27 Cap.3. Fenomenul wind-up Optimizarea parametrilor de acord ai unui regulator PID numeric include şi alegerea optimă a perioadei de eşantionare T . Criteriile uzuale pentru alegerea perioadei de eşantionare(pe lângă teorema lui Shanon) sunt: performanţele impuse sistemului de reglare dinamica procesului spectrul de frecvenţă al perturbaţiilor tipul elementului de execuţie echipamentul de măsură modelul procesului identificat În funcţie de dinamica procesului sunt mai multe moduri de alegere a perioadei de eşantionare. Astfel, dacă timpul mort al procesului este dominant, se va folosi relaţia: 8 1 ....... .......... 4 1 T Dacă spectrul perturbaţiilor este limitat la max , atunci pe baza teoremei lui Shannon se alege perioada de eşantionare: max T . O altă modalitate de stabilire a perioadei de eşant ionare este identificarea modelului procesului şi determinarea pe baza răspunsului indicial a timpului de creştere % 95 t necesar ca mărimea de ieşire să atingă o valoare egală cu 95% din valoarea de regim staţionar şi astfel vom alege: % 95 12 1 . .......... 6 1 t T Pentru ca acelaşi sistem numeric (acelaşi procesor fizic) să poată conduce mai multe bucle de reglare, se folosesc perioade de eşantionare mai mari. În acest caz, se pot recomanda perioade de eşantionare în funcţie de variabila controlată: Debit 3 1 T secunde Nivel 10 5 T secunde Presiune 5 1 T secunde Temperatură 20 10 T secunde Regulatoarele numerice comerciale(...clasice) care deservesc mai multe bucle de reglare folosesc o perioadă de eşantionare fixă de ordinul a 200ms. Aceasta implică funcţionarea cvasicontinuă a regulatoarelor şi deci posibilitatea de aplicare a regulilor de acordare specifice sistemelor continue. În multe aplicaţii, pentru a evita şocurile la elementul de execuţie, componenta derivativă nu se introduce pe canalul erorii , ci pe canalul mărimii măsurate ca în fig.2.1.
Transcript
27
Cap.3. Fenomenul wind-up
Optimizarea parametrilor de acord ai unui regulator PID numeric include şi
alegerea optimă a perioadei de eşantionare T . Criteriile uzuale pentru alegerea
perioadei de eşantionare(pe lângă teorema lui Shanon) sunt:
performanţele impuse sistemului de reglare
dinamica procesului
spectrul de frecvenţă al perturbaţiilor
tipul elementului de execuţie
echipamentul de măsură
modelul procesului identificat
În funcţie de dinamica procesului sunt mai multe moduri de alegere a perioadei de
eşantionare. Astfel, dacă timpul mort al procesului este dominant, se va folosi
relaţia:
8
1.................4
1T
Dacă spectrul perturbaţiilor este limitat la max , atunci pe baza teoremei lui Shannon
se alege perioada de eşantionare: max
T .
O altă modalitate de stabilire a perioadei de eşantionare este identificarea
modelului procesului şi determinarea pe baza răspunsului indicial a timpului de
creştere %95t necesar ca mărimea de ieşire să atingă o valoare egală cu 95% din
valoarea de regim staţionar şi astfel vom alege:
%95121...........
61 tT
Pentru ca acelaşi sistem numeric (acelaşi procesor fizic) să poată conduce mai
multe bucle de reglare, se folosesc perioade de eşantionare mai mari. În acest caz, se
pot recomanda perioade de eşantionare în funcţie de variabila controlată:
Debit 31T secunde
Nivel 105T secunde
Presiune 51T secunde
Temperatură 2010T secunde
Regulatoarele numerice comerciale(...clasice) care deservesc mai multe bucle de
reglare folosesc o perioadă de eşantionare fixă de ordinul a 200ms. Aceasta implică
funcţionarea cvasicontinuă a regulatoarelor şi deci posibilitatea de aplicare a regulilor
de acordare specifice sistemelor continue.
