Rezumatul tezei de doctorat CAPITOLUL 1 INTRODUCERE În raport cu o problemă atât de importantă pentru societate cum este sănătatea publică, diversele segmente ale populaţiei sunt sensibilizate de a reacţiona pozitiv mai ales spre prevenţie, educaţie şi tratament. Noua abordare a sănătăţii publice de prevenire, educaţie şi tratament impune necesitatea integrării şi interacţiunii puternice dintre diferitele ramuri inginereşti, spre crearea de domenii noi, de frontieră care să se integreze în dinamica social-umană spre o societate europeană. Pornind de la aceste consideraţii, teza doctorală intitulată „Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă” îşi propune să realizeze cercetări teoretice şi practice în domeniul vast al implanturilor de osteosinteză. Teza de doctorat îmbină specificul proiectării asistate de calculator a corpurilor mecanice cu specificul utilizării calculatorului în domeniul medical pentru prelucrarea de imagini, extragerea de date esenţiale şi modelare, având ca scop dezvoltarea unui nou implant de osteosinteză pentru fracturilor transsindesmotice de peroneu. Teza de doctorat cuprinde 218 pagini, 166 de figuri, 34 tabele şi este structurată pe şase capitole, dintre care trei dintre ele sunt de consistenţă şi prezintă în mod gradat problema şi rezolvarea ei, iar celelalte trei tratează introducerea, obiectivele tezei doctorale, concluziile, contribuţiile originale şi respectiv modul de valorificare a rezultatelor şi direcţii viitoare de cercetare. De asemenea, teza mai cuprinde alte 16 anexe, pe 147 pagini, corespunzătoare cercetărilor experimentale efectuate de către autor. Capitolul 1 intitulat „Introducere” încearcă o scurtă trecere în revistă a posibilităţilor oferite de metodele de protezare şi importanţa acestora pentru factorul uman. Capitolul 2 intitulat „Stadiul actual al cercetării în domeniul protezării prin Prototipare Rapidă” îşi propune sintetizarea noţiunilor de bază necesare înţelegerii problemelor protezării corpului uman prin: identificarea principiilor şi metodelor de protezare, clasificarea materialele folosite la confecţionarea implanturilor precum şi biocompatibilitatea acestora cu organismul uman şi identificarea procedeelor tehnologice de Prototipare Rapidă cu aplicaţii în domeniul medical. 1
Transcript
Rezumatul tezei de doctorat
CAPITOLUL 1
INTRODUCEREÎn raport cu o problemă atât de importantă pentru societate cum este sănătatea publică,
diversele segmente ale populaţiei sunt sensibilizate de a reacţiona pozitiv mai ales spre prevenţie, educaţie şi tratament. Noua abordare a sănătăţii publice de prevenire, educaţie şi tratament impune necesitatea integrării şi interacţiunii puternice dintre diferitele ramuri inginereşti, spre crearea de domenii noi, de frontieră care să se integreze în dinamica social-umană spre o societate europeană.
Pornind de la aceste consideraţii, teza doctorală intitulată „Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă” îşi propune să realizeze cercetări teoretice şi practice în domeniul vast al implanturilor de osteosinteză. Teza de doctorat îmbină specificul proiectării asistate de calculator a corpurilor mecanice cu specificul utilizării calculatorului în domeniul medical pentru prelucrarea de imagini, extragerea de date esenţiale şi modelare, având ca scop dezvoltarea unui nou implant de osteosinteză pentru fracturilor transsindesmotice de peroneu.
Teza de doctorat cuprinde 218 pagini, 166 de figuri, 34 tabele şi este structurată pe şase capitole, dintre care trei dintre ele sunt de consistenţă şi prezintă în mod gradat problema şi rezolvarea ei, iar celelalte trei tratează introducerea, obiectivele tezei doctorale, concluziile, contribuţiile originale şi respectiv modul de valorificare a rezultatelor şi direcţii viitoare de cercetare. De asemenea, teza mai cuprinde alte 16 anexe, pe 147 pagini, corespunzătoare cercetărilor experimentale efectuate de către autor.
Capitolul 1 intitulat „Introducere” încearcă o scurtă trecere în revistă a posibilităţilor oferite de metodele de protezare şi importanţa acestora pentru factorul uman.
Capitolul 2 intitulat „Stadiul actual al cercetării în domeniul protezării prin Prototipare Rapidă” îşi propune sintetizarea noţiunilor de bază necesare înţelegerii problemelor protezării corpului uman prin: identificarea principiilor şi metodelor de protezare, clasificarea materialele folosite la confecţionarea implanturilor precum şi biocompatibilitatea acestora cu organismul uman şi identificarea procedeelor tehnologice de Prototipare Rapidă cu aplicaţii în domeniul medical.
Capitolul 3 este intitulat „Obiectivele tezei de doctorat” şi tratează obiectivele punctuale ale tezei de doctorat. Aceste obiective sunt date de: studiul teoretic al modurilor de protezare a corpului uman, studiul analitic al biomecanicii membrului inferior, reconstrucţia tridimensională a elementelor anatomice ale membrului inferior, simulări numerice a ansamblurilor modelate şi obţinerea fizică a elementelor modelate folosind tehnologia neconvenţională de Prototipare Rapidă.
Capitolul 4 se mai numeşte şi „Contribuţii teoretice şi experimentale privind modelarea solicitărilor statice şi dinamice a sistemelor anatomice gleznă – picior şi genunchi – gambă” şi este dedicat, aşa cum îi spune şi numele, în exclusivitate cercetărilor analitice şi experimentale. În primă etapă, se descrie pe larg algoritmul de modelare biomecanică a sistemelor anatomice gleznă-picior şi gleznă-gambă, care se bazează pe metoda dinamicii inverse, ce include o serie de tehnici specifice de calcul mecanic şi matematic, în vederea extragerii de informaţii utile specifice proiectării şi realizării unui nou implant de osteosinteză. În cea de-a doua fază, se descrie analiza experimentală cu ajutorul căreia parametrii cinematici şi dinamici rezultaţi în timpul mersului normal sunt determinaţi. Pentru a-şi îndeplini funcţiile căreia îi este destinată, instalaţia
1
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
experimentală este una hibridă, concepută din trei sisteme de măsurare, astfel: sistemul Kistler, sistemul BIOPAC şi sistemul video TroubleShooter.
Capitolul 5 intitulat şi „Contribuţii la concepţia şi realizarea implantului de osteosinteză pentru fracturile transsindesmotice de peroneu” tratează pe larg metodele de modelare şi proiectare utilizate în vederea obţinerii prototipului implantului de osteosinteză.
Capitolul 6 este intitulat „Concluzii generale. Contribuţii personale. Modul de valorificare şi direcţii viitoare de cercetare” şi, după cum îi spune şi numele, prezintă concluziile generale ale rezultatelor obţinute, elementele de originalitate şi contribuţiile aduse de către autor în cadrul acestei teze doctorale precum şi valorificarea rezultatelor şi direcţiile viitoare de cercetare.
Teza se încheie cu referinţe bibliografice şi şaisprezece anexe corespunzătoare cercetărilor experimentale efectuate de către autor.
Această teză de doctorat reprezintă rezultatul cercetărilor întreprinse de către autor pe parcursul a cinci ani, cu sprijinul ştiinţific şi logistic al unui număr important de persoane şi instituţii, cărora doresc să le mulţumesc şi le datorez toată recunoştinţa mea. O mare parte din cercetările experimentale ale tezei au fost posibile datorită accesului asigurat pentru doctorand în cadrul Bazei de Cercetare Multidisciplinară pentru Managementul Modelării, Proiectării şi Fiabilităţii Sistemelor Mecatronice cu Aplicaţie în Industrie şi Medicină, din Catedra de Mecanică Fină şi Mecatronică, Facultatea de Inginerie Mecanică, Universitatea Transilvania din Braşov. De asemenea, cercetarea experimentală în vederea obţinerii modelelor fizice ale peroneului şi implantului de osteosinteză prin procedeul FDM, a fost posibilă cu ajutorul Centrului Naţional de Fabricare Rapidă a Prototipurilor din Cluj – Napoca, sub conducerea Domnului Prof.dr.ing. Petru BERCE şi a Domnului inginer cercetător Horia CHEZAN.
Mulţumesc în mod deosebit referenţilor care, cu răbdare şi îngăduiţă, au analizat prezenta lucrare şi m-au sfătuit astfel încât, teza de doctorat să prezinte un nivel ştiinţific ridicat.
Doresc să mulţumesc în mod deosebit conducătorului ştiinţific, Doamna Prof.dr.ing. Ileana ROŞCA, pentru contribuţia la formarea mea pe plan ştiinţific şi personal.
Mulţumesc conducerii Catedrei de Mecanică Fină şi Mecatronică, Decanatului Facultăţii de Inginerie Mecanică şi Rectoratului Universităţii Transilvania din Braşov pentru sprijinul acordat după terminarea stagiul obligatoriu de doctorat, prin angajarea mea pe postul de inginer în cercetare la departamentul Produse Mecanice de Înaltă Precizie şi Sisteme Mecatronice, condus de Doamna Prof.dr.ing. Luciana CRISTEA.
Mulţumesc tuturor colegilor din cadrul Catedrei de Mecanică Fină şi Mecatronică, pentru sprijinul acordat în diferitele etape de pregătire a tezei de doctorat.
Doresc să mulţumesc colaboratorului meu din domeniul medical, Domnul Dr.med. George MUNTEAN, medic primar la Secţia de Ortopedie a Spitalului Municipal Braşov, care m-a ajutat oferindu-mi informaţii preţioase în ceea ce priveşte anatomia aparatului locomotor.
De asemenea, mulţumesc Doamnei Conf.dr.ing. Carmen STICLARU şi Doamnei Prof.dr.ing. Arjana DAVIDESCU, de la Facultatea de Mecanică, Universitatea Politehnică din Timişoara, pentru ajutorul acordat în ceea ce priveşte simularea numerică cu elemente finite a sistemelor anatomice folosite în prezenta teză de doctorat
Nu în ultimul rând, doresc să mulţumesc în mod deosebit familiei mele pentru sprijinul moral şi financiar acordat în special pe durata activităţii mele doctorale.
2
Rezumatul tezei de doctorat
Ianuarie, 2009 Autorul
CAPITOLUL 2
STADIUL ACTUAL AL CERCETĂRIIPRIVIND OBŢINEREA ELEMENTELOR DE PROTEZARE
PRIN PROTOTIPARE RAPIDĂ
2.1. INTRODUCERE ÎN CONCEPTUL DE PROTEZARECuvântul „proteză” provine de la cuvintele greceşti: „pro”- în loc, şi „tilhemi”- aşezare,
indicând prin urmare un aparat care să înlocuiască lipsa unui organ în întregime sau numai a unui segment al corpului. Denumirea de proteză este de multe ori folosită greşit în limbajul comun, fapt ce dă naştere la confuzii atunci când este vorba de un aparat ortopedic, care are ca scop îndreptarea unei atitudini vicioase sau să permită reglarea unei funcţii.
Tabelul 2.1. Clasificarea protezelor.
CR
ITE
RIU
L D
E C
LA
SIFI
CA
RE
mod
ul d
e ap
licar
ea la
:
proteze interne
endoproteze, folosite pentru protezarea totală a unei structuri anatomice complet compromisă (endoprotezele de şold, genunchi, gleznă, valvele artificiale ale inimii, etc.);
dispozitive de osteosinteză, folosite pentru fixarea fracturilor
dispozitive interne de osteosinteză
plăcitije intramedulareşuruburi de fixaredispozitive spinale de fixarefire şi ace ortopedice
dispozitive externe de osteosinteză
fixarea de fracturialungirea oaselor
proteze externe
exoproteze pentru membrele superioare, care ajută la activităţile zilnice (protezele pentru braţ)
exoproteze pentru membrele inferioare, care ajută la stabilitatea corpului, la funcţia mersului, la absorbţia de şocuri precum şi la o mai bună imagine a corpului uman (proteza de şold, proteza de coapsă, proteza de gambă, proteza postpiciorului şi a zonei medio-tarsiene).
rolu
lui p
rote
zelo
r
proteze estetice, al căror singur scop este acela de a reda forma structurii anatomice (proteza de umăr, proteza mâinii, proteza de ochi, etc)
proteze funcţionale, care se folosesc la protezarea membrelor superioare şi urmăresc animarea membrului amputat
proteze funcţionale cu sursă de energie din corp (mişcarea tunelurilor obţinute prin cinematizări musculare, modificarea volumului muscular prin contracţii izometrice, etc.);
proteze funcţionale cu sursă de energie extracorporală (energie electrică, gaze sub presiune, pompe hidraulice, etc).
Principiul de protezare constă în folosirea de părţi artificiale (proteze) pentru îmbunătăţirea funcţiei vitale şi a modului de viaţă a persoanelor cu deficienţe motorii şi nu numai. Trebuie de la început să recunoaştem că, până în prezent, cu toate progresele realizate în domeniile industriale, nu
3
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
s-a ajuns încă până acolo încât să se poată înlocui natura, printr-o creaţie tehnică oricât de desăvârşită ar fi ea.
Protezele sunt foarte complexe, pot varia în funcţie de aplicabilitatea lor [B2] şi pot fi clasificate în funcţie de criterii foarte diverse, dintre care unele sunt prezentate în Tabelul 2.1 [A2, B1, 2, 3, C1, D2, 3]:
2.2 BIOMATERIALE ŞI BIOCOMPATIBILITATEA ACESTORA CU ORGANISMUL UMAN
Ştiinţa biomaterialelor este „ştiinţa care se ocupă cu interacţiunile dintre organismele vii şi materiale”, iar biomaterialele ca fiind „orice substanţă sau combinaţie de substanţă, de origine naturală sau sintetică, care poate fi folosită pe o perioadă de timp bine determinată, ca un întreg sau ca o parte componentă a unui sistem care tratează, grăbeşte, sau înlocuieşte un ţesut, organ sau o funcţie a organismului uman” (Williams 1992) [W1][W2][W3].
Ortopedia, chirurgia estetica, oftamologia, chirurgia maxio-facială, cardiologia, urologia si neurologia şi practic toate specialităţile medicale nu numără mai puţin de 400 de produse diferite şi 10% din activităţile medicale necesită utilizarea de biomateriale în scopuri de: diagnosticare, prevenţie şi terapie (figura 2.2) [D2][D3].
Figura 2.1 Aplicaţii ale biomaterialelor în medicină.
Există trei tipuri de biomateriale ce se disting după interacţiunea lor cu mediul biologic [B6][B7][S1][W5][W6]:
materiale bioinerte,
4
Rezumatul tezei de doctorat
materialele bioabsorbante, materiale bioactive.
Materialele bioinerte cum ar fi titanul, tantalul, polietilena şi alumina, expun o foarte mică interacţiune chimică cu ţesuturile adiacente. Ţesuturile pot adera la suprafaţa acestor materiale inerte fie prin creşterea acestora în microneregularităţile suprafeţei (osteointegrare) fie prin folosirea de adeziv special (acrilat). Pe termen lung, acesta din urmă nu este modul ideal de fixare a implanturilor, de regulă cele ortopedice şi stomatologice. Cu toate acestea, multe din implanturile polimerice sunt considerate a fi sigure şi eficace pe o perioadă cuprinsă între câteva luni şi câţiva ani. Reacţia biologică este inevitabilă, dar este compensată de modul de proiectare a implanturilor.
Materialele bioabsorbante cum ar fi fosfatul tricalcic, acidul copolimeric polilactic-poliglicolic, chiar şi unele metale, sunt astfel concepute încât acestea să poată fi uşor absorbite de organism şi înlocuite de ţesuturile adiacente (ţesutul osos sau pielea). Acest tip de materiale sunt folosite în cazul transportului de medicamente sau în cazul structurilor implantabile biodegradabile cum ar fi aţa chirurgicală.
Din categoria materialele bioactive fac parte materialele sticloase, ceramicele, combinaţiile ale materialelor sticloase cu ceramicele şi hidroxiapatita care conţine oxizi de silicon (SiO2), sodiu (NaO2), calciu (CaO), fosfor (P2O5) şi alţi constituenţi de materiale care ajută la formarea de legături chimice cu ţesutul osos. Aceste materiale sunt bioactive datorită legăturilor pe care acestea le realizează în timp cu ţesutul osos şi în unele cazuri cu ţesutul moale. În particular, are loc o reacţie de schimb de ioni între materialul bioactiv şi lichidele corpului, prin care particule de material difuză în lichid şi viceversa, rezultând în timp, un strat biologic activ de fosfat de calciu, care este chimic şi cristalografic echivalent cu structura osoasă.
În funcţie de natura biomaterialelor întâlnim [A3][D5][M5][R10]: biomateriale naturale (materiale biologice):
2.3. PROCEDEE TEHNOLOGICE NECONVENŢIONALE FOLOSITE LA REALIZAREA ELEMENTELOR DE PROTEZARE
Încercând o clasificare a tehnologiilor cunoscute şi utilizate până la începutul anilor ’90, putem spune ca există două mari grupe [B10][B12][G5][J1]:
1. tehnologii de prelucrare prin înlăturare de material, care pornesc de la o cantitate mare de material brut şi înlătura materialul în exces prin folosirea unor metode convenţionale (strunjire, frezare, rectificare, etc.), sau prin folosirea de metode neconvenţionale (electroeroziune, prelucrarea cu laser, ultrasunete, etc.)
