METODELE GEOMETRIEI DESCRIPTIVE 75 6. METODELE GEOMETRIEI DESCRIPTIVE Prin metodele geometriei descriptive se realizează modificarea proiecţiilor elementelor geometrice din poziţiile date în alte poziţii, particulare faţă de planele de proiecţie, poziţii în care dreptele, figurile geometrice sau unghiurile apar în adevărată mărime. Aceste transformări pot fi făcute în două moduri : - modificând sistemul de referinţă, adică schimbând poziţia planelor de proiecţie şi lăsând pe loc elementul geometric proiectat; - rotind elementul geometric şi lăsând neschimbate planele de proiecţie. Metodele geometriei descriptive, de transformare a proiecţiilor elementelor geometrice, studiate în continuare sunt : - metoda schimbării planelor de proiecţie; - metoda rotaţiei; - metoda rabaterii. 6.1 Metoda schimbării planelor de proiecţie Prin metoda schimbării planelor de proiecţie se poate schimba planul vertical de proiecţie, planul orizontal de proiecţie, sau alternativ ambele plane de proiecţie (dubla schimbare de plan) astfel încât, elementul proiectat să ocupe o altă poziţie faţă de noile plane de proiecţie (în general, paralel sau perpendicular), în funcţie de cerinţa problemei. 6.1.1 Schimbarea planului vertical de proiecţie Prin schimbarea planului vertical de proiecţie, proiecţia orizontală a elementului geometric rămâne neschimbată, iar proiecţia verticală se schimbă în raport cu noul plan vertical. a) Schimbarea planului vertical de proiecţie pentru un punct Fie punctul A(a,a’) în sistemul de referinţă iniţial, format din cele două plane de proiecţie perpendiculare, orizontal [H] şi vertical [V] (fig.6.1). Dacă se consideră un nou plan vertical de proiecţie [V 1 ], perpendicular pe planul [H], linia de pământ devine O 1 x 1 . În noul sistem de referinţă proiecţiile punctului A vor fi : pe planul orizontal, acelaşi punct a, a a 1 , iar pe planul vertical [V 1 ], punctul a 1 ’. Se observă că punctul A are aceeaşi cotă în noul sistem (a x1 a 1 ’ = a x a’ = z), iar depărtarea modificată (a 1 a x1 aa x ), raportată la planul vertical de proiecţie [V 1 ]. Pentru realizarea schimbării de plan vertical pentru punctul A(a,a’), în epură (fig.6.1, b), se trasează noua linie de pământ O 1 x 1 , se duce linia de ordine din proiecţia orizontală a, perpendiculară pe O 1 x 1 până în a 1x şi se prelungeşte cu o distanţă egal ă cu cota punctului, obţinând proiecţia a 1 ’. x O [H] [V] z y A a) b) x O a' a=a 1 a' O 1 x 1 a 1 ' a x a 1x z [V 1 ] a 1x a=a 1 a 1 ' O 1 x 1 a x z z z Fig.6.1 Reprezentarea schimbării de plan vert ical de proiecţie pentru punctul A(a,a’) : a) în spaţiu ; b) în epură
Transcript
METODELE GEOMETRIEI DESCRIPTIVE
75
6. METODELE GEOMETRIEI DESCRIPTIVE
Prin metodele geometriei descriptive se realizează modificarea proiecţiilor elementelor geometrice din poziţiile date în alte poziţii, particulare faţă de planele de proiecţie, poziţii în care dreptele, figurile geometrice sau unghiurile apar în adevărată mărime. Aceste transformări pot fi făcute în două moduri : - modificând sistemul de referinţă, adică schimbând poziţia planelor de proiecţie şi lăsând pe loc elementul geometric proiectat; - rotind elementul geometric şi lăsând neschimbate planele de proiecţie. Metodele geometriei descriptive, de transformare a proiecţiilor elementelor geometrice, studiate în continuare sunt : - metoda schimbării planelor de proiecţie; - metoda rotaţiei; - metoda rabaterii.
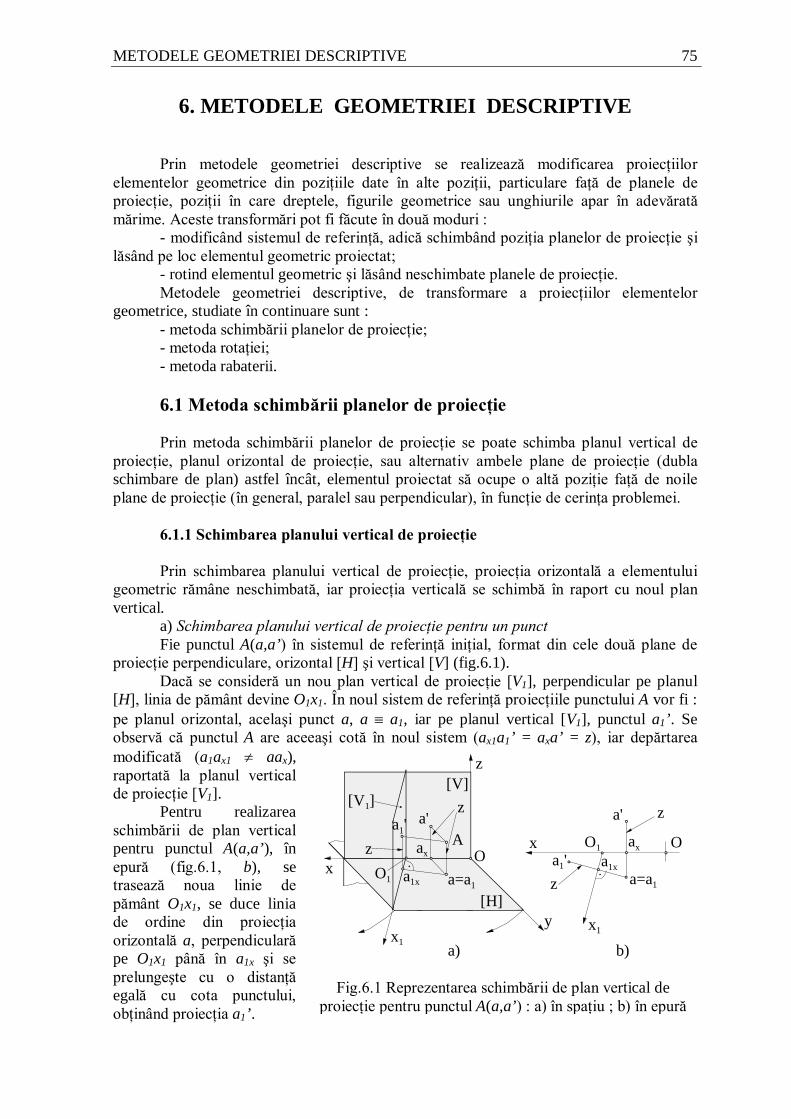
6.1 Metoda schimbării planelor de proiecţie Prin metoda schimbării planelor de proiecţie se poate schimba planul vertical de proiecţie, planul orizontal de proiecţie, sau alternativ ambele plane de proiecţie (dubla schimbare de plan) astfel încât, elementul proiectat să ocupe o altă poziţie faţă de noile plane de proiecţie (în general, paralel sau perpendicular), în funcţie de cerinţa problemei. 6.1.1 Schimbarea planului vertical de proiecţie Prin schimbarea planului vertical de proiecţie, proiecţia orizontală a elementului geometric rămâne neschimbată, iar proiecţia verticală se schimbă în raport cu noul plan vertical. a) Schimbarea planului vertical de proiecţie pentru un punct Fie punctul A(a,a’) în sistemul de referinţă iniţial, format din cele două plane de proiecţie perpendiculare, orizontal [H] şi vertical [V] (fig.6.1). Dacă se consideră un nou plan vertical de proiecţie [V1], perpendicular pe planul [H], linia de pământ devine O1x1. În noul sistem de referinţă proiecţiile punctului A vor fi : pe planul orizontal, acelaşi punct a, a a1, iar pe planul vertical [V1], punctul a1’. Se observă că punctul A are aceeaşi cotă în noul sistem (ax1a1’ = axa’ = z), iar depărtarea modificată (a1ax1 aax), raportată la planul vertical de proiecţie [V1]. Pentru realizarea schimbării de plan vertical pentru punctul A(a,a’), în epură (fig.6.1, b), se trasează noua linie de pământ O1x1, se duce linia de ordine din proiecţia orizontală a, perpendiculară pe O1x1 până în a1x şi se prelungeşte cu o distanţă egală cu cota punctului, obţinând proiecţia a1’.
xO
[H]
[V]z
y
A
a) b)
x Oa'
a=a1
a'
O1
x1
a1'ax
a1x
z[V1]
a1xa=a1
a1'O1
x1
axz
z
z
Fig.6.1 Reprezentarea schimbării de plan vertical de proiecţie pentru punctul A(a,a’) : a) în spaţiu ; b) în epură
GEOMETRIE DESCRIPTIVĂ
76
Orientarea liniei de pământ trebuie astfel făcută încât punctul să-şi păstreze diedrul în care a fost iniţial.
Observaţie : La schimbarea de plan vertical de proiecţie, proiecţia orizontală şi cota unui punct rămân neschimbate, iar proiecţia verticală şi depărtarea punctului se modifică.
b) Schimbarea planului vertical de proiecţie pentru o dreaptă Fie o dreaptă fiind definită de două puncte. A schimba planul vertical de proiecţie
pentru aceasta înseamnă a face această schimbare pentru două puncte ale dreptei. Fiind dat segmentul de dreaptă AB(ab,a’b’), schimbarea de plan vertical se face
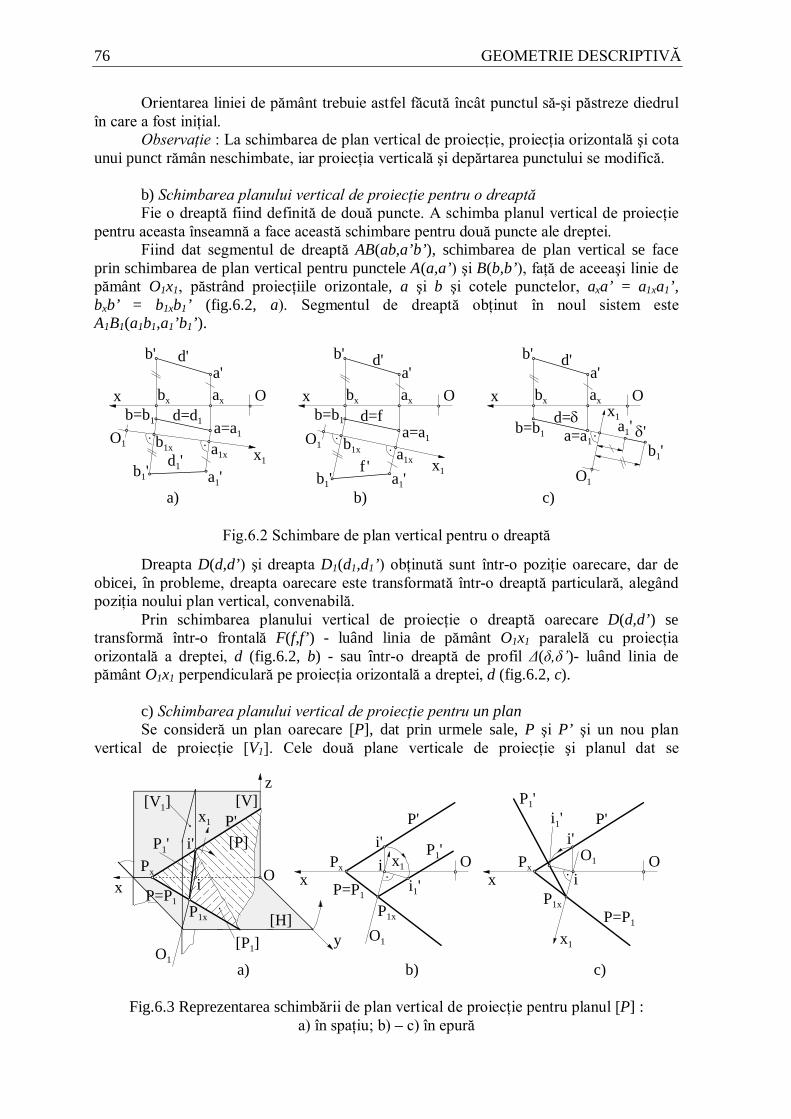
prin schimbarea de plan vertical pentru punctele A(a,a’) şi B(b,b’), faţă de aceeaşi linie de pământ O1x1, păstrând proiecţiile orizontale, a şi b şi cotele punctelor, axa’ = a1xa1’, bxb’ = b1xb1’ (fig.6.2, a). Segmentul de dreaptă obţinut în noul sistem este A1B1(a1b1,a1’b1’).
Dreapta D(d,d’) şi dreapta D1(d1,d1’) obţinută sunt într-o poziţie oarecare, dar de obicei, în probleme, dreapta oarecare este transformată într-o dreaptă particulară, alegând poziţia noului plan vertical, convenabilă.
Prin schimbarea planului vertical de proiecţie o dreaptă oarecare D(d,d’) se transformă într-o frontală F(f,f’) - luând linia de pământ O1x1 paralelă cu proiecţia orizontală a dreptei, d (fig.6.2, b) - sau într-o dreaptă de profil Δ(δ,δ’)- luând linia de pământ O1x1 perpendiculară pe proiecţia orizontală a dreptei, d (fig.6.2, c).
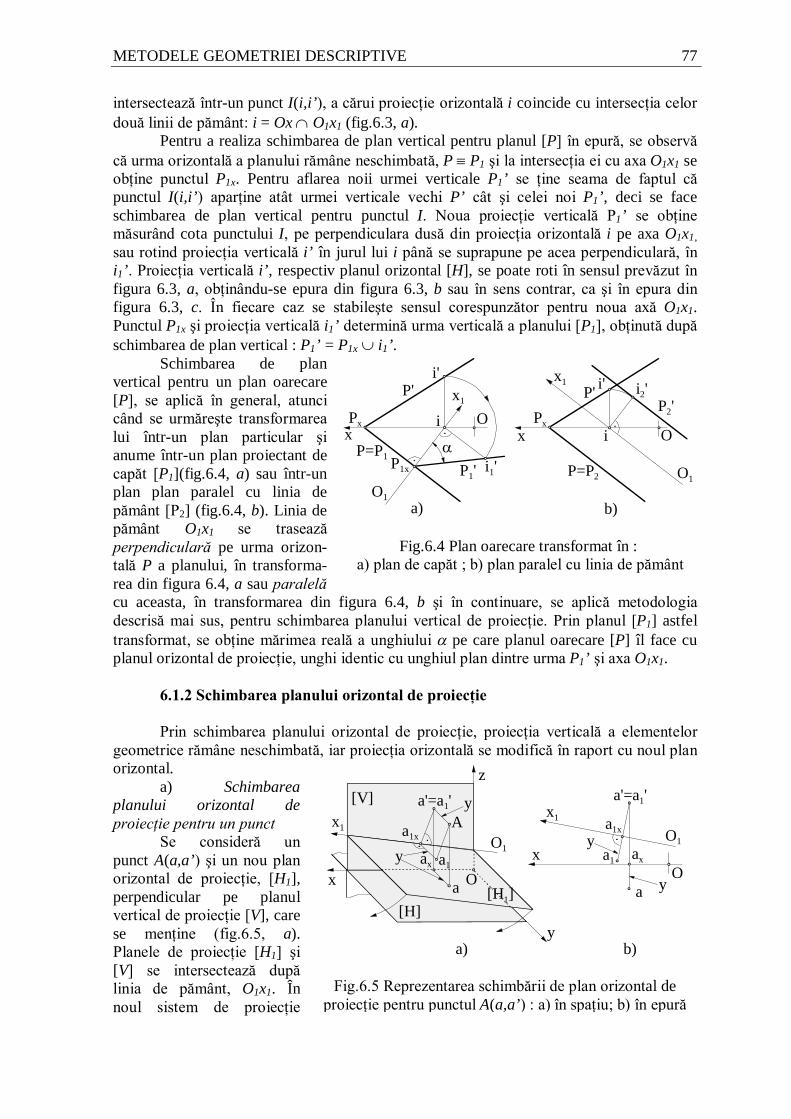
c) Schimbarea planului vertical de proiecţie pentru un plan Se consideră un plan oarecare [P], dat prin urmele sale, P şi P’ şi un nou plan
vertical de proiecţie [V1]. Cele două plane verticale de proiecţie şi planul dat se
x Oa'
a1x
a=a1
a1'
O1x1
ax
b'
bx
b=b1
b1'
b1x
d'
d1'
d=d1
x Oa'
a=a1
ax
b'
bx
b=b1
O1 b1x a1x
b1' a1'f '
d=f
d'
x1
a) b)
x Oa'
a=a1
ax
b'
bx
b=b1
O1
b1'a1' '
d=
d'
x1
c)
Fig.6.2 Schimbare de plan vertical pentru o dreaptă
xO
[H]
[V]z
y
a) b)
xO
P'
O1
x1
[V1]
[P]i'Px
P1x
P=P1i
[P1]
P1'ii'
i1'
P'
P=P1
P1x
Px
O1
x1P1'
c)
xO
i
i'i1' P'
P1x
PxO1
x1
P1'
P=P1
Fig.6.3 Reprezentarea schimbării de plan vertical de proiecţie pentru planul [P] : a) în spaţiu; b) – c) în epură
METODELE GEOMETRIEI DESCRIPTIVE
77
intersectează într-un punct I(i,i’), a cărui proiecţie orizontală i coincide cu intersecţia celor două linii de pământ: i = Ox O1x1 (fig.6.3, a).
Pentru a realiza schimbarea de plan vertical pentru planul [P] în epură, se observă că urma orizontală a planului rămâne neschimbată, P P1 şi la intersecţia ei cu axa O1x1 se obţine punctul P1x. Pentru aflarea noii urmei verticale P1’ se ţine seama de faptul că punctul I(i,i’) aparţine atât urmei verticale vechi P’ cât şi celei noi P1’, deci se face schimbarea de plan vertical pentru punctul I. Noua proiecţie verticală P1’ se obţine măsurând cota punctului I, pe perpendiculara dusă din proiecţia orizontală i pe axa O1x1, sau rotind proiecţia verticală i’ în jurul lui i până se suprapune pe acea perpendiculară, în i1’. Proiecţia verticală i’, respectiv planul orizontal [H], se poate roti în sensul prevăzut în figura 6.3, a, obţinându-se epura din figura 6.3, b sau în sens contrar, ca şi în epura din figura 6.3, c. În fiecare caz se stabileşte sensul corespunzător pentru noua axă O1x1. Punctul P1x şi proiecţia verticală i1’ determină urma verticală a planului [P1], obţinută după schimbarea de plan vertical : P1’ = P1x i1’.
Schimbarea de plan vertical pentru un plan oarecare [P], se aplică în general, atunci când se urmăreşte transformarea lui într-un plan particular şi anume într-un plan proiectant de capăt [P1](fig.6.4, a) sau într-un plan plan paralel cu linia de pământ [P2] (fig.6.4, b). Linia de pământ O1x1 se trasează perpendiculară pe urma orizon-tală P a planului, în transforma-rea din figura 6.4, a sau paralelă cu aceasta, în transformarea din figura 6.4, b şi în continuare, se aplică metodologia descrisă mai sus, pentru schimbarea planului vertical de proiecţie. Prin planul [P1] astfel transformat, se obţine mărimea reală a unghiului pe care planul oarecare [P] îl face cu planul orizontal de proiecţie, unghi identic cu unghiul plan dintre urma P1’ şi axa O1x1.
6.1.2 Schimbarea planului orizontal de proiecţie
Prin schimbarea planului orizontal de proiecţie, proiecţia verticală a elementelor
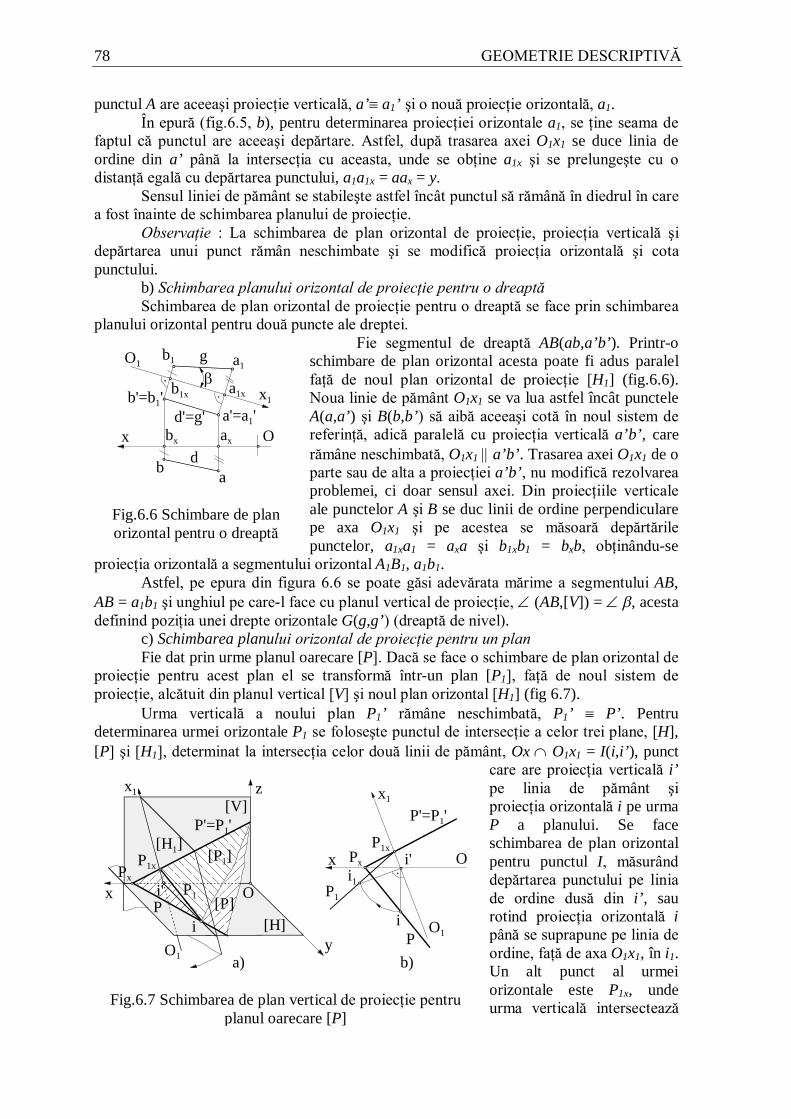
geometrice rămâne neschimbată, iar proiecţia orizontală se modifică în raport cu noul plan orizontal. a) Schimbarea planului orizontal de proiecţie pentru un punct
Se consideră un punct A(a,a’) şi un nou plan orizontal de proiecţie, [H1], perpendicular pe planul vertical de proiecţie [V], care se menţine (fig.6.5, a). Planele de proiecţie [H1] şi [V] se intersectează după linia de pământ, O1x1. În noul sistem de proiecţie
xOi
i'
i1'
P'
P=P1 P1x
Px
O1
x1
P1'
x Oi
i' i2'P'
P=P2
Px
x1
P2'
O1
a) b)
Fig.6.4 Plan oarecare transformat în : a) plan de capăt ; b) plan paralel cu linia de pământ
x
[H]
[V]z
y
A
a) b)
xO
O1
x1
a'=a1'
a1x
ya1x
a1
O1
x1
ax
Oa
ax a1
[H1]
y
a'=a1'
a y
y
Fig.6.5 Reprezentarea schimbării de plan orizontal de proiecţie pentru punctul A(a,a’) : a) în spaţiu; b) în epură
GEOMETRIE DESCRIPTIVĂ
78
punctul A are aceeaşi proiecţie verticală, a’ a1’ şi o nouă proiecţie orizontală, a1. În epură (fig.6.5, b), pentru determinarea proiecţiei orizontale a1, se ţine seama de
faptul că punctul are aceeaşi depărtare. Astfel, după trasarea axei O1x1 se duce linia de ordine din a’ până la intersecţia cu aceasta, unde se obţine a1x şi se prelungeşte cu o distanţă egală cu depărtarea punctului, a1a1x = aax = y.
Sensul liniei de pământ se stabileşte astfel încât punctul să rămână în diedrul în care a fost înainte de schimbarea planului de proiecţie.
Observaţie : La schimbarea de plan orizontal de proiecţie, proiecţia verticală şi depărtarea unui punct rămân neschimbate şi se modifică proiecţia orizontală şi cota punctului.
b) Schimbarea planului orizontal de proiecţie pentru o dreaptă Schimbarea de plan orizontal de proiecţie pentru o dreaptă se face prin schimbarea
planului orizontal pentru două puncte ale dreptei. Fie segmentul de dreaptă AB(ab,a’b’). Printr-o
schimbare de plan orizontal acesta poate fi adus paralel faţă de noul plan orizontal de proiecţie [H1] (fig.6.6). Noua linie de pământ O1x1 se va lua astfel încât punctele A(a,a’) şi B(b,b’) să aibă aceeaşi cotă în noul sistem de referinţă, adică paralelă cu proiecţia verticală a’b’, care rămâne neschimbată, O1x1 a’b’. Trasarea axei O1x1 de o parte sau de alta a proiecţiei a’b’, nu modifică rezolvarea problemei, ci doar sensul axei. Din proiecţiile verticale ale punctelor A şi B se duc linii de ordine perpendiculare pe axa O1x1 şi pe acestea se măsoară depărtările punctelor, a1xa1 = axa şi b1xb1 = bxb, obţinându-se
proiecţia orizontală a segmentului orizontal A1B1, a1b1. Astfel, pe epura din figura 6.6 se poate găsi adevărata mărime a segmentului AB,
AB = a1b1 şi unghiul pe care-l face cu planul vertical de proiecţie, (AB,[V]) = , acesta definind poziţia unei drepte orizontale G(g,g’) (dreaptă de nivel).
c) Schimbarea planului orizontal de proiecţie pentru un plan Fie dat prin urme planul oarecare [P]. Dacă se face o schimbare de plan orizontal de
proiecţie pentru acest plan el se transformă într-un plan [P1], faţă de noul sistem de proiecţie, alcătuit din planul vertical [V] şi noul plan orizontal [H1] (fig 6.7).