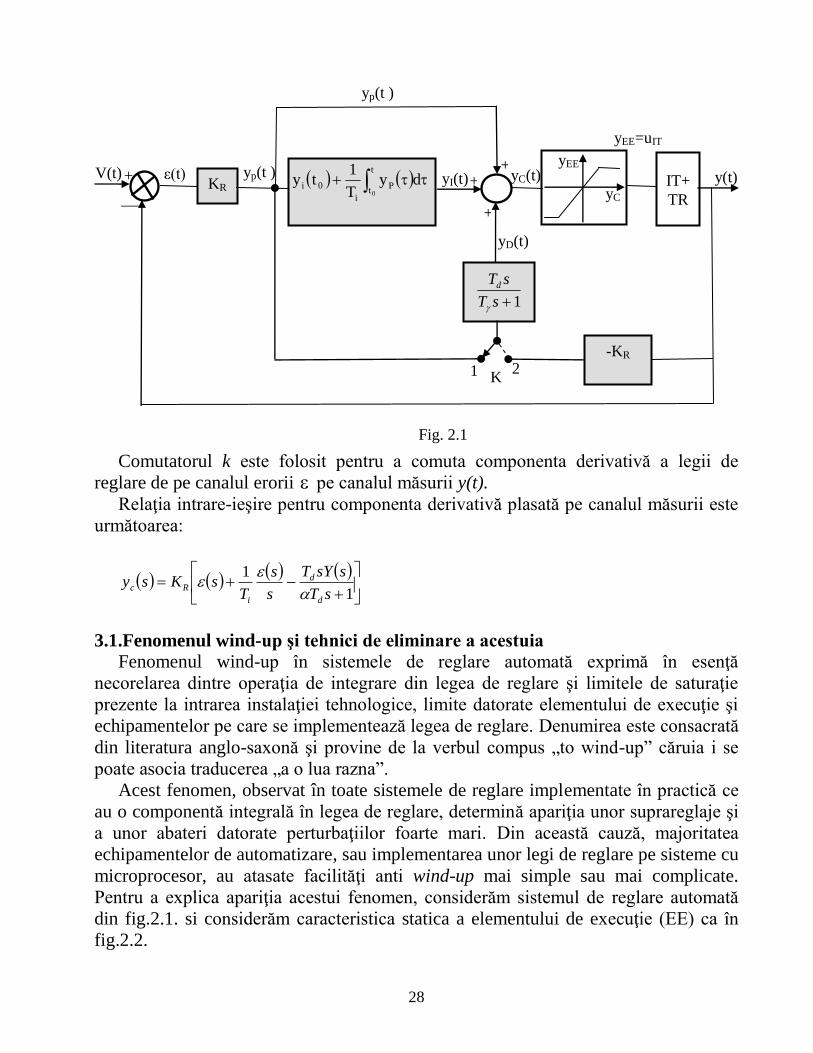
În multe aplicaţii, pentru a evita şocurile la elementul de execuţie, componenta
derivativă nu se introduce pe canalul erorii , ci pe canalul mărimii măsurate ca în
fig.2.1.
28
Comutatorul k este folosit pentru a comuta componenta derivativă a legii de
reglare de pe canalul erorii pe canalul măsurii y(t).
Relaţia intrare-ieşire pentru componenta derivativă plasată pe canalul măsurii este
următoarea:
1
1
sT
ssYT
s
s
TsKsy
d
d
i
Rc
3.1.Fenomenul wind-up şi tehnici de eliminare a acestuia
Fenomenul wind-up în sistemele de reglare automată exprimă în esenţă
necorelarea dintre operaţia de integrare din legea de reglare şi limitele de saturaţie
prezente la intrarea instalaţiei tehnologice, limite datorate elementului de execuţie şi
echipamentelor pe care se implementează legea de reglare. Denumirea este consacrată
din literatura anglo-saxonă şi provine de la verbul compus „to wind-up” căruia i se
poate asocia traducerea „a o lua razna”.
Acest fenomen, observat în toate sistemele de reglare implementate în practică ce
au o componentă integrală în legea de reglare, determină apariţia unor suprareglaje şi
a unor abateri datorate perturbaţiilor foarte mari. Din această cauză, majoritatea
echipamentelor de automatizare, sau implementarea unor legi de reglare pe sisteme cu
microprocesor, au atasate facilităţi anti wind-up mai simple sau mai complicate.
Pentru a explica apariţia acestui fenomen, considerăm sistemul de reglare automată
din fig.2.1. si considerăm caracteristica statica a elementului de execuţie (EE) ca în
fig.2.2.
KR
t
tP
i
0i0
dyT
1ty
IT+
TR
yI(t) yC(t) yEE
yC y(t)
yEE=uIT
ε(t) yp(t ) V(t) +
1sT
sTd
-KR
K 1 2
+
+
+
Fig. 2.1
yD(t)
yp(t )
29
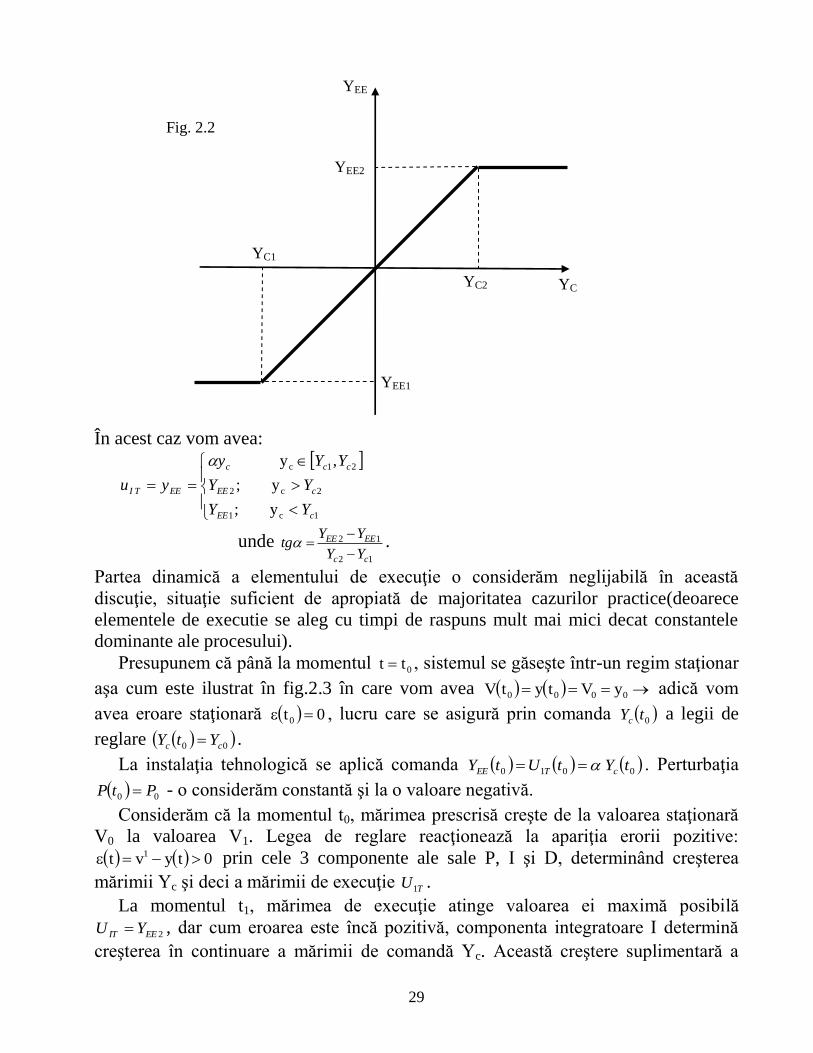
În acest caz vom avea:
1c1
2c2
21c
y ;
y ;
,y
cEE
cEE
ccc
EETI
YY
YY
YYy
yu
unde 12
12
cc
EEEE
YY
YYtg
.