2. tehnologii de prelucrare prin redistribuire de material, care pornesc de la o cantitate corectă de material brut pe care-l redistribuie la forma solicitată prin deformare în stare solidă
5
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
(forjare, ştanţare, trefilare, extrudare, etc.), sau redistribuire în fază lichidă sau semilichidă (turnare, modelare prin injecţie, etc.).
În anii ’90 apare o a treia grupă de tehnologii, care se deosebeşte de primele două, în sensul că foloseşte un alt tip de principiu pentru materializare unor piese, tehnologii cunoscute sub numele de Prototipare Rapidă (tehnologii de fabricare rapidă a prototipurilor sau Rapid Prototyping – RP) care realizează piesa prin adăugare de material atât cât este necesar şi unde este necesar.
Termenul de „Rapid Prototyping” este atribuit acestor noi tehnologii care încep să crească în importanţă datorită căutărilor producătorilor de a reduce timpii de da concepţie până la desfacerea pe piaţă, precum şi costurile pentru asimilarea şi fabricarea unor noi produse [G4][P5].
Utilizarea sistemelor de fabricaţie RP a început cu folosirea lor în producţia de modele pentru dezvoltarea sau modernizarea de produse. Se poate înlocui astfel procesul de fabricare a modelelor folosind maşini şi tehnologii convenţionale, în general costisitoare şi cu productivitate scăzută, cu aceste noi tehnologii capabile să producă modele sau prototipuri cu o precizie ridicată într-un timp foarte scurt. Astăzi, ultimele generaţii de sisteme de fabricare rapidă a prototipurilor pot realiza direct piese funcţionale fie ele metalice, fie din alte materiale.
Există două posibilităţi de clasificare a tehnologiilor de fabricare rapidă a prototipurilor. Prima clasificare se referă la procedeele de „prelucrare” sau solidificare a materiei prime, iar a doua prezintă o clasificare a metodelor de realizare a formei. Materia primă utilizată de aceste tehnologii poate fi lichidă, pulbere sau solidă. Procedeele ce folosesc ca materie primă materialele în stare lichidă se pot clasifica la rândul lor în două grupe[B10][B12][C6][G4][K3][P5]:
1. Cele ce folosesc polimeri lichizi ca material de bază, iar solidificarea se realizează la impactul cu lumina de la o sursă specială de lumină (în general lumina ultravioletă), de la o radiaţie laser de mică putere (Stereolitografia) sau prin încălzire (polimerizarea termală);
2. Cele bazate pe topire, depunere sau resolidificare a materialului. Ele permit folosirea de metale (tehnologii de topire în formă), precum şi plastic sau lichide (procedeul FDM - Fused Deposit Modeling şi respectiv prelucrarea cu particule balistice).Alte procedee folosesc ca materie primă pulberea. Legarea particulelor de pulbere poate fi
realizată prin fuzionarea în aria de contact între particule de acelaşi fel sau cu particule dintr-un alt material care se va constitui ca material complementar special (liant) pentru acest proces (sinterizarea selectivă cu laser - SLS, topirea cu fascicul de electroni - EBM), sau lipirea particulelor în zonele de interes cu o substanţă specială (tipărirea 3D – procedeul 3D Printing).
În final, unele procese folosesc materia primă în stare solidă, în special folii subţiri (laminarea tridimensională – LOM). Câteva procedee realizează lipirea sau sudarea foliilor, în grosime, pentru a produce forma solicitată. Alte procedee folosesc semipolimerizarea foliilor de plastic care sunt fixate împreună printr-o altă fotopolimerizare.
Construirea modelului poate fi realizată direct 3D sau prin secţiuni succesive în 2D, metodă utilizată de cele mai multe sisteme. În acest caz, modelul CAD al piesei este secţionat în număr mare de secţiuni orizontale, distanţate între ele cu câteva zecimi de milimetru. La prelucrare, secţiunile de mai jos sunt create primele, peste ele adăugându-se succesiv următoarele, până se ajunge la ultima secţiune. O secţiune poate fi creată fie punct cu punct fie strat cu strat. Oricum, cele mai multe sisteme folosesc fabricarea de straturi solide prin scanare, continuă sau discontinuă, şi solidificare punct cu punct a materialului [B10][C6][D7][G5][S8].
6
Rezumatul tezei de doctorat
CAPITOLUL 3
OBIECTIVELE TEZEI DE DOCTORATIniţierea prezentei teze de doctorat se datorează în primul rând importanţei pe care o are pe
plan mondial, în domeniul implantologiei, tratamentul chirurgical cu reducere indirectă şi fixare internă minimă. Analiza acestei probleme a condus la ideea necesităţii studierii în amănunt a algoritmului de proiectare a unui element de osteosinteză pentru fracturile transsindesmotice de peroneu. În vederea proiectării implantului de osteosinteză primele cerinţe care trebuie respectate sunt cele cinematice, studiile recente fiind însă concentrate asupra dinamicii mişcărilor naturale, cu luarea în calcul a forţelor de contact, respectiv a reacţiunilor dinamice din articulaţii.
Ţinând cont de aceste aspecte, s-au conturat obiectivele generale şi cele punctuale ale tezei de doctorat, după cum urmează:1. Pornind de la materialul bibliografic existent să se realizeze un studiu complex în ceea ce
priveşte stadiul actual al cercetării în domeniul protezării prin identificarea principiilor şi metodelor de protezare a biomaterialelor folosite în aplicaţiile medicale, a aplicaţiilor protezelor în medicină şi a tehnologiilor neconvenţionale de Prototipare Rapidă în medicină.
2. Prin folosirea metodelor clasice, să se realizeze o modelare analitică statică şi dinamică a sistemelor anatomice gleznă–picior şi gleznă–gambă cu scopul determinării reacţiunilor dezvoltate în articulaţia gleznei şi a genunchiului în timpul mersului normal.
3. Proiectarea unei instalaţii experimentale care să poată determina şi analiza parametrii cinematici şi dinamici rezultaţi în urma mersului normal, având drept scop rezolvarea numerică a ecuaţiilor analitice, în vederea determinării forţelor de reacţiune din gleznă şi genunchi.
4. Proiectarea şi realizarea algoritmului de analiză a datelor experimentale şi valorificarea lui.5. Să se realizeze un studiu teoretic complex în ceea ce priveşte anatomia şi fiziologia sistemului
anatomic gleznă – picior în vederea identificării mecanismelor de fracturare a acestui segment anatomic şi metodele existente de protezare.
6. Să se obţină modelele tridimensionale virtuale ale componentelor osoase ce alcătuiesc membrele inferioare folosind programe speciale de imagistică medicală.
7. Folosind tehnicile clasice de modelare CAD să se modeleze un implant de osteosinteză existent şi să se proiecteze un altul nou, astfel încât ulterior să fie posibilă o analiză de comparare a celor două. Modelarea implantului medical existent să urmărească identificarea lui şi extragerea dimensiunilor de gabarit, astfel încât acestea să poată fi folosite la modelarea sa virtuală şi identificarea materialului din care este confecţionat pentru extragerea proprietăţilor mecanice. Modelarea noului implant de osteosinteză se va axa pe identificarea geometriei adecvate astfel încât implantul să poată imita cu fidelitate neregularităţile osului şi pe alegerea materialului astfel încât, acesta să reziste solicitărilor dinamice din timpul locomoţiei umane.
8. Să se realizeze o analiză comparativă folosind o metodă de analiză cu elemente finite, astfel încât să se poată identifica avantajele sau dezavantajele noului implant de osteosinteză pentru fracturile transsindesmotice de peroneu. Această analiză să presupună evaluarea stării de tensiune, deformaţie şi contact a ambelor ansambluri.
7
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
9. Să se realizeze fizic modelul anatomic al peroneului şi prototipul implantului de osteosinteză folosind unul din procedeele tehnologiei neconvenţionale de Prototipare Rapid.
10. Să se enunţe concluziile finale.
CAPITOLUL 4
CONTRIBUŢII TEORETICE ŞI EXPERIMENTALEPRIVIND MODELAREA SOLICITĂRILOR STATICE
ŞI DINAMICE ALE SISTEMELOR ANATOMICE GLEZNĂ-PICIOR ŞI GENUNCHI – GAMBĂ
4.1 CONTRIBUŢII TEORETICE LA METODA DE MODELARE STATICĂ ŞI DINAMICĂ A SISTEMELOR ANATOMICE GLEZNĂ – PICIOR ŞI GENUNCHI – GAMBĂ
4.1.1 Modelarea sistemului anatomic gleznă – picior folosind metoda dinamicii inverse
Modelarea biomecanică a sistemului anatomic gleznă – picior se bazează pe metoda dinamicii inverse, ce include o serie de tehnici specifice de calcul mecanic şi matematic, în vederea extragerii de informaţii utile specifice proiectării şi realizării unor implanturi de osteosinteză specifice fracturilor transsindesmotice de peroneu.
Metoda dinamicii inverse presupune ca, datele cinematice ale sistemului biomecanic să fie definite în detaliu, iar obiectivul constă în determinarea parametrilor dinamici ce cauzează mişcările sistemului [V4]. Metoda foloseşte modele ale corpurilor rigide pentru a reprezenta comportamentul mecanic al pendulelor aflate în conexiune, sau mai concret, al membrelor corpului uman unde, parametrii antropometrici1, parametrii dinamici şi parametrii cinematici ai segmentelor corpului uman sunt folosiţi ca date de intrare pentru sistemul de ecuaţii al echilibrului dinamic, pentru determinarea forţelor de reacţiune internă şi a momentelor ce cauzează mişcările sistemului (figura 4.1) [C9][V5].
Metoda dinamicii inverse presupune folosirea unor condiţii speciale, astfel [W8][W11]: corpul uman este împărţit în segmente anatomice individuale; segmentele sunt considerate corpuri rigide cu masa concentrată în centrul lor de greutate; parametrii antropometrici ai segmentelor sunt consideraţi constanţi în timpul deplasări; forţa de frecare cu aerul este minimă; forţele de frecare cu solul şi din articulaţii sunt considerate nule; viteza de deplasare a întregului sistem este considerată constantă; mersul este considerat un ciclu repetitiv şi simetric pentru ambele membre inferioare.În vederea determinării forţelor de reacţiune şi a momentului reactiv din articulaţia gleznei s-
au parcurs două etape, reprezentate schematic în figura 4.1, după cum urmează:1. reducerea forţelor interioare (forţele musculare, din tendoane şi de contact între suprafeţele
osoase) la o singură forţă ce reprezintă rezultantă tuturor forţelor interioare;
1 Antropometria este o metodă de studiu a posibilităţilor de identificare a oamenilor în funcţie de forma, amprente şi părţi ale corpului uman. Este o metodă fundamentală în cercetările bio-antropologiei populaţionale. (Vlădescu, M., Vulpe, C.: Atlasul antropologic al Transilvaniei, Editura Academiei Române, 2005) [V7].
8
Rezumatul tezei de doctorat
2. scrierea şi rezolvarea analitică a ecuaţiilor de echilibru dinamic pentru fiecare fază de suport a piciorului pe sol în vederea determinării parametrilor caracteristici modelării statice şi dinamice a sistemului anatomic gleznă – picior.
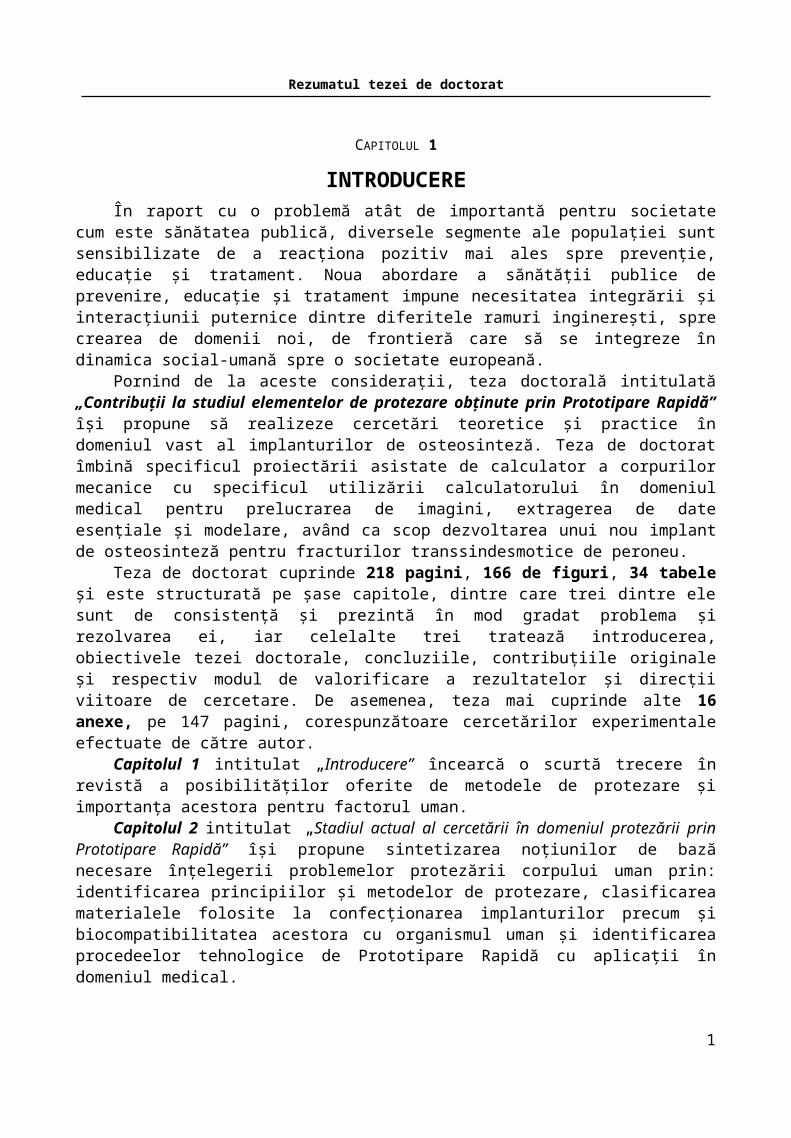
Fig. 4.1 Schema de principiu a metodei alese pentru modelarea biomecanică în vederea determinării parametrilor caracteristici modelării statice şi dinamice a sistemului anatomic gleznă – picior.
Tehnica reducerii forţelor interioare la o singură rezultantă are la bază condiţiile impuse anterior. Astfel, membrul inferior este împărţit pe segmente anatomice (coapsă, gambă şi picior), urmând apoi obţinerea modelelor solidelor rigide pentru fiecare segment în parte. Fiecărui segment în parte i s-a asociat un model, respectiv: pentru coapsă şi gambă modelul asociat este o bară articulată la capete iar pentru picior, modelul asociat este un triunghi rigid oarecare.
Pentru determinarea forţelor de reacţiune şi a momentului reactiv din articulaţia gleznei este necesar să se cunoască toate forţele interne ce se exercită în muşchi, tendoane şi între suprafeţele osoase aflate în contact, punctele de inserţie a muşchilor precum şi distanţele dintre punctele de inserţie şi centrul de rotaţie al gleznei. Toate aceste cerinţe sunt aproape imposibil de determinat şi complică foarte mult modelul. Astfel, cu ajutorul modelului propus, va fi posibilă determinarea forţelor de reacţiune şi a momentului net muscular, folosind tehnica de reducere a forţelor. Această tehnică presupune următoarele [G7][W11]:
se consideră toate forţele externe şi interne ce acţionează asupra sistemului gleznă- picior; articulaţia gleznei, călcâiul şi vârful tarsienelor formează un triunghi rigid oarecare ABC; forţa F este considerată ca fiind rezultanta tuturor forţelor exercitate de muşchi, tendoane şi
structuri osoase aflate în contact; se consideră F* ca fiind rezultanta forţelor exercitate de muşchi, tendoane şi structuri osoase
aflate în contact, translatată în articulaţia gleznei; corespondenta forţei F* este forţa ce echilibrează sistemul, - F*, forţă care are acelaşi punct de
aplicaţie, aceeaşi direcţie dar sens contrar;
9
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
cuplul de forţe (F, - F*) dă naştere unui moment net muscular Mg ce acţionează în articulaţia gleznei. Acest moment muscular ia în calcul atât muşchii agonişti cât şi pe cei antagonişti;
forţa rezultantă F*, translatată în centrul de rotaţie al articulaţiei gleznei se descompune pe direcţiile Ox, Oy, în Rgx respectiv Rgy.
Fig. 4.2 Metoda reducerii forţelor aplicată modelului sistemului anatomic gleznă – picior.