Urma verticală a noului plan P1’ rămâne neschimbată, P1’ P’. Pentru determinarea urmei orizontale P1 se foloseşte punctul de intersecţie a celor trei plane, [H], [P] şi [H1], determinat la intersecţia celor două linii de pământ, Ox O1x1 = I(i,i’), punct
care are proiecţia verticală i’ pe linia de pământ şi proiecţia orizontală i pe urma P a planului. Se face schimbarea de plan orizontal pentru punctul I, măsurând depărtarea punctului pe linia de ordine dusă din i’, sau rotind proiecţia orizontală i până se suprapune pe linia de ordine, faţă de axa O1x1, în i1. Un alt punct al urmei orizontale este P1x, unde urma verticală intersectează
x Oa'=a1'
a
ax
b'=b1'
bx
b
O1
b1x a1x
b1 a1g
d
d'=g'x1
Fig.6.6 Schimbare de plan orizontal pentru o dreaptă
x
[H]
[V]z
ya) b)
x O
O1
x1
O
[H1]
i
i'P
P1
P'=P1'
Px
P1x[P1]
[P]
P'=P1'
O1
x1
P1xPx
P
i'
i
i1P1
Fig.6.7 Schimbarea de plan vertical de proiecţie pentru planul oarecare [P]
METODELE GEOMETRIEI DESCRIPTIVE
79
linia de pământ O1x1. Se unesc cele două puncte şi se obţine urma orizontală P1 a planului transformat, P1 = P1x i1. Rotirea proiecţiei i se poate face şi în sens invers celui prezentat în epura din figura 6.7, b, în acest caz modificându-se şi direcţia axei O1x1.
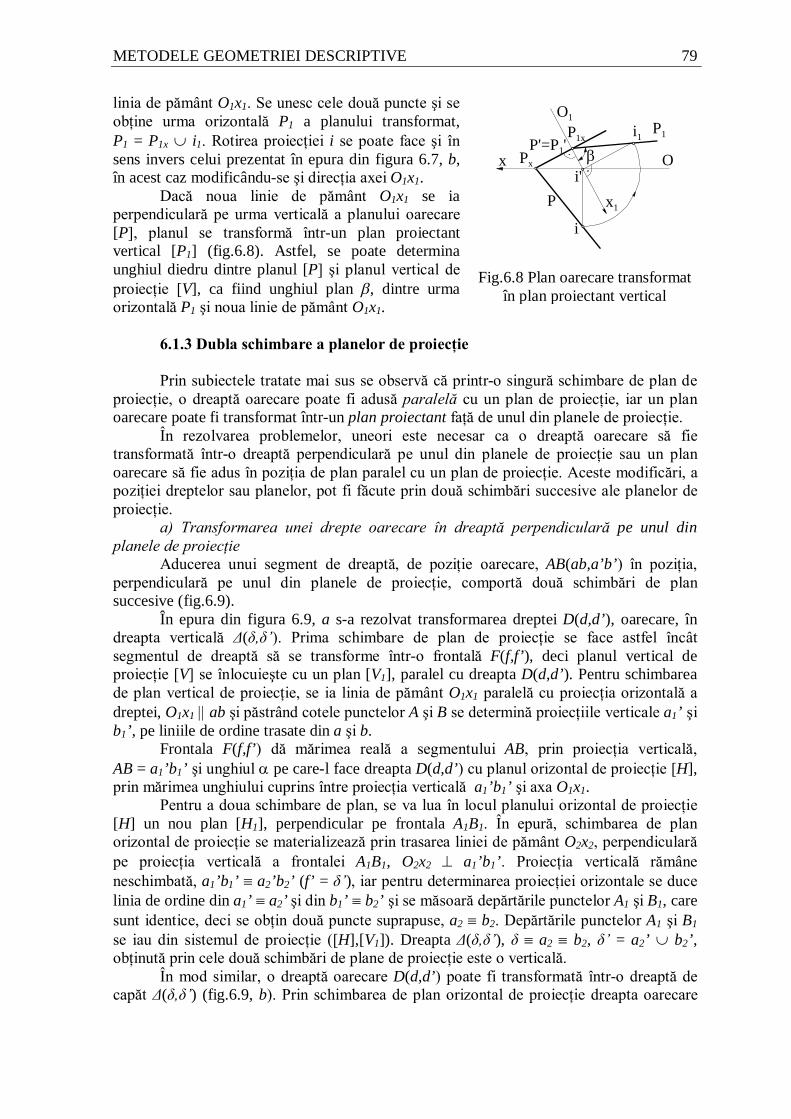
Dacă noua linie de pământ O1x1 se ia perpendiculară pe urma verticală a planului oarecare [P], planul se transformă într-un plan proiectant vertical [P1] (fig.6.8). Astfel, se poate determina unghiul diedru dintre planul [P] şi planul vertical de proiecţie [V], ca fiind unghiul plan , dintre urma orizontală P1 şi noua linie de pământ O1x1.
6.1.3 Dubla schimbare a planelor de proiecţie Prin subiectele tratate mai sus se observă că printr-o singură schimbare de plan de
proiecţie, o dreaptă oarecare poate fi adusă paralelă cu un plan de proiecţie, iar un plan oarecare poate fi transformat într-un plan proiectant faţă de unul din planele de proiecţie.
În rezolvarea problemelor, uneori este necesar ca o dreaptă oarecare să fie transformată într-o dreaptă perpendiculară pe unul din planele de proiecţie sau un plan oarecare să fie adus în poziţia de plan paralel cu un plan de proiecţie. Aceste modificări, a poziţiei dreptelor sau planelor, pot fi făcute prin două schimbări succesive ale planelor de proiecţie.
a) Transformarea unei drepte oarecare în dreaptă perpendiculară pe unul din planele de proiecţie
Aducerea unui segment de dreaptă, de poziţie oarecare, AB(ab,a’b’) în poziţia, perpendiculară pe unul din planele de proiecţie, comportă două schimbări de plan succesive (fig.6.9).
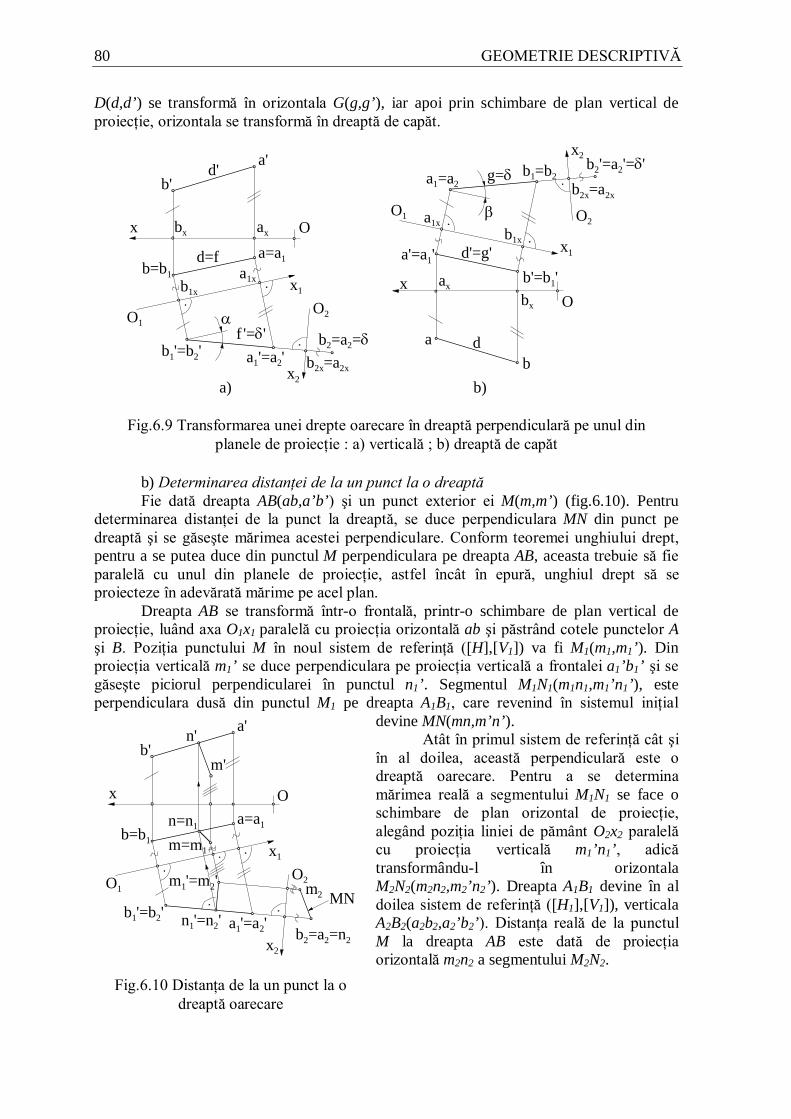
În epura din figura 6.9, a s-a rezolvat transformarea dreptei D(d,d’), oarecare, în dreapta verticală Δ(δ,δ’). Prima schimbare de plan de proiecţie se face astfel încât segmentul de dreaptă să se transforme într-o frontală F(f,f’), deci planul vertical de proiecţie [V] se înlocuieşte cu un plan [V1], paralel cu dreapta D(d,d’). Pentru schimbarea de plan vertical de proiecţie, se ia linia de pământ O1x1 paralelă cu proiecţia orizontală a dreptei, O1x1 ab şi păstrând cotele punctelor A şi B se determină proiecţiile verticale a1’ şi b1’, pe liniile de ordine trasate din a şi b.
Frontala F(f,f’) dă mărimea reală a segmentului AB, prin proiecţia verticală, AB = a1’b1’ şi unghiul pe care-l face dreapta D(d,d’) cu planul orizontal de proiecţie [H], prin mărimea unghiului cuprins între proiecţia verticală a1’b1’ şi axa O1x1.
Pentru a doua schimbare de plan, se va lua în locul planului orizontal de proiecţie [H] un nou plan [H1], perpendicular pe frontala A1B1. În epură, schimbarea de plan orizontal de proiecţie se materializează prin trasarea liniei de pământ O2x2, perpendiculară pe proiecţia verticală a frontalei A1B1, O2x2 a1’b1’. Proiecţia verticală rămâne neschimbată, a1’b1’ a2’b2’ (f’ = δ’), iar pentru determinarea proiecţiei orizontale se duce linia de ordine din a1’ a2’ şi din b1’ b2’ şi se măsoară depărtările punctelor A1 şi B1, care sunt identice, deci se obţin două puncte suprapuse, a2 b2. Depărtările punctelor A1 şi B1 se iau din sistemul de proiecţie ([H],[V1]). Dreapta Δ(δ,δ’), δ a2 b2, δ’ = a2’ b2’, obţinută prin cele două schimbări de plane de proiecţie este o verticală.
În mod similar, o dreaptă oarecare D(d,d’) poate fi transformată într-o dreaptă de capăt Δ(δ,δ’) (fig.6.9, b). Prin schimbarea de plan orizontal de proiecţie dreapta oarecare
x OP'=P1'
O1
x1
P1x
Px
Pi'
i
i1P1
Fig.6.8 Plan oarecare transformat în plan proiectant vertical
GEOMETRIE DESCRIPTIVĂ
80
D(d,d’) se transformă în orizontala G(g,g’), iar apoi prin schimbare de plan vertical de proiecţie, orizontala se transformă în dreaptă de capăt.
b) Determinarea distanţei de la un punct la o dreaptă Fie dată dreapta AB(ab,a’b’) şi un punct exterior ei M(m,m’) (fig.6.10). Pentru
determinarea distanţei de la punct la dreaptă, se duce perpendiculara MN din punct pe dreaptă şi se găseşte mărimea acestei perpendiculare. Conform teoremei unghiului drept, pentru a se putea duce din punctul M perpendiculara pe dreapta AB, aceasta trebuie să fie paralelă cu unul din planele de proiecţie, astfel încât în epură, unghiul drept să se proiecteze în adevărată mărime pe acel plan.
Dreapta AB se transformă într-o frontală, printr-o schimbare de plan vertical de proiecţie, luând axa O1x1 paralelă cu proiecţia orizontală ab şi păstrând cotele punctelor A şi B. Poziţia punctului M în noul sistem de referinţă ([H],[V1]) va fi M1(m1,m1’). Din proiecţia verticală m1’ se duce perpendiculara pe proiecţia verticală a frontalei a1’b1’ şi se găseşte piciorul perpendicularei în punctul n1’. Segmentul M1N1(m1n1,m1’n1’), este perpendiculara dusă din punctul M1 pe dreapta A1B1, care revenind în sistemul iniţial
devine MN(mn,m’n’). Atât în primul sistem de referinţă cât şi
în al doilea, această perpendiculară este o dreaptă oarecare. Pentru a se determina mărimea reală a segmentului M1N1 se face o schimbare de plan orizontal de proiecţie, alegând poziţia liniei de pământ O2x2 paralelă cu proiecţia verticală m1’n1’, adică transformându-l în orizontala M2N2(m2n2,m2’n2’). Dreapta A1B1 devine în al doilea sistem de referinţă ([H1],[V1]), verticala A2B2(a2b2,a2’b2’). Distanţa reală de la punctul M la dreapta AB este dată de proiecţia orizontală m2n2 a segmentului M2N2.
x O
a'
a=a1
ax
b'
bx
b=b1
O1
b1x
a1x
f '='
d=f
d'
x1
a1'=a2'b1'=b2'x2
b2x=a2x
O2
xO
a
a'=a1'ax
b
bx
b'=b1'
O1
b1x
a1x
g=
d'=g'
d
x1
x2
b2=a2=
O2
b2x=a2x
b2'=a2'='b1=b2a1=a2
a) b)
Fig.6.9 Transformarea unei drepte oarecare în dreaptă perpendiculară pe unul din planele de proiecţie : a) verticală ; b) dreaptă de capăt
x O
a'
a=a1
b'
b=b1
O1
x1
a1'=a2'b1'=b2'
x2
O2
b2=a2=n2
m'
m=m1
m1'=m2' m2
n1'=n2'MN
n=n1
n'
Fig.6.10 Distanţa de la un punct la o dreaptă oarecare
METODELE GEOMETRIEI DESCRIPTIVE
81
c) Transformarea unui plan oarecare în plan paralel cu unul din planele de proiecţie
Transformarea unui plan oarecare în plan paralel cu unul din planele de proiecţie se poate face prin două schimbări de plan succesive (fig.6.11).
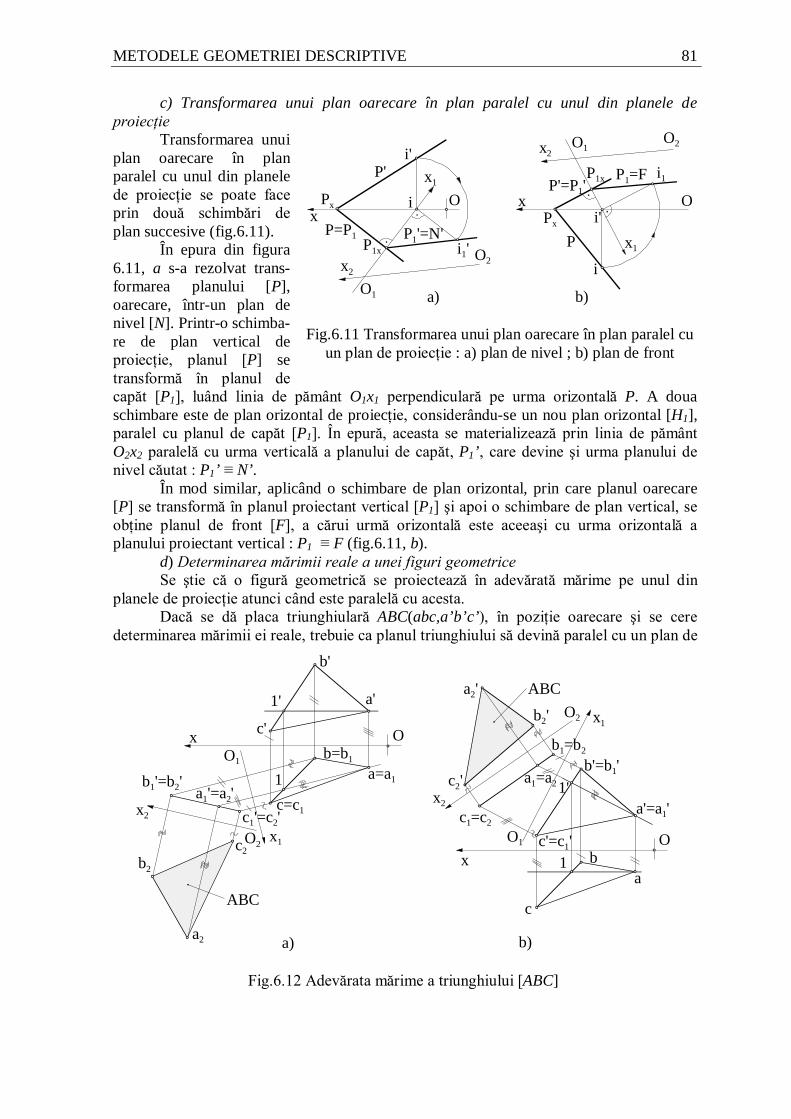
În epura din figura 6.11, a s-a rezolvat trans-formarea planului [P], oarecare, într-un plan de nivel [N]. Printr-o schimba-re de plan vertical de proiecţie, planul [P] se transformă în planul de capăt [P1], luând linia de pământ O1x1 perpendiculară pe urma orizontală P. A doua schimbare este de plan orizontal de proiecţie, considerându-se un nou plan orizontal [H1], paralel cu planul de capăt [P1]. În epură, aceasta se materializează prin linia de pământ O2x2 paralelă cu urma verticală a planului de capăt, P1’, care devine şi urma planului de nivel căutat : P1’ ≡ N’.
În mod similar, aplicând o schimbare de plan orizontal, prin care planul oarecare [P] se transformă în planul proiectant vertical [P1] şi apoi o schimbare de plan vertical, se obţine planul de front [F], a cărui urmă orizontală este aceeaşi cu urma orizontală a planului proiectant vertical : P1 ≡ F (fig.6.11, b).
d) Determinarea mărimii reale a unei figuri geometrice Se ştie că o figură geometrică se proiectează în adevărată mărime pe unul din
planele de proiecţie atunci când este paralelă cu acesta. Dacă se dă placa triunghiulară ABC(abc,a’b’c’), în poziţie oarecare şi se cere
determinarea mărimii ei reale, trebuie ca planul triunghiului să devină paralel cu un plan de
x O
a'
a=a1
b'
b=b1O1
c'
c=c1
1'
1
x1O2
x2
b1'=b2' a1'=a2'c1'=c2'
b2
c2
a2
ABC
xO
a'=a1'
ab
c
1
1'b'=b1'
c'=c1'c1=c2
O1
x1O2
x2
a1=a2
b1=b2
b2'
a2'
c2'
ABC
a) b)
Fig.6.12 Adevărata mărime a triunghiului [ABC]
xOi
i'
i1'
P'
P=P1P1x
Px
O1
x1
P1'=N'
x2O2
x OP'=P1'
O1
x1
P1x
Px
Pi'
i
i1P1=F
O2x2
a) b) Fig.6.11 Transformarea unui plan oarecare în plan paralel cu
un plan de proiecţie : a) plan de nivel ; b) plan de front
GEOMETRIE DESCRIPTIVĂ
82
proiecţie. Pentru aceasta trebuie schimbate succesiv ambele plane de proiecţie, ordinea schimbărilor fiind indiferentă.
În epura din figura 6.12, a, asupra plăcii triunghiulare ABC se aplică o schimbare de plan vertical de proiecţie, astfel încât să devină plan de capăt, [A1B1C1] [V1], iar apoi o schimbare de plan orizontal de proiecţie, devenind plan de nivel, [A2B2C2] [H1].
Pentru realizarea schimbării de plan vertical de proiecţie se foloseşte o orizontală a triunghiului ABC, dusă printr-un vârf al triunghiului, A1(a1,a’1’). Linia de pământ O1x1 se trasează perpendiculară pe proiecţia orizontală a orizontalei, O1x1 a1, astfel încât aceasta se transformă într-o dreaptă de capăt. Din proiecţiile orizontale ale vârfurilor triunghiului a, b şi c se duc linii de ordine şi se măsoară cotele punctelor, obţinând proiecţiile verticale a1’, b1’ şi c1’, coliniare, având în vedere că triunghiul [A1B1C1] este proiectant faţă de planul vertical de proiecţie [V1] (plan de capăt).
La a doua schimbare de plan orizontal de proiecţie, linia de pământ O2x2 se trasează paralelă cu urma verticală a planului triunghiului [A1B1C1], O2x2 a1’b1’c1’ (triunghiul este paralel cu planul [H1]). Din proiecţiile verticale ale vârfurilor triunghiului, a1’, b1’ şi c1’ se trasează linii de ordine şi se măsoară depărtările punctelor din al doilea sistem de referinţă ([H],[V1]), obţinându-se proiecţiile a2, b2 şi c2, care unite dau adevărata mărime a triunghiului, a2b2c2 ABC.
În mod similar, se poate începe cu o schimbare de plan orizontal de proiecţie, ca şi în epura din figura 6.12, b, placa triunghiulară ABC devenind plan proiectant vertical, [A1B1C1] [H1], iar apoi o schimbare de plan vertical de proiecţie, devenind plan de front, [A2B2C2] [V1]. Adevărata mărime a triunghiului rezultă în proiecţia verticală : a2’b2’c2’ ABC
Metoda se poate aplica şi pentru determinarea unghiului real dintre două drepte oarecare, aducând planul celor două drepte paralel cu unul din planele de proiecţie, prin două schimbări succesive de plan.
6.2 Metoda rotaţiei Prin metoda rotaţiei, planele de proiecţie orizontal şi vertical rămân nemodificate ca
poziţie în spaţiu şi se modifică poziţia elementelor geometrice faţă de acestea, prin rotirea lor în jurul unei axe de rotaţie Z, perpendiculară pe unul din planele de proiecţie.
Planele în care se rotesc punctele sunt perpendiculare pe axa de rotaţie, deci sunt paralele cu planele de proiecţie. Punctul în care axa de rotaţie înţeapă un astfel de plan se numeşte centru de rotaţie, se notează cu şi reprezintă centrul arcelor de cerc descrise de puncte în rotaţie. Raza arcelor de cerc este egală cu distanţa de la puncte la centrul de rotaţie, iar când punctele sunt situate pe axa de rotaţie, ele nu se deplasează rămânând propriile lor puncte rotite. Sensul în care se rotesc punctele este indiferent, dar este important ca toate punctele unei figuri geometrice să fie rotite în acelaşi sens şi cu acelaşi unghi.
6.2.1 Rotaţia de nivel La rotaţia de nivel, axa de rotaţie Z(z,z’) este perpendiculară pe planul orizontal de
proiecţie [H] (dreaptă verticală), iar planele în care se rotesc punctele sunt plane paralele cu planul [H] (plane de nivel [N]). Arcele de cerc după care se rotesc punctele se proiectează în adevărată mărime pe planul orizontal de proiecţie.
METODELE GEOMETRIEI DESCRIPTIVE
83
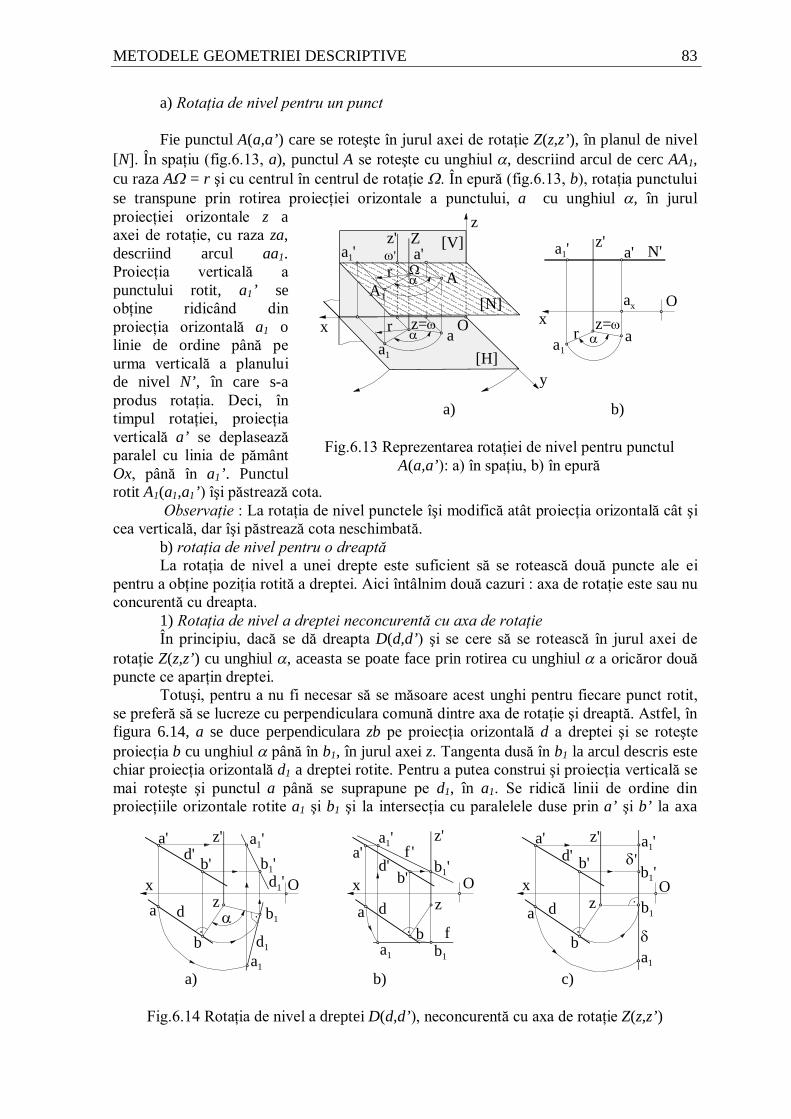
a) Rotaţia de nivel pentru un punct Fie punctul A(a,a’) care se roteşte în jurul axei de rotaţie Z(z,z’), în planul de nivel
[N]. În spaţiu (fig.6.13, a), punctul A se roteşte cu unghiul , descriind arcul de cerc AA1, cu raza A = r şi cu centrul în centrul de rotaţie . În epură (fig.6.13, b), rotaţia punctului se transpune prin rotirea proiecţiei orizontale a punctului, a cu unghiul , în jurul proiecţiei orizontale z a axei de rotaţie, cu raza za, descriind arcul aa1. Proiecţia verticală a punctului rotit, a1’ se obţine ridicând din proiecţia orizontală a1 o linie de ordine până pe urma verticală a planului de nivel N’, în care s-a produs rotaţia. Deci, în timpul rotaţiei, proiecţia verticală a’ se deplasează paralel cu linia de pământ Ox, până în a1’. Punctul rotit A1(a1,a1’) îşi păstrează cota.
Observaţie : La rotaţia de nivel punctele îşi modifică atât proiecţia orizontală cât şi cea verticală, dar îşi păstrează cota neschimbată.
b) rotaţia de nivel pentru o dreaptă La rotaţia de nivel a unei drepte este suficient să se rotească două puncte ale ei
pentru a obţine poziţia rotită a dreptei. Aici întâlnim două cazuri : axa de rotaţie este sau nu concurentă cu dreapta.
