Dinamica, operaţiile şi controlul proceselor Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării 8.0 context si directive Cunoaşterea procesului este baza pentru controlul proceselor de succes. În Lecţia 7, am folosit cunoştinţele procesului pentru a ghida, prin reglarea corelaţiilor, alegerea noastră a parametrilor regulatorului. În această lecţie, cunoaşterea procesului va ghida alegerea noastră de structură de control la sine: făcând măsurători suplimentare de proces, vom mări singura- bucla sistem de control feedback-ul pentru a da o capacitate mai mare. COMPORTAMENTUL SISTEMULUI DINAMIC 8.1 Un proces cu variabila intermediară identificabilă Vom începe cu un proces care are trei intrări, două dintre ele tulburări şi o ieşire pe care vom dori să o controlăm. Ca de obicei, se transferă funcţiile G D1 (s), G D2 (s) şi G M (e) se poate referi la acelaşi ansamblu de echipamente,dar specifica modul în care variabila de ieşire y depinde de fiecare intrare în parte. Descrierea procesului de domeniu Laplace este atunci: (8.1-1) Ne imaginăm o situaţie în care procesul de G m (e) ar putea fi împărţită în două părţi, conectate printr-o variabilă intermediara masurabila xi: acest lucru ar putea fi la fel de simplu ca două rezervoare în serie, la fel ca în Lecţia 4. Avand specificata o parte din structura interioară a G m , considerăm X d2 o sa fie tulburari tipice care afectează procesul 1
Transcript
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
8.0 context si directive
Cunoaşterea procesului este baza pentru controlul proceselor de succes. În Lecţia 7, am folosit cunoştinţele procesului pentru a ghida, prin reglarea corelaţiilor, alegerea noastră a parametrilor regulatorului. În această lecţie, cunoaşterea procesului va ghida alegerea noastră de structură de control la sine: făcând măsurători suplimentare de proces, vom mări singura-bucla sistem de control feedback-ul pentru a da o capacitate mai mare.
COMPORTAMENTUL SISTEMULUI DINAMIC
8.1 Un proces cu variabila intermediară identificabilă
Vom începe cu un proces care are trei intrări, două dintre ele tulburări şi o ieşire pe care vom dori să o controlăm. Ca de obicei, se transferă funcţiile GD1(s), GD2(s) şi GM (e) se poate referi la acelaşi ansamblu de echipamente,dar specifica modul în care variabila de ieşire y depinde de fiecare intrare în parte.
