105
METODOS NUMERICOS Ingeniería Civil ING. CRISTIAN CASTRO P. Facultad de Ingeniería de Minas, Geología y Civil Departamento académico de ingeniería de minas y civil CATEDRA 1 2
METODOS NUMERICOS
Ingeniería Civil
ING.�CRISTIAN�CASTRO�P.
Facultad de Ingeniería de Minas, Geología y Civil
Departamento académico de ingeniería de minas y civil
CATEDRA 12
Capitulo XII
AJUSTE DE CURVAS APROXIMACIÓN FUNCIONAL
ING.�CRISTIAN�CASTRO�P.
Ajusteu Polinomios de Taylor
u Mínimos Cuadrados
u Minimización de normas
u Aproximación Racional
u Series de Fourier
u Curvas de Bezier
u B-Splines
Interpolacionu Interpolación Polinomial
u Polinomios Osculadores: Interpolación de Hermite
u Interpolación Racional: Aproximaciones de Pade
u Interpolación segmentaria: Splines
u Otros
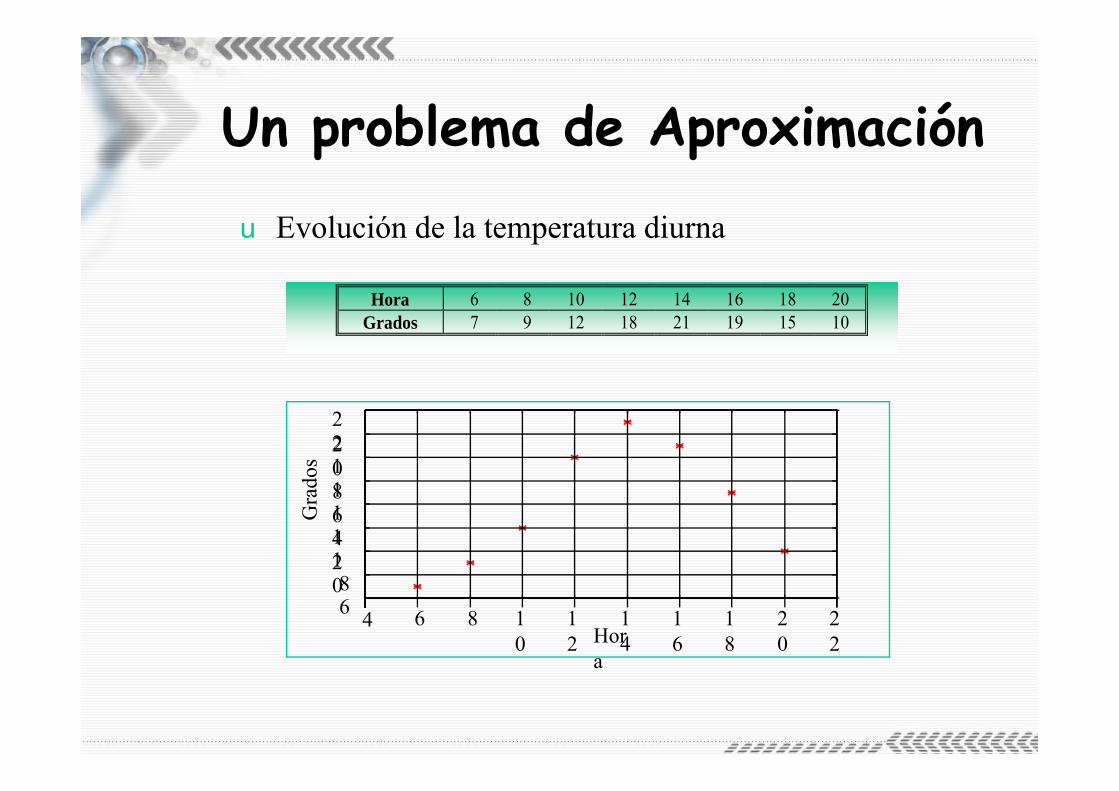
Hora 6 8 10 12 14 16 18 20Grados 7 9 12 18 21 19 15 10
Un problema de Aproximaciónu Evolución de la temperatura diurna
4
8
20
6 8 10
12
14
16
18
20
22
6
10
12
14
16
18
22
Hora
Gra
dos

Métodos Numéricos Aplicados a la Ingeniería
Método de Mínimos Cuadrados
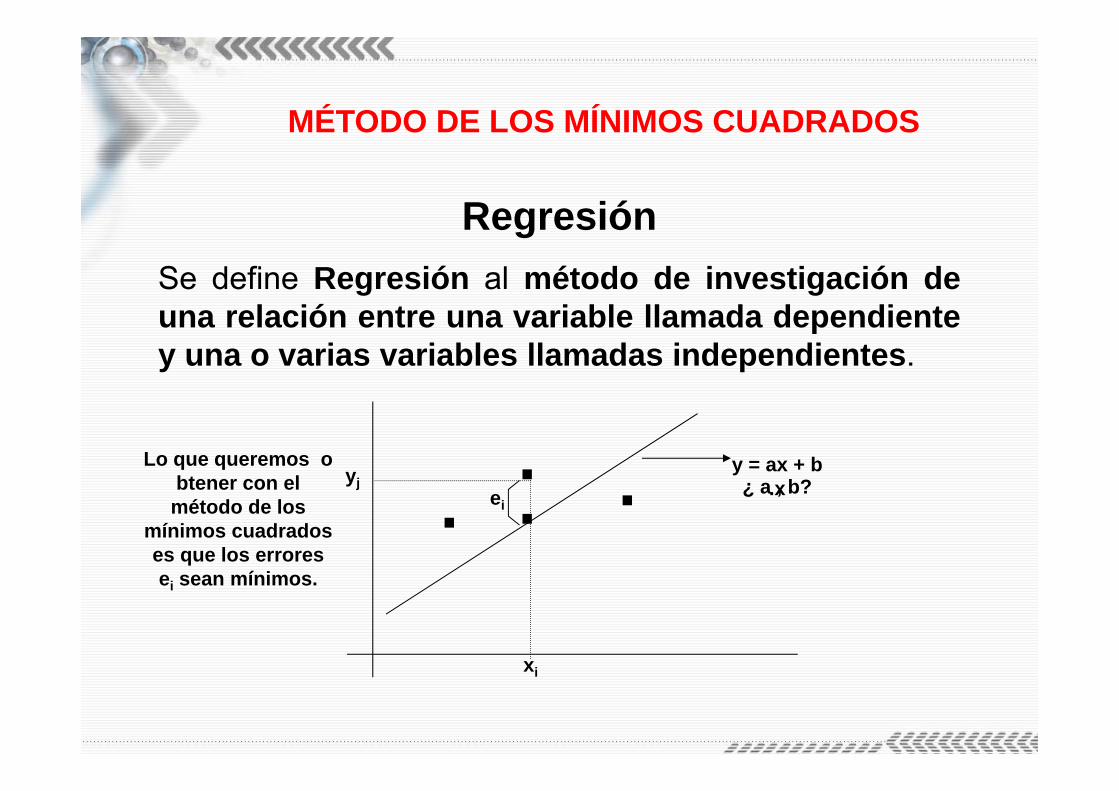
MÉTODO DE LOS MÍNIMOS CUADRADOS
RegresiónSe define Regresión al método de investigación deuna relación entre una variable llamada dependientey una o varias variables llamadas independientes.
..
. .yj
xi
ei
y = ax + b.x¿ a , b?
Lo que queremos obtener con el método de los
mínimos cuadrados es que los errores ei sean mínimos.
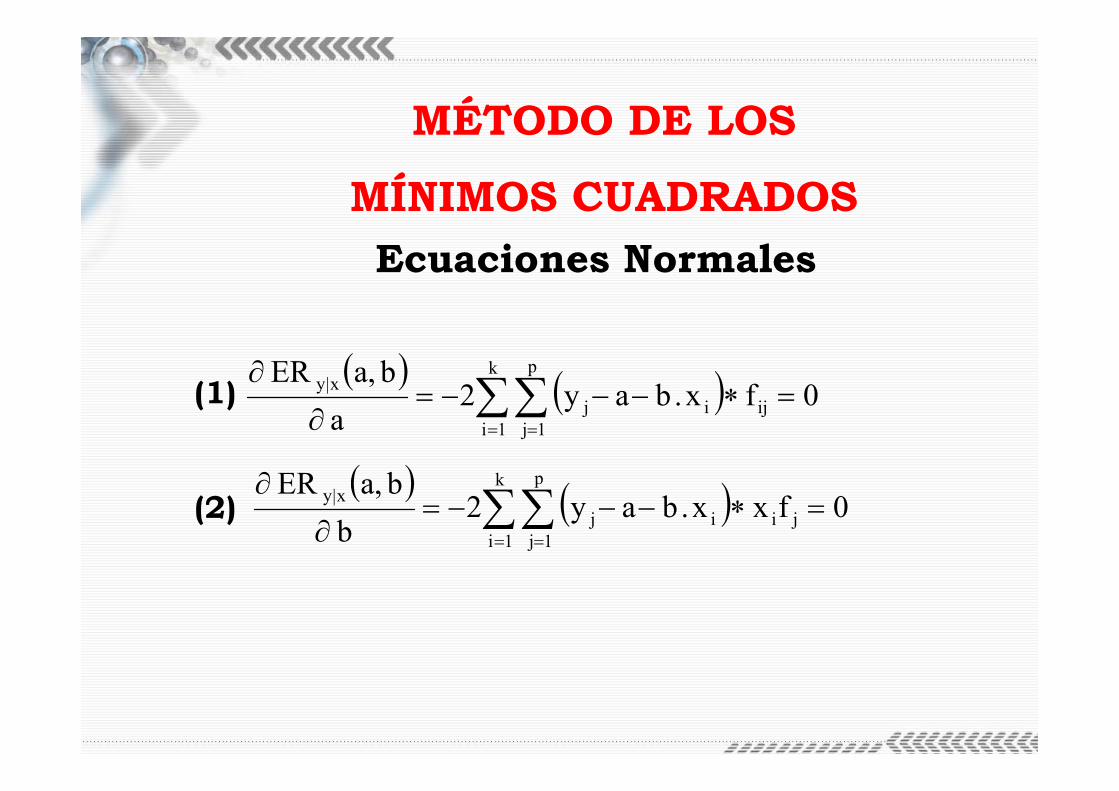
MÉTODO DE LOS
MÍNIMOS CUADRADOSEcuaciones Normales
(1)
(2)
k
1i
p
1jijij
x|y 0fx.bay2a
ba,ER
k
1i
p
1jjiij
x|y 0fxx.bay2b
ba,ER
MÉTODO DE LOS MÍNIMOS CUADRADOS
0b 0b
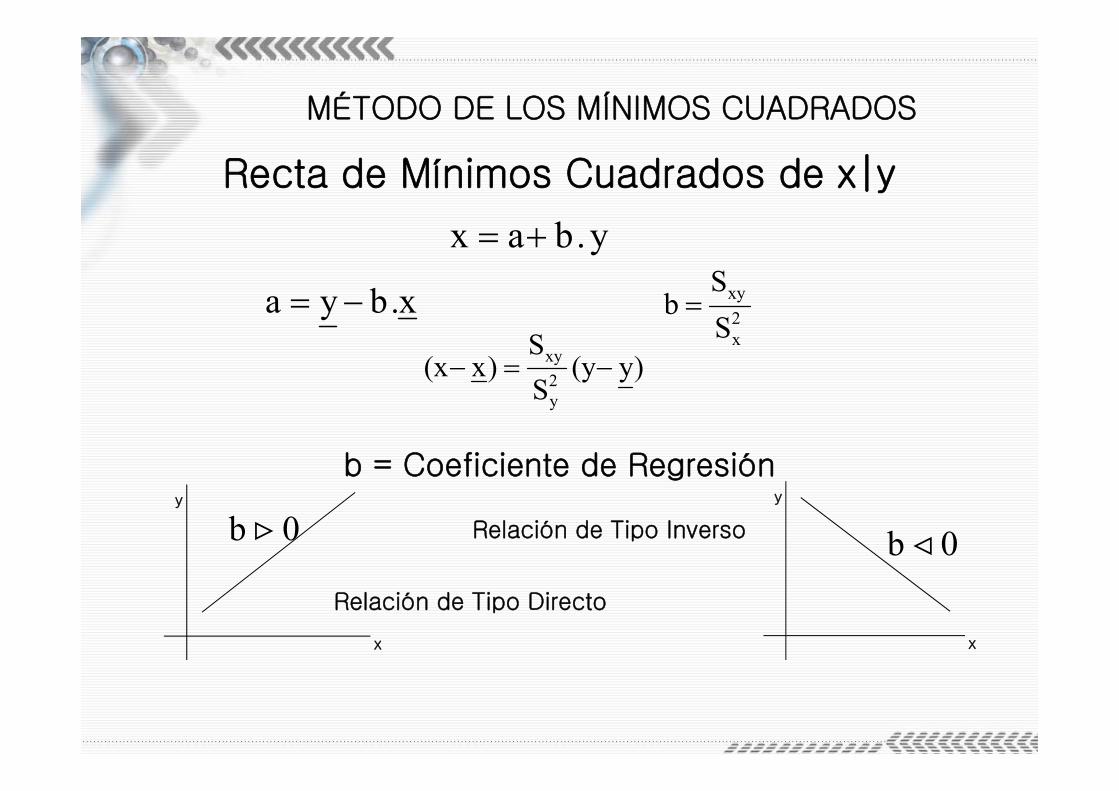
Recta de Mínimos Cuadrados de x|y
b = Coeficiente de Regresión
y.bax
x.bya 2x
xy
SS
b
)y(ySS
)x(x 2y
xy
y
x
y
x
Relación de Tipo Directo
Relación de Tipo Inverso
MEDIDAS DE DEPENDENCIA ESTADÍSTICA
Varianza ResidualSe define la Varianza Residual de Y sobre X, como la varianza de los errores ei , i = 1,…, n (entre valores yi , yi*)
Se define la Varianza Residual de X sobre Y, como la varianza de los errores ei´ , i = 1,…, n (entre valores xi , xi*)
n
1i
2i
2x)|e(y ee
n1S
n
1i
2i
2y)|(xe ee
n1S
MEDIDAS DE DEPENDENCIA ESTADÍSTICA
Ecuaciones Normales de la Recta de Mínimos Cuadrados y|x
(1)
(2)
(1)
(2)
k
1i
p
1jijij
x|y 0fx.bay2a
ba,ER
k
1i
p
1jjiij
x|y 0fxx.bay2b
ba,ER
n
1ii 0e
n
1iii 0xe
MEDIDAS DE DEPENDENCIA ESTADÍSTICA
Coeficiente de DeterminaciónSe define el Coeficiente de Determinación de Y sobre X como:
Se define el Coeficiente de Determinación de X sobre Y como:
2Y
2X)|e(Y
2Y
2Y*2
X|Y SS
1SSR
2X
2Y)|e(X
2X
2X*2
Y|X SS
1SSR
COEFICIENTE DE CORRELACIÓN LINEAL
Coeficiente de Correlación LinealEl Coeficiente de Correlación Lineal de X e Y, se define como:
Propiedades:
(1)
(2)
(3)
(4)
(5) X e Y dependen linealmente X e Y están incorreladas linealmente
(6) Si X e Y son independientes --> X e Y están incorreladas linealmente.
YX
XY
SSSr
2Y
2X|Y S).r(1m 2
X2
Y|X S).r(1m 2
Y|X2
X|Y2 RRr
b.br 2 1r11r0 2
1r 0r
COMPARACIÓN CON LA CURVA DE REGRESIÓN
Comparación
Interpretación(1) La Curva de regresión de Y sobre X es la recta demínimos cuadrados de Y sobre X.
(2) Las dos curvas de regresión son las rectas demínimos cuadrados.
(3) Proporción que explica la variabilidad deY sobre la recta de mínimos cuadrados de Y|X
0rη10rη1
22Y|X
22X|Y
2X|Y
2 ηr
2Y|X
2X|Y
2 ηηr
2Y
x|y2Y2
SmS
r0´75
RELACIÓN ENTRE VARIABLES ORDINALES
Coeficiente de Correlación de Spearman, rs
El Coeficiente de Correlación de Spearman para lasvariables X e Y en escala ordinal se define como elcoeficiente de correlación lineal entre ambas variables.
Interpretación:
(1)
(2) Relación exacta directa Relación exactainversa No existe una relación clara entre X e Y
1)n(n
d61
SSS
r 2
2i
n
1i
YX
XYs
1r1 s
1rs 1rs 0rs
MÉTODO DE MÍNIMOS CUADRADOS
x
y

0mS 0
bS
N
ii
N
ii yxbaN
11
N
iii
N
ii
N
ii yxxbxa
11
2
1
(xi,yi)
y = b+mxyi -b-m xi
N
iii mxbyS
1
2)(