1) Rotaţia de nivel a dreptei neconcurentă cu axa de rotaţie În principiu, dacă se dă dreapta D(d,d’) şi se cere să se rotească în jurul axei de
rotaţie Z(z,z’) cu unghiul , aceasta se poate face prin rotirea cu unghiul a oricăror două puncte ce aparţin dreptei.
Totuşi, pentru a nu fi necesar să se măsoare acest unghi pentru fiecare punct rotit, se preferă să se lucreze cu perpendiculara comună dintre axa de rotaţie şi dreaptă. Astfel, în figura 6.14, a se duce perpendiculara zb pe proiecţia orizontală d a dreptei şi se roteşte proiecţia b cu unghiul până în b1, în jurul axei z. Tangenta dusă în b1 la arcul descris este chiar proiecţia orizontală d1 a dreptei rotite. Pentru a putea construi şi proiecţia verticală se mai roteşte şi punctul a până se suprapune pe d1, în a1. Se ridică linii de ordine din proiecţiile orizontale rotite a1 şi b1 şi la intersecţia cu paralelele duse prin a’ şi b’ la axa
x O
[H]
[V]z
y
a) b)
xO
a'
a
a'
A1
z'
[N]
a1'
ax
Ar
ra1
a1'Z
z=
'
r aa1
N'z'
z=
Fig.6.13 Reprezentarea rotaţiei de nivel pentru punctul A(a,a’): a) în spaţiu, b) în epură
x O
a' a1'b'
b
b1'd'
d b1
a1
a
d1
z'
zx O
a'a1'
b'
b
b1'd'
daf
z'
zx O
a' a1'b'
b
b1'd'
d b1
a1
a
z'
z
d1'
a1 b1
f '
'
a) b) c)
Fig.6.14 Rotaţia de nivel a dreptei D(d,d’), neconcurentă cu axa de rotaţie Z(z,z’)
GEOMETRIE DESCRIPTIVĂ
84
Ox, se obţin proiecţiile verticale a1’ şi b1’ care definesc proiecţia verticală d1’ a dreptei rotite D1.
Dacă tangenta la arcul după care se roteşte punctul b se duce astfel încât să fie paralelă cu axa Ox, dreapta rotită va fi o frontală F(f,f’), ca în epura din figura 6.14, b, iar dacă tangenta este perpendiculară pe axa Ox, dreapta rotită va fi o dreaptă de profil Δ(δ,δ’) (fig.6.14, c).
2) Rotaţia de nivel a dreptei concurente cu axa de rotaţie Când axa de rotaţie Z(z,z’) este concurentă cu dreapta dată D(d,d’) în punctul I(i,i’), este suficient să se rotească un singur punct al dreptei, al doilea punct pentru definirea dreptei rotite fiind chiar punctul de concurenţă, care rămâne propriul lui rotit.
În figura 6.15, a pentru determinarea poziţiei rotite cu unghiul a dreptei D(d,d’) se roteşte punctul a în a1, în jurul axei z şi se găseşte proiecţia verticală a1’. Dreapta rotită D1(d1,d1’) este determinată de cele două puncte : punctul de concurenţă I(i,i) şi punctul rotit A1(a1,a1’) : d1 = i a1 şi d1’ = i’ a1’.
Urmând aceeaşi metodologie, în epura din figura 6.15, b dreapta oarecare D(d,d’) s-a transformat în dreapta frontală F(f,f’), rotind proiecţia orizontală a până segmentul a1i a devenit paralel cu axa Ox. De asemenea dreapta oarecare D(d,d’) se poate roti până în poziţia de dreaptă de profil Δ(δ,δ’), ca în epura din figura 6.15, c.
c) Rotaţia de nivel pentru un plan La rotaţia de nivel a unui plan oarecare [P] cu un unghi se întâlnesc două cazuri : 1) Rotaţia de nivel a planului când axa de rotaţie este o verticală oarecare Fiind dat planul oarecare [P] şi axa de rotaţie Z(z,z’) se propune rotirea planului în
jurul acesteia cu unghiul (fig.6.16, a). Se utilizează o orizontală G(g,g’) a planului, dusă prin punctul de intersecţie I(i,i’) dintre plan şi axa de rotaţie, punct care nu-şi schimbă
poziţia în timpul rotaţiei. Din z se duce perpendi-culara zm, pe urma orizontală a planului, P şi se roteşte punctul m cu unghiul cerut până în punctul m1, în jurul axei z. Ducând tangenta în m1 la arcul de cerc descris de punctul m se obţine urma orizontală P1 a planului rotit [P1], iar la intersecţia cu Ox
x O
a' a1'
i'
i=z
d'
d a1a d1
z'
f
d1' f '
'
a) b) c)
x O
a' a1'i'
i=z
d'
d
a1
a
z'
x O
a' a1'i'
i=z
d'
da
z'
a1
Fig.6.15 Rotaţia de nivel a dreptei D(d,d’), concurentă cu axa de rotaţie Z(z,z’)
xO
i=z
i'P'
P
P1xPx
v1'
P1
g1
g'=g1'z'
v'
vg
P1'v1
m
xO
i=z
i'P'
P
P1xPx
P1
g'z'
v'
vg
P1'
mb)a)
m1
m1
Fig.6.16 Rotaţia de nivel a planului când axa de rotaţie este o verticală oarecare
METODELE GEOMETRIEI DESCRIPTIVE
85
punctul P1x. După rotire orizontala G va avea o nouă poziţie G1(g1,g1’). Proiecţia orizontală g1 trece prin punctul i şi este paralelă cu urma P1, iar proiecţia verticală rămâne neschimbată, g1’ g’. Se determină urma verticală a orizontalei G1, V1(v1,v1’), iar urma verticală a planului rotit P1’ va trece prin P1x şi prin v1’, P1’ = Px1 v1’. Dacă tangenta în m1 la arcul de cerc descris de proiecţia m este perpendiculară pe axa Ox, P1 Ox, planul [P1] obţinut este un plan de capăt (fig.6.16, b). În acest caz orizontala G(g,g’) s-a transformat într-o dreaptă de capăt, cu proiecţia verticală în i’, g1’ i’.
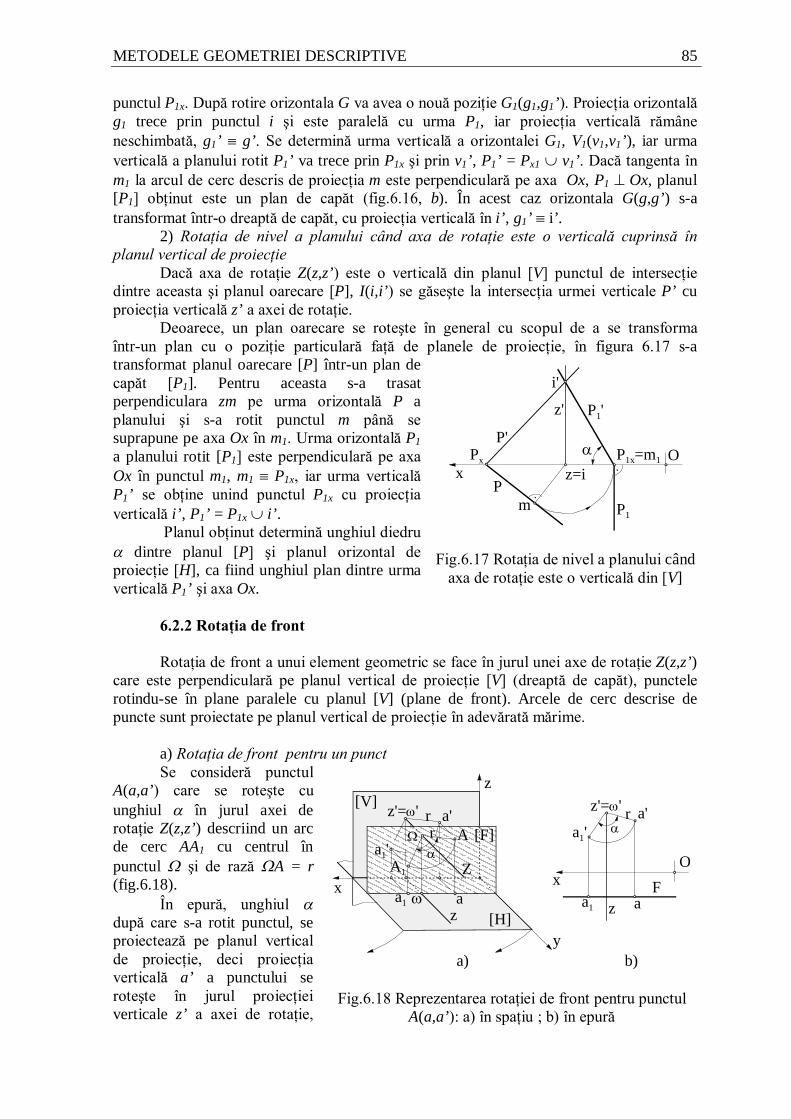
2) Rotaţia de nivel a planului când axa de rotaţie este o verticală cuprinsă în planul vertical de proiecţie
Dacă axa de rotaţie Z(z,z’) este o verticală din planul [V] punctul de intersecţie dintre aceasta şi planul oarecare [P], I(i,i’) se găseşte la intersecţia urmei verticale P’ cu proiecţia verticală z’ a axei de rotaţie.
Deoarece, un plan oarecare se roteşte în general cu scopul de a se transforma într-un plan cu o poziţie particulară faţă de planele de proiecţie, în figura 6.17 s-a transformat planul oarecare [P] într-un plan de capăt [P1]. Pentru aceasta s-a trasat perpendiculara zm pe urma orizontală P a planului şi s-a rotit punctul m până se suprapune pe axa Ox în m1. Urma orizontală P1 a planului rotit [P1] este perpendiculară pe axa Ox în punctul m1, m1 P1x, iar urma verticală P1’ se obţine unind punctul P1x cu proiecţia verticală i’, P1’ = P1x i’.
Planul obţinut determină unghiul diedru dintre planul [P] şi planul orizontal de proiecţie [H], ca fiind unghiul plan dintre urma verticală P1’ şi axa Ox.
6.2.2 Rotaţia de front Rotaţia de front a unui element geometric se face în jurul unei axe de rotaţie Z(z,z’)
care este perpendiculară pe planul vertical de proiecţie [V] (dreaptă de capăt), punctele rotindu-se în plane paralele cu planul [V] (plane de front). Arcele de cerc descrise de puncte sunt proiectate pe planul vertical de proiecţie în adevărată mărime.
a) Rotaţia de front pentru un punct Se consideră punctul
A(a,a’) care se roteşte cu unghiul în jurul axei de rotaţie Z(z,z’) descriind un arc de cerc AA1 cu centrul în punctul şi de rază A = r (fig.6.18).
În epură, unghiul după care s-a rotit punctul, se proiectează pe planul vertical de proiecţie, deci proiecţia verticală a’ a punctului se roteşte în jurul proiecţiei verticale z’ a axei de rotaţie,
xO
z=i
i'
P'
P
P1x=m1Px
P1
z' P1'
m
Fig.6.17 Rotaţia de nivel a planului când
axa de rotaţie este o verticală din [V]
x O
[H]
[V]z
ya) b)
xO
a' a'
z
a1'
a1
Z
z'='
r
aa1a
A
r
A1
a1'r
Z
[F]
z'='
zF
Fig.6.18 Reprezentarea rotaţiei de front pentru punctul A(a,a’): a) în spaţiu ; b) în epură
GEOMETRIE DESCRIPTIVĂ
86
după arcul de cerc de rază ’a’ şi de unghi până ajunge în a1’, proiecţia verticală a punctului A1 rotit. Pentru determinarea proiecţiei orizontale a1 a punctului rotit se duce linie de ordine din a1’ până pe urma orizontală a planului de front F, în care se petrece rotaţia. Deci, proiecţia orizontală a punctului rotit se deplasează paralel cu axa Ox, adică are aceeaşi depărtare.
Observaţie : La rotaţia de front punctele îşi modifică atât proiecţia orizontală, cât şi cea verticală, dar îşi păstrează depărtările neschimbate.
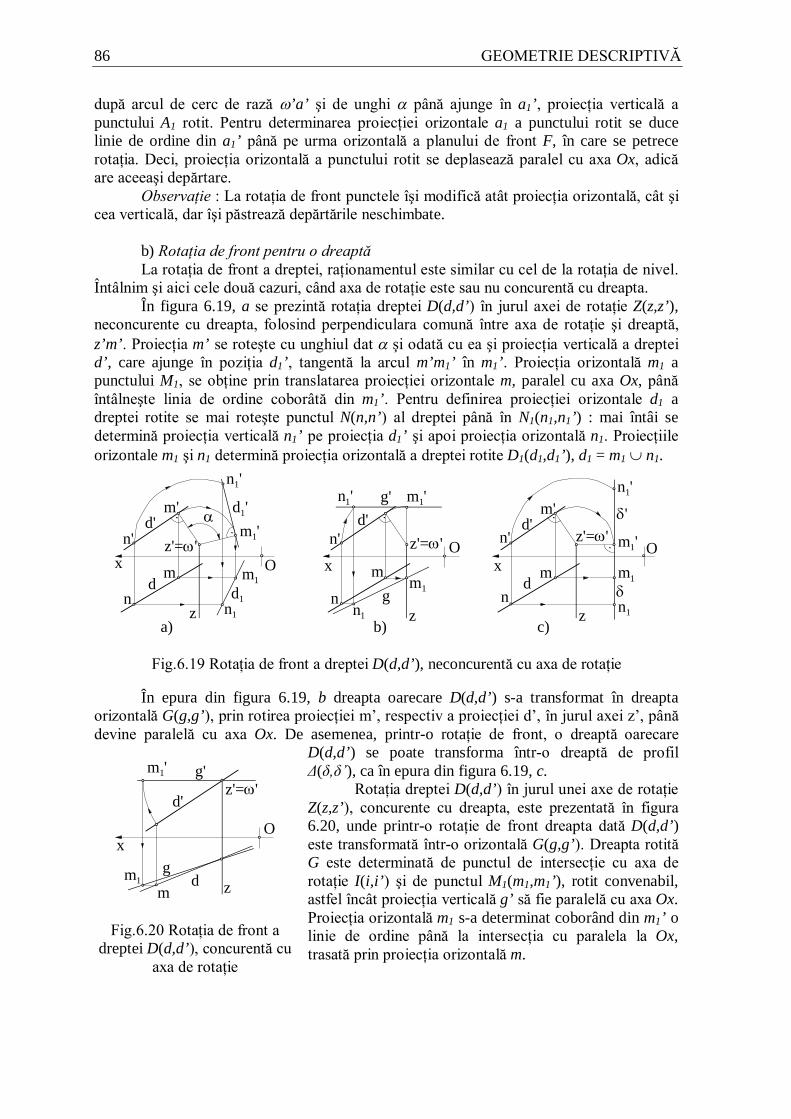
b) Rotaţia de front pentru o dreaptă La rotaţia de front a dreptei, raţionamentul este similar cu cel de la rotaţia de nivel.
Întâlnim şi aici cele două cazuri, când axa de rotaţie este sau nu concurentă cu dreapta. În figura 6.19, a se prezintă rotaţia dreptei D(d,d’) în jurul axei de rotaţie Z(z,z’),
neconcurente cu dreapta, folosind perpendiculara comună între axa de rotaţie şi dreaptă, z’m’. Proiecţia m’ se roteşte cu unghiul dat şi odată cu ea şi proiecţia verticală a dreptei d’, care ajunge în poziţia d1’, tangentă la arcul m’m1’ în m1’. Proiecţia orizontală m1 a punctului M1, se obţine prin translatarea proiecţiei orizontale m, paralel cu axa Ox, până întâlneşte linia de ordine coborâtă din m1’. Pentru definirea proiecţiei orizontale d1 a dreptei rotite se mai roteşte punctul N(n,n’) al dreptei până în N1(n1,n1’) : mai întâi se determină proiecţia verticală n1’ pe proiecţia d1’ şi apoi proiecţia orizontală n1. Proiecţiile orizontale m1 şi n1 determină proiecţia orizontală a dreptei rotite D1(d1,d1’), d1 = m1 n1.
În epura din figura 6.19, b dreapta oarecare D(d,d’) s-a transformat în dreapta orizontală G(g,g’), prin rotirea proiecţiei m’, respectiv a proiecţiei d’, în jurul axei z’, până devine paralelă cu axa Ox. De asemenea, printr-o rotaţie de front, o dreaptă oarecare
D(d,d’) se poate transforma într-o dreaptă de profil Δ(δ,δ’), ca în epura din figura 6.19, c.
Rotaţia dreptei D(d,d’) în jurul unei axe de rotaţie Z(z,z’), concurente cu dreapta, este prezentată în figura 6.20, unde printr-o rotaţie de front dreapta dată D(d,d’) este transformată într-o orizontală G(g,g’). Dreapta rotită G este determinată de punctul de intersecţie cu axa de rotaţie I(i,i’) şi de punctul M1(m1,m1’), rotit convenabil, astfel încât proiecţia verticală g’ să fie paralelă cu axa Ox. Proiecţia orizontală m1 s-a determinat coborând din m1’ o linie de ordine până la intersecţia cu paralela la Ox, trasată prin proiecţia orizontală m.
x O
m'm1'
n'
n1'
d'
d m1md1
z'='
zg
d1'g'
'
a) b) c)
n n1
n'
m'
nn1 z
dm
m1
Ox
z'='m1'
n1'
d'n'
n n1
m m1
Oz'=' m1'
n1'
d'
z
x
Fig.6.19 Rotaţia de front a dreptei D(d,d’), neconcurentă cu axa de rotaţie
m1'
g
g'
zmm1
Ox
z'='d'
d
Fig.6.20 Rotaţia de front a
dreptei D(d,d’), concurentă cu axa de rotaţie
METODELE GEOMETRIEI DESCRIPTIVE
87
c) Rotaţia de front pentru un plan Rotaţia de front a unui plan oarecare poare fi făcută în jurul unei axe de rotaţie
Z(z,z’) care să fie perpendiculară pe planul vertical de proiecţie într-un punct oarecare din spaţiu sau să fie cuprinsă în planul orizontal de proiecţie.
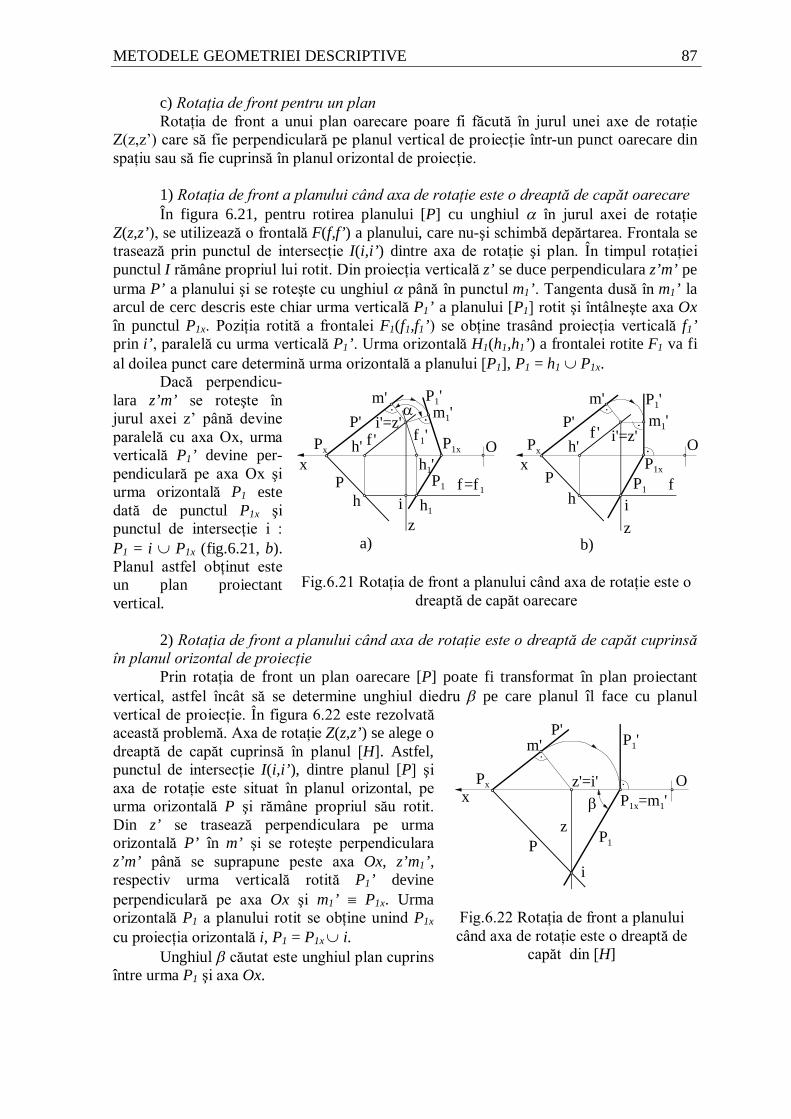
1) Rotaţia de front a planului când axa de rotaţie este o dreaptă de capăt oarecare În figura 6.21, pentru rotirea planului [P] cu unghiul în jurul axei de rotaţie
Z(z,z’), se utilizează o frontală F(f,f’) a planului, care nu-şi schimbă depărtarea. Frontala se trasează prin punctul de intersecţie I(i,i’) dintre axa de rotaţie şi plan. În timpul rotaţiei punctul I rămâne propriul lui rotit. Din proiecţia verticală z’ se duce perpendiculara z’m’ pe urma P’ a planului şi se roteşte cu unghiul până în punctul m1’. Tangenta dusă în m1’ la arcul de cerc descris este chiar urma verticală P1’ a planului [P1] rotit şi întâlneşte axa Ox în punctul P1x. Poziţia rotită a frontalei F1(f1,f1’) se obţine trasând proiecţia verticală f1’ prin i’, paralelă cu urma verticală P1’. Urma orizontală H1(h1,h1’) a frontalei rotite F1 va fi al doilea punct care determină urma orizontală a planului [P1], P1 = h1 P1x.
Dacă perpendicu-lara z’m’ se roteşte în jurul axei z’ până devine paralelă cu axa Ox, urma verticală P1’ devine per-pendiculară pe axa Ox şi urma orizontală P1 este dată de punctul P1x şi punctul de intersecţie i : P1 = i P1x (fig.6.21, b). Planul astfel obţinut este un plan proiectant vertical.
2) Rotaţia de front a planului când axa de rotaţie este o dreaptă de capăt cuprinsă
în planul orizontal de proiecţie Prin rotaţia de front un plan oarecare [P] poate fi transformat în plan proiectant
vertical, astfel încât să se determine unghiul diedru pe care planul îl face cu planul vertical de proiecţie. În figura 6.22 este rezolvată această problemă. Axa de rotaţie Z(z,z’) se alege o dreaptă de capăt cuprinsă în planul [H]. Astfel, punctul de intersecţie I(i,i’), dintre planul [P] şi axa de rotaţie este situat în planul orizontal, pe urma orizontală P şi rămâne propriul său rotit. Din z’ se trasează perpendiculara pe urma orizontală P’ în m’ şi se roteşte perpendiculara z’m’ până se suprapune peste axa Ox, z’m1’, respectiv urma verticală rotită P1’ devine perpendiculară pe axa Ox şi m1’ P1x. Urma orizontală P1 a planului rotit se obţine unind P1x cu proiecţia orizontală i, P1 = P1x
i. Unghiul căutat este unghiul plan cuprins
între urma P1 şi axa Ox.
xO
i'=z'
i
P'
P
P1x Px
h1'P1
f 1'
f=f1
h'
h
f '
P1'
h1
b)a)
m1'
Ox
Px
P1xP
P'
h
h'f '
m' m'm1'
P1'
P1 fi
i'=z'
z z
Fig.6.21 Rotaţia de front a planului când axa de rotaţie este o
dreaptă de capăt oarecare
xOz'=i'
i
P'
P
P1x=m1'Px
P1z
P1'm'
Fig.6.22 Rotaţia de front a planului când axa de rotaţie este o dreaptă de
capăt din [H]
GEOMETRIE DESCRIPTIVĂ
88
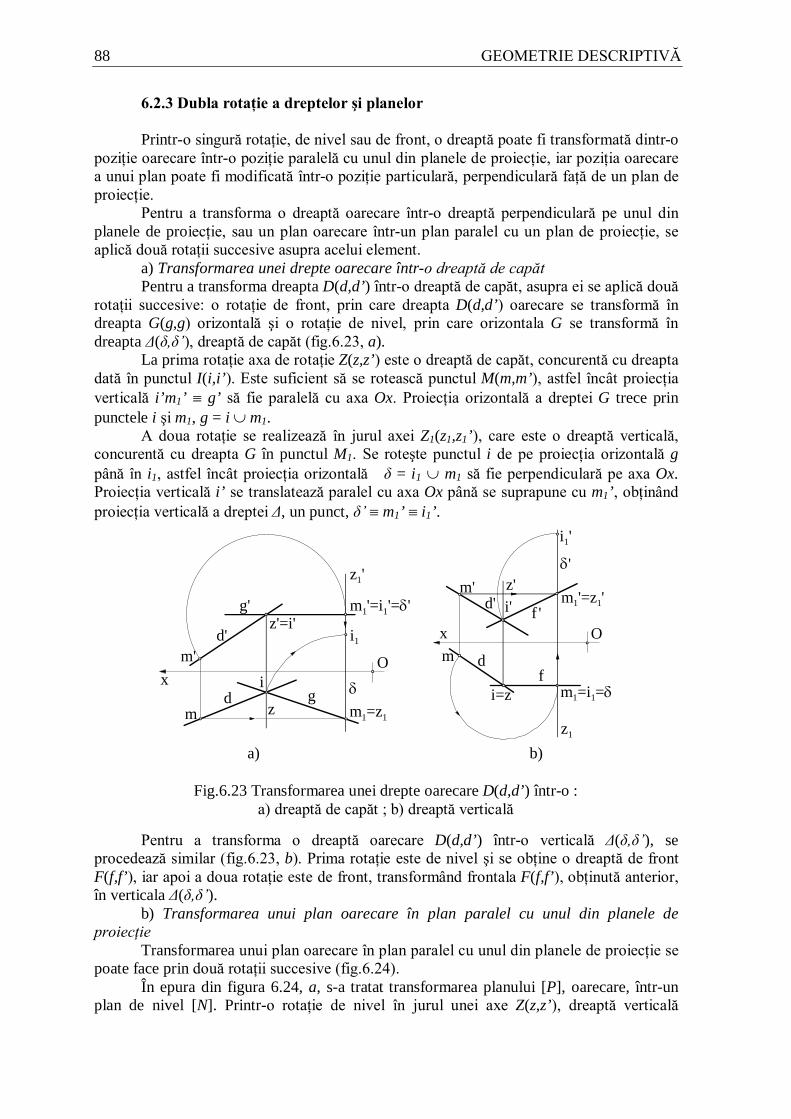
6.2.3 Dubla rotaţie a dreptelor şi planelor Printr-o singură rotaţie, de nivel sau de front, o dreaptă poate fi transformată dintr-o
poziţie oarecare într-o poziţie paralelă cu unul din planele de proiecţie, iar poziţia oarecare a unui plan poate fi modificată într-o poziţie particulară, perpendiculară faţă de un plan de proiecţie.