Descrierea procesului de domeniu Laplace este atunci:
(8.1-1)
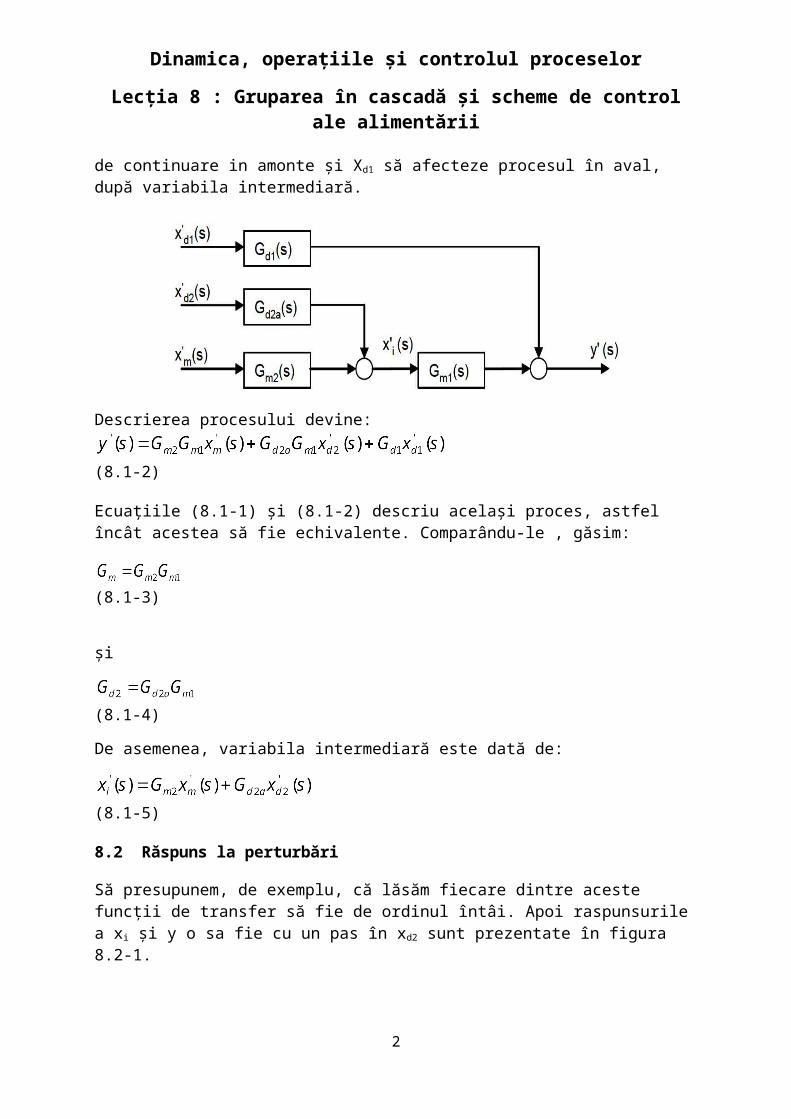
Ne imaginăm o situație în care procesul de Gm (e) ar putea fi împărțită în două părți, conectate printr-o variabilă intermediara masurabila xi: acest lucru ar putea fi la fel de simplu ca două rezervoare în serie, la fel ca în Lecția 4. Avand specificata o parte din structura interioară a Gm, considerăm Xd2 o sa fie tulburari tipice care afectează procesul de continuare in amonte şi Xd1 să afecteze procesul în aval, după variabila intermediară.
Descrierea procesului devine:
1
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
(8.1-2)
Ecuaţiile (8.1-1) şi (8.1-2) descriu acelaşi proces, astfel încât acestea să fie echivalente. Comparându-le , găsim:
(8.1-3)
şi
(8.1-4)
De asemenea, variabila intermediară este dată de:
(8.1-5)
8.2 Răspuns la perturbări
Să presupunem, de exemplu, că lăsăm fiecare dintre aceste funcții de transfer să fie de ordinul întâi. Apoi raspunsurile a xi şi y o sa fie cu un pas în xd2 sunt prezentate în figura 8.2-1.
Figura 8.2-1. Răspuns Etapa de variabile intermediare şi de ieşire
Observăm că variabila intermediară răspunde faţă de ieşire. Poate că acest lucru ne poate ajută pentru a îmbunătăţi controlul y.
SCHEMA DE CONTROL
8.3 Etapa 1 - specifică un obiectiv de control pentru proces
2
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Obiectivul nostru este de a menţine controlul variabilei de ieşire y la punctul stabilit.
8.4 Etapa 2 - atribuie variabilele in sistemul dinamic
Variabila controlată este y. Variabila manipulată afectează variabila controlată prin funcţia de transfer. Aceste misiuni sunt familiare cu lecţiile anterioare. Cu toate acestea, avem unele noi misiuni de a face:
• Privind mai în detaliu la componența acestui proces, am identificat o variabilă intermediară care influenţează variabilele controlate, răspunde la perturbații înaintea variabilei controlate şi răspunde la variabila manipulată, de asemenea. Putem utiliza aceste informaţii suplimentare într-un sistem numit control în serie.
• Mai mult decât atât, să presupunem că putem măsura o variabilă de perturbare care deranjează frecvent procesul. Prin acest lucru, putem prognoza atunci când variabila controlată este pe cale să fie modificata şi a preveni acest lucru într-un sistem numit control feedforward.