În figura 4.3 sunt reprezentate modelele biomecanice ale sistemului gleznă-picior, folosind metoda dinamicii inverse, unde: Rgx,y este forţa de reacţiune din gleznă ce acţionează pe direcţiile Ox, Oy, în N; Rsx,y este forţa de reacţiune a solului asupra piciorului ce acţionează pe direcţiile Ox, Oy, în N, cu punctul de aplicaţie în călcâi B (pentru prima fază de suport), la 23,6% din lungimea piciorului faţă de călcâi (pentru a II-a fază), la 70,5% din lungimea piciorului faţă de călcâi (pentru faza a III-a), în vârful degetelor C (pentru fazele IV şi V) [J2]; Gp este greutatea piciorului care are originea în centrul de greutate al triunghiului oarecare ABC, în N; Mg, momentul net ce acţionează în articulaţia gleznei şi face posibilă rotirea acesteia, în Nm; mp este masa piciorului, în kg; M este masa totală a subiectului, în kg; ax,y este acceleraţia piciorului în centrul de greutate al acestuia, pe direcţia Ox, Oy, în m/s2; este unghiul pe care îl face axa de simetrie a gambei cu orizontală, în ; , unghiul dintre suprafaţa plană a solului şi suprafaţa plantară a piciorului în ; A, glezna; B, călcâiul; C, vârful degetelor considerat a fi vârful celui de-al doilea metatars; O, centrul de greutate al
10
Rezumatul tezei de doctorat
piciorului; p, acceleraţia unghiulară a piciorului în planul mişcării, în rad/s2; Ip, momentul de inerţie al piciorului kgm2; d1,2, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al gleznei şi punctul de aplicaţie al călcâiului, în m; d3,4, distanţele, pe orizontală şi verticală, dintre centrul de greutate al piciorului şi centrul de rotaţie al articulaţiei gleznei, în m.
Fig. 4.3 Modelarea sistemului anatomic gleznă-picior folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol: contactul iniţial (a); încărcarea (b); mijlocul
sprijinului (c) sprijinul terminal (d); desprinderea de pe sol (e).
Pentru determinarea reacţiunilor ce se dezvoltă în gleznă, în timpul fazelor de suport ale piciorului pe sol, conform metodei dinamicii inverse, s-au scris ecuaţiile de echilibru dinamic:
11
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
prima fază de suport (4.1)
a doua fază de suport(4.2)
a treia fază de suport(4.3)
a patra fază de suport(4.4)
a cincea fază de suport(4.5)
4.1.2. Modelarea sistemului anatomic genunchi – gambă folosind metoda dinamicii inverse
Modelarea biomecanică a sistemului anatomic genunchi – gambă se bazează pe aceleaşi condiţii speciale ale metodei dinamicii inverse, trecând prin aceleaşi etape ce au fost urmate şi la modelarea sistemului anatomic gleznă – picior.
a) b)
12
Rezumatul tezei de doctorat
c) d)
e)
Fig. 4.4 Modelarea biomecanică a subsistemului anatomic genunchi-gambă folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol: contactul iniţial al călcâiului cu solul (a); contactul
total cu solul (b); mijlocul suportului (c); ridicarea călcâiului (d); desprinderea de pe sol (e).
În figura 4.4 sunt reprezentate modelele biomecanice ale sistemului anatomic genunchi - gambă, folosind metoda dinamicii inverse, în timpul fazelor de suport ale piciorului pe sol, unde: mg, masa gambei, în kg; M, masa totală a subiectului, în kg; ax,y, acceleraţia gambei faţă de centrul de greutate al acesteia, pe direcţia Ox, Oy, în m/s2; , unghiul dintre axa de simetrie a coapsei şi orizontală, în ; g, acceleraţia unghiulară a gambei în planul mişcării (planul sagital), în rad/s2; Ig, momentul de inerţie al gambei, în kgm2; d5,6, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al gleznei şi centrul de rotaţie al genunchiului, în m; d7,8, distanţele, pe orizontală şi verticală, dintre centrul de rotaţie al genunchiului şi centrul de greutate al gambei, în m.
13
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Pentru determinarea reacţiunilor ce se dezvoltă în genunchi, în timpul fazelor de suport ale piciorului pe sol, conform metodei dinamicii inverse, s-au scris ecuaţiile de echilibru dinamic:
prima fază de suport,(4.6)
a doua fază de suport(4.7)
a treia fază de suport,(4.8)
a patra fază de suport,(4.9)
a cincea fază de suport,(4.10)
4.2 PROIECTAREA EXPERIMENTULUI ÎN VEDEREA DETERMINĂRII PARAMETRILOR CARACTERISTICI MODELĂRII STATICE
ŞI DINAMICE A SISTEMELOR ANATOMICE GLEZNĂ – PICIOR ŞI GENUNCHI - GAMBĂ
Studiul teoretic asupra modelării biomecanice a sistemului anatomic gleznă-picior şi genunchi-gambă, prezentat în paragraful 4.1, s-a bazat pe utilizarea metodei dinamicii inverse. Folosind această metodă s-au putut scrie ecuaţiile analitice de echilibru dinamic pentru modelele biomecanice ales, în cele cinci faze ale suportului piciorului pe sol, din care au rezultat anumite necunoscute ce sunt caracteristice parametrilor necesari modelării statice şi dinamice a sistemului anatomic gleznă-picior şi genunchi-gambă. Astfel, aceşti parametrii sunt reprezentaţi de forţele de reacţiune ale solului asupra piciorului pe cele două direcţii Ox, Oy (Rsx şi Rsy), acceleraţiile piciorului şi a gambei pe cele două direcţii Ox, Oy (ax, ay respectiv a
x, ay), unghiurile de înclinaţie
dintre segmentul piciorului şi segmentul gambei (), respectiv dintre gambă şi coapsă () şi unghiurile de atac ale piciorului pe sol ().
Pentru a-şi îndeplini funcţiile căreia îi este destinată şi pentru a funcţiona în condiţiile enunţate la paragraful anterior, instalaţia experimentală prezentată schematic şi sub formă de imagine în figura 4.5 este formată din următoarele componente:
o placa de forţe tip Kistler, un amplificator de semnale tip Kistler, două plăci de achiziţie PC CARD un sistem de măsurare BIOPAC (o unitate centrală MP150), două module de amplificare DA100C, două accelerometre TSD109C, o cameră video de mare viteză, cinci repere luminoase, trei surse de lumină şi trei umbrele de difuziune,
14
Rezumatul tezei de doctorat
un sistem central de achiziţie datelor (laptop Dell). De asemenea, pentru sincronizarea datelor măsurate cu ajutorul sistemului Kistler cu datele
măsurate de sistemul BIOPAC se va folosi un dispozitiv de sincronizare. Acesta este încorporat în unitatea centrală MP150 a sistemului BIOPAC.
Fig. 4.5 Instalaţia experimentală utilizată pentru determinarea parametrilor cinematici şi dinamici rezultaţi în timpul mersului normal.
Placa Kistler a fost utilizată, în cadrul acestui experiment, pentru determinarea forţelor de reacţiune ale solului asupra piciorului, forţe ce se dezvoltă în timpul suportului piciorului pe placa. Placa Kistler (figura 4.6) este echipată cu patru senzori de forţă piezoelectrici, fiecare poziţionat în cele patru colţuri ale plăcii. Senzorii piezoelectrici au rolul de a transforma o acţiune mecanică (forţa cu care subiectul acţionează asupra plăcii) într-un semnal electric fără nici o sursă exterioară de energie. Senzorii, folosiţi de către placa de forţe, conţin câte trei plăcuţe suprapuse de formă inelară, din cristale de cuarţ, sensibile piezoelectric la forţe de compresiune (Fy) şi de forfecare (Fx, Fz). Placa Kistler poate asigura măsurări ale forţei totale de reacţiune pe verticală (Fy) şi ale forţelor de reacţiune pe orizontală (Fx, Fz) cu o acurateţe de 1% şi o sensibilitate de până la 0,05 Pa, într-un domeniu de lucru de -10 200 kPa, pe direcţie verticală şi -10 50 kPa pe direcţie orizontală.
15
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 4.6 Ansamblul format din placa de forţe Kistler, platformele de lemn şi materialul tampon.
Pentru a elimina zona de „treaptă”, ce se formează între suprafaţa de contact a plăcii de forţe şi podea, s-au construit două platforme de lemn, amplasate de o parte şi de alta a plăcii (pe direcţia de deplasare a subiectului uman), având dimensiunile 760 x 360 x 35 mm. Dimensiunile platformelor permit subiectului uman să efectueze un pas în întregime, atât înainte cât şi după ieşirea de pe placa de forţe, făcând astfel posibilă realizarea unui mers normal pe toată lungimea deplasării. Contactul dintre cele două platforme şi placa de forţe nu se face direct, ci prin intermediul unui material tampon (polistiren expandat), pentru a minimaliza eventualele micromişcări induse de subiectul uman în timpul mersului (figura 4.6).
Accelerometrul tip TSD109C este un traductor electric de înaltă precizie, din gama sistemelor de măsurare BIOPAC, şi a fost utilizat pentru determinarea simultană a acceleraţiilor liniare de până la 5 g [M10], ale piciorului şi gambei. Pentru acest experiment s-au utilizat două accelerometre, astfel încât să se poate determina valorile acceleraţiilor liniare pe axele Ox, Oy, atât pentru segmentul gambei cât şi pentru picior. Înainte de începerea experimentului, cele două accelerometre au fost calibrate după fiecare axă, atât pentru sensul negativ cât şi pentru cel negativ. Prin calibrare, se vor determina valorile tensiunilor electrice normale pentru fiecare direcţie dorită la o acceleraţie gravitaţională egală cu 1 g [M10]. Astfel, calibrarea accelerometrului, ce a fost amplasat pe faţa laterală a gambei, s-a realizat pe o suprafaţă plană, pentru fiecare axă în parte şi pentru ambele sensuri [M10]. În cazul accelerometrului, ce s-a montat pe faţa anterioară a piciorului, calibrarea s-a realizat pe un plan înclinat la 17, pentru fiecare axă în parte şi pentru ambele sensuri.
Modul de amplasare al accelerometrelor pe segmentele anatomice luate în discuţie trebuie să respecte condiţia impusă de metoda dinamicii inverse, precum că segmentele sunt considerate corpuri rigide cu masa concentrată în centrul lor de greutate. Primul accelerometru a fost poziţionat pe faţa laterală a gambei, în centrul de greutate al acesteia, respectiv la 56,06% din lungimea totală a gambei, faţă de centrul de rotaţie al articulaţiei gleznei. Cel de-al doilea accelerometru s-a montat pe faţa posterioară a piciorului, în centrul de greutate al acestuia, respectiv la 50,85% din lungimea totală a piciorului, faţă de vârful degetelor (vezi figura 4.7. a). Prinderea accelerometrelor, de segmentele anatomice luate în discuţie, se face cu ajutorul unor benzi de tip scai, astfel, nefiind permisă mişcarea accelerometrelor faţă de segmentele anatomice aflat în mişcare (figura 4.7. b).
a) b)
16
Rezumatul tezei de doctorat
Fig. 4.7 Amplasarea accelerometrelor în dreptul centrul de greutate al gambei şi piciorului (a); modul de prindere al accelerometrelor pe gambă şi picior (b).
În vederea obţinerii parametrilor cinematici şi a traiectoriilor de mişcare a articulaţiilor membrului inferior, s-a utilizat o cameră video de mare viteză de tip TroubleShooter, produsă de firma americană Fastec Imaging, cu o rezoluţie maximă de 640 x 480 pixeli, prevăzută cu un senzor CMOS pentru imagini color ( un pixel având rezoluţia de 24 biţi) [M7]. Camera video poate filma imagini de la 25 de cadre/secundă până la 500 de cadre/secundă în condiţii normale. În cazul în care se apelează la funcţia shooter, care poate fi 1x, 2x, 3x, 4x, 5x, 10x şi 20x, camera poate înregistra imagini până la 10.000 de cadre/secundă [M7].
În vederea efectuării experimentului, pentru camera video, s-au achiziţionat un număr de trei obiective optice, şi anume: obiectivul optic cu distanţa focală de 25 mm pentru distanţă, obiectivul optic cu distanţa focală de 25 mm superangular, obiectiv optic normal cu distanţa focală de 12 mm.
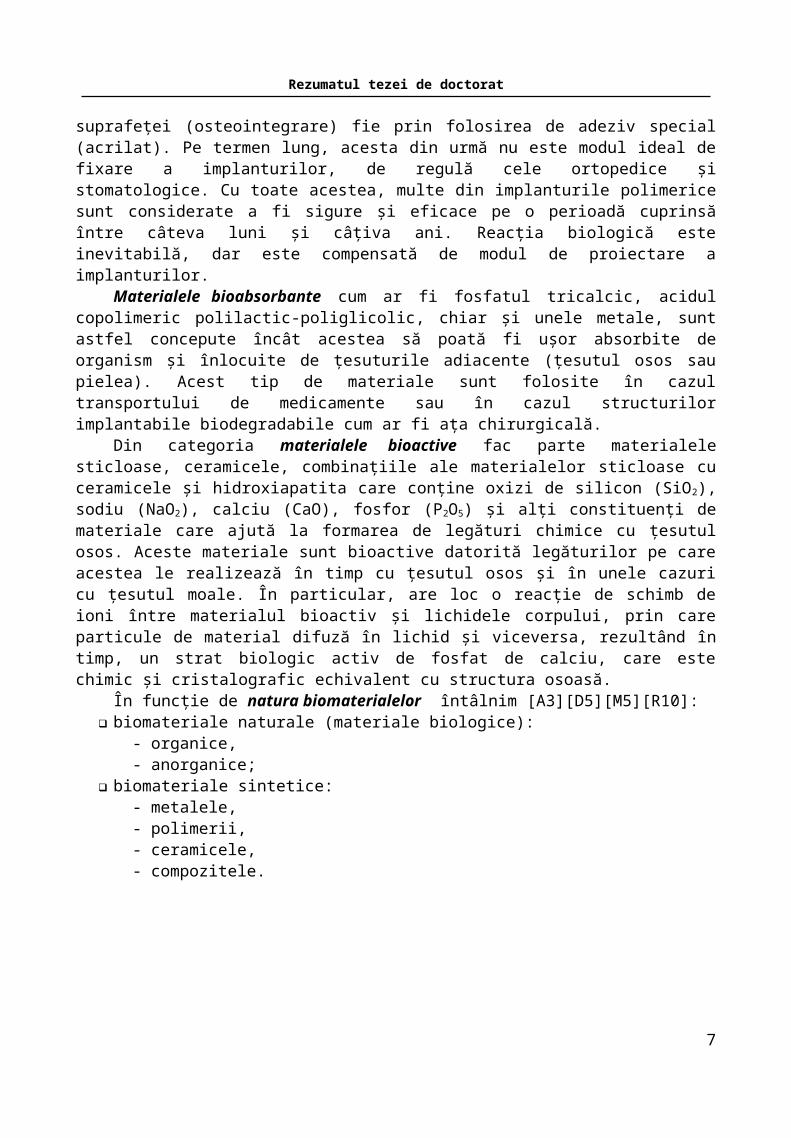
Camera video a fost montată pe un suport (trepied), care a servit la susţinerea camerei video pe verticala punctului de aşezare şi la orizontalizarea aproximativă în primă etapă, a suportului şi a sistemelor de orientare ale acesteia (figura 4.8).
a) b)
Fig. 4.8 Montarea camerei video pe trepiedul de susţinere (a); sistemul de poziţionare şi orientare a camerei video (b)
Trepiedul (figura 4.8. a) are trei picioare telescopice prevăzute cu saboţi din cauciuc, prinse articulat în capul trepiedului, picioarele fiind realizate din material compozit. Materialul compozit amortizează vibraţiile trepiedului (vibraţii care sunt transmise prin podea, introduse de subiectul uman în timpul deplasării pe placa de forţe). Prinderea camerei se realizează cu cap sferic care permite o orizontalitate preliminară rapidă a sistemului cu precizia de 3. Dispozitivul de orientare a camerei permite reglarea poziţiei acesteia după cele trei axe Ox, Oy, Oz (figura 4.8. b) [M7].
Pentru acest experiment, reperele luminoase (markerii) au fost utilizate împreună cu o camera video de mare viteză, pentru determinarea cinematicii articulaţiilor membrului inferior. Prin editarea imaginilor înregistrate, cu ajutorul unui program de prelucrare a imaginilor (Adobe After Effects 6.5), se pot obţine traiectoriile de mişcare ale articulaţiilor membrului inferior (articulaţia şoldului, genunchiului, gleznei), a vârfului degetelor (al doilea metatars), a călcâiului precum şi unghiurile ce se formează între picior şi suprafaţa de mers.
17
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Reperele luminoase (figura 4.9) sunt corpuri sferice realizate din material plastic, cu diametrul de 30 mm, vopsite cu o vopsea reflectorizantă, sensibilă la lumină cu descărcare în gaze.
Fig. 4.9 Amplasarea reperelor luminoase în zonele de interes, respectiv: articulaţia şoldului, articulaţia genunchiului, articulaţia gleznei, călcâi şi zona posterioară a piciorului (vârful distal al
metatarsienelor: vedere în plan sagital (a); vedere în plan frontal (b).
Reperele luminoase, cinci la număr, au fost poziţionate atât în zona articulaţiilor şoldului, genunchiului şi gleznei, în zona călcâiului precum şi în vârful degetelor, considerat a fi cel de-al doilea metatars. Acestea au fost ataşate de o bandă elastică de culoare neagră având lăţimea de 50 mm, cu ajutorul căreia, acesta se poziţionează în zona interesată. Utilizarea bandei elastice este foarte practică, pentru că astfel, poziţia reperelor faţă de zona interesată se poate ajusta în orice moment dat, şi în acelaşi timp oferă stabilitate în timpul deplasării (figura 4.9).