Pentru a transforma o dreaptă oarecare într-o dreaptă perpendiculară pe unul din planele de proiecţie, sau un plan oarecare într-un plan paralel cu un plan de proiecţie, se aplică două rotaţii succesive asupra acelui element.
a) Transformarea unei drepte oarecare într-o dreaptă de capăt Pentru a transforma dreapta D(d,d’) într-o dreaptă de capăt, asupra ei se aplică două
rotaţii succesive: o rotaţie de front, prin care dreapta D(d,d’) oarecare se transformă în dreapta G(g,g) orizontală şi o rotaţie de nivel, prin care orizontala G se transformă în dreapta Δ(δ,δ’), dreaptă de capăt (fig.6.23, a).
La prima rotaţie axa de rotaţie Z(z,z’) este o dreaptă de capăt, concurentă cu dreapta dată în punctul I(i,i’). Este suficient să se rotească punctul M(m,m’), astfel încât proiecţia verticală i’m1’ g’ să fie paralelă cu axa Ox. Proiecţia orizontală a dreptei G trece prin punctele i şi m1, g = i m1.
A doua rotaţie se realizează în jurul axei Z1(z1,z1’), care este o dreaptă verticală, concurentă cu dreapta G în punctul M1. Se roteşte punctul i de pe proiecţia orizontală g până în i1, astfel încât proiecţia orizontală δ = i1 m1 să fie perpendiculară pe axa Ox. Proiecţia verticală i’ se translatează paralel cu axa Ox până se suprapune cu m1’, obţinând proiecţia verticală a dreptei Δ, un punct, δ’ m1’ i1’.
Pentru a transforma o dreaptă oarecare D(d,d’) într-o verticală Δ(δ,δ’), se procedează similar (fig.6.23, b). Prima rotaţie este de nivel şi se obţine o dreaptă de front F(f,f’), iar apoi a doua rotaţie este de front, transformând frontala F(f,f’), obţinută anterior, în verticala Δ(δ,δ’).
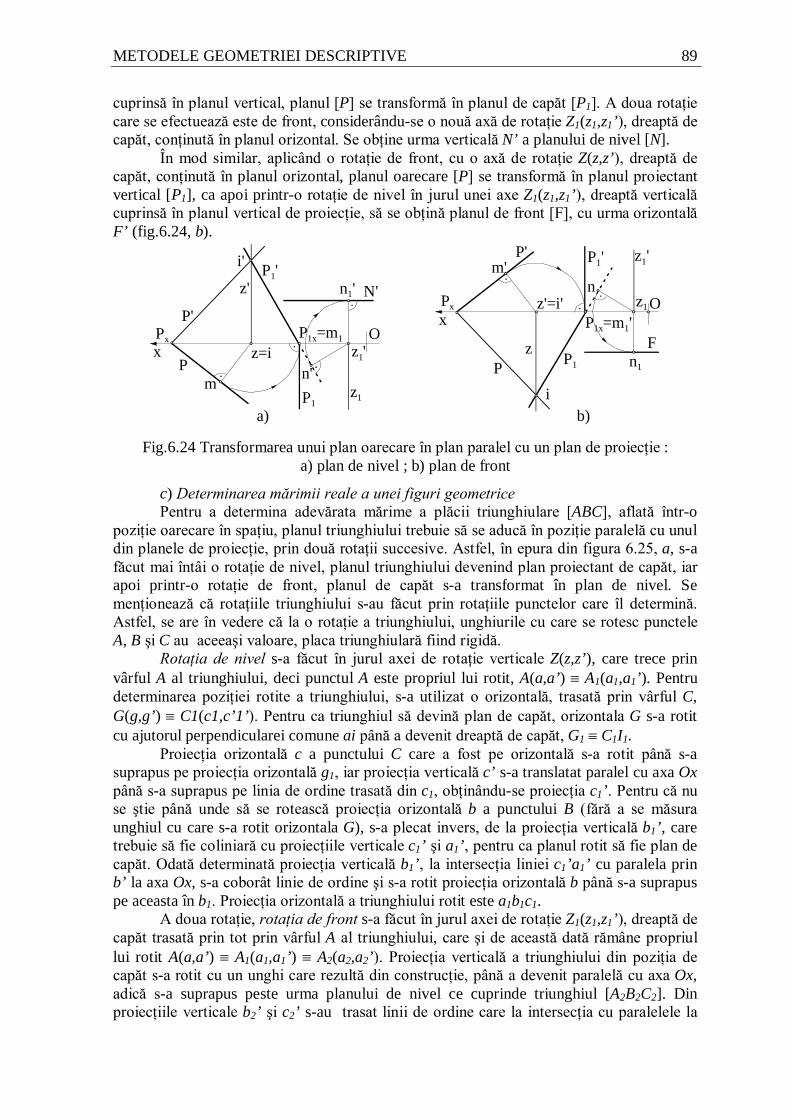
b) Transformarea unui plan oarecare în plan paralel cu unul din planele de proiecţie
Transformarea unui plan oarecare în plan paralel cu unul din planele de proiecţie se poate face prin două rotaţii succesive (fig.6.24).
În epura din figura 6.24, a, s-a tratat transformarea planului [P], oarecare, într-un plan de nivel [N]. Printr-o rotaţie de nivel în jurul unei axe Z(z,z’), dreaptă verticală
m1'=i1'='
g
g'
zm
Ox
z'=i'd'
d
m'i
z1'
m1=z1
i1
f
f 'x O
m'i'
i=z
d'
d
m1=i1=
m
z'
i1'
m1'=z1'
z1
'
a) b)
Fig.6.23 Transformarea unei drepte oarecare D(d,d’) într-o : a) dreaptă de capăt ; b) dreaptă verticală
METODELE GEOMETRIEI DESCRIPTIVE
89
cuprinsă în planul vertical, planul [P] se transformă în planul de capăt [P1]. A doua rotaţie care se efectuează este de front, considerându-se o nouă axă de rotaţie Z1(z1,z1’), dreaptă de capăt, conţinută în planul orizontal. Se obţine urma verticală N’ a planului de nivel [N].
În mod similar, aplicând o rotaţie de front, cu o axă de rotaţie Z(z,z’), dreaptă de capăt, conţinută în planul orizontal, planul oarecare [P] se transformă în planul proiectant vertical [P1], ca apoi printr-o rotaţie de nivel în jurul unei axe Z1(z1,z1’), dreaptă verticală cuprinsă în planul vertical de proiecţie, să se obţină planul de front [F], cu urma orizontală F’ (fig.6.24, b).
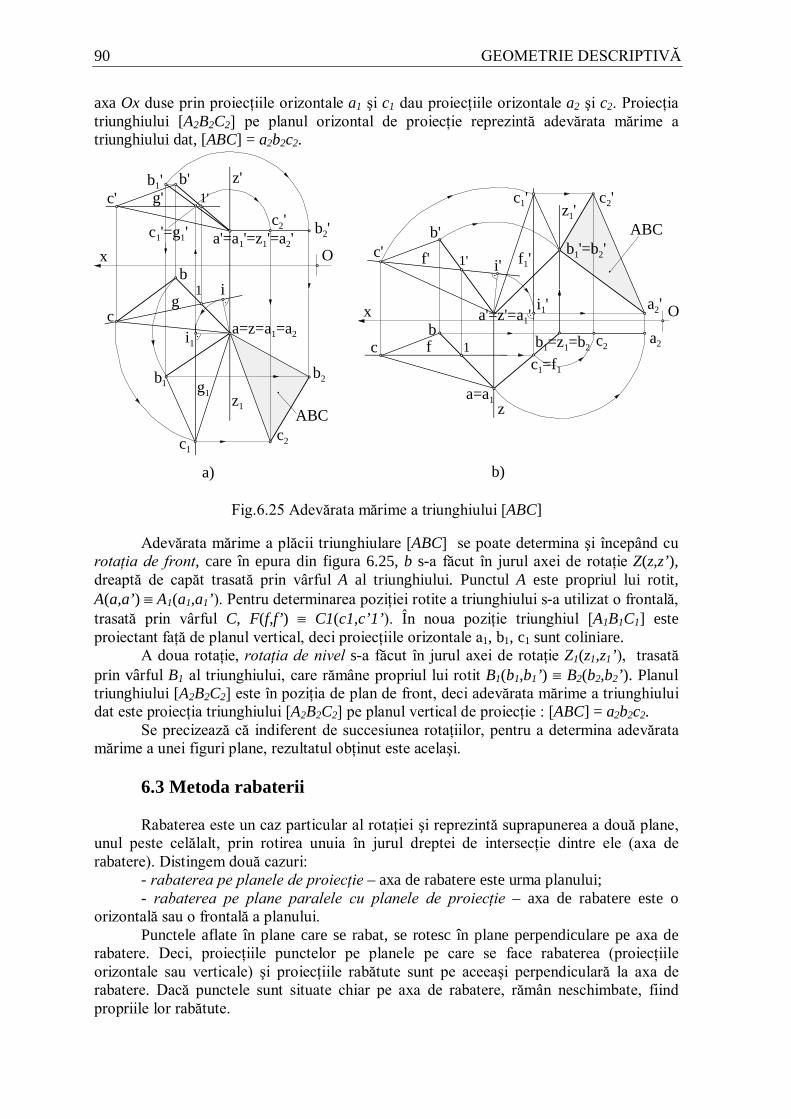
c) Determinarea mărimii reale a unei figuri geometrice Pentru a determina adevărata mărime a plăcii triunghiulare [ABC], aflată într-o
poziţie oarecare în spaţiu, planul triunghiului trebuie să se aducă în poziţie paralelă cu unul din planele de proiecţie, prin două rotaţii succesive. Astfel, în epura din figura 6.25, a, s-a făcut mai întâi o rotaţie de nivel, planul triunghiului devenind plan proiectant de capăt, iar apoi printr-o rotaţie de front, planul de capăt s-a transformat în plan de nivel. Se menţionează că rotaţiile triunghiului s-au făcut prin rotaţiile punctelor care îl determină. Astfel, se are în vedere că la o rotaţie a triunghiului, unghiurile cu care se rotesc punctele A, B şi C au aceeaşi valoare, placa triunghiulară fiind rigidă.
Rotaţia de nivel s-a făcut în jurul axei de rotaţie verticale Z(z,z’), care trece prin vârful A al triunghiului, deci punctul A este propriul lui rotit, A(a,a’) A1(a1,a1’). Pentru determinarea poziţiei rotite a triunghiului, s-a utilizat o orizontală, trasată prin vârful C, G(g,g’) C1(c1,c’1’). Pentru ca triunghiul să devină plan de capăt, orizontala G s-a rotit cu ajutorul perpendicularei comune ai până a devenit dreaptă de capăt, G1 C1I1.
Proiecţia orizontală c a punctului C care a fost pe orizontală s-a rotit până s-a suprapus pe proiecţia orizontală g1, iar proiecţia verticală c’ s-a translatat paralel cu axa Ox până s-a suprapus pe linia de ordine trasată din c1, obţinându-se proiecţia c1’. Pentru că nu se ştie până unde să se rotească proiecţia orizontală b a punctului B (fără a se măsura unghiul cu care s-a rotit orizontala G), s-a plecat invers, de la proiecţia verticală b1’, care trebuie să fie coliniară cu proiecţiile verticale c1’ şi a1’, pentru ca planul rotit să fie plan de capăt. Odată determinată proiecţia verticală b1’, la intersecţia liniei c1’a1’ cu paralela prin b’ la axa Ox, s-a coborât linie de ordine şi s-a rotit proiecţia orizontală b până s-a suprapus pe aceasta în b1. Proiecţia orizontală a triunghiului rotit este a1b1c1.
A doua rotaţie, rotaţia de front s-a făcut în jurul axei de rotaţie Z1(z1,z1’), dreaptă de capăt trasată prin tot prin vârful A al triunghiului, care şi de această dată rămâne propriul lui rotit A(a,a’) A1(a1,a1’) A2(a2,a2’). Proiecţia verticală a triunghiului din poziţia de capăt s-a rotit cu un unghi care rezultă din construcţie, până a devenit paralelă cu axa Ox, adică s-a suprapus peste urma planului de nivel ce cuprinde triunghiul [A2B2C2]. Din proiecţiile verticale b2’ şi c2’ s-au trasat linii de ordine care la intersecţia cu paralelele la
xOz'=i'
i
P'
P
P1x=m1'Px
P1z
P1'm'
F
z1'
z1
n
n1x
Oz=i
i'
P'
P
P1x=m1Px
P1
z'P1'
m
N'
n'
n1'
z1
z1'
a) b)
Fig.6.24 Transformarea unui plan oarecare în plan paralel cu un plan de proiecţie : a) plan de nivel ; b) plan de front
GEOMETRIE DESCRIPTIVĂ
90
axa Ox duse prin proiecţiile orizontale a1 şi c1 dau proiecţiile orizontale a2 şi c2. Proiecţia triunghiului [A2B2C2] pe planul orizontal de proiecţie reprezintă adevărata mărime a triunghiului dat, [ABC] = a2b2c2.
Adevărata mărime a plăcii triunghiulare [ABC] se poate determina şi începând cu rotaţia de front, care în epura din figura 6.25, b s-a făcut în jurul axei de rotaţie Z(z,z’), dreaptă de capăt trasată prin vârful A al triunghiului. Punctul A este propriul lui rotit, A(a,a’) A1(a1,a1’). Pentru determinarea poziţiei rotite a triunghiului s-a utilizat o frontală, trasată prin vârful C, F(f,f’) C1(c1,c’1’). În noua poziţie triunghiul [A1B1C1] este proiectant faţă de planul vertical, deci proiecţiile orizontale a1, b1, c1 sunt coliniare.
A doua rotaţie, rotaţia de nivel s-a făcut în jurul axei de rotaţie Z1(z1,z1’), trasată prin vârful B1 al triunghiului, care rămâne propriul lui rotit B1(b1,b1’) B2(b2,b2’). Planul triunghiului [A2B2C2] este în poziţia de plan de front, deci adevărata mărime a triunghiului dat este proiecţia triunghiului [A2B2C2] pe planul vertical de proiecţie : [ABC] = a2b2c2.
Se precizează că indiferent de succesiunea rotaţiilor, pentru a determina adevărata mărime a unei figuri plane, rezultatul obţinut este acelaşi.
6.3 Metoda rabaterii Rabaterea este un caz particular al rotaţiei şi reprezintă suprapunerea a două plane,
unul peste celălalt, prin rotirea unuia în jurul dreptei de intersecţie dintre ele (axa de rabatere). Distingem două cazuri:
- rabaterea pe planele de proiecţie – axa de rabatere este urma planului; - rabaterea pe plane paralele cu planele de proiecţie – axa de rabatere este o
orizontală sau o frontală a planului. Punctele aflate în plane care se rabat, se rotesc în plane perpendiculare pe axa de
rabatere. Deci, proiecţiile punctelor pe planele pe care se face rabaterea (proiecţiile orizontale sau verticale) şi proiecţiile rabătute sunt pe aceeaşi perpendiculară la axa de rabatere. Dacă punctele sunt situate chiar pe axa de rabatere, rămân neschimbate, fiind propriile lor rabătute.
x O
b'
b
c'
c
1'
1
b2'c2'
b2b1
i
i1
c1
b1'
a'=a1'=z1'=a2'
c2
a=z=a1=a2
g'
g
ABC
z'
z1
g1
c1'=g1'
a) b)
x O
b'
b
c'
c
1'
1
b1'=b2'
a2b1=z1=b2
z
f'
f
i'
i1'
c1=f1
a=a1
a'=z'=a1'
f1'
z1'c2'
c2
c1'
a2'
ABC
Fig.6.25 Adevărata mărime a triunghiului [ABC]
METODELE GEOMETRIEI DESCRIPTIVE
91
6.3.1 Rabaterea unui plan oarecare pe planul orizontal de proiecţie Rabaterea unui plan oarecare pe planul orizontal de proiecţie se face prin rotirea
planului în jurul urmei orizontale (axa de rabatere), care rămâne fixă, deci aceasta este o dreaptă a planului rabătut. Pentru ca planul rabătut să fie determinat, este nevoie de încă un punct oarecare din plan, pentru care să se cunoască proiecţia rabătută . Astfel, se deosebesc două cazuri pentru determinarea planului rabătut :
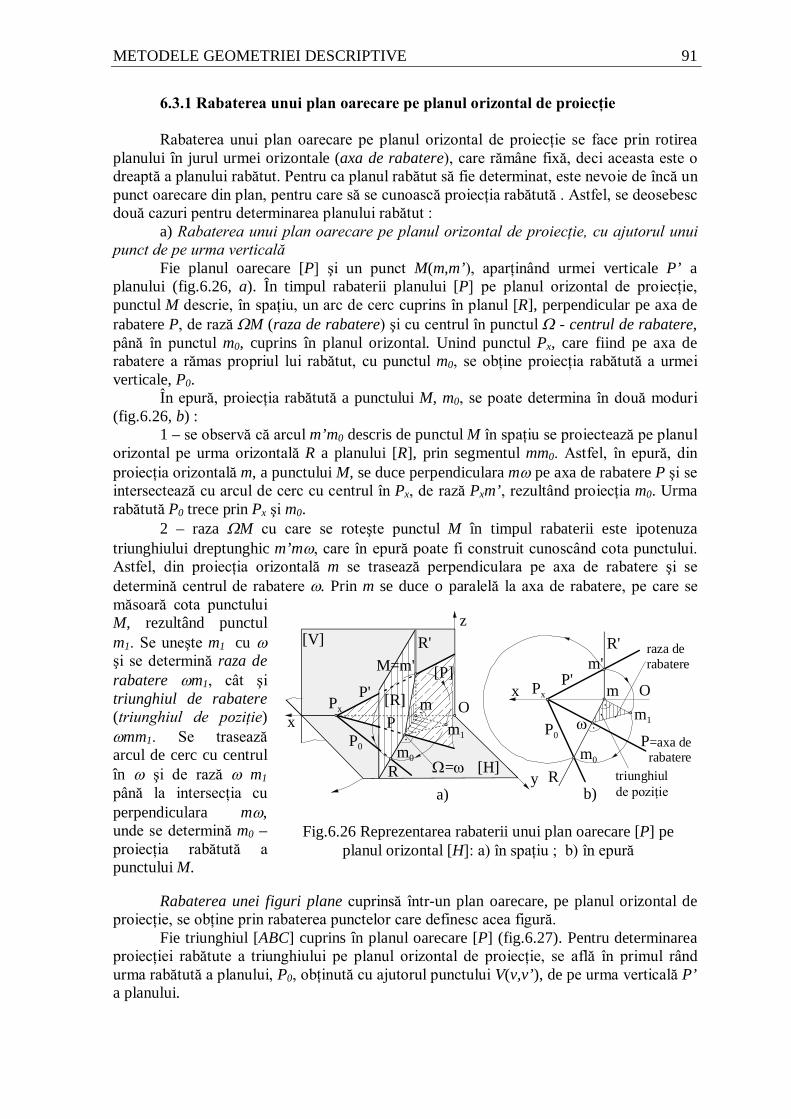
a) Rabaterea unui plan oarecare pe planul orizontal de proiecţie, cu ajutorul unui punct de pe urma verticală
Fie planul oarecare [P] şi un punct M(m,m’), aparţinând urmei verticale P’ a planului (fig.6.26, a). În timpul rabaterii planului [P] pe planul orizontal de proiecţie, punctul M descrie, în spaţiu, un arc de cerc cuprins în planul [R], perpendicular pe axa de rabatere P, de rază M (raza de rabatere) şi cu centrul în punctul - centrul de rabatere, până în punctul m0, cuprins în planul orizontal. Unind punctul Px, care fiind pe axa de rabatere a rămas propriul lui rabătut, cu punctul m0, se obţine proiecţia rabătută a urmei verticale, P0.
În epură, proiecţia rabătută a punctului M, m0, se poate determina în două moduri (fig.6.26, b) :
1 – se observă că arcul m’m0 descris de punctul M în spaţiu se proiectează pe planul orizontal pe urma orizontală R a planului [R], prin segmentul mm0. Astfel, în epură, din proiecţia orizontală m, a punctului M, se duce perpendiculara m pe axa de rabatere P şi se intersectează cu arcul de cerc cu centrul în Px, de rază Pxm’, rezultând proiecţia m0. Urma rabătută P0 trece prin Px şi m0.
2 – raza M cu care se roteşte punctul M în timpul rabaterii este ipotenuza triunghiului dreptunghic m’m, care în epură poate fi construit cunoscând cota punctului. Astfel, din proiecţia orizontală m se trasează perpendiculara pe axa de rabatere şi se determină centrul de rabatere . Prin m se duce o paralelă la axa de rabatere, pe care se măsoară cota punctului M, rezultând punctul m1. Se uneşte m1 cu şi se determină raza de rabatere m1, cât şi triunghiul de rabatere (triunghiul de poziţie) mm1. Se trasează arcul de cerc cu centrul în şi de rază m1 până la intersecţia cu perpendiculara m, unde se determină m0 – proiecţia rabătută a punctului M.
Rabaterea unei figuri plane cuprinsă într-un plan oarecare, pe planul orizontal de
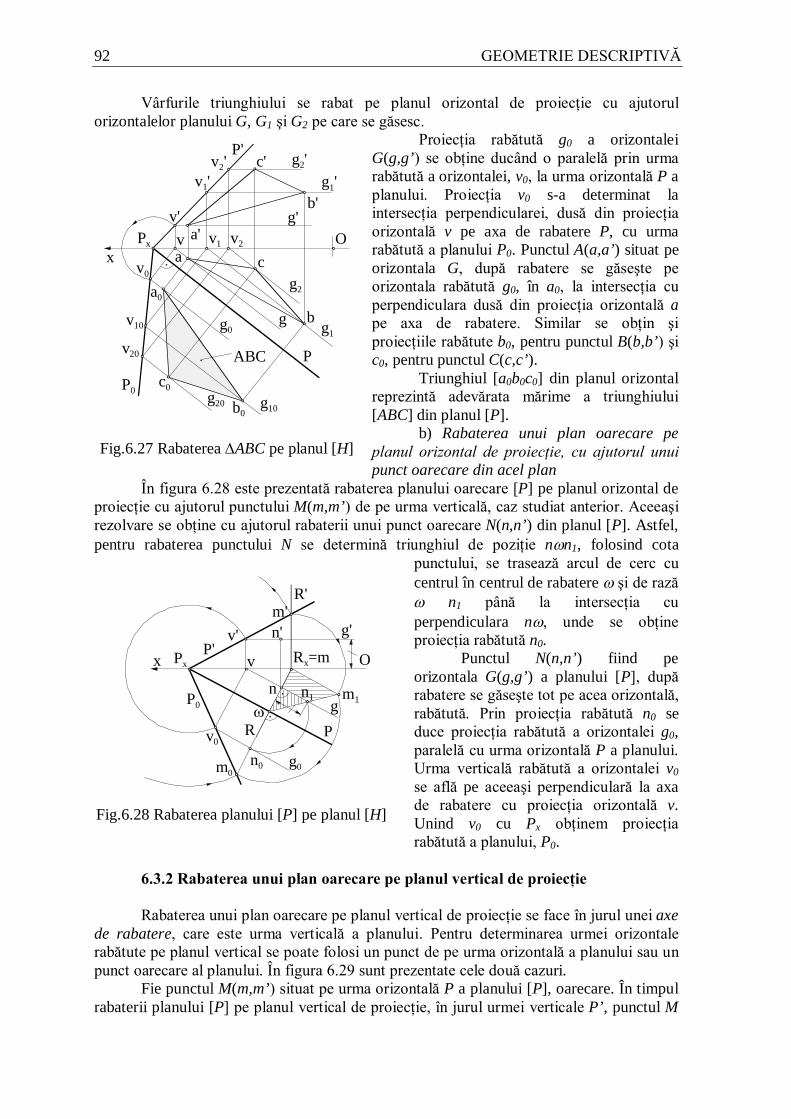
proiecţie, se obţine prin rabaterea punctelor care definesc acea figură. Fie triunghiul [ABC] cuprins în planul oarecare [P] (fig.6.27). Pentru determinarea
proiecţiei rabătute a triunghiului pe planul orizontal de proiecţie, se află în primul rând urma rabătută a planului, P0, obţinută cu ajutorul punctului V(v,v’), de pe urma verticală P’ a planului.
x
[H]
[V]z
ya) b)
x OO
m'R'
Px
Px
P=axa derabatere
M=m'
P0m1
mP'
Rm0
[R]
=
P
[P]
R'
R
P'm
m1
m0
P0
triunghiul de pozitie
raza derabatere
Fig.6.26 Reprezentarea rabaterii unui plan oarecare [P] pe planul orizontal [H]: a) în spaţiu ; b) în epură
triunghiul de poziţie
GEOMETRIE DESCRIPTIVĂ
92
Vârfurile triunghiului se rabat pe planul orizontal de proiecţie cu ajutorul orizontalelor planului G, G1 şi G2 pe care se găsesc.
Proiecţia rabătută g0 a orizontalei G(g,g’) se obţine ducând o paralelă prin urma rabătută a orizontalei, v0, la urma orizontală P a planului. Proiecţia v0 s-a determinat la intersecţia perpendicularei, dusă din proiecţia orizontală v pe axa de rabatere P, cu urma rabătută a planului P0. Punctul A(a,a’) situat pe orizontala G, după rabatere se găseşte pe orizontala rabătută g0, în a0, la intersecţia cu perpendiculara dusă din proiecţia orizontală a pe axa de rabatere. Similar se obţin şi proiecţiile rabătute b0, pentru punctul B(b,b’) şi c0, pentru punctul C(c,c’).