CRITERIO: Minimizar S
AJUSTE POR MÍNIMOS CUADRADOS
(Ajuste lineal)
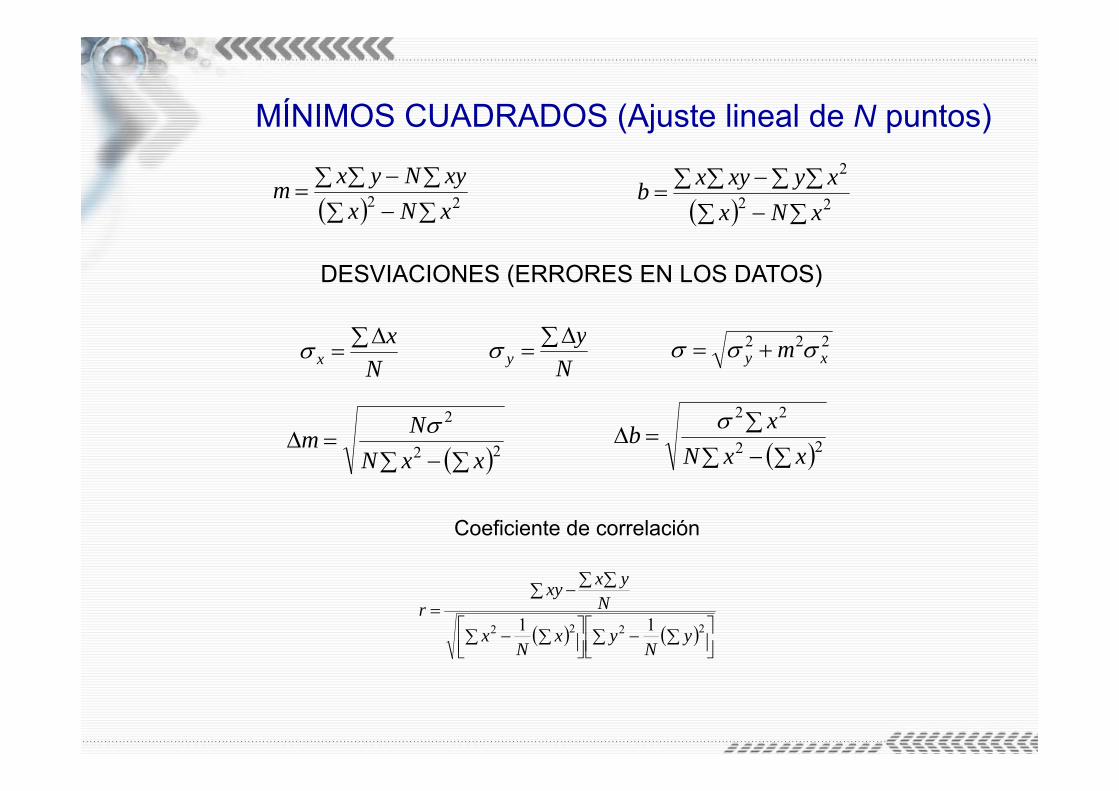
MÍNIMOS CUADRADOS (Ajuste lineal de N puntos)
2222 11 yN
yxN
x
Nyxxy
r
22 xNx
xyNyxm 22
2
xNxxyxyxb
Nx
x
N
yy
222
xy m
22
2
xxNNm
22
22
xxNxb
DESVIACIONES (ERRORES EN LOS DATOS)
Coeficiente de correlación
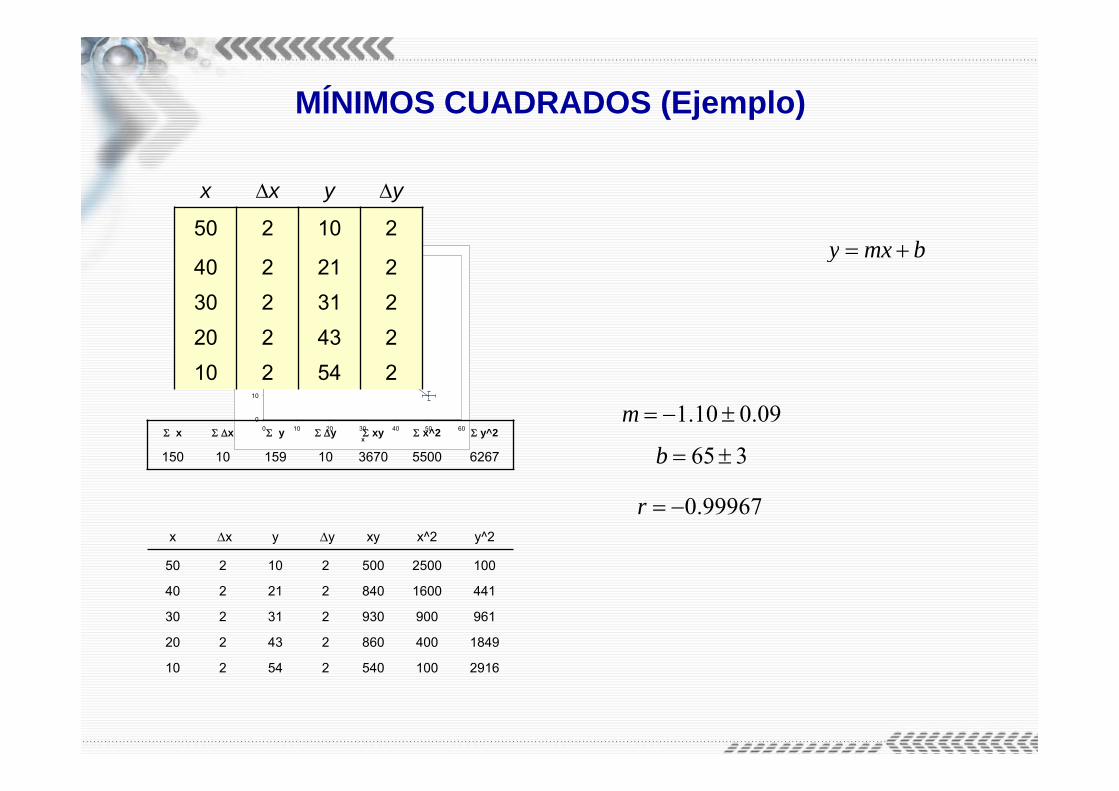
MÍNIMOS CUADRADOS (Ejemplo)
0
10
20
30
40
50
60
70
0 10 20 30 40 50 60
x
y
x x y y
50 2 10 2
40 2 21 230 2 31 220 2 43 210 2 54 2
09.010.1 m
365b
99967.0r
bmxy
x x y y xy x^2 y^2
150 10 159 10 3670 5500 6267
x x y y xy x^2 y^2
50 2 10 2 500 2500 100
40 2 21 2 840 1600 441
30 2 31 2 930 900 961
20 2 43 2 860 400 1849
10 2 54 2 540 100 2916
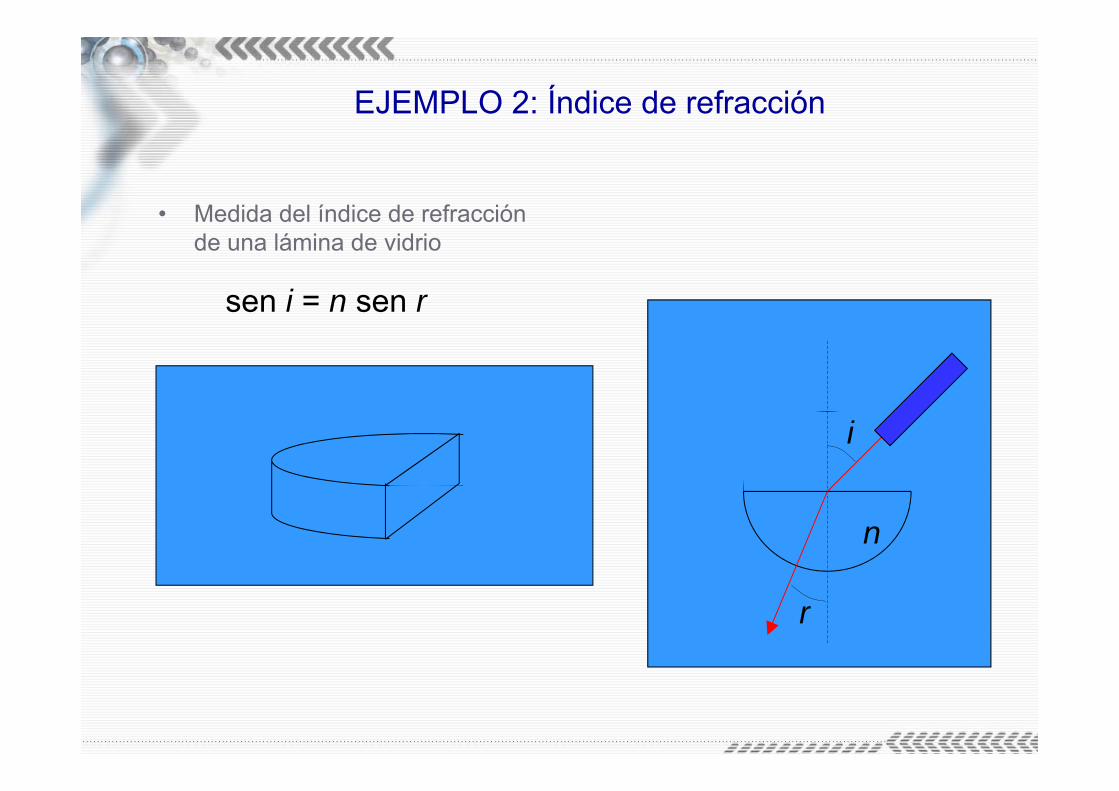
EJEMPLO 2: Índice de refracción
• Medida del índice de refracción de una lámina de vidrio
i
r
n
sen i = n sen r
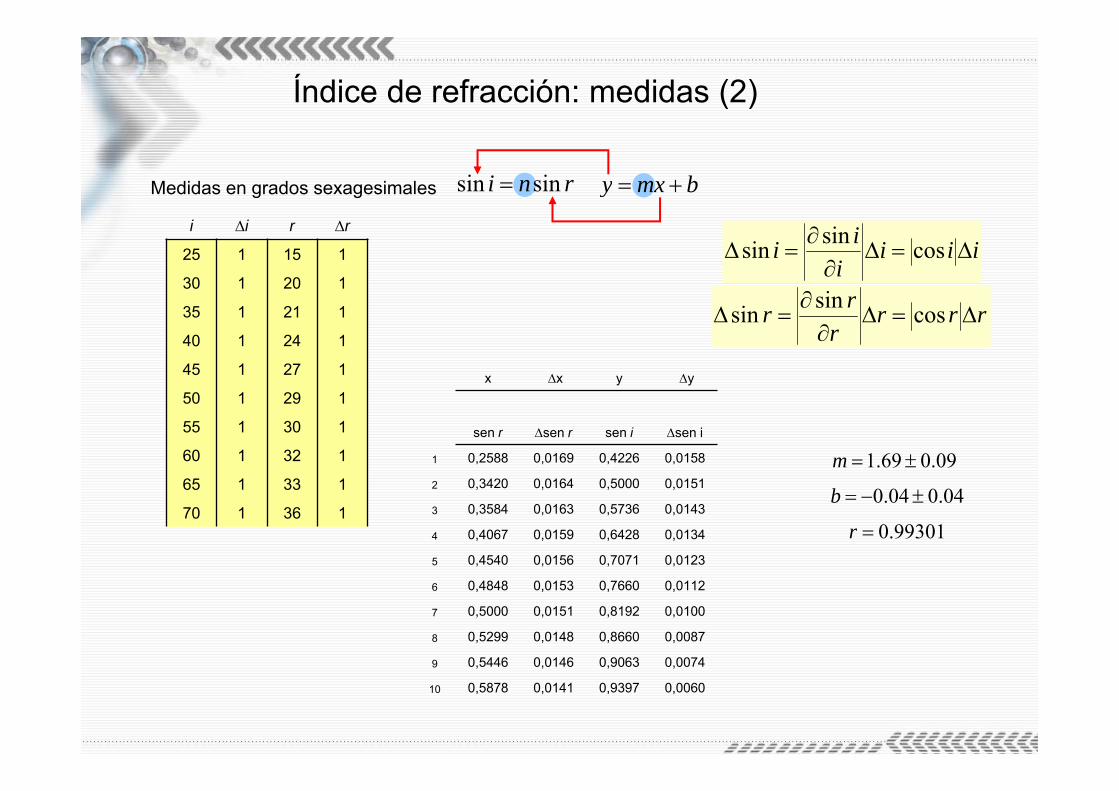
i i r r
25 1 15 1
30 1 20 1
35 1 21 1
40 1 24 1
45 1 27 1
50 1 29 1
55 1 30 1
60 1 32 1
65 1 33 1
70 1 36 1
bmxy
x x y y
sen r sen r sen i sen i
1 0,2588 0,0169 0,4226 0,0158
2 0,3420 0,0164 0,5000 0,0151
3 0,3584 0,0163 0,5736 0,0143
4 0,4067 0,0159 0,6428 0,0134
5 0,4540 0,0156 0,7071 0,0123
6 0,4848 0,0153 0,7660 0,0112
7 0,5000 0,0151 0,8192 0,0100
8 0,5299 0,0148 0,8660 0,0087
9 0,5446 0,0146 0,9063 0,0074
10 0,5878 0,0141 0,9397 0,0060
Medidas en grados sexagesimales
Índice de refracción: medidas (2)
rni sinsin
iiii
ii
cossinsin
09.069.1 m
04.004.0 b
99301.0r
rrrr
rr
cossinsin
0,0
0,2
0,4
0,6
0,8
1,0
1,2
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7
sen r
sen
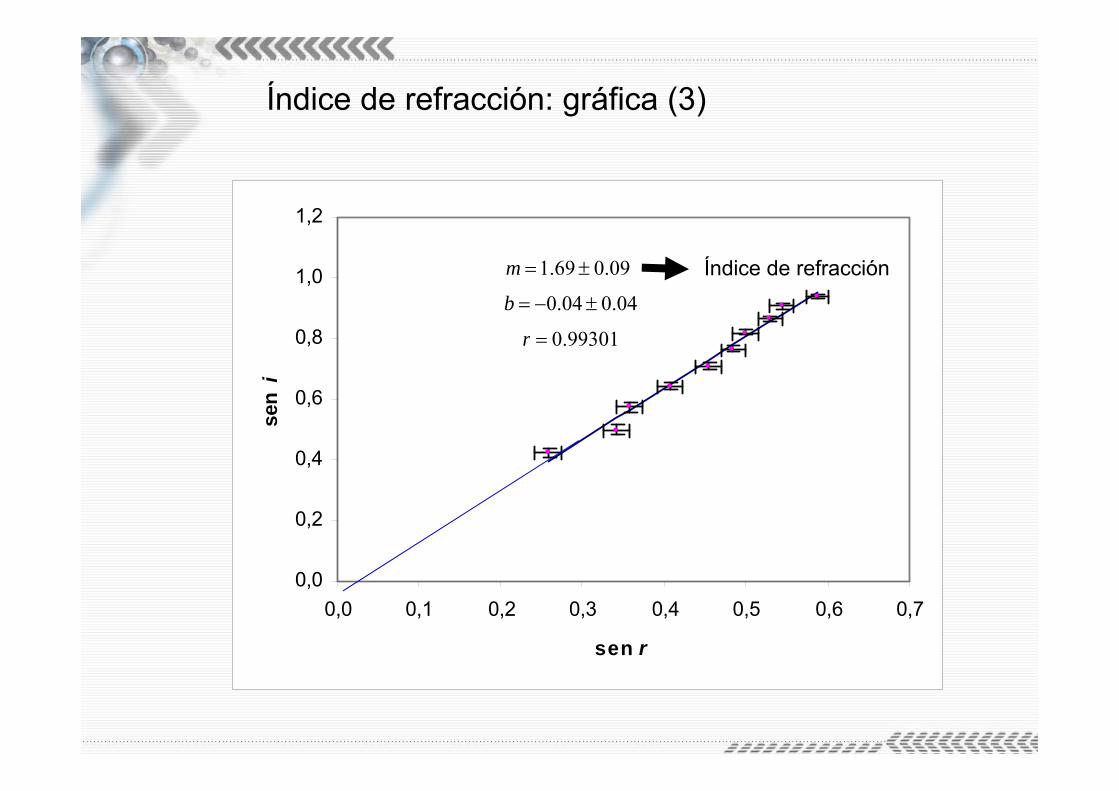
i09.069.1 m
04.004.0 b
99301.0r
Índice de refracción: gráfica (3)
Índice de refracción
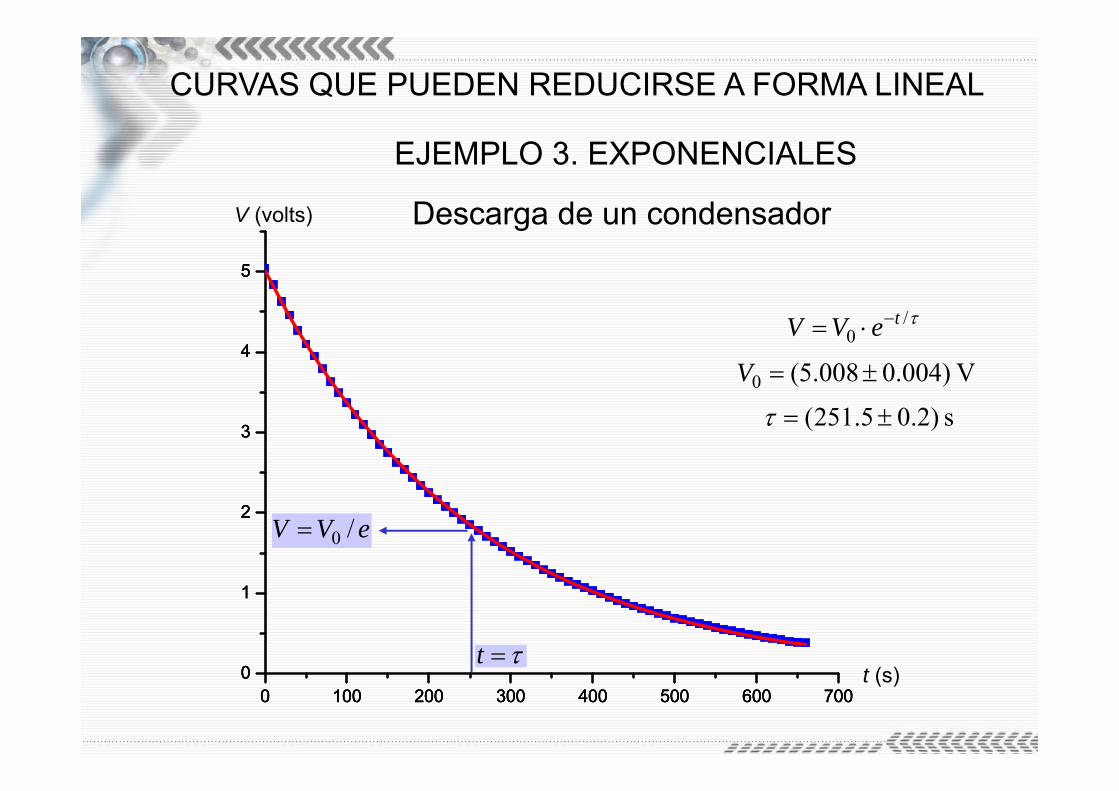
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
EJEMPLO 3. EXPONENCIALES
0 100 200 300 400 500 600 7000
1
2
3
4
5
t (s)
V (volts)
0 100 200 300 400 500 600 7000
1
2
3
4
5
/0
teVV
V )004.0008.5(0 Vs)2.05.251(
0 100 200 300 400 500 600 7000
1
2
3
4
5
t
eVV /0
Descarga de un condensador
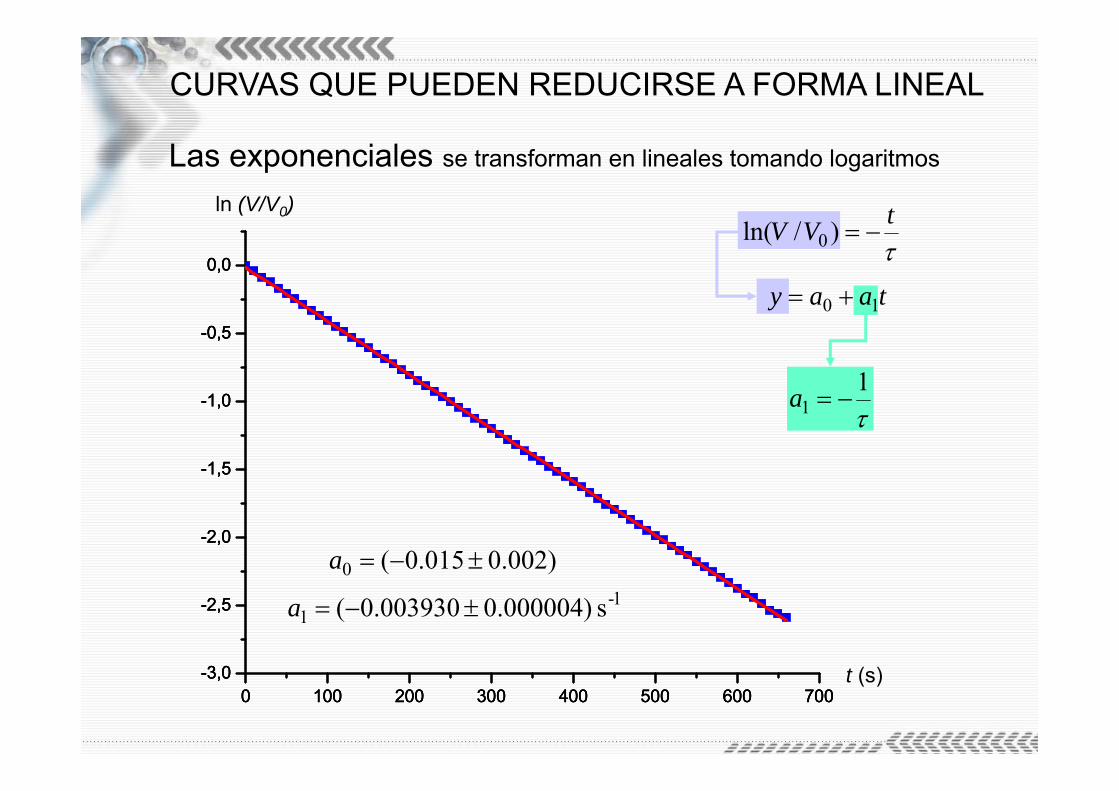
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
Las exponenciales se transforman en lineales tomando logaritmos
1
1 a
0 100 200 300 400 500 600 700-3,0
-2,5
-2,0
-1,5
-1,0
-0,5
0,0
t (s)
ln (V/V0)
0 100 200 300 400 500 600 700-3,0
-2,5
-2,0
-1,5
-1,0
-0,5
0,0
0 100 200 300 400 500 600 700-3,0
-2,5
-2,0
-1,5
-1,0
-0,5
0,0 tVV )/ln( 0
taay 10
)002.0015.0(0 a1-
1 s )000004.0003930.0( a
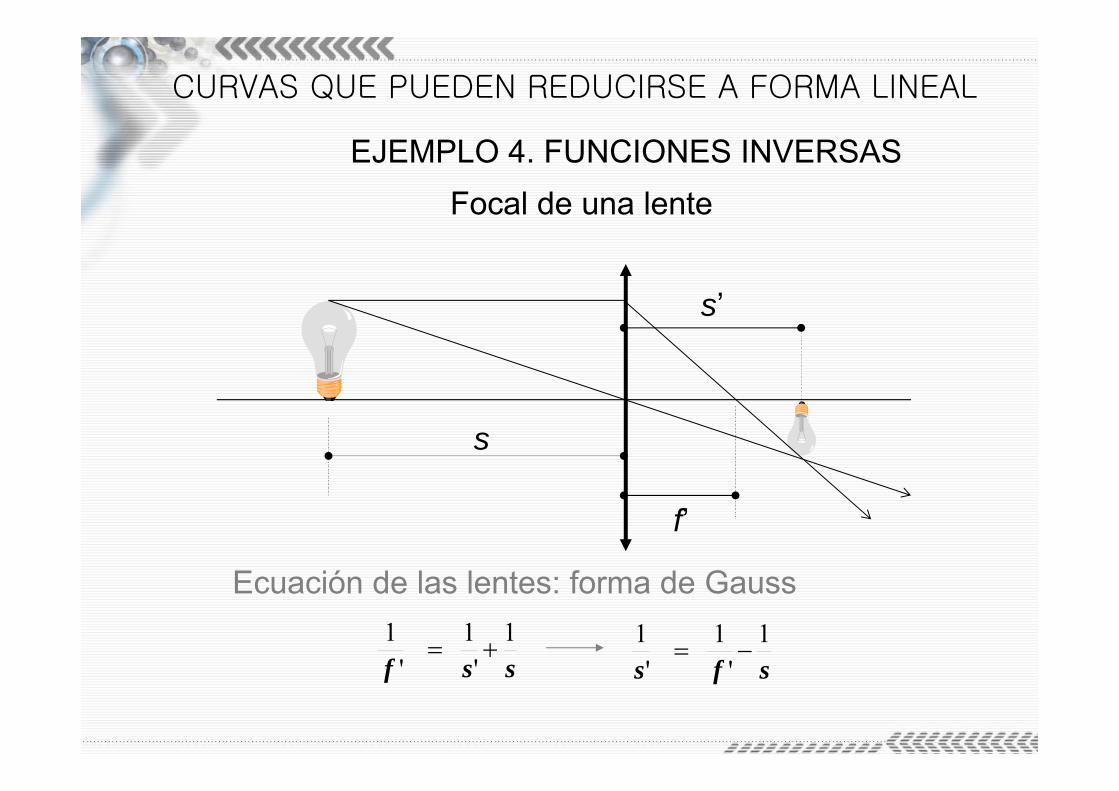
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
s
s’
ss
f1
'1
'1
f’
sf
s1
'1
'1
Ecuación de las lentes: forma de Gauss
EJEMPLO 4. FUNCIONES INVERSASFocal de una lente
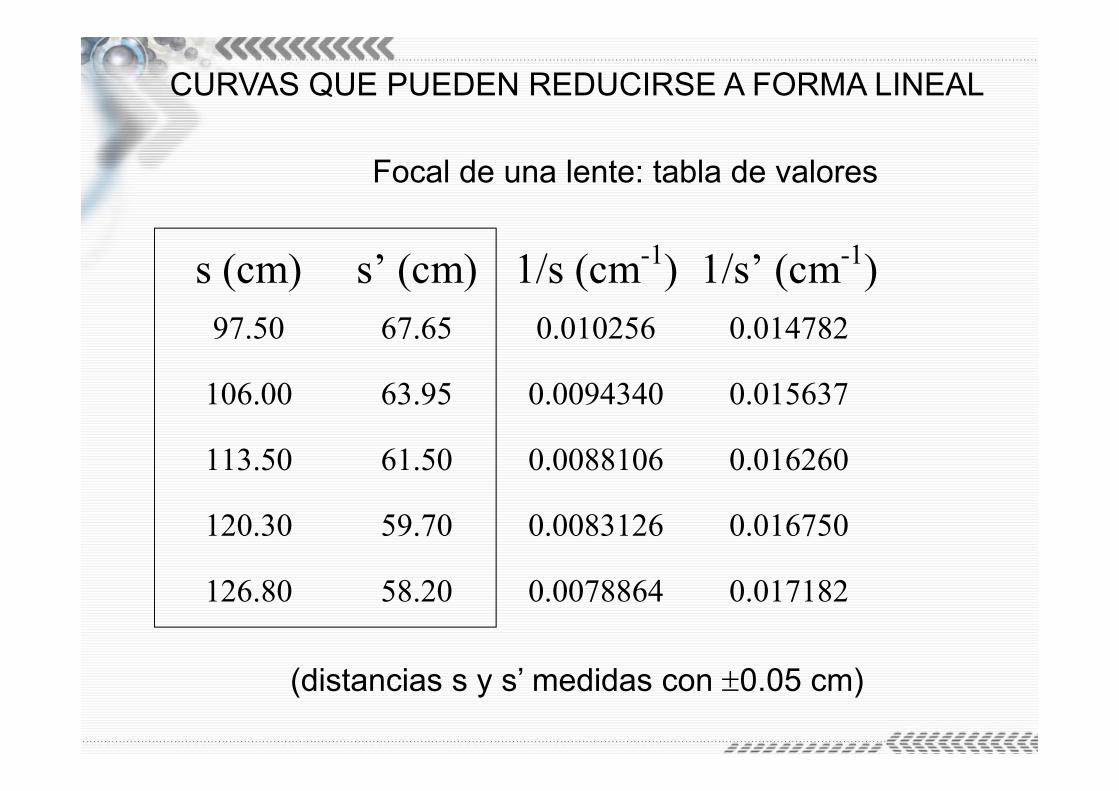
s (cm) s’ (cm) 1/s (cm-1) 1/s’ (cm-1)97.50 67.65 0.010256 0.014782
106.00 63.95 0.0094340 0.015637
113.50 61.50 0.0088106 0.016260
120.30 59.70 0.0083126 0.016750
126.80 58.20 0.0078864 0.017182
(distancias s y s’ medidas con 0.05 cm)
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
Focal de una lente: tabla de valores
27
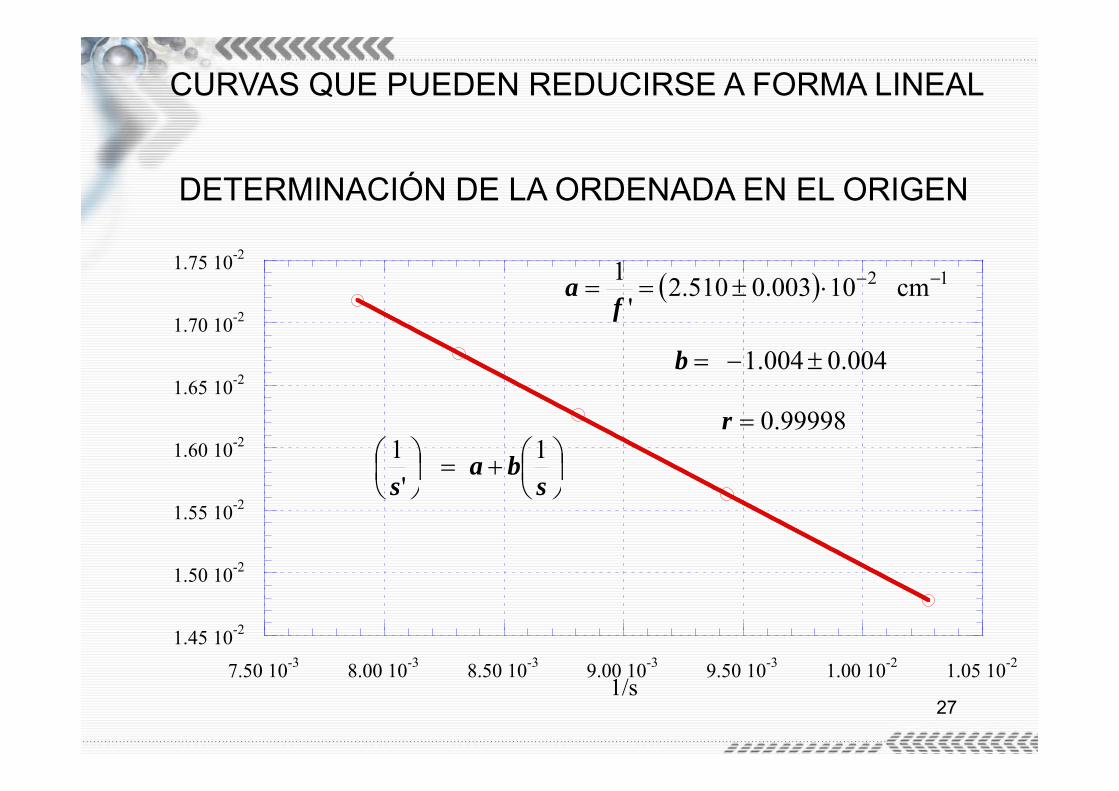
1.45 10-2
1.50 10-2
1.55 10-2
1.60 10-2
1.65 10-2
1.70 10-2
1.75 10-2
7.50 10-3 8.00 10-3 8.50 10-3 9.00 10-3 9.50 10-3 1.00 10-2 1.05 10-2
1/s
12 cm10003.0510.2'
1 f
a
004.0004.1 b
99998.0r
sb a
s1
'1
DETERMINACIÓN DE LA ORDENADA EN EL ORIGEN
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
CURVAS QUE PUEDEN REDUCIRSE A FORMA LINEAL
cm84.3910510.2
11' 2 a
f
cm05.0
10510.2
10003.01' 22
2
2
a
af
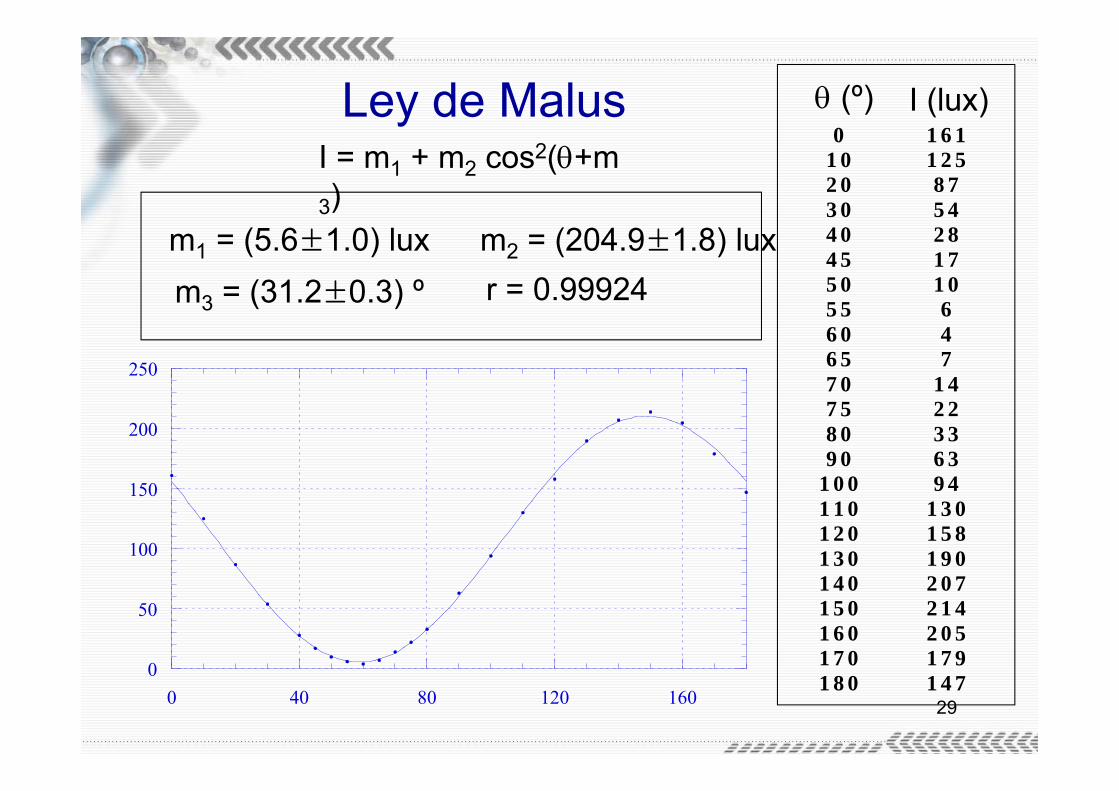
Ley de Malus
29
0 1 6 11 0 1 2 52 0 8 73 0 5 44 0 2 84 5 1 75 0 1 05 5 66 0 46 5 77 0 1 47 5 2 28 0 3 39 0 6 3
1 0 0 9 41 1 0 1 3 01 2 0 1 5 81 3 0 1 9 01 4 0 2 0 71 5 0 2 1 41 6 0 2 0 51 7 0 1 7 91 8 0 1 4 7
(º) I (lux)
0
50
100
150
200
250
0 40 80 120 160
I = m1 + m2 cos2(+m3)
m1 = (5.6±1.0) lux m2 = (204.9±1.8) luxm3 = (31.2±0.3) º r = 0.99924
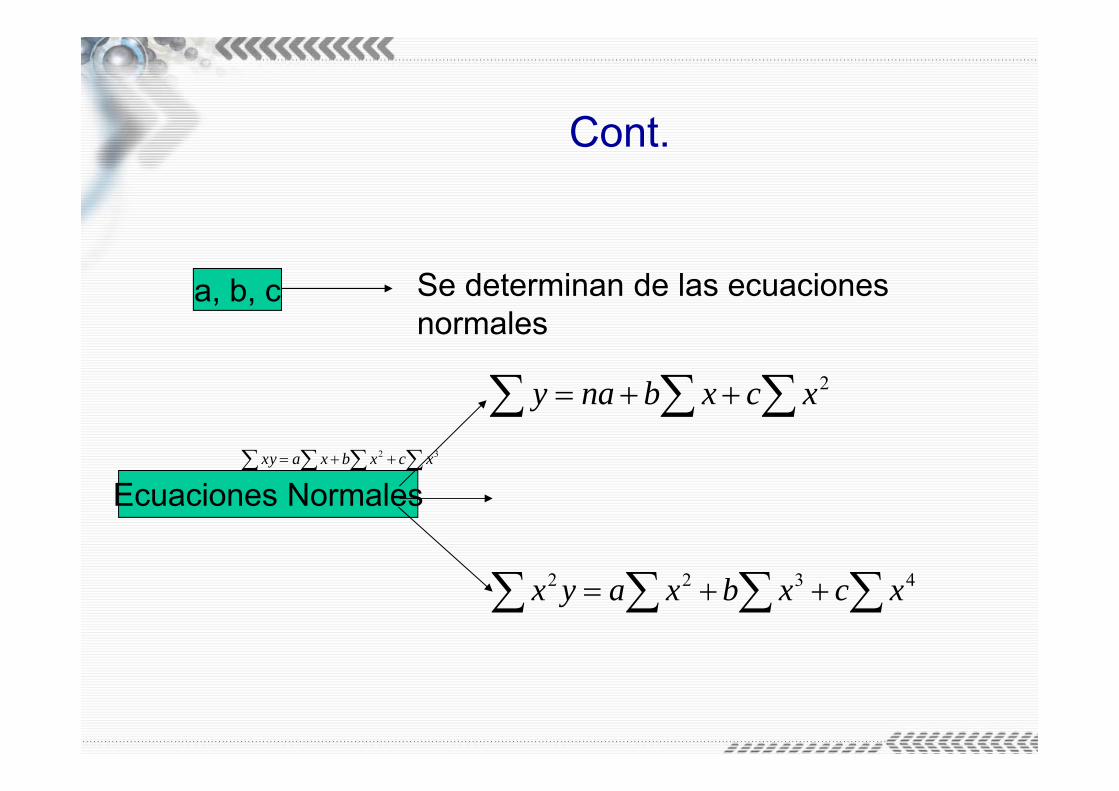
Cont.
