98
Constantin MARIN Emil PETRE Dan POPESCU Cosmin IONETE Dan SELI§TEANU TEORIA SISTEMELOR PROBLEME CRAIOVA
| Date post: | 07-Feb-2018 |
| Category: |
Documents |
| Upload: | truongkhue |
| View: | 222 times |
| Download: | 0 times |
Constantin MARIN
Emil PETRE Dan POPESCU
Cosmin IONETE Dan SELI§TEANU
TEORIA SISTEMELOR
PROBLEME
CRAIOVA

CUPRINS
Aplicaþii de tipul 1: Calculul transformatei Laplace directe ............... 1
Aplicaþii de tipul 2: Calculul transformatei Laplace inverse .............. 11
Aplicaþii de tipul 3: Proprietatea de liniaritate a sistemelor ............... 17
Aplicaþii de tipul 4: Proprietatea de invariabilitate ............................ 32
Aplicaþii de tipul 5: Calculul funcþiilor de matrici .............................. 40Aplicaþii de tipul 6: Calculul funcþiei pondere ßi funcþiei indiciale
....52
Aplicaþii de tipul 7: Calculul funcþiei (matricei) de transfer a unuisistem reperezentat prin ecuaþii de stare .............
60
Aplicaþii de tipul 8: Reducerea sistemelor prin transformareaschemelor bloc ....................................................
66
Aplicaþii de tipul 9: Reducerea sistemelor prin grafe de fluenþá ....... 89Aplicaþii de tipul 10: Deducerea ecuaþiilor matricial-vectoriale de
stare pornind de la schema bloc .......................... 93
Aplicaþii de tipul 11: Trasarea caracteristicilor de frecvenþá Bode ßiNyquist ...............................................................
101
Aplicaþii de tipul 12: Relaþia Bode ßi caracteristicile de frecvenþá ....... 143
Aplicaþii de tipul 13: Trasarea caracteristicilor Bode ßi determinarearáspunsului indicial .............................................
157
Aplicaþii de tipul 14: Caracteristici Bode pentru montaje R, L, C ........ 167Aplicaþii de tipul 15: Criteriile de stabilitate Routh ßi Hurwitz ............ 170
Aplicaþii de tipul 16: Studiul stabilitáþii sistemelor utilizänd criteriulNyquist .......................................................
175
Aplicaþii de tipul 17: Calculul transformatei Z directe ......................... 183
Aplicaþii de tipul 18: Calculul transformatei Z inverse ........................ 190
Aplicaþii de tipul 19: Calculul funcþiei de transfer H(z) ßi aráspunsului discret la intrare treaptá ...................
195
Aplicaþii de tipul 20: Calculul ecuaþiilor de stare ßi a matricilor detranziþie pentru sisteme discrete ..........................
200
Aplicaþii de tipul 21: Calculul matricii de transfer discrete H(z) .......... 206Aplicaþii de tipul 22: Ráspunsul sistemelor descrise prin ecuaþii
diferenþiale ..........................................................
211Aplicaþii de tipul 23: Utilizarea algebrei sistemelor cu eßantionare ..... 217Anexa 1: Utilizarea transformárii Laplace ......................... 220
Anexa 3: Proprietatea de liniaritate a unui sistemorientat..
225
Anexa 4: Proprietatea de invariabilitate ín timp a unuisistem dinamic ....................................................
228
Anexa 5: Funcþii de matrici pátratice ................................. 233
Anexa 8: Reducerea sistemelor prin transformareaschemelor bloc ....................................................
238
Anexa 9: Reducerea sistemelor prin grafe de fluenþá ........ 242
Anexa 11: Trasarea caracteristicilor de frecvenþá Bode ßiNyquist ...............................................................
245
Anexa 17: Utilizarea transformárii Z ................................... 250
Bibliografie: ............................................................................. 257
P r e f a þ á
Teoria sistemelor, ca discipliná fundamentalá a ßtiinþei conducerii,foloseßte un cadru unitar de noþiuni ßi o bazá abstractá comuná, astfel cápermite studiul comportárii celor mai diferite tipuri ßi forme de sisteme,indiferent dacá acestea sunt electrice, mecanice, chimice, biologice etc.
Din acest punct de vedere, teoria sistemelor se impune tot mai mult cao discipliná fundamentalá ßi strict necesará ín pregátirea oricárui inginer, dindouá motive:
formarea gändirii sistemice ín abordarea oricárei probleme;• posibilitatea mänuirii instrumentelor matematice pentru rezolvarea•
problemelor concrete.Predänd cursul sau conducänd seminariile de teoria sistemelor la
secþiile Automaticá, Calculatoare, Electronicá, Electromecanicá,Electrotehnicá ßi Mecanicá, autorii au sintetizat ßi selectat, pe parcursul anilor,un set de probleme reprezentative, care sá permitá o mai buná ínþelegere aaspectelor teoretice.
Ín prezenta lucrare sunt cuprinse 23 tipuri de probleme totalizänd 244probleme enunþate. Din acestea, 129 probleme sunt rezolvate complet, uneleprin mai multe metode. Majoritatea problemelor nerezolvate au ráspunsuri ßireprezintá cazuri absolut particulare, fárá dificultáþi de interpretare, ale celorrezolvate.
Pentru a ußura ínþelegerea modului de rezolvare, pentru 8 tipuri deprobleme, considerate mai importante, la sfärßitul lucrárii se prezintá, subforma unor anexe, cäteva indicaþii teoretice privind noþiunile implicate.Anexele au indexul tipului de problemá la care se referá.
Unele probleme enunþate sunt clasice, putänd fi íntälnite ínreferinþele bibliografice, ínsá rezolvarea lor a fost efectuatá de cátre autori ínspiritul cursurilor predate.
Tipurile de probleme vizeazá ín special principalele aspecte deanalizá ßi se referá la sistemele liniare atät continuale, cät ßi discrete.
Lucrarea se adreseazá direct studenþilor de la secþiile menþionate maisus, dar este utilá ßi inginerilor care folosesc teoria sistemelor.
Autorii

Anexa 1: Utilizarea transformárii Laplace
Transformarea Laplace reprezintá o aplicaþie biunivocá íntre o mulþimede funcþii de variabilá temporalá (numite funcþii original) ßi o mulþime defuncþii complexe de variabilá complexá (mulþimea transformatelor funcþiilororiginal). Aceastá corespondenþá prezintá interes dacá unor operaþii pe mulþimeafuncþiilor original le corespund ín mulþimea imagine operaþii mai simple.Printre altele, de obicei, operaþiilor de derivare, integrare sau convoluþie lecorespund operaþii algebrice mai simple.
Definiþie: O funcþie f, definitá pe R (domeniul temporal), cu valorireale sau complexe, se numeßte funcþie original dacá are urmátoarele proprietáþi:
(C1). f(t) = 0 , ( ) t (- , 0);∀ ∈ ∞(C2). este derivabilá pe porþiuni;(C3). existá douá numere, M > 0 , s0 0 astfel íncät ≥
| f(t) | M e , ( ) t [ 0 , )≤ s 0t ∀ ∈ ∞
Prima condiþie, aparent restrictivá, este ín concordanþá cu problemelefizice ín care se aplicá metodele operaþionale cänd se efectueazá studiul ínvariaþii faþá de valori constante sau faþá de evoluþii predeterminate ale márimilorfizice. A treia condiþie aratá cá valorile funcþiei f nu depáßesc valorile uneianumite funcþii exponenþiale. Numárul se numeßte indicele de creßtere als0funcþiei f .
Ín acest moment putem defini transformata Laplace a unei funcþiioriginal.
Definiþie: Fie f o funcþie original arbitrará ßi s0 indicele sáu de creßtere.Funcþia F: D0 ----> C, unde = s C | Re(s) > , definitá prin:D0 ∈ s0
F(s) = (A1.1)∫0
∞
f(t)⋅e−stdt
se numeßte transformata Laplace a funcþiei f ßi se noteazá F = Lf.L se numeßte operatorul de transformare Laplace. Pentru a pune ín
evidenþá argumentele celor douá funcþii f ßi F, prin abuz de notaþie, se mai scrie: F(s) = Lf(t) (A1.2)
Transformarea Laplace este folositá pentru ußurarea calculelor dindomeniul timp prin transformarea lor ín operaþii algebrice ín domeniul complex.Transformarea Laplace se poate aplica ßi unor funcþii care nu sunt funcþiioriginal dacá integrala de definiþie (A1.1) are sens ßi este convergentá. Dacácondiþia (C1) nu este índeplinitá, transformarea Laplace manipuleazá numairestricþia acestei funcþii pe intervalul .t ∈ [0,∞)Cum, pentru noi, are semnificaþie o reprezentare temporalá, se defineßte
transformarea Laplace inversá. Aceasta rezolvá problema aflárii funcþieioriginal f(t) dacá cunoaßtem transformata sa F(s) ßi se scrie:
f(t) = L-1F(s) (A1.3)Prin transformarea Laplace inversá se va obþine o expresie care este nulá pentru t< 0, deci o funcþie original.
Transformarea Laplace se poate aplica ßi unor categorii matematicecare nu sunt funcþii, de exemplu distribuþii (funcþii generalizate), ín particulardistribuþia singulará Dirac .δ(t)
Teoremá: Dacá F(s) = Lf(t), atunci:
L-1F(s) = f(t) = , a > s0 (A1.4)12πj ∫
a−j∞
a+j∞
F(s)e stds
Dacá funcþia f(t) nu a índeplinit condiþia (C1) dar existá F(s) = Lf(t),atunci L-1F(s) = f(t) .⋅1(t)
Pentru calculul integralei complexe(A1.4) se poate folosi, dacá F(s)este raþionalá ßi strict proprie, teorema reziduurilor, care se bazeazá pecunoaßterea polilor funcþiei de variabilá complexá F(s). Aceßti poli pot fi realisau complecßi ßi au fiecare un ordin de multiplicitate. Sá presupunem cá F(s) arem poli distincþi (reali sau complecßi) cu ordinele dep1 , p2 ,..., pm
multiplicitate respectiv . Atunci:n1 , n2 ,..., nm
f(t) = (A1.5)Σk=1
mRezp k F(s)e st
Dacá F(s) are ín s = pk un pol multiplu avänd ordinul de multiplicitate nk, atunci:
(A1.6)Rezp k F(s)e st = 1(nk − 1)!(s − pk)nk ⋅ F(s)e st
(nk − 1)
s=p k
Proprietáþile transformárii Laplace
Transformarea Laplace are o serie de proprietáþi exprimate prin teoreme, utile íncalculul efectiv al unor transformate. Se considerá:
Lf(t) = F(s), Re(s) > , unde s0 este indicele de crestere pentru f.;s0L (t) = (s), Re(s) > , cu s1 indicele de crestere pentru ;f1 F1 s1 f1
L (t) = (s), Re(s) > , cu s2 indicele de crestere pentru .f2 F2 s2 f2Se va observa, din enumerarea proprietáþilor, dualitatea íntre domeniul timp ßidomeniul frecvenþá.1. Teorema de liniaritate
La1f1(t) + a2f2(t) = a1F1(s) + a2F2(s), Re(s) > maxs1, s2
, complexe.L−1a1F1(s) + a2F2(s) = a1f1(t) + a2f2(t) ∀ a1, a2
Anexa 1: Utilizarea transformárii Laplace Pag 1

2. Teorema derivárii reale
L = sF(s) - f(0)df(t)dt
Dacá f(t) este discontinuá ín t = 0, prin f(0) se ínþelege f(0+) = t>0
t→0limf(t)
L = - , Re(s) > s0dnf(t)
dtn snF(s) Σk=0
n−1f (k)(0) sn−k−1
3. Teorema derivárii imaginii
Ltf(t) = - F'(s)
, Re(s) > Ltnf(t) = (-1)n dnF(s)dsn s0
4. Teorema integrárii reale
L = F(s) , Re(s) > ∫0
t
f(τ)dτ 1s s0
5. Teorema integrárii imaginii
L = , Re(s) > f(t)t ∫
s
∞
F(z)dz s0
6. Teorema íntärzierii
L f(t - ) = e F(s) + , Re(s) > s0 , 0 < finitτ −τs e−τs ∫−τ
0
f(t)e−stdt τ
7. Teorema anticipárii
L f(t + ) = e [F(s) - , > 0τ τs ∫0
τ
f(t)e−st dt] , Re(s) > s0 τ
8. Teorema deplasárii ín complex
L = F(s-a) , a numár real sau complex, Re(s) > Re(a) + s0 e at f(t)
9. Teorema schimbárii de scará a timpului
L f( ) = F(as) , ta a⋅ a ∈ R+∗ , Re(as)> s0
10. Teorema schimbárii de scará a frecvenþei
F( ) = a f(at),L−1 sa ⋅ a ∈ R+∗ , Re( s
a)> s0
11. Teorema convoluþiei ín domeniul timp ( multiplicárii complexe )
L = ∫0
t
f1(τ) ⋅ f2(t − τ)dτ F1(s)⋅F2(s), Re(s) > s1+s2
12. Teorema produsului de convoluþie ín complex
L = , f1(t)⋅f2(t) 12πj
⋅ ∫c−j∞
c+j∞
F1(z) ⋅F2(s − z)dz
s1 < Re(z) < σ − s2 , σ = maxs1, s2, s1 + s2
13. Teorema valorii iniþiale
f( 0+ ) = s−>∞lim sF(s)
14. Teorema valorii finale
f( ) = ∞t−>∞lim f(t) =
s−>0limsF(s
15. Teorema derivárii parþiale
L = Lf(t,a)∂∂af(t, a) ∂
∂a
16. Imaginea unei funcþii periodice cu perioada T > 0
L f(t) = 11 − e−sT
⋅ ∫0
T
f(t)e−std
Tabel cu transformatele Laplace inverse ale unor funcþii raþionale
Transformata Laplace F(s) Funcþia Original f(t)1
s − ae at
Σk=1
n P(s)Q(s)
, Q(s) = Πk=1
n(s − ak) Σ
k=1
n P(ak)Q (ak)
e akt
Σk=1
n Aks − ak
Σk=1
nAke−akt
P(s)Q(s)
, Q(s) = Πk=1
m(s − ak)nk Σ
k=1
m
Σl=1
nk
Akltnk−l
(nk − l)!e akt
Anexa 1: Utilizarea transformárii Laplace Pag 2
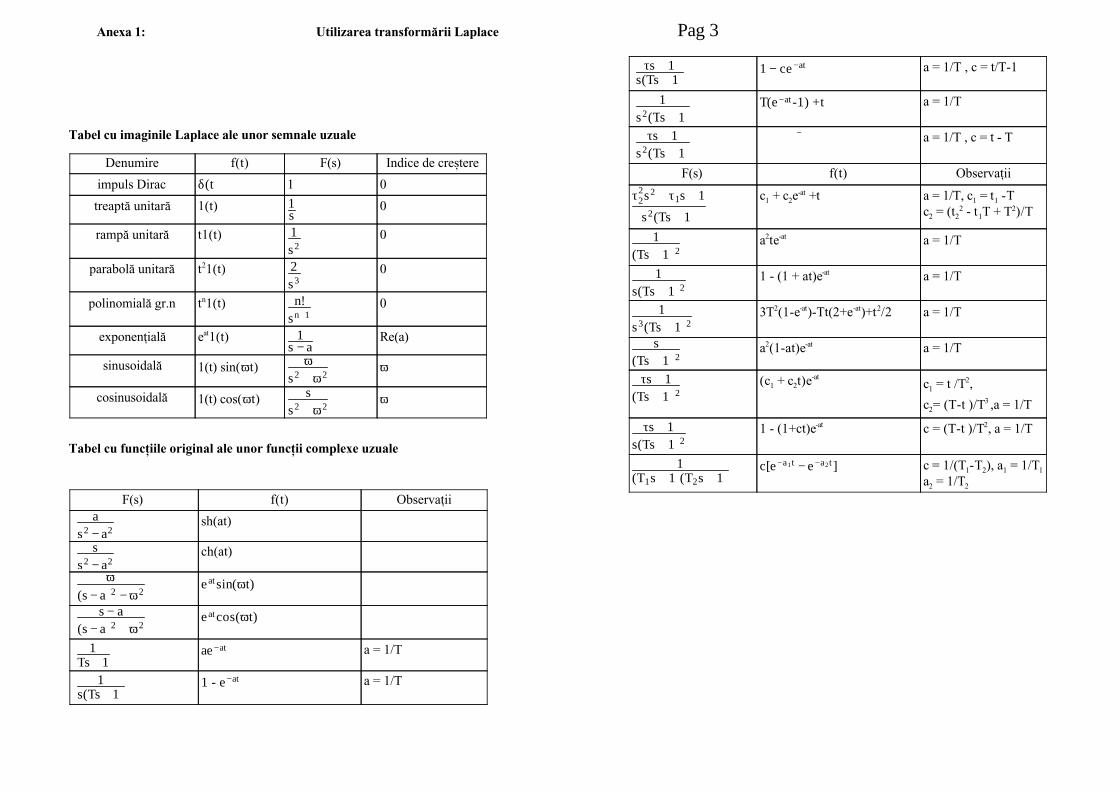
Tabel cu imaginile Laplace ale unor semnale uzuale
Denumire f(t) F(s) Indice de creßtereimpuls Dirac δ(t) 1 0treaptá unitará 1(t) 1
s0
rampá unitará t1(t) 1s2
0
parabolá unitará t21(t) 2s3
0
polinomialá gr.n tn1(t) n!sn+1
0
exponenþialá eat1(t) 1s − a
Re(a)
sinusoidalá 1(t) sin(ωt) ωs2 + ω2
ω
cosinusoidalá 1(t) cos(ωt) ss2 + ω2
ω
Tabel cu funcþiile original ale unor funcþii complexe uzuale
F(s) f(t) Observaþiia
s2 − a2sh(at)
ss2 − a2
ch(at)
ω(s − a)2 − ω2
e atsin(ωt)
s − a(s − a)2 + ω2
e atcos(ωt)
1Ts + 1
ae−at a = 1/T
1s(Ts + 1)
1 - e−at a = 1/T
τs + 1s(Ts + 1)
1 − ce−at a = 1/T , c = t/T-1
1s2(Ts + 1)
T(e−at -1) +t a = 1/T
τs + 1s2(Ts + 1)
c(1 - e−at) + t a = 1/T , c = t - T
F(s) f(t) Observaþii
τ22s2 + τ1s + 1
s2(Ts + 1)
c1 + c2e-at +t a = 1/T, c1 = t1 -Tc2 = (t2
2 - t1T + T2)/T
1(Ts + 1)2
a2te-at a = 1/T
1s(Ts + 1)2
1 - (1 + at)e-at a = 1/T
1s3(Ts + 1)2
3T2(1-e-at)-Tt(2+e-at)+t2/2 a = 1/T
s(Ts + 1)2
a2(1-at)e-at a = 1/T
τs + 1(Ts + 1)2
(c1 + c2t)e-at c1 = t /T2,c2= (T-t )/T3 ,a = 1/T
τs + 1s(Ts + 1)2
1 - (1+ct)e-at c = (T-t )/T2, a = 1/T
1(T1s + 1)(T2s + 1)
c[e−a1t − e−a2t ] c = 1/(T1-T2), a1 = 1/T1a2 = 1/T2
Anexa 1: Utilizarea transformárii Laplace Pag 3

Aplicaþii de tipul 1: Calculul transformatei Laplace directe
Sá se calculeze transformata Laplace pentru una din funcþiile originalde mai jos, exprimate analitic sau grafic:
1.1 y(t) = e−4t + sin(t-2) + t2e−2t
1.2 y(t) = sin(2t+3) + cos2(5t) + t3sin(6t)
1.3 y(t) = e atsin(ωt)1.4 y(t)=1 -
e−ξωnt
1 − ξ 2sin(ωn 1 − ξ 2 t + ϕ) , ϕ = arctg
1 − ξ 2
ξ, ξ ∈ (0, 1)
1.5
1
-1
2T 3T0
y(t)
t
periodicá
T
1.6
A
y(t)
T 2T
t
T/2 3T/2
0
periodicá
1.7
1
0 T 2T t
y(t)
nulá ín rest
1+α
−α
1.8
= A s i n tA
y ( t )
T / 2 T t
Τ = 2 π / ω
0
ω
p e r i o d i c á
1.9
0
y(t)
t
T / 2 T 3 T / 2
A y(t) = A|sin t|
p e r i o d i c á
ω
Problema 1.1 Rezolvare:
Dacá am aplica mecanic teoremele transformárii Laplace am puteascrie, folosind liniaritatea transformárii Laplace:
Y(s) = L y(t) = L e−4t + L sin(t − 2) + L t2e−2t
L e−4t = 1s + 4
L sin(t) = => L sin(t-2) = 1s2 + 1
e−2s 1s2 + 1
=> = L e−2t = 1s + 2
L t2e−2t = (-1)2
1s + 2
(2) 2(s + 2)3
Vom obþine ín final:
Y(s) = 1s + 4
+ e−2s 1s2 + 1
+ 2(s + 2)3
Ín rezolvarea de mai sus se strecoará ínsá cäteva inexactitáþi. Ín primul ränd vominsista asupra folosirii teoremei íntärzierii, care afirmá cá:
Lf(t- ) = τ e−sτF(s) + e−sτ ∫−τ
0
f(t)e−stdt
Este binecunoscut faptul cá transformata Laplace se aplicá ín mod sigurfuncþiilor original. Orice funcþie ce índeplineßte c2 ßi c3 din definiþia
Aplicaþii de tipul 1: Calculul transformatei Laplace directe Pag 4 4

transformárii Laplace (Anexa1) reprezentänd un semnal fizic se poatetransforma íntr-o funcþie original prin simpla ínmulþire cu un semnal treaptáunitará aplicat ín origine; prin y(t) vom ínþelege íntotdeauna f(t) = y(t) 1(t),⋅dacá nu se face o altá precizare explicitá, astfel cá:
Y(s) = Ly(t) = Ly(t) 1(t) = ⋅ ∫0
∞
y(t)e−stdt
Avänd ín vedere acest lucru, putem spune cá teorema íntärzierii afirmá cá:,Ly(t − τ) ⋅1(t − τ) = Lf(t − τ) = e−sτY(s)
deoarece ∫−τ
0
f(t)e−stdt = ∫−τ
0
y(t) ⋅1(t)e−stdt = 0
Dacá vom considera funcþia y(t) de mai sus, avem deci ín vedere funcþia. Sey(t) ⋅ 1(t) = L e−4t ⋅1(t) + Lsin(t-2)⋅1(t)+ Lt2e−2t ⋅ 1(t)
observá cá ín cazul aplicárii transformatei Laplace trebuie sá facem deosebirea íntre
.Lsin(t-2)⋅1(t) ≠Lsin(t-2)⋅1(t − 2)
Fig. 1.1Ín cazul general:
Ly(t − τ) ⋅1(t) = ∫0
∞
y(t − τ) ⋅ e−stdt = e−sτ ∫−τ
∞
y(t) ⋅e−stdt
Ly(t − τ) ⋅1(t) = e−sτ
Y(s) + ∫
−τ
0
y(t) ⋅e−stdt
Ín cazul nostru concret, y(t-2) = sin(t-2) => y(t) = sin(t) iar prin Lsin(t-2)
ínþelegem .Vom puteaLsin(t − 2) ⋅1(t) = e−2s
∫
−2
0
sin(t)e−stdt + Lsin(t)
calcula aceastá integralá dacá vom gási o primitivá pentru . Folosindsin(t) ⋅e−st
metoda integrárii prin párþi vom obþine ußor:
∫ sin(t) ⋅e−stdt = − 1s2 + 1
[cos(t) ⋅e−st + s ⋅ sin(t) ⋅e−st ]
Deci: =∫−2
0
sin(t)e−stdt = − 1s2 + 1
[cos(t) ⋅ e−st + s ⋅sin(t) ⋅e−st ]0
−2
= − 1s2 + 1
1 − cos(−2) ⋅e2s − s ⋅ sin(−2) ⋅e2s
Se obþine prin urmare rezultatul:
Lsin(t − 2) ⋅1(t) = e−2s
∫
−2
0
sin(t)e−stdt + 1s2 + 1
=
= e−2s − 1
s2 + 11 − cos(−2) ⋅e2s − s ⋅ sin(−2) ⋅e2s + 1
s2 + 1
= cos(2) 1s2 + 1
− sin(2) ss2 + 1
La acelaßi rezultat se poate ajunge ßi dacá aplicám formula:
Lsin(t − 2) ⋅1(t) = Lsin(t) ⋅1(t) ⋅cos(2) − cos(t) ⋅1(t) ⋅ sin(2)
= cos(2) ⋅Lsin(t) ⋅ 1(t) − sin(2) ⋅ Lcos(t) ⋅1(t) = cos(2) 1s2 + 1
− sin(2) ss2 + 1
adicá exact formula gásitá mai ínainte. Concluzionám cá rezultatul corect laaceastá problemá este:
Y(s) = Ly(t) ⋅1(t) = Le−4t ⋅1(t) + Lsin(t − 2) ⋅1(t) + Lt2e−2t ⋅1(t)
Y(s) = 1s + 4
+ cos(2) 1s2 + 1
− sin(2) ss2 + 1
+ 2(s + 2)3
Problema 1.2 Rezolvare:
Aplicänd cele menþionate ín problema 1.1 ßi teoremele transformáriiLaplace din Anexa 1 se va obþine:
Y(s) = Ly(t) ⋅1(t) = L sin(2t + 3) + cos2(5t) + t3sin(6t) ⋅ 1(t) =
(1.2.1)= Lsin(2t + 3) ⋅ 1(t) + L cos2(5t) ⋅ 1(t) + L t3sin(6t) ⋅1(t)
Aplicaþii de tipul 1: Calculul transformatei Laplace directe Pag 5 5

Putem trece la calculul separat al fiecáreia dintre transformatele de mai sus,íncercänd sá folosim cele mai simple metode de calcul.Lsin(2t + 3) ⋅1(t) = Lsin(2t) ⋅cos 3 + cos(2t) ⋅ sin3 =
(1.2.2)= cos 3 ⋅Lsin 2t + sin 3 ⋅Lcos 2t = cos 3 ⋅ 2s2 + 4
+ sin3 ⋅ ss2 + 4
L cos2(5t) ⋅ 1(t) = L cos(10t) + 12
⋅1(t) = 12
Lcos(10t) + 12
L1(t) =
(1.2.3)= 12
⋅ ss2 + 100
+ 12
⋅ 1s
L t3sin(6t) ⋅ 1(t) = (−1)3[Lsin(6t)](3) = − 6
s2 + 36
(3)
=
(1.2.4)= −144 ⋅ s ⋅ s2 − 36s2 + 36
4
Ínlocuind relaþiile (1.2.2), (1.2.3) ßi (1.2.4) ín (1.2.1) vom obþine:
Y(s) = cos 3 ⋅ 2s2 + 4
+ sin3 ⋅ ss2 + 4
+ 12
⋅ ss2 + 100
+ 12
⋅ 1s − 144 ⋅s ⋅ s2 − 36
s2 + 36
4
Problema 1.3 Rezolvare:
y(t) = e at ⋅sin(ωt)=e at ⋅ f(t) => Y(s) = Ly(t) = Le at ⋅ f(t) = F(s − a)
unde F(s) = Lf(t) . Ín cazul nostru, f(t) = sin(ωt) => F(s) = ωs2 + ω2
Rezultá deci foarte simplu:
Y(s) = ω(s − a)2 + ω2
Problema 1.4 Rezolvare:
y(t) = 1 − e−ξωnt
1 − ξ 2sin(ωn 1 − ξ 2 t + ϕ) , ϕ = arctg
1 − ξ 2
ξ,ξ ∈ (0,1)
(1.4.1)Pentru ußurinþa calculelor vom face urmátoarele notaþii:
α = ξωn ; β = ωn 1 − ξ 2 ; tgϕ =1 − ξ 2
ξ=
sinϕcos ϕ =>
sin ϕ = 1 − ξ 2
cos ϕ = ξ
Ín aceste condiþii, relaþia de definiþie a lui y(t) (1.4.1) devine:
y(t) = 1 − e−αt
βωn
sin(βt + ϕ) , ϕ = arctg1 − ξ 2
ξ, ξ ∈ (0, 1)
y(t) = 1 − e−αt
βωn
[sin(βt)cos(ϕ) + sinϕ cos(βt)]
Vom aplica teorema íntärzierii ín complex pentru calculul lui Y(s):
Y(s) = 1s − ωn
β
cos ϕ
βs2 + β 2
+ sinϕ ss2 + β 2
s−> s + α
Y(s) = 1s − 1
β
ωncos ϕ
β(s + α)2 + β 2
+ ωnsin ϕ s + α(s + α)2 + β 2
Y(s) = 1s − 1
β
α
β(s + α)2 + β 2
+ β s + α(s + α)2 + β 2
Y(s) = 1s −
α
(s + α)2 + β 2+ s + α
(s + α)2 + β 2
Y(s) = 1s − s + 2α
(s + α)2 + β 2=
s2 + 2αs + α2 + β 2 − s2 − 2αs
ss2 + 2αs + α2 + β 2
=α2 + β 2
ss2 + 2αs + α2 + β
Ín final obþinem expresia:
Y(s) = ωn2
ss2 + 2ξωns + ωn
2
Problema 1.5 Rezolvare:
Pentru calculul transformatei Laplace a funcþiei prezentate prin graficulsáu vom folosi formula transformatei Laplace a unei funcþii periodice de
perioadá T > 0. Dacá y(t) = y(t + T), atunci .Y(s) = 11 − e−sT ∫
0
T
y(t) ⋅e−stdt
Folosind notaþiile din figurá, constatám cá y(t) este o funcþie periodicá deperioadá 2T:
Y(s) = 11 − e−s2T ∫
0
2T
y(t)e−stdt = 11 − e−s2T
∫
0
T
1 ⋅e−stdt + ∫T
2T
(−1) ⋅e−stdt
Y(s) = 11 − e−s2T
−1s e−st
T0
−
−1s e−st
2TT
Y(s) = 11 − e−s2T
−1s e−st
T0
− −1
s e−st
2TT
Aplicaþii de tipul 1: Calculul transformatei Laplace directe Pag 6 6

Y(s) = 11 − e−s2T
−1
s
e−sT − 1
− e−s2T − e−sT
Y(s) = 11 − e−s2T
1s
1 − e−sT
2
= 1(1 − e−sT )(1 + e−sT )
1s
1 − e−sT
2
Rezultatul final va fi: Y(s) = 1s ⋅ 1 − e−sT
1 + e−sT
Problema 1.6 Rezolvare:
Se observá din reprezentarea graficá faptul cá y(t) este o funcþieperiodicá de perioadá T. Vom putea aplica pentru calculul lui Y(s) relaþia:
(1.6.1)Y(s) = 11 − e−sT ∫
0
T
y(t)e−stdt
Pentru a putea efectua calculele este nevoie sá explicitám y(t):
(1.6.2)y(t) =
2AT t , t ∈
0, T2
2AT (T − t) , t ∈
T2 , T
Ínlocuind (1.6.2) ín (1.6.1) se obþine relaþia (1.6.3):
Y(s) = 11 − e−sT ∫
0
T
y(t)e−stdt = 11 − e−sT
∫
0
T/22AT
te−stdt + ∫T/2
T2AT
(T − t)e−stdt
(1.6.3)Integralele definite se vor calcula þinänd cont de relaþiile:
(1.6.4)∫ e−stdt = −1s e−st
(1.6.5)∫ te−stdt = −1s te−st − 1
s2e−st
Aplicänd (1.6.4) ßi (1.6.5) ín (1.6.3) vom obþine:
Y(s) = 11 − e−sT
2A
T−1
s te−st − 1s2
e−st
T/20
− 2AT
−1
s te−st − 1s2
e−st
TT/2
+2A−1
s e−st
TT/2
Dupá cäteva calcule elementare se obþine:
Y(s) = 2AT
⋅ 1s2
⋅ 1 − e−sT/2 + 2Ts ⋅ e−sT/2
1 + e−sT/2
Problema 1.7 Rezolvare:
Y(s) = = = Y1(s) + Y2(s)∫0
2T
y(t)e−stdt [∫0
T
y(t)e−stdt + ∫T
2T
y(t)e−stdt]
Pentru calculul integralei este necesar sá explicitám funcþia y(t).
Vom avea astfel : y(t) =
α tT + 1 , pentru t ∈ [0 , T)
−α tT
+ α , pentru t ∈ [T , 2T)
0 , pentru t > 2T
Y(s) =
∫
0
T
(α tT
+ 1)e−stdt + ∫T
2T
(−α tT
+ α)e−stdt
Cum ßi se obþine:∫ e−stdt = −1s e−st ∫ te−stdt = −1
s te−st + 1
s e−st
Y1(s) =
αT
−1
s te−st + 1
s e−st
+
−1s e−st
0
T
Y2(s) = −α
T−1
s te−st + 1
s e−st
+ α
−1s e−st
T
2T
Y1(s) = −1s e−st
αT
(t + 1s ) + 1
0T
Y2(s) = −1s e−st
−α
T (t + 1s ) + α
T2T
Se observá cá singura dificultate este calculul integralei definite pe un intervalde o lungime prestabilitá (pe care funcþia este nenulá sau pe lungimea uneiperioade a funcþiei y(t) e-st ).⋅
Y1(s) = −1s e−sT
αT
(T+ 1s ) + 1
−
−1s
αT
(1s ) + 1
Y2(s) = −1s e−s2T
−α
T(2T+ 1
s ) + α
− −1
s e−sT
−α
T(T + 1
s ) + α
Y(s) = −1s e−sT
αT
(T+ 1s ) + 1
+ 1s
αT
( 1s ) + 1
+1s e−sT
−α
T(T+ 1
s ) + α
− 1s e−s2T
−α
T(2T + 1
s ) + α
Y(s) = 1s
αT
1s + 1
− 1s e−sT
αT
1s + 1
+
αT
1s + α
+ 1s e−s2T
αT
1s + α
Y(s) = 1 − e−sT
s α
T⋅ 1 − e−sT
s + 1 − α ⋅e−sT
La aceleaßi rezultate vom ajunge ßi dacá vom descompune semnalul y(t) íntr-osumá de semnale de tip treaptá ßi rampá decalate ín timp. Astfel:
Aplicaþii de tipul 1: Calculul transformatei Laplace directe Pag 77

y(t) = 1(t) + αT
⋅ t ⋅1(t) − (1 + α) ⋅1(t − T) − 2αT
⋅ (t − T) ⋅1(t − T)+
+α ⋅1(t − 2T) + αT
⋅ (t − 2T) ⋅1(t − 2T)
Prin aplicarea teoremei íntärzierii vom gási direct expresia lui Y(s):
Y(s) = 1s + α
T1s2
− (1 + α)e−sT 1s − 2 α
Te−sT 1s2
+ αe−s2T 1s + α
Te−s2T 1s2
Y(s) = 1s
αT
1s + 1
− 1s e−sT
αT
1s + 1
+
αT
1s + α
+ 1s e−s2T
αT
1s + α
Y(s) = 1 − e−sT
s ⋅ α
T⋅ 1 − e−sT
s + 1 − α ⋅ e−sT
Problema 1.8 Rezolvare:
Se observá din reprezentarea graficá faptul cá y(t) este o funcþieperiodicá de perioadá T. Vom putea aplica pentru calculul lui Y(s) relaþia:
(1.8.1)Y(s) = 11 − e−sT
⋅ ∫0
T
y(t)e−stdt
Pentru a putea efectua calculele este nevoie sá explicitám y(t):
(1.8.2)y(t) =
A ⋅ sin 2πT t , t ∈
0, T2
0 , t ∈
T2 ,T
(1.8.3)Y(s) = 11 − e−sT ∫
0
T
y(t)e−stdt = A1 − e−sT ∫
0
T/2
sin(ωt) ⋅ e−stdt
Rámäne sá calculám integrala definitá bazändu-ne pe cunoaßterea unei primitive:
(1.8.4)∫ e jωt ⋅e−stdt = − 1s − jω
e−(s−jω)t = ∫ [cos ωt + j sinωt] ⋅e−stdt
(1.8.5)∫ [cos ωt + j sin ωt] ⋅e−stdt = ∫cos ωt ⋅e−stdt + j ∫ sin ωt ⋅e−stdtEfectuänd identificárile intre (1.8.4) ßi (1.8.5) vom avea:
− 1s − jω
e−(s−jω)t = −s + jω
s2 + ω2⋅ e−st ⋅e jωt = ∫cos ωt ⋅e−stdt + j ∫ sin ωt ⋅e−std
−s + jω
s2 + ω2⋅ e−st ⋅ [cos ωt + j sinωt] = ∫cos ωt ⋅e−stdt + j ∫ sin ωt ⋅e−std
Identificänd párþile reale ßi imaginare vom obþine:
(1.8.6)∫ cos ωt ⋅ e−stdt = e−st
s2 + ω2[ωsin(ωt) − s cos(ωt)]
(1.8.7)∫ sinωt ⋅e−stdt = − e−st
s2 + ω2[ω cos(ωt) + s sin(ωt)]
Ínlocuind (1.8.7) ín (1.8.3) vom obþine:
Y(s) = A1 − e−sT
− e−st
s2 + ω2[ω cos(ωt) + s sin(ωt)] T/2
0
Y(s) = A1 − e−sT
− e−sT/2
s2 + ω2[ω cos(π) + s sin(π)]+ 1
s2 + ω2ω
Y(s) = A ωs2 + ω2
⋅ 11 − e−sT/2
Problema 1.9 Rezolvare:
Urmárind rezolvarea problemei anterioare, ceea ce se modificá esteforma analiticá a funcþiei periodice y(t):
(1.9.1)y(t) = A sin ωt
de unde rezultá cá avem de-aface cu o funcþie periodicá de perioadá T/2. Rezultásimplu:
(1.9.2)Y(s) = 11 − e−sT/2
⋅ ∫0
T/2
y(t)e−stdt = A1 − e−sT/2
⋅ ∫0
T/2
sin(ωt) ⋅ e−stdt
deci o expresie asemánátoare cu (1.8.3) ín care la numitor avem ín loc1 − e−sT/2
de . Calculele fiind similare, vom obþine rezultatul:1 − e−sT
Y(s) = A1 − e−sT/2
⋅
− e−st
s2 + ω2[ωcos(ωt) + s sin(ωt)] T/2
0
Y(s) = A ⋅ ωs2 + ω2
⋅ 1 + e−sT/2
1 − e−sT/2
Semnalul din problema 1.8 reprezintá un semnal sinusoidal redresatmonoalternanþá iar cel de la problema 1.9 un semnal sinusoidal redresatbialternanþá, deci semnale des íntälnite ín practicá.
Aplicaþii de tipul 1: Calculul transformatei Laplace directe Pag 88