8.5 Etapa 3 - sistem de control în serie
Ideea este de a introduce o buclă de control secundar între variabila manipulata xm si variabila controlată y. Bucla secundară controlează variabila intermediară xi. Această variabilă trebuie sa deţină mai multe calificări:
• trebuie să răspundă la perturbări importante (cele care în mod semnificativ afectează variabila controlată)
• ea trebuie să transmită, de asemenea, efectele unor astfel de perturbări la variabila controlată;
• trebuie să răspundă la variabila manipulată;
Variabila intermediară xi este numita variabilă secundară, iar schema de control are acum o noua buclă secundară în circuitul primar iniţial.
3
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Figura 8.5-1. Schema bloc pentru structura de control în serie
Bucla secundara controlează variabila intermediara (secundara) x i prin ajustarea variabilei manipulate xm. Circuitul primar controleaza variabila y prin manipularea valorii de referință a controlerului secundar xo1. Astfel, avem aceeaşi variabila controlata şi valoare stabilita ca înainte, dar supapa a fost majorata cu o buclă de control intern.
Perturbarea xd2 este respinsa de către bucla secundară înainte de a afecta intregul proces, şi, astfel, răspunsul este mai rapid şi impactul asupra y’mai mic. Bucla primara este necesara să se ocupe de alte perturbari, cum ar fi xd1’, fiindca există mereu. Procesul este de obicei mult mai lent decât controlerul.
Cascada poate fi realizată la intervale seriale. De exemplu, în Figura 8.5-2 compoziția regulatorului stabileşte un punct stabilit de temperatură în bucla secundar; regulatorul de temperatură, la rândul său stabileşte valoarea de referință de curgere pentru bucla terțiara.
Figura 8.5-2. Controlul de cascadă pe trei niveluri
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Controlul în cascadă încă este un control feedback, realizat cu algoritmi de control PID convenţionale. Îmbunătăţirea vine pentru că ne uităm în interiorul procesului, diferentiind de-a lungul tulburărilor, precum şi aplicând feedback-ul cu creşterea abilităţii.
8.6 Etapa 3 - sistem de control feedforward
Ne apropiem de rădăcina problemei, dacă vom reacționa direct la tulburări, estimand ce ar trebui să facă variabila manipulată, fara sa asteptam pentru un răspuns al procesului. Acesta este subiectul controlului feedforward. Un control feedback simplu este în figura 8.6-1 cu controlul feedforward în figura 8.6-2:
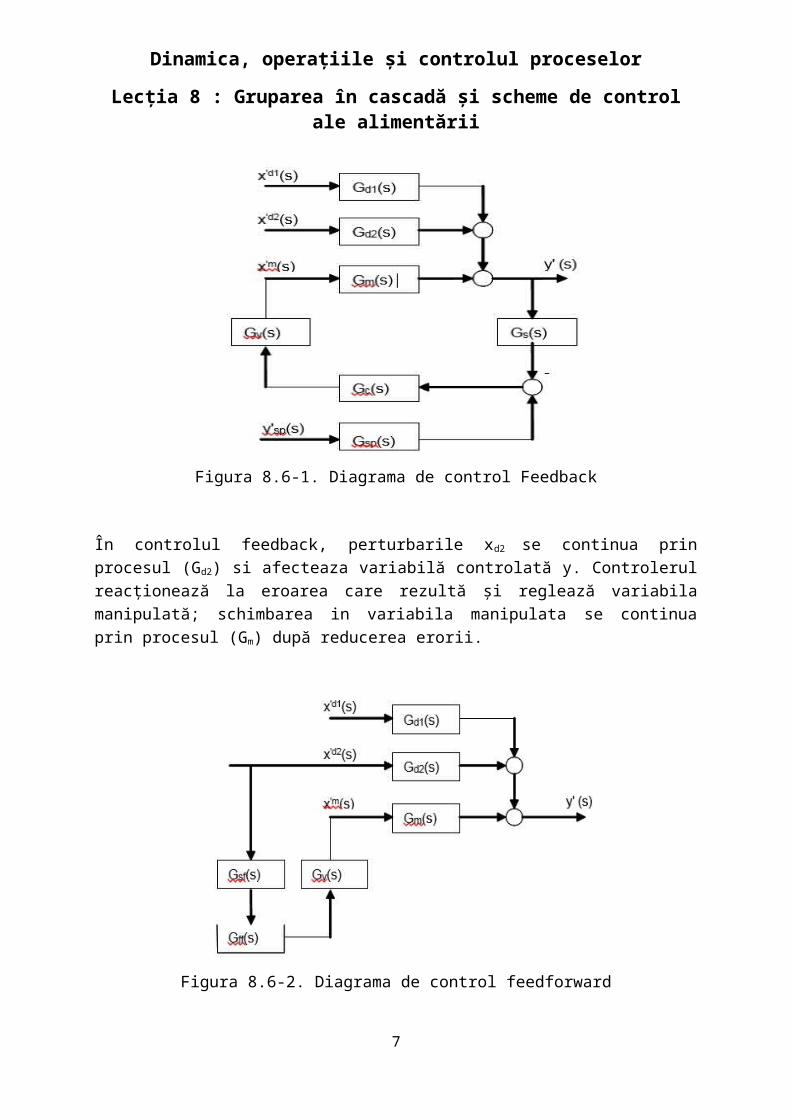
Figura 8.6-1. Diagrama de control Feedback
În controlul feedback, perturbarile xd2 se continua prin procesul (Gd2) si afecteaza variabilă controlată y. Controlerul reacționează la eroarea care rezultă şi reglează variabila manipulată; schimbarea in variabila manipulata se continua prin procesul (Gm) după reducerea erorii.
5
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Figura 8.6-2. Diagrama de control feedforward
În controlul feedforward, actionarile tulburărilor xd2 au loc în paralel, prin procesul (Gd2) şi prin controlerul feedforward (Gff). Controlerul reglează variabila manipulată pentru a contracara perturbările, astfel încât tulburările şi variabilele manipulate afecteaza împreună variabila de ieşire y. În cele mai bune cazuri, variabila manipulata ar compensa tulburările pas pentru pas, astfel încât variabila controlată nu va fi niciodată afectata!
De asemenea, confruntam feedforward-ul cu structura cascadă din secțiunea 8.5.
Controlul feedforward adaugă, de asemenea un alt senzor şi controler. Cu toate acestea, conceptul diferă de cea in cascadă, în care perturbarea este măsurata, dar variabila manipulata nu-l afectează - nu există niciun feedback. Feedforward este astfel mai specific decât un control în cascadă: este concepute pentru a preîntâmpina o anumită tulburare. Cu toate acestea, nu se poate măsura cât de bine a făcut-o, nici nu poate răspunde la alte tulburări, cum ar fi xd1, care ar putea afecta variabila controlată. Prin urmare feedforward-ul urmează să se aplice în împreună cu o buclă de feedback convențional. Atât feedback-ul cat şi controlerele feedforward ajusteaza variabila manipulată în figura 8.6-3.
6
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Figura 8.6-3. Diagrama de control feedback/ feedforward
Algoritmul feedforward nu este PID convențional. Mai degrabă este specific procesului şi perturbarii. Dorim să precizam funcția de transfer feedforward a controlerului Gff pentru a minimiza efectul de xd2 pe y. In mod ideal, vrem y '(s) = 0, iar din figura 8.6-2 sau 8.6-3 acest lucru necesită ca:
(8.6-
1)
Calea paralela prin controlerul feedforward face uz de avans avertizand perturbarea. Având în vedere modelele de procese perfecte, plus capacitatea de a le face în funcție de transfer Gff, compensația poate nega complet efectul lui xd2. Desigur, perfecțiunea este puțin probabil, dupa cum vom vedea mai târziu.