32 xcxbxaxy
2xcxbnay
4322 xcxbxayx
a, b, c Se determinan de las ecuaciones normales
Ecuaciones Normales
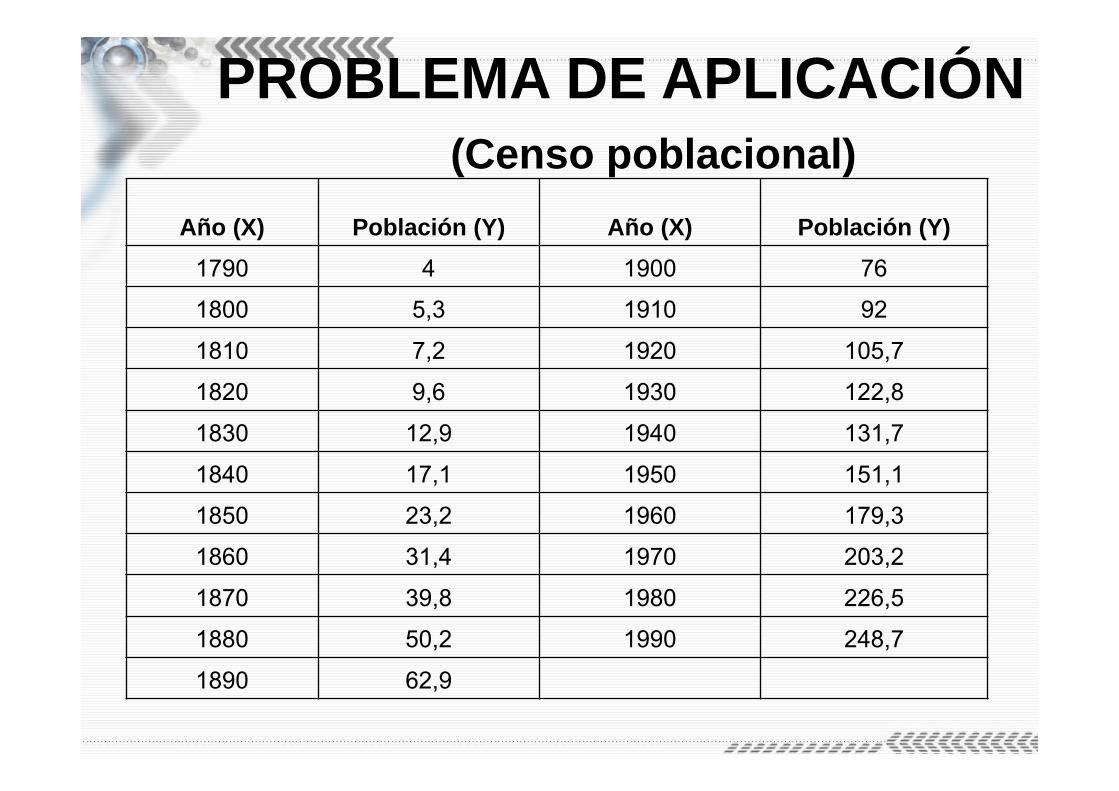
Año (X) Población (Y) Año (X) Población (Y)1790 4 1900 76
1800 5,3 1910 92
1810 7,2 1920 105,7
1820 9,6 1930 122,8
1830 12,9 1940 131,7
1840 17,1 1950 151,1
1850 23,2 1960 179,3
1860 31,4 1970 203,2
1870 39,8 1980 226,5
1880 50,2 1990 248,7
1890 62,9
PROBLEMA DE APLICACIÓN(Censo poblacional)
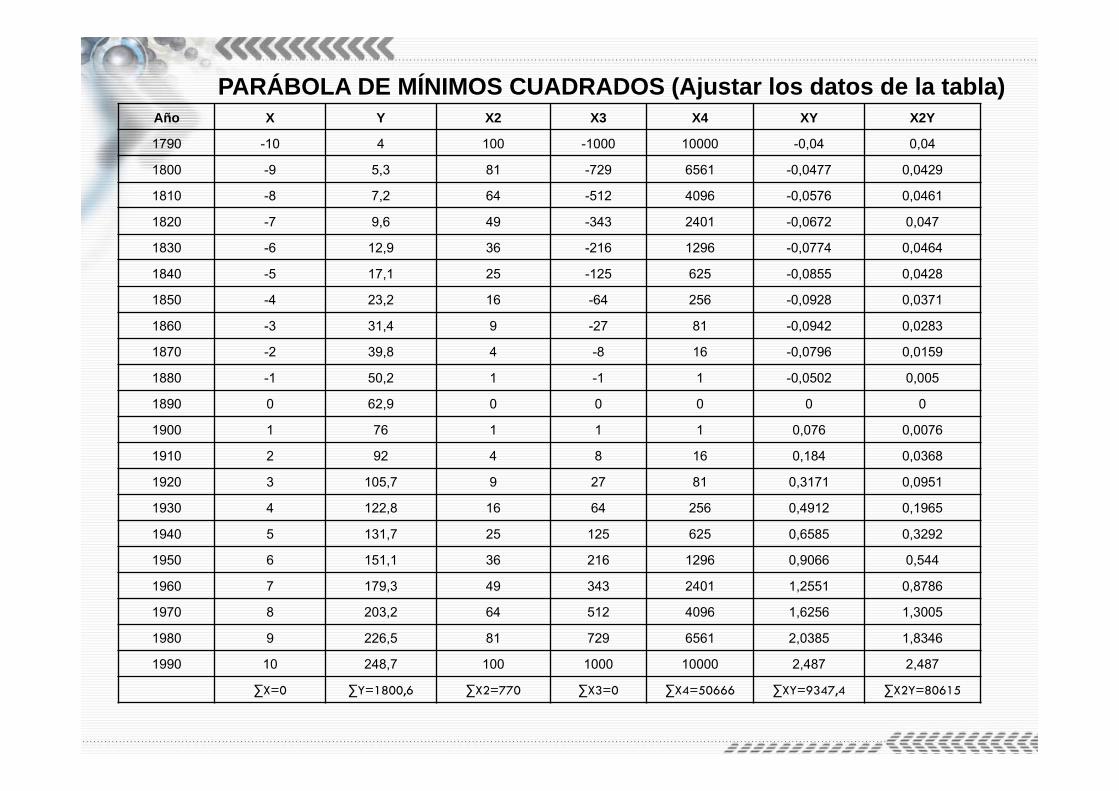
Año X Y X2 X3 X4 XY X2Y
1790 -10 4 100 -1000 10000 -0,04 0,04
1800 -9 5,3 81 -729 6561 -0,0477 0,0429
1810 -8 7,2 64 -512 4096 -0,0576 0,0461
1820 -7 9,6 49 -343 2401 -0,0672 0,047
1830 -6 12,9 36 -216 1296 -0,0774 0,0464
1840 -5 17,1 25 -125 625 -0,0855 0,0428
1850 -4 23,2 16 -64 256 -0,0928 0,0371
1860 -3 31,4 9 -27 81 -0,0942 0,0283
1870 -2 39,8 4 -8 16 -0,0796 0,0159
1880 -1 50,2 1 -1 1 -0,0502 0,005
1890 0 62,9 0 0 0 0 0
1900 1 76 1 1 1 0,076 0,0076
1910 2 92 4 8 16 0,184 0,0368
1920 3 105,7 9 27 81 0,3171 0,0951
1930 4 122,8 16 64 256 0,4912 0,1965
1940 5 131,7 25 125 625 0,6585 0,3292
1950 6 151,1 36 216 1296 0,9066 0,544
1960 7 179,3 49 343 2401 1,2551 0,8786
1970 8 203,2 64 512 4096 1,6256 1,3005
1980 9 226,5 81 729 6561 2,0385 1,8346
1990 10 248,7 100 1000 10000 2,487 2,487
∑X=0 ∑Y=1800,6 ∑X2=770 ∑X3=0 ∑X4=50666 ∑XY=9347,4 ∑X2Y=80615
PARÁBOLA DE MÍNIMOS CUADRADOS (Ajustar los datos de la tabla)
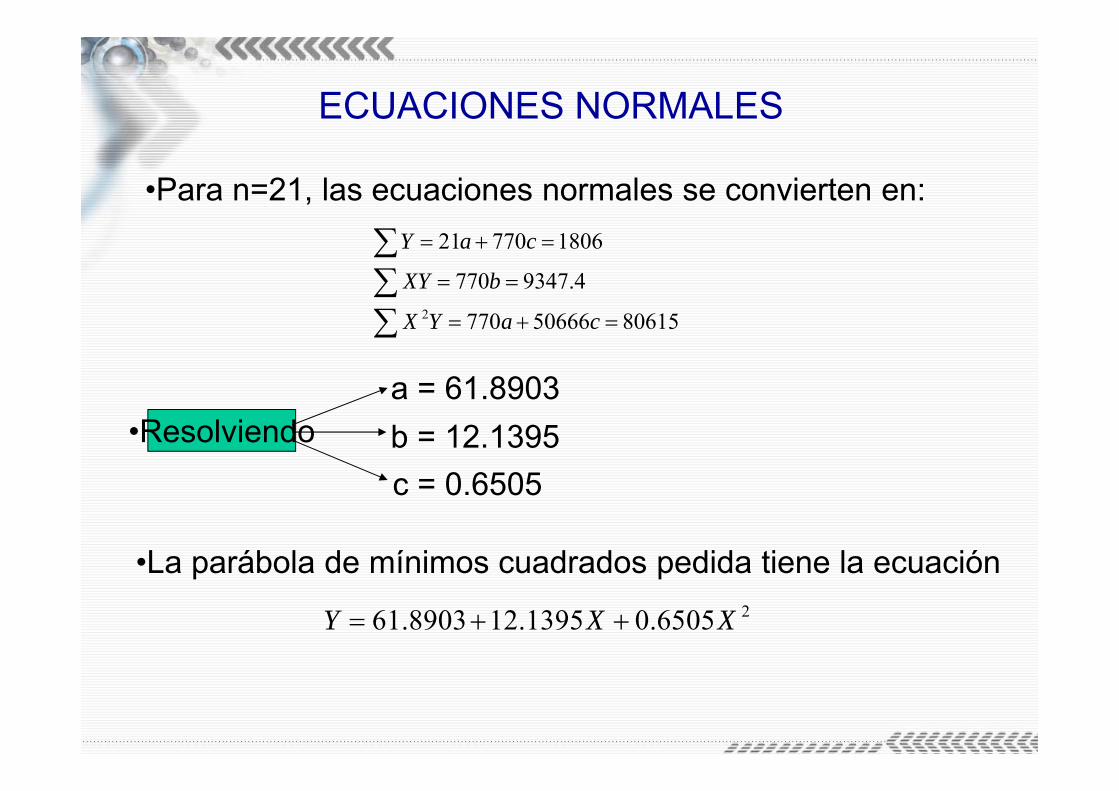
ECUACIONES NORMALES
8061550666770
4.9347770
180677021
2
caYX
bXY
caY
26505.01395.128903.61 XXY
•Para n=21, las ecuaciones normales se convierten en:
•Resolviendo b = 12.1395a = 61.8903
c = 0.6505
•La parábola de mínimos cuadrados pedida tiene la ecuación

Métodos Numéricos Aplicados a la Ingeniería
Interpolación
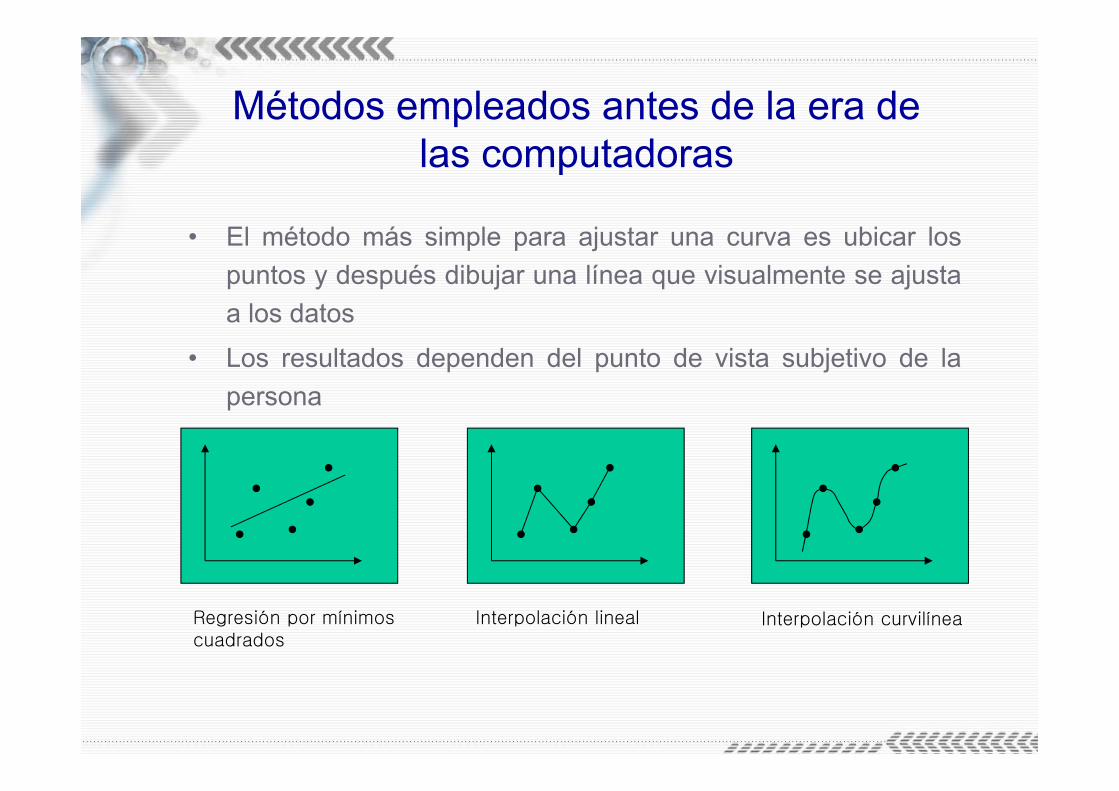
Métodos empleados antes de la era de las computadoras
• El método más simple para ajustar una curva es ubicar lospuntos y después dibujar una línea que visualmente se ajustaa los datos
• Los resultados dependen del punto de vista subjetivo de lapersona
Regresión por mínimos cuadrados
Interpolación lineal Interpolación curvilínea
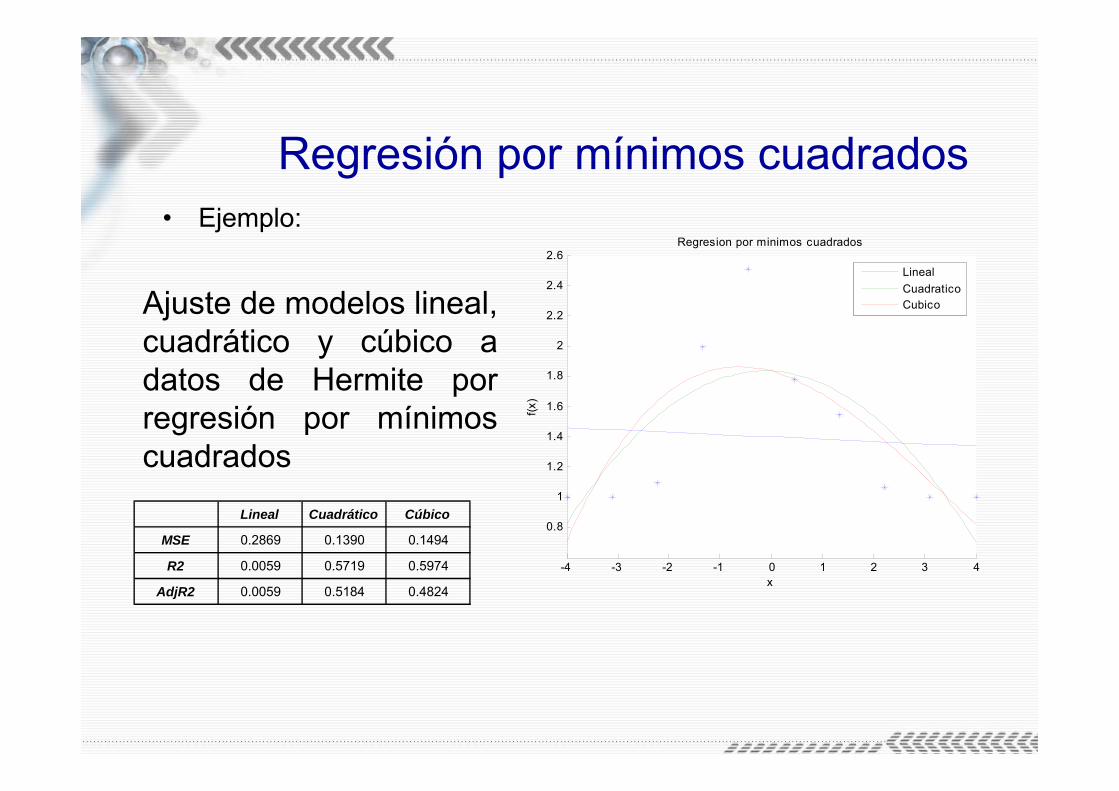
Regresión por mínimos cuadrados• Ejemplo:
Lineal Cuadrático Cúbico
MSE 0.2869 0.1390 0.1494
R2 0.0059 0.5719 0.5974
AdjR2 0.0059 0.5184 0.4824
Ajuste de modelos lineal,cuadrático y cúbico adatos de Hermite porregresión por mínimoscuadrados
-4 -3 -2 -1 0 1 2 3 4
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6Regresion por minimos cuadrados
x
f(x)
LinealCuadraticoCubico
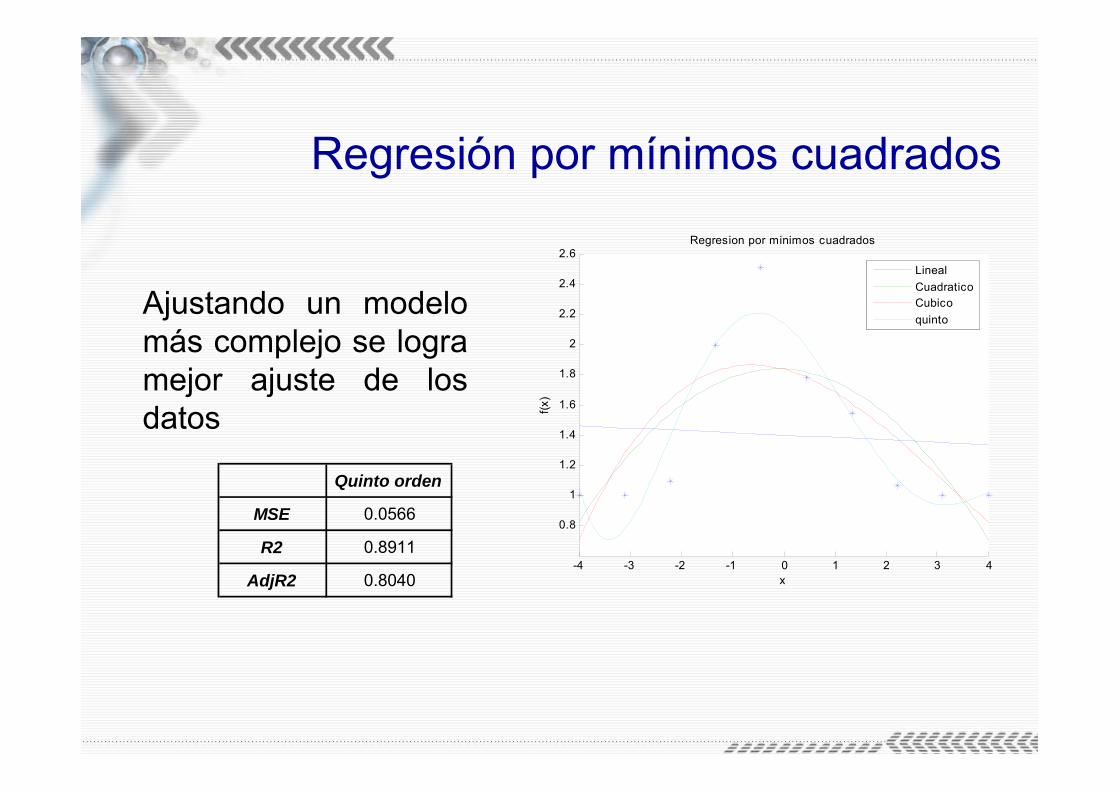
Regresión por mínimos cuadrados
Ajustando un modelomás complejo se logramejor ajuste de losdatos
-4 -3 -2 -1 0 1 2 3 4
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6Regresion por minimos cuadrados
x
f(x)
LinealCuadraticoCubicoquinto
Quinto orden
MSE 0.0566
R2 0.8911
AdjR2 0.8040
Interpolación polinómica
• Interpolamos mediante la combinación linealde funciones conocidas
• La suma, resta, multiplicación, derivada eintegral de polinomios dan como resultado otropolinomio
• El teorema de Weierstrass nos asegura quesiempre se puede aproximar una funcióncontinua f(x) con un polinomio de grado n
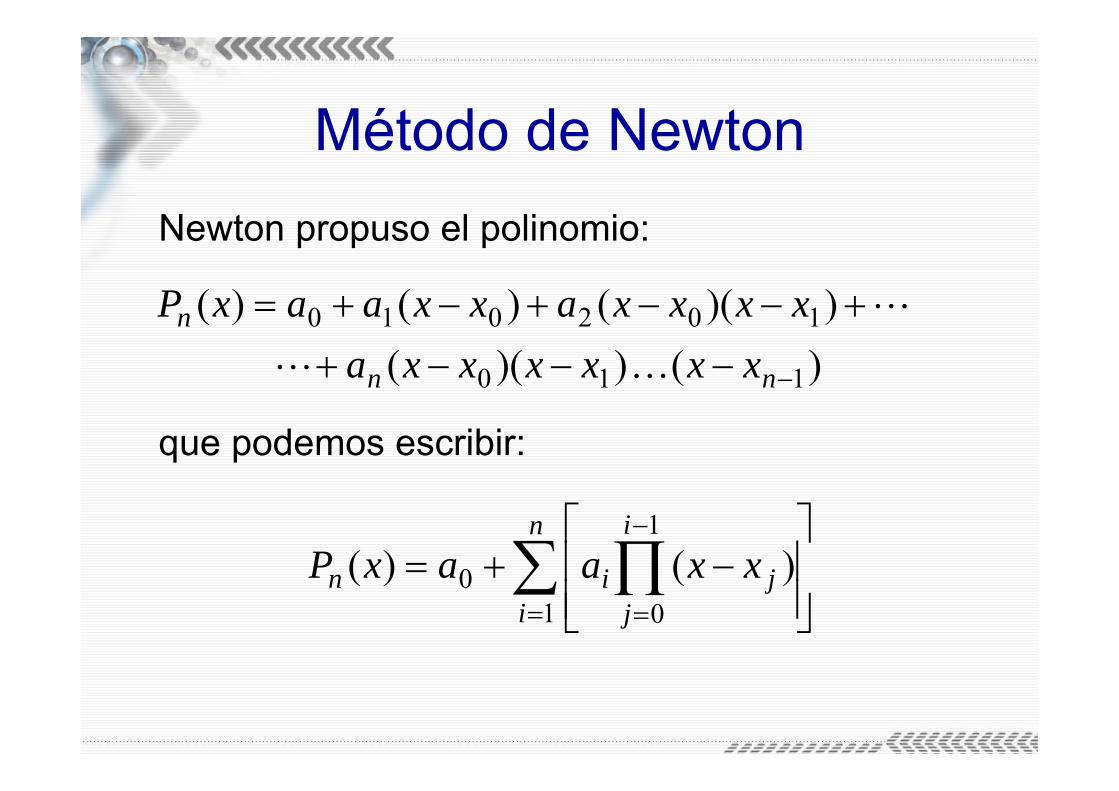
Método de NewtonNewton propuso el polinomio:
que podemos escribir:
)())(( ))(()()(
110
102010
nn
n
xxxxxxaxxxxaxxaaxP
n
i
i
jjin xxaaxP
1
1
00 )()(
Método de Newton
¿Cómo podemos encontrar los ai?
000 )( yaxPn
101101 )()( yxxaaxPn
21202202102 ))(()()( yxxxxaxxaaxPn
Método de NewtonSi elegimos los intervalos equidistantes:
ctexxx nn 1
Si elegimos los intervalos equidistantes:
00000 )( yayaxPn
xy
xxyyayxxaaxPn
01
011101101 )()(
Método de Newton
20
2
2012
2
0201
0102
2
21202202102
)(2)(22
)(2
)(
))(()()(
xy
xyyy
x
xxxxyyyy
a
yxxxxaxxaaxPn
Método de NewtonPara el caso general:
20
)(! xnya
n
n
Lagrange propuso el polinomio:
)())()((
)())()(( )())()(( )())()(()(
1210
3102
3201
3210
nn
n
n
nn
xxxxxxxxa
xxxxxxxxaxxxxxxxxaxxxxxxxxaxP
Método de Lagrange¿Cómo podemos encontrar los ai?
