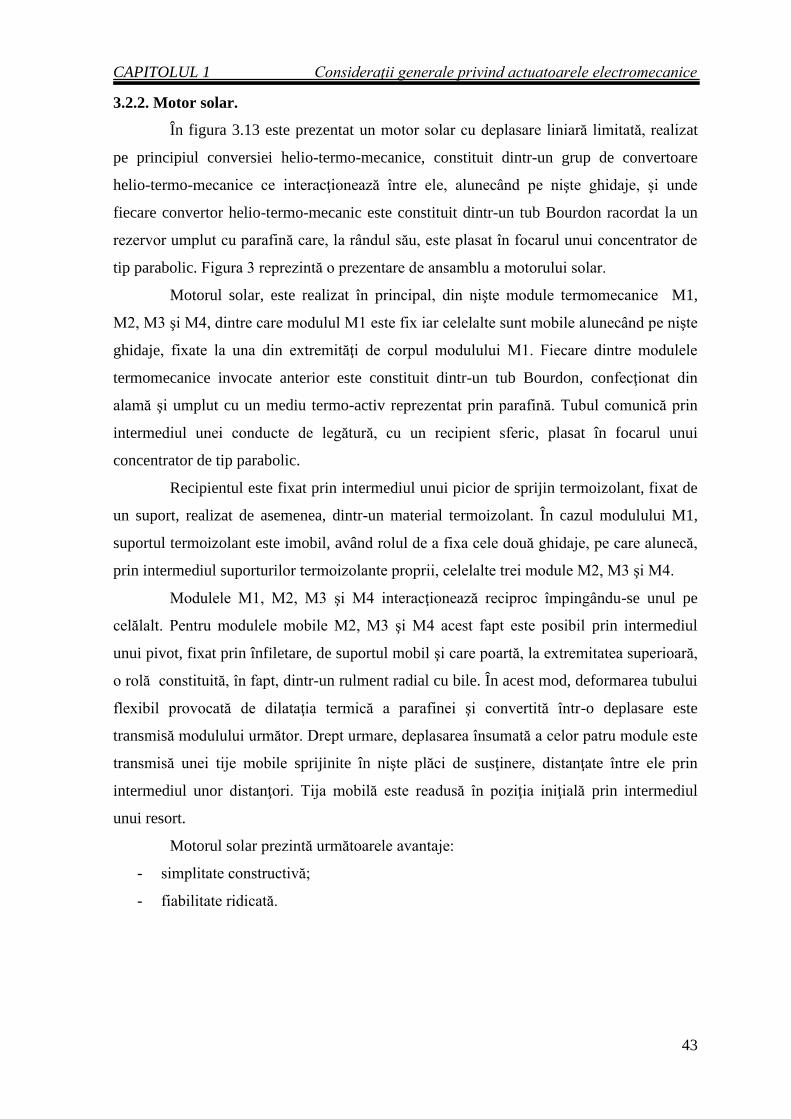
Succesiunea secvenţelor corespunzătoare unei rotaţii complete a rotorului cu
excentric este descrisă în figura 3.12.
Fig. 3.12. Succesiunea fazelor motorului solar. [83]
Page 43
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
43
3.2.2. Motor solar.
În figura 3.13 este prezentat un motor solar cu deplasare liniară limitată, realizat
pe principiul conversiei helio-termo-mecanice, constituit dintr-un grup de convertoare
helio-termo-mecanice ce interacţionează între ele, alunecând pe nişte ghidaje, şi unde
fiecare convertor helio-termo-mecanic este constituit dintr-un tub Bourdon racordat la un
rezervor umplut cu parafină care, la rândul său, este plasat în focarul unui concentrator de
tip parabolic. Figura 3 reprezintă o prezentare de ansamblu a motorului solar.
Motorul solar, este realizat în principal, din nişte module termomecanice M1,
M2, M3 şi M4, dintre care modulul M1 este fix iar celelalte sunt mobile alunecând pe nişte
ghidaje, fixate la una din extremităţi de corpul modulului M1. Fiecare dintre modulele
termomecanice invocate anterior este constituit dintr-un tub Bourdon, confecţionat din
alamă şi umplut cu un mediu termo-activ reprezentat prin parafină. Tubul comunică prin
intermediul unei conducte de legătură, cu un recipient sferic, plasat în focarul unui
concentrator de tip parabolic.
Recipientul este fixat prin intermediul unui picior de sprijin termoizolant, fixat de
un suport, realizat de asemenea, dintr-un material termoizolant. În cazul modulului M1,
suportul termoizolant este imobil, având rolul de a fixa cele două ghidaje, pe care alunecă,
prin intermediul suporturilor termoizolante proprii, celelalte trei module M2, M3 şi M4.
Modulele M1, M2, M3 şi M4 interacţionează reciproc împingându-se unul pe
celălalt. Pentru modulele mobile M2, M3 şi M4 acest fapt este posibil prin intermediul
unui pivot, fixat prin înfiletare, de suportul mobil şi care poartă, la extremitatea superioară,
o rolă constituită, în fapt, dintr-un rulment radial cu bile. În acest mod, deformarea tubului
flexibil provocată de dilataţia termică a parafinei şi convertită într-o deplasare este
transmisă modulului următor. Drept urmare, deplasarea însumată a celor patru module este
transmisă unei tije mobile sprijinite în nişte plăci de susţinere, distanţate între ele prin
intermediul unor distanţori. Tija mobilă este readusă în poziţia iniţială prin intermediul
unui resort.
Motorul solar prezintă următoarele avantaje:
- simplitate constructivă;
- fiabilitate ridicată.
Page 44
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
44
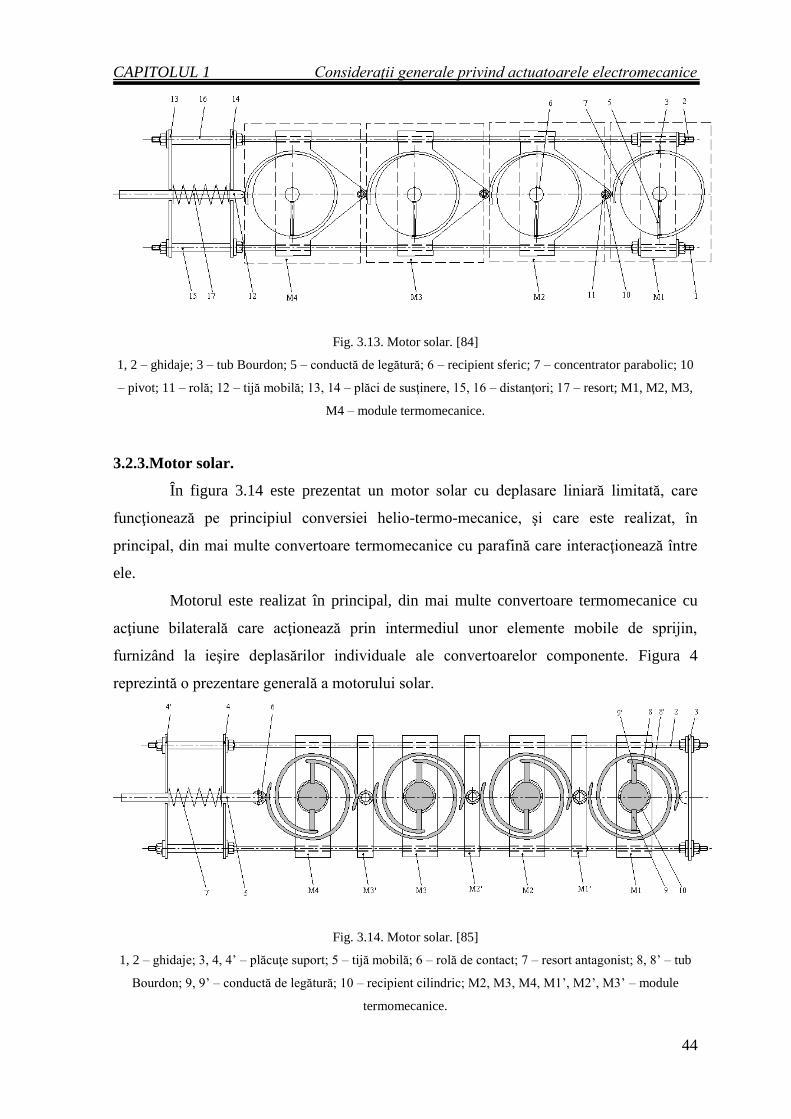
Fig. 3.13. Motor solar. [84]
1, 2 – ghidaje; 3 – tub Bourdon; 5 – conductă de legătură; 6 – recipient sferic; 7 – concentrator parabolic; 10
– pivot; 11 – rolă; 12 – tijă mobilă; 13, 14 – plăci de susţinere, 15, 16 – distanţori; 17 – resort; M1, M2, M3,
M4 – module termomecanice.
3.2.3.Motor solar.
În figura 3.14 este prezentat un motor solar cu deplasare liniară limitată, care
funcţionează pe principiul conversiei helio-termo-mecanice, şi care este realizat, în
principal, din mai multe convertoare termomecanice cu parafină care interacţionează între
ele.