8.7 Compararea rezumatului între serie şi feedforward
La prima vedere, unul este apt de a perturba cascada şi feedforward unul cu altul. Tabelul 8.7-1 prezintă o comparație side-by-side: presupune un existent proces cu un controler de feedback, cum ar fi faptul că, în figura 8.6-1. Numim acest controler, controler primar, şi comparam adăugând fie un controler secundar de feedback la un sistem cascadă (Figura 8.5-1), sau un controler feedforward la un sistem feedforward / feedback (Figura 8.6-3). Tabelul subliniază asemănările şi deosebirile dintre cele două sisteme.
Noi ar trebui să încheiem comparația cu o clarificare a conceptului: sa ne gandim la "cascadă" şi "feedforward", ca moduri de a aranja controlerele, nu limitand aranjamentele specifice prezentate mai sus. Adică, este posibil controler feedforward care reglează valoarea de
7
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
referință unui controler feedback. În acest caz, avem atât controlul feedforward cat şi o structura cascadă; Am putea spune că operatorul feedforward "serie" la un controler secundar. Vom arăta un exemplu în secțiunea următoare.
Tabelul 8.7-1. Comparație între cascadă şi control înainte de alimentare
8.8 exemplu
Un flux de alimentare este pre-încălzit cu ajutorul unui ulei de încălzire într-un schimbător carcasa-tub. Temperatura de ieşire este controlată prin manipularea debitul de ulei.
Figura 8.8-1 control unic în buclă a temperaturii de ieşire
Procesul este supusă mai multor perturbari: debitul şi temperatura de intrare a ambelor procese (alimentare) şi alimentare cu combustibil (păcură) fluxuri ce pot varia. Ultimele tulburări sunt deosebit de suparatoare; pentru că uleiul de încălzire este alimentat de la un
8
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
antet care alimenteaza alti utilizatori mai mari, stabilizand presiunea de alimentare şi temperatura sunt frecvente. Propunem folosind măsurători suplimentare şi bucle de control, dispuse ca în figura 8.8-2.
Figura 8.8-2 Schemă de control bucle multiple pentru temperatura de ieşire
Fluxul de control al de fluxului de alimentare este acum efectuat de către o buclă secundara. Două controlere primare se leaga în serie la aceasta noua buclă secundara. Primul este controlerul de feedback inițial pentru temperatura de proces. Al doilea este un controler feedforward de la temperatura uleiului.
În cazul în care scăderea de presiune la alimentare cu ulei, regulatorul de debit secundar va răspunde prin deschiderea supapei de aprovizionare. Acest lucru va permite debitul de ulei pentru a reveni la valoarea sa dorit. Structura cascadă răspunde la perturbarea presiune înainte Mărimea de reglaj este afectată.
În cazul în care scade temperatura de alimentare cu ulei, controlerul feedforward va răspunde prin direcționarea controlerul secundar pentru a creşte rata de curgere. Debitul mare de ulei de încălzire va tinde să mențină rata de căldură în schimbătorul de căldură, chiar cand temperatura de alimentare scade.
Controlerul de temperatură pe țiței necesită un algoritm feedforward pentru că variabila manipulată (flux păcură) sa nu afecteze variabila măsurată (temperatura păcură). Regulatorul de temperatură in fluxul de proces este un controler de feedback care răspunde la orice eroare în această temperatură, cum ar putea rezulta si din perturbari ale fluxului de proces şi temperatura. Ambele controlere sunt inseriate la un controler secundar.
ECHIPAMENTE
8.9 controlere practice feedforward
Desigur, există o varietate copleşitoare de modele de proces, dar dacă ne amintim că o clasă mare de procese pot fi reprezentate cu succes de FODT, putem obține un controler feedforward cu o solutie generala (Marlin, 2000). Deschizand supapa şi senzorul în descrierea procesului, funcția de transfer (8.6-1) devine:
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Am mai generalizat aceasta forma prin asocierea unei cresteri a controlerului cu raportul de cresteri de proces, o perioadă de pregătire cu calea procesului xm, un decalaj de timp cu calea procesului de xd2
’, şi un timp mort cu diferența dintre perturbari şi timpii morti ai procesului manipulat. Acesti patru parametri pot fi apoi reglati ca si parametrii PID, pentru a îmbunătăți răspunsul variabilei controlate la xd2’.