Triunghiul [a0b0c0] din planul orizontal reprezintă adevărata mărime a triunghiului [ABC] din planul [P].
b) Rabaterea unui plan oarecare pe planul orizontal de proiecţie, cu ajutorul unui punct oarecare din acel plan
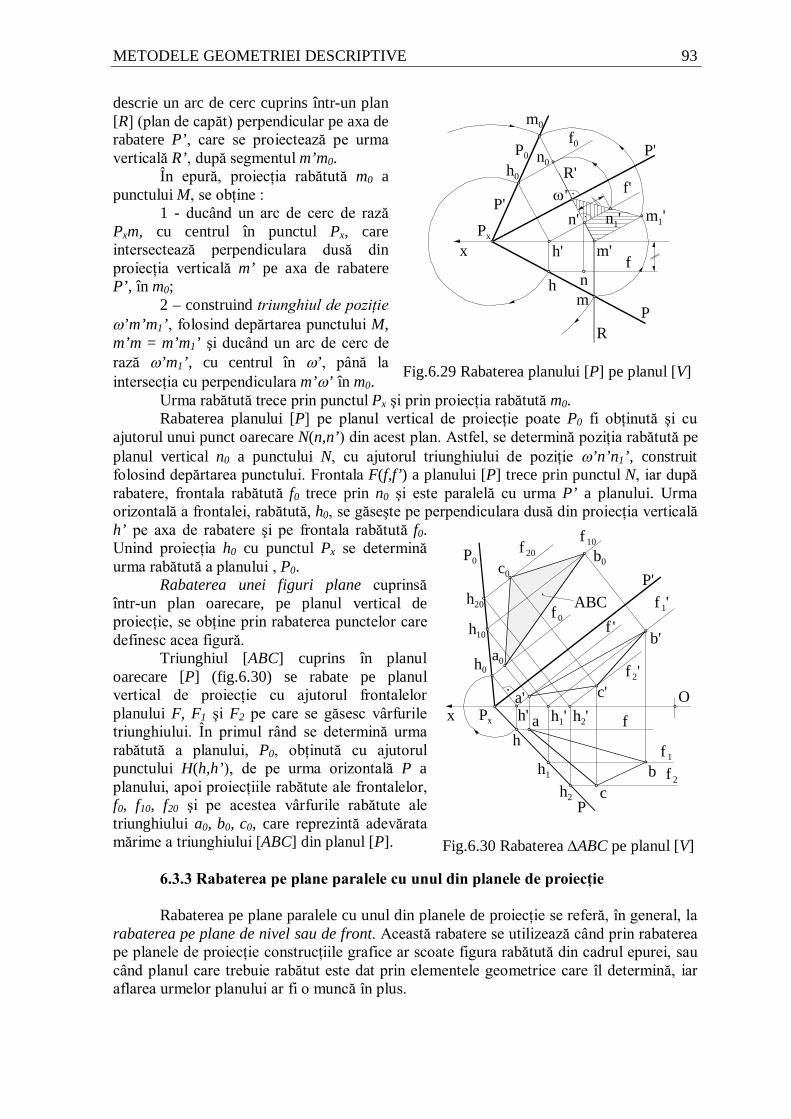
În figura 6.28 este prezentată rabaterea planului oarecare [P] pe planul orizontal de proiecţie cu ajutorul punctului M(m,m’) de pe urma verticală, caz studiat anterior. Aceeaşi rezolvare se obţine cu ajutorul rabaterii unui punct oarecare N(n,n’) din planul [P]. Astfel, pentru rabaterea punctului N se determină triunghiul de poziţie nn1, folosind cota
punctului, se trasează arcul de cerc cu centrul în centrul de rabatere şi de rază n1 până la intersecţia cu perpendiculara n, unde se obţine proiecţia rabătută n0.
Punctul N(n,n’) fiind pe orizontala G(g,g’) a planului [P], după rabatere se găseşte tot pe acea orizontală, rabătută. Prin proiecţia rabătută n0 se duce proiecţia rabătută a orizontalei g0, paralelă cu urma orizontală P a planului. Urma verticală rabătută a orizontalei v0 se află pe aceeaşi perpendiculară la axa de rabatere cu proiecţia orizontală v. Unind v0 cu Px obţinem proiecţia rabătută a planului, P0.
6.3.2 Rabaterea unui plan oarecare pe planul vertical de proiecţie Rabaterea unui plan oarecare pe planul vertical de proiecţie se face în jurul unei axe
de rabatere, care este urma verticală a planului. Pentru determinarea urmei orizontale rabătute pe planul vertical se poate folosi un punct de pe urma orizontală a planului sau un punct oarecare al planului. În figura 6.29 sunt prezentate cele două cazuri.
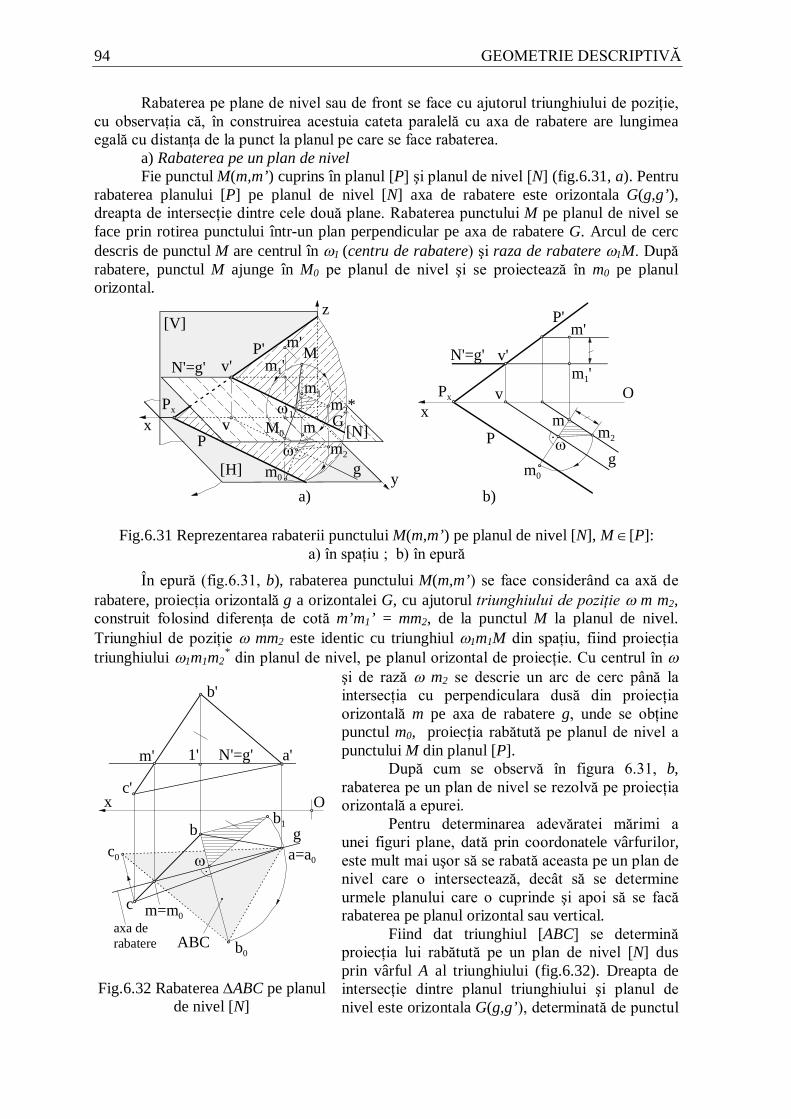
Fie punctul M(m,m’) situat pe urma orizontală P a planului [P], oarecare. În timpul rabaterii planului [P] pe planul vertical de proiecţie, în jurul urmei verticale P’, punctul M
x O
n'Px
R'
R
P'
n m1
v0
P0
m'v'
P
m0
n1
n0
g
g'
g0
Rx=mv
Fig.6.28 Rabaterea planului [P] pe planul [H]
xO
c'P'
aPx
g1
v1'
v'
ABC
b0
a0
c0
g0
v0
v10
v20
g10g20
b
c
P
g
P0
g2
v a' v1 v2
b'g'
v2' g2'g1'
Fig.6.27 Rabaterea ABC pe planul [H]
METODELE GEOMETRIEI DESCRIPTIVE
93
descrie un arc de cerc cuprins într-un plan [R] (plan de capăt) perpendicular pe axa de rabatere P’, care se proiectează pe urma verticală R’, după segmentul m’m0.
În epură, proiecţia rabătută m0 a punctului M, se obţine :
1 - ducând un arc de cerc de rază Pxm, cu centrul în punctul Px, care intersectează perpendiculara dusă din proiecţia verticală m’ pe axa de rabatere P’, în m0;
2 – construind triunghiul de poziţie ’m’m1’, folosind depărtarea punctului M, m’m = m’m1’ şi ducând un arc de cerc de rază ’m1’, cu centrul în ’, până la intersecţia cu perpendiculara m’’ în m0.
Urma rabătută trece prin punctul Px şi prin proiecţia rabătută m0. Rabaterea planului [P] pe planul vertical de proiecţie poate P0 fi obţinută şi cu
ajutorul unui punct oarecare N(n,n’) din acest plan. Astfel, se determină poziţia rabătută pe planul vertical n0 a punctului N, cu ajutorul triunghiului de poziţie ’n’n1’, construit folosind depărtarea punctului. Frontala F(f,f’) a planului [P] trece prin punctul N, iar după rabatere, frontala rabătută f0 trece prin n0 şi este paralelă cu urma P’ a planului. Urma orizontală a frontalei, rabătută, h0, se găseşte pe perpendiculara dusă din proiecţia verticală h’ pe axa de rabatere şi pe frontala rabătută f0. Unind proiecţia h0 cu punctul Px se determină urma rabătută a planului , P0.
Rabaterea unei figuri plane cuprinsă într-un plan oarecare, pe planul vertical de proiecţie, se obţine prin rabaterea punctelor care definesc acea figură.
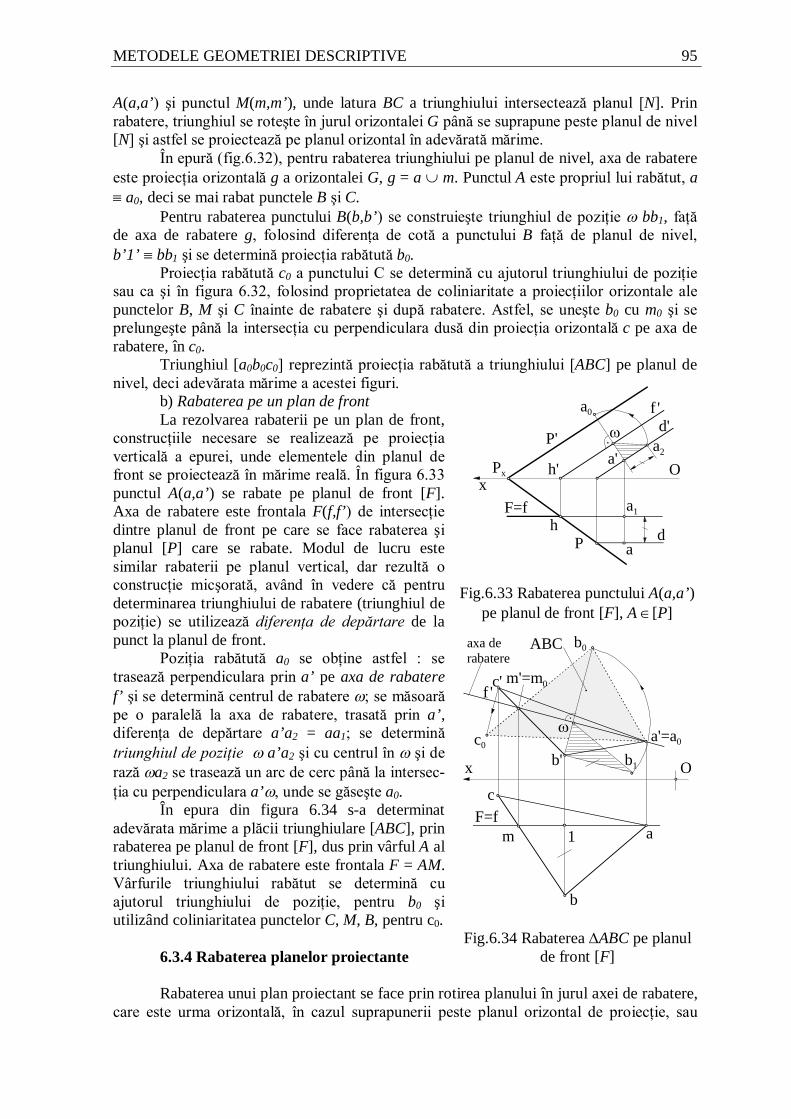
Triunghiul [ABC] cuprins în planul oarecare [P] (fig.6.30) se rabate pe planul vertical de proiecţie cu ajutorul frontalelor planului F, F1 şi F2 pe care se găsesc vârfurile triunghiului. În primul rând se determină urma rabătută a planului, P0, obţinută cu ajutorul punctului H(h,h’), de pe urma orizontală P a planului, apoi proiecţiile rabătute ale frontalelor, f0, f10, f20 şi pe acestea vârfurile rabătute ale triunghiului a0, b0, c0, care reprezintă adevărata mărime a triunghiului [ABC] din planul [P].
6.3.3 Rabaterea pe plane paralele cu unul din planele de proiecţie Rabaterea pe plane paralele cu unul din planele de proiecţie se referă, în general, la
rabaterea pe plane de nivel sau de front. Această rabatere se utilizează când prin rabaterea pe planele de proiecţie construcţiile grafice ar scoate figura rabătută din cadrul epurei, sau când planul care trebuie rabătut este dat prin elementele geometrice care îl determină, iar aflarea urmelor planului ar fi o muncă în plus.
xOc'
P'
aPx
f 1
h1'h'
ABC
b0
a0
c0
f 0
h0
h10
h20
f 10f 20
bc
P
f
P0
f 2
h
a'
h1
h2
b'f '
h2'
f 2'
f 1'
Fig.6.30 Rabaterea ABC pe planul [V]
f
f'
PR
m
Px
x
P'
P'P0
f0
R'
h
h'
h0
m0
m'
n
n''
n0
n1' m1'
Fig.6.29 Rabaterea planului [P] pe planul [V]
GEOMETRIE DESCRIPTIVĂ
94
Rabaterea pe plane de nivel sau de front se face cu ajutorul triunghiului de poziţie, cu observaţia că, în construirea acestuia cateta paralelă cu axa de rabatere are lungimea egală cu distanţa de la punct la planul pe care se face rabaterea.
a) Rabaterea pe un plan de nivel Fie punctul M(m,m’) cuprins în planul [P] şi planul de nivel [N] (fig.6.31, a). Pentru
rabaterea planului [P] pe planul de nivel [N] axa de rabatere este orizontala G(g,g’), dreapta de intersecţie dintre cele două plane. Rabaterea punctului M pe planul de nivel se face prin rotirea punctului într-un plan perpendicular pe axa de rabatere G. Arcul de cerc descris de punctul M are centrul în 1 (centru de rabatere) şi raza de rabatere 1M. După rabatere, punctul M ajunge în M0 pe planul de nivel şi se proiectează în m0 pe planul orizontal.
În epură (fig.6.31, b), rabaterea punctului M(m,m’) se face considerând ca axă de rabatere, proiecţia orizontală g a orizontalei G, cu ajutorul triunghiului de poziţie m m2, construit folosind diferenţa de cotă m’m1’ = mm2, de la punctul M la planul de nivel. Triunghiul de poziţie mm2 este identic cu triunghiul 1m1M din spaţiu, fiind proiecţia triunghiului 1m1m2
* din planul de nivel, pe planul orizontal de proiecţie. Cu centrul în şi de rază m2 se descrie un arc de cerc până la intersecţia cu perpendiculara dusă din proiecţia orizontală m pe axa de rabatere g, unde se obţine punctul m0, proiecţia rabătută pe planul de nivel a punctului M din planul [P].
După cum se observă în figura 6.31, b, rabaterea pe un plan de nivel se rezolvă pe proiecţia orizontală a epurei.
Pentru determinarea adevăratei mărimi a unei figuri plane, dată prin coordonatele vârfurilor, este mult mai uşor să se rabată aceasta pe un plan de nivel care o intersectează, decât să se determine urmele planului care o cuprinde şi apoi să se facă rabaterea pe planul orizontal sau vertical.
Fiind dat triunghiul [ABC] se determină proiecţia lui rabătută pe un plan de nivel [N] dus prin vârful A al triunghiului (fig.6.32). Dreapta de intersecţie dintre planul triunghiului şi planul de nivel este orizontala G(g,g’), determinată de punctul
x
[H]
[V]z
ya) b)
xPx
Px
PG
g
v'
v
N'=g'm1
m2
m'
m2*
Mm1'
m
m0
M0
1
P'
P [N]
O
v'N'=g'
P'm'
m1'v
m0g
mm2
Fig.6.31 Reprezentarea rabaterii punctului M(m,m’) pe planul de nivel [N], M [P]: a) în spaţiu ; b) în epură
x O
a'
a=a0
b'
b
c'
c
ABC
m=m0
1' N'=g'
gb1
axa de rabatere b0
c0
m'
Fig.6.32 Rabaterea ABC pe planul de nivel [N]
METODELE GEOMETRIEI DESCRIPTIVE
95
A(a,a’) şi punctul M(m,m’), unde latura BC a triunghiului intersectează planul [N]. Prin rabatere, triunghiul se roteşte în jurul orizontalei G până se suprapune peste planul de nivel [N] şi astfel se proiectează pe planul orizontal în adevărată mărime.
În epură (fig.6.32), pentru rabaterea triunghiului pe planul de nivel, axa de rabatere este proiecţia orizontală g a orizontalei G, g = a m. Punctul A este propriul lui rabătut, a a0, deci se mai rabat punctele B şi C.
Pentru rabaterea punctului B(b,b’) se construieşte triunghiul de poziţie bb1, faţă de axa de rabatere g, folosind diferenţa de cotă a punctului B faţă de planul de nivel, b’1’ bb1 şi se determină proiecţia rabătută b0.
Proiecţia rabătută c0 a punctului C se determină cu ajutorul triunghiului de poziţie sau ca şi în figura 6.32, folosind proprietatea de coliniaritate a proiecţiilor orizontale ale punctelor B, M şi C înainte de rabatere şi după rabatere. Astfel, se uneşte b0 cu m0 şi se prelungeşte până la intersecţia cu perpendiculara dusă din proiecţia orizontală c pe axa de rabatere, în c0.
Triunghiul [a0b0c0] reprezintă proiecţia rabătută a triunghiului [ABC] pe planul de nivel, deci adevărata mărime a acestei figuri.
b) Rabaterea pe un plan de front La rezolvarea rabaterii pe un plan de front,
construcţiile necesare se realizează pe proiecţia verticală a epurei, unde elementele din planul de front se proiectează în mărime reală. În figura 6.33 punctul A(a,a’) se rabate pe planul de front [F]. Axa de rabatere este frontala F(f,f’) de intersecţie dintre planul de front pe care se face rabaterea şi planul [P] care se rabate. Modul de lucru este similar rabaterii pe planul vertical, dar rezultă o construcţie micşorată, având în vedere că pentru determinarea triunghiului de rabatere (triunghiul de poziţie) se utilizează diferenţa de depărtare de la punct la planul de front. Poziţia rabătută a0 se obţine astfel : se trasează perpendiculara prin a’ pe axa de rabatere f’ şi se determină centrul de rabatere ; se măsoară pe o paralelă la axa de rabatere, trasată prin a’, diferenţa de depărtare a’a2 = aa1; se determină triunghiul de poziţie a’a2 şi cu centrul în şi de rază a2 se trasează un arc de cerc până la intersec-ţia cu perpendiculara a’, unde se găseşte a0. În epura din figura 6.34 s-a determinat adevărata mărime a plăcii triunghiulare [ABC], prin rabaterea pe planul de front [F], dus prin vârful A al triunghiului. Axa de rabatere este frontala F = AM. Vârfurile triunghiului rabătut se determină cu ajutorul triunghiului de poziţie, pentru b0 şi utilizând coliniaritatea punctelor C, M, B, pentru c0.
6.3.4 Rabaterea planelor proiectante Rabaterea unui plan proiectant se face prin rotirea planului în jurul axei de rabatere,
care este urma orizontală, în cazul suprapunerii peste planul orizontal de proiecţie, sau
P
xPx Oh'
F=f
P'd'
a
a0 f '
h
a'
d
a2
a1
Fig.6.33 Rabaterea punctului A(a,a’) pe planul de front [F], A [P]
a
a'=a0
b'
b
c'
c
ABC
m'=m0
1F=f
f '
b1
axa de rabatere
b0
c0
m
Ox
Fig.6.34 Rabaterea ABC pe planul de front [F]
GEOMETRIE DESCRIPTIVĂ
96
urma verticală, în cazul suprapunerii peste planul vertical de proiecţie. Rotirea planelor proiectante într-un sens sau într-altul nu influenţează rabaterea.
Deoarece, planele proiectante au urmele perpendiculare între ele, rabaterea punctelor aflate în aceste plane se face mult mai uşor, urmele planelor rămânând perpendiculare şi după rabaterea pe unul din planele de proiecţie.
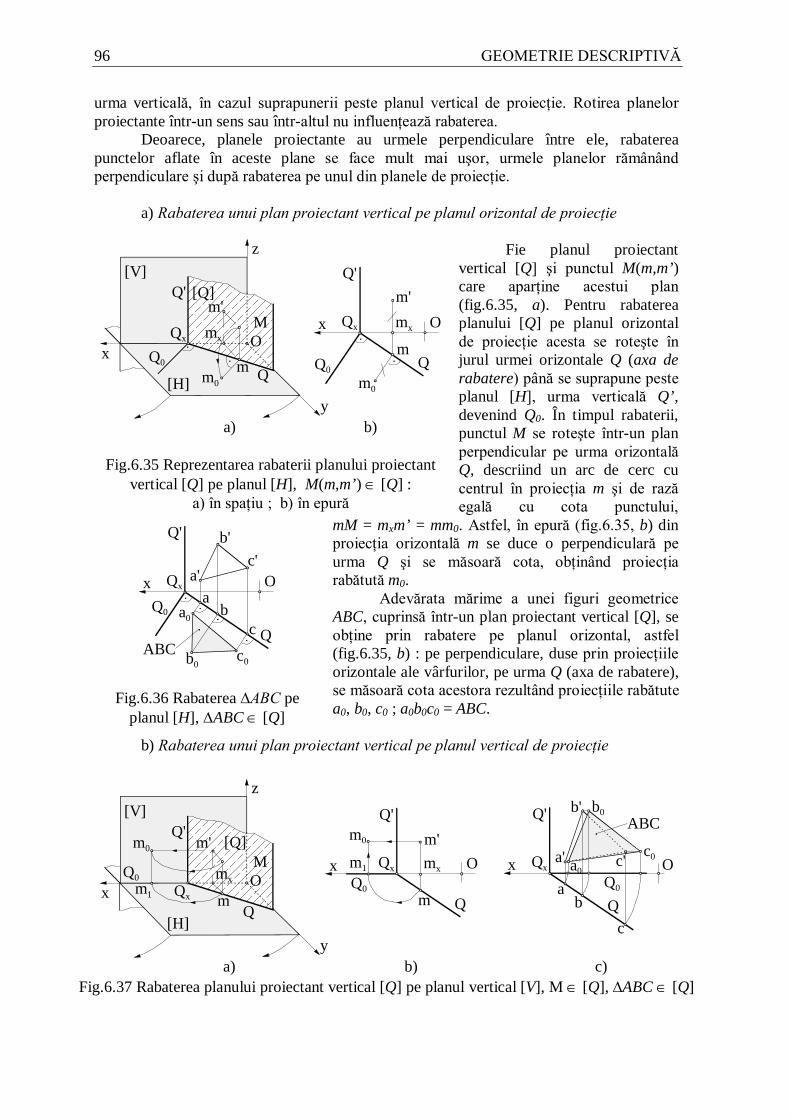
a) Rabaterea unui plan proiectant vertical pe planul orizontal de proiecţie
Fie planul proiectant
vertical [Q] şi punctul M(m,m’) care aparţine acestui plan (fig.6.35, a). Pentru rabaterea planului [Q] pe planul orizontal de proiecţie acesta se roteşte în jurul urmei orizontale Q (axa de rabatere) până se suprapune peste planul [H], urma verticală Q’, devenind Q0. În timpul rabaterii, punctul M se roteşte într-un plan perpendicular pe urma orizontală Q, descriind un arc de cerc cu centrul în proiecţia m şi de rază egală cu cota punctului,
mM = mxm’ = mm0. Astfel, în epură (fig.6.35, b) din proiecţia orizontală m se duce o perpendiculară pe urma Q şi se măsoară cota, obţinând proiecţia rabătută m0.
Adevărata mărime a unei figuri geometrice ABC, cuprinsă într-un plan proiectant vertical [Q], se obţine prin rabatere pe planul orizontal, astfel (fig.6.35, b) : pe perpendiculare, duse prin proiecţiile orizontale ale vârfurilor, pe urma Q (axa de rabatere), se măsoară cota acestora rezultând proiecţiile rabătute a0, b0, c0 ; a0b0c0 = ABC.
b) Rabaterea unui plan proiectant vertical pe planul vertical de proiecţie
Fig.6.37 Rabaterea planului proiectant vertical [Q] pe planul vertical [V], M [Q], ABC [Q]
x O
b'
b
b0
Qx
Q'
Q0
Q
c'a'
a0
c0
c
a
ABC
Fig.6.36 Rabaterea ∆ABC pe
planul [H], ABC [Q]
METODELE GEOMETRIEI DESCRIPTIVE
97
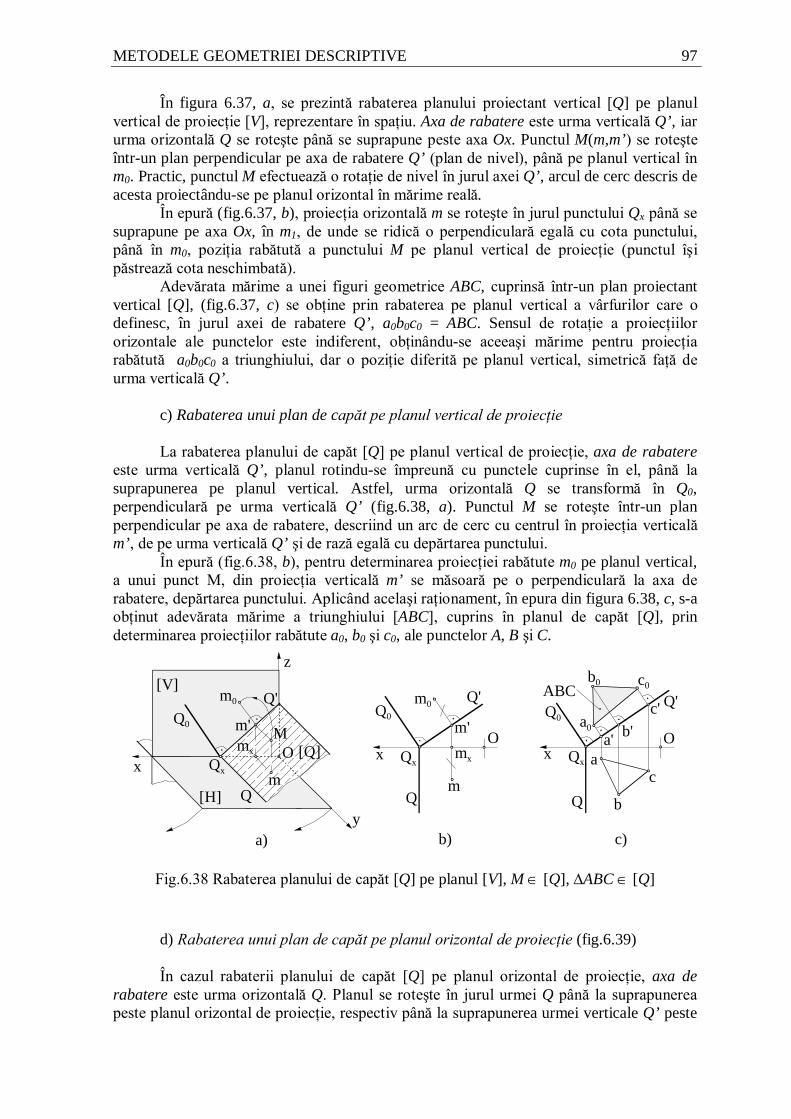
În figura 6.37, a, se prezintă rabaterea planului proiectant vertical [Q] pe planul vertical de proiecţie [V], reprezentare în spaţiu. Axa de rabatere este urma verticală Q’, iar urma orizontală Q se roteşte până se suprapune peste axa Ox. Punctul M(m,m’) se roteşte într-un plan perpendicular pe axa de rabatere Q’ (plan de nivel), până pe planul vertical în m0. Practic, punctul M efectuează o rotaţie de nivel în jurul axei Q’, arcul de cerc descris de acesta proiectându-se pe planul orizontal în mărime reală. În epură (fig.6.37, b), proiecţia orizontală m se roteşte în jurul punctului Qx până se suprapune pe axa Ox, în m1, de unde se ridică o perpendiculară egală cu cota punctului, până în m0, poziţia rabătută a punctului M pe planul vertical de proiecţie (punctul îşi păstrează cota neschimbată).