Partea dinamică a elementului de execuţie o considerăm neglijabilă în această
discuţie, situaţie suficient de apropiată de majoritatea cazurilor practice(deoarece
elementele de executie se aleg cu timpi de raspuns mult mai mici decat constantele
dominante ale procesului).
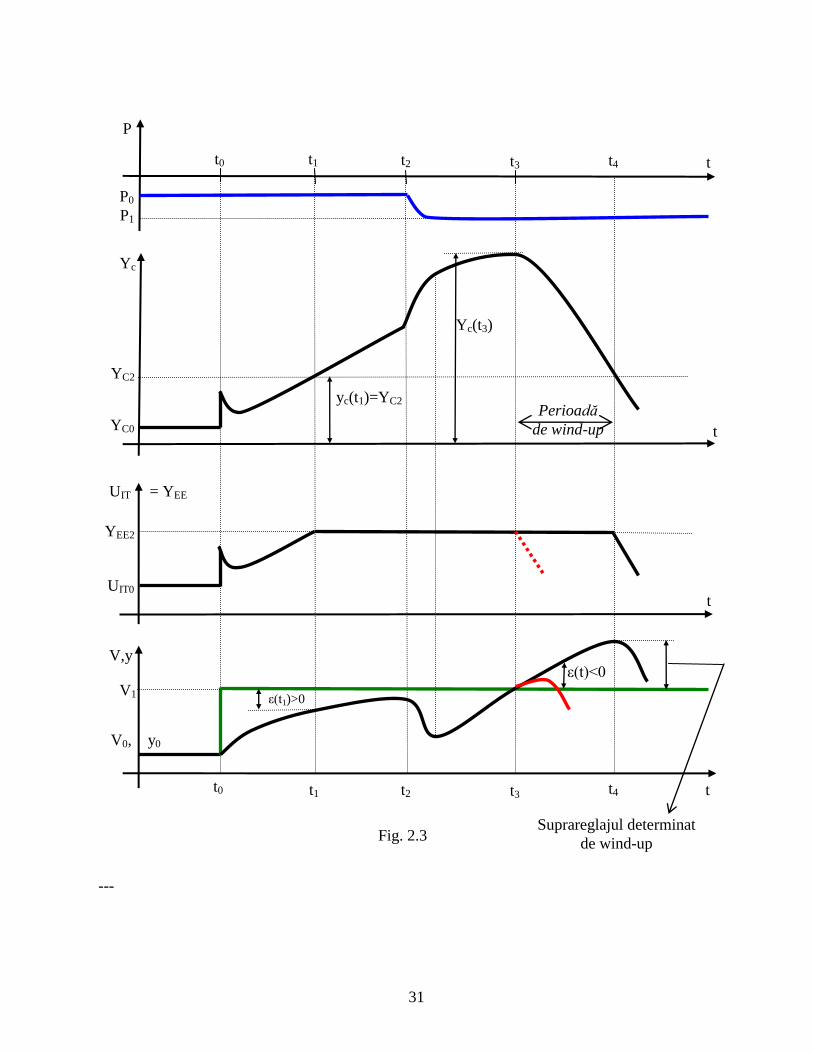
Presupunem că până la momentul 0tt , sistemul se găseşte într-un regim staţionar
aşa cum este ilustrat în fig.2.3 în care vom avea 0000 yVtytV adică vom
avea eroare staţionară 0t0 , lucru care se asigură prin comanda 0tYc a legii de
reglare 00 cc YtY .