Aplicaþii de tipul 2: Calculul transformatei Laplace inverse
Sá se calculeze transformata Laplace inversá pentru:
2.1 Y(s) = 2.6 Y(s) = ss2 − 2s + 1
2s + 1s(s2 + 5s + 6)
2.2 Y(s) = 2.7 Y(s) = 1s3 − 27
10s2 + 2s + 1s2 + 5s + 6
2.3 Y(s) = 2.8 Y(s) = s(s − 1)3(s + 2)2
K(Tds + 1)Tγs + 1
2.4 Y(s) = 2.9 Y(s)=ωn2
s2 + 2ξωns + ωn2,ξ ∈ (0,1
KTiTds2 + Tis + 1
Tis2
2.5 Y(s) = 2.10 Y(s)=Kωn2
ss2 + 2ξωns + ωn
2
,ξ ∈ (0, 1
Tis+
Tds + 1Tγs + 1
⋅1s
Problema 2.1 Rezolvare:
Deoarece avem de-a face cu o funcþie complexá raþionalá strict proprie,vom putea aplica teorema reziduurilor. Pentru aceasta este necesará gásireapolilor funcþiei Y(s):
Y(s) = ss2 − 2s + 1
= s(s − 1)2
Rezultá cá Y(s) are un pol p = 1 cu ordinul de multiplicitate 2, deci:
y(t)=Rezp=1Y(s)e st = 1(2 − 1)!
(s − 1)2 s
(s − 1)2e st
s=1
(1)
= [se st ] s=1(1)
Rezultatul final este:
y(t) = [e st + s ⋅ t ⋅e st ] s=1 = e t + t ⋅e t = (t + 1) ⋅ e t
Problema 2.2 Rezolvare:Metoda a
Ca sá aflám funcþia original, vom aplica direct teorema reziduurilordacá avem de-a face cu funcþii complexe raþionale strict proprii. Pentru aceastaeste necesar sá gásim ín prealabil polii funcþiei Y(s), cu ordinele lor demultiplicitate.
s3-27 = (s-3)(s2+3s+9) => p1 = 3 , p2 = -1.5+ j , p3 = -1.5- j (2.2.1)332
332
Avem deci 3 poli simpli , doi dintre ei complex conjugaþi : p3 = p2* ;
y(t) = (2.2.2)Σk=1
3RezpkY(s)e st
Rez Y(s)est = (2.2.3)p110!
(s − 3) 1
(s − 3)(s2 + 3s + 9)e st
s = 3
= 127
e
Rezp 2 Y(s)e st = 10!
(s − p2) 1
(s − 3)(s − p2)(s − p2∗ )
e st
s = p2
(2.2.4)Rezp 2 Y(s)e st= 1(p2 − 3)(p2 − p2
∗)ep 2
Rezp 2∗ Y(s)e st = 1
0!
(s − p2
∗ ) 1(s − 3)(s − p2)(s − p2
∗ )e st
s = p2
∗
(2.2.5)Rezp 2∗ Y(s)e st = 1
(p2∗ − 3)(p2
∗ − p2)ep 2
∗
Se observá cá ultimele douá reziduuri calculate ín relaþiile (2.2.4) ßi (2.2.5) suntcomplex conjugate, deci pot fi scrise sub forma Ae (coordonate polare:jϕ(t)
modul A ßi fazá ).ϕ(t)
ep 2t = e−1.5te j33
2 t
Cum ßi rapoartele dinaintea exponenþialelor sunt numere complexe pe care levom scrie sub forma , putem scrie:ae±jϕ
y(t) = 127
e3t + ae jϕe−1.5te j33
2 t + ae−jϕe−1.5te−j33
2 t
a = 0,037 , = 2,0944 ( sau )ϕ 2π3
y(t)= 127
e3t + ae−1.5t e j(3
3
2 t+ϕ) + e−j(33
2 t+ϕ)
y(t) = 127
e3t + 2ae−1.5tcos(332
t + ϕ) ,a = 0.037 ,ϕ = 2.0944 ( sau 2π3
y(0) = 2a cos + => vom gási valoarea nulá la momentul iniþial, lucruϕ 127
= 0
confirmat ßi prin aplicarea teoremei valorii iniþiale .Metoda b
Se dezvoltá ín sumá de fracþii simple Y(s):Y(s) = 1
(s − 3)(s2 + 3s + 9)= 1
(s − 3)
s + 32
2+ 27
4
= 1(s − 3)(s + a)2 + b
Aplicaþii de tipul 2: Calculul transformatei Laplace inverse Pag 9 9

a = , b = 32
332
Y(s) = , A = , B = , C = As − 3
+ B(s + a) + C(s + a)2 + b2
127
− 127
−16
Vom gási:y(t) = L−1Y(s) = A⋅e3t + B⋅e−at ⋅cos(bt) + C
b⋅e−at ⋅sin(bt
y(t) = 127
e3t + e−1,5t
(− 1
27)cos(3
32
t) + (− 19 3
)sin(332
t)
y(t) = 127
e3t + e−1,5t
−cos(3
32
t) − 3 sin(332
t)
Punänd tg = - , vom obþine:ϕ 3
y(t) = 127
⋅e3t − 127
⋅e−1,5t ⋅cos(332
t + ϕ) ⋅ 1cos ϕ
ßi vom obþine expresia de la metoda a, ϕ = 2π3
Verificaþi identitatea celor douá expresii obþinute.
Problema 2.3 Rezolvare:Ín problema 2.3 avem de-a face cu poli reali multipli.
Y(s) = s(s − 1)3(s + 2)2
Ín acest caz vom avea o expresie pentru y(t) de forma:
(2.3.1)y(t)= 1(3 − 1)!
s
(s + 2)2e st
s=1
(3−1)
+ 1(2 − 1)!
s
(s − 1)3e st
s=−2
(2−1)
(2.3.2)1(3 − 1)!
s
(s + 2)2e st
s=1
(3−1)
= 12
⋅ 3t2 + 2t − 227
⋅e t
(2.3.3)1(2 − 1)!
s
(s − 1)3e st
s=−2
(2−1)
= 2t + 127
⋅e−2t
Din relaþiile (2.3.1), (2.3.2) ßi (2.3.3) vom avea rezultatul:
y(t) = 12
⋅ 3t2 + 2t − 227
⋅e t + 2t + 127
⋅ e−2t
Problema 2.4 Rezultat (Vezi problema 6.2):
y(t) =Kωn
1 − ξ 2e−ξωntsin
ωn
1 − ξ 2
t
Problema 2.5 Rezultat (Vezi problema 6.2):
y(t) = K ⋅
1 − e−ξωnt
1 − ξ 2⋅ sin
ωn
1 − ξ 2
t + ϕ
, ϕ = arccos (ξ)
Problema 2.6 Rezolvare:
Y(s) = 2s + 1s(s2 + 5s + 6)
= 2s + 1s(s + 2)(s + 3)
Rezultá cá avem o funcþie raþionalá strict proprie, deci putem aplica teoremareziduurilor:
(2.6.1)y(t) = ΣpoliiY(s)
RezY(s)e st
(2.6.2)y(t) = Rez0Y(s)e st + Rez−2Y(s)e st + Rez−3Y(s)e st
(2.6.3)Rez0Y(s)e st = s 2s + 1
s(s + 2)(s + 3)⋅ e st
s = 0
= 16
(2.6.4)Rez−2Y(s)e st = (s + 2) 2s + 1
s(s + 2)(s + 3)⋅e st
s = −2
= 32
e−2t
(2.6.5)Rez−3Y(s)e st = (s + 3) 2s + 1
s(s + 2)(s + 3)⋅e st
s = −3
= −53
e−3t
Ínlocuind (2.6.3), (2.6.4) ßi (2.6.5) ín (2.6.2) vom obþine rezultatul:
y(t) = 16
+ 32
e−2t − 53
e−3t
Problema 2.7 Rezolvare:
Cum , pentru calculul lui y(t) nu vom putea aplicaY(s) = 10s2 + 2s + 1s2 + 5s + 6
teorema reziduurilor deoarece Y(s) nu este strict proprie. Efectuänd ímpárþireanumárátorului la numitor, Y(s) se poate scrie sub forma:
Aplicaþii de tipul 2: Calculul transformatei Laplace inverse Pag 1010
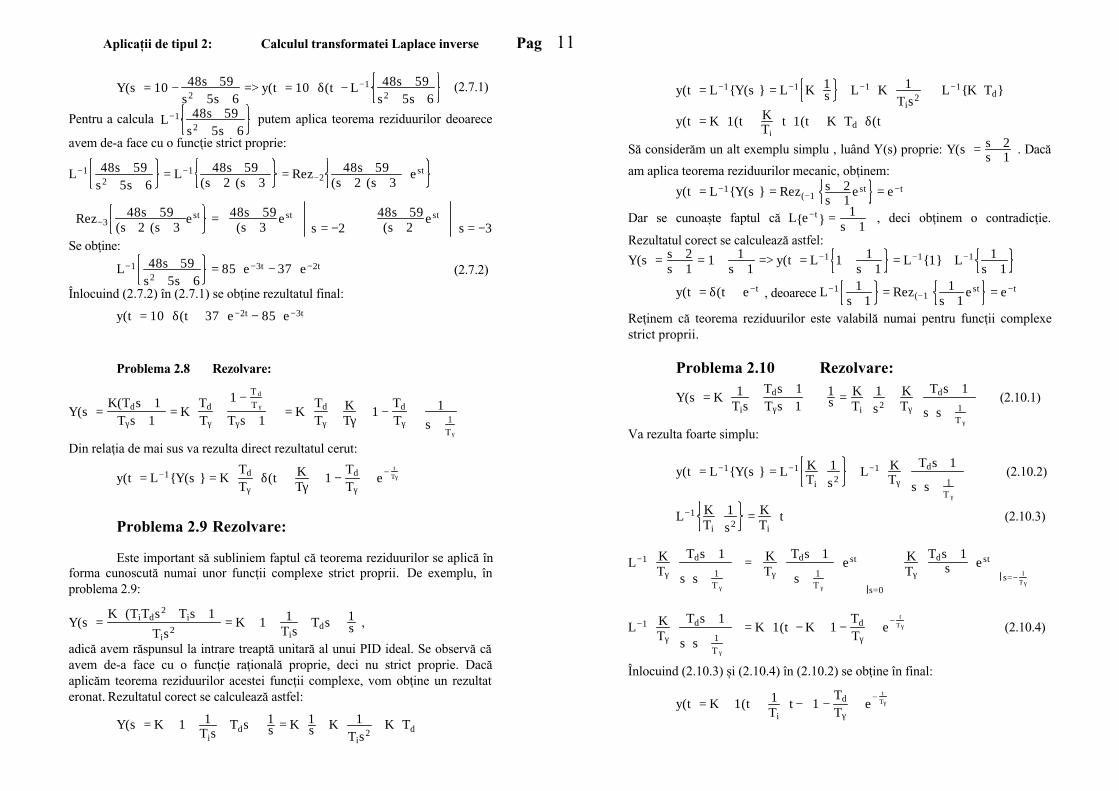
(2.7.1)Y(s) = 10 − 48s + 59s2 + 5s + 6
=> y(t) = 10 ⋅ δ(t) − L−1 48s + 59s2 + 5s + 6
Pentru a calcula putem aplica teorema reziduurilor deoareceL−1 48s + 59s2 + 5s + 6
avem de-a face cu o funcþie strict proprie:
L−1 48s + 59s2 + 5s + 6
= L−1 48s + 59(s + 2)(s + 3)
= Rez−248s + 59
(s + 2)(s + 3)⋅e st +
+Rez−348s + 59
(s + 2)(s + 3)e st =
48s + 59
(s + 3)e st
s = −2
+ 48s + 59
(s + 2)e st
s = −3
Se obþine:
(2.7.2)L−1 48s + 59s2 + 5s + 6
= 85 ⋅e−3t − 37 ⋅ e−2t
Ínlocuind (2.7.2) ín (2.7.1) se obþine rezultatul final:
y(t) = 10 ⋅δ(t) + 37 ⋅e−2t − 85 ⋅e−3t
Problema 2.8 Rezolvare:
Y(s) =K(Tds + 1)
Tγs + 1= K
Td
Tγ+
1 − T d
T γ
Tγs + 1
= K ⋅Td
Tγ+ K
Tγ⋅ 1 −
Td
Tγ
⋅ 1s + 1
Tγ
Din relaþia de mai sus va rezulta direct rezultatul cerut:
y(t) = L−1Y(s) = K ⋅Td
Tγ⋅δ(t) + K
Tγ⋅ 1 −
Td
Tγ
⋅e− tTγ
Problema 2.9 Rezolvare:
Este important sá subliniem faptul cá teorema reziduurilor se aplicá ínforma cunoscutá numai unor funcþii complexe strict proprii. De exemplu, ínproblema 2.9:
, Y(s) =K ⋅ (TiTds2 + Tis + 1)
Tis2= K ⋅
1 + 1Tis
+ Tds ⋅ 1
s
adicá avem ráspunsul la intrare treaptá unitará al unui PID ideal. Se observá cáavem de-a face cu o funcþie raþionalá proprie, deci nu strict proprie. Dacáaplicám teorema reziduurilor acestei funcþii complexe, vom obþine un rezultateronat. Rezultatul corect se calculeazá astfel:
Y(s) = K ⋅ 1 + 1
Tis+ Tds
⋅ 1s = K ⋅ 1
s + K ⋅ 1Tis2
+ K ⋅ Td
y(t) = L−1Y(s) = L−1 K ⋅ 1s + L−1
K ⋅ 1
Tis2
+ L−1K ⋅Td
y(t) = K ⋅1(t) + KTi
⋅ t ⋅1(t) + K ⋅ Td ⋅δ(t)
Sá considerám un alt exemplu simplu , luänd Y(s) proprie: . DacáY(s) = s + 2s + 1
am aplica teorema reziduurilor mecanic, obþinem:y(t) = L−1Y(s) = Rez(−1)
s + 2s + 1
e st = e−t
Dar se cunoaßte faptul cá , deci obþinem o contradicþie.Le−t = 1s + 1
Rezultatul corect se calculeazá astfel:Y(s) = s + 2
s + 1= 1 + 1
s + 1=> y(t) = L−1 1 + 1
s + 1= L−11 + L−1 1
s + 1
, deoarece y(t) = δ(t) + e−t L−1 1s + 1
= Rez(−1)1
s + 1e st = e−t
Reþinem cá teorema reziduurilor este valabilá numai pentru funcþii complexestrict proprii.
Problema 2.10 Rezolvare:
(2.10.1)Y(s) = K 1
Tis+
Tds + 1Tγs + 1
⋅ 1
s = KTi
⋅ 1s2
+ KTγ
⋅Tds + 1
ss + 1
T γ
Va rezulta foarte simplu:
(2.10.2)y(t) = L−1Y(s) = L−1 KTi
⋅ 1s2
+ L−1
KTγ
⋅Tds + 1
ss + 1
T γ
(2.10.3)L−1 KTi
⋅ 1s2
= KTi
⋅ t
L−1
KTγ
⋅Tds + 1
ss + 1
T γ
=
KTγ
⋅Tds + 1s + 1
T γ
⋅ e st
s=0
+ K
Tγ⋅Tds + 1
s ⋅e st
s=− 1Tγ
(2.10.4)L−1
KTγ
⋅Tds + 1
ss + 1
T γ
= K ⋅1(t) − K ⋅
1 −
Td
Tγ
⋅ e− tTγ
Ínlocuind (2.10.3) ßi (2.10.4) ín (2.10.2) se obþine ín final:
y(t) = K ⋅ 1(t) + 1
Ti⋅ t −
1 −
Td
Tγ
⋅e− tTγ
Aplicaþii de tipul 2: Calculul transformatei Laplace inverse Pag 1111

Anexa 3: Proprietatea de liniaritate a unui sistem orientatSe considerá un sistem orientat exprimat printr-un sistem abstract
orientat avänd la un moment de timp t intrarea ießirea ßiu(t) ∈ U, y(t) ∈ Y.starea x(t)∈ X
Fie mulþimea intrárilor admise , adicá , undeΩ u [t0 ,t 1] ∈ Ω, ∀t0 , t1 ∈ R
(A3.1)u [t0 ,t 1] = (t, u(t)), t0 ≤ t ≤ t1
Sistemul abstract se poate exprima ín formá explicitá prin soluþii (relaþii) sauín formá implicitá prin ecuaþii.
Exprimarea ín formá explicitá se face prin:Relaþia intrare-stare iniþialá-stare:
(A3.2)x(t) = ϕ(t, t0 , x0 , u [t0 ,t])Relaþia intrare-stare iniþialá-ießire:
(A3.3)y(t) = η(t, t0 , x0 , u [t0 ,t])
unde prin x0 s-a notat valoarea stárii la momentul t0 , adicá x(t0) = x0.Exprimarea ín formá implicitá se face prin ecuaþii:
Ecuaþia de stare propriu-zisá:
(A3.4)dx(t)dt
= f(x(t), u(t), t) ; x(t0 ) = x0
Ecuaþia (relaþia) de ießire: (A3.5)y(t) = g(x(t), u(t), t)
Faptul cá ießirea y(t) depinde de starea iniþialá ín forma explicitá(A3.3) sau de valoarea stárii la un moment dat ín forma implicitá (A3.5)conferá sistemului caracterul de sistem dinamic.
Dacá ießirea la un moment dat de timp t, y(t) depinde numai devaloarea intrárii la acel moment de timp t, u(t), adicá,
y(t) = g(u(t),t) (A3.6)atunci sistemul este nedinamic sau de tip scalar.
Sistemul (A3.4), (A3.5) ín care x(t) este un vector cu un numár finit decomponente este un sistem finit dimensional, ordinul sistemului fiind egal cunumárul de componente ale vectorului x(t).
Dacá ießirea la un moment de timp t, y(t), depinde ßi de valorileintrárii la momentele de timp anterioare, de exemplu , atunciu(t − τ), τ > 0sistemul este infinit dimensional (sistem cu íntärziere). Astfel de sisteme pot fidescrise prin relaþii de forma:
(A3.7)y(t) = u(t − τ) -element de intarziere puray(t) = g(u(t), u(t − τ), t) -sistemnediferential cu intarziere
O altá formá implicitá de reprezentare a unui sistem dinamic esteprintr-o ecuaþie diferenþialá ín cazul sistemelor cu o singurá ießire,
F(y, y (1), ..., y(n), u, u (1), ..., u (m), t) = 0
sau: (A3.8)F(^y, ^u, t) = 0, unde ^y=
yy(1)
y(2)
.
.y(n)
, ^u=
uu (1)
u (2)
.
.u (m)
sau un sistem de ecuaþii diferenþiale ín cazul sistemelor cu mai multe ießiri.Un sistem este liniar (are proprietatea de liniaritate) dacá sunt
índeplinite douá condiþii:(CL1) Mulþimile sunt organizate ca spaþii liniare pe o aceeaßiU, Y, X, Ω
mulþime a scalarilor G. Aceasta ínseamná cá pentru ßi∀α, β ∈ Gau loc relaþiile:∀t0 ≤ t ≤ t1, ∀t0 , t1 , t0 ≤ t1
(A3.9)u c(t) := α ⋅ ua(t) + β ⋅ ub(t) ∈ U, ∀u a(t), ub (t) ∈ U
(A3.10)y c(t) := α ⋅ ya(t) + β ⋅ yb(t) ∈ Y, ∀y a(t), yb (t) ∈ Y
(A3.11)xc(t) := α ⋅ xa(t) + β ⋅ xb(t) ∈ X, ∀xa(t), xb (t) ∈ X
u [t0 ,t 1]c := α⋅ u [t0 ,t 1]
a + β ⋅ u[t 0 ,t1 ]b ∈ Ω, ∀u [t 0,t 1]
a ∈ Ω, u [t0 ,t 1]b ∈ Ω
α ⋅ u [t 0,t 1]a = (t, α ⋅ u a(t)), t0 ≤ t ≤ t1
(CL2) Ecuaþiile de stare au proprietatea de aditivitate ßi omogenitate ínraport cu perechea pentru forma explicitá, sau cu perechea (x(t),
x0 , u [t 0,t]
u(t)) pentru forma implicitá. Aceasta se exprimá prin identitáþile ín raport cutoate argumentele (A3.12 ....... A3.15):ϕ
t, t0 , αx0a + βx0
b , αu[t 0 ,t]a + βu [t0 ,t]
b ≡ αϕ
t, t0 , x0a , u [t 0,t]
a + βϕ
t, t0 , x0b, u [t 0,t]
b
xc(t) xa(t) xb(t)η
t, t0 , αx0a + βx0
b , αu[t 0 ,t]a + βu [t0 ,t]
b ≡ αη
t, t0 , x0a , u [t 0,t]
a + βη
t, t0 , x0b, u [t 0,t]
b
yc(t) ya(t) yb(t)f(αxa(t)+ βxb(t), αu a(t) + βub (t), t) ≡ α ⋅ f(xa(t), ua(t), t) + β ⋅ f(xb(t), ub (t), t)
xc(t) xa(t) xb(t)g(αxa(t)+ βxb(t), αu a(t) + β ⋅ ub(t), t) ≡ α ⋅ g(xa(t), u a(t), t)+ β ⋅ g(xb (t), ub(t), t)
yc(t) ya(t) yb(t)Identitáþile (A3.12) pentru forma explicitá sau (A3.14) pentru formaimplicitá exprimá liniaritatea ín evoluþia stárii. Identitáþile (A3.13) pentru
Anexa 3: Proprietatea de liniaritate a unui sistem orientat Pag 1212
forma explicitá sau (A3.15) pentru forma implicitá exprimá liniaritatea ínevoluþia ießirii. Un sistem este liniar dacá este liniar atät ín raport atät custarea, cät ßi ín raport cu ießirea. Pentru sisteme nedinamice, (CL2) se exprimáprin:
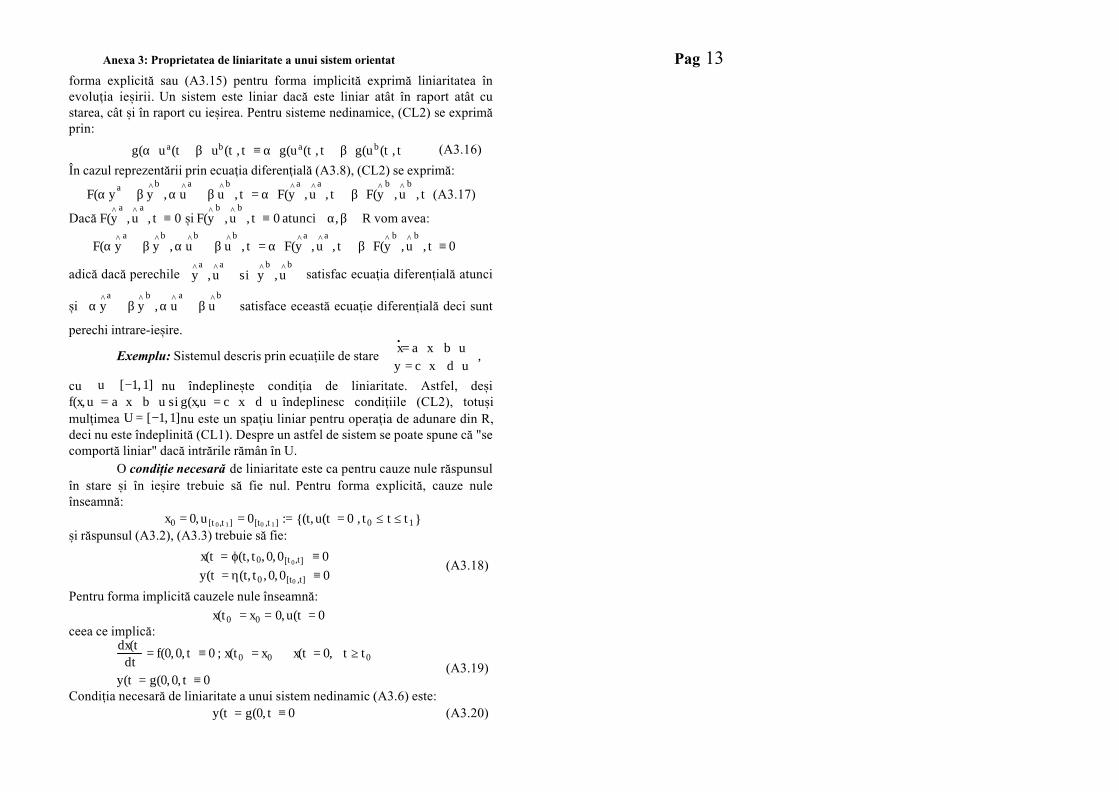
(A3.16)g(α ⋅ u a(t) + β ⋅ ub (t), t) ≡ α ⋅ g(u a(t), t)+ β ⋅ g(ub (t), t)Ín cazul reprezentárii prin ecuaþia diferenþialá (A3.8), (CL2) se exprimá:
(A3.17)F(α⋅∧y a + β⋅
^y
b, α⋅
^u
a+ β⋅
^u
b, t) = α ⋅ F(
^y
a,
^u
a, t) + β ⋅ F(
^y
b,
^u
b, t)
Dacá ßi vom avea:F(^y
a,
^u
a, t) ≡ 0 F(
^y
b,
^u
b, t) ≡ 0 atunci ∀α, β ∈ R
F(α⋅^y
a+ β⋅
^y
b, α⋅
^u
b+ β⋅
^u
b, t) = α ⋅ F(
^y
a,
^u
a, t) + β ⋅ F(
^y
b,
^u
b, t) ≡ 0
adicá dacá perechile satisfac ecuaþia diferenþialá atunci
^y
a,
^u
a si
^y
b,
^u
b
ßi satisface eceastá ecuaþie diferenþialá deci suntα⋅
^y
a+ β⋅
^y
b, α⋅
^u
a+ β⋅
^u
b
perechi intrare-ießire.
Exemplu: Sistemul descris prin ecuaþiile de stare
•x= a ⋅ x+ b ⋅ uy = c ⋅ x+ d ⋅ u
,
cu nu índeplineßte condiþia de liniaritate. Astfel, deßiu ∈ [−1, 1]índeplinesc condiþiile (CL2), totußif(x, u) = a ⋅ x+ b ⋅ u si g(x,u) = c ⋅ x+ d ⋅ u
mulþimea nu este un spaþiu liniar pentru operaþia de adunare din R,U = [−1, 1]deci nu este índeplinitá (CL1). Despre un astfel de sistem se poate spune cá "secomportá liniar" dacá intrárile rámän ín U.
O condiþie necesará de liniaritate este ca pentru cauze nule ráspunsulín stare ßi ín ießire trebuie sá fie nul. Pentru forma explicitá, cauze nuleínseamná:
x0 = 0, u [t 0,t 1] = 0[t0 ,t 1] := (t, u(t) = 0), t0 ≤ t ≤ t1ßi ráspunsul (A3.2), (A3.3) trebuie sá fie:
(A3.18)x(t) = ϕ(t, t0, 0, 0[t 0,t]) ≡ 0y(t) = η(t, t0 , 0, 0[t0 ,t]) ≡ 0
Pentru forma implicitá cauzele nule ínseamná: x(t0 ) = x0 = 0, u(t) = 0
ceea ce implicá:
dx(t)
dt= f(0, 0, t) ≡ 0 ; x(t0 ) = x0 ⇒ x(t) = 0, ∀t ≥ t0
(A3.19)y(t) = g(0, 0, t) ≡ 0
Condiþia necesará de liniaritate a unui sistem nedinamic (A3.6) este: (A3.20)y(t) = g(0, t) ≡ 0
Anexa 3: Proprietatea de liniaritate a unui sistem orientat Pag 1313

Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor
Sá se verifice proprietatea de liniaritate a sistemelor exprimate prinrelaþii explicite sau ecuaþii:
3.1 y(t) = e−t−t0
T ⋅ x0 + 1T
⋅ ∫t 0
t
e− t−τT ⋅ u(τ)dτ
3.2 y(t) = a⋅u(t) + b
3.3 y(t) = u( t -τ )
3.4
•x1 (t) = 3 ⋅ x1 (t) + 2•x2 (t) = 4 ⋅ x2 (t)+ 5 ⋅ u(t)y(t) = 6 ⋅ x1 (t)+ 7 ⋅ x2 (t)
3.5•x (t) = −2 ⋅ x2 (t) , t ≥ t0
3.6 y(t) = 3⋅u(t) +4 ⋅ ddt
u(t)
3.7 y(t) = 2⋅t⋅u(t) + 3⋅u(t2 )
3.8 y(t) = 4⋅u(t) + 7⋅u2 (t)
3.9 y(t) =∫t 0
t
τ ⋅ u(τ) ⋅ dτ
3.10 yk = 0, 5 ⋅ yk−1 + 3 ⋅ uk − 5 ⋅ uk−1 , k∈ Z, k ≥ 1
3.11 y(t) = ∫−∞
+∞
h(t, τ) ⋅ u(τ) ⋅ dτ ; h(t,τ) = 11 − (t − τ)2
3.12 y(t) = min u1(t) , u2(t)
3.13 y(t) =
0 , t < t1
a ⋅ u(t) , t ∈ [t1 , t2)b ⋅ u(t) , t ≥ t2
Problema 3.1 Rezolvare:
(3.1.1)y(t) = e−t−t0
T ⋅ x0 + 1T
⋅ ∫t0
t
e− t−τT ⋅ u(τ) ⋅ dτ , x0 ∈ R, u ∈ R
Aceasta este o relaþie intrare-stare iniþialá-ießire de forma (A3.3). Fie:u c(τ) = α ⋅ ua(τ) + β ⋅ ub(τ) , x0
c = α⋅x0a + β⋅x0
b
Notám: y a(t) = e−t−t 0
T ⋅ x0a + 1
T⋅ ∫
t 0
t
e− t−τT ⋅ u a(τ) ⋅ dτ
yb (t) = e−t−t 0
T ⋅ x0b + 1
T⋅ ∫
t 0
t
e− t−τT ⋅ ub (τ) ⋅ dτ
y c(t) = e−t−t 0
T ⋅ x0c + 1
T⋅ ∫
t 0
t
e− t−τT ⋅ u c(τ) ⋅ dτ
Se calculeazá:
y c(t) = e−t−t 0
T ⋅ α ⋅ x0
a + β ⋅ x0b
+ 1T
⋅ ∫t0
t
e− t−τT ⋅
α ⋅ u a(τ) + β ⋅ ub (τ) ⋅ dτ =
= α ⋅
e−
t−t 0T ⋅ x0
a + 1T ⋅ ∫
t 0
t
e− t−τT ⋅ u a(τ) ⋅ dτ
+ β ⋅
e−
t−t0T ⋅ x0
b + 1T ⋅ ∫
t0
t
e− t−τT ⋅ ub (τ) ⋅ dτ
= α ⋅ ya(t) + β ⋅ yb(t)
Deci , adicá CL2 este índeplinitá.y c(t) = α ⋅ ya(t) + β ⋅ yb(t), ∀α, β ∈ RDeoarece sunt spaþii liniare CL1 este índeplinitá.u ∈ R, x0 ∈ R, U = R, X = RRelaþia (3.1.1) exprimá un sistem liniar.
Problema 3.2 Rezolvare: (3.2.1)y(t) = a⋅u(t) + b
Aceastá relaþie intrare-ießire exprimá un sistem nedinamic, fiind de tipul(A3.6). Deoarece nu s-a menþionat explicit U, se presupune adicáu ∈ R = Uun spaþiu liniar, deci CL1 este índeplinitá. Fie:
y1 (t) = a⋅u1 (t) + b ; y2 (t) = a⋅u2(t) + b ; u3 (t) = α⋅u1 (t) + β ⋅ u2(t), ∀α, β ∈ R
Se noteazá . Se calculeazá .y3 (t) = a⋅u3 (t) + b y3 (t) = a⋅[α ⋅ u1(t) + β ⋅ u2 (t)] + by3 (t) = α⋅ a ⋅ u1 (t)+ β ⋅ b ⋅ u2(t) + b = α ⋅ y1 (t) + β ⋅ y2 (t) + b ⋅ [1 − α − β]
Se observá cá , deci relaþia (3.2.1) nu índeplineßtey3 (t) ≠ α ⋅ y1 (t)+ β ⋅ y2 (t)proprietatea de liniaritate ín raport cu intrarea u. Se observá cá relaþiaintrare-ießire (3.2.1) nu índeplineßte condiþia necesará de liniaritate (A3.19).
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1414
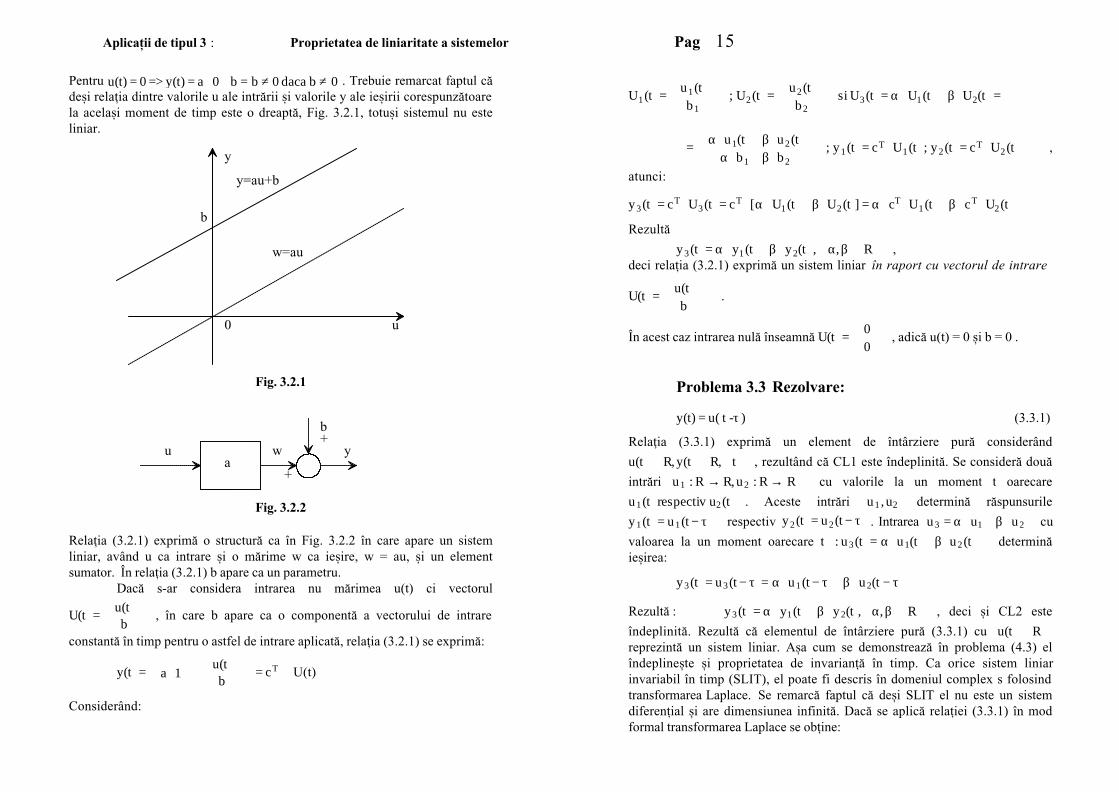
Pentru . Trebuie remarcat faptul cáu(t) = 0 => y(t) = a ⋅ 0+ b = b ≠ 0 daca b ≠ 0deßi relaþia dintre valorile u ale intrárii ßi valorile y ale ießirii corespunzátoarela acelaßi moment de timp este o dreaptá, Fig. 3.2.1, totußi sistemul nu esteliniar.
b
y
u
y=au+b
0
w=au
Fig. 3.2.1
au w
b
y+
+
Fig. 3.2.2
Relaþia (3.2.1) exprimá o structurá ca ín Fig. 3.2.2 ín care apare un sistemliniar, avänd u ca intrare ßi o márime w ca ießire, w = au, ßi un elementsumator. Ín relaþia (3.2.1) b apare ca un parametru.
Dacá s-ar considera intrarea nu márimea u(t) ci vectorul
, ín care b apare ca o componentá a vectorului de intrareU(t) =
u(t)b
constantá ín timp pentru o astfel de intrare aplicatá, relaþia (3.2.1) se exprimá:
U(t)y(t) = a 1 ⋅
u(t)b
= cT⋅
Consideränd:
U1 (t) =
u1 (t)b1
; U2 (t) =
u2 (t)b2
si U3 (t) = α ⋅ U1 (t) + β ⋅ U2(t) =
,=
α ⋅ u1(t) + β ⋅ u2 (t)α ⋅ b1 + β ⋅ b2
; y1 (t) = cT ⋅ U1 (t) ; y2 (t) = cT ⋅ U2 (t)
atunci:
y3 (t) = cT ⋅ U3 (t) = cT ⋅ [α ⋅ U1 (t) + β ⋅ U2 (t)] = α ⋅ cT ⋅ U1 (t) + β ⋅ cT ⋅ U2 (t)
Rezultá , y3 (t) = α ⋅ y1 (t) + β ⋅ y2(t) , ∀α, β ∈ R
deci relaþia (3.2.1) exprimá un sistem liniar ín raport cu vectorul de intrare
. U(t) =
u(t)b
Ín acest caz intrarea nulá ínseamná , adicá u(t) = 0 ßi b = 0 .U(t) =
00
Problema 3.3 Rezolvare:
(3.3.1)y(t) = u( t -τ )
Relaþia (3.3.1) exprimá un element de íntärziere purá consideränd , rezultänd cá CL1 este índeplinitá. Se considerá douáu(t) ∈ R, y(t) ∈ R, ∀t
intrári cu valorile la un moment t oarecareu1 : R → R, u2 : R → R. Aceste intrári determiná ráspunsurileu1 (t) respectiv u2 (t) u1 , u2
respectiv . Intrarea cuy1 (t) = u1 (t − τ) y2 (t) = u2 (t − τ) u3 = α ⋅ u1 + β ⋅ u2
valoarea la un moment oarecare t determiná: u3 (t) = α ⋅ u1(t) + β ⋅ u2 (t)ießirea:
y3 (t) = u3 (t − τ) = α⋅ u1 (t − τ) + β ⋅ u2(t − τ) Rezultá : , deci ßi CL2 estey3 (t) = α ⋅ y1 (t) + β ⋅ y2(t), ∀α, β ∈ Ríndeplinitá. Rezultá cá elementul de íntärziere purá (3.3.1) cu u(t) ∈ Rreprezintá un sistem liniar. Aßa cum se demonstreazá ín problema (4.3) elíndeplineßte ßi proprietatea de invarianþá ín timp. Ca orice sistem liniarinvariabil ín timp (SLIT), el poate fi descris ín domeniul complex s folosindtransformarea Laplace. Se remarcá faptul cá deßi SLIT el nu este un sistemdiferenþial ßi are dimensiunea infinitá. Dacá se aplicá relaþiei (3.3.1) ín modformal transformarea Laplace se obþine:
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1155

; Se noteazá ßi vom avea (vezi A1):Ly(t) = Lu(t − τ) Y(s) = Ly(t)
(3.3.2)Y(s) = e−τs ⋅ U(s)+ e−τs ⋅ ∫−τ
0
u(t) ⋅ e−st ⋅ dt
unde s-a notat . Se obþine deci:U(s) = Lu(t) ⋅ 1(t) = ∫0
∞
u(t) ⋅ e−st ⋅ dt
(3.3.3)Y(s) = e−τs ⋅ U(s)+ e−τs ⋅ ∫−τ
0
u(t) ⋅ e−st ⋅ dt = Yf(s) + Yl (s)
Se observá cá ráspunsul Y(s) conþine douá componente:
- o componentá forþatá: (3.3.4)Yf(s) = e−τs ⋅ U(s)
- o componentá liberá: (3.3.5)Yl (s) = e−τs ⋅ ∫−τ
0
u(t) ⋅ e−stdt
Componenta forþatá depinde de U(s) adicá de segmentul iar componentau [0,∞)liberá de valorile:
(3.3.6)u [−τ ,0) = x(0)
Relaþia (3.3.6) reprezintá starea iniþialá la momentul t = 0. Deci starea iniþialáeste reprezentatá de toate valorile intrárii ín intervalul de timp .t ∈ [−τ, 0)Deoarece existá o infinitate de valori u(t) pentru ínseamná cá suntt ∈ [−τ, 0)necesare o infinitate de informaþii pentru a restabili univocitatea dependenþeiintrare-ießire, íntre intrarea u(t) pe intervalul de observare ßi y(t) pe[0, ∞)acelaßi interval, adicá ordinul sistemului ( egal cu numárul de astfel deinformaþii ) este infinit. Starea acestui sistem la un moment de timp oarecareeste:
(3.3.7)x(t) = u[t−τ ,t) = (ξ, u(ξ)), t − τ ≤ ξ< tDin relaþia (3.3.4) se poate deduce expresia funcþiei de transfer pentruelementul de íntärziere purá:
(3.3.8)H(s)∆=
Yf(s)U(s) c.i.n
= e−τs
Avänd ín vedere cá , deoarece transformata LaplaceU(s) = Lu(t) ⋅ 1(t)foloseßte numai restricþia lui u(t) pe intervalul , expresia ín timp a[0, ∞)ráspunsului forþat se calculeazá ca pentru orice sistem liniar aplicändy f(t)transformata Laplace inversá expresiei , ín cazul nostru :H(s) ⋅ U(s) e−τs ⋅ U(s)
(3.3.9)y f(t) = L−1e−τs ⋅ U(s) = u(t − τ) ⋅ 1(t − τ) =
0, t ∈ [0, τ)u(t − τ), t ≥ τ
Acest rezultat se verificá prin aceea cá folosind formula de definiþie atransformatei Laplace directe se calculeazá .Lu(t − τ) ⋅ 1(t − τ) = e−τs ⋅ U(s)Expresia ín timp a ráspunsului liber se calculeazá aplicänd transformatay l (t)Laplace inversá expresiei din (3.3.5):Yl (s)
(3.3.10)y l (t) = L−1Yl(s) = L−1
e−τs ⋅ ∫−τ
0
u(t) ⋅ e−st ⋅ dt
Pentru a obþine acest rezultat se interpreteazá ca fiind transformataYl (s)Laplace a unei funcþii w(t), adicá:
(3.3.11)Yl (s) = W(s) = Lw(t) => L−1Yl (s) = L−1W(s) = yl (t) = w(t)
Relaþia (3.3.5) se exprimá:
(3.3.12)Yl (s) = e−τs ∫−τ
0
u(t) ⋅ e−st ⋅ dt = ∫−τ
0
u(t) ⋅ e−(τ+t)⋅s ⋅ dt = ∫0
τ
u(ξ− τ) ⋅ e−ξs ⋅ dξ
Fie: (3.3.13)w(ξ) =
u(ξ− τ), ξ ∈ [0, τ)0, ξ≥ τ
Cu aceastá notaþie relaþia (3.3.12) se scrie:
Yl (s) = ∫0
∞
w(ξ) ⋅ e−ξs ⋅ dξ = W(s) = Lw(t)
astfel cá din (3.3.10) se obþine:
(3.3.14)y l (t) = w(t) =
u(t − τ), t ∈ [0, τ)0, t ≥ τ
Repetám cá, deoarece intervalul de observare din calculele ce folosesctransformarea Laplace este , ráspunsurile liber ßi forþat se definesc (au[0, ∞)sens) numai pentru , fiind determinate de intrarea ßi stareat ∈ [0, ∞) u [0,∞)iniþialá x(0) definitá ca ín (3.3.6).
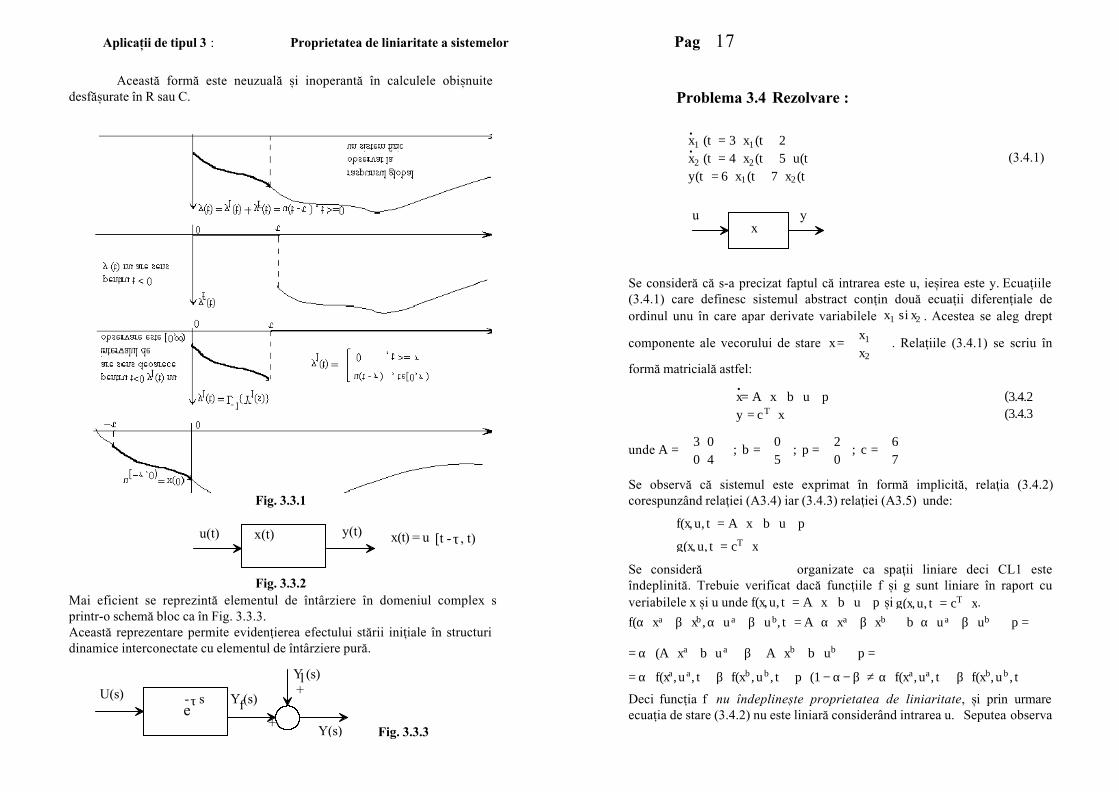
Un exemplu de comportare pentru o intrare u(t) : R-->R ßiráspunsurile corespunzátoare calculate cu transformarea Laplace ßiy l (t) si yf(t)observate la un element fizic (de fapt la un element fizic se observá ráspunsulglobal ) este prezentat ín Fig. 3.3.1. Elementul de íntärzierey(t) = yl (t) + yf(t)purá poate fi reprezentat ca un sistem orientat cu intrarea u(t) , ießirea y(t) ßistarea x(t) ca ín Fig. 3.3.2.
Relaþia (3.3.1) este o ecuaþie funcþionalá ßi constituiey(t) = u(t − τ)forma implicitá de prezentare a unui sistem dinamic. Deoarece starea la unmoment t este o mulþime, ecuaþia de evoluþie a stárii implicá operaþii cumulþimi ßi s-ar putea prezenta astfel:
(3.3.15)x(t + ε) = x(t)\u [t−τ ,t−τ+ε) ∪ u [t,t+ε)
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1166
Aceastá formá este neuzualá ßi inoperantá ín calculele obißnuitedesfáßurate ín R sau C.
Fig. 3.3.1
u(t) y(t)x(t) [t - , t)τx(t) = u
Fig. 3.3.2Mai eficient se reprezintá elementul de íntärziere ín domeniul complex sprintr-o schemá bloc ca ín Fig. 3.3.3. Aceastá reprezentare permite evidenþierea efectului stárii iniþiale ín structuridinamice interconectate cu elementul de íntärziere purá.
Fig. 3.3.3
U(s)e- s Y (s)
Y (s)
Y(s)
τ
+
+f
l
Problema 3.4 Rezolvare :
(3.4.1)
•x1 (t) = 3 ⋅ x1 (t)+ 2•x2 (t) = 4 ⋅ x2 (t)+ 5 ⋅ u(t)y(t) = 6 ⋅ x1 (t)+ 7 ⋅ x2 (t)
u yx
Se considerá cá s-a precizat faptul cá intrarea este u, ießirea este y. Ecuaþiile(3.4.1) care definesc sistemul abstract conþin douá ecuaþii diferenþiale deordinul unu ín care apar derivate variabilele . Acestea se aleg dreptx1 si x2
componente ale vecorului de stare . Relaþiile (3.4.1) se scriu ínx=
x1
x2
formá matricialá astfel:
•x= A ⋅ x+ b ⋅ u + py = cT ⋅ x
(3.4.2)(3.4.3)
unde A =
3 00 4
; b =
05
; p =
20
; c =
67
Se observá cá sistemul este exprimat ín formá implicitá, relaþia (3.4.2)corespunzänd relaþiei (A3.4) iar (3.4.3) relaþiei (A3.5) unde:
f(x, u, t) = A ⋅ x+ b ⋅ u + p
g(x, u, t) = cT ⋅ x
Se considerá organizate ca spaþii liniare deci CL1 esteu ∈ R, x ∈ R2
índeplinitá. Trebuie verificat dacá funcþiile f ßi g sunt liniare ín raport cuveriabilele x ßi u unde ßi .f(x, u, t) = A ⋅ x+ b ⋅ u + p g(x, u, t) = cT ⋅ xf(α ⋅ xa + β ⋅ xb , α ⋅ u a + β ⋅ ub, t) = A
α ⋅ xa + β ⋅ xb + b
α ⋅ u a + β ⋅ ub + p =
= α ⋅ (A ⋅ xa + b ⋅ u a)+ β ⋅ A ⋅ xb + b ⋅ ub
+ p =
= α ⋅ f(xa, u a, t)+ β ⋅ f(xb , ub , t)+ p ⋅ (1 − α− β) ≠ α⋅ f(xa, ua, t) + β ⋅ f(xb, ub , t)
Deci funcþia f nu índeplineßte proprietatea de liniaritate, ßi prin urmareecuaþia de stare (3.4.2) nu este liniará consideränd intrarea u. Seputea observa
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1177

imediat cá , deci nu se índeplineßtef(0, 0, t) = A ⋅ 0 + b ⋅ 0+ p = p ≠ 0condiþia necesará de liniaritate (A3.18). Ecuaþia de ießire (3.4.3) este liniará deoarece:
g(α ⋅ xa + β ⋅ xb , α ⋅ ua + β ⋅ ub, t) = cT ⋅ α ⋅ xa + β ⋅ xb
=
= α ⋅ cT ⋅ xa + β ⋅ cT ⋅ xb = α ⋅ y a + β ⋅ yb
unde s-au notat .y a = cT ⋅ xa, yb = cT ⋅ xb
Problema 3.5 Rezolvare:
(3.5.1)•x (t) = −2 ⋅ x2 (t) , t ≥ t0
Se presupune cá deci CL1 este índeplinitá. Relaþia (3.5.1) exprimá unx∈ Rsistem dinamic ín formá implicitá (A3.4) unde . Considerändf(x, u, t) = −2 ⋅ x2
se obþine:xc = α ⋅ xa + β ⋅ xb, α, β ∈ R
f(xc, u, t) = −2 ⋅ (xc)2 = −2 ⋅ α ⋅ xa + β ⋅ xb
2
=
= −2 ⋅ α2 ⋅ (xa)2 + β2 ⋅
xb
2+ 2 ⋅ α ⋅ β ⋅ xa ⋅ xb
≠
≠ α ⋅ (xa)2 + β ⋅ xb
2
= α ⋅ f(xa, u, t) + β ⋅ f(xb, u, t)Deci condiþia CL2 nu este índeplinitá, sistemul fiind neliniar.
Problema 3.6 Rezolvare:
(3.6.1)y(t) = 3⋅u(t) +4 ⋅ ddt
u(t)
Sistemul (3.6.1) este reprezentat printr-o ecuaþie diferenþialá de tipul (A3.8),unde
^y= y, ^u=
u•u
, F
^u, ^y, t
=^y +gT⋅^u , gT = 3 4
Se observá cá:
F
α⋅
^ua +β⋅
^ub , α⋅
^y a +β⋅
^yb , t
=
α⋅
^y a +β⋅
^yb
+ gT ⋅
α⋅
^u a +β⋅
^ub
=
= α ⋅
^y a +gT⋅
^u a
+ β ⋅
^
yb +gT⋅^
ub
= α ⋅ F
^
u a,^
y a, t + β ⋅ F
^
ub ,^
yb , t
Deci sistemul índeplineßte CL2. Presupunänd cá ßi cá mulþimeau, y ∈ Rintrárilor admise este mulþimea funcþiilor continue ßi derivabile CL1 esteΩíndeplinitá. Ín concluzie , (3.6.1) este un sistem liniar.
Ín ipoteza cá este mulþimea funcþiilor continue ßi derivabile seΩpoate afirma cá sistemul este fizic realizabil (neanticipativ) deoarece derivata
poate fi extrasá (ßi este determinatá ) numai prin derivata la stänga caredu(t)dt
presupune valori trecute ale funcþiei u(t) faþá de momentul prezent t:
•u st (t) =ε−>0lim u(t − ε) − u(t)
ε
Dacá conþine ßi funcþii nederivabile la stänga, atunci sistemul esteΩ
anticipativ deoarece derivata la dreapta implicá•udr (t) =ε−>0lim u(t + ε) − u(t)
εvalori viitoare faþá de momentul prezent t .
Problema 3.7 Rezolvare:
(3.7.1)y(t) = 2⋅t⋅u(t) + 3⋅u(t2 )
Se observá cá relaþia (3.7.1) exprimá un sistem nedinamic de forma (A3.5),deoarece pentru un t oarecare dat , cunoscänd valoareat ≥ t0 ≥ 0 => t2 ≥ t0
2
u(t) ßi deci ßi márimea care are sens, se determiná ín mod univocw(t) = u(t2 )
ießirea y(t). Notänd , relaþia (3.7.1) se scrie:U(t) =
u(t)w(t)
=
u(t)u(t2 )
(3.7.2)y(t) = dT(t) ⋅ U(t) , unde dT(t) = 2 ⋅ t 3
Pentru o intrare datá se calculeazá ßi respectiv pentru ou a(t) wa(t) = u a(t2)
intrare se calculeazá . Prin urmare ßiub (t) wb (t) = ub (t2) Ua(t) =
u a(t)wa(t)
. Ub (t) =
ub (t)wb (t)
Consideränd , se calculeazá:Uc(t) = α ⋅ Ua(t) + β ⋅ Ub(t)
y c(t) = dT(t) ⋅ Uc(t) = dT(t) ⋅ α ⋅ Ua(t) + β ⋅ Ub (t) =
α ⋅ dT(t) ⋅ Ua(t) + β ⋅ dT(t) ⋅ Ub (t) = α ⋅ y a(t) + β ⋅ yb (t)unde s-au folosit notaþiile
y a(t) = dT(t) ⋅ Ua(t) =2⋅t⋅u a(t) + 3⋅ua(t2 )respectiv
. yb (t) = dT(t) ⋅ Ub (t) =2⋅t⋅ub (t) + 3⋅ub (t2 )Deci sistemul este liniar dacá se presupune cá . u ∈ R
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1188

Problema 3.8 Rezolvare:
(3.8.1)y(t) = 4⋅u(t) + 7⋅u2 (t)
Sistemul exprimat de relaþia (3.8.1) este nedinamic, de tipul (A3.6) unde. Se observá cá:g(u, t) = 4⋅u + 7⋅u2
g(α ⋅ u1 + β ⋅ u2 , t) = 4⋅(α ⋅ u1 + β ⋅ u2 )+ 7⋅(α ⋅ u1 + β ⋅ u2 )2 ≠
≠ α ⋅ g(u1 , t) + β ⋅ g(u2 , t) = α ⋅ 4 ⋅ u1 + 7 ⋅ u1
2 + β ⋅
4 ⋅ u2 + 7 ⋅ u22
Deci sistemul nu este liniar.
Problema 3.9 Rezolvare:
(3.9.1)y(t) =∫t 0
t
τ ⋅ u(τ) ⋅ dτ
Se observá cá ießirea la momentul t este integrala ponderatá a intrárii íncepändcu un anumit moment iniþial . Aceasta reprezintá o aßa numitá formát0integralá de reprezentare a relaþiei intrare-ießire. Derivänd (3.9.1) ín raport cu tse obþine ecuaþia diferenþialá:
(3.9.2)•
y(t) = t⋅u(t)
care este o altá formá de exprimare a aceleiaßi relaþii intrare-ießire. Integrändecuaþia (3.9.2) de la se obþine:t0 la t
(3.9.3)y(t) = y(t0 )+ ∫t 0
t
τ ⋅ u(τ) ⋅ dτ = ηt, t0, x0 , u [t0 ,t]
unde . Se observá cá ín relaþia (3.9.3) apare ßi valoarea ießirii lay(t0 ) = x(0) = x0momentul iniþial . Relaþia (3.9.3) este forma explicitá de prezentare ßit0constituie relaþia intrare-stare iniþialá-ießire de forma (A3.3) ín care stareainiþialá este . Se poate alege y(t) = x(t) ca variabilá de stare,x(t0 ) = y(t0 ) = x0relaþia (3.9.3) índeplinind condiþia de consistenþá deci este ßi o relaþieintrare-stare iniþialá-stare. Relaþia datá de (3.9.1) exprimá prin urmareráspunsul forþat obþinut ín condiþia iniþialá nulá .x(t0 ) = y(t0 ) = x0 = 0Presupunänd cá este índeplinitá CL1. CL2 se poate interpretau(t)∈ R, y(t) ∈ Ratät pe forma (3.9.3) cät ßi pe forma (3.9.2).Presupunänd cá avem douá cauze , considerám
x0a , u [t 0,t]
a si
x0b, u [t 0,t]
b
ßi se obþine:x0c = α ⋅ x0
a + β ⋅ x0b, u [t 0,t]
c = α ⋅ u [t 0,t]a + β ⋅ u [t0 ,t]
b
y c(t) = α ⋅ x0a + β ⋅ x0
b + ∫t0
t
τ⋅ α ⋅ u a(τ)+ β ⋅ ub (τ)
⋅ dτ =
. Rezultá:= α ⋅
x0
a + ∫t 0
t
τ ⋅ u a(τ)
⋅ dτ+ β ⋅
x0
b + ∫t0
t
τ⋅ ub (τ)
⋅ dτ
y c(t) = α ⋅ ya(t) + β ⋅ xb(t)
unde s-au notat: , ráspunsuriley a(t) = x0a + ∫
t 0
t
τ ⋅ u a(τ) , yb (t) = x0b + ∫
t 0
t
τ ⋅ ub (τ)
pentru cele douá cauze considerate. Ín concluzie ßi CL2 este índeplinitárezultänd cá sistemul este liniar.
Proprietatea de liniaritate se poate analiza ßi pe forma (3.9.2) care estede tipul (A3.4) unde: . Aceastá relaþie este liniará deoarece:f(x, u, t) = t ⋅ u
fα ⋅ xa + β ⋅ xb , α⋅ u a + β ⋅ ub , t
= t ⋅ α ⋅ u a + β ⋅ ub
=
.= α ⋅ (t ⋅ u a)+ β ⋅ t ⋅ ub
= α⋅ f(xa, ua, t) + β ⋅ fxb , ub , t , ∀α, β ∈ R
Problema 3.10 Rezolvare: (3.10.1)yk = 0, 5 ⋅ yk−1 + 3 ⋅ uk − 5 ⋅ uk−1 , k∈ Z, k ≥ 1
Se observá cá relaþia (3.10.1) este o ecuaþie cu diferenþe liniará ßi cu coeficienþiconstanþi, deci exprimá un sistem pur discret liniar ín ipoteza cá
, adicá CL1 este índeplinitá. Pentru a se demonstra acestuk , yk ∈ R, ∀k ≥ 1adevár se aplicá metodologia de demonstrare a proprietáþii de liniaritate.Ecuaþia (3.10.1) se exprimá sub forma:
(3.10.2)F(yk , yk−1 , uk , uk−1, k) = 0
(3.10.3)F(yk , yk−1 , uk , uk−1, k) = yk − 0, 5 ⋅ yk−1 − 3 ⋅ uk + 5 ⋅ uk−1
Se considerá cá ßirurile verificá ecuaþia cu diferenþe , deci uka , yk
a , k ≥ 0 ∀k ≥ 0
constituie o pereche intrare-ießire , adicá:uk
a , yka
, k ≥ 0
(3.10.4)Fyk
a , yk−1a , uk
a, uk−1a , k
≡ 0, ∀k ≥ 0
Fie o altá pereche intrare ießire , adicá:uk
b , ykb
, k ≥ 0
(3.10.5)Fyk
b , yk−1b , uk
b, uk−1b , k
≡ 0, ∀k ≥ 0
Ín ipoteza cá CL1 este índeplinitá trebuie verificat faptul cá ßirurile verificá ecuaþia (3.10.1), adicáuk
c = α ⋅ uka + β ⋅ uk
b, ykc = α⋅ yk
a + β ⋅ ykb
constituie de asemenea o pereche intrare ießire. Íntr-adevár:
Fyk
c , yk−1c , uk
c, uk−1c , k
= α ⋅ yk
a + β ⋅ ykb − 0, 5 ⋅
α ⋅ yk−1a + β ⋅ yk−1
b − ...
... − 3 ⋅ α ⋅ uk
a + β ⋅ ukb + 5 ⋅
α ⋅ uk−1a + β ⋅ uk−1
b =
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 1199

= αyka − 0, 5 ⋅ yk−1
a − 3 ⋅ uka + 5 ⋅ uk−1
a + βykb − 0, 5 ⋅ yk−1
b − 3 ⋅ ukb + 5 ⋅ uk−1
b =
= α ⋅ Fyk
a , yk−1a , uk
a , uk−1a , k
+ β ⋅ Fyk
b , yk−1b , uk
b , uk−1b , k
≡ 0, ∀α, β ∈ R
þinänd cont de (3.10.4) ßi (3.10.5) . Rezultá cá sistemul este liniar.
Problema 3.11 Rezolvare:
(3.11.1)y(t) = ∫−∞
+∞
h(t, τ) ⋅ u(τ) ⋅ dτ ; h(t,τ) = 11 − (t − τ)2
Dacá se interpreteazá relaþia integralá (3.11.1) ca o relaþie intrare-ießire a unuisistem orientat cu intrarea u(t) ßi ießirea y(t) atunci ín mod evident acel sistemeste anticipativ (necauzal). Ießirea y(t) la un moment prezent t este dependentáde valorile viitoare ale intrárii. Totußi relaþia (3.11.1) reprezintá un produsoff-line de netezire ( o filtrare ce foloseßte valorile trecute, prezente ßi viitoareale intrárii faþá de momentul la care se apreciazá un ráspuns), foarte des folositín prelucrarea off-line a informaþiilor. Dacá, de exemplu, funcþia de ponderare
este:h(t, τ)
(3.11.2)h(t, τ) = 11 − (t − τ)2
atunci un proces de netezire pentru o funcþie u : R-->R se prezintá ca ínFig.3.11.1. Proprietatea de liniaritate a relaþiei (3.11.1) ín raport cu funcþia u :R-->R se testeazá aplicänd procedura obißnuitá. Se presupuneu ∈ Ω
deci CL1 este índeplinitá. Fie douá funcþiiu(t) ∈ R, y(t) ∈ R. Atunci pentru funcþia definitáu a : R → R , ub : R → R , u a, ub ∈ Ω u c : R → R
prin legea de corespondenþá: ßi notatáu c(τ) = α ⋅ ua(τ) + β ⋅ ub(τ), ∀τ ∈ R , se obþine:u c = α ⋅ ua + β ⋅ ub
y c(t) = ∫−∞
+∞
h(t, τ) ⋅ α ⋅ ua(τ) + β ⋅ ub (τ) ⋅ dτ = α ⋅ ∫−∞
+∞
h(t, τ) ⋅ ua(τ) ⋅ dτ+ ...
... + β ⋅ ∫−∞
+∞
h(t, τ)ub (τ) ⋅ dτ = α ⋅ y a(t) + β ⋅ yb (t), ∀α, β ∈ R
unde sunt ießirile (valorile obþinute din relaþia (3.11.1)) pentruy a(t), yb (t)intrárile .u a respectiv ub
Fig. 3.11.1
Problema 3.12 Rezolvare:
y(t) = min u1(t) , u2(t) (3.12.1)
Relaþia (3.12.1) poate exprima o dependenþá intrare-ießire a unui sistemorientat cu douá intrári ßi o ießire y reprezentat printr-o schemá bloc cau1 , u2
ín Fig. 3.12.1. Intrarea poate fi exprimatá prin vectorul .u(t) =
u1(t)u2(t)
u (t)
u (t)
y(t)g(.)
1
2Fig. 3.12.1
Cunoscänd valoarea intrárii u la un moment de timp t (deci ) seu1 (t), u2 (t)poate determina ín mod univoc ießirea y(t) la acel moment de timp. Decisistemul este nedinamic iar relaþia (3.11.1) este de tipul (A3.6) unde:
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 220

(3.12.2)g(u(t), t) = min u1 (t), u2 (t) =u1(t) + u2(t) − u1 (t) − u2 (t)
2Consideränd douá intrári:
ßiu a(t) =
u1a (t)
u2a (t)
, ub(t) =
u1b (t)
u2b (t)
u c(t) = α ⋅ ua(t) + β ⋅ ub(t) =
α ⋅ u1a(t) + β ⋅ u1
b (t)
α ⋅ u2a(t) + β ⋅ u2
b (t)
=
u1c (t)
u2c (t)
se obþine:
g(u c(t), t) =u1
c (t) + u2c (t) − u1
c (t) − u2c (t)
2 =
=α⋅ u1
a + β ⋅ u1b + α ⋅ u2
a ) + β ⋅ u2b − α ⋅ u1
a + β ⋅ u1b − α ⋅ u2
a − β ⋅ u2b
2Avänd ín vedere cá:
g(u a, t) =u1
a + u2a − u1
a − u2a
2si g
ub , t =
u1b + u2
b − u1b − u2
b
2sistemul ar fi liniar dacá ar avea loc identitatea:
g(u c, t) = α ⋅ g(ua, t) + β ⋅ gub , t
, ∀α, β ∈ R <=>
<=> α⋅ u1
a − u2a
− β ⋅ u1
b − u2b
≡ α ⋅ u1a − u2
a + β ⋅ u1b − u2
b , ∀α, β ∈ R
Relaþia de mai sus nefiind valabilá, ínseamná cá CL2 nu este índeplinitá decisistemul exprimat prin (3.12.1) este neliniar.
Problema 3.13 Rezolvare:
(3.13.1)y(t) =
0 , t < t1
a ⋅ u(t) , t ∈ [t1 , t2)b ⋅ u(t) , t ≥ t2
Se observá cá relaþia de mai sus exprimá un sistem orientat cu o intrare u(t) ßi oießire y(t) nedinamic deoarece cunoscänd valoarea intrárii la un moment t datse poate determina ín mod univoc ießirea y(t). Acest sistem este de tipul (A3.6)unde:
(3.13.2)g(u,t) =
0 , t < t1
a ⋅ u , t ∈ [t1 , t2)b ⋅ u , t ≥ t2
Dacá atunci CL1 este índeplinitá. Considerändu ∈ R, y ∈ R se obþine:u3 (t) = α ⋅ u1 (t) + β ⋅ u2(t), ∀t ∈ R
g(u3 (t),t) =
0 , t < t1
a ⋅ u3 (t) , t ∈ [t1 , t2 )b ⋅ u3 (t) , t ≥ t2
=
0 , t < t1
a ⋅ (α ⋅ u1(t) + β ⋅ u2 (t)) , t ∈ [t1 , t2 )b ⋅ (α ⋅ u1 (t) + β ⋅ u2(t)) , t ≥ t2
=
= α ⋅
0 , t < t1
a ⋅ u1 (t) , t ∈ [t1 , t2 )b ⋅ u1 (t) , t ≥ t2
+ β ⋅
0 , t < t1
a ⋅ u2 (t) , t ∈ [t1, t2 )b ⋅ u2 (t) , t ≥ t2
= ...
... = α⋅ g(u1 (t),t)+β ⋅ g(u2(t),t),∀α, β ∈ R
deci ßi CL2 este índeplinitá astfel cá sistemul este liniar.
Aplicaþii de tipul 3 : Proprietatea de liniaritate a sistemelor Pag 2121
Anexa 4: Proprietatea de invariabilitate ín timp a unui sistemdinamic
Se spune cá un sistem dinamic este invariabil ín timp sau cá areproprietatea de invariabilitate ín timp (sistem invariant) dacá ráspunsurile saleprin ießire ßi stare sunt aceleaßi, indiferent de momentul de timp la care seiniþiazá evoluþia, dacá se aplicá aceleaßi cauze (stare iniþialá ßi intrare). Cu altecuvinte, dacá la un moment iniþial t0 sistemul se aflá ín starea iniþialá
ßi se aplicá o intrare adicá se obþine un ráspunsx(t0 ) = x0 u [t0 ,t] u(τ), t0 ≤ τ ≤ tprin ießire y(t) ßi prin stare x(t) pentru . Consideränd ínsá cá la unt ≥ t0moment iniþial o valoare oarecare, sistemul se aflá ín aceeaßit0 + δ, δ≥ 0, cu δstare iniþialá adicá , ßi cá i se aplicá o aceeaßi intrare, ínsáx0 x(t0 + δ) = x0deplasatá ín timp, adicá , seu [t0 +δ,t]
δ uδ(τ), t0 + δ≤ τ ≤ t, unde uδ(τ) = u(τ − δ)obþin ráspunsurile ßi care sunt aceleaßi ca ín primul caz ínsá decalateyδ(t) xδ(t)ín timp, adicá ßi .yδ(t) = y(t − δ) xδ(t) = x(t − δ)
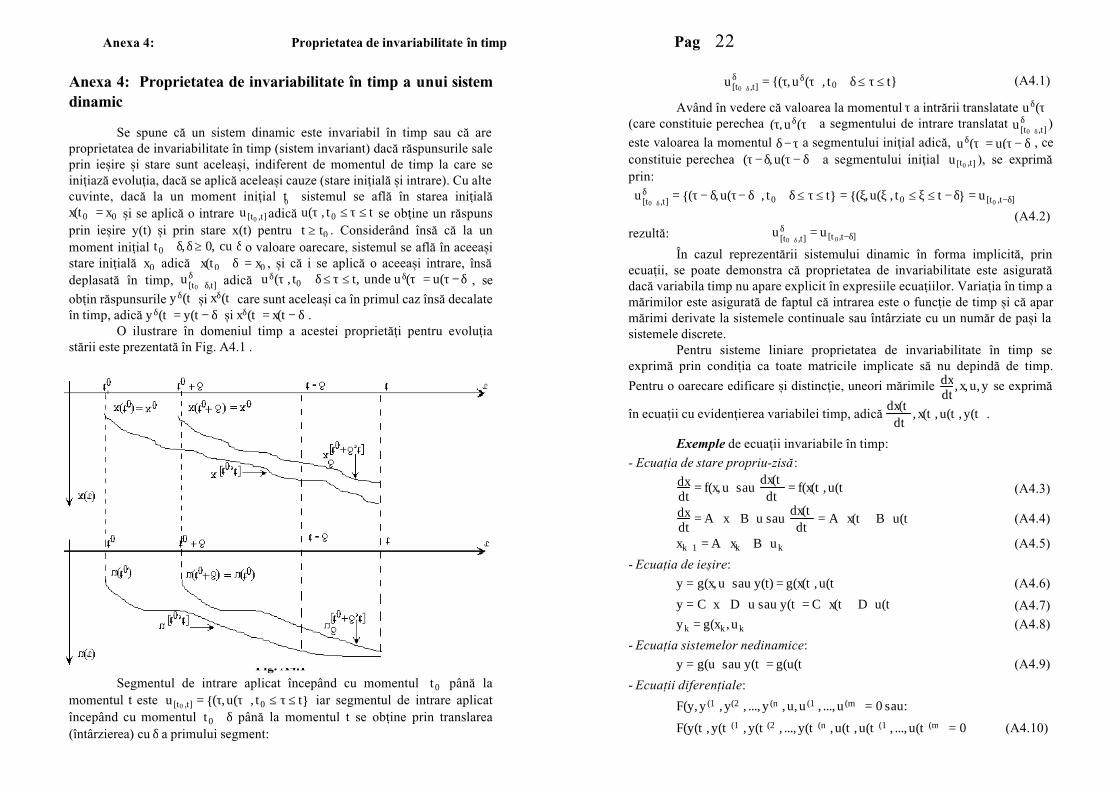
O ilustrare ín domeniul timp a acestei proprietáþi pentru evoluþiastárii este prezentatá ín Fig. A4.1 .
Fig. A4.1Segmentul de intrare aplicat íncepänd cu momentul päná lat0
momentul t este iar segmentul de intrare aplicatu [t0 ,t] = (τ, u(τ)), t0 ≤ τ ≤ tíncepänd cu momentul päná la momentul t se obþine prin translareat0 + δ(íntärzierea) cu a primului segment:δ
(A4.1)u [t0+δ ,t]δ = (τ, uδ(τ)), t0 + δ≤ τ ≤ t
Avänd ín vedere cá valoarea la momentul a intrárii translatate τ uδ(τ)(care constituie perechea a segmentului de intrare translatat )(τ, uδ(τ)) u [t0+δ ,t]
δ
este valoarea la momentul a segmentului iniþial adicá, , ceδ− τ uδ(τ) = u(τ − δ)constituie perechea a segmentului iniþial ), se exprimá(τ − δ, u(τ − δ)) u [t0 ,t]prin: u [t0+δ ,t]
δ = (τ − δ, u(τ− δ)), t0 + δ≤ τ ≤ t = (ξ, u(ξ), t0 ≤ ξ ≤ t − δ = u [t0 ,t−δ]
(A4.2)rezultá: u [t0+δ ,t]
δ = u [t 0,t−δ]
Ín cazul reprezentárii sistemului dinamic ín forma implicitá, prinecuaþii, se poate demonstra cá proprietatea de invariabilitate este asiguratádacá variabila timp nu apare explicit ín expresiile ecuaþiilor. Variaþia ín timp amárimilor este asiguratá de faptul cá intrarea este o funcþie de timp ßi cá aparmárimi derivate la sistemele continuale sau íntärziate cu un numár de paßi lasistemele discrete.
Pentru sisteme liniare proprietatea de invariabilitate ín timp seexprimá prin condiþia ca toate matricile implicate sá nu depindá de timp.Pentru o oarecare edificare ßi distincþie, uneori márimile se exprimádx
dt, x, u, y
ín ecuaþii cu evidenþierea variabilei timp, adicá .dx(t)dt
, x(t), u(t), y(t)
Exemple de ecuaþii invariabile ín timp:- Ecuaþia de stare propriu-zisá:
(A4.3)dxdt
= f(x, u) sau dx(t)dt
= f(x(t), u(t))
(A4.4)dxdt
= A ⋅ x+ B ⋅ u sau dx(t)dt
= A ⋅ x(t) + B ⋅ u(t)
(A4.5)xk+1 = A ⋅ xk + B ⋅ uk
- Ecuaþia de ießire: (A4.6)y = g(x, u) sau y(t) = g(x(t), u(t))
(A4.7)y = C ⋅ x+ D ⋅ u sau y(t) = C ⋅ x(t)+ D ⋅ u(t) (A4.8)yk = g(xk , uk)
- Ecuaþia sistemelor nedinamice: (A4.9)y = g(u) sau y(t) = g(u(t))
- Ecuaþii diferenþiale:F(y, y (1), y(2), ..., y (n), u, u (1), ..., u (m)) = 0 sau:
(A4.10)F(y(t), y(t)(1), y(t)(2), ..., y(t)(n), u(t), u(t)(1), ..., u(t)(m)) = 0
Anexa 4: Proprietatea de invariabilitate ín timp Pag 2222
- Ecuaþii cu diferenþe: (A4.11)F(yk , yk−1 , ..., yk−n , uk, uk−1 , ..., uk−m) = 0
Ín cazul exprimárii sistemului ín formá explicitá prin relaþiiintrare-stare iniþialá-stare ßi intrare-stare iniþialá-ießire de tipul (A3.2) respectiv(A3.3), pentru verificarea proprietáþii de invariabilitate ín timp se aplicá exactdefiniþia acestei proprietáþi precizatá la ínceputul acestei anexe ßi anume:
Pentru relaþia intrare-stare iniþialá-stare:•Considerám cá starea iniþialá la momentul ßi intrarea t0 este x0 u [t0 ,t]determiná la momentul t starea x(t) datá de:
(A4.12)x(t) = ϕt, t0 , x0, u [t 0,t]
Evident proprietatea de consistenþá a acestei relaþii impune .x(t0 ) = x0O aceeaßi valoare a stárii aplicatá ínsá la momentul ßi cu intrareax0 t0 + δ
determiná la momentul t starea datá de:u [t0 ,t]δ xδ(t)
(A4.13)xδ(t) = ϕt, t0 + δ, x0, u [t 0+δ,t]
δ
Consideränd cá intrarea aplicatá pe intervalul este chiar intrareauδ(t) [t0 + δ, t] translatatá, dar din se folosesc numai valorile sale pentru u(τ) u(τ) τ ∈ [t0 , t − δ]
, adicá au loc (A3.2), se exprimá din (A4.3):xδ(t)
(A4.14)xδ(t) = ϕt, t0 + δ, x0, u [t 0,t−δ]
Relaþia intrare-stare iniþialá-stare (A4.12) este invariabilá ín timp dacávaloarea este translarea (íntärziarea) cu a valorii x(t), adicá:xδ(t) δ
(A4.15)xδ(t) = x(t − δ)
Þinänd cont cá expresia se obþine din (A4.12) pur ßi simplu prinx(t − δ)ínlocuirea lui t prin ,t − δ
(A4.16)x(t − δ) = ϕt − δ, t0 , x0 , u [t 0,t−δ]
Condiþia de invariabilitate (A4.15) devine:
(A4.17)ϕt, t0 + δ, x0 , u [t 0,t−δ]
= ϕ
t − δ, t0, x0 , u [t0 ,t−δ]
Practic se procedeazá astfel:1. Presupunänd cá s-a dat (A4.12), se calculeazá ínlocuind ínx(t − δ)
(A4.12) t prin .t − δ2. Se calculeazá ínlocuind ín (A4.12) ßi Ínxδ(t) t0 prin t0 + δ u(τ) prin uδ(τ)
aceastá expresie se face substituþia ßi se aduce la o formá maiuδ(τ) = u(τ − δ)simplá.
3. Se verificá identitatea xδ(t) = x(t − δ)
Exemplu: Fie (A4.18)x(t) = Φ(t − t0 ) ⋅ x0 + ∫t0
t
Φ(t − τ) ⋅ u(τ) ⋅ dτ
Se observá cá ϕt, t0 , x0 , u [t0 ,t]
= Φ(t − t0) ⋅ x0 + ∫
t0
t
Φ(t − τ) ⋅ u(τ) ⋅ dτ
1) x(t − δ) = Φ(t − δ− t0 ) ⋅ x0 + ∫t 0
t−δ
Φ(t − δ− τ) ⋅ u(τ) ⋅ dτ := ϕt − δ, t0 , x0, u [t 0,t]
Deci (A4.19)x(t − δ) = ϕ
t − δ, t0, x0 , u [t0 ,t]
2) xδ(t) = ϕt, t0 + δ, x0, u [t 0+δ,t]
δ
(A4.20)xδ(t) = Φ(t − (t0 + δ)) ⋅ x0 + ∫t0 +δ
t
Φ(t − τ) ⋅ uδ(τ) ⋅ dτ
Sub integralá se ínlocuießte ßi se obþine:uδ(τ) = u(τ − δ)
(A4.21)xδ(t) = Φ(t − δ− t0) ⋅ x0 + ∫t0 +δ
t
Φ(t − τ) ⋅ u(τ − δ) ⋅ dτ
Sub integralá se face substituþia τ − δ = ξ=> dτ = dξ; τ = t0 + δ=> ξ= t0 ; ßi se obþine:τ = t => ξ = t − δ
xδ(t) = Φ(t − δ− t0) ⋅ x0 + ∫t0
t−δ
Φ(t − δ− ξ) ⋅ u(ξ) ⋅ dξ
(A4.22)xδ(t) = ϕt, t0 + δ, x0, u [t 0,t−δ]
3) Din (A4.22) ßi (A4.19) se observá identitatea:
xδ(t) ≡ x(t − δ), ∀t, ∀δ≥ 0, ∀x0 ∈ X, ∀u ∈ Ω
Deci relaþia (A4.18) este o relaþie invariabilá ín timp.Faptul cá ínlocuind ín(A4.18) confirmá proprietatea de consistenþá, ceea cet = t0 se obtine x(t0 ) = x0ínseamná cá relaþia (A4.18) poate fi o relaþie intrare-stare iniþialá-stare.
Se ßtie cá o relaþie de forma (A4.12) pentru a fi o relaþie intrare-stareiniþialá-stare, pe längá condiþia de consistenþá trebuie sá índeplineascá ßicondiþiile de unicitate ßi tranziþie a stárilor.
Pentru relaþia intrare-stare iniþialá-ießire:•
(A4.23)y(t) = ηt, t0 , x0, u [t 0,t]
Procedura este aceeaßi numai cá ín loc de x(t) apare y(t) ßi ín loc de. Algoritmul de verificare este:ϕ(•) apare η(•)
1. Se calculeazá
Anexa 4: Proprietatea de invariabilitate ín timp Pag 2323

(A4.24)y(t − δ) = ηt − δ, t0 , x0 , u [t 0,t−δ]
2. Se calculeazá
(A4.25)yδ(t) = ηt, t0 + δ, x0, u [t 0+δ,t]
δ
Substituind ßi fácänd schimbári de variabilá se exprimá:uδ(τ) = u(τ − δ)
(A4.26)yδ(t) = ηt, t0 + δ, x0, u [t 0,t−δ]
3. Se verificá identitatea
(A4.27)yδ(τ) = y(τ − δ), ∀t, ∀δ≥ 0, ∀x0 ∈ X, ∀u ∈ Ω
Se face menþiunea cá relaþia intrare-stare iniþialá-ießire nu trebuie sáíndeplineascá condiþia de consistenþá .y(t0 ) = x0
Dacá totußi ínseamná cá vectorul de ießire ales y(t) poate fiy(t0 ) = x0vectorul de stare x(t).
Anexa 4: Proprietatea de invariabilitate ín timp Pag 2244

Aplicaþii de tipul 4
Sá se verifice proprietatea de invariabilitate ín timp a sistemelorexprimate prin relaþii explicite sau ecuaþii:
4.1 y(t) = e−t−t0
T ⋅ x0 + 1T
⋅ ∫t 0
t
e− t−τT ⋅ u(τ)dτ
4.2 y(t) = a⋅u(t) + b
4.3 y(t) = u( t -τ )
4.4
•x1 (t) = 3 ⋅ x1 (t)+ 2•x2 (t) = 4 ⋅ x2 (t)+ 5 ⋅ u(t)y(t) = 6 ⋅ x1 (t) + 7 ⋅ x2 (t)
4.5•x (t) = −2 ⋅ x2 (t) , t ≥ t0
4.6 y(t) = 3⋅u(t) +4 ⋅ ddt
u(t)
4.7 y(t) = 2⋅t⋅u(t) + 3⋅u(t2 )
4.8 y(t) = 4⋅u(t) + 7⋅u2 (t)
4.9 y(t) =∫t 0
t
τ ⋅ u(τ) ⋅ dτ
4.10 yk = 0, 5 ⋅ yk−1 + 3 ⋅ uk − 5 ⋅ uk−1 , k∈ Z, k ≥ 1
4.11 y(t) = ∫−∞
+∞
h(t, τ) ⋅ u(τ) ⋅ dτ ; h(t,τ) = 11 − (t − τ)2
4.12 y(t) = min u1(t) , u2(t)
4.13 y(t) =
0 , t < t1
a ⋅ u(t) , t ∈ [t1 , t2)b ⋅ u(t) , t ≥ t2
Problema 4.1 Rezolvare:
(4.1.1)y(t) = e−t−t0
T ⋅ x0 + 1T
⋅ ∫t 0
t
e− t−τT ⋅ u(τ)dτ
Relaþia (4.1.1) este o relaþie intrare-stare iniþialá-ießire de forma (A.4.14).Pentru verificarea proprietáþii de invariabilitate se aplicá algoritmul de testaredin Anexa 4.
1) Se calculeazá ínlocuind ín (4.1.1) t prin ,y(t − δ) t − δ
(4.1.2)y(t-δ) = e−(t−δ)−t0
T ⋅ x0 + 1T
⋅ ∫t 0
(t−δ)
e− (t−δ)−τT ⋅ u(τ)dτ
2) Se calculeazá ínlocuind ín (4.1.1) yδ(t) t0 prin t0 + δsi u(τ) prin uδ(τ)
(4.1.3)yδ(t) = e−t−
t 0+δ
T ⋅ x0 + 1T
⋅ ∫t0 +δ
t
e− t−τT ⋅ uδ(τ)dτ
Se substituie ín (4.1.3) ßi se efectueazá sub integralá schimbareauδ(τ) = u(τ − δ)de variabilá ,τ − δ = ξ
(4.1.4)yδ(t) = e−(t−δ)−t0
T ⋅ x0 + 1T
⋅ ∫t0
(t−δ)
e−(t−δ)−ξ
T ⋅ u(ξ)dξ
3) Se observá identitatea yδ(t)≡y(t-δ), ∀x0 ∈ R, ∀δ≥ 0, ∀t, ∀u ∈ Ωdeci sistemul este invariant ín timp.
Problema 4.2 Rezolvare:
(4.2.1)y(t) = a⋅u(t) + b
Relaþia (4.2.1) exprimá un sistem nedinamic de formá implicitá (A4.9) ín care. Deoarece variabila timp nu apare explicit, sistemul esteg(u) = a⋅u + b
invariabil ín timp. Relaþia (4.2.1) poate fi interpretatá ca un caz particular alrelaþiei intrare-stare iniþialá-ießire ín formá explicitá (A4.14) ín care evident nuapare deoarece sistemul nu este dinamic. Se poatex0 si t0 iar u [t 0,t] = (t, u(t))aplica formal algoritmul de testare prezentat ín Anexa 4:1) y(t-δ) = a⋅u(t-δ) + b
2) yδ(t) = a⋅uδ(t) + b
Substituind se obþine:uδ(τ) = u(τ − δ)
yδ(t) = a⋅u(τ− δ)+ b
3) Se verificá , deci (4.2.1) reprezintá o relaþie liniará.yδ(t)≡y(t-δ)
Aplicaþii de tipul 4 Pag 2255
Problema 4.3 Rezolvare:
(4.3.1)y(t) = u(t − τ)
Relaþia (4.3.1) este o ecuaþie funcþionalá ce exprimá un element de íntärzierepurá. Se observá cá ín partea dreaptá a acestei ecuaþii nu apare variabila timp tín mod explicit (ea apare prin argumentul intrárii u) astfel cá sistemul esteinvariabil ín timp. Oricum se poate interpreta ca o intrare w(t),u(t − τ)
ßi relaþia (4.3.1) este de forma (A4.9) unde g(w) = w. Totußi ßi ínw(t) = u(t − τ)acest caz se poate aplica algoritmul de testare a invarianþei ín timp prezentat ínAnexa 4:
1) y(t − δ) = u(t − δ− τ)
2) . yδ(t) = uδ(t − τ)S-a interpretat w(t) = u(t − τ) si wδ(t) = u(t − δ− τ)
.unde wδ(t) = w(t − δ) => uδ(t − τ) = u(t − τ − δ)Substituind => uδ(t − τ) = u(t − τ − δ) yδ(t) = u(t − τ− δ)
3) Se observá identitatea .yδ(t) ≡ y(t − δ), ∀δ≥ 0
Problema 4.4 Rezolvare:
(4.4.1)
•x1 (t) = 3 ⋅ x1 (t)+ 2•x2 (t) = 4 ⋅ x2 (t)+ 5 ⋅ u(t)y(t) = 6 ⋅ x1 (t) + 7 ⋅ x2 (t)
Þinänd cont de (A4.4) ßi (A4.3), ecuaþiile (4.4.1) se scriu ín forma matricialá:
, unde
•x= A ⋅ x+ b ⋅ u + py = cT ⋅ x+ d ⋅ u
x=
x1
x2
, A =
3 00 4
, b =
05
, c =
67
, d = 0, p =
20
Deoarece matricile ßi vectorii implicaþi ín ecuaþii nu depind de timp, sistemuleste invariabil ín timp.
Problema 4.5 Rezolvare:
(4.5.1)•x (t) = −2 ⋅ x2 (t) , t ≥ t0
Ecuaþia (4.5.1) exprimá un sistem (ecuaþia de stare propriu-zisá) de forma(A4.3) ín care , funcþie care nu depinde explicit de timp decif(x, u) = −2 ⋅ x2
ecuaþia de stare este invariabilá ín timp.
Problema 4.6 Rezolvare:
(4.6.1)y(t) = 3⋅u(t) +4 ⋅ ddt
u(t)
Ecuaþia (4.6.1) este o ecuaþie diferenþialá de forma (A4.10) (de fapt este un cazparticular ín care funcþia cáutatá y(t) nu este derivatá ci datá explicit) care sepoate determina numai dacá conþine numai funcþii continue ßi derivabile.ΩDeci (4.6.1) se exprimá sub forma: unde F(y, u, •u) = 0 F(y, u, •u) = y − 3 ⋅ u − 4⋅•unu depinde in mod explicit de timp . Ín concluzie sistemul exprimat de (4.6.1)este invariabil ín timp.
Problema 4.7 Rezolvare:
(4.7.1)y(t) = 2⋅t⋅u(t) + 3⋅u(t2 )
Dupá cum s-a menþionat ín problema (3.7) relaþia (3.7.1) exprimá un sistemnedinamic ce poate fi interpretat ca avänd douá intrári u(t) ßi rescrisw(t) = u(t2 )sub forma:
(4.7.2)y(t) = dT(t) ⋅ U(t), U(t) =
u(t)w(t)
=
u(t)u(t2 )
, d(t) =
2 ⋅ t3
El este de forma (A3.5) unde:g(U, t) = dT(t) ⋅ U(t) = 2 ⋅ t ⋅ u + 3 ⋅ w
care depinde explicit de timp deci sistemul nu este invariabil ín timp. Pentrutestarea proprietáþii de invariabilitate ín timp se poate aplica relaþiei (4.7.1)prezentatá ín forma (4.7.2) algoritmul de testare din Anexa 4 astfel:1) y(t-δ) = dT(t − δ) ⋅ U(t − δ)
2) yδ(t) = dT(t) ⋅ Uδ(t)
Dar . Deci:Uδ(t) = U(t − δ) =
u(t − δ)w(t − δ)
=
u(t − δ)u((t − δ)2 )
yδ(t) = dT(t) ⋅ U(t − δ)
3) Se observá cá y(t-δ) = dT(t − δ) ⋅ U(t − δ) ≠ yδ(t) = dT(t) ⋅ U(t − δ)deci nu este índeplinitá proprietatea de invariabilitate ín timp.
Problema 4.8 Rezolvare: (4.8.1)y(t) = 4⋅u(t) + 7⋅u2 (t)
Se observá cá relaþia (4.8.1) exprimá un sistem nedinamic de forma (A4.9)unde nu depinde explicit de timp, deci sistemul este invariabilg(u) =4⋅u + 7⋅u2
ín timp.
Aplicaþii de tipul 4 Pag 2626
Problema 4.9 Rezolvare:
(4.9.1)y(t) =∫t 0
t
τ ⋅ u(τ) ⋅ dτ
Structura ßi semnificaþia acestui sistem a fost discutatá pe larg la problema(3.9). Relaþia (4.9.1) este o relaþie intrare-stare iniþialá-ießire astfel cá se poateaplica algoritmul de testare prezentat ín Anexa 4 . Pentru a analiza proprietateade invariabilitate atät a ráspunsului liber cät ßi forþat se prezintá formacompletá a relaþiei determinatá prin (3.9.3).
(4.9.2)y(t) = y(t0 )+ ∫t 0
t
τ ⋅ u(τ) ⋅ dτ
1) y(t-δ) = x0 + ∫t0
t−δ
τ⋅ u(τ) ⋅ dτ
2) yδ(t) = x0 + ∫t0 +δ
t
τ⋅ uδ(τ) ⋅ dτ
Substituind se obþine: . Fácänduδ(τ) = u(t − δ) yδ(t) = x0 + ∫t0 +δ
t
τ⋅ u(τ − δ) ⋅ dτ
schimbarea de variabilá se obþine:τ − δ = ξ
yδ(t) = x0 + ∫t 0
t−δ
(ξ+ δ) ⋅ u(ξ) ⋅ dξ
yδ(t) = x0 + ∫t 0
t−δ
τ ⋅ u(τ) ⋅ dτ + δ⋅ ∫t0
t−δ
u(τ) ⋅ dτ
Se observá cá deci sistemul nu este invariabilyδ(t)− y(t − δ) = δ⋅ ∫t 0
t−δ
u(τ) ⋅ dτ ≠ 0
ín timp. Aplicarea algoritmului de testare direct relaþiei (4.9.1) ßi nu relaþiei(4.9.2) ar ínsemna studiul invariabilitáþii ín timp a ráspunsului forþat pe care-lreprezintá relaþia (4.9.1). Se poate vedea cá ráspunsul liber este
este constant ín timp ßi índeplineßte proprietatea dey l (t) = x0 , unde x0 = y(t0 )invariabilitate ín timp. Ín cazul de faþá ráspunsul forþat a fost cel care nu a avutaceastá proprietate.
Problema 4.10 Rezolvare:
(4.10.1)yk = 0, 5 ⋅ yk−1 + 3 ⋅ uk − 5 ⋅ uk−1 , k∈ Z, k ≥ 1
Relaþia (4.10.1) este o ecuaþie cu diferenþe de forma (A4.11) unde:
F(yk , yk−1 , uk , uk−1) = 0 unde:
F(yk , yk−1 , uk , uk−1) = yk − 0, 5 ⋅ yk−1 − 3 ⋅ uk + 5 ⋅ uk−1
Deoarece variabila timp (deoarece sistemul este discret) nu apare ín modk ∈ Zexplicit ín ecuaþia cu diferenþe, sistemul este invariabil ín timp. De fapt sepoate recunoaßte cá (4.10.1) este o ecuaþie cu diferenþe liniará cu coeficienþiconstanþi deci índeplineßte aceastá proprietate.
Problema 4.11 Rezolvare:
(4.11.1)y(t) = ∫−∞
+∞
h(t, τ) ⋅ u(τ) ⋅ dτ ; h(t,τ) = 11 − (t − τ)2
Aceastá relaþie a fost interpretatá sistemic pe larg ín problema (3.11). Pentrutestarea proprietáþii de invariabilitate se aplicá algoritmul din Anexa 4:
1) y(t-δ) = ∫−∞
+∞
h(t − δ, τ) ⋅ u(τ) ⋅ dτ
2) yδ(t) = ∫−∞
+∞
h(t, τ) ⋅ uδ(τ) ⋅ dτ
Substituind se obþine: . Fácänduδ(τ) = u(τ − δ) yδ(t) = ∫−∞
+∞
h(t, τ) ⋅ u(τ− δ) ⋅ dτ
schimbarea de variabilá se obþine:τ − δ = ξ
yδ(t) = ∫−∞
+∞
h(t, ξ+ δ) ⋅ u(ξ) ⋅ dξ = ∫−∞
+∞
h(t, τ+ δ) ⋅ u(τ) ⋅ dτ
3) yδ(t)− y(t − δ) = ∫−∞
+∞
[h(t − δ, τ) − h(t, τ + δ)] ⋅ u(τ) ⋅ dτ
Proprietatea de invariabilitate ín timp este índeplinitá numai dacá:
(4.11.2)h(t − δ, τ) = h(t, τ + δ), ∀τ, ∀δ, ∀t
Pentru cazul particular prezentat condiþia (4.11.2) devine:
deci:h(t-δ,τ) = 11 − (t − δ− τ)2
; h(t,τ + δ) = 11 − [t − (τ + δ)]2
11 − (t − δ− τ)2
= 11 − [t − (τ + δ)]2
Prin urmare sistemul pentru cazul particular al funcþiei este invariabil ính(t, τ)timp. Ín general se poate demonstra cá dacá atunci relaþiah(t, τ) ≡ h(t − τ)(4.11.1) este invariabilá ín timp.
Aplicaþii de tipul 4 Pag 2277

Problema 4.12 Rezolvare:
y(t) = min u1(t) , u2(t) (4.12.1)
Aßa cum s-a analizat ín problema (3.12) sistemul exprimat de (4.12.1) este unsistem nedinamic de forma (A4.9).
y(t) = g(u(t)), u =
u1
u2
, y = g(u) = u1 + u2 − u1 − u2
2
Deoarece g(u) nu depinde explicit de timp, sistemul este invariabil ín timp.Consideränd (4.12.1) exprimatá ca ín relaþia (3.12.2) se poate aplica algoritmulde testare prezentat ín Anexa 4:
y(t) = g(u(t)) = u1 (t) + u2 (t) − u1 (t)− u2 (t)2
1) y(t − δ) = g(u(t − δ)) = u1 (t − δ) + u2 (t − δ)− u1 (t − δ) − u2(t − δ)2
2) yδ(t) = g(uδ(t))
Substituind se obþine: uδ(t) = u(t − δ) =
u1 (t − δ)u2 (t − δ)
yδ(t) = g(u(t − δ))
3) Se observá cá , deci sistemulyδ(t) = g(u(t − δ)) = y(t − δ), ∀δ≥ 0, ∀teste invariabil ín timp.
Problema 4.13 Rezolvare:
(4.13.1)y(t) =
0 , t < t1
a ⋅ u(t) , t ∈ [t1 , t2)b ⋅ u(t) , t ≥ t2
Aßa cum s-a analizat ín problema (3.13), sistemul este nedinamic de tipul(A3.6) cu:
y(t) = g(u,t) unde g(u,t) =
0 , t < t1
a ⋅ u , t ∈ [t1 , t2 )b ⋅ u , t ≥ t2
Se observá cá ín expresia g(.) variabila timp apare prin condiþiile de comutarela momentele . Dacá sistemul nu este invariabil ín timpt = t1 si t = t2 a ≠ bdeoarece momentele sunt semnificative . Ín particular dacá a = bt = t1 si t = t2= 0 atunci ele sunt nesemnificative ßi sistemul este invariabil ín timp. Pentru a
justifica temeinic aceastá afirmaþie se aplicá algoritmul de testare prezentat ínAnexa 4:
1) y(t − δ) =
0 , t-δ < t1
a ⋅ u , t-δ∈ [t1 , t2)b ⋅ u , t-δ≥ t2
=
0 , t < t1 + δa ⋅ u , t ∈ [t1 + δ, t2 + δ)b ⋅ u , t ≥ t2 + δ
2) yδ(t) =
0 , t < t1
a ⋅ uδ(t) , t ∈ [t1 , t2 )b ⋅ uδ(t) , t ≥ t2
Substituind se obþine:uδ(t) = u(t − δ)
yδ(t) =
0 , t < t1
a ⋅ u(t − δ) , t ∈ [t1 , t2)b ⋅ u(t − δ) , t ≥ t2
Trebuie menþionat cá nu au nimic comun cu momentele iniþiale alet1 si t2
evoluþiei, cum era considerat momentul iniþial la care sistemul avea stareat0 , deoarece acest sistem nu este dinamic. Variabilele sunt pur ßix0 t1 si t2
simplu doi parametri de structurá ai sistemului.
3) Dacá a = b = 0 se observá cá deci proprietatea are loc.y(t − δ) = yδ(t)Dacá ßi, de exemplu, condiþia devine:a ≠ b a ≠ 0, b ≠ 0 y(t − δ) = yδ(t)
--> fals deoarece identitatea trebuie sá aibá loct1 ≡ t1 + δ, t2 ≡ t2 + δ => δ= 0. Deci proprietatea de invariabilitate nu este índeplinitá.∀δ
Aplicaþii de tipul 4 Pag 2288

Anexa 5: Funcþii de matrici pátratice
Cea mai simplá funcþie de o matrice pátraticá este puterea aceleimatrici:
(k termeni )Ak = A ⋅ A ⋅A ⋅ ...... ⋅ A = I (matricea unitate )A0
Ín acest mod , dacá f(x) este un polinom de gradul m:f(x) = a0 + a1x +........+ amxm
se defineßte polinomul matricial f(A) sub forma:f(A) = a0I + a1A +.......+ amAm
Se observá din definiþie cá un polinom matricial este de fapt o matrice de aceeaßidimensiune cu A. Douá polinoame matriciale ín aceiaßi matrice A comutá:
f(A)⋅g(A) = g(A)⋅f(A)Douá polinoame ín matricile pátrate A ßi B comutá dacá ßi numai dacá A ßi Bcomutá:
f(A)⋅g(B) = g(B)⋅f(A) <=> A⋅B = B⋅AUn polinom matricial poate fi factorizat íntr-o manierá analoagá cu factorizareaunui polinom scalar. De exemplu , sá considerám:
f(x) = x2 + 3x + 2 = (x + 1)(x + 2)f(A) = A2 + 3A +2I = (A + I)(A + 2I)
Toate considerentele de mai sus se pot generaliza la serii infinite:
f(x) = => f(A) = Σi=0
∞ aixi
Σi=0
∞ aiAi
Dacá vom considera ín particular o funcþie exponenþialá de forma:,f(x) = ex
vom putea dezvolta aceastá funcþie íntr-o serie de puteri:
f(x) = Σi = 0
∞ 1i!
⋅ xi
Va rezulta cá seria de puteri matricialá asociatá va fi convergentá ßi vom adoptaurmátoarea notaþie:
eA = Σi = 0
∞
1i!
⋅ Ai
De asemenea, vom putea folosi ßi variabila temporalá t ßi obþinem:
eAt = Σi = 0
∞
1i!
⋅ (At) i
Se observá cá am introdus ín acest moment noþiunea de funcþie dematrice, f(A), unde f nu este neapárat o funcþie polinomialá. Se pune problema
descrierii unor metode de calcul ale acestor funcþii de matrici. Existá mai multemetode, cäteva dintre ele fiind descrise ín continuare. Pentru ínþelegerea maiußoará a acestor metode, vom introduce cäteva noþiuni ßi rezultate utile. Astfel,
(l) = det(lI - A) ∆se numeßte polinom caracteristic. Rádácinile (reale sau complexe) alepolinomului caracteristic se numesc valori proprii ale matricei A; (l) = 0 se∆numeßte ecuaþie caracteristicá. Mulþimea valorilor proprii a matricei A senumeßte spectrul matricei ßi se noteazá cu S(A); S(A) = l1,l2,.....,ln dacámatricea este de ordinul n. Se poate demonstra cá dacá matricea A are valorileproprii l1,l2,.....,ln atunci polinomul matricial q(A) va avea valorile propriiq(l1),q(l2),.....,q(ln) .
Teorema Cayley-Hamilton este una dintre cele mai importanteteoreme din analiza matricialá , deosebit de utilá ín aplicaþii. Aceastá teoremáafirmá cá orice matrice pátratá A satisface ecuaþia sa caracteristicá.Demonstraþia teoremei nu este foarte dificilá ßi o schiþám ín continuare.
Demonstraþie. Se porneßte de la (sI - A)-1 = adj(sI - A).1∆(s)
unde (sI - A) este o matrice de dimensiune (nxn) ßi adj(sI - A), matriceaadjunctá, va fi tot o matrice de dimensiune (nxn) ín care fiecare element va fi unpolinom ín s de grad cel mult (n-1), obþinut prin calculul complementuluialgebric corespunzátor. Din relaþia anterioará se obþine:
(s) I = (sI - A) adj(sI - A), (s) fiind polinomul caracteristic al∆ ⋅ ⋅ ∆matricei A. Cum adj(sI - A) = B1sn−1 + B2sn−2 +.....+ Bn−1s + Bn , cu Bkmatrici de dimensiuni (nxn), obþinem: (sn+a1sn−1 +.....+ an−1s + an) I=(sI-A) (B1sn−1+ B2sn−2+...+ Bn−1s+Bn)
Prin identificare obþinem relaþiile:
= I | B1 ⋅An
| -B1A + B2 = a1I ⋅An−1
| -B2A + B3 = a2I ⋅An−2
-------------------------------------------------------| -Bn−1A + Bn = an−1I ⋅A1
| = I-BnA = anI ⋅A0
Dupá ínmulþirea ambilor membri ai egalitáþilor cu cantitáþile din stänga ßi dupáadunarea tuturor egalitáþilor, obþinem:
An+a1An−1 +.....+ an−1A + anI = Onxn
adicá exact ce afirmá teorema. Gásirea matricei B(s) dupá aceastá formulá sebazeazá pe cunoaßterea polinomului caracteristic p(s) al matricei A.
Anexa 5: Fnctii de matrici Pag 2912

Levérrier ßi Fadeeva au propus o metodá de calculare simultaná acoeficienþilor polinomului caracteristic ßi a matricei asociate B(s). Acestalgoritm este folosit pentru calculul funcþiei de matrice cät ßi pentruf(A) = eAt
calculul matricei de tranziþie a stárilor pentru sisteme discrete (veziAk = Φk
aplicaþii de tipul 5).
L = (sI - A)-1 => L-1(sI - A)-1 = .eAt eAt
Algoritmul Leverrier- Fadeeva
= , unde:(sI - A)−1 Bn−1sn−1 + Bn−2sn−2 + … + B1s + B0
sn + dn−1sn−1 + … + d1s + d0
, tr(A) = Bn−1 = I , dn−1 = -tr(A) Σi=1
n(aii)
Bn−2 = Bn−1A + dn−1I , dn−2 = - 12
tr(Bn−2A)
-------------------------------------------------- = - tr( A)Bi = Bi+1A + di+1I , di
1n − i
Bi
-------------------------------------------------- = - tr( A)B0 = B1A + d1I , d0
1n B0
Onxn = B0A + d0I
eAt = L−1 (sI − A)−1
Putem prezenta un program MATLAB ce calculeazá automat matricile ßiBi
scalarii dupá algoritmul Leverrier - Fadeeva numit lf.m:di
function [b,d]=lf(a);[n,m]=size(a);b=zeros(n,n^2);d=zeros(1,n);b(:,1:n)=eye(n);d(1)=-trace(a);for k=2:nb(:,(k-1)*n+1:k*n)=b(:,(k-2)*n+1:(k-1)*n)*a+d(k-1)*eye(n);d(k)=-trace(b(:,(k-1)*n+1:k*n)*a)/k;end;d=[1 d];
Din teorema Cayley - Hamilton mai rezultá cá se poate scrie ca oAn
combinaþie liniará a puterilor inferioare. Rezultá cá orice polinom de matricea Ase poate scrie ca o combinaþie liniará a matricilor I , A , sau caA2 , ..... , An−1
un polinom de ordinul (n-1) ín A. Acest rezultat poate fi pus íntr-o formácompactá astfel:
Dändu-se matricea (nxn) A cu valorile proprii cuλ1,λ2,.....,λNordinele de multiplicitate , polinomul caracteristic (l) va fi:m1 , m2 , .... , mN ∆
(l) = ∆ Π1
N(λ − λk)mk , Σ
k=1
Nmk = n
Fie f ßi g douá polinoame arbitrare. Dacá:
, j = 0,1,2,..., -1; k = 1,2,....,ndj
dλjf(λ)
λ = λk= dj
dλjg(λ)
λ = λkmk
atunci f(A) = g(A).
Setul de numere pentru k = 1,2,...,N ßi j = 0,1,..., -1 sedj
dλjf(λ) λ=λk mk
numesc valorile lui f ín spectrul lui A.Folosirea teoremei Cayley-Hamilton se poate extinde ßi pentru calculul
funcþiilor de matrici. Dacá f( ) este o funcþie (nu neapárat un polinom) definitáλpe un domeniu care sá includá spectrul matricei A ßi care sá fie continuá ßiderivabilá ín punctul , se gáseßte un polinom g( )λ = λk de mk − 1 ori, k = 1÷N λde gradul (n-1) care sá aibá aceleaßi valori ca f( ) ín spectrul lui A. Atunci f(A)λ= g(A). Bazändu-ne pe aceastá proprietate formulám:
Metoda polinomului de interpolare Silvester-LagrangeUn polinom matricial este identic cu o funcþie matricialá dacá au
aceleaßi valori ín spectrul lui A. (A se vedea mai sus ce ínseamná acest lucru).Algoritmul de calcul a unei funcþii de matrice f(A) dupá metoda
polinomului de interpolare Silvester-Lagrange este:1. Se alege un polinom g(λ) = α0 + α1 ⋅ λ + α2 ⋅λ2 + ... + αn−1 ⋅ λn−1
2. Se formeazá sistemul de ecuaþii:
dj
dλjf(λ)
λ = λk= dj
dλjg(λ)
λ = λk,
j = 0,1, ...,mk − 1k = 1, ...,N
3. Se rezolvá sistemul de ecuaþii de mai sus cu necunoscuteleα0, α1, ...αN−1
4. Se calculeazá : f(A) = α0 ⋅ I + α1 ⋅A + α2 ⋅ A2 + ... + αn−1 ⋅An−1
Metoda fundamentalá a funcþiilor de matrici Se numeßte polinom anulant al matricei A orice polinom f(x) pentru
care f(A) = . Polinomul caracteristic al matricei A s-a vázut cá este un0nxnpolinom anulant pentru A. Polinomul anulant de grad minim posibil ßi monic(cu coeficientul puterii maxime unitar) se numeßte polinom minimal . Polinomulminimal se introduce deoarece matricile au proprietatea ca din A B = 0nxn sá nu⋅rezulte íntotdeauna A = 0 sau B = 0 !
Formula fundamentalá a funcþiilor de matrici este:
Anexa 5: Fnctii de matrici Pag 130

f(A) = Σk=1
N
Σl=0
mk−1Ekl ⋅ f (l)(λk) , Σ
k=1
Nmk = n
Ceea ce este foarte important de reþinut din formula fundamentalá afuncþiilor de matrici este faptul cá matricile Ekl nu depind de funcþia f ci numaide matricea A.
Algoritmul de calcul este urmátorul:
1. Se determiná polinomul caracteristic (l) ataßat matricei A.∆
2. Se rezolvá ecuaþia caracteristicá ßi se determiná valorile proprii∆(λ) = 0distincte ßi ordinele lor de multiplicitate .λk mk
3. Se expliciteazá formula fundamentalá a funcþiilor de matrici:
f(A) = (A5.1)Σk=1
N
Σl=0
mk−1Ekl ⋅ f (l)(λk) , Σ
k=1
Nmk = n
4. Se particularizeazá convenabil funcþia f pentru obþinerea unui sistem deecuaþii liniar independente cät mai simplu pentru calculul matricilor ceEklintervin ín formula fundamentalá a funcþiilor de matrici ßi care, reþineþi, suntindependente de forma particulará a funcþiei f, depinzänd exclusiv de matriceaA.
5. Se revine la funcþia iniþialá ßi se calculeazá f(A) cu formula (A5.1)indicatá.
Anexa 5: Fnctii de matrici Pag 1312

Aplicaþii de tipul 5: Calculul funcþiilor de matrici
Sá se calculeze matricile pentru:Φ(t) = eAt si Fk = Ak
5.1 A = 5.6 A =
1 2 −10 1 01 −4 3
−1 1 −10 1 −40 1 −3
5.2 A = 5.7 A =
1 2 −10 1 01 4 3
−1 −2 30 1 −1
−1 −1 2
5.3 A = 5.8 A =
1 −2 1−1 −1 01 0 −1
0 1 10 0 10 0 0
5.4 A = 5.9 A =
−3 1 −1−2 0 −1−1 1 −2
−3 1 01 −3 00 0 −3
5.5 A = 5.10 A =
−3 1 4−5 −2 −51 0 −1
1 1 00 1 00 0 1
Indicaþii generale de rezolvare:
Cu ajutorul algoritmului Leverrier - Fadeeva vom calcula ßi(sI − A)−1
apoi, calculänd transformata Laplace inversá a matricei complexe obþinute, vomcalcula . Transformata Laplace inversá a unei matrici complexe este oeAt
matrice ale cárei elemente sunt transformatele Laplace inverse ale elementelormatricei complexe corespondente. Deci:
(5.1)eAt = L−1 (s ⋅ I − A)−1
Pentru calculul acestei funcþii de matrice vom putea utiliza toate metodeleprezentate ín Anexa 5. Pentru a calcula dispunem de o metodá foarteFk = Ak
simplá care necesitá utilizarea unui mediu special.Ín MATLAB dispunem de funcþia eig care permite descompunerea unei
matrici A dupá valorile proprii ßi vectorii proprii:
EIG Eigenvalues and eigenvectors. EIG(X) is a vector containing the eigenvalues of a square matrix X. [V,D] = EIG(X) produces a diagonal matrix D of eigenvalues and a full matrix V whose columns are the corresponding eigenvectors so that X*V = V*D. [V,D] = EIG(X,'nobalance') performs the computation with balancing disabled, which sometimes gives more accurate results for certain problems with unusual scaling.
Generalized eigenvalues and eigenvectors. EIG(A,B) is a vector containing the generalized eigenvalues of square matrices A and B. [V,D] = EIG(A,B) produces a diagonal matrix D of general- ized eigenvalues and a full matrix V whose columns are the corresponding eigenvectors so that A*V = B*V*D.
Vom gási, aplicänd mai íntäi comanda:[v,d]=eig(a)
vectorii proprii v ßi o matrice diagonalá d ce conþine pe diagonalá valorileproprii ale matricei a (matricea A ín cazul nostru ). Rezultá simplu:
(5.2)A = V ⋅D ⋅ V−1 => Ak = V ⋅Dk ⋅ V−1
Avantajul constá ín faptul cá matricea D este o matrice diagonalá a cárei puterese poate calcula imediat. Dezavantajul íl reprezintá faptul cá trebuie sá calculám
. O posibilitate mult mai elegantá este utilizarea algoritmului Leverrier -V−1
Fadeeva. Un sistem discret este descris de ecuaþiile recursive:
(5.3)
xk+1 = A ⋅xk + B ⋅uk
yk = C ⋅xk + D ⋅uk
Se observá cá reprezintá matricea de tranziþie a stárii ín cazulFk = Ak
sistemelor discrete:
xk+1 = A ⋅xk => z ⋅ [X(z) − x0] = A ⋅ X(z) => X(z) = z ⋅ (z ⋅ I − A)−1 ⋅ x0
Aplicänd transformarea Z inversá vom obþine:
xk = Z−1X(z) = Σv.p. A
Rez zk−1 ⋅z ⋅ (z ⋅ I − A)−1 ⋅x0
(5.4)xk = Z−1X(z) = Σv.p. A
Rez zk ⋅ (z ⋅ I − A)−1 ⋅x0
unde v.p. A reprezintá valorile proprii ale matricei A. Dar cum: (5.5)xk = Ak ⋅x0
rezultá foarte simplu din (5.4) ßi (5.5) cá:
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 1322

(5.6)Ak = Σv.p. A
Rez zk ⋅ (z ⋅ I − A)−1
Se observá clar cum pentru a calcula este necesar sá calculám ,Ak (z ⋅ I − A)−1
lucru posibil de realizat cu algoritmul Leverrier - Fadeeva. Ca o concluziegeneralá, din (5.1) ßi (5.6) rezultá evident cá algoritmul Leverrier - Fadeeva sepoate utiliza atät pentru calculul cät ßi pentru calculul . Vomf(t) = eAt Fk = Ak
putea scrie un program foarte simplu ín MATLAB care sá ne permitá calcululautomat pentru , program prezentat ín Anexa 5(s ⋅ I − A)−1 respectiv (z ⋅ I − A)−1
cu numele lf.m . Avem de-a face cu funcþia lf.m ce calculeazá, dändu-se matriceaa, matricile , respectiv . Maib = [Bn−1, Bn−2, ....., B0] d = [ 1 , dn−1 , ...... , d0 ]facem observaþia cá ín va trebui sá calculámAk = Σ
v.p. ARez zk ⋅ (z ⋅ I − A)−1
reziduurile unei funcþii matriciale dependente de z ßi de k:
Ak = Σv.p. A
RezA(z,k) , unde A(z, k) = zk ⋅ (z ⋅ I − A)−1
Calculul se poate face global sau element cu element, prin derivarea unei funcþiimatriciale A(z, k) ínþelegänd derivarea fiecárui element al matricei.
Problema 5.5 Rezolvare:
Fie matricea A = . Sá se calculeze ßi
−3 1 4−5 −2 −51 0 −1
f(A) = eAt Fk = Ak
Formula fundamentalá a funcþiilor de matrici:
1. Calculám polinomul caracteristic:(l) = det(lI -A) = det = (l+2)3∆
2. Ín cazul nostru l1 = -2 , n1 = 3 , N = 1
3. f(A) = Σk=1
N
Σl=0
2Eklf (l)(λk) = E10f(λ1) + E11f’(λ1) + E12f” (λ1)
4. Particularizám convenabil f(l), dintr-o mulþime de funcþii liniarindependente ín .λ
- fie f(l) = 1 => f (λ1) = 0 , f” (λ1) = 0 ⇒f(A) = I = E10⋅1 + E11⋅0 + E12⋅0 => E10 = I
- fie f(l) = l+2 => f(λ1) = 0 , f ’(λ1) = 1 , f” (λ1) = 0 ⇒
f(A) = A+2I = E10⋅0 + E11⋅1 + E12⋅0 => E11 =A+2I =
−1 1 4−5 0 −51 0 1
- fie f(λ) = (λ+2)2 => f(λ1) = 0 , f ’(λ1) = 0 , f” (λ1) = 2 ⇒
=f(A) =(A+2I)2 =E10⋅0 + E11⋅0 + E12⋅2 => E12 =(A+2I)2
0 −1/2 −5/20 −5/2 −25/20 1/2 5/2
5. Funcþia iniþialá a fost .f(λ) = eλt => f’(λ) = teλt , f”(λ) = t2eλt
Conform cu formula fundamentalá a funcþiilor de matrici vom avea:
+... f(A) = eAt = E10e−2t + E11te−2t + E12t2e−2t =
1 0 00 1 00 0 1
e−2t
...+ + =
−1 1 4−5 0 −51 0 1
te−2t
0 −1/2 −5/20 −5/2 −25/20 1/2 5/2
t2e−2t
=
e−2t − te−2t te−2t − 0.5t2e−2t 4te−2t − 2.5t2e−2t
−5te−2t e−2t − 2.5t2e−2t −5te−2t − 12.5t2e−2t
te−2t 0.5t2e−2t e−2t + te−2t + 2.5t2e−2t
La acelaßi rezultat va trebui sá ajungem dacá folosim metoda polinomului deinterpolare Silvester - Lagrange. Avänd o matrice pátratá de ordinul 3, vomfolosi polinomul de interpolare de gradul 2 de forma:
g(λ) = α0 + α1λl + α2λ2
Vom cáuta sá gásim valorile coeficienþilor astfel íncät g(l) ßi f(l) sáα0,α1, α2aibá aceleaßi valori ín spectrul lui A. Ecuaþiile la care vom ajunge sunt:
f(-2) = g(-2) <=> e−2t = α0-2α1+4α2
f'(-2) = g'(-2) <=> te−2t = α1 - 4α2
f''(-2) = g''(-2) <=> t2e−2t = 2α2
Se gásesc urmátoarele valori:
α2 = 12t2e−2t
α1 = te−2t + 2t2e−2t
α0 = e−2t + 2te−2t + 2t2e−2t
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 1332

Rezultá simplu:
= ( )f(A)=eAt = g(A) = α0I+α1A+α2A2 e−2t + 2te−2t + 2t2e−2t
1 0 00 1 00 0 1
+
+ ( ) + te−2t + 2t2e−2t
−3 1 4−5 −2 −51 0 −1
12
t2e−2t
8 −5 1820 −1 −5−4 1 3
=
=
e−2t − te−2t te−2t − 0.5t2e−2t 4te−2t − 2.5t2e−2t
−5te−2t e−2t − 2.5t2e−2t −5te−2t − 12.5t2e−2t
te−2t 0.5t2e−2t e−2t + te−2t + 2.5t2e−2t
Pentru calculul f(A) = putem folosi ßi algoritmul Leverrier- Fadeeva,eAt
deoarece . Ín cazul nostruL eAt = (sI − A)−1 => eAt = L−1 (sI − A)−1
obþinem:
, unde:(sI − A)−1 =B2s2 + B1s + B0I3
s3 + d2s2 + d1s + d0
B2 = I , d2 = -tr(A) , tr(A) = Σi=1
3aii
A =
−3 1 4−5 −2 −51 0 −1
=> tr(A) = (−3) + (−2) + (−1) = −6
B2 =
1 0 00 1 00 0 1
; d2 = 6
B1 = B2A + d2I ; d1 = - tr(B1A)12
B1 = I3A + 6I3 =
−3 1 4−5 −2 −51 0 −1
+ 6
1 0 00 1 00 0 1
=
3 1 4−5 4 −51 0 5
d1 = −12
tr
3 1 4−5 4 −51 0 5
−3 1 4−5 −2 −51 0 −1
= −12
tr
−10 1 3−10 −13 −35
2 1 −1
= 12
B0 = B1A + d1I ; d0 = - tr(B0A)13
B0 =
3 1 4−5 4 −51 0 5
−3 1 4−5 −2 −51 0 −1
+ 12
1 0 00 1 00 0 1
=
2 1 3−10 −1 −35
2 1 11
d0 = −13
tr
3 1 4−5 4 −51 0 5
−3 1 4−5 −2 −51 0 −1
= −13
tr
−8 0 00 −8 00 0 −8
= 8
Se observá cum se verificá relaþia de ínchidere ßi anume:
, ceea ce probeazá corectitudinea calculelor. Rezultá
0 0 00 0 00 0 0
= B0A+ d0I3
ín urma calculelor efectuate cá :
(sI − A)−1 =
1 0 00 1 00 0 1
s2 +
3 1 4−5 4 −51 0 5
s +
2 1 3−10 −1 −35
2 1 11
s3 + 6s2 + 12s + 8
(sI − A)−1 =
s2 + 3s + 2 s + 1 4s + 3−5s − 10 s2 + 4s − 1 −5s − 35
s + 2 1 5s + 11
s3 + 6s2 + 12s + 8
eAt = L−1 (sI − A)−1
De exemplu, primul element al matricei va fi:eAt
a11(t) = L−1 s2 + 3s + 2s3 + 6s2 + 12s + 8
= L−1
(s + 1)(s + 2)(s + 2)3
= L−1
s + 1
(s + 2)2
a11(t) = Rez(−2)
s + 1
(s + 2)2e st
= 1
(2 − 1)!
(s + 2)2 s + 1
(s + 2)2e st
(1)
s = −2
, a11(t) = [e st + (s + 1)te st ]s = −2
= e−2t − te−2t
adicá exact rezultatul obþinut ßi prin celelalte metode. Ín mod analog secalculeazá restul elementelor matricei .eAt
Exemplu de calcul: Fie A = . Sá se calculeze f(A) = sin(At)
1 22 1
Dupá acelaßi model ca la exemplul anterior vom gási:
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 3412

(l) = det(lI-A) = = (l+1)(l-3)∆
λ − 1 −2−2 λ − 1
Avem douá valori proprii : . Pentru aceastáλ1 = -1 , n1 =1 ßi λ2 = 3 , n2 = 1matrice ßi pentru orice funcþie vom avea:
f(A) = E10f(λ1) + E20f(λ2)
Particularizám convenabil f(l) astfel íncät sá gásim ußor E10 ßi E20
. Rezultá:f(λ) = λ+1 => f(λ1) = 0 ßi f(λ2) = 4
A+I = 4 => = (A+I) = E20 E2014
1/2 1/21/2 1/2
f(l) = l-3 => . Rezultá:f(λ1) = -4 ßi f(λ2) = 0
A - 3I = = - (A-3I) = −4 E10 => E1014
1/2 −1/2−1/2 1/2
Va rezulta ín final:
sin(At) = sin(-t) + sin(3t)
1/2 −1/2−1/2 1/2
1/2 1/21/2 1/2
Aplicänd metoda polinomului de interpolare Silvester-Lagrange, vom alege unpolinom de interpolare de gradul 1 (ordinul matricei A fiind 2):
g(l) = a1l + a0
Coeficienþii polinomului de interpolare se vor gási din condiþia ca g(l) ßi f(l) sáaibá aceleaßi valori ín spectrul matricei A:
g(-1) = f(-1) => = -sin(t)-α1 + α0
g(3) = f(3) => = sin(3t) 3α1 + α0
Rezultá valorile: = [sin(t) + sin(3t)]α1
14
= [sin(3t) - 3sin(t)]α014
Va rezulta simplu : sin(At) = f(A) = g(A) = α1A + α0I
sin(At) = [sin(3t) + sin(t)] + [sin(3t) - 3sin(t)]14
1 22 1
1
4
1 00 1
Ín cazul acestei funcþii de matrice nu putem aplica (principial) algoritmulLeverrier - Fadeeva.
Pentru a calcula putem aplica urmátoarele operaþii ínFk = Ak
MATLAB:
a = -3 1 4 -5 -2 -5 1 0 -1
[v,d]=eig(a)v = 0.1912 - 0.0220i 0.1912 + 0.0220i -0.1924 0.9560 - 0.1098i 0.9560 + 0.1098i -0.9623 -0.1912 + 0.0220i -0.1912 - 0.0220i 0.1925 d = -2.0000 + 0.0000i 0 0 0 -2.0000 - 0.0000i 0 0 0 -2.0000
Ín acest moment putem calcula:
Fk = Ak = V ⋅
(−2)k 0 00 (−2)k 00 0 (−2)k
⋅V−1
deci putem gási o formá dependentá de k pentru Fk = Ak
O posibilitate mult mai elegantá este utilizarea algoritmului Leverrier-Fadeeva . Aplicänd funcþia lf.m obþinem:
[b,d]=lf(a)b = 1 0 0 3 1 4 2 1 3 0 1 0 -5 4 -5 -10 -1 -35 ⇔ 0 0 1 1 0 5 2 1 11
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 1352

⇔ b =
1 0 00 1 00 0 1
s2 +
3 1 4−5 4 −51 0 5
s +
2 1 3−10 −1 −35
2 1 11
d = 1 6 12 8 ⇔ d = s3 + 6s2 + 12s + 8
Se observá cá obþinem exact rezultatele de mai ínainte. Consideränd variabilacomplexá z, obþinem:
(zI − A)−1 =
z2 + 3z + 2 z + 1 4z + 3−5z − 10 z2 + 4z − 1 −5z − 35
z + 2 1 5z + 11
z3 + 6z2 + 12z + 8
Ak = Σpol (-2)
Rez
zk ⋅
z2 + 3z + 2 z + 1 4z + 3−5z − 10 z2 + 4z − 1 −5z − 35
z + 2 1 5z + 11
(z + 2)3
Ak =
a11(k) a12(k) a13(k)a21(k) a22(k) a23(k)a31(k) a32(k) a33(k)
, k ≥ 1
Ín acest moment putem calcula pentru orice valoare naturalá a lui k. DeAk
exemplu, dorim sá calculám elementul :a12(k)
a12(k) = Σpol (-2)
Rez
zk ⋅ z + 1
(z + 2)3
= 1
(3 − 1)!⋅ zk+1 + zk
(2)
z = −2
a12(k) = 12 ⋅ (k + 1)k ⋅zk−1 + k(k − 1) ⋅zk−2 z = −2
a12(k) = 12
⋅ (k + 1)k ⋅ (−2)k−1 + k(k − 1) ⋅ (−2)k−2 Putem ínsá sá abordám global calculul formulei reziduurilor de mai sus:
Ak = Rez(−2)
zk+2 + 3zk+1 + 2zk zk+1 + zk 4zk+1 + 3zk
−5zk+1 − 10zk zk+2 + 4zk+1 − zk −5zk+1 − 35zk
zk+1 + 2zk zk 5zk+1 + 11zk
(z + 2)3
Ak = Rez(−2)
A(z,k)(z + 2)3
= 1
2⋅ [A(z,k)]
z = −2Se observá cá:
A(z, k) =
zk+2 + 3zk+1 + 2zk zk+1 + zk 4zk+1 + 3zk
−5zk+1 − 10zk zk+2 + 4zk+1 − zk −5zk+1 − 35zk
zk+1 + 2zk zk 5zk+1 + 11zk
Pentru a calcula reziduul ín polul (-2) cu ordinul de multiplicitate 3 va trebui sáderivám A(z, k) de douá ori, obþinänd ín final rezultatul:
A (z, k) =
(k + 1)(k + 2)zk + 3 ⋅ (k + 1) ⋅k ⋅ zk−1 + 2 ⋅k ⋅ (k − 1) ⋅zk−2.........−5(k + 1) ⋅kz⋅k−1 − 10 ⋅ k ⋅ (k − 1) ⋅ zk−2.....................................(k + 1)kzk−1 + 2 ⋅k ⋅ (k − 1) ⋅zk−2...............................................
(z + 2)3
.......................(k + 1)kzk−1 + k(k − 1)zk−2 4(k + 1)kzk−1 + 3k(k − 1)zk−2
(k + 1)[(k + 2)zk + 4kzk−1]− k(k − 1)zk−2 −5(k + 1)kzk−1 − 35k(k − 1)zk−2
.............................................k(k − 1)zk−2 5(k + 1)kzk−1 + 11k(k − 1)zk−2
(z + 2)3
Evident, vom avea:
Ak = 12 ⋅
A (z, k) z = −2
Pentru verificare, sá calculám :A7
a^7ans = -576 1120 5152 -2240 3232 14560 448 -672 -3040
a12(7) = 12 ⋅ 8 ⋅7 ⋅ (−2)6 + 7 ⋅6 ⋅ (−2)5 = 1
2 ⋅ [56 ⋅ 64 − 42 ⋅ 32] = 1120
Problema 5.7 Rezolvare:
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 3612

A = Calculám f(A) =
−1 −2 30 1 −1−1 −1 2
eAt si Fk = Ak
Cea mai des utilizatá funcþie de matrice este f(A) = , deoarece cunoaßterea eieAt
duce la cunoaßterea ráspunsului liber al sistemelor liniare invariante ín timpcontinue cät ßi la posibilitatea de calcul a ráspunsului forþat. Am vázut cá pentrucalculul acestei funcþii putem aplica toate cele 3 metode prezentate ín Anexa 5.
Formula fundamentalá a funcþiilor de matrici prezintá dezavantajulnecesitáþii calculului rádácinilor polinomului caracteristic, lucru ín generaldificil.
Algoritmul Leverrier - Fadeeva se preteazá unei implementári pecalculator dar necesitá ín final calculul transformatei Laplace inverse a fiecáruielement al matricei (s ⋅ I − A)−1.
Metoda polinomului de interpolare Silvester - Lagrange este metodacea mai expeditivá care se poate aplica pentru calculul funcþiilor de matrice,(deßi ßi aici este nevoie de cunoaßterea valorilor proprii ale matricei), motivpentru care se utilizeazá cel mai intens. Avänd o matrice pátratá de ordinul 3,vom folosi polinomul de interpolare de gradul 2 de forma:
g(λ) = α0 + α1λl + α2λ2
Dacá f(A) = eAt => f(λ) = eλt
Valorile proprii ale matricei A sunt rádácinile polinomului det(sI - A), adicá:λ1 = λ2 = 1 , λ3 = 0
Vom cáuta sá gásim valorile coeficienþilor astfel íncät g(l) ßi f(l) sá aibáaceleaßi valori ín spectrul lui A. Ecuaþiile la care vom ajunge sunt:
f(1) = g(1) <=> (5.7.1)e t = α0 + α1+α2
f'(1) = g'(1) <=> (5.7.2)t⋅ e t = α1+2⋅α2
f(0) = g(0) <=> (5.7.3)1 = α0
Rezolvänd sistemul de ecuaþii (5.7.1), (5.7.2) ßi (5.7.3) se gásesc urmátoarelevalori:
α0 = 1α1 = 2 ⋅ (e t − 1) − t ⋅ e t
α2 = t ⋅e t − (e t − 1)Vom gási foarte simplu:
, adicá:f(A) = eAt = g(A) = α0 ⋅ I + α1 ⋅A + α2 ⋅ A2
eAt = 1 ⋅ I +[2 ⋅ (e t − 1) − t ⋅e t ] ⋅A + [t ⋅ e t − (e t − 1)] ⋅ A2
eAt =
1 0 00 1 00 0 1
+[2 ⋅ (e t − 1) − t ⋅e t ] ⋅
−1 −2 30 1 −1−1 −1 2
+...
...+ [t ⋅ e t − (e t − 1)] ⋅
−2 −3 51 2 −3−1 −1 2
Ín cazul sistemelor discrete acest rol ín calculul ráspunsului liber íl capátámatricea , ce duce la evidenþierea evoluþiei stárii la pasul k.Ak
De exemplu , fie A =
−1 −2 30 1 −1−1 −1 2
a = -1 -2 3 0 1 -1 -1 -1 2
[b,d]=lf(a)b = 1 0 0 -3 -2 3 1 1 -1 0 1 0 0 -1 -1 1 1 -1 0 0 1 -1 -1 0 1 1 -1d = 1 -2 1 0
Rezultá:
(z ⋅ I − A)−1 =
1 0 00 1 00 0 1
⋅z2 +
−3 −2 30 −1 −1−1 −1 0
⋅ z +
1 1 −11 1 −11 1 −1
z3 − 2 ⋅ z2 + z
(z ⋅ I − A)−1 =
z2 − 3z + 1 −2z + 1 3z − 11 z2 − z + 1 −(z + 1)
−(z − 1) −(z − 1) z2 − 1
z ⋅ (z − 1)2
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 3712
Ak = Σpol 0,1
Rez
zk ⋅
z2 − 3z + 1 −2z + 1 3z − 11 z2 − z + 1 −(z + 1)
−(z − 1) −(z − 1) z2 − 1
z ⋅ (z − 1)2
Ak =
a11(k) a12(k) a13(k)a21(k) a22(k) a23(k)a31(k) a32(k) a33(k)
, k ≥ 1
Pentru a putea calcula, de exemplu, vom scrie:a32(k)
a32(k) = Σpol 0,1
Rez
zk ⋅ −(z − 1)
z ⋅ (z − 1)2
= −Rezz=1
zk−1
z − 1= −1
Acest lucru se poate verifica direct prin calcul. Dacá dorim sá facem calcululglobal, vom avea:
Ak = Σpol 0,1
Rez
A(z, k)z ⋅ (z − 1)2
, A(z, k) = zk
z2 − 3z + 1 −2z + 1 3z − 11 z2 − z + 1 −(z + 1)
−(z − 1) −(z − 1) z2 − 1
Ak = Σpol 0,1
Rez
A(z, k)z ⋅ (z − 1)2
=
A(z,k)(z − 1)2
z = 0
+
A(z, k)z
z = 1
Ak =
A(z, k)(z − 1)2
z = 0
+
A (z,k) ⋅z − A(z, k)z2
z = 1
Ak = A(0, k) + A (1, k) − A(1, k)
Se observá cá trebuie sá calculám :A (z,k)
A (z,k) =
(k + 2)zk+1 − 3(k + 1)zk + kzk−1......kzk−1.................................................−(k + 1)zk − kzk ............................
−2(k + 1)zk + kzk−1 3(k + 1)zk − kzk−1
(k + 2)zk−1 − (k + 1)zk + kzk−1 −(k + 1)zk + kzk−1 −(k + 1)zk − kzk−1 (k + 2)zk+1 − kzk−1
Vom obþine:
Ak =
−k − 1 −k − 2 2k + 3k k + 1 −2k − 1
−1 −1 2
− (1)k ⋅
−1 −1 21 1 −20 0 0
Ak =
−k −k − 1 2k + 1k − 1 k −2k + 1−1 −1 2
Aplicaþii de tipul 5: Calculul functiilor de matrice Pag 1382

Aplicaþii de tipul 6: Calculul funcþiei pondere ßi funcþieiindiciale
Sá se calculeze funcþia pondere ßi funcþia indicialá pentru sistemele:
6.1 H(s) = ,T1 , T2 R+K(T1s + 1)(T2s + 1)
∈
6.2 H(s) = , KT2s 2 + 2ξTs + 1
ξ∈ (0, 1), T > 0
6.3 H(s) = , KsT2s 2 + 2ξTs + 1
ξ∈ (0, 1)
6.4 H(s) = ,K(s + z)T2s 2 + 2ξTs + 1
ξ∈ (0, 1)
6.5 H(s) = Ks(Ts + 1)
Indicaþii
Funcþia pondere reprezintá ráspunsul sistemului la intrare impulsDirac iar funcþia indicialá este ráspunsul sistemului la intrare treaptá unitará.Cum Y(s) = H(s)U(s) , ín primul caz vom avea U(s) = 1 (impuls Dirac) iar ín celde-al doilea caz U(s) = (treaptá unitará). Deci pentru calculul funcþiei1
spondere vom avea: y(t) = L-1 H(s) . Pentru calculul funcþiei indiciale vomfolosi relaþia: y(t) = L-1 H(s) . Pentru calculul efectiv se poate folosi1
steorema reziduurilor dacá H(s) respectiv sunt raþionale strict proprii.H(s) ⋅ 1
s
Problema 6.1 Rezolvare:
a). Calculul funcþiei pondere:
y(t) = L−1H(s) = L−1 K(T1s + 1)(T2s + 1)
=
= L−1
K
T1 ⋅ T2⋅ 1
s + 1
T1
s + 1
T2
(6.1.1)y(t) = KT1 ⋅ T2
1
s + 1
T2
⋅ est
s= 1
T1
+
1
s + 1
T1
⋅ est
s= 1
T 2
y(t) = KT1 ⋅ T2
T1 ⋅ T2
T1 − T2⋅ e− t
T1 −T1 ⋅ T2
T1 − T2⋅ e− t
T2 = K
T1 − T2⋅ e− t
T1 − e− tT 2
b). Calculul funcþiei indiciale:
y(t) = L−1 H(s) ⋅ 1s = L−1 K
(T1s + 1)(T2s + 1) ⋅ 1s =
(6.1.2)= L−1
K
T1 ⋅ T2⋅ 1
s + 1
T1
s + 1
T2
s
y(t) = KT1 ⋅ T2
1
s + 1
T2
s
⋅ est
s= 1
T1
+
1
s + 1
T1
s
⋅ est
s= 1
T 2
+ ...
(6.1.3)... + 1s + 1
T1
s + 1
T2
⋅ est
s=0
y(t) = KT1 ⋅ T2
(−T1 )
T1 ⋅ T2T1 − T2
⋅ e− tT1 − (−T2)
T1 ⋅ T2T1 − T2
⋅ e− tT2 + (T1 ⋅ T2 )
y(t) = K ⋅ 1−
T1T1 − T2
⋅ e− tT1 +
T2T1 − T2
e− tT2
Problema 6.2 Rezolvare:
Vom rezolva problema 6.2 care are cele mai multe aplicaþii teoretice.Avem de-a face cu un sistem de ordinul 2 cu doi poli complex-conjugaþi.
a). Pentru ínceput sá calculám ráspunsul indicial. Vom avea:
Y(s) = H(s) ⋅ 1s
Y(s) = KT2s2 + 2ξTs + 1
⋅ 1s = K ⋅ ωn
2
s 2 + 2ξωns + ωn2
⋅ 1s = As + B
s 2 + 2ξωns + ωn2
+ Cs
(6.2.1)Ín relaþia de mai sus am notat , iar A, B, C sunt coeficienþi cuωn = 1
Turmátoarele valori: . Ín acest mod relaþia (6.2.1)A = −K ; B = −2ξωnK ; C = Kse mai scrie:
Aplicaþii de tipul 6 Calculul functiei pondere sifunctiei indiciala Pag 39

Y(s) = As + Bs 2 + 2ξωns + ωn
2+ C
s =A(s + ξωn )+ (B − Aξωn )
(s + ξωn )2 + ωn2 (1− ξ2 )
+ Cs =
= A(s + ξωn)
(s + ξωn )2 + ωn2 (1 − ξ2 )
+(B− Aξωn )
ωn1 − ξ2
ωn1− ξ2
(s + ξωn )2 + ωn2 (1 − ξ2 )
+ Cs
Se observá clar cum putem scrie relaþia de mai sus:
Y(s) = C ⋅ L1(t) + A ⋅ L
e−ξωnt ⋅ cos
ωn
1 − ξ2
t
+ ...
... + (B − A ⋅ ξωn )
ωn1− ξ2
⋅ L
e−ξωn tsin
ωn
1 − ξ2
t
ín care L* este operatorul Laplace. Ínlocuind valorile lui A, B, C, vomobþine imediat:
y(t) = K ⋅
1− e−ξωn t ⋅
cos
ωn 1− ξ2 t +
ξ
1− ξ2
sinωn
1ξ2
t
Sá reprezentám dispoziþia ín planul complex a celor doi poli complexconjugaþi ai funcþiei de transfer ca ín Fig. 6.2.1:
0
jIm
Re
n
−ξω
ω 1−ξ2
n
p1
p2
φ
nω
nω 1−ξ-2
j
j
(s)
(s)
Fig. 6.2.1
Se observá cum:
ctgϕ =ξωn
ωn 1 − ξ2=
ξ
1 − ξ2=
cos ϕsin ϕ
;sin ϕ = 1 − ξ2 cosϕ = ξ
Ínlocuind valorile obþinute ín expresia lui y(t) vom obþine:
y(t) = K ⋅
1− e−ξωn t
cos
ωn
1− ξ2
t
+ cos ϕsin ϕ
sinωn
1− ξ2
t
=
= K ⋅ 1 − e−ξωn t
sin ϕ⋅ sin
ωn 1 − ξ2 t + ϕ
y(t) = K ⋅
1− e−ξωn t
1 − ξ2⋅ sin
ωn 1 − ξ2 ⋅ t + ϕ
, ϕ = arccos (ξ)
Ráspunsul indicial al unui astfel de sistem pentru ωn = 1, ξ= 0; 0.2; 0.6; 0.9este prezentat ín Fig. 6.2.2:
Fig. 6.2.2Se observá cum ráspunsul indicial este pentru oscilant neamortizat ßiξ= 0devine din ce ín ce mai amortizat pe másura creßterii factorului de amortizare,de unde ßi denumirea de factor de amortizare datá lui .ξ
Sistemul descris de funcþia de transfer are doiH(s) = Kωn2
s 2 + 2ξωns + ωn2
parametri a cáror modificare permite obþinerea unor ráspunsuri la(ξ, ωn )
Aplicaþii de tipul 6 Calculul functiei pondere sifunctiei indiciala Pag 40

intrare treaptá mai mult sau mai puþin convenabile.b). Ín cazul funcþiei pondere vom avea:
Y(s) = KT2s2 + 2ξTs + 1
= Kωn2
s 2 + 2ξωns + ωn2
=
= Kωn2
ωn 1 − ξ2⋅
ωn 1 − ξ2
(s + ξωn)2 + ωn2 (1 − ξ2 )
Rezultá imediat, aplicänd teorema deplasárii ín complex ßi cunoscändtransformata Laplace a funcþiei sin(t):
y(t) = Kωn
1− ξ2⋅ e−ξωnt ⋅ sin
ωn 1 − ξ2 ⋅ t
Funcþia pondere pentru parametrii anteriori este reprezentatá ín Fig.6.2.3:
Fig. 6.2.3
Problema 6.3 Rezolvare:
(6.3.1)H(s) = KsT2s2 + 2ξTs + 1
= s ⋅ KT2s 2 + 2ξTs + 1
= s ⋅ F(s)
unde (6.3.2)F(s) = KT2s2 + 2ξTs + 1
Folosind teorema derivárii reale obþinem relaþia evidentá: (6.3.3)h(t) = L−1H(s) = L−1s ⋅ F(s) = f (t)
unde (6.3.4)f(t) = L−1F(s)Rezultá ín mod evident din (6.3.3) cá:
a). Funcþia pondere a sistemului cu funcþia de transfer H(s) este derivatafuncþiei pondere a sistemului cu funcþia de transfer F(s):
(6.3.5)y(t) = L−1H(s) = L−1s ⋅ F(s) = f (t)
b). Funcþia indicialá a sistemului cu funcþia de transfer H(s) este derivatafuncþiei indiciale a sistemului cu funcþia de transfer F(s):
(6.3.6)y(t) = L−1 H(s) ⋅ 1s = L−1 s ⋅ F(s) ⋅ 1
s = L−1 F(s) ⋅ 1
s
Dar sistemul descris de este cel de laF(s) = KT2s2 + 2ξTs + 1
problema 6.2 ßi concluzionám cá se obþin rezultatele:
Funcþia indicialá:
y(t) =
K ⋅
1 − e−ξωnt
1 − ξ2⋅ sin
ωn 1 − ξ2 t + ϕ
(1), ϕ = arccos (ξ)
y(t) = K ⋅
− e−ξωnt
1− ξ2⋅ cos
ωn 1 − ξ2 t + ϕ ⋅ ωn 1 − ξ2 + ...
(6.3.7)... + ξωn ⋅ e−ξωn t
1− ξ2⋅ sin
ωn 1 − ξ2 t + ϕ
Prelucränd relaþia (6.3.7) se obþine:
y(t) = K ⋅ ωn ⋅ e−ξωn t
1 − ξ2⋅ −cos
ωn 1 − ξ2 t + ϕ ⋅ 1 − ξ2 + ...
... + ξ⋅ sin ωn 1 − ξ2 t + ϕ
Cum se obþine ráspunsul:sin ϕ = 1 − ξ2 si cosϕ = ξ
y(t) = Kωn
1− ξ2⋅ e−ξωnt ⋅ sin
ωn 1 − ξ2 ⋅ t
Ne aßteptam la acest rezultat deoarece ráspunsul indicial al lui H(s) esteráspunsul pondere al lui F(s) calculat ín problema 6.2.
Funcþia pondere:
Aplicaþii de tipul 6 Calculul functiei pondere sifunctiei indiciala Pag 41
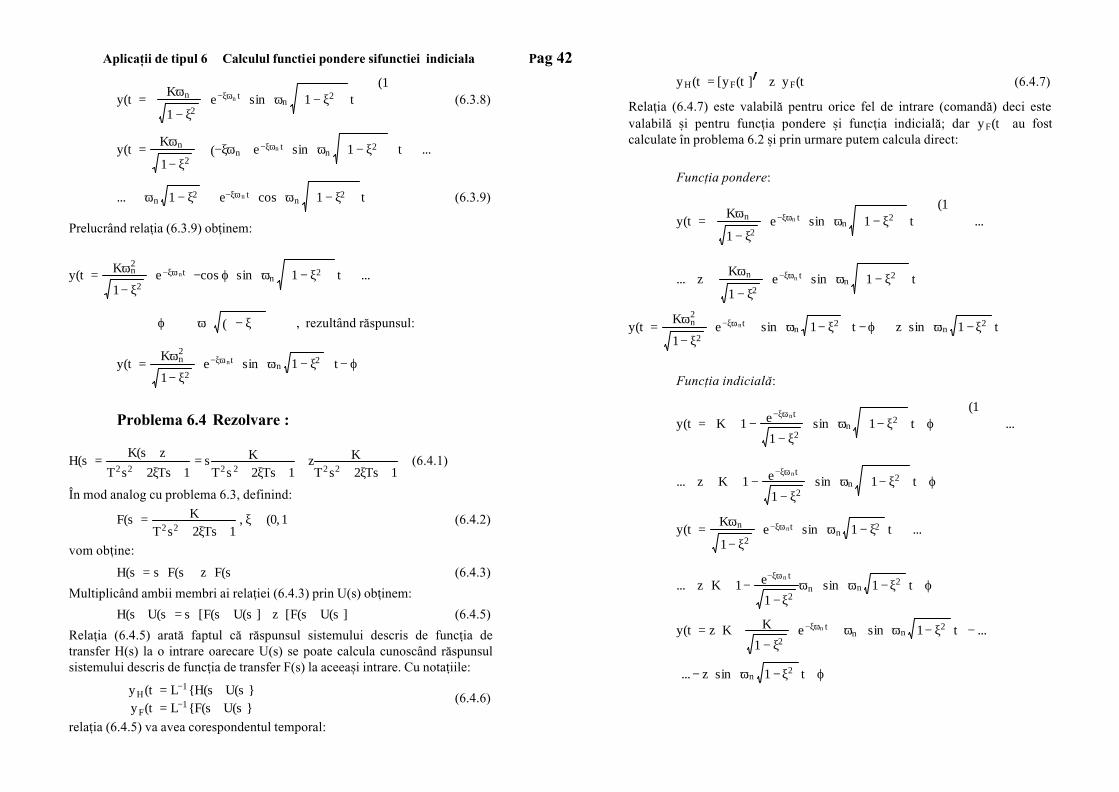
(6.3.8)y(t) =
Kωn
1 − ξ2⋅ e−ξωn t ⋅ sin
ωn
1 − ξ2
⋅ t
(1)
y(t) = Kωn
1− ξ2⋅
(−ξωn) ⋅ e−ξωn t ⋅ sin
ωn
1 − ξ2
⋅ t
+ ...
(6.3.9)... + ωn 1 − ξ2
⋅ e−ξωn t ⋅ cosωn
1 − ξ2
⋅ t
Prelucränd relaþia (6.3.9) obþinem:
y(t) = Kωn2
1− ξ2⋅ e−ξωnt
−cos ϕ⋅ sin
ωn
1 − ξ2
⋅ t
+ ...
, rezultänd ráspunsul:... + cos ϕ ⋅ sin ωn (1 − ξ2)⋅ t
y(t) = Kωn2
1− ξ2⋅ e−ξωnt ⋅ sin
ωn 1 − ξ2 ⋅ t − ϕ
Problema 6.4 Rezolvare :
(6.4.1)H(s) = K(s + z)T2s2 + 2ξTs + 1
= s KT2s 2 + 2ξTs + 1
+ z KT2s2 + 2ξTs + 1
Ín mod analog cu problema 6.3, definind:
(6.4.2)F(s) = KT2s2 + 2ξTs + 1
, ξ ∈ (0, 1)
vom obþine: (6.4.3)H(s) = s ⋅ F(s) + z ⋅ F(s)
Multiplicänd ambii membri ai relaþiei (6.4.3) prin U(s) obþinem: (6.4.5)H(s) ⋅ U(s) = s ⋅ [F(s) ⋅ U(s)]+ z ⋅ [F(s) ⋅ U(s)]
Relaþia (6.4.5) aratá faptul cá ráspunsul sistemului descris de funcþia detransfer H(s) la o intrare oarecare U(s) se poate calcula cunoscänd ráspunsulsistemului descris de funcþia de transfer F(s) la aceeaßi intrare. Cu notaþiile:
(6.4.6)
yH(t) = L−1H(s) ⋅ U(s)yF(t) = L−1F(s) ⋅ U(s)
relaþia (6.4.5) va avea corespondentul temporal:
(6.4.7)yH(t) = [yF(t)] + z ⋅ yF(t)
Relaþia (6.4.7) este valabilá pentru orice fel de intrare (comandá) deci estevalabilá ßi pentru funcþia pondere ßi funcþia indicialá; dar au fostyF(t)calculate ín problema 6.2 ßi prin urmare putem calcula direct:
Funcþia pondere:
y(t) =
Kωn
1 − ξ2⋅ e−ξωn t ⋅ sin
ωn
1 − ξ2
⋅ t
(1)+ ...
... + z ⋅
Kωn
1 − ξ2⋅ e−ξωn t ⋅ sin
ωn
1 − ξ2
⋅ t
y(t) = Kωn2
1− ξ2⋅ e−ξωnt ⋅
sin ωn 1− ξ2 ⋅ t − ϕ
+ z ⋅ sin ωn 1 − ξ2 ⋅ t
Funcþia indicialá:
y(t) =
K ⋅
1 − e−ξωnt
1 − ξ2⋅ sin
ωn
1− ξ2
t + ϕ
(1)+ ...
... + z ⋅
K ⋅
1 − e−ξωnt
1 − ξ2⋅ sin
ωn
1− ξ2
t + ϕ
y(t) = Kωn
1− ξ2⋅ e−ξωnt ⋅ sin
ωn 1 − ξ2 ⋅ t + ...
... + z ⋅ K ⋅
1− e−ξωn t
1 − ξ2ωn ⋅ sin
ωn 1 − ξ2 ⋅ t + ϕ
y(t) = z ⋅ K + K
1 − ξ2⋅ e−ξωn t ⋅
ωn ⋅ sin
ωn 1− ξ2 ⋅ t − ...
... − z ⋅ sin ωn 1 − ξ2 ⋅ t + ϕ
Aplicaþii de tipul 6 Calculul functiei pondere sifunctiei indiciala Pag 42

Problema 6.5 Rezolvare:
a). Funcþia pondere:
(6.5.1)y(t) = L−1 Ks(Ts + 1)
= L−1
KT
s s + 1
T
= K ⋅ L−1
1s − 1
s + 1
T
Rezultá:
(6.5.2)y(t) = K ⋅ 1− e− tT
b). Funcþia indicialá:
Pentru calculul funcþiei indiciale se poate folosi teorema reziduurilor sauputem folosi teoremele transformárii Laplace. Vom alege aceastá ultimávariantá:
y(t) = L−1
K
s 2 ⋅ (Ts + 1)
= L−1
KT
s2 ⋅ s + 1
T
= K ⋅ L−1
s + 1
T − s
s 2 ⋅ s + 1
T
y(t) = K ⋅
L−1 1
s2− L−1
1
s s + 1
T
= K ⋅
t − T ⋅ L−1
1s − 1
s + 1
T
Va rezulta:
(6.5.3)y(t) = K ⋅ t − T ⋅
1(t) − e− tT
Aplicaþii de tipul 6 Calculul functiei pondere sifunctiei indiciala Pag 43

Aplicaþii de tipul 7: Calculul funcþiei (matricei) de transfer a unui sistem reprezentat prin ecuaþii de stare Sá se calculeze funcþia (matricea) de transfer a sistemului reprezentat
prin ecuaþiile de stare: , ín particular pentru o
.x (t) = A ⋅ x(t)+ B ⋅ u(t)y(t) = C ⋅ x(t) + D ⋅ u(t)
intrare B --> b ßi pentru o ießire C --> cT:
7.1 A = ; b = ; c = ; d = 1
1 2 −10 1 01 −4 3
001
110
7.2 A = ; b = ; c = ; d = 0
1 2 −10 1 01 4 3
001
111
7.3 A = ; B = ; C = ; D = 0
1 −2 1−1 1 11 0 −1
0 10 01 0
1 1 00 1 10 0 1
7.4 A = ; b = ; c = ; d = 0
0 1 05 0 2
−2 0 −2
−11
−1
−210
7.5 A = ; b = ; c = ; d = 0−14
3 11 3
11
11
7.6 A = ; b = ; c = ; d = 0
1 2 −10 1 01 −4 3
001
1−11
7.7 A = ; B = ; C = [1 0 1] ; D = 0
1 2 −10 1 01 −4 3
0 10 11 1
7.8 A = ; B = ; C = [1 0 1] ; D = 0
1 1 00 1 00 0 1
0 01 01 1
7.9 A = ; B = ; C = [1 0 1] ; D = 0
1 1 00 1 00 0 1
0 11 01 0
7.10 A = ; b = ; c = ; d = 0
−1 1 −10 1 −40 1 −3
021
01
−1
Problema 7.1 Rezolvare:
A =
1 2 −10 1 01 −4 3
; b =
001
; c =
110
; d = 1
Se ßtie cá H(s) = C(sI - A)-1B + D, relaþie care ín cazul sistemelormonovariabile se transformá ín H(s) = cT(sI - A)-1b + d , ca ín exemplul de sus.Se observá cá singura dificultate constá ín calculul (sI - A)-1. Avem de alesíntre metoda clasicá de calcul a inversei matricei (sI - A) sau algoritmulLeverier - Fadeeva pentru calculul lui (sI - A)-1. Vom alege aceastá metodá(prezentatá la funcþii de matrici pátratice) pentru cá este algoritmizatá ßi ußorde implementat pe calculator (vezi Anexa 2 ). Ín cazul nostru vom avea:
(sI - A)-1 = B2s 2 + B1s + B0
s 3 + d2s 2 + d1s + d0
Vom folosi pentru calculul automat al parametrilor de mai sus funcþiaMATLAB lf.m . Ín urma folosirii sale vom obþine rezultatele:
a=[1 2 -1;0 1 0;1 -4 3]
a = 1 2 -1 0 1 0 1 -4 3
[b,d]=lf(a)
b = 1 0 0 -4 2 -1 3 -2 1 0 1 0 0 -4 0 0 4 0 0 0 1 1 -4 -2 -1 6 1d = 1 -5 8 -4Rezultatele de mai sus se interpreteazá ín felul urmátor:
Aplicaþii de tipul 7 Calculul functiei (matricei) de transfer Pag 44

- Primele 3 coloane ale matricei b reprezintá B2 =
1 0 00 1 00 0 1
= I3
- Urmátoarele 3 coloane ale matricei b reprezintá B1 =
−4 2 −10 −4 01 −4 −2
- Ultimele 3 coloane ale matricei b reprezintá matricea B0 =
3 −2 10 4 0−1 6 1
- Vectorul d reprezintá coeficienþii numitorului funcþiei ín ordinea(sI − A)−1
descrescátoare a puterilor lui s .
Obþinem deci rezultatul:
(sI − A)−1 =
1 0 00 1 00 0 1
⋅ s 2 +
−4 2 −10 −4 01 −4 −2
⋅ s +
3 −2 10 4 0−1 6 1
s 3 − 5s 2 + 8s − 4
(sI − A)−1 =
s 2 − 4s + 3 2(s − 1) −(s − 1)0 (s − 2)2 0
s − 1 −2(2s − 3) s 2 − 2s + 1
(s − 1) ⋅ (s − 2)2
Vom obþine din relaþia :H(s) = cT ⋅ (sI− A)−1 ⋅ b + d
H(s) = 1(s − 1)(s − 2)2
[ 1 1 0]
s 2 − 4s + 3 2(s − 1) −(s − 1)0 (s − 2)2 0
s − 1 −2(2s − 3) s 2 − 2s + 1
001
+ 1
H(s) = 1(s − 1) ⋅ (s − 2)2
⋅ 1 1 0 ⋅
−(s − 1)0
s 2 − 2s + 1
+ 1 = −(s − 1)(s − 1) ⋅ (s − 2)2
+ 1
H(s) = (s − 1)(s − 3)(s − 2)2
Problema 7.2 Rezolvare:
A =
1 2 −10 1 01 4 3
; b=
001
; c =
111
; d = 0
Aplicänd algoritmul Leverrier - Fadeeva vom obþine:
(sI − A)−1 =
1 0 00 1 00 0 1
⋅ s 2 +
−4 2 −10 −4 01 4 −2
⋅ s +
3 −10 10 4 0−1 −2 1
s 3 − 5s 2 + 8s − 4
(sI − A)−1 =
s 2 − 4s + 3 2(s − 5) −(s − 1)0 (s − 2)2 0
s − 1 2(2s − 1) (s − 1)2
(s − 1) ⋅ (s − 2)2
H(s) = cT ⋅ (sI− A)−1 ⋅ b + d
H(s) = 1(s − 1) ⋅ (s − 2)2
⋅ [ 1 1 1 ]
s 2 − 4s + 3 2(s − 5) −(s − 1)0 (s − 2)2 0
s − 1 2(2s − 1) (s − 1)2
⋅
001
H(s) = 1(s − 1) ⋅ (s − 2)2
[ 1 1 1 ]
−(s − 1)0
(s − 1)2
= 1(s − 1) ⋅ (s − 2)2
(s − 1)(s − 2)
H(s) = 1s − 2
Problema 7.3 Rezolvare:
A =
1 −2 1−1 1 11 0 −1
; B =
0 10 01 0
; C =
1 1 00 1 10 0 1
; D = 03x2
Aplicänd algoritmul Leverrier - Fadeeva vom obþine:
(sI − A)−1 =
1 0 00 1 00 0 1
⋅ s 2 +
0 −2 1−1 0 11 0 −2
⋅ s +
−1 −2 −30 −2 −2−1 −2 −1
s 3 − s 2 − 4s + 2
Aplicaþii de tipul 7 Calculul functiei (matricei) de transfer Pag 45

(sI − A)−1 =
s 2 − 1 −2(s + 1) s − 3−s s 2 − 2 s − 2
s − 1 −2 s 2 − 2s − 1
s 3 − s 2 − 4s + 2Rezultá simplu:
H(s) = C ⋅ (sI − A)−1 ⋅ B + D
H(s) = 1s 3 − s 2 − 4s + 2
1 1 00 1 10 0 1
s2 − 1 −2(s + 1) s − 3−s s 2 − 2 s − 2
s − 1 −2 s 2 − 2s − 1
0 10 01 0
H(s) = 1s 3 − s 2 − 4s + 2
⋅
1 1 00 1 10 0 1
⋅
s − 3 s2 − 1s − 2 −s
s 2 − 2s − 1 s − 1
H(s) = 1s 3 − s 2 − 4s + 2
⋅
2s − 5 s 2 − s − 1s 2 − s − 3 −1s 2 − 2s − 1 s − 1
Se observá cá avem o matrice de transfer, sistemul fiind multivariabil.
Problema 7.4 Ráspuns:
H(s) = 3s + 3
Problema 7.5 Ráspuns:
H(s) = 2s + 1
Problema 7.6 Indicaþie:
Sistemul din aceastá problemá are matricea de stare identicá cu matricea destare din problema 7.1. Din aceste motive vom avea aceeaßi matrice (sI − A)−1
deci:
H(s) = 1(s − 1) ⋅ (s − 2)2
1 −1 1
s 2 − 4s + 3 2(s − 1) −(s − 1)0 (s − 2)2 0
s − 1 −2(2s − 3) s 2 − 2s + 1
001
H(s) = 1(s − 1) ⋅ (s − 2)2
⋅ 1 −1 1 ⋅
−(s − 1)0
s2 − 2s + 1
= s 2 − 2s + 2(s − 1) ⋅ (s − 2)2
Problema 7.7 Indicaþie:
Íntocmai ca la problema 7.6 vom obþine:
H(s) = 1(s − 1)(s − 2)2
1 0 1
s2 − 4s + 3 2(s − 1) −(s − 1)0 (s − 2)2 0
s − 1 −2(2s − 3) s 2 − 2s + 1
0 10 11 1
H(s) = 1(s − 1) ⋅ (s − 2)2
⋅ 1 0 1 ⋅
−(s − 1)0
s2 − 2s + 1
s2 − 3s + 2(s − 2)2
s2 − 5s + 6
H(s) = 1(s − 1) ⋅ (s − 2)2
⋅ s 2 − 3s + 2 2(s − 2) ⋅ (s − 2)
Problema 7.8 Indicaþie:
H(s)= 1(s − 3)(s − 1)2
1 0 1
s 2 − 4s + 3 s − 3 00 s 2 − 4s + 3 0
s − 1 −4s + 5 s2 − 2s + 1
0 01 01 1
H(s) = 1(s − 3) ⋅ (s − 1)2
⋅ s 2 − 5s + 3 (s − 1)2
Problema 7.9 Indicaþie:
H(s)= 1(s − 3)(s − 1)2
1 0 1
s 2 − 4s + 3 s − 3 00 s 2 − 4s + 3 0
s − 1 −4s + 5 s2 − 2s + 1
0 10 01 0
H(s) = 1(s − 3) ⋅ (s − 1)2
⋅ s 2 − 5s + 3 (s − 1)(s − 2)
Aplicaþii de tipul 7 Calculul functiei (matricei) de transfer Pag 46

Anexa 8: Reducerea sistemelor prin transformareaschemelor bloc
Funcþii de transfer ale conexiunilor de elementea). Conexiunea serie.
H (s) H (s) H (s) H (s)1 2 3 nU(s)=U (s)
Y (s)=U (s)
Y (s)=U (s)
Y (s)=U (s)
.... Y (s)=U (s)
Y(s)=Y (s)1 2 3 4 n
n-11 2 3
n
<=> H(s)U(s) Y(s)
Fig. A8.1
Funcþia de transfer echivalentá a conexiunii serie se obþine imediat: Y(s) = [Hn (s) ⋅ Hn−1 (s)…H3 (s) ⋅ H2 (s) ⋅ H1 (s)] ⋅ U(s) ∆= H(s) ⋅ U(s)
(A8.1)H(s) = Πi=1
n[Hi (s)]
b). Conexiunea paralelá.
Y (s)
..
.
<=>
H (s)
H (s)
H (s)
H(s)U(s) Y(s)U(s)
U(s)=U (s)
U(s)=U (s)
U(s)=U (s)
Y (s)
Y (s)
Y(s)
1
2
n
1
2
n
+
++
Fig. A8.2
Funcþia de transfer a conexiunii paralele se obþine din relaþia:
Y(s) = Y1 (s) + Y2 (s) + ... + Yn(s) = [H1 (s)+ H2 (s)+ ... + Hn (s)] ⋅ U(s)
Dar ßi vom avea:Y(s) ∆= H(s) ⋅ U(s)
(A8.2)H(s) = Σi=1
n[Hi (s)]
c). Conexiunea paralel-opusá (cu reacþie inversá).
U(s)H (s)
H (s)
Y (s)=Y(s)
U (s)=Y(s)Y (s)=R(s)R(s)
E(s)=U (s)1
2
1
2
+_ 1
2
<=> H(s)U(s) Y(s)
Fig. A8.3
Funcþia de transfer a conexiunii cu reacþie inversá va fi obþinutá din relaþiilede calcul urmátoare:
Y(s) = H1 (S) ⋅ E(s) = H1 (s)[U(s)± R(s)] = H1(s)[U(s) ± H2(s) ⋅ Y(s)]Y(s)
_+ H1 (s) ⋅ H2 (s) ⋅ Y(s) = H1 (s) ⋅ U(s)
, deci:Y(s) =H1(s)
1_+ H1 (s) ⋅ H2 (s)
⋅ U(s)∆= H(s) ⋅ U(s)
(A8.3)H(s) =H1(s)
1_+ H1 (s) ⋅ H2 (s)
Observaþii:- Conexiunile serie, paralelá ßi paralel-opus se pot realiza doar dacá
sunt índeplinite aßa-numitele condiþii de interconectare (de existenþá), care nuau fost specificate ín anexá.
- Relaþiile (A8.1) ßi (A8.2) sunt valabile ßi pentru calculul matricilorde transfer echivalente ín cazul sistemelor multivariabile, þinänd ínsá cont deregulile operaþiilor matriciale.
- Relaþia (A8.3) ín cazul unui sistem multivariabil nu mai estevalabilá pentru calculul matricii de transfer. Relaþia de calcul corectá este:
(A8.4)H(s) = [I_+ H1 (s) ⋅ H2 (s)]−1 ⋅ H1(s)
unde I este matricea unitate.
Reguli de transformare a schemelor bloc
Pentru reducerea schemelor bloc se pot folosi conexiunile simple deelemente descrise mai sus precum ßi regulile de transformare care permitaflarea funcþiilor de transfer pentru schemele cu bucle íncrucißate. Cele maisimple ßi mai utilizate reguli sunt urmátoarele:a). Deplasarea unui punct de aplicaþie (nod) din amonte ín aval (de la intrareaunui bloc la ießirea acestuia):Echivalenþa din Fig. A8.4 este justificatá imediat din punct de vedere analitic:
U(s) = 1H(s)
⋅ Y(s) = 1H(s)
⋅ H(s) ⋅ U(s) ≡ U(s)
Blocul este un bloc de calcul ßi nu are semnificaþie fizicá.1/H(s)
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 47

H(s)U(s)
U(s)
Y(s)
<=>
H(s)U(s) Y(s)
U(s)1H(s)
Fig. A8.4
b). Deplasarea unui punct de aplicaþie (nod) din aval ín amonte (de la ießireaunui bloc la intrarea acelui bloc):
H(s)U(s) Y(s)
<=>
H(s)U(s) Y(s)
Y(s)H(s)
Y(s)
Fig. A8.5
Din punct de vedere analitic avem: ceea ce este evident ßiY(s) = H(s) ⋅ U(s)din Fig. A8.5 .
c). Deplasarea unui sumator din amonte ín aval:
H(s)U (s)
U (s)
Y(s)
<=>
H(s)+
+_
1
2H(s)
U (s)
U (s)
1
2
Y(s)
_+
+
Fig. A8.6
Echivalenþa este justificatá de urmátoarea relaþie analiticá:Y(s) = H(s) ⋅ [U1 (s)± U2 (s)] = H(s) ⋅ U1 (s) ± H(s) ⋅ U2(s)
d). Deplasarea unui sumator din aval ín amonte:
H(s)U (s)
U (s)
Y(s)
<=>H(s)
+_
2
U (s)
U (s)
1
2
Y(s)
_++1 +
1H(s)
Fig. A8.7Relaþia de echivalenþá este:
Y(s) = H(s) ⋅ U1 (s)± U2(s) = H(s) ⋅ [U1 (s) ± 1H(s)
⋅ U2 (s)]
e). Echivalarea sumatoarelor (elementelor de comparaþie):
U (s)U (s)
U (s)
Y(s)12
3
+
+
_+
<=> U (s)U (s)
U (s)
Y(s)12
3
+
+
+_
U (s)
U (s) U (s)
U (s)
U (s) U (s)<=>
Y(s) Y(s)1 1
2 23 3
+ + + + + +
+
+ +
_ _ _ _
Fig. A8.8
Echivalenþele din Fig. A8.8 rezultá imediat din relaþiile:Y(s) = U1 (s) + U2 (s) ± U3 (s) = (U1(s) + U2 (s)) ± U3 (s)Y(s) = (U1 (s) ± U2 (s)) ± U3 (s) = (U1(s) ± U3 (s)) ± U2 (s)
Observaþie: Dacá ín schema bloc existá zone cu multe íncrucißári, sumatoareßi blocuri se pot marca intrárile ßi ießirile din acea zoná, urmänd sá se facá orezolvare analiticá separatá. De exemplu, pentru o astfel de zoná cu douáintrári ßi douá ießiri se obþine dupá rezolvarea analiticá structura din Fig. A8.9.
H (s) H (s)
H (s) H (s)
11
12
21
22
U (s)
U (s)
Y (s)Y (s)
1
2
1
2
U (s)
Y (s)
Y (s)
1
1U (s)2
2
<=>
Fig. A8.9
Relaþiile analitice corespunzátoare sunt: Y1 (s) = H11 (s) ⋅ U1 (s)+ H12 (s) ⋅ U2 (s)
Y2 (s) = H21 (s) ⋅ U1 (s)+ H22 (s) ⋅ U2 (s)
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 48
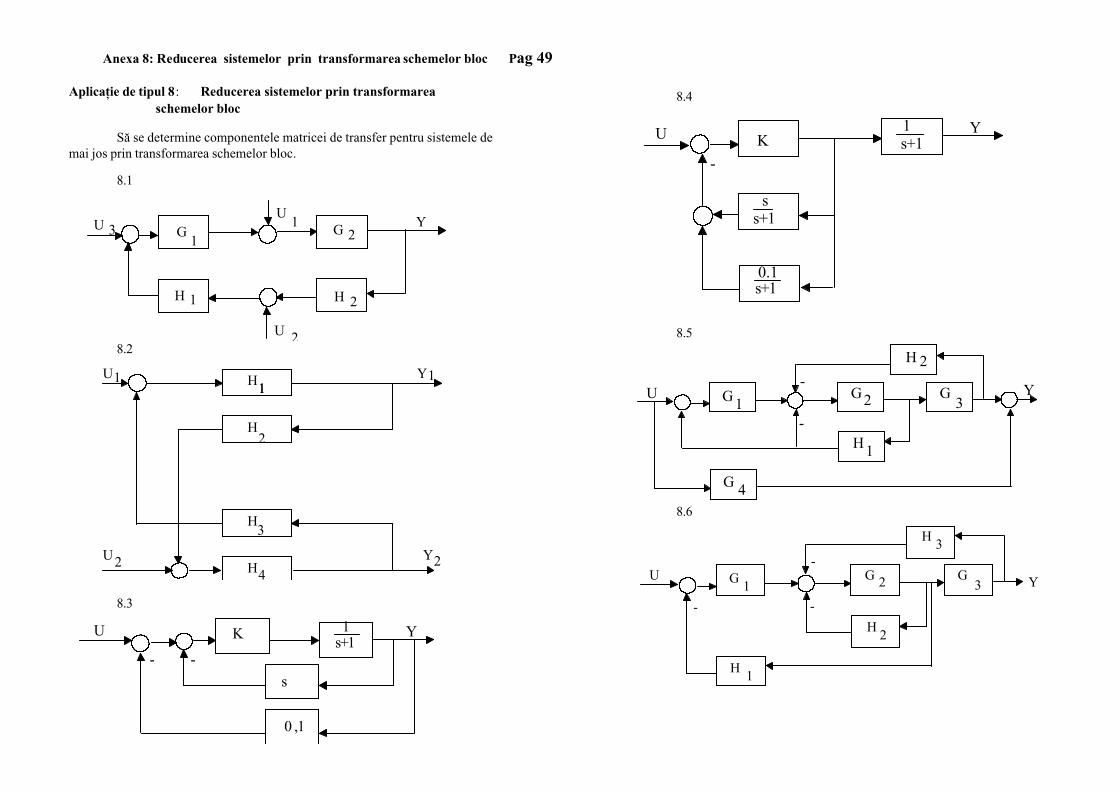
Aplicaþie de tipul 8: Reducerea sistemelor prin transformarea schemelor bloc
Sá se determine componentele matricei de transfer pentru sistemele demai jos prin transformarea schemelor bloc.
8.1
U 3 G 1G 2
H 2H 1
U 1
U 2
Y
8.2
U H
H
H
HU
Y
Y
11
2
3
4
1
2
1
2
8.3
U K 1s+1
s
Y
--
0 ,1
8.4
U YK
1s+1
ss+1
0.1s+1
-
8.5
U Y-
-
G 1
G 4
G 2 G 3
H 2
H 1
8.6
U-
-
G 1
H 1
G 2 G3
H
H 2
-
Y
3
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 49
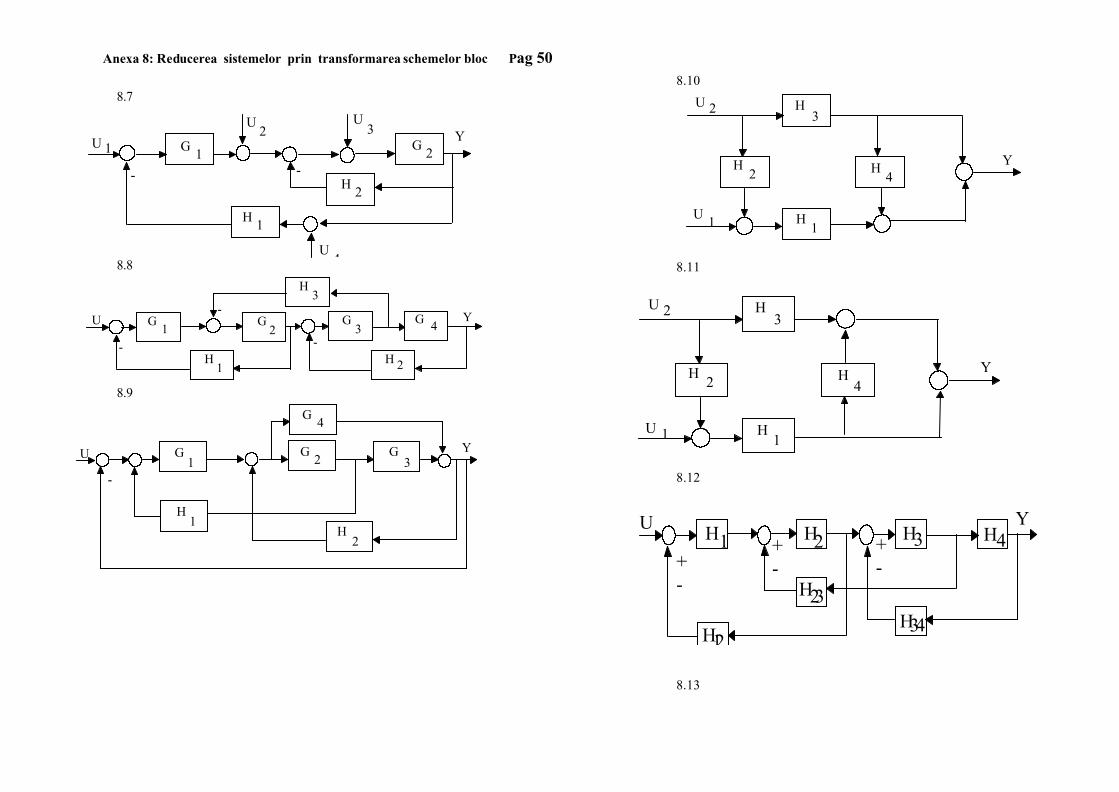
8.7
U 1 G 1 G 2
H 2
H 1
U 2U
3
U 4
- -
Y
8.8
U YG G G G
H
H H
1 2 3 4
21-
-
-
3
8.9
G1
G 2 G3
G 4
H1
H2
-
U Y
8.10
U 1
U 2
H 4
H 1
H 2
H3
Y
8.11
U 1
U 2
H4
H1
H 2
H3
Y
8.12
U YH1 H2 H3 H4
H23H34H12
+-
+-
+-
8.13
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 50

U 1
U 2
H4
H 1
H 2
H3
Y
8.14
H 4
H 3
H 2
H1
U 2
U 1
Y
8.15
U 2
U 1
H4
H 3
H2
H1
Y
8.16
H3
H2
H1
H4
U 2
U 1
Y
8.17U 2
U 1 H1
H2
H3 H
4Y
8.18
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 51
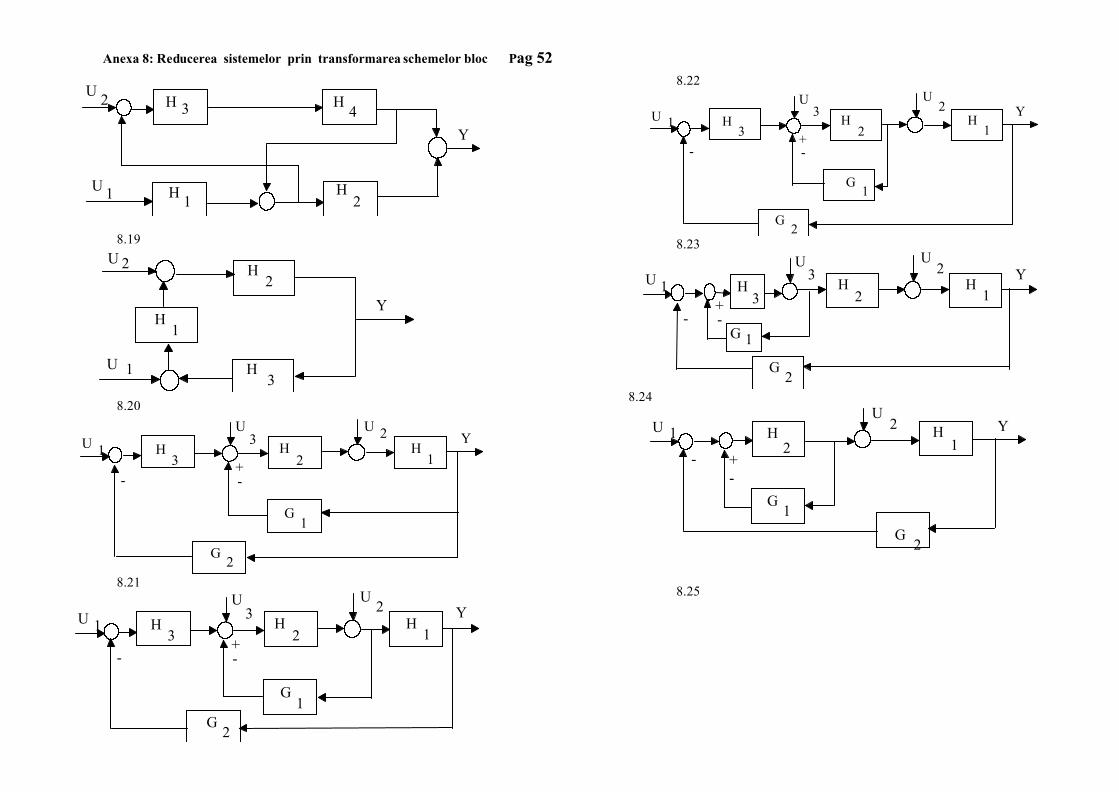
H 3 H 4
H 1H
2U 1
U 2
Y
8.19U 2
U 1
H1
H2
H3
Y
8.20
-+-
U 1
U3
U 2H
3H
2H
1Y
G1
G 28.21
-+-
U 1
U3
U 2H
3H
2H
1Y
G1
G 2
8.22
-+-
U 1
U3
U2
H3
H2
H1
Y
G1
G2
8.23
-
U 1
U3
U2
H2
H1
Y
G2
+-
G 1
H3
8.24
U 1
- +-
H2
H1
G 1G 2
YU
2
8.25
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 52

U 1
H4
H3
G1
G2
H2 H 1
U2
Y
- +-
8.26
U 1U
3U2
H3
G3
H 2
G 2
H1
G1
Y
- +-
+-
8.27
U1
U2
H 3H 2
H1
G3
G1G 2
G4
+-
+-
Y
8.28
U1
U3U2 YH 4 H 3 H
2H
1
G1
G2
G3
G4
8.29
U1 H4 H3
H 2 H1
G 1
G 2
G3G4
+-
+-
U3 U2 Y
8.30
U1
U 3 U 2YH4 H
3H
2H 1
G 1
G 2
G3
G 4
-+-
+-
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 53
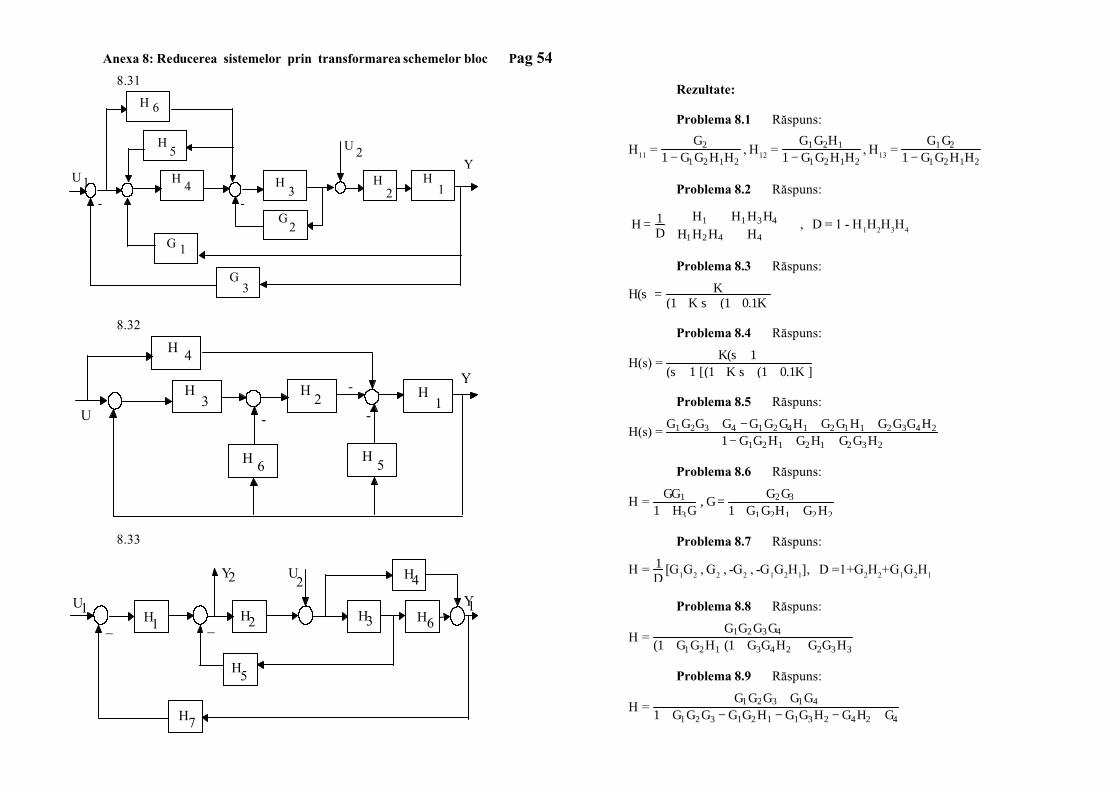
8.31
U1
U 2
H 6
H5
H 4 H3
H2
H1
G2
G 1
G3
- -
Y
8.32
U
Y
H 4
H3
H 2 H1
H 5H 6
-
--
8.33
H H H H
H
H
H
1U1 Y1
Y U2 2
2 3
4
5
6
7
_ _
Rezultate:
Problema 8.1 Ráspuns:
H11 = , H12 = , H13 = G2
1 − G1G2H1H2
G1G2H11 − G1G2H1H2
G1G21 − G1G2H1H2
Problema 8.2 Ráspuns:
, D = 1 - H1H2H3H4 H = 1D
H1 H1H3H4
H1H2H4 H4
Problema 8.3 Ráspuns:
H(s) = K(1 + K)s + (1+ 0.1K)
Problema 8.4 Ráspuns:
H(s) = K(s + 1)(s + 1)[(1+ K)s + (1 + 0.1K)]
Problema 8.5 Ráspuns:
H(s) = G1G2G3 + G4 − G1G2G4H1 + G2G1H1 + G2G3G4H21− G1G2H1 + G2H1 + G2G3H2
Problema 8.6 Ráspuns:
H = GG1
1 + H3G, G= G2G3
1 + G1G2H1 + G2H2
Problema 8.7 Ráspuns:
H = [G1G2 , G2 , -G2 , -G1G2H1], D =1+G2H2+G1G2H11D
Problema 8.8 Ráspuns:
H = G1G2G3G4
(1 + G1G2H1)(1 + G3G4H2 )+ G2G3H3
Problema 8.9 Ráspuns:
H = G1G2G3 + G1G4
1 + G1G2G3 − G1G2H1 − G1G3H2 − G4H2 + G4
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 54
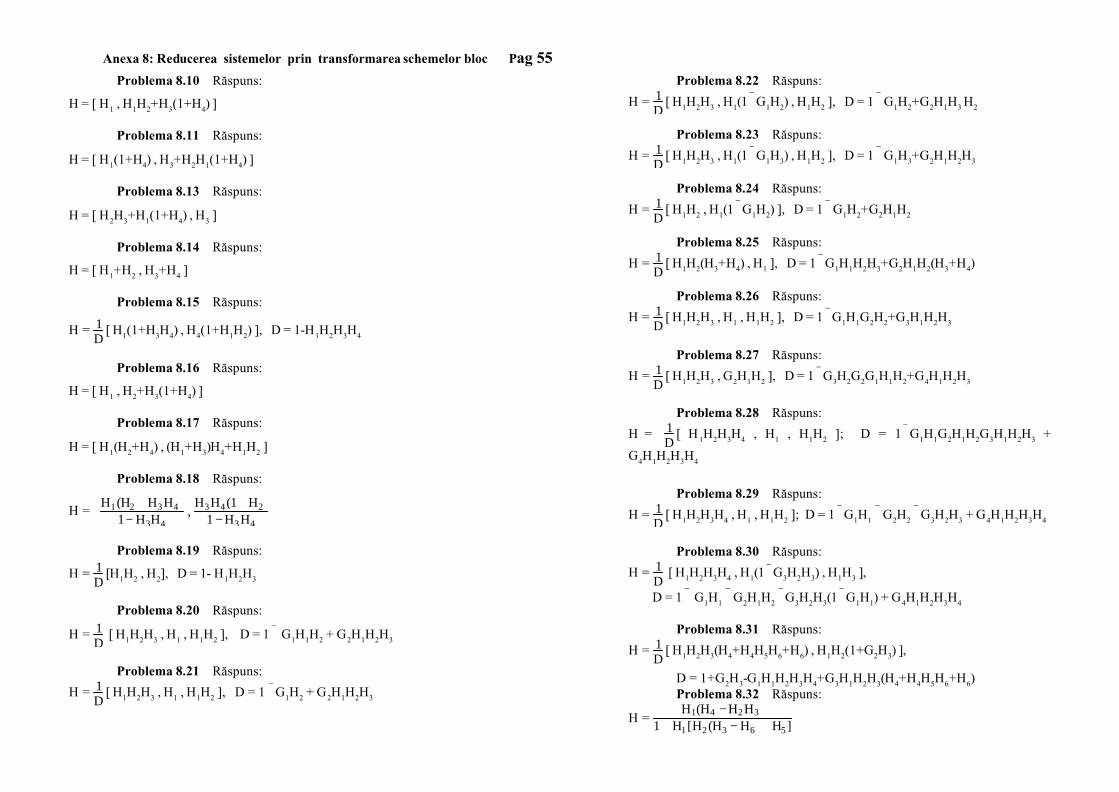
Problema 8.10 Ráspuns:
H = [ H1 , H1H2+H3(1+H4) ]
Problema 8.11 Ráspuns:
H = [ H1(1+H4) , H3+H2H1(1+H4) ]
Problema 8.13 Ráspuns:
H = [ H2H3+H1(1+H4) , H3 ]
Problema 8.14 Ráspuns:
H = [ H1+H2 , H3+H4 ]
Problema 8.15 Ráspuns:
H = [ H1(1+H3H4) , H4(1+H1H2) ], D = 1-H1H2H3H41D
Problema 8.16 Ráspuns:
H = [ H1 , H2+H3(1+H4) ]
Problema 8.17 Ráspuns:
H = [ H1(H2+H4) , (H1+H3)H4+H1H2 ]
Problema 8.18 Ráspuns:
H =
H1 (H2 + H3H4 )1− H3H4
,H3H4 (1+ H2)
1 − H3H4
Problema 8.19 Ráspuns:
H = [H1H2 , H2], D = 1- H1H2H31D
Problema 8.20 Ráspuns:
H = [ H1H2H3 , H1 , H1H2 ], D = 1 G1H1H2 + G2H1H2H3 1D
−+
Problema 8.21 Ráspuns: H = [ H1H2H3 , H1 , H1H2 ], D = 1 G1H2 + G2H1H2H3
1D
−+
Problema 8.22 Ráspuns: H = [ H1H2H3 , H1(1 G1H2) , H1H2 ], D = 1 G1H2+G2H1H3 H2
1D
−+
−+
Problema 8.23 Ráspuns: H = [ H1H2H3 , H1(1 G1H3) , H1H2 ], D = 1 G1H3+G2H1H2H3
1D
−+
−+
Problema 8.24 Ráspuns: H = [ H1H2 , H1(1 G1H2) ], D = 1 G1H2+G2H1H2
1D
−+
−+
Problema 8.25 Ráspuns: H = [ H1H2(H3+H4) , H1 ], D = 1 G1H1H2H3+G2H1H2(H3+H4)
1D
−+
Problema 8.26 Ráspuns: H = [ H1H2H3 , H1 , H1H2 ], D = 1 G1H1G2H2+G3H1H2H3
1D
−+
Problema 8.27 Ráspuns: H = [ H1H2H3 , G2H1H2 ], D = 1 G3H2G2G1H1H2+G4H1H2H3
1D
−+
Problema 8.28 Ráspuns:H = [ H 1H2H3H4 , H1 , H1H2 ]; D = 1 G1H1G2H1H2G3H1H2H3 +1
D−+
G4H1H2H3H4
Problema 8.29 Ráspuns:H = [ H1H2H3H4 , H1 , H1H2 ]; D = 1 G1H1 G2H2 G3H2H3 + G4H1H2H3H4
1D
−+
−+
−+
Problema 8.30 Ráspuns:H = [ H1H2H3H4 , H1(1 G3H2H3) , H1H3 ],
1D
−+
D = 1 G1H1 G2H1H2 G3H2H3(1 G1H1) + G4H1H2H3H4
−+
−+
−+
−+
Problema 8.31 Ráspuns:H = [ H1H2H3(H4+H4H5H6+H6) , H1H2(1+G2H3) ],
1D
D = 1+G2H3-G1H1H2H3H4+G3H1H2H3(H4+H4H5H6+H6)Problema 8.32 Ráspuns:
H = H1(H4 − H2H3 )
1 + H1 [H2 (H3 − H6) + H5 ]
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 55

Problema 8.33 Ráspuns:
H = 1D
H1H2H3H6 + H1H2H4 H4 + H3H6
H1 −H4H7H1 − H3H5 − H3H6H7H1
D = 1 + H2 ⋅ H3 ⋅ H5 + H1 ⋅ H2 ⋅ H3 ⋅ H6 ⋅ H7 + H1 ⋅ H2 ⋅ H4 ⋅ H7
Problema 8.12 Rezolvare:Vom da un exemplu de aplicare a transformárilor structurale simple
pentru aflarea funcþiilor de transfer ale schemelor cu bucle íncrucißate. Vor fiutilizate relaþiile ßi regulile de transformare prezentate ín Anexa 8.
Fie schema bloc:
U YH1 H2 H3 H4
H23H34H12
+-
+-
+-
Se translateazá punctul marcat din amonte ín aval cu pástrareaechivalenþei schemei:
U YH1 H2 H3 H4
H23
H34H12
+-
+-
+-
1H4
Ha
H bSe echivaleazá porþiunea marcatá din schemá:
;Ha(s) = H3H4
1−+ H3H4H34
Hb (s) = H23
H4
Vom obþine schema echivalentá:
U YH 1 H2
HH12
+-
+-
b
H a
Se translateazá punctul marcat din amonte ín aval cu pástrarea echivalenþei:
U YH 1 H2
H
H12
+-
+-
b
H a
1H a
H c
HdEchivaländ blocurile marcate vom obþine schema:
;Hc =H2Ha
1−+ H2HaHb
Hd =H12Ha
U YH 1 H c
Hd
+-
Se obþine simplu:H(s) = Y(s)U(s)
= Hc(s) ⋅ H1 (s)
1−+ Hd (s) ⋅ Hc(s) ⋅ H1 (s)
Se ínlocuiesc valorile obþinute pentru funcþiile de transfer ce intervin ßi seobþine astfel funcþia de transfer globalá.Observaþie: Ín cazul ín care intervin mai multe intrári sau ießiri, se defineßte o matrice detransfer la care elementele sunt funcþii de transfer.
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 56

Problema 8.15 Rezolvare:
U 2
U 1
H4
H 3
H2
H1
Y
Se observá cá avem douá intrári ßi o singurá ießire, deci:
U(s) =
U1 (s)U2 (s)
H(s) = [ H11(s) H12(s) ]
H11(s) = Y(s)U1 (s)
H12(s) = Y(s)U2 (s)
Ca sá calculám H1(s) vom considera U2(s) = 0, deci nu vom mai considera ínschemá prezenþa lui u2 . Se obþine schema:
U 1
H 4
H 3
H 2
H 1
Y
Aceastá schemá este echivalentá cu urmátoarea:
H1
H 3H 4H
U 1 Y
2
Translatám punctul marcat din aval ín amonte ßi obþinem:
H1
H3H4H
U1 Y
2H3 H4
Ha
HbEchivaländ blocurile marcate se obþine:
U 1 H a
Hb
Y
Ha(s) = H1 (s)1 − H1 (s) ⋅ H2 (s) ⋅ H3 (s) ⋅ H4 (s)
Hb (s) = H3 (s)⋅H4 (s)
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 57

Se obþine simplu: .H11 (s) = Ha(s) [1 + Hb (s)]Ín acelaßi mod se gáseßte ßi H12 (s) .
Problema 8.33 Rezolvare:
H H H H
H
H
H
1U1 Y1
Y U2 2
2 3
4
5
6
7
_ _
Se observá cá avem douá ießiri ßi douá intrári:
; ; U(s) =
U1 (s)U2 (s)
Y(s) =
Y1 (s)Y2 (s)
H(s) =
H11 (s) H12 (s)H21 (s) H22 (s)
;H11 (s) = Y1 (s)U1 (s) U 2=0
H12 (s) = Y1 (s)U2 (s) U 1=0
;H21 (s) = Y2 (s)U1 (s) U 2=0
H22 (s) = Y2 (s)U2 (s) U 1=0
a). Pentru calculul primei componente a matricii de transfer a sistemuluißi anume H11(s) vom considera U2 = 0 ßi vom ignora pe Y 2 ín schema bloc. Sedeplaseazá punctul marcat din aval ín amonte (de la ießirea blocului cu funcþiade transfer H3 la intrarea acestuia) ßi obþinem:
H H H H
H
H
H
1U1 Y1
2 3
4
5
6
7
_ _
H H H H
H
H
H
1U1
Y12 3
4
5
6
7
_ _
H3H
H
a
b
Blocurile marcate se echivaleazá fiind conexiuni simple ßi obþinem:
;Ha =H2
1+ H2H5H3Hb = H4 + H3H6
H
H
1U1
Y1
7
_H Ha b
Obþinem ín final expresia funcþiei de transfer H11(s):
H11 (s) =H1HaHb
1+ H1HaHbH7=
H1H2H3H6 + H1H2H41+ H2H3H5 + H1H2H3H6H7 + H1H2H4H7
b). Pentru calculul componentei H12(s) vom considera U1 = 0 ßi vomignora pe Y2 ín schema bloc.
H H H H
H
H
H
1Y1
U2
2 3
4
5
6
7
_ _
Se deplaseazá punctul marcat din aval ín amonte ßi vom avea:
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 58

H
H H H
H
H
H1
Y1
U2
2 3
4
5
6
7
_ _
H3 Ha
Se observá cá apar douá conexiuni serie simple ßi o conexiune paralelá Ha carese echivaleazá:
Ha(s) = H4 + H3H6
H
H
H
H1
Y1
U2
2
5
7
_ _
H 3
Ha
.
.
Se translateazá punctul de aplicaþie marcat din amonte ín aval:
H
H
H
H1
Y1
U2
2
5
7
H 3
H a
.
. 1
Ha
H b
-
Se echivaleazá structura paralelá care rezultá: Hb (s) = H1H7 + H5H3
Ha
Y1H a
bH H2
U2
-
Prin echivalarea acestei scheme bloc rezultá H12(s):
H12 (s) = Ha1+ HaH2Hb
=H4 + H3H6
1 + H2H3H5 + H1H2H3H6H7 + H1H2H4H7
c). Pentru determinarea funcþiei de transfer H21(s) considerám U2= 0 ßiignorám ießirea Y1 .
H H H H
H
H
H
1U1
Y2
2 3
4
5
6
7
_ _
Deplasám punctul marcat din aval ín amonte:
H H H H
H
H
H
1U1
Y2
2 3
4
5
6
7
_ _
H3
H a
Echivalám conexiunea serie ßi conexiunea paralelá H a :Ha(s) = H4 + H3H6
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 59

H H
H
H
1U1
Y2
2
5
7
_ _
H a
H3.
Dupá echivalarea conexiunii serie se obþine urmátoarea schemá:
H
H
1U1
_ _
H3
.
5
H 2
H H7 a
Y 2
.
Se translateazá punctul marcat de la ießirea blocului cu funcþia de transfer H2la intrarea acestuia:
H1
U1
_ _
.
H2
H H7 a
Y2
H2
H H 5 3.
H
H
c
bConexiunea serie Hb ßi conexiunea paralel-opusá H c se echivaleazá:
;Hb (s) = H2H7Ha Hc(s) = 11+ H2H3H5
H1U1
_
Y2H
H
c
bObþinem expresia componentei H21 (s):
H21 (s) =H1Hc
1+ H1HcHb=
H11 + H2H3H5 + H1H2H3H6H7 + H1H2H4H7
d). Componenta matricii de transfer H22(s) se calculeazá considerändintrarea U1= 0 ßi neglijänd ießirea Y1 .
H H H H
H
H
H
1
Y U2 2
2 3
4
5
6
7
_ _
Pentru reducerea schemei bloc se deplaseazá punctul marcat din aval ínamonteßi obþinem urmátoarea structurá:
H H H H
H
H
H
1
Y U2 2
2 3
4
5
6
7
_ _
H3
Ha
Se poate echivala conexiunea serie dintre H3 ßi H5 ßi conexiunea paralelá Ha(s) = H4 + H3 H6 . Se observá cá apare ßi o conexiune serie íntre H a ßi H7 .
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 60

H H
H
H
1
Y U2 2
2
5
7
_ _
H3
Ha
.
.
Dacá redesenám schema bloc þinänd seama de intrare, de ießire ßi de semnelede la intrarea sumatoarelor obþinem:
H H
H H H
H
Y35
7 a
_
_
1
2
.
.
H b
U
Conexiunea paralelá care apare se poate echivala ßi vom avea:Hb = −(H3H5 + H1H7Ha)
Ultima componentá a matricii de transfer se obþine imediat:
H22 (s) =Hb
1− H2Hb=
−H3H5 − H1H4H7 − H1H3H6H71 + H2H3H5 + H1H2H3H6H7 + H1H2H4H7
Anexa 8: Reducerea sistemelor prin transformarea schemelor bloc Pag 61

Anexa 9: Reducerea sistemelor prin grafe de fluenþáGraful de fluenþá este o formá graficá de reprezentare a unor relaþii
liniare íntre diferite márimi. Elementele fundamentale ale unui graf de fluenþásunt: nodul ßi arcul elementar orientat.
Nodul reprezentat ín graf printr-un punct, exprimá o márime marcatáprintr-o literá, de exemplu x j ce desemneazá o variabilá a grafului.
Arcul elementar orientat íntre douá noduri, de la nodul x j la nodulxi, de exemplu, este un arc de curbá orientat printr-o ságeatá de la nodul xj lanodul x i care leagá direct nodul x j de nodul x i fárá sá treacá prin alt nod.
El este marcat printr-o literá sau simbol ßi defineßte coeficientul sauoperatorul prin care márimea xj contribuie ca un termen la determinareamárimii x i.
Coeficientul tji ataßat arcului elementar orientat defineßtetransmitanþa elementará íntre cele douá noduri. Se considerá nulátransmitanþa pe un arc ín sens invers celui indicat de ságeatá. Transmitanþa tjieste ascendentá (incidentá) la nodul xi sau nodul xi are tji ca transmitanþáascendentá dacá arcul elementar orientat de transmitanþá tji intrá ín nodul xi.Transmitanþa tji este descendentá din nodul xj sau nodul xj are tji catransmitanþá descendentá dacá arcul elementar de transmitanþá tji pleacá dinnodul x j.
Dacá o transmitanþá se noteazá indexatá cu doi indici inferiori, deexemplu tji, primul indice (j) aratá nodul de plecare xj iar al doilea indice (i)aratá nodul de sosire x i.
X Xj i
t ji
Xi = t ji . Xj
Fig. A9.1
Prin nod sursá se ínþelege un nod conectat numai la transmitanþeledescendente (toate transmitanþele conectate la acel nod au sensurile dinspreacel nod). Prin noduri sursá se reprezintá termenii liberi ai sistemului deecuaþii, cauzele care afecteazá alte márimi din sistem (márimile de intrare ßicondiþiile iniþiale íntr-un sistem dinamic).
Prin nod receptor se ínþelege nodul conectat numai la transmitanþeleascendente. Toate transmitanþele elementare conectate la acel nod au sensulspre acel nod.
Aßa cum este cunoscut, grafele de fluenþá permit rezolvareagrafo-analiticá a unor sisteme de ecuaþii algebrice liniare, deci se pot aplicadirect la reducerea sistemelor.
Graful sistemului poate fi trasat pornind fie de la sistemul de ecuaþiifie de la schema bloc. Pentru a deduce ußor graful de fluenþá pornind de laschema bloc se procedeazá astfel:
1. Se asociazá ín schema bloc o literá pentru fiecare ießire dintr-unsumator ßi pentru fiecare punct de ramificare. Acestea vor deveni noduri íngraf.
2. Márimile de intrare ßi condiþiile iniþiale (cänd schema bloc exprimáßi efectul condiþiilor iniþiale) se asociazá unor noduri sursá. Márimile de ießirese asociazá unor noduri receptor.
3. Se deseneazá toate nodurile ín poziþii care sá urmáreascá eventualstructura schemei bloc sau care sá conducá la evitarea intersecþiilor de arce.
4. Pentru fiecare nod diferit de un nod sursá se stabileßte pe schemabloc relaþia care exprimá acel nod ín funcþie de márimi ce sunt alese ca nodurißi se reprezintá ín graf aceastá relaþie.
Componenta a matricei de transfer Hij (s) =Yi (s)Uj (s) Uk≠j (s) = 0
reprezintá transmitanþa echivalentá dintre nodul ßi nodul . AceastaTUj Y i Uj Yise calculeazá folosind formula lui Mason:
Hij (s) =Yi (s)Uj (s) Uk≠j (s) = 0
= TUj Yi =Σq=1
...Cq ⋅ Dq
Dunde D este determinantul grafului, este una din cáile de la nodul j laCq
nodul i iar este determinantul asociat buclelor disjuncte cáii q.Dq
,D = 1+ Σk=1
...(−1)k ⋅ Spk
unde reprezintá suma produselor de cäte k bucle disjuncte. Notänd prin Spk B i transmitanþa buclei i (adicá produsul transmitanþelor elementare din bucla i),vom avea:
, suma tuturor buclelor grafului.Sp1 = Σ(i)
...Bi
, suma produselor de cäte douá bucle disjuncte.Sp2 = Σ(i,l)
...Bi ⋅ Bl
Termenul apare numai dacá buclele sunt disjuncte, adicá nu auBi ⋅ Bl Bi si Blnici un nod ín comun.
, suma produselor de cäte 3 bucle disjuncte.Sp3 = Σ(i,l,m)
...Bi ⋅ Bl ⋅ Bm
Termenul apare numai dacá buclele sunt disjuncte,Bi ⋅ Bl ⋅ Bm Bi , Bl si Bm
adicá nu au nici un nod ín comun. este transmitanþa echivalentá a unei cái de la nodul la nodul Cq Uj Yj
se calculeazá ca ßi D dar luänd ín considerare numai buclele disjuncteDqcáii q.
Anexa 8: Reducerea sistemelor prin grafe de fluenþá Pag 62

Aplicaþie de tipul 9:Reducerea sistemelor prin grafe de fluenþá
Sá se determine componentele matricei de transfer pentru sistemele dela Aplicaþia de tipul 8 folosind reducerea sistemelor prin grafe de fluenþá.
Problema 9.15 Rezolvare:
Pentru rezolvarea acestui tip de probleme se pot folosi relaþiile ßiindicaþiile din Anexa 9.
U 2
U 1
H 4
H 3
H 2
H 1
Y
a a
aa
1 2
3 4
Ín sistemul reprezentat prin schema de mai sus s-a asociat cäte o literá fiecáreiießiri din sumatoare ßi fiecárui punct de ramificaþie: U1 ßi U2 α1 , α2 , α3 , α4.sunt noduri sursá iar ießirea este Y (nod receptor). Din schema bloc rezultárelaþiile: α1 = U2 + H3α4
α2 = H4α1
α3 = U1 + H2α2
α4 = H1α3
Y= α2 + α4
Graful asociat acestui sistem este prezentat ín figura urmátoare:
U 1 Y1
1U 1
a a
aa
1 2
34
H
H
H
H1
2
3
41
2
Se identificá o singurá buclá:
B1 = H4 ⋅ H2 ⋅ H1 ⋅ H3
Prin urmare vom avea:Sp1 = B1
Sp2 = 0, Spk = 0 , ∀k ≥ 2
D = 1+ Σk=1
. ..
(−1)k ⋅ Spk = 1 − H4 ⋅ H2 ⋅ H1 ⋅ H3
Matricea de transfer are douá componente: ßi .H11 (s) H12 (s)
Calculul componentei :H11 (s) = Y(s)U1 (s) U2 (s) = 0
De la U1 la Y existá douá cái:
1). ßi D1 = 1 deoarece nu existá bucle disjuncte la aceastáC1 = 1 ⋅ H1 ⋅ 1cale.2). ßi D2 = 1 deoarece nu existá bucle disjuncte laC2 = 1 ⋅ H1 ⋅ H3 ⋅ H4 ⋅ 1aceastá cale. Aplicänd formula lui Mason vom obþine:
H11 (s) = TU 1Y = C1 ⋅ D1 + C2 ⋅ D2
D= H1 ⋅ (1+ H3 ⋅ H4)
1− H1 ⋅ H2 ⋅ H3 ⋅ H4
Calculul componentei :H12 (s) = Y(s)U2 (s) U1 (s) = 0
De la nodul U 2 la nodul Y se disting douá cái:1). C1 = 1 ⋅ H4 ⋅ 1 , D1 = 1
2). C2 = 1 ⋅ H4 ⋅ H2 ⋅ H1 ⋅ 1 , D2 = 1
Aplicám formula lui Mason:
H12 (s) = TU 2Y = C1 ⋅ D1 + C2 ⋅ D2
D= H4 ⋅ (1+ H1 ⋅ H2)
1− H1 ⋅ H2 ⋅ H3 ⋅ H4
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 63

Problema 9.33 Rezolvare:
H H H H
H
H
H
1U1 Y1
Y U2 2
2 3
4
5
6
7
_ _
a a
a
a
a aa
a
a
1 0 2
7
5
63
4
8
Ín sistemul reprezentat prin schema bloc de mai sus s-a asociat cäte o literáfiecárei ießiri din sumatoare ßi fiecárui punct de ramificaþie. Acestea sunt:
. sunt noduri sursá iar ießirile sunt . Dinα1 , α2 , α3 , α4, α8 U1 si U2 Y1 si Y2schema bloc rezultá relaþiile:
α1 = U1 − H7 ⋅ α8
α2 = H1 ⋅ α1 − H5 ⋅ α4
α3 = H2 ⋅ α2 + U2
α4 = H3 ⋅ α3
α8 = H6 ⋅ α4 + H4 ⋅ α3
Y1 = α8
Y2 = α2
Graful asociat acestui sistem de ecuaþii este prezentat ín figura de mai jos:
U H H H H 1 Y
UY
11 1 aa
a
a a1 2 2
2 2
3
3 14
H4
-H
-H
5
6
7
8
1 1
Se identificá urmátoarele bucle:
B1 = H2 ⋅ H3 ⋅ (−H5 )
B2 = H1 ⋅ H2 ⋅ H3 ⋅ H6 ⋅ (−H7 )
B3 = H1 ⋅ H2 ⋅ H4 ⋅ (−H7 )Se observá cá aceste bucle sunt conjuncte douá cäte douá .
Sp1 = B1 + B2 + B3
Sp1 = −(H2 ⋅ H3 ⋅ H5 + H1 ⋅ H2 ⋅ H3 ⋅ H6 ⋅ H7 + H1 ⋅ H2 ⋅ H4 ⋅ H7 )
deoarece nu existá bucle disjuncte douá cäte douá ßi deci:Sp2 = 0
Spk = 0 , k≥ 2
D = 1− Sp1 = 1 + H2 ⋅ H3 ⋅ H5 + H1 ⋅ H2 ⋅ H3 ⋅ H6 ⋅ H7 + H1 ⋅ H2 ⋅ H4 ⋅ H7
Calculul componentei :H11 (s) =Y1 (s)U1 (s) U2 (s) = 0
De la existá douá cái:U1 la Y1
1). ßi = 1 deoarece nu existá bucle disjuncte laC1 = H1 ⋅ H2 ⋅ H3 ⋅ H6 D1aceastá cale.
2). deoarece nu existá bucle disjuncte la aceastáC2 = H1 ⋅ H2 ⋅ H4 si D2 = 1cale.Aplicänd formula lui Mason vom obþine:
H11 (s) = C1 ⋅ D1 + C2 ⋅ D2
D= H1 ⋅ H2 ⋅ H3 ⋅ H6 + H1 ⋅ H2 ⋅ H4
D
Calculul componentei :H12 (s) =Y1 (s)U2 (s) U1 (s) = 0
Íntre nodul se disting urmátoarele cái:U2 si nodul Y1
1). C3 = H4 , D3 = 1
2). C4 = H3 ⋅ H6 , D4 = 1
TU2 Y 1 = H12 (s) = C3 ⋅ D3 + C4 ⋅ D4
D= H4 + H3 ⋅ H6
D
Calculul componentei :H21 (s) =Y2 (s)U1 (s) U2 (s) = 0
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 64

Íntre nodul se distinge urmátoareea cale:U1si nodul Y2
1). C5 = H1 , D5 = 1
TU1 Y 2 = H21 (s) = C5 ⋅ D5
D= H1
D
Calculul componentei :H22 (s) =Y2 (s)U2 (s) U1 (s) = 0
Íntre nodul se disting urmátoarele cái:U2 si nodul Y2
1). C6 = H4 ⋅ (−H7 ) ⋅ H1 , D6 = 1
2). C7 = H3 ⋅ (−H5 ) , D7 = 1
3). C8 = H3 ⋅ H6 ⋅ (−H7 ) ⋅ H1 , D8 = 1
TU2 Y 2 = H22 (s) = C6 ⋅ D6 + C7 ⋅ D7 + C8 ⋅ D8
D
H22 (s) = −H4 ⋅ H7 ⋅ H1 − H3 ⋅ H5 − H3 ⋅ H6 ⋅ H7 ⋅ H1
D
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 65

Aplicaþie de tipul 10:Deducerea ecuaþiilor matricial -vectoriale de stare pornind dela schema bloc
Sá se ataßeze variabilele de stare ßi sá se deducá ecuaþiilematricial-vectoriale de stare ßi funcþia de transfer pentru sistemele:
10.1
21
s+11
s+1
2s+3
U(s) Y(s)
- -
10.2
U(s)
s+1
Y(s)
- -s+1s+2
1s+1
1s
10.3
1s+2
1s+2
1s+1
s
1s+1
U(s) Y(s)
- -
10.4
1s +s+1
5s+2
1s
s+1
2U(s) Y(s)
- -
10.5
s1 -6
1s 18
2
1s -5
3
2
U(s)
Y(s)
-
-
-
10.6
U(s) Y(s)K (1+ )1T s
K(T s+1)(T s+1)R i
F1 2
-
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 66

10.7
U(s)10(1+ 1
s )2
s+25
s+4
ss+10
- -
10.8
ss+5
4s+1
5s
U(s) Y(s)
10.9
U(s)
Y(s)
2
1s+1
2
5
1s+2
1s+3
-
10.10
U(s) Y(s)
5
s+10s+2
s+5s+10 s
1
ss+1
-
Problema 10.2 Rezolvare:
Avem urmátoarea schemá bloc:
U ( s )
s+1
Y(s)
- -s+1s+2
1s+1
1s
H (s) H (s) H (s)
H (s)
u y u y
u y
uy
1 2
3
1 2
3
444
1 2 3
Fig. 10.2.1
1. Fiecárui bloc dinamic component i se ataßeazá la intrare ßi la ießirecäte o literá, uk respectic yk , k = 1,2,3,4 ín cazul de faþá.
2. Se observá cá blocurile H2 ßi H3 sunt elemente de ordinul 1 strictproprii astfel cá ießirea fiecáruia poate fi componentá a vectorului de stare. Seasociazá variabilele x2 ßi x3 .
3. Blocul H1 (s) este de ordinul 1, propriu, astfel cá se transfigureazáíntr-o conexiune paralel dintre un element scalar ßi un element strict propriu.Deoarece:
Y1 (s) =
s + 1s + 2
U1 (s) =
1 − 1s + 2
U1 (s) = 1 ⋅ U1 (s) −
1
s + 2 U1 (s)
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 67

se realizeazá echivalenþa ín reprezentarea prin schemá bloc ca ín Fig. 10.2.2:
s+1s+2 1
s+2
u y u y1 1 1 1-
<=>
x1Fig. 10.2.2
Y1 (s) = −X1 (s) + U1 (s)
Ín acest caz se ataßeazá o componentá a vectorului de stare, x1 , la ießireaelementului strict propriu. Structura din Fig. 10.2.2 se va substitui ín locul blocului H1 din Fig. 10.2.1 .La fel de bine se poate considera echivalenþa algebricá:
Y1 (s) =
s + 1s + 2
⋅ U1(s) =
1+ −1s + 2
⋅ U1 (s) = 1 ⋅ U1 (s) +
−1
s + 2 ⋅ U1(s)
care conduce la echivalenþa graficá:
s+1s+2 1
s+2
u y u y1 1 1 1<=>
-x1
Fig. 10.2.3
Y1 (s) = X1 (s) + U1 (s)
Ataßänd la ießirea elementului strict propriu variabila x1 , ín final se va obþineo altá realizare prin ecuaþii de stare a sistemului dat faþá de cazul ín care s-ar fiutilizat echivalenþa din Fig. 10.2.2 . Vom considera echivalenþa din Fig.10.2.2.
4.Se observá cá blocul H4 este impropriu. El exprimá un element PD-ideal.Acest element se descompune íntr-o conexiune paralel dintre un elementproporþional real ßi un element D-ideal.
s + 1u y u y
<=>s
4 44 4
x x4 4.
Fig. 10.2.4
Y4 (s) = (1 + s)U4 (s) <=> Y4(s) = U4 (s)+ sU4 (s) <=> y4 (t) = u4 (t)+ •u4 (t)
Se asociazá o literá x4 la intrarea elementului derivator. La ießirea acestuia seva marca .•x4 Variabilele x4 ßi vor dispare dacá sistemul nu este impropriu, ele avänd•x4rolul, la sistemele proprii sau strict proprii, de a facilita substituþiile.
5. Ín urma utilizárii notaþiilor suplimentare uk ßi yk , a echivalenþelordin Fig. 10.2.2 ßi 10.2.4 ßi a definirii unor componente xk la ießireaelementelor strict proprii ßi la intrarea elementului D-ideal, schema din Fig.10.2.1 devine:
U ( s )
s
Y(s)
- -
s+2
1s+1
1s
y u y
u
y
u
y
1 2 32
3
4
4
1
u1
x1
x 4x 4.
x3x2
Fig. 10.2.56. Se scriu relaþiile ín domeniul complex s dintre márimile care intervinín aceastá structurá ßi echivalentul acestor relaþii ín domeniul timp. Evident,dupá o oarecare experienþá aceste relaþii se scriu direct ín domeniul timpprivind numai schema bloc. X1 (s) = 1
s + 2U1 (s) <=> sX1(s) + 2X1(s) = U1 (s) <=> •x1 (t) = −2x1 (t)+ u1 (t)
(10.2.1)X2 (s) = 1
s + 1U2 (s) <=> sX2(s) + X2(s) = U2 (s) <=> •x2 (t) = −x2 (t)+ u2 (t)
(10.2.2)
(10.2.3)X3 (s) = 1s U3(s) <=> sX3 (s) = U3(s) <=> •x3 (t) = u3 (t)
(10.2.4)u3 (t) = x2 (t)
(10.2.5)u2 (t) = y1 (t)− x2 (t)
(10.2.6)y1 (t) = u1 (t)− x1 (t)
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 68
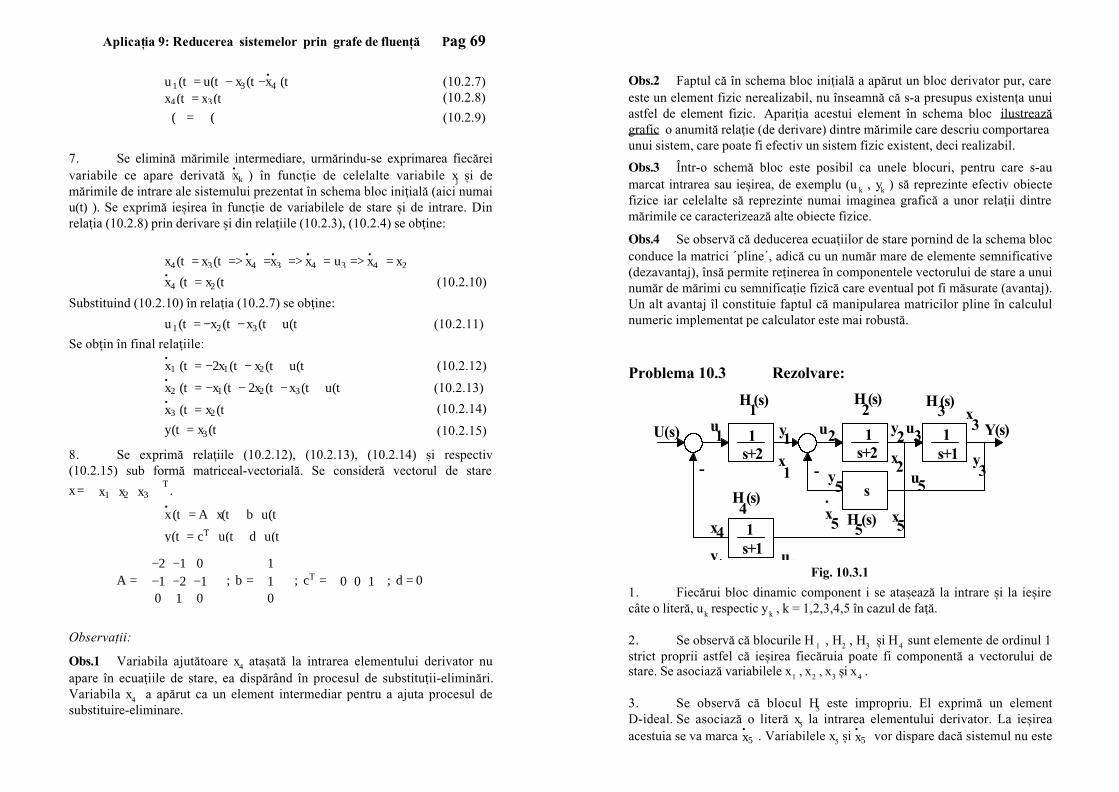
(10.2.7)u1 (t) = u(t) − x3 (t)−•x4 (t) (10.2.8)x4 (t) = x3 (t) (10.2.9)y(t) = x3(t)
7. Se eliminá márimile intermediare, urmárindu-se exprimarea fiecáreivariabile ce apare derivatá ( ) ín funcþie de celelalte variabile xj ßi de•xkmárimile de intrare ale sistemului prezentat ín schema bloc iniþialá (aici numaiu(t) ). Se exprimá ießirea ín funcþie de variabilele de stare ßi de intrare. Dinrelaþia (10.2.8) prin derivare ßi din relaþiile (10.2.3), (10.2.4) se obþine:
x4 (t) = x3 (t) => •x4 =•x3 => •x4 = u3 => •x4 = x2
(10.2.10)•x4 (t) = x2 (t)
Substituind (10.2.10) ín relaþia (10.2.7) se obþine: (10.2.11)u1 (t) = −x2 (t) − x3 (t)+ u(t)
Se obþin ín final relaþiile: (10.2.12)
•x1 (t) = −2x1 (t) − x2 (t) + u(t)
(10.2.13)•x2 (t) = −x1 (t) − 2x2 (t) − x3 (t) + u(t)
(10.2.14)•x3 (t) = x2 (t)
(10.2.15)y(t) = x3 (t)
8. Se exprimá relaþiile (10.2.12), (10.2.13), (10.2.14) ßi respectiv(10.2.15) sub formá matriceal-vectorialá. Se considerá vectorul de stare
.x= x1 x2 x3 T
•x (t) = A ⋅ x(t) + b ⋅ u(t)
y(t) = cT ⋅ u(t)+ d ⋅ u(t)
A =
−2 −1 0−1 −2 −10 1 0
; b =
110
; cT = 0 0 1 ; d = 0
Observaþii:
Obs.1 Variabila ajutátoare x4 ataßatá la intrarea elementului derivator nuapare ín ecuaþiile de stare, ea dispáränd ín procesul de substituþii-eliminári.Variabila x4 a apárut ca un element intermediar pentru a ajuta procesul desubstituire-eliminare.
Obs.2 Faptul cá ín schema bloc iniþialá a apárut un bloc derivator pur, careeste un element fizic nerealizabil, nu ínseamná cá s-a presupus existenþa unuiastfel de element fizic. Apariþia acestui element ín schema bloc ilustreazágrafic o anumitá relaþie (de derivare) dintre márimile care descriu comportareaunui sistem, care poate fi efectiv un sistem fizic existent, deci realizabil.Obs.3 Íntr-o schemá bloc este posibil ca unele blocuri, pentru care s-aumarcat intrarea sau ießirea, de exemplu (u k , yk ) sá reprezinte efectiv obiectefizice iar celelalte sá reprezinte numai imaginea graficá a unor relaþii dintremárimile ce caracterizeazá alte obiecte fizice.
Obs.4 Se observá cá deducerea ecuaþiilor de stare pornind de la schema blocconduce la matrici 'pline', adicá cu un numár mare de elemente semnificative(dezavantaj), ínsá permite reþinerea ín componentele vectorului de stare a unuinumár de márimi cu semnificaþie fizicá care eventual pot fi másurate (avantaj).Un alt avantaj íl constituie faptul cá manipularea matricilor pline ín calcululnumeric implementat pe calculator este mai robustá.
Problema 10.3 Rezolvare:
1s+2
1s+2
1s+1
s
1s+1
U(s) Y(s)
- -
H (s)H (s)1 H (s)
H (s)H (s)
2 3
45
u y u y u
yuy
uy
1 1 2 2 3
355
4 4
x x
x
x xx
1 2
3
4 55.
Fig. 10.3.11. Fiecárui bloc dinamic component i se ataßeazá la intrare ßi la ießirecäte o literá, uk respectic yk , k = 1,2,3,4,5 ín cazul de faþá.
2. Se observá cá blocurile H 1 , H2 , H3 ßi H4 sunt elemente de ordinul 1strict proprii astfel cá ießirea fiecáruia poate fi componentá a vectorului destare. Se asociazá variabilele x1 , x2 , x3 ßi x4 .
3. Se observá cá blocul H5 este impropriu. El exprimá un elementD-ideal. Se asociazá o literá x5 la intrarea elementului derivator. La ießireaacestuia se va marca . Variabilele x5 ßi vor dispare dacá sistemul nu este•
x5•x5
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 69

impropriu, ele avänd rolul, la sistemele proprii sau strict proprii, de a facilitasubstituþiile.
4. Ín urma utilizárii notaþiilor suplimentare uk ßi yk, a definirii unorcomponente xk la ießirea elementelor strict proprii ßi la intrarea elementuluiD-ideal, se scriu relaþiile ín domeniul complex s dintre márimile care intervinín aceastá structurá ßi echivalentul acestor relaþii ín domeniul timp.
X1 (s) = 1
s + 2U1 (s) <=> sX1(s) + 2X1(s) = U1 (s) <=> •x1 (t) = −2x1 (t) + u1 (t)
(10.3.1)X2 (s) = 1
s + 2U2 (s) <=> sX2(s) + 2X2(s) = U2 (s) <=> •x2 (t) = −2x2 (t) + u2 (t)
(10.3.2)X3 (s) = 1
s + 1U3 (s) <=> sX3(s) + X3(s) = U3 (s) <=> •x3 (t) = −x3 (t) + u3 (t)
(10.3.3)X4 (s) = 1
s + 1U4 (s) <=> sX4(s) + X4(s) = U4 (s) <=> •x4 (t) = −x4 (t) + u4 (t)
(10.3.4) (10.3.5)u3 (t) = u4 (t) = x2 (t)
(10.3.6)u2 (t) = y1 (t) − y5 (t) = x1 (t)−•x5 (t)
(10.3.7)x5 (t) = x3 (t) =>•x5 (t) =
•x3 (t) = −x3 (t)+ u3 (t)
(10.3.8)u1 (t) = u(t) − x4 (t)
(10.3.9)u5 (t) = x3 (t)
(10.3.10)y(t) = x3 (t)
5. Se eliminá márimile intermediare, urmárindu-se exprimarea fiecáreivariabile ce apare derivatá ( ) ín funcþie de celelalte variabile xj ßi de•
xkmárimile de intrare ale sistemului prezentat ín schema bloc iniþialá (aici numaiu(t) ). Se obþin ín final relaþiile:
(10.3.11)•x1 (t) = −2x1 (t) − x4 (t) + u(t)
(10.3.12)•x2 (t) = x1 (t) − 2x2 (t) + x3 (t) − u(t)
(10.3.13)•x3 (t) = x2 (t) − x3 (t)
(10.3.14)•x4 (t) = x2 (t) − x4 (t)
(10.3.15)y(t) = x3 (t)
6. Se exprimá relaþiile (10.3.12) (10.3.15) sub formá matriceal÷-vectorialá. Se considerá vectorul de stare .x= x1 x2 x3 x4
T
•x (t) = A ⋅ x(t) + b ⋅ u(t)
y(t) = cT ⋅ u(t)+ d ⋅ u(t)
A =
−2 0 0 −11 −2 1 00 1 −1 00 1 0 −1
; b =
1−100
; cT = 0 0 1 0; d = 0
Aplicaþia 9: Reducerea sistemelor prin grafe de fluenþá Pag 70

Anexa 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist
Indicaþii generale11.a Caracteristici de frecvenþáPentru un sistem liniar cu funcþia de transfer H(s) se definesc :
1. Caracteristica amplitudine - pulsaþie A(w):A(ω) = | H(jω) | , ω R+∈
2. Caracteristica fazá - pulsaþie (w):ϕ(ω) = arg( H(jω) ) , ω R+ϕ ∈
3. Caracteristica logaritmicá amplitudine - pulsaþie L(w):L(ω) = 20 lgA(ω) , ω R+∈
4. Caracteristici asimptotice de frecvenþá:Se fac aproximárile :
(A11.1)(ωT)2 + 1 ≈
1 , ωT < 1ωT , ωT ≥ 1
(A11.2)[1− (ωT)2 ]2 + 4ξ2 (ωT)2 ≈
1 , ωT < 1(ωT)2 , ωT ≥ 1
ín L(ω) rezultänd La(ω) ßi
arctg(ωT) (A11.3)≈
0 , ωT < 0, 2π4
+ ln 102
lg(ωT) , ωT ∈ [0, 2...5]π2
, ωT > 5
arctg (A11.4)
2ξωT1 − (ωT)2
≈
0 , ωT < ω1Tπ2
+ ln 10ξ lg(ωT) , ωT ∈ [ω1T...ω2T]
π , ωT > ω2T
Cu aceste aproximaþii, caracteristicile reale amplificare-pulsaþie ßifazá-pulsaþie vor deveni segmente de dreaptá ce aproximeazá caracteristicilereale corespunzátoare. Din (A11.1) ßi (A11.2) rezultá cá dreptele ceaproximeazá caracteristicile reale amplificare-pulsaþie se vor intersecta ínpunctul .ωf ⋅ T = 1 => ωf = 1
TCaracteristicile fiind asimptotice, rezultá cá ele vor aproxima cel mai
bine caracteristicile reale pentru , respectivlg ω = −∞ respectiv pentru lgω = ∞pentru . (A11.3) sau (A11.4) substituite ín (ω) determináω → 0 sau ω → ∞ ϕ
(ω). ϕa
Ín cazul sistemelor de ordinul I, punctele de frängere alecaracteristicei fazá-pulsaþie ω1T ßi ω2T se pot calcula funcþie de punctul defrängere al caracteristicei logaritmice asimptotice amplificare-pulsaþie ,ωf = 1
Trezolvänd sistemul de ecuaþii:
π4
+ ln 102
lg(ωT) = 0π4
+ ln 102
lg(ωT) = π2
<=> ln 102
lg(ωT) = ±π4
<=> ωT = e± π2 =>
ω1T = e− π2
ω2T = eπ2
Calculänd, vom gási : de unde ßi relaþiile
ω1T = e− π2 = 0.2079 ≅ 0.2 = 1
5
ω2T = eπ2 = 4.8105 ≅ 5
(A11.3). Ín cazul sistemelor de ordinul II, punctele de frängere alecaracteristicii fazá-pulsaþie ω1T ßi ω2T rezultá din intersecþia dreptei de pantá
ín punctul [ wT =1 , ] cu coordonatele ) .ln 10ξ ϕ = π
2ϕ = 0 respectiv ϕ = π
Acest lucru este echivalent cu rezolvarea ecuaþiilor:
(A11.5)ln 10ξ
lg(ωT) = ± π2
<=> lg(ωT) = ± π2
⋅ ξlg(e) <=> ω1,2 = 1T
e±π2 ⋅ξ
Din (A11.5) rezultá cá punctele de frängere sunt dispuse ín stänga ßiín dreapta punctului de frängere al caracteristicilor logaritmice asimptoticeamplificare-pulsaþie . Cele douá puncte coincid numai ín cazul ín careωf = 1
T, caz ín care amplificarea devine infinit de mare, deci se atinge rezonanþaξ= 0
sistemului. Erorile de aproximare ale caracteristicilor logaritmice de frecvenþáprin caracteristicile logaritmice asimptotice corespunzátoare sunt mai mari ínvecinátatea punctelor de frängere atät pentru sisteme de ordinul I cät ßi pentrusistemele de ordinul II.
Pentru sisteme de ordinul I ßi II erorile de aproximare alecaracteristicilor logaritmice amplitudine-pulsaþie prin cele asimptotice auurmátoarele valori ín punctele de frängere:
Sisteme de ordinul I: (A11.6)ε = ±20 ⋅ lg 2 = ±3 dB
Sisteme de ordinul II: (A11.7)ε = ±20 ⋅ lg (2 ⋅ ξ)
11.b Caracteristici Bode Reprezintá caracteristicile [A(ω), (ω)] sau [L(ω), (ω)] reprezentateϕ ϕ
eventual asimptotic, la o aceeaßi scará logaritmicá in w.
11.c Caracteristica complexá de frecvenþá H(jw)
Reprezintá hodograful H(jω) cänd w R+, adicá locul geometric al∈värfurilor vectorilor H(jω) = P(ω) + jQ(ω) ín planul (P , Q) cänd ω R+. Ín∈
Anexa 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag 71

general, dacá w parcurge conturul Nyquist se obþine caracteristica complexáNyquist.
Ín cele ce urmeazá vor fi trasate caracteristicile logaritmiceamplitudine-pulsaþie ßi fazá-pulsaþie . Se preferá trasareaL(ω) ϕ(ω)caracteristicilor logaritmice de amplificare ßi de fazá din cauzá cá un sistemmai complex, cu o funcþie de transfer mai complicatá, se poate descompuneíntr-o conexiune serie de subsisteme mai simple:
(A11.8)H(s) = Πk=1
nHk (s) => H(jω) = Π
k=1
nHk (jω)
Cum pentru sistemul global cu funcþia de transfer H(s) ßi pentrusubsistemele componente putem scrie:
(A11.9)
H(jω) = A(ω)e jϕ(ω)
Hk (jω) = Ak (ω)e jϕk(ω) => A(ω)e jϕ(ω) = Πk=1
nAk(ω)e jϕk(ω)
Prin identificare ín relaþia 11.2 vom obþine :
(A11.10)
A(ω) = Πk=1
nAk(ω)
e jϕ(ω) = Πk=1
nejϕk (ω) = e
j Σk=1
nϕk(ω)
<=>
A(ω) = Πk=1
nAk (ω)
ϕ(ω) = Σk=1
nϕk (ω)
Din relaþia (11.3) se observá cum caracteristica fazá-pulsaþie se poateobþine prin ínsumarea graficá a caracteristicilor fazá-pulsaþie ale subsistemelorcomponente ce se pot obþine mult mai ußor.
Pentru trasarea caracteristicii amlitudine-pulsaþie ar trebui sá facemun produs grafic, lucru mult mai dificil decät o ínsumare graficá.
Cum logaritmarea unui produs se transformá íntr-o sumá de logaritmi,din relaþia (11.3) rezultá:
(A11.11)20 ⋅ lg A(ω) = 20 ⋅ lg
Π
k=1
nAk(ω)
= Σ
k=1
n[20 ⋅ lg Ak (ω)]
Notänd , relaþia (11.4) devine:20 ⋅ lg A(ω) = L(ω)
(A11.12)L(ω) = Σk=1
nLk (ω)
Relaþia (A11.5) aratá cum caracteristica logaritmicá globalá se obþineprin ínsumarea graficá a caracteristicilor logaritmice ale subsistemelorcomponente, care se obþin mult mai ußor. Punerea ín evidenþá acaracteristicilor logaritmice asimptotice ne permite formularea unui algoritmexpedititiv de trasare manualá a caracteristicilor Bode:
Pas 1: Se descompune funcþia de transfer H(s) a sistemului datíntr-un produs de funcþii de transfer tip:
H(s) = H1 (s) ⋅ H2 (s) ⋅ ...... ⋅ Hn(s) <=> H(s) = Πk=1
nHk (s)
Prin funcþii de transfer tip ínþelegem:1) Funcþii de transfer de ordinul I:
1a) Funcþii de transfer de ordinul I cu un zerou real:
Hj (s) = Kj ⋅ T j ⋅ s + 1
1b) Funcþii de transfer de ordinul I cu un pol real:
Hj (s) =Kj
T j ⋅ s + 1
2) Funcþii de transfer de ordinul II :2a) Funcþii de transfer de ordinul II cu douá zerouri complex conjugate:
Hj (s) = Kj ⋅ T j
2 ⋅ s2 + 2 ⋅ ξj ⋅ T j ⋅ s + 1 ; ξj ∈ [0 1)
2b) Funcþii de transfer de ordinul II cu doi poli complex conjugaþi :
Hj (s) =Kj
T j
2 ⋅ s 2 + 2 ⋅ ξj ⋅ T j ⋅ s + 1
; ξj ∈ [0 1)
Pas 2: Pentru fiecare funcþie de transfer tip se reprezintácaracteristicile Bode asimptotice amplificare-pulsaþie corespunzátoare, numitecaracteristici Bode asimptotice amplificare-pulsaþie elementare.
Caracteristicile Bode elementare amplificare-pulsaþie vor fi reprezentateastfel:
- pentru fiecare funcþie de transfer elementará se reprezintá pe abscisalogaritmicá punctele de frängere corespunzátoare ;ωf
j , j = 1, ... , n
- pentru pulsaþii cuprinse íntre se traseazá o dreaptá orizontalá0, ..., ωf
j
trecänd prin pe ordonatá;20 ⋅ lg Kj
- pentru pulsaþii cuprinse íntre se traseazá drepte cu umátoareleωf
j , ..., ∞
pante:1a) +20 dB/decadá; 2a) +40 dB/decadá;1b) -20 dB/decadá; 2b) -40 dB/decadá
Ín acest mod vom construi .Lja(ω) ; j = 1, ..., n
Observaþie: Funcþiile de transfer de tipul Hj (s) =Kjs sau Hj (s) = Kj ⋅ s
reprezintá cazuri particulare ale funcþiilor 1b) respectiv 1a) ín care , deciωfj = 0
Anexa 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag 72

punctul de frängere se aflá pe caracteristica logaritmicá la . Ín acest mod−∞astfel de funcþii de transfer vor avea drept caracteristicá logaritmicáamplificare-pulsaþie o dreaptá cu o pantá de +20 db/decadá, ín cazul lui
, sau -20 dB/decadá ín cazul lui .Hj (s) = Kj ⋅ s Hj (s) =Kjs
Pas 3: Pentru fiecare funcþie de transfer tip se reprezintácaracteristicile Bode asimptotice fazá-pulsaþie corespunzátoare, numitecaracteristici Bode asimptotice fazá-pulsaþie elementare.
Caracteristicile Bode elementare fazá-pulsaþie vor fi reprezentate astfel:- pentru fiecare funcþie de transfer elementará se reprezintá pe abscisa
logaritmicá punctele de frängere corespunzátoare , íntocmai ca laωfj
caracteristicile asimptotice amplificare-pulsaþie;- se marcheazá punctele de frängere pentru aceste caracteristici:
pentru sisteme de tipul 1a) respectiv 1b) se marcheazá pe•caracteristica logaritmicá puntele . Apoi se folosesc relaþiile1
5⋅ ωf
j si 5⋅ωfj
(A11.3). pentru sisteme de tipul 2a) respectiv 2b) se folosesc relaþiile•
(A11.4).Pas 4: Se face ínsumarea graficá a caracteristicilor elementare
amplificare-pulsaþie ßi fazá-pulsaþie:
La(ω) = Σk=1
nLk
a (ω)
ϕa(ω) = Σk=1
nϕk
a (ω)
obþinändu-se caracteristicile globale asimptotice .La(ω) si ϕa(ω)Ín final se pot aproxima mai bine caracteristicile reale þinänd cont de
aproximárile fácute ín punctele de frängere. Observaþii: Pe aceleaßi diagrame logaritmice se vor reprezenta atät
caracteristicile logaritmice asimptotice amplitudine-pulsaþie ßiLa(ω)fazá-pulsaþie cät ßi cele reale.ϕa(ω)
Putem face diferenþa dintre aceste douá tipuri de caracteristici þinändcont de faptul cá cele asimptotice vor fi reprezentate prin segmente de dreaptáßi cu o linie mai groasá. Caracteristicile fazá-pulsaþie pe ordonatá sunt gradateín radiani, dar s-a preferat normalizarea lor prin simpla ímpárþire la . Atenþieπla interpretarea lor deci, pentru obþinerea fazei ín radiani fiind necesarámultiplicarea prin .π
Pe axa absciselor vom avea pulsaþia la scará logaritmicá .
Anexa 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag 73

Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist
Sá se traseze caracteristicile Bode ßi sá se schiþeze caracteristicaNyquist pentru sistemele cu funcþiile de transfer de mai jos:
11.1 H(s) = 11.10 H(s) = 1(s + 0, 5)(2s + 1)
2500 ⋅ (s + 1)s(s+2)(s 2+30s+2500)
11.2 H(s) = 11.11 H(s)=s + 3s 2 + 4s + 16
10(s + 1)s 2 (2s + 1)(100s + 1)
11.3 H(s) = 11.12 H(s) = 1 + 0, 5ss2
2(3s + 1)s(s + 1)(s + 2)
11.4 H(s) = 11.13 H(s) = 30(s + 8)s(s + 2)(s + 4)
200(s + 1)(s + 2)(s + 5)
11.5 H(s) = 11.14 H(s) = 120(s + 2)s 2 (s + 4)(s + 6)
2(s + 2)s(s + 5)
11.6 H(s) = 11.15 H(s) = s + 20s(s + 2)2 (s 2 + 0.2s + 100)
100 ⋅ s(s + 10)(s + 1)2
11.7 H(s) = 11.16 H(s) = 103 (s + 10)s(s + 100)
1s 4 (s + 10)
11.8 H(s) = 11.17 H(s) = 0, 01(s + 1)(s + 5)
s 2 + 20s + 104
s(s + 10)
11.9 H(s) = 11.18 H(s) = 104 (s + 10)(s + 1)(s2 + 20s + 104 )
s 2 + 20s + 104
s + 102
2
⋅ (s + 10)
Problema 11.1 Rezolvare:
unde:H(s) = 1(s + 0, 5)(2s + 1)
= H1 (s) ⋅ H2 (s)
H1 (s) = 1s + 0, 5 = 2
2s + 1 =K1
T1s + 1 , K1 = 2; T1 = 2
H2 (s) = 12s + 1 =
K2T2s + 1 , K2 = 1; T2 = 2
Se observá cá H(s) este produsul a douá funcþii de transfer ce caracterizeazáelemente aperiodice (de ordinul I ). Putem trasa rapid caracteristicile Bodepentru astfel de funcþii de transfer tip, suprapunänd pe acelaßi graficcaracteristicile asimptotice de frecvenþá:- Caracteristica logaritmicá asimptoticá amplitudine-pulsaþie porneßteL1
a (ω)de la frecvenþe joase cu o amplificare de , va avea un20 ⋅ lg K1 = 20 ⋅ lg 2 = 6 dB
punct de frängere la pulsaþia ßi va avea apoi o pantáω1 = 1T1
= 0, 5
descendentá de - 20 dB/decadá.- Caracteristica logaritmicá asimptoticá amplitudine-pulsaþie porneßteL2
a (ω)de la frecvenþe joase cu o amplificare de , va avea un punct de20 ⋅ lg K2 = 0 dB
frängere la pulsaþia ßi va avea apoi o pantá descendentá de - 20ω2 = 1T2
= 0, 5
dB/decadá.Pe aceeaßi caracteristicá vom reprezenta atät caracteristicile logaritmiceasimptotice cät ßi cele logaritmice reale (indicele a se referá la caracteristiciasimptotice care sunt ín fapt segmente de dreaptá ce aproximeazácaracteristicile reale). Ínsumänd grafic cele douá caracteristici elementare demai sus vom obþine caracteristicile Bode ale sistemului global. Pentru o maibuná ínþelegere a procesului de trasare a caracteristicilor logaritmiceasimptotice trasám separat caracteristicile asimptotice reale. Este important deobservat faptul cá erorile de aproximare cele mai mari se fac ín jurul punctelorde frängere (-3 dB pentru sisteme de ordinul I). Vom observa cá pantadescendentá pentru ßi va fi de -40 dB/decadá, adicá suma pantelorL(ω) La(ω)descendente ale caracteristicilor de amplitudine elementare ßiL1 (ω)
ßi . De asemenea, se verificá faptul cá pentru oriceL2 (ω) respectiv L1a (ω) L2
a (ω)frecvenþá avem:
L(ω) = L1 (ω) + L2 (ω)
La(ω) = L1a (ω)+ L2
a (ω)
fapt pus ín evidenþá pe caracteristicile din Fig.11.1.1 ßi Fig.11.1.2 pentrupunctele marcate pe caracteristicá la pulsaþiile: . ω = 0.01; 0.1; 1; 10; 100
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag74

Fig. 11.1.1
Fig. 11.1.2
Fig. 11.1.3
Fig. 11.1.4
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag75
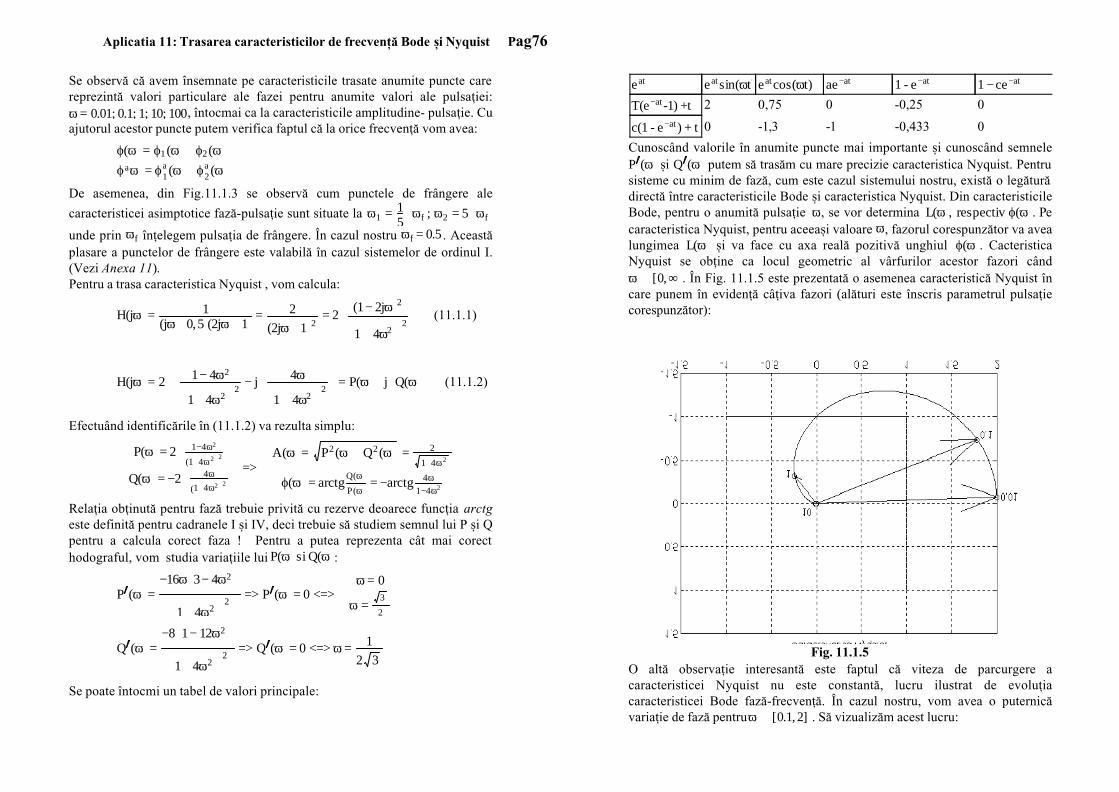
Se observá cá avem ínsemnate pe caracteristicile trasate anumite puncte carereprezintá valori particulare ale fazei pentru anumite valori ale pulsaþiei:
, íntocmai ca la caracteristicile amplitudine- pulsaþie. Cuω = 0.01; 0.1; 1; 10; 100ajutorul acestor puncte putem verifica faptul cá la orice frecvenþá vom avea:
ϕ(ω) = ϕ1 (ω) + ϕ2 (ω)ϕaω) = ϕ1
a (ω) + ϕ2a (ω)
De asemenea, din Fig.11.1.3 se observá cum punctele de frängere alecaracteristicei asimptotice fazá-pulsaþie sunt situate la ω1 = 1
5⋅ ωf ; ω2 = 5 ⋅ ωf
unde prin ínþelegem pulsaþia de frängere. Ín cazul nostru . Aceastáωf ωf = 0.5plasare a punctelor de frängere este valabilá ín cazul sistemelor de ordinul I.(Vezi Anexa 11).Pentru a trasa caracteristica Nyquist , vom calcula:
(11.1.1)H(jω) = 1(jω + 0, 5)(2jω + 1)
= 2(2jω + 1)2
= 2 ⋅ (1− 2jω)2
1 + 4ω2
2
(11.1.2)H(jω) = 2 ⋅
1− 4ω2
1+ 4ω2
2
− j ⋅ 4ω1 + 4ω2
2
= P(ω)+ j ⋅ Q(ω)
Efectuänd identificárile ín (11.1.2) va rezulta simplu:
P(ω) = 2 ⋅ 1−4ω2
(1+4ω2)2
Q(ω) = −2 ⋅ 4ω
(1+4ω2 )2
=>
A(ω) = P2 (ω)+ Q2 (ω) = 2
1+4ω2
ϕ(ω) = arctgQ(ω)
P(ω)= −arctg 4ω
1−4ω2
Relaþia obþinutá pentru fazá trebuie privitá cu rezerve deoarece funcþia arctgeste definitá pentru cadranele I ßi IV, deci trebuie sá studiem semnul lui P ßi Qpentru a calcula corect faza ! Pentru a putea reprezenta cät mai corecthodograful, vom studia variaþiile lui :P(ω) si Q(ω)
P (ω) =−16ω
3− 4ω2
1+ 4ω2
2
=> P (ω) = 0 <=>
ω = 0
ω =3
2
Q (ω) =−8
1− 12ω2
1+ 4ω2
2
=> Q (ω) = 0 <=> ω = 12 3
Se poate íntocmi un tabel de valori principale:
eat eatsin(ωt) eatcos(ωt) ae−at 1 - e−at 1 − ce−at
T(e−at -1) +t 2 0,75 0 -0,25 0
c(1 - e−at ) + t 0 -1,3 -1 -0,433 0Cunoscänd valorile ín anumite puncte mai importante ßi cunoscänd semnele
ßi putem sá trasám cu mare precizie caracteristica Nyquist. PentruP (ω) Q (ω)sisteme cu minim de fazá, cum este cazul sistemului nostru, existá o legáturádirectá íntre caracteristicile Bode ßi caracteristica Nyquist. Din caracteristicileBode, pentru o anumitá pulsaþie , se vor determina . Peω L(ω), respectiv ϕ(ω)caracteristica Nyquist, pentru aceeaßi valoare , fazorul corespunzátor va aveaωlungimea ßi va face cu axa realá pozitivá unghiul . CacteristicaL(ω) ϕ(ω)Nyquist se obþine ca locul geometric al värfurilor acestor fazori cänd
. Ín Fig. 11.1.5 este prezentatá o asemenea caracteristicá Nyquist ínω ∈ [0, ∞)care punem ín evidenþá cäþiva fazori (aláturi este ínscris parametrul pulsaþiecorespunzátor):
Fig. 11.1.5O altá observaþie interesantá este faptul cá viteza de parcurgere acaracteristicei Nyquist nu este constantá, lucru ilustrat de evoluþiacaracteristicei Bode fazá-frecvenþá. Ín cazul nostru, vom avea o puternicávariaþie de fazá pentru . Sá vizualizám acest lucru:ω ∈ [0.1, 2]
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag76
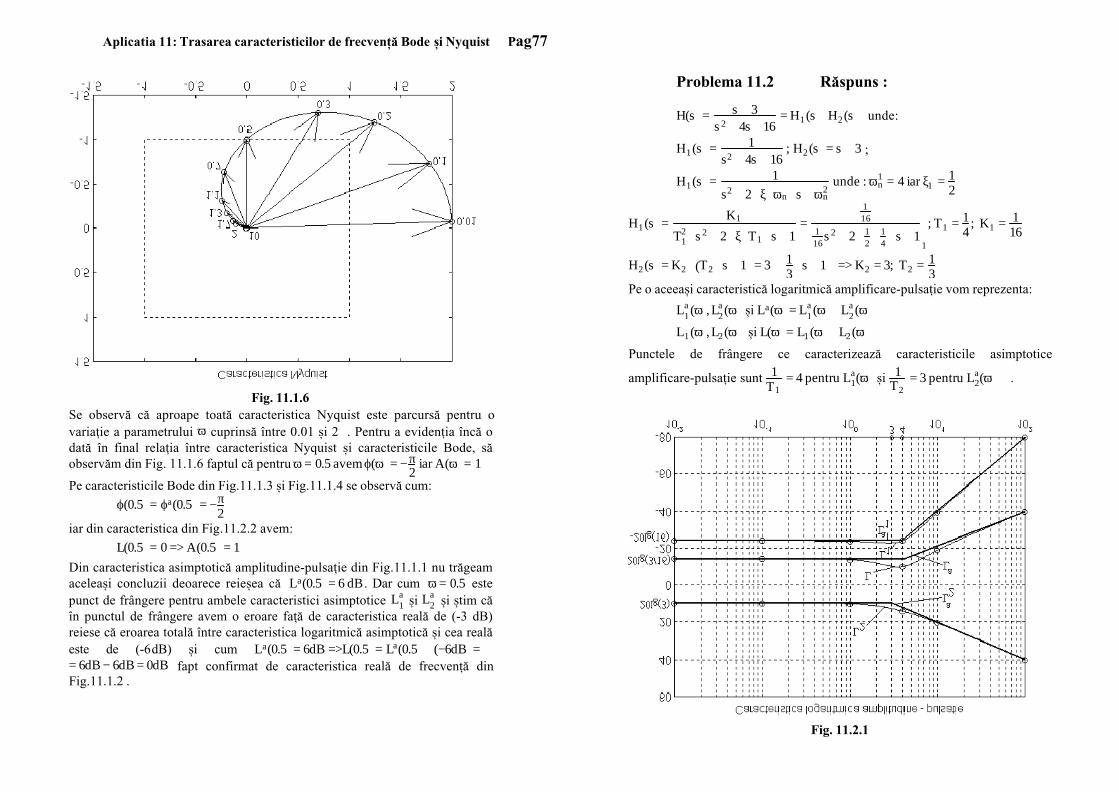
Fig. 11.1.6Se observá cá aproape toatá caracteristica Nyquist este parcursá pentru ovariaþie a parametrului cuprinsá íntre 0.01 ßi 2 . Pentru a evidenþia íncá oωdatá ín final relaþia íntre caracteristica Nyquist ßi caracteristicile Bode, sáobservám din Fig. 11.1.6 faptul cá pentru ω = 0.5 avemϕ(ω) = − π
2iar A(ω) = 1
Pe caracteristicile Bode din Fig.11.1.3 ßi Fig.11.1.4 se observá cum:ϕ(0.5) = ϕa(0.5) = −π
2iar din caracteristica din Fig.11.2.2 avem:
L(0.5) = 0 => A(0.5) = 1Din caracteristica asimptoticá amplitudine-pulsaþie din Fig.11.1.1 nu trágeamaceleaßi concluzii deoarece reießea cá . Dar cum esteLa(0.5) = 6 dB ω = 0.5punct de frängere pentru ambele caracteristici asimptotice ßi ßi ßtim cáL1
a L2a
ín punctul de frängere avem o eroare faþá de caracteristica realá de (-3 dB)reiese cá eroarea totalá íntre caracteristica logaritmicá asimptoticá ßi cea realáeste de (-6dB) ßi cum La(0.5) = 6dB =>L(0.5) = La(0.5) + (−6dB) =
fapt confirmat de caracteristica realá de frecvenþá din= 6dB − 6dB = 0dBFig.11.1.2 .
Problema 11.2 Ráspuns :
unde:H(s) = s + 3s 2 + 4s + 16
= H1 (s) ⋅ H2 (s)
;H1 (s) = 1s2 + 4s + 16
; H2 (s) = s + 3
H1 (s) = 1s2 + 2 ⋅ ξ⋅ ωn ⋅ s + ωn
2unde : ωn
1 = 4 iar ξ1 = 12
H1 (s) = K1
T12 ⋅ s 2 + 2 ⋅ ξ⋅ T1 ⋅ s + 1
=116
116
s 2 + 2 ⋅ 12
⋅ 14
⋅ s + 11
; T1 = 14
; K1 = 116
H2 (s) = K2 ⋅ (T2 ⋅ s + 1) = 3 ⋅
13
⋅ s + 1 => K2 = 3; T2 = 1
3Pe o aceeaßi caracteristicá logaritmicá amplificare-pulsaþie vom reprezenta:
ßi L1a (ω), L2
a (ω) La(ω) = L1a (ω)+ L2
a (ω)
ßi L1 (ω), L2 (ω) L(ω) = L1 (ω) + L2 (ω)
Punctele de frängere ce caracterizeazá caracteristicile asimptotice
amplificare-pulsaþie sunt ßi .1T1
= 4 pentru L1a(ω) 1
T2= 3 pentru L2
a(ω)
Fig. 11.2.1
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag77
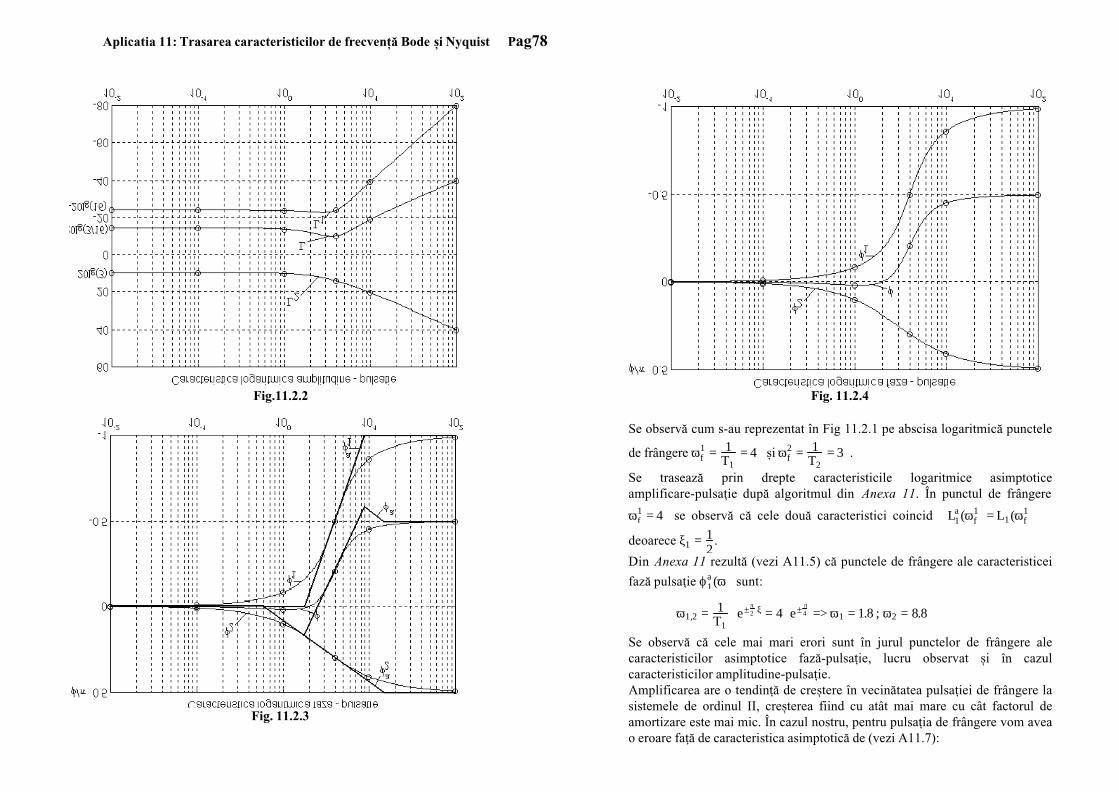
Fig.11.2.2
Fig. 11.2.3
Fig. 11.2.4
Se observá cum s-au reprezentat ín Fig 11.2.1 pe abscisa logaritmicá punctele
de frängere ßi . ωf1 = 1
T1= 4 ωf
2 = 1T2
= 3
Se traseazá prin drepte caracteristicile logaritmice asimptoticeamplificare-pulsaþie dupá algoritmul din Anexa 11. Ín punctul de frängere
se observá cá cele douá caracteristici coincid ωf1 = 4
L1a (ωf
1 ) = L1 (ωf1 )
deoarece . ξ1 = 12
Din Anexa 11 rezultá (vezi A11.5) cá punctele de frängere ale caracteristiceifazá pulsaþie sunt:ϕ1
a (ω)
ω1,2 = 1T1
⋅ e±π2 ⋅ξ = 4 ⋅ e± π
4 => ω1 = 1.8 ; ω2 = 8.8
Se observá cá cele mai mari erori sunt ín jurul punctelor de frängere alecaracteristicilor asimptotice fazá-pulsaþie, lucru observat ßi ín cazulcaracteristicilor amplitudine-pulsaþie. Amplificarea are o tendinþá de creßtere ín vecinátatea pulsaþiei de frängere lasistemele de ordinul II, creßterea fiind cu atät mai mare cu cät factorul deamortizare este mai mic. Ín cazul nostru, pentru pulsaþia de frängere vom aveao eroare faþá de caracteristica asimptoticá de (vezi A11.7):
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag78

.ε = 20 ⋅ lg 2 ⋅ 1
2 = 0
lucru observat ßi din reprezentarea caracteristicilor. Caracteristica Nyquist ovom trasa punänd ín evidenþá pulsaþiile particulare evidenþiate pecaracteristicile Bode : .ω = 0.01, 0.1, 1, 4, 10, 100
Din caracteristicile Bode rezultá cá pentru vom avea un avans de fazáω ∈ (0, 2]determinat de caracterul preponderent derivator al funcþiei de transfer H2 (s)care are zeroul (-3) dominant faþá de polul (-4) al funcþiei de transfer . H1 (s)Se observá cum amplificarea maximá se obþine pentru pulsaþii ín jurul lui
, lucru sugerat ßi de caracteristica amplificare-pulsaþie. ω = 4Caracteristica Nyquist generalá este datá ín figura de mai jos din care deducemfaptul cá variaþia maximá de fazá este determinatá de pulsaþii , deciω ∈ (2, 10)tragem concluzia cá aceastá caracteristicá nu este parcursá cu vitezá constantáín raport cu parametrul .ω
Problema 11.3 Ráspuns:
unde:H(s) = 1 + 0, 5ss 2
= H1 (s) ⋅ H2 (s) ⋅ H3 (s)
H1 (s) = H2 (s) = 1s
H3 (s) = 0, 5 ⋅ s + 1 = K3 ⋅ (T3 ⋅ s + 1) ;
K3 = 1; T3 = 0, 5
Se observá cum , deci pe caracteristicá vom avea oH1 (s) = H2 (s)singurá reprezentare pentru cele douá sisteme ßi anume o dreaptá ce coboarácu o pantá de - 20 dB/decadá .
Prin ínsumarea graficá, contribuþia celor douá subsistemecomponente ale sistemului global cu funcþia de transfer H(s) va fi o dreaptácoborätoare cu -40 dB/decadá .
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag79
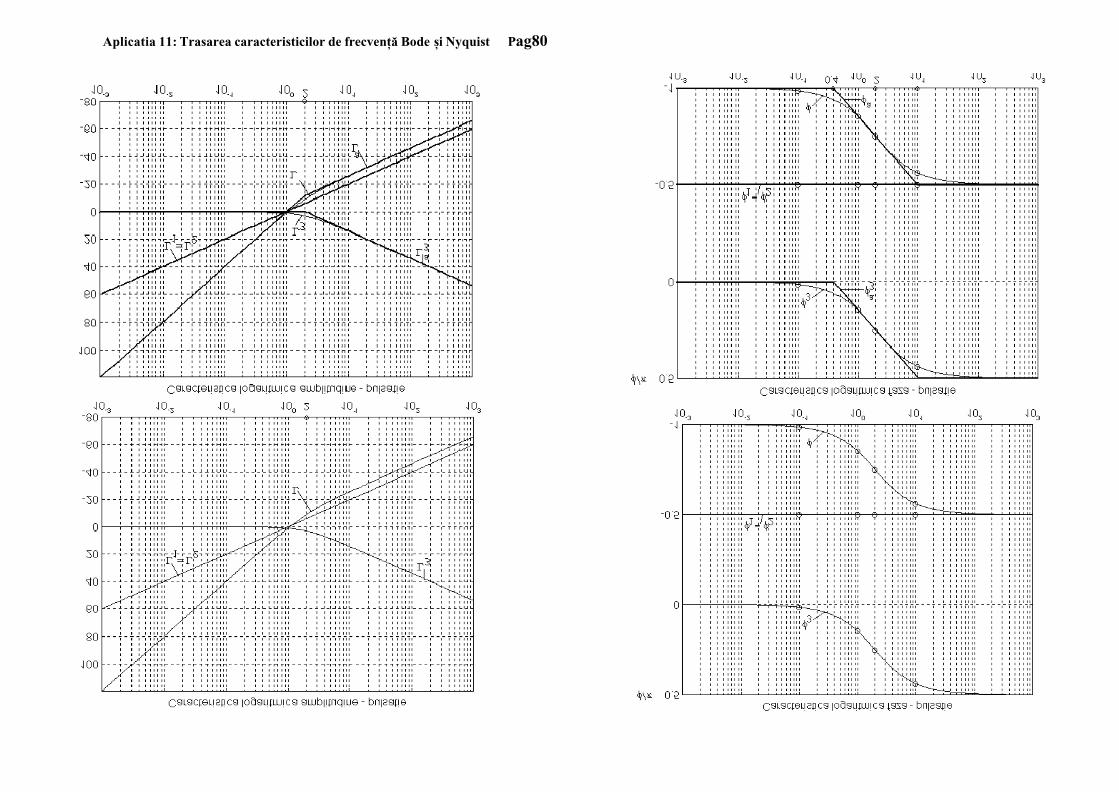
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag80

Se observá din caracteristicile de mai sus cum avem un singur punct defrängere pentru la pulsaþia iar va avea douá puncte deL3
a (ω) ωf = 1T3
= 2 ϕ3a (ω)
frängere la pulsaþiile ßi . Pentru a trasa caracteristica15
⋅ ωf = 0.4 5⋅ωf = 10
Nyquist vom calcula :H(jω)
H(jω) =1 + 0, 5jω
−ω2= − 1
ω2− j ⋅ 0, 5 ⋅ 1
ω = P(ω) + j ⋅ Q(ω)
unde:
P(ω) = − 1ω2
; Q(ω) = −0, 5ω
Se observá cum pentru ßi iar pentruω → ∞ => P → 0, Q → 0 ϕ(ω) → −π2
ßi . Concluzia pe care o tragem examinändω → 0 => P → ∞, Q → ∞ ϕ(ω) → −πcaracteristicile Bode este cá, ín ciuda faptului cá pentru frecvenþe mici
, P creßte mult mai rapid decät Q ßi, reprezentänd la o scará careP → ∞, Q → ∞sá nu distorsioneze, caracteristica Nyquist va porni de pe axa realá negativá,fazorul Nyquist fácänd un unghi egal cu . Pentru frecvenþe din ce ín ce mai−πmari, amplitudinea va scádea ßi caracteristica Nyquist va intra ín origine
fácänd un unghi de cu axa realá pozitivá, deci tangentá la axa imaginará.−π2
La o scará normalá, pentru caracteristica Nyquist aratá sub forma:ω ∈ (0, 1..10)
Se observá din aceastá caracteristicá faptul cá pentru o gamá de
pulsaþii relativ restränsá are loc o mare variaþie de fazá, faptω ∈ (0, 1...10)observat ßi din caracteristica Bode fazá-pulsaþie. Se observá cá am trasatcaracteristica Nyquist pentru o gamá de pulsaþii relativ redusá pentru cá nuputeam scade prea mult deoarece caracteristica ar párea "lipitá" de axa realáωnegativá !
Pentru a ne convinge de faptul cá pentru pulsaþii mari caracteristicaNyquist intrá ín origine tangentá la axa imaginará, vom reprezentacaracteristica Nyquist pentru ín figura de mai jos. Se remarcá íncáω ∈ [1, 100]o datá faptul cá pentru sistemele cu minim de fazá se poate observaechivalenþa íntre caracteristicile Bode ßi cea Nyquist. Cunoscändcaracteristicile Bode putem trasa caracteristica Nyquist ßi reciproc.
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag81

Problema 11.4 Ráspuns:
Problema 11.5 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag82
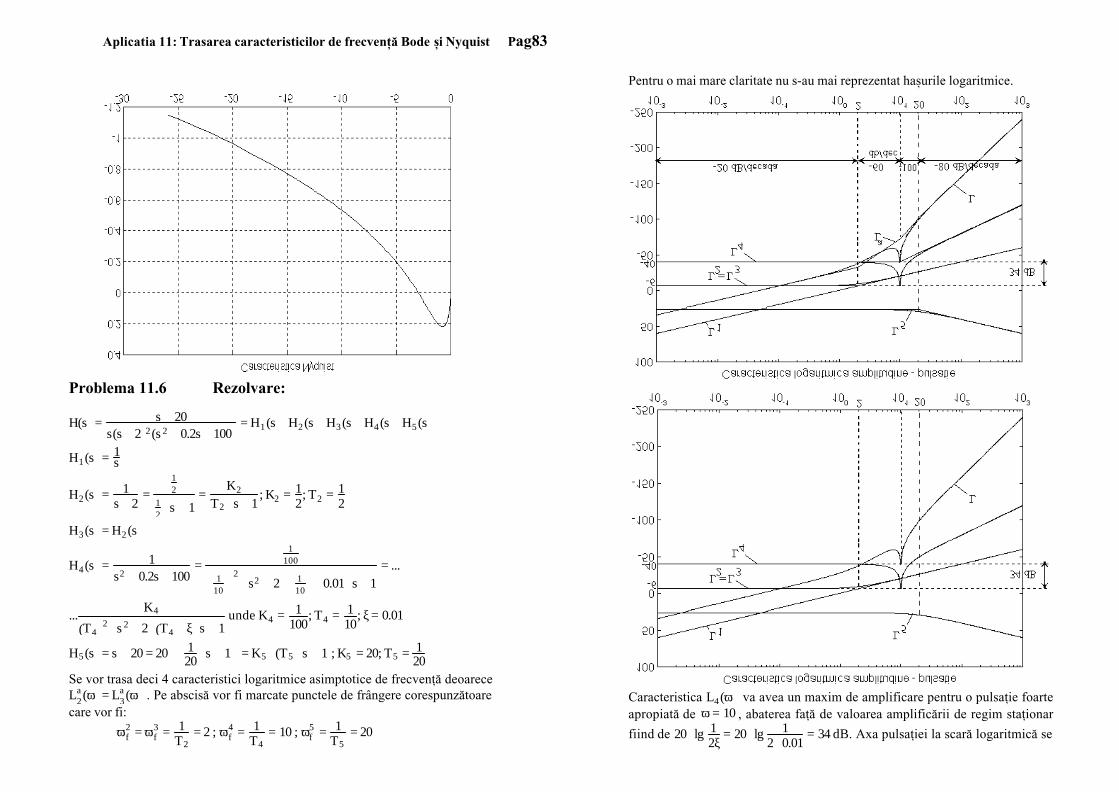
Problema 11.6 Rezolvare:
H(s) = s + 20s(s + 2)2 (s 2 + 0.2s + 100)
= H1 (s) ⋅ H2 (s) ⋅ H3 (s) ⋅ H4 (s) ⋅ H5 (s)
H1 (s) = 1s
H2 (s) = 1s + 2
=12
12
⋅ s + 1=
K2
T2 ⋅ s + 1; K2 = 1
2; T2 = 1
2
H3 (s) = H2 (s)
H4 (s) = 1s2 + 0.2s + 100
=1
100
110
2⋅ s2 + 2 ⋅
110
⋅ 0.01 ⋅ s + 1
= ...
... K4
(T4 )2 ⋅ s 2 + 2 ⋅ (T4 ) ⋅ ξ ⋅ s + 1unde K4 = 1
100; T4 = 1
10; ξ= 0.01
H5 (s) = s + 20 = 20 ⋅
120 ⋅ s + 1
= K5 ⋅ (T5 ⋅ s + 1); K5 = 20; T5 = 120
Se vor trasa deci 4 caracteristici logaritmice asimptotice de frecvenþá deoarece. Pe abscisá vor fi marcate punctele de frängere corespunzátoareL2
a (ω) = L3a (ω)
care vor fi:ωf
2 = ωf3 = 1
T2= 2 ; ωf
4 = 1T4
= 10 ; ωf5 = 1
T5= 20
Pentru o mai mare claritate nu s-au mai reprezentat haßurile logaritmice.
Caracteristica va avea un maxim de amplificare pentru o pulsaþie foarteL4 (ω)apropiatá de , abaterea faþá de valoarea amplificárii de regim staþionarω = 10
fiind de . Axa pulsaþiei la scará logaritmicá se20 ⋅ lg 12ξ
= 20 ⋅ lg 12 ⋅ 0.01
= 34 dB
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag83
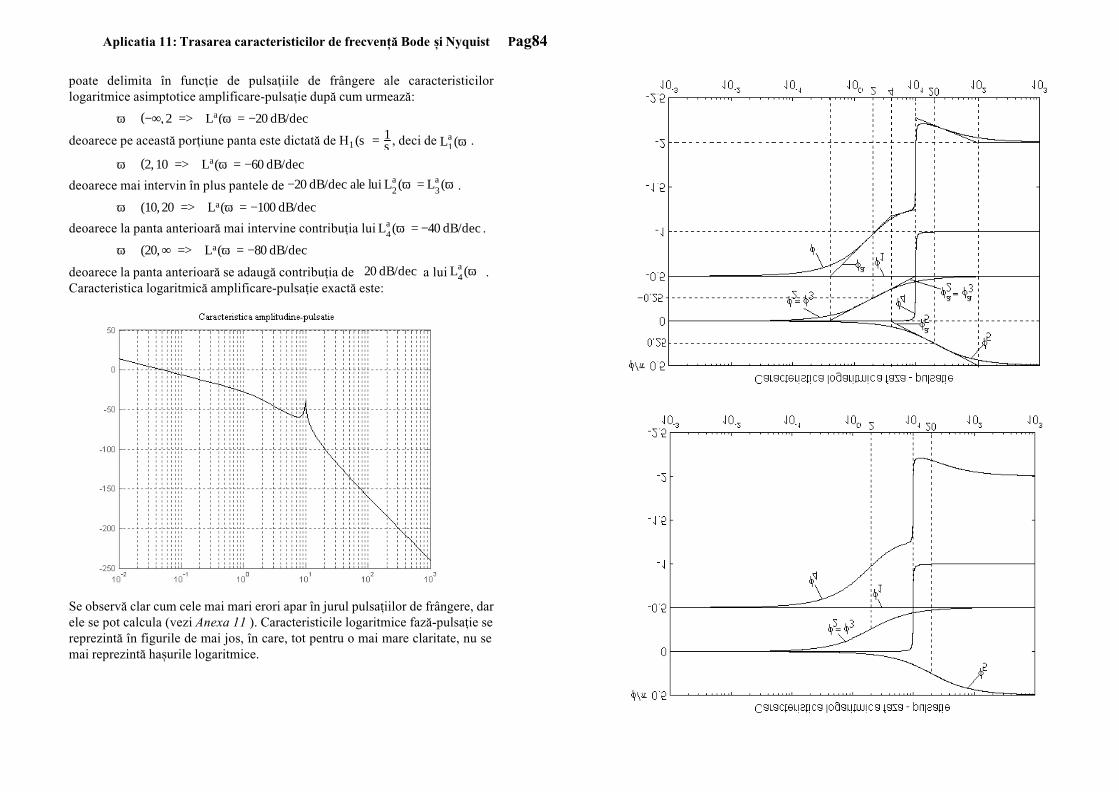
poate delimita ín funcþie de pulsaþiile de frängere ale caracteristicilorlogaritmice asimptotice amplificare-pulsaþie dupá cum urmeazá:
ω ∈ (−∞, 2) => ∠La(ω) = −20 dB/dec
deoarece pe aceastá porþiune panta este dictatá de , deci de .H1 (s) = 1s L1
a (ω)
ω ∈ (2, 10) => ∠La(ω) = −60 dB/dec
deoarece mai intervin ín plus pantele de .−20 dB/dec ale lui L2a (ω) = L3
a (ω)
ω ∈ (10, 20) => ∠La(ω) = −100 dB/dec
deoarece la panta anterioará mai intervine contribuþia lui .L4a (ω) = −40 dB/dec
ω ∈ (20, ∞) => ∠La(ω) = −80 dB/dec
deoarece la panta anterioará se adaugá contribuþia de a lui .+20 dB/dec L4a (ω)
Caracteristica logaritmicá amplificare-pulsaþie exactá este:
Se observá clar cum cele mai mari erori apar ín jurul pulsaþiilor de frängere, darele se pot calcula (vezi Anexa 11 ). Caracteristicile logaritmice fazá-pulsaþie sereprezintá ín figurile de mai jos, ín care, tot pentru o mai mare claritate, nu semai reprezintá haßurile logaritmice.
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag84
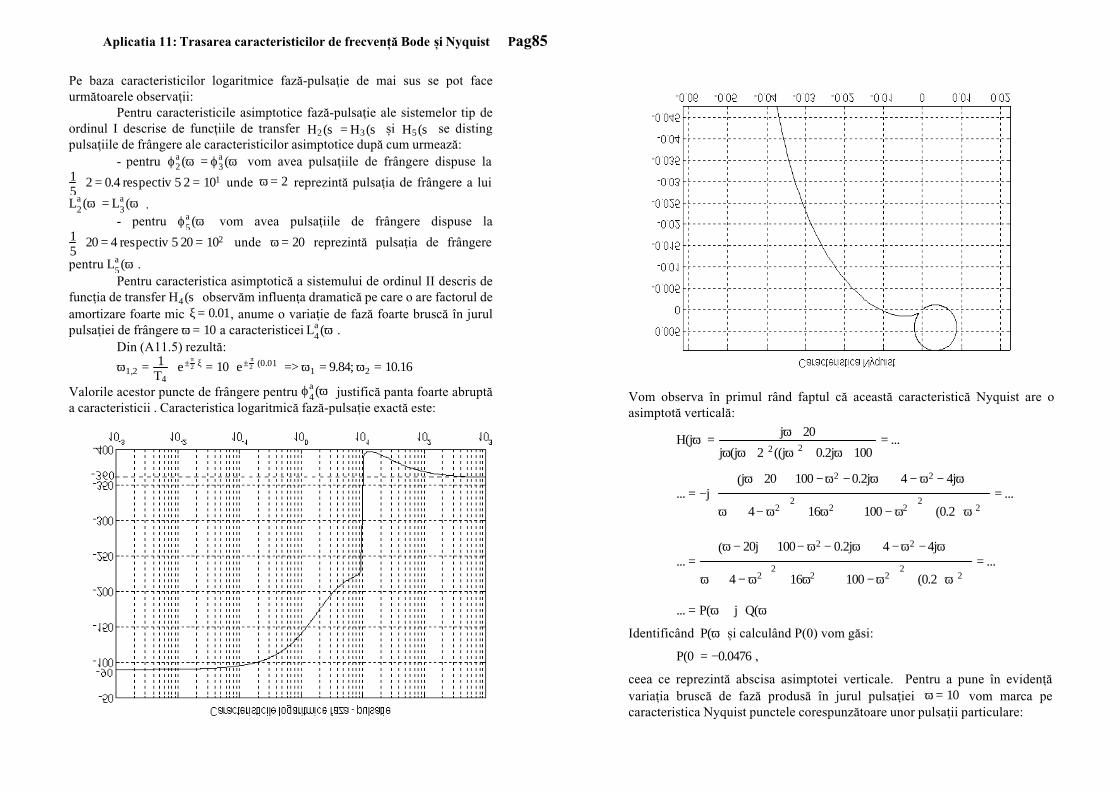
Pe baza caracteristicilor logaritmice fazá-pulsaþie de mai sus se pot faceurmátoarele observaþii:
Pentru caracteristicile asimptotice fazá-pulsaþie ale sistemelor tip deordinul I descrise de funcþiile de transfer ßi se distingH2 (s) = H3 (s) H5 (s)pulsaþiile de frängere ale caracteristicilor asimptotice dupá cum urmeazá:
- pentru vom avea pulsaþiile de frängere dispuse laϕ2a (ω) = ϕ3
a (ω)
unde reprezintá pulsaþia de frängere a lui15
⋅ 2 = 0.4 respectiv 5⋅2 = 101 ω = 2
.L2a (ω) = L3
a (ω)- pentru vom avea pulsaþiile de frängere dispuse laϕ5
a (ω)
unde reprezintá pulsaþia de frängere15
⋅ 20 = 4 respectiv 5⋅20 = 102 ω = 20
pentru .L5a (ω)Pentru caracteristica asimptoticá a sistemului de ordinul II descris de
funcþia de transfer observám influenþa dramaticá pe care o are factorul deH4 (s)amortizare foarte mic , anume o variaþie de fazá foarte bruscá ín jurulξ= 0.01pulsaþiei de frängere a caracteristicei .ω = 10 L4
a (ω)Din (A11.5) rezultá:ω1,2 = 1
T4⋅ e±π
2 ⋅ξ = 10 ⋅ e± π2 ⋅(0.01) => ω1 = 9.84; ω2 = 10.16
Valorile acestor puncte de frängere pentru justificá panta foarte abruptáϕ4a (ω)
a caracteristicii . Caracteristica logaritmicá fazá-pulsaþie exactá este:Vom observa ín primul ränd faptul cá aceastá caracteristicá Nyquist are oasimptotá verticalá:
H(jω) = jω + 20
jω(jω + 2)2 ((jω)2 + 0.2jω+ 100)= ...
... = −j ⋅(jω+ 20) ⋅
100 − ω2 − 0.2jω ⋅
4 − ω2 − 4jω
ω ⋅
4− ω2
2
+ 16ω2 ⋅
100 − ω2
2
+ (0.2 ⋅ ω)2
= ...
... =(ω − 20j) ⋅
100− ω2 − 0.2jω ⋅
4 − ω2 − 4jω
ω ⋅
4 − ω2
2
+ 16ω2 ⋅
100 − ω2
2
+ (0.2 ⋅ ω)2
= ...
... = P(ω)+ j ⋅ Q(ω)
Identificänd ßi calculänd P(0) vom gási: P(ω)
,P(0) = −0.0476
ceea ce reprezintá abscisa asimptotei verticale. Pentru a pune ín evidenþávariaþia bruscá de fazá produsá ín jurul pulsaþiei vom marca peω = 10caracteristica Nyquist punctele corespunzátoare unor pulsaþii particulare:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag85

Deßi din caracteristica de mai sus nu se poate observa, pentru frecvenþe maricaracteristica Nyquist intrá ín origine tangentá la axa realá, aßa cum reiese dincaracteristica Bode de fazá. Pentru a evidenþia acest lucru vom trasacaracteristica Nyquist exactá pentru pulsaþii mari :ω ∈ (100...10000)
Problema 11.7 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag86
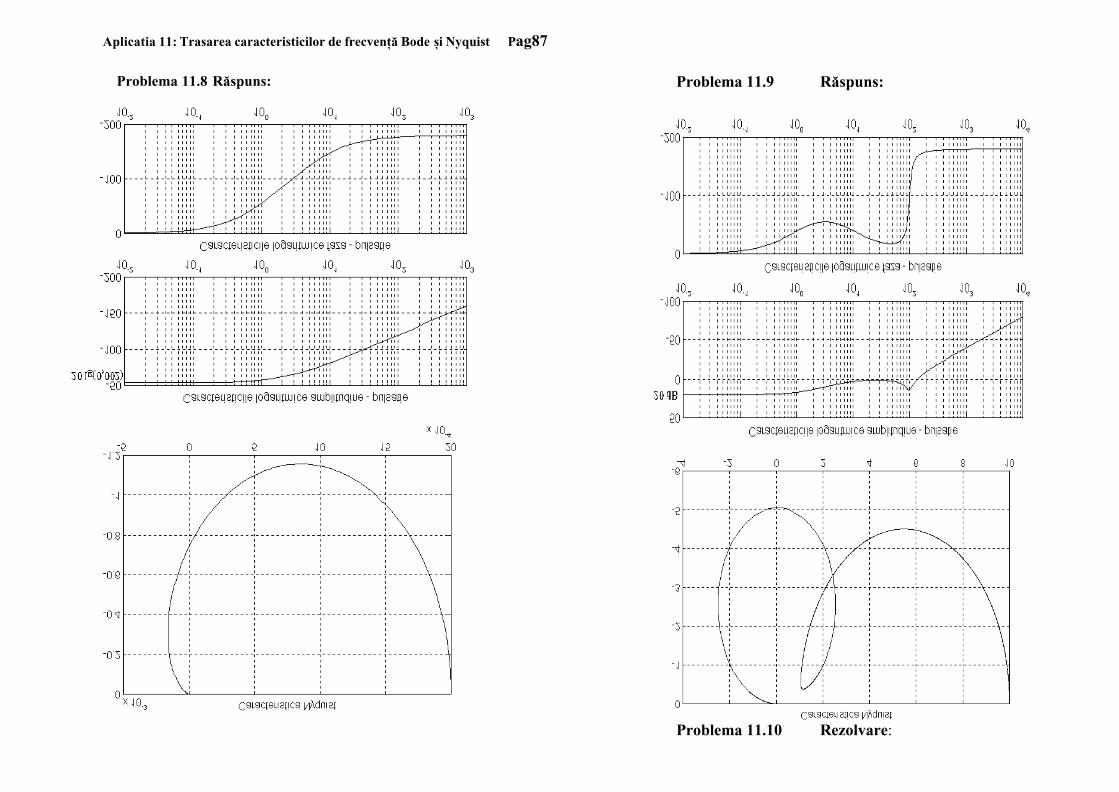
Problema 11.8 Ráspuns: Problema 11.9 Ráspuns:
Problema 11.10 Rezolvare:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag87
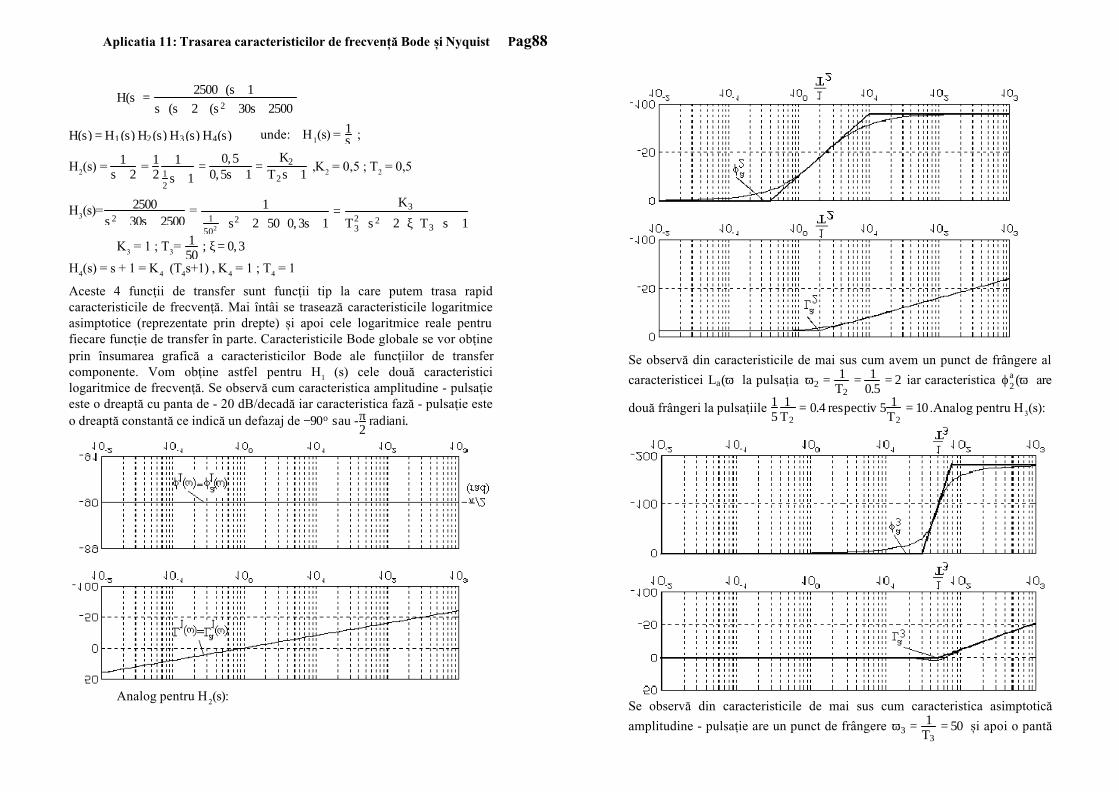
H(s) = 2500 ⋅ (s + 1)s ⋅ (s + 2) ⋅ (s 2 + 30s + 2500)
unde: H1(s) = ;H(s) = H1 (s)⋅H2 (s)⋅H3 (s)⋅H4(s) 1s
H2(s) = = ,K2 = 0,5 ; T2 = 0,51s + 2
12
112
s + 1= 0, 5
0, 5s + 1 =K2
T2s + 1
H3(s)= = 2500s 2 + 30s + 2500
11
502 ⋅ s2 + 2 ⋅ 50 ⋅ 0, 3s + 1=
K3
T32 ⋅ s 2 + 2 ⋅ ξ ⋅ T3 ⋅ s + 1
K3 = 1 ; T3= 150
; ξ= 0, 3
H4(s) = s + 1 = K4 (T4s+1) , K4 = 1 ; T4 = 1⋅
Aceste 4 funcþii de transfer sunt funcþii tip la care putem trasa rapidcaracteristicile de frecvenþá. Mai íntäi se traseazá caracteristicile logaritmiceasimptotice (reprezentate prin drepte) ßi apoi cele logaritmice reale pentrufiecare funcþie de transfer ín parte. Caracteristicile Bode globale se vor obþineprin ínsumarea graficá a caracteristicilor Bode ale funcþiilor de transfercomponente. Vom obþine astfel pentru H1 (s) cele douá caracteristicilogaritmice de frecvenþá. Se observá cum caracteristica amplitudine - pulsaþieeste o dreaptá cu panta de - 20 dB/decadá iar caracteristica fazá - pulsaþie esteo dreaptá constantá ce indicá un defazaj de −90o sau -π
2radiani.
Analog pentru H2(s):
Se observá din caracteristicile de mai sus cum avem un punct de frängere alcaracteristicei la pulsaþia iar caracteristica areLa(ω) ω2 = 1
T2= 1
0.5= 2 ϕ2
a (ω)
douá frängeri la pulsaþiile .Analog pentru H3(s): 15
1T2
= 0.4 respectiv 5 1T2
= 10
Se observá din caracteristicile de mai sus cum caracteristica asimptoticáamplitudine - pulsaþie are un punct de frängere ßi apoi o pantáω3 = 1
T3= 50
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag88

descendentá de - 40 dB/decadá iar caracteristica fazá - pulsaþie douá puncte defrängere la pulsaþiile .ω = 1
T3⋅ e± π
2 ⋅0,3 adica 0,6⋅ 1T3
= 30 respectiv 1,6⋅ 1T3
= 80
La frecvenþe joase defazajul este nul ßi amplificarea unitará iar la frecvenþemari defazajul este de iar amplificarea tinde spre zero, deci−180o sau -π radianifrecvenþele mari sunt rejectate lucru ce confirmá comportamentul de filtrutrece jos. Amplificarea maximá se obþine ín jurul frecvenþei de frängere undedefazajul este de . Se ßtie cá ín punctul de frängere−90o sau -π
2 radiani
amplificarea este de , lucru confirmat20 ⋅ lg
12 ⋅ ξ
= 20 ⋅ lg
12 ⋅ 0, 3
= 4, 437 dB
de caracteristica realá logaritmicá amplitudine - frecvenþá. Pentru H4(s) vomavea caracteristicile logaritmice:
Dacá se reprezintá toate caracteristicile de frecvenþá pe un acelaßi grafic ßifacem ínsumarea graficá se obþine caracteristica Bode globalá. Mai íntäi sávedem cum aratá caracteristica logaritmicá amplificare pulsaþie:
Pe caracteristica amplitudine - pulsaþie globalá de mai sus se pot face cätevaconsideraþii edificatoare:- Pe intervalul de frecvenþe intre 0 ßi caracteristica globalá are o pantá1
T4descendentá de - 20 dB/decadá datá de . H1 (s)
- Primul punct de frängere íntälnit este , deci se va manifesta influenþa1T4
= 1
lui ce tinde sá modifice panta globalá cu + 20 dB/decadá , dar influenþaH4 (s)sa este micá deoarece se ajunge prin creßterea frecvenþei la urmátorul punct defrängere, anume , deci se va manifesta ßi influenþa lui ce tinde sá1
T2= 2 H2 (s)
modifice panta globalá cu - 20 dB/decadá , deci per total, pentru frecvenþe maimari ca vom avea o pantá de - 20 dB/decadá. 1
T2- Ultima modificare pe care o va suferi caracteristica globalá amplitudine -
frecvenþá va fi ín jurul ultimului punct de frängere ce confirmá1T3
= 50
influenþa lui , un sistem de ordinul 2 cu un factor mic de amortizareH3 (s)
. Panta va creßte ínainte de a ajunge ín dupá care va avea o scádere(ξ= 0, 3) 1T3
puternicá cu íncá - 40 dB/decadá, deci pentru frecvenþe ínalte vom avea opantá descendentá cu - 60 dB/decadá.
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag89
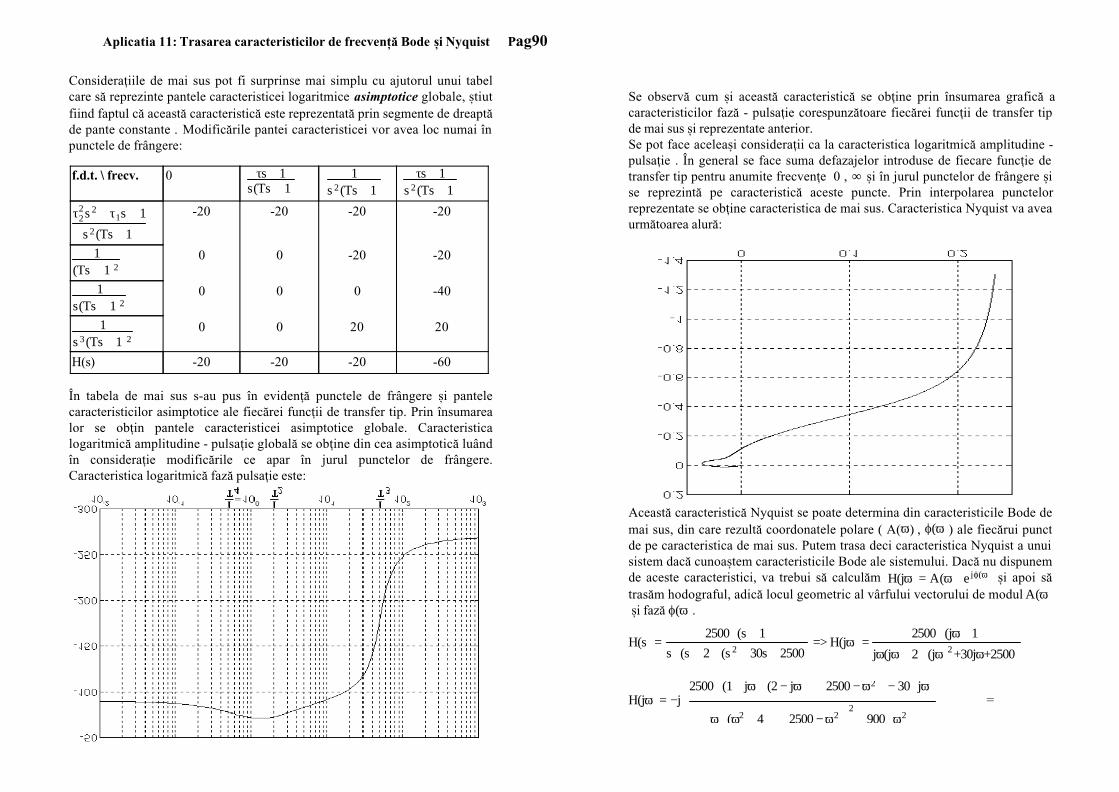
Consideraþiile de mai sus pot fi surprinse mai simplu cu ajutorul unui tabelcare sá reprezinte pantele caracteristicei logaritmice asimptotice globale, ßtiutfiind faptul cá aceastá caracteristicá este reprezentatá prin segmente de dreaptáde pante constante . Modificárile pantei caracteristicei vor avea loc numai ínpunctele de frängere:
f.d.t. \ frecv. 0 τs + 1s(Ts + 1)
1s 2 (Ts + 1)
τs + 1s 2 (Ts + 1)
τ22s 2 + τ1s + 1
s 2 (Ts + 1)
-20 -20 -20 -20
1(Ts + 1)2
0 0 -20 -20
1s(Ts + 1)2
0 0 0 -40
1s 3 (Ts + 1)2
0 0 20 20
H(s) -20 -20 -20 -60
Ín tabela de mai sus s-au pus ín evidenþá punctele de frängere ßi pantelecaracteristicilor asimptotice ale fiecárei funcþii de transfer tip. Prin ínsumarealor se obþin pantele caracteristicei asimptotice globale. Caracteristicalogaritmicá amplitudine - pulsaþie globalá se obþine din cea asimptoticá luändín consideraþie modificárile ce apar ín jurul punctelor de frängere.Caracteristica logaritmicá fazá pulsaþie este:
Se observá cum ßi aceastá caracteristicá se obþine prin ínsumarea graficá acaracteristicilor fazá - pulsaþie corespunzátoare fiecárei funcþii de transfer tipde mai sus ßi reprezentate anterior.Se pot face aceleaßi consideraþii ca la caracteristica logaritmicá amplitudine -pulsaþie . Ín general se face suma defazajelor introduse de fiecare funcþie detransfer tip pentru anumite frecvenþe 0 , ßi ín jurul punctelor de frängere ßi∞se reprezintá pe caracteristicá aceste puncte. Prin interpolarea punctelorreprezentate se obþine caracteristica de mai sus. Caracteristica Nyquist va aveaurmátoarea alurá:
Aceastá caracteristicá Nyquist se poate determina din caracteristicile Bode demai sus, din care rezultá coordonatele polare ( A( ) , ) ale fiecárui punctω ϕ(ω)de pe caracteristica de mai sus. Putem trasa deci caracteristica Nyquist a unuisistem dacá cunoaßtem caracteristicile Bode ale sistemului. Dacá nu dispunemde aceste caracteristici, va trebui sá calculám ßi apoi sáH(jω) = A(ω) ⋅ e jϕ(ω)
trasám hodograful, adicá locul geometric al värfului vectorului de modul A(ω) ßi fazá .ϕ(ω)
H(s) =2500 ⋅ (s + 1)
s ⋅ (s + 2) ⋅ (s 2 + 30s + 2500)=> H(jω) =
2500 ⋅ (jω+ 1)
jω(jω + 2)(jω)2+30jω+2500
=H(jω) = −j ⋅2500 ⋅ (1+ jω) ⋅ (2 − jω) ⋅
2500 − ω2
− 30 ⋅ jω
ω ⋅ (ω2 + 4) ⋅ 2500 − ω2
2
+ 900 ⋅ ω2
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag90

= 2500ω[(2500 − ω2)− 30(2 + ω2)] − j ⋅ [(2500 − ω2)(2 + ω2) + 30ω2]
ω⋅ (ω2 + 4) ⋅ (2500 − ω2)2 + 900 ⋅ ω2
H(jω) = P(ω)+ j ⋅ Q(ω)
Vom obþine prin identificare:
P(ω) = 2500 ⋅2500 − ω2
− 302 + ω2
(ω2 + 4) ⋅
2500− ω2
2+ 900 ⋅ ω2
Q(ω) = −2500 ⋅2500 − ω2
2+ ω2
+ 30ω2
ω ⋅ (ω2 + 4) ⋅ 2500 − ω2
2
+ 900 ⋅ ω2
Se obþine:
A(ω) = P2 (ω) + Q2 (ω) = 2500 ⋅ 1
ω ⋅ ω2 + 4
⋅
ω2 + 2+ ω2
2
2500− ω2
2
+ 900 ⋅ ω2
ϕ(ω) = −arctg2500 − ω2
2+ ω2
+ 30ω2
ω ⋅
2500− ω2
− 302+ ω2
Sá calculám pentru ce valori ale lui :ω avemP(ω) = 0, Q(ω) = 0
P(ω) = 0 => ω = 244031 = 8, 871
Q(ω) = 0 => ω = 50, 3
Se observá de asemenea cá . Constatám de asemeneaω→∞lim P(ω) =
ω→∞lim Q(ω) = 0
cá , deci hodograful va avea o asimptotáω→0lim Q(ω) = −∞ si P(0) = 2440
10000= 0, 244
verticalá pentru , lucru constatat ßi din diagramá ; Dacá sintetizámω = 0rezultatele de mai sus íntr-o formá tabelará obþinem:
s(Ts + 1)2
0 8,8718 50,3 τs + 1(Ts + 1)2
τs + 1s(Ts + 1)2
0,244 0 -0,0329 0
c[e−a1 t − e−a2t ] 1(T1s + 1)(T2s +
-9,1981 0 0
Dacá dorim o trasare mai precisá a acestei diagrame Nyquist, mai putemcalcula ßi pentru alte cäteva valori intermediare ale lui .P(ω) Q(ω) ω
Problema 11.11 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag91

Problema 11.12 Ráspuns:
Problema 11.13 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag92
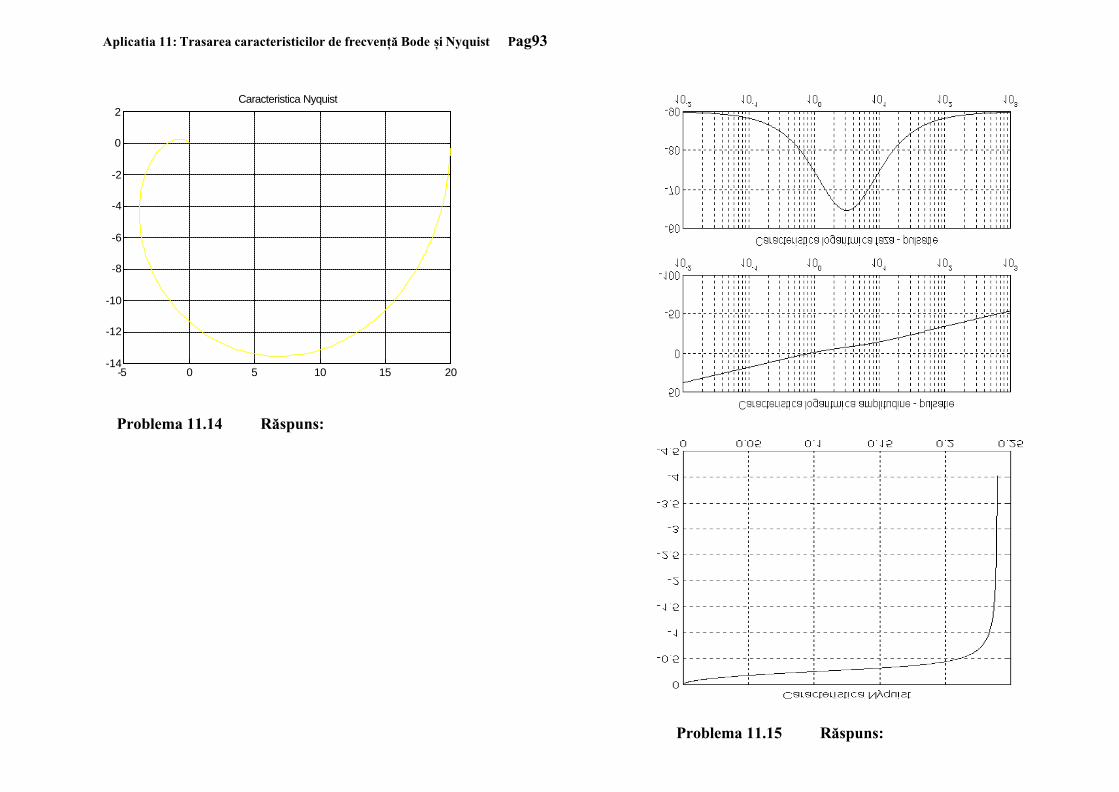
-5 0 5 10 15 20-14
-12
-10
-8
-6
-4
-2
0
2Caracteristica Nyquist
Problema 11.14 Ráspuns:
Problema 11.15 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag93

Problema 11.16 Ráspuns: Problema 11.17 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag94

Problema 11.18 Ráspuns:
Aplicatia 11: Trasarea caracteristicilor de frecvenþá Bode ßi Nyquist Pag95

