(8.9-2)
Efectul de crestere este de a amplifica răspunsul controlerului pentru o intrare. Cresterea satisface relația la starea de echilibru între perturbare şi variabilele manipulate. Efectul de timp mort este de a întârzia răspunsul regulatorului, astfel încât aceasta nu va afecta variabila controlată prematur. Un astfel de pas este necesar în cazul în care perturbarea timpulului mort depăşeşte pe cea a procesului. Cu toate acestea, în cazul în care perturbarea timpulului mort este mai mica, controlul perfect necesită un θff negativ, care presupune estimarea debutul perturbării viitoare! O astfel de maşină- timp ar fi foarte utila, in mai multe scopuri, dar noi nu sunt susceptibili in a găsi una - astfel parametrul θff va fi setat la zero.
Putem ilustra (8.9-2) prin calcularea la ieşirea controlerului si primirea unui pas de intrare de amplitudine A. Aplicand schimbarea în trepte, găsim:
(8.9-3)
Elementele lead/ lag la dezvoltarea unui răspuns, aşa cum se arată în figura 8.9-1. De exemplu, dacă Tlag este setat pentru a fi mai mare decât T lead, ieşirea controlerului creşte cu timpul. Aceasta este adecvată în cazul în perturbarea se propagă mai încet prin proces decât o face variabila manipulată. Dacă reversul este adevărat, atunci un răspuns variabil manipulat mai puternic este în ordine de la început, şi aşa Tlead este setat mai mare decât Tlag.
10
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Figura 8.9-1 Răspunsul controlerului Gff la o treaptă de intrare
8.10 Insumarea semnalelor feedforward şi feedback-ul la o supapă
Fiecare controlor precizează, în orice moment, cât de mult supapa trebuie să fie mutata din poziția sa anterioară. Aceste două ieşiri sunt însumate şi apoi trimise la traductorul supapei.
Se poate ca cele două controlere sa se opuna reciproc, astfel încât suma ieşirilor este o mişcare mai mică decât fiecare controler individual. Acest lucru nu este neapărat o problemă: fiecare controler răspunde în domeniul său de expertiză (feedback-ul răspunde la prezenta erorii; feedforward previzioneaza efectele perturbarii prezent). Desigur, suma rezultatelor controlerului ar putea tinde în afara intervalul 0 - 100% al supapei. In acest caz, supapa se poate deplasa doar la limita răspunsului sau. În cazul în care acest lucru este un fenomen frecvent, variabila manipulată poate fi insuficient de puternica pentru a depăşi perturbarile.
8.11 Controlul fluxului
După cum am văzut deja în exemplele date, o aplicație foarte comuna a unui sistem cascadă este de a folosi un regulator de debit ca o buclă de cascadă interioara. Acest lucru permite curgerii să fie mai puțin afectata, de exemplu, diferențele de presiune, astfel încât să poată fi o variabilă mai fiabil de manipulat în buclele exterioare.