La instalaţia tehnologică se aplică comanda 0010 tYtUtY cTEE . Perturbaţia
00 PtP - o considerăm constantă şi la o valoare negativă.
Considerăm că la momentul t0, mărimea prescrisă creşte de la valoarea staţionară
V0 la valoarea V1. Legea de reglare reacţionează la apariţia erorii pozitive:
0tyvt 1 prin cele 3 componente ale sale P, I şi D, determinând creşterea
mărimii Yc şi deci a mărimii de execuţie TU1 .
La momentul t1, mărimea de execuţie atinge valoarea ei maximă posibilă
2EEIT YU , dar cum eroarea este încă pozitivă, componenta integratoare I determină
creşterea în continuare a mărimii de comandă Yc. Această creştere suplimentară a
YEE2
YEE1
YC1
YC2
Fig. 2.2
YC
YEE
30
mărimii de comandă este fără nici un efect deoarece, în continuare, mărimea de
execuţie rămâne limitată la valoarea ei maximă 21 EET YU . În aceste condiţii(marimea
de comanda saturata) sistemul de reglare se comportă ca un sistem în circuit deschis
(bucla de reglare practic este decuplată si sistemul nu este controlabil).
31
---
ε(t1)>0
ε(t)<0
Suprareglajul determinat
de wind-up
Perioadă
de wind-up
Yc(t3)
yc(t1)=YC2
t
t
t
t
V1
P
t0 t1 t2 t3
t0 t1 t2 t3 t4
P0
Yc
YC2
YC0
UIT = YEE
YEE2
V,y
V0, y0
Fig. 2.3
UIT0
P1
t4
32
Dacă în această perioadă, începând cu momentul t2 de exemplu, perturbaţia are şi
ea o variaţie care determină scăderea mărimii de ieşire, eroarea se menţine pozitivă o
perioadă de timp mai îndelungată, iar datorită componentei integrale mărimea de
comandă creşte în continuare.
Presupunem că totuşi instalaţia tehnologică este controlabilă la ieşire şi că având
aplicată comanda maximă 21 EET YU ea este capabilă să atingă şi să depăşească noua
valoare a mărimii prescrise chiar dacă perturbaţia a avut o variaţie nefavorabilă.
În momentul t3 eroarea se anulează şi pentru 3tt ea este chiar negativă. În aceste
condiţii ar fi normal să se aplice sistemului o comandă de scădere a mărimii reglate,
lucru care nu se intampla(graficul de culoare rosie). Categoric, componenta P
reacţionează imediat la eroare negativă, eventual reacţionează şi componenta
D(componenta D urmăreşte limitarea de fapt a vitezei de variaţie a mărimii reglate).
Inclusiv componenta integratoare I a legii de reglare reacţionează, în sensul că
determină scăderea mărimii de comandă, însă această scădere porneşte de la o valoare
foarte mare, adică valoarea 3tYc .
Viteza de variaţie a componentei I este proporţională cu raportul iT
KR. Dacă Ti este
mare, această descreştere este lentă astfel că, deşi eroarea este negativă, în continuare
se aplică mărimea de execuţie (comanda maxima) 21 EET YU care determină o creştere
şi mai mare a mărimii reglate. Aceasta conduce la un suprareglaj (abatere maximă)
foarte mare.
În momentul t4, mărimea de comandă Yc(t4) atinge valoarea maximă de iesire a
elementului de executie, adică 24 Cc YtY şi bulca de reglare începe să reacţioneze
(adică bucla este din nou cuplată).
Inervalul de timp 43 t,t se numeşte „perioadă de wind-up”. Aceasta se datorează
faptului că procesul de integrare a continuat să se desfăşoare în mod nejustificat.
Schemele anti wind-up presupun un ansamblu de proceduri şi dispozitive care să
oprească procesul de integrare în momentul în care mărimea de execuţie U1T atinge
una din valorile de saturaţie 1EEY sau 2EEY şi să reacţioneze imediat ce mărimea
TEE UY 1 reintră într-un domeniu pe care-l numim „zona de lucru” şi care se află între
limitele de saturaţie. Spunem zonă de lucru şi nu domeniu de liniaritate pentru că este
posibil ca între C21 Y siYC , caracteristica statică a elementului de execuţie să nu fie
liniară.
Există mai multe tehnici de eliminare a fenomenului de wind-up (scheme anti
wind-up), printre care cea mai importantă presupune schimbarea automată a structurii
legii de reglare. Aceasta se poate aplica atât pentru implementările analogice cât şi
cele numerice.