Pentru obţinerea unor imagini ale reperelor luminoase cât mai clare şi ulterior pentru o mai bună editare a acestora, membrele inferioare ale subiectului uman vor fi îmbrăcate cu un pantalon mulat de culoare neagră, astfel încât lumina emanată de vopseaua reflectorizantă să fie în contrast puternic cu culoarea pantalonului.
Pentru experimentul propus, care a necesitat o înregistrare continuă, s-au utilizat trei surse de lumină cu halogen, respectiv lămpile Kaiser Videolight (figura 4.10). Condiţiile de iluminare au satisfăcut cerinţele impuse de reperele luminoase (markeri) folosite pentru determinarea traiectoriilor de mişcare a articulaţiilor aparatului locomotor inferior şi de camera video de mare viteză cu care s-a realizat filmarea, şi anume de minim 10 lux, iar iluminarea standard de 1500 lux [M7]. Aceste condiţii s-au obţinut printr-o iluminare difuză, uniformă, constantă, dată de trei surse de radiaţie luminoasă cu descărcare în gaz (halogen), ce a fost proiectată pe suprafeţele unor umbrele de reflexie, care la rândul lor au reflectat lumina pe zona de interes (figura 4.10).
Aceste umbrele fac, prin construcţia lor, ca lumina incidentă să fie reflectată exact în direcţia de incidenţă având astfel eliminată situaţia când radiaţia luminoasă cade direct pe zona de interes (articulaţiile membrului inferior drept al subiectului uman pe care sunt amplasate reperele luminoase, sensibile la lumină cu descărcare în gaz) şi apare fenomenul de umbră.
18
Rezumatul tezei de doctorat
Fig. 4.10 Sistemul de iluminare format din sursa de lumină, umbrelă de difuziune, trepied.
4.3 METODA DE ANALIZĂ ŞI PRELUCRARE A DATELOR EXPERIMENTALE
Dată fiind complexitatea metodelor folosite pentru obţinerea şi analiza datelor experimentale, a fost necesar să se folosească un algoritm compus din mai multe module, prezentat schematic în figura 4.11.
Fig. 4.11 Schema de principiu a procesului de obţinere şi analiză a datelor experimentale, unde: 1 – modulul de montare şi poziţionare a dispozitivele de măsurare; 2 – modulul de obţinere a rezultatelor
experimentale; 3 – modulul de prelucrare a datelor experimentale; 4 – modulul de utilizare a rezultatelor valorice experimentale pentru rezolvarea ecuaţiilor de echilibru dinamic.
Încercările au constat în filmări succesive a unui număr de 10 subiecţi umani, ce sau deplasat pe o placă de forţe, şi cărora le-au fost ataşate pe membrul inferior drept două accelerometre, (unul pentru segmentul gambei şi celălalt pentru picior) şi cinci repere luminoase (trei pentru articulaţiile
19
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
mari ale membrului inferior, unui pentru călcâi şi unul pentru vârful degetelor). Pentru fiecare subiect uman în parte s-au realizat câte trei teste.
4.3.1 Montarea şi poziţionarea dispozitivelor de măsurare şi înregistrare video
Acest modul experimental a constat în efectuarea a mai multor etape succesive de lucru. Prima etapă a acestui modul experimental a constat în montarea plăcii de forţe şi a dispozitivelor aferente acesteia (cablul de transmitere a datelor, amplificatorul şi plăcile de achiziţie) în zona de lucru. Astfel, placa de forţe Kistler a fost montată pe podeaua aferentă zonei de lucru, respectând condiţiile de plan-paralelism impuse de fabricant. Montarea plăcii de forţe s-a realizat astfel încât să se permită o distanţă optimă de 3,5 m între camera video de mare viteză şi placă. Etapei de montare a fost urmată de etapa de calibrare iniţială a plăcii de forţe. Calibrarea iniţială s-a realizat prin utilizarea unei greutăţi etalon de 10 kg.
a) b) c)
e) d)
Fig. 4.12 Pregătirea subiectului uman pentru efectuarea încercărilor experimentale: îmbrăcarea subiectului uman într-un pantalon negru mulat (a); montarea primului accelerometru în centrul de greutate al piciorului (b); montarea celui de-al doilea accelerometru în centrul de greutate al
gambei (c); montarea reperelor luminoase în zonele anatomice de interes (d); teste ale subiectului uman în vederea acomodării acestuia cu instalaţia experimentală (e).
Cea dea două fază a constat în montarea accelerometrelor în zonele anatomice de interes, respectiv în centrele de greutate ale piciorului şi gambei (figura 4.12. b, c). Montarea celor două accelerometre s-a realizat conform celor menţionate la paragraful 4.2. În prealabil, accelerometrele au fost calibrate, conform specificaţiilor firmei producătoare, menţionate la paragraful 4.2. Locaţiile procentuale ale centrele de greutate ale segmentelor anatomice luate în discuţie au fost preluate din literatura de specialitate, şi au fost determinate valoric pentru fiecare subiect în parte supus testelor. Determinarea lungimilor s-a efectuat cu ajutorul unui mijloc de măsurare profesional de măsurat lungimi. Pentru obţinerea unor valori cu o precizie acceptabilă, s-a repetat măsurarea de mai multe
20
Rezumatul tezei de doctorat
ori, în condiţii pe care le-am considerat identice2, şi s-a adoptat drept valoare măsurată valoare medie a determinărilor efectuate.
Cea de-a treia fază de lucru a constat în poziţionarea reperelor luminoase în zonele anatomice de interes, începând cu articulaţia şoldului, apoi articulaţia genunchiului şi cea a gleznei, şi terminând cu vârful celui de-al doilea metatars (figura 4.12. d).
În prealabil, pentru depistarea centrelor de rotaţie ale articulaţiilor (în centrul lor de rotaţie fiind amplasate reperele luminoase), s-au făcut palpări repetate a acestor zone anatomice. Plasarea reperelor luminoase s-a realizat destul de aproximativ, pe de o parte datorită imposibilităţii localizării precise a centrelor de rotaţie ale articulaţilor, şi pe de altă parte datorită alunecării relative între suportul vestimentar al subiectului uman şi tegumentul pielii cu care este în contact.
Ce-a de-a patra etapă a constat în instalarea şi reglarea camerei video şi a sistemelor de iluminare. Reglarea şi verificarea camerei video s-a realizat în mai multe faze, după cum urmează:
1. Alimentarea şi pornirea camerei video de mare viteză;2. Conectarea camerei video la sistemul de achiziţie central al datelor (laptop) prin intermediul
unui cablu cu mufe de tip USB.3. Pornirea programului de interfaţă a camerei video, CamLink;4. Montarea pe camera video a obiectivului optic normal cu distanţa focală de 12 mm.5. Folosind programul CamLink s-au realizat următoarele setări:
a. Rezoluţia maximă de 640 x 480 pixeli;b. Shooter (funcţie electronică de amplificare) de 1x;c. Trigger (funcţie electronică de sincronizare) la începerea înregistrării video;d. Funcţia de iluminare caracteristică filmării în interior cu surse de lumină cu
descărcare în gaze (halogen). 6. S-a poziţionat camera video în poziţia de filmare pe trepiedul, perpendicular pe direcţia de
deplasare a subiectului uman, la o distanţă optimă de 3,5 m faţă de axa de simetrie longitudinală a plăcii de forţe Kistler. S-a ales distanţa de 3,5 m în urma unor înregistrări efectuate cu subiectul uman pe placa de forţe. Această distanţa permite o vizualizare a subiectului uman de la nivelul toracelui în jos şi implicit vizualizarea corectă a tuturor reperelor luminoase montate la nivelul membrului inferior.
7. S-au poziţionat cele trei surse de iluminare cu descărcare în gaze în spatele camerei de filmat, la o distanţă de câţiva centimetrii de această, astfel încât acestea să nu apară în câmpul de înregistrare a camerei.
8. S-a realizat reglajul diafragmei obiectivului optic, astfel încât să nu existe o strălucire excesivă a imaginilor înregistrate, în special a celor care conţin reperele luminoase. Cu aceste reglaje şi verificări efectuate, camera video a fost pusă în funcţiune, pregătită să
efectueze filmările. După montarea şi poziţionarea dispozitivelor de măsurare şi înregistrare video şi înainte de începerea încercărilor experimentale, pentru fiecare subiect uman în parte, s-au efectuat teste care au dus la acomodarea acestora cu dispozitivele ataşate lor.
4.3.2. Determinarea parametrilor dinamici ai piciorului şi gambei
2 Se consideră măsurare repetată obţinerea a mai multor valori ale aceluiaşi măsurand prin aceeaşi metodă de măsurare, cu acelaşi mijloc de măsurare, de către acelaşi operator şi într-un interval de timp suficient de scurt astfel încât condiţiile exterioare să nu sufere modificări esenţiale [R12].
21
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Parametrii dinamici ai piciorului şi gambei, rezultaţi în timpul mersului normal, sunt reprezentaţi de forţele de reacţiune ale solului asupra piciorului pe direcţiile Ox, Oy, precum şi de acceleraţiile liniare ale segmentului piciorului şi gambei în centrele de greutate ale acestora, pe direcţiile Ox, Oy, în cele cinci faze de suport a piciorului pe sol. Pentru achiziţionarea acestor parametrii dinamici s-au utilizat două sisteme de măsurare, şi anume: sistemul Kistler, pentru achiziţionarea forţelor de reacţiune ale solului asupra piciorului şi sistemul BIOPAC, utilizat la achiziţionarea acceleraţiilor liniare ale celor două segmente anatomice. Conform paragrafului 4.2, s-au reţinut din înregistrările 3D ale acestor echipamente doar cele cuprinse în planul xOy adoptat în coincidenţă cu planul de lucru.
În primă fază, s-au prelucrat datele provenite de la platforma Kistler, urmând apoi dalele provenite de la cele două accelerometre. După terminarea timpului de înregistrare de 4 s, dispunerea datelor experimentale în programul BioWare s-a făcut grafic. Datorită sensibilităţii ridicate a senzorilor plăcii de forţe, graficele sunt afectate de zgomote. Pentru eliminarea lor s-a aplicat un filtru statistic cu medie mişcătoare pe interval de cinci valori, aşa cum se observă în figura 4.13. Practic, prin aplicarea acestui filtru, se face o mediere a cinci valori consecutive (două crescătoare şi trei descrescătoare) a zonei afectate de zgomote. Cu linie continuă sunt reprezentate forţele de reacţiune ce au suferit filtrarea, iar cu linie punctată sunt reprezentate forţele dinaintea filtrării.
Fig. 4.13 Afişarea forţelor de reacţiune Fx, Fy, Fz după aplicarea filtrului statistic cu medie mişcătoare pe interval de cinci valori.
Pentru rezolvarea numerică a ecuaţiilor de echilibru dinamic, din graficul rezultat, generat de programul BioWare, s-au extras valorile forţelor de reacţiune pe direcţiile Ox, Oy, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m, în cele cinci faze de suport ale piciorului pe placa de forţe (vezi tabelul 4.1). Algoritmul de determinare a forţelor de reacţiune ale solului asupra piciorului pe cele două axe Ox, Oy, mai sus explicat, s-a aplicat şi celorlalţi subiecţi umani supuşi testelor, respectiv câte trei teste pentru fiecare subiect. Datorită faptului că, mersul normal specific a unui subiect uman nu este identic în cazul celor trei teste, atunci s-a luat hotărârea de a se realiza o mediere a valorilor obţinute pentru fiecare fază în parte (vezi tabelul 4.8). Medierea folosită este media aritmetică a valorilor.
22
Rezumatul tezei de doctorat
Tabelul 4.1 Forţele de reacţiune ale solului asupra piciorului pe direcţiile Ox, Oy, în cazul unui subiect uman cu masa 89,71 kg şi înălţimea 1,76 m, în cele cinci faze de suport ale piciorului pe placa de forţe.
Teste Fazele de suport
Fx
[N]Fy
[N]t
[s]
Test 1
Faza I 70,3 878 1,46Faza II 22,9 808,1 1,66Faza III 4,3 850 1,70Faza IV -31,6 866,1 1,78Faza V -8,1 1005 1,84
Test 2
Faza I 82,2 873,2 1,55Faza II 34,2 777,4 1,70Faza III 14,7 817,6 1,77Faza IV -31,3 856,9 1,86Faza V -40,4 964,1 1,96
Test 3
Faza I 69,7 871,4 1,06Faza II 34,1 806,2 1,26Faza III 8,53 846,2 1,35Faza IV -24 864,3 1,44Faza V -34,8 938,1 1,49
Medierea aritmetică a valorilor
Faza I 74,1 874,2 -Faza II 30,4 797,2 -Faza III 9,2 837,9 -Faza IV -29,0 862,4 -Faza V -27,8 969,1 -
Următorul pas, după obţinerea valorilor forţelor de reacţiune folosind programul BioWare, a fost acela de prelucrare şi interpretare a datelor provenite de la cele două accelerometre, folosind programul AcqKnowledge. Şi în acest caz, pentru obţinerea unor date experimentale cât mai concludente, pe intervalul de timp 1,22 2,56 s (perioada de contact a piciorului cu placa de forţe), semnalelor electrice obţinute de către cele două accelerometre li s-au aplicat un filtru statistic cu medie mişcătoare pe interval de cinci valori. Astfel, are loc o netezire a semnalului, prin medierea a cinci valori consecutive (două crescătoare şi trei descrescătoare) a zonei afectate de zgomote. După filtrare s-a obţinut graficul reprezentat în figura 4.14.
Folosind datele provenite din tabelul 4.1 în ceea ce priveşte timpul de producere a fazelor de contact a piciorului pe placa de forţe, din programul AcqKnowledge s-au putut determina valorile acceleraţiilor pentru ambele segmente anatomice pe axele Ox, Oy.
Datorită faptului că, mersul normal specific a unui subiect uman nu este identic în cazul celor trei teste, atunci s-a luat hotărârea de a se realiza o mediere aritmetică a valorilor obţinute pentru fiecare fază în parte (vezi tabelul 4.2).
Acelaşi algoritm de mediere a fost aplicat şi pentru valorile acceleraţiilor piciorului şi gambei, rezultate în cazul celorlalţi subiecţi umani, în timpul fazelor de suport ale piciorului pe sol.
23
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 4.14 Reprezentarea grafică ale acceleraţiilor liniare, ale piciorului şi gambei, în centrele de greutate ale acestora, pe direcţiile Ox, Oy, în cazul unui subiect uman cu o masă de 89,71 kg şi o
înălţime de 1,76 m după aplicarea filtrului statistic cu medie mişcătoare pe interval de cinci valori.
Tabelul 4.2 Acceleraţiile liniare ale piciorului şi gambei, în centrele de greutate ale acestora, pe direcţiile Ox, Oy, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m, în cele
cinci faze de suport ale piciorului pe sol.
Teste Fazele de suport
ax
[m/s2]ay
[m/s2]
[m/s2]
[m/s2]t
[s]
Test 1
Faza I -11,46 -1,08 -0,08 -0,89 1,46Faza II 10,62 1,04 0,04 0,88 1,66Faza III 11,92 1,06 0,01 0,91 1,70Faza IV 11,1 1,19 0,25 1,25 1,78Faza V 13,3 0,09 0,18 1,01 1,84
Test 2
Faza I -26,68 -0,97 -0,26 -0,56 1,55Faza II 23,13 0,77 0,02 0,91 1,70Faza III 21,13 1,02 0,11 0,89 1,77Faza IV 27,4 0,99 0,12 0,91 1,86Faza V 28,6 1,05 0,51 0,87 1,96
Test 3
Faza I -3,11 -0,92 -0,05 -0,89 1,06Faza II 2,18 1,04 0,03 0,87 1,26Faza III 1,73 1,01 0,06 0,93 1,35Faza IV 2,77 0,99 0,03 0,97 1,44Faza V 3,11 1,41 0,55 0,88 1,49
Medierea aritmetică a
valorilor
Faza I -13,75 -0,99 -0,13 -0,78 -Faza II 11,98 0,95 0,03 0,89 -Faza III 11,59 1,03 0,06 0,91 -Faza IV 13,76 1,06 0,13 1,04 -Faza V 15,00 0,85 0,41 0,92 -
24
Rezumatul tezei de doctorat
4.3.3. Prelucrarea datelor obţinute în urma înregistrărilor video
Înregistrările video a traiectoriilor reperelor luminoase, amplasate la nivelul membrelor inferiore drepte (în articulaţia şoldului, genunchiului, gleznei, pe călcâi şi cel de-al doilea metatars), ale celor zece subiecţi umani aflaţi în mişcare pe o placă de forţe, se face cu ajutorul unei camere video de mare viteză, în mod continuu, în condiţii speciale de înregistrare, adică 125 cadre/s, profunzime câmp obiect reglabilă prin autofocalizare pe o distanţă de aproximativ 3,5 m.
Pentru fiecare subiect uman în parte, aflat în mişcare normală, vom dispune de câte un clip video de câteva secunde, din care numai o porţiune este utilă pentru evidenţierea fenomenului (trasarea traiectoriilor de mişcare).