0030201000 )())()(()( yxxxxxxxxaxP nn
1131210111 )())()(()( yxxxxxxxxaxP nn
2232120222 )())()(()( yxxxxxxxxaxP nn
nnnnnnnnn yxxxxxxxxaxP )())()(()(
1210
Problemas... • ¿Cómo se ve la interpolación si se realiza con
polinomios de alto orden?
• ¿Cómo afecta la acumulación de errores de numéricos en polinomios de alto orden?
Interpolación de polinomios• Formula general para un polinomio
• Para n+1 puntos, hay uno y sólo un polinomio de orden n que pasa a través de todos los puntos
• Polinomio de primer orden (línea recta) conecta dos puntos• Polinomio de segundo orden (parábola) conecta tres puntos
• La interpolación polinomial consiste en determinar el único polinomio de n-ésimo orden que ajuste n+1 puntos
• Luego este polinomio permite calcular valores intermedios
• Existen dos formas matemáticas de expresar este polinomio1. Polinomio de Newton2. Polinomio de Lagrange
nn xaxaxaaxf 2
210
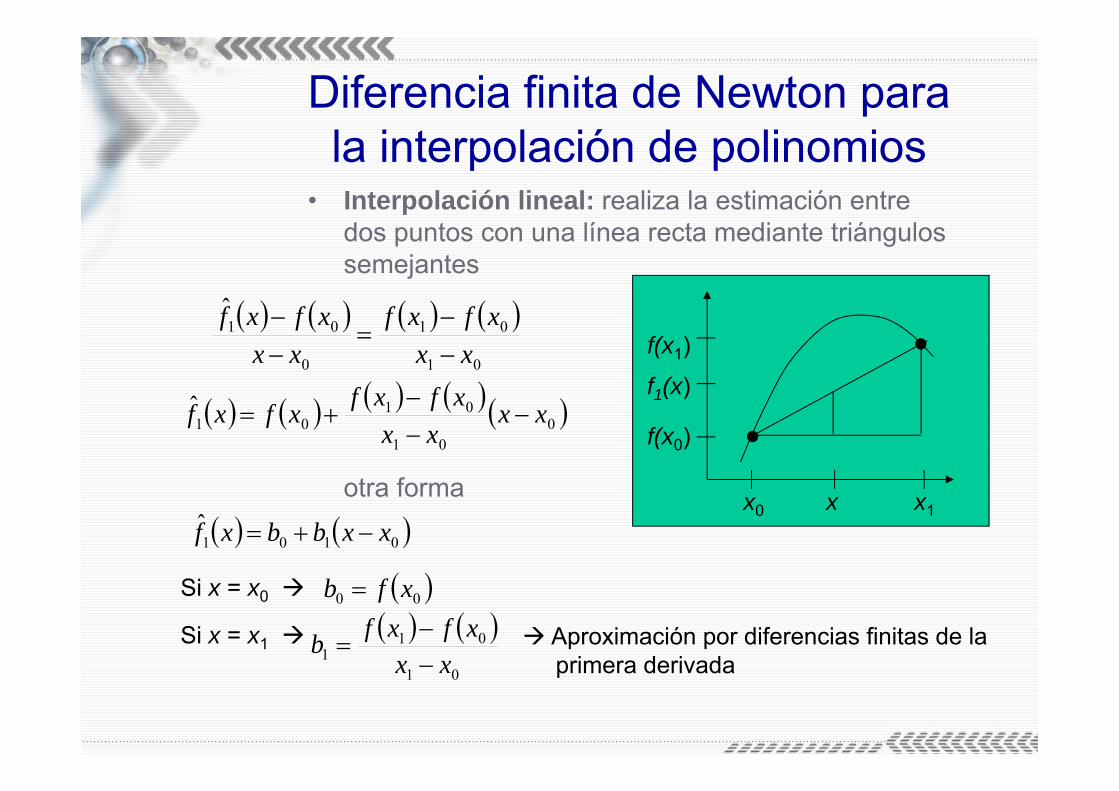
Diferencia finita de Newton para la interpolación de polinomios
• Interpolación lineal: realiza la estimación entre dos puntos con una línea recta mediante triángulos semejantes
otra forma
01
01
0
01̂
xxxfxf
xxxfxf
001
0101̂ xx
xxxfxfxfxf
x0 x x1
f(x0)
f1(x)
f(x1)
0101̂ xxbbxf
Si x = x0
Si x = x1
00 xfb
01
011 xx
xfxfb
Aproximación por diferencias finitas de la primera derivada
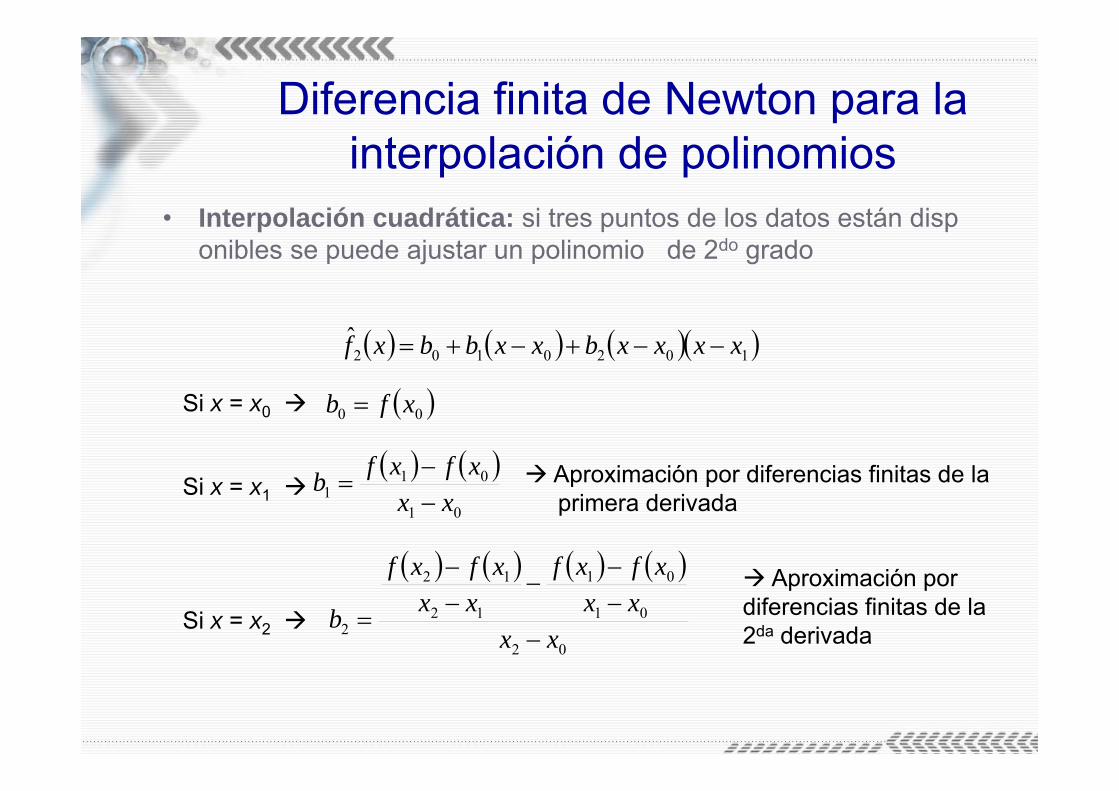
Diferencia finita de Newton para la interpolación de polinomios
• Interpolación cuadrática: si tres puntos de los datos están disponibles se puede ajustar un polinomio de 2do grado
1020102̂ xxxxbxxbbxf
Si x = x0
Si x = x1
00 xfb
01
011 xx
xfxfb
Aproximación por diferencias finitas de la primera derivada
Si x = x2
02
01
01
12
12
2 xxxx
xfxfxx
xfxf
b
Aproximación por diferencias finitas de la 2da derivada
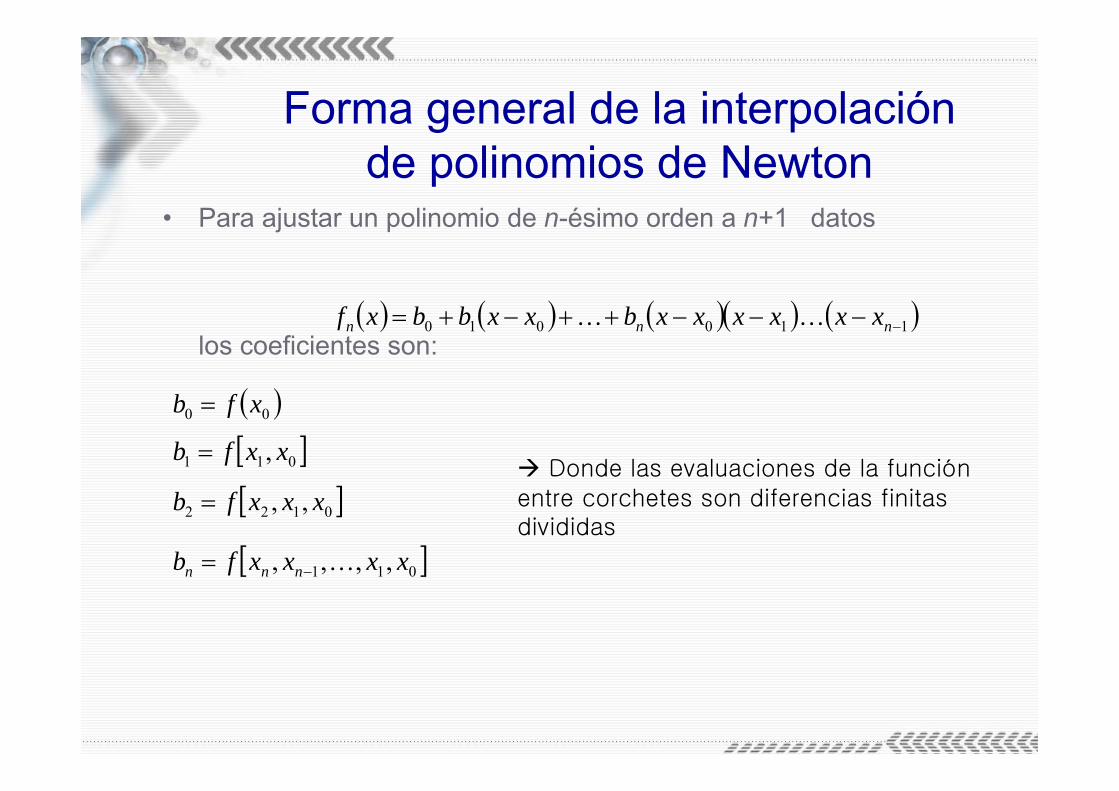
Forma general de la interpolación de polinomios de Newton
• Para ajustar un polinomio de n-ésimo orden a n+1 datos
los coeficientes son: 110010 nnn xxxxxxbxxbbxf
00 xfb
011 , xxfb Donde las evaluaciones de la función entre corchetes son diferencias finitas divididas
0122 ,, xxxfb
011 ,,,, xxxxfb nnn
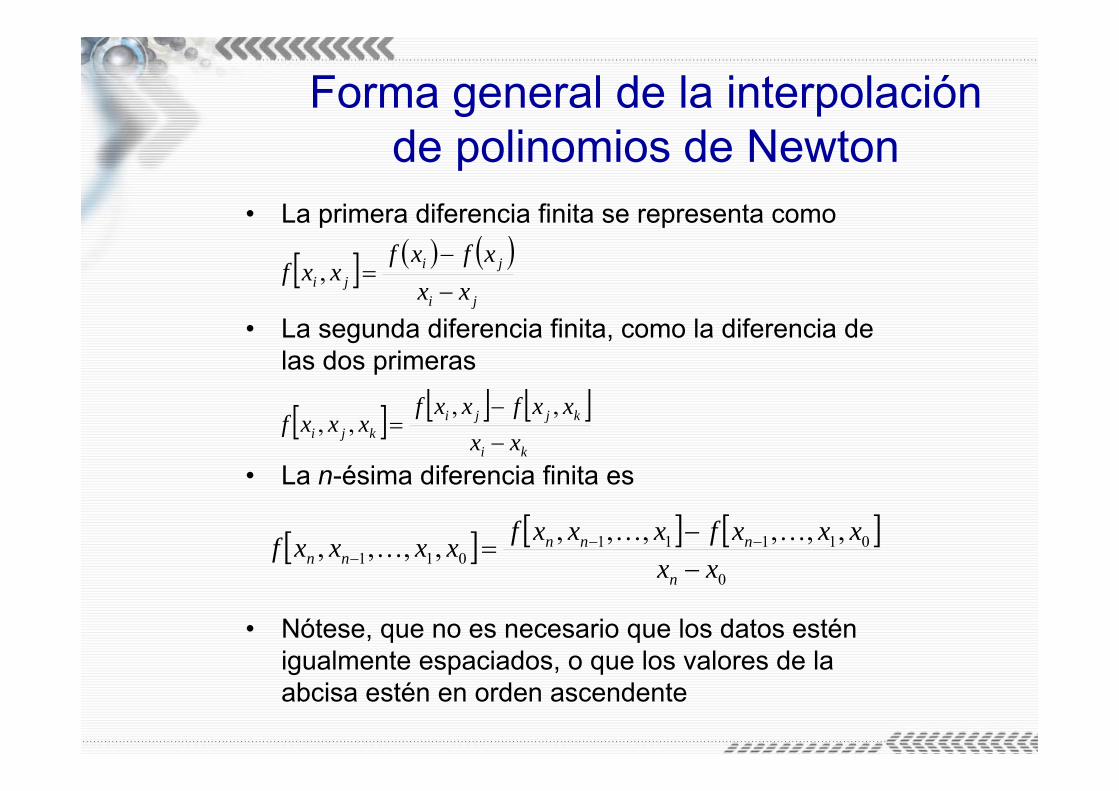
Forma general de la interpolación de polinomios de Newton
ji
jiji xx
xfxfxxf
,
• La primera diferencia finita se representa como
• La segunda diferencia finita, como la diferencia de las dos primeras
• La n-ésima diferencia finita es
• Nótese, que no es necesario que los datos estén igualmente espaciados, o que los valores de la abcisa estén en orden ascendente
ki
kjjikji xx
xxfxxfxxxf
,,
,,
0
01111011
,,,,,,,,,,xx
xxxfxxxfxxxxfn
nnnnn
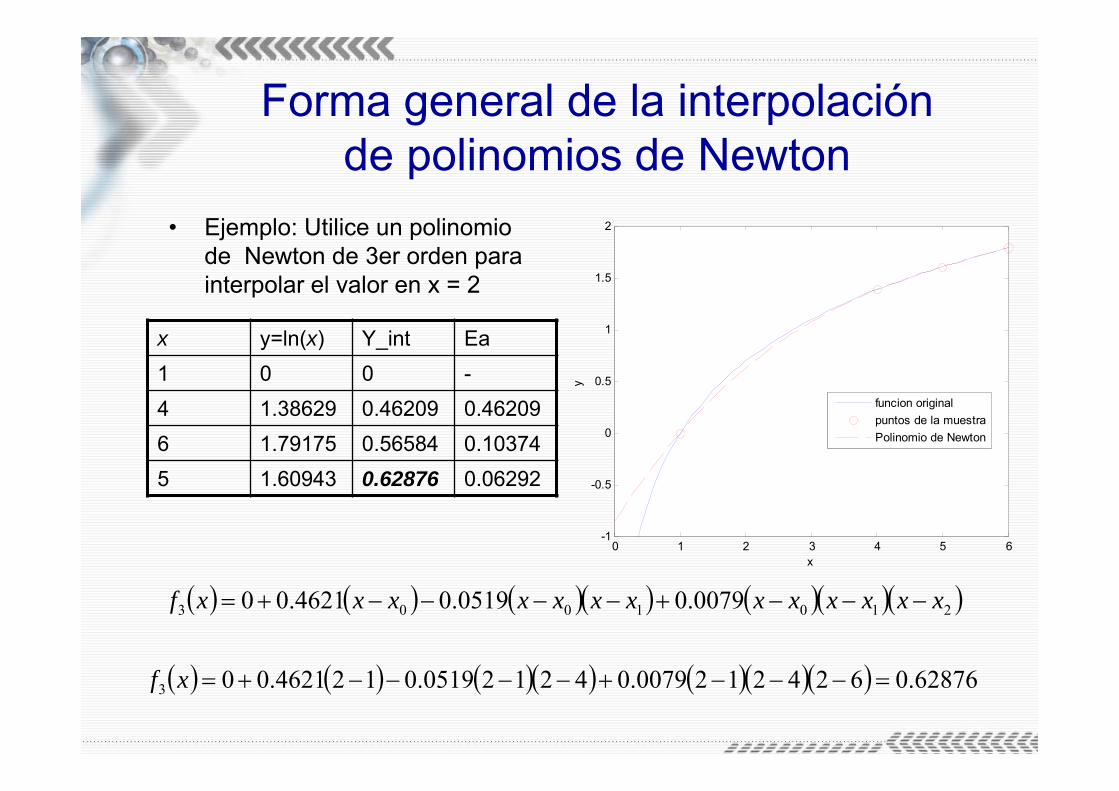
Forma general de la interpolación de polinomios de Newton
• Ejemplo: Utilice un polinomio de Newton de 3er orden para interpolar el valor en x = 2
2101003 0079.00519.04621.00 xxxxxxxxxxxxxf
x y=ln(x) Y_int Ea1 0 0 -4 1.38629 0.46209 0.462096 1.79175 0.56584 0.103745 1.60943 0.62876 0.06292
0 1 2 3 4 5 6-1
-0.5
0
0.5
1
1.5
2
xy
funcion originalpuntos de la muestraPolinomio de Newton
62876.06242120079.042120519.0124621.003 xf
Error de la interpolación con polinomios de Newton
• El polinomio de Newton de orden n es de la forma
• La estructura del polinomio de Newton es similar a la de la serie de Taylor
• De manera similar al caso de la serie de Taylor se puede obtener una formulación para el error de los polinomios de Newton• Para la serie de Taylor
• Para polinomio de newton de orden n
110010010 ,,,, nnnn xxxxxxxxxfxxxxfxfxf
nn
iii
n
iiiii Rxxn
xfxxxfxfxf 111 !'
1
1
1
!1
nii
n
n xxn
fR
n
n
n xxxxxxn
fR
10
1
!1
Error de la interpolación con polinomios de Newton
• Una formulación alternativa está disponible y no requiere el conocimiento de la función
• Esta formula no puede resolverse porque contiene la incógnita f(x), sin embargo, si se dispone de un dato adicional puede usarse para estimar el error
• El error estimado para el polinomio de n-ésimo orden es equivalente a la diferencia entre la estimación de (n+1)-ésimo orden y la de n-ésimo orden
nnnn xxxxxxxxxxfR 1001 ,,,,
nnnnn xxxxxxxxxxfR 10011 ,,,,
xfxfR nnn 1
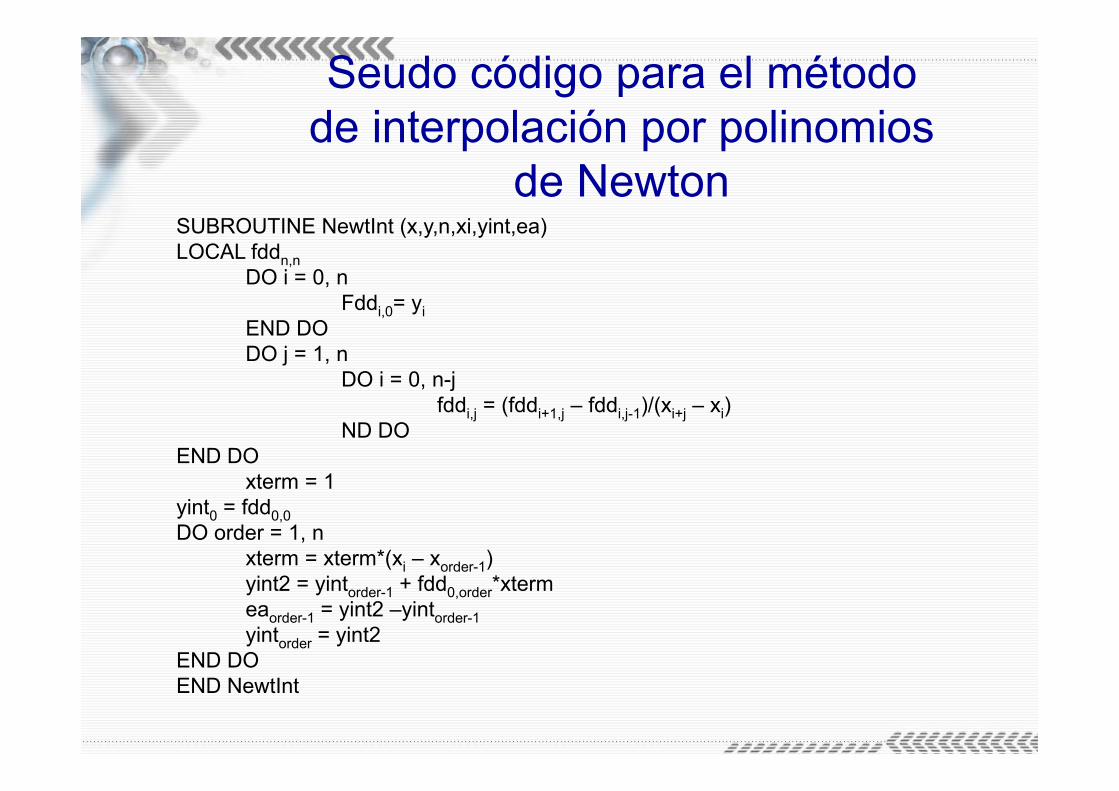
Seudo código para el método de interpolación por polinomios
de NewtonSUBROUTINE NewtInt (x,y,n,xi,yint,ea)LOCAL fddn,n
DO i = 0, nFddi,0= yi
END DODO j = 1, n
DO i = 0, n-jfddi,j = (fddi+1,j – fddi,j-1)/(xi+j – xi)
ND DOEND DO
xterm = 1yint0 = fdd0,0DO order = 1, n
xterm = xterm*(xi – xorder-1)yint2 = yintorder-1 + fdd0,order*xtermeaorder-1 = yint2 –yintorder-1yintorder = yint2
END DOEND NewtInt
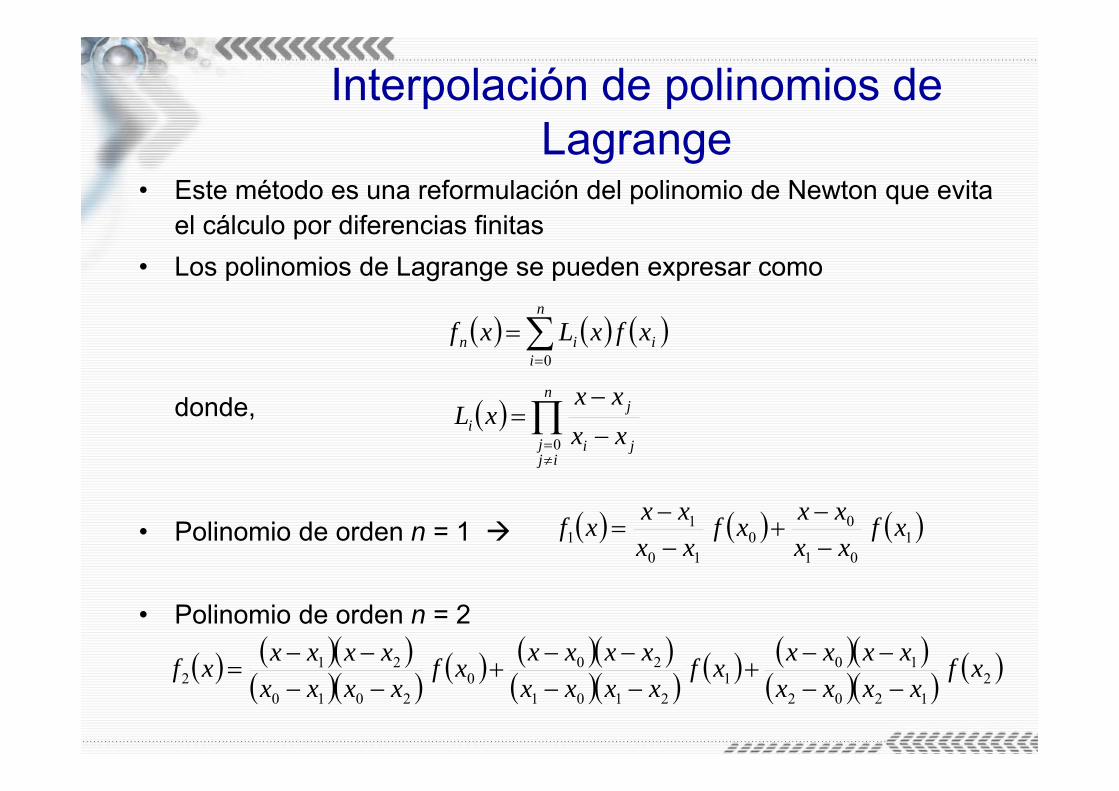
Interpolación de polinomios de Lagrange
• Este método es una reformulación del polinomio de Newton que evita el cálculo por diferencias finitas
• Los polinomios de Lagrange se pueden expresar como
donde,
• Polinomio de orden n = 1
• Polinomio de orden n = 2
n
iiin xfxLxf
0
n
ijj ji
ji xx
xxxL
0
101
00
10
11 xf
xxxxxf
xxxxxf
2
1202
101
2101
200
2010
212 xf
xxxxxxxxxf
xxxxxxxxxf
xxxxxxxxxf
Interpolación de polinomios de Lagrange
• La estimación del error en la interpolación con los polinomios de Lagrange esta dada por
• Sin embargo, como este método no usa las diferencias finitas, no es práctico hacer este cálculo
• Por eso se prefiere usar polinomios de Lagrange cuando se conoce a priori el orden del polinomio
• Y se usan los polinomios de Newton para cálculos exploratorios, ya que este método proporciona información respecto al comportamiento de los polinomios de diferente orden
n
iinnn xxxxxxfR
001 ,,,,
Seudo código para el método de interpolación por polinomios de Lagrange
FUNCTION Lagrng(x,y,n,x)sum = 0DO i = 0, n
product = yiDO j = 0, n
IF i ~= j THENproduct = product*(x – xj)/(xi – xj)
END IFEND DOsum = sum + product
END DOLagrng = sum
END Lagrng
Coeficientes de un polinomio de interpolación
• Un método directo para calcular los coeficientes de un polinomio de interpolación
se basa en el hecho de que n+1 puntos se requieren para determinar los n+1 coeficientes
• Se puede usar la solución de un sistema de ecuaciones algebraicas simultáneas para calcular los coeficientes
nn xaxaxaaxf 2
210
Coeficientes de un polinomio de interpolación
• Por ejemplo, se quiere calcular los coeficientes de
Se requieren tres puntos (x0,f(x0)), (x1,f(x1)) y (x2,f(x2)), sustituyendo cada uno en el polinomio para dar
• Se debe tener precaución con el orden• Los sistemas como estos están notoriamente mal condicionados• Los coeficientes pueden ser altamente inexactos, en particular para
n grandes
2210 xaxaaxf
2020100 xaxaaxf
2121101 xaxaaxf
2222102 xaxaaxf
Interpolación segmentaria (SPLINES)
• En la sección anterior se usó polinomios de n-ésimo ordenpara interpolar n+1 puntos
• Esta curva podría capturar todas las curvaturas sugeridas porlos puntos
• Hay casos en los que estas funciones pueden llevar aresultados erróneos debido a errores de redondeo y puntoslejanos
• Una alternativa es aplicar polinomios de orden inferior a sub-conjuntos de datos
• A estos se les llama funciones segmentarias• Estas se pueden construir de tal forma que las conexiones
entre las ecuaciones cúbicas adyacentes resultan visualmentesuaves
Segmentarias cuadráticas
iiii cxbxaxf 2
• Para asegurar que las derivadas m-ésimas sean continuasen los nodos, se debe usar una segmentaria del al menosm+1 orden
• En la práctica se usan con más frecuencia segmentariascúbicas para asegurar derivadas continuas de 1ro y 2do orden
• El objetivo de las segmentarias cuadráticas es obtener unpolinomio de 2do orden para cada intervalo i entre datos
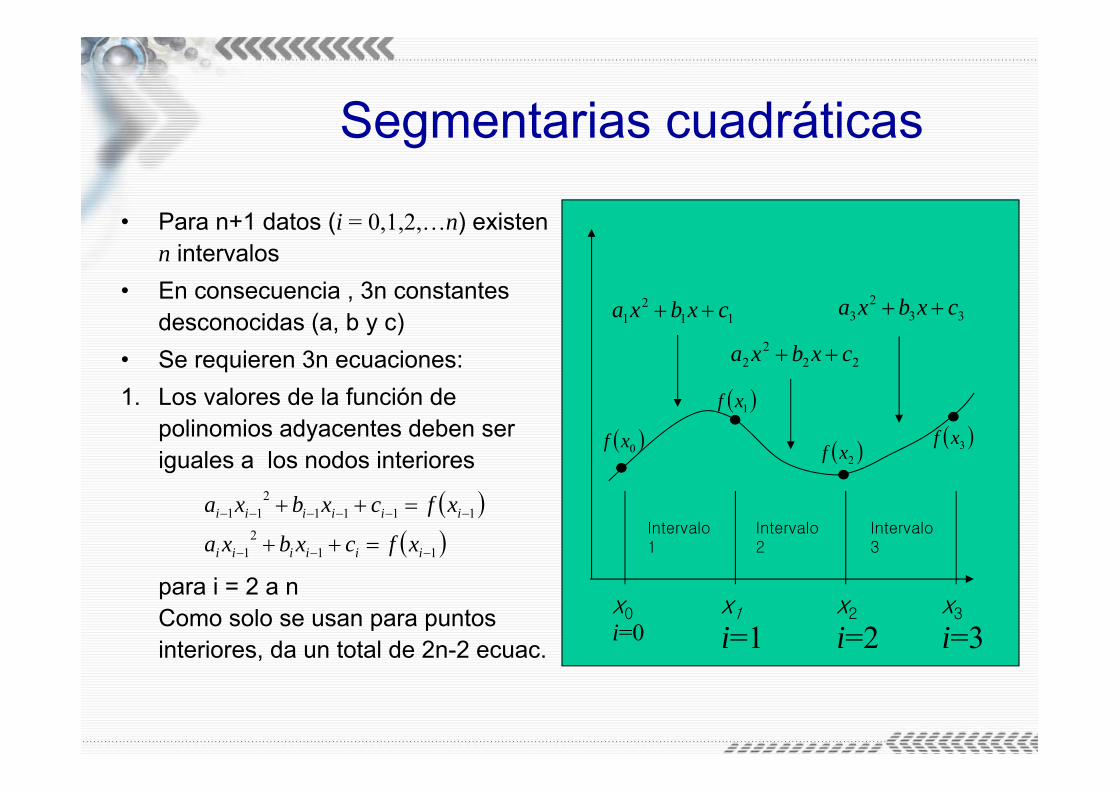
Segmentarias cuadráticas
• Para n+1 datos (i = 0,1,2,…n) existen n intervalos
• En consecuencia , 3n constantes desconocidas (a, b y c)
• Se requieren 3n ecuaciones:1. Los valores de la función de
polinomios adyacentes deben ser iguales a los nodos interiores
para i = 2 a nComo solo se usan para puntos interiores, da un total de 2n-2 ecuac.