Adevărata mărime a unei figuri geometrice ABC, cuprinsă într-un plan proiectant vertical [Q], (fig.6.37, c) se obţine prin rabaterea pe planul vertical a vârfurilor care o definesc, în jurul axei de rabatere Q’, a0b0c0 = ABC. Sensul de rotaţie a proiecţiilor orizontale ale punctelor este indiferent, obţinându-se aceeaşi mărime pentru proiecţia rabătută a0b0c0 a triunghiului, dar o poziţie diferită pe planul vertical, simetrică faţă de urma verticală Q’. c) Rabaterea unui plan de capăt pe planul vertical de proiecţie La rabaterea planului de capăt [Q] pe planul vertical de proiecţie, axa de rabatere este urma verticală Q’, planul rotindu-se împreună cu punctele cuprinse în el, până la suprapunerea pe planul vertical. Astfel, urma orizontală Q se transformă în Q0, perpendiculară pe urma verticală Q’ (fig.6.38, a). Punctul M se roteşte într-un plan perpendicular pe axa de rabatere, descriind un arc de cerc cu centrul în proiecţia verticală m’, de pe urma verticală Q’ şi de rază egală cu depărtarea punctului. În epură (fig.6.38, b), pentru determinarea proiecţiei rabătute m0 pe planul vertical, a unui punct M, din proiecţia verticală m’ se măsoară pe o perpendiculară la axa de rabatere, depărtarea punctului. Aplicând acelaşi raţionament, în epura din figura 6.38, c, s-a obţinut adevărata mărime a triunghiului [ABC], cuprins în planul de capăt [Q], prin determinarea proiecţiilor rabătute a0, b0 şi c0, ale punctelor A, B şi C.
d) Rabaterea unui plan de capăt pe planul orizontal de proiecţie (fig.6.39)
În cazul rabaterii planului de capăt [Q] pe planul orizontal de proiecţie, axa de
rabatere este urma orizontală Q. Planul se roteşte în jurul urmei Q până la suprapunerea peste planul orizontal de proiecţie, respectiv până la suprapunerea urmei verticale Q’ peste
xO
[V]z
y
M
a) b)
xO
m'
mQx
mx
m0
Q0
[Q]
Q'
m'mx
m
m0
Qx
Q'Q0
QQ[H]
xOb'
b
b0
Qx
Q'Q0
Q
a'a0
c0
ca
ABCc'
c)
Fig.6.38 Rabaterea planului de capăt [Q] pe planul [V], M [Q], ABC [Q]
GEOMETRIE DESCRIPTIVĂ
98
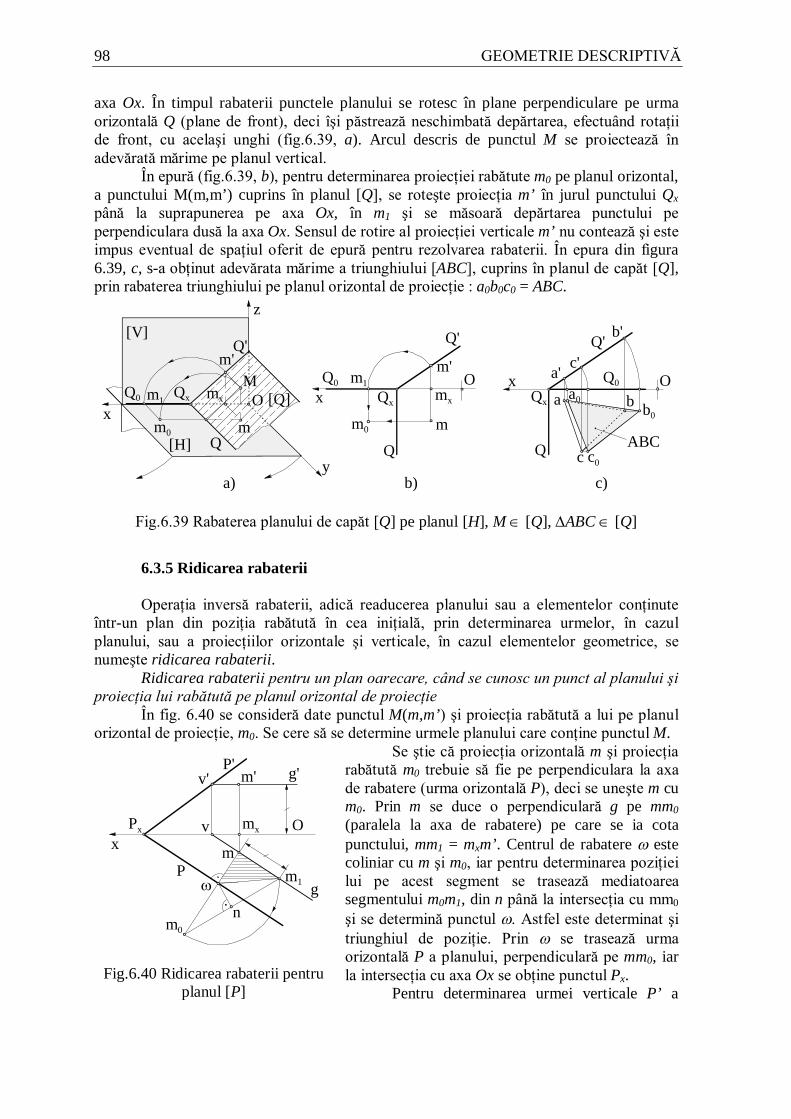
axa Ox. În timpul rabaterii punctele planului se rotesc în plane perpendiculare pe urma orizontală Q (plane de front), deci îşi păstrează neschimbată depărtarea, efectuând rotaţii de front, cu acelaşi unghi (fig.6.39, a). Arcul descris de punctul M se proiectează în adevărată mărime pe planul vertical. În epură (fig.6.39, b), pentru determinarea proiecţiei rabătute m0 pe planul orizontal, a punctului M(m,m’) cuprins în planul [Q], se roteşte proiecţia m’ în jurul punctului Qx până la suprapunerea pe axa Ox, în m1 şi se măsoară depărtarea punctului pe perpendiculara dusă la axa Ox. Sensul de rotire al proiecţiei verticale m’ nu contează şi este impus eventual de spaţiul oferit de epură pentru rezolvarea rabaterii. În epura din figura 6.39, c, s-a obţinut adevărata mărime a triunghiului [ABC], cuprins în planul de capăt [Q], prin rabaterea triunghiului pe planul orizontal de proiecţie : a0b0c0 = ABC.
6.3.5 Ridicarea rabaterii Operaţia inversă rabaterii, adică readucerea planului sau a elementelor conţinute într-un plan din poziţia rabătută în cea iniţială, prin determinarea urmelor, în cazul planului, sau a proiecţiilor orizontale şi verticale, în cazul elementelor geometrice, se numeşte ridicarea rabaterii. Ridicarea rabaterii pentru un plan oarecare, când se cunosc un punct al planului şi proiecţia lui rabătută pe planul orizontal de proiecţie
În fig. 6.40 se consideră date punctul M(m,m’) şi proiecţia rabătută a lui pe planul orizontal de proiecţie, m0. Se cere să se determine urmele planului care conţine punctul M.
Se ştie că proiecţia orizontală m şi proiecţia rabătută m0 trebuie să fie pe perpendiculara la axa de rabatere (urma orizontală P), deci se uneşte m cu m0. Prin m se duce o perpendiculară g pe mm0 (paralela la axa de rabatere) pe care se ia cota punctului, mm1 = mxm’. Centrul de rabatere este coliniar cu m şi m0, iar pentru determinarea poziţiei lui pe acest segment se trasează mediatoarea segmentului m0m1, din n până la intersecţia cu mm0 şi se determină punctul . Astfel este determinat şi triunghiul de poziţie. Prin se trasează urma orizontală P a planului, perpendiculară pe mm0, iar la intersecţia cu axa Ox se obţine punctul Px.
Pentru determinarea urmei verticale P’ a
xPx
P
O
v' g'P'm'
m1
v
m0
g
m
n
mx
Fig.6.40 Ridicarea rabaterii pentru planul [P]
a) b)
xO
m'
mx
mm0
Qx
Q'
Q0
Q
m1 x O
b'
b b0
Qx
Q'
Q0
Q
c'a'
c0c
a
ABC
a0
c)
xO
[V]z
y
Mm'
m
Qx mx
m0
Q0 [Q]
Q'
Q[H]
m1
Fig.6.39 Rabaterea planului de capăt [Q] pe planul [H], M [Q], ABC [Q]
METODELE GEOMETRIEI DESCRIPTIVE
99
planului, se găseşte urma verticală V(v,v’) a orizontalei G(g,g’) a planului care trece prin punctul M. Urma P’ este dată de punctul Px şi de proiecţia verticală v’.
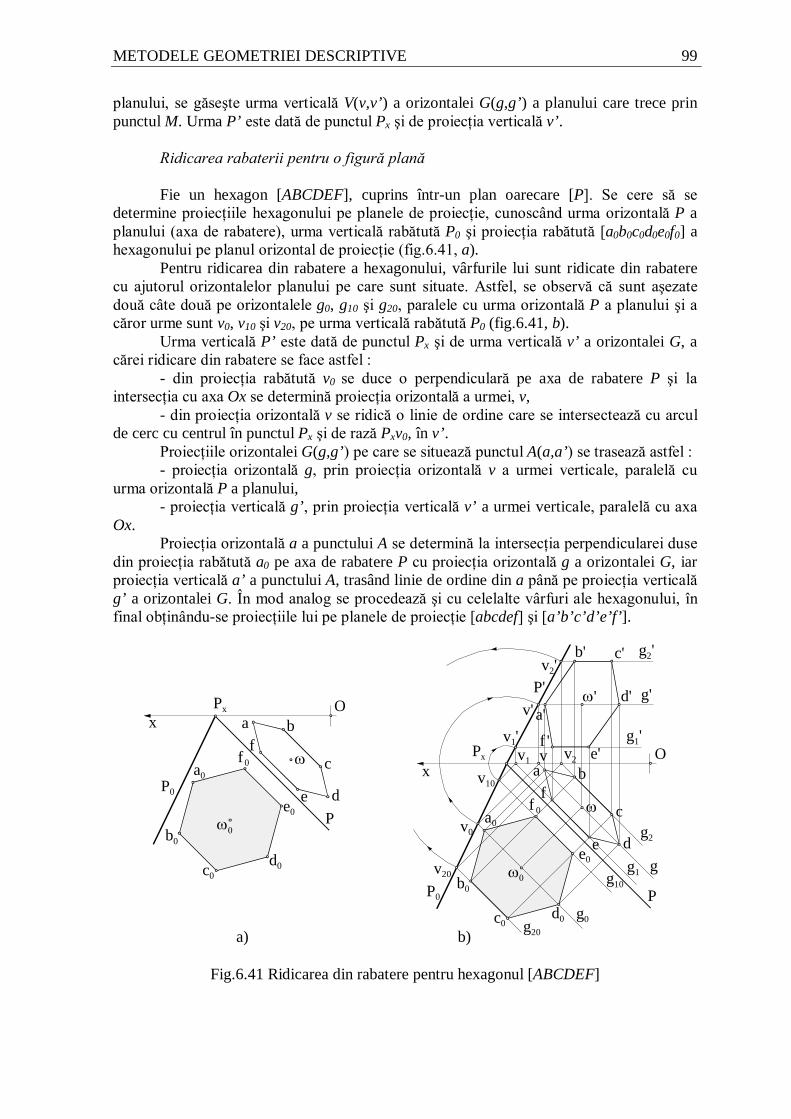
Ridicarea rabaterii pentru o figură plană Fie un hexagon [ABCDEF], cuprins într-un plan oarecare [P]. Se cere să se
determine proiecţiile hexagonului pe planele de proiecţie, cunoscând urma orizontală P a planului (axa de rabatere), urma verticală rabătută P0 şi proiecţia rabătută [a0b0c0d0e0f0] a hexagonului pe planul orizontal de proiecţie (fig.6.41, a).
Pentru ridicarea din rabatere a hexagonului, vârfurile lui sunt ridicate din rabatere cu ajutorul orizontalelor planului pe care sunt situate. Astfel, se observă că sunt aşezate două câte două pe orizontalele g0, g10 şi g20, paralele cu urma orizontală P a planului şi a căror urme sunt v0, v10 şi v20, pe urma verticală rabătută P0 (fig.6.41, b).
Urma verticală P’ este dată de punctul Px şi de urma verticală v’ a orizontalei G, a cărei ridicare din rabatere se face astfel :
- din proiecţia rabătută v0 se duce o perpendiculară pe axa de rabatere P şi la intersecţia cu axa Ox se determină proiecţia orizontală a urmei, v,
- din proiecţia orizontală v se ridică o linie de ordine care se intersectează cu arcul de cerc cu centrul în punctul Px şi de rază Pxv0, în v’.
Proiecţiile orizontalei G(g,g’) pe care se situează punctul A(a,a’) se trasează astfel : - proiecţia orizontală g, prin proiecţia orizontală v a urmei verticale, paralelă cu
urma orizontală P a planului, - proiecţia verticală g’, prin proiecţia verticală v’ a urmei verticale, paralelă cu axa
Ox. Proiecţia orizontală a a punctului A se determină la intersecţia perpendicularei duse
din proiecţia rabătută a0 pe axa de rabatere P cu proiecţia orizontală g a orizontalei G, iar proiecţia verticală a’ a punctului A, trasând linie de ordine din a până pe proiecţia verticală g’ a orizontalei G. În mod analog se procedează şi cu celelalte vârfuri ale hexagonului, în final obţinându-se proiecţiile lui pe planele de proiecţie [abcdef] şi [a’b’c’d’e’f’].
xO
'
a0
Px
P'
P0 P
a b
c
de
f
g
g2
g1g10
g0g20
b0
d0
e0
f 0
c0
a'
b' c'
d'
e'f '
g2'
g'
g1'
v2'
v'
v1'v1 v v2
v10
v0
v20
x
a0P0
P
a b
c
de
f
b0
d0
e0
f 0
c0
Px O
b)a)
Fig.6.41 Ridicarea din rabatere pentru hexagonul [ABCDEF]
GEOMETRIE DESCRIPTIVĂ
100
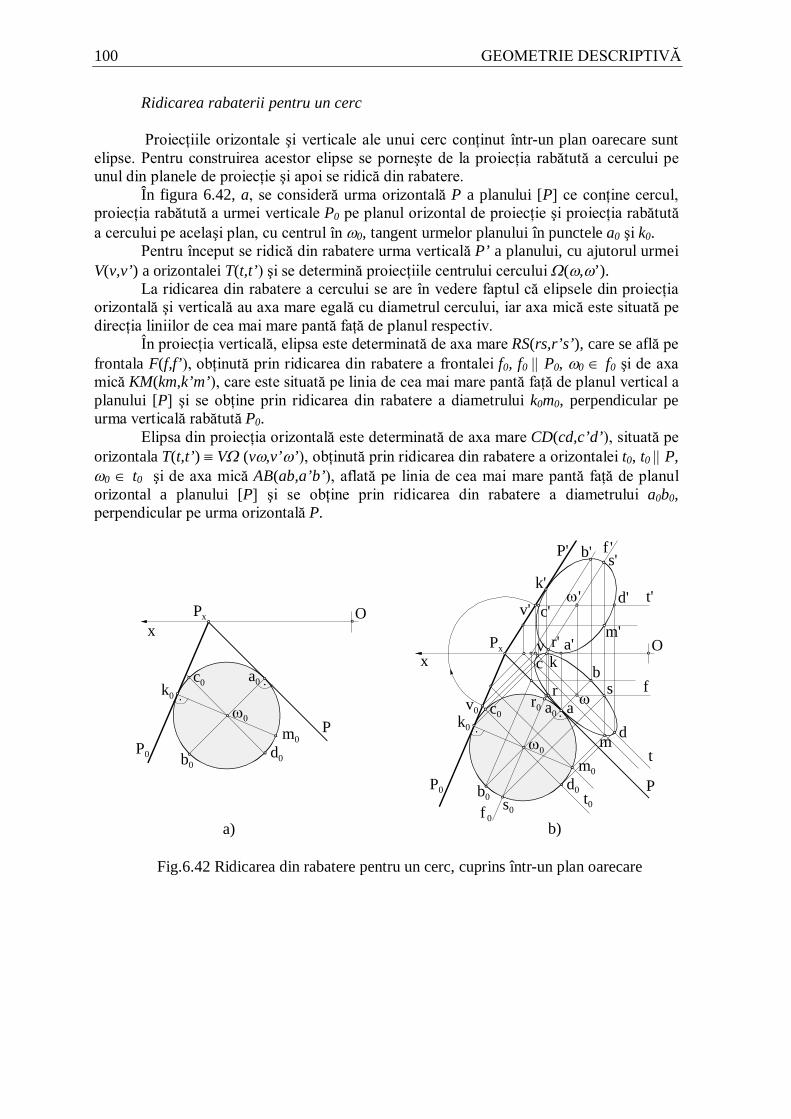
Ridicarea rabaterii pentru un cerc Proiecţiile orizontale şi verticale ale unui cerc conţinut într-un plan oarecare sunt
elipse. Pentru construirea acestor elipse se porneşte de la proiecţia rabătută a cercului pe unul din planele de proiecţie şi apoi se ridică din rabatere.
În figura 6.42, a, se consideră urma orizontală P a planului [P] ce conţine cercul, proiecţia rabătută a urmei verticale P0 pe planul orizontal de proiecţie şi proiecţia rabătută a cercului pe acelaşi plan, cu centrul în 0, tangent urmelor planului în punctele a0 şi k0.
Pentru început se ridică din rabatere urma verticală P’ a planului, cu ajutorul urmei V(v,v’) a orizontalei T(t,t’) şi se determină proiecţiile centrului cercului (,’).
La ridicarea din rabatere a cercului se are în vedere faptul că elipsele din proiecţia orizontală şi verticală au axa mare egală cu diametrul cercului, iar axa mică este situată pe direcţia liniilor de cea mai mare pantă faţă de planul respectiv.
În proiecţia verticală, elipsa este determinată de axa mare RS(rs,r’s’), care se află pe frontala F(f,f’), obţinută prin ridicarea din rabatere a frontalei f0, f0 P0, 0 f0 şi de axa mică KM(km,k’m’), care este situată pe linia de cea mai mare pantă faţă de planul vertical a planului [P] şi se obţine prin ridicarea din rabatere a diametrului k0m0, perpendicular pe urma verticală rabătută P0.
Elipsa din proiecţia orizontală este determinată de axa mare CD(cd,c’d’), situată pe orizontala T(t,t’) V (v,v’’), obţinută prin ridicarea din rabatere a orizontalei t0, t0 P, 0 t0 şi de axa mică AB(ab,a’b’), aflată pe linia de cea mai mare pantă faţă de planul orizontal a planului [P] şi se obţine prin ridicarea din rabatere a diametrului a0b0, perpendicular pe urma orizontală P.