25
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 4.15 Modele geometrice ale poziţiile reperelor luminoase faţă de camera video de mare viteză: axele de filmare pe direcţie verticală în planul frontal (a); axele de filmare pe direcţie
orizontală în planul transversal (b).
Pentru o interpretare cât mai corectă a imaginilor înregistrate, s-a determinat prin metoda corecţiei geometrice simple care este eroarea maximă de deformare a imaginii, atât pe direcţie orizontală cât şi verticală. În acest scop, pentru ambele direcţii de filmare, s-a construit un model geometric virtual care să reproducă şi să evidenţieze cât mai real poziţiile reperelor luminoase faţă de camera de filmat. După cum se poate observa în figura 4.15. a, respectiv figura 4.15. b, axa de filmare a camerei video nu se află pe aceeaşi direcţie cu axa de mişcare a reperelor luminoase sau pe una paralelă, ci este perpendiculară pe aceasta.
Astfel, pentru o înălţare a camerei faţă de sol de aproximativ 600 mm, o distanţă maximă de înregistrare de 2130mm şi o distanţă de 3500 mm între axul optic central al obiectivului camerei şi axa de simetrie a reperelor luminoase, s-au obţinut erorile de deformare ale imaginilor înregistrate pe direcţie orizontală şi verticală, după cum urmează: m1 = m2,4,5 = m3 = m
1,3 = m2 = m
4 = m
5 = 0,857%. Din rezultatele obţinute se poate deduce faptul că imaginile înregistrate sub această formă (poziţie cameră, distanţa de mişcare a reperelor luminoase, iluminarea, etc.) nu este deformată, deci forma reperelor luminoase este în continuare sferică fără a fi deformată după nicio direcţie. Conform spuselor lui Vladimir Medved, 2001, pentru ca datele obţinute prin metoda video de mare viteză să fie concludente, erorile de deformare a imaginilor înregistrate nu trebuie să depăşească valoarea de 1% [M9].
Ulterior acestor determinări s-a trecut la editarea imaginilor înregistrate, în vederea obţinerii traiectoriilor de mişcare a reperelor luminoase ataşate membrului inferior drept precum şi a unghiurilor ce se formează între segmente. În acest sens s-a utilizat programul Adobe After Effects. Pentru fiecare reper luminos, din programul Adobe After Effects s-a generat un reper virtual de urmărire. Odată generate, reperele virtuale au fost editate, stabilindu-se: modul de urmărire (în funcţie de culoare), nivelul de încredere al culorii (80%) precum şi nivelul de adaptare a reperului de urmărire (ales pentru toate cadrele). Prin alegerea modului de urmărire în funcţie de culoare, s-a stabilit practic culoarea albă pe care reperele virtuale o vor urmări pe parcursul întregii secvenţei filmate. Chiar dacă nivelul de încredere al culorii este sub 80%, reperele virtuale vor urmării în continuare reperele luminoase de culoare albă. În figura 4.16 sunt reprezentate traiectoriilor de mişcare a reperelor luminoase.
26
Rezumatul tezei de doctorat
Fig. 4.16 Obţinerea traiectoriilor de mişcare a reperelor luminoase, folosind programul Adobe After Effects.
De asemenea, folosind o serie de funcţii de editare a imaginilor, s-au obţinut modele ce au fost atribuite iniţia segmentelor anatomice, pentru fiecare fază de suport a piciorului pe sol, respectiv: două bare drepte ce reprezintă segmentul coapsei şi gamba şi un triunghi oarecare ce reprezintă segmentul piciorului (figura 4.17).
Fig. 4.17 Editarea cadrelor în vederea determinării fazelor de suport a piciorului pe placă.
27
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 4.18 Traiectoriile de mişcare a articulaţiei şoldului, genunchiului, gleznei, a călcâiului şi vârfului degetelor pentru un subiect uman de sex masculin, cu masa de 89,71 kg şi înălţimea de 1,74 m, în cazul mersului normal: - traiectoria articulaţiei şoldului; - traiectoria articulaţiei genunchiului; - traiectoria articulaţiei gleznei; - traiectoria călcâiului; - traiectoria vârfului celui de-al doilea
metatars considerat a fi vârful tuturor degetelor.
Un alt obiectiv principal al acestor cercetări experimentale a fost determinarea unghiurilor ce se formează între coapsă, gambă şi axa de simetrie, pe direcţia de deplasare paralelă cu axa Ox, ce trece prin articulaţia genunchiului (unghiul ) respectiv articulaţia gleznei (unghiul ) precum şi a unghiurilor ce se formează între talpa piciorului şi placa de forţe (unghiul ).
Prin aplicarea filtrului de culoare albă, toate cadrele clipului înregistrat au devenit albe, scoţând în evidenţă traiectoriile şi reperele virtuale de urmărire. Folosind funcţia „Paint”, cu ajutorul liniilor drepte s-au unit centrele reperelor virtuale de urmărire, obţinând astfel modelele prestabilite ale segmentelor anatomice luate în discuţie, respectiv două bare pentru coapsă şi gambă şi un triunghi oarecare pentru picior. În urma prelucrărilor efectuate au rezultat unghiurile dintre segmentele anatomice, respectiv unghiul de atac al piciorului pe sol.
Algoritmul de determinare a unghiurilor , , şi , mai sus explicat, s-a aplicat şi celorlalţi subiecţi umani supuşi testelor, respectiv câte trei teste pentru fiecare subiect. Datorită faptului că, mersul normal specific a unui subiect uman nu este identic în cazul celor trei teste, atunci s-a luat hotărârea de a se realiza o mediere a valorilor obţinute pentru fiecare fază în parte (tabelul 4.3).
28
Rezumatul tezei de doctorat
a)
b)
c)
29
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
d)
e)
Fig. 4.19 Determinarea unghiurilor , şi folosind programul de editare a imaginilor Adobe After Effects 6.5, în cazul fazelor de suport a piciorului pe placa de forţe: contactul iniţial (a); încărcarea
(b); mijlocul suportului (c); sprijinul terminal (d); desprinderea de pe placă (e).
Tabelul 4.3 Valorile unghiurilor , , şi , în planul de lucru (planul sagital) în cazul unui subiect uman cu masa 89,71 kg şi înălţimea 1,76 m, în cele cinci faze de suport ale piciorului pe placa de forţe (sol).
Teste Faza de suport [] [] []
Test 1
Faza I 80 16 80Faza II 88 0 77Faza III 80 0 90Faza IV 76 10 82Faza V 60 24 88
Test 2 Faza I 82 15,6 80,6Faza II 87,3 0 78,4Faza III 81,6 0 89,1Faza IV 77,6 10,6 83,9
30
Rezumatul tezei de doctorat
Faza V 62,3 23,8 88,7
Test 3
Faza I 84,1 14,9 82,6Faza II 87,6 0 79,5Faza III 80,8 0 90Faza IV 74,3 9,5 86,4Faza V 64,3 20,4 87,6
Medierea aritmetică a
valorilor
Faza I 82,07 15,67 61,13Faza II 87,77 0,00 57,90Faza III 81,00 0,00 58,13Faza IV 76,10 10,10 57,73Faza V 62,23 22,83 57,09
4.3.4. Rezolvarea numerică a ecuaţiilor de echilibru dinamic în vederea determinării forţelor de reacţiune din articulaţia gleznei şi genunchi
Valorile mediate ale parametrilor cinematici şi dinamici ai piciorului şi gambei au constituit datele de intrare pentru această aplicaţie. De asemenea ca date de intrare au intrat şi parametrii antropometrici ai subiecţilor umani. Datele de ieşire sunt reprezentate chiar de necunoscutele ecuaţiilor de echilibru, respectiv forţele de reacţiune din articulaţia gleznei Rgx, Rgy; forţele de reacţiune din articulaţia genunchiului R’gx, R’gy; momentul reactiv din articulaţia gleznei şi genunchi Mg respectiv M’
g. Având rezultatele valorice ale forţelor de reacţiune şi momentul reactiv din articulaţia gleznei se pot calcula forţele de reacţiune şi momentul reactiv din peroneu, mai precis din maleola laterală. Din literatura de specialitate, se cunoaşte faptul că, în direcţie axială, peroneul preia 1/6 din reacţiunea ce se dezvoltă în articulaţia gleznei, iar pe direcţie orizontală, peroneul preia în totalitate reacţiunea din articulaţie. În ceea ce priveşte momentul reactiv, peroneul preia în totalitate momentul ce se dezvoltă în articulaţia gleznei. Spre exemplificare, în tabelul 4.4 au fost enumerate valorile forţelor de reacţiune din articulaţia gleznei şi genunchi, momentele reactive din aceste două articulaţii precum şi forţa de reacţiune axială ce se dezvoltă în peroneu. Cu ajutorul acestor valori s-a putut întocmi o serie de grafice, în care sunt reprezentate variaţiile forţelor de reacţiune şi a momentelor în funcţie de fazele de suport ale piciorului pe sol (vezi figura 4.20).
Tabelul 4.4 Valorile numerice ale forţelor de reacţiune din articulaţia gleznei şi genunchi, momentele reactive din aceste două articulaţii precum şi forţa de reacţiune axială ce se dezvoltă în peroneu, în
cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m, în toate cele cinci faze de suport ale piciorului pe sol.
Parametrii dinamici
Fazele de suport
Faza I Faza II Faza III Faza IV Faza V
Rgx [N] 57,25 3,26 18,68 -1,64 1,81
Rgy [N] -676,76 -649,84 -701,26 -706,04 -747,19
Mg [Nm] -20,86 -51,53 -63,69 25,46 12,74
Rpy [N] -112,79 -108,31 -116,88 -117,67 -124,53
R’gx [N] 146,19 14,71 15,08 -10,57 -6,59
31
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
R’gy [N] -825,09 -738,61 -738,53 -803,03 -910,51
M’g [Nm] 111,24 -84,95 112,79 124,04 -209,14
a)
b)
c)
32
Rezumatul tezei de doctorat
d)
Fig. 4.20 Reprezentarea grafică a rezultatelor obţinute în urma rezolvării numerice a ecuaţiilor de echilibru dinamic, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m, în toate cele cinci faze de suport ale piciorului pe sol: forţele de reacţiune din articulaţia gleznei şi genunchi Rgx şi R’gx, ce acţionează pe direcţia Ox, (a); forţele de reacţiune din articulaţia gleznei şi genunchi Rgy şi R’gy, ce acţionează pe direcţia Oy, (b); momentele reactive din articulaţia gleznei şi genunchi
Mg şi M’g (c); forţele de reacţiune din peroneu Rpy, ce acţionează pe direcţia Oy, (d).
Momentul reactiv Mg din articulaţia gleznei determină care din muşchii sistemului anatomic gleznă – gambă sunt răspunzători cu mişcarea de flexie şi extensie a sistemului precum şi valoarea necesară exercitării unei mişcări normale. În urma analizării graficului din figura 4.20. c, se poate trage concluzia că, momentul necesar mişcării de flexie este pozitiv iar momentul necesar extensiei este negativ. Se observă faptul că momentul reactiv din articulaţia gleznei este negativ în primele trei faze de suport ale piciorului pe sol şi doar în faza de sprijin terminal şi desprinderea de pe sol, acesta este pozitiv. Momentul reactiv din articulaţia gleznei, necesar deplasării normale, creşte treptat de la prima fază de suport până la cea de-a treia şi apoi descreşte treptat până la ultima fază de suport.
CAPITOLUL 5
CONTRIBUŢII LA CONCEPŢIA ŞI REALIZAREA IMPLANTULUI DE OSTEOSINTEZĂ PENTRU
FRACTURILE TRANSSINDESMOTICE DE PERONEU
5.1 RECONSTRUCŢIA TRIDIMESIONALĂ ŞI MODELAREA SISTEMULUI ANATOMIC AL MEMBRELOR INFERIORE
Soluţia propusă se bazează pe un ansamblu de metode ce includ tehnici specifice analizei şi prelucrării de imagini medicale, extragerii de informaţie utilă din acestea, reprezentării cu ajutorul
33
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
graficii 3D a modelului anatomic construit pe baza informaţiilor utile extrase şi manipularea acestui model în scopuri asociate studiului sau prelucrării ulterioare.
Fig. 5.1 Metodologia de modelare 3D a sistemului anatomic al membrelor inferioare.
Tehnicile de obţinere şi prelucrare ale modelelor 3D ale membrelor inferioare, se bazează pe tomograme (reprezentarea 2D a secţiunii) obţinute de la un tomograf computerizat şi pe un program de imagistică medicală [A6]. Metodologia de modelare (figura 5.1) cuprinde trei etape majore, şi anume [A6]:
citirea şi procesarea datelor de intrare; segmentarea datelor de intrare, identificarea automată a obiectelor din imagini (utile atunci
când se doreşte detectarea şi punerea în evidenţă a unor zone de interes); reconstrucţia tridimensională a modelelor anatomice.
5.1.1 Citirea şi procesarea datelor de intrare
Citirea şi procesarea imaginilor prelevate de tomograf reprezintă un pas esenţial în obţinerea modelului virtual al sistemului anatomic gleznă-picior. În acest scop s-a utilizat programul MIMICS (Materialise Interactive Medical Imaging Control System), licenţiat la Facultatea de Mecanică, Universitatea Politehnica din Timişoara.
Datele de intrare ale procesului de modelare au fost reprezentate de fişiere conţinând tomogramele, în format DICOM, rezultate în urma analizelor specifice. Tomogramele prezentate în figura 5.10, în număr de 666, aparţin unui subiect uman de sex masculin cu vârsta de 27 ani, masa de 89,71 kg şi înălţimea totală de 1,76 m, şi au fost furnizate de la un Computer Tomograf Somatom Emotion 6, din cadrul Policlinicii de Diagnostic Rapid Braşov. Ca variabile de intrare se
34
Rezumatul tezei de doctorat
furnizează numărul de fişiere de citit (666 la număr), dimensiunea lor în pixeli (512 512 pixeli), distanţa dintre ele (rezoluţia de1 mm) şi tipul lor (format DICOM) (figura 5.2).
Fig. 5.2 Succesiunea celor 666 de imagini 2D (tomograme) ale membrelor inferiore achiziţionate de Computer-ul Tomograf Somatom Emotion 6.
5.1.2 Segmentarea datelor de intrare
Segmentarea reprezintă o categorie de tehnici de prelucrare a imaginilor ce permit extragerea din contextul imaginii a unor elemente de interes în scopul analizei ulterioare şi, eventual, al clasificării lor. Extragerea contururilor este o etapă necesară pentru a realiza caracterizarea regiunilor din imagine în vederea identificării obiectelor de interes. În plus, această operaţie asigură o reducere importantă a volumului de informaţie de la sute de mii sau milioane de pixeli, la mii de puncte de contur [S9].
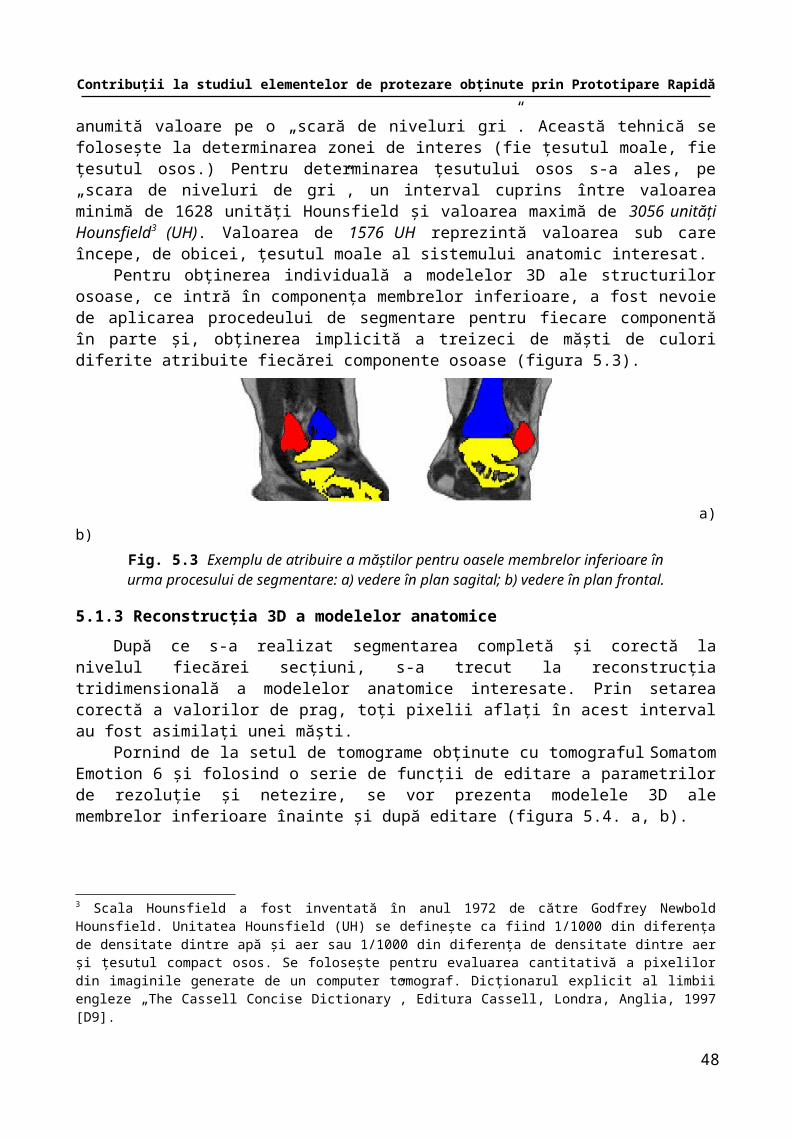
Tehnica folosită pentru realizarea segmentării în cazul de faţă a fost aceea a „valorii de prag”. Toate elementele prezentate într-o secţiune sunt reprezentate prin pixeli care, fiecare, au o anumită valoare pe o „scară de niveluri gri”. Această tehnică se foloseşte la determinarea zonei de interes (fie ţesutul moale, fie ţesutul osos.) Pentru determinarea ţesutului osos s-a ales, pe „scara de niveluri de gri”, un interval cuprins între valoarea minimă de 1628 unităţi Hounsfield şi valoarea maximă de 3056 unităţi Hounsfield3 (UH). Valoarea de 1576 UH reprezintă valoarea sub care începe, de obicei, ţesutul moale al sistemului anatomic interesat.