11
21
11112
11
iiiiii
iiiiii
xfcxbxa
xfcxbxa
x0
i=0x1
i=1x3
i=3x2
i=2
Intervalo1
Intervalo2
Intervalo3
112
1 cxbxa
222
2 cxbxa
332
3 cxbxa
0xf
1xf
2xf 3xf
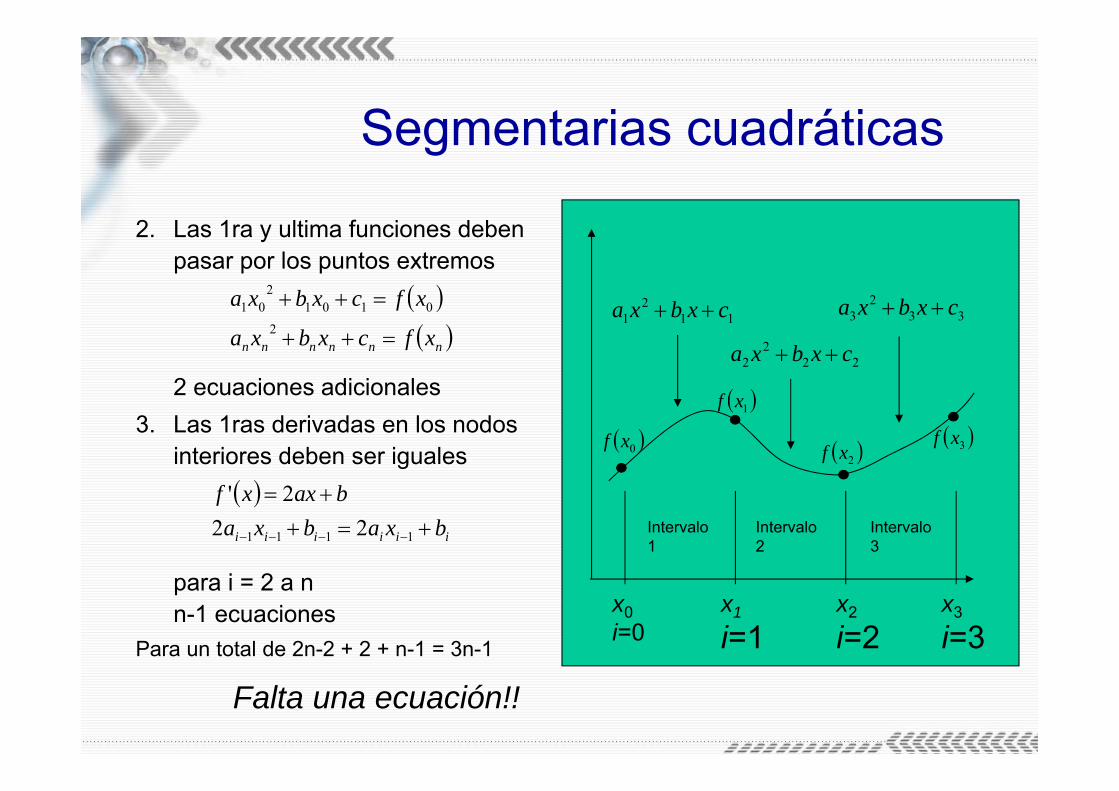
Segmentarias cuadráticas
2. Las 1ra y ultima funciones deben pasar por los puntos extremos
2 ecuaciones adicionales3. Las 1ras derivadas en los nodos
interiores deben ser iguales
para i = 2 a nn-1 ecuaciones
Para un total de 2n-2 + 2 + n-1 = 3n-1
nnnnnn xfcxbxa
xfcxbxa
2
01012
01
x0i=0
x1
i=1x3
i=3x2
i=2
Intervalo1
Intervalo2
Intervalo3
112
1 cxbxa
222
2 cxbxa
332
3 cxbxa
0xf
1xf
2xf 3xf
iiiiii bxabxa
baxxf
1111 222'
Falta una ecuación!!
Segmentarias cuadráticas
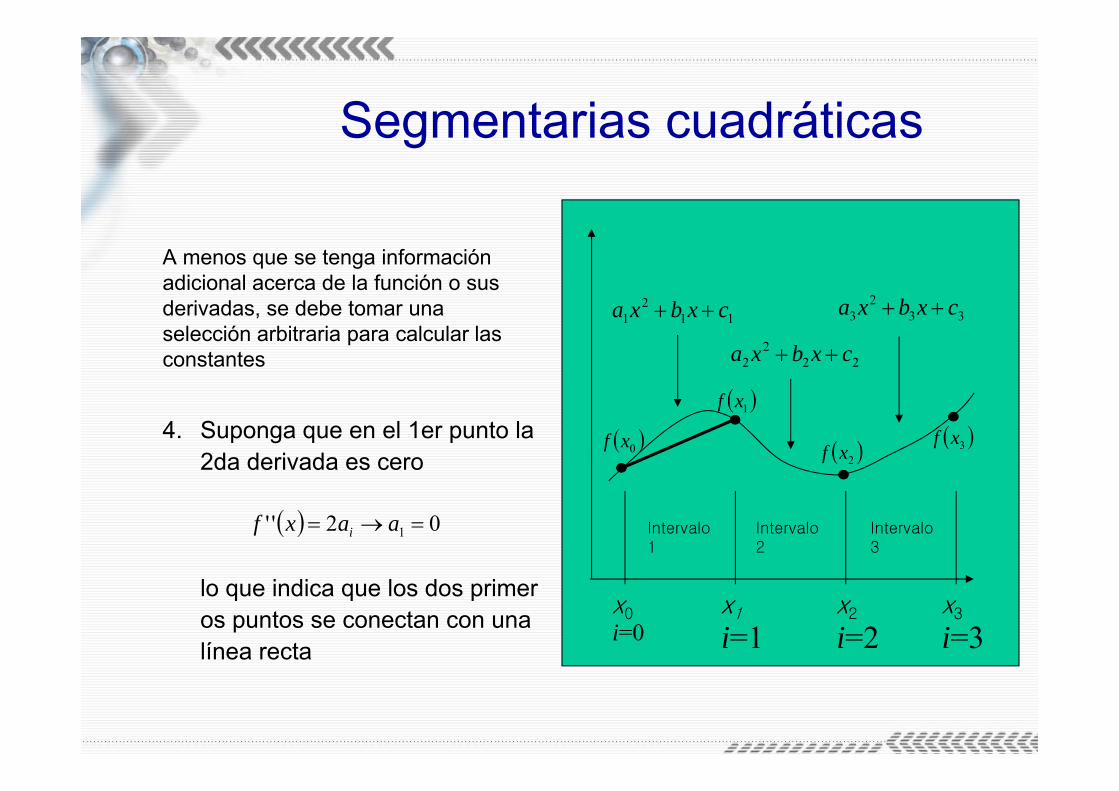
A menos que se tenga información adicional acerca de la función o sus derivadas, se debe tomar una selección arbitraria para calcular las constantes
4. Suponga que en el 1er punto la 2da derivada es cero
lo que indica que los dos primeros puntos se conectan con una línea recta
x0
i=0x1
i=1x3
i=3x2
i=2
Intervalo1
Intervalo2
Intervalo3
112
1 cxbxa
222
2 cxbxa
332
3 cxbxa
0xf
1xf
2xf 3xf
02'' 1 aaxf i
Segmentarias cuadráticas
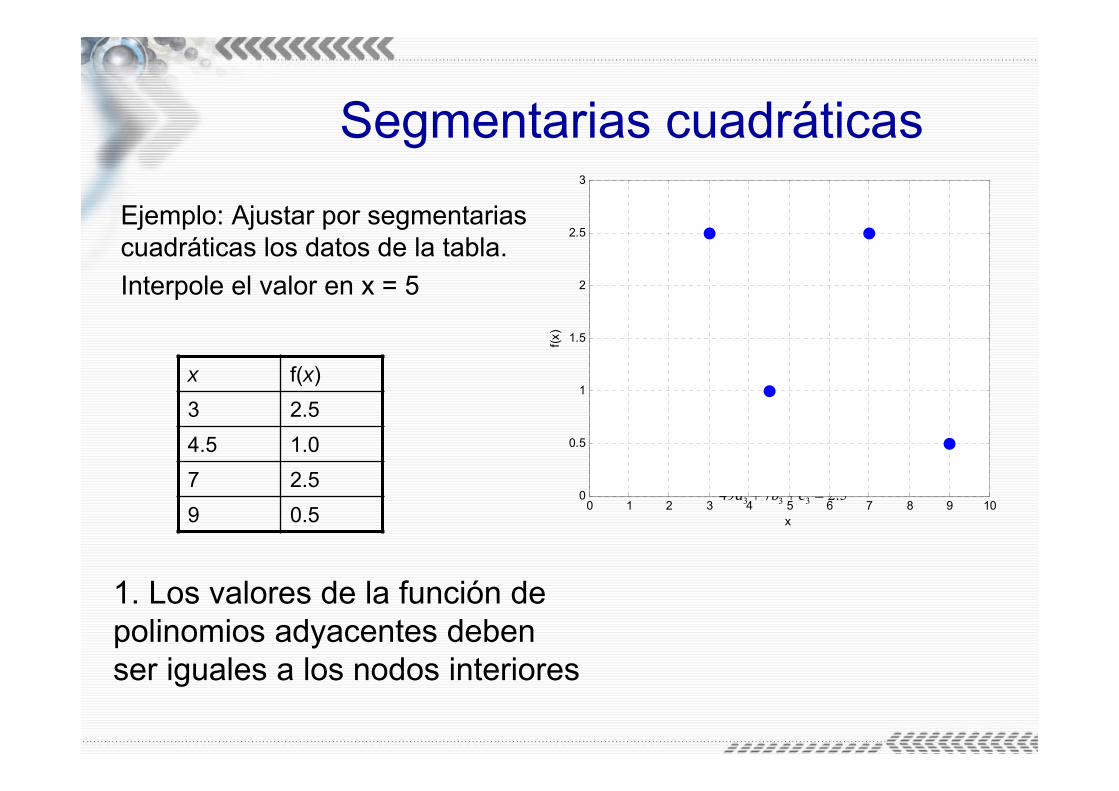
Ejemplo: Ajustar por segmentarias cuadráticas los datos de la tabla.Interpole el valor en x = 5
5.27495.27490.15.425.200.15.425.20
333
222
222
111
cbacbacbacba
x f(x)3 2.54.5 1.07 2.59 0.5 0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
x
f(x)
1. Los valores de la función de polinomios adyacentes deben ser iguales a los nodos interiores
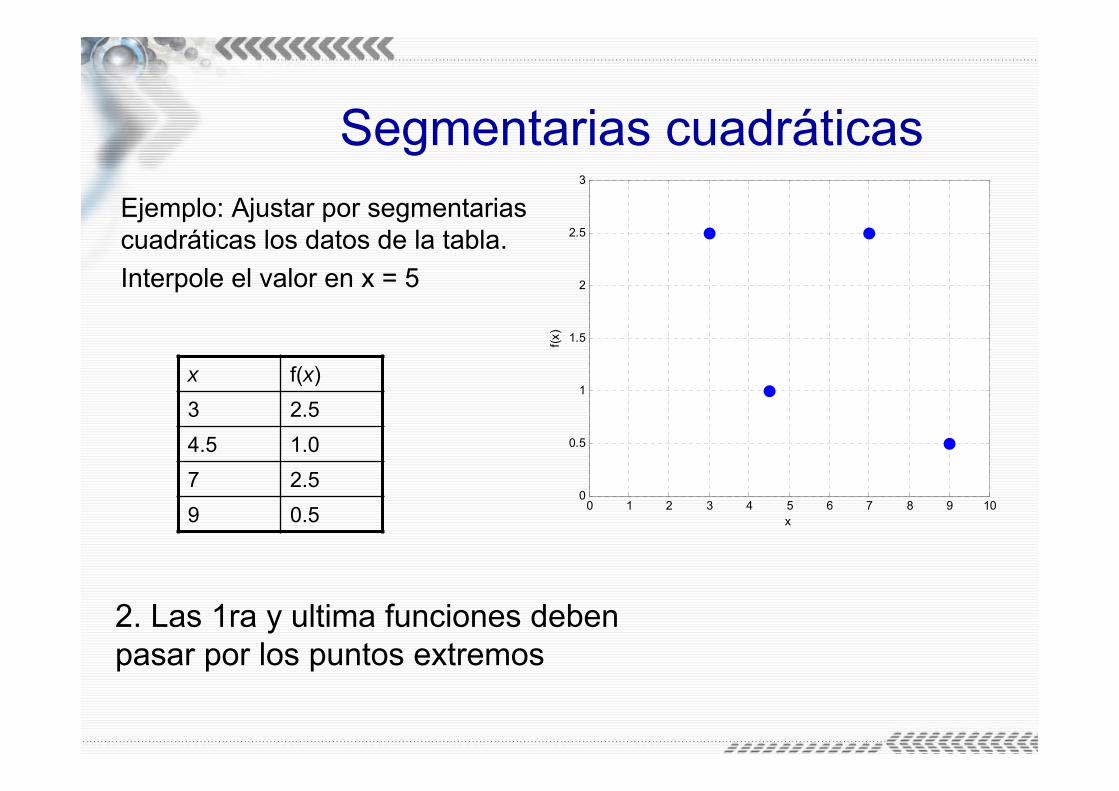
Segmentarias cuadráticasEjemplo: Ajustar por segmentarias cuadráticas los datos de la tabla. Interpole el valor en x = 5
5.09815.239
333
111
cbacba
x f(x)3 2.54.5 1.07 2.59 0.5 0 1 2 3 4 5 6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
x
f(x)
2. Las 1ra y ultima funciones deben pasar por los puntos extremos
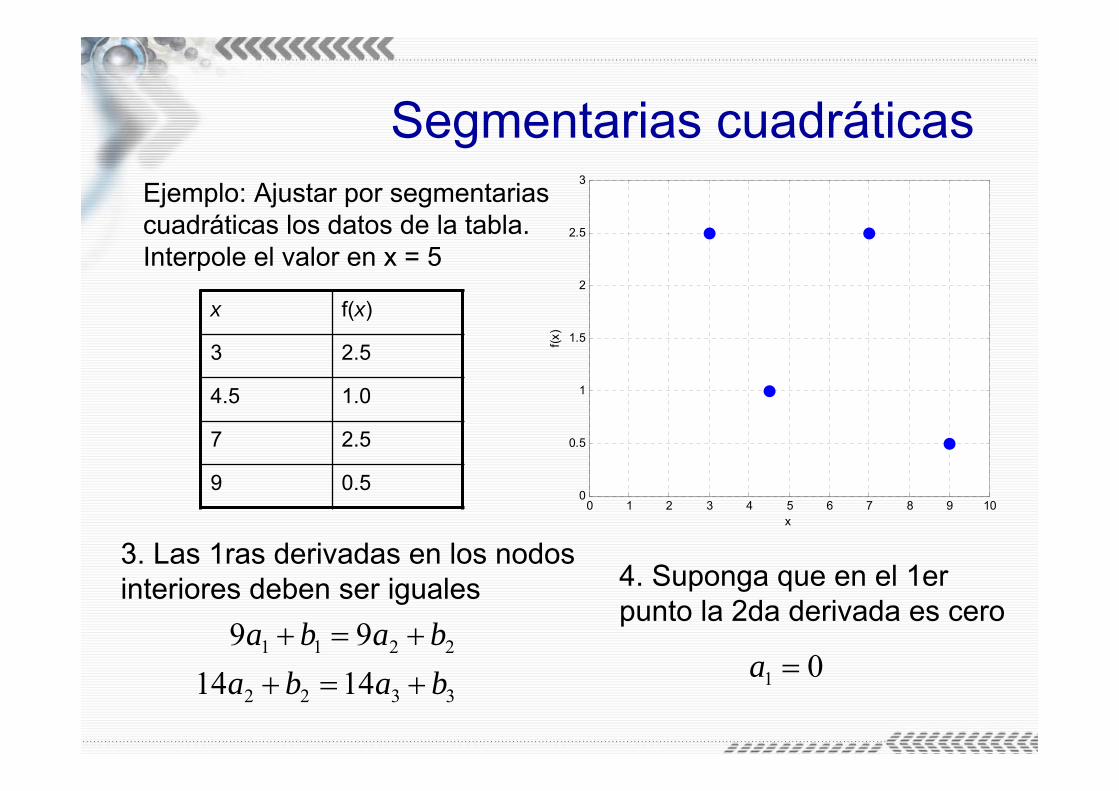
Segmentarias cuadráticasEjemplo: Ajustar por segmentarias cuadráticas los datos de la tabla. Interpole el valor en x = 5
3322
2211
141499
babababa
x f(x)
3 2.5
4.5 1.0
7 2.5
9 0.50 1 2 3 4 5 6 7 8 9 10
0
0.5
1
1.5
2
2.5
3
x
f(x)
3. Las 1ras derivadas en los nodos interiores deben ser iguales 4. Suponga que en el 1er
punto la 2da derivada es cero
01 a
Segmentarias cuadráticas
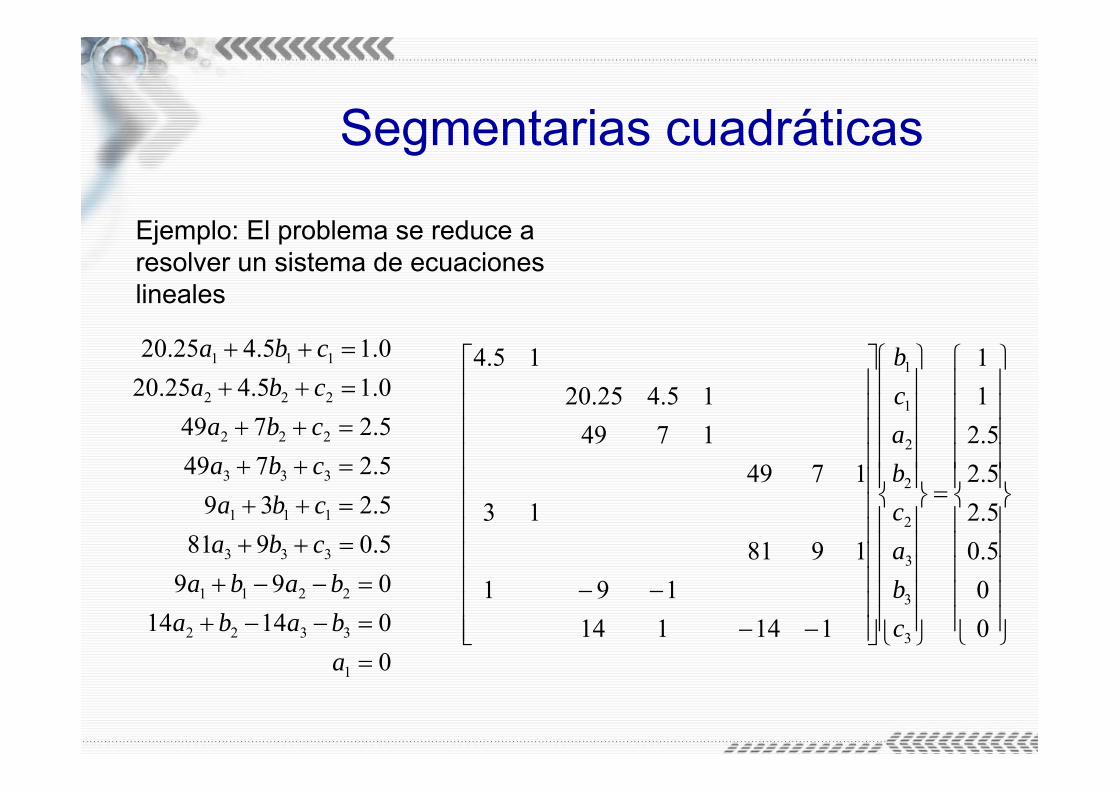
Ejemplo: El problema se reduce a resolver un sistema de ecuaciones lineales
0014140995.09815.2395.27495.27490.15.425.200.15.425.20
1
3322
2211
333
111
333
222
222
111
ababababa
cbacbacbacbacbacba
005.05.25.25.2
11
114114191
198113
1749174915.425.20
15.4
3
3
3
2
2
2
1
1
cbacbacb
Segmentarias cuadráticas
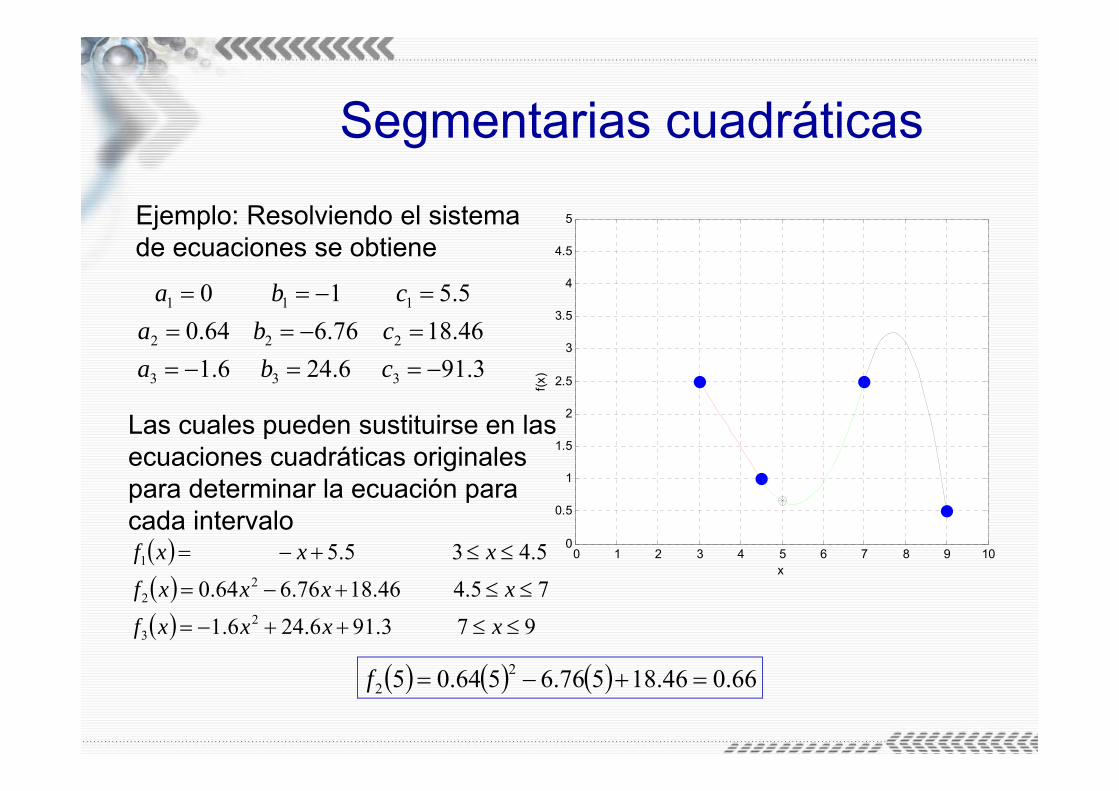
Ejemplo: Resolviendo el sistema de ecuaciones se obtiene
3.916.246.146.1876.664.05.510
333
222
111
cbacba
cba
Las cuales pueden sustituirse en las ecuaciones cuadráticas originales para determinar la ecuación para cada intervalo 973.916.246.1
75.446.1876.664.0
5.435.5
23
22
1
xxxxfxxxxf
xxxf
66.046.18576.6564.05 22 f
0 1 2 3 4 5 6 7 8 9 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x
f(x)
Segmentarias cúbicas
iiiii dxcxbxaxf 23
• El objetivo de las segmentarias cúbicas es obtener unpolinomio de 3er orden para cada intervalo entre los puntos
• Para n+1 datos (i=0,1,2,…,n) existen n intervalos, 4nincógnitas constantes para evaluar
• Se requieren 4n ecuaciones para evaluar las incógnitas
Segmentarias cúbicas
1. Los valores de la función deben ser iguales en los puntos interiores (2n-2) ecuaciones
2. Las primera y última funciones deben pasar por los puntos extremos (2 ecuaciones)
3. Las 1ras derivadas en los puntos interiores deben ser iguales (n-1 ecuaciones)