xO
a0
Px
P0
P
b0d0
k0
c0
m0
xO
'
a0
Px
P'
P0 P
a
bc
d
kf
t
t0b0
d0
k0
c0
a'
b'
c'd'
k'
f '
t'v'
v
v0
s0
r0
f 0
sr
s'
r' m'
mm0
a) b)
Fig.6.42 Ridicarea din rabatere pentru un cerc, cuprins într-un plan oarecare
METODELE GEOMETRIEI DESCRIPTIVE
101
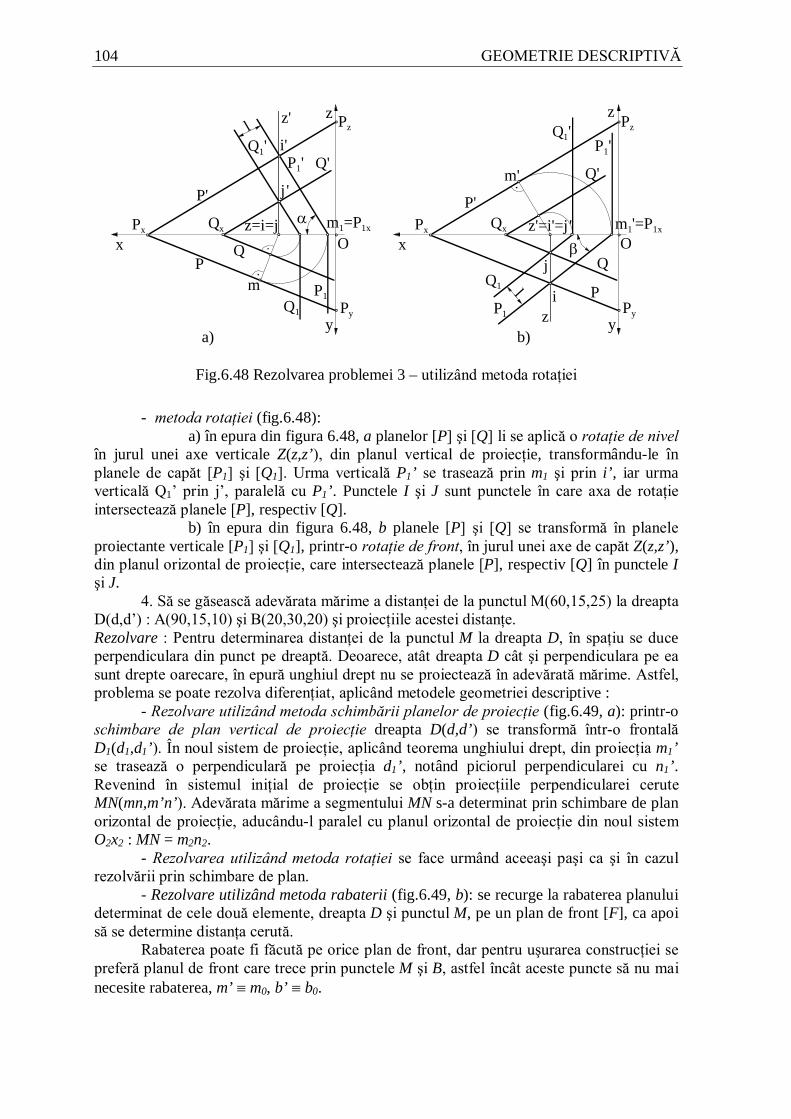
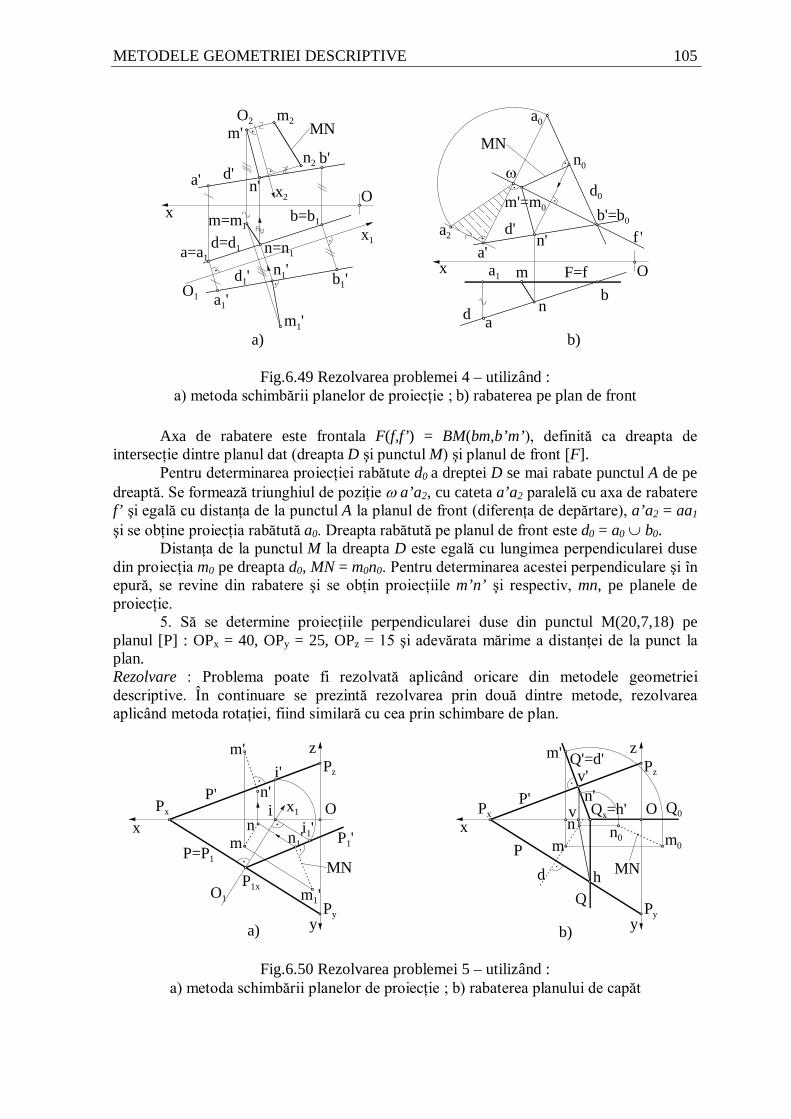
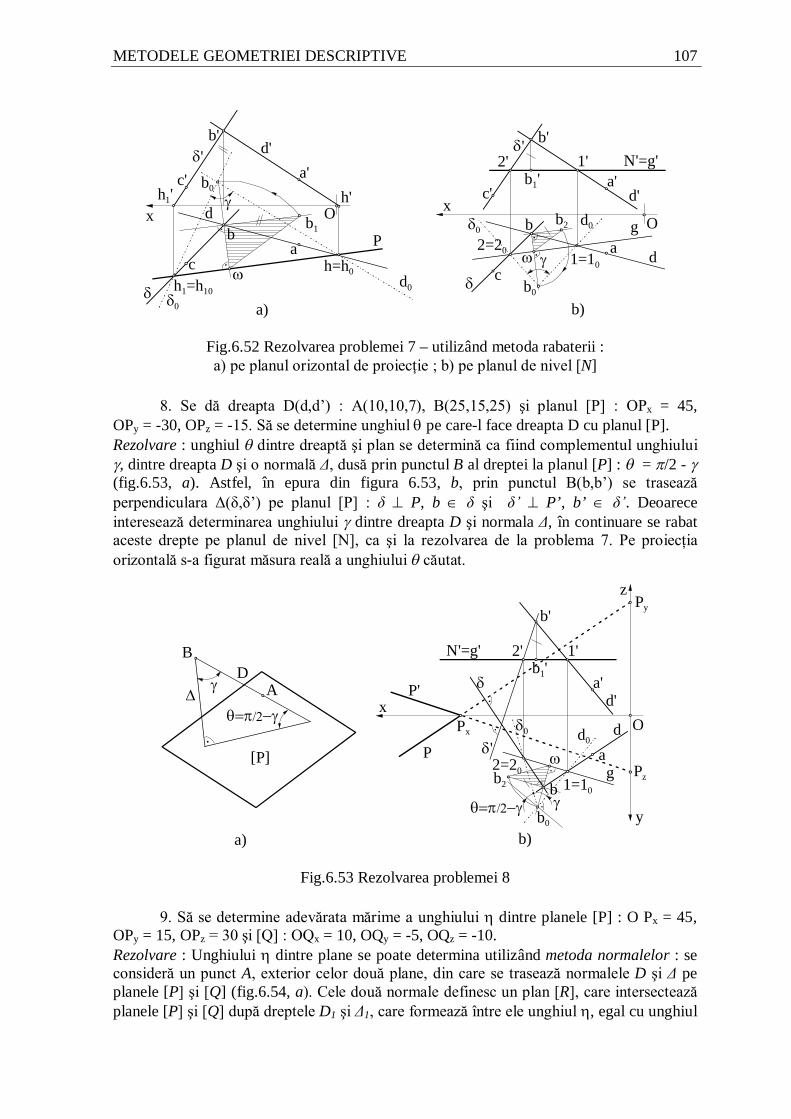
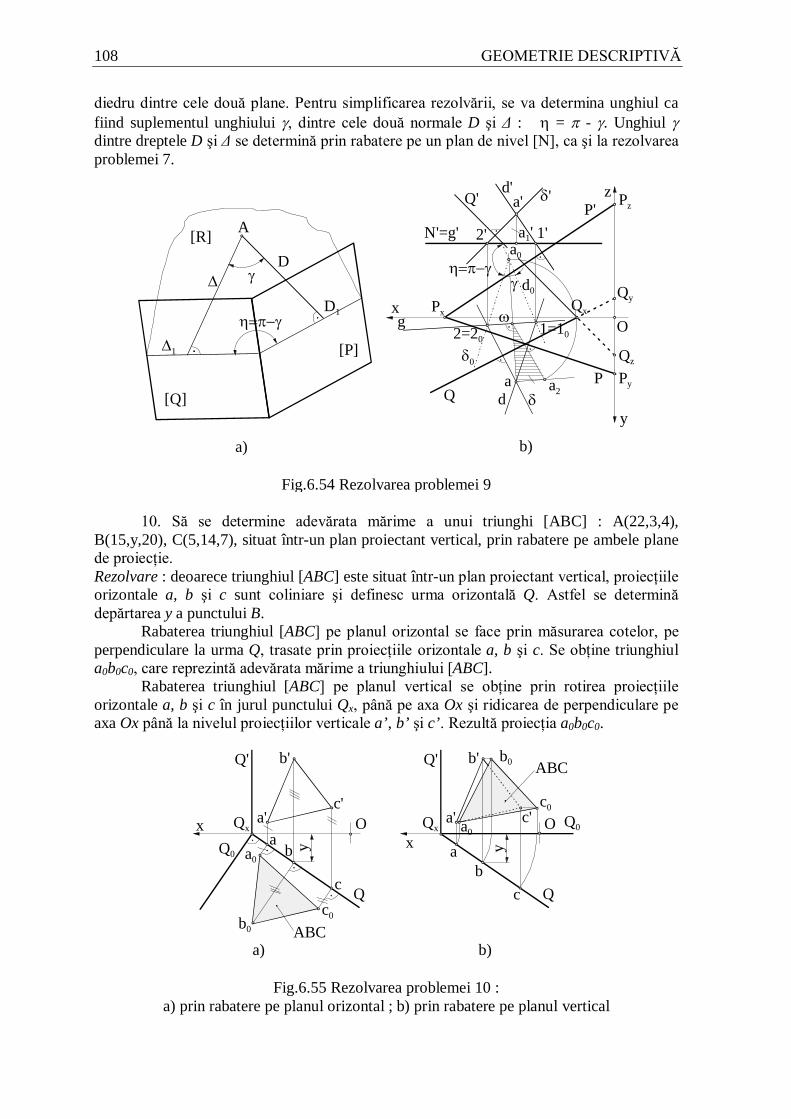
6.4 Probleme rezolvate 1. Să se determine adevărata mărime a segmentului AB : A(10,10,7), B(30,5,20) şi
unghiurile pe care acesta le face cu planele de proiecţie. Rezolvare : Problema comportă rezolvare prin diferite metode : - Rezolvare utilizând metoda schimbării planelor de proiecţie : - în epura din figura 6.43, a, segmentul AB, oarecare, se aduce paralel cu un nou plan vertical [V1], prin schimbare de plan vertical de proiecţie ; astfel, axa O1x1 se trasează paralelă cu proiecţia ab, din proiecţiile a şi b se duc perpendiculare pe axa O1x1 şi pe acestea se măsoară cotele punctelor, obţinându-se proiecţiile a1’ şi b1’. Adevărata mărime a segmentului AB este dată de proiecţia verticală a segmentului A1B1(a1b1,a1’b1’), iar unghiul din epură reprezintă unghiul dintre segmentul AB şi planul orizontal de proiecţie. - în epura din figura 6.43, b, segmentul AB, oarecare, se aduce paralel cu un nou plan orizontal [H1], prin schimbare de plan orizontal de proiecţie ; astfel, axa O2x2 se trasează paralelă cu proiecţia a’b’, din proiecţiile a’ şi b’ se duc perpendiculare pe axa O2x2 şi pe acestea se măsoară depărtările puncte-lor, obţinându-se proiecţiile a2 şi b2. Adevărata mărime a segmentului AB este dată de proiecţia orizontală a seg-mentului A2B2(a2b2,a2’b2’), iar unghiul din epură reprezintă unghiul dintre segmentul AB şi planul vertical de proiecţie. - Rezolvare utilizând metoda rotaţiei : - în epura din figura 6.44, a, segmentului AB, oarecare, i se aplică o rotaţie de nivel, în jurul unui ax vertical Z(z,z’) dus prin punctul B. Proiecţia a se roteşte până proiecţia a1b1 devine paralelă cu axa Ox, respectiv segmentul A1B1(a1b1,a1’b1’) este paralel cu planul vertical de proiecţie : AB = a1’b1’, = (AB,[H]). - în epura din figura 6.44, b, segmentului AB, oarecare, i se aplică o rotaţie de front, în jurul unui ax perpendicular pe planul [V] Z(z,z’) dus prin punctul A. Proiecţia b’ se roteşte până proiecţia a2’b2’ devine paralelă cu axa Ox, respectiv segmentul A2B2(a2b2,a2’b2’) este paralel cu planul orizontal de proiecţie : AB = a2b2, = (AB,[V]).
x Oa'
a=a1
ax
b'
bx
b=b1
O1 b1xa1x
b1'
a1'AB
x1
xO
a
ax
bx
b
O2
b2x
a2x
b2
a2
x2
b'=b2'
a'=a2'
AB
a) b)
Fig.6.43 Rezolvarea problemei 1 – utilizând metoda schimbării de plan
x Oa'
a
axbx
z=b=b1
b'=b1'
a1'
AB
a1
z'
x O
a=a2
axbx
b
b2'
b'
z'=a'=a2'
z
b2
ABa) b)
Fig.6.44 Rezolvarea problemei 1 – utilizând metoda rotaţiei
GEOMETRIE DESCRIPTIVĂ
102
2. Să se determine adevărata mărime a distanţei l cuprinsă între dreptele paralele D(d,d’) : A(10,10,7) şi B(30,5,20) şi Δ(δ,δ’) : C(20,3,5). Rezolvare : Problema se poate rezolva transformând cele două drepte oarecare în drepte perpendiculare pe unul din planele de proiecţie, prin diferite metode : - Rezolvare utilizând metoda schimbării planelor de proiecţie : în epura din figura 6.45, a dreptele D(d,d’) şi Δ(δ,δ’) s-au transformat în dreptele D1(d1,d1’) şi Δ1(δ1,δ1’), frontale, prin schimbare de plan vertical de proiecţie, luând noua linie de pâmânt O1x1 paralelă cu proiecţiile orizontale ale dreptelor şi păstrând cotele punctelor ce definesc dreptele, neschimbate. Dreptele D1(d1,d1’) şi Δ1(δ1,δ1’) s-au adus în poziţia de drepte verticale, D2(d2,d2’) şi Δ2(δ2,δ2’), printr-o schimbare de plan orizontal de proiecţie, luând noua linie de pâmânt O2x2 perpendiculară pe proiecţiile verticale ale frontalelor şi păstrând cotele punctelor din ultimul sistem. Distanţa dintre proiecţiile orizontale d2 şi δ2 este adevărata mărime a distanţei l cuprinsă între dreptele paralele D(d,d’) şi Δ(δ,δ’). - Rezolvare utilizând metoda rotaţiei : în epura din figura 6.45, b dreptele D(d,d’) şi Δ(δ,δ’) s-au transformat în dreptele D1(d1,d1’) şi Δ1(δ1,δ1’), frontale, prin rotaţie de nivel, luând axul vertical Z(z,z’) prin punctul C al dreptei Δ. Pentru dreapta D, s-a executat rotaţia cu ajutorul perpendicularei ci. Printr-o rotaţie de front, în jurul unei drepte de capăt Z1(z1,z1’), dusă prin punctul A1 de pe dreapta D1, dreptele D1(d1,d1’) şi Δ1(δ1,δ1’) se aduc în poziţia de drepte verticale şi astfel : d2δ2 = l.
x Oa'
a=a1
b'
b=b1O1
a1'=a2'x1
c'
d''
c=c1
c1'=c2'
O2
x2
d=d1
d1'=d2'b1'=b2'
'=2'c2=2
a2=b2=d2
l
x Oa'
2
b'
i1
c'
d''
d l d1
a
i'
ib
a1'=z1'
i1'
z=c=c1
d1'
1'
2'd2'
a1=d2
z'
e'
e1'
z1
a) b)
Fig.6.45 Rezolvarea problemei 2 – utilizând : a) metoda schimbării planelor de proiecţie ; b) metoda rotaţiei
xO
a'
a
b'
b
c'
d''
c
d0
b1P
h1'h1
h'
hb0
d
l
xO
a'
a
b'
b
c'd''
c d0
b1 N'=g'
1=10
2=20
b0
d
l
1'
gb2
2'
a) b)
Fig.6.46 Rezolvarea problemei 2 – utilizând : a) rabaterea pe planul orizontal ; b) rabaterea pe un plan de nivel
METODELE GEOMETRIEI DESCRIPTIVE
103
- Rezolvare utilizând metoda rabaterii : adevărata mărime a distanţei dintre dreptele paralele D(d,d’) şi Δ(δ,δ’) este dată de distanţa l dintre dreptele d0 şi δ0, obţinute astfel : a - prin rabatere pe planul orizontal de proiecţie (fig.6.46, a) : axa de rabatere este urma orizontală P a planului definit de dreptele D şi Δ. Se rabate punctul B în bo, cu ajutorul triunghiului de poziţie bb1, unde bb1 este cota punctului B. Proiecţia rabătută d0 este dată de b0 h şi δ0, de o paralelă la d0, trasată prin urma din planul orizontal h1.
b - prin rabatere pe planul de nivel [N] (fig.6.46, b) : axa de rabatere este orizontala G(g,g’) de intersecţie dintre un plan de nivel N şi planul definit de dreptele D şi Δ. În proiecţia orizontală axa de rabatere g este determinată de punctele 1 şi 2. Se rabate punctul B în bo, cu ajutorul triunghiului de poziţie bb2, unde bb2 = b’b1 este diferenţa de cotă a punctului B faţă de planul de nivel. Proiecţia rabătută d0 este dată de b0 10 şi δ0, de o paralelă la d0, trasată prin punctul 2 = 20 din planul de nivel.
3. Să se determine adevărata mărime a distanţei l cuprinsă între planele paralele [P] : OPx = 50, OPy = 20, OPz = 30 şi [Q] : OQx = 30. Rezolvare : problema se rezolvă prin transformarea planelor paralele, oarecare, [P] şi [Q] în plane proiectante faţă de unul din planele de proiecţie, astfel încât distanţa l dintre ele să se măsoare între urmele de pe planul de proiecţie faţă de care planele sunt proiectante. Acest lucru se poate realiza utilizând : - schimbarea planelor de proiecţie (fig.6.47):
a) în epura din figura 6.47, a planele [P] şi [Q] se transformă în planele de capăt [P1] şi [Q1], printr-o schimbare de plan vertical de proiecţie, luând noua axă O1x1 perpendiculară pe urmele orizontale şi folosind punctele I şi J, din planele [P], respectiv [Q]. Distanţa l se măsoară între noile urme verticaleP1’ şi Q1’, iar între axa O1x1 şi urma P1’ se poate măsura şi unghiul , pe care planele [P] şi [Q] îl fac cu planul orizontal de proiecţie.
b) în epura din figura 6.47, b se aplică o schimbare de plan orizontal de proiecţie, prin care planele [P] şi [Q] devin plane proiectante verticale, [P1] şi [Q1]. Acest lucru se realizeaxă cu ajutorul punctelor I şi J, din planele [P], respectiv [Q], luând noua axă O1x1 perpendiculară pe urmele verticale. Distanţa l se măsoară între noile urme orizontale P1 şi Q1, iar între axa O1x1 şi urma P1 se poate măsura şi unghiul , pe care planele [P] şi [Q] îl fac cu planul orizontal de proiecţie.
y
Oi=jj '
Q'
Q=Q1
P1x
Px
x
z
Py
Pz
Qx
P'
O1
x1
i'
i1
j1P=P1
l
P1'
Q1'
y
Oi'=j '
jQ
Q'=Q1'
P1x
Px
x
z
Py
Pz
Qx
P
i
i1'j1'
P'=P1'
l P1
Q1
O1
x1
a) b)
Fig.6.47 Rezolvarea problemei 3 – utilizând schimbarea planelor de proiecţie
GEOMETRIE DESCRIPTIVĂ
104
- metoda rotaţiei (fig.6.48):
a) în epura din figura 6.48, a planelor [P] şi [Q] li se aplică o rotaţie de nivel în jurul unei axe verticale Z(z,z’), din planul vertical de proiecţie, transformându-le în planele de capăt [P1] şi [Q1]. Urma verticală P1’ se trasează prin m1 şi prin i’, iar urma verticală Q1’ prin j’, paralelă cu P1’. Punctele I şi J sunt punctele în care axa de rotaţie intersectează planele [P], respectiv [Q].
b) în epura din figura 6.48, b planele [P] şi [Q] se transformă în planele proiectante verticale [P1] şi [Q1], printr-o rotaţie de front, în jurul unei axe de capăt Z(z,z’), din planul orizontal de proiecţie, care intersectează planele [P], respectiv [Q] în punctele I şi J.
4. Să se găsească adevărata mărime a distanţei de la punctul M(60,15,25) la dreapta D(d,d’) : A(90,15,10) şi B(20,30,20) şi proiecţiile acestei distanţe. Rezolvare : Pentru determinarea distanţei de la punctul M la dreapta D, în spaţiu se duce perpendiculara din punct pe dreaptă. Deoarece, atât dreapta D cât şi perpendiculara pe ea sunt drepte oarecare, în epură unghiul drept nu se proiectează în adevărată mărime. Astfel, problema se poate rezolva diferenţiat, aplicând metodele geometriei descriptive : - Rezolvare utilizând metoda schimbării planelor de proiecţie (fig.6.49, a): printr-o schimbare de plan vertical de proiecţie dreapta D(d,d’) se transformă într-o frontală D1(d1,d1’). În noul sistem de proiecţie, aplicând teorema unghiului drept, din proiecţia m1’ se trasează o perpendiculară pe proiecţia d1’, notând piciorul perpendicularei cu n1’. Revenind în sistemul iniţial de proiecţie se obţin proiecţiile perpendicularei cerute MN(mn,m’n’). Adevărata mărime a segmentului MN s-a determinat prin schimbare de plan orizontal de proiecţie, aducându-l paralel cu planul orizontal de proiecţie din noul sistem O2x2 : MN = m2n2. - Rezolvarea utilizând metoda rotaţiei se face urmând aceeaşi paşi ca şi în cazul rezolvării prin schimbare de plan. - Rezolvare utilizând metoda rabaterii (fig.6.49, b): se recurge la rabaterea planului determinat de cele două elemente, dreapta D şi punctul M, pe un plan de front [F], ca apoi să se determine distanţa cerută. Rabaterea poate fi făcută pe orice plan de front, dar pentru uşurarea construcţiei se preferă planul de front care trece prin punctele M şi B, astfel încât aceste puncte să nu mai necesite rabaterea, m’ m0, b’ b0.
y
O
Q'
Q
m1=P1xPx
xz=i=j
Py
Pz
Qx
P'
mP
l
P1'Q1'
P1Q1
z'
i'
j '
z
y
O
Q'
Q
m1'=P1xPx
xz'=i'=j '
Py
Pz
Qx
P'
m'
Pl
P1'Q1'
P1
Q1
z
j
iz
a) b)
Fig.6.48 Rezolvarea problemei 3 – utilizând metoda rotaţiei
METODELE GEOMETRIEI DESCRIPTIVE
105
Axa de rabatere este frontala F(f,f’) = BM(bm,b’m’), definită ca dreapta de
intersecţie dintre planul dat (dreapta D şi punctul M) şi planul de front [F]. Pentru determinarea proiecţiei rabătute d0 a dreptei D se mai rabate punctul A de pe
dreaptă. Se formează triunghiul de poziţie a’a2, cu cateta a’a2 paralelă cu axa de rabatere f’ şi egală cu distanţa de la punctul A la planul de front (diferenţa de depărtare), a’a2 = aa1 şi se obţine proiecţia rabătută a0. Dreapta rabătută pe planul de front este d0 = a0 b0.
Distanţa de la punctul M la dreapta D este egală cu lungimea perpendicularei duse din proiecţia m0 pe dreapta d0, MN = m0n0. Pentru determinarea acestei perpendiculare şi în epură, se revine din rabatere şi se obţin proiecţiile m’n’ şi respectiv, mn, pe planele de proiecţie.
5. Să se determine proiecţiile perpendicularei duse din punctul M(20,7,18) pe planul [P] : OPx = 40, OPy = 25, OPz = 15 şi adevărata mărime a distanţei de la punct la plan. Rezolvare : Problema poate fi rezolvată aplicând oricare din metodele geometriei descriptive. În continuare se prezintă rezolvarea prin două dintre metode, rezolvarea aplicând metoda rotaţiei, fiind similară cu cea prin schimbare de plan.
xO
b'
b=b1
n=n1
a' d'
d=d1a=a1
n'
n1'O1
x1
a1'
m=m1
m1'
b1'd1'
m'm2
n2
MNO2
x2
x O
b'=b0
b
m'=m0
ma'
d'
d
a0
a
a2
a1
d0
n
n'
n0
MN
F=f
f '
a) b)
Fig.6.49 Rezolvarea problemei 4 – utilizând : a) metoda schimbării planelor de proiecţie ; b) rabaterea pe plan de front
a) b)
xOi
m'
i1'
P'
P=P1
P1x
Px
O1
x1
P1'
yPy
Pz
zi'
m n1'n
m1'
MN
n'
xO
m' Q'=d'
Qx=h'n0
yPy
Pz
z
m
v'n'
Px
h
nv
Q
Pm0
MN
P'
d
Q0
Fig.6.50 Rezolvarea problemei 5 – utilizând : a) metoda schimbării planelor de proiecţie ; b) rabaterea planului de capăt
GEOMETRIE DESCRIPTIVĂ
106
- Rezolvare utilizând metoda schimbării planelor de proiecţie (fig.6.50, a): printr-o schimbare de plan vertical de proiecţie planul oarecare [P] se transformă într-un plan de capăt [P1] şi odată cu el punctul M(m,m’) în punctul M1(m1,m1’). În noul sistem de proiecţie se poate trasa perpendiculara din proiecţia m1’ pe urma P1’, piciorul perpendicularei fiind n1’, n1’ P1’. Proiecţia n1 se găseşte pe o paralelă dusă la axa O1x1, deoarece perpendiculara M1N1 este o frontală. Rezultă că adevărata mărime a distanţei de la punct la plan, adică a perpendicularei MN, este proiecţia m1’n1’. Proiecţia n’ se determină revenind în sistemul iniţial, ducând o linie de ordine din proiecţia n până la intersecţia cu perpendiculara din m’ pe urma P’.
- Rezolvare utilizând metoda rabaterii (fig.6.50, b): perpendiculara dusă din punctul M pe planul [P] este dreapta D(d,d’), care are d P, m d şi d’ P’, m’ d’. Se determină punctul N de intersecţie dintre perpendiculara D şi planul [P], utilizând planul de capăt [Q]. Pentru a afla adevărata mărime a distanţei MN, care este distanţa de la punct la plan, se rabate planul de capăt [Q], împreună cu segmentul MN, pe planul orizontal de proiecţie şi se obţine segmentul m0n0.
6. Să se găsească urma verticală P’ a planului [P], cunoscând urma orizontală : OPx = 40, OPy = 25 şi unghiul de 300 pe care planul [P] îl face cu planul orizontal de proiecţie. Rezolvare : în epura din figura 6.51, cunoscând urma orizontală P, se face o schimbare de plan vertical de proiecţie, luând noua linie de pământ perpendiculară pe urma orizontală P şi din P1x se trasează urma P1’ înclinată la 300, faţă de axa O1x1, deoarece noul plan obţinut [P1] este plan de capăt. Se revine din schimbarea de plan, determinând punctul I(i,i’) din planul [P], de pe urma P’.
Problema poate fi rezolvată similar aplicând metoda rotaţiei.
7. Fie dreptele D(d,d’) : A(10,10,7), B(30,5,20) şi Δ(δ,δ’) : B, C(40,15,5), concurente în punctul B. Să se determine adevărata mărime a unghiului dintre cele două drepte. Rezolvare : problema poate fi rezolvată aplicând succesiv două schimbări de plan de proiecţie sau două rotaţii, prin aducerea planului definit de cele două drepte în poziţia de plan de nivel (vezi rezolvarea de la adevărata mărime a unei figuri plane). Aici se va exemplifica rezolvarea prin metoda rabaterii : - rezolvare utilizând rabaterea pe planul orizontal de proiecţie (fig.6.52, a): se determină urma orizontală P a planului [P] definit de cele două drepte. Se rabate punctul B pe planul orizontal de proiecţie în jurul axei de rabatere P, în b0. Poziţia rabătută a dreptelor d0 şi δ0 este dată de urmele dreptelor din planul orizontal h0, h10 şi de punctul de concurenţă b0 : d0 = b0 h0, δ0 = b0 h10, şi între ele se măsoară adevărata mărime a unghiului dintre cele două drepte. - rezolvare utilizând rabaterea pe un plan de nivel (fig.6.52, b): se intersectează planul definit de cele două drepte cu un plan de nivel [N], rezultând orizontala G(g,g’), dată de punctele (1,1’) şi (2,2’). Se rabat dreptele D şi Δ pe planul de nivel [N], având ca axă de rabatere orizontala g. Este nevoie de rabaterea punctului de concurenţă B, b0 şi de punctele 10 şi 20, care fiind în planul de nivel sunt identice cu proiecţiile 1 şi 2 : d0 = b0 10, δ0 = b0 20. Adevărata mărime a unghiului dintre dreptele D şi Δ este unghiul măsurat între dreptele d0 şi δ0.
xOi=i1
i1'
P'
P=P1
P1x
Px
O1
x1
P1'
yPy
zi'
300
Fig.6.51 Rezolvarea problemei 6
METODELE GEOMETRIEI DESCRIPTIVE
107
8. Se dă dreapta D(d,d’) : A(10,10,7), B(25,15,25) şi planul [P] : OPx = 45,
OPy = -30, OPz = -15. Să se determine unghiul pe care-l face dreapta D cu planul [P]. Rezolvare : unghiul dintre dreaptă şi plan se determină ca fiind complementul unghiului , dintre dreapta D şi o normală Δ, dusă prin punctul B al dreptei la planul [P] : = /2 - (fig.6.53, a). Astfel, în epura din figura 6.53, b, prin punctul B(b,b’) se trasează perpendiculara Δ(δ,δ’) pe planul [P] : δ P, b δ şi δ’ P’, b’ δ’. Deoarece interesează determinarea unghiului dintre dreapta D şi normala Δ, în continuare se rabat aceste drepte pe planul de nivel [N], ca şi la rezolvarea de la problema 7. Pe proiecţia orizontală s-a figurat măsura reală a unghiului căutat.
9. Să se determine adevărata mărime a unghiului dintre planele [P] : O Px = 45,
OPy = 15, OPz = 30 şi [Q] : OQx = 10, OQy = -5, OQz = -10. Rezolvare : Unghiului dintre plane se poate determina utilizând metoda normalelor : se consideră un punct A, exterior celor două plane, din care se trasează normalele D şi Δ pe planele [P] şi [Q] (fig.6.54, a). Cele două normale definesc un plan [R], care intersectează planele [P] şi [Q] după dreptele D1 şi Δ1, care formează între ele unghiul , egal cu unghiul
B
D
[P]
A
a) b)
xO
a'
a
b'
b
d'
'd0
b1'N'=g'
2=20
d
1'
gb2
2'
b0
1=10
z
y
Px
Pz
Py
P
P'
Fig.6.53 Rezolvarea problemei 8
x O
a'
a
b'
b
c'
d''
c
b1P
h1'
h1=h10
h'
h=h0
b0
d
d0
xO
a'
a
b'
b
c' d'
'
d0
b1'N'=g'
2=20
d
1'
gb2
2'
b0
c1=10
a) b)
Fig.6.52 Rezolvarea problemei 7 – utilizând metoda rabaterii : a) pe planul orizontal de proiecţie ; b) pe planul de nivel [N]
GEOMETRIE DESCRIPTIVĂ
108
diedru dintre cele două plane. Pentru simplificarea rezolvării, se va determina unghiul ca fiind suplementul unghiului , dintre cele două normale D şi Δ : = - . Unghiul dintre dreptele D şi Δ se determină prin rabatere pe un plan de nivel [N], ca şi la rezolvarea problemei 7.