Pentru obţinerea individuală a modelelor 3D ale structurilor osoase, ce intră în componenţa membrelor inferioare, a fost nevoie de aplicarea procedeului de segmentare pentru fiecare componentă în parte şi, obţinerea implicită a treizeci de măşti de culori diferite atribuite fiecărei componente osoase (figura 5.3).
a) b)
3 Scala Hounsfield a fost inventată în anul 1972 de către Godfrey Newbold Hounsfield. Unitatea Hounsfield (UH) se defineşte ca fiind 1/1000 din diferenţa de densitate dintre apă şi aer sau 1/1000 din diferenţa de densitate dintre aer şi ţesutul compact osos. Se foloseşte pentru evaluarea cantitativă a pixelilor din imaginile generate de un computer tomograf. Dicţionarul explicit al limbii engleze „The Cassell Concise Dictionary”, Editura Cassell, Londra, Anglia, 1997 [D9].
35
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 5.3 Exemplu de atribuire a măştilor pentru oasele membrelor inferioare în urma procesului de segmentare: a) vedere în plan sagital; b) vedere în plan frontal.
5.1.3 Reconstrucţia 3D a modelelor anatomice
După ce s-a realizat segmentarea completă şi corectă la nivelul fiecărei secţiuni, s-a trecut la reconstrucţia tridimensională a modelelor anatomice interesate. Prin setarea corectă a valorilor de prag, toţi pixelii aflaţi în acest interval au fost asimilaţi unei măşti.
Pornind de la setul de tomograme obţinute cu tomograful Somatom Emotion 6 şi folosind o serie de funcţii de editare a parametrilor de rezoluţie şi netezire, se vor prezenta modelele 3D ale membrelor inferioare înainte şi după editare (figura 5.4. a, b).
a) b)
Fig. 5.4 Reprezentarea 3D a ţesutului osos al membrelor inferioare: înainte de editare(a); după editare (b).
Fig. 5.5 Modelul 3D al peroneului.
În primă fază, s-au reconstruit modelele 3D brute ale sistemelor anatomice, în care procedeul de segmentare a fost aplicat la nivelul fiecărei secţiuni, în întreaga stivă de imagini tomografice. În cel de-al doilea caz, procesul de segmentare a fost aplicat la nivelul fiecărei secţiuni, pentru fiecare element component în parte, obţinându-se în final câte un model 3D pentru fiecare componentă în parte a membrelor inferioare. De asemenea, din modelele complexe 3D ale membrelor inferioare, s-
36
Rezumatul tezei de doctorat
a extras modelul tridimensional al peroneului, în vederea utilizării acestuia pentru obţinerea implantului de osteosinteză pentru fracturile transsindesmotice de peroneu (figura 5.5).
5.2 TEHNICA DE MODELARE CAD A PERONEULUI ÎN VEDEREA OBŢINERII IMPLANTULUI DE OSTEOSINTEZĂ
Tehnica de modelare CAD, realizată cu ajutorul modulului MedCAD al programului MIMICS, reprezintă veriga de legătură dintre modelul 3D al peroneului şi implantul de osteosinteză. Folosind tehnica CAD se obţine modelul peroneului în format IGES4, care ulterior va fi folosit ca model de referinţă într-un program de proiectare CAD (SolidWorks) pentru design-ul implantului de osteosinteză. Modelul IGES este reprezentat de o suprafaţă ce copie cu fidelitate toate neregularităţile osului.
Trecerea de la solid la suprafaţă s-a făcut prin generarea poliliniilor ce determină conturul exterior al peroneului. Astfel, la nivelul fiecărei secţiuni, s-a generat câte o polilinie, care în acest caz este o linie continuă curbă care trece prin fiecare punct ce determină conturul secţiunii respective. Având un număr total de 73 de tomograme s-au obţinut un număr egal de polilinii. Modelul suprafeţei IGES s-a obţinut prin inserarea unei suprafeţe, tangentă la fiecare din cele 73 de polilinie. Această suprafaţa copiază cu fidelitate neregularităţile modelului 3D ce a fost obţinut din tomograme (figura 5.6). Astfel obţinut, modelul 3D al peroneului, în format *.IGES, a fost exportat către un sistem de proiectare CAD, SolidWorks, în vederea proiectării implantului de osteosinteză.
Fig. 5.6 Generarea poliliniilor pentru fiecare tomogramă în parte în vederea obţinerii modelului 3D al peroneului în format IGES.
5.3 TEHNICA DE MODELARE CAD ÎN VEDEREA STABILIRII FORMEI OPTIME A IMPLANTULUI DE OSTEOSINTEZĂ
Acest paragraf este destinat descrierii tehnicilor de modelare CAD în vederea stabilirii formei optime a implantului de osteosinteză pornind de la o structura de bază, reprezentată de suprafaţa IGES, şi ajungându-se în final la modelul virtual al implantului medical folosit la osteosinteza fracturilor de peroneu. Acest model final va servi realizării de ansambluri funcţionale virtuale, care să servească simulărilor numerice şi realizării practice a acestuia folosind tehnologia neconvenţională Rapid Prototyping.4 Initial Graphics Exchange Specification – IGES – defineşte un format neutru de date care permite transferul digital de informaţii, sub forma unor diagrame circuit, suprafeţe, solide, între sistemele de proiectare CAD. (http://en.wikipedia.org/wiki/IGES#File_format [W23].
37
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Modelarea CAD a structurilor anatomice şi a elementelor de protezare s-a realizat utilizând tehnici convenţionale disponibile în mediul CAD SolidWorks 2007 şi ProEngineering WildFire 2. Structura de bază de la care s-a pornit modelarea CAD, în vederea obţinerii diferitelor straturi osoase şi a traiectului de fractură, este suprafaţa IGES a peroneului.
Pe baza noţiunilor teoretice, în ceea ce priveşte straturile oaselor lungi, în programul SolidWorks s-a realizat un ansamblu al peroneului format din mai multe componente. În figura 5.7 este prezentat acest ansamblu, unde: 1 – stratul osos extern (periostul) al epifizei inferioare; 1’– masa osoasă spongioasă a epifizei inferioare; 2 – stratul osos extern (periostul) al diafizei; 2’– masa osoasă compactă a diafizei; 3 – stratul osos extern (periostul) al epifizei superioare; 3’ – masa osoasă spongioasă a epifizei superioare.
În vederea obţinerii implantului de osteosinteză s-a utilizat aceeaşi tehnică de modelare CAD, ca şi în cazul ansamblului peroneului, pornind de la aceeaşi suprafaţă IGES a peroneului. S-a început cu conturarea unei forme care să satisfacă din punct de vedere funcţional necesităţile unui astfel de implant. Aceste necesităţi constau în posibilitatea implantului de a fi fixat cu şuruburi, de a corespunde dimensional cu structura osoasă a peroneului cu care se conjugă.
Astfel, în primă fază s-a modelat o plăcuţă de fixare, care face parte din categoria implanturilor de osteosinteză existente, şi care îndeplineşte într-o anumită măsură cerinţele funcţionale impuse unui astfel de construcţii. Pentru realizarea acestei plăcuţe s-au necesitat 61 de operaţii de modelare, cum ar fi: extrudare, tăiere, crearea de planuri, puncte, axe, realizarea găurilor, şanfrenare etc. În figura 5.8 este reprezentat modelul tridimensional al plăcuţei metalice existente a cărui grosime este de 2,2 mm.
Fig. 5.8 Modelul tridimensional al plăcuţei de osteosinteză existente.
În vederea obţinerii unui timp de vindecare cât mai scurt a structurii osoase afectate de fractură, s-a considerat optimizarea formei implantului de osteosinteză, astfel încât să prezinte două funcţionalităţi majore:
capacitatea de poziţionare exactă a implantului pe structura osoasă astfel încât, în timpul solicitărilor, cele două entităţi să păstreze un contact total;
posibilitatea păstrării vascularizaţiei periostale la locul de contact dintre plăcuţa metalică şi os.
38
Rezumatul tezei de doctorat
Luând în considerare cele amintite mai sus, s-a modelat un nou implant de osteosinteză, care să corespundă considerentelor de funcţionalitate dinamică. Acest implant a fost modelat prin aceeaşi tehnică clasică de modelare ca şi în cazul primului implant. În figura 5.9 este prezentată schiţa de bază după care s-a proiectat implantul de osteosinteză. Pentru constrângerea desenului liber al schiţei, între elementele geometrice constituente s-au stabilit, după caz, relaţii de: verticalitate, orizontalitate, simetrie, egalitate, perpendicularitate, paralelism.
Fig. 5.9 Schiţa de bază după care s-a proiectat implantul de osteosinteză.
Din punct de vedere constructiv, prototipul implantului de osteosinteză este caracterizat de următoarele elemente (figura 5.10):
Orificiile de prindere (1), şase la număr, cu diametrul de 3,7 mm, permit şuruburilor de fixare, cu diametrul de 3,5 mm să se poziţioneze perpendicular pe suprafaţa osoasă. S-au proiectat şase orificii de prindere pentru zona diafizei. Prin existenţa acestor găuri, implantologului i se permite să aleagă, în funcţie de complexitatea fracturii, cea mai bună soluţie de fixare a implantului pe structura osoasă. De asemenea, aceste găuri uşurează implantul, neafectând rezistenţa la solicitări a acestuia şi permit o mai bună vascularizarea a zonei osoase;
Orificiile de prindere (2), trei la număr, cu diametrul de 4,2 mm, permit şuruburilor de fixare cu diametrul de 4 mm să se poziţioneze în zona epifizei inferioare a peroneului;
Raza de racordare (3) este de 0,3 mm şi a fost aplicată pe toată lungimea conturului implantului având rolul de a elimina rănirile ţesutului moale adiacent plăcuţei metalice;
Şanfrenul (4) a fost aplicat tuturor orificiilor de prindere şi are dimensiunea de 0,6 mm cu o înclinaţie de 45. Sau utilizat aceste dimensiuni pentru a realiza o concordanţă cu cotele de execuţie a şuruburilor de fixare existente;
Principalul rol al degajării (5) este acela de a permite o mai bună vascularizare a zonei de contact dintre implant şi os. De asemenea, prin această degajare de material implantul devine mai uşor, fără să se afecteze rezistenţa mecanică a acestuia.
39
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
a) b)Fig. 5.10 Modelul final al implantului de osteosinteză folosit pentru fracturile transsindesmotice
de peroneu: elementele caracteristice (a); diferite vederi ale implantului (b).
În vederea determinării grosimii implantului s-a apelat la relaţia rezistenţei limite la rupere pentru compresiune şi tracţiune a barelor încărcate axial, după cum urmează [M12]:
, (5.1)unde: este rezistenţa limită la rupere în secţiune transversală, care în cazul oţelului inoxidabil austenitic are valoarea de 517 MPa [S11]; F este forţa aplicată pe direcţie axială, F = 124,53 N, şi reprezintă forţa de reacţiune care acţionează pe direcţie verticală asupra peroneului, în timpul ultimei faze de suport a piciorului pe sol, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m şi A este aria secţiunii transversale, în mm2.
Cunoscând forţa F, rezistenţa limită la rupere în secţiune transversală , şi folosind relaţia (5.1) se poate determina care este aria secţiunii transversale a implantului de osteosinteză:
mm2.Aria secţiunii transversale are relaţia:
(5.2)unde: h este lăţimea secţiunii, în mm şi L este lungimea secţiunii, care pentru acest caz este de 12,8 mm, folosindu-se informaţiile referitoare la conformaţia geometrică a peroneului în zona de fracturare considerată. Folosind relaţia (5.2) s-a putut determina care este grosimea admisibilă a implantului de osteosinteză, după cum urmează:
mmŞtiind care este grosimea minimă admisibilă, s-a putut dimensiona implantul de osteosinteză
astfel încât acesta să reziste solicitărilor la care este supus în timpul mersului normal. Astfel, s-a considerat un factor de siguranţă 42, rezultând grosimea implantului de 0,8 mm.
40
Rezumatul tezei de doctorat
Pentru a se putea verifica funcţionalitatea dorită a implantului de osteosinteză proiectat, s-a realizat ansamblul acestuia cu şase structuri osoase, o plăcuţă metalică şi şapte şuruburi de fixare. Acest ansamblu a fost obţinut folosind programul SolidWorks 2007 (vezi figura 5.11).
Fig. 5.11 Ansamblul os – plăcuţă – şuruburi proiectat în programul SolidWorks: vedere frontală (a); vedere izometrică (b); vedere detaliată a elementelor componente ce formează ansamblul (c).
5.4 ANALIZA NUMERICĂ CU ELEMENTE FINITE A ANSAMBLULUI OS – PLĂCUŢĂ – ŞURUBURI
Pentru scopul propus de mine, s-a pornit de la modelul virtual al ansamblului os-implant de osteosinteză-şuruburi, proiectat în programul CAD SolidWorks 2007, model care ulterior a fost importat în programul de analiză cu element finit ANSYS Workbench 10.
Complexitatea geometrică a unităţii funcţionale implantate conduce la un comportament static structural complex, imposibil de evaluat prin calcule clasice de rezistenţă. Din acest motiv s-a utilizat în rezolvarea problemei metoda elementului finit, prin intermediul programului ANSYS Workbench 10. Evaluarea stării de tensiune, deformaţie şi contact a elementelor proiectate s-a realizat prin analiza statică structurală a celor două ansambluri (unul deja existent şi celălalt proiectat), în aceleaşi condiţii de încărcare şi fixare. S-au evaluat astfel efectele încărcărilor la nivelul interfeţelor os – plăcuţă metalică, plăcuţă metalică – şuruburi şi respectiv os – şuruburi.
Astfel, pentru evaluarea stărilor de tensiune, deformaţie şi contact induse în interfaţa osoasă de către implantul de osteosinteză şi şuruburile de fixare, ambele ansambluri (cel existent şi cel proiectat) au fost supuse analizei numerice cu elemente finite, în aceleaşi condiţii de solicitare. În primă fază s-a supus analizei ansamblul proiectat, urmat apoi de ansamblul existent. Analiza numerică statică cu elemente finite aplicată ansamblului proiectat a avut ca primă etapă importarea modelului CAD a ansamblului şi declararea tuturor materialelor implicate în analiză. Astfel,
41
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
materialele folosite în această analiză sunt: oţelul inoxidabil austenitic pentru plăcuţa metalică şi pentru şuruburile de fixare, osul spongios pentru stratul interior al epifizei inferioare a peroneului, periostul pentru stratul superficial al peroneului şi osul cortical pentru stratul inferior al diafizei peroneului (vezi tabelul 5.2)
Tabelul 5.2 Proprietăţile mecanice ale materialelor considerate pentru ambele ansamble supuse analizei numerice cu elemente finite [G8][P7][S12].
Materiale Modulul de elasticitate E [MPa]
Coeficientului lui Poisson
Densitatea [kg/mm3]
Oţel inoxidabil austenitic 1,93105 0,31 7,8610-6
Os spongios 100 0,27 110-6
Periostul 15,3103 0,28 1,810-6
Os compact (cortical) 17,5103 0,28 210-6
După atribuirea materialelor pentru elementele componente ale ansamblului, următoarea etapă a constat în declararea contactelor dintre elemente. Această operaţiune s-a realizat în mod automat, programul ANSYS identificând suprafeţelor aflate în contact fizic şi declarându-le legături. Astfel, s-au stabilit 27 de contacte independente, de tip „bonded” (fixare rigidă).
Următoarea etapă a acestei analize numerice a fost cea de discretizare a ansamblurilor în elemente finite. Discretizarea s-a realizat în mod automatic, utilizând elementele tetraedice, respectiv 10-Node Tetrahedral Structural Solid. Structurile discretizate numără 158481 de noduri şi 164230 elemente, acesta în cazul ansamblului proiectat, iar pentru celălalt ansamblu un număr de 139259 noduri şi 141430 elemente.
Etapa de discretizare a fost urmată de etapă de stabilire a constrângerilor şi a solicitărilor ce se exercită asupra ansamblului. Astfel, ansamblul este supus acţiunii a două forţe (forţa_1 şi forţa_2), a unui moment de rotaţie şi a unei deplasări, iar în zona superioară acesta este constrâns prin încastrare (zero grade de libertate).