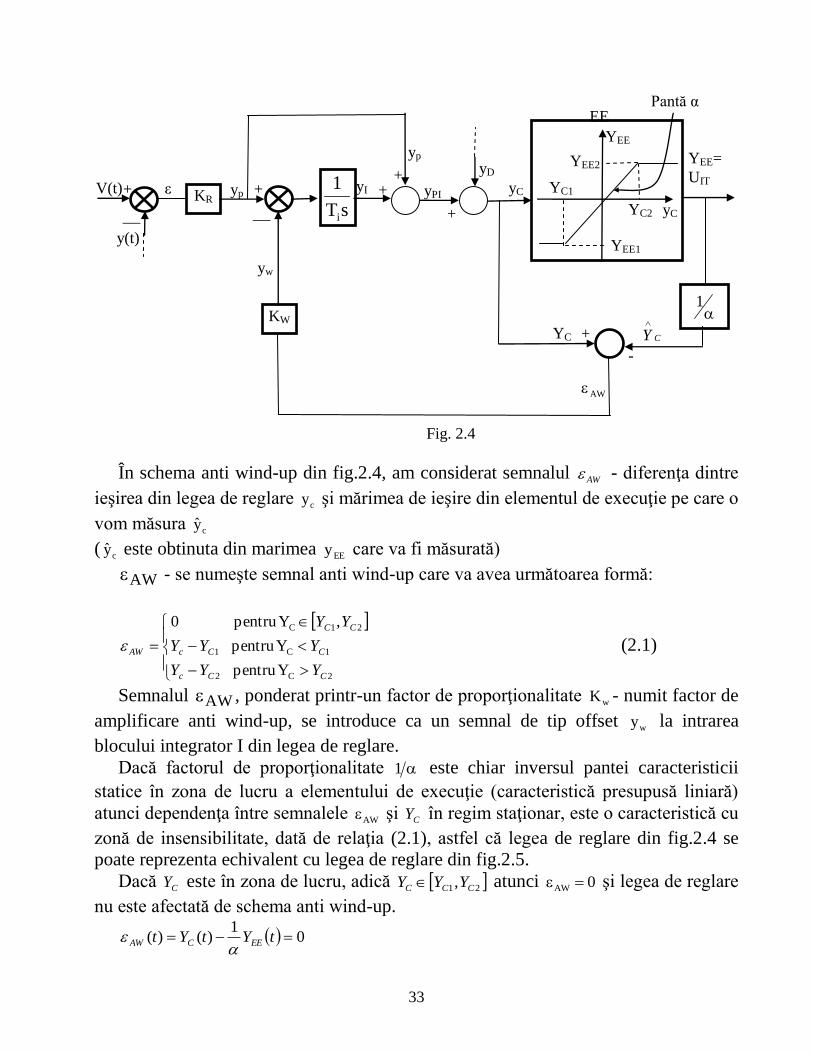
Considerăm sistemul de reglare din fig.2.4 care reprezintă de fapt sistemul din
fig.2.1 unde nu a mai fost menţionată producerea componentei derivative D.
33
În schema anti wind-up din fig.2.4, am considerat semnalul AW - diferenţa dintre
ieşirea din legea de reglare cy şi mărimea de ieşire din elementul de execuţie pe care o
vom măsura cy
( cy este obtinuta din marimea EEy care va fi măsurată)
AW - se numeşte semnal anti wind-up care va avea următoarea formă:
2C2
1C1
21C
Ypentru
Ypentru
, Ypentru 0
CCc
CCc
CC
AW
YYY
YYY
YY
(2.1)
Semnalul AW , ponderat printr-un factor de proporţionalitate wK - numit factor de
amplificare anti wind-up, se introduce ca un semnal de tip offset wy la intrarea
blocului integrator I din legea de reglare.
Dacă factorul de proporţionalitate 1 este chiar inversul pantei caracteristicii
statice în zona de lucru a elementului de execuţie (caracteristică presupusă liniară)
atunci dependenţa între semnalele AW şi CY în regim staţionar, este o caracteristică cu
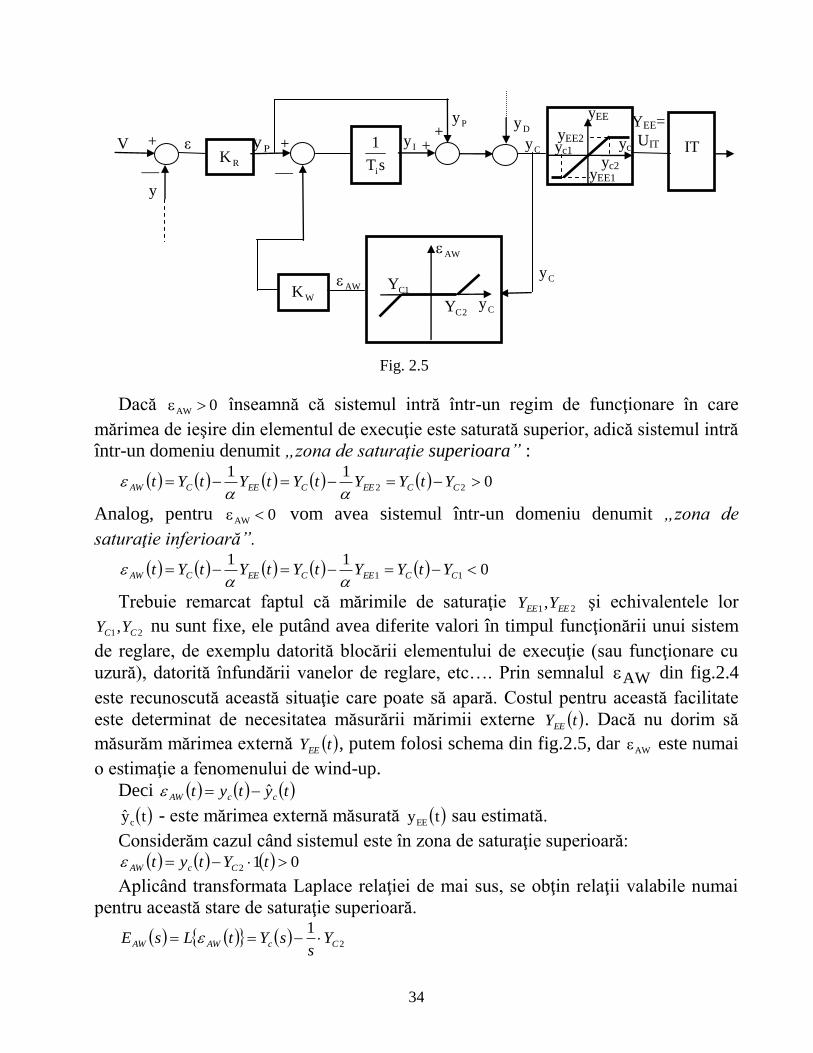
zonă de insensibilitate, dată de relaţia (2.1), astfel că legea de reglare din fig.2.4 se
poate reprezenta echivalent cu legea de reglare din fig.2.5.
Dacă CY este în zona de lucru, adică 21, CCC YYY atunci 0AW şi legea de reglare
nu este afectată de schema anti wind-up.
01
)()( tYtYt EECAW
KR
sT
1
i
YEE1
YC2 yC
YEE
YEE2
YC1
Pantă α EE
KW 1
yw
y(t)
+ V(t) ε yp yI
+ +
+
yp
yPI
yD
yC
+
-
YC CY
AW
Fig. 2.4
+
YEE=
UIT
34
Dacă 0AW înseamnă că sistemul intră într-un regim de funcţionare în care
mărimea de ieşire din elementul de execuţie este saturată superior, adică sistemul intră
într-un domeniu denumit „zona de saturaţie superioara” :
011
22 CCEECEECAW YtYYtYtYtYt
Analog, pentru 0AW vom avea sistemul într-un domeniu denumit „zona de
saturaţie inferioară”.
011
11 CCEECEECAW YtYYtYtYtYt
Trebuie remarcat faptul că mărimile de saturaţie 21, EEEE YY şi echivalentele lor
21, CC YY nu sunt fixe, ele putând avea diferite valori în timpul funcţionării unui sistem
de reglare, de exemplu datorită blocării elementului de execuţie (sau funcţionare cu
uzură), datorită înfundării vanelor de reglare, etc…. Prin semnalul AW din fig.2.4
este recunoscută această situaţie care poate să apară. Costul pentru această facilitate
este determinat de necesitatea măsurării mărimii externe tYEE . Dacă nu dorim să
măsurăm mărimea externă tYEE , putem folosi schema din fig.2.5, dar AW este numai
o estimaţie a fenomenului de wind-up.
Deci tytyt ccAWˆ
tyc - este mărimea externă măsurată tyEE sau estimată.
Considerăm cazul când sistemul este în zona de saturaţie superioară: 012 tYtyt CcAW
Aplicând transformata Laplace relaţiei de mai sus, se obţin relaţii valabile numai
pentru această stare de saturaţie superioară.
2
1CcAWAW Y
ssYtLsE
RK sT
1
i
IT
yEE
yEE2
yEE1
yc1
yc2
yc
YEE=
UIT
Dy
Cy Iy +
+ + Py ε V +
y
2CY Cy 1CY
AW
WK Cy
AW
Py
Fig. 2.5
35
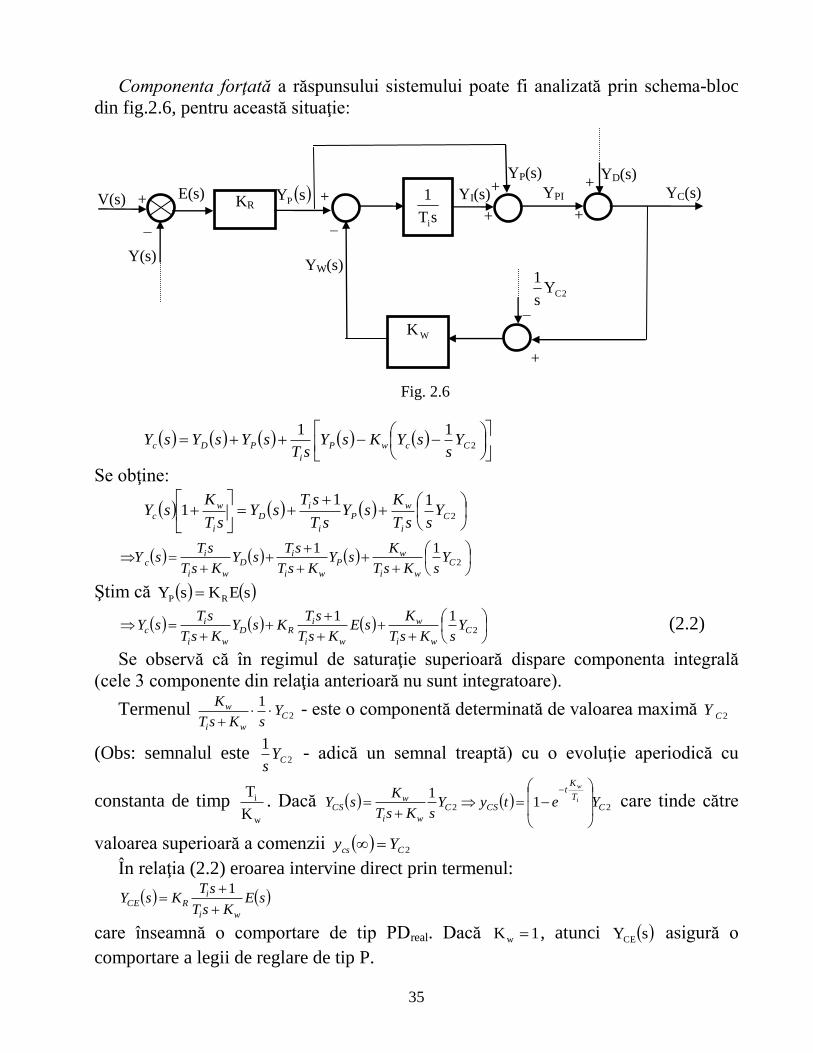
Componenta forţată a răspunsului sistemului poate fi analizată prin schema-bloc
din fig.2.6, pentru această situaţie:
2
11CcwP
i
PDc Ys
sYKsYsT
sYsYsY
Se obţine:
2
111 C
i
w
P
i
i
D
i
w
c YssT
KsY
sT
sTsY
sT
KsY
2
11C
wi
wP
wi
iD
wi
ic Y
sKsT
KsY
KsT
sTsY
KsT
sTsY
Ştim că sEKsY RP
2
11C
wi
w
wi
iRD
wi
ic Y
sKsT
KsE
KsT
sTKsY
KsT
sTsY (2.2)
Se observă că în regimul de saturaţie superioară dispare componenta integrală
(cele 3 componente din relaţia anterioară nu sunt integratoare).
Termenul 2
1C
wi
w YsKsT
K
- este o componentă determinată de valoarea maximă 2CY
(Obs: semnalul este 2
1CY
s - adică un semnal treaptă) cu o evoluţie aperiodică cu
constanta de timp w
i
K
T. Dacă 22 1
1C
T
Kt
CSC
wi
wCS YetyY
sKsT
KsY i
w
care tinde către
valoarea superioară a comenzii 2Ccs Yy
În relaţia (2.2) eroarea intervine direct prin termenul:
sEKsT
sTKsY
wi
iRCE
1
care înseamnă o comportare de tip PDreal. Dacă 1Kw , atunci sYCE asigură o
comportare a legii de reglare de tip P.
KR
sT
1
i
WK
V(s) +
–
Y(s)
E(s) sYP +
–
+
+
+
+
+
–
YI(s)
YP(s)
YPI
YD(s)
YC(s)
2CYs
1
YW(s)
Fig. 2.6
36
Din păcate, componenta derivativă sE1sT
sTKsY d
RD
{ pentru k pe poziţia 1 din
fig.2.1} sau sY1sT
sTKsY d
RD
{ pentru k pe poziţia 2 din fig.2.1}, determină o
comportare a componentei sYKsT
sTsY D
wi
iCD
- din relaţia (2.2), ca o lege D-real a
componentei derivative sYD . Acest lucru înseamnă un caracter dublu derivator în
raport cu eroarea sau cu mărimea măsurată (în funcţie de cum se utilizează
componenta derivativă).
În condiţiile existenţei unor zgomote pe canalul de măsură y(t), componenta
derivativă sYCD are un caracter necorespunzător, motiv pentru care, în unele
implementări, facilitatea anti wind-up este dezactivată dacă legea de reglare conţine
componentă derivativă (D).
Cu excepţia efectului nefavorabil al derivării unor zgomote, în general,
componenta derivativă sYD , cu parametrii T,Td bine calculaţi, determină ieşirea
mai rapida din zona de saturaţie superioară, având ca efect reducerea suprareglajului.
Utilizarea acestei scheme anti wind-up presupune un nou parametru de acordare:
wK , ale cărui valori pot afecta comportarea numai în cele 2 regimuri: zona saturaţie
superioară şi inferioară. Deoarece în aceste zone de lucru, sistemul de reglare este în
circuit deschis, valorile optime ale factorului wK depind numai de parametrii legii de
reglare şi de 21, CC YY şi V.