4. Las 2das derivadas en los puntos interiores deben ser iguales (n-1 ecuaciones)
5. Las 2das derivadas en los puntos extremos son cero (2ecuaciones)2n – 2 + 2 + n -1 + n – 1 + 2 = 4n
La última condición indica que la función se vuelve una línea recta en lospuntos extremos
Segmentarias cúbicas
11
1
11
1
1
31
1
3
1
1
6''
6''
6''
6''
iiii
ii
i
iiii
ii
i
iii
ii
ii
ii
xxxxxfxxxf
xxxxxfxx
xf
xxxxxfxx
xxxfxf
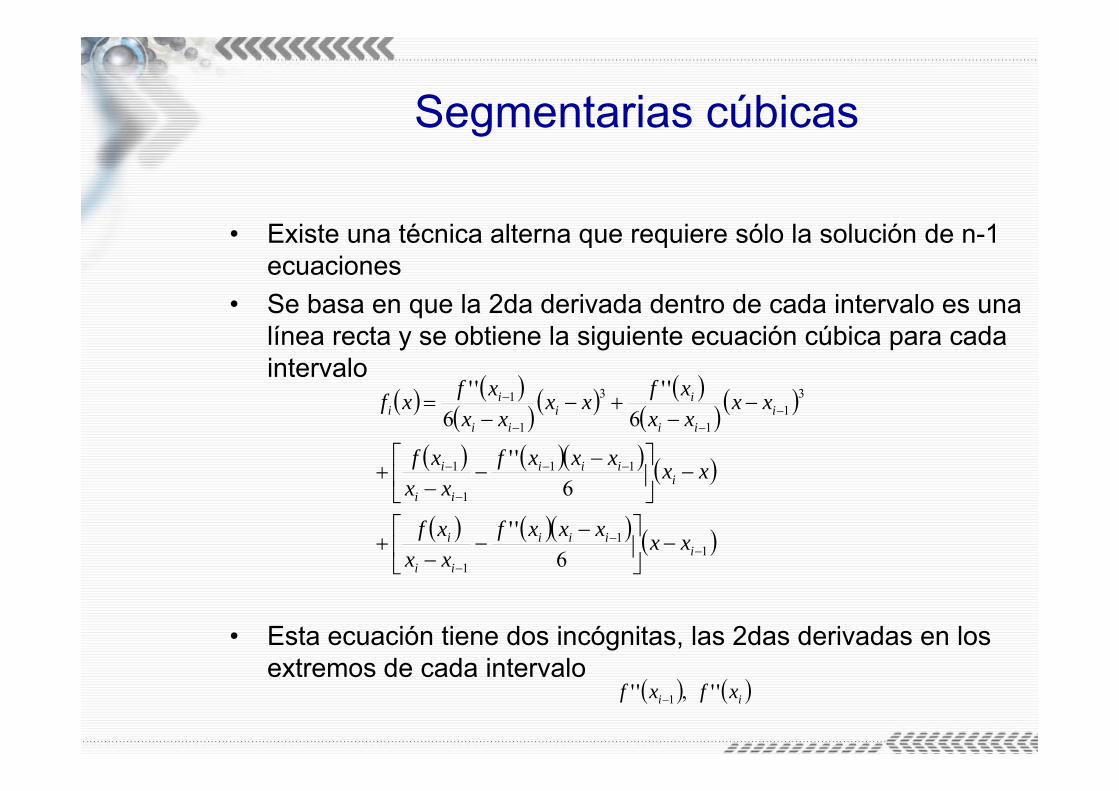
• Existe una técnica alterna que requiere sólo la solución de n-1 ecuaciones
• Se basa en que la 2da derivada dentro de cada intervalo es una línea recta y se obtiene la siguiente ecuación cúbica para cada intervalo
• Esta ecuación tiene dos incógnitas, las 2das derivadas en los extremos de cada intervalo
ii xfxf '' ,'' 1
Segmentarias cúbicas
iiii
iiii
iiiiiiiii xfxfxx
xfxfxx
xfxxxfxxxfxx
11
11
11111166''''2''
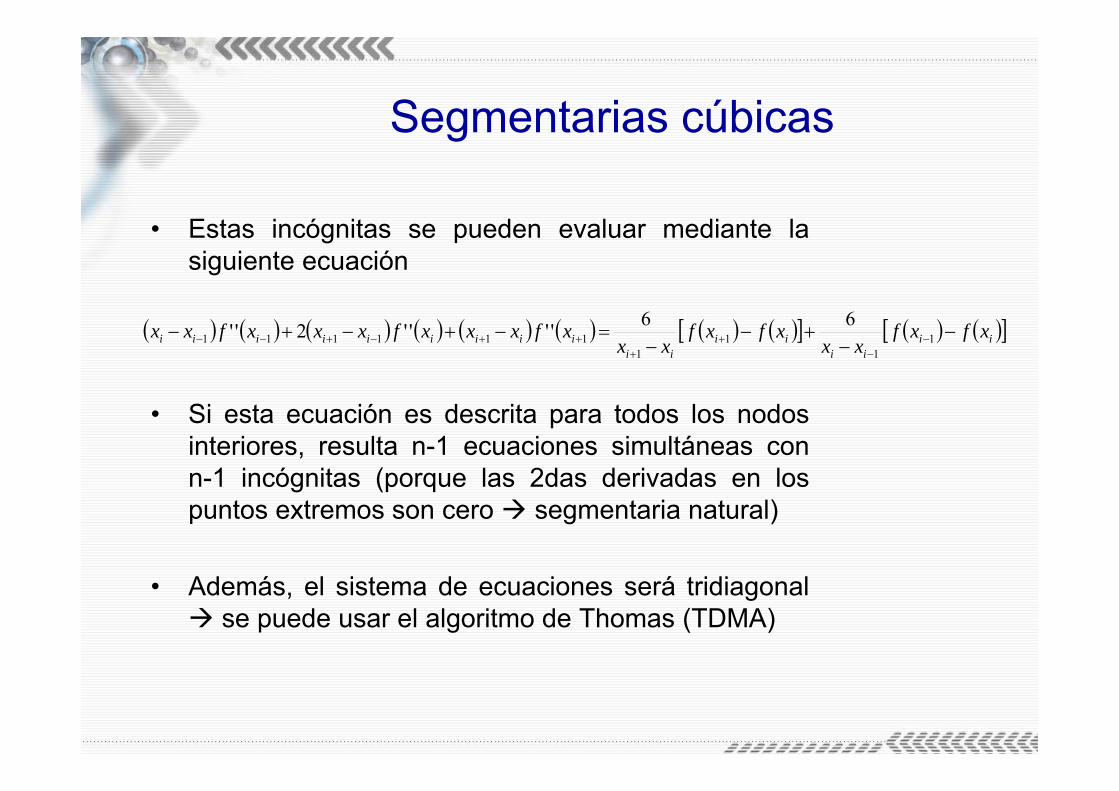
• Estas incógnitas se pueden evaluar mediante lasiguiente ecuación
• Si esta ecuación es descrita para todos los nodosinteriores, resulta n-1 ecuaciones simultáneas conn-1 incógnitas (porque las 2das derivadas en lospuntos extremos son cero segmentaria natural)
• Además, el sistema de ecuaciones será tridiagonal se puede usar el algoritmo de Thomas (TDMA)

Interpolación Polinómica Segmentaria
u Limitaciones de la interpolación polinómica4 Grado del polinomio 4 Carácter de la función a interpolar
u Alternativa propuesta: Splines.4 Numéricamente estable4 Matrices dispersas4 Agradable a la vista
Interpolación Polinomica Segmentaria: Splines
u Interpolación Segmentaria
u Interpolación Segmentaria Lineal
u Interpolación Segmentaria Cúbica4 Condiciones Naturales
4 Condiciones sobre la derivada
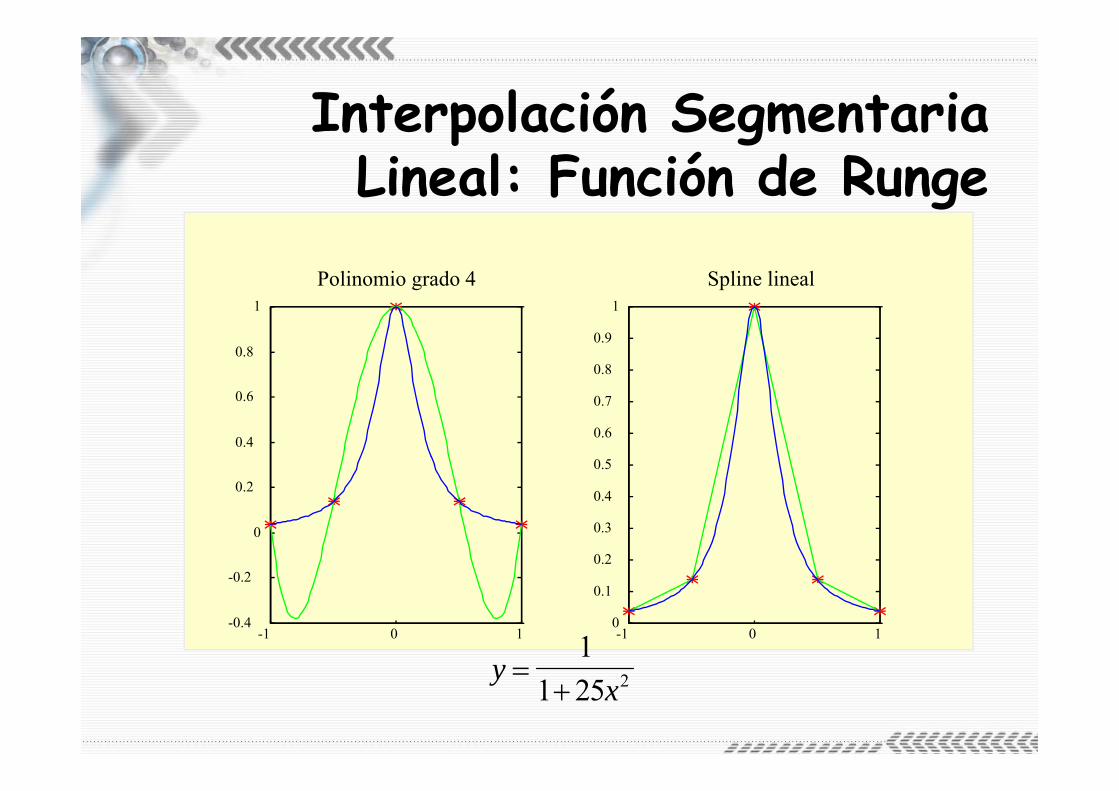
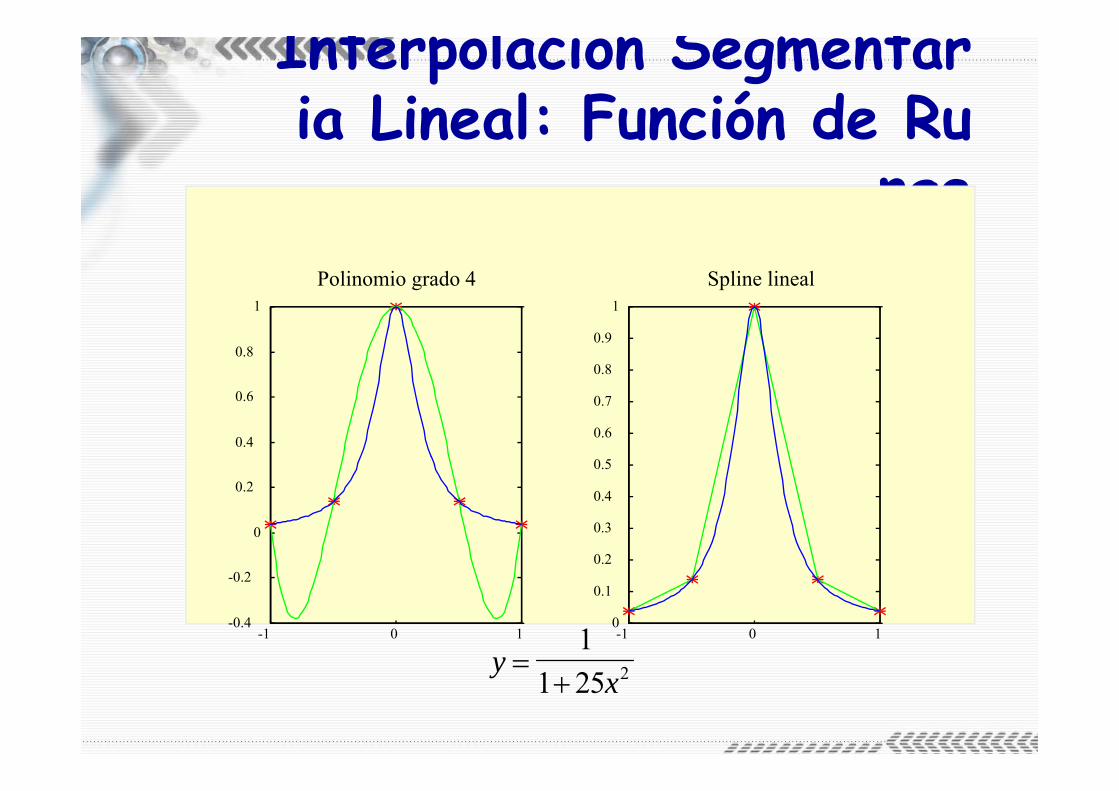
Interpolación Segmentaria Lineal: Función de Runge
-1 0 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Spline lineal
-1 0 1-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Polinomio grado 4
yx
11 25 2
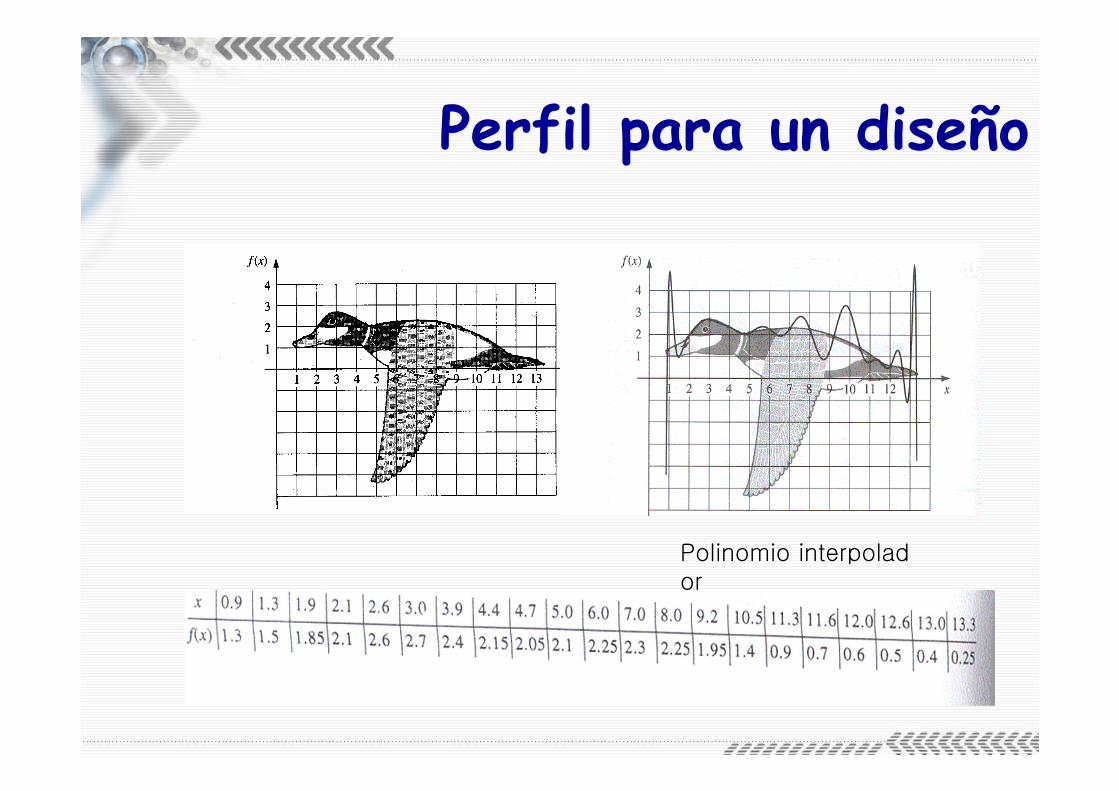
Perfil para un diseño
Polinomio interpolador
Aplicacionesu Ingeniería y Diseño (CAD/CAM, CNC’s)u Geologíau Aeronáutica y automociónu Economía u Procesamiento de señales e imágenes (Reconocimientode patrones, recuperación de imágenes)
u Robóticau Medicina (Aparatos auditivos, mapas cerebrales)u Meteorología (Mapas climáticos, detección de inundaciones,...)u Mundo Virtual Distribuido Multiusuario
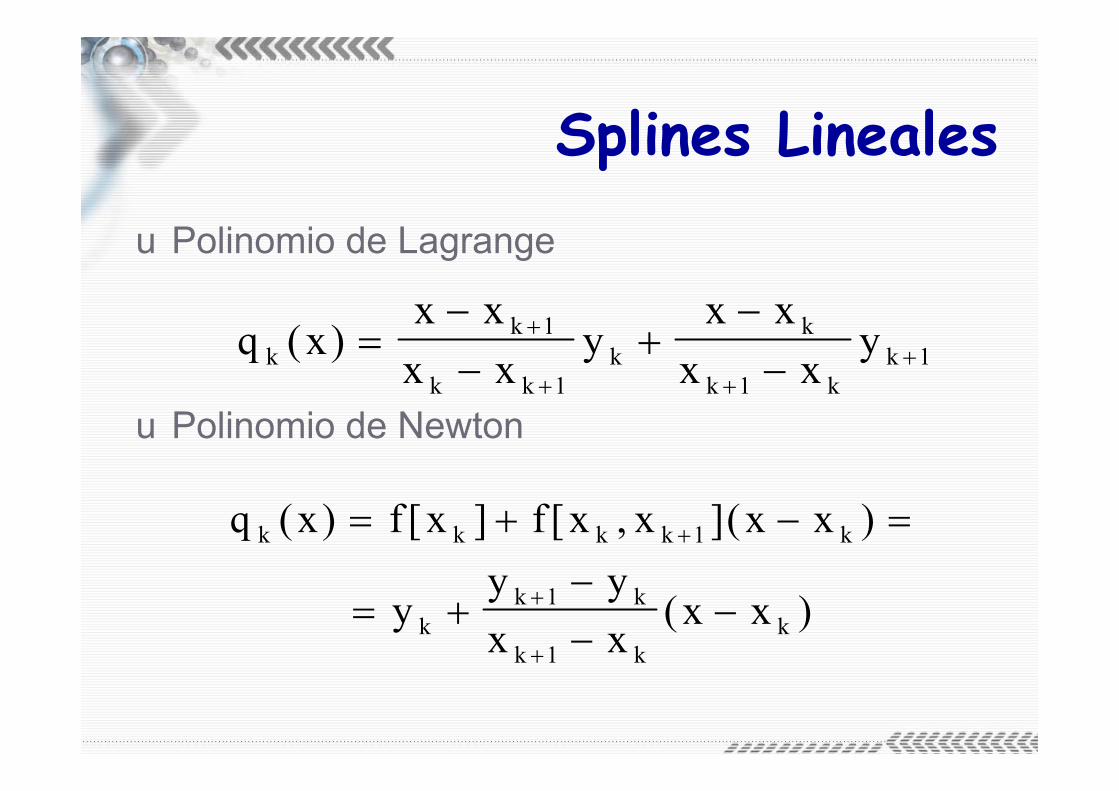
Splines Linealesu Polinomio de Lagrange
u Polinomio de Newton
q xx x
x xy
x xx x
ykk
k kk
k
k kk( )
1
1 11
q x f x f x x x x
yy yx x
x x
k k k k k
kk k
k kk
( ) [ ] [ , ]( )
( )
1
1
1
Splines Lineales
Interpolación Segmentaria Lineal: Función de Ru
nge
-1 0 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Spline lineal
-1 0 1-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Polinomio grado 4
yx
11 25 2
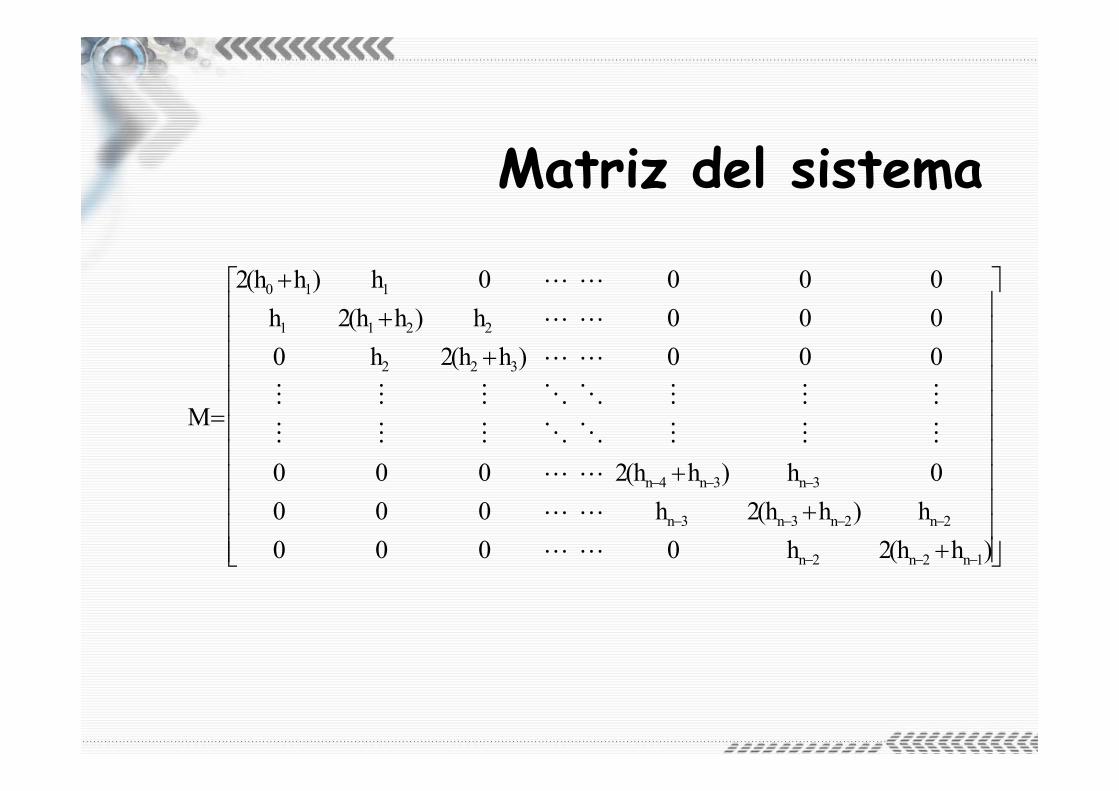
Matriz del sistema
M
h h hh h h h
h h h
h h hh h h h
h h h
n n n
n n n n
n n n
2 0 0 0 02 0 0 0
0 2 0 0 0
0 0 0 2 00 0 0 20 0 0 0 2
0 1 1
1 1 2 2
2 2 3
4 3 3
3 3 2 2
2 2 1
( )( )
( )
( )( )
( )
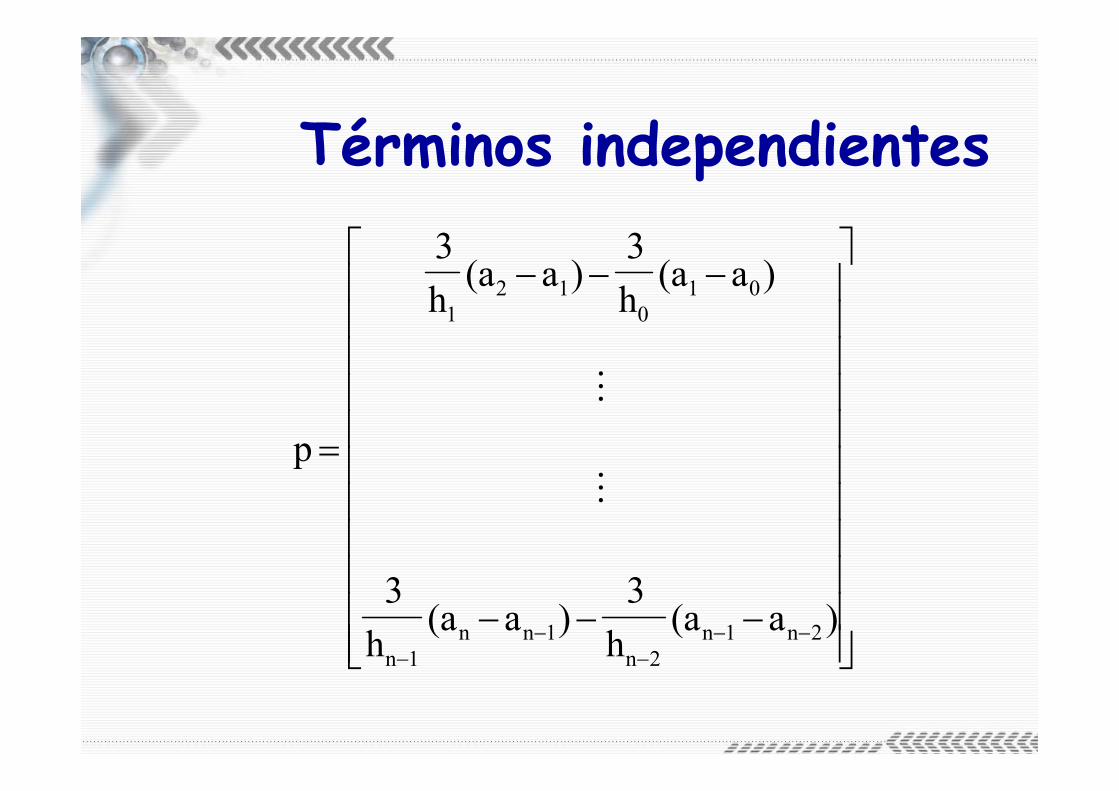
p
ha a
ha a
ha a
ha a
nn n
nn n
3 3
3 3
12 1
01 0
11
21 2
( ) ( )
( ) ( )
Términos independientes
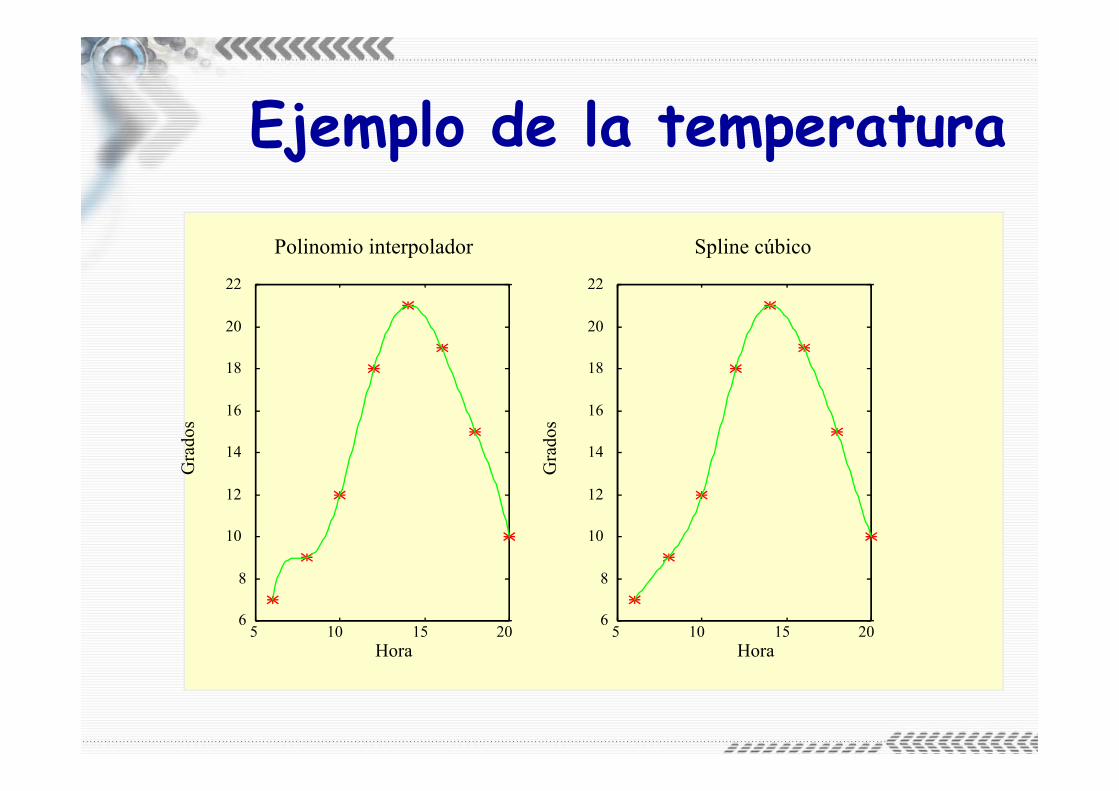
Ejemplo de la temperatura
5 10 15 206
8
10
12
14
16
18
20
22
Hora
Gra
dos
Spline cúbico
5 10 15 206
8
10
12
14
16
18
20
22
Hora
Gra
dos
Polinomio interpolador
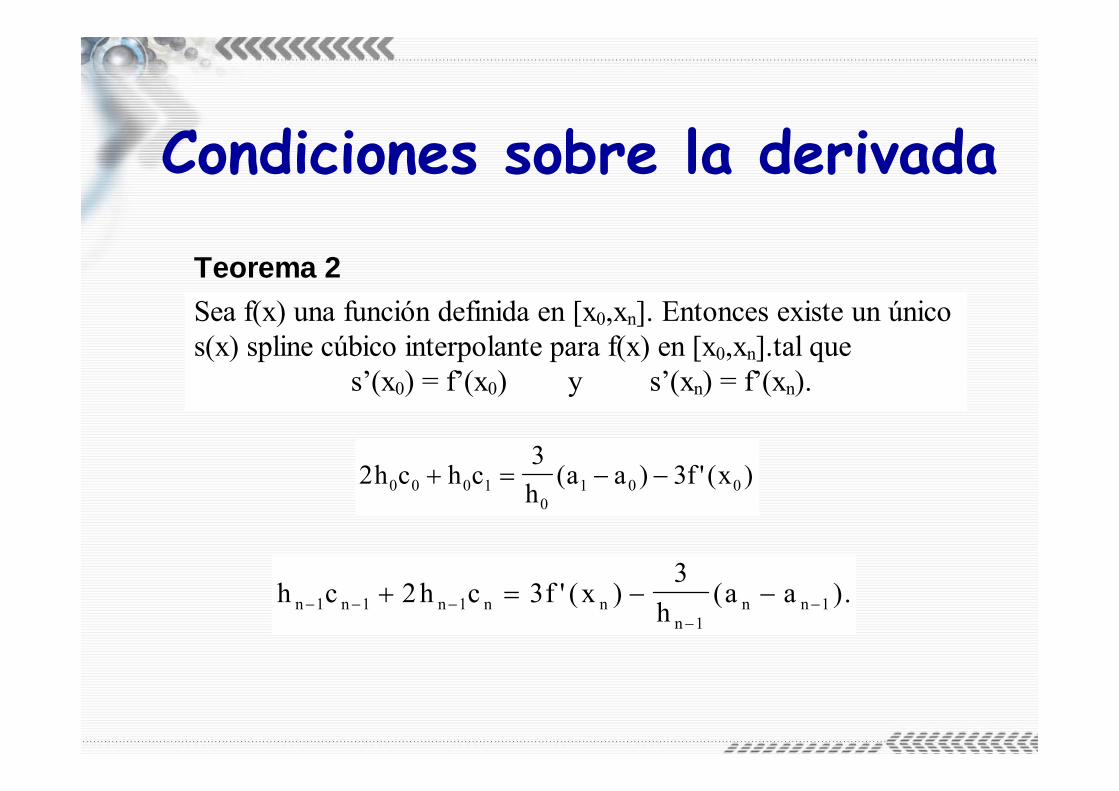
Condiciones sobre la derivada
Teorema 2Sea f(x) una función definida en [x0,xn]. Entonces existe un únicos(x) spline cúbico interpolante para f(x) en [x0,xn].tal que
s’(x0) = f’(x0) y s’(xn) = f’(xn).