Forţa_1 este forţa de reacţiune ce acţionează asupra peroneului pe axa Oy, având ca punct de aplicaţie zona inferioară a maleolei laterale. Acesteia i s-a atribuit valoarea de 124,53 N, valoare ce reprezintă 1/6 din forţa de reacţiune totală pe direcţia Oy, ce se exercită în articulaţia gleznei, în timpul ultimei faze de suport a piciorului pe sol, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m (vezi capitolul 4, tabelul 4.4).
Forţa_2 este forţa de reacţiune ce acţionează asupra peroneului pe axa Ox, având ca punct de aplicaţie faţa interioară a maleolei laterale, în zona de contact dintre maleola laterală şi talus. Mărimea forţei de 1,81 N şi reprezintă valoarea totală a forţei de reacţiune pe direcţia Ox, ce se exercită în articulaţia gleznei, în timpul ultimei faze de suport a piciorului pe sol, în cazul unui subiect uman cu o masă de 89,71 kg şi o înălţime de 1,76 m. Transversal, peroneul preia toată forţa ce se exercită în articulaţia gleznei (vezi capitolul 4, tabelul 4.4).
Momentul de rotaţie aplicat ansamblului, supus analizei cu elemente finite, este de 12,74 Nm şi reprezintă momentul ce se exercită în gleznă, în timpul ultimei faze de suport a piciorului pe sol.
În timpul mersului, cu toate că peroneul este strâns legat de tibie prin ligamente, au putut fi demonstrate o serie de mişcări ale acestui os. Astfel, în extensie se produce o creştere treptată a
42
Rezumatul tezei de doctorat
distanţei între cele două oase, media creşterii la o mişcare completă fiind de 1 2 mm. În acelaşi timp, peroneul descrie o uşoară mişcare elicoidală, având unghiul de rotaţie de 2 5 şi o deplasare de maxim 1mm [O2]. Ţinând cont de cele menţionate, ansamblului os – plăcuţă – şuruburi i s-a aplicat o deplasare de 2 mm pe axa Ox şi de 0,5 mm pe axa Oz. În figura 5.12 sunt reprezentate încărcările şi constrângerile la care este supus ansamblul.
a) b)Fig. 5.12 Reprezentarea încărcărilor şi constrângerilor aplicate ansamblului os – plăcuţă –
şuruburi: vedere de ansamblu (a); vedere detaliată (b).
Următoarea etapă a acestei analizei numerice a constat în afişarea rezultatelor sub formă de grafice, precum şi în analiza comparativă a rezultatelor obţinute în cazul celor două ansambluri. S-a urmărit obţinerea tensiunilor echivalente, a deformaţiilor şi a interstiţiilor rezultate în urma solicitărilor statice aplicate celor două ansambluri.
În figura 5.13 sunt reprezentate grafic tensiunile echivalente la nivelul interfeţei plăcuţă metalică – structuri osoase, în cazul celor două ansambluri supuse solicitărilor statice. Astfel, în cazul ansamblului existent, tensiunea echivalentă maximă este de 3,066103 MPa, care este cu aproximativ 103 MPa mai mare tensiunea echivalentă maximă (2,112103 MPa) ce apare în cazul ansamblului proiectat. Acest fapt poate fi explicat prin diferenţa considerabilă între grosimile celor două implanturi, respectiv 0,8 mm pentru implantul proiectat şi 2,2 mm pentru implantul existent.
a) b)
43
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Fig. 5.13 Tensiunile echivalente ce se manifestă în: ansamblul proiectat (a); ansamblul existent utilizat în aplicaţiile medicale (b).
Efectele încărcărilor se observă şi mai clar prin reprezentarea deformaţiilor specifice care apar în structurile osoase, sub efectul aceloraşi încărcări (figura 5.14. a, b). Nuanţele de verde, galben şi roşu indică valori mult mai crescute ale deformaţiilor în structurile osoase decât în plăcuţa metalică şi şuruburile de fixare. Acest fenomen se poate explica prin diferenţele majore între modulele de elasticitate ale structurilor osoase şi cele ale elementelor metalice.
a) b)
Fig. 5.14 Reprezentarea grafică a deformaţiilor specifice ce se manifestă în: ansamblul proiectat (a); ansamblul existent (b).
Comparând deformaţiile ce se manifestă în cele două ansambluri supuse analizei numerice se observă faptul că, deformaţiile maxime (4,06910-2 mm/mm) din ansamblul proiectat sunt mai mici decât cele din ansamblul existent (5,24410-2 mm/mm). În cazul ansamblului proiectat, deformaţia maximă se manifestă în componenta 2 (periostul epifizei inferioare a peroneului), iar pentru ansamblul existent, deformaţia maximă are loc în componenta 4 (periostul diafizei peroneului). Diferenţele dintre deformaţiile maxime se pot explica prin rigiditatea mare a plăcuţei metalice existente, rigiditate dată de grosimea supradimensionată a acesteia de 2,2 mm. Astfel, încărcările la care este supus ansamblul sunt transmise structurilor osoase prin intermediul elementelor metalice.
O altă condiţie ce trebuie îndeplinită de către implant, în vederea accelerării procesului de vindecare, este aceea ca faţa anterioară a plăcuţei metalice să păstreze un contact permanent cu structurile osoase. Menţinând un contact permanent, tensiunile rezultate în urma solicitărilor sunt distribuite într-o anumită proporţie în toate elementele componente ale ansamblului, nu numai în structurile osoase. Astfel, microdeplasările din focarul fracturii sunt diminuate.
În figura 5.15 sunt reprezentate grafic interstiţiile rezultate în urma solicitărilor, între suprafaţa anterioară a plăcuţei metalice şi structurile osoase, în cazul ansamblului proiectat şi cel existent. Se poate observa o diferenţă majoră în ceea ce priveşte valorile interstiţiilor dintre plăcuţa metalică şi ţesutul osos, pentru ansamblul proiectat interstiţiul maxim este de 8,3310-17 mm iar pentru cel existent interstiţiul maxim este de 1,6710-17 mm.
De asemenea, se poate observa că în cazul ansamblului existent nu există contact permanent între plăcuţa metalică şi ţesutul osos, cu precădere în zona inferioară a focarului fracturii. Conform graficului din figura 5.15. b, în zona de culoare maro, există o uşoară desprindere (-0,119 mm) a plăcuţei metalice faţă de ţesutul osos. Acest fenomen este nedorit pentru că induce tensiuni mai
44
Rezumatul tezei de doctorat
mari în structurile osoase şi microdeplasări considerabile în focarul fracturii, şi poate fi explicat prin grosimea supradimensionată a plăcuţei metalice existente. În ceea ce priveşte ansamblul proiectat, plăcuţa metalică are un contact total cu ţesutul osos, conform zonei de culoare roşie (figura 5.15. a).
a) b)
Fig. 5.15 Reprezentarea grafică a interstiţiilor rezultate în urma solicitărilor, între plăcuţa metalică şi structurile osoase, în cazul: ansamblului proiectat (a); ansamblului existent (b).
Analiza numerică cu element finit a ansamblelor os-plăcuţă-şuruburi a scos în evidenţă trei tipuri de comportamente: cel al tensiunilor echivalente ce apar în elementele componente ale ansamblurilor, cel al deformaţiilor din focarul fracturii precum şi cel al interstiţiilor dintre plăcuţele metalice şi structurile osoase. Astfel, în urma analizei cu elemente finite, urmărind cele trei comportamente menţionate anterior, reiese faptul că implantul de osteosinteză proiectat are o comportarea superioară celui existent şi poate fi propus pentru obţinere lui fizică ca şi prototip, utilizând tehnologia neconvenţională de fabricare rapidă a prototipurilor (prototipare rapidă).
5.6. REALIZAREA MODELULUI ANATOMIC AL PERONEULUI ŞI A PROTOTIPULUI IMPLANTULUI DE OSTEOSINTEZĂ PROPUS PENTRU
FRACTURILE TRANSSINDESMOTICE
Una dintre tehnicile de prototipare rapidă (fabricarea rapidă a prototipurilor), prezentată în capitolul 2, respectiv tehnica de prototipare prin depunere de material topit (FDM – Fused Deposit Modeling), a fost utilizată în realizarea modelului anatomic al peroneului respectiv a prototipului implantului de osteosinteză propus pentru fracturile transsindesmotice de peroneu.
Prototiparea acestor două modele s-a realizat cu ajutorul maşinii de prototipare FDM – 1650, produsă de firma Stratasys Inc., aflată în dotarea Centrului Naţional de Fabricare Rapidă a Prototipurilor, Facultatea TCM din cadrul Universităţii Tehnice Cluj – Napoca (figura 5.16). S-au realizat astfel un model anatomic al peroneului şi un prototip al implantului de osteosinteză, ambele realizate din materiale plastice, respectiv ABS P400.
Etapele ce au fost parcurse în vederea obţinerii modelului fizic al peroneului şi implantului de osteosinteză, pentru fracturile transsindesmotice de peroneu, au fost:
1. Etapa de postprocesare, unde modelele celor două modele, au fost transformate în format .*STL, respectiv în faţete triunghiulare. În urma divizării modelelor au rezultat un număr de 21.920 faţete pentru implantul de osteosinteză şi 17.060 de faţete pentru peroneu;
45
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
2. Etapa de realizare propriu-zisă a modelelor. Pentru ambele modele s-a ales acelaşi tip de material, respectiv ABS P400, sub formă de fir cu un diametru aproximativ de 1,8 mm. Temperatura de topire a materialului de lucru şi de suport, controlată de blocul electronic de comandă a maşinii FDM 1650, a fost setată la 270C şi respectiv 265C. În ceea ce priveşte temperatura optimă în camera de lucru a maşinii, s-a setat valoarea de 70C. În cazul peroneului s-a ales o grosime a statului de 0,2540 mm, iar pentru implantul de osteosinteză s-a ales o grosime a stratului de 0,1778 mm.
3. Etapa de postprocesare, unde modelele obţinute au fost supuse procesului: de înlăturare de pe platforma de lucru a maşinii, de înlăturare a suporţilor şi de finisare (şlefuire cu hârtie abrazivă, grunduire, vopsire).
Fig. 5.16 Maşina de prototipare rapidă FDM – 1650.
Aspectul rugos al suprafeţelor se datorează efectului de scară produs de curburile cu grad mare de înclinare ale modelelor (figura 5.17. a). Prin aplicarea procesului de şlefuire, o mare parte din asperităţi au fost îndepărtate, iar prin aplicare unui strat foarte subţire de grund (figura 5.17. b), suprafeţele modelelor fizice, acestea au căpătat o rugozitate mult diminuată. Pentru o mai bună evidenţiere a implantului de osteosinteză, acesta a fost vopsit, prin pulverizare, cu un strat subţire de vopsea de culoarea cromului (figura 5.17. c).
Fig. 5.17 Modele fizice ale peroneului şi implantului de osteosinteză: după terminarea procesului de fabricaţie FDM (a); după aplicarea unui strat subţire de grund pentru obţinerea
46
Rezumatul tezei de doctorat
unor suprafeţe cu rugozitate diminuată (b); modelul prototipului implantului de osteosinteză după aplicarea unui strat subţire de vopsea de culoarea cromului.
În concluzie, se poate spune că, elementele rezultate folosind tehnologia de Prototipare Rapidă FDM, se înscriu în rigorile impuse de formă şi dimensiuni, timp de realizare (de la modelele CAD la modelele fizice din material plastic) şi de structură.
CAPITOLUL 6
CONCLUZII GENERALE. CONTRIBUŢII PERSONALE. MODUL DE VALORIFICARE A REZULTATELOR. DIRECŢII VIITOARE
DE CERCETARE
6.1 CONCLUZII GENERALEStudiul asupra proiectării şi obţinerii unui element de protezare prin tehnologia de Prototipare
Rapidă, care a făcut obiectul prezentei teze de doctorat, a avut drept bază importanţa pe care o au implanturile de osteosinteză în vindecarea traumatismelor scheletului osos. Abordarea studiului în ceea ce priveşte proiectarea şi obţinerea unui implant de osteosinteză prin tehnologia de Prototipare Rapidă s-a făcut după şase direcţii principale: studiul stadiului actual al cercetărilor în domeniul protezării, studiul analitic, cu impunerea unor ipoteze simplificatoare, studiul experimental, în condiţii reale de desfăşurare, studiul proiectării CAD, în condiţii de simulare virtuală, studiul simulării numerice şi studiul tehnologic, în condiţii reale de desfăşurarea a procesului tehnologic.
Scopul final al tezei de doctorat a fost obţinerea fizică a prototipului implantului de osteosinteză proiectat folosind tehnologia neconvenţională de Prototipare Rapidă. Materializarea lui atestă faptul că această teză de doctorat este o lucrare interdisciplinară, aflată la frontiera dintre ingineria mecanică şi medicină. Tehnicile utilizate cuprind un domeniu extins, de la algoritmi clasici de calcul mecanic şi algoritmi din domeniul imagisticii medicale şi proiectării CAD, continuând cu metoda de analiză cu elemente finite a structurilor anatomice, respectiv mecanice şi terminând cu un procedeu de fabricaţie de Prototipare Rapidă a elementului anatomic şi mecanic.
În ceea ce priveşte studiul teoretic, acesta a impus utilizarea unor ipoteze simplificatoare pentru aparatul locomotor inferior, utilizând metoda dinamicii inverse, rezultând în final parametrii dinamici şi cinematici ai locomoţiei umane. Ca şi dezavantaj al acestei metode, se poate menţiona faptul că, prin determinarea momentelor reactive din articulaţia gleznei şi cea a genunchiului nu s-au putut furniza informaţii legate de activitatea fiecărui muşchi ce participă la locomoţie ci numai informaţii despre grupele de muşchi, respectiv grupa muşchilor extensivi şi flexori.
Obţinerea datelor experimentale în stare brută, a impus găsirea de noi metode de evaluare a fenomenelor studiate şi evidenţiate în urma studiului teoretic. Prelucrarea lor a presupus construirea unor algoritmi de achiziţie şi analiză a datelor înregistrate, în scopul evidenţierii particularităţilor mişcării normale studiată în abordarea teoretică.
În vederea obţinerii unui timp de vindecare cât mai scurt a structurii osoase afectate de fractură, s-a considerat optimizarea formei implantului de osteosinteză, astfel încât să prezinte două funcţionalităţi majore:
47
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
capacitatea de poziţionare exactă a implantului pe structura osoasă astfel încât, în timpul solicitărilor, cele două entităţi să păstreze un contact total;
posibilitatea păstrării vascularizaţiei periostale la locul de contact dintre plăcuţa metalică şi structura osoasă.
Analiza numerică folosind metoda elementului finit abordează problemele legate de evaluarea stării de tensiune, deformaţie şi contact la nivelul ansamblului os-plăcuţă-şuruburi, pentru ambele cazuri: cel propus de către autor şi cel existent. Astfel, în urma analizei cu elemente finite, urmărind cele trei comportamente menţionate anterior reiese faptul că, implantul proiectat are o comportarea superioară celui existent şi poate fi propus pentru obţinere lui ca prototip.
Ultima parte a tezei este dedicată în totalitate elaborării experimentale a modelului anatomic al peroneului şi al implantului de osteosinteză propus. Este dezvoltată aici tehnica de Prototipare Rapidă prin depunere succesivă de material FDM.
Se poate spune că tehnica de Prototipare Rapidă, revoluţionară în domeniul tehnologic, poate fi utilizată cu succes în realizarea oricărui element de protezare sau model anatomic, din materiale dintre cele mai diverse: plastic, metale, nemetale. Elementele rezultate, folosind tehnologia de Prototipare Rapidă FDM, se înscriu în rigorile impuse de formă şi dimensiuni, timp de realizare (de la modelele CAD la modelele fizice din material plastic) şi de structură.
Conclusiv, se poate afirma faptul că, scopul stabilit prin tema de cercetare a fost pe deplin realizat prin concepţia, dezvoltarea şi realizarea unui prototip de implant de osteosinteză pentru fracturile transsindesmotice de peroneu.
6.2 CONTRIBUŢII PERSONALEÎn conformitate cu obiectivele propuse, precum şi în urma rezultatelor obţinute pe parcursul
elaborării tezei de doctorat, autorul consideră că în cazul acestei lucrări a adus următoarele contribuţii personale:
1. Realizarea unui studiu bibliografic exaustiv în ceea ce priveşte principiile şi metodele de protezare, în urma căruia s-au identificat cu acurateţe biomaterialele folosite în aplicaţiile medicale, aplicaţiile protezelor în medicină şi tehnologiile neconvenţionale de Prototipare Rapidă cu aplicaţii în medicină.
2. Prin folosirea metodelor clasice, s-a realizat o modelare analitică statică şi dinamică a sistemelor anatomice gleznă-picior şi genunchi-gambă, obţinându-se în final reacţiunilor dezvoltate în articulaţia gleznei şi a genunchiului în timpul mersului normal. Acest studiu analitic a presupus ca, autorul să folosească metoda dinamicii inverse elaborând astfel, o serie de modele ce descriu din punct de vedere biomecanic segmentul piciorului şi cel al gambei.