10. Să se determine adevărata mărime a unui triunghi [ABC] : A(22,3,4),
B(15,y,20), C(5,14,7), situat într-un plan proiectant vertical, prin rabatere pe ambele plane de proiecţie. Rezolvare : deoarece triunghiul [ABC] este situat într-un plan proiectant vertical, proiecţiile orizontale a, b şi c sunt coliniare şi definesc urma orizontală Q. Astfel se determină depărtarea y a punctului B. Rabaterea triunghiul [ABC] pe planul orizontal se face prin măsurarea cotelor, pe perpendiculare la urma Q, trasate prin proiecţiile orizontale a, b şi c. Se obţine triunghiul a0b0c0, care reprezintă adevărata mărime a triunghiului [ABC]. Rabaterea triunghiul [ABC] pe planul vertical se obţine prin rotirea proiecţiile orizontale a, b şi c în jurul punctului Qx, până pe axa Ox şi ridicarea de perpendiculare pe axa Ox până la nivelul proiecţiilor verticale a’, b’ şi c’. Rezultă proiecţia a0b0c0.
xO
a'
a
d' '
d0
a1'N'=g'
2=20
d
1'
g
2'
1=10
z
y
Px
Pz
Py
Q
Q'
a2
a0
Qx
Qz
Qy
P'
P
A
D
[P]
[Q]
D1
1
[R]
a) b)
Fig.6.54 Rezolvarea problemei 9
x O
b'
b
b0
Qx
Q'
Q0
Q
c'a'
a0
c0
c
a
ABC
y xO
b'
b
b0
Qx
Q'
Q0
Q
c'a' a0
c0
c
a
ABC
y
a) b)
Fig.6.55 Rezolvarea problemei 10 : a) prin rabatere pe planul orizontal ; b) prin rabatere pe planul vertical
METODELE GEOMETRIEI DESCRIPTIVE
109
11. Se consideră pătratul ABCE, aparţinând planului [P] : OPx = 50, OPy = 50, OPz = 80. Să se determine proiecţia dublu ortogonală a acestuia, cunoscând mărimea laturii L = 15mm, rabaterea vârfului A pe planul orizontal A0(55,38,0) şi faptul că latura AB este paralelă cu planul orizontal de proiecţie. Rezolvare : în epura din figura 6.56, a sunt prezentate elementele de la care se porneşte în rezolvarea problemei. Se determină proiecţia rabătută a urmei verticale, P0, cu ajutorul punctului V(v,v’). Se trasează pătratul de latură 15mm şi orizontalele g10 şi g20, pe care se găsesc vârfurile a0, b0 şi c0, e0. Se revine din rabatere, obţinându-se astfel proiecţiile pătratului abce şi a’b’c’e’ (fig.6.56, b).
6.5 Probleme propuse Metoda schimbării planelor de proiecţie 1. Prin metoda schimbării planelor de proiecţie să se transforma dreapta D(d,d’)
dată prin punctele A(80,20,10,) şi B(25,15,25) într-o orizontală. Precizaţi adevărata mărime a segmentului AB şi unghiul pe care dreapta D(d,d’) îl face cu planul vertical de proiecţie.
2. Printr-o schimbare de plan, să se transforme dreapta oarecare D(d,d’) : A(70,25,20) şi B(20,15,10) într-o dreaptă de profil.
3. Prin metoda schimbării planelor de proiecţie să se transforma dreapta D(d,d’) dată prin punctele A(75,35,20,) şi B(30,20,10) într-o frontală. Precizaţi adevărata mărime a segmentului AB şi unghiul pe care dreapta D(d,d’) îl face cu planul orizontal de proiecţie.
4. Să se determine proiecţia verticală d’ a dreptei D(d,d’) : A(70,20,30) şi B(20,40,z), cunoscând unghiul de 300, pe care dreapta îl face cu planul orizontal de proiecţie.
5. Fie punctul A(90,20,20), situat în planul bisector [B1] şi punctul B(30,-30,30), situat în planul bisector [B2]. Să se găsească distanţa dintre cele două puncte, printr-o schimbare de plan.
6. Printr-o schimbare de plan, să se transforme dreapta oarecare D(d,d’), dată prin urme V(30,0,40,) H(80,25,0), într-o dreaptă conţinută în primul plan bisector (Indicaţie : noua linie de pământ O1x1 se trasează prin h, tangentă la un cerc cu centrul în v şi rază vv’).
450
O
P'
Px
a0
Pb0
15
x 400 xO
c'P'
a
Px
g1
v1'v'
ABCE
b0
a0
v0
v10
v20
g10
g20
b
c
P
e
P0
g2
va'
v1 v2b'
v2' g2'
g1'
c0
e0
e'
b)a)
Fig.6.56 Rezolvarea problemei 11
GEOMETRIE DESCRIPTIVĂ
110
7. Să se determine proiecţiile perpendicularei comune dusă între dreapta oarecare D(d,d’) : A(60,10,10), B(15,20,30) şi o dreaptă situată în planul orizontal de proiecţie F(f,f’) : M(15,10,0), N(50,25,0).
8. Fie planul [P] dat prin urme : OPx = 90, OPy = 45, OPz = 40. Printr-o schimbare de plan să se transforme planul [P] în plan de capăt şi să se determine unghiul pe care acesta îl face cu planul orizontal de proiecţie.
9. Să se determine urma verticală a unui plan oarecare [P], cunoscând urma sa orizontală OPx = 80, OPy = 40 şi unghiul de 300 pe care acesta îl face cu planul orizontal de proiecţie.
10. Să se determine, printr-o schimbare de plan, distanţa de la punctul A(50,25,30) la planul [P] : OPx = 100, OPy = 50, OPz = 70.
11. Printr-o schimbare de plan, să se găsească proiecţia verticală m’ a unui punct M(60,20,z), cunoscând distanţa l = 35mm de la punctul M la planul oarecare [P] : OPx = 110, OPy = 40, OPz = 60 (Indicaţie : se transformă planul [P] într-un plan de capăt [P1], se trasează o paralelă la urma P1’, la distanţa l, care va intersecta noua linie de ordine a punctului M1 în m1’, apoi se revine în vechiul sistem de proiecţie şi se determină m’).
12. Să se determine, printr-o schimbare de plan, distanţa l dintre planele paralele [P] şi [Q], definite prin urme : [P] : OPx = 50, OPy = 40, OPz = 30 şi [Q] : OQx = -10.
13. Să se determine, printr-o schimbare de plan, urmele Q şi Q’ ale unul plan [Q], paralel cu planul [P] : OPx = 90, OPy = 50, OPz = 35, situat la distanţa l = 20mm faţă de planul [P].
14. Să se găsească urmele verticale P’ şi Q’ ale planelor [P] şi [Q], paralele, ştiind că urmele lor orizontale fac 600 cu linia de pământ, Px (70,0,0), Qx (46,0,0) şi că adevărata mărime a distanţei dintre ele este de 15mm.
15. Printr-o schimbare de plan să se transforme planul [P], definit prin urme : OPx = 80, OPy = 30, OPz = 40, într-un plan [P1] a cărui urme P1 şi P1’ să fie în prelungire.
16. Să se determine urmele P şi P’ ale planului [P], care conţine punctul A(50,45,40) şi este perpendicular pe planul [Q] : OQx = 80, OQy = 50, OQz = 80 (Indicaţie : printr-o schimbare de plan orizontal se transformă planul [Q] într-un plan proiectant vertical [Q1] şi se trasează P1 Q1, prin a1, apoi se revine din schimbarea făcută în vechiul sistem de proiecţie).
17. Fie dreptele D(d,d’) : A(47,64,30,) B(75,32,10) şi Δ(δ,δ’) : M(20,10,15,) N(70,30,45), neparalele şi neconcurente. Prin două schimbări de plan succesive să se determine proiecţiile perpendicularei comune duse pe cele două drepte date.
18. Prin două schimbări de plan succesive să se transforme dreapta oarecare D(d,d’) : A(80,30,20,) B(30,15,15) într-o verticală.
19. Să se transforme dreapta oarecare D(d,d’) : A(90,25,35,) B(20,10,15) într-o dreaptă de capăt, prin două schimbări de plan succesive.
20. Să se determine în adevărată mărime distanţa l dintre dreptele paralele D(d,d’) : A(90,15,10,) B(25,7,20) şi Δ : C(80,25,22), aplicând două schimbări de plan succesive.
21. Prin două schimbări de plan succesive să se determine în adevărată mărime distanţa l de la punctul M(60,15,25) la dreapta D(d,d’) : A(90,15,10) B(20,30,20).
22. Să se determine în adevărată mărime distanţa l dintre drepta D(d,d’) : H(80,25,0) H(58,0,50) şi planul [Q] : OQx = 70, OQy = 45, OQz = 50 (Indicaţie : se determină distanţa l dintre dreapta D(d,d’) şi o dreaptă Δ(δ,δ’), paralelă cu aceasta şi cuprinsă în planul [P]).
23. Fie dreapta D(d,d’) : A(80,15,30) B(25,25,15). Prin două schimbări de plan succesive să se transforme dreapta oarecare D(d,d’) într-o fronto-orizontală.
24. Prin metoda schimbării planelor de proiecţie să se determine adevărata mărime a unghiului ANB : A(50,30,30) B(70,15,15), N(30,20,15).
METODELE GEOMETRIEI DESCRIPTIVE
111
25. Printr-o schimbare de plan să se aducă planul oarecare [P] : OPx = 100, OPy = 50, OPz = 70 în poziţia de plan paralel cu linia de pământ.
26. Prin punctul A(50,y,5) din planul [P] : OPx = 110, OPy = 60, OPz = 40, să se ducă o dreaptă D(d,d’), conţinută în planul [P], care să facă 600 cu planul vertical de proiecţie (Indicaţie : se transformă planul [P] în planul de nivel [P2], prin două schimbări de plan succesive, se trasează prin a2 proiecţia d2, înclinată cu 600 faţă de axa O2x2 şi se revine din schimbările făcute în vechiul sistem de proiecţie).
27. Să se determine adevărată mărime a triunghiurilor de mai jos, aplicând două schimbări succesive de plan :
a) [ABC] : A(50,10,15,) B(90,25,25), C(70,45,40); b) [ABC] : A(55,40,43,) B(30,25,10), C(90,15,20); c) [ABC] : A( 35,30,35,) B(90,5,20), C(15,5,10); d) [ABC] : A(90,30,10,) B(60,10,30), C(20,35,15); e) [ABC] : A(90,10,15,) B(65,60,50), C(20,30,30); Metoda rotaţiei 28. Fie dreapta D(d,d’) : A(80,35,15), B(30,20,40). Să se rotească dreapta D, astfel
încât să devină paralelă cu planul orizontal de proiecţie. Precizaţi adevărata mărime a segmentului AB şi unghiul pe care dreapta D(d,d’) îl face cu planul vertical de proiecţie.
29. Să se rotească dreapta D(d,d’) : A(90,20,20), B(20,50,35) astfel încât să devină paralelă cu planul vertical de proiecţie. Precizaţi adevărata mărime a segmentului AB şi unghiul pe care dreapta D(d,d’) îl face cu planul orizontal de proiecţie.
30. Fie dreapta D(d,d’) : A(80,35,15) şi B(30,20,40). Prin metoda rotaţiei să se determine unghiurile pe care dreapta D le face cu planele de proiecţie.
31. Să se determine adevărata mărime a segmentului AB : A(90,20,20), B(20,50,35), utilizând metoda rotaţiei.
32. Să se determine proiecţia verticală d’ a dreptei D : A(80,15,40), B(25,30,z), cunoscând unghiul de 450 pe care-l face dreapta cu planul orizontal de proiecţie.
33. Fie punctul M(15,5,5) şi planul [P] : OPx = 40, OPy = 30, OPz = 45. Să se determine distanţa l de la punctul M la planul [P], prin metoda rotaţiei (Indicaţie : axa de rotaţie se ia prin punctul M).
34. Să se determine distanţa de la punctul M(50,35,30) la planul [P] : OPx = 100, OPy = 50, OPz = 70, utilizând metoda rotaţiei.
35. Se consideră dată urma orizontală P a planului oarecare [P] : OPx = 60, OPy = 40, punctul A(35,10,15) şi distanţa l = 7mm dintre acest punct şi plan. Folosind metoda rotaţiei să se determine urma verticală P’ a planului [P] (Indicaţie : se determină urma orizontală P1 a planului de capăt [P1], luând axa de rotaţie prin punctul A şi se trasează P1’ prin P1x tangent la un cerc cu centrul în a’, de rază 7mm, apoi se revine din rotaţie şi se determină P’).
36. Să se determine adevărata mărime a unghiului pe care-l face ∆ABC : A(50,10,15), B(90,25,25) şi C(70,45,40) cu planul orizontal de proiecţie, utilizând metoda rotaţiei. (Indicaţie : se transformă planul triunghiului într-un plan de capăt).
37. Se dă planul [P] : OPx = 80, OPy = 40, OPz = 40. Să se determine unghiul dintre planul [P] şi planele de proiecţie, rotind planul [P] convenabil.
38. Să se determine urma P a unui plan [P], cunoscând urma verticală : OPx = 80, OPz = 50 şi unghiul de 450 pe care-l face planul [P] cu planul [V] (Indicaţie : prin rotaţie de front se obţin urmele planului [P1] proiectant vertical şi se revine din rotaţie).
GEOMETRIE DESCRIPTIVĂ
112
39. Să se determine urma verticală P’ a unui plan [P], cunoscând urma orizontală : OPx = 60, OPy = 30 şi unghiul de 300 pe care-l face planul [P] cu planul [H] (Indicaţie : prin rotaţie de nivel se obţin urmele planului [P1] de capăt şi se revine din rotaţie).
40. Să se determine adevărata mărime a distanţei l cuprinsă între planele paralele [P] : OPx = 60, OPy = 40, OPz = 30 şi [Q] : OQx = 10, utilizând metoda rotaţiei (Indicaţie : se transformă planele [P] şi [Q] în plane proiectante).
41. Să se găsească urmele verticale P’ şi Q’ ale planelor [P] şi [Q], paralele, cunoscând urmele lor orizontale : OPx = 70, OPy = 40, OQx = 40 şi că adevărata mărime a distanţei dintre ele este de 10mm.
42. Se dă un plan [P] definit de două drepte concurente : D(d,d’) : A(110,10,10), B(75,30,30) şi Δ(δ,δ’) : B şi C(30,15,20). Să se rotească planul [P] astfel încât să devină plan de capăt, fără a utiliza urmele planului.
43. Să se determine adevărata mărime a triunghiului [ABC] : A(10,10,30), B(50,50,10), C(30,30,70), folosind metoda rotaţiei. Ce unghi face triunghiul cu planul vertical ? (Obs. Atenţie : Triunghiul ABC este cuprins într-un plan proiectant vertical).
44. Să se determine adevărata mărime a triunghiului [ABC] : A(10,30,10), B(50,10,50), C(30,70,30), folosind metoda rotaţiei. Ce unghi face triunghiul cu planul orizontal de proiecţie ? (Obs. Atenţie : Triunghiul ABC este cuprins într-un plan de capăt).
45. Prin două rotaţii succesive să se transforme dreapta oarecare D(d,d’) : A(100,20,15), B(20,40,40) într-o verticală.
46. Să se transforme planul [P] : OPx = 70, OPy = 40, OPz = 65, într-un plan de nivel, utilizând dubla rotaţie. 47. Utilizând dubla rotaţie să se transforme dreapta D(d,d’) : M(70,40,40), N(25,20,15) într-o dreaptă de capăt. 48. Să se transforme dreapta oarecare D(d,d’) : A(70,40,40), B(25,20,15) într-o verticală, aplicând două rotaţii succesive. 49. Fie planul [P] : OPx = 90, OPy = 50, OPz = 55. Să se transforme planul [P] într-un plan de front, utilizând dubla rotaţie. 50. Fie dreapta D(d,d’) : A(60,17,20) şi B(20,40,50). Să se rotească dreapta D, astfel încât să devină paralelă ca axa Ox. (Indicaţie : se utilizează dubla rotaţie). 51. Să se rotească dreapta D(d,d’) : A(60,15,35) şi B(10,25,20), astfel încât să devină o fronto-orizontală. 52. Să se determine adevărata mărime a distanţei dintre două drepte paralele, D(d,d’) şi Δ(δ,δ’) , folosind metoda rotaţiei ; D(d,d’) : A(90,60,50), B(70,30,10); Δ(δ,δ’) : C(60,70,60) (Indicaţie : se transformă dreptele în drepte verticale sau drepte de capăt). 53. Să se găsească adevărata mărime a distanţei de la punctul M(80,20,10) la dreapta D(d,d’) : A(60,15,35) şi B(10,25,20) prin metoda rotaţiei (Indicaţie : axa de rotaţie se ia prin punct). 54. Să se determine adevărata mărime a unghiului MIN, folosind metoda rotaţiei : M(50,20,50), I(90,70,10), N(10,30,30) (Indicaţie : se transformă planul unghiului într-un plan de nivel sau de front). 55. Să se determine în adevărată mărime distanţa l dintre drepta D(d,d’) : H(100,25,0) H(78,0,50) şi planul [P] : OPx = 70, OPy = 45, OPz = 50 (Indicaţie : se determină distanţa l dintre dreapta D(d,d’) şi o dreaptă Δ(δ,δ’), paralelă cu aceasta şi cuprinsă în planul [P], rotindu-le în poziţia de drepte perpendiculare pe unul din planele de proiecţie).
56. Să se determine adevărată mărime a triunghiurilor de mai jos, aplicând două rotaţii succesive :
a) [ABC] : A(50,10,15,) B(90,25,25), C(70,45,40); b) [ABC] : A(55,40,43,) B(30,25,10), C(90,15,20);
METODELE GEOMETRIEI DESCRIPTIVE
113
c) [ABC] : A( 35,30,35,) B(90,5,20), C(15,5,10); d) [ABC] : A(90,30,10,) B(60,10,30), C(20,35,15); e) [ABC] : A(90,10,15,) B(65,60,50), C(20,30,30); Metoda rabaterii 57. Să se determine adevărata mărime a triunghiului [ABC] : A(90,5,20),
B(35,30,35), C(15,20,10), prin rabatere pe planul orizontal de proiecţie. 58. Fie triunghiul [ABC] : A(11,ya,23), B(50,yb,21), B(31,yc,22) situat în planul
[P] : OPx = 110, OPy = 40, OPz = 45. Să se determine rabaterea triunghiului pe planul orizontal de proiecţie.
59. Să se determine în adevărată mărime distanţa de la punctul M(60,15,25) la dreapta D(d,d’) : A(90,15,10) şi B(40,30,20), cât şi proiecţiile acesteia, prin metoda rabaterii.
60. Se consideră dreapta D(d,d’) : A(30,20,30), B(80,35,15) şi un punct M(50,10,15), exterior dreptei. Să se determine proiecţiile punctelor situate pe dreapta D la distanţa l = 40mm faţă de punctul M, aplicând metoda rabaterii.
61. Fiind date dreapta D(d,d’) : A(20,15,10), B(80,40,45) şi punctul M(45,50,35), prin metoda rabaterii să se determine piciorul perpendicularei duse din punctul M pe dreapta D şi mărimea reală a acesteia.
62. Să se determine distanţa de la punctul M(60,40,30) la planul [P] : OPx = 80, OPy = 50, OPz = 40, folosind un plan proiectant vertical şi rabaterea acestuia pe planul vertical de proiecţie.
63. Fie dreptele D(d,d’) : A(90,30,10), B(60,10,30) şi Δ(δ,δ’) : B, C(20,35,15), concurente în punctul B. Să se determine adevărata mărime a unghiului dintre cele două drepte prin rabatere pe planul orizontal de proiecţie şi prin rabatere pe un plan de nivel. Comparaţi cele două rezultate.
64. Să se determine în adevărată mărime unghiului dintre dreapta oarecare D(d,d’) : A(30,30,20), B(50,15,10) şi dreapta de profil Δ(δ,δ’) : B, C(30,40,10), concurente în punctul B, prin rabatere pe planul orizontal de proiecţie.
65. Se consideră un plan [P] care trece prin linia de pământ şi prin punctele A(30,15,15) şi B(70,40,40). Să se determine proiecţia unui punct M(m,m’) de pe linia de pământ situat la egală distanţă de punctele A şi B (Indicaţie : se rabat punctele A şi B pe planul orizontal de proiecţie, se trasează mediatoarea segmentului A0B0 până la intersecţia cu axa Ox, unde se obţine punctul M).
66. Se dă dreapta D(d,d’) : A(80,40,40), B(20,10,10) şi planul [P] : OPx = 60, OPy = 35, OPz = 45. Să se determine valoarea unghiului pe care-l face dreapta D cu planul [P], prin rabatere.
67. Să se determine valoarea unghiului pe care-l face dreapta D(d,d’) : A(15,5,40), B(50,30,10) cu un plan paralel cu linia de pământ [R] : ORx = ∞, ORy = 50, ORz = 40, prin rabatere pe planul orizontal de proiecţie (Indicaţie : se utilizează şi proiecţia pe planul lateral, pentru determinarea urmei orizontale).
68. Să se determine în adevărată mărime unghiului dintre dreapta oarecare D(d,d’) : H(80,40,0), V(30,0,20) şi un plan de profil [P] : OPx = 30, OPy = ∞, OPz = ∞, prin rabatere pe planul orizontal de proiecţie.
69. Fie dreapta oarecare D(d,d’) : A(20,25,15), B(70,50,40) şi planul paralel cu linia de pământ [R] : ORx = ∞, ORy = 30, ORz = 20. Să se determine valoarea unghiului pe care-l face dreapta D cu planul [R], prin rabatere pe planul orizontal de proiecţie.
GEOMETRIE DESCRIPTIVĂ
114
70. Să se determine adevărata mărime a unghiului dintre planele [P] : OPx = 90, OPy = 50, OPz = 60 şi [Q] : OQx = 30, OQy = -10, OQz = -30, prin rabatere pe un plan de front.
71. Să se determine adevărata mărime a unghiului dintre planele [P] : O Px = 90, OPyP = 600, OPzP’ = 300 şi [Q] : OQx = 20, OQy = -10, OQz = -20, prin rabatere pe un plan de nivel.
72. Să se determine adevărata mărime a distanţei dintre dreptele paralele D(d,d’) : A(130,70,30), B(40,40,80) şi Δ(δ,δ’) : C(70,90,30) prin rabatere pe un plan de nivel.
73. Să se determine adevărata mărime a distanţei dintre dreptele paralele D(d,d’) : A(85,35,15), B(40,20,40) şi Δ(δ,δ’) : C(55,45,15) prin rabatere pe un plan de front.
74. Să se determine proiecţiile înălţimilor triunghiului [ABC] : A(30,10,15), B(90,25,25), C(75,45,40), utilizând rabaterea (Indicaţie : se trasează înălţimile pe proiecţia rabătută a triunghiului, pe un plan de nivel ce trece prin vârful B).
75. Utilizând rabaterea, să se determine adevărata mărime a triunghiurilor : a) [ABC] : A(50,10,15,) B(90,25,25), C(70,45,40); b) [ABC] : A(55,40,43,) B(30,25,10), C(90,15,20); c) [ABC] : A( 35,30,35,) B(90,5,20), C(15,5,10); d) [ABC] : A(90,30,10,) B(60,10,30), C(20,35,15); e) [ABC] : A(90,10,15,) B(65,60,50), C(20,30,30); 76. Dreapta oarecare D(d,d’) : A(80,25,15), B(30,20,40) şi punctul M(50,50,z) sunt
cuprinse în acelaşi plan de capăt. Să se determine proiecţiile perpendicularei din punctul M pe dreapta D, utilizând rabaterea.
77. Se dă punctul M(78,50,52) şi planul [P] : OPx = 100, OPy = 55, OPz = 90. Să se determine adevărata mărime a distanţei de la punctul M la planul [P].
78. Să se determine adevărata mărime a unui triunghi [ABC] : A(90,9,15), B(65,y,50) C(20,32,27), situat într-un plan proiectant vertical, prin rabatere pe ambele plane de proiecţie. Să se compare rezultatele.
79. Să se determine adevărata mărime a unui triunghi [ABC] : A(90,15,9), B(65,50,z) C(20,27,32), situat într-un plan de capăt, prin rabatere pe ambele plane de proiecţie. Să se compare rezultatele.
80. Se consideră triunghiul echilateral ABC, aparţinând planului [P] : OPx = 60, OPy = 50, OPz = 80. Cunoscând rabaterea triunghiului pe planul orizontal A0(55,38,0), B0(46,66,0), să se determine proiecţia dublu ortogonală a acestuia.
81. Să se găsească urmele P şi P’ ale unui plan [P], cunoscând un punct M(40,30,20) ce aparţine planului şi rabaterea acestuia pe planul orizontal M0(80,50,0).
82. Se consideră orizontala D(d,d’) care face 450 cu planul vertical de proiecţie şi are urma V(90,0,30) şi un punct M(40,0,0) de pe axa Ox. Să se determine proiecţiile punctelor A şi B, situate pe dreapta D, astfel încât triunghiul AMB să fie echilateral (Indicaţie : se rabate orizontala pe planul orizontal de proiecţie, se stabilesc punctele A0 şi B0 şi se revine din rabatere).
83. Să se determine urma verticală P’ a planului [P] : OPx = 70, OPy = 40, cunoscând rabaterea A0(45,35,0) a punctului A(30,10,z) din planul [P].
84. Fiind date planul [P] : OPx = 110, OPy = 70, OPz = 60 şi punctul (30,20,z) din acest plan, să se traseze proiecţiile unui poligon regulat cu 6 laturi, de lungime 25mm şi cu centrul în punctul (Indicaţie : se determină proiecţia rabătută a poligonului şi se revine din rabatere).
85. Să se determine proiecţiile unui triunghi echilateral, cunoscând latura AB care este o orizontală : A(50,11,23), B(20,25,23) şi că vârful C este situat în planul orizontal (Indicaţie : se determină pe planul de nivel ce conţine orizontala AB proiecţia rabătută a0b0c0 a triunghiului şi se revine din rabatere cu punctul C).