23
30 0 0 10
1 0 0h c h ch
a a f x ( ) ' ( )
h c h c f xh
a an n n n nn
n n
1 1 11
12 33
' ( ) ( ).
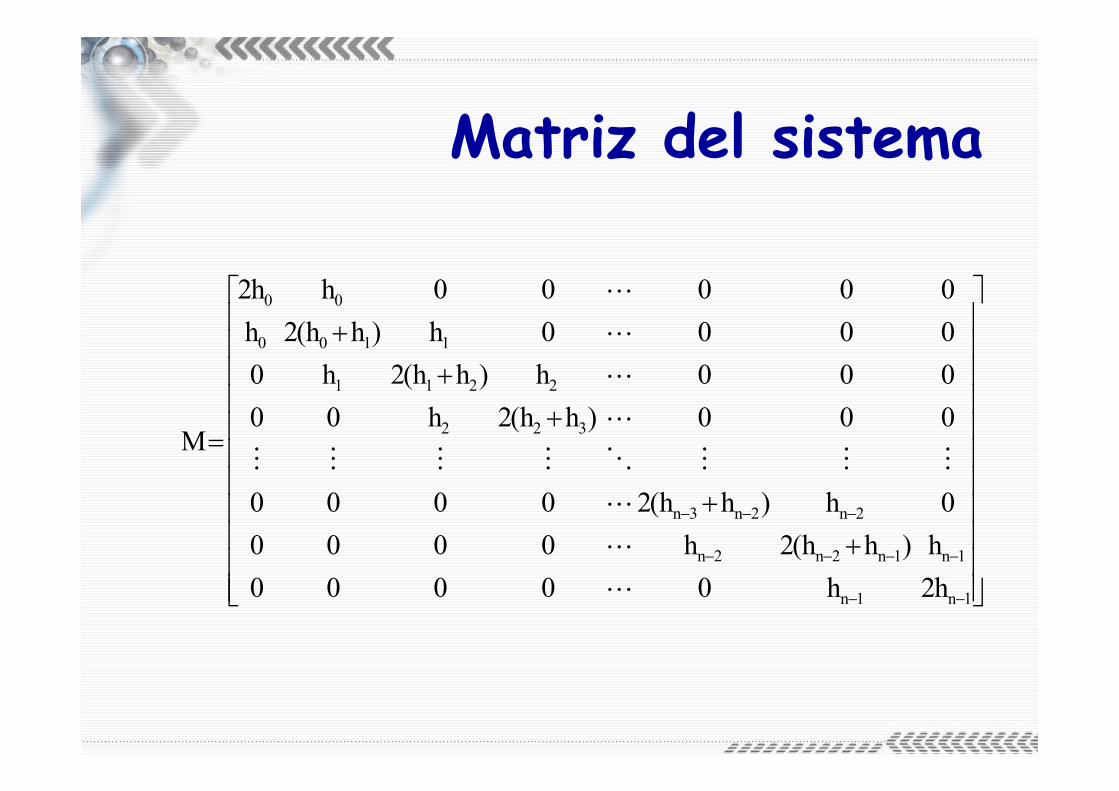
Matriz del sistema
M
h hh h h h
h h h hh h h
h h hh h h h
h h
n n n
n n n n
n n
2 0 0 0 0 02 0 0 0 0
0 2 0 0 00 0 2 0 0 0
0 0 0 0 2 00 0 0 0 20 0 0 0 0 2
0 0
0 0 1 1
1 1 2 2
2 2 3
3 2 2
2 2 1 1
1 1
( )( )
( )
( )( )
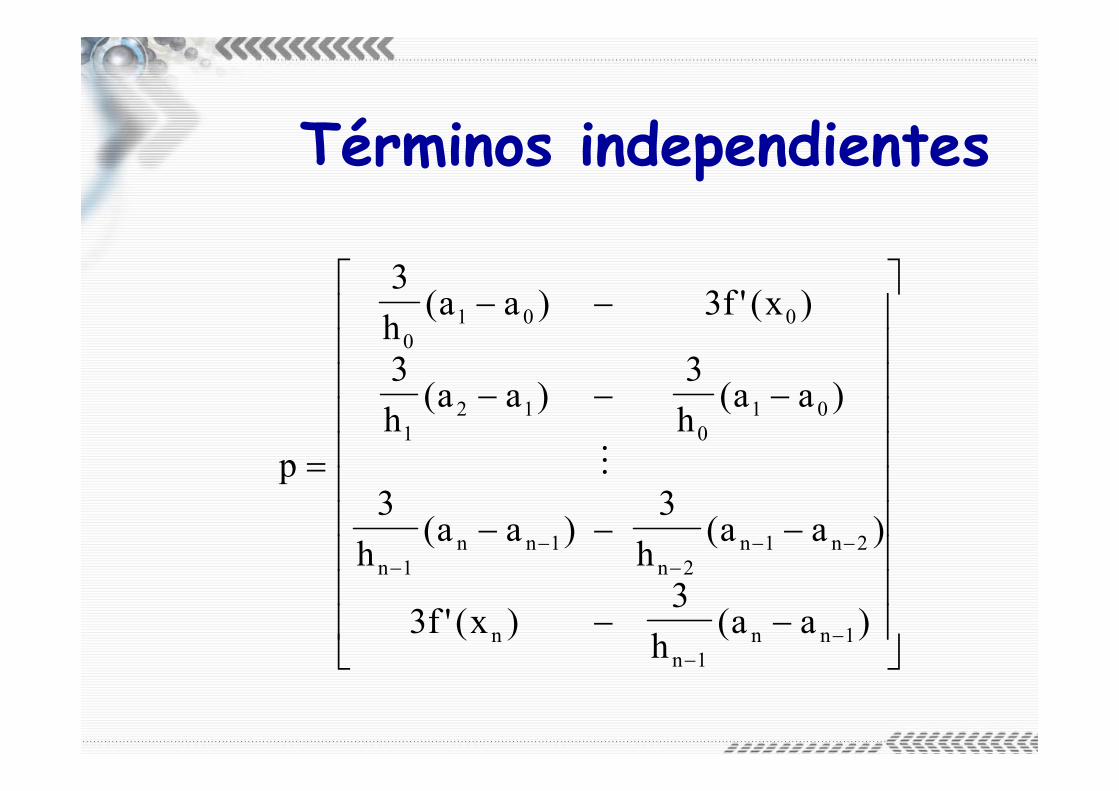
Términos independientes
p
ha a f x
ha a
ha a
ha a
ha a
f xh
a an
n nn
n n
nn
n n
33
3 3
3 3
33
01 0 0
12 1
01 0
11
21 2
11
( ) ' ( )
( ) ( )
( ) ( )
' ( ) ( )
Splines Cúbicos
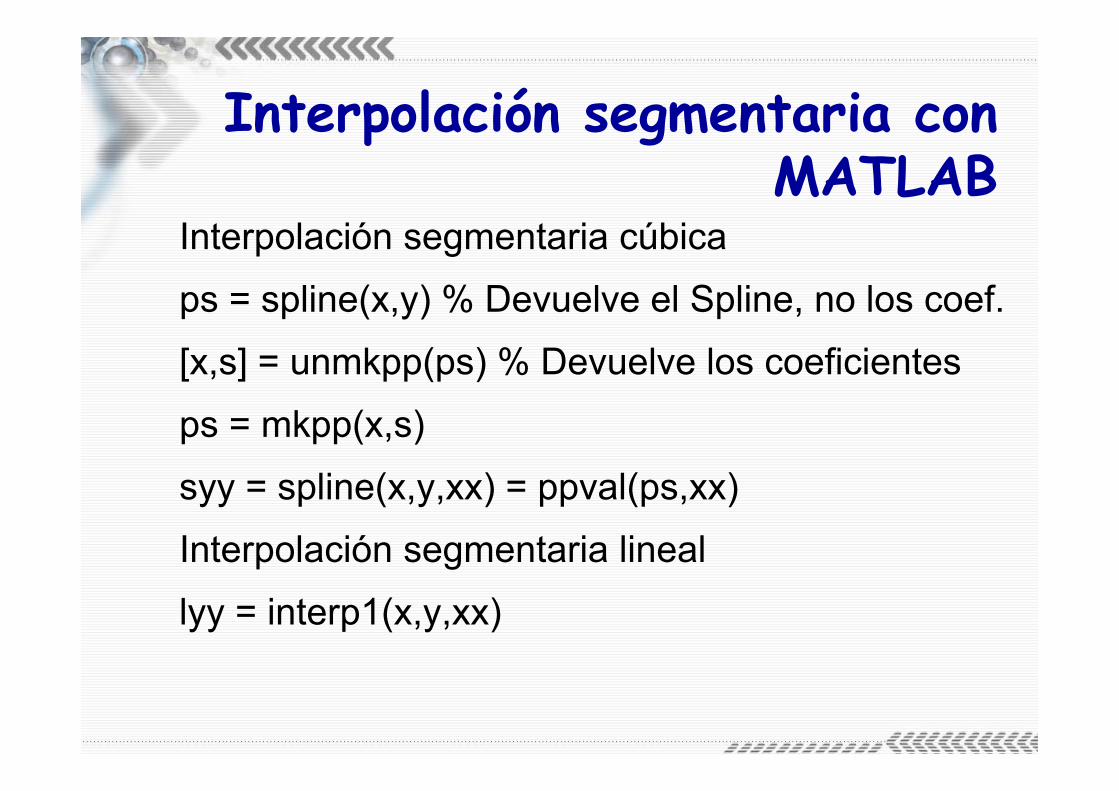
Interpolación segmentaria con MATLAB
Interpolación segmentaria cúbica
ps = spline(x,y) % Devuelve el Spline, no los coef.
[x,s] = unmkpp(ps) % Devuelve los coeficientes
ps = mkpp(x,s)
syy = spline(x,y,xx) = ppval(ps,xx)
Interpolación segmentaria lineal
lyy = interp1(x,y,xx)
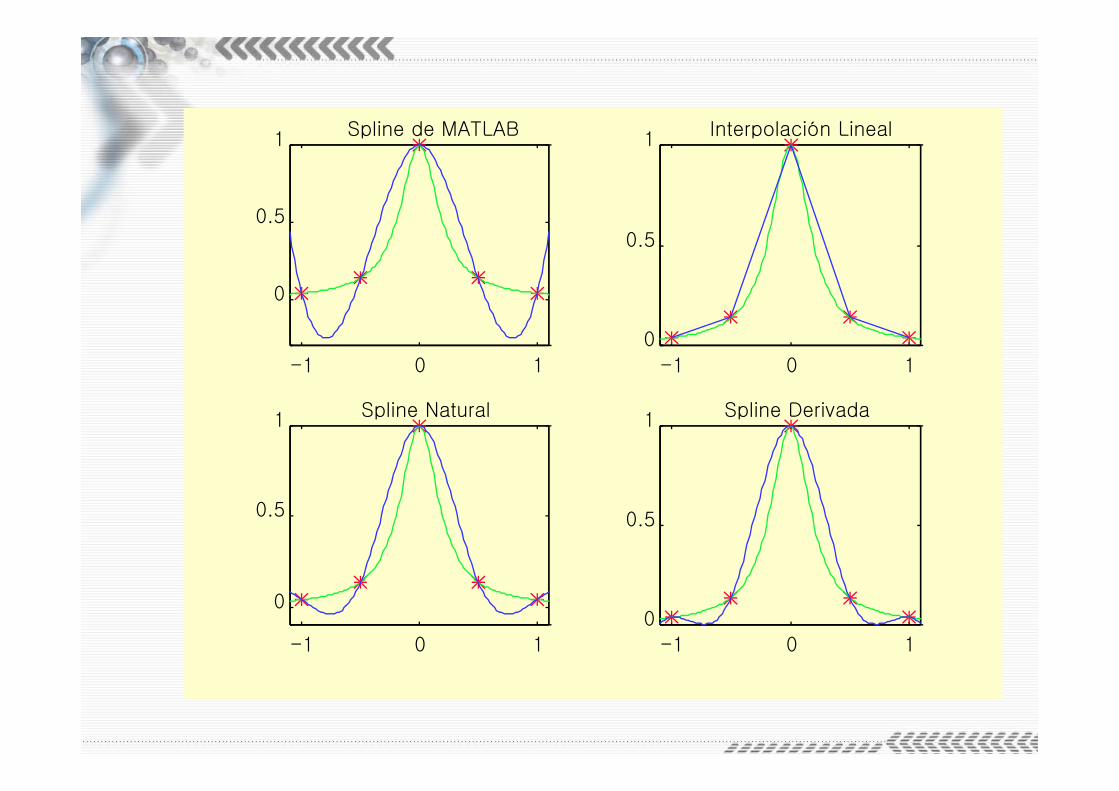
-1 0 1
0
0.5
1 Spline Natural
-1 0 1
0
0.5
1 Spline Derivada
-1 0 1
0
0.5
1 Interpolación Lineal
-1 0 1
0
0.5
1 Spline de MATLAB

Métodos Numéricos Aplicados a la Ingeniería
Problemas Propuestos de IC343
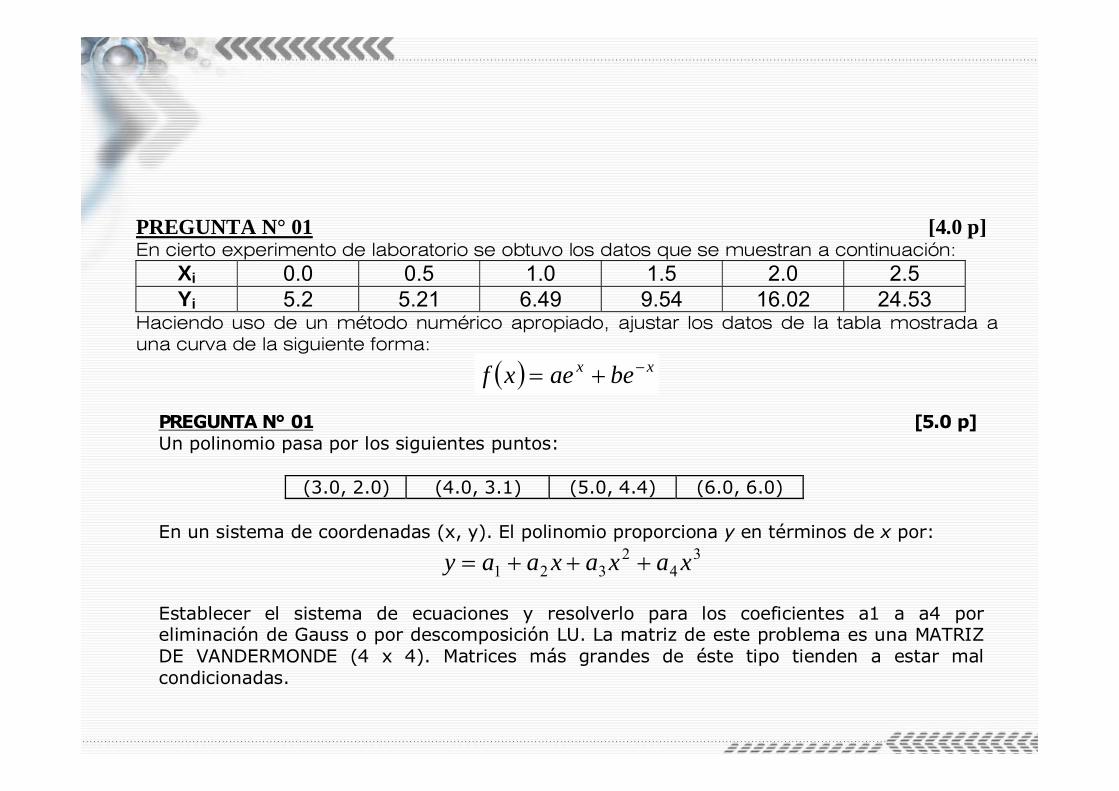
PREGUNTA N° 01 [4.0 p] En cierto experimento de laboratorio se obtuvo los datos que se muestran a continuación:
Xi 0.0 0.5 1.0 1.5 2.0 2.5 Yi 5.2 5.21 6.49 9.54 16.02 24.53
Haciendo uso de un método numérico apropiado, ajustar los datos de la tabla mostrada a una curva de la siguiente forma:
xx beaexf
PREGUNTA N° 01 [5.0 p]Un polinomio pasa por los siguientes puntos:
(3.0, 2.0) (4.0, 3.1) (5.0, 4.4) (6.0, 6.0)
En un sistema de coordenadas (x, y). El polinomio proporciona y en términos de x por:
34
2321 xaxaxaay
Establecer el sistema de ecuaciones y resolverlo para los coeficientes a1 a a4 por eliminación de Gauss o por descomposición LU. La matriz de este problema es una MATRIZ DE VANDERMONDE (4 x 4). Matrices más grandes de éste tipo tienden a estar mal condicionadas.
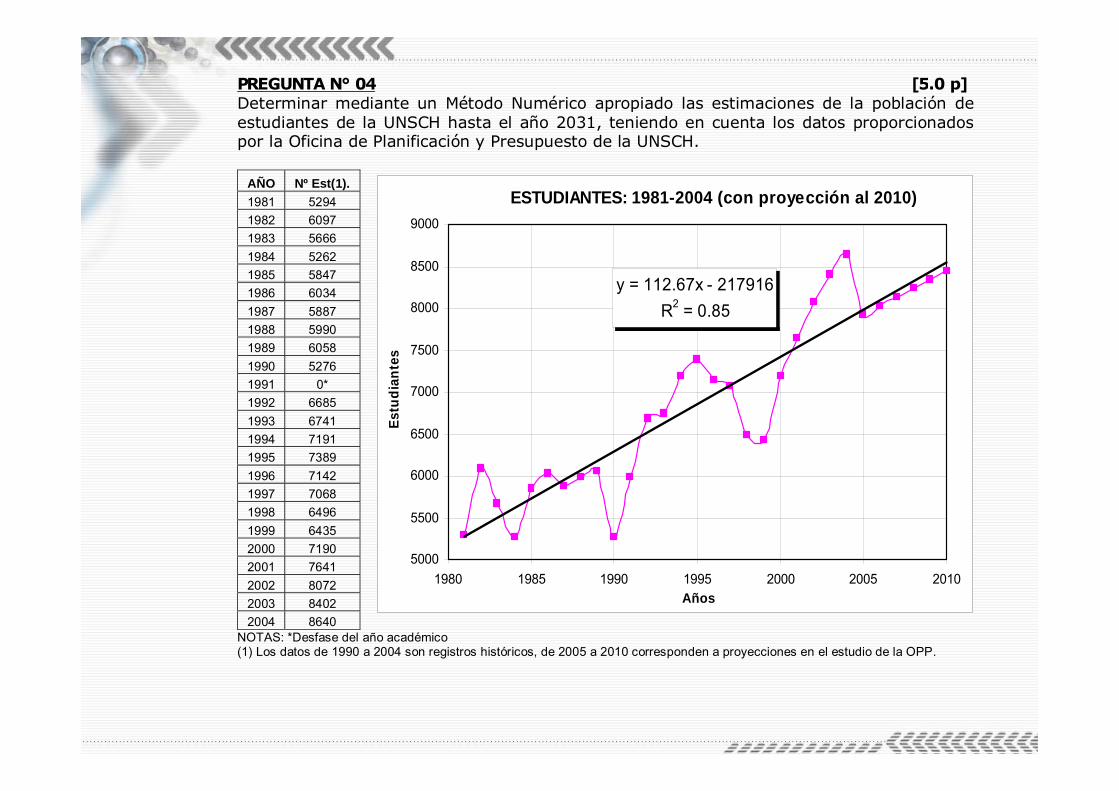
PREGUNTA N° 04 [5.0 p]Determinar mediante un Método Numérico apropiado las estimaciones de la población de estudiantes de la UNSCH hasta el año 2031, teniendo en cuenta los datos proporcionados por la Oficina de Planificación y Presupuesto de la UNSCH.
AÑO Nº Est(1). 1981 52941982 60971983 5666 1984 52621985 58471986 6034 1987 5887 1988 59901989 6058 1990 52761991 0*1992 6685 1993 67411994 71911995 7389 1996 71421997 7068 1998 6496 1999 64352000 71902001 7641 2002 80722003 84022004 8640
ESTUDIANTES: 1981-2004 (con proyección al 2010)
y = 112.67x - 217916R2 = 0.85
5000
5500
6000
6500
7000
7500
8000
8500
9000
1980 1985 1990 1995 2000 2005 2010Años
Estu
dian
tes
NOTAS: *Desfase del año académico (1) Los datos de 1990 a 2004 son registros históricos, de 2005 a 2010 corresponden a proyecciones en el estudio de la OPP.