3. Proiectarea unei instalaţii experimentale cu ajutorul căreia s-au putut determina şi analiza parametrii cinematici şi dinamici rezultaţi în timpul mersului normal fiind posibilă astfel, rezolvarea ecuaţiilor de echilibru dinamic şi de aici mai departe obţinerea forţelor de reacţiune din gleznă şi genunchi.
4. Proiectarea şi realizarea algoritmului de analiză a datelor experimentale şi valorificarea lui.5. Realizarea unui studiu teoretic complex în ceea ce priveşte anatomia şi fiziologia sistemului
anatomic gleznă – picior prin identificarea mecanismelor de fracturare a acestui segment anatomic şi metodele existente de protezare.
48
Rezumatul tezei de doctorat
6. Obţinerea modelele tridimensionale virtuale ale componentelor osoase ce alcătuiesc membrele inferioare folosind programe speciale de imagistică medicală.
7. Modelarea unui implant de osteosinteză existent şi proiectarea altuia astfel încât acesta din urmă, are o geometrie adecvată care copie cu fidelitate toate neregularităţile osului şi rezistă solicitărilor dinamice din timpul locomoţiei umane.
8. Realizarea unei analize comparative folosind o metodă de analiză cu elemente finite, prin identificarea avantajele noului implant de osteosinteză pentru fracturile transsindesmotice de peroneu. Această analiză a presupus evaluarea stării de tensiune, deformaţie şi contact a ambelor ansambluri, cel existent şi cel proiectat.
9. Realizarea fizică a modelul anatomic al peroneului şi prototipul implantului de osteosinteză folosind unul din procedeele tehnologiei neconvenţionale de Prototipare Rapid.
10. Enunţarea concluziile finale.
6.3 MODUL DE VALORIFICARE A REZULTATELORCercetările ştiinţifice efectuate asupra temei şi domeniilor adiacente ei, care s-au întins pe o
perioadă de cinci ani, s-au materializat prin unele rezultate valorificate prin publicaţii în reviste de specialitate de diverse categorii, prin cărţi şi contracte de cercetare, care se structurează în felul următor:
1 lucrare în ISI journal, 6 lucrări în ISI proceedings, 25 lucrări în conferinţe internaţionale cu comitet de program, 19 în reviste de specialitate fără cotaţie ISI, 4 cărţi în curs de publicare, 4 contracte de cercetare,
în total 55 de titluri şi 4 contracte de cercetare.Dintre acestea, autorul este: la 14 - unic autor, la 31 - prim autor şi la 6 - coautor. Dintre
contractele de cercetare la care am lucrat la 1 contract am fost director de program.
6.4 DIRECŢII VIITOARE DE CERCETARERezultatele teoretice şi experimentale ale cercetărilor dezvoltate în prezenta teză de doctorat
deschid noi orizonturi de cercetare în ingineria medicală bazată pe interacţiunea dintre un element mecanic de protezare şi ţesutul gazdă. Dintre numeroasele cercetări ce vor fi abordate în viitor se pot menţiona:
Elaborarea implantului de osteosinteză pentru fracturile transsindesmotice de peroneu din material metalic, mai precis din oţel inoxidabil, utilizând ca procedeu tehnologic tot unul aparţinând tehnologiei de Prototipare Rapidă, respectiv sinterizarea selectivă cu laser;
Propunerea spre realizarea de serie a implantului de osteosinteză şi implementarea acestora în practicile ortopedice;
Evaluarea statistică a comportării în timp a implanturilor de osteosinteză prin monitorizarea gradului şi a timpului de vindecare a fracturilor şi aducerea de îmbunătăţiri, după caz, pe baza constatărilor făcute;
49
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
Utilizarea algoritmului de proiectare utilizat în cazul implantului de osteosinteză propus, şi pentru alte tipuri de implanturi şi proteze pentru membrele inferioare;
Asocierea sistemelor de măsurarea aferente instalaţiei experimentale, cu alte sisteme de analiză a parametrilor dinamici (placa de măsurare a presiunii plantare), în vederea proiectării unor noi forme a tălpilor din componenţa încălţămintei sport.
BIBLIOGRAFIE SELECTIVĂ
[A1] Alexander, H., Brunski, J.B., Cooper, S.L., Hench, L.L., Hergenrother, R.W., Hoffman, A.S., Kohn, J., Langer, R., Peppas, N.A., Ratner, B.D., Shalaby, S.W., Visser, S.A., Yannas, I.V.: An Introduction to Materials in Medicine, Academic Press, New York, 1996.
[A2] Alexa, O.: Tehnici chirurgicale uzuale în traumatismele osteoarticulare. Editura Grigore T. Popa, UMF Iaşi, 2007.
[B1] Bracero, X., Perez, J., Rodriguez, Y., Ruiz R.: Biomechanics of Orthopaedic Fixation, Applications of Engineering Mechanics in Medicine, GED – University of Puerto Rico, Mayagüez, 2003.
[B2] Berce, P., Ancău, M., Caizar, C., Bâlc, N., Comşa, S., Jidav, H, Chezan, H.: Fabricarea Rapidă a Prototipurilor, Editura Tehnică, Bucureşti 2000.
[C1] Cristea, Luciana.: Materiale Speciale, Suport de curs, Universitatea Transilvania din Braşov, 2006.
[D1] Dumitru, M.: Studii şi cercetări asupra tehnologiilor şi utilajelor de turnare a titanului şi aliajelor sale pentru piese de mici dimensiuni, Teză de doctorat, Universitatea „Transilvania” din Braşov, Facultatea Ştiinţa şi Ingineria Materialelor, Braşov 2001.
[R1] Radu, C., Roşca, Ileana, C.: Some contribution to the design of osteosysnthesis implant, Estonian Journal of Engineering, Tallin, Estonia, ISSN 1736-7522, (în curs de publicare Martie 2009).
[R2] Radu, C., Roşca, Ileana, C.: On the design of medical implant used for ostheosyntesis of the transsindesmotic fibular fracture – Part 1: Ankle joint and fibular bone 3D model by thomographic sclices, 6th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING", DAAAM 2008, Tallin, Estonia, ISBN 978-9985-59-783-5.
[R3] Radu, C., Roşca, Ileana, C.: On the design of medical implant used for ostheosyntesis of the transsindesmotic fibular fracture – Part 2: The locking orthopaedic plate, 6th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING", DAAAM 2008, Tallin, Estonia, ISBN 978-9985-59-783-5.
[R4] Roşca, Ileana, C., Radu, C.: On the design of the analytical ankle-foot model used to determine dynamic parameters during locomotion, 6th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING", DAAAM 2008, Tallin, Estonia, ISBN 978-9985-59-783-5
[R5] Roşca, Ileana, C., Radu, C.: On a mechatronic system to determine dynamic parameters of human limb during locomotion used fro artificial muscles and implant design, 6th
50
Rezumatul tezei de doctorat
International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING", DAAAM 2008, Tallin, Estonia, ISBN 978-9985-59-783-5
[R6] Radu, C., Roşca, Ileana, C.: Image treatment process to obtain kinematic parameters during human locomotion, the 19th INTERNATIONAL DAAAM SYMPOSIUM "Intelligent Manufacturing & Automation: Focus on Next Generation of Intelligent Systems and Solutions", DAAAM 2008, Trnava, Slovacia, ISSN 1726-9679.
[R7] Roşca, Ileana, C., Radu, C.: On the design of an experimental installation to determine the kinematic parameters during human locomotion, the 19th INTERNATIONAL DAAAM SYMPOSIUM "Intelligent Manufacturing & Automation: Focus on Next Generation of Intelligent Systems and Solutions", DAAAM 2008, Trnava, Slovacia, ISSN 1726-9679.
[R8] Radu, C.: Determination of unitary stress in case of fibular fracture, COMEFIM 8, Seria: Applied Mathematics and Mechanics 49, Vol II, Cluj-Napoca, 2006, ISSN 1221-5872.
[R9] Radu, C.: Determination of knee joint reaction forces in static conditions using inverse dynamic method, COMEFIM 8, Seria: Applied Mathematics and Mechanics 49, Vol II, Cluj-Napoca, 2006, ISSN 1221-5872.
[R10] Radu, C.: Application of computer graphics in a 3D reconstruction of human ankle, the 1st
International Conference Computational Mechanics and Virtual Engineering COMEC 2005, Braşov, 2005, ISBN 973-635-593-4.
[R11] Radu, C.: Finite element analysis in biomechanical systems, the 1st International Conference Computational Mechanics and Virtual Engineering COMEC 2005, Braşov, 2005, ISBN 973-635-593-4.
[R12] Radu, C.: 3D Modeling and static finite element analysis of human tibia, 5th International Conference CADAM 2007, Croaţia, 2007, ISBN 978-953-7142-24-7.
[R13] Radu, C., Roşca, Ileana, C.: Medical image processing and biomechanical analysis of fibula bone, International Conference on Modelling of Heterogeneous Materials with Applications in Construction and Biomedical Engineering MHM 2007, Cehia, ISBN 978-80-01-03762-1.
[R14] Radu, C.: Automatic reconstruction of 3D CAD models from tomographic slices via Rapid Prototyping technology, TMT2006, Barcelona-Lloret de Mar, Spania, ISBN 9958-617-30-7.
[R15] Radu, C.: Some theoretical aspects about normal cycle gait, TMT 2007, Hammamet, Tunisia, ISBN 978-9958-617-34-8.
[R16] Radu, C.: Normal cycle gait analysis using a force plate, TMT 2007, Hammamet, Tunisia, ISBN 978-9958-617-34-8.
[R17] Radu, C., Roşca, Ileana, C.: Fibula modeling and conception of a new adapted ostheosynthesis implant, Internation Conference of Bioengineering and Biomaterials, IC2B 2009, Meknes, Maroc (în curs de publicare, Martie 2009).
[R18] Roşca, Ileana, C., Radu, C.: FEM analysis of the fractured fibula bone with osteosysnthesis implant fixed by screws, Internation Conference of Bioengineering and Biomaterials, IC2B 2009, Meknes, Maroc (în curs de publicare, Martie 2009).
[R19] Roşca, Ileana, C.: Contribuţii la studiul dinamicii corpurilor în mişcare de rostogolire. Teză de doctorat, Universitatea Transilvania din Braşov, Braşov, 1995.
[S1] Stănciulescu, V.: Modelarea computerizată a structurii osoase faciale în vederea protezării şi intervenţiilor chirurgicale reparatorii, Teză de doctorat, Universitatea Politehnică Timişoara, Timişoara 2003.
51
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
[S2] Stoia, D.I.: Modelarea, dezvoltarea şi testarea implanturilor pentru coloana vertebrală. Teză de doctorat, Universitatea Politehnica din Timişoara, Facultatea de Mecanică, 2008.
[W1] Williams, D.F.: An Introduction to Medical and Dental Materials, Concise Encyclopedia of Medical & Dental Materials, Pergamon Press and The MIT Press, 1990.
[W2] Williams, D.F.: Definitions in Biomaterials, Proceeding of a Consensus Conference of the European Society for Biomaterials, Chester, England, 1986.
REZUMAT
Traumatismele scheletului osos uman reprezintă o problemă majoră de sănătate publică în lumea industrializată. Incidenţa acestora depinde de factori socio-economici şi culturali, constituind cauza a circa două treimi din decesele posttraumatice şi totodată cel mai frecvent generator de handicap permanent.
Pornind de la aceste consideraţii, teza doctorală intitulată „Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă” îşi propune să realizeze cercetări teoretice şi practice în domeniul vast al implanturilor de osteosinteză. Teza de doctorat îmbină specificul proiectării asistate de calculator a corpurilor şi subansamblurilor mecanice cu specificul utilizării calculatorului în domeniul medical pentru prelucrarea de informaţii şi imagini, extragerea de date esenţiale şi modelare, având drept scop îmbunătăţirea modului de protezare a unor structuri anatomice, mai precis dezvoltarea unor moduri de realizare a unui implant de osteosinteză folosit la fixarea fracturilor transsindesmotice de peroneu.
Ca urmare a dezvoltării tratamentului chirurgical, noţiunea de “rezultat bun” din trecut s-a modificat în ultimii 25 de ani. Astfel, prin această teză de doctorat se doreşte ca obiectivul tratamentului să nu se refere doar la obţinerea vindecării osoase ci, mai ales, la redobândirea completă şi rapidă a funcţiei segmentului osos lezat.
ABSTRACTThe human bone skeleton trauma represents a major problem of public health in industrial
world. The incidence of these depends of socio-economical and cultural factors, consisting most of the posttraumatic deaths and at the same time the most frequent permanent handicap producer.
52
Rezumatul tezei de doctorat
Starting with these considerations, the PhD. thesis called “Contribution to the study of prosthetic elements by Rapid Prototyping”, proposes to accomplish theoretical and experimental researches in the vast domain of osteosynthesis implants. The thesis combines the domain of CAD modeling of mechanical bodies with the medical domain for information and image process, essential data extraction and modeling, in order to improve the prosthetic method of some anatomical segments, more precisely the development of a new osteosysnthesis implant used for transsindesmotic fractures.
According the surgical treatment development, the “good result” term from the past has been changed in the last 25 years. Thus, by this thesis, the main objective of the surgical treatments is not only to obtain a bone healing, and mostly to achieve a rapidly and complete function of the fractured bone.
CURRICULUM VITAE
DATE PERSONALE:Nume: RADUPrenume: CIPRIANData naşterii: 30.04.1980Locul naşterii: Zărneşti, BraşovStarea civilă: CăsătoritAdresa locului de muncă: Universitatea „Transilvania” din Braşov, Facultatea de Inginerie
Mecanică, Catedra de Mecanică Fină şi MecatronicăAdresa domiciliu: Str. B. Lăutaru, nr. 13, bl. 26, sc. C, ap. 15, BraşovE-mail: [email protected], [email protected]
STUDII LICEALE:1994 – 1998 Liceul Industrial Zărneşti, Braşov
STUDII UNIVERSITARE:1998 – 2003 Universitatea „Transilvania” din Braşov, Facultatea de Inginerie
Mecanică, Catedra de Mecanică Fină şi Mecatronică, specializarea „Mecatronică”. Şef de promoţie, media generală 9,78.
SPECIALIZĂRI: 1999 – 2000 Colegiul Universitar Tehnic „Galway-Mayo Institute of
Technology”, specializarea „Inginerie Mecanică”. Bursă de studii SOCRATES;
2003 – 2004 Studii aprofundate în „Structuri de Mecanică Fină pentru Managementul Sistemelor Tehnice”, Universitatea „Transilvania”
Contribuţii la studiul elementelor de protezare obţinute prin Prototipare Rapidă
din Braşov, Facultatea de Inginerie Mecanică, Catedra de Mecanică Fină şi Mecatronică;
2006 Curs de „Pedagogie şi Metodică”, Universitatea „Transilvania” din Braşov, Facultatea de Psihologie şi Ştiinţele Educaţiei;
ACTIVITATE PROFESIONALĂ:2003 – 2007 Doctorand cu frecvenţă al Universităţii „Transilvania” din Braşov,
Facultatea de Inginerie Mecanică, Catedra de Mecanică Fină şi Mecatronică;
2008 – 2009 Inginer cercetător grad II în cadrul departamentului de cercetare „Produse Mecanice de Înaltă Precizie şi Sisteme Mecatronice”, Universitatea „Transilvania” din Braşov.
ACTIVITATE ŞTIINŢIFICĂ:Cărţi şi manuale publicate: 4 (în curs de publicare)Articole publicare: 51 (dintre care 31 ca prim autor)Contracte de cercetare: 4 (dintre care la unul ca director)
LIMBĂ STRĂINĂ: Engleză
CURRICULUM VITAE
PERSONAL DETAILES:Surname: RADUFirst name: CIPRIAN Date of birth: 30.04.1980Place of birth: Zărneşti, BraşovMarital status: MarriedWork address: „Transilvania” University from Braşov, Faculty of Mechanical
Engineering, Department of Precision Mechanics and MechatronicsHIGH SCHOOL:
1994 – 1998 Industrial High School from Zărneşti, BraşovUNIVERSITARY EDUCATION:
1998 – 2003 „Transilvania” University from Braşov, Faculty of Mechanical Engineering, specialization “Mechatronics”. First in his series, average mark 9.78
POSTGRADUATE AND SPECIALIZATION COURSES:
54
Rezumatul tezei de doctorat
1999 – 2000 Technical Regional College „Galway-Mayo Institute of Technology”, specialization „Mechanical Engineering”. SOCRATES scholar ship;
2003 – 2004 Master in “Precision Mechanics Structures for Technical System Management”, „Transilvania” University from Braşov, Faculty of Mechanical Engineering, Department of Precision Mechanics and Mechatronics;
2006 Course of “Pedagogy and Methodic”, „Transilvania” University from Braşov, Faculty of Psychology and Education Sciences.
PROFESIONAL ACTIVITY:2003 – 2007 PhD. Student of „Transilvania” University from Braşov, Faculty of
Mechanical Engineering, Department of Precision Mechanics and Mechatronics;
2008 – 2009 Researcher engineer second grade, “Mechanics Products of High Precision and Mechatronic Systems”, „Transilvania” University from Braşov.
SCIENTIFIC ACTIVITY: Books and published courses: 4 (current published)
Conference papers: 51 (31 as first author)Research grants: 4 (one as grant’s director)