Motorul este realizat în principal, din mai multe convertoare termomecanice cu
acţiune bilaterală care acţionează prin intermediul unor elemente mobile de sprijin,
furnizând la ieşire deplasărilor individuale ale convertoarelor componente. Figura 4
reprezintă o prezentare generală a motorului solar.
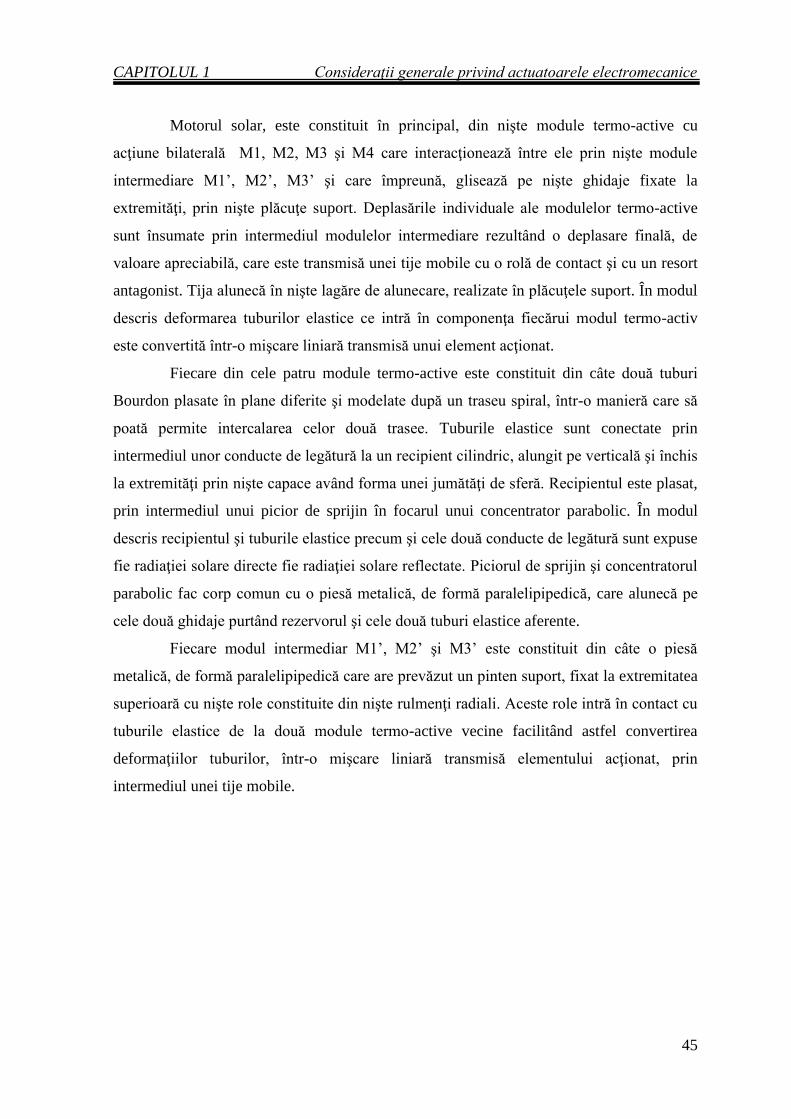
Fig. 3.14. Motor solar. [85]
1, 2 – ghidaje; 3, 4, 4’ – plăcuţe suport; 5 – tijă mobilă; 6 – rolă de contact; 7 – resort antagonist; 8, 8’ – tub
Bourdon; 9, 9’ – conductă de legătură; 10 – recipient cilindric; M2, M3, M4, M1’, M2’, M3’ – module
termomecanice.
Page 45
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
45
Motorul solar, este constituit în principal, din nişte module termo-active cu
acţiune bilaterală M1, M2, M3 şi M4 care interacţionează între ele prin nişte module
intermediare M1’, M2’, M3’ şi care împreună, glisează pe nişte ghidaje fixate la
extremităţi, prin nişte plăcuţe suport. Deplasările individuale ale modulelor termo-active
sunt însumate prin intermediul modulelor intermediare rezultând o deplasare finală, de
valoare apreciabilă, care este transmisă unei tije mobile cu o rolă de contact şi cu un resort
antagonist. Tija alunecă în nişte lagăre de alunecare, realizate în plăcuţele suport. În modul
descris deformarea tuburilor elastice ce intră în componenţa fiecărui modul termo-activ
este convertită într-o mişcare liniară transmisă unui element acţionat.
Fiecare din cele patru module termo-active este constituit din câte două tuburi
Bourdon plasate în plane diferite şi modelate după un traseu spiral, într-o manieră care să
poată permite intercalarea celor două trasee. Tuburile elastice sunt conectate prin
intermediul unor conducte de legătură la un recipient cilindric, alungit pe verticală şi închis
la extremităţi prin nişte capace având forma unei jumătăţi de sferă. Recipientul este plasat,
prin intermediul unui picior de sprijin în focarul unui concentrator parabolic. În modul
descris recipientul şi tuburile elastice precum şi cele două conducte de legătură sunt expuse
fie radiaţiei solare directe fie radiaţiei solare reflectate. Piciorul de sprijin şi concentratorul
parabolic fac corp comun cu o piesă metalică, de formă paralelipipedică, care alunecă pe
cele două ghidaje purtând rezervorul şi cele două tuburi elastice aferente.
Fiecare modul intermediar M1’, M2’ şi M3’ este constituit din câte o piesă
metalică, de formă paralelipipedică care are prevăzut un pinten suport, fixat la extremitatea
superioară cu nişte role constituite din nişte rulmenţi radiali. Aceste role intră în contact cu
tuburile elastice de la două module termo-active vecine facilitând astfel convertirea
deformaţiilor tuburilor, într-o mişcare liniară transmisă elementului acţionat, prin
intermediul unei tije mobile.
Page 46
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
46
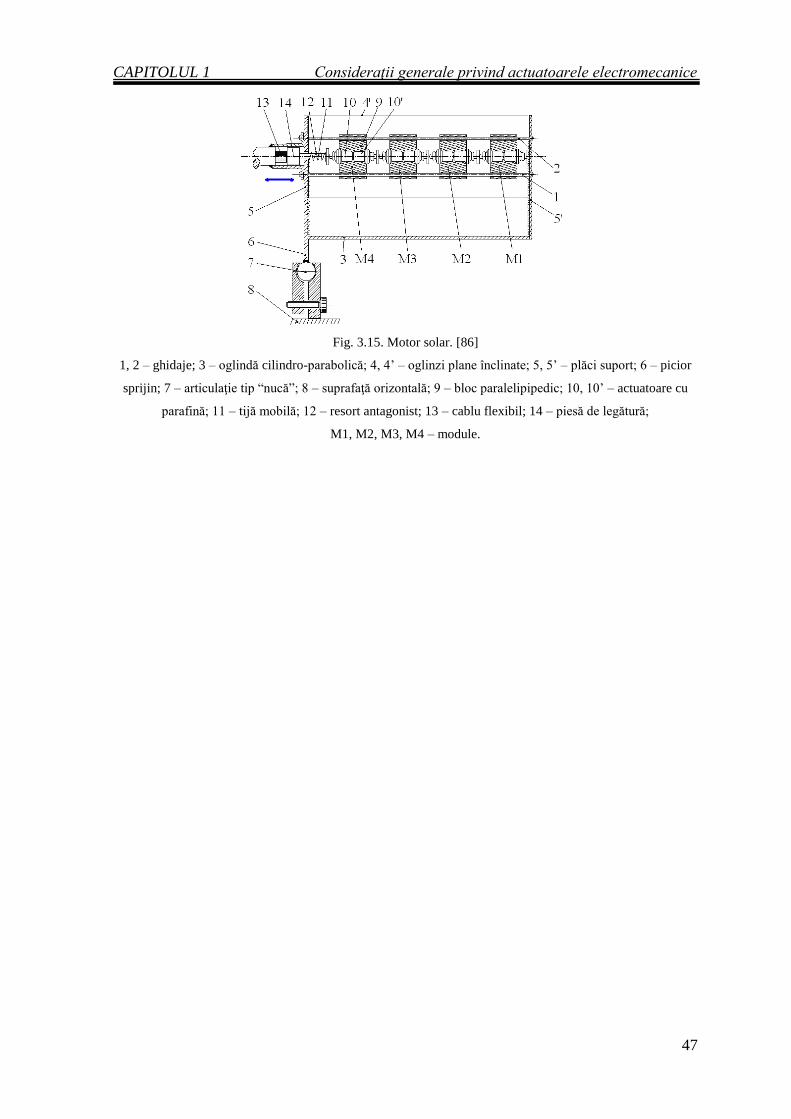
3.2.4. Motor solar.
Dispozitivul prezentat în figura 3.15 se referă la un motor solar cu deplasare
liniară limitată, care funcţionează pe principiul conversiei helio-termo-mecanice, şi care
este realizat, în principal, din mai multe convertoare termomecanice cu parafină care
interacţionează între ele. Motorul este constituit, în principal, din mai multe convertoare
termomecanice cu acţiune bilaterală care acţionează prin intermediul unor elemente mobile
de sprijin, furnizând la ieşire o deplasare globală ce reprezintă suma deplasărilor
individuale ale convertoarelor componente. Figura 5 reprezintă o secţiune longitudinală
prin motorul solar.
Motorul solar, este realizat din nişte module M1, M2, M3 şi M4, care alunecă pe
nişte ghidaje fixate la extremităţi, de pereţii unui concentrator solar, constituit dintr-o
oglindă cilindro-parabolică asociată, în părţile laterale cu nişte oglinzi plane, înclinate.
Extremităţile concentratorului invocat sunt consolidate prin nişte plăci suport. Una dintre
plăcile suport, este prevăzută la partea inferioară, cu un picior de sprijin montat într-o
articulaţie tip „nucă”, plasată pe o suprafaţă orizontală.
Fiecare din modulele M1, M2, M3 şi M4 este constituit, în principal, dintr-un bloc
paralelipipedic masiv, realizat din aliaj de aluminiu, care alunecă pe cele două ghidaje şi
care poartă înglobate în ele câte două actuatoare cu parafină şi piston.
Mişcarea însumată a deplasărilor tuturor tijelor piston este transmisă asupra unei
tije mobile asociată cu un resort antagonist. Această deplasare este transmisă, în final, către
elementul acţionat prin intermediul unui cablu flexibil, montat în prelungirea tijei, prin
intermediul unei piese de legătură.
Blocurile paralelipipedice ce intră în componenţa fiecărui modul are menirea de a
capta energia solară sub formă de căldură, de a înmagazina această căldură şi de a o
distribui către actuatoarele cu parafină şi piston. În scopul menţionat, feţele laterale ale
blocului paralelipipedic, sunt expuse radiaţiei solare directe şi a radiaţiei solare reflectate
prin intermediul oglinzilor. În acelaşi scop, aceste suprafeţe sunt acoperite cu un strat de
vopsea capabilă să faciliteze absorbţia radiaţiei calorice de origine solară.
Deplasarea majorată, simplitate constructivă şi siguranţă în funcţionare sunt
avantajele acestui tip de motor solar.
Page 47
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
47
Fig. 3.15. Motor solar. [86]
1, 2 – ghidaje; 3 – oglindă cilindro-parabolică; 4, 4’ – oglinzi plane înclinate; 5, 5’ – plăci suport; 6 – picior
sprijin; 7 – articulaţie tip “nucă”; 8 – suprafaţă orizontală; 9 – bloc paralelipipedic; 10, 10’ – actuatoare cu
parafină; 11 – tijă mobilă; 12 – resort antagonist; 13 – cablu flexibil; 14 – piesă de legătură;
M1, M2, M3, M4 – module.
Page 48
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
48
CONTRIBUŢII LA REALIZAREA ŞI EXPERIMENTAREA
UNOR RELEE ŞI POMPE ELECTROCHIMICE
4.1 Contribuţii la realizarea unor relee electrochimice
4.1.1. Releu de timp
Dispozitivul prezentat în figura 4.1 reprezintă un releu de timp constituit dintr-un
burduf elastic umplut cu un lichid care se dilată sub acţiunea căldurii generată, într-o
perioadă de timp, de efectul termic generat de un curent electric.
Releul de timp este constituit din două cavităţi ce comunică între ele prin nişte
canale şi unde prima cavitate, în mod obligatoriu elastică, este umplută cu ulei siliconic, iar
a doua cavitate, cu configuraţie rigidă, constituie înfăşurarea secundară a unui
transformator electric, este umplută cu mercur care încălzindu-se se dilată provocând
deformarea în timp a camerei elastice care acţionează asupra unui întrerupător basculant.
Releul de timp conform invenţiei este constituit dintr-un transformator monofazat
având miezul magnetic realizat din tole silicioase laminate la cald sau la rece, înfăşurarea
primară alimentată de la o sursă de tensiune alternativă, nereprezentată în figură, şi, în rol
de înfăşurare secundară, o spiră în scurtcircuit realizată dintr-un lichid conductor (mercur),
acesta reprezentând lichidul activ şi este stocat într-o cavitate cilindrică-inelară cu pereţi
dubli. Cavitatea în care este introdus lichidul activ conductor (mercurul) comunică prin
două tuburi cu o cameră elastică deformabilă (silfon) în interiorul căreia se află ulei
siliconic.
Lichidul activ, reprezentând spira în scurtcircuit a transformatorului, se încălzeşte,
datorită pierderilor în scurtcircuit, şi îşi măreşte volumul, determinând deformarea
silfonului (în sensul elongării), al cărui capăt superior acţionează asupra contactului
întrerupătorului.
Se dă în continuare un exemplu de realizare al releului în legătură cu figura 1 care
reprezintă o secţiune longitudinală prin dispozitiv.
Page 49
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
49
Fig. 4.1. Releu de timp. [87]
1 – miez magnetic; 2 – înfăşurare primară; 3 – cavitate cilindrică-liniară; 4 – lichid activ; 5, 5’ – tuburi;
6 – silfon; 7 – ulei siliconic; 8 – întrerupător.
Releul de timp, prezintă ca avantaje o simplitate constructivă, reglajul timpului de
răspuns şi siguranţă în funcţionare.
4.1.2. Releu de gaze
Dispozitivul din figura 4.2 se referă la un releu de gaze cu funcţionare sigură în
condiţii de vibraţii şi seism. Releul de gaze este alcătuit dintr-un recipient cilindric, din
sticlă, închis etanş şi prevăzut la partea inferioară cu o cantitate de mercur peste care se
suprapune o cantitate de ferofluid electroizolant aflat sub influenţa câmpului magnetic
produs de nişte magneţi permanenţi incluşi în structura unui flotor plasat în apropiere; la
cealaltă extremitate a recipientului sunt dispuşi doi electrozi paraleli, încastraţi în peretele
recipientului, şi la care extremităţile inferioare sunt imersate în ferofluidul electroizolant;
sub acţiunea câmpului magnetic produs de magnetul permanent, ferofluidul devine
magnetoreologic, fapt pentru care, când flotorul coboară, stratul de ferofluid presează
asupra băii de mercur; inversând poziţia celor două fluide; cei doi electrozi sunt imersaţi în
baia de mercur fapt care echivalează cu închiderea unui contact în circuitul de semnalizare,
respectiv în circuitul de declanşare ale releului.
8
6
7
5’
1
2
4
5
3
Page 50
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
50
În figura 4.2 este reprezentat sistemul de comutaţie al releului de gaze, constituit
dintr-un recipient cilindric din sticlă, închis etanş şi prevăzut la partea superioară cu nişte
electrozi, încastraţi în peretele recipientului.
La partea inferioară recipientul este prevăzut cu o cantitate de mercur peste care se
suprapune o cantitate de ferofluid electroizolant aflat sub influenţa câmpului magnetic
produs de nişte magneţi permanenţi. Sub acţiunea câmpului magnetic produs de magnetul
permanent ferofluidul devine magnetoreologic mărindu-şi considerabil vâscozitatea.
Magneţii permanenţi sunt fixaţi pe un flotor. În momentul când flotorul coboară, acesta
presează asupra băii cu mercur, drept urmare poziţia celor două fluide se inversează.
Inversând poziţia ferofluidului, cei doi electrozi sunt imersaţi în baia de mercur care,
stabilind o punte conductoare între electrozi conduce, de fapt, la închiderea unui contact
stabilit, după caz în circuitul de semnalizare, respectiv în circuitul de declanşare al releului
Releul de gaze, prezintă avantajul unei funcţionări sigure în condiţii de vibraţii şi
şocuri seismice.
Figura 4.2 reprezintă detaliu privind realizarea sistemului de comutaţie cu
siguranţă sporită în condiţii de vibraţii şi şocuri seismice.
Fig. 4.2. Releu de gaze. Detaliu privind realizarea sistemului de comutaţie. [88]
1 – recipient; 2, 3 – electrozi; 4 – mercur; 5 – ferofluid electroizolant; 6, 6’ – magneţi permanenţi; 7 – flotor;
Figura 4.3, prezintă o vedere generală a ansamblului releului, care este realizat
dintr-o cuvă metalică prevăzută pe două laturi cu orificii pentru racordarea la conducta
stabilită între cuva transformatorului şi conservatorul acestuia. Pe pereţii cuvei sunt
montate de asemenea nişte vizoare din sticlă, marcate în cm3, pentru aprecierea volumului
de gaze acumulat. În interiorul cuvei, pe un capac montat pe un suport de ghidaj sunt fixate
Page 51
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
51
cele două sisteme de comutaţie ale releului. Pe suportul de ghidaj alunecă două flotoare în
care sunt înglobaţi nişte magneţi permanenţi respectiv care acţionează asupra contactelor
de siguranţă sporită la vibraţii şi şocuri seismice.
Cele două flotoare sunt realizate dintr-un material plastic spongios. Flotorul
superior lucrează la acumulări lente de gaze, când, în urma coborârii nivelului de ulei,
ansamblul magneţilor permanenţi acţionează asupra sistemului de contact, închizând astfel
contactul de semnalizare.
Sistemul de comutaţie inferior este legat de flotorul şi devine activ la scădere
nivelului de ulei provocat de neetanşeităţi aferente cuvei sau în cazul apariţiei unei unde de
ulei, de la cuvă către conservator şi care undă este generată de un defect major produs la
partea activă a transformatorului.
Pentru activarea sistemului de comutaţie inferior, capătul inferior al ghidajului
face corp comun cu un suport, de care este legat printr-o articulaţie, un alt suport prevăzut
cu două braţe de care se sprijină de nişte pinteni, ce fac corp comun cu flotorul.
Pe suport este montată o paletă reglabilă printr-un şurub şi un canal longitudinal
practicat în paletă. La acţionarea undei de ulei, paleta prin intermediul braţelor suportului,
determină coborârea flotorului şi drept urmare activarea sistemului de comutaţie inferior al
cărui contact se închide. Sistemul de comutaţie inferior este activat, aşa cum s-a mai
precizat, şi la scăderea nivelului de ulei din cuva releului care provoacă, de asemenea,
coborârea flotorului.
Se dă în continuare un exemplu de realizare a releului în legătură figura 4.3 care
reprezintă o vedere generală a ansamblului releului.
Page 52
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
52
Fig. 4.3. Releu de gaze. Vedere generală a ansamblului releului. [88]
1d, 1s – sistem de contact; 6d, 6’d, 6s, 6’s – magneţi permanenţi; 7d, 7s – flotoare; 8 – cuvă metalică;
9 – capac; 10 – suport de ghidaj; 11, 12 – suport; 12a, 12b – braţele suportului; 13 – pinteni;
14 – paletă reglabilă; 15 – şurub; c – canal longitudinal.
Page 53
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
53
4.2. Contribuţii la realizarea unor pompe electrochimice
4.2.1. Micropompă electrochimică cu electrolizor.
Dispozitivul prezentat, care reprezintă o secţiune longitudinală printr-o
micropompă cu electrolizor, se referă la o micropompă electrochimică funcţionând pe
principiul lichidelor nemiscibile şi pe efectul de sifon şi care este utilizată în domeniile
unde este necesară vehicularea precisă a unor cantităţi reduse de lichid.
Micropompa este prevăzută cu o sursă de alimentare inclusă în construcţia
micropompei şi a cărei funcţionare se bazează pe existenţa unui dispozitiv bazat pe
conversia helio-termo-electrică.
Într-o primă variantă constructivă, prezentată în figura 4.4, micropompa
electrochimică cu lichide nemiscibile, este confecţionată dintr-o carcasă cilindrică,
realizată dintr-un material plastic transparent, care este prevăzută cu o cavitate principală a,
în care este stocat la partea superioară un lichid supus vehiculării iar la partea inferioară,
este plasat un electrolizor constituit din doi electrozi, plasaţi într-o microcavitate a’
realizată pe fundul carcasei principale. Electrozii sunt alimentaţi de la o sursă de curent
continuu prin două conductoare, realizate dintr-un material ordinar şi protejate împotriva
acţiunii electrochimice prin înglobare într-un suport din material plastic, ce face corp
comun cu un capac circular. Electrozii sunt imersaţi într-un lichid generator de gaze
constituit din apă, astfel încât, în urma procesului de electroliză, este degajat un amestec
gazos caracterizat de o suprapresiune ce acţionează asupra stratului de lichid, în sensul
evacuării acestuia.
Pentru obţinerea evacuării lichidului vehiculat se utilizează un dispozitiv tip sifon,
alcătuit dintr-un microcanal, la care una din extremităţi este plasată în lichidul de vehiculat,
iar cealaltă extremitate este poziţionată în exterior, la nivelul fundului carcasei.
Amorsarea curgerii prin efect termosifon are loc datorită suprapresiunii gazelor
dagajate la partea superioară a cavităţii a.
Pentru activarea micropompei descrise, alimentarea se realizează pe baza unui
generator termoelectric realizat cu ajutorul unei baterii de elemente Peltier imobilizate pe
capacul carcasei micropompei prin intermediul unui ecran metalic din alamă sau cupru şi a
unei rame realizată dintr-un material stratificat şi termoizolant.
La partea superioară a ansamblului descris se află o lentilă biconvexă din
plexiglas, iar întreg ansamblul este fixat şi strâns pe suprafaţa capacului carcasei prin
intermediul a două şuruburi şi a unor distanţiere.
Page 54
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
54
Sub acţiunea radiaţiei calorice solare concentrată prin lentilă pe suprafaţa
ecranului metalic, căldura este înmagazinată apoi transmisă la bateria de elemente Peltier
care furnizează la ieşire o tensiune suficientă pentru alimentarea electrolizorului şi
descompunerea lichidului generator de gaze. Amestecul de gaze rezultat se acumulează la
partea superioară a cavităţii interioare a micropompei şi prin suprapresiunea creată
determină evacuarea lichidului vehiculat.
Fig. 4.4. Micropompă electrochimică. [89]
1 – carcasă cilindrică; 2 – lichid supus vehiculării; 3, 3’ – electrozi; 4, 4’ – conductoare; 5 – suport; 6 – capac
circular; 7 – lichid generator de gaze; 8 – microcanal; 9 – element Peltier; 10 – ecran metalic; 11 – ramă;
12 – lentilă biconvexă; 13, 13’ – şuruburi; 14a, 14b, 14c, 14d – distanţiere;
a – cavitate principală; a’ – microcavitate.
În altă variantă constructivă prezentată în figura 4.5, lichidul generator de gaze
este reprezentat prin perhidrol, iar degajarea gazului (a oxigenului) se realizează prin efect
Joule-Lenz cu ajutorul unui încălzitor reprezentat printr-o rezistenţă alimentată de la
bornele aceluiaşi generator termoelectric descris în prima variantă.
Page 55
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
55
Fig. 4.5. Micropompă electrochimică. [89]
1 – carcasă cilindrică; 2 – lichid supus vehiculării; 3 – rezistenţă; 4, 4’ – conductoare; 5 – suport; 6 – capac
circular; 7 – lichid generator de gaze; 8 – microcanal; 9 – element Peltier; 10 – ecran metalic; 11 – ramă;
12 – lentilă biconvexă; 13, 13’ – şuruburi; 14a, 14b, 14c, 14d – distanţiere;
a – cavitate principală; a’ – microcavitate.
4.2.2. Micropompă electrochimică cu lichide nemiscibile.
În figura 4.6 este prezentată o micropompă cu lichide nemiscibile care
funcţionează prin efect de sifon, cu sursă solară de energie şi care este destinată vehiculării
unor cantităţi mici de lichid. Micropompa este prevăzută o celulă fotovoltaică pe bază de
siliciu sau sulfură de cadmiu, orientată către soare şi destinată conversiei energiei solare în
energia electrică necesară alimentării dispozitivului folosit pentru descompunerea unuia
din cele două lichide nemiscibile şi care descompunere creează o suprapresiune interioară
folosită pentru evacuarea lichidului supus vehiculării.
În prima variantă constructivă, prezentată în figura 4.6, micropompa
electrochimică cu lichide nemiscibile, este constituită dintr-o carcasă cilindrică, realizată
dintr-un material plastic transparent, care este prevăzută cu o cavitate principală a, în care
Page 56
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
56
este stocat la partea superioară un lichid supus vehiculării şi unde, la partea inferioară, este
plasat un electrolizor constituit din doi electrozi, plasaţi într-o microcavitate a’ realizată pe
fundul carcasei principale, electrozi alimentaţi de la o sursă de curent continuu prin două
conductoare, realizate dintr-un material ordinar şi protejate împotriva acţiunii
electrochimice prin înglobare într-un suport din material plastic, ce face corp comun cu un
capac circular. Electrozii sunt imersaţi într-un lichid generator de gaze constituit din apă,
astfel încât, în urma procesului de electroliză, este degajat un amestec gazos caracterizat de
o suprapresiune ce acţionează asupra stratului de lichid, în sensul evacuării acestuia.
Pentru obţinerea evacuării lichidului vehiculat se utilizează un dispozitiv tip sifon,
alcătuit dintr-un microcanal, la care una din extremităţi este plasată în lichidul de vehiculat,
iar cealaltă extremitate este poziţionată în exterior, la nivelul fundului carcasei.
Amorsarea curgerii prin efect termosifon are loc datorită suprapresiunii gazelor
dagajate la partea superioară a cavităţii a.
În scopul activării micropompei descrise alimentarea se realizează de la o celulă
fotovoltaică realizată pe bază de siliciu sau sulfură de cadmiu şi fixată de capacul
micropompei. Celula fotovoltaică este poziţionată prin intermediul unei garnituri utilizată
pentru amortizarea şocurilor mecanice şi care este fixată prin intermediul unui alt capac
realizat dintr-un material transparent şi a unor şuruburi de fixare care permit expunerea
fotocelulei la acţiunea radiaţiei solare.
Micropompa prezintă avantajul utilizării unei surse de energie înglobate în
construcţia proprie ceea ce simplifică condiţiile de instalare şi exploatare.
Page 57
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
57
Fig. 4.6. Micropompă electrochimică cu lichide nemiscibile. [90]
1 – carcasă cilindrică; 2 – lichid supus vehiculării; 3, 3’ – electrozi; 4, 4’ – conductoare; 5 – suport; 6 – capac
circular; 7 – lichid generator de gaze; 8 – microcanal; 9 – celulă fotovoltaică; 10 – garnitură; 11 – capac;
12, 13 – şuruburi de fixare; a – cavitate principală; a’ – microcavitate.
În altă variantă constructivă, prezentată în figura 4.7, micropompa electrochimică
cu lichide nemiscibile prezintă o funcţionare şi o construcţie similară variantei din figura 3,
cu menţiunea că lichidul generator de gaze este perhidrol, care începe să degaje oxigen sub
acţiunea căldurii degajate prin efect Joule-Lenz de o rezistenţă chimică şi alimentată de la
bornele fotocelulei.
Page 58
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
58
Fig. 4.7. Micropompă electrochimică cu lichide nemiscibile. [90]
1 – carcasă cilindrică; 2 – lichid supus vehiculării; 3 – rezistenţă chimică; 4, 4’ – conductoare; 5 – suport;
6 – capac circular; 7 – lichid generator de gaze; 8 – microcanal; 9 – celulă fotovoltaică; 10 – garnitură;
11 – capac; 12, 13 – şuruburi de fixare; a – cavitate principală; a’ – microcavitate.
4.2.3 Pompă electrochimică cu lichid.
Invenţia se referă la o pompă electrochimică cu lichid prevăzută cu două lichide,
unul vehiculat, celălalt folosit ca lichid activ şi unde sursa de încălzire a lichidului activ
este realizată pe baza pierderilor de scurtcircuit.
În scopul realizării pompei electrochimice, cele două lichide de bază, folosite în
funcţionarea pompei, sunt separate fizic şi chimic, în care scop lichidul de lucru este plasat
într-un recipient constituit din două părţi: o parte elastică deformabilă, plasată în
continuarea celeilalte părţi având forma unei spire metalice conductoare în scurtcircuit,
având formă cilindrică cu pereţi dubli, între care este stocat lichidul de lucru (activ) şi care
constituie, în acelaşi timp, circuitul secundar al unui transformator monofazat alimentat de
la reţeaua de alimentare industrială; sub acţiunea căldurii generate de pereţii părţii rigide a
recipientului descris, lichidul de lucru produce gaze sau vapori care deformează partea
elastică a recipientului; drept urmare lichidul evacuat, stocat în alt recipient, cu
configuraţie rigidă, şi care conţine silfonul menţionat anterior, este evacuat în exterior.
Page 59
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
59
Pompa electrochimică, conform invenţiei, funcţionează pe baza a două lichide: un
lichid vehiculat şi un lichid activ (de lucru), menit să furnizeze gaze sau vapori pe baza
unor reacţii chimice sau ca urmare a unor fenomene fizice, de natură termică sau
electrotermică. Pentru stocarea, vehicularea şi desfăşurarea reacţiilor chimice sau a
fenomenelor fizice precizate, pompa electrochimică este prevăzută cu două recipiente: un
recipient în care este stocat lichidul vehiculat şi un alt recipient, în care este stocat lichidul
activ (de lucru) precum şi gazele sau vaporii rezultaţi din descompunerea acestuia.
Recipientul este constituit dintr-o cavitate elastică şi deformabilă, care reprezintă în fapt,
un silfon unde se acumulează gazul şi vaporii rezultaţi din descompunerea lichidului activ
(de lucru) stocat într-o altă cavitate. Cavitatea este din punct de vedere fizic o spiră în
scurtcircuit, element constructiv conductor, de formă cilindrică-inelară, cu pereţi dubli,
între care este stocat lichidul. Spira menţionată reprezintă în fapt secundarul unui
transformator electric monofazat, în alcătuirea căruia mai intră: o înfăşurare primară,
conectată la o sursă de alimentare şi un miez magnetic monofazat, în manta, realizat prin
ţesere, din tole silicioase laminate la cald sau la rece.
Cavitatea este conectată la camera elastică prin intermediul unor canale colectoare
tubulare. Camera elastică este fixată într-o montură, ce are la partea superioară, plasat
printr-o garnitură de etanşare, un capac transparent care concură la alcătuirea recipientului
în care este stocat lichidul vehiculat, precum şi silfonul. Lichidul este presat de silfon, fiind
evacuat către exterior, printr-o conductă tubulară.
Se dă în continuare un exemplu de realizare a invenţiei în legătură cu figura 4.8
care reprezintă o secţiune longitudinală prin structura pompei.
Page 60
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
60
Fig. 4.8. Pompă electrochimică cu lichid. [91]
1 – lichid vehiculat; 2 – lichid activ; 3 – recipient lichid vehiculat; 4 – recipient lichid activ; 5 – înfăşurare
primară; 6 – sursă de alimentare; 7 – miez magnetic; 8, 8’ – canale colectoare; 9 – montură; 10 – garnitură de
etanşare; 11 – conductă tubulară.
Pompa electrochimică prezintă următoarele avantaje:
- simplitate constructivă;
- siguranţă mare în funcţionare
4.2.4 Pompă electrochimică cu celulă de combustie.
În figura 4.9 este prezentată o pompă electrochimică prevăzută cu două lichide de
lucru şi celulă de combustie. În scopul realizării pompei electrochimice, cele două lichide
folosite în funcţionarea acesteia, sunt separate atât fizic cât şi chimic, în care scop lichidul
de lucru, generator de hidrogen, este introdus într-un recipient, prevăzut cu celulă de
combustie reversibilă, recipient care comunică, printr-o conductă, cu un alt recipient,
4a
8’4
9 8
5
11
1
4b
7
3 10
~
2
6
Page 61
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
61
elastic şi deformabil, plasat în interiorul unui rezervor cilindric, în care este stocat lichidul
vehiculat; prin acumularea de hidrogen, recipientul elastic îşi măreşte volumul, presând
asupra lichidului vehiculat care este astfel împins din rezervor către exterior printr-o
conductă adecvată.
Se dă în continuare un exemplu de realizare a invenţiei în legătură cu figura 4.9
care reprezintă o schemă de principiu a dispozitivului.
a) b)
Fig. 4.9. Pompă electrochimică cu celulă de combustie. [92]
a) Schemă de principiu; b) Vedere de ansamblu al modelului realizat.
1 – recipient; 2 – lichid activ; 3 – celulă de combustie; 4 – conductă; 5 – recipient; 6 – rezervor cilindru
transparent; 7 – lichid vehiculat; 8 – conductă tubulară.
Pompa electrochimică, conform invenţiei, este constituită dintr-un recipient, în
care este introdus lichidul activ (apă), şi care este prevăzut cu o celulă de combustie
alimentată de la o sursă de tensiune constantă nereprezentată în figură, recipient care
comunică printr-o conductă cu un alt recipient, elastic şi deformabil, reprezentat de un
balon de cauciuc, plasat în interiorul unui rezervor cilindric trasparent în care se află
lichidul vehiculat, rezervor care comunică cu exteriorul printr-o conductă tubulară.
8
O2
H2
H2
O
H2
7
6
5
4
3
2
1
Page 62
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
62
Celula de combustie reversibilă descompune lichidul activ (apa) în oxigen şi
hidrogen; oxigenul este eliminat în atmosferă, iar hidrogenul este dirijat, prin conducta,
către interiorul recipientului elastic şi deformabil care, prin acumularea hidrogenului îşi
măreşte volumul, acţionând asupra lichidului vehiculat, împingându-l în afara rezervorului
prin conducta.
Pompa electrochimică prezintă ca avantaje simplitate constructivă şi siguranţă în
funcţionare.
4.2.5 Pompă electrochimică cu electrolizor.
În figura 4.10 este prezentată o pompă electrochimică cu lichid a cărei funcţionare
se bazează pe descompunerea apei în cele două gaze componente prin electroliză. Pentru
alimentarea electrolizorului, este utilizată soluţia conversiei helio-termo-electrică,
concretizată într-o baterie de elemente Peltier, la care una din feţe este încălzită, de la
soare, prin intermediul unui concentrator de tip parabolic, în timp ce cealaltă faţă este
răcită cu o parte din apa rece vehiculată prin pompa electrochimică propriu-zisă.
Pompa electrochimică este constituită în principal, din pompa propriu-zisă şi din
sistemul de conversie şi alimentare. Pompa propriu-zisă, este realizată dintr-un recipient,
umplut cu un mediu lichid reprezentat prin apa în care este imersat electrolizorul pompei în
componenţa căruia intră nişte suporţi conductori, prevăzuţi la partea inferioară cu câte un
electrod în formă de pastile, şi care electrozi sunt realizaţi, de preferinţă din platină.
Suporţii conductori menţionaţi sunt încastraţi, pe partea superioară într-un capac
electroizolant care închide etanş recipientul, prin intermediul unei garnituri de etanşare. Pe
capacul electroizolant mai sunt montate şi două conducte de evacuare. Conducta de
evacuare cu diametrul cel mai mic serveşte la vehicularea apei pentru răcire, în timp ce
conducta, cu diametrul cel mai mare, serveşte pentru evacuarea apei pentru utilizările
propriu-zise.
La partea superioară a ansamblului este situat sistemul de conversie şi alimentare,
constituit în principal, dintr-o baterie cu elemente Peltier plasată, cu faţa caldă, în contact
cu o placă metalică colectoare, poziţionată prin intermediul unui picior de sprijin în focarul
unui concetrator solar de tip parabolic. Concentratorul solar este fixat de capacul
electroizolant prin acelaşi picior de sprijin. Prin intermediul concentratorului, radiaţia
solară este reflectată şi concentrată pe suprafaţa exterioară a plăcii colectoare care
încălzindu-se, transmite căldura către faţa caldă a bateriei Peltier.
Page 63
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
63
Pe faţa rece a bateriei amintite, este poziţionat un recipient paralelipipedic cu un
contur identic cu cel al bateriei şi în care este introdusă apa de răcire, adusă prin conducta.
După utilizare, apa de răcire este evacuată printr-o conductă de evacuare, racordată pe
nivelul superior al recipientului. Recipientul este protejat împotriva încălzirii, prin radiaţia
solară directă, cu ajutorul unui paravan electroizolant, fixat prin nişte picioare de sprijin
fixate pe conturul exterior al concentratorului.
Se dă în continuare un exemplu de realizare a invenţiei, în legătură cu figura 4.10,
care reprezintă o secţiune longitudinală prin dispozitiv.
a) b)
Fig. 4.10. Pompă electrochimică cu electrolizor. [93]
a) Schema de principiu; b) Model demonstrativ.
1 – recipient; 2 – mediu lichid; 3, 4 – suporţi conductori; 5, 6 – electrozi; 7 – capac electroizolant;
8 – garnitură de etanşare; 9, 10 – conducte de evacuare; 11 – element Peltier; 12 – placă metalică colectoare;
13 – picior de sprijin; 14 – concentrator solar; 15 – recipient paralelipipedic; 16 – paravan electroizolant;
17, 17’ – picioare de sprijin.
Alimentarea este realizată pe baza conversiei energiei solare, practic, inepuizabilă,
simplitate constructivă şi extinderea posibilităţilor de utilizare sunt doar câteva avantaje ale
acestei pompe electrochimice.
1
7 9’
12
11
9
8
7
1
2 3
5
16
15
9
’
14
13
10
4
6
Radiaţia
solară
17’
Page 64
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
64
Fig. 4.11. Stand experimental pentru determinarea funcţionării pompei electrochimice
sub acţiunea radiaţiei solare.
4.2.6 Sistem de pompare cu ferofluid.
În figura 4.12 este prezentat un sistem de pompare cu ferofluid. Cu o structură
liniară şi relativ simplă, sistemul este bazat pe deformarea, sub acţiunea ferofluidului, a
unui tub subţire de cauciuc. Sistemul de pompare este format, dintr-un tub principal care
este prevăzut la partea interioară cu un tub adiţional din cauciuc moale. Interstiţiul cuprins
între peretele interior al tubului principal şi cel de cauciuc este umplut cu ferofluid.
a) b)
Fig. 4.12. Micropompă cu ferofluid.
a) Schemă de principiu. b) Vedere de ansamblu al modelului realizat.
1, 1’, 2, 2’, 3, 3’, 4, 4’, 5, 5’, 6, 6’, 7, 7’ – bobine; 8 – conductă; 9 – ferofluid; 10 – cauciuc subţire.
10 8 9
1 2 3 4 5 6 7
1’ 2’ 3’ 4’ 5’ 6’ 7’
Page 65
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
65
Acţionarea pompei este realizată de către dispozitivul format din şapte baterii de
bobine, plasat la exterior. Comanda se realizează prin alimentarea secvenţială a bobinelor,
pe trei grupe, realizându-se astfel vehicularea lichidului de lucru de la intrarea spre ieşirea
pompei, prin alimentarea alternativă a bobinelor pe trei secţiuni distincte ale canalului.
După cum se poate observa în figura 4.12b, sistemul de pompare este format din
pompa propriu-zisă compusă din bateriile de bobine care acţionează asupra ferofluidului
introdus între carcasa pompei si tubul de vehiculare a lichidului de lucru, un rezervor de
intrare, un rezervor de ieşire şi circuitul de comandă al bateriilor de bobine.
Fig. 4.13. Stand experimental pentru determinarea funcţionării
sistemului de pompare.
Page 66
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
66
CONCLUZII REZULTATE ÎN URMA STUDIULUI
EXPERIMENTAL
Concluziile generale pot fi sistematizate după cum urmează:
- actuatorii electromecanici cu lichid prezintă avantaje cum ar fi economia de
energie, economia de spaţiu şi economia de resurse materiale, cost minim de
investiţie, răspuns rapid, construcţie modularizată pentru dezvoltarea unor astfel de
sisteme;
- actuatorii electromecanici cu lichid sunt caracterizaţi de posibilităţi de
miniaturizare, performanţe funcţionale deosebite raportate la gabarit, simplitate
constructivă, control precis, astfel că se deschid noi perspective în folosirea lor în
structura sistemelor de tip microfabrică;
- îmbunătăţirea răspunsului în timp se asigura prin reducere a timpului la
încălzire şi a duratei de răcire;
- construcţia actuatorilor din structura familiei de actuatori este simplă, cu
puţine piese în mişcare, asigurând o funcţionare sigură, silenţioasă, un număr mare
de cicluri de funcţionare, în condiţiile reducerii greutăţii şi volumului prin soluţia
aleasă, placa electronică este încorporată în carcasă, alături de elementele active şi
structura mecanică asociată;
- dezavantajul major al actuatorilor electromecanici cu lichid disponibili
comercial, este reprezentat de faptul că sunt concepuţi pentru o anumită aplicaţie,
fiind limitate posibilităţile de modificare a parametrilor funcţionali, în concordanţă
cu cerinţele altor aplicaţii, nu au o structură modularizată şi au un răspuns lent la
răcire.
Micropompele electrochimice sunt utilizate pentru a vehicula cantităţi mici de
lichid.
Actuatoarele electromecanice bazate pe deformarea unor structuri elastice, sub
acţiunea unui lichid care se vaporizează (de exemplu în prezenţa căldurii de origine solară),
permit obţinerea unor viteze mici, până la câteva rotaţii pe minut, fără a utiliza reductoare
mecanice şi în condiţiile obţinerii unor cupluri mecanice ridicate.
Soluţiile prezentate se identifică prin următoarele avantaje:
- simplitate constructivă;
- consum redus de energie electrică;
- timpii morţi sunt reduşi sau chiar eliminaţi.
Page 67
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
67
REFERINŢE BIBLIOGRAFICE
[1]. HOPKINS, D. A. Electrochemical Actuator and method of making same. Int. Cl.
6
F16K 31/02. United States Patent, No. 5 671 905, 1997-09-30.
[2]. BUJOREANU, L. Materiale Inteligente. Iaşi: Editura Junimea, 2002.
[3]. GILBERTSON, R. G.; BUSCH, J. D. A survey of micro – actuator technologies for
future spacecraft missions. In : The Journal of the British Interplanetary Society, vol. 49,
1996, p. 129-138.
[4]. PONS, J.L. Emerging Actuator Technologies: A Micromechatronic Approach.
Hardcover: John Wiley & Sons, Ltd., March 2005, p. 1-5, ISBN: 0-470-09197-5
[5]. www.drinkingbirds.com/html/science.html
[6]. UNGUREANU, C.; MINESCU, D.; PRODAN, C.; NEGRU, M.B.; CERNOMAZU,
D. Contribuţii la realizarea şi experimentarea unor motoare solare. In: Conferinţa
Naţională a Energiei, Regional Energy Foren 2002, 9-13 iunie, Neptun – Olimp, România.
[7]. LAPEYRE, J.M. Solar engine. United State Patent Nr. 3984985, 1976-10-12, Int. Cl.2
F01K 7/02; F01K 7/06.
[8]. O’HARE, L.R. Solar engine called, bellows solar engine. United State Patent
Nr.4179893, 1979-12-25, Int. Cl.2 F02C ¼.
[9]. ALBERTINI, M. Motor solaire a exposition alternative. Demande de brevet
d’invention, FR Nr. 2553473, France.
[10]. MAYER, H.M. Electrothermal actuator. Int.Cl.3: G01K 5/44. UK Patent
Application, No GB 2 133 544 A, Application published 1984-07-25.
[11]. STROPKAY, G.P.; ET AL. Self-limiting thermal fluid displacement actuator. Int.
Cl.4 F03G 7/06. United States Patent, No 4 759 189, 1988-07-26.
[12]. HOPKINS, D. A.; et al. Electrochemical Actuator and Method of Making Same. Int.
Cl.6 F16K 31/02. United States Patent, No 5671905, 1997-09-30.
[13]. GAVRILIU, M.G. Studiu privind proiectarea, realizarea şi testarea unor noi
variante de motoare solare. Proiect de diplomă. Coordonator ştiinţific: prof. univ. dr. ing.
Dorel Cernomazu. Suceava: Universitatea “Ştefan cel Mare”, Facultatea de Inginerie
Electrică, 1997, p. 66-87.
Page 68
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
68
[14]. TARNOVEŢCHI, M. Studiul micromotoarelor solare bazate pe deformarea unor
structuri solide. Contribuţii la realizarea unor modele experimentale. Proiect de diplomă.
Suceava: Universitatea “Ştefan cel Mare”, Facultatea de Inginerie Electrică, 2001, p.
37(71)-87.
[15]. DANFOSS A/S (DENMARK). Thermal actuator especially for fluid-flow valves.
JACOBSEN, F. ET AL. (inventors). Int. Cl.3 G01K 5/32, F16K 31/00. UK Patent
Application. No GB 2 138 937 A, 1984-10-31.
[16]. KOPELOVICI, A.P. Sisteme de reglare automată. Metode de calcul inginereşti.
Bucureşti: Editura Tehnică, 1963, p. 67-151.
[17]. RUMŞISKI, L.Z. Prelucrarea matematică a datelor experimentale. Îndrumar.
Traducere din limba rusă. Bucureşti: Editura Tehnică, 1974, p. 9-183.
[18]. BEJAN, I.; BALABAN, G. Automatizări şi telecomenzi în electroenergetică.
Bucureşti: Editura Didactică şi Pedagogică, 1976, p. 53-59, 60-72.
[19]. STURDEVANT, M.L.; ALLEN, G.M.;SCHNEIDER, E.T.
Thermochemical/mechanical brake and clutch unit. Int.Cl.6: F03G 7/06. U.S. Patent, No 5
822 989, 1998-10-20.
[20]. PAULIUKONIS, R.S. Electro-thermal linear pull actuator. Int. Cl.3 H05B 3/80.
United States Patent. No 4 242 571. 1980-12-30.
[21]. HITTLE, D. C. Phase Change Materials in Floor Tiles for Thermal Energy Storage.
Colorado State University, October 2002, p.10-12.
[22]. BĂLĂNESCU, G.; et al. Dicţionar de chimie. Bucureşti: Editura Tehnică, 1964.
[23]. BADER, M. Microencapsulated Paraffin in Polyethylene for Thermal Energy
Storage. New Zealand: The University of Auckland, School of Engineering, Department of
Chemical & Material Engineering, February 2002, p.
[24]. CARLEN, E. T.; MASTRANGELO, C. H. Simple, high actuation power, thermally
activated paraffin microactuator. In: Transducers’99 Conference, Sendai, Japan, June 7-
10,1999.
[25]. CIOBANU, C.; RAŢĂ, M. Tehnici de conversie a energiei – îndrumar de laborator.
Suceava: „Editura Universităţii Ştefan cel Mare”, 1997, p. 36.
[26]. ZHANG, Z.; FANG, X. Study on paraffin/expanded graphite composite phase
change thermal energy storage material. In: Energy Conversion and Management, Volume
47, Issue 3, February 2006, p. 303-310.
[27]. TAMME, R. Phase – Change Storage Systems. In: Workshop on Thermal Storage for
Trough Power Systems, February 20-21, 2003.
Page 69
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
69
[28]. PIRKLE, F. L. Thermally Expansible Compositions Methods for Preparation and
Devices using same. United State Patent Nr. 5816493, 1976-10-06, Int. Cl.6 G05D 23/02.
[29]. BAU, H.; THOMPSON, J. Application of ferrofluid as a valve/pump for
polycarbonate microfluidic devices. NSF Summer Undergraduate Fellowship in Sensor
Technologies 2006
Helen Schwerdt (Biomedical Engineering) - Johns Hopkins University.
[30]. HAIDER, M. I.; KUDER, J.E. Thermally Expandable, Viscosity Modified Wax
Compositions and Method of use in Actuators. Int. Cl.6 B29C 35/02. United States Patent.
No 5772949, 1998-06-30.
[30]. HAIDER, M. I.; KUDER, J.E. Thermally Expandable, Viscosity Modified Wax
Compositions and Method of use in Actuators. Int. Cl.6 C08L 91/06. United States Patent.
No 5709740, 1998-01-30.
[31]. HENAULT, C.; CEDEX, A. Heat Motor. Int.Cl.5: F03G 7/06. United State Patent,
No 5 020325, 1991-06-04.
[32]. IONESCU, F.; CATRINA, D.; DORIN, A. Mecanica fluidelor şi acţionări
hidraulice şi pneumatice. Bucureşti: Editura Didactică şi Pedagogică, 1980.
[33]. NICOLAE, D.; LUNGU, R.; CISMARU, C. Măsurarea parametrilor fluidelor.
Echipamente şi sisteme. Craiova; Editura Scrisul Românesc, 1986.]
[34]. HELGIU, I. Fizică generală. Bucureşti: Editura Didactică şi Pedagogică, 1970, p. 88-
89.
[35]. CĂLUGĂRU, G.; COTAE, C. Lichide magnetice. Bucureşti: Editura Ştiinţifică şi
Enciclopedică, 1978.
[36]. BEJAN, I.; BALABAN, G. Automatizări şi telecomenzi în electroenergetică.
Bucureşti: Editura Didactică şi Pedagogică, 1976.
[37]. DĂNESCU, A.; BUCURENCIU, S.; PETRESCU, S. Utilizarea energiei solare.
Bucureşti: Editura Tehnică, 1980.
[38]. VASILESCU, E.; MARIN, D.; ZGURĂ, A.; et al. Desen tehnic industrial – Elemente
de proiectare. Bucureşti: Editura Tehnică, 1994.
[39]. BODEN, R. Paraffin Microactuator-Laboratory instruction. Universitatea Uppsala.
[40]. LUCYSZYN, S. Bulk Micromachined Electrothermal Hydraulic Microactuator and
its Applications. In: Optica land Semicoductor Devices Group, Departament of EEE,
Imperial College, London, UK.
[41]. http://www.staticsealing.com/e_graphite.htm
Page 70
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
70
[42]. MASTRANGELO, C. H.; CARLEN, E. T.; et. al. Thermally Activated Polymer
Device. Int.Cl.7: F16K 31/64. United State Patent, No 6494433B2, 2002-12-17.
[43]. MASTRANGELO, C. H.; CARLEN, ; et. al. Paraffin Actuated Micromachined
Valves. In: Center for Integrated Microsystems, Departament of Electrical Engineering
Microsystems, University of Michigan, Ann Arbor, MI 48109-2122, USA.
[44]. KWANG, W.; NAMKOONG, K.; PARK C. A Phase Change Microvalve Using A
Meltable Magnetic Materail: Ferro-Wax. In: 9th
Conference on Miniaturized Szstems for
Chemistry anf Life Sciences October 9-13, 2005, Boston, Massachusetts, USA.
[45]. http://www.powerscontrols.com/pdf/B-CC.pdf
[46]. VERNET, V.; et. al. Multi-Range Expansion Material. United State Patent, No
3001401, 1961-09-26.
[47]. http://www.cibolas7.net/12299.html
[48]. SURGAREK, A.; Thermostat. United State Patent Nr. 5984197, 1999-11-16, Int. Cl.6
G65D 23/12.
[49]. http://www.engine-cooling.com/page20.html
[50]. KUZE, Y. Wax Pellet Thermostat. United State Patent Nr. 4948043, 1990-08-14, Int.
Cl.5 F01P 7/16.
[51]. SCHNEIDER, E.; JAVOR, K. A.; et. al. Proportionally Controlled Thermochemical
Mechanical Actuator. Int. Cl.6 F03G 7/06. United States Patent. No 5685149. 1997-11-11.
[52]. MALLET, O.; KORNMANN, M. Design, Development and Testing of a Paraffin
Actuator-Final Report. In: Materails Development, Design and Devices, September,1997.
[53]. http://www.btt.behrgroup.com/english/produkte/haustechnik/sanitaer/thermaqua.pdf
[54]. DRANSFIELD, A.; HABER, F.D. Instruire programată în metoda locului rădăcinii.
Bucureşti: Editura Tehnică, 1980.
[55]. POPESCU, C.; LEFTER, C. Materiale electrotehnice. Bucureşti: Editura Didactică şi
Pedagogică, 1970.
[56]. RADU, C. Studiul structurilor Tansegrity. Proiect de diplomă. Coordonator ştiinţific:
conf. dr.ing. Gheorghe Frunză. Suceava: Universitatea “Ştefan cel Mare”, Facultatea de
Inginerie Electrică, 1997.
[57]. www.vernet.fr
[58]. SEBASTIAN, L. Automatica. Bucureşti: Editura Didactica şi Pedagogică, 1972.
[59]. PRECUPEŢU, P. Desen tehnic şi industrial pentru construcţii de maşini. Bucureşti:
Editura Tehnică, 1990.
Page 71
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
71
[60]. PIETRĂREANU, I. Agenda electricianului. Bucureşti: Editura Tehnică, 1986.
[61]. FLOREA, I.; PANAITESCU, V. Mecanica Fluidelor. Bucureşti: Editura Didactică şi
Pedagogică, 1979.
[62]. HEIJNING, S. Design of an Electro-Dynamic Tape-Tether Deployment System. Delft
University of Technology, The Netherlands.
[63]. HUEBSCHER, R. G.; SOBECKS, R. R.; et. al. Electro-Thermal Linear Actuator
With Internal Reservoir. Int. Cl.2 F03G 7/06. United States Patent. No 3991572. 1976-11-
06.
[64].www.gemansupply.com technical article.
[65]. PRIEBE, J. The Utilization of High Output Paraffin Actuators in Aerospace
Applications. Starsys Research Corporation. American Institute of Aeronautics and
Astronautics, 1995.
[66]. INGVARSSON, L.; ANDRE, P.; et. al. Thermal Actuator. United State Patent Nr.
6046666, 2000-04-04, Int. Cl.7 H01H 37/36.
[67]. LUCY, M. H.; HARDY, R. C.; et. al. Report on Alternative Devices to Pyrotechnics
on Spacecraft. In: 10th
Annual AIAA/USU Conference on Small Satellites Utah State
University; Logan, September 17-19, 1996.
http://www.btt.behrgroup.com/english/produkte/haustechnik/sanitaer/thermaqua.pdf
[68]. JONES, A.P.; SPENCE, B. Spacecraft Solar Array Technology Trends. AEC-Able
Engineering Company, Inc.93 Castilian Dr. Goleta, CA 93117 805-685-2262.
[69]. http://www.rostravernatherm.com/thermal-actuators.htm
[70]. SCHNEIDER, E.T. Remote controlled high force actuator. Int. Cl.5: F02G 7/06.
United States Patent. No 5 025 627. 1991-06-25.
[71]. XAVIER, P. R.; MAURAN, S. “Paraffin/Porous–Graphite-Matrix Composite As A
High And Constant Power Thermal Storage Material”, Int. J. Heat Mass Trans, Vol. 44,
2001, p. 2727 –2737.
[72]. http://www.omnimpex.ro/texte/petroliere/romana_07/PARAFINA.pdf.
[73]. JEDER, M. Studiul motoarelor solare. Contribuţii la realizarea unor actuatoare cu
lichid folosite ca propulsoare la rotaţia motoarelor solare - proiect de diplomă. Suceava:
Universitatea “Ştefan cel Mare”, Facultatea de Inginerie Electrică, Promoţia 2005.
[74.] CERNOMAZU, D.; GRAUR, A.; MANDICI, L.; SOREA N., NIŢAN, I.; PRODAN, C.; MILICI, L. D.; MILICI, M.R.; RAŢĂ, M.; ROMANIUC, I. Actuator cu parafină. Cerere de Brevet de Invenţie nr A/01065 din 26.10.2011. CMI nr.15222/07.10.2011
Page 72
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
72
[75.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I. BACIU, I. Actuator solar. Cerere de Brevet de Invenţie nr A/01168 din 16.11.2011 CMI nr.16600/31.10.2011
[76.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I.; BACIU, I. Actuator solar. Cerere de Brevet de Invenţie nr A/00032 din 17.01.2012 CMI nr.16603/31.10.2011
[77.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I.; BACIU, I. Actuator solar. Cerere de Brevet de Invenţie nr A/01164 din 16.11.2011 CMI nr.16599/31.10.2011- Cerere ce trebuie data Paulei
[78.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I.; BUZDUGA, C. Actuator solar. Cerere de Brevet de Invenţie nr A/01370 din 09.02.2011 CMI nr.16602/31.10.2011
[79.] SOREA N., NIŢAN, I.; BACIU, I.; BUZDUGA, C.; OLARIU, E. D.; ROMANIUC, I.; CERNOMAZU, D. Actuator solar. Cerere de Brevet de Invenţie nr A/01162 din16.11.2011 CMI nr.16604/31.10.2011
[80.] SOREA N., NIŢAN, I.; PRODAN, C.; MILICI, L. D.; MILICI, M.R.; RAŢĂ, M.; BACIU, I. BUZDUGA, C.; ROMANIUC, I.; CERNOMAZU, D. Actuator solar. Cerere de Brevet de Invenţie nr A/00034 din 17.01.2012 CMI nr.189089/09.12.2011
[81.] UNGUREANU, C.; NIŢAN, I.; ROMANIUC, I.; BACIU, I.; DAVID, C.; RAŢĂ, M.; MILICI, M.R.; MILICI, D.L.; OLARIU, E. D.; CERNOMAZU, D. Stand de încercare Cerere de brevet de invenţie nr. A/00259 din 24.03.2011, OSIM Bucureşti, - Contract de misiune inventivă nr. 4389 din 21.03.2011
[82.] UNGUREANU, C.; NIŢAN, I.; ROMANIUC, I.; BACIU, I.; DAVID, C.; RAŢĂ, M.; MILICI, M.R.; MILICI, D.L.; OLARIU, E. D.; CERNOMAZU, D. Stand de încercare Cerere de brevet de invenţie nr. A/00287 din 01.04.2011, OSIM Bucureşti, - Contract de misiune inventivă nr. 4390 din 21.03.2011
[83.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; PRODAN, C.; MILICI, L. D.; MILICI, M.R.; RAŢĂ, M.; ROMANIUC, I. Motor solar. Cerere de Brevet de Invenţie nr A/01067 din 26.10.2011. CMI nr.15223/07.10.2011
[84.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I.; BACIU, I. Motor solar. Cerere de Brevet de Invenţie nr A/01163 din 16.11.2011 CMI nr.16605/31.10.2011
[85.] CERNOMAZU, D.; MANDICI, L.; GRAUR, A.; SOREA N., NIŢAN, I.; RAŢĂ, M.; MILICI, L. D.; MILICI, M.R.; PRODAN, C.; ROMANIUC, I.; BACIU, I. Motor solar. Cerere de Brevet de Invenţie nr A/01167 din 16.11.2011 CMI nr.16606/31.10.2011
[86.] SOREA N., NIŢAN, I.; BACIU, I.; BUZDUGA, C.; OLARIU, E. D.; ROMANIUC, I.; CERNOMAZU, D.Motor solar. Cerere de Brevet de Invenţie nr A/01169 din 16.11.2011, CMI nr.16607/31.10.2011
[87.] CERNOMAZU, D.; MILICI, M.R.; MILICI, L.D.; PRODAN (DAVID), C.; RAŢĂ, M.; NIŢAN, I.; Releu de timp. Cerere de brevet de invenţie nr. A/00120 din 09.02.2011, OSIM Bucureşti, (Contract de misiune inventivă înregistrat la USV cu nr.17828/06.12.2010)
[88.] CERNOMAZU, D.; MILICI, M. R.; MILICI, L. D.; DAVID, C.; RAŢĂ, M.; BUZDUGA, C.; OLARIU, E. D.; NIŢAN, I. Releu de gaze. Cerere de brevet nr. A/00668 din 28.07.2010, OSIM Bucureşti
Page 73
CAPITOLUL 1 Consideraţii generale privind actuatoarele electromecanice
73
[89.] CERNOMAZU, D.; MILICI, M. R.; MILICI, L. D.; DAVID, C.; RAŢĂ, M.; OLARIU, E. D.; NIŢAN, I. Micropompă electrochimică. Cerere de brevet nr. A/00665 din 28.07.2010, OSIM Bucureşti
[90.] CERNOMAZU, D.; MILICI, M. R.; MILICI, L. D.; DAVID, C.; RAŢĂ, M.; OLARIU, E. D.; NIŢAN, I. Micropompă electrochimică. Cerere de brevet nr. A/00666 din 28.07.2010, OSIM Bucureşti
[91.] CERNOMAZU, D.; MILICI, M. R.; NIŢAN, I.; MILICI, L. D.; DAVID, C.; RAŢĂ, M.; SAVU, E.; OLARIU, E. D. Pompă electrochimică cu lichid. Cerere de brevet de invenţie nr. A/00883 din 23.09.2010, OSIM Bucureşti
[92.] MILICI, M.R.; MILICI, L.D.; RAŢĂ, M.; DAVID, C.; NIŢAN, I.; OLARIU, E.D.; CERNOMAZU, D.; Pompă electrochimică. Cerere de brevet de invenţie nr.A/00911 din 28.09.2010, OSIM Bucureşti
[93.] NIŢAN, I.; ROMANIUC, I.; MILICI, M.R.; MILICI, L.D.; RAŢĂ, M.; DAVID, C.; OLARIU, E.D.; CERNOMAZU, D.; Pompă electrochimică. Cerere de brevet de invenţie din 28.09.2012, OSIM Bucureşti