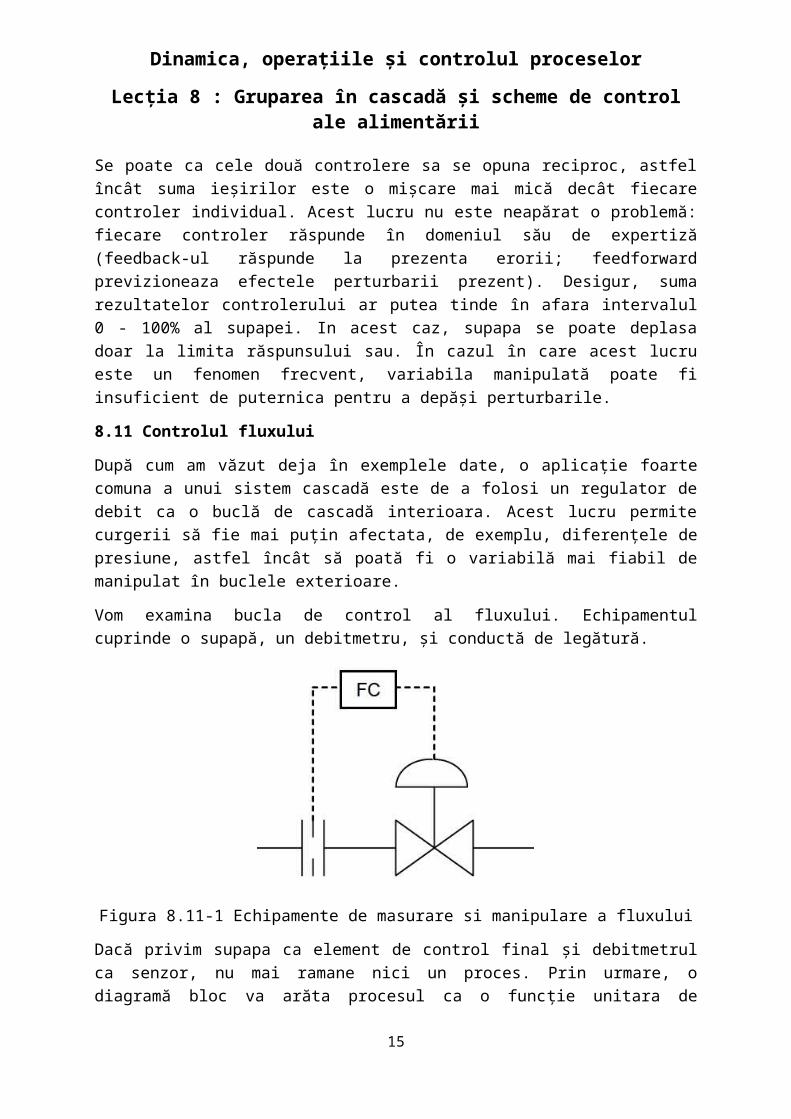
Vom examina bucla de control al fluxului. Echipamentul cuprinde o supapă, un debitmetru, şi conductă de legătură.
11
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
Figura 8.11-1 Echipamente de masurare si manipulare a fluxului
Dacă privim supapa ca element de control final şi debitmetrul ca senzor, nu mai ramane nici un proces. Prin urmare, o diagramă bloc va arăta procesul ca o funcție unitara de transfer: variabila controlată şi variabila manipulata sunt identice:
Figura 8.11-2 Schema bloc a buclei de reglare a debitului
Supapa afectează fluxul prin poziția tijei, aşa cum este descris în funcție de transfer Gv. Diagrama identifică, de asemenea, două perturbari care afectează fluxul : o schimbare în diferența de presiune prin supapa (ca ar putea rezulta din variațiile surse şi condiții de scufundare) şi modificări ale proprietăților fizice ale fluidului care curge. Toate aceste funcții de transfer vin, ca şi în alte exemple, de la un model linearizat de curgere printr-o valvă.
12
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
După distingerea variabilelor manipulate şi controlate, variabila manipulată să fie identica cu variabila controlată poate părea ciudat. Un punct de vedere alternativ este de a considera variabila manipulata pentru a fi în poziția tijei supapei, aşa cum se arată în figura 8.11-3.
Figura 8.11-3 diagramă bloc alternativă de buclă de reglare a debitului
Într-adevăr, funcția de transfer care descrie modul în care poziția tijei supapei afecteaza fluxul de a se misca de la Gv în figura 8.11-2 la Gm în figura 8.11-3. În aceste serii de lecții, am preferat punctul de vedere din figura 8.11-2; adică, un controler acționează printr-un element de control final pentru a produce un flux, care poate fi apoi utilizat pentru a manipula un proces de ieşire.