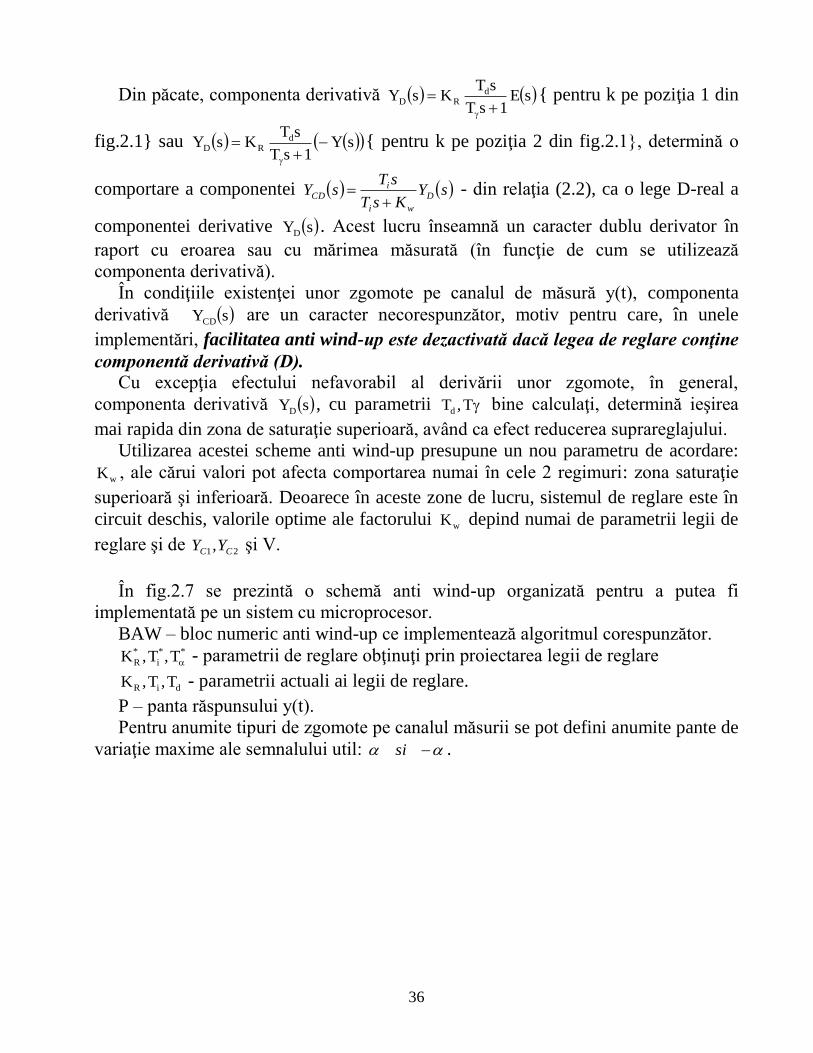
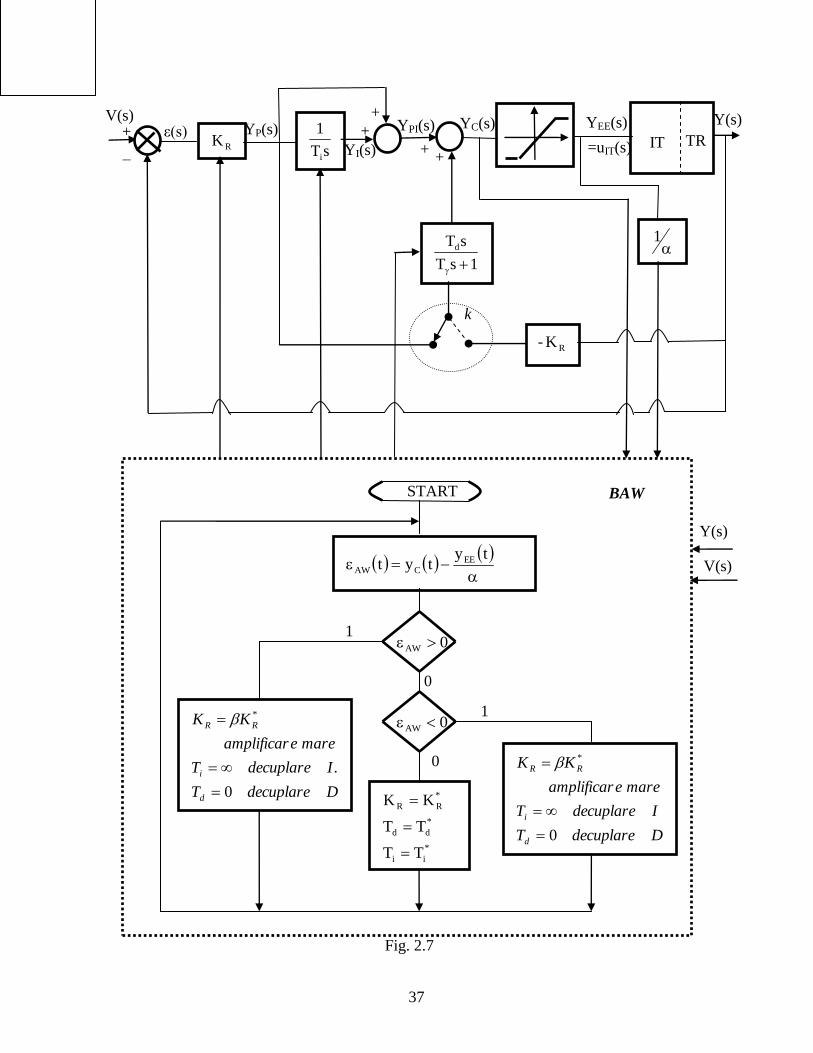
În fig.2.7 se prezintă o schemă anti wind-up organizată pentru a putea fi
implementată pe un sistem cu microprocesor.
BAW – bloc numeric anti wind-up ce implementează algoritmul corespunzător. **
i
*
R T,T,K - parametrii de reglare obţinuţi prin proiectarea legii de reglare
diR T,T,K - parametrii actuali ai legii de reglare.
P – panta răspunsului y(t).
Pentru anumite tipuri de zgomote pe canalul măsurii se pot defini anumite pante de