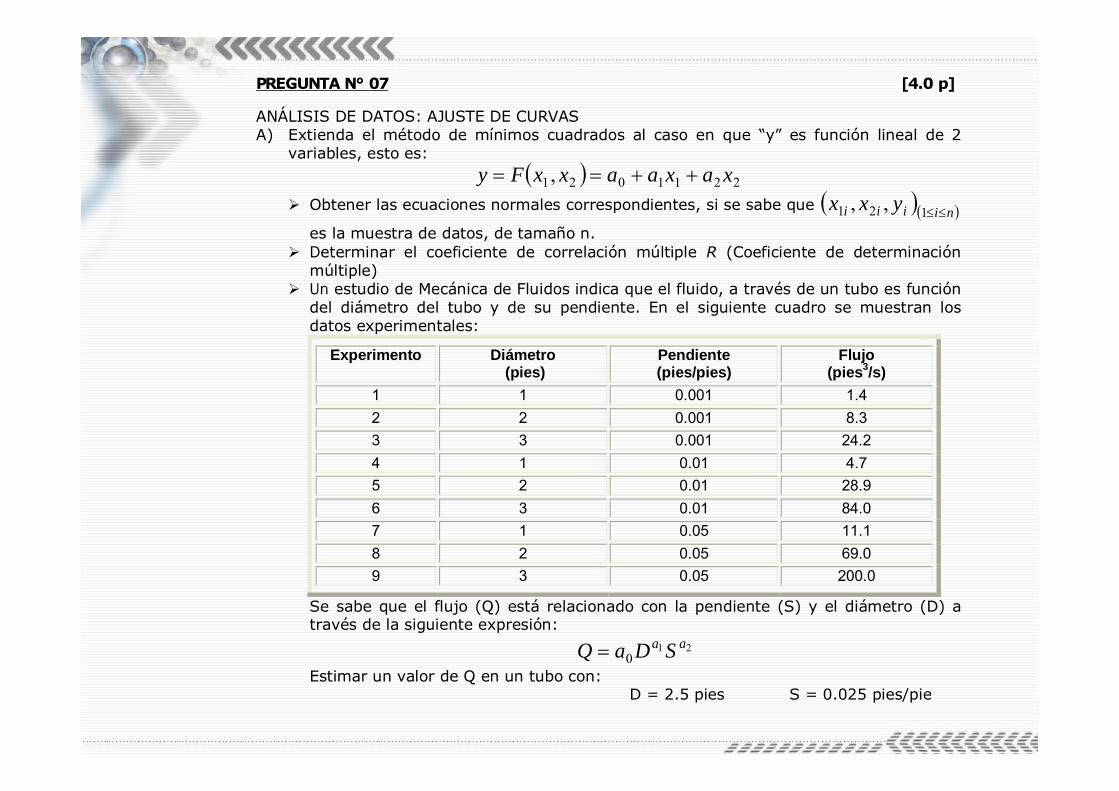
PREGUNTA N° 07 [4.0 p] ANÁLISIS DE DATOS: AJUSTE DE CURVAS A) Extienda el método de mínimos cuadrados al caso en que “y” es función lineal de 2
variables, esto es: 2211021, xaxaaxxFy
Obtener las ecuaciones normales correspondientes, si se sabe que niiii yxx 121 ,,
es la muestra de datos, de tamaño n. Determinar el coeficiente de correlación múltiple R (Coeficiente de determinación
múltiple) Un estudio de Mecánica de Fluidos indica que el fluido, a través de un tubo es función
del diámetro del tubo y de su pendiente. En el siguiente cuadro se muestran los datos experimentales:
Experimento Diámetro (pies)
Pendiente (pies/pies)
Flujo (pies3/s)
1 1 0.001 1.4 2 2 0.001 8.3 3 3 0.001 24.2 4 1 0.01 4.7 5 2 0.01 28.9 6 3 0.01 84.0 7 1 0.05 11.1 8 2 0.05 69.0 9 3 0.05 200.0
Se sabe que el flujo (Q) está relacionado con la pendiente (S) y el diámetro (D) a través de la siguiente expresión:
210
aa SDaQ
Estimar un valor de Q en un tubo con: D = 2.5 pies S = 0.025 pies/pie
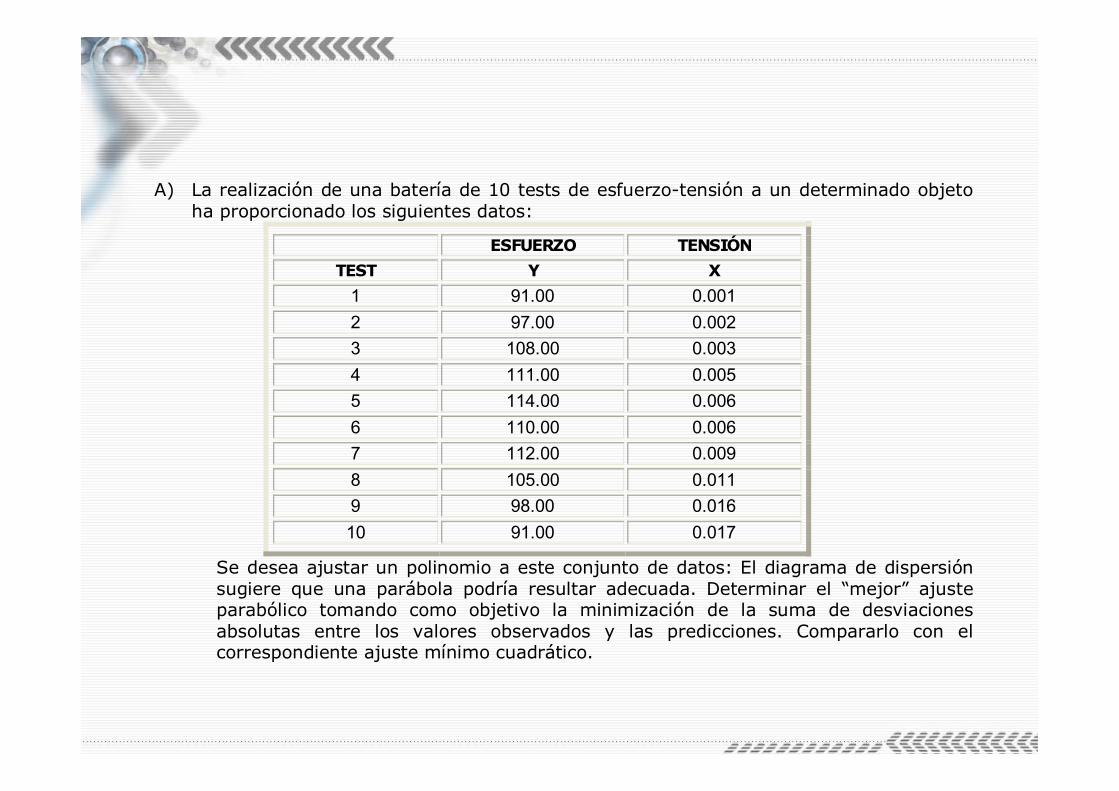
A) La realización de una batería de 10 tests de esfuerzo-tensión a un determinado objeto ha proporcionado los siguientes datos:
ESFUERZO TENSIÓN
TEST Y X
1 91.00 0.001 2 97.00 0.002 3 108.00 0.003 4 111.00 0.005 5 114.00 0.006 6 110.00 0.006 7 112.00 0.009 8 105.00 0.011 9 98.00 0.016 10 91.00 0.017
Se desea ajustar un polinomio a este conjunto de datos: El diagrama de dispersión sugiere que una parábola podría resultar adecuada. Determinar el “mejor” ajuste parabólico tomando como objetivo la minimización de la suma de desviaciones absolutas entre los valores observados y las predicciones. Compararlo con el correspondiente ajuste mínimo cuadrático.
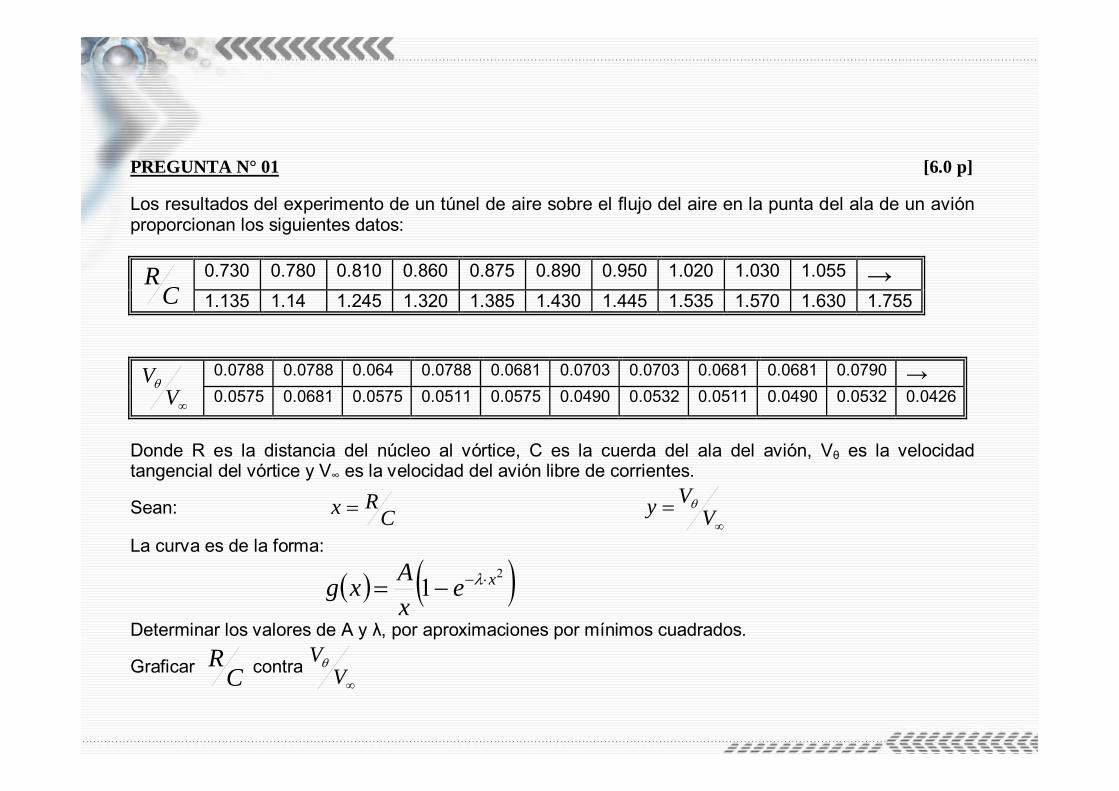
PREGUNTA N° 01 [6.0 p] Los resultados del experimento de un túnel de aire sobre el flujo del aire en la punta del ala de un avión proporcionan los siguientes datos:
CR
0.730 0.780 0.810 0.860 0.875 0.890 0.950 1.020 1.030 1.055 → 1.135 1.14 1.245 1.320 1.385 1.430 1.445 1.535 1.570 1.630 1.755
VV
0.0788 0.0788 0.064 0.0788 0.0681 0.0703 0.0703 0.0681 0.0681 0.0790 → 0.0575 0.0681 0.0575 0.0511 0.0575 0.0490 0.0532 0.0511 0.0490 0.0532 0.0426
Donde R es la distancia del núcleo al vórtice, C es la cuerda del ala del avión, Vθ es la velocidad tangencial del vórtice y V∞ es la velocidad del avión libre de corrientes.
Sean: CRx
V
Vy
La curva es de la forma:
21 xe
xAxg
Determinar los valores de A y λ, por aproximaciones por mínimos cuadrados.
Graficar CR contra
VV
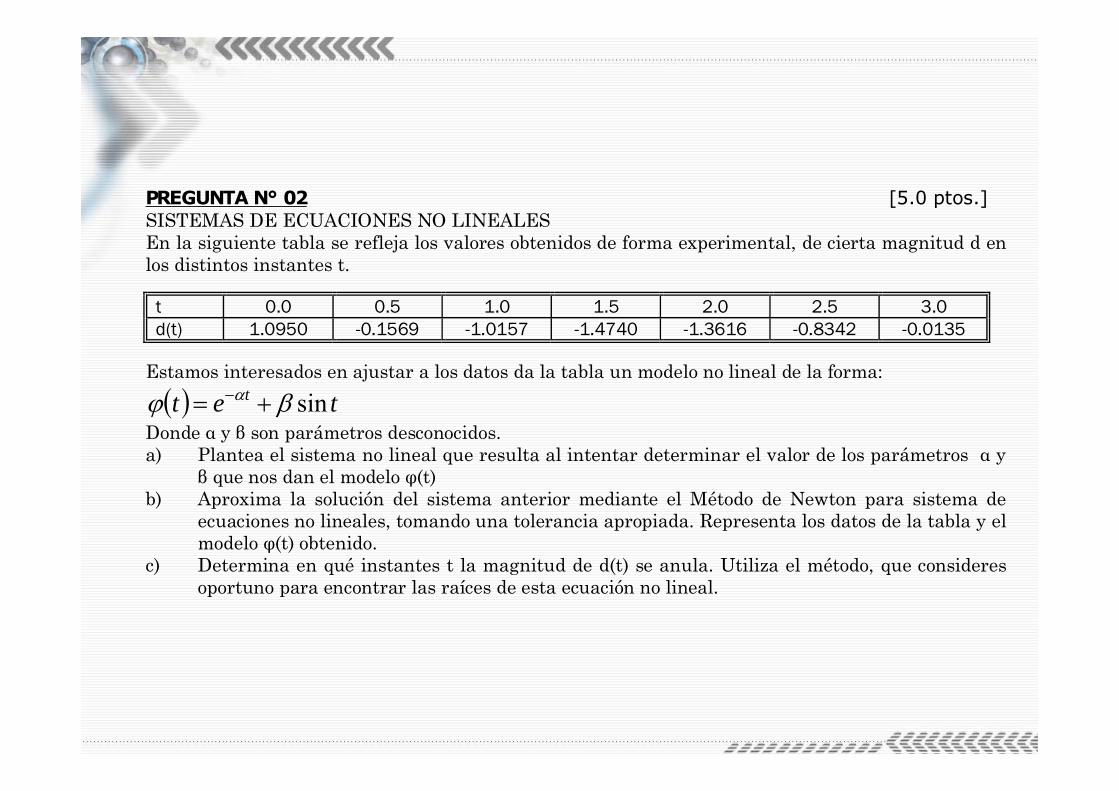
PREGUNTA N° 02 [5.0 ptos.] SISTEMAS DE ECUACIONES NO LINEALES En la siguiente tabla se refleja los valores obtenidos de forma experimental, de cierta magnitud d en los distintos instantes t.
t 0.0 0.5 1.0 1.5 2.0 2.5 3.0d(t) 1.0950 -0.1569 -1.0157 -1.4740 -1.3616 -0.8342 -0.0135
Estamos interesados en ajustar a los datos da la tabla un modelo no lineal de la forma:
tet t sin Donde α y β son parámetros desconocidos. a) Plantea el sistema no lineal que resulta al intentar determinar el valor de los parámetros α y
β que nos dan el modelo φ(t) b) Aproxima la solución del sistema anterior mediante el Método de Newton para sistema de
ecuaciones no lineales, tomando una tolerancia apropiada. Representa los datos de la tabla y el modelo φ(t) obtenido.
c) Determina en qué instantes t la magnitud de d(t) se anula. Utiliza el método, que consideres oportuno para encontrar las raíces de esta ecuación no lineal.
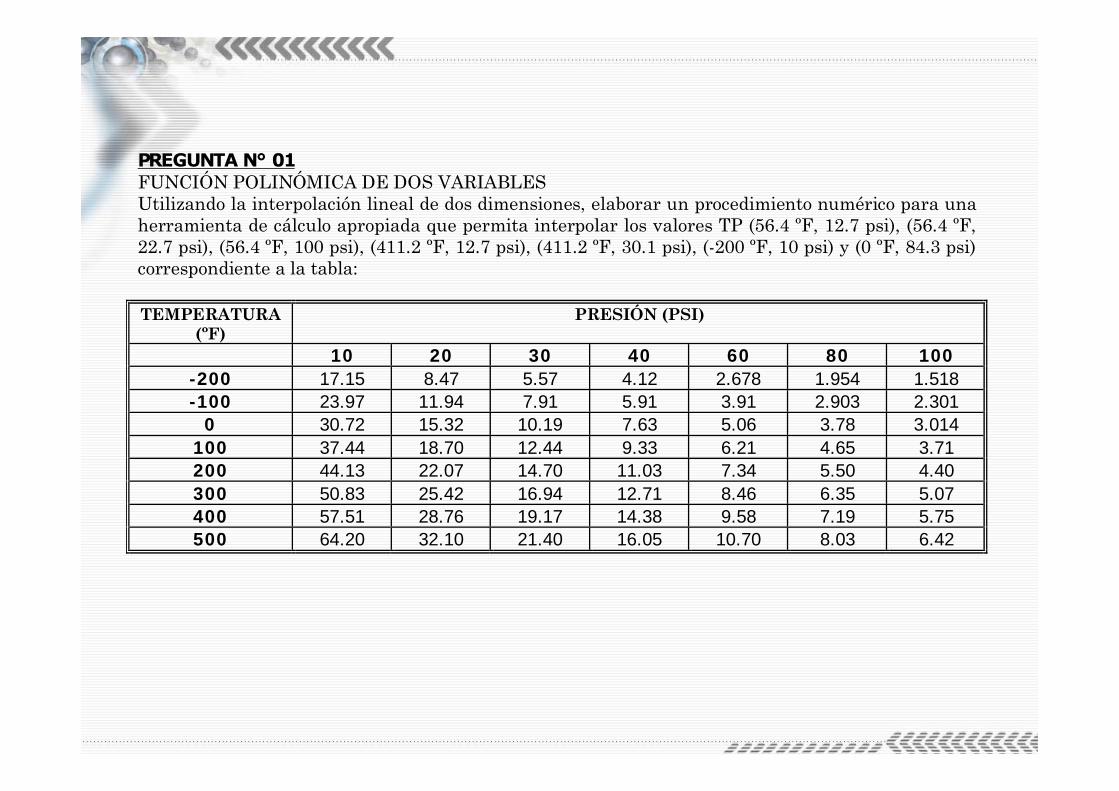
PREGUNTA N° 01 FUNCIÓN POLINÓMICA DE DOS VARIABLES Utilizando la interpolación lineal de dos dimensiones, elaborar un procedimiento numérico para una herramienta de cálculo apropiada que permita interpolar los valores TP (56.4 ºF, 12.7 psi), (56.4 ºF, 22.7 psi), (56.4 ºF, 100 psi), (411.2 ºF, 12.7 psi), (411.2 ºF, 30.1 psi), (-200 ºF, 10 psi) y (0 ºF, 84.3 psi) correspondiente a la tabla: TEMPERATURA
(ºF)PRESIÓN (PSI)
10 20 30 40 60 80 100-200 17.15 8.47 5.57 4.12 2.678 1.954 1.518-100 23.97 11.94 7.91 5.91 3.91 2.903 2.301
0 30.72 15.32 10.19 7.63 5.06 3.78 3.014100 37.44 18.70 12.44 9.33 6.21 4.65 3.71200 44.13 22.07 14.70 11.03 7.34 5.50 4.40300 50.83 25.42 16.94 12.71 8.46 6.35 5.07400 57.51 28.76 19.17 14.38 9.58 7.19 5.75500 64.20 32.10 21.40 16.05 10.70 8.03 6.42
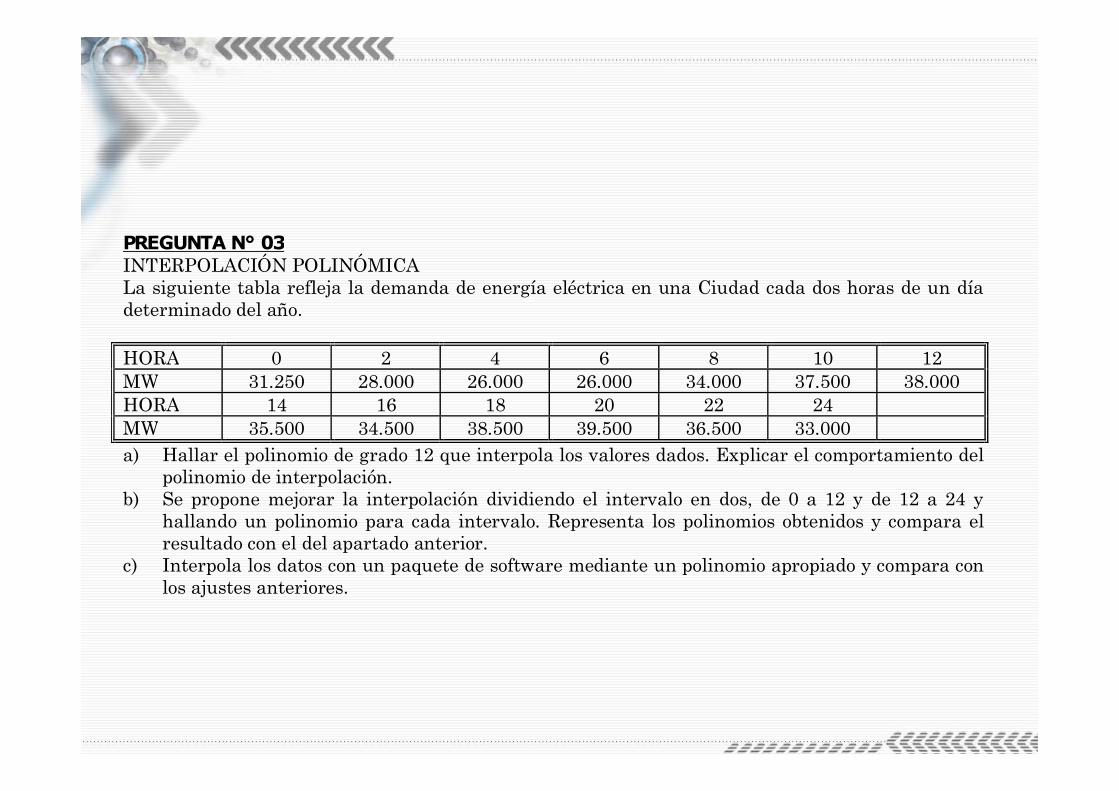
PREGUNTA N° 03 INTERPOLACIÓN POLINÓMICA La siguiente tabla refleja la demanda de energía eléctrica en una Ciudad cada dos horas de un día determinado del año. HORA 0 2 4 6 8 10 12MW 31.250 28.000 26.000 26.000 34.000 37.500 38.000HORA 14 16 18 20 22 24MW 35.500 34.500 38.500 39.500 36.500 33.000a) Hallar el polinomio de grado 12 que interpola los valores dados. Explicar el comportamiento del
polinomio de interpolación. b) Se propone mejorar la interpolación dividiendo el intervalo en dos, de 0 a 12 y de 12 a 24 y
hallando un polinomio para cada intervalo. Representa los polinomios obtenidos y compara el resultado con el del apartado anterior.
c) Interpola los datos con un paquete de software mediante un polinomio apropiado y compara con los ajustes anteriores.
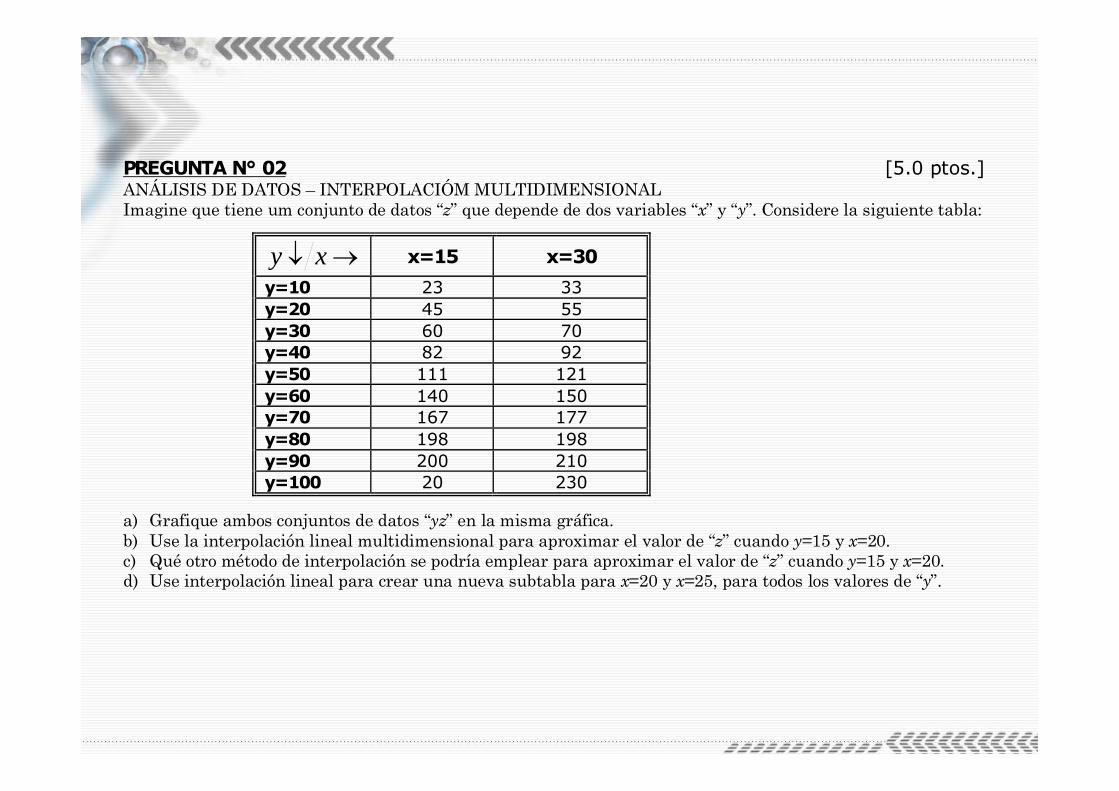
PREGUNTA N° 02 [5.0 ptos.] ANÁLISIS DE DATOS – INTERPOLACIÓM MULTIDIMENSIONAL Imagine que tiene um conjunto de datos “z” que depende de dos variables “x” y “y”. Considere la siguiente tabla:
xy x=15 x=30
y=10 23 33y=20 45 55y=30 60 70y=40 82 92y=50 111 121y=60 140 150y=70 167 177y=80 198 198y=90 200 210y=100 20 230
a) Grafique ambos conjuntos de datos “yz” en la misma gráfica. b) Use la interpolación lineal multidimensional para aproximar el valor de “z” cuando y=15 y x=20. c) Qué otro método de interpolación se podría emplear para aproximar el valor de “z” cuando y=15 y x=20. d) Use interpolación lineal para crear una nueva subtabla para x=20 y x=25, para todos los valores de “y”.
Sección de Preguntas
Muchas Gracias

