COMPORTAMENTUL BUCLEI INCHISE
8.12 Performanță cascadei
Din figura 8.5-1, am obține funcția de transfer pentru structura cascadă buclă închisă. Cu bucle imbricate în diagrame bloc, este mai bine să înceapă cu bucla interioară.
(8.12-1)
Astfel incat:
13
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
(8.12-2)
în cazul în care funcția de transfer în jurul buclei secundare este:
(8.12-3)
Cu xi’cunoscut, vom continua în bucla exterioara:
(8.12-4)
Rezolvarea pentru y '
(8.12-5)
unde funcţia de transfer jurul circuitul primar este
(8.12-6)
Ecuaţia (8.12 - 5) este generala pentru o structură cascadă cu două bucla cu perturbari dispuse ca în figura 8.5-1. Acesta poate fi specificat prin substituirea funcţiile de transfer pentru componentele din cascada.
8.13 Ajustare cascadei
Marlin (2000) sugerează ajustarea buclei interioare în primul rând, cu bucla exterioara prin setare manuala. Apoi reglarea buclei exterioare cu bucla interioară prin setarea automată.
8.14 Stabilitatea seriei buclei inchise
Ecuaţia caracteristică pentru structura cascadă, obţinută din (8.12 - 5), conţine funcţiile de transfer pentru ambele controlere. Astfel ambele controlere pot afecta polii şi prin urmare, stabilitatea cascadei.
8.15 performanţă feedforward şi stabilitate
Din figura 8.6-3, am obţinut funcţia de transfer pentru structura buclei de feedback / feedforward închisă.
14
Dinamica, operaţiile şi controlul proceselor
Lecţia 8 : Gruparea în cascadă şi scheme de control ale alimentării
(8.15-1)
Rezolvând
(8.15-2)
unde funcţia de transfer în jurul buclei de reacţie este:
(8.15-3)
Observaţi că regulatorul feedforward afectează numai funcţia de transfer de perturbare xd2; alte tulburări şi de referinţă au funcţii uzuale a buclei transfer feedback. În (8.6-1) vom încerca să facem funcţia de transfer xd2 zero. Cu toate acestea, în cazul în care nu se poate, controlerul feedback este de asemenea disponibil, prin funcţia de transfer numitor, pentru a răspunde la xd2, aşa cum se întâmplă la alte perturbari.
Deoarece ecuaţia caracteristică obţinută din (8.15-2) nu depinde de controlerul feedforward, adăugând o buclă feedforward nu are niciun efect asupra ajustarii controlerului de feedback pentru stabilitate în buclă închisă. Chiar şi aşa, dacă regulatorul feedforward în sine este instabil, ansamblul este probabil să fie inoperabil.
8.16 Ajustare feedforward
În mod ideal, toate celelalte tperturbari s-ar prăbuşi, astfel încât bucla de feedback ar putea fi pusa în manual şi bucla feedforward aranjata pentru a răspunde la perturbaţiile sale specifice.
8.17 Concluzie
Prin intelegerea problemei şi masuratori suplimentare, precum şi obţinerea cunostinte mai profunde a procesului, se poate îmbunătăţi performanţa controlerului PID cu o singura bucla. Acest lucru nu inseamn că în cascadă sau feedforward îmbunătăţirile sunt întotdeauna recomandate - trebuie să fie punct de vedere tehnic (măsurătorile şi caracterul noilor variabile in caz) sa fie justificate economic. Aceasta, desigur, este o problema familiara inginerilor.
Feedforward-ul şi cascada puncteaza modul de a promova programe de control care utilizează modele de proces. Diferite forme de control bazat pe model pot oferi avantaje în bucle de control simple, dar sunt într-adevăr în forma initialacând luăm în considerare modul în care buclele de control individuale pot interacţiona - atunci când modele realiste de proces sunt MIMO - multiple intrari / ieşire multiple.
8.18 referinţe
Marlin, Thomas E. Process Control. 2nd ed. Boston, MA: McGraw-Hill, 2000. ISBN: 0